universidade lusófona de humanidades e tecnologia · capazes de encontrar e extinguir um incêndio...
TRANSCRIPT

Universidade Lusófona de Humanidades e Tecnologia
Faculdade de Engenharia
Engenharia Electrotécnica
Concurso de Robótica‐ Robot Apaga Chama (RAC)
Concurso de 12 Setembro 2018
1. O Concurso Robot Apaga Chama (RAC) tem como objectivo por à prova robots móveis autónomos,
capazes de encontrar e extinguir um incêndio (simulado por uma pequena vela), dentro de um modelo de uma
casa formado por corredores e salas. Em determinados aspectos o concurso segue de perto o Concurso Robot
Bombeiro que é realizado anualmente pelo Instituto Politécnico da Guarda e o concurso Fire Fighting, realizado
pelo Trinity College, EUA.
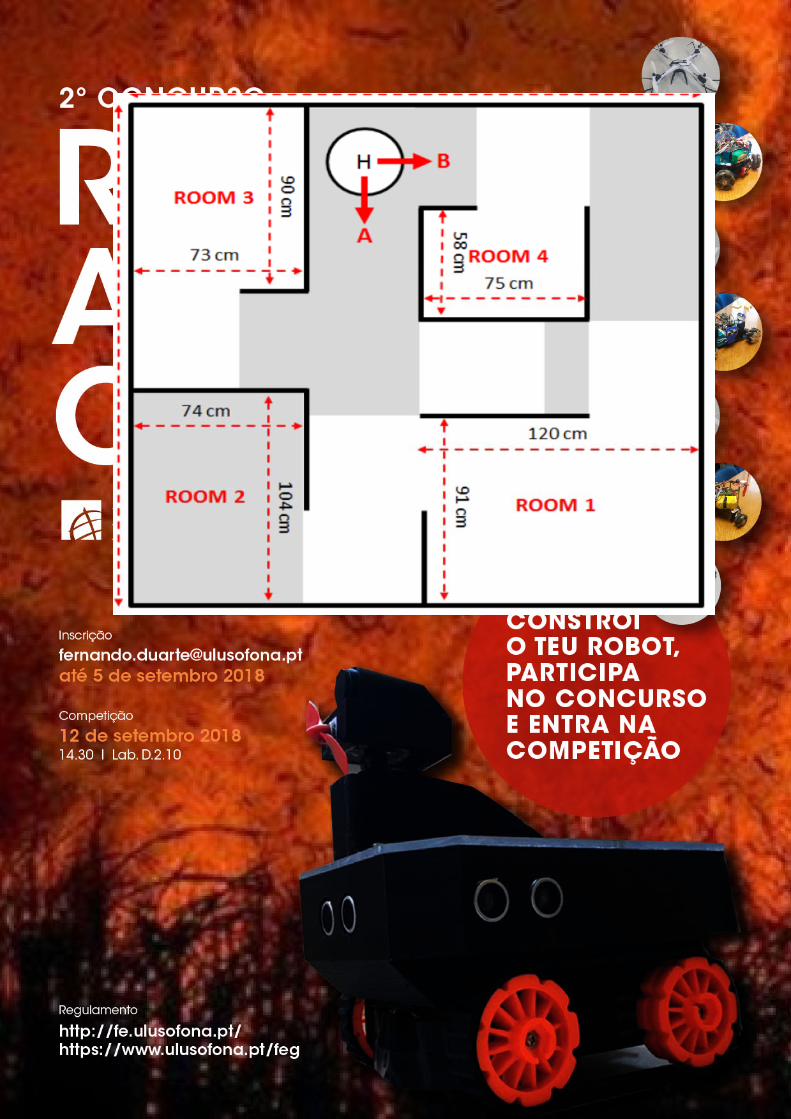
2. A participação será feita por equipas com 3 ou 4 elementos, sendo, pelo menos, um elemento aluno ou
ex‐aluno do curso de Engª Electrotécnica da ULHT.
3. O concurso terá um Júri soberano com a seguinte constituição: 1 Docente do curso de Engª Eletrotécnica
(presidente), um aluno ou ex‐aluno do curso de Engª Electrotécnica. Das decisões do júri não haverá recurso.
4. O robot, a competir, terá dimensões que permitam a sua introdução, por completo, numa caixa cúbica com 35x35x35 cm. O robot não poderá ter qualquer dispositivo que lhe permita "ver" por cima das paredes e não poderá, após iniciar a prova, alterar as suas dimensões. 5. Para o este concurso será possível a participação de pequenos drones, voando autonomamente sobre a pista e dectando e apagando a chama de forma similar à dos robots. Obviamente que poderão usar técnicas de visão. 6. O robot/drone poderá ser decorado com algum tipo de artefacto, uma bandeira por exemplo, para além dos 35 cm, desde que tal artefacto não tenha qualquer efeito no funcionamento do robot. 7. Não há restrições relativamente ao tipo de materiais que podem ser usados na construção do robot/drone. 8. Após ser ligado, o robot/drone terá de ser completamente autónomo, tanto no que se refere à sua capacidade de processamento, como à sua fonte de energia. Não é permitido qualquer tipo de comunicação entre o robot/drone e outros dispositivos exteriores a ele. 9. O robot/drone poderá embater nas paredes da área de jogo, embora seja penalizado por isso. 10. Não há restrições relativamente ao tipo de sensores que podem ser usados, desde que respeitem as outras regras. 11. O robot/drone terá de possuir mecanismos de segurança adequados à sua potência e modo de locomoção, que permitam a sua imobilização em situações que possam representar perigo para pessoas ou bens. O mecanismo de segurança aconselhável será um interruptor geral colocado em local de fácil acesso; 12. A figura mostra a planta oficial da área de jogo. Notar que a planta da área de jogo é conhecida, no entanto as dimensões apresentadas no plano são aproximadas. 13. As paredes da estrutura serão de madeira, ou outro material semelhante, com aproximadamente 35 cm de altura e 2 cm de espessura. As paredes serão pintadas de branco. 14. O pavimento será também de madeira, ou outro material semelhante, pintado de preto. O pavimento poderá ter junções que serão cobertas por fita adesiva preta, o que poderá implicar que o pavimento poderá não ser completamente liso, podendo haver pequenas irregularidades. 15. Todos os corredores de circulação e entradas de salas terão uma largura de 45 cm. Todas as entradas serão assinaladas per uma fita adesiva branca de aproximadamente 1.5 cm de largura. 16. O robot/drone de cada concorrente/equipa, iniciará sua prova dentro de um círculo de cor branca com 35 cm de diâmetro (círculo marcado com um H no plano da figura). O círculo estará no centro do corredor de 45 cm de largura, pelo que haverá uma folga entre fronteira do círculo e as paredes do corredor. O robot/drone poderá ser alinhado manualmente antes de iniciar a prova. Cada manga será realizada por todos os concorrentes/equipas em condições rigorosamente iguais em sequência previamente sorteada.

17. O robot/drone de cada equipa/concorrente, terá de encontrar a vela e extinguir a sua chama, no menor tempo possível. 18. O robot/drone será desqualificado se derrubar a vela ainda acesa. Se a vela for derrubada depois de a chama ter sido extinta, a manga ainda será válida, mas o robot/drone será penalizado. 19. O robot/drone terá de encontrar a vela, usando sensores (ou outros) adequados, antes de tentar apagá‐la. 20. A chama da vela pretende simular um pequeno incêndio, que o robot/drone tentará encontrar e extinguir. 21. A chama da vela estará a uma altura entre 15cm a 20cm do pavimento, incluindo uma pequena base em cima da qual se encontra a vela. a. A vela terá um diâmetro aproximado de 1,5 cm e será de cor branca. b. A parte mais baixa da chama da vela não estará abaixo dos 13cm nem acima dos 18cm, a partir do pavimento. 22. O sector circular, com a vela, será colocada ao acaso num dos 4 “cantos” de uma das salas do jogo e terá a mesma probabilidade de ser colocado em qualquer um dos “cantos”, em qualquer uma das salas, em cada uma das mangas. Se a vela for colocada duas vezes seguidas no mesmo “canto” da mesma sala, o júri garantirá que a vela não voltará a ser colocada nesse mesmo “canto” e sala, em mais nenhuma das mangas. Assim, todos os robots/drones terão que encontrar a vela em pelo menos duas salas distintas, durante as mangas. 23. Os concorrentes não podem medir ou tocar na vela. O júri poderá usar qualquer vela válida em qualquer manga e poderá trocar de vela entre mangas. 24. O robot não sabe em qual das 4 salas está a vela. Por vezes, com sorte, a vela poderá estar na 1ª sala que o robot explora e por vezes, o robot tendo menos sorte, a vela poderá estar na 4ª sala explorada. 25. Para este concurso não haverá qualquer factor de correcção de sala que poderia discriminar positivamente em função do número de salas que o robot tem que explorar antes de encontrar a vela. 26. A Pontuação de Tempo (PT), por manga, é dada por PT = TP+PP, onde TP é o Tempo de Prova, em segundos, que o robot/drone levou a extinguir a chama da vela, e PP os Pontos de penalização, atribuídos da seguinte forma: a. 5 pontos por cada toque nas paredes; b. 1 ponto por segundo quando o deslocamento é feito a tocar numa parede; c. 30 pontos por tocar na vela (ou base) enquanto a chama estiver acesa; d. 30 pontos por derrubar a vela depois de apagada; e. o tempo máximo de prova permitido é de PT=300seg. 27. Após 3 mangas serão escolhidas as 2 melhores Pontuação de Manga (PM1 e PM2) e adicionadas, obtendo‐se assim SM, a soma das mangas, i.e., SM=PM1+PM2. 28. Introduz‐se também um Factor de Eficácia (FE), a saber: a. se o robot apagou a vela nas três mangas, FE=0.9; b. se o robot não apagou a vela nas três mangas, FE=1.0; 29. A Pontuação Final (PF) será dada por PF=SM*FE. 30. O robot vencedor será o que obtiver a Pontuação Final (PF) mais baixa. 31. Cada equipa, no momento de inscrição da prova, deverá indicar o nome da equipa e a constituição da equipa, com indicação do “capitão” e se concorre com um robot ou com drone.