tcc_gabriel estêvão de morais rodrigues - temporário
TRANSCRIPT

GABRIEL ESTÊVÃO DE MORAIS RODRIGUES
CONCEPÇÃO E VALIDAÇÃO DE UM MODELO DINÂMICO ESTRUTURAL DA
EMPENAGEM VERTICAL DA AERONAVE EMBRAER EMB – 121 “XINGU”.
UNIVERSIDADE FEDERAL DE UBERLÂNDIA
FACULDADE DE ENGENHARIA MECÂNICA
2016

GABRIEL ESTÊVÃO DE MORAIS RODRIGUES
Orientador
Professor Dr. Aldemir Aparecido Cavallini Junior
CONCEPÇÃO E VALIDAÇÃO DE UM MODELO DINÂMICO ESTRUTURAL DA
EMPENAGEM VERTICAL DA AERONAVE EMBRAER EMB – 121 “XINGU”.
Projeto de Conclusão de Curso apresentado ao
Curso de Graduação em Engenharia Aeronáutica
da Universidade Federal de Uberlândia, como
parte dos requisitos para a obtenção do título de
BACHAREL em ENGENHARIA
AERONÁUTICA.
UBERLÂNDIA - MG
2016
3
CONCEPÇÃO E VALIDAÇÃO DE UM MODELO DINÂMICO ESTRUTURAL DA
EMPENAGEM VERTICAL DA AERONAVE EMBRAER EMB – 121 “XINGU”.
Projeto de conclusão de curso APROVADO pelo
Colegiado do Curso de Graduação em Engenharia Aeronáutica da Faculdade de Engenharia Mecânica da Universidade Federal de Uberlândia.
BANCA EXAMINADORA
________________________________________
Prof. Dr. Aldemir Aparecido Cavalini Jr Universidade Federal de Uberlândia
________________________________________ Prof. Dr. Tobias Souza Morais
Universidade Federal de Uberlândia
________________________________________
Prof. Dr. Leonardo Sanches Universidade Federal de Uberlândia
UBERLÂNDIA - MG
2016

4
AGRADECIMENTOS
Agradeço à minha família, Eliane, Sarah, Bernardo e Leandro, que me ajudaram a chegar
onde estou e que, sem eles, não seria possível completar essa etapa tão importante da minha vida
que é a graduação em Engenharia Aeronáutica. Também tenho que agradecer à Camila, que o
apoio e os conselhos foram essenciais para superar os desafios passados durante o final de minha
graduação.
Agradeço também aos profissionais envolvidos neste trabalho, mais precisamente os
Professores Doutores Aldemir Aparecido Cavalini Junior e Leonardo Sanches que, além de terem
tido participação primordial neste trabalho e em minha graduação, também vem exercendo um
trabalho essencial no desenvolvimento do curso de Graduação em Engenharia Aeronáutica.

5
RODRIGUES, G. E. M. Concepção e Validação de um Modelo Dinâmico Estrutural
da Empenagem Vertical da Aeronave Embraer EMB – 121 “Xingu”. 2016. 55p. Projeto de
Conclusão de Curso, Universidade Federal de Uberlândia, Uberlândia, Brasil.
RESUMO
O presente trabalho descreve os processos de criação e validação do modelo dinâmico
estrutural da empenagem vertical de aeronave Embraer EMB – 121 Xingu, através modelagem
tridimensional, em elementos finitos, utilizando softwares comercias de CAD e CAE, com a
posterior validação do modelo criado, através de ensaios dinâmicos da estrutura real. Foi criado
um modelo da estrutura através do software CATIA®, com a malha feita no software
HyperMesh® e a análise em elementos finitos feita através do software Siemens FEMAP®. A
validação do modelo numérico ocorreu através do ensaio dinâmico da estrutura real sobre as
condições de corpo livre. O modelo numérico em elementos finitos apresentou diferença média
entre os valores de frequência experimentais de 8,5%, ou seja, 19,4 Hz. Os modos de vibrar
também tiveram coerência em relação aos resultados experimentais e numéricos.
PALAVRAS CHAVE: análise modal, vibração de Estruturas, modelagem, CAE, CAD,
frequências naturais.

6
RODRIGUES, G. E. M. Design and Validation of a Structural Dynamic Model of a Embraer
EMB - 121's Vertical Empennage.”. 2016. 55p. Graduation Project, Federal University of
Uberlândia, Uberlandia, Brazil.
ABSTRACT
This work describes the construction and validation process of a vertical empennage finite
element model of the Embraer EMB - 121 Xingu aircraft. A three dimensional model was created
through the CATIA® software with the mesh made in HyperMesh® software. The finite element
analysis was made through Siemens FEMAP® software using NASTRAN code. The validation
of the numerical model was performed through dynamic tests with the real full scale structure in
free conditions. The numerical and experimental natural frequencies presented a mean difference
of 8.5%. The numerical vibration modes also presented consistency with the experimental results.
KEYWORDS: Modal analysis, structural vibration, modeling, CAE, CAD, natural frequencies.

7
LISTA DE FIGURAS
Figura 1 – Estabilizador vertical, em vermelho, em relação à vista lateral da aeronave (FISCHER, 2013).
........................................................................................................................................................ 14
Figura 2 - Sobreposição da resposta no domínio do tempo com a relativa resposta em frequência de um
sistema genérico (Fonte: AVITABILE, PETER. (REV 052700)). ........................................................... 19
Figura 3 - Obtenção dos modos de vibrar de uma placa plana através do Método da Quadratura.
Representação da posição de captação dos acelerômetros na placa ao lado esquerdo da imagem. (Fonte:
AVITABILE, PETER. -REV 052700). .................................................................................................. 20
Figura 4 - Função resposta em frequência de um sistema suspenso na condição livre com os modos de
corpo rígido com frequências diferentes de zero. (Fonte: AGILENT TECHNOLOGIES COMPANY
(1997)). ............................................................................................................................................ 22
Figura 5 - Esquematização de um ensaio utilizando Shaker para a aplicação de uma força randômica e o
espectro das frequências dos harmônicos contidos na excitação randômica de um shaker. (Fonte:
AGILENT TECHNOLOGIES COMPANY (1997))................................................................................ 22
Figura 6 - Etapas de uma análise dinâmica de uma estrutura. Adapatação de (JUNIOR e KURDILA,
2006) ................................................................................................................................................ 23
Figura 7 - Método de comparação das frequências naturais da análise experimental e o modelo
matemático teórico por meio de análise gráfica. Adaptado de (AGILENT TECHNOLOGIES
COMPANY®, 1997). ........................................................................................................................ 25
Figura 8 – Vista lateral da geometria da empenagem vertical do Embraer EMB - 121 Xingu criada
através do software CATIA. ............................................................................................................... 27
Figura 9 - Malha criada no software HyperMesh® a partir da geometria criada em CAD. ..................... 28
Figura 10 - Função que descreve a faixa de frequência da força utilizada nos cálculos do modelo
numérico no software FEMAP - NASTRAN. Imagem retirada a partir do software Siemens FEMAP®. .. 29
Figura 11 - Ponto de aplicação da força de excitação no modelo numérico. ......................................... 30
Figura 12 - Pontos de análise de resposta em frequência. .................................................................... 30
Figura 13 - Foto da estrutura analisada com destaque para o seu sistema de fixação. ........................... 32
Figura 14 - Foto destacando a fixação do acelerômetro. A fixação se deu através da utilização de cera. 32
Figura 15 - Foto da cadeia de medição com destaque para a fixação do shaker com a célula de carga
fixada na ponta da haste através de um parafuso preso à estrutura....................................................... 33
Figura 16 - Gráfico da variação da força na porta da haste do acelerômetro fixado na estrutura
analisada, frente uma excitação inicial. .............................................................................................. 34
Figura 17 - Valor da coerência em função da frequência da força aplicada. Teste 1 (ponto 0). .............. 34
Figura 18 - Ponto de fixação da haste do shaker e, consequentemente, da célula de carga, comum a todos
os experimentos realizados................................................................................................................. 35
Figura 19 - Ponto de fixação do acelerômetro para os testes de análise do valor das frequências naturais
(Teste 1)............................................................................................................................................ 35
Figura 20 - Ponto de fixação do acelerômetro para o teste de determinação dos modos de vibrar (Teste
2). .................................................................................................................................................... 36
Figura 21 - Função Resposta em Frequência. Teste 1 (Experimental, ponto 0) . .................................... 37

8
Figura 22 - Função Resposta em Frequência (Numérico, Análise Harmônica 1, Ponto 0). Magnitude da
aceleração em relação à frequência da força de excitação na direção Y. .............................................. 38
Figura 23 - Reta de tendência. (Análise Harmônica 1 e Teste 1 - Ponto 0). ........................................... 39
Figura 24 - Reta de tendência. (Análise Harmônica 2 e Teste 2 - Ponto 2). ........................................... 40
Figura 25 - Reta de tendência. (Análise Harmônica 3 e Teste 2 - Ponto 4). ........................................... 41
Figura 26 - Reta de tendência. Reta de tendência. (Análise Harmônica 4 e Teste 2 - Ponto 1). ............... 42
Figura 27 - Componentes que tiveram a sua espessura alterada para o ajuste do modelo, segundo a
tabela 9............................................................................................................................................. 44
Figura 28 - Função resposta em frequência referente ao ponto 0 da figura (12), para o modelo ajustado.
........................................................................................................................................................ 45
Figura 29 - Comparação das frequências naturais dos modos gerais de vibrar da estrutura (Teste 1
experimental e dados do modelo ajustado – Ponto 0). ........................................................................ 46
Figura 30 – Erro entre os valores das frequências naturais dos modos gerais de vibrar da estrutura para
o modelo numérico ajustado e os valores experimentais – Ponto 0. ...................................................... 47
Figura 31 - Reta de tendência entre os valores das frequências naturais dos modos gerais de vibrar da
estrutura para o modelo numérico ajustado e os valores experimentais – Ponto 0. ................................ 47
Figura 32 - Erro entre os valores das frequências naturais dos modos gerais de vibrar da estrutura para
o modelo numérico ajustado e os valores experimentais....................................................................... 48
Figura 33 – Primeiro modo de vibrar obtido experimentalmente: frequência de 105Hz. ........................ 49
Figura 34 - Primeiro Modo de Vibrar obtido analiticamente: frequência 113,0 Hz. ............................... 49
Figura 35 - Segundo modo de vibrar obtido experimentalmente: frequência de 162Hz........................... 49
Figura 36 - Segundo Modo de Vibrar obtido analiticamente: frequência 168,9 Hz. ............................... 50
Figura 37 - Terceiro modo de vibrar obtido experimentalmente: frequência de 220Hz........................... 50
Figura 38 - Terceiro Modo de Vibrar obtido analiticamente: frequência 215,8 Hz. ............................... 50
Figura 39 - Propriedades das folhas de alumínio 2024 T3 dadas em unidades do sistema internacional em
função de sua espessura. Fonte: (DEPARTMENT OF DEFENSE USA, 2003) ..................................... 56
Figura 40 - Espectro de frequência da força aplicada no ensaio com a referente amplitude. .................. 57
Figura 41 - Função resposta em frequência. ....................................................................................... 57
Figura 42 - Diagrama de fase do sinal................................................................................................ 57
Figura 43 - Coerência dos resultados obtidos em função da frequência de análise. ............................... 58

9
LISTA DE TABELAS
Tabela 1 – Parâmetros da malha feita através do software HyperMesh®. ................................... 28
Tabela 2 - Parâmetros para o segundo ensaio experimental (Teste 2). ........................................ 33
Tabela 3 - Resultado da frequência de corpo rígido do sistema de fixação dos testes
experimentais. ................................................................................................................................ 34
Tabela 4 - Correlação entre testes Experimentais e Numéricos. .................................................. 37
Tabela 5 - Resultados numéricos (Análise Harmônica 1) e experimentais (Teste 1) para o Ponto
0. .................................................................................................................................................... 39
Tabela 6 - Resultados numéricos (Análise Harmônica 2) e experimentais (Teste 2) para o Ponto
2. .................................................................................................................................................... 39
Tabela 7 - Resultados numéricos (Análise Harmônica 3) e experimentais (Teste 2) para o Ponto
4. .................................................................................................................................................... 40
Tabela 8 - Resultados numéricos (Análise Harmônica 4) e experimentais (Teste 2) para o Ponto
1. .................................................................................................................................................... 41
Tabela 9 - Alterações do modelo numérico em elementos finitos, representados pela figura 26. 44
Tabela 10 - Alteração das propriedades do material do modelo em elementos finitos. ............... 45
Tabela 11 - Frequências Naturais dos modos de vibrar gerais da estrutura. Resultados
numéricos ajustados e experimentais. ........................................................................................... 46
10
LISTA DE ABREVIAÇÕES
D.O.F. Degrees of Freedom (graus de liberdade).
M.D.O.F. Multiple Degrees of Freedom (múltiplos graus de liberdade).
S.D.O.F. Single Degree of Freedom (único grau de liberdade).
C.A.D. Computer Aided Design (Desenho Assistido por computador, DAC)
C.A.E. Computer-Aided Engineering
F. R. F. Função Resposta em Frequência.
M. E. F. Método dos Elementos Finitos.

11
LISTA DE SÍMBOLOS
ft Pés
m Metros
pol Polegadas
kg Quilogramas
g Gramas
km/h Quilômetros por hora
kt Nó
m/s² Metros por segundo ao quadrado
Hz Hertz (ciclos por segundo)
kHz Quilohertz (1000 ciclos por segundo)
N Newtons
LbF Libra Força
°C Graus Celsius
mV Milivolts
s Segundos
mV/m/s² Milivolts por metros por segundo ao quadrado
Mpa Mega Pascais

12
SUMÁRIO
1. Introdução ............................................................................................................................... 13
2. Abordagem Analítica.............................................................................................................. 15
3. Abordagem Experimental relacionada à Dinâmica das Estruturas ........................................ 18
4. Validação do Modelo Analítico.............................................................................................. 23
5. Modelagem via Software Método de Elementos Finitos........................................................ 26
6. Procedimentos Experimentais ................................................................................................ 31
7. Comparação dos Resultados Analíticos Iniciais e Experimentais.......................................... 37
8. Ajustes do Modelo em Elementos Finitos .............................................................................. 44
9. Considerações Finais .............................................................................................................. 53
Bibliografia .................................................................................................................................... 54
Anexo 2: Propriedades do Alumínio 2024 T3. .............................................................................. 56
Anexo 3: Resultados Experimentais .............................................................................................. 57

13
1. Introdução
O fenômeno de flutter é definido como uma oscilação autossustentada que tende a levar à
falha da estrutura poucos momentos após iniciada (TAVARES, 2009). Isto se constitui em um
problema crítico enfrentado pelos projetistas de aeronaves, principalmente em sistemas de alto
desempenho onde é necessário reduzir o peso e controlar as cargas aerodinâmicas (JUNIOR,
REBOLHO, et al., 2007). Como consequência, o projeto da estrutura de uma aeronave deve ser
concebido de forma que atenda tanto os requisitos de cargas estáticas quando os requisitos de
cargas dinâmicas (AGÊNCIA NACIONAL DA AVIAÇÃO CIVIL, BRASIL, 2010).
A análise da dinâmica de estruturas faz parte do desenvolvimento do projeto de uma
aeronave. Para que seja possível a certificação do sistema, parâmetros como frequências naturais,
velocidade de flutter e velocidade de divergência precisam ser apresentados para o órgão
fiscalizador por meio do envelope de manobra da aeronave. É necessário comprovar
experimentalmente que os valores de fatores de carga e velocidade estejam dentro dos requisitos
exigidos (AGÊNCIA NACIONAL DA AVIAÇÃO CIVIL, BRASIL, 2014). Para obter tais
resultados, um modelo matemático que seja fiel à estrutura real deve ser criado a fim de obter um
dimensionamento correto da mesma. A posterior análise da estrutura através de ensaios não
destrutivos e do protótipo da aeronave também faz parte da fase de desenvolvimento (AGÊNCIA
NACIONAL DA AVIAÇÃO CIVIL, BRASIL, 2010). Através de um modelo em elementos
finitos representativo, é possível prever o comportamento da estrutura caso esta sofra mudanças
deste que não afetem significativamente a estrutural original, ou caso as condições de contorno
mudem (RIBEIRO, 2015).
Este estudo tem o objetivo de construir e validar um modelo de elementos finitos da
empenagem vertical da aeronave EMBRAER EMB-121 Xingu em termos de suas frequências
naturais e modos de vibrar. A representatividade e as fontes de erros que levaram à divergência
entre o modelo em elementos finitos e a estrutural real também serão avaliadas por estre trabalho.
O Embraer EMB-121 Xingu é uma aeronave bimotor de médio porte para uso executivo, com
motorização turboélice e cabine pressurizada. Tem capacidade para transportar dois tripulantes e
até oito ou nove passageiros em viagens de médio curso, desenvolvida e fabricada no Brasil a
partir da década de 1970 pela EMBRAER (veja a Fig. 1). Utilizou como base o projeto de asa do
turboélice bimotor para transporte regional de passageiros Bandeirante (EMBRAER S. A., 2016).

14
Figura 1 – Estabilizador vertical, em vermelho, em relação à vista lateral da aeronave (FISCHER, 2013).

15
2. Abordagem Analítica
Este capítulo apresenta a abordagem teórica e os conceitos aplicados na modelagem de
uma estrutura utilizando o método dos elementos finitos. São apresentadas as justificativas para
os softwares empregados na modelagem do sistema e para o posterior cálculo do comportamento
dinâmico da estrutura.
2.1. A equação do movimento para modelos discretos
Vibração é uma oscilação do sistema em torno de sua posição de equilíbrio e é resultado
de uma troca contínua de energia cinética e potencial (RADE e STEFFEN JR, 2013). A maioria
dos elementos naturais ou criados pelo homem envolve vibração, uma vez que qualquer corpo
que possua massa e elasticidade é passível de vibração (RIBEIRO, 2015).
A análise modal é entendida como o conjunto de técnicas analíticas e experimentais
utilizadas para caracterizar o comportamento dinâmico de um sistema vibratório, e se baseiam no
fato que, a partir de certas condições, a resposta dinâmica de um sistema pode ser representada
como a superposição de respostas dinâmicas de sistemas mecânicos elementares, em termos das
chamadas características modais (RADE e STEFFEN JR, 2013).
Como já foi falado, este trabalho parte da modelagem de uma estrutura complexa através
de softwares que utilizam o MEF como método de cálculo, ou seja, há a discretização da
estrutura em n graus de liberdade (SOUZA, 2003).
Segundo RADE e STEFFEN JR (2013) o comportamento dinâmico de uma estrutura com
n graus de liberdade é representada na forma matricial como:
[𝑀]{�̈�(𝑡)} + [𝐶]{�̇�(𝑡)} + [𝐾]{𝑥(𝑡)} = {𝑓(𝑡)} (1)
onde:
{𝑥(𝑡)} = {𝑥1(𝑡)
…𝑥𝑛(𝑡)
} ∊ 𝑅𝒏 é o vetor resposta no tempo;

16
{𝑓(𝑡)} = {𝑓1(𝑡)
…𝑓𝑛(𝑡)
} ∊ 𝑅𝑛 é o vetor das forças de excitação atuantes no sistema;
[𝑀], [𝐶] 𝑒 [𝐾] ∊ 𝑅𝑛,𝑛 são as matrizes de massa, amortecimento e rigidez do sistema,
respectivamente.
Desprezando o efeito do amortecimento e a atuação de forças externas ao sistema, a Eq.
(1) fica com a seguinte forma:
[𝑀]{�̈�(𝑡)} + [𝐾]{𝑥(𝑡)} = {0} (2)
onde a solução geral é dada por:
𝑥(𝑡) = {𝑥}𝑒𝑖𝜔𝑡 ,𝜆 = 𝜔2 (3)
Substituindo a Eq. (3) na Eq. (2), o seguinte problema é obtido:
([𝐾] − 𝜆[𝑀]){𝑥} = {0} (4)
O problema dado pela Eq. (4) admite 𝑛 pares de soluções (𝜆𝑟 , {𝑥𝑟}), 𝑟 = 1,2,… , 𝑛
chamadas autosoluções, onde:
𝜆𝑟 ∊ 𝑅+ são os autovalores. As frequências naturais são dadas por 𝜔𝑟 = √𝜆𝑟 , 𝑟 = 1, … ,𝑛;
{𝑥𝑟} ∊ 𝑅𝑛 são os autovetores ou os modos de vibração da estrutura.
Os autovalores e autovetores são obtidos a partir da seguinte relação:
𝑑𝑒𝑡([𝐾] − 𝜆[𝑀]) = 0 (5)
17
Para cada um dos n autovalores, um autovetor correspondente {𝑥𝑟} é obtido a partir da
Eq. (4). Reagrupando as autosoluções tem-se que:
[𝑋] = [{𝑥1} {𝑥2} … {𝑥𝑛}] ∊ 𝑅𝑛,𝑛 (6)
[ʌ] = 𝑑𝑖𝑎𝑔{𝜆1 𝜆2 … 𝜆𝑛} ∊ 𝑅𝑛,𝑛 (7)
Assim, pode-se afirmar que este trabalho se resume em encontrar as matrizes das
frequências naturais e dos modos de vibrar da empenagem vertical da aeronave EMB – 121
Xingu, [𝑋] e [ʌ], através do software de MEF.
2.2. Generalidades Sobre o Método dos Elementos Finitos (MEF)
Segundo (SILVA, SOEIRO, et al., 2001), o Método dos Elementos Finitos, MEF,
consiste em uma aproximação numérica para a resolução de equações diferenciais através da
repartição do meio contínuo em pequenas regiões de geometria simples. Segundo (BATHE,
1996), o MEF consiste nas seguintes etapas:
Transformação de um elemento contínuo em um elemento discreto de finitos graus de
liberdade;
Aplicação e resolução, através de rotinas numéricas, das equações inerentes ao tipo de
análise a ser feita para cada parte discretizada do sistema, nomeado usualmente como
elemento finito.
A ideia de dividir o domínio em estudo em diversas regiões menores soluciona um
problema referente à dificuldade de se escolher funções de interpolação capazes de descrever o
comportamento das variáveis do problema ao longo de todo o domínio. As funções de
interpolação devem satisfazer as condições de contorno do problema, como também representar
satisfatoriamente o comportamento do material (RADE e STEFFEN JR, 2013).

18
3. Abordagem Experimental relacionada à Dinâmica das Estruturas
3.1. Obtenção das frequências naturais e modos de vibrar
A análise experimental tem como foco obter os parâmetros modais da estrutura, ou seja,
frequências naturais, fatores de amortecimento e modos de vibrar (RADE e STEFFEN JR, 2013).
Segundo (AGILENT TECHNOLOGIES COMPANY®, 1997), embora sistemas reais possuam
múltiplos graus de liberdade (MDOF) e tem algum grau de não linearidade, o modelo de análise
experimental se baseia no fato que eles podem ser geralmente representados como um modelo
discreto de vários elementos de um único grau de liberdade (SDOF), a partir do princípio da
superposição (modelos lineares).
Segundo (AGILENT TECHNOLOGIES COMPANY®, 1997), a análise dinâmica de uma
estrutura é feita através de sua resposta em frequência dada pela função 𝐻(𝑓𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎), Eq. (8).
Como induz a notação, esta função possui seu valor em função da frequência da força atuante na
estrutura, e é representada por:
𝐻(𝑓𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎) =𝑆𝑎í𝑑𝑎
𝐸𝑛𝑡𝑟𝑎𝑑𝑎=
𝑅𝑒𝑠𝑝𝑜𝑠𝑡𝑎 (𝑓𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎)
𝐹𝑜𝑟ç𝑎 𝑒𝑥𝑐𝑖𝑡𝑎𝑑𝑜𝑟𝑎 (𝑓𝑟𝑒𝑞𝑢ê𝑛𝑐𝑖𝑎) (8)
A análise em frequência da estrutura se baseia no conceito simples que, para forças de
mesma intensidade, mas frequências diferentes, as frequências naturais da estrutura são aquelas
cuja resposta em frequência é acentuada (SILVA, SOEIRO, et al., 2001). Este conceito é descrito
por meio da Fig. 2, onde se tem a sobreposição da resposta no domínio do tempo com a relativa
resposta em frequência de um sistema genérico.

19
Figura 2 - Sobreposição da resposta no domínio do tempo com a relativa resposta em frequência de um sistema
genérico (Fonte: AVITABILE, PETER. (REV 052700)).
No caso de sistemas contínuos, podemos representá-lo como uma combinação de sistemas
de um grau de liberdade, de modo que a discretização é feita em função do número de pontos de
coleta (AGILENT TECHNOLOGIES COMPANY®, 1997), dado pela posição de fixação dos
acelerômetros e da posição de aplicação da força. Assim, para uma estrutura bidimensional, os
descolamentos da estrutura frente a uma excitação podem ser calculados por:
{
𝑥1
𝑥2…𝑥𝑁
} = [
𝐻1,1 𝐻1,2
𝐻2,1 𝐻2,2
… 𝐻1,𝑁
… …… …
𝐻𝑁,1 …… …… 𝐻𝑁,𝑁
] {
𝐹1
𝐹2…𝐹𝑁
} (9)
Nas análises experimentais, é possível analisar a resposta em frequência da estrutura
através de excitações aplicadas em uma banda larga de frequências (via shaker ou martelo de
impacto. Sendo assim, pode-se medir a resposta em frequência sobre três formas:
𝐻 =𝑋
𝐹=
𝐷𝑒𝑠𝑙𝑜𝑐𝑎𝑚𝑒𝑛𝑡𝑜
𝐹𝑜𝑟ç𝑎
𝐻 =𝑉
𝐹=
𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑𝑒
𝐹𝑜𝑟ç𝑎
𝐻 =𝐴
𝐹=
𝐴𝑐𝑒𝑙𝑒𝑟𝑎çã𝑜
𝐹𝑜𝑟ç𝑎
As funções resposta em frequência do sistema (Eq. 10) são obtidas através da
transformada de Fourier da resposta no tempo obtida através dos sensores (AGILENT
TECHNOLOGIES COMPANY®, 1997). Tais funções são compostas por pontos cujos valores
são complexos, compostos por parte real e imaginária (RADE e STEFFEN JR, 2013).

20
A frequência de ressonância pode ser estimada a partir dos dados da resposta em
frequência, observando a frequência na qual as seguintes tendências ocorrem, segundo
(AVITABLE, 2001):
Magnitude da resposta em frequência é máxima;
Todos os pontos de ressonância são separados por pontos de antirressonância;
A parte imaginária da resposta em frequência possui valor máximo ou mínimo;
A parte real da resposta em frequência possui valor nulo;
O gráfico de fase do sinal tem um decaimento de 180° ao passar por um ponto de
ressonância e tem um ganho de 180° ao passar por um ponto de antirressonância.
A forma do pico na resposta em frequência indica o fator de amortecimento do sistema
(AGILENT TECHNOLOGIES COMPANY®, 1997).
Uma das mais simples técnicas de estimação dos modos de vibrar é o método de
quadratura, muitas vezes chamado de “colheita de pico”. Neste trabalho, este método será
utilizado automaticamente pelo software de análise modal utilizado o equipamento Modelo
PULSE Reflex™, tipo 7765, fabricado pela Brüel & Kjær. Os modos de vibrar são estimados a
partir da parte imaginária da resposta em frequência do sistema (AGILENT TECHNOLOGIES
COMPANY®, 1997), como mostra a Fig. 3.
Figura 3 - Obtenção dos modos de vibrar de uma placa plana através do Método da Quadratura. Representação da
posição de captação dos acelerômetros na placa ao lado esquerdo da imagem. (Fonte: AVITABILE, PETER. -REV
052700).
Segundo (AVITABLE, 2001) é necessário uma quantidade mínima de dados para que os
modos de vibrar de uma estrutura possam ser obtidos. Ainda segundo (AVITABLE, 2001), dada
a matriz de respostas em frequência de uma estrutura bidimensional representada em pela Eq.
(11), é necessário obter ao menos uma linha ou uma coluna desta matriz para que os modos sejam
21
obtidos via Método da Quadratura. Isso se traduz, em procedimentos experimentais que, para
obter os dados mínimos tem-se que:
Dada uma excitação da estrutura em apenas um ponto, através de um shaker, por
exemplo, devem ser coletadas as respostas em frequências em todos os pontos de análise,
ou seja, se deve instrumentar a estrutura com acelerômetros em todas as posições de
análise, ou;
Via teste de impacto com apenas um acelerômetro, deve ser feita a excitação da estrutura
através do martelo de impacto em todos os pontos de análise;
Os acelerômetros não podem estar localizados no nó de um modo de vibrar, caso
contrário, o modo não será possível de se visualizar através do método da quadratura.
3.2. Suspendendo a estrutura
As condições de contorno afetam diretamente as funções de resposta em frequência de
estruturas sobre uma dada excitação (TORII, 2012). Analiticamente, condições de contorno
podem ser especificadas como sendo completamente livres ou totalmente engastadas (RADE e
STEFFEN JR, 2013). Na prática, no entanto, não é possível atingir plenamente estas condições.
A condição livre significa que a estrutura está, na verdade, flutuando no espaço sem apoios e
exibe um comportamento de corpo rígido na frequência zero (AGILENT TECHNOLOGIES
COMPANY®, 1997).
Ao suspender a estrutura para simular a condição livre, o sistema completo será composto
pela estrutura analisada e a estrutura de fixação. Se um apoio suficientemente macio é utilizado,
as frequências naturais do sistema de fixação serão muito menores do que as primeiras
frequências naturais da estrutura analisada e, portanto, terão efeito dinâmico negligenciável. A
regra para suportes livres é que a frequência mais elevada do sistema de fixação deve ser inferior
a um décimo do primeiro modo flexível da estrutura analisada (AGILENT TECHNOLOGIES
COMPANY®, 1997). Se este critério for cumprido, modos de corpo rígido terão efeito
insignificante sobre os modos flexíveis do sistema (AGILENT TECHNOLOGIES COMPANY®,
1997). A Fig. 4 mostra uma medição típica deste tipo de sistema com modos de corpo rígido
diferentes de zero na resposta em frequência.

22
Figura 4 - Função resposta em frequência de um sistema suspenso na condição livre com os modos d e corpo rígido
com frequências diferentes de zero. (Fonte: AGILENT TECHNOLOGIES COMPANY (1997)).
3.3. Excitando a estrutura: teste utilizando excitadores eletrodinâmicos (shakers)
O teste através do shaker utiliza de uma excitação randômica para abranger um largo
espectro de frequências, como evidenciado pelos gráficos da Fig. 5. Outra particularidade deste
método é a necessidade de se modelar a rigidez da junção da haste do shaker com a estrutura para
manter a representatividade dos resultados. Uma das principais vantagens do teste através da
utilização de shakers é a possibilidade de limitar a banda de frequência da força excitadora
(AGILENT TECHNOLOGIES COMPANY®, 1997). Por outro lado, este método é mais
trabalhoso com relação à instalação e à troca de posição de atuação do shaker.
Figura 5 - Esquematização de um ensaio utilizando Shaker para a aplicação de uma força randômica e o espectro
das frequências dos harmônicos contidos na excitação randômica de um shaker. (Fonte: AGILENT
TECHNOLOGIES COMPANY (1997)).

23
4. Validação do Modelo Analítico
4.1. Etapas da investigação estrutural dinâmica
Segundo (JUNIOR e KURDILA, 2006), as etapas para a criação de um modelo dinâmico
de uma estrutura estão esquematizadas no diagrama da Fig. 6.
Figura 6 - Etapas de uma análise dinâmica de uma estrutura. Adapatação de (JUNIOR e KURDILA, 2006)
Análise segue as seguintes etapas:
1. Criação da geometria a ser analisada a partir do processo de medição da estrutura real ou
de dados e fichas técnica da mesma;
2. Fase de análise numérica, que consiste em: definir o modelo analítico, obter o modelo
matemático e resolvê-lo para determinar as respostas dinâmicas do sistema. A criação de
um modelo analítico consiste em:
Conjunto de simplificações feitas ao reduzir o sistema real em um sistema analítico;
Conjunto de dados geométricos que descrevem o modelo analítico;
24
Lista de parâmetros do modelo (espessuras, propriedades dos materiais utilizados).
3. Testes dinâmicos, cujo propósito principal é validar o modelo matemático.
Segundo (JUNIOR e KURDILA, 2006), os modelos analíticos são classificados em duas
categorias: modelos contínuos e modelos discretos. No caso dos modelos discretos, sua
aproximação com os resultados reais depende do número de graus de liberdade considerado.
Ainda segundo (JUNIOR e KURDILA, 2006), a etapa mais importante em uma análise dinâmica
é a criação de um modelo matemático da estrutura (Etapas 2a e 2b da Fig. 6).
4.2. Método de comparação dos dados experimentais e numéricos e correlação com o MEF
Segundo (AGILENT TECHNOLOGIES COMPANY®, 1997), ao solucionar um
problema de vibração ou investigar alterações simples de uma estrutura, um método de análise
conhecido como Modificação Estrutural pode ser muito útil. Basicamente, o método determina os
efeitos na mudança da massa, rigidez e amortecimento sobre as características dinâmicas da
estrutura. A técnica pode ser estendida a um processo iterativo, muitas vezes chamado de análise
de sensibilidade, a fim de classificar a sensibilidade do sistema às alterações de quantidades
específicas de massa, rigidez ou amortecimento (TORII, 2012).
Em geral, a modificação estrutural envolve determinar a resposta em frequência do
modelo e, a partir da análise inicial, determinar a quantidade de massa, rigidez e amortecimento
que devem ser adicionados para se atingir à resposta desejada. Este trabalho seguiu a segunda
linha de projeto, ou seja, criou-se um modelo matemático e, a partir dos resultados iniciais, as
propriedades foram alteradas para que o modelo respondesse como o desejado (em acordo com
os resultados experimentais).
A tarefa de correlação é geralmente iniciada comparando as frequências naturais medidas
com as previstas pelo modelo teórico. Para isso, as frequências naturais medidas e estimadas
numericamente são associadas através da representação gráfica mostrada na Fig. 7. As diferenças
relativas entre as frequências podem ser observadas, bem como as tendências globais. Esta
representação pode sugerir as possíveis causas das diferenças observadas (AGILENT
TECHNOLOGIES COMPANY®, 1997). Se há uma correlação direta entre as frequências
naturais, os pontos vão se localizar em torno de uma linha reta com uma inclinação igual a 1

25
(um). Ainda segundo (AGILENT TECHNOLOGIES COMPANY®, 1997), tem-se que o
comportamento do gráfico indica que:
Figura 7 - Método de comparação das frequências naturais da análise experimental e o modelo matemático teórico
por meio de análise gráfica. Adaptado de (AGILENT TECHNOLOGIES COMPANY®, 1997).
Se uma dispersão aleatória surge, então o modelo de elementos finitos pode não ser uma
representação precisa da estrutura. Isto pode ser resultado de um tipo de elemento
inadequado ou uma malha pouco refinada no modelo de elementos finitos. Esse
comportamento também pode ser resultado da aplicação das condições de contorno de
forma incorreta no teste e/ou na análise;
Se os pontos se encontram em linha reta, mas com um coeficiente angular diferente do
unitário, então o problema pode ser um problema no teste modal ou uma propriedade do
material incorreta, tal como o módulo de elasticidade ou a densidade do material, no
modelo de elementos finitos.
É importante citar que a comparação entre a estrutura real e o modelo numérico não é
feita simplesmente comparando as frequências naturais (TORII, 2012). Os modos de vibrar
também devem ser comparados para garantir uma correspondência entre modos de vibrar e
frequências naturais (TORII, 2012). Uma técnica para realizar esta comparação é simplesmente
sobrepor às formas modais do teste experimental e do modelo numérico para observar suas
tendências gerais (AGILENT TECHNOLOGIES COMPANY®, 1997). Isso pode se tornar
bastante difícil, especialmente para estruturas com geometria complicada, já que os modos de
vibrar tendem a possuírem formas complexas.

26
5. Modelagem via Software Método de Elementos Finitos
Esta seção trata da construção do modelo dinâmico da empenagem do EMBRAER EMB-
121 Xingu através da metodologia apresentada. Uma análise experimental foi feita seguindo os
fundamentos apresentados na seção 3 e a comparação dos resultados e validação do modelo foi
feita seguindo os fundamentos mostrados na seção 4.
5.1. Escolha dos softwares utilizados
A escolha do CATIA® V5R21 como software CAD ocorreu devido por este ser o software
CAD mais utilizado na indústria aeronáutica, como Boeing e Airbus (DASSAULT
SYSTÈMES®, © 2002-2016). A escolha do FEMAP como software CAE ocorreu por este
oferecer uma boa interface de trabalho, e principalmente por ter como base o código NX
NASTRAN (Nasa Structural Analysis) (SIEMENS®, Copyright 1996-2016). O código NX
NASTRAN, consiste em um conjunto de sistemas computacionais, cujo procedimento de análise
e cálculo se baseia no MEF. Este software possui mais de 50 anos de utilização e aprimoramento,
sendo um código já validado e robusto.
5.2. Criação da geometria: modelo CAD em três dimensões através do CATIA V5R21
Através do processo de medição da estrutura real disponível no Laboratório de Ensino em
Engenharia Aeronáutica (LEEAR) e do recolhimento de medidas obtidas no manual da aeronave,
foi possível construir o desenho técnico da empenagem vertical utilizando o software CATIA®
V5R21, como mostra a Fig. 8.

27
Figura 8 – Vista lateral da geometria da empenagem vertical do Embraer EMB - 121 Xingu criada através do
software CATIA.
As seguintes considerações foram feitas durante a confecção do desenho técnico em três
dimensões:
Foi considerada a estrutura em seu estado atual, com as carenagens e portas de inspeção
ausentes, a fim de obter uma melhor aproximação dos resultados;
Foram usadas dimensões provenientes do valor da média aritmética de três medidas para a
dimensão de cada elemento da estrutura;
Para as dimensões até o limite da faixa de medição do paquímetro (200 mm) foi usado um
paquímetro com resolução 0,01 mm;
Para as dimensões a partir de 200 mm foi usada uma fita métrica;
As dimensões fornecidas pelo manual da aeronave, foram consideradas como verdadeiras
e foram transferidas diretamente para os desenhos em três dimensões;
Foi desconsiderada a presença dos rebites;
Foi considerada a união criada pelos rebites como uma união perfeita, ou seja, duas placas
unidas pelo processo de rebitagem foram consideradas como uma única placa maciça com
espessura maior;
A geometria da empenagem vertical analisada foi criada somente através de superfícies
sem espessura, sendo que a espessura de cada superfície foi agregada posteriormente no
software Siemens FEMAP®.
É importante citar que, como a geometria foi criada em parte pelo processo de medição e
alguns detalhes da geometria foram ignorados, o modelo matemático necessita da validação via
análise experimental, segundo está previsto na seção 6 deste documento.
5.3. Criação da malha através do software HyperMesh®
A malha foi criada a partir da geometria criada no software CATIA® e cujo processo de
desenvolvimento foi explicado pela seção 5.2. Como software base, utilizou-se o Hyper Mesh®
13.0. Os parâmetros utilizados na confecção da malha estão expressos na Tab. 1.

28
Tabela 1 – Parâmetros da malha feita através do software HyperMesh®.
Informações Modelo/ Malha
Forma predominante Quadrática
Tamanho médio da aresta lateral 10 mm
Número de Componentes 36
Número de Elementos 78.251
Número de Nós 78.439
Os procedimentos adotados nesta seção e da seção 9 foram norteados segundo (ARAÚJO,
SURIANE e NETO, 2015). Segundo (TORII, 2012), o erro associado ao cálculo via MEF é
inversamente proporcional ao tamanho dos elementos utilizados no modelo matemático durante o
processo de discretização.
5.4.Análise via NASTRAN FEMAP®:
Foi utilizado o software Siemens FEMAP® para a construção do modelo de elementos
finitos. Para tal análise, algumas considerações foram feitas:
Para simular a condição livre da estrutura, nenhuma reação de apoio (restrição ao
movimento em nenhum grau de liberdade) foi adicionada ao modelo;
Figura 9 - Malha criada no software HyperMesh® a partir da geometria criada em CAD.
Para análise modal, foram utilizadas as opções NX Nastran em Analysis Program e
Normal Modes / Eigenvalues em Analysis Type; Essas opções selecionam o código de
solução (NASTRAN) e do tipo de análise (MODAL);
Nesta etapa foram acrescentadas as propriedades do material e a espessura de cada
componente. As espessuras dos componentes do modelo geométrico foram colocadas de
forma central em cada superfície da geometria criada no CATIA®;

29
As propriedades mecânicas adotadas tiveram como base o Alumínio 2024 – T3. Essa
escolha foi feita através da recorrência deste material em estruturas aeronáuticas
semelhantes à analisada. Suas propriedades foram consultadas em (DEPARTMENT OF
DEFENSE USA, 2003), segundo (Fig. 39 – veja o Anexo 1).
Após a análise modal, foram feitas quatro análises harmônicas através do software
Siemens FEMAP®. Para tais análises, foi necessário aplicar uma força na qual foi determinada a
faixa de frequência de atuação da mesma, como mostra a Fig. 10.
Para a coerência em relação às condições de contorno com os testes experimentais, tem-se
que o ponto de aplicação da força no modelo é comum a todas as análises harmônicas e é
mostrado na Fig. 11. As análises se organizam da seguinte maneira:
Análise Harmônica 1: Ponto de resposta da estrutura segundo o ponto (0) da Fig. 12;
Análise Harmônica 2: Ponto de resposta da estrutura segundo o ponto (2) da Fig. 12;
Análise Harmônica 3: Ponto de resposta da estrutura segundo o ponto (4) da Fig. 12;
Análise Harmônica 4: Ponto de resposta da estrutura segundo o ponto (1) da Fig. 12.
Figura 10 - Função que descreve a faixa de frequência da força utilizada nos cálculos do modelo numérico no
software FEMAP - NASTRAN. Imagem retirada a partir do software Siemens FEMAP® .

30
Figura 11 - Ponto de aplicação da força de excitação no modelo numérico.
Figura 12 - Pontos de análise de resposta em frequência.

31
6. Procedimentos Experimentais
6.1. Montagem e disposição dos equipamentos
A partir da Fig. 13 à Fig. 15 pode-se verificar a cadeia de medição utilizada durante os
testes realizados neste trabalho. Para o devido ajuste do sistema de medição e do sistema de
fixação, adotaram-se os seguintes procedimentos:
Foram utilizadas duas estruturas metálicas rígidas para a fixação dos elastômeros.
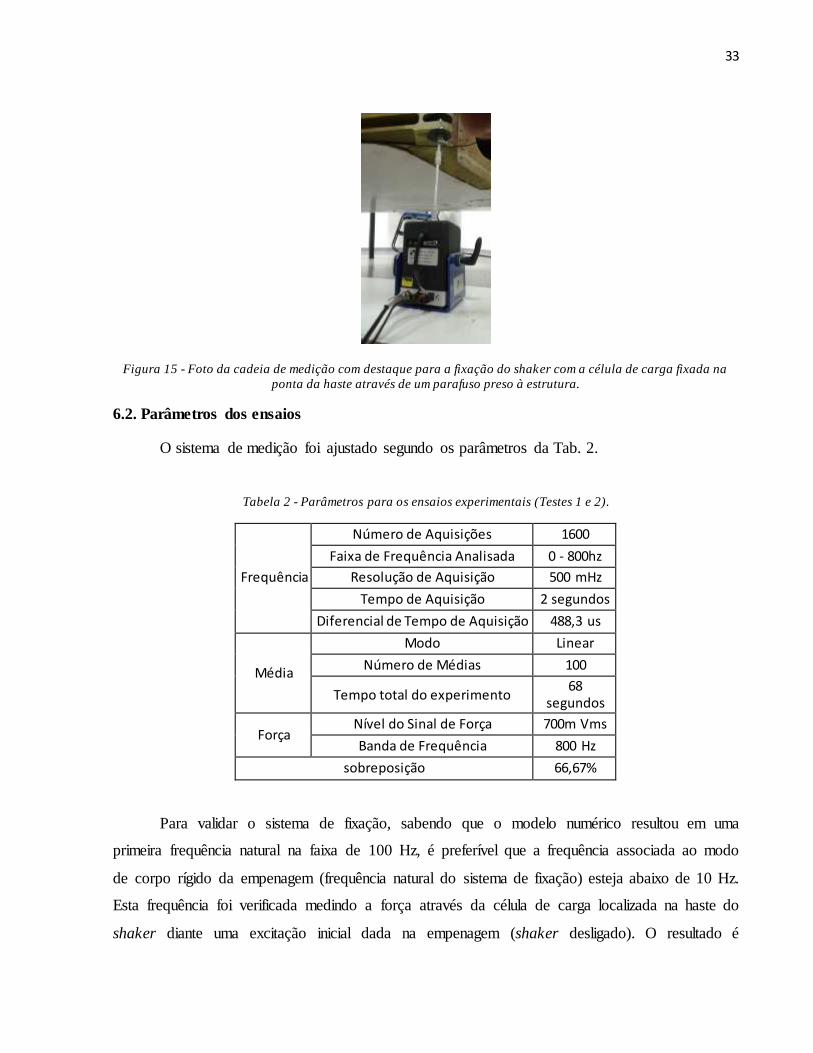
Certificou-se que não havia flexibilidade suficiente que pudesse interferir nos
resultados dos testes.
Certificou-se que as estruturas metálicas estavam suficientemente fixadas ao chão
de forma que não pudessem se deslocar durante a excitação da estrutura.
Foram utilizados elastômeros e molas para fixar a empenagem nas estruturas
metálicas. As molas foram acrescentadas para diminuir a frequência de corpo
rígido do sistema de fixação uma vez que, devido o peso da estrutura, os
elastômeros ficaram totalmente esticados. Sem a presença das molas observou-se
um alto grau de dissipação de energia (amortecimento) da energia transmitida pelo
shaker á estrutura. Notou-se também que, sem a presença das molas no sistema de
fixação, a frequência de corpo rígido era superior, pelo fato dos elastômeros
estarem esticados além de seu regime elástico de deformação.
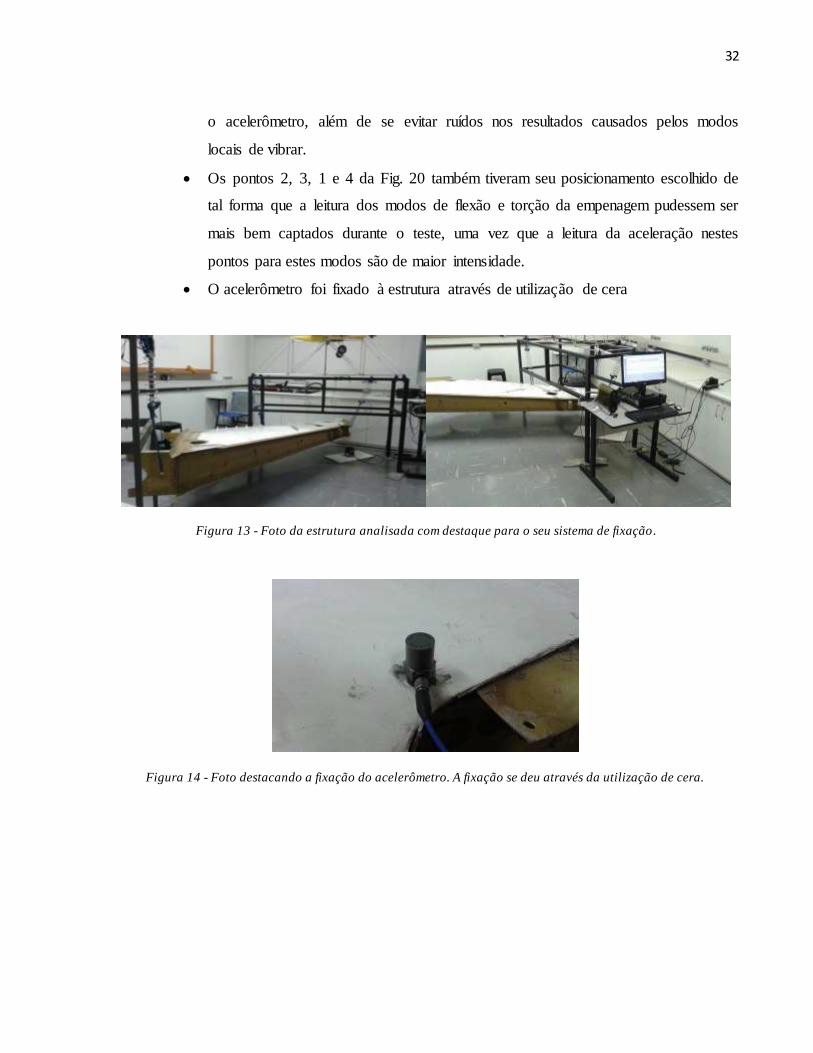
O shaker, como demonstrado pela Fig. 14, teve a sua haste parafusada à estrutura
e foi posicionado de forma que a sua haste se posicionasse de forma normal à
estrutura.
A base do shaker foi parafusada a uma peça de madeira compensada de área maior
que a sua base original. Com essa configuração de fixação, foi possível aumentar o
atrito entre o shaker e o chão, evitando o seu deslocamento durante os ensaios.
Tanto os pontos de fixação do acelerômetro quanto o ponto de fixação do shaker
(ver Fig. 18, 19 e 20) foram escolhidos de forma que se posicionassem nas partes
mais rígidas da empenagem. Através deste critério foi possível garantir uma maior
transmissão de energia tanto entre o shaker e a estrutura quanto entre a estrutura e
32
o acelerômetro, além de se evitar ruídos nos resultados causados pelos modos
locais de vibrar.
Os pontos 2, 3, 1 e 4 da Fig. 20 também tiveram seu posicionamento escolhido de
tal forma que a leitura dos modos de flexão e torção da empenagem pudessem ser
mais bem captados durante o teste, uma vez que a leitura da aceleração nestes
pontos para estes modos são de maior intensidade.
O acelerômetro foi fixado à estrutura através de utilização de cera
Figura 13 - Foto da estrutura analisada com destaque para o seu sistema de fixação.
Figura 14 - Foto destacando a fixação do acelerômetro. A fixação se deu através da utilização de cera.
33
Figura 15 - Foto da cadeia de medição com destaque para a fixação do shaker com a célula de carga fixada na
ponta da haste através de um parafuso preso à estrutura.
6.2. Parâmetros dos ensaios
O sistema de medição foi ajustado segundo os parâmetros da Tab. 2.
Tabela 2 - Parâmetros para os ensaios experimentais (Testes 1 e 2).
Frequência
Número de Aquisições 1600
Faixa de Frequência Analisada 0 - 800hz
Resolução de Aquisição 500 mHz
Tempo de Aquisição 2 segundos
Diferencial de Tempo de Aquisição 488,3 us
Média
Modo Linear
Número de Médias 100
Tempo total do experimento 68
segundos
Força Nível do Sinal de Força 700m Vms
Banda de Frequência 800 Hz
sobreposição 66,67%
Para validar o sistema de fixação, sabendo que o modelo numérico resultou em uma
primeira frequência natural na faixa de 100 Hz, é preferível que a frequência associada ao modo
de corpo rígido da empenagem (frequência natural do sistema de fixação) esteja abaixo de 10 Hz.
Esta frequência foi verificada medindo a força através da célula de carga localizada na haste do
shaker diante uma excitação inicial dada na empenagem (shaker desligado). O resultado é
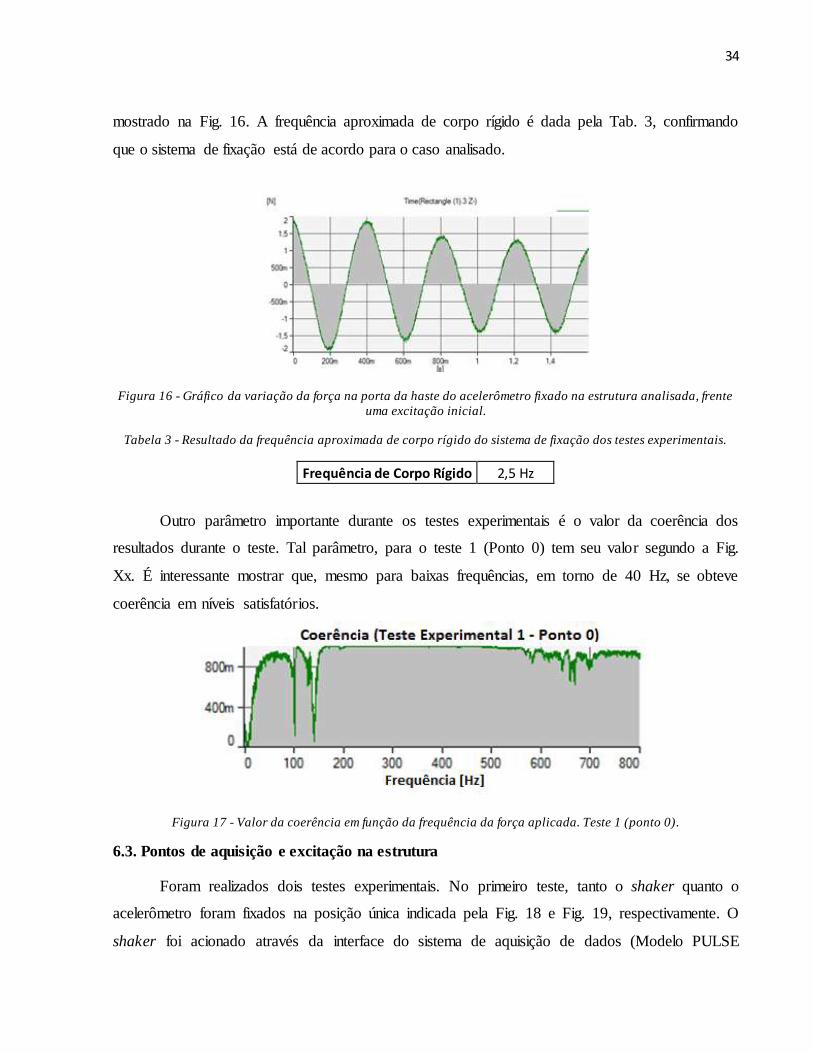
34
mostrado na Fig. 16. A frequência aproximada de corpo rígido é dada pela Tab. 3, confirmando
que o sistema de fixação está de acordo para o caso analisado.
Figura 16 - Gráfico da variação da força na porta da haste do acelerômetro fixado na estrutura analisada, frente
uma excitação inicial.
Tabela 3 - Resultado da frequência aproximada de corpo rígido do sistema de fixação dos testes experimentais.
Frequência de Corpo Rígido 2,5 Hz
Outro parâmetro importante durante os testes experimentais é o valor da coerência dos
resultados durante o teste. Tal parâmetro, para o teste 1 (Ponto 0) tem seu valor segundo a Fig.
Xx. É interessante mostrar que, mesmo para baixas frequências, em torno de 40 Hz, se obteve
coerência em níveis satisfatórios.
Figura 17 - Valor da coerência em função da frequência da força aplicada. Teste 1 (ponto 0).
6.3. Pontos de aquisição e excitação na estrutura
Foram realizados dois testes experimentais. No primeiro teste, tanto o shaker quanto o
acelerômetro foram fixados na posição única indicada pela Fig. 18 e Fig. 19, respectivamente. O
shaker foi acionado através da interface do sistema de aquisição de dados (Modelo PULSE

35
Reflex™, tipo 7765, fabricado pela Brüel & Kjær) e as médias dos resultados são feitas de
maneira automática.
Figura 18 - Ponto de fixação da haste do shaker e, consequentemente, da célula de carga, comum a todos os
experimentos realizados.
Figura 19 - Ponto de fixação do acelerômetro para os testes de análise do valor das frequências naturais (Teste 1).
Para o teste de obtenção dos modos de vibrar de flexão e torção da empenagem, o shaker
foi posicionado unicamente segundo a Fig. 18 e o acelerômetro foi posicionado nas posições
mostradas na Fig. 20. O shaker foi acionado para cada posição diferente do acelerômetro,
obtendo as médias das FRFs para cada ponto.

36
Figura 20 - Ponto de fixação do acelerômetro para o teste de determinação dos modos de vibrar (Teste 2).

37
7. Comparação dos Resultados Analíticos Iniciais e Experimentais
7.1. Comparação das Funções Resposta em Frequência
Para facilitar a compreensão da correlação entre os testes experimentais e analíticos, segue
a Tab. 4. Os dados comparados seguem a equivalência em relação à posição do acelerômetro na
empenagem.
Tabela 4 - Correlação entre testes Experimentais e Numéricos.
Testes Numéricos Equivalência dos Testes Experimentais Ponto de Análise (Segundo
Fig. 20 e Fig. 12)
Análise Harmônica 1 Teste 1 Ponto (0)
Análise Harmônica 2 Teste 2 Ponto (2)
Análise Harmônica 3 Teste 2 Ponto (4)
Análise Harmônica 4 Teste 2 Ponto (1)
A comparação das funções resposta em frequência foi feita para os quatro testes presentes
na Tab. 4. Os resultados numéricos e experimentais se mostraram semelhantes para a banda mais
baixa de frequências (até 300 Hz), como evidenciado através da Fig. 21 e Fig. 22. Para uma faixa
de frequência superior à 300 Hz, os resultados de resposta em frequência e de fase não foram
conclusivos ao ponto de se definir uma resposta geral da estrutura, tanto para os resultados
experimentais quanto o resultado do modelo em elementos finitos
Figura 21 - Função Resposta em Frequência. Teste 1 (Experimental, ponto 0) .
1,00E+08
1,00E+09
1,00E+10
1,00E+11
1,00E+12
1,00E+13
1,00E+14
0 100 200 300 400 500 600
(m/s
^2)/
(10
^9N
)
Frequêcia [Hz]
Função Resposta em Frequência Experimental ( Ponto 0)

38
Figura 22 - Função Resposta em Frequência (Numérico, Análise Harmônica 1, Ponto 0). Magnitude da aceleração
em relação à frequência da força de excitação na direção Y.
7.2.Comparação das Frequências Naturais
Nesta seção são apresentados os resultados numéricos e experimentais de cada um dos
testes mencionados. As frequências naturais obtidas através dos testes experimentais foram
retiradas dos gráficos de fase e de resposta em frequências respeitando as condições citadas na
seção 3.1. Em seguida houve a comparação entre os resultados para quatro pontos (pontos 0, 2, 4
e 1), seguindo a localização mostrada pelas Fig. 12 e 20, com a seguinte equivalência dada pela
Tab. 4.
Através do processo de regressão linear, foi possível calcular as retas de tendência para as
frequências naturais da estrutura para cada ponto analisado, com o respectivo desvio de cada
valor entre os resultados experimentais e analíticos, tendo os valores experimentais como
referência. A convergência entre os resultados foi analisada através dos desvios obtidos,
coeficiente angular, coeficiente linear e coeficiente de linearidade de cada reta de tendência. Foi
calculada a média dos desvios de todas as frequências naturais para todos os pontos como fator
de comparação geral do modelo, cujo valor será apresentado na seção 7.3.

39
7.2.1. Comparação dos resultados (Ponto 0)
Tabela 5 - Resultados numéricos (Análise Harmônica 1) e experimentais (Teste 1) para o Ponto 0.
Comparação de Resultados - Ponto 0
Frequências Resultado FEMAP/ NASTRAN
(Hz)
Frequências Resultado Experimental (Hz)
Erro Associado (%) Erro Associado em Valor
Absoluto (Hz)
126,8 105 20,76 21,8
189,6 162 17,03 27,6
226,7 185 22,54 41,7
270,3 220 22,86 50,3
Figura 23 - Reta de tendência. (Análise Harmônica 1 e Teste 1 - Ponto 0).
Através do processo de regressão linear, conclui-se que a equação representativa do gráfico da
Fig. 23 é dada por: 𝑦 = 0,793𝑥 + 6,7463, com coeficiente de linearidade dado por 𝑅2 = 0,9953.
7.2.2. Comparação dos resultados (Ponto 2)
Tabela 6 - Resultados numéricos (Análise Harmônica 2) e experimentais (Teste 2) para o Ponto 2.
Comparação de Resultados - Ponto 2
Frequências Resultado FEMAP/ NASTRAN
(Hz)
Frequências Resultado Experimental (Hz)
Erro Associado (%) Erro Associado em Valor
Absoluto (Hz)
126,9 104,5 21,43 22,4
179,6 162,5 10,52 17,1
214,5 187,5 14,40 27
233,5 205 13,90 28,5
0
50
100
150
200
250
0 50 100 150 200 250 300Fre
qu
ên
cia
Re
sult
ado
Exp
eri
me
nta
l [H
z]
Frequência Resultado Analítico [Hz]

40
Figura 24 - Reta de tendência. (Análise Harmônica 2 e Teste 2 - Ponto 2).
Através do processo de regressão linear, conclui-se que a equação representativa do gráfico da
Fig. 24 é dada por: 𝑦 = 0,933𝑥 + (−11,11), com coeficiente de linearidade dado por 𝑅2 = 0,9914.
7.2.3. Comparação dos resultados (Ponto 4)
Tabela 7 - Resultados numéricos (Análise Harmônica 3) e experimentais (Teste 2) para o Ponto 4.
Comparação de Resultados - Ponto 4
Frequências Resultado FEMAP/ NASTRAN
(Hz)
Frequências Resultado Experimental (Hz)
Erro Associado (%) Erro Associado em Valor
Absoluto (Hz)
126,9 104,5 21,43 22,4
217,5 180 20,83 37,5
226,6 189 19,89 37,6
0
50
100
150
200
250
0 50 100 150 200 250
Fre
qu
ên
cia
Re
sult
ado
Exp
eri
me
nta
l [H
z]
Frequência Resultado Analítico [Hz]

41
Figura 25 - Reta de tendência. (Análise Harmônica 3 e Teste 2 - Ponto 4).
Através do processo de regressão linear, conclui-se que a equação representativa do gráfico da
Fig. 25 é dada por: 𝑦 = 0,8418𝑥 + (−2,3869), com coeficiente de linearidade dado por 𝑅2 = 0,9998.
7.2.4. Comparação dos resultados (Ponto 1)
Tabela 8 - Resultados numéricos (Análise Harmônica 4) e experimentais (Teste 2) para o Ponto 1.
Comparação de Resultados - Ponto 1
Frequências Resultado FEMAP/
NASTRAN
Frequências Resultado Experimental (Hz)
Erro Associado (%) Erro Associado em Valor
Absoluto (Hz)
131,7 108 21,94 23,7
189 131,5 17,02 27,5
227 186 22,04 41
234,6 192 22,18 42,6
0
50
100
150
200
250
0 50 100 150 200 250
Fre
qu
ên
cia
Re
sult
ado
Exp
eri
me
nta
l [H
z]
Frequência Resultado Analítico [Hz]

42
Figura 26 - Reta de tendência. Reta de tendência. (Análise Harmônica 4 e Teste 2 - Ponto 1).
Através do processo de regressão linear, conclui-se que a equação representativa do gráfico da
Fig. 26 é dada por: 𝑦 = 0,8106 + 3,336, com coeficiente de linearidade dado por 𝑅2 = 0,9925.
7.3. Discussão sobre os dados iniciais
Através da comparação feita entre os dados experimentais e numéricos feita na seção
10.20 deste texto, pode-se observar que o modelo em elementos finitos feito no software Siemens
FEMAP®, apresenta comportamento semelhante à estrutura real ensaiada. Esta afirmação se
baseia no fato de que:
Os valores das frequências naturais do modelo de elementos finitos foram em média
19,25% maiores que as frequências naturais obtidas nos ensaios experimentais (valor
obtido através da média do erro resultante de todos os valores de frequência naturais
comparados no presente trabalho);
Os valores das frequências naturais do modelo de elementos finitos foram em média 31,24
Hz maiores que as frequências naturais obtidas nos ensaios experimentais (valor obtido
através da média do erro resultante absoluto de todo os valores de frequência naturais
comparados no presente trabalho);
0
50
100
150
200
250
0 50 100 150 200 250
Fre
qu
ên
cia
Re
sult
ado
Exp
eri
me
nta
l [H
z]
Frequência Resultado Analítico [Hz]
43
As curvas de tendência que relacionam as frequências naturais experimentais e numéricas
tiveram comportamento linear, com um coeficiente de linearidade médio superior à 0,99.
Tal comportamento mostra que, segundo a seção 4.2 do presente trabalho, o modelo de
elementos finitos criado provavelmente possui malha com refinamento adequado, assim
como o tipo de elemento usado para tal análise. Outra conclusão que podemos chegar
através da análise destes dados é que houve uma conformidade entre as condições de
contorno do modelo numérico e do ensaio experimental;
Ainda analisando as curvas de tendência que relaciona as frequências naturais
experimentais e numéricas, pode-se notar que elas se organizam em uma dispersão linear
em torno de uma reta com coeficiente linear diferente de 1. Segundo a seção 4.2 deste
trabalho, isso pode significar que as propriedades dos materiais utilizadas no modelo
numérico, módulo de elasticidade ou densidade, podem não estar corretas. Esta é uma
afirmação plausível, uma vez que o modelo de elementos finitos feito no software
Siemens FEMAP® se baseou na suposição de que toda a estrutura era feita de alumínio
2024 T3. As propriedades deste material são bem definidas através de literaturas técnicas,
porém a utilização das propriedades deste material no modelo ocorreu sem nenhuma
informação oficial que comprove que a estrutural real foi realmente fabricada com este
material;
As aproximações feitas durante a confecção do modelo de elementos finitos da
empenagem é outra fonte de erro que levou às diferenças entre os resultados numéricos e
experimentais.
44
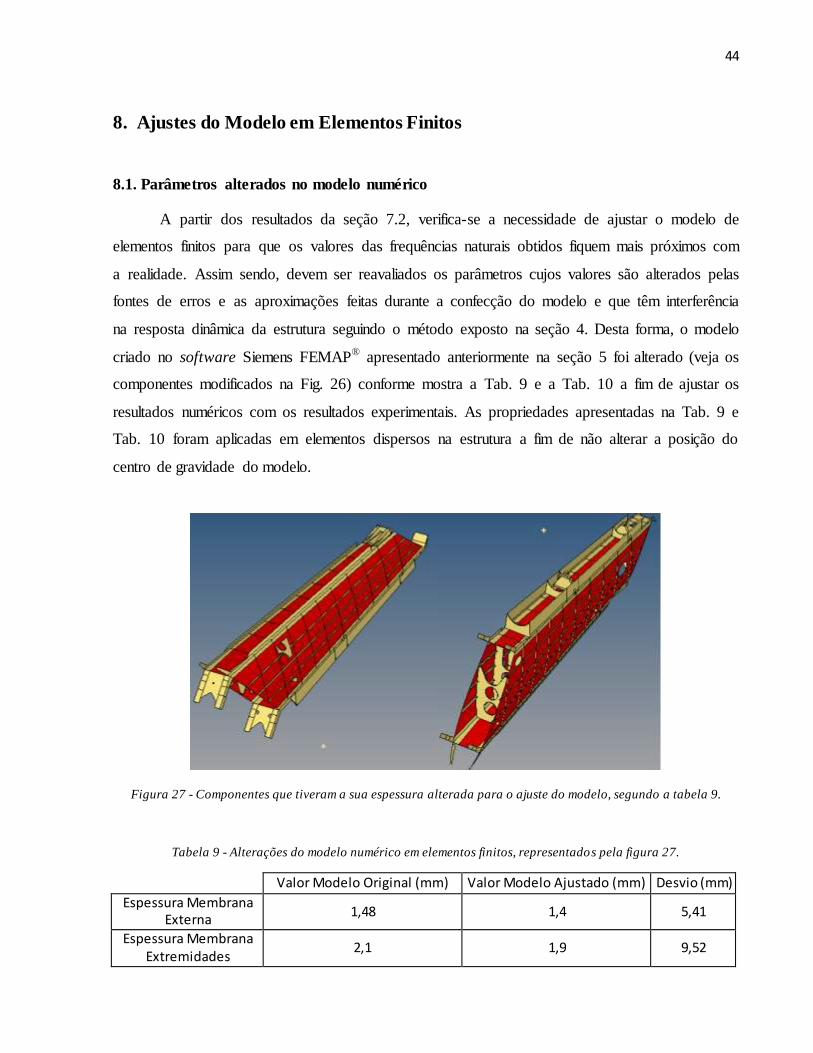
8. Ajustes do Modelo em Elementos Finitos
8.1. Parâmetros alterados no modelo numérico
A partir dos resultados da seção 7.2, verifica-se a necessidade de ajustar o modelo de
elementos finitos para que os valores das frequências naturais obtidos fiquem mais próximos com
a realidade. Assim sendo, devem ser reavaliados os parâmetros cujos valores são alterados pelas
fontes de erros e as aproximações feitas durante a confecção do modelo e que têm interferência
na resposta dinâmica da estrutura seguindo o método exposto na seção 4. Desta forma, o modelo
criado no software Siemens FEMAP® apresentado anteriormente na seção 5 foi alterado (veja os
componentes modificados na Fig. 26) conforme mostra a Tab. 9 e a Tab. 10 a fim de ajustar os
resultados numéricos com os resultados experimentais. As propriedades apresentadas na Tab. 9 e
Tab. 10 foram aplicadas em elementos dispersos na estrutura a fim de não alterar a posição do
centro de gravidade do modelo.
Figura 27 - Componentes que tiveram a sua espessura alterada para o ajuste do modelo, segundo a tabela 9.
Tabela 9 - Alterações do modelo numérico em elementos finitos, representados pela figura 27.
Valor Modelo Original (mm) Valor Modelo Ajustado (mm) Desvio (mm)
Espessura Membrana Externa
1,48 1,4 5,41
Espessura Membrana Extremidades
2,1 1,9 9,52

45
Tabela 10 - Alteração das propriedades do material do modelo em elementos finitos.
Para todo o modelo
Massa Específica [toneladas/mm3]
Módulo de Elasticidade
2,79E-09 Valor Inicial
3,20E-09 (+14%) (Valor Inicial)*0,95
8.2. Resultados do modelo ajustado
O gráfico da função resposta em frequência para o ponto 0, relativo à análise harmônica 1
do modelo em elementos finitos está representado pela Fig. 28. A comparação das frequências
naturais é apresentada pela Tab. 11.
Figura 28 - Função resposta em frequência referente ao ponto 0 da figura (12), para o modelo ajustado.
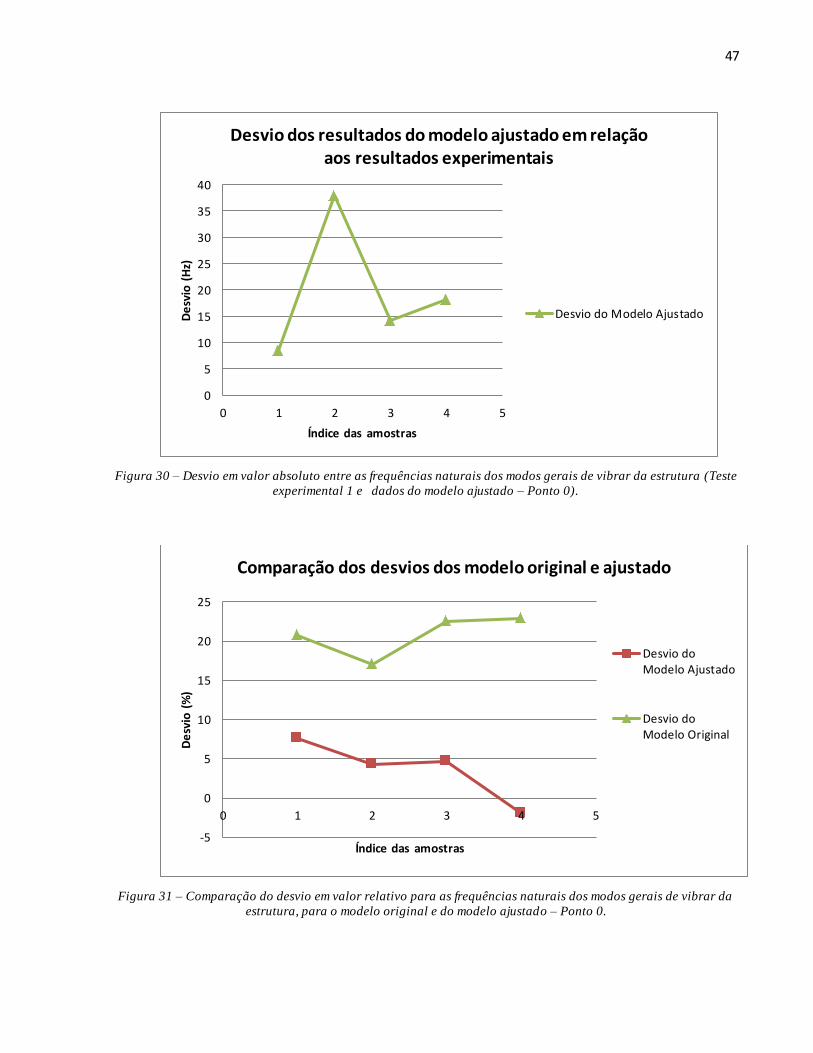
A comparação, para o ponto 0, entre os resultados experimentais e numéricos do modelo
ajustado em relação às frequências naturais estão representados pela Fig. 29, 30, 31 e 32.

46
Tabela 11 - Frequências Naturais dos modos de vibrar gerais da estrutura. Resultados numéricos ajustados e
experimentais.
Comparação Teste Numérico Ajustado e Teste Experimental 2 - Ponto 0
Frequências Resultado FEMAP/
NASTRAN
Frequências Resultado Experimental
Erro Associado (%) Erro Associado
(Valor Absoluto)
113,0 105 7,522123894 8,5
168,9 162 22,4393132 37,9
193,7 185 7,330924109 14,2
215,8 220 8,679065331 18,2
Figura 29 - Comparação das frequências naturais dos modos gerais de vibrar da estrutura (Teste experimental 1 e
dados do modelo ajustado – Ponto 0).
0
50
100
150
200
250
300
0 1 2 3 4 5
Fre
qu
ên
cia
[Hz]
Índice das amostras
Comparação dos resultados das frequências naturais
Frequências Naturais doModelo Ajustado
Frequências Naturais doModelo Original
Frequências ObtidasExperimentalmente
47
Figura 30 – Desvio em valor absoluto entre as frequências naturais dos modos gerais de vibrar da estrutura (Teste
experimental 1 e dados do modelo ajustado – Ponto 0).
Figura 31 – Comparação do desvio em valor relativo para as frequências naturais dos modos gerais de vibrar da
estrutura, para o modelo original e do modelo ajustado – Ponto 0.
0
5
10
15
20
25
30
35
40
0 1 2 3 4 5
De
svio
(H
z)
Índice das amostras
Desvio dos resultados do modelo ajustado em relação aos resultados experimentais
Desvio do Modelo Ajustado
-5
0
5
10
15
20
25
0 1 2 3 4 5
De
svio
(%
)
Índice das amostras
Comparação dos desvios dos modelo original e ajustado
Desvio doModelo Ajustado
Desvio doModelo Original

48
Figura 32 - Erro entre os valores das frequências naturais dos modos gerais de vibrar da estrutura para o modelo
numérico ajustado e os valores experimentais.
Os resultados da Tab. 11 levam a seguinte equação de reta de tendência 𝑦 = 1,0859𝑥 +
(−9,704), com coeficiente de linearidade 𝑅2 = 0,9955 em contraste com 𝑦 = 0,793𝑥 +
6,7463 e 𝑅2 = 0,9953 apresentado pela seção 7.2.1.
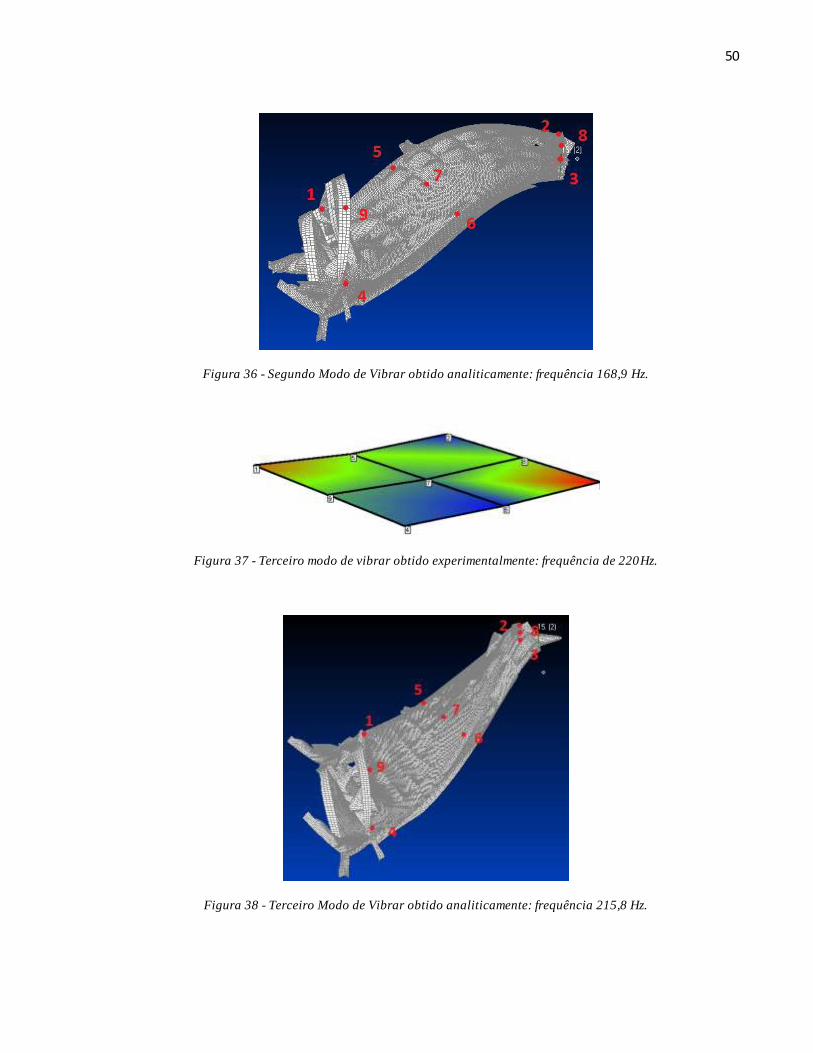
8.3. Comparação dos modos de vibrar
Através da plataforma de análises dinâmicas (Modelo PULSE Reflex™, tipo 7765,
fabricado pela Brüel & Kjær), foi possível obter as formas de vibrar experimentais da
empenagem analisada. Neste caso, é necessário fazer uma correlação entre as geometrias
apresentadas pela Fig. 33 e Fig. 35 com o modelo tridimensional apresentado pela Fig. 34 e Fig.
36, respectivamente.
0
50
100
150
200
250
0 50 100 150 200 250 300
Fre
qu
ên
cia
Re
sult
ado
Exp
eri
me
nta
l [H
z]
Frequência Resultado Analítico [Hz]
Comparação entre as retas de tendência do modelo original e o modelo ajustado (Ponto 0)
Pontos dedistribuição:
Modelo Ajustado
Pontos dedistribuição:
Modelo Original
Linear (Pontos dedistribuição:
Modelo Ajustado)
Linear (Pontos dedistribuição:
Modelo Original)

49
Figura 33 – Primeiro modo de vibrar obtido experimentalmente: frequência de 105Hz.
Figura 34 - Primeiro Modo de Vibrar obtido analiticamente: frequência 113,0 Hz.
Figura 35 - Segundo modo de vibrar obtido experimentalmente: frequência de 162Hz.
50
Figura 36 - Segundo Modo de Vibrar obtido analiticamente: frequência 168,9 Hz.
Figura 37 - Terceiro modo de vibrar obtido experimentalmente: frequência de 220Hz.
Figura 38 - Terceiro Modo de Vibrar obtido analiticamente: frequência 215,8 Hz.

51
8.4.Discussões dos resultados finais
A resposta em frequência do modelo em elementos finitos ajustado, representada pela Fig.
28, mostra que, em comparação à função resposta em frequência da estrutural real obtida
experimentalmente e representada pela Fig. 21, tem-se que o desvio entre o comportamento dos
gráficos ficou menor que os resultados iniciais (Fig. 22).
Em relação à comparação das frequências naturais, os desvios do modelo original e do
modelo ajustado em relação aos dados experimentais são mostrados pelas Fig. 29, 30 e 31.
Através da Fig. 30 pode-se notar que há um maior desvio em valores absolutos para a segunda
frequência natural. Esse comportamento reflete no deslocamento do segundo pico da FRF do
modelo em elementos finitos em relação à FRF experimental. Considerando Fig. 32 tem-se que o
coeficiente angular da reta de tendência do modelo ajustado é mais próximo do valor unitário e o
coeficiente linear possui valor de mesma grandeza em módulo, o que nos leva a afirmar que o
modelo ajustado fornece resultados mais coerentes com os resultados experimentais. Outro
parâmetro a se analisar é o coeficiente de linearidade da reta de tendência do modelo ajustado,
que se manteve com um valor alto e acima de 0,99, validando as propriedades da malha e das
condições de contorno como é demonstrado na seção 4.2.
Através das alterações realizadas e evidenciadas pela seção 8.1, chegou-se a um modelo
mais representativo do sistema experimental. Após o ajuste do modelo, tem-se um erro médio dos
desvios, é de 4,53% em percentagem e de 18,4 Hz em valor absoluto.
Em relação aos modos de vibrar, considerando a limitação da quantidade de pontos de
aquisição do teste experimental que produziu uma malha pouco refinada, e a aquisição da
aceleração em apenas uma direção, pode-se considerar que os resultados indiquem uma
convergência dos modos de vibrar em relação aos resultados do modelo analítico. Por outro lado
tais resultados não podem ser considerados conclusivos visto que o número de pontos de
aquisição durante teste experimental não criou uma malha suficientemente refinada para uma
conclusão mais acertada.
A partir dos resultados finais obtidos, pode-se sugerir, para melhores resultados, uma
análise experimental com mais pontos de aquisição e a comparação dos modos de vibrar usando
técnicas numéricas como a utilização do Modal Scale Factor, o que pode gerar resultados mais
conclusivos em relação à compatibilidade dos modos de vibrar. A validação da massa e do centro
de gravidade do modelo em elementos finitos, juntamente com uma investigação das causas que

52
levaram a uma maior divergência do valor da frequência natural do segundo modo de vibrar e da
determinação do desvio máximo admissível pela autoridade aeronáutica para modelos
representativos da estrutura e a simplificação do modelo em elementos finitos, com a adição de
elementos rígidos no lugar de nervuras com o intuito de diminuir a resposta de modos locais de
vibrar na resposta dinâmica do modelo podem ser outros pontos que contribuiriam para os
resultados finais deste trabalho.

53
9. Considerações Finais
A técnica de simulação de uma estrutura através do método de elementos finitos é
consagrada e de larga aplicação da indústria. Porém, para a validação de um modelo numérico
que utiliza esta técnica de análise e possui geometria complexa, muitas vezes, é necessária a
comparação de resultados experimentais. Este trabalho evidenciou esta realidade, através do
estudo de caso de uma estrutura aeronáutica. Através deste trabalho, notou-se a importância de se
adotar as corretas propriedades e condições de contorno nos modelos, tanto da análise numérica
em elementos finitos quanto da análise experimental. Notou-se também a importância da
coerência das condições de contorno entre os dois tipos de análise para que a comparação dos
resultados possa ser feita e para que haja a validação do modelo numérico. Outra conclusão é que
a hipótese de ignorar a junção por rebites das placas da estrutura, considerando duas placas
rebitadas como um único elemento é válido. Por fim, através da alteração da espessura de dois
elementos (dos 36 elementos que compõe o modelo), do aumento do valor da massa específica e
da diminuição do módulo de elasticidade e de tensão cisalhante, através da alteração dentro da
realidade dos parâmetros da estrutura real, chegou-se num modelo mais representativo
experimentalmente.

54
Bibliografia
AGÊNCIA NACIONAL DA AVIAÇÃO CIVIL, BRASIL. REGULAMENTO BRASILEIRO DA AVIAÇÃO CIVIL - RBAC
21 Emenda 02. Brasília: Agência Nacional da Aviação Civil, 2010.
AGÊNCIA NACIONAL DA AVIAÇÃO CIVIL, BRASIL. REGULAMENTO BRASILEIRO DA AVIAÇÃO CIVIL - RBAC
25 Emenda 136. Brasília: Agência Brasileira da Aviação Civil, 2014.
AGILENT TECHNOLOGIES COMPANY®. Fundamentals of Modal Testing. [S.l.]: 2000 Agilent Technologies
Printed in U.S.A., v. 5/00 5954-7957, 1997.
ARAÚJO, G. F.; SURIANE, M. M.; NETO, R. TUTORIAL DE SIMULAÇÃO DA ASA E EMPENAGENS NO
NASTRAN. Uberlândia: Equipe Tucano.Universidade Federal de Uberlândia. Faculdade de Engenharia
Mecânica, 2015.
AVITABLE, P. Experimental Modal Analysis (A Simple Non-Mathematical Presentation). Massachusetts
USA: University Of Massachusetts Lowell, Mechanical Engineering Department, v. (REV 052700), 2001.
BATHE, K. J. Finite Element Procedures. New Jersey: Prentice-Hall Inc, 1996.
DASSAULT SYSTÈMES®. V5 Portfolio. Dassault Systèmes: 3D Software Company, © 2002-2016.
Disponivel em: <http://www.3ds.com/products-services/catia/products/v5/portfolio/>. Acesso em: 23
outubro 2016.
DEPARTMENT OF DEFENSE USA. Metallic Materials and Elements for Aerospace Vehicle Structures.
United States of America: Department of Defense USA, v. AMSC N/A, FSC 1560, 2003.
EMBRAER S. A. EMB 121 Xingu. Centro Histórico Embraer, 2016. Disponivel em:
<http://www.centrohistoricoembraer.com.br/pt-BR/HistoriaAeronaves/Paginas/EMB-121-Xingu.aspx>.
Acesso em: 24 Outubro 2016.
FISCHER, F. Aviation Profilart, 2013. Disponivel em: <http://aviationprofilart.blogspot.com.br/>. Acesso
em: 11 nov. 2016.
JUNIOR, C. D. M. et al. Design of an Experimental Flutter Mount System. São Paulo: Universidade de São
Paulo – USP. Escola de Engenharia de São Carlos, v. 29, 2007. ISBN 3.
JUNIOR, R. C. R.; KURDILA, A. J. Fundamentals of Structural Dynamics. [S.l.]: John Wiley & Sons, v. 2nd
Edition, 2006.
RADE, D. A.; STEFFEN JR, V. Structural Dynamics and Modal Analysis. Uberlândia: Federal University of
Uniberlândia, 2013.
RIBEIRO, C. A. B. ESTIMATIVA DAS FREQUENCIAS NATURAIS DE VIBRAÇÃO VERTICAL. Rio de Janeiro:
Universidade Federal do Rio de Janeiro., 2015.

55
SIEMENS®. Femap: Siemens PLM Software. PLM - Gerenciamento do Cilco de Vida do Produto: Siemens
PLM Software, Copyright 1996-2016. Disponivel em:
<https://www.plm.automation.siemens.com/pt_br/>. Acesso em: 11 Novembro 2015.
SILVA, J. G. S. D. et al. ANÁLISE ESTRUTURAL DE CHASSIS DE VEÍCULOS PESADOS COM BASE NO
EMPREGO DO PROGRAMA ANSYS. Cobenge, p. 88-95, 2001.
SOUZA, P. H. M. Análise Modal Expreimental Utilizando Vibrômetro Laser Doppler. São João del-Rei:
UNIVERSIDADE FEDERAL DE SÃO JOÃO DEL-REI, 2014.
SOUZA, R. M. D. O Método dos Elementos Finitos Aplicado ao Problema de Condução de Calor. Belém:
UNIVERSIDADE FEDERAL DO PARÁ, DEPARTAMENTO DE ENGENHARIA CIVIL, 2003.
TAVARES, E. J. Modelo Experimental para Ensaios de Flutter de uma Seção Típica Aeroelástica.
Dissertação (Mestrado). São Paulo: Escola de Engenharia de São Carlos da Universidade de São Paulo,
2009.
TECMES®. CATIA | Tecmes. TECMES, 2014. Disponivel em:
<http://www.tecmes.com.br/produtos/dassault-systemes/catia>. Acesso em: 25 Outubro 2016.
THORBY, D. Structural Dynamics and Vibrations in Practice - An Engineering Handbook. Oxford, UK:
Elsevier Ltd, 2008.
TORII, A. J. Análise Dinâmica de Estruturas com o Método dos Elementos Finitos Generalizado. Curitiba:
Universidade Federal do Paraná, 2012.

56
Anexo 1: Propriedades do Alumínio 2024 T3.
Figura 39 - Propriedades das folhas de alumínio 2024 T3 dadas em unidades do sistema internacional em função de
sua espessura. Fonte: (DEPARTMENT OF DEFENS E USA, 2003)

57
Anexo 2: Resultados Experimentais (Teste 1 - Ponto 0)
Figura 40 - Espectro de frequência da força aplicada no ensaio com a referente amplitude.
Figura 41 - Função resposta em frequência.
Figura 42 - Diagrama de fase do sinal.

58
Figura 43 - Coerência dos resultados obtidos em função da frequência de análise.

59
Anexo 3: Dados operacionais dos equipamentos utilizados
Tabela 12 - Parâmetros de operação do shaker utilizado para os testes experimentais.
Parâmetro Especificação
Taxa da Força de Excitação
Força Senoidal 7 lbf pk (31 N pk)
Força Randômica
5 lbf pk (22 N pk)
Força de
Impacto
15 lbf pk (67 N pk), pulso de
11 ms
Deslocamento Máximo 0.5'' pk-pk (13mm pk-pk), contínuo
Velocidade Máxima de Deslocamento 95 polegadas por segundo pk (2m/s)
Aceleração Máxima de Deslocamento (sem Carga)
70 g pk (628 m/s²), acionado
120 g pk (1177 m/s²), em ressonância
190 g pk (1863 m/s²), pulse de Impacto
Faixa de Frequência Operacional DC-9 khz,
Tabela 13 - Parâmetros de operação do acelerômetro utilizado para os testes experimentais.
Acelerômetro Brüel & Kjær, Modelo Tipo 4371
Faixa de Frequência 0.1 – 12600
Hz
Temperatura -74 – 250 C
Peso 11 gram
Sensibilidade 9.8 mV/g
Nível de carga máximo 6000 g
Conector elétrico 10-32 UNF
Montagem 10-32 UNF
Saída Charge-PE
Triaxial No
Frequência de Ressonância 38,2 kHz
Maximum Shock Level 20000 g
Tabela 14 - Parâmetros de operação da célula de carga utilizada para os testes experimentais.
Célula de Carga PCB Piezotronics. Modelo 208C02
Faixa de Medição 100 lb (0.4448 kN)
Sensibilidade (±15%) 50 mV/lb (11241 mV/kN)
Mínima frequência de operação (-5%) 0.001 Hz
Máxima frequência de operação 36000 Hz
Faixa de temperatura para operação -65 to +250 °F (-54 to +121 °C)

60