resposta na frequência de amplificadores transistorizados · pdf fileresposta na...
TRANSCRIPT

Resposta na frequência de amplificadores transistorizados
1. Introdução
1.1 Função de rede; polos e zeros
Há 2 variáveis básicas em teoria de circuitos: corrente i e tensão v. Chama-se função de rede elétrica (ou circuito elétrico) F(s) à relação entre quaisquer duas transformadas de Laplace das variáveis básicas Xa(s) e Xb(s), com X = I ou V, no domínio da variável s = σ + jω, frequência complexa. Quando se pretende calcular a resposta em frequência de um circuito, na realidade pretende-se calcular a função de rede que é o quociente entre uma variável básica da saída Xo(s) e uma da entrada Xi(s). Na maioria dos casos refere-se a um ganho de tensão: Av(s) = Vo(s) / Vi(s). No entanto, por vezes calcula-se também a resposta em frequência do ganho de corrente Ai(s) = Io(s) / Ii(s), da impedância ou admitância de transferência, Yt(s) = Io(s) / Vi(s) ou Zt(s) = Vo(s) / Ii(s). Também se calcule a resposta em frequência de funções de rede locais como, a impedância ou admitância de entrada Zi(s) = 1 / Yi(s)
= Vi(s) / Ii(s), ou a admitância ou impedância de saída Yo(s) = 1 / Zo(s) = Io(s) / Vo(s). Os componentes dos circuitos elétricos responsáveis pela dependência da frequência são as bobinas e os condensadores. No caso particular dos amplificadores transistorizados, na grande maioria das aplicações não há bobinas ou efeitos indutivos significativos, pelo que neste texto se vai referir apenas a influência dos condensadores. A cada condensador independente está associado, na função de rede, um polo e um zero, embora um deles possa estar na origem ou no infinito. Uma função de rede, por exemplo um ganho de tensão Av, obtém-se a partir do esquema elétrico dum circuito real por aplicação das equações de Kirchoff. No domínio da variável s pode-se sempre escrever uma função de rede dum circuito real na forma dum quociente de 2 polinómios em s, sendo o do numerador de ordem m e o do denominador de ordem n com m < n já que um circuito real não responde à frequência infinita. Só até uma dada frequência finita se pode considerar um circuito real como passa-alto. Sem perda de generalidade, pode se escrever um ganho de tensão como
)s/s1)...(s/s1)(s/s1(
)s/s1)...(s/s1)(s/s1(A
sb...sbb
sa...saa
)s(V
)s(V)s(A
pn2p1p
zm2z1z
0vn
n10
m
m10
i
o
v −−−
−−−=
+++
+++== (1)
onde se apresenta Av(s) com os polinómios fatorizados em termos de 1ª ordem. Em (1) szi e spj são os zeros e os polos de Av(s), respetivamente.
Para zeros reais e negativos (szi = – σzi), caso frequente em amplificadores transistorizados, tem-se
para cada termo do numerador de Av(s), Z = (1 – s / szi), regime forçado sinusoidal (s = j ω), um
andamento assimptótico do módulo em decibéis e fase em função de log ω do tipo:
Para ω << |szi| |(1 – s / szi)|dB = |Z|dB ≈ 0 fase(1 – s / szi) = φZ ≈ 0º
Para ω = |szi| |(1 – s / szi)|dB = |Z|dB ≈ 20 log √2 = 3,0103 ≈ 3 fase(1 – s / szi) = φZ = 45º
Para ω >> |szi| |(1 – s / szi)|dB = |Z|dB ≈ 20 log (ω / |szi|) fase(1 – s / szi) = φZ ≈ 90º
O erro máximo que se comete ao admitir o andamento assimptótico é de 3dB no módulo, e verifica-se
para ω = |szi|, e de 5,711º na fase, que se verifica em ω = |szi|/10 e ω = 10 |szi| (φZ = arctg 0,1 = 5,711º
e φZ = arctg 10 = 84,289º, respetivamente).
Para polos reais e negativos (spj = – σpj), caso ainda mais frequente em amplificadores transistorizados, já que sistemas incondicionalmente estáveis devem ter os polos no SPCE (semi-plano complexo esquerda) tem-se para cada termo do denominador de Av(s), P = 1 / (1 – s / spj), regime forçado
sinusoidal (s = jω), um andamento assimptótico do módulo em decibéis e da fase em função de log ω do tipo:
Para ω << |spj| |1 / (1 – s / spj)|dB = |P|dB ≈ 0 fase 1/(1 – s / spj) = φz ≈ 0º
Para ω = |spj| |1 / (1 – s / spj)|dB = |P|dB ≈ –20 log √2 ≈ –3 fase 1/(1 – s / spj) = φz = – 45º
Para ω >> |spj| |1 / (1 – s / spj)|dB = |P|dB ≈ –20 log (ω / |spj|) fase 1/(1 – s / spj) = φz ≈ – 90º
O erro máximo que se comete ao admitir o andamento assimptótico é de –3dB no módulo, e verifica-se para ω = |spj|, e de 5,711º na fase, que se verifica em ω = |spi|/10 e ω = 10 |spj| (φP = – arctg 0,1 =
– 5,711º e φP = – arctg 10 = – 84,289º, respetivamente). Em conclusão: é usual dizer-se que, em primeira aproximação, o andamento assimptótico do módulo de uma função de rede F(s) a partir da frequência de um polo, ω = |spj|, aumenta o seu declive de
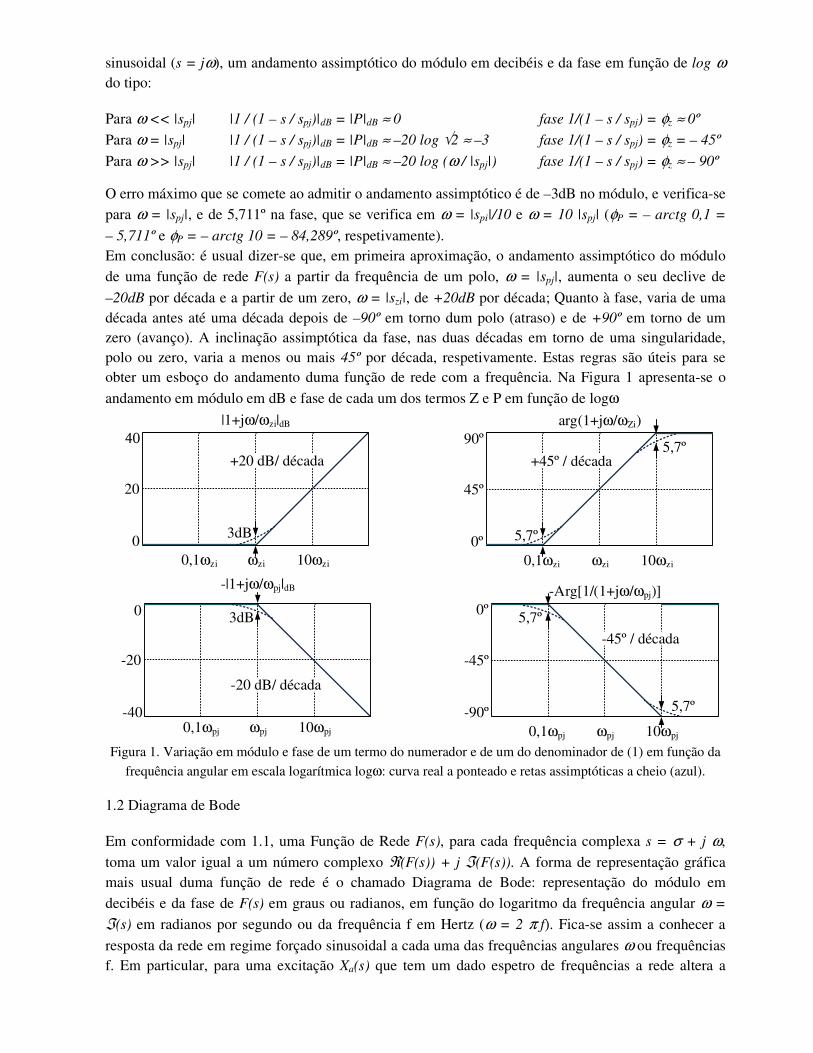
–20dB por década e a partir de um zero, ω = |szi|, de +20dB por década; Quanto à fase, varia de uma década antes até uma década depois de –90º em torno dum polo (atraso) e de +90º em torno de um zero (avanço). A inclinação assimptótica da fase, nas duas décadas em torno de uma singularidade, polo ou zero, varia a menos ou mais 45º por década, respetivamente. Estas regras são úteis para se obter um esboço do andamento duma função de rede com a frequência. Na Figura 1 apresenta-se o
andamento em módulo em dB e fase de cada um dos termos Z e P em função de logω
ωzi 10ωzi0,1ωzi
+20 dB/ década
20
40
0
|1+jω/ωzi|dB
3dB
ωzi 10ωzi0,1ωzi
+45º / década
90º
0º
arg(1+jω/ωZi)
45º
5,7º
5,7º
ωpj 10ωpj0,1ωpj
-20 dB/ década
-20
-40
0
-|1+jω/ωpj|dB
3dB
ωpj 10ωpj0,1ωpj
-45º / década
-90º
0º-Arg[1/(1+jω/ωpj)]
-45º
5,7º
5,7º
Figura 1. Variação em módulo e fase de um termo do numerador e de um do denominador de (1) em função da
frequência angular em escala logarítmica logω: curva real a ponteado e retas assimptóticas a cheio (azul).
1.2 Diagrama de Bode
Em conformidade com 1.1, uma Função de Rede F(s), para cada frequência complexa s = σ + j ω,
toma um valor igual a um número complexo ℜ(F(s)) + j ℑ(F(s)). A forma de representação gráfica mais usual duma função de rede é o chamado Diagrama de Bode: representação do módulo em
decibéis e da fase de F(s) em graus ou radianos, em função do logaritmo da frequência angular ω =
ℑ(s) em radianos por segundo ou da frequência f em Hertz (ω = 2 π f). Fica-se assim a conhecer a
resposta da rede em regime forçado sinusoidal a cada uma das frequências angulares ω ou frequências f. Em particular, para uma excitação Xa(s) que tem um dado espetro de frequências a rede altera a

amplitude e a fase de cada componente do espetro do sinal de entrada de acordo com o Diagrama de Bode permitindo este conhecer a forma da resposta Xb(s), sendo F(s) = Xb(s) / Xa(s). A vantagem de se ter o traçado do módulo duma função de rede em escala log/log e o da fase em graus/log é que, como se viu em 1.1, por cada polo ou zero da Função de Rede, tem-se um andamento assimptótico linear por troços (segmentos de reta). No caso de se ter uma Função de Rede com vários polos e zeros, de (1) é imediato que
∑∑==
−−−+=n
j
dBpj
m
i
dBzivodBv ssssAsA11
|/1||/1|)log(20|)(| (2)
∑∑==
−−−+=n
j
pj
m
i
ziAA sssssvo
11
)/1()/1()( φφφφ (3)
pelo que há que calcular o contributo constante de Avo e somar os contributos de cada zero e subtrair os
contributos de cada polo. Note-se que φAvo será igual a ±180º, se o circuito for inversor em DC (f=0),
ou igual a 0, se o circuito for não inversor.
Apresenta-se de seguida um exemplo de cálculo do traçado de um Diagrama de Bode de um circuito passivo simples com 2 resistências e 2 condensadores, e que no entanto é um circuito de 1ª ordem, como se verificará.
Exemplo 1 - Traçado do diagrama de Bode de uma Função de Rede de 1ª ordem
Na Figura 2 (a) apresenta-se o esquema duma rede RC onde: R1 = R2 = 1 kΩ, C1 = 1 nF e C2 = 200
nF. Esta rede apesar de ter 2 condensadores tem apenas um zero e um polo reais. Tal facto deve-se a que os condensadores não são independentes. A tensão Vi é imposta por um gerador independente (gerador de excitação da entrada) e portanto, circulando na malha exterior a lei de Kirchoff das tensões permite escrever Vi = Vc1 + Vc2, logo sabido Vc1 ou Vc2 a tensão no outro condensador, Vc2 ou Vc1 respetivamente, fica logo definida. Calcule o valor do polo sp e do zero sz da função de transferência F(s) = Av(s) = Vo(s) / Vi(s), bem como os valores do seu módulo e fase em regime forçado sinusoidal
(s = j ω) para ω = 0 e quando ω tende para infinito. Trace os respetivos diagramas de Bode
assimptóticos. Indique as diferenças entre as aproximações assimptóticas e as curvas exatas de Av(ω)
nas frequências de interseção das assíntotas (ω = ωp = |sp| e ω = ωz = |sz| para o módulo de F(s) e
0,1ωp, ωp, 10ωp, 0,1ωz, ωz e 10ωz para a fase de F(s).
C1
R1
C2
R2Vi
Vo
ωp ≈ 104 log ωωz = 106102
−−−−20dB/década
|Av|dB-6
-46
(rad s-1)
Ox
log ω
−−−− 45º/década−−−− 90º
0ºφAv
+ 45º/década
102 ωp ≈ 104 ωz = 106 108
−−−− 45º
x O
(a) (b) (c) Figura 2. Rede RC de 1ª ordem: (a) esquema elétrico; diagrama de Bode da amplitude (b) e da fase (c) da função
de transferência Av(ω) = Vo / Vi.
Resolução 1 - Notando que o ganho de tensão do circuito da Figura 1(a) corresponde a um divisor de tensão entre duas associações R//C (Z1 = R1 // C1 e Z2 = R2 // C2), pode-se escrever:
=
+
=
1 +
1 + +
1 +
=
+
1 +
1 +
+ ( + )
(4) Tem-se então de (4), para o zero sz e polo sp de Av(s) os valores:
sz = – 1 / (R1 C1) = – 106 rad s
-1 e sp = – 1 / [(R1 // R2)(C1 + C2)] = – 9950 rad s
-1 (5)
Ambas as frequências são reais e negativas pelo que a análise aproximada do andamento do módulo e fase de Av(s) apresentada é válida. De (4) é possível também obter o valor exato pedido de Av(s = j 0) e
Av(s = j ∞):
Av(j0)= R2 / ( R1+ R2) = 1 / 2 ≈ – 6 dB e Av(j∞) = C1 /(C1+ C2) = 1 / 201 = – 46 dB (6)
Note-se que em ambos os casos a fase é nula (Av real e positivo): a variação imposta pelo polo é compensada pela do zero com |sp| < |sz|. De acordo com (5) e (6) obteve-se os diagramas de Bode assimptóticos do módulo e fase de Av(ω), Figura 1(b) e (c). De (4) obtém-se os valores exatos de
|Av| para s = j |sp| e s = j |sz|, e de φAv para s = j 0,1 |sp|, s = j |sp|, s = j 10 |sp|, s = j 0,1 |sz|), s = j |sz| e s = j 10 |sz|:
|Av(j|sp|)|dB = – 9,03 dB ≈ |Av(j0)|dB| – 3 dB; |Av(j|sz|)|dB = – 43,05 ≈ |Av(j∞)|dB| + 3 dB (7a)
φAv(j0,1|sp|) = – 5,65º; φAv(j|sp|) = – 44,43º; φAv(j10|sp|) = – 78,61º (7b)
φAv(j0,1|sz|) = – 78,61º; φAv(j|sz|) = – 44,43º; φAv(j10|sz|) = – 5,65º (7c)
Realça-se que os valores da amplitude e fase para frequências angulares ω = 10 |sp| e ω = 0,1 |sz| são
idênticos porque 10 |sp| = 99,5 krad s-1
≈ 100 krad s-1
= 0,1 |sz|. Note-se também que o valor da fase em |sp| e |sz| não é – 45º. Tal facto deve-se à influência entre o zero e o polo já que estes distam apenas um do outro 2 décadas. No entanto, a diferença é apenas da ordem de 1%.
Exemplo 2 - Traçado do diagrama de Bode de uma Função de Rede de 3ª ordem
Um amplificador operacional tem um ganho em DC de Avo = 80 dB, 3 polos, em fp1 = 1 MHz, fp2 = 10
MHz e fp3 = 30 MHz, e um zero em fz = 100 MHz. Vai-se traçar o seu Diagrama de Bode e obter uma estimativa da frequência para a qual o ganho é unitário (Av(fo = ?) = 1 = 0 dB).
Resolução 2 - Como é dado o ganho em DC e as 3 primeiras singularidades são polos, até à frequência do 1º polo (1MHz) o ganho mantem-se 80dB. Entre o 1º polo (1 MHz) e o 2º polo (10 MHz), uma década, o ganho cai a 20dB/década, logo cai até 60dB. Entre o 2º polo (10 MHz) e o 3º (30 MHz), cerca de meia década (log3 = 0,477), o ganho cai a 40dB/década, logo cai até cerca de 40dB. Entre o 3º polo (30 MHz) e o zero (100 MHz), cerca de meia década, o ganho cai a 60dB/década, logo cai até cerca de 10dB. Finalmente, a partir do zero (100 MHz), última singularidade, cai a 40dB/década. Logo o ganho vale 0dB = 1, cerca de 1/4 de década depois do zero: 1/4 de década corresponde a 101/4=1,78
logo fo ≈ 178 MHz. O diagrama da fase é obtido de forma idêntica aos anteriores exemplos, somando-se os efeitos de cada singularidade. Inicialmente, como nada é dito quanto à fase, e como o amplificador é operacional (entrada diferencial) admite-se não inversor e fase inicia em 0. Devido aos 3 polos a fase tende a atrasar 3x90º = 270º, mas como há um zero no final das singularidades (100 MHz) e a menos de uma

década do último polo (30 MHz), a fase não chega a atingir os −270º e começa a subir até −270º + 90º = -180. Na Figura 3 apresenta-se o andamento assimptótico do módulo do ganho em dB e o da fase em graus para os dados do problema.
|Av|dB
60
40
0
0
φAv (º)
-180
-90
10-1
fp1 fz2
101
fp2
x
102
-20
20
-60dB/déc
-20dB/déc
-40dB/déc
103
10 102
-270
log f (MHz)
-45º/déc
-135º/déc
-90º/déc
80
103
xx
log f (MHz)
-40dB/décfp3
110-1
-45º/déc +45º/déc
x x x
Figura 3. Diagrama assimptótico de Bode da amplitude e da fase da função de transferência do Exemplo 2.
Nesta secção, bem como na expressão geral de uma função de rede (1), não está representado de forma explícita, o caso dos circuitos com zeros na origem, como é o caso de muitos circuitos passa-alto e passa-banda. Nestes casos, se Av(s) tiver na origem um zero de ordem k, os primeiros k coeficientes do numerador da expressão geral (1) são nulos (a0, a1, …, ak = 0) e (1) toma a forma
)s/s1)...(s/s1)(s/s1(
)s/s1)...(s/s1)(s/s1(sA
sb...sbb
)sa...saa(s
)s(V
)s(V)s(A
pn2p1p
)km(z2z1z
k
von
n10
km
km10
k
i
o
v −−−
−−−=
+++
+++== −
−− (8)
onde Avo não é o ganho na origem porque neste caso Av(s) = 0 devido ao zero na origem. Para o traçado do diagrama de Bode há que escolher uma frequência para definir por onde passa assimptota inicial que tem uma inclinação de +20k dB/década. Uma hipótese, é escolher a frequência pelo menos uma década antes de qualquer das singularidades, zeros ou polos. Se esta frequência for fx tem-se |Av(fx)| = Avo fx
k, já que todos os demais termos do tipo |1 – s / ωi| ≈ 1 onde ωi = |sz,pi| com um erro da ordem de 0,5% (|1 – 0,1 j| = 1,005). Note-se que, para esta frequência fx obtém-se um valor para |Av(fx)| que só depende da constante Avo e de fx.
Exemplo 3 - Traçado do diagrama de Bode de uma Função de Rede com um zero na origem
Um amplificador tem uma função de rede F(s) dada por:
)k126/s1)(k88,1/s1)(28,6/s1(
)8,62/s1(s)s(F
++++
=
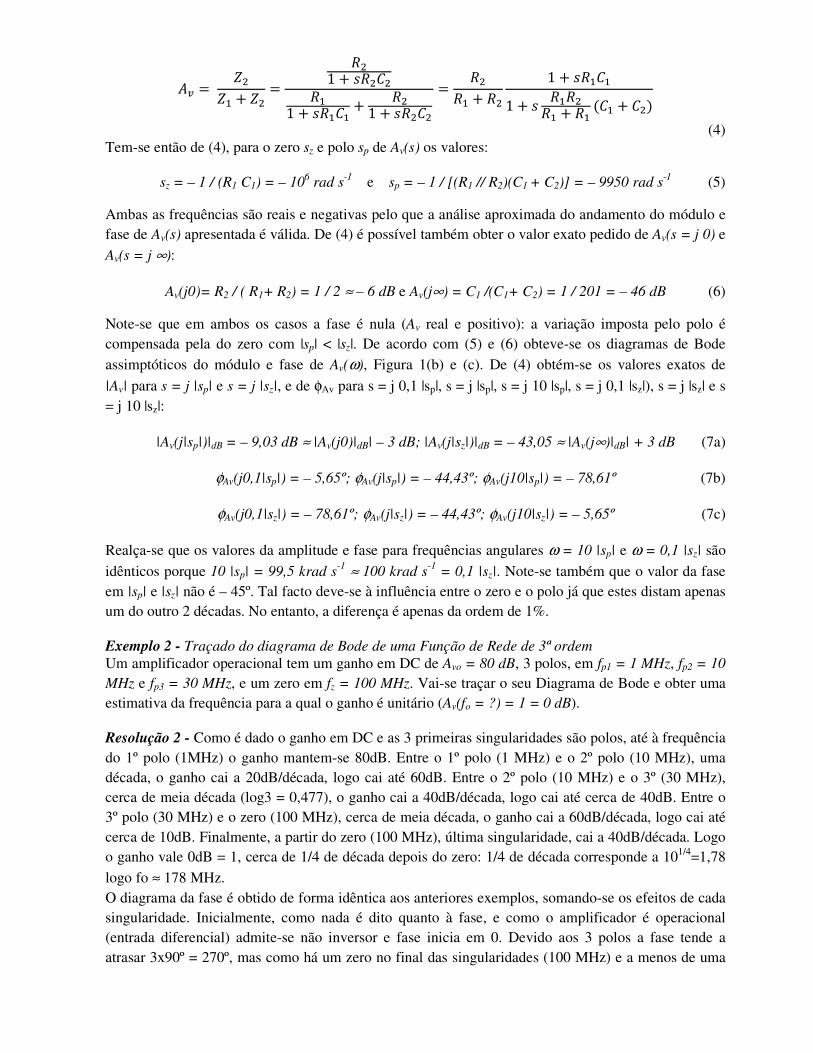
Pretende-se traçar o seu Diagrama de Bode, marcando o eixo das frequências em Hz. O fator k = 103. Qual é o valor máximo do ganho?
Resolução 3 – Para iniciar o traçado há que calcular as frequências das singularidades em Hz.
fz1= 0; fz2= 62,8/2π = 10 Hz; fp1= 6,28/2π = 1 Hz; fp2= 1,88k /2π = 300 Hz; fp3= 126k /2π = 20 kHz.
Escolhendo fx = 0,1 Hz tem-se |F(0,1 Hz)| = |0,2 π| = 0,628 = - 4,04 ≈ - 4 dB. A fase na origem vale +90º (F(0) = j0 = 0 e
+jπ/2). Definido o valor do módulo e fase nestas duas frequências, utilizando as regras já utilizadas nos Exemplos 1 e 2 obteve-se o diagrama de Bode em módulo e fase de F(s) da Figura 4.
log f (Hz)
|Av|dB
60
40
0
-40
0
φAv (º)
45
90
10-2 10-1 fp1 fz2 102 103 105
fp2 fp3
x
104
-20
20
-20dB/déc+20dB/déc
+20dB/déc
106
10-2 1 102 104 106
-45
-90
log f (Hz)
-45º/déc-45º/déc +45º/déc
-45º/déc
-90º/déc
-45º/déc
-4
Figura 4. Diagrama assimptótico de Bode da amplitude e da fase da função de transferência F(s) do Exemplo 3.
2. Resposta em frequências de circuitos RC
2.1 Introdução
Os circuitos com 1 condensador e: só resistências; ou resistências e um gerador de corrente comandado
(caso do modelo do transístor) são circuitos de 1ª ordem que terão portanto um zero e um polo. Tendo os componentes valores reais, os coeficientes dos polinómios em s do numerador e do denominador de qualquer função de rede desse circuito terá polos e zeros reais, que para o sistema ser está vamos admitir que os polos estão no semiplano complexo esquerdo. Se o polo for maior que o zero a resposta será tipo passa alto: depois do zero sobe a 20dB/década e após o polo torna-se constante num patamar superior ao das frequências inferiores ao zero. Se o polo for menor que o zero a resposta será passa-
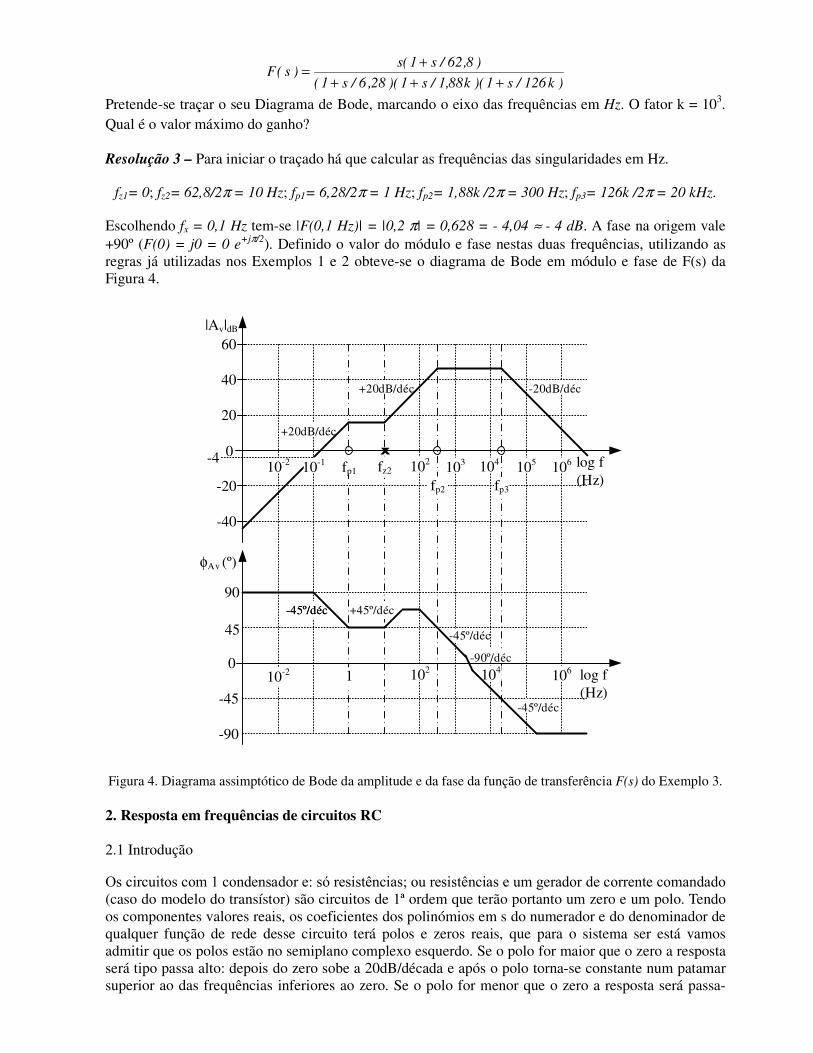
baixo: depois do polo começa a decrescer a -20dB/década e tornar-se-á de novo constante a seguir ao zero, mas num patamar inferior. Um circuito sem condensadores (e bobinas) é dito puramente resistivo, e não tem nem polos nem zeros (não há componentes com impedâncias imaginárias). Este é o caso dos circuitos que se estudaram no capítulo 1: Circuitos com um Transístor. Existirá uma banda de frequências onde se possa desprezar todas as capacidades dum circuito? Vamos verificar, nas próximas secções, qual o comportamento dos condensadores que se encontram nos circuitos de amplificação com transístores para responder a esta questão. Para o efeito vai-se usar como circuito de estudo, um dos mais usuais que é o amplificador em Fonte Comum com polarização estabilizada com uma resistência na Fonte (Figura 5), e que foi estudado em DC e AC desprezando os condensadores, no capítulo 1.
rogmvgs
+vo
-
+vgs
-
Gig id
S
DCgd
Cgs
VDD
RG1
RG2 RS
+
vDS
-
RD
+vGS -
CS
+
vi
-
+
vo
-
io
iiCG CD
RL
(a) (b) Figura 5 (a) Amplificador em Fonte Comum com polarização estabilizada resistiva e (b) modelo simplificado do
TMOS para alta-frequência
O Circuito apresenta um total de 5 condensadores independentes (não há malhas de condensadores e geradores independentes nem condensadores em série ou paralelo), logo as suas funções de rede F(s) terão no máximo 5 polos e 5 zeros. Como calcula-los ou pelo menos aproximadamente obter os limites da banda que eles definem? Rigorosamente só há uma maneira, usar o circuito total onde o transístor é substituído pelo seu esquema equivalente dinâmico e usar as leis de Kirchoff. Este processo é trabalhoso, mas não é difícil, e no século XXI com as ferramentas de simulação existentes não há necessidade de se efetuar esse esforço. Vai-se responder também a esta questão nas restantes secções deste capítulo.
2.2 Circuitos passa-alto de 1ª ordem
Vai-se verificar qual é o comportamento do circuito devido a cada um dos condensadores de acoplamento e contorno que existem para separar o funcionamento em DC do em AC, permitindo por um lado polarizar o transístor num dado PFR na zona de saturação (zona de ganho) e por outro evitar que o gerador de excitação de entrada e a carga não alterem o PFR e eventuais resistências de polarização não afetem (reduzam o ganho) no funcionamento em AC. Os condensadores de acoplamento de entrada e saída (CG e CD) estão a bloquear a componente DC em AC porque um condensador é um circuito aberto em DC e eles estão no caminho do sinal. Então introduzem um zero na origem. Cada um deles será responsável por um zero na origem e obviamente um polo porque um sistema realizável tem sempre o número de polos igual ou maior que o número de zeros finitos. Se assim não fosse o ganho estaria sempre a crescer até infinito! Quanto ao condensador de contorno (CS) em baixo frequência, quando apresenta uma alta impedância, não contorna a resistência RS e em AC o circuito é uma montagem de degeneração de Fonte que tem
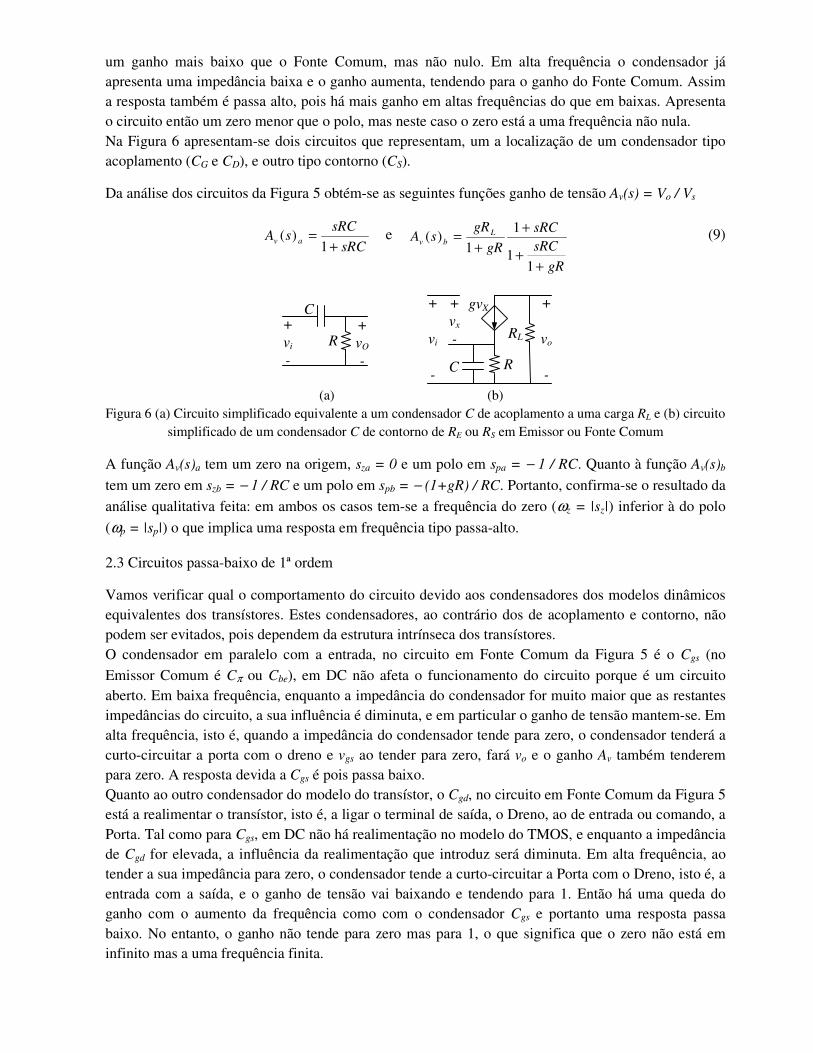
um ganho mais baixo que o Fonte Comum, mas não nulo. Em alta frequência o condensador já apresenta uma impedância baixa e o ganho aumenta, tendendo para o ganho do Fonte Comum. Assim a resposta também é passa alto, pois há mais ganho em altas frequências do que em baixas. Apresenta o circuito então um zero menor que o polo, mas neste caso o zero está a uma frequência não nula. Na Figura 6 apresentam-se dois circuitos que representam, um a localização de um condensador tipo acoplamento (CG e CD), e outro tipo contorno (CS).
Da análise dos circuitos da Figura 5 obtém-se as seguintes funções ganho de tensão Av(s) = Vo / Vs
sRC
sRCsA av +
=1
)( e
gR
sRC
sRC
gR
gRsA L
bv
++
++
=
11
1
1)( (9)
C
R+
vO
- C R
gvX
RL
+
vi
-
+
vi
-
+
vx
-
+
vo
-
(a) (b) Figura 6 (a) Circuito simplificado equivalente a um condensador C de acoplamento a uma carga RL e (b) circuito
simplificado de um condensador C de contorno de RE ou RS em Emissor ou Fonte Comum
A função Av(s)a tem um zero na origem, sza = 0 e um polo em spa = − 1 / RC. Quanto à função Av(s)b
tem um zero em szb = − 1 / RC e um polo em spb = − (1+gR) / RC. Portanto, confirma-se o resultado da
análise qualitativa feita: em ambos os casos tem-se a frequência do zero (ωz = |sz|) inferior à do polo
(ωp = |sp|) o que implica uma resposta em frequência tipo passa-alto.
2.3 Circuitos passa-baixo de 1ª ordem
Vamos verificar qual o comportamento do circuito devido aos condensadores dos modelos dinâmicos equivalentes dos transístores. Estes condensadores, ao contrário dos de acoplamento e contorno, não podem ser evitados, pois dependem da estrutura intrínseca dos transístores. O condensador em paralelo com a entrada, no circuito em Fonte Comum da Figura 5 é o Cgs (no
Emissor Comum é Cπ ou Cbe), em DC não afeta o funcionamento do circuito porque é um circuito aberto. Em baixa frequência, enquanto a impedância do condensador for muito maior que as restantes impedâncias do circuito, a sua influência é diminuta, e em particular o ganho de tensão mantem-se. Em alta frequência, isto é, quando a impedância do condensador tende para zero, o condensador tenderá a curto-circuitar a porta com o dreno e vgs ao tender para zero, fará vo e o ganho Av também tenderem para zero. A resposta devida a Cgs é pois passa baixo. Quanto ao outro condensador do modelo do transístor, o Cgd, no circuito em Fonte Comum da Figura 5 está a realimentar o transístor, isto é, a ligar o terminal de saída, o Dreno, ao de entrada ou comando, a Porta. Tal como para Cgs, em DC não há realimentação no modelo do TMOS, e enquanto a impedância de Cgd for elevada, a influência da realimentação que introduz será diminuta. Em alta frequência, ao tender a sua impedância para zero, o condensador tende a curto-circuitar a Porta com o Dreno, isto é, a entrada com a saída, e o ganho de tensão vai baixando e tendendo para 1. Então há uma queda do ganho com o aumento da frequência como com o condensador Cgs e portanto uma resposta passa baixo. No entanto, o ganho não tende para zero mas para 1, o que significa que o zero não está em infinito mas a uma frequência finita.
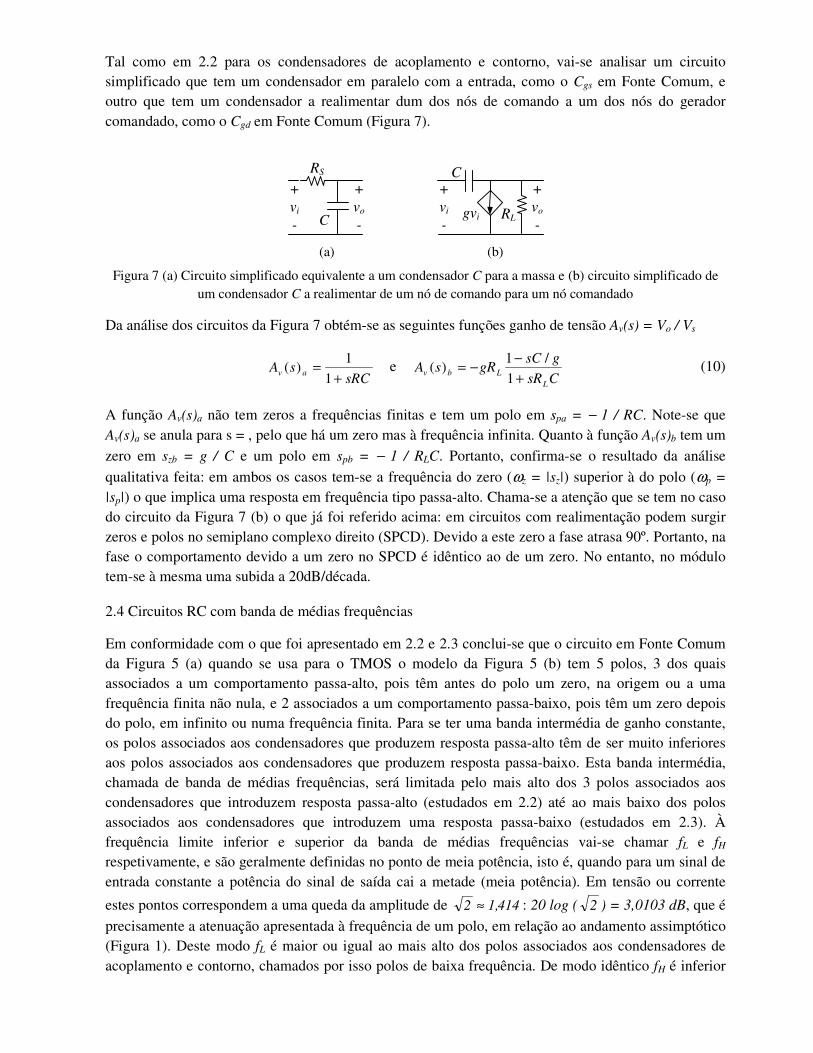
Tal como em 2.2 para os condensadores de acoplamento e contorno, vai-se analisar um circuito simplificado que tem um condensador em paralelo com a entrada, como o Cgs em Fonte Comum, e outro que tem um condensador a realimentar dum dos nós de comando a um dos nós do gerador comandado, como o Cgd em Fonte Comum (Figura 7).
C
gvi RL
+
vo
-
+
vi
-
+
vi
- C
RS
+
vo
-
(a) (b)
Figura 7 (a) Circuito simplificado equivalente a um condensador C para a massa e (b) circuito simplificado de um condensador C a realimentar de um nó de comando para um nó comandado
Da análise dos circuitos da Figura 7 obtém-se as seguintes funções ganho de tensão Av(s) = Vo / Vs
sRC
sA av +=
1
1)( e
CsR
gsCgRsA
L
Lbv +−
−=1
/1)( (10)
A função Av(s)a não tem zeros a frequências finitas e tem um polo em spa = − 1 / RC. Note-se que Av(s)a se anula para s = , pelo que há um zero mas à frequência infinita. Quanto à função Av(s)b tem um
zero em szb = g / C e um polo em spb = − 1 / RLC. Portanto, confirma-se o resultado da análise
qualitativa feita: em ambos os casos tem-se a frequência do zero (ωz = |sz|) superior à do polo (ωp =
|sp|) o que implica uma resposta em frequência tipo passa-alto. Chama-se a atenção que se tem no caso do circuito da Figura 7 (b) o que já foi referido acima: em circuitos com realimentação podem surgir zeros e polos no semiplano complexo direito (SPCD). Devido a este zero a fase atrasa 90º. Portanto, na fase o comportamento devido a um zero no SPCD é idêntico ao de um zero. No entanto, no módulo tem-se à mesma uma subida a 20dB/década.
2.4 Circuitos RC com banda de médias frequências
Em conformidade com o que foi apresentado em 2.2 e 2.3 conclui-se que o circuito em Fonte Comum da Figura 5 (a) quando se usa para o TMOS o modelo da Figura 5 (b) tem 5 polos, 3 dos quais associados a um comportamento passa-alto, pois têm antes do polo um zero, na origem ou a uma frequência finita não nula, e 2 associados a um comportamento passa-baixo, pois têm um zero depois do polo, em infinito ou numa frequência finita. Para se ter uma banda intermédia de ganho constante, os polos associados aos condensadores que produzem resposta passa-alto têm de ser muito inferiores aos polos associados aos condensadores que produzem resposta passa-baixo. Esta banda intermédia, chamada de banda de médias frequências, será limitada pelo mais alto dos 3 polos associados aos condensadores que introduzem resposta passa-alto (estudados em 2.2) até ao mais baixo dos polos associados aos condensadores que introduzem uma resposta passa-baixo (estudados em 2.3). À frequência limite inferior e superior da banda de médias frequências vai-se chamar fL e fH respetivamente, e são geralmente definidas no ponto de meia potência, isto é, quando para um sinal de entrada constante a potência do sinal de saída cai a metade (meia potência). Em tensão ou corrente
estes pontos correspondem a uma queda da amplitude de 414,12 ≈ : 20 log ( 2 ) = 3,0103 dB, que é
precisamente a atenuação apresentada à frequência de um polo, em relação ao andamento assimptótico (Figura 1). Deste modo fL é maior ou igual ao mais alto dos polos associados aos condensadores de acoplamento e contorno, chamados por isso polos de baixa frequência. De modo idêntico fH é inferior
ou igual ao mais baixo dos polos associados aos condensadores do modelo do transístor, chamados por isso polos de alta frequência. Em geral em circuitos de amplificação está-se interessado em ter esta banda de médias frequências. Tal consegue-se escolhendo o transístor e os condensadores de acoplamento e contorno tais que Cgs e Cgd
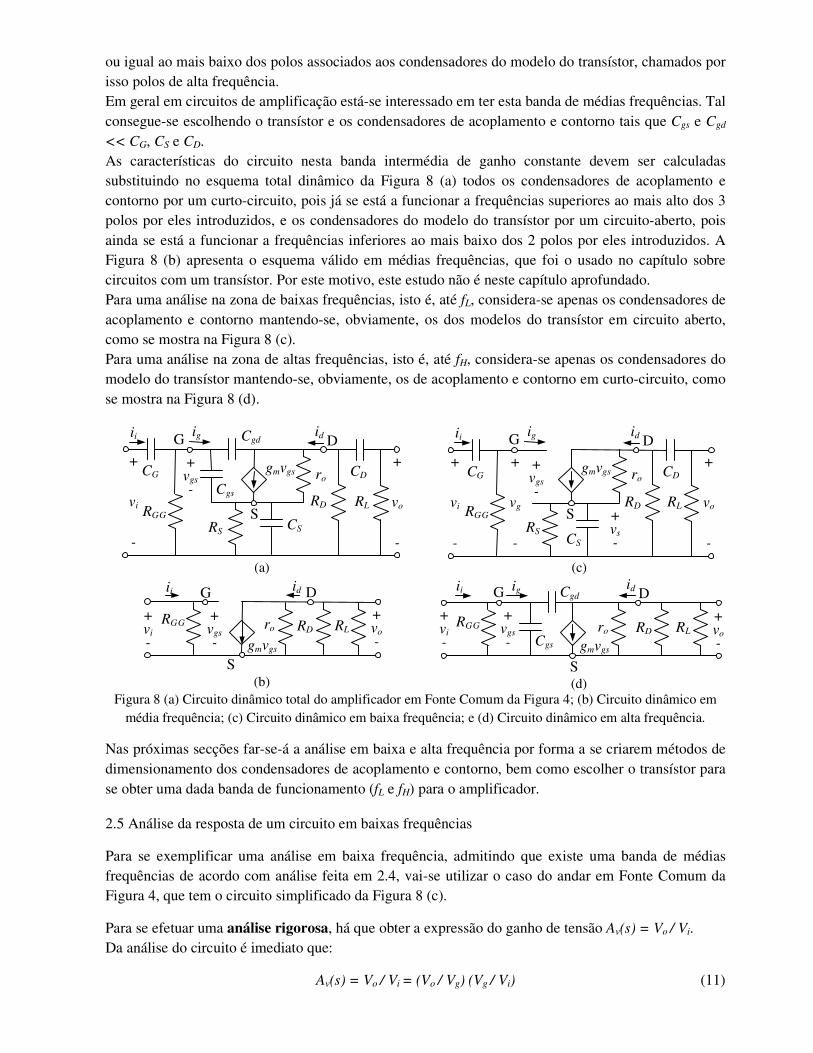
<< CG, CS e CD. As características do circuito nesta banda intermédia de ganho constante devem ser calculadas substituindo no esquema total dinâmico da Figura 8 (a) todos os condensadores de acoplamento e contorno por um curto-circuito, pois já se está a funcionar a frequências superiores ao mais alto dos 3 polos por eles introduzidos, e os condensadores do modelo do transístor por um circuito-aberto, pois ainda se está a funcionar a frequências inferiores ao mais baixo dos 2 polos por eles introduzidos. A Figura 8 (b) apresenta o esquema válido em médias frequências, que foi o usado no capítulo sobre circuitos com um transístor. Por este motivo, este estudo não é neste capítulo aprofundado. Para uma análise na zona de baixas frequências, isto é, até fL, considera-se apenas os condensadores de acoplamento e contorno mantendo-se, obviamente, os dos modelos do transístor em circuito aberto, como se mostra na Figura 8 (c). Para uma análise na zona de altas frequências, isto é, até fH, considera-se apenas os condensadores do modelo do transístor mantendo-se, obviamente, os de acoplamento e contorno em curto-circuito, como se mostra na Figura 8 (d).
RGG
RD
+
vi
-
Gii D
RS
rogmvgs
+vgs
-
ig id
S
Cgd
Cgs
CS
CG
+
vo
-
CD
RL
(a)
RGG
RD
+
vi
-
Gii D
RS
rogmvgs
+
vo
-
+vgs
-
ig id
S
CS
CDCG
+
vg
-
+vs
-
RL
(c)
ro
gmvgs
RGG RD
Gii id
S
D
+vo
-
+vgs
-
+vi
-RL
(b)
RGG RD
+vi
-
Gii D
ro
gmvgs
+vo
-
+vgs
-
ig id
S
Cgd
Cgs
RL
(d)
Figura 8 (a) Circuito dinâmico total do amplificador em Fonte Comum da Figura 4; (b) Circuito dinâmico em média frequência; (c) Circuito dinâmico em baixa frequência; e (d) Circuito dinâmico em alta frequência.
Nas próximas secções far-se-á a análise em baixa e alta frequência por forma a se criarem métodos de dimensionamento dos condensadores de acoplamento e contorno, bem como escolher o transístor para se obter uma dada banda de funcionamento (fL e fH) para o amplificador.
2.5 Análise da resposta de um circuito em baixas frequências
Para se exemplificar uma análise em baixa frequência, admitindo que existe uma banda de médias frequências de acordo com análise feita em 2.4, vai-se utilizar o caso do andar em Fonte Comum da Figura 4, que tem o circuito simplificado da Figura 8 (c).
Para se efetuar uma análise rigorosa, há que obter a expressão do ganho de tensão Av(s) = Vo / Vi. Da análise do circuito é imediato que:
Av(s) = Vo / Vi = (Vo / Vg) (Vg / Vi) (11)

O 2º Termo (Vg / Vi) é independente do 1º termo (Vo / Vg), devido a ig = 0. Notando que o circuito de entrada é idêntico ao da Figura 6 (a), pode-se escrever
GGG
GGG
i
g
CsR1
CsR
V
V
+= (12)
De (12) é imediato que um zero e um polo, dos 3 de baixa frequência, estão já calculados e dependem só de CG:
szG = 0 e spG = −1 / (RGG CG) (13)
Da análise do circuito da Figura 8 (c), chamando Vrd à tensão aos terminais de RD, do divisor de tensão entre RD e a série RL e CD obtém-se:
Vo = Vrd RL / (RL + 1 / s CD) donde Vrd = Vo (1 + sCD RL) (14)
A corrente id passa no paralelo RS // CS = ZS = 1 / YS e no paralelo de RD com a série RL e CD, pelo que se pode escrever
Id = (Vg − Vgs ) YS = − Vrd / RD − Vo / RL com YS = sCS + 1 / RS (15)
Da Lei de Kirchoff das correntes aplicada ao nó da Fonte pode-se escrever
gm Vgs + (Vrd − Vg + Vgs) / ro = (Vg − Vgs ) YS (16)
De (13), (14) e (15), 3 equações a 4 incógnitas (Vrd, Vgs, Vg e Vo) obtém-se
=g
o
V
V (17)
)r//R(R
1
R
gg
r//R
C
R
Rg)
R
R1)(Ggg(Cs]
r//R
R1[CCs
)CsR1(GsCRg
oDSD
om
oD
S
S
L
o
D
L
SomD
oD
L
SD
2
SSSDLm
++
+
+
++++++
+−
Como era de esperar, a expressão (17) apresenta 2 zeros, um dos quais na origem, devido a CD, e o outro à frequência finita ω = 1 / RS CS, devido a CS, e dois polos. No entanto, a passagem de (14) a (16) para (17) é um pouco trabalhosa, e ambos os polos dependem de CD e CS. A expressão do ganho total em baixa frequência, circuito da Figura 8 (c), pode então escrever-se a partir de (11), (12) e (17) como:
•+
==GGG
GGG
g
o
i
g
vCsR1
CsR
V
V
V
V)s(A (18)
)r//R(R
1
R
gg
r//R
C
R
Rg)
R
R1)(Ggg(Cs]
r//R
R1[CCs
)CsR1(GsCRg
oDSD
om
oD
S
S
L
o
D
L
SomD
oD
L
SD
2
SSSDLm
++
+
+
++++++
+−
Fazendo um parêntesis, refere-se que no estudo equivalente de um amplificador em Emissor Comum,
devido ao parâmetro rπ do modelo do TJB, não há independência entre os 3 polos associados a CB, CE e CC, sendo ainda mais trabalhoso a obtenção do ganho em baixa frequência. Além do zero e polo dados em (13), e que só dependem de CG, tem-se de (18)
szD = 0; szS = −1 / (RS CS) e spS,D = [− B ± (B2 − 4AC)
1/2] / (2A) (19)
onde A, B e C são os coeficientes do polinómio em s do denominador, dados por:
A = ]r//R
R1[CC
oD
LSD + B=
oD
S
S
Lo
D
LSomD
r//R
C
R
Rg)
R
R1)(Ggg(C +
++++ (20a)
e
C = )r//R(R
1
R
gg
oDSD
om ++
(20b)
Portanto, os dois polos devidos a CS e CD dependem de ambos os condensadores. Não é pois claro retirar de (19) informação sobre o dimensionamento dos condensadores. Atendendo a que a função Av(s) dada por (18) tem o número de zeros igual ao número de polos, ela tem uma resposta tipo passa-alto:
Av(j0)| = 0 e | Av(j∞)| = gm (RL // RD // ro) (21)
Note-se que | Av(j∞)| do circuito equivalente de baixas frequências, Figura 8 (c), é obviamente o valor do ganho em médias frequências obtido através do respetivo circuito equivalente da Figura 8 (b). De acordo com a expressão geral de uma função de rede fatorizada com zeros na origem (8), a frequência de corte a -3dB fL do circuito da Figura 8 (c), que é um passa-alto, pode ser obtida de:
2f
f
|f
jf1|
|f
jf1|
f
zS
S,D,Gj
pj
S,D,Gj pj
L
zS
L
2
L
∏
∏
=
=
=
+
+ (22)
Conhecidos os 3 polos fpj, o zero finito não nulo fzS a expressão (22) permite então obter a frequência limite inferior a -3 dB. A constante Avo não afeta este cálculo pois é independente da frequência.
Uma alternativa para calcular a frequência de corte a -3dB inferior de um circuito é usar o método das
constantes de tempo em curto-circuito τsc, isto é, calcular as constantes de tempo associadas a cada um dos condensadores com os demais em curto-circuito e admitir que:
∑=
=m
1j
scjL /12
1f τ
π (23)
O índice sc refere-se à designação em inglês “short circuit”. Se houver uma constante de tempo muito
menor que as outras (τsck << τscj j ≠ k), esta predomina no somatório e diz-se que o circuito tem um polo dominante, que será essencialmente associado ao condensador k, pois à frequência do polo, todos os outros condensadores já devem ser efetivamente equivalentes a um curto-circuito. Nestas condições a expressão (23) dá uma boa estimativa de fL que é também uma boa aproximação do polo dominante. Para o circuito da Figura 8 (c) as constantes de tempo em curto-circuito são calculadas de acordo com
os 3 circuitos da Figura 9: (a) τscG, (b) τscD e (c) τscS. A resistência vista por cada um dos condensadores com os outros em curto-circuito é, de acordo com o teorema de Thèvenin, calculada anulando todos os geradores independentes, isto é, no circuito da Figura 8 (c), vi = 0. Como o circuito tem um gerador comandado é sugerido calcular a resistência pelo método do gerador auxiliar: Req = vx / ix.
Para o condensador CG, e de acordo com a Figura 9 (a), tem-se:
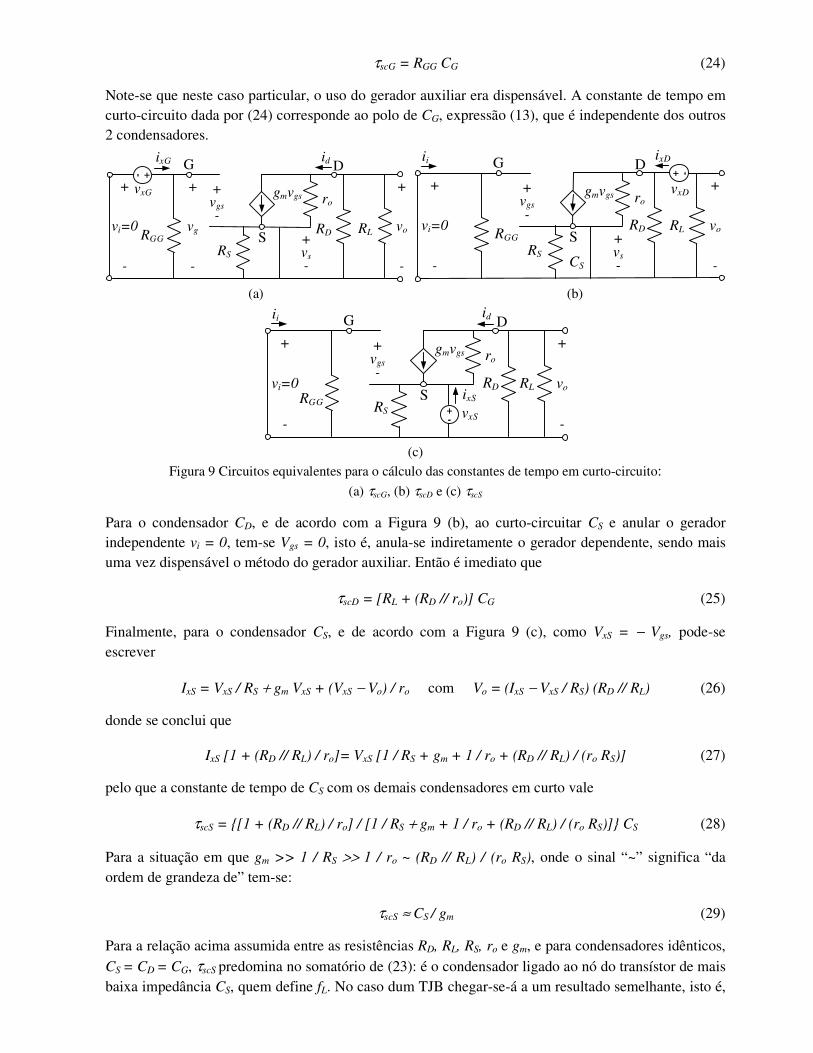
τscG = RGG CG (24)
Note-se que neste caso particular, o uso do gerador auxiliar era dispensável. A constante de tempo em curto-circuito dada por (24) corresponde ao polo de CG, expressão (13), que é independente dos outros 2 condensadores.
RGGRD
+
vi=0
-
GixG D
RS
rogmvgs
+
vo
-
+vgs
-
id
S
+
vg
-
+vs
-
+-
vxG
RL
RGG
RL
+
vi=0
-
Gii D
RS
rogmvgs
+
vo
-
+vgs
-
ixD
S
CS
vxD
+vs
-
+ -
RD
(a) (b)
RGG
RL
+
vi=0
-
Gii D
RS
rogmvgs
+
vo
-
+vgs
-
id
SvxS
+-
ixS
RD
(c)
Figura 9 Circuitos equivalentes para o cálculo das constantes de tempo em curto-circuito: (a) τscG, (b) τscD e (c) τscS
Para o condensador CD, e de acordo com a Figura 9 (b), ao curto-circuitar CS e anular o gerador independente vi = 0, tem-se Vgs = 0, isto é, anula-se indiretamente o gerador dependente, sendo mais uma vez dispensável o método do gerador auxiliar. Então é imediato que
τscD = [RL + (RD // ro)] CG (25)
Finalmente, para o condensador CS, e de acordo com a Figura 9 (c), como VxS = − Vgs, pode-se escrever
IxS = VxS / RS + gm VxS + (VxS − Vo) / ro com Vo = (IxS − VxS / RS) (RD // RL) (26)
donde se conclui que
IxS [1 + (RD // RL) / ro]= VxS [1 / RS + gm + 1 / ro + (RD // RL) / (ro RS)] (27)
pelo que a constante de tempo de CS com os demais condensadores em curto vale
τscS = [1 + (RD // RL) / ro] / [1 / RS + gm + 1 / ro + (RD // RL) / (ro RS)] CS (28)
Para a situação em que gm >> 1 / RS >> 1 / ro ~ (RD // RL) / (ro RS), onde o sinal “~” significa “da ordem de grandeza de” tem-se:
τscS ≈ CS / gm (29)
Para a relação acima assumida entre as resistências RD, RL, RS, ro e gm, e para condensadores idênticos, CS = CD = CG, τscS predomina no somatório de (23): é o condensador ligado ao nó do transístor de mais baixa impedância CS, quem define fL. No caso dum TJB chegar-se-á a um resultado semelhante, isto é,
para CE = CC = CB, τscE predomina no somatório de (23): é o condensador ligado ao nó do transístor de mais baixa impedância CE, quem define fL. Para alargar a banda (baixar fL) deve-se escolher para CS (TMOS) ou CE (TJB), um valor mais elevado, para compensar o baixo valor da resistência vista por esse condensador.
Exemplo 4 – Frequência de corte inferior fL de um amplificador em Fonte Comum
Um amplificador em Fonte Comum da Figura 5 (a) é alimentado por uma fonte DC VDD = 7,5 V e as
resistências têm os seguintes valores: RG1 = 1,5 MΩ; RG2 = 3,3 MΩ; RD = 1 kΩ; RS = 1 kΩ; e RL = 1
MΩ (impedância típica duma ponto de prova de um osciloscópio). O TMOS é caracterizado pelos
seguintes parâmetros dinâmicos de baixa frequência: gm = 3,26 mS; e ro =98 kΩ. Os condensadores de
acoplamento valem CG = CD = 1 µF, e o de contorno CS = 10 µF. (a) Calcule os polos e zeros da função de transferência Av (s) = Vo / Vi. (b) Escreva a função de transferência Av(s) tendo em conta o resultado da alínea anterior. (c) Trace o diagrama de Bode de uma década antes da primeira singularidade até uma década depois da última. (d) Obtenha uma estimativa da frequência de corte
inferior a −3dB de Av(ω) em Hertz (fL) a partir da função Av(s). (e) Repita a alínea anterior usando o método das constantes de tempo em curto-circuito e compare com o resultado da alínea anterior tendo em conta os resultados da 1ª alínea. (f) Escreva a função de transferência Av(s) tendo em conta apenas o resultado da alínea anterior.
Resolução 4 (a) Para calcular as singularidades (polos e zeros) de Av(s) e as respetivas frequências (módulo dos polos e zeros) em Hz, há que deduzir a função Av(s) e as raízes do numerador (zeros) e do denominador (polos). Tal dedução foi feita no texto anterior e conduziu à expressão (18). De acordo com ela tem-se:
szG = szD = 0 ⇒ fzD = fzG = 0 zero duplo na origem; szS = − 1 / (RS CS) = − 100 rad s-1
⇒ fzS = 15,92 Hz; spG = −1 / (RGG CG) = - 0,97 rad s
-1 ⇒ fpG = 0,154 Hz ; spDS = [− B + (B
2 − 4AC)1/2
] / 2A = − 1 rad s-1
⇒ fpDS= 0,159 Hz; spSD = [− B − (B2 − 4 A C)
1/2] / 2A = − 424 rad s
-1 ⇒ fpSD = 67,48 Hz.
As constantes A, B e C são dadas por (20) e os seus valores são : A = 1,011 10−8
F2; B = 4,298 10
−6
FS; C = 4,283 10−6
S2. Note-se que fpG ≈ fpDS o que equivale a um polo duplo mas estão muito abaixo
do polo mais elevado fpS. No entanto, fzS está menos de uma década de fpS, mais precisamente a cerca de duas oitavas, pelo que as aproximações assimptóticas de Bode são pouco precisas.
Resolução 4 (b) Para obter a expressão de Av é necessário saber-se o valor do ganho a uma frequência não nula pois já se sabe que Avo(j0) = 0. Quando f tende para infinito, a expressão (18) reduz-se a (21), que é o ganho em médias frequências, que é dado por | Av(j∞)| = gm (RL // RD // ro) = 3,23 = 10,2 dB.
Do valor dos zeros e polos tem-se:)42497,0)(424/s1)(s1)(97,0/s1(
100)23,3)(100/s1(s)s(A
2
v ×+++
+−= .
Note-se que, como estamos em face duma resposta passa alto, o valor de médias frequências é obtido para s = j∞, logo há que multiplicar o numerador pelo módulo do zero não nulo e o denominador pelo produto dos módulos dos polos.
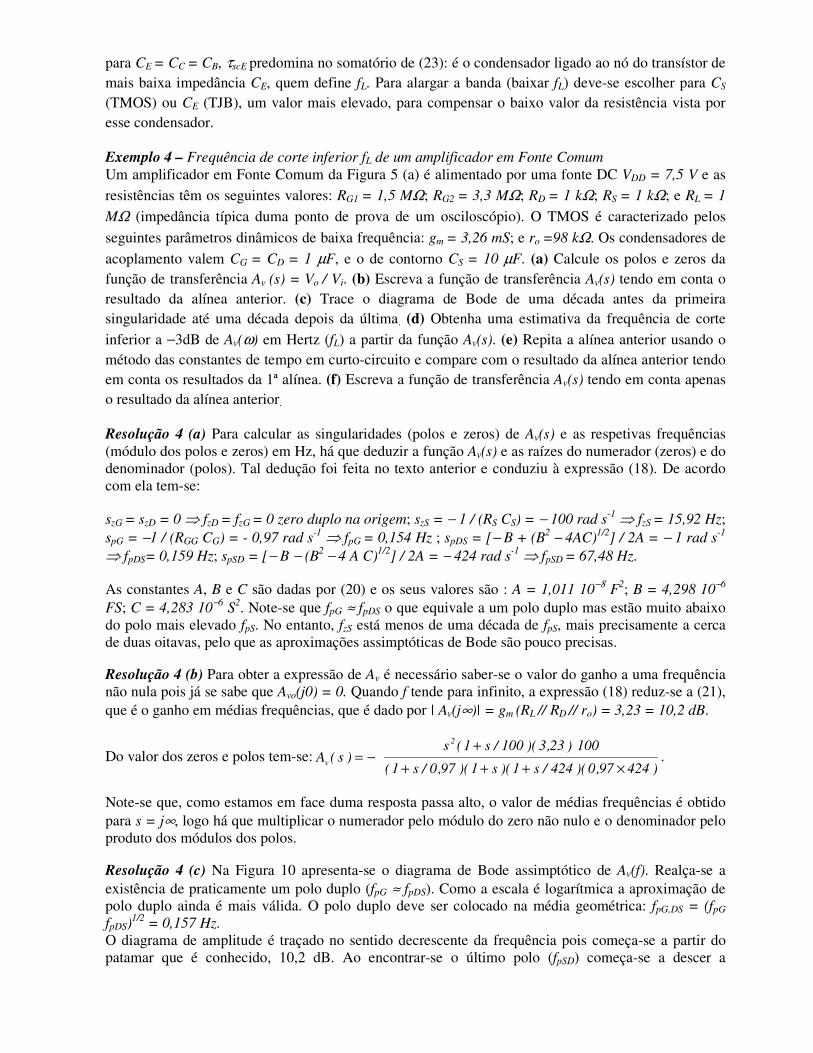
Resolução 4 (c) Na Figura 10 apresenta-se o diagrama de Bode assimptótico de Av(f). Realça-se a existência de praticamente um polo duplo (fpG ≈ fpDS). Como a escala é logarítmica a aproximação de polo duplo ainda é mais válida. O polo duplo deve ser colocado na média geométrica: fpG,DS = (fpG
fpDS)1/2
= 0,157 Hz. O diagrama de amplitude é traçado no sentido decrescente da frequência pois começa-se a partir do patamar que é conhecido, 10,2 dB. Ao encontrar-se o último polo (fpSD) começa-se a descer a
20dB/década até ao último zero (fzS) onde se atinge um patamar. Ao encontrar-se o polo duplo (fpG,DS) começa-se a descer a 40dB/década. A fase inicial é 0º devido ao zero duplo na origem (fzG = fzD =0 ⇒ +2 × 90º = + 180º) e ao circuito ser inversor (sinal – ⇒ 180º). De uma década antes do polo duplo, a primeira singularidade não nula, até uma década depois a fase atrasa 180º (fpG ≡ fpDS ⇒ −180º em 2 décadas). Como o polo duplo está praticamente duas décadas antes da singularidade seguinte, o zero não nulo, a fase assim que chega a −180º começa logo a subir a +45º/década (fzS ⇒ +2 × 45º = + 90º) até uma década após o zero não nulo. No entanto, o último polo está a menos de uma década (fpSD) e compensa, a partir de uma década antes dele, a subida de fase devida ao zero, atingindo-se um patamar. Este estende-se até uma década após o zero descendo depois a −45º/década até atingir a fase final é de −180º, uma década depois do último polo. A variação total é de – 180º pois temos o número de polos iguais ao número de zeros, mas a função é inversora.
log f (Hz)
|Av|dB
10
-10
0
φAv (º)
10-2
fzS
102
fpS
x
-50
-30
+20dB/déc
102
-90
-180 -45º/déc
fpG ≈ fpDS
1*
10-2 1 log f (Hz)
-90º/déc
+45º/déc
+40dB/déc
x
fpG ≈ fpDS fzS fpS
Figura 10 Diagrama de Bode assimptótico do circuito do exemplo 4
Resolução 4 (d) De |Av(s = jωL)| =3,23 / 2 obtém-se ωL = 400 rad s−1 donde fL = ωL / 2π = 63,6 Hz.
Resolução 4 (e) As expressões das constantes de tempo já foram deduzidas no texto pelo que se tem de (24), (25) e (28):
τscG = RGG CG = 1,031 s; τscD = [RL + (RD // ro)] CG = 1,001 s (30a)
τscS = [1 + (RD // RL) / ro] / [1 / RS + gm + 1 / ro + (RD // RL) / (ro RS)] CS = 2 ms (30b)
Então de (23) obtém-se fL = 67,8 Hz. Este valor está relativamente próximo do obtido rigorosamente na alínea anterior. O erro é de 6,6% e o cálculo é muito mais simples, além de dar informação sobre a melhor forma de alterar fL. Neste caso, dos 3 condensadores, a influência de CS é a mais importante, quer do seu polo (praticamente dominante) quer do seu zero, que é a segunda singularidade mais importante na definição de fL. A diferença encontrada entre os dois valores de fL está associada ao método das constantes de tempo não pesar a influência dos zeros, e neste caso a singularidade mais próxima do polo mais elevado é um zero.
Resolução 4 (f) O método das constantes de tempo, ao permitir apenas calcular a frequência de corte a -3dB, que será a frequência do polo mais elevado, suposto dominante, só permite escrever:
)426/s1(
426/23,3s)s(Av +
×−=
Esta expressão só será válida a partir da proximidade de fL.
2.6 Análise da resposta de um circuito em altas frequências
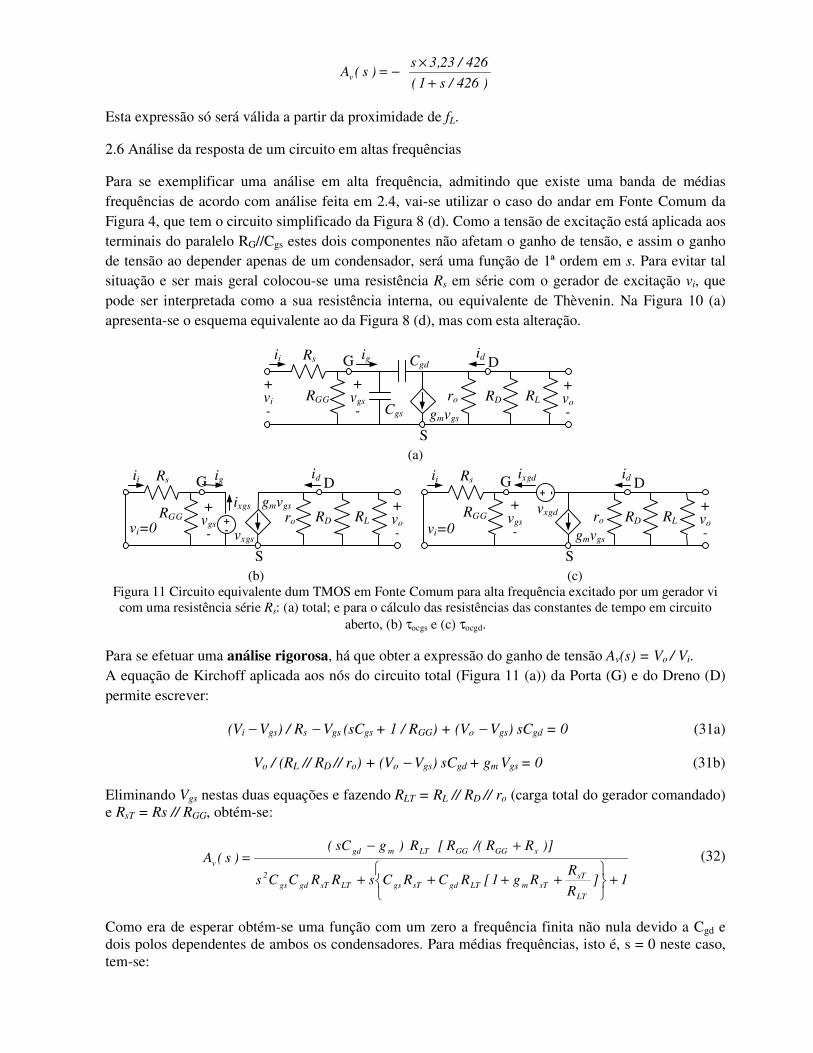
Para se exemplificar uma análise em alta frequência, admitindo que existe uma banda de médias frequências de acordo com análise feita em 2.4, vai-se utilizar o caso do andar em Fonte Comum da Figura 4, que tem o circuito simplificado da Figura 8 (d). Como a tensão de excitação está aplicada aos terminais do paralelo RG//Cgs estes dois componentes não afetam o ganho de tensão, e assim o ganho de tensão ao depender apenas de um condensador, será uma função de 1ª ordem em s. Para evitar tal situação e ser mais geral colocou-se uma resistência Rs em série com o gerador de excitação vi, que pode ser interpretada como a sua resistência interna, ou equivalente de Thèvenin. Na Figura 10 (a) apresenta-se o esquema equivalente ao da Figura 8 (d), mas com esta alteração.
RGG RD
+vi
-
Gii D
ro
gmvgs
+vo
-
+vgs
-
ig id
S
Cgd
Cgs
RL
Rs
(a)
RGG RD
Gii D
ro
gmvgs +vo
-
+vgs
-
ig id
S
RL
Rs
vi=0vxgs
+-
ixgs
RGG RDvi=0
Gii D
ro
gmvgs
+vo
-
+vgs
-
id
S
RL
Rs ixgd
vxgd
+ -
(b) (c) Figura 11 Circuito equivalente dum TMOS em Fonte Comum para alta frequência excitado por um gerador vi com uma resistência série Rs: (a) total; e para o cálculo das resistências das constantes de tempo em circuito
aberto, (b) τocgs e (c) τocgd.
Para se efetuar uma análise rigorosa, há que obter a expressão do ganho de tensão Av(s) = Vo / Vi. A equação de Kirchoff aplicada aos nós do circuito total (Figura 11 (a)) da Porta (G) e do Dreno (D) permite escrever:
(Vi − Vgs) / Rs − Vgs (sCgs + 1 / RGG) + (Vo − Vgs) sCgd = 0 (31a)
Vo / (RL // RD // ro) + (Vo − Vgs) sCgd + gm Vgs = 0 (31b)
Eliminando Vgs nestas duas equações e fazendo RLT = RL // RD // ro (carga total do gerador comandado) e RsT = Rs // RGG, obtém-se:
1]R
RRg1[RCRCsRRCCs
)]RR/(R[R)gsC()s(A
LT
sT
sTmLTgdsTgsLTsTgdgs
2
sGGGGLTmgd
v
+
++++
+−= (32)
Como era de esperar obtém-se uma função com um zero a frequência finita não nula devido a Cgd e dois polos dependentes de ambos os condensadores. Para médias frequências, isto é, s = 0 neste caso, tem-se:
sGG
GG
LTmvoRR
RRgA
+−= (33)
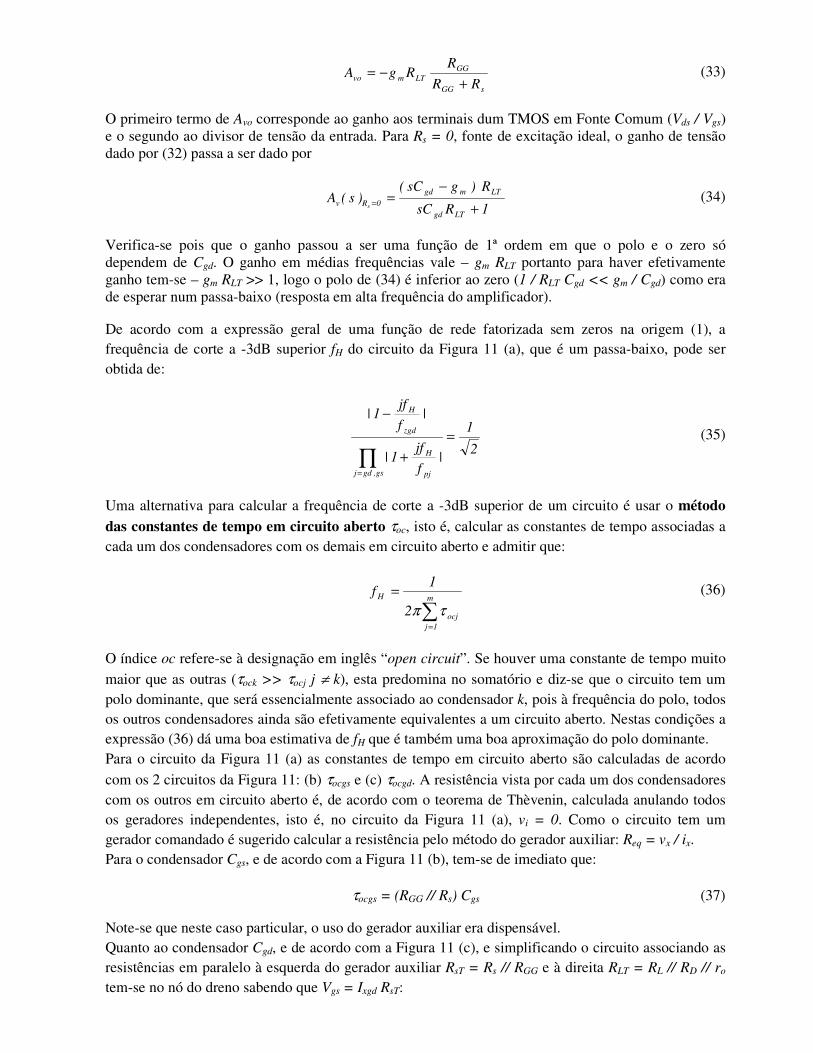
O primeiro termo de Avo corresponde ao ganho aos terminais dum TMOS em Fonte Comum (Vds / Vgs) e o segundo ao divisor de tensão da entrada. Para Rs = 0, fonte de excitação ideal, o ganho de tensão dado por (32) passa a ser dado por
1RsC
R)gsC()s(A
LTgd
LTmgd
0Rv s +
−== (34)
Verifica-se pois que o ganho passou a ser uma função de 1ª ordem em que o polo e o zero só dependem de Cgd. O ganho em médias frequências vale – gm RLT portanto para haver efetivamente ganho tem-se – gm RLT >> 1, logo o polo de (34) é inferior ao zero (1 / RLT Cgd << gm / Cgd) como era de esperar num passa-baixo (resposta em alta frequência do amplificador).
De acordo com a expressão geral de uma função de rede fatorizada sem zeros na origem (1), a frequência de corte a -3dB superior fH do circuito da Figura 11 (a), que é um passa-baixo, pode ser obtida de:
2
1
|f
jf1|
|f
jf1|
gs,gdj pj
H
zgd
H
=
+
−
∏=
(35)
Uma alternativa para calcular a frequência de corte a -3dB superior de um circuito é usar o método
das constantes de tempo em circuito aberto τoc, isto é, calcular as constantes de tempo associadas a cada um dos condensadores com os demais em circuito aberto e admitir que:
∑=
=m
1j
ocj
H
2
1f
τπ (36)
O índice oc refere-se à designação em inglês “open circuit”. Se houver uma constante de tempo muito maior que as outras (τock >> τocj j ≠ k), esta predomina no somatório e diz-se que o circuito tem um polo dominante, que será essencialmente associado ao condensador k, pois à frequência do polo, todos os outros condensadores ainda são efetivamente equivalentes a um circuito aberto. Nestas condições a expressão (36) dá uma boa estimativa de fH que é também uma boa aproximação do polo dominante. Para o circuito da Figura 11 (a) as constantes de tempo em circuito aberto são calculadas de acordo
com os 2 circuitos da Figura 11: (b) τocgs e (c) τocgd. A resistência vista por cada um dos condensadores com os outros em circuito aberto é, de acordo com o teorema de Thèvenin, calculada anulando todos os geradores independentes, isto é, no circuito da Figura 11 (a), vi = 0. Como o circuito tem um gerador comandado é sugerido calcular a resistência pelo método do gerador auxiliar: Req = vx / ix. Para o condensador Cgs, e de acordo com a Figura 11 (b), tem-se de imediato que:
τocgs = (RGG // Rs) Cgs (37)
Note-se que neste caso particular, o uso do gerador auxiliar era dispensável. Quanto ao condensador Cgd, e de acordo com a Figura 11 (c), e simplificando o circuito associando as resistências em paralelo à esquerda do gerador auxiliar RsT = Rs // RGG e à direita RLT = RL // RD // ro tem-se no nó do dreno sabendo que Vgs = Ixgd RsT:
– Ixgd = gm Vgs + (Vgs – Vxgd) / RLT = gm Ixgd RsT + (Ixgd RsT – Vxgd) / RLT (38)
Que permite obter a resistência aos terminais de Cgd e a respetiva constante de tempo τocgd
τocgd = RLT (1 + gm RsT + RsT / RLT) Cgd (39)
A frequência de corte superior fH será dada, de acordo (36), por:
fH = 1/ 2 π [RLT (1 + gm RsT + RsT / RLT) Cgd + RsT Cgs] (40)
Note-se que se Rs = 0, fonte de excitação ideal, a expressão (39) simplifica-se e obtém-se:
fH (Rs=0) = 1/ ( 2 π RLT Cgd ) (41)
Esta expressão está de acordo com (34): o ganho tem um só polo que é só função de Cgd, não dependendo de Cgs.
Para a resposta em alta frequência, pode ainda ser calculado o parâmetro fH de outra forma aproximada, recorrendo ao Teorema de Miller. Este teorema aplica-se em circuitos com dois nós entre os quais há um ganho de tensão Avo e se tem uma impedância Zf a ligar esses dois nós (realimentação: liga dois nós entre os quais há ganho), como se exemplifica na Figura 12 (a).
ii
+vo = Av vi
-
+vi
-
ioZf
RGG
+vi
-
Gii
gmvgs
+vo
-
+vgs
- SCgs+Ceqgd RLT
Rs D
(a) (b)
Figura 12 Circuito para introdução do teorema de Thèvenin (a) aplicação ao circuito da Figura 11 (b).
A impedância vista do nó de entrada pode ser dada por:
Zi = Vi / Ii = Zf Vi / (Vi – Av Vi) = Zf / (1 – Av) (42)
Portanto a impedância Zf é vista da entrada dividida por 1 – Av. Se Zf for um condensador, como no caso de Cgd num TMOS em Fonte Comum tem-se
Zi = 1 / [s Cgd (1 – Av)] = 1 / s Ceqgd com Ceqgd = Cgd (1 – Av) (43)
O condensador equivalente a Cgd, referido aos terminais de entrada é multiplicado por 1 + |Av| (Fonte Comum é inversor). Esta capacidade equivalente está em paralelo com Cgs e apesar de na zona de saturação, devido ao canal não ser uniforme, se ter Cgs > Cgd, este efeito multiplicativo, dito de Miller, faz com que a capacidade a realimentar Cgd tenha um peso importante na definição de fH. Na Figura 12 (b) apresenta-se um circuito equivalente ao da Figura 11 (a) para o cálculo do ganho e impedância de entrada. Em média frequência os circuitos são idênticos e o ganho Av continua ser dado por (33). Como deixou de haver realimentação e Ceqgd está em paralelo com Cgs, o ganho de tensão é, dentro da aproximação de Miller, uma função de 1ª ordem, pelo que é imediato o cálculo do polo e portanto de fH:
fH ≈ fp_Miller = 1/ 2 π RsT [(1 + gm RLT) Cgd + Cgs] (44)
Exemplo 5 – Frequência de corte superior fH de um amplificador em Fonte Comum
Considere o amplificador do Exemplo 4 em que os condensadores do modelo do TMOS valem Cgs =
10 pF e Cgd = 1 pF. (a) Calcule os polos e zeros da função de transferência Av (s) = Vo / Vi do amplificador em alta frequência. (b) Escreva a função de transferência Av(s) tendo em conta o

resultado da alínea anterior. (c) Trace o diagrama de Bode de uma década antes da primeira singularidade até uma década depois da última. (d) Obtenha uma estimativa da frequência de corte
superior a −3dB de Av(ω) em Hertz (fH) a partir da função Av(s). (e) Repita a alínea anterior usando o método das constantes de tempo em circuito aberto e pela aplicação do Teorema de Miller e compare estes dois resultados com o da alínea anterior tendo em conta os resultados da 1ª alínea. (f) Escreva a função de transferência Av(s) tendo em conta apenas um dos resultados da alínea anterior.
Resolução 5 (a) Para calcular as singularidades (polos e zeros) de Av(s) e as respetivas frequências (módulo dos polos e zeros) em Hz, há que deduzir a função Av(s) e as raízes do numerador (zeros) e do denominador (polos). Tal dedução foi feita no texto anterior e conduziu à expressão (32). De acordo com ela tem-se:
szgd = gm / Cgd = 3,26 Grad s-1
⇒ fzgd = 519 MHz ; sp1 = [− B + (B2 − 4AC)
1/2] / 2A = − 113 Mrad s
-1
⇒ fp1= 18,0 MHz; sp2 = [− B − (B2 − 4 A C)
1/2] / 2A = − 1,492 Grad s
-1 ⇒ fp2 = 237,5 MHz.
As constantes A, B e C são os coeficientes do polinómio de segundo grau em s do denominador de (32)
e os seus valores são: A = 5,930 10−18
s2; B = 9,520 10
−9 s; C = 1. Note-se que fp1 << fp2 e fzgd o que
significa que tem um polo dominante. No entanto, fzgd está a menos de uma década de fp2, cerca de uma oitava, mas as aproximações assimptóticas de Bode devem ser precisas.
Resolução 5 (b) Para obter a expressão de Av é necessário saber-se o valor do ganho a uma frequência. Com se está a fazer a análise em alta frequência (passa baixo), quando f tende para zero, a expressão (32) reduz-se a (33), que é o ganho em médias frequências, que vale | Av(j0)| = gm RLT RGG / (Rs + RGG)
= 3,23 = 10,2 dB. Note-se que a introdução de Rs não afetou este ganho (mesmo valor que o ganho em médias frequências do Exemplo 4) pois Rs << RGG.
Do valor dos zeros e polos tem-se:)1049,1/s1)(19113/s1(
)1026,3/s1(23,3)s(A
66
9
v ×+×+
×−−= .
Note-se que, em relação ao caso do Exemplo 4 (passa alto), não é necessário multiplicar pelo módulo do zero e dividir pelo produto dos módulos dos polos, porque é uma função passa baixo.
Resolução 5 (c) Na Figura 13 apresenta-se o diagrama de Bode assimptótico de Av(f). Sendo uma resposta passa baixo começa-se a traçar o módulo do ganho pelo valor de patamar (Avo). A partir polo fp1 cai a 20dB/década, a partir de fp2 a 40dB/década e a partir do zero fzgd volta a 20dB/década. Para o traçado do andamento da fase, tenha-se em atenção que por cada polo fp a fase atrasa 90º em duas décadas (de 0,1 fp até 10 fp). Note-se que o zero, como é positivo, produz também um atraso na fase (note-se o sinal “–” dentro do parêntesis do numerador de Av(s)). A desfasagem máxima será de
3×90º=270º e, como a fase inicial é 180º pois temos um andar inversor (sinal – ⇒ 180º), a fase final valerá –90º. Na Figura 13, setas duplas indicam a zona de frequências em que cada uma das 3 singularidades afeta a fase. Nas zonas com a influência de n singularidades (n = 1, 2 ou 3) a inclinação
da assimptota é de − n × 45º. Em conformidade, uma década antes do polo fp1 começa a cair (atrasa) a 45º/década. Deveria manter esta inclinação até uma década depois do polo fp1 mas uma década antes de fp2 começa a cair a 90º/década porque fp1 e fp2 estão afastados menos de 2 décadas. Logo a seguir entra na zona de influência do zero fzgd, cerca de uma oitava depois de fp2, mas antes de uma década depois de fp1, a fase passa a cair a 135º/década. Depois de 10fp1 volta a cair apenas a 90º/década e depois de 10fp2 passa a cair a 45º/década e estabiliza em –90º a partir de 10fzgd.

log f (MHz)
|Av|dB
10
-10
0
φAv (º)
10
fzgd
105
fp2
x
-30
105
90
180
-45º/déc
10310
log f (MHz)
-45º/déc
x
fp1
103x
-90º/déc
x
-20dB/déc
-40dB/déc
-20dB/déc
102 104
-90
-135º/déc
-90º/déc
Figura 13 Diagrama de Bode assimptótico do circuito do exemplo 5
Resolução 5 (d) De |Av(s = jωH)| =3,23 / 2 obtém-se ωH = 112,5 Mrad s−1 donde fH = ωH / 2π =
17,9 MHz.
Resolução 5 (e) As expressões das constantes de tempo já foram deduzidas no texto pelo que se tem de (37) e (39):
τocgs = (RGG // Rs) Cgs = 5,997 ns; τocgd = RLT (1 + gm RsT + RsT / RLT) Cgd = 3,524 ns
Então de (36) obtém-se fH = 16,7 MHz. Este valor está relativamente próximo do obtido rigorosamente
na alínea anterior. O erro é de −6,6% e o cálculo é muito mais simples, além de dar informação sobre a melhor forma de alterar fL. Neste caso, ambos os condensadores influem na definição de fH. Tal facto é previsto também pelo método de Miller (44). De acordo com este método tem-se
fH ≈ fp_Miller = 1/ 2 π RsT [(1 + gm RLT) Cgd + Cgs] = 18,7 MHz
O erro neste caso é de +4,2%. Note-se que efetivamente há um polo dominante já que fp1 está afastado de fp2 mais de uma década, e a proximidade do zero ainda reduz a sua influência. Esta é a justificação dos valores razoáveis obtidos por qualquer dos métodos aproximados usados, constantes de tempo em aberto ou Miller.
Resolução 5 (f) Os métodos aproximados, das constantes de tempo em vazio ou Miller, ao permitirem apenas calcular a frequência de corte a -3dB, que será a frequência do polo mais elevado, suposto dominante, só permite escrever, usando o valor obtido pelas constantes de tempo ou Miller
)105/10s1(
23,3)s(A
6v −+−= ou
)117/10s1(
23,3)s(A
6v −+−=
Esta expressão só será válida até à proximidade de fH.

2.7 Considerações finais
Para se ajuizar do interesse em obter um andamento assimptótico da resposta em frequência de um circuito, apresenta-se o diagrama exato com o assimptótico sobreposto, para os dois exemplos 4 e 5. Ambos são referentes ao mesmo circuito, pelo que se pode juntar os dois diagramas. Tal não foi feito para não se ter uma escala reduzida e se perderem alguns pormenores.
Na Figura 14 apresenta-se os Diagramas de Bode da amplitude e fase do ganho de tensão do Exercício 4, a cheio preto o assimptótico e a tremido mais claro o teórico para o ganho de patamar (médias frequências), os polos (X) e zeros (O) calculados. Note-se a boa concordância e que o maior afastamento para o módulo se verifica na proximidade das singularidades, como previsto teoricamente.
XX XO
fpG ≈ fpDS
+40dB/déc
+20dB/déc
fzS fpSD
XX XO
(Hz)
(dB)
XX XO
XOXX
fpG ≈ fpDS fzS fpSD
(Hz)
(º)
-90º/déc
+45º/déc -45º/déc
Figura 14 Diagrama de Bode teórico e assimptótico do circuito do exemplo 4
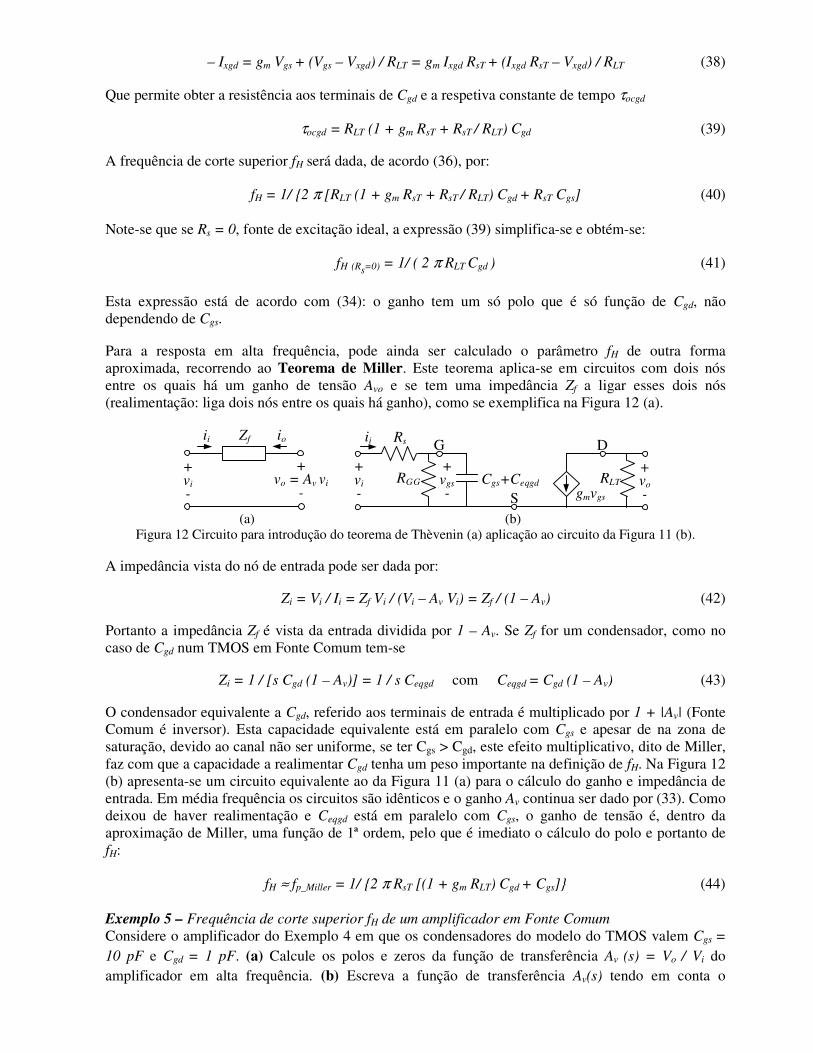
Na Figura 15 apresenta-se os Diagramas de Bode da amplitude e fase do ganho de tensão do Exercício 5, a cheio preto o assimptótico e a tremido mais claro o teórico, para o ganho de patamar (médias frequências), os polos (X) e zeros (O) calculados. Note-se, como no caso anterior, a boa concordância e que o maior afastamento para o módulo se verifica na proximidade das singularidades, como previsto teoricamente. O maior afastamento para a fase verifica-se entre as singularidades, nomeadamente cerca de uma década antes ou depois delas quando não há outras na proximidade.
X X O
3dB -20dB/década
-40dB/década
-20dB/década
(Hz)
(dB)
X X O
X X O
-45º/déc-90º/déc-135º/déc
fzgd
-45º/déc-90º/déc
fp1
fp2
Figura 15 Diagrama de Bode teórico e assimptótico do circuito do exemplo 5