sistemas de vectores - fenix.tecnico.ulisboa.pt · 2 teoria dos sistemas de vectores 1. classes de...
TRANSCRIPT
DECivil Secção de Mecânica Estrutural e Estruturas
TEORIA DOS SISTEMAS DE VECTORES
I. Cabrita Neves
Abril de 2002

2
TEORIA DOS SISTEMAS DE VECTORES 1. Classes de vectores e parâmetros necessários à sua definição 3 2. Adição de vectores 3 3. Decomposição de um vector em componentes. Componentes cartesianas de um vector 4 4. Momento de um vector em relação a um ponto 5 5. Determinação da linha de acção de um vector do qual se conhecem as componentes e o momento que produz relativamente a um ponto conhecido 7 6. Momento de um vector em relação a um eixo 8 7. Componentes do momento de um vector em relação a um ponto 9 8. Momento de um binário 10 9. Transporte paralelo de um vector 11 10. Elementos de redução de um sistema de vectores. Redução de um sistema de vectores num ponto 12 11. Fórmula de propagação de momentos resultantes de um sistema de vectores 12 12. Propriedade projectiva. Campos projectivos 14 13. Sistemas de vectores equivalentes 14 14. Invariantes de um sistema de vectores 15. Casos de redução de um sistema de vectores 15 16. Eixo central de um sistema de vectores 16 17. Distribuição de momentos resultantes em torno do eixo central 18 18. Casos particulares de sistemas equivalentes a vector único 19 19. Teorema de Varignon 21 20. Sistemas de vectores distribuídos 21
1. Classes de vectores e parâmetros necessários à sua definição
Os vectores podem ser classificados em:
a) aplicados. b) deslizantes c) livres
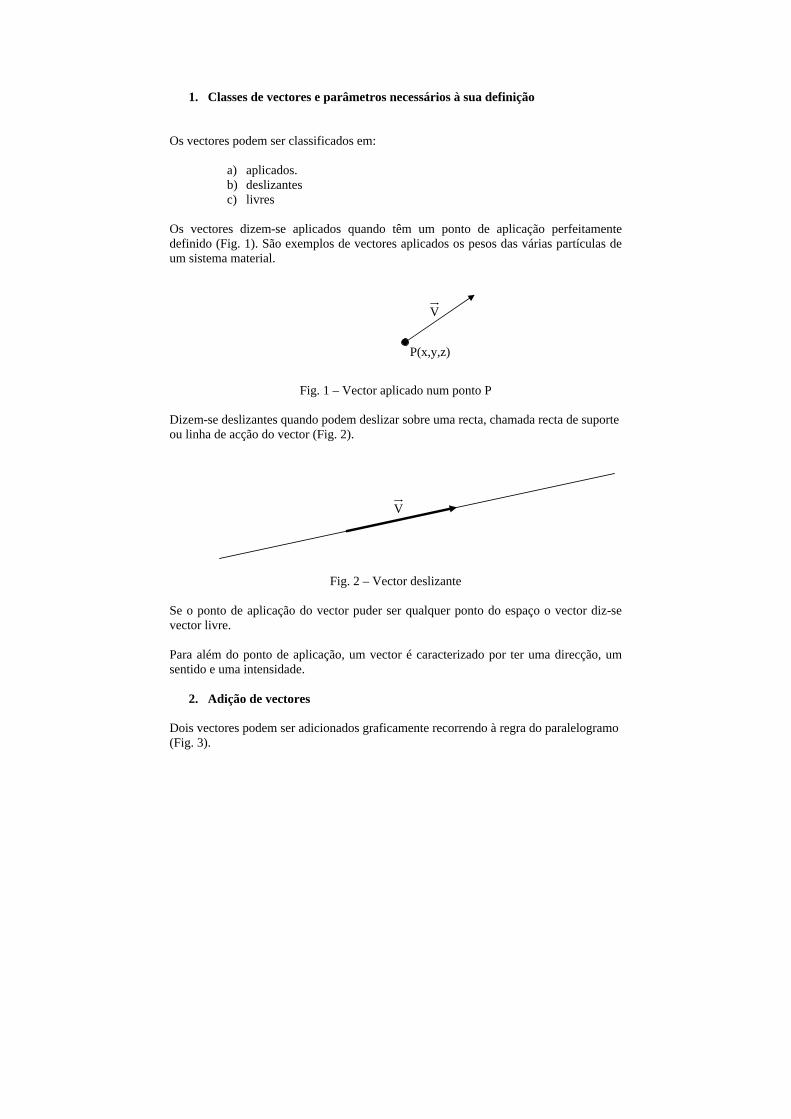
Os vectores dizem-se aplicados quando têm um ponto de aplicação perfeitamente definido (Fig. 1). São exemplos de vectores aplicados os pesos das várias partículas de um sistema material.
Fig. 1 – Vector aplicado num ponto P Dizem-se deslizantes quando podem deslizar sobre uma recta, chamada recta de suporte ou linha de acção do vector (Fig. 2).
Fig. 2 – Vector deslizante Se o ponto de aplicação do vector puder ser qualquer ponto do espaço o vector diz-se vector livre. Para além do ponto de aplicação, um vector é caracterizado por ter uma direcção, um sentido e uma intensidade.
2. Adição de vectores Dois vectores podem ser adicionados graficamente recorrendo à regra do paralelogramo (Fig. 3).
P(x,y,z)
V
V
4
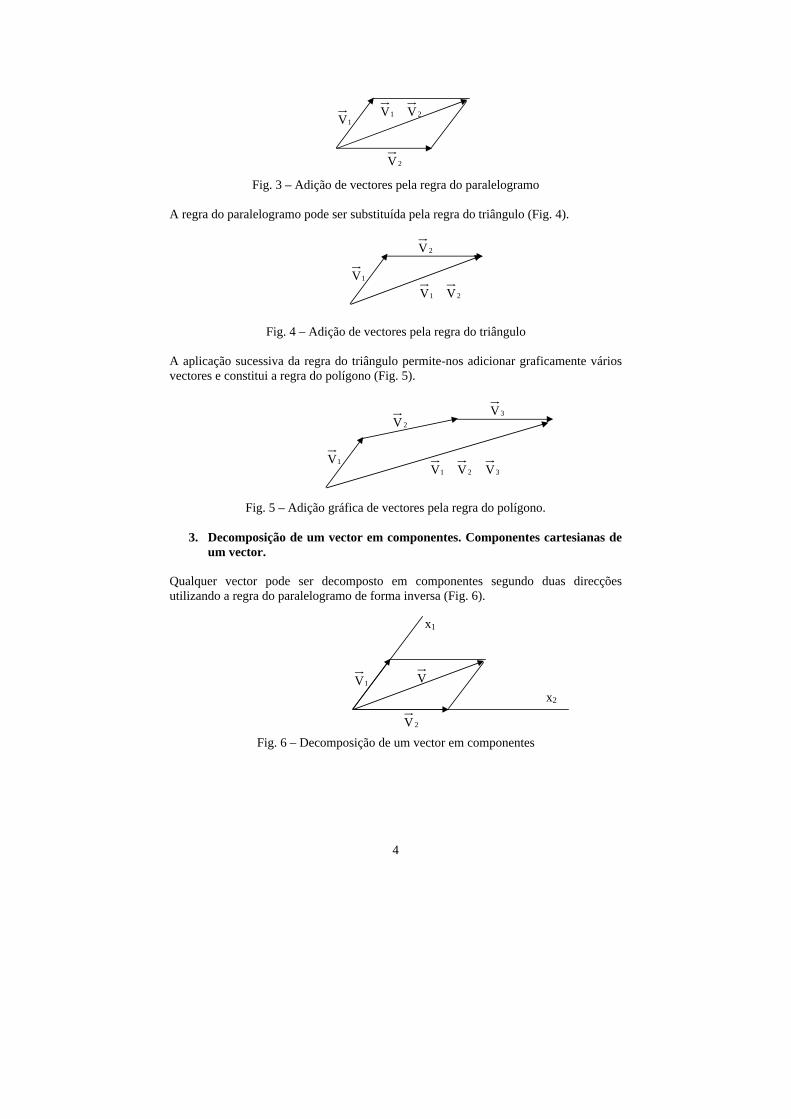
Fig. 3 – Adição de vectores pela regra do paralelogramo
A regra do paralelogramo pode ser substituída pela regra do triângulo (Fig. 4).
Fig. 4 – Adição de vectores pela regra do triângulo A aplicação sucessiva da regra do triângulo permite-nos adicionar graficamente vários vectores e constitui a regra do polígono (Fig. 5).
Fig. 5 – Adição gráfica de vectores pela regra do polígono.
3. Decomposição de um vector em componentes. Componentes cartesianas de um vector.
Qualquer vector pode ser decomposto em componentes segundo duas direcções utilizando a regra do paralelogramo de forma inversa (Fig. 6).
Fig. 6 – Decomposição de um vector em componentes
1V
2V
21 VV +
1V
2V
21 VV +
1V
2V
321 VVV ++
3V
1V
2V
V
x1
x2

5
Se estas direcções forem ortogonais entre si as componentes do vector chamam-se componentes cartesianas (Fig. 7).
Fig. 7 – Componentes cartesianas de um vector
Neste caso, cada componente pode ser expressa em função do vector unitário ou versor do eixo respectivo por forma que jViVVVV 2121
rr+=+= (1)
ou, mais genericamente, no espaço tridimensional kVjViVV 321
rrr++= (2)
sendo k,j,i
rrr os versores dos eixos x1, x2, x3 respectivamente, e V1, V2, V3 as 3
componentes cartesianas do vector V no referencial x1, x2, x3, as quais se obtêm por projecção do vector sobre os eixos do referencial. Isto significa que vectores iguais e paralelos têm componentes iguais num mesmo referencial.
4. Momento de um vector em relação a um ponto Um dos tipos de vectores que nos interessa particularmente estudar são os sistemas de vectores constituídos por forças. Quando se aplica uma força a um corpo esta impõe ao corpo uma tendência para este se mover em movimento de translação na direcção e sentido da força, sendo que esta tendência é proporcional à intensidade da força. O próprio vector força é pois a entidade adequada para traduzir esta tendência para o movimento de translação. Duas forças iguais e paralelas aplicadas a um corpo impõem-lhe tendências iguais para este se mover em movimento de translação (Fig. 8). Contudo, a tendência para o movimento de rotação em torno de um determinado ponto (ponto A na Fig. 8) é diferente.
Fig. 8 – Tendência para o movimento de translação e tendência para o movimento de rotação
1V
2V V
x1
x2
ir
jr
F
F
A
B
C
6
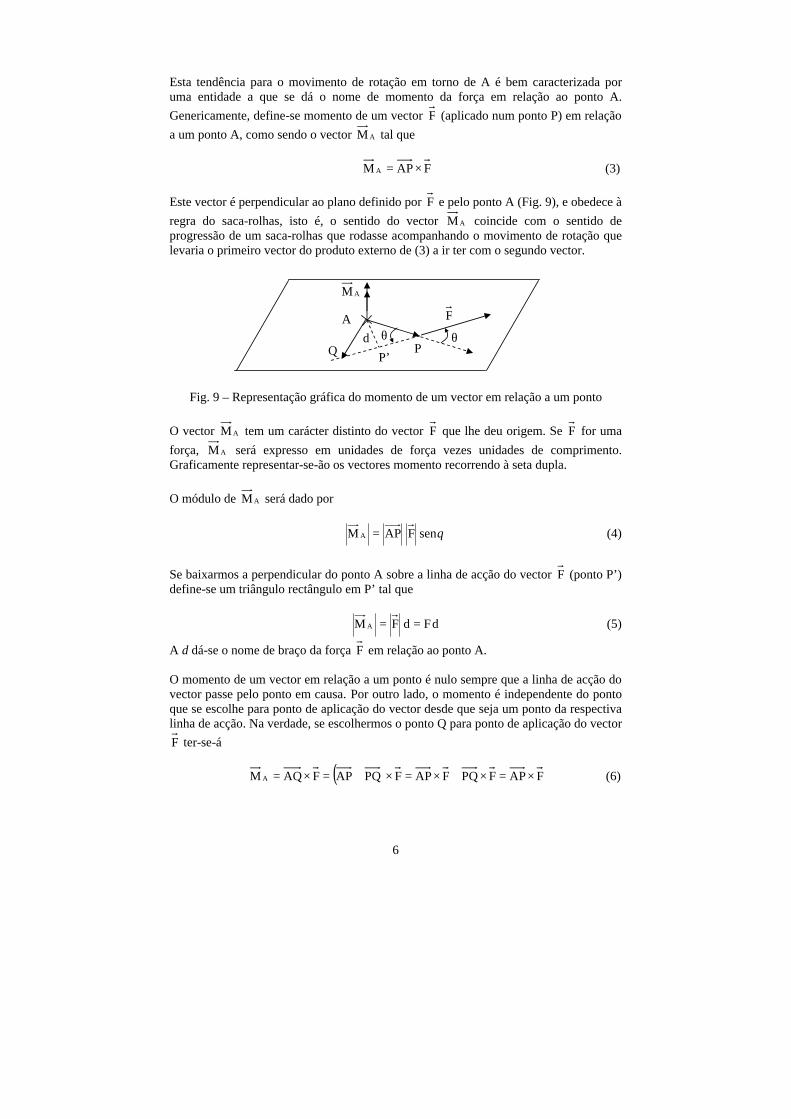
Esta tendência para o movimento de rotação em torno de A é bem caracterizada por uma entidade a que se dá o nome de momento da força em relação ao ponto A. Genericamente, define-se momento de um vector F (aplicado num ponto P) em relação a um ponto A, como sendo o vector AM tal que FAPM A ×= (3) Este vector é perpendicular ao plano definido por F e pelo ponto A (Fig. 9), e obedece à regra do saca-rolhas, isto é, o sentido do vector AM coincide com o sentido de progressão de um saca-rolhas que rodasse acompanhando o movimento de rotação que levaria o primeiro vector do produto externo de (3) a ir ter com o segundo vector.
Fig. 9 – Representação gráfica do momento de um vector em relação a um ponto O vector AM tem um carácter distinto do vector F que lhe deu origem. Se F for uma força, AM será expresso em unidades de força vezes unidades de comprimento. Graficamente representar-se-ão os vectores momento recorrendo à seta dupla. O módulo de AM será dado por
θsenFAPM A = (4)
Se baixarmos a perpendicular do ponto A sobre a linha de acção do vector F (ponto P’) define-se um triângulo rectângulo em P’ tal que
dFdFM A == (5)
A d dá-se o nome de braço da força F em relação ao ponto A. O momento de um vector em relação a um ponto é nulo sempre que a linha de acção do vector passe pelo ponto em causa. Por outro lado, o momento é independente do ponto que se escolhe para ponto de aplicação do vector desde que seja um ponto da respectiva linha de acção. Na verdade, se escolhermos o ponto Q para ponto de aplicação do vector F ter-se-á ( ) FAPFPQFAPFPQAPFAQM A ×=×+×=×+=×= (6)
A
P
AM
F
P’
θ θ d Q
7
já que FPQ × é nulo, por se tratar do produto externo de dois vectores paralelos. Isto
vem sublinhar o carácter deslizante do vector F . Os efeitos da aplicação de uma força F permanecem os mesmos qualquer que seja o ponto da respectiva recta de suporte que se escolha para ponto de aplicação de F . As tendências para a translação e para a rotação do corpo a que a força é aplicada não são alteradas.
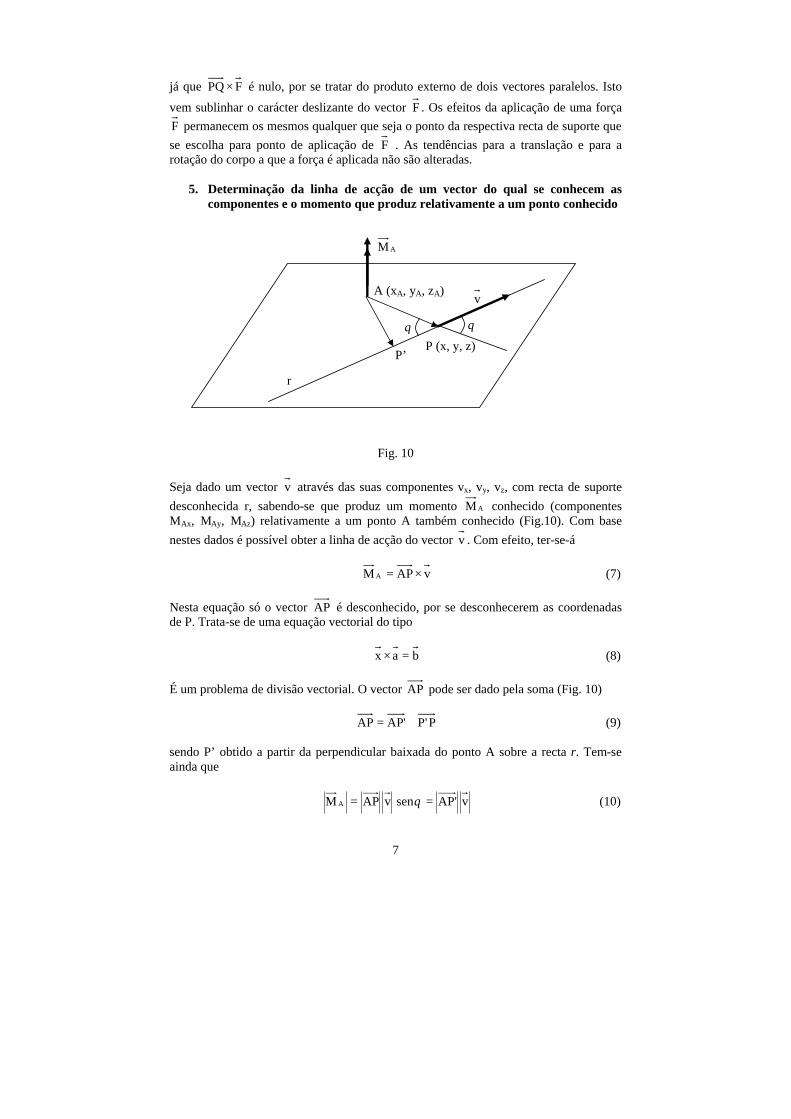
5. Determinação da linha de acção de um vector do qual se conhecem as componentes e o momento que produz relativamente a um ponto conhecido
Fig. 10 Seja dado um vector v através das suas componentes vx, vy, vz, com recta de suporte desconhecida r, sabendo-se que produz um momento AM conhecido (componentes MAx, MAy, MAz) relativamente a um ponto A também conhecido (Fig.10). Com base nestes dados é possível obter a linha de acção do vector v . Com efeito, ter-se-á vAPMA ×= (7) Nesta equação só o vector AP é desconhecido, por se desconhecerem as coordenadas de P. Trata-se de uma equação vectorial do tipo bax =× (8) É um problema de divisão vectorial. O vector AP pode ser dado pela soma (Fig. 10) P'P'APAP += (9) sendo P’ obtido a partir da perpendicular baixada do ponto A sobre a recta r. Tem-se ainda que
v'APsenvAPM A == θ (10)
v
AM
A (xA, yA, zA)
P (x, y, z) P’
r
θ θ

8
ou seja
v
M'AP
A
= (11)
Sendo o vector 'AP simultaneamente perpendicular a AM e a v , pode ser obtido através de
2
AA
A
A
vMv
v
M
Mv
Mv'AP
×=
×
×= (12)
Quanto ao vector P'P da equação (9) ele pode pôr-se na forma vP'P λ= (13) sendo λ um escalar que pode assumir qualquer valor, já que P é qualquer ponto da recta r. Teremos finalmente
vvMv
AP 2
A λ+×
= (14)
ou
vvMv
AP 2
A λ+×
+= (15)
Esta é a equação vectorial da recta de suporte do vector v . A solução do problema genérico de divisão vectorial da Eq. (8) é então da forma
aa
bax 2 λ+
×= (16)
6. Momento de um vector em relação a um eixo O momento de um vector em relação a um eixo é a projecção sobre o eixo do momento do vector em relação a um ponto do eixo (Fig. 11).

9
Fig. 11 – Momento de um vector em relação a um eixo ( )[ ]λλ
rr⋅×= FAPM e (17)
Nesta expressão λ
rrepresenta o versor do eixo e, e
( ) θθλλλ cosMcosMMFAP AAA ==⋅=⋅×rrr
(18)
representa a projecção de AM sobre o eixo e. O momento de uma força em relação a um eixo representa a tendência que a força impõe para a rotação em torno do eixo. Essa tendência é nula sempre que a força e o eixo existam num mesmo plano, como se pode demonstrar a partir da expressão (17). O ponto que se escolhe sobre o eixo para o cálculo do momento pode ser qualquer. Se se escolher o ponto A’ em vez de A ter-se-á
( )[ ] ( )( )[ ]
( )[ ] ( )[ ] ( )[ ] e
e
MFAPFAPFA'A
FAPA'AFP'A'M
=⋅×=⋅×+⋅×
=⋅×+=⋅×=
λλλλλλ
λλλλrrrrrr
rrrr
(19)
7. Componentes do momento de um vector em relação a um ponto
O momento de um vector v em relação a um ponto A será do tipo kMjMiMM AzAyAxA ++= (20) Se fizermos o produto interno de AM por i obteremos, por definição, o momento de v em relação ao eixo paralelo a x que passa por A AxA MiM =⋅ (21)
θ
A
AM
eM
e λr
F P
A’

10
Quer dizer, as componentes do momento de um vector v em relação a um ponto A representam os momentos de v em relação a eixos paralelos aos eixos coordenados que passam por A.
8. Momento de um binário Um binário é um sistema constituído por duas forças iguais e opostas com linhas de acção distintas (Fig. 12).
Fig. 12 – Binário
Calculemos o momento produzido por este binário em relação a um ponto O qualquer. Ter-se-á, por definição ( ) ( ) FBAFOBOAFOBFOAFOBFOAM O ×=×−=×−×=−×+×= (22) Ou seja, o momento do binário em relação ao ponto O é independente de O. O momento de um binário é portanto igual em todos os pontos do espaço. Tem carácter de vector livre, não sendo necessário utilizar o índice O. Este momento é perpendicular ao plano definido por BA e por F , ou seja, é perpendicular ao plano do binário e tem um sentido que obedece à regra do saca-rolhas (Fig. 12, vector M ). O seu módulo será dado por
dFsenFBAsenFBAM === αθ (23)
sendo d o braço do binário. Este sistema de vectores, cuja soma é nula, é caracterizado unicamente pelo seu momento M . É um sistema de forças que, aplicado a um corpo, não lhe impõe qualquer tendência para se mover em translação. Só existe tendência para o movimento de rotação, que é máxima em torno de eixos perpendiculares ao plano do binário e nula em torno de eixos paralelos ao plano do binário, como é fácil de provar a partir da definição de momento em relação a um eixo.
A
B
F F−
O
d
θ
α
90º
M
11
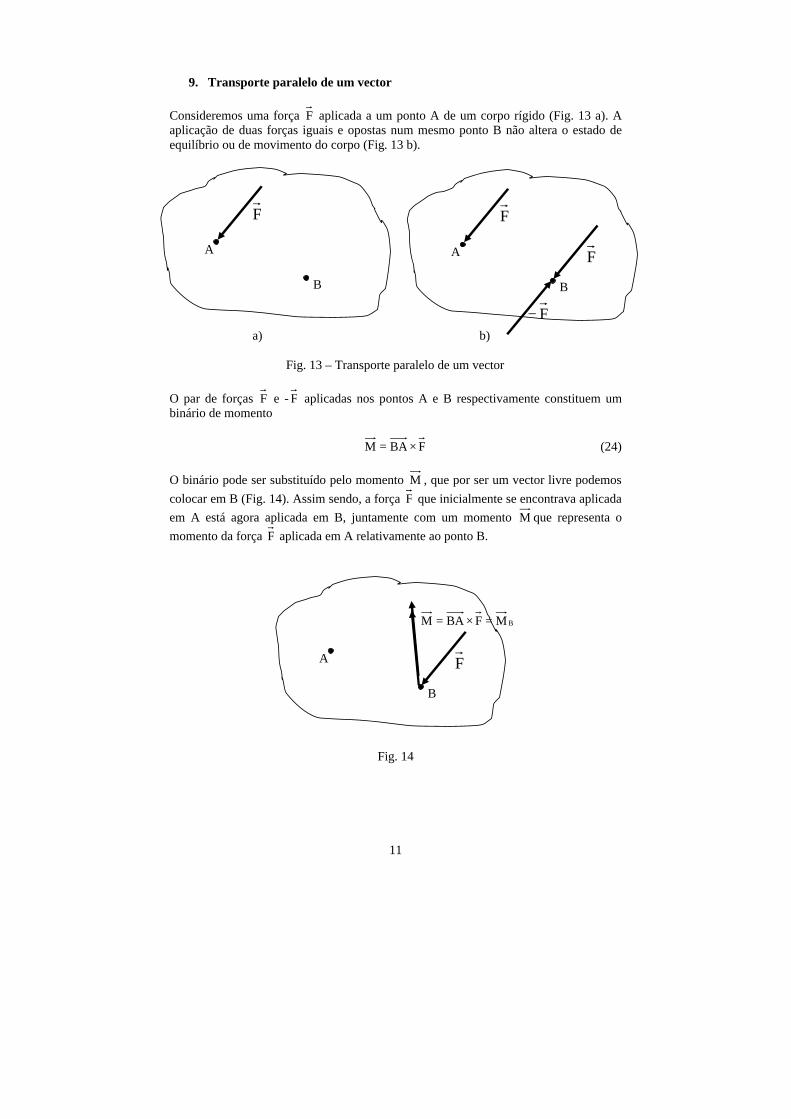
9. Transporte paralelo de um vector Consideremos uma força F aplicada a um ponto A de um corpo rígido (Fig. 13 a). A aplicação de duas forças iguais e opostas num mesmo ponto B não altera o estado de equilíbrio ou de movimento do corpo (Fig. 13 b). a) b) Fig. 13 – Transporte paralelo de um vector O par de forças F e - F aplicadas nos pontos A e B respectivamente constituem um binário de momento FBAM ×= (24) O binário pode ser substituído pelo momento M , que por ser um vector livre podemos colocar em B (Fig. 14). Assim sendo, a força F que inicialmente se encontrava aplicada em A está agora aplicada em B, juntamente com um momento M que representa o momento da força F aplicada em A relativamente ao ponto B.
Fig. 14
A
B
F
A
B
F
F−
F
A
B
F
BMFBAM =×=
12
10. Elementos de redução de um sistema de vectores. Redução de um sistema de vectores num ponto
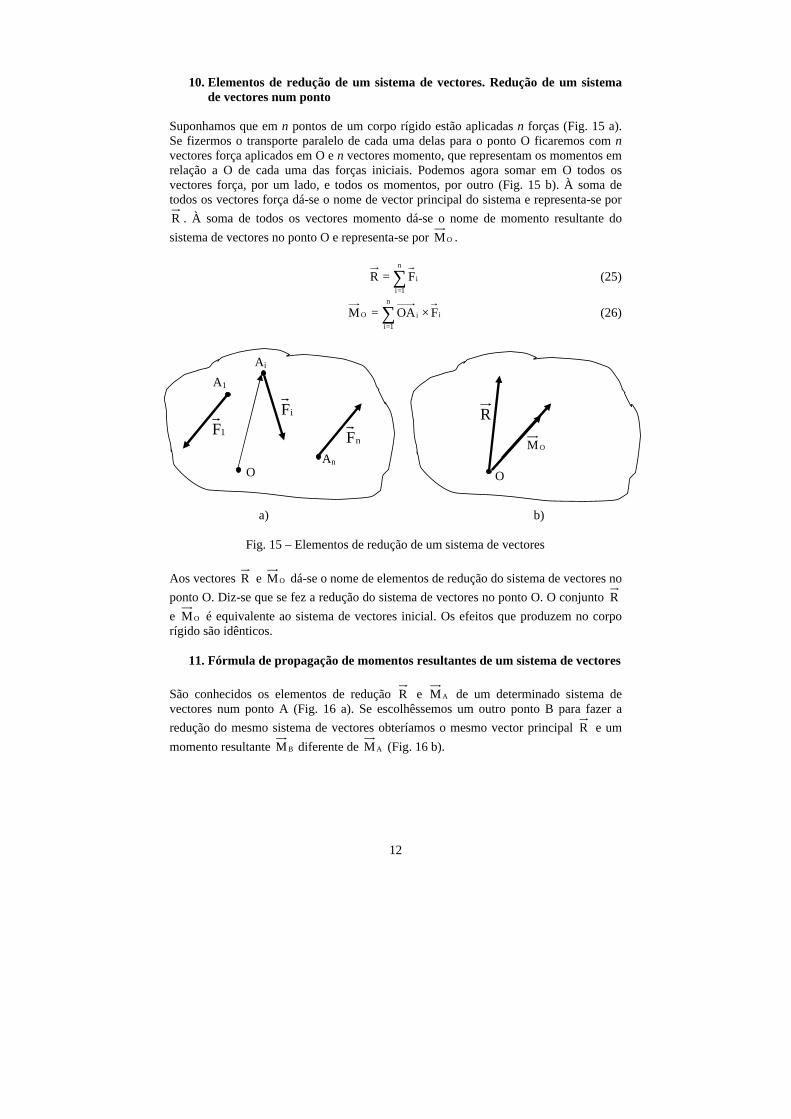
Suponhamos que em n pontos de um corpo rígido estão aplicadas n forças (Fig. 15 a). Se fizermos o transporte paralelo de cada uma delas para o ponto O ficaremos com n vectores força aplicados em O e n vectores momento, que representam os momentos em relação a O de cada uma das forças iniciais. Podemos agora somar em O todos os vectores força, por um lado, e todos os momentos, por outro (Fig. 15 b). À soma de todos os vectores força dá-se o nome de vector principal do sistema e representa-se por R . À soma de todos os vectores momento dá-se o nome de momento resultante do sistema de vectores no ponto O e representa-se por OM .
∑=
=n
1i
iFR (25)
∑=
×=n
1i
iiO FOAM (26)
a) b) Fig. 15 – Elementos de redução de um sistema de vectores Aos vectores R e OM dá-se o nome de elementos de redução do sistema de vectores no ponto O. Diz-se que se fez a redução do sistema de vectores no ponto O. O conjunto R e OM é equivalente ao sistema de vectores inicial. Os efeitos que produzem no corpo rígido são idênticos.
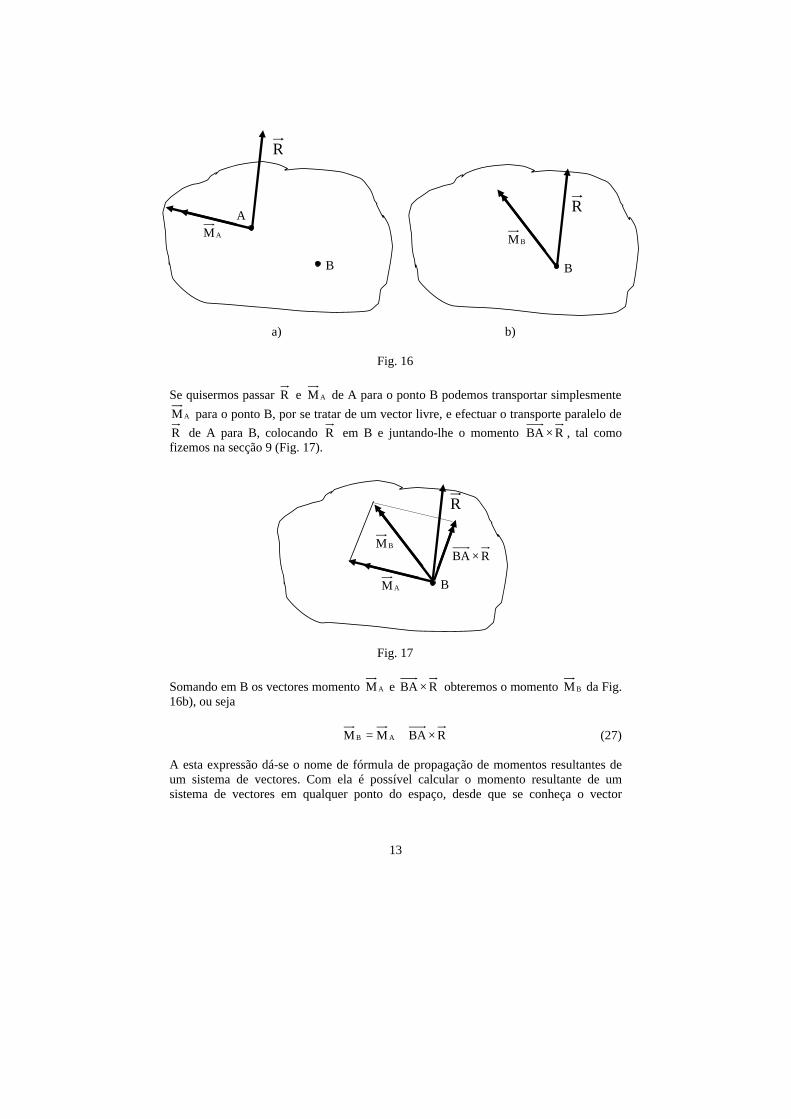
11. Fórmula de propagação de momentos resultantes de um sistema de vectores São conhecidos os elementos de redução R e AM de um determinado sistema de vectores num ponto A (Fig. 16 a). Se escolhêssemos um outro ponto B para fazer a redução do mesmo sistema de vectores obteríamos o mesmo vector principal R e um momento resultante BM diferente de AM (Fig. 16 b).
A1
Ai
1F
O An
iF
nF
O
R
OM
13
a) b) Fig. 16 Se quisermos passar R e AM de A para o ponto B podemos transportar simplesmente
AM para o ponto B, por se tratar de um vector livre, e efectuar o transporte paralelo de R de A para B, colocando R em B e juntando-lhe o momento RBA × , tal como fizemos na secção 9 (Fig. 17). Fig. 17 Somando em B os vectores momento AM e RBA × obteremos o momento BM da Fig. 16b), ou seja RBAMM AB ×+= (27) A esta expressão dá-se o nome de fórmula de propagação de momentos resultantes de um sistema de vectores. Com ela é possível calcular o momento resultante de um sistema de vectores em qualquer ponto do espaço, desde que se conheça o vector
A
B
R
AM
R
BM
B
R
AM B
BM RBA ×
14
principal R e o momento resultante num ponto. Da sua observação conclui-se que o momento resultante de um sistema de vectores varia em geral de ponto para ponto do espaço. Ao conjunto dos momentos resultantes de um sistema de vectores relativamente a todos os pontos do espaço dá-se o nome de campo de momentos resultantes.
12. Propriedade projectiva. Campos projectivos
Se internarmos ambos os membros da Eq. (27) por AB
AB obteremos
AB
ABM
AB
ABRBA
AB
ABM
AB
ABM AAB ⋅=⋅×+⋅=⋅ (28)
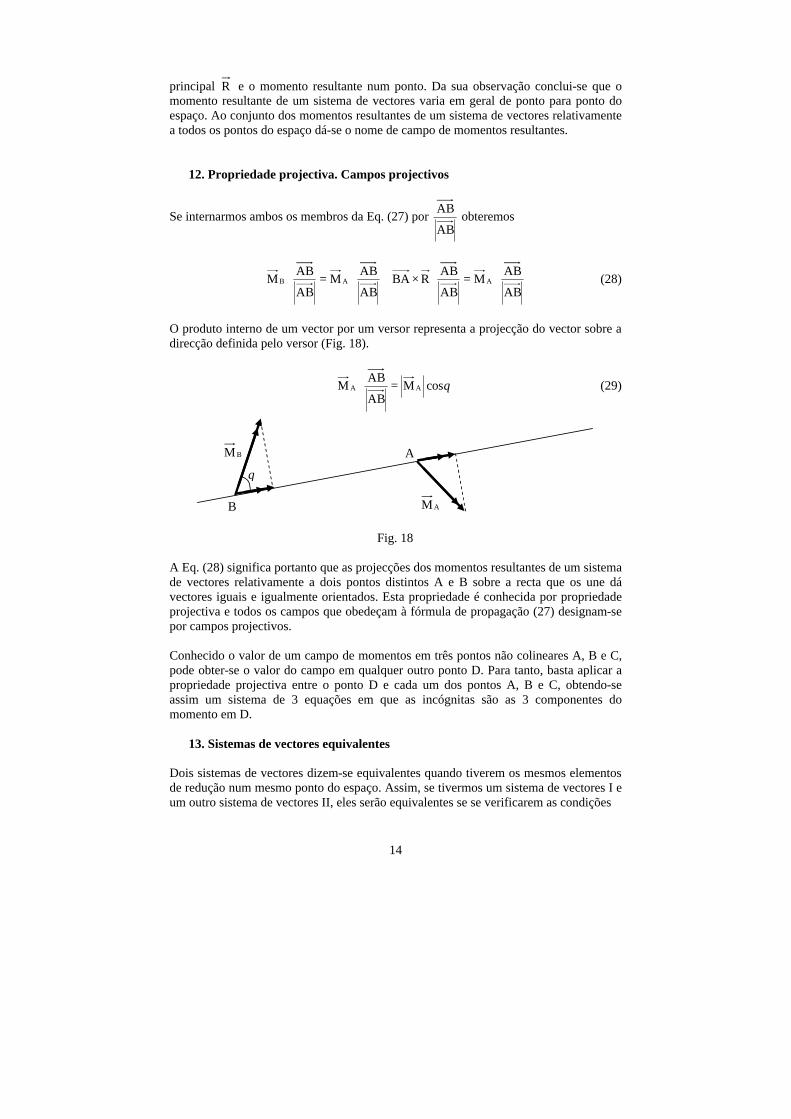
O produto interno de um vector por um versor representa a projecção do vector sobre a direcção definida pelo versor (Fig. 18).
θcosMAB
ABM AA =⋅ (29)
Fig. 18 A Eq. (28) significa portanto que as projecções dos momentos resultantes de um sistema de vectores relativamente a dois pontos distintos A e B sobre a recta que os une dá vectores iguais e igualmente orientados. Esta propriedade é conhecida por propriedade projectiva e todos os campos que obedeçam à fórmula de propagação (27) designam-se por campos projectivos. Conhecido o valor de um campo de momentos em três pontos não colineares A, B e C, pode obter-se o valor do campo em qualquer outro ponto D. Para tanto, basta aplicar a propriedade projectiva entre o ponto D e cada um dos pontos A, B e C, obtendo-se assim um sistema de 3 equações em que as incógnitas são as 3 componentes do momento em D.
13. Sistemas de vectores equivalentes Dois sistemas de vectores dizem-se equivalentes quando tiverem os mesmos elementos de redução num mesmo ponto do espaço. Assim, se tivermos um sistema de vectores I e um outro sistema de vectores II, eles serão equivalentes se se verificarem as condições
A
B
θ
AM
BM
15
IIO
IO
III
MM
RR
=
= (30)
Dois sistemas de forças serão equivalentes se produzirem os mesmos efeitos quando aplicados a um corpo rígido. Neste caso as condições (30) significam a mesma tendência para o movimento de translação e a mesma tendência para a rotação em torno de O.
14. Invariantes de um sistema de vectores São dois os invariantes de um sistema de vectores:
R - 1º invariante ou invariante vectorial RMO ⋅ - 2º invariante ou invariante escalar
O 1º invariante é o próprio vector principal do sistema de vectores, que toma esta designação por o resultado ser sempre o mesmo qualquer que seja o ponto do espaço que se escolha para fazer a soma dos vectores. Quanto ao 2º invariante, é fácil de provar que o seu valor se mantém qualquer que seja o ponto O do espaço escolhido para calcular o momento resultante OM . Na verdade, se internarmos ambos os membros da fórmula de propagação de momentos resultantes (27) por R teremos RMRRBARMRM AAB ⋅=⋅×+⋅=⋅ (31)
15. Casos de redução de um sistema de vectores Qualquer sistema de vectores pode ser substituído por um de quatro sistemas de vectores simples. A identificação do sistema de vectores simples que lhe é equivalente é feita com base nos invariantes. Os casos de redução possíveis são os seguintes: 1) R = 0 ∧ OM = 0 → Sistema de vectores equivalente a zero (se os vectores do sistema forem forças estas condições traduzem o equilíbrio do sistema de forças). A fórmula de propagação de momentos resultantes permite-nos concluir que neste caso o momento resultante é nulo em todos os pontos do espaço. 2) R = 0 ∧ OM ≠ 0 → Sistema de vectores equivalente a conjugado (se os vectores do sistema forem forças o sistema diz-se equivalente a binário). A fórmula de propagação de momentos resultantes permite-nos concluir que neste caso o momento resultante é constante em todos os pontos do espaço. 3) R ≠ 0 ∧ RMO ⋅ = 0 → Sistema de vectores equivalente a vector único. O vector único é o vector R que neste caso assume a designação de resultante do sistema de vectores.

16
4) R ≠ 0 ∧ RMO ⋅ ≠ 0 → Sistema de vectores equivalente a vector mais conjugado ou dois vectores não complanares.
16. Eixo central de um sistema de vectores A fórmula de propagação de momentos resultantes de um sistema de vectores (27) mostra-nos que em geral o momento resultante varia de ponto para ponto do espaço. Será que há pontos Q do espaço em que o momento resultante QM seja paralelo ao
vector principal R ? Ou seja RM Q α= (32) Se conhecermos os elementos de redução do sistema num ponto O podemos escrever RRQOMM OQ α=×+= (33) Se internarmos ambos os membros de (33) por R obteremos 2
O RRRRRQORM αα =⋅=⋅×+⋅ (34) ou seja
2
O
RRM ⋅
=α (35)
e, recorrendo a (32)
R
R
R
RMR
RRM
M O2
OQ
⋅=
⋅= (36)
Se existirem pontos Q do espaço em que o momento resultante do sistema seja paralelo a R o seu valor será dado por (36). A expressão (33) pode ainda pôr-se na forma OMRRQO −=× α (37) Nesta equação são conhecidas as coordenadas do ponto O onde se fez a redução do sistema de vectores, são conhecidos R e OM e α poder calculado por (35). Só são desconhecidas as coordenadas do ponto Q. Estamos portanto perante uma equação do tipo bax =× (38)

17
que é um problema de divisão vectorial, cuja solução será, atendendo a (16)
( )
RR
MRRQO 2
O λα
+−×
= (39)
ou ainda, atendendo a que é nulo o produto externo RR α× e que λ é um escalar qualquer
RR
MROQ 2
O λ+×
+= (40)
Esta é a equação vectorial do lugar geométrico dos pontos do espaço em que o momento resultante do sistema de vectores é paralelo ao vector principal do sistema. Trata-se da equação de uma recta que recebe o nome de eixo central do sistema de vectores. Vejamos que esta recta é ela própria paralela a R . Para tanto, escolhamos dois dos seus pontos Q1 e Q2 atribuindo ao parâmetro λ dois valores particulares λ1 ≠ λ2.
RR
MROQ 12
O1 λ+
×+= (41)
RR
MROQ 22
O2 λ+
×+= (42)
Subtraindo membro a membro (41) e (42) vem ( ) RRQQQQ 211221 λλλ =−==− (43) Isto é, o vector 12QQ , que existe sobre o eixo central, é paralelo a R (Fig. 19). Fig. 19 A Eq. (36) representa a projecção do momento OM sobre a direcção de R (Fig. 20)
Q
Q1
Q2 R
QM Eixo central
18
Fig. 20 Quer dizer, sendo o momento nos pontos do eixo central a projecção do momento em qualquer outro ponto sobre a direcção de R , podemos concluir que o momento nos pontos do eixo central é mínimo. O eixo central de um sistema de vectores é então o lugar geométrico dos pontos do espaço em que o momento resultante é mínimo. Só dois dos quatro casos de redução apresentados na secção 15 admitem eixo central. Os sistemas equivalentes a vector único e os sistemas equivalentes a vector mais conjugado. Na verdade, os sistemas equivalentes a zero e a conjugado não só não têm vector principal como o seu momento resultante é constante em todos os pontos do espaço.
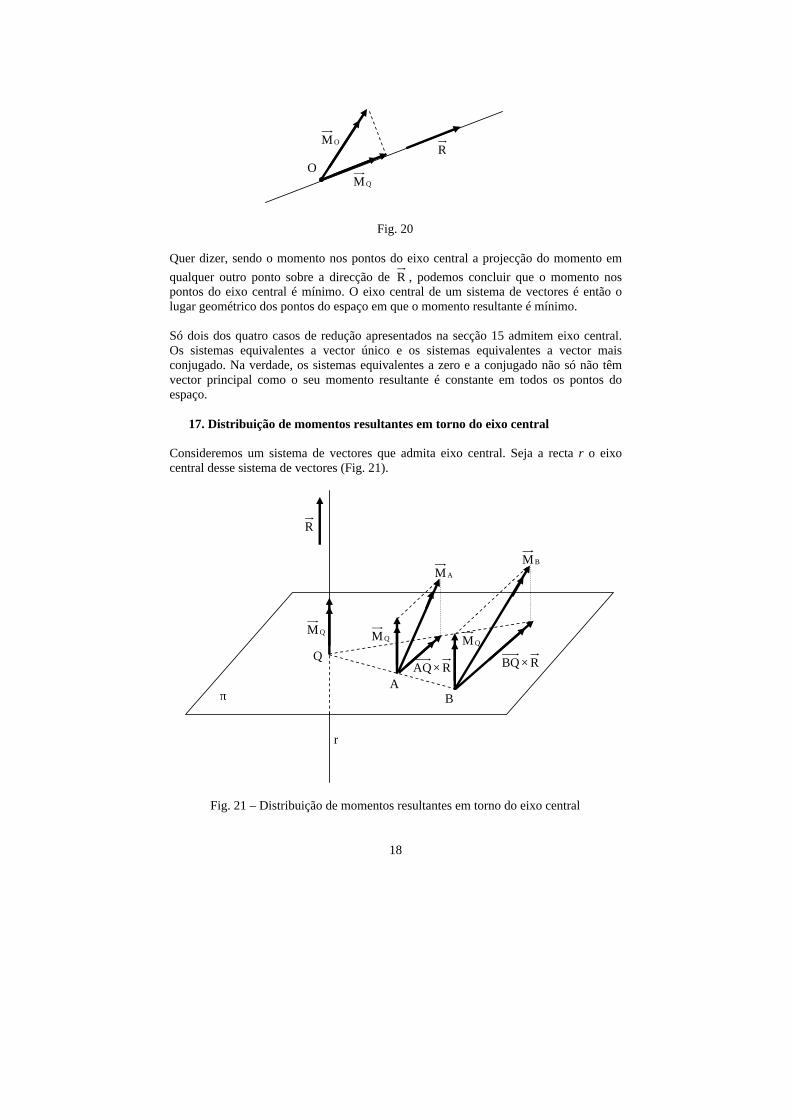
17. Distribuição de momentos resultantes em torno do eixo central Consideremos um sistema de vectores que admita eixo central. Seja a recta r o eixo central desse sistema de vectores (Fig. 21). Fig. 21 – Distribuição de momentos resultantes em torno do eixo central
R O
QM
OM
Q
R
QM QM
QM
A B
AM BM
RAQ×
RBQ ×
r
π
19
Consideremos ainda um plano π perpendicular ao eixo central que o intersecta no ponto Q. O momento resultante do sistema neste ponto será naturalmente paralelo ao vector R que por sua vez será paralelo ao próprio eixo central. Para obtermos o momento resultante num ponto A do plano π podemos recorrer à fórmula de propagação de momentos resultantes RAQMM QA ×+= (44) O momento em A é pois a soma do momento no eixo central QM com o vector
RAQ× , que é perpendicular a AQ e a R (existe no plano π). Esta soma vectorial está representada graficamente na Fig. 21. Num ponto B mais afastado do eixo central o momento resultante continua a ser a soma do momento no eixo central com um vector existente no plano π que é maior que o anterior (cresce proporcionalmente com a distância ao eixo central). Vê-se assim que à medida que nos afastamos do eixo central o momento resultante não só vai crescendo como vai tendendo para a perpendicular ao eixo central. Inversamente, o momento resultante nos pontos do eixo central é o menor de todos. É a projecção do momento em qualquer outro ponto sobre o eixo central (direcção de R ). Note-se que se tivéssemos considerado qualquer outro plano paralelo ao plano π a Fig. 21 continuaria inteiramente válida. Podemos por isso concluir que o lugar geométrico dos pontos do espaço em que o momento resultante é igual a AM é uma recta paralela ao eixo central passando por A. Ou que o lugar geométrico dos pontos do espaço em que o momento resultante tem a mesma intensidade que AM é uma superfície cilíndrica de raio QA e eixo no eixo central. A Fig. 21 representa o caso de um sistema de vectores equivalente a vector mais conjugado visto que o 2º invariante é diferente de zero ( RMA ⋅ ≠ 0). Se se tratasse de um sistema de vectores equivalente a vector único ( RMA ⋅ = 0), o momento fora do eixo central teria que ser perpendicular ao eixo central (⊥ a R ) e portanto a componente
QM não existiria. Nos sistemas equivalentes a vector único o momento resultante nos pontos do eixo central além de ser mínimo é nulo. Resumindo. Quando se faz a redução de um sistema de vectores equivalente a vector mais conjugado num ponto do eixo central obtém-se o vector R e um momento QM
paralelo a R . Quando se faz a redução de um sistema de vectores equivalente a vector único num ponto do eixo central obtém-se unicamente o vector R . Então o eixo central é a linha de acção da resultante dos sistemas equivalentes a vector único. Só nos pontos do eixo central é que é possível substituir o sistema exclusivamente pela resultante. Em qualquer ponto fora do eixo central haverá sempre o vector R e um momento perpendicular a R .
18. Casos particulares de sistemas equivalentes a vector único Há três casos de sistemas que são em geral equivalentes a vector único.
20
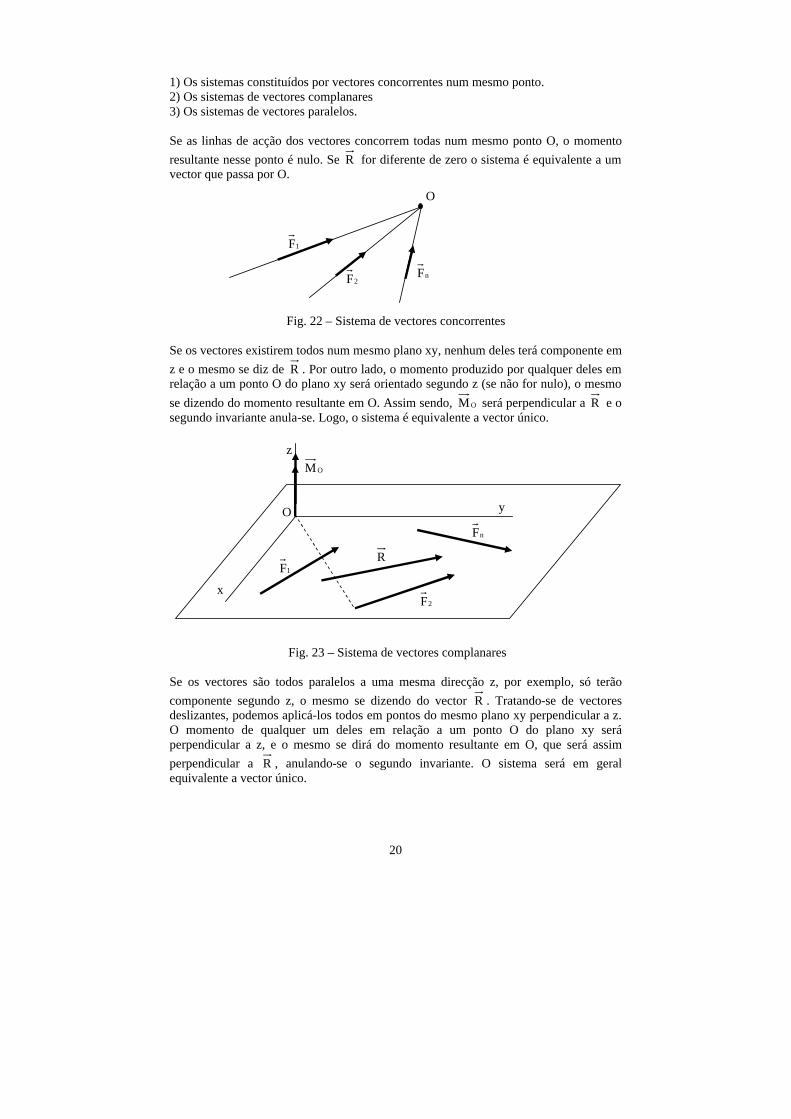
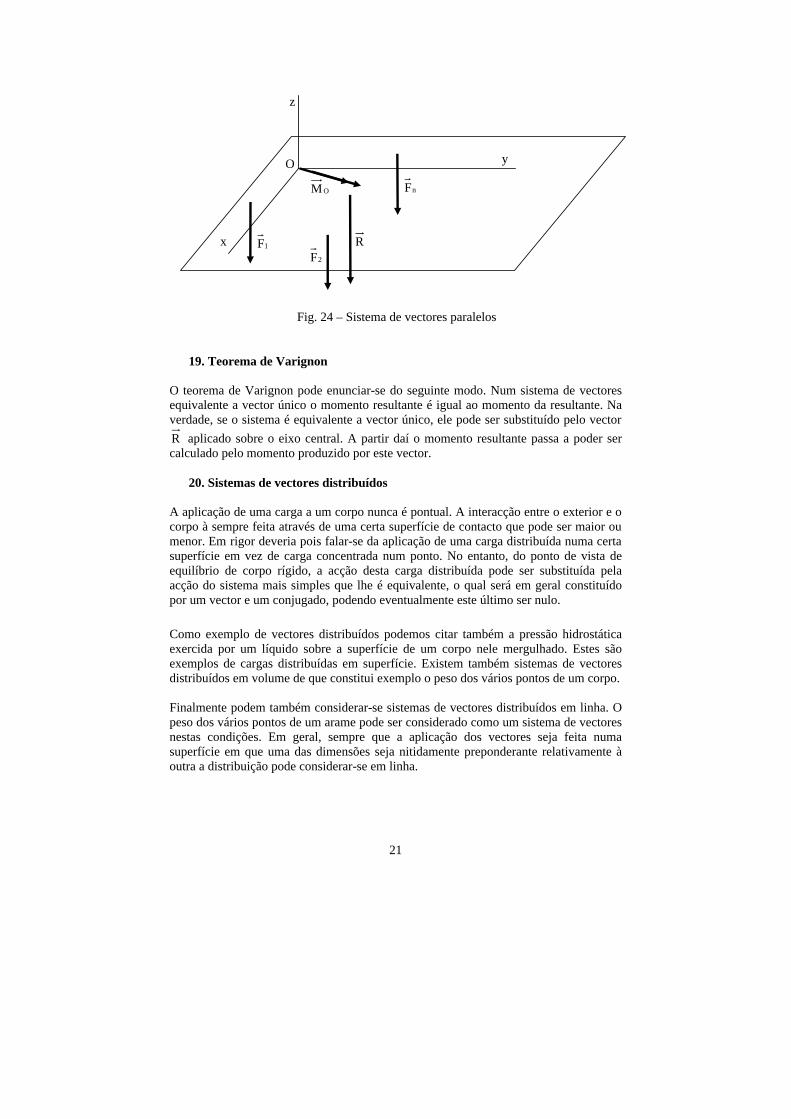
1) Os sistemas constituídos por vectores concorrentes num mesmo ponto. 2) Os sistemas de vectores complanares 3) Os sistemas de vectores paralelos. Se as linhas de acção dos vectores concorrem todas num mesmo ponto O, o momento resultante nesse ponto é nulo. Se R for diferente de zero o sistema é equivalente a um vector que passa por O. Fig. 22 – Sistema de vectores concorrentes Se os vectores existirem todos num mesmo plano xy, nenhum deles terá componente em z e o mesmo se diz de R . Por outro lado, o momento produzido por qualquer deles em relação a um ponto O do plano xy será orientado segundo z (se não for nulo), o mesmo se dizendo do momento resultante em O. Assim sendo, OM será perpendicular a R e o segundo invariante anula-se. Logo, o sistema é equivalente a vector único. Fig. 23 – Sistema de vectores complanares Se os vectores são todos paralelos a uma mesma direcção z, por exemplo, só terão componente segundo z, o mesmo se dizendo do vector R . Tratando-se de vectores deslizantes, podemos aplicá-los todos em pontos do mesmo plano xy perpendicular a z. O momento de qualquer um deles em relação a um ponto O do plano xy será perpendicular a z, e o mesmo se dirá do momento resultante em O, que será assim perpendicular a R , anulando-se o segundo invariante. O sistema será em geral equivalente a vector único.
O
1F
2F nF
O
x
y
z
1F
2F
nF
R
OM
21
Fig. 24 – Sistema de vectores paralelos
19. Teorema de Varignon O teorema de Varignon pode enunciar-se do seguinte modo. Num sistema de vectores equivalente a vector único o momento resultante é igual ao momento da resultante. Na verdade, se o sistema é equivalente a vector único, ele pode ser substituído pelo vector R aplicado sobre o eixo central. A partir daí o momento resultante passa a poder ser calculado pelo momento produzido por este vector.
20. Sistemas de vectores distribuídos A aplicação de uma carga a um corpo nunca é pontual. A interacção entre o exterior e o corpo à sempre feita através de uma certa superfície de contacto que pode ser maior ou menor. Em rigor deveria pois falar-se da aplicação de uma carga distribuída numa certa superfície em vez de carga concentrada num ponto. No entanto, do ponto de vista de equilíbrio de corpo rígido, a acção desta carga distribuída pode ser substituída pela acção do sistema mais simples que lhe é equivalente, o qual será em geral constituído por um vector e um conjugado, podendo eventualmente este último ser nulo.
Como exemplo de vectores distribuídos podemos citar também a pressão hidrostática exercida por um líquido sobre a superfície de um corpo nele mergulhado. Estes são exemplos de cargas distribuídas em superfície. Existem também sistemas de vectores distribuídos em volume de que constitui exemplo o peso dos vários pontos de um corpo. Finalmente podem também considerar-se sistemas de vectores distribuídos em linha. O peso dos vários pontos de um arame pode ser considerado como um sistema de vectores nestas condições. Em geral, sempre que a aplicação dos vectores seja feita numa superfície em que uma das dimensões seja nitidamente preponderante relativamente à outra a distribuição pode considerar-se em linha.
O
x
y
z
1F 2F
nF
R
OM

22
Como se faz então o estudo de um sistema de vectores distribuídos? Como o de qualquer outro sistema de vectores. Através dos respectivos elementos de redução, o vector principal R e o momento resultante num ponto OM . O vector principal R foi definido como a soma vectorial dos vários vectores que constituem o sistema. No caso presente, uma vez que temos uma distribuição contínua de vectores, essa soma será substituída por um integral. Vamos pois definir o vector elementar que actua num elemento de superfície dS que envolve um ponto genérico P. Esse vector será o produto de uma densidade de distribuição vectorial pelo elemento de superfície dS. ( ) ( ) dSPdPdv S= (45) No caso de os vectores distribuídos serem do tipo força as dimensões desta densidade serão as de força por unidade de superfície. Quer o vector ( )Pdv quer a densidade
( )PdS são função das coordenadas do ponto P. Para os casos de distribuição em linha e em volume teremos respectivamente ( ) ( ) dsPdPdv s= (46) ( ) ( ) dVPdPdv V= (47) O vector principal R será então, para cada um dos casos ( ) ( )∫∫ ==
S SSdSPdPdvR (48)
( ) ( )∫∫ ==
s ssdsPdPdvR (49)
( ) ( )∫∫ ==
V VVdVPdPdvR (50)
Quanto ao momento resultante será também a soma (integral) dos vários vectores momento de cada um dos vectores elementares em relação ao ponto considerado
( ) ( )∫∫ ×=×=S SS
O dSPdOPPdvOPM . (51)
( ) ( )∫∫ ×=×=s ss
O dsPdOPPdvOPM (52)
( ) ( )∫∫ ×=×=V VV
O dVPdOPPdvOPM (53)
23
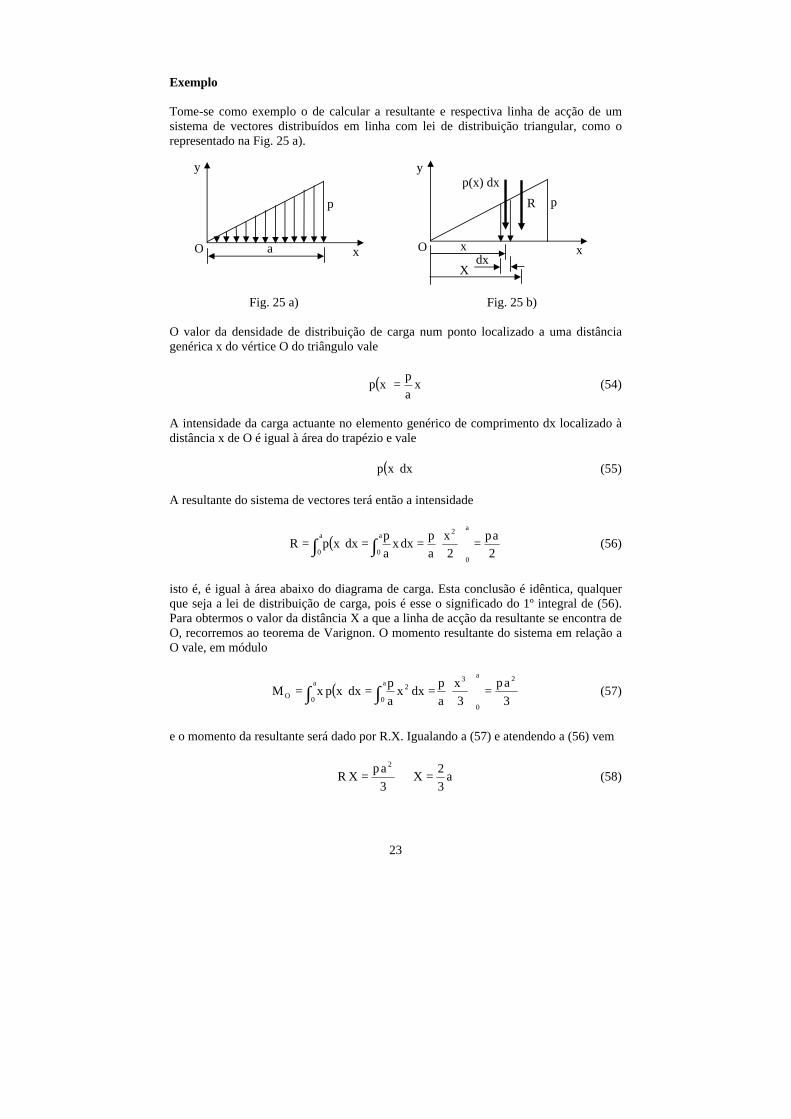
Exemplo Tome-se como exemplo o de calcular a resultante e respectiva linha de acção de um sistema de vectores distribuídos em linha com lei de distribuição triangular, como o representado na Fig. 25 a). Fig. 25 a) Fig. 25 b) O valor da densidade de distribuição de carga num ponto localizado a uma distância genérica x do vértice O do triângulo vale
( ) xap
xp = (54)
A intensidade da carga actuante no elemento genérico de comprimento dx localizado à distância x de O é igual à área do trapézio e vale ( )dxxp (55) A resultante do sistema de vectores terá então a intensidade
( )2ap
2x
ap
dxxap
dxxpRa
0
2a
0
a
0=
=== ∫∫ (56)
isto é, é igual à área abaixo do diagrama de carga. Esta conclusão é idêntica, qualquer que seja a lei de distribuição de carga, pois é esse o significado do 1º integral de (56). Para obtermos o valor da distância X a que a linha de acção da resultante se encontra de O, recorremos ao teorema de Varignon. O momento resultante do sistema em relação a O vale, em módulo
( )3ap
3x
ap
dxxap
dxxpxM2a
0
3a
0
2a
0O =
=== ∫∫ (57)
e o momento da resultante será dado por R.X. Igualando a (57) e atendendo a (56) vem
a32
X3ap
XR2
=⇒= (58)
p
y
x O a O
p
x
p(x) dx
dx
R
x
y
X