sistema de monitoramento para uma central de cuidados de ... · também agradeço a minha namorada...
TRANSCRIPT
ALEXANDRE HIDEKI AKITA
Sistema de Monitoramento para uma
Central de Cuidados de Idosos
SOROCABA 2018
ALEXANDRE HIDEKI AKITA
SISTEMA DE MONITORAMENTO PARA UMA CENTRAL DE
CUIDADOS DE IDOSOS
Trabalho de Conclusão de Curso
apresentado ao Instituto de Ciência e
Tecnologia de Sorocaba, Universidade
Estadual Paulista (UNESP), como parte
dos requisitos para obtenção do grau de
Bacharel em Engenharia de Controle e
Automação.
Orientador: Prof. Dr. Galdenoro Botura
Jr.
SOROCABA
2018

Ficha catalográfica elaborada pela Biblioteca da Unesp Instituto de Ciência e Tecnologia – Câmpus de Sorocaba
Bibliotecário responsável: Bruna B. Guimarães – CRB 8/8855
Akita, Alexandre Hideki.
Sistema de monitoramento para uma central de cuidados de idosos / Alexandre Hideki Akita, 2018.
47 f.: il. Orientador: Galdenoro Botura Junior.
Trabalho de Conclusão de Curso (Graduação) – Universidade
Estadual Paulista "Júlio de Mesquita Filho". Instituto de Ciência e Tecnologia (Câmpus de Sorocaba), 2018.
1. Arduino. 2. Idoso. 3. Acidentes por quedas. 4. Automação.
I. Universidade Estadual Paulista "Júlio de Mesquita Filho". Instituto de Ciência e Tecnologia (Câmpus de Sorocaba). II. Título.

FOLHA DE APROVAÇÂO
AGRADECIMENTOS
A todos os professores que me ensinaram com tanta dedicação todo
conhecimento que tenho hoje.
Ao professor Dr.Galdenoro Botura Jr. pela dedicação e orientação no
trabalho de graduação.
Também a professor Dr. Ivando Severino Diniz pela ajuda nas
dificuldades que tive com o Arduino.
Agradeço minha família e amigos pelo apoio durante todo o trajeto da
faculdade. Também agradeço a minha namorada Juliana Montibeller que me
apoiou e me ajudou nas madrugadas dedicadas ao projeto.

“A luta pela vida, nem sempre é vantajosa aos fortes,
nem aos espertos. Mais cedo ou mais tarde,
quem cativa a vitória é aquele que crê plenamente:
EU CONSEGUIREI. ”
(Napoleon Hill)
RESUMO
Com a diminuição da natalidade e com o aumento da expectativa de vida
do povo brasileiro, o aumento da população idosa tem sido significativo. Devido
a esse novo status da população brasileira há um aumento dos gastos do
sistema de saúde. Os idosos tendem a ter cada vez mais problemas de saúde e
uma diminuição da sua independência. Esses problemas de saúde são
causados pela a ocorrência da queda, justificada pela falta de equilíbrio,
vertigem, confusão mental e entre outros.
Com o avanço da tecnologia, a área de Automação tem tido um papel
importante para ajudar esses idosos a ter uma vida mais independente e segura.
Um exemplo de ajuda é o projeto que irá ser desenvolvido nesse trabalho.
Para solucionar isso o projeto irá englobar o uso do Arduino e seu
microcontrolador para obter as informações de um acelerômetro em que este irá
informar a ocorrência de queda do idoso. Além disso, o projeto irá ter uma central
de atendimento onde estará conectado com o aposento do idoso e poderá
monitorar o idoso caso haja a queda e com uma câmera que será ativada quando
o acelerômetro mostrar uma queda.
Os resultados do projeto foram um protótipo de sensor de queda que
verifica a queda através de uma variação de aceleração e um sistema que inclui
dois programas um Servidor e um Cliente, onde eles se comunicam em rede. O
primeiro monitora a queda através de um painel simples e de fácil visualização
e o segundo consegue captar os dados do sensor de queda através do bluetooth
e enviar o alerta para o primeiro programa.
Palavras chave: Arduino, Idoso, Acidentes por quedas, Automação
ABSTRACT
With the decrease in the birth rate and the increase in the life expectancy
of the Brazilian people, the increase in the elderly population has been significant.
Due to this new status of the Brazilian population there is an increase in health
system expenditures. Older people tend to have more and more health problems
and a decline in their independence. These health problems are caused by the
occurrence of the fall, justified by the lack of balance, vertigo, mental confusion
and among others.
With the advancement of technology, the Automation area has played an
important role in helping these elderly people to lead a more independent and
safe life. An example of help is the project that will be developed in this work.
To solve this the project will encompass the use of the Arduino and its
microcontroller to obtain the information of an accelerometer in which this will
inform the occurrence of fall of the elderly. In addition, the project will have a call
center where it will be connected to the elderly room and can monitor the elderly
if there is a fall and with a camera that will be activated when the accelerometer
shows a fall.
The results of the project were a prototype of fall sensor that verifies the
fall through a variation of acceleration and a system that includes two programs
a Server and a Client where they communicate in network. The first monitors the
fall through a simple panel and easy to see and the second can capture the data
of the fall sensor through the bluetooth and send the alert to the first program.
Keywords: Arduino, Aged, Accidental fall, Automation
Sumário1. Introdução ............................................................................................................................................. 1
2. Revisão bibliográfica ............................................................................................................................ 6
3. Embasamento Teórico ......................................................................................................................... 8
ARDUINO ...................................................................................................................................................... 8
ACELEROMETRO ........................................................................................................................................ 9
Bluetooth ..................................................................................................................................................... 10
LABVIEW .................................................................................................................................................... 11
Rede de área local (LAN) ............................................................................................................................ 12
4. Materiais e Métodos ........................................................................................................................... 13
4.1 Materiais ................................................................................................................................................ 13
Arduino uno R3 ........................................................................................................................................... 13
Acelerômetro MPU-6050 ............................................................................................................................. 14
Bluetooth 4.0 HM-10 ................................................................................................................................... 15
Câmera USB ............................................................................................................................................... 16
4.2- Métodos ............................................................................................................................................... 17
Projeto ......................................................................................................................................................... 17
Arduino ........................................................................................................................................................ 18
MPU-6050 ................................................................................................................................................... 19
HM-10 com o PC ......................................................................................................................................... 21
Usando Câmera USB .................................................................................................................................. 22
Programa no LabView ................................................................................................................................. 22
O Painel central ........................................................................................................................................... 22
A Conexão da rede ..................................................................................................................................... 23
Descrição da parte da câmera .................................................................................................................... 25
A aquisição dos dados ................................................................................................................................ 25
5. Resultados e Discussões ....................................................................................................................... 27
5.1- Programas Cliente e Servidor .............................................................................................................. 27
5.2- Testes do Projeto ................................................................................................................................. 31
6.0- Conclusão ............................................................................................................................................ 32
7.0- Referências .......................................................................................................................................... 34
Apêndice A ................................................................................................................................................. 38
Apêndice B ................................................................................................................................................. 39
1
1. Introdução
A história da população brasileira já sofreu muitas alterações, desde um
crescimento acelerado quanto uma oscilação na faixa etária. Contudo, desde
1970 a taxa de natalidade diminuiu, isso pelo fato das mulheres entrarem no
mercado de trabalho e pelo custo com a criação de uma criança ter aumentado
consideravelmente.
Com isso, a população começou a envelhecer aos poucos e de acordo
com estatísticas do IBGE (Instituto Brasileiro de Geografia e Estatística, 2012)
em 2050 haverá 73 idosos para cada 100 crianças. Outro estudo diz que
aproximadamente em 2039 a população brasileira irá entrar em uma tendência
mundial que se chama “crescimento zero”, ou seja, o crescimento da população
brasileira irá estabilizar (FREITAS,2018).
Podemos observar que segundo dados do IBGE referidos no livro UNATI
de 2012, em 2020 os idosos chegarão a 25 milhões de pessoas, mas segundo
o Instituto Brasileiro de Geografia e Estatística (IBGE) em 2016 a população
idosa chegou a 29,6 milhões, ou seja, o crescimento foi acima do esperado.
(MARQUES, et al., 2012) (IBGE, 2017)
Outro fator é que, a expectativa de vida dos brasileiros hoje é de 72,78
anos e pelas estatísticas, em 2050 ela irá subir para 81,29 anos. Quase igual ao
do Japão (83,10 anos), dado de 2012. (FREITAS,2018)
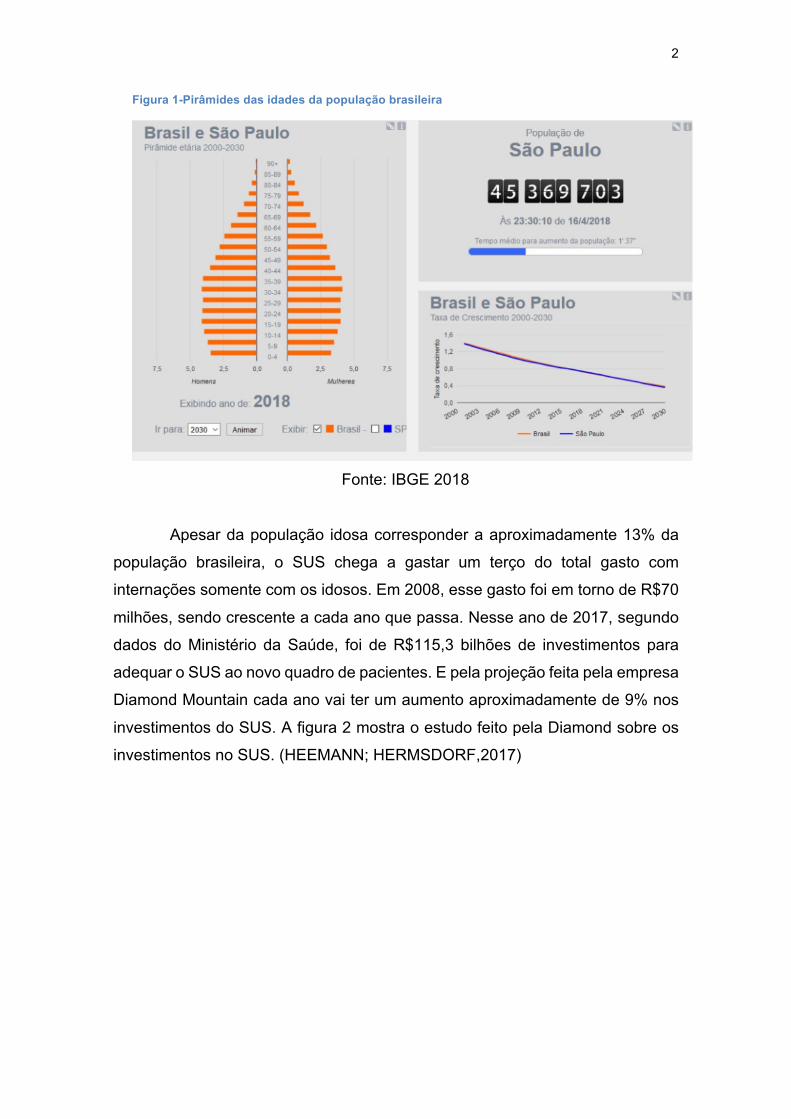
Na figura 1 temos a projeção da pirâmide de faixa etária do Brasil em
2018 e o gráfico da projeção de 2000 até 2030 para visualizar o aumento da
população idosa no Brasil.
2
Figura 1-Pirâmides das idades da população brasileira
Fonte: IBGE 2018
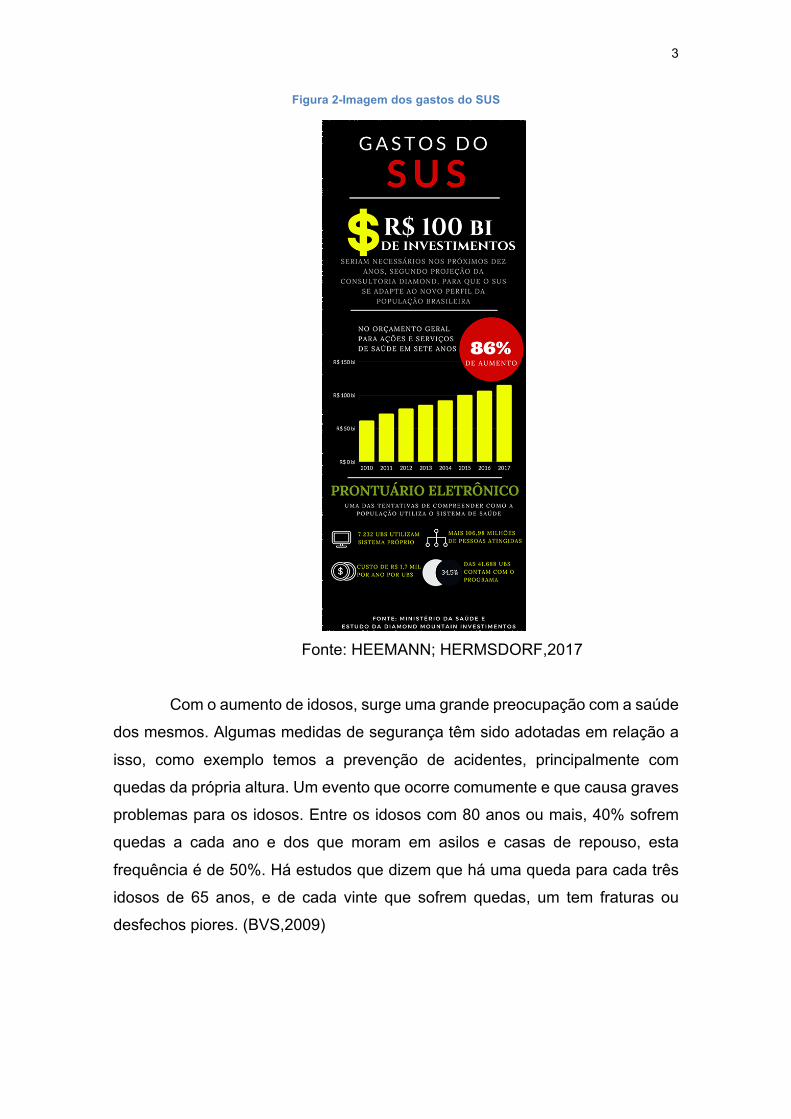
Apesar da população idosa corresponder a aproximadamente 13% da
população brasileira, o SUS chega a gastar um terço do total gasto com
internações somente com os idosos. Em 2008, esse gasto foi em torno de R$70
milhões, sendo crescente a cada ano que passa. Nesse ano de 2017, segundo
dados do Ministério da Saúde, foi de R$115,3 bilhões de investimentos para
adequar o SUS ao novo quadro de pacientes. E pela projeção feita pela empresa
Diamond Mountain cada ano vai ter um aumento aproximadamente de 9% nos
investimentos do SUS. A figura 2 mostra o estudo feito pela Diamond sobre os
investimentos no SUS. (HEEMANN; HERMSDORF,2017)
3
Figura 2-Imagem dos gastos do SUS
Fonte: HEEMANN; HERMSDORF,2017
Com o aumento de idosos, surge uma grande preocupação com a saúde
dos mesmos. Algumas medidas de segurança têm sido adotadas em relação a
isso, como exemplo temos a prevenção de acidentes, principalmente com
quedas da própria altura. Um evento que ocorre comumente e que causa graves
problemas para os idosos. Entre os idosos com 80 anos ou mais, 40% sofrem
quedas a cada ano e dos que moram em asilos e casas de repouso, esta
frequência é de 50%. Há estudos que dizem que há uma queda para cada três
idosos de 65 anos, e de cada vinte que sofrem quedas, um tem fraturas ou
desfechos piores. (BVS,2009)
4
“A distribuição das causas difere entre idosos institucionalizados e os
não-institucionalizados. As quedas entre os moradores de asilos e casas de
repouso são em decorrência de distúrbios de marcha, equilíbrio, vertigem e
confusão mental, enquanto que pessoas não institucionalizadas tendem a cair
por problemas ambientais, seguidos de fraqueza/distúrbios do equilíbrio e
marcha, "síncope de pernas", tontura/vertigem, alteração postural/hipotensão
ortostática, lesão do Sistema Nervoso Central, síncope e outras causas. ” (BVS,2009)
Atualmente, alguns processos que ajudam na redução das quedas são
modificações na casa como por exemplo tapete antiderrapante, barras de apoio,
uma maior iluminação, automação residencial e outros. Como citado
anteriormente, a automação residencial é um grande aliado para auxiliar os
idosos na diminuição das quedas, principalmente incentivando seu autocuidado
e uma maior independência, como exemplo, agindo através de sensores de
presença para acionamento da luz sem necessidade de locomoção dos mesmos
no escuro, ou com elevadores para facilitar a deambulação dentro do ambiente
doméstico.
Existem alguns produtos que tem como visão solucionar esse problema
com relação aos cuidados de idosos. Um exemplo deles é o TeleHelp que
basicamente é um colar aonde há um botão que caso a pessoa precise de ajuda
ele pode acionar e solicitar assistência. (TELEHELP,2017) Nos Estados Unidos,
existe o “Home Safe Medical Alarm”, que consiste em um sensor para idosos,
que ao cair aciona o botão automaticamente para central de atendimentos enviar
uma ambulância (PHILIPS,2017).
Assim, em função do histórico da população, do aumento do número de
quedas, e principalmente do papel que a Automação tem para ajudar na atual
situação, é de grande importância que o Engenheiro de Controle e Automação
tenha conhecimento do uso de Arduino, câmeras, e acelerômetros para assim
desenvolver soluções inovadoras para auxiliar o controle do número de quedas
dos idosos com um rápido atendimento.
Uma das soluções é criar um sistema para identificar uma possível
queda devido a um infarto por exemplo, usando o Arduino (microcontrolador)
mais um acelerômetro, quando ocorrer a queda, um alerta é enviado para a
central onde automaticamente acionará a câmera do local onde o idoso está.
5
Isso fará com que o atendimento seja mais rápido e facilitará o salvamento de
uma vida. Além disso, diminui os gastos do SUS, pois 76% da população idosa
fazem o uso sistema único de saúde.
E segundo Helvécio Magalhães Júnior que foi o secretário de atenção à
saúde do Ministério da Saúde: “Nós não vamos resolver a questão dos idosos somente com
geriatras. Existem 400 ou 500 profissionais geriatras no Brasil. Nós
vamos precisar de muito mais, mas não é só isso que vai resolver o
problema” (ANAHP,2013)
Logo, a solução do projeto vai auxiliar na diminuição da necessidade de
muitos geriatras e cuidadores.
6
2. Revisãobibliográfica
Em sua tese de mestrado, (MIRANDA et al., 2008) apresenta um sensor de
queda feita com duas etapas, a primeira etapa constitui em dois sensores de
aceleração para detectar a queda enviando continuamente sinais analógicos
para um microcontrolador MSP430 que digitaliza o sinal e analisa a ocorrência
de queda e envia um sinal via Rádio frequência para uma central e a segunda
etapa um outro MSP430 para receber esses dados via Rádio frequência e este
microcontrolador enviar um SMS para o celular registrado.
Já em 2012, no artigo de (MERLIM et al., 2012), foi apresentado uma
plataforma onde foi utilizada um microcontrolador da Microchip dsPICF3012 com
o bluetooth ADXL330 e em conjunto de uma interface gráfica desenvolvida com
LabWindows detectava a queda de um idoso. Um ponto relevante nesse trabalho
foi utilização de um microcontrolador pequeno onde no resultado final ajuda na
leveza e na portabilidade do sensor e a interface de monitoramento consegue
ver a situação atual do paciente e pode analisar os dados físicos utilizando um
data logger.
Em 2016, (SAMPAIO, 2016) desenvolveu em sua dissertação de pós-
graduação um projeto que detecta a queda do idoso, contudo utiliza um aplicativo
desenvolvido pela mesma para captar as oscilações do idoso através do
acelerômetro do celular. É capaz de verificar as oscilações presentes na
manutenção do equilíbrio estático de idosos e diferenciar os resultados em dois
grupos de alto e baixo risco de queda. Justificou o uso smartphone, pois a
utilização deste está em grande expansão e o uso dele faz o custo do projeto ser
mais barato pois quase todos os idosos já o possui.
(TORQUATO et al., 2017) apresentou em seu trabalho uma maneira parecida
com (SAMPAIO, 2016) de monitoramento de idosos e de pessoas debilitadas.
Foi utilizado o acelerômetro do celular e um aplicativo desenvolvido capaz de
detectar uma eventual queda analisando dois parâmetros: a primeira é a
aceleração resultante para analisar uma variação de aceleração brusca onde
pode ocorrer queda, ou uma corrida ou uma caminhada rápida e a segunda é
caso a aceleração for brusca como nos casos citados, verificar se depois dessa
7
variação ocorreu uma parada de movimento no individuo por um período,
identificando a possível queda.
Dos projetos mais próximos, o (TORQUATO et al., 2017) apresentou uma
melhora no projeto de (SAMPAIO, 2016) analisando de dois jeitos a aceleração
para uma melhor analise da possível queda.
Comparando os projetos, temos uma variedade de maneiras para fazer um
monitoramento de quedas, desde usando microcontroladores a smartphones.
Mas todos utilizam o mesmo princípio da variação da aceleração do sensor de 3
eixos (acelerômetro). Outro fator notado entre os projetos, todos visam alguma
maneira para o idoso ser o mais breve socorrido.
8
3. EmbasamentoTeórico
ARDUINO
A definição do Arduino seria um sistema de desenvolvimento (uma
placa) que você pode programar para realizar comandos nas entradas e saídas
entre componentes externos e no próprio Arduino. Ele pode se comunicar tanto
por hardware quanto em meio de software, assim definindo como uma
plataforma embarcada. Contém todos os itens para ser definido também com um
microcomputador, os itens como microprocessador, memória ROM, memória
RAM, periféricos de entrada / saída, Conversor Analógio/Digital, etc.
Um exemplo básico que sempre é feito no começo dos aprendizados
nesse microcontrolador é o de acender um led conectado com o mesmo por meio
de um botão e após um tempo ele se apaga. Esse exemplo pode ser estendido
para por exemplo sensores de presença, sensores de aceleração, motores,
sensores de temperatura, sensores de pressão, ou qualquer outro dispositivo
que possa emitir ou receber dados.
Arduino é placa projetada com um microcontrolador Atmel AVR com
suporte de entrada/saída e linguagem de programação padrão que é
essencialmente C/C++. Esse dispositivo tem um baixo custo, são flexíveis e
fáceis de serem usados para os trabalhos. Também pode ter uma saída USB
para conexão com o PC e pino de entrada e saída para conectar com outros
circuitos ou sensores (CHAVIER,2017)
A programação do Arduino é feita no IDE (Integrated Development
Environment) do Arduino, um software onde você pode colocar uma série de
instruções ou códigos baseados em linguagem C. O software permite você fazer
programa (ou sketches como são chamados) e fazer o upload para o
microcontrolador. Então o Arduino irá executar o passo a passo de cada código
com o todos os periféricos conectados a ele.
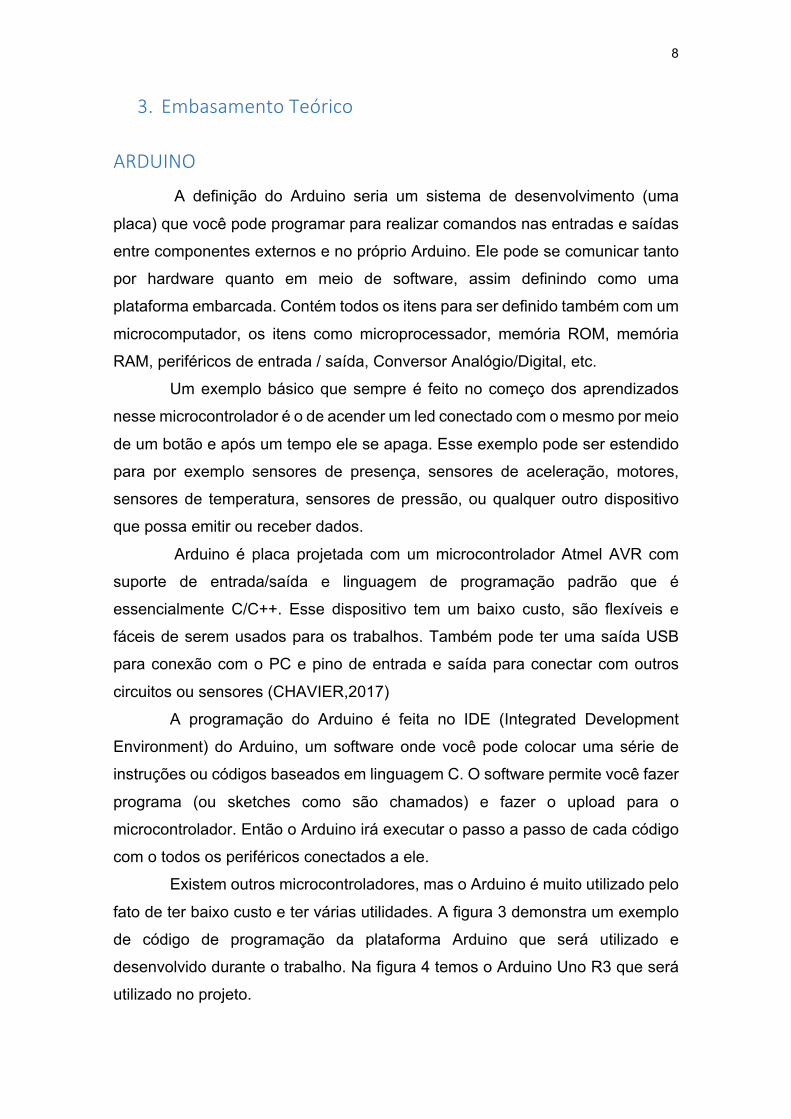
Existem outros microcontroladores, mas o Arduino é muito utilizado pelo
fato de ter baixo custo e ter várias utilidades. A figura 3 demonstra um exemplo
de código de programação da plataforma Arduino que será utilizado e
desenvolvido durante o trabalho. Na figura 4 temos o Arduino Uno R3 que será
utilizado no projeto.
9
Figura 3-Exemplo de código de Programação da plataforma Arduino
Fonte: Própria
Figura 4-Arduino Uno R3
Fonte: Própria
ACELEROMETRO
Os acelerômetros são dispositivos capazes de medir a aceleração de um
corpo. Medem a variação de velocidade no tempo em faixas especificas em
relação à gravidade. Esses dispositivos variam basicamente em quantidade de
eixos (x, y, z) e pela faixa de medição. A faixa de medição é geralmente dada
em relação à aceleração da gravidade, sendo simbolizada pela letra g. Assim,
1g é a aceleração da gravidade. (Oliveira, 2013)
10
Bluetooth
É uma comunicação por Rádio Frequência onde permite a transmissão
de dados entre dispositivos. Apesar de dos aparelhos necessitarem de estar
próximos, o Bluetooth é de baixo consumo de energia.
O Bluetooth possibilita a comunicação desses dispositivos uns com os
outros quando estão dentro do raio de alcance. O raio de alcance varia de acordo
com a classe do dispositivo. A seguir temos a tabela 1 que caracteriza as
diferentes classes:
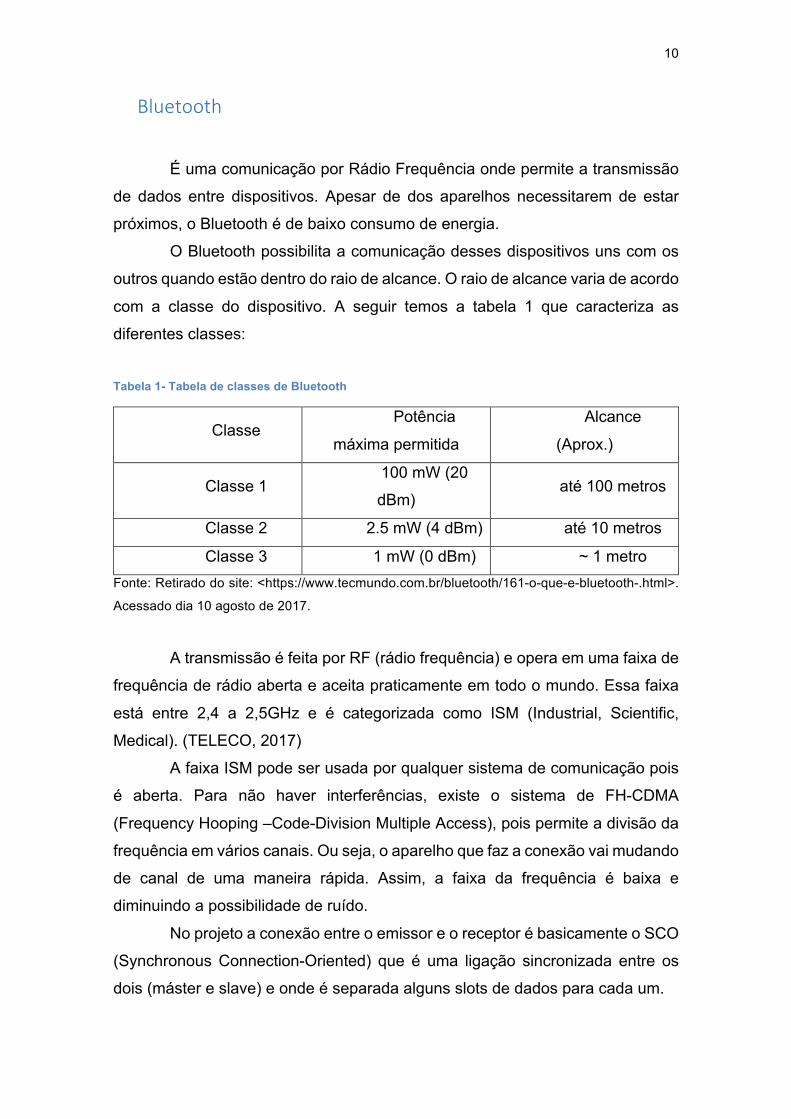
Tabela 1- Tabela de classes de Bluetooth
Classe Potência
máxima permitida
Alcance
(Aprox.)
Classe 1 100 mW (20
dBm) até 100 metros
Classe 2 2.5 mW (4 dBm) até 10 metros
Classe 3 1 mW (0 dBm) ~ 1 metro Fonte: Retirado do site: <https://www.tecmundo.com.br/bluetooth/161-o-que-e-bluetooth-.html>.
Acessado dia 10 agosto de 2017.
A transmissão é feita por RF (rádio frequência) e opera em uma faixa de
frequência de rádio aberta e aceita praticamente em todo o mundo. Essa faixa
está entre 2,4 a 2,5GHz e é categorizada como ISM (Industrial, Scientific,
Medical). (TELECO, 2017)
A faixa ISM pode ser usada por qualquer sistema de comunicação pois
é aberta. Para não haver interferências, existe o sistema de FH-CDMA
(Frequency Hooping –Code-Division Multiple Access), pois permite a divisão da
frequência em vários canais. Ou seja, o aparelho que faz a conexão vai mudando
de canal de uma maneira rápida. Assim, a faixa da frequência é baixa e
diminuindo a possibilidade de ruído.
No projeto a conexão entre o emissor e o receptor é basicamente o SCO
(Synchronous Connection-Oriented) que é uma ligação sincronizada entre os
dois (máster e slave) e onde é separada alguns slots de dados para cada um.
11
LABVIEW
É um a linguagem de programação gráfica da National Instrument.
Usada mais em medição e automação, o programa é feito com diagrama de
blocos com fluxo de dados. Assim oferecendo vantagem na aquisição de dados
e para manipulação destes. (NATIONAL INSTRUMENT,2017)
Sua programação gráfica permite ao engenheiro codificar sistemas de
forma simples e também interoperando com outros hardwares como o Arduino.
Segue na figura 5 de como pode ser feito a programação gráfica.
Figura 5-Imagem de um exemplo de junção do Arduino com LabView
Fonte: Retirado do site: < https://br.pinterest.com/pin/357262182925236896/>.
Acessado dia 10 agosto de 2017.
12
Rededeárealocal(LAN)
É uma rede local usando um roteador, este termo LAN vem de Local
Área Network. É uma rede de computadores restrita em um local físico, como no
caso uma central de cuidado de idosos. A rede fica restrita a uma faixa de IP
com a mesma máscara de rede comum. O IP é um número que o dispositivo
recebe ao conectar à internet, na qual é o que o identifica e pode receber ou
enviar dados. Na figura 6 um exemplo de rede local:
Figura 6-Imagem de uma rede local
Fonte: Retirado do site: < https://lucianoerodrigo.wordpress.com/lan/
>. Acessado dia 13 agosto de 2017
13
4. MateriaiseMétodos
4.1Materiais
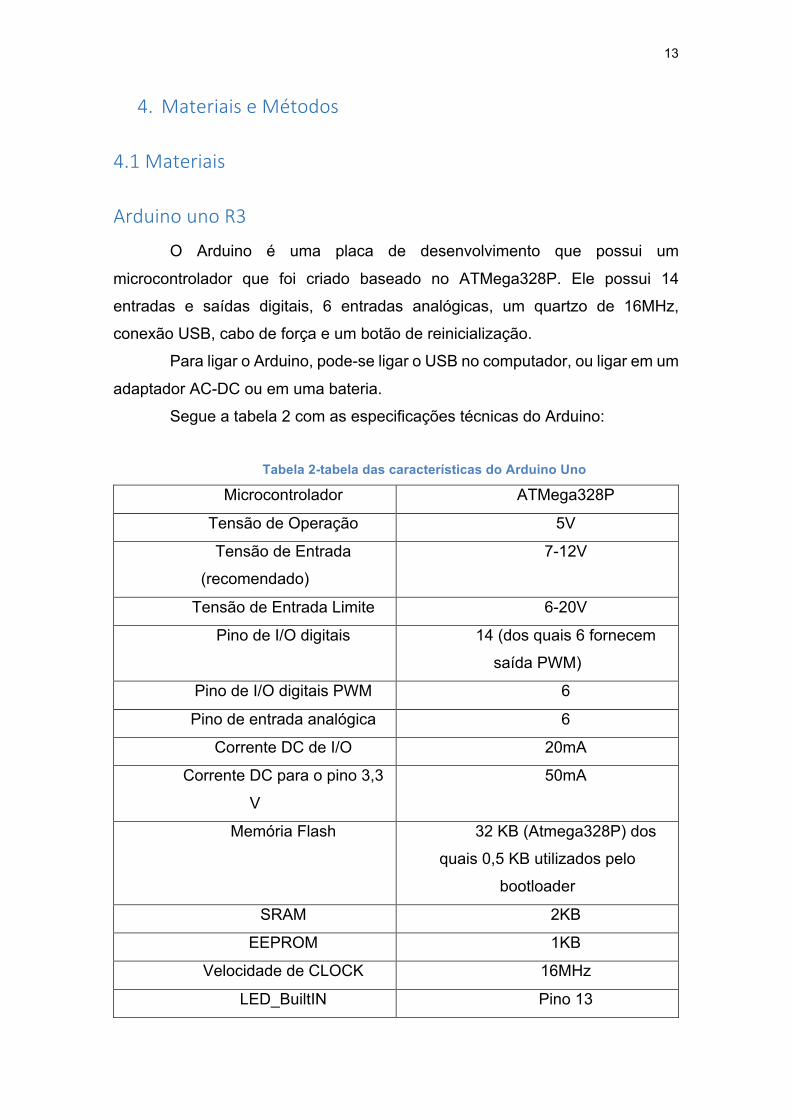
ArduinounoR3
O Arduino é uma placa de desenvolvimento que possui um
microcontrolador que foi criado baseado no ATMega328P. Ele possui 14
entradas e saídas digitais, 6 entradas analógicas, um quartzo de 16MHz,
conexão USB, cabo de força e um botão de reinicialização.
Para ligar o Arduino, pode-se ligar o USB no computador, ou ligar em um
adaptador AC-DC ou em uma bateria.
Segue a tabela 2 com as especificações técnicas do Arduino:
Tabela 2-tabela das características do Arduino Uno
Microcontrolador ATMega328P
Tensão de Operação 5V
Tensão de Entrada
(recomendado)
7-12V
Tensão de Entrada Limite 6-20V
Pino de I/O digitais 14 (dos quais 6 fornecem
saída PWM)
Pino de I/O digitais PWM 6
Pino de entrada analógica 6
Corrente DC de I/O 20mA
Corrente DC para o pino 3,3
V
50mA
Memória Flash 32 KB (Atmega328P) dos
quais 0,5 KB utilizados pelo
bootloader
SRAM 2KB
EEPROM 1KB
Velocidade de CLOCK 16MHz
LED_BuiltIN Pino 13
14
Comprimento 68,6mm
Largura 53,4mm
Peso 25g
Fonte: Própria
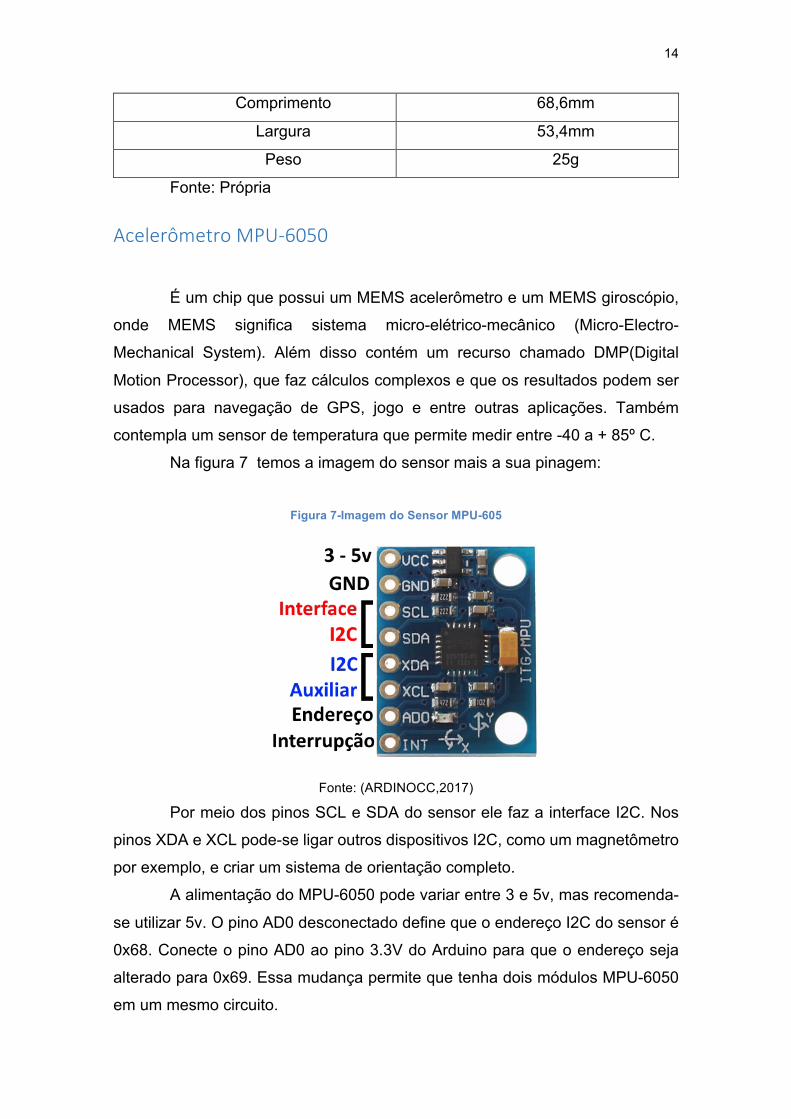
AcelerômetroMPU-6050
É um chip que possui um MEMS acelerômetro e um MEMS giroscópio,
onde MEMS significa sistema micro-elétrico-mecânico (Micro-Electro-
Mechanical System). Além disso contém um recurso chamado DMP(Digital
Motion Processor), que faz cálculos complexos e que os resultados podem ser
usados para navegação de GPS, jogo e entre outras aplicações. Também
contempla um sensor de temperatura que permite medir entre -40 a + 85º C.
Na figura 7 temos a imagem do sensor mais a sua pinagem:
Figura 7-Imagem do Sensor MPU-605
Fonte: (ARDINOCC,2017)
Por meio dos pinos SCL e SDA do sensor ele faz a interface I2C. Nos
pinos XDA e XCL pode-se ligar outros dispositivos I2C, como um magnetômetro
por exemplo, e criar um sistema de orientação completo.
A alimentação do MPU-6050 pode variar entre 3 e 5v, mas recomenda-
se utilizar 5v. O pino AD0 desconectado define que o endereço I2C do sensor é
0x68. Conecte o pino AD0 ao pino 3.3V do Arduino para que o endereço seja
alterado para 0x69. Essa mudança permite que tenha dois módulos MPU-6050
em um mesmo circuito.
15
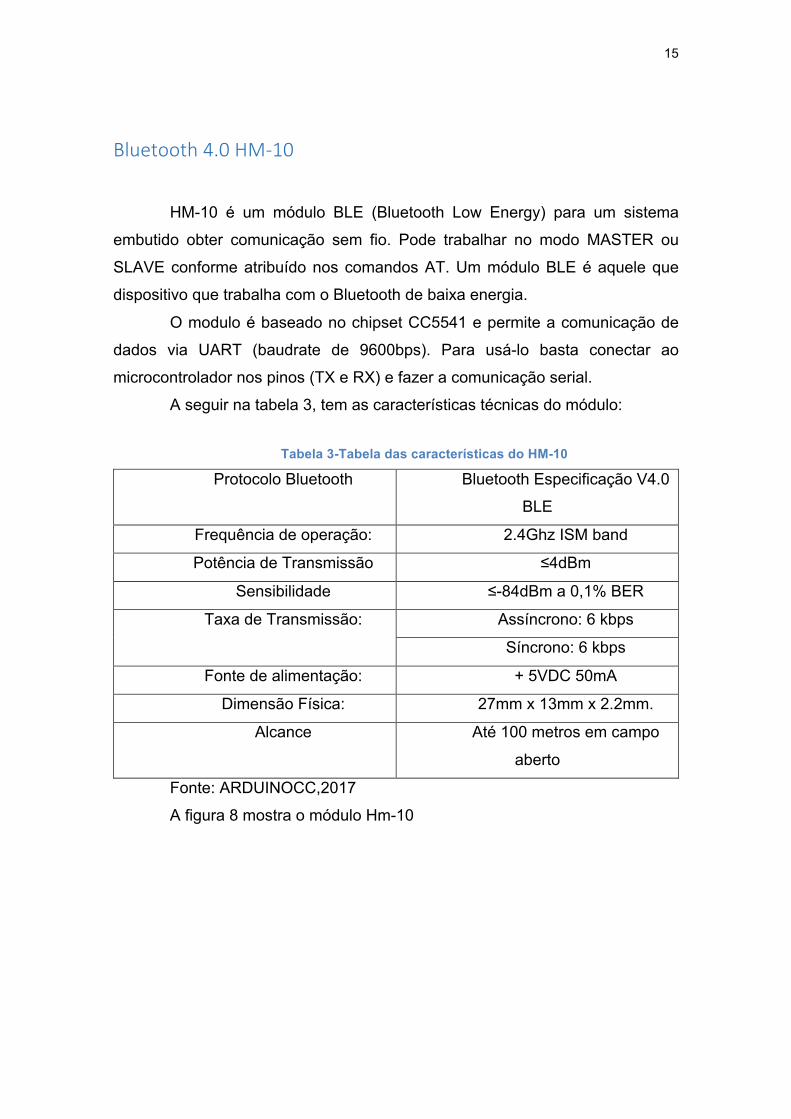
Bluetooth4.0HM-10
HM-10 é um módulo BLE (Bluetooth Low Energy) para um sistema
embutido obter comunicação sem fio. Pode trabalhar no modo MASTER ou
SLAVE conforme atribuído nos comandos AT. Um módulo BLE é aquele que
dispositivo que trabalha com o Bluetooth de baixa energia.
O modulo é baseado no chipset CC5541 e permite a comunicação de
dados via UART (baudrate de 9600bps). Para usá-lo basta conectar ao
microcontrolador nos pinos (TX e RX) e fazer a comunicação serial.
A seguir na tabela 3, tem as características técnicas do módulo:
Tabela 3-Tabela das características do HM-10
Protocolo Bluetooth Bluetooth Especificação V4.0
BLE
Frequência de operação: 2.4Ghz ISM band
Potência de Transmissão ≤4dBm
Sensibilidade ≤-84dBm a 0,1% BER
Taxa de Transmissão: Assíncrono: 6 kbps
Síncrono: 6 kbps
Fonte de alimentação: + 5VDC 50mA
Dimensão Física: 27mm x 13mm x 2.2mm.
Alcance Até 100 metros em campo
aberto
Fonte: ARDUINOCC,2017
A figura 8 mostra o módulo Hm-10

16
Figura 8-Módulo HM-10
Fonte: Própria
CâmeraUSB
Câmeras USB são câmeras de imagens que usam a tecnologia USB 2.0
ou USB 3.0 para transferir dados de imagem. Câmeras USB são projetados para
facilmente interface com sistemas de computador dedicado, usando a mesma
tecnologia USB que é encontrado na maioria dos computadores. A
acessibilidade da tecnologia USB em sistemas de computador, bem como a taxa
de transferência de 480 Mb/s de USB 2.0 faz Câmeras USB ideal para muitas
aplicações de imagem. Uma seleção crescente de câmeras USB 3.0 também
está disponível com taxas de transferência de dados de até 5 Gb / s.
Figura 9-Camera USB usada no projeto
Fonte: Própria
17
4.2-Métodos
Nessa parte do projeto iremos descrever como foi desenvolvido cada
módulo citado anteriormente nos materiais.
Projeto
Primeiramente, para o projeto foi levantado um estudo sobre aonde
poderia ser aplicado a ideia do projeto. Conforme foi discutindo com alguns
profissionais da área de saúde e procurando mais sobre cuidado de idosos, o
uso do projeto seria ideal para uma central de cuidado de idosos.
Nessa central, que por acaso seria adaptado como um conjunto de
kitnets ou studios, cada idoso teria seu próprio quarto para uma maior
privacidade. Na figura 10, segue uma projeção de como poderia ser feito a
central de idosos feita pelo escritório de arquitetura Afalo e Gasperini: Figura 10-Projeção feita pelo escritório de arquitetura Aflalo e Gasperini para o Vila Dignidade, desenvolvido pela Secretaria da Habitação e Companhia de Desenvolvimento Habitacional e
Urbano (CDHU)
Fonte: TORQUATO, 2017
Após esse estudo da aplicação, foi levantado um estudo do uso do
Arduino em cima do projeto. Pois, como já possuía o microcontrolador e o
potencial de desenvolvimento dele é grande. Os outros periféricos como o
acelerômetro, câmeras, módulos de Bluetooth foram comprados para se
conectar com o Arduino.
18
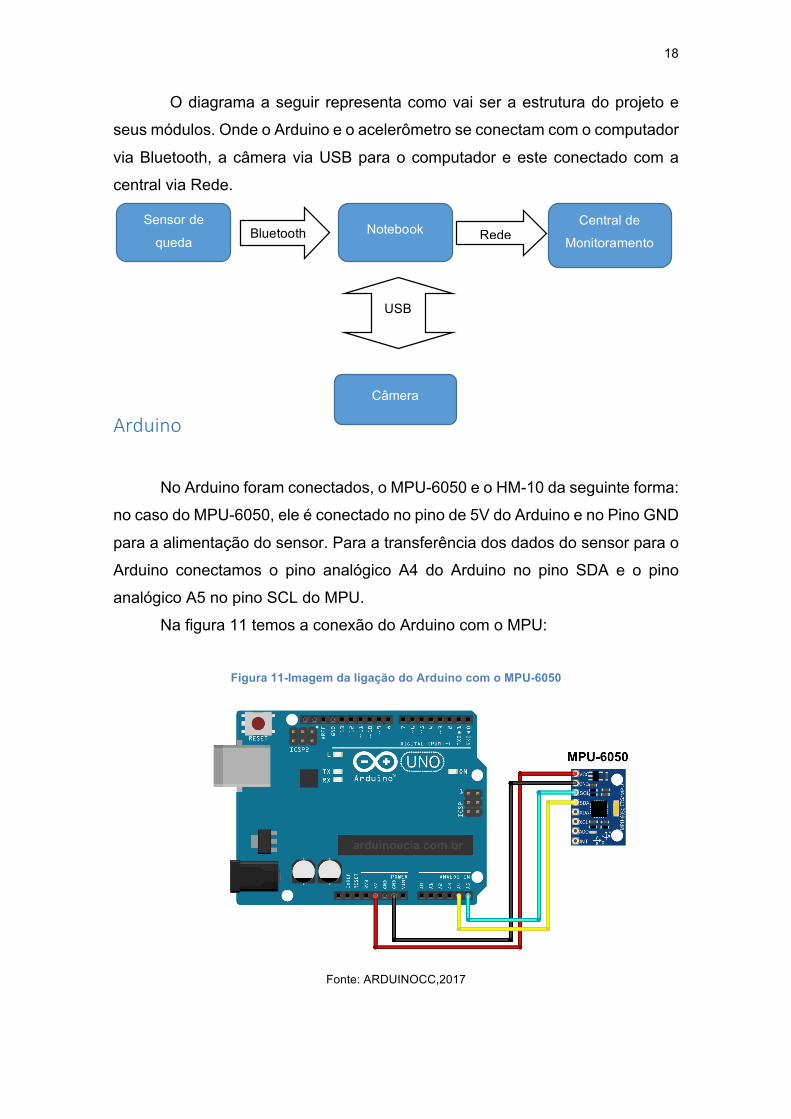
O diagrama a seguir representa como vai ser a estrutura do projeto e
seus módulos. Onde o Arduino e o acelerômetro se conectam com o computador
via Bluetooth, a câmera via USB para o computador e este conectado com a
central via Rede.
Arduino
No Arduino foram conectados, o MPU-6050 e o HM-10 da seguinte forma:
no caso do MPU-6050, ele é conectado no pino de 5V do Arduino e no Pino GND
para a alimentação do sensor. Para a transferência dos dados do sensor para o
Arduino conectamos o pino analógico A4 do Arduino no pino SDA e o pino
analógico A5 no pino SCL do MPU.
Na figura 11 temos a conexão do Arduino com o MPU:
Figura 11-Imagem da ligação do Arduino com o MPU-6050
Fonte: ARDUINOCC,2017
Notebook Sensor de
queda
Central de
Monitoramento
Câmera
Bluetooth Rede
USB

19
No caso do HM-10 com o Arduinos conectamos os pinos de alimentação
do Bluetooth em 3,3 V e no GND, e para a transferência de dados conectamos
o RX do HM-10 no TX do Arduino e o TX do HM-10 no RX do microcontrolador.
Figura 12- Ligação do Arduino com HM-10
Fonte: ARDUINOCC,2017
MPU-6050
Após estudar as referências bibliográficas foi identificado que o MPU-6050
é o mais utilizado e indicado pois apresenta uma resposta mais rápida e não
recebe tantos ruídos.
O programa a seguir foi implementado no Arduino para utilizar o MPU-6050:
#include<Wire.h>
//Nessa parte do programa temos a inicialização das variáveis do
programa
const int MPU=0x68; //I2C address of MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
int16_t dx,dy,dz;
int OldAcX,OldAcY,OldAcZ,OldTmp,OldGyX,OldGyY,OldGyZ;
int AcSensitivity =10000;
boolean moved=false;
int n=0;
20
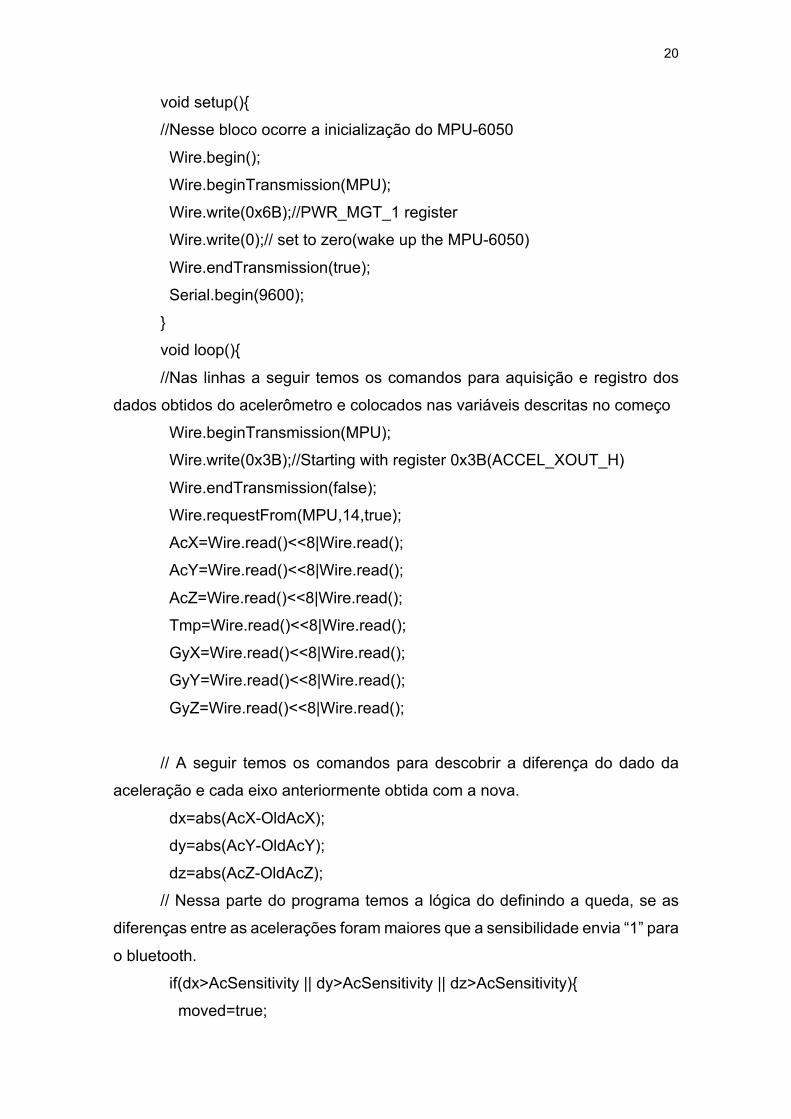
void setup(){
//Nesse bloco ocorre a inicialização do MPU-6050
Wire.begin();
Wire.beginTransmission(MPU);
Wire.write(0x6B);//PWR_MGT_1 register
Wire.write(0);// set to zero(wake up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
//Nas linhas a seguir temos os comandos para aquisição e registro dos
dados obtidos do acelerômetro e colocados nas variáveis descritas no começo
Wire.beginTransmission(MPU);
Wire.write(0x3B);//Starting with register 0x3B(ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU,14,true);
AcX=Wire.read()<<8|Wire.read();
AcY=Wire.read()<<8|Wire.read();
AcZ=Wire.read()<<8|Wire.read();
Tmp=Wire.read()<<8|Wire.read();
GyX=Wire.read()<<8|Wire.read();
GyY=Wire.read()<<8|Wire.read();
GyZ=Wire.read()<<8|Wire.read();
// A seguir temos os comandos para descobrir a diferença do dado da
aceleração e cada eixo anteriormente obtida com a nova.
dx=abs(AcX-OldAcX);
dy=abs(AcY-OldAcY);
dz=abs(AcZ-OldAcZ);
// Nessa parte do programa temos a lógica do definindo a queda, se as
diferenças entre as acelerações foram maiores que a sensibilidade envia “1” para
o bluetooth.
if(dx>AcSensitivity || dy>AcSensitivity || dz>AcSensitivity){
moved=true;
21
n=n+1;
}
if(moved==true & n>2){
Serial.println("1");
}
//Definindo o aceleração nova como antiga para um novo ciclo
OldAcX=AcX;
OldAcY=AcY;
OldAcZ=AcZ;
moved=false;
delay(100);
}
Dentro da programação a linha onde tem o comando (int AcSensitivity
=10000;) foi definida a sensibilidade do sensor em relação a queda, podendo ser
alterada para um melhor desempenho, contudo após alguns testes esse valor de
10000 foi dado como sensibilidade boa para o controlador de queda.
Caso o programa detectar a mudança brusca de variáveis, ele irá
mandar um sinal de “1” para o Serial e dele será mandado para o HM-10. E este
mandará esse dado para o computador.
HM-10comoPC
O HM-10 é pareado com o computador e cria-se automaticamente uma
porta serial virtual. No projeto, a informação da ocorrência de queda é transmitida
por essa porta serial. A transmissão do dado pelo Arduino devido a programação
descrita no item anterior é recebida e analisada pelo programa feito no LabView.
A programação será explicada no item 3.2.5 sobre o programa do Labview.

22
UsandoCâmeraUSB
Inicialmente no projeto era para usar utilizar uma câmera IP, devido ao
fato do programa do LabView necessitar de um hardware de aquisição de
imagem para esse tipo de câmera. Como não estava disponível e fora do
orçamento para o projeto, será utilizado uma câmera USB.
Ela atende o necessário para visualizar o dentro do quarto e irá facilitar
a identificação do alerta de queda.
Quando ocorrer a queda o sensor irá acionar a câmera e está ira mandar
a imagem para o computador na central de atendimento.
ProgramanoLabView
Para falar sobre o programa vamos separar em 4 partes para um melhor
entendimento:
OPainelcentral
O painel central é parte visual do programa aonde será controlado a
kitnet de exemplo do projeto. Pode-se aumentar o número de painéis para criar
um controle de outras kitnets ao mesmo tempo, mas para o projeto iremos utilizar
um como exemplo. Pela figura 13 vemos um visual simples, porém que
conseguirá informar e confirmar caso haja a ocorrência de queda; Figura 13-Painel visto no computador da Central
Fonte própria
No quadro a esquerda temos aonde vai aparecer a imagem da câmera.
Ao lado, um visor de alerta que quando estiver preto nada ocorreu e caso mude
para vermelho é sinal de uma queda.
23
E os dois botões de stop são para pausar o programa, um no caso é
para parar a gravação e o outro o programa.
AConexãodarede
Para a conexão do computador da central com o computador da kitnet
foi estudado um exemplo onde há emissão de um dado através de dois
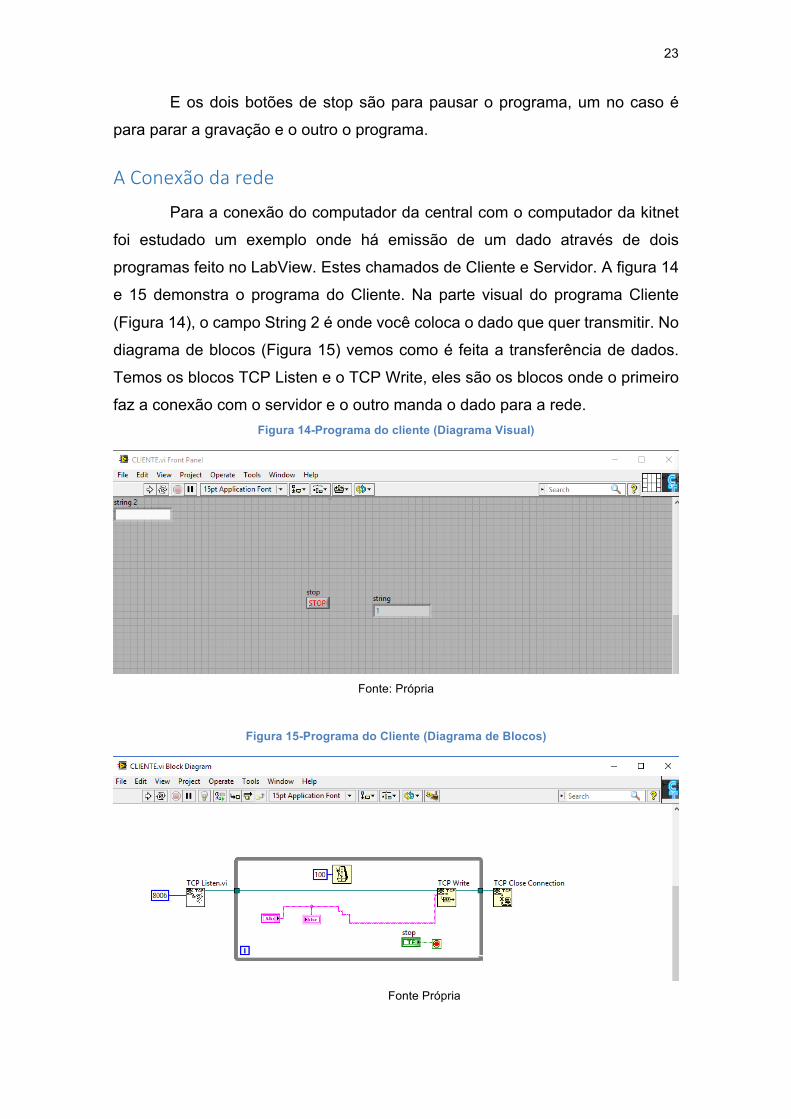
programas feito no LabView. Estes chamados de Cliente e Servidor. A figura 14
e 15 demonstra o programa do Cliente. Na parte visual do programa Cliente
(Figura 14), o campo String 2 é onde você coloca o dado que quer transmitir. No
diagrama de blocos (Figura 15) vemos como é feita a transferência de dados.
Temos os blocos TCP Listen e o TCP Write, eles são os blocos onde o primeiro
faz a conexão com o servidor e o outro manda o dado para a rede. Figura 14-Programa do cliente (Diagrama Visual)
Fonte: Própria
Figura 15-Programa do Cliente (Diagrama de Blocos)
Fonte Própria
24
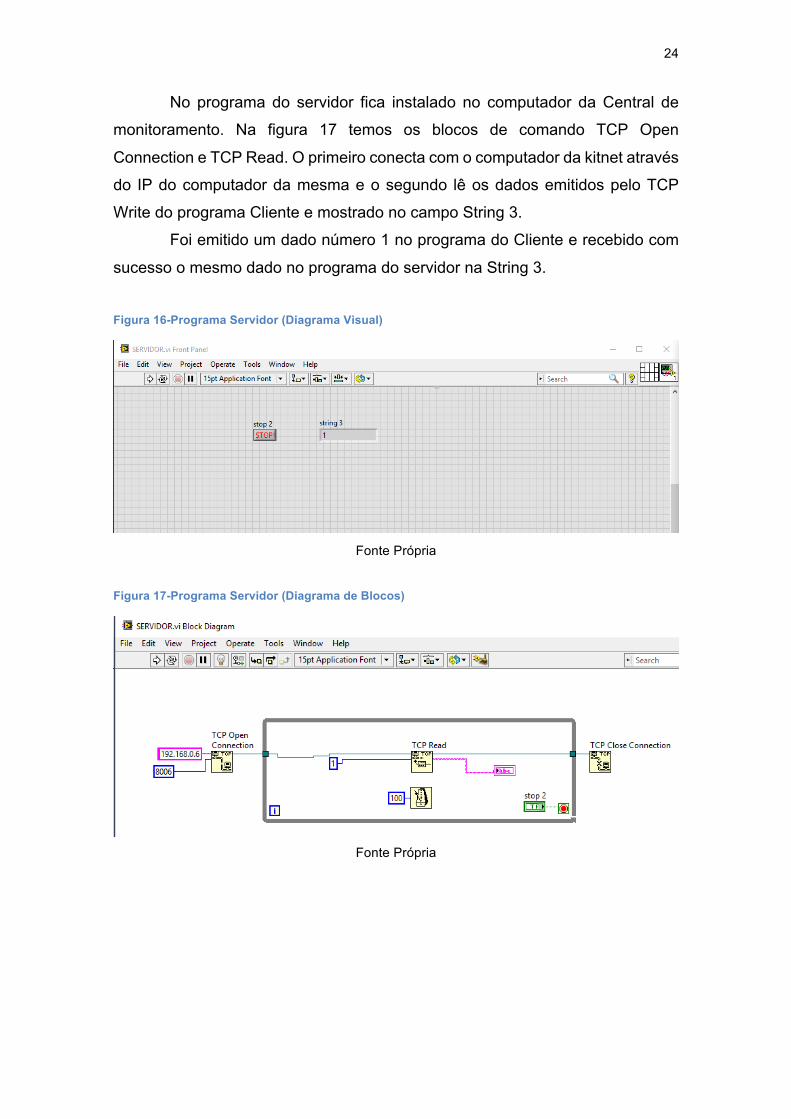
No programa do servidor fica instalado no computador da Central de
monitoramento. Na figura 17 temos os blocos de comando TCP Open
Connection e TCP Read. O primeiro conecta com o computador da kitnet através
do IP do computador da mesma e o segundo lê os dados emitidos pelo TCP
Write do programa Cliente e mostrado no campo String 3.
Foi emitido um dado número 1 no programa do Cliente e recebido com
sucesso o mesmo dado no programa do servidor na String 3.
Figura 16-Programa Servidor (Diagrama Visual)
Fonte Própria
Figura 17-Programa Servidor (Diagrama de Blocos)
Fonte Própria
25
Descriçãodapartedacâmera
No Labview para usar as imagens das câmeras precisa-se instalar a
extensão Vision and Motion. No projeto, a Unesp forneceu a possibilidade de
usar essa extensão pois na versão com a licença de estudante não é possível
obter.
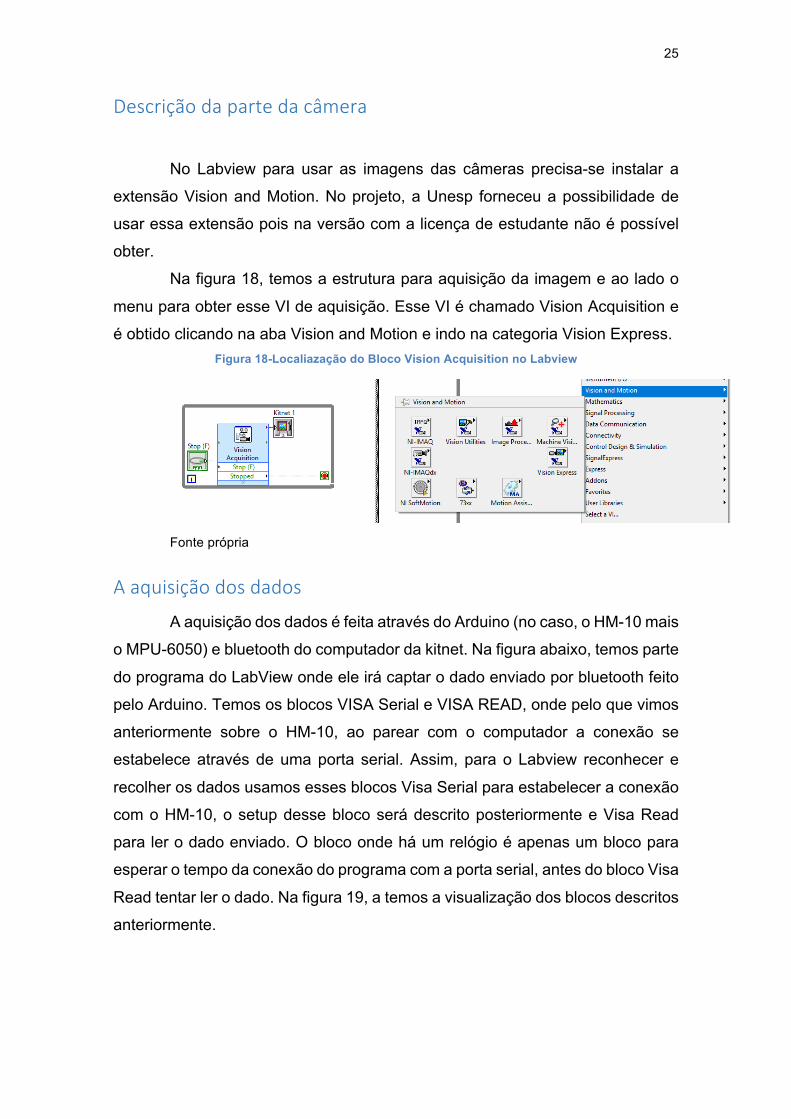
Na figura 18, temos a estrutura para aquisição da imagem e ao lado o
menu para obter esse VI de aquisição. Esse VI é chamado Vision Acquisition e
é obtido clicando na aba Vision and Motion e indo na categoria Vision Express. Figura 18-Localiazação do Bloco Vision Acquisition no Labview
Fonte própria
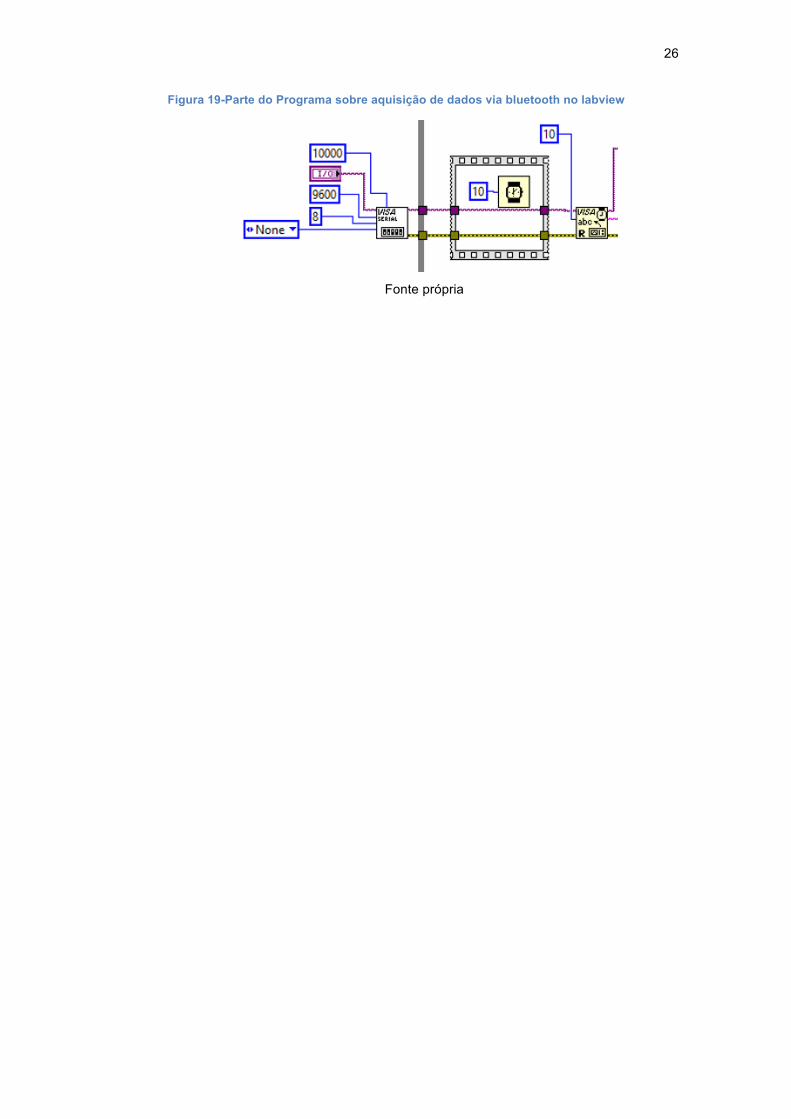
Aaquisiçãodosdados
A aquisição dos dados é feita através do Arduino (no caso, o HM-10 mais
o MPU-6050) e bluetooth do computador da kitnet. Na figura abaixo, temos parte
do programa do LabView onde ele irá captar o dado enviado por bluetooth feito
pelo Arduino. Temos os blocos VISA Serial e VISA READ, onde pelo que vimos
anteriormente sobre o HM-10, ao parear com o computador a conexão se
estabelece através de uma porta serial. Assim, para o Labview reconhecer e
recolher os dados usamos esses blocos Visa Serial para estabelecer a conexão
com o HM-10, o setup desse bloco será descrito posteriormente e Visa Read
para ler o dado enviado. O bloco onde há um relógio é apenas um bloco para
esperar o tempo da conexão do programa com a porta serial, antes do bloco Visa
Read tentar ler o dado. Na figura 19, a temos a visualização dos blocos descritos
anteriormente.
26
Figura 19-Parte do Programa sobre aquisição de dados via bluetooth no labview
Fonte própria
27
5.ResultadoseDiscussões
5.1-ProgramasClienteeServidor
Com todas as partes estudas e desenvolvidas, o resultado é a junção de
todas as quatro partes comentadas anteriormente e que formam dois programas.
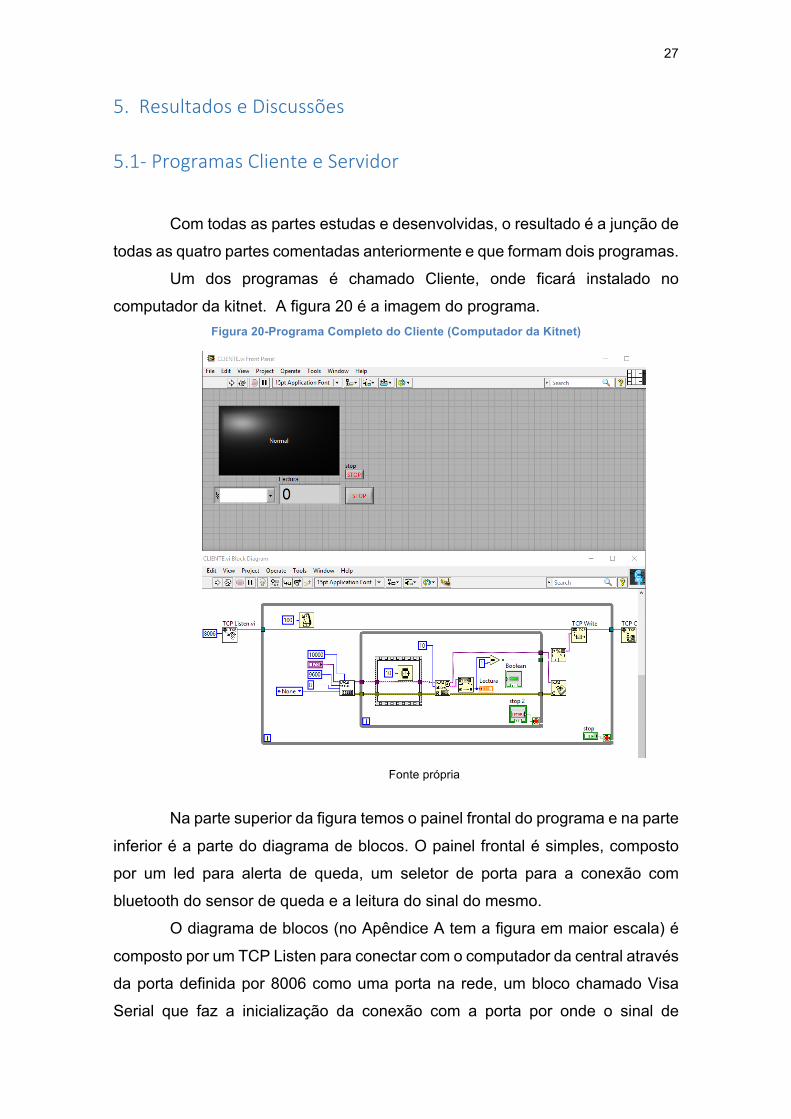
Um dos programas é chamado Cliente, onde ficará instalado no
computador da kitnet. A figura 20 é a imagem do programa. Figura 20-Programa Completo do Cliente (Computador da Kitnet)
Fonte própria
Na parte superior da figura temos o painel frontal do programa e na parte
inferior é a parte do diagrama de blocos. O painel frontal é simples, composto
por um led para alerta de queda, um seletor de porta para a conexão com
bluetooth do sensor de queda e a leitura do sinal do mesmo.
O diagrama de blocos (no Apêndice A tem a figura em maior escala) é
composto por um TCP Listen para conectar com o computador da central através
da porta definida por 8006 como uma porta na rede, um bloco chamado Visa
Serial que faz a inicialização da conexão com a porta por onde o sinal de
28
bluetooth do aparelho irá emparelhar e enviar os dados, conforme falado no item
“Aquisição de dados”. Nesse bloco definimos o setup: o timeout de 1000
(Timeout especifica o tempo, em milissegundos, para as operações de gravação
e leitura. O padrão é 10000), o baud rate de 9600(Baud rate é a taxa de
transmissão. O padrão é 9600), data bits em 8 (o número de bits nos dados
recebidos. O valor dos bits de dados é entre cinco e oito. O valor padrão é 8),
deixamos a parity (especifica a paridade usada para cada quadro a ser
transmitido ou recebido) como 0 para não ter paridade e por último definimos a
porta serial com que vai ser feita a conexão de pareamento do bluetooth. Depois
desse bloco vem o Visa Read que vai ler o dado que está sendo transmitido para
a porta selecionada e enviar para o próximo bloco.
O bloco seguinte é um bloco que recebe o dado em string enviado do
Visa read e transforma em numeral. E deste bloco partimos para o TCP write
que envia o dado recebido para a rede.
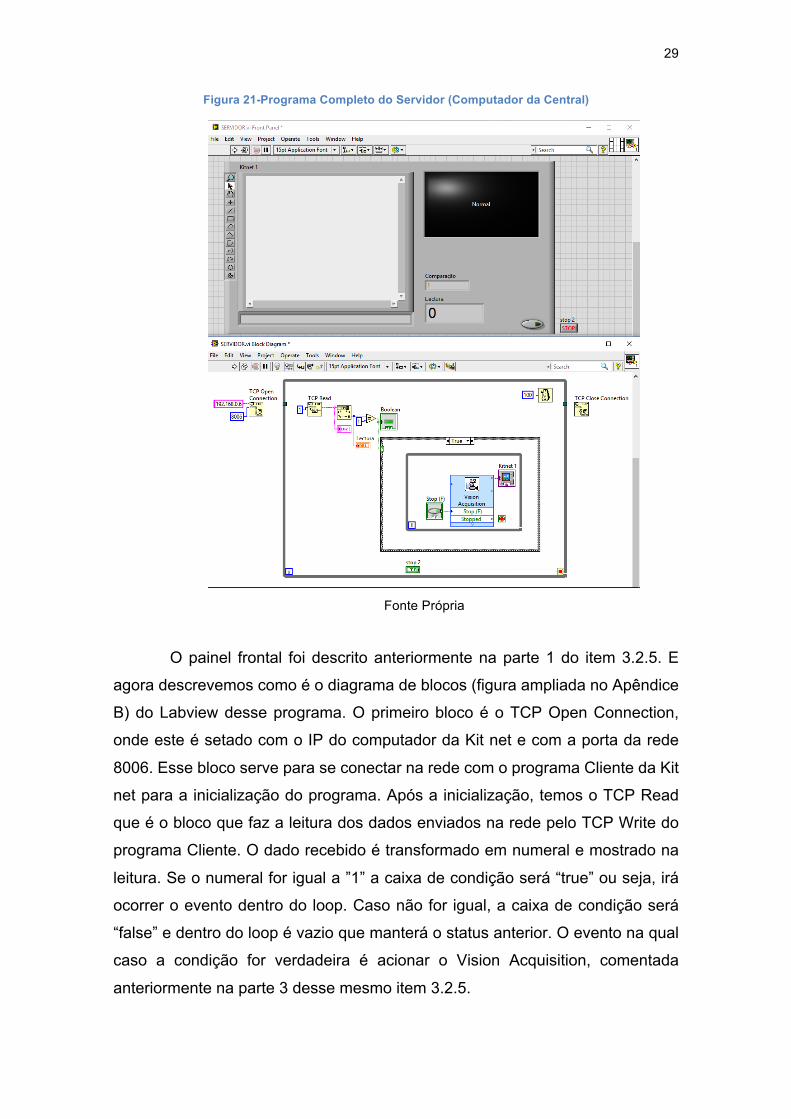
O outro programa é chamado Servidor onde é instalado no computador
da Central de monitoramento das kitnets. A figura 21 mostra o programa e sendo
que na parte superior dela é o painel frontal visto pelo administrador da central e
a parte de baixo o diagrama de blocos com a lógica do programa.
29
Figura 21-Programa Completo do Servidor (Computador da Central)
Fonte Própria
O painel frontal foi descrito anteriormente na parte 1 do item 3.2.5. E
agora descrevemos como é o diagrama de blocos (figura ampliada no Apêndice
B) do Labview desse programa. O primeiro bloco é o TCP Open Connection,
onde este é setado com o IP do computador da Kit net e com a porta da rede
8006. Esse bloco serve para se conectar na rede com o programa Cliente da Kit
net para a inicialização do programa. Após a inicialização, temos o TCP Read
que é o bloco que faz a leitura dos dados enviados na rede pelo TCP Write do
programa Cliente. O dado recebido é transformado em numeral e mostrado na
leitura. Se o numeral for igual a ”1” a caixa de condição será “true” ou seja, irá
ocorrer o evento dentro do loop. Caso não for igual, a caixa de condição será
“false” e dentro do loop é vazio que manterá o status anterior. O evento na qual
caso a condição for verdadeira é acionar o Vision Acquisition, comentada
anteriormente na parte 3 desse mesmo item 3.2.5.
30
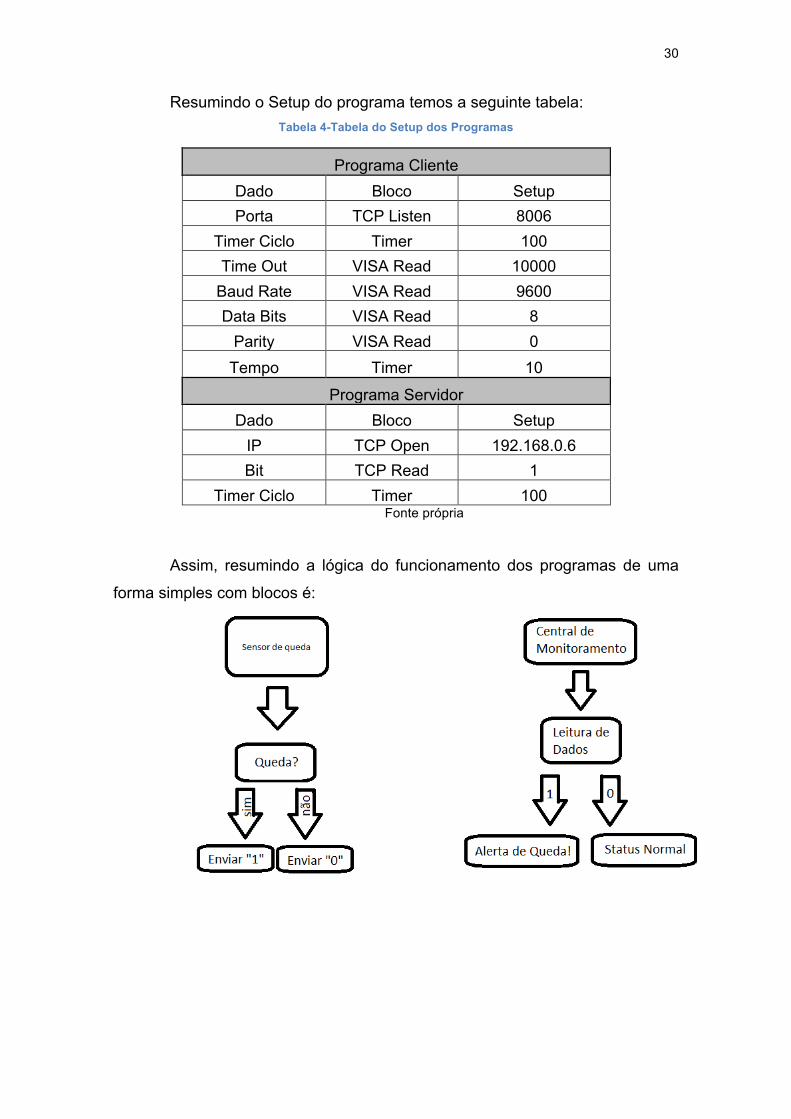
Resumindo o Setup do programa temos a seguinte tabela: Tabela 4-Tabela do Setup dos Programas
Programa Cliente Dado Bloco Setup Porta TCP Listen 8006
Timer Ciclo Timer 100 Time Out VISA Read 10000
Baud Rate VISA Read 9600 Data Bits VISA Read 8
Parity VISA Read 0 Tempo Timer 10
Programa Servidor Dado Bloco Setup
IP TCP Open 192.168.0.6 Bit TCP Read 1
Timer Ciclo Timer 100 Fonte própria
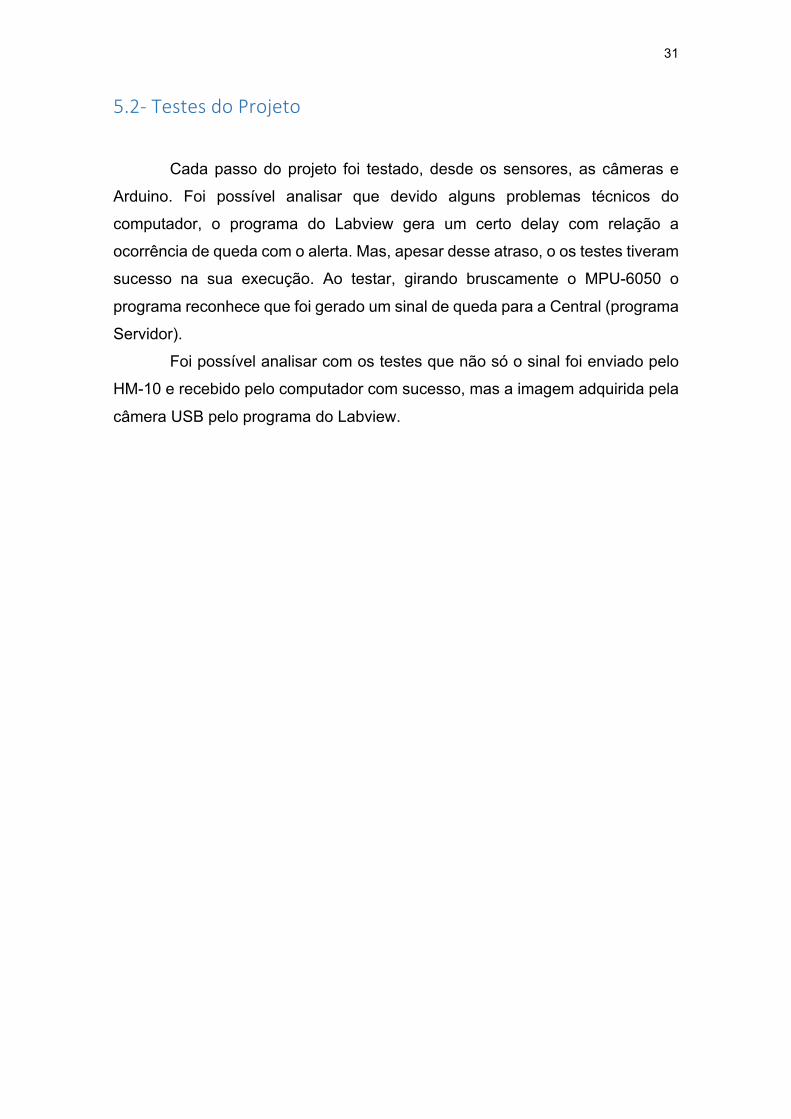
Assim, resumindo a lógica do funcionamento dos programas de uma
forma simples com blocos é:
31
5.2-TestesdoProjeto
Cada passo do projeto foi testado, desde os sensores, as câmeras e
Arduino. Foi possível analisar que devido alguns problemas técnicos do
computador, o programa do Labview gera um certo delay com relação a
ocorrência de queda com o alerta. Mas, apesar desse atraso, o os testes tiveram
sucesso na sua execução. Ao testar, girando bruscamente o MPU-6050 o
programa reconhece que foi gerado um sinal de queda para a Central (programa
Servidor).
Foi possível analisar com os testes que não só o sinal foi enviado pelo
HM-10 e recebido pelo computador com sucesso, mas a imagem adquirida pela
câmera USB pelo programa do Labview.
32
6.0-Conclusão
A proposta do trabalho foi desenvolver um protótipo de um sistema de
monitoramento de idosos para uma central de atendimento. Um sistema onde o
cuidador ficasse em um computador monitorando os quartos ou kitnets. Esse
sistema inclui o protótipo de sensor de queda e uma câmera para verificar a real
queda do idoso e um painel no computador da central de fácil visualização.
No que diz respeito ao proposto o protótipo e a interface do painel
responderam as expectativas, apresentando um reconhecimento de uma
possível queda e a visualização do quarto de forma clara e fácil para o cuidador.
Sobre o painel visto pelo cuidador no computador da central, podemos
observar a facilidade de visualização do alerta de queda e da imagem da câmera.
Como o programa foi desenvolvido no LabView, ele cria a possibilidade de
aumentar o número de câmeras e de sensores para ser observados no painel.
Um outro ponto de melhoria seria aumentar o número de câmeras para maior
visualização do quarto.
Em relação ao programa LabView, podemos dizer que ele facilita muito
o desenvolvimento de projetos pelo fato da facilidade da interação da parte do
hardware com a parte do software vista no projeto. Contudo, como o programa
precisa ter licenças para poder utilizar algumas ferramentas, isso atrapalha na
inclusão de alguns hardwares, com por exemplo uma câmera IP, o programa
que foi utilizado precisaria de um hardware de aquisição de imagem para
câmeras IP, o que não foi possível adquirir. Nesse ponto, uma melhoria para
uma futura implementação seria o uso do PHP que não necessitaria do uso
desse hardware de aquisição de imagem.
Do ponto de vista do Arduino UNO, escolhido para ser o
microcontrolador do projeto devido ao fato de já ter disponível para a criação de
um projeto, ele desenvolve com muita facilidade as infinitas possibilidades de
projetos e além de ser um microcontrolador mais barato e que utiliza a linguagem
de programação em C, que foi ensinada durante o curso. Um ponto de melhoria
identificado seria trocar o microcontrolador Arduino Uno para um Micro Pro
Arduino para otimizar o tamanho do sensor de queda como foi feito no trabalho
33
do MERLIM(2012) utilizando um microcontrolador pequeno como o
dsPIC30F3012.
Algumas melhorias que poderiam ser incluídas em projeto futuro, além
das citadas acima seria:
-A inclusão de sensores para controlar o batimento cardíaco do idoso.
-A inclusão de mais aparelhos para um teste de maior escala.
-A inclusão de outros sensores em outros pontos do quarto, como por
exemplo um sensor de pressão na cama.
-Inclusão de uma automatização residencial no quarto com acesso da
central.
Com todas as observações, testes, e conclusões pode-se afirmar que
apesar de ser um protótipo, ele permite muitas melhorias em suas características
e a possível inclusão de outros cuidados dos idosos não só o monitoramento de
queda. E apesar de ser um protótipo ele atende de forma satisfatória a proposta
inicial de monitoramento da queda do idoso, e também abre uma discussão
sobre aumentar o desenvolvimento de mais projetos e pesquisas nessa área de
automação para a área de saúde, pois conforme falado na introdução, e
conversado com pessoas dessa área a uma grande necessidade aparelhos e
automações para facilitar o trabalho das pessoas que cuidam da nossa saúde.
34
7.0- Referências
ADILSON THOMSEN de. “Acelerômetro MPU6050 com
Arduino”<http://blog.filipeflop.com/sensores/tutorial-acelerometro-mpu6050-
arduino.html> Acessado em: Acessado em 03 de agosto de 2017
Agência IBGE Notícias de. ”PNAD 2016: população idosa cresce 16% frente a
2012 e chega a 29,6 milhões”; Disponível em:<
https://agenciadenoticias.ibge.gov.br/agencia-noticias/2013-agencia-de-noticias
/releases/18263-pnad-2016-populacao-idosa-cresce-16-0-frente-a-2012-e-
chega-a-29-6-milhoes.html >. Acesso em 24 abril de 2018.
ANAHP de. “Internação de idosos representa um terço dos gastos do SUS”
Disponível em <http://anahp.com.br/noticias/noticias-do-mercado/internacao-de-
idosos-representa-um-terco-dos-gastos-do-sus>, fonte: Saúde Web 2013.
Acessado em 03 de agosto de 2017
ARDUINOCC de. “MPU-6050 Accelerometer + Gyro”
<http://playground.arduino.cc/Main/MPU-6050> Acessado em 03 de agosto de
2017
ARDUINOCC de. ” Arduino Uno Rev3”
<https://www.arduino.cc/en/Main/ArduinoBoardUno>. Acessado em 03 de
agosto de 2017
BVS-Biblioteca Virtual em Saúde do Ministério da Saúde de. “Queda de idosos “
Disponível em <http://bvsms.saude.gov.br/bvs/dicas/184queda_idosos.html>,
2009 Acesso em 03 de agosto de 2017
CHAVIER, LUIS. “Programação para Arduino - Primeiros Passos”. Disponível
em:<https://www.circuitar.com.br/tutoriais/programacao-para-arduino-primeiros-
passos/>. Acessado em 10 de Agosto 2017.
35
DAN CHEN de. “How to Use Bluetooth 4.0 HM10 “
<http://www.instructables.com/id/How-to-Use-Bluetooth-40-HM10/> Acessado
em 07 de agosto de 2017
Debilitada. P. Coordenação de Engenharia de Computação, CEFET/RJ, p.985-986. [. Apresentado no XXXV SIMPÓSIO BRASILEIRO DE
TELECOMUNICAÇÕES E PROCESSAMENTO DE SINAIS, 2017, São Pedro].
ELEKTOR EMBEBBED de. “LabVIEW, Arduino & Android“ Disponível em
<http://elektorembedded.blogspot.com.br/2011/08/labview-for-arduino-or-is-
it.html>. Acessado em 03 de agosto de 2017
FACULDADE CHRISTUS de. “Introdução à Computação e aos Sistemas de
Informação” Disponível em <http://www.ceara.pro.br/introducao/IV-
redes/redes02.html>. Acessado em 03 de agosto de 2017
FREITAS, Eduardo de. "O número de idosos deverá aumentar no Brasil "; Brasil
Escola. Disponível em <http://brasilescola.uol.com.br/brasil/o-numero-idosos-
devera-aumentar-no-brasil.htm>. Acesso em 25 de fevereiro de 2018.
HEEMANN, M.; HERMSDORF, M. de. “Custo de internações de idosos é 30%
maior para o SUS”; Estadão. Disponível em
<http://infograficos.estadao.com.br/focas/planeje-sua-vida/custo-de-
internacoes-de-idosos-e-30-maior-para-o-sus> Acesso em 25 de fevereiro de
2018.
MARQUES, M. A; BOTURA JR, G.; CANTÃO, L. A. P.; DINIZ, A. C. Sorocaba e
os desafios da informática para terceira idade. In: MASSO, M. C. S. D. (Org.);
AZEVEDO, T. C. A. M. (Org.). UNATI: Espaço aberto ao ensino e à criatividade.
São Paulo: Cultura Acadêmica, 2012. p. 217-226.
MERLIM, R. S. et al. Desenvolvimento de uma plataforma para detecção de quedas usando acelerômetro e comunicação por bluetooth. Universidade
Federal do Espírito Santo, Vitória, 2012
36
MIRANDA, A.; MARIK, P. SISTEMA DETECTOR DE QUEDAS (SDQ). 80
páginas- Pontifícia Universidade Católica do Paraná – PUCPR,2008
OLIVEIRA, J. P. D. et al. SISTEMA DE MONITORAMENTO DE QUEDAS PARA
PESSOAS COM DEFICIÊNCIA MOTORA. 159 páginas - UNIVERSIDADE
TECNOLÓGICA FEDERAL DO PARANÁ, 2013
NATIONAL INSTRUMENTS. Programação gráfica. Disponível em: <
http://www.ni.com/getting-started/labview-basics/pt/dataflow>. Acessado em 10
de agosto de 2017
PHILIPS LIFELINE. Medical Alert Service. Disponível em:
<https://www.lifeline.philips.com/>. Acessado em: 10 de agosto 2017
RYDEPIER de. “Comparing the HM10 and BLE CC41a Bluetooth “
<https://rydepier.wordpress.com/2015/10/22/comparing-the-hm10-and-ble-
cc41a-bluetooth/> Acessado em 10 de agosto 2017
SAMPAIO, L. V. P. Desenvolvimento de um aplicativo para dispositivos móveis de avaliação do equilíbrio e risco de quedas em idosos. 2016. 59 páginas. Programa de Pós-Graduação Stricto Sensu em Gerontologia, Universidade Católica, Brasília, 2016 TELECO. Redes Wi-Fi I: Espectro de Frequência ISM. Disponível em: < http://www.teleco.com.br/tutoriais/tutorialredeswifi1/pagina_5.asp>. Acessado em 11 de agosto 2017 TELEHELP. Pulseira com botão de emergência. Disponível em:<
http://www.telehelp.com.br/botao-de-emergencia/?utm_source=G_PESQ_INS
TITUCIONAL&utm_medium=G_PESQ_INSTITUCIONAL&utm_campaign=G_P
ESQ_INSTITUCIONAL&gclid=EAIaIQobChMIgPaNz-Ga2wIViYiRCh0Fmw
fvEAAYASAAEgLE8fD_BwE> Acesso em 10 de agosto 2017
TORQUATO, L. M.; MONTEIRO, A. F.; HENRIQUES, F. R Fall Monitor: Detector
de Quedas para Dispositivos Móveis para Cuidado à Pessoas com Mobilidade
UOL de. “Projetos com arquitetura acessível facilitam a vida dos
idosos”<https://estilo.uol.com.br/casa-e-decoracao/noticias/redacao /2010/03/31
37
/projetos-com-arquitetura-acessivel-facilitam-a-vida-dos-idosos.htm> Acessado
em 10 agosto 2017
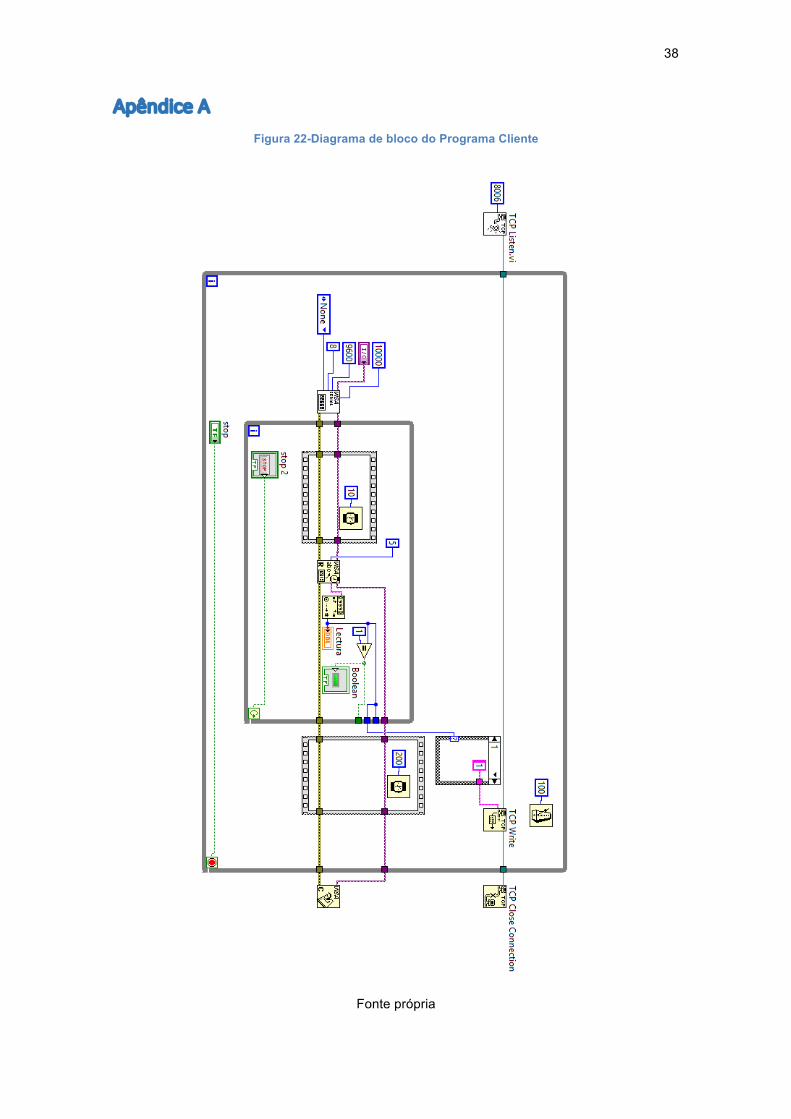
38
ApêndiceAFigura 22-Diagrama de bloco do Programa Cliente
Fonte própria
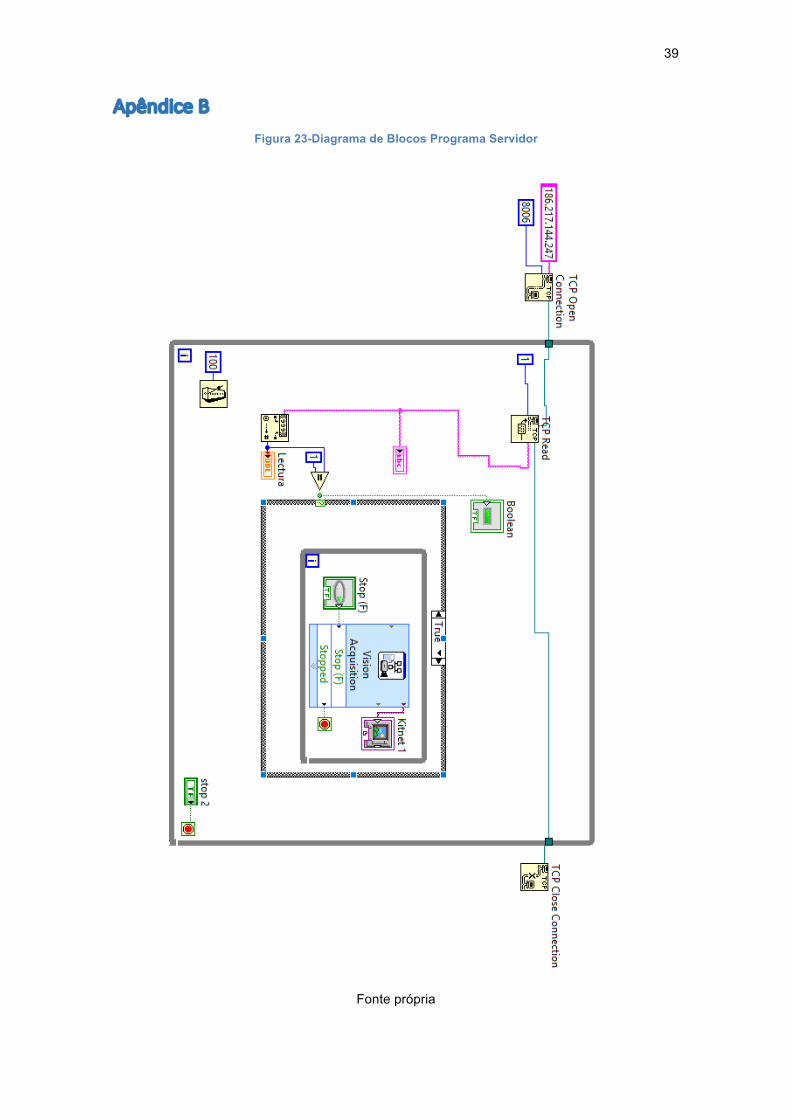
39
ApêndiceBFigura 23-Diagrama de Blocos Programa Servidor
Fonte própria