soluÇÃo numÉrica das equaÇÕes de euler 3d...
TRANSCRIPT

SOLUÇÃO NUMÉRICA DAS EQUAÇÕES DE EULER 3D COMPRESSÍVEIS EM
AMBIENTE DE COMPUTAÇÃO PARALELA DE MEMÓRIA DISTRIBUÍDA
ATRAVÉS DE UMA FORMULAÇÃO ESTABILIZADA DE ELEMENTOS FINITOS
Anderson de Lima Mendonça
Tese de Doutorado apresentada ao Programa de
Pós-graduação em Engenharia Civil, COPPE, da
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Doutor em Engenharia Civil.
Orientador: Alvaro Luiz Gayoso de Azeredo
Coutinho
Rio de Janeiro
Agosto de 2013

SOLUÇÃO NUMÉRICA DAS EQUAÇÕES DE EULER 3D COMPRESSÍVEIS EM
AMBIENTE DE COMPUTAÇÃO PARALELA DE MEMÓRIA DISTRIBUÍDA
ATRAVÉS DE UMA FORMULAÇÃO ESTABILIZADA DE ELEMENTOS FINITOS
Anderson de Lima Mendonça
TESE SUBMETIDA AO CORPO DOCENTE DO INSTITUTO ALBERTO LUIZ
COIMBRA DE PÓS-GRADUAÇÃO E PESQUISA DE ENGENHARIA (COPPE) DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE DOUTOR EM
CIÊNCIAS EM ENGENHARIA CIVIL.
Examinada por:
________________________________________________
Prof. Alvaro Luiz Gayoso de Azeredo Coutinho, D.Sc.
________________________________________________ Prof. Luiz Landau, D.Sc.
________________________________________________ Prof. José Luis Drummond Alves, D.Sc.
________________________________________________ Dr. Norberto Mangiavacchi, Ph.D.
________________________________________________ Prof. José da Rocha Miranda Pontes, Ph.D.
RIO DE JANEIRO, RJ - BRASIL
AGOSTO DE 2013

iii
Mendonça, Anderson de Lima
Solução Numérica das Equações de Euler 3D
Compressíveis em Ambiente de Computação Paralela de
Memória Distribuída através de uma Formulação
Estabilizada de Elementos Finitos / Anderson de Lima
Mendonça. – Rio de Janeiro: UFRJ/COPPE, 2013.
X, 132 p.: il.; 29,7 cm.
Orientador: Alvaro Luiz Gayoso de Azeredo Coutinho
Tese (doutorado) – UFRJ/ COPPE/ Programa de
Engenharia Civil, 2013.
Referências Bibliográficas: p. 116-123.
1. Solução Numérica das Equações de Euler 3D
Compressíveis. 2. Formulação Estabilizada de Elementos
Finitos. 3. Computação em Ambiente Paralelo de
Memória Distribuída. I. Coutinho, Alvaro Luiz Gayoso de
Azeredo. II. Universidade Federal do Rio de Janeiro,
COPPE, Programa de Engenharia Civil. III. Título.

iv
À minha esposa Márcia Cristina
Aos meus filhos Anderson e Vinícius

v
Agradecimentos
Primeiramente agradeço a Deus por ter me conduzido nessa jornada. Deus sempre
iluminou o meu caminhou e me deu forças para que eu pudesse superar esse grande
desafio.
Ao Prof. Alvaro Luiz Gayoso de Azeredo Coutinho, amigo e orientador, por sua
dedicação, paciência, confiança e incentivo ao longo de todo o desenvolvimento desse
trabalho de pesquisa.
Aos Professores Luiz Landau e José Luis Drummond Alves pela constante
prestatividade durante toda realização desse trabalho.
À ANP (Agência Nacional de Petróleo) pelo apoio financeiro através da bolsa de
doutorado, indispensável à realização dessa pesquisa.
Ao amigo Renato Nascimento Elias pelas longas e valiosas discussões que muito
contribuíram para a realização desse trabalho de pesquisa.
Ao Núcleo de Atendimento em Computação de Alto Desempenho
(NACAD/COPPE/UFRJ) e ao Laboratório de Métodos Computacionais em Engenharia
(LAMCE/COPPE/UFRJ) pelo apoio computacional.
Aos amigos da COPPE/UFRJ, José Camata e Adriano Côrtes, que sempre me apoiaram.
Aos amigos de Mangaratiba, Fábio e Luciene, que sempre me incentivaram.
Um agradecimento todo especial a minha maravilhosa esposa Márcia Cristina. Nos
momentos mais difíceis ela sempre esteve ao meu lado oferecendo apoio, carinho,
atenção e motivação, ingredientes que me ajudaram a seguir em frente. Durante toda
duração do curso ela abriu mão de muita coisa para ficar ao meu lado, sempre me

vi
apoiando e me incentivando. Por isso, tenho de agradecer a Deus por Ele ter colocado
essa pessoa tão especial na minha vida.

vii
Resumo da Tese apresentada à COPPE/UFRJ como parte dos requisitos necessários
para a obtenção do grau de Doutor em Ciências (D.Sc.)
SOLUÇÃO NUMÉRICA DAS EQUAÇÕES DE EULER 3D COMPRESSÍVEIS EM
AMBIENTE DE COMPUTAÇÃO PARALELA DE MEMÓRIA DISTRIBUÍDA
ATRAVÉS DE UMA FORMULAÇÃO ESTABILIZADA DE ELEMENTOS FINITOS
Anderson de Lima Mendonça
Agosto/2013
Orientador: Alvaro Luiz Gayoso de Azeredo Coutinho
Programa: Engenharia Civil
Esse trabalho apresenta a solução numérica em ambiente de computação paralela
das equações de Euler 3D compressíveis. Essas equações regem o escoamento de
fluidos compressíveis não viscosos e apresentam grande aplicação na indústria de
petróleo. O presente trabalho foi desenvolvido com ênfase nesse tipo de aplicação onde
é possível simular a sobrepressão proveniente de uma explosão acidental ocorrida em
plataformas de petróleo e aplicar esses resultados em estudos de análise de risco. A
solução numérica foi obtida através de uma formulação estabilizada de elementos
finitos do tipo SUPG acrescida de um operador de captura de choque. Foram usados
diferentes operadores de captura de choque. O desenvolvimento computacional ocorreu
sobre o EdgeCFD, que é um software de CFD desenvolvido e mantido pelo
NACAD/UFRJ. O EdgeCFD é um software de elementos finitos construído em
ambiente de computação paralela (paralelismo de memória distribuída, compartilhada e
híbrida), código escrito em Fortran 90 e utiliza estrutura de dados baseada nas arestas
dos elementos para armazenar as matrizes oriundas da discretização das equações.
Foram utilizados problemas clássicos para avaliar a qualidade das soluções numéricas e
a robustez do código.

viii
Abstract of Thesis presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Doctor of Science (D.Sc.)
NUMERICAL SOLUTION OF 3D COMPRESSIBLE EULER EQUATIONS IN
PARALLEL ENVIRONMENT OF DISTRIBUTED MEMORY THROUGH
STABILIZED FINITE ELEMENT FORMULATION
Anderson de Lima Mendonça
August/2013
Advisor: Alvaro Luiz Gayoso de Azeredo Coutinho
Department: Civil Engineering
This work presents a numerical solution of 3D compressible Euler equations in a
parallel framework. These equations, governing compressible inviscid fluid flow have
application in the oil industry. This work is developed with emphasis in this application,
where it is possible to simulate the overpressure arising from accidental explosions in
oil platforms. The simulation results can be used in the risk analysis of the platforms.
The numerical solution has been obtained through a stabilized finite element
formulation (SUPG-type) plus a shock capturing operator. Different shock capturing
operators have been used. The development of the computational code has been done in
the in-house software EdgeCFD, which is a CFD software developed and maintained by
NACAD/UFRJ. EdgeCFD is a finite element software that works in parallel
environments (distributed memory, shared memory and hybrid), it was written in
Fortran 90 and uses edge based scheme to store the matrix generated by discretization.
Benchmarks problems are used to assess the quality of the numerical solutions and the
robustness of the code.
ix
Sumário
Capítulo 1 ................................................................................................. 1
Introdução ................................................................................................ 1
1.1 Considerações Iniciais ................................................................................. 1
1.2 Objetivos do Trabalho................................................................................. 6
1.3 Organização do Texto.................................................................................. 7
Capítulo 2 ................................................................................................. 9
Formulação Matemática .......................................................................... 9
2.1 Equações Governantes ................................................................................ 9
2.2 Condições de Contorno e Condições Iniciais ............................................ 12
2.3 Adimensionalização das Equações Governantes ...................................... 13
2.4 Classificação de Escoamentos Compressíveis........................................... 15
Capítulo 3 ............................................................................................... 17
Formulação Numérica ........................................................................... 17
3.1 Formulação Estabilizada de Elementos Finitos........................................ 17
3.1.1 Operador de Captura de Choque δ91................................................ 20
3.1.2 Operador de Captura de Choque CAU ............................................. 21
3.1.3 Parâmetros de Estabilização KIRK1................................................. 23
3.1.4 Parâmetros de Estabilização KIRK2................................................. 23
3.1.5 Parâmetros de Estabilização YZβ1 ................................................... 23
3.1.6 Parâmetros de Estabilização YZβ2 ................................................... 25
3.2 Integração no Tempo................................................................................. 26
Capítulo 4 ............................................................................................... 30
x
Técnicas Computacionais ...................................................................... 30
4.1 Implementação do Código Computacional............................................... 30
4.2 Solução dos Sistemas Lineares .................................................................. 31
4.3 Estrutura de Dados por Aresta ................................................................. 33
4.4 Produto Matriz-Vetor por Aresta............................................................. 40
4.5 Computação Paralela ................................................................................ 42
Capítulo 5 ............................................................................................... 47
Resultados............................................................................................... 47
5.1 Verificação e Validação (V&V)................................................................. 48
5.2 Casos de Teste 1D ...................................................................................... 49
5.2.1 Descrição do Tubo de Choque.......................................................... 50
5.2.2 Tubo de Choque de Sod ................................................................... 53
5.2.3 Tubo de Choque de Lax-Harden....................................................... 61
5.3 Casos de Teste 2D ...................................................................................... 68
5.3.1 Choque Oblíquo............................................................................... 68
5.3.2 Choque Refletido ............................................................................. 75
5.3.3 Túnel de Vento com um Degrau a Mach 3 ....................................... 82
5.4 Caso de Aplicação 3D ................................................................................ 90
5.4.1 Explosão em uma Plataforma Semi-Submersível.............................. 91
Conclusões ............................................................................................ 111
Considerações Finais ......................................................................................... 111
Trabalhos Futuros............................................................................................. 114
Referências Bibliográficas ................................................................... 116
Apêndice A............................................................................................ 124

1
CAPÍTULO 1
INTRODUÇÃO
1.1 Considerações Iniciais
Nos últimos anos a Fluidodinâmica Computacional (CFD da sigla em inglês,
Computational Fluid Dynamics) tem se desenvolvido bastante. Atualmente as técnicas
de CFD têm sido aplicadas em diversas áreas da engenharia. Com o avanço da
computação, principalmente a computação paralela, a área de CFD se torna cada vez
mais presente no dia-a-dia das empresas de engenharia, pois atualmente é possível
resolver problemas de grande porte, os quais no passado não apresentavam viabilidade
de solução em função da falta de recursos computacionais daquela época. A solução de
problemas cada vez mais robustos gera soluções com confiabilidade cada vez maior e
faz com que CFD se torne uma ferramenta importante na tomada de decisões no
ambiente corporativo.
Basicamente, a mecânica dos fluidos é subdividida em duas áreas principais,
escoamentos incompressíveis e escoamentos compressíveis. Os líquidos são geralmente
modelados como incompressíveis. Enquanto os gases são quase sempre tratados com
compressíveis, embora exista uma ampla faixa de escoamentos lentos onde os gases
apresentam comportamento quase incompressível. Também existem aplicações práticas
onde os líquidos apresentam compressibilidade considerável. Portanto, não existe um
limite físico totalmente definido separando o comportamento dos fluidos em
incompressível ou compressível. Em CFD as dificuldades e os métodos numéricos que
surgem em cada uma das áreas (incompressível e compressível) são bastante específicos.
Por exemplo, em escoamento incompressível há uma preocupação com a condição de
Babusza-Brezzi, enquanto produção de entropia e captura de choque são as maiores
2
preocupações no regime compressível. Diferentes conjuntos de variáveis são usados em
cada caso. No caso incompressível geralmente são usadas variáveis primitivas, enquanto
variáveis conservativas são quase sempre consideradas no caso compressível. Do
mesmo modo, é comum usar diferentes ordens de interpolação em escoamentos
incompressíveis, enquanto no caso compressível interpolações de mesma ordem são
quase uma regra. As estratégias numéricas adotadas para resolver os sistemas de
equações também são diferentes. Em escoamentos incompressíveis soluções segregadas
são amplamente empregadas, enquanto em escoamentos compressíveis soluções
totalmente acopladas são as mais utilizadas (HAUKE; HUGHES, 1998). Diante das
diferenças apresentadas em relação ao regime de escoamento considerado fica evidente
a necessidade de se tratar cada tipo de escoamento de forma bem específica.
No presente trabalho será considerado o tratamento numérico de escoamentos
compressíveis. Será apresentada toda a estratégia numérica adotada para tratar os
escoamentos compressíveis, assim como aplicações práticas para esse tipo de
escoamento.
Em soluções numéricas de problemas predominantemente advectivos o método
de diferenças finitas centradas e a formulação variacional clássica de Galerkin de
elementos finitos não são estáveis. As soluções calculadas utilizando esses métodos
apresentam oscilações espúrias. Uma alternativa eficiente para o controle de tais
instabilidades são os métodos upwind de elementos finitos, como é o caso da
formulação SUPG (Streamline-Upwind / Petrov-Galerkin) desenvolvida por BROOKS
e HUGHES (1982). Essa formulação prevê a utilização de funções peso descontínuas
que contém uma ponderação à montante na direção das linhas de fluxo, adicionando à
formulação clássica de Galerkin um termo que acrescenta estabilidade na direção das
linhas de corrente e desta maneira controlam as oscilações espúrias. BROOKS e
HUGHES (1982) desenvolveram a formulação SUPG para a equação linear de
advecção-difusão e a estenderam para escoamentos incompressíveis de fluidos viscosos
regidos pelas equações de Navier-Stokes. HUGHES e MALLET (1986a) apresentaram
uma versão da formulação SUPG generalizada para sistema advectivo-difusivo
multidimensional.
HUGHES e TEZDUYAR (1984) estenderam a formulação SUPG para resolver
as equações de Euler compressíveis, onde foram tratados escoamentos com grandes

3
velocidades e ocorrência de choques usando variáveis conservativas. Embora os
resultados tenham sido considerados satisfatórios nesse trabalho, oscilações espúrias
ainda permaneceram na vizinhança de regiões de gradientes elevados.
BROOKS e HUGHES (1982) e HUGHES e TEZDUYAR (1984) utilizaram a
formulação SUPG para tratar as oscilações espúrias ao longo das linhas de correntes.
Entretanto, uma série de escoamentos, principalmente os escoamentos compressíveis a
altas velocidades, apresentam variações abruptas em suas propriedades, gerando
grandes descontinuidades. Essas descontinuidades, ou choque, não são bem capturadas
pela formulação SUPG, que é instável nessas regiões. Assim, foi necessário desenvolver
um novo esquema de estabilização para evitar as oscilações espúrias nas proximidades
das descontinuidades e, portanto, surgiram os operadores de captura de descontinuidade
(ou operadores de captura de choque). HUGHES et. al. (1986b) mostraram, para o caso
da equação de advecção-difusão de um escalar, que era possível estabilizar a solução
nas proximidades das regiões de descontinuidade adicionando um termo referente ao
operador de captura de descontinuidade à formulação SUPG. Essa estrutura composta
pela formulação SUPG acrescida de um termo referente ao operador de captura de
descontinuidade tornou-se uma formulação estabilizada amplamente utilizada até os
dias de hoje. Ao longo dos anos os parâmetros de estabilização SUPG e de captura de
descontinuidades foram sendo cada vez mais aperfeiçoados, mas a estrutura da
formulação praticamente não se alterou.
A formulação SUPG acrescida de um operador de captura de descontinuidade é
uma formulação estabilizada de elementos finitos amplamente aplicada em escoamentos
compressíveis e será objeto de estudo do presente trabalho.
Ao longo dos anos diversas formas de cálculo dos parâmetros de estabilização
SUPG e captura de descontinuidade foram desenvolvidas. Nesse contexto, HUGHES e
MALLET (1986b) apresentaram uma versão do operador de captura de descontinuidade
multidimensional. SHAKIB (1988) acrescentou um operador de captura de
descontinuidade a uma formulação espaço-tempo de Galerkin com Mínimos Quadrados
(GLS – Galerkin Least Squares) em variáveis de entropia. GALEÃO e DUTRA DO
CARMO (1988) desenvolveram, para a equação advecção-difusão de um escalar, o
operador de captura de descontinuidade CAU (Consistent Approximate Upwind)
proporcional ao resíduo no interior dos elementos. LE BEAU e TEZDUYAR (1991)

4
acrescentaram um operador de captura de descontinuidades em variáveis conservativas
a uma formulação SUPG semidiscreta para resover as equações de Euler compressíveis.
Esse operador foi construído a partir de uma transformação inversa do operador dado
originalmente em variáveis de entropia em HUGHES e MALLET (1986). Esse mesmo
operador apresentado em LE BEAU e TEZDUYAR (1991) foi usado em ALIABADI e
TEZDUYAR (1995) para resolver as equações de Euler e Navier-Stokes compressíveis.
ALMEIDA e GALEÃO (1996) estenderam a estrutura do operador CAU para
escoamentos compressíveis regidos pelas equações de Euler e Navier-Stokes. Os
primeiros operadores de captura de descontinuidades eram desenvolvidos geralmente
em variáveis de entropia. Muitas vezes usavam-se uma transformação de variáveis para
aplicá-los em formulações escritas em variáveis conservativas. LE BEAU et. al. (1993)
e ALIABADI et. al. (1993) realizaram comparações entre soluções obtidas com
variáveis de entropia e variáveis conservativas. Eles usaram a formulação estabilizada
SUPG acrescida de um operador de captura de descontinuidade para resolver as
equações de Euler e Navier-Stokes compressíveis. As conclusões foram que as soluções
obtidas a partir dos dois conjuntos de variáveis (variáveis de entropia e variáveis
conservativas) são muito próximas e algumas vezes quase idênticas. CATABRIGA e
COUTINHO (2002) usaram um operador de captura de descontinuidade em variáveis
conservativas que foi originalmente dado em variáveis de entropia em ALMEIDA e
GALEÃO (1996). TEZDUYAR e SENGA (2006, 2007) e TEZDUYAR et. al. (2006)
desenvolveram o operador de captura de descontinuidade YZβ em variáveis
conservativas e o aplicaram em formulações SUPG semidiscreta e espaço-tempo para
resolver problemas de escoamentos compressíveis. CATABRIGA et. al. (2009)
apresentaram uma comparação de operadores de captura de descontinuidade na solução
das equações de Euler 3D e mostraram que o método YZβ apresenta melhores
resultados quando comparado com métodos de captura de choque mais antigos. KIRK
et. al. (2010) e KIRK (2010) apresentaram uma formulação de elementos finitos
semidiscreta com um operador de captura de descontinuidade similar ao operador
apresentado em CATABRIGA e COUTINHO (2002). Entretanto, KIRK et. al. (2010) e
KIRK (2010) desenvolveram um método para determinar um novo parâmetro de
estabilização da formulação SUPG dependente do operador de captura de
descontinuidade. HUGHES et. al. (2010) apresentaram uma perspectiva histórica dos
últimos 25 anos de pesquisas realizados pelos autores no contexto de escoamentos
compressíveis.

5
O presente trabalho apresenta uma comparação de operadores de captura de
descontinuidades implementados em um ambiente de computação paralela utilizando
estrutura de dados baseada nas arestas dos elementos. Para tal foi adotada uma
formulação estabilizada de elementos finitos do tipo SUPG para resolver as equações de
Euler 3D compressíveis. Cabe ressaltar que é comum denominar a descrição matemática
de escoamentos compressíveis invíscidos simplesmente como equações de Euler
compressíveis. Portanto, daqui por diante será adotada essa denominação.
A solução numérica desenvolvida nesse trabalho poderá ser empregada na
simulação numérica de explosões em áreas abertas ou pouco congestionadas, muito
comum na indústria de óleo e gás, onde é possível simular a sobrepressão proveniente
de uma explosão acidental ocorrida em plataformas de petróleo e aplicar esses
resultados em estudos de análise de risco.
No presente trabalho adotou-se uma formulação de elementos finitos euleriana,
onde a malha de elementos permanece fixa durante a análise. Em função da natureza
dos escoamentos regidos pelas equações de Euler apresentarem grandes
descontinuidades em somente algumas regiões (onda de choque), o uso de formulações
que utilizam malhas adaptativas que acompanham o deslocamento da onda de choque é
bastante comum para resolver essas equações, como, por exemplo, em SCOVAZZI
(2007) e NAZAROV (2010). No presente trabalho a malha de elementos é refinada em
todo o domínio resultando, geralmente, em malhas consideradas de grande porte. A
estratégia de solução adotada no presente trabalho consiste em utilizar um paralelismo
por troca de mensagens em conjunto com uma estrutura de dados por aresta para
alcançar uma solução eficiente e robusta que possa ser aplicada às equações de Euler
compressíveis.
A estrutura de dados por arestas tem provado, em diversos trabalhos, sua
habilidade em acelerar processos iterativos de solução. VENKATAKRISHNAN e
MAVRIPLIS (1993) apresentaram testes de desempenho utilizando estruturas de dados
por arestas para a solução implícita das equações de Navier-Stokes compressíveis
utilizando o método dos volumes finitos. CATABRIGA e COUTINHO (2002)
empregaram com sucesso esta estrutura de dados na solução das equações de Euler em
2D utilizando triângulos lineares e formulação SUPG com operador de captura de
descontinuidade. COUTINHO et. al. (2001) aplicaram a estrutura de dados por arestas

6
em elementos tetraédricos na solução de problemas de plasticidade. A estrutura de
dados por aresta apresentou resultados superiores, em relação ao tempo de computação
e consumo de memória, quando comparada com a estrutura de dados por elemento.
RIBEIRO e COUTINHO (2005) fizeram uma comparação detalhada dos custos
computacionais relacionados aos esquemas de estrutura de dados por aresta, por
elemento e CSR (Compressed Sparse Row) e a conclusão desse trabalho foi que a
estrutura de dados por aresta é computacionalmente mais eficiente para problemas com
mais de 3 de graus de liberdade por nó. ELIAS et. al. (2006b) empregaram a estrutura
de dados por arestas na solução paralela das equações de Navier-Stokes para
escoamentos viscoplásticos utilizando uma formulação estabilizada de elementos finitos
do tipo SUPG/PSPG.
1.2 Objetivos do Trabalho
O presente trabalho apresenta uma comparação de operadores de captura de
descontinuidades implementados em um ambiente de computação paralela utilizando
estrutura de dados por arestas. Para tal foi adotada uma formulação estabilizada de
elementos finitos do tipo SUPG para resolver as equações de Euler 3D compressíveis.
Para atender aos objetivos do trabalho serão realizadas as seguintes etapas:
i) Na solução das equações de Euler será adotada uma formulação estabilizada
de elementos finitos do tipo SUPG acrescida de um operador de descontinuidade. Serão
analisados diferentes operadores de captura de descontinuidade. Além disso, diferentes
estruturas do parâmetro de estabilização SUPG também serão avaliadas.
ii) Será adotado um paralelismo por troca de mensagens com o intuito de
resolver problemas com malhas de grande porte em um ambiente de memória
distribuída. Problemas regidos pelas equações de Euler geralmente exigem malhas
grandes, portanto, a computação em paralelo torna-se imprescindível nesses casos.
iii) Será adotado um esquema de solução baseado em estrutura de dados por
aresta. Este tipo de estrutura de dados tem se mostrado bastante eficiente, conforme
resultados apresentados na literatura. O produto matriz-vetor, intensamente resolvido
durante a solução do problema, será realizado de forma a tirar proveito da estrutura de
7
dados por aresta, fornecendo assim mais eficiência a essa operação que é muito
dispendiosa do ponto de vista computacional.
iv) Ao final do trabalho pretende-se mostrar que a ferramenta computacional que
será desenvolvida poderá ser aplicada a problemas de projeto de engenharia. Pretende-
se simular a explosão ocorrida por vazamento e acúmulo de gás em uma plataforma de
petróleo.
1.3 Organização do Texto
O restante desse trabalho está organizado conforme descrito a seguir.
O Capítulo 2 apresentará a formulação matemática que será tratada nesse
trabalho. Serão apresentadas as equações de Euler 3D compressíveis e suas respectivas
condições de contorno e condições iniciais. Nesse capítulo também serão apresentadas a
estratégia de adimensionalização das equações de Euler e a classificação dos regimes de
escoamentos compressíveis.
No Capítulo 3 será apresentada a formulação estabilizada de elementos finitos
usada no presente trabalho. Trata-se de uma formulação do tipo SUPG acrescida de um
operador de captura de descontinuidade. Serão mostrados diferentes operadores de
captura de descontinuidade. Esse capítulo também apresentará o algoritmo de avanço
temporal adotado.
No Capítulo 4 serão apresentadas as técnicas computacionais usadas nesse
trabalho. Serão apresentados o método iterativo de solução de sistemas lineares, o pré-
condicionador usado para acelerar a solução iterativa e o tipo de estrutura de dados
adotados. Será discutida também a estratégia usada na implementação do produto
matriz-vetor e as técnicas de computação paralela usadas.
O Capítulo 5 apresentará os resultados obtidos no presente trabalho. Nesse
capítulo serão usados problemas clássicos para verificar a qualidade das soluções
obtidas. Também será apresentado um problema de aplicação, onde será mostrada toda
a robustez computacional da ferramenta numérica desenvolvida nesse trabalho.

8
Por fim serão apresentadas as Conclusões do trabalho. Nesse capítulo serão
expostas as considerações finais e as sugestões de trabalhos futuros.

9
CAPÍTULO 2
FORMULAÇÃO MATEMÁTICA
2.1 Equações Governantes
As equações governantes para o escoamento de fluidos compressíveis não
viscosos regidos pelas equações de Euler são apresentadas nesta seção de acordo com
HIRSH (1992). Tais equações são provenientes da aplicação dos princípios de
conservação de massa, quantidade de movimento e energia que regem a mecânica do
contínuo. Maiores detalhes a respeito do desenvolvimento das equações de conservação
podem ser obtidos em HIRSH (1992).
As equações de Euler formam um sistema invíscido de equações de conservação
hiperbólicas, ou ainda, um conjunto acoplado de equações diferenciais não-lineares de
primeira ordem. As equações de Euler compressíveis podem ser entendidas como um
caso especial das equações de Navier-Stokes compressíveis onde o fluxo difusivo (ou
viscoso) e o vetor de termos fonte são considerados nulos.
As equações de Euler podem ser escritas de forma compacta, ou conservativa,
em um domínio espaço-tempo [0, ]T , conforme equação 2.1:
0yx z
t x y z
FF FU
, em 0,t T , (2.1)
onde 3R e [0, ]t T . O vetor de variáveis conservativas U e os vetores dos fluxos
de Euler Fi para i=x,y,z, são dados, respectivamente, nas expressões 2.2 e 2.3:

10
1
2
3
4
5
1
x
y
z
T
U
U u
U u
U u
U e
U , (2.2)
11
, para , ,xix
i i yiy
ziz
iT
u
u p i x y zu
u
ue
F . (2.3)
Nas equações 2.2 e 2.3, ρ é a massa específica do fluido, u = [ux, uy, uz]T é a
velocidade, Te é a densidade total de energia por unidade de massa, p é a pressão
termodinâmica e ij é o delta de Kronecker. Na equação 2.2, as variáveis U1, U2, U3, U4,
U5 são as variáveis conservativas enquanto as variáveis ρ, ux, uy, uz, e são as variáveis
primitivas.
A densidade total de energia por unidade de massa Te é dada pela soma da
energia interna por unidade de massa ei e da energia cinética do escoamento por unidade
de massa, conforme expresso na equação 2.4:
2
2T ie e
u, (2.4)
onde o segundo termo da lado direito da equação 2.4 é a energia cinética por unidade de
massa.
Considerando que o fluido segue a lei dos gases ideais, a relação constitutiva
para gases perfeitos é dada pelas equações 2.5, 2.6 e 2.7:
i ve c , (2.5)
1 ip e (2.6)

11
p
v
c
c , (2.7)
onde cv é o calor específico a volume constante, cp é o calor específico a pressão
constante, é a temperatura absoluta e é a razão entre cp e cv.
Duas relações úteis serão apresentadas a seguir. Trata-se da velocidade acústica
(ou velocidade do som) e do número de Mach, que serão usadas na seção 2.4 na
classificação do regime de escoamento compressível. Considerando o fluido como um
gás ideal tem-se:
pc
, (2.8)
onde c é a velocidade acústica do gás ideal.
O número de Mach é dado pela relação entre a velocidade do escoamento e a
velocidade acústica conforme equação 2.9.
Mc
u
, (2.9)
onde M é o número de Mach.
As equações de Euler apresentadas na forma compacta na equação 2.1 podem
ser escritas na forma quasi-linear conforme equação 2.10:
0x y zt x y z
U U U UA A A
, (2.10)
onde a matrizes Jacobianas dos fluxos de Euler Ax, Ay, e Az são matrizes de ordem 5 5
definidas pela equação 2.11:
= , = , =yx z
x y z
FF FA A A
U U U. (2.11)
A forma geral das matrizes Jacobianas dos fluxos de Euler é dada pela equação
2.12:
1 2 3 4 5 5 5
= , para , ,i i i i ii i x y z
U U U U U
F F F F FA , (2.12)

12
onde i
jU
F é um vetor de 5 posições para 1,2,3, 4,5j .
O desenvolvimento das matrizes Jacobianas dos fluxos de Euler em variáveis
conservativas pode ser encontrado em HUGHES e TEZDUYAR (1984) e em
ALIABADI e TEZDUYAR (1995).
2.2 Condições de Contorno e Condições Iniciais
Considerando o domínio espaço-tempo [0, ]T de definição do problema,
com contorno as equações de Euler admitem condições de contorno e condições
iniciais conforme descrito a seguir.
Condições de contorno de Dirichlet, dadas pela equação 2.13:
BU G , em 0,t T . (2.13)
Condições iniciais, dadas na equação 2.14:
0,0 U x U x , em . (2.14)
Nas equações acima B é um operador de condição de contorno e G e 0U x
são funções dadas. Nas condições de contorno de Dirichlet são especificados valores
para as variáveis conservativas U no contorno 0,t T . Nas condições iniciais
são especificados valores para as variáveis conservativas U no domínio no instante
0t . As condições de contorno e iniciais apresentadas aqui estão de acordo com LE
BEAU e TEZDUYAR (1991).
Nas equações de Euler o termo viscoso presente nas equações de Navier-Stokes
não é considerado e, por isso, a componente tangencial da velocidade do escoamento
nas superfícies impermeáveis não é nula. Essa situação caracteriza a condição de

13
escorregamento, onde o fluido em contato com uma superfície impermeável não sofre
atrito viscoso.
A componente perpendicular da velocidade do escoamento nas superfícies
impermeáveis é nula para garantir a condição de parede impermeável. Portanto, em cada
ponto da superfície a solução das equações de Euler deve satisfazer a seguinte condição:
0 u n , (2.15)
onde u é vetor velocidade do escoamento e n é o vetor unitário normal à superfície
impermeável.
As condições de escorregamento e de parede impermeável devem ser
consideradas na solução das equações de Euler sempre que necessário.
2.3 Adimensionalização das Equações Governantes
A adimensionalização das equações que governam um escoamento reduz os
problemas relacionados aos erros de truncamento computacionais e permite que um
mesmo problema numérico represente vários problemas físicos. Esse procedimento
baseia-se no conceito de similaridade de escoamentos, onde a solução do problema de
escoamento resolvido em diferentes escalas é equivalente. Portanto, o problema de
escoamento pode ser resolvido em escalas menores (escalas de protótipos) ou em
escalas maiores (escala real) e suas respectivas soluções serão equivalentes. Dois
problemas possuem soluções equivalentes quando suas respectivas soluções são
proporcionais, sendo a constante de proporcionalidade entre as soluções dependente das
propriedades do escoamento na região não perturbada.
A similaridade de escoamentos é garantida quando a similaridade geométrica e a
similaridade dinâmica estão simultaneamente presentes no problema. Na similaridade
geométrica as proporções nas dimensões do modelo geométrico precisam permanecer as
mesmas tanto nas escalas menores quanto nas escalas maiores. A similaridade dinâmica
é garantida quando um parâmetro de similaridade é mantido constante nas diferentes
escalas. Em escoamentos viscosos geralmente usa-se o número de Reynolds como
parâmetro de similaridade. Dessa forma, o escoamento nas escalas menores e maiores
precisam necessariamente apresentar o mesmo número de Reynolds para que se tenha a
14
similaridade dinâmica. No caso de escoamentos não viscosos de velocidades elevadas
usa-se o número de Mach para garantir a similaridade dinâmica dos escoamentos.
Nesta seção serão apresentados os procedimentos de adimensionalização das
equações de Euler. Os procedimentos adotados nessa seção estão descritos em
ANDERSON JR. (1990) e são apresentados a seguir.
O tempo adimensional *t é dado por:
*
0
ct t
l , (2.16)
onde c é a velocidade do som no escoamento não perturbado e 0l é o comprimento
característico do escoamento.
O comprimento adimensional *l é dado por:
*
0
ll
l , (2.17)
onde l é o comprimento com dimensão.
A massa específica adimensional * é dada por:
*
, (2.18)
onde é a massa específica no escoamento não perturbado.
As componentes de velocidade adimensionais *xu , *
yu , e *zu são dadas por:
* xx
uu
c
, * y
y
uu
c
, * zz
uu
c
, (2.19)
onde c é a velocidade do som no escoamento não perturbado.
A pressão adimensional *p é dada por:
*
2
pp
c
, (2.20)

15
onde e c são, respectivamente, a massa específica e a velocidade do som no
escoamento não perturbado.
O número de Mach no escoamento não perturbado M é dado pela equação
2.21.
Mc
u
, (2.21)
onde u é a velocidade no escoamento não perturbado.
2.4 Classificação de Escoamentos Compressíveis
Os escoamentos compressíveis podem ser classificados em quatro diferentes
regimes (ANDERSON JR., 1990). Essa classificação baseia-se no número de Mach no
escoamento não perturbado M e no número de Mach local M . O número de Mach
local M representa os valores de Mach em cada ponto do escoamento como, por
exemplo, no escoamento ao redor de um aerofólio, onde o valor de Mach pode variar ao
longo do aerofólio.
A classificação dos escoamentos compressíveis são os seguintes:
1 - Escoamentos subsônicos: são escoamentos em que o número de Mach é
sempre menor do que 1 ( M < 1) em qualquer região. Geralmente esse tipo de
escoamento ocorre para M < 0,8.
2 - Escoamentos transônicos: são escoamentos que ocorrem para 0,8 < M < 1,2.
Nesses escoamentos algumas regiões podem apresentar M > 1 enquanto outras regiões
podem apresentar M < 1.
3 - Escoamentos supersônicos: são escoamentos em que o número de Mach local
é sempre maior do que 1 ( M > 1) em qualquer região. Geralmente esse tipo de
escoamento ocorre para M > 1,2.
4 - Escoamentos hipersônicos: são escoamentos que ocorrem para M > 5.

16
Os problemas tratados nesse trabalho são geralmente classificados como
escoamentos supersônicos. Cabe ressaltar que os escoamentos hipersônicos apresentam
variações extremas de temperatura, pressão e massa específica, o que acrescenta
enormes dificuldades para se alcançar a solução nesse regime de escoamento. Entretanto,
o tratamento de escoamentos hipersônicos está fora do escopo desse trabalho.

17
CAPÍTULO 3
FORMULAÇÃO NUMÉRICA
3.1 Formulação Estabilizada de Elementos Finitos
Nesta seção é apresentada a formulação estabilizada de elementos finitos para as
equações de Euler em variáveis conservativas. Trata-se de uma formulação semi-
discreta que se caracteriza por uma discretização de elementos finitos no espaço
resultando em um conjunto de equações diferenciais ordinárias dependentes do tempo.
A discretização temporal do problema será realizada através do algoritmo preditor-
multicorretor apresentado na seção 3.2.
Por questões de simplificação, inicialmente a equação 2.10 será escrita na forma
de um operador dado pela equação 3.1:
0x y zLt x y z
U U U UU A A A . (3.1)
O método dos elementos finitos consiste em subdividir o domínio do problema
em um conjunto de subdomínios e (elementos finitos) tal que, 1
nele
e e
para e ei j i j , onde nel representa o número total de elementos da malha e o
superíndice e indica o e-ésimo elemento da malha.
O espaço das funções teste hS e o espaço das funções peso hV são dados,
respectivamente, por:

18
551 1, , em e
h h h h h e hP
S U U H U BU G (3.2)
551 1, , 0 em e
h h h h h e hP
V W W H W BW (3.3)
onde o superíndice h indica a discretização de elementos finitos, 1 eP representa o
conjunto de polinômios de grau 1 em e , representa o contorno de ,
1 1h H H representa um espaço de dimensões finitas sobre o domínio e
1 H é o espaço das funções cuja a primeira derivada é quadrado integrável, isto é,
se:
2
1 < dff d
dx
H . (3.4)
A formulação de elementos finitos para as equações de Euler consiste em
encontrar h hU S tal que h h W V , tem-se:
T
1
1
0
e
e
hnelh h e h h e
ke k
h hnele e
e i i
L d L dx
dx x
WW U τ A U
W U, (3.5)
onde hU é a função incógnita discreta e hW é a função peso discreta.
A matriz de estabilização SUPG eτ é definida como diagonal. Essa forma de
estabilização foi inicialmente proposta em HUGHES a TEZDUYAR (1984). Mais tarde
ocorreram alguns aperfeiçoamentos na formulação, por exemplo, em LE BEAU e
TEZDUYAR (1991) e em ALIABADI e TEZDUYAR (1995). A primeira integral na
equação 3.5 representa o termo de Galerkin, o primeiro somatórios de integrais
representa o termo de estabilização SUPG e o segundo somatório de integrais representa
o termo de estabilização referente ao operador de captura de descontinuidades.

19
O parâmetro de estabilização apresentado a seguir é o definido em
ALIABADI e TEZDUYAR (1995). Já o parâmetro de estabilização será definido em
cada subseção que se seguirá.
A matriz de estabilização SUPG 5 5e τ I depende do parâmetro dada pelas
equações 3.6, 3.7, 3.8 e 3.9:
2
max 0,1 2
e
t ae
CFL
CFL
, (3.6)
2
3 1 2t aeCFL
, (3.7)
2
e
a e
h
c u β
, (3.8)
2
e
ec u β
, (3.9)
onde ec é a velocidade acústica do elemento, t é o parâmetro de estabilização
correspondentes aos termos dependentes do tempo, a é o parâmetro de estabilização
correspondentes aos termos advectivos e é o parâmetro de estabilização para
descontar os efeitos do termo de captura de descontinuidade. O parâmetro controla a
estabilidade e a precisão do algoritmo da marcha temporal e será discutido na seção 3.2.
O número de Courant-Fredrichs-Lewy eCFL é definido pela equação 3.10:
e
e
e
c tCFL
h
u β , (3.10)
e β é um vetor arbitrário normalizado dado pela equação 3.11:

20
2
*
2
* 2
Uβ
U, (3.11)
sendo * 2
ou 10*
à conforme descrito em ALIABADI e TEZDUYAR (1995).
No presente trabalho adotou-se * 2
. A matriz 10Ã é definida em HUGHES et.
al. (1986a).
O parâmetro eh apresentado na equação 3.10 é o tamanho característico de
elemento. No presente trabalho adotou-se o tamanho característico do elemento eh
como sendo a raiz cúbica do volume do elemento eV , dado pela equação 3.12.
3e eh V , (3.12)
onde eV é o volume do elemento.
A velocidade acústica do elemento ec é dada pela equação 3.13:
2
12
eic e
u
. (3.13)
A equação 3.13 é equivalente à equação 2.8 apresentada anteriormente.
Alternativas para o cálculo da matriz de estabilização SUPG eτ são apresentadas
em CATABRIGA et. al. (2005) e CATABRIGA et. al. (2006), onde a matriz eτ é
calculada a partir dos coeficientes das matrizes de elementos e das arestas. No presente
trabalho, entretanto, adotou-se eτ dado em ALIABADI e TEZDUYAR (1995), equação
3.6.
Foram avaliados diferentes métodos para o cálculo do parâmetro do operador de
captura de descontinuidade , apresentados a seguir.
3.1.1 Operador de Captura de Choque δ91
O parâmetro do operador de captura de descontinuidade 91 foi definido em
variáveis conservativas em LE BEAU e TEZDUYAR (1991). Esse operador foi
construído a partir de uma transformação inversa do operador dado originalmente em
variáveis de entropia em HUGHES e MALLET (1986b). O parâmetro 91 em variáveis
21
conservativas é dado na equação 3.14. Daqui por diante esse método será identificado
somente como 91 .
10
10
91
h h hh h hx y z
h
x y z
Ã
Ã
U U UA A A
U.
(3.14)
3.1.2 Operador de Captura de Choque CAU
O parâmetro do operador de captura de descontinuidade CAU é definido em
ALMEIDA e GALEÃO (1996). Esse parâmetro foi inicialmente desenvolvido em
variáveis de entropia em ALMEIDA e GALEÃO (1996) e posteriormente foi escrito em
variáveis conservativas em CATABRIGA e COUTINHO (2002) conforme equação
3.15. Daqui por diante esse método será identificado somente como CAU.
10
10
10
10
se 0
0 se 0
h h h hh h hx y z
h
hCAU
h
t x y z
Ã
Ã
Ã
Ã
U U U UA A A
UU
U
, (3.15)
onde:
12
10
10
h h h
Ã
U U Ã U . (3.16)
A equação 3.16 pode ser escrita conforme a seguir:
10
10
10
10
1 1 1
2 2 2
3 3 3
h h hh
h h h
h h h
x x y y z z
x x y y z z
x x y y z z
ÃÃ
Ã
Ã
U U UU
U U U
U U U
. (3.17)
22
O termo hU é o gradiente generalizado de hU em relação ao sistema de
coordenadas locais dos elementos ξ dado pela equação 3.18:
1 1 1
2 2 2
3 3 3
h h h
h h hh
h h h
x x y y z z
x x y y z z
x x y y z z
U U U
U U UU
U U U
. (3.18)
Os componentes
ξ
x são os termos da matriz 1J dada pela equação 3.19.
1 1 1
1 2 2 2
3 3 3
x y z
x y z
x y z
J . (3.19)
O termo hU é obtido a partir da equação 3.20 (COSTA et. al., 2005).
1h h ξU J U . (3.20)
O termo hU é o gradiente de hU em relação as coordenadas globais e é dado
pela equação 3.21.
h
hh
h
x
y
z
U
UU
U
. (3.21)
O termo 10Ã é definido como a norma de um vetor induzida pela matriz 1
0Ã
(norma de energia). Por exemplo, a norma do vetor de velocidade u induzida pela
matriz 10Ã é dada pela equação 3.22.
12
10
10
Ã
u u à u . (3.22)
23
3.1.3 Parâmetros de Estabilização KIRK1
Em KIRK et. al. (2010) o parâmetro de estabilização SUPG é calculado
conforme equação 3.23.
122
2
1 2
2 4=
e
CAUkirk
SUPG SUPG
c
h h
u
, (3.23)
1
1
ˆ=2
nen
SUPG aa
h N
u
, (3.24)
ˆ u
uu
, (3.25)
onde nen é o número de nós por elemento e aN são as funções de forma usadas na
formulação de elementos finitos. Daqui por diante esse método será identificado
somente como KIRK1.
3.1.4 Parâmetros de Estabilização KIRK2
Em KIRK (2010) o parâmetro de estabilização SUPG é calculado conforme
equação 3.26.
122
2
2
2 2=
e
kirk
SUPG
c
h t
u
, (3.26)
onde t é o passo de tempo da análise e os demais parâmetros estão apresentados nas
equações 3.24 e 3.25. Nesse método o parâmetro do operador de captura de
descontinuidade usado é o CAU . Daqui por diante esse método será identificado
somente como KIRK2.
3.1.5 Parâmetros de Estabilização YZβ1
TEZDUYAR e SENGA (2007) apresentam o método YZβ para o cálculo do
parâmetro de estabilização SUPG e para o parâmetro do operador de captura de
descontinuidade . TEZDUYAR e SENGA (2007) apresentam diferentes formas para

24
o cálculo dos parâmetros de estabilização. No presente trabalho adotaram-se os
procedimentos de cálculo dos parâmetros de estabilização do método YZβ conforme
mostrado a seguir.
O parâmetro de estabilização SUPG para o método YZβ é definido na equação
3.27
1
1 2
1 1r
SUPG r rUGN
SUGN SUGN
, (3.27)
onde SUGN é dado em função do vetor unitário j , da velocidade acústica ec , das
funções de forma aN e do passo de tempo t , conforme equações 3.28, 3.29 e 3.30. É
adotado 2r (TEZDUYAR; SENGA, 2007).
1
1
1
nene
SUGN a aa
c N N
j u , (3.28)
j , (3.29)
2 2SUGN
t
. (3.30)
O parâmetro do operador de captura de descontinuidade 1shoc do método YZβ é
definido na equação 3.31:
2
1shoc shoc u , (3.31)
2shocshoc
shoc
ref
hh
u, (3.32)
1
1
2nen
shoc JGN aa
h h N
j . (3.33)

25
Na equação 3.32 ref é a massa específica de referência, o parâmetro é
adotado como 1 para choques suaves e 2 para choques acentuados. Para levar
em consideração os dois valores de o parâmetro shoc é calculado a partir da
expressão:
1 2
1
2shoc shoc shoc
. (3.34)
Daqui por diante o método YZβ apresentado em TEZDUYAR e SENGA (2007)
e descrito nesta seção será identificado somente por YZβ1.
3.1.6 Parâmetros de Estabilização YZβ2
Outra possibilidade de estabilização é considerar o mesmo parâmetro de
estabilização definido na equação 3.27 e calcular o parâmetro do operador de captura de
choque 2shoc conforme apresentado nas equações 3.35, 3.36, 3.37 e 3.38. Neste caso a
matriz Y é uma matriz diagonal construída a partir dos valores de referência de U .
212
11 1 12
1 2
sdnh shoc
shoci i
h
x
UY Z Y Y U , (3.35)
1
2
3
4
5
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
ref
ref
ref
ref
ref
U
U
U
U
U
Y , (3.36)
hhi
it x
U UZ A . (3.37)
O parâmetro é adotado como 1 para choques suaves e 2 para
choques acentuados. Para levar em consideração os dois valores de o parâmetro
2shoc é calculado a partir da expressão 3.38:
2 1 2
1
2shoc shoc shoc
. (3.38)

26
Daqui por diante o método YZβ apresentado em TEZDUYAR e SENGA (2007)
e descrito nesta seção será identificado somente por YZβ2.
3.2 Integração no Tempo
A discretização espacial da equação 3.5 leva a um conjunto de equações
diferenciais não-lineares ordinárias dependentes do tempo dadas pela equação 3.39.
Ma Cv 0 , (3.39)
onde v é o vetor de valores nodais de U , a é a derivada temporal de v , M é a matriz
de massa generalizada e C é a matriz de convecção generalizada.
As matrizes globais M e C são obtidas pelo assembly (ou montagem) a partir
das matrizes de elementos em e ec , respectivamente. A operação de assembly é
definida em HUGHES (1987). As matrizes de elementos são definidas pelas equações
3.40 e 3.41.
e e eg pg m m m (3.40)
e e e eag apg cc c c c c , (3.41)
onde egm é a matriz de massa consistente Galerkin, e
pgm é a matriz de massa de Petrov-
Galerkin, eagc é matriz de convecção de Galerkin, e
pgc é matriz de convecção de Petrov-
Galerkin e eccc é a matriz de captura de choque.
Nesse trabalho emprega-se o elemento tetraedro linear com um ponto de
integração para se obter as matrizes de elementos. Uma descrição detalhada da obtenção
de cada matriz de elemento para as equações de Euler 3D é fornecida em SESINI
(2006). SOUZA (2008) também descreve detalhes da discretização das equações de
Euler.
A operação de assembly para montagem das matrizes M e C , descrita em
HUGHES (1987), é representada conforme as equações 3.42 e 3.43.

27
1
nele
e
M mA (3.42)
1
nele
e
C cA , (3.43)
onde nel é o número de elementos e o superíndice e indica contribuição das matrizes de
elemento.
No presente trabalho as matrizes globais nunca são explicitamente montadas e,
além disso, elas são computadas a partir da contribuição das arestas dos elementos.
Portanto, as equações 3.42 e 3.43 representam apenas um esquema didático para
facilitar o entendimento desse assunto.
Para solucionar o sistema 3.39 é usado o algoritmo preditor-multicorretor
apresentado em ALIABADI e TEZDUYAR (1995), conforme Quadro 3.1. Neste
algoritmo o sistema 3.39 é discretizado por diferenças finitas, n é o contador de passos
de tempo, i é o contador das multicorreções (iterações não-lineares), maxit é o número
máximo de iterações não-lineares do algoritmo, as aproximações para nta e ntv são
representadas por na e nv , respectivamente, e t é o passo de tempo da análise, 0t é o
tempo inicial da análise, ft é o tempo final da análise e a é o incremento da derivada
temporal. O algoritmo preditor-multicorretor pode ser resumido conforme apresentado
no Quadro 3.1.
Dependendo da escolha de *M pode-se ter um algoritmo implícito ou explicito
conforme descrito em ALIABADI e TEZDUYAR (1995). No presente trabalho adota-
se *M conforme equação 3.44.
* t M M C , (3.44)
que leva a um algoritmo implícito, resultando em uma matriz *M não-simétrica. O
parâmetro controla a estabilidade e a precisão do algoritmo da marcha temporal. No
presente trabalho adota-se 0,5 o que leva a um método de segunda ordem de
precisão em relação ao tamanho do passo de tempo t chamado de regra trapezoidal
(ALIABADI; TEZDUYAR, 1995).

28
Quadro 3.1 – Algoritmo preditor-multicorretor.
Dados: na e nv .
Para 0n t até fn t Fazer
Passo 1: 1 1in n nt v v a (Predição ou Inicialização)
Passo 2: 1 0in a (Predição ou Inicialização)
Para 0i até i maxit ou até Convergir Fazer
Passo 3: Calcule: 1 1i in n r Ma Cv
Passo 4: Resolve: * M a r
Passo 5: 11 1
i in n t v v a (Correção ou Atualização)
Passo 6: 11 1
i in n a a a (Correção ou Atualização)
Fim do laço em i
Fim do laço em n
O critério de parada para as iterações não-lineares do algoritmo preditor
multicorretor é alcançado quando 0 i itol r r , onde tol é uma tolerância fornecida. O
número de iterações não-lineares pode ser reduzido usando uma tolerância para
controlar o resíduo linear. Assim o Passo 4 do algoritmo preditor multicorretor, dado no
Quadro 3.1, é substituída por:
* i i M a r r , (3.45)
levando a solução não-linear a um método do tipo Newton Inexato (ELIAS et. al.,
2006a). A tolerância é o termo forçante e sua estrutura é discutida em detalhes em
KELLY (1995). Neste trabalho adotaram-se os mesmos procedimentos de ELIAS et. al.
(2006a) para o cálculo do termo forçante . A utilização do termo forçante conduz a

29
um algoritmo não-linear adaptativo. Portanto, a idéia do método de Newton Inexato,
também conhecido por Newton Truncado, é minimizar o esforço empregado para a
solução dos sistemas de equações lineares quando a direção de busca não-linear estiver
longe da solução de equilíbrio.

30
CAPÍTULO 4
TÉCNICAS COMPUTACIONAIS
Neste capítulo serão listadas as técnicas e os métodos computacionais que foram
utilizados nesse trabalho durante a implementação da solução numérica das equações de
Euler.
4.1 Implementação do Código Computacional
A solução numérica das equações de Euler desenvolvida no presente trabalho foi
realizada sobre a estrutura computacional do EdgeCFD, que é um software de
elementos finitos desenvolvido e mantido pelo NACAD/UFRJ.
O EdgeCFD foi desenvolvido inicialmente para tratar escoamentos
incompressíveis e viscosos (ELIAS, 2007). Desde então o EdgeCFD vem recebendo
diversas contribuições, como por exemplo, PARAIZO (2009) e GONÇALVES JR.
(2011). Além disso, diversos trabalhos têm sido conduzidos com o EdgeCFD, tais como,
ELIAS et. al. (2006a, 2006b, 2011) e ALVES et. al. (2012). Esse software é escrito em
Fortran 90, usa estrutura de dados por aresta e trabalha em ambientes de computação
paralela de memória distribuída, compartilhada e híbrida.
O fluxo de uma simulação computacional pode ser resumido basicamente em
três etapas: pré-processamento, processamento e pós-processamento. No pré-
processamento constrói-se o modelo geométrico e a malha discreta. No processamento é
realizada a solução do problema. No pós-processamento é realizada a visualização dos
resultados obtidos. Nesse contexto, o EdgeCFD é usado apenas na etapa de
processamento de uma simulação computacional.

31
O EdgeCFD é composto por dois módulos, o EdgeCFD-Pre e o EdgeCFDSolver.
No EdgeCFD-Pre são realizados o particionamento do domínio, através da biblioteca
Metis (KARYPIS; KUMAR, 1998), e a extração de dados, através da biblioteca
EdgePack (MARTINS et. al., 2006). O EdgeCFDSolver é responsável pelo
processamento da análise.
O EdgeCFD escreve arquivos de resultados que podem ser pós-processados
diretamente no software Paraview. O pré-processamento do EdgeCFD pode ser
realizado em qualquer software gerador de malhas. No presente trabalho será usado o
software ANSYS ICEM CFD para realizar o pré-processamento. Para esta finalidade foi
desenvolvido um programa computacional que transforma as informações de malha do
ANSYS ICEM CFD no formato do EdgeCFD. Detalhes desse programa computacional
estão apresentados no Apêndice A.
Todas as funcionalidades computacionais presentes no EdgeCFD foram
adaptadas e estão disponíveis na solução das equações de Euler desenvolvida no
presente trabalho. As próximas seções desse capítulo farão uma abordagem mais
detalhada das técnicas computacionais mais importantes presentes nesse trabalho.
4.2 Solução dos Sistemas Lineares
No algoritmo preditor-multicorretor, apresentado no Quadro 3.1, a cada
multicorreção (ou iteração não-linear), é necessário resolver o sistema * M a r , onde
*M é uma matriz não-simétrica. O método utilizado para resolver o sistema * M a r
foi o método iterativo GMRES (SAAD; SCHULTZ, 1986) com um pré-condicionador
do tipo bloco diagonal nodal (SHAKIB et. al., 1989).
O método GMRES (Generalized Minimum RESidual) é um método iterativo
usado na solução de sistemas de equações que tem como objetivo minimizar a norma
residual do sistema. Considere o sistema de equações hipotético dado pela equação 4.1.
Ax b . (4.1)
O resíduo do sistema 4.1 é dado por:
r Ax b . (4.2)

32
No método GMRES a solução do sistema é obtida quando a norma do resíduo
r alcança uma tolerância. Considerando 0x como a solução inicial do sistema Ax b ,
uma solução aproximada irá apresentar a forma 0 x z onde z é um vetor do espaço de
Krylov. O método GMRES determina z tal que a norma do resíduo
0r b - A x + z seja mínima. Esse procedimento se repete até que o valor da norma
do resíduo r alcance uma tolerância desejada.
De maneira simples pode-se dizer que o GMRES é composto por dois laços
iterativos. O laço externo, também chamado de ciclos GMRES, poderá ter um número
máximo de iterações igual a maxl , onde maxl é um valor adotado. O laço interno, também
chamado de iterações GMRES, terá sempre um número de iterações igual a k que é o
número de vetores de Krylov adotado.
A utilização de pré-condicionadores acelera a taxa de convergência dos métodos
iterativos (SAAD, 1996). A técnica de pré-condicionamento baseia-se na idéia de
transformar o sistema de equações original em outro sistema que seja equivalente ao
sistema original, ou seja, que possua a mesma solução do sistema original, porém com
um melhor condicionamento, o que aumenta a taxa de convergência do método iterativo.
Por exemplo, a aplicação da técnica de pré-condicionamento ao sistema 4.1
conduz ao sistema:
1 1 M Ax M b . (4.3)
onde 1M é uma aproximação da inversa de A .
A escolha de 1M define o tipo de pré-condicionador que será adotado. Uma
discussão detalhada sobre esse tema pode ser encontrada em SAAD (1996).
Uma estratégia simples de pré-condicionamento é o pré-condicionador diagonal,
onde diagD A e o operador diag extrai a diagonal principal de A . O sistema pré-
condicionado tem a seguinte forma:
1 1 D Ax D b . (4.4)
33
No presente trabalho foi adotado o pré-condicionador bloco diagonal nodal
(SHAKIB et. al., 1989). Nesse tipo de pré-condicionamento tem-se blockB A ,
onde o operador block extrai de A as matrizes bloco-diagonais nodais de ordem m m ,
onde m é o número de graus de liberdade por nó. Para as equações de Euler
compressíveis em três dimensões 5m . A Figura 4.1 mostra de forma esquemática a
estrutura da matriz B .
Figura 4.1 – Pré-condicionador bloco diagonal nodal.
No caso do pré-condicionador bloco diagonal nodal o sistema pré-condicionado
tem a seguinte forma:
1 1 B Ax B b . (4.5)
O bloco-diagonal nodal representa uma técnica de pré-condicionamento de fácil
implementação, com custo de armazenamento e computacional maior que no pré-
condicionador diagonal, porém com uma maior eficiência na aceleração da solução
iterativa de sistemas de equações.
4.3 Estrutura de Dados por Aresta
A matriz *M , resolvida a cada multicorreção (ou iteração não-linear), conforme
Quadro 3.1, é a matriz global do problema. Na implementação computacional essa
matriz pode ser armazenada de diferentes formas. Diversas estratégias podem ser
utilizadas gerando códigos com diferentes tipos de estruturas de dados. As estruturas de
dados por elemento e por aresta são alternativas onde não é necessário realizar a
montagem da matriz global *M , reduzindo consideravelmente o esforço computacional.
Outras vantagens desses tipos de estrutura de dados podem ser encontradas em
RIBEIRO e COUTINHO (2005), onde os autores fizeram uma comparação detalhada
dos custos computacionais relacionados aos esquemas de estrutura de dados por aresta,
B =

34
por elemento e CSR (Compressed Sparse Row) e a conclusão desse trabalho foi que a
estrutura de dados por aresta é computacionalmente mais eficiente, quando comparada
com os outros tipos de estruturas de dados, para problemas com mais de 3 de graus de
liberdade por nó. No presente trabalho a solução das equações de Euler 3D apresenta 5
graus de liberdade por nó, o que justifica a aplicação da estrutura de dados por aresta
nesse trabalho.
No presente trabalho utilizou-se estrutura de dados por aresta na implementação
computacional das equações de Euler. A partir das matrizes dos elementos oriundas da
formulação estabilizada, representadas pelas equações 3.42 e 3.43, define-se um
desmembramento dos coeficientes dessas matrizes gerando as contribuições de cada
aresta. A mudança de estrutura de dados é feita considerando que os dados referentes à
malha de elementos já existam. As informações da malha são manipuladas de forma a
gerar a nova estrutura baseada nas arestas dos elementos. Para realizar essa tarefa
utilizou-se a biblioteca EdgePack (MARTINS el. al., 2006). Assim as matrizes
definidas nas equações 3.42 e 3.43 podem ser escritas pelas contribuições das arestas
dos elementos conforme equações 4.6 e 4.7.
1
nedgess
s
M mA (4.6)
1
nedgess
s
C cA , (4.7)
onde nedges é o número de arestas da malha e o superíndice s indica contribuição das
matrizes baseadas nas arestas. Dessa forma a matriz *M é formada a partir da
contribuição das arestas dos elementos. CATABRIGA (2000), MARTINS (2001) e
ELIAS (2007) descrevem as etapas de construção das matrizes de arestas, conforme
apresentado a seguir.
Quando se adotam estruturas de dados do tipo elemento-por-elemento ou aresta-
por-aresta as matrizes globais M , C e *M nunca são explicitamente montadas. Nesses
casos apenas as matrizes relativas aos elementos, ou às arestas, são montadas e
armazenadas. Como no presente trabalho adotou-se a estrutura de dados do tipo aresta-
por-aresta, será feita uma descrição de tipo de estrutura de dados a partir desse ponto.

35
As matrizes oriundas da discretização realizada pelo método dos elementos
finitos são matrizes com alto grau de esparsidade. Isto significa que a maior parte dos
coeficientes dessas matrizes são coeficientes nulos. No caso de elementos tetraédricos
com funções de interpolação lineares existe relação entre matrizes esparsas, grafos e
malha (SAAD, 1996). A estrutura de dados por aresta tira proveito dessa relação.
A Teoria dos Grafos é discutida em SAAD (1996). No presente trabalho será
apresentada uma abordagem simplificada apenas para ilustrar a utilização de grafos no
contexto do método dos elementos finitos. Basicamente os grafos são formados por um
conjunto de vértices e um conjunto de arestas. Os grafos mais utilizados nesse tipo de
aplicação são: nodal e dual. Os vértices do grafo nodal correspondem aos nós da malha
e as arestas do grafo correspondem às arestas da malha. Os vértices do grafo dual
correspondem aos elementos das malhas e as arestas do grafo correspondem às arestas
comuns dos elementos adjacentes. A figura 4.2 mostra a relação entre a malha de
triângulos, a matriz de coeficientes, o grafo nodal e o grafo dual. Pode-se observar que
na figura 4.2 a numeração dos elementos foi substituída por letras para facilitar a
compreensão. Na figuras 4.2b o símbolo representa os coeficientes não nulos da
matriz.
(a) Malha
(b) Matriz
(c) Grafo nodal
(d) Grafo dual
Figura 4.2 – Relação entre malha, matriz e grafos.

36
As malhas usadas nos métodos de elementos finitos geralmente são organizadas
em arranjos denominados incidências ou conectividades. No presente trabalho foram
adotados os seguintes arranjos:
IEN(nnoel,nel): conectividade dos nós que formam o elemento,
IEDGE(2,nare) conectividade dos nós que formam a aresta,
IEEI(nae,nel): conectividade das arestas que formam o elemento,
onde nnoel é o número de nós por elemento, nel é o número de elementos, nare é o
número de arestas e nae é o número de arestas por elemento. A figura 4.3 será usada
para exemplificar a construção desses arranjos. Nessa figura a numeração dos nós está
em azul, a numeração dos elementos está em vermelho e a numeração das arestas está
em preto.
Figura 4.3 – Construção das incidências de elemento e aresta
Os arranjos de incidências para malha apresentada na figuras 4.3 são:
IEN: ie 1 2 3
ien(1,ie): 1 5 4
ien(2,ie): 4 2 2
ien(3,ie): 3 4 3

37
IEDGE:
ia 1 2 3 4 5 6 7
iedge(1,ia): 1 3 4 2 3 4 4
iedge(2,ia): 4 1 3 5 2 5 2
IEEI:
ie 1 2 3 ieei(1,ie) 1 6 7 ieei(2,ie) 3 -4 -5 ieei(3,ie) 2 -7 -3
No arranjo IEEI foi convencionado atribuir valor negativo para as arestas que
não possuem incidência nodal correspondente às incidências nodais dos elementos. Por
exemplo, a aresta 4 de acordo com o arranjo IEDGE é formada pelos nós 2-5. Essa
mesma aresta é formada pelos nós 5-2 no arranjo IEN. Portanto, à aresta 4 foi
convencionado atribuir um valor negativo.
As informações referentes aos arranjos IEDGE e IEEI não são normalmente
disponibilizadas pelos softwares de geração de malha. Portanto, esses arranjos precisam
ser construídos a partir das informações de malha fornecidas pelos softwares geradores
de malha. No presente trabalho esses arranjos foram construídos com o uso da
biblioteca EdgePack desenvolvida por MARTINS el. al. (2006).
As matrizes de arestas são construídas a partir do desmembramento dos
coeficientes das matrizes de elementos (MARTINS, 2001). Portanto, a matriz de aresta
considerando apenas um grau de liberdade por nó, qualquer que seja o elemento, sempre
será dada por:
e eii ije
ij e eji jj
T
k k
k k (4.8)
onde eijk é o coeficiente da matriz de elemento correspondente à aresta ij do elemento
e . Para mais de um grau de liberdade por nó, eijk corresponderá a blocos de matrizes de
dimensão ngl ngl , onde ngl é o número de graus de liberdade por nó.

38
A matriz de aresta dada na equação 4.8 só está recebendo a contribuição de um
único elemento e . Um exemplo típico dessa configuração são as arestas localizadas no
contorno do domínio. No caso geral, é conveniente formular as matrizes das arestas
levando em consideração a contribuição de todos os seus elementos concorrentes, como:
1 1
1 1
n ne eii ij
a e eij n n
e eji jj
e e
T
k k
k k
(4.9)
onde n é o número total de elementos que compartilham a aresta ij e eijk é a submatriz
do elemento e correspondente aos graus de liberdade dos nós i e j da aresta a .
Um exemplo para a contribuição de 6 elementos para uma única aresta “a1”,
destacada em vermelho, é dado na figura 4.4.
Figura 4.4 – Contribuição de 6 elementos para a matriz de aresta a1.
Usando a relação dada na equação 4.9 pode-se obter a matriz da aresta “a1”,
destacada em vermelho na figura 4.4, através da contribuição de cada elemento que
compartilha essa aresta, conforme descrito na equação 4.10.
1 11 12 11 12 11 12 11 12 11 12 11 121 2
21 22 21 2
1 1 2 2 3 3 4 4 5 5 6 6
2 211 1 2 2 3 3 4 4 5 5 6 6
22 21 22 21 2
a
2 21 22
k k k k k k k k k k k k
k k k k k k k k k kT
k k (4.10)

39
O elemento utilizado no pressente trabalho é o tetraedro linear e a formulação
numérica aplicada às equações de Euler gera matrizes de elementos não simétricas. A
figura 4.5 mostra o esquema de montagem das 6 matrizes de aresta do tetraedro linear a
partir do desmembramento da matriz de elemento.
Tetraedro Linear
(a)
11
22
3 3
13
31
23
32
24
42
12
2
4
43
3
44
4
1
1
41
e
k
k
k
k
k
k
k
k
k kk
kK
kk
k
k
Matriz de elemento (b)
12
21
11
22
eA
k
k
kT
k
Matriz da aresta A (c)
23
32
22
33
eB
k
k
kT
k
Matriz da aresta B (d)
13
31
11
33
eC
k
k
kT
k
Matriz da aresta C (e)
14
41
11
44
eD
k
k
kT
k
Matriz da aresta D (f)
24
42
22
44
eE
k
k
kT
k
Matriz da aresta E (g)
34
43
33
44
eF
k
k
kT
k
Matriz da aresta F (h)
Figura 4.5 – Montagem das 6 matrizes de arestas do elemento tetraédrico a partir do desmembramento da matriz de elemento.
Na figura 4.5 a matriz de elemento tem a dimensão de nnoel ngl nnoel ngl ,
onde ngl é o número de graus de liberdade por nó e nnoel é o número de nós por
elemento. Para o tetraedro linear 4nnoel . As matrizes de arestas têm a dimensão de

40
2 2ngl ngl . As matrizes de aresta possuem sentido convencionado conforme seu
arranjo de incidências e representado por setas na figura 4.5a. Portanto, a submatriz 1-3,
por exemplo, é igual a transposta da submatriz matriz 3-1.
A seqüência básica de construção das matrizes de aresta é dada no Quadro 4.1.
Quadro 4.1 – Seqüência de construção das matrizes de aresta.
Para cada elemento fazer:
Passo 1: Recuperar incidência nodal do elemento (arranjo IEN)
Passo 2: Calcular coeficientes da matriz de elemento
Passo 3: Recuperar incidência de aresta do elemento (arranjo IEEI)
Passo 4: Acumular as contribuições para cada aresta
Fim do laço
4.4 Produto Matriz-Vetor por Aresta
A cada iteração do método GMRES, descrito anteriormente, é necessário
resolver uma série de operações, dentre as quais o produto matriz-vetor é a que
apresenta o maior custo computacional. A estrutura de dados por aresta poder ser usada
para otimizar o produto matriz-vetor, como será mostrado adiante.
Considerando a estrutura de dados por aresta, o produto matriz-vetor pode ser
representado por:
1
nare
a aa
y Ap A p (4.11)
onde nare é o número de arestas da malha, y é o vetor global que armazena a solução,
ap são as componentes de p restritas aos graus de liberdade da aresta e aA é a matriz
da aresta. É importante destacar novamente que adotando um esquema de estrutura de
dados por aresta a matriz global A nunca será explicitamente montada.

41
O produto matriz-vetor por aresta dado pela equação 4.11 pode ser
esquematizado conforme Quadro 4.2.
Quadro 4.2 – Produto matriz-vetor por aresta.
Para cada aresta a fazer
Passo 1: Localize as componentes de ap no vetor global p
Passo 2: Realize o produto matriz-vetor local: a a ay A p
Passo 3: Espalhe o resultado local ap no vetor global p
Fim do laço
Para aumentar a eficiência do produto matriz-vetor por aresta utiliza-se uma
técnica que armazena o arranjo bloco-diagonal nodal da matriz A em um arranjo global
B fora da matriz A . Essa técnica aumenta a eficiência do produto matriz-vetor por
aresta, pois evita o armazenamento redundante dos componentes da diagonal por aresta
e reduz o número de operações de pontos flutuantes em relação ao produtor matriz-vetor
apresentado no Quadro 4.2. Essa técnica foi inicialmente proposta por GIJZEN (1995)
em relação aos termos da diagonal da matriz e, posteriormente, a utilização do arranjo
bloco-diagonal nodal foi adotada por CATABRIGA (2000) e ELIAS (2007).
O produto matriz-vetor utilizando a técnica proposta inicialmente por GIJZEN
(1995) pode ser escrito da seguinte forma:
1
nare
a aa
y Bp A p (4.12)
onde B é o arranjo bloco-diagonal nodal global e aA é a matriz de aresta sem o termo
do arranjo bloco-diagonal nodal.
O produto matriz-vetor por aresta dado pela equação 4.12 pode ser
esquematizado conforme Quadro 4.3.

42
Portanto, no presente trabalho, o produto matriz-vetor por aresta foi
implementado conforme o esquema GIJZEN (1995) descrito no Quadro 4.3. Trata-se de
um esquema mais eficiente do que o produto matriz-vetor apresentado no Quadro 4.2
onde todas as operações são realizadas localmente. No esquema GIJZEN (1995) as
operações locais são realizadas apenas com os termos da matriz A que se encontram
fora do arranjo bloco-diagonal nodal, deixando o produto matriz-vetor mais eficiente.
Quadro 4.3 – Produto matriz-vetor por aresta (GIJZEN, 1995).
Para cada aresta a fazer
Passo 1: Localize as componentes de ap no vetor global p
Passo 2: Realize o produto da matriz-vetor local: a a ay A p
Passo 3: Espalhe o resultado local ay no vetor global y
Fim do laço
Para cada nó n fazer
Passo 4: Multiplique nB por np
Passo 5: Adicione o resultado a ny , ou seja: n n n n y y B p
Fim do laço
4.5 Computação Paralela
Nesse trabalho utilizou-se o paralelismo por troca de mensagens através do uso
da biblioteca MPI (Message Passing Interface). Nesse tipo de paralelismo o domínio do
problema é particionado em subdomínios. Cada subdomínio é enviado para um núcleo
computacional que resolve cada problema particionado quase que de forma
independente. A interface entre as partições vizinhas compartilham os mesmos nós.
Esses nós compartilhados entre as interfaces vizinhas precisam se comunicar através do
43
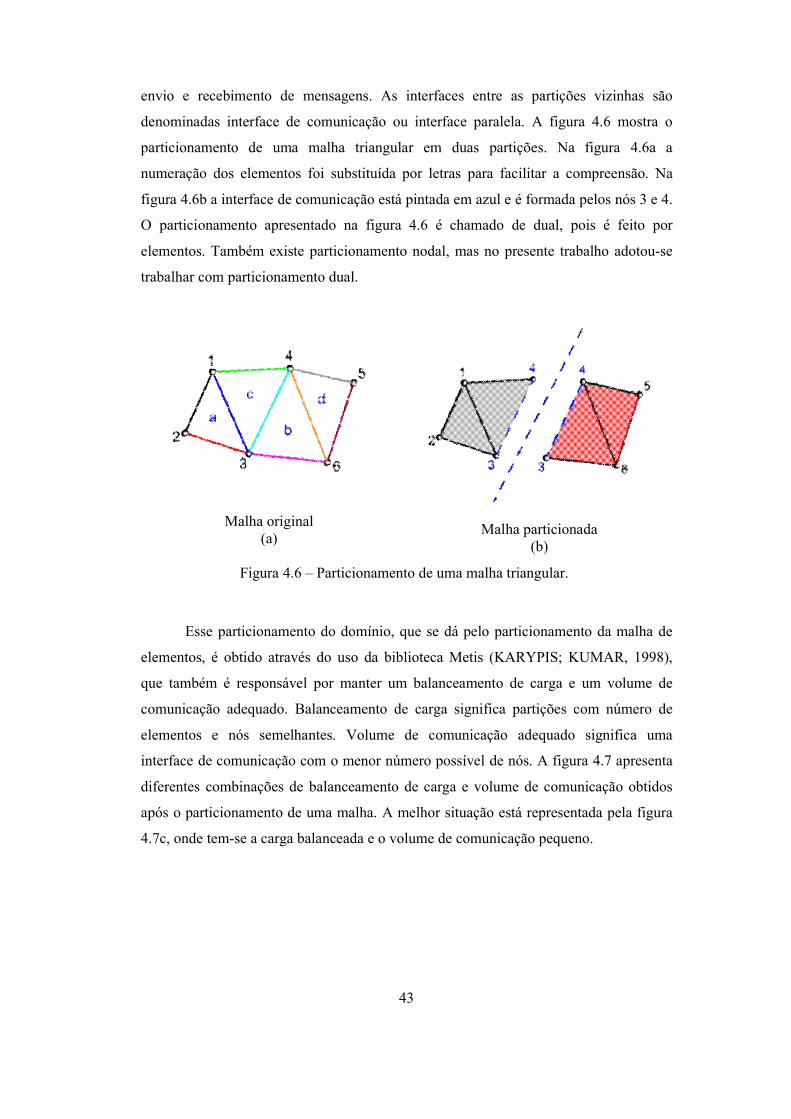
envio e recebimento de mensagens. As interfaces entre as partições vizinhas são
denominadas interface de comunicação ou interface paralela. A figura 4.6 mostra o
particionamento de uma malha triangular em duas partições. Na figura 4.6a a
numeração dos elementos foi substituída por letras para facilitar a compreensão. Na
figura 4.6b a interface de comunicação está pintada em azul e é formada pelos nós 3 e 4.
O particionamento apresentado na figura 4.6 é chamado de dual, pois é feito por
elementos. Também existe particionamento nodal, mas no presente trabalho adotou-se
trabalhar com particionamento dual.
Malha original (a)
Malha particionada (b)
Figura 4.6 – Particionamento de uma malha triangular.
Esse particionamento do domínio, que se dá pelo particionamento da malha de
elementos, é obtido através do uso da biblioteca Metis (KARYPIS; KUMAR, 1998),
que também é responsável por manter um balanceamento de carga e um volume de
comunicação adequado. Balanceamento de carga significa partições com número de
elementos e nós semelhantes. Volume de comunicação adequado significa uma
interface de comunicação com o menor número possível de nós. A figura 4.7 apresenta
diferentes combinações de balanceamento de carga e volume de comunicação obtidos
após o particionamento de uma malha. A melhor situação está representada pela figura
4.7c, onde tem-se a carga balanceada e o volume de comunicação pequeno.

44
(a) Carga balanceada e grande volume de comunicação
(b) Carga desbalanceada e pequeno volume de comunicação
(c) Carga balanceada e pequeno volume de comunicação
Figura 4.7 – Balanceamento de carga e volume de comunicação.
Após o particionamento da malha de elementos é necessário renumerar
localmente as entidades de malha (elementos e nós) de cada partição para que cada
núcleo computacional possa resolver sua partição como se fosse um problema
independente. Essa renumeração das entidades de malha de cada partição é realizada
através do uso da biblioteca EdgePack (MARTINS el. al., 2006). A figura 4.8 apresenta
o particionamento de uma malha e compara a diferença entre a malha particionada com
numeração original, figura 4.8a, e a malha particionada e renumerada, figura 4.8b.
Nessas figuras os números dos elementos foram substituídos por letras para facilitar a
compreensão. A malha original particionada na figura 4.8 possui 16 elementos e 20 nós.
Analisando a figura 4.8a observa-se que a numeração dos nós (e também a numeração
dos elementos, embora omitida na figura) ficou descontínua, em função da distribuição
das entidades de malha entre as partições criadas. Um possível arranjo de renumeração
local é apresentado na figura 4.8b, onde as entidades de malha foram redistribuídas
entre as partições e os nós internos de cada partição e os nós da interface de paralela
estão agrupados de forma organizada.

45
(a) Malha particionada e com numeração original
(b) Malha particionada e renumerada
Figura 4.8 – Renumeração local das partições.
Os nós das interfaces de comunicação podem se comunicar através de
comunicação coletiva ou comunicação ponto-a-ponto. Na comunicação coletiva todos
os nós de todas as interfaces de comunicação trocam mensagens entre si. Na
comunicação ponto-a-ponto a troca de mensagens ocorre apenas entre os nós das
interfaces de comunicação vizinhas, o que torna a comunicação ponto-a-ponto mais
eficiente. Nesse trabalho utilizou-se o tipo de comunicação ponto-a-ponto para realizar

46
o envio e o recebimento de mensagens entre os nós das interfaces de comunicação
vizinhas conforme estratégia descrita em ELIAS et. al. (2011). Os nós das interfaces de
comunicação são frequentemente acessados nas trocas de mensagens e, por isso,
precisam ser de fácil localização. Portanto, foram criados mapas de localização para os
nós das interfaces de comunicação. É importante destacar que no EdgeCFD os dois
modos de comunicação estão disponíveis. O modo de comunicação ponto-a-ponto é
ativado quando o programa encontra os arquivos *.p2p, que são os próprios mapas de
localização gerados pelo EdgeCFD. A chave de ativação da comunicação ponto-a-ponto
é a variável lógica UsingP2P. O trecho de ativação da comunicação ponto-a-ponto
usado no EdgeCFD pode ser resumido no Quadro 4.4.
Quadro 4.4 – Ativação de comunicação paralela no EdgeCFD.
if (UsingP2P) then ! Chama as rotinas de comunicação ponto-a-ponto else ! Chama as rotinas de comunicação coletiva end if
Os resultados paralelos obtidos nesse trabalho são avaliados usando as seguintes
medidas de desempenho: speed up e eficiência.
O speed up é definido como:
1p
p
TS
T , (4.13)
onde pS é o speed up, 1T é o tempo de rodada gasto pelo algoritmo serial e pT é o
tempo gasto pelo algoritmo paralelo rodando com p núcleos computacionais.
A eficiência é definida como:
pp
SE
p , (4.14)
onde pE é a eficiência e p é o número de núcleos computacionais utilizados na rodada.
Caso não seja possível de se obter o tempo serial, como por exemplo, se o
problema não cabe na memória disponível, 1T é substituído pelo tempo de solução do
problema com o menor número de núcleos.
47
CAPÍTULO 5
RESULTADOS
Neste capítulo é realizada a verificação da solução numérica desenvolvida no
presente trabalho. Para tal, inicialmente se faz uma revisão sobre o conceito de
Verificação e Validação (V&V), mostrando a necessidade de se buscar uma forma de
quantificar o erro numérico embutido nos resultados computacionais. Em seguida os
casos de testes são apresentados. Os problemas usados para avaliar a solução numérica
proposta nesse trabalho estão divididos em: i) casos de teste 1D; ii) casos de teste 2D;
iii) caso de aplicação 3D. Cada um dos itens mencionados anteriores será descrito em
detalhes neste capítulo.
Considera-se que todos os problemas se encontram em um sistema compatível
de unidades. A visualização dos resultados será realizada no software Paraview. Os
recursos computacionais usados nesse trabalho encontram-se instalados no Núcleo
Avançado em Computação de Alto Desempenho (NACAD/UFRJ). Os testes foram
realizados na máquina SGI Altix ICE 8400, que possui 64 nós de processamento com
128 processadores Intel Xeon totalizando 640 núcleos de processamento. São 64
processadores Six Core Intel Xeon X5650 (Westmere) 2.67 GHz totalizando 384
núcleos de processamento e 64 processadores Quad Core Intel Xeon X5355
(Clovertown) 2.66 GHz totalizando 256 núcleos de processamento. Trata-se de uma
máquina baseada em arquitetura de memória distribuída com um total de 1,28 TBytes
de RAM. Na interligação entre os nós usa-se uma rede Infiniband.
Em todos os problemas analisados utilizou-se 35 vetores de Krylov e um
máximo de 200 ciclos para o método GMRES. O número máximo de multicorreções no
algoritmo preditor-multicorretor foi de 18 em cada uma das análises. Cabe ressaltar que

48
nenhuma análise alcançou o número máximo de multicorreções, pois a convergência em
cada passo não-linear sempre foi alcançada com um número de iterações menor do que
o máximo. Todos os modelos geométricos e suas respectivas malhas de tetraedros foram
gerados no programa ANSYS ICEM CFD. As malhas de tetraedros foram convertidas
para o formato do EdgeCFD com o programa apresentado no Apêndice A.
5.1 Verificação e Validação (V&V)
Tão importante quanto obter um resultado numérico é saber avaliar sua exatidão.
Em Computação Científica, o termo exatidão refere-se à proximidade entre a solução
numérica e a solução exata do problema. Ou seja, quanto maior a exatidão, mais
próximo a solução numérica estará da solução exata. Em inglês utiliza-se o termo
accuracy para se referenciar exatidão (HEATH, 2002). Dessa forma, é importante
definir um critério para quantificar a qualidade da solução numérica obtida. Geralmente
definem-se métricas para essa finalidade. Essas métricas podem ser grandezas
elaboradas especificamente para cada tipo de problema conforme mostrado em
OBERKAMPF e TRUCANO (2002), OBERKAMPF e BARONE (2006) e SCHWER
(2007). Alternativamente, essas métricas podem ser adotadas como relações mais
simples. No presente trabalho adotou-se uma medida de erro numérico dependente da
norma euclidiana. Entretanto, é importante destacar os esforços que têm sido realizados
para se elaborar estratégias e métodos de avaliações mais rigorosos das soluções
oriundas da computação numérica.
Com o aumento da modelagem computacional na área da engenharia e ciências
físicas, torna-se necessário o melhoramento de métodos usados para comparação de
resultados computacionais e medidas experimentais, assim como para a comparação
entre resultados computacionais e soluções analíticas de problemas clássicos
(OBERKAMPF; BARONE, 2006).
Quantificar a comparação de respostas transientes é muito útil para análises que
buscam melhorar a avaliação de métodos numéricos. Tradicionalmente, comparações
gráficas de respostas transientes têm sido usadas para realizar julgamentos subjetivos se
os resultados são aceitáveis ou não. Recentemente, tem se aumentado o interesse em
quantificar essas comparações com o intuito de minimizar a subjetividade nesse tipo de
49
decisão (SCHWER, 2007). Esse é um esforço que tem sido organizado no bojo de uma
nova área de pesquisa, hoje conhecida como Verificação & Validação (V&V).
Verificação e Validação (V&V) permite avaliar a exatidão e a confiabilidade de
uma simulação computacional (OBERKAMPF; TRUCANO, 2002). A Verificação trata
da precisão com que o problema matemático é resolvido. Portanto, na Verificação
compara-se o resultado computacional com soluções exatas (analíticas) de problemas
clássicos. A Validação representa a avaliação de como a realidade está representada
pelo modelo matemático, base do modelo computacional. Então, no caso da Validação,
compara-se o resultado computacional com valores experimentais obtidos a partir de um
problema real. Nesse contexto, o modelo computacional pode ser entendido como o
conjunto que engloba, por exemplo, a malha utilizada na discretização do domínio, os
modelos matemáticos adotados para representar a física do problema, os métodos
matemáticos usados na solução dos sistemas de equações e o conjunto de condições de
contorno e condições iniciais adotados.
Conforme já mencionado, no presente trabalho adotou-se uma medida de erro
numérico baseada na norma euclidiana dada pela equação 5.1.
ex num
num exe
s s
s, (5.1)
onde nume é o erro numérico, exs é a solução exata e nums é a solução numérica.
Sempre que a solução exata do problema de teste existir e estiver disponível, o
erro numérico será calculado e apresentado. Cabe ressaltar que o cálculo do erro
numérico nesse trabalho é realizado com base no pós-processamento dos resultados
realizado no software Paraview utilizando o filtro de pós-processamento PlotOverLine.
Foram extraídos 100 pontos em cada pós-processamento realizado no Paraview
utilizando o filtro PlotOverLine.
5.2 Casos de Teste 1D
Os casos de teste 1D pertencem à classe de problemas mais simples que será
apresentada nesse trabalho. Embora simples esses tipos de problemas têm se mostrado
bastante úteis nas avaliações de soluções numéricas. Uma vantagem desse tipo de

50
problema é que geralmente eles apresentam soluções exatas que podem ser aplicadas
nas etapas de verificações de códigos computacionais. O tubo de choque é um típico
representante da classe de problemas 1D usados na avaliação de soluções numéricas das
equações Euler. Nesse trabalho utilizaram-se duas versões desse tipo de problema
conhecidas como tubo de choque de Sod e tubo de choque de Lax-Harden. Nas
próximas subseções será feita uma breve discussão sobre o problema de tubo de choque
e serão apresentados os resultados obtidos para os casos de teste 1D.
A solução desenvolvida nesse trabalho é totalmente 3D e para ser aplicada na
solução de problemas 1D considera-se o escoamento apenas em uma das direções
cartesianas. Isto significa que a velocidade em duas das direções cartesianas será
mantida nula durante toda a simulação.
5.2.1 Descrição do Tubo de Choque
O problema clássico de tubo de choque, ou problema de Riemann, é comumente
usado para testar códigos computacionais aplicados na solução das equações de Euler.
Uma das vantagens de se utilizar o problema de tubo de choque é que, sob determinadas
condições, o mesmo apresenta solução analítica. Neste trabalho adotaram-se os
procedimentos apresentados em ANDERSON JR. (1990) para se obter a solução
analítica do problema de tubo de choque, utilizando-se um código para o software
Matlab disponível em WÜTHRICH (2007). A descrição do tubo de choque, elaborada
nessa seção, também é a mesma encontrada em ANDERSON JR. (1990).
Basicamente, tubo de choque é um tubo longo no qual uma onda de choque forte
é gerada. Em sua configuração inicial, o tubo é dividido em duas seções distintas por
um diafragma: uma seção carreadora contendo gás a alta pressão e uma seção carreada
contendo gás a baixa pressão. Os gases existentes nas duas seções podem ser diferentes
ou não. Na figura 5.1 tem-se um esquema de um tubo de choque em sua configuração
inicial, onde ambos fluidos se encontram em repouso e separados pelo diafragma. O
índice 1 representa a seção de alta pressão enquanto o índice 2 representa a seção de
baixa pressão.

51
Figura 5.1 – Tubo de choque em sua configuração inicial.
Quando o diafragma se rompe os seguintes fenômenos são observados: 1) ocorre
a propagação de uma onda de choque normal na seção carreada se deslocando para a
direita; 2) a superfície de contato entre as duas seções (descontinuidade de contato)
também se desloca para a direita e 3) ocorre a propagação de uma onda de expansão
contínua dentro da seção carreadora se deslocando para a esquerda. A figura 5.2
apresenta um esboço desses fenômenos, onde as diferentes regiões do escoamento
encontram-se representadas pelos índices de 1 a 2. A onda de choque se propaga com
uma velocidade superior a velocidade da onda de contato. Na onda de expansão a
velocidade da “cabeça da onda” é maior do que a velocidade da “cauda da onda”. Esse
fato faz com que o gradiente da solução nessa região do escoamento diminua com o
tempo conforme pode ser observado no esboço de pressão na figura 5.2.
P1
P2
Região (2)
Baixa pressão
Seção carreada Seção carreadora
Alta pressão
Região (1)
Diafragma
Posição
ρ1 ρ2
Pre
ssão
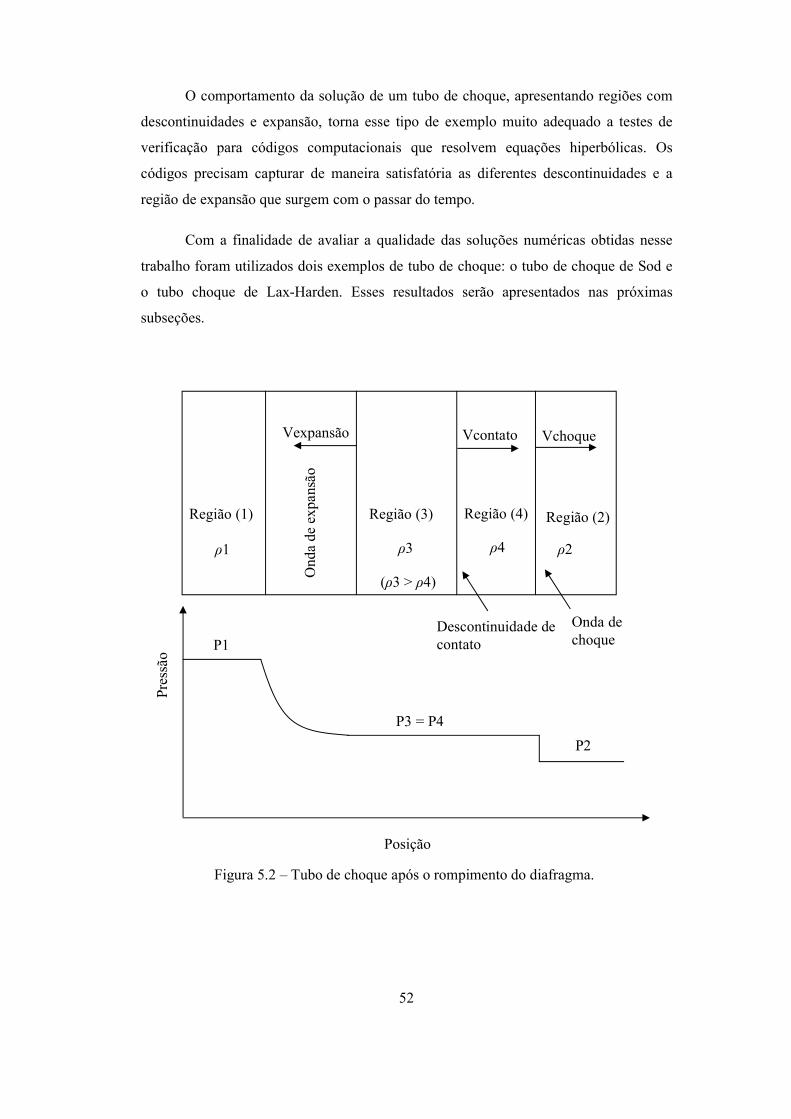
52
O comportamento da solução de um tubo de choque, apresentando regiões com
descontinuidades e expansão, torna esse tipo de exemplo muito adequado a testes de
verificação para códigos computacionais que resolvem equações hiperbólicas. Os
códigos precisam capturar de maneira satisfatória as diferentes descontinuidades e a
região de expansão que surgem com o passar do tempo.
Com a finalidade de avaliar a qualidade das soluções numéricas obtidas nesse
trabalho foram utilizados dois exemplos de tubo de choque: o tubo de choque de Sod e
o tubo choque de Lax-Harden. Esses resultados serão apresentados nas próximas
subseções.
Figura 5.2 – Tubo de choque após o rompimento do diafragma.
P1
P2
Ond
a de
exp
ansã
o
Região (1)
Posição
Região (3) Região (4) Região (2)
ρ1 ρ2 ρ3 ρ4
P3 = P4
Onda de choque
Descontinuidade de contato
Vchoque Vcontato Vexpansão
(ρ3 > ρ4)
Pre
ssão
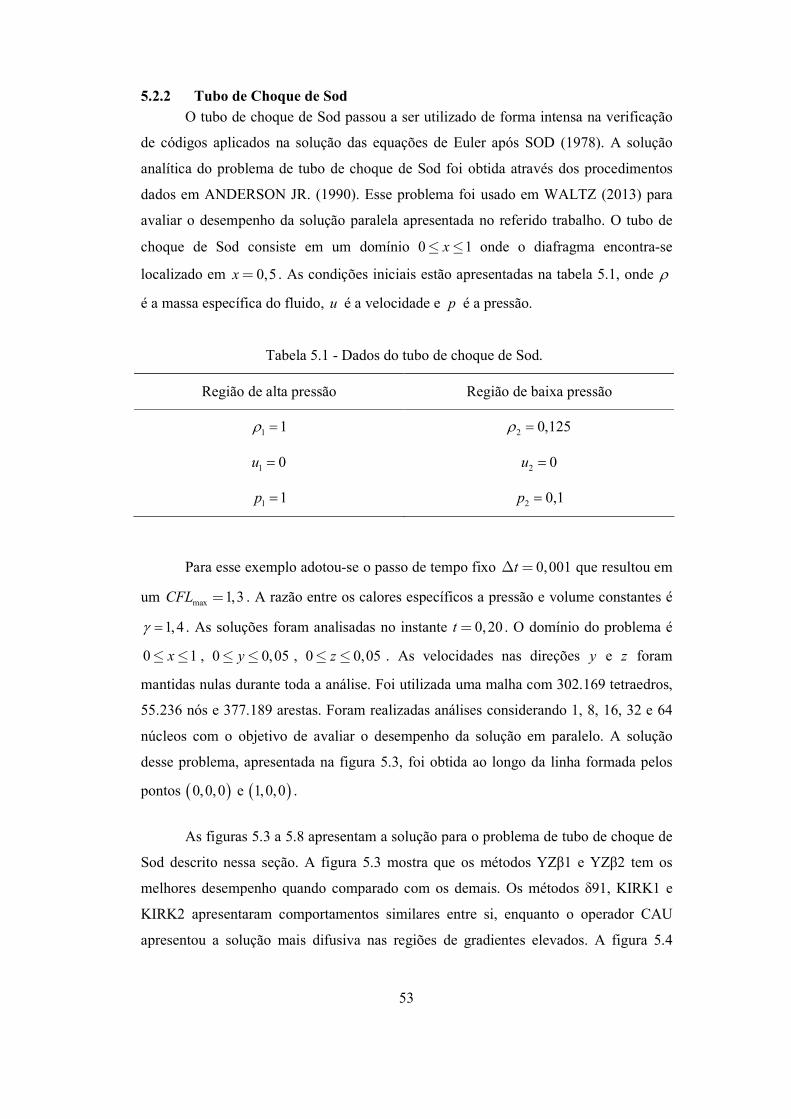
53
5.2.2 Tubo de Choque de Sod
O tubo de choque de Sod passou a ser utilizado de forma intensa na verificação
de códigos aplicados na solução das equações de Euler após SOD (1978). A solução
analítica do problema de tubo de choque de Sod foi obtida através dos procedimentos
dados em ANDERSON JR. (1990). Esse problema foi usado em WALTZ (2013) para
avaliar o desempenho da solução paralela apresentada no referido trabalho. O tubo de
choque de Sod consiste em um domínio 0 1x onde o diafragma encontra-se
localizado em 0,5x . As condições iniciais estão apresentadas na tabela 5.1, onde
é a massa específica do fluido, u é a velocidade e p é a pressão.
Tabela 5.1 - Dados do tubo de choque de Sod.
Região de alta pressão Região de baixa pressão
1 1 2 0,125
1 0u 2 0u
1 1p 2 0,1p
Para esse exemplo adotou-se o passo de tempo fixo 0,001t que resultou em
um max 1,3CFL . A razão entre os calores específicos a pressão e volume constantes é
1,4 . As soluções foram analisadas no instante 0,20t . O domínio do problema é
0 1x , 0 0,05y , 0 0,05z . As velocidades nas direções y e z foram
mantidas nulas durante toda a análise. Foi utilizada uma malha com 302.169 tetraedros,
55.236 nós e 377.189 arestas. Foram realizadas análises considerando 1, 8, 16, 32 e 64
núcleos com o objetivo de avaliar o desempenho da solução em paralelo. A solução
desse problema, apresentada na figura 5.3, foi obtida ao longo da linha formada pelos
pontos 0,0,0 e 1,0,0 .
As figuras 5.3 a 5.8 apresentam a solução para o problema de tubo de choque de
Sod descrito nessa seção. A figura 5.3 mostra que os métodos YZβ1 e YZβ2 tem os
melhores desempenho quando comparado com os demais. Os métodos δ91, KIRK1 e
KIRK2 apresentaram comportamentos similares entre si, enquanto o operador CAU
apresentou a solução mais difusiva nas regiões de gradientes elevados. A figura 5.4

54
mostra a solução do tubo de choque obtida com o operador YZβ1, tendo sido adotado
neste caso o particionamento do domínio em 8 subdomínios. O erro numérico para essa
análise, calculado em relação à massa específica, encontra-se na tabela 5.2. Os métodos
YZβ1 e YZβ2 apresentaram os menores erros numéricos da análise, sendo que o YZβ1
apresentou o menor erro numérico da análise. Os métodos δ91, KIRK1 e KIRK2
apresentaram erros numéricos semelhantes, enquanto o CAU apresentou o maior erro
numérico para esse problema.
Figura 5.3 – Comparação da massa específica para o tubo de choque de Sod em t =
0,20 para diferentes métodos.
A figura 5.9 mostra detalhes do particionamento para o caso do tubo de choque
de Sod considerando a divisão do domínio em 8 subdomínios. Cada subdomínio está
representado por uma cor. Por questão de comodidade apenas o particionamento em 8
subdomínios é apresentado. A figura 5.10 apresenta a malha de tetraedros usada na
solução do tubo de choque. Nessa figura tem-se o detalhe da malha em apenas um dos
subdomínios.

55
Tabela 5.2 – Erro numérico para o tubo de choque de Sod.
Método de Estabilização Erro Numérico (%)
δ91 3,96
CAU 4,56
YZβ1 2,57
YZβ2 3,22
KIRK1 3,98
KIRK2 3,97
Figura 5.4 – Massa específica para o tubo de choque de Sod em t = 0,20 obtida com o
método YZβ1.

56
Figura 5.5 – Massa específica para o tubo de choque de Sod em t = 0,20.
Figura 5.6 – Pressão para o tubo de choque de Sod em t = 0,20.

57
Figura 5.7 – Velocidade para o tubo de choque de Sod em t = 0,20.
Figura 5.8 – Energia interna para o tubo de choque de Sod em t = 0,20.

58
Figura 5.9 – Particionamento do domínio em 8 subdomínios para o tubo de choque de
Sod.
Figura 5.10 – Detalhe da malha de tetraedros em um subdomínio para o tubo de choque
de Sod particionado em 8 subdomínios.

59
Figura 5.11 – Tempo de análise normalizado para o tubo de choque de Sod (YZβ1).
Figura 5.12 – Speed up da solução em paralelo para o tubo de choque de Sod (YZβ1).

60
Figura 5.13 – Eficiência da solução em paralelo para o tubo de choque de Sod (YZβ1).
Tabela 5.3 – Comparação de desempenho da solução paralela para o tubo de choque de Sod (YZβ1).
Número de Núcleos Tempo de Análise DD:HH:MM:SS
Speed up Eficiência
1 00:03:42:36 1 1
8 00:00:32:13 6,91 0,86
16 00:00:20:02 11,11 0,69
32 00:00:16:48 13,25 0,41
64 00:00:22:41 9,81 0,15
As figuras 5.11 a 5.13 apresentam uma análise de escalabilidade da solução
paralela do problema de tubo de choque de Sod. De acordo com a figura 5.12 é possível
obter ganhos significativos em relação ao tempo de análise com a utilização de até 16

61
núcleos para esse problema, cuja malha pode ser considerada pequena. No caso onde se
utilizou 16 núcleos cada partição tem aproximadamente 3.200 nós, 19.000 elementos e
24.000 arestas. A tabela 5.3 apresenta os tempos de simulação para o problema de tubo
de choque de Sod em função do número de núcleos utilizados.
5.2.3 Tubo de Choque de Lax-Harden
Este exemplo é muito semelhante ao tubo de choque de Sod, exceto pelo fato de
que em sua configuração inicial o tubo de choque de Lax-Harden já apresenta uma
descontinuidade na velocidade. Portanto, o problema de tubo de choque de Lax-Harden
consiste em um domínio 0 1x onde o diafragma encontra-se localizado em 0,5x .
As condições iniciais para esse problema são dadas em LUO et. al. (2006) e estão
apresentadas na tabela 5.4, onde é a massa específica do fluido, u é a velocidade e
p é a pressão.
Tabela 5.4 - Dados do tubo de choque de Lax-Harden.
Região de alta pressão Região de baixa pressão
1 0,445 2 0,50
1 0,698u 2 0u
1 3,528p 2 0,571p
Para esse exemplo adotou-se o passo de tempo fixo 0,001t que resultou em
um max 3CFL . A razão entre os calores específicos a pressão e volume constantes é
1,4 . As soluções foram analisadas no instante 0,15t . O domínio computacional e
a malha são os mesmos que foram usados no problema de tubo de choque de Sod.
Novamente, as velocidades nas direções y e z foram mantidas nulas durante toda a
análise. Foram realizadas análises considerando 1, 8, 16, 32 e 64 núcleos com o objetivo
de avaliar o desempenho da solução em paralelo. A solução desse problema,
apresentada na figura 5.14, foi obtida ao longo da linha formada pelos pontos 0,0,0 e
1,0,0 .

62
As figuras 5.14 a 5.19 apresentam a solução para o problema de tubo de choque
de Lax-Harden descrito nessa seção. A figura 5.14 mostra que os métodos YZβ1 e
YZβ2 novamente têm os melhores desempenho quando comparados com os demais
métodos. Os métodos CAU, δ91, KIRK1 e KIRK2 apresentaram comportamentos
praticamente idênticos. A figura 5.15 mostra a solução do tubo de choque de Lax-
Harden obtida com o operador YZβ1, tendo sido adotado neste caso o particionamento
do domínio em 8 subdomínios. O erro numérico para essa análise, calculado em relação
à massa específica, encontra-se na tabela 5.5. Os métodos YZβ1 e YZβ2 apresentaram
os menores erros numéricos da análise, sendo que o YZβ1 mais uma vez apresentou o
menor erro numérico da análise. Os métodos CAU, δ91, KIRK1 e KIRK2 apresentaram
erros numéricos semelhantes.
Figura 5.14 – Comparação da massa específica para o tubo de choque de Lax-Harden
em t = 0,15 para diferentes métodos.
As figuras 5.20 a 5.22 apresentam uma análise de escalabilidade da solução
paralela do problema de tubo de choque de Lax-Harden. De acordo com a figura 5.21 é
possível também nesse problema obter ganhos significativos em relação ao tempo de

63
análise com a utilização de até 16 núcleos para esse problema. A tabela 5.6 apresenta os
tempos de simulação para o problema de tubo de choque de Lax-Harden em função do
número de núcleos utilizados.
Tabela 5.5 – Erro numérico para o tubo de choque de Lax-Harden
Método de Estabilização Erro Numérico (%)
δ91 18,90
CAU 18,86
YZβ1 16,16
YZβ2 18,42
KIRK1 19,03
KIRK2 19,02
Figura 5.15 – Massa específica para o tubo de choque de Lax-Harden em t = 0,15 obtida
com o método YZβ1.
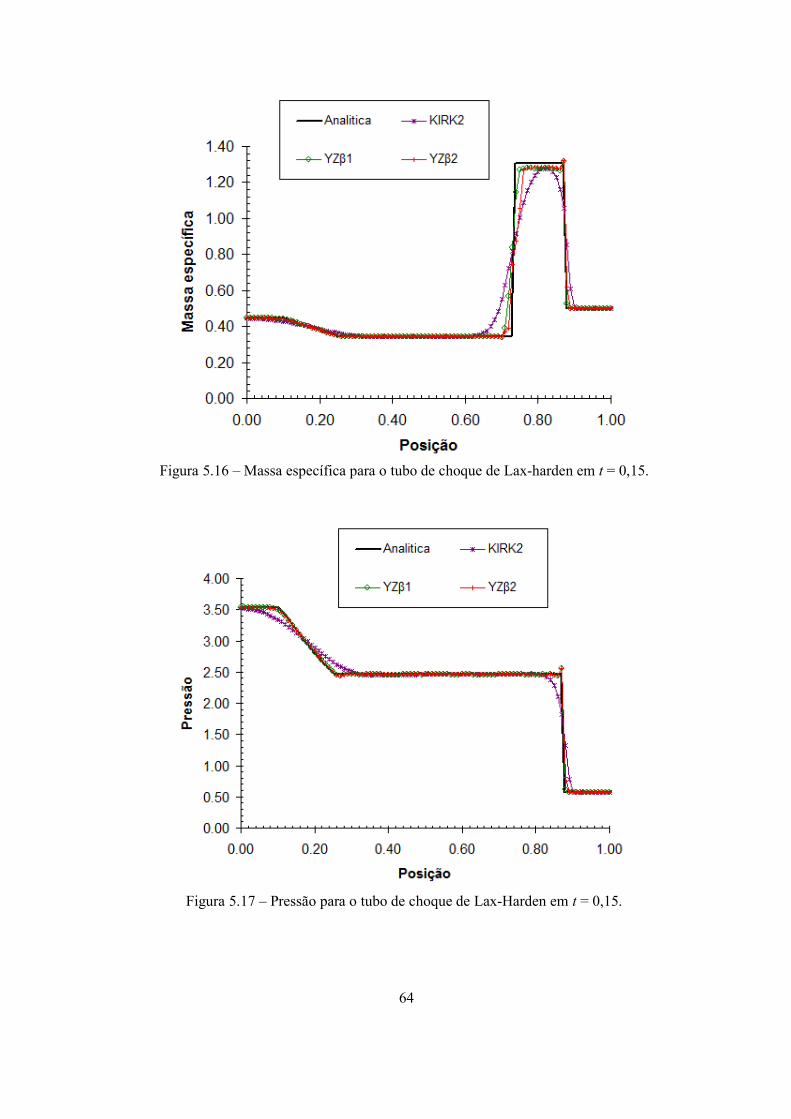
64
Figura 5.16 – Massa específica para o tubo de choque de Lax-harden em t = 0,15.
Figura 5.17 – Pressão para o tubo de choque de Lax-Harden em t = 0,15.

65
Figura 5.18 – Velocidade para o tubo de choque de Lax-Harden em t = 0,15.
Figura 5.19 – Energia interna para o tubo de choque de Lax-Harden em t = 0,15.
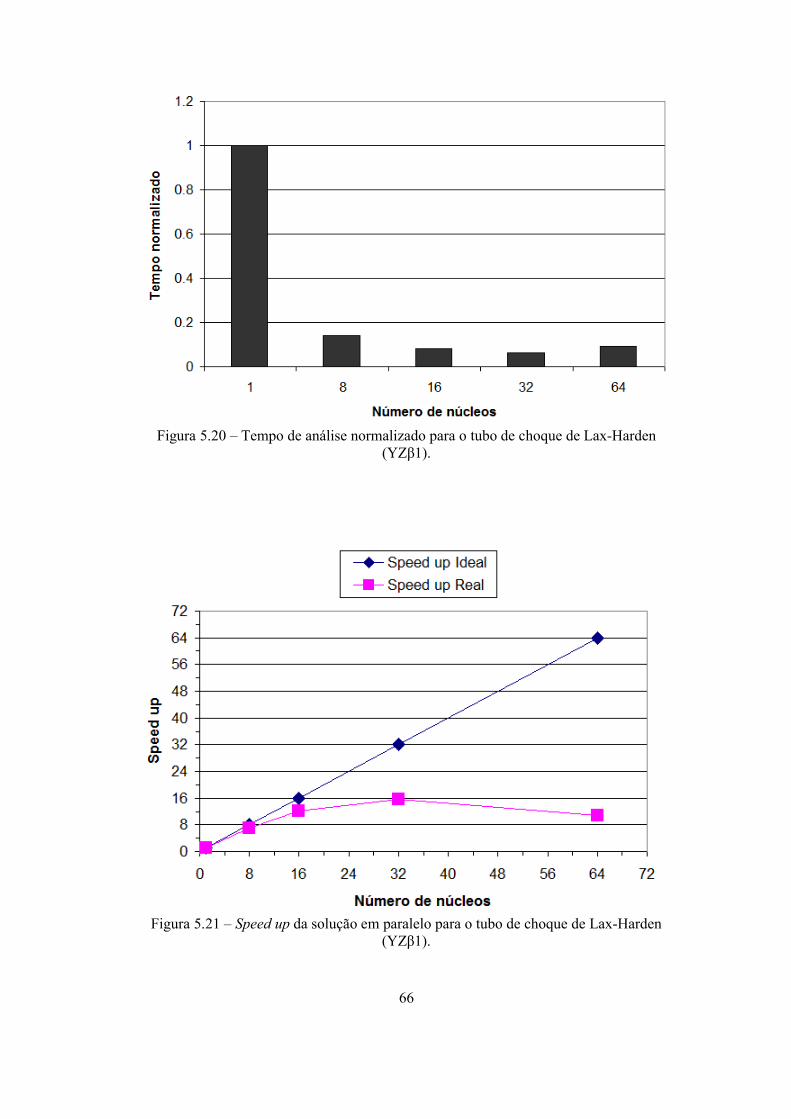
66
Figura 5.20 – Tempo de análise normalizado para o tubo de choque de Lax-Harden
(YZβ1).
Figura 5.21 – Speed up da solução em paralelo para o tubo de choque de Lax-Harden
(YZβ1).

67
Figura 5.22 – Eficiência da solução em paralelo para o tubo de choque de Lax-Harden
(YZβ1).
Tabela 5.6 – Comparação de desempenho solução paralela para o tubo de choque de Lax-Harden (YZβ1).
Número de Núcleos Tempo de Análise DD:HH:MM:SS
Speed up Eficiência
1 00:03:38:24 1 1
8 00:00:30:54 7,06 0,88
16 00:00:18:05 12,07 0,75
32 00:00:13:56 15,67 0,48
64 00:00:20:29 10,66 0,16

68
5.3 Casos de Teste 2D
Os casos de teste 2D também foram usados nesse trabalho, pois, assim como os
casos de teste 1D, são bastante úteis nas avaliações de soluções numéricas. A maioria
dos problemas apresentados possui soluções exatas disponíveis que podem ser aplicadas
nas etapas de verificações de códigos computacionais. Foram usados os problemas
clássicos conhecidos como choque oblíquo, choque refletido e túnel de vento com um
degrau. Nas próximas subseções serão apresentados os resultados obtidos para os casos
de teste 2D.
A solução desenvolvida nesse trabalho é totalmente 3D e para ser aplicada na
solução de problemas 2D considera-se o escoamento apenas em duas direções
cartesianas. Isto significa que a velocidade em uma das direções cartesianas será
mantida nula durante toda a simulação.
5.3.1 Choque Oblíquo
O problema de choque oblíquo apresentado aqui está descrito em SHAKIB et. al.
(1991). Um esboço esquemático desse problema é apresentado na figura 5.23. Trata-se
de um escoamento supersônico a Mach 2 onde o fluxo de entrada faz um ângulo de 10
graus em relação ao eixo x , conforme mostrado na figura 5.23.
Figura 5.23 – Descrição do problema de choque obliquo (SHAKIB et. al., 1991).

69
Na figura 5.23 o número de Mach M relaciona as variáveis do problema
conforme equação 2.9.
Foram aplicadas condições de contorno na face à esquerda e no topo do domínio.
Na parede impermeável, fundo do domínio, considera-se a condição de escorregamento,
ou seja, 0xu e 0yu . Na face à direita não há prescrição alguma.
As prescrições na face à esquerda e no topo domínio são fornecidas por:
2M 1 0,9848xu 0,17364yu 0,17857p (5.2)
A solução exata na região inferior da face à direita é dada por:
1,64052M 1, 45843 0,88731xu 0yu 0,30475p (5.3)
Para esse exemplo adotou-se o passo de tempo fixo 0,001t que resultou em
um max 0,3CFL . A razão entre os calores específicos a pressão e volume constantes é
1,4 . As soluções foram analisadas no instante 3t para garantir que o problema já
tivesse alcançado seu estado permanente. O domínio do problema é 0 1x ,
0 1y , 0 0,1z . A velocidade na direção z foi mantida nula durante toda a
análise. Foi utilizada uma malha com 410.006 tetraedros, 74.257 nós e 507.176 arestas.
Foram realizadas análises considerando 1, 8, 16, 32 e 64 núcleos com o objetivo de
avaliar o desempenho da solução em paralelo. A solução desse problema, apresentada
na figura 5.24, foi obtida ao longo da linha 0,9x mostrada na figura 5.23.
As figuras 5.24 a 5.27 apresentam a solução para o problema do choque refletido
descrito nessa seção. Para esse problema apenas o método YZβ1 foi utilizado. A figura
5.24 mostra que o método YZβ1 apresenta elevado desempenho na solução do problema
de choque refletido. O método YZβ1 representou bem toda a solução do problema de
choque refletido, inclusive as regiões de gradientes elevados. O erro numérico dessa
análise, calculado em relação à massa específica, foi de 2,57%.

70
Figura 5.24 – Massa específica para o choque oblíquo em t = 3 (YZβ1).
Figura 5.25 – Massa específica para o choque oblíquo em t = 3 (YZβ1).

71
Figura 5.26 – Pressão para o choque oblíquo em t = 3 (YZβ1).
Figura 5.27 – Velocidade na direção x para o choque oblíquo em t = 3 (YZβ1).
72
Figura 5.28 – Particionamento do domínio em 8 subdomínios para o choque oblíquo.
Figura 5.29 – Detalhe da malha de tetraedros em um subdomínio para o choque
oblíquo particionado em 8 subdomínios.
A figura 5.28 mostra detalhes do particionamento para o caso do choque oblíquo
considerando a divisão do domínio em 8 subdomínios. Cada subdomínio está
representado por uma cor. Por questão de comodidade apenas o particionamento em 8
subdomínios é apresentado. A figura 5.29 apresenta a malha de tetraedros usada na
solução do choque oblíquo. Nessa figura tem-se o detalhe da malha em apenas um dos
subdomínios. A figura 5.25 mostra a solução do problema de choque oblíquo obtida

73
com o método YZβ1, tendo sido adotado neste caso o particionamento do domínio em 8
subdomínios. Na figura 5.25 é possível observar a formação das 2 regiões, típicas da
solução do problema de choque oblíquo, geradas na face à direita do domínio.
As figuras 5.30 a 5.32 apresentam uma análise de escalabilidade da solução
paralela do problema de choque oblíquo. De acordo com a figura 5.31 é possível obter
ganhos significativos em relação ao tempo de análise com a utilização de até 32 núcleos
para esse problema. No caso onde se utilizou 32 núcleos cada partição tem
aproximadamente 2.000 nós, 13.000 elementos e 16.000 arestas. A tabela 5.7 apresenta
os tempos de simulação para o problema de choque oblíquo em função do número de
núcleos utilizados.
Figura 5.30 – Tempo de análise normalizado para o choque oblíquo (YZβ1).

74
Figura 5.31 – Speed up da solução em paralelo para o choque oblíquo (YZβ1).
Figura 5.32 – Eficiência da solução em paralelo para o choque oblíquo (YZβ1).

75
Tabela 5.7 – Comparação de desempenho da solução paralela para o choque oblíquo (YZβ1).
Número de Núcleos Tempo de Análise DD:HH:MM:SS
Speed up Eficiência
1 02:00:31:13 1 1
8 00:07:03:49 6,86 0,85
16 00:03:34:08 13,59 0,84
32 00:02:05:33 23,18 0,72
64 00:01:39:59 29,11 0,45
5.3.2 Choque Refletido
O problema de choque refletido apresentado aqui está descrito em SHAKIB et.
al. (1991). Um esboço esquemático desse problema é apresentado na figura 5.33. O
problema consiste em 3 regiões separadas por um choque oblíquo e por sua reflexão ao
longo de uma parede, conforme figura 5.33.
Figura 5.33 – Descrição do problema de choque refletido (SHAKIB et. al., 1991).
Na figura 5.33 o número de Mach M relaciona as variáveis do problema
conforme equação 2.9.
Foram aplicadas condições de contorno na face à esquerda e no topo do domínio.
Na parede impermeável, fundo do domínio, considera-se a condição de escorregamento,
76
ou seja, 0xu e 0yu . Na face à direita, situada na região 3, não há prescrição
alguma.
As prescrições na face à esquerda e no topo do domínio são fornecidas,
respectivamente, nas expressões 5.4 e 5.5.
Regiao 1 2,9M 1 2,9xu 0yu 0,71429p (5.4)
Regiao 2 2,3781M 1,7 2,61934xu 0,50632yu 1,52819p (5.5)
A solução exata na região 3 é dada na expressão 5.6.
Regiao 3 1,94235M 2,68728 2, 40140xu 0yu 2,93407p (5.6)
Para esse exemplo adotou-se o passo de tempo fixo 0,001t que resultou em
um max 0,65CFL . A razão entre os calores específicos a pressão e volume constantes
é 1,4 . As soluções foram analisadas no instante 3,4t para garantir que o
problema já tivesse alcançado seu estado permanente. O domínio do problema é
0 4,1x , 0 1y , 0 0,1z . A velocidade na direção z foi mantida nula
durante toda a análise. Foi utilizada uma malha com 760.498 tetraedros, 140.918 nós e
961.387 arestas. Foram realizadas análises considerando 1, 8, 16, 32 e 64 núcleos com o
objetivo de avaliar o desempenho da solução em paralelo. A solução desse problema,
apresentada na figura 5.34, foi obtida ao longo da linha 0, 25y mostrada na figura
5.33.
As figuras 5.34 a 5.37 apresentam a solução para o problema do choque refletido
descrito nessa seção. Para esse problema apenas o operador YZβ1 foi utilizado. A figura
5.34 mostra que o método YZβ1 apresenta elevado desempenho na solução do problema
de choque refletido. O método YZβ1 representou bem toda a solução do problema de
choque refletido, inclusive as regiões de gradientes elevados. Nessa análise o erro
numérico, calculado em relação à massa específica, foi de 2,83%.

77
Figura 5.34 – Massa específica para o choque refletido em t = 3,4 (YZβ1).
Figura 5.35 – Massa específica para o choque refletido em t = 3,4 (YZβ1).

78
Figura 5.36 – Pressão para o choque refletido em t = 3,4 (YZβ1).
Figura 5.37 – Velocidade na direção x para o choque refletido em t = 3,4 (YZβ1).

79
Figura 5.38 – Particionamento do domínio em 8 subdomínios para o choque refletido.
Figura 5.39 – Detalhe da malha de tetraedros em um subdomínio para o choque
refletido particionado em 8 subdomínios.
A figura 5.38 mostra detalhes do particionamento para o caso do choque
refletido considerando a divisão do domínio em 8 subdomínios. Novamente, cada
subdomínio está representado por uma cor. A figura 5.39 apresenta a malha de
tetraedros usada na solução do choque refletido. Nessa figura tem-se o detalhe da malha
em apenas um dos subdomínios. A figura 5.35 mostra a solução do problema de choque
refletido obtida com o método YZβ1, tendo sido adotado neste caso o particionamento
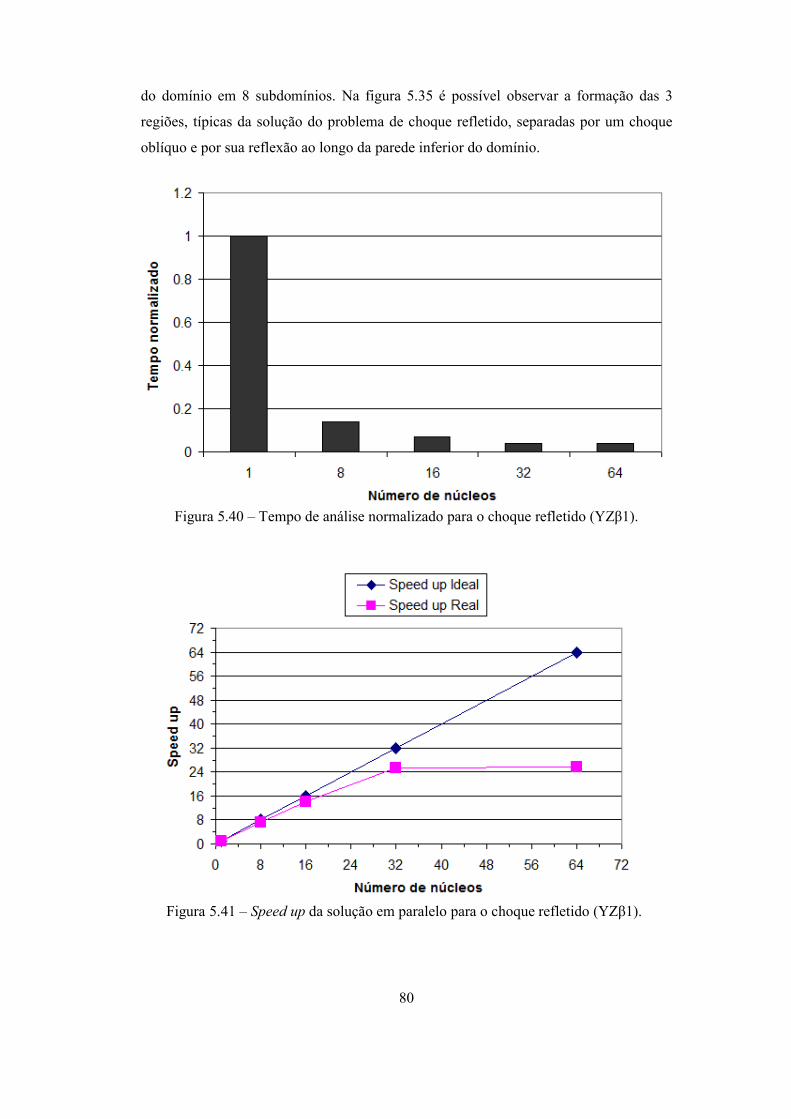
80
do domínio em 8 subdomínios. Na figura 5.35 é possível observar a formação das 3
regiões, típicas da solução do problema de choque refletido, separadas por um choque
oblíquo e por sua reflexão ao longo da parede inferior do domínio.
Figura 5.40 – Tempo de análise normalizado para o choque refletido (YZβ1).
Figura 5.41 – Speed up da solução em paralelo para o choque refletido (YZβ1).

81
Figura 5.42 – Eficiência da solução em paralelo para o choque refletido (YZβ1).
Tabela 5.8 – Comparação de desempenho da solução paralela para o choque refletido (YZβ1).
Número de Núcleos Tempo de Análise DD:HH:MM:SS
Speed up Eficiência
1 04:05:54:26 1 1
8 00:13:59:00 7,28 0,91
16 00:07:11:07 14,18 0,88
32 00:04:00:52 25,38 0,79
64 00:03:57:42 25,72 0,40
As figuras 5.40 a 5.42 apresentam uma análise de escalabilidade da solução
paralela do problema de choque refletido. De acordo com a figura 5.41 é possível obter
ganhos significativos em relação ao tempo de análise com a utilização de até 32 núcleos
para esse problema. No caso onde se utilizou 32 núcleos cada partição tem
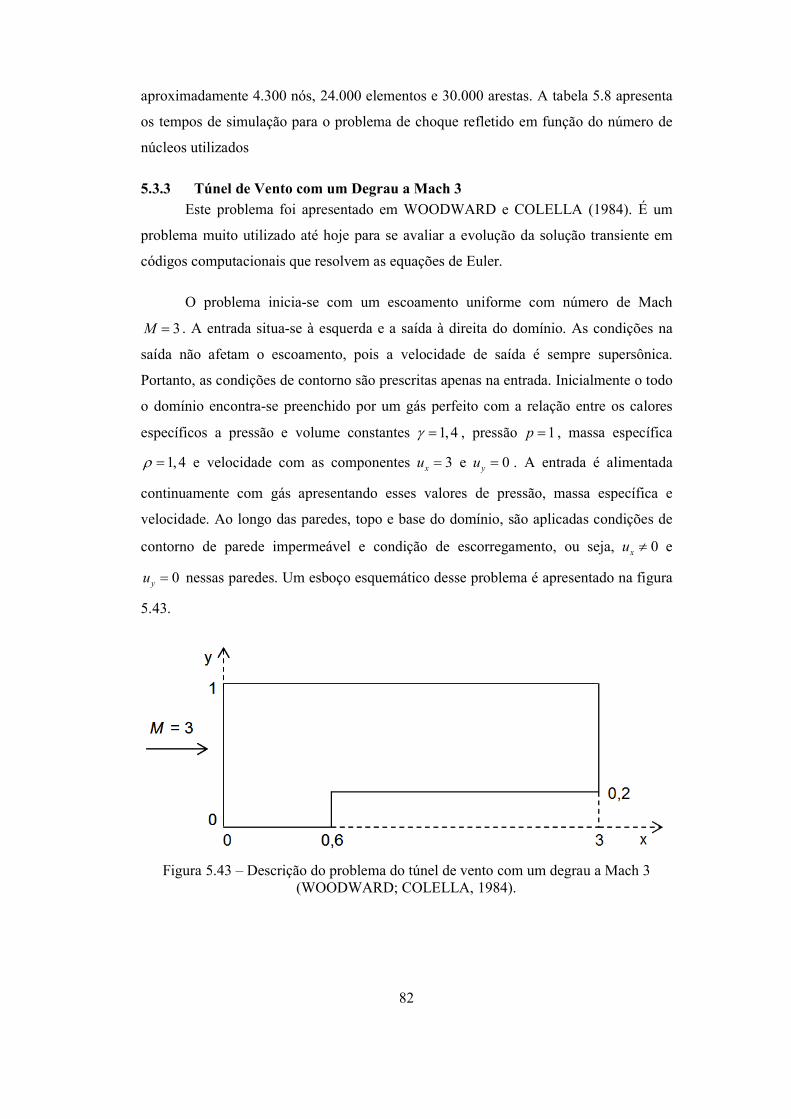
82
aproximadamente 4.300 nós, 24.000 elementos e 30.000 arestas. A tabela 5.8 apresenta
os tempos de simulação para o problema de choque refletido em função do número de
núcleos utilizados
5.3.3 Túnel de Vento com um Degrau a Mach 3
Este problema foi apresentado em WOODWARD e COLELLA (1984). É um
problema muito utilizado até hoje para se avaliar a evolução da solução transiente em
códigos computacionais que resolvem as equações de Euler.
O problema inicia-se com um escoamento uniforme com número de Mach
3M . A entrada situa-se à esquerda e a saída à direita do domínio. As condições na
saída não afetam o escoamento, pois a velocidade de saída é sempre supersônica.
Portanto, as condições de contorno são prescritas apenas na entrada. Inicialmente o todo
o domínio encontra-se preenchido por um gás perfeito com a relação entre os calores
específicos a pressão e volume constantes 1,4 , pressão 1p , massa específica
1,4 e velocidade com as componentes 3xu e 0yu . A entrada é alimentada
continuamente com gás apresentando esses valores de pressão, massa específica e
velocidade. Ao longo das paredes, topo e base do domínio, são aplicadas condições de
contorno de parede impermeável e condição de escorregamento, ou seja, 0xu e
0yu nessas paredes. Um esboço esquemático desse problema é apresentado na figura
5.43.
Figura 5.43 – Descrição do problema do túnel de vento com um degrau a Mach 3
(WOODWARD; COLELLA, 1984).

83
Na figura 5.43 o número de Mach M relaciona as variáveis do problema
conforme equação 2.9.
Para esse exemplo adotou-se o passo de tempo fixo 0,001t que resultou em
um max 1,84CFL . A razão entre os calores específicos a pressão e volume constantes é
1,4 . A solução foi conduzida até o instante 4t . O domínio do problema é
0 3x , 0 1y , 0 0,03z . A velocidade na direção z foi mantida nula
durante toda a análise. Foi utilizada uma malha com 3.099.013 tetraedros, 581.831 nós e
3.871.411 arestas. Foram realizadas análises considerando 1, 8, 16, 32 e 64 núcleos com
o objetivo de avaliar o desempenho da solução em paralelo.
As figuras 5.44 a 5.51 apresentam a solução para o problema do túnel de vento
com um degrau a Mach 3 descrito nessa seção. Para esse problema apenas o método
YZβ1 foi utilizado. O método YZβ1 representou bem todas as regiões do escoamento
que estão descritas e apresentadas em WOODWARD e COLELLA (1984). A evolução
transiente da solução também foi representada adequadamente. Essa análise não possui
solução analítica disponível e, portanto, neste caso não se avaliou o erro numérico.
Nesse problema foi realizada uma comparação qualitativa em relação aos resultados
apresentados em WOODWARD e COLELLA (1984).
Figura 5.44 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 0,2 (YZβ1).

84
Figura 5.45 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 0,4 (YZβ1).
Figura 5.46 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 0,6 (YZβ1).

85
Figura 5.47 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 0,8 (YZβ1).
Figura 5.48 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 1 (YZβ1).
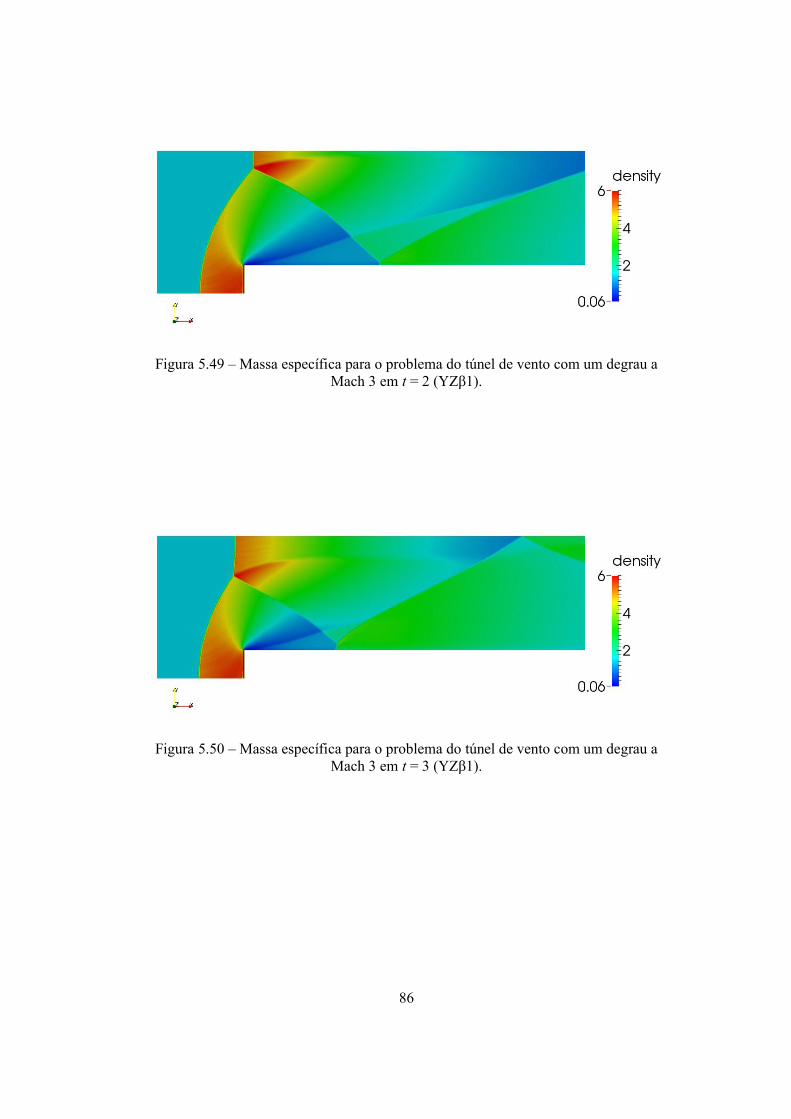
86
Figura 5.49 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 2 (YZβ1).
Figura 5.50 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 3 (YZβ1).

87
Figura 5.51 – Massa específica para o problema do túnel de vento com um degrau a
Mach 3 em t = 4 (YZβ1).
Figura 5.52 – Particionamento do domínio em 8 subdomínios para o problema do túnel
de vento com um degrau.

88
Figura 5.53 – Detalhe da malha de tetraedros em um subdomínio para o problema do
túnel de vento com um degrau particionado em 8 subdomínios.
A figura 5.52 mostra detalhes do particionamento para o caso do túnel de vento
com um degrau a Mach 3 considerando a divisão do domínio em 8 subdomínios. A
figura 5.53 apresenta a malha de tetraedros usada na solução desse problema. Nessa
figura tem-se o detalhe da malha em apenas um dos subdomínios.
Figura 5.54 – Tempo de análise normalizado para o problema do túnel de vento com um
degrau (YZβ1).
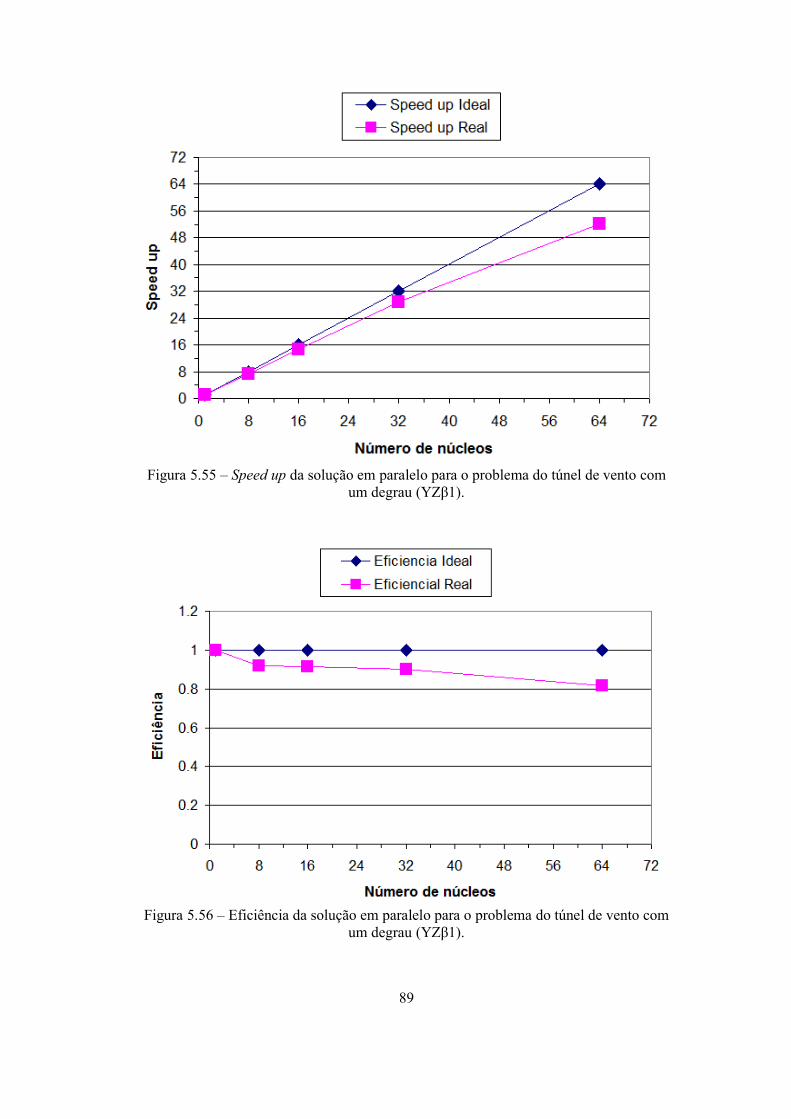
89
Figura 5.55 – Speed up da solução em paralelo para o problema do túnel de vento com
um degrau (YZβ1).
Figura 5.56 – Eficiência da solução em paralelo para o problema do túnel de vento com
um degrau (YZβ1).
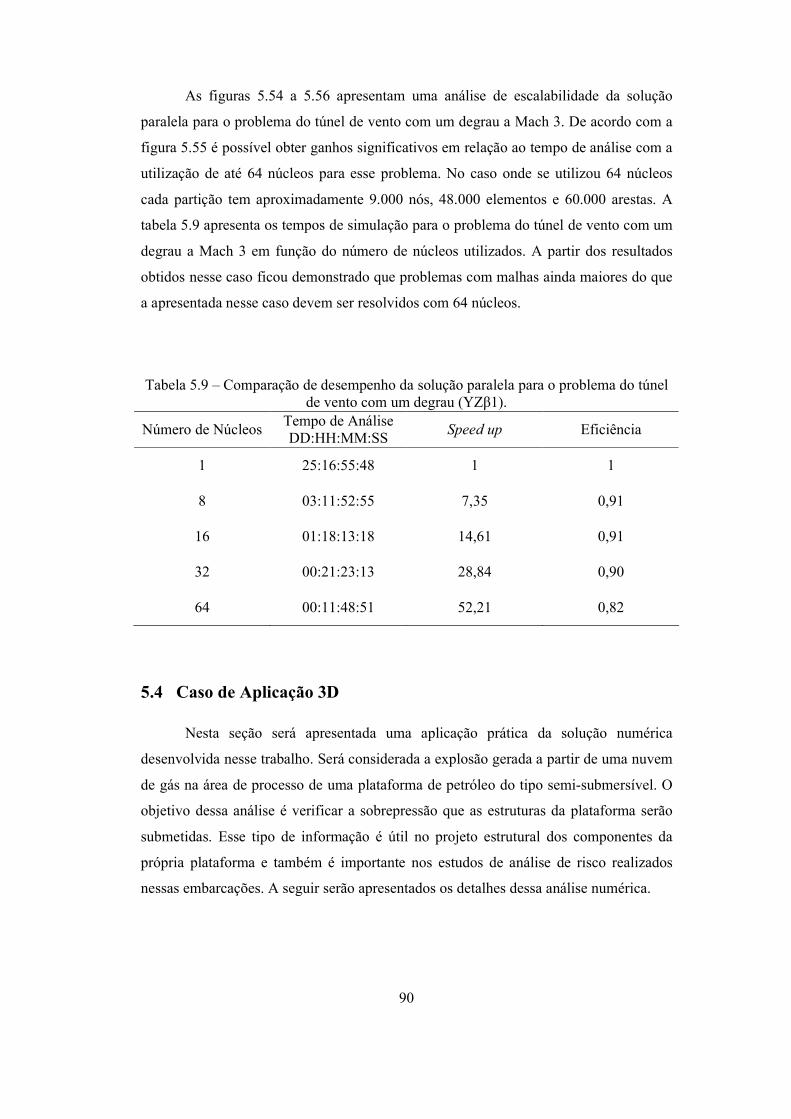
90
As figuras 5.54 a 5.56 apresentam uma análise de escalabilidade da solução
paralela para o problema do túnel de vento com um degrau a Mach 3. De acordo com a
figura 5.55 é possível obter ganhos significativos em relação ao tempo de análise com a
utilização de até 64 núcleos para esse problema. No caso onde se utilizou 64 núcleos
cada partição tem aproximadamente 9.000 nós, 48.000 elementos e 60.000 arestas. A
tabela 5.9 apresenta os tempos de simulação para o problema do túnel de vento com um
degrau a Mach 3 em função do número de núcleos utilizados. A partir dos resultados
obtidos nesse caso ficou demonstrado que problemas com malhas ainda maiores do que
a apresentada nesse caso devem ser resolvidos com 64 núcleos.
Tabela 5.9 – Comparação de desempenho da solução paralela para o problema do túnel de vento com um degrau (YZβ1).
Número de Núcleos Tempo de Análise DD:HH:MM:SS
Speed up Eficiência
1 25:16:55:48 1 1
8 03:11:52:55 7,35 0,91
16 01:18:13:18 14,61 0,91
32 00:21:23:13 28,84 0,90
64 00:11:48:51 52,21 0,82
5.4 Caso de Aplicação 3D
Nesta seção será apresentada uma aplicação prática da solução numérica
desenvolvida nesse trabalho. Será considerada a explosão gerada a partir de uma nuvem
de gás na área de processo de uma plataforma de petróleo do tipo semi-submersível. O
objetivo dessa análise é verificar a sobrepressão que as estruturas da plataforma serão
submetidas. Esse tipo de informação é útil no projeto estrutural dos componentes da
própria plataforma e também é importante nos estudos de análise de risco realizados
nessas embarcações. A seguir serão apresentados os detalhes dessa análise numérica.

91
5.4.1 Explosão em uma Plataforma Semi-Submersível
Esse problema mostra que a ferramenta computacional desenvolvida ao longo
desse trabalho pode ser aplicada em casos práticos de projetos de engenharia. Portanto,
não faz parte do escopo desse trabalho a discussão detalhada de metodologias usadas
em estudos de análise de risco onde a simulação de explosão é apenas uma das diversas
análises envolvidas.
Nessa simulação será considerado um caso hipotético de uma explosão ocorrida
na área de processo de uma plataforma semi-submersível. As dimensões da plataforma
são dimensões típicas desses tipos de embarcações e também foram adotadas de forma
hipotética. A quantidade de energia liberada durante a explosão também foi adotada
hipoteticamente considerando valores típicos geralmente recomendados por normas
internacionais.
Um estudo detalhado sobre explosões pode ser encontrado em BJERKETVEDT
et. al. (1997). Entretanto, não é escopo do presente trabalho discutir detalhes sobre esse
tipo de análise. Apenas serão apresentados conceitos fundamentais desse tópico para
que se possa fazer uma ligação entre a solução numérica das equações de Euler e as
simulações de explosões em plataformas.
Basicamente, as explosões em plataformas são causadas pela combustão de uma
mistura ar-gás combustível seguida de liberação rápida de energia, gerando uma onda
de pressão. Esse processo se dá geralmente por deflagração ou detonação. No primeiro
caso as ondas de pressão formadas se propagam em um regime subsônico, enquanto no
segundo a propagação é supersônica. As explosões podem ocorrer em áreas abertas,
confinadas ou parcialmente confinadas. Além disso, o congestionamento gerado por
obstáculos ao escoamento, como tubulações e equipamentos em um ambiente de
processamento de petróleo, pode favorecer o aumento da sobrepressão, que é a
diferença entre pressão gerada durante a explosão e a pressão ambiente
(BJERKETVEDT et. al., 1997).
Áreas de explosão com alto grau de congestionamento tendem a gerar
escoamentos mais turbulentos, que por sua vez tendem a gerar maiores sobrepressões,
criando assim um ciclo de retroalimentação.
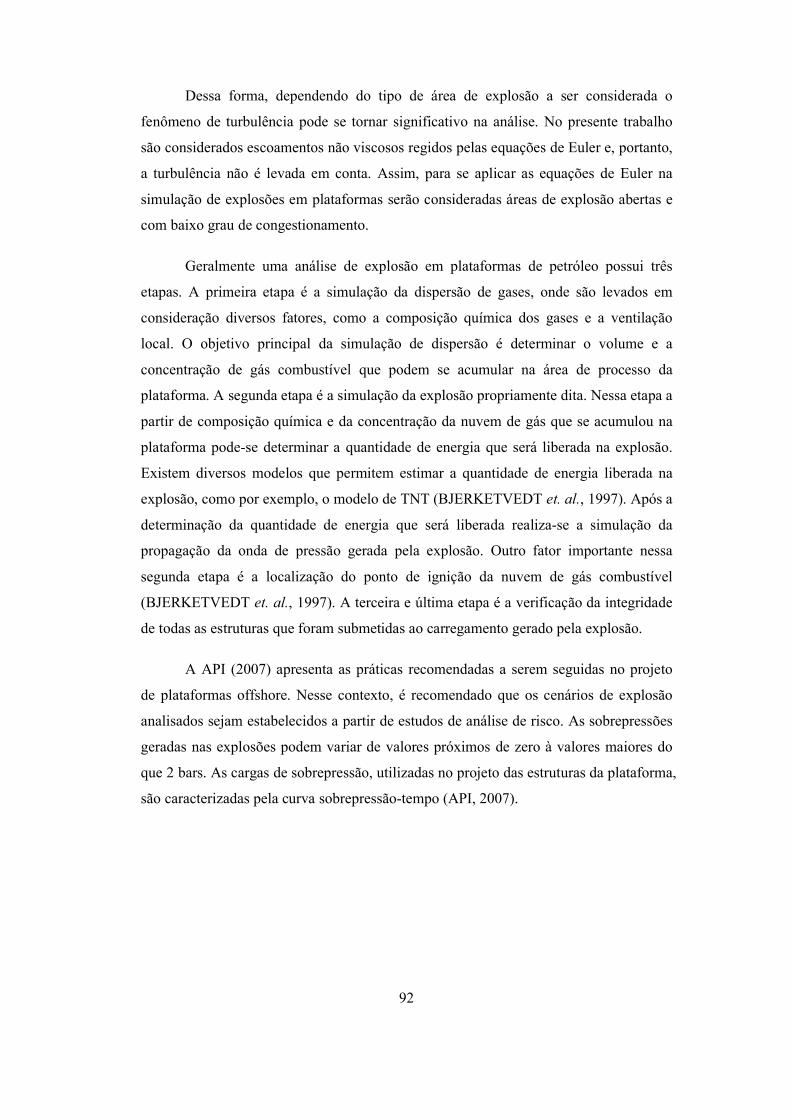
92
Dessa forma, dependendo do tipo de área de explosão a ser considerada o
fenômeno de turbulência pode se tornar significativo na análise. No presente trabalho
são considerados escoamentos não viscosos regidos pelas equações de Euler e, portanto,
a turbulência não é levada em conta. Assim, para se aplicar as equações de Euler na
simulação de explosões em plataformas serão consideradas áreas de explosão abertas e
com baixo grau de congestionamento.
Geralmente uma análise de explosão em plataformas de petróleo possui três
etapas. A primeira etapa é a simulação da dispersão de gases, onde são levados em
consideração diversos fatores, como a composição química dos gases e a ventilação
local. O objetivo principal da simulação de dispersão é determinar o volume e a
concentração de gás combustível que podem se acumular na área de processo da
plataforma. A segunda etapa é a simulação da explosão propriamente dita. Nessa etapa a
partir de composição química e da concentração da nuvem de gás que se acumulou na
plataforma pode-se determinar a quantidade de energia que será liberada na explosão.
Existem diversos modelos que permitem estimar a quantidade de energia liberada na
explosão, como por exemplo, o modelo de TNT (BJERKETVEDT et. al., 1997). Após a
determinação da quantidade de energia que será liberada realiza-se a simulação da
propagação da onda de pressão gerada pela explosão. Outro fator importante nessa
segunda etapa é a localização do ponto de ignição da nuvem de gás combustível
(BJERKETVEDT et. al., 1997). A terceira e última etapa é a verificação da integridade
de todas as estruturas que foram submetidas ao carregamento gerado pela explosão.
A API (2007) apresenta as práticas recomendadas a serem seguidas no projeto
de plataformas offshore. Nesse contexto, é recomendado que os cenários de explosão
analisados sejam estabelecidos a partir de estudos de análise de risco. As sobrepressões
geradas nas explosões podem variar de valores próximos de zero à valores maiores do
que 2 bars. As cargas de sobrepressão, utilizadas no projeto das estruturas da plataforma,
são caracterizadas pela curva sobrepressão-tempo (API, 2007).

93
Figura 5.57 – Modelo simplificado da plataforma semi-submersível.
Conforme já mencionado anteriormente nesse trabalho serão consideradas áreas
de explosão abertas e com baixo grau de congestionamento. Além disso, a análise será
limitada à simulação da propagação da onda de pressão gerada após a explosão. A
figura 5.57 apresenta um modelo simplificado da plataforma semi-submersível que será
analisada. Nessa figura pode-se observar a área de processo separada do compartimento
de acomodações por uma parede de proteção, geralmente denominada blast wall. Na
área de processo estão instalados todos os equipamentos utilizados no processamento de
óleo ou gás da unidade. No compartimento de acomodações encontram-se os
dormitórios e a sala de controle da plataforma. Será considerada uma nuvem de gás
acumulada na região entre a parede de proteção e os módulos de equipamentos,
conforme mostrado na figura 5.57. O objetivo dessa análise é verificar a sobrepressão
que as estruturas da plataforma serão submetidas.

94
Figura 5.58 – Vista frontal da plataforma semi-submersível.
Figura 5.59 – Vista superior da plataforma semi-submersível.
O deck da plataforma é um bloco com dimensões de 50x50x2. A origem do
sistema de coordenadas localiza-se no canto inferior esquerdo da figura 5.59 e sua
elevação é o piso da plataforma, onde Z=0. As pernas da plataforma são blocos com
dimensões de 8x8x20. O compartimento das acomodações é um bloco com dimensões
de 6x15x5. Os equipamentos de processo são formados por 3 blocos com dimensões de
8x4x12 e um bloco com dimensões de 12x10x12. A parede de proteção está localizada a
30 unidades de comprimento da origem e é um bloco com dimensões 2x50x7. A região
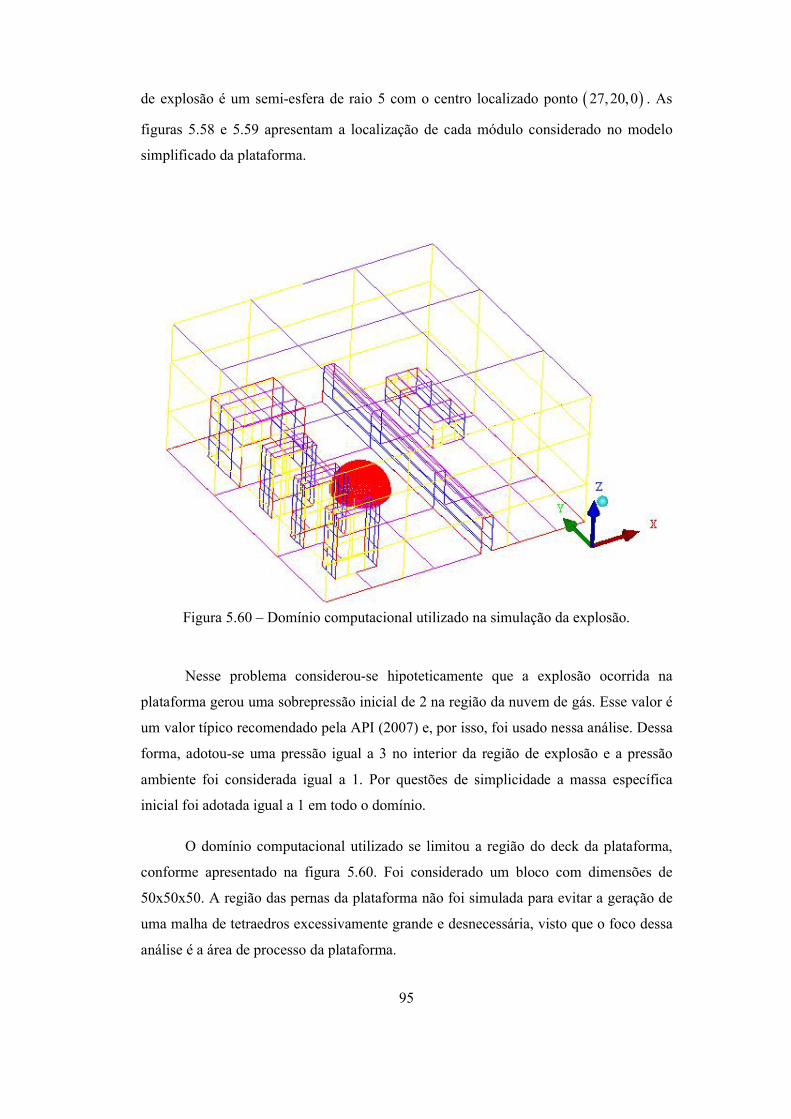
95
de explosão é um semi-esfera de raio 5 com o centro localizado ponto 27,20,0 . As
figuras 5.58 e 5.59 apresentam a localização de cada módulo considerado no modelo
simplificado da plataforma.
Figura 5.60 – Domínio computacional utilizado na simulação da explosão.
Nesse problema considerou-se hipoteticamente que a explosão ocorrida na
plataforma gerou uma sobrepressão inicial de 2 na região da nuvem de gás. Esse valor é
um valor típico recomendado pela API (2007) e, por isso, foi usado nessa análise. Dessa
forma, adotou-se uma pressão igual a 3 no interior da região de explosão e a pressão
ambiente foi considerada igual a 1. Por questões de simplicidade a massa específica
inicial foi adotada igual a 1 em todo o domínio.
O domínio computacional utilizado se limitou a região do deck da plataforma,
conforme apresentado na figura 5.60. Foi considerado um bloco com dimensões de
50x50x50. A região das pernas da plataforma não foi simulada para evitar a geração de
uma malha de tetraedros excessivamente grande e desnecessária, visto que o foco dessa
análise é a área de processo da plataforma.
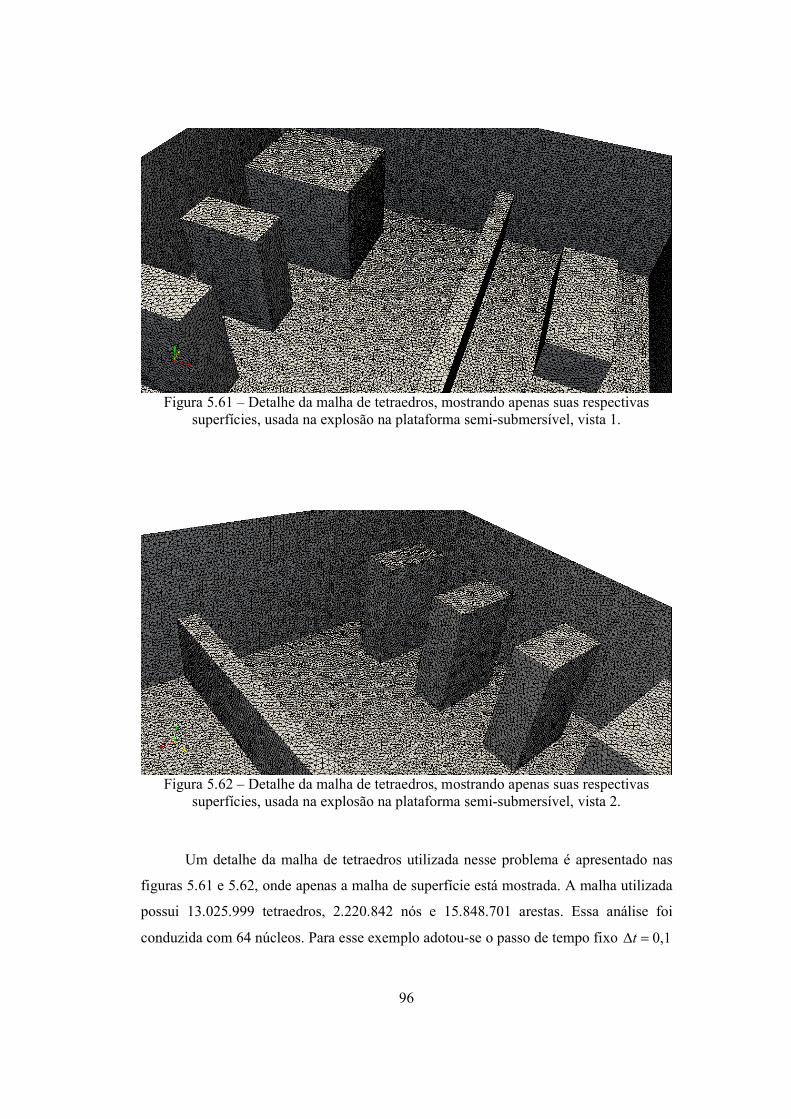
96
Figura 5.61 – Detalhe da malha de tetraedros, mostrando apenas suas respectivas
superfícies, usada na explosão na plataforma semi-submersível, vista 1.
Figura 5.62 – Detalhe da malha de tetraedros, mostrando apenas suas respectivas
superfícies, usada na explosão na plataforma semi-submersível, vista 2.
Um detalhe da malha de tetraedros utilizada nesse problema é apresentado nas
figuras 5.61 e 5.62, onde apenas a malha de superfície está mostrada. A malha utilizada
possui 13.025.999 tetraedros, 2.220.842 nós e 15.848.701 arestas. Essa análise foi
conduzida com 64 núcleos. Para esse exemplo adotou-se o passo de tempo fixo 0,1t

97
que resultou em um max 2CFL . A razão entre os calores específicos a pressão e
volume constantes é 1,4 . A simulação foi conduzida até o instante 5t .
A solução desse problema está apresentada nas figuras 5.63 a 5.86. A pressão
em vários instantes está apresentada nas figuras 5.63 a 5.74. Foi possível observar que
quando a onda de pressão encontra um obstáculo ocorre um aumento de pressão e em
seguida o fenômeno de reflexão. Esses fenômenos foram representados de forma
adequada pela simulação. As figuras 5.75 a 5.86 mostram a massa específica em
diferentes instantes.
Figura 5.63 – Pressão durante a explosão na plataforma semi-submersível em
t = 0.

98
Figura 5.64 – Pressão durante a explosão na plataforma semi-submersível em
t = 1.
Figura 5.65 – Pressão durante a explosão na plataforma semi-submersível em
t = 2.

99
Figura 5.66 – Pressão durante a explosão na plataforma semi-submersível em
t = 3.
Figura 5.67 – Pressão durante a explosão na plataforma semi-submersível em
t = 4.

100
Figura 5.68 – Pressão durante a explosão na plataforma semi-submersível em
t = 5.
Figura 5.69 – Pressão durante a explosão na plataforma semi-submersível em
t = 0.

101
Figura 5.70 – Pressão durante a explosão na plataforma semi-submersível em
t = 1.
Figura 5.71 – Pressão durante a explosão na plataforma semi-submersível em
t = 2.

102
Figura 5.72 – Pressão durante a explosão na plataforma semi-submersível em
t = 3.
Figura 5.73 – Pressão durante a explosão na plataforma semi-submersível em
t = 4.

103
Figura 5.74 – Pressão durante a explosão na plataforma semi-submersível em
t = 5.
Figura 5.75 – Massa específica durante a explosão na plataforma semi-submersível em
t = 0.

104
Figura 5.76 – Massa específica durante a explosão na plataforma semi-submersível em
t = 1.
Figura 5.77 – Massa específica durante a explosão na plataforma semi-submersível em
t = 2.
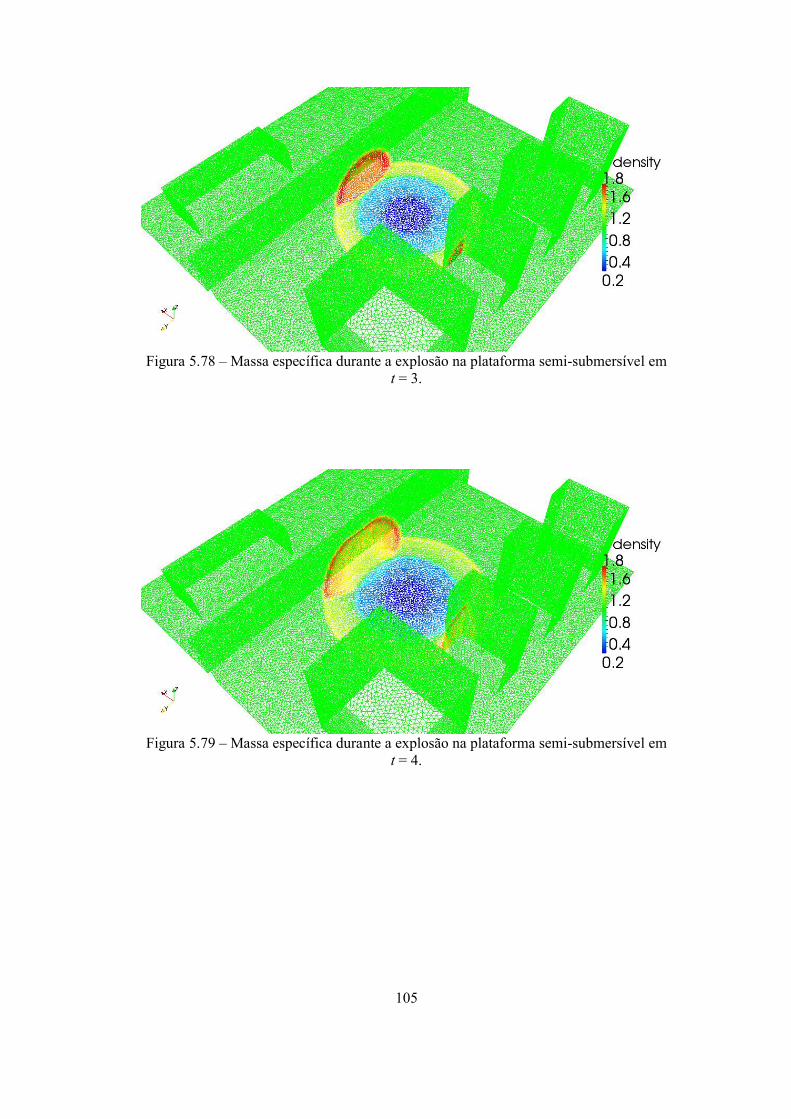
105
Figura 5.78 – Massa específica durante a explosão na plataforma semi-submersível em
t = 3.
Figura 5.79 – Massa específica durante a explosão na plataforma semi-submersível em
t = 4.

106
Figura 5.80 – Massa específica durante a explosão na plataforma semi-submersível em
t = 5.
Figura 5.81 – Massa específica durante a explosão na plataforma semi-submersível em
t = 0.
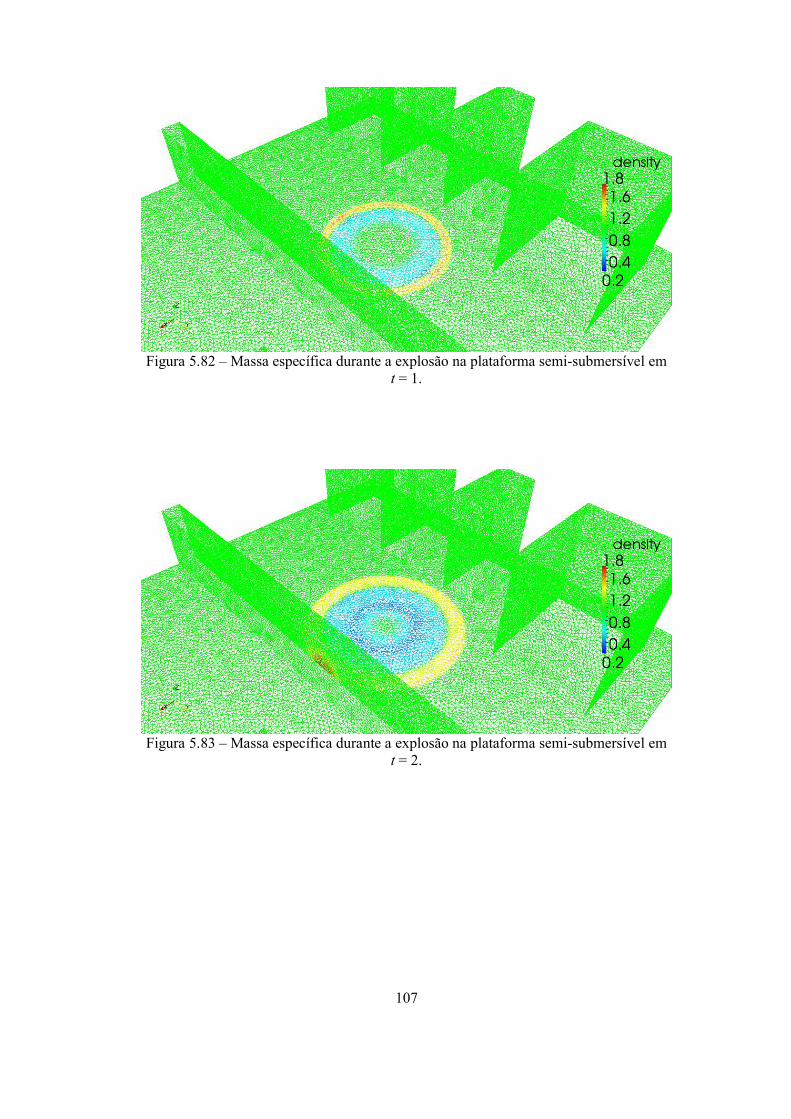
107
Figura 5.82 – Massa específica durante a explosão na plataforma semi-submersível em
t = 1.
Figura 5.83 – Massa específica durante a explosão na plataforma semi-submersível em
t = 2.

108
Figura 5.84 – Massa específica durante a explosão na plataforma semi-submersível em
t = 3.
Figura 5.85 – Massa específica durante a explosão na plataforma semi-submersível em
t = 4.
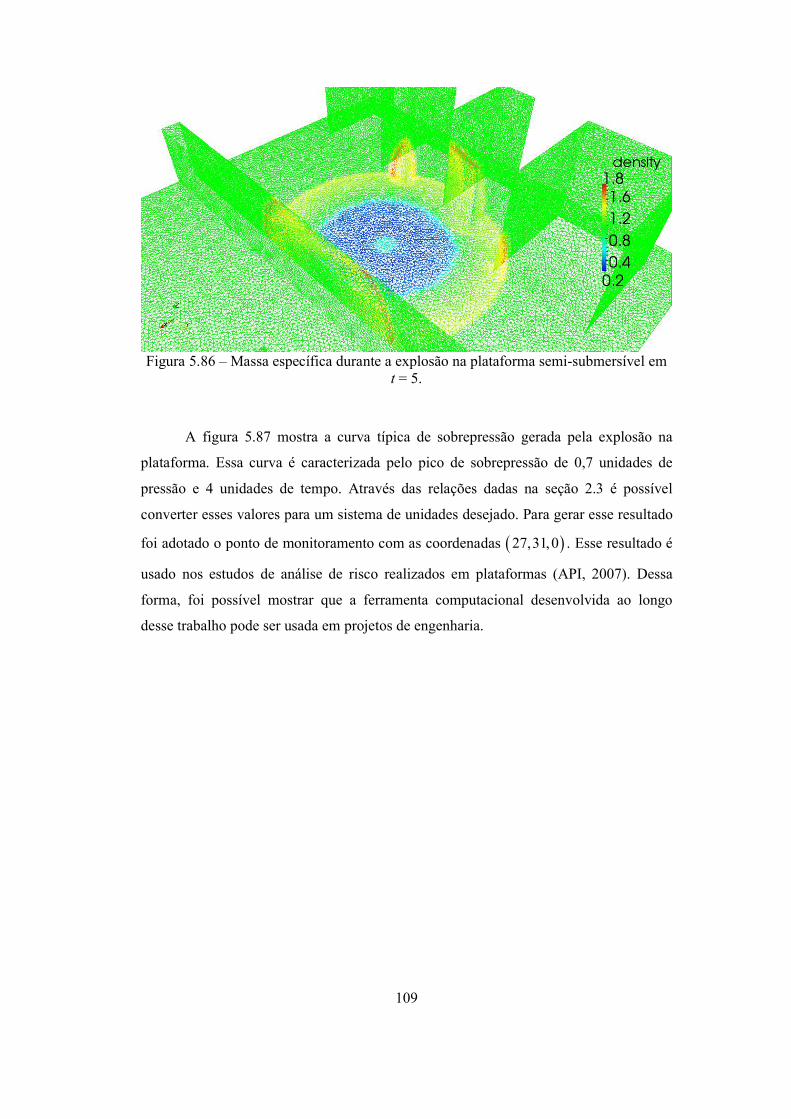
109
Figura 5.86 – Massa específica durante a explosão na plataforma semi-submersível em
t = 5.
A figura 5.87 mostra a curva típica de sobrepressão gerada pela explosão na
plataforma. Essa curva é caracterizada pelo pico de sobrepressão de 0,7 unidades de
pressão e 4 unidades de tempo. Através das relações dadas na seção 2.3 é possível
converter esses valores para um sistema de unidades desejado. Para gerar esse resultado
foi adotado o ponto de monitoramento com as coordenadas 27,31,0 . Esse resultado é
usado nos estudos de análise de risco realizados em plataformas (API, 2007). Dessa
forma, foi possível mostrar que a ferramenta computacional desenvolvida ao longo
desse trabalho pode ser usada em projetos de engenharia.

110
Figura 5.87 – Sobrepressão durante a explosão na plataforma semi-submersível em
função do tempo de análise.
A tabela 5.10 apresenta o tempo gasto nessa análise, o método de estabilização
utilizado e número de núcleos adotado. A malha usada nessa análise é considerada de
grande porte e tempo gasto para resolver esse problema mostra a robustez da ferramenta
desenvolvida para alcançar a solução paralela das equações de Euler.
Tabela 5.10 – Tempo de análise para o problema da explosão na plataforma.
Método de Estabilização Número de Núcleos Tempo de Análise DD:HH:MM:SS
YZβ1 64 00:00:46:35

111
CONCLUSÕES
Considerações Finais
O presente trabalho apresentou a solução numérica das equações de Euler 3D
compressíveis em um ambiente de computação paralela de memória distribuída. Nesse
trabalho foi utilizado o paralelismo por troca de mensagens através do uso da biblioteca
MPI.
Foi adotada uma formulação estabilizada de elementos finitos para discretizar a
formulação matemática. A formulação de elementos finitos usada foi uma formulação
do tipo SUPG acrescida de um operador de captura de descontinuidades. Foram testados
diferentes parâmetros de estabilização e, portanto, diferentes métodos de estabilização
foram avaliados.
No presente trabalho foi adotado um esquema de estrutura de dados por aresta.
Neste caso a matriz global referente a discretização do problema nunca é explicitamente
montada. As matrizes originadas da discretização foram armazenas por arestas, o que
melhora a eficiência computacional da solução.
Foram utilizados problemas clássicos para avaliar a solução numérica obtida
nesse trabalho. Foram usados problemas 1D, 2D e 3D. Todos os métodos de
estabilização avaliados apresentaram bons resultados.
No problema de tubo de choque de Sod foram avaliados todos os métodos de
estabilização. O método CAU apresentou os resultados mais difusivos nas regiões de
gradientes elevados e também apresentou o maior erro numérico dessa análise. Os
métodos δ91, KIRK1 e KIRK2 apresentaram comportamentos semelhantes entre si,
com valores de erros numéricos praticamente iguais. Os métodos YZβ1 e YZβ2
apresentaram os menores erros numéricos da análise e, conseqüentemente os melhores

112
desempenho. Esses métodos capturam bem as regiões de gradientes elevados. O método
YZβ1 apresentou o melhor desempenho da análise.
No problema de tubo de choque de Lax-Harden também foram avaliados todos
os métodos de estabilização. Mais uma vez os métodos YZβ1 e YZβ2 apresentaram os
melhores desempenho quando comparado com os demais métodos. Esses métodos
capturaram bem as regiões de gradientes elevados. O método YZβ1 apresentou o
melhor desempenho da análise. Os métodos CAU, δ91, KIRK1 e KIRK2 apresentaram
comportamento difusivo nas regiões de gradientes elevados e os seus respectivos erros
numéricos foram quase idênticos. Nesse caso o método CAU apresentou erro numérico
ligeiramente menor do que os métodos δ91, KIRK1 e KIRK2. Os métodos KIRK1 e
KIRK2 foram os que apresentaram o maior erro numérico nessa análise.
Os testes 1D mostraram que os métodos YZβ1 e YZβ2 apresentam desempenhos
superiores quando comparados com os demais métodos. Esses métodos capturaram bem
as regiões de gradientes elevados presentes nos problemas de tubo de choque. Os
métodos CAU, δ91, KIRK1 e KIRK2 apresentaram comportamentos semelhantes nos
teste de tubo de choque. Esses métodos apresentaram comportamentos difusivos nas
regiões de gradientes elevados. O método YZβ1 foi o melhor nos dois problemas de
tubos de choque. Nos dois casos de tubo de choque foi utilizada a mesma malha com
302.169 tetraedros. É importante destacar que o tubo de choque de Lax-Harden é um
problema que apresenta um grau de dificuldade bem maior do que o tubo de choque de
Sob. Esse fato pode ser confirmado pelos valores dos erros numéricos calculados em
cada um dos casos. No tubo de choque Sod o erro numérico máximo foi 3,98%
enquanto no tubo de choque de Lax-Harden o maior valor de erro numérico foi 19,03%.
Com base nos resultados obtidos nos casos 1D apenas o método YZβ1 foi
avaliado nos casos 2D e 3D.
Os problemas de choque oblíquo e choque refletido apresentaram resultados
semelhantes. Nesses problemas o método YZβ1 apresentou um bom desempenho,
representando muito bem todas as regiões do escoamento. Esses casos apresentam um
grau de dificuldade da solução menor do que nos problemas de tubo de choque. A
malha usada no problema do choque oblíquo tem 410.006 elementos tetraédricos,
enquanto a malha do choque refletido tem 760.498 tetraedros. O método YZβ1
113
apresentou 2,57% de erro numérico no caso do choque oblíquo e 2,83% no caso do
choque refletido. Mais uma vez o método YZβ1 capturou bem as regiões de elevados
gradientes presentes nos problemas de choque oblíquo e choque refletido.
O problema do túnel de vento com um degrau a Mach 3 também foi resolvido
apenas com o método YZβ1. Esse problema não apresenta a solução analítica e,
portanto, apenas uma comparação qualitativa foi realizada com base nos resultados
disponíveis na literatura. A malha adotada nessa simulação possui 3.099.013 tetraedros.
O método YZβ1 representou bem todas as regiões presentes no escoamento e a
evolução transiente da solução também foi representada adequadamente.
O paralelismo adotado nesse trabalho mostrou-se bastante eficiente nos testes de
escalabilidade, principalmente quando foram utilizadas malhas de grande porte. Os
resultados mostraram que a eficiência do paralelismo aumenta com o tamanho da malha
de tetraedros. Nos problemas de tubo de choque, onde a malha pode ser considerada
pequena, obteve-se ganho computacional com até 16 núcleos. Nos casos do choque
oblíquo e o choque refletido, onde as malhas podem ser consideradas de porte médio,
obteve-se ganho computacional com até 32 núcleos. No caso do problema do túnel de
vento, onde a malha já pode ser considerada de grande porte, foram obtidos ganhos
computacionais com até 64 núcleos. Portanto, para malhas ainda maiores optou-se em
resolvê-las somente com 64 núcleos. O problema da simulação da explosão na
plataforma utilizou uma malha com mais de 13 milhões de tetraedros, que pode ser
considerada uma malha de grande porte, e sua solução foi alcançada em cerca de 46
minutos com a utilização de 64 núcleos.
Foi utilizado um problema de aplicação 3D para demonstrar a robustez da
ferramenta computacional desenvolvida. Neste caso simulou-se a explosão ocorrida na
área de processo de uma plataforma semi-submersível. Tratou-se de um caso hipotético
de aplicação onde a explosão se deu pelo acúmulo de gás combustível na área de
processo da plataforma. A simulação da propagação da onda de pressão mostrou-se
adequada. Foi possível verificar os efeitos de reflexão ocorridos na onda de pressão
quando a mesma chocou-se contra obstáculos. Os resultados mostraram que o
compartimento de acomodações não foi submetido a sobrepressões geradas pela
explosão.

114
As principais contribuições desse trabalho foram: i) A avaliação de vários
métodos estabilizados na solução das equações de Euler. Neste caso o método YZβ1
mostrou-se a melhor opção, embora todos os métodos avaliados tenham apresentados
bons resultados; ii) A solução de problemas de grande porte usando o paralelismo por
troca de mensagens. A solução paralela apresentada nesse trabalho se mostrou bastante
eficiente ao resolver um problema com mais de 13 milhões de tetraedros em cerca de 46
minutos. A implementação da solução em paralelo permite resolver problemas ainda
maiores, ficando o tamanho do problema limitado ao recurso computacional disponível.
Problemas regidos pelas equações de Euler compressíveis geralmente necessitam de
malhas de grande porte para serem solucionados. Portanto, a solução paralela das
equações de Euler é uma estratégia extremamente útil e importante na solução desses
problemas; iii) O desenvolvimento de um módulo de escoamentos compressíveis que
será acoplado ao EdgeCFD. Esse módulo computacional permitirá que novos estudos
sejam conduzidos no NACAD a partir do que foi desenvolvido no presente trabalho.
Embora tenha sido usado um caso de aplicação na área de petróleo, simulação de
uma explosão em uma plataforma semi-submersível, a ferramenta computacional
desenvolvida nesse trabalho está perfeitamente pronta para ser aplicada em outras áreas.
Uma possível aplicação seria na área aeronáutica, onde é possível simular o escoamento
supersônico ao redor de uma aeronave e usar os resultados para avaliar o perfil
aerodinâmico dos componentes da aeronave.
Trabalhos Futuros
Uma sugestão de trabalho futuro é estender a formulação matemática para tratar
escoamentos regidos pelas equações de Navier-Stokes compressíveis. Nesse caso será
preciso acrescentar às equações de Euler o termo viscoso e o termo fonte. Isso implica
acrescentar novas matrizes à formulação discreta. Essas matrizes serão referentes a cada
novo termo adicionado. Ainda nesse contexto, o tratamento do fenômeno de turbulência
se tornará importante no caso de escoamentos regidos pelas equações de Navier-Stokes.
Portanto, modelos de turbulência também deverão ser considerados nesse novo
problema. Essa nova formulação matemática permitirá aplicação, por exemplo, em
simulações de explosões em ambientes confinados e com alto grau de congestionamento,
caso em que as equações de Euler não se aplicam.

115
Uma segunda sugestão para trabalhos futuros é o tratamento da interação fluido-
estrutura, onde o código de escoamento é acoplado a um código de análise estrutural.
Nas simulações de explosões, por exemplo, a onda de pressão ao se propagar choca-se
contra obstáculos e, conseqüentemente, ocorre uma aplicação de força nesses obstáculos.
Assim, o resultado do escoamento é usado como carregamento numa análise estrutural
para verificar a integridade das estruturas que foram submetidas aos efeitos da explosão.
116
REFERÊNCIAS BIBLIOGRÁFICAS
ALIABADI, S. K., RAY, S. E., TEZDUYAR, T. E., 1993, “SUPG Finite Element
Computation of Viscous Compressible Flows Based on the Conservation and
Entropy Variables Formulations”, Computational Mechanics, vol. 11, pp. 300-312.
ALIABADI, S. K., TEZDUYAR, T. E., 1995, “Parallel Fluid Dynamics Computations
in Aerospace Applications”, International Journal for Numerical Methods in
Fluids, vol. 21, pp. 783-805.
ALMEIDA, R. C., GALEÃO, A. C., 1996, “An Adaptative Petrov-Galerkin
Formulation for the Compressible Euler and Navier-Stokes Equations”, Computer
Methods in Applied Mechanics and Engineering, vol. 129, pp. 157-176.
ALVES, J. L. D., COUTINHO, A. L. G. A., MARTINS, M. A. D., da SILVA, C. E.;
ELIAS, R. N., FERREIRA, M. D. A. S., GUEVARA Jr., N. O., ROCHINHA, F.
A., da SILVA, D. F .C., 2012, “EdgeCFD-ALE: A stabilized finite element system
for fluid-structure interaction in offshore engineering”, In: International
Conference on Ocean, Offshore and Arctic Engineering, Rio de Janeiro.
Proceedings of the 31st OMAE 2012, vol. 4. pp. 299-308.
ANDERSON JR, J. D., 1990, Modern Compressible Flow: With Historical Perspective.
2 ed. New York, McGraw-Hill.
API, 2007, “RP 2A-WSD: Recommended Practice for Planning, Designing and
Construction Fixed Offshore Platforms – Working Stress Design (WSD)”,
American Petroleum Institute.
BJERKETVEDT, D., BAKKE, J. R., van WINGERDEN, K., 1997, “Gas Explosion
Handbook”, Journal of Hazardous Materials, vol. 52, pp. 1-150.
117
BROOKS, A. N., HUGHES, T.J.R., 1982, “Streamline Upwind/Petrov-Galerkin
formulations for convection dominated flows with particular emphasis on the
incompressible Navier-Stokes equations”, Computer Methods in Applied
Mechanics and Engineering, vol. 32, pp.199-259.
CATABRIGA, L., 2000, Soluções Implícitas das Equações de Euler empregando
Estruturas de Dados por Aresta. Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ,
Brasil.
CATABRIGA, L., COUTINHO, A. L. G. A., 2002, “Implicit SUPG Solution of Euler
Equations using Edge-based Data Structure”, Computer Methods in Applied
Mechanics and Engineering, vol. 191, pp. 3477-3490.
CATABRIGA, L., COUTINHO, A.L.G.A., TEZDUYAR, T.E., 2005,“Compressible
Flow SUPG Parameters Computed from Element Matrices”, Communications in
Numerical Methods in Engineering, vol. 21, pp. 465–476.
CATABRIGA, L., COUTINHO, A.L.G.A., TEZDUYAR, T.E., 2006, “Compressible
Flow SUPG Stabilization Parameters Computed from degree-of-freedom
Submatrices”, Computational Mechanics, vol. 38, pp. 334–343.
CATABRIGA, L., SOUZA, D. A. F., COUTINHO, A. L. G. A., TEZDUYAR, T.,
2009, “Three-Dimensional Edge-based SUPG Computation of Inviscid
Compressible Flows with YZβ Shock-Capturing”, Journal of Applied Mechanics,
vol. 76, 021208, doi: 10.1115/1. 3062968.
COSTA, G. K., LYRA, P. R. M., de OLIVEIRA LIRA, C. A. B., 2005, “Numerical
Simulation of Two Dimensional Compressible and Incompressible Flows”,
Journal of the Brazilian Society of Mechanical Sciences and Engineering, vol. 27,
pp. 372-380.
COUTINHO, A. L. G. A., MARTINS, A. D., ALVES, J. L. D., LANDAU, L.,
MORAES, A., 2001, “Edge-based Finite Element Techniques for Non-linear Solid
Mechanics Problems”, International Journal for Numerical Methods in
Engineering, vol. 50, pp. 2053-2068.

118
ELIAS, R. N., 2007, Estrutura de Dados por Aresta para Simulação Paralela de
Escoamentos Incompressíveis pelo Método Estabilizado dos Elementos Finitos.
Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
ELIAS, R. N., CAMATA, J. J., AVELEDA, A. A., COUTINHO, A. L. G. A., 2011,
“Evaluation of Message Passing Communication Patterns in Finite Element
Solution of Coupled Problems”, Lecture Notes in Computer Science, vol. 6449, pp.
306-313.
ELIAS, R. N., COUTINHO, A. L. G. A., MARTINS M. A. D., 2006, “Inexact
Newton-Type Methods for the Solution of Steady Incompressible Viscoplastic
Flows with the SUPG/PSPG Finite Element Formulation”, Computer Methods in
Applied Mechanics and Engineering, vol. 195, pp. 3145-3167.
ELIAS, R. N., MARTINS M. A. D., COUTINHO, A. L. G. A., 2006, “Parallel Edge-
based Solution of Viscoplastic Flows with the SUPG/PSPG Formulation”,
Computational Mechanics, vol. 38, pp. 365-381.
GALEÃO, A. C., DUTRA DO CARMO, E. G., 1988, “A Consistent Approximate
Upwind Petrov-Galerkin Method for Convection-Dominated Problems”, Computer
Methods in Applied Mechanics and Engineering, vol. 68, pp. 83-95.
GONÇALVES JR., 2011, Uma Formulação Estável de Elementos Finitos com
Precisão Temporal de 2ª Ordem para Simulação de Escoamentos Incompressíveis.
Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
HAUKE, G., HUGHES, T.J.R., 1998, “A Comparative Study of Different Sets of
Variables for Solving Compressible and Incompressible Flows”, Computer
Methods in Applied Mechanics and Engineering, vol. 153, pp.1-44.
HEATH, M. T., 2002, Scientific Computing: A Introductory Survey. 2 ed. New York,
McGraw-Hill..

119
HIRSH C., 1992, Numerical computation of internal and external flows:
Computational methods for inviscid and viscous flows. New York, Johns Wiley
and Sons Ltd.
HUGHES, T. J. R., 1987, The Finite Element Method – Linear Static and Dynamic
Finite Element Analysis. Englewoods Cliffs, New Jersey, Prentice-Hall.
HUGHES, T. J. R., FRANCA, L. P., MALLET, M., 1986, “A New Finite Element
Formulation for Computational Fluid Dynamics: I. Symmetric Forms of the
Compressible Euler and Navier-Stokes Equations and The Second Law of
Thermodynamics”, Computer Methods in Applied Mechanics and Engineering, vol.
54, pp. 223-234.
HUGHES, T. J. R., MALLET, M., 1986, “A New Finite Element Formulation for
Computational Fluid Dynamics: III. The Generalized Streamline Operator for
Multidimensional Advective-Diffusive Systems”, Computer Methods in Applied
Mechanics and Engineering, vol. 58, pp. 305-328.
HUGHES, T. J. R., MALLET, M., 1986, “A New Finite Element Formulation for
Computational Fluid Dynamics: IV. A Discontinuity-Capturing Operator for
Multidimensional Advective-Diffusive Systems”, Computer Methods in Applied
Mechanics and Engineering, vol. 58, pp. 329-336.
HUGHES, T. J. R., MALLET, M., MIZUKAMI, A., 1986, “A New Finite Element
Formulation for Computational Fluid Dynamics: II. BEYOND SUPG”, Computer
Methods in Applied Mechanics and Engineering, vol. 54, pp. 341-355.
HUGHES, T. J. R., TEZDUYAR, T. E., 1984, “Finite Element Methods for First-Order
Hyperbolic Systems with Particular Emphasis on the Compressible Euler
Equations”, Computer Methods in Applied Mechanics and Engineering, vol. 45, pp.
217-284.
HUGHES, T. JR, SCOVAZZI, G., TEZDUYAR, T. E., 2010, “Stabilized Methods for
Compressible Flows”, Journal of Scientific Computing, vol. 43, pp. 343-368.

120
KARYPIS, G., KUMAR, V., 1998. Metis 4.0: Unstructured Graph Partitioning and
Sparse Matrix Ordering System. Technical report. Department of Computer
Science, University of Minnesota, EUA. Disponível em:
<http://glaros.dtc.umn.edu/gkhome>
KELLY, C. T., 1995, Iterative Methods for Linear and Nonlinear Equations. Frontiers
in Applied Mathematics, SIAM, Philadelphia.
KIRK, B., 2010, “Adiabatic Shock Capturing in Perfect Gas Hypersonic Flows”,
International Journal for Numerical Methods in Fluids, vol. 64, pp. 1041-1062.
KIRK, B., BOVA, S. W., BOND, B., 2010, “Influence of Stabilization Parameters in
the SUPG Finite Element Method for Hypersonic Flows”, 48th AIAA American
Institute of Aeronautics and Astronautics, Aerospace Sciences Meeting Including
the New Horizons Foruns and Aerospace Exposition 4-7 January 2010, Orlando,
Florida, USA.
LE BEAU, G. J., RAY, S. E., ALIABADI, S. K., TEZDUYAR, T. E., 1993, “SUPG
Finite Element Computation of Compressible Flows with the Entropy and
Conservation Variables Formulations”, Computer Methods in Applied Mechanics
and Engineering, vol. 104, pp. 397-422.
LE BEAU, G. J., TEZDUYAR, T. E., 1991, “Finite Element Computation of
Compressible Flows with the SUPG Formulation”, Advances in Finite Element
Analysis in Fluid Dynamics, ASME, vol. 123, pp. 21-27.
LUO, H., BAUM, J. D., LÖHNER, R., 2006, “A hybrid Cartesian grid and gridless
method for compressible flow”, Journal of Computational Physics, vol. 214, pp.
618-632.
MARTINS, M. A. D., 2001, Estrutura de Dados por Aresta para Simulação de
Problemas de Plasticidade Computacional. Tese de D.Sc., COPPE/UFRJ, Rio de
Janeiro, RJ, Brasil.

121
MARTINS, M., ELIAS, R., COUTINHO, A., 2006, “EdgePack: A Parallel Vertex and
Node Reordering Package for Optimizing Edge-Based Computations in
Unstructured Grids”, 7th. High Performance Computing Science – VECPAR’06,
LNCS 4395, Rio de Janeiro, Brazil.
NAZAROV, M., HOFFMAN, J., 2010, “An Adaptative Finite Element Method for
Inviscid Compressible Flow”, International Journal for Numerical Methods in
Fluids, vol. 64, pp. 1102-1128.
OBERKAMPF, W. L., BARONE, M. F., 2006, “Measures of agreement between
computational and experimental: Validation metrics”, Journal of Computational
Physics, vol. 217, pp. 5-36.
OBERKAMPF, W. L., TRUCANO, T. G., 2002, “Verification and validation in
computational fluid dynamics”, Progress in Aerospace Science, vol. 38, pp. 209-
272.
PARAIZO, P. L. B., 2009, Modelagem Numérica dos Processos de Transporte e
Deposição de Areia por Correntes de Densidade: Uma Ferramenta para o Estudo
dos Turbiditos. Tese de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
RIBEIRO, F. L. B., COUTINHO A. L. G. A., 2005, “Comparison between Element,
Edge and Compressed Storage Schemes for Iterative Solutions in Finite Element
Analysis, International Journal for Numerical Methods in Engineering, vol. 63, pp.
569-588.
SAAD, Y, SCHULTZ, M. H., 1986, “GMRES: A Generalized Minimal Residual
Algorithm for Solving Non-Symmetric Systems”, SIAM Journal of Scientific and
Statistical Computing, vol.7, pp. 856-869.
SAAD, Y., 1996, Iterative Methods for Sparse Linear Systems. Boston, PWS
Publishing Company.
SCHWER, L. E., 2007, “Validation metrics for response histories: perspectives and
case study”, Engineering with Computers, vol. 23, pp. 295-309.
122
SCOVAZZI, G.., CHRISTON, M. A., HUGHES, T. J. R., SHADID, J. N., 2007,
“Stabilized Shock Hydrodynamics: I. A Lagrandian Method”, Computer Methods
in Applied Mechanics and Engineering, vol. 196, pp. 923-966.
SESINI, P. A., 2006, Um Estudo Sobre a Solução de Leis de Conservação Não
Lineares por Elementos Finitos Estabilizados. Tese de D.Sc., COPPE/UFRJ, Rio
de Janeiro, RJ, Brasil.
SHAKIB, F., 1988, Finite Element Analysis of the Compressible Euler and Navier-
Stokes Equations. Ph.D. Thesis, Stanford University.
SHAKIB, F., HUGHES, T. J. R., JOHAN, Z., 1989, “A Multi-element Group
Preconditioned GMRES Algorithm for Nonsymmetric Systems Arising in Finite
Element Analysis”, Computer Methods in Applied Mechanics and Engineering,
vol. 75, pp. 415-456.
SHAKIB, F., HUGHES, T. J. R., JOHAN, Z., 1991, “A New Finite Element
Formulation for Computational Fluid Dynamics: X. The Compressible Euler and
Navier Stokes Equations”, Computer Methods in Applied Mechanics and
Engineering, vol. 89, pp. 141-219.
SOD, G. A., 1978, “A Survey of Several Finite Difference Methods for Systems of
Nonlinear Hyperbolic Conservation Laws”, Journal of Computational Physics, vol.
27, pp. 1-31.
SOUZA, D. A. F., 2008, Técnicas Computacionais para Elementos Finitos
Estabilizados na Solução de Leis de Conservação Hiperbólicas não Lineares. Tese
de D.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil.
TEZDUYAR, T. E., SENGA, M., 2006, “Stabilization and Shock-Capturing
Parameters in SUPG formulation of Compressible Flows”, Computer Methods in
Applied Mechanics and Engineering, vol. 195, pp. 1612-1632.

123
TEZDUYAR, T. E., SENGA, M., 2007, “SUPG Finite Element Computation of
Inviscid Supersonic Flows with YZβ Shock-Capturing”, Computer & Fluids, vol.
36, pp. 147-159.
TEZDUYAR, T. E., SENGA, M., VICKER, D., 2006, “Computation of Inviscid
Supersonic Flows Around Cylinders and Spheres with the SUPG formulation and
YZβ Shock-Capturing”, Computational mechanics, vol. 38, pp. 469-481.
VAN GIJZEN, M. B., 1995, “Large Scale Finite Element Computations with GMRES-
like Methods on a CRAY Y-MP”, Applied Numerical Mathematics, vol. 19, pp.
51-62.
VENKATAKRISHNAN, V., MAVRIPLIS, D. J., 1993, “Implicit Solvers on
Unstructured Meshes”, Journal of Computational Physics, vol. 105, pp. 83-91.
WALTZ, J., 2013, “Spatial Accuracy and Performance of a Mixed-Order, Explicit
Multi-Stage Method for Unsteady Flows”, International Journal for Numerical
Methods in Fluids, vol. 71, pp. 1361-1368.
WÜTHRICH, B., 2007, Simulation and Validation of Compressible Flow in Nozzle
Geometries and Validation of OpenFOAM for this Application. M.Sc.. Thesis,
Institute of Fluid Dynamics, ETH Zurich.

124
APÊNDICE A
Neste apêndice é apresentado o código computacional usado para fazer a
integração entre o software gerador de malhas ANSYS ICEM CFD com o solver
EdgeCFD. Esse código, denominado ReadIcemFIDAP, foi escrito em Fortran 90 e
utiliza como entrada de dados um arquivo exportado pelo ANSYS ICEM CFD. A malha
de tetraedros gerada no ANSYS ICEM CFD deve ser exportada no formato FIDAP.
Esse arquivo contendo as informações da malha de tetraedros no formato FIDAP é
usado como entrada de dados no código ReadIcemFIDAP, que faz a leitura da malha e
escreve os arquivos de entrada de dados do EdgeCFD com base na malha gerada pelo
ANSYS ICEM CFD. Abaixo é apresentado o código em Fortran 90 para o programa de
leitura de malha ReadIcemFIDAP.

125
!**************************************************************************** ! PROGRAMA: ReadIcemFIDAP versao 1.0 ! ! Este programa serve para usar o arquivo de saida do ICEM CFD (fidap.FDNEUT) e ! transforma-lo no formato do programa EdgeCFD-Pre ! ! Apos gerar a malha de tetraedros no ICEM CFD o usuario a exportara no formato FIDAP. ! Isso ira gerar um arquivo com as informacoes da ! malha de tetraedros e suas respectivas parts (fidap.FDNEUT) ! ! Arquivos de entrada: ! fidap.FDNEUT (arquivo de saida ICEM no formato FIDAP) ! input_ReadIcemFIDAP.txt (arquivo de input do programa) ! ! Arquivos de saida: ! filename.mesh (arquivo contendo as informacoes da malha) ! *.nds (um para cada part gerada no ICEM) ! ! Obs.: Caso o arquivo de input do programa nao seja encontrado no diretorio ! de trabalho o programa vai criar um arquivo de input padrao. ! ! Autor: Anderson Mendonca ! email: [email protected] ! !**************************************************************************** !==== module var_global character(len=60) :: filename !variavel que contem o nome do arquivo FIDAP character(len=60) :: filename2 !variavel que contem o nome dos arquivos *.nds character(len=60) :: radical !radical para as saidas do programa integer :: iin = 30 !arquivo de entrada do programa integer :: ifidap = 31 !arquivo no formato *.fidap integer :: iout = 32 !arquivo temporario de saida da malha *.temp integer :: iFilePart = 33 !arquivos de saida dos nos prescritos *.nds integer :: iout2 = 34 !arquivo de saida da malha *.mesh integer :: isolve !flag que determina o tipo de escoamento !(0=incompressivel e 1=compressivel) integer,dimension(:),allocatable :: ivector !ivector para armazenar as !incidencias: ivector(nel*nodes_per_elem) end module var_global !==== !==== program ReadIcemFIDAP use var_global !**************************************************************************** implicit real(8) (a-h,o-z) character(len=1) :: commented_line !**************************************************************************** write(*,'(//,a,//)') ' Programa: ReadIcemFIDAP versao 1.0' !abrindo o arquivo de descricao do programa open(unit=1,file='ReadIcemFIDAP.dat') !escrevendo a descricao do programa no arquivo .dat write(1,100) !fechando o arquivo de descricao do programa close(1) !abrindo o arquivo de entrada !se nao for encontrado o programa escrevera um arquivo padrao open (unit=iin, file='input_ReadIcemFIDAP.txt', status = 'old' , iostat = ierr)
126
if (ierr .eq. 0) then !notificando na tela a leitura do arquivo de input write(*,'(a)') ' Iniciando a leitura do arquivo de input' !pulando linha de comentario read (iin,*) commented_line !leitura do nome do arquivo FIDAP read (iin,*) filename !pulando linha de comentario read (iin,*) commented_line !leitura do nome do radical usado nas saidas ensight read (iin,*) radical !pulando linha de comentario read (iin,*) commented_line !leitura do nome do flag que determina o tipo de escoamento read (iin,*) isolve !notificando na tela a leitura do arquivo de input write(*,'(a,/)') ' Leitura do arquivo de input realizada com sucesso' else !notificando na tela por nao encontrar o arquivo de input write(*,'(a)') ' O arquivo input nao foi encontrado' write(*,'(a)') ' O programa vai escrever um arquivo input padrao' write(*,'(a)') ' Basta altera-lo e rodar o programa novamente' write(*,'(a)') ' Aperte a tecla ENTER para fechar o programa' read(*,*) !abrindo o arquivo input open (unit=iin , file='input_ReadIcemFIDAP.txt') !escrevendo o texto padrao no arquivo input write (iin , 200) !fecha o arquivo input close (iin) !termina a execucao do programa stop end if 200 format ( '#Nome do arquivo FIDAP' , / & 'fidap.FDNEUT' , / & '' , / & '#Nome do radical para as saidas' , / & 'radical' , / & '' , / & '#Tipo de escoamento (0=incompressivel e 1=compressivel)' , / & '1' ) !abertura do arquivo .fidap open (unit=ifidap,file=trim(filename)) !notificando na tela a leitura do arquivo .fidap write(*,'(a)') ' Iniciando a leitura do arquivo '//trim(filename) !pulando 4 linhas de comentarios do arquivo .fidap do i=1,4 read (ifidap,*) commented_line end do !lendo na 5a linha do arquivo apenas as primeira, segunda e terceira posicoes read (ifidap,*) nnos, nel_total, igroup_total !pulando 4 linhas de comentarios do arquivo .fidap do i=1,4 read (ifidap,*) commented_line end do

127
!abertura do arquivo de saida temporario .mesh-temp open (unit=iout,file=trim(radical)//'.mesh-temp') !notificando na tela a escrita do arquivo .mesh-temp write(*,'(a,/)') ' Escrevendo o arquivo '//trim(radical)//'.mesh-temp' !deixando a 1a linha do arquivo .mesh-temp em branco, para posteriormente escrever !nel_tetra write(iout,*) '' !escrevendo nnos na 2a linha do arquivo .mesh-temp write(iout,'(i20)') nnos !leitura das coordenadas nodais do i=1,nnos !lendo as coordenadas nodais do arquivo .fidap read (ifidap,*) node, x, y, z !escrevendo as coordenadas nodais no arquivo .mesh-temp write(iout ,'(i20,9x,3(e20.12,9x))') node, x, y, z end do !pulando 3 linhas de comentarios do arquivo .fidap do i=1,3 read (ifidap,*) commented_line end do !inicializando nel_tetra nel_tetra = 0 do ii=1,igroup_total !esse loop do eh limitado !lendo o numero de elementos (nel) e o numero de nos por elemento (nodes_per_elem) read(ifidap,*) commented_line, igroup, commented_line, nel, commented_line, nodes_per_elem !lendo o nome da part e armazenando em filename read(ifidap,*) commented_line, commented_line, filename2 !quando o programa chegar na parte de elementos com 2 nos o programa para de ler o !arquivo FIDAP if (nodes_per_elem < 3) exit if (nodes_per_elem == 4) then !incrementando o numero total de elementos tetraedros !...somente quando nodes_per_elem = 4 nel_tetra = nel_tetra + nel end if !abrindo um arquivo .nsd open(iFilePart , file=trim(filename2)//'.nds') !notificando na tela a abertura do arquivo .nds write(*,'(a)') ' Abrindo o arquivo '//trim(filename2)//'.nds' !escrevendo no arquivo .nds write(iFilePart,'(i20)') nel*nodes_per_elem !notificando na tela a escrita do arquivo .nds write(*,'(a)') ' Escrevendo no arquivo '//trim(filename2)//'.nds' !leitura e escrita de uma determinada part do j=1,nel !para nodes_per_elem = 4 if (nodes_per_elem == 4) then !lendo as incidencias do arquivo .ifidap read(ifidap,*) inel, node1, node2, node3, node4 !escrevendo as incidencias no arquivo .mesh-temp write(iout,'(4(i20))') node1, node2, node3, node4 !escrevendo os nos no arquivo .nds !mesmo escrevendo repeticoes nao havera probrema

128
!...para o programa, pois o programa ira sobrescrever !...as condicoes de contorno de nos repetidos write(iFilePart,'(3(i20,/),i20)') node1, node2, node3, node4 !para nodes_per_elem = 3 else if (nodes_per_elem == 3) then !lendo as incidencias do arquivo .ifidap read(ifidap,*) inel, node1, node2, node3 !escrevendo os nos no arquivo .nds !mesmo escrevendo repeticoes nao havera probrema !...para o programa, pois o programa ira sobrescrever !...as condicoes de contorno de nos repetidos write(iFilePart,'(2(i20,/),i20)') node1, node2, node3 end if !if para nodes_per_elem = 4 e 3 end do !leitura e escrita de uma determinada part !fechando um arquivo .nsd fora dos teste condicionais if's close(iFilePart) !notificando na tela a escrita do arquivo .nds write(*,'(a,/)') ' O arquivo '//trim(filename2)//'.nds foi escrito com sucesso' end do !notificando na tela a leitura do arquivo .fidap write(*,'(a)') ' Leitura do arquivo '//trim(filename)//' realizada com sucesso' !notificando na tela a escrita do arquivo .mesh-temp write(*,'(a,/)') ' O arquivo '//trim(radical)//'.mesh-temp foi escrito com sucesso' !fechando a arquivo .mesh-temp close(iout) !abrindo o arquivo .mesh-temp para iniciar a leitura na 1a posicao do arquivo open(unit=iout,file=trim(radical)//'.mesh-temp',status='old') !abrindo o arquivo de malha .mesh open(iout2, file=trim(radical)//'.mesh') !notificando na tela a abertura do arquivo .mesh write(*,'(a)') ' Abrindo o arquivo '//trim(radical)//'.mesh' !notificando na tela a escrita no arquivo .mesh write(*,'(a)') ' Escrevendo no arquivo '//trim(radical)//'.mesh' !escrevendo nel_tetra na 1a linha do arquivo .mesh write(iout2,'(i20)') nel_tetra !lendo a 1a posicao do arquivo .mesh-temp read(iout,*) nnos !escrevendo na 2a posicao do arquivo .mesh write(iout2,'(i20)') nnos !leitura e escrita das coordenadas nodais do i=1,nnos !lendo as coordenadas nodais do arquivo .mesh-temp read (iout,*) node, x, y, z !escrevendo as coordenadas nodais no arquivo .mesh write(iout2 ,'(i20,9x,3(e20.12,9x))') node, x, y, z end do !leitura e escrita das coordenadas nodais !leitura e escrita das incidencias do i=1,nel_tetra !lendo as incidencias do arquivo .mesh-temp read (iout,*) node1, node2, node3, node4

129
!escrevendo as incidencias no arquivo .mesh write(iout2 ,'(4(i20))') node1, node2, node3, node4 end do !leitura e escrita das incidencias !fecha o arquivo de saida (.mesh-temp) close (iout) !fecha o arquivo de saida (.mesh) close (iout2) !notificando na tela a escrita do arquivo .mesh write(*,'(a,/)') ' O arquivo '//trim(radical)//'.mesh foi escrito com sucesso' !subrotina para escrever os arquivos: .solver, .preprocessor, .materials, .ic, .bc call WriteOtherFiles () !fecha o arquivo input close (iin) !fecha o arquivo FIDAP close (ifidap) !notificando em tela que o programa foi executado com sucesso write(*,'(/,a)') ' O programa foi executado com sucesso' write(*,'(a,/)') ' Fim!' write(*,'(a)') ' Aperte a tecla ENTER para fechar o programa' read(*,*) !formato para a escrita do arquivo de descricao do programa - cabecalho do codigo 100 format(' ', / & '!**************************************************************************** ', / & '! PROGRAMA: ReadIcemFIDAP versao 1.0 ', / & '! ', / & '! Este programa serve para usar o arquivo de saida do ICEM CFD (fidap.FDNEUT) e ', / & '! transforma-lo no formato do programa EdgeCFD-Pre ', / & '! ', / & '! Apos gerar a malha de tetraedros no ICEM CFD o usuario a exportara no formato ', / & '! FIDAP. Isso ira gerar um arquivo com as informacoes da malha de ', / & '! tetraedros e suas respectivas parts (fidap.FDNEUT) ', / & '! ', / & '! Arquivos de entrada: ', / & '! fidap.FDNEUT (arquivo de saida ICEM no formato FIDAP) ', / & '! input_ReadIcemFIDAP.txt (arquivo de input do programa) ', / & ' ', / & '! Arquivos de saida: ', / & '! filename.mesh (arquivo contendo as informacoes da malha) ', / & '! *.nds (um para cada part gerada no ICEM) ', / & '! ', / & '! Obs.: Caso o arquivo de input do programa nao seja encontrado no diretorio ', / & '! de trabalho o programa vai criar um arquivo de input padrao. ', / & '! ', / & '! Autor: Anderson Mendonca ', / & '! email: [email protected] ', / & '! ', / & '!**************************************************************************** ', / & ' ' ) end program ReadIcemFIDAP !==== !==== subroutine WriteOtherFiles () use var_global !Essa rotina escreve os arquivos: ! - radical.solver ! - radical.preprocessor ! - radical.materials ! - radical.ic ! - radical.bc i1 = 50 !solver i2 = 51 !preprocessor i3 = 52 !materials i4 = 53 !ic

130
i5 = 54 !bc i6 = 55 !SetupEuler open(unit=i1,file=trim(radical)//'.solver') !notificando na tela - escrevendo o arquivo .solver write(*,'(a)') ' Escrevendo o arquivo '//trim(radical)//'.solver' write(i1,201) !notificando na tela - escrevendo o arquivo .solver write(*,'(a,/)') ' O arquivo '//trim(radical)//'.solver foi escrito com sucesso' close(i1) open(unit=i2,file=trim(radical)//'.preprocessor') !notificando na tela - escrevendo o arquivo .preprocessor write(*,'(a)') ' Escrevendo o arquivo '//trim(radical)//'.preprocessor' write(i2,202) !notificando na tela - escrevendo o arquivo .preprocessor write(*,'(a,/)') ' O arquivo '//trim(radical)//'.preprocessor foi escrito com sucesso' close(i2) open(unit=i3,file=trim(radical)//'.materials') !notificando na tela - escrevendo o arquivo .materials write(*,'(a)') ' Escrevendo o arquivo '//trim(radical)//'.materials' if (isolve == 0) then write(i3,203) !escoamento incompressivel else write(i3,204) !escoamento compressivel end if !notificando na tela - escrevendo o arquivo .materials write(*,'(a,/)') ' O arquivo '//trim(radical)//'.materials foi escrito com sucesso' close(i3) open(unit=i4,file=trim(radical)//'.ic') !notificando na tela - escrevendo o arquivo .ic write(*,'(a)') ' Escrevendo o arquivo '//trim(radical)//'.ic' if (isolve == 0) then write(i4,205) !escoamento incompressivel else write(i4,206) !escoamento compressivel end if !notificando na tela - escrevendo o arquivo .ic write(*,'(a,/)') ' O arquivo '//trim(radical)//'.ic foi escrito com sucesso' close(i4) open(unit=i5,file=trim(radical)//'.bc') !notificando na tela - escrevendo o arquivo .bc write(*,'(a)') ' Escrevendo o arquivo '//trim(radical)//'.bc' if (isolve == 0) then write(i5,207) !escoamento incompressivel else write(i5,208) !escoamento compressivel end if !notificando na tela - escrevendo o arquivo .bc write(*,'(a,/)') ' O arquivo '//trim(radical)//'.bc foi escrito com sucesso' close(i5) open(unit=i6,file='SetupEuler.dat') !notificando na tela - escrevendo o arquivo SetupEuler write(*,'(a)') ' Escrevendo o arquivo SetupEuler.dat' if (isolve /= 0) then write(i6,209) !escoamento compressivel end if !notificando na tela - escrevendo o arquivo SetupEuler write(*,'(a,/)') ' O arquivo SetupEuler.dat foi escrito com sucesso' close(i6)

131
!solver 201 format( & ' &&&&&&&&&&&&&&&&&&&&&&&&&&&&&& ',/& ' Solver Parameters && ',/& ' &&&&&&&&&&&&&&&&&&&&&&&&&&&&&& ',/& ' csmag 0.100d0 ',/& ' flsic 1 ',/& ' iprint 5 ',/& ' noal 0 ',/& ' csi 1.0d-04 ',/& ' sigma0 0.100d0 ',/& ' sigma1 0.500d0 ',/& ' gamma 0.900d0 ',/& ' dt -1.0d-03 ',/& ' tmax 1.000d0 ',/& ' cflmin 0.500d0 ',/& ' cflmax 5.000d0 ',/& ' tol_v 0.200d0 ',/& ' dtmin 0.001d0 ',/& ' dtmax 0.500d0 ',/& ' gravx 0.000d0 ',/& ' gravy 0.000d0 ',/& ' gravz 0.000d0 ',/& ' beta 0.000d0 ',/& ' tref 0.000d0 ',/& ' eta_f 0.100d0 ',/& ' rtol_f 0.001d0 ',/& ' dutol_f 0.001d0 ',/& ' maxit_f 7 ',/& ' maxslv_f -200 ',/& ' kmax_f 35 ',/& ' eta_t 0.001d0 ',/& ' rtol_t 0.001d0 ',/& ' dutol_t 0.001d0 ',/& ' maxit_t 7 ',/& ' maxslv_t -200 ',/& ' kmax_t 35') !preprocessor 202 format('JOIN' , / & '1 0 0 0 0 0 0 0 0 0') !materials - escoamento incompressivel 203 format('1' , / & '1 Water Newtonian 0.01d0 0 1.0d0 0 0 0 0') !materials - escoamento compressivel 204 format('1' , / & '1 IdealGas Newtonian 0 0 1.4d0 0 0 0 0') !ic - escoamento incompressivel 205 format('NUMBER_OF_ICS 1' ,/ & 'PartName1 4' ,/ & '1 Constant 0.0d0 ! pres' ,/ & '2 Constant 0.0d0 ! vx' ,/ & '3 Constant 0.0d0 ! vy' ,/ & '4 Constant 0.0d0 ! vz' ) !ic - escoamento compressivel 206 format('NUMBER_OF_ICS 1' ,/ & 'PartName1 5' ,/ & '21 Constant 0.0d0 ! dens' ,/ & '22 Constant 0.0d0 ! dens*vx' ,/ & '23 Constant 0.0d0 ! dens*vy' ,/ & '24 Constant 0.0d0 ! dens*vz' ,/ & '25 Constant 0.0d0 ! dens*et') !bc - escoamento incompressivel 207 format('NUMBER_OF_BCS 1' ,/ & 'PartName1 4' ,/ & '1 Constant 0.0d0 ! pres' ,/ & '2 Constant 0.0d0 ! vx' ,/ & '3 Constant 0.0d0 ! vy' ,/ & '4 Constant 0.0d0 ! vz' ) !bc - escoamento compressivel
132
208 format('NUMBER_OF_BCS 1' ,/ & 'PartName1 5' ,/ & '21 Constant 0.0d0 ! dens' ,/ & '22 Constant 0.0d0 ! dens*vx' ,/ & '23 Constant 0.0d0 ! dens*vy' ,/ & '24 Constant 0.0d0 ! dens*vz' ,/ & '25 Constant 0.0d0 ! dens*et') !SetupEuler - escoamento compressivel 209 format(' ',/& ' ! SetupEuler ',/& ' ',/& ' ! Funcao peso para formulacao de Petrov Galerkin (0=[Tk=A formulacao A2] ; ',/& ' 1=[Tk=At formulacao AtA]) ',/& ' ! ipg ',/& ' 0 ',/& ' ',/& ' ! Operador de captura de choque (0=sim ; 1=nao) ',/& ' ! iopc ',/& ' 0 ',/& ' ',/& ' ! Diferentes maneiras de calcular delta (0=Delta91; 1=CAU; 2=YZBeta; 3=KIRK) ',/& ' ! iop ',/& ' 2 ',/& ' ',/& ' ! Estabilizacao SUPG (0=sim ; 1=nao) ',/& ' ! isupg ',/& ' 0 ',/& ' ',/& ' ! Versao do metodo YZBeta (1=versao1 ; 2=versao2) ',/& ' ! iYZBeta ',/& ' 2 ',/& ' ',/& ' ! Versao do metodo KIRK (1=versao1 ; 2=versao2) ',/& ' ! iKIRK ',/& ' 2 ',/& ' ',/& ' ! Termo forcante (0=EWK; 1=EWC; 2=GLT; 3=PP) ',/& ' ! iterm_force ',/& ' 0 ',/& ' ',/& ' ! Valor minimo para a massa especifica do fluido (Minimum Density) ',/& ' ! rho_min ',/& ' 1.0d-3 ' ) end subroutine WriteOtherFiles