salto em distância definições de biomecânica Áreas de ... · 3 metodologia biomecânica...
TRANSCRIPT

1
Aula 2: Introdução a Biomecânica
• Definições de Biomecânica • Áreas de atuação da Biomecânica
Exemplos
• Salto em distância
Imagens extraídas do lab. de biofísica da usp http://www.usp.br/eef/lob/
Exemplos
•
Definições de Biomecânica
A Biomecânica estuda os movimentos dos homens e dos animais do ponto de vista das leis mecânicas (HOCHMUTH, 1973).
A Biomecânica é a ciência da descrição e explicação mecânica das manifestações e causas dos movimentos, tomando-se por base as condições do organismos (WILLIMCZIK, 1989).
Mecânica Aplicada
Corpos Rígidos Corpos Não-Rígidos
Mecânica Dos
Fluidos
Estática
Viscoelasticidade
Ozkaya e Nordin, 1999
Dinâmica
Cinética
Plasticidade
Cinemática
Elasticidade
Gases
Líquidos
2
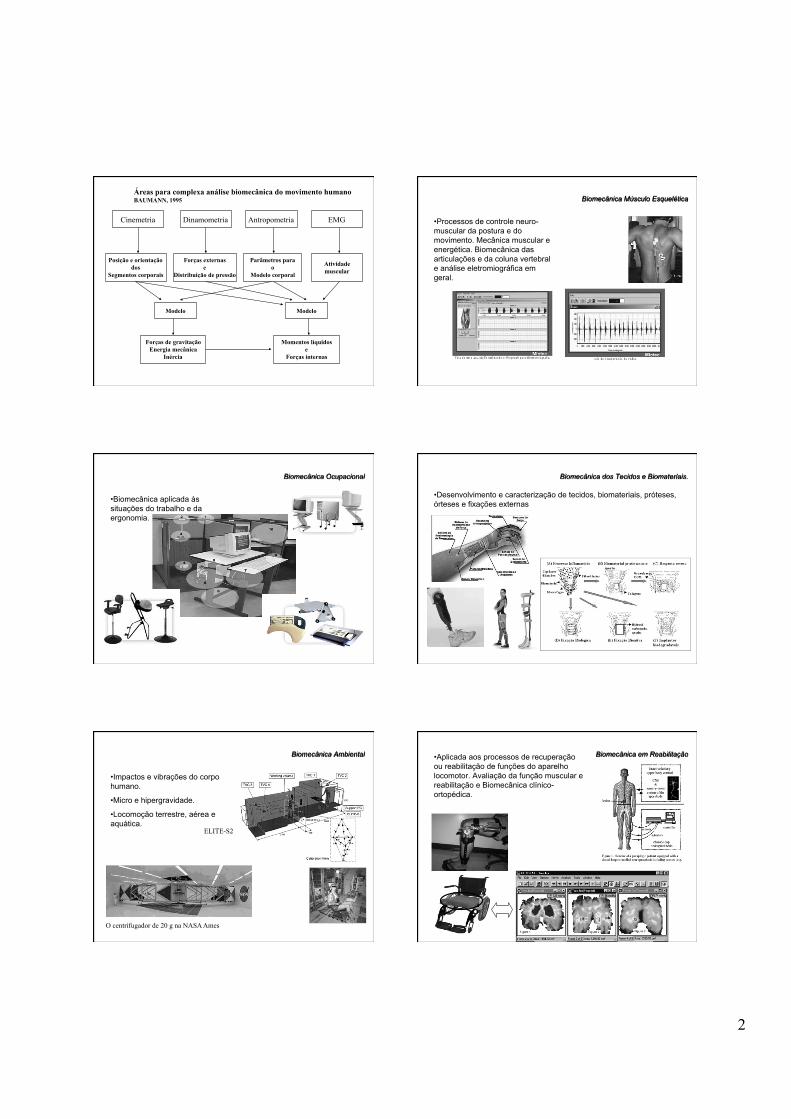
Cinemetria Dinamometria Antropometria EMG
Posição e orientação dos
Segmentos corporais
Forças externas e
Distribuição de pressão
Parâmetros para o
Modelo corporal
Atividade muscular
Modelo Modelo
Forças de gravitação Energia mecânica
Inércia
Momentos líquidos e
Forças internas
Áreas para complexa análise biomecânica do movimento humano BAUMANN, 1995 Biomecânica Músculo Esquelética
• Processos de controle neuro-muscular da postura e do movimento. Mecânica muscular e energética. Biomecânica das articulações e da coluna vertebral e análise eletromiográfica em geral.
Biomecânica Ocupacional
• Biomecânica aplicada às situações do trabalho e da ergonomia.
Biomecânica dos Tecidos e Biomateriais.
• Desenvolvimento e caracterização de tecidos, biomateriais, próteses, órteses e fixações externas
Biomecânica Ambiental
• Impactos e vibrações do corpo humano.
• Micro e hipergravidade.
• Locomoção terrestre, aérea e aquática.
O centrifugador de 20 g na NASA Ames
ELITE-S2
Biomecânica em Reabilitação • Aplicada aos processos de recuperação ou reabilitação de funções do aparelho locomotor. Avaliação da função muscular e reabilitação e Biomecânica clínico-ortopédica.
3
Metodologia Biomecânica
• Desenvolvimento de métodos e instrumentação, medição e processamento de dados, modelagem e simulação computacional e otimização.
Distribuição de pressão plantar Desenvolvimento de materiais
Biomecânica Cárdio-Respiratória
• Caracterização do movimento respiratório, possibilidades de estudo em situação dinâmica e diferentes manifestações.
Biomecânica dos Esportes.
• Biomecânica em contexto esportivo.
Controle Motor – equilíbrio e queda
• Noção de espaço métrico e dimensões • Sistema de referência. • Conceito de posição em 1, 2 e 3 dimensões. • Conceito de vetor. • Operações vetoriais • Exemplos • Atividades práticas
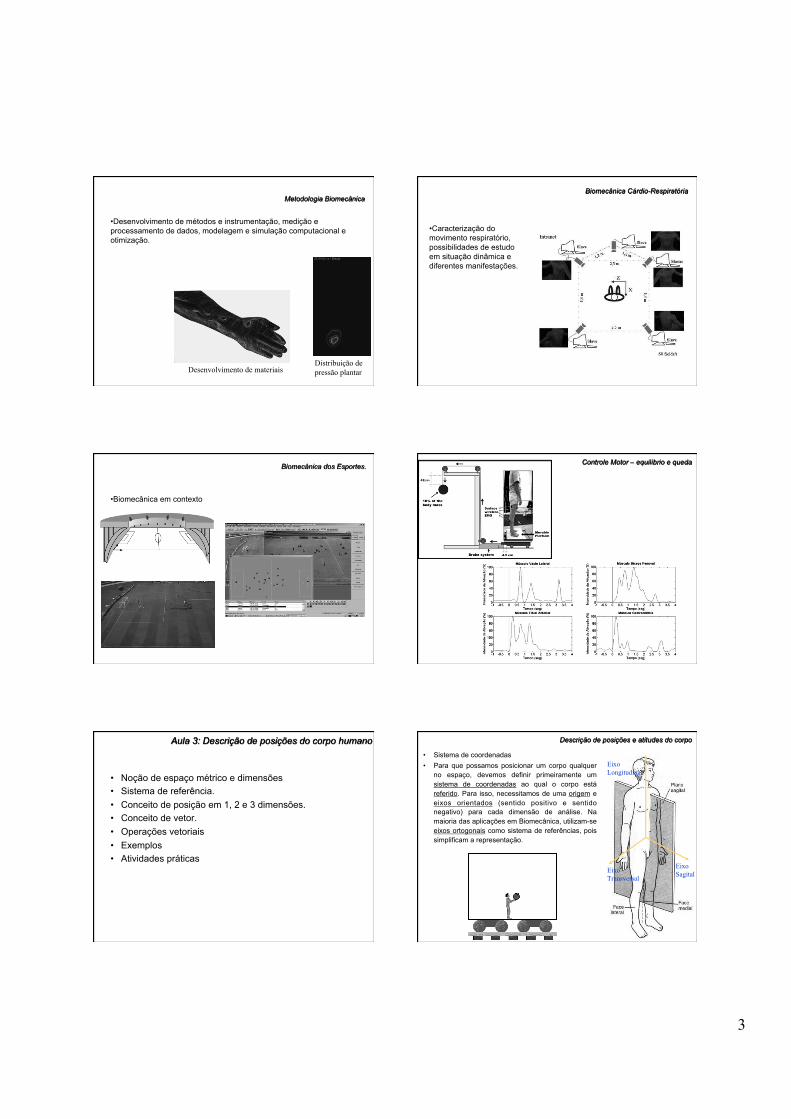
Aula 3: Descrição de posições do corpo humano • Sistema de coordenadas • Para que possamos posicionar um corpo qualquer
no espaço, devemos definir primeiramente um sistema de coordenadas ao qual o corpo está referido. Para isso, necessitamos de uma origem e eixos orientados (sentido positivo e sentido negativo) para cada dimensão de análise. Na maioria das aplicações em Biomecânica, utilizam-se eixos ortogonais como sistema de referências, pois simplificam a representação.
Descrição de posições e atitudes do corpo
EixoSagital
EixoLongitudinal
EixoTransversal
EixoSagital
EixoLongitudinal
EixoTransversal
4
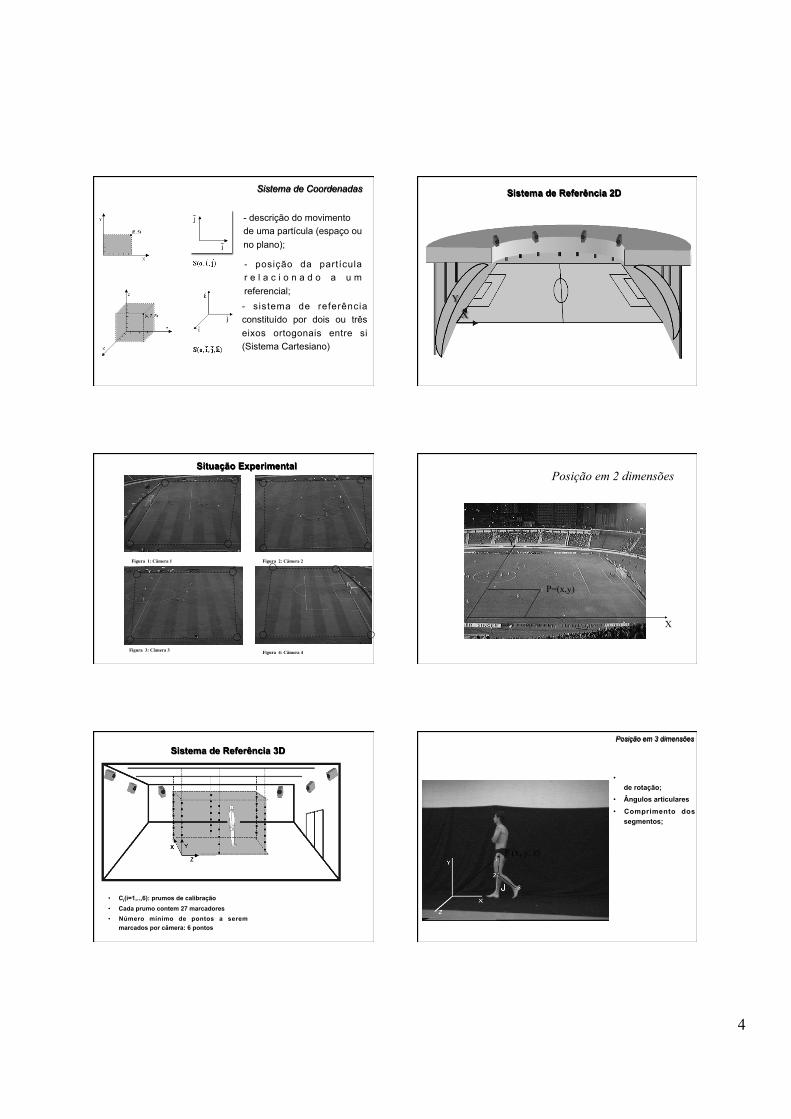
Sistema de Coordenadas
- posição da partícula r e l a c i o n a d o a u m referencial; - sistema de referência constituído por dois ou três eixos ortogonais entre si (Sistema Cartesiano)
- descrição do movimento de uma partícula (espaço ou no plano);
Sistema de Referência 2D
X
YX
Y
Situação Experimental
Figura 1: Câmera 1 Figura 2: Câmera 2
Figura 3: Câmera 3 Figura 4: Câmera 4
P=(x,y)
X
Y
Posição em 2 dimensões
Sistema de Referência 3D
• Ci(i=1,..,6): prumos de calibração
• Cada prumo contem 27 marcadores • Número mínimo de pontos a serem
marcados por câmera: 6 pontos
Posição em 3 dimensões
P (x, y, z)
• Posição 3d do eixo de rotação;
• Ângulos articulares
• Comprimento dos segmentos;
5
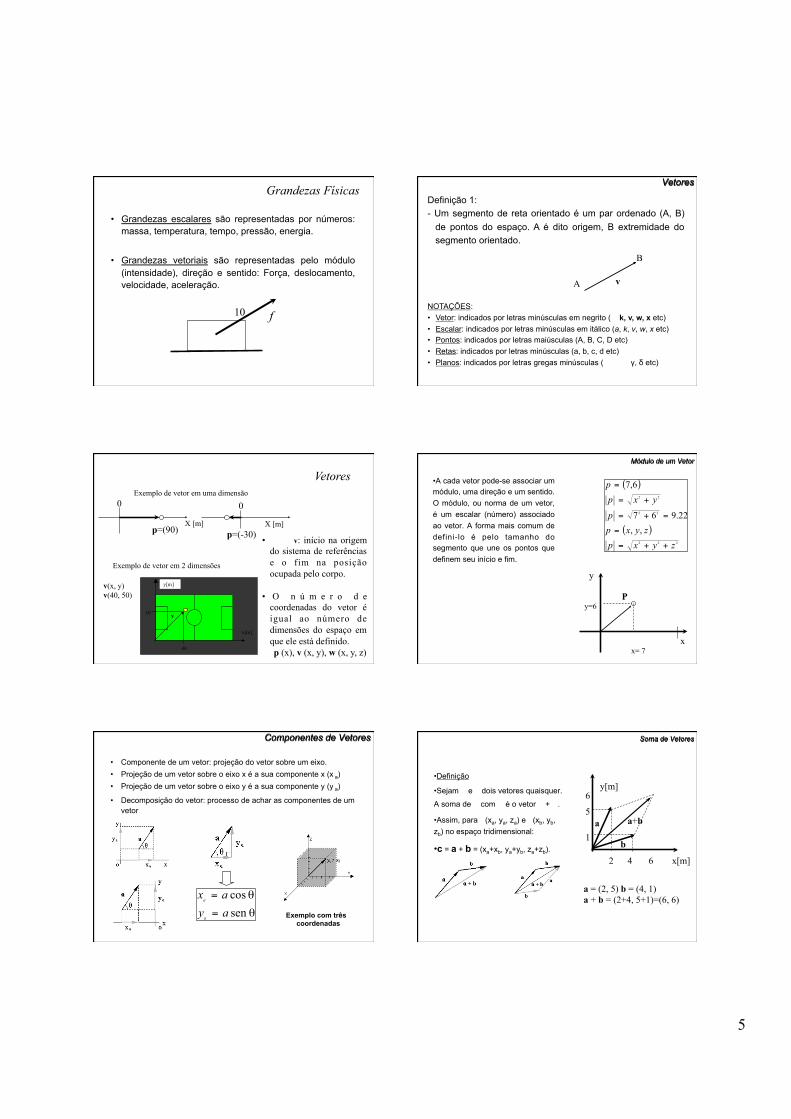
Grandezas Físicas
• Grandezas escalares são representadas por números: massa, temperatura, tempo, pressão, energia.
• Grandezas vetoriais são representadas pelo módulo (intensidade), direção e sentido: Força, deslocamento, velocidade, aceleração.
f 10
Vetores
Definição 1: - Um segmento de reta orientado é um par ordenado (A, B)
de pontos do espaço. A é dito origem, B extremidade do segmento orientado.
NOTAÇÕES: • Vetor: indicados por letras minúsculas em negrito (a, k, v, w, x etc) • Escalar: indicados por letras minúsculas em itálico (a, k, v, w, x etc) • Pontos: indicados por letras maiúsculas (A, B, C, D etc) • Retas: indicados por letras minúsculas (a, b, c, d etc) • Planos: indicados por letras gregas minúsculas (π, α, β, γ, δ etc)
A
B
v
y[m]
x[m]
v
40
50
Exemplo de vetor em 2 dimensões
v(x, y) v(40, 50)
Exemplo de vetor em uma dimensão
X [m]
0
p=(90) X [m]
0
p=(-30)
Vetores
• Vetor v: início na origem do sistema de referências e o fim na posição ocupada pelo corpo.
• O n ú m e r o d e coordenadas do vetor é igual ao número de dimensões do espaço em que ele está definido.
p (x), v (x, y), w (x, y, z)
• A cada vetor pode-se associar um módulo, uma direção e um sentido. O módulo, ou norma de um vetor, é um escalar (número) associado ao vetor. A forma mais comum de defini-lo é pelo tamanho do segmento que une os pontos que definem seu início e fim.
x
P
x= 7
y=6
y
Módulo de um Vetor
( )
( )222
22
22
,,22.967
6,7
zyxp
zyxp
p
yxp
p
++=
=
=+=
+=
=
Componentes de Vetores
• Componente de um vetor: projeção do vetor sobre um eixo. • Projeção de um vetor sobre o eixo x é a sua componente x (x a) • Projeção de um vetor sobre o eixo y é a sua componente y (y a)
• Decomposição do vetor: processo de achar as componentes de um vetor
Exemplo com três coordenadas
θ=
θ=
sencosayax
a
a
• Definição
• Sejam a e b dois vetores quaisquer.
A soma de a com b é o vetor a + b.
• Assim, para a(xa, ya, za) e b(xb, yb, zb) no espaço tridimensional:
• c = a + b = (xa+xb, ya+yb, za+zb). b
a
4 6
1
6
x[m]
y[m]
a = (2, 5) b = (4, 1) a + b = (2+4, 5+1)=(6, 6)
a+b
2
5
Soma de Vetores
6
Subtração de Vetores
Definição Sejam a e b dois vetores quaisquer. A diferença de a por b é definida por
a – b = a + (-b)
Vetor oposto O negativo de a tem o mesmo comprimento e a mesma direção de a, mas sentido oposto.
a – b a
– b b b
a a – b
Vetores
B
B
A
C
D
Mesmo sentido
A
C
D
Sentido contrário
Definição 2 • Os segmentos orientados (A, B) e (C, D) têm
o mesmo comprimento se os segmentos geométricos AB e CD têm o mesmo comprimento.
• (A, B) e (C, D) têm mesma direção se AB // CD
! Se (A, B) e (C, D) têm mesma direção:
• As retas AB e CD têm mesmo sentido quando os segmentos AC e BD tenham interseção vazia.
• Têm sentido contrário quando a interseção não seja vazia.
Vetores Definição 3 • Os segmentos orientados (A, B) e (C, D) são equipolentes (A, B)
~ (C, D). • Ambos são nulos • Nenhum é nulo e têm mesmo comprimento, mesma direção e
mesmo sentido. Propriedades:
• (A, B) ~ (A, B) : reflexiva • (A, B) ~ (C, D) => (C, D) ~ (A, B) : simétrica • (A, B) ~ (C, D) e (C, D) ~ (E, F) => (A, B) ~ (E, F): transitiva
• Classe de equipolência de (A, B): conjunto de todos os segmentos
orientados que são equipolentes a (A, B).
Vetores
Definição 4 • Vetor é uma classe de equipolência de segmentos
orientados.
• vetor nulo: vetor cujo representante é um segmento orientado nulo.
• vetores x e y não-nulos são paralelos (x // y) se um representante de x é paralelo a um representante de y.
• Norma (módulo ou comprimento) de um vetor: comprimento de qualquer um de seus representantes.
a
b
4
1
x[m]
y[m]
2
5
-b a-b
a = (4,1) b = (2, 5) a - b = (4-2, 1-5) a - b = (2, -4)
Chamamos a atenção que todo vetor resultante está referido a origem, contudo o vetor que une os pontos A e B (de B para A) tem o mesmo módulo, direção e sentido que o vetor A-B.
Subtração de Vetores
• Considere um vetor em um espaço tridimensional a(xa, ya, za) e um escalar k, a multiplicação de k pelo vetor a é o vetor b(k xa, k ya, k za).
Multiplicação de um vetor por um escalar
Definição Se v é um vetor não-nulo e k é um número real (escalar) não-nulo, então o produto kv é definido como o vetor de mesma direção de v cujo comprimento é |k| vezes o comprimento de v e cujo sentido é o mesmo de v se k>0 e oposto ao de v se k<0.
7
x 5
4
y
6
a b
a = (5, 4) k = 1.5 b = (5*1.5, 4*1.5) b = (7.5, 6)
7.5
Multiplicação de um vetor por um escalar Produto escalar
Definição Se a e b são vetores no espaço bi ou tridimensional e α é o ângulo entre a e b, então o produto escalar a.b é definido por a.b = ||a|| ||b|| cos α
Componente de a ao longo da direção e do sentido positivo de b é a cos α
Componente de b ao longo da direção e do sentido positivo de a é b cos α ( )( ) ( )( )α=α= coscos. bababa
Produto escalar
• Considere dois vetores em um espaço tridimensional a(xa, ya, za) e b(xb, yb, zb), e α como sendo o ângulo entre eles, o produto escalar pode ser obtido de duas formas:
• a.b = xa xb + ya yb + za zb • a.b = ||a|| ||b|| cosα • Assim: • cos α = a.b / ||a|| ||b||
y b
a
a = (8,4) b = (2,6) a . b = 16 + 24 = 40 ||a|| = 8.9 ||b|| = 6.3 α = acos(40/(8.9*6.3)) α = 45°"
α"
x
Produto vetorial
a
b
v
α
• Como exemplo, tome o caso particular, em que a(1,0,0) e b(0,1,0). Note que v(0,0,1) é um vetor ortogonal ao plano que contém a e b.
Definição Se a = (x a, y a, z a) e b = (x b, y b, z b) são vetores no espaço tridimensional, então o produto vetorial a x b é o vetor definido por a x b = (y a zb – za yb, za xb – xa zb, xa yb – ya xb) xv = ya zb – za yb yv = za xb – zb xa zv = xa yb – ya xb
!!"
#$$%
&−=×
bb
aa
bb
aa
bb
aa
yxyx
zxzx
zyzy
ba ,,
||a x b|| = ||a|| ||b|| sen α
Ou em notação de determinante
Produto vetorial
a
b
v
α
Observação a x b = - (b x a)
Descrição de posição do corpo humano
• Biomecânica Aplicada
8
A figura acima representa uma partida de Rugby em cadeira de rodas. Sabendo que a origem é O(0,0) e que a quadra tem dimensões de 28 x 15m, posicione os jogadores (2, 3, 4 e 5) e calcule a distância entre os jogadores 3 e 4 do time azul.
x y
Distância percorrida no futebol de campo
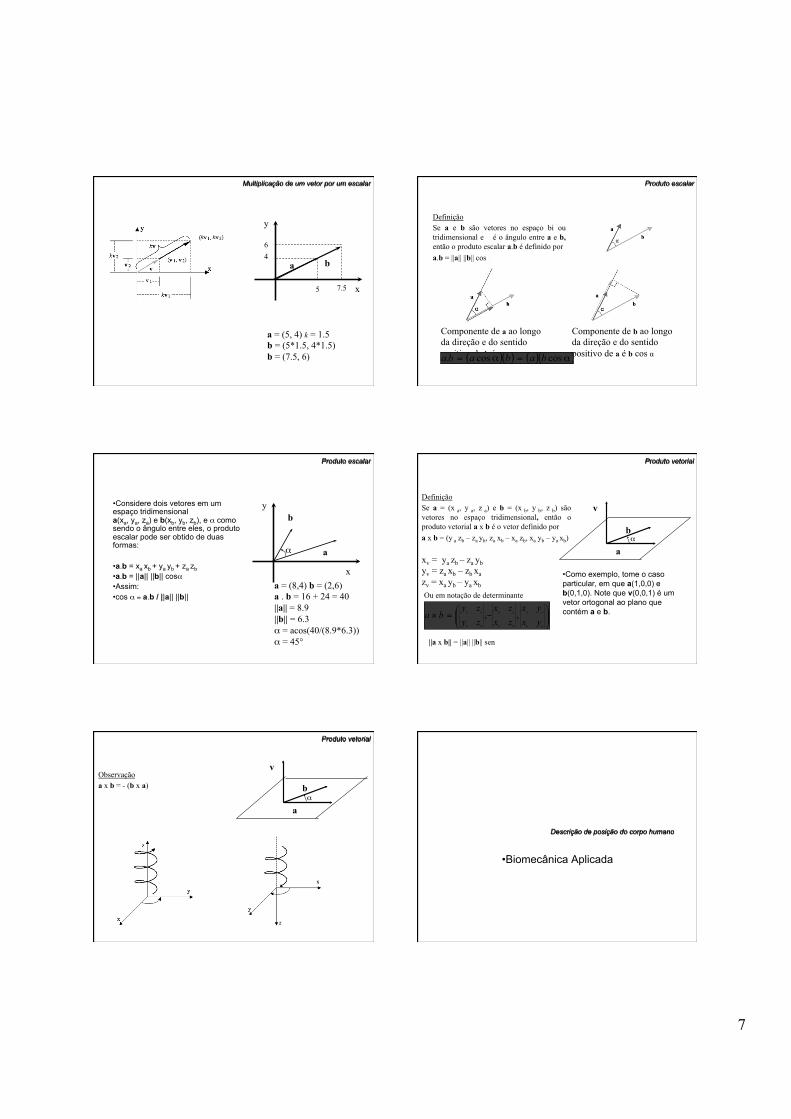
Trajetória e Distância percorrida
Goleiro Lateral
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
ATAQUE DEFESA
Distância percorrida: 1969 m
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
ATAQUE DEFESA
Distância percorrida: 4925 m
Zagueiro Volante
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
ATAQUE DEFESA
Distância percorrida: 4558 m
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
ATAQUE DEFESA
Distância percorrida: 4280 m
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
ATAQUE DEFESA
Distância percorrida: 4627 m
0 10 20 30 40 50 60 70 80 90 1000
10
20
30
40
50
60
ATAQUE DEFESA
Distância percorrida: 4094 m
Meio de Campo Atacante
Posição Tridimensional e Distância entre dois pontos
X Y
v
Numa prova de salto em distância, a velocidade inical com que a atleta sai do chão para fazer o salto é dada pelo vetor v=( 8.6,3.5)
Deternime: a) a n o r m a d o v e t o r
velocidade inicial da atleta.
b) O Ângulo de saída da atleta.
9
Distância Percorrida X Deslocamento
Em uma prova de 200m livre, qual será a distância percorrida e o deslocamento do atleta?
Ângulo entre dois vetores
0 5 10 15 20 25 30-2
0
2
4
6
8
10
12
14
16
18
offense
defense
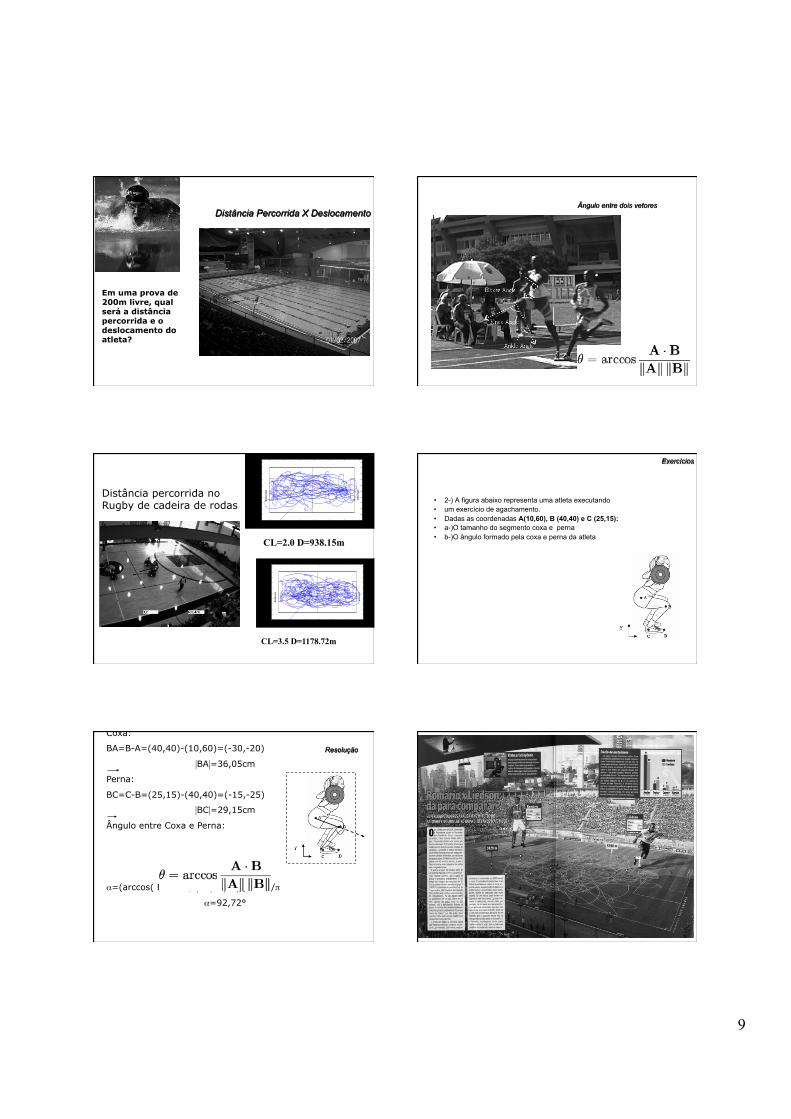
CL=2.0 D=938.15m
0 5 10 15 20 25 30-2
0
2
4
6
8
10
12
14
16
18
offense
defense
CL=3.5 D=1178.72m
Distância percorrida no Rugby de cadeira de rodas
Exercícios
• 2-) A figura abaixo representa uma atleta executando • um exercício de agachamento. • Dadas as coordenadas A(10,60), B (40,40) e C (25,15): • a-)O tamanho do segmento coxa e perna • b-)O ângulo formado pela coxa e perna da atleta
Resolução
Coxa:
BA=B-A=(40,40)-(10,60)=(-30,-20)
|BA|=36,05cm
Perna:
BC=C-B=(25,15)-(40,40)=(-15,-25)
|BC|=29,15cm
Ângulo entre Coxa e Perna:
α =(arccos( BA . BC/ |BA| * |BC|)) *180/π
α =92,72°