soft-starter ssw-06 v1€¦ · introdução à softplc ssw-06 | 6 1 introduÇÃo À softplc a...
TRANSCRIPT

Motores | Energia | Automação | Tintas
SoftPLC
Soft-Starter SSW-06 V1.6X
Manual da SoftPLC Idioma: Português Documento: 0899.5721 / 03

Manual da SoftPLC
Série: SSW-06 V1.6X
Idioma: Português
Nº do Documento: 0899.5721 / 03
Data da Publicação: 09/2009

Índice .
ÍNDICE
SOBRE O MANUAL ....................................................................................... 5 ABREVIAÇÕES E DEFINIÇÕES....................................................................................................................5 REPRESENTAÇÃO NUMÉRICA...................................................................................................................5
1 INTRODUÇÃO À SOFTPLC........................................................................ 6 1.1 SÍMBOLO DOS TIPOS DE DADOS ........................................................................................................6
2 MEMÓRIA DA SOFTPLC ............................................................................ 7 2.1 MEMÓRIA DE DADOS ............................................................................................................................7
2.1.1 Constantes .....................................................................................................................................7 2.1.2 Entradas e Saídas Físicas (Hardware).........................................................................................7 2.1.3 Marcadores Voláteis (Variáveis)...................................................................................................7 2.1.4 Marcadores do Sistema................................................................................................................8 2.1.5 Parâmetros.....................................................................................................................................9
3 RESUMO DOS BLOCOS DE FUNÇÃO .................................................... 10 3.1 CONTATOS............................................................................................................................................10
3.1.1 Contato Normalmente Aberto – NO Contact............................................................................10 3.1.2 Contato Normalmente Fechado – NC Contact.........................................................................10 3.1.3 Lógicas “E (And)” com Contatos ...............................................................................................10 3.1.4 Lógicas “Ou (Or)” com Contatos ...............................................................................................10
3.2 BOBINAS................................................................................................................................................11 3.2.1 Bobina Normal – COIL.................................................................................................................11 3.2.2 Bobina Negada – NEG COIL .......................................................................................................11 3.2.3 Seta Bobina – SET COIL..............................................................................................................11 3.2.4 Reseta Bobina – RESET COIL ....................................................................................................11 3.2.5 Bobina De Transição Positiva – PTS COIL................................................................................11 3.2.6 Bobina De Transição Negativa – NTS COIL..............................................................................11
3.3 BLOCOS DE CLP ..................................................................................................................................12 3.3.1 Temporizador – TON ...................................................................................................................12 3.3.2 Contador Incremental – CTU......................................................................................................12
3.4 BLOCOS DE CÁLCULO........................................................................................................................12 3.4.1 Comparador – COMP ..................................................................................................................12 3.4.2 Operação Matemática – MATH..................................................................................................13 3.4.3 Função Matemática – FUNC.......................................................................................................13 3.4.4 Saturador – SAT...........................................................................................................................14 3.4.5 Multiplexador – MUX...................................................................................................................14 3.4.6 Demultiplexador – DMUX............................................................................................................15
3.5 BLOCOS DE TRANSFERÊNCIA...........................................................................................................15 3.5.1 Transfere Dados – TRANSFER...................................................................................................15 3.5.2 Transfere Dados Indireta – IDATA .............................................................................................16
3.6 CONTROLE MULTIMOTOR – MMC ....................................................................................................16
4 PARAMETRIZAÇÃO DA SSW-06............................................................. 18 4.1 SÍMBOLOS PARA DESCRIÇÃO DAS PROPRIEDADES.....................................................................18 4.2 PARÂMETROS DE CONFIGURAÇÃO .................................................................................................18 4.3 PARÂMETROS EXCLUSIVOS DA SOFTPLC ......................................................................................21
5 RESUMO DAS PRINCIPAIS FUNÇÕES DO WLP.................................... 23 5.1 PROJETO – NOVO ................................................................................................................................23 5.2 PROJETO – ABRIR................................................................................................................................23 5.3 EXIBIR – INFORMAÇÕES DA COMPILAÇÃO.....................................................................................24 5.4 CONSTRUIR – COMPILAR...................................................................................................................24 5.5 COMUNICAÇÃO – CONFIGURAÇÃO..................................................................................................25 5.6 COMUNICAÇÃO – DOWNLOAD ..........................................................................................................25

Índice .
5.7 COMUNICAÇÃO – UPLOAD................................................................................................................ 26
Sobre o Manual
SSW-06 | 5
SOBRE O MANUAL Este manual fornece a descrição necessária para a operação da chave de partida SSW-06 utilizando o módulo de programação do usuário, denominado SoftPLC. Este manual deve ser utilizado em conjunto com manual do usuário da SSW-06 e do software WLP. ABREVIAÇÕES E DEFINIÇÕES CLP Controlador Lógico Programável CRC Cycling Redundancy Check RAM Random Access Memory WLP Software de Programação em Linguagem Ladder REPRESENTAÇÃO NUMÉRICA Números decimais são representados através de dígitos sem sufixo. Números hexadecimais são representados com a letra ’h’ depois do número.
Introdução à SoftPLC
SSW-06 | 6
1 INTRODUÇÃO À SOFTPLC A SoftPLC é um recurso que incorpora à SSW-06 as funcionalidades de um CLP, agregando flexibilidade ao produto e permitindo que o usuário desenvolva seus próprios aplicativos (programas do usuário). As principais características da SoftPLC são:
■ Programação em “Linguagem Ladder” utilizando o software WLP; ■ Acesso a todos os Parâmetros e I/O’s do SSW-06; ■ 18 parâmetros configuráveis para uso do usuário; ■ Blocos de CLP e Matemáticos; ■ Transferência e monitoração on-line do software aplicativo via serial (RS-232.); ■ O cabo (ITEM WEG: 10050215) deve ser conectado diretamente a interface serial do PC:
1.1 SÍMBOLO DOS TIPOS DE DADOS %KW constantes do tipo word (16 bits) %MX marcadores de bit %MW marcadores de word (16 bits) %SX marcadores de bit de sistema %SW marcadores de word do sistema (16 bits) %IX entradas digitais %QX saídas digitais %QW saídas analógicas (14 bits) %PW parâmetros do sistema %UW parâmetros do usuário

Memória da SoftPLC
SSW-06 | 7
2 MEMÓRIA DA SOFTPLC O tamanho total de memória da SoftPLC é de 1024 bytes, entre memória de programa e memória de dados. 2.1 MEMÓRIA DE DADOS Na SoftPLC, a área de memória de dados (variáveis do usuário) e de programa é compartilhada. Por isso um aplicativo pode variar o tamanho total em função da quantidade de variáveis utilizadas pelo usuário. Os marcadores de bit e word são alocados de acordo com o ÚLTIMO endereço utilizado no aplicativo, ou seja, quanto maior for este último endereço, maior será a área alocada. Por isso, é recomendado ao usuário utilizar os marcadores de maneira SEQÜENCIAL. As constantes word também utilizam espaço de programa.
2.1.1 CONSTANTES
Tabela 2.1: Mapa de Memória das Constantes
Símb. Descrição Bytes %KW Constantes Word
(16 bits) Depende da quantidade de constantes word diferentes. Ex: Se foram utilizados as: - %KW: 327 = 2 bytes - %KW: 5; 67 = 4 bytes - %KW: 13; 1000; 13; 4 = 6 bytes
2.1.2 ENTRADAS E SAÍDAS FÍSICAS (HARDWARE)
Tabela 2.2 : Mapa de Memória dos I/O’s
Símb. Descrição Faixa %IX Entradas Digitais 1 a 6 ou 1 a 12 com K-IOE %QX Saídas Digitais 1 a 3 ou 1 a 9 com K-IOE %QW Saídas Analógicas 1 a 2
2.1.3 MARCADORES VOLÁTEIS (VARIÁVEIS)
Consistem em variáveis que podem ser utilizadas pelo usuário para executar as lógicas do aplicativo. Podem ser marcadores de bit (1 bit) e marcadores de word (16 bits).
Tabela 2.3: Mapa de Memória dos Marcadores Voláteis
Símb. Descrição Faixa Bytes %MX Marcadores de Bit 5000 ... 6099 Depende do último marcador utilizado. São organizados de
2 em 2 bytes. Ex: - último marcador: %MX5000 = 2 bytes - último marcador: %MX5014 = 2 bytes - último marcador: %MX5016 = 4 bytes - último marcador: %MX5039 = 6 bytes
%MW Marcadores de Word
8000 ... 8199 Depende do último marcador utilizado. Ex: - último marcador: %MX8000 = 2 bytes - último marcador: %MX8001 = 4 bytes - último marcador: %MX8007 = 16 bytes
NOTA! Para minimizar o tamanho do aplicativo, utilizar marcadores de forma seqüencial. Ex: Marcadores de bit: %MX5000, %MX5001, %MX5002, ... Marcadores de word: %MW8000, %MW8001, %MW8002, ....

Memória da SoftPLC
SSW-06 | 8
2.1.4 MARCADORES DO SISTEMA Consistem em variáveis especiais que permitem ao usuário ler e alterar dados da Soft-Starter SSW-06 que podem ou não estar disponíveis nos parâmetros. Podem ser: marcadores de bit do sistema (1 bit) ou marcadores de word do sistema (16 bits).
Tabela 2.4.a: Mapa de Memória dos Marcadores de Bit do Sistema - Ímpares
Símb. Descrição Faixa Descrição Tipo Bits do Sistema 3000 ... 3040
Escrita/Comando (Ímpares) 3001 Gira/Pára 0: pára motor.
1: gira motor. 3003 Habilita Gera 0: desabilita geral, interrompendo a alimentação para o motor.
1: habilita geral, permitindo a operação do motor.
3005 JOG 0: desabilita a função JOG. 1: habilita a função JOG.
3007 Sentido de Giro 0: gira motor no sentido horário. 1: gira motor no sentido anti-horário.
3009 LOC/REM 0: vai para o modo local. 1: vai para o modo remoto.
%SX
3015 Reset de Erros 0: sem função. 1: se em estado de erro, executa o reset da SSW-06.
Tabela 2.4.b: Mapa de Memória dos Marcadores de Bit do Sistema - Pares
Símb. Descrição Faixa Descrição Tipo Bits do Sistema 3000 ... 3040
Leitura/Estado (Pares) 3000 Motor Girando 0: motor está parado.
1: motor está girando, executando rampa de aceleração, desaceleração ou em frenagem.
3002 Habilitado Geral 0: está desabilitado geral. 1: está habilitado geral e pronto para girar motor.
3004 JOG 0: função JOG inativa. 1: função JOG ativa.
3006 Em Aceleração 0: não está executando rampa de aceleração. 1: está executando rampa de aceleração.
3008 Em Limitação de Corrente 0: não está em limitação de corrente. 1: está em limitação de corrente.
3010 Em Tensão Plena 0: não está em tensão plena sobre o motor. 1: está em tensão plena sobre o motor.
3012 Com Alarme 0: não está em estado de alarme. 1: está em estado de alarme. Obs.: O número do alarme pode ser lido através do parâmetro P021 – Alarme Atual.
3014 Em Desaceleração 0: não está em rampa de desaceleração. 1: está em rampa de desaceleração.
3016 Em Remoto 0: em modo local. 1: em modo remoto.
3018 Em Frenagem 0: não está executando frenagem. 1: está executando frenagem.
3020 Em Troca de Sentido de Giro 0: não está executando troca de sentido de giro. 1: está executando troca de sentido de giro.
3022 Em Sentido Anti-Horário 0: está em sentido horário. 1: está em sentido anti-horário.
3024 Com Bypass Fechado 0: não está com bypass fechado 1: está com bypass fechado.
3028 Com Alimentação na Potência 0: está sem alimentação na potência 1: está com alimentação na potência nas 3 fases acima de 15V.
%SX
3030 Com Erro 0: não está em estado de erro. 1: está em estado de erro.

Memória da SoftPLC
SSW-06 | 9
Tabela 2.5: Mapa de Memória dos Marcadores de Word do Sistema
Símb. Descrição Faixa Words do Sistema 3300 ... 3303 Marcadores de Escrita/Comando (Ímpares) 3303 Erro do usuário (E86 ao E89)
%SW
3305 Alarme do usuário (A90 ao A93)
2.1.5 PARÂMETROS
O Mapa de Memória dos parâmetros da Soft-Starter SSW-06 é descrita na tabela 2.6.
Tabela 2.6: Mapa de Memória dos Parâmetros
Símb. Descrição Faixa Parâmetros do Sistema (ver manual da SSW-06)
0... 950
P088: Estado da SoftPLC [Parâmetro de Leitura]
0: Sem. 1: Carregando. 2: Falha. 3: Parado. 4: Executando.
P089: Permite SoftPLC 0: Não 1: Sim
P204: Carrega/Salva Parâmetros 13: Apaga SoftPLC 14: Zera Parâmetos do usuário (P952 a P969)
P950: Habilita SoftPLC 0: Não 1: Sim
%PW
P951: Habilitação do Cartão de Expansão de Entradas e Saídas Digitais (K-IOE)
0: Não 1: Sim
%UW Parâmetros do Usuário 952... 969

Resumo dos Blocos de Função
SSW-06 | 10
3 RESUMO DOS BLOCOS DE FUNÇÃO Neste capítulo será apresentado um resumo dos blocos de funções que estão disponíveis para a programação do usuário. 3.1 CONTATOS Carregam para a pilha o conteúdo de um dado programado (0 ou 1), que pode ser do tipo: ■ %MX: Marcador de Bit ■ %IX: Entrada Digital ■ %QX: Saída Digital ■ %UW: Parâmetro do Usuário ■ %SX: Marcador de Bit do Sistema – Leitura
NOTA! Se utilizados contatos com parâmetros (%UW), estes são setados quando o valor for diferente de zero. Nos exemplos de lógica abaixo, o contato %UW952 é considerado ativo se o parâmetro P952 foi diferente de zero.
3.1.1 CONTATO NORMALMENTE ABERTO – NO CONTACT
Menu: Inserir-Contatos-NO CONTACT. Ex: Envia para a pilha o conteúdo do marcador de bit 5000.
3.1.2 CONTATO NORMALMENTE FECHADO – NC CONTACT
Menu: Inserir-Contatos-NC CONTACT. Ex: Envia para a pilha o conteúdo negado da saída digital 1.
3.1.3 LÓGICAS “E (AND)” COM CONTATOS
Quando os contatos estão em série, uma lógica “E” é executada entre eles armazenando o resultado na pilha. Exemplos:
Exemplo Tabela Verdade %IX1 %IX2 Pilha
%IX1.%IX2
0 0 1 1
0 1 0 1
0 0 0 1
%UW952 %QX1 Pilha
%UW952 . (~%QX1)
0 0 1 1
0 1 0 1
0 0 1 0
3.1.4 LÓGICAS “OU (OR)” COM CONTATOS
Quando os contatos estão em paralelo, uma lógica “OU” é executada entre eles armazenando o resultado na pilha. Exemplos:

Resumo dos Blocos de Função
SSW-06 | 11
Exemplo Operação Tabela Verdade %IX1 %IX2 Pilha
%IX1 + %IX2
0 0 1 1
0 1 0 1
0 1 1 1
%UW952 %QX1 Pilha
%UW952+ (~%QX1)
0 0 1 1
0 1 0 1
1 0 1 1
3.2 BOBINAS Salvam o conteúdo da pilha no dado programado (0 ou 1), que pode ser do tipo: ■ %MX: Marcador de Bit ■ %QX: Saída Digital ■ %UW: Parâmetro do Usuário ■ %SX: Marcador de Bit do Sistema – Escrita É permitido adicionar bobinas em paralelo na última coluna.
3.2.1 BOBINA NORMAL – COIL
Menu: Inserir-Bobinas-COIL Ex: Seta o marcador de bit 5001 com o conteúdo da pilha
3.2.2 BOBINA NEGADA – NEG COIL
Menu: Inserir-Bobinas-NEG COIL Ex: Seta a saída digital 2 com o conteúdo negado da pilha
3.2.3 SETA BOBINA – SET COIL
Menu: Inserir-Bobinas-SET COIL Ex: Seta o parâmetro do usuário P960 se o conteúdo da pilha não for 0.
3.2.4 RESETA BOBINA – RESET COIL
Menu: Inserir-Bobinas-RESET COIL Ex: Reseta o parâmetro do usuário P960 se o conteúdo da pilha não for 0.
3.2.5 BOBINA DE TRANSIÇÃO POSITIVA – PTS COIL
Menu: Inserir-Bobinas-PTS COIL Ex: Seta o marcador de bit 5002 durante 1 ciclo de varredura, se for detectado uma transição de 0 para 1 no conteúdo da pilha
3.2.6 BOBINA DE TRANSIÇÃO NEGATIVA – NTS COIL
Menu: Inserir-Bobinas-NTS COIL Ex: Seta o marcador de bit do sistema 3011 durante 1 ciclo de varredura, se for detectado uma transição de 1 para 0 no conteúdo da pilha
Resumo dos Blocos de Função
SSW-06 | 12
3.3 BLOCOS DE CLP
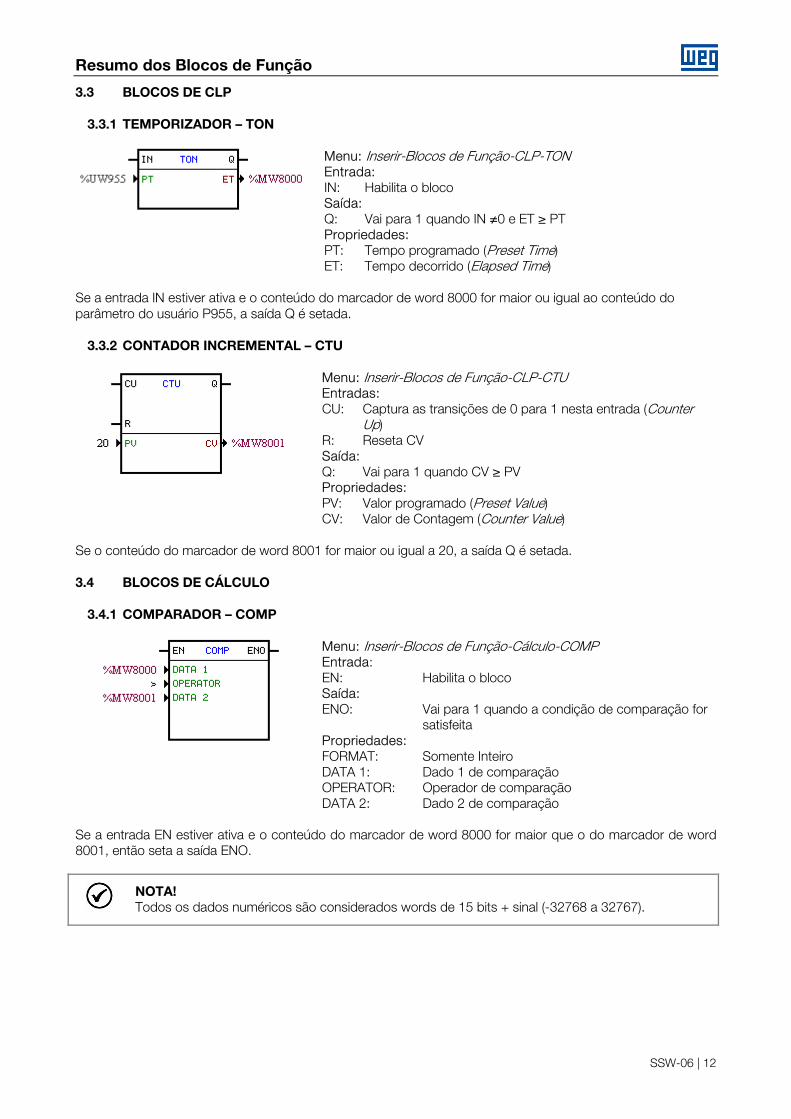
3.3.1 TEMPORIZADOR – TON
Menu: Inserir-Blocos de Função-CLP-TON Entrada: IN: Habilita o bloco Saída: Q: Vai para 1 quando IN ≠0 e ET ≥ PT Propriedades: PT: Tempo programado (Preset Time) ET: Tempo decorrido (Elapsed Time)
Se a entrada IN estiver ativa e o conteúdo do marcador de word 8000 for maior ou igual ao conteúdo do parâmetro do usuário P955, a saída Q é setada.
3.3.2 CONTADOR INCREMENTAL – CTU
Menu: Inserir-Blocos de Função-CLP-CTU Entradas: CU: Captura as transições de 0 para 1 nesta entrada (Counter
Up) R: Reseta CV Saída: Q: Vai para 1 quando CV ≥ PV Propriedades: PV: Valor programado (Preset Value) CV: Valor de Contagem (Counter Value)
Se o conteúdo do marcador de word 8001 for maior ou igual a 20, a saída Q é setada. 3.4 BLOCOS DE CÁLCULO
3.4.1 COMPARADOR – COMP
Menu: Inserir-Blocos de Função-Cálculo-COMP Entrada: EN: Habilita o bloco Saída: ENO: Vai para 1 quando a condição de comparação for
satisfeita Propriedades: FORMAT: Somente Inteiro DATA 1: Dado 1 de comparação OPERATOR: Operador de comparação DATA 2: Dado 2 de comparação
Se a entrada EN estiver ativa e o conteúdo do marcador de word 8000 for maior que o do marcador de word 8001, então seta a saída ENO.
NOTA! Todos os dados numéricos são considerados words de 15 bits + sinal (-32768 a 32767).

Resumo dos Blocos de Função
SSW-06 | 13
3.4.2 OPERAÇÃO MATEMÁTICA – MATH
Menu: Inserir-Blocos de Função-Cálculo-MATH Entrada: EN: Habilita o bloco Saída: ENO: Indica se o cálculo foi executado Propriedades: FORMAT: Inteiro ou ponto flutuante DATA1: Dado 1 do cálculo. Também pode aparecer como
DATA1H e DATA1L (representando as partes alta e baixa do dado 1)
OPERATOR: Operador matemático (+, -, *, etc.) DATA2: Dado 2 do cálculo. Também pode aparecer como
DATA2H e DATA2L (representando as partes alta e baixa do dado 2)
RES: Resultado do cálculo. Também pode aparecer como RESH e RESL (representando as partes alta e baixa do resultado) e também como QUOC e REM (representando o quociente e o resto de uma divisão)
OVER: Indica se o resultado ultrapassou o seu limite. SIGNAL: Sinal do resultado
Quando a entrada EN está ativa, o valor do marcador de word 8000 é incrementado a cada ciclo de scan. Quando o marcador de bit 5000 vai para 1, indica que houve um estouro de limite e o marcador de word 8000 permanece em 32767.
NOTA! Todos os dados numéricos são considerados words de 15 bits + sinal (-32768 a 32767).
3.4.3 FUNÇÃO MATEMÁTICA – FUNC
Menu: Inserir-Blocos de Função-Cálculo-FUNC Entrada: EN: Habilita o bloco Saída: ENO: Indica se o cálculo foi executado Propriedades: FORMAT: Somente Inteiro IN: Dado a ser cálculo FUNCTION: Função matemática: abs (módulo) e neg (negativo) OUT: Resultado do cálculo
Quando a entrada EN está ativa, o marcador de word 8001 apresenta o módulo do marcador de word 8000.
NOTA! Todos os dados numéricos são considerados words de 15 bits + sinal (-32768 a 32767).

Resumo dos Blocos de Função
SSW-06 | 14
3.4.4 SATURADOR – SAT
Menu: Inserir-Blocos de Função-Cálculo-SAT Entrada: EN: Habilita o bloco Saída: ENO: Indica se houve saturação, se EN ≠ 0 Propriedades: FORMAT: Somente Inteiro IN: Dado de entrada MAX: Valor máximo permitido MIN: Valor mínimo permitido OUT: Dado de saída
Quando a entrada EN está ativa, o marcador de word 8000 conterá o valor do parâmetro do usuário P952, porém limitado entre o máximo de 100 e o mínimo de -100.
NOTA! Caso o valor de mínimo seja maior que o máximo as saídas OUT e ENO são zeradas.
NOTA! Todos os dados numéricos são considerados words de 15 bits + sinal (-32768 a 32767).
3.4.5 MULTIPLEXADOR – MUX
Menu: Inserir-Blocos de Função-Cálculo-MUX Entrada: EN: Habilita a operação matemática Saída: ENO: Indica que a transferência foi feita Propriedades: X0-X15: Vetor de dados binários W: Word resultante
Quando a entrada EN está ativa, as entradas digitais 1, 2 e 3 transferem o seu conteúdo aos bits 0, 1 e 2 do parâmetro do usuário P952.
Resumo dos Blocos de Função
SSW-06 | 15
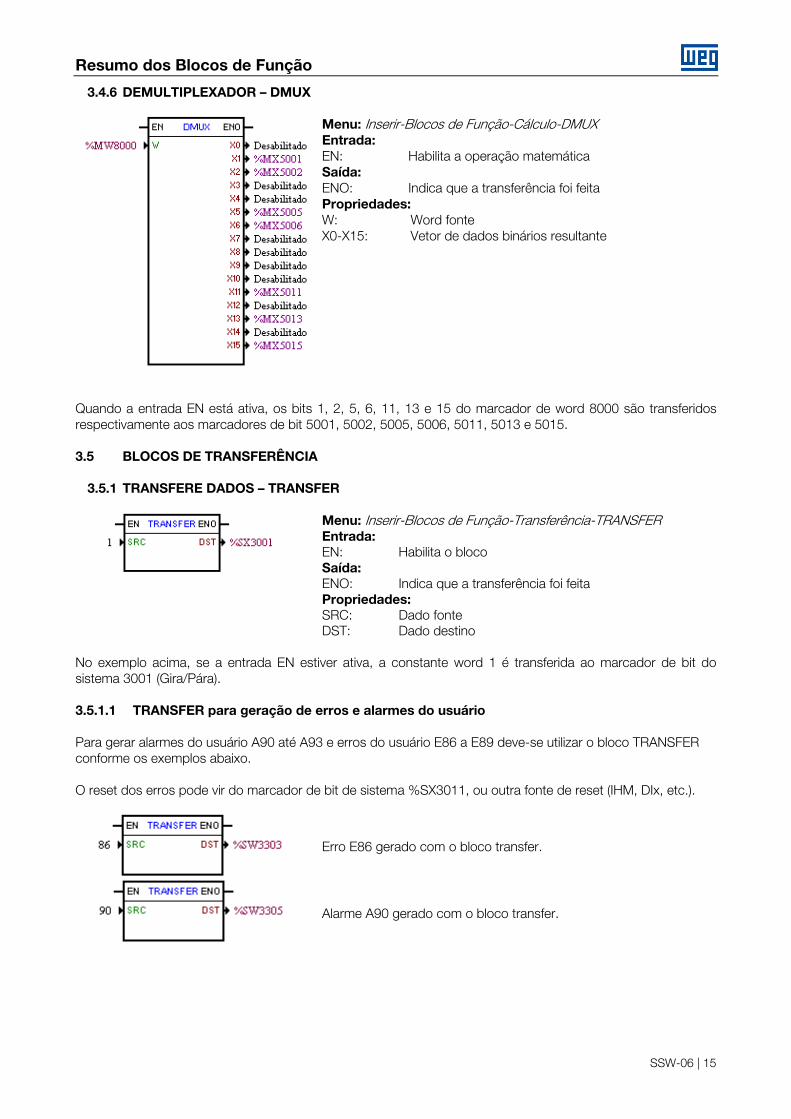
3.4.6 DEMULTIPLEXADOR – DMUX
Menu: Inserir-Blocos de Função-Cálculo-DMUX Entrada: EN: Habilita a operação matemática Saída: ENO: Indica que a transferência foi feita Propriedades: W: Word fonte X0-X15: Vetor de dados binários resultante
Quando a entrada EN está ativa, os bits 1, 2, 5, 6, 11, 13 e 15 do marcador de word 8000 são transferidos respectivamente aos marcadores de bit 5001, 5002, 5005, 5006, 5011, 5013 e 5015. 3.5 BLOCOS DE TRANSFERÊNCIA
3.5.1 TRANSFERE DADOS – TRANSFER
Menu: Inserir-Blocos de Função-Transferência-TRANSFER Entrada: EN: Habilita o bloco Saída: ENO: Indica que a transferência foi feita Propriedades: SRC: Dado fonte DST: Dado destino
No exemplo acima, se a entrada EN estiver ativa, a constante word 1 é transferida ao marcador de bit do sistema 3001 (Gira/Pára). 3.5.1.1 TRANSFER para geração de erros e alarmes do usuário Para gerar alarmes do usuário A90 até A93 e erros do usuário E86 a E89 deve-se utilizar o bloco TRANSFER conforme os exemplos abaixo. O reset dos erros pode vir do marcador de bit de sistema %SX3011, ou outra fonte de reset (IHM, DIx, etc.).
Erro E86 gerado com o bloco transfer.
Alarme A90 gerado com o bloco transfer.

Resumo dos Blocos de Função
SSW-06 | 16
NOTA! Utilizando-se erros do usuário, deve-se tomar cuidado da entrada EN do bloco transfer não ficar sempre ativa, com um reset sempre ativo. Isto fará com que a Soft-Starter SSW-06 fique em loop de erro e reset, conforme abaixo.
Lógica para o loop de erro e reset.
NOTA! Os alarmes do usuário somente podem ser resetados com o comando vindo pela SoftPLC, neste caso o SRC do bloco transfer deve conter o valor zero. Os alarmes da Soft-Starter SSW-06 somente podem ser resetas pela fonte que os gerou.
3.5.2 TRANSFERE DADOS INDIRETA – IDATA
Menu: Inserir-Blocos de Função-Transferência-IDATA. Entrada: EN: Habilita o bloco. Saída: ENO: Indica que a transferência foi feita. Propriedades: CMD: Comando de Leitura/Escrita DATATYPE: Tipo de dado ADDRESS: Endereço do usuário. VALUE: Conteúdo lido/Valor a ser escrito
No exemplo acima, se a entrada EN estiver ativa, o conteúdo do marcador de bit 5000 é escrito para a saída digital cujo endereço é o conteúdo do marcador de word 8000. 3.6 CONTROLE MULTIMOTOR – MMC

Resumo dos Blocos de Função
SSW-06 | 17
Menu: Inserir-Bloco de controle multimotor -MMC Entrada: EN: Habilita o bloco. Saída: ENO: Indica que o bloco está ativo. Propriedades: MotorX START: Aciona o motor em 1. STOP: Desaciona o motor em 0. FAULT: Desaciona o motor em 0. STARTING: Indica motor partindo ou parando. BYPASS: Indica by-pass acionado. SRC1: Dado fonte. SRC2: Dado fonte. SRC3: Dado fonte. DST1: Dado destino. DST2: Dado destino. DST2: Dado destino.
No exemplo acima, através do MMC pode-se controlar a partida e parada de até três motores diferentes apenas uma única Soft-Starter SSW-06.

Parametrização da SSW-06
SSW-06 | 18
4 PARAMETRIZAÇÃO DA SSW-06 A seguir serão apresentados apenas os parâmetros chave de partida SSW-06 que possuem relação com a SoftPLC, lembrando que todos os parâmetros são acessíveis, com exceção dos parâmetros P200 e P215. Verificar manual da SSW-06 para maiores detalhes. 4.1 SÍMBOLOS PARA DESCRIÇÃO DAS PROPRIEDADES
RO Parâmetro somente de leitura CFG Parâmetro somente pode ser alterado com motor parado
4.2 PARÂMETROS DE CONFIGURAÇÃO P220 – Seleção da Fonte LOCAL/REMOTO Faixa de 0 = Sempre Local Padrão: 2 Valores: 1 = Sempre Remoto 2 = HMI (L) 3 = HMI (R) 4 = DI4 a DI6 5 = Serial (L) 6 = Serial (R) 7 = Fieldbus (L) 8 = Fieldbus (R) 9 = SoftPLC Local 10 = SoftPLC Remoto Propriedades: CFG Descrição: Define a fonte de origem do comando que irá selecionar entre a situação LOCAL e a situação REMOTO.
Situação Defaullt é quando a Soft=Starter SSW-06 é energizada (inicialização).
Tabela 4.1: Seleção Local / Remoto
P220 Seleção LOCAL / REMOTO 0 Sempre situação Local 1 Sempre situação Remoto
2 Tecla da HMI (Default LOCAL)
3 Tecla da HMI (Default REMOTO) 4 Entradas Digitais DI4 a DI6 (P266 a P268) 5 Serial (Default Local) – SuperDrive ou Modbus incorporado 6 Serial (Default Remoto) – SuperDrive ou Modbus incorporado 7 Fieldbus (Default Local) – Módulo de interface opcional 8 Fieldbus (Default Remoto) – Módulo de interface opcional 9 SoftPLC (Default Local)
10 SoftPLC (Default Remoto)
P229 – Seleção de Comandos - Situação LOCAL P230 – Seleção de Comandos - Situação REMOTO Faixa de 0 = Teclas HMI Padrão: P230 = 1 Valores: 1 = Entradas Digitais DIx P229 = 0 2 = Serial 3 = Fieldbus 4 = SoftPLC

Parametrização da SSW-06
SSW-06 | 19
Propriedades: CFG Descrição: Definem a fonte da origem dos comandos de aciona e desaciona da Soft-Starter SSW-06.
Tabela 4.2: Seleção da origem dos comandos de acionamento Local / Remoto
P229/P230 Seleção Referência Velocidade LOCAL / REMOTO 0 Teclas HMI 1 Entradas Digitais DIx 2 Comunicação Serial 3 Comunicação Fieldbus (DeviceNet ou Profibus DP) 4 SoftPLC
P251 – Função da Saída AO1 (0 a 10)V P253 – Função da Saída AO2 (0 a 20mA ou 4 a 20mA) Faixa de 0 = Sem Função Padrão: P251 = 0 Valores: 1 = Corrente (em %In da SSW) P253 = 0 2 = Tensão de Entrada (em %Un da SSW) 3 = Tensão de Saída (em %Un da SSW) 4 = Fator de Potência 5 = Proteção térmica 6 = Potência (em W) 7 = Potência (em VA) 8 = Torque (em %Tn do Motor) 9 = Fieldbus 10 = Serial 11 = SoftPLC Descrição: Esses parâmetros ajustam as funções das saídas analógicas, conforme mostra a tabela 4.6. O valor da saída analógica pode ser lido nos parâmetros P027 (AO1) e P028 (AO2), porém nesses parâmetros os valores foram convertidos para tensão e corrente, utilizando o fundo de escala conforme a tabela abaixo. Assim, se a AO1 for programada para SoftPLC (P251=11) e for escrito o valor 16383, a saída analógica terá 10V. A mesma situação é válida para a saída analógica em corrente (AO2), onde o valor 16383 será 20mA e o valor 0 será 0mA ou 4mA, dependendo da programação da saída analógica (P255=0 (0 a 20mA) ou P255=1 (4 a 20mA)).
Tabela 4.6: Funções das saídas analógicas
Funções P251 (AO1)
P253 (AO2) Fundo de escala quando
Sem Função 0 0 Corrente em % In da SSW 1 1 5 x P295 Tensão de Entrada em %Un da SSW 2 2 1,5 x P296(max.) Tensão de Motor em % Un da SSW 3 3 1,5 x P296(max.) Fator de Potência 4 4 P008 = 1.00 Proteção Térmica 5 5 P050 = 250% Potência em W 6 6 1,5 x √3 x P295 x P296(max.) x P008 Potência em VA 7 7 1,5 x √3 x P295 x P296(max.) Torque em % Tn do Motor 8 8 P009 = 100% Fieldbus 9 9 16383 (3FFFh) Serial 10 10 16383 (3FFFh) SoftPLC 11 11 16383 (3FFFh)

Parametrização da SSW-06
SSW-06 | 20
P277 – Função da Saída DO1 (RL1) P278 – Função da Saída DO2 (RL2) P279 – Função da Saída DO3 (RL3) Faixa de 0 = Sem Função Padrão: P277 = 1 Valores: 1 = Em Funcionamento P278 = 2 2 = Em Tensão Plena P279 = 6 3 = Bypass Externo 4 = Sentido de Giro K1 (RL1) / Sentido de Giro K2 (RL2) / Sem função (RL3) 5 = Frenagem CC 6 = Sem Erro 7 = Com Erro 8 = Fieldbus 9 = Serial 10 = SoftPLC 11 = Sem Alarme 2 = Com Alarme Descrição: Programam a função das saídas digitais, conforme as opções apresentadas anteriormente.
Quando a condição declarada pela função for verdadeira, a saída digital estará ativada.
Os estados das saídas digitais podem ser monitorados no parâmetro P013. P308 – Endereço da Soft-Starter na Rede de Comunicação Serial Faixa de 1 a 247 Padrão: 1 Valores: Descrição: Este parâmetro ajusta o endereço da Soft-Starter SSW-06 na Rede de comunicação Serial.
A Soft-Starter SSW-06 e deve estar configurada exatamente igual no software WLP (Verificar item 5.6) para fazer download/upload do software do usuário. P312 – Tipo de Protocolo e Taxa de Transmissão da Comunicação Serial Faixa de 1 = Modbus-RTU (9600bps, sem paridade) Padrão: 1 Valores: 2 = Modbus-RTU (9600bps, ímpar) 3 = Modbus-RTU (9600bps, par) 4 = Modbus-RTU (19200bps, sem paridade) 5 = Modbus-RTU (19200bps, ímpar) 6 = Modbus-RTU (19200bps, par) 7 = Modbus-RTU (38400bps, sem paridade) 8 = Modbus-RTU (38400bps, ímpar) 9 = Modbus-RTU (38400bps, par) Descrição: Este parâmetro ajusta o protocolo e a taxa da transmissão serial.
A Soft-Starter SSW-06 e deve estar configurada exatamente igual no software WLP (Verificar item 5.6) para fazer download/upload do software do usuário.

Parametrização da SSW-06
SSW-06 | 21
4.3 PARÂMETROS EXCLUSIVOS DA SOFTPLC P088 – Estado do SoftPLC Faixa de 0 = Sem Padrão: - Valores: 1 = Carregando 2 = Falha 3 = Parado 4 = Executando Propriedades: RO Descrição: Permite ao usuário visualizar o status em que a SoftPLC se encontra. Se não há aplicativo instalado, o parâmetro P088 mostrará o a opção 0 (“Sem”).
Se este parâmetro apresentar a opção 2 (“Aplic. Incomp.”), indica que o software do usuário que foi carregado pelo WLP é incompatível com a versão de firmware da Soft-Starter SSW-06 ou ocorre algum erro na transferência do programa.
Neste caso, é necessário que o usuário recompile o seu projeto no WLP, considerando a nova versão da SSW-06 e refazer o “download”. Caso isto não seja possível, pode-se fazer o “upload” deste aplicativo com o WLP.
As opções 3 (“Parado”) e 4 (“Executando”) têm relação com o P950 (“Habilita SoftPLC”). P089 – Permite SoftPLC Faixa de 0 = Não Padrão: - Valores: 1 = Sim Propriedades: CFG Descrição: O recurso de SoftPLC da Soft-Starter SSW-06 está disponível a partir da versão de firmware 1.40, porém é necessário um upgrade do cartão de controle com mais memória para a operação da SoftPLC. Desta forma o parâmetro P089 verifica se a versão de hardware é compatível (P089 = 1) ou não (P089 = 0). P204 – Carrega/Salva Parâmetros Faixa de 0 = Sem Função Padrão: 0 Valores: 1 = Sem Função 2 = Sem Função 3 = Apaga P043-P050 4 = Apaga P053-P058 5 = Carrega Padrão de fábrica 6 = Sem Função 7 = Carrega Usuário 1 8 = Carrega Usuário 2 9 = Sem Função 10 = Salva Usuário 1 11 = Salva Usuário 2 12 = Sem Função 13 = Apaga SoftPLC 14 = Apaga parâmetros do usuário SoftPLC (P952-P969) 15 = Reservado 16 = Reservado Propriedades: CFG

Parametrização da SSW-06
SSW-06 | 22
Descrição: O parâmetro P204 carrega, salva e reseta diversos parâmetros, como descritos na lista anterior. As opções que têm relação com o recurso SoftPLC são: 13 que apaga o software do usuário e o 14 que reseta os parâmetros do usuário P952 a P969. P950 – Habilita SoftPLC Faixa de 0 = Não Padrão: 0 Valores: 1 = Sim Propriedades: CFG Descrição: Permite parar e rodar um aplicativo instalado, mas para isto, o motor deve estar desabilitado. P951 –Habilitação do Cartão de Expansão de Entradas e Saídas Digitais Faixa de 0 = Não Padrão: 0 Valores: 1 = Sim Propriedades: CFG Descrição: Permite habilitar o cartão de expansão de entradas e saídas digitais do Kit K-IOE, com: seis entradas digitais 24Vcc (de DI7 a DI12) e seis saídas digitais a relé (de RL4 a RL9). P952 até P969 – Parâmetros SoftPLC Faixa de 0 a 65535 Padrão: 0 Valores: Descrição: Consistem em parâmetros de uso definido pelo usuário via software WLP.

Resumo das Principais Funções do WLP
SSW-06 | 23
5 RESUMO DAS PRINCIPAIS FUNÇÕES DO WLP Este capítulo traz informações básicas sobre as operações feitas com o software WLP para programação da Soft-Starter SSW-06. Maiores informações podem ser obtidas no manual ou na ajuda do software WLP. 5.1 PROJETO – NOVO Cria um novo projeto. Além de definir o nome do projeto, é necessário configurar o equipamento e a respectiva versão de firmware.
5.2 PROJETO – ABRIR Abre o projeto selecionado.

Resumo das Principais Funções do WLP
SSW-06 | 24
5.3 EXIBIR – INFORMAÇÕES DA COMPILAÇÃO Permite ao usuário saber o tamanho em bytes do aplicativo compilado (<nomedoprojeto>.bin) a ser enviado ao equipamento.
5.4 CONSTRUIR – COMPILAR Analisa o aplicativo e gera o código para o equipamento especificado.

Resumo das Principais Funções do WLP
SSW-06 | 25
5.5 COMUNICAÇÃO – CONFIGURAÇÃO Para o SSW-06 se utiliza a porta serial para a comunicação com o equipamento. Para isto, os BAUD Rate da SSW-06 e do WLP devem estar corretamente configurados.
5.6 COMUNICAÇÃO – DOWNLOAD Este comando permite enviar a SSW-06 o aplicativo.
Resumo das Principais Funções do WLP
SSW-06 | 26
5.7 COMUNICAÇÃO – UPLOAD Este comando permite capturar o aplicativo que está instalado na SSW-06.