tÉcnicas inteligentes para o diagnÓstico de falhas … · de se realizar novamente o experimento...
TRANSCRIPT

TÉCNICAS INTELIGENTES PARA O DIAGNÓSTICO DE FALHAS EM MOTORES DE CORRENTE CONTÍNUA
ALEX C. SILVA, LIVIA F. S. MENDES, LANE M. R. BACCARINI.
Departamento de Engenharia Elétrica, Universidade Federal de São João del Rei, Pça Frei Orlando, 170,MINAS GERAIS, CEP. 36.307.352
E-mails: [email protected], [email protected] e [email protected]
Abstract Faults related to short-circuit are the most common in electrical machines, diagnose them intelligently and non-invasively is of utmost importance in the manufacturing process because it prevents damage to the unscheduled shutdown, emergency maintenance and even accidents involving humans. Using the statistical method of response surface can create typically polynomial functions depending on the state variables of the dynamic system that enables diagnose intelligently related to short-circuit faults in the field and the armature of the DC machine circuits. Since the necessary sensors are usually found in the industry, this project aims to propose a method of fault diagnosis in DC Motors that can be applied in a real plant.
Keywords DC motor, predictive maintenance, non intrusive methods, fault diagnosis, percentage of turns shorted, response surface
Resumo Falhas relacionadas a curto-circuito são as mais comuns em máquinas elétricas e diagnosticá-las de forma inteligente e não in-vasiva é de extrema importância para o processo fabril, pois previne danos como a parada não programada, manutenção de emergência e até mesmo acidentes envolvendo seres humanos. O método estatístico de superfície de resposta permite criar funções tipicamente polinomi-ais em função das variáveis de estado do sistema dinâmico e pode se tornar uma ferramenta útil para o diagnóstico de falhas relacionadas a curto-circuito nos circuitos de campo e de armadura de máquinas de corrente contínua. Visto que os sensores necessários são usualmente encontrados na indústria, este projeto tem o objetivo de propor uma técnica de diagnóstico de falhas em Motores de Corrente Contínua que possa ser aplicada em uma planta real.
Palavras-chave Motor de corrente contínua, manutenção preditiva, método não invasivo, diagnóstico de falhas, percentual de espiras em curto-circuito, superfície de resposta
1 Introdução
As máquinas elétricas estão sujeitas a falhas e, portanto, necessitam de procedimentos adequados de intervenção pois paradas não programadas podem causar prejuízos materiais, econômicos e sociais de grandes proporções. Assim, o Gerenciamento de Eventos Anormais (AEM) tem recebido grande aten-ção dos profissionais responsáveis pela área de ma-nutenção pois é um processo importante que inclui tarefas como detecção, diagnóstico e correção de anomalias que geram as falhas em processos indus-triais (de Almeida, 2012).
A demanda por procedimentos inteligentes de monitoramento de uma planta cresce, uma vez que a detecção antecipada das falhas traz como consequên-cia um alto grau de confiabilidade ao funcionamento dos sistemas reais. Este fato resultou na necessidade do aumento de pesquisa para o desenvolvimento de sistemas de supervisão, que possuem como finalida-de a automatização dos processos do Gerenciamento de Eventos Anormais (Venkatasubramanian et al., 2003).
Estudos reais apresentados em (de Almeida, 2012) comprovaram a redução do risco de falhas em empresas que implementaram técnicas de manuten-ção preditiva. O levantamento foi realizado pela “Plant Performance Group” (uma divisão da “Tech-nology for Energy Corporation”) e foi projetado para
quantificar o impacto da inclusão de técnicas de ma-nutenção preditiva como parte chave da filosofia da gerência de manutenção. De acordo com os resulta-dos do levantamento, as maiores melhorias puderam ser obtidas em custos de manutenção, falhas não programadas da máquina, tempo parado para reparo, redução de peças no estoque, e recompensas diretas e indiretas de hora extra. Em complemento, o levanta-mento indicou uma melhoria substancial na vida da máquina, produção, segurança do operador, qualida-de do produto, e lucro global.
Atualmente diversas propostas de técnicas para o Gerenciamento de Eventos Anormais podem ser encontradas, porém muitas delas se mostram de bai-xo custo/benefício, ineficazes ou mesmo de difícil aplicação em processos industriais (Baccarini, 2005). É necessário levar em consideração as condi-ções reais do processo pois muitas máquinas traba-lham de forma contínua e/ou estão em ambientes agressivos exigindo que o monitoramento seja feito sem parada da máquina, de forma não intrusiva e, o mais importante, sem expor o técnico a uma situação de risco de acidentes.
As máquinas elétricas rotativas estão presentes na maioria dos processos produtivos. Muitos desses processos, onde o controle de velocidade deve ser re-alizado com boa resposta, ainda se utilizam de Mo-tores de Corrente Contínua (MCCs) Estes motores permitem regular a velocidade de uma forma eficaz
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2036

garantindo-se assim um elevado desempenho e flexi-bilidade nas mais variadas situações. Portanto, a exemplo do que acontece com outros tipos de moto-res, o desenvolvimento de técnicas pra o diagnóstico de falhas em motores de corrente contínua é estraté-gico para o processo produtivo, pois evitam paradas não programadas e manutenções emergenciais (Erik et al., 2008; dos Santos, 2011).
Extrair informações relevantes a partir do grande volume de dados atualmente disponível em sistemas de controle de plantas industriais é um de-safio (Vaz Junior, 2010). Devido às dimensões das bases de dados, ferramentas estatísticas específicas são necessárias para obter informações importantes a respeito das condições operacionais do processo.
O processo multivariado possui uma infinidade de características que podem ser avaliadas. Portanto, a primeira etapa para o monitoramento consiste em definir quais grandezas serão transformadas em va-riáveis para observação. Às vezes são escolhidas as variáveis mais simples ou de menor custo de medi-ção ou ainda, se houver conhecimento profundo do processo, escolhem-se as variáveis mais pertinentes às falhas mais eminentes. Ferramentas de redução de variáveis também podem ser empregadas a fim de aperfeiçoar esta escolha (Vaz Junior, 2010; Campos, 2007).
O método de superfície de resposta é uma téc-nica que emprega métodos estatísticos para criar funções tipicamente polinomiais para representar a resposta ou o resultado de um experimento em ter-mos de diversas variáveis independentes. Estas fun-ções auxiliam a reduzir a complexidade na busca de solução (Junior et al, 2012; Neves, 2004; Silva et al. 2008 ).
Basicamente, as diretrizes para se trabalhar com um modelo de superfície de resposta são: Amostragem; Modelagem e Otimização. A amostra-gem é o número de ensaios que será executado le-vando em consideração os modelos que serão imple-mentados. A Modelagem e Testes de Hipóteses é a etapa de ajuste dos modelos e analises desses ajustes. E a otimização é a etapa de obtenção e configuração ótima dos níveis dos fatores de interesse, entre os in-tervalos considerados, e verificação da necessidade de se realizar novamente o experimento consideran-do novos níveis para os fatores (Silva et al. 2008 ).
Assim considerando que: 1. A detecção anteci-pada das falhas permite um alto grau de confiabili-dade ao funcionamento dos sistemas; 2. O alarme antecipado dos problemas da máquina e sistemas re-duz o risco de falhas destrutivas e também danos pessoais; 3. Muitos processos rodam de forma contí-nua ou estão em ambientes agressivos, exigindo que o monitoramento real seja feito sem parada da má-quina, de forma não invasiva e, principalmente, sem expor o técnico ao contato direto com a máquina; 4. O Motor de Corrente Contínua é o cerne de muitos dos processos produtivos; 5. O processamento de
monitoramento de sistemas exige que o método de análise tenha baixa complexidade computacional; 7. Que a técnica Superfície de Resposta auxilia a redu-zir a complexidade na busca de solução. Este traba-lho tem por objetivo propor uma técnica de diagnós-tico de falhas em Motores de Corrente Contínua que possa ser aplicada em uma Planta Real.
A Seção 2 apresenta a Metodologia adotada para atingir os objetivos do trabalho. Os resultados e suas análises estão apresentados na Seção 3. As con-clusões encontram-se na Seção 4.
2. Metodologia
O motor de corrente contínua, basicamente, é constituído por três componentes fundamentais: o campo da armadura (rotor), o campo do estator e o comutador. Considerando a corrente de armadura (
), a corrente de campo( ) e a velocidade ( ) como variáveis de estado, o modelo dinâmico para a máquina funcionando como motor é representado pelas equações:
(1)
(2)
(3)
Sendo: (4)
(5)
As constantes e grandezas são: : resistência do circuito da armadura; : resistência do circuito de campo; : indutância do circuito da armadura;
: indutância do circuito de campo; : indutância mútua armadura/campo; : força contra eletromotriz da armadura; : conjugado eletromagnético; : conjugado mecânico exigido pela carga; : coeficiente de atrito viscoso; : Momento de inércia do sistema motor/carga.
As falhas em componentes da planta, conjunto máquina/carga, consideradas são: curto-circuito entre espiras na bobina da armadura e curto-circuito entre espiras na bobina do campo, ambas podem ser modeladas por variações nas resistências e indutâncias da armadura e do campo.
Para criação e validação do modelo utilizou-se torque mecânico variante randomicamente entre 10 e 100% do seu valor nominal, com o intuito de obter uma ampla faixa de carregamento do motor.
As resistências e indutâncias dos circuitos de armadura e do campo, na presença de falhas de curto-circuito sofreram variações aleatórias entre 95 e 97% dos seus respectivos valores sem a presença
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2037

da falha. O parâmetro responsável por esta variação é o µ que representa o percentual de espiras em curto-circuito.
Considerando que 3 a 5% das espiras estão em curto-circuito, tanto para o enrolamento de campo quanto para o da armadura e adotando o modelo proposto por Caminhas ( 1997) tem-se:
Onde representa o percentual de espiras da armadura em curto-circuito; o percentual de espiras em curto-circuito do enrolamento de campo;
: resistência da armadura na presença de curto-circuito; : resistência do campo na presença da curto-circuito; : indutância da armadura na presença de curto-circuito; : indutância de campo na presença de curto-circuito; : indutância mútua armadura/campo na presença de curto-circuito no campo ou na armadura.
O motivo da indutância mútua, na presença do curto-circuito, variar entre 95 e 97% do seu valor sem a falha se deve ao fato de considerarmos as duas falhas como eventos independentes, ou seja, não ocorrem simultaneamente. Os parâmetros da máquina de corrente contínua utilizados foram obtidos em Caminhas (1997) e estão apresentados na Tabela 1.
Tabela 1: Parâmetros do Motor de Corrente Contínua
Parâmetros Valores no SI
Resistência da armadura (ra) 0,00467
Resistência do campo (rfd) 12,1875
Indutância da armadura (La) 0.000238
Indutância mútua (Lafd) 8,75
Indutância do campo (Lfd) 0,23
Coeficiente de atrito (Bm) 127
Tensão nominal (van) 750
Tensão nominal do campo (vfdn) 750
Corrente nominal da armadura (ian) 17098
Corrente nominal do campo (ifdn) 61,53
O modelo foi implementado utilizando o software MATLAB. Para a elaboração do banco de dados foram realizados 150 testes e os dados foram armazenados após o transitório, ou seja, operação em regime permanente.
Os primeiros 50 testes correspondem a operação simétrica, ausência de falhas. Os 50 testes subsequentes correspondem a presença de curto-circuito na armadura e os 50 testes finais curto-circuito no enrolamento de campo.
Utilizando este banco de dados para a criação da superfície de resposta, percebeu-se que era possível obter vários modelos diferentes dependendo da escolha da variável e do número de variáveis de estado utilizadas. Mas, independente da quantidade de variáveis consideradas em cada modelagem sempre foi possível identificar três situações distintas: motor operando sem falhas, motor operando com falha relacionada a curto-circuito nas espiras da armadura e motor trabalhando com falha relacionada a curto-circuito nas espiras do campo.
Para obtenção da melhor resposta foram testadas todas as possíveis superfícies. Como existem três variáveis de estado, o polinômio geral que representa a superfície de resposta é:
onde : representa as variáveis de estado usadas em cada
modelo.representam os coeficientes do polinômio a
serem determinados.
Para a criação das superfícies atribuiu-se, em todos os casos, saída como sendo a situação sem falha, ou seja, os 50 primeiros testes do banco de dados. para testes com a presença de curto-circuito no enrolamento da armadura, ou seja, os 50 testes subsequentes e por fim atribuiu-se para testes com curto-circuito no campo, ou seja, os 50 testes finais.
Para a comprovação da funcionalidade das superfícies de resposta e validação dos modelos criou-se um banco de dados contendo 600 testes, procedendo da mesma forma anterior, sendo os 200 primeiros correspondentes à máquina operando sem a presença de falhas, os 200 testes subsequentes considerando curto-circuito na armadura e os 200 testes finais considerando curto-circuito no campo.
Nesta etapa de validação dos modelos admitiram-se como acertos as saídas: para testes sem falha, para testes com a presença de curto-circuito na armadura e para testes com a presença de curto-circuito no campo. A Figura 1 apresenta graficamente as três regiões distintas.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2038

Figura 1- Identificação das três regiões distintas analisadas
2.1 Construção das superfícies de respostas para uma variável de estado
Este é o modelo mais simples possível. Para construir as superfícies considerando apenas uma variável de estado têm-se as seguintes possibilidades:
Combinação 1 = corrente de campo;Combinação 2 = corrente de armadura;Combinação 3 = velocidade.
Para o cálculo dos coeficientes do polinômio característico, considerou-se a matriz:
Onde: indica que cada elemento da variável de estado será elevado ao quadrado.
Assim, através da expressão:
Onde o índice t indica transposição e o índice -1 a inversão da matriz, obtém-se os coeficientes desejados.
Para validar o modelo, calculou-se a saída correspondente a cada teste do banco de validação através da expressão abaixo:
Por fim, esta resposta foi comparada com o valor estipulado para criação do modelo.
2.2 Construção da superfícies de respostas para duas variáveis de estado
Para a construção das superfícies considerando duas variáveis independentes têm-se as seguintes combinações possíveis:
Combinação 1= corrente do circuito de campo;= corrente do circuito de armadura.
Combinação 2= corrente do circuito de campo;= velocidade.
Combinação 3= corrente do circuito de a armadura;= velocidade.
Para o cálculo dos coeficientes do polinômio característico, a nova matriz é dada por:
Após o cálculo dos coeficientes calculou-se a saída correspondente a cada teste para validar o modelo através da expressão abaixo:
Por fim este valor foi comparado como o valor estipulado para criação do modelo.
2.3 Construção da superfície de resposta para três variáveis de estado
De forma semelhante, para a construção da superfície considerando três variáveis independentes tem-se apenas uma combinação possível:
= corrente do circuito de campo;= corrente do circuito de armadura;= velocidade.
Para a validação do modelo calculou-se a saída correspondente a cada teste do banco de validação através da expressão:
Por fim, comparou-se este valor com o estipula-do para criação do modelo.
3. Resultados e Análises
Nesta etapa foi observada a funcionalidade do modelo para cada configuração, obtido através do percentual de acertos encontrados no processo de validação. Esta verificação é realizada comparando o valor de saída, , de cada teste com o respectivo valor estipulado para a elaboração do modelo.
Analisou-se a presença de alarmes falsos nas respostas, como por exemplo, detecção de curto-circuito em testes referentes a uma situação sem falha. Também se avaliou a sensibilidade dos
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2039
modelos, ou seja, se os modelos conseguiram diferenciar as três situações distintas.
Analisou-se também a dispersão das respostas em torno do valor estipulado na criação do modelo, como por exemplo, nos testes sem falha considerou-se como acerto todos os valores , mas o ideal é que estes valores estejam com a menor dispersão possível em relação ao valor estipulado na criação do modelo,
3.1 Considerando = corrente de campo como sendo a única variável independente do modelo
Após o cálculo dos coeficientes, o polinômio obtido para esta configuração é dado por:
A Figura 2 mostra a saída do modelo utilizando apenas a corrente do circuito de campo como variá-vel independente.
Figura 2- Modelo da SR utilizando apenas a corrente de campo como variável independente
O modelo conseguiu identificar todos os testes com a presença de curto-circuito no circuito de campo, além de apresentar uma baixa dispersão em torno do valor de saída, , estipulado para esta região, porém o modelo não conseguiu diferenciar testes sem falha e testes onde há curto-circuito na armadura.
Observa-se claramente que este modelo não conseguiu diferenciar as três situações distintas. O percentual de acertos para esta configuração foi de 33.3333%.
3.2 Considerando = corrente de armadura como sendo a única variável independente do modelo
O polinômio obtido para esta configuração é dado por:
Analisando este polinômio, observa-se que o termo independente é bem mais significativo que os demais coeficientes, assim para pequenas variações na corrente de armadura não se tem variações signi-ficativas na saída.
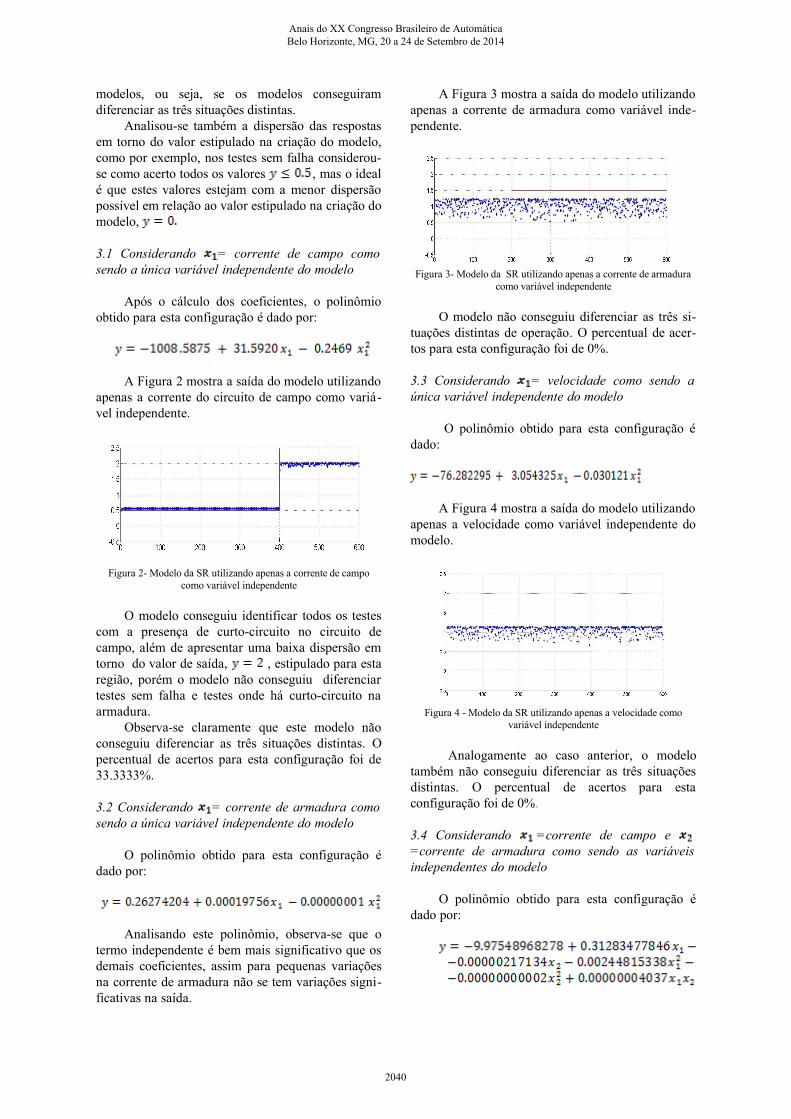
A Figura 3 mostra a saída do modelo utilizando apenas a corrente de armadura como variável inde-pendente.
Figura 3- Modelo da SR utilizando apenas a corrente de armadura como variável independente
O modelo não conseguiu diferenciar as três si-tuações distintas de operação. O percentual de acer-tos para esta configuração foi de 0%.
3.3 Considerando = velocidade como sendo a única variável independente do modelo
O polinômio obtido para esta configuração é dado:
A Figura 4 mostra a saída do modelo utilizando apenas a velocidade como variável independente do modelo.
Figura 4 - Modelo da SR utilizando apenas a velocidade como variável independente
Analogamente ao caso anterior, o modelo também não conseguiu diferenciar as três situações distintas. O percentual de acertos para esta configuração foi de 0%.
3.4 Considerando =corrente de campo e =corrente de armadura como sendo as variáveis independentes do modelo
O polinômio obtido para esta configuração é dado por:
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2040

A Figura 5 mostra a saída do modelo utilizando a corrente de campo e a corrente de armadura como variáveis independentes do modelo.
Figura 5- Modelo da SR utilizando as correntes de campo e de armadura como variáveis independentes
Os resultados obtidos foram semelhantes ao primeiro caso, onde foi considerado apenas a corrente de campo. Obtendo bons resultados na identificação de curto-circuito no campo e não distinguindo testes sem falhas dos teste com curto-circuito na armadura. O percentual de acertos para esta configuração foi de 33.3333%.
3.5 Considerando = corrente de campo e =velocidade como sendo as duas variáveis independentes
O polinômio obtido para esta configuração é dado por:
A Figura 6 mostra a saída do modelo utilizando a corrente de campo e a velocidade como variáveis independentes do modelo.
Figura 6- Modelo de SR utilizando a corrente de campo e a velocidade como variáveis independentes
O modelo conseguiu identificar todos os testes com curto-circuito no campo e com uma baixa dispersão em torno do valor esperado para esta região, .
Observa-se que o modelo começa ligeiramente a diferenciar as duas primeiras regiões, porém há um elevado número de alarmes falsos fazendo com que o percentual de acertos ainda seja baixo, como pode ser observado claramente nas duas primeiras
regiões da Figura 5. O percentual de acertos para esta configuração foi de 33.3333%.
3.6 Considerando =corrente de armadura e =velocidade como sendo as duas variáveis independentes do modelo
O polinômio obtido para esta configuração é dado por:
A Figura 7 mostra a saída do modelo utilizando a corrente de armadura e a velocidade como variá-veis independentes do modelo.
Figura 7 - Modelo de SR utilizando a corrente de armadura e a velocidade como variáveis independentes
Os resultados foram semelhantes aos casos em que se utilizou apenas a corrente de armadura e apenas a velocidade, não diferenciando as três situações distintas. O percentual de acertos para esta configuração foi de 0%.
3.7 Considerando = corrente de campo, = corrente de armadura e = velocidade como sendo as três variáveis independentes do modelo.
O polinômio obtido para esta configuração é dado por:
A Figura 8 mostra a saída do modelo utilizando a corrente de armadura, a corrente de campo e a ve-locidade como variáveis independentes do modelo.
Este modelo apresenta alta sensibilidade para diferenciar as três situações distintas, sem a presença de alarmes falsos e com baixa dispersão dos resultados em torno do valor esperado para cada região.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2041

Neste caso o modelo conseguiu acertar todos os testes, assim o percentual de acertos para esta configuração foi de 100%.
Figura 8 - Modelo da SR utilizando as correntes de campo e de armadura e a velocidade como variáveis independentes
4. Conclusão
Muitos processos ainda utilizam motores de corrente contínua, principalmente aqueles onde o controle de velocidade é crítico, pois permitem regular a velocidade de uma forma eficaz garantindo assim elevado desempenho. O desenvolvimento de técnicas pra o diagnóstico de falhas em motores de corrente contínua é estratégico para o processo produtivo, pois evitam paradas não programadas e manutenções emergenciais.
Neste trabalho, as variáveis utilizadas para o diagnóstico de falhas foram: a corrente de armadura, a corrente de campo e a velocidade. Através destas variáveis buscou-se dentre todas as superfícies possíveis, a que apresentasse os resultados mais satisfatórios, como: distinção entre as três regiões, elevado percentual de acerto, inexistência de alarmes falsos além de baixa dispersão do valor de saída em relação ao valor estipulado na criação do modelo.
Observou-se que o modelo construído com as três variáveis de estado atendeu todas as expectativas, gerando um percentual de acerto de 100%.
Agradecimentos
Os autores agradecem a FAPEMIG, Projeto Demanda Universal 01/2011 TEC APQ-00589-11 e a CAPES, Projeto Pro-equipamentos.
Referências Bibliográficas
Baccarini, L.M. R. Detecção e Diagnóstico de Falhas em Máquinas de Indução, Tese de Doutorado – UFMG, 2005.
Caminhas, W. M. Estratégias de Detecção e Diagnóstico de Falhas Em Sistemas Dinâmicos. Tese de doutorado, Universidade Estadual de Campinas, 1997.
Campos, A. A. Um algoritmo de detecção de falhas em sistemas multivariados, Dissertação de Mestrado, Programa de Pós-Graduação em Engenharia Elétrica, UFMG, 2007.
de Almeida, Márcio Tadeu. Manutenção Preditiva: Benefícios e Lucratividade. Artigo disponível no site do Instituto de Vibração MTA. (s.d). 5p. Disponível em:
< http://www.mtaev.com.br/download/mnt2.pdf>, 2012.
dos Santos, S. D. P. M., Metodologias de Controlo e Diagnóstico de Falhas com Aplicação em Motores de Corrente Contínua, Mestrado Integrado em Engenharia Electrotécnica e de Computadores, Universidade Nova de Lisboa, 2011.
Erik B; de Almeida Levy Ely; Bô, R. Y; Barros, M., Lambert-Torres, G. Martins, H. G. Diagnóstico de Falhas em Motores de Corrente Contínua, VIII Conferência Internacional de Aplicações Industriais, 2008.
Júnior, A. M. G; Silva, V.; Baccarini, L. M. R Reconhecimento e categorização de faltas em motores de indução trifásicos através de modelos obtidos por redes neurais e superfícies de resposta, Congresso Brasileiro de Automática, 2012.
Neves, R.A. Desenvolvimento de modelos mecânico-probalísticos para de pavimentos de edifícios’. Tese de doutorado. Universidade de São Paulo, 2004.
Silva G. C., Teoria e Aplicações de Algoritmos Imunoinspirados para Detecção e Diagnóstico de Falhas em Sistemas Dinâmicos, Trabalho de Qualificação, Universidade Federal de Minas Gerais, Engenharia Elétrica, 2012.
Silva, V.V.R., Fleming, P.J., Sugimoto, J. e Yokoyama, R.. Multiobjective optimization using variable complexity modeling for control system design. Applied Soft Computing, Vol.8, Issue 1, pp. 392-401, 2008.
Vaz Junior, C. A. Detecção e Diagnóstico de Falhas com base em dados históricos de Processos: Aplicação em Dutovias, Tese de Doutorado, Escola de Química, Universidade Federal do Rio de Janeiro, 2010.
Venkatasubramanian, V., Rengaswamy, R., and Kavuri, S. N. A review of process fault detection and diagnosis - part I: Quantitative model-based methods. Computers and Chemical Engineering, 27(3):293–311, 2003.
Venkatasubramanian, V., Rengaswamy, R., and Kavuri, S. N. (2003b). A review of process fault detection and diagnosis - part II: Qualitative models and search strategies. Computers and Chemical Engineering, 27(3):313–326, 2003.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2042