sites.florianopolis.ifsc.edu.brtranslate this...
TRANSCRIPT
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 1
APOSTILA GNSS
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 2
1 GNSS.......................................................................................................................................................... 3
1.1 Tipos .......................................................................................................................................3 2 GPS – Global Positioning System........................................................................................................... 3
2.1 Introdução ...............................................................................................................................3 2.2 Estrutura do Sistema ...............................................................................................................4 2.3 Segmento de Controle.............................................................................................................4 2.4 Estrutura dos Sinais.................................................................................................................6 2.5 Matemática do Posicionamento ..............................................................................................6 2.6 Tipos de Medida .....................................................................................................................7
2.6.1 Código C/A ......................................................................................................................7 2.6.2 Fase da Portadora .............................................................................................................8
2.7 Tipos de Posicionamento ......................................................................................................10 2.7.1 Autônomo (ou absoluto) ................................................................................................10 2.7.2 Diferencial (ou relativo).................................................................................................10
2.8 Tipos de Processamento........................................................................................................10 2.8.1 Pós-processado...............................................................................................................10 2.8.2 Processamento em Tempo Real .....................................................................................11
2.9 Ângulo de Máscara ...............................................................................................................12 2.10 Sistema de Referencia do GPS ...........................................................................................12 2.11 Geometria dos Satélites.......................................................................................................12
3 Principais erros no Posicionamento GPS ............................................................................................ 13 3.1 Efeméride dos satélites .........................................................................................................13 3.2 Disponibilidade Seletiva S/A (Selective Availability) .........................................................14 3.3 Multi-caminhamento.............................................................................................................14 3.4 Ionosfera ...............................................................................................................................15
4 Métodos de Levantamento..................................................................................................................... 15 4.1 PPP (Posicionamento por Ponto Preciso) .............................................................................15 4.2 Método Estático ....................................................................................................................16 4.3 Método Cinemático Stop-and-go..........................................................................................16 4.4 Método Cinemático Contínuo...............................................................................................17
5 Tipos de Receptores............................................................................................................................... 17 5.1 Navegação.............................................................................................................................17 5.2 GIS ........................................................................................................................................17 5.3 Mapeamento..........................................................................................................................18 5.4 Geodésico..............................................................................................................................18 5.5 Características dos Receptores..............................................................................................19
6 Glonass.................................................................................................................................................... 20 7 Galileo ...................................................................................................................................................... 20 8 Compass (Beidou) .................................................................................................................................. 20 9 Levantamento com GNSS ...................................................................................................................... 21
9.1 PPP (Posicionamento por Ponto Preciso) .............................................................................21 9.1.1 CONFIGURAÇÃO DOS RECEPTORES.....................................................................21 9.1.2 PROCESSAMENTO .....................................................................................................22
9.2 Método Estático ....................................................................................................................22 9.2.1 PLANEJAMENTO DE RASTREIO .............................................................................23 9.2.2 CADERNETA DE CAMPO..........................................................................................23 9.2.3 PROCESSAMENTO .....................................................................................................23
9.3 Método Cinemático “Stop and Go” ......................................................................................24
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 3
1 GNSS
GNSS é o acrônimo de Global Navigation Satellite Systems (Sistema Global de Navegação por Satélite), que engloba todos os sistemas de posicionamento por satélite.
A geodésia sempre se utilizou de ângulos e distâncias para resolver seus problemas e implantar pontos geodésicos de referência. Com o surgimento dos satélites artificiais, começou o desenvolvimento de métodos para a utilização deles como pontos espaciais geodésicos de referência.
O primeiro sistema de satélites colocado à disposição no meio civil foi o TRANSIT em 1967. Necessitava várias semanas de rastreamento para a determinação de 1 ponto. Este sistema foi usado pelo IBGE até 1991.
1.1 Tipos Atualmente, temos operando: GPS: Desenvolvido e mantido pelos departamento de defesa dos Estados Unidos. GLONASS: Desenvolvido e mantido pelo Ministério de Defesa Federal Russo. Em atual reestruturação.
Estão em desenvolvimento: GALILEO: Sistema europeu de navegação por satélite. BEIDOU: também conhecido como COMPASS, é o sistema de posicionamento Chinês.
Geodesicamente falando, todos os sistemas possuem o mesmo princípio para o posicionamento. Inclusive o GPS, GLONASS e GALILEO, já possuem um acordo para o funcionamento totalmente integrado dos sistemas, o que significa que podemos fazer o posicionamento como se tivéssemos um único sistema com uma única constelação de satélites.
2 GPS – Global Positioning System
2.1 Introdução Com a criação do sistema NAVSTAR GPS (Navigation Satellite with Time and Ranging) em 1973,
que permitiu alcançar melhores precisões num menor tempo de rastreamento. Usado pelo IBGE a partir de 1991 e até 2012 foram implantados mais de 2500 vértices.
O sistema NAVSTAR GPS foi desenvolvido e é mantido pelo Departamento de Defesa Norte Americano, inicialmente para navegação com propósitos militares.
O sistema GPS consiste atualmente de 32 satélites distribuídos em 6 planos de órbita cada um com 55º com o plano do Equador.
A altitude aproximada da órbita é de 20200km. Um satélite dá a volta na Terra num período aproximado de 12h. O tempo máximo que um satélite fica acima do horizonte é de 5h.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 4
Imagem LandSat a uma altitude de 20200km com Florianópolis ao Centro
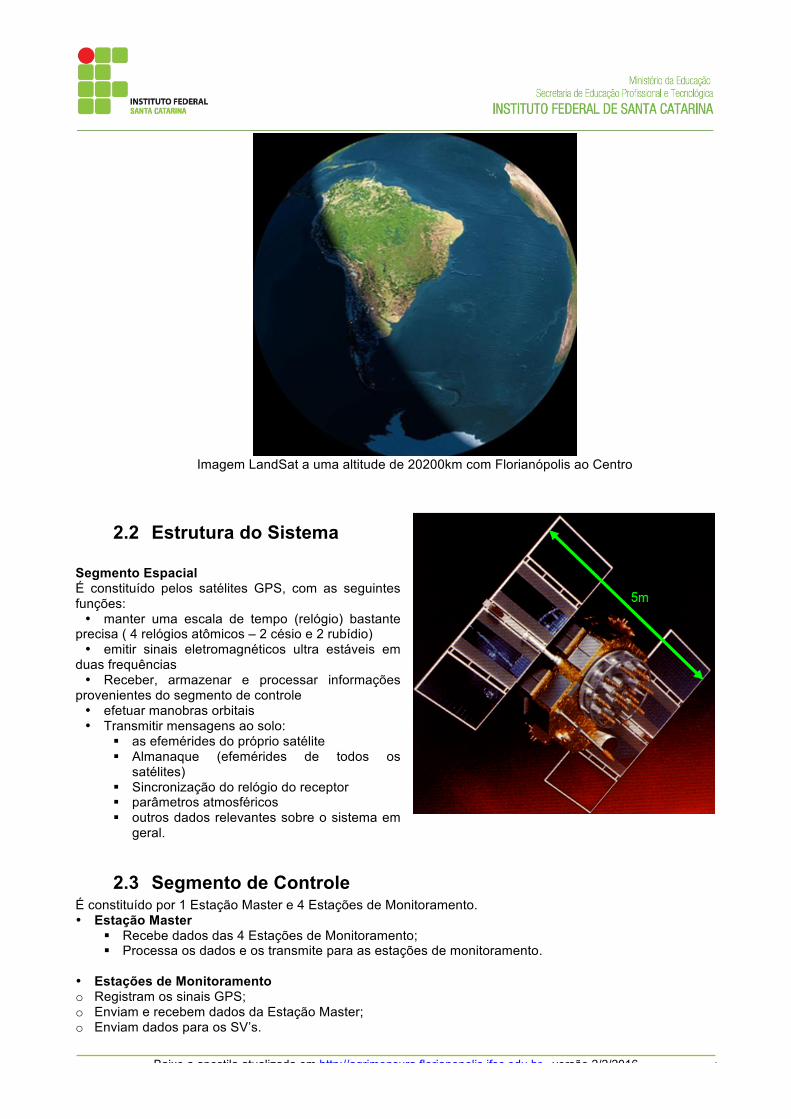
2.2 Estrutura do Sistema Segmento Espacial É constituído pelos satélites GPS, com as seguintes funções: • manter uma escala de tempo (relógio) bastante
precisa ( 4 relógios atômicos – 2 césio e 2 rubídio) • emitir sinais eletromagnéticos ultra estáveis em
duas frequências • Receber, armazenar e processar informações
provenientes do segmento de controle • efetuar manobras orbitais • Transmitir mensagens ao solo:
! as efemérides do próprio satélite ! Almanaque (efemérides de todos os
satélites) ! Sincronização do relógio do receptor ! parâmetros atmosféricos ! outros dados relevantes sobre o sistema em
geral.
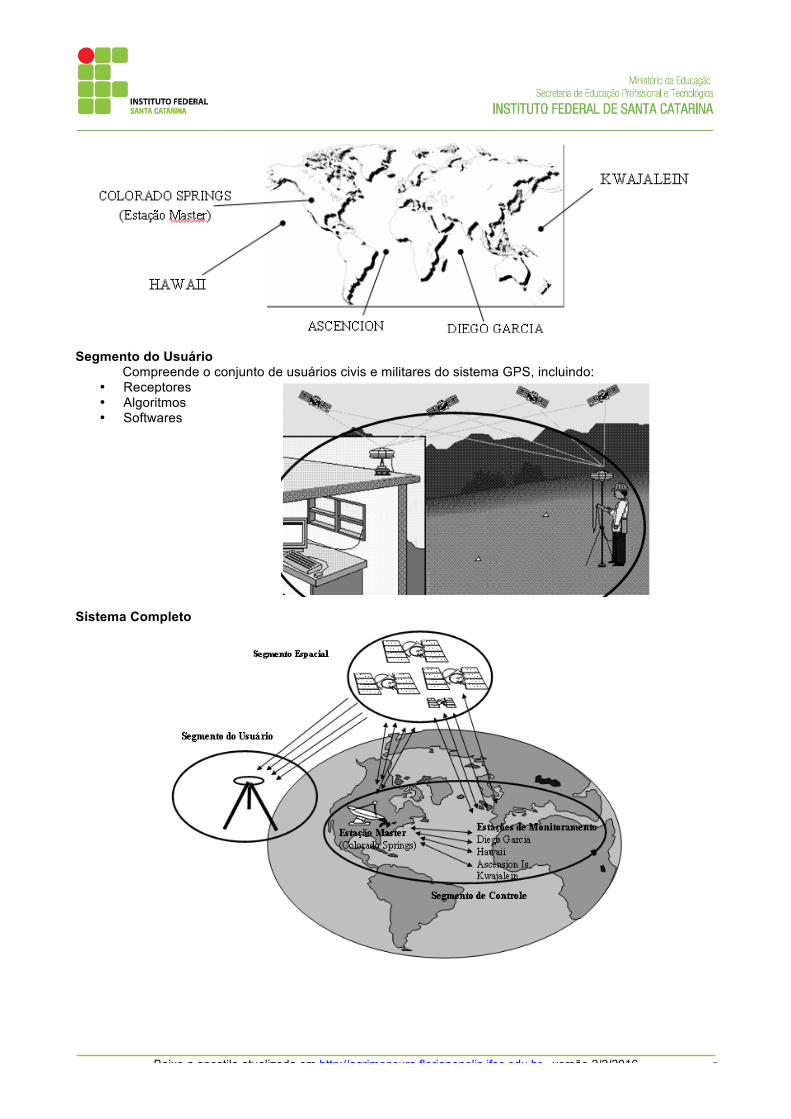
2.3 Segmento de Controle É constituído por 1 Estação Master e 4 Estações de Monitoramento. • Estação Master
! Recebe dados das 4 Estações de Monitoramento; ! Processa os dados e os transmite para as estações de monitoramento.
• Estações de Monitoramento o Registram os sinais GPS; o Enviam e recebem dados da Estação Master; o Enviam dados para os SV’s.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 5
Segmento do Usuário
Compreende o conjunto de usuários civis e militares do sistema GPS, incluindo: • Receptores • Algoritmos • Softwares
Sistema Completo
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 6
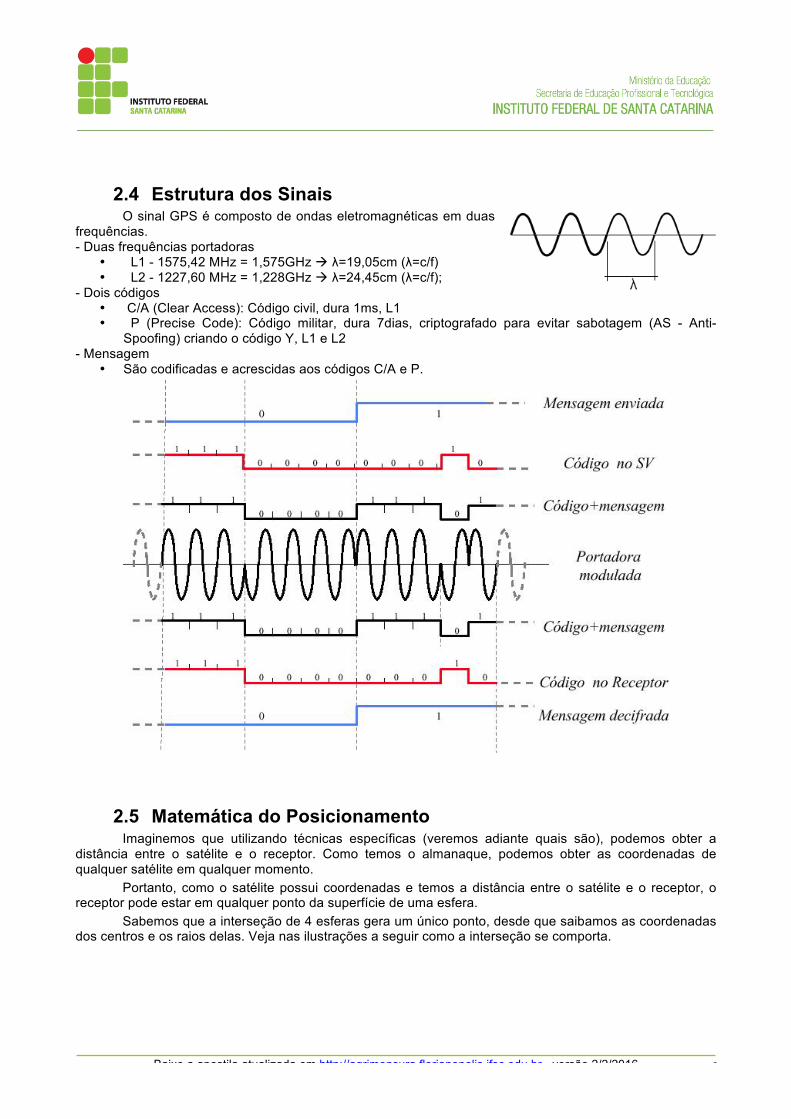
2.4 Estrutura dos Sinais O sinal GPS é composto de ondas eletromagnéticas em duas frequências. - Duas frequências portadoras
• L1 - 1575,42 MHz = 1,575GHz " λ=19,05cm (λ=c/f) • L2 - 1227,60 MHz = 1,228GHz " λ=24,45cm (λ=c/f);
- Dois códigos • C/A (Clear Access): Código civil, dura 1ms, L1 • P (Precise Code): Código militar, dura 7dias, criptografado para evitar sabotagem (AS - Anti-
Spoofing) criando o código Y, L1 e L2 - Mensagem
• São codificadas e acrescidas aos códigos C/A e P.
2.5 Matemática do Posicionamento Imaginemos que utilizando técnicas específicas (veremos adiante quais são), podemos obter a distância entre o satélite e o receptor. Como temos o almanaque, podemos obter as coordenadas de qualquer satélite em qualquer momento. Portanto, como o satélite possui coordenadas e temos a distância entre o satélite e o receptor, o receptor pode estar em qualquer ponto da superfície de uma esfera.
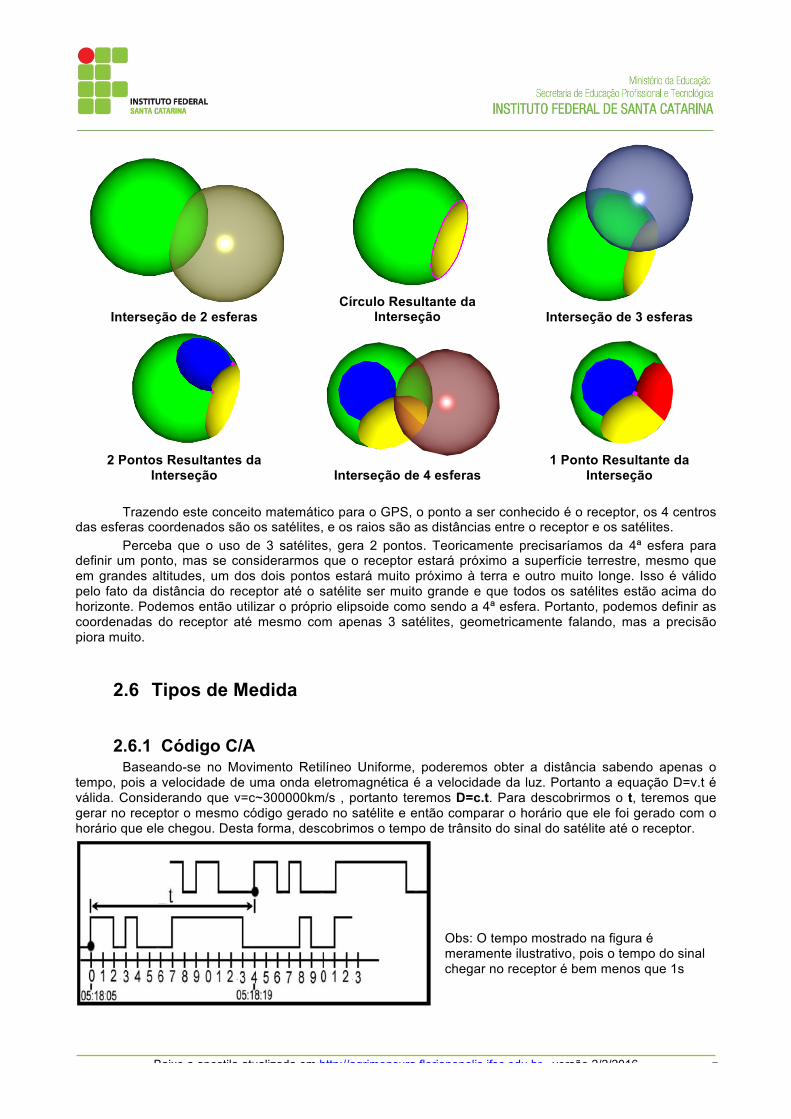
Sabemos que a interseção de 4 esferas gera um único ponto, desde que saibamos as coordenadas dos centros e os raios delas. Veja nas ilustrações a seguir como a interseção se comporta.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 7
Interseção de 2 esferas
Círculo Resultante da
Interseção
Interseção de 3 esferas
2 Pontos Resultantes da
Interseção
Interseção de 4 esferas
1 Ponto Resultante da
Interseção Trazendo este conceito matemático para o GPS, o ponto a ser conhecido é o receptor, os 4 centros das esferas coordenados são os satélites, e os raios são as distâncias entre o receptor e os satélites. Perceba que o uso de 3 satélites, gera 2 pontos. Teoricamente precisaríamos da 4ª esfera para definir um ponto, mas se considerarmos que o receptor estará próximo a superfície terrestre, mesmo que em grandes altitudes, um dos dois pontos estará muito próximo à terra e outro muito longe. Isso é válido pelo fato da distância do receptor até o satélite ser muito grande e que todos os satélites estão acima do horizonte. Podemos então utilizar o próprio elipsoide como sendo a 4ª esfera. Portanto, podemos definir as coordenadas do receptor até mesmo com apenas 3 satélites, geometricamente falando, mas a precisão piora muito.
2.6 Tipos de Medida
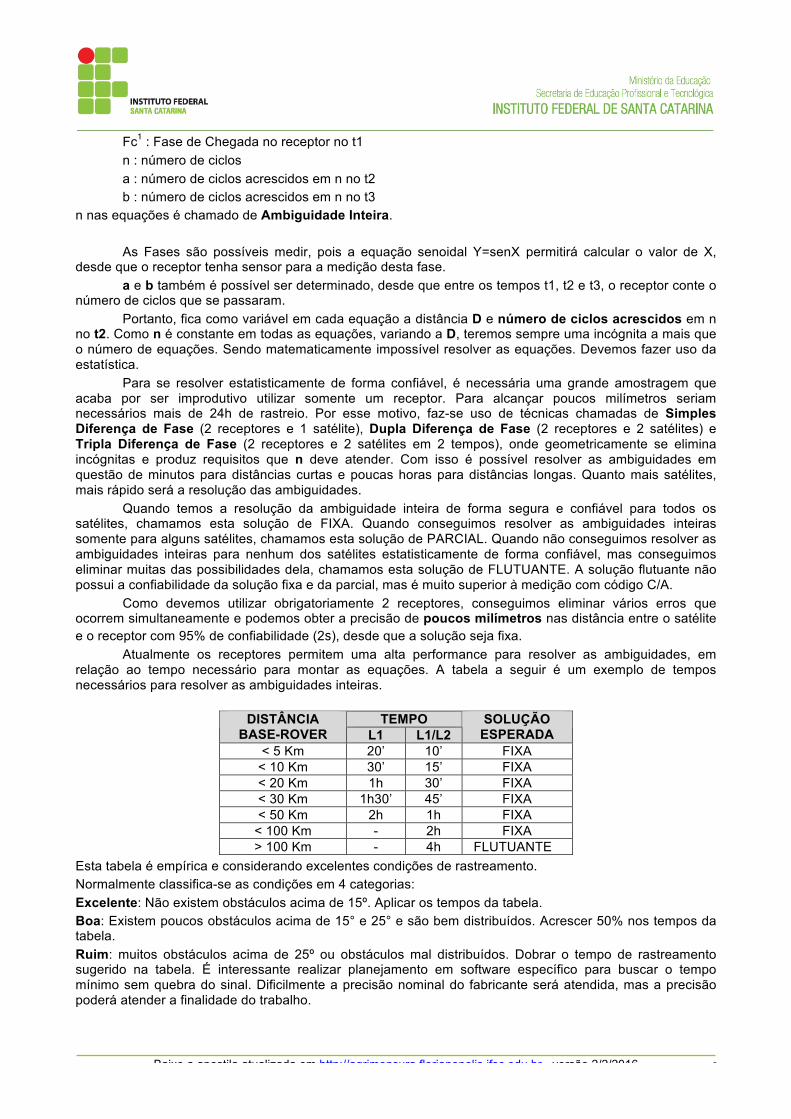
2.6.1 Código C/A Baseando-se no Movimento Retilíneo Uniforme, poderemos obter a distância sabendo apenas o tempo, pois a velocidade de uma onda eletromagnética é a velocidade da luz. Portanto a equação D=v.t é válida. Considerando que v=c~300000km/s , portanto teremos D=c.t. Para descobrirmos o t, teremos que gerar no receptor o mesmo código gerado no satélite e então comparar o horário que ele foi gerado com o horário que ele chegou. Desta forma, descobrimos o tempo de trânsito do sinal do satélite até o receptor.
Obs: O tempo mostrado na figura é meramente ilustrativo, pois o tempo do sinal chegar no receptor é bem menos que 1s

Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 8
Para que este tempo esteja correto, é necessário que o relógio do receptor e do satélite estejam sincronizados, mas sabemos que isso é impossível, pois o relógio do receptor não é atômico e mesmo se fosse, teríamos ainda uma pequena diferença em função do tempo de sincronização dos relógios. Portanto, o tempo tem aí um erro (et) e a equação passa a ser D=c.(t+et). Como sabemos que o tempo está errado, não poderemos chamá-la de Distância e sim de Pseudo-distância (falsa distância). A equação passa a figurar PD=c.t+c.et, ou ainda PD=D+c.et.
Analiticamente sabemos que a distância tridimensional entre 2 pontos é ,que representa exatamente a equação da esfera. Portanto a equação fica da seguinte forma.
sendo, PD1 : Pseudo-distância do receptor para o satélite 1, calculada pelo tempo medido (X1 Y1 Z1) : Coordenadas do satélite 1 obtidas pelas efemérides (XR YR ZR) : Coordenadas do receptor que desejamos Temos portanto 1 equação e 4 incógnitas (XR YR ZR e et), matematicamente impossível de se calcular. Precisamos então incluir mais satélites para gerar mais equações, desde que seja num mesmo instante para o erro do tempo ser o mesmo para os demais satélites.
Utilizando 4 satélites num mesmo instante, poderemos saber o valor de et e as Coordenadas do receptor. Por esse motivo é fundamental que se tenha no mínimo 4 satélites. Com mais de 4 satélites poderemos calcular várias posições utilizando as combinações possíveis e aumentando a precisão. Com 5 satélites, fazendo a análise combinatória, teremos 5 coordenadas num único instante. Com 7 satélites teremos 210 coordenadas.Ou seja, quanto mais satélites, maior será a precisão. Em função do erro das efemérides, falta de sincronismo dos relógios dos satélites, ionosfera e outras variáveis do sistema, a posição acaba por ter a precisão de ±15m com 95% de confiabilidade (2s).
2.6.2 Fase da Portadora Vimos que utilizando o Código C/A, obrigatoriamente precisaremos utilizar o tempo para o cálculo das distâncias entre os satélites e o receptor. O método de medição da fase da portadora visa calcular estas distâncias sem o uso do tempo, eliminando assim uma grande fonte de erros.
Chamamos de Fase da portadora quando um ciclo é fracionado.
Onde, D1 : Distância do satélite ao receptor no t1 Fp1 : Fase de Partida no satélite no t1
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 9
Fc1 : Fase de Chegada no receptor no t1 n : número de ciclos a : número de ciclos acrescidos em n no t2 b : número de ciclos acrescidos em n no t3
n nas equações é chamado de Ambiguidade Inteira.
As Fases são possíveis medir, pois a equação senoidal Y=senX permitirá calcular o valor de X, desde que o receptor tenha sensor para a medição desta fase.
a e b também é possível ser determinado, desde que entre os tempos t1, t2 e t3, o receptor conte o número de ciclos que se passaram.
Portanto, fica como variável em cada equação a distância D e número de ciclos acrescidos em n no t2. Como n é constante em todas as equações, variando a D, teremos sempre uma incógnita a mais que o número de equações. Sendo matematicamente impossível resolver as equações. Devemos fazer uso da estatística.
Para se resolver estatisticamente de forma confiável, é necessária uma grande amostragem que acaba por ser improdutivo utilizar somente um receptor. Para alcançar poucos milímetros seriam necessários mais de 24h de rastreio. Por esse motivo, faz-se uso de técnicas chamadas de Simples Diferença de Fase (2 receptores e 1 satélite), Dupla Diferença de Fase (2 receptores e 2 satélites) e Tripla Diferença de Fase (2 receptores e 2 satélites em 2 tempos), onde geometricamente se elimina incógnitas e produz requisitos que n deve atender. Com isso é possível resolver as ambiguidades em questão de minutos para distâncias curtas e poucas horas para distâncias longas. Quanto mais satélites, mais rápido será a resolução das ambiguidades.
Quando temos a resolução da ambiguidade inteira de forma segura e confiável para todos os satélites, chamamos esta solução de FIXA. Quando conseguimos resolver as ambiguidades inteiras somente para alguns satélites, chamamos esta solução de PARCIAL. Quando não conseguimos resolver as ambiguidades inteiras para nenhum dos satélites estatisticamente de forma confiável, mas conseguimos eliminar muitas das possibilidades dela, chamamos esta solução de FLUTUANTE. A solução flutuante não possui a confiabilidade da solução fixa e da parcial, mas é muito superior à medição com código C/A. Como devemos utilizar obrigatoriamente 2 receptores, conseguimos eliminar vários erros que ocorrem simultaneamente e podemos obter a precisão de poucos milímetros nas distância entre o satélite e o receptor com 95% de confiabilidade (2s), desde que a solução seja fixa.
Atualmente os receptores permitem uma alta performance para resolver as ambiguidades, em relação ao tempo necessário para montar as equações. A tabela a seguir é um exemplo de tempos necessários para resolver as ambiguidades inteiras.
TEMPO DISTÂNCIA BASE-ROVER L1 L1/L2
SOLUÇÃO ESPERADA
< 5 Km 20’ 10’ FIXA < 10 Km 30’ 15’ FIXA < 20 Km 1h 30’ FIXA < 30 Km 1h30’ 45’ FIXA < 50 Km 2h 1h FIXA
< 100 Km - 2h FIXA > 100 Km - 4h FLUTUANTE
Esta tabela é empírica e considerando excelentes condições de rastreamento. Normalmente classifica-se as condições em 4 categorias: Excelente: Não existem obstáculos acima de 15º. Aplicar os tempos da tabela. Boa: Existem poucos obstáculos acima de 15° e 25° e são bem distribuídos. Acrescer 50% nos tempos da tabela. Ruim: muitos obstáculos acima de 25º ou obstáculos mal distribuídos. Dobrar o tempo de rastreamento sugerido na tabela. É interessante realizar planejamento em software específico para buscar o tempo mínimo sem quebra do sinal. Dificilmente a precisão nominal do fabricante será atendida, mas a precisão poderá atender a finalidade do trabalho.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 10
Péssima: condições de rastreio não são ideais. Utilizar rastreios GNSS somente em último caso, sabendo que será impossível obter a precisão nominal do equipamento. É Fundamental realizar planejamento em software específico. Deve-se consultar o fabricante para aplicação segura desta tabela. Acima de 50km de distância, o equipamento de monofreqüência não é recomendado. Veremos mais a frente o motivo.
2.7 Tipos de Posicionamento
2.7.1 Autônomo (ou absoluto) O Posicionamento autônomo é quando utilizamos apenas um receptor
independente. Para eliminarmos os erros do sistema, será necessário aguardar utilizar dados modelados posterior à medição.
Normalmente utilizado com o código C/A, sendo muito prático o seu uso para Navegação, pois a precisão fica em torno de ±15m com 95% de confiabilidade, e o processamento é feito instantaneamente em campo.
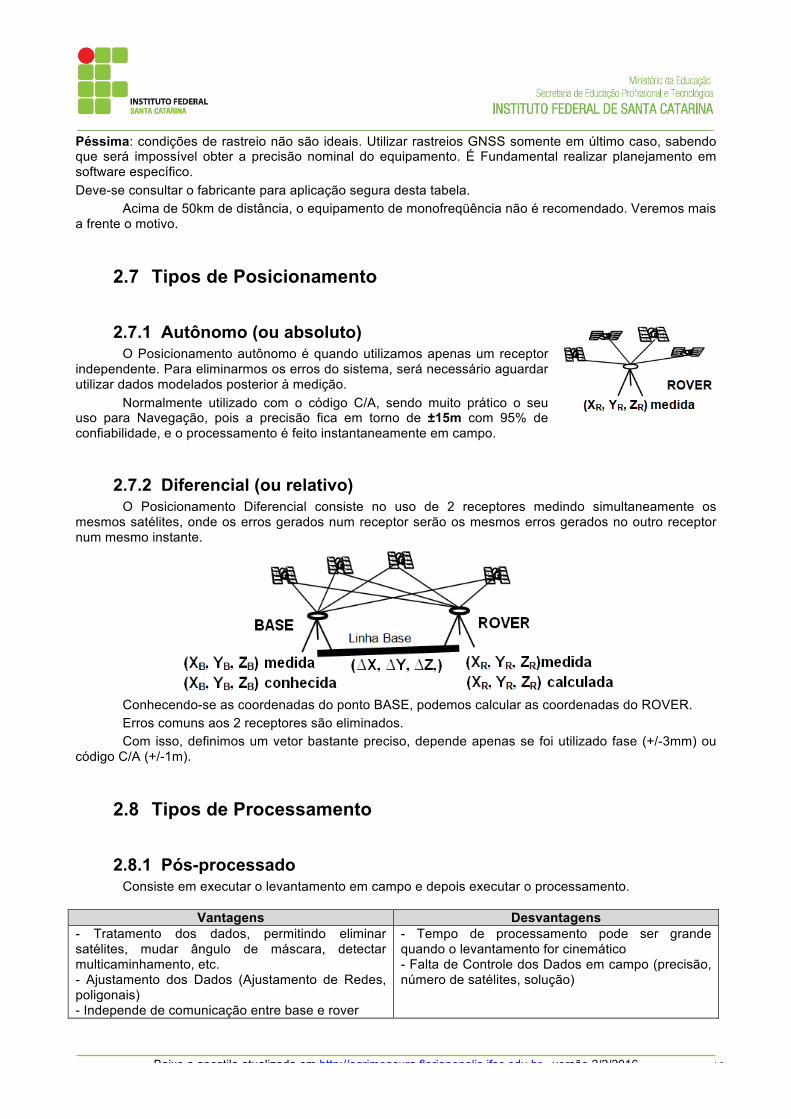
2.7.2 Diferencial (ou relativo) O Posicionamento Diferencial consiste no uso de 2 receptores medindo simultaneamente os mesmos satélites, onde os erros gerados num receptor serão os mesmos erros gerados no outro receptor num mesmo instante.
Conhecendo-se as coordenadas do ponto BASE, podemos calcular as coordenadas do ROVER. Erros comuns aos 2 receptores são eliminados. Com isso, definimos um vetor bastante preciso, depende apenas se foi utilizado fase (+/-3mm) ou código C/A (+/-1m).
2.8 Tipos de Processamento
2.8.1 Pós-processado Consiste em executar o levantamento em campo e depois executar o processamento.
Vantagens Desvantagens - Tratamento dos dados, permitindo eliminar satélites, mudar ângulo de máscara, detectar multicaminhamento, etc. - Ajustamento dos Dados (Ajustamento de Redes, poligonais) - Independe de comunicação entre base e rover
- Tempo de processamento pode ser grande quando o levantamento for cinemático - Falta de Controle dos Dados em campo (precisão, número de satélites, solução)
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 11
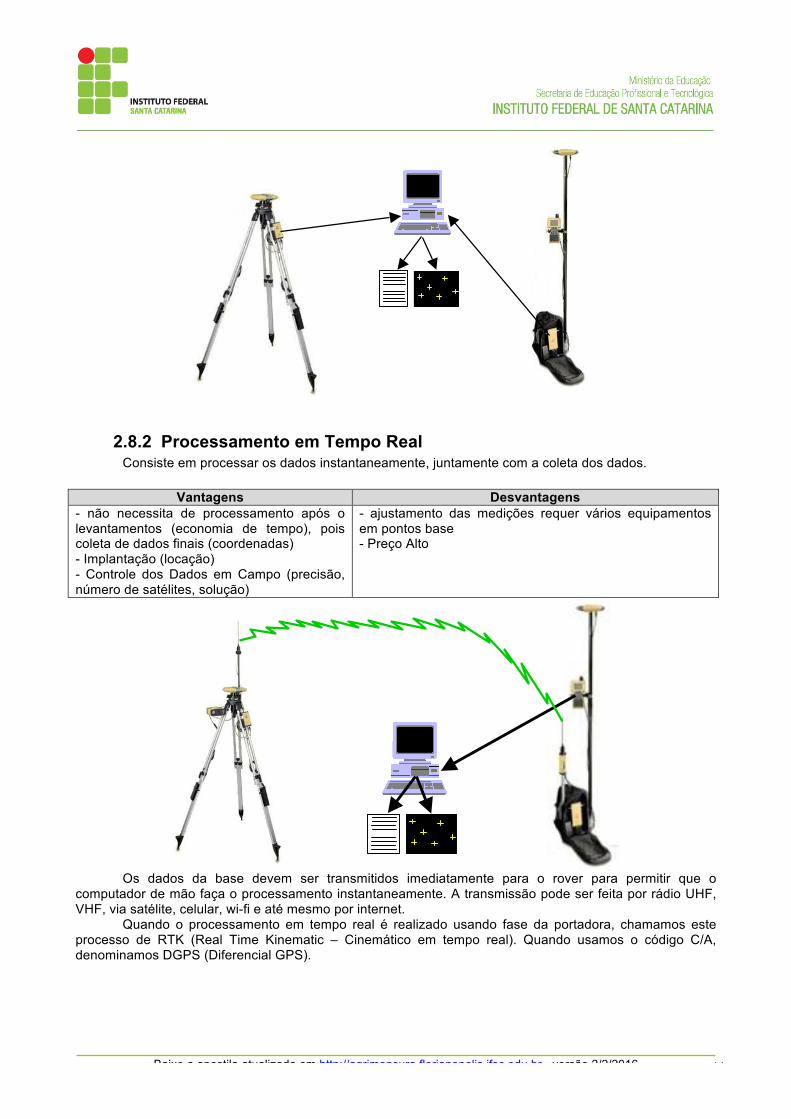
2.8.2 Processamento em Tempo Real Consiste em processar os dados instantaneamente, juntamente com a coleta dos dados.
Vantagens Desvantagens - não necessita de processamento após o levantamentos (economia de tempo), pois coleta de dados finais (coordenadas) - Implantação (locação) - Controle dos Dados em Campo (precisão, número de satélites, solução)
- ajustamento das medições requer vários equipamentos em pontos base - Preço Alto
Os dados da base devem ser transmitidos imediatamente para o rover para permitir que o computador de mão faça o processamento instantaneamente. A transmissão pode ser feita por rádio UHF, VHF, via satélite, celular, wi-fi e até mesmo por internet. Quando o processamento em tempo real é realizado usando fase da portadora, chamamos este processo de RTK (Real Time Kinematic – Cinemático em tempo real). Quando usamos o código C/A, denominamos DGPS (Diferencial GPS).
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 12
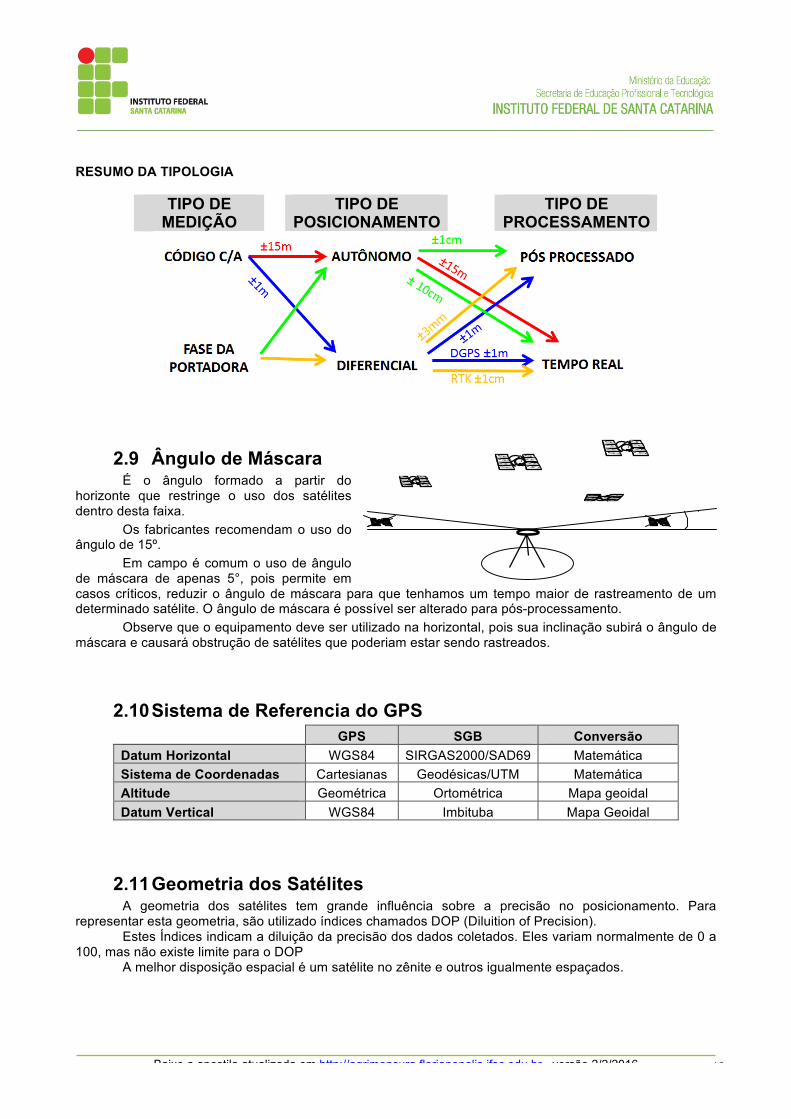
RESUMO DA TIPOLOGIA
TIPO DE MEDIÇÃO
TIPO DE POSICIONAMENTO
TIPO DE PROCESSAMENTO
2.9 Ângulo de Máscara É o ângulo formado a partir do horizonte que restringe o uso dos satélites dentro desta faixa. Os fabricantes recomendam o uso do ângulo de 15º. Em campo é comum o uso de ângulo de máscara de apenas 5°, pois permite em casos críticos, reduzir o ângulo de máscara para que tenhamos um tempo maior de rastreamento de um determinado satélite. O ângulo de máscara é possível ser alterado para pós-processamento. Observe que o equipamento deve ser utilizado na horizontal, pois sua inclinação subirá o ângulo de máscara e causará obstrução de satélites que poderiam estar sendo rastreados.
2.10 Sistema de Referencia do GPS GPS SGB Conversão Datum Horizontal WGS84 SIRGAS2000/SAD69 Matemática Sistema de Coordenadas Cartesianas Geodésicas/UTM Matemática Altitude Geométrica Ortométrica Mapa geoidal Datum Vertical WGS84 Imbituba Mapa Geoidal
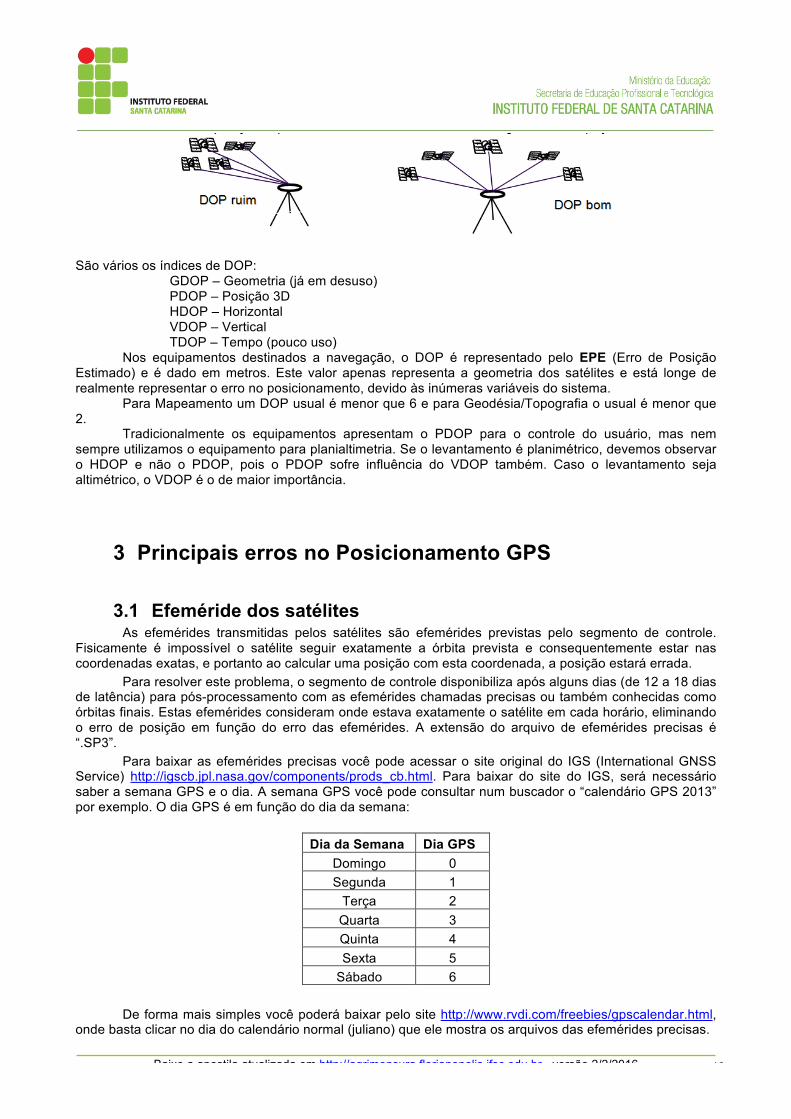
2.11 Geometria dos Satélites A geometria dos satélites tem grande influência sobre a precisão no posicionamento. Para
representar esta geometria, são utilizado índices chamados DOP (Diluition of Precision). Estes Índices indicam a diluição da precisão dos dados coletados. Eles variam normalmente de 0 a
100, mas não existe limite para o DOP A melhor disposição espacial é um satélite no zênite e outros igualmente espaçados.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 13
São vários os índices de DOP: GDOP – Geometria (já em desuso) PDOP – Posição 3D HDOP – Horizontal
VDOP – Vertical TDOP – Tempo (pouco uso)
Nos equipamentos destinados a navegação, o DOP é representado pelo EPE (Erro de Posição Estimado) e é dado em metros. Este valor apenas representa a geometria dos satélites e está longe de realmente representar o erro no posicionamento, devido às inúmeras variáveis do sistema. Para Mapeamento um DOP usual é menor que 6 e para Geodésia/Topografia o usual é menor que 2. Tradicionalmente os equipamentos apresentam o PDOP para o controle do usuário, mas nem sempre utilizamos o equipamento para planialtimetria. Se o levantamento é planimétrico, devemos observar o HDOP e não o PDOP, pois o PDOP sofre influência do VDOP também. Caso o levantamento seja altimétrico, o VDOP é o de maior importância.
3 Principais erros no Posicionamento GPS
3.1 Efeméride dos satélites As efemérides transmitidas pelos satélites são efemérides previstas pelo segmento de controle.
Fisicamente é impossível o satélite seguir exatamente a órbita prevista e consequentemente estar nas coordenadas exatas, e portanto ao calcular uma posição com esta coordenada, a posição estará errada.
Para resolver este problema, o segmento de controle disponibiliza após alguns dias (de 12 a 18 dias de latência) para pós-processamento com as efemérides chamadas precisas ou também conhecidas como órbitas finais. Estas efemérides consideram onde estava exatamente o satélite em cada horário, eliminando o erro de posição em função do erro das efemérides. A extensão do arquivo de efemérides precisas é “.SP3”.
Para baixar as efemérides precisas você pode acessar o site original do IGS (International GNSS Service) http://igscb.jpl.nasa.gov/components/prods_cb.html. Para baixar do site do IGS, será necessário saber a semana GPS e o dia. A semana GPS você pode consultar num buscador o “calendário GPS 2013” por exemplo. O dia GPS é em função do dia da semana:
Dia da Semana Dia GPS
Domingo 0 Segunda 1
Terça 2 Quarta 3 Quinta 4 Sexta 5
Sábado 6 De forma mais simples você poderá baixar pelo site http://www.rvdi.com/freebies/gpscalendar.html,
onde basta clicar no dia do calendário normal (juliano) que ele mostra os arquivos das efemérides precisas.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 14
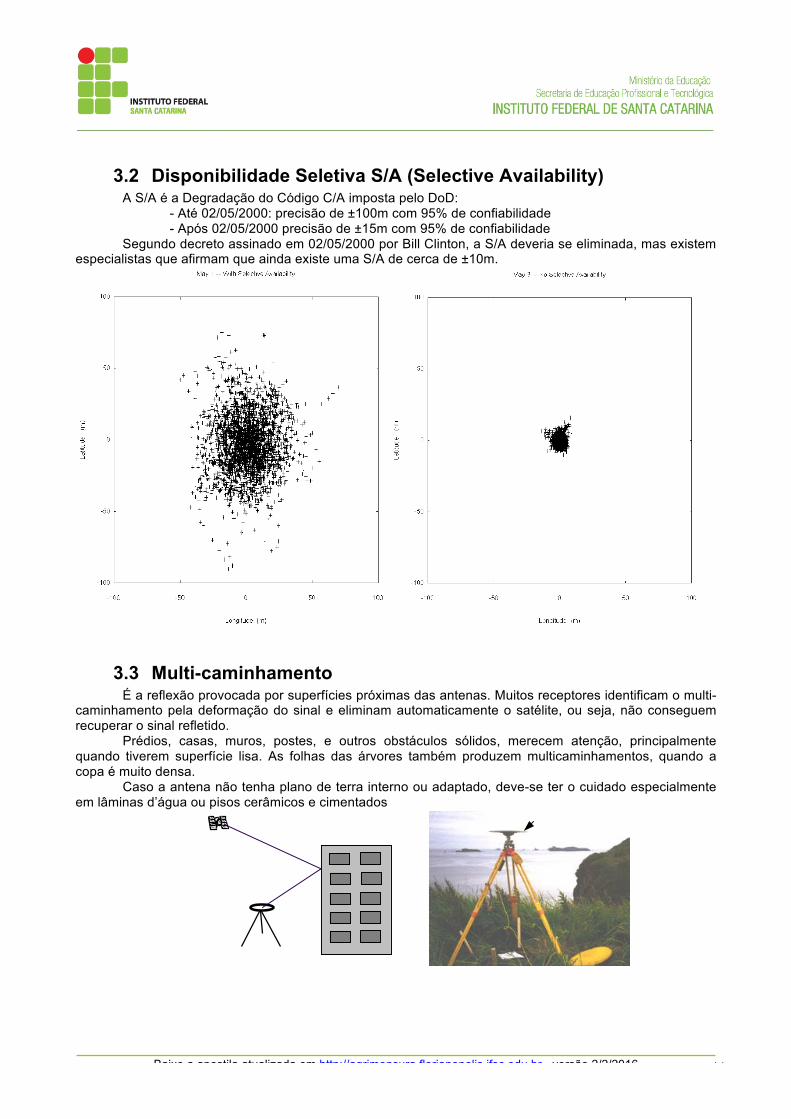
3.2 Disponibilidade Seletiva S/A (Selective Availability) A S/A é a Degradação do Código C/A imposta pelo DoD: - Até 02/05/2000: precisão de ±100m com 95% de confiabilidade - Após 02/05/2000 precisão de ±15m com 95% de confiabilidade Segundo decreto assinado em 02/05/2000 por Bill Clinton, a S/A deveria se eliminada, mas existem especialistas que afirmam que ainda existe uma S/A de cerca de ±10m.
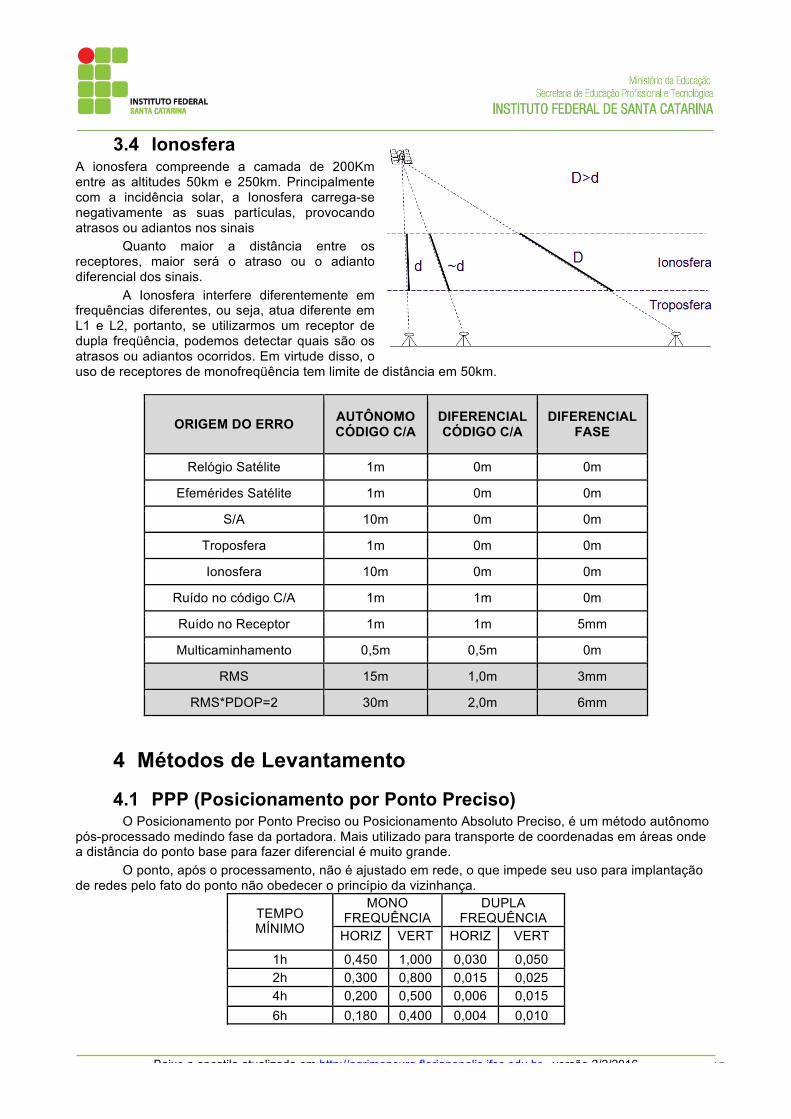
3.3 Multi-caminhamento É a reflexão provocada por superfícies próximas das antenas. Muitos receptores identificam o multi-
caminhamento pela deformação do sinal e eliminam automaticamente o satélite, ou seja, não conseguem recuperar o sinal refletido.
Prédios, casas, muros, postes, e outros obstáculos sólidos, merecem atenção, principalmente quando tiverem superfície lisa. As folhas das árvores também produzem multicaminhamentos, quando a copa é muito densa.
Caso a antena não tenha plano de terra interno ou adaptado, deve-se ter o cuidado especialmente em lâminas d’água ou pisos cerâmicos e cimentados
Geoide
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 15
3.4 Ionosfera A ionosfera compreende a camada de 200Km entre as altitudes 50km e 250km. Principalmente com a incidência solar, a Ionosfera carrega-se negativamente as suas partículas, provocando atrasos ou adiantos nos sinais
Quanto maior a distância entre os receptores, maior será o atraso ou o adianto diferencial dos sinais.
A Ionosfera interfere diferentemente em frequências diferentes, ou seja, atua diferente em L1 e L2, portanto, se utilizarmos um receptor de dupla freqüência, podemos detectar quais são os atrasos ou adiantos ocorridos. Em virtude disso, o uso de receptores de monofreqüência tem limite de distância em 50km.
ORIGEM DO ERRO AUTÔNOMO CÓDIGO C/A
DIFERENCIAL CÓDIGO C/A
DIFERENCIAL FASE
Relógio Satélite 1m 0m 0m
Efemérides Satélite 1m 0m 0m
S/A 10m 0m 0m
Troposfera 1m 0m 0m
Ionosfera 10m 0m 0m
Ruído no código C/A 1m 1m 0m
Ruído no Receptor 1m 1m 5mm
Multicaminhamento 0,5m 0,5m 0m
RMS 15m 1,0m 3mm
RMS*PDOP=2 30m 2,0m 6mm
4 Métodos de Levantamento
4.1 PPP (Posicionamento por Ponto Preciso) O Posicionamento por Ponto Preciso ou Posicionamento Absoluto Preciso, é um método autônomo
pós-processado medindo fase da portadora. Mais utilizado para transporte de coordenadas em áreas onde a distância do ponto base para fazer diferencial é muito grande.
O ponto, após o processamento, não é ajustado em rede, o que impede seu uso para implantação de redes pelo fato do ponto não obedecer o princípio da vizinhança.
MONO FREQUÊNCIA
DUPLA FREQUÊNCIA TEMPO
MÍNIMO HORIZ VERT HORIZ VERT
1h 0,450 1,000 0,030 0,050 2h 0,300 0,800 0,015 0,025 4h 0,200 0,500 0,006 0,015 6h 0,180 0,400 0,004 0,010
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 16
Como podemos ver na tabela acima publicada pelo IBGE, equipamentos de monofrequência dificilmente atenderão alguma finalidade de levantamento topográfico. O processamento é realizado com as efemérides precisas, o que significa que após o levantamento o processamento poderá ser realizado após as publicações delas, ou seja, após 12 a 18 dias.
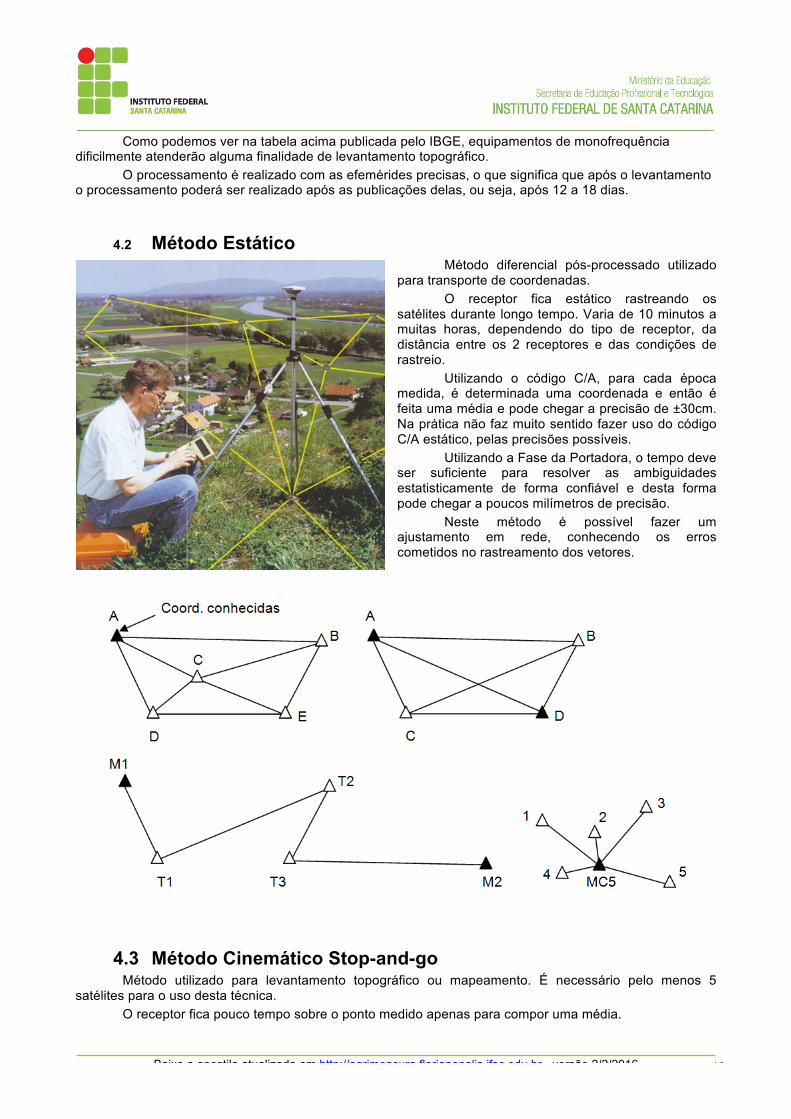
4.2 Método Estático Método diferencial pós-processado utilizado para transporte de coordenadas. O receptor fica estático rastreando os satélites durante longo tempo. Varia de 10 minutos a muitas horas, dependendo do tipo de receptor, da distância entre os 2 receptores e das condições de rastreio.
Utilizando o código C/A, para cada época medida, é determinada uma coordenada e então é feita uma média e pode chegar a precisão de ±30cm. Na prática não faz muito sentido fazer uso do código C/A estático, pelas precisões possíveis.
Utilizando a Fase da Portadora, o tempo deve ser suficiente para resolver as ambiguidades estatisticamente de forma confiável e desta forma pode chegar a poucos milímetros de precisão. Neste método é possível fazer um ajustamento em rede, conhecendo os erros cometidos no rastreamento dos vetores.
4.3 Método Cinemático Stop-and-go Método utilizado para levantamento topográfico ou mapeamento. É necessário pelo menos 5 satélites para o uso desta técnica. O receptor fica pouco tempo sobre o ponto medido apenas para compor uma média.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 17
Com Código C/A: O receptor trabalha OTF (on the fly) e assim que ele sintonizar pelo menos 5 satélites já é possível iniciar a medição de um ponto. Com Código C/A, suavizado com fase: O receptor também trabalha OTF, mas quanto mais tempo ficar rastreando os mesmos satélites, maior será a precisão, pois tentará resolver as ambiguidades. A precisão pode variar de 50cm a 10cm. Com Fase da Portadora: O receptor necessita inicializar. Inicializar significa resolver as ambiguidades para então iniciar o levantamento. A inicialização é feita no 1º ponto do levantamento (mais demorado) ou sobre um ponto já conhecido (menos demorado). Fica-se o tempo necessário para resolver as ambigüidades e então o valor de n é aplicado para os demais pontos (desde que não haja perda de ciclos). Alguns receptores permitem fazer a inicialização OTF, mas enquanto não passar o tempo necessário para a resolução das ambiguidades, não poderá haver perda de ciclos. Toda vez que se perder um ciclo, é necessário inicializar novamente. Com o sistema de correção em tempo real (RTK) a inicialização ocorre em poucos segundos.
4.4 Método Cinemático Contínuo O método cinemático consiste em definir um parâmetro para coleta de dados em função do tempo ou em função da distância percorrida. Utilizado para mapear elementos contínuos como cultivos, limite de vegetação, estradas, rios, etc. Elementos contínuos que necessite maior precisão (poucos centímetros) não devemos utilizar este métodos pela deficiência na verticalidade da antena e na grande variação da altura da antena.
5 Tipos de Receptores
5.1 Navegação
5.2 GIS
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 18
5.3 Mapeamento
5.4 Geodésico
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 19
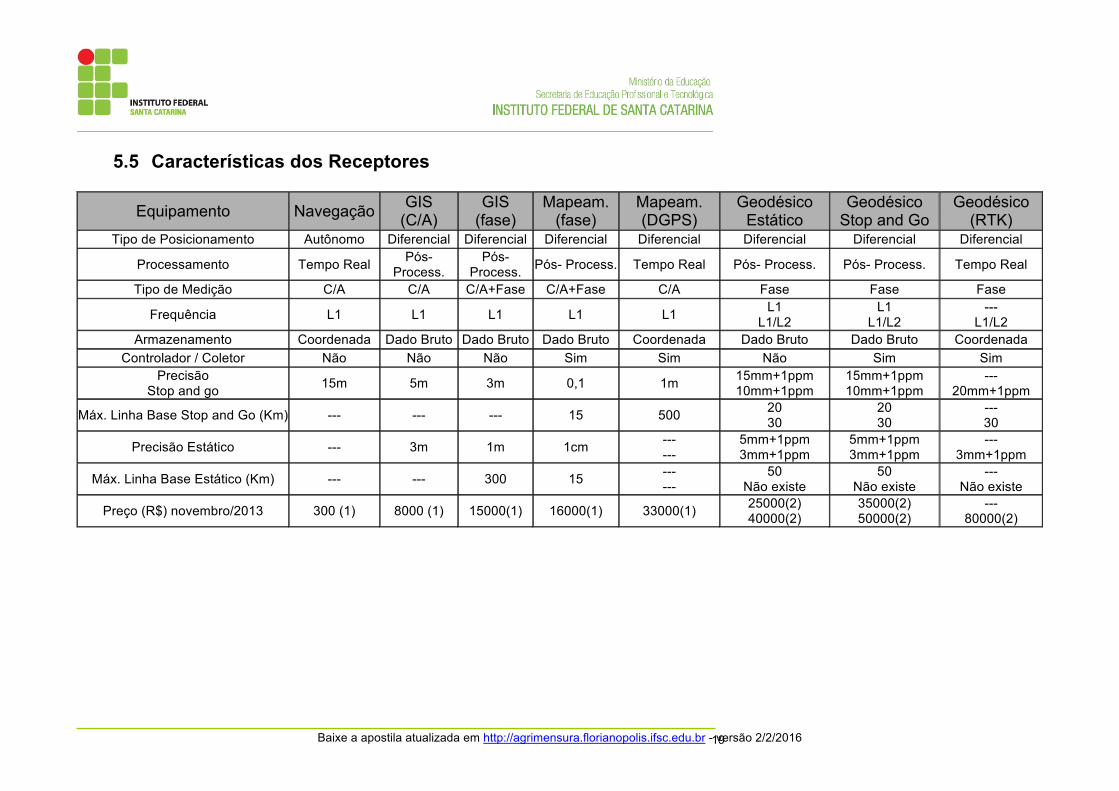
5.5 Características dos Receptores
Equipamento Navegação GIS (C/A)
GIS (fase)
Mapeam. (fase)
Mapeam. (DGPS)
Geodésico Estático
Geodésico Stop and Go
Geodésico (RTK)
Tipo de Posicionamento Autônomo Diferencial Diferencial Diferencial Diferencial Diferencial Diferencial Diferencial
Processamento Tempo Real Pós- Process.
Pós- Process. Pós- Process. Tempo Real Pós- Process. Pós- Process. Tempo Real
Tipo de Medição C/A C/A C/A+Fase C/A+Fase C/A Fase Fase Fase
Frequência L1 L1 L1 L1 L1 L1 L1/L2
L1 L1/L2
--- L1/L2
Armazenamento Coordenada Dado Bruto Dado Bruto Dado Bruto Coordenada Dado Bruto Dado Bruto Coordenada Controlador / Coletor Não Não Não Sim Sim Não Sim Sim
Precisão Stop and go 15m 5m 3m 0,1 1m 15mm+1ppm
10mm+1ppm 15mm+1ppm 10mm+1ppm
--- 20mm+1ppm
Máx. Linha Base Stop and Go (Km) --- --- --- 15 500 20 30
20 30
--- 30
Precisão Estático --- 3m 1m 1cm --- ---
5mm+1ppm 3mm+1ppm
5mm+1ppm 3mm+1ppm
--- 3mm+1ppm
Máx. Linha Base Estático (Km) --- --- 300 15 --- ---
50 Não existe
50 Não existe
--- Não existe
Preço (R$) novembro/2013 300 (1) 8000 (1) 15000(1) 16000(1) 33000(1) 25000(2) 40000(2)
35000(2) 50000(2)
--- 80000(2)
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 20
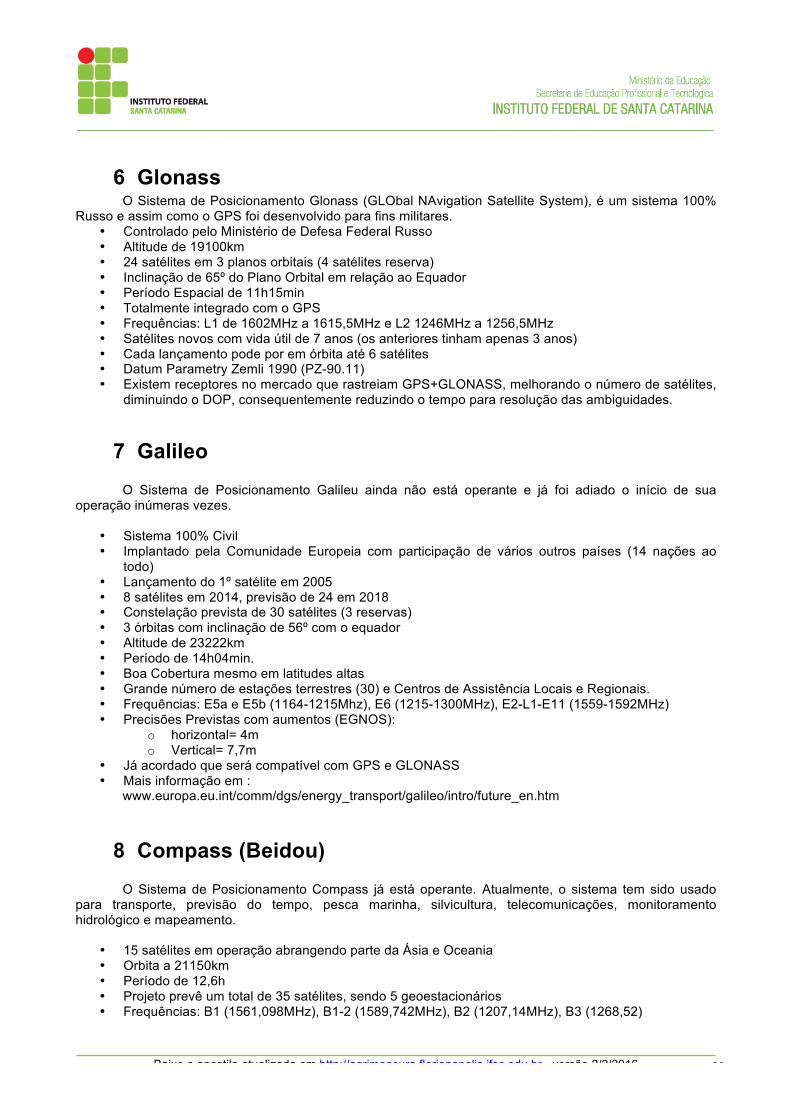
6 Glonass O Sistema de Posicionamento Glonass (GLObal NAvigation Satellite System), é um sistema 100% Russo e assim como o GPS foi desenvolvido para fins militares.
• Controlado pelo Ministério de Defesa Federal Russo • Altitude de 19100km • 24 satélites em 3 planos orbitais (4 satélites reserva) • Inclinação de 65º do Plano Orbital em relação ao Equador • Período Espacial de 11h15min • Totalmente integrado com o GPS • Frequências: L1 de 1602MHz a 1615,5MHz e L2 1246MHz a 1256,5MHz • Satélites novos com vida útil de 7 anos (os anteriores tinham apenas 3 anos) • Cada lançamento pode por em órbita até 6 satélites • Datum Parametry Zemli 1990 (PZ-90.11) • Existem receptores no mercado que rastreiam GPS+GLONASS, melhorando o número de satélites,
diminuindo o DOP, consequentemente reduzindo o tempo para resolução das ambiguidades.
7 Galileo O Sistema de Posicionamento Galileu ainda não está operante e já foi adiado o início de sua
operação inúmeras vezes.
• Sistema 100% Civil • Implantado pela Comunidade Europeia com participação de vários outros países (14 nações ao
todo) • Lançamento do 1º satélite em 2005 • 8 satélites em 2014, previsão de 24 em 2018 • Constelação prevista de 30 satélites (3 reservas) • 3 órbitas com inclinação de 56º com o equador • Altitude de 23222km • Período de 14h04min. • Boa Cobertura mesmo em latitudes altas • Grande número de estações terrestres (30) e Centros de Assistência Locais e Regionais. • Frequências: E5a e E5b (1164-1215Mhz), E6 (1215-1300MHz), E2-L1-E11 (1559-1592MHz) • Precisões Previstas com aumentos (EGNOS):
o horizontal= 4m o Vertical= 7,7m
• Já acordado que será compatível com GPS e GLONASS • Mais informação em :
www.europa.eu.int/comm/dgs/energy_transport/galileo/intro/future_en.htm
8 Compass (Beidou) O Sistema de Posicionamento Compass já está operante. Atualmente, o sistema tem sido usado
para transporte, previsão do tempo, pesca marinha, silvicultura, telecomunicações, monitoramento hidrológico e mapeamento.
• 15 satélites em operação abrangendo parte da Ásia e Oceania • Orbita a 21150km • Período de 12,6h • Projeto prevê um total de 35 satélites, sendo 5 geoestacionários • Frequências: B1 (1561,098MHz), B1-2 (1589,742MHz), B2 (1207,14MHz), B3 (1268,52)
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 21
9 Levantamento com GNSS
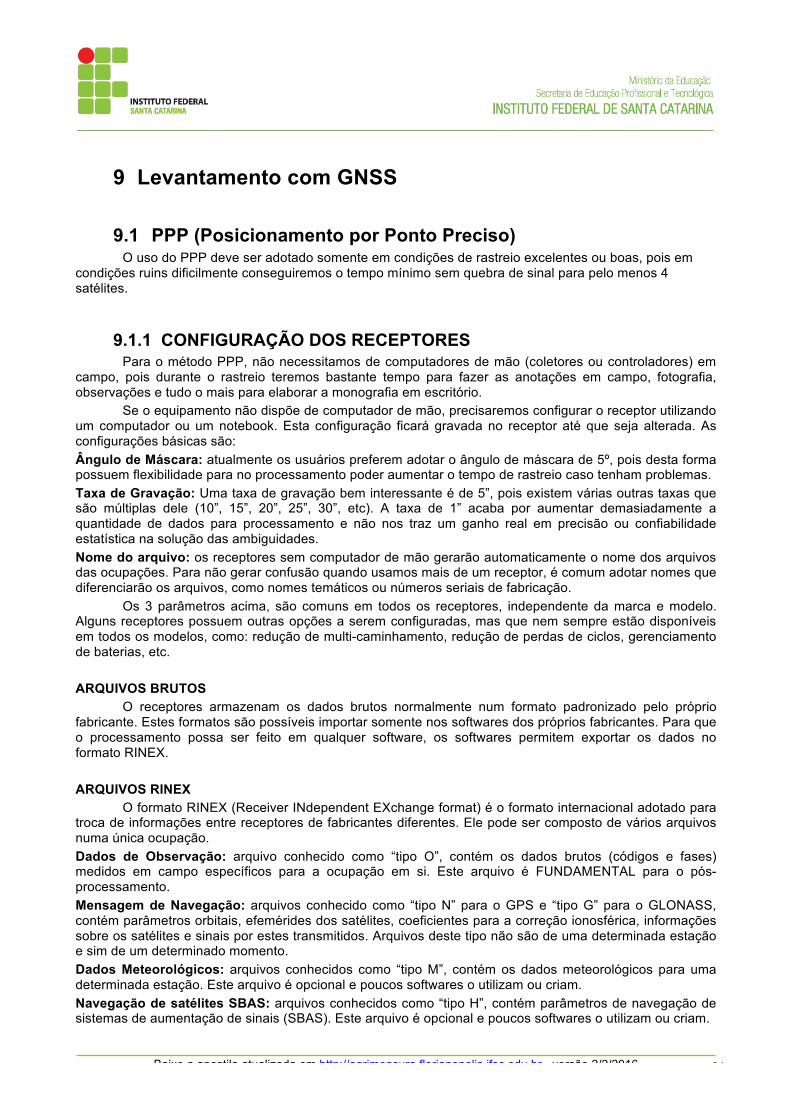
9.1 PPP (Posicionamento por Ponto Preciso) O uso do PPP deve ser adotado somente em condições de rastreio excelentes ou boas, pois em
condições ruins dificilmente conseguiremos o tempo mínimo sem quebra de sinal para pelo menos 4 satélites.
9.1.1 CONFIGURAÇÃO DOS RECEPTORES Para o método PPP, não necessitamos de computadores de mão (coletores ou controladores) em campo, pois durante o rastreio teremos bastante tempo para fazer as anotações em campo, fotografia, observações e tudo o mais para elaborar a monografia em escritório. Se o equipamento não dispõe de computador de mão, precisaremos configurar o receptor utilizando um computador ou um notebook. Esta configuração ficará gravada no receptor até que seja alterada. As configurações básicas são: Ângulo de Máscara: atualmente os usuários preferem adotar o ângulo de máscara de 5º, pois desta forma possuem flexibilidade para no processamento poder aumentar o tempo de rastreio caso tenham problemas. Taxa de Gravação: Uma taxa de gravação bem interessante é de 5”, pois existem várias outras taxas que são múltiplas dele (10”, 15”, 20”, 25”, 30”, etc). A taxa de 1” acaba por aumentar demasiadamente a quantidade de dados para processamento e não nos traz um ganho real em precisão ou confiabilidade estatística na solução das ambiguidades. Nome do arquivo: os receptores sem computador de mão gerarão automaticamente o nome dos arquivos das ocupações. Para não gerar confusão quando usamos mais de um receptor, é comum adotar nomes que diferenciarão os arquivos, como nomes temáticos ou números seriais de fabricação. Os 3 parâmetros acima, são comuns em todos os receptores, independente da marca e modelo. Alguns receptores possuem outras opções a serem configuradas, mas que nem sempre estão disponíveis em todos os modelos, como: redução de multi-caminhamento, redução de perdas de ciclos, gerenciamento de baterias, etc. ARQUIVOS BRUTOS O receptores armazenam os dados brutos normalmente num formato padronizado pelo próprio fabricante. Estes formatos são possíveis importar somente nos softwares dos próprios fabricantes. Para que o processamento possa ser feito em qualquer software, os softwares permitem exportar os dados no formato RINEX. ARQUIVOS RINEX O formato RINEX (Receiver INdependent EXchange format) é o formato internacional adotado para troca de informações entre receptores de fabricantes diferentes. Ele pode ser composto de vários arquivos numa única ocupação. Dados de Observação: arquivo conhecido como “tipo O”, contém os dados brutos (códigos e fases) medidos em campo específicos para a ocupação em si. Este arquivo é FUNDAMENTAL para o pós-processamento. Mensagem de Navegação: arquivos conhecido como “tipo N” para o GPS e “tipo G” para o GLONASS, contém parâmetros orbitais, efemérides dos satélites, coeficientes para a correção ionosférica, informações sobre os satélites e sinais por estes transmitidos. Arquivos deste tipo não são de uma determinada estação e sim de um determinado momento. Dados Meteorológicos: arquivos conhecidos como “tipo M”, contém os dados meteorológicos para uma determinada estação. Este arquivo é opcional e poucos softwares o utilizam ou criam. Navegação de satélites SBAS: arquivos conhecidos como “tipo H”, contém parâmetros de navegação de sistemas de aumentação de sinais (SBAS). Este arquivo é opcional e poucos softwares o utilizam ou criam.
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 22
Correção de relógio: arquivos conhecidos como “tipo C”, contém parâmetros de correção de relógios atômicos. Este arquivo é opcional e poucos softwares o utilizam ou criam.
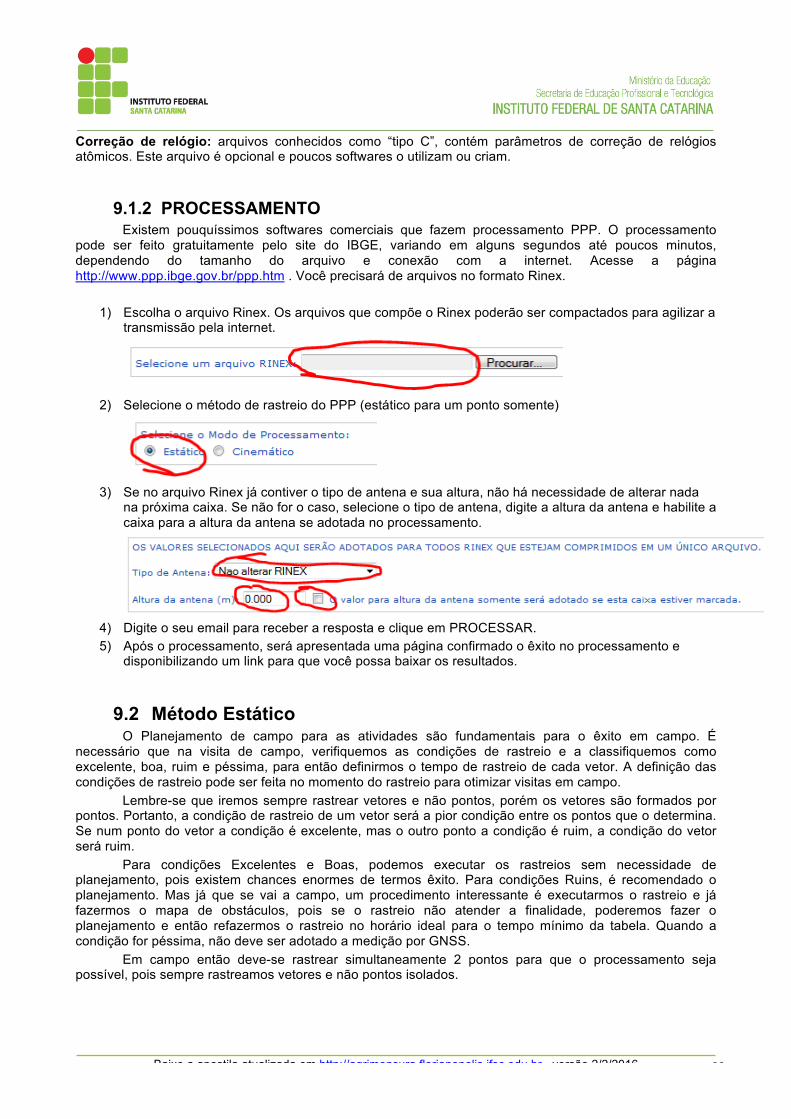
9.1.2 PROCESSAMENTO Existem pouquíssimos softwares comerciais que fazem processamento PPP. O processamento
pode ser feito gratuitamente pelo site do IBGE, variando em alguns segundos até poucos minutos, dependendo do tamanho do arquivo e conexão com a internet. Acesse a página http://www.ppp.ibge.gov.br/ppp.htm . Você precisará de arquivos no formato Rinex.
1) Escolha o arquivo Rinex. Os arquivos que compõe o Rinex poderão ser compactados para agilizar a transmissão pela internet.
2) Selecione o método de rastreio do PPP (estático para um ponto somente)
3) Se no arquivo Rinex já contiver o tipo de antena e sua altura, não há necessidade de alterar nada
na próxima caixa. Se não for o caso, selecione o tipo de antena, digite a altura da antena e habilite a caixa para a altura da antena se adotada no processamento.
4) Digite o seu email para receber a resposta e clique em PROCESSAR. 5) Após o processamento, será apresentada uma página confirmado o êxito no processamento e
disponibilizando um link para que você possa baixar os resultados.
9.2 Método Estático O Planejamento de campo para as atividades são fundamentais para o êxito em campo. É necessário que na visita de campo, verifiquemos as condições de rastreio e a classifiquemos como excelente, boa, ruim e péssima, para então definirmos o tempo de rastreio de cada vetor. A definição das condições de rastreio pode ser feita no momento do rastreio para otimizar visitas em campo. Lembre-se que iremos sempre rastrear vetores e não pontos, porém os vetores são formados por pontos. Portanto, a condição de rastreio de um vetor será a pior condição entre os pontos que o determina. Se num ponto do vetor a condição é excelente, mas o outro ponto a condição é ruim, a condição do vetor será ruim.
Para condições Excelentes e Boas, podemos executar os rastreios sem necessidade de planejamento, pois existem chances enormes de termos êxito. Para condições Ruins, é recomendado o planejamento. Mas já que se vai a campo, um procedimento interessante é executarmos o rastreio e já fazermos o mapa de obstáculos, pois se o rastreio não atender a finalidade, poderemos fazer o planejamento e então refazermos o rastreio no horário ideal para o tempo mínimo da tabela. Quando a condição for péssima, não deve ser adotado a medição por GNSS. Em campo então deve-se rastrear simultaneamente 2 pontos para que o processamento seja possível, pois sempre rastreamos vetores e não pontos isolados.

Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 23
9.2.1 PLANEJAMENTO DE RASTREIO Existem várias soluções para planejamento gratuitas, inclusive on-line. As soluções on-line são bem
interessantes, pois o Almanaque (coleção das efemérides) são sempre atualizadas. Se for utilizar um software no seu computador, lembre-se de atualizar o almanaque.
Para fazer planejamento de rastreio é necessário que você faça em campo o Mapa de Obstáculos. O Mapa de Obstáculos tem como objetivo identificar o azimute e o ângulo de elevação (ângulo vertical em relação ao plano horizontal) de cada obstáculo, desenhando as áreas que o sinal será impedido ou quebrado (em caso de árvores). O centro do gráfico é o ponto de rastreio. Para a medição dos azimutes você precisará de uma bússola, pois alguns graus de precisão no azimute, não serão significativos. Para a medição de ângulos de elevação, você precisará de um inclinômetro, pois alguns graus de precisão na elevação também não serão significativos. Hoje uma excelente solução são os smartphones que possuem acelerômetro conseguindo medir azimutes, ângulos de elevação e também as coordenadas com o GPS de navegação. Para IOS tem o Theodolite e similar a ele para Android tem o Geocam.
Soluções on-line: http://www.trimble.com/GNSSPlanningOnline http://asp.ashtech.com/wmp/mobile.html http://asp.ashtech.com/wmp/
9.2.2 CADERNETA DE CAMPO Quando não utilizamos um computador de mão para introduzir informações de campo, será necessário o preenchimento da caderneta de campo para que possamos introduzir diretamente no software de pós-processamento.
9.2.3 PROCESSAMENTO No escritório os passos abaixo são necessários, independente do software:
1- Criar uma obra, arquivo ou trabalho 2- Configuração da obra (tolerâncias, datum, sistema de projeção, fuso horário, etc) 3- Importação dos dados medidos (inclusive as efemérides precisas se for o caso) 4- Digitação dos dados anotados em campo da ocupação (altura da antena, tipo da antena, nome dos
pontos, etc) 5- Definir o(s) ponto (s) base(s) - Definir controle (horizontal, vertical ou os 2 casos) - Digitar coordenadas - Digitar precisões 6- Revisar os passos 4 e 5
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 24
7- Eliminar vetores desnecessários (vetores que não tiveram o tempo de rastreio recomendado ou vetores formados por vértices que já possuam coordenadas)
8- Processar vetores 9- Analisar vetores 10- Se necessário, tratar os dados (ângulo de máscara, eliminar satélites, etc) e retornar ao passo 8 11- Ajustar os pontos 12- Analisar as precisões dos pontos 13- Se necessário, eliminar vetores de uma rede que eventualmente possam estar piorando a
geometria da rede 14- Gerar relatórios
9.3 Método Cinemático “Stop and Go” Num levantamento utilizando o método “Stop and Go”, é necessário definir um ponto base em
condições no mínimo boa para não prejudicar outros pontos em condições melhores. Quanto mais próximo o ponto base estiver da área a ser levantada, mais rápido será o processo de inicialização, aumentando significativamente a produtividade em campo.
Muticaminhamentos e obstrução dos sinais devem ser observados para evitar quebras de sinais durante todo o rastreio inclusive durante o movimento (go). A Antena deve ser conduzida na vertical para evitar estes problemas. Não haverá necessidade de caderneta nem tampouco configurar o receptor antes do levantamento, pois no “Stop and Go” será obrigatório o uso de um computador de mão para gerenciar e introduzir os dados. O processamento é muito similar ao estático, sendo um processo mais simplificado:
1- Criar uma obra, arquivo ou trabalho 2- Configuração da obra (tolerâncias, datum, sistema de projeção, fuso horário, etc) 3- Importação dos dados medidos 4- Definir o(s) ponto (s) base(s) - Definir controle (horizontal, vertical ou os 2 casos) - Digitar coordenadas - Digitar precisões 5- Revisar o passo 4 6- Processar vetores 7- Analisar vetores 8- Se necessário, tratar os dados (ângulo de máscara, eliminar satélites, etc) e retornar ao passo 6 9- Ajustar os pontos (processo este que calculará a propagação das precisões e calculará o valor final
das coordenadas) 10- Gerar relatórios
Baixe a apostila atualizada em http://agrimensura.florianopolis.ifsc.edu.br - versão 2/2/2016 25
BIBLIOGRAFIA http://www.lapig.iesa.ufg.br/lapig/cursos_online/gvsig/index.html http://mathematikos.psico.ufrgs.br/disciplinas/ufrgs/mat010392k2/ens22k2/xyz/projecao.htm http://www.mundovestibular.com.br/articles/4258/1/A-FORMA-DA-TERRA/Paacutegina1.html http://www.ibge.gov.br http://www.uff.br/mapprojections/mp_br.html http://www.esteio.com.br/newsletters/paginas/006/orientacao.htm http://ciencia.hsw.uol.com.br/mapa.htm IBGE. Recomendações para Levantamentos Relativos Estáticos – GPS. 2008. Rio de Janeiro: IBGE. P 35. MONICO, J. F. G. Posicionamento pelo NAVSTAR-GPS: Descrição, Fundamentos e Aplicações. 1ª ed. São
Paulo: Unesp, 2000a. p 287.