tec projeto1
TRANSCRIPT
Tecnologia de Projetos- I 1o Ciclo de Mecânica
1
ETE “Cel. Fernando Febeliano da Costa”
TECNOLOGIADE
PROJETO - I
1o Ciclo deTécnico Mecânica
Apostila baseada nas anotações de Professorese do TC – 2000 Técnico – Distribuição gratuita aos Alunos

Tecnologia de Projeto I – 1o Ciclo de Mecânica
2
MECÂNICA TÉCNICA – parte - 1
ESTÁTICA
Estática é uma das partes da mecânica que estuda as forçase as condições necessárias para o seu equilíbrio.
FORÇA
É qualquer causa capaz de produzir ou modificar o estado derepouso ou de movimento de um corpo.
As características de uma força são:
a) ponto de aplicação
b) direção ou reta de ação
c) sentido
d) intensidade
A unidade de medida de força é:
*No Sistema Técnico é o kilograma-força [ kgf ]
*No Sistema Internacional é Newtons [ N ]
*Veremos com maior detalhes em Dinâmica na pagina 48
Trabalharemos com força no Sistema Técnico [ kgf ]
Graficamente é representada por um segmento de reta orien-tado chamo por vetor.
intensidade
ponto de aplicação sentido
reta de ação
0 2 31 4 kgf
escala das forças
Temos:
Módulo (Intensidade): 8 kgf (a cada um Centímetro corres-ponde a 1 kgf em escala)
Direção: Horizontal
Sentido: da esquerda para a direita
Duas ou mais forças constituem um sistema de forças, sendoque cada uma delas é chamada COMPONETES.
No caso em que as forças tem um mesmo ponto de aplicaçãoou se encontram num mesmo ponto depois de prolongadas, recebem onome de forças CONCORRENTES. Se agem numa mesma reta deação são chamadas forças COINCIDENTES.
COMPOSIÇÃO DE FORÇAS COINCIDENTES
Todo sistema de forças coincidentes pode ser substituído poruma única força, chamada resultante, que produz o mesmo efeito dascomponentes.
A resultante terá a mesma reta de ação das componentes,com intensidade e sentido igual à soma algébrica das componentes.
1F
2F2F1F
R
1F2F
1F
2FR
Caso 1 Caso 2
PROBLEMAS
1-) Calcular a resultante das forças F1 = 15Kgf e F2 = 10Kgf de mesmosentido.
2-) Calcular a resultante das forças F1 = 15Kgf e F2 = 10Kgf de senti-dos contrários.
3-) Calcular a resultante das forças F1 = 5Kgf, F2 = 8Kgf e F3 = 7Kgfaplicadas no bloco em figura.
2F3F
1F
4-) Dizer para que lado a corda irá se deslocar ao ser aplicado ospesos P1 = 8Kgf, P2 = 4Kgf e P3 = 6Kgf no sistema abaixo.
1P 2P
3P
argola

Tecnologia de Projeto I – 1o Ciclo de Mecânica
3
PROBLEMAS PROPOSTOS
1-) Dizer para que lado o bloco irá se deslocar e calcular a resultante:
1 kgf
2-) Calcular a resultante do sistema cujas forças têm todas a direçãonorte-sul com as seguintes intensidades e sentidos: (Resp.:700Kgf para o norte)
P1 = 500Kgf (sentido norte)P2 = 400Kgf (sentido sul)P3 = 200Kgf (sentido sul)P4 = 800Kgf (sentido norte)
3-) Num bloco agem as seguintes forças: F1 = +6Kgf, F2 = -4Kgf, F3 = -5Kgf, F4 = +1Kgf. Calcular a resultante e dizer o sentido do movimentodo bloco. Adotar o sinal positivo como sendo o sentido da direita paraa esquerda. (Resp.: R = -2Kgf para a direita)
4-) Um balão a gás, que consegue exercer uma força para cima de100Kgf, está suspendendo uma carga de 40Kgf. Se for acrescentadauma sobre-carga de 75Kgf, qual será o sentido do movimento do balãoe com que força se fará este movimento?(Resp.: para baixo, com uma força de 15Kgf)
5-) Calcular a força F para equilibrar as forças aplicadas no bloco dafigura abaixo.(Resp. F = 30 kgf)
10kgf=1F 15kgf=2F
40kgf=3F
5kgf=4FF
COMPOSIÇÃO DE FORÇAS CONCORRENTES
Todo sistema de forças concorrentes pode ser substituído poruma única resultante que produz o mesmo efeito, se esta substituiraquelas.
A resultante pode ser determinada gráfica ou analiticamente.
I - RESULTANTE DE DUAS FORÇAS CONCORRENTES
Graficamente: é determinada pela diagonal do paralelogra-mo construído sobre as retas que representam as forças componentes.Esta é a chamada regra do paralelogramo.
REGRA DO PARALELOGRAMO
1F
2F
12Rϕ
α
Analiticamente: a intensidade e a direção da resultantepodem ser calculadas pelas seguintes fórmulas:
α.cos.F2.FFFR 2122
2112 ++=
αα
ϕ.cosFF
.senFtg21
2
+=
PROBLEMAS
1-) Determinar gráfica e analiticamente a intensidade e a direção daresultante das forças concorrentes F1 = 40Kgf e F2 = 60Kgf que formamum ângulo α igual a 45º.
2-) Calcular gráfica e analiticamente a intensidade e a direção daresultante das forças F1 = 60Kgf e F2 = 80Kgf, perpendiculares.
3-) Calcular a resultante das forças F1 = 70Kgf e F2 = 40Kgf que for-mam um ângulo α igual a 130º.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
4
PROBLEMAS PROPOSTOS
1-) Calcular, gráfica e analiticamente, a resultante das forças F1 =20Kgf e F2 = 30Kgf nos seguintes casos:
2F
2F
1F 1F
o45o135
1F
2F
2-) Calcular graficamente a resultante das seguintes forças F1 =15Kgf, F2 = 25Kgf, F3 = 30Kgf, conforme figuras abaixo:
1F
2F
o120
o120
o120
1F2F
3F
3F o45
o60
3-) Calcular gráfica e analiticamente, a resultante das forças F1 =30Kgf e F2 = 40Kgf aplicadas no bloco em figura e determinar a direçãoda resultante. ( Resp.: 67,6 kgf e 17o12’)
2F
1F
o75o30
4-) Na figura abaixo está representada uma estaca articulada na basee solicitada pelas forças F1 = 200Kgf e F2 = 300Kgf. Verificar se elapermanecerá em equilíbrio. Caso contrário, para que lado tombará?
Resp.: Tombará para a direita.
2F
1Fo30
o60
5-) No suporte em figura cada pé resiste no máximo 100Kgf. Calculara máxima carga P quando os pés formam o ângulo α = 70º. (Resp.:164 kgf)
o70
P
6-) Sabendo-se que cada cabo da figura abaixo resiste uma carga até400Kgf, calcular o máximo peso P que o conjunto pode suportar.
7-) Calcular a reação de apoio R no suporte da polia em figura.(Resp.: 2,82tf)
DECOMPOSIÇÃO DE UMA FORÇA
Sendo dada uma força R, é possível decompô-la em duasoutras, FH e FV, de direções dadas. Para isto basta aplicar a regra doparalelogramo.
Exemplo: Decompor a força R nas direções das retas dadasem figura.
θ
R
θ
RVF
HF Horizontal
Vertical
θR.cos.FH = θR.sen.FV =
PROBLEMAS
1-) Decompor o peso P = 20Kgf do bloco em figura, na direção daparalela e na direção da perpendicular ao plano inclinado.
o30
Tecnologia de Projeto I – 1o Ciclo de Mecânica
5
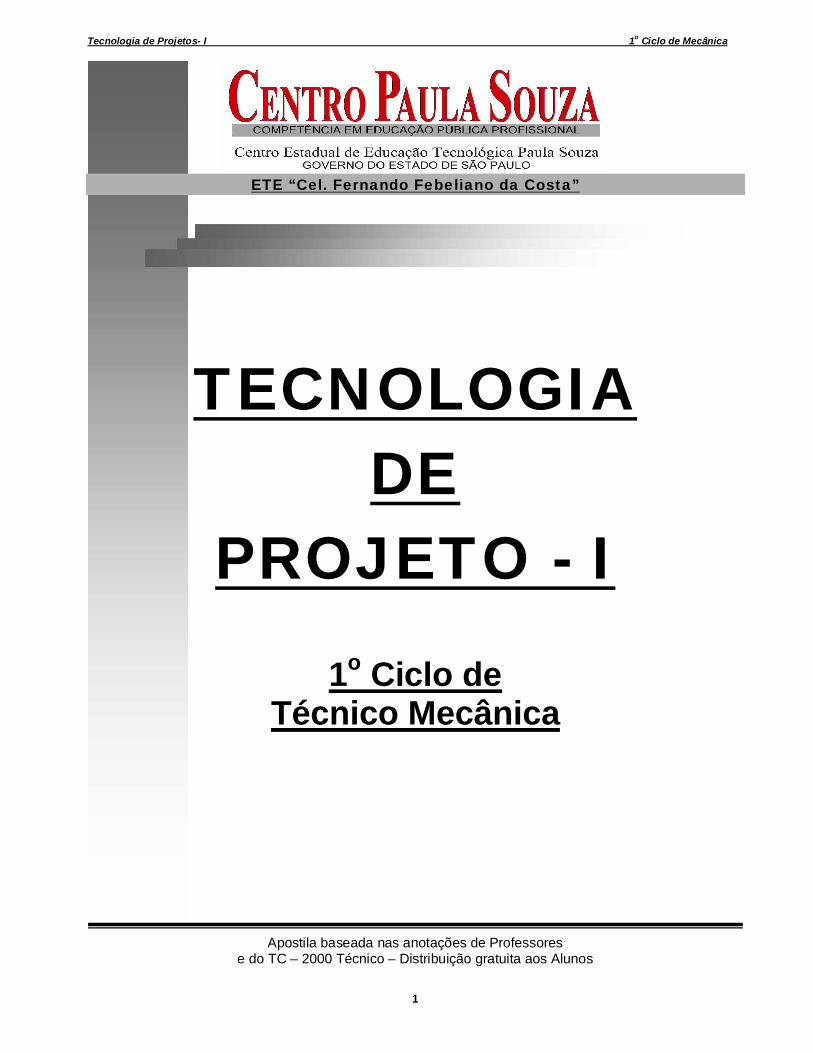
2-) Calcular gráfica e analiticamente as forças normais às faces late-rais da guia representada em figuraDados: carga P = 400Kgf ângulo do canal 100º
o100
P
3-) Calcular as componentes H, horizontal, e V, vertical, da força F= 30 Kgf aplicada na viga conforme figura abaixo.
o60
F
4-) Calcular a carga nos pés do suporte em figura, sabendo-se que P= 40Kgf e α = 60º.
o60
P
PROBLEMAS PROPOSTOS
1-) Na cunha abaixo, calcular a força V. (Resp.: V = 280Kgf)
H = 400 kgf
V
o30
2-) No suporte em figura, calcular a carga no tirante. (Resp.: F =400Kgf)
200kgf
o30
3-) No suporte em figura, calcular a carga na escora.(Resp.: F = 400Kgf)
200kgf
o30
4-) No sistema biela-manivela em figura, calcular a força radial e aforça tangencial. Sabendo-se que a biela exerce no pino uma força F =400Kgf.Resp.: (Fr = 200Kgf Ft = 346,4Kgf)
MOMENTO ESTÁTICODenomina-se momento estático Mo da força F em relação ao
ponto 0, ao produto da força F pela mínima distância d entre a força e oponto 0. É medido em [ Kgf.cm ].
Exemplo:
F d
+ -
Sentido de Giro
HorárioAntiHorário
O
F.dMF ±=
No caso da manivela, o momento é o produto da força F peloraio r. Será positivo se a manivela girar no sentido anti-horário enegativo no sentido horário.
Problemas:
Calcular o momento da força F em relação ao ponto 0, nos seguintescasos:
F= 80 k
gf d= 5 cm
OO
F= 200 kgfd=
8 cm

Tecnologia de Projeto I – 1o Ciclo de Mecânica
6
VÍNCULOS
Um corpo qualquer, situado numa superfície plana, possuitrês liberdades de movimento:
• deslocamento vertical• deslocamento horizontal• rotação
Vincular este corpo significa impedir uma ou todas as possibi-lidades de movimento.
Logo, existem três tipos de vínculos:
1-) Vínculos simples (apoio simples, tirante): impede o desloca-mento numa determinada direção.
2-) Vínculo duplo (apoio fixo, articulação): impede qualquer deslo-camento, mas permite a rotação.
Simbologia
3-) Vínculo triplo (engastamento): impede qualquer possibilidade demovimento.
Os vínculos, impedindo determinados movimentos, se opõemàs forças externas aplicadas no corpo e, pelo 3o.princípio da Dinâmica,originam reações iguais e contrárias às forças que sobre eles atuam.
O apoio simples reage com uma força R perpendicular ao vínculo.
R = V
A articulação reage com uma força R que passa pelo seu centro e cujadireção depende das forças externas.
H
VR
O engastamento reage com uma força R e um momento M.
R
MF
Para que um corpo fique em equilíbrio sob a ação de umsistema de forças é necessário que sejam eliminadas as possibilidadesde movimento, o que poderá ser obtido por meio de vínculos.
Os corpos que apresentam os vínculos necessários e sufici-entes para o seu equilíbrio, são chamados isostáticos.
Se possuem um número insuficiente de vínculos, são ditoshipostáticos.
No caso em que o número de vínculos é superior ao neces-sário, são ditos hiperestáticos.
ISOSTÁTICO HIPOSTÁTICO
HIPERESTÁTICO
EQUILÍBRIO DOS CORPOS
Para que um corpo permanece em “EQUILIBRIO” é neces-sário que a somatórias das forças e momentos destas forças que atu-am sobre este corpo sejam NULAS .
CONDIÇÕES DE EQUILÍBRIO
No caso em que o sistema é coplanar, o problema pode serresolvido decompondo-se as forças em duas direções H e V perpendi-culares, obtendo-se dessa maneira, 3 condições de equilíbrio:
H1F H2F
V1F V2F1F 2F
a b c
H
1V2V
1F 2F
a b c
1θ 2θ

Tecnologia de Projeto I – 1o Ciclo de Mecânica
7
1a. condição: impede a rotação.
Para que um corpo não entre em rotação é necessário que asoma algébrica dos momentos de todas as forças, em relação a umponto qualquer, seja nula (em relação ao ponto 0, por exemplo).
∑ = 0Mi
Pôr convenção+
(sentido Anti-horário)
V2 . (a+b+c) - FV1 .a - FV1 . (a+b) = 0
2a. condição: impede deslocamento vertical.
Para que um corpo não seja deslocado verticalmente é ne-cessário que a soma algébrica de todas as forças verticais seja nula.
∑ = 0FVi
Por convenção+
(de baixo para cima)
V1 + V2 - FV1 - FV2 = 0
3a. condição: impede deslocamento horizontal
Para que um corpo não seja deslocado horizontalmente énecessário que a soma algébrica de todas as forças horizontais sejanula.
∑ = 0FHi
Por convenção+
(da direita para a esquerda)
H - FH1 - FH2 = 0
ALAVANCAS
Alavanca é uma barra rígida, reta ou curva, móvel em tornode um eixo denominado ponto de apoio.
Para resolver problemas sobre alavanca, aplica-se as condi-ções de equilíbrio.
F = Força Q = carga
R = reação de apoio a, b = braços de alavanca
F . a = Q . b
Tipos de alavanca:
a b
QF
a b
QF
PROBLEMAS
1-) Calcular a reação de apoio R e a força F para levantar a carga Qcom auxilio da alavanca em figura.
40 cm 10cm
F Q = 500 kgf
2-) Determinar a posição do cursor para que a balança romana emfigura equilibre um peso de 2Kgf, sabendo-se que o contra-peso tem0,5Kgf.
0,5 kgf
2,0 kgf
X 5 cm
3-) Calcular a força F necessária para equilibrar a alavanca em figura.
21cm 35cm
F
Q = 200 kgf
4-) Na alavanca em figura, calcular a força F capaz de suspender opeso Q.
F
20cm
Q = 270 kgf
34cm
a b
QF

Tecnologia de Projeto I – 1o Ciclo de Mecânica
8
5-) Calcular a reação de apoio e a força F para equilibrar a alavancaem figura.
F
50cm
Q = 600 kgf
40cm
30cm
20cm
500 kgf
100 kgf
________________________________________________________
PROBLEMAS
1-) Na tesoura mecânica em figura, foi necessário uma força F =50Kgf para cortar o ferro redondo. Calcular a resistência oferecidapelo ferro. ( Resp.: 375 kgf)a = 20 cm b = 130 cm
a b
R
F
2-) Para freiar o eixo da figura abaixo foi necessário uma força FN =40Kgf. Calcular a força F. (Resp.: 12 kgf)
F
FN
L =
100c
m
30cm
3-) Se disponho de uma força F = 10Kgf, calcular o novo comprimentoL que deverá ter o braço do freio de sapata do problema 2.Resp.: L = 120cm
4-) O motor em figura pesa 30Kgf. Calcular a força exercida peloesticador quando a correia tende a levantar o motor com uma força de10Kgf. ( Resp.: 9 kgf )
45 cm 55 cm
5-) Calcular o máximo peso P que pode ser levantado por um opera-dor, com auxílio das roldanas em figura.
P
R = 48 cmr = 24 cm
F
6-) Calcular o máximo peso P que pode ser levantado pelo operador,com auxílio do sarilho em figura, em trabalho normal.
P
D = 16cm
r = 3
0cm
REAÇÕES DE APOIO
A determinação das reações de apoio de um corpo é feitaaplicando-se as três condições de equilíbrio como já foi visto na pagina39 desta apostila.
Para casos de reações de apoio em eixos podemos resolveranaliticamente.
PROBELMAS
1-) Calcular as reações R1 e R2 dos mancais do eixo em figura.
100 kgf 200 kgf150 kgf
20 cm 10 cm 25 cm 15 cm

Tecnologia de Projeto I – 1o Ciclo de Mecânica
9
2-) Calcular a reação no pino abaixo sabendo que o peso da barra éde PB = 200 kgf
o30
2,0 m
Q = 1,0 tf
pino
MOMENTO FLETOR ( Mf )
A seção ( x ) da barra em figura está solicitada parte à com-pressão e parte a tração, isto é, as fibras superiores da barra sãocomprimidas e as fibras inferiores são tracionadas.
Denomina-se momento fletor (Mf) da seção ( x ), a somaalgébrica dos momentos, em relação a ( x ), de todas as forças Pi queprecedem ou seguem a seção.
Exemplo: momento fletor na seção ( x ):
Convenção: Mf
Mf = P1.a – R1 . b + P2 . c
Desse modo calcula-se o momento fletor de cada seção doeixo e com valores obtidos traça-se o diagrama como nos exemplosque se seguem.
Gráfico de Momento Fletor (Cargas Concentradas)
Mf1 = 0
Mf2 = 10 . 2 = 20 kgf.cm
Mf3 = 10 . 5 – 22 . 3 = -16 kgf.cm
Mf4 = 0
Observações:
1-) Neste exemplo foi considerado as forças que precedem a seção.Se forem tomadas as forças que seguem as seções, os momentosterão os mesmos valores, a menos do sinal.
2-) Notar que, no caso em questão (forças concentradas), o momentofletor varia linearmente ao longo dos trechos descarregados. Conclui-se daí que, para traçar o diagrama basta calcular apenas o momentosfletores nas seções em que são aplicados as forças e unir os valorespor meio de retas.
3-) A seção mais solicitada é aquela que o momento fletor é máximo.
Problemas Propostos:
1-)
tração
compressão
Linha Neutra
P
P1
R2
c
R1
P1
b
a
x
+
10 kgf
Mf2
2
R1 = 22 kgf
20 kgf
3
+
R1 = 8 kgf
Mf3
Mf4Mf1
-
2 cm
100
2,5
300
1,5 2,0 m
200 kgf
3,0

Tecnologia de Projeto I – 1o Ciclo de Mecânica
10
2-)
3-)
4-)
______________________________________________________
CINEMÁTICA
A Cinemática é uma das partes da Mecânica que estuda omovimento em si, classifica-o e descreve-o matematicamente, semlevar em conta as causas e os seus efeitos.
Dizemos que um corpo está em movimento quando emtempos sucessivos varia de posição. Se ocupa constantemente amesma posição, dizemos que ele está em equilíbrio ou em repouso.
MOVIMENTO CIRCULAR UNIFORME
Dizemos que o movimento de um móvel é circular uniforme, quandosua trajetória é uma circunferência e percorre arcos iguais em temposiguais.
Rotação por minuto [ n ]: é o numero de voltas dadas em 1 minuto.Medimos em [ rpm ].
O arco percorrido na unidade de tempo é a velocidade. Podemosmedir o arco pelo seu comprimento ou pelo ângulo compreendido, logo,temos dois tipos de velocidade:
.
v
R
n
aC
200
2,0
400
2,5 2,0 m
200 kgf
3,0
400
2,0 m
200 kgf
4,0
2002,0 m
600 kgf
4,0

Tecnologia de Projeto I – 1o Ciclo de Mecânica
11
Velocidade tangencial ou periférica [v]: é o comprimento do arcopercorrido na unidade de tempo. Medimos em [ m/s ].
Fórmula:60
n.R.2v .π=
R = raio da circunferência em metros [ m ]
Velocidade angular [ ]: é a medida do ângulo varrido na unidade detempo. Medimos em [rad/s].
Fórmula:60
n.2v .π= [ rad/s ]
O radiano (rad) é o ângulo Central do arco de comprimento igual aoraio.
360º equivale a 2 π rad.
Período T: é o tampo gasto para o móvel dar volta na circunferência.
Fórmula:n60T = [ s ]
Freqüência f: é o número de voltas por segundo. Medimos em hertz [Hz ].
Fórmula:60nf = [ s-1 ] ou [ Hz ]
Podemos escrever:T1f =
f1T =
Aceleração centrípeta ac: medimos em [ m/s2 ]
Fórmula:Rva
2
c =
PROBLEMAS RESOLVIDOS
1 – Transformar 30º em rad.
2 – Transformar 34π rad em grau.
3 – Calcular a velocidade periférica, a velocidade angular, o período, afreqüência e aceleração centrípeta de um disco de 6m de diâmetro a20 rpm.
4 – No volante dado, calcular as velocidades periférica e angular doponto A na coroa e do ponto B no cubo, sabendo-se que o eixo gira a50 rpm.
5 – No conjunto de engrenagens dadas calcular as velocidades tan-genciais de cada uma sabendo-se que o eixo fira a 240 rpm.
6 – Calcular a rpm de uma engrenagem, cuja velocidade tangencial éde 6,28 m/s com diâmetro de 120 mm.
7 – Que raio deverá ter um volante para uma velocidade periférica de9,42 m/s a 300 rpm?
A
B
φ200φ50
100 mm 80 mm
Tecnologia de Projeto I – 1o Ciclo de Mecânica
12
d1
d2
d3 d4
d1
d2
d3
d4
n
d
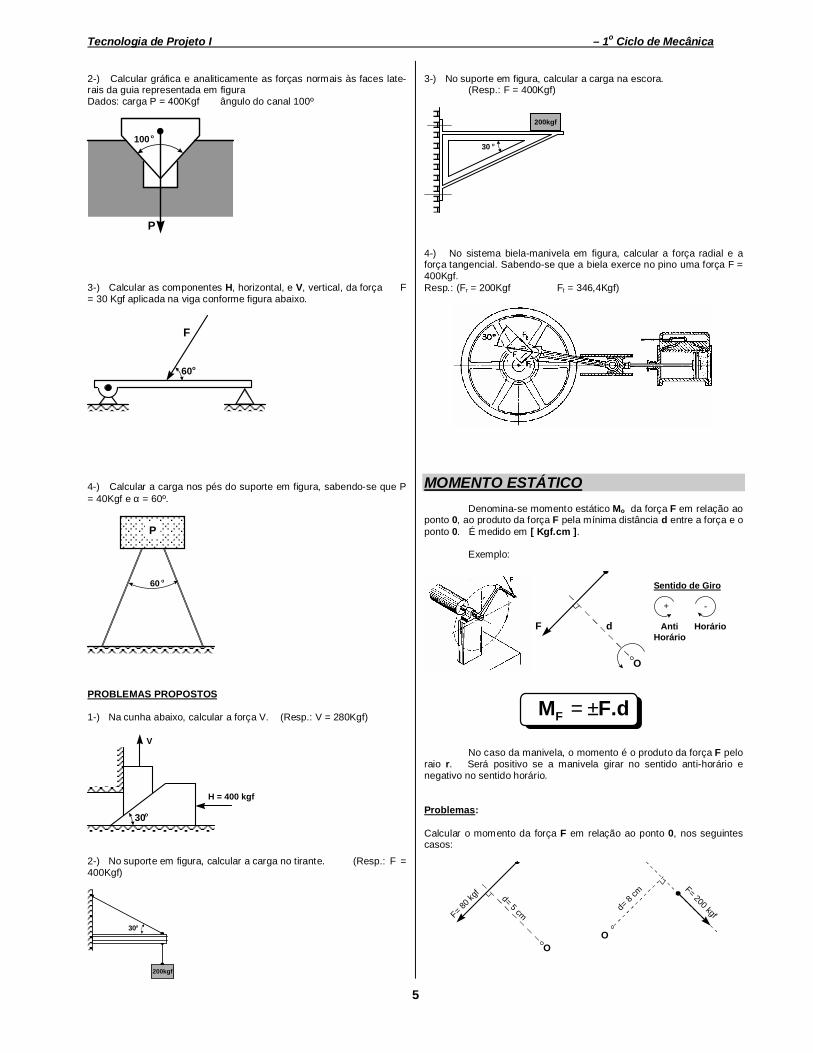
8 – Na figura abaixo calcular a rotação da polia maior.
9 – No par de engrenagens dadas em figura, calcular o diâmetro primi-tivo do pinhão.
10 – Projetar um câmbio, conforme esquema em figura, para se obterna saída 150 rpm, quando acionado por um motor de 1400 rpm.
PROBLEMAS PROPOSTOS
1 – A velocidade de corte da ferramenta do torno é de 0,6 m/s. Calcularo número de rotações por minuto da árvore para tornear uma peça de10 cm de diâmetro. Resp. 114,6 rpm
2 – Qual será a velocidade de corte de uma ferramenta quando sepretende tornear uma peça de 3 cm de diâmetro, com a placa do tornogirando a 250 rpm? Resp: 0,39 m/s
3 – Calcular o diâmetro ideal de uma peça a ser torneada num tornoque da 120 rpm na árvore e com velocidade de corte de 0,5 m/s.Resp: 0,5 m/s
4– A velocidade média de corte de uma serra mecânica é de 1,2 m/s.No sistema biela-manivela que movimenta a serra, a manivela tem 12cm de raio. Qual é a rpm da manivela?Resp: 95,5rpm
5 – Calcular as rpm da broca para abrir um furo de 1” de diâmetro,sabendo-se que a velocidade de corte da broca é de 0,254 m/s.Resp: 191 rpm
6 – Calcular os diâmetros das polias e das engrenagens da prensaexcêntrica esquematizada em figura para dar 36 golpes por minuto.Resp. Depende dos valores adotados
7 – Projetar as engrenagens e polias para a serra mecânica esquema-tizada em figura. Motor de 1400rpm Resp. Depende dos valoresadotados
D2 = 200 mm
D1 = 120 mm
n1 = 1000rpm
n2 = ?
dp2 =100mm
dp1 = ? n2 =60 rpm
n1 =120 rpm
d1
d2
d3 d4

Tecnologia de Projeto I – 1o Ciclo de Mecânica
13
DINÂMICAA Dinâmica é uma das partes da Mecânica que estuda a
relação entre o movimento e a sua causa.
AS TRÊS LEIS DA DINÂMICA
Newton, sábio e físico inglês, enunciou as três leis básicas daDinâmica:
1ª LEI – (princípio de inércia): toda ação instantânea exer-cida sobre um corpo comunica-lhe um movimento retilíneo uniforme.
De acordo com o princípio de inércia, um corpo não pode, porsi mesmo, produzir ou modificar seu estado de repouso ou de movi-mento. A mudança de qualquer um destes estados se faz somente pelaintervenção de uma causa: esta causa recebe o nome de FORÇA.
Assim, um carro inicia seu movimento somente quandoestiver sob a ação de uma força. Depois de cessada a aplicação destaforça, ele continuaria sempre em movimento se não houvesse algumacausa externa que lhe oferecesse resistência, tal como o atrito, resis-tência do ar, freios, etc.
2ª LEI – ( lei da proporcionalidade): variação do movimentode um corpo é proporcional à ação aplicada.
A segunda lei relaciona a força aplicada e o movimentoadquirido.
Se a força aplicada no carro não fosse removida e se conti-nuasse agindo com intensidade constante, a velocidade estaria sempreaumentando de maneira constante e uniforme. O movimento adquiridoseria retilíneo uniformemente acelerado.
Logo, uma força constante aplicada num corpo, imprimeneste uma aceleração que será tanto maior quanto maior for a forçaaplicada.
Há, assim, uma proporcionalidade entre força e aceleração: ocoeficiente de proporcionalidade é a MASSA do corpo.
Tal dependência se exprime pela seguinte fórmula:
F = m . a F = forçam = massaa = aceleração
Esta é a EQUAÇÃO FUNDAMENTAL DA DINÂMICA.
No S.I. (Sistema Internacional) temos a seguinte unidade para aforça:
M = comprimento [ m ] metrosK = massa [ kg ] quilogramaS = tempo [ s ] segundos
m = massa [ kg ] quilograma
a = aceleração [ m/s2 ]
[ F ] = [ m ] . [ a ] = kg . m/s2 = N = newton
Verifica-se também esta lei na queda dos corpos. Sabe-sepela Cinemática que uma pedra em queda livre adquire movimentoacelerado com aceleração constante e igual a 9,8 m/s2, chamadaaceleração da gravidade.
A força com que a pedra é atraída para a Terra recebe onome de PESO.
Aplicando neste caso a equação fundamental, tem-se:
P = m . g formula de peso
P = pesom = massag = aceleração da gravidade
Desta fórmula deduz-se quegPm =
Levando este valor de m na equação fundamental da Dinâ-mica, resulta:
.agPF =
⇒ Sistema Técnico de Medidas MK*S:
M = metros [ m ]K* = quilograma-força [ kgf ou kp ]S = segundos [ s ]P e F medidos em kgf ou kpAceleração a em m/s2.
Esta é uma outra forma de se representar a equação funda-mental da Dinâmica.
Além do kgf, a força pode ser medida com as seguintesunidades: tonelada-forca ( tf ), Newton ( N ) e libra-força ( lbf ).
Equivalências: 1 tf = 1000 kgf ou kp1 lbf = 0,454 kgf ou kp
1 kgf ou kp = 9,8 N
3ª LEI – ( lei da igualdade entre ação e reação): a todaação se opõe uma reação igual e contrária.
v = constante v = 0 (repouso)
P
T
T
T
Polia
m P
N
m
a = constanteF
m

Tecnologia de Projeto I – 1o Ciclo de Mecânica
14
PROBLEMAS PROPOSTOS:
1 – Calcular a força capaz de imprimir uma aceleração de 0,3 m/s2 emum automóvel de peso igual a 2000 kgf.
2 – Qual é a intensidade da força aplicada nas rodas de um caminhãode 6000 kgf cujo motorista deseja freiá-lo com uma desaceleração de0,5 m/s2?
3 – Qual é o peso de um carro que para obter uma aceleração de 4,9m/s2 requer uma força de 300 kgf?
4 – Um edifício tem um elevador de 500 kgf. Calcular a tensão noscabos para uma aceleração de 0,5 m/s2, no movimento de ascenção.
5 – Um carro de 1,5 tf está parado. Calcular a força necessária paraque em 30s adquira a velocidade de 54 km/h.
6 – O projétil de um canhão pesa 25kgf. É lançado com velocidade de400 m/s. Qual a aceleração e a força aplicada pelos gases em expan-são no seu trajeto dentro do cano cujo comprimento é de 2 m?
______________________________________________________
PROBLEMAS PROPOSTOS:
1 – Calcular a força necessária par imprimir uma aceleração de 4,9m/s2 num carro de corrida de 800kgf de peso.
2 – Um carro de 980kgf está em movimento. Calcular a força aplicadana rodas para freia-lo com uma desaceleração de 2 m/s2.
3 – Qual o peso de um corpo que para adquirir uma aceleração de 2,45m/s2 requer uma força de 30kgf?
4 – No problema 3, calcular a aceleração do corpo quando a forçaaplicada for 40 kgf.
5 – Um bloco de 700kgf oferece uma resistência de 300kgf devido aoatrito com a superfície horizontal em que está apoiado. Calcular a forçanecessária para empurrá-lo com velocidade constante.
6 – No problema 5, calcular a nova força aplicada quando se desejaimprimir ao bloco uma aceleração 1,4 m/s2.
7 – O jato expelido por um foguete de 600 kgf de peso age com umaresultante vertical de 100kgf. Calcular a velocidade adquirida 12s apóso lançamento.
8 – O elevador de um edifício pesa 1 tf. Calcular a tensão nos cabosquando:
a – encontra-se parado;b – sobe com aceleração de 0,49 m/s2;c – continua subindo com velocidade constante de 2 m/s;d – é freiado no seu movimento de ascenção com uma desa-
celeração 2,45m/s2;e – desce com movimento acelerado de 1,96 m/s2;f – continua descendo com velocidade constante dde 2 m/s;g – é freiado com desaceleração de 4,9 m/s2.
9 – Uma bala de 24,5g sai do cano de um fuzil com a velocidade de500 m/s. Pede-se a força aplicada pelo explosivo sabendo-se quelevou 0,001 seg para percorrer o cano.
10 – Calcular a força tangencial necessária para fazer girar a 50 rpmum volante com diâmetro 1m e peso 980kgf em 10s.
11 – O elevador de uma mina é empregado no transporte vertical deminério num poço de 40 m de profundidade. Sabendo-se que o seupeso mais a carga transportada perfazem juntos 5 tf, e que não éaconselhável sobrecarregar o cabo com uma carga superior a 7,5tf,pede-se determinar qual o menor tempo em que pode ser feita, comsegurança, a ascenção.
Observações:
A aceleração da gravidade depende do lugar.
Em Paris, g = 9,81 m/seg2, no Equador g = 9,78 m/seg2 e nosPólos g = 9,83 m/seg2.
Esta variação da aceleração influi no peso, pois P = m . g
Isto já não acontece com a massa que se conserva constanteindependentemente da localidade.
Já foi visto no MK*S que a massa de um corpo pode sercalculada pela seguinte fórmula:
gPm = =
9,8m/skg = u.t.m.
(unidade técnica de massa)
Enquanto o peso é medido em kgf, a massa é medida emu.t.m. Nos cálculos técnicos costuma-se adotar g = 9,8 m/s2.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
15
FA
N
P
Sentido doMovimento
α
α
PV PH
N
FA
Tendência doMovimento
δ
F
N
r
FORÇA DE ATRITO
A força de atrito entre dois corpos em contato é tangente àsuperfície de contato e possui sentido oposto ao movimento relativoentre as superfícies.
Estudaremos dois tipos de atrito;
⇒ Atrito de Escorregamento;
⇒ Atrito de Rolamento.
Atrito de Escorregamento:
Manifesta-se quando uma superfície escorrega sobre a outra,é dirigida em sentido oposto ao movimento e, é devida a inevitávelrugosidade das superfícies em contato.
FA = µ . N
µ = coeficiente de atritoN = força normal [kgf ]
O deslocamento de um corpo é mais difícil no inicio quedurante o movimento.
N = PV = P . cos α FA = PH = P . sen α
µ .N = P . sen α
µ . P . cos α = P . sen α
µ = tg α
Podemos classificar o coeficiente de atrito em:
⇒ Estático: de repouso ou de saída;
⇒ Dinâmico: de movimento ou de regime.
O Coeficiente de atrito ( µ ) depende do material, do estadode polimento e lubrificação da superfície em contato,
mas não depende da área de contato.
Vejamos a seguir a tabela de atritos entre algumas superfí-cies em contato:
Tabela de coeficiente de atrito
µe
(estático)µd
(dinâmico)Materiaisem Contato
seco lubrif. seco lubrif.
Aço e aço 0,15 0,10 0,12 0,09
Aço e ferro fun-dido ou bronze 0,18 0,10 0,16 0,015
Bronze e bronze - - 0,20 0,15
Bronze ferrofundido - - 0,21 -
Ferro fundido eferro fundido - - 0,22 0,15
Aço e metalpatente 0,23 0,10 0,22 0,015
Observação: Desejando valores mais precisos, deveremos fazerexperimentos em condições o mais possível ao caso real.
Atrito de Rolamento
O atrito de rolamento é a resistência que se opõe ao rola-mento de um corpo cilíndrico ou esférico sobre uma superfície.
As causas que originam esta resistência não são bem defini-das. Parecem provir do seguinte:
Quando uma esfera ou cilindro roda sobre uma superfície, aforça atuante sobre eles produz uma depressão na superfície, geral-mente muito pequena, eu faz com que o contato não se dê mais porum ponto (esfera) ou uma reta (cilindro) e, sim, por uma zona de conta-to.
Tecnologia de Projeto I – 1o Ciclo de Mecânica
16
.
v
R
n
aC
FCentrifuga
FCentrípeta
800kgf
F
200kgf
F
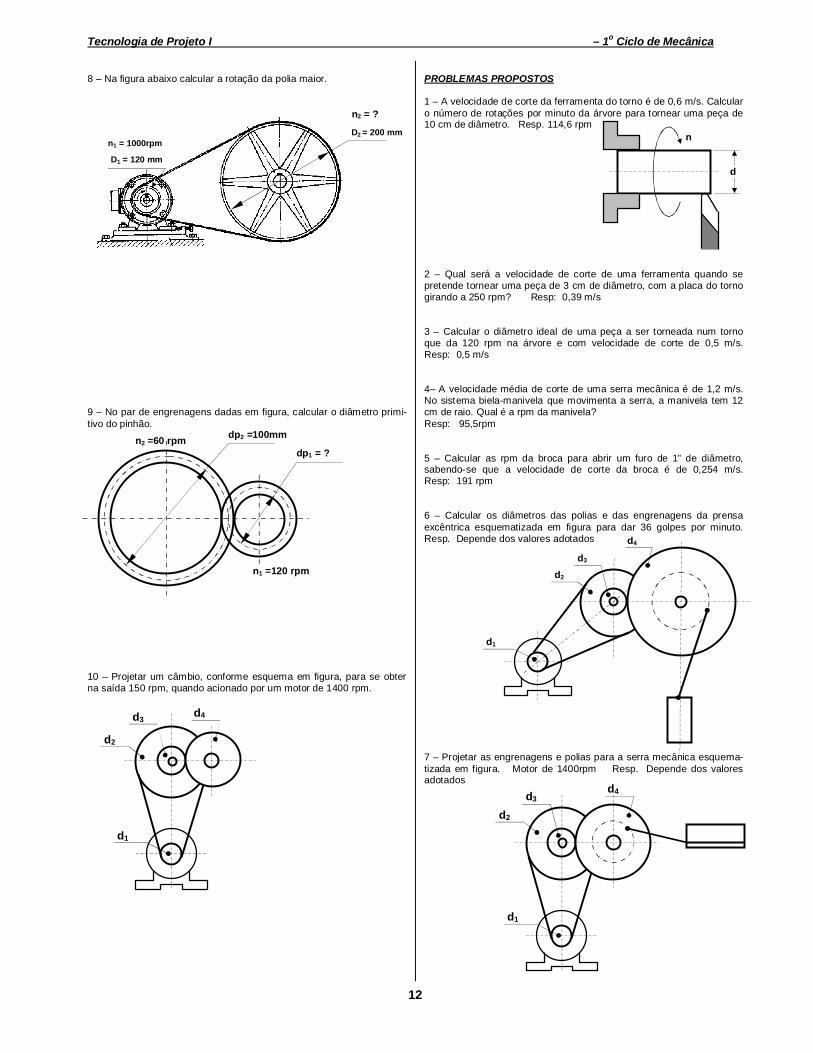
Durante o rolamento, a resultante das reações do plano, se desloca,para frente, de δ, formando com N um binário de momento [ N . δ ] aque se deve opor o momento [ F . r ].
Logo, temos a seguinte fórmula:
rN.F δ=
A condição para que o cilindro role se escorregar:
µδ
≥r
Valores práticos de δ
Aço/aço 0,005
Aço/concreto ouasfalto 1,0
Aço/madeira 0,1
Aço/terra batida 4,0
Esferas/anéis(rolamento) 0,001
Exercício:
1-) Um prisma de aço de 800kgf desliza sobre roletes de aço comdiâmetro de 30mm e estes rolam sobre um plano também de aço.Determinar:a-) a força de rolamento;b-) a força de escorregamento;c-) o diâmetro mínimo dos roletes para que haja rolamento e não escor-regamento.
2-) Uma embalagem de madeira de 200kgf desliza sobre roletes comdiâmetro de 11cm e estes rolam sobre um plano de concreto. Deter-mine a força F de rolamento.
______________________________________________________
FORÇAS CENTRÍPETA E CENTRÍFUGA
Uma esfera de aço em movimento circular, presa a um fio,está sujeita a uma força radial que tende atraí-la para o centro dacircunferência descrita. Esta força recebe o nome de força centrípeta.
Pelo princípio da ação e reação, a esfera reage com umaforça da mesma intensidade, mas que tende afasta-la do centro datrajetória. Esta é a força centrífuga.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
17
Sabe-se pela Cinemática que a aceleração centrípeta é dadapela seguinte fórmula:
rva
2
C =
Substituindo-se este valor da aceleração na equação funda-mental da Dinâmica, tem-se:
g.rP.vF
2
C =
P = peso v = velocidade
r = raio da circunferência
Que fornece o valor da força centrífuga Fc
A força centrífuga é muito importante em certos aparelhos,tais como: bombas centrífugas, reguladores Watt, centrífugadoras, etc.
PROBLEMAS PROPOSTOS:
1 – Calcular a força centrífuga na esfera de 5 kgf quando gira comvelocidade tangencial de 6 m/s conforme figura abaixo.
2 – Calcular a nova força centrífuga do problema 1 quando o peso daesfera é aumentado para 8 kgf.
3 – Quando o raio da circunferência descrita pela esfera do problema 1for reduzido para 0,5 m, calcular a nova força centrífuga.
5 – A coroa de um volante de diâmetro 2m pesa 800kgf. Calcular asoma total da força centrífuga quando gira a 120 rpm.
6 – Calcular a inclinação interna que deve ter uma estrada numa curvade 80 m de raio, de modo que um veículo possa percorrê-la com segu-rança à velocidade de 20 m/s.
PROBLEMAS PROPOSTOS:
1 – Calcular a força centrífuga que age sobre uma esfera de2kgf, amarrada a um fio de 0,5 m de comprimento e animada de movi-mento circular uniforme de 60 rpm.
2 – No problema 1, calcular a máxima rotação que pode serdada ao movimento se a resistência do fio à tração é de 60kgf.
3 – Um carro de 2tf percorre uma estrada com a velocidadede 7 m/s. Calcular a força centrífuga quando o carro percorre umacurva de raio 100m.
4 – Um volante de 1 m de diâmetro médio está ligado ao seucubo por intermédio de 6 braços. Qual o esforço de tração em cadabraço, sabendo-se que o volante gira a 60 rpm e que a coroa pesa600kgf?
5 – Um patinador realiza as revoluções sobre uma pista degelo, plana e horizontal, descrevendo uma circunferência de raio 15mcom uma velocidade de 16 m/s. Determinar o ângulo por ele formadocom a vertical.
6 – Por meio de uma corda de 2dm de comprimento, faz-segirar um pequeno vaso aberto, contendo água. Efetuando-se a rotaçãonum plano vertical, pergunta-se a velocidade periférica mínima demodo a não haver queda d’água.
α

Tecnologia de Projeto I – 1o Ciclo de Mecânica
18
7 – Cada esfera do regulador watt em figura pesa 2kgf. Calcular o raio re a força centrífuga na rotação máxima de 240 rpm.
8 – Determinar com que velocidade uma esfera, suspensa por um fiode comprimento l = 0,25 m, deve girar em torno do eixo x de modo aformar um ângulo de 45º com este eixo.
PRESSÃOUm bloco apoiado sobre um plano horizontal tem seu peso
distribuído uniformemente ao longo da superfície de contato.
A força em cada unidade de área recebe o nome de pressãoe pode ser calculada pela seguinte fórmula:
AFp =
p = pressão em [ kgf/cm2 ]F = força em [ kgf ]
A = área em [ cm2 ]
Além de kgf/cm2 existem outras unidade de pressão: atmos-fera (atm), centímetro de mercúrio (cm Hg), bária (bar), libra por pole-gada quadrada (lib/inch), com as seguintes equivalências:
1 atm = 1,033 kgf/cm2 1 bar = 75,01 cm Hg1 atm = 76 cm Hg 1 kgf/cm2 = 14,22 lib/inch = 14,22psi
O cálculo de pressão é muito importante quando se quersaber a força exercida por um líquido ou gás sobre uma certa superfí-cie, tal como a pressão da água num cano, a pressão no fundo dorecipiente que contém um líquido, a força aplicada no êmbolo pelo gásnuma máquina a vapor, etc.
No caso dos líquidos, vale o Princípio de Pascal, que diz oseguinte:
“A pressão exercida sobre cera região de um líquido setransmite integralmente em todos os pontos desse líquido.”
Área do pistão menor: s = π.d2 /4Área do pistão maior S = π.D2 /4
Pelo Princípio de Pascal, a pressão no pistão menor é igualà pressão no pistão maior; são as forças f e F que diferem.
Pressão no pistão menor: p =sf =
/4df2π
Pressão no pistão maior: P =SF =
/4DF
2π
Logo:/4D
F/4d
f22 ππ
=
Donde se deduz a fórmula da pressão hidráulica:
22 DF
df
=
PROBLEMAS PROPOSTOS:
1 – Qual a pressão exercida por um peso de 50 kgf sobreuma superfície de 25 cm2?
2 – Calcular a força na haste do êmbolo em figura sabendo-se que apressão exercida pelo vapor é de 15 kgf/cm2. (d = 30 cm)

Tecnologia de Projeto I – 1o Ciclo de Mecânica
19
3 – Um recipiente cilíndrico contém gasolina até à altura de 500 cm.Calcular a pressão exercida no fundo do recipiente. Peso específicoda gasolina: γ = 800 kgf/m3
4 – A válvula de segurança de uma caldeira tem diâmetro de 8 cm eseu centro dista 10 cm do apoio. Calcular a distância x para que apressão máxima da caldeira seja de 5 atm sabendo-se que o peso P é50 kgf.
5 – Calcular a força f no pistão menor da prensa hidráulica em figurasabendo-se que o bloco A requer uma força F = 3 tf para ser esmaga-do. Dados: d= 5 cm e D = 20 cm.
______________________________________________________
PROBLEMAS PROPOSTOS:
1 – O peso total de uma máquina operatriz é de 2 tf. Calcular a pressãoexercida sobre o solo sabendo-se que sua base de apoio tem 500 cm2
de área.
2 – Na máquina a vapor em figura, calcular a pressão dovapor para se ter uma força F = 10000 kgf na haste do êmbolo.
3 – Na prensa hidráulica em figura, o diâmetro da bomba é de 1,6 cm edo êmbolo da prensa 32 cm; a alavanca que serve ao manobrador daprensa tem por braços 60 cm e 10 cm. Na extremidade da alavanca éexercida uma força de 12 kgf. Pede-se a força que a prensa podeexercer.
4 – Um depósito de água tem uma válvula na parte ascendente de umtubo lateral de 2 cm de diâmetro conforme figura. Esta válvula develevantar quando h for igual a 180 cm. Calcular o peso da válvula.
5 – Uma coluna de 12,4 tf tem um alicerce de concreto de 2 tfcom base quadrada. Calcular o lado deste quadrado sabendo-se que osolo suporta uma pressão admissível de 1 kgf/cm2.
______________________________________________________
TRABALHO
O trabalho T de uma força F é o produto da intensidade destaforça pelo deslocamento s do seu ponto de aplicação e pelo coseno doângulo ∝ formado entre a força e a direção do deslocamento.
T = F . d . cos α
O bloco em figura é puxado por uma força F que forma umângulo α com a direção do deslocamento.
Quando a força atua na própria direção do deslocamento, istoé, quando ∝ = 0, a fórmula se torna mais simples pois cos 0 =1.
T = F . d
F
α
F
d

Tecnologia de Projeto I – 1o Ciclo de Mecânica
20
Quando a direção da força é perpendicular ao deslocamentoo ângulo ∝ = 900 e cos 900 = 0, resultando: T = 0. Logo, forçaperpendicular ao deslocamento não realiza trabalho.
Examinando a fórmula, nota-se que o trabalho não dependeda velocidade ou do tempo em que a força é aplicada.
A força é medida em kgf e o deslocamento em metros. Dessaforma o trabalho será expresso em quilogrâmetro (kgf.m). Além destaunidade existem as seguintes: erg e joule.
1 kgf.m = 98000000 ergEquivalências:
1 kgf.m = 9,8 joule
PROBLEMAS PROPOSTOS:
1 – Calcular o trabalho realizado pela força F = 50 kgf para puxar obloco em figura a uma distância de 6 m.
2 – O bloco da figura abaixo requer uma força F = 60 kgf para serconduzido sobre o plano inclinado. Qual o trabalho desenvolvido pelaforça ao longo de 6 m?
3 – Calcular o trabalho realizado pela força F = 70 kgf para deslocar obloco da figura abaixo a uma distância de 10 m. A força forma umângulo de 30º com a direção do deslocamento.
4 – Qual o trabalho realizado pela força F para deslocar o bloco aolongo do plano inclinado até à posição indicada na figura?
5 – O martelo de um bate-estaca pesa 500 kgf. Calcular o trabalhonecessário para levantá-lo à altura de 4m.
6 – Uma cidade consome 500 mil litros de água por dia. Estaágua é recalcada de uma empresa a um reservatório, cujo desnível éde 15 m. Qual é o trabalho realizado pelo motor da bomba durante umdia?
7 – Calcular o trabalho de um elevador para transportar 50tijolos a uma altura de 20 m. Considerar que cada tijolo pesa mais oumenos 1,3 kgf.
______________________________________________________
RENDIMENTO
Parte do trabalho fornecida a uma máquina se dissipa devidoàs resistências passivas (atrito, forças que se opõem ao movimentoetc.) e o restante é aproveitado para satisfazer a finalidade da máquina.
Trabalho fornecido é chamado trabalho motor e o trabalhoaproveitado é chamado trabalho útil.
Chama-se rendimento η (eta) a relação entre o trabalho útil(Tu) e o trabalho motor (Tm).
M
U
TT
=η
F F
6m
F
30o
F
10m

Tecnologia de Projeto I – 1o Ciclo de Mecânica
21
Como o trabalho motor é sempre maior que o trabalho ú-til,verifica-se pela fórmula que o rendimento é sempre menor que 1.
Costuma-se representar o rendimento em porcentagem ouem número decimal. Assim, uma máquina com rendimento η = 0,7,significa que 70% do trabalho motor é aproveitado com trabalho útil.
É bastante vantajoso construir máquinas de máximo rendi-mento possível, o que se consegue diminuindo o atrito entre as peçascom uso de lubrificantes.
Exemplos:
1 – Qual o rendimento de uma máquina que recebe um trabalho motorTm = 200 kgf.m e desenvolve sob forma de trabalho útil Tu = 160 kgf.m?
2 – Calcular o trabalho motor de uma furadeira de 80% de rendimentopara furar uma chapa que requer um trabalho útil de 320 kgf.m.
______________________________________________________
POTÊNCIA
A Potencia de uma máquina é o trabalho que ela é capaz deproduzir na unidade de tempo.
Designando de N a potência e T o trabalho realizado duranteo tempo t, tem-se a seguinte fórmula:
tT=
Medindo-se T em [ kg.m ] e t em segundos, resulta N em [kg.m/s ] . Além dessas unidades usa-se o watt (joule/seg), quilowatt(kw), cavalo vapor (CV), horse power (HP) e pferdestärke (PS).
Equivalências:
1 CV = 75 kgm/seg = 736 watt1 kgm/seg = 9,81 watt 1 HP = 76,04 kgm/seg = 746 watt1 kw = 1000 watt 1 PS = 75 kgm/seg = 736 watt
Na prática, costuma-se confundir as unidades CV, HP e PS,dividindo-se a fórmula da trabalho por 75:
75.tT= [ CV, HP ]
Observações:Em todas as máquinas, parte da trabalho fornecida se dissipa
por atrito, e somente uma parte é aproveitada, chamada trabalho útil. Arelação entre estas trabalhos chama-se rendimento.
O trabalho produzido durante um certo tempo, depende datrabalho da máquina: quanto maior a trabalho, maior será o volume detrabalho realizado durante o referido tempo.
OUTRAS FÓRMULAS DA POTÊNCIA:
Substituindo T, na fórmula do trabalho por F . s, conforme adefinição de trabalho tem-se:
75.tF.s
=
Se o movimento for uniforme, sabe-se pela Cinemática que s= v.t, logo:
75F.v
=
Quando o movimento é circular,6000
.r.n2.v π= com v em
m/s, r em cm e n em rpm.
71620F.r.n
6000.r.n2.
75F
==π.
Na fórmula anterior o produto F . r representa o momentotorcedor que é indicado com Mt, logo:
71620.r.nMt=
Isolando M t no primeiro membro, chega-se à seguinte fórmu-la:
nN71620.Mt = [ kgf.cm ]
Esta é a expressão mais conhecida e usada para o cálculode motores, polias, engrenagens, eixos, etc.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
22
PROBLEMAS PROPOSTOS:
1 – Calcular o momento torcedor no eixo de um motor de 2 HP a 1000rpm.
2 – Calcular a trabalho necessária para levantar um bloco de 50 kgf auma altura de 1,5 m em 2s.
3 – Um elevador de carga tem as seguintes características: velocidadede subida: v = 6 m/s carga total: 20 tf contra-peso: 2,5 tfPede-se a potência do motor, admitindo-se um rendimento de 70%.
4 – Calcular a trabalho da manivela em figura quando acionada a 30rpm.
5 – Calcular a carga que o sarilho em figura pode elevar com a veloci-dade de 0,5 m/s. Admitir que o rendimento do conjunto (sarilho) seja η= 80%.
6 – Calcular a trabalho de uma bomba destinada a encher uma caixad’água de 50 m3 em 2 h, sabendo-se que o desnível é de 15 m. Admitirque o rendimento do conjunto, incluindo perdas de carga seja de 50%.
7 – Que rotação deverá apresentar um eixo acionado por um motor de3 HP para ter um momento torcedor de 1000 kgf.cm?
8 – Calcular o raio de uma manivela acionada por uma força de 15 kgfpara se ter um momento torcedor de 300 kgf.cm.
9 – No par de engrenagens em figura, calcular o momento torcedor dacoroa, sabendo-se que a relação de transmissão é 1:2,5. Admitir ren-dimento de 90%.
PROBLEMAS PROPOSTOS:
1 – Devendo-se levantar um peso de 500 kgf á altura de 10 m em 30s,qual a trabalho necessária?
2 – Transformar 225 kg.m/s em watt, kw e CV.
3 – Com que velocidade um motor de 5 kw consegue levantar um pesode 10 kgf?
4 – Quatro pessoas juntas tiram de um poço de 7,3 m de profundidadeum recipiente que contém 200 litros de água em 10s. Calcular a traba-lho de cada pessoa.
5 – Calcular a trabalho de uma bomba destinada a reclcar 10 litros deágua por segundo a uma altura de 30 m. Considerar rendimento de60%.6 – Determinar o esforço de tração de uma locomotiva que absorveuma trabalho de 500 CV para conduzir um trem à velocidade de 36km/h.
7 – Calcular a potencia útil de uma turbina alimentada por um reserva-tório com vazão de 200 l/seg e altura de 15 m. Considerar rendimentode 75%.
8 – Calcular o momento torcedor de um eixo que gira acionado por ummotor de 5 HP a 100 rpm.
9 – Que trabalho deverá ter um motor para acionar uma polia a 1000rpm, cujo momento torcedor é de 100 kg.cm?
10 – Um malho pesa 300 kg e dá 50 golpes por minuto, caindo de umaaltura de 0,70 m. Calcular a trabalho necessário.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
23
ELEMENTOS DE MÀQUINAS – IPARTE 2
Introdução aos elementos de fixação
Elementos de fixação
Se você vai fazer uma caixa de papelão, possivelmente usará cola, fitaadesiva ou grampos para unir as partes da caixa. Por outro lado, sevocê pretende fazer uma caixa ou engradado de madeira, usará pregosou taxas para unir as partes.
Na mecânica é muito comum a necessidade de unir peças comochapas, perfis e barras. Qualquer construção, por mais simplesque seja, exige união de peças entre si.
Entretanto, em mecânica as peças a serem unidas, exigem elementos pró-prios de união que são denominados elementos de fixação.
Numa classificação geral, os elementos de fixação mais usadosem mecânica são: rebites, pinos, cavilhas, parafusos, porcas,arruelas, chavetas etc.
Você vai estudar cada um desses elementos de fixação para conhecersuas características, o material de que é feitos, suas aplicações, repre-sentação, simbologia e alguns cálculos necessários para seu emprego.
A união de peças feita pelos elementos de fixação pode ser de doistipos: móvel ou permanente.
No tipo de união móvel, os elementos de fixação podem ser colocadosou retirados do conjunto sem causar qualquer dano às peças queforam unidas. É o caso, por exemplo, de uniões feitas com parafusos,porcas e arruelas.
No tipo de união permanente, os elementos de fixação, umavez instalados, não podem ser retirados sem que fiquem inutilizados. Éo caso, por exemplo, de uniões feitas com rebites e soldas.
Tanto os elementos de fixação móvel como os elementos de fixaçãopermanente devem ser usados com muita habilidade e cuidado porquesão, geralmente, os componentes mais frágeis da máquina. Assim,para projetar um conjunto mecânico é preciso escolher o elemento defixação adequado ao tipo de peças que irão ser unidas ou fixadas. Se,por exemplo, unirmos peças robustas com elementos de fixação fracose mal planejados, o conjunto apresentará falhas e poderá ficar inutiliza-do. Ocorrerá, portanto, desperdício de tempo, de materiais e de recur-sos financeiros.
Ainda é importante planejar e escolher corretamente os elementos defixação a serem usados para evitar concentração de tensão nas peçasfixadas. Essas tensões causam rupturas nas peças por fadiga do materi-al, isto é, a queda de resistência ou enfraquecimento do material devido atensões e constantes esforços.
Fadiga de material significa queda de resistência ou enfraqueci-mento do material devido a tensões e constantes esforços.
Tipos de elementos de fixação
Para você conhecer melhor alguns elementos de fixação, apresenta-mos a seguir uma descrição simples de cada um deles.
Rebite
O rebite é formado por um corpo cilíndrico e uma cabeça.É fabricado em aço, alumínio, cobre ou latão. É usado para fixaçãopermanente de duas ou mais peças.
Hoje em dia não a mais a utilização de tipo de junção
Pino
O pino une peças articuladas. Nesse tipo de união, uma das peçaspode se movimentar por rotação.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
24
CavilhaA cavilha une peças que não são articuladas entre si.
Contrapino ou cupilhaO contrapino ou cupilha é uma haste ou arame com forma semelhanteà de um meio-cilindro, dobrado de modo a fazer uma cabeça circular etem duas pernas desiguais. Introduz-se o contrapino ou cupilha numfuro na extremidade de um pino ou parafuso com porca castelo. Aspernas do contrapino são viradas para trás e, assim, impedem a saídado pino ou da porca durante vibrações das peças fixadas.
cupilha ou contrapino
ParafusoO parafuso é uma peça formada por um corpo cilíndrico roscado e umacabeça, que pode ter várias formas.
PorcaA porca tem forma de prisma, de cilindro etc. Apresenta um furo rosca-do. Através desse furo, a porca é atarraxada ao parafuso.
Arruela
A arruela é um disco metálico com um furo no centro. O corpo do para-fuso passa por esse furo.
Anel elástico
O anel elástico é usado para impedir deslocamento de eixos. Serve,também, para posicionar ou limitar o movimento de uma peça quedesliza sobre um eixo.
Chaveta
A chaveta tem corpo em forma prismática ou cilíndrica que pode terfaces paralelas ou inclinadas, em função da grandeza do esforço e dotipo de movimento que deve transmitir.
Alguns autores classificam a chaveta como elementos de fixação eoutros autores, como elementos de transmissão. Na verdade, a chave-ta desempenha as duas funções.
Pinos e cupilhasPinos ranhurados
Os pinos têm a finalidade de alinhar ou fixar os elementos de máquinas,permitindo uniões mecânicas, ou seja, uniões em que se juntam duas oumais peças, estabelecendo, assim, conexão entre elas.
Veja os exemplos abaixo.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
25
Os pinos ranhurados, também, são chamados pinos estriados, pinosentalhados ou, ainda, rebite entalhado. A diferenciação entre pinos e ospinos ranhurados leva em conta o formato dos elementos e suas apli-cações. Por exemplo, pinos são usados para junções de peças que searticulam entre si e os pinos ranhurados são utilizadas em conjuntossem articulações; indicando pinos com entalhes externos na sua super-fície. Esses entalhes é que fazem com que o conjunto não se movi-mente. A forma e o comprimento dos entalhes determinam os tipos depinos ranhurados.
Pinos e pinos ranhurados se diferenciam pelos seguintes fatores:• utilização• forma• tolerâncias de medidas• acabamento superficial• material• tratamento térmico

Tecnologia de Projeto I – 1o Ciclo de Mecânica
26
Pinos
Os pinos são usados em junções resistentes a vibrações. Há váriostipos de pino, segundo sua função.
Tipo Função
1. Pino cônico Ação de centragem.
2. Pino cônicocom hasteroscada
A ação de retirada do pino de furos cegos éfacilitada por um simples aperto da porca.
3. Pino cilíndricoRequer um furo de tolerâncias rigorosas e éutilizado quando são aplicadas as forças cortan-tes.
4. Pino elásticoou pino tubu-lar partido
Apresenta elevada resistência ao corte e podeser assentado em furos, com variação de diâme-tro considerável.
5. Pino de guiaServe para alinhar elementos de máquinas. A distân-cia entre os pinos deve ser bem calculada para evitaro risco de ruptura.
1 - pino cônico 2 - pino cônico com rosca 3 - pino cilíndrico4 - pino elástico
pino guia
Para especificar pinos deve-se levar em conta seu diâmetro nominal,seu comprimento e função do pino, indicada pela respectiva norma.
Exemplo: Um pino de diâmetro nominal de 15mm, com comprimentode 20mm, a ser utilizado como pino cilíndrico, é designado: pino côni-co: 10 x 60 DIN 1.
Pinos ranhurados
O pino ranhurado é uma peça cilíndrica, fabricada em aço,cuja superfície externa recebe três entalhes que formam ressaltos. Aforma e o comprimento dos entalhes determinam os tipos de pinoranhurado. Sua fixação é feita diretamente no furo aberto por broca,dispensando-se o acabamento e a precisão do furo alargado.
Classificação de pinos ranhurados
pinos ranhurados
Segue uma tabela de classificação dos pinos ranhurados segundotipos, normas e utilização.
Tipo Norma Utilização
KS1 DIN 1471 Fixação e junção.
KS2 DIN 1472 Ajustagem e articulação.
KS3 DIN 1473
Fixação e junção em casos de aplicação de
forças variáveis e simétricas, bordas depeças de ferro fundido.
KS4 DIN 1474 Encosto e ajustagem.
KS6 e 7 – Ajustagem e fixação de molas e correntes.
KS9 –Utilizado nos casos em que se tem neces-sidade de puxar o pino ranhurado do furo.
KS10 –Fixação bilateral de molas de tração ou deeixos de roletes.
KS8 DIN 1475 Articulação de peças.
KS11 e12
– Fixação de eixos de roletes e manivelas.
KN4 DIN 1476
KN5 DIN 1477Fixação de blindagens, chapas e dobradi-
ças sobre metal
KN7 –Eixo de articulação de barras de estrutu-ras, tramelas, ganchos, roletes e polias.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
27
Cupilha ou contrapino
Cupilha é um arame de secção semi-circular, dobrado de modo aformar um corpo cilíndrico e uma cabeça.
Sua função principal é a de travar outros elementos de máquinas comoporcas.
Pino cupilhado
Nesse caso, a cupilha não entra no eixo, mas no próprio pino. O pinocupilhado é utilizado como eixo curto para uniões articuladas ou parasuportar rodas, polias, cabos, etc.
pino sem cabeça
pino roscado
pino com cabeça
Parafusos I
Introdução
Todo parafuso tem rosca de diversos tipos. Para você compreendermelhor a noção de parafuso e as suas funções, vamos, antes, conhe-cer roscas.
Roscas
Rosca é um conjunto de filetes em torno de uma superfície cilíndrica.
As roscas podem ser internas ou externas. As roscas internas encon-tram-se no interior das porcas. As roscas externas se localizam nocorpo dos parafusos.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
28
As roscas permitem a união e desmontagem de peças.
Permitem, também, movimento de peças. O parafuso que movimenta amandíbula móvel da morsa é um exemplo de movimento de peças.
Os filetes das roscas apresentam vários perfis. Esses perfis, sempreuniformes, dão nome às roscas e condicionam sua aplicação.
Tipos de roscas (perfis) Perfil de filete - Aplicação
Parafusos e porcas de fixação na união de peças.Ex.: Fixação da roda do carro.
Parafusos que transmitem movimento suave e uniforme.Ex.: Fusos de máquinas.
Parafusos de grandes diâmetros sujeitos a grandes esforços.Ex.: Equipamentos ferroviários.
Parafusos que sofrem grandes esforços e choques.Ex.: Prensas e morsas.
Parafusos que exercem grande esforço num só sentido.
Sentido de direção da rosca
Dependendo da inclinação dos filetes em relação ao eixo do parafuso,as roscas ainda podem ser direitas e esquerdas. Portanto, as roscaspodem ter dois sentidos: à direita ou à esquerda.
Na rosca direita, o filete sobe da direita para a esquerda, conforme afigura.
Na rosca esquerda, o filete sobe da esquerda para a direita, conformea figura.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
29
Nomenclatura da rosca
Independentemente da sua aplicação, as roscas têm os mesmos ele-mentos, variando apenas os formatos e dimensões.
P = passo (em mm)
d = diâmetro externo
d1 = diâmetro interno
d2 = diâmetro do flanco
a = ângulo do filete
f = fundo do filete
i = ângulo da hélice
c = crista
D = diâmetro do fundo da porca
D1 = diâmetro do furo da porca
h1 = altura do filete da porca
h = altura do filete do parafuso
Roscas triangulares
As roscas triangulares classificam-se, segundo o seu perfil, em trêstipos:• rosca métrica• rosca whitworth• rosca americana
Para nosso estudo, vamos detalhar apenas dois tipos: a métrica e awhitworth.
Rosca métrica ISO normal e rosca métrica ISO fina NBR 9527.
Ângulo do perfil da rosca: a = 60º
Diâmetro menor do parafuso (∅ do núcleo):d1 = d - 1,2268P
Diâmetro efetivo do parafuso (∅ médio):d2 = D2 = d - 0,6495P
Folga entre a raiz do filete da porca e a crista do filete do parafuso:f = 0,045P
Diâmetro maior da porca: D = d + 2f
Diâmetro menor da porca (furo): D1 = d - 1,0825P
Diâmetro efetivo da porca (∅ médio): D2 = d2
Altura do filete do parafuso: he = 0,61343P
Raio de arredondamento da raiz do filete do parafuso:rre = 0,14434P
Raio de arredondamento da raiz do filete da porca:rri = 0,063P
A rosca métrica fina, num determinado comprimento, possui maiornúmero de filetes do que a rosca normal. Permite melhor fixação darosca, evitando afrouxamento do parafuso, em caso de vibração demáquinas. Exemplo: em veículos.
Rosca Whitworth normal - BSW e rosca Whitworth fina - BSF
Fórmulas:A = 55º P= 1” / no de fios
hi = he = 0,6403P rri =rre = 0,1373P
d=D d1 = d - 2he D2 = d2 = d - he

Tecnologia de Projeto I – 1o Ciclo de Mecânica
30
A fórmula para confecção das roscas Whitworth normal e fina é amesma. Apenas variam os números de filetes por polegada.Utilizando as fórmulas anteriores, você obterá os valores para cadaelemento da rosca.Para facilitar a obtenção desses valores, apresentamos a seguir astabelas das roscas métricas de perfil triangular normal e fina e Whitwor-th normal - BSW e Whitworth fina - BSF.
Tabela de Roscas ver Anexo – 1, 2 e 3.
Parafusos II
Parafusos
Parafusos são elementos de fixação, empregados na união não per-manente de peças, isto é, as peças podem ser montadas e desmonta-das facilmente, bastando apertar e desapertar os parafusos que asmantêm unidas.
Os parafusos se diferenciam pela forma da rosca, da cabeça, da hastee do tipo de acionamento.
ObservaçãoO tipo de acionamento está relacionado com o tipo de cabeça do para-fuso. Por exemplo, um parafuso de cabeça sextavada é acionado porchave de boca ou de estria.
Em geral, o parafuso é composto de duas partes: cabeça e corpo.
O corpo do parafuso pode ser cilíndrico ou cônico, totalmente roscadoou parcialmente roscado. A cabeça pode apresentar vários formatos;porém, há parafusos sem cabeça.
Cilíndrico Cônico
Prisioneiro
Há uma enorme variedade de parafusos que podem ser diferenciadospelo formato da cabeça, do corpo e da ponta. Essas diferenças, deter-minadas pela função dos parafusos, permite classificá-los em quatrograndes grupos: parafusos passantes, parafusos não-passantes, para-fusos de pressão, parafusos prisioneiros.
Parafusos passantesEsses parafusos atravessam, de lado a lado, as peças a serem unidas,passando livremente nos furos.
Dependendo do serviço, esses parafusos, além das porcas, utilizamarruelas e contraporcas como acessórios.
Os parafusos passantes apresentam-se com cabeça ou sem cabeça.
Parafusos não-passantes
São parafusos que não utilizam porcas. O papel de porca é desempe-nhado pelo furo roscado, feito numa das peças a ser unida.
Parafusos de pressão
Esses parafusos são fixados por meio de pressão. A pressão é exerci-da pelas pontas dos parafusos contra a peça a ser fixada.
Os parafusos de pressão podem apresentar cabeça ou não.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
31
Parafusos prisioneiros
São parafusos sem cabeça com rosca em ambas as extremidades,sendo recomendados nas situações que exigem montagens e desmon-tagens freqüentes. Em tais situações, o uso de outros tipos de parafu-sos acaba danificando a rosca dos furos.
As roscas dos parafusos prisioneiros podem ter passos diferentes ousentidos opostos, isto é, um horário e o outro anti-horário.
Para fixarmos o prisioneiro no furo da máquina, utilizamos uma ferra-menta especial.
Caso não haja esta ferramenta, improvisa-se um apoio com duas por-cas travadas numa das extremidades do prisioneiro.
Após a fixação do prisioneiro pela outra extremidade, retiram-se asporcas.
A segunda peça é apertada mediante uma porca e arruela, aplicadas àextremidade livre do prisioneiro.
O parafuso prisioneiro permanece no lugar quando as peças são des-montadas.
Vimos uma classificação de parafusos quanto à função que eles exer-cem. Veremos, a seguir, alguns tipos de parafusos.
Segue Anexo – 4 síntese com características da cabeça, do corpo,das pontas e com indicação dos dispositivos de atarraxamento.
Segue Anexo - 5 com a ilustração dos tipos de parafusos em suaforma completa.
Ao unir peças com parafusos, o profissional precisa levar em conside-ração quatro fatores de extrema importância:• Profundidade do furo broqueado;• Profundidade do furo roscado;• Comprimento útil de penetração do parafuso;• Diâmetro do furo passante.
Esses quatro fatores se relacionam conforme mostram as figuras e atabela a seguir.
furo broqueado diâmetro do furo passante
furo roscado parafuso inserido no furo roscado
∅ - diâmetro do furo broqueadod - diâmetro da roscaA - profundidade do furo broqueadoB - profundidade da parte roscadaC - comprimento de penetração do parafusod1 - diâmetro do furo passante
Fatores a considerar ao unir peças com parafusos
MaterialProfundidade dofuro broqueado
A
Profundidadeda parte rosca-
daB
Comprimentode penetra-
ção do para-fusoC
Diâmetrodo furo
passanted1
aço 2 d 1,5 d 1 d
ferrofundido 2,5 d 2 d 1,5 d
bronze,latão 2,5 d 2 d 1,5 d
alumínio 3 d 2,5 d 2 d
1,06 d
ExemploDuas peças de alumínio devem ser unidas com um parafuso de 6mm dediâmetro. Qual deve ser a profundidade do furo broqueado? Qual deveser a profundidade do furo roscado? Quanto o parafuso deverá pene-trar? Qual é o diâmetro do furo passante?
Solução
a) Procura-se na tabela o material a ser parafusado, ou seja, o alumí-nio.
b) A seguir, busca-se na coluna profundidade do furo broquea-do a relação a ser usada para o alumínio. Encontra-se o valor3d. Isso significa que a profundidade do furo broqueado deveráser três vezes o diâmetro do parafuso, ou seja: 3 x 6mm =18mm.
c) Prosseguindo, busca-se na coluna profundidade do furo rosca-do a relação a ser usada para o alumínio. Encontra-se o valor2,5d. Logo, a profundidade da parte roscada deverá ser: 2,5 x6mm = 15mm.
d) Consultando a coluna comprimento de penetração do parafu-so, encontra-se a relação 2d para o alumínio.Portanto: 2 x 6mm = 12mm. O valor 12mm deverá ser o compri-mento de penetração do parafuso.
e) Finalmente, determina-se o diâmetro do furo passante por meio darelação 1,06d. Portanto: 1,06 x 6mm = 6,36mm.
Se a união por parafusos for feita entre materiais diferentes, os cálculosdeverão ser efetuados em função do material que receberá a rosca.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
32
Parafusos III
Introdução
Até agora você estudou classificação geral dos parafusos quanto àfunção que eles exercem e alguns fatores a serem considerados naunião de peças.
Você vai estudar, de forma mais aprofundada, alguns tipos de parafu-sos bastante usados em mecânica.
Parafuso de cabeça sextavada
Em desenho técnico, esse parafuso é representado da seguinte forma:
d = diâmetro do parafuso;k = altura da cabeça (0,7 d);s = medida entre as faces paralelas do sextavado (1,7 d);e = distância entre os vértices do sextavado (2 d);L = comprimento útil (medidas padronizadas);b = comprimento da rosca (medidas padronizadas);R = raio de arredondamento da extremidade do corpo do parafuso.
ObservaçãoAs medidas das partes dos parafusos são proporcionais ao diâmetro doseu corpo.
AplicaçãoEm geral, esse tipo de parafuso é utilizado em uniões em que se ne-cessita de um forte aperto da chave de boca ou estria.
Esse parafuso pode ser usado com ou sem rosca.
Quando usado sem rosca, o rosqueamento é feito na peça.
Parafusos com sextavado interno
• De cabeça cilíndrica com sextavado interno (Allen). Em desenhotécnico, este tipo de parafuso é representado na seguinte forma:
onde:
A = d = altura da cabeça do parafuso;e = 1,5 d = diâmetro da cabeça;t = 0,6 d = profundidade do encaixe da chave;s = 0,8 d = medida do sextavado interno;d = diâmetro do parafuso.
AplicaçãoEste tipo de parafuso é utilizado em uniões que exigem um bom aperto,em locais onde o manuseio de ferramentas é difícil devido à falta deespaço.
Esses parafusos são fabricados em aço e tratados termicamente paraaumentar sua resistência à torção.
Geralmente, este tipo de parafuso é alojado em um furo cujas propor-ções estão indicadas na tabela da página seguinte.
Tecnologia de Projeto I – 1o Ciclo de Mecânica
33
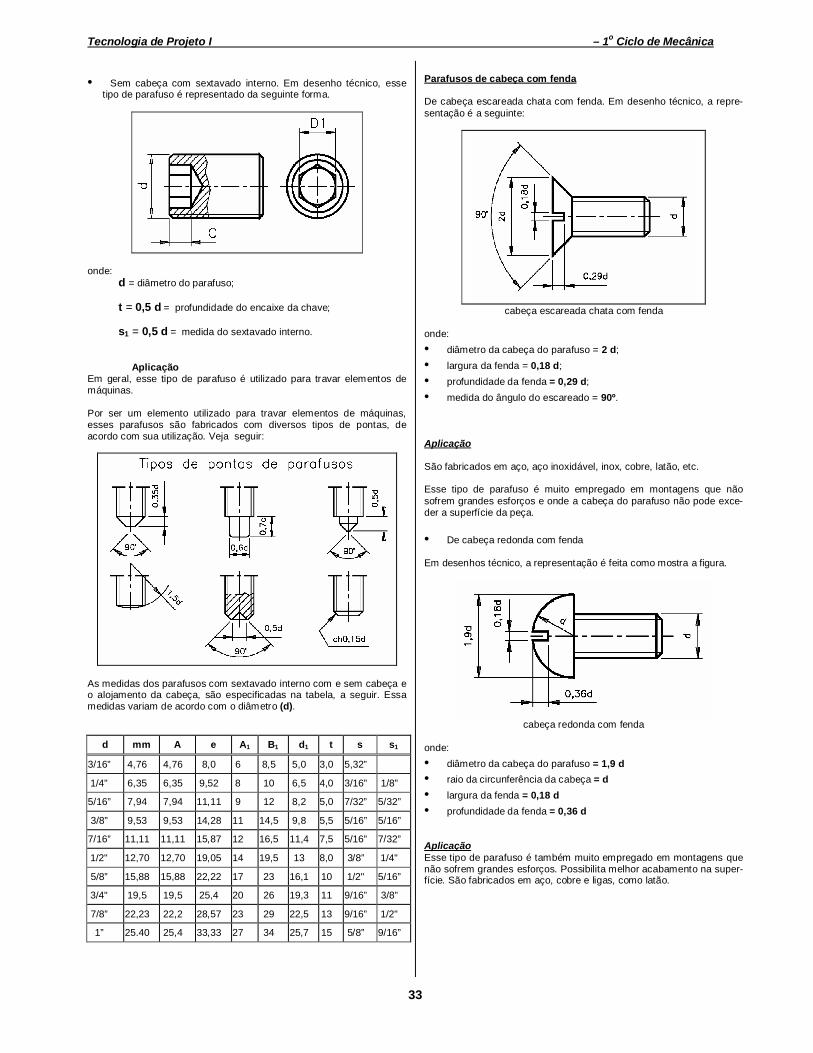
• Sem cabeça com sextavado interno. Em desenho técnico, essetipo de parafuso é representado da seguinte forma.
onde:d = diâmetro do parafuso;
t = 0,5 d = profundidade do encaixe da chave;
s1 = 0,5 d = medida do sextavado interno.
AplicaçãoEm geral, esse tipo de parafuso é utilizado para travar elementos demáquinas.
Por ser um elemento utilizado para travar elementos de máquinas,esses parafusos são fabricados com diversos tipos de pontas, deacordo com sua utilização. Veja seguir:
As medidas dos parafusos com sextavado interno com e sem cabeça eo alojamento da cabeça, são especificadas na tabela, a seguir. Essamedidas variam de acordo com o diâmetro (d).
d mm A e A1 B1 d1 t s s1
3/16” 4,76 4,76 8,0 6 8,5 5,0 3,0 5,32”
1/4" 6,35 6,35 9,52 8 10 6,5 4,0 3/16” 1/8”
5/16” 7,94 7,94 11,11 9 12 8,2 5,0 7/32” 5/32”
3/8” 9,53 9,53 14,28 11 14,5 9,8 5,5 5/16” 5/16”
7/16” 11,11 11,11 15,87 12 16,5 11,4 7,5 5/16” 7/32”
1/2" 12,70 12,70 19,05 14 19,5 13 8,0 3/8” 1/4"
5/8” 15,88 15,88 22,22 17 23 16,1 10 1/2" 5/16”
3/4" 19,5 19,5 25,4 20 26 19,3 11 9/16” 3/8”
7/8” 22,23 22,2 28,57 23 29 22,5 13 9/16” 1/2"
1” 25.40 25,4 33,33 27 34 25,7 15 5/8” 9/16”
Parafusos de cabeça com fenda
De cabeça escareada chata com fenda. Em desenho técnico, a repre-sentação é a seguinte:
cabeça escareada chata com fenda
onde:• diâmetro da cabeça do parafuso = 2 d;• largura da fenda = 0,18 d;• profundidade da fenda = 0,29 d;• medida do ângulo do escareado = 90º.
Aplicação
São fabricados em aço, aço inoxidável, inox, cobre, latão, etc.
Esse tipo de parafuso é muito empregado em montagens que nãosofrem grandes esforços e onde a cabeça do parafuso não pode exce-der a superfície da peça.
• De cabeça redonda com fenda
Em desenhos técnico, a representação é feita como mostra a figura.
cabeça redonda com fenda
onde:• diâmetro da cabeça do parafuso = 1,9 d• raio da circunferência da cabeça = d• largura da fenda = 0,18 d• profundidade da fenda = 0,36 d
AplicaçãoEsse tipo de parafuso é também muito empregado em montagens quenão sofrem grandes esforços. Possibilita melhor acabamento na super-fície. São fabricados em aço, cobre e ligas, como latão.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
34
De cabeça cilíndrica boleada com fendaEm desenho técnico, a representação é feita como mostra a figura.
onde:•diâmetro da cabeça do parafuso = 1,7 d• raio da cabeça = 1,4 d•comprimento da parte cilíndrica da cabeça = 0,66 d• largura da fenda = 0,18 d•profundidade da fenda = 0,44 d
Aplicação
São utilizados na fixação de elementos nos quais existe a possibilidadede se fazer um encaixe profundo para a cabeça do parafuso, e a ne-cessidade de um bom acabamento na superfície dos componentes.Trata-se de um parafuso cuja cabeça é mais resistente do que asoutras de sua classe. São fabricados em aço, cobre e ligas, comolatão.
• De cabeça escareada boleada com fenda
cabeça escareada boleada com fenda
onde:• diâmetro da cabeça do parafuso = 2 d;• raio da cabeça do parafuso = 2 d;• largura da fenda = 0,18 d;profundidade da fenda 0,5 d.
AplicaçãoSão geralmente utilizados na união de elementos cujas espessurassejam finas e quando é necessário que a cabeça do parafuso fiqueembutida no elemento. Permitem um bom acabamento na superfície.São fabricados em aço, cobre e ligas como latão.
Parafusos com rosca soberba para madeiraSão vários os tipos de parafusos para madeira. Apresentamos, emseguida, os diferentes tipos e os cálculos para dimensionamento dosdetalhes da cabeça.
Tipos
cabeça chata com fenda cabeça quadrada
cabeça redonda cabeça sextavada
Aplicação
Esse tipo de parafuso também é utilizado com auxílio de buchas plásti-cas. O conjunto, parafuso-bucha é aplicado na fixação de elementosem bases de alvenaria.Quanto à escolha do tipo de cabeça a ser utilizado, leva-se em consi-deração a natureza da união a ser feita.São fabricados em aço e tratados superficialmente para evitar efeitosoxidantes de agentes naturais.
Ver Anexo 6 Norma Din 931
Tecnologia de Projeto I – 1o Ciclo de Mecânica
35
Cálculos de roscas
Introdução
Nem sempre os parafusos usados nas máquinas são padronizados(normalizados) e, muitas vezes, não se encontra o tipo de parafusodesejado no comércio.
Nesse caso, é necessário que a própria empresa faça os parafusos.Para isso é preciso pôr em prática alguns conhecimentos, como saberidentificar o tipo de rosca do parafuso e calcular suas dimensões.
Considerando a importância desse conhecimento, esta aula apresentauma série de informações sobre cálculos de roscas triangulares deparafusos comumente usados na fixação de componentes mecânicos.
De forma prática, a aula se compõe de um conjunto de exemplos decálculos, seguidos de exercícios. Esses cálculos estão relacionadosaos seguintes tipos de roscas: triangulares métrica normal, incluindorosca métrica fina e rosca whitworth normal (BSW) e fina (BSF).
Para você resolver os cálculos, é necessário seguir todas as indicaçõesapresentadas nos formulários a seguir.
Esses formulários já foram estudados. Entretanto, convém revê-lospara facilitar a compreensão dos exemplos de cálculos apresentados edos exercícios propostos a partir de cada exemplo.
Formulários
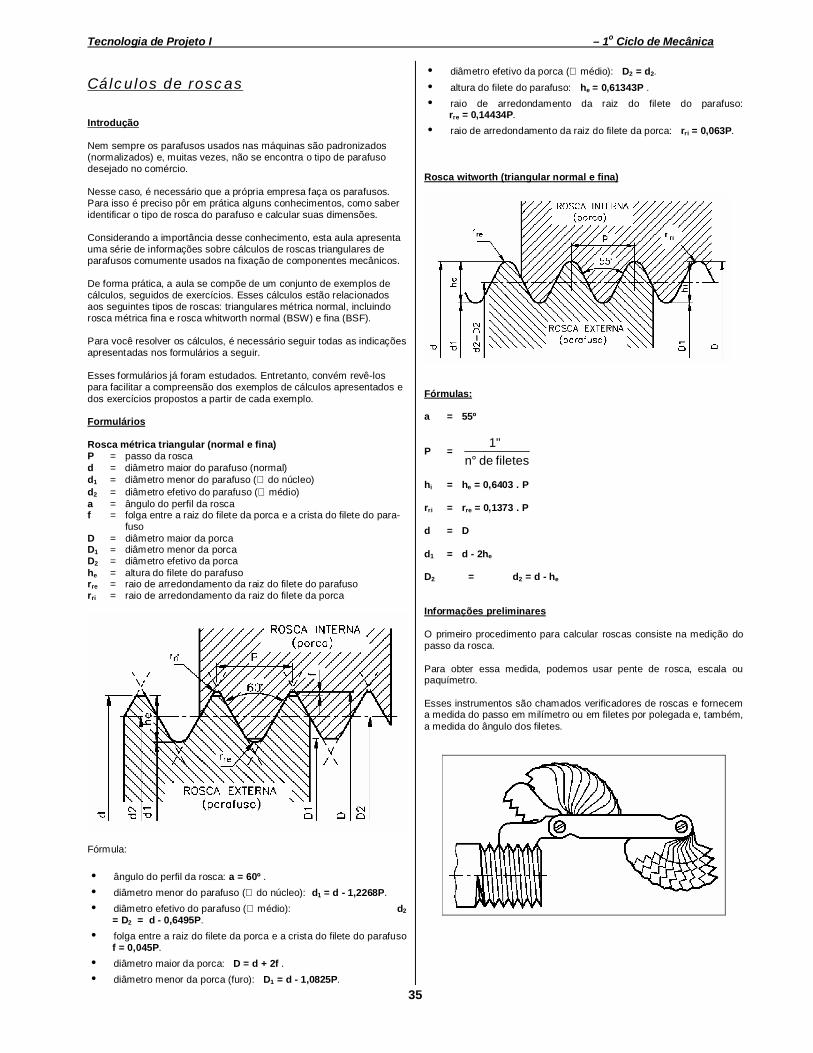
Rosca métrica triangular (normal e fina)P = passo da roscad = diâmetro maior do parafuso (normal)d1 = diâmetro menor do parafuso (∅ do núcleo)d2 = diâmetro efetivo do parafuso (∅ médio)a = ângulo do perfil da roscaf = folga entre a raiz do filete da porca e a crista do filete do para-
fusoD = diâmetro maior da porcaD1 = diâmetro menor da porcaD2 = diâmetro efetivo da porcahe = altura do filete do parafusorre = raio de arredondamento da raiz do filete do parafusorri = raio de arredondamento da raiz do filete da porca
Fórmula:
• ângulo do perfil da rosca: a = 60º .• diâmetro menor do parafuso (∅ do núcleo): d1 = d - 1,2268P.• diâmetro efetivo do parafuso (∅ médio): d2
= D2 = d - 0,6495P.• folga entre a raiz do filete da porca e a crista do filete do parafuso
f = 0,045P.• diâmetro maior da porca: D = d + 2f .• diâmetro menor da porca (furo): D1 = d - 1,0825P.
• diâmetro efetivo da porca (∅ médio): D2 = d2.• altura do filete do parafuso: he = 0,61343P .• raio de arredondamento da raiz do filete do parafuso:
rre = 0,14434P.• raio de arredondamento da raiz do filete da porca: rri = 0,063P.
Rosca witworth (triangular normal e fina)
Fórmulas:
a = 55º
P =filetesden
1"°
hi = he = 0,6403 . P
rri = rre = 0,1373 . P
d = D
d1 = d - 2he
D2 = d2 = d - he
Informações preliminares
O primeiro procedimento para calcular roscas consiste na medição dopasso da rosca.
Para obter essa medida, podemos usar pente de rosca, escala oupaquímetro.
Esses instrumentos são chamados verificadores de roscas e fornecema medida do passo em milímetro ou em filetes por polegada e, também,a medida do ângulo dos filetes.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
36
As roscas de perfil triangular são fabricadas segundo três sistemasnormalizados: o sistema métrico ou internacional (ISO), o sistemainglês ou whitworth e o sistema americano.
No sistema métrico, as medidas das roscas são determinadas emmilímetros. Os filetes têm forma triangular, ângulo de 60º, crista plana eraiz arredondada.
No sistema whitworth, as medidas são dadas em polegadas. Nessesistema, o filete tem a forma triangular, ângulo de 55º, crista e raizarredondadas.O passo é determinado dividindo-se uma polegada pelo número defiletes contidos em uma polegada.
No sistema americano, as medidas são expressas em polegadas. Ofilete tem a forma triangular, ângulo de 60º, crista plana e raiz arredon-dada.
Nesse sistema, como no whitworth, o passo também é determinadodividindo-se uma polegada pelo número de filetes contidos em umapolegada.
Nos três sistemas, as roscas são fabricadas em dois padrões: normal efina.
A rosca normal tem menor número de filetes por polegada que a roscafina.
No sistema whitworth, a rosca normal é caracterizada pela sigla BSW(british standard whitworth - padrão britânico para roscas normais).Nesse mesmo sistema, a rosca fina é caracterizada pela sigla BSF(british standard fine - padrão britânico para roscas finas).
No sistema americano, a rosca normal é caracterizada pela sigla NC(national coarse) e a rosca fina pela sigla NF (national fine).
Cálculos de roscas triangulares – métrica normal
Agora que você viu com detalhes os instrumentos de medir passo derosca e os sistemas de roscas, vamos fazer alguns exercícios práticos.
Antes dos exercícios, é preciso que você saiba quais são os procedi-mentos para determinar o passo da rosca ou o número de fios porpolegada. Vamos usar o pente de rosca.
• Verificar qual das lâminas do pente da rosca se encaixa perfeita-mente nos filetes da rosca. A lâmina que se encaixar vai indicar-lheo passo da rosca ou o número de fios por polegada.
• Vimos que, no lugar do pente de rosca, você pode usar uma escalae medir, por exemplo, 10 filetes da rosca. Você divide a medida en-contrada por 10 para encontrar o passo da rosca. Isto, se a rosca fordo sistema métrico. Se ela for do sistema inglês, você deve verificarquantos filetes cabem em uma polegada da escala. O resultado, por-tanto, será o número de fios por polegada.
• Medir o diâmetro externo da rosca com paquímetro. Tendo amedida do diâmetro e a medida do passo, ou o número de fios porpolegada, você vai consultar a tabela para obter as demais medidasda rosca. Também, em vez de consultar a tabela, você pode fazeros cálculos das dimensões da rosca.
Cálculo de dimensões de roscaRosca métrica normalExemploCalcular o diâmetro menor de um parafuso (d1) para uma rosca dediâmetro externo (d) de 10mm e passo (p) de 1,5mm.Cálculo: d1 = d - 1,2268 . PSubstituindo os valores dessa fórmula:d1 = 10 - 1,2268 . 1,5 = 10 - 1,840 → d1 = 8,16mm
Portanto, o diâmetro menor da rosca é de 8,16mm.
Exercícios 1Conforme foi feito no exemplo acima, calcule o diâmetro menor de umarosca métrica normal, a saber: diâmetro externo: 6mm Passo: 1mm Fórmula: d1 = d - 1,2268 . P
ExemploCalcular o diâmetro efetivo de um parafuso (∅ médio) com rosca métri-ca normal, cujo diâmetro externo é de 12mm e o passo é de 1,75mm.Fórmula: d2 = d - 0,6495 . P
Substituindo os valores desta fórmula:d2 = 12 - 0,6495 . 1,75 = 12 - 1,1366 → d2 = 10,86mm
Portanto, a medida do diâmetro médio é de 10,86mm.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
37
Exercício 2Com base no exemplo, calcule o diâmetro médio de um parafuso comrosca métrica normal, a saber:diâmetro externo: 8mmPasso: 1,25mmFórmula: d2 = d - 0,6495 . P
Exemplo:Calcular a folga (f) de uma rosca métrica normal de um parafuso cujodiâmetro maior (d) é de 14mm e o passo (p) é de 2mm.Fórmula: f = 0,045 . PSubstituindo os valores: f = 0,045 . 2 = 0,09mmPortanto, a folga entre a raiz do filete da porca e a crista do filete doparafuso é de 0,09mm.
Exercícios 3Calcule a folga (f) de uma rosca métrica normal de um parafuso cujodiâmetro maior (d) é de 10mm e o passo (p) é de 1,5mm.Fórmula: f = 0,045 . P
Exemplo:Calcular o diâmetro maior de uma porca com rosca métrica normal,cujo diâmetro maior do parafuso é de 8mm e o passo é de 1,25mm.Fórmula: D = d + 2fCalcula-se, primeiro o valor de f cuja fórmula é f = 0,045 . P
Portanto: f = 0,045 . 1,25 = 0,05625
Substituindo os valores de f na fórmula:D = 8 + 2 . 0,056 = 8 + 0,112 = 8,11mm
Portanto, o diâmetro maior da porca é de 8,11mm.
Exercícios 4Calcular o diâmetro maior de uma porca com rosca métrica normal cujodiâmetro maior do parafuso é de 16mm e o passo é de 2mm.Fórmula: D = d + 2f
Exemplo:Calcular o diâmetro menor de uma porca com rosca métrica normalcujo diâmetro maior do parafuso é de 6mm e o passo é de 1mm.Fórmula: D1 = d - 1,0825 . P
Substituindo os valores:D1 = 6 - 1,0825 . 1 = 6 - 1,0825 D1 = 4,92mm
Portanto, o diâmetro menor da porca é de 4,92mm.
Exercícios 5Calcule o diâmetro menor de uma porca com rosca métrica normal cujodiâmetro maior do parafuso é de 18mm e o passo é de 2,5mm.Fórmula: D1 = d - 1,0825 . P
Exemplo:Calcular a altura do filete de um parafuso com rosca métrica normalcom diâmetro maior de 4mm e o passo de 0,7mm.Fórmula: he = 0,61343 . PSubstituindo os valores: he = 0,61343 . 0,7 = 0,43mm
Portanto, a altura do filete do parafuso é de 0,43mm.
Exercício 6Calcule a altura do filete de um parafuso com rosca métrica normalcom diâmetro maior de 20mm e o passo de 2,5mm.Fórmula: he = 0,61343 . P
Cálculos de roscas triangularesRosca métrica finaNo caso de cálculo de roscas triangulares métricas finas, são usadasas mesmas fórmulas das roscas triangulares métricas normais. A únicadiferença é a medida do passo.
Exemplo:Calcular o diâmetro menor de um parafuso (d1), sabendo que o diâme-tro maior é de 10mm e o passo é de 0,75mm.
Fórmula: d1 = d - 1,2268 . P
Substituindo os valores: d1 = 10 - 1,2268 . P = 10 - 0,9201d1 = 9,08mm
Portanto, o diâmetro menor do parafuso é de 9,08mm.
Exercícios 7Calcule o diâmetro menor de um parafuso (d1), sabendo que o diâmetromaior é de 12mm e o passo é de 1mm.Fórmula: d1 = d - 1,2268 . P
Exemplo:Calcular a altura do filete de um parafuso (he) com rosca métrica trian-gular fina com diâmetro maior de 8mm e passo de 1mm.Fórmula: he = 0,61343 . PSubstituindo os valores: he = 0,61343 . 1 = 0,61mm
Portanto, a altura do filete é de 0,61mm.
É muito importante para o mecânico saber o cálculo do diâmetro dabroca que vai fazer um furo no qual a rosca será aberta por macho.No cálculo de diâmetro da broca para abrir rosca métrica triangular,normal ou fina, usa-se a seguinte fórmula:
∅ broca = d - P
Exemplo:Calcular diâmetro de broca para abrir o furo a ser roscado com roscamétrica, sabendo que o diâmetro maior do parafuso é de 10mm e opasso é de 1,5mm.
Substituindo os valores na fórmula:∅ broca = 10 - 1,5 ∅ broca = 8,5mm
Portanto, o diâmetro da broca deve ser de 8,5mm.
Exercício 8Calcular diâmetro de broca para abrir o furo a ser roscado com roscamétrica, sabendo que o diâmetro maior do parafuso é de 8mm e opasso é de 1mm.Fórmula: ∅ broca = d - P
Cálculo de roscas triangularesRosca whitworth normal (BSW) e fina (BSF)
Exemplo:Calcular o passo em mm de um parafuso com rosca whitworth, saben-do-se que a rosca tem 32 fios por polegada.
Fórmula: P =fiosden
25,4°
Substituindo os valores:
P =32
25,4 P = 0,79mm
Portanto, o passo deve ser de 0,79mm.
Exercício 9Calcule o passo em mm de um parafuso com rosca whitworth, saben-do-se que a rosca tem 18 fios por polegada.
Fórmula: P =fiosden
25,4°

Tecnologia de Projeto I – 1o Ciclo de Mecânica
38
Exemplo:Calcular a altura de filete (he) de uma rosca whitworth, sabendo-se queo passo é de 0,793mm.Fórmula: he = 0,6403 . PSubstituindo os valores: he = 0,6403 . 0,793 = 0,51mm
Portanto, a altura do filete é de 0,51mm.
Exercício 10Calcule a altura de filete (he) de uma rosca whitworth, asbendo que arosca tem 20 filetes por polegada.
Fórmula: he = 0,6403 . P P =fiosden
25,4°
Exemplo:Calcular o raio de arredondamento da raiz do filete do parafuso de umarosca whitworth com 10 fios por polegada.Fórmula para calcular o passo:
P =fiosden
25,4°
Substituindo os valores: P =10
25,4 = 2,54mm
Fórmula para calcular o arredondamento: rre = 0,1373 . P
Substituindo os valores: rre = 0,1373 . 2,54 = 0,35mm
Portanto, o raio de arredondamento é de 0,35mm.
Exercício 11Calcule o raio de arredondamento da raiz do filete do parafuso de umarosca whitworth com 12 fios por polegada.Fórmula para calcular o passo:
P =fiosden
25,4°
Fórmula para calcular o arredondamento: rre = 0,1373 . P
Exemplo:Calcular o diâmetro menor de um parafuso com rosca whitworth, cujodiâmetro é de 1/2 polegada (12,7mm) e que tem 12 fios por polegada.
Calcula-se o passo:P =
1225,4 = 2,117mm
Calcula-se o he = 0,6403 . P = 0,6403 . 2,117 = 1,355mm
Calcula-se o diâmetro menor do parafuso:d1 = d - 2he
Substituindo os valores:d1 = 12,7 - 2 . 1,355 = 12,7 - 2,71 d1 = 9,99mm
Portanto, o diâmetro menor do parafuso é de 9,99mm.
Exercício 12Calcule o diâmetro menor do parafuso com rosca whitworth, cujodiâmetro é de 1/4" (6,35mm) e que tem 26 fios por polegada.
Exemplo:Calcular o diâmetro efetivo do parafuso (∅ médio) com rosca whitworth,cujo diâmetro externo é de 5/16" (7,9375mm) e tem 18 fios por polega-da.
Calcula-se o passo: P =18
25,4 = 1,411mm
Calcula-se o he = 0,6403 . 1,411 he = 0,903
Calcula-se o ∅ médio: Fórmula: d2 = d - he
Substituindo os valores: d2 = 7,9375 - 0,903 d2 = 7,03mm
Portanto o ∅ médio do parafuso é de 7,03mm.
Exercício 13Calcule o diâmetro efetivo de parafuso (∅ médio) com rosca whitworth,cujo diâmetro externo é de 1" (25,4mm) e que tem 8 fios por polegada.
Porcas
Introdução
Porca é uma peça de forma prismática ou cilíndrica geralmente metáli-ca, com um furo roscado no qual se encaixa um parafuso, ou umabarra roscada. Em conjunto com um parafuso, a porca é um acessórioamplamente utilizado na união de peças.
A porca está sempre ligada a um parafuso. A parte externa tem váriosformatos para atender a diversos tipos de aplicação. Assim, existemporcas que servem tanto como elementos de fixação como de trans-missão.
Material de fabricação
As porcas são fabricadas de diversos materiais: aço, bronze, latão,alumínio, plástico.
Há casos especiais em que as porcas recebem banhos de galvaniza-ção, zincagem e bicromatização para protegê-las contra oxidação(ferrugem).
Tipos de rosca
O perfil da rosca varia de acordo com o tipo de aplicação que se dese-ja. As porcas usadas para fixação geralmente têm roscas com perfiltriangular.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
39
As porcas para transmissão de movimentos têm roscas com perfisquadrados, trapezoidais, redondo e dente de serra.
TrapezoidalÉ usado nos órgãos de co-mando das máquinas opera-trizes (para transmissão demovimento suave e unifor-me), nos fusos e nas pren-sas de estampar.QuadradoTipo em desuso, mas aindaaplicado em parafusos depeças sujeitas a choques egrandes esforços (morsas).
Dente-de-serraÉ usado quando o parafusoexerce grande esforço numsó sentido, como nas mor-sas e nos macacos.RedondoÉ usado em parafusos degrandes diâmetros e quedevem suportar grandesesforços.
Tipos de porca
Para aperto manual são mais usados os tipos de porca borboleta,recartilhada alta e recartilhada baixa.
Veja, nas ilustrações a seguir, a aplicação da porca borboleta e daporca recartilhada alta.
As porcas cega baixa e cega alta, além de propiciarem boa fixação,deixam as peças unidas com melhor aspecto.
Veja a aplicação desse tipo de porca.
Para ajuste axial (eixos de máquinas), são usadas as seguintes porcas,veja a aplicação desses tipos de porca na figura ao lado:

Tecnologia de Projeto I – 1o Ciclo de Mecânica
40
Certos tipos de porcas apresentam ranhuras próprias para uso decupilhas. Utilizamos cupilhas para evitar que a porca se solte comvibrações
Veja como fica esse tipo de porca com o emprego da cupilha.
Veja, a seguir, os tipos mais comuns de porcas.
Observe a aplicação da porca sextavada chata.
Para montagem de chapas em locais de difícil acesso, podemos utilizaras porcas:
porca rápida porca rápida dobrada
Veja, a seguir, a aplicação desses tipos de porca.
Há ainda outros tipos de porca que serão tratados em momento opor-tuno.
Material de Parafuso e Porca Segundo DIN-267
A tabela que segue abaixo, determina a classe de resistência de mate-riais para parafuso.
Exemplo: Parafuso DIN 267 Classe 5.8
Ver tabela de materiais Anexo - 7
Arruelas
Introdução
A maioria dos conjuntos mecânicos apresenta elementos de fixação.Onde quer que se usem esses elementos, seja em máquinas ou emveículos automotivos, existe o perigo de se produzir, em virtude dasvibrações, um afrouxamento imprevisto no aperto do parafuso.
Para evitar esse inconveniente utilizamos um elemento de máquinachamado arruela.
5 . 8
Estiramento do parafuso 8 x 10 = 80%
Classe de resistência a tração 5 x 100 = 500 N/mm2
ou 50 kgf/mm2

Tecnologia de Projeto I – 1o Ciclo de Mecânica
41
As arruelas têm a função de distribuir igualmente a força de apertoentre a porca, o parafuso e as partes montadas. Em algumas situa-ções, também funcionam como elementos de trava.
Os materiais mais utilizados na fabricação das arruelas são aço-carbono, cobre e latão.
Tipos de arruela
Existem vários tipos de arruela: lisa, de pressão, dentada, serrilhada,ondulada, de travamento com orelha e arruela para perfilados.
Para cada tipo de trabalho, existe um tipo ideal de arruela.
Arruela lisaAlém de distribuir igualmente o aperto, a arruela lisa tem, também, afunção de melhorar os aspectos do conjunto.A arruela lisa por não ter elemento de trava, é utilizada em órgãos demáquinas que sofrem pequenas vibrações
Ver norma DIN para arruela lisa Anexo - 8
Arruela de pressãoA arruela de pressão é utilizada na montagem de conjuntos mecânicos,submetidos a grandes esforços e grandes vibrações. A arruela depressão funciona, também, como elemento de trava, evitando o afrou-xamento do parafuso e da porca. É, ainda, muito empregada em equi-pamentos que sofrem variação de temperatura (automóveis, prensasetc.).
Arruela dentadaMuito empregada em equipamentos sujeitos a grandes vibrações, mascom pequenos esforços, como, eletrodomésticos, painéis automotivos,equipamentos de refrigeração etc.
O travamento se dá entre o conjunto parafuso/porca. Os dentes incli-nados das arruelas formam uma mola quando são pressionados e seencravam na cabeça do parafuso.
Arruela serrilhadaA arruela serrilhada tem, basicamente, as mesmas funções da arrueladentada. Apenas suporta esforços um pouco maiores.
É usada nos mesmos tipos de trabalho que a arruela dentada
Arruela onduladaA arruela ondulada não tem cantos vivos. É indicada, especialmente,para superfícies pintadas, evitando danificação do acabamento.
É adequada para equipamentos que possuem acabamento externoconstituído de chapas finas.
Arruela de travamento com orelhaUtiliza-se esta arruela dobrando-se a orelha sobre um canto vivo dapeça. Em seguida, dobra-se uma aba da orelha envolvendo um doslados chanfrado do conjunto porca/parafuso.
Arruela para perfiladosÉ uma arruela muito utilizada em montagens que envolvem cantoneirasou perfis em ângulo. Devido ao seu formato de fabricação, este tipo dearruela compensa os ângulos e deixa perfeitamente paralelas as super-fícies a serem parafusadas.
Os tipos de arruelas mais usados são os vistos até aqui. Porém, exis-tem outros tipos menos utilizados:
arruela chanfrada arruela quadrada

Tecnologia de Projeto I – 1o Ciclo de Mecânica
42
arruela de furo quadrado arruela dupla de pressão
arruela curva de pressão arruela com dentes internos
arruela com dentes cônicos arruela com serrilhado interno
arruela com serrilhado cônico
Anéis elásticos
Introdução
O anel elástico é um elemento usado em eixos ou furos, tendo comoprincipais funções:• Evitar deslocamento axial de peças ou componentes.• Posicionar ou limitar o curso de uma peça ou conjunto deslizante
sobre o eixo.
Observação:Deslocamento axial é o movimento no sentido longitudinal do eixo.
Esse elemento de máquina é conhecido também como anel de reten-ção, de trava ou de segurança.
Material de fabricação e forma
Fabricado de aço-mola, tem a forma de anel incompleto, que se alojaem um canal circular construído conforme normalização.
Aplicação: para eixos com diâmetro entre 4 e 1 000 mm. Trabalhaexternamente • Norma DIN 471.
Aplicação: para furos com diâmetro entre 9,5 e 1 000 mm. Trabalhainternamente • Norma DIN 472.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
43
Tendo em vista facilitar a escolha e seleção dos anéis em função dostipos de trabalho ou operação, existem tabelas padronizadas de anéis,como as que seguem.
Ver tabela de Anéis Elásticos Anexos 9 e 10
Aplicação: para eixos com diâmetro entre 8 e 24 mm. Trabalha exter-namente • Norma DIN 6799.
Aplicação: para eixos com diâmetro entre 4 e 390 mm para rolamentos.
Anéis de secção circular • Aplicação: para pequenos esforços axiais.
Na utilização dos anéis, alguns pontos importantes devem ser obser-vados:• A dureza do anel deve ser adequada aos elementos que traba-
lham com ele.• Se o anel apresentar alguma falha, pode ser devido a defeitos de
fabricação ou condições de operação.• As condições de operação são caracterizadas por meio de vibra-
ções, impacto, flexão, alta temperatura ou atrito excessivo.• Um projeto pode estar errado: previa, por exemplo, esforços
estáticos, mas as condições de trabalho geraram esforços dinâmi-cos, fazendo com que o anel apresentasse problemas que dificulta-ram seu alojamento.
• A igualdade de pressão em volta da canaleta assegura aderênciae resistência. O anel nunca deve estar solto, mas alojado no fundoda canaleta, com certa pressão.
• A superfície do anel deve estar livre de rebarbas, fissuras e oxida-ções.
• Em aplicações sujeitas à corrosão, os anéis devem receber trata-mento anticorrosivo adequado.
• Dimensionamento correto do anel e do alojamento.• Em casos de anéis de secção circular, utilizá-los apenas uma vez.• Utilizar ferramentas adequadas para evitar que o anel fique torto
ou receba esforços exagerados.• Montar o anel com a abertura apontando para esforços menores,
quando possível.• Nunca substituir um anel normalizado por um “equivalente”, feito
de chapa ou arame sem critérios.
Para que esses anéis não sejam montados de forma incorreta, é ne-cessário o uso de ferramentas adequadas, no caso, alicates.
Vejamos alguns tipos de alicate:
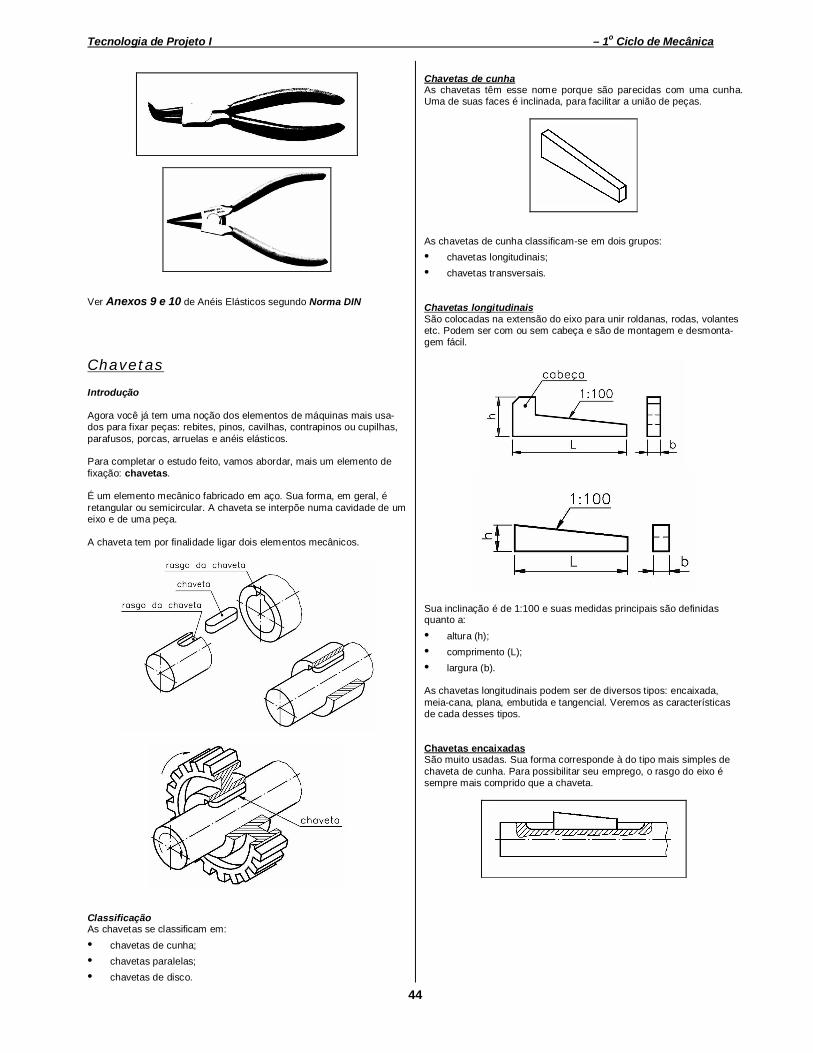
Tecnologia de Projeto I – 1o Ciclo de Mecânica
44
Ver Anexos 9 e 10 de Anéis Elásticos segundo Norma DIN
Chavetas
Introdução
Agora você já tem uma noção dos elementos de máquinas mais usa-dos para fixar peças: rebites, pinos, cavilhas, contrapinos ou cupilhas,parafusos, porcas, arruelas e anéis elásticos.
Para completar o estudo feito, vamos abordar, mais um elemento defixação: chavetas.
É um elemento mecânico fabricado em aço. Sua forma, em geral, éretangular ou semicircular. A chaveta se interpõe numa cavidade de umeixo e de uma peça.
A chaveta tem por finalidade ligar dois elementos mecânicos.
ClassificaçãoAs chavetas se classificam em:• chavetas de cunha;• chavetas paralelas;• chavetas de disco.
Chavetas de cunhaAs chavetas têm esse nome porque são parecidas com uma cunha.Uma de suas faces é inclinada, para facilitar a união de peças.
As chavetas de cunha classificam-se em dois grupos:• chavetas longitudinais;• chavetas transversais.
Chavetas longitudinaisSão colocadas na extensão do eixo para unir roldanas, rodas, volantesetc. Podem ser com ou sem cabeça e são de montagem e desmonta-gem fácil.
Sua inclinação é de 1:100 e suas medidas principais são definidasquanto a:• altura (h);• comprimento (L);• largura (b).
As chavetas longitudinais podem ser de diversos tipos: encaixada,meia-cana, plana, embutida e tangencial. Veremos as característicasde cada desses tipos.
Chavetas encaixadasSão muito usadas. Sua forma corresponde à do tipo mais simples dechaveta de cunha. Para possibilitar seu emprego, o rasgo do eixo ésempre mais comprido que a chaveta.
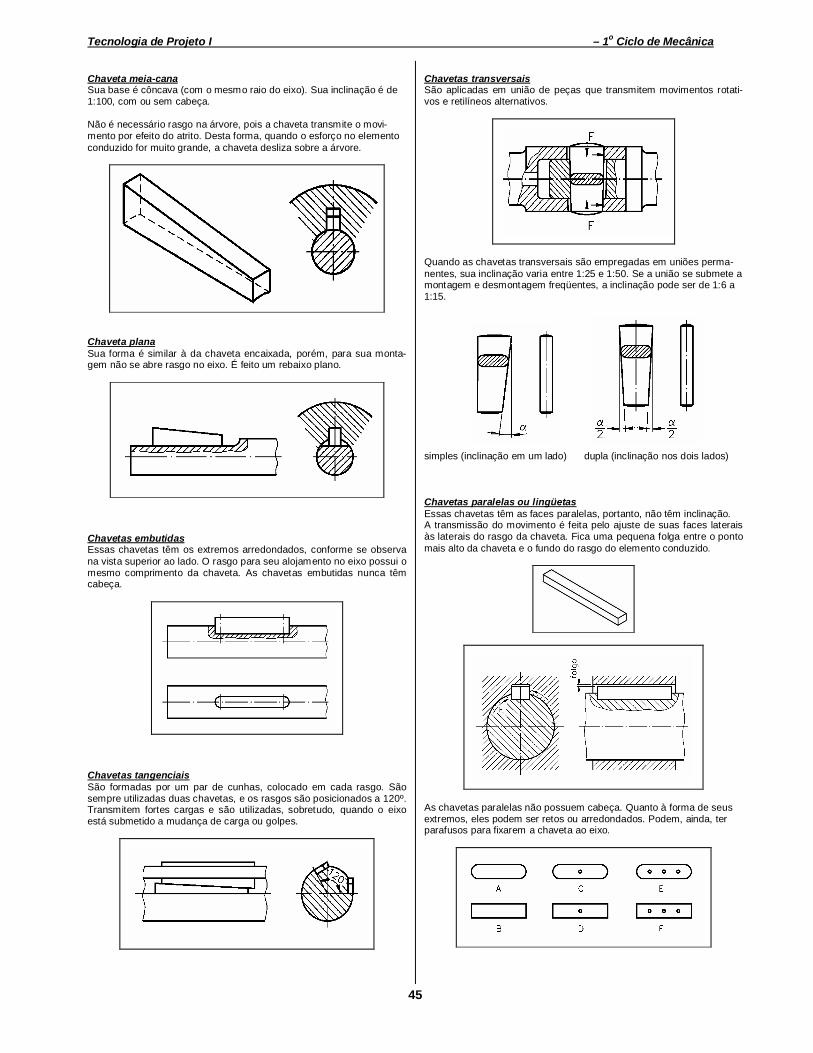
Tecnologia de Projeto I – 1o Ciclo de Mecânica
45
Chaveta meia-canaSua base é côncava (com o mesmo raio do eixo). Sua inclinação é de1:100, com ou sem cabeça.
Não é necessário rasgo na árvore, pois a chaveta transmite o movi-mento por efeito do atrito. Desta forma, quando o esforço no elementoconduzido for muito grande, a chaveta desliza sobre a árvore.
Chaveta planaSua forma é similar à da chaveta encaixada, porém, para sua monta-gem não se abre rasgo no eixo. É feito um rebaixo plano.
Chavetas embutidasEssas chavetas têm os extremos arredondados, conforme se observana vista superior ao lado. O rasgo para seu alojamento no eixo possui omesmo comprimento da chaveta. As chavetas embutidas nunca têmcabeça.
Chavetas tangenciaisSão formadas por um par de cunhas, colocado em cada rasgo. Sãosempre utilizadas duas chavetas, e os rasgos são posicionados a 120º.Transmitem fortes cargas e são utilizadas, sobretudo, quando o eixoestá submetido a mudança de carga ou golpes.
Chavetas transversaisSão aplicadas em união de peças que transmitem movimentos rotati-vos e retilíneos alternativos.
Quando as chavetas transversais são empregadas em uniões perma-nentes, sua inclinação varia entre 1:25 e 1:50. Se a união se submete amontagem e desmontagem freqüentes, a inclinação pode ser de 1:6 a1:15.
simples (inclinação em um lado) dupla (inclinação nos dois lados)
Chavetas paralelas ou lingüetasEssas chavetas têm as faces paralelas, portanto, não têm inclinação.A transmissão do movimento é feita pelo ajuste de suas faces lateraisàs laterais do rasgo da chaveta. Fica uma pequena folga entre o pontomais alto da chaveta e o fundo do rasgo do elemento conduzido.
As chavetas paralelas não possuem cabeça. Quanto à forma de seusextremos, eles podem ser retos ou arredondados. Podem, ainda, terparafusos para fixarem a chaveta ao eixo.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
46
Chaveta de disco ou meia-lua (tipo woodruff)É uma variante da chaveta paralela. Recebe esse nome porque suaforma corresponde a um segmento circular.
É comumente empregada em eixos cônicos por facilitar a montagem ese adaptar à conicidade do fundo do rasgo do elemento externo.
Tolerâncias para chavetas
O ajuste da chaveta deve ser feito em função das características dotrabalho.
A figura mostra os três tipos mais comuns de ajustes e tolerâncias parachavetas e rasgos.
ajuste forçado deslizante justo (montagens fixas) (montagens justas)
deslizante livre(peças móveis)
Exemplos de montagem com chavetas
Ver Anexo 11 e 12 segundo Norma DIN
Mancais
O mancal pode ser definido como suporte ou guia em que se apoia oeixo.No ponto de contato entre a superfície do eixo e a superfície do man-cal, ocorre atrito. Dependendo da solicitação de esforços, os mancaispodem ser de deslizamento ou de rolamento.
parte inferior de um carro de boi
Mancais de deslizamento
Geralmente, os mancais de deslizamento são constituídos de umabucha fixada num suporte. Esses mancais são usados em máquinaspesadas ou em equipamentos de baixa rotação, porque a baixa veloci-dade evita superaquecimento dos componentes expostos ao atrito.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
47
O uso de buchas e de lubrificantes permite reduzir esse atrito emelhorar a rotação do eixo.As buchas são, em geral, corpos cilíndricos ocos que envolvem oseixos, permitindo-lhes uma melhor rotação. São feitas de materiaismacios, como o bronze e ligas de metais leves.
Bucha
Muitos aparelhos possuem buchas em seus mecanismos como, porexemplo o liqüidificador, o espremedor de frutas e o ventilador.
As buchas são elementos de máquinas de forma cilíndrica ou cônica.Servem para apoiar eixos e guiar brocas e alargadores. Nos casos emque o eixo desliza dentro da bucha, deve haver lubrificação.
Podem ser fabricadas de metal antifricção ou de materiais plásticos.Normalmente, a bucha deve ser fabricada com material menos duroque o material do eixo.
Observação
Metal antifricção é uma liga de cobre, zinco, estanho, chumbo e anti-mônio. É conhecido também por metal patente ou metal branco
Classificação
As buchas podem ser classificadas quanto ao tipo de solicitação. Nes-se sentido, elas podem ser de fricção radial para esforços radiais, defricção axial para esforços axiais e cônicas para esforços nos doissentidos.
Buchas de fricção radialEssas buchas podem ter várias formas. As mais comuns são feitas deum corpo cilíndrico furado, sendo que o furo possibilita a entrada delubrificantes.
Essas buchas são usadas em peças para cargas pequenas e emlugares onde a manutenção seja fácil.
Em alguns casos, essas buchas são cilíndricas na parte interior ecônicas na parte externa. Os extremos são roscados e têm três rasgoslongitudinais, o que permite o reajuste das buchas nas peças.
Bucha de fricção axialEssa bucha é usada para suportar o esforço de um eixo em posiçãovertical.
Bucha cônicaEsse tipo de bucha é usado para suportar um eixo do qual se exigemesforços radiais e axiais. Quase sempre essas buchas requerem umdispositivo de fixação e, por isso, são pouco empregadas.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
48
Bucha-guia para furação e alargamentoNos dispositivos para furação, a bucha-guia orienta e possibilita auto-posicionamento da ferramenta em ação na peça. Dessa forma, obtém-se a posição correta das superfícies usinadas.
As buchas-guia são elementos de precisão, sujeitas a desgaste poratrito. Por isso, elas são feitas em aço duro, com superfícies bem lisas,de preferência retificadas.
guias fixas ajuste H7-n6
As buchas pequenas com até 20 mm de diâmetro são feitas em aço-carbono, temperado ou nitretado. As maiores são feitas em aço cemen-tado. A distância entre a bucha-guia e a peça baseia-se em dois parâ-metros:
Quando o cavaco deve passar pelo interior da bucha-guia, a distânciaserá de 0,2mm.Quando o cavaco deve sair por baixo da bucha-guia, a distância seráigual ou maior que 0,5 mm, multiplicado pelo diâmetro do furo da bu-cha.
A principal finalidade da bucha-guia é a de manter um eixo comum(coaxilidade) entre ela e o furo. Para isso, as buchas-guia devem serde tipos variados.
Quando a distância (h) entre a peça e a base de sustentação da bucha-guia é grande, usam-se buchas-guia longas com as seguintes caracte-rísticas:
• Ajuste: h7 - n6;• Distância (e) com saída por baixo do cavaco.• Bucha com borda para limitação da descida.• Diâmetro (d) conforme a ferramenta rotativa.• Diâmetro (D) maior que a ferramenta rotativa.
buchas-guias longas H7-n6
Quando dois furos são próximos um do outro, usam-se duas buchas-guia com borda e travamento entre si. Ou, então, usa-se uma bucha-guia de diâmetro que comporte os furos com travamento lateral porpino.
buchas-guias para furos próximos
Se for necessário trocar a bucha-guia durante o processo de usinagem,usam-se buchas-guia do tipo removível com ajuste H7 - j6, cabeça recarti-lhada e travamento lateral por parafuso de fenda.
buchas-guias removíveis H7-j6
Segue a ilustração de uma bucha-guia com três usos, mais sofisticadatecnologicamente. Ela serve para manter um eixo comum (coaxilidade)para centralizar a peça e para fixá-la no dispositivo.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
49
bucha-guia roscada de fixação
Há grande variedade de tipos de buchas-guia. De acordo com o projetode dispositivos, define-se o tipo de bucha-guia a ser usado.
Mancais de rolamento
Quando necessitar de mancal com maior velocidade e menos atrito, omancal de rolamento é o mais adequado.
Os rolamentos são classificados em função dos seus elementos rolan-tes.
Veja os principais tipos, a seguir.
rolamento de esfera rolamento de rolo rolamento de agulha
Os eixos das máquinas, geralmente, funcionam assentados em apoios.Quando um eixo gira dentro de um furo produz-se, entre a superfície doeixo e a superfície do furo, um fenômeno chamado atrito de escorre-gamento.
Quando é necessário reduzir ainda mais o atrito de escorregamento,utilizamos um outro elemento de máquina, chamado rolamento.
Os rolamentos limitam, ao máximo, as perdas de energia em conse-qüência do atrito.
São geralmente constituídos de dois anéis concêntricos, entre os quaissão colocados elementos rolantes como esferas, roletes e agulhas.
Os rolamentos de esfera compõem-se de:
O anel externo é fixado no mancal, enquanto que o anel interno éfixado diretamente ao eixo.
As dimensões e características dos rolamentos são indicadas nasdiferentes normas técnicas e nos catálogos de fabricantes.
Ao examinar um catálogo de rolamentos, ou uma norma específica,você encontrará informações sobre as seguintes características:
Características dos rolamentos:D: diâmetro externo;d: diâmetro interno;R: raio de arredondamento;L: largura.
Em geral, a normalização dos rolamentos é feita a partir do diâmetrointerno d, isto é, a partir do diâmetro do eixo em que o rolamento éutilizado.
Para cada diâmetro são definidas três séries de rolamentos: leve,média e pesada.
As séries leves são usadas para cargas pequenas. Para cargas maio-res, são usadas as séries média ou pesada. Os valores do diâmetro De da largura L aumentam progressivamente em função dos aumentosdas cargas.
Os rolamentos classificam-se de acordo com as forças que eles supor-tam. Podem ser radiais, axiais e mistos.
Radiais - não suportam cargas axiais e impedem o deslocamento nosentido transversal ao eixo
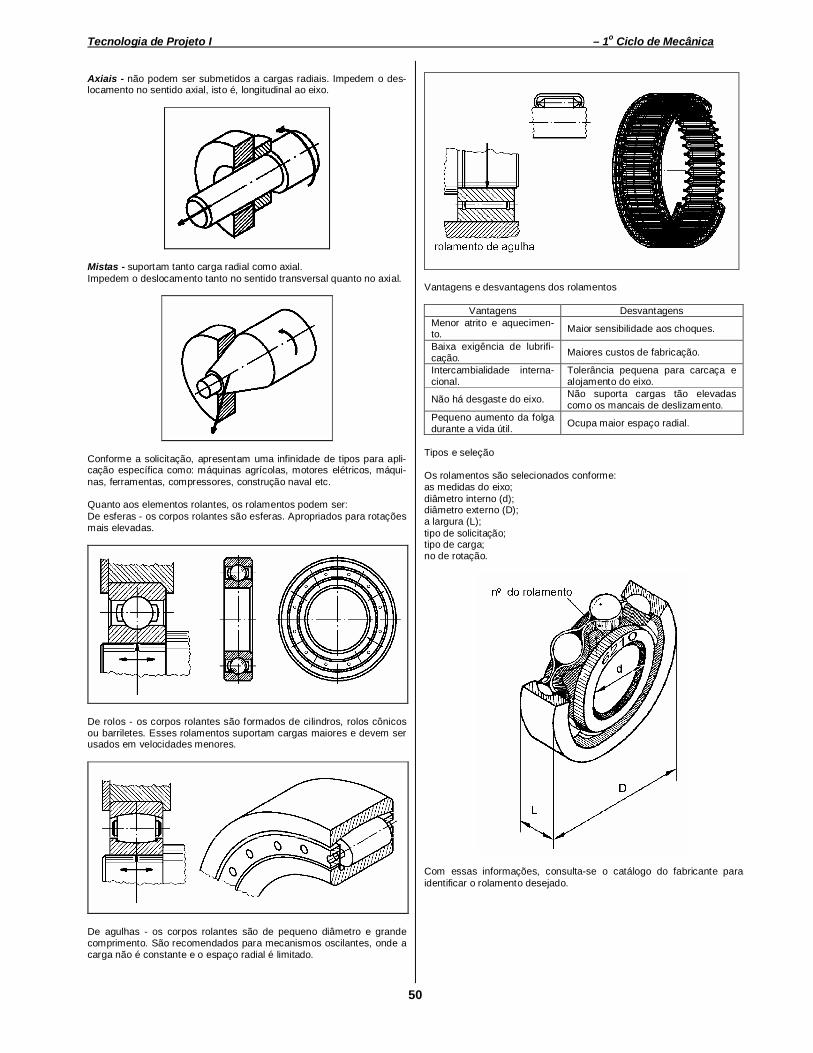
Tecnologia de Projeto I – 1o Ciclo de Mecânica
50
Axiais - não podem ser submetidos a cargas radiais. Impedem o des-locamento no sentido axial, isto é, longitudinal ao eixo.
Mistas - suportam tanto carga radial como axial.Impedem o deslocamento tanto no sentido transversal quanto no axial.
Conforme a solicitação, apresentam uma infinidade de tipos para apli-cação específica como: máquinas agrícolas, motores elétricos, máqui-nas, ferramentas, compressores, construção naval etc.
Quanto aos elementos rolantes, os rolamentos podem ser:De esferas - os corpos rolantes são esferas. Apropriados para rotaçõesmais elevadas.
De rolos - os corpos rolantes são formados de cilindros, rolos cônicosou barriletes. Esses rolamentos suportam cargas maiores e devem serusados em velocidades menores.
De agulhas - os corpos rolantes são de pequeno diâmetro e grandecomprimento. São recomendados para mecanismos oscilantes, onde acarga não é constante e o espaço radial é limitado.
Vantagens e desvantagens dos rolamentos
Vantagens DesvantagensMenor atrito e aquecimen-to. Maior sensibilidade aos choques.
Baixa exigência de lubrifi-cação. Maiores custos de fabricação.
Intercambialidade interna-cional.
Tolerância pequena para carcaça ealojamento do eixo.
Não há desgaste do eixo. Não suporta cargas tão elevadascomo os mancais de deslizamento.
Pequeno aumento da folgadurante a vida útil. Ocupa maior espaço radial.
Tipos e seleção
Os rolamentos são selecionados conforme:as medidas do eixo;diâmetro interno (d);diâmetro externo (D);a largura (L);tipo de solicitação;tipo de carga;no de rotação.
Com essas informações, consulta-se o catálogo do fabricante paraidentificar o rolamento desejado.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
51
Rolamentos
Tipos e finalidades
Os rolamentos podem ser de diversos tipos: fixo de uma carreira deesferas, de contato angular de uma carreira de esferas, autocompen-sador de esferas, de rolo cilíndrico, autocompensador de uma carreirade rolos, autocompensador de duas carreiras de rolos, de rolos côni-cos, axial de esfera, axial autocompensador de rolos, de agulha e comproteção.
Rolamento fixo de uma carreira de esferas
É o mais comum dos rolamentos. Suporta cargas radiais e pequenascargas axiais e é apropriado para rotações mais elevadas.Sua capacidade de ajustagem angular é limitada. É necessário umperfeito alinhamento entre o eixo e os furos da caixa.
Rolamento de contato angular de uma carreirade esferas
Admite cargas axiais somente em um sentido e deve sempre ser mon-tado contra outro rolamento que possa receber a carga axial no sentidocontrário.
Rolamento autocompensador de esferas
É um rolamento de duas carreiras de esferas com pista esférica noanel externo, o que lhe confere a propriedade de ajustagem angular, ouseja, de compensar possíveis desalinhamentos ou flexões do eixo.
Rolamento de rolo cilíndrico
É apropriado para cargas radiais elevadas. Seus componentes sãoseparáveis, o que facilita a montagem e desmontagem.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
52
Rolamento autocompensador de uma carreira derolos
Seu emprego é particularmente indicado para construções em que seexige uma grande capacidade para suportar carga radial e a compen-sação de falhas de alinhamento.
Rolamento autocompensador de duas carreirasde rolos
É um rolamento adequado aos mais pesados serviços. Os rolos são degrande diâmetro e comprimento.Devido ao alto grau de oscilação entre rolos e pistas, existe uma distri-buição uniforme da carga.
Rolamento de rolos cônicos
Além de cargas radiais, os rolamentos de rolos cônicos também supor-tam cargas axiais em um sentido.
Os anéis são separáveis. O anel interno e o externo podem ser monta-dos separadamente. Como só admitem cargas axiais em um sentido,torna-se necessário montar os anéis aos pares, um contra o outro.
Rolamento axial de esfera
Ambos os tipos de rolamento axial de esfera (escora simples e esco-ra dupla) admitem elevadas cargas axiais, porém, não podem sersubmetidos a cargas radiais. Para que as esferas sejam guiadas fir-memente em suas pistas, é necessária a atuação permanente de umacarga axial mínima.
escora simples
escora dupla

Tecnologia de Projeto I – 1o Ciclo de Mecânica
53
Rolamento axial autocompensador de rolos
Possui grande capacidade de carga axial devido à disposição inclinadados rolos. Também pode suportar consideráveis cargas radiais.
A pista esférica do anel da caixa confere ao rolamento a propriedadede alinhamento angular, compensando possíveis desalinhamentos ouflexões do eixo.
Rolamento de agulha
Possui uma seção transversal muito fina em comparação com os rola-mentos de rolos comuns.É utilizado especialmente quando o espaço radial é limitado.
Rolamentos com proteção
São assim chamados os rolamentos que, em função das característi-cas de trabalho, precisam ser protegidos ou vedados.A vedação é feita por blindagem (placa). Existem vários tipos.
Os principais tipos de placas são:
Execução Z 1 placade proteção
Execução 2Z2placas de proteção
Execução RS1 1placa de vedação
Execução 2RS1 2placas de vedação
As designações Z e RS são colocadas à direita do número que identifi-ca os rolamentos. Quando acompanhados do número 2 indicam prote-ção de ambos os lados.
Cuidados com os rolamentos
Na troca de rolamentos, deve-se tomar muito cuidado, verificando suaprocedência e seu código correto.Antes da instalação é preciso verificar cuidadosamente os catálogosdos fabricantes e das máquinas, seguindo as especificações recomen-dadas.
Na montagem, entre outros, devem ser tomados os seguintes cuida-dos:• verificar se as dimensões do eixo e cubo estão corretas;• usar o lubrificante recomendado pelo fabricante;• remover rebarbas;• no caso de reaproveitamento do rolamento, deve-se lavá-lo elubrificá-lo imediatamente para evitar oxidação;• não usar estopa nas operações de limpeza;• trabalhar em ambiente livre de pó e umidade.
Defeitos comuns dos rolamentos
Os defeitos comuns ocorrem por:• desgaste;• fadiga;• falhas mecânicas.
DesgasteO desgaste pode ser causado por:• deficiência de lubrificação;• presença de partículas abrasivas;• oxidação (ferrugem);• desgaste por patinação (girar em falso);• desgaste por brinelamento.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
54
fase inicial(armazenamento)
fase avançada (antes do trabalho)
fase final(após o trabalho
Fadiga
A origem da fadiga está no deslocamento da peça, ao girar em falso. Apeça se descasca, principalmente nos casos de carga excessiva.
Descascamento parcial revela fadiga por desalinhamento, ovalizaçãoou por conificação do alojamento.
Falhas mecânicas
O brinelamento é caracterizado por depressões correspondentes aosroletes ou esferas nas pistas do rolamento.
Resulta de aplicação da pré-carga, sem girar o rolamento, ou da pren-sagem do rolamento com excesso de interferência.
Goivagem é defeito semelhante ao anterior, mas provocado porpartículas estranhas que ficam prensadas pelo rolete ou esfera naspistas.
Sulcamento é provocado pela batida de uma ferramenta qualquersobre a pista rolante.
Queima por corrente elétrica é geralmente provocada pela pas-sagem da corrente elétrica durante a soldagem. As pequenas áreasqueimadas evoluem rapidamente com o uso do rolamento e provocamo deslocamento da pista rolante.
As rachaduras e fraturas resultam, geralmente, de aperto excessi-vo do anel ou cone sobre o eixo. Podem, também, aparecer comoresultado do girar do anel sobre o eixo, acompanhado de sobrecarga.
O engripamento pode ocorrer devido a lubrificante muito espesso ouviscoso. Pode acontecer, também, por eliminação de folga nos roletesou esferas por aperto excessivo.
Para evitar paradas longas na produção, devido a problemas de rola-mentos, é necessário ter certeza de que alguns desses rolamentosestejam disponíveis para troca. Para isso, é aconselhável conhecercom antecedência que rolamentos são utilizados nas máquinas e asferramentas especiais para sua montagem e desmontagem.
Os rolamentos são cobertos por um protetor contra oxidação, antes deembalados. De preferência, devem ser guardados em local onde atemperatura ambiente seja constante (21ºC). Rolamentos com placa deproteção não deverão ser guardados por mais de 2 anos. Confira se osrolamentos estão em sua embalagem original, limpos, protegidos comóleo ou graxa e com papel parafinado.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
55
Lubrificantes
Com graxa
A lubrificação deve seguir as especificações do fabricante da máquinaou equipamento. Na troca de graxa, é preciso limpar a engraxadeiraantes de colocar graxa nova. As tampas devem ser retiradas paralimpeza. Se as caixas dos rolamentos tiverem engraxadeiras, deve-seretirar toda a graxa e lavar todos os componentes.
Com óleo
Olhar o nível do óleo e completá-lo quando for necessário. Verificar seo respiro está limpo. Sempre que for trocar o óleo, o óleo velho deveser completamente drenado e todo o conjunto lavado com o óleo novo.Na lubrificação em banho, geralmente se faz a troca a cada ano quan-do a temperatura atinge, no máximo, 50ºC e sem contaminação; acimade 100ºC, quatro vezes ao ano; acima de 120ºC, uma vez por mês;acima de 130ºC, uma vez por semana, ou a critério do fabricante.
Representações de rolamentos nos desenhos técnicos
Os rolamentos podem ser apresentados de duas maneiras nos dese-nhos técnicos: simplificada e simbólica.
Observe, com atenção, cada tipo de representação.
Tipos de rolamento Representação
Rolamento fixocom uma carreir de
esferas.
Rolamento de rolocom uma carreira
de rolos.
Rolamento decontato angular
com uma carreirade esferas.
Rolamento auto-compensador de
esferas.
Rolamento auto-compensador de
rolos.
Rolamento de roloscônicos.
Rolamento axialsimples.
Observe novamente as representações simbólicas dos rolamentos erepare que a mesma representação simbólica pode ser indicativa detipos diferentes de rolamentos.Quando for necessário, a vista frontal do rolamento também pode serdesenhada em representação simplificada ou simbólica.
vista frontal representação simplificada
vista frontal representação simbólica

Tecnologia de Projeto I – 1o Ciclo de Mecânica
56
Elementos Elásticos
Molas
Vejamos agora vários tipos de elementos elásticos, tais como as mo-las.
Molas helicoidais
A mola helicoidal é a mais usada em mecânica. Em geral, ela é feita debarra de aço enrolada em forma de hélice cilíndrica ou cônica. A barrade aço pode ter seção retangular, circular, quadrada, etc. Em geral, amola helicoidal é enrolada à direita. Quando a mola helicoidal forenrolada à esquerda, o sentido da hélice deve ser indicado no dese-nho.
molahelicoidal à direita mola helicoidal à esquerda
As molas helicoidais podem funcionar por compressão, por tração oupor torção.
A mola helicoidal de compressão é formada por espirais. Quandoesta mola é comprimida por alguma força, o espaço entre as espirasdiminui, tornando menor o comprimento da mola.
mola helicoidal de compressão mola helicoidal de compressãoem repouso comprimida
A mola helicoidal de tração possui ganchos nas extremidades,além das espiras. Os ganchos são também chamados de olhais.
Para a mola helicoidal de tração desempenhar sua função, deve seresticada, aumentando seu comprimento. Em estado de repouso, elavolta ao seu comprimento normal.
A mola helicoidal de tração é aplicada em várias situações. Veja umexemplo:
molas em estado de repouso molas esticadas
A mola helicoidal de torção tem dois braços de alavancas, além dasespiras.
Veja um exemplo de mola de torção na figura à esquerda, e, à direita, aaplicação da mola num pregador de roupas.
Agora veja exemplos de molas helicoidais cônicas e suas aplicaçõesem utensílios diversos.
Note que a mola que fixa as hastes do alicate é bicônica.Algumas molas padronizadas são produzidas por fabricantes específi-cos e encontram-se nos estoques dos almoxarifados. Outras são exe-cutadas de acordo com as especificações do projeto, segundo medidasproporcionais padronizadas.
A seleção de uma mola depende das respectivas formas e solicitaçõesmecânicas.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
57
Características das molas helicoidais
Analise as características da mola helicoidal de compressão cilíndri-ca.
De: diâmetro externo;Di: diâmetro interno;H: comprimento da mola;d: diâmetro da seção do arame;p: passo da mola;nº: número de espiras da mola.
Passo – é a distância entre os centros de duas espiras consecutivas. Adistância entre as espiras é medida paralelamente ao eixo da mola.
As molas de compressão são enroladas com as espiras separadas deforma que possam ser comprimidas.
O próximo desenho apresenta uma mola de compressão cotada. Re-solva os exercícios, aplicando o que você aprendeu.
Verificando o entendimento
Analise o desenho técnico da mola e escreva as cotas pedidas.
a) De:___________
b) Di:___________
c) H:____________
d) d:____________
e) p:____________
f) nº: ___________
Analise agora as características da mola helicoidal de tração:
De (diâmetro externo);Di (diâmetro interno);d (diâmetro da seção do arame);p (passo);nº(número de espiras da mola).
Como você vê, as características da mola helicoidal de tração são quaseas mesmas da mola helicoidal de compressão. A única diferença é emrelação ao comprimento. Na mola helicoidal de tração, H representa ocomprimento total da mola, isto é, a soma do comprimento do corpo damola mais o comprimento dos ganchos.
A mola de tração é enrolada com as espiras em contato uma com aoutra, de forma a poder ser estendida.
As extremidades normalmente terminam em dois ganchos de formacircular.
Resolva o próximo exercício para fixar bem as características da molade tração.
Verificando o entendimento
Analise o desenho técnico da mola de tração e escreva sobre as linhasde cota, as cotas indicadas a seguir:
a) De: 20 mmb) Di: 15 mmc) p: 2,5 mmd) H: 65 mme) h: 30 mmf) nº de espiras: 11g) d: 2,5 mm
Você já sabe que a mola helicoidal de compressão pode ter a forma deum tronco de cone.
Então veja as características de dois tipos de molas cônicas: a primei-ra tem seção circular e a segunda tem seção retangular.
Mola cônica de seção circular:
H: comprimento;Dm: diâmetro maior da mola;dm: diâmetro menor da mola;p: passo;nº: número de espiras;d: diâmetro da seção do arame;

Tecnologia de Projeto I – 1o Ciclo de Mecânica
58
Compare as características anteriores com as características da molacônica de seção retangular.
Mola cônica de seção retangular:
H: comprimento da mola;Dm: diâmetro maior da mola;dm: diâmetro menor da mola;p: passo;nº: número de espiras;e: espessura da seção da lâmina;A: largura da seção da lâmina.
Em lugar do diâmetro do arame (d) da mola circular, a mola de seçãoretangular apresenta outras características:e – espessura da seção da lâmina eA – largura da seção da lâmina
Interprete a cotagem de uma mola cônica, resolvendo o próximo exer-cício.
Verificando o entendimento
Analise o desenho e responda às questões.
a) Qual a forma da seção da mola representada?
_______________________________________________________
b) Qual é a medida do passo da mola?
_______________________________________________________
c) Qual é a largura da seção da lâmina?
_______________________________________________________
Analise as características da mola helicoidal de torção.
Mola helicoidal de torção:De: Diâmetro externo da mola;Di: Diâmetro interno da mola;H: comprimento da mola;d: diâmetro da seção do arame;p: passo;nº: número de espiras;r: comprimento do braço de alavanca;a: ângulo entre as pontas da mola.
As novas características que aparecem nesse tipo de mola são: r, querepresenta o comprimento do braço da alavanca, e a, que representa aabertura do ângulo formado pelos dois braços da alavanca.
Note que as forças que atuam sobre a mola de torção são perpendicu-lares ao seu eixo, enquanto que nas molas de torção e de compressãoa força segue a mesma direção do eixo.
Você já dispõe dos conhecimentos necessários para ler e interpretar acotagem de uma mola de torção.
Então, resolva o próximo exercício.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
59
Verificando o entendimento
Analise o desenho técnico da mola de torção e escreva as cotas indi-cadas.
a) diâmetro externo da mola: 16 mm;b) diâmetro interno da mola: 12 mm;c) comprimento da mola: 18 mm;d) diâmetro da seção do arame: 2 mm;e) passo: 2 mm;f) número de espiras: 6;g) comprimento do braço de alavanca: 15 mm;h) ângulo entre pontas da mola: 90º.
Molas planas
As molas planas são feitas de material plano ou em fita.
As molas planas podem ser simples, prato, feixe de molas e espiral.
mola plana simples mola prato
feixe de molas mola espiral
Observe a ilustração da mola plana simples.
Esse tipo de mola é empregado somente para algumas cargas. Emgeral, essa mola é fixa numa extremidade e livre na outra. Quandosofre a ação de uma força, a mola é flexionada em direção oposta.
Veja agora a mola prato. Essa mola tem a forma de um tronco de conecom paredes de seção retangular.
Em geral, as molas prato funcionam associadas entre si, empilhadas,formando colunas. O arranjo das molas nas colunas depende da ne-cessidade que se tem em vista.
Veja a seguir dois exemplos de colunas de molas prato.
molas prato acopladas molas prato acopladas no mesmo sentido em sentido alternado
As características das molas prato são:
De: diâmetro externo da mola;Di: diâmetro interno da mola;H: comprimento da mola;h: comprimento do tronco interno da mola;e: espessura da mola.
Observe atentamente o desenho cotado da mola prato e resolva oexercício.
Verificando o entendimento
Escreva as cotas solicitadas.
a) De:__________
b) Di:___________
c) H:____________
d) h:____________
e) e:____________

Tecnologia de Projeto I – 1o Ciclo de Mecânica
60
O feixe de molas é feito de diversas peças planas de comprimentovariável, moldadas de maneira que fiquem retas sob a ação de umaforça.
Finalmente, conheça um pouco mais sobre a mola espiral.
A mola espiral tem a forma de espiral ou caracol. Em geral ela é feitade barra ou de lâmina com seção retangular.
A mola espiral é enrolada de tal forma que todas as espiras ficamconcêntricas e coplanares.
Esse tipo de mola é muito usado em relógios e brinquedos.
Para interpretar a cotagem da mola espiral, você precisa conhecersuas características. É o que você vai aprender a seguir.
De: diâmetro externo da molaL: largura da seção da lâmina;e: espessura da seção da lâmina;nº: número de espiras.
Verificando o entendimento
Interprete a cotagem de uma mola espiral.Dê os nomes das características correspondentes às cotas indicadas:
a) 1 : ___________
b) 3 : ___________
c) 6 : ___________
d) 49 : __________
Representação de molas em desenho técnico
A representação das molas, nos desenhos técnicos, é normalizadapela ABNT.
São três as formas de representação adotadas:• normal;• em corte;• simplificada.Os quadros a seguir mostram os três tipos de representação das prin-cipais molas estudadas nestas aulas.
Examine os quadros com muita atenção. Observe bem os detalhes decada representação.
Note que nas representações normais as espiras são desenhadas domodo como são vistas pelo observador.
Já nas representações simplificadas as espiras são representadasesquematicamente, por meio de linhas.
Resolva o exercício proposto a seguir.
Verificando o entendimento
Analise o quadro da página seguinte e responda as questões.
a)Que tipo de mola está representado neste desenho?
_______________________________________________________
b)Que tipo de representação convencional foi adotado?
_______________________________________________________
Você deve ter notado que, nesse desenho, a mola funciona enroladaem volta de um pino com porca sextavada. A mola está sofrendo aação de uma força F, que reduz o seu comprimento.
Trata-se, portanto, de uma mola helicoidal de compressão, de seçãocircular (a), e está desenhada em representação normal, em corte (b).

Tecnologia de Projeto I – 1o Ciclo de Mecânica
61
Material de fabricação
As molas podem ser feitas com os seguintes materiais: aço, latão,cobre, bronze, borracha, madeira, plastiprene, etc.
As molas de borracha e de arames de aço com pequenos diâmetros,solicitados a tração, apresentam a vantagem de constituírem elemen-tos com menor peso e volume em relação à energia armazenada.
Para conservar certas propriedades das molas - elásticas, magnéticas;resistência ao calor e à corrosão - deve-se usar aços-liga e bronzeespeciais ou revestimentos de proteção. Os aços molas devem apre-sentar as seguintes características: alto limite de elasticidade, granderesistência, alto limite de fadiga.
Quando as solicitações são leves, usam-se aços-carbono - ABNT 1070ou ABNT 1095.
Além de 8mm de diâmetro, não são aconselháveis os aços-carbono,pois a têmpera não chega até o núcleo.
As molas destinadas a trabalhos em ambientes corrosivos com grandevariação de temperaturas são feitas de metal monel (33% CU - 67% Ni)ou aço inoxidável.
Os aços-liga apresentam a vantagem de se adequarem melhor a qual-quer temperatura, sendo particularmente úteis no caso de molas degrandes dimensões.
Aplicação
Para selecionar o tipo de mola, é preciso levar em conta certos fatores,como por exemplo, espaço ocupado, peso e durabilidade. Há casos emque se deve considerar a observação das propriedades elásticas, atritosinternos ou externo adicional (amortecimento, relações especiais entreforça aplicada e deformação).Na construção de máquinas empregam-se, principalmente, molashelicoidais de arame de aço. São de baixo preço, de dimensionamentoe montagem fáceis e podem ser aplicadas em forças de tração e decompressão.
As molas de borracha são utilizadas em fundações, especialmentecomo amortecedores de vibrações e ruídos e em suspensão de veícu-los.
As molas de lâmina (feixe de molas) e de barra de torção requeremespaços de pequena altura (veículos).
As molas espirais (de relógios) e de prato podem ser montadas emespaços estreitos.
As molas de lâmina, de prato, helicoidal de prato e de borracha dispen-dem pouca quantidade de energia por atrito.
mola prato ou Belleville

Tecnologia de Projeto I – 1o Ciclo de Mecânica
62
Anexo 1

Tecnologia de Projeto I – 1o Ciclo de Mecânica
63
Anexo 2

Tecnologia de Projeto I – 1o Ciclo de Mecânica
64
Anexo 3

Tecnologia de Projeto I – 1o Ciclo de Mecânica
65
Anexo 4

Tecnologia de Projeto I – 1o Ciclo de Mecânica
66
Anexo 5

Tecnologia de Projeto I – 1o Ciclo de Mecânica
67
Anexo 6
Parafusos de Cabeça Sextavada de Rosca Métrica DIN-931Ver nos esclarecimentos a correlação com as recomendações I S O
r
s
ed
x z1
L
b
od s
o30
k
c
Designação de um parafuso de cabeça sextavada de rosca d = M8comprimento L = 50mm e classe de resistência 8,8 :
PARAFUSO DE CABEÇA SEXTAVADA M8 X 50 DIN 931 - 8,8
d M 1,6 (M 1,7) M2 (M 2,3) M2,5 (M2,6) M 3,0 M 3,5) M 4 M 5 M 6 (M 7) M8 M10 M12
1 9 9 10 11 11 11 12 13 14 16 18 20 22 26 30b 2 - - - - - - - - - 22 24 26 28 32 36 3 - - - - - - - - - - - - - 45 49
c - - - - - - - - 0,1 0,2 0,3 0,3 0,4 0,4 0,4do max 2 2,1 2,6 2,9 3,1 3,2 3,6 4,1 4,7 5,7 6,8 7,8 9,2 11,2 14,2d m 3,48 3,82 4,38 4,95 5,51 5,51 6,08 6,64 7,74 8,87 11,05 12,12 14,38 18,90 21,10
mín.
mg
- - - - - - - - - - - - - - 20,88
k 1,1 1,2 1,4 1,6 1,7 1,8 2 2,4 2,8 3,5 4 5 5,5 7 8rmin 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,1 0,2 0,2 0,25 0,25 0,4 0,4 0,6s 3,2 3,5 4 4,5 5 5 5,5 6 7 8 10 11 13 17 18
L 4) Peso ( 7,85 kg/dm3 ) kg / 100012 0,240 0,280 0,400
(14) 0,272 0,315 0,450 0,610 0,770 0,79016 0,304 0,350 0,500 0,675 0,845 0,870
(18) 0,740 0,920 0,97020 0,805 0,995 1,03 1,29
(22) 1,07 1,11 1,40 2,03 2,8225 1,17 1,24 1,57 2,25 3,12
(28) 1,74 2,48 3,4130 3,61 5,64 8,06 12,135 4,04 6,42 9,13 13,6 18,240 4,53 7,20 10,2 15,1 20,7 35,045 5,03 7,98 11,3 16,6 22,2 38,0 53,650 5,52 8,76 12,3 18,1 24,2 41,1 58,155 6,02 9,54 13,4 19,5 25,8 43,8 62,660 6,51 10,3 14,4 21,0 27,8 46,9 67,065 7,01 11,1 15,5 22,5 29,8 50,0 70,370 7,50 11,9 16,5 24,0 31,8 53,1 74,775 12,7 17,6 25,5 33,7 56,2 79,180 13,5 18,6 27,0 35,7 62,3 83,6
(85) 19,7 28,5 37,7 65,4 88,090 20,8 30,0 39,6 68,5 92,4
(95) 31,5 41,6 71,6 96,9100 33,1 43,6 77,7 100110 47,5 83,9 109120 90,0 118130 96,2 127140 102 136150 108 145160 153170 162180 171
• Medidas não previstas pela ISO/R 272 - 1962 e que devem ser evitadas.
Os parafusos acima da linha cheia têmrosca até próximo da cabeça e devemser designados pela norma DIN 933

Tecnologia de Projeto I – 1o Ciclo de Mecânica
68
Anexo 6 - Continuação
Continuação da tabela DIN-931
d (M 14) (M 16) (M18) M 20 M 22) M 24 (M 27) M 30 M 33) M 36 M 39) M 42 (M45) M 48 (M 52)
1) 34 38 42 46 50 54 60 66 72 78 84 90 96 102 -b 2) 40 44 48 52 56 60 66 72 78 84 90 96 102 108 116 3) 53 57 61 65 69 73 79 85 91 97 103 109 115 121 129
c 0,4 0,4 0,4 0,4 0,4 0,5 0,5 0,5 0,5 0,5 0,6 0,6 0,6 0,6 -do max 16,2 18,2 20,2 22,4 24,4 26,4 30,4 33,4 36,4 39,4 42,4 45,6 48,6 52,6 56,6d m 24,49 26,75 30,14 33,53 35,72 39,98 45,63 51,28 55,80 61,31 66,96 72,61 78,26 83,91 89,56
mín mg 23,91 26,17 29,16 32,95 35,03 39,55 45,20 50,85 55,37 60,69 66,44 72,09 77,74 83,39 89,04k 9 10 12 13 14 15 17 19 21 23 25 26 28 30 33
rmin 0,6 0,6 0,6 0,8 0,8 0,8 1 1 1 1 1 1,2 1,2 1,6 1,6s 22 24 27 30 32 36 41 46 50 55 60 65 70 75 80
L 4) Peso ( 7,85 kg/dm3 ) kg / 100050 82,255 88,3 11560 94,3 123 16165 100 131 171 21970 106 139 181 231 28175 112 147 191 243 296 36480 118 155 201 255 311 382 511
(85) 124 163 210 267 326 410 53490 128 171 220 279 341 428 557 712
(95) 134 179 230 291 356 446 580 739100 140 186 240 303 370 464 603 767 951110 152 202 260 327 400 500 650 823 1020 1250 1510120 165 218 280 351 430 535 695 880 1090 1330 1590 1900 2260130 175 230 295 365 450 560 720 920 1150 1400 1650 1980 2350 2780140 187 246 315 389 480 595 765 975 1220 1480 1740 2090 2480 2920150 199 262 335 423 510 630 810 1030 1290 1560 1830 2200 2600 3010 3450160 211 278 355 447 540 665 855 1090 1350 1640 1930 2310 2730 3160 3770170 223 294 375 470 570 700 900 1140 1410 1720 2020 2420 2850 3300 3930180 235 310 395 495 600 735 945 1200 1480 1900 2120 2520 2980 3440 4100190 247 326 415 520 630 770 990 1250 1540 1980 2210 2630 3100 3580 4270200 260 342 435 545 660 805 1030 1310 1610 2060 2310 2740 3220 3720 4430220 590 720 870 1130 1420 1750 2220 2500 2960 3470 4010 4760240 1530 1880 2380 2700 3180 3820 4290 5110260 1640 2020 2540 2900 3400 4030 4570 5450
Evitar os possíveis tamanhos entre parênteses. Usualmente se fabricam estes parafusos com as classe de resistência 5.6 e 8.8, nos tamanhos marcados por indicaçõesde peso. Tamanhos cuja indicação de peso esta destacada por impressão em negrito, se realizam geralmente como comercial abase de sua freqüência . Condições técnicas de fabricação segundo DIN 267 Classe de resistência (material) : 5.6
5.8 só até M4 segundo DIN 2678.8 só até M39 folha 3
10.9
Execução: m segundo DIN 267 a partir de M12 também mg (a escolha do fabricante) folha 2 Com essa proteção de superfície, se completará a designação segundo DIN 267 fl.9.
Se há de ser prescrita excepcionalmente uma das formas B, K, Ko, L, S, Sb, Sk, Sz e To admissíveis seg. DIN 962 apartir de M12, se indicará este expressamente no pedido. Exemplos de designação veja DIN 962. Se hão de fabricar parafusos até M14 com arruelas de pressão se indicará este expressamente no pedido. Exemplos dedesignação veja DIN 6900. Parafusos torneados podem ser fabricados de acordo também sem saliência na superfície.
1) Para comprimentos até 125mm.2) Para comprimentos de mais de 125 até 200mm.3) Para comprimentos de mais de 200mm.4) Se evitarão os possíveis comprimentos intermediários. Comprimentos de mais de 260mm se escalonarão de 20 em
20mm.
Os parafusos sobre a linha escalonadatem a rosca aproximadamente até acabeça e são pedidas seg. DIN 933.

Tecnologia de Projeto I – 1o Ciclo de Mecânica
69
Anexo 7
Classe de Material DIN - 267
Classe de DIN 267 parte 3 3.6 4.6 4.8 5.6 5.8 6.6 6.8 6.9Resistência DIN ISSO 898 parte 1 3.6 4.6 4.8 5.6 5.8 -- 6.8 --Mínima Resistência DIN 267 parte 3 340 400 400 500 500 600 600 600a tração [N/mm2] DIN ISSO 898 parte 1 330 400 420 500 520 -- 600 --Limite mínimo de DIN 267 parte 3 200 240 320 300 400 360 480 540escoamento[N/mm2]
DIN ISSO 898 parte 1 190 240 340 300 420 -- 480 --
Classe de DIN 267 parte 3 8.8 -- 10.9 12.9 14.9Resistência DIN ISSO 898 parte 1 8.8 9.8 10.9 12.9 --
M16≤ > M16 M16≤
Mínima Resistência DIN 267 parte 3 800 -- 1000 1200 1400a tração [N/mm2] DIN ISSO 898 parte 1 8088 830 900 1040 1220 --Limite mínimo de DIN 267 parte 3 640 -- 900 1080 1260escoamento[N/mm2]
DIN ISSO 898 parte 1 640 660 700 940 1100 --

Tecnologia de Projeto I – 1o Ciclo de Mecânica
70
Anexo 8
Tabela de Arruela Lisa

Tecnologia de Projeto I – 1o Ciclo de Mecânica
71
Anexo 9

Tecnologia de Projeto I – 1o Ciclo de Mecânica
72
Anexo 10

Tecnologia de Projeto I – 1o Ciclo de Mecânica
73
Anexo 11
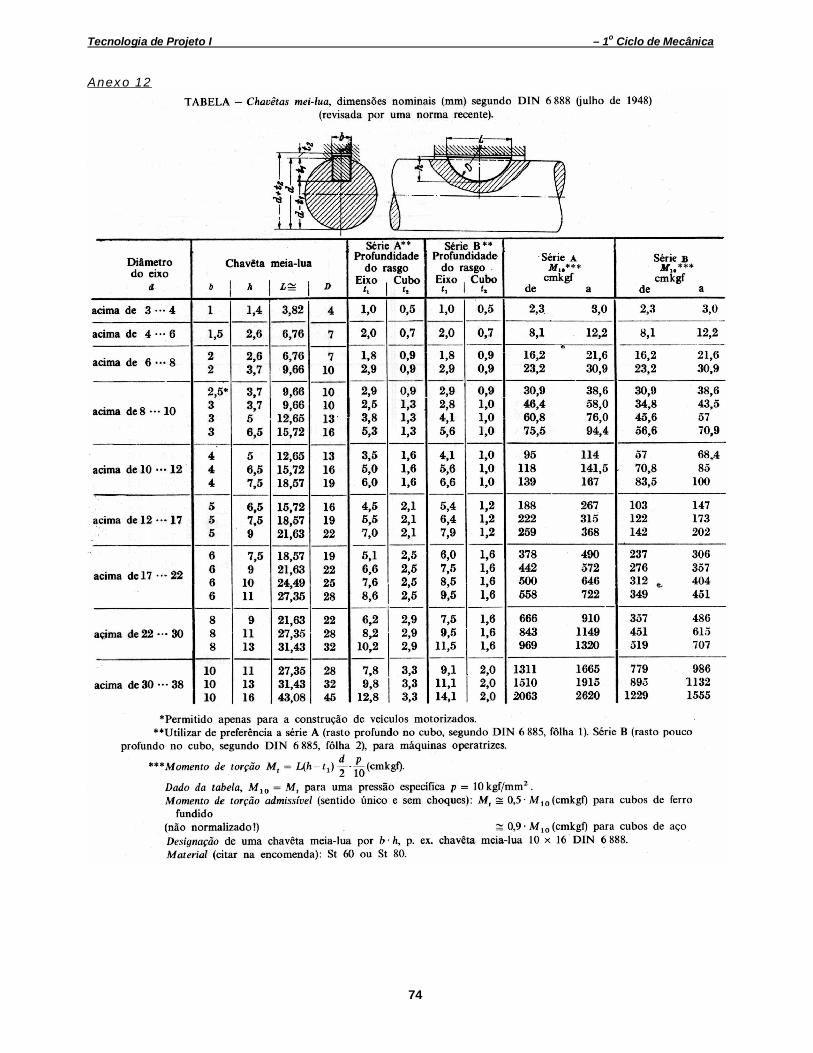
Tecnologia de Projeto I – 1o Ciclo de Mecânica
74
Anexo 12

Tecnologia de Projeto I – 1o Ciclo de Mecânica
75
Anexo 13