tejeiro. relatividad especial problemas
TRANSCRIPT

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page i — #1i
i
i
i
i
i
Relatividad especial: problemas selectos
Juan Manuel Tejeiro Sarmiento
Profesor Titular
Observatorio Astronomico Nacional
Facultad de Ciencias
Universidad Nacional de Colombia
2009

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page ii — #2i
i
i
i
i
i
Indice general
1. Introduccion 1
2. Cinematica relativista 6
2.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.1. Transformaciones de Lorentz . . . . . . . . . . . . 6
2.1.2. Estructura causal del espacio-tiempo . . . . . . . . 8
2.1.3. Cinematica . . . . . . . . . . . . . . . . . . . . . . 9
2.2. Problemas basicos de cinematica . . . . . . . . . . . . . . 9
2.3. Problemas avanzados . . . . . . . . . . . . . . . . . . . . . 19
3. Efecto Doppler 24
3.0.1. Cuadrivector de onda . . . . . . . . . . . . . . . . 24
3.1. Problemas sobre el efecto Doppler . . . . . . . . . . . . . 26
4. Dinamica relativista 28
4.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.2. Postulados de la dinamica relativista . . . . . . . . . . . . 28
4.2.1. Sistema centro de masa . . . . . . . . . . . . . . . 31
4.2.2. Fotones y estructura atomica . . . . . . . . . . . . 32
4.3. Problemas de dinamica relativista . . . . . . . . . . . . . 35
5. Tensores 41
5.1. Definiciones fundamentales . . . . . . . . . . . . . . . . . 41
5.1.1. Algebra y propiedades de simetrıa de tensores . . . 45
5.2. Transformacion general de coordenadas . . . . . . . . . . 47
5.2.1. Operadores vectoriales . . . . . 48
5.3. Problemas de algebra tensorial . . . . . . . . . . . . . . . 49
ii

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page iii — #3i
i
i
i
i
i
INDICE GENERAL iii
6. Electrodinamica 55
6.1. Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . 556.2. Ecuaciones de Maxwell . . . . . . . . . . . . . . . . . . . . 566.3. Ecuaciones de Maxwell covariantes . . . . . . . . . . . . . 586.4. Transformaciones Gauge . . . . . . . . . . . . . . . . . . . 606.5. Problemas de electrodinamica . . . . . . . . . . . . . . . . 62
7. Cinematica relativista 68
7.1. Soluciones de problemas de cinematica . . . . . . . . . . . 687.2. Soluciones de problemas avanzados . . . . . . . . . . . . . 114
8. Efecto Doppler 129
8.1. Soluciones de problemas del efecto Doppler . . . . . . . . 129
9. Dinamica relativista 140
9.1. Soluciones de problemas sobre dinamica . . . . . . . . . . 140
10.Tensores 175
10.1. Soluciones de problemas algebra tensorial . . . . . . . . . 175
11.Electrodinamica 198
11.1. Soluciones de problemas electrodinamica . . . . . . . . . . 198
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page iv — #4i
i
i
i
i
i
Prefacio
En los diferentes currıculos de las carreras de fısica y de algunasingenierıas la teorıa de la relatividad se introduce a traves de un cursodedicado a este tema, o haciendo parte de otros cursos, como los deintroduccion a fısica moderna. La ubicacion de estos cursos en los planesde estudio varıa tambien entre los diferentes programas.
Por esta razon, en la literatura especializada sobre la teorıa especialde la relatividad, nos encontramos con una gran variedad de textos ylibros, con diferentes enfoques y diferentes niveles de profundidad y com-plejidad. Textos como el de R. Resnick “Introduccion a la teorıa especialde la relatividad” [9] o el de R. Skinner “Relativity for Scientists andEngineers” [10] desarrollan la teorıa en forma sencilla e intuitiva y conun lenguaje matematico elemental, asumiendo que el lector posee cono-cimientos basicos de mecanica y electromagnetismo. Otros textos masavanzados, como el de French [3], si bien asumen del lector una forma-cion similar a la de los anteriores, profundizan mucho mas en diferentestemas y aplicaciones, con ejemplos y ejercicios un poco mas complejos.
En la carrera de Fısica en la Universidad Nacional de Colombia (sedeBogota) el curso de relatividad, el cual he venido dictando desde hacevarios anos y para el que escribı un texto [1], se ubica en el quintosemestre del programa, lo que permite profundizar un poco mas en eltema, aprovechando herramientas matematicas mas complejas como loscuadrivectores y tensores.
Una estrategia fundamental para los cursos basicos de formacion esel desarrollo de ejemplos y problemas que le permitan al estudiante con-solidar los conocimientos teoricos y adquirir habilidades para el enfren-tamiento de nuevos problemas. El presente libro se dedica a problemasen relatividad y sus soluciones y puede utilizarse como texto para uncurso de relatividad especial o como complemento al texto del autor [1].
iv
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 1 — #5i
i
i
i
i
i
Capıtulo 1
Introduccion
La Teorıa Especial de la Relatividad es uno de los pilares fundamen-tales de la fısica, pues esta basada sobre los postulados del principio derelatividad y la constancia de la velocidad de la luz en el vacıo y unconjunto de suposiciones generales del espacio, homogeneidad, isotropıay estructura euclidiana, y del tiempo, homogeneidad e isotropıa. Estoimplica que la teorıa especial de la relatividad se constituye en el marcoesencial para describir las interacciones fundamentales, electromagneti-ca, fuerte, debil y gravitacional, que rigen todos los fenomenos fısicosconocidos hasta el presente.
Las ecuaciones de Maxwell, junto con la ecuacion de fuerza de Lo-rentz, describen los fenomenos relacionados con la interaccion electro-magnetica. En 1861 Maxwell completa las leyes del electromagnetismo ypredice la existencia de las ondas electromagneticas, cuya velocidad depropagacion, sin referencia a ningun observador especıfico, depende solode dos constantes fundamentales: ǫ0 la permitividad electrica del vacıoy µ0 la permitividad magnetica del vacıo. Este resultado implicaba quelas ecuaciones de Maxwell no permanecıan invariantes bajo transforma-ciones de Galileo, y por lo tanto las leyes del electromagnetismo eranvalidas solo en un sistema de referencia inercial, identificando este siste-ma privilegiado con el espacio absoluto. Sin embargo, los experimentosdisenados para medir velocidades absolutas no arrojaron resultados po-sitivos.
La solucion a las contradicciones que se presentaban entre los princi-pios de la electrodinamica (ecuaciones de Maxwell) y las leyes de Newtonfue dada por Albert Einstein en 1905, y publicada en sus dos famososartıculos, donde se establecen los fundamentos de la teorıa especial de
1
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 2 — #6i
i
i
i
i
i
2 CAPITULO 1. INTRODUCCION
la relatividad: “Sobre la electrodinamica de los cuerpos en movimiento”y “¿Depende la inercia de un cuerpo de su contenido de energıa?” Lasleyes del electromagnetismo, descritas por las ecuaciones de Maxwell,satisfacen los principios de la teorıa especial de la relatividad y por estarazon no requirieron de ninguna modificacion con el surgimiento de larelatividad, pero sı, definitivamente, incidieron sobre la comprension yalcance de la teorıa electromagnetica de Maxwell.
Las interacciones fuerte y debil describen las fuerzas que actuan entreciertas partıculas fundamentales y son las responsables (junto con lasfuerzas electromagneticas) de procesos que suceden a escalas nuclearesy su dinamica esta descrita por la teorıa cuantica de campos, la cual sebasa en la mecanica cuantica relativista formulada por Dirac en 1928.
La interaccion gravitacional, descrita inicialmente por la ley de gra-vitacion universal de Newton, es una fuerza que actua entre todos loscuerpos en forma universal, dependiente solamente de sus masas y no dela naturaleza o constitucion de los cuerpos. Es importante aclarar queen fısica el termino masa tiene dos significados diferentes: el primero serefiere a la masa inercial de un cuerpo y el segundo a su masa gravita-cional. Galileo formulo el principio conocido como “la ley de caıda delos cuerpos”, el cual establece que, sobre la tierra y en ausencia de ro-zamiento, todos los cuerpos, independientemente de su naturaleza, caencon la misma aceleracion. Este hecho, conocido hoy como el principiode equivalencia, implica que la relacion entre la masa gravitacional y lamasa inercial de un cuerpo es una constante universal, la cual puede serelegida como la unidad. Esta eleccion implica que las masas gravitacionale inercial de un cuerpo se miden en las mismas unidades.
En 1916 Einstein formula la teorıa general de la relatividad, como unanecesidad de modificar la ley de gravitacion universal de Newton, puesesta ley implica que la fuerza gravitacional actua en forma instantanea,violando ası el principio de la constancia de la velocidad de la luz en elvacıo. Para desarrollar esta nueva formulacion de la gravitacion se hizonecesario generalizar el principio de relatividad y levantar la hipotesiseuclidiana del espacio.
En este contexto la teorıa de la relatividad es una teorıa fundamentaldel espacio-tiempo, y por lo tanto la formacion en relatividad constitu-ye hoy dıa una necesidad, no solo para los profesionales en fısica, sinotambien para otras areas de las ciencias basicas y aplicadas, como lasingenierıas y las ciencias del espacio, donde, por ejemplo, el sistema geo-grafico de posicionamiento global (GPS) esta fundamentado en la teorıa

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 3 — #7i
i
i
i
i
i
3
de la relatividad. Cada capıtulo se inicia con un resumen de los principa-les resultados de la teorıa, los cuales son necesarios para el desarrollo delos problemas, y es por esta razon que el libro es autocontenido. Los pro-blemas estan disenados para consolidar la teorıa, adquirir habilidades yprofundizar en la teorıa y sus aplicaciones, ofreciendo en muchos de ellosvarias alternativas de solucion, discusiones adicionales y su relacion conotros campos de la fısica o la matematica, como la astronomıa y la teorıade grupos, sin que sea necesario que el estudiante este familiarizado conestos temas.
En este texto utilizaremos la convencion (+,−,−,−) para la metricaminkowskiana y la convencion de suma de Einstein, donde los ındicesgriegos van de 0 a 3 y los latinos de 1 a 3, los cuales estan reserva-dos para describir las coordenadas espaciales. La siguiente es una tablade constantes fundamentales y algunas definiciones con sus correspon-dientes factores de conversion de unidades, que son de utilidad para eldesarrollo de los problemas:
1. Constantes fundamentales:
1.1 Velocidad de la luz en el vacıo
c = 2,99792458 × 108ms−1
1.2 Constante de Planck
h = 6,6260755 × 10−34Js
ℏ ≡ h
2π= 1,05457266 × 10−34Js
1.3 Constante de gravitacion universal
G = 6,67259 × 10−11m3kg−1s−2
1.4 Masa propia del electron, proton y neutron
moe = 9,1093897 × 10−31kg
m0p = 1,6726231 × 10−27kg
m0n = 1,6749286 × 10−27kg
1.5 Carga del electron
e = 1,60217733 × 10−19C

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 4 — #8i
i
i
i
i
i
4 CAPITULO 1. INTRODUCCION
1.6 Relacion carga/masa del electron
e/m = 1,75881962 × 1011Ckg−1
1.7 Constante de Boltzmann
k = 1,3806568 × 10−23JK−1
1.8 Constante de Coulomb
K =1
4πǫ08,98755 × 109Nm2C−2
1.9 Constante de Rydberg
R = 1,0973731534 × 107m−1
2. Unidades astronomicas:
2.1 La unidad astronomica AU se define como la distancia mediade la tierra al sol:
1AU = 1,495978 × 1011m
2.2 El ano luz al se define como la distancia que la luz recorre enun ano:
1al = 9,46053 × 1015m = 6,324 × 104AU
2.3 El parsec pc, definido como la distancia a la cual una AUsubtiende un segundo de arco:
1pc = 3,085678 × 1016m = 3,261633al = 206265AU
3. Otras unidades de uso comun en relatividad y fısica atomica:
3.1 El electronvoltio ev se define como la energıa cinetica queadquiere una partıcula de carga fundamental
e = 1,60217733 × 10−19C
cuando se acelera en una diferencia de potencial de 1 voltio:
1eV = 1,60217733 × 10−19J

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 5 — #9i
i
i
i
i
i
5
3.2 De la relacion de equivalencia entre masa y energıa E = mc2
es comun expresar la masa de las partıculas elementales enunidades de energıa en electronvoltios (lo cual es equivalentea tomar c = 1):
moe = 0,51099906 × 106eV = 0,51099906MeV
mon = 939,566MeV
mop = 938,27231MeV
3.3 Constante de Planck ℏ y constante de Rydberg en unidadesde electronvoltios:
ℏ = 6,5821220 × 10−16eV s
R = 13,6056981eV
La constante de Rydberg corresponde a la energıa de ioni-zacion del atomo de hidrogeno.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 6 — #10i
i
i
i
i
i
Capıtulo 2
Cinematica relativista
2.1. Introduccion
Este capıtulo esta dedicado a la cinematica relativista. En la prime-ra parte presentaremos las definiciones y los resultados mas importantespara abordar los problemas propuestos.
Para un desarrollo detallado de la cinematica relativista remitimosal lector a los textos [1], [2] y [3].
Hay tres artıculos interesantes que recomendamos como lectura com-plementaria, los cuales ilustran la variedad y complejidad de los proble-mas que pueden surgir en relatividad. El primero es de Scott y Viner([4]), el cual trata sobre la forma aparente de los objetos, y los otrosdos, de Dewan y Beran ([5]) y Dewan ([6]), discuten el problema de doscohetes conectados por un hilo inextensible.
2.1.1. Transformaciones de Lorentz
Consideremos dos sistemas de referencia Σ y Σ′. Entonces la trans-formacion de Lorentz homogenea mas general se puede escribir en laforma
Λ : Σ → Σ′
x → x′ = Λx(2.1)
donde
Λ = Λ(~v,~θ) (2.2)
con ~v la velocidad de Σ′ respecto a Σ, y ~θ un conjunto de tres parame-tros, por ejemplo los angulos de Euler, que determinan rotacion de los
6

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 7 — #11i
i
i
i
i
i
2.1. INTRODUCCION 7
ejes espaciales. Si llamamos xα y x′α las componentes de x y x′ res-pectivamente, la ecuacion de transformacion se puede escribir en la for-ma:
x′α = Λαβxβ (2.3)
con Λαβ los elementos de la matriz de transformacion. Asumiendo que
el sistema de referencia Σ′ se mueve con velocidad v en la direccion delos ejes positivos x − x′, y suponiendo que los dos observadores eligent = t′ = 0 cuando los orıgenes de coordenadas coinciden y toman los ejesespaciales paralelos, las ecuaciones de transformacion de Lorentz estandadas por
x′0 = γ(x0 − βx1)x′1 = γ(x1 − βx0)
x′2 = x2
x′3 = x3
(2.4)
con la siguiente notacion:x0 = ct (2.5)
~r =(
x1, x2, x3)
(2.6)
β =v
c(2.7)
γ = γ(v) =1
√
1 − β2(2.8)
Para este caso los elementos de la matriz de transformacion de Lo-rentz toman la forma
Λαβ =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
(2.9)
La relacion entre un intervalo de tiempo propio ∆τ y el intervalode tiempo ∆t, entre dos eventos medidos por un observador inercial,esta dada por la ecuacion:
∆t =∆τ
√
1 − β2(2.10)
La relacion entre la longitud fısica de un objeto ℓ, que se mueve convelocidad v, y su longitud propia ℓ0 es
ℓ = ℓ0
√
1 − β2 (2.11)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 8 — #12i
i
i
i
i
i
8 CAPITULO 2. CINEMATICA RELATIVISTA
2.1.2. Estructura causal del espacio-tiempo
La estructura causal del espacio-tiempo esta determinada por el in-tervalo de distancia espacio-temporal entre eventos, el cual esta definidopor
∆S2ij = (x0
j − x0i )
2 − (x1j − x1
i )2 − (x2
j − x2i )
2 − (x3j − x3
i )2 (2.12)
donde
Pi = (x0i , x
1i , x
2i , x
3i ) (2.13)
son las coordenadas del evento Pi y similarmente para el evento Pj . Elintervalo espacio-temporal es invariante bajo transformaciones de Lo-rentz. Este intervalo tambien se puede escribir utilizando la matriz otensor metrico de Minkowski
ηµν =
+1 µ = ν = 0−1 µ = ν = 1, 2, 30 µ 6= ν
(2.14)
en la forma
∆S2ij = ηµν∆xµ∆xν (2.15)
donde
∆xµ = xµj − xµ
i (2.16)
Para generalizar este resultado, se define el producto minkowskianoentre dos cuadrivectores x y y como el invariante
x · y = ηµνxµyν (2.17)
y la norma minkowskiana por
x2 = x · x = ηµνxµxν (2.18)
Dada la definicion de norma minkowskiana, clasificamos los cuadri-vectores no nulos de la siguiente forma:
si x2 > 0 =⇒ x es temporal
si x2 < 0 =⇒ x es espacial
si x2 = 0 =⇒ x es nulo o de luz

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 9 — #13i
i
i
i
i
i
2.2. PROBLEMAS BASICOS DE CINEMATICA 9
2.1.3. Cinematica
Seax(τ ) = (x0(τ), x1(τ ), x2(τ), x3(τ )) (2.19)
el cuadrivector posicion de una partıcula como funcion del tiempo propioτ el cual describe la lınea de universo de la partıcula. El parametrotiempo propio esta definido en terminos de la distancia espacio-temporalentre dos posiciones sucesivas de la partıcula
x(τ )
x(τ + dτ) = x(τ ) + dx(τ ) (2.20)
asıc2dτ2 = ds2 =
(
dx0)2 −
(
dx1)2 −
(
dx2)2 −
(
dx3)2
(2.21)
entonces la cuadrivelocidad de la partıcula se define como
U =dx
dτ= (U0, U1, U2, U3) (2.22)
y su cuadrivector aceleracion
A =dU
dτ= (A0, A1, A2, A3) (2.23)
Dado que la norma al cuadrado de un cuadrivector es un invarian-te, las cuatro componentes del cuadrivector velocidad y el cuadrivectoraceleracion no son independientes, pues
U2 =(
U0)2 −
(
U1)2 −
(
U2)2 −
(
U3)2
= c2 (2.24)
y
A2 =(
A0)2 −
(
A1)2 −
(
A2)2 −
(
A3)2
= −α2 (2.25)
donde α es la aceleracion propia. Ademas los cuadrivectores U y A sonortogonales bajo el producto minkowskiano, es decir
U · A = U0A0 − U1A1 − U2A2 − U3A3 = 0 (2.26)
2.2. Problemas basicos de cinematica
1. Estructura causal. Sea Σ un sistema de referencia inercial y sean
P1 = (3, 2, 0, 2) P2 = (4,−1, 0, 2) P3 = (−2,−1, 0,−2)
las coordenadas de tres eventos, en unidades arbitrarias con c = 1.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 10 — #14i
i
i
i
i
i
10 CAPITULO 2. CINEMATICA RELATIVISTA
a ¿Cuales eventos estan conectados causalmente?
b ¿Para cual par de eventos existe un sistema de referencia Σ′ parael que los dos eventos son simultaneos? Calcular la velocidadde Σ′ respecto a Σ.
c ¿Para cual par de eventos existe un sistema de referencia Σ′ conrespecto al cual los dos eventos suceden en el mismo puntodel espacio? Calcular la velocidad de Σ′ respecto a Σ.
2. La paradoja del garaje. Consideremos un bus de longitud pro-pia ℓ0 = 10m moviendose con velocidad v = 0,8c directamentehacia un garaje en reposo de longitud 6m. Debido al efecto decontraccion de longitudes el bus mide, respecto al sistema de refe-rencia garaje,
ℓ =
√
1 − v2
c2ℓ0 = 6m (2.27)
Ası, cuando la trompa del bus alcance la pared posterior del garaje,la parte trasera del bus pasa por la puerta de este y por lo tan-to, respecto al observador fijo con relacion al garaje el bus queda“atrapado” en el. Supongamos (sin que esto influya en la soluciondel problema) que la pared del garaje es lo suficientemente rıgidade tal manera que el bus quede atrapado en el garaje, deformando-se por efecto del impacto contra la pared. Si analizamos la mismasituacion desde el punto de vista de un sistema de referencia, conrespecto al cual el bus se encuentre en reposo, el garaje se muevehacia el bus con velocidad 0,8c y por lo tanto la longitud del garaje,vista desde el bus, es de 3,6m y ası el bus no puede ser “atrapado”dentro del garaje. ¿Como se resuelve esta aparente paradoja, puesel principio de relatividad establece que la fısica es la misma desdetodos los sistemas de referencia inerciales?
3. Varilla inclinada. Consideremos una varilla de longitud propiaℓ0 situada en el plano x−y que se mueve con velocidad v a lo largodel eje x positivo respecto a un observador inercial, la cual formaun angulo θ0 en su sistema de referencia propio con respecto aleje de las x. ¿Que angulo forma la varilla respecto al observadorinercial Σ?
4. Paradoja de la varilla inclinada. Una varilla de longitud pro-pia ℓv
0 se mueve con velocidad v hacia una plataforma en reposo

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 11 — #15i
i
i
i
i
i
2.2. PROBLEMAS BASICOS DE CINEMATICA 11
que tiene una rendija de longitud propia ℓ0. La varilla permane-ce paralela a la plataforma y se mueve hacia ella en la direccionque forma un angulo de 45o con respecto a la plataforma, como semuestra en la figura (2.1).
Figura 2.1: Paradoja de la varilla inclinada. La varilla se mueve hacia unarendija, de tal forma que su centro se dirige hacia el centro de la rendija.
Dado que la varilla se contrae con respecto al sistema de referenciade la plataforma, supongamos que la varilla pasa por la rendijaexactamente. Asumir que el centro de la varilla pasa por el centrode la rendija. Si analizamos lo que sucede desde el punto de vistade un observador inercial ligado a la varilla, la rendija es la quese contrae y por lo tanto no deberıa pasar por la rendija. ¿Comoresolver esta paradoja? Tengamos en cuenta que, si desde el puntode vista de un observador la varilla pasa por la rendija, entoncesesto debe suceder para todos los observadores.
5. Adicion de velocidades no paralelas. Considere tres sistemasde referencia inerciales Σ, Σ′ y Σ′′.
a Supongamos que el sistema Σ′ se mueve con velocidad vx res-pecto a Σ y que Σ′′ se mueve con velocidad vz respecto aΣ′. Calcular los elementos de la matriz de transformacion deLorentz entre Σ y Σ′′.
b Si ahora Σ′ se mueve con velocidad vz respecto a Σ y Σ′′ se mue-ve con velocidad vx respecto a Σ′, calcular los elementos de lamatriz de transformacion de Lorentz entre Σ y Σ′′. Comparar

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 12 — #16i
i
i
i
i
i
12 CAPITULO 2. CINEMATICA RELATIVISTA
la respuesta con la parte a: ¿la composicion de transforma-ciones puras de Lorentz es conmutativa en general?
6. Vida media de partıculas inestables. La mayorıa de las partıcu-las fundamentales son inestables, es decir, se desintegran en otraspartıculas al cabo de un cierto tiempo τ , llamado tiempo de vidamedia. El tiempo de vida media de una partıcula elemental es unacantidad estadıstica definida como el tiempo necesario para quela mitad de una poblacion inicial N0 de partıculas se desintegreen su sistema propio de referencia, i. e., si N(t) es el numero departıculas que aun no se han desintegrado, entonces
N(t) = N02−t/τ (2.28)
Un pion π+ (+ se refiere a la carga electrica del pion) se desintegraen otras partıculas elementales segun la reaccion
π+ → µ+ + ν (2.29)
donde µ+ es un muon positivo y ν un neutrino. Los mesones π sepueden producir en el laboratorio por choque entre protones en unacelerador. En un experimento de colision de protones se producenmesones π con velocidad v = 0,985c y se observa que 2/3 de ellossobreviven a una distancia D = 25m del blanco. Calcular el tiempode vida media de los mesones π.
7. Cuadrivector velocidad. Encontrar la relacion entre las compo-nentes del cuadrivector velocidad
U =(
U0, U1, U2, U3)
(2.30)
y las componentes de la velocidad fısica de una partıcula
~u = (ux, uy, uz) (2.31)
8. Cuadrivector aceleracion. Encontrar la relacion entre las com-ponentes del cuadrivector aceleracion
A =(
A0, A1, A2, A3)
(2.32)
y las componentes de la aceleracion fısica de una partıcula
~a =d~u
dt(2.33)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 13 — #17i
i
i
i
i
i
2.2. PROBLEMAS BASICOS DE CINEMATICA 13
Mostrar que los cuadrivectores velocidad y aceleracion para unapartıcula son ortogonales, es decir
U · A = 0
9. Transformacion de la velocidad. A partir de las componen-tes del cuadrivector velocidad y las transformaciones de Lorentzusuales, encontrar las ecuaciones de transformacion para las com-ponentes de la velocidad entre dos sistemas de referencia inerciales.
10. Velocidad relativa. Consideremos dos partıculas que se muevencon velocidades ~v1 y ~v2 respecto a un observador inercial Σ. Cal-cular la magnitud de la velocidad relativa entre las dos partıculasen terminos de ~v1 y ~v2.
11. Espacio-tiempo euclidiano. A partir de la definicion
tanh φ := β = v/c
encontrar las ecuaciones de transformacion de Lorentz usuales yel teorema de adicion de velocidades en terminos del parametro φ.Interpretar geometricamente el resultado.
12. Adicion numerable de velocidades. Supongamos que un blo-que se mueve con velocidad v1 = v en la direccion del eje x positivorespecto a un sistema de referencia Σ y un segundo bloque se des-liza con velocidad constante v2 = v respecto al primer bloque y enla direccion del eje x positivo.
a A partir del teorema de adicion de velocidades relativista calcu-lar la velocidad del segundo bloque v′2 respecto a Σ y demos-trar que si v → c entonces v′2 → c.
b Consideremos un tercer bloque que se mueve con respecto alsegundo a velocidad v3 = v. Calcular la velocidad v′3 de estebloque respecto a Σ. Generalizar esta relacion para n bloquesy demostrar que
lımn→∞
v′n = c (2.34)
13. Longitud aparente. Consideremos una camara fotografica situa-da sobre el eje y positivo de un sistema de referencia inercial yuna varilla homogenea de longitud propia ℓ0 que se mueve convelocidad β = v/c a lo largo del eje x positivo.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 14 — #18i
i
i
i
i
i
14 CAPITULO 2. CINEMATICA RELATIVISTA
a Si la camara, situada a una distancia D del origen de coordena-das, toma una foto de la varilla de tal manera que el centro dela varilla aparezca en el origen de coordenadas, ¿donde apa-rentan estar los extremos de la varilla segun la foto? ¿Cuales la longitud aparente de la varilla segun la foto y su rela-cion con la longitud fısica? Ilustre los resultados con ejemplosnumericos y muestre que si la distancia de la varilla a la cama-ra es mucho mayor que la longitud de la varilla, entonces lalongitud aparente se aproxima a la longitud fısica.
b Consideremos ahora una foto de la varilla en una posicion ar-bitraria, cuando la lınea que une el centro de la varilla y lacamara forma un angulo α con respecto al eje x y suponga laaproximacion de rayos paralelos, valida si D >> ℓ0. ¿Cual esla longitud aparente de la varilla segun la foto? Compare elresultado con la longitud fısica de la varilla y con el resultadode la primera parte de este problema.
14. Comunicacion espacial. Dos naves espaciales A y B viajan endirecciones opuestas a velocidad constante v respecto a la tierra.Las naves se cruzan cuando se encuentran a una distancia L dela tierra, medida en el sistema de referencia de la tierra. En elinstante del cruce de las naves se envıa una primera senal de luzdesde la tierra hacia las naves y un tiempo posterior t0 se envıauna segunda senal. Las senales de luz se reflejan instantaneamenteen las naves regresando a la tierra. Suponga que
t0 < L/v (2.35)
Asumiendo que el movimiento de las naves y el de la tierra seencuentran sobre la misma lınea, esta condicion implica que lasegunda senal es emitida antes que la nave que se acerca llegue ala tierra.
a Hacer un diagrama espacio-tiempo y dibujar las lıneas de uni-verso de la tierra, las naves y las senales de luz.
b ¿Cual es la posicion de las naves, medida en el sistema tierra,cuando se reciben las senales en las naves?
c ¿Con que diferencia de tiempos, medida en el sistema tierra,llegan las dos senales a cada nave?

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 15 — #19i
i
i
i
i
i
2.2. PROBLEMAS BASICOS DE CINEMATICA 15
d Con que diferencia de tiempos, medida en el sistema tierra, lle-gan las senales reflejadas a la tierra, provenientes de cada unade las naves?
e Resolver las preguntas c y d anteriores respecto al sistema dereferencia de cada una de las naves.
15. Velocidades superluminosas aparentes. En observaciones as-tronomicas de algunos AGN (Nucleos Activos de Galaxias) quese encuentran a distancias muy grandes, se han detectado movi-mientos propios que implican velocidades transversales aparentesvT de la fuente mayores que la luz (por ejemplo vT ∼ 10c). Unaexplicacion, que no entra en conflicto con otras observaciones as-tronomicas y con el segundo postulado de la relatividad, esta ba-sada sobre el movimiento relativista de materia (fuente) en estosAGN. Supongamos que en un instante dado recibimos radiacionelectromagnetica de una unica fuente distante f y un tiempo pos-terior (varios anos despues) recibimos senales de otra fuente f2 quese aleja de la fuente original f (que ahora denotamos por f1 comose muestra en la figura (2.2)).
Figura 2.2: Velocidades superluminosas aparentes. En un instante inicial unobservador distante ve una sola fuente y un tiempo posterior se observan dos fuentesalejandose.
Si la fuente f2 se aleja de la fuente original f1 a una velocidad v for-mando un angulo ϕ con respecto a la lınea de vision del observador0, calcular la velocidad transversal aparente
vT = 0f2∆α/∆t (2.36)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 16 — #20i
i
i
i
i
i
16 CAPITULO 2. CINEMATICA RELATIVISTA
de la fuente f2, vista por el observador en 0 y hacer un grafico devT en funcion del angulo ϕ, para diferentes valores de la velocidadv. Asumir que la separacion angular ∆α de las fuentes es pequena.
16. Relatividad sin el segundo postulado. Las ecuaciones de trans-formacion de Lorentz se dedujeron a partir de los dos postuladosbasicos: principio de relatividad y constancia de la velocidad de laluz en el vacıo. En el proceso de deduccion de las ecuaciones detransformacion de Lorentz, entre dos sistemas de referencia iner-ciales Σ y Σ′ (con Σ′ moviendose con velocidad v a lo largo de losejes x− x′), por la aplicacion del primer postulado se obtienen lassiguientes ecuaciones de transformacion (ver e. g. [1]):
y′ = y (2.37)
z′ = z (2.38)
x′ = γ(x − vt) (2.39)
x = γ(x′ + vt′) (2.40)
γ = γ (2.41)
donde γ es un parametro por determinar que depende de la ve-locidad v y el cual caracteriza a la transformacion (independientede las coordenadas). A partir de estas ecuaciones y sin utilizarel segundo postulado demostrar que la transformacion para t′ enfuncion de t y x se puede escribir en la forma
t′ = γ(t − v
K2x) (2.42)
con
γ =1
√
1 − v2
K2
(2.43)
y K dado por
K =v2γ2
γ2 − 1(2.44)
Teniendo en cuenta que la transformacion obtenida debe ser validapara todos los sistemas de referencia inerciales, muestre que K esun parametro independiente de la velocidad relativa entre sistemasde referencia. Ayuda: aplique la composicion de transformacionespara pasar de Σ′′ → Σ, con Σ′ moviendose con velocidad v respectoa Σ y Σ′′ moviendose con velocidad u respecto a Σ′ (ambos a lolargo del eje x positivo).

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 17 — #21i
i
i
i
i
i
2.2. PROBLEMAS BASICOS DE CINEMATICA 17
17. Viaje al pasado. El postulado de la constancia de la velocidadde la luz en el vacıo trae como consecuencia que las partıculasmateriales solo pueden viajar a velocidades menores que c, lo cualimplica que siempre es posible encontrar un sistema de referencia,con respecto al cual la partıcula se encuentra en reposo. Estasecuaciones muestran, tambien, que no tiene sentido hablar de unobservador (sistema de referencia) que viaje a la velocidad de laluz, pues en este caso el factor γ de Lorentz diverge, ya que
lımv→c
γ(v) = lımv→c
1√
1 − v2
c2
= +∞ (2.45)
Sin embargo, cabe la pregunta ¿podrıan existir partıculas que via-jen a velocidades mayores que c? A estas partıculas hipoteticas selas conoce con el nombre de tachyones. Aun cuando se han ela-borado modelos teoricos sobre estas partıculas, hasta el presenteno se tiene ninguna evidencia observacional sobre ellas. Una con-secuencia que podrıamos deducir, si tuvieramos a disposicion unemisor de tachyones para enviar senales, es que podrıamos recibiruna senal de respuesta antes de haber enviado la primera senal.Consideremos un observador inercial Σ, que dispone de un emisorde tachyones, situado en el origen del sistema y el cual envıa unasenal a una velocidad vT > c hacia un segundo observador inercialΣ′, que se mueve con velocidad v en la direccion del eje x posi-tivo. Supongamos que el observador inercial Σ′ recibe el tachyoncuando se encuentra a una distancia D medida con respecto a Σ,y devuelve inmediatamente la senal tachyonica hacia el origen delsistema Σ, con velocidad vT relativa a su sistema Σ′. Calcular eltiempo de ida y vuelta de la senal medido por Σ y mostrar que esposible recibir la senal antes que la primera salga.
18. Viaje interestelar 1. Una nave espacial parte de la tierra conaceleracion propia g constante y se dirige hacia el cumulo abiertode las Pleyades, el cual se encuentra a una distancia de nosotros deunos 425 al (anos-luz). Este cumulo, con una poblacion estimadade unas 400 estrellas, es visible a simple vista y se pueden obser-var normalmente sus siete estrellas mas brillantes: Alcine, Atlas,Electra, Maia, Merope, Taygeta y Pleione; algunas personas hanlogrado observar dos estrellas adicionales: Celaeno y Asterope.
a El ano luz al se define como la distancia que la luz recorre en

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 18 — #22i
i
i
i
i
i
18 CAPITULO 2. CINEMATICA RELATIVISTA
un ano (ver inroduccion sobre unidades):
1al = 9,46053 × 1015m (2.46)
donde se ha tomado para la velocidad de la luz en el vacıo elvalor
c = 2,99792458 × 108ms−1 (2.47)
Si medimos las distancias en al y la velocidad en unidades dec, calcular el valor de la aceleracion de la gravedad terrestreg = 9,8ms−2 en estas unidades.
b Calcular la lınea de universo para el cohete en funcion del tiempopropio de la nave, asumiendo que cuando la nave parte de latierra t = 0, en el sistema de referencia tierra y τ = 0 eltiempo propio de la nave. Tomar el origen de coordenadas enla tierra.
c Supongamos que el cohete, en su viaje hacia las Pleyades, partede la tierra con aceleracion propia g = 9,8ms−2 hasta alcanzarla mitad del camino y luego frena, en el resto del viaje, con lamisma aceleracion propia. Calcular el tiempo en llegar hastala mitad del camino y hasta las Pleyades, medido en el sistematierra y en el cohete. Cuando la nave se encuentra a mitad decamino e inicia el frenado, ¿a que velocidad se esta moviendoel cohete respecto a la tierra? Si la nave regresa a la tierrasiguiendo un recorrido similar al de ida, ¿cuanto tiempo tardael viaje total, ida y regreso, para el observador en la nave ypara la tierra?
d Una segunda nave parte de la tierra simultaneamente con laprimera nave, pero con aceleracion propia de 10g hasta lamitad del camino a las Pleyades y luego desacelera a 10ghasta llegar al reposo. Repetir los calculos de la parte c delpresente problema y comparar los resultados.
19. Viaje interestelar 2. Consideremos de nuevo el viaje de un cohe-te que parte de la tierra hasta las Pleyades (ver problema anterior).La nave inicia su viaje con aceleracion propia de 10g hasta alcanzaruna velocidad de v = 0,999c, luego continua el viaje a velocidadconstante y finalmente desacelera con aceleracion propia de 10g,llegando a las Pleyades con velocidad final cero.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 19 — #23i
i
i
i
i
i
2.3. PROBLEMAS AVANZADOS 19
a ¿En cuanto tiempo, medido desde el cohete y desde la tierra,alcanza la nave la velocidad final v?
b ¿A que distancia de la tierra se encuentra la nave en ese instante,medida en el sistema tierra?
c Si el cohete regresa a la tierra, siguiendo un recorrido similar alde ida, ¿Cuanto tiempo tarda el viaje completo para el cohe-te y para la tierra? Comparar el resultado con el problemaanterior.
20. El horizonte de eventos. Una partıcula material es aceleradadesde el reposo con aceleracion propia constante α, con respectoa un sistema de referencia inercial Σ. La partıcula inicia su mo-vimiento en el origen de Σ cuando t = 0 y se elige el eje x en ladireccion de movimiento de la partıcula.
a Encontrar la lınea de universo de la partıcula en funcion deltiempo propio, i. e., encontrar
x(τ) = (x0(τ ), x1(τ), 0, 0)
b Calcular la posicion de la partıcula con respecto al tiempo parael observador Σ, i. e., encontrar
x1 = x1(x0)
Hacer un grafico espacio-tiempo del movimiento de la partıcu-la con aceleracion propia constante y analizar este grafico.
c Mostrar que si se envıa una senal de luz desde el origen un tiem-po c/α despues de salir la partıcula, entonces esta senal nuncaalcanza a la partıcula. Con base en este resultado, analizarel grafico espacio-tiempo del movimiento de una partıcula so-metida a una aceleracion propia constante.
2.3. Problemas avanzados
1. Grupo de Lorentz. Consideremos el producto minkowskiano ennotacion matricial
x · y = xT ηy (2.48)
donde x, y ∈ M, el espacio-tiempo de Minkowski, y con la notacion
x =[
x0 x1 x2 x3]
(2.49)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 20 — #24i
i
i
i
i
i
20 CAPITULO 2. CINEMATICA RELATIVISTA
xT =
x0
x1
x2
x3
(2.50)
y la matriz de Minkowski dada por
η =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
(2.51)
a Encontrar las propiedades generales de una transformacion deLorentz
Λ : M −→ Mx 7−→ x′ = Λx
(2.52)
que deja invariante el producto minkowskiano. Ayuda: de lainvarianza bajo el producto minkowskiano encontrar la ecua-cion de restriccion para la matriz Λ. A partir de esta ecuacion,encontrar el determinante y el numero maximo necesario deparametros independientes, que caracterizan una transforma-cion general de Lorentz y analizar el resultado.
b Sea Λ una matriz de transformacion de Lorentz y sea L otramatriz 4 × 4 tal que
Λ = eL (2.53)
La exponencial de una matriz se debe entender en el siguientesentido: dado que la expansion en serie de la funcion expo-nencial esta dada por
ex = 1 + x +1
2x2 + · · · =
∞∑
n=0
1
n!xn (2.54)
entonces
eL = 1 + L +1
2L2 + · · · (2.55)
A partir de esta representacion de una transformacion de Lo-rentz, a traves de la exponencial de otra matriz L, encontrarla forma general de una transformacion de Lorentz. Ayuda:muestre en primer lugar que para una transformacion propiade Lorentz tenemos
det |Λ| = eTrL (2.56)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 21 — #25i
i
i
i
i
i
2.3. PROBLEMAS AVANZADOS 21
donde TrL es la traza de la matriz L. Probar luego que lamatriz ηL es antisimetrica y de este resultado mostrar que laforma general de la matriz L se puede escribir como
L =
0 L01 L02 L03
L01 0 L12 L13
L02 −L12 0 L23
L03 −L13 −L23 0
(2.57)
c Demostrar que la matriz L se puede escribir como una combi-nacion lineal de las siguientes matrices:
R1 =
0 0 0 00 0 0 00 0 0 −10 0 1 0
; B1 =
0 1 0 01 0 0 00 0 0 00 0 0 0
(2.58)
R2 =
0 0 0 00 0 0 10 0 0 00 −1 0 0
; B2 =
0 0 1 00 0 0 01 0 0 00 0 0 0
(2.59)
R3 =
0 0 0 00 0 −1 00 1 0 00 0 0 0
; B3 =
0 0 0 10 0 0 00 0 0 01 0 0 0
(2.60)
es decir, mostrar que
L = −α1R1 − α2R2 − α3R3 − ζ1B1 − ζ2B2 − ζ3B3 (2.61)
El signo menos es arbitrario y se introduce solo por conve-niencia para su interpretacion fısica (ver parte d del presenteproblema). La ecuacion anterior se puede escribir en formacompacta como
L = −~α · R − ~ζ · B (2.62)
donde
~α = (α1, α2, α3) (2.63)
~ζ = (ζ1, ζ2, ζ3) (2.64)
y con el producto punto usual en R3.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 22 — #26i
i
i
i
i
i
22 CAPITULO 2. CINEMATICA RELATIVISTA
d Mostrar, por calculo directo, que las matrices Ri y Bj , i, j =1, 2, 3, cumplen con las siguientes propiedades: Los cuadradosde las seis matrices R2
i y B2j son matrices diagonales y ademas
(~α · R)3 = −~α ·R (2.65)
(
~ζ · B)3
= ~ζ · B (2.66)
para cualesquiera trivectores reales unitarios ~α y ~ζ. Por lo tan-to, cualquier potencia de las matrices Ri y Bj , i, j = 1, 2, 3,puede ser expresada como un multiplo de la matriz o de sucuadrado.
e Con el resultado del numeral anterior y teniendo en cuenta laexpansion en serie de Taylor de la funcion exponencial, ecua-cion (2.55), valida para L un numero, funcion, matriz o engeneral cualquier operador bien definido, considerar los casosparticulares
~α = (0, 0, 0) ~ζ = (ζ, 0, 0) (2.67)
y~α = (0, 0, α) ~ζ = (0, 0, 0) (2.68)
y calcular las correspondientes matrices de transformacion deLorentz Λ e interpretar fısicamente el resultado.
2. Transformacion general de Lorentz. Sean Σ y Σ′ dos sistemasde referencia inerciales tal que el sistema Σ′ se mueve con velocidad~v respecto a Σ. Si los dos observadores eligen los ejes coordenadosparalelos y los orıgenes coinciden en t = t′ = 0, encontrar lastransformaciones generales de Lorentz entre los dos observadoresinerciales.
3. Algebra de Lie del grupo de Lorentz. Sean A y B dos ma-trices cuadradas. Se define el conmutador de dos matrices [A,B]como la matriz
C = [A,B] ≡ AB − BA (2.69)
con el producto y la suma usual de matrices.
a Demostrar las siguientes propiedades del conmutador:
[A,B] = − [B,A] (2.70)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 23 — #27i
i
i
i
i
i
2.3. PROBLEMAS AVANZADOS 23
[A,B + C] = [A,B] + [A,C] (2.71)
[A,BC] = [A,B]C + B [A,C] (2.72)
[A,B]T =[
BT ,AT]
(2.73)
[A, [B,C]] + [C, [A,B]] + [B, [C,A]] = 0 (2.74)
La ultima igualdad se conoce como la identidad de Jacobi.
b Mostrar que las matrices Ri y Bj , i, j = 1, 2, 3, definidas en(2.58), (2.59) y (2.60), satisfacen las siguientes propiedades:
[Ri,Rj ] = ǫijkRk (2.75)
[Ri,Bj ] = ǫijkBk (2.76)
[Bi,Bj ] = −ǫijkRk (2.77)
donde el sımbolo ǫijk se define por:
ǫijk =
+1 ijk permutacion par de 123−1 ijk permutacion impar de 1230 en los demas casos
(2.78)Estas propiedades se conocen como el algebra de Lie del gru-po de Lorentz y son de gran importancia en teorıa cuanticade campos. El primer conmutador corresponde a las relacio-nes de conmutacion del momento angular, asociado con ro-taciones. El segundo conmutador establece que el vector B
se transforma como un trivector bajo rotaciones de los ejesespaciales y el tercer conmutador implica que, en general, dostransformaciones puras de Lorentz no conmutan, salvo si es-tas se realizan en la misma direccion, pues en este caso i = jy por lo tanto
ǫiik = 0 (2.79)
y las matrices conmutan.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 24 — #28i
i
i
i
i
i
Capıtulo 3
Efecto Doppler
En este capıtulo se continua con el desarrollo de la cinematica re-lativista, pero esta dedicado a la relatividad de las senales de luz. Elfenomeno del cambio en la frecuencia de una onda electromagnetica,cuando esta es medida por diferentes observadores inerciales, se conocecomo efecto Doppler. Por su gran importancia practica, en diferentescampos de la fısica y la astronomıa, le dedicaremos un capıtulo de pro-blemas independiente.
3.0.1. Cuadrivector de onda
Por el principio de superposicion, cualquier onda electromagneticase puede escribir como una combinacion lineal de ondas planas mono-cromaticas, descritas por una funcion de la forma
Ψ(t, ~r) = Ae±i(ωt−~k·~r) (3.1)
donde Ψ(t, ~r) representa la amplitud del campo (electrico, magnetico,potencial electrico o potencial magnetico) en un punto del espacio ~r yen un instante de tiempo t, A es la amplitud maxima del campo, ωla frecuencia angular de la onda y ~k = (kx, ky, kz) el vector de onda,definido como
~k =2π
λn (3.2)
con λ su longitud de onda y n un vector unitario en la direccion depropagacion de la onda. La frecuencia angular ω esta relacionada con lafrecuencia ν (medida en ciclos por segundo) por la ecuacion
ω = 2πν =2π
T(3.3)
24

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 25 — #29i
i
i
i
i
i
25
con T = 1/ν el perıodo. En la ecuacion (3.1) el signo ± representa ondasincidentes (+) u ondas emergentes (−). La relacion de dispersion paralas ondas electromagneticas en el vacıo esta dada por la ecuacion
∣
∣
∣
~k∣
∣
∣=√
k2x + k2
y + kz =ω
c(3.4)
o en forma equivalenteλν = c (3.5)
Puesto que la fase ωt − ~k · ~r de una onda electromagnetica plana debeser un invariante relativista, podemos definirla como el producto internominkowskiano
ωt − ~k · ~r = x · k (3.6)
entre el cuadrivector posicion
x = (ct, ~r) = (x0, x1, x2, x3) (3.7)
y el cuadrivector de onda k, definido como
k = (ω
c,~k) = (
ω
c, kx, ky, kz) = (k0, k1, k2, k3) (3.8)
La norma al cuadrado del cuadrivector de onda esta dada por
k2 = ηµνkµkν =
ω2
c2−∣
∣
∣
~k∣
∣
∣
2(3.9)
Debido a la relacion de dispersion para las ondas electromagneticas,ecuacion (3.4), el cuadrivector de onda es nulo, i. e.,
k2 = 0 (3.10)
La definicion del cuadrivector de onda implica que sus componentesse transforman como
k′0 = γ(k0 − βk1)k′1 = γ(k1 − βk0)
k′2 = k2
k′3 = k3
(3.11)
cuando son medidas en dos sistemas de referencia inerciales, relacionadospor una transformacion de Lorentz usual (2.4).
Las ecuaciones (3.11) contienen todas las relaciones conocidas sobrela relatividad de las senales de luz, tales como el efecto Doppler longi-tudinal, transversal y la aberracion de la luz estelar.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 26 — #30i
i
i
i
i
i
26 CAPITULO 3. EFECTO DOPPLER
3.1. Problemas sobre el efecto Doppler
1. Cuadrivector de onda. Consideremos dos sistemas de referenciainerciales Σ y Σ′ relacionados de la manera usual. Encontrar la re-lacion entre la frecuencia, el numero de onda y la longitud de onda,medidas por los dos observadores, de una onda electromagneticaplana.
2. Efecto Doppler longitudinal. Una fuente monocromatica deondas electromagneticas se mueve con velocidad v, respecto a unobservador inercial Σ y alejandose del observador, situado en elorigen del sistema. Si la fuente emite ondas de frecuencia propiaω0, ¿que frecuencia ωD mide un detector situado en el origen delsistema de referencia Σ? Repetir el calculo si la fuente se muevehacia el origen de Σ. Comparar los resultados anteriores en el lımiteno relativista, con el efecto Doppler clasico, el cual es valido paratodos los fenomenos ondulatorios
ωD = ω0vm − v
c(3.12)
donde vm es la velocidad de propagacion de las ondas respecto almedio. En esta ecuacion se supone que la fuente de ondas esta enreposo respecto al medio de propagacion, y c es la velocidad de lasondas electromagneticas respecto al medio de propagacion.
3. Efecto Doppler transversal y aberracion de la luz. Unafuente monocromatica de ondas electromagneticas se mueve convelocidad v con respecto a un detector en reposo y en la direcciondel eje x positivo de un sistema de referencia ligado al detector.Supongamos que en el instante t = 0 la fuente se encuentra en unpunto situado sobre el eje y y emite un tren de ondas de frecuen-cia propia ω0 (medida en el sistema de la fuente). ¿Cuales son lafrecuencia y el vector de onda medido por el detector? Compararel resultado con el caso no relativista.
4. Comunicacion espacial con Doppler. Dos naves espaciales A yB viajan en direcciones opuestas a velocidad constante v respecto ala tierra. Cuando las naves se cruzan se encuentran a una distanciaL de la tierra, medida en el sistema de referencia de la tierra. Enel instante del cruce de las naves se envıa una primera senal de luzdesde la tierra hacia las naves y un tiempo posterior t0 se envıa

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 27 — #31i
i
i
i
i
i
3.1. PROBLEMAS SOBRE EL EFECTO DOPPLER 27
una segunda senal. Las senales de luz se reflejan instantaneamenteen las naves regresando a la tierra. Asuma que t0 < L/v y utiliceel efecto Doppler para el calculo.
a ¿Con que diferencia de tiempo llegan las dos senales a cada nave,medidas con respecto al sistema de referencia de las naves?
b ¿Con que diferencia de tiempo, medido en el sistema tierra,llegan las senales reflejadas a la tierra provenientes de cadauna de las naves?
5. Expansion del universo. Hubble descubrio en 1929 que el uni-verso se encuentra en expansion. Observando los espectros carac-terısticos de varias galaxias, encontro que las frecuencias de emi-sion presentaban un corrimiento hacia el rojo proporcional a ladistancia de las galaxias. Esta relacion, conocida como ley de ex-pansion de Hubble, se expresa por la ecuacion
H0dL = cz (3.13)
donde H0 es la constante de Hubble, dL la distancia de luminosidada la galaxia (la cual coincide con la distancia propia para galaxiasno muy lejanas) y z es el factor de corrimiento (al rojo si z > 0 yal azul si z < 0) definido por
1 + z =λ
λ0(3.14)
donde λ0 es la longitud de onda emitida por la galaxia y λ lalongitud de onda observada en la tierra. En un espectro de emisionde la galaxia NGC−4649 se observo que la lınea Hα del hidrogenotiene una longitud de onda de λ = 6650A (Angstrom). Teniendo encuenta que la longitud de onda propia de la lınea Hα es de 6563A,calcular el factor de corrimiento y la velocidad de la galaxia.
6. Ley de reflexion en espejos planos. De la optica geometricausual, se sabe que el angulo de incidencia de un rayo de luz sobreun espejo en reposo es igual al angulo de reflexion. Considerar unespejo plano que se mueve con velocidad v normal a su plano y unrayo de luz de frecuencia ωi que incide sobre el espejo formando unangulo θi respecto a la normal. Calcular la frecuencia y el angulo dereflexion del rayo. Repetir el calculo si el espejo se esta moviendoen su plano.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 28 — #32i
i
i
i
i
i
Capıtulo 4
Dinamica relativista
4.1. Introduccion
La dinamica relativista corresponde a la generalizacion de las leyesde Newton. La primera ley de Newton esta contenida en los dos postu-lados de la relatividad, el principio de relatividad y la constancia de lavelocidad de la luz en el vacıo. La segunda ley de Newton admite unageneralizacion inmediata en terminos de cantidades cuadrivectoriales,mientras que la tercera ley de Newton deja de ser valida en general y esremplazada por el postulado de conservacion del cuadrivector momentototal de un sistema aislado de partıculas.
4.2. Postulados de la dinamica relativista
Definicion 1 El cuadrivector momento p de una partıcula de masa pro-pia m0, con cuadrivector velocidad U , esta definido por
p := m0U = m0dx
dτ(4.1)
Por definicion, la masa propia, o en reposo, de una partıcula es uninvariante relativista que caracteriza a la partıcula, la cual esta dada porla norma del cuadrivector momento, ecuacion (4.1):
p2 = m20c
2 (4.2)
dado que la norma al cuadrado del cuadrivector velocidad es c2.
28

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 29 — #33i
i
i
i
i
i
4.2. POSTULADOS DE LA DINAMICA RELATIVISTA 29
Teniendo en cuenta que las componentes del cuadrivector velocidadestan relacionadas con la velocidad de la partıcula a traves de la ecuacion
Uα = γ(~u)(c, ~u) (4.3)
entonces las componentes del cuadrivector momento estan dadas por larelacion
pα = (m0γ(~u)c,m0γ(~u)~u) =: (E/c, ~p) (4.4)
donde se define la energıa total E de la partıcula por
E = m0γ(~u)c2 = mc2 (4.5)
con
m = m0γ(~u) (4.6)
la masa relativista y
~p = m0γ(~u)~u = m~u (4.7)
el momento fısico de la partıcula.
La definicion de energıa total de una partıcula implica que, para elcaso de una partıcula en reposo ~u = 0, tenemos que su energıa totalesta dada por
E = m0c2 ≡ E0 (4.8)
la cual se llama energıa propia o en reposo. Estas definiciones conducena introducir el concepto de energıa cinetica K de una partıcula de masapropia m0 por la relacion
K = E − E0 = mc2 − m0c2 (4.9)
Ademas, dado que la norma al cuadrado de todo cuadrivector es uninvariante relativista, tenemos que si p es el cuadrivector momento deuna partıcula, entonces
p2 =(
p0)2 − |~p|2
=E2
c2− |~p|2 = m2
0c2 (4.10)
es decir, la norma del cuadrivector momento mide la masa propia de lapartıcula. Otra forma util y usual de escribir este invariante es
E2 = E20 + |~p|2 c2 (4.11)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 30 — #34i
i
i
i
i
i
30 CAPITULO 4. DINAMICA RELATIVISTA
que relaciona la energıa total E, la energıa en reposo E0 y el momento|~p| de la partıcula.
A partir de la definicion del cuadrivector momento de una partıcula,podemos mantener la misma definicion de la segunda ley de Newton,pero formulada para las cantidades cuadrivectoriales. Ası
Axioma 2 La ecuacion de movimiento relativista esta dada por
f =dp
dτ= m0A (4.12)
donde A es el cuadrivector aceleracion y f es el cuadrivector fuerza.
La tercera ley de Newton no es valida en general y por lo tanto, endinamica relativista, se toman como postulado fundamental las leyes deconservacion.
Axioma 3 Para un sistema aislado de partıculas, con cuadrivectoresmomento pi, i = 1, 2, ..., entonces el cuadrivector momento total delsistema p, definido como
p :=∑
i=1
pi (4.13)
es una constante de movimiento.
Este postulado implica que si expresamos la ecuacion (4.13) en com-ponentes, con
pi = (Ei/c, ~pi) (4.14)
yp = (E/c, ~p) (4.15)
obtenemos que la energıa total del sistema E, definida como la suma delas energıas de las partıculas individuales
E :=∑
i=1
Ei (4.16)
y el momento total del sistema, definido como la suma vectorial de losmomentos individuales de las partıculas
~p :=∑
i=1
~pi (4.17)
se conservan. Ademas, una consecuencia adicional que se deriva de laequivalencia masa-energıa es que el numero de partıculas en un sistemaaislado no es constante.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 31 — #35i
i
i
i
i
i
4.2. POSTULADOS DE LA DINAMICA RELATIVISTA 31
4.2.1. Sistema centro de masa
Definicion 4 Definimos la masa relativista total m del sistema y sucuadrivector momento total p como
m :=∑
i=1
mi (4.18)
p :=∑
i=1
pi =∑
i=1
(mic, ~pi) = (mc, ~p) (4.19)
donde hemos definido el momento total del sistema ~p en la ultima igual-dad de la ecuacion (4.19).
Si el sistema de partıculas es aislado, los postulados de conservacionimplican que p y, por tanto, m y ~p son constantes en el tiempo. Dado queel cuadrivector momento total p es un vector temporal, existe un sistemade referencia, que lo llamaremos ΣCM o sistema de referencia centro demasa, para el cual el cuadrivector momento total p no tenga componentesespaciales, esto es, un sistema para el cual ~p = ~0. La velocidad ~uCM delsistema de referencia centro de masa respecto a Σ esta dada por
~uCM =~p
m(4.20)
A partir de la velocidad ~uCM , el cuadrivector velocidad del centrode masa toma la forma
UCM = γ(~uCM )(c, ~uCM ) (4.21)
Entonces, de la definicion del cuadrivector momento total, ecuacion(4.19), velocidad del centro de masa, ecuacion (4.20) y la definicion delcuadrivector velocidad del centro de masa (ecuacion (4.21)), tenemos
p = (mc, ~p) = m(c, ~uCM ) = mγ−1(~uCM )UCM (4.22)
La norma al cuadrado de esta ecuacion
p2 = m2γ−2(~uCM )c2 (4.23)
permite definir la masa total del sistema de partıculas, en el sistema dereferencia centro de masa ΣCM :
mCM :=m
γ(~uCM )(4.24)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 32 — #36i
i
i
i
i
i
32 CAPITULO 4. DINAMICA RELATIVISTA
Por lo tanto, podemos escribir el cuadrivector momento total delsistema como
p = mCMUCM (4.25)
Es importante aclarar que mCM , la masa en reposo del sistema enΣCM , excede a la suma de las masas en reposo de las partıculas delsistema, pues a ella contribuyen tambien las energıas cineticas de laspartıculas individuales. Por tanto la energıa cinetica del sistema en ΣCM
esta dada porKCM = mCMc2 − m0c
2 (4.26)
donde hemos definidom0 :=
∑
i
m0i (4.27)
Definicion 5 La energıa umbral se define como la energıa mınima ne-cesaria para que, en un proceso de colision, se cree una nueva partıculade masa en reposo dada.
De cualquier manera, la energıa mınima (umbral) se tendra cuandolas partıculas resultantes de la colision esten en reposo en el sistema dereferencia del centro de masa del sistema. Esta ultima afirmacion defineoperacionalmente el concepto de energıa umbral.
4.2.2. Fotones y estructura atomica
Una partıcula de masa en reposo cero m0 = 0 implica que el cuadri-vector momento sea nulo. Ası, si E es la energıa total de la partıcula ymomento ~p, entonces
p =
(
E
c, ~p
)
(4.28)
conp2 = 0 (4.29)
La relacion entre el concepto de partıcula de masa en reposo nulay el concepto de foton o quantum de energıa se basa en la generali-zacion de la hipotesis de Einstein, para el transporte de la energıa enuna onda electromagnetica. Einstein postulo que si tenemos una ondaelectromagnetica monocromatica de frecuencia ν, entonces la energıatransportada por la onda esta concentrada en cantidades discretas deenergıa dada por la relacion
E = hν (4.30)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 33 — #37i
i
i
i
i
i
4.2. POSTULADOS DE LA DINAMICA RELATIVISTA 33
donde h es la constante de Planck. Ası, dado que la onda transportaenergıa, entonces tambien debe transportar momento de magnitud
|~p| =E
c(4.31)
por lo tanto, se postula que una onda electromagnetica monocromaticadescrita por el cuadrivector de onda
k =(ω
c, kx, ky , kz
)
(4.32)
posee un cuadrivector momento dado por la relacion
p = ℏk (4.33)
donde ℏ = h/2π. Esta ecuacion implica que la energıa asociada a la ondaes
E = ℏω (4.34)
y su momento fısico~p = ℏ~k (4.35)
Definicion 6 Se define colision elastica en relatividad como aquella pa-ra la cual las masas propias de las partıculas iniciales (incluyendo laspartıculas de masa en reposo cero) antes de la colision son las mismasdespues de la colision.
Una consecuencia de esta definicion es que la energıa cinetica antesy despues de la colision no cambia, como se vera en un problema.
En relatividad, y en general en fısica, el concepto de partıcula esta aso-ciado a un cuerpo material puntual, caracterizado por su masa pro-pia, carga electrica, momento angular intrınseco o spin y otros numeroscuanticos. Aun cuando la mayorıa de las partıculas conocidas presen-tan estructura interna y por esta razon no son partıculas puntuales enestricto sentido, para nuestros propositos la aproximacion de partıculapuntual es suficiente.
El atomo de hidrogeno es un sistema de dos partıculas, un electrony un proton, ligados por la fuerza electrica. La estructura interna y suspropiedades fısicas son objeto de estudio de la mecanica cuantica. Sinembargo, para efecto de estudiar procesos dinamicos relativistas, como lacolision del atomo con otras partıculas, se puede considerar que el atomoes una partıcula electricamente neutra, caracterizada por su masa propia

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 34 — #38i
i
i
i
i
i
34 CAPITULO 4. DINAMICA RELATIVISTA
y por su estado interno de energıa, el cual esta dado, para el atomo dehidrogeno, por un numero entero n relacionado con la energıa interna ode ligadura del atomo por la ecuacion
En = −13,6056981
n2eV ; n = 1, 2, ... (4.36)
donde la unidad de energıa es el electronvoltio:
1eV = 1, 602 × 10−19J (4.37)
El estado base del atomo de hidrogeno corresponde al nivel n = 1 yel atomo solamente puede absorber y emitir una cantidad de energıaQ si esta cantidad es igual a la diferencia entre dos niveles de energıapermitidos, es decir si
Q = Efinal − Einicial = En − Em (4.38)
si n > m significa que el atomo absorbe energıa y si n < m, que emiteenergıa. La energıa de ionizacion del atomo corresponde a la energıamınima necesaria para quitarle un electron al atomo, cuando este seencuentra en su estado base.
Para el caso particular del atomo de hidrogeno, esto implica que laenergıa necesaria para que el atomo pase del estado base n = 1 al estadom = ∞ el cual representa que el electron y el proton no interaccionany tienen energıas cineticas nulas en el infinito, corresponde a la energıade ionizacion del atomo.
Ası, la energıa de ionizacion del hidrogeno esta dada por
Qion = Efinal − Einicial
= lımn→∞
(
−13, 6057
n2eV
)
−(
−13, 6057
12eV
)
= 13, 6057eV (4.39)
La masa propia del atomo esta dada por la suma de las masas propiasdel electron y el proton mas el equivalente en masa de la energıa interna.
Ası, para el atomo de hidrogeno, su masa propia (en unidades equi-valentes de energıa en electronvoltios) en el estado de energıa En es
Mm0c2 = m0ec
2 + m0pc2 + En (4.40)
donde m0e es la masa propia del electron y m0p la del proton. De es-ta forma, para todos los efectos de la dinamica relativista, dos atomos

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 35 — #39i
i
i
i
i
i
4.3. PROBLEMAS DE DINAMICA RELATIVISTA 35
quımicamente iguales (e. g. de hidrogeno), pero en estados internos dis-tintos, son partıculas diferentes.
Por ejemplo, la masa propia del electron, en udidades de ev, es
m0ec2 = 510999,06eV = 0,51099906MeV (4.41)
y la del proton
m0pc2 = 938272310eV = 938,27231MeV (4.42)
y si el atomo de hidrogeno se encuentra en su estado base n = 1 entoncessu masa propia esta dada por
Mm0c2 = m0ec
2 + m0pc2 − 13,6056981eV
= 510999,06eV + 938272310eV − 13,6056981eV
= 9. 387 8 × 108eV (4.43)
Lo que se ha dicho en esta seccion es valido para todos los atomosy en general para todos los sistemas compuestos de partıculas, comolos nucleos atomicos; solamente que la estructura energetica interna delatomo o nucleo no esta dada por una relacion tan sencilla como la en-contrada para el atomo de hidrogeno, ecuacion (4.36).
4.3. Problemas de dinamica relativista
1. Cuadrivector momento. Sean p1 y p2 los cuadrivectores mo-mento de dos partıculas de masas propias m01 y m02 respectiva-mente. Muestre que el momento total del sistema
p = p1 + p2 (4.44)
es un cuadrivector temporal, es decir su norma es positiva.
2. Sistema centro de masa. En un sistema de referencia inercial Σdos partıculas de masas propias m01 y m02 tienen cuadrivectoresmomento p1 y p2 respectivamente. Calcular la velocidad del siste-ma de referencia centro de masa ΣCM y la masa propia del sistemamedida en Σ y en ΣCM .
3. Transformacion del momento. Una partıcula de masa en re-poso m0 tiene una energıa total E y un momento ~p medido porun observador inercial Σ. Un segundo sistema de referencia Σ′ se
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 36 — #40i
i
i
i
i
i
36 CAPITULO 4. DINAMICA RELATIVISTA
esta moviendo con velocidad v en la direccion del eje x positivocon respecto a Σ. Si los dos observadores eligen los ejes espacialesparalelos y toman t = t′ = 0 cuando los orıgenes coinciden, en-contrar la energıa total E, momento ~p y energıa cinetica K ′ de lapartıcula medidas en el sistema de referencia Σ′, en terminos delas cantidades E, ~p y K medidas por el observador Σ.
4. Cuadrivector fuerza. Interpretar fısicamente las componentesdel cuadrivector fuerza, definido por la ecuacion de movimiento
f =dp
dτ= m0A (4.45)
donde m0 es la masa propia de una partıcula, sobre la cual actuauna fuerza ~F y A es su cuadrivector aceleracion.
5. Transformacion de la fuerza entre sistemas de referencia.
Encontrar las ecuaciones de transformacion de las componentes dela fuerza fısica entre sistemas de referencia inerciales, relacionadospor una transformacion de Lorentz usual.
6. Energıa disponible para crear partıculas. En un experimentode colision de dos partıculas, donde, despues de la colision, emergenlas dos partıculas iniciales mas una nueva partıcula de masa en re-poso dada, surge la necesidad de considerar la mınima energıa ini-cial necesaria para crear esta partıcula, la cual es llamada energıaumbral. Otra forma de plantear el concepto de energıa umbral esconsiderar la maxima cantidad de energıa disponible en un procesode colision de dos partıculas, las cuales emergen despues del choquejunto con otra partıcula adicional. Los experimentos de colision departıculas usualmente utilizan protones contra protones y estosexperimentos se pueden disponer de dos maneras: en la primeraforma, un proton de energıa propia E0 es acelerado hasta alcanzarcierta energıa total E1, el cual se hace chocar contra un proton enreposo. En la segunda forma los dos protones se aceleran hasta unaenergıa final de E2 cada uno y se hacen colisionar frontalmente. Enambos casos la energıa total del sistema es E = E1 = 2E2, sin em-bargo las energıas disponibles son diferentes. Calcular la energıadisponible ED en cada experimento. Asumir que E = 30Gev yE0 = 0,94Gev para el proton.
7. Sistema de dos electrones. Un electron de masa propia m0
se esta moviendo con una energıa cinetica que es el doble de su

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 37 — #41i
i
i
i
i
i
4.3. PROBLEMAS DE DINAMICA RELATIVISTA 37
energıa propia, en la direccion de otro electron que se encuentraen reposo en el sistema de referencia del laboratorio Σ.
a ¿Cual es la velocidad del electron movil medida en Σ?
b Calcular los cuadrivectores momento de los dos electrones y elcuadrivector momento total del sistema en Σ.
c ¿Cual es la velocidad del sistema de referencia centro de masa?Calcular las componentes del cuadrivector momento de cadaelectron en el sistema de referencia centro de masa ΣCM .
d Calcular la masa propia total del sistema de dos partıculas, enΣ y en el sistema de referencia centro de masa ΣCM .
8. Sistema de dos fotones. Dos fotones de la misma energıa E,con respecto a un sistema de referencia inercial Σ, se propagan,el primero en la direccion del eje x positivo y el segundo en ladireccion del eje y positivo.
a Calcular los cuadrivectores momento de los dos fotones y el cua-drivector momento total del sistema en Σ.
b ¿Cual es la velocidad del sistema de referencia centro de masa?
c Calcular la masa propia del sistema de dos fotones.
9. Partıcula compuesta. En el sistema de laboratorio un electronde energıa cinetica 2m0c
2/3 choca con un positron (partıcula de lamisma masa que el electron y de carga positiva) en reposo y formaun atomo de positronio.
a ¿Cual es la masa propia del positronio?
b ¿Que velocidad final adquiere el atomo de positronio?
c Si el atomo de positronio, despues de un tiempo corto se desin-tegra de nuevo en un electron y un positron, ¿cual es la velo-cidad de las partıculas finales si ellas son emitidas formandoel mismo angulo con respecto a la direccion de movimientodel positronio? ¿Cuanto vale este angulo?
d Analizar si el proceso de colision completo
e− + e+ −→ Ap −→ e− + e+ (4.46)
es elastico o inelastico, donde e− representa al electron, e+ alpositron y Ap al atomo de positronio.
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 38 — #42i
i
i
i
i
i
38 CAPITULO 4. DINAMICA RELATIVISTA
10. Aniquilacion de partıculas. Considere un electron que se muevecon energıa cinetica de 2m0c
2/3 y choca con un positron en reposoaniquilandose el electron y el positron en dos fotones:
e− + e+ −→ γ + γ
a Con respecto a la direccion de incidencia del electron, ¿en que di-recciones deben salir los fotones para que uno de ellos tengaenergıa maxima? En este caso ¿cual es la energıa de cadafoton?
b Si en el proceso de aniquilacion los dos fotones salen formandoun angulo igual (y opuesto) con respecto a la direccion deincidencia, ¿cuanto vale el angulo? y ¿que energıa tiene cadafoton?
c Resolver los dos numerales anteriores analizando el problemapara un observador en reposo con respecto al sistema de re-ferencia centro de masa de las partıculas iniciales.
11. Absorcion atomica. Un atomo de hidrogeno en su estado base,con masa propia M0, se encuentra en reposo en el sistema labo-ratorio Σ. Un foton de energıa Q choca contra el atomo y es ab-sorbido por este, pasando a su primer estado excitado n = 2. SeaM0 la masa propia del atomo excitado y
Q0 = M0c2 − M0c
2 (4.47)
la diferencia de las energıas propias del hidrogeno despues y antesde la colision.
a Encontrar una expresion para la energıa Q que debe tener elfoton incidente, en funcion de la energıa de excitacion Q0 yla masa propia del atomo M0 en su estado base.
b Demostrar que la diferencia entre la energıa del foton incidenteQ y la energıa interna de excitacion del atomo corresponde ala energıa cinetica del atomo excitado.
c Calcular numericamente Q teniendo en cuenta que Q0 corres-ponde a la diferencia entre los niveles de energıa interna n = 2y n = 1, y calcular la velocidad con que retrocede el atomoal absorber el foton de energıa Q.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 39 — #43i
i
i
i
i
i
4.3. PROBLEMAS DE DINAMICA RELATIVISTA 39
12. Cohete fotonico. El motor de maxima eficiencia que se podrıallegar a construir es el cohete fotonico, el cual convierte el 100%del combustible (materia) en radiacion colimada (fotones). Supon-gamos que en los problemas del capıtulo de cinematica Viaje inte-
restelar 1 y Viaje interestelar 2 la nave dispone de un cohetefotonico. Calcular que porcentaje de la masa inicial del cohete M0
se gasta en el viaje en cada caso.
13. Dispersion elastica proton-proton. En el sistema laborato-rio una partıcula de masa propia m0 y energıa cinetica K chocaelasticamente contra otra partıcula identica en reposo. Calcularel angulo entre las dos partıculas despues de la colision en fun-cion de K y m0, si las dos partıculas salen con la misma energıa.Aplicar el resultado para protones, con m0c
2 = 938,27231MeV yK = 437MeV . Sutton et al. ([8]) obtuvieron el valor experimentalde 84,0o ± 0,2o.
14. Procesos prohibidos. Demostrar que los siguientes procesosde colision son prohibidos: un proton en reposo emite un foton yretrocede
p −→ p + γ (4.48)
Un foton se desintegra en un par electron-positron
γ −→ e− + e+ (4.49)
Un par electron-positron se aniquila dando lugar a un foton
e− + e+ −→ γ (4.50)
donde γ representa un foton de energıa dada, p un proton, e− unelectron y e+ un positron.
15. Experimentos de coincidencia. En el experimento original delefecto Compton se midio la energıa del foton dispersado en funciondel angulo de dispersion, pero no se midio el electron dispersado.Calcular la energıa y el angulo de dispersion del electron en funcionde la energıa del foton incidente y el angulo de dispersion del foton.
16. Reflexion inelastica de un foton en un atomo. Un foton deenergıa Qi choca contra un atomo de hidrogeno en reposo que seencuentra en su primer estado excitado. Despues de la colision elatomo pasa a su estado base y el foton se dispersa con la mismaenergıa retrocediendo.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 40 — #44i
i
i
i
i
i
40 CAPITULO 4. DINAMICA RELATIVISTA
a ¿El choque es elastico o inelastico?
b Cual es la velocidad del atomo despues de la colision?
c ¿Cual es la energıa Qi del foton incidente?

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 41 — #45i
i
i
i
i
i
Capıtulo 5
Tensores
En este capıtulo se introducen los conceptos fundamentales del calcu-lo tensorial. Los tensores seran definidos en terminos de sus propieda-des de transformacion, bajo un cambio de sistemas de coordenadas. To-das las definiciones dadas, ası como sus propiedades, son generales, i. e.son validas para transformaciones generales de coordenadas, pero estecapıtulo se restringira exclusivamente a las transformaciones de Lorentz,aun cuando se mantiene en lo posible una notacion general.
5.1. Definiciones fundamentales
Definicion 7 Sean Σ y Σ′ dos sistemas de referencia inerciales y seanxµ = (x0, x1, x2, x3) y x′µ = (x′0, x′1, x′2, x′3) las coordenadas de unevento fısico medidas en Σ y Σ′ respectivamente. Entonces una trans-formacion de Lorentz de las coordenadas esta definida como:
xµ 7−→ x′µ = Λµνx
ν (5.1)
tal que el producto punto minkowskiano queda invariante bajo esta trans-formacion de coordenadas.
Definicion 8 Un escalar de Lorentz es una cantidad (en general unafuncion de las coordenadas) que es invariante bajo transformaciones deLorentz.
Ejemplos de escalares de Lorentz son: la masa propia de una partıcu-la, el intervalo de tiempo propio entre dos eventos, la norma de todocuadrivector, el producto interno de cuadrivectores, etc.
41

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 42 — #46i
i
i
i
i
i
42 CAPITULO 5. TENSORES
Definicion 9 Un cuadrivector V es una cantidad cuyas componentes,denotadas por V µ, µ = 0, 1, 2, 3, medidas por el observador inercial Σ,se transforman bajo una transformacion de Lorentz de las coordenadas(ecuacion (5.1)), de la misma manera que las coordenadas, es decir:
V ′µ = ΛµνV
ν (5.2)
donde V ′µ denota las componentes del cuadrivector V medidas en elsistema de referencia Σ′.
A las cantidades V µ se las llama las componentes contravariantes delcuadrivector V.
Definicion 10 Un tensor T de segundo orden dos veces contravariantees un conjunto de 42 componentes T µν ; µ, ν = 0, 1, 2, 3, medidas en unsistema de referencia Σ, tales que bajo una transformacion de Lorentz(ecuacion (5.1)) sus componentes se transforman como:
T ′µν = ΛµαΛν
βTαβ (5.3)
donde T ′µν denota las componentes del tensor T en el sistema de refe-rencia Σ′.
Definicion 11 La definicion anterior se generaliza al caso de un tensorT contravariante de orden r, como un objeto de 4r componentes, medidasen un sistema de referencia Σ, cuyas componentes se transforman bajouna transformacion de Lorentz (5.1) en la forma:
T ′µ1µ2...µr = Λµ1ν1
Λµ2ν2
· · · ΛµrνrT
ν1ν2...νr (5.4)
Ası, se define un tensor de orden cero como un escalar y un tensorcontravariante de orden uno como un cuadrivector.
Definicion 12 La distancia espacio-tiempo entre dos eventos de coor-denadas xµ y xµ + dxµ esta definida por
ds2 = ηµνdxµdxν (5.5)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 43 — #47i
i
i
i
i
i
5.1. DEFINICIONES FUNDAMENTALES 43
Esta distancia es un invariante bajo una transformacion de coorde-nadas, es decir:
ds2 = ηµνdxµdxν = ηµνdx′µdx′ν (5.6)
donde la matriz de Minkowski η (tambien llamada tensor metrico deMinkowski) esta definida por:
ηµν :=
1; si µ = ν = 0−1; si µ = ν = 1, 2, 3
0; si µ 6= ν(5.7)
Entonces por la invarianza de ds2 se tiene que
ds2 = ηµνdx′µdx′ν = ηµνΛµαΛν
βdxαdxβ = ηαβdxαdxβ (5.8)
por lo tanto se debe cumplir la relacion:
ηαβ = ΛµαΛν
βηµν (5.9)
Dado que
det(ηαβ) = −1 (5.10)
entonces existe la matriz de transformacion inversa (ηαβ)−1, cuyas com-
ponentes se denotan por ηαβ, y satisfacen la siguiente relacion:
ηη−1 = 1 ⇐⇒ ηαβηβσ =δ σα (5.11)
donde δ σα son los elementos de la matriz identidad. Los elementos de
la matriz inversa de Minkowski coinciden numericamente con ηαβ, yademas son matrices simetricas, i. e.
ηαβ = ηβα
ηαβ = ηβα (5.12)
.La inversa de una transformacion de Lorentz esta dada por:
xµ = Λ µν x′ν (5.13)
con
Λ µν = (Λµ
ν)−1 ⇐⇒ Λ ε
ν Λνµ = δ ε
µ (5.14)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 44 — #48i
i
i
i
i
i
44 CAPITULO 5. TENSORES
Definicion 13 Se definen las “componentes” covariantes de un cuadri-vector V como
Vα := ηαβV β (5.15)
Ası, dadas las componentes covariantes Vµ, entonces sus correspon-dientes componentes contravariantes se obtienen de la transformacioninversa:
V µ = ηµνVν (5.16)
Esta definicion se generaliza para el caso de tensores de cualquierrango. Por ejemplo, las componentes covariantes de un tensor de segundoorden estan relacionadas con sus componentes contravariantes por laecuacion:
Tµν = ηµαηνβTαβ (5.17)
y en forma similar se pueden definir las componentes de un tensor desegundo orden una vez contravariante y una vez covariante, con las si-guientes posibilidades:
Tαβ = ηβµTαµ ; T β
α = ηµαT µβ (5.18)
De esta forma, Tαβ, Tµν , Tαβ y T β
α son todas diferentes represen-taciones de un mismo tensor de segundo rango T.
Las componentes covariantes de un tensor de rango uno, bajo unatransformacion de Lorentz, se transforman como:
V ′α = Λ µ
α Vµ (5.19)
La ley general de transformacion de las componentes covariantes ycontravariantes de un tensor cualquiera T, r-veces contravariante y s-veces covariante, esta dada por:
T′µ1µ2...µrγ1γ2...γs
= Λµ1ν1
Λµ2ν2
· · · ΛµrνrΛ
δ1γ1
Λ δ2γ2
· · · Λ δrγr
T ν1ν2...νrδ1δ2...δs
(5.20)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 45 — #49i
i
i
i
i
i
5.1. DEFINICIONES FUNDAMENTALES 45
5.1.1. Algebra y propiedades de simetrıa de tensores
Definicion 14 Sea
Πrs =
{
T | T ν1ν2...νrδ1δ2...δs
}
el conjunto de todos los tensores r-veces contravariante y s-veces cova-riante.
Ası, en esta notacion, un escalar es un elemento de Π00, un cuadri-
vector contravariante es un elemento de Π10 y uno covariante de Π0
1, etc.
Definicion 15 Dados dos tensores T,S ∈ Πrs definimos la suma y la
multiplicacion por un escalar λ ∈ R, por:
Qν1ν2...νrδ1δ2...δs
:= (T + S)ν1ν2...νrδ1δ2...δs
:= T ν1ν2...νrδ1δ2...δs
+ Sν1ν2...νrδ1δ2...δs
(5.21)
P ν1ν2...νrδ1δ2...δs
:= (λT )ν1ν2...νrδ1δ2...δs
:= λT ν1ν2...νrδ1δ2...δs
(5.22)
Definicion 16 Dados dos tensores T ∈ Πrs y S ∈ Πp
q , se define el pro-ducto tensorial como:
Wν1ν2...νrνr+1...νr+p
δ1δ2...δsδs+1...δs+q:= T ν1ν2...νr
δ1δ2...δsS
νr+1νr+2...νr+p
δs+1δs+2...δs+q(5.23)
el cual es un tensor de Πr+ps+q .
Definicion 17 Dado un tensor T ∈ Πrs se define la contraccion del
ındice contravariante αi (1 ≤ i ≤ r) con el ındice covariante βj (1 ≤j ≤ s) por:
C(αi)(βj)
(Tα1α2...αi...αr
β1β2...βj ...βs) := Tα1α2...σ...αr
β1β2...σ...βs∈ Πr−1
s−1 (5.24)
La operacion de subir y bajar ındices es un caso particular de com-binar las operaciones de producto tensorial y contraccion.
Definicion 18 Un tensor T de segundo rango del tipo Π20, con compo-
nentes Tαβ en un sistema de referencia Σ, se llama simetrico si
Tαβ = T βα (5.25)
y antisimetrico siTαβ = −T βα (5.26)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 46 — #50i
i
i
i
i
i
46 CAPITULO 5. TENSORES
Esta definicion es valida tambien para las componentes covariantesde un tensor de segundo rango y puede ser generalizada a cualquier parde ındices de un tensor de rango n ≥ 2. Por ejemplo
Tαβγ = T βαγ (5.27)
es un tensor simetrico en sus dos primeros ındices contravariantes y
Tαβγ = −Tαγβ (5.28)
es antisimetrico en sus dos ultimos ındices contravariantes.
Definicion 19 Dado un tensor T de segundo rango del tipo Π20, con
componentes Tαβ en un sistema de referencia Σ, se define un nuevotensor, denotado como T (αβ), por la operacion
T (αβ) :=1
2(Tαβ + T βα) (5.29)
el cual por definicion es simetrico, es decir T (αβ) = T (βα).
Definicion 20 Se define la operacion de antisimetrizacion de un tensordado Tαβ , que se denota como T [αβ], por:
T [αβ] :=1
2(Tαβ − T βα) (5.30)
De la misma manera se tiene que si un tensor Tαβ es simetrico,entonces el tensor antisimetrizado es cero, y si Tαβ es antisimetrico,entonces
T [αβ] = Tαβ (5.31)
Claramente estas operaciones son validas tambien para tensores deltipo Π0
2. Estas operaciones de simetrizacion y antisimetrizacion se pue-den generalizar a tensores de orden mayor:
T (α1···αr) :=1
r!
∑
Pσ
TPσ(α1···αr) (5.32)
T [α1···αr] :=1
r!
∑
Pσ
(−1)NσTPσ(α1···αr) (5.33)
donde la suma se realiza sobre todas las permutaciones de los ındices(α1, · · ·, αr) y Nσ = ±1 es el signo de la permutacion.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 47 — #51i
i
i
i
i
i
5.2. TRANSFORMACION GENERAL DE COORDENADAS 47
La generalizacion del producto cruz del algebra usual de vectorestridimensionales corresponde al producto tensorial de vectores antisime-trizado. Ası, sean Aα y Bβ las componentes de dos cuadrivectores enun sistema de referencia Σ, entonces se define un nuevo tensor como elproducto tensorial antisimetrizado de estos dos cuadrivectores:
Cαβ := A[αBβ] =1
2{AαBβ − AβBα} (5.34)
Un caso especial de un tensor de cuarto rango completamente anti-simetrico es el tensor de Levi-Civita, definido por la ecuacion:
εαβγδ :=
+1 si αβγδ es permutacion par de 0123−1 si αβγδ es permutacion impar de 0123
0 en los demas casos(5.35)
Este tensor, al igual que el tensor metrico de Minkowski, tiene laparticularidad que en todos los sistemas de referencia inerciales sus com-ponentes poseen el mismo valor numerico.
5.2. Transformacion general de coordenadas
Un cambio general de coordenadas entre los sistemas Σ y Σ′ se pue-de expresar como un conjunto de cuatro ecuaciones, donde las nuevascoordenadas primadas son funciones continuas, con inversa continua, delas coordenadas no primadas. Ası la transformacion de coordenadas ysu inversa se pueden escribir como:
x′µ = x′µ(xα) (5.36)
xβ = xβ(x′ν) (5.37)
Notemos que si exigimos que las transformaciones de coordenadassean lineales, entonces estas ecuaciones se reducen a la forma:
x′µ = Λµαxα (5.38)
xβ = Λ βν x′ν (5.39)
con los coeficientes de las transformaciones Λµα (y los de la transforma-
cion inversa Λ βν ) constantes, independientes de las coordenadas. Con la
identificacion
Λµα =
∂x′µ
∂xα(5.40)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 48 — #52i
i
i
i
i
i
48 CAPITULO 5. TENSORES
Λ βν =
∂xβ
∂x′ν
las ecuaciones que definen la ley de transformacion (y su inversa), paralas componentes de cualquier vector en los dos sistemas de referencia, sepueden escribir en la forma
V ′µ =∂x′µ
∂xνV ν (5.41)
V µ =∂xµ
∂x′ν V ′ν (5.42)
Entonces, la relacion
ΛµαΛ α
ν = δµν (5.43)
es equivalente a∂x′µ
∂xα
∂xα
∂x′ν = δµν (5.44)
Esta relacion se obtiene directamente si aplicamos la regla de la cadenapara las derivadas a la transformacion identica x′µ(xα(x′ν)) ≡ x′µ.
5.2.1. Operadores vectoriales
La generalizacion del vector gradiente del calculo vectorial usual so-bre R
3
~∇ = (∂
∂x,
∂
∂y,
∂
∂z) (5.45)
el cual al actuar sobre una funcion escalar produce un vector en la di-reccion del maximo cambio de la funcion, es el operador diferencial
∂µ =∂
∂xµ
que al actuar sobre una funcion escalar de las coordenadas genera uncuadrivector covariante
∂µΦ = (∂Φ
∂x0,
∂Φ
∂x1,
∂Φ
∂x2,
∂Φ
∂x3)
Las componentes del operador gradiente se transforman, bajo uncambio de coordenadas, como las componentes covariantes de un cua-drivector, es decir
∂′µ = Λ ν
µ ∂v (5.46)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 49 — #53i
i
i
i
i
i
5.3. PROBLEMAS DE ALGEBRA TENSORIAL 49
A partir de esta definicion se pueden construir los operadores de usomas frecuente en fısica, siguiendo los mismos procedimientos que en elcaso del calculo vectorial tridimensional estandar.
Para el caso de un campo vectorial Ψµ(xα), esto es, una funcion vec-torial de las coordenadas, si se toma el producto interno minkowskianoentre este campo vectorial y el vector gradiente:
∇ · Ψ = ∂νΨν (5.47)
se obtiene la cuadridivergencia que corresponde a la generalizacion deloperador divergencia tridimensional. Ademas, tomando el producto in-terno del operador gradiente consigo mismo, se obtiene el operador deD´Alembert que es un invariante (un escalar) bajo transformaciones decoordenadas, ası:
� = ηµν∂µ∂ν = ∂µ∂µ =∂2
∂x02− ∇
2 (5.48)
Finalmente la generalizacion del rotacional se define como un tensorde segundo rango antisimetrico obtenido por la operacion:
∂[αΨβ] = ∂αΨβ − ∂βΨα (5.49)
5.3. Problemas de algebra tensorial
1. Transformacion de componentes covariantes. A partir de lapropiedad
ηαβ = ΛµαΛν
βηµν (5.50)
que debe satisfacer una transformacion de Lorentz Λµα y de la
definicion de componentes covariantes de un cuadrivector
Vα := ηαβV β (5.51)
y de la ley de transformacion para las componentes contravariantes
V ′α = ΛαβV β (5.52)
encontrar la ley de transformacion para las componentes covarian-tes del cuadrivector V, i. e., demostrar que
V ′α = Λ µ
α Vµ (5.53)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 50 — #54i
i
i
i
i
i
50 CAPITULO 5. TENSORES
2. Componentes covariantes del cuadrivector momento. Da-das las componentes contravariantes del cuadrimomento en un sis-tema de referencia Σ,
p =(
p0, p1, p2, p2)
=
(
E
c, px, py, pz
)
(5.54)
encontrar las componentes covariantes.
3. Transformacion de componentes covariantes. A partir delas ecuaciones de transformacion para las componentes covariantesde un cuadrivector, mostrar que las ecuaciones de transformacionpara la energıa y el momento de una partıcula son las mismassin importar si se trabaja con sus componentes contravariantes ocovariantes.
4. Propiedades de simetrıa. Considere un tensor de segundo rangocontravariante Tαβ.
a Muestre que si el tensor es simetrico en un sistema de referen-cia tambien es simetrico en todos los sistemas de referencia.Similarmente si es antisimetrico.
b A partir de Tαβ encontrar sus componentes covariantes Tαβ ymostrar que si Tαβ es simetrico entonces Tαβ tambien lo es.Similarmente si es antisimetrico. ¿Que sucede con las compo-nentes mixtas Tα
β y T βα ?
5. Tensor metrico de Minkowski. Mostrar, por calculo directo,que el tensor metrico de Minkowski ηαβ tiene las mismas compo-
nentes en todos los sistemas coordenados. Similarmente ηαβ y eltensor metrico mixto δα
β .
6. Algebra de tensores. Sean Tα1...αrβ1...βs
y Rα1...αrβ1...βs
las componentesde dos tensores r − veces contravariantes y s − veces covariantesmedidas en un sistema de referencia Σ, y λ un numero real.
a Demostrar que las cantidades
Sα1...αrβ1...βs
= λTα1...αrβ1...βs
(5.55)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 51 — #55i
i
i
i
i
i
5.3. PROBLEMAS DE ALGEBRA TENSORIAL 51
se transforman como las componentes de un tensor r − vecescontravariante y s−veces covariante bajo una transformacionde Lorentz.
b Demostrar que las cantidades
Qα1...αrβ1...βs
= Tα1...αrβ1...βs
+ Rα1...αrβ1...βs
(5.56)
se transforman como las componentes de un tensor r − vecescontravariante y s−veces covariante bajo una transformacionde Lorentz.
7. Contraccion de tensores. Demuestre que la contraccion de ten-sores es una operacion tensorial. Es decir, muestre que el conjuntode cantidades obtenidas por la contraccion de cualquier ındice co-variante con cualquier ındice contravariante de un tensor dado T
r − veces contravariante y s − veces covariante, conforman lascomponentes de un tensor r− 1 veces contravariante y s− 1 vecescovariante.
8. Tensor de Levi-Civita. El tensor de Levi-Civita esta definidopor la ecuacion (5.35).
a Mostrar que las componentes del tensor de Levi-Civita tienen elmismo valor en todos los sistemas de referencia inerciales.
b Calcular las componentes del tensor de Levi-Civita completa-mente covariante.
c Calcular
εαβγδεαβγδ (5.57)
9. El tensor dual. Dado un tensor de segundo rango covarianteantisimetrico, i. e.
Fαβ = −Fβα (5.58)
entonces:
a Calcular las componentes contravariantes del tensor dual, defi-nido como
(∗F )αβ =1
2εαβγδFγδ (5.59)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 52 — #56i
i
i
i
i
i
52 CAPITULO 5. TENSORES
b Bajando los ındices con el tensor metrico de Minkowski, encon-trar las componentes covariantes del tensor dual:
(∗F )αβ = ηαµηβν (∗F )µν (5.60)
y demostrar que
(∗F )αβ =1
2εαβγδF
γδ (5.61)
c Comparar el resultado anterior si definimos el dual de un tensorde segundo orden contravariante antisimetrico por la relacion
∗Fαβ =1
2εαβγδF
γδ (5.62)
teniendo en cuenta que las componentes covariantes y con-travariantes del tensor F estan relacionadas por
Fαβ = ηαµηβνFµν (5.63)
d Demostrar que
∗ (∗F ) = −F
10. Transformacion general de coordenadas. Las ecuaciones detransformacion de Lorentz usuales entre sistemas de referenciainerciales
x′α = Λαβxβ (5.64)
corresponden, matematicamente, a una transformacion de coorde-nadas
x′α = x′α (x0, x1, x2, x3)
= x′α (xµ) (5.65)
con α = 0, 1, 2, 3.
a Encontrar la relacion entre los elementos de la matriz jacobianade la transformacion de coordenadas
J(
x, x′) =
∂x′0
∂x0∂x′0
∂x1∂x′0
∂x2∂x′0
∂x3
∂x′1
∂x0∂x′1
∂x1∂x′1
∂x2∂x′1
∂x3
∂x′2
∂x0∂x′2
∂x1∂x′2
∂x2∂x′2
∂x3
∂x′3
∂x0∂x′3
∂x1∂x′3
∂x2∂x′3
∂x3
=
[
∂x′α
∂xβ
]
(5.66)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 53 — #57i
i
i
i
i
i
5.3. PROBLEMAS DE ALGEBRA TENSORIAL 53
b Calcular los elementos de la transformacion de coordenas inversa(el jacobiano de la transformacion inversa), asumiendo que eldeterminante de la matriz de Jacobi no es nulo, y relacionarloscon los correspondientes elementos de la matriz de Lorentzinversa.
11. Derivada de un tensor. Sea Tαβ(x) una funcion tensorial delas coordenadas de segundo orden contravariante. Muestre que lasfunciones obtenidas, diferenciando con respecto a las coordenadaslas componentes del tensor Tαβ, es decir
∂
∂xγTαβ ≡ ∂γTαβ ≡ Tαβ
,γ (5.67)
bajo una transformacion de Lorentz se comportan como las com-ponentes de un tensor de tercer orden, dos veces contravariante yuna vez covariante, es decir
T ′αβ,γ = Λα
µΛβνΛ
σγ T µν
,σ (5.68)
Este resultado se puede generalizar a tensores arbitrarios, es de-cir si Tα1...αr
β1...βses un tensor r − veces contravariante y s − veces
covariante, entonces
∂
∂xγTα1...αr
β1...βs= ∂γTα1...αr
β1...βs= Tα1...αr
β1...βs,γ (5.69)
es un tensor r−veces contravariante y s+1−veces covariante. Esteresultado es valido solamente si la transformacion de coordenadases lineal (ver el siguiente problema).
12. Transformacion general de coordenadas y derivadas. SeaVα(x) un campo tensorial covariante y considerando una transfor-macion de coordenadas general (no lineal)
x′α = x′α(xµ) (5.70)
entonces mostrar que las cantidades
∂
∂xγVα = ∂γVα = Vα,γ (5.71)
no se transforman como las componentes de un tensor dos vecescovariante. ¿Bajo que condicion las cantidades Vα,γ correspondena las componentes de un tensor de segundo orden?

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 54 — #58i
i
i
i
i
i
54 CAPITULO 5. TENSORES
13. El tensor energıa-momento. Muchos sistemas fısicos, como unfluido o el campo electromagnetico, se pueden caracterizar poruna cantidad fısica llamada el tensor energıa-momento Tαβ , conla propiedad que sea simetrico
Tαβ = T βα (5.72)
y que cumpla con la ecuacion
∂
∂xβTαβ = 0 (5.73)
El modelo simple, pero de interes fısico, de un fluido relativistaes conocido como el fluido perfecto, el cual esta determinado pordos funciones escalares ρ0(x) y p0(x). La funcion ρ0 representa ladensidad de energıa propia del fluido en cada punto del espacio-tiempo x, es decir ρ0 corresponde a la densidad de energıa delfluido en cada punto del espacio-tiempo medida por un observadorinercial con respecto al cual el fluido se encuentra en reposo, ası
ρ0 = c2 dm0
dV0(5.74)
donde dm0 es la masa propia contenida en el elemento de volumenpropio dV0, y la funcion p0(x) representa la presion propia delfluido en el punto x. Las componentes del tensor energıa-momentodel fluido, en el sistema de referencia propio, estan dadas por
Tαβ0 (x) =
ρ0 0 0 00 p0 0 00 0 p0 00 0 0 p0
(5.75)
donde el subındice cero se refiere al sistema de referencia propio.Utilizando la matriz de transformacion de Lorentz general, ecua-cion (7.334), encontrar los elementos del tensor energıa-momentopara un observador arbitrario que se mueve con velocidad ~u y mos-trar que los elementos del tensor se pueden escribir como
Tαβ = (p0 + ρ0)UαUβ − p0η
αβ (5.76)
donde Uα es la cuadrivelocidad del fluido respecto al observadorarbitrario, definida por
Uα =dxα
ds= γ(~u)(1, ~β) (5.77)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 55 — #59i
i
i
i
i
i
Capıtulo 6
Electrodinamica
6.1. Introduccion
Las leyes de la electrodinamica, constituidas por las ecuaciones deMaxwell, la ecuacion de continuidad para la carga y la ley de la fuerza deLorentz, son validas en el marco de los postulados de Einstein de la teorıaespecial de la relatividad. En efecto, las leyes que rigen los fenomenoselectromagneticos no dependen del sistema de referencia inercial y por lotanto las ecuaciones de la electrodinamica deben permanecer invariantesbajo transformaciones de Lorentz.
Esta invarianza implica que los campos electricos y magneticos de-ben satisfacer ciertas ecuaciones de transformacion entre sistemas dereferencia, de tal manera que las leyes de la electrodinamica mantengansu forma para todos los observadores inerciales. Una consecuencia dela covarianza de las ecuaciones de Maxwell es que el campo electrico ymagnetico debe describirse en forma unificada a traves del tensor campoelectromagnetico.
Otra forma de ver el caracter relativista de los fenomenos electro-magneticos es a partir del campo electrico estatico, asumiendo la validezde la ley de Coulomb para cargas en reposo y las ecuaciones de trans-formacion de Lorentz, y mostrar mostrar que la existencia del campomagnetico es un efecto relativista. A traves de los problemas del presen-te capıtulo desarrollaremos estas dos formas de entender los fenomenoselectromagneticos en el marco de los postulados de la teorıa de la rela-tividad especial.
55

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 56 — #60i
i
i
i
i
i
56 CAPITULO 6. ELECTRODINAMICA
6.2. Ecuaciones de Maxwell
Las leyes de la electrodinamica estan constituidas por dos conjun-tos de ecuaciones. El primer conjunto lo conforman las ecuaciones deMaxwell que estan dadas por (en unidades cgs):
~∇ · ~E = 4πρ (6.1)
~∇ · ~B = 0 (6.2)
~∇× ~B =1
c
∂ ~E
∂t+
4π
c~J (6.3)
~∇× ~E +1
c
∂ ~B
∂t= 0 (6.4)
las cuales nos determinan los campos electrico ~E y magnetico ~B enterminos de sus fuentes (cargas y corrientes), con ρ la densidad volume-trica de carga y ~J la densidad de corriente electrica.
La primera de estas ecuaciones (6.1) es la ley de Gauss y estable-ce que las cargas electricas son fuente del campo electrico. La segundaecuacion (6.2), ley de Gauss para el campo magnetico, nos dice queno existen fuentes para el campo magnetico. La tercera ecuacion deMaxwell (6.3) contiene dos terminos: la ley de Ampere, esto es, que lascorrientes electricas (representadas en el termino 4π ~J/c) producen cam-pos magneticos y por otra parte esta el termino 1/c∂ ~E/∂t, introducidopor Maxwell, que nos dice que campos electricos variables en el tiemposon tambien una fuente de campo magnetico. La ultima de las ecuacionesde Maxwell (6.4) es la ley de induccion de Faraday, la cual establece quecampos magneticos variables en el tiempo inducen campos electricos.
El segundo conjunto de ecuaciones que conforman las leyes de laelectrodinamica lo constituyen la ecuacion de continuidad y la ley de lafuerza de Lorentz:
~∇ · ~J +∂ρ
∂t= 0 (6.5)
d~p
dt= q ~E +
q
c~u × ~B (6.6)
donde q es la carga de la partıcula y ~u su velocidad medida con respectoa un sistema de referencia inercial.
La primera de estas ecuaciones (6.5), la ecuacion de continuidad,establece que la carga electrica es conservada en la naturaleza. Es deanotar que esta ley de conservacion de la carga esta contenida en las

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 57 — #61i
i
i
i
i
i
6.2. ECUACIONES DE MAXWELL 57
ecuaciones de Maxwell y por lo tanto no constituye una ley independientede la electrodinamica, pues si tomamos la divergencia de la ecuacion (6.3)tenemos que
~∇ ·(
~∇× ~B)
=1
c~∇ · ∂ ~E
∂t+
4π
c~∇ · ~J (6.7)
intercambiando la derivada espacial y temporal, utilizando la primeraecuacion de Maxwell (6.1) y teniendo en cuenta que la divergencia delrotacional se anula, obtenemos la ecuacion de continuidad:
0 =1
c
∂~∇ · ~E
∂t+
4π
c~∇ · ~J
=4π
c
∂ρ
∂t+
4π
c~∇ · ~J (6.8)
Finalmente, la ultima ecuacion (6.6) corresponde a la ley de la fuerzade Lorentz, la cual nos da la ecuacion de movimiento para una cargapuntual en presencia de un campo electromagnetico.
La ley de Coulomb describe la fuerza entre partıculas cargadas esta-cionarias:
~f12 = kq1q2
r2r (6.9)
donde q1 y q2 miden las cargas electricas de las partıculas, r es la distan-cia entre ellas, con r un vector unitario en la direccion del radio vectorque une la carga 1 con la carga 2, y k es una constante de proporciona-lidad que depende del sistema de unidades elegido (k = 1 en el sistemacgs). Entonces ~f12 nos mide la fuerza que la carga q2 experimenta debidoa la carga q1, siendo esta fuerza atractiva o repulsiva dependiendo delsigno de las cargas. Ademas esta expresion de la fuerza satisface, por sudefinicion, la tercera ley de Newton, esto es
~f12 = −~f21 (6.10)
A partir de la ecuacion (6.9) podemos escribir la ley de Coulomb en laforma:
~f12 = q2~E1(~r) (6.11)
donde la cantidad ~E1(~r), definida como
~E1(~r) :=q1
r2r (6.12)
representa el campo electrico producido por la carga q1 en el punto ~r.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 58 — #62i
i
i
i
i
i
58 CAPITULO 6. ELECTRODINAMICA
Estas expresiones para la fuerza (6.9) y el campo electrico (6.12) sonvalidas para un observador inercial Σ, con respecto al cual la carga q1
esta en reposo. Es un hecho experimental que la fuerza sobre la cargade prueba q2 es independiente del estado de movimiento de la carga deprueba, lo cual esta implıcito en la expresion para la fuerza de Coulomb,pues ella depende solamente de la posicion instantanea de la carga q2.Ademas, tanto la fuerza de Coulomb como el campo electrico producidopor la carga q1, son independientes del tiempo siempre y cuando la cargaq1 se encuentre en reposo.
Experimentalmente determinamos la fuerza ~f12 sobre la carga deprueba q2 en el sistema de referencia inercial Σ, midiendo la rata decambio del momento ~p2 de la carga q2, es decir midiendo d~p2/dt, ası comotambien las otras variables cinematicas y dinamicas que entran en ladefinicion de la fuerza de Coulomb, tales como la distancia entre lacarga q1 y la de prueba, la velocidad (nula en este caso) de la carga q1
y el momento ~p2 de q2.
6.3. Ecuaciones de Maxwell covariantes
La ecuacion de continuidad (6.5) la podemos escribir, en forma ex-plıcitamente covariante, como:
∂µJµ = 0 (6.13)
donde el cuadrivector corriente Jν se ha definido en la forma:
Jν := (J0, J1, J2, J3) = (cρ, ~J) (6.14)
La componente temporal J0 representa la densidad de carga (siendola carga un invariante relativista) y las componentes espaciales J i, i =1, 2, 3 corresponden a las componentes del vector densidad de corrienteelectrica. En las ecuaciones de Maxwell (6.1) a (6.4), los campos electri-cos ~E y magneticos ~B son vectores cartesianos usuales y por lo tantono corresponden a ninguna cantidad relativista, es decir a un escalar deLorentz, o a un cuadrivector, o a un tensor. Por esta razon se defineel tensor campo electromagnetico F medido por un observador inercialΣ, como un tensor de segundo rango antisimetrico cuyas componentescontravariantes estan dadas por:
F 12 = −F 21 = Bz F 23 = −F 32 = Bx F 31 = −F 13 = By
F 01 = −F 10 = Ex F 02 = −F 20 = Ey F 03 = −F 30 = Ez
Fαα = 0 ∀α = 0, 1, 2, 3(6.15)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 59 — #63i
i
i
i
i
i
6.3. ECUACIONES DE MAXWELL COVARIANTES 59
Con esta definicion, podemos escribir las dos primeras ecuaciones deMaxwell (ecuaciones (6.1) y (6.2)) en la forma:
∂αFαβ = −4π
cJβ (6.16)
la cual es una ecuacion covariante relativista. Esto significa que estaecuacion tiene la misma forma en todos los sistemas de referencia iner-ciales, es decir, en un sistema de referencia Σ′, para el cual F ′αβ y J ′β sonlas correspondientes componentes del tensor campo electromagnetico ydensidad de corriente, las dos primeras ecuaciones de Maxwell tienen laforma:
∂′αF ′αβ = −4π
cJ ′β (6.17)
donde las componentes de la densidad de corriente J ′β y del tensorF ′αβ medidas en Σ′, estan relacionadas con las medidas en Σ, por lasecuaciones de transformacion:
J ′µ = ΛµαJα (6.18)
F ′µν = ΛµαΛν
βFαβ (6.19)
Estas relaciones nos dan las ecuaciones de transformacion para lasfuentes y los campos electricos y magneticos medidas por dos observa-dores inerciales. Las ecuaciones de Maxwell homogeneas (6.2) y (6.4),con la ayuda del tensor de Levi-Civita (5.35) introducido en el capıtuloanterior, las podemos escribir en la forma:
εαβγδ∂βFγδ = 0 (6.20)
en esta ultima ecuacion se ha utilizado el tensor de Minkowski para bajarlos ındices del tensor electromagnetico F, esto es:
Fγδ = ηαγηβδFαβ (6.21)
la cual nos representa las componentes covariantes del tensor campoelectromagnetico. Finalmente consideremos la ecuacion de la fuerza deLorentz (ecuacion (6.6)), que podemos escribir en forma covariante co-mo:
fα =dpα
dτ(6.22)
=q
cηβγF βα dxγ
dτ
=q
cF α
γ
dxγ
dτ

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 60 — #64i
i
i
i
i
i
60 CAPITULO 6. ELECTRODINAMICA
donde pα es el cuadrimomento de la partıcula de carga q, τ el tiempopropio, xγ sus coordenadas de posicion y F α
γ las componentes mixtasdel tensor campo electromagnetico definidas por:
F αγ = ηγσF σα (6.23)
6.4. Transformaciones Gauge
Hay dos teoremas del calculo diferencial en varias variables, que nospermiten escribir las ecuaciones de Maxwell en forma mas compacta:
Teorema 21 Sea ~F una funcion vectorial tal que su rotacional es cero,i. e.,
~∇× ~F = 0 (6.24)
entonces la funcion ~F se puede escribir como el gradiente de una funcionescalar Ψ(~r), esto es:
~F = ~∇Ψ(~r) (6.25)
Teorema 22 Sea ~F una funcion vectorial tal que su divergencia es cero,i. e.,
~∇ · ~F = 0 (6.26)
entonces la funcion ~F se puede escribir como el rotacional de una fun-cion vectorial ~Υ(~r), esto es:
~F = ~∇× ~Υ(~r) (6.27)
Si aplicamos estos dos resultados del calculo vectorial, los camposelectrico y magnetico se pueden escribir en terminos del potencial vec-torial ~A y del potencial escalar Φ en la forma:
~B = ~∇× ~A (6.28)
~E = −∂ ~A
∂t− ~∇Φ (6.29)
El signo menos en la ecuacion anterior permite interpretar directamenteal potencial Φ, para el caso de campos independientes del tiempo, comoel trabajo por unidad de carga realizado por el campo electrico, llamadopotencial electrostatico, el cual es un campo conservativo. Estos dosteoremas del calculo vectorial corresponden a casos particulares de unteorema mas general de tensores:

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 61 — #65i
i
i
i
i
i
6.4. TRANSFORMACIONES GAUGE 61
Teorema 23 Sean Tαβ las componentes covariantes de un tensor desegundo rango antisimetrico, tal que
εαβγδ∂βTγδ = 0 (6.30)
entonces el tensor Tαβ se puede escribir como el “rotacional” de unafuncion cuadrivectorial W γ, es decir
Tαβ = ∂[αWβ] = ∂αWβ − ∂βWα (6.31)
Ası, dado que las dos ecuaciones de Maxwell homogeneas (6.2) y(6.4) se pueden escribir en la forma
εαβγδ∂βFγδ = 0 (6.32)
donde Fγδ es el tensor campo electromagnetico; entonces, de acuerdocon el teorema anterior el tensor campo electromagnetico Fγδ se puedeescribir en la forma
Fγδ = ∂γAδ − ∂δAγ =∂Aδ
∂xγ− ∂Aγ
∂xδ(6.33)
donde el cuadrivector Aµ, definido como:
Aµ := (Φ, ~A) (6.34)
es llamado el cuadripotencial,con ~A el potencial vectorial y Φ el potencialescalar definidos en la ecuaciones (6.28) y (6.29) respectivamente.
Con esta definicion del cuadripotencial Aµ, podemos escribir lasecuaciones de Maxwell inhomogeneas en la forma:
∂µ∂µAγ − ∂µ∂γAµ = −4πJγ (6.35)
De esta manera, la ultima ecuacion es equivalente a las ecuaciones decampo de Maxwell, pues dadas las fuentes de los campos Jα y resolviendola ecuacion (6.35), conocemos el cuadripotencial Aµ y ası los camposelectromagneticos. Si realizamos la transformacion
Aµ ⇀ Aµ = Aµ + ∂µΛ (6.36)
donde Λ es una funcion cualquiera de las coordenadas, la funcion Fγδ
permanece invariante bajo la transformacion (6.36) y ası tambien loscampos electromagneticos ~E y ~B. La transformacion (6.36) se llamauna transformacion “gauge”.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 62 — #66i
i
i
i
i
i
62 CAPITULO 6. ELECTRODINAMICA
Estas transformaciones juegan un papel fundamental en la teorıacuantica de campos y en las teorıas de unificacion de las interaccionesfundamentales. Finalmente, dado que el cuadripotencial Aµ no esta defi-nido de manera unica, entonces podemos imponer sobre el una condiciono ecuacion de ligadura, llamada la eleccion de un gauge particular, lacual no cambia la fısica, es decir no cambian los campos ~E y ~B. Ası,por ejemplo si se escoge funcion arbitraria Λ en la ecuacion (6.36), detal manera que el potencial cuadrivectorial Aµ cumpla con la ecuacion:
∂µAµ = 0 (6.37)
llamado el gauge de Lorentz, entonces la ecuacion (6.35) se simplifica,reduciendose a la ecuacion:
�Aµ = −Jµ (6.38)
que es la ecuacion de ondas inhomogenea. El operador �, el cual es in-variante bajo transformaciones de Lorentz, esta definido por la ecuacion
� =1
c2
∂2
∂t2− ~∇2
(6.39)
6.5. Problemas de electrodinamica
1. Conservacion de la carga. Muestre que la ecuacion de conti-nuidad para la carga
∂αJα = 0 (6.40)
implica la conservacion total de la carga electrica.
2. Cuadricorriente de una partıcula. Consideremos una partıcu-la de carga q en reposo respecto a un observador inercial Σ.
a Escribir las componentes del cuadrivector densidad de corrientemedidas en el sistema Σ.
b Considerar un segundo sistema de referencia inercial Σ′ que semueve con velocidad −v respecto a Σ a lo largo del eje x. En-contrar las componentes del cuadrivector densidad de corrien-te en Σ′, es decir para una partıcula que se mueve a velocidadconstante respecto a un observador inercial.
c ¿Que sucede con la carga total del sistema medida por los dosobservadores inerciales Σ y Σ′?

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 63 — #67i
i
i
i
i
i
6.5. PROBLEMAS DE ELECTRODINAMICA 63
3. Ecuaciones de Maxwell covariantes. Mostrar que las ecuacio-nes de Maxwell covariantes
∂αFαβ = −4π
cJβ (6.41)
εαβγδ∂βFγδ = 0 (6.42)
implican las ecuaciones de Maxwell vectoriales.
4. Fuerza de Lorentz. A partir de la ecuacion covariante para lafuerza sobre una partıcula cargada en un campo electromagnetico
fα =dpα
dτ
=q
cηβγF βα dxγ
dτ
=q
cF α
γ
dxγ
dτ(6.43)
encontrar la fuerza de Lorentz e interpretar las componentes delcuadrivector fuerza.
5. Campo electrico de carga en movimiento. El campo electricoproducido por una carga estacionaria Q se define como la relacionentre la fuerza sobre una carga de prueba q por unidad de carga,es decir
~E = lımq→0
~Fq
q(6.44)
con~Fq = k
r2r (6.45)
donde asumimos que la carga Q esta en el origen de coordenadasy la carga de prueba q esta situada en un punto de coordenadas~r. Notemos que la fuerza sobre q es valida independiente del es-tado de movimiento de la carga de prueba, es decir depende solode su posicion instantanea. Consideremos una partıcula de cargaQ moviendose con velocidad constante v respecto a un observa-dor inercial Σ. A partir de la ley de Coulomb encontrar el campoelectrico medido en Σ debido a la carga Q. Para resolver este pro-blema supongamos que la carga Q se encuentra en el origen decoordenadas de Σ en el instante t = 0 y se mueve en la direcciondel eje x positivo y la carga de prueba q esta en reposo respecto a

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 64 — #68i
i
i
i
i
i
64 CAPITULO 6. ELECTRODINAMICA
Σ en un punto de coordenadas ~r = (x, y, z). Considere primero elcaso particular ~r = (x, 0, 0) y luego ~r = (0, y, 0) y a partir de estosresultados encuentre el caso general cuando ~r = (x, y, z).
Figura 6.1: Causalidad y el campo electrico de una carga en movimiento
uniforme. Campo electrico en dos instantes para una carga en movimiento uniforme.
6. Causalidad y campo electrico de una carga en movimien-
to uniforme. El campo electrico de una carga en movimientouniforme obtenido en el problema anterior plantea una aparentecontradiccion con el postulado de la constancia de la velocidad dela luz y por ende con el principio de causalidad en la fısica, pues elresultado obtenido establece que el campo electrico de una cargaen movimiento uniforme en un punto del espacio es radial y de-pende solo de la distancia entre la posicion instantanea de la cargay el punto de observacion, como se muestra en la figura (6.1). Ar-gumentar por que este resultado para el campo electrico no violael principio de causalidad. Compare la situacion anterior con unacarga que se mueve a velocidad constante a lo largo del eje x res-pecto a un observador inercial y en un instante, por ejemplo t = 0,la carga es frenada rapidamente hasta alcanzar el reposo. Dibujarlas lıneas de campo electrico para un tiempo t < 0 y para t > 0,con t >> δt donde δt es el tiempo que tarda la carga en alcanzarel reposo.
7. Fuerza sobre una carga en movimiento. Calcular la fuerzasobre una partıcula de prueba q debida a una carga fuente Q.La carga q se mueve con velocidad ~u respecto a un sistema de

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 65 — #69i
i
i
i
i
i
6.5. PROBLEMAS DE ELECTRODINAMICA 65
referencia inercial Σ y se encuentra en el instante t = 0 en unpunto de coordenadas ~r, mientras que la carga fuente Q se muevea velocidad constante v en la direccion del eje x positivo y la cualpasa por el origen de Σ en t = 0 (ver figura (6.2)). Para resolvereste problema considere primero los dos casos siguientes: primerola carga de prueba q esta en la posicion
~r = (x, 0, 0) (6.46)
y con velocidad arbitraria. Segundo, la carga q se encuentra en laposicion
~r = (0, y, 0) (6.47)
y tiene velocidad~u = (ux, 0, 0) (6.48)
y generalice para una velocidad arbitraria. A partir de estos resul-tados considere la situacion general.
Figura 6.2: Fuerza sobre una carga en movimiento. En el instante t = 0 lacarga q se encuentra en la posicion ~r.
En todos los casos anteriores compare la fuerza ~F sobre la partıculade prueba con la fuerza ~FE calculada en el problema 5 de estaseccion y encuentre la diferencia
~FM = ~F − ~FE (6.49)
la cual se interpreta como la fuerza magnetica, y muestre que sepuede escribir en la forma
~FM = q~u × ~B (6.50)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 66 — #70i
i
i
i
i
i
66 CAPITULO 6. ELECTRODINAMICA
8. Transformacion general del campo electromagnetico. Apartir del tensor campo electromagnetico Fαβ y de la ley de trans-formacion para las componentes contravariantes bajo un cambiode sistema de referencia
F ′′αβ = ΛαµΛβ
νFµν (6.51)
encontrar las ecuaciones de transformacion de los campos electricoy magnetico, medidas por dos observadores inerciales relacionadospor una transformacion de Lorentz usual.
9. Campo de una carga en movimiento. Encontrar los camposelectrico y magnetico de una carga Q que se mueve a velocidadconstante v a partir de las ecuaciones de transformacion de lascomponentes del campo electromagnetico encontradas en el pro-blema anterior. Suponga que la carga pasa por el origen de unsistema de referencia inercial Σ en t = 0 y se mueve en la direcciondel eje x positivo.
10. Invariantes del campo electromagnetico. A partir del tensorcampo electromagnetico Fαβ construir dos invariantes bajo trans-formaciones de Lorentz. Ayuda: considerar el tensor dual ∗F .
11. Campos ortogonales. Demuestre que si un campo electrico ~E yuno magnetico ~B forman el mismo angulo para todos los observa-dores inerciales, entonces los campos son ortogonales, i. e.
~E · ~B = 0 (6.52)
12. El tensor energıa-momento del campo electromagnetico.
El tensor campo electromagnetico esta definido por
Tαβ =1
4π
[
1
4ηαβF σδFσδ − FασF β
σ
]
(6.53)
calcular sus componentes en terminos de los campos ~E y ~B. Mos-trar que la componente
T 00 =1
8π
[
~E2 + ~B2]
(6.54)
representa la densidad de energıa del campo electromagnetico, T 0i
las componentes del vector de Pointing
~S =1
4π~E × ~B (6.55)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 67 — #71i
i
i
i
i
i
6.5. PROBLEMAS DE ELECTRODINAMICA 67
y T ij las componentes del tensor de tensiones del campo electro-magnetico:
T ij =1
4π
[
EiEj + BiBj +1
2δij(
~E2 + ~B2)
]
(6.56)
13. Ecuacion de continuidad del tensor Tµν . Demostrar que eltensor energıa-momento del campo electromagnetico tiene cuadri-divergencia nula si no hay fuentes, es decir probar que
∂Tαβ
∂xβ= 0 (6.57)
si Jα = 0. ¿Que ecuacion cumple Tαβ si Jα 6= 0?
14. La traza del tensor Tµν . Demostrar que la traza del tensorenergıa-momento del campo electromagnetico tiene traza cero, esdecir
T σσ = 0 (6.58)
15. Otro invariante relativista. Demostrar que
(
T 00)2 − | ~S |2 (6.59)
es un invariante relativista.
16. Trayectoria en campo electrico constante. Un proton de car-ga +e incide con velocidad ~v0 en una region de campo electricoconstante ~E. Si la velocidad inicial del proton ~v0 es perpendicularal campo electrico, encontrar la trayectoria del proton.
17. Trayectoria en campo magnetico constante. Un proton decarga +e se mueve con velocidad |~v| constante en una region decampo magnetico constante ~B. Si la velocidad es perpendicular alcampo magnetico, encontrar la trayectoria del proton y calcular lafrecuencia de giro en funcion del radio de la trayectoria, el campomagnetico, la velocidad y la masa propia del proton.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 68 — #72i
i
i
i
i
i
Capıtulo 7
Cinematica relativista
7.1. Soluciones de problemas de cinematica
1. Estructura causal. El intervalo espacio-temporal (2.12) para loseventos P1 = (3, 2, 0, 2), P2 = (4,−1, 0, 2) y P3 = (−2,−1, 0,−2)esta dado por:
∆S212 = (4 − 3)2 − (−1 − 2)2 − (0 − 0)2 − (2 − 2)2 = −8 (7.1)
∆S213 = (−2 − 3)2 − (−1 − 2)2 − (0 − 0)2 − (−2 − 2)2 = 0 (7.2)
∆S223 = (−2 − 4)2 − (−1 + 1)2 − (0 − 0)2 − (−2 − 2)2 = 20 (7.3)
a Si el intervalo espacio-temporal es mayor o igual a cero, los even-tos estan causalmente conectados. Por lo tanto los eventos P1
y P3 son nulos y estan causalmente conectados y los eventosP2 y P3 son temporales y tambien estan causalmente conec-tados.
b La condicion para que dos eventos separados en el espacio pue-dan ser simultaneos para un observador, es que no estencausalmente conectados y por lo tanto su intervalo espacio-temporal debe ser menor que cero. Ası, para los eventos P1
y P2 existe un sistema de referencia inercial Σ′ tal que losdos eventos son simultaneos. Para calcular la velocidad con-sideremos la transformacion de Lorentz usual, ecuacion (2.4),para las componentes temporales x′0
1 y x′02 de los dos eventos
medidas por Σ′,x′0
1 = γ(x01 − βx1
1) (7.4)
68

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 69 — #73i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 69
x′02 = γ(x0
2 − βx12) (7.5)
e imponiendo la condicion que en Σ′ los eventos son simultaneos
x′01 = x′0
2 (7.6)
podemos encontrar la velocidad Σ′ respecto a Σ, ası:
γ(x01 − βx1
1) = γ(x02 − βx1
2) (7.7)
despejando β de esta ecuacion y remplazando los valores paralas coordenadas tenemos
β =x0
2 − x01
x12 − x1
1
= −1
3(7.8)
por lo tanto la velocidad del sistema Σ′ respecto a Σ es
~v =
(
−1
3c, 0, 0
)
(7.9)
c Para que exista un sistema de referencia Σ′ con respecto al cuallos dos eventos sucedan en el mismo punto del espacio, se re-quiere que los dos eventos sean temporales, por lo tanto estacondicion se cumple para los eventos P2 y P3. Para calcular lavelocidad de Σ′ respecto a Σ aplicamos las transformacionesde Lorentz para la coordenada espacial. Dadas las coordena-das de los eventos y teniendo en cuenta que en este caso elmovimiento relativo de los sistemas debe ser a lo largo de losejes z − z′, tenemos
x′32 = γ(x3
2 − βx02) (7.10)
x′33 = γ(x3
3 − βx03) (7.11)
igualando las coordenadas x′32 = x′3
3 , despejando β y rempla-zando obtenemos
β =x3
3 − x32
x03 − x0
2
=2
3(7.12)
por lo tanto la velocidad del sistema Σ′ respecto a Σ esta dadapor
~v =
(
0, 0,2
3c
)
(7.13)
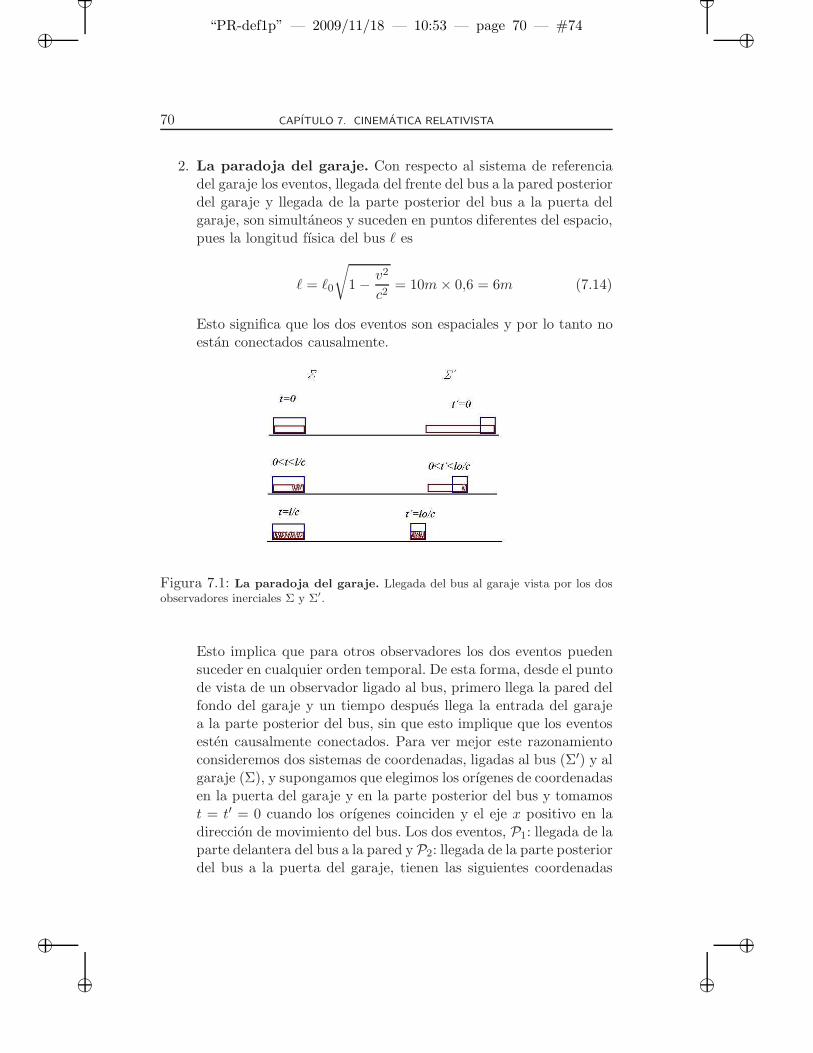
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 70 — #74i
i
i
i
i
i
70 CAPITULO 7. CINEMATICA RELATIVISTA
2. La paradoja del garaje. Con respecto al sistema de referenciadel garaje los eventos, llegada del frente del bus a la pared posteriordel garaje y llegada de la parte posterior del bus a la puerta delgaraje, son simultaneos y suceden en puntos diferentes del espacio,pues la longitud fısica del bus ℓ es
ℓ = ℓ0
√
1 − v2
c2= 10m × 0,6 = 6m (7.14)
Esto significa que los dos eventos son espaciales y por lo tanto noestan conectados causalmente.
Figura 7.1: La paradoja del garaje. Llegada del bus al garaje vista por los dosobservadores inerciales Σ y Σ′.
Esto implica que para otros observadores los dos eventos puedensuceder en cualquier orden temporal. De esta forma, desde el puntode vista de un observador ligado al bus, primero llega la pared delfondo del garaje y un tiempo despues llega la entrada del garajea la parte posterior del bus, sin que esto implique que los eventosesten causalmente conectados. Para ver mejor este razonamientoconsideremos dos sistemas de coordenadas, ligadas al bus (Σ′) y algaraje (Σ), y supongamos que elegimos los orıgenes de coordenadasen la puerta del garaje y en la parte posterior del bus y tomamost = t′ = 0 cuando los orıgenes coinciden y el eje x positivo en ladireccion de movimiento del bus. Los dos eventos, P1: llegada de laparte delantera del bus a la pared y P2: llegada de la parte posteriordel bus a la puerta del garaje, tienen las siguientes coordenadas

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 71 — #75i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 71
con respecto al sistema Σ:
P1 = (x01, x
11, x
21, x
31) = (0, ℓ, 0, 0) (7.15)
P2 = (x02, x
12, x
22, x
32) = (0, 0, 0, 0) (7.16)
Aplicando una transformacion de Lorentz usual, las coordenadasde los dos eventos respecto a Σ′ son:
x′01 = γ(x0
1 − βx11)
= −γβℓ = −βℓ0 (7.17)
x′11 = γ(x1
1 − βx01)
= γℓ = ℓ0 (7.18)
ası
P1 = (x′01 , x′1
1 , x′21 , x′3
1 )
= (−βℓ0, ℓ0, 0, 0) (7.19)
P2 = (x′02 , x′1
2 , x′22 , x′3
2 )
= (0, 0, 0, 0) (7.20)
esto significa que para Σ′ el evento P1 sucede antes que el eventoP2, es decir, en el instante en que el bus impacta con la pared delgaraje, la puerta del garaje aun no ha llegado a la parte posteriordel bus. Ademas supongamos que en el momento del impacto sepropaga una senal hacia la parte posterior del bus (por la ondade deformacion) a la maxima velocidad posible c, entonces estasenal alcanza la parte posterior del bus un tiempo ℓ0/c, despuesdel impacto, es decir en el instante
−βℓ0 + ℓ0 = ℓ0 (1 − β) > 0 (7.21)
lo cual significa que la informacion (viajando a la velocidad c)llega a la parte posterior del bus despues que ha llegado la puertadel garaje. En la figura (7.1) se ilustra en una secuencia lo que se“observa” desde cada sistema de referencia inercial.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 72 — #76i
i
i
i
i
i
72 CAPITULO 7. CINEMATICA RELATIVISTA
3. Varilla inclinada. Para encontrar el angulo que forma la vari-lla respecto al sistema de referencia inercial Σ, consideremos lascoordenadas de los extremos de la varilla medidas por Σ y por unobservador Σ′ ligado a la varilla. Sean P1 y P2 los eventos querepresentan la medida hecha por el observador Σ de los extremosde la varilla, entonces las coordenadas en Σ de estos eventos son
P1 = (x01, x
11, x
21, 0) (7.22)
P2 = (x02, x
12, x
22, 0) (7.23)
asumiendo que la varilla se encuentra en el plano x − y, ademasx0
1 = x02 pues la medida de los extremos de la varilla deber ser reali-
zada por Σ simultaneamente. Por lo tanto el angulo de inclinacionde la varilla con respecto al eje x que mide Σ es
tan θ =x2
2 − x21
x12 − x1
1
(7.24)
Para el observador Σ′ el angulo θ0 esta dado por
tan θ0 =x′2
2 − x′21
x′12 − x′1
1
(7.25)
Dado que la varilla se mueve a velocidad constante a lo largo del ejex, las coordenadas de los extremos de la varilla estan relacionadaspor la transformacion de Lorentz usual; ası, teniendo en cuentaque x0
1 = x02, tenemos
tan θ0 =x2
2 − x21
γ(v)(
x12 − βx0
2
)
− γ(v)(
x11 − βx0
1
)
=x2
2 − x21
γ(v)(
x12 − x1
1
) (7.26)
por lo tantotan θ = γ(v) tan θ0 (7.27)
es decir, el angulo que forma la varilla con respecto a su direccionde movimiento medido por el observador Σ es mayor en el factorγ(v).
4. Paradoja de la varilla inclinada. Para analizar el problemaconsideremos dos sistemas de referencia inerciales, Σ ligado a la

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 73 — #77i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 73
plataforma con origen en el centro de la rendija y Σ′ ligado a lavarilla con origen en su centro y orientemos los ejes x−x′ positivosen la direccion de movimiento de la varilla y tomemos t = t′ = 0cuando el centro de la varilla pasa por el centro de la rendija.Ver figura (7.2). El angulo que forma la varilla y la plataformacon respecto al observador inercial Σ es θ = 45o. Del resultadoobtenido en el problema anterior, ecuacion (7.27), el angulo θ0 queforma la varilla movil con respecto a la direccion de movimiento,medido en el sistema de referencia propio de la varilla, es menoren el factor γ(v), es decir
tan θ0 =1
γ(v)tan θ =
1
γ(v)< 1 (7.28)
Figura 7.2: Paradoja de la varilla inclinada. Sistema de referencia de la plata-forma Σ.
Ademas, con respecto al sistema de referencia de la varilla Σ′ laplataforma se esta moviendo con velocidad v y por lo tanto elangulo θ′ que ella forma con respecto al eje x′ es mayor en elfactor γ(v) pues
tan θ′ = γ(v) tan θ = γ(v) > 1 (7.29)
Estos resultados implican que, con respecto al sistema de referen-cia propio de la varilla, la plataforma (y por tanto el orificio) semueve hacia la varilla con un angulo de inclinacion mayor que elde la varilla y por lo tanto la varilla sı pasa por el orificio. En la

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 74 — #78i
i
i
i
i
i
74 CAPITULO 7. CINEMATICA RELATIVISTA
figura (7.3) se muestra la secuencia del paso de la varilla por elagujero, visto en el sistema de referencia Σ′. La parte inferior delagujero llega primero a la varilla en un instante t′1 < 0, luego enel instante t′ = 0 el centro del agujero pasa por el centro de lavarilla y finalmente en un instante posterior t′2 > 0 pasa la partesuperior. Para probar esta afirmacion consideremos los tres eventossiguientes: P1 la parte inferior de la varilla y rendija coinciden, P2
la parte superior de la varilla y la rendija coinciden y P0 el centrode la varilla y el centro del orificio coinciden. La longitud propiade la rendija es ℓ0 y la plataforma forma un angulo de 45o conrespecto al eje de las x, entonces, para el sistema de referencia Σ,los tres eventos son simultaneos y las coordenadas estan dadas por
P0 = (0, 0, 0, 0) (7.30)
P1 = (0, ℓ0
√2/2,−ℓ0
√2/2, 0) (7.31)
P2 = (0,−ℓ0
√2/2, ℓ0
√2/2, 0) (7.32)
Figura 7.3: Paradoja de la varilla inclinada. Sistema de referencia de la varillaΣ′.
Para calcular las coordenadas de estos eventos con respecto alsistema de referencia Σ′ de la varilla aplicamos una transforma-cion de Lorentz usual. Entonces las coordenadas del evento P0 son(0, 0, 0, 0), pues elegimos los ejes de los sistemas que coincidieran ent = t′ = 0, cuando los centros de la varilla y del agujero se crucen.Si llamamos a las coordenadas del evento P1 = (x′0
1 , x′11 , x′2
1 , x′31 ),

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 75 — #79i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 75
entonces
x′01 = γ(x0
1 − βx11) = −βγ
ℓ0
√2
2(7.33)
x′11 = γ(x1
1 − βx01) = γ
ℓ0
√2
2(7.34)
x′21 = x2
1 = −ℓ0
√2
2(7.35)
Para el evento P2 = (x′02 , x′1
2 , x′22 , x′3
2 ) obtenemos
x′02 = γ(x0
2 − βx12) = βγ
ℓ0
√2
2(7.36)
x′12 = γ(x1
2 − βx02) = −γ
ℓ0
√2
2(7.37)
x′22 = x2
2 =ℓ0
√2
2(7.38)
Estos resultados muestran que el evento P1 sucede antes que elevento P0 y este antes que el evento P2, pasando la varilla por larendija para todos los observadores inerciales.
5. Adicion de velocidades no paralelas. Consideremos las dostransformaciones de Lorentz siguientes:
Λ(vx) : Σ −→ Σ′
x 7→ x′ = Λ(vx)x(7.39)
con
Λαβ(vx) =
γ(vx) −βxγ(vx) 0 0−βxγ(vx) γ(vx) 0 0
0 0 1 00 0 0 1
(7.40)
yΛ(vz) : Σ′ −→ Σ′′
x′ 7→ x′′ = Λ(vz)x′ (7.41)
con
Λαβ(vz) =
γ(vz) 0 0 −βzγ(vz)0 1 0 00 0 1 0
−βzγ(vz) 0 0 γ(vz)
(7.42)
donde βi = vi/c y γi = γ(vi), con i = x, z.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 76 — #80i
i
i
i
i
i
76 CAPITULO 7. CINEMATICA RELATIVISTA
a La composicion de transformaciones de Lorentz
Λ(vx) Λ(vz)Σ −→ Σ′ −→ Σ′′
x 7→ x′ = Λ(vx)x 7→ x′′ = Λ(vz)Λ(vx)x
corresponde al producto matricial de los elementos de la trans-formacion,
γz 0 0 −βzγz
0 1 0 00 0 1 0
−βzγz 0 0 γz
γx −βxγx 0 0−βxγx γx 0 0
0 0 1 00 0 0 1
=
γxγz −βxγxγz 0 −βzγz
−βxγx γx 0 00 0 1 0
−γxβzγz βxγxβzγz 0 γz
(7.43)
b La composicion de transformaciones de Lorentz
Λ(vz) Λ(vx)Σ −→ Σ′ −→ Σ′′
x 7→ x′ = Λ(vz)x 7→ x′′ = Λ(vx)Λ(vz)x
tiene como elementos matriciales
γx −βxγx 0 0−βxγx γx 0 0
0 0 1 00 0 0 1
γz 0 0 −βzγz
0 1 0 00 0 1 0
−βzγz 0 0 γz
=
γxγz −βxγx 0 −γxβzγz
−βxγxγz γx 0 βxγxβzγz
0 0 1 0−βzγz 0 0 γz
(7.44)
los cuales son claramente diferentes al caso a. Este resultadomuestra que, en general, la composicion de transformacionespuras de Lorentz no es conmutativa, salvo cuando las dos serealizan a lo largo del mismo eje.
6. Vida media de partıculas inestables. Dado que los mesones πse mueven a una velocidad constante v en el sistema laboratorio,

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 77 — #81i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 77
el tiempo que requieren para recorrer la distancia D es
t =D
v(7.45)
En el sistema laboratorio, al cabo de este tiempo, han sobrevivido2/3 de las partıculas iniciales, ası
2
3N0 = N02
−t/tM = N02−D/(vtM ) (7.46)
donde el tiempo de vida media tM de los mesones π, en el sistemalaboratorio, esta relacionado con su vida media propia τ por
tM = γ(v)τ (7.47)
entonces
ln2
3= − D
vγτln 2 (7.48)
y por lo tanto
τ = − D ln 2
vγ(v) ln(2/3)(7.49)
remplazando los valores para D y v obtenemos
τ = 2,5 × 10−8s (7.50)
7. Cuadrivector velocidad. A partir de la definicion de tiempopropio, ecuacion (2.21), y tomando la derivada con respecto a lacoordenada temporal t, obtenemos la siguiente relacion:
c2
(
dτ
dt
)2
= c2 −(
dx1
dt
)2
−(
dx2
dt
)2
−(
dx3
dt
)2
(7.51)
Entonces, teniendo en cuenta que la velocidad fısica de una partıcu-la medida por un observador inercial Σ esta definida como
~u =d~r
dt=
(
dx1
dt,dx2
dt,dx3
dt
)
= (ux, uy, uz) (7.52)
la ecuacion (7.51) implica
γ(~u) =dt
dτ=
(
1 − |~u|2c2
)−1/2
(7.53)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 78 — #82i
i
i
i
i
i
78 CAPITULO 7. CINEMATICA RELATIVISTA
Aplicando la regla de la cadena y teniendo en cuenta que x0 = ct,las componentes del cuadrivector velocidad se pueden escribir enterminos de la velocidad fısica de la partıcula:
U =dx
dτ=
dt
dτ
dx
dt= γ(~u)(c, ux, uy, uz) (7.54)
es decirU0 = cγ(~u) (7.55)
U i = γ(~u)ui; i = 1, 2, 3 (7.56)
Similarmente, dadas las componentes del cuadrivector velocidad,entonces las componentes de la velocidad fısica estan dadas por
ui
c=
U i
U0; i = 1, 2, 3 (7.57)
Otra relacion util entre las componentes del cuadrivector velocidadla podemos obtener a partir de su norma:
U0 =
√
c2 + (U1)2 + (U2)2 + (U3)2 (7.58)
Finalmente, calculemos la norma de la velocidad fısica en funcionde la componente temporal del cuadrivector velocidad. Para estefin es suficiente despejar |~u| de la ecuacion (7.55):
γ(~u) =1
√
1 − |~u|2c2
=U0
c=⇒
|~u| = c
√
1 −( c
U0
)2(7.59)
8. Cuadrivector aceleracion. Para encontrar la relacion entre lascomponentes del cuadrivector aceleracion y las componentes dela aceleracion fısica de una partıcula medida por un observadorinercial Σ, definida por la ecuacion
~a =d~u
dt(7.60)
donde ~u es la velocidad de la partıcula medida en Σ, sean
(
A0, A1, A2, A3)
= Aα =dUα
dτ(7.61)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 79 — #83i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 79
las componentes del cuadrivector aceleracion medida por Σ. En-tonces, de los resultados obtenidos en el problema anterior para elcuadrivector velocidad y aplicando la regla de la cadena, tenemos
Aα =d
dτ[γ (~u) (c, ~u)]
=dt
dτ
d
dt[γ (~u) (c, ~u)]
= γ (~u)
(
cdγ (~u)
dt,
d
dt(γ (~u) ~u)
)
= γ (~u)
(
cdγ (~u)
dt,dγ (~u)
dt~u + γ (~u)
d~u
dt
)
(7.62)
para expresar esta relacion en forma explıcita, calculemos la deri-vada del factor gama de Lorentz γ (~u), ası
dγ (~u)
dt=
d
dt
[
1 − |~u|2c2
]−1/2
=
[
1 − |~u|2c2
]−3/21
c2~u · d~u
dt
= γ3 (~u)~u · ~ac2
(7.63)
donde se tuvo en cuenta la definicion en la ecuacion (7.60). Enton-ces las componentes del cuadrivector aceleracion toman la forma
Aα = γ (~u)
(
1
cγ3 (~u) ~u · ~a, γ3 (~u)
~u · ~ac2
~u + γ (~u)~a
)
(7.64)
Para interpretar fısicamente esta ecuacion consideremos el sistemade referencia propio de la partıcula, es decir un sistema de referen-cia inercial con respecto al cual la partıcula este momentaneamen-te en reposo. Entonces, con respecto a este sistema de referenciainercial, la partıcula esta en reposo (~u = 0) y por lo tanto lascomponentes del cuadrivector aceleracion estan dadas por
Aα =
(
0,d~u
dt
∣
∣
∣
∣
~u=~0
)
(7.65)
donde el vector
~α =d~u
dt
∣
∣
∣
∣
~u=~0
(7.66)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 80 — #84i
i
i
i
i
i
80 CAPITULO 7. CINEMATICA RELATIVISTA
corresponde a la aceleracion propia de la partıcula, es decir, ala aceleracion de la partıcula medida en el sistema de referenciacon respecto al cual la partıcula esta en reposo. Por lo tanto, elcuadrivector aceleracion es espacial y su norma al cuadrado midela magnitud de la aceleracion propia de la partıcula:
A2 = − |~α|2 (7.67)
Para demostrar la ortogonalidad de los cuadrivectores aceleraciony velocidad podemos seguir tres metodos equivalentes: un metodoes calcular el producto punto minkowskiano
A · U = A0U0 − A1U1 − A2U2 − A3U3 (7.68)
Remplazando las componentes de los cuadrivectores, ecuaciones(7.54) y (7.64), tenemos
A · U = γ5 (~u) ~u · ~a − γ5 (~u)~u · ~ac2
~u · ~u − γ3 (~u)~a · ~u
= γ5 (~u) ~u · ~a(
1 − |~u|2c2
)
− γ3 (~u)~a · ~u
= γ5 (~u) ~u · ~a 1
γ2 (~u)− γ3 (~u)~a · ~u = 0 (7.69)
Otro metodo, mas directo y que utiliza la propiedad de invarianzadel producto punto minkowskiano, es calcular el producto puntoen el sistema de referencia propio de la partıcula, pues dado queen este sistema las componentes de los cuadrivectores velocidad yaceleracion estan dadas por
U = (c, 0, 0, 0) (7.70)
A = (0, αx, αy, αz) (7.71)
entonces un calculo directo muestra que
A · U = 0 (7.72)
El tercer metodo parte de la norma del cuadrivector velocidad
U2 = c2 (7.73)
Derivando esta expresion con repecto al tiempo propio, tenemosla relacion buscada:
0 =dU2
dτ= 2U · dU
dτ= 2U · A (7.74)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 81 — #85i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 81
9. Transformacion de la velocidad. Dado que las componentesdel cuadrivector velocidad
U = (U0, U1, U2, U3) (7.75)
se transforman como las componentes del cuadrivector posicion,cuando pasamos de un sistema de referencia inercial a otro, enton-ces
U ′0 = γ(U0 − βU1) (7.76)
U ′1 = γ(U1 − βU0) (7.77)
U ′2 = U2 U ′3 = U3 (7.78)
con β = v/c, γ = γ(v) y v la velocidad de Σ′ respecto a Σ. Sillamamos ~u la velocidad de la partıcula respecto a Σ y ~u′ respectoa Σ′ y remplazamos las componentes del cuadrivector velocidaden terminos de la velocidad fısica de la partıcula (ver problemaanterior), obtenemos
cγ(~u′) = γ(v) (cγ(~u) − βγ(~u)ux) (7.79)
γ(~u′)ux′ = γ(v) (γ(~u)ux − βcγ(~u)) (7.80)
γ(~u′)uy′ = γ(~u)uy (7.81)
γ(~u′)uz′ = γ(~u)uz (7.82)
De la ecuacion (7.79) obtenemos la ecuacion para la transformaciondel factor γ de Lorentz para la velocidad:
γ(~u′) = γ(v)γ(~u)(
1 − vux
c2
)
(7.83)
Remplazando este factor de Lorentz en las ecuaciones (7.80), (7.81)y (7.82) y despejando las componentes de la velocidad fısica en Σ′,obtenemos las ecuaciones de transformacion buscadas:
ux′ =ux − v
1 − vuxc2
(7.84)
uy′′ =uy
γ(v)(
1 − vux
c2
) (7.85)
uz′′ =uz
γ(v)(
1 − vuxc2
) (7.86)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 82 — #86i
i
i
i
i
i
82 CAPITULO 7. CINEMATICA RELATIVISTA
10. Velocidad relativa. Sea ~v la velocidad de la partıcula 2 respectoa la partıcula 1. Un metodo para calcular la velocidad relativa ~v,en funcion de las velocidades de las partıculas ~v1 y ~v2, es utilizandotransformaciones de Lorentz, sin embargo el calculo es largo y al-gebraicamente tedioso. El metodo que seguiremos aquı aprovechalas propiedades de los cuadrivectores y el caracter invariante delproducto punto minkowskiano. Sean
U1 = (c, 0, 0, 0) (7.87)
U2 = γ(~v)(c, ~v) (7.88)
las componentes del cuadrivector velocidad de las partıculas 1 y 2respectivamente, medidas en el sistema de referencia propio de lapartıcula 1. Tomando el producto punto de estos dos cuadrivecto-res velocidad, obtenemos el invariante
U1 · U2 = c2γ(~v) (7.89)
Para llegar al resultado buscado basta con calcular este productopunto en el sistema de referencia Σ. Ası, dado que las componentesdel cuadrivector velocidad de las partıculas en Σ estan dadas por
U1 = γ(~v1)(c, ~v1) (7.90)
U2 = γ(~v2)(c, ~v2) (7.91)
entonces
U1 · U2 = γ(~v1)γ(~v2)(
c2 − ~v1 · ~v2
)
(7.92)
Teniendo en cuenta la ecuacion (7.89) y definiendo ~β = ~v/c tene-

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 83 — #87i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 83
mos
~β2
= 1 − 1
γ2(~β1)γ2(~β2)
(
1 − ~β1 · ~β2
)2
= 1 −
(
1 − ~β2
1
)(
1 − ~β2
2
)
(
1 − ~β1 · ~β2
)2
=
(
1 − ~β1 · ~β2
)2−(
1 − ~β2
1
)(
1 − ~β2
2
)
(
1 − ~β1 · ~β2
)2
=
(
~β1 · ~β2
)2− 2~β1 · ~β2 + ~β
2
1 + ~β2
2 − ~β2
1~β
2
2(
1 − ~β1 · ~β2
)2
=
(
~β2 − ~β1
)2+(
~β1 · ~β2
)2− ~β
2
1~β
2
2(
1 − ~β1 · ~β2
)2 (7.93)
Esta expresion la podemos escribir de otra forma si tenemos encuenta la identidad vectorial
(
~A × ~B)
·(
~C × ~D)
=(
~A · ~C)(
~B · ~D)
−(
~B · ~C)(
~A · ~D)
(7.94)
por lo tanto, tomando ~A = ~C = ~β1 y ~B = ~D = ~β2
~β2
=
(
~β2 − ~β1
)2−(
~β1 × ~β2
)2
(
1 − ~β1 · ~β2
)2 (7.95)
11. Espacio-tiempo euclidiano. A partir de la definicion del para-metro φ, en terminos de la velocidad v del sistema de referenciaΣ′ respecto a Σ,
tanh φ := β =v
c(7.96)
y las siguientes definiciones e identidades para las funciones hi-

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 84 — #88i
i
i
i
i
i
84 CAPITULO 7. CINEMATICA RELATIVISTA
perbolicas
sinhφ =eφ − e−φ
2tanh φ =
sinhφ
cosh φ
cosh φ =eφ + e−φ
2sech φ =
1
cosh φcosh2 φ − sinh2 φ = 1 1 − tanh2 φ = sech2 φ
(7.97)
sinh (φ1 + φ2) = sinhφ1 cosh φ2 + cosh φ1 sinhφ2
cosh (φ1 + φ2) = cosh φ1 cosh φ2 + sinhφ1 sinhφ2
tanh (φ1 + φ2) =tanh φ1+tanh φ2
1+tanh φ1 tanh φ2
(7.98)
podemos obtener las transformaciones de Lorentz en terminos delparametro φ. A partir de la ultima identidad de las ecuaciones(7.97) se obtiene que
1 − β2 =1
cosh2 φ(7.99)
por lo tanto, el factor γ de Lorentz toma la forma
cosh φ = γ(v) (7.100)
y asısinh φ = βγ(v) (7.101)
Con estos resultados los elementos de la matriz de la transforma-cion de Lorentz (2.9) se pueden escribir en la forma
Λαβ =
cosh φ − sinhφ 0 0− sinhφ cosh φ 0 0
0 0 1 00 0 0 1
(7.102)
El teorema de adicion de velocidades se obtiene como consecuenciade la ultima ecuacion (7.98), pues si llamamos tanh φ1 = v1/c ytanh φ2 = v2/c tanh φ1 = v1/c tenemos
tanh(φ1 + φ2) =β1 + β2
1 + β1β2
=1
c
v1 + v2
1 + v1v2
c2
=u
c(7.103)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 85 — #89i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 85
con u la velocidad resultante. Esto significa que al utilizar el parame-tro φ = tanh−1(v/c) para representar una transformacion de Lo-rentz, la adicion relativista de velocidades se reduce a la suma usualde los correspondientes parametros φ. La interpretacion geometri-ca de las transformaciones de Lorentz y del teorema de adicion develociades se puede obtener si tenemos en cuenta la relacion entrelas funciones trigonometricas y las hiperbolicas. Para este fin essuficiente tener en cuenta las siguientes definiciones y propiedadesde los numeros complejos: sea z ∈ C, entonces
z = x + iy = |z| (cos ϕ + i sin ϕ) = |z| eiϕ (7.104)
x = Re z, y = Im z
|z| =√
x2 + y2; ϕ = arg z (7.105)
i2 = −1
De la ecuacion (7.104) podemos despejar las funciones trigonome-tricas sinϕ y cos ϕ,
cos ϕ =1
2(eiϕ + e−iϕ) (7.106)
sin ϕ =1
2i(eiϕ − e−iϕ) (7.107)
si hacemos el remplazo ϕ → iϕ en las ecuaciones anteriores, obte-nemos las siguientes relaciones con las funciones hiperbolicas
cos(iϕ) =1
2(e−ϕ + eϕ) = cosh ϕ (7.108)
sin(iϕ) =1
2i(e−ϕ − eϕ) = i sinh ϕ (7.109)
Consideremos ahora la matriz de transformacion de Lorentz usual,la cual se puede escribir como una transformacion matricial
x′0
x′1
x′2
x′3
=
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
x0
x1
x2
x3
(7.110)
y consideremos la transformacion compleja de la coordenada tem-poral t → it, o equivalentemente
(x0, x1, x2, x3) → (ix0, x1, x2, x3) ≡ (x0, x1, x2, x3) (7.111)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 86 — #90i
i
i
i
i
i
86 CAPITULO 7. CINEMATICA RELATIVISTA
entonces las transformaciones de Lorentz, para las nuevas coorde-nadas, se pueden escribir en la forma
x′0
x′1
x′2
x′3
=
γ −iβγ 0 0−iβγ γ 0 0
0 0 1 00 0 0 1
x0
x1
x2
x3
(7.112)
Teniendo en cuenta las relaciones (7.108) y (7.109), la transforma-cion de Lorentz toma la forma final:
x′0
x′1
x′2
x′3
=
cos(iϕ) − sin(iϕ) 0 0− sin(iϕ) cos(iϕ) 0 0
0 0 1 00 0 0 1
x0
x1
x2
x3
(7.113)
Si comparamos esta ecuacion de transformacion con las ecuacio-nes de transformacion que representan una rotacion rıgida de ejes(ver por ejemplo la seccion 3.2 del libro [1]), la ecuacion de trans-formacion (7.113) se puede interpretar como una rotacion en unangulo iϕ del plano complejo (x0, x1) = (ict, x) en sentido de lasmanecillas del reloj. Ademas, teniendo en cuenta que la composi-cion de dos rotaciones rıgidas de los ejes en los angulos ϕ1 y ϕ2,corresponde a otra rotacion en un angulo ϕ1 + ϕ2, el teorema deadicion de velocidades con parametro tanh ϕ = v/c, muestra quela composicion de dos transformaciones de Lorentz, a lo largo delmismo eje espacial, corresponde a una rotacion en el plano comple-jo en un angulo iϕ1+iϕ2. Para finalizar este problema, el productopunto minkowskiano en las coordenadas complejas (x0, x1, x2, x3)(salvo un signo negativo global) corresponde al producto puntoeuclidiano:
x · y = −(x0y0 + x1y1 + x2y2 + x3y3) (7.114)
Esta transformacion t → it se conoce como la euclidianizacion dela teorıa y es ampliamente usada en teorıa cuantica de campos.
12. Adicion numerable de velocidades. La forma usual del teore-ma de adicion de velocidades establece que
ux′ =ux − v
(1 − vuxc2
)(7.115)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 87 — #91i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 87
donde ux es la componente en la direccion x de la velocidad deuna partıcula respecto a un sistema de referencia inercial Σ, ux′ lavelocidad de la partıcula respecto a un segundo sistema de referen-cia Σ′ el cual se mueve con velocidad v relativo a Σ en la direcciondel eje x positivo.
a Para aplicar este teorema de adicion a los bloques, tomemosen la expresion anterior v1 = v la velocidad del bloque 1y ux′ = v2 la velocidad del bloque 2 respecto al 1. Entoncesdespejando ux de la ecuacion (7.115) (transformacion inversa)e identificando ux = v′2 tenemos
v′2 =v1 + v2
1 + v1v2
c2=
2v
1 + v2
c2
(7.116)
Para demostrar que v′2 → c si v → c utilicemos las cantidadesadimensionales β = v/c y β2 = v2/c, y veamos que β2 → 1 siβ → 1. Con esta notacion la ecuacion (7.116) toma la forma
β2 =2β
1 + β2 (7.117)
entonces
lımβ→1
2β
1 + β2 = 1 (7.118)
como se querıa probar.
b Para calcular la velocidad v′3 del tercer bloque respecto a Σ po-demos aplicar dos veces el resultado de la parte a y luegoproceder de la misma forma para calcular la velocidad deln-esimo bloque respecto a Σ. Sin embargo los calculos lospodemos simplificar significativamente si utilizamos el teore-ma de adicion de velocidades en terminos del parametro φdefinido por tan φ = v/c (ver el problema anterior). Ası, si
φ = tanh−1 β = tanh−1 (v/c) (7.119)
es la velocidad de un bloque respecto al anterior, entonces lavelocidad del bloque 2 respecto a Σ (en terminos del parame-tro φ) es
tanh−1(
v′2/c)
= φ1 + φ2 = 2φ

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 88 — #92i
i
i
i
i
i
88 CAPITULO 7. CINEMATICA RELATIVISTA
y la velocidad del bloque n-esimo respecto a Σ es
tanh−1(
v′n/c)
= nφ (7.120)
por lo tanto
v′nc
= tanh (nφ) = tanh(
n tanh−1(v
c
))
(7.121)
Retomando la definicion de las funciones hiperbolicas (pro-blema anterior) tenemos que
(
eφ)2n
= (cosh φ + sinhφ)2n
=[
(1 + tanh φ)2 cosh2 φ]n
=
[
(1 + tanh φ)2
sech2 φ
]n
=
[
(1 + tanh φ)2
1 − tanh2 φ
]n
=
[
1 + tanh φ
1 − tanh φ
]n
(7.122)
entonces
nφ = ln
[
1 + β
1 − β
]n/2
(7.123)
Por lo tanto
v′nc
= tanh
[
ln
(
1 + β
1 − β
)n/2]
=eln((1+β)/(1−β))n/2 − e− ln((1+β)/(1−β))n/2
eln((1+β)/(1−β))n/2+ e− ln((1+β)/(1−β))n/2
=((1 + β)/(1 − β))n/2 − ((1 − β)/(1 + β))n/2
((1 + β)/(1 − β))n/2 + ((1 − β)/(1 + β))n/2
=1 − [(1 − β)/(1 + β)]n
1 + [(1 − β)/(1 + β)]n(7.124)
Ahora, puesto que
lımn→∞
[
1 − β
1 + β
]n
= 0 (7.125)
entonces v′n → c para n → ∞.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 89 — #93i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 89
13. Longitud aparente. Consideremos los eventos que se muestranen la figura (7.4).
a Sea x la distancia del extremo izquierdo de la varilla en el mo-mento en que se emite el foton (evento P1), de tal maneraque este alcance la camara (evento P4) simultaneamente conel foton emitido cuando el centro de la varilla pasa por elorigen de coordenadas (evento P3) y con el foton emitido des-de el extremo derecho de la varilla (evento P2). El evento P4
corresponde a la foto tomada por la camara.
Figura 7.4: Longitud aparente. Sucesion de los eventos emision de fotones quellegan simultaneamente al observador.
La condicion de simultaneidad de la llegada de los fotonesimplica que ellos debieron ser emitidos en instantes diferen-tes. El tiempo t1 que tarda en llegar el foton del evento P1
esta dado por
t1 =
√x2 + D2
c(7.126)
Este tiempo debe ser igual al tiempo t3 que gasta el fotonemitido desde el centro de la varilla hasta la camara
t3 =D
c(7.127)
mas el tiempo t4 que gasta el centro de la varilla CM en llegaral origen de coordenadas
t4 =x − ℓ
2
v(7.128)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 90 — #94i
i
i
i
i
i
90 CAPITULO 7. CINEMATICA RELATIVISTA
donde v es la velocidad y ℓ la longitud fısica de la varillamedida en el sistema de referencia de la camara, dada por larelacion
ℓ = ℓ0
√
1 − v2
c2=
ℓ0
γ(v)(7.129)
con ℓ0 su longitud propia. Ası, llamando β = v/c tenemosque
√
x2 + D2 = D +1
β
(
x − ℓ
2
)
(7.130)
Siguiendo un procedimiento similar para el extremo derechode la varilla, obtenemos la distancia a la cual debe ser emitidoel foton (evento P2) para que llegue a la camara simultanea-mente con el foton emitido por el centro de la varilla. Si lla-mamos x esta distancia obtenemos
√
x2 + D2 = D +1
β
(
ℓ
2− x
)
(7.131)
Las soluciones generales a las ecuaciones (7.130) y (7.131)son expresiones complicadas y por esta razon, para ilustrarcomo se ve la varilla en la foto, consideremos un ejemplonumerico particular. Supongamos que la varilla se mueve conuna velocidad β = 4/5 y tiene longitud propia ℓ0 = 2m y lacamara esta situada a una distancia de D = 10m; entonces,remplazando estos valores en las ecuaciones (7.130) y (7.131)obtenemos
x = 0,615 12 (7.132)
yx = 0,586 26 (7.133)
La interpretacion fısica de estos resultados es directa: la longi-tud fısica de la varilla medida en el sistema de referencia de lacamara es ℓ = ℓ0
√
1 − β2 = 1, 2m, es decir, en el instante enque el centro de la varilla pasa por el origen de coordenadas,las coordenadas de los extremos de la varilla son x± ± 0, 6m;sin embargo, en la foto, lo que observamos es que cuando elcentro de la varilla pasa por el origen de coordenadas, el ex-tremo izquierdo aparenta estar en xI = −0,615 12m mientrasque el extremo derecho aparenta estar en xD = 0,586 26m, esdecir la longitud aparente ℓA de la varilla esta dada por
ℓA = xD − xI = 1,20138m

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 91 — #95i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 91
Para comparar estos resultados con la parte b de este proble-ma (aproximacion de rayos paralelos), en la siguiente tabla semuestran los resultados numericos para diferentes distanciasde la camara (dejando fija la longitud propia y la velocidad)y calculando con cuatro cifras decimales:
D xI xD ℓA
2 −0,693 44 0,542 24 1,235 710 −0,615 12 0,586 26 1,201 4100 −0,601 45 0,598 57 1,2000
Cuando la distancia a la camara es muy grande, la longitudaparente tiende a la longitud fısica, lo que significa que en es-tas condiciones los fotones que salen de los extremos de la va-rilla y del centro, practicamente salen simultaneamente. Esteresultado numerico se puede probar formalmente si tomamosel lımite cuando D → ∞ en las ecuaciones (7.130) y (7.131).Por ejemplo consideremos la primera de estas ecuaciones ydividamos por D ambos lados:
√
1 +x2
D2= 1 +
1
βD
(
x − ℓ
2
)
(7.134)
Dado que D >> x expandimos el radical hasta terminos deprimer orden, entonces
1 +x2
2D2= 1 +
1
βD
(
x − ℓ
2
)
=⇒
x2
2D=
1
β
(
x − ℓ
2
)
→ 0 (7.135)
esto implica que x → ℓ0
√
1 − β2/2, con un resultado similarpara x, como se querıa probar.
b La aproximacion de rayos paralelos es valida cuando la distanciadel objeto a la camara es mucho mayor que las dimensionesdel objeto. Tambien es posible obtener experimentalmentela aproximacion de rayos paralelos cuando la distancia delobjeto a la camara no es mucho mayor que las dimensionesdel objeto. En la figura (7.5) se muestra un posible montajeen el cual L es una lente convergente.
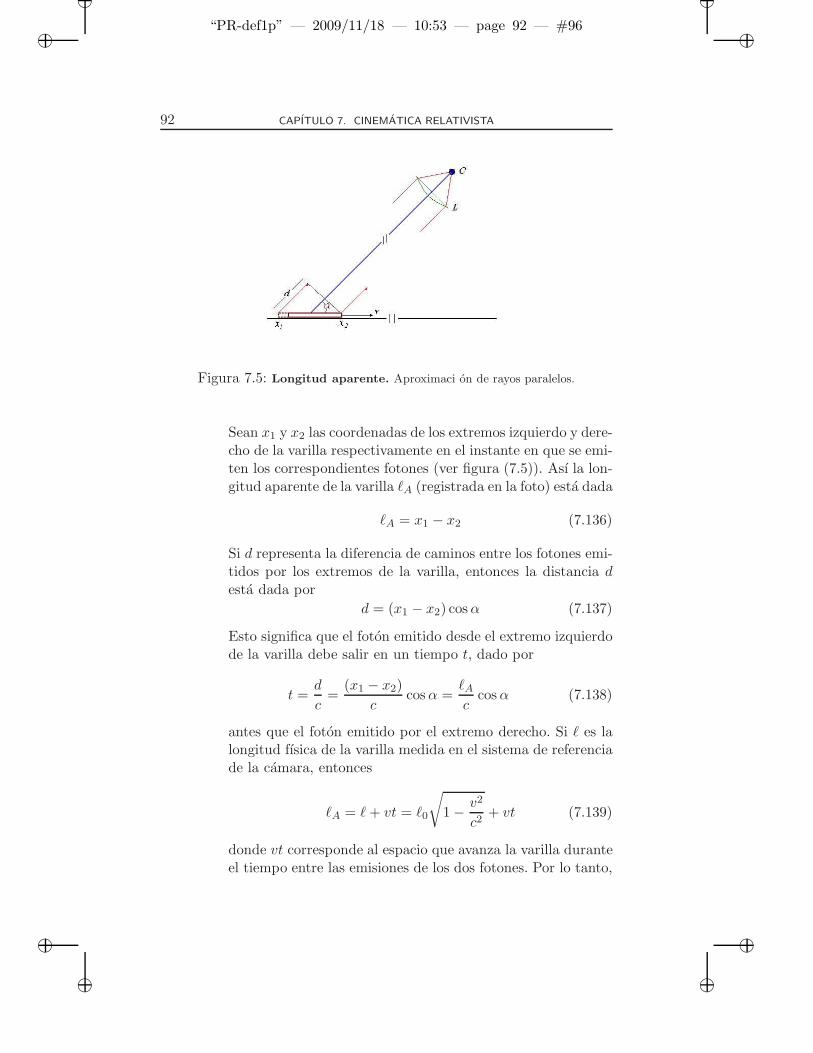
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 92 — #96i
i
i
i
i
i
92 CAPITULO 7. CINEMATICA RELATIVISTA
Figura 7.5: Longitud aparente. Aproximaci on de rayos paralelos.
Sean x1 y x2 las coordenadas de los extremos izquierdo y dere-cho de la varilla respectivamente en el instante en que se emi-ten los correspondientes fotones (ver figura (7.5)). Ası la lon-gitud aparente de la varilla ℓA (registrada en la foto) esta dada
ℓA = x1 − x2 (7.136)
Si d representa la diferencia de caminos entre los fotones emi-tidos por los extremos de la varilla, entonces la distancia desta dada por
d = (x1 − x2) cos α (7.137)
Esto significa que el foton emitido desde el extremo izquierdode la varilla debe salir en un tiempo t, dado por
t =d
c=
(x1 − x2)
ccos α =
ℓA
ccos α (7.138)
antes que el foton emitido por el extremo derecho. Si ℓ es lalongitud fısica de la varilla medida en el sistema de referenciade la camara, entonces
ℓA = ℓ + vt = ℓ0
√
1 − v2
c2+ vt (7.139)
donde vt corresponde al espacio que avanza la varilla duranteel tiempo entre las emisiones de los dos fotones. Por lo tanto,

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 93 — #97i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 93
la longitud aparente de la varilla esta dada por
ℓA = x2 − x1
= ℓ0
√
1 − v2
c2+ βℓA cos α
ası
ℓA =ℓ0
√
1 − v2
c2
1 − β cos α(7.140)
Notemos que si la foto es tomada cuando el centro de la varillaaparenta estar en el origen de coordenadas α = 90o, enton-ces la longitud aparente corresponde a la longitud fısica, enacuerdo con la primera parte de este problema.
14. Comunicacion espacial. Consideremos el sistema de referenciaΣ ligado a la tierra, con el origen en la tierra y el eje x positivoen la direccion de movimiento de la nave A y tomemos t = 0 en elinstante que se emite la primera senal.
a Con las coordenadas elegidas, el diagrama espacio-tiempo de laslıneas de universo se muestra en la figura (7.6), teniendo encuenta las siguientes convenciones: T lınea de universo de latierra, A lınea de universo de la nave A, B lınea de universode la nave B, t1 tiempo de llegada de la primera senal a lanave B, t2 tiempo de llegada de la primera senal a la naveA, t3 tiempo de llegada de la primera senal reflejada en lanave B a la tierra T , t4 tiempo de llegada de la primera senalreflejada en la nave A a la tierra T y t01, t02, t03 y t04 loscorrespondientes tiempos para la segunda senal enviada en elinstante t0.
b Consideremos primero la nave B unicamente, pues los calculospara la nave A son similares cambiando v → −v. Dado queel problema es bidimensional (movimiento a lo largo del ejex) describimos las coordenadas espacio-tiempo de los eventossolo con dos componentes (ct, x, 0, 0) ≡ (ct, x). Con esta no-tacion, sea (ct1, x1) las coordenadas del evento “llegada de laprimera senal a la nave B”. Dado que la nave viaja a veloci-dad constante y la senal parte del origen en t = 0, cuando lanave se encuentra en la posicion x0B = L, entonces se debe

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 94 — #98i
i
i
i
i
i
94 CAPITULO 7. CINEMATICA RELATIVISTA
Figura 7.6: Comunicacion espacial. Lıneas de universo de la tierra y las dosnaves.
cumplir queL = ct1 + vt1 (7.141)
ası, la nave B se encuentra en la siguiente posicion cuando lasenal la alcanza
x1 = ct1 =L
1 + β(7.142)
Para la segunda senal las coordenadas del evento “llegadade la segunda senal a la nave B” son (ct01, x01). Dado quedurante el tiempo t0 la nave se ha movido una distancia vt0,entonces su posicion, en el instante de emision de la segundasenal, sera L−vto y por lo tanto, si llamamos t el tiempo quetarda la segunda senal en llegar a la nave, se debe cumplir larelacion
L − vto = ct + vt (7.143)
y la posicion de la nave B esta dada por
x01 = ct =L − vt01 + β
(7.144)
Para la nave A la posicion cuando llega la primera senal es
x2 =L
1 − β(7.145)
y para la segunda senal esta dada por
x02 =L + vt01 − β

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 95 — #99i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 95
c Sea ∆tB el intervalo de tiempo entre la llegada de los dos pulsosa la nave B. De la parte b del presente problema, la primerasenal la recibe en el instante
t1 =L/c
1 + β(7.146)
El segundo pulso llega a la nave en el instante
t01 = t0 + t = t0 +L/c − βt0
1 + β
por lo tanto el intervalo de tiempo esta dado por
∆tB = t01 − t1 = t0 −βt0
1 + β=
t01 + β
(7.147)
El intervalo de tiempo ∆tA de la llegada de los pulsos a lanave A es
∆tA =t0
1 − β(7.148)
d Para calcular los intervalos de tiempo de la llegada de las senalesreflejadas a la tierra, consideremos primero el caso de la naveB. Dado que la reflexion es instantanea, la primera senal serefleja en el instante y en el punto
t1 =L/c
1 + β
x1 =L
1 + β(7.149)
entonces tarda un tiempo
tRA =x1
c=
L/c
1 + β(7.150)
en llegar a la tierra y por lo tanto esta senal alcanza la tierraen el instante
t3 = t1 + tRA =2L/c
1 + β(7.151)
La segunda senal reflejada parte de la nave en el instante
t01 = t0 +L/c − βt0
1 + β

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 96 — #100i
i
i
i
i
i
96 CAPITULO 7. CINEMATICA RELATIVISTA
cuando la nave se encuentra en el punto
x01 =L − vt01 + β
(7.152)
por lo tanto, la segunda senal llega a la tierra en el instante
t03 = t01 +x01
c= t0 + 2
L/c − βt01 + β
=t0 − βt0 + 2L/c
1 + β(7.153)
entonces el intervalo de tiempo ∆tTB es
∆tTB = t03 − t3 = t01 − β
1 + β(7.154)
y para los pulsos reflejados en la nave A el intervalo de tiempo∆tTA esta dado por
∆tTA = t01 + β
1 − β(7.155)
e Para calcular la posicion de las naves y los intervalos de tiempode la llegada de los pulsos a las naves y a la tierra, bastacon tener en cuenta la ecuacion para la dilatacion temporal.Consideremos en primer lugar el intervalo de tiempo ∆t′Ade la llegada de los dos pulsos a la nave A. Puesto que loseventos “llegada de cada uno de los pulsos a la nave” sucedenen el mismo punto para el sistema de referencia de la nave,el intervalo de tiempo medido en A es un intervalo de tiempopropio y por lo tanto esta relacionado con ∆tA por la ecuacion
∆tA = γ(v)∆t′A (7.156)
Remplazando la ecuacion (7.148) para ∆tA y despejando, te-nemos
∆t′A =1
γ(v)
t01 − β
= t0
√
1 + β
1 − β(7.157)
Para el caso de la nave B, el intervalo de tiempo entre lallegada a la nave de los dos pulsos, medidas con respecto alsistema de referencia de la nave B, obtenemos
∆t′B = t0
√
1 − β
1 + β(7.158)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 97 — #101i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 97
Los intervalos de tiempo ∆tTA y ∆tTB, calculados en la par-te d del presente problema, son intervalos de tiempo propios,por lo tanto se aplica la misma relacion de dilatacion tem-poral. Por ejemplo si llamamos ∆t′TA el intervalo de tiempode la llegada a la tierra de los pulsos reflejados en la nave A,medidos en su sistema de referencia, entonces este intervaloesta relacionado con ∆tTA por
∆t′TA = γ(v)t01 + β
1 − β(7.159)
15. Velocidades superluminosas aparentes. Supongamos que enalgun instante inicial t = 0 las dos fuentes f1 y f2 estan juntas(fuente f en la figura (2.2)) y un tiempo posterior δt la fuente f2
se ha desplazado una distancia vδt = f1f2. La primera observacion,cuando las fuentes se ven juntas, se mide en la tierra en un tiempo
ti =0f
c(7.160)
mientras que la segunda observacion (figura (2.2) inferior) se mideen la tierra en un tiempo
tf = δt +0f2
c(7.161)
Entonces la velocidad transversal aparente de la fuente f2, vistadesde la tierra, es
vT = 0f2∆α
∆t= 0f2
∆α
tf − ti(7.162)
En los objetos astronomicos, como el quasar 3C-273, donde se haobservado este fenomeno, la separacion angular de las fuentes, vistapor el observador en tierra, es de unos pocos segundos de arco yası podemos hacer la aproximacion
0f ≃ 0f2 + vδt cos ϕ (7.163)
∆α ≃ vδt sin ϕ
0f2
(7.164)
entonces
∆t = δt +0f2
c− 0f
c≃ δt (1 − β cos ϕ) (7.165)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 98 — #102i
i
i
i
i
i
98 CAPITULO 7. CINEMATICA RELATIVISTA
con β = v/c, por lo tanto la velocidad transversal esta dada por
βT =vT
c=
β sin ϕ
1 − β cos ϕ(7.166)
Figura 7.7: Velocidades superluminosas aparentes. La velocidad transversalβT en funcion de β y ϕ, con −0,99 ≤ β ≤ 0,99 y -π/2 ≤ ϕ ≤ π/2
En la figura (7.7) se muestra la grafica de βT en funcion del anguloϕ para diferentes valores de la velocidad β = v/c de la fuentef2, donde, para valores suficientes de la velocidad de la fuente, lavelocidad transversal aparente puede ser mayor que la velocidadde la luz. Por ejemplo, las curvas muestran un maximo de βT elcual esta dado por la condicion:
dβT
dϕ=
β(cos ϕ − β)
(1 − β cos ϕ)2= 0 (7.167)
puesto que β < 1 el denominador nunca se anula y la condiciondel maximo se obtiene para
cos ϕ = β (7.168)
entonces
βTmax= β
√
1 − β2
1 − β2 = βγ(v) (7.169)
Dado que el factor γ puede tomar valores arbitrariamente gran-des, entonces es posible medir velocidades transversales aparentesmayores que c. Este fenomeno se ha observado en varios AGN, porejemplo el quasar 3C-273 muestra este comportamiento (ver [7]).

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 99 — #103i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 99
16. Relatividad sin el segundo postulado. Sean Σ y Σ′ dos sis-temas de referencia inerciales relacionados de la manera usual.Entonces el principio de relatividad nos permite encontrar las si-guientes relaciones entre las coordenadas de los dos sistemas dereferencia:
y′ = y; z′ = z (7.170)
x′ = γ(x − vt) (7.171)
x = γ(x′ + vt′) (7.172)
γ = γ (7.173)
remplazando x′ de la ecuacion 7.171 en la ecuacion 7.172 y des-pejando t′ obtenemos
x = γ(γ(x − vt) + vt′)
= γ2x − γ2vt + γvt′ =⇒
t′ = x1 − γ2
vγ+ γt = γ
(
t − γ2 − 1
vγ2x
)
(7.174)
entonces
t′ = γ(
t − v
K2x)
(7.175)
donde
K2 =v2γ2
γ2 − 1(7.176)
despejando el factor γ de la ultima ecuacion tenemos
γ2 =1
1 − v2
K2
(7.177)
Esta ecuacion implica que el factor γ es una funcion de la velocidady el parametro K, es decir
γ = γ(v,K) (7.178)
Aun cuando la ecuacion (7.176) implica aparentemente que elparametro K depende de la velocidad, esto no es ası, si queremosque la composicion de transformaciones de Lorentz sea de nuevouna transformacion de Lorentz. Para este fin consideremos un nue-vo sistema de referencia Σ′′ que se mueve con velocidad u respectoa Σ′. Si llamamos K el parametro para la transformacion entre Σ′

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 100 — #104i
i
i
i
i
i
100 CAPITULO 7. CINEMATICA RELATIVISTA
y Σ′′, entonces las ecuaciones de transformacion de Lorentz entreΣ y Σ′ son
x′ = γ(v;K)(x − vt) (7.179)
t′ = γ(v;K)(
t − v
K2x)
(7.180)
y entre Σ′ y Σ′′ toman la forma
x′′ = γ(u; K)(x′ − ut′) (7.181)
t′′ = γ(u; K)
(
t′ − u
K2x′)
(7.182)
donde γ(v;K) y γ(u; K) son los correspondientes factores gammaque dependen de (v;K) y (u; K) respectivamente. Remplazandolas coordenadas primadas en las ultimas ecuaciones, tenemos
x′′ = γ(u; K)γ(v;K)(
1 +uv
K2
)
(
x − u + v
1 + uvK2
t
)
(7.183)
t′′ = γ(u; K)γ(v;K)
(
1 +uv
K2
)
(
t −u
K2+ v
K2
1 + uvK2
x
)
(7.184)
un calculo directo muestra que si K = K la composicion de trans-formaciones de Lorentz es de nuevo una transformacion de Lorentzcon velocidad
w =u + v
1 + uvK2
(7.185)
pues
γ(u;K)γ(v;K)(
1 +uv
K2
)
= γ(w;K) (7.186)
El parametro K debe ser determinado experimentalmente, porejemplo con un experimento sobre dilatacion temporal o un ex-perimento dinamico, como el comportamiento de la masa inercialde una partıcula con la velocidad. Si experimentalmente se deter-mina que K = ∞, las ecuaciones de transformacion obtenidas sereducen a las transformaciones de Galileo, o si el experimento arro-ja K = c tenemos las transformaciones de Lorentz. Esto implicaque el segundo postulado de la relativitad pudiera ser remplaza-do por otro, el cual condujera a determinar en forma explıcita elparametro K.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 101 — #105i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 101
17. Viaje al pasado. Supongamos que la primera senal tachyonicaes enviada desde el origen de Σ en el instante t0 a la velocidad
βT =vT
c=
dx1
dx0(7.187)
y es recibida por un receptor situado en el origen de Σ′, cuandoeste se encuentra a una distancia D medida con respecto a Σ.Entonces, el instante en el cual la senal es recibida esta dado por(en unidades de c)
ct1 = ct0 +D
βT
(7.188)
La senal es devuelta instantaneamente, desde el origen de Σ′ ha-cia el origen de Σ a una velocidad igual de vT , pero medida conrespecto al sistema Σ′, es decir
dx′
dt′= −vT (7.189)
Para calcular el tiempo de regreso de la senal medida por Σ, debe-mos calcular primero la velocidad de la senal respecto al sistemade referencia Σ. Para este fin consideremos las transformacionesde Lorentz usuales
x′0 = γ(x0 − βx1) (7.190)
x′1 = γ(x1 − βx0) (7.191)
con β = v/c y γ = γ(v). Entonces
−βT =dx′1
dx′0 =γd(x1 − βx0)
γd(x0 − βx1)=
dx1 − βdx0
dx0 − βdx1
=dx1
dx0 − β
1 − β dx1
dx0
(7.192)
despejando la velocidad de la senal tachyonica dx1
dx0 medida conrespecto a Σ tenemos
−dx1
dx0=
βT − β
1 − βT β(7.193)
ası, el tiempo que tarda la senal en su viaje de ida y vuelta es
cttotal =D
βT
+Ddx1
dx0
= D
(
1
βT
+1 − βT β
βT − β
)
(7.194)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 102 — #106i
i
i
i
i
i
102 CAPITULO 7. CINEMATICA RELATIVISTA
por lo tanto, la senal es recibida en Σ en el instante t dado por
ct = ct0 + cttotal = ct0 + D
(
1
βT
+1 − βT β
βT − β
)
(7.195)
si el factor que acompana al termino D es menor que cero, entoncesesto significa que la senal de regreso puede ser detectada en elorigen de Σ antes que la primera senal sea enviada desde allı. Paraver si esto es posible analicemos la funcion
f(βT ;β) =1
βT
+1 − βT β
βT − β(7.196)
En primer lugar, esta funcion esta bien definida pues 0 ≤ β < 1y βT > 1, por lo tanto los denominadores en la expresion anteriornunca se anulan. Si los sistemas de referencia Σ y Σ′ estan enreposo relativo, entonces β = 0 y por lo tanto el tiempo total es
cttotal =2D
βT
(7.197)
el cual es positivo. Por otra parte, si la senal tachyonica es enviadaa una velocidad arbitrariamente grande, entonces
lımβT→∞
(
1
βT
+1 − βT β
βT − β
)
= −β (7.198)
y por lo tanto
ct = ct0 − βD (7.199)
lo cual significa que la senal de regreso llega un tiempo βD antesque la primera senal sea enviada. De hecho, dada la velocidadrelativa de los sistemas de referencia β, entonces sea βT tal quef(βT ;β) = 0, es decir βT dado por
βT =1 +
√
1 − β2
β
corresponde a la velocidad a la que se deben enviar los tachyones,para que la senal reflejada llegue en el instante en que se envıa lasenal inicial, y por lo tanto siempre es posible encontrar velocida-des tachyonicas βT > βT para las cuales la senal reflejada llega

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 103 — #107i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 103
antes que la senal sea enviada. En el calculo de βT se tomo la raızpositiva, pues
0 <1 +
√
1 − β2
β< ∞ si 1 > β > 0 (7.200)
y
0 <1 −
√
1 − β2
β< 1 si 0 < β < 1 (7.201)
Este ejemplo muestra uno de los problemas fundamentales en con-siderar los tachyones, pues el principio de causalidad de la fısica serompe. Sin embargo, los tachyones han sido considerados en fısica,en el marco de algunos modelos teoricos, no solo para tratar deentender algunos problemas fundamentales y por completez de lateorıa, sino tambien para buscar que influencia observacional pu-dieran tener los tachyones (si existieran) sobre las partıculas usua-les. Hasta el presente no se ha predicho ningun efecto observable(lo que no significa que no pudiera existir) y por esta razon los ta-chyones no se han desechado del todo, pero tampoco se consideranen las teorıas usuales.
18. Viaje interestelar 1. Aun cuando las unidades que trabajaremosen el presente problema estan en anos-luz y el valor de la velocidadde la luz es c = 1, en las expresiones generales mantendremos c enforma explıcita y solo utilizaremos las unidades para los calculosnumericos.
a Para calcular el valor de la aceleracion de la gravedad en unida-des de anos-luz (al) y en unidades de c = 1, tenemos que
2,99792458 × 108m = 1s (7.202)
y
1m =1
9,46053 × 1015al (7.203)
entonces
g = 9,8ms−2
= 9,8m ×(
2,99792458 × 108m)−2
= 1,090 4 × 10−16m−1
= 1,090 4 × 10−16 × 9,46053 × 1015al−1
= 1,0316al−1 (7.204)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 104 — #108i
i
i
i
i
i
104 CAPITULO 7. CINEMATICA RELATIVISTA
Para los calculos del presente problema es suficiente aproxi-mar el valor de la aceleracion de la gravedad terrestre a
g = 9,8ms−2 ≃ 1al−1 (7.205)
b Dado que el movimiento del cohete es unidimensional, elijamosel eje x positivo del sistema de referencia tierra en direccionde las Pleyades. En estas condiciones, la lınea de universo delcohete esta descrita por el cuadrivector posicion
x(τ) =(
x0(τ), x1(τ), 0, 0)
(7.206)
entonces los cuadrivectores velocidad y aceleracion del coheteestan dados por
U =dx
dτ= (U0, U1, 0, 0) (7.207)
A =dU
dτ= (A0, A1, 0, 0) (7.208)
Dado que la aceleracion propia es constante, entonces se de-ben cumplir las siguientes relaciones:
U2 =(
U0)2 −
(
U1)2
= c2 (7.209)
A2 =(
A0)2 −
(
A1)2
= −g2 (7.210)
U · A = U0A0 − U1A1 = 0 (7.211)
Despejando A0 de la ecuacion (7.211) y remplazando en (7.210)tenemos que
−g2 =
(
A1 U1
U0
)2
−(
A1)2
=(
A1)2
(
(
U1)2
(U0)2− 1
)
=(
A1)2
(
(
U1)2 −
(
U0)2
(U0)2
)
= −c2
(
A1)2
(U0)2(7.212)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 105 — #109i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 105
donde se utilizo la ecuacion (7.209) en el ultimo paso. To-mando la raız positiva de esta ecuacion y despejando A1 ob-tenemos
A1 =g
cU0 (7.213)
Se tomo la raız positiva por las condiciones iniciales del pro-blema, pues la nave parte del reposo y se acelera. Procediendoen forma similar a la anterior deduccion, pero despejando A1
de la ecuacion (7.211) y remplazando en (7.210), llegamos a
A0 =g
cU1 (7.214)
Derivando la ecuacion (7.213) con respecto a τ , teniendo encuenta las definiciones (7.207) y (7.208) y utilizando la ecua-cion (7.214), obtenemos la siguiente ecuacion diferencial desegundo orden para U1:
d2U1
dτ 2=
g
c
dU0
dτ=(g
c
)2U1 (7.215)
Un procedimiento similar, pero partiendo ahora de la ecua-cion (7.214), conduce a una ecuacion diferencial de segun-do orden para U0. Este procedimiento permite desacoplar elsistema de ecuaciones diferenciales (7.209), (7.210) y (7.211) yconvertirlo en el siguiente sistema de dos ecuaciones de segun-do orden desacopladas, para las componentes del cuadrivectorvelocidad:
d2U1
dτ 2−(g
c
)2U1 = 0 (7.216)
d2U0
dτ 2−(g
c
)2U0 = 0 (7.217)
Estas ecuaciones son integrables en forma exacta, en terminosde las funciones hiperbolicas:
U0(τ) = K1 sinh(g
cτ)
+ K2 cosh(g
cτ)
(7.218)
U1(τ) = K3 sinh(g
cτ)
+ K4 cosh(g
cτ)
(7.219)
Las constantes de integracion K1, K2, K3 y K4 se determinana partir de las condiciones iniciales del problema:
U(τ = 0) = (U0(0), U1(0), 0, 0) = (c, 0, 0, 0) (7.220)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 106 — #110i
i
i
i
i
i
106 CAPITULO 7. CINEMATICA RELATIVISTA
dU
dτ
∣
∣
∣
∣
τ=0
= (A0(0), A1(0), 0, 0) = (0, g, 0, 0) (7.221)
pues la nave parte del reposo con aceleracion propia g. Laprimera condicion inicial para U1 implica K4 = 0 y la segundacondicion inicial para A0 nos conduce a K1 = 0, entonces
U0(τ ) = K2 cosh(g
cτ)
(7.222)
U1(τ) = K3 sinh(g
cτ)
(7.223)
La primera condicion inicial para U0 implica que K2 = c,mientras que derivando (7.223), la segunda condicion implicaK3 = c; ası el cuadrivector velocidad del cohete, en funciondel tiempo propio, esta dado por:
U(τ ) = (c cosh(g
cτ)
, c sinh(g
cτ)
, 0, 0) (7.224)
Para encontrar la lınea de universo de la nave falta integrarla ecuacion (7.207), donde las componentes del cuadrivectorvelocidad estan dadas por la ecuacion (7.224). Entonces inte-grando estas ecuaciones obtenemos:
x0(τ) =c2
gsinh
(g
cτ)
+ K5 (7.225)
x1(τ) =c2
gcosh
(g
cτ)
+ K6 (7.226)
con K5 y K6 constantes de integracion, que se determinan apartir de la condicion inicial
x(τ = 0) = (x0(0), x1(0), 0, 0) = (0, 0, 0, 0) (7.227)
pues, cuando la nave parte de la tierra, x1 = 0 y tomamosla condicion t = 0. Aplicando estas condiciones iniciales a lasecuaciones (7.225) y (7.226) obtenemos, finalmente, la lıneade universo de la nave:
x(τ) = (c2
gsinh
(g
cτ)
,c2
g(cosh
(g
cτ)
− 1), 0, 0) (7.228)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 107 — #111i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 107
c Trabajando en unidades de c = 1 y la distancia en al, la acelera-cion de gravedad es 1al−1 y el tiempo queda medido en anos.Cuando la nave alcanza la mitad del recorrido x1 = 212,5aly entonces
212,5al = cosh(τ) − 1 (7.229)
por lo tanto
τ = cosh−1(213,5) = 6,056 8anos (7.230)
el cual es el tiempo que indica un reloj que viaja en el cohete.El tiempo medido en la tierra esta dado por
x0 = sinh (6,056 8) = 213,502anos (7.231)
A partir de este instante la nave comienza a desacelerar aun g hasta llegar a las Pleyades. Por simetrıa, el tiempo quegasta la nave desde este punto hasta alcanzar el reposo enlas Pleyades es igual que el tiempo calculado para la primeraparte del viaje. Ası, el tiempo total del viaje, desde la tierrahasta las Pleyades, medido en el cohete es
τ ida = 2 × 6,056 8anos = 12,114anos (7.232)
y medido desde el sistema tierra, esta dado por
x0ida = 2 × 213,502anos = 427,004anos (7.233)
Para calcular la velocidad de la nave en el instante en que estaalcanza la mitad del viaje, utilizamos la ecuacion (7.57), lacual nos da la velocidad en terminos de las componentes delcuadrivector aceleracion; ası de la ecuacion (7.224) tenemos
v
c=
U1
U0=
c sinh( g
c τ)
c cosh( g
c τ) = tanh
(g
cτ)
(7.234)
remplazando τ = 6,056 8anos en la ecuacion anterior, tene-mos
v
c= tanh (6,056 8) = 0,99999 (7.235)
El viaje total de ida y regreso, para el observador del cohetees
τ total = 2 × τ ida = 24,228anos (7.236)
y para la tierra
x0total = 2 × x0
ida = 854,08anos (7.237)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 108 — #112i
i
i
i
i
i
108 CAPITULO 7. CINEMATICA RELATIVISTA
d Cuando la nave alcanza la mitad del recorrido x1 = 212,5altenemos
x1(τ ) =c2
g(cosh
(g
cτ)
− 1) (7.238)
entonces, en las unidades que estamos trabajando
212,5al =1
10(cosh (10τ ) − 1)al (7.239)
por lo tanto
τ =1
10cosh−1 (2125 + 1) = 0,835 51anos (7.240)
y el tiempo medido en el sistema tierra es de
x0(0,835 51anos) =1
10sinh (10 × 0,835 51)
= 212,59anos (7.241)
por lo tanto el viaje total de ida y vuelta, medido en la navees de
τ total = 4 × 0,835 51anos = 3,342anos (7.242)
y medido desde la tierra
x0total = 4 × 212,59anos = 850,36anos (7.243)
La velocidad de la nave, cuando alcanza la mitad del caminode ida, esta dada por
v
c=
U1
U0= tanh (10τ ) = tanh (8,35 51)
= 0,999999889. (7.244)
Notemos que el tiempo propio del cohete se puede disminuirindefinidamente, aumentando la aceleracion, pero el tiempomedido en la tierra esta acotado por 850al que es el tiempoque gastarıa un rayo de luz en ir desde la tierra hasta lasPleyades y regresar.
19. Viaje interestelar 2. Tomemos el origen del sistema de refe-rencia en la tierra, con t = 0 = τ cuando la nave parte, y el eje xen la direccion de movimiento. En unidades de c = 1 las distanciasy los tiempos tienen las mismas unidades de longitud, las cualestomaremos en al (anos luz).

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 109 — #113i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 109
a En el desplazamiento inicial, con aceleracion propia constantede 10g, la velocidad de la partıcula esta dada por la relacion(7.224)
v
c=
U1
U0=
c sinh( g
c τ)
c cosh( g
c τ) = tanh
(g
cτ)
(7.245)
entonces, cuando la nave alcanza la velocidad β = v/c =0,999, el tiempo transcurrido en la nave (tiempo propio) es
τ =1
10tanh−1 (0,999) anos = 0,380 02anos (7.246)
y por lo tanto el tiempo medido desde la tierra esta dado por
x0(0,380 02anos) =1
10sinh (10 × 0,380 02) = 2,234 4anos
(7.247)a partir de este instante la nave continua su viaje con veloci-dad constante de 0,999c.
b En el instante τ = 0,38002anos la nave alcanza la velocidad v,y por lo tanto la coordenada de posicion x1(τ ), que en estecaso nos da tambien la distancia a la tierra, esta dada por larelacion (7.238) y por lo tanto
x1(0,380 02) =1
10(cosh (10 × 0,380 02)− 1)al = 2,136 6al (7.248)
Es decir el cohete se encuentra en ese instante a mitad decamino de la estrella mas cercana a nosotros, Proxima delCentauro, la cual esta a una distancia de 4,3al de la tierra.
c A partir de este momento la nave continua su recorrido a veloci-dad constante, hasta encontrarse a una distancia de 2,136 6alde las Pleyades, momento en el cual inicia la desaceleracion a10g para llegar con velocidad cero a su destino. Esto significaque el cohete recorre una distancia D a velocidad constantedada por
D = 425al − 2 × 2,136 6al = 420,73al (7.249)
por lo tanto el intervalo de tiempo que gasta la nave en re-correr esta distancia, medida por el sistema tierra, es de
∆x0 =D
β=
420,73
0,999= 421,15anos (7.250)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 110 — #114i
i
i
i
i
i
110 CAPITULO 7. CINEMATICA RELATIVISTA
Teniendo en cuenta que ∆x0 corresponde al intervalo de tiem-po entre los eventos, “la nave alcanza la velocidad v” y “lanave inicia la desaceleracion”, medido por la tierra, entonces∆x0 esta relacionado con el intervalo de tiempo propio ∆τ ,entre los dos eventos, por la ecuacion
∆x0 =∆τ
√
1 − β2(7.251)
donde ∆τ corresponde al intervalo de tiempo propio medidopor los relojes del cohete. Ası, en el sistema cohete la partedel viaje a velocidad constante dura
∆τ = 421,15
√
1 − (0,999)2 = 18,830anos (7.252)
Por simetrıa, la ultima parte del camino, cuando el cohetedesacelera, dura un tiempo igual a la primera parte, cuandola nave esta acelerando, por lo tanto el tiempo total del viajede ida y regreso a las Pleyades esta dado por
τ total = 2× (2 × 0,380 02 + 2 × 18,830) = 76,84anos (7.253)
medido por los relojes del cohete y
x0total = 2×(2 × 2. 234 4 + 2 × 421,15) = 1693,5anos (7.254)
Los resultados obtenidos en este y el anterior problema losresumimos en la siguiente tabla:
A B Cτ total 24,228anos 3,342anos 76,84anosx0
total 854,0anos 850,36anos 1693,5anos
Esto muestra que, en condiciones normales, es realizable unviaje interestelar en tiempos propios razonables para los via-jeros de la nave, pero su retorno a la tierra significarıa re-gresar cuando ya han pasado varias generaciones en la tierra.Este resultado de la relatividad especial, conocido como laparadoja de los mellizos de Langevan, ha sido utilizado en laliteratura y el cine de ficcion, por ejemplo en la pelıcula “Elplaneta de los simios”. Es importante aclarar que la palabra“ficcion” se refiere a que aun no es posible realizar este tipo

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 111 — #115i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 111
de viajes interestelares, debido a las limitaciones tecnologicas.Sin embargo, el efecto del retraso de relojes viajeros se mi-dio con relojes de alta precision en aviones, donde los atrasosregistrados son del orden de 10−9s.
20. El horizonte de eventos. Como la partıcula con aceleracionpropia constante α parte del reposo en el origen del sistema dereferencia Σ, tomamos t = τ = 0 en este punto.
a Para el caso de la partıcula que estamos considerando, la lıneade universo x(τ) ya fue calculada en un problema anterior,entonces de la ecuacion (7.228) tenemos
x(τ) = (c2
αsinh
(α
cτ)
,c2
α(cosh
(α
cτ)
− 1), 0, 0) (7.255)
donde solo se ha remplazado el valor de la aceleracion de lagravedad g por la aceleracion propia α.
b Para encontrar la trayectoria de la partıcula x1 = x1(x0), medi-da por el observador inercial Σ, debemos despejar el parame-tro τ de la ecuacion (7.255) en terminos de la primera coor-denada x0. Entonces como
x0 =c2
αsinh
(α
cτ)
(7.256)
x1 =c2
α(cosh
(α
cτ)
− 1) (7.257)
despejamos las funciones sinh y cosh de las ecuaciones anterio-res, elevamos al cuadrado, restamos y utilizamos la identidad
cosh2 θ − sinh2 θ = 1 (7.258)
de las funciones hiperbolicas, obteniendo
1 = cosh2(α
cτ)
− sinh2(α
cτ)
=
(
αx1
c2+ 1
)2
−(
αx0
c2
)2
(7.259)
Esta ecuacion la podemos escribir en la forma(
x1 + c2
α
)2
c4
α2
−(
x0)2
c4
α2
= 1 (7.260)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 112 — #116i
i
i
i
i
i
112 CAPITULO 7. CINEMATICA RELATIVISTA
Teniendo en cuenta que la ecuacion general de una hiperbolaen el plano x − y tiene la forma
(x − h)2
a2− (y − k)2
b2= 1 (7.261)
donde (h, k) es el centro de la hiperbola, con asıntotas
y = ± b
ax +
(
k ∓ b
ah
)
(7.262)
la solucion (7.260) representa una hiperbola en el plano x1−x0
(recordemos que en relatividad el eje temporal x0 se tomavertical) con centro en el punto
(h, k) =
(
−c2
α, 0
)
(7.263)
y asıntotas con pendiente ±1. Esto implica que las asıntotascorresponden al cono de luz del evento
(x0, x1) =
(
−c2
α, 0
)
(7.264)
dadas por
x0 = ±(
x1 − c2
α
)
(7.265)
En la figura (7.8) se muestra la lınea de universo de unapartıcula con aceleracion propia constante.
La parte de la hiperbola en el cuadrante superior derecho re-presenta la lınea de universo de la partıcula, que parte del ori-gen con aceleracion propia constante y por lo tanto, asintoti-camente, la velocidad de la partıcula tiende a la velocidad dela luz. La parte inferior de esta rama de la hiperbola corres-ponderıa a una partıcula que proviene de la region x1 → ∞ enel tiempo x0 → −∞ desacelerando, y la cual alcanza el origencon velocidad cero, en el instante x0 = 0. La rama izquierdade la hiperbola corresponde a una partıcula que viene de laregion x1 → −∞ desacelerando con α, llegando al reposo enun punto situado en la coordenada x1 = −2c2/α y que vuelvea acelerar dirigiendose a x1 → −∞.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 113 — #117i
i
i
i
i
i
7.1. SOLUCIONES DE PROBLEMAS DE CINEMATICA 113
Figura 7.8: El horizonte de eventos. Lınea de universo con aceleracion propiaconstante.
c En la parte b del presente problema vimos que el movimientode una partıcula con aceleracion propia constante esta repre-sentado por una hiperbola en el plano x0 − x1, la cual tienecomo asıntotas el cono de luz del punto
(x0, x1) =
(
−c2
α, 0
)
(7.266)
Esto significa que la recta con ecuacion
x0 = x1 − c2
α(7.267)
no intercepta a la hiperbola y representa, en el cuadrantesuperior derecho, un rayo de luz que parte del origen en elinstante
x0 = ct =c2
α(7.268)
en la direccion del eje x1 positivo. El diagrama espacio-tiempo,figura (7.8), muestra que ninguna senal enviada desde un pun-to a la izquierda de la asıntota (7.267) puede interceptar lalınea de universo de la partıcula acelerada del lado derechodel diagrama. Por esta razon se dice que la recta (7.267) re-presenta un horizonte de eventos para la partıcula. Notemos,sin embargo, que la partıcula sı puede enviar una senal haciala region de la izquierda de esta recta. Una situacion similar

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 114 — #118i
i
i
i
i
i
114 CAPITULO 7. CINEMATICA RELATIVISTA
se presenta para la lınea de universo en los cuadrantes de laizquierda.
7.2. Soluciones de problemas avanzados
1. Grupo de Lorentz. Sean x, y ∈ M dos cuadrivectores y Λ latransformacion de Lorentz
Λ : M −→ M (7.269)
con x′ = Λx y y′ = Λy.
a Dado que Λ debe dejar invariante el producto minkowskiano,tenemos que
x′ · y′ = x′T ηy′ = xT ηy = x · y (7.270)
remplazando los cuadrivectores primados en terminos de losno primados, se llega a la ecuacion
xT ηy = (Λx)T η (Λy) = xTΛT ηΛy (7.271)
Puesto que esta ecuacion debe cumplirse para todos los cua-drivectores, tenemos que las matrices de transformacion deLorentz deben satisfacer la condicion
ΛT ηΛ = η (7.272)
La primera propiedad que se deriva de la ecuacion anterior,teniendo en cuenta las propiedades de los determinantes, esque
det |Λ| = ±1 (7.273)
El conjunto de todas las transformaciones de Lorentz, que enla representacion matricial corresponde a todas las matrices4 × 4 reales que satisfacen la condicion (7.272), forman ungrupo no abeliano, llamado el grupo general de Lorentz. Lastransformaciones con determinante +1 se llaman propias yforman un subgrupo, el grupo de transformaciones propiasde Lorentz, pues si Λ1 y Λ2 son dos transformaciones deLorentz con determinante +1, entonces Λ1Λ2 es de nuevouna transformacion con determinante
det |Λ1Λ2| = det |Λ1|det |Λ2| = +1 (7.274)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 115 — #119i
i
i
i
i
i
7.2. SOLUCIONES DE PROBLEMAS AVANZADOS 115
Las transformaciones con determinante −1 se llaman impro-pias y no forman un subgrupo, pues dos transformaciones im-propias sucesivas Λ1 y Λ2 dan una transformacion de Lorentzpropia, dado que
det |Λ1Λ2| = det |Λ1|det |Λ2| = (−1) (−1) = +1 (7.275)
Ejemplos de transformaciones impropias son la inversion deejes espaciales
ΛEx =
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
x0
x1
x2
x3
=
x0
−x1
−x2
−x3
(7.276)
y la inversion temporal
ΛT x =
−1 0 0 00 1 0 00 0 1 00 0 0 1
x0
x1
x2
x3
=
−x0
x1
x2
x3
(7.277)
sin embargo la inversion espacio-temporal es una transforma-cion propia:
ΛE−T x =
−1 0 0 00 −1 0 00 0 −1 00 0 0 −1
x0
x1
x2
x3
=
−x0
−x1
−x2
−x3
(7.278)
pues det |ΛE−T | = +1. Otra propiedad que se obtiene direc-tamente de la ecuacion (7.272) es que el numero de parame-tros independientes, de una transformacion de Lorentz ge-neral, es de seis, pues de las 16 ecuaciones de restriccion en(7.272) hay solo 10 independientes, dado que la matriz deMinkowski es simetrica ηT = η. Ası, el sistema de 10 ecua-ciones (7.272) independientes implica que, de los 16 elementosmatriciales necesarios para representar una transformacion deLorentz Λ, solamente seis parametros son independientes. Esdecir, una transformacion de Lorentz general queda determi-nada por seis parametros libres. Estos seis parametros, esco-gidos convenientemente, pueden ser interpretados como tres

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 116 — #120i
i
i
i
i
i
116 CAPITULO 7. CINEMATICA RELATIVISTA
parametros que representan rotaciones de los ejes espaciales ytres que representan las componentes de la velocidad relativaentre dos sistemas de referencia inerciales.
b Dada la matriz L tal que la transformacion de Lorentz Λ tienela forma
Λ = eL (7.279)
obtenemos que
det |Λ| = det∣
∣eL∣
∣ = eTrL (7.280)
donde TrL es la traza de la matriz L. Esta igualdad se puedeprobar teniendo en cuenta que la matriz Λ posee determinan-te diferente de cero y por lo tanto existe una transformacionde similitud S tal que
S−1ΛS = λ y S−1LS = ℓ (7.281)
son matrices diagonales y ademas esta transformacion dejael determinante y la traza de las matrices invariantes. Por lotanto
det |Λ| = det∣
∣S−1ΛS∣
∣ =3∏
α=0
λαα (7.282)
donde λαα son elementos de la diagonal de λ; entonces, dadoque
λαα = eℓαα (7.283)
con ℓαα los elementos de la matriz diagonal ℓ, tenemos que
det |Λ| =3∏
α=0
eℓαα = exp
(
3∑
α=0
ℓαα
)
= eTrℓ = eTrL (7.284)
Si elegimos la matriz L real, la ecuacion (7.279) excluye lastransformaciones impropias y ademas dado que det |Λ| = 1,entonces
TrL = 0 (7.285)
Es decir, para transformaciones propias de Lorentz L es unamatriz real sin traza. Teniendo en cuenta que la matriz deMinkowski posee las siguientes propiedades (por su defini-cion)
ηT = η; η2 = I (7.286)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 117 — #121i
i
i
i
i
i
7.2. SOLUCIONES DE PROBLEMAS AVANZADOS 117
con I la matriz identidad, la ecuacion (7.272) se puede escribiren la forma
ηΛT η = Λ−1 (7.287)
y de la ecuacion (7.279) se obtienen las siguientes propiedades
ΛT =(
eL)T
= eLT
(7.288)
ηΛT η = eηLT η (7.289)
Λ−1 = e−L (7.290)
Estas ecuaciones se pueden probar por calculo directo, uti-lizando la definicion de la exponencial de una matriz. Porejemplo veamos la primera ecuacion:
ΛT =(
eL)T
=
(
1 + L +1
2!L2 + · · ·
)T
= 1T + LT +1
2!
(
L2)T
+ · · ·
= 1 + LT +1
2!
(
LT)2
+ · · ·
= eLT(7.291)
como se querıa probar. Entonces
ηLT η = −L (7.292)
o en forma equivalente
[ηL]T = −ηL (7.293)
es decir la matriz ηL es antisimetrica y, por lo tanto, la formamas general de la matriz L, que satisface estas propiedades,se puede escribir
L =
0 L01 L02 L03
L01 0 L12 L13
L02 −L12 0 L23
L03 −L13 −L23 0
(7.294)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 118 — #122i
i
i
i
i
i
118 CAPITULO 7. CINEMATICA RELATIVISTA
pues la matriz L tiene traza cero y
(ηL)T =
L00 L01 L02 L03
L10 L11 L12 L13
L20 L21 L22 L23
L30 L31 L32 L33
T
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
T
=
L00 −L10 −L20 −L30
L01 −L11 −L21 −L31
L02 −L12 −L22 −L32
L03 −L13 −L23 −L33
(7.295)
−ηL = −
1 0 0 00 −1 0 00 0 −1 00 0 0 −1
L00 L01 L02 L03
L10 L11 L12 L13
L20 L21 L22 L23
L30 L31 L32 L33
=
−L00 −L01 −L02 −L03
L10 L11 L12 L13
L20 L21 L22 L23
L30 L31 L32 L33
(7.296)
asıLαα = −Lαα; α = 0, 1, 2, 3 (7.297)
y por lo tanto Lαα = 0,
L0i = Li0; i = 1, 2, 3 (7.298)
yLij = −Lji; i, j = 1, 2, 3 (7.299)
Esto muestra que una transformacion de Lorentz general que-da determinada por seis parametros L01, L02, L03, L12, L13
y L23 independientes.
c Dada la forma general de la matriz L, encontrada en la ecuacion(7.294), es suficiente elegir
~α = (−L23,−L13,−L12); ~ζ = (−L01,−L02,−L03) (7.300)
de tal manera que la matriz L se puede escribir como lacombinacion lineal:
L = −~α · R − ~ζ · B (7.301)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 119 — #123i
i
i
i
i
i
7.2. SOLUCIONES DE PROBLEMAS AVANZADOS 119
donde las componentes de los vectores R y B estan dadas porlas matrices (2.58), (2.59) y (2.60).
d Consideremos primero la matriz R1 y calculemos su cuadrado:
R21 =
0 0 0 00 0 0 00 0 −1 00 0 0 −1
= diag(00 − 1 − 1) (7.302)
la cual es diagonal. Un calculo similar para las otras matricesconduce a
R22 = diag(0 − 10 − 1)
R23 = diag(0 − 1 − 10)
B21 = diag(1100) (7.303)
B22 = diag(1010)
B23 = diag(1001)
Calculemos ahora(
~α · R)2
para cualquier vector real unitario
~α:
(
~α · R)2
=(
α1)2
R21 +
(
α2)2
R22 +
(
α3)2
R23 + α1α2R1R2
+α1α2R2R1 + α1α3R1R3 + α1α3R3R1
+α2α3R3 + α2α3R3R2 (7.304)
remplazando las matrices Ri tenemos
(
~α · R)2
(7.305)
= −
0 0 0 0
0(
α2)2
+(
α3)2 −α1α2 −α1α3
0 −α1α2(
α1)2
+(
α3)2 −α2α3
0 −α1α3 −α2α3(
α1)2
+(
α2)2
Multiplicando esta matriz por ~α · R y teniendo en cuenta lacondicion de unitariedad
(
α1)2
+(
α2)2
+(
α3)2
= 1 (7.306)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 120 — #124i
i
i
i
i
i
120 CAPITULO 7. CINEMATICA RELATIVISTA
tenemos
(
~α · R)3
=
0 0 0 00 0 α3 −α2
0 −α3 0 α1
0 α2 −α1 0
= −~α · R (7.307)
Un calculo similar conduce al resultado
(
~ζ · B)3
= ~ζ · B (7.308)
por lo tanto cualquier potencia de las matrices Ri y Bj , i, j =1, 2, 3 puede ser expresada como un multiplo de la matriz o desu cuadrado, pues, por ejemplo, si tomamos el vector unitario~ζ = (1, 0, 0) tenemos que
(
~ζ · B)3
= B31 = B1 (7.309)
y
B41 = B3
1B1 = B1B1 = B21 (7.310)
con un resultado similar para las demas matrices.
e Consideremos en primer lugar el caso particular
~α = (0, 0, 0); ~ζ = (ζ, 0, 0) (7.311)
Entonces la matriz de transformacion de Lorentz Λ esta dadapor
Λ = eL = e−~α·R−~ζ·B = e−ζB1 (7.312)
Para calcular la funcion exponencial hacemos uso de la ex-pansion en serie de Taylor
Λ = I − ζB1 +(ζB1)
2
2!− (ζB1)
3
3!+
(ζB1)4
4!− · · · (7.313)
Utilizando el resultado de la parte d del presente problemapara las potencias de la matriz B1, la serie anterior se puede

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 121 — #125i
i
i
i
i
i
7.2. SOLUCIONES DE PROBLEMAS AVANZADOS 121
escribir en la forma
Λ = I +
(
−ζB1 −(ζB1)
3
3!− (ζB1)
5
5!− · · ·
)
+
(
(ζB1)2
2!+
(ζB1)4
4!+
(ζB1)6
6!+ · · ·
)
= I −(
ζ +ζ3
3!+
ζ5
5!+ · · ·
)
B1
+
(
ζ2
2!+
ζ4
4!+
ζ6
6!+ · · ·
)
B21 (7.314)
Las expansiones en potencias de ζ en la expresion anteriorcorresponden a las series de Taylor del sinh y cosh respecti-vamente, salvo el primer termino de la serie de cosh, el cuallo sumamos y lo restamos, ası
Λ = 1− B21 − B1 sinh ζ + B2
1 cosh ζ (7.315)
Remplazando explıcitamente las matrices B1, su cuadrado yla matriz identidad I, tenemos
Λ =
cosh ζ − sinh ζ 0 0− sinh ζ cosh ζ 0 0
0 0 1 00 0 0 1
(7.316)
la cual coincide con la transformacion de Lorentz usual (verecuacion (7.102)), donde el parametro ζ esta relacionado conla velocidad v del sistema de referencia Σ′ respecto a Σ porla ecuacion
tanh ζ =v
c(7.317)
Consideremos ahora el segundo caso particular
~α = (0, 0, α); ~ζ = (0, 0, 0) (7.318)
y procedamos en forma similar al caso anterior:
Λ = eL = e−~α·R−~ζ·B
= e−αR1 (7.319)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 122 — #126i
i
i
i
i
i
122 CAPITULO 7. CINEMATICA RELATIVISTA
Expandiendo la exponencial en serie de Taylor y utilizandolas propiedades de las potencias de la matriz R1, tenemos
Λ = I − αR1 +(αR1)
2
2!− (αR1)
3
3!+ · · ·
= I − αR1 +(αR1)
2
2!+
α3R1
3!− · · · (7.320)
remplazando las matrices I, R1 y R21, recordando las expan-
siones en serie de Taylor para las funciones sin α y cos α, te-nemos que la transformacion de Lorentz esta dada por
Λ =
1 0 0 00 cos α sinα 00 − sin α cos α 00 0 0 1
(7.321)
la cual representa una rotacion rıgida de los ejes espacialesen un angulo α alrededor del eje z. A partir de estos resul-tados es facil convencerse que las matrices Ri correspondena rotaciones rıgidas de los ejes espaciales y las matrices Bi atransformaciones puras de Lorentz. Por ejemplo, una trans-formacion de la forma
Λ = e−~ζ·B
(7.322)
representa una transformacion pura de Lorentz en la direcciondel vector ~ζ, el cual esta relacionado con la velocidad delsistema de referencia por
~ζ = β tanh−1 β (7.323)
con~β = ~v/c (7.324)
2. Transformacion general de Lorentz. Teniendo en cuenta el re-sultado del problema anterior, la transformacion pura de Lorentzmas general esta dada por la ecuacion (7.322), donde el parame-tro ~ζ se relaciona con la velocidad ~v por las ecuaciones (7.323) y(7.324). Entonces, expandiendo en serie de Taylor la ecuacion
Λ = e−β·B tanh
−1 β(7.325)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 123 — #127i
i
i
i
i
i
7.2. SOLUCIONES DE PROBLEMAS AVANZADOS 123
donde β es un vector unitario en la direccion de la velocidad, ob-tenemos
Λ = I − β · B tanh−1 β +
(
β · B tanh−1 β)2
2!−
(
β · B tanh−1 β)3
3!+
(
β · B tanh−1 β)4
4!− · · ·(7.326)
Teniendo en cuenta las propiedades de la matriz B, deducidas enel problema anterior (ecuacion (7.308)), y agrupando los terminosen ~ζ · B y su cuadrado, tenemos que
Λ = I − β · B(
tanh−1 β +
(
tanh−1 β)3
3!+ · · ·
)
(7.327)
+(
β · B)2(
(
tanh−1 β)2
2!+
(
tanh−1 β)4
4!− · · ·
)
Las series entre parentesis en la ecuacion anterior corresponden ala expansion en serie de Taylor de sinh(tanh−1 β) y cosh(tanh−1 β);por lo tanto
Λ = I − ~ζ · B sinh(tanh−1 β) +(
~ζ · B)2
cosh(tanh−1 β) (7.328)
teniendo en cuenta las ecuaciones (7.100) y (7.101) que relacionanla velocidad con las funciones hiperbolicas
sinh(tanh−1 β) = βγ (7.329)
cosh(tanh−1 β) = γ (7.330)
la transformacion de Lorentz toma la forma
Λ = I − βγ~ζ · B + γ(
~ζ · B)2
(7.331)
Calculando ahora las matrices ~ζ · B y(
~ζ · B)2
, utilizando las de-
finiciones para las matrices B (ecuaciones (2.58), (2.59) y (2.60)),obtenemos

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 124 — #128i
i
i
i
i
i
124 CAPITULO 7. CINEMATICA RELATIVISTA
Λ =
γ −βγβ1 −βγβ2 −βγβ3
−βγβ1 1 + β1(γ − 1) β1β2(γ − 1) β1β3(γ − 1)
−βγβ2 β1β2(γ − 1) 1 + β2(γ − 1) β2β3(γ − 1)
−βγβ3 β1β3(γ − 1) β2β3(γ − 1) 1 + β3(γ − 1)
(7.332)
Dado que
β =~β
β=
1
β
(
βx, βy, βz
)
= (β1, β2, β3) (7.333)
con βx = vx/c, etc., llegamos finalmente a la matriz de Lorentzgeneral
Λ =
γ −βxγ −βyγ −βzγ
−βxγ 1 + (γ−1)β2x
β2
(γ−1)βxβy
β2
(γ−1)βxβz
β2
−βyγ(γ−1)βxβy
β2 1 +(γ−1)β2
y
β2
(γ−1)βyβz
β2
−βzγ(γ−1)βxβz
β2
(γ−1)βyβz
β2 1 + (γ−1)β2z
β2
(7.334)
A partir de esta matriz podemos obtener las ecuaciones generalespara la transformacion de las coordenadas entre los sistemas dereferencia inerciales Σ y Σ′,
x′0
x′1
x′2
x′3
=
γ −βxγ −βyγ −βzγ
−βxγ 1 + (γ−1)β2x
β2
(γ−1)βxβy
β2
(γ−1)βxβz
β2
−βyγ(γ−1)βxβy
β2 1 +(γ−1)β2
y
β2
(γ−1)βyβz
β2
−βzγ(γ−1)βxβz
β2
(γ−1)βyβz
β2 1 + (γ−1)β2z
β2
×
x0
x1
x2
x3
(7.335)
las cuales se pueden reescribir en la forma usual
x′0 = γ(x0 − ~β · ~x) (7.336)
~x′ = ~x +(γ − 1)
β2
(
~β · ~x)
~β − γx0~β (7.337)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 125 — #129i
i
i
i
i
i
7.2. SOLUCIONES DE PROBLEMAS AVANZADOS 125
3. Algebra de Lie del grupo de Lorentz. La demostracion de laspropiedades del conmutador es directa a partir de la definicion yde las propiedades del producto y la suma de matrices, recordandoque el producto de matrices no es conmutativo.
a De la definicion de conmutador tenemos
[A,B] = AB − BA = − (BA− AB) = − [B,A] (7.338)
[A,B + C] = A (B + C) − (B + C)A
= AB + AC − BA− CA
= AB − BA + AC − CA
= [A,B] + [A,C] (7.339)
donde se ha hecho uso de la conmutatividad de la suma dematrices.
[A,BC] = ABC − BCA
= ABC − BAC − BCA + BAC
= (AB − BA)C + B (AC − CA)
= [A,B]C + B [A,C] (7.340)
en el segundo paso se sumo y resto el termino BAC.
[A,B]T = (AB− BA)T = (AB)T − (BA)T
= BT AT − ATBT =[
BT ,AT]
(7.341)
Para probar la identidad de Jacobi basta con desarrollar ex-plıcitamente los conmutadores y aplicar las propiedades (2.70),(2.71) y (2.72) demostradas:
[A, [B,C]] + [C, [A,B]] + [B, [C,A]]
= [A,BC − CB] + [C,AB −BA] + [B,CA − AC]
= [A,BC] − [A,CB] + [C,AB] − [C,BA]
+ [B,CA] − [B,AC]
= 2 [A,B]C + 2B [A,C] + 2 [C,A]B
+2C [B,A] + 2A [C,B] + 2 [B,C]A
= 2ABC − 2BAC + 2BAC − 2BCA
+2CAB− 2ACB + 2CBA− 2CAB
+2ACB− 2ABC + 2BCA− 2CBA
≡ 0 (7.342)
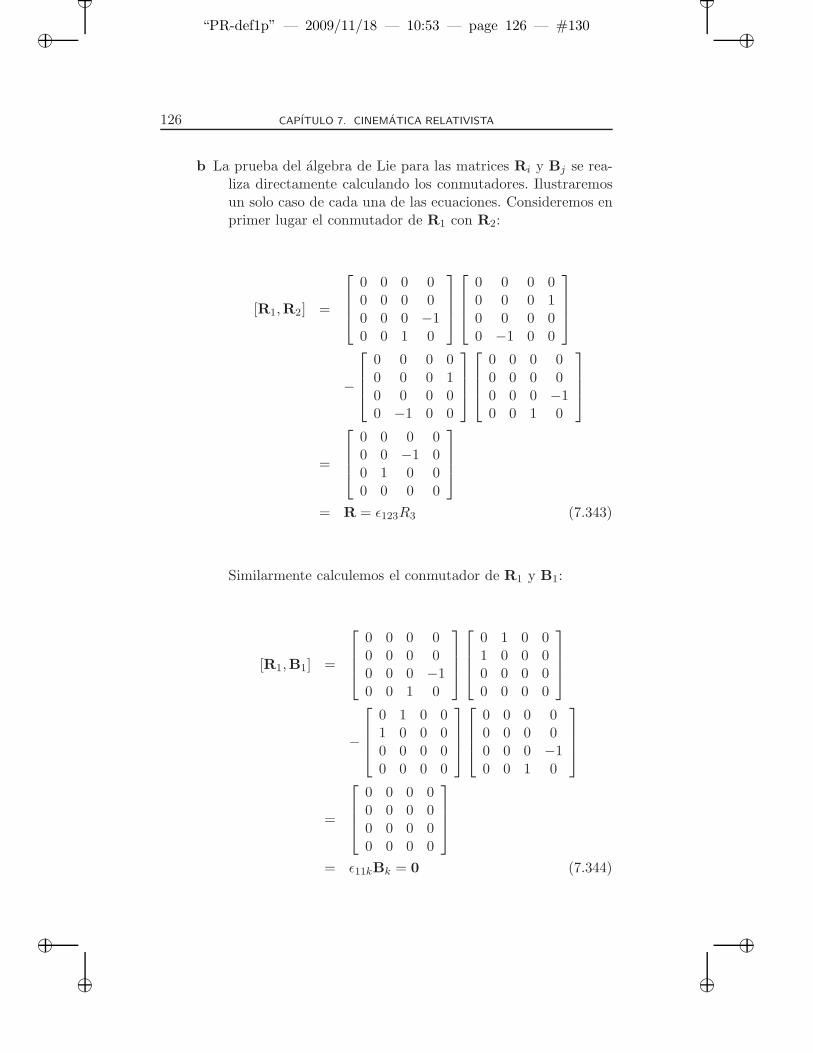
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 126 — #130i
i
i
i
i
i
126 CAPITULO 7. CINEMATICA RELATIVISTA
b La prueba del algebra de Lie para las matrices Ri y Bj se rea-liza directamente calculando los conmutadores. Ilustraremosun solo caso de cada una de las ecuaciones. Consideremos enprimer lugar el conmutador de R1 con R2:
[R1,R2] =
0 0 0 00 0 0 00 0 0 −10 0 1 0
0 0 0 00 0 0 10 0 0 00 −1 0 0
−
0 0 0 00 0 0 10 0 0 00 −1 0 0
0 0 0 00 0 0 00 0 0 −10 0 1 0
=
0 0 0 00 0 −1 00 1 0 00 0 0 0
= R = ǫ123R3 (7.343)
Similarmente calculemos el conmutador de R1 y B1:
[R1,B1] =
0 0 0 00 0 0 00 0 0 −10 0 1 0
0 1 0 01 0 0 00 0 0 00 0 0 0
−
0 1 0 01 0 0 00 0 0 00 0 0 0
0 0 0 00 0 0 00 0 0 −10 0 1 0
=
0 0 0 00 0 0 00 0 0 00 0 0 0
= ǫ11kBk = 0 (7.344)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 127 — #131i
i
i
i
i
i
7.2. SOLUCIONES DE PROBLEMAS AVANZADOS 127
El conmutador de R1 con B2 esta dado por:
[R1,B2] =
0 0 0 00 0 0 00 0 0 −10 0 1 0
0 0 1 00 0 0 01 0 0 00 0 0 0
−
0 0 1 00 0 0 01 0 0 00 0 0 0
0 0 0 00 0 0 00 0 0 −10 0 1 0
=
0 0 0 10 0 0 00 0 0 01 0 0 0
= B3 = ǫ123B3 (7.345)
Finalmente calculemos el conmutador [B3,B2]:
[B3,B2] =
0 0 0 10 0 0 00 0 0 01 0 0 0
0 0 1 00 0 0 01 0 0 00 0 0 0
−
0 0 1 00 0 0 01 0 0 00 0 0 0
0 0 0 10 0 0 00 0 0 01 0 0 0
=
0 0 0 00 0 0 00 0 0 −10 0 1 0
= R3 = −ǫ321R3 (7.346)
pues ǫ321 = −1 porque 321 es una permutacion impar de 123.
En general, cualquier conjunto de seis matrices (u operadores de cual-quier naturaleza), que obedezcan el algebra de Lie del grupo de Lorentz,constituyen una representacion de las transformaciones de Lorentz. Te-niendo en cuenta que los 6 parametros necesarios para describir unatransformacion propia de Lorentz se pueden elegir de manera arbitraria,

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 128 — #132i
i
i
i
i
i
128 CAPITULO 7. CINEMATICA RELATIVISTA
se debe utilizar, en general, otro conjunto de seis matrices de represen-tacion, las cuales, no necesariamente, tienen un significado geometrico ofısico explıcito, como fue el caso que consideramos para las matrices Ri
y Bj y los parametros ~α y ~ζ.
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 129 — #133i
i
i
i
i
i
Capıtulo 8
Efecto Doppler
8.1. Soluciones de problemas del efecto Doppler
1. Cuadrivector de onda. Sean λ, ω y ~k la longitud de onda, lafrecuencia angular y el vector de onda, medidos por el observadorΣ, y λ, ω y ~k′ las cantidades correspondientes para el observadorΣ′. A partir de las ecuaciones de transformacion (3.11), para lascomponentes del cuadrivector de onda y su definicion en terminosde la frecuencia y numero de onda, ecuacion (3.8), obtenemos elsiguiente conjunto de ecuaciones:
ω
c= γ(
ω
c− βkx) (8.1)
kx′ = γ(kx − βω
c) (8.2)
ky′ = ky (8.3)
kz′ = kz (8.4)
La primera de estas ecuaciones la podemos escribir tambien en laforma
ν = γ(ν − vkx) (8.5)
Dado que la relacion de dispersion para las ondas electromagneti-cas en el vacıo es la misma, i. e. λν = c, entonces de esta relacion seobtiene la longitud de onda, dada la frecuencia. Tambien se puedeobtener la relacion entre las normas del vector de onda, medidasen Σ y Σ′, a partir de la relacion entre las longitudes de onda,
129

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 130 — #134i
i
i
i
i
i
130 CAPITULO 8. EFECTO DOPPLER
o calculandola directamente de las ecuaciones de transformacionanteriores:
∣
∣k′∣∣ =
√
k2x′ + k2
y′ + k2z′
=
√
γ2(k2x + β2 ω2
c2− 2kxβ
ω
c) + k2
y + k2z
=
√
|k|2 + k2xβ2γ2 + γ2β2 |k|2 − 2γ2βkxk
=
√
|k|2 γ2 + k2xβ2γ2 − 2γ2βkx |k|
= γ ||k| − kxβ| (8.6)
2. Efecto Doppler longitudinal. Consideremos un sistema de re-ferencia Σ′ ligado a la fuente y con origen en ella y relacionado conel sistema Σ de la manera usual. Supongamos que en algun ins-tante t > 0 la fuente emite ondas monocromaticas en la direcciondel eje x negativo, como se muestra en la figura (8.1).
Figura 8.1: Efecto Doppler longitudinal. Sistema de referencia inercial para elobservador Σ y para la fuente Σ′.
Las componentes del cuadrivector de onda, en el sistema de refe-rencia Σ′, para una onda plana monocromatica que se mueve haciael origen del sistema Σ (ver figura (8.1) superior), estan dadas por:
k = (k′0, k′1, k′2, k′3) = (ω0
c, kx0, 0, 0) (8.7)
dondekx0 = −
∣
∣
∣
~k∣
∣
∣ x (8.8)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 131 — #135i
i
i
i
i
i
8.1. SOLUCIONES DE PROBLEMAS DEL EFECTO DOPPLER 131
Debido a la relacion de dispersion, ecuacion (3.9), tenemos que
ω20
c2−∣
∣
∣
~k∣
∣
∣
2=
ω20
c2− k2
x0 = 0 (8.9)
y por lo tanto las componentes del cuadrivector de onda toman laforma
k = (k′0, k′1, k′2, k′3) = (ω0
c,−ω0
c, 0, 0) (8.10)
Para encontrar la frecuencia medida por el detector, situado enel origen del sistema Σ, aplicamos la transformacion de Lorentzinversa (de Σ′ a Σ) para las componentes del cuadrivector de onda.Si llamamos
k = (k0, k1, k2, k3) = (ωD
c, kxD, kyD, kzD) (8.11)
a las componentes del cuadrivector de onda medidas en el sistemaΣ, tenemos
ωD
c= γ(−v)(
ω0
c+ βkx0) (8.12)
kxD = γ(−v)(kx0 + βω0
c) (8.13)
kyD = kzD = 0 (8.14)
Entonces, de la primera ecuacion anterior obtenemos
ωD = γω0(1 − β) = ω0
√
1 − β
1 + β(8.15)
La segunda ecuacion nos conduce a la misma relacion encontrada ypor lo tanto no da nueva informacion. Si la fuente se esta moviendohacia el detector basta con cambiar v → −v y obtenemos que lafrecuencia detectada en Σ esta dada por
ωD = ω0
√
1 + β
1 − β(8.16)
Notemos que en el primer caso, cuando la fuente se aleja, la fre-cuencia detectada es menor que la frecuencia emitida y se conoceen la literatura como “corrimiento al rojo”, mientras que en el se-gundo caso, cuando la fuente se acerca, la frecuencia medida esmayor y se conoce como “corrimiento al azul”. Esta denominacion

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 132 — #136i
i
i
i
i
i
132 CAPITULO 8. EFECTO DOPPLER
se refiere a que, en el espectro visible, el rojo corresponde a fre-cuencias menores y el azul a frecuencias mayores. El efecto Dopplerlongitudinal clasico (no relativista) es un fenomeno tıpicamenteondulatorio, que se presenta en todos los fenomenos ondulatorios,incluidas las ondas electromagneticas. Clasicamente el corrimientoDoppler longitudinal esta dado por
ωD = ω0c − v
c(8.17)
Este resultado lo podemos obtener a partir de la ecuacion (8.15),si expandimos el factor γ en potencias de v/c:
γ(v) =
(
1 − v2
c2
)−1/2
= 1 +1
2
v2
c2+ O(v4/c4) (8.18)
remplazando en la ecuacion (8.15) tenemos
ωD = ω0(1 −v
c)
„
1 +1
2
v2
c2+ O(v4/c4)
«
= ω0(1 −v
c) + ω0O(v2/c2) (8.19)
donde no se han escrito explıcitamente terminos cuadraticos enβ, los cuales corresponden a la correccion relativista del resultadoclasico.
3. Efecto Doppler transversal y aberracion de la luz. Consi-deremos un sistema de referencia Σ′ ligado a la fuente relacionadocon el sistema Σ de la manera usual y con la fuente en algun puntosobre el eje y′ positivo. Las componentes del cuadrivector de onda,medidas en el sistema de la fuente, estan dadas por
k = (k′0, k′1, k′2, k′3) = (ω0
c, 0, ky0, 0) = (
ω0
c, 0,−ω0
c, 0) (8.20)
donde la ultima igualdad se obtiene de la relacion de dispersion.Las componentes del cuadrivector de onda
(ωD
c, kxD, kyD, kzD) (8.21)
en el sistema Σ se obtienen por una transformacion de Lorentz deΣ′ → Σ, ası
ωD
c= γ(−v)(
ω0
c+ β) (8.22)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 133 — #137i
i
i
i
i
i
8.1. SOLUCIONES DE PROBLEMAS DEL EFECTO DOPPLER 133
kxD = γ(−v)(kx0 + βω0
c) (8.23)
kyD = ky0 (8.24)
kzD = 0 (8.25)
Dado que en Σ′ la componente kx0 se anula, la primera ecuacionimplica que
ωD = γ(v)ω0 =ω0
√
1 − β2(8.26)
Esta relacion es conocida como efecto Doppler transversal y co-responde a un efecto netamente relativista porque su origen se debeal efecto de dilatacion temporal y no tiene correspondencia a nivelclasico, pues en primera aproximacion γ(v) ∼ 1. Las ecuaciones detransformacion (8.23) y (8.24) implican que
kxD = γ(v)v
c2ω0 (8.27)
kyD = −ω0
c(8.28)
esto significa que para el detector el frente de ondas incide forman-do un angulo de
tan θ =kxD
kyD= −γ(v)
v
c(8.29)
con respecto al eje y. Este efecto es conocido como aberracion de laluz y fue observado con las estrellas situadas perpendicularmente alplano de la orbita terrestre. El calculo clasico y el valor observadoesta dado por
tan θ = −v
c(8.30)
el cual corresponde al lımite clasico de la ecuacion (8.29), dondese hace la aproximacion γ ∼ 1.
4. Comunicacion espacial con Doppler. De igual manera que enel problema 10 del primer capıtulo, supongamos que la nave A seesta alejando de la tierra. Para resolver este problema, utilizando elefecto Doppler, consideremos que las dos senales enviadas desde latierra con una diferencia de tiempos t0 corresponden a dos frentesde onda consecutivos y por lo tanto t0 representa el periodo de unaonda y ası la frecuencia angular de la senal es
ω0 =2π
t0(8.31)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 134 — #138i
i
i
i
i
i
134 CAPITULO 8. EFECTO DOPPLER
a Consideremos primero el caso de la nave A la cual se aleja dela fuente (tierra) y por lo tanto podemos aplicar el efectoDoppler longitudinal (problema 2 ecuacion (8.15)):
ωD = ω0
√
1 − β
1 + β(8.32)
ası, la diferencia de tiempos ∆t′A entre las dos senales medidaspor la nave A es
∆t′A =2π
ωD=
2π
ω0
√
1 + β
1 − β= t0
√
1 + β
1 − β(8.33)
Para el caso de la nave B, la cual se esta acercando a la fuente,basta con cambiar v → −v, por lo tanto
∆t′B = t0
√
1 − β
1 + β(8.34)
b El calculo de la diferencia de tiempos de los pulsos que llegana la tierra procede en forma similar. Para el caso de la naveA podemos considerar que los pulsos reflejados en la navecorresponden a un frente de ondas emitido por la nave A conuna frecuencia ωD y por lo tanto, aplicando efecto Dopplerlongitudinal, en la tierra se detecta un frente de ondas defrecuencia
ωT = ωD
√
1 − β
1 + β(8.35)
remplazando la ecuacion (8.32) para ωD tenemos
ωT = ω01 − β
1 + β(8.36)
y la diferencia de tiempos de la llegada de los dos pulsosesta dada por
∆tTA =2π
ωT= t0
1 + β
1 − β(8.37)
Para calcular la diferencia de tiempos de la nave B es sufi-ciente cambiar v → −v:
∆tTB = t01 − β
1 + β(8.38)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 135 — #139i
i
i
i
i
i
8.1. SOLUCIONES DE PROBLEMAS DEL EFECTO DOPPLER 135
5. Expansion del universo. El factor de corrimiento esta definidocomo
z =λ
λ0− 1 (8.39)
Remplazando los valores para la longitud de onda propia y obser-vada de la lınea Hα obtenemos
z =6650
6563− 1 = 1. 325 6 × 10−2 (8.40)
Teniendo en cuenta que el corrimiento es hacia el rojo, pues z > 0,expresemos la velocidad en terminos del corrimiento al rojo. De laecuacion (8.15) tenemos que la frecuencia detectada esta dada por
ω =
√
1 − β
1 + βω0 (8.41)
donde β = v/c es la velocidad con que se esta alejando la galaxiay ω0 es la frecuencia propia de emision. Teniendo en cuenta larelacion entre frecuencia angular y longitud de onda
ω0 =2πc
λ0(8.42)
tenemos que
λ
λ0=
√
1 + β
1 − β= z + 1 (8.43)
despejando la velocidad en funcion de z obtenemos
β =(z + 1)2 − 1
(z + 1)2 + 1(8.44)
entonces remplazando
β =
(
1. 325 6 × 10−2 + 1)2 − 1
(1. 325 6 × 10−2 + 1)2 + 1= 1. 316 8 × 10−2 (8.45)
6. Ley de reflexion en espejos planos. Considerese el sistemade referencia de laboratorio LΣ, con respecto al cual el plano delespejo esta en el plano y − z y se esta moviendo con velocidad~v = −vx y sin perdida de generalidad el rayo de luz se mueve enel plano x − y hacia el espejo (ver figura (8.2)).

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 136 — #140i
i
i
i
i
i
136 CAPITULO 8. EFECTO DOPPLER
Figura 8.2: Ley de reflexion en espejos planos. Reflexion sobre espejo movilnormal al plano del espejo.
Las componentes del cuadrivector de onda ki del rayo incidente,en el sistema laboratorio, estan dadas por:
ki =(
k0i , k
1i , k
2i , k
3i
)
=(ωi
c,ωi
ccos θi,
ωi
csin θi, 0
)
(8.46)
Considerese ahora un sistema de referencia EΣ ligado al espejocon sus ejes paralelos a los ejes del sistema LΣ. Las componentesdel cuadrivector de onda incidente en el sistema de referencia delespejo
Eki =(
Ek0i ,
E k1i ,
E k2i ,
E k3i
)
(8.47)
se obtienen a partir de ki por una transformacion de Lorentz usualde LΣ a EΣ con velocidad −v. Ası, las componentes no nulas son
Ek0i = γ
(
k0i + βk1
i
)
= γ(ωi
c+ β
ωi
ccos θi
)
= γωi
c(1 + β cos θi) (8.48)
Ek1i = γ
(
k1i + βk0
i
)
= γ(ωi
ccos θi + β
ωi
c
)
= γωi
c(cos θi + β) (8.49)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 137 — #141i
i
i
i
i
i
8.1. SOLUCIONES DE PROBLEMAS DEL EFECTO DOPPLER 137
Ek2i = k2
i =ωi
csin θi (8.50)
En el sistema de referencia del espejo, el rayo de luz se refleja si-guiendo la ley de angulo de incidencia igual al angulo de reflexion;entonces el cuadrivector de onda reflejado en EΣ tiene componen-tes dadas por
Ekr =(
Ek0r ,
E k1r ,
E k2r ,
E k3r
)
=(
γωi
c(1 + β cos θi) ,−γ
ωi
c(cos θi + β) ,
ωi
csin θi
)
(8.51)
Realizando la transformacion de Lorentz inversa se obtienen lascomponentes del cuadrivector de onda reflejado kr en el sistemalaboratorio, ası
k0r = γ
(
Ek0r − βEk1
r
)
= γ(
γωi
c(1 + β cos θi) + βγ
ωi
c(cos θi + β)
)
= γ2 ωi
c
(
1 + 2β cos θi + β2)
(8.52)
k1r = γ
(
Ek1r − βEk0
r
)
= γ(
−γωi
c(cos θi + β) − βγ
ωi
c(1 + β cos θi)
)
= −γ2 ωi
c
(
cos θi + 2β + β2 cos θi
)
(8.53)
k2r =E k2
r =ωi
csin θi (8.54)
por lo tanto la frecuencia del rayo reflejado cambia y esta dadapor
ωr = ωiγ2(
1 + 2β cos θi + β2)
(8.55)
y el angulo de reflexion θr esta dado por (medido con respecto ala normal)
cos θr =
∣
∣k1r
∣
∣
∣
∣
∣
~kr
∣
∣
∣
=
∣
∣k1r
∣
∣
k0r
=γ2 ωi
c
(
cos θi + 2β + β2 cos θi
)
γ2 ωic
(
1 + 2β cos θi + β2)
=2β +
(
1 + β2)
cos θi
1 + 2β cos θi + β2 (8.56)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 138 — #142i
i
i
i
i
i
138 CAPITULO 8. EFECTO DOPPLER
Considerese ahora el caso del espejo moviendose con velocidadconstante en el plano del espejo. Sin perdida de generalidad, seasume que el espejo esta en el plano x − z y se mueve con velo-cidad v en la direccion del eje x positivo del sistema laboratorioy el rayo de luz se mueve en el plano x − y e incide en el espejocon un angulo θi, respecto a la normal. Entonces las componentesdel cuadrivector de onda incidente, en el sistema laboratorio, estandadas por
ki =(
k0i , k
1i , k
2i , k
3i
)
=(ωi
c,ωi
csin θi,
ωi
ccos θi, 0
)
(8.57)
Pasando al sistema de referencia del espejo (ahora con velocidadv) las componentes del cuadrivector de onda incidente
Eki =(
Ek0i ,
E k1i ,
E k2i ,
E k3i
)
(8.58)
estan dadas por
Ek0i = γ
(
k0i + βk1
i
)
= γ(ωi
c− β
ωi
csin θi
)
= γωi
c(1 − β sin θi) (8.59)
Ek1i = γ
(
k1i + βk0
i
)
= γ(ωi
csin θi − β
ωi
c
)
= γωi
c(sin θi − β) (8.60)
Ek2i = k2
i =ωi
cc cos θi (8.61)
En el sistema de referencia del espejo el rayo de luz se reflejasiguiendo la ley de angulo de incidencia igual al angulo de reflexiony por lo tanto las componentes del cuadrivector de onda reflejadoen EΣ son
Ekr =(
Ek0r ,
E k1r ,
E k2r ,
E k3r
)
=(
γωi
c(1 − β sin θi) , γ
ωi
c(sin θi − β) ,−ωi
ccos θi, 0
)
(8.62)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 139 — #143i
i
i
i
i
i
8.1. SOLUCIONES DE PROBLEMAS DEL EFECTO DOPPLER 139
Aplicando la transformacion de Lorentz inversa se obtienen lascomponentes del cuadrivector de onda reflejado kr en el sistemalaboratorio, ası
k0r = γ
(
Ek0r + βEk1
r
)
= γ(
γωi
c(1 − β sin θi) + βγ
ωi
c(sin θi − β)
)
= γ2 ωi
c
(
1 − β2)
(8.63)
=ωi
c(8.64)
es decir la frecuencia no cambia y
k1r = γ
(
Ek1r − βEk0
r
)
= γ(
γωi
c(sin θi − β) + βγ
ωi
c(1 − β sin θi)
)
= γ2 ωi
csin θi
(
1 − β2)
(8.65)
=ωi
csin θi (8.66)
k2r = Ek2
r = −ωi
ccos θi (8.67)
por lo tanto el angulo de reflexion es (medido con respecto a lanormal)
cos θr =
∣
∣k2r
∣
∣
∣
∣
∣
~kr
∣
∣
∣
=
∣
∣k2r
∣
∣
k0r
=ωic cos θi
ωic
= cos θi (8.68)
es decir, para este caso se sigue cumpliendo que el angulo de inci-dencia es igual al de reflexion.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 140 — #144i
i
i
i
i
i
Capıtulo 9
Dinamica relativista
9.1. Soluciones de problemas sobre dinamica
1. Cuadrivector momento. Debemos probar que p2 > 0, si p21 > 0
y p22 > 0. Entonces
p2 = (p1 + p2)2 = p2
1 + p22 + 2p1 · p2 (9.1)
El producto interno minkowskiano p1 · p2 de los cuadrivectoresmomento, por ser una cantidad invariante, lo podemos calcularen el sistema de referencia propio de una cualquiera de las dospartıculas, por ejemplo de la partıcula 1. Entonces, en este sistemade referencia, los cuadrivectores momento de las partıculas estandados por
p1 = (m01c, 0, 0, 0) (9.2)
p2 = (m02γ(v21)c,m02γ(v21)~v21) (9.3)
donde ~v21 es la velocidad de la partıcula 2 respecto a la partıcula1. Entonces
p1 · p2 = m01m02γ(v21)c2 > 0 (9.4)
pues el factor γ siempre es positivo. Por lo tanto
p2 = m201c
2 + m202c
2 + 2m01m02γ(v21)c2 > 0 (9.5)
como se querıa probar.
140

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 141 — #145i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 141
2. Sistema centro de masa. El cuadrivector momento total delsistema esta dado por
p = p1 + p2
= (m1c, ~p1) + (m2c, ~p2)
= ((m1 + m2) c, ~p1 + ~p2)
= (mc, ~p) (9.6)
donde mi = m0iγ(~vi), i = 1, 2 con ~vi las velocidades de las partıcu-las en el sistema de referencia Σ. La velocidad ~uCM del sistemacentro de masa esta dada por
~uCM =~p
m=
m01γ(~v1)~v1 + m02γ(~v2)~v2
m01γ(~v1) + m02γ(~v2)(9.7)
La masa propia del sistema de partıculas M0 medida por el ob-servador Σ se puede calcular a partir de la norma al cuadrado delcuadrivector momento total del sistema, ası
p2 = M20 c2 (9.8)
entonces
p2 = (p1 + p2)2
= p21 + p2
2 + 2p1 · p2
= m201c
2 + m202c
2 + 2m1m2c2 − 2~p1 · ~p2
= m201c
2 + m202c
2 +
2m01m02γ(~v1)γ(~v2)c2
(
1 − ~v1 · ~v2
c2
)
(9.9)
Si las dos partıculas estuvieran en reposo en el sistema Σ, enton-ces la masa propia total serıa la suma de las masas propias delas partıculas que conforman el sistema. La masa propia total delsistema medida en el sistema centro de masa ΣCM esta dada por
M0CM =m
γ(~uCM )=
m01γ(~v1) + m02γ(~v2)
γ(~uCM )(9.10)
donde la velocidad del sistema centro de masa ~uCM esta dada porla ecuacion (9.7).

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 142 — #146i
i
i
i
i
i
142 CAPITULO 9. DINAMICA RELATIVISTA
3. Transformacion del momento. El cuadrivector momento deuna partıcula de masa propia m0 y velocidad ~u, medidas en elsistema de referencia inercial Σ, esta dado por
p = (p0, p1, p2, p3) =
(
E
c, ~p
)
=
(
E
c, px, py, pz
)
(9.11)
dondeE = mc2 = m0γ(~u)c2 (9.12)
es la energıa total y~p = m0γ(~u)~u (9.13)
su momento, estan relacionados con las componentes del cuadri-vector momento en Σ′ por la transformacion de Lorentz usual:
p′0 = γ(v)(
p0 − βp1)
(9.14)
p′1 = γ(v)(
p1 − βp0)
(9.15)
p′2 = p2 (9.16)
p′3 = p3 (9.17)
con β = v/c la velocidad de Σ′ respecto a Σ. Entonces
E′ = γ(v) (E − vpx) (9.18)
p′x = γ(v)(
px − v
c2E)
(9.19)
p′y = py (9.20)
p′z = pz (9.21)
La energıa cinetica K de la partıcula se define como
K = E − E0 = m0c2(γ(~u) − 1) (9.22)
entonces, en el sistema Σ′ tenemos que
K ′ = E − E0
= m0c2(γ(~u′) − 1) (9.23)
donde ~u′ es la velocidad de la partıcula medida por Σ′. Teniendo encuenta como el factor γ se transforma entre sistemas de referencia,ecuacion (7.83), se obtiene
K ′ = m0c2(
γ(v)γ(~u)(
1 − vux
c2
)
− 1)
(9.24)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 143 — #147i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 143
4. Cuadrivector fuerza. Para interpretar fısicamente las compo-nentes del cuadrivector fuerza, definido por la ecuacion de movi-miento
f = m0A =dp
dτ(9.25)
consideremos sus componentes medidas por un observador inercialΣ. Teniendo en cuenta la definicion del cuadrivector momento p,tenemos
(
f0, f1, f2, f3)
= fα =dpα
dτ
=dt
dτ
d
dt
(
E
c, ~p
)
= γ(~u)
(
1
c
dE
dt,d~p
dt
)
(9.26)
Para interpretar fısicamente esta ecuacion consideremos el pro-ducto punto minkowskiano entre el cuadrivector fuerza y el cua-drivector velocidad:
f · U = m0A · U (9.27)
Dado que el producto punto es un invariante relativista, calculemossu valor en el sistema de referencia propio de la partıcula, es deciren el sistema de referencia con respecto al cual la partıcula seencuentra en reposo, ası
Uα = (c, 0, 0, 0) (9.28)
Aα = (0, ~α) (9.29)
donde ~α es la aceleracion propia de la partıcula; entonces
f · U = 0 (9.30)
Para un sistema de referencia inercial Σ, las componentes de loscuadrivectores velocidad y fuerza (ver ecuacion (9.26)) estan dadaspor
Uα = γ (~u) (c, ~u) (9.31)
fα = γ(~u)
(
1
c
dE
dt,d~p
dt
)
(9.32)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 144 — #148i
i
i
i
i
i
144 CAPITULO 9. DINAMICA RELATIVISTA
entonces
0 = f · U
= γ2(~u)
(
dE
dt− d~p
dt· ~u)
(9.33)
Por lo tanto, dado que el efecto de la fuerza fısica ~F que actuasobre una partıcula es cambiar su momento, entonces tenemos que
~F =d~p
dt(9.34)
y si se adopta la definicion usual del trabajo, realizado por unafuerza sobre una partıcula, como
dW = ~F · d~r (9.35)
entonces la ecuacion (9.33) implica que el cambio en la energıatotal de la partıcula por unidad de tiempo
dE
dt=
d~p
dt· ~u = ~F · ~u (9.36)
es el trabajo por unidad de tiempo (potencia) realizado por lafuerza externa ~F sobre la partıcula, lo cual esta de acuerdo conla interpretacion de E como la energıa total de la partıcula. Ası,las componentes del cuadrivector fuerza se pueden escribir en laforma
fα = γ(~u)
(
1
c
dE
dt,d~p
dt
)
= γ(~u)
(
1
c~F · ~u, ~F
)
(9.37)
es decir, la componente temporal representa el trabajo por uni-dad de tiempo realizado por la fuerza externa y las componentesespaciales (salvo el factor γ) corresponden a las componentes dela fuerza fısica que actua sobre la partıcula.
5. Transformacion de la fuerza entre sistemas de referencia.
Consideremos dos sistemas de referencia Σ y Σ′ relacionados poruna transformacion de Lorentz usual. Entonces las componentesdel cuadrivector fuerza se transforman como
f ′0 = γ(
f0 − βf1)
(9.38)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 145 — #149i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 145
f ′1 = γ(
f1 − βf0)
(9.39)
f ′2 = f2 (9.40)
f ′3 = f3 (9.41)
con γ = γ(v), β = v/c y v la velocidad del sistema Σ′ respecto aΣ en la direccion del eje x positivo. La interpretacion fısica de lascomponentes del cuadrivector fuerza encontradas en el problemaanterior implica que
(
f0, f1, f2, f3)
= γ(~u)
(
1
c~F · ~u, ~F
)
(9.42)
donde ~u es la velocidad de la partıcula. Estamos interesados enencontrar las ecuaciones de transformacion para la fuerza ~F . Sillamamos
~F =(
Fx′ , Fy′ , Fz′)
(9.43)
las componentes de la fuerza medida en Σ′, de la segunda ecuacionde transformacion tenemos
γ(~u′)Fx′ = γ(v)(
γ(~u)Fx − v
c2γ(~u)~F · ~u
)
(9.44)
teniendo en cuenta la manera como el factor γ(~u′) se transforma,ver ecuacion (7.83),
γ(~u′) = γ(v)γ(~u)(
1 − vux
c2
)
(9.45)
entonces obtenemos
Fx′ =Fx − v
c2~F · ~u
1 − vuxc2
(9.46)
Para las otras dos componentes tenemos
γ(~u′)Fy′ = γ(~u)Fy (9.47)
γ(~u′)Fz′ = γ(~u)Fz (9.48)
por lo tanto
Fy′ =Fy
γ(v)(
1 − vuxc2
) (9.49)
Fz′ =Fz
γ(v)(
1 − vuxc2
) (9.50)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 146 — #150i
i
i
i
i
i
146 CAPITULO 9. DINAMICA RELATIVISTA
6. Energıa disponible para crear partıculas. Si se elige el eje xen la direccion de movimiento de los protones, en el primer caso elcuadrivector momento de cada proton esta dado por
p1 =
(
E1
c, ~p1
)
=
(
E1
c, px, 0, 0
)
(9.51)
p2 =
(
E0
c, 0, 0, 0
)
(9.52)
Despues de la colision emergen los dos protones mas una nuevapartıcula de masa propia M0 = ED/c2, es decir, se esta asumiendoque toda la energıa disponible en el experimento se transforma enenergıa propia de la nueva partıcula. Entonces la conservacion delcuadrivector momento implica
p1 + p2 = p1f + p2f + pf (9.53)
con p1f y p2f los cuadrivectores momento finales de los protonesy pf el cuadrivector momento final de la nueva partıcula. Elevan-do al cuadrado ambos miembros de esta ecuacion obtenemos elinvariante relativista
(p1 + p2)2 = (p1f + p2f + pf )2 (9.54)
El lado izquierdo se calcula en el sistema laboratorio, entonces
(p1 + p2)2 = p2
1 + p22 + 2p1 · p2
= 2E2
0
c2+ 2
E0E1
c2(9.55)
Para calcular el lado derecho se impone la condicion de energıa um-bral, donde las partıculas despues de la colision quedan en reposoen el sistema de referencia centro de masa, entonces
(p1f + p2f + pf )2 =
(
E0
c+
E0
c+
ED
c
)2
(9.56)
Igualando las dos expresiones y despejando ED se tiene
2E2
0
c2+ 2
E0E1
c2= 4
E20
c2+
E2D
c2+ 4
E0ED
c2(9.57)
entoncesE2
D + 4E0ED + 2E20 − 2E0E1 = 0 (9.58)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 147 — #151i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 147
resolviendo la ecuacion cuadratica para ED y tomando la raız po-sitiva se obtiene
ED = −2E0 +√
2E20 + 2E0E1 (9.59)
Para el caso donde E1 = 30Gev y E0 = 0,94Gev la energıa dispo-nible es
ED = 5. 746 7Gev (9.60)
Para el segundo caso, los cuadrivectores momento de los protonesiniciales son
p1 =
(
E2
c, |~p2| , 0, 0
)
(9.61)
p2 =
(
E2
c,− |~p2| , 0, 0
)
(9.62)
entonces
(p1 + p2)2 = p2
1 + p22 + 2p1 · p2
= 2E2
0
c2+ 2
(
E22
c2+ |~p2|2
)
(9.63)
dado que
p21 =
E20
c2=
E22
c2− |~p2|2
por lo tanto
(p1 + p2)2 = 2
E20
c2+ 2
(
E22
c2+
E22
c2− E2
0
c2
)
= 4E2
2
c2(9.64)
Entonces, de la ecuacion de conservacion del cuadrivector momentoal cuadrado, se tiene que
4E2
2
c2= 4
E20
c2+
E2D
c2+ 4
E0ED
c2(9.65)
despejando la energıa disponible se llega a la ecuacion cuadratica
E2D + 4E0ED + 4E2
0 − 4E22 = 0 (9.66)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 148 — #152i
i
i
i
i
i
148 CAPITULO 9. DINAMICA RELATIVISTA
cuya solucion positiva esta dada por
ED =1
2
[
−4E0 +√
16E20 − 16E2
0 + 16E22
]
(9.67)
= 2E2 − 2E0 (9.68)
tomando E2 = 15Gev se obtiene
ED = 28, 12Gev (9.69)
lo cual implica que en el segundo experimento se tiene cinco vecesmas energıa disponible. O en forma equivalente, si se quiere teneruna energıa disponible de 28, 12Gev, se requiere que, en el primerexperimento, el proton sea acelerado a una energıa de
E1 =E2
D + 4E0ED + 2E20
2E0
= 477, 78Gev (9.70)
7. Sistema de dos electrones. Elijamos el eje x del sistema de refe-rencia del laboratorio Σ en la direccion de movimiento del electrony sean p1 el cuadrivector momento del electron movil y p2 el cua-drivector momento del electron en reposo.
a La energıa cinetica del electron 1 (movil) es
K1 = E1 − E0 (9.71)
donde E1 es su energıa total y E0 = m0c2 su energıa en
reposo. Entonces
2m0c2 = γ(u)m0c
2 − m0c2 (9.72)
con u la velocidad del electron. Despejando el factor γ(u) setiene
γ(u) =1
√
1 − u2
c2
= 3 (9.73)
y por lo tanto la velocidad del electron esta dada por
u
c= βu =
√
1 − 1
γ(u)2
=2√
2
3(9.74)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 149 — #153i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 149
b El cuadrivector momento del electron 2, en reposo respecto alsistema laboratorio Σ, es
p2 =
(
E2
c, ~p2
)
= (m0c, 0, 0, 0) (9.75)
y el del electron 1 esta dado por
p1 =
(
E1
c, ~p1
)
= (m0cγ(u),m0γ(u)u, 0, 0)
= (3m0c, 2√
2m0c, 0, 0) (9.76)
Por lo tanto, para el cuadrivector momento total del sistemaen Σ se obtiene
p = p1 + p2
= (4m0c, 2√
2m0c, 0, 0) (9.77)
c La velocidad del centro de masa para un sistema de partıculasesta dada por
~uCM =~p
m(9.78)
donde ~p es el momento total del sistema y mc2 su energıatotal. Entonces, para el sistema de los dos electrones tenemos
~uCM =1
4m0
(
2√
2m0c, 0, 0)
=
(√2
2c, 0, 0
)
(9.79)
Para calcular las componentes del cuadrivector momento delos electrones, en el sistema de referencia ΣCM , es suficientetener en cuenta la transformacion de Lorentz entre los siste-mas Σ y ΣCM , donde ΣCM se mueve con velocidad uCM =√
2/2 en la direccion del eje x positivo (ver ecuacion (9.79)).Bajo esta transformacion de Lorentz las componentes del cua-drivector momento, en los dos sistemas de referencia, estandadas por
p′0 = γ(uCM )(
p0 − βCMp1)
(9.80)
p′1 = γ(uCM )(
p1 − βCMp0)
(9.81)
p′2 = p2 (9.82)
p′3 = p3 (9.83)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 150 — #154i
i
i
i
i
i
150 CAPITULO 9. DINAMICA RELATIVISTA
donde βCM = uCM/c. Aplicando estas transformaciones a p1
y p2 tenemos:
p′10 = γ(uCM )
(
p01 − βCMp1
1
)
=√
2
(
3m0c −√
2
22√
2m0c
)
=√
2m0c (9.84)
p′11 = γ(uCM )
(
p11 − βCMp0
1
)
=√
2
(
2√
2m0c −√
2
23m0c
)
= m0c2 (9.85)
y las demas componentes son cero. Para el segundo electronse tiene
p′20 = γ(uCM )
(
p02 − βCMp1
2
)
=√
2 (m0c − 0)
=√
2m0c (9.86)
p′21 = γ(uCM )
(
p12 − βCMp0
2
)
=√
2
(
0 −√
2
2m0c
)
= −m0c (9.87)
Entoncesp′1 =
(√2m0c,m0c, 0, 0
)
(9.88)
p′2 =(√
2m0c,−m0c, 0, 0)
(9.89)
d La masa propia del sistema, por definicion, es un invariante re-lativista y debe ser la misma calculada en cualquier sistemade referencia inercial. Para calcular la masa propia en Σ to-mamos la norma del cuadrivector momento total del sistema,entonces
p2 = (p1 + p2)2 = (4m0c, 2
√2m0c, 0, 0)
2
= 16m20c
2 − 8m20c
2
= 8m20c
2 (9.90)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 151 — #155i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 151
asıM0 = 2
√2m0 (9.91)
En el sistema centro de masa tenemos
p′2 =(
p′1 + p′2)2
=(
2√
2m0c, 0, 0, 0)
= 8m20c
2 (9.92)
y se obtiene, como se esperaba, el mismo resultado.
8. Sistema de dos fotones. Sean p1 y p2 los cuadrivectores mo-mento de los dos fotones en el sistema de referencia Σ.
a La relacion entre la energıa E y la magnitud del momento |~p|de un foton esta dada por la ecuacion
|~p| =E
c(9.93)
entonces los cuadrivectores momento de los fotones toman laforma
p1 =
(
E
c,E
c, 0, 0
)
(9.94)
para el foton en movimiento a lo largo del eje x positivo, y
p2 =
(
E
c, 0,
E
c, 0
)
(9.95)
para el foton en movimiento a lo largo del eje y positivo. Elcuadrivector momento total del sistema esta dado por
p = p1 + p2
=
(
2E
c,E
c,E
c, 0
)
(9.96)
b La velocidad del centro de masa para un sistema de partıculasesta dada por
~uCM =~p
m(9.97)
donde ~p es el momento total del sistema y mc2 su energıatotal. Ası, para el sistema de dos fotones tenemos
~uCM =~p
m=
c2
2E
(
E
c,E
c, 0
)
=( c
2,c
2, 0)
(9.98)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 152 — #156i
i
i
i
i
i
152 CAPITULO 9. DINAMICA RELATIVISTA
la cual corresponde a la velocidad del sistema de referenciaΣCM respecto al sistema laboratorio Σ, de tal manera que enel sistema ΣCM el momento total es cero. La magnitud de lavelocidad ~uCM esta dada por
|~uCM | =
√
( c
2
)2+( c
2
)2
=
√2
2c < c (9.99)
c La masa propia M0 del sistema de dos fotones se puede calculara partir de la norma del cuadrivector momento total, ası
M20 c2 = (p1 + p2)
2
=
(
2E
c
)2
−(
E
c
)2
−(
E
c
)2
=2E2
c2(9.100)
entonces
M0 =
√2E
c2(9.101)
notese que la masa propia del sistema es 1/√
2, la suma delas masas equivalentes en energıa asociadas a cada foton.
9. Partıcula compuesta. Elijamos el eje x positivo del sistema dereferencia del laboratorio Σ en la direccion de movimiento del elec-tron inicial.
a La energıa total del electron inicial esta dada por
E = E0 + K
= m0c2 +
2
3m0c
2
=5
3m0c
2 (9.102)
por lo tanto el factor γ y la velocidad inicial del electron son
E = γ(v)m0c2 =⇒ γ(v) =
5
3(9.103)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 153 — #157i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 153
β =v
c=
√
1 − 1
γ2(v)=⇒ β =
4
5(9.104)
Para calcular la masa propia M0 del atomo de positronio,sea p1 el cuadrivector momento del electron movil, el cualesta dado por
p1 =
(
E
c,m0γ(v)~v
)
=
(
5
3m0c,
4
3m0c, 0, 0
)
(9.105)
y el cuadrivector momento del positron en reposo
p2 = (m0c, 0, 0, 0) (9.106)
entonces, por conservacion del cuadrivector momento totaldel sistema, su norma al cuadrado da la masa propia totaldel sistema, la cual tambien es la masa propia del positronio,ası
M20 c2 = p2
f = (p1 + p2)2
=
(
8
3m0c,
4
3m0c, 0, 0
)2
=
(
8
3m0c
)2
−(
4
3m0c
)2
=48
9m2
0c2 (9.107)
entonces
M0 =4√
3
3m0 (9.108)
b Para calcular la velocidad final vf del atomo de positronio sepueden seguir varios metodos: el primero, y mas directo, esnotando que la velocidad final del positronio corresponde ala velocidad del centro de masa del sistema electron-positron,ası
βCM = βf =p1
f
p0f
=43m0c83m0c
=1
2(9.109)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 154 — #158i
i
i
i
i
i
154 CAPITULO 9. DINAMICA RELATIVISTA
El segundo metodo utiliza la energıa total del sistema: en-tonces de la componente temporal del cuadrivector momentototal del sistema tenemos
M0γ(vf )c =8
3m0c (9.110)
y por lo tanto
γ(vf ) =83m0
4√
33 m0
=2√3
=⇒
vf =
√
1 − 1
γ2(vf )
=
√
1 − 3
4=
1
2(9.111)
Un tercer camino serıa utilizando la conservacion del momen-to fısico para el sistema, ası
~pf =4
3m0cx = M0γ(vf )vf x (9.112)
entonces4√
3
3m0γ(vf )vf =
4
3m0c
despejando la velocidad final, se obtiene
γ(βf )βf =1√3
=⇒ 3β2f = 1 − β2
f
=⇒ βf =1
2(9.113)
c Por conservacion del momento, dado que el electron inicial seesta moviendo en la direccion del eje x positivo, entonces elelectron y el positron deben salir en un mismo plano. Ademas,debido a que el electron y el positron tienen la misma masapropia y salen formando el mismo angulo con respecto al eje x,su velocidad debe ser igual para que el momento total trans-versal a la direccion de movimiento inicial se anule. Entonces,si elegimos el eje y en el plano del movimiento del sistema y setoma positivo en la direccion en la cual el electron se dispersa,

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 155 — #159i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 155
las componentes del cuadrivector momento final del electronp−f y del positron p+f estan dadas por:
p−f = (E−f , px−f , py−f , 0)
= (m0γ(u)c,m0γ(u)u cos θ,m0γ(u)u sin θ, 0) (9.114)
yp+f = (E+f , px+f , py+f , 0)
= (m0γ(u)c,m0γ(u)u cos θ,−m0γ(u)u sin θ, 0) (9.115)
donde u es la magnitud de la velocidad final y θ el angulo conrespecto al eje x. La conservacion del cuadrivector momentoimplica que
pf = p−f + p+f (9.116)
con pf el cuadrivector momento del positronio; ası esta ecua-cion nos conduce al siguiente sistema de ecuaciones:
M0γ(vf )c = 2m0γ(u)c (9.117)
M0γ(vf )vf = 2m0γ(u)u cos θ (9.118)
la tercera ecuacion para la componente en y es una identidady no arroja informacion adicional. Dado que (ver parte b delpresente problema)
M0γ(vf )c =4√
3
3m0 ×
2√3c
=8
3m0c (9.119)
entonces de la ecuacion (9.117) se tiene
γ(u) =4
3=⇒ βu =
√7
4(9.120)
y de la ecuacion (9.118) se obtiene el angulo:
cos θ =M0γ(vf )vf
2m0γ(u)u
=
4√
33 m0 × 2√
3× 1
2
2m0 × 43 ×
√7
4
=2√7
(9.121)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 156 — #160i
i
i
i
i
i
156 CAPITULO 9. DINAMICA RELATIVISTA
d Una colision de define inelastica si las partıculas iniciales y fina-les que intervienen en el proceso cambian. Ası en la primerareaccion
e− + e+ −→ Ap (9.122)
el proceso es inelastico, y en la segunda reaccion
Ap −→ e− + e+ (9.123)
las partıculas tambien cambian y el proceso es por lo tantoinelastico. Sin embargo, considerando la reaccion total
e− + e+ −→ Ap −→ e− + e+ (9.124)
el proceso es elastico. En efecto, se puede tratar la parte c
del presente problema independientemente del estado inter-medio (formacion del positronio), como un proceso de colisionelastico
e− + e+ −→ e− + e+ (9.125)
donde un electron choca contra un positron en reposo, dis-persandose elasticamente. Ası, por conservacion del cuadri-vector momento,
p1 + p2 = p−f + p+f (9.126)
Con las mismas consideraciones que se hicieron en la parte cdel presente problema, esta ecuacion conduce a:(
8
3m0c,
4
3m0c, 0, 0
)
= (2m02γ(u)c, m0γ(u)u cos θ, 0, 0) (9.127)
lo que lleva al siguiente sistema de ecuaciones acopladas:
8
3m0c = 2m02γ(u)c (9.128)
4
3m0c = m0γ(u)u cos θ (9.129)
las cuales implican que
βu =
√7
4(9.130)
y
cos θ =2√7
(9.131)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 157 — #161i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 157
10. Aniquilacion de partıculas. Para el sistema de referencia dellaboratorio elijamos el eje x en la direccion de movimiento delelectron inicial y los otros ejes de tal manera que el plano de lacolision este en el plano x− y. Sea m0 la masa propia del electron(igual a la del positron) y v su velocidad.
a Los cuadrivectores momento iniciales del electron y el positronestan dados por
p1 =
(
E1
c, ~p1
)
=
(
5
3m0c,
4
3m0c, 0, 0
)
(9.132)
y
p2 =
(
E2
c, ~p2
)
= (m0c, 0, 0, 0) (9.133)
respectivamente. Supongase que un foton (llamese 1) sale for-mando un angulo θ con respecto al eje x positivo y el otrofoton (2) formando un angulo ϕ respecto al mismo eje. En-tonces sus cuadrivectores momento son
pγ1=
(
Eγ1
c, ~pγ1
)
(9.134)
=
(
Eγ1
c,Eγ1
ccos θ,
Eγ1
csin θ, 0
)
(9.135)
y
pγ2=
(
Eγ2
c, ~pγ2
)
(9.136)
=
(
Eγ2
c,Eγ2
ccos ϕ,
Eγ2
csinϕ, 0
)
(9.137)
La conservacion total del cuadrivector momento del sistemaimplica
p1 + p2 = pγ1+ pγ2
(9.138)
lo cual conduce al siguiente sistema de ecuaciones acopladas
8
3m0c =
Eγ1+ Eγ2
c(9.139)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 158 — #162i
i
i
i
i
i
158 CAPITULO 9. DINAMICA RELATIVISTA
4
3m0c =
Eγ1cos θ + Eγ2
cos ϕ
c(9.140)
0 =Eγ1
csin θ +
Eγ2
csin ϕ (9.141)
Este sistema de tres ecuaciones acopladas contiene cuatroincognitas, las energıas de los dos fotones y los angulos queforman con el eje de las x; ası se pueden despejar tres de lasincognitas en terminos de la cuarta, por ejemplo en terminosde θ. Con esta eleccion la energıa del primer foton Eγ1
de-pende del angulo θ, y a partir de allı se busca el angulo paraque la energıa sea maxima, i. e. a partir de la condicion
dEγ1
dθ= 0; con
d2Eγ1
dθ2 < 0 (9.142)
Despejando Eγ2de la ecuacion (9.139), sin ϕ de la ecuacion
(9.141) y remplazando en la ecuacion (9.140) y despejandode esta ultima ecuacion Eγ1
obtenemos
Eγ1=
2m0c2
2 + cos θ(9.143)
Aplicando la condicion de maximo (ecuacion (9.142)) se ob-tiene que
θ = 0 (9.144)
Este resultado se hubiera podido anticipar, pues por conser-vacion de energıa la suma de las energıas de los fotones es laenergıa total inicial, la cual es fija y por conservacion de mo-mento la componente perpendicular del momento total de losfotones es cero y por lo tanto la condicion de energıa maximade uno de los fotones se tiene cuando este sale en la mismadireccion del electron incidente y por tanto el foton 2 debesalir en la direccion opuesta, con la mınima energıa posible.Ası para calcular las energıas de los fotones, cuando uno deellos (foton 1) sale con la maxima energıa, tomamos θ = 0 yϕ = π en las ecuaciones (9.139) y (9.140); entonces
8
3m0c =
Eγ1+ Eγ2
c(9.145)
4
3m0c =
Eγ1− Eγ2
c(9.146)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 159 — #163i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 159
resolviendo este sistema de ecuaciones (sumando y restando)se tiene que
Eγ1= 2m0c
2 (9.147)
que es la maxima energıa posible y
Eγ2=
2
3m0c
2 (9.148)
b En la ecuacion 9.141 implica que Eγ1= Eγ2
= Eγ con θ = −ϕ,entonces las ecuaciones de conservacion 9.139 y 9.140 tomanla forma
8
3m0c =
Eγ1+ Eγ2
c=
2Eγ
c(9.149)
y
4
3m0c =
Eγ1cos θ + Eγ2
cos θ
c
=2Eγ cos θ
c(9.150)
respectivamente. Dividiendo la segunda ecuacion entre la pri-mera tenemos que
cos θ =1
2=⇒ θ =
π
3(9.151)
A partir de la ecuacion 9.149 la energıa de cada foton esta da-da por
Eγ1= Eγ2
=4
3m0c (9.152)
c El momento total del sistema es
p1 + p2 =
(
8
3m0c,
4
3m0c, 0, 0
)
(9.153)
entonces la velocidad vCM del sistema de referencia centro demasa ΣCM esta dada por la relacion
~βCM =~p1
p0
=43m0c83m0c
x =1
2x (9.154)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 160 — #164i
i
i
i
i
i
160 CAPITULO 9. DINAMICA RELATIVISTA
por lo tanto las componentes del cuadrivector momento paracada una de las partıculas iniciales se obtienen aplicando unatransformacion de Lorentz usual del sistema laboratorio Σal sistema centro de masa. Entonces, llamando p1 y p2 loscuadrimomentos del electron y el positron respectivamente,tenemos para el electron
p01 = γ(vCM )
(
p01 − βCMp1
1
)
=2√
3
3
(
5
3m0c −
1
2× 4
3m0c
)
=2√
3
3m0c (9.155)
p11 = γ(vCM )
(
p11 − βCMp0
1
)
=2√
3
3
(
4
3m0c −
1
2× 5
3m0c
)
=
√3
3m0c (9.156)
y para el positron
p02 = γ(vCM )
(
p02 − βCMp1
2
)
=2√
3
3m0c (9.157)
p12 = γ(vCM )
(
p12 − βCMp0
2
)
= −√
3
3m0c (9.158)
Esto implica que en el sistema centro de masa la energıa totaldel sistema es
ECM =2√
3
3m0c +
2√
3
3m0c
=4√
3
3m0c (9.159)
y el momento total es cero. Entonces, cuando se aniquilanlas partıculas en dos fotones, ellos deben salir en direcciones

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 161 — #165i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 161
opuestas y con el mismo momento, y por lo tanto cada unode los fotones tendra la misma energıa Eγ dada por
Eγ =2√
3
3m0c (9.160)
Por consiguiente los cuadrivectores momento de los fotonesp1γ y p2γ estan dados por:
p1γ =
(
2√
3
3m0c,
2√
3
3m0cn
)
(9.161)
p2γ =
(
2√
3
3m0c,−
2√
3
3m0cn
)
(9.162)
donde n es la direccion de propagacion del primer foton y porlo tanto −n la del segundo foton. A partir de estos cuadri-vectores momento en el sistema ΣCM y aplicando la trans-formacion inversa de Lorentz se obtienen los cuadrivectoresmomento de fotones en el sistema Σ. La condicion de maxi-ma energıa para uno de los fotones se obtiene cuando uno deellos sale en la direccion de movimiento del electron inicial;por ello en este caso se tiene que los cuadrivectores momentodel electron y el positron en el sistema de referencia centrode masa son
pγ1 =
(
2√
3
3m0c,
2√
3
3m0c, 0, 0
)
(9.163)
pγ2 =
(
2√
3
3m0c,−
2√
3
3m0c, 0, 0
)
(9.164)
Entonces, aplicando la transformacion de Lorentz inversa pa-ra la componente cero, se tiene que
p0γ1 = γ(−vCM )
(
p0γ1 + βCM p1
γ1
)
=2√
3
3
(
2√
3
3m0c +
1
2× 2
√3
3m0c
)
= 2m0c (9.165)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 162 — #166i
i
i
i
i
i
162 CAPITULO 9. DINAMICA RELATIVISTA
p0γ2 = γ(−vCM )
(
p0γ2 + βCM p1
γ2
)
=2√
3
3
(
2√
3
3m0c −
1
2× 2
√3
3m0c
)
=2
3m0c (9.166)
ası pues las energıas de los dos fotones, uno de maxima energıay el otro de mınima, son
Eγ1= 2m0c
2 (9.167)
Eγ2=
2
3m0c
2 (9.168)
en acuerdo con el resultado de la parte a del presente pro-blema. Para el segundo caso, cuando los dos fotones salenformando el mismo angulo en el sistema laboratorio, tenemosque en el sistema centro de masa los fotones deben salir endirecciones perpendiculares a la direccion de movimiento delsistema centro de masa, respecto al sistema laboratorio. Ası sepuede elegir como eje y el del movimiento de los fotones y porlo tanto el cuadrivector momento de cada foton en ΣCM sera
pγ1 =
(
2√
3
3m0c, 0,
2√
3
3m0c, 0
)
(9.169)
pγ2 =
(
2√
3
3m0c, 0,−
2√
3
3m0c, 0
)
(9.170)
Aplicando la transformacion inversa de Lorentz se tiene quelas componentes no nulas del cuadrivector momento en elsistema laboratorio, para el primer foton toman la forma
p0γ1 = γ(−vCM )
(
p0γ1 + βCM p1
γ1
)
=2√
3
3× 2
√3
3m0c
=4
3m0c (9.171)
p1γ1 = γ(−vCM )
(
p1γ1 + βCM p0
γ1
)
=2√
3
3× 1
2× 2
√3
3m0c
=2
3m0c (9.172)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 163 — #167i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 163
p2γ1 = p2
γ1 =2√
3
3m0c (9.173)
y para el segundo foton
p0γ2 = γ(−vCM )
(
p0γ2 + βCM p1
γ2
)
=2√
3
3× 2
√3
3m0c
=4
3m0c (9.174)
p1γ2 = γ(−vCM )
(
p1γ2 + βCM p0
γ2
)
=2√
3
3× 1
2× 2
√3
3m0c
=2
3m0c (9.175)
p2γ2 = p2
γ2 = −2√
3
3m0c (9.176)
ası el angulo que forma el primer foton respecto al eje x es
tan θ =p2
γ1
p1γ1
=2√
33 m0c23m0c
=√
3 (9.177)
=⇒ θ =π
3(9.178)
11. Absorcion atomica. Sea pγ , p0 y pf los vectores cuadrivectormomento del foton incidente, atomo inicial y atomo final respecti-vamente; entonces, si se toma el eje x en la direccion de movimientodel foton inicial, tenemos que
pγ =
(
Q
c,Q
c, 0, 0
)
(9.179)
p0 = (M0c, 0, 0, 0) (9.180)
pf =(
M0γ(vf )c, M0γ(vf )vf , 0, 0)
(9.181)
a Por conservacion del cuadrivector momento se tiene que
pγ + p0 = pf (9.182)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 164 — #168i
i
i
i
i
i
164 CAPITULO 9. DINAMICA RELATIVISTA
Tomando la norma al cuadrado de esta expresion se obtiene
p2γ + p2
0 + 2pγ · p0 = p2f (9.183)
Teniendo en cuenta que la norma al cuadrado del cuadrivec-tor momento da la masa propia al cuadrado de la partıculay realizando el producto punto minkowskiano se llega a larelacion
M20 c2 + 2M0Q = M2
0 c2 (9.184)
Despejando la energıa del foton Q y teniendo en cuenta que
Q0 = M0c2 − M0c
2 (9.185)
se obtiene
Q =M2
0 c4 − M20 c4
2M0c2
= Q0M0c
2 + M0c2
2M0c2
= Q0Q0 + 2M0c
2
2M0c2
= Q0
(
1 +Q0
2M0c2
)
(9.186)
notemos que si la masa del atomo es mucho mayor que laenergıa interna de excitacion, entonces la energıa del fotonincidente es practicamente igual a la de excitacion.
b La diferencia entre la energıa del foton incidente y la energıainterna de excitacion
Q − Q0 =Q0
2M0c2(9.187)
corresponde a la energıa cinetica del atomo que al absorberel foton debe retroceder por conservacion del momento. Dela ecuacion de conservacion (9.182) se obtiene el sistema deecuaciones
Q
c+ M0c = M0γ(vf )c (9.188)
Q
c= M0γ(vf )vf (9.189)
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 165 — #169i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 165
Entonces, de la ecuacion de conservacion de la energıa se tiene
Q + M0c2 − M0c
2 = M0c2 (γ(vf ) − 1) (9.190)
ası de la ecuacion (9.185)
Q − Q0 = M0c2 (γ(vf ) − 1) = K (9.191)
donde K es la energıa cinetica del atomo excitado.
c La energıa interna de excitacion entre los niveles n = 1 y n = 2esta dada por
Q0 = E2 − E1 = En
= −13,6056981
22eV −
(
−13,6056981
12eV
)
= 10. 204eV (9.192)
entonces, teniendo en cuenta que la masa del atomo M0 ensu estado base esta dada por (ver ecuacion (4.43))
M0c2 = m0ec
2 + m0pc2 − 13,6056981eV
= 9. 387 8 × 108eV (9.193)
la energıa del foton incidente, necesaria para excitar el atomodel nivel base n = 1 a su primer nivel excitado n = 2 es
Q = Q0
(
1 +Q0
2M0c2
)
= 10. 204eV
(
1 +10. 204eV
9. 387 8 × 108eV
)
= 10,20399999eV (9.194)
notemos que aun para el caso del atomo mas liviano, el hi-drogeno, su masa en unidades de energıa es mucho mayorque las energıas de excitacion y la diferencia de Q − Q0 esdel orden de 10−8. Para calcular la velocidad de retroceso delatomo excitado se divide la ecuacion (9.189) entre la ecuacion(9.188); entonces
vf
c=
Q
Q + M0c2
=10,204eV
10,204eV + 9. 387 8 × 108eV
= 1. 086 9 × 10−8 (9.195)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 166 — #170i
i
i
i
i
i
166 CAPITULO 9. DINAMICA RELATIVISTA
i. e. vf ∼ 3m/s la cual es una velocidad muy pequena compa-rada con las velocidades tıpicas en los sistemas atomicos. Porejemplo, el principio de equiparticion de la energıa relacionala energıa cinetica promedio de una partıcula (e. g., atomo)con la temperatura a la cual se encuentra el gas
K =3
2kBT (9.196)
donde
kB = 8,617385 × 10−5eV K−1 (9.197)
es la constante de Boltzmann y T la temperatura absoluta. Siaplicamos este principio al caso de un gas de hidrogeno atomi-co a temperatura ambiente (T = 300K), la energıa cineticapromedio de un atomo de hidrogeno es
K =3
2× 8,617385 × 10−5eV K−1 × 300K
= 3. 877 8 × 10−2eV (9.198)
la cual es seis ordenes de magnitud mayor que la energıacinetica Q − Q0 que adquiere el atomo al absorber un foton.
12. Cohete fotonico. Sea M = M(τ ) la masa propia del cohete enun instante dado y P = MU su cuadrimomento, donde
U = (U0, ~U) = (U0, U1, 0, 0) (9.199)
es la cuadrivelocidad del cohete, el cual se mueve a lo largo del ejex, y sea
prad =
(
Erad
c, ~prad
)
=
(
Erad
c, prad, 0, 0
)
(9.200)
el cuadrimomento de la radiacion. Por conservacion de la energıa,el cambio en la energıa del cohete es igual al cambio en la energıaradiada; entonces
d(MU0) = −dErad
c(9.201)
Como la energıa radiada es en forma de fotones, se debe tener que:
dErad = cdprad (9.202)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 167 — #171i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 167
y por conservacion del momento tenemos:
dprad = d(MU1) (9.203)
Entonces, de estas relaciones se obtiene la ecuacion:
d(
MU0)
= −d(MU1) (9.204)
la cual se puede escribir en la forma:
dM
M= −d(U0 + U1)
U0 + U1(9.205)
Integrando esta ecuacion y teniendo en cuenta las expresiones paraU0 y U1 (ecuacion (7.224)) se obtiene la expresion para la masapropia del cohete, en funcion del tiempo propio τ :
dM
M= −d (c cosh (gτ/c) + c sinh (gτ/c))
c cosh (gτ/c) + c sinh (gτ/c)
= −d(
egτ/c)
egτ/c(9.206)
integrandoM = M0e
−τg/c (9.207)
donde M0 es la masa propia inicial de la nave. En el Viaje in-
terestelar 1 la nave esta permanentemente acelerada con g, enel viaje de ida acelera la mitad del camino a las Pleyades en untiempo propio de 6. 056 8anos y luego desacelera durante un tiem-po igual, retornando a la tierra en forma similar. Entonces para elviaje completo la masa propia del cohete al llegar a la tierra es
M(τ = 4 × 6. 056 8anos) = M0e−24. 227
= 3. 008 5 × 10−11M0 (9.208)
Para el Viaje interestelar 2 la nave acelera a 10g durante untiempo propio de τ = 0,380 02anos, continuando el viaje a velo-cidad constante, hasta llegar a una distancia de 2. 136 6al de lasPleyades, punto en el cual inicia la desaceleracion a 10g. El viajede retorno sigue una trayectoria similar. Por lo tanto, dado queel combustible se consume solo durante la aceleracion, entonces lamasa final de la nave al regresar a la tierra es
M(τ = 4 × 0,380 02anos) = M0e−1. 520 1
= 0,218 69M0 (9.209)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 168 — #172i
i
i
i
i
i
168 CAPITULO 9. DINAMICA RELATIVISTA
El primer viaje dura, en tiempo del cohete, poco mas de tres anosmientras que el segundo dura 76. 84anos. Sin embargo el consumode combustible en el segundo viaje corresponde a un quinto de lamasa inicial del cohete, en tanto que en el primer viaje la masafinal del cohete es 10−11 veces su masa inicial. Esto quiere decir,por ejemplo, que si la nave retorna a la tierra con 100ton, entoncessu masa inicial debio ser de 1013ton.
13. Dispersion elastica proton-proton. Para el sistema laboratorioΣ elıjase el eje x en la direccion de movimiento de la partıculainicial. Entonces el cuadrivector momento de las partıculas inicialesesta dado por
p1 = (m0γc,m0γv, 0, 0) (9.210)
p2 = (m0c, 0, 0, 0) (9.211)
donde γ = γ(v), con v la velocidad de la partıcula inicial. El cuadri-vector momento de las partıculas finales, las cuales emergen conla misma energıa, es
p1f = (m0γ(vf )c,m0γ(vf )~vf1) (9.212)
p1f = (m0γ(vf )c,m0γ(vf )~vf2) (9.213)
donde |~vf1| = |~vf2| = vf . Por conservacion del cuadrivector mo-mento total se tiene que
p1 + p2 = pf1 + pf2 (9.214)
entonces
(m0c(γ + 1) ,m0v, 0, 0) = (2m0γ(vf )c,m0γ(vf )(~vf1 + ~vf2))
Por el lema de la colision elastica entre dos partıculas se debecumplir que
p1 · p2 = pf1 · pf2 (9.215)
por lo tanto
m20c
2γ = m20c
2γ2(vf ) − m20γ
2(vf )~vf1 · ~vf2
= m20c
2γ2(vf )
(
1 − ~vf1 · ~vf2
c2
)
= m20c
2γ2(vf )
(
1 −v2f
c2cos θ
)
(9.216)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 169 — #173i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 169
donde θ es el angulo entre las partıculas finales, ası
γ = γ2(vf )(1 −v2f
c2cos θ) (9.217)
Para calcular la velocidad final vf se puede utilizar la conservacionde la energıa total:
(m0c(γ + 1) = 2m0γ(vf )c (9.218)
entonces
γ(vf ) =γ + 1
2(9.219)
y
β2f =
v2f
c2= 1 − 1
γ2(vf )(9.220)
Por lo tanto, despejando cos θ de la ecuacion (9.217) y remplazandovf se obtiene
cos θ =c2
v2f
(
1 − γ
γ2(vf )
)
=γ2(vf )
γ2(vf ) − 1
(
1 − γ
γ2(vf )
)
=
(
γ+12
)2
(
γ+12
)2− 1
1 − γ
(
γ+12
)2
=(γ − 1)2
(γ + 1)2 − 4
=γ − 1
γ + 3(9.221)
Dado queK = m0c
2 (γ − 1) (9.222)
entonces
cos θ =K
K + 4m0c2(9.223)
Para el caso en que las partıculas sean protones se tiene que
cos θ =437MeV
437MeV + 4 × 938,27231MeV= 0,104 29 (9.224)
Por lo tantoθ = 84,014o (9.225)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 170 — #174i
i
i
i
i
i
170 CAPITULO 9. DINAMICA RELATIVISTA
14. Procesos prohibidos. Considerese en primer lugar el proceso
p −→ p + γ (9.226)
Sean pi, pf y pγ los cuadrivectores momento del proton inicial,proton final y foton final, y sea m0 la masa propia del proton;entonces por conservacion del cuadrivector momento total se tieneque
p1 = pf + pγ (9.227)
elevando al cuadrado esta ecuacion se obtiene
p2i = p2
f + p2γ + 2pf · pγ (9.228)
asıpf · pγ = 0 (9.229)
pues p2i = p2
f y p2γ = 0; por lo tanto si se calcula el producto punto
invariante en el sistema de referencia propio del proton, se obtieneque
m0Q = 0 (9.230)
con Q la energıa del foton. Por consiguiente esta relacion implicaque Q = 0 o m0 = 0, lo cual no es posible. Ası el proceso esprohibido. El segundo y el tercer procesos
γ −→ e− + e+ (9.231)
e− + e+ −→ γ (9.232)
corresponden a procesos inversos, y por esta razon si uno de elloses prohibido, el otro tambien lo es. Ademas, para darse cuenta quelos procesos anteriores no son posibles es suficiente pararse en elsistema de referencia centro de masa. Allı el momento total es ceroy siempre es posible para un par de partıculas como el electrony el positron encontrar un sistema donde su momento total escero, pero un foton solo nunca puede tener momento nulo; ası losprocesos son prohibidos. Otra forma de ver esto es considerandoel cuadrado de la ecuacion de conservacion, pues
(pe− + pe+)2 = p2γ (9.233)
implica que2m2
0c2 + 2m2
0c2γ(v) = 0 (9.234)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 171 — #175i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 171
lo cual no es posible. En el calculo anterior v es la velocidad de unade las partıculas respecto a la otra, pues en el sistema de referenciade una de ellas, e. g. el electron, el positron se esta moviendo convelocidad v y por ello
pe− · pe+ = m20c
2γ(v) (9.235)
15. Experimentos de coincidencia. Tomando el plano y−z como elplano de la colision, con el eje z en la direccion del foton incidente,los cuadrivectores momento del electron y foton iniciales son
pie = (m0c, 0, 0, 0) (9.236)
piγ =
(
Eiγ
c, 0, 0,
Eiγ
c
)
(9.237)
y del electron y foton finales son
pfe = (m0cγ(v), 0,−m0γ(v)v sin ϕ,m0γ(v)v cos ϕ) (9.238)
pfγ =
(
Efγ
c, 0,
Efγ
csin θ,
Efγ
ccos θ
)
(9.239)
donde ϕ es el angulo de dispersion del electron, medido con res-pecto al eje z, θ el angulo de dispersion del foton con respecto aleje z y se ha tomado el eje y positivo en la direccion del fotondispersado. Por conservacion del cuadrivector momento se tieneque
pie + piγ = pfe + pfγ (9.240)
entonces
(pie + piγ − pfγ)2 = (pfe)2 (9.241)
implica que
pie · piγ − pie · pfγ − piγ · pfγ = 0 (9.242)
por lo tanto
m0Eiγ − m0Efγ − EiγEfγ
c2(1 − cos θ) = 0 (9.243)
Ası
Efγ =m0c
2Eiγ
m0c2 + Eiγ (1 − cos θ)(9.244)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 172 — #176i
i
i
i
i
i
172 CAPITULO 9. DINAMICA RELATIVISTA
La ecuacion de conservacion (9.240) conduce al siguiente sistemade ecuaciones
m0c +Eiγ
c= m0cγ(v) +
Efγ
c(9.245)
0 = −m0γ(v)v sin ϕ +Efγ
csin θ (9.246)
Eiγ
c= m0γ(v)v cos ϕ +
Efγ
ccos θ (9.247)
Despejando γ(v)v de la segunda ecuacion y remplazando en latercera se obtiene
tan ϕ =Efγ sin θ
Eiγ − Efγ cos θ
=sin θ
1 +Eiγ
m0c2− cos θ
(
1 +Eiγ
m0c2
) (9.248)
y la energıa final del electron dispersado se obtiene de la primeraecuacion
m0c2γ(v) = m0c
2 + Eiγ − Efγ
= m0c2 + Eiγ − m0c
2Eiγ
m0c2 + Eiγ (1 − cos θ)
=
(
m0c2)2
+ Eiγ (1 − cos θ)(
m0c2 + Eiγ
)
m0c2 + Eiγ (1 − cos θ)(9.249)
16. Reflexion inelastica de un foton en un atomo. En el sistemade referencia del laboratorio se elige el eje x en la direccion deincidencia del foton inicial.
a El choque es inelastico puesto que la masa propia del atomofinal es diferente a la masa propia del atomo inicial, debido aque el atomo hace una transicion interna.
b Con la eleccion de ejes dada, los cuadrivectores momento delfoton y del atomo inicial estan dados por
pγi =
(
Qi
c,Qi
c, 0, 0
)
(9.250)
pi =(
M0c, 0, 0, 0)
(9.251)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 173 — #177i
i
i
i
i
i
9.1. SOLUCIONES DE PROBLEMAS SOBRE DINAMICA 173
donde M0 es la masa propia del atomo de hidrogeno excitado.Los cuadrivectores momento del foton y del atomo final, conM0 la masa propia del hidrogeno en su estado base, son
pγf =
(
Qi
c,−Qi
c, 0, 0
)
(9.252)
pf = (M0γ(v)c,M0γ(v)v, 0, 0) (9.253)
con v la velocidad final del atomo. Por las leyes de conserva-cion se tiene que
pγi + pi = pγf + pf (9.254)
entoncesQi
c+ M0c =
Qi
c+ M0γ(v)c (9.255)
Qi
c= −Qi
c+ M0γ(v)v (9.256)
por lo tanto
γ(v) =M0
M0=
M0c2
M0c2=
E2
E1(9.257)
Donde E1 y E2 son las energıas propias totales del hidrogenoen su estado base (n = 1) y en el primer estado excitado(n = 2) respectivamente, y de la ecuacion (9.192) la dife-rencia de las energıas
Q0 = E2 − E1 = M0c2 − M0c
2 = 10,204 eV (9.258)
da la energıa de excitacion. De la ecuacion para el factor γ(v)se obtiene la velocidad de retroceso del atomo
v
c=
√
1 − 1
γ2=
√
1 − M0c2
M0c2
=
√
1 − M0c2
M0c2 + 10,204eV
=
√
1 − 9,387 8 × 108eV
9,387 8 × 108eV + 10,204eV
= 1,042 6 × 10−4 (9.259)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 174 — #178i
i
i
i
i
i
174 CAPITULO 9. DINAMICA RELATIVISTA
c De la ecuacion de conservacion del momento se obtiene que
2Qi
c= M0γ(v)v (9.260)
entonces
1
2
(
10. 204eV + 9. 387 8 × 108eV)
1. 042 6 × 10−4 = 48939.eV
(9.261)y
Qi =1
2M0γ(v)vc =
1
2M0c
2βM0c
2
M0c2
=1
2M0c
2β =1
2
(
Q0 + M0c2)
β
=1
2
(
10,204eV + 9,387 8 × 108eV)
1,042 6 × 10−4
= 48,9MeV (9.262)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 175 — #179i
i
i
i
i
i
Capıtulo 10
Tensores
10.1. Soluciones de problemas algebra tensorial
1. Transformacion de componentes covariantes. Para encon-trar como se transforman las componentes covariantes de un cua-drivector V, considerese en primer lugar que para un sistema dereferencia Σ′ las componentes covariantes V ′
α estan relacionadascon sus componentes contravariantes por la relacion
V ′α = ηαµV ′µ (10.1)
entonces, aplicando la ley de transformacion de las componentescontravariantes se tiene que
V ′α = ηαµΛµ
νVν (10.2)
Ahora, de la relacion
Λ µν = ηνγηµδΛγ
δ (10.3)
la cual se cumple para la matriz inversa de Lorentz, pues
Λ µν Λν
ω = ηνγηµδΛγδΛ
νω
= ηµδηνγΛγδΛ
νω
= ηµδηδω
= δµω (10.4)
dado que la matriz de Lorentz debe satisfacer que
ηαβ = ΛµαΛν
βηµν (10.5)
175

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 176 — #180i
i
i
i
i
i
176 CAPITULO 10. TENSORES
multiplicando la relacion (10.3) por ηβµ a ambos lados y sumandosobre el ındice µ, se obtiene
ηβµΛ µν = ηβσηνµησδΛµ
δ = ηνµδδβΛµ
δ = ηνµΛµβ (10.6)
Remplazando esta relacion en el ultimo termino de la ecuacion10.2, se tiene que
V ′α = ηαµΛµ
νVν
= ηνµΛ µα V ν
= Λ µα Vµ (10.7)
Esta ecuacion da la ley de transformacion de las componentes co-variantes para un cuadrivector.
2. Componentes covariantes del cuadrivector momento. Pordefinicion, las componentes covariantes de un cuadrivector estanrelacionadas con sus componentes contravariantes por la ecuacion
Vα = ηασV σ (10.8)
aplicando esta relacion a las componentes del cuadrivector momen-to se tiene
p0 = η0βpβ
= η00p0 + η01p
1 + η02p2 + η03p
3
= η00p0
=E
c(10.9)
p1 = η1βpβ
= η10p0 + η11p
1 + η12p2 + η13p
3
= η11p1
= −px (10.10)
y similarmente
p2 = η22p2 = −py (10.11)
p3 = η33p2 = −pz (10.12)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 177 — #181i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 177
ası obtenemos
pµ = (p0, p1, p2, p3) =
(
E
c,−px,−py,−pz
)
(10.13)
De esta forma la interpretacion fısica de las componentes covarian-tes del cuadrivector momento es, en esencia, similar a las compo-nentes contravariantes, salvo por el signo negativo de las compo-nentes espaciales.
3. Transformacion de componentes covariantes. La ecuacionde transformacion para las componentes covariantes de un cuadri-vector esta dada por
V ′α = Λ σ
α Vσ (10.14)
donde Λ σα son los elementos de la transformacion de Lorentz
inversa. Si se aplica esta ecuacion a las componentes covariantes delcuadrivector momento, para la transformacion de Lorentz usual,se tiene que
p′0 = γ(v) (p0 + βp1) (10.15)
p′1 = γ(v) (p1 + βp0) (10.16)
p′2 = p2 (10.17)
p′3 = p3 (10.18)
Teniendo en cuenta la ecuacion 10.13 que relaciona las componen-tes covariantes del cuadrivector momento de una partıcula con suenergıa y momento, se obtienen las ecuaciones que relacionan laenergıa y el momento de una partıcula medidas por dos observa-dores inerciales:
E′ = γ(v) (E − vpx) (10.19)
p′x = γ(v)
(
px − vE
c2
)
(10.20)
p′y = py (10.21)
p′y = py (10.22)
Estas ecuaciones tambien se obtienen a partir de las ecuaciones detransformacion para las componentes contravariantes
p′α = Λασpσ (10.23)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 178 — #182i
i
i
i
i
i
178 CAPITULO 10. TENSORES
(ver ecuaciones (9.18), (9.19), (9.20) y (9.21)). Este resultado queera de esperar, pues dada la relacion biunıvoca entre las compo-nentes covariantes y contravariantes de un cuadrivector, la inter-pretacion fısica de sus componentes debe ser la misma, salvo porun signo menos global en las componentes espaciales (ver ecuacion(10.13)).
4. Propiedades de simetrıa. La ley de transformacion de las com-ponentes del tensor, bajo una transformacion de Lorentz, esta dadapor
T ′αβ = ΛασΛα
ωT σω (10.24)
a Si el tensor es simetrico en un sistema de referencia
Tαβ = T βα (10.25)
entonces
T ′αβ = ΛασΛβ
ωT σω
= ΛβωΛα
σTωσ
= T ′βα (10.26)
pues el producto de los elementos de la transformacion deLorentz es conmutativo. En el caso del tensor antisimetricose tiene que
T ′αβ = ΛασΛβ
ωT σω
= −ΛβωΛα
σTωσ
= −T ′βα (10.27)
entonces las propiedades de simetrıa de tensores contrava-riantes no dependen del sistema de referencia. Un resultadosimilar vale para tensores covariantes y en general para lascomponentes contravariantes o covariantes de tensores mix-tos.
b Las componentes covariantes del tensor T estan relacionadascon sus componentes contravariantes por
Tαβ = ηασηβτTστ (10.28)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 179 — #183i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 179
entonces, si Tαβ es simetrico se tiene que
Tαβ = ηασηβτTστ
= ηασηβτTτσ
= ηβτηασT τσ
= Tβα (10.29)
un resultado similar se obtiene si el tensor Tαβ es antisimetri-co, es decir
Tαβ = −Tβα (10.30)
Sobre las componentes mixtas no hay una relacion de simetrıao antisimetrıa general, si el tensor es simetrico o antisimetrico,pues por ejemplo, las componentes mixtas Tα
β estan dadaspor
Tαβ = ηβσTασ (10.31)
entonces
T 01 = η1σT 0σ
= η10T00 + η11T
01 + η12T02 + η13T
03
= η11T01
= −T 01 (10.32)
y
T 10 = η0σT 1σ
= η00T10 = T 10 (10.33)
ası, aun cuando el tensor es simetrico T 10 = T 01, se tiene que
T 01 = −T 1
0 (10.34)
pero para otra componente, por ejemplo T 12, se tiene que
T 12 = η2σT 1σ = η22T
12 = −T 12 (10.35)
peroT 2
1 = η1σT 2σ = η11T21 = −T 21 (10.36)
y aquı se cumple que
T 12 = T 2
1 (10.37)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 180 — #184i
i
i
i
i
i
180 CAPITULO 10. TENSORES
5. Tensor metrico de Minkowski. Las componentes del tensormetrico de Minkowski se transforman como
η′αβ = Λ σα Λ ω
β ησω (10.38)
Considerese una transformacion de Lorentz usual, donde las com-ponentes de la matriz de transformacion inversa Λ σ
α estan dadaspor
Λ σα =
γ βγ 0 0βγ γ 0 00 0 1 00 0 0 1
(10.39)
entonces
η′00 = Λ σ0 Λ ω
0 ησω
= Λ 00 Λ 0
0 η00 + Λ 10 Λ 1
0 η11
= γ2η00 + (βγ)2 η11
= γ2 − β2γ2
= 1 (10.40)
donde en la suma sobre los dos ındices solo se han escrito los termi-nos no nulos. Para las componentes espaciales de la diagonal ηii
con i = 1, 2, 3 se tiene
η′ii = Λ σi Λ ω
i ησω
= Λ 0i Λ 0
i η00 + Λ 1i Λ 1
i η11 + Λ 2i Λ 2
i η22 + Λ 3i Λ 3
i η33
= (βγ)2 δ1i η00 + γ2δ1
i η11 + δ2i η22 + δ3
i η33
=
β2γ2 − γ2 = −1 i = 1η22 = −1 i = 2η33 = −1 i = 3
(10.41)
Para los terminos no diagonales se obtiene:
η′01 = Λ σ0 Λ ω
1 ησω
= Λ 00 Λ 0
1 η00 + Λ 10 Λ 1
1 η11
= βγ2η00 + βγ2η11
= 0 (10.42)
y para los terminos η′0i con i = 2, 3 todos los terminos de la sumase anulan
η′0i = Λ σ0 Λ ω
i ησω = 0 (10.43)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 181 — #185i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 181
Para el tensor metrico contravariante se sigue un calculo similar,donde ahora la ley de transformacion es
ηαβ = ΛασΛβ
ωησω (10.44)
con Λασ los elementos de la transformacion de Lorentz directa.
Ası por ejemplo
η00 = Λ0σΛ0
ωησω
= Λ00Λ
00η
00 + Λ01Λ
01η
11
= γ2η00 + (−βγ)2 η11
= γ2 − β2γ2 = 1 (10.45)
y de manera similar para las demas componentes. Para el tensormetrico mixto δα
β la ley de transformacion esta dada por
δ′αβ = ΛασΛ ω
β δσω (10.46)
De esta transformacion se sigue inmediatamente el resultado, puesal sumar sobre ω, por las propiedades del sımbolo δ, todos losterminos son nulos salvo cuando ω = σ; entonces
δ′αβ = ΛασΛ ω
β δσω
= ΛασΛ σ
β
= δαβ (10.47)
donde la ultima igualdad se obtiene del hecho que Λασ y Λ σ
β
son mutuamente inversas.
6. Algebra de tensores. Sea Σ′ un sistema de referencia relacionadocon Σ por una transformacion de Lorentz.
a Sea
S′α1...αrβ1...βs
= λT ′α1...αrβ1...βs
(10.48)
las cantidades medidas en un sistema de referencia Σ′; enton-ces, por hipotesis T ′α1...αr
β1...βsson las componentes de un tensor
y ası ellas estan relacionadas con las componentes del tensoren el sistema Σ por la ecuacion (5.20)
T ′α1...αrβ1...βs
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsT
γ1...γrσ1...σs (10.49)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 182 — #186i
i
i
i
i
i
182 CAPITULO 10. TENSORES
por lo tanto remplazando en la ecuacion (10.48) se tiene
S′α1...αrβ1...βs
= λΛα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsT
γ1...γrσ1...σs
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βs
(
λTγ1...γrσ1...σs
)
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsS
γ1...γrσ1...σs (10.50)
lo cual demuestra que las cantidades Sγ1...γrσ1...σs se transforman
como las componentes de un tensor r − veces contravarientey s − veces covariante.
b Para un sistema de referencia Σ′ tenemos que
Q′α1...αrβ1...βs
= T ′α1...αrβ1...βs
+ Rα1...αrβ1...βs
(10.51)
entonces, como T y R son tensores, sus componentes endos sistemas de referencia estan relacionadas por la ecuacion(5.20), ası
T ′α1...αrβ1...βs
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsT
γ1...γrσ1...σs
R′α1...αrβ1...βs
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsR
γ1...γrσ1...σs(10.52)
remplazando estas expresiones en la ecuacion (10.51) tenemos
Q′α1...αrβ1...βs
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsT
γ1...γrσ1...σs +
Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsR
γ1...γrσ1...σs (10.53)
factorizando los elementos de la transformacion de Lorentz seobtiene
Q′α1...αrβ1...βs
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βs
(
Tγ1...γrσ1...σs + R
γ1...γrσ1...σs
)
= Λα1γ1
· · · Λαrγr
Λ σ1
β1· · · Λ σs
βsQ
γ1...γrσ1...σs (10.54)
lo cual demuestra que la suma de tensores del mismo tipo esun tensor.
7. Contraccion de tensores. Sean
Qα1...αi−1αi+1...αr
β1...βj−1βj+1...βs= T
α1...αi−1σαi+1...αr
β1...βj−1δβj+1...βs(10.55)
las cantidades obtenidas por la contraccion de la i-esima compo-nente contravariante y la j-esima componente covariante del ten-sor T medidas en un sistema de referencia Σ. Consideremos un

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 183 — #187i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 183
segundo sistema de referencia Σ′ relacionado con Σ por una trans-formacion de Lorentz. Sean
Q′α1...αi−1αi+1...αr
β1...βj−1βj+1...βs= T
′α1...αi−1σαi+1...αr
β1...βj−1δβj+1...βs(10.56)
las cantidades medidas en Σ′, entonces aplicando la ecuacion (5.20)se tiene que
Q′α1...αi−1αi+1...αr
β1...βj−1βj+1...βs= Λα1
γ1· · · Λαi−1
γi−1Λσ
γiΛ
αi+1γi+1
· · ·Λαr
γrΛ ω1
β1· · · Λ ωj−1
βj−1Λ
ωjσ Λ
ωj+1
βj+1·
· · Λ σsβs
Tγ1...γi−1γiγi+1...γrω1...ωj−1ωjωj+1...ωs (10.57)
teniendo en cuenta que
Λσγi
Λωj
σ = δωjγi
(10.58)
puesto que Λσγi
y Λωj
σ corresponden a las componentes de la trans-formacion de Lorentz y su inversa, obtenemos
Q′α1...αi−1αi+1...αr
β1...βj−1βj+1...βs= Λα1
γ1· · · Λαi−1
γi−1Λαi+1
γi+1· · · Λαr
γrΛ ω1
β1· ·
Λωj−1
βj−1Λ
ωj+1
βj+1· · · Λ σs
βsδωj
γiT
γ1...γi−1γiγi+1...γrω1...ωj−1ωjωj+1...ωs
= Λα1
γ1· · · Λαi−1
γi−1Λαi+1
γi+1· · · Λαr
γrΛ ω1
β1· ·
Λωj−1
βj−1Λ
ωj+1
βj+1· · · Λ σs
βsT
γ1...γi−1ωjγi+1...γrω1...ωj−1ωjωj+1...ωs
= Λα1
γ1· · · Λαi−1
γi−1Λαi+1
γi+1· · · Λαr
γrΛ ω1
β1(10.59)
· · ·Λ ωj−1
βj−1Λ
ωj+1
βj+1· · · Λ σs
βsQ
γ1...γi−1γi+1...γrω1...ωj−1ωj+1...ωs
como se querıa demostrar.
8. Tensor de Levi-Civita. Las componentes del tensor de Levi-Civita estan dadas por
εαβγδ :=
+1 si αβγδ es permutacion par de 0123−1 si αβγδ es permutacion impar de 01230 en los demas casos
a Bajo una transformacion de Lorentz usual las componentes deltensor de Levi-Civita se transforman como
ε′αβγδ = ΛαµΛβ
νΛγσΛδ
ωεµνσω (10.60)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 184 — #188i
i
i
i
i
i
184 CAPITULO 10. TENSORES
Consideremos primero el elemento con α, β, γ, δ = 0, 1, 2, 3respectivamente, entonces
ε′0123 = Λ0µΛ1
νΛ2σΛ3
ωεµνσω
= det |Λ|= 1 (10.61)
para una transformacion de Lorentz usual. Si consideramosuna permutacion cualquiera de los ındices de ε′, por ejem-plo α, β, γ, δ = 3, 0, 1, 2, la cual es una permutacion impar,tenemos que
ε′3012 = Λ3µΛ0
νΛ1σΛ2
ωεµνσω
= −Λ3ωΛ0
µΛ1νΛ2
σεωµνσ
= −Λ0µΛ1
νΛ2σΛ3
ωεωµνσ
= − det |Λ|= −1 (10.62)
donde en el segundo paso se ha hecho la misma permutacionde los ındices del tensor de Levi-Civita, la cual cambia el signopor ser una permutacion impar. Ası, procediendo de la mismaforma sobre todas las permutaciones posibles encontramosque
ε′αβγδ = ±1 (10.63)
dependiendo de si (αβγδ) es una permutacion par(+) o impar(-) de (0123). Finalmente, si dos ındices son iguales, por ejemploel primero y el tercero, desarrollando la suma sobre ındicesrepetidos se tiene que
ε′αβαδ = ΛαµΛβ
νΛασΛδ
ωεµνσω
= Λα0Λ
β1Λ
α2Λ
δ3ε
0123 + Λα0Λ
β1Λ
α3Λ
δ2ε
0132 +
· · · + Λα2Λ
β1Λ
α0Λ
δ3ε
2103 + · · ·= Λα
0Λβ1Λ
α2Λ
δ3
(
ε0123 + ε2103)
+ · · ·= Λα
0Λβ1Λ
α2Λ
δ3 (+1 − 1) + · · ·
= 0 (10.64)
anulandose todos los terminos dos a dos.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 185 — #189i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 185
b Las componentes covariantes del tensor de Levi-Civita estandadas por
εαβγδ = ηαµηβνηγσηδωεµνδω (10.65)
Consideremos primero el caso en que los ındices (αβγδ) sontodos diferentes. Entonces a partir de la definicion del tensormetrico de Minkowski
ηαβ =
+1 α = β = 0−1 α = β = 1, 2, 30 α 6= β
(10.66)
tenemos que en la ecuacion (10.65) los terminos de las sumassobre los ındices repetidos µ, ν, σ y ω se anulan salvo cuandoα = µ, β = ν, γ = σ y δ = ω; entonces
εαβγδ = ηαµηβνηγσηδωεµνδω
= ηααηββηγγηδδεαβγδ
= (+1) (−1)3 εαβγδ
= −εαβγδ (10.67)
Para los demas casos, cuando dos o mas ındices del tensorεαβγδ estan repetidos, la expresion se anula, pues por ejemplo,si el segundo y el cuarto ındice son iguales, se tiene que
εαβγβ = ηαµηβνηγσηβωεµνδω
= ηααηββηγγηββεαβγβ
= 0 (10.68)
por la definicion de las componentes contravariantes del ten-sor de Levi-Civita. Ası la relacion entre las componentes con-travariantes y covariantes del tensor esta dada por
εαβγβ = −εαβγβ (10.69)
c Por el resultado anterior (ecuacion (10.69)) tenemos que
εαβγδεαβγδ = −
3∑
α,β,γ,δ=0
∣
∣
∣εαβγδ∣
∣
∣
2(10.70)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 186 — #190i
i
i
i
i
i
186 CAPITULO 10. TENSORES
pero de los 44 = 256 terminos de las sumas, solamente 4! = 24son diferentes de cero, los cuales corresponden a las permuta-ciones de los ındices αβγδ, y puesto que
∣
∣εαβγδ∣
∣ = 1, tenemos
εαβγδεαβγδ = −
3∑
α,β,γ,δ=0
1 = −24 (10.71)
9. El tensor dual. Sean
Fαβ =
0 F01 F02 F03
F10 0 F12 F13
F20 F21 0 F23
F30 F31 F32 0
(10.72)
las componentes del tensor antisimetrico; entonces
a De la definicion de tensor dual tenemos (escribiendo solo losterminos no nulos)
(∗F )αβ =1
2εαβγδFγδ
=1
2[εαβ01F01 + εαβ02F02 + εαβ03F03
+εαβ10F10 + εαβ12F12 + εαβ13F13
+εαβ20F20 + εαβ21F21 + εαβ23F23
+εαβ30F30 + εαβ31F31 + εαβ32F32](10.73)
dado que εαβ01 = −εαβ10 y F01 = −F10, y similarmente conlos demas terminos, obtenemos
(∗F )αβ = εαβ01F01 + εαβ02F02 + εαβ03F03
+εαβ12F12 + εαβ31F31 + εαβ23F23 (10.74)
A partir de esta relacion podemos obtener directamente lascomponentes del tensor dual, pues de la definicion del tensorde Levi-Civita, para los diferentes ındices α y β solo sobrevive

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 187 — #191i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 187
un termino de la relacion anterior, ası
(∗F )αβ =
0 ε0123F23 ε0231F31 ε0312F12
ε1023F23 0 ε1203F03 ε1302F02
ε2031F31 ε2103F03 0 ε2301F01
ε3012F12 ε3102F02 ε3201F01 0
=
0 F23 F31 F12
−F23 0 F03 −F02
−F31 −F03 0 F01
−F12 F02 −F01 0
(10.75)
notemos que el tensor dual tambien es antisimetrico:
(∗F )αβ = − (∗F )βα (10.76)
b Las componentes covariantes del tensor dual estan dadas por
(∗F )αβ = ηαµηβν (∗F )µν (10.77)
Entonces, de la definicion del tensor metrico de Minkowski,los unicos terminos no nulos de la doble suma son para α = µy β = ν, ası
(∗F )αβ =
0 − (∗F )01 − (∗F )02 − (∗F )03
− (∗F )10 0 (∗F )12 (∗F )13
− (∗F )20 (∗F )21 0 (∗F )23
− (∗F )30 (∗F )31 (∗F )32 0
=
0 −F23 −F31 −F12
F23 0 F03 −F02
F31 −F03 0 F01
F12 F02 −F01 0
(10.78)
c De la definicion
(∗F )αβ =1
2εαβγδF
γδ (10.79)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 188 — #192i
i
i
i
i
i
188 CAPITULO 10. TENSORES
tenemos que
(∗F )αβ =1
2[εαβ01F
01 + εαβ02F02 + εαβ03F
03
+εαβ10F10 + εαβ12F
12 + εαβ13F13
+εαβ20F20 + εαβ21F
21 + εαβ23F23
+εαβ30F30 + εαβ31F
31 + εαβ32F32]
= εαβ01F01 + εαβ02F
02 + εαβ03F03
+εαβ12F12 + εαβ31F
31 + εαβ23F23 (10.80)
Entonces, a partir de esta ecuacion las componentes covarian-tes del tensor dual estan dadas por
(∗F )αβ =
0 ε0123F23 ε0231F
31 ε0312F12
ε1023F23 0 ε1203F
03 ε1302F02
ε2031F31 ε2103F
03 0 ε2301F01
ε3012F12 ε3102F
02 ε3201F01 0
=
0 −F 23 −F 31 −F 12
F 23 0 −F 03 F 02
F 31 F 03 0 −F 01
F 12 −F 02 F 01 0
(10.81)
pues
εαβγδ = −εαβγδ (10.82)
Para comparar estas componentes covariantes del tensor dual,con las obtenidas en la parte b del presente problema, rempla-cemos las componentes Fαβ en terminos de sus componentescovariantes, relacionadas por la ecuacion
Fαβ = ηαµηβνFµν (10.83)
entonces, de las propiedades del tensor metrico de Minkowski,tenemos
Fαβ = ηααηββFαβ (10.84)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 189 — #193i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 189
ası
(∗F )αβ
=
0 −η22η33F23 −η33η11F31 −η11η22F12
η22η33F23 0 −η00η33F03 η00η22F02
η33η11F31 η00η33F03 0 −η00η11F01
η11η22F12 −η00η22F02 η00η11F01 0
=
0 −F 23 −F 31 −F 12
F 23 0 F 03 −F 02
F 31 −F 03 0 F 01
F 12 F 02 −F 01 0
(10.85)
el cual coincide con las componentes obtenidas en la parte b.Esta relacion se puede mostrar en forma directa pues
(∗F )αβ = ηασηβτ (∗F )στ
= ηασηβτ
1
2εστγδFγδ
=1
2ε γδαβ Fγδ
=1
2ηγµηδνεαβµνFγδ
=1
2εαβµνη
γµηδνFγδ
=1
2εαβµνF
µν (10.86)
como se querıa probar.
d Para probar esta relacion aplicamos la definicion del tensor dual∗F , i. e.,
(∗ (∗F ))αβ =1
2εαβδγ (∗F )δγ
=1
2εαβδγ 1
2εδγµνF
µν
=1
4εαβδγεδγµνF
µν (10.87)
calculemos ahora el tensor:
εαβδγεδγµν (10.88)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 190 — #194i
i
i
i
i
i
190 CAPITULO 10. TENSORES
entonces realizando la doble suma y escribiendo solo los termi-nos no nulos, y teniendo en cuenta que εαβδγ = −εαβγδ (si-milarmente para las componentes covariantes), tenemos
εαβδγεδγµν = 2εαβ01ε01µν + 2εαβ02ε02µν
+2εαβ03ε03µν + 2εαβ12ε12µν
+2εαβ13ε13µν + 2εαβ23ε23µν (10.89)
recordemos que los ındices del tensor de Levi-Civita debenser todos diferentes para que este no sea nulo. Ası de los seisterminos de la suma para cada par de valores que tomen losındices libres α y β, solamente un termino sobrevive y ademaslos ındices µ y ν tambien toman los mismos valores de α y β,es decir se debe cumplir uno de los siguientes casos:
α = µ y β = ν (10.90)
oα = ν y β = µ (10.91)
por lo tanto, dado que α 6= β, tenemos que
εαβδγεδγµν = −2 si α = µ y β = ν (10.92)
εαβδγεδγµν = 2 si α = ν y β = µ (10.93)
esta relacion se puede escribir en forma tensorial como
εαβδγεδγµν = −2δαβµν = −2
(
δαµδβ
ν − δαν δβ
µ
)
(10.94)
donde el segundo termino define al tensor
δαβµν = −1
2εαβδγεδγµν (10.95)
Por lo tanto utilizando este resultado tenemos que
(∗ (∗F ))αβ =1
4εαβδγεδγµνF
µν
= −1
2δαβµν Fµν
= −1
2
(
δαµδβ
ν − δαν δβ
µ
)
Fµν
= −1
2
(
Fαβ − F βα)
= −Fαβ (10.96)
como se querıa probar.

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 191 — #195i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 191
10. Transformacion general de coordenadas. Sean
x′α = Λαβxβ (10.97)
las ecuaciones de transformacion de Lorentz usuales entre siste-mas de referencia inerciales, las cuales se pueden escribir como elconjunto de cuatro transformaciones de coordenadas
x′α = x′α(
xβ)
; α, β = 0, 1, 2, 3 (10.98)
a Tomando las diferenciales de las funciones de transformacionde coordenadas, ecuacion (10.98), y aplicando la regla de lacadena tenemos
dx′α =∂x′α
∂xβdxβ (10.99)
Diferenciando las ecuaciones de transformacion de Lorentz,ecuacion (10.97), y teniendo en cuenta que los coeficientes dela transformacion Λα
β son constantes independientes de lascoordenadas, tenemos que
dx′α = Λαβdxβ (10.100)
por lo tanto, comparando las dos ecuaciones anteriores se ob-tiene
Λαβ =
∂x′α
∂xβ(10.101)
esto significa que los elementos de la matriz de transforma-cion de Lorentz corresponden a los elementos de la matrizjacobiana de la transformacion de coordenadas.
b Si el determinante de la matriz de Jacobi de la transformacionde coordenadas es diferente de cero
det∣
∣J(x, x′)∣
∣ 6= 0 (10.102)
entonces podemos despejar las coordenadas x en funcion delas x′, es decir
xα = xα(x′β) (10.103)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 192 — #196i
i
i
i
i
i
192 CAPITULO 10. TENSORES
y por lo tanto el jacobiano de esta transformacion esta dadopor
J(
x′, x)
=
∂x0
∂x′0∂x0
∂x′1∂x0
∂x′2∂x0
∂x′3
∂x1
∂x′0∂x1
∂x′1∂x1
∂x′2∂x1
∂x′3
∂x2
∂x′0∂x2
∂x′1∂x2
∂x′2∂x2
∂x′3
∂x3
∂x′0∂x3
∂x′1∂x3
∂x′2∂x3
∂x′3
=
[
∂xα
∂x′β
]
(10.104)
Si remplazamos en la transformacion de coordenadas, ecua-cion (10.98), la ecuacion para la transformacion inversa (10.103),obtenemos la transformacion identidad, es decir
x′α(xβ(x′γ)) = x′α (10.105)
diferenciando esta identidad, aplicando la regla de la cadena,tenemos
dx′α =∂x′α
∂xβ
∂xβ
∂x′γ dx′γ (10.106)
por lo tanto, dado que las coordenadas son independientes,se debe cumplir que
∂x′α
∂xβ
∂xβ
∂x′γ = δαγ (10.107)
esto significa que la matriz de Jacobi correspondiente a latransformacion inversa de coordenadas es la inversa de la ma-triz de Jacobi de la transformacion:
J(x′, x) = J−1(x, x′) (10.108)
Ası los elementos de la transformacion de Lorentz inversaestan dados por
Λ αβ =
∂xα
∂x′β (10.109)
11. Derivada de un tensor. Del problema anterior vimos que unatransformacion de Lorentz se puede expresar en la forma
x′α = x′α(xµ) ⇐⇒x′α = Λα
µxµ ⇐⇒
x′α =∂x′α
∂xµxµ (10.110)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 193 — #197i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 193
Entonces, para un sistema de referencia Σ′ tenemos
T ′αβ,γ =
∂T ′αβ
∂x′γ (10.111)
Para relacionar estas cantidades con las correspondientes en el sis-tema de referencia Σ tengamos en cuenta que las componentes deltensor estan relacionadas por la transformacion
T ′αβ = ΛαµΛα
νT µν (10.112)
y para calcular la derivada debemos aplicar la regla de la cadena,pues
T µν = T µν(x) = T µν(x(x′)) (10.113)
con x(x′) la transformacion inversa de Lorentz, ası
T ′αβ,γ =
∂
∂x′γ
(
T ′αβ)
=∂
∂x′γ(
ΛαµΛα
νTµν)
= ΛαµΛα
ν
∂
∂x′γ (T µν (x))
= ΛαµΛα
ν
∂xσ
∂x′γ∂
∂xσ(T µν)
= ΛαµΛα
ν
∂xσ
∂x′γ T µν,σ (10.114)
teniendo en cuenta la ecuacion (10.109) obtenemos el resultado
T ′αβ,γ = Λα
µΛβνΛ
σγ T µν
,σ (10.115)
12. Transformacion general de coordenadas y derivadas. Con-sideremos una transformacion general de coordenadas
x′α = x′α(xµ) (10.116)
Entonces, en las coordenadas primadas tenemos
Vα,γ =∂
∂x′γ V ′α (10.117)
Teniendo en cuenta la ley de transformacion para las componentesde un tensor una vez contravariante
V ′α =
∂xµ
∂x′α Vµ (10.118)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 194 — #198i
i
i
i
i
i
194 CAPITULO 10. TENSORES
remplazando esta ecuacion en (10.117) tenemos
Vα,γ =∂
∂x′γ
(
∂xµ
∂x′α Vµ
)
(10.119)
aplicando la regla para la derivada de un producto de funcionesy notando que ahora el jacobiano de la transformacion es unafuncion de las coordenadas, a diferencia del caso restringido de lastransformaciones de Lorentz, tenemos que
V ′α,γ =
∂xµ
∂x′α∂
∂x′γ (Vµ) +
(
∂
∂x′γ∂xµ
∂x′α
)
Vµ
=∂xµ
∂x′α∂xσ
∂x′γ∂
∂xσ(Vµ) +
∂2xµ
∂x′γ∂x′α Vµ
=∂xµ
∂x′α∂xσ
∂x′γ Vµ,σ +∂2xµ
∂x′γ∂x′α Vµ (10.120)
ası el primer termino de esta expresion corresponde a la ley detransformacion de tensores 2-veces covariantes, pero el ultimo termi-no, salvo que este se anule, indica que Vα,γ no se transforma comolas componentes de un tensor 2-veces covariante. La condicion pa-ra que la ley de transformacion se cumpla se obtiene anulando elsegundo termino, es decir si
∂2xµ
∂x′γ∂x′α = 0 (10.121)
esta condicion significa que
∂2xµ
∂x′γ∂x′α =∂
∂x′γ(
J(x′, x))
= 0 (10.122)
esto es, si los elementos de la matriz jacobiana de la transforma-cion de coordenadas son constantes (independientes de las coor-denadas), lo cual implica que las ecuaciones de transformacion decoordenadas deben ser lineales.
13. El tensor energıa-momento. La ecuacion de transformacionpara las componentes de un tensor de segundo rango contrava-riante esta dada por
T ′αβ = ΛαµΛβ
νTµν0 (10.123)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 195 — #199i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 195
donde T µν0 corresponden a las componentes del tensor en el sistema
de referencia propio y Tαβ las componentes respecto al observa-dor inercial Σ que se mueve con velocidad −~u respecto al sistemapropio, y los elementos de la matriz de transformacion de Lorentzestan dados por (ecuacion (7.334)):
[
Λαµ
]
=
γ βxγ βyγ βzγ
βxγ 1 +(γ−1)β2
x
β2
(γ−1)βxβy
β2
(γ−1)βxβz
β2
βyγ(γ−1)βxβy
β2 1 +(γ−1)β2
y
β2
(γ−1)βyβz
β2
βzγ(γ−1)βxβz
β2
(γ−1)βyβz
β2 1 +(γ−1)β2
z
β2
(10.124)
con γ = γ(~u) y βi = ui/c, i = x, y, z. Ası, considerando que el
tensor Tαβ0 es diagonal, tenemos
T 00 = Λ0µΛ0
νT µν0
= Λ00Λ
00T
000 + Λ0
1Λ01T
110 + Λ0
2Λ02T
220 + Λ0
3Λ03T
330
= γ2ρ0 +(
γ2β2x + γ2β2
y + γ2β2z
)
p0
= γ2(
ρ0 + p0β2)
(10.125)
donde
β2 =|~u|2c2
(10.126)
Para α = i = 1 y β = 0 se obtiene
T 10 = Λ1µΛ0
νTµν0
= Λ10Λ
00T
000 + Λ1
1Λ01T
110 + Λ1
2Λ02T
220 + Λ1
3Λ03T
330
= βxγ2ρ0 +
(
1 +(γ − 1)β2
x
β2
)
βxγp0
+(γ − 1)βxβy
β2 βyγp0 +(γ − 1)βxβz
β2 βzγp0
= βxγ2ρ0 + βxγp0 +(γ − 1)βx
β2 γp0
(
β2x + β2
y + β2z
)
= (ρ0 + p0)βxγ2 (10.127)
este resultado nos permite extrapolar para los casos α = i = 2, 3y β = 0, ası
T i0 = ΛiµΛ0
νTµν0
= (ρ0 + p0)βiγ2; i = 1, 2, 3 (10.128)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 196 — #200i
i
i
i
i
i
196 CAPITULO 10. TENSORES
Falta por calcular T ij para i, j = 1, 2, 3. Consideremos primero loscasos con i = j, entonces
T 11 = Λ1µΛ1
νTµν0
= Λ10Λ
10T
000 + Λ1
1Λ11T
110 + Λ1
2Λ12T
220 + Λ1
3Λ13T
330
= β2xγ2ρ0 +
(
1 +(γ − 1)β2
x
β2
)2
p0 +
(
(γ − 1)βxβy
β2
)2
p0 +
(
(γ − 1)βxβz
β2
)2
p0 (10.129)
Desarrollando los terminos cuadraticos y reagrupando, teniendoen cuenta que
β2 = β2x + β2
x + β2x (10.130)
obtenemos
T 11 = β2xγ2ρ0 + p0 + 2
(γ − 1)β2x
β2 p0 +(γ − 1)2β2
x
β2 p0
= p0 + β2xγ2ρ0 −
β2x
β2 p0 +γ2β2
x
β2 p0
= p0 + β2xγ2ρ0 +
(
γ2 − 1) β2
x
β2 p0
= p0 + (ρ0 + p0)β2xγ2 (10.131)
Ası, los terminos diagonales espaciales del tensor energıa-momentose pueden escribir en la forma
T ii = p0 + (ρ0 + p0) β2i γ
2, i = 1, 2, 3 (10.132)
Consideremos ahora los elementos del tensor T ij, con i 6= j:
T 12 = Λ1µΛ2
νTµν0
= Λ10Λ
20T
000 + Λ1
1Λ21T
110 + Λ1
2Λ22T
220 + Λ1
3Λ23T
330
= βxβyγ2ρ0 + 2
(γ − 1)βxβy
β2 p0 +(γ − 1)2βxβy
β2 p0
= βxβyγ2ρ0 +
(γ2 − 1)βxβy
β2 p0
= βxβyγ2 (ρ0 + p0) (10.133)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 197 — #201i
i
i
i
i
i
10.1. SOLUCIONES DE PROBLEMAS ALGEBRA TENSORIAL 197
Finalmente los elementos del tensor energıa-momento se puedenescribir en una forma mas compacta como
T 00 = γ2(
ρ0 + p0β2)
(10.134)
T ij = p0δij + (ρ0 + p0) βiβjγ2
T 0i = (ρ0 + p0)βiγ2
Estos elementos del tensor los podemos reescribir en forma cova-riante, es decir en terminos de cantidades tensoriales, si tenemosen cuenta el tensor metrico de Minkowski y la definicion de lacuadrivelocidad del fluido, es decir dado que
Uα =dxα
ds= γ(1, βx, βy, βz) (10.135)
y
ηαβ =
1 α = β = 0−1 α = β = 1, 2, 30 α 6= β
(10.136)
entonces las ecuaciones (10.134) se pueden reescribir en terminosde las componentes de la cuadrivelocidad:
T 00 = γ2(
ρ0 + p0β2)
= γ2ρ0 + γ2β2p0
= U0U0ρ0 + p0(γ2 − 1)
= U0U0 (ρ0 + p0) − p0η00 (10.137)
T ij = p0δij + (ρ0 + p0)βiβjγ2
= p0δij + (ρ0 + p0)U iU j
= −p0ηij + (ρ0 + p0)U iU j (10.138)
T 0i = (ρ0 + p0)βiγ2
= (ρ0 + p0)U0U i − p0η0i (10.139)
Por lo tanto, las tres ecuaciones anteriores se pueden escribir enforma covariante como
Tαβ = (p0 + ρ0)UαUβ − p0η
αβ (10.140)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 198 — #202i
i
i
i
i
i
Capıtulo 11
Electrodinamica
11.1. Soluciones de problemas electrodinamica
1. Conservacion de la carga. A partir de la ecuacion de continui-dad para la carga
∂αJα = 0 ⇐⇒ ∂ρ
∂t+ ~∇ · ~J = 0 (11.1)
e integrando en todo el espacio tenemos
∫ (
∂ρ
∂t+ ~∇ · ~J
)
dV = 0 (11.2)
entonces, sacando la derivada parcial con respecto al tiempo dela integral y aplicando el teorema de la divergencia de Gauss seobtiene
0 =d
dt
∫
ρdV +
∫
~∇ · ~JdV
=d
dt
∫
ρdV +
∮
Σ
~J · d~σ (11.3)
La primera integral nos da la carga total en todo el espacio, mien-tras que la segunda integral cerrada de superficie nos da el flujode la carga a traves de la superficie que delimita el volumen de in-tegracion. Ası, debido a que estamos considerando todo el espacioy asumiendo que la distribucion de corrientes es finita en todo el
198

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 199 — #203i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 199
espacio, es decir no se tienen corrientes en el infinito, entonces laintegral de superficie se anula y por lo tanto
0 =d
dt
∫
ρdV =dQ
dt(11.4)
implica que la carga total es una constante (se conserva)
Q = constante (11.5)
2. Cuadricorriente de una partıcula. Sea Σ un sistema de refe-rencia inercial y Σ′ un segundo sistema de referencia que se muevecon velocidad −v respecto a Σ, entonces las ecuaciones de trans-formacion de coordenadas estan dadas por las relaciones
x′0 = γ(x0 + βx1) (11.6)
x′1 = γ(x1 + βx0)
x′2 = x2
x′3 = x3
a Consideremos en primer lugar que la partıcula de carga q esta si-tuada en el origen de coordenadas del sistema Σ, entonces ladensidad de carga se puede escribir en terminos de la distri-bucion δ (~r) de Dirac definida por las relaciones
δ (~r) = 0 si ~r 6= ~0 (11.7)
∫
δ (~r) f (~r) d3r = f(~0) (11.8)
Ası
ρ(~r) = qδ (~r) (11.9)
la cual representa una densidad de carga, que es nula en todoel espacio salvo en el punto ~r = 0 y cuya carga total es q,pues
∫
ρ(~r)d3r =
∫
qδ (~r) d3r = q (11.10)
dado que la carga esta en reposo respecto al sistema de refe-rencia Σ, la densidad de corriente se anula:
~J = ~0 (11.11)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 200 — #204i
i
i
i
i
i
200 CAPITULO 11. ELECTRODINAMICA
por lo tanto el cuadrivector densidad de corriente esta dadopor
Jα = (cρ, Jx, Jy , Jz) = (cqδ (~r) , 0, 0, 0) (11.12)
En el caso mas general, cuando la carga en Σ esta situada enun punto arbitrario ~r0, entonces las componentes del cuadri-vector densidad de corriente toman la forma
Jα = (cqδ (~r − ~r0) , 0, 0, 0) (11.13)
b Para encontrar las componentes del cuadrivector densidad decorriente con respecto al sistema Σ′ aplicamos las ecuacionesde transformacion (11.6) a las componentes del cuadrivector(11.12); ası tenemos
J ′0 = γ(J0 + βJ1)
= γJ0
= cγ(v)δ(~r) (11.14)
pero para referir esta densidad de carga al sistema Σ′ debemoscambiar la dependencia de ~r en terminos de las coordenadasde Σ′; ası, aplicando las transformaciones de Lorentz inversastenemos
~r = (x, y, z) = (x1, x2, x3)
= (γ(x′1 − βx′0), x′2, x′3)
= (γ(v)(x′ − vt′), y′.z′) (11.15)
entonces
J ′0 = cqγ(v)δ(γ(v)(x′ − vt′), y′.z′) (11.16)
por la definicion de la distribucion de Dirac esta ecuacionadmite una interpretacion fısica directa, pues representa unadensidad de carga variable en el tiempo, la cual es nula en to-do el espacio salvo en el punto x′ = vt′, y′ = 0, z′ = 0, es deciresta densidad de carga corresponde a la de una partıcula pun-tual de carga q que se mueve con velocidad v en la direcciondel eje x′ positivo. Notemos ademas que la densidad de cargaaumenta en un factor γ, el cual corresponde a la disminucion

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 201 — #205i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 201
de la unidad de volumen debibo a la contraccion de la lon-gitud en la direccion de movimiento. Las otras componentesdel cuadrivector corriente son
Jx′ = J ′1 = γ(J1 + βJ0)
= γβJ0
= γ(v)ρv (11.17)
yJy′ = Jz′ = 0 (11.18)
por lo tanto
J ′α =(
cqγ(v)δ(γ(v)(x′ − vt′), y′.z′), γ(v)ρv, 0, 0)
(11.19)
c En el sistema de referencia inercial Σ la carga total del sistemaesta dada por la integral de la densidad de carga en todo elespacio; entonces
Q =
∫
ρ(t, ~r)d3r
=
∫
qδ(~r)d3r
=
∫
qδ(~r)dxdydz
= q (11.20)
por las propiedades de la distribucion de Dirac; ası la cargatotal del sistema es q, la carga de la partıcula. Para el sistemade referencia Σ′ tenemos que
Q =
∫
ρ(t′, ~r)d3r
=
∫
qγ(v)δ(γ(v)(x′ − vt′), y′, z′)dx′dy′dz′ (11.21)
para hacer esta integral realizamos el siguiente cambio devariable
u = γx′ − vγt′ =⇒ (11.22)
dx′ =du
γ(11.23)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 202 — #206i
i
i
i
i
i
202 CAPITULO 11. ELECTRODINAMICA
entonces
Q =
∫
qγδ(
u, y′, z′) du
γdy′dz′
=
∫
qδ(
u, y′, z′)
dudy′dz′
= q (11.24)
es decir la carga es un invariante relativista.
3. Ecuaciones de Maxwell covariantes. Consideremos en primerlugar la ecuacion homogenea
εαβγδ∂βFγδ = 0 (11.25)
Teniendo en cuenta la definicion del tensor de Levi-Civita y laantisimetrıa del tensor campo electromagnetico tenemos, para α =0
0 = ε0βγδ∂βFγδ
= ε0123∂1F23 + ε0132∂1F32 + ε0213∂2F13
+ε0231∂2F31 + ε0312∂3F12 + ε0321∂3F21
= 2∂1F23 + 2∂2F31 + 2∂3F12 (11.26)
Por otra parte, las componentes covariantes del tensor campo elec-tromagnetico estan dadas por
Fαβ = ηαµηβνFµν (11.27)
Dado que el tensor de Minkowski es simetrico entonces el tensorcovariante electromagnetico tambien es antisimetrico; ası es su-ficiente calcular los seis terminos independientes F0i, i = 1, 2, 3 yF12, F31 y F23. Consideremos primero F0i. Entonces para i = 1, 2, 3tenemos que el unico termino no nulo de la doble suma en la ecua-cion (11.27) se obtiene para µ = 0 y ν = i pues ηαβ = 0 si α 6= β,ası
F0i = η0µηiνFµν
= η00ηiiF0i
= −F 0i (11.28)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 203 — #207i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 203
De manera similar, para los terminos Fij con ij = 12, 31, 23 tene-mos
Fij = ηiµηjνFµν
= ηiiηjjFij
= Fij (11.29)
Por lo tanto, teniendo en cuenta la definicion del tensor contra-variante electromagnetico, ecuacion (6.15), las componentes cova-riantes del tensor estan dadas por
Fαβ =
α, β−Ex 0, 1−Ey 0, 2−Ez 0, 3Bx 2, 3By 3, 1Bz 1, 2
(11.30)
Entonces la ecuacion (11.26) toma la forma
0 = ∂1F23 + ∂2F31 + ∂3F12
=∂Bx
∂x+
∂By
∂y+
∂Bz
∂z(11.31)
la cual corresponde a la ley de Gauss para el campo magnetico.Para α = i = 1, 2, 3 tenemos
0 = εiβγδ∂βFγδ
= εi0jk∂0Fjk + εi0kj∂0Fkj + εij0k∂jF0k
+εijk0∂jFk0 + εik0j∂kF0j + εikj0∂kFj0
= 2εi0jk∂0Fjk + 2εij0k∂jF0k + 2εik0j∂kF0j (11.32)
donde i 6= j 6= k y no hay suma sobre los ındices latinos repeti-dos. Entonces remplazando las componentes covariantes del ten-sor campo electromagnetico y asumiendo el orden de los ındices(ijk) = (123) y sus permutaciones cıclicas, es decir (kij) y (jki),tenemos
−∂Bi
c∂t+
∂Ek
∂xj− ∂Ej
∂xk= 0 (11.33)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 204 — #208i
i
i
i
i
i
204 CAPITULO 11. ELECTRODINAMICA
o en forma equivalente
(
~∇× ~E)
i+
1
c
∂Bi
∂t= 0 (11.34)
la cual, para i = 1, 2, 3, nos da la ley de Faraday en componentes.Consideremos ahora las ecuaciones de Maxwell inhomogeneas:
∂αFαβ = −4π
cJβ (11.35)
Desarrollando la suma sobre el ındice α, para β = 0, suprimiendolos terminos nulos, tenemos
∂1F10 + ∂2F
20 + ∂3F30 = −4π
cJ0 (11.36)
y remplazando los terminos obtenemos la ley de Gauss
−∂Ex
∂x− ∂Ey
∂y− ∂Ez
∂z= −4πρ ⇐⇒
~∇ · ~E = 4πρ (11.37)
Para β = i = 1, 2, 3, donde de nuevo no hay suma sobre ındiceslatinos (j y k) y con i 6= j 6= k, obtenemos
∂0F0i + ∂jF
ji + ∂kFki = −4π
cJ i (11.38)
entonces asumiendo los ındices latinos (ijk) = (123) y sus permu-taciones cıclicas, tenemos
∂Ei
c∂t+
∂Bj
∂xk− ∂Bk
∂xj= −4π
cJi (11.39)
donde ahora los subındices latinos i, j, k significan x, y, z. Ası laecuacion anterior, para i = x, y, z corresponde a cada una de lascomponentes de la ecuacion de Maxwell
~∇× ~B =1
c
∂ ~E
∂t+
4π
c~J (11.40)
4. Fuerza de Lorentz. Consideremos la ecuacion de movimiento enla forma
fα =q
cηβγF βα dxγ
dτ(11.41)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 205 — #209i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 205
y tomemos primero el caso α = i = 1, 2, 3; entonces sumando sobreel ındice repetido β tenemos
f i =q
cηβγF βi dxγ
dτ
=q
cη0γF 0i dxγ
dτ+
q
cη1γF 1i dxγ
dτ
+q
cη2γF 2i dxγ
dτ+
q
cη3γF 3i dxγ
dτ(11.42)
esta ecuacion se puede escribir en forma mas compacta si tenemosen cuenta que para cada i = 1, 2, 3 uno de los tres ultimos terminosde la suma debe anularse debido a la antisimetrıa del tensor campoelectromagnetico, ası
f i =q
cη0γF 0i dxγ
dτ+
q
cηjγF jidxγ
dτ+
q
cηkγF ki dxγ
dτ(11.43)
con i 6= j 6= k y no hay suma sobre los ındices latinos repeti-dos (jk). Teniendo en cuenta la definicion del tensor metrico deMinkowski, podemos hacer la suma sobre el ındice γ obteniendo
f i =q
cη00F
0i dx0
dτ+
q
cηjjF
ji dxj
dτ+
q
cηkkF
ki dxk
dτ(11.44)
Si recordamos la interpretacion fısica de las componentes del cua-drivector fuerza, ecuacion (9.37), entonces la ecuacion anterior to-ma la forma (con i = x, y, z)
γ (~u) Fi =q
cEic
dt
dτ+
q
cBk
dt
dτuj −
q
cBj
dt
dτuk (11.45)
simplificando y teniendo en cuenta que γ (~u) = dt/dτ , obtenemos
~F = q ~E +q
c~u × ~B (11.46)
Consideremos finalmente el caso α = 0; entonces desarrollandola doble suma sobre los ındices β y γ en la ecuacion (11.41) yreteniendo solo los terminos no nulos, tenemos
f0 =q
cηβγF β0 dxγ
dτ
=q
cη11F
10 dx1
dτ+
q
cη22F
20 dx2
dτ+
q
cη33F
30 dx3
dτ(11.47)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 206 — #210i
i
i
i
i
i
206 CAPITULO 11. ELECTRODINAMICA
Teniendo en cuenta que la componente temporal del cuadrivectorfuerza representa el trabajo por unidad de tiempo realizado por lafuerza externa sobre la partıcula
γ(~u)1
c
dE
dt=
q
cγ(~u) ~E · ~u (11.48)
es decirdE
dt= q ~E · ~u (11.49)
entonces esta ecuacion implica que solamente el campo electricohace trabajo sobre la carga.
5. Campo electrico de carga en movimiento. Para resolver esteproblema aplicando la ley de Coulomb consideremos un segundosistema de referencia inercial Σ′ que se mueve con velocidad v res-pecto a Σ. Entonces con respecto al sistema de referencia inercialΣ′ la carga Q esta en reposo en el origen de coordenadas, mientrasque la carga de prueba q se esta moviendo respecto a Σ′ con velo-cidad ~v = (−v, 0, 0). Por otra parte, en el sistema de referencia Σconsideremos los dos eventos siguientes: la carga Q se encuentraen el origen en el instante t = 0 y la carga de prueba q esta enreposo situada en el punto de coordenadas ~r = (x, 0, 0); ası lascoordenadas de los dos eventos estan dadas por
P1 = (x01, x
11, x
21, x
31) = (0, 0, 0, 0) (11.50)
yP2 = (x0
2, x12, x
22, x
32) = (0, x, 0, 0) (11.51)
Por lo tanto las coordenadas de estos dos eventos medidas en elsistema de referencia Σ′ estan dadas por la transformacion de Lo-rentz usual:
P1 = (x′01 , x′1
1 , x′21 , x′3
1 ) = (0, 0, 0, 0)
y
P2 = (x′02 , x′1
2 , x′22 , x′3
2 ) = (ct′, x′, 0, 0)
= (−γ(v)v
cx, γ(v)x, 0, 0) (11.52)
Notemos que los dos eventos P1 y P2 son simultaneos en Σ, puesestamos interesados en medir la fuerza (y ası el campo electrico)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 207 — #211i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 207
sobre la carga de prueba q cuando la carga fuente Q se encuentraen el origen en t = 0 y por lo tanto x representa la distanciafısica entre la carga Q y la carga de prueba q. Sin embargo, parael sistema Σ′ estos dos eventos no son simultaneos y por lo tantola coordenada x′ no representa la distancia fısica entre las cargas,pues la carga q se encuentra en el punto x′ en un instante t′ < 0cuando los orıgenes de Σ y Σ′ se cruzan. Pero debido a que la cargaQ esta en reposo en el origen de Σ′, entonces cuando la carga qpasa por x′ en el instante t′ la carga Q se encuentra en x′ = 0 enese instante, y por lo tanto la fuerza sobre la carga de prueba enel instante t′ esta dada por la ley de Coulomb
~F ′ =(
Fx′ , Fy′ , Fz′)
=
(
kQq
x′2 , 0, 0
)
(11.53)
Apliquemos, ahora, las ecuaciones de transformacion de la fuerzaentre sistemas de referencia inerciales. A partir de las ecuaciones(9.46), (9.49) y (9.50) podemos obtener las ecuaciones de trans-formacion inversas (pues conocemos las componentes de la fuerzaen Σ′) cambiando v por −v y ~u′ = (−v, 0, 0); entonces aplicandoestas ecuaciones tenemos que las componentes de la fuerza sobrela carga q en el sistema Σ estan dadas por
~F = (Fx, Fy, Fz) =
(
Fx′ + vc2
~F ′ · ~u′
1 +vux′
c2, 0, 0
)
=
(
k Qqx′2 − v2
c2 k Qqx′2
1 − v2
c2
, 0, 0
)
=
(
kQq
x′2 , 0, 0
)
(11.54)
es decir la fuerza sobre la carga q medida en el sistema de refe-rencia Σ en el instante t = 0 tiene el mismo valor que la fuerzasobre la carga q medida en el sistema Σ′ en el instante t′, pero ladistancia x entre las cargas Q y q medida en Σ en el instante t = 0es menor que la distancia entre las cargas en Σ′, pues x′ = γ(v)xy por lo tanto la fuerza sobre la carga de prueba q en Σ esta dadapor
~F = (Fx, Fy, Fz) =
(
kQq
γ2(v)x2, 0, 0
)
(11.55)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 208 — #212i
i
i
i
i
i
208 CAPITULO 11. ELECTRODINAMICA
y por consiguiente el campo electrico producido por la carga Q,que se mueve con velocidad constante v en la direccion del eje xpositivo, a una distancia x de la carga es
~E = (Ex, Ey, Ez) = lımq→0
~F
q=
(
1
γ2(v)
kQ
x2, 0, 0
)
(11.56)
notemos que el campo es el mismo si cambiamos v por −v. Esdecir, el campo electrico producido por una carga en movimientoa velocidad constante, a lo largo de la direccion de movimiento,depende de la posicion instantanea del punto de observacion delcampo y es menor, en un factor γ2(v), que el campo si la cargaestuviera en reposo. Consideremos ahora el caso cuando la cargade prueba, en el sistema de referencia Σ, se encuentra en reposoen un punto de coordenadas ~r = (0, y, 0) y la carga Q se muevecon velocidad constante v en la direccion del eje x positivo y pasapor el origen de Σ en el instante t = 0 y el sistema de referenciaΣ′ que se mueve con velocidad v en la direccion positiva x relativoa Σ y con respecto al cual la carga Q se encuentra en reposo ensu origen. Los dos eventos, simultaneos en Σ, tienen coordenadasdadas por
P1 = (x01, x
11, x
21, x
31) = (0, 0, 0, 0) (11.57)
y
P2 = (x02, x
12, x
22, x
32) = (0, 0, y, 0) (11.58)
mientras que con respecto al sistema Σ′ sus coordenadas son
P1 = (x′01 , x′1
1 , x′21 , x′3
1 ) = (0, 0, 0, 0)
y
P2 = (x′02 , x′1
2 , x′22 , x′3
2 ) = (ct′, x′, y′, z′)
= (0, 0, y, 0) (11.59)
es decir los eventos son tambien simultaneos respecto al observadorΣ′. Aplicando la ley de Coulomb en Σ′ tenemos
~F =(
Fx′ , Fy′ , Fz′)
=
(
0, kQq
y′2, 0
)
(11.60)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 209 — #213i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 209
y aplicando las ecuaciones de transformacion para las componentesde la fuerza, cambiando v por −v y ~u′ = (−v, 0, 0), obtenemos
~F = (Fx, Fy, Fz)
=
(
Fx′ + vc2
~F · ~u′
1 +vux′
c2,
Fy′
γ(v)(
1 +vux′
c2
) , 0
)
=(
0, γ(v)Fy′ , 0)
=
(
0, γ(v)kQq
y′2, 0
)
(11.61)
en este caso la fuerza es diferente entre los dos sistemas, pero ladistancia entre las cargas es la misma y = y′, ası
~F = (Fx, Fy , Fz) =
(
0, γ(v)kQq
y2, 0
)
(11.62)
por lo tanto el campo electrico esta dado por
~E = (Ex, Ey, Ez) = lımq→0
~F
q=
(
0, γ(v)kQ
y2, 0,
)
(11.63)
Es decir, el campo electrico producido por una carga en movi-miento a velocidad constante, en una direccion perpendicular a ladireccion de movimiento, depende de la posicion instantanea delpunto de observacion del campo y es mayor en un factor γ(v) queel campo de la carga, si esta estuviera en reposo. Finalmente consi-deremos el caso general, cuando la carga de prueba q se encuentraen reposo respecto al sistema Σ en un punto arbitrario de coor-denadas ~r = (x, y, z) y con la carga fuente Q moviendose en ladireccion x positiva y pasando por el origen de coordenadas de Σen t = 0. Procediendo en forma similar a los dos casos considera-dos, tenemos que las coordenadas de los dos eventos, medidas porΣ, estan dadas por
P1 = (x01, x
11, x
21, x
31) = (0, 0, 0, 0) (11.64)
yP2 = (x0
2, x12, x
22, x
32) = (0, x, y, z) (11.65)
y sus coordenadas medidas en Σ′ son
P1 = (x′01 , x′1
1 , x′21 , x′3
1 ) = (0, 0, 0, 0)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 210 — #214i
i
i
i
i
i
210 CAPITULO 11. ELECTRODINAMICA
y
P2 = (x′02 , x′1
2 , x′22 , x′3
2 ) = (ct′, x′, y′, z′)
= (−γ(v)v
cx, γ(v)x, y, z) (11.66)
Aplicando la ley de Coulomb en el sistema de referencia Σ′ tenemos
~F =(
Fx′ , Fy′ , Fz′)
=
(
kQqx′
r′3, k
Qqy′
r′3, k
Qqz′
r′3
)
(11.67)
donde
r =(
x′2 + y′2 + z′2)1/2
(11.68)
Aplicando las ecuaciones de transformacion inversas para las com-ponentes de la fuerza, con ~u′ = (−v, 0, 0), obtenemos
~F = (Fx, Fy, Fz)
=
(
Fx′ + vc2
~F · ~u′
1 +vux′
c2,
Fy′
γ(v)(
1 +vux′
c2
) ,Fz′
γ(v)(
1 +vux′
c2
)
)
=(
Fx′ , γ(v)Fy′ , γ(v)Fz′)
=
(
kQqx′
r3 , γ(v)kQqy′
r3 , γ(v)kQqz′
r3
)
(11.69)
Dado que las coordenadas primadas estan relacionadas con lascoordenadas en Σ por la ecuacion 11.66, entonces la fuerza sobrela carga de prueba esta dada por
~F = (Fx, Fy, Fz)
=
(
γ(v)kQqx
r3 , γ(v)kQqy
r3 , γ(v)kQqz
r3
)
(11.70)
con
r =(
γ2(v)x2 + y2 + z2)1/2
(11.71)
y en notacion vectorial
~F = γ(v)kQq
(γ2(v)x2 + y2 + z2)3/2~r (11.72)
Por lo tanto el campo electrico producido por una carga que semueve a velocidad constante en la direccion del eje x positivo

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 211 — #215i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 211
esta dado por
~E = (Ex, Ey, Ez) = lımq→0
~F
q
= γ(v)kQ
(γ2(v)x2 + y2 + z2)3/2~r (11.73)
Notemos que esta ecuacion se reduce a los dos casos anteriores y sila velocidad de la carga se anula, obtenemos el campo electrostaticousual de una carga puntual en reposo. Este campo es radial ydepende solamente de la posicion instantanea de carga fuente y dela distancia. Pero a diferencia del caso de una carga puntual enreposo, para la cual el campo es esfericamente simetrico, el campode la carga en movimiento tiene simetrıa cilındrica alrededor de ladireccion de movimiento de la carga y la magnitud del campo varıasegun la direccion de observacion: para puntos a lo largo de la lıneade movimiento de la carga el campo electrico es menor en un factorγ2(v) (que el correspondiente valor si la carga estuviera quieta) yaumenta en un factor γ(v) para puntos en el plano perpendiculara la lınea de movimiento de la carga.
6. Causalidad y campo electrico de una carga en movimiento
uniforme. Para entender claramente por que no hay violacion delprincipio de la constancia de la velocidad de la luz, debemos recor-dar las condiciones bajo las cuales la ley de Coulomb y la definicionde campo electrico estatico es valida: dos cargas q1 y q2 situadasen los puntos del espacio de coordenadas ~r1 y ~r2, respectivamente,con relacion a un observador inercial Σ, ejercen mutuamente unafuerza dada por la ley de Coulomb
~F12 = kq1q2
|~r2 − ~r1|3(~r2 − ~r1) = −~F21 (11.74)
donde ~F12 es la fuerza sobre la carga q2 debida a la carga q1, lacual es igual en magnitud y de sentido contrario a la fuerza ~F21
sobre la carga q1 debida a la carga q2, es decir la ley de Coulombsatisface la tercera ley de Newton. La condicion para la validezde esta relacion es que las cargas esten en reposo en Σ y hayanpermanecido en reposo en sus correspondientes posiciones duranteun tiempo t suficiente. Por “un tiempo t suficiente” queremos decirque
t >|~r2 − ~r1|
c(11.75)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 212 — #216i
i
i
i
i
i
212 CAPITULO 11. ELECTRODINAMICA
Esta condicion la explicaremos detalladamente mas adelante, cuan-do analicemos que sucede con la carga que es frenada. El conceptode campo electrico surge cuando consideramos la fuerza sobre dife-rentes cargas (cargas de prueba) situadas en diferentes puntos delespacio, debida a una carga dada (carga fuente). Sin perdida degeneralidad, consideremos la carga fuente Q situada en el origende coordenadas del sistema Σ y la carga de prueba q en un puntode coordenadas ~r; entonces a partir de la ley de Coulomb la fuerzasobre la carga de prueba es
~F = kQq
r3~r (11.76)
Esta relacion nos permite definir el concepto de campo electrico~E(~r) producido por la carga Q en un punto ~r del espacio por larelacion
~F = q ~E(~r) (11.77)
donde
~E(~r) = lımq→0
~F
q= k
Q
r3~r (11.78)
Para que esta relacion sea valida en todo el espacio, es decir pa-ra cualquier punto ~r, la condicion (11.75) implica que la carga Qha permanecido en reposo desde siempre. Sin embargo, dado quela fuerza sobre una carga de prueba q en un instante dado, solodepende del campo electrico de la carga fuente Q en el punto ~rdonde se ubica la carga q, entonces esta fuerza es independientedel estado de movimiento de la carga de prueba q. Este resultadofue el que se aplico para resolver el problema anterior. ¿Que suce-de si consideramos esta situacion desde otro sistema de referenciainercial Σ′? Para Σ′ la carga fuente se mueve con velocidad cons-tante −v (con v la velocidad de Σ′ respecto a Σ) desde siempre,y por lo tanto el campo electrico medido en Σ′ corresponde a latransformacion de Lorentz del campo de una carga estacionaria(campo medido en Σ), dado que con respecto al observador Σtodos los puntos del espacio tienen la informacion (a traves delcampo electrico) de la posicion de la carga (pues ha estado fija enun punto desde t → −∞). Para ilustrar esta situacion considere-mos una carga fuente Q que se ha estado moviendo con velocidadconstante desde t → −∞, respecto a un observador inercial Σ, yque en el instante t = 0 es frenada rapidamente hasta alcanzar el
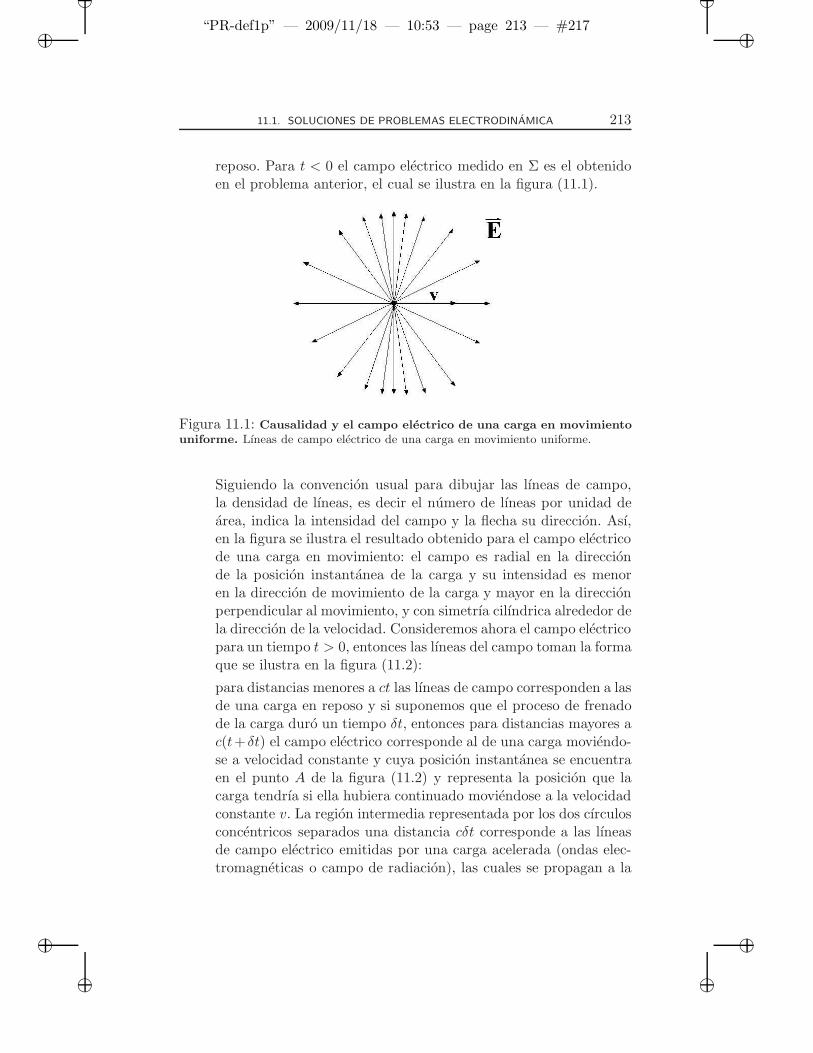
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 213 — #217i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 213
reposo. Para t < 0 el campo electrico medido en Σ es el obtenidoen el problema anterior, el cual se ilustra en la figura (11.1).
Figura 11.1: Causalidad y el campo electrico de una carga en movimiento
uniforme. Lıneas de campo electrico de una carga en movimiento uniforme.
Siguiendo la convencion usual para dibujar las lıneas de campo,la densidad de lıneas, es decir el numero de lıneas por unidad dearea, indica la intensidad del campo y la flecha su direccion. Ası,en la figura se ilustra el resultado obtenido para el campo electricode una carga en movimiento: el campo es radial en la direccionde la posicion instantanea de la carga y su intensidad es menoren la direccion de movimiento de la carga y mayor en la direccionperpendicular al movimiento, y con simetrıa cilındrica alrededor dela direccion de la velocidad. Consideremos ahora el campo electricopara un tiempo t > 0, entonces las lıneas del campo toman la formaque se ilustra en la figura (11.2):
para distancias menores a ct las lıneas de campo corresponden a lasde una carga en reposo y si suponemos que el proceso de frenadode la carga duro un tiempo δt, entonces para distancias mayores ac(t+ δt) el campo electrico corresponde al de una carga moviendo-se a velocidad constante y cuya posicion instantanea se encuentraen el punto A de la figura (11.2) y representa la posicion que lacarga tendrıa si ella hubiera continuado moviendose a la velocidadconstante v. La region intermedia representada por los dos cırculosconcentricos separados una distancia cδt corresponde a las lıneasde campo electrico emitidas por una carga acelerada (ondas elec-tromagneticas o campo de radiacion), las cuales se propagan a la

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 214 — #218i
i
i
i
i
i
214 CAPITULO 11. ELECTRODINAMICA
Figura 11.2: Causalidad y el campo electrico de una carga en movimiento
uniforme. Lıneas de campo electrico de una carga que se frena en un tiempo δt.
velocidad de la luz y llevan la informacion que la carga ha sidoacelerada (frenada en este caso).
7. Fuerza sobre una carga en movimiento. Para el primer caso,cuando la carga fuente esta, en el instante t = 0, en la posicion~r = (x, 0, 0) y se mueve con velocidad ~u, transformemos a unsistema de referencia inercial Σ′ con respecto al cual la carga fuentese encuentra en reposo. En este sistema el campo electrico de lacarga fuente Q en reposo, en un punto de coordenadas (x′, 0, 0),esta dado por
~E = kQ
x′2 (11.79)
y por lo tanto la fuerza sobre una carga de prueba en ese punto,independientemente de su velocidad, esta dada por
~F =(
Fx′ , Fy′ , Fz′)
=
(
kQq
x′2 , 0, 0
)
(11.80)
En el sistema de referencia Σ′ la velocidad de la carga de prueba es~u = (ux′ , uy′ , uz′) y por lo tanto las ecuaciones de transformacion

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 215 — #219i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 215
inversas para la fuerza medida en el sistema Σ implican que
~F = (Fx, Fy, Fz) =
(
Fx′ + vc2
~F · ~u′
1 +vux′
c2, 0, 0
)
=
(
kQq
x′21 + v
c2 ux′
1 +vux′
c2, 0, 0
)
=
(
kQq
x′2 , 0, 0
)
=
(
kQq
γ2(v)x2, 0, 0
)
(11.81)
el cual es el mismo resultado obtenido en el problema 5 de estaseccion, donde la carga de prueba se encontraba en reposo en elpunto ~r = (x, 0, 0). Consideremos ahora la carga q situada en elpunto de coordenadas ~r = (0, y, 0) en t = 0 y con velocidad ~u =(ux, 0, 0). Pasando al sistema de referencia Σ′ donde la carga fuentese encuentra en reposo en el origen, el campo electrico en el punto~r = (0, y′, 0) esta dado por
~E′ =
(
0, kQ
y′2, 0
)
(11.82)
y por lo tanto la fuerza sobre la carga de prueba es
~F ′ =
(
0, kQq
y′2, 0
)
(11.83)
Transformando esta expresion al sistema de referencia Σ, teniendoen cuenta que la velocidad de la carga de prueba es ~u′ = (ux′ , 0, 0),obtenemos
~F =
(
Fx′ + vc2
~F · ~u′
1 +vux′
c2,
Fy′
γ(v)(
1 +vux′
c2
) ,Fz′
γ(v)(
1 +vux′
c2
)
)
=
(
0,Fy′
γ(v)(
1 +vux′
c2
) , 0
)
(11.84)
considerando que y = y′ y
ux′ =ux − v
1 − vuxc2
(11.85)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 216 — #220i
i
i
i
i
i
216 CAPITULO 11. ELECTRODINAMICA
tenemos que la unica componente no nula de la fuerza sobre lacarga de prueba esta dada por
Fy = kQq
y2
1
γ(v)
1
1 + vc2
ux−v1− vux
c2
= kQq
y2
1
γ(v)
1 − vuxc2
1 − v2
c2
= γ(v)kQq
y2
(
1 − vux
c2
)
(11.86)
En el problema 5 de esta seccion encontramos que la fuerza sobreuna carga de prueba en reposo situada en el eje y, debida a lacarga Q que se mueve con velocidad constante v a lo largo del ejex positivo, cuando la carga esta pasando por el origen en t = 0, es
~F =
(
0, γ(v)kQq
y2, 0
)
(11.87)
esto significa que sobre la carga de prueba en movimiento apareceuna fuerza adicional, la cual es una funcion de la velocidad ux dela carga q, dada por la expresion
~FM =
(
0,−γ(v)kQq
y2
vux
c2, 0
)
= −vux
c2~FE (11.88)
con ~FE la fuerza de origen electrico dada por la ecuacion (11.87)(~FM hace referencia a la fuerza magnetica como veremos mas ade-lante). Consideremos ahora como se modificarıa la fuerza en el casoanterior si la carga de prueba se mueve con velocidad arbitraria~u = (ux, uy, uz). El cambio para este caso surge de la transforma-cion de las componentes de la fuerza del sistema Σ′ al sistema Σ,pues de la ecuacion (11.83) tenemos
~F =
(
Fx′ + vc2
~F · ~u′
1 +vux′
c2,
Fy′
γ(v)(
1 +vux′
c2
) ,Fz′
γ(v)(
1 +vux′
c2
)
)
=
(
vc2
Fy′uy′
1 +vux′
c2,
Fy′
γ(v)(
1 +vux′
c2
) , 0
)
(11.89)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 217 — #221i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 217
Transformando las cantidades primadas al sistema Σ, con
ux′ =ux − v
1 − vuxc2
(11.90)
uy′ =uy
γ(v)(
1 − vuxc2
) (11.91)
se obtiene
~F = kQq
y2
v
c2
uy
γ(v)“
1− vuxc2
”
1 + vc2
ux−v1− vux
c2
,1
γ(v)(
1 + vc2
ux−v1− vux
c2
) , 0
= kQq
y2
v
c2
uy
γ(v)“
1− vuxc2
”
1γ2(v)
(
1 − vuxc2
) , γ(v)(
1 − vux
c2
)
, 0
= kQq
y2
(
γ(v)vuy
c2, γ(v)
(
1 − vux
c2
)
, 0)
(11.92)
De acuerdo con el problema 5 de esta seccion, en el sistema Σ lacarga de prueba experimenta una fuerza debida al campo electricode la carga fuente dada por la ecuacion (11.87):
~FE =
(
0, γ(v)kQq
y2, 0
)
(11.93)
y por lo tanto de la ecuacion (11.92) tenemos que sobre la partıculade prueba actua una fuerza adicional
~FM = ~F − ~FE
= kQq
y2
(
γ(v)vuy
c2, γ(v)
(
1 − vux
c2
)
, 0)
−(
0, γ(v)kQq
y2, 0
)
=
(
kQq
y2γ(v)
v
c2uy,−k
y2γ(v)
v
c2ux, 0
)
(11.94)
la cual depende de la velocidad ~u de la carga de prueba. Esta fuerza~FM la identificamos con la fuerza magnetica, pues si definimos
~B = γ(v)v
c
Q
y2(0, 0, 1) (11.95)
como el campo magnetico debido a la carga Q en el punto decoordenadas ~r = (0, y, 0), entonces la fuerza magnetica se puedeescribir en la forma
~FM =q
c~u × ~B (11.96)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 218 — #222i
i
i
i
i
i
218 CAPITULO 11. ELECTRODINAMICA
pues
q
c~u × ~B = γ(v)
v
c
y2(ux, uy, uz) × (0, 0, 1)
=
(
kQq
y2γ(v)
v
cuy,−k
y2γ(v)
v
cux, 0
)
(11.97)
Ademas podemos encontrar la relacion entre el campo electrico yel campo magnetico producido por la partıcula de prueba, pues
~B = γ(v)v
c
Q
y2(0, 0, 1)
= γ(v)v
c
Q
y2(1, 0, 0) × (0, 1, 0)
=1
c~v × ~E (11.98)
Veamos ahora el caso general donde la partıcula de prueba en elinstante t = 0 se encuentra en el punto ~r = (x, y, z) y posee unavelocidad ~u = (ux, uy, uz). La fuerza en el sistema de referencia Σ′
esta dada por (ver problema 5 de esta seccion, ecuacion (11.67))
~F ′ =(
Fx′ , Fy′ , Fz′)
=
(
kQqx′
r′3, k
Qqy′
r′3, k
Qqz′
r′3
)
(11.99)
donder2 = x′2 + y′2 + z′2 (11.100)
Transformando las componentes de la fuerza al sistema de refe-rencia Σ tenemos que
Fx =Fx′ + v
c2~F ′ · ~u′
1 +vux′
c2(11.101)
y teniendo en cuenta que
x′ = γ(v)x
y′ = y
z′ = z (11.102)
y aplicando las ecuaciones de transformacion para las componentesde la velocidad se tiene que
1
1 +vux′
c2=
1
1 + vc2
(
ux−v1− vux
c2
)
= γ2(v)(
1 − vux
c2
)
(11.103)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 219 — #223i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 219
entonces
Fx = γ2(v)(
1 − vux
c2
)(
Fx′ +v
c2~F ′ · ~u′
)
= kQq
r′3γ2(
1 − vux
c2
)(
γx(1 +vux′
c2) +
v
c2(yuy′ + zuz′)
)
= kQq
r′3γ2(
1 − vux
c2
)
(
γx
γ2(
1 − vuxc2
) +v
c2
yuy + zuz
γ(
1 − vuxc2
)
)
= kQq
r′3γ(
x +vuy
c2y +
vuz
c2z)
(11.104)
conr′ =
√
γ2x2 + y2 + z2 (11.105)
Para las otras componentes de la fuerza tenemos
Fy =Fy′
γ(v)(
1 +vux′
c2
)
= kQq
r′3yγ(
1 − vux
c2
)
(11.106)
y
Fz =Fz′
γ(v)(
1 +vux′
c2
)
= kQq
r′3zγ(
1 − vux
c2
)
(11.107)
Por lo tanto la fuerza sobre la carga de prueba q, de origen magneti-co, esta dada por
~FM = ~F − ~FE
= kQq
r3 γ(vuy
c2y +
vuz
c2z,−vux
c2y,−vux
c2z)
(11.108)
esta expresion la podemos escribir en la forma
~FM =q
c~u ×
(
kQ
r3 γv
c(0,−z, y)
)
=q
c~u × ~B (11.109)
identificando~B = k
Q
r3 γv
c(0,−z, y) (11.110)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 220 — #224i
i
i
i
i
i
220 CAPITULO 11. ELECTRODINAMICA
con el campo magnetico producido por la carga fuente Q en elpunto ~r, el cual esta relacionado con el campo electrico por
~B =1
c~v × ~E (11.111)
8. Transformacion general del campo electromagnetico. Lascomponentes del tensor campo electromagnetico estan dadas por:
Fαβ =
0 Ex Ey Ez
−Ex 0 Bz −By
−Ey −Bz 0 Bx
−Ez By −Bx 0
(11.112)
y los elementos de la matriz de transformacion de Lorentz usualson
Λαβ =
γ −βγ 0 0−βγ γ 0 0
0 0 1 00 0 0 1
(11.113)
donde β = v/c es la velocidad del sistema de referencia Σ′ respectoa Σ a lo largo de los ejes x − x′. Entonces, de las ecuaciones detransformacion para las componentes contravariantes de un tensorde segundo orden
F ′αβ = ΛαµΛβ
νFµν (11.114)
tenemos queEx′ = F ′01 = Λ0
µΛ1νFµν (11.115)
realizando la doble suma sobre los ındices repetidos, y reteniendosolo los terminos no nulos, obtenemos
Ex′ = Λ00Λ
11F
01 + Λ01Λ
10F
10
= γ2Ex − γ2β2Ex
= Ex (11.116)
Procediendo en forma analoga para las otras componentes del cam-po electrico, tenemos
Ey′ = F ′02 = Λ0µΛ2
νFµν
= Λ00Λ
22F
02 + Λ01Λ
22F
12
= γEy − βγBz (11.117)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 221 — #225i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 221
Ez′ = F ′03 = Λ0µΛ3
νFµν
= Λ00Λ
33F
03 + Λ01Λ
33F
13
= γEz + βγBy (11.118)
y las componentes del campo magnetico estan dadas por
Bx′ = F ′23 = Λ2µΛ3
νFµν
= Λ22Λ
33F
23
= Bx (11.119)
By′ = F ′31 = Λ3µΛ1
νFµν
= Λ33Λ
10F
30 + Λ33Λ
11F
31
= βγEz + γBy (11.120)
Bz′ = F ′12 = Λ1µΛ2
νFµν
= Λ10Λ
22F
02 + Λ11Λ
22F
12
= −βγEy + γBz (11.121)
9. Campo de una carga en movimiento. Para aplicar los resul-tados obtenidos en el problema anterior, consideremos un sistemade referencia Σ′ relacionado con Σ de la manera usual. Ası, conrespecto a Σ′ la carga Q esta en reposo en su origen y por lo tantoel campo de la carga en un punto ~r ′ = (x′, y′, z′) es solamenteelectrico y esta dado por la ley de Coulomb:
~E′ =(
Ex′ , Ey′ , Ez′)
=
(
kQx′
r′3, k
Qy′
r′3, k
Qz′
r′3
)
(11.122)
Para utilizar las ecuaciones de transformacion de los campos ob-tenidas en el problema anterior, debemos aplicar las ecuacionesde transformacion inversas, las cuales se obtienen cambiando vpor −v. Entonces, de las ecuaciones (11.116), (11.117) y (11.118),las componentes del campo electrico en el sistema de referencia Σestan dadas por:
Ex = Ex′ = kQx′
r′3(11.123)
i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 222 — #226i
i
i
i
i
i
222 CAPITULO 11. ELECTRODINAMICA
teniendo en cuenta las ecuaciones de transformacion de Lorentzpara las coordenadas,
x′ = γ(v)x (11.124)
entonces
Ex = kγQx
(γ2x2 + y2 + z2)3/2(11.125)
Para las otras componentes del campo electrico obtenemos
Ey = γEy′ + βγBz′
= γkQy′
r′3
= kγQy
(γ2x2 + y2 + z2)3/2(11.126)
y
Ez = γEz′ + βγBy′
= γkQz′
r3
= kγQz
(γ2x2 + y2 + z2)3/2(11.127)
Este resultado coincide con el obtenido en el problema 5 de estecapıtulo (ver ecuacion (11.73)). Para obtener las componentes delcampo magnetico, consideremos ahora las inversas de las ecuacio-nes (11.119), (11.120) y (11.121) del problema anterior. Entonces
Bx = Bx′ = 0 (11.128)
By = −βγEz′ + γBy′
= −βγkQz′
r′3
= −kβγQz
(γ2x2 + y2 + z2)3/2(11.129)
Bz = βγEy′ + γBz′
= βγkQy′
r′3
= kβγQy
(γ2x2 + y2 + z2)3/2(11.130)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 223 — #227i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 223
escribiendo el resultado en forma vectorial obtenemos
~B = kQ
r′3γ
v
c2(0,−z, y) (11.131)
de acuerdo con la ecuacion (11.110) del problema 5.
10. Invariantes del campo electromagnetico. A partir del tensorcampo electromagnetico Fαβ podemos construir un primer inva-riante considerando la traza del tensor, es decir
Fαα = ηασFασ = 0 (11.132)
el cual es identicamente nulo, pues Fαβ es antisimetrico. Conside-remos ahora la contraccion del tensor Fαβ consigo mismo, esto es(escribiendo solo los terminos no nulos)
FαβFαβ = F 01F01 + F 02F02 + F 03F03 +
F 10F10 + F 12F12 + F 13F13 +
F 20F20 + F 21F21 + F 23F23 +
F 30F30 + F 31F31 + F 32F32
= 2[F 01F01 + F 02F02 + F 03F03 +
F 12F12 + F 31F31 + F 23F23] (11.133)
donde se ha utilizado la propiedad antisimetrica del tensor Fαβ
para la ultima igualdad. De las ecuaciones (6.15) y (11.30) quenos dan las componentes contravariantes y covariantes del tensorFαβ en terminos de las componentes de los campos electrico ymagnetico, tenemos
FαβFαβ = 2[−E2x − E2
y − E2z + B2
z + B2y + B2
x]
= 2[ ~B · ~B − ~E · ~E] (11.134)
Otro invariante que podemos construir es la contraccion del tensorFαβ con su dual, ası
(∗F )αβ Fαβ =1
2εδγαβF δγFαβ (11.135)
Desarrollando la suma sobre los cuatro ındices (sin escribir los

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 224 — #228i
i
i
i
i
i
224 CAPITULO 11. ELECTRODINAMICA
terminos nulos), tenemos
(∗F )αβ Fαβ =1
2[ε0123F
01F 23 + ε0132F01F 32 + ε0213F
02F 13
+ε0231F02F 31 + ε0312F
03F 12 + ε0321F03F 21
+ε1023F10F 23 + ε1032F
10F 32 + ε1203F12F 03
+ε1230F12F 30 + ε1302F
13F 02 + ε1320F13F 20
+ε2013F20F 13 + ε2031F
20F 31 + ε2103F21F 03
+ε2130F21F 30 + ε2301F
23F 01 + ε2310F23F 10
+ε3012F30F 12 + ε3021F
30F 21 + ε3102F31F 02
+ε3120F31F 20 + ε3201F
32F 01 + ε3210F32F 10]
= 4[ε0123F01F 23 + ε0213F
02F 13
+ε0312F03F 12] (11.136)
Remplazando las componentes del tensor Fαβ en terminos de loscampos, obtenemos
(∗F )αβ Fαβ = 4 [−ExBx − EyBy − EzBz]
= −4~E · ~B (11.137)
ası
~E · ~B = −1
4(∗F )αβ Fαβ
= −1
8εδγαβF δγFαβ (11.138)
11. Campos ortogonales. En el problema anterior encontramos dosinvariantes formados a partir del tensor campo electromagneticoFαβ:
~B2 − ~E2 =1
2FαβFαβ (11.139)
~E · ~B = −1
8εδγαβF δγFαβ (11.140)
esto muestra ademas que ni ~E2 ni ~B2 son invariantes indepen-dientes; de hecho no existen mas invariantes construidos a partirde Fαβ que no sean multiplos o combinacion lineal de los dosinvariantes anteriores. Supongamos que los campos ~E y ~B formanun angulo φ para un sistema de referencia inercial Σ, entonces
cos φ =~E · ~B∣
∣
∣
~E∣
∣
∣
∣
∣
∣
~B∣
∣
∣
(11.141)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 225 — #229i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 225
esto significa que para Σ
∣
∣
∣
~E∣
∣
∣ 6= 0 y∣
∣
∣
~B∣
∣
∣ 6= 0 (11.142)
por lo tanto, si por hipotesis los campos forman el mismo angulo entodos los sistemas de referencia inerciales, entonces en Σ′ tenemos
cos φ =~E′ · ~B′∣
∣
∣
~E∣
∣
∣
∣
∣
∣
~B∣
∣
∣
(11.143)
Puesto que el producto punto es un invariante
~E · ~B = ~E′ · ~B′ (11.144)
mientras que las normas de los campos electrico y magnetico no loson, se debe tener que
~E · ~B = 0 (11.145)
para todos los observadores y ademas en ningun sistema de refe-rencia se puede anular uno de los campos.
12. El tensor energıa-momento del campo electromagnetico.
El tensor campo electromagnetico esta definido por la expresion
Tαβ =1
4π
[
1
4ηαβF σδFσδ − FασF β
σ
]
(11.146)
entonces consideremos primero la componente temporal:
T 00 =1
4π
[
1
4η00F σδFσδ − F 0σF 0
σ
]
=1
4π
[
1
2
(
~B2 − ~E2)
− F 01F 01 − F 02F 0
2 − F 03F 03
]
(11.147)
por otra parte tenemos que
Fαβ = ηβσFασ (11.148)
entonces, para i = 1, 2, 3 obtenemos
F 0i = ηiσF 0σ = ηiiF
0i = −Ei (11.149)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 226 — #230i
i
i
i
i
i
226 CAPITULO 11. ELECTRODINAMICA
por lo tanto
T 00 =1
4π
[
1
2
(
~B2 − ~E2)
− ~E2
]
=1
8π
[
~E2 + ~B2]
(11.150)
la cual corresponde a la densidad de energıa del campo electro-magnetico. Consideremos ahora los terminos T 0i, con i = 1, 2, 3:
T 0i =1
4π
[
1
4η0iF σδFσδ − F 0σF i
σ
]
= − 1
4πF 0σF i
σ
= − 1
4π
[
F 01F i1 + F 02F i
2 + F 03F i3
]
(11.151)
puesto que
F ij = ηjσF iσ = ηjjF
ij = −F ij (11.152)
ası
T 01 = − 1
4π
[
F 02F 12 + F 03F 1
3
]
= − 1
4π[−EyBz + EzBy]
=1
4π
[
~E × ~B]
x(11.153)
y de forma similar para las otras componentes, esto es
T 0i =1
4π
[
~E × ~B]
i(11.154)
con i = x, y, z, las cuales corresponden a las componentes del vec-tor de Pointing
~S =1
4π~E × ~B (11.155)
Para las componentes i, j = 1, 2, 3 se obtiene
T ij =1
4π
[
1
4ηijF σδFσδ − F iσF j
σ
]
(11.156)
= − 1
4π
[
F i0F j0 + F i1F j
1 + F i2F j2 + F i3F j
3 +1
4δijF σδFσδ
]

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 227 — #231i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 227
teniendo en cuenta que
F j0 = η0σF jσ = η00F
j0 = F j0 (11.157)
el primer termino de la expresion anterior (ecuacion (11.156)) da
F i0F j0 = EiEj (11.158)
Para los otros tres terminos, con i = j, tenemos
F i1F i1 + F i2F i
2 + F i3F i3 =
(
Bi)2 − ~B2 (11.159)
con la notacion Bi = Bx, By, Bz para i = 1, 2, 3, pues, por ejemplo,para i = j = 1 se obtiene
F 11F 11 + F 12F 1
2 + F 13F 13 = −BzBz − ByBy (11.160)
Consideremos ahora los terminos con i 6= j,
F i1F j1 + F i2F j
2 + F i3F j3 = BiBj (11.161)
Por ejemplo si i = 1 y j = 2 tenemos que
F 11F 21 + F 12F 2
2 + F 13F 23 = ByBx (11.162)
Por lo tanto
T ij =1
4π
[
EiEj + BiBj +1
2δij(
~E2 + ~B2)
]
(11.163)
el cual corresponde al tensor de tensiones tridimensional del campoelectromagnetico.
13. Ecuacion de continuidad del tensor Tµν . A partir de la de-finicion del tensor energıa-momento del campo electromagneticotenemos
∂Tαβ
∂xβ= Tαβ
,β
=1
4π
∂
∂xβ
[
1
4ηαβF σδFσδ − FασF β
σ
]
=1
16πηαβ ∂
∂xβ
(
F σδFσδ
)
− 1
4π
∂
∂xβ
(
FασF βσ
)
=1
16πηαβ
(
F σδ,βFσδ + F σδFσδ,β
)
−1
4π
(
Fασ,βF β
σ + FασF βσ,β
)
(11.164)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 228 — #232i
i
i
i
i
i
228 CAPITULO 11. ELECTRODINAMICA
El primer termino de la ultima igualdad lo podemos escribir en laforma
1
16πηαβ
(
F σδ,βFσδ + F σδFσδ,β
)
=1
8π
(
FσδFσδ,α
)
(11.165)
donde se ha utilizado el hecho que
F σδFσδ = FσδFσδ (11.166)
y
ηαβF σδ,β = ηαβ ∂F σδ
∂xβ=
∂F σδ
∂xα= F σδ,α (11.167)
por lo tanto
T αβ,β =
1
8π
(
FσδFσδ,α
)
− 1
4π
(
Fασ,βF β
σ + FασF βσ,β
)
= − 1
4π
[
FασF βσ,β + Fασ
,βF βσ − 1
2FσδF
σδ,α
]
(11.168)
De la ecuacion de Maxwell en ausencia de fuentes tenemos
∂αFαβ = −4π
cJβ = 0 (11.169)
entonces el primer termino de la ecuacion (11.168) se anula, pues
FασF βσ,β = ησγFασF βγ
,β = 0 (11.170)
Ası, subiendo y bajando el ındice β en el segundo termino de laecuacion (11.168) e intercambiando los ındices mudos de suma deeste termino en la forma β → σ y σ → δ, tenemos
Tαβ,β = − 1
4π
[
Fασ,βF β
σ − 1
2FσδF
σδ,α
]
=1
4π
[
1
2FσδF
σδ,α − Fασ,βFβσ
]
=1
4π
[
1
2FσδF
σδ,α − Fαδ,σFσδ
]
=1
4πFσδ
[
1
2F σδ,α − Fαδ,σ
]
(11.171)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 229 — #233i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 229
Esta ecuacion la podemos transformar teniendo en cuenta la anti-simetrıa del tensor campo electromagnetico, y redefiniendo ındicesmudos en el ultimo termino σ → δ y δ → σ, obtenemos
Fσδ
[
1
2F σδ,α − Fαδ,σ
]
=1
2Fσδ
[
F σδ,α + F δα,σ + F δα,σ]
=1
2
[
FσδFσδ,α + FσδF
δα,σ + FδσF σα,δ]
=1
2
[
FσδFσδ,α + FσδF
δα,σ + FσδFασ,δ
]
=1
2Fσδ
[
F σδ,α + F δα,σ + Fασ,δ]
= 0 (11.172)
pues el termino entre parentesis corresponde a la ecuacion de Max-well homogenea, i. e.
F σδ,α + F δα,σ + Fασ,δ = 0 (11.173)
es decir, en ausencia de fuentes externas la cuadridivergencia deltensor energıa-momento del campo electromagnetico se anula:
∂Tαβ
∂xβ= Tαβ
,β = 0 (11.174)
Si hay fuentes entonces obtenemos que
Tαβ,β = FασJσ (11.175)
14. La traza del tensor Tµν . Dado el tensor energıa-momento
Tαβ =1
4π
[
1
4ηαβF σδFσδ − FασF β
σ
]
(11.176)
su traza la podemos calcular a traves de la relacion
Tαγ = ηγβTαβ
=1
4πηγβ
[
1
4ηαβF σδFσδ − FασF β
σ
]
=1
4π
[
1
4ηγβηαβF σδFσδ − ηγβFασF β
σ
]
=1
4π
[
1
4δαγ F σδFσδ − FασFγσ
]
(11.177)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 230 — #234i
i
i
i
i
i
230 CAPITULO 11. ELECTRODINAMICA
entonces
Tαα =
1
4π
[
1
4δααF σδFσδ − FασFασ
]
=1
4π
[
F σδFσδ − FασFασ
]
= 0 (11.178)
puesδαα = 4 (11.179)
15. Otro invariante relativista. De la definicion de densidad deenergıa y del vector de Pointing tenemos que
(
T 00)2 −
∣
∣
∣
~S∣
∣
∣
2=
(
1
8π
)2 (~E2 + ~B2
)2−(
1
4π~E × ~B
)2
=1
64π2
[
~E4 + ~B4 + 2~E2 ~B2 − 4~E2 ~B2 + 4(
~E · ~B)2]
=1
64π2
[
(
~E2 − ~B2)2
+ 4(
~E · ~B)2]
=1
256π2
[
(
FαβFαβ
)2− 1
4
(
εδγαβF δγFαβ)2]
(11.180)
el cual es un invariante relativista.
16. Trayectoria en campo electrico constante. Eligiendo un sis-tema de coordenadas con su origen en el instante y en el puntodonde el proton entra a la region de campo electrico, y tomando eleje x = x1 en la direccion de incidencia del proton y el eje y = x2
en la direccion del campo, tenemos que la cuadrivelocidad inicialdel proton esta dada por
U0 = γ(v0) (c, v0, 0, 0) (11.181)
La ecuacion de movimiento viene dada por la fuerza de Lorentz
fα =dpα
dτ=
q
cηβγF βα dxγ
dτ(11.182)
Las componentes del tensor campo electromagnetico estan dadaspor
F βα =
0 0 E 00 0 0 0
−E 0 0 00 0 0 0
(11.183)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 231 — #235i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 231
por lo tanto las componentes del cuadrivector fuerza de Lorentzson: la temporal
dp0
dτ=
e
cηβγF β0 dxγ
dτ=
e
cη22F
20 dx2
dτ
=e
cEU2
=e
cEγ(~v)vy (11.184)
la componente en la direccion del eje x
dp1
dτ=
e
cηβγF β1 dxγ
dτ= 0 (11.185)
en la direccion del eje y
dp2
dτ=
e
cηβγF β2 dxγ
dτ=
e
cη00F
02 dx0
dτ
=e
cEU0
= eEγ(~v) (11.186)
y en la direccion del eje z
dp3
dτ=
e
cηβγF β3 dxγ
dτ= 0 (11.187)
De la ecuacion (11.185) para la componente x tenemos que
p1(τ ) = m0U1(τ) = C1 = const. (11.188)
donde m0 es la masa propia del proton y por la condicion inicial(ecuacion (11.181)) obtenemos
p1(τ = 0) = m0γ(v0)v0 (11.189)
y por lo tantodx1
dτ= U1(τ) = γ(v0)v0 (11.190)
Integrando esta ecuacion tenemos
x1(τ) = γ(v0)v0τ + C2 (11.191)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 232 — #236i
i
i
i
i
i
232 CAPITULO 11. ELECTRODINAMICA
y puesto que hemos elegido x1 = 0 en τ = 0 la constante deintegracion C2 = 0. Ası
x1(τ) = γ(v0)v0τ (11.192)
Por las condiciones iniciales la componente z (ecuacion (11.187))y por tanto la coordenada z son nulas. Las ecuaciones (11.184) y(11.186) las podemos reescribir en la forma
m0dU0
dτ=
e
cEU2 (11.193)
m0dU2
dτ=
e
cEU0 (11.194)
derivando la segunda ecuacion y remplazando la primera tenemos
m0d2U2
dτ2=
e
cE
dU0
dτ=
e2
m0c2E2U2 (11.195)
Integrando esta ecuacion
U2(τ ) = C3 sinh
(
eE
m0cτ
)
+ C4 cosh
(
eE
m0cτ
)
(11.196)
de la condicion inicial
U2(τ = 0) = 0 (11.197)
obtenemos C4 = 0 y para establecer la otra constante de integra-cion utilizamos la ecuacion (11.194) en τ = 0, ası
m0dU2(τ)
dτ
∣
∣
∣
∣
τ=0
=e
cEU0(τ = 0) = eEγ(v0) (11.198)
pero
m0dU2(τ )
dτ
∣
∣
∣
∣
τ=0
= m0C3eE
m0ccosh
(
eE
m0cτ
)∣
∣
∣
∣
τ=0
= C3eE
c(11.199)
y por lo tanto
C3 = cγ(v0) (11.200)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 233 — #237i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 233
De esta forma obtenemos
dx2
dτ= U2(τ) = cγ(v0) sinh
(
eE
m0cτ
)
(11.201)
Integrando esta ecuacion tenemos
x2(τ) = cγ(v0)m0c
eEcosh
(
eE
m0cτ
)
+ C5 (11.202)
La constante de integracion se determina con la condicion inicialque x2 = 0 para τ = 0, ası
x2(τ ) = γ(v0)m0c
2
eE
[
cosh
(
eE
m0cτ
)
− 1
]
(11.203)
De la ecuacion (11.194) podemos obtener la componente U0 de lacuadrivelocidad
U0 =m0c
eE
dU2
dτ
= cγ(v0) cosh
(
eE
m0cτ
)
(11.204)
Ası el cuadrivector velocidad del proton esta dado por
U = (11.205)
(
cγ(v0) cosh
(
eE
m0cτ
)
, γ(v0)v0, cγ(v0) sinh
(
eE
m0cτ
)
, 0
)
cuya norma al cuadrado es
U2 = c2γ2(v0) cosh2
(
eE
m0cτ
)
− γ2(v0)v20
−c2γ2(v0) sinh2
(
eE
m0cτ
)
= c2γ2(v0) − γ2(v0)v20
= c2 (11.206)
como debe ser. Notemos que, a diferencia del caso no relativista,la velocidad del proton no es constante en la direccion normal alcampo, pues lo que se conserva en esta direccion es el momento ydebido a que la partıcula esta acelerada en la direccion del campo,

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 234 — #238i
i
i
i
i
i
234 CAPITULO 11. ELECTRODINAMICA
su velocidad va aumentando y por lo tanto su masa inercial relati-vista, lo que exige que la velocidad en la direccion del eje x, dadapor
vx
c=
U1
U0=
v0
c cosh(
eEm0cτ
) (11.207)
disminuya. La lınea de universo de la partıcula esta dada por
x(τ ) =(
x0(τ ), x1(τ), x2(τ ), x3(τ))
=
(
x0, γ0v0τ , γ0m0c
2
eE
[
cosh
(
eE
m0cτ
)
− 1
]
, 0
)
(11.208)
donde γ0 = γ(v0). Para encontrar la coordenada temporal ct =x0(τ) integramos la ecuacion (11.204) con la condicion inicial t = 0en τ = 0:
x0(τ) =m0c
2γ(v0)
eEsinh
(
eE
m0cτ
)
(11.209)
Para encontrar la trayectoria del proton, es decir
~r(t) =(
x1(t), x2(t), x3(t))
= (x(t), y(t), z(t)) (11.210)
despejamos τ en funcion de t de la ecuacion (11.209)
τ =m0c
eEsinh−1
(
eE
m0cγ(v0)t
)
(11.211)
y lo remplazamos en las coordenadas x1 y x2. Ası
x1(t) = γ(v0)v0m0c
eEsinh−1
(
eE
m0cγ(v0)t
)
(11.212)
x2(t) = γ(v0)m0c
2
eE
√
1 −(
eE
m0cγ(v0)t
)2
− 1
(11.213)
La curva que sigue el proton y = y(x) en el campo electrico cons-tante la podemos obtener eliminando el tiempo en las dos ecuacio-nes anteriores. Sin embargo es mas sencillo si utilizamos la ecuacion(11.192) para eliminar τ en funcion de x1 = x y remplazamos enla ecuacion para x2 = y; de esta forma obtenemos
y(x) = γ(v0)m0c
2
eE
[
cosh
(
eE
m0cγ(v0)v0x
)
− 1
]
(11.214)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 235 — #239i
i
i
i
i
i
11.1. SOLUCIONES DE PROBLEMAS ELECTRODINAMICA 235
En el caso no relativista sabemos que la trayectoria que sigue unapartıcula cargada en un campo electrico uniforme, con velocidadinicial perpendicular al campo, esta dada por la relacion para eltiro parabolico; ası, eligiendo las mismas coordenadas anteriores,la trayectoria que sigue el proton esta dada por
x(t) = v0t (11.215)
y(t) =1
2
eE
m0t2 (11.216)
y por lo tanto la curva es una parabola
y =1
2
eE
m0v20
x2 (11.217)
Calculemos el lımite de bajas velocidades de la ecuacion (11.214),teniendo en cuenta que la expansion en serie de Taylor de la funcioncosh esta dada por
cosh z = 1 +1
2z2 + · · · (11.218)
reteniendo terminos hasta segundo orden: tenemos
y = γ(v0)m0c
2
eE
[
cosh
(
eE
m0cγ(v0)v0x
)
− 1
]
∼= γ(v0)m0c
2
2eE
(
eE
m0cγ(v0)v0x
)2
=1
2
eE
γ(v0)m0v20
x
∼= 1
2
eE
m0v20
x2 (11.219)
con γ ∼= 1 para v0 << c.
17. Trayectoria en campo magnetico constante. Dado que elcampo magnetico no hace trabajo sobre la partıcula cargada, lamagnitud de la velocidad no cambia y la trayectoria de la partıculaes un cırculo de radio R. Si tomamos el eje z en la direccion delcampo magnetico, entonces el cuadrimomento del proton esta dadopor
pα = (γ(~v)m0c, γ(~v)m0vx, γ(~v)m0vy, 0) (11.220)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 236 — #240i
i
i
i
i
i
236 CAPITULO 11. ELECTRODINAMICA
donde ~v = (vx, vy, 0), pues la velocidad del proton es perpendi-
cular al campo magnetico ~B = Bz. La ecuacion de movimientoviene dada por la fuerza de Lorentz
fα =dpα
dτ=
q
cηβγF βα dxγ
dτ(11.221)
Las componentes del tensor campo electromagnetico estan dadaspor
F βα =
0 0 0 00 0 B 00 −B 0 00 0 0 0
(11.222)
Por lo tanto
f0 =dp0
dτ=
q
cηβγF β0 dxγ
dτ= 0 (11.223)
pues el campo electrico es cero: ~E =(
F 01, F 02, F 03)
= 0. Para lasotras componentes de la cuadrifuerza tenemos (escribiendo solo losterminos no nulos de la doble suma):
f1 =dp1
dτ=
q
cηβγF β1 dxγ
dτ
=q
cη22F
21 dx2
dτ
=q
cBU2
=q
cBγ(~v)vy (11.224)
f2 =dp2
dτ=
q
cηβγF β2 dxγ
dτ
=q
cη11F
12 dx1
dτ
= −q
cBU1
= −q
cBγ(~v)vx (11.225)
y
f3 =dp3
dτ=
q
cηβγF β3 dxγ
dτ= 0 (11.226)

i
i
“PR-def1p” — 2009/11/18 — 10:53 — page 237 — #241i
i
i
i
i
i
Bibliografıa
[1] Tejeiro J.M. Sobre la teorıa especial de la relatividad. Facultad deCiencias. Universidad Nacional. 2005.
[2] Smith J.H. Introduction to Special Relativity. Benjamin, New York,1965.
[3] French A.P. Relatividad especial, curso de Fısica del M.I.T. Edito-rial Reverte S. A., 1988.
[4] Scott G.D. and Viner M.R. Am. J. Phys., 33, 534 (1965).
[5] Dewan E. and Beran M. Am. J. Phys., 27, 517 (1959).
[6] Dewan E. Am. J. Phys., 31, 383 (1963).
[7] Peterson B.M. An introduction to Active Galactic Nuclei. Cambrid-ge University Press (1997).
[8] Sutton R.B., Fields T.H., Fox J.G., Kane J.A., Mott W.E. andStallwood R.A. Proton-proton scattering at 437Mev. Phys. Rev.97, 783 (1955).
[9] Resnick R., Introduccion a la teorıa especial de la relatividad. Li-musa (1981)
[10] Skinner R., Relativity for Scientists and Engineers. Dover Publis-hing N.Y. (1982)
237