teoria 21 motores de passo-1
TRANSCRIPT

5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 1/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
273
Teoria 21 Motores de Passo
Introdução:
Motores de Passo podem ser vistos como motores elétricos sem comutadores.Tipicamente, todos os enrolamentos do motor fazem parte do estator, e o rotor ou é de ímãspermanentes ou, no caso de motores de relutância variável, um bloco dentado de algummaterial levemente magnetizado.
Toda a comutação deve ser controlada externamente pelo controlador de motor, etipicamente, os motores e os controladores são projetados de forma que o motor possa:
• Ser retido em uma posição fixa qualquer, como também;• Ser girado em um ou outro sentido.
Os "steppers” , como os motores de passo também são conhecidos, podem ser movidosa freqüências da ordem de até várias centenas de Hz, permitindo-lhes girar a uma rotaçãoconsiderável, e com um controlador apropriado, eles podem partir e parar em temposbastante curtos sob orientações controladas.
Para algumas aplicações, existe uma margem de escolha entre usar um servomotor ouusar um motor de passo. Ambos os tipos de motores oferecem características semelhantespara posicionamento preciso, mas por outro lado existem varias diferenças entre eles:
Servomotores requerem sistemas de controle com realimentação analógica de algumtipo. Tipicamente, e na forma mais simples, isto envolve um potenciômetro para prover um
sinal de realimentação sobre a posição de rotor, e um circuito de controle atuando sobre ocircuito de potência com uma ação tal que a corrente pelo motor seja diretamenteproporcional á diferença entre a posição desejada e a posição atual.
Ao fazer-se uma escolha entre steppers e servos, devem-se considerar vários aspectos ea ordem de importância destes aspectos depende das características da aplicação. Porexemplo, a repetibilidade de posicionamento feito com um motor de passo depende dageometria do rotor de motor, enquanto a repetibilidade de posicionamento feito com umservomotor geralmente depende da estabilidade do potenciômetro e de outros componentesanalógicos no circuito de realimentação.
Motores podem ser usados em sistemas simples de controle em malha aberta; estes sãogeralmente adequados para sistemas que operam em baixas acelerações com cargas deconjugado constante, mas um controle em malha fechada pode ser essencial quando serequer acelerações altas, particularmente se elas ocorrem em sistemas que envolvam cargasde conjugado variável. Se um motor de passo em um sistema de controle em malha abertafor submetido a um conjugado resistente maior que o conjugado do motor, o motor perde o
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 2/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
274
passo e toda referência de posicionamento é também perdida e o sistema deve serreiniciado, buscando novamente estabelecer a posição de referência; servomotores nãoestão sujeito a este problema.
A Física e os Tipos dos Motores de Passo:
Motores de passo se apresentam em duas variedades:
• De ímã permanente;• De relutância variável.
Existem ainda os motores de passo híbridos (os quais são indistinguivelmente motoresde ímã permanentes do ponto de vista do controlador).
Na falta uma etiqueta identificadora no corpo do motor ou da documentação dofabricante, geralmente pode-se identificar entre um e outro tipo por uma simples inspeção
manual, sem necessidade de aplicação de energia ao motor:√ Motores de ímã permanentes se comportam como que possuindo "dentes de
engrenagem" quando você gira o rotor com as mãos, enquanto que;
√ Motores de relutância variável giram assim, quase que livremente (embora elespossam apresentar um efeito bem atenuado de dente de engrenagem por causade magnetização residual no rotor).
Você também pode distinguir entre as duas variedades com um ohmmímetro(multímetro na escala de resistência):
√ Motores de relutância variável normalmente têm três (às vezes quatro ou atémesmo cinco) enrolamentos, mas sempre temos estes enrolamentos todos comum retorno comum (retorno por um único fio), enquanto que;
√ Motores de ímãs permanentes na grande maioria dos casos apresentam doisenrolamentos independentes, os quais podem ou não apresentar uma derivaçãocentral.
• Dois enrolamentos independentes com derivação central são usados naconstrução de motores unipolares de ímãs permanentes, ao passo que;
• Dois enrolamentos independentes sem derivação central são usados naconstrução de motores bipolares de ímãs permanentes.
Os motores de passo podem ser encontrados em uma variada gama de resoluçãoangular. A resolução angular define o “tamanho do passo”. Os motores de menorresolução tipicamente se movimentam a 90º por passo, enquanto que motores de passo de
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 3/24
imã permanente de maior resolução atingem a marca de 1,8º por passo ou até mesmo 0,72ºpor passo. Conhecendo-se a resolução angular, podemos determinar a quantidade de passospor volta.
Com um controlador apropriado, os motores de passo do tipo híbrido ou de imãpermanente, podem ser movidos a ½ passo e alguns controladores podem ainda mover taismotores a passos fracionários ainda menores, chamados de micro-passos.
Tanto em um motor de passo de imã permanente quanto em um motor de passo derelutância variável, se apenas um dos enrolamentos do motor for energizado, o rotor irábuscar um posicionamento em uma posição angular fixa, a qual corresponde a um ponto deequilíbrio da interação dos campos magnéticos, sendo que o ponto de equilíbrio buscado éo que esteja mais próximo da posição original do rotor, seja no sentido horário ou anti-horário, e fixando-se nesta posição o motor passará a desenvolver um torque de retenção (Holding Torque).
Para um motor que gira S graus por passo, o gráfico do torque versus posição
angular para o rotor, relativo a alguma posição de equilíbrio inicial, se aproximarágeralmente a uma senoidal. A forma da curva depende da geometria dos pólos do rotor e doestator, e nem esta curva nem a informação da geometria costumam ser apresentadas nasfolhas de dados dos motores! Paramotores de ímã permanente e motoreshíbridos, a curva parece normalmentesenoidal, mas não tome isso como regra:para motores de relutância variável, acurva raramente parece senoidal; curvastrapezoidal e curvas em forma de dentede serra assimétrica não são incomuns.
Se externamente aplicarmos um binário de forças ao eixo do rotor, este nãoconseguirá remover o rotor de sua posição de equilíbrio, a menos que sua intensidadeconsiga suplantar a intensidade do torque de retenção do motor. Se isso ocorrer o rotorentão escapará deste ponto de retenção e se moverá no sentido que o binário o forçou, atéque se encontre mais adiante em um novo ponto de equilíbrio, onde tentará, mais uma vez,reter-se. Mas se o binário aplicado ao eixo do rotor mantiver a sua intensidade num valoracima do torque de retenção, ele conseguirá manter o rotor girando por tempo indefinido.
Assim sendo, existe um certo número de pontos de equilíbrio, os quais se encontramem posições angulares definidas, ao longo do percurso de uma volta do rotor. A quantidadede pontos de equilíbrio está relacionada diretamente com quantidade de passos por volta einversamente com a quantidade de fases do motor.
Sem energizar quaisquer dos enrolamentos de um motor de passo, o torque não caide retenção não cai a zero! Em motores de passo de relutância variável, a magnetizaçãoresidual nos circuitos magnéticos do motor pode conduzir a uma torque residual pequeno, eem motores de ímãs permanentes e híbridos, a combinação da geometria dos pólos doSENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
275
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 4/24
estator e o rotor permanentemente magnetizado podem conduzir a um torque significantemesmo sem energia aplicada.
O torque residual em um motor de passo de ímã permanente ou híbridofreqüentemente é chamado de torque de endentamento (cogging torque ou detent torque),
isso porque um observador ingênuo freqüentemente é levado a crer que há um mecanismoengrenagem de algum tipo dentro do motor. Os motores mais comuns apresentam umtorque de endentamento que varia de forma senoidal com o ângulo de rotor, com umaposição de equilíbrio a cada passo e uma amplitude de aproximadamente 10% do torque deretenção nominal do motor, podendo chegar a mais de 20% em motores pequenos e 2,5%em motores maiores.
Motores de Passo de Relutância Variável:
A Relutância Magnética é definida como a resistência de um material a um campomagnético. É dada como a relação entre a força magnetomotriz e o fluxo magnético. O
princípio da variação na relutância de um circuito magnético no qual parte do circuito estáse movendo, é usado em instrumentos de medição contendo os chamados de transdutores(sensores) de relutância variável. Uma das aplicações principais está em cápsulascaptadoras eletromagnéticas nos toca discos (vinil) e nos violões elétricos.
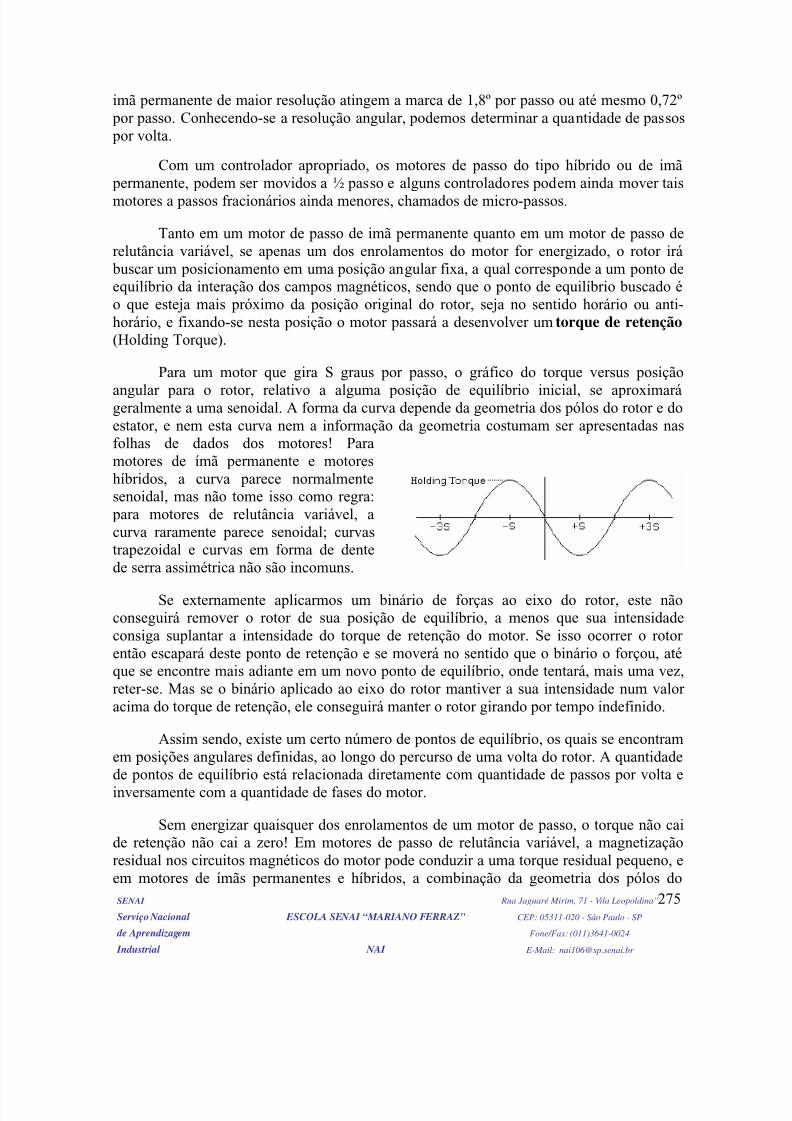
Se um motor de passo tem três enrolamentos, tipicamente conectado como mostradono diagrama esquemático da figura aseguir, com um terminal comum a todosos enrolamentos, ele deve ser, muitoprovavelmente um motor de passo derelutância variável. Em operação, o
terminal comum é tipicamente conectadoao positivo da fonte de alimentação e osdemais terminais nas pontas de cadaenrolamento serão chaveados emseqüência.
Estes motores de passo têm rotores multipolares de ferro macio e um estatorbobinado. O ferro normal mantém seu magnetismo por um bom tempo quando a correntede magnetização cessa, mas o ferro macio perde seu magnetismo muito mais rapidamentequando a corrente de magnetização cessa. Núcleos de férreo macio são úteis quando vocêquer um eletroímã que comute rapidamente.
O número de dentes no rotor e no estator, como também o número de enrolamentosde fases, determina o ângulo de passo. Motores de passo de relutância variável sãogeralmente dispositivos de ângulo de passo médios (de 5º a 15° por passo) e que operam avelocidades de passo altas. Motores deste tipo operam a taxas de pulso de no máximo de300 a 1000 passos/seg .
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
276

5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 5/24
O torque deste tipo de motor de passo é geralmente mais baixo se comparado comoutros tipos de motor de passo de mesmo tamanho. A inércia do rotor e, por conseguinte, acapacidade de carga inercial também é baixa. e têm uma capacidade carga inercial máximade cerca de 2/3 da inércia de rotor. Quando é excitado de um modo sobreposto, estesmotores de passo podem mover-se a ângulos de meio-passo e a taxa de pulso dobrada,
situação na qual o motor produz uma velocidade que permanece a mesma.O desenho em corte mostrado na figura a seguir corresponde a um motor de
relutância variável de 30º por passo. O rotor neste motor tem 4 dentes (quatro pólos) e oestator tem 6 pólos, com cada enrolamento abarcado ao redor de dois pólos opostos. Comapenas o enrolamento 1 energizado, os dentes do rotor são atraídos para os pólos desteenrolamento. Se a corrente através do enrolamento número 1 for desligada e doenrolamento 2 for ligada, o rotor girará 30 graus no sentido horário, de forma que os dentesdo rotor que se encontrarem mais próximos, passam a se alinhar com os pólos doenrolamento 2.
Para girar este motor continuamente, aplica-se energia aos três enrolamentos emseqüência. Assumindo lógica positiva onde nível lógico “1” significa que o rolamento domotor esta energizado, a seguinte seqüência de acionamento girará o motor em questão nosentido horário por seis passos, o que corresponde a ½ volta:
A seção Controle de Nível Médio deste capítulo proverádetalhes de métodos para gerar tais seqüências de sinais decontrole, enquanto que a seção Circuitos de Controle discutirá ocircuito de eletrônica de potência necessário para acionar osenrolamentos do motor sob tais seqüências.
F1 F2 F3
1 0 00 1 00 0 1
Repare que a cada três linhas a seqüência de acionamentovolta a se repetir, assim temos um motor de 3 fases. De fato nummotor de passo de relutância variável o número de fases é igualao número de enrolamentos.
1 0 00 1 00 0 1
Em um modo modificado, duas fases adjacentes são simultaneamente excitadas e orotor indexa a uma posição de relutância mínima correspondendo ao resultante dos doiscampos magnéticos. Uma vez que dois enrolamentos do motor de passo são excitadossimultaneamente, o dobro da energia é necessário, se comparado com o modo padrão ondese excita uma fase de cada vez. Operando neste modo, não há ganho de velocidade, mas asvibrações provocadas pelo movimento contínuo do motor são amortecidas.SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
277
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 6/24
Existem também motores de passo de relutância variável com 4 e com 5enrolamentos, os quais possuem 5 ou 6 fios. O princípio para acionar estes motores ésemelhante ao de 3 enrolamentos. É importante respeitar a correta ordem de acionamentodos enrolamentos para fazer o motor trabalhar corretamente.
A geometria do motor ilustrado na figura anterior, o qual move-se a 30º por passo,baseia-se numa arquitetura mínima, com o menor número possível de dentes do rotor e depólos do estator, que ainda permita uma operação satisfatória. Usando-se um número maiorde pólos no estator e de mais dentes do rotor, permite-se a construção de motores comângulo de passo menor. Faces dentadas em cada pólo, associados a um rotor finamentedentado, permitem ângulos de passo tão pequeno quanto alguns graus.
Motores de Passo Unipolares:
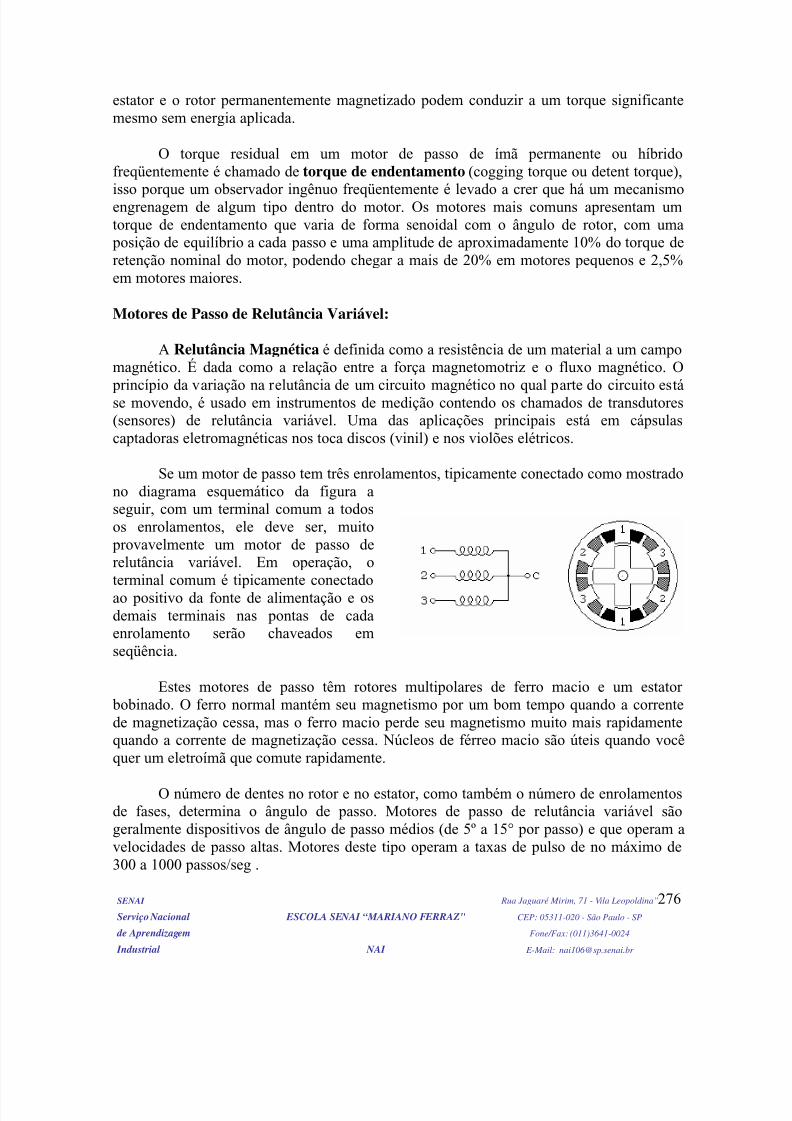
Os Motores de Passo Unipolares, sejam estes de ímã permanente ou sejam híbridos,com seis fios de terminação, são normalmente bobinados como mostrado no esquemáticoda figura a seguir: com uma derivação central em cada um de seus dois enrolamentos. Emoperação normal de modo unipolar, as derivações centrais dos enrolamentos são juntadas econectadas ao terminal positivo da fonte de alimentação, e os dois fins de cada enrolamentosão chaveados para o GND alternadamente a fim de inverter a direção do campo providapor aquele enrolamento.
O motor em corte mostrado na figura a seguir pode representar um motor de passode ímã permanente ou motor de passo híbrido, de 30º por passo. O enrolamento “1” domotor está arranjado de modo a poder produzir, quando energizado, um pólo no lado
superior e outro pólo na parte inferior doestator, enquanto que o enrolamento “2” domotor está arranjado de tal modo a produzir,
quando energizado, um pólo à esquerda eoutro pólo à direita do estator. Já por sua vezo rotor, é constituído de elementos de ímãpermanente com seis pólos, três pólos sul etrês pólos norte, organizados ao redor dacircunferência do rotor, com defasagemespacial de 60º entre pólos adjacentes.
O motor de 30º por passo mostrado na figura anterior é um dos motores de passo deímã permanentes mais comuns e simples, embora se encontrem também bastante difundidoo uso de motores de passo 15º e 7.5º por passo. Para maiores resoluções angulares, o rotordeve ter, proporcionalmente, um número maior de pólos, enquanto que o estator possuisempre o mesmo arranjo, seja qual for a resolução angular.
São fabricados e disponibilizados motores de imã permanente ou motores híbridoscom resoluções tão fina quanto 3.6º ou 1.8º por passo. Até mesmo resoluções tão finasquanto 0,9º ou 0.72º por passo podem ser encontradas.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
278
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 7/24
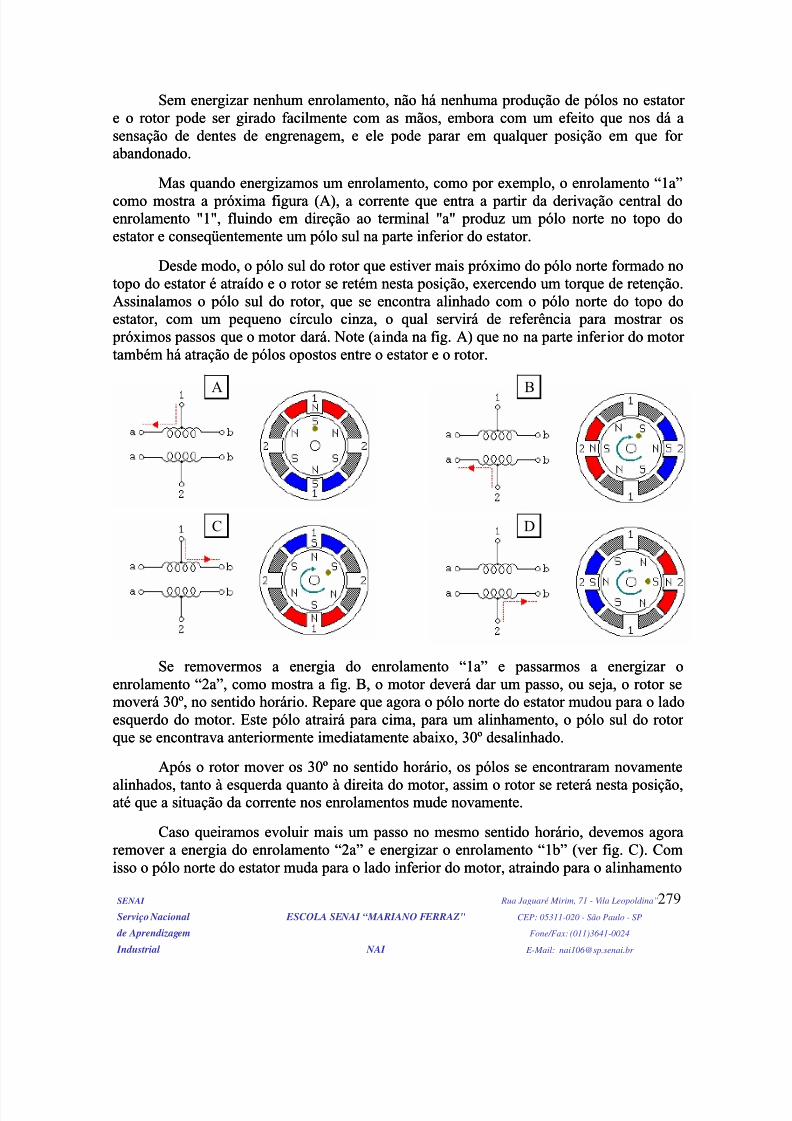
Sem energizar nenhum enrolamento, não há nenhuma produção de pólos no estatore o rotor pode ser girado facilmente com as mãos, embora com um efeito que nos dá asensação de dentes de engrenagem, e ele pode parar em qualquer posição em que forabandonado.
Sem energizar nenhum enrolamento, não há nenhuma produção de pólos no estatore o rotor pode ser girado facilmente com as mãos, embora com um efeito que nos dá asensação de dentes de engrenagem, e ele pode parar em qualquer posição em que forabandonado.
Mas quando energizamos um enrolamento, como por exemplo, o enrolamento “1a”como mostra a próxima figura (A), a corrente que entra a partir da derivação central doenrolamento "1", fluindo em direção ao terminal "a" produz um pólo norte no topo doestator e conseqüentemente um pólo sul na parte inferior do estator.
Mas quando energizamos um enrolamento, como por exemplo, o enrolamento “1a”como mostra a próxima figura (A), a corrente que entra a partir da derivação central doenrolamento "1", fluindo em direção ao terminal "a" produz um pólo norte no topo doestator e conseqüentemente um pólo sul na parte inferior do estator.
Desde modo, o pólo sul do rotor que estiver mais próximo do pólo norte formado notopo do estator é atraído e o rotor se retém nesta posição, exercendo um torque de retenção.Assinalamos o pólo sul do rotor, que se encontra alinhado com o pólo norte do topo doestator, com um pequeno círculo cinza, o qual servirá de referência para mostrar ospróximos passos que o motor dará. Note (ainda na fig. A) que no na parte inferior do motortambém há atração de pólos opostos entre o estator e o rotor.
Desde modo, o pólo sul do rotor que estiver mais próximo do pólo norte formado notopo do estator é atraído e o rotor se retém nesta posição, exercendo um torque de retenção.Assinalamos o pólo sul do rotor, que se encontra alinhado com o pólo norte do topo doestator, com um pequeno círculo cinza, o qual servirá de referência para mostrar ospróximos passos que o motor dará. Note (ainda na fig. A) que no na parte inferior do motortambém há atração de pólos opostos entre o estator e o rotor.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
279
Se removermos a energia do enrolamento “1a” e passarmos a energizar oenrolamento “2a”, como mostra a fig. B, o motor deverá dar um passo, ou seja, o rotor semoverá 30º, no sentido horário. Repare que agora o pólo norte do estator mudou para o ladoesquerdo do motor. Este pólo atrairá para cima, para um alinhamento, o pólo sul do rotorque se encontrava anteriormente imediatamente abaixo, 30º desalinhado.
Se removermos a energia do enrolamento “1a” e passarmos a energizar oenrolamento “2a”, como mostra a fig. B, o motor deverá dar um passo, ou seja, o rotor semoverá 30º, no sentido horário. Repare que agora o pólo norte do estator mudou para o ladoesquerdo do motor. Este pólo atrairá para cima, para um alinhamento, o pólo sul do rotorque se encontrava anteriormente imediatamente abaixo, 30º desalinhado.
Após o rotor mover os 30º no sentido horário, os pólos se encontraram novamente
alinhados, tanto à esquerda quanto à direita do motor, assim o rotor se reterá nesta posição,até que a situação da corrente nos enrolamentos mude novamente.
Após o rotor mover os 30º no sentido horário, os pólos se encontraram novamente
alinhados, tanto à esquerda quanto à direita do motor, assim o rotor se reterá nesta posição,até que a situação da corrente nos enrolamentos mude novamente.
Caso queiramos evoluir mais um passo no mesmo sentido horário, devemos agoraremover a energia do enrolamento “2a” e energizar o enrolamento “1b” (ver fig. C). Comisso o pólo norte do estator muda para o lado inferior do motor, atraindo para o alinhamento
Caso queiramos evoluir mais um passo no mesmo sentido horário, devemos agoraremover a energia do enrolamento “2a” e energizar o enrolamento “1b” (ver fig. C). Comisso o pólo norte do estator muda para o lado inferior do motor, atraindo para o alinhamento
A B
C D
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 8/24
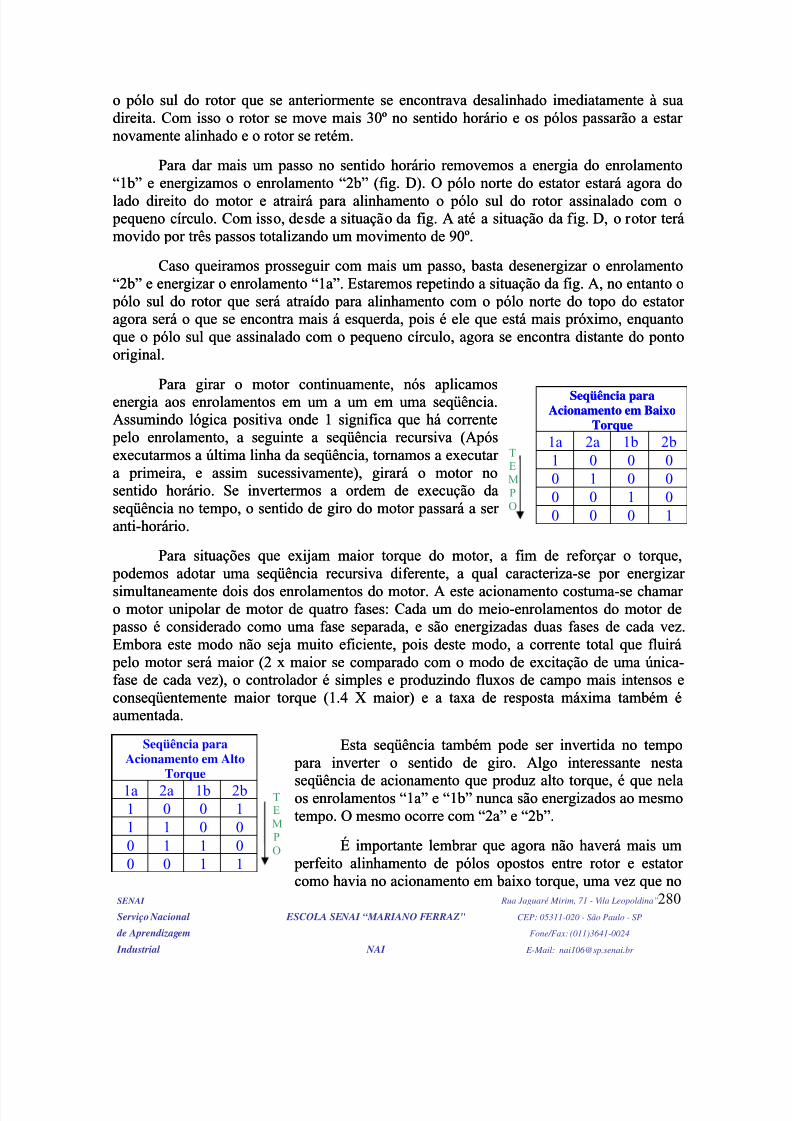
o pólo sul do rotor que se anteriormente se encontrava desalinhado imediatamente à suadireita. Com isso o rotor se move mais 30º no sentido horário e os pólos passarão a estarnovamente alinhado e o rotor se retém.
o pólo sul do rotor que se anteriormente se encontrava desalinhado imediatamente à suadireita. Com isso o rotor se move mais 30º no sentido horário e os pólos passarão a estarnovamente alinhado e o rotor se retém.
Para dar mais um passo no sentido horário removemos a energia do enrolamento“1b” e energizamos o enrolamento “2b” (fig. D). O pólo norte do estator estará agora dolado direito do motor e atrairá para alinhamento o pólo sul do rotor assinalado com opequeno círculo. Com isso, desde a situação da fig. A até a situação da fig. D, o rotor terámovido por três passos totalizando um movimento de 90º.
Para dar mais um passo no sentido horário removemos a energia do enrolamento“1b” e energizamos o enrolamento “2b” (fig. D). O pólo norte do estator estará agora dolado direito do motor e atrairá para alinhamento o pólo sul do rotor assinalado com opequeno círculo. Com isso, desde a situação da fig. A até a situação da fig. D, o rotor terámovido por três passos totalizando um movimento de 90º.
Caso queiramos prosseguir com mais um passo, basta desenergizar o enrolamento“2b” e energizar o enrolamento “1a”. Estaremos repetindo a situação da fig. A, no entanto opólo sul do rotor que será atraído para alinhamento com o pólo norte do topo do estatoragora será o que se encontra mais á esquerda, pois é ele que está mais próximo, enquantoque o pólo sul que assinalado com o pequeno círculo, agora se encontra distante do pontooriginal.
Caso queiramos prosseguir com mais um passo, basta desenergizar o enrolamento“2b” e energizar o enrolamento “1a”. Estaremos repetindo a situação da fig. A, no entanto opólo sul do rotor que será atraído para alinhamento com o pólo norte do topo do estatoragora será o que se encontra mais á esquerda, pois é ele que está mais próximo, enquantoque o pólo sul que assinalado com o pequeno círculo, agora se encontra distante do pontooriginal.
Para girar o motor continuamente, nós aplicamosenergia aos enrolamentos em um a um em uma seqüência.Assumindo lógica positiva onde 1 significa que há correntepelo enrolamento, a seguinte a seqüência recursiva (Apósexecutarmos a última linha da seqüência, tornamos a executara primeira, e assim sucessivamente), girará o motor nosentido horário. Se invertermos a ordem de execução daseqüência no tempo, o sentido de giro do motor passará a seranti-horário.
Para girar o motor continuamente, nós aplicamosenergia aos enrolamentos em um a um em uma seqüência.Assumindo lógica positiva onde 1 significa que há correntepelo enrolamento, a seguinte a seqüência recursiva (Apósexecutarmos a última linha da seqüência, tornamos a executara primeira, e assim sucessivamente), girará o motor nosentido horário. Se invertermos a ordem de execução daseqüência no tempo, o sentido de giro do motor passará a seranti-horário.
Seqüência paraAcionamento em Baixo
Torque
Seqüência paraAcionamento em Baixo
Torque
1a 2a 1b 2bTEMPO
1 0 0 00 1 0 00 0 1 00 0 0 1
Para situações que exijam maior torque do motor, a fim de reforçar o torque,podemos adotar uma seqüência recursiva diferente, a qual caracteriza-se por energizar
simultaneamente dois dos enrolamentos do motor. A este acionamento costuma-se chamaro motor unipolar de motor de quatro fases: Cada um do meio-enrolamentos do motor depasso é considerado como uma fase separada, e são energizadas duas fases de cada vez.Embora este modo não seja muito eficiente, pois deste modo, a corrente total que fluirápelo motor será maior (2 x maior se comparado com o modo de excitação de uma única-fase de cada vez), o controlador é simples e produzindo fluxos de campo mais intensos econseqüentemente maior torque (1.4 X maior) e a taxa de resposta máxima também éaumentada.
Para situações que exijam maior torque do motor, a fim de reforçar o torque,podemos adotar uma seqüência recursiva diferente, a qual caracteriza-se por energizar
simultaneamente dois dos enrolamentos do motor. A este acionamento costuma-se chamaro motor unipolar de motor de quatro fases: Cada um do meio-enrolamentos do motor depasso é considerado como uma fase separada, e são energizadas duas fases de cada vez.Embora este modo não seja muito eficiente, pois deste modo, a corrente total que fluirápelo motor será maior (2 x maior se comparado com o modo de excitação de uma única-fase de cada vez), o controlador é simples e produzindo fluxos de campo mais intensos econseqüentemente maior torque (1.4 X maior) e a taxa de resposta máxima também éaumentada.
Esta seqüência também pode ser invertida no tempopara inverter o sentido de giro. Algo interessante nesta
seqüência de acionamento que produz alto torque, é que nelaos enrolamentos “1a” e “1b” nunca são energizados ao mesmotempo. O mesmo ocorre com “2a” e “2b”.
Esta seqüência também pode ser invertida no tempopara inverter o sentido de giro. Algo interessante nesta
seqüência de acionamento que produz alto torque, é que nelaos enrolamentos “1a” e “1b” nunca são energizados ao mesmotempo. O mesmo ocorre com “2a” e “2b”.
Seqüência paraAcionamento em Alto
Torque
1a 2a 1b 2b
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
280Serviço Nacional
É importante lembrar que agora não haverá mais umperfeito alinhamento de pólos opostos entre rotor e estatorcomo havia no acionamento em baixo torque, uma vez que no
É importante lembrar que agora não haverá mais umperfeito alinhamento de pólos opostos entre rotor e estatorcomo havia no acionamento em baixo torque, uma vez que no
1 0 0 11 1 0 00 1 1 00 0 1 1
TEMPO
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 9/24
estator surgirão, para qualquer linha desta seqüência, quatro pólos (dois pólos norte e doispólos sul), os quais estarão defasados espacialmente em 90º entre adjacentes, enquanto queno rotor o total de pólos continua sendo de seis, os quais encontram-se defasadosespacialmente em 60º entre adjacentes.
Esta geometria polar faz com que, se os pólos do rotor se alinhassem com os pólosverticais do estator não seria possível um alinhamento concomitante com os póloshorizontais, e vice versa. Assim, o rotor acaba por assumir uma posição de retençãointermediária, em equilíbrio com as intensidades das forças de atração dos pólossimultâneos.
Ambas as seqüências mostradas (alto torque e baixo torque) movem um motor deimã permanente um passo de cada vez (no caso do exemplo, de 30º em 30º).
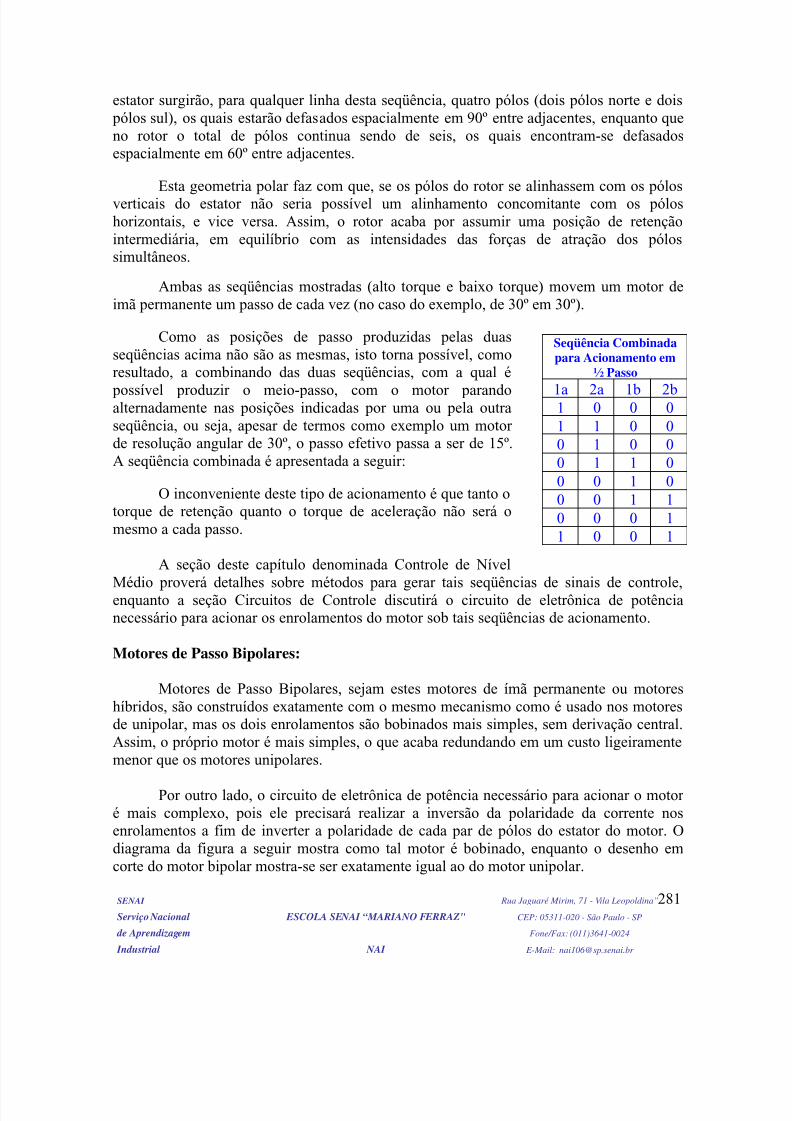
Como as posições de passo produzidas pelas duasseqüências acima não são as mesmas, isto torna possível, comoresultado, a combinando das duas seqüências, com a qual é
possível produzir o meio-passo, com o motor parandoalternadamente nas posições indicadas por uma ou pela outraseqüência, ou seja, apesar de termos como exemplo um motorde resolução angular de 30º, o passo efetivo passa a ser de 15º.A seqüência combinada é apresentada a seguir:
Seqüência Combinadapara Acionamento em
½ Passo
1a 2a 1b 2b1 0 0 01 1 0 00 1 0 00 1 1 00 0 1 0
O inconveniente deste tipo de acionamento é que tanto otorque de retenção quanto o torque de aceleração não será omesmo a cada passo.
0 0 1 10 0 0 11 0 0 1
A seção deste capítulo denominada Controle de Nível
Médio proverá detalhes sobre métodos para gerar tais seqüências de sinais de controle,enquanto a seção Circuitos de Controle discutirá o circuito de eletrônica de potêncianecessário para acionar os enrolamentos do motor sob tais seqüências de acionamento.
Motores de Passo Bipolares:
Motores de Passo Bipolares, sejam estes motores de ímã permanente ou motoreshíbridos, são construídos exatamente com o mesmo mecanismo como é usado nos motoresde unipolar, mas os dois enrolamentos são bobinados mais simples, sem derivação central.Assim, o próprio motor é mais simples, o que acaba redundando em um custo ligeiramentemenor que os motores unipolares.
Por outro lado, o circuito de eletrônica de potência necessário para acionar o motoré mais complexo, pois ele precisará realizar a inversão da polaridade da corrente nosenrolamentos a fim de inverter a polaridade de cada par de pólos do estator do motor. Odiagrama da figura a seguir mostra como tal motor é bobinado, enquanto o desenho emcorte do motor bipolar mostra-se ser exatamente igual ao do motor unipolar.
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
281
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 10/24
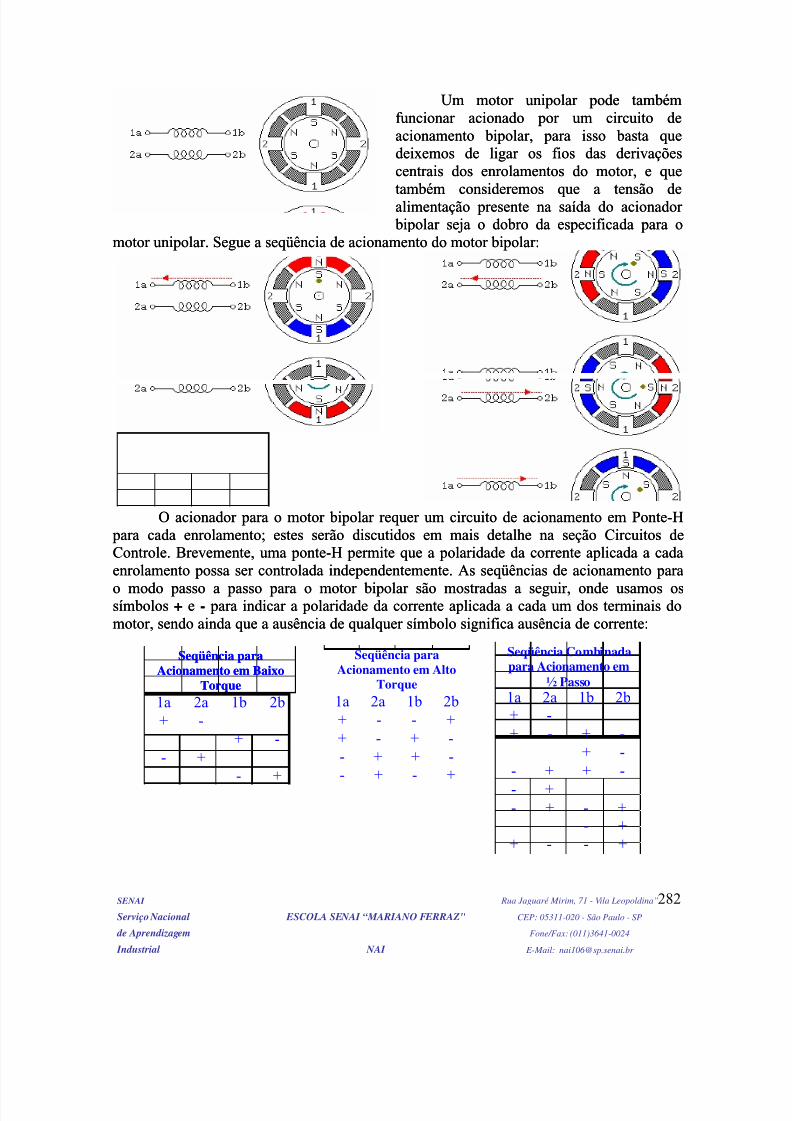
Um motor unipolar pode tambémfuncionar acionado por um circuito deacionamento bipolar, para isso basta quedeixemos de ligar os fios das derivaçõescentrais dos enrolamentos do motor, e que
também consideremos que a tensão dealimentação presente na saída do acionadorbipolar seja o dobro da especificada para o
motor unipolar. Segue a seqüência de acionamento do motor bipolar:
Um motor unipolar pode tambémfuncionar acionado por um circuito deacionamento bipolar, para isso basta quedeixemos de ligar os fios das derivaçõescentrais dos enrolamentos do motor, e que
também consideremos que a tensão dealimentação presente na saída do acionadorbipolar seja o dobro da especificada para o
motor unipolar. Segue a seqüência de acionamento do motor bipolar:
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
282
O acionador para o motor bipolar requer um circuito de acionamento em Ponte-Hpara cada enrolamento; estes serão discutidos em mais detalhe na seção Circuitos deControle. Brevemente, uma ponte-H permite que a polaridade da corrente aplicada a cadaenrolamento possa ser controlada independentemente. As seqüências de acionamento para
o modo passo a passo para o motor bipolar são mostradas a seguir, onde usamos ossímbolos + e - para indicar a polaridade da corrente aplicada a cada um dos terminais domotor, sendo ainda que a ausência de qualquer símbolo significa ausência de corrente:
O acionador para o motor bipolar requer um circuito de acionamento em Ponte-Hpara cada enrolamento; estes serão discutidos em mais detalhe na seção Circuitos deControle. Brevemente, uma ponte-H permite que a polaridade da corrente aplicada a cadaenrolamento possa ser controlada independentemente. As seqüências de acionamento para
o modo passo a passo para o motor bipolar são mostradas a seguir, onde usamos ossímbolos + e - para indicar a polaridade da corrente aplicada a cada um dos terminais domotor, sendo ainda que a ausência de qualquer símbolo significa ausência de corrente:
Seqüência paraAcionamento em Baixo
Torque
Seqüência paraAcionamento em Baixo
Torque
1a 2a 1b 2b+ -
+ -- +
- +
Seqüência paraAcionamento em Alto
Torque
Seqüência Combinadapara Acionamento em
½ Passo
1a 2a 1b 2b1a 2a 1b 2b+ -+ - - ++ - + -+ - + -
+ -- + + -- + + -- + - +- +
- + - +
- +
+ - - +

5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 11/24
Note que, a um nível abstrato, estas seqüências são idênticas àquelas para o motorunipolar, e que o circuito que produz os sinais de controle da seqüência podem ser omesmo, seja para o circuito de ponte-H de um acionador bipolar ou para o circuitoacionador unipolar simples. Os sistemas de controle que geram as seqüências podem seridênticos para os dois tipos de motor.
Para distinguir um motor de ímã permanente bipolar de outros motores que possuemarranjo de conexão a 4 fios, meça as resistências entre os diferentes terminais.
Motores de Passo Bifilares:
Enrolamentos bifilares são aplicáveis em motores de passo com mesmo tipo de rotore de geometria de estator dos motores unipolar e bipolar vistos anteriormente, mas em vezde bobinar cada enrolamento ao estator com um único fio, dois fios são enroladosparalelamente. Como resultado, o motor passará a ter um arranjo de conexão a 8 fios aoinvés de 4 fios, pois de fato ele terá 4 enrolamentos independentes.
Na prática, tais motores acabam sendo configurados em uma organização de doisconjuntos de dois enrolamentos, para serem acionados ou como motores unipolares oucomo motores bipolares:
√ Se os dois enrolamentos de cada conjunto estiverem ligados em série, temoscomo resultados:
• Um motor bipolar que pode ser usado com uma tensão maior;
• Um motor unipolar para uma tensão menor, uma vez que o pontocomum da associação série deverá ser usado como derivação central.
√ Mas se os enrolamentos de cada conjunto estiverem associados em paralelo,temos então um motor bipolar para uma tensão menor, porém maior corrente,pois ambos os enrolamentos consumirão independentemente;
A figura a seguir mostra as conexõesalternativas para os enrolamentos de tal ummotor.
Devemos notar que essencialmentetodos os motores a 6-fios disponíveis no
mercado para uso bipolar são de fatobobinados usando enrolamentos bifilares, deforma que a conexão externa que serve como uma derivação central está realmenteconectada como mostrado no enrolamento 1 da figura anterior. Naturalmente, então,qualquer motor de unipolar pode ser usado como um motor bipolar a duas vezes a o valorda tensão nominal e metade da corrente nominal indicada na etiquete de identificação do
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
283
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 12/24
2motor. Alguns projetistas sugerem uma tensão apenas vezes maior para a associaçãosérie e está questão não é de decisão tão trivial, principalmente devido ao fato de sob ascondições nominais de tensão e corrente os circuitos magnéticos de um motor de passo játrabalham muito próximos das saturação.
Há três considerações a serem feitas:
√ A capacidade máxima de corrente por enrolamento;√ A necessidade de resfriamento do motor;√ A necessidade de evitar levar os circuitos magnéticos do motor à saturação.
Os técnicos que trabalham aproveitam motores usados, quando encontram pelafrente um motor de passo de 8-fios tem um desafio!
Depois de usar um ohmmímetro para identificar onde estão os 4 enrolamentosindependentes, é preciso saber qual enrolamento faz parelha com qual enrolamento (qual
enrolamento pode ser associado a qual enrolamento).
Para isso use um gerador de funções para gerar um sinal CA senoidal de baixa-tensão, com alguns poucos volts. Este sinal deverá ter uma freqüência também baixa(<200hz). Em seguida conecte este sinal para alimentar um dos enrolamentos qualquer quefoi identificado no passo anterior.
Devido à geometria dos circuitos magnéticos do motor, podemos ter a garantia deque o sinal aplicado a esse enrolamento irá provocar indução em apenas um dos outros trêsenrolamentos (efeito transformador), e isso poderá ser constatado com um voltímetro. Oenrolamento que receber indução é o faz parelha com aquele que está alimentado.
Mantenha o enrolamento alimentado e em seguida associe-o em serie com aqueleenrolamento que foi identificado como o seu associado é meça o valor da tensão totalresultante da associação em série. Se a tensão resultante for nula, isto significa que elesestão associados em contra fase, ou seja, com polaridade invertida um em relação ao outro,mas se a tensão dobrar, isto significa que eles estão em fase, ou seja, estão associados napolaridade correta.
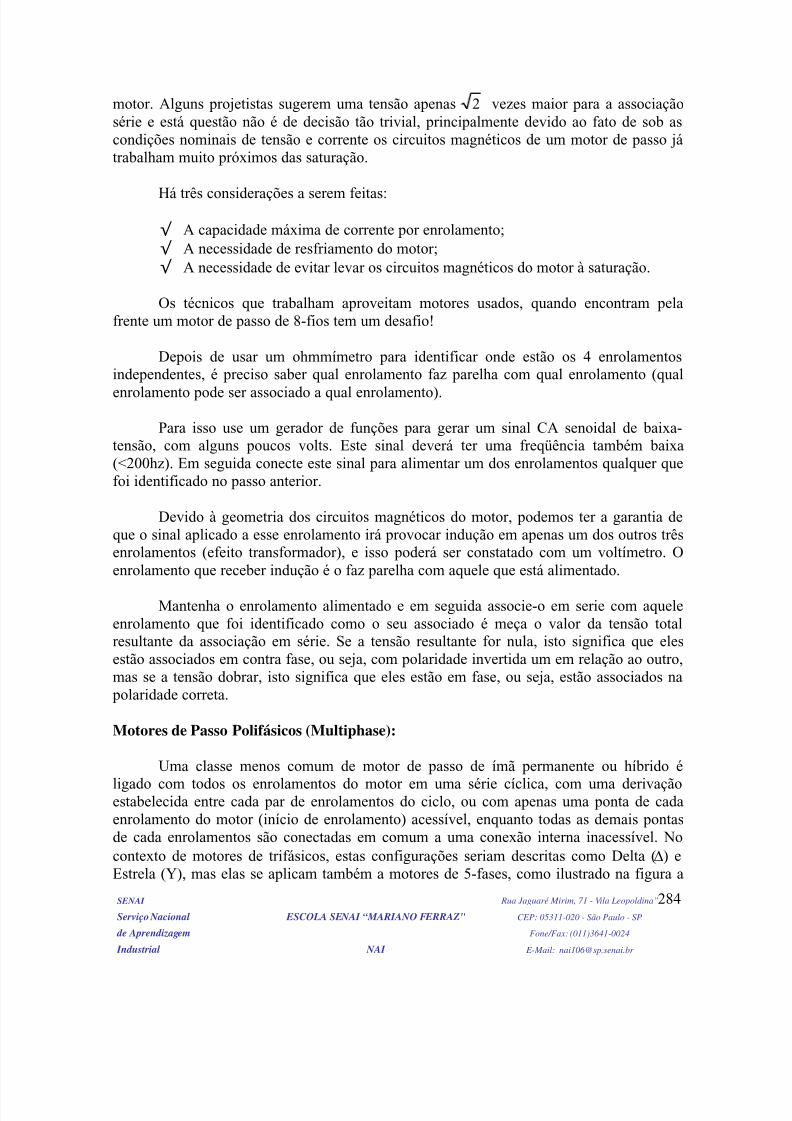
Motores de Passo Polifásicos (Multiphase):
Uma classe menos comum de motor de passo de ímã permanente ou híbrido é
ligado com todos os enrolamentos do motor em uma série cíclica, com uma derivaçãoestabelecida entre cada par de enrolamentos do ciclo, ou com apenas uma ponta de cadaenrolamento do motor (início de enrolamento) acessível, enquanto todas as demais pontasde cada enrolamentos são conectadas em comum a uma conexão interna inacessível. Nocontexto de motores de trifásicos, estas configurações seriam descritas como Delta (Δ) eEstrela (Y), mas elas se aplicam também a motores de 5-fases, como ilustrado na figura a
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
284
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 13/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
285
alternativamente, permitindo acionar cada enrolamento independentemente.
u Y requer 1/2de uma ponte-H para cada terminal do motor. É notável que motores de 5-fases de umdeterminado tamanho carcaça têm o potencial de entregar mais torque se comparados comos unipolares, bipolares ou trifásicos de mesmo tamanho, porque todos ou todos menos um
mentos são energizados a todo instante pela seqüência de ciclo de passo.Alguns motores de 5-fases têm resoluções altas, da ordem de 0.72º por passo (500 passosor revolução).
Muitos alternadores automotivos são construídos usando uma geometria trifásicahíbrida com um rotor de ímã permanente ou um rotor de eletroímã energizado por um parde anéi
alternativamente, permitindo acionar cada enrolamento independentemente.
u Y requer 1/2de uma ponte-H para cada terminal do motor. É notável que motores de 5-fases de umdeterminado tamanho carcaça têm o potencial de entregar mais torque se comparados comos unipolares, bipolares ou trifásicos de mesmo tamanho, porque todos ou todos menos um
mentos são energizados a todo instante pela seqüência de ciclo de passo.Alguns motores de 5-fases têm resoluções altas, da ordem de 0.72º por passo (500 passosor revolução).
Muitos alternadores automotivos são construídos usando uma geometria trifásicahíbrida com um rotor de ímã permanente ou um rotor de eletroímã energizado por um parde anéi
seguir. Alguns motores polifásicos (multiphase) expõem todos as pontas de todos osenrolamentos do motor, deixando para o usuário decidir entre as configurações Δ e Y, ou
O controle de qualquer um destes motores de polifásicos seja em Δ o
seguir. Alguns motores polifásicos (multiphase) expõem todos as pontas de todos osenrolamentos do motor, deixando para o usuário decidir entre as configurações Δ e Y, ou
O controle de qualquer um destes motores de polifásicos seja em Δ o
dos seus enrolados seus enrola
pp
s deslizantes. Estes alternadores foram usados com sucesso como motores de passoem algumas aplicações industriais; tem-se a informação ângulos de passo de 10º por passonestas adaptações.
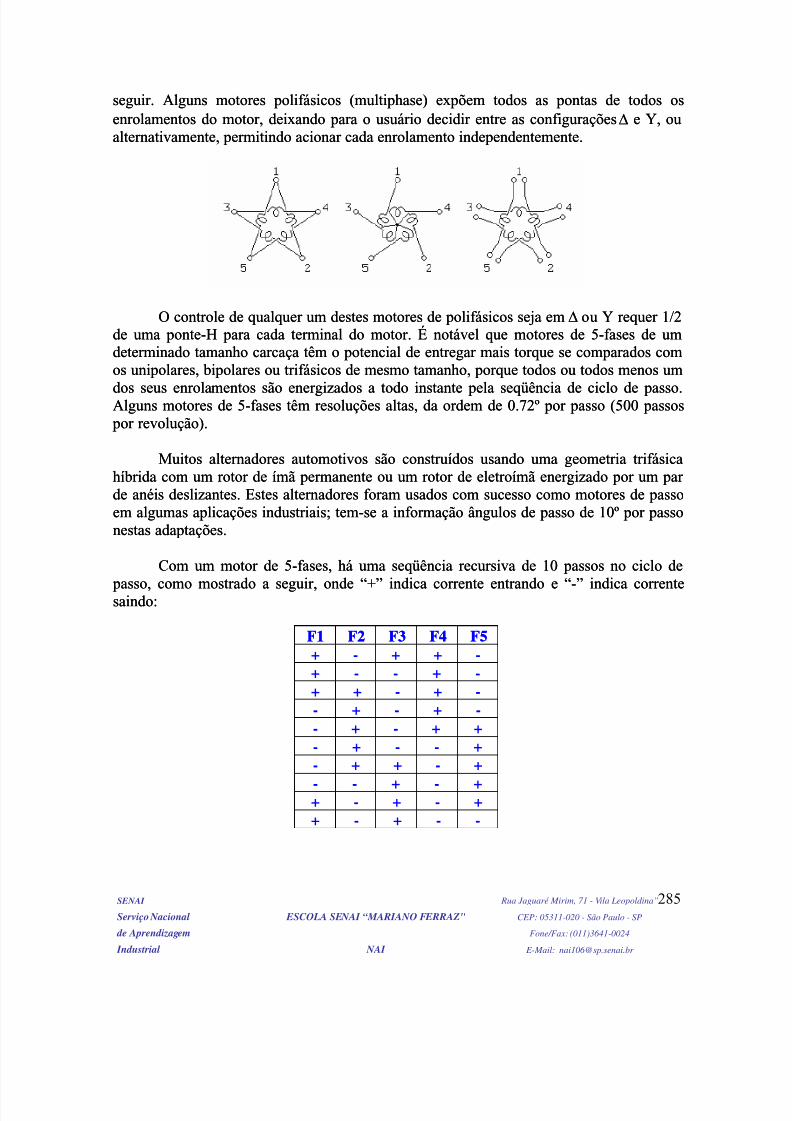
Com um motor de 5-fases, há uma seqüência recursiva de 10 passos no ciclo de
passo, como mostrado a seguir, onde “+” indica corrente entrando e “-” indica correntesaindo:
s deslizantes. Estes alternadores foram usados com sucesso como motores de passoem algumas aplicações industriais; tem-se a informação ângulos de passo de 10º por passonestas adaptações.
Com um motor de 5-fases, há uma seqüência recursiva de 10 passos no ciclo de
passo, como mostrado a seguir, onde “+” indica corrente entrando e “-” indica correntesaindo:
F1 F2 F3 F4 F5F1 F2 F3 F4 F5
+ - + + -
+ - - + -
+ + - + -
- + - + -
- + - + +
- + - - +
- + + - +
- - + - ++ - + - +
+ - + - -
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 14/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
286
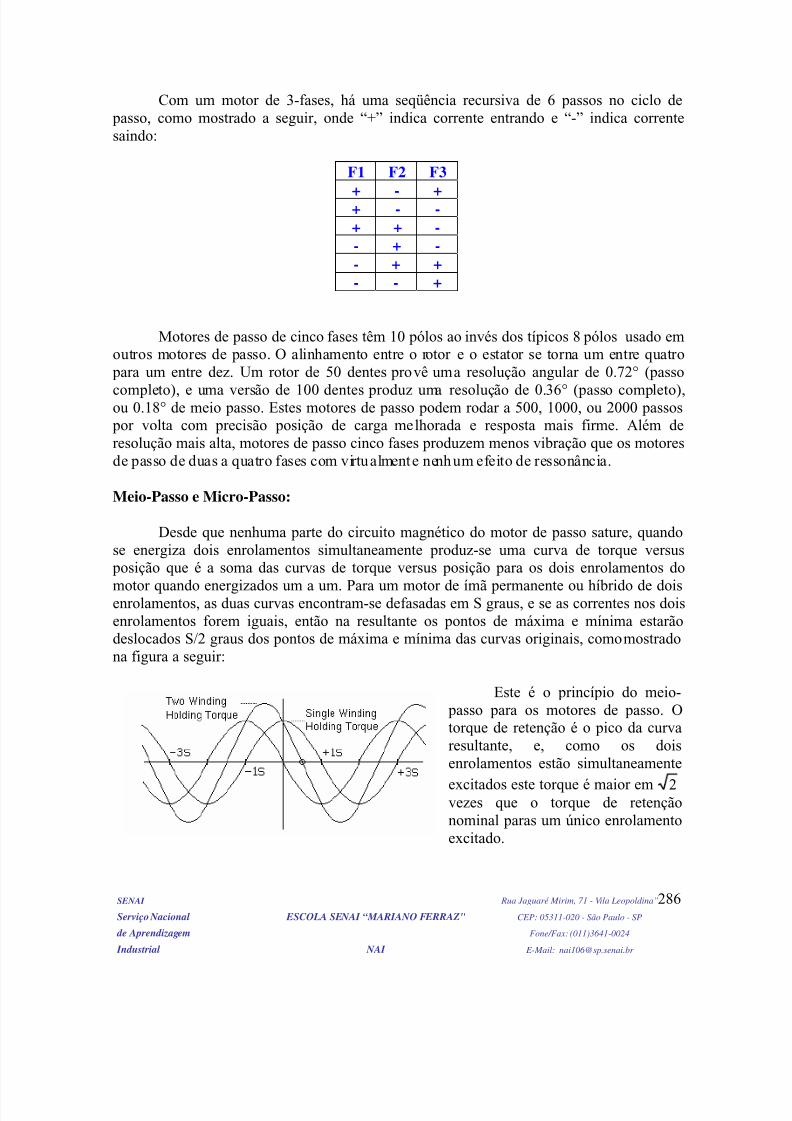
om um motor de 3-fases, há uma seqüência recursiva de 6 passos no ciclo depasso, como mostrado a seguir, onde “+” indica corrente entrando e “-” indica correntesaindo:
F1 F2 F3
C
+ - ++ - -
+ + -
- + -
- + +
- - +
Motores de passo de cinco fases têm 10 pólos ao invés dos típicos 8 pólos usado emoutros motores de passo. O alinhamento entre o r e o estator se torna um entre quatropara um entre dez. Um rotor de 50 dentes vê a resolução angular de 0.72° (passo
completo), e uma versão de 100 dentes produz um resolução de 0.36° (passo completo),ou 0.18° de meio passo. Estes motores de passo podem rodar a 500, 1000, ou 2000 passospor volta com precisão posição de carga lhorada e resposta mais firme. Além deresolução mais alta, motores de passo cinco fases produzem menos vibração que os motoresde passo de duas a quatro fases com vi alm e ne um efeito de ressonância.
Meio-Passo e Micro-Passo:
mostradona figura a seguir:
Este é o princípio do meio-
otorpro um
a
me
rtu ent nh
Desde que nenhuma parte do circuito magnético do motor de passo sature, quandose energiza dois enrolamentos simultaneamente produz-se uma curva de torque versusposição que é a soma das curvas de torque versus posição para os dois enrolamentos do
motor quando energizados um a um. Para um motor de ímã permanente ou híbrido de doisenrolamentos, as duas curvas encontram-se defasadas em S graus, e se as correntes nos doisenrolamentos forem iguais, então na resultante os pontos de máxima e mínima estarãodeslocados S/2 graus dos pontos de máxima e mínima das curvas originais, como
passo para os motores de passo. Otorque de retenção é o pico da curvaresultante, e, como os doisenrolamentos estão simultaneamente
excitados este torque é maior em 2 vezes que o torque de retençãonominal paras um único enrolamentoexcitado.
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 15/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
287
circuito mde torque versus posição para cada enrolamento é uma
A maioria das folhas de dados de motoresrelutância variável cita o torque de retenção para dois
de torque para um único enrolamento excitado; em p e émaior, e em parte, é porque os controladores de penergizam simultaneamente dois enrolamentos.
Se qualquer parte dos circuitos magnéticos do motor é saturada, as duas curvas detorque
ção da combinaçãopode não ser exatamente eqüidistante em S/2 graus das posições de equilíbrios originais.
Isto requer assumir que nenhuma parte do circuito mde torque versus posição para cada enrolamento é uma
A maioria das folhas de dados de motoresrelutância variável cita o torque de retenção para dois
de torque para um único enrolamento excitado; em p e émaior, e em parte, é porque os controladores de penergizam simultaneamente dois enrolamentos.
Se qualquer parte dos circuitos magnéticos do motor é saturada, as duas curvas detorque
ção da combinaçãopode não ser exatamente eqüidistante em S/2 graus das posições de equilíbrios originais.
agnético sature e que a curvasenoidal ideal.
de passo de ímã permanente e deenrolamentos excitados e não a curva
arte, isto ocorre porque este torquasso completo mais comuns sempre
agnético sature e que a curvasenoidal ideal.
de passo de ímã permanente e deenrolamentos excitados e não a curva
arte, isto ocorre porque este torquasso completo mais comuns sempre
Isto requer assumir que nenhuma parte do
não somarão linearmente. Como resultado, o torque resultante será menor que asoma das componentes torques de componente e o equilíbrio de posi
não somarão linearmente. Como resultado, o torque resultante será menor que asoma das componentes torques de componente e o equilíbrio de posi
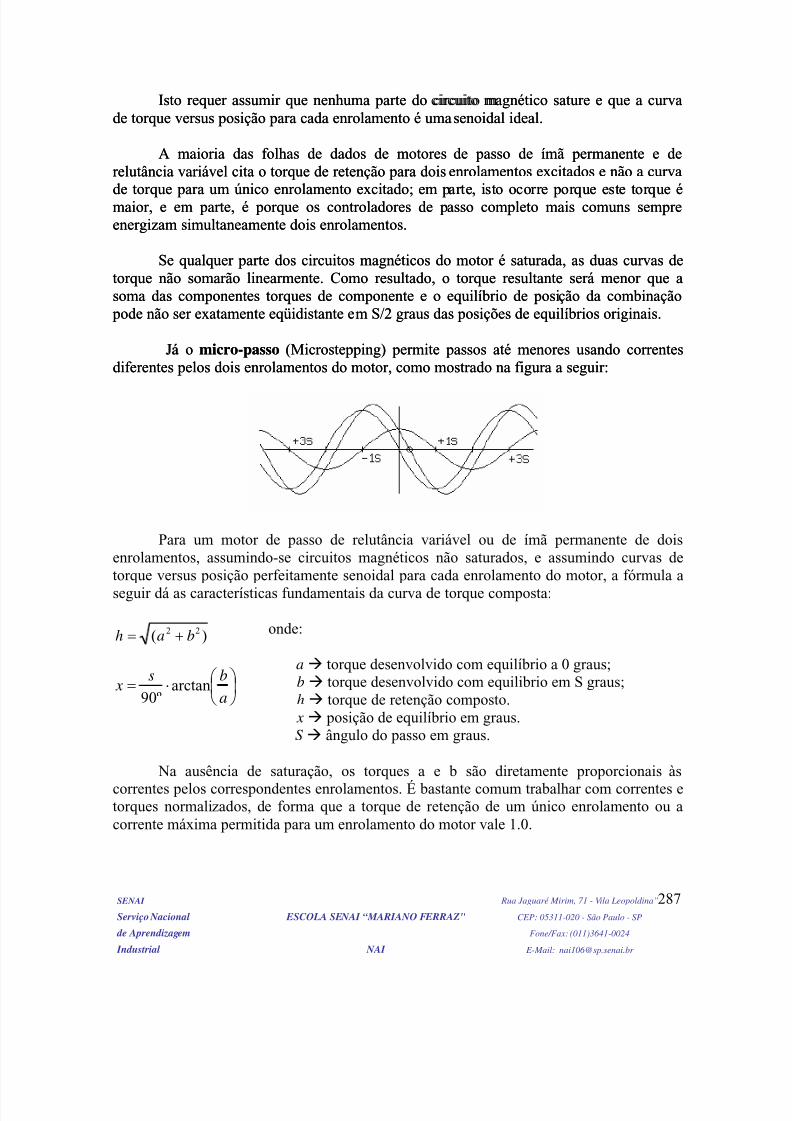
Já o micro-passo (Microstepping) permite passos até menores usando correntesdiferentes pelos dois enrolamentos do motor, como mostrado na figura a seguir:
Já o micro-passo (Microstepping) permite passos até menores usando correntesdiferentes pelos dois enrolamentos do motor, como mostrado na figura a seguir:
Para um motor de passo de relutância variável ou de ímã permanente de doisenrolamentos, assumindo-se circuitos magnéticos não saturados, e assumindo curvas detorque versus posição perfeitamente senoidal para cada enrolamento do motor, a fórmula aseguir dá as características fundamentais da curva de torque composta:
onde:
a torque desenvolvido com equilíbrio a 0 graus;b torque desenvolvido com equilibrio em S graus;h torque de retenção composto.
Na ausên àscorrentes pelos correspondentes enrolamentos. É bastante comum trabalhar com correntes e
zados, d de retenção de um único enrolamento ou acorrente máxima permitida para um enrolamento do motor vale 1.0.
)( 22 bah +=
x posição de equilíbrio em graus.S ângulo do passo em graus.
cia de saturação, os torques a e b são diretamente proporcionais
⎟ ⎠
⎞⎜⎝
⎛ ⋅=
a
bs x arctan
º90
e forma que a torquetorques normali
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 16/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
288
Atrito, Zonas Mortas e Micro-Passos:
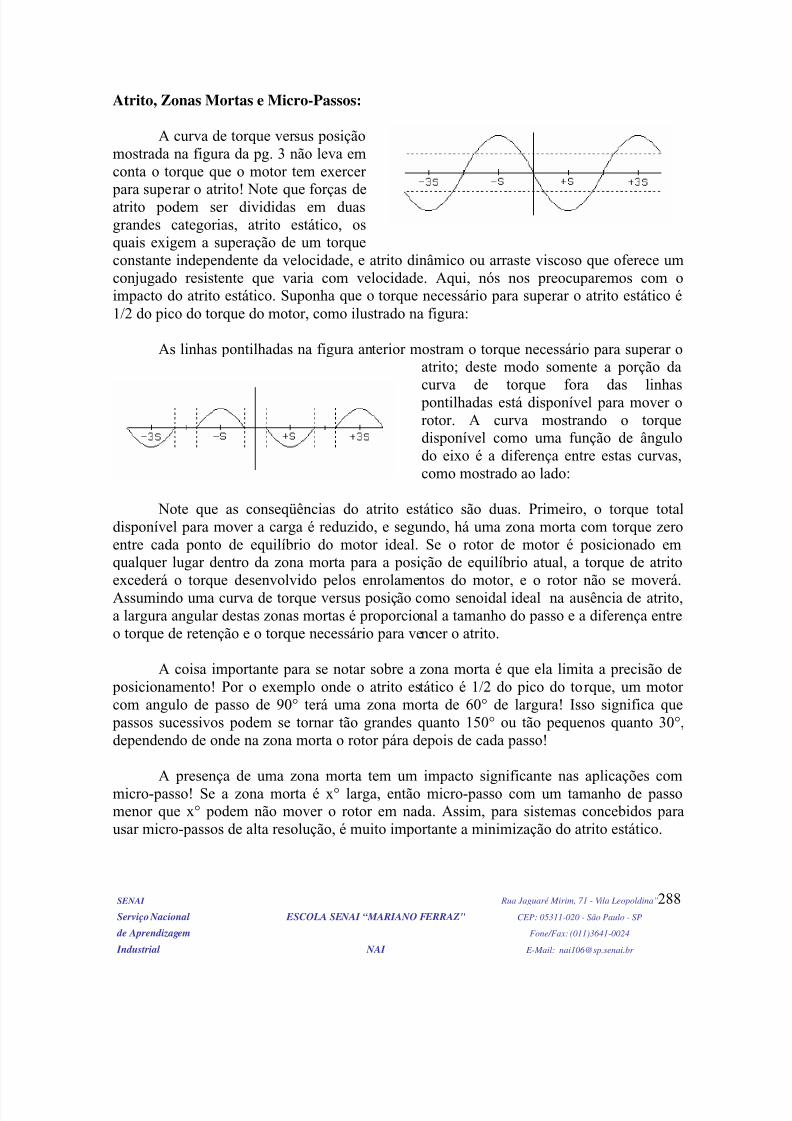
A curva de torque vermostrada na figura da pg. 3 não leva emconta o
quais exigem a superação de um torqueonstante independente da velocidade, e atrito dinâmico ou arraste viscoso que oferece um
conjugado resistente que varia com velocidade. Aqui, nós nos preocuparemos com otorque necessário para superar o atrito estático é
1/2 do pico do torque do motor, como ilustrado na figura:
ter
disponível como uma função de ângulodo eixo é a diferença entre estas curvas,
er a carga é reduzido, e segundo, há uma zona morta com torque zeroentre cada ponto de equilíbrio do motor ideal. Se o rotor de motor é posicionado emqualqu
excederá o torque desenvolvido pelos enrolameão ca largura angular destas zonas mortas é proporcioo torque de retenção e o torque necessário para ve
A coisa importante para se notar sobre aposicionamento! Por o exemplo onde o atrito es rque, um motorcom angulo de passo de 90° terá uma zona morta de 60° de largura! Isso significa quepassos
sus posição
torque que o motor tem exercer
para superar o atrito! Note que forças deatrito podem ser divididas em duasgrandes categorias, atrito estático, os
c
impacto do atrito estático. Suponha que o
As linhas pontilhadas na figura an
como mostrado ao lado:
Note que as conseqüências do atrito estático são duas. Primeiro, o torque totaldisponível para mov
ior mostram o torque necessário para superar oatrito; deste modo somente a porção da
curva de torque fora das linhaspontilhadas está disponível para mover orotor. A curva mostrando o torque
er lugar dentro da zona morta para a posição de equilíbrio atual, a torque de atrito
ntos do motor, e o rotor não se moverá.omo senoidal ideal na ausência de atrito,nal a tamanho do passo e a diferença entrencer o atrito.
zona morta é que ela limita a precisão detático é 1/2 do pico do to
Assumindo uma curva de torque versus posiç
sucessivos podem se tornar tão grandes quanto 150° ou tão pequenos quanto 30°,dependendo de onde na zona morta o rotor pára depois de cada passo!
A presença de uma zona morta tem um impacto significante nas aplicações commicro-passo! Se a zona morta é x° larga, então micro-passo com um tamanho de passomenor que x° podem não mover o rotor em nada. Assim, para sistemas concebidos parausar micro-passos de alta resolução, é muito importante a minimização do atrito estático.
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 17/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
289
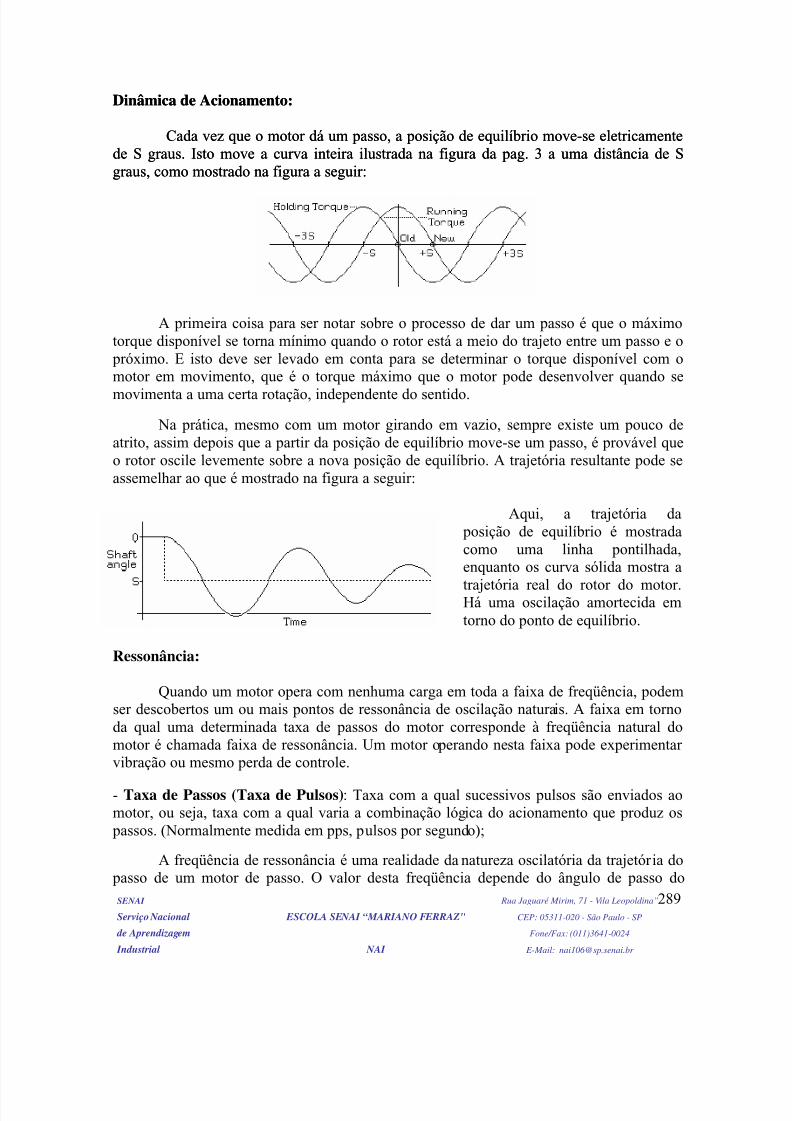
DinâmDinâmica de Acionamento:
Cada vez que o motor dá um passo, a posição de equilíbrio move-se eletricamentede S graus. Isto move a curva inteira ilustrada na figura da pag. 3 a uma distância de Sgraus, como mostrado na figura a seguir:
ica de Acionamento:
Cada vez que o motor dá um passo, a posição de equilíbrio move-se eletricamentede S graus. Isto move a curva inteira ilustrada na figura da pag. 3 a uma distância de Sgraus, como mostrado na figura a seguir:
A primeira coisa paratorque disponível se torna míni
ser notar sobre o processo de dar um passo é que o máximomo quando o rotor está a meio do trajeto entre um passo e o
próxim
Na prática, mesmo com um motor girando em vazio, sempre existe um pouco deatrito, assim depois que a partir da posição de equilíbrio move-se um passo, é provável queo rotor oscile levemente sobre a nova posição de equilíbrio. A trajetória resultante pode seassemelhar ao que é mostrado na figura a seguir:
Aqui, a trajetória daposição de equilíbrio é mostrada
Resson
is. A faixa em tornoda qual uma determinada taxa de passos do motor corresponde à freqüência natural do
perando nevibração ou mesmo perda de controle.
- Taxa de Passos (Taxa de Pulsos): Taxa com a qualmotor, ou seja, taxa com a qual varia a combinação lógpassos. (Normalmente medida em pps, pulsos por segund
A freqüência de ressonância é uma realidade da ia dopasso de um motor de passo. O valor desta freqüência depende do ângulo de passo do
o. E isto deve ser levado em conta para se determinar o torque disponível com omotor em movimento, que é o torque máximo que o motor pode desenvolver quando se
movimenta a uma certa rotação, independente do sentido.
como uma linha pontilhada,enquanto os curva sólida mostra a
trajetória real do rotor do motor.Há uma oscilação amortecida emtorno do ponto de equilíbrio.
ância:
Quando um motor opera com nenhuma carga em toda a faixa de freqüência, podemser descobertos um ou mais pontos de ressonância de oscilação natura
sta faixa pode experimentar
sucessivos pulsos são enviados aoica do acionamento que produz oso);
natureza oscilatória da trajetór
motor é chamada faixa de ressonância. Um motor o
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 18/24
SENAI
Serviço Nacional ESCOLA SENAI “MARIANO FER
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
bém, para um motor girando em vazio, da relação do torque de retençãoom o momento de inércia do rotor. Ou seja, um torque maior ou um momento de inércia
menor,
s de motores de passo incluem informação sobre areqüência de ressonância, mas ela só vale para o motor em vazio, mas se qualquer carga é
gnificantes quando a taxa deasso e
coplado a uma cargasem atr
os podem ser usados. Aqui, os amortecedores não sótirarão energia dos
acoplamento elastométricos eamorte
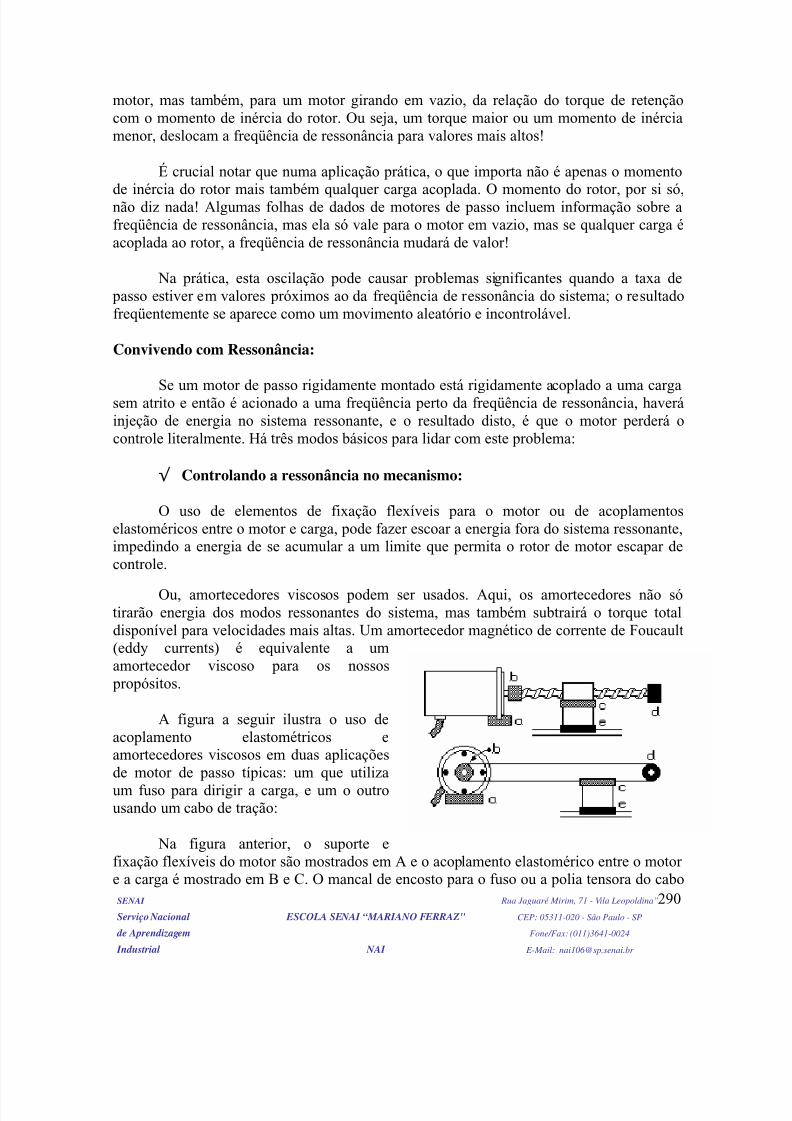
cabo de tração:
lamento elastomérico entre o motor
motor, mas tamc
deslocam a freqüência de ressonância para valores mais altos!
É crucial notar que numa aplicação prática, o que importa não é apenas o momento
de inércia do rotor mais também qualquer carga acoplada. O momento do rotor, por si só,não diz nada! Algumas folhas de dadof acoplada ao rotor, a freqüência de ressonância mudará de valor!
Na prática, esta oscilação pode causar problemas sip stiver em valores próximos ao da freqüência de ressonância do sistema; o resultadofreqüentemente se aparece como um movimento aleatório e incontrolável.
Convivendo com Ressonância:
Se um motor de passo rigidamente montado está rigidamente aito e então é acionado a uma freqüência perto da freqüência de ressonância, haveráinjeção de energia no sistema ressonante, e o resultado disto, é que o motor perderá ocontrole literalmente. Há três modos básicos para lidar com este problema:
√ Controlando a ressonância no mecanismo:
O uso de elementos de fixação flexíveis para o motor ou de acoplamentoselastoméricos entre o motor e carga, pode fazer escoar a energia fora do sistema ressonante,impedindo a energia de se acumular a um limite que permita o rotor de motor escapar decontrole.
Ou, amortecedores viscosmodos ressonantes do sistema, mas também subtrairá o torque total
disponível para velocidades mais altas. Um amortecedor magnético de corrente de Foucault(eddy currents) é equivalente a umamortecedor viscoso para os nossospropósitos.
A figura a seguir ilustra o uso de
cedores viscosos em duas aplicaçõesde motor de passo típicas: um que utilizaum fuso para dirigir a carga, e um o outrousando um
Na figura anterior, o suporte efixação flexíveis do motor são mostrados em A e o acope a carga é mostrado em B e C. O mancal de encosto para o fuso ou a polia tensora do cabo
Rua Jaguaré Mirim, 71 - Vila Leopoldina”
RAZ" CEP: 05311-020 - São Paulo - SP
290
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 19/24
SENAI
Serviço Nacional ESCOLA SENAI “MARIANO FER
de Aprendizagem
Rua Jaguaré Mirim, 71 - Vila Leopoldina”
RAZ" CEP: 05311-020 - São Paulo - SP
Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
291
mortecendo para prevenir problemas deressonância.
uma voltagem de corrente alternada nos
enrolamento. Grampeando-se a c quemasbasead ustrados
em seç
nível do sistema de controle pode evitar o acionamento do motor emfreqüências ressonantes conhecidas, acelerando e desacelerando por estas freqüências esempre
assos que combina ambos os tipos de acionamento
devemos nos preocupar com duas diferentes freqüências de ressonância, uma diferente daoutra e
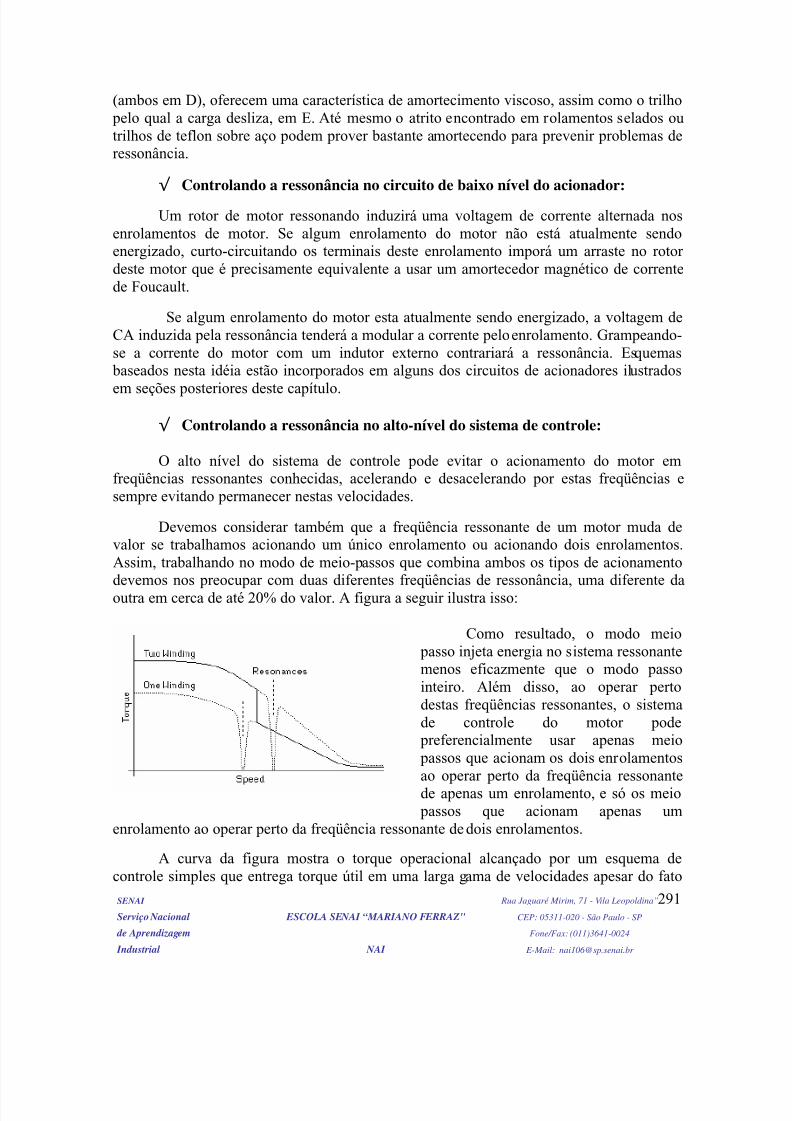
disso, ao operar perto
e só os meiopassos que acionam apenas um
enrolamento ao operar perto da freqüência ressonante de
A curva da figura mostra o torque opecontrole simples que entrega torque útil em uma larga g
(ambos em D), oferecem uma característica de amortecimento viscoso, assim como o trilhopelo qual a carga desliza, em E. Até mesmo o atrito encontrado em rolamentos selados outrilhos de teflon sobre aço podem prover bastante a
√ Controlando a ressonância no circuito de baixo nível do acionador:
Um rotor de motor ressonando induziráenrolamentos de motor. Se algum enrolamento do motor não está atualmente sendoenergizado, curto-circuitando os terminais deste enrolamento imporá um arraste no rotordeste motor que é precisamente equivalente a usar um amortecedor magnético de correntede Foucault.
Se algum enrolamento do motor esta atualmente sendo energizado, a voltagem deCA induzida pela ressonância tenderá a modular a corrente pelo
orrente do motor com um indutor externo contrariará a ressonância. Esos nesta idéia estão incorporados em alguns dos circuitos de acionadores il
ões posteriores deste capítulo.
√ Controlando a ressonância no alto-nível do sistema de controle:
O alto
evitando permanecer nestas velocidades.
Devemos considerar também que a freqüência ressonante de um motor muda devalor se trabalhamos acionando um único enrolamento ou acionando dois enrolamentos.Assim, trabalhando no modo de meio-p
m cerca de até 20% do valor. A figura a seguir ilustra isso:
Como resultado, o modo meiopasso injeta energia no sistema ressonantemenos eficazmente que o modo passointeiro. Alémdestas freqüências ressonantes, o sistemade controle do motor podepreferencialmente usar apenas meiopassos que acionam os dois enrolamentos
ao operar perto da freqüência ressonantede apenas um enrolamento,
dois enrolamentos.
racional alcançado por um esquema deama de velocidades apesar do fato
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 20/24
que o torque disponível cair para zero a cada ressonância no sistema. Esta solução éparticularmente efetiva se as freqüências ressonantes estiverem muito bem definidas e bemseparadas. Este será o caso em sistemas minimamente amortecidos que operam abaixo davelocidade de corte definida na próxima seção.
SENAI
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ"
de Aprendizagem
Rua Jaguaré Mirim, 71 - Vila Leopoldina”
CEP: 05311-020 - São Paulo - SP
Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
292
Curv
ariável, não é uma constante! A indutânciado enrolamento do motor determina o tempo de elevação e de queda da corrente pelos
perar para uma forma de onda quadrada de tensão
do circuito
s t
enrolamentos de motor têm pouco invelocidades mais altas, o efeito da indut
A velocidade máxima
estas fazem
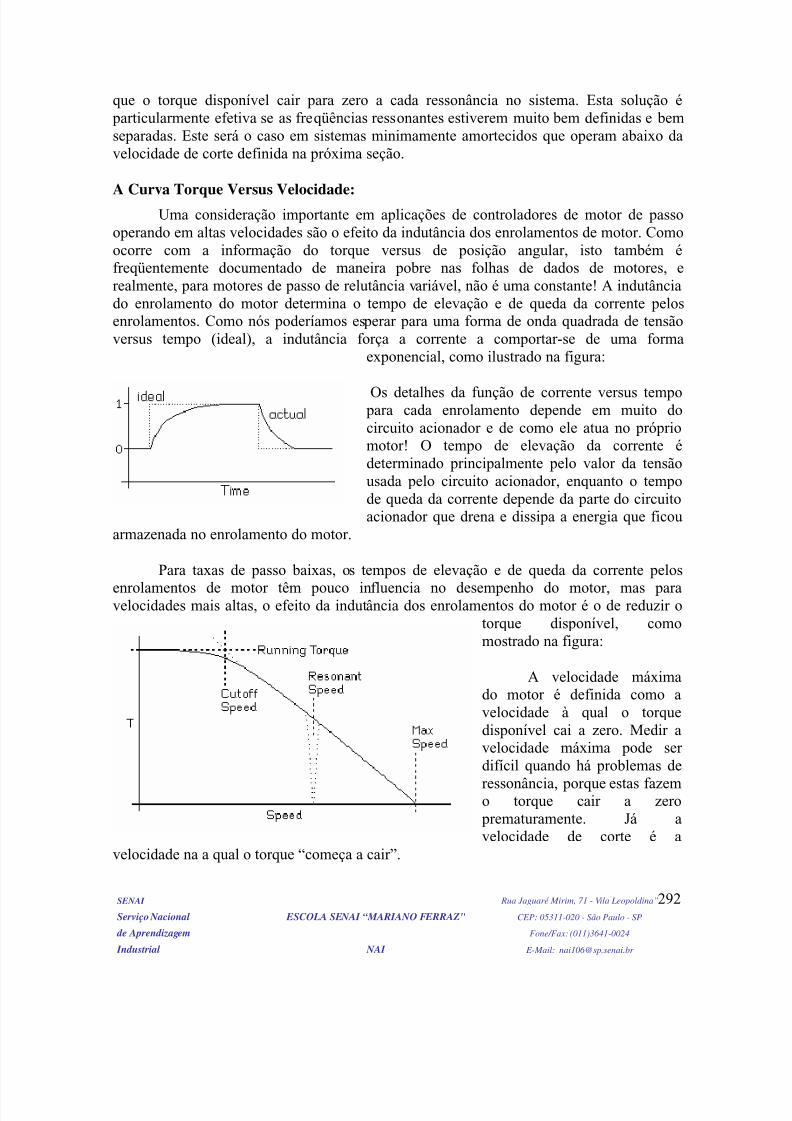
velocidade na a qual o torque “começa a cair”.
A a Torque Versus Velocidade:Uma consideração importante em aplicações de controladores de motor de passo
operando em altas velocidades são o efeito da indutância dos enrolamentos de motor. Comoocorre com a informação do torque versus de posição angular, isto também éfreqüentemente documentado de maneira pobre nas folhas de dados de motores, erealmente, para motores de passo de relutância v
enrolamentos. Como nós poderíamos esversus tempo (ideal), a indutância força a corrente a comportar-se de uma forma
exponencial, como ilustrado na figura:
Os detalhes da função de corrente versus tempopara cada enrolamento depende em muito docircuito acionador e de como ele atua no própriomotor! O tempo de elevação da corrente édeterminado principalmente pelo valor da tensãousada pelo circuito acionador, enquanto o tempode queda da corrente depende da parteacionador que drena e dissipa a energia que ficou
empos de elevação e de queda da corrente pelos
fluencia no desempenho do motor, mas paraância dos enrolamentos do motor é o de reduzir o
torque disponível, comomostrado na figura:
armazenada no enrolamento do motor.
Para taxas de passo baixas, o
do motor é definida como avelocidade à qual o torquedisponível cai a zero. Medir avelocidade máxima pode serdifícil quando há problemas de
ressonância, porqueo torque cair a zeroprematuramente. Já avelocidade de corte é a
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 21/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
293
cada passo, enquanto que na velocidade de corte, o tempode duração do passo é comparável à soma dos tempos da elevação e queda da correntepelos e
corte e a velocidade máxima para qualquer motor em particular dependem, em parte, nosistema
reza do sistema decontrole. Algumas curvas de torque versus velocidade publicadas mostram ressonânciasmuito
cias eletrônicas que agem paraaumentar o torque disponível sobre o torque de baixa velocidade do motor. Um resultadocomum
Quando o motor está operando abaixo de sua velocidade de corte, os tempos deelevação e de queda da corrente pelos enrolamentos do motor ocupam uma fraçãoinsignificante do tempo total de
nrolamentos. Note que uma velocidade de corte bem definida é difícil, assim
declarações da velocidade de corte de um motor são, necessariamente valores aproximados.Os detalhes da relação do torque versus velocidade dependem dos detalhes da dos
tempos de elevação e de queda da corrente nos enrolamentos de motor, e estes dependemdo sistema de controle de motor como também do próprio motor. Então, a velocidade de
de controle! As curvas de torque versus velocidade publicadas ocasionalmente emfolhas de dados de motores vem com informação do controlador de motor com o qual seobteve aquela curva, mas isto está longe de ser uma prática universal!
Semelhantemente, a velocidade ressonante depende do momento de inércia do
sistema giratório inteiro, não só do rotor do motor, e até que ponto o torque cai naressonância depende da presença de amortecedor mecânico e da natu
claras, mas sem documentar o momento de inércia do hardware que pode ter sidoprendido ao cabo de motor para fazer medidas de torque.
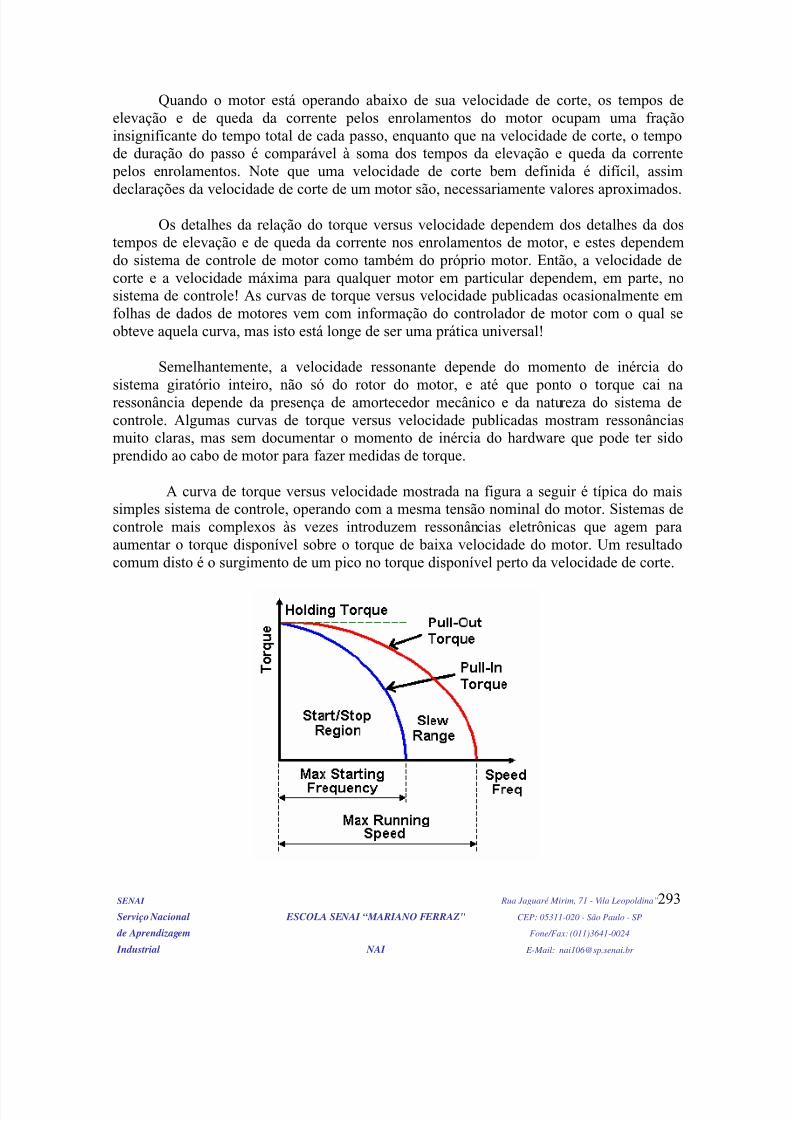
A curva de torque versus velocidade mostrada na figura a seguir é típica do maissimples sistema de controle, operando com a mesma tensão nominal do motor. Sistemas decontrole mais complexos às vezes introduzem ressonân
disto é o surgimento de um pico no torque disponível perto da velocidade de corte.
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 22/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
294
Ao desenvolver uma aplicação com motor de passo, parâmetros importantes a seconsiderar são o torque de partida e o torque em velocidade que o motor conseguedesenvolver.
Para isso podemos nos servir da curva do torque versus velocidade, que é a curva
que mostra a correlação entre o torque e a velocidade, conforme exemplo mostrado acima.Desta curva podemos extrair ainda informação sobre os seguintes parâmetros:
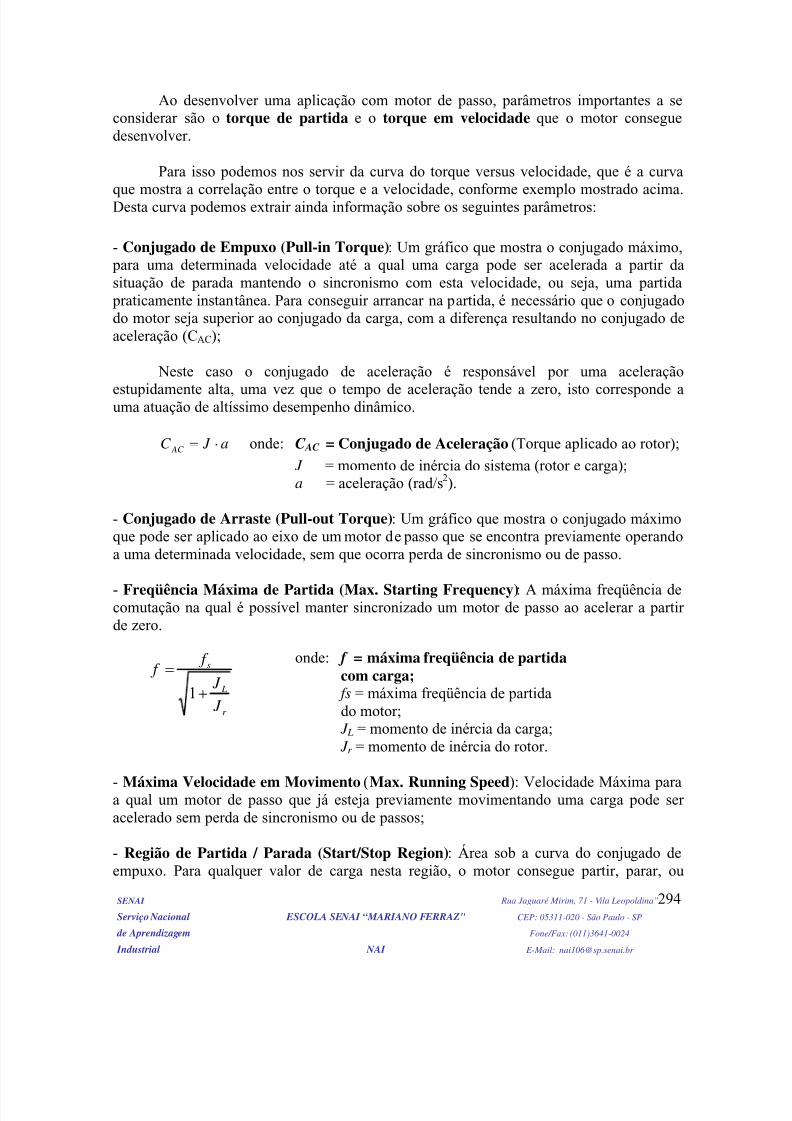
- Conjugado de Empuxo (Pull-in Torque): Um gráfico que mostra o conjugado máximo,para uma determinada velocidade até a qual uma carga pode ser acelerada a partir dasituação de parada mantendo o sincronismo com esta velocidade, ou seja, uma partidapraticamente instantânea. Para conseguir arrancar na partida, é necessário que o conjugadodo motor seja superior ao conjugado da carga, com a diferença resultando no conjugado deaceleração (CAC);
Neste caso o conjugado de aceleração é responsável por uma aceleração
estupid
⋅ onde: C AC = Conjugado de Aceleração (Torque aplicado ao rotor);
ado máximoque pode ser aplicado ao eixo de um e ente operando
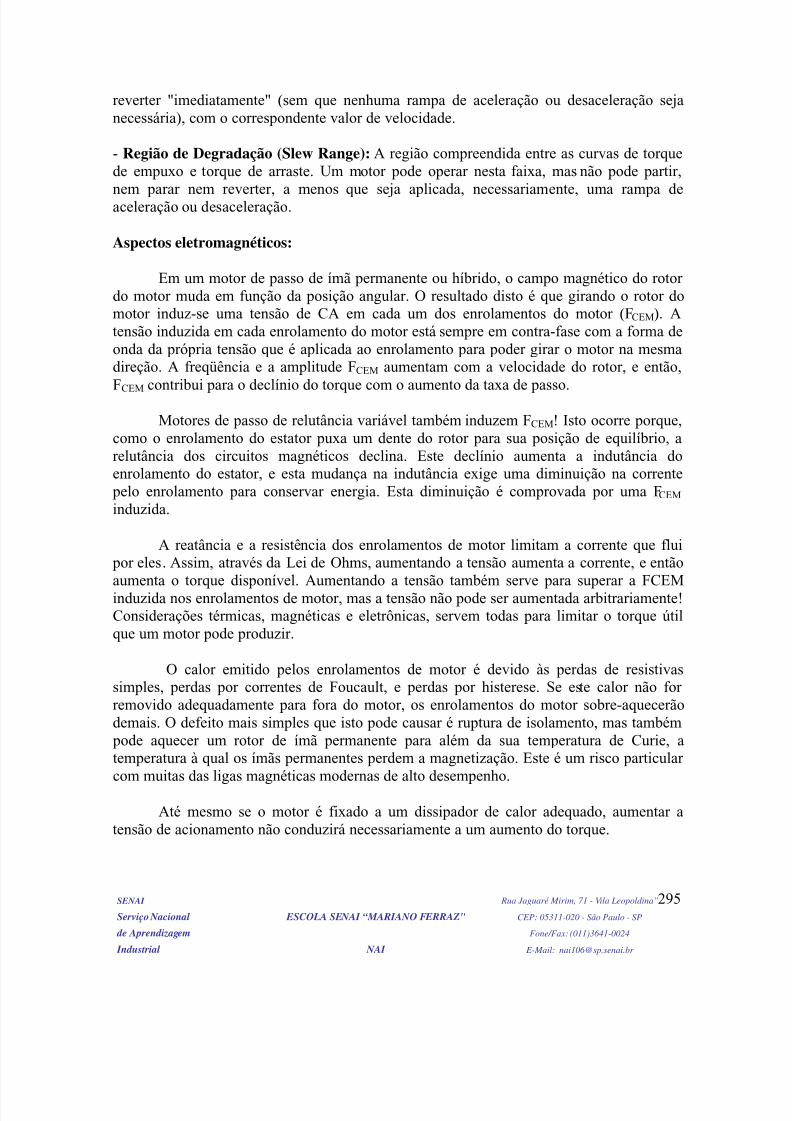
onde: f = máxima freqüência de partida
J = momento de inércia da carga;
Speed): Velocidade Máxima paraqual um motor de passo que já esteja previamente movimentando uma carga pode ser
gado dempuxo. Para qualquer valor de carga nesta região, o motor consegue partir, parar, ou
amente alta, uma vez que o tempo de aceleração tende a zero, isto corresponde auma atuação de altíssimo desempenho dinâmico.
C AC = a J
J = momento de inércia do sistema (rotor e carga);a = aceleração (rad/s2).
- Conjugado de Arraste (Pull-out Torque): Um gráfico que mostra o conjugmotor d
a uma determinada velocidade, sem que ocorra perda de sincronismo ou de passo.
- Freqüência Máxima de Partida (Max. Starting Frequency): A máxima freqüência decomutação na qual é possível manter sincronizado um motor de passo ao acelerar a partirde zero.
passo que se encontra previam
com carga; fs = máxima freqüência de partidado motor; L
J r = momento de inércia do rotor.
- Máxima Velocidade em Movimento (Max. Runningaacelerado sem perda de sincronismo ou de passos;
- Região de Partida / Parada (Start/Stop Region): Área sob a curva do conjue
r
L
s
J
J +
=
1
f f
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 23/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
295
Região de Degradação (Slew Range): A região compreendida entre as curvas de torquenão pode partir,
nem parar nem reverter, a menos ente, uma rampa deu d s
Aspectos eletromagnéticos:
Em um motor de passo de ímã permanente ou híbrido, o campo magnético do rotor
sempre em contra-fase com a forma denda da própria tensão que é aplicada ao enrolamento para poder girar o motor na mesma
induzem FCEM! Isto ocorre porque,omo o enrolamento do estator puxa um dente do rotor para sua posição de equilíbrio, a
ncia dos enrolamentos de motor limitam a corrente que fluipor eles. Assim, através da Lei de Ohms, aumentando a tensão aumenta a corrente, e então
aumen
te calor não forremovido adequadamente para fora do motor, os enrolamentos do motor sobre-aquecerãodemais
mesmo se o motor é fixado a um dissipador de calor adequado, aumentar atensão de acionamento não conduzirá necessariamente a um aumento do torque.
reverter "imediatamente" (sem que nenhuma rampa de aceleração ou desaceleração sejanecessária), com o correspondente valor de velocidade.
-de empuxo e orque de arraste. Um motor pode operar nesta faixa, mast
que seja aplicada, necessariamaceleração o e aceleração.
do motor muda em função da posição angular. O resultado disto é que girando o rotor domotor induz-se uma tensão de CA em cada um dos enrolamentos do motor (FCEM). Atensão induzida em cada enrolamento do motor estáodireção. A freqüência e a amplitude FCEM aumentam com a velocidade do rotor, e então,
FCEM contribui para o declínio do torque com o aumento da taxa de passo.Motores de passo de relutância variável também
crelutância dos circuitos magnéticos declina. Este declínio aumenta a indutância doenrolamento do estator, e esta mudança na indutância exige uma diminuição na correntepelo enrolamento para conservar energia. Esta diminuição é comprovada por uma FCEM induzida.
A reatância e a resistê
ta o torque disponível. Aumentando a tensão também serve para superar a FCEMinduzida nos enrolamentos de motor, mas a tensão não pode ser aumentada arbitrariamente!Considerações térmicas, magnéticas e eletrônicas, servem todas para limitar o torque útilque um motor pode produzir.
O calor emitido pelos enrolamentos de motor é devido às perdas de resistivassimples, perdas por correntes de Foucault, e perdas por histerese. Se es
. O defeito mais simples que isto pode causar é ruptura de isolamento, mas tambémpode aquecer um rotor de ímã permanente para além da sua temperatura de Curie, atemperatura à qual os ímãs permanentes perdem a magnetização. Este é um risco particular
com muitas das ligas magnéticas modernas de alto desempenho.Até
5/11/2018 Teoria 21 Motores de Passo-1 - slidepdf.com
http://slidepdf.com/reader/full/teoria-21-motores-de-passo-1 24/24
SENAI Rua Jaguaré Mirim, 71 - Vila Leopoldina”
Serviço Nacional ESCOLA SENAI “MARIANO FERRAZ" CEP: 05311-020 - São Paulo - SP
de Aprendizagem Fone/Fax: (011)3641-0024
Industrial NAI E-Mail: [email protected]
296
rrente aumentada não conduzirá a um aumento apreciávelde campo magnético em tal motor!
motor.
rite não-condutivo, e eles devem ter fios de bitolas bem finas nos enrolamentos para minimizarperdas
em velocidade alta!
e se o motor éacionado perto da temperatura de Curie dos ímãs permanentes, a desmagnetização é um
risco s
Os motores, em sua grande maioria, são projetados de forma que, com a correntenominal fluindo pelos enrolamentos, os circuitos magnéticos do motor já estão bempróximos da saturação. Uma co
Dado um sistema de acionamento que limita a corrente por cada enrolamento domotor ao valor máximo nominal para aquele enrolamento, mas que usa sobre-tensão paraalcançar um torques mais altos, há outros limites que entram em jogo. A velocidades altasvelocidades, os enrolamentos do motor devem, necessariamente, levar sinais de CA de altasfreqüências. Isto conduz perdas por correntes de Foucault nos circuitos magnéticos domotor, e conduz perdas por "efeito pelicular" nos enrolamentos de
Motores projetados para rodar em velocidades muito altas devem assim terestruturas magnéticas que usam laminações muito finas ou materiais planos de fer
de efeito pelicular. Motores comuns de alto torque têm enrolamentos de motor de
feito de fios de bitola larga e laminas de núcleo grossas, e, por conseqüência, emvelocidades altas, tal motor pode aquecer demais facilmente e então deveria seradequadamente delimitado para rodar
Também vale notar que o melhor modo para desmagnetizar algo é expô-lo a umcampo magnético de alta amplitude e alta freqüência. Chavear o sistema de controle paragirar o rotor a uma velocidade alta quando o rotor está previamente parado, ou ter o rotorgirando a velocidade alta contra um sistema de controle que tenta segurar o rotor em umaposição fixa ambas situações expõem o rotor a um campo de alta freqüência e altaamplitude. Se tais condições operacionais forem comuns, particularment
ério e para evitar isso às forças de campo (e os torques esperados) devem serreduzidos adequadamente!