universidade federal do rio de janeiromonografias.poli.ufrj.br/monografias/monopoli10013696.pdf ·...
TRANSCRIPT

UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Departamento de Engenharia Mecânica
DEM/POLI/UFRJ
OTIMIZAÇÃO AERO-ESTRUTURAL DE UMA ASA COM GEOMETRIA ATUADAPOR LIGAS DE MEMÓRIA DE FORMA VIA CLASS/SHAPE TRANSFORMATION
Pedro Batista Camara Leal
Projeto final submetido ao corpo docente
do Departamento de Engenharia Mecânica
da Escola Politécnica da Universidade
Federal do Rio de Janeiro como parte dos
requisitos necessários para a obtenção do
grau de engenheiro mecânico.
Orientador: Marcelo Amorim Savi
Rio de Janeiro
Março de 2015

UNIVERSIDADE FEDERAL DO RIO DE JANEIRODepartamento de Engenharia Mecânica
DEM/POLI/UFRJ
OTIMIZAÇÃO AERO-ESTRUTURAL DE UMA ASA COM GEOMETRIA
ATUADA POR LIGAS DE MEMÓRIA DE FORMA VIA CLASS/SHAPE
TRANSFORMATION
Pedro Batista Camara Leal
PROJETO FINAL SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA MECÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO MECÂNICO.
Aprovado por:
________________________________________________Prof. Marcelo Amorim Savi
________________________________________________Prof. Fernando Alves Rochinha
________________________________________________Prof. Thiago Gamboa Ritto
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2015

Camara Leal, Pedro
Otimizacao aero-estrutural de uma asa com geometria
atuada por ligas de memoria de forma via Class/Shape
Transformation/Pedro Camara Leal. – Rio de Janeiro:
UFRJ/COPPE, 2015.
XII, 50 p.: il.; 29, 7cm.
Orientador: Marcelo Amorim Savi
Projeto Final de Graduacao (bacharelato) –
UFRJ/COPPE/Programa de Engenharia Mecanica,
2015.
Bibliography: p. 40 – 42.
1. Otimizao. 2. Memria de forma. 3. Painis
Finitos. 4. Elementos Finitos. I. Amorim Savi,
Marcelo. II. Universidade Federal do Rio de Janeiro,
COPPE, Programa de Engenharia Mecanica. III. Tıtulo.
iii

Para Tita.
iv
Agradecimentos
O autor gostaria de agradecer o apoio do Centro Nacional de Desenvolvimento
Cientıfico e Tecnologico (CNPq) que disponibilizou uma bolsa de estudos via o
INCT-EIE (Instituto Nacional de Cincia e Tecnologia - Estruturas Inteligentes em
Engenharia). Este trabalho nao seria possıvel sem a orientacao do Prof Marcelo
Savi e do Prof. Darren Hartl. Tambem agradeco aos meus colegas Edwin Peraza
Hernandez e Christopher Bertagne pela ajuda tecnica. Analise estrutural foi efetu-
ada graas a uma licena academica fornecida pela Simulia. Otimizacao foi realizada
gracas ao software OpenMDAO. Por fim, gostaria de agradecer a minha namorada
Martha por ter me apoiado e por ter lido este trabalho comigo.
v

Resumo da Projeto Final de Graduacao apresentada a COPPE/UFRJ como parte
dos requisitos necessarios para a obtencao do grau de Bacharel em Ciencias (B.Sc.)
OTIMIZACAO AERO-ESTRUTURAL DE UMA ASA COM GEOMETRIA
ATUADA POR LIGAS DE MEMORIA DE FORMA VIA CLASS/SHAPE
TRANSFORMATION
Pedro Camara Leal
Fevereiro/2015
Orientador: Marcelo Amorim Savi
Programa: Engenharia Mecanica
A otimizacao das condicoes de voo representa um tema de grande interesse rela-
cionado a questoes aeroelasticas e mudanca de forma. Este trabalho propoe uma
metodologia para determinar as configuracoes de uma asa que muda de forma em
diferentes condicoes de voo. Buscam-se situacoes que sejam fisicamente e estrutural-
mente viaveis atraves do uso de atuadores construdos com ligas de memoria de forma
(SMAs). Para achar a solucao deste problema de otimizacao acoplada, multiplas
otimizacoes sao necessarias. A otimizacao da geometria feita para condicoes de voo
de cruzeiro e de aterrissagem. Alem disso, otimizam-se os atuadores de SMA visando
mudar a configurao do aerofolio entre duas geometrias. Para as tres otimizacoes em
serie utiliza-se o algoritmo genetico. As otimizacoes levam em consideracao os efeitos
da deformacao da estrutura e os carregamentos aerodinamicos aplicados asa. As
pressoes aerodinamicas sao avaliadas a partir do Metodo dos Paineis Finitos. Cada
geometria e gerada por um metodo conhecido como Class/Shape Transformation.
vi

Abstract of Bachelor’s Thesis presented to COPPE/UFRJ as a partial fulfillment of
the requirements for the degree of Bachelor of Science (B.Sc.)
AERO-STRUCTURAL OPTIMIZATION OF SHAPE MEMORY ALLOY-BASED
WING MORPHING VIA A CLASS/SHAPE TRANSFORMATION APPROACH
Pedro Camara Leal
February/2015
Advisor: Marcelo Amorim Savi
Department: Mechanical Engineering
The optimization of flight performance is a theme of great interest related to
aerolastic and shape morphing. This work proposes a method for determining in
a preliminary manner morphing wing configurations that provide benefits during
various disparate flight conditions but that are also each physically/structurally at-
tainable via localized active shape change operations. The controlled reconfiguration
is accomplished through the use of shape memory alloys (SMAs). To address this
coupled optimization problem, multiple optimization loops are required. In this
work, we consider optimized cruise and landing configurations in addition to the
SMA actuator configuration required to provide appropriate morphing between the
two. Thus, three chained optimization problems are addressed via a standard ge-
netic algorithm. In addition, each analysis-driven optimization considers the effects
of both the deformable structure (i.e. strain energy effects) and the aerodynamic
loading experienced by the wing. Aerodynamic considerations are addressed via use
of panel method. Each shape is generated by the so-called Class/Shape Transfor-
mation methodology.
vii

Contents
List of Figures x
List of Tables xii
1 Introduction 1
2 Structures and Optimization 3
2.1 Class Shape Transformation . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Abaqus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Shape Memory alloys . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
3 Aerodynamics and Fluid-Structure Interaction 14
3.1 Fundamental Concepts . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 Panel Method . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 Multiphysics Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.4 OpenMDAO: Optimization Platform . . . . . . . . . . . . . . . . . . 23
3.5 NSGA-II: Genetic Optimization . . . . . . . . . . . . . . . . . . . . . 24
4 Workflow 27
4.1 Wing Design Optimization . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Morphing Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5 Results 31
5.1 Continuous Flap Demonstration . . . . . . . . . . . . . . . . . . . . . 31
5.2 Wing Design: Optimization . . . . . . . . . . . . . . . . . . . . . . . 32
5.3 Morphing Optimization . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6 Conclusion 39
Bibliography 40
A CST: Python Code 43
B Data Sheet: ICA IS-32 49
viii

C Taguchi 50
ix

List of Figures
1.1 Examples of adaptive wings and their enhanced behaviour . . . . . . 1
2.1 Influence of variables N1 and N2. All with constant Shape functions. 4
2.2 Examples of the influence of Ali variables for a first order shape func-
tion. The values of Aui were held constant. . . . . . . . . . . . . . . 5
2.3 Example of the use of the restrictions. The blue line represents a
cruise configuration, the green line a landing configuration and the
red lines indicate the local thicknesses that were kept constant in both
configurations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 Shape Memory Effect . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5 SMA stress-temperature phase diagram (schematic) [2] . . . . . . . . 10
2.6 Experimental results illustrating the SMA under a constant 200MPa
stress [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.7 Experimental result depicting the Pseudoelastic Effect [2] . . . . . . . 11
3.1 Representative airfoil depicting all relevant geometric definitions . . . 14
3.2 Representative wing depicting all relevant geometric definitions . . . . 15
3.3 Aerodynamic Forces . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4 A single panel with its nomenclature . . . . . . . . . . . . . . . . . . 17
3.5 Outline of panels resulting from the circle method . . . . . . . . . . . 18
3.6 Panel distribution generated by Xfoil . . . . . . . . . . . . . . . . . . 21
3.7 Pressure vectors generated by Xfoil . . . . . . . . . . . . . . . . . . . 22
3.8 Flowchart of the Fluid-Structure simulation. . . . . . . . . . . . . . . 23
3.9 View of an Assembly Showing Data Flow . . . . . . . . . . . . . . . . 24
3.10 Schematic of NSGA-II algorithm [4] . . . . . . . . . . . . . . . . . . . 25
4.1 3D Wing Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2 Flowchart of the airfoil shape optimization for cruise. . . . . . . . . . 28
x

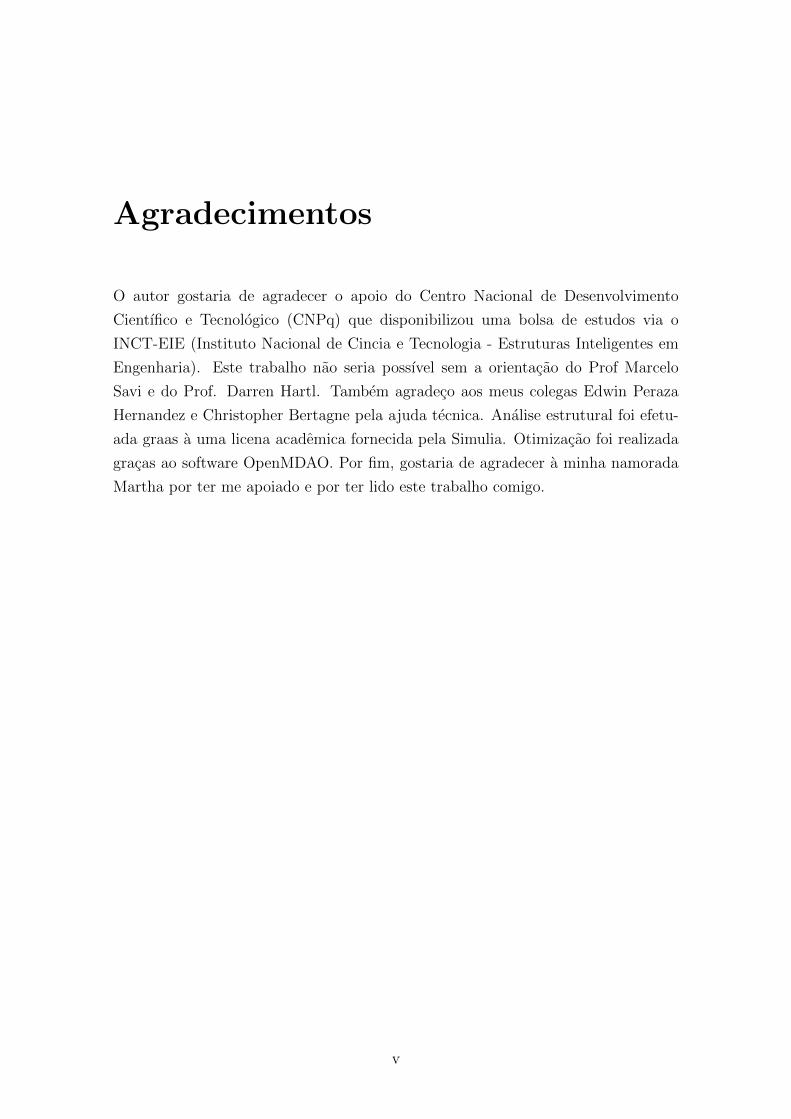
4.3 Example of an airfoil with SMA inserts (maximum insert widths)
with their respective labels. This example depicts a configuration for
maximizing the airfoil’s camber. Upon actuation, the upper inserts
(red) will expand while the those in the bottom (blue) will contract.
The widths of each SMA insert is denoted as wLior wUi
. . . . . . . 29
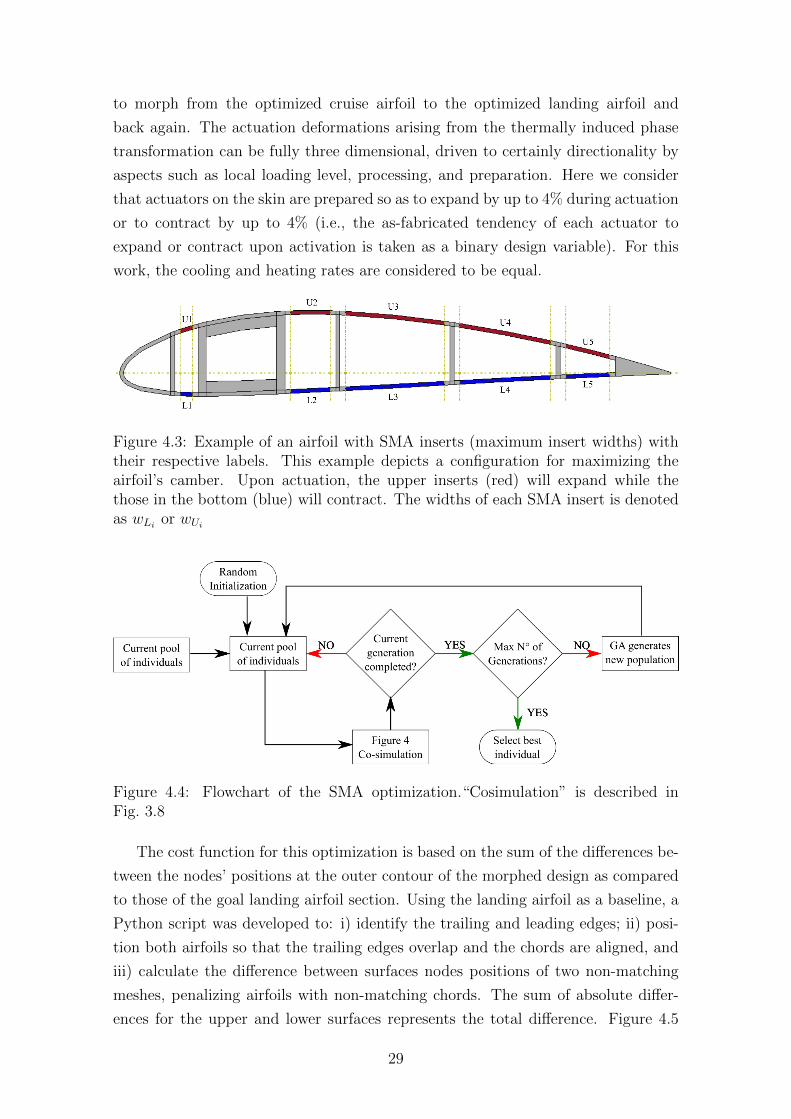
4.4 Flowchart of the SMA optimization.“Cosimulation” is described in
Fig. 3.8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.5 Shape difference concept. . . . . . . . . . . . . . . . . . . . . . . . . . 30
5.1 Pressure Coefficient Distributions using traditional (blue) and mor-
phing (red) flaps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2 Comparison of the geometry of an airfoil using traditional (blue) and
morphing (red) flaps . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3 Drag vs Mass plots of all generations: (a) Cruise optimization; (b)
Landing optimization . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4 Optimized airfoil section profiles: the optimized cruise airfoil is in
blue, the optimized landing airfoil in red and the shape difference in
green. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.5 Von Mises Stress for the optimized cruise wing . . . . . . . . . . . . . 35
5.6 Von Mises Stress for the optimized landing wing . . . . . . . . . . . . 35
5.7 Evaluation in imposed conditions and structural response during the
morphing corresponding to the optimal morphing design. (a) Temper-
ature, (b) Angle of Attack, (c) Velocity, (d) Trailing edge displacement 37
5.8 SMA morphing optimization: shape difference for the best individual
through the generations . . . . . . . . . . . . . . . . . . . . . . . . . 37
5.9 Airfoil section profiles: the optimized cruise airfoil is in blue, the
optimized landing airfoil in red and the morphed cruise airfoil in green. 38
5.10 Shape Difference vs Maximum Von Mises Stress through all generations 38
C.1 Taguchi L50: used for 7 and 8 variables . . . . . . . . . . . . . . . . . 50
xi

List of Tables
2.1 Summary of various SMA properties and their effects. [2] . . . . . . . 8
3.1 List of elementary flows . . . . . . . . . . . . . . . . . . . . . . . . . 17
5.1 SMA Insert Design Optimization Problem . . . . . . . . . . . . . . . 32
5.2 Optimized design variables for landing and cruise sections . . . . . . . 33
5.3 Optimum variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5.4 SMA Insert Design Optimization Problem . . . . . . . . . . . . . . . 36
5.5 Optimized SMA insert widths in millimeters . . . . . . . . . . . . . . 38
xii

Chapter 1
Introduction
The airfoil design associated with a given aircraft wing configuration is primarily
intended to maximize performance during the predominant flight condition (e.g.
cruise) while generally considering constraints on performance in off-optimal con-
ditions (e.g., during landing). To overcome this performance loss, several methods
exist to adapt the wing according to freestream conditions or changing performance
requirements. The most common is the inclusion of rigid but movable control sur-
faces, which permit the reconfiguration of the wing necessary to transition from
takeoff to cruise and then, to landing (i.e. Figure 1.1). These mechanisms lead
to higher efficiency but are not without drawbacks. Due to their complexity, they
occupy volume inside the wing which might displace valuable fuel storage; more
importantly, they add weight. Due to the use of discontinuous surfaces, extra drag
and noise are also generated for all flight conditions. These disadvantages motivate
the use of alternative adaptive technologies, such as conformal wing morphing via
implementation of shape memory alloys or other active materials.[5]
Shape memory alloys (SMAs) represent a class of materials that, when provided
Figure 1.1: Examples of adaptive wings and their enhanced behaviour
1

sufficient thermal energy, can generate a significant amount of actuation work in a
monolithic and compact form requiring very little installation volume. Their actua-
tion work density exceeds that attainable from all other active material options [6].
Because of this behavior and also due to its simplicity, there has been a great interest
in their use for aerospace applications.[2]
In the literature, many works can be consulted that address morphing wings [7],
and a large number of those consider the use of SMAs as the driving actuation
mechanism. However, due to limited variety of commercially available SMA forms,
these works have focused primarly on the use of simple shapes, such as springs [8]
and wires [9, 10]. Many works have focused on camber morphing [11–13],while others
have focused on the use of SMA on control surfaces [11, 14, 15]. Regarding numerical
analysis of such systems, the number of papers is quite scarce. Strelec et al.[9]
focused on the numerical and experimental use of nitinol wires to change the camber
of an airfoil. This work is based on and espands the preliminary work described by
Lima Junior et al. [16]. Using an approximation of the SMA transformation via
artificial thermal expansive methods, it was shown in that previous work that SMA
skin inserts are feasible as a solution for morphing from one NACA airfoil section
to another.
The goal of this work is to expand the previous effort from Lima Junior et al. [16].
SMA inserts are considered and their size optimized to drive morphing between two
airfoil shapes. Aerodynamic effects are considered throughout the design process
and, as in Strelec et al. [9], coupled fluid-structural effects are considered and an
accurate constitutive model describing the SMA material [17] behavior is employed.
Also novel is the method of airfoil section selection. Instead of optimizing between
two arbitrary NACA airfoils (as in the past work), two optimized airfoils are used,
each for a different flight condition. The shape of each optimized airfoil is described
by the “Class/Shape Transformation” methodology [18].
The structural Finite Element Analysis (FEA) is performed via Abaqus [19],
while the XFOIL’s [20] implementation of the panel method is used for estimating
aerodynamic forces. Abaqus’ user material subroutine (UMAT) is utilized to define
the constitutive inelastic behavior of the SMA. A custom-coded Python scripted
framework is used to integrate all these listed tools. A Python environment known as
open-source Multidisciplinary Design Analysis and Optimization, OpenMDAO [21],
is chosen for the optimization framework.
Several methodologies and softwares are utilized for this work. In 2 a review of
all structure related topics are covered including an introduction
2

Chapter 2
Structures and Optimization
In this chapter, a review of all strctures related topics are covered. The generic
form of the method developed by Boeing, the “Class/Shape Transformation”, is
depicted in Subsection 2.1 and further simplified and adapted for our needs. A
brief introduction to Abaqus and its functionalities are introduced in the following
Subsection (2.2). 2.3 is a summary of the properties and constitutive model of Shape
Memory Alloys. Finally, 3.4 is a summary of the optimization platform herein used
and 3.5 introduce the concepts of a genetic optimization, more specifically NSGA-II.
2.1 Class Shape Transformation
In previous works [16], morphing between two known NACA profiles (available on
University of Illinois at Urbana-Champaign website) was performed. Here, a dif-
ferent procedure is of concern. Before morphing, the optimized profiles and inner
structures for both shapes, landing and cruise, are obtained. For such, a method is
necessary to represent the outer shape of the airfoils. In the context of an optimiza-
tion problem, certain characteristics are necessary:
• Smooth and realistic shapes. As in structurally viable.
• Requires relatively few variables to represent a large enough design space to
contain optimum aerodynamic shapes for a variety of design conditions and
constraints.
• Mathematically efficient and fast
• Provides easy control for designing and editing the shape of a curve.
Several methods exist involving the manipulation of discrete points towards the
representation of the airfoil surface, while others focus in the use of splines. However
all of these methods fail to satisfy the above conditions. In 2006, Boeing developed
3

the Class/Shape Transformation Method [18]. The method satisfies all of the above
conditions through the use of two separate functions: the class and the shape.
Through the manipulation of the constants in these functions, different shapes are
obtainable.
The Class Function, equation 2.1, states the general classes of geometry through
the variables N1 and N2 (i.e. shape trailing edges and blunt leading edge). In
Figure 2.1, various of the possible classes are depicted.
CN1N2 = ψN1[1− ψ]N2 (2.1)
(a) NACA airfoil (N1=0.5, N2=1.0) (b) Elliptical airfoil (N1=0.5, N2=1.0)
(c) Biconvex airfoil (N1=1.0, N2=1.0)(d) Low drag projectile (N1=0.75, N2=0.25)
(e) Wedge (N1=1.0, N2=1.0 (f) Rectangle (N1=0.001, N2=0.001)
Figure 2.1: Influence of variables N1 and N2. All with constant Shape functions.
For subsonic flights, the usual of a glider, the (a) class is well suited. Therefore,
for the rest of the work we will consider that N1 = 0.5 and N2 = 1.0.
The Shape Function is used to define specific shapes within the geometry class
(i.e. camber and thickness). Contrary to the class function, the shape function
depends on the polynomial series: the Bernstein Polynomial. If n is the polynomial
degree, the upper and lower surfaces are defined by:
Su =n∑i−1
AuiSi(ψ) (2.2a)
Sl =n∑i−1
AliSi(ψ) (2.2b)
4

where Aui and Ali are constants and the shape component Si is defined as,
Sr,n(ψ) = Ki,nxr(1− ψ)n−r (2.3)
where Ki,n is the Bernstein polynomial defined by equation 2.4.
Ki,n =n!
i!(n− i)!(2.4)
Depending on the polynomial degree n, there are 2(n+1)Aus and Als. Therefore,
a total of 4(n+ 1) variables. The influence of the A variables is depicted on Figure
2.1.
(a) Al0 = 0.1, Al1 = −0.1(b) Al0 = 0.3, Al1 = −0.1
(c) Al0 = 0.3, Al1 = 0.3 (d) Al0 = 0.6, Al1 = −0.1
Figure 2.2: Examples of the influence of Ali variables for a first order shape function.The values of Aui were held constant.
Combining both functions, class and shape, and taking in to account the trailing
thickness, we have the 2.5 equations for the ζ coordinates of both surfaces.
ζupper = CN1N2Su(ψ) + ψ∆ζupper (2.5a)
ζlower = −CN1N2Sl(ψ)− ψ∆ζlower (2.5b)
where, ∆ζupper and ∆ζlower are the trailing edge thicknesses which are considered
to be equal and constant. From [18], it was found that a first order Bernstein
polynomial, although the few variable, already lead to good results. If a first order
Bernstein polynomial representation is used for the upper (u) and lower (l) surfaces,
both can be represented as
ζu = ψ0.5(1− ψ)[Au0(1− ψ) + Au1ψ] + ψ∆ζu, (2.6a)
ζl = ψ0.5(ψ − 1)[Al0(1− ψ) + Al1ψ]− ψ∆ζl, (2.6b)
5

Figure 2.3: Example of the use of the restrictions. The blue line represents a cruiseconfiguration, the green line a landing configuration and the red lines indicate thelocal thicknesses that were kept constant in both configurations.
where Au0 , Au1 , Al0 and Al1 are the design variables; and∆ζu and ∆ζl are trailing
edge thicknesses which are considered to be equal and constant.
For the landing optimization, extra design constraints related to thicknesses of
the airfoil section, i.e. the distance between upper and lower surface, are considered
that will influence the possible landing configurations. The spar region of the wing
section is assumed to be free of SMA actuator segment; morphing of the spar (and, in
particular, the airfoil outer mold line thickness in the region of the spar) is unfeasible.
The same is considered for the stiffeners. To avoid such a problem, the thickness at
4 points along the chord of the airfoil section (ψ1, ψ2, ψ3 and ψ4), are transferred
unchanged to the shape equation defining the airfoil optimized for landing. This
enables similar spar geometries without overconstraining the shape. If ζi is the
thicknesses at one of these points (i=1, 2, 3 and 4), from equations 2.6, we have
that:
Au0 =K1/(1− ψ1)−K2/(1− ψ2)ψ1/(1− ψ1)− ψ2/(1− ψ2)
Au1 =K3/(1− ψ3)−K4/(1− ψ4)ψ3/(1− ψ3)− ψ4/(1− ψ4)
where,Ki =ζi − 2ψi∆ζψ0.5i (1− ψi)
(2.7)
Since for the landing analysis the thickness ζi is known, the total num-
ber of unknowns across the two equations is reduced to two given that Au0 =
f(ψ1, ψ2, Al0 , ζ1, ζ2) and Au1 = f(ψ3, ψ4, Al0 , ζ3, ζ4) . In this way, the number of
design variables is reduced while the structural feasibility of the morphing struc-
tures design (i.e. the integrity of the non-morphing spar) is guaranteed.
The result of equations 2.7 can be clearly noticed on Figure 2.6.
6

2.2 Abaqus
Abaqus 6.12 is a suite of FEA/CFD routines. It has inbuilt CAD functionalities,
mesh generators, an easy-to-use GUI with in-depth visualization options and a con-
venient Python interface. Therefore the user can create, mesh, define the loads and
boundary conditions, submit and analyse the results in one single platform. Due to
it’s Python API, users can easy script and automate the software. This shows to be
an vital functionality when leading with optimization problems.
One of the many Abaqus functionalities is the use of subroutines. Through
the use of Fortran codes, the user is able to create functionalities not inherent to
the software. Such as supersonic CFD’s, materials with non-linear behaviours and
others. For most researches, this is the main reason Abaqus is used. For this work,
the Abaqus subroutine User material (UMAT) developed by TiiMS (Texas Institute
for Intelligent Materials and Structures) is utilized. It enables the creation of new
material characteristics, such as those of shape memory alloys.
2.3 Shape Memory alloys
Shape memory alloys (SMAs) are metallic alloys which undergo solid-to-solid phase
transformations induced by the appropriate temperature and/or stress. The trans-
formations are between 3 distinct crystalline structures: twinned martensite, de-
twinned martensite and austenite [5]. Table 2.1 is summary of all of the character-
istics of such alloys. The High Actuation Strain and the High Energy Density traits
are the main reason why SMAs are of interest to the Aerospace industry. Hence,
the reason why this kind of material was here selected. Each phase transformation
has a pre-defined start and final temperature, where the martensite fraction can
vary from 0 (pure austenite) to 1 (pure martensite). The transformation between
the pure states are known as martensite transformation (from 0 to 1) and austenite
transformation (from 1 to 0).
The primary characteristic of these alloys is the Shape Memory Effect depicted
in Figure 2.4. If the alloy is in a twinned martensite state, e.g. no stress and T < As,
where As is the temperature where austenitization starts, when loaded above σMs,
martensite starts to be detwinned. Once σ > σMf , martensite is complety detwinned
and returns to elastically deform. When unloaded a residual strain is noticeable since
the material is still in detwinned martensite state. To recover to its original form, the
7

Table 2.1: Summary of various SMA properties and their effects. [2]
8

Figure 2.4: Shape Memory Effect
material is heated above Af , the temperature where the austenite transformation
is complete, recovering the residual strain. This highly coupled thermal-mechanical
behaviour is of great interest for actuation purposes.
From Figure 2.5, one can notice that the transformation temperatures from
Austenite to Martensite (Ms and Mf ) and from Martensite to Austenite (As and
Af ) are different. This results in a behaviour known as a hysteresis depicted in
Figure 2.6, which is the result of an energy dissipation.
Another phenomena characteristic to SMAs is the Pseudoelastic effect. The
transformation from austenite to detwinned martensite, stress-induced, can generate
reversible inelastic strains. The strains are recovered once the load are reduced to
their original values. An experimental evidence of such effect can be observed on
Figure 2.7.
The thermo-mechanical behavior of SMAs can be described by constitutive mod-
els that establish a phenomenological description of these alloys. Herein, the Hartl-
Lagoudas [6] model is employed. Contrary to other method, martensitic transforma-
tion is not considered. Only the generation and recovery of transformation strains
that occur as a result of martensitic transformation is taken into account. The model
considers three external state variables: the stress σ, the total strain ε, and the ab-
solute temperature T . Two internal state variables are also considered: the inelastic
transformation strain εt (e.g. caused by transformation) and the martensitic vol-
ume fraction ξ. The model follows the Helmholts free energy principle, therefore the
temperature and the total strain are assumed to be known. Additive decomposition
9

Figure 2.5: SMA stress-temperature phase diagram (schematic) [2]
Figure 2.6: Experimental results illustrating the SMA under a constant 200MPastress [3]
10

Figure 2.7: Experimental result depicting the Pseudoelastic Effect [2]
is assumed by considering elastic, thermal and inelastic contributions.
ε = S(ξ)σ + α(T − To) + εt (2.8)
where S(ξ) is the phase-dependent fourth-order compliance tensor, written as
S(ξ) = SA − ξ(SA − SM) = SA − ξS (2.9)
where SA and SM are the compliance tensors for austenitic and martensitic phases,
respectively; α is the second-order coefficient of thermal expansion tensor, where
To is the material reference temperature. Standard isotropic forms are assumed for
S(ξ) and α, and they are computed from material properties to be described shortly.
The inelastic transformation strain evolves such that the time rate of change of
both its magnitude and direction are given as
εt = ξ
Hcur(σ 3σ′
2σ) ; ξ > 0
εt−r
ξr; ξ < 0
(2.10)
During forward transformation (ξ > 0), the formulation for the direction of
transformation follows the assumptions of classical associative Mises plasticity. The
Mises equivalent stress is given as σ = 2√
3/2σ′ : σ′, where σ′ is the deviatoric stress.
The magnitude of transformation strain generated during full martensite transfor-
mation is captured by the scalar-valued function Hcur(σ). For trained materials,
Hcur may be considered as follows:
11

Hcur(σ) =
Hmin ; σ ≤ σcrit
Hmin + (Hmax −Hmin)(1− exp−k(σ−σcrit)) ; σ > σcrit(2.11)
here Hmin, Hmax, k and σcrit are model parameters.
During reverse transformation (ξ < 0), the direction and magnitudes are defined
such that all transformation strain existing at the cessation of austenite transfor-
mation (i.e., at which time ξ → ξr and εt → εt−r ) is fully recovered should the
material transform fully back into austenite. Having related stress, total strain, and
inelastic strain, and further having defined an evolution equation for the inelastic
strain εt, we need only define constraints on the evolution of the martensitic volume
fraction ξ, which acts as a scalar multiplier in 2.10. For this purpose, we introduce
the transformation function Φ. Inspired by the methods of classical plasticity, the
following constraints are stated:
Φt ≤ 0, ξΦt = 0, 0 ≤ ξ ≤ 1 (2.12)
where the first two represent the the Kuhn-Tucker constraints (e.g. first order con-
ditions for a solution of a nonlinear problem to be optimal), and the third bounds
the martensitic volume fraction, which naturally ranges from 0 to 1.
From the definition 2.10, we have that forward and reverse transformation are
distinctive process, therefore
Φt =
Φtfwd ; ξ ≥ 0 and 0 ≤ ξ < 1
Φtrev ; ξ > 0 and 0 ≤ ξ < 1
(2.13)
Φtfwd and Φt
rev are given by
Φtfwd = (1−D)Hcur(σ)σ − 1
2σ : Sσ − ρ∆soT + ρ∆uo
−[
1
2a1(1 + ξn1 + (1− ξ)n2) + a3
]− Y t
o (2.14)
Φtrev = (D − 1)
σ : εt−r
ξr+
1
2σ : ∆Sσ + ρ∆soT + ρ∆uo
−[
1
2a2(1 + ξn3 + (1− ξ)n4) + a3
]− Y t
o (2.15)
where D and T to are transformation dissipation parameters; ρ∆so and ρ∆uo are
the volume-specific change in reference to entropy and to internal energy between
12

martensite and austenite, respectively; a1, a2 and a3 are transformation hardening
coefficients while n1, n2, n3 and n4 are transformation hardening exponents.
13

Chapter 3
Aerodynamics and Fluid-Structure
Interaction
In this chapter all the aerodynamic related topics are covered. An introduction
of the concepts of aerodynamics herein utilized are introduced in Subsection 3.1.
The theory behind panel methods and the Xfoil software utilized are described in
Subsection 3.2. 3.3 describes the multiphysics python code developed incorporating
the Abaqus FEA model and the Xfoil panel model.
3.1 Fundamental Concepts
Although complicated geometries, most wings can be represented through a collec-
tion of geometric characteristics related to their cross-section (Figure ??) or to their
top view (Figure ??). Here, the following geometric wing related concepts have been
utilized:
• Leading Edge: the foremost edge of an airfoil section, usually the edge at the
round-off end Also defined as the origin, e.g. the (0,0) point, of our coordinate
system.
Figure 3.1: Representative airfoil depicting all relevant geometric definitions
14

Root
Tip
Span
λ
Figure 3.2: Representative wing depicting all relevant geometric definitions
• Trailing Edge: the rearmost edge of an airfoil section, usually the edge at the
sharp end of the airfoil.
• Chord : absolute distance from the leading edge to the trailing edge.
• ψ: nodes’ coordinates along the chord line and normalized by the chord.
• ζ: nodes’ coordinates normal of the chord line and normalized by the chord.
• Camber Line: line of points midway between the upper and lower surfaces.
• Angle of Attack(α): Angle of the chord relative to the wind’s direction.
• Centerline: line located equidistant of both tips following the fuselage.
• x : coordinate along the spam that has its origin is located at the centerline .
• Root : wing cross section at the centerline.
• Tip: wing cross section at the extremity of the wing
• Span: distance between the wing tips.
• Taper : ratio between the tip chord and the root chord.
• Sweep (λ): angle of the leading edge in relation to the span.
In addition, to evaluate the performance of the airfoils herein analyzed, several
aerodynamic concepts were utilized. The formal definition of these concepts are:
• Cruise: flight condition where altitude is stabilized. Time wise, it is the
predominant flight condition. [22]
• Landing : flight condition where the aircraft descends from cruise altitude to
the ground.
• Resulting Force (R): it is the resultant force generated by wind pressure.
15

Figure 3.3: Aerodynamic Forces
• Lift (L): it is the component perpendicular to the wind’s direction of R. As
can be seen in Figure 3.3. High Lift is usually desirable. Aircraft’s with higher
lift can generate less drag, consume less fuel or carry more cargo.
• Drag (D): it is the component perpendicular to the wind’s direction of R. As
can be seen in Figure 3.3. High drag for most flight conditions is undesirable.
Since more thrust and, therefore, fuel, is necessary to propel the vehicle.
• Pressure Coefficient : It is the local unidimensional coefficient of the wind
pressure. Since pressure along the airfoil surface varies, the coefficient is a
local variable. If p∞ and ρ are, respectively, the air pressure and density at
the aircraft’s altitude; and V∞ the wind velocity; we have that:
Cp =p− p∞ρV 2∞
(3.1)
3.2 Panel Method
Although a free software known as Xfoil is utilized to calculate the aerodynamic
pressures through the panel method, the author finds it necessary to introduce the
theory behind the method to depict its advantages and disadvantages. This section
is based on the lectures from Prof. Lorena A. Barba, author of the Aeropython
lessons.
The algorithm is initialized performing a discretization of the airfoil geometry
into panels. The panel’s attributes are: a starting point, an end point, a mid-point,
its length and its orientation. Figure 3.4 depicts the nomenclature herein used.
Since the trailing and leading edge have more complicated geometries, the mesh
needs to be more refined near these regions. For such, a standard method is to store
16

Figure 3.4: A single panel with its nomenclature
Table 3.1: List of elementary flowsUniform Flow: φ = U∞ + C
Source (Sink): φ = (−) σ2πln(√
(xci − xj(sj))2 + (yci − yj(sj))2)
Vortex: φ = (−)γtan−1(y−ysourcex−xsource
)
the x-coordinate of the circle points to be the x-coordinate of the panel nodes, x,
and project the y-coordinate of the circle points onto the airfoil by interpolation.
We end up with a node distribution like this:
From potential flow theory, it is known that inviscid flows can be represented by
the superposition of 5 elementary flow elements: a uniform flow, a vortex, a source,
a sink and a doublet.
If we consider a uniform flow at wind velocity U∞, a source at the mid-point
of each panel i and a vortexes of constant γ strength at each mid-point, using the
principle of superposition, we have that the potential velocity is:
φ (xci , yci) = U∞xci cosα + U∞yci sinα
+N∑j=1
σj2π
∫j
ln
(√(xci − xj(sj))2 + (yci − yj(sj))2
)dsj
−N∑j=1
γ
2π
∫j
tan−1
(yci − yj(sj)xci − xj(sj)
)dsj (3.2)
17

Figure 3.5: Outline of panels resulting from the circle method
Enforcing the flow-tangency condition on each panel mid-point (with subscript
c) approximately makes the body geometry correspond to a dividing streamline (and
the approximation improves if we represented the body with more and more panels).
So, for each panel i, we make the component of u normal to the panel, un =, equal
to zero at (xci , yci), that is
un =∂
∂ni{φ (xci , yci)} = 0 (3.3)
which leads to:
0 = U∞ cos (α− βi) +N∑j=1
σj2π
∫j
∂
∂niln
(√(xci − xj(sj))2 + (yci − yj(sj))2
)dsj
−N∑
j=1,j 6=i
γ
2π
∫j
∂
∂nitan−1
(yci − yj(sj)xci − xj(sj)
)dsj (3.4)
where βi is the angle that the panel’s normal makes with the x-axis, so
∂xci∂ni
= cos βi and∂yci∂ni
= sin βi (3.5)
and
xj(sj) = xaj − sin (βj) sj
yj(sj) = yaj + cos (βj) sj (3.6)
18

But, there is still a problem to handle when i=j. So that the streamlines do
not penetrate the panel, the source sheet strength should be equal to the incoming
volume. Therefore, for an i-th panel to itself its contribution is σi2
. Applying the
boundary condition at the center of the i-th panel on equation 3.4:
0 = U∞ cos (α− βi) +σi2
+N∑
j=1,j 6=i
σj2π
∫j
∂
∂niln
(√(xci − xj(sj))2 + (yci − yj(sj))2
)dsj
−N∑
j=1,j 6=i
γ
2π
∫j
∂
∂nitan−1
(yci − yj(sj)xci − xj(sj)
)dsj (3.7)
Solving the partial derivations, we have that:
0 = U∞ cos (α− βi) +σi2
+N∑
j=1,j 6=i
σj2π
∫j
(xci − xj)∂xci∂ni
+ (yci − yj)∂yci∂ni
(xci − xj)2 + (xci − xj)
2 )dsj
−N∑
j=1,j 6=i
γ
2π
∫j
(xci − xj)∂yci∂ni− (yci − yj)
∂xci∂ni
(xci − xj)2 + (yci − yj)
2 dsj (3.8)
The Kutta-condition states that the pressure below and above the airfoil trailing
edge must be equal so that the flow does not bend around it, but leaves tangentially.
The rear stagnation point must be exactly at the trailing edge. To enforce the Kutta-
condition, we must include one more equation. We state that the pressure coefficient
on the first panel must be equal to that on the last panel:
Cp1 = CpN (3.9)
Using the definition of the pressure coefficient on a surface for an i-th panel:
Cpi = 1−(VtiU∞
)2
(3.10)
with equation 3.9 and considering that the horizontal axis of the coordinate system
for both panels are inversed, we have that:
Ut1 = −UtN (3.11)
Therefore, we need to evaluate the tangential velocity at the first and last pan-
els. Let’s derive it for every panel, since it will be useful to compute the pressure
coefficient.
19

Uti =∂
∂ti(φ (xci , yci)) (3.12)
i.e.,
Uti = U∞ sin (α− βi)
+N∑
j=1,j 6=i
σj2π
∫j
∂
∂tiln
(√(xci − xj(sj))2 + (yci − yj(sj))2
)dsj
−N∑
j=1,j 6=i
γ
2π
∫j
∂
∂titan−1
(yci − yj(sj)xci − xj(sj)
)dsj (3.13)
which gives
Uti = U∞ sin (α− βi)
+N∑
j=1,j 6=i
σj2π
∫j
(xci − xj)∂xci∂ti
+ (yci − yj)∂yci∂ti
(xci − xj)2 + (xci − xj)
2 dsj
−N∑
j=1,j 6=i
γ
2π
∫j
(xci − xj)∂yci∂ti− (yci − yj)
∂xci∂ti
(xci − xj)2 + (xci − xj)
2 dsj (3.14)
where∂xci∂ti
= − sin βi and∂yci∂ti
= cos βi
Here, we build and solve the linear system of equations of the form:
[A][σ, γ] = [b] (3.15)
where the N + 1×N + 1 matrix [A] contains three blocks: an N ×N source matrix
(matrix [S] in Equation 3.16), an N × 1 vortex array to store the weight of the
variable γ at each panel (vector [g]), and a 1 × N + 1 Kutta array that represents
our Kutta-condition (vector [k]).
Sij =
12
, if i = j
12π
∫ (xci−xj(sj)) cosβi+(yci−yj(sj)) sinβi
(xci−xj(s))2+(yci−yj(s))
2 dsj , if i 6= j(3.16)
The right-hand-side vector b is defined as:
[b] =
bi = −U∞ cos βi , if i 6= N + 1
bN+1 = −U∞sin(α− βi) , if i = N + 1(3.17)
The main disadvantage of the Panel Method is the Paradox of D’Alembert ,
which states that for an incompressible and inviscid flow, the drag force is zero on
a body moving with constant velocity relative to the fluid. Zero drag is in direct
20

contradiction to the observation of substantial drag on bodies moving relative to
fluids.[23] The solution adopted by the author of Xfoil, Mark Drela, is to apply
the Squire-Young formula to obtain the Drag. The formula assumes that the wake
behaves in an asymptotic manner downstream of the point of application. This
assumption is strongly violated in the near-wake behind an airfoil with trailing edge
separation. Hence, the usual application of Squire-Young at the trailing edge is
questionable with separation present, but its application for flow conditions before
separation is reasonable. Therefore the problem of calculating aerodynamic pres-
sures reduces to a linear algebric system. Wherein modern CFS’s simulations would
lead to much longer computational periods.
As mentioned before, instead of developing a Panel Method code, a free software
is used. Xfoil was developed by Mark Drela from MIT and for the last two decades
has been optimized. The concepts herein presented are applied in the software. It
is able to generate panel meshes (Figure 3.6 and calculate the Pressure Coefficients
(Figure 3.7)
In this work we will be leading with 2D and 3D geometries, but the pressure
coefficients from the Panel Method are only for 2D geometries. For such, an elliptical
distribution is utilized along the wing span [24]. Although an ideal distribution, it
is considered a plausible pressure distribution for an unswept and untapered wing.
If the pressure coefficient at the wing root are considered to be those given by xfoil,
[Cxfoilp ], the pressure coefficients along the span are obtained through 3.18.
[Cp(x)] = [Cxfoilp ]
√1− (2x/b) ∗ ∗2 (3.18)
3.3 Multiphysics Algorithm
The approach for computing the response of this coupled mechanical systems fol-
lows from that of Felippa et al. [25]. The computational multiphysics framework
herein utilized was developed for a staggered solution problem using a partitioned
Figure 3.6: Panel distribution generated by Xfoil
21

Figure 3.7: Pressure vectors generated by Xfoil
treatment. An overview of the staggered solution problem considered herein is de-
picted in Figure 3.8. The system is represented through differential partitions (i.e.
discretization of a decomposed system). The interaction effects are communicated
between the individual partitions using prediction or substitution, (i.e. communicat-
ing the response of the current state to the following state or to the current state).
This representation enables the utilization of non-matching spatial discretizations
and geometric representations, which is a requirement for efficient calculation of
aerodynamic effects via the panel method. For computational treatment of a dy-
namical coupled system such as an aeroelastic simulation, the decomposed systems
are the fluid and solid fields, where each is discretized in space and time. At each
time interval, further decomposition of the time discretization of a field is possible;
this approach is known as splitting or sub-cycling. This feature will be of importance
when dealing with stability issues associated with morphing elements in the finite
element model.
In the context of this current effort, the developed framework allows the calcu-
lation of the pressure distribution to update based on the deformed airfoil shape
while the aero-structural loads likewise update based on changing pressures. This
occurs throughout a dynamic analysis. With the optimized parameters found for
both the cruise and landing shapes, the cruise shape is imported in Abaqus, thus
creating the Initial model in Figure 3.8. Information regarding the outer mold line
of the Abaqus model is transferred to XFOIL via a custom-coded Python inter-
face where the pressure distributions are calculated and then transferred back to
Abaqus, updating the pressure distribution. An FEA takes place for a small step of
time using the UMAT for defining the SMA behavior. The incremental process re-
peats itself in this explicit manner until the total simulation time has been reached.
It is assumed that the morphing is relatively slow (i.e. quasi-static) and that the
flow has sufficient time to stabilize between each morphing increment, therefore, the
panel method analysis provides steady-state solutions and does not depend on time.
The cost function described in Section 3. The coupled aero-structural morphing
22

calculation process is depicted in Figure 3.8.
Figure 3.8: Flowchart of the Fluid-Structure simulation.
3.4 OpenMDAO: Optimization Platform
OpenMDAO is an open Multidisciplinary Design Analysis and Optimization
platform [21]. Developed by NASA and written in Python. It’s purpose is to
facilitate the communication between 3rd party softwares in working environment
where other features such as optimization or design of experiments can be easily
implemented. Such a framework is possible due to the separation of the flow of
information, dataflow, from the process in which analyses are executed, workflow.
The software is composed of four specific constructs. They are:
• Component : an object with input and output variables. It can be a wrapped
3rd party software or a code written by the user (in python or any other
language). It is possible to have multiple components that communicate with
each other.
• Assembly : a group of linked components with a specified dataflow between
them.
• Driver : responsible for iterating over a workflow until some condition is met
such as in an optimization or a design of experiments.
• Workflow : responsible for dictating the components to execute and in that
order to execute them for a given driver. Drivers can also be used inside a
workflow, enabling nested iterations.
An overview of an usual OpenMDAO framework utilizing the above constructs
is depicted in Figure 3.4.
23

Figure 3.9: View of an Assembly Showing Data Flow
3.5 NSGA-II: Genetic Optimization
Since heuristic methods become increasingly more effective in finding the global
optimum given a large number of design variables and considering also the expected
high degree of non-linearity in the design response, for this work a robust and efficient
genetic algorithm known as NSGA-II (Non Sorting Genetic Algorithm II) [26] was
selected for all optimizations. This well known option is included in the current
distribution of OpenMDAO. In such a scheme, each design variable is treated as
a gene; a combination of these genes represents the chromosome of an individual
design; a group of individuals is treated as a population. Techniques inspired by
natural evolution, such as crossovers, mutations and natural selection, generate a
series of design population generations that should eventually include the nearly
optimal solution.
The procedure of the NSGA-II, depicted in Figure ?? is as follows:
1. Population Initialization: based on the population size, N , and ranges defined
by the user, the population is created (R0)
2. Non-Dominated sort : as in any genetic algorithm, every individual p is eval-
uated (i.e maximum Von Mises Stress, tip displacement) and therefore at-
tributed a fitness. However a non-dominated sort also considers the set the
individual dominates (Sp) and the number of individuals that dominate the
individual (np), organizing the population in to fronts, Fi. All individuals in
front F1 have fitness 1, in front F2 have fitness 2 and so on. Once all individ-
uals are sorted, the individuals with higher fitness are rejected. If M is the
number of individuals in the set Pt of surviving configurations, individuals in
24

Figure 3.10: Schematic of NSGA-II algorithm [4]
fronts with fitness higher that that of the M -th sorted individual are rejected.
3. Crowding Distance: is the measure of how close an individual is to the indi-
viduals in it’s own front. Large average crowding distance will result in better
diversity in the population. The population in each front is sorted according to
it’s crowding distance. Individuals of the highest front with crowding distance
lower than that of the M -th sorted individual are rejected. The result is set
Pt+1, the pool of possible candidates.
4. Genetic Operators : inspired by natural evolution, three algorithms are used
to generate new individuals of set Qt+1, the offspring :
• Binary Tournament Selection: two randomly chosen individuals are
drawn from the Pt+1. An individual is selected if the fitness is lesser
than the other, and if the fitness are equal, the individual is selected if
crowding distance is greater than the other.
• Binary Crossover : generation of individuals through random interpola-
tion of the genes of two individual’s from Pt+1.
• Mutation: to avoid local minimums, a genetic algorithm is utilized. It
enables variation of genes even when the results has converged, hence the
global minimum in the domain can be found if enough generations are .
5. Recombination: elitism The offspring population of the previous step is com-
bined with the current generation population and selection is performed to
set the individuals of the next generation resulting in set Rt+1. Since all the
previous and current best individuals are added in the population, elitism is
ensured. If by adding all the individuals in Fi the population exceeds N then
25

individuals in Fi are selected based on their crowding distance in the descend-
ing order until the population size is N . And hence the process repeats starting
from step 2 onwards until the user defined number of generations is reached.
26

Chapter 4
Workflow
4.1 Wing Design Optimization
In this work, we will consider two key flight conditions weighted by the percentage of
total flight [22]: cruise and landing. We further restrict ourselves to the consideration
of an untapered and unswept wing to minimize three dimensional effects during this
preliminary assessment of our approach. Standard aluminum construction is also
considered except where augmented via the placement of SMA actuation segments.
For each flight condition, the airfoil of a non-tapered and non-swept wing including
martensitic NiTiCu is optimized. As depicted in Figure 4.1, the inner structure
of the wing consists of a traditional assemblage of ribs, a spar, and a D-box. The
optimization focuses on obtaining a wing with low weight, low drag, and low bending
displacement under lifting loads while providing sufficient lift and avoiding localized
over-stress. For landing, the desire for a minimized landing velocity is considered.
For cruise, extra design variables related to the thicknesses of inner components
(spars, skin, ribs and D-box) and to the number of ribs are considered. For landing,
the optimal cruise thicknesses and number of ribs are used. The influence of the
component’s thicknesses over aluminum’s properties are also considered.[27]
As depicted in the airfoil design flowchart of Figure 4.2, the analysis is initiated
with the creation of random wing design configurations; for each, an Abaqus struc-
tural model is created. From this model, total aircraft weight is found. The minimal
angle of attack that provides sufficient lift, if possible, is assessed via XFOIL. Hav-
ing found the necessary angle of attack, the pressure distributions are calculated in
XFOIL; via a simplified assumption of an approximately elliptical lift distribution,
the three dimensional (i.e., full wing) loads are found. The loads are then imported
by Abaqus, and a FEA is completed. If the wing is found to violate structural
constraints on local stress limits, the configuration is eliminated from the pool of
possible designs. If the maximum number of iterations has not reached its maxi-
27

Figure 4.1: 3D Wing Model
mum, a new generation is created according to the optimization code. Otherwise the
best configuration among all members of the design populations of all generations
is assumed to be sufficiently approximate the optimal design. For landing, the same
process is applied, but the minimum velocity is assess instead.
Figure 4.2: Flowchart of the airfoil shape optimization for cruise.
4.2 Morphing Optimization
The purpose of this work is not only the optimization of various airfoil outer mold
line configurations, but also the associated optimization of the means by which those
configurations are morphed from one to another. This is truly a novel contribution
of this work. With the airfoils generated for the process of Figure 4.2, NiTiCu shape
memory alloy inserts of various sizes are generated on the skin as can be seen in
Figure 4.3. These inserts are thermally driven so as to actuate, morphing the section
28
to morph from the optimized cruise airfoil to the optimized landing airfoil and
back again. The actuation deformations arising from the thermally induced phase
transformation can be fully three dimensional, driven to certainly directionality by
aspects such as local loading level, processing, and preparation. Here we consider
that actuators on the skin are prepared so as to expand by up to 4% during actuation
or to contract by up to 4% (i.e., the as-fabricated tendency of each actuator to
expand or contract upon activation is taken as a binary design variable). For this
work, the cooling and heating rates are considered to be equal.
Figure 4.3: Example of an airfoil with SMA inserts (maximum insert widths) withtheir respective labels. This example depicts a configuration for maximizing theairfoil’s camber. Upon actuation, the upper inserts (red) will expand while thethose in the bottom (blue) will contract. The widths of each SMA insert is denotedas wLi
or wUi
Figure 4.4: Flowchart of the SMA optimization.“Cosimulation” is described inFig. 3.8
The cost function for this optimization is based on the sum of the differences be-
tween the nodes’ positions at the outer contour of the morphed design as compared
to those of the goal landing airfoil section. Using the landing airfoil as a baseline, a
Python script was developed to: i) identify the trailing and leading edges; ii) posi-
tion both airfoils so that the trailing edges overlap and the chords are aligned, and
iii) calculate the difference between surfaces nodes positions of two non-matching
meshes, penalizing airfoils with non-matching chords. The sum of absolute differ-
ences for the upper and lower surfaces represents the total difference. Figure 4.5
29

Figure 4.5: Shape difference concept.
depicts the concept behind the code.
The design variables to be considered during morphing optimization include the
width of each insert labeled in Figure 4.3. As can be seen in Figure 4.4, the scheme
is similar to the one used for finding the landing and cruise airfoil sections. The
two main differences are: i) the airfoil is no longer required to provide sufficient lift
since the airfoil sections have already been determined, and ii) the structure needs
to be feasible (the surfaces must not intersect). Once again the optimization process
(Figure 4.4) incorporates the integrative capabilities and built-in optimization algo-
rithms of OpenMDAO. To provide an accurate evaluation of morphing under flight
conditions, a Fluid-structure interaction framework was developed for communica-
tion between Abaqus and XFOIL.
30

Chapter 5
Results
5.1 Continuous Flap Demonstration
For the purpose of demonstrating the advantages of deforming capabilities of a
continuous flap via SMA in comparison to traditional flaps, an analysis of a simpler
continuous wing was undertaken. In this section a wing with the two forward most
SMA inserts represented at Figure 2 are removed and replaced by ordinary aluminum
materials. All other inserts have the maximum width depicted in Table 5.4. The
trailing edge deflection was 14% of the chord and a deflection angle of 11.5◦, results
that are similar experimental wire-based morphing wings found in the literature [11,
12].
Figure 5.1: Pressure Coefficient Distributions using traditional (blue) and morphing(red) flaps
Since XFOIL utilizes the panel method, the integral boundary layer method
is utilized [20]. Although able to calculate small separation at low Reynolds, the
program is suboptimal for not being able to handle large scale separation (stall) [28].
A comparison of the morphed geometries with a traditional flap is undertaken. The
31

Figure 5.2: Comparison of the geometry of an airfoil using traditional (blue) andmorphing (red) flaps
pressure coefficient distributions are obtained for the same deflection angle, 11.5◦,
Reynolds, 3.0 × 106, and angle of attack, 5.0◦. The center of the first SMA insert
(0.35 of the chord) was considered to be the hinge point for the traditional flap.
The deflection angle for the morphing flap was considered to be the angle between
the the Trailing Edge and the hinge point used for the traditional flap. The chosen
deflection angle is the maximum possible for the structure analyzed in this work.
For the same conditions, the morphing flap generated 28% less drag and 18% more
lift. Both pressure distributions can be found in Figure 5.2. These results clearly
indicate the advantages of a continuously airfoil over a discontinuous.
5.2 Wing Design: Optimization
Table 5.1: SMA Insert Design Optimization ProblemCruise Landing
Minimize the Weight Weight differenceproduct of: Drag Landing Velocityby varying 0.1 ≤ Al0 ≤ 0.3 0.05 ≤ Al0 ≤ 0.15
inputs: −0.15 ≤ Al1 ≤ 0.2 −0.3 ≤ Al1 ≤ 0.050.16 ≤ Au0 ≤ 0.40.16 ≤ Au1 ≤ 0.4
0.002m ≤ Spar thickness (tribs) ≤ 0.01m0.004m ≤ Box thickness (tbox) ≤ 0.02m
0.0002m ≤ Skin thickness (tskin) ≤ 0.008m0.002m ≤ Rib thickness (nribs) ≤ 0.01m
subject to Wing tip displacement < 1.0 mconstraint Maximum Von Mises Stress < Aluminum Yield Stress [27]
on outputs:
A summary of the design problem [29] can be found in Table 5.1. The bounds
were determined iteratively through Design of Experiments (DOE). A DOE is a
relevant method to determine the influence of a design variable on the results of a
32

Table 5.2: Optimized design variables for landing and cruise sectionstspar(mm) trib(mm) tskin(mm) tbox(mm) nribs
3.3 3.6 5.4 4.1 12
Cruise:Au0 Au1 Al0 Al1
0.1849 0.3908 0.1392 -0.1499
Landing:Au0 Au1 Al0 Al1
0.2553 0.57581 0.0688 -0.300
non-linear problem. Due to the elevated number of design variable, a Taguchi array
was utilized (see Appendix C).
The process of both optimizations is described by Figure 4.2. Note that a rela-
tively moderate landing angle of attack for landing was chosen; this corresponds to
a more challenging morphing wing problem. The selected cruise velocity is slightly
above the maximum velocity for the Romanian high performance metal two-seat
sailplane ICA IS-32 produced by IAR Brasov [30] (See Appendix B for more specifi-
cations). Atmospheric properties were based on the work of Drela [28]. Respecting
the ranges of influence of all the design variables and considering ∆ζ=4 mm, the
two wing optimizations (cruise and landing) were implemented. The optimum de-
sign variables are given in Table 5.2 and the results through the generations can be
found at Figure 7.
(a) (b)
Figure 5.3: Drag vs Mass plots of all generations: (a) Cruise optimization; (b)Landing optimization
For purpose of feasible consistency, the optimized landing and cruise airfoil sec-
tions must each correspond to the same mass. However, strict satisfaction of this
design requirement via a directly imposed constraint was expected to be too re-
strictive to the optimization process. Rather, the difference of current and desired
33

Table 5.3: Optimum variables
Weight(N) Drag(N) Max Von Mises (MPa)Cruise 7271.6 152.7 119.8 Angle of Attack=0.5◦
Landing 7549.2 83.3 209.4 Velocity =32.4 m/s
weights was included in the objective function such that the best individual of the
last generation will satisfy this equality constraint in an approximate sense. The
final performance measures for the optimized sections are given in Table 5.3, we
notice that the weight variation is considerable and should be a consequence of the
inherent difference of perimeter between both shapes.
To place these results in the context of a real-world aircraft, the optimal cruise
wing is compared to a modern sailplane, the ICA IS-32. This Romanian sailplane
has the equivalent span of the aircraft modeled herein and is also of all-metal con-
struction, and thus a reasonable choice for validation. The gross weight of the IS-32
(5900 N) is smaller than that obtained here, but our calculated L/D (47.83) is higher
than the maximum for the ICA IS-32 (L/D = 45). Therefore the aircraft is heavier,
but more efficient at cruise. As would be expected, the landing airfoil was found to
have a higher camber and lower velocity. This is considered sufficient for validating
the efficacy of our current approach in a preliminary sense. However a deeper study
of the cost functions is necessary. The von Mises contour plot of both wings are
depicted on Figures 5.5 and 5.6.
Figure 5.4: Optimized airfoil section profiles: the optimized cruise airfoil is in blue,the optimized landing airfoil in red and the shape difference in green.
5.3 Morphing Optimization
While the optimization of multiple fixed-point wing designs for various flight condi-
tions is a interesting goal, the main objective of this work is truly the use of shape
memory alloy components as a means to morph between optimized shapes. This
difficult design task is described in this section. The initial velocity is set to zero
to avoid possible convergence difficulties and through the use of a smooth curve
34

Figure 5.5: Von Mises Stress for the optimized cruise wing
Figure 5.6: Von Mises Stress for the optimized landing wing
35

Table 5.4: SMA Insert Design Optimization Problem
Minimize: Error between morphed and goal landing sectionby varying 0.01 m≤ wU1 ≤ 0.03 m 0.01 m ≤ wU2 ≤ 0.09 m
inputs: 0.01 m ≤ wU3 ≤ 0.09 m 0.01 m ≤ wU4 ≤ 0.09 m0.01 m ≤ wU5 ≤ 0.02 m 0.01 m ≤ wL1 ≤ 0.03 m0.01 m ≤ wL2 ≤ 0.09 m 0.01 m ≤ wL3 ≤ 0.09 m0.01 m ≤ wL4 ≤ 0.09 m 0.01 m ≤ wL5 ≤ 0.02 m
subject to constraint Maximum Von Mises Stress < SMA Yield Stress [31]on outputs:
amplitude [19], the cruise velocity is imposed in the minimum ramping time nec-
essary. At this point, the morphing simulation begins. During the simulation, the
aircraft’s altitude is decreased from 3048 meters to 914 meters (i.e. the freestream
fluid conditions are evolved) while the angle of attack and freestream velocity are
simultaneously altered to simulate landing conditions. It was considered that the
aircraft would take 700 seconds to lose 2134 meters of altitude. During the descent,
the temperature and velocity are altered so as to smoothly transition to landing con-
ditions, the transitions are in phase to avoid excessive deformation of the structures
mesh. To commence active morphing, the SMA inserts are heated and the shape of
the airfoil is modified, leading to the trailing edge displacement of Figure 9d. From
the results obtained from Section 5.2 it was determined the binary variable of the
SMA inserts, i.e. to contract or expand, be predefined. All upper inserts are set to
expand and all bottom inserts to contract. The properties of the SMA inserts are
taken from an outside reference [31]. The design optimization problem is stated in
Table 4.
Figure 10 depicts the shape difference for the best individual for each generation
while in Figure 9, all the stages of the simulation are depicted for the optimum
solution. The transition between the two altitudes takes place in the time period
delimited by the red lines. For 1 second the flow is accelerated from zero to flight
condition velocity. To initialize the analysis, the temperature is increased for 99
seconds with constant flight conditions. For the next 600 seconds the SMA inserts
will continue to be heated and the flight conditions will swift from cruise to landing.
For the last 100 seconds, the temperature is constant and landing conditions are
finally achieved. It can be seen that even at maximum velocity the deflections
caused by the aerodynamic pressure are negligible when compared to those of the
SMA actuation. The optimum SMA inserts widths are given in Table 5.5, where
the variables correspond to the labels in Figure 4.3. The optimization framework
has been tested and proven for a single design variable.
We can conclude that the outer mold line obtained via optimized morphing was
36

(a) (b)
(c) (d)
Figure 5.7: Evaluation in imposed conditions and structural response during themorphing corresponding to the optimal morphing design. (a) Temperature, (b)Angle of Attack, (c) Velocity, (d) Trailing edge displacement
Figure 5.8: SMA morphing optimization: shape difference for the best individualthrough the generations
able to reduce the difference between itself and the goal outer mold lines, as seen
in Figure 5.9. However, since the shape difference did not converge to zero (Figure
37

wL1 wL2 wL3 wL4 wL5
11.0 78.4 80.2 10.3 10.5wU1 wU2 wU3 wU4 wU5
25.4 90.0 120. 49.7 12.4
Table 5.5: Optimized SMA insert widths in millimeters
5.10), it is clear that fully successful morphing was not obtained. Examining the
final values in Table 5.5 in comparison with the bounds of Table 5.4, especially
for SMA inserts toward the aft of the airfoil, it seems that parameter bounds may
have influenced the greater error in that region. Further, it is important to note
that true morphing toward greater camber requires a decrease in camber, which is
not accounted for the goal landing shape. Overall, the morphed configuration was
found to have similar geometry to that desired, therefore validating the method
herein considered, though improvement is possible in future efforts.
Figure 5.9: Airfoil section profiles: the optimized cruise airfoil is in blue, the opti-mized landing airfoil in red and the morphed cruise airfoil in green.
Figure 5.10: Shape Difference vs Maximum Von Mises Stress through all generations
38

Chapter 6
Conclusion
This work described for the first time a morphing wing design approach in which
all of the aforementioned analysis components (e.g. fluid-structure simulation,
Abaqus/XFOIL interface) have been developed and integrated in a single frame-
work. Although the approach method adopted differs from those of previous works,
the obtained airfoil for cruise lead to satisfactory performance when compared to
modern sailplanes. The obtained landing airfoil was considered to be satisfactory.
In the end, we demonstrated in analysis that fully integrated design of airfoil and
actuator is possible and that SMA-driven reconfigurable wings are structurally fea-
sible. The use of complementary method to calculate the aerodynamic pressures
that can take stall into account should be considered. Further studies should also
study morphing wings for more than two flight conditions to perhaps represent more
difficult and more realistic flight conditions.
39

Bibliography
[1] CAMARA LEAL, P., BERTAGNE, C., SAVI, M., et al. “Aerostructural Opti-
mization of Shape Memory Alloy-based Wing Morphing via a Class/Shape
Transformation Approach”, 23RD AIAA/AHS Adaptive Structures Con-
ference, 2015.
[2] HARTL, D. J., LAGOUDAS, D. “Aerospace Applications of Shape Memory
Alloys”, Proceedings of the Institution of Mechanical Engineers, Part G:
Journal of Aerospace Engineering, v. 221 (Special Issue), pp. 535–552,
2007.
[3] PERKINS, J. Shape Memory Effects in Alloys. New York, Plenum Press, 1975.
[4] MURTY YANDAMURI, S. R., SRINIVASAN, K., MURTY BHALLAMUDI,
S. “Multiobjective Optimal Waste Load Allocation Models for Rivers
Using Nondominated Sorting Genetic Algorithm-II”, Journal of Water
Resources Planning and Management, pp. 145–163, jun. 2006.
[5] VALASEK, J. Morphing Aerospace Strctures. 1st ed. SOMEWHERE, SOME-
BODY, 2012.
[6] LAGOUDAS, D. Shape Memory Alloys: Modeling and Engineering Applications.
New York, Springer-Verlag, 2008.
[7] BARBARINO, S., SAAVEDRA FLORES, E. I., AJAJ, R. M., et al. “A review
on shape memory alloys with applications to morphing aircraft”, Smart
Materials and Structures, 2014.
[8] DONG, Y., BOMING, Z., JUN, L. “A changeable aerofoil actuated by shape
memory alloy springs”, Materials Science and Engineering, v. A 485,
pp. 243–250, 2008.
[9] STRELEC, J. K., LAGOUDAS, D. C., KHAN, M. A., et al. “Design and Im-
plementation of a Shape Memory Alloy Actuated Reconfigurable Wing”,
Journal of Intelligent Material Systems and Structures, v. 14, pp. 257–273,
2003.
40

[10] ABDULLAH, E. J., BIL, C., WATKINS, S. “Testing of adaptive airfoil for
UAV using Shape Memory Alloy Actuators”, 27th International Congress
of the Aeronautical Sciences, 2010.
[11] KUDVA, J. “Overview of the DARPA Smart Wing Project”, Journal of Intel-
ligent Material Systems and Structures, v. 15, pp. 261–267, 2004.
[12] PEEEL, L. D., MEJIJA, J., NARVAEZ, B., et al. “Development of a sim-
ple morphing wing using elastomeric composites as skins and actuators”,
Journal of Mechanical Design, 2009.
[13] ICARDI, U., FERRERO, L. “Preliminary study of an adaptive wing with shape
memory alloy torsion actuators”, Materials and Design, 2009.
[14] SENTHILKUMA, M. “Analysis of SMA Actuated Plain Flap Wing”, Journal
of Engineering Science and Technology, v. Review 5 (1), pp. 39–43, 2012.
[15] CHOPRA, I. “Recent Progress on Development of a Smart Rotor System”,
Journal of Elasticity, 2001.
[16] LIMA JUNIOR, L. C., SAVI, M. A., HARTL, D. J., et al. “Morphing air-
foils: camber optimization using shape memory alloys”, 22nd Interna-
tional Congress of Mechanical Engineering (COBEM 2013), 2013.
[17] HARTL, D. J., LAGOUDAS, D. C., CALKINS, F. T. “Advanced methods
for the analysis, design, and optimization of SMA-based aerostructures”,
Smart Material and Structures, v. 20, 2011.
[18] KULFAN, B. M., BUSSOLETTI, J. E. “Fundamental Parametric Geome-
try Representations for Aircraft Component Shapes”, 11th AIAA/ISSMO
Multidisciplinary Analysis and Optimization Conference, v. 6948, 2006.
[19] ABAQUS. Analysis User’s Manual. Dassault Systemes of America Corp.,
Woodlands Hills, CA, 2007.
[20] XFOIL 6.9 User Primers. Mark Drela, MIT AERO and Astro, Harold Youn-
gren, Aerocraft, Incl, 2001.
[21] GRAY, J. S., MOORE, K. T., NAYLOR, B. A. “OPENMDAO: An Open
Source Framework for Multidisciplinary Analysis and Optimization”. In:
13th AIAA/ISSMO Multidisciplinary Analysis and Optimization Confer-
ence, 2010.
[22] AUTHOR. Statistical Summary of Commercial Jet Airplane Accidents, 1959 -
2008. TYPE NUMBER, Boeing, YEAR.
41

[23] FALKOVICH, G. Fluid Mechanics: A short course for Physicists. SOME-
WHERE, Cambridge, 2011.
[24] ANDERSON JR., J. D. Fundamentals of Aerodynamics. 2nd ed. New York,
McGraw-Hill, 1991.
[25] FELIPPA, C., PARK, K. C., FARHAT, C. “Partitioned Analysis of Coupled
Mechanical Systems”. In: CU-CAS-99-06, University of Colorado, 1999.
Center for Aerospace Structures.
[26] DEB, K., PRATAP, A., AGARWAL, S., et al. “A fast and elitist multiob-
jective genetic algorithm: NSGA-II”, Evolutionary Computation, IEEE
Transactions, v. 6(2):181197., 2002.
[27] ADMINISTRATION, U. S. F. A., LABORATORIES, B. M. I. C. Metallic
Materials Properties Development and Standardization. Relatorio Tecnico
MMPDS-07, 2012.
[28] DRELA, M. Flight Vehicle Aerodynamics. ADDRESS, The MIT Press, 2014.
[29] OEHLER, S., HARTL, D., LOPEZ, R., et al. “Design optimization and un-
certainty analysis of SMA morphing structures”, Smart Materials and
Structures, 2012.
[30] TAYLOR, M. Jane’s Encyclopedia of Aviation. ADDRESS, Portland House,
1989.
[31] SAUNDERS, R., HARTL, D., MALAK, R., et al. “Design and Analysis of a
Self-Folding SMA-SMP Composite Laminate”, Proceedings of the ASME
International Design Engineering Technical Conferences and Computers
and Information in Engineering Conference (IDETC/CIE), 2014.
42

Appendix A
CST: Python Code
”””
Created on Mon Jan 20 11 : 05 : 41 2014
Shape Function us ing Bernste in Polynomial ’ s o f any order . I t i s a
func t i on that depends o f n and ps i , where n i s the order o f the BP and
p s i i s the space coo rd ina t e s
@author : Pedro
”””
import math
import numpy as np
def CST(x , c , d e l t a s z=None ,Au=None , Al=None ) :
”””
Based on the paper ”Fundamental” Parametric Geometry
Representat ions f o r A i r c r a f t Component Shapes” from Brenda M.
Kulfan and John E. B u s s o l e t t i . The code uses a 1 s t order Bernste in
Polynomial f o r the ” Class /Shape Function ” a i r f o i l r e p r e s e n t a t i o n .
The degree o f polynomial i s dependant on how many va lue s the re are
f o r the c o e f f i c i e n t s . The a lgor i thm i s ab le to use Bernste in
Polynomials f o r any order automat i ca l l y . The a lgor i thm i s a l s o
ab le to ana lyze only the top or lower s u r f a c e i f d e s i r e d . I t w i l l
r e c o g n i z e by the inputs g iven . i . e . : f o r CST( x=.2 , c =1. , d e l t a sx =.2 ,
Au=.7) , the re i s only one value f o r Au, so i t i s a Bernste in
polynomial o f 1 s t order f o r the upper s u r f a c e . By ommiting Al the
code w i l l only input and return the upper s u r f a c e .
43

Although the code i s f l e x i b l e , the inputs need to be c o e s i v e .
l en ( d e l t a s z ) must be equal to the number o f s u r f a c e s . Au and Al
need to have the same length i f a f u l l a n a l y s i s i s be ing r e a l i z e d .
The inputs are :
− x : l i s t o f po in t s a long the chord , from TE and the LE, or
v ice−versa . The code works both ways .
− c : chord
− d e l t a s z : l i s t o f t h i c k n e s s e s on the TE. In case the upper
and lower s u r f a c e are being analyzed , the f i r s t element in
the l i s t i s r e l a t e d to the upper s u r f a c e and the second to
the lower s u r f a c e . There are two because the CST method
t r e a t s the a i r f o i l s u r f a c e s as two d i f f e r e n t s u r f a c e s ( upper
and lower )
− Au: l i s t / f l o a t o f Au c o e f f i c i e n t s , which are des ign
parameters . I f None , the s u r f a c e i s not analyzed .
− Al : l i s t / f l o a t o f Al c o e f f i c i e n t s , which are des ign
parameters . I f None , the s u r f a c e i s not analyzed .
The outputs are :
− y :
− f o r a f u l l a n a l y s i s : d i s c t i o n a r y with keys ’u ’ and ’ l ’
each with a l i s t o f the y p o s i t i o n s f o r a s u r f a c e .
− f o r a h a l f a n a l y s i s : a l i s t with the l i s t o f the y
po s t i on s o f the the d e s i r e d s u r f a c e
Created on Sun Jan 19 16 : 36 : 55 2014
Updated on Mon May 19 18 : 13 : 26 2014
@author : Pedro Leal
”””
44

# Bersnte in Polynomial
def K( r , n ) :
K=math . f a c t o r i a l (n )/ ( math . f a c t o r i a l ( r )∗math . f a c t o r i a l (n−r ) )
return K
# Shape Function
def S( r , n , p s i ) :
S=K( r , n )∗ ( p s i ∗∗ r )∗(1− p s i )∗∗ (n−r )
return S
# Class Function
def C(N1 , N2 , p s i ) :
C=(( p s i )∗∗N1)∗((1− p s i )∗∗N2)
return C
i f type ( x)== l i s t :
x=np . array ( x )
# Adimens iona l i z ing
p s i=x/c ;
#˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜
# Class Function
#˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜
# The C o e f f i c i e n t s f o r an a i r f o i l wi th a rounded l e a d i n g edge and
# a sharp t r a i l i n g edge are N1=0.5 and N2=1.0.
N1=0.5;
N2=1.0 ;
C=C(N1 , N2 , p s i ) ;
#=================================================================
# Def in ing the working s u r f a c e s
#=================================================================
d e l t a z ={}eta={}y={}Shape={}
i f Al and Au:
45

d e l t a z [ ’u ’ ]= d e l t a s z [ 0 ]
d e l t a z [ ’ l ’ ]= d e l t a s z [ 1 ]
i f len (Au)!= len ( Al ) :
raise Exception ( ”Au and Al need to have the same dimensions ” )
e l i f len ( d e l t a s z ) !=2 :
raise Exception ( ” I f both s u r f a c e s are being analyzed , two va lue s f o r d e l t a s z are needed” )
e l i f Au and not Al :
i f type ( d e l t a s z)== l i s t :
i f len ( d e l t a z [ ’u ’ ] ) ! = 1 :
raise Exception ( ” I f only one s u r f a c e i s be ing analyzed , one value f o r d e l t a s z i s needed” )
else :
d e l t a z [ ’u ’ ]= f loat ( d e l t a s z )
else :
d e l t a z [ ’u ’ ]= d e l t a s z
e l i f Al and not Au:
i f type ( d e l t a s z)== l i s t :
i f ( d e l t a z [ ’ l ’ ] ) ! = 1 :
raise Exception ( ” I f only one s u r f a c e i s be ing analyzed , one value f o r d e l t a s z i s needed” )
else :
d e l t a z [ ’ l ’ ]= f loat ( d e l t a s z )
else :
d e l t a z [ ’ l ’ ]= d e l t a s z
else :
raise Exception ( ”Au or Al need to have at l e a s t one value ” )
A={ ’ u ’ :Au, ’ l ’ : Al}for s u r f a c e in [ ’ u ’ , ’ l ’ ] :
i f A[ s u r f a c e ] :
i f type (A[ s u r f a c e ])== int or type (A[ s u r f a c e ])== f loat :
A[ s u r f a c e ]=[A[ s u r f a c e ] ]
# the degree o f the Berns te in po lynomia l i s g i ven by the
# number o f c o e f f i c i e n t s
n=len (A[ s u r f a c e ])−1
#˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜
# Shape Function
#˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜
46

Shape [ s u r f a c e ]=0
for i in range ( len (A[ s u r f a c e ] ) ) :
# p r i n t A
# p r i n t S( i , n , p s i )
i f s u r f a c e==’ l ’ :
Shape [ s u r f a c e ]−=A[ s u r f a c e ] [ i ]∗S( i , n , p s i )
else :
Shape [ s u r f a c e ]+=A[ s u r f a c e ] [ i ]∗S( i , n , p s i )
#˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜
# A i r f o i l Shape ( e ta=z /c )
#˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜˜
# A i r f o i l Shape ( e ta=z /c )
i f s u r f a c e==’ l ’ :
e ta [ s u r f a c e ]= C∗Shape [ s u r f a c e ]− p s i ∗ d e l t a z [ s u r f a c e ] / c ;
else :
e ta [ s u r f a c e ]= C∗Shape [ s u r f a c e ]+ p s i ∗ d e l t a z [ s u r f a c e ] / c ;
# Giving back the dimensions
y [ s u r f a c e ]=c∗ eta [ s u r f a c e ]
i f Al and Au:
return y
e l i f Au:
return y [ ’u ’ ]
else :
return y [ ’ l ’ ]
# Fol lowing the example o f the paper , a c u b i c f u n c t i o n i s used to t r a n s i t i o n
# from one geometry to another , a t the edges the s l o p e s are e q u a l to zero
def NC function (NC BC,max,min , n ) :
# f ( y)=A∗yˆ3+B∗yˆ2+C∗y+D
# with the f o l l o w i n g BC:
# f (0)=N1 f (1)=N2 df (0)= df (1)=0
perc=np . arange (max,min , (max−min)/n)
N l i s t =[0]∗ len ( eta )
counter=0
N1=NC BC [ 0 ]
N2=NC BC [ 1 ]
D=N1
47

C=0
B=3∗(N2−N1)
A=2∗(N1−N2)
# vars ( ) [ ’T%i ’ % i ] = A∗ e p s i l o n ∗∗3+B∗ e p s i l o n ∗∗2+C∗ e p s i l o n+D
N l i s t [ counter ]=A∗perc∗∗3+B∗perc∗∗2+C∗perc+D
return N l i s t
48

Appendix B
Data Sheet: ICA IS-32
General characteristics:
• Crew: 2
• Length: 8.36 m (27 ft 5 in)
• Wingspan: 20 m (65 ft 7 in)
• Height: 2.27 m (7 ft 5 in)
• Wing area: 14.68 m2 (158.0 sq ft)
• Aspect ratio: 27.25
• Airfoil: root:Wortmann FX 67-K-170; tip: Wortmann FX 67-K-150
• Empty weight: 400 kg (882 lb)
• Max takeoff weight: 590 kg (1,301 lb)
• Structure metal
Performance:
• Stall speed: 78 km/h (48 mph; 42 kn)
• Never exceed speed: 195 km/h (121 mph; 105 kn) in smooth air
• Maximum glide ratio: 44.5
• Best glide speed: 110 km/h (59 kn; 68 mph)
• Rate of sink: 0.62 m/s (122 ft/min)
• Minimum sink speed: 90 km/h (49 kn; 56 mph)
• Wing loading: 40.2 kg/m2 (8.2 lb/sq ft)
49

Appendix C
Taguchi
Figure C.1: Taguchi L50: used for 7 and 8 variables
50