uma abordagem pi-neural aplicado ao controle … · estipulados os ganhos proporcional e...
TRANSCRIPT

UMA ABORDAGEM PI-NEURAL APLICADO AO CONTROLE DE UMSERVO-MECANISMO
Vlademir Aparecido Freire Junior, Alessandro do Nascimento Vargas, AlessandroGoedtel
Laboratorio de Controle e Automacao de Sistemas, Universidade Tecnologica Federal do ParanaAvenida Alberto Carazzai, 1640 - Centro - Cornelio Procopio, Parana, Brasil
Email: [email protected], [email protected], [email protected]
Abstract— PI controllers are widely used in industrial control. However, these controllers have difficulties incontrol systems with long time delay and obtaining optimal gains. This strategy requires mathematical modelsand have compromised their robustness with respect to variations in process parameters. This paper proposesa comparative study between a conventional PI and PI-Neural through a strategy of tuning without the needfor system modeling applied to control a servo mechanism. Experimental results are presented to validate theproposal.
Keywords— Artificial Neural Networks, PI Controller, Identification Systems, Tuning Method, Servo-Mechanism.
Resumo— Controladores PI sao vastamente utilizados no controle industrial. Entretanto, estes controladoresapresentam dificuldades no controle de sistemas com longo atraso de tempo e na obtencao de ganhos ideais.Tal estrategia necessita de modelos matematicos e tem sua robustez comprometida em relacao a variacoes dosparametros dos processo. Este trabalho propoe um estudo comparativo entre um PI convencional e um PI-Neuralatraves de uma estrategia de sintonia sem a necessidade da modelagem do sistema aplicado ao controle de umservo-mecanismo. Resultados experimentais sao apresentados para validar a proposta.
Keywords— Redes Neurais Artificiais, Controlador PI, Identificacao de Sistemas, Metodo de Sintonia, Servo-Mecanismo.
1 Introducao
O controle em malha fechada do tipo PI trata-sede um metodo de controle tradicional no qual saoestipulados os ganhos proporcional e integrativo,com finalidade de permitir que o sistema operedentro de uma dinamica aceitavel.
O ajuste dos parametros do controle PI devemser baseados nas caracterısticas do processo a sercontrolado e para tanto um modelo matematiconem sempre esta disponıvel ou e conhecido.
O procedimento geral, nestes casos, e a uti-lizacao de modelos aproximados, que possuamparametros significativos para a dinamica do sis-tema permitindo assim a sintonia dos contro-ladores. A sintonia ideal para controladores PIpode ser obtida quando sao conhecidas todas ascaracterısticas dos processos a serem controlados,(Carmo, 2006).
Apesar de sua vasta aplicacao, segundo(Wong, 1998), os controladores PI possuem po-bre resposta transiente e nao fornece robustez su-ficiente em relacao as variacoes dos parametrosdo processo. De acordo com, (Ji, 2009), o PIDtradicional ja nao pode satisfazer os requisitos deestabilidade, rapidez e robustez para sistemas decontrole de velocidade de um motor DC sem esco-vas (brushless). Ainda, (Dorf, 1998), afirma queo principal problema na escolha dos coeficientese que esta composicao nem sempre reflete direta-mente o desempenho desejado.
Metodos de controle com redes neurais artifi-ciais (RNA’s) tem sido uma alternativa aos meto-
dos de controle classicos. Estas estrategias saoaplicaveis a uma grande variedade de aplicacoese nao necessitam de um modelo matematico doprocesso, (Wong, 1998). Controladores utilizandoestrategias de redes neurais tem sido o foco devarios estudos atualmente, devido sua facilidadede implementacao e demonstracao de bons resul-tados, conforme Tajne (2012).
O artigo de Sujatha (2010) apresenta bons re-sultados em estrategias de controle utilizando re-des neurais no controle de um motor DC (brush-less) tendo melhora na resposta de velocidade ereduzindo ondulacoes de torque.
Ainda o artigo de Yu (2006) mostra que oPID-Neural tem recebido uma maior atencao nasaplicacoes industriais. O artigo evidencia os resul-tados que o PID-Neural e menos sensıvel a vari-acoes do sistema, em relacao ao controlador PIDconvencional.
Este trabalho propoe o desenvolvimento deuma estrategia aplicado ao controle de velocidadede um servo-mecanismo utilizando as redes neu-rais artificiais, considerando como variaveis de en-trada os valores de saıda e a referencia de uma en-trada degrau aplicada a um PI convencional. Comobjetivo de validar a metodologia proposta, resul-tados experimentais sao apresentados e compara-dos com os resultados obtidos atraves do controlePI convencional sintonizado por metodos tradi-cionais.
O trabalho esta organizado da seguinte forma:A Secao 2 trata dos aspectos do controlador PIconvencional. Na Secao 3 sao descritos os princı-

pios das Redes Neurais Artificiais e na Secao4 e proposto o controle PI-Neural do servo-mecanismo. Finalmente na Secao 5 as conclusoesdo artigo sao apresentadas.
2 Controlador PI Convencional
A acao de controle PI reune as caracterısticas docontrole proporcional e integral em um mesmocontrolador. Visto que, a acao do controlador PIe definida por:
u (t) = Kpe (t) +Kp
Ti
t∫0
e (t) dt (1)
onde:
u(t) e a saıda do controlador;Kp e o ganho proporcional;e(t) e o erro;Ti e o tempo integrativo;
De acordo com (Y. Zhang, 2011), a funcao detransferencia do controlador PI e dada como:
U(s)
E(s)= Kp
(1 +
1
Tis
)(2)
Esta equacao pode ser representada na formadiscreta aplicando-se uma aproximacao trape-zoidal para o termo integrativo. Com isso, obtem-se:
U(z)
E(z)= Kp
(1 +
Ts(1 + z−1
)2Ti (1 − z−1)
)(3)
Chegando na seguinte equacao de diferencas.
u[n] = u[n− 1] + a (e[n]− e[n− 1]) +b
2e[n] + e[n− 1]
(4)
onde:
a = Kp (5)
b = KpTsTi
(6)
sendo Ts o perıodo de amostragem.
3 Redes Neurais Artificiais
As redes neurais artificiais, sao modelos matemati-cos inspirados no sistema nervoso de seres vivos(Silva, 2010). A semelhanca entre as redes neu-rais artificiais e os sistemas biologicos e que am-bas possuem alta capacidade computacional pormeio de um grande numero de elementos simplesde processamento com alto grau de conectividadeentre si (Haykin, 2001).
O neuronio artificial e descrito matematica-mente por:
y = ϕ
m∑j=1
wjxj + b
(7)
onde:
j e o numero de entradas do neuronio;wj e o peso associado com a j -esima entrada;b e o limiar de ativacao associado ao neuronio;xj e a j -esima entrada do neuronio;ϕ(.) e a funcao de ativacao do neuronio;y e a saıda do neuronio.
Desta forma, as RNAs possuem capacidade deaquisicao e retencao do conhecimento baseado naexperiencia, podendo ser definidas como um con-junto de unidades de processamento denominadosneuronios artificiais. Estas redes dispoem aindada capacidade de generalizacao. E podem respon-der apropriadamente a estımulos para os quais naoforam treinadas.
O processo de treinamento consiste num al-goritmo de aprendizagem em que os pesos saoajustados de forma a mapear o comportamentoentre as variaveis de entrada e saıda de umsistema. Conforme (Rezende, 2005), as RNAscaracterizam-se pelo aprendizado por meio de ex-emplos, ficando o algoritmo de aprendizado re-sponsavel pela adaptacao dos parametros da redede maneira que, em um numero finito de iteracoes,ha convergencia para uma solucao. Visto que oobjetivo principal do aprendizado das RNAs e aobtencao de modelos com capacidade de general-izacao tendo como base o conjunto de dados.
4 Controle PI-Neural de umServomecanismo
Servo-mecanismos sao encontrados em processos eequipamentos industriais. A aplicacao deste dis-positivo ocorre no controle de posicao e/ou ve-locidade angular como, por exemplo, em controlesnumericos computadorizados (CNC’s), bracosroboticos e correias transpostadoras, (Carmo,2006).
Neste artigo foi utilizado um modulo de en-sino desenvolvido pela Datapool Eletronica Ltda,modelo 2208 conforme a Figura 1.
O mesmo e constituıdo por um servo-potenciometro como trandustor de deslocamentoangular. Para a afericao da rotacao utiliza-se umtacometro que fornece um sinal de tensao propor-cional a velocidade na faixa de 0 a 5V. O modulopossui tambem um servomotor de corrente con-tınua de ima permanente acoplado a um conjuntomecanico que aciona o conjunto braco/ponteiro dosistema de rotacao e/ou posicionador. A tensaode armadura e alterada por um driver de aciona-mento linear a partir do borne de acesso Vu nafaixa de -5 a 5V.

Figura 1: Modulo Datapool Servo - Mecanismo
4.1 Identificacao de Sistema e Metodo de Sinto-nia
Identificacao de um sistema trata-se da deter-minacao do modelo matematico que representeos seus aspectos essenciais de forma adequadapara uma utilizacao particular: diagnostico, su-pervisao, otimizacao e controle (Coelho, 2004).
Tais modelos representam a dinamica do sis-tema seja um processo ou uma planta, podendo amaioria dos processos industriais ser modelada porfuncoes de transferencia de primeira ou de segundaordem com atraso de transporte (Morari andZafirou, 1989). Neste trabalho, o modelo estimadodo processo e representado segundo (Ogata, 2000)pela seguinte expressao:
G (s) =Ke−Ls
Ts+ 1(8)
onde:
K e o ganho estatico do processo;L e o atraso de transporte;T e a constante de tempo;
No presente trabaho o metodo de identifi-cacao aplicado no sistema foi o de Broıda, (Hamiti,1996), o qual traca a resposta do sistema deprimeira ordem sobre a curva de ordem superiorobtida experimentalmente. Verifica-se que ha umintervalo comum entre elas: um ponto A situadoa 28% de ∆ y e um ponto B situado a 40% de ∆y, conforme na Figura 2.
Sendo os valores de L e T calculados daseguinte forma:
T = 5, 5(t2 − t1) (9)
L = 2, 8t1 − 1, 8t2 (10)
A sintonia de um algoritmo de controle con-siste em selecionar valores adequados de seusparametros que atendam as condicoes de projeto,(Carmo, 2005).
Figura 2: Curva de reacao de sistema de primeiraordem sobre a de ordem superior
No caso dos controladores PI, trata-se de cal-cular os valores dos parametros Kp e Ti, que rep-resentam o ganho proporcional e o tempo de inte-gral.
Metodos de sintonia para controlador PI saomuito utilizados em processos industriais. Osmais aplicados sao baseados na resposta ao de-grau, como Cohen-Coon, o qual foi utilizado notrabalho, (Cohen, 1953). Tal metodo baseia-setambem na constante de tempo do processo, notempo de atraso e no ganho estatico do processo.Cohen e Coon utilizaram essa relacao na deter-minacao dos valores teoricos dos parametros docontroladores. Este metodo e resumido conformea Tabela 1.
Tabela 1: Tabela de Sintonia do Controlador PI,metodo de Cohen-Coon
Controlador Kp Ti Td
PI 0,9TKL
(1 + 0,92τ
1−τ
)3,3−3τ1+1,2τ 0
Fonte:(Astrom and HAgglund, 1934)
Onde o parametro τ varia entre 0 e 1 e edefinido como τ = L/(L + T ).
Nestes parametros a medida que τ aumenta,mais difıcil se torna o controle, pois sao processoscom tempo morto dominante. Tal metodo tam-bem e baseado em uma resposta com taxa de de-caimento de 1/4 na resposta, quando o atraso detransporte e pequeno comparado a constante detempo.
4.2 Controlador PI Neural
A rede proposta e constituıda por 3 camadas: acamada de entrada onde sao apresentados os val-ores de referencia e velocidade real, a camadaoculta contendo 5 neuronios e a camada de saıdana qual tem-se a acao de controle. A arquiteturado controlador PI-Neural e apresentado na Figura3.
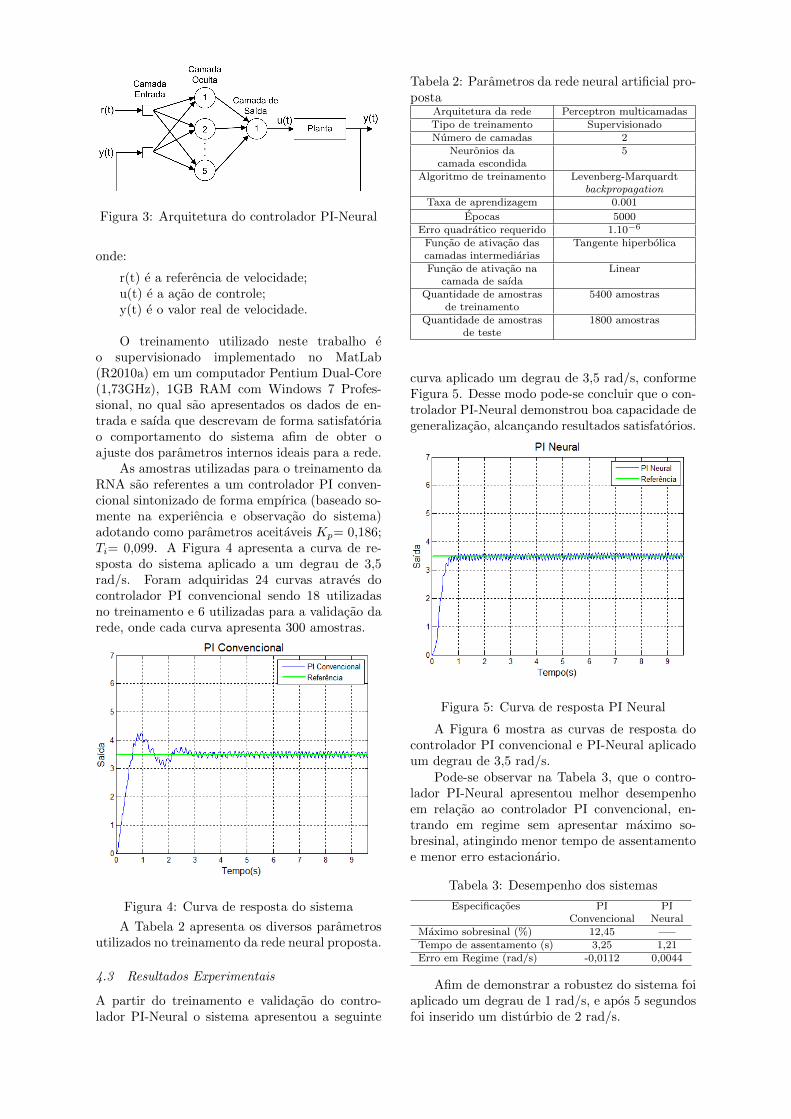
Figura 3: Arquitetura do controlador PI-Neural
onde:
r(t) e a referencia de velocidade;u(t) e a acao de controle;y(t) e o valor real de velocidade.
O treinamento utilizado neste trabalho eo supervisionado implementado no MatLab(R2010a) em um computador Pentium Dual-Core(1,73GHz), 1GB RAM com Windows 7 Profes-sional, no qual sao apresentados os dados de en-trada e saıda que descrevam de forma satisfatoriao comportamento do sistema afim de obter oajuste dos parametros internos ideais para a rede.
As amostras utilizadas para o treinamento daRNA sao referentes a um controlador PI conven-cional sintonizado de forma empırica (baseado so-mente na experiencia e observacao do sistema)adotando como parametros aceitaveis Kp= 0,186;Ti= 0,099. A Figura 4 apresenta a curva de re-sposta do sistema aplicado a um degrau de 3,5rad/s. Foram adquiridas 24 curvas atraves docontrolador PI convencional sendo 18 utilizadasno treinamento e 6 utilizadas para a validacao darede, onde cada curva apresenta 300 amostras.
Figura 4: Curva de resposta do sistema
A Tabela 2 apresenta os diversos parametrosutilizados no treinamento da rede neural proposta.
4.3 Resultados Experimentais
A partir do treinamento e validacao do contro-lador PI-Neural o sistema apresentou a seguinte
Tabela 2: Parametros da rede neural artificial pro-posta
Arquitetura da rede Perceptron multicamadasTipo de treinamento SupervisionadoNumero de camadas 2
Neuronios da 5camada escondida
Algoritmo de treinamento Levenberg-Marquardtbackpropagation
Taxa de aprendizagem 0.001
Epocas 5000Erro quadratico requerido 1.10−6
Funcao de ativacao das Tangente hiperbolicacamadas intermediariasFuncao de ativacao na Linear
camada de saıdaQuantidade de amostras 5400 amostras
de treinamentoQuantidade de amostras 1800 amostras
de teste
curva aplicado um degrau de 3,5 rad/s, conformeFigura 5. Desse modo pode-se concluir que o con-trolador PI-Neural demonstrou boa capacidade degeneralizacao, alcancando resultados satisfatorios.
Figura 5: Curva de resposta PI Neural
A Figura 6 mostra as curvas de resposta docontrolador PI convencional e PI-Neural aplicadoum degrau de 3,5 rad/s.
Pode-se observar na Tabela 3, que o contro-lador PI-Neural apresentou melhor desempenhoem relacao ao controlador PI convencional, en-trando em regime sem apresentar maximo so-bresinal, atingindo menor tempo de assentamentoe menor erro estacionario.
Tabela 3: Desempenho dos sistemas
Especificacoes PI PIConvencional Neural
Maximo sobresinal (%) 12,45 —–Tempo de assentamento (s) 3,25 1,21Erro em Regime (rad/s) -0,0112 0,0044
Afim de demonstrar a robustez do sistema foiaplicado um degrau de 1 rad/s, e apos 5 segundosfoi inserido um disturbio de 2 rad/s.

Figura 6: Curva de comparacao PI convencionale PI Neural.
Neste caso o PI-Neural tambem apresentoumelhor resposta em relacao ao PI convencionalcom maior tempo de subida apos aplicacao do dis-turbio, como visto na Figura 7.
Figura 7: Curva PI-Convencional e PI-Neuralaplicado disturbio.
Com o intuito de demonstrar uma maior efi-ciencia do controlador PI-Neural, foi realizada aidentificacao e sintonia do sistema utilizando osmetodos tradicionais da literatura apresentadosna subsecao 4.1. Aplicando um degrau de 3 rad/sem malha aberta o sistema apresentou a curva deidentificacao e estimacao de parametros, conformea Figura 8.
Chegando na funcao de transferencia eparametros a seguir:
G (s) =1, 378
0, 0001451.s+ 1.e−3,17e−5.s (11)
Kp = 3, 2222
Ti = 2, 2740(12)
Figura 8: Curva de identificacao do sistema.
A Figura 9 apresenta uma comparacao entreas curvas de resposta do controlador PI Identifi-cado e PI-Neural aplicado um degrau de 3 rad/s.
Figura 9: Curva de comparacao PI Identificado ePI Neural.
O controlador PI-Neural demonstrou menortempo de estabilizacao e menor sobresinal quandocomparado ao controlador PI convencional sin-tonizado utilizando metodos tradicionais.
5 Conclusao
O presente artigo apresenta um estudo compara-tivo entre o controlador PI convencional e o con-trolador PI-Neural aplicado ao controle de umservo-mecanismo visando o controle de sua veloci-dade.
O sistema proposto teve por base os dadosgerados num processo o qual foi sintonizado pormetodos convencionais. A aplicacao de degrauao servo-mecanismo produz uma sequencia de da-dos relativos ao processo. Atraves do metodo detreinamento ha o ajuste dos pesos sinapticos dosneuronios da rede com o objetivo de otimizar aresposta do controle.
O controlador PI-Neural demonstrou maioreficiencia em ambas as comparacoes, isto e, tantopara o controlador PI convencional sintonizado deforma empırica quanto para o controlador PI iden-tificado e sintonizado por metodos convencionaisda literatura, atendendo aos objetivos propostosneste artigo. Cabe ainda ressaltar os resulta-dos satisfatorios, nao apresentando maximo so-bresinal, demonstrando menor tempo de subidaapos aplicacao de disturbio, menor tempo de as-sentamento e menor erro estacionario.
Demonstrou-se assim que sistemas in-teligentes baseados nas redes neurais sao umaalternativa para sistemas de controle para osquais nao e possıvel a obtencao da funcaode transferencia que descreve precisamente ocomportamento do sistema.
Referencias
Astrom, K. J. and HAgglund, T. (1934). PIDControllers: theory, design and tuning, 2 edn,Instrument Society of America.
Carmo, M. J. (2006). Ambiente educacional multi-funcional integrado para sintonia e avaliacaodo desempenho de malhas industriais de con-trole, Master’s thesis, Centro Federal de Edu-cacao Tecnologica de Minas Gerais - CEFET-MG.
Carmo, M. J.; Gomes, F. J. (2005). Sintonia decontroladores e analise funcional de malhasindustriais em ambiente multifuncional inte-grado, XXXIII Cobenge .
Coelho, A. A. R.; Coelho, L. d. S. (2004). Identi-ficacao de Sistemas Dinamicos Lineares, Ed.UFSC, Florianopolis.
Cohen, G. H.; Coon, G. A. (1953). Theoreti-cal considerations of retarded control, ASMETransactions 75: 827–834.
Dorf, R. C. ;Bishop, R. H. (1998). Sistemas deControle Moderno, 8 edn, LTC.
Hamiti, K. (1996). Position control of a pneu-matic actuator under the influence of siction,Elsevier Science Ltd pp. 1079–1088.
Haykin, S. (2001). Redes neurais Princıpios epratica, Bookman.
Ji, H.; Li, Z. (2009). Design of neural networkpid controller based on brushless dc motor,Second International Conference on Intelli-gent Computation Technology and Automa-tion pp. 46 – 49.
Morari, M. and Zafirou, E. (1989). Robust ProcessControl, Prentice-Hall, Englewood Cliffs, NJ.
Ogata, K. (2000). Engenharia de Controle Mod-erno, 3 edn, LTC, Rio de Janeiro.
Rezende, S. O. (2005). Sistemas Inteligentes Fun-damentos e Aplicacoes, 1 edn, Manole.
Silva, I. N. da, S. D. H. e. F. R. A. (2010). Redesneurais artificiais para engenharia e cienciasaplicadas, Artliber, USP, Sao Carlos.
Sujatha, K. N.; Vaisakh, K. A. G. (2010). Artifi-cial intelligence based speed control of brush-less dc motor, Power and Energy SocietyGeneral Meeting, 2010 IEEE pp. 1 – 6.
Tajne, S. K.; Srivastava, S. P. (2012). Compara-tive performance analysis of vector controlledinduction motor drive for neural controllerand dsp implemented pi controller, Inter-national Conference on Communication Sys-tems and Network Technologies pp. 274 – 281.
Wong, C.F.; Shippen, J. J. B. (1998). Neural net-work control strategies for low specificationservo actuators, International Journal of Ma-chine Tools & Manufacture p. 11091124.
Y. Zhang, X. Yu, M. B. S. X. (2011). An adap-tive neural pid controller for torque control ofhybrid electric vehicle, The 6th InternationalConference on Computer Science & Educa-tion (ICCSE 2011) pp. 901–903.
Yu, Z.; Xie Y.; Jing, Y. L. X. (2006). Applyingneural networks to pid controllers for time-delay systems, Proceedings of the Fifth In-ternational Conference on Machine Learningand Cybernetics pp. 3173 – 3176.