projeto e construção de um anemômetro térmico...
TRANSCRIPT
PROJETO E CONSTRUÇÃO DE UM ANEMÔMETRO TÉRMICO COM
SENSOR TERMISTOR
Eduardo Guerreiro Zilves
Projeto de Graduação apresentado ao Curso
de Engenharia Mecânica da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Juliana Braga Rodrigues Loureiro
Rio de Janeiro
Agosto de 2019

Zilves, Eduardo Guerreiro
Projeto e Construção de um Anemômetro Térmico com
Sensor Termistor/Eduardo Guerreiro Zilves. Rio de
Janeiro: UFRJ/ Escola Politécnica, 2019.
XIV, 69 p.: il.; 29, 7cm.
Orientador: Juliana Braga Rodrigues Loureiro
Projeto de Graduação UFRJ/ Escola Politécnica/
Curso de Engenharia Mecânica, 2019.
Referências Bibliográcas: p. 61 62.
1. Instrumentação. 2. Anemometria. 3. Termistor.
I. Loureiro, Juliana Braga Rodrigues. II. Universidade
Federal do Rio de Janeiro, Escola Politécnica, Curso de
Engenharia Mecânica. III. Título.
iii

Aos meus pais e minha irmã
iv
Agradecimentos
Gostaria de agradecer a algumas das inúmeras pessoas que contribuíram em minha
jornada até aqui.
Agradeço primeiramente aos meus pais, Rodnei e Eveline, que sempre apoiaram
meus estudos e me ajudaram em necessidades que surgiram. Agradeço também à
minha irmã Raquel pelo convívio ao longo desses anos.
Agradeço aos colegas de curso pela amizade ao longo das situações vividas na
graduação, em especial a Bruno, Eduardo, Raphael, Rafael, Caio, Lucas, Pedro,
Alexandre, Rodrigo, e tantos outros que não me recordo agora mas que foram de
crucial apoio nos bons e maus momentos da graduação. Agradeço aos professores
do Departamento de Engenharia Mecânica, da Escola Politécnica, aos servidores
técnico-administrativos.
Agradeço à minha orientadora Juliana pelo apoio durante a produção deste tra-
balho. Agradeço também a André e Wellington, mas principalmente a Laert pela
ajuda em dúvidas que surgiram ao longo deste trabalho.
Agradeço aos colegas de estágio Rodolpho, Cecília, Roberto, Guilherme, Alexan-
dre, Axel, Aleck, Bruno e Cíntia pelos ensinamentos na esfera prossional.
Agradeço à banca de defesa Prof. Juliana, Prof. Átila e Prof. José Luiz, que
se dispuseram de tempo para este trabalho, e também aos que assistiram à defesa.
Espero que este trabalho possa ser de utilidade para desenvolvimento de projetos
futuros.
Agradeço a todos os que não me recordo no momento em que escrevo este texto,
mas que contribuíram para que eu chegasse até aqui.
Por último, agradeço a você, leitor, por se dispor a ler este trabalho. Espero que
ele seja útil para sua jornada.
v

Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como
parte dos requisitos necessários para a obtenção do grau de Engenheiro Mecânico.
PROJETO E CONSTRUÇÃO DE UM ANEMÔMETRO TÉRMICO COM
SENSOR TERMISTOR
Eduardo Guerreiro Zilves
Agosto/2019
Orientador: Juliana Braga Rodrigues Loureiro
Curso: Engenharia Mecânica
A medição de velocidade no ar, seja de pers de escoamento ou de fenômenos
ondulatórios, é utilizada para ns acadêmicos ou industriais para estudar o compor-
tamento do perl de velocidades ao redor de um corpo imerso no uido. A caracte-
rização do escoamento pode ser usado para determinar também propriedades como
arrasto ou campos de pressão na superfície do objeto.
A anemometria térmica se baseia no equilíbrio entre trocas térmicas de efeito
Joule e dissipação por convecção. As relações estabelecidas pela literatura permitem
correlacionar uma tensão de alimentação com a velocidade do escoamento que se
deseja medir.
Este trabalho propõe-se a construir um instrumento de medição de sensor termis-
tor capaz de medir pers de velocidades em um escoamento e também obter resposta
em frequência de fenômenos ondulatórios. Os resultados são posteriormente com-
parados com valores esperados e a bibliograa a m de conrmar que o sensor é
possível e resulta em medições capazes de obter valores experimentais.
vi

Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulllment
of the requirements for the degree of Engineer.
THESIS TITLE
Eduardo Guerreiro Zilves
August/2019
Advisor: Juliana Braga Rodrigues Loureiro
Course: Mechanical Engineering
The measurement of air velocity, either for ow proles or oscilatory patterns, is
used for academic or industrial reasons to study the behavior of ow around a body
immmersed in a uid. This characterization of ow can be used to also determine
other properties such as drag or pressure elds over the surface of the body.
Thermal anemometry is based in the balance between heat transfer from Joule
eect and dissipation by convection. The known relations established by literature
allow us to correlate a voltage input to the velocity of the ow to be measured.
This work proposes to build a measurement instrument using a thermistor sensor
capable of measuring velocity proles in a ow, and also to obtain frequency response
to ondulatory phenomena. The results are later compared to expected values and to
the literature so as to conrm that the sensor is capable of performing experimental
measurements.
vii

Sumário
Lista de Figuras xi
Lista de Tabelas xiv
1 Introdução 1
1.1 Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 Organização do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Fundamentos teóricos 3
2.1 Denições gerais de Mecânica dos uidos . . . . . . . . . . . . . . . . 3
2.2 Anemometria térmica a Fio Quente . . . . . . . . . . . . . . . . . . . 4
2.3 Funcionamento de um Termistor . . . . . . . . . . . . . . . . . . . . . 4
2.3.1 Equação de Steinhart-Hart . . . . . . . . . . . . . . . . . . . . 5
2.4 Ponte de Wheatstone . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.4.1 Ponte em Temperatura Constante . . . . . . . . . . . . . . . . 7
2.5 Calibração estática e dinâmica . . . . . . . . . . . . . . . . . . . . . . 8
2.5.1 Lei de King para Anemômetros Térmicos . . . . . . . . . . . . 8
2.6 Linearidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.7 Incertezas de medição . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.8 Frequência de emissão de vórtices em um corpo cilíndrico . . . . . . . 10
3 Revisão Bibliográca 12
3.1 Anemometria a Fio Quente . . . . . . . . . . . . . . . . . . . . . . . 12
3.2 Modos de operação do anemômetro . . . . . . . . . . . . . . . . . . . 16
3.3 Bibliograa técnica para anemometria . . . . . . . . . . . . . . . . . 18
3.4 Anemometria com Sensor Termistor . . . . . . . . . . . . . . . . . . . 19
3.5 Obtenção de parâmetros ótimos por análise gráca . . . . . . . . . . 22
4 Descrição do Instrumento 23
4.1 Caracterização do Termistor . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.1 Curva Temperatura-Resistência . . . . . . . . . . . . . . . . . 24
viii
4.1.2 Escolha do ponto de operação . . . . . . . . . . . . . . . . . . 24
4.2 O Instrumento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2.1 Ponte de Wheatstone do instrumento . . . . . . . . . . . . . . 26
4.2.2 Malha de controle do instrumento . . . . . . . . . . . . . . . . 28
4.2.3 Fonte de alimentação do circuito . . . . . . . . . . . . . . . . 30
4.2.4 Métodos para redução de ruído no sinal . . . . . . . . . . . . . 30
4.3 Escolha dos parâmetros do instrumento . . . . . . . . . . . . . . . . . 31
4.3.1 Escolha dos parâmetros dinâmicos . . . . . . . . . . . . . . . . 31
4.3.2 Inuência dos parâmetros dinâmicos . . . . . . . . . . . . . . 32
4.4 Procedimentos de calibração . . . . . . . . . . . . . . . . . . . . . . . 33
4.4.1 Calibração estática . . . . . . . . . . . . . . . . . . . . . . . . 33
4.4.2 Calibração dinâmica . . . . . . . . . . . . . . . . . . . . . . . 35
4.5 Análise de incertezas . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
5 Resultados 38
5.1 Calibração Estática . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.1.1 Obtenção da velocidade do túnel de vento . . . . . . . . . . . 39
5.1.2 Relação de calibração pela Lei de King . . . . . . . . . . . . . 40
5.1.3 Comparação entre resistências da ponte . . . . . . . . . . . . . 41
5.2 Calibração Dinâmica Resposta ao Degrau . . . . . . . . . . . . . . 42
5.2.1 Teste de resposta ao degrau . . . . . . . . . . . . . . . . . . . 42
5.2.2 Comparação gráca da resposta ao degrau . . . . . . . . . . . 44
5.2.3 Parâmetros padrão otimizados . . . . . . . . . . . . . . . . . . 46
5.3 Calibração em Frequência Resposta à Senoide . . . . . . . . . . . . 46
5.4 Medição do perl de velocidades à Jusante do Cilindro . . . . . . . . 47
5.4.1 Caso 1: Distância 50 mm, velocidade 0.12 m/s . . . . . . . . . 48
5.4.2 Caso 2: Distância 50 mm, velocidade 0.81 m/s . . . . . . . . . 48
5.4.3 Caso 3: Distância 100 mm, velocidade 0.12 m/s . . . . . . . . 50
5.4.4 Caso 4: Distância 100 mm, velocidade 0.81 m/s . . . . . . . . 50
5.5 Comparação do perl à jusante em gráco na forma adimensional . . 51
5.6 Identicação da Frequência de Emissão de Vórtices . . . . . . . . . . 52
5.7 Perl de Intensidade Turbulenta . . . . . . . . . . . . . . . . . . . . . 56
6 Conclusões 59
6.1 Análise Crítica e Sugestões para trabalhos futuros . . . . . . . . . . . 60
Referências Bibliográcas 61
A Diagrama do circuito 63
B Código da Análise Fourier para Frequência de Emissão de Vórtices 65
ix

C Código da Análise de Intensidade Turbulenta 68
x

Lista de Figuras
2.1 Desenho esquemático da ponta de um anemômetro a o quente em
operação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Desenho representativo de uma Ponte de Wheatstone. . . . . . . . . . 6
2.3 Esquema representativo de uma ponte de um anemômetro a o quente,
em malha fechada, operando em modo de temperatura constante. . . 7
2.4 Padrão de emissão de vórtices atrás de um corpo cilíndrico . . . . . . 11
3.1 Lei de King gráca, com percurso de temperatura constante. (Adap-
tado de [8]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Malha de controle de anemômetro CTA proposto. (Reprodução de [8]) 14
3.3 Variação da resposta do polo no plano complexo, de acordo com pa-
râmetros do instrumento. (Adaptado de [8]) . . . . . . . . . . . . . . 15
3.4 Malha de controle básica para anemometria. (Reprodução [9]) . . . . 16
3.5 Posicionamento do anemômetro HWA num escoamento unidimensio-
nal. (Adaptado de [9]) . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.6 Comparação entre os dois casos de termistor estudados por Moore,
em Suporte (A) e Tubo (B). (Adaptado de [14]) . . . . . . . . . . . . 20
3.7 Circuito de malha de controle usado no trabalho de MOORE com
perturbação de onda quadrada. (Reprodução de [14]) . . . . . . . . . 21
3.8 Ajuste ótimo da resposta ao degrau para um anemômetro. (Adaptado
de [14]) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1 Sensor termistor utilizado nas medições, com régua milimetrada. . . . 23
4.2 Comparação da curva de resistência por temperatura do termistor
Omega 44004 entre dados do fabricante e experimentais. . . . . . . . 24
4.3 Jato de Ar Quente utilizado nas medições para calibração térmica. . . 25
4.4 Circuito nal utilizado no instrumento. . . . . . . . . . . . . . . . . . 26
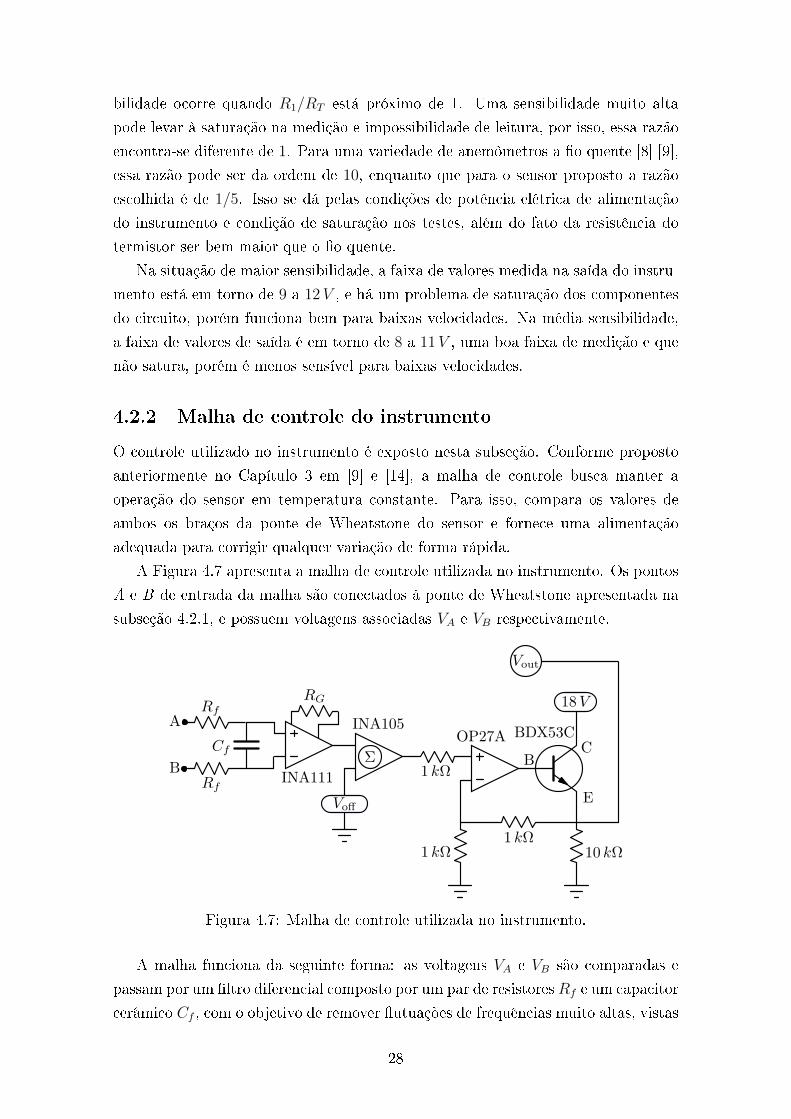
4.5 Diagrama da ponte de Wheatstone do anemômetro a termistor. . . . 26
4.6 Ponte de Wheatstone com as resistências escolhidas. . . . . . . . . . . 27
4.7 Malha de controle utilizada no instrumento. . . . . . . . . . . . . . . 28
4.8 Malha de controle com os valores otimizados. . . . . . . . . . . . . . . 29
xi

4.9 Diagrama da fonte de alimentação utilizada no instrumento. . . . . . 30
4.10 Osciloscópio padrão utilizado nas medições de calibração. . . . . . . . 33
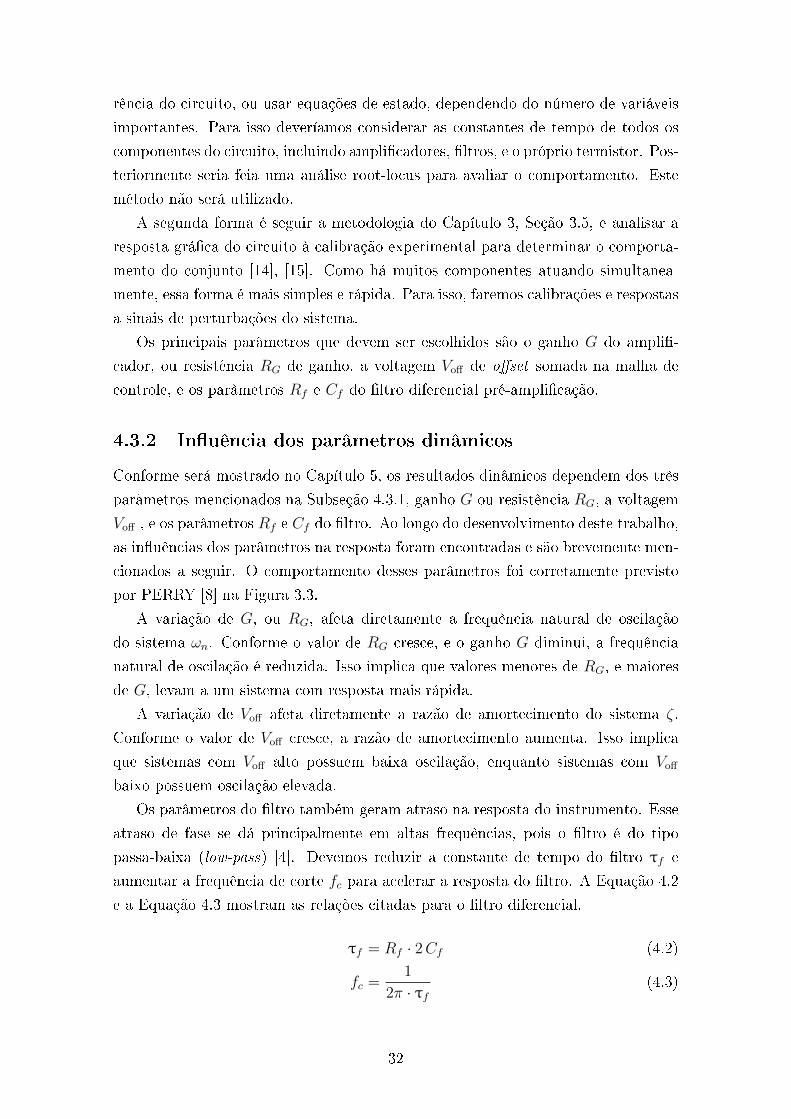
4.11 Disposição do sensor termistor no escoamento para calibração e to-
mada de medições. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.12 Ponteira do posicionador com sensor termistor acoplado. . . . . . . . 34
4.13 Aplicação de perturbação na ponte de Wheatstone para o teste degrau. 36
5.1 Túnel de vento utilizado nas medições experimentais. . . . . . . . . . 38
5.2 Traseira do túnel de vento utilizado nas medições experimentais. . . . 39
5.3 Relação entre a velocidade do escoamento medida e a frequência do
inversor no túnel de vento utilizado. . . . . . . . . . . . . . . . . . . . 39
5.4 Tomada de medida da calibração estática do anemômetro a termistor
quente. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.5 Resposta ao degrau da condição mais otimizada. . . . . . . . . . . . . 44
5.6 Comparação gráca da resposta ao degrau para algumas situações
notáveis. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.7 Magnitude de resposta de saída em função da frequência de oscilação
aplicada. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.8 Cilindro circular utilizado nas medições experimentais. . . . . . . . . 48
5.9 Perl de medição de velocidade à jusante do cilindro, distante 50 mm
com U∞ = 0.12 m/s, com zona de recirculação e valores não denidos
pela lei de King inversa. . . . . . . . . . . . . . . . . . . . . . . . . . 49
5.10 Perl de medição de velocidade à jusante do cilindro, distante 50 mm
com U∞ = 0.81 m/s, e região de mudança de valores signicativos de
incerteza na borda da esteira. . . . . . . . . . . . . . . . . . . . . . . 49
5.11 Perl de medição de velocidade à jusante do cilindro, distante 100 mm
com U∞ = 0.12 m/s. . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.12 Perl de medição de velocidade à jusante do cilindro, distante 100 mm
com U∞ = 0.81 m/s, com mudança dos valores signicativos de incer-
teza, apenas ilustrativo. . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.13 Comparação entre perl esperado pela literatura e encontrado por
medição, com U∞ = 0.20 m/s e meia-esteira de tamanho 30 mm. . . . 52
5.14 Perl de velocidade encontrado para escoamento ao redor do cilindro,
com x/d variável com Re = 40. (Reprodução [20]) . . . . . . . . . . . 53
5.15 Distribuição de utuações de velocidade u′rms por velocidade média
Umed. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
5.16 Distribuição de intensidade turbulenta IT por velocidade média Umed. 58
A.1 Diagrama completo do circuito nal. . . . . . . . . . . . . . . . . . . 64
xii

B.1 Gráco de saída de medição do teste #26 no domínio do tempo. . . . 66
B.2 Gráco de saída de medição do teste #26 no domínio da frequência,
com destaque para frequências características esperadas. . . . . . . . 67
C.1 Perl de velocidade para o caso de Umed = 10.79 m/s. . . . . . . . . . 69
xiii
Lista de Tabelas
2.1 Propriedades do ar relevantes a 300 K (ou 27 C). [1] . . . . . . . . . 3
3.1 Passo a passo de medição em anemometria, segundo JØRGENSEN
[15]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4.1 Constantes de Steinhart-Hart do termistor Omega 44004 fornecidas
pelo fabricante. [19] . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5.1 Coecientes do ajuste de velocidade e frequência no túnel de vento. . 40
5.2 Voltagem de saída do instrumento como função da velocidade, para
R1 = 47 Ω e R1 = 96 Ω. . . . . . . . . . . . . . . . . . . . . . . . . . . 42
5.3 Comparação de tempo de resposta em diferentes combinações de pa-
râmetros. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.4 Comparação de tempo de resposta em diferentes combinações de va-
lores de ltro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.5 Parâmetros associados às respostas da Figura 5.6. . . . . . . . . . . . 46
5.6 Tabela de parâmetros-padrão usados no instrumento. . . . . . . . . . 46
5.7 Tabela comparativa dos parâmetros usados na medição de perl à
jusante do cilindro. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.8 Dados dos testes de frequência de emissão de vórtices . . . . . . . . . 54
5.9 Resultados dos testes de frequência de emissão de vórtices . . . . . . 55
5.10 Tabela de velocidade média Umed, utuação u′rms e intensidade tur-
bulenta IT . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
xiv
Capítulo 1
Introdução
1.1 Motivação
Sistemas de medição de ar (anemômetros) são utilizados em pesquisa para estudar
o escoamento ao redor de corpos e comparar com métodos de resolução numérica
(CFD - Dinâmica dos Fluidos Computacional). Os anemômetros também podem
ser usados na área acadêmica para ensino de mecânica dos uidos e de instrumen-
tação. Já na indústria, podem ser usados como sensores de vazão em exaustores ou
tubulações.
A motivação deste trabalho será obter uma maneira de se medir velocidades
de escoamento do ar, de forma a reproduzir resultados da literatura e comparar
com valores esperados. Desejamos também encontrar um modo de medição prático,
conável, de baixo custo e boa resolução.
Além disso, buscamos validar para vericar se tal método é possível e viável de
ser utilizado.
1.2 Objetivo
O objetivo deste trabalho é projetar um anemômetro térmico com um sensor estru-
turalmente mais robusto do que o anemômetro a o-quente, com maior resistência
e durabilidade, porém ainda assim com boa resposta dinâmica. Este sensor deve
ser capaz de medir pers de velocidade média e utuações turbulentas com boa
resolução espacial e temporal.
Para tal, será usado um sensor do tipo termistor, de forma esférica, com bom
coeciente de troca térmica no ar. O sensor possui tamanho reduzido o suciente
para ter uma resposta rápida, porém ainda é rígido o suciente para não romper ou
quebrar durante o uso.
O sensor será ligado a uma malha de controle que garante que sua temperatura
1
de operação seja constante. Essa malha de controle é similar à malha encontrada
em diversos projetos de anemômetros de temperatura constante.
Em primeiro lugar desejamos vericar se é possível construir um instrumento
com o sensor desejado, em seguida desejamos descobrir se é possível obter medi-
ções conáveis com o sensor. Logo após, o objetivo passa a ser a comparação dos
resultados com a literatura para vericar a conabilidade de medição, e nalmente
chegaremos a uma conclusão sobre o uso deste tipo de sensor.
O projeto foi desenvolvido no Laboratório de Mecânica da Turbulência do Núcleo
Interdisciplinar de Dinâmica dos Fluidos (NIDF), do Instituto Alberto Luiz Coimbra
de Pós-graduação e Pesquisa de Engenharia (COPPE), na Universidade Federal do
Rio de Janeiro (UFRJ)
1.3 Organização do trabalho
A estruturação textual e divisão em capítulos do trabalho apresenta-se a seguir. O
atual capítulo (Capítulo 1), introduz brevemente o trabalho, descrevendo motiva-
ção e objetivos do projeto proposto. O Capítulo 2 introduz conceitos de mecânica
dos uidos, instrumentação, e sinais necessários para compreensão do trabalho. O
Capítulo 3 complementa o capítulo anterior e apresenta trabalhos anteriores sobre
anemometria, com alguns resultados encontrados pela literatura e metodologia pro-
posta.
O Capítulo 4 apresenta a descrição do trabalho realizado, com caracterização
do instrumento proposto baseado na metodologia apresentada nos capítulos anteri-
ores, como escolha de parâmetros, denição da calibração e incerteza. O Capítulo 5
apresenta os resultados encontrados das medições desejadas, com caracterização -
nal da calibração, resposta do instrumento estática e dinâmica, comparações para
otimização dos resultados, medição de pers de velocidade, comparação com a litera-
tura, medição de frequências de emissão de vórtice esperadas, e perl de intensidade
turbulenta. Informações adicionais encontram-se no Anexo A, no Anexo B e no
Anexo C.
O trabalho é nalizado com o Capítulo 6 que sumariza os avanços encontrados
neste trabalho, junto de críticas e sugestões de melhorias.
2

Capítulo 2
Fundamentos teóricos
O presente capítulo apresenta a base teórica necessária para a compreensão geral do
funcionamento do projeto.
2.1 Denições gerais de Mecânica dos uidos
Esta subseção descreve brevemente alguns conceitos já fundamentados que devem
ser abordados antes da leitura dos capítulos seguintes, a começar por denições
básicas.
Primeiramente, vamos denir o número de Reynolds Re como sendo a razão
entre as forças inerciais e viscosas de um uido [1]. A Equação 2.1 apresenta essa
relação adimensional.
Re =ρ · U∞ · d
µ=U∞ · dν
(2.1)
Os parâmetros ρ e µ são a massa especíca e a viscosidade dinâmica do uido
respectivamente, e podem ser simplicados pela viscosidade cinemática ν. Esses
valores variam muito com a temperatura e são conhecidos para o uido em questão,
que neste trabalho é o ar.
Os parâmetros restantes são a velocidade média do escoamento U∞ e uma di-
mensão característica d, que dependem do cenário estudado.
As propriedades do ar relevantes para este trabalho estão na Tabela 2.1.
Tabela 2.1: Propriedades do ar relevantes a 300 K (ou 27 C). [1]
Símbolo Valorρ 1.1614 kg/m3
µ 184.6× 10−7 N · s/m2
ν 15.89× 10−6 m2/s
3
2.2 Anemometria térmica a Fio Quente
Um dos principais métodos de medição experimental de velocidade utilizados em
escoamentos é a anemometria por o quente, ou HWA (Hot-Wire Anemometry, do
inglês) conforme dito em FIGLIOLA e BEASLEY [2] e em [3].
O princípio de funcionamento do HWA é baseado na troca térmica por convecção
de um o resistivo aquecido com o ambiente ao redor. A troca térmica é dependente
direta da velocidade do meio, de tal forma que uma velocidade de escoamento maior
possibilita maior troca de calor entre o o quente e o meio.
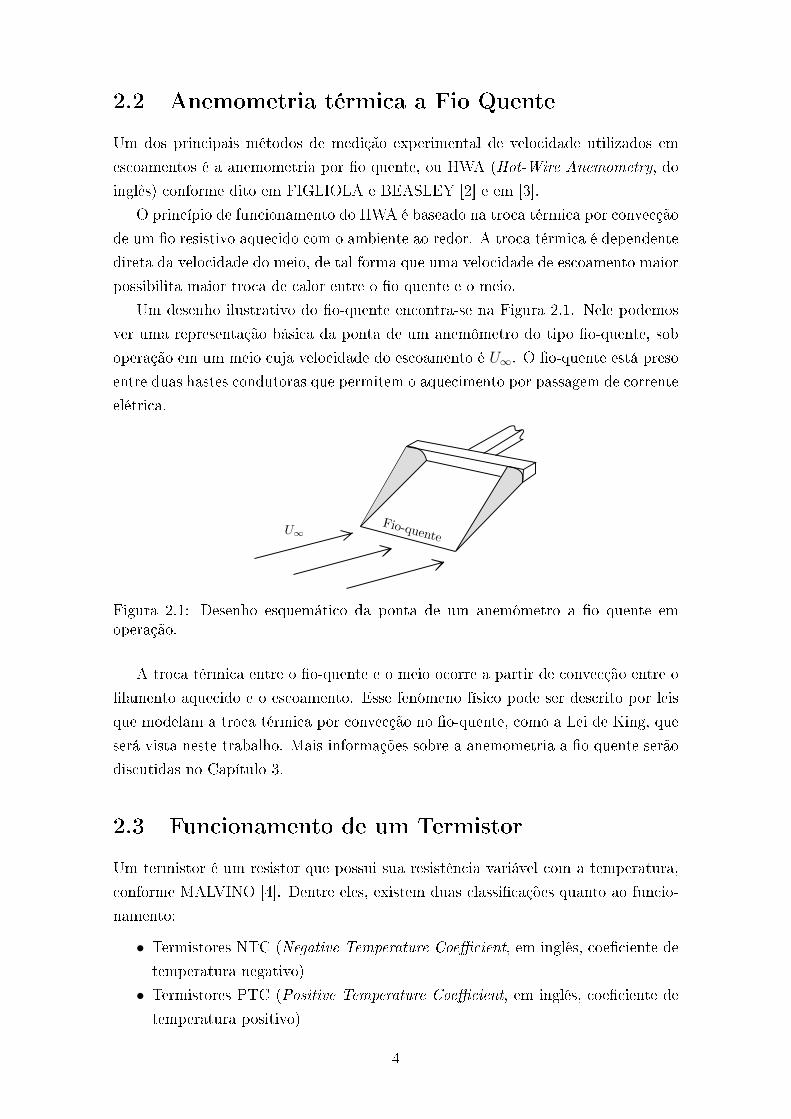
Um desenho ilustrativo do o-quente encontra-se na Figura 2.1. Nele podemos
ver uma representação básica da ponta de um anemômetro do tipo o-quente, sob
operação em um meio cuja velocidade do escoamento é U∞. O o-quente está preso
entre duas hastes condutoras que permitem o aquecimento por passagem de corrente
elétrica.
Figura 2.1: Desenho esquemático da ponta de um anemômetro a o quente emoperação.
A troca térmica entre o o-quente e o meio ocorre a partir de convecção entre o
lamento aquecido e o escoamento. Esse fenômeno físico pode ser descrito por leis
que modelam a troca térmica por convecção no o-quente, como a Lei de King, que
será vista neste trabalho. Mais informações sobre a anemometria a o quente serão
discutidas no Capítulo 3.
2.3 Funcionamento de um Termistor
Um termistor é um resistor que possui sua resistência variável com a temperatura,
conforme MALVINO [4]. Dentre eles, existem duas classicações quanto ao funcio-
namento:
• Termistores NTC (Negative Temperature Coecient, em inglês, coeciente de
temperatura negativo)
• Termistores PTC (Positive Temperature Coecient, em inglês, coeciente de
temperatura positivo)
4

Os termistores NTC apresentam resistência decrescente com o aumento da tempera-
tura, enquanto os termistores PTC possuem resistência mais alta com temperaturas
mais elevadas.
O funcionamento de um Termistor obedece a uma equação não linear geralmente
expressa pela forma da Equação 2.2 conforme FIGLIOLA e BEASLEY [2]:
R(T ) = R0 exp
[β
(1
T− 1
T0
)](2.2)
R(T ) é a resistência do termistor, variável com a temperatura T , em escala
absoluta. Os valores de R0 e T0 são respectivamente uma resistência e temperatura
de referência associadas do termistor em um ponto inicial, enquanto β é o coeciente
do termistor.
2.3.1 Equação de Steinhart-Hart
A Equação 2.2 descreve a resistência de um elemento termistor como função da tem-
peratura. Porém, quando se necessita da temperatura como função da resistência,
como é o caso da anemometria térmica, uma outra formulação pode ser conveniente.
Essa é a equação de Steinhart-Hart conforme [2], dada pela Equação 2.3:
1
T= A+ B ln(R) + C ln3(R) (2.3)
onde A, B e C são constantes de cada termistor.
É possível inverter essa equação para encontrar a Equação 2.4
R = exp(
3√β − α− 3
√β + α
)(2.4)
onde α e β auxiliares são denidos por:
α =1
2C
(A− 1
T
)
β =
√√√√( B
3C
)3
+ α2
e a temperatura T é dada em escala absoluta.
2.4 Ponte de Wheatstone
Um dos métodos mais amplamente utilizados para se comparar resistências ou ca-
pacitâncias em um circuito divisor de tensão é baseado no princípio da Ponte de
5
Wheatstone, que pode ser visto em MALVINO [4], BENTLEY [5] e ALCIATORE
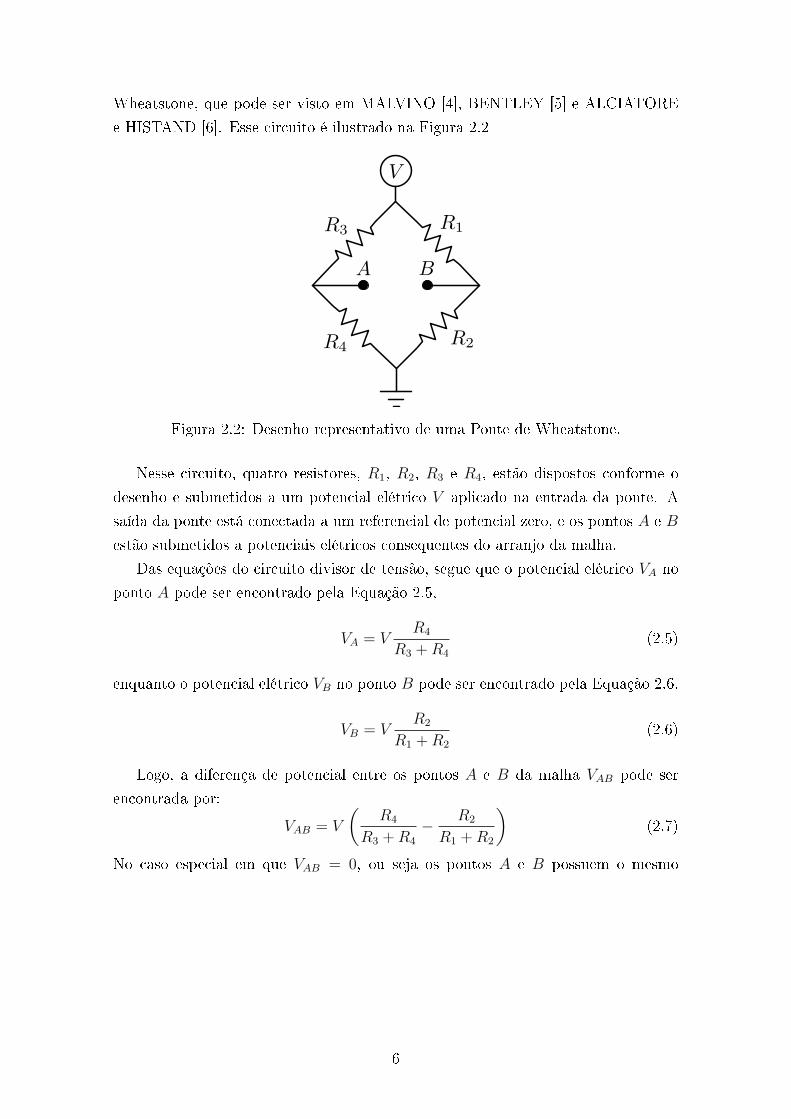
e HISTAND [6]. Esse circuito é ilustrado na Figura 2.2
Figura 2.2: Desenho representativo de uma Ponte de Wheatstone.
Nesse circuito, quatro resistores, R1, R2, R3 e R4, estão dispostos conforme o
desenho e submetidos a um potencial elétrico V aplicado na entrada da ponte. A
saída da ponte está conectada a um referencial de potencial zero, e os pontos A e B
estão submetidos a potenciais elétricos consequentes do arranjo da malha.
Das equações do circuito divisor de tensão, segue que o potencial elétrico VA no
ponto A pode ser encontrado pela Equação 2.5,
VA = VR4
R3 +R4
(2.5)
enquanto o potencial elétrico VB no ponto B pode ser encontrado pela Equação 2.6.
VB = VR2
R1 +R2
(2.6)
Logo, a diferença de potencial entre os pontos A e B da malha VAB pode ser
encontrada por:
VAB = V
(R4
R3 +R4
− R2
R1 +R2
)(2.7)
No caso especial em que VAB = 0, ou seja os pontos A e B possuem o mesmo
6

potencial, devemos ter
V
(R4
R3 +R4
− R2
R1 +R2
)= 0
R4
R3 +R4
=R2
R1 +R2
R1R4 +R2R4 = R2R3 +R2R4
R1R4 = R2R3 (2.8)
ou seja, a equação 2.8 enuncia que os produtos das resistências opostas devem ser
iguais no caso em que VAB = 0.
A partir da Equação 2.7 e da Equação 2.8, podemos tirar algumas conclusões
do conjunto de resistores, como por exemplo descobrir o valor de uma resistência
desconhecida na malha. Esse é um dos princípios para descobrir, ou controlar, o
valor de resistência de um anemômetro com sensor do tipo termistor ou o-quente.
2.4.1 Ponte em Temperatura Constante
Dentre os possíveis modos de operação para um anemômetro de o-quente, como
veremos no Capítulo 3, podemos citar os modos de voltagem constante, corrente
constante e temperatura constante. O modo mais utilizado em medições e mais
estável é o Anemômetro de Temperatura Constante ou CTA (Constant Temperature
Anemometer) . Um desenho ilustrativo de seu funcionamento está na Figura 2.3
Figura 2.3: Esquema representativo de uma ponte de um anemômetro a o quente,em malha fechada, operando em modo de temperatura constante.
O sistema é alimentado por uma voltagem proporcional à diferença entre os
braços da ponte de Wheatstone, somada à uma voltagem oset introduzida na
realimentação de malha fechada. Dessa forma, a resistência desconhecida pode ser
7

obtida indiretamente através da alimentação da entrada da ponte. O Capítulo 3
apresentará o aprofundamento neste tema.
Este circuito é dito de malha fechada, isto é, a saída da diferença da ponte é
usada como alimentação para o próprio circuito. Com isso a resposta é mais rápida
e se ajusta automaticamente sem necessidade de ajuste humano para equilibrar o
braço da ponte. Sobre essa resposta em malha aberta e fechada recomenda-se a
leitura de BENTLEY [5] e ALCIATORE e HISTAND [6].
As referências principais sobre anemometria a o quente, uso do sensor termistor,
e ponte em temperatura constante serão apresentadas no Capítulo 3.
2.5 Calibração estática e dinâmica
Um anemômetro, como qualquer outro instrumento de comparação, deve ser cali-
brado. A metodologia de calibração está apresentada no Capítulo 3, e sua aplicação
está no Capítulo 4 e resultados serão discutidos no Capítulo 5. Uma das relações
principais de calibração em anemometria térmica é a Lei de King, descrita a seguir.
2.5.1 Lei de King para Anemômetros Térmicos
Uma das leis fundamentais para modelagem de troca de calor na anemometria tér-
mica é a lei de potências (Power Law) ou lei de King conforme estabelecido em
[7]. Ela estabelece uma relação de calibração entre troca térmica por velocidade de
escoamento e potência dissipada num anemômetro a o quente. No nosso caso, a
potência dissipada está relacionada com o quadrado de uma voltagem E aplicada
no o quente. A Equação 2.9 enuncia a lei de King para uma voltagem E e uma
velocidade de escoamento U∞, e sua inversa na Equação 2.10.
E2 = A+B · U∞n (2.9)
U∞ =
(E2 − AB
)1/n
(2.10)
Essa lei é de fundamental importância para a anemometria térmica em geral, pois
estabelece implicitamente as relações de troca térmica por convecção e de potência
dissipada. Os parâmetros A, B e n são obtidos a partir de calibrações experimentais
do o quente. Mais informações sobre a calibração podem ser vistas no Capítulo 3,
sua aplicação está no Capítulo 4, e resultados serão apresentados no Capítulo 5.
8
2.6 Linearidade
A relação do termistor da Equação 2.2 indica que o funcionamento do termistor
é não-linear [2], logo podemos esperar que essa não-linearidade esteja presente em
um circuito que depende de seu funcionamento. A ponte de Wheatstone também
é não-linear. Além disso, a lei de King da Equação 2.9 também é não-linear [2].
Com isso, nosso sistema de medição proposto é não-linear, porém para efeito de
simplicação essas não-linearidades serão simplicadas e o sistema será assumido
como tendo comportamento de segunda ordem, com amortecimento e oscilação,
conforme a Equação 2.11. Substanciação sobre esta simplicação pode ser vista em
PERRY [8] e BRUUN [9].
mx+ cx+ kx = F (t) (2.11)
Esse sistema possui uma constante de tempo τ, uma frequência natural de os-
cliação ωn, e uma razão de amortecimento do sistema ζ. O funcionamento de um
sistema de segunda ordem pode ser visto com detalhes em FIGLIOLA e BEASLEY
[2], [3], BENTLEY [5] e ALCIATORE e HISTAND [6].
Esses parâmetros τ, ωn e ζ relacionam-se com a velocidade de resposta do sis-
tema, e sua escolha está intimamente ligada com os parâmetros ajustados do ins-
trumento. A relação entre essas variáveis será explorada com mais detalhes no
Capítulo 4.
Um sistema de segunda ordem apresenta uma frequência de corte ωC em função
das frequências de excitação F (t) [2], [5]. ωC ocorre onde há redução de 50 %, ou
−3 dB na energia transmitida pelo sistema, ou quando a razão entre o quadrado
das amplitudes na frequência de corte A(ωC) e de referência A0 é de 1/2 como na
Equação 2.12. (A(ωC)
A0
)2
=1
2(2.12)
É comum para medir o comportamento ou decaimento para as frequências usar
a função Magnitude, ou Magnitude de Resposta M(ω), que pode ser vista na Equa-
ção 2.13. Os argumentos de M(ω) podem ser em unidades Hz ou rad/s, desde que
haja consistência de escolha.
M(ω) =
(A(ω)
A0
)2
(2.13)
9

2.7 Incertezas de medição
Conforme INMETRO [10] e [11], as incertezas podem ser de medição, denidas por
estatísticas de várias medições, ou sistemáticas, determinadas pela incerteza de de-
terminado instrumento. As incertezas deste trabalho foram consideradas tomando-se
como base o ISO - Guia Universal de Medição [10] e o ISO - Vocabulário Interna-
cional de Metrologia [11].
As incertezas de medição de uma variável q podem ser avaliadas pela média q
e desvio padrão da amostra s2(q), pelas Equações 2.14a e 2.14b. A incerteza da
variável σ(q) é dada pelo estimador da Equação 2.14c em que n é o número de
amostragens.
q =1
n
n∑k=1
qk (2.14a)
s2(qk) =1
n− 1
n∑j=1
(qj − q)2 (2.14b)
σ2(q) =s2(qk)
n(2.14c)
As incertezas sistemáticas são fornecidas pelo instrumento e se relacionam geral-
mente com o menor valor da escala de medição e a incerteza combinada se dá pela
soma quadrática dos dois tipos de incertezas. Para a propagação de incertezas em
fórmulas, a Equação 2.15 fornece a expressão necessária para o cálculo. A incerteza
propagada de uma função σ(F ) é tomada pelo somatório da derivada parcial de cada
variável multiplicada por sua incerteza.
(σ(F (q1, q2, . . . , qn))
)2=
n∑i=1
(∂F (q1, q2, . . . )
∂qi
)2
·(σ(qi)
)2(2.15)
A equação 2.15 é vital para este trabalho pois fornece a expressão para a propa-
gação de incerteza nas fórmulas.
2.8 Frequência de emissão de vórtices em um corpo
cilíndrico
Todo corpo rombudo, em nosso caso cilíndrico, apresenta um padrão de emissão de
vórtices à jusante de um escoamento. Esse fenômeno pode ser visto em FOX et al.
[1], em KUNDU e COHEN [12] e principalmente em SCHLICHTING [13]. Esse
padrão de emissão de vórtices é uma das características da esteira de Von-Karman,
e possui frequência determinada pelas características geométricas da situação. A
10
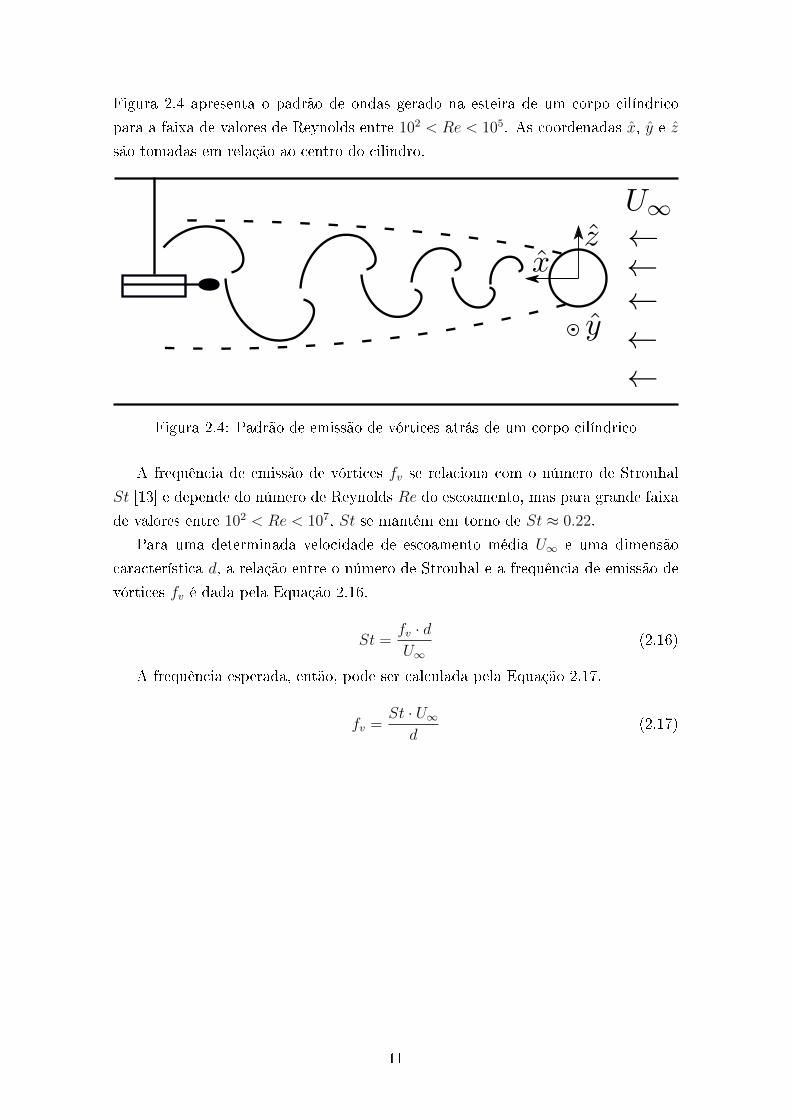
Figura 2.4 apresenta o padrão de ondas gerado na esteira de um corpo cilíndrico
para a faixa de valores de Reynolds entre 102 < Re < 105. As coordenadas x, y e z
são tomadas em relação ao centro do cilindro.
Figura 2.4: Padrão de emissão de vórtices atrás de um corpo cilíndrico
A frequência de emissão de vórtices fv se relaciona com o número de Strouhal
St [13] e depende do número de Reynolds Re do escoamento, mas para grande faixa
de valores entre 102 < Re < 107, St se mantém em torno de St ≈ 0.22.
Para uma determinada velocidade de escoamento média U∞ e uma dimensão
característica d, a relação entre o número de Strouhal e a frequência de emissão de
vórtices fv é dada pela Equação 2.16.
St =fv · dU∞
(2.16)
A frequência esperada, então, pode ser calculada pela Equação 2.17.
fv =St · U∞
d(2.17)
11
Capítulo 3
Revisão Bibliográca
Este capítulo apresenta brevemente uma revisão bibliográca sobre o tema abordado
neste trabalho.
3.1 Anemometria a Fio Quente
PERRY [8] apresenta os princípios de anemometria com o quente, aplicado tanto a
escoamentos turbulentos quanto laminares. Do funcionamento, temos um lamento
que aquece por efeito Joule e cuja interação com o escoamento pode ser monito-
rado pela eletrônica. Entre os dois principais métodos de operação temos a corrente
constante e a temperatura constante (CTA), sendo que o método de corrente cons-
tante não será abordado aqui. PERRY [8] dene o anemômetro como um transdutor
térmico, não linear, cujo maior desao é obter a melhor sensibilidade de medição
na maior faixa de operação possível. PERRY [8] dene que num anemômetro a o
quente, o lamento é a parte mais crucial do transdutor, com variedade de disponi-
bilidade, desde prata com núcleo de platina até tungstênio.
Dentre as aplicações do anemômetro a o quente podemos listar [9] o escoamento
em gases devido à tamanho pequeno e calibração bem-denida. Anemômetros o-
quente de 5µm são comuns. Para temperaturas abaixo de 150 C os os de tungstê-
nio são mais utilizados, enquanto que para temperaturas de 150 C a 700 C os os
de platina são mais comuns pois são mais resistentes à oxidação.
PERRY [8] considera o o como innitamente longo, e usa leis empíricas de
convecção para apresentar uma denição de modelagem. Ele também considera que
o o quente tem resistividade variante conforme e Equação 3.1, em que RW e R0
são as resistências do o em operação e inicial respectivamente, e TW e T0 são as
temperaturas de operação e inicial, enquanto C é uma constante.
RW = R0
(1 + C0(TW − T0) + C1(TW − T0)2 + . . .
)(3.1)
12

PERRY [8] também faz o balanço térmico para o o quente e chega na Equa-
ção 3.2, que pode ser simplicada para Equação 3.3, onde I é a corrente que passa
pelo o quente, Rg depende da variação da resistência com a temperatura, e A e B
são constantes.
I2RW = (RW −Rg)(X + Y√U) (3.2)
I2 = A+B√U (3.3)
A Equação 3.3 é a lei de King quando notamos que I2 é proporcional à potência
dissipada no o, e esta é proporcional a E2 da Equação 2.9, sendo a única diferença
ajustada o índice da raiz da velocidade U . A Figura 3.1 apresenta um gráco
do comportamento da lei de King, e a situação de burnout é o limite quando a
temperatura de operação é muito alta e não há troca térmica suciente.
I2
I2 = X + Y U0.5(Burnout)
U0.5
-x/y 0
I2 = A + B U0.5
Figura 3.1: Lei de King gráca, com percurso de temperatura constante. (Adaptadode [8])
PERRY [8] continua seu trabalho enunciando equações de sistema de controle
do lamento para deduzir as equações governantes às perturbações de voltagem e′,
velocidade u′, corrente i′, e temperatura T ′.
Dentre as principais vantagens do anemômetro de temperatura constante CTA,
podemos citar [8] a compensação da inércia térmica do lamento conforme o ponto
de operação varia, ou seja, a calibração em onda quadrada é a mesma para várias
velocidades. Além disso, o sistema é usado em ponto de operação próximo da
calibração estática, sobressaindo-se sobre sistemas de corrente constante. A malha
de controle proposta por PERRY [8] está na Figura 3.2, e é composta de uma ponte
de Wheatstone, e uma alimentação via um amplicador, um somador de tensão, e um
transistor de potência. Esta malha será abordada com mais detalhes no Capítulo 4
13
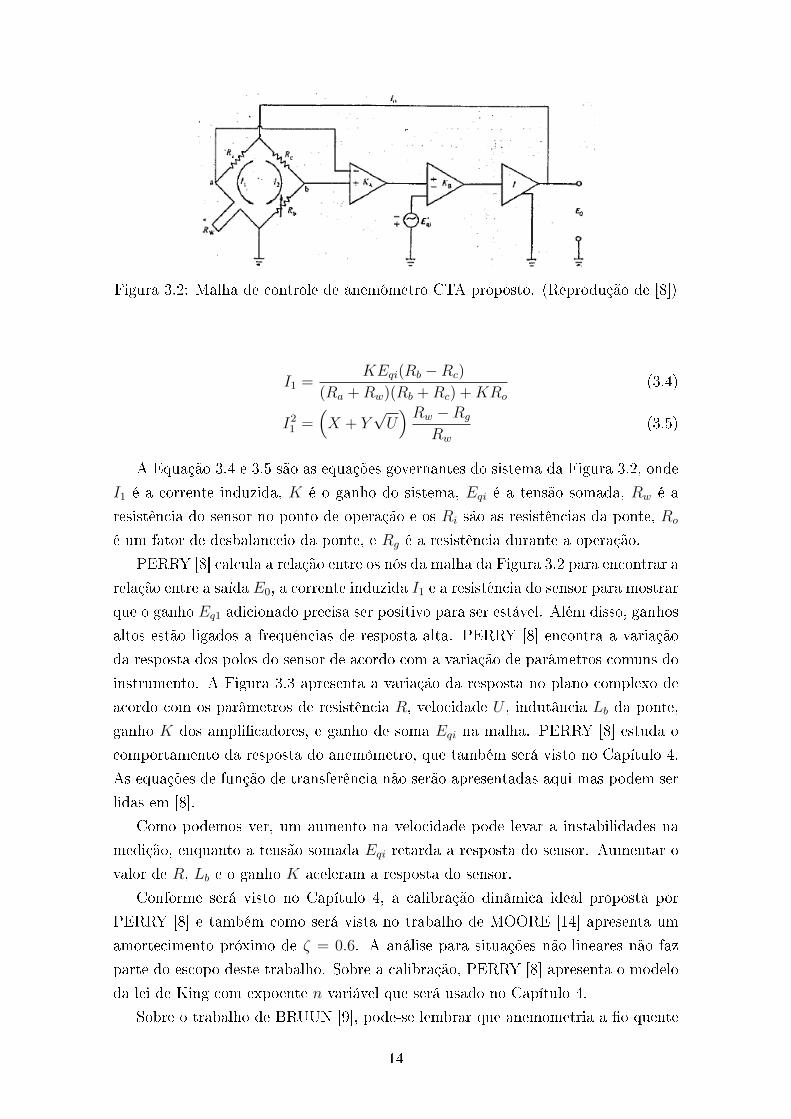
Figura 3.2: Malha de controle de anemômetro CTA proposto. (Reprodução de [8])
I1 =KEqi(Rb −Rc)
(Ra +Rw)(Rb +Rc) +KRo
(3.4)
I21 =
(X + Y
√U) Rw −Rg
Rw
(3.5)
A Equação 3.4 e 3.5 são as equações governantes do sistema da Figura 3.2, onde
I1 é a corrente induzida, K é o ganho do sistema, Eqi é a tensão somada, Rw é a
resistência do sensor no ponto de operação e os Ri são as resistências da ponte, Ro
é um fator de desbalanceio da ponte, e Rg é a resistência durante a operação.
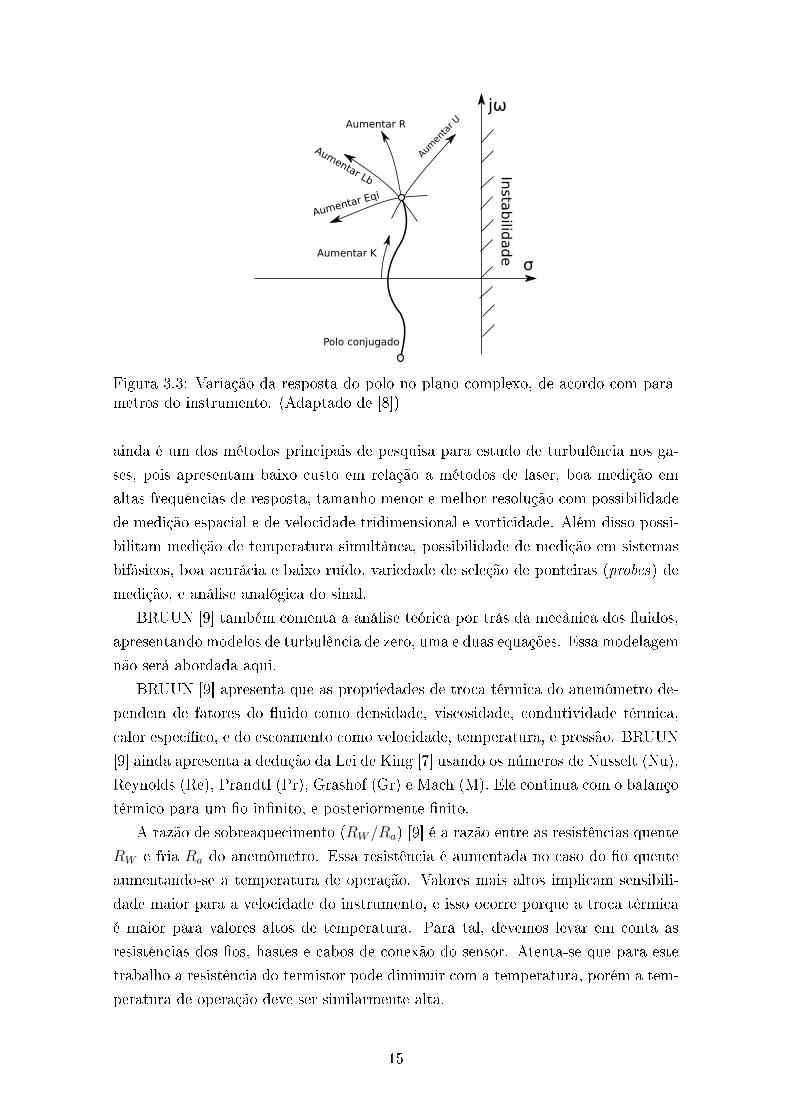
PERRY [8] calcula a relação entre os nós da malha da Figura 3.2 para encontrar a
relação entre a saída E0, a corrente induzida I1 e a resistência do sensor para mostrar
que o ganho Eq1 adicionado precisa ser positivo para ser estável. Além disso, ganhos
altos estão ligados a frequências de resposta alta. PERRY [8] encontra a variação
da resposta dos polos do sensor de acordo com a variação de parâmetros comuns do
instrumento. A Figura 3.3 apresenta a variação da resposta no plano complexo de
acordo com os parâmetros de resistência R, velocidade U , indutância Lb da ponte,
ganho K dos amplicadores, e ganho de soma Eqi na malha. PERRY [8] estuda o
comportamento da resposta do anemômetro, que também será visto no Capítulo 4.
As equações de função de transferência não serão apresentadas aqui mas podem ser
lidas em [8].
Como podemos ver, um aumento na velocidade pode levar a instabilidades na
medição, enquanto a tensão somada Eqi retarda a resposta do sensor. Aumentar o
valor de R, Lb e o ganho K aceleram a resposta do sensor.
Conforme será visto no Capítulo 4, a calibração dinâmica ideal proposta por
PERRY [8] e também como será vista no trabalho de MOORE [14] apresenta um
amortecimento próximo de ζ = 0.6. A análise para situações não-lineares não faz
parte do escopo deste trabalho. Sobre a calibração, PERRY [8] apresenta o modelo
da lei de King com expoente n variável que será usado no Capítulo 4.
Sobre o trabalho de BRUUN [9], pode-se lembrar que anemometria a o quente
14
σ
jωAumentar R
Aumen
tar U
Aumentar Lb
Aumentar Eqi
Aumentar K
Polo conjugado
Insta
bilid
ade
Figura 3.3: Variação da resposta do polo no plano complexo, de acordo com parâ-metros do instrumento. (Adaptado de [8])
ainda é um dos métodos principais de pesquisa para estudo de turbulência nos ga-
ses, pois apresentam baixo custo em relação a métodos de laser, boa medição em
altas frequências de resposta, tamanho menor e melhor resolução com possibilidade
de medição espacial e de velocidade tridimensional e vorticidade. Além disso possi-
bilitam medição de temperatura simultânea, possibilidade de medição em sistemas
bifásicos, boa acurácia e baixo ruído, variedade de seleção de ponteiras (probes) de
medição, e análise analógica do sinal.
BRUUN [9] também comenta a análise teórica por trás da mecânica dos uidos,
apresentando modelos de turbulência de zero, uma e duas equações. Essa modelagem
não será abordada aqui.
BRUUN [9] apresenta que as propriedades de troca térmica do anemômetro de-
pendem de fatores do uido como densidade, viscosidade, condutividade térmica,
calor especíco, e do escoamento como velocidade, temperatura, e pressão. BRUUN
[9] ainda apresenta a dedução da Lei de King [7] usando os números de Nusselt (Nu),
Reynolds (Re), Prandtl (Pr), Grashof (Gr) e Mach (M). Ele continua com o balanço
térmico para um o innito, e posteriormente nito.
A razão de sobreaquecimento (RW/Ra) [9] é a razão entre as resistências quente
RW e fria Ra do anemômetro. Essa resistência é aumentada no caso do o quente
aumentando-se a temperatura de operação. Valores mais altos implicam sensibili-
dade maior para a velocidade do instrumento, e isso ocorre porque a troca térmica
é maior para valores altos de temperatura. Para tal, devemos levar em conta as
resistências dos os, hastes e cabos de conexão do sensor. Atenta-se que para este
trabalho a resistência do termistor pode diminuir com a temperatura, porém a tem-
peratura de operação deve ser similarmente alta.
15
3.2 Modos de operação do anemômetro
Um anemômetro a o quente pode ser operado principalmente em dois modos, sendo
eles Corrente Constante e Temperatura Constante [9]. O modo corrente constante
permite que a temperatura do anemômetro varie durante a operação, enquanto o
modo de temperatura constante mantém a resistência e temperatura virtualmente
constante, enquanto varia a corrente. Ambos os métodos podem ser usados, porém
neste trabalho somente o modo de temperatura constante será abordado, pois a
inércia térmica é ajustada automaticamente.
Esse modo de operação é obtido utilizando uma malha de retroalimentação no
circuito da ponte para se obter variações rápidas na corrente de aquecimento para
compensar mudanças instantâneas na velocidade do escoamento [9]. Essas malhas de
compensação foram consolidadas com os amplicadores de instrumentação a partir
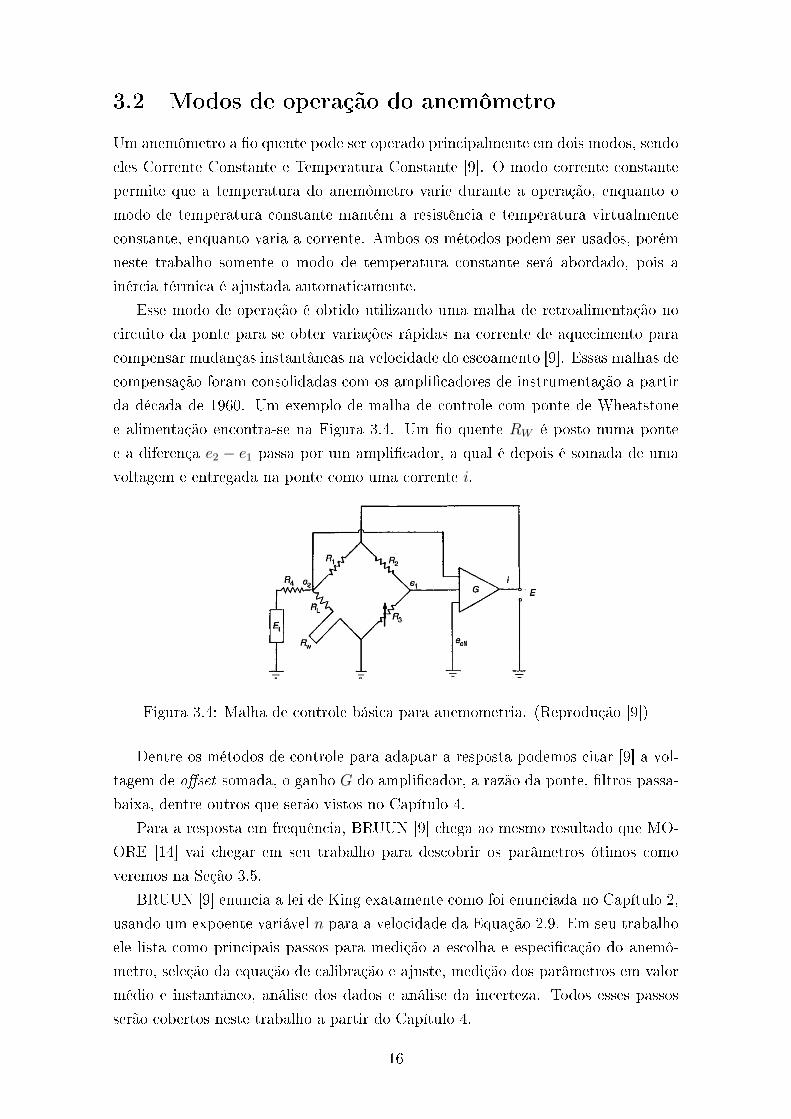
da década de 1960. Um exemplo de malha de controle com ponte de Wheatstone
e alimentação encontra-se na Figura 3.4. Um o quente RW é posto numa ponte
e a diferença e2 − e1 passa por um amplicador, a qual é depois é somada de uma
voltagem e entregada na ponte como uma corrente i.
Figura 3.4: Malha de controle básica para anemometria. (Reprodução [9])
Dentre os métodos de controle para adaptar a resposta podemos citar [9] a vol-
tagem de oset somada, o ganho G do amplicador, a razão da ponte, ltros passa-
baixa, dentre outros que serão vistos no Capítulo 4.
Para a resposta em frequência, BRUUN [9] chega ao mesmo resultado que MO-
ORE [14] vai chegar em seu trabalho para descobrir os parâmetros ótimos como
veremos na Seção 3.5.
BRUUN [9] enuncia a lei de King exatamente como foi enunciada no Capítulo 2,
usando um expoente variável n para a velocidade da Equação 2.9. Em seu trabalho
ele lista como principais passos para medição a escolha e especicação do anemô-
metro, seleção da equação de calibração e ajuste, medição dos parâmetros em valor
médio e instantâneo, análise dos dados e análise da incerteza. Todos esses passos
serão cobertos neste trabalho a partir do Capítulo 4.
16
O transdutor anemômetro deve ser escolhido com base na disponibilidade e fun-
cionalidade do meio a ser medido, o tipo de anemômetro HWA mais utilizado é
de temperatura constante CTA devido à boa resposta em frequência. A razão de
sobreaquecimento deve ser alta para medição em velocidade [9], exceto no caso em
medições em líquidos onde deve permanecer baixa para evitar formação de bolhas
como veremos na Seção 3.4. Existem sensores [9] capazes de medição simultânea em
mais de um eixo, mas eles não serão cobertos neste trabalho.
A equação de calibração escolhida por BRUUN [9] é função somente da veloci-
dade, e a lei de King apresenta bons resultados, apesar de existirem outras relações
mais complexas com acurácias variadas. A calibração deve determinar os valores
dos coecientes da equação de relação escolhida, geralmente feita com o anemôme-
tro estacionário ou em escoamento conhecido e a turbulência deve ser baixa para
evitar introduzir erros.
Para a análise dos dados, é sugerido [9] usar um sistema que possua ltro passa-
baixa e condicionador de sinal, capaz de multiplicar e deslocar a voltagem medida
para o intervalo do instrumento de aquisição digital. Isso é útil em sistemas de
medição em computador ou até mesmo quando usar osciloscópios digitais. A vol-
tagem deve estar na faixa de leitura, a resolução digital deve ser boa o suciente
para garantir a leitura correta do sinal, e a taxa de aquisição deve ser no mínimo
duas vezes a frequência mais alta a ser medida. Escolhidos os parâmetros, é possível
fazer a medição das velocidades através da voltagem e da inversão da lei de King.
Os últimos passos são a apresentação de dados, que deve ilustrar o comportamento
desejado como perl de velocidade, podendo ser em valores médios ou em análise
instantânea de turbulência, e a análise de incerteza para validar a magnitude de
precisão do instrumento, que deve levar em conta as incertezas de medição e as
equações usadas. Essas análises serão apresentadas no Capítulo 5.
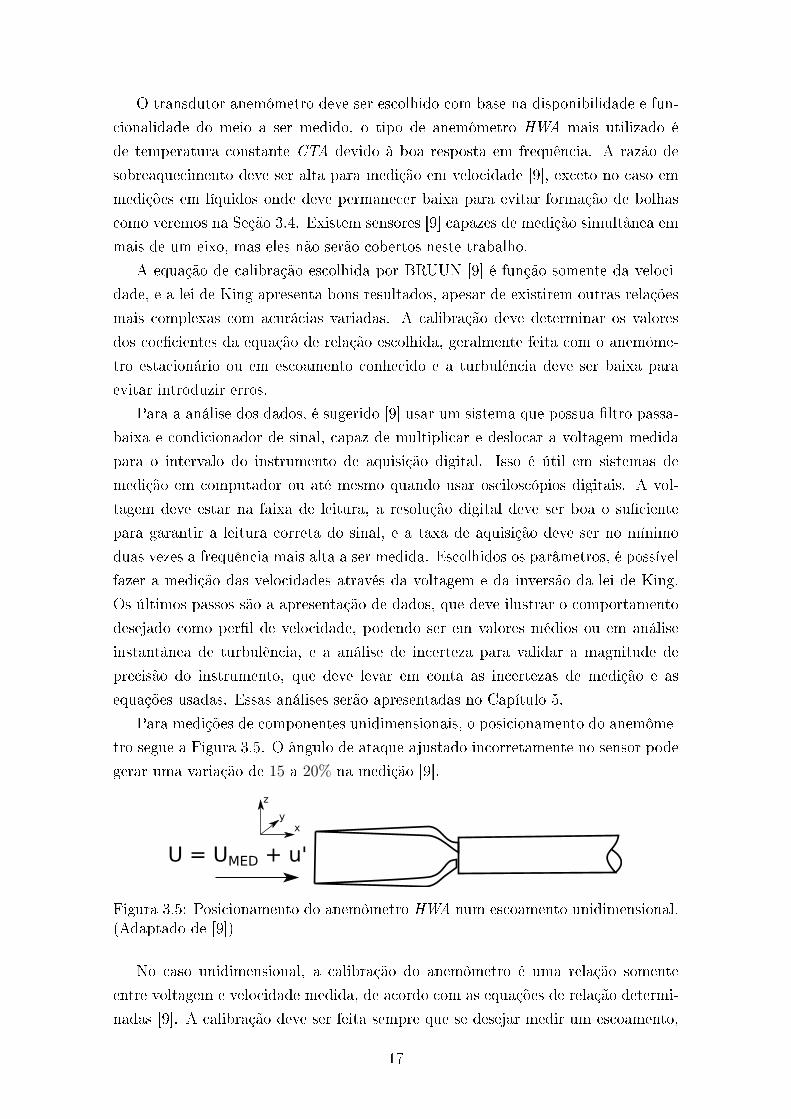
Para medições de componentes unidimensionais, o posicionamento do anemôme-
tro segue a Figura 3.5. O ângulo de ataque ajustado incorretamente no sensor pode
gerar uma variação de 15 a 20% na medição [9].
U = UMED + u'
xy
z
Figura 3.5: Posicionamento do anemômetro HWA num escoamento unidimensional.(Adaptado de [9])
No caso unidimensional, a calibração do anemômetro é uma relação somente
entre voltagem e velocidade medida, de acordo com as equações de relação determi-
nadas [9]. A calibração deve ser feita sempre que se desejar medir um escoamento,
17
por variações na temperatura ou parâmetros. Deve-se colocar o instrumento em um
escoamento conhecido de baixa turbulência e medir a voltagem de saída, o posiciona-
mento deve ser perpendicular conforme a Figura 3.5. Por exemplo, pode-se colocar
um instrumento Pitot para medir a velocidade ao lado do anemômetro, ou alguma
outra forma de medição conável, assumindo-se que o escoamento é uniforme nesse
intervalo. O objetivo [9] é conseguir um conjunto de pontos para correlacionar na lei
de correlação escolhida. Se não for possível realizar a calibração no local da medição,
deve-se atentar para introdução de incertezas.
É possível usar um método de mínimos quadrados para encontrar os coecien-
tes das equações de calibração. Dentre as possíveis leis de correlação [9] temos as
leis de potência, como a lei de King na Equação 3.6, leis de potência estendidas da
Equação 3.7, leis universais em que a razão (E2−E20)1/(E
2−E20)2 para dois anemô-
metros deve permanecer constante da Equação 3.8, leis de Spline de forma cúbica, e
leis polinomiais da Equação 3.9. Os resultados das leis de potência apresentam erro
dentro da faixa de 0.15%, e são as melhores de acordo com BRUUN [9], portanto
são as escolhidas para este trabalho. Apesar das equações Spline apresentarem erro
menor, seu uso é mais complicado que a lei de potência.
E2 = A+BUn (3.6)
E2 = A+BUn + CU (3.7)
E2 − E20 = CF (U) (3.8)
U = A+BE + CE2 +DE3 + . . . (3.9)
3.3 Bibliograa técnica para anemometria
Dentre a literatura técnica, uma boa leitura de textos sobre o assunto tem como fonte
a DANTEC em [15], fabricante de anemômetros a o quente, pois sua bibliograa
cobre o uso e operação destes instrumentos. JØRGENSEN [15] apresenta os mesmos
conceitos vistos em PERRY [8] e BRUUN [9], com ênfase para aplicação nal.
A ponteira (probe) de medição deve ser escolhida conforme a aplicação, e a
faixa útil de medição de acordo com o datasheet do equipamento deve ser ampla
o suciente para a medição desejada. JØRGENSEN [15] apresenta um passo a
passo para as operações de medição com anemometria. A lista de operações está na
Tabela 3.1 e será coberta no Capítulo 4.
É importante que as conexões do instrumento não entrem em contato com partes
metálicas, pois podem gerar fenômenos de fuga de corrente [15] que impossibilitam a
leitura, o probe só pode ser montado ou desmontado com o equipamento desligado,
18

Tabela 3.1: Passo a passo de medição em anemometria, segundo JØRGENSEN [15].
1. Set-Up
1a. Ajustar sobreaquecimento1b. Medir temperatura ambiente1c. Se necessário, medir resposta ao degrau1d. Escolher ltro passa-baixa
2. Calibração2a. Determinar ajuste de coecientes2b. Determinar relação de inversão
3. Denir experimento3a. Conrmar parâmetros3b. Preparar movimento do probe3c. Denir taxa de aquisição (Sampling Rate)
4. Realizar medição4a. Vericar se leituras estão na faixa esperada4b. Mover o probe e realizar medições
5. Analisar resultado 5a. Converter dados e apresentar
cabos devem ter o menor comprimento possível e contatos devem ser isolados
Segundo JØRGENSEN [15], a razão de ponte deve ser no máximo de 20 vezes, e
o resistor em série com o probe em torno de 20 Ω. Para leituras de melhor precisão,
recomenda-se razão de ponte ainda menor. A razão de sobreaquecimento segue os
mesmos cuidados de PERRY [8] e BRUUN [9]. O teste de onda quadrada proposto
por JØRGENSEN [15] será visto na 3.5.
Para a calibração, JØRGENSEN [15] também segue a bibliograa anterior e
dene que seja feita próximo a um tubo de Pitot, mas atenta que variações na
temperatura devem ser registradas e corrigidas posteriormente. O ajuste escolhido
por JØRGENSEN [15] é a lei de potência de King da Equação 2.9, o mesmo pro-
posto para este trabalho. JØRGENSEN [15] também apresenta procedimentos para
aquisição e tratamento de dados, dentre eles a velocidade média e a intensidade
turbulenta IT = u′RMS/UMED. Esses tratamentos serão usados para caracterizar o
escoamento medido no Capítulo 5.
Ao rodar um experimento, a Tabela 3.1 pode nos auxiliar com o passo a passo.
A temperatura é uma das principais causas de erros de medição, pois uma variação
de 1 C pode causar variação de 2% na medição [15]. JØRGENSEN [15] apresenta
uma leitura fundamental mais aprofundada para todo projeto de anemometria a o
quente e derivados. O funcionamento do anemômetro CTA, por exemplo, é explicado
pela diferença induzida na ponte e compensação do circuito.
3.4 Anemometria com Sensor Termistor
Dos principais trabalhos na literatura sobre anemometria com termistor, um dos
que mais se destaca como similar ao proposto aqui é o de MOORE [14]. Seu tra-
balho desenvolveu um instrumento de medição de velocidade de uidos usando os
19
princípios de ponte à temperatura constante (CTA) e anemometria térmica.
Dentre seus avanços podemos citar a compensação para temperatura de líquidos
na anemometria, que é uma das principais diculdades da troca térmica devido ao
alto calor especíco dos líquidos comparados ao ar. Outro avanço é o uso de uma
equação de calibração generalizada, relacionando o número de Reynolds e Nusselt
com compensação de temperatura [14]. Esta relação, porém, não será abordada
aqui.
Dentre as conclusões de MOORE [14], é possível construir sensores que sejam
calibrados na faixa de 0.01 a 0.6 m/s, com resolução espacial da faixa de 3 mm e
escala temporal de 1.2 ms. O custo é barato e o sensor é de fácil substituição devido
a disponibilidade imediata do termistor. Ele usou um sensor Thermometrics GM102
conforme KATZ e SHAUGHNESSY [16] e LABARBERA e VOGEL [17].
MOORE [14] escolheu usar a equação de três termos de Steinhart-Hart da Equa-
ção 2.3 para analisar o seu termistor.
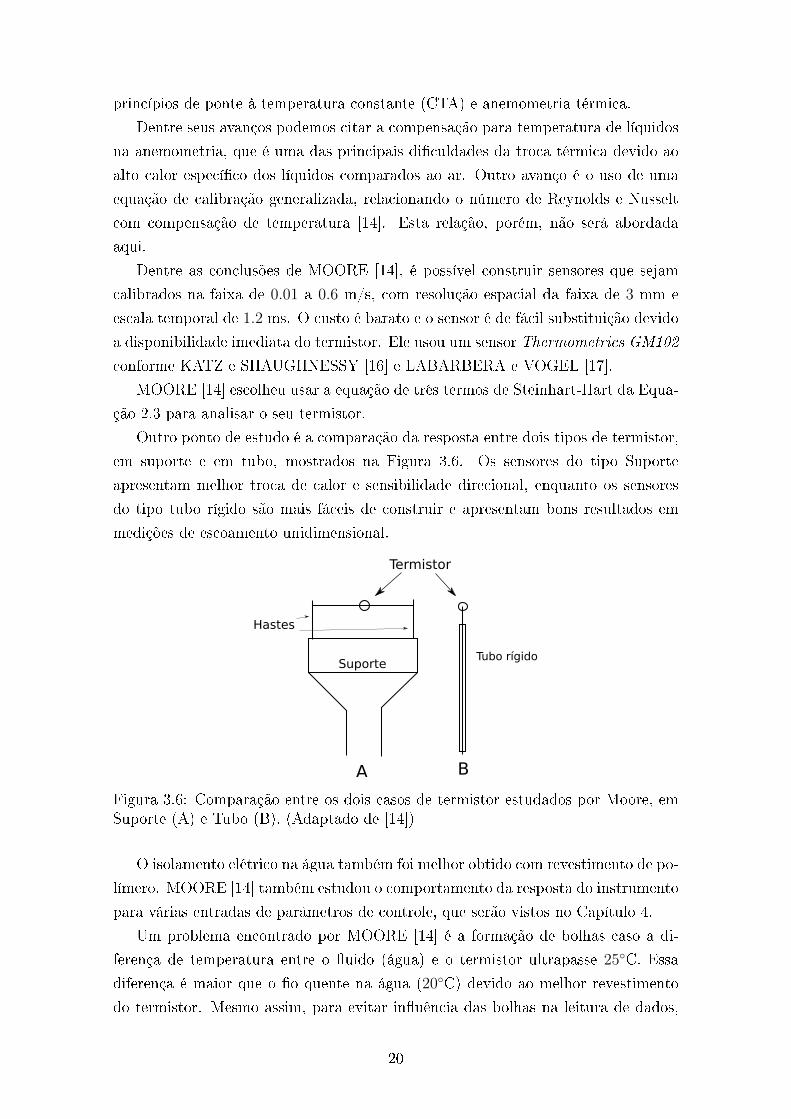
Outro ponto de estudo é a comparação da resposta entre dois tipos de termistor,
em suporte e em tubo, mostrados na Figura 3.6. Os sensores do tipo Suporte
apresentam melhor troca de calor e sensibilidade direcional, enquanto os sensores
do tipo tubo rígido são mais fáceis de construir e apresentam bons resultados em
medições de escoamento unidimensional.
Termistor
Tubo rígidoSuporte
Hastes
A B
Figura 3.6: Comparação entre os dois casos de termistor estudados por Moore, emSuporte (A) e Tubo (B). (Adaptado de [14])
O isolamento elétrico na água também foi melhor obtido com revestimento de po-
límero. MOORE [14] também estudou o comportamento da resposta do instrumento
para várias entradas de parâmetros de controle, que serão vistos no Capítulo 4.
Um problema encontrado por MOORE [14] é a formação de bolhas caso a di-
ferença de temperatura entre o uido (água) e o termistor ultrapasse 25C. Essa
diferença é maior que o o quente na água (20C) devido ao melhor revestimento
do termistor. Mesmo assim, para evitar inuência das bolhas na leitura de dados,
20

é essencial operar em faixas de temperatura próximas da água e usar o mecanismo
de compensação de temperatura.
Com relação à malha de controle para resposta do termistor, MOORE [14] de-
senvolveu um trabalho que será muito similar ao abordado aqui. Ambos os trabalhos
apresentam introdução de uma voltagem oset na malha de controle e um amplica-
dor operacional de ganho de sensibilidade. O aprofundamento da inuência desses
parâmetros será discutido no Capítulo 4. O desenho esquemático do circuito de
MOORE [14] está na Figura 3.7.
Figura 3.7: Circuito de malha de controle usado no trabalho de MOORE com per-turbação de onda quadrada. (Reprodução de [14])
MOORE [14] escolheu que a ponte de Wheatstone deve uir corrente para uma
voltagem −V de um transistor e não para o terra comum, diferente deste trabalho.
Isso se deve pois os líquidos requerem maior tensão para que a troca térmica seja
suciente devido ao maior calor especíco dos líquidos convencionais, como a água,
em relação ao ar. Além disso, existe uma compensação de temperatura na malha,
visto que MOORE [14] desenvolveu seu projeto para líquidos.
MOORE [14] também analisou o efeito do sampling na aquisição de dados. Seu
trabalho comenta que para uma frequência de análise de 10 kHz, precisamos de uma
captura de no mínimo 20 000 s−1. Esse tópico voltará a ser abordado no Capítulo 4
e no Capítulo 5.
A calibração de MOORE [14] é feita em tomada de dados de forma estática,
com velocidade conhecida, e dinâmica, através de um impulso de perturbação de
onda quadrada no sistema. A Figura 3.7 mostra um esquema para introdução de
uma perturbação de onda quadrada no circuito da ponte. O mesmo será feito neste
trabalho. A resposta ao degrau é similar a apresentada no Capítulo 5.
A natureza semicondutora do termistor é uma fonte de ruído [14] e a malha de
controle de temperatura constante é um fator para aumentar esse ruído. Também é
21

visto que circuitos com resposta mais rápida tendem a ter ruído, que pode ser mini-
mizado com um ltro do tipo passa-baixa. Isso também foi analisado por BRUUN
[9]
Os resultados de MOORE [14] para a calibração se mostraram consistentes e sua
curva de calibração foi encontrada por ajuste dos dados comparando-se um modelo
de Lei de King generalizada com curvas logarítmicas.
3.5 Obtenção de parâmetros ótimos por análise grá-
ca
Conforme MOORE [14], BRUUN [9] e ainda JØRGENSEN [15], os ajustes para
se obter a melhor resposta ao degrau podem ser encontrados gracamente ao se
introduzir uma perturbação do tipo degrau no sensor. A Figura 3.8 apresenta uma
resposta típica ao degrau de um sistema de segunda ordem.
Tempo
Leit
ura
do S
enso
r
h 0.97h
0.15h
Figura 3.8: Ajuste ótimo da resposta ao degrau para um anemômetro. (Adaptadode [14])
MOORE [14] encontrou por meio de FREYMUTH [18] que na situação ótima a
relação entre a altura do primeiro vale deve ser em torno de 15% do primeiro pico.
Para esta situação, a frequência de corte do sensor é dada por fc = 1/tX , em que
tX é a distância entre o degrau e o primeiro vale. MOORE [14] continua dizendo
que a maioria dos anemômetros CTA são ajustados dessa forma. Erros de regime
permanente do circuito são tratados pelo próprio processo de calibração. Ganhos
maiores no amplicador da malha também proporcionam velocidade mais rápida
para o sensor.
22
Capítulo 4
Descrição do Instrumento
Neste capítulo será apresentado o instrumento projetado com base nos fundamentos
teóricos do Capítulo 2 e na revisão bibliográca apresentada no Capítulo 3.
4.1 Caracterização do Termistor
O termistor usado no projeto foi o Thermistor Omega Precision 44004 [19], com
resistência de 2252 Ω a 25 C, com variação de ± 0.2 C. Sua temperatura máxima
de operação é de 150 C. O fabricante informa uma constante de tempo de troca
térmica igual a 1 s no óleo e 10 s no ar, e uma constante de dissipação térmica igual
a 8 mW/C no óleo e 1 mW/C em ar parado. A foto do sensor termistor está na
Figura 4.1.
Figura 4.1: Sensor termistor utilizado nas medições, com régua milimetrada.
As constantes de Steinhart-Hart das Equações 2.3 e 2.4 dadas pelo fabricante
[19] referentes ao termistor são apresentadas a seguir na Tabela 4.1. Lembrando que
na equação deve ser usada a temperatura em unidades absolutas.
23
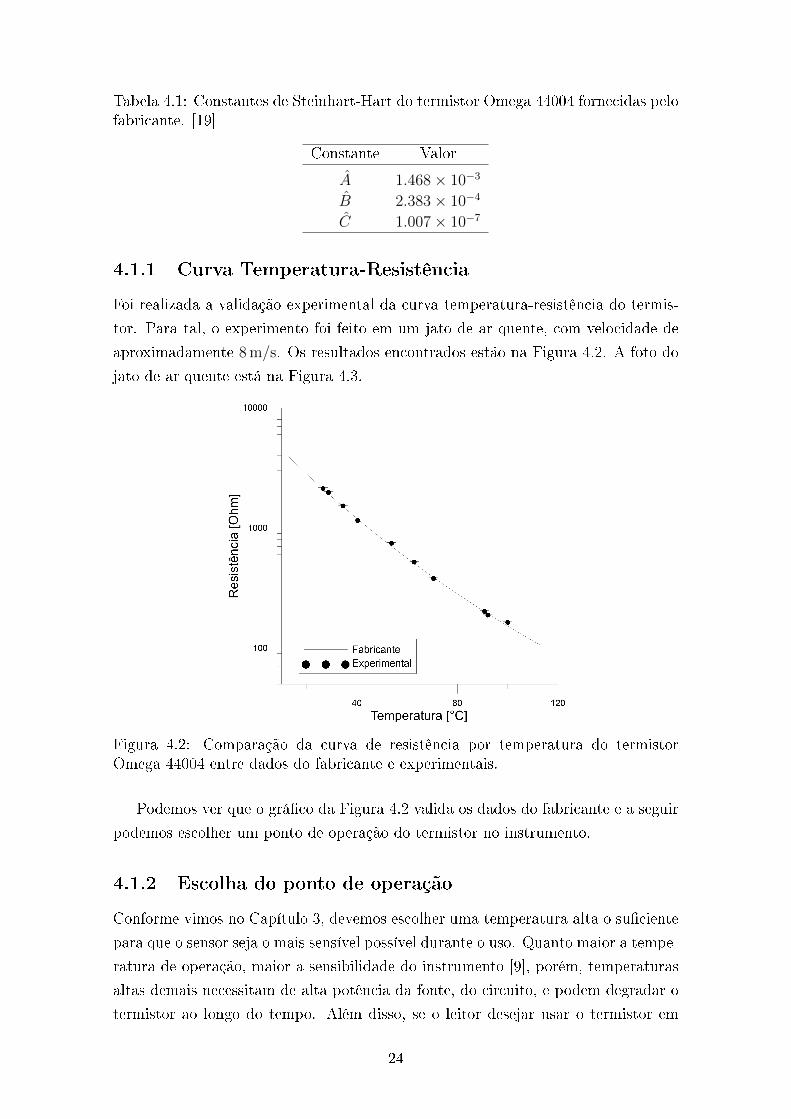
Tabela 4.1: Constantes de Steinhart-Hart do termistor Omega 44004 fornecidas pelofabricante. [19]
Constante Valor
A 1.468× 10−3
B 2.383× 10−4
C 1.007× 10−7
4.1.1 Curva Temperatura-Resistência
Foi realizada a validação experimental da curva temperatura-resistência do termis-
tor. Para tal, o experimento foi feito em um jato de ar quente, com velocidade de
aproximadamente 8 m/s. Os resultados encontrados estão na Figura 4.2. A foto do
jato de ar quente está na Figura 4.3.
Figura 4.2: Comparação da curva de resistência por temperatura do termistorOmega 44004 entre dados do fabricante e experimentais.
Podemos ver que o gráco da Figura 4.2 valida os dados do fabricante e a seguir
podemos escolher um ponto de operação do termistor no instrumento.
4.1.2 Escolha do ponto de operação
Conforme vimos no Capítulo 3, devemos escolher uma temperatura alta o suciente
para que o sensor seja o mais sensível possível durante o uso. Quanto maior a tempe-
ratura de operação, maior a sensibilidade do instrumento [9], porém, temperaturas
altas demais necessitam de alta potência da fonte, do circuito, e podem degradar o
termistor ao longo do tempo. Além disso, se o leitor desejar usar o termistor em
24
Figura 4.3: Jato de Ar Quente utilizado nas medições para calibração térmica.
outros meios, deve car atento para não haver a formação de bolhas devido à alta
temperatura [14].
O ponto de operação do circuito foi escolhido como sendo de 90 C (363 K), ou
seja, possuindo resistência de 206 Ω± 1 Ω no ponto de operação. É alta o suciente
para grande sensibilidade, abaixo da temperatura máxima recomendada pelo fabri-
cante (150 C), e está abaixo de 100 C para um manuseio seguro. Esse valor é o
escolhido no projeto e será levado em consideração nas próximas seções e capítulos.
Vale lembrar que esse ponto de operação será usado em medições no ar.
4.2 O Instrumento
O circuito proposto para o projeto é um anemômetro de temperatura constante
(CTA), utilizando um termistor aquecido como sensor, e alimentado por uma malha
de controle que forneça condições de operação e de respostas adequadas.
O circuito é composto de três partes, brevemente descritas a seguir:
• Ponte de Wheatstone do sensor, onde está conectado o termistor e a parte
principal de medição;
• Malha de controle de realimentação, que fornece a lógica de funcionamento e
ajuste para manter as condições desejadas;
• Fonte de alimentação, para fornecer a energia limpa para o funcionamento dos
componentes e de potência mínima necessária para o instrumento.
As seções a seguir descrevem cada uma das partes da composição do instrumento,
com esquemas de circuito. Um esquema completo nal, com todos os valores já
escolhidos como ótimos, está no Apêndice A, na Figura A.1. A foto do circuito nal
utilizado no instrumento está na Figura 4.4.
25
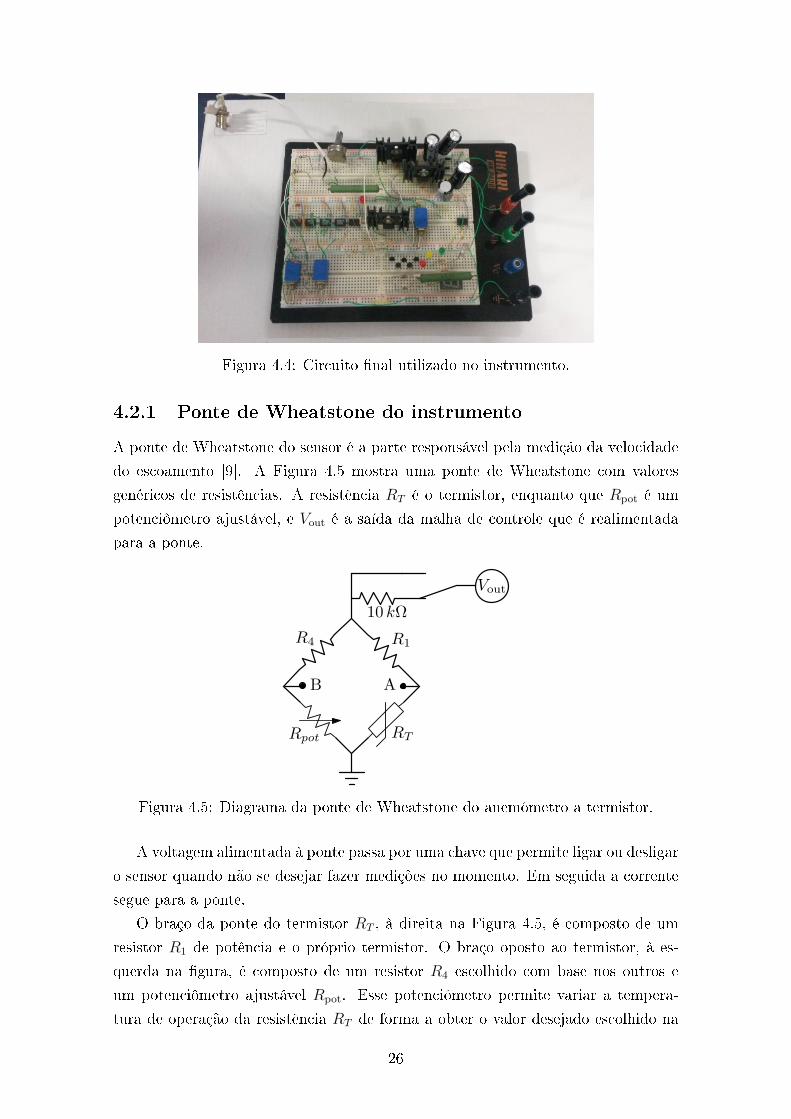
Figura 4.4: Circuito nal utilizado no instrumento.
4.2.1 Ponte de Wheatstone do instrumento
A ponte de Wheatstone do sensor é a parte responsável pela medição da velocidade
do escoamento [9]. A Figura 4.5 mostra uma ponte de Wheatstone com valores
genéricos de resistências. A resistência RT é o termistor, enquanto que Rpot é um
potenciômetro ajustável, e Vout é a saída da malha de controle que é realimentada
para a ponte.
Figura 4.5: Diagrama da ponte de Wheatstone do anemômetro a termistor.
A voltagem alimentada à ponte passa por uma chave que permite ligar ou desligar
o sensor quando não se desejar fazer medições no momento. Em seguida a corrente
segue para a ponte.
O braço da ponte do termistor RT , à direita na Figura 4.5, é composto de um
resistor R1 de potência e o próprio termistor. O braço oposto ao termistor, à es-
querda na gura, é composto de um resistor R4 escolhido com base nos outros e
um potenciômetro ajustável Rpot. Esse potenciômetro permite variar a tempera-
tura de operação da resistência RT de forma a obter o valor desejado escolhido na
26

subseção 4.1.2.
Os pontos A e B da Figura 4.5 são conectados à malha de controle do instru-
mento, que será apresentada a seguir na subseção 4.2.2. A corrente então, após
passar pela ponte do instrumento, segue para um terra comum.
Como dito, os valores das resistências devem ser escolhidos com base no ponto
de operação. Esse ponto, escolhido na subseção 4.1.2, é de 90 C (363 K), com
resistência de 206 Ω. Conforme os fundamentos da seção 2.4, as resistências foram
escolhidas e estão na Figura 4.6.
Figura 4.6: Ponte de Wheatstone com as resistências escolhidas.
A entrada da ponte de Wheatstone do instrumento também tem uma chave
seletora para interromper a corrente, quando se desejar parar as medições, usando
um resistor de 10 kΩ.
Considerações adicionais sobre a ponte, otimização e sensibilidade
Conforme vimos no Capítulo 3 em [9] e [15], a razão entre os braços da ponte
deve permanecer entre ×1 vez e ×20 vezes. Razões de ponte maiores que essa
introduzem ruído e dicultam a leitura, porém razões muito baixas requerem alta
potência da fonte de alimentação e reduzem a eciência do instrumento. Então,
a razão escolhida foi de ×10 vezes, para isso, como a resistência de operação é de
206 Ω, o potenciômetro é ajustado para 2060 Ω.
Seguindo o que foi visto [15], a resistência no braço da ponte do termistor deve
ser o mais baixo possível para que a potência fornecida seja otimizada no termis-
tor, mas não deve ser baixa demais para não impactar a sensibilidade da medição.
A resistência escolhida foi um resistor de potência de 47 Ω. Pela Equação 2.8, a
resistência do braço do potenciômetro é de 470 Ω, que está mostrado na Figura 4.6.
A razão entre as resistências no braço da ponte do termistor está sujeita a uma
relação de sensibilidade versus mensurabilidade, ou seja, a condição da ponte não
está na máxima sensibilidade, mas possui boa mensurabilidade. A máxima sensi-
27
bilidade ocorre quando R1/RT está próximo de 1. Uma sensibilidade muito alta
pode levar à saturação na medição e impossibilidade de leitura, por isso, essa razão
encontra-se diferente de 1. Para uma variedade de anemômetros a o quente [8] [9],
essa razão pode ser da ordem de 10, enquanto que para o sensor proposto a razão
escolhida é de 1/5. Isso se dá pelas condições de potência elétrica de alimentação
do instrumento e condição de saturação nos testes, além do fato da resistência do
termistor ser bem maior que o o quente.
Na situação de maior sensibilidade, a faixa de valores medida na saída do instru-
mento está em torno de 9 a 12V , e há um problema de saturação dos componentes
do circuito, porém funciona bem para baixas velocidades. Na média sensibilidade,
a faixa de valores de saída é em torno de 8 a 11V , uma boa faixa de medição e que
não satura, porém é menos sensível para baixas velocidades.
4.2.2 Malha de controle do instrumento
O controle utilizado no instrumento é exposto nesta subseção. Conforme proposto
anteriormente no Capítulo 3 em [9] e [14], a malha de controle busca manter a
operação do sensor em temperatura constante. Para isso, compara os valores de
ambos os braços da ponte de Wheatstone do sensor e fornece uma alimentação
adequada para corrigir qualquer variação de forma rápida.
A Figura 4.7 apresenta a malha de controle utilizada no instrumento. Os pontos
A e B de entrada da malha são conectados à ponte de Wheatstone apresentada na
subseção 4.2.1, e possuem voltagens associadas VA e VB respectivamente.
Figura 4.7: Malha de controle utilizada no instrumento.
A malha funciona da seguinte forma: as voltagens VA e VB são comparadas e
passam por um ltro diferencial composto por um par de resistoresRf e um capacitor
cerâmico Cf , com o objetivo de remover utuações de frequências muito altas, vistas
28
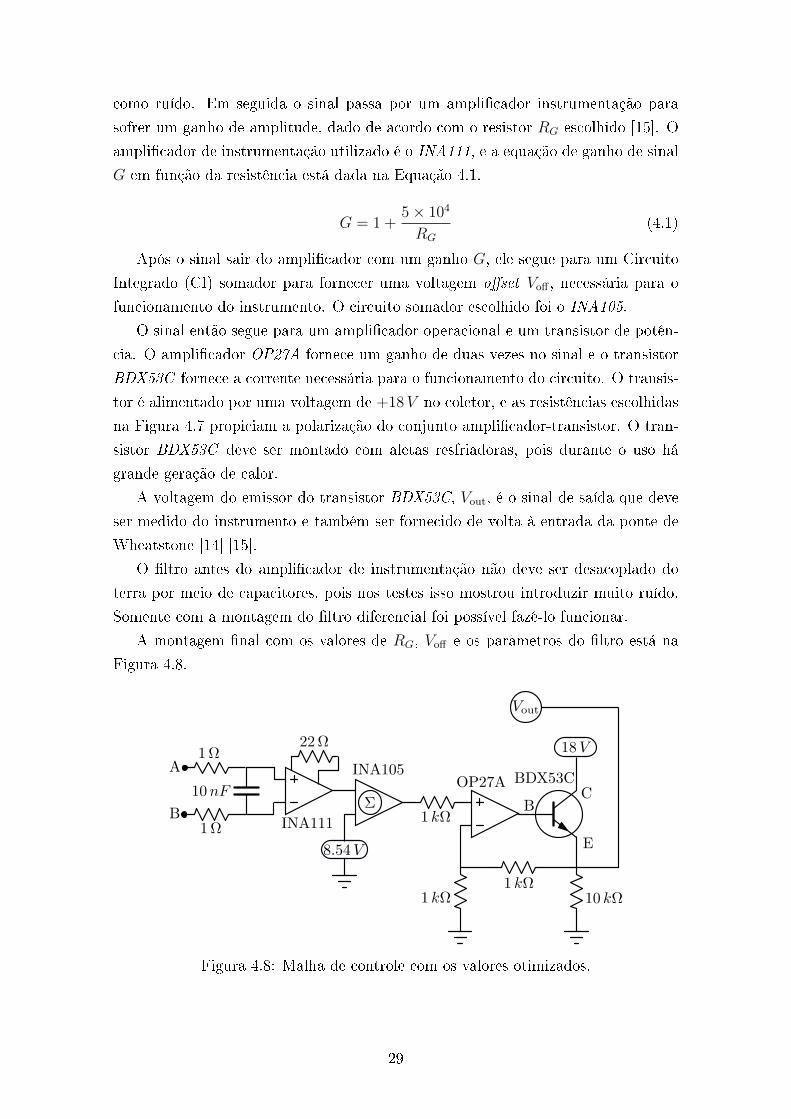
como ruído. Em seguida o sinal passa por um amplicador instrumentação para
sofrer um ganho de amplitude, dado de acordo com o resistor RG escolhido [15]. O
amplicador de instrumentação utilizado é o INA111, e a equação de ganho de sinal
G em função da resistência está dada na Equação 4.1.
G = 1 +5× 104
RG
(4.1)
Após o sinal sair do amplicador com um ganho G, ele segue para um Circuito
Integrado (CI) somador para fornecer uma voltagem oset Voff , necessária para o
funcionamento do instrumento. O circuito somador escolhido foi o INA105.
O sinal então segue para um amplicador operacional e um transistor de potên-
cia. O amplicador OP27A fornece um ganho de duas vezes no sinal e o transistor
BDX53C fornece a corrente necessária para o funcionamento do circuito. O transis-
tor é alimentado por uma voltagem de +18V no coletor, e as resistências escolhidas
na Figura 4.7 propiciam a polarização do conjunto amplicador-transistor. O tran-
sistor BDX53C deve ser montado com aletas resfriadoras, pois durante o uso há
grande geração de calor.
A voltagem do emissor do transistor BDX53C, Vout, é o sinal de saída que deve
ser medido do instrumento e também ser fornecido de volta à entrada da ponte de
Wheatstone [14] [15].
O ltro antes do amplicador de instrumentação não deve ser desacoplado do
terra por meio de capacitores, pois nos testes isso mostrou introduzir muito ruído.
Somente com a montagem do ltro diferencial foi possível fazê-lo funcionar.
A montagem nal com os valores de RG, Voff e os parâmetros do ltro está na
Figura 4.8.
Figura 4.8: Malha de controle com os valores otimizados.
29
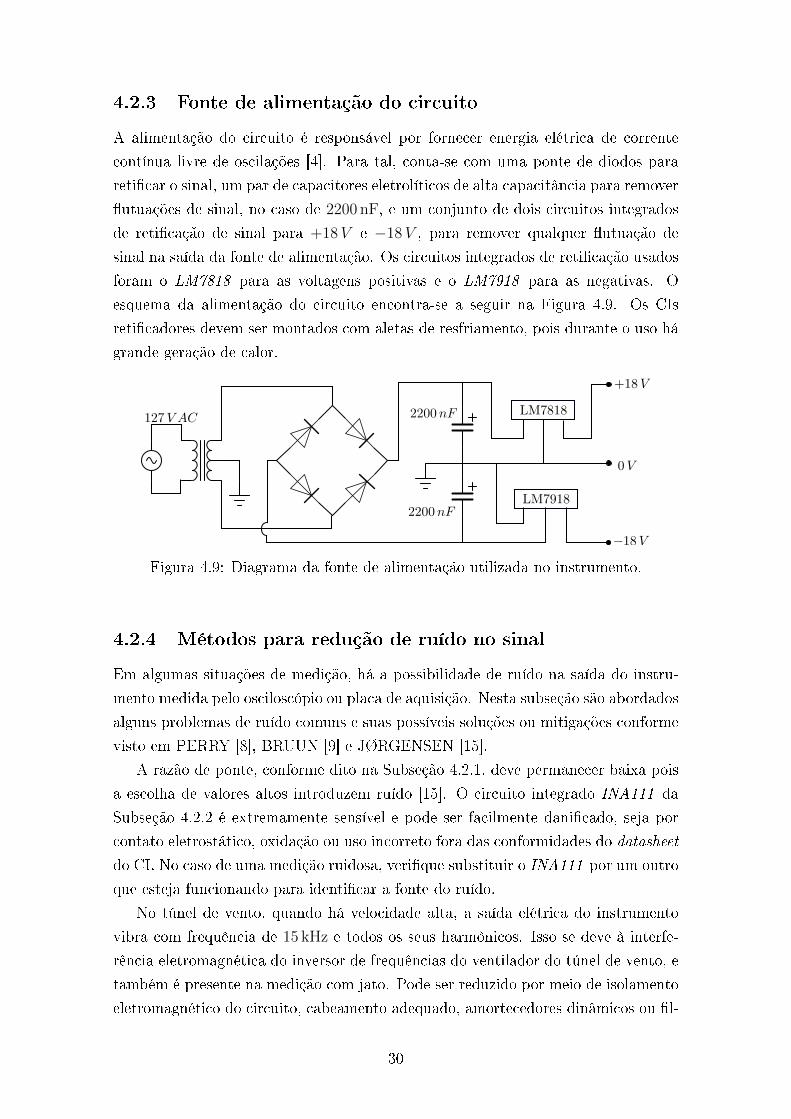
4.2.3 Fonte de alimentação do circuito
A alimentação do circuito é responsável por fornecer energia elétrica de corrente
contínua livre de oscilações [4]. Para tal, conta-se com uma ponte de diodos para
reticar o sinal, um par de capacitores eletrolíticos de alta capacitância para remover
utuações de sinal, no caso de 2200 nF, e um conjunto de dois circuitos integrados
de reticação de sinal para +18V e −18V , para remover qualquer utuação de
sinal na saída da fonte de alimentação. Os circuitos integrados de reticação usados
foram o LM7818 para as voltagens positivas e o LM7918 para as negativas. O
esquema da alimentação do circuito encontra-se a seguir na Figura 4.9. Os CIs
reticadores devem ser montados com aletas de resfriamento, pois durante o uso há
grande geração de calor.
Figura 4.9: Diagrama da fonte de alimentação utilizada no instrumento.
4.2.4 Métodos para redução de ruído no sinal
Em algumas situações de medição, há a possibilidade de ruído na saída do instru-
mento medida pelo osciloscópio ou placa de aquisição. Nesta subseção são abordados
alguns problemas de ruído comuns e suas possíveis soluções ou mitigações conforme
visto em PERRY [8], BRUUN [9] e JØRGENSEN [15].
A razão de ponte, conforme dito na Subseção 4.2.1, deve permanecer baixa pois
a escolha de valores altos introduzem ruído [15]. O circuito integrado INA111 da
Subseção 4.2.2 é extremamente sensível e pode ser facilmente danicado, seja por
contato eletrostático, oxidação ou uso incorreto fora das conformidades do datasheet
do CI. No caso de uma medição ruidosa, verique substituir o INA111 por um outro
que esteja funcionando para identicar a fonte do ruído.
No túnel de vento, quando há velocidade alta, a saída elétrica do instrumento
vibra com frequência de 15 kHz e todos os seus harmônicos. Isso se deve à interfe-
rência eletromagnética do inversor de frequências do ventilador do túnel de vento, e
também é presente na medição com jato. Pode ser reduzido por meio de isolamento
eletromagnético do circuito, cabeamento adequado, amortecedores dinâmicos ou l-
30
tragem do sinal [9]. Atente pois a ltragem do sinal pode gerar atrasos de fase na
medição.
Neste trabalho, o cabeamento foi suciente para reduzir esse problema. A cone-
xão entre o termistor e o circuito deve sempre ser feita por cabos coaxiais ou por
par de cabos trançados (twisted pair). Os conectores podem ser aparafusados ou
do tipo BNC, e deve-se ter cuidado extra em qualquer solda para que não haja mal
contato gerador de ruído.
Verique sempre a existência de ground loops, ou correntes de terra. São uma
fonte comum de ruído que surge quando pontos diferentes de um terra comum não
estão conectados à mesma voltagem. Isso induz a formação de correntes parasitas
no circuito que comprometem as medições.
Deve-se sempre buscar uma fonte de alimentação de tomada com baixo ruído
e pouca interferência de equipamentos próximos. Verique também o estado dos
reticadores de tensão LM7818 e LM7918, pois o ruido de reticação (ripple) pode
ser uma das causas de ruído de medição. Se tal ruído apresentar frequências de
60 Hz alternada e harmônicos (ou 50 Hz onde a distribuição de eletricidade se apli-
car), verique a fonte reticadora, substitua os CIs LM7818 e LM7918 por outros
que estejam funcionando para tentar resolver o problema. Se possível, utilize uma
tomada isolada de motores elétricos e outros equipamentos que geram ruido na rede.
Quando isso não for possível, utilize baterias como fonte de alimentação. Três ba-
terias de 9V podem ser sucientes, duas para a banda de voltagem positiva e uma
para a negativa.
4.3 Escolha dos parâmetros do instrumento
Conforme o Capítulo 3, devemos seguir alguns procedimentos para melhor determi-
nar os parâmetros do instrumento de forma que seja adequado às condições desejadas
[8], [9]. O primeiro parâmetro já foi escolhido na subseção 4.1.2, que é a tempera-
tura de operação do sensor. Além disso os parâmetros da ponte de Wheatstone, que
determinam a resposta estática, foram também escolhidos na subseção 4.2.1.
Restam encontrar os parâmetros dinâmicos do instrumento, dentre os principais
podemos citar ganho G do amplicador de instrumentação, voltagem oset Voff no
somador e o ltro diferencial antes do amplicador de instrumentação, caracterizado
por Rf e Cf .
4.3.1 Escolha dos parâmetros dinâmicos
Para escolher os parâmetros dinâmicos do circuito podemos tomar duas possibilida-
des. A primeira é analítica e envolveria analisar os parâmetros de função de transfe-
31
rência do circuito, ou usar equações de estado, dependendo do número de variáveis
importantes. Para isso deveríamos considerar as constantes de tempo de todos os
componentes do circuito, incluindo amplicadores, ltros, e o próprio termistor. Pos-
teriormente seria feia uma análise root-locus para avaliar o comportamento. Este
método não será utilizado.
A segunda forma é seguir a metodologia do Capítulo 3, Seção 3.5, e analisar a
resposta gráca do circuito à calibração experimental para determinar o comporta-
mento do conjunto [14], [15]. Como há muitos componentes atuando simultanea-
mente, essa forma é mais simples e rápida. Para isso, faremos calibrações e respostas
a sinais de perturbações do sistema.
Os principais parâmetros que devem ser escolhidos são o ganho G do ampli-
cador, ou resistência RG de ganho, a voltagem Voff de oset somada na malha de
controle, e os parâmetros Rf e Cf do ltro diferencial pré-amplicação.
4.3.2 Inuência dos parâmetros dinâmicos
Conforme será mostrado no Capítulo 5, os resultados dinâmicos dependem dos três
parâmetros mencionados na Subseção 4.3.1, ganho G ou resistência RG, a voltagem
Voff , e os parâmetros Rf e Cf do ltro. Ao longo do desenvolvimento deste trabalho,
as inuências dos parâmetros na resposta foram encontradas e são brevemente men-
cionados a seguir. O comportamento desses parâmetros foi corretamente previsto
por PERRY [8] na Figura 3.3.
A variação de G, ou RG, afeta diretamente a frequência natural de oscilação
do sistema ωn. Conforme o valor de RG cresce, e o ganho G diminui, a frequência
natural de oscilação é reduzida. Isso implica que valores menores de RG, e maiores
de G, levam a um sistema com resposta mais rápida.
A variação de Voff afeta diretamente a razão de amortecimento do sistema ζ.
Conforme o valor de Voff cresce, a razão de amortecimento aumenta. Isso implica
que sistemas com Voff alto possuem baixa oscilação, enquanto sistemas com Voff
baixo possuem oscilação elevada.
Os parâmetros do ltro também geram atraso na resposta do instrumento. Esse
atraso de fase se dá principalmente em altas frequências, pois o ltro é do tipo
passa-baixa (low-pass) [4]. Devemos reduzir a constante de tempo do ltro τf e
aumentar a frequência de corte fc para acelerar a resposta do ltro. A Equação 4.2
e a Equação 4.3 mostram as relações citadas para o ltro diferencial.
τf = Rf · 2Cf (4.2)
fc =1
2π · τf(4.3)
32

O aumento de fc acelera a resposta do circuito e reduz o atraso de fase nas altas
frequências, então varia-se o ltro para obter o ponto de mais rápida resposta que
ainda seja estável.
Um ponto importante que foi notado é que a variação dos parâmetros de resposta
dinâmica não afeta a resposta estática permanente do sistema, isto é, em funciona-
mento normal do instrumento, a resposta estática depende somente dos parâmetros
da ponte. A variação do ganho, oset ou ltro afeta somente a resposta transitória
do instrumento.
4.4 Procedimentos de calibração
A calibração do sensor, conforme o Capítulo 3, se dá em duas grandes fases impor-
tantes, sendo a segunda dividida em mais duas:
• Calibração estática;
• Calibração dinâmica;
Resposta ao degrau
Resposta à senoide
As motivações das calibrações são discutidas nas subseções a seguir, e os resultados
obtidos nas calibrações serão apresentados no Capítulo 5. Todas as calibrações,
exceto a calibração térmica no jato descrita na Subseção 4.1.1, são feitas em túnel
de vento. O osciloscópio utilizado nas medições está na Figura 4.10.
Figura 4.10: Osciloscópio padrão utilizado nas medições de calibração.
4.4.1 Calibração estática
O objetivo da calibração estática é formar uma correlação entre voltagem na saída
do sensor e velocidade a ser descoberta. Como a relação temperatura-resistência
33
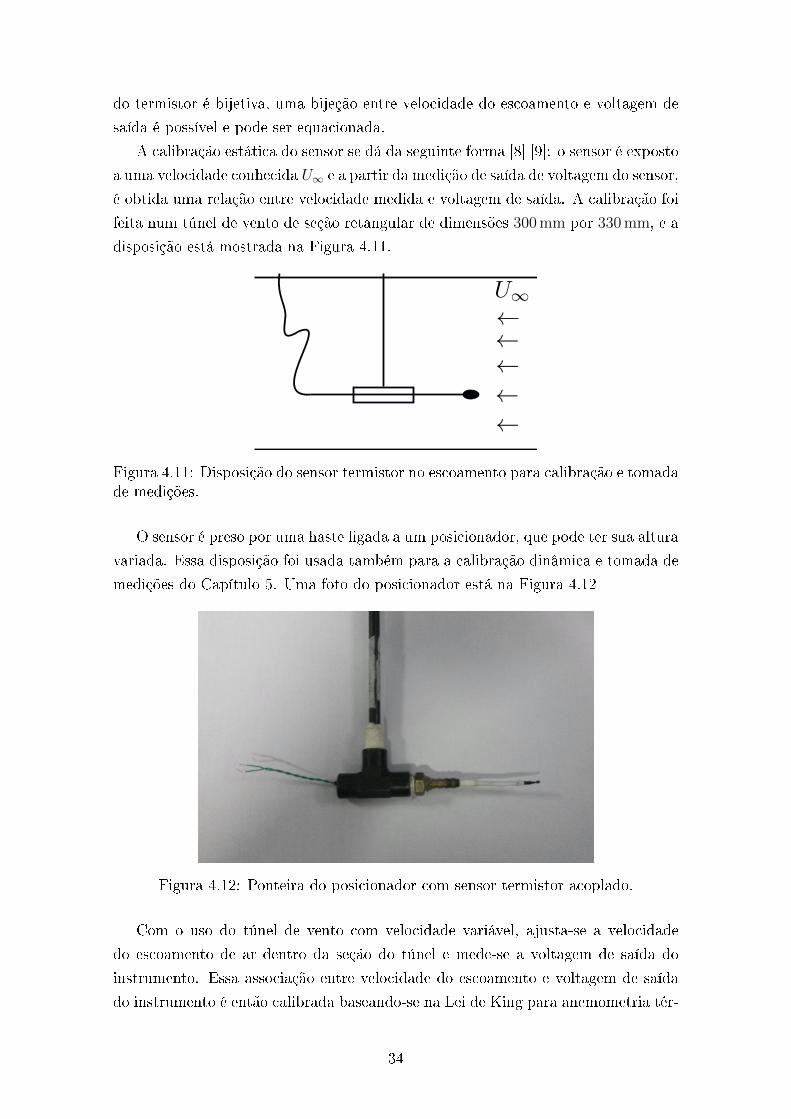
do termistor é bijetiva, uma bijeção entre velocidade do escoamento e voltagem de
saída é possível e pode ser equacionada.
A calibração estática do sensor se dá da seguinte forma [8] [9]: o sensor é exposto
a uma velocidade conhecida U∞ e a partir da medição de saída de voltagem do sensor,
é obtida uma relação entre velocidade medida e voltagem de saída. A calibração foi
feita num túnel de vento de seção retangular de dimensões 300 mm por 330 mm, e a
disposição está mostrada na Figura 4.11.
Figura 4.11: Disposição do sensor termistor no escoamento para calibração e tomadade medições.
O sensor é preso por uma haste ligada a um posicionador, que pode ter sua altura
variada. Essa disposição foi usada também para a calibração dinâmica e tomada de
medições do Capítulo 5. Uma foto do posicionador está na Figura 4.12
Figura 4.12: Ponteira do posicionador com sensor termistor acoplado.
Com o uso do túnel de vento com velocidade variável, ajusta-se a velocidade
do escoamento de ar dentro da seção do túnel e mede-se a voltagem de saída do
instrumento. Essa associação entre velocidade do escoamento e voltagem de saída
do instrumento é então calibrada baseando-se na Lei de King para anemometria tér-
34
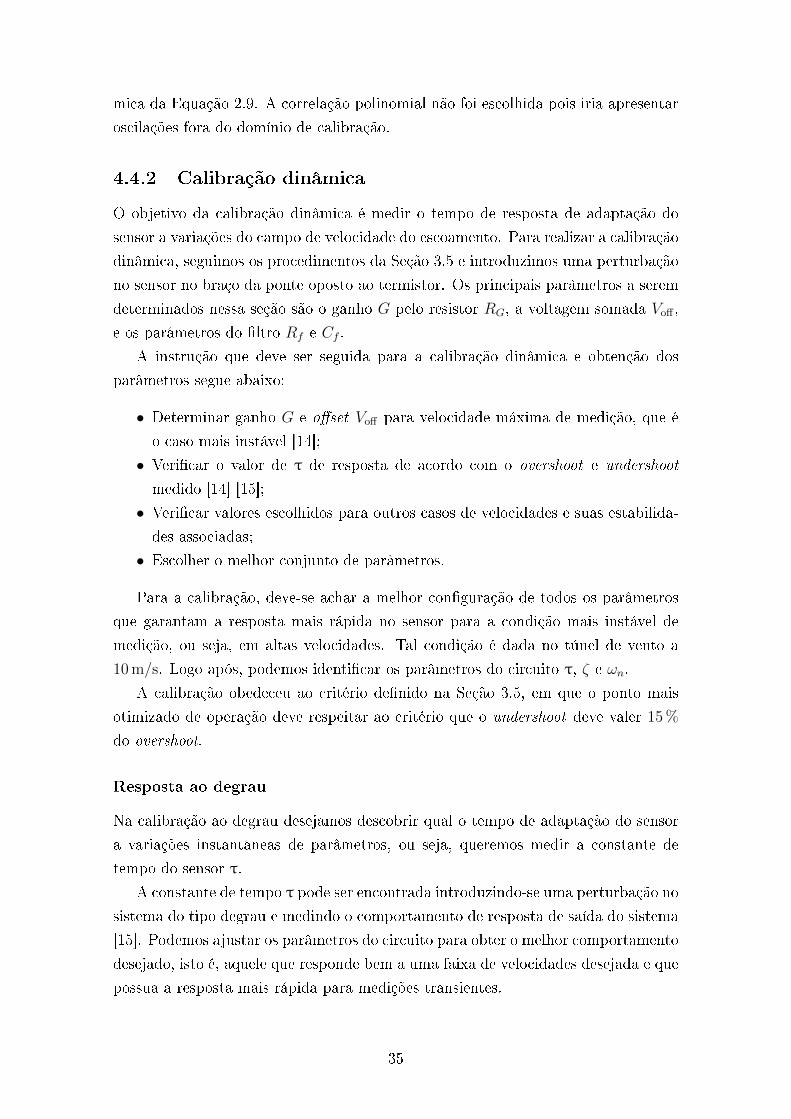
mica da Equação 2.9. A correlação polinomial não foi escolhida pois iria apresentar
oscilações fora do domínio de calibração.
4.4.2 Calibração dinâmica
O objetivo da calibração dinâmica é medir o tempo de resposta de adaptação do
sensor a variações do campo de velocidade do escoamento. Para realizar a calibração
dinâmica, seguimos os procedimentos da Seção 3.5 e introduzimos uma perturbação
no sensor no braço da ponte oposto ao termistor. Os principais parâmetros a serem
determinados nessa seção são o ganho G pelo resistor RG, a voltagem somada Voff ,
e os parâmetros do ltro Rf e Cf .
A instrução que deve ser seguida para a calibração dinâmica e obtenção dos
parâmetros segue abaixo:
• Determinar ganho G e oset Voff para velocidade máxima de medição, que é
o caso mais instável [14];
• Vericar o valor de τ de resposta de acordo com o overshoot e undershoot
medido [14] [15];
• Vericar valores escolhidos para outros casos de velocidades e suas estabilida-
des associadas;
• Escolher o melhor conjunto de parâmetros.
Para a calibração, deve-se achar a melhor conguração de todos os parâmetros
que garantam a resposta mais rápida no sensor para a condição mais instável de
medição, ou seja, em altas velocidades. Tal condição é dada no túnel de vento a
10 m/s. Logo após, podemos identicar os parâmetros do circuito τ, ζ e ωn.
A calibração obedeceu ao critério denido na Seção 3.5, em que o ponto mais
otimizado de operação deve respeitar ao critério que o undershoot deve valer 15 %
do overshoot.
Resposta ao degrau
Na calibração ao degrau desejamos descobrir qual o tempo de adaptação do sensor
a variações instantâneas de parâmetros, ou seja, queremos medir a constante de
tempo do sensor τ.
A constante de tempo τ pode ser encontrada introduzindo-se uma perturbação no
sistema do tipo degrau e medindo o comportamento de resposta de saída do sistema
[15]. Podemos ajustar os parâmetros do circuito para obter o melhor comportamento
desejado, isto é, aquele que responde bem a uma faixa de velocidades desejada e que
possua a resposta mais rápida para medições transientes.
35
A calibração é feita introduzindo-se uma perturbação no braço da ponte de Whe-
atstone oposto ao sensor termistor, e medindo-se a resposta temporal de adaptação
da voltagem de saída de volta ao patamar original. Essa resposta da voltagem de
saída é analisada com o uso de um osciloscópio de rápida amostragem. A Figura 4.13
mostra como é introduzida a perturbação na ponte do instrumento.
Figura 4.13: Aplicação de perturbação na ponte de Wheatstone para o teste degrau.
Um gerador de funções é conectado no braço da ponte do potenciômetro, e a
amplitude da onda está em torno de 50 mV. Entre a ponte e o gerador de funções,
há uma resistência de 940 kΩ. A oscilação introduzida, apesar de baixa, pode ser
medida e usada para caracterizar o instrumento.
Foi escolhido aplicar no braço da ponte oposto ao termistor por motivos de esta-
bilidade, isto é, os parâmetros de realimentação variam menos e o sistema se mostra
mais estável durante a calibração. A aplicação da perturbação no braço da ponte
do termistor não surte efeito no sistema. Se, ao invés disso, aplicasse-se uma per-
turbação na malha de controle da ponte via um somador, o sistema apresentaria
instabilidade devido a diferença entre a voltagem oset e a voltagem da pertur-
bação momentaneamente negativa, que pode levar o sistema a uma instabilidade
permanente, corrigível somente com o desligamento e religamento do instrumento.
Resposta à senoide
No teste de resposta à senoide, ou teste de resposta à frequência, o objetivo é
descobrir como a frequência do sinal pode interferir na amplitude de medição, ou
seja, queremos medir a faixa de atuação do sensor conforme decaimentos em altas
36

frequências, isto é, a frequência de corte do sensor ωC , além das frequências naturais
de oscilação do instrumento.
A calibração à senoide é feita obtendo-se a razão entre a amplitude de saída para
cada frequência e a amplitude medida de referência, nesse caso tomada como uma
condição estática padrão.
O processo de resposta à senoide é similar ao degrau, com uma função seno no
lugar da onda quadrada. O esquema de ligação continua sendo o da Figura 4.13,
porém com onda senoide no lugar da onda quadrada.
A função avaliada na resposta a frequência é a magnitude de respostaM(ω), que
pode ser vista na Equação 2.13.
4.5 Análise de incertezas
A metodologia de propagação de incertezas foi apresentada na Seção 2.7. Dando
continuidade à fórmula de propagação de incertezas, encontramos a incerteza de ca-
libração do instrumento. O procedimento de incertezas deste trabalho seguiu o Guia
Universal de Medição ISO-GUM [10] e o Vocabulário Internacional de Metrologia
ISO-VIM [11].
Relembrando, da Seção 2.7, a Equação 2.15 apresenta a fórmula de propagação
de incertezas:
(σ(F (q1, q2, . . . , qn))
)2=
n∑i=1
(∂F (q1, q2, . . . )
∂qi
)2
·(σ(qi)
)2(2.15, rev)
Para a Equação 2.10 de ajuste da lei de King inversa, usando a fórmula da
Equação 2.15, temos então a seguinte expressão para a incerteza da velocidade na
calibração estática na Equação 4.4.
U∞ =
(E2 − AB
)1/n
(2.10, rev)
σ(U∞) =2E
B · n·(E2 − AB
) 1n−1
· σ(E) (4.4)
A fórmula de propagação de incertezas da Equação 2.15 será aplicada também a
todos os cálculos no trabalho que envolvam medições experimentais com incerteza.
37
Capítulo 5
Resultados
Os resultados experimentais do sensor são expostos neste capítulo. Dentre os testes
realizados podemos citar calibração estática, calibração dinâmica por teste degrau,
calibração dinâmica por resposta à frequência, medição de perl de velocidades
atrás de um corpo cilíndrico, comparação do perl de velocidade com resultados
da literatura, identicação da frequência de emissão de vórtices atrás de um corpo
cilíndrico, e medição do perl de intensidade turbulenta de um escoamento. Os
testes foram feitos num túnel de vento de seção retangular de dimensões 300 mm
por 330 mm no Laboratório de Mecânica da Turbulência, do NIDF-UFRJ mostrado
na Figura 5.1 e Figura 5.2. O cilindro usado nos experimentos possui diâmetro de
22.3 mm.
Figura 5.1: Túnel de vento utilizado nas medições experimentais.
5.1 Calibração Estática
O sensor é muito sensível para baixas velocidades e o objetivo nesta seção é calibrar
a medição de velocidade estática do instrumento.
38
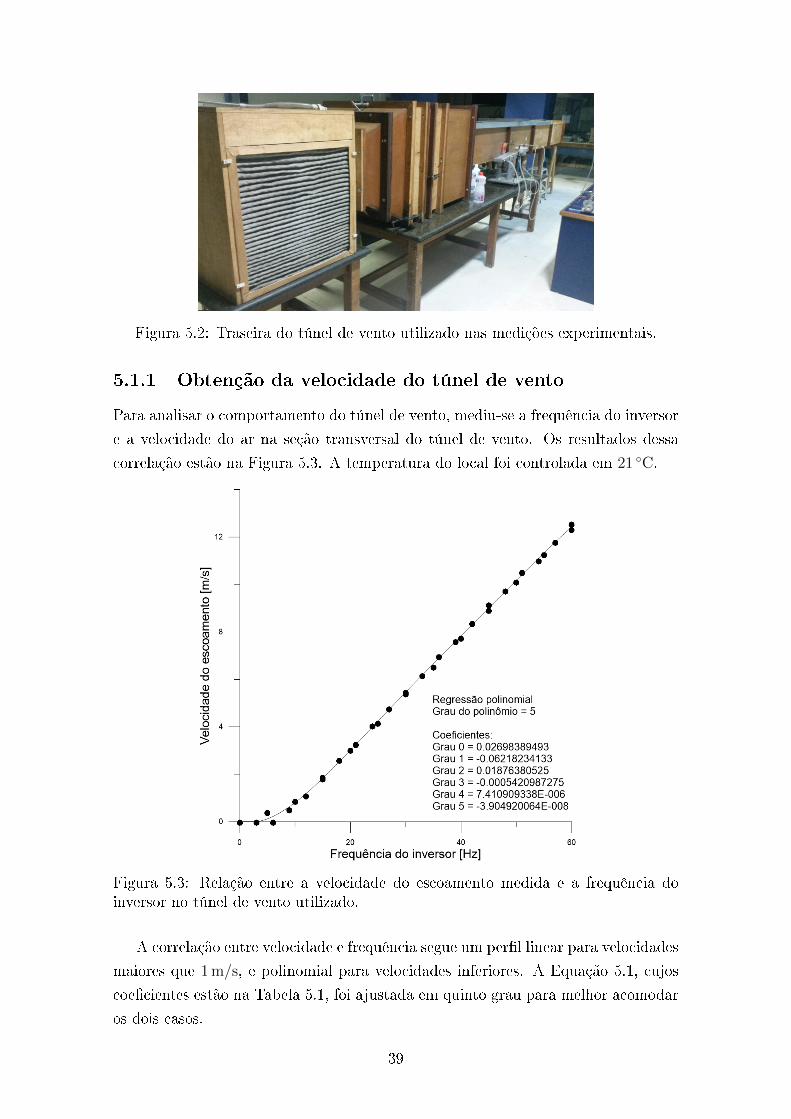
Figura 5.2: Traseira do túnel de vento utilizado nas medições experimentais.
5.1.1 Obtenção da velocidade do túnel de vento
Para analisar o comportamento do túnel de vento, mediu-se a frequência do inversor
e a velocidade do ar na seção transversal do túnel de vento. Os resultados dessa
correlação estão na Figura 5.3. A temperatura do local foi controlada em 21 C.
Figura 5.3: Relação entre a velocidade do escoamento medida e a frequência doinversor no túnel de vento utilizado.
A correlação entre velocidade e frequência segue um perl linear para velocidades
maiores que 1 m/s, e polinomial para velocidades inferiores. A Equação 5.1, cujos
coecientes estão na Tabela 5.1, foi ajustada em quinto grau para melhor acomodar
os dois casos.
39

U∞ = a0 + a1f + a2f2 + a3f
3 + a4f4 + a5f
5 (5.1)
Tabela 5.1: Coecientes do ajuste de velocidade e frequência no túnel de vento.
Coeciente Valora0 2.698× 10−2
a1 −6.218× 10−2
a2 1.876× 10−2
a3 −5.421× 10−4
a4 7.411× 10−6
a5 −3.905× 10−8
5.1.2 Relação de calibração pela Lei de King
Conhecendo-se a velocidade, podemos medir a voltagem de saída para cada veloci-
dade de escoamento e ajustar uma curva que melhor satisfaça os pontos [15]. Para
formular uma relação, usaremos a Lei de King enunciada na Equação 2.9, relem-
brando:
E2 = A+B · U∞n (2.9, rev)
Para encontrar a equação de calibração estática do anemômetro a termistor, foi
realizada a medição da voltagem de saída para várias velocidades. Os resultados
da calibração estática estão expostos no gráco da Figura 5.4, a temperatura do
local foi mantida em 21 C. O teste foi feito em túnel de vento em seção livre e sem
obstáculos.
O ajuste da curva foi feito baseado no modelo proposto pela lei de King. A equa-
ção governante do instrumento com os coecientes está mostrada na Equação 5.2,
em que E2 = Vout2 é o quadrado da voltagem medida no instrumento aplicada
na equação da lei de King, isto é, a voltagem de saída do instrumento, e U∞ é a
velocidade do escoamento.
E2 = 75.5682 + 19.2743 · U∞0.551037 (5.2)
A Equação 5.2 é a primeira caracterização do instrumento aqui apresentada e
com ela podemos fazer medições estáticas de velocidade. A relação inversa da lei de
King está na Equação 5.3, e com ela podemos obter a velocidade U∞ em função do
potencial E medido.
U∞ = 4.6566× 10−3 (E2 − 75.5682)1.81476 (5.3)
40
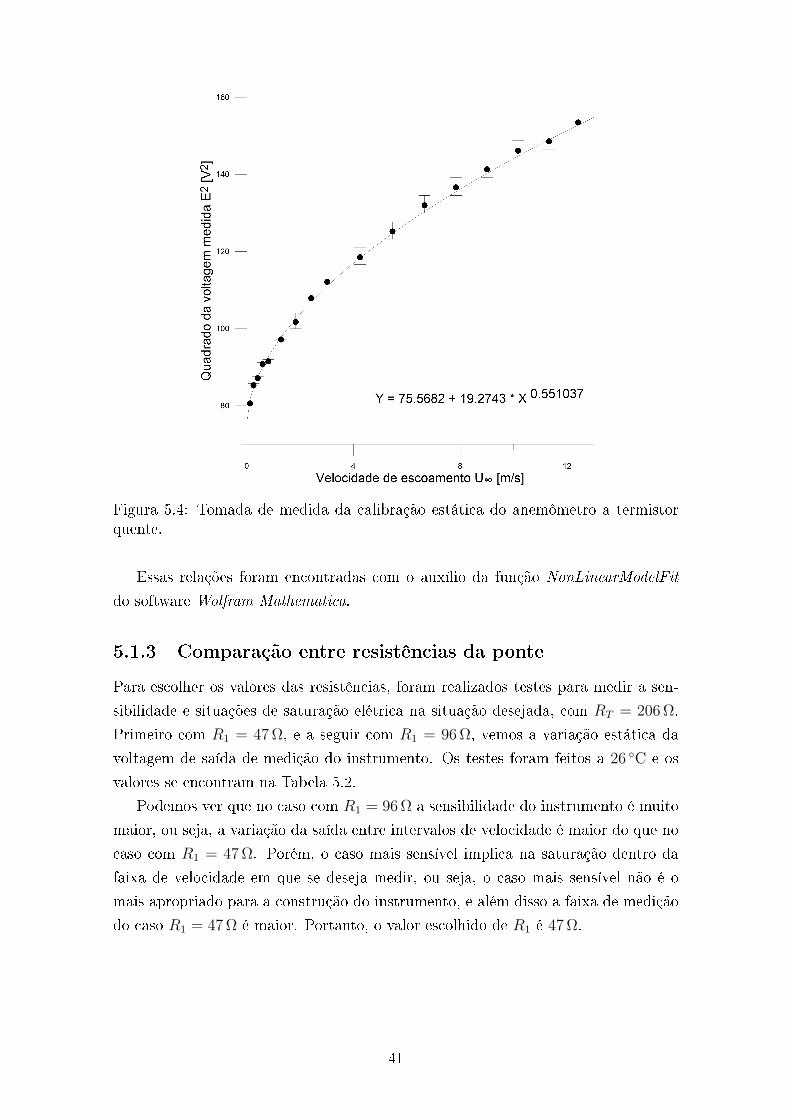
Figura 5.4: Tomada de medida da calibração estática do anemômetro a termistorquente.
Essas relações foram encontradas com o auxílio da função NonLinearModelFit
do software Wolfram Mathematica.
5.1.3 Comparação entre resistências da ponte
Para escolher os valores das resistências, foram realizados testes para medir a sen-
sibilidade e situações de saturação elétrica na situação desejada, com RT = 206 Ω.
Primeiro com R1 = 47 Ω, e a seguir com R1 = 96 Ω, vemos a variação estática da
voltagem de saída de medição do instrumento. Os testes foram feitos a 26 C e os
valores se encontram na Tabela 5.2.
Podemos ver que no caso com R1 = 96 Ω a sensibilidade do instrumento é muito
maior, ou seja, a variação da saída entre intervalos de velocidade é maior do que no
caso com R1 = 47 Ω. Porém, o caso mais sensível implica na saturação dentro da
faixa de velocidade em que se deseja medir, ou seja, o caso mais sensível não é o
mais apropriado para a construção do instrumento, e além disso a faixa de medição
do caso R1 = 47 Ω é maior. Portanto, o valor escolhido de R1 é 47 Ω.
41

Tabela 5.2: Voltagem de saída do instrumento como função da velocidade, paraR1 = 47 Ω e R1 = 96 Ω.
Velocidade [m/s] Voltagem [V]
R1 = 47 Ω
Ar parado 8.400.81 11.235.46 13.0110.17 13.85
R1 = 96 Ω
Ar parado 9.600.81 13.115.46 15.3510.17 16.27 (saturado)
5.2 Calibração Dinâmica Resposta ao Degrau
Nesta seção, escolhemos e justicamos os valores de G e Voff além de Rf e Cf ,
baseados nas análises propostas da Seção 3.5.
5.2.1 Teste de resposta ao degrau
As medições para calibração em resposta ao degrau foram feitas no túnel de vento
com velocidade de U∞ = 9.5 m/s. A temperatura do ambiente foi registrada entre
26.3 C e 26.5 C. e voltagem pico-a-pico da onda quadrada de 1.2 V.
A Tabela 5.3 mostra a comparação de diferentes valores de tempo de resposta τ
para combinações de RG com seus Voff ajustados para a resposta otimizada. O ltro
utilizado teve parâmetros Rf = 1 Ω e Cf = 10 nF. O osciloscópio usado estava em
modo de acoplamento AC, com média de quatro amostragens por medição. Os casos
de aquecimento e resfriamento são análogos, porém no resfriamento a onda quadrada
está em queda e a forma da onda é rebatida simetricamente no eixo horizontal.
Para a situação proposta, a combinação de RG = 22 Ω e Voff = 8.5 V se mostrou
a melhor otimizada para o instrumento. É a combinação que garante a resposta
mais rápida e permanece estável na faixa de medições desejada. O ganho máximo
que pode ser submetido ao sistema antes da instabilidade é de G = 2274 vezes,
conforme dado pela fórmula 4.1.
Podemos ver que quanto maior o ganho G em decorrência da redução de RG,
maior o valor de Voff requerido para equilibrar o sistema no ponto de operação
necessário. Isso também foi previsto por PERRY [8] na Figura 3.3.
Os casos com RG < 22 Ω se mostraram instáveis na condição escolhida de esco-
amento com velocidade de U∞ = 9.5 m/s, pois requerem altos valores de Voff para
amortecer a resposta. Esses parâmetros poderiam ser escolhidos caso se desejasse
calibrar em velocidades inferiores, o que resultaria numa resposta ainda mais rápida.
Porém, pelo método de calibração proposto, calibramos para a situação mais instá-
42
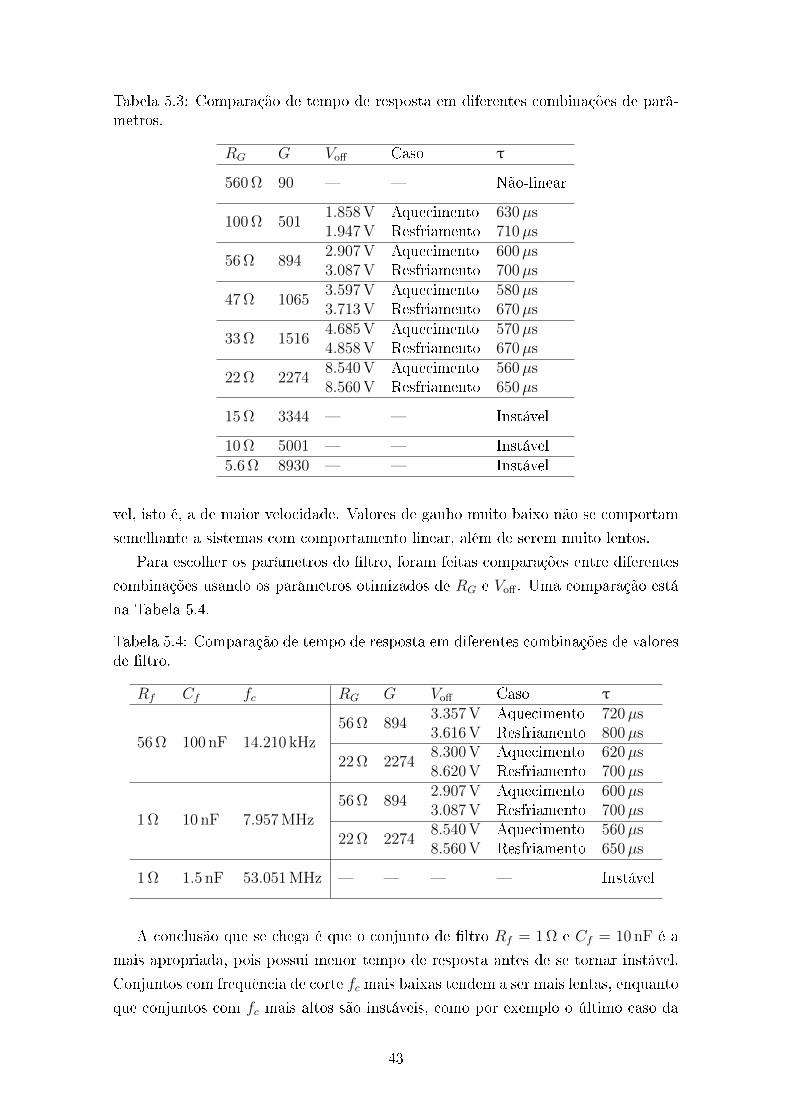
Tabela 5.3: Comparação de tempo de resposta em diferentes combinações de parâ-metros.
RG G Voff Caso τ
560 Ω 90 Não-linear
100 Ω 5011.858 V Aquecimento 630µs1.947 V Resfriamento 710µs
56 Ω 8942.907 V Aquecimento 600µs3.087 V Resfriamento 700µs
47 Ω 10653.597 V Aquecimento 580µs3.713 V Resfriamento 670µs
33 Ω 15164.685 V Aquecimento 570µs4.858 V Resfriamento 670µs
22 Ω 22748.540 V Aquecimento 560µs8.560 V Resfriamento 650µs
15 Ω 3344 Instável
10 Ω 5001 Instável5.6 Ω 8930 Instável
vel, isto é, a de maior velocidade. Valores de ganho muito baixo não se comportam
semelhante a sistemas com comportamento linear, além de serem muito lentos.
Para escolher os parâmetros do ltro, foram feitas comparações entre diferentes
combinações usando os parâmetros otimizados de RG e Voff . Uma comparação está
na Tabela 5.4.
Tabela 5.4: Comparação de tempo de resposta em diferentes combinações de valoresde ltro.
Rf Cf fc RG G Voff Caso τ
56 Ω 100 nF 14.210 kHz56 Ω 894
3.357 V Aquecimento 720µs3.616 V Resfriamento 800µs
22 Ω 22748.300 V Aquecimento 620µs8.620 V Resfriamento 700µs
1 Ω 10 nF 7.957 MHz56 Ω 894
2.907 V Aquecimento 600µs3.087 V Resfriamento 700µs
22 Ω 22748.540 V Aquecimento 560µs8.560 V Resfriamento 650µs
1 Ω 1.5 nF 53.051 MHz Instável
A conclusão que se chega é que o conjunto de ltro Rf = 1 Ω e Cf = 10 nF é a
mais apropriada, pois possui menor tempo de resposta antes de se tornar instável.
Conjuntos com frequência de corte fc mais baixas tendem a ser mais lentas, enquanto
que conjuntos com fc mais altos são instáveis, como por exemplo o último caso da
43
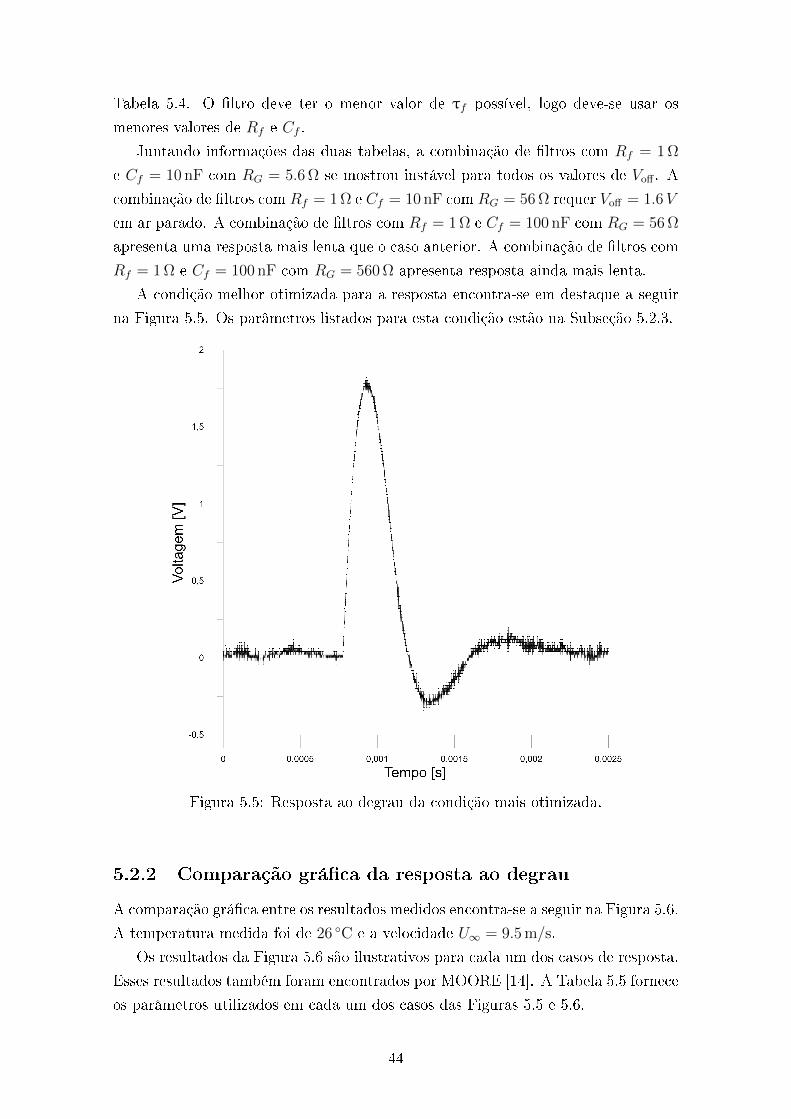
Tabela 5.4. O ltro deve ter o menor valor de τf possível, logo deve-se usar os
menores valores de Rf e Cf .
Juntando informações das duas tabelas, a combinação de ltros com Rf = 1 Ω
e Cf = 10 nF com RG = 5.6 Ω se mostrou instável para todos os valores de Voff . A
combinação de ltros com Rf = 1 Ω e Cf = 10 nF com RG = 56 Ω requer Voff = 1.6V
em ar parado. A combinação de ltros com Rf = 1 Ω e Cf = 100 nF com RG = 56 Ω
apresenta uma resposta mais lenta que o caso anterior. A combinação de ltros com
Rf = 1 Ω e Cf = 100 nF com RG = 560 Ω apresenta resposta ainda mais lenta.
A condição melhor otimizada para a resposta encontra-se em destaque a seguir
na Figura 5.5. Os parâmetros listados para esta condição estão na Subseção 5.2.3.
Figura 5.5: Resposta ao degrau da condição mais otimizada.
5.2.2 Comparação gráca da resposta ao degrau
A comparação gráca entre os resultados medidos encontra-se a seguir na Figura 5.6.
A temperatura medida foi de 26 C e a velocidade U∞ = 9.5 m/s.
Os resultados da Figura 5.6 são ilustrativos para cada um dos casos de resposta.
Esses resultados também foram encontrados por MOORE [14]. A Tabela 5.5 fornece
os parâmetros utilizados em cada um dos casos das Figuras 5.5 e 5.6.
44
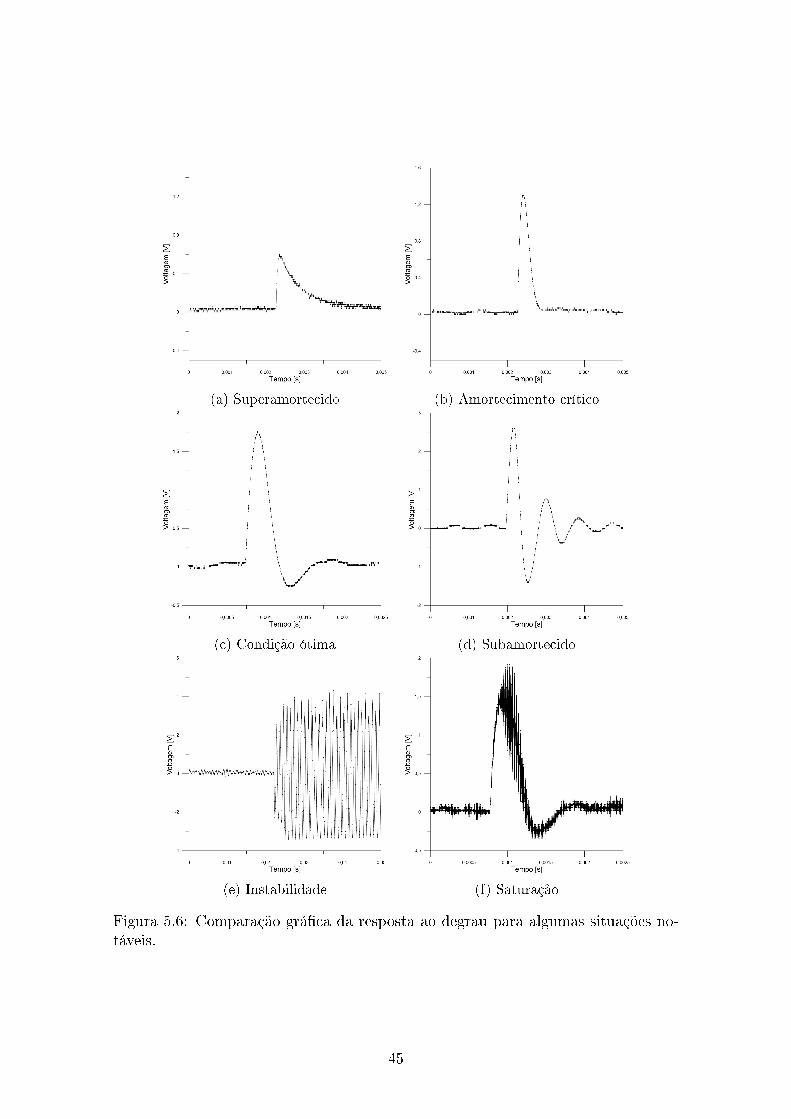
(a) Superamortecido (b) Amortecimento crítico
(c) Condição ótima (d) Subamortecido
(e) Instabilidade (f) Saturação
Figura 5.6: Comparação gráca da resposta ao degrau para algumas situações no-táveis.
45

Tabela 5.5: Parâmetros associados às respostas da Figura 5.6.
Figura Caso RG Voff
5.6a Superamortecido 56 Ω 9.680 V5.6b Amortecimento crítico 56 Ω 4.580 V5.6c Condição ótima 56 Ω 3.616 V5.6d Subamortecido 56 Ω 2.361 V5.6e Instabilidade 56 Ω 1.976 V5.6f Saturação 22 Ω 10.30 V5.5 Otimizado 22 Ω 8.560 V
Podemos ver que tanto a condição da Figura 5.5 quanto da Figura 5.6c são
estáveis e desejadas para a situação de interesse, porém, pela Tabela 5.3 o valor de
maior ganho G, menor RG, é mais rápido.
5.2.3 Parâmetros padrão otimizados
Os parâmetros-padrão denidos pela calibração estão mostrados na Tabela 5.6.
Essas congurações ajustam o sistema para operação com constante de tempo
τ < 1 ms, em torno de τ ' 600µs.
Tabela 5.6: Tabela de parâmetros-padrão usados no instrumento.
Parâmetro ValorRpot 2 060 ΩR1 47 ΩRG 22 ΩVoff 8.56 VCf 10 nFRf 1 Ω
Os parâmetros da Tabela 5.6 são aqueles que fornecem a condição ótima para
medição no túnel de vento. A conguração alternativa da Tabela 5.3 com RG = 56 Ω
também é possível, pois requer menor Voff , mas neste trabalho não será usada por
ser mais lenta. A conguração recomendada continuou sendo aquela submetida à
velocidade de 9.5 m/s.
5.3 Calibração em Frequência Resposta à Senoide
O teste de resposta à frequência foi feito também e está apresentado a seguir. As
condições foram temperatura de 26 C e velocidade de escoamento 0.5 m/s, a vol-
tagem pico a pico da perturbação senoide aplicada foi de 400 mV, e os parâmetros
do circuito utilizados são os da Tabela 5.6. Os resultados do teste de resposta em
frequência se encontram a seguir na Figura 5.7.
46
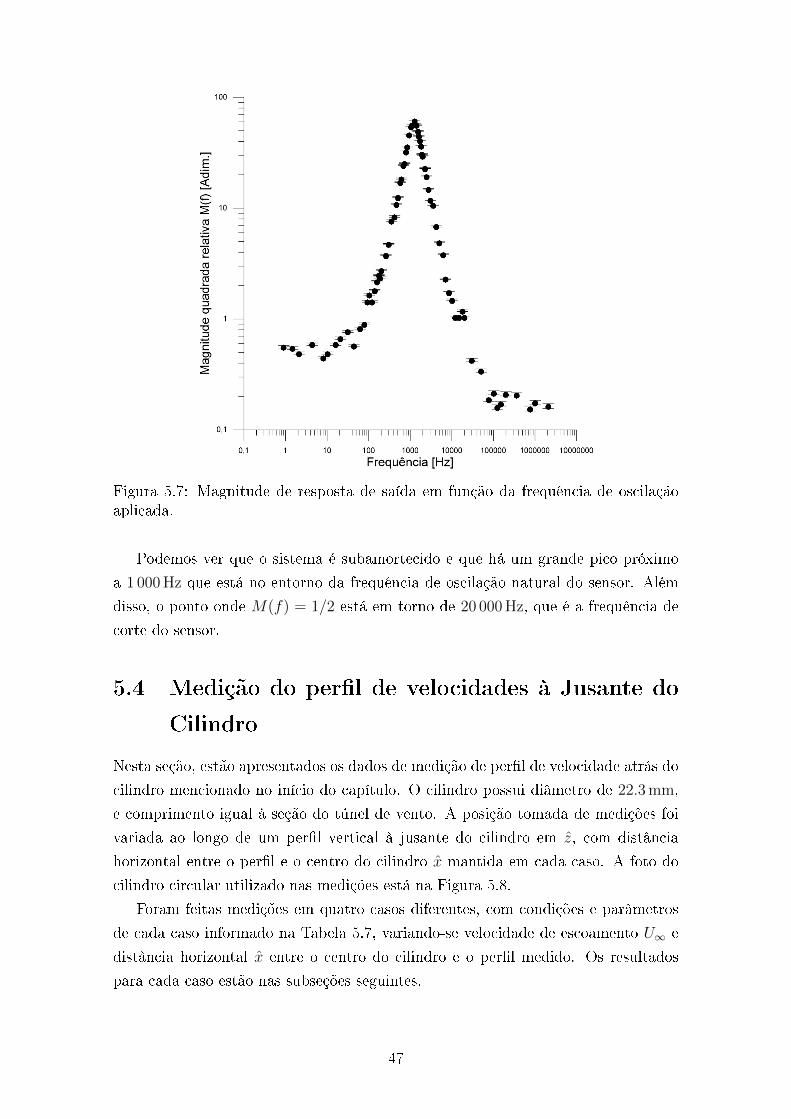
Figura 5.7: Magnitude de resposta de saída em função da frequência de oscilaçãoaplicada.
Podemos ver que o sistema é subamortecido e que há um grande pico próximo
a 1 000 Hz que está no entorno da frequência de oscilação natural do sensor. Além
disso, o ponto onde M(f) = 1/2 está em torno de 20 000 Hz, que é a frequência de
corte do sensor.
5.4 Medição do perl de velocidades à Jusante do
Cilindro
Nesta seção, estão apresentados os dados de medição de perl de velocidade atrás do
cilindro mencionado no início do capítulo. O cilindro possui diâmetro de 22.3 mm,
e comprimento igual à seção do túnel de vento. A posição tomada de medições foi
variada ao longo de um perl vertical à jusante do cilindro em z, com distância
horizontal entre o perl e o centro do cilindro x mantida em cada caso. A foto do
cilindro circular utilizado nas medições está na Figura 5.8.
Foram feitas medições em quatro casos diferentes, com condições e parâmetros
de cada caso informado na Tabela 5.7, variando-se velocidade de escoamento U∞ e
distância horizontal x entre o centro do cilindro e o perl medido. Os resultados
para cada caso estão nas subseções seguintes.
47

Figura 5.8: Cilindro circular utilizado nas medições experimentais.
Tabela 5.7: Tabela comparativa dos parâmetros usados na medição de perl à ju-sante do cilindro.
Distância horizontal x VelocidadeCaso 1 50 mm 0.12 m/sCaso 2 50 mm 0.81 m/sCaso 3 100 mm 0.12 m/sCaso 4 100 mm 0.81 m/s
5.4.1 Caso 1: Distância 50 mm, velocidade 0.12 m/s
Os resultados medidos estão na Figura 5.9. A velocidade de escoamento média
apresenta um aumento conforme se aproxima do centro, até que apresenta uma
queda brusca ao se aproximar do cilindro, chegando a zero. As velocidades entre
−20 mm e 20 mm não são denidas como números reais pela lei de King inversa da
Equação 2.10. Essa anomalia pode ser explicada por uma zona de recirculação atrás
do cilindro, que diculta a dissipação de calor gerado pelo termistor. Nesse caso, a
dissipação é menor que no caso de convecção natural, e a Equação 2.10 não fornece
um número real nem nos apresenta um valor denido.
5.4.2 Caso 2: Distância 50 mm, velocidade 0.81 m/s
Os resultados medidos estão na Figura 5.10. A velocidade de escoamento apresenta
aumento conforme se aproxima do centro do cilindro, até sofrer queda ao se aproxi-
mar da região da esteira. As velocidades da esteira, nesse caso, não se anulam por
estar fora de zona de recirculação. A incerteza das medidas ao se aproximar da re-
gião da esteira aumenta devido à resolução do osciloscópio. Medidas com voltagem
de 10.0 V e acima possuem uma ordem de grandeza acima na incerteza de medição.
48
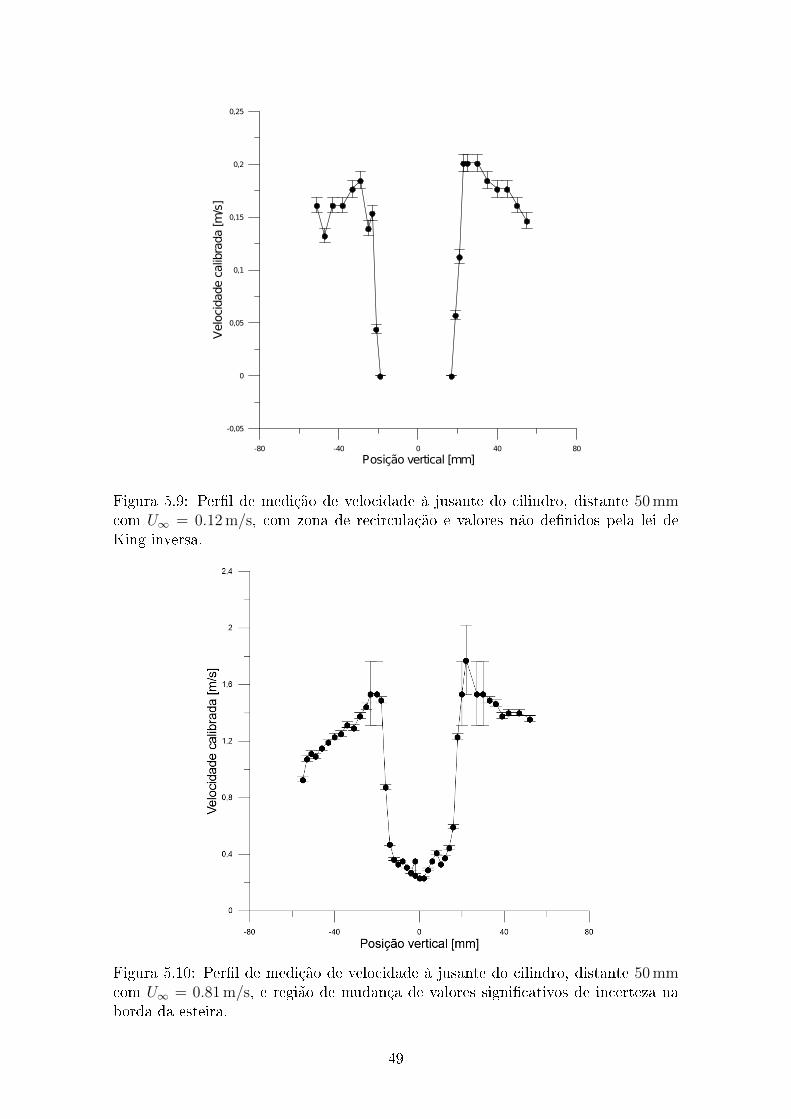
-80 -40 0 40 80
Posição vertical [mm]
-0,05
0
0,05
0,1
0,15
0,2
0,25
Vel
ocid
ade
calib
rada
[m/s
]
Figura 5.9: Perl de medição de velocidade à jusante do cilindro, distante 50 mmcom U∞ = 0.12 m/s, com zona de recirculação e valores não denidos pela lei deKing inversa.
Figura 5.10: Perl de medição de velocidade à jusante do cilindro, distante 50 mmcom U∞ = 0.81 m/s, e região de mudança de valores signicativos de incerteza naborda da esteira.
49
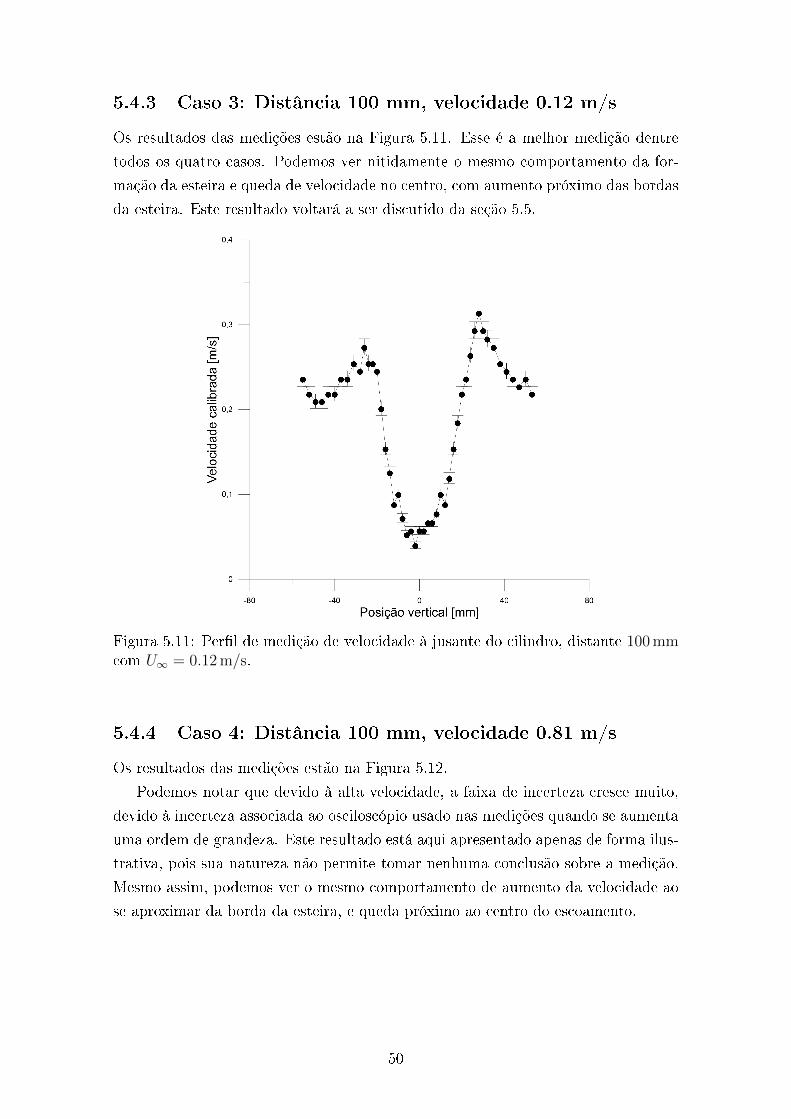
5.4.3 Caso 3: Distância 100 mm, velocidade 0.12 m/s
Os resultados das medições estão na Figura 5.11. Esse é a melhor medição dentre
todos os quatro casos. Podemos ver nitidamente o mesmo comportamento da for-
mação da esteira e queda de velocidade no centro, com aumento próximo das bordas
da esteira. Este resultado voltará a ser discutido da seção 5.5.
Figura 5.11: Perl de medição de velocidade à jusante do cilindro, distante 100 mmcom U∞ = 0.12 m/s.
5.4.4 Caso 4: Distância 100 mm, velocidade 0.81 m/s
Os resultados das medições estão na Figura 5.12.
Podemos notar que devido à alta velocidade, a faixa de incerteza cresce muito,
devido à incerteza associada ao osciloscópio usado nas medições quando se aumenta
uma ordem de grandeza. Este resultado está aqui apresentado apenas de forma ilus-
trativa, pois sua natureza não permite tomar nenhuma conclusão sobre a medição.
Mesmo assim, podemos ver o mesmo comportamento de aumento da velocidade ao
se aproximar da borda da esteira, e queda próximo ao centro do escoamento.
50
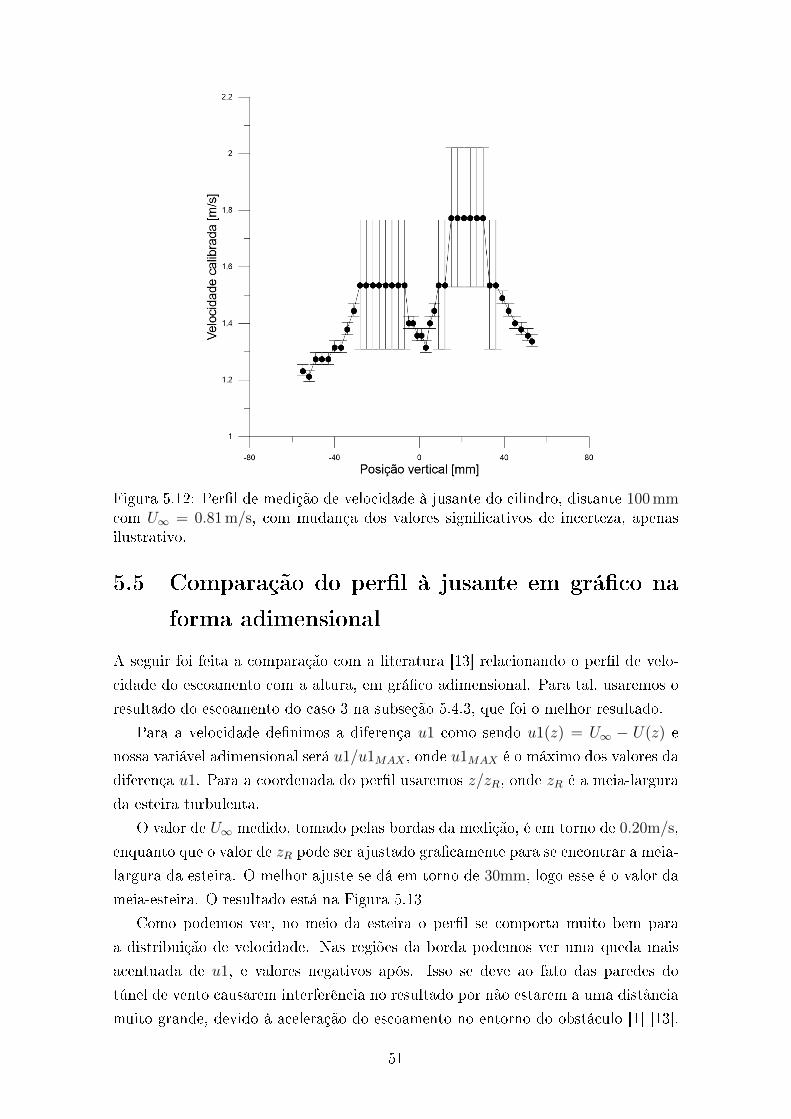
Figura 5.12: Perl de medição de velocidade à jusante do cilindro, distante 100 mmcom U∞ = 0.81 m/s, com mudança dos valores signicativos de incerteza, apenasilustrativo.
5.5 Comparação do perl à jusante em gráco na
forma adimensional
A seguir foi feita a comparação com a literatura [13] relacionando o perl de velo-
cidade do escoamento com a altura, em gráco adimensional. Para tal, usaremos o
resultado do escoamento do caso 3 na subseção 5.4.3, que foi o melhor resultado.
Para a velocidade denimos a diferença u1 como sendo u1(z) = U∞ − U(z) e
nossa variável adimensional será u1/u1MAX , onde u1MAX é o máximo dos valores da
diferença u1. Para a coordenada do perl usaremos z/zR, onde zR é a meia-largura
da esteira turbulenta.
O valor de U∞ medido, tomado pelas bordas da medição, é em torno de 0.20m/s,
enquanto que o valor de zR pode ser ajustado gracamente para se encontrar a meia-
largura da esteira. O melhor ajuste se dá em torno de 30mm, logo esse é o valor da
meia-esteira. O resultado está na Figura 5.13
Como podemos ver, no meio da esteira o perl se comporta muito bem para
a distribuição de velocidade. Nas regiões da borda podemos ver uma queda mais
acentuada de u1, e valores negativos após. Isso se deve ao fato das paredes do
túnel de vento causarem interferência no resultado por não estarem a uma distância
muito grande, devido à aceleração do escoamento no entorno do obstáculo [1] [13].
51
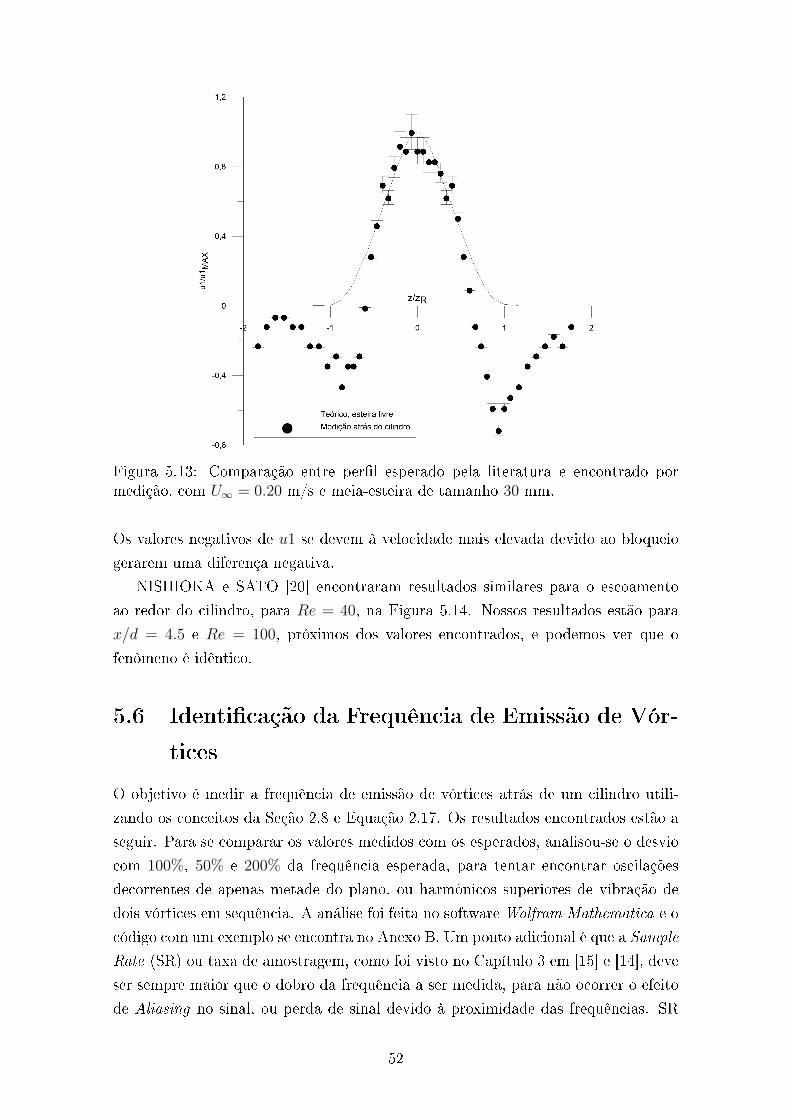
Figura 5.13: Comparação entre perl esperado pela literatura e encontrado pormedição, com U∞ = 0.20 m/s e meia-esteira de tamanho 30 mm.
Os valores negativos de u1 se devem à velocidade mais elevada devido ao bloqueio
gerarem uma diferença negativa.
NISHIOKA e SATO [20] encontraram resultados similares para o escoamento
ao redor do cilindro, para Re = 40, na Figura 5.14. Nossos resultados estão para
x/d = 4.5 e Re = 100, próximos dos valores encontrados, e podemos ver que o
fenômeno é idêntico.
5.6 Identicação da Frequência de Emissão de Vór-
tices
O objetivo é medir a frequência de emissão de vórtices atrás de um cilindro utili-
zando os conceitos da Seção 2.8 e Equação 2.17. Os resultados encontrados estão a
seguir. Para se comparar os valores medidos com os esperados, analisou-se o desvio
com 100%, 50% e 200% da frequência esperada, para tentar encontrar oscilações
decorrentes de apenas metade do plano, ou harmônicos superiores de vibração de
dois vórtices em sequência. A análise foi feita no software Wolfram Mathematica e o
código com um exemplo se encontra no Anexo B. Um ponto adicional é que a Sample
Rate (SR) ou taxa de amostragem, como foi visto no Capítulo 3 em [15] e [14], deve
ser sempre maior que o dobro da frequência a ser medida, para não ocorrer o efeito
de Aliasing no sinal, ou perda de sinal devido à proximidade das frequências. SR
52

Figura 5.14: Perl de velocidade encontrado para escoamento ao redor do cilindro,com x/d variável com Re = 40. (Reprodução [20])
também não pode ser alto demais com risco de não captar as frequências baixas.
A Tabela 5.8 apresenta os dados dos testes de frequência de emissão de vórtices, e
a Tabela 5.9 apresenta o desvio encontrado de cada teste com relação às frequências
a 100% do valor esperado f100%, a 50% do valor esperado f50% e a 200% do valor
esperado f200%.
Conforme podemos ver pelas tabelas 5.8 e 5.9, os melhores resultados encontrados
para a emissão são nos casos de Sampling Rate de 100 Hz devido ao Aliasing nas
frequências menores. O método para análise para encontrar as frequências está
descrito no Anexo B.
A maioria dos valores encontrados está dentro de uma faixa de ±10% dos valores
esperados. Os erros podem ser explicados por Aliasing, variações de medição por
escala do osciloscópio, taxa de aquisição (Sampling Rate), ou velocidade do escoa-
mento. Os valores de velocidade muito baixos possuem diculdade de serem medidos
devido à convecção natural do ar predominar na situação.
53
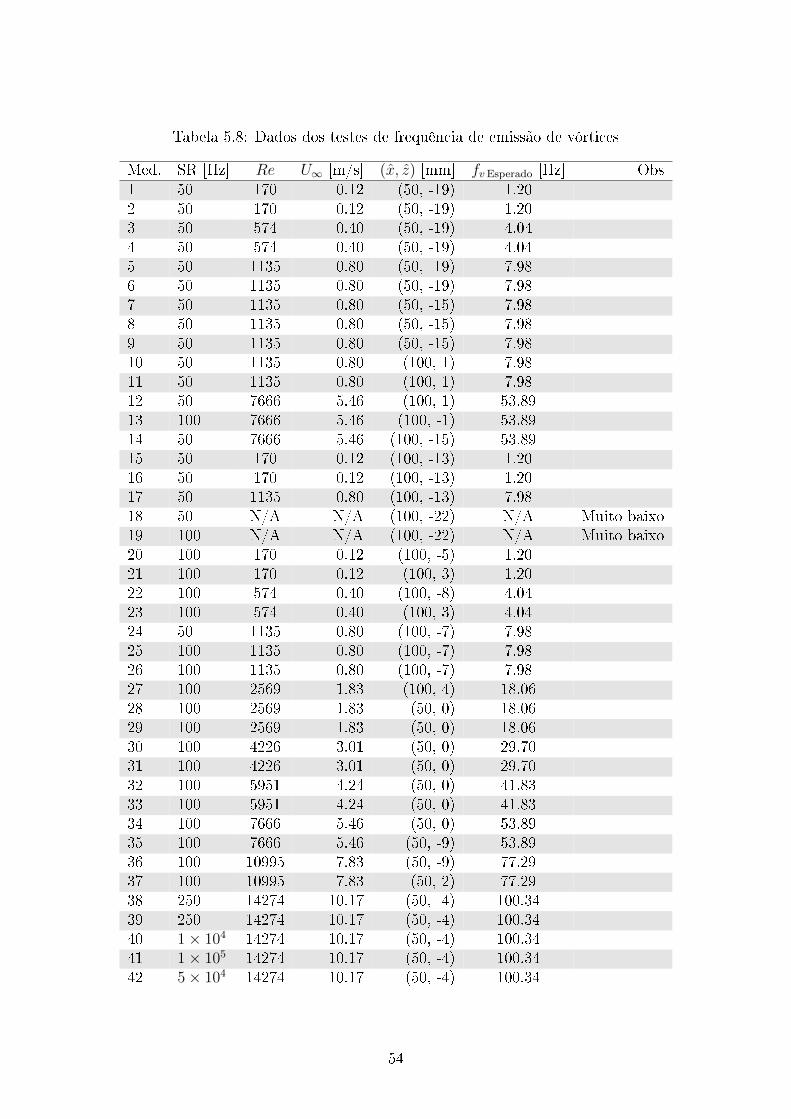
Tabela 5.8: Dados dos testes de frequência de emissão de vórtices
Med. SR [Hz] Re U∞ [m/s] (x, z) [mm] fv Esperado [Hz] Obs1 50 170 0.12 (50, -19) 1.202 50 170 0.12 (50, -19) 1.203 50 574 0.40 (50, -19) 4.044 50 574 0.40 (50, -19) 4.045 50 1135 0.80 (50, -19) 7.986 50 1135 0.80 (50, -19) 7.987 50 1135 0.80 (50, -15) 7.988 50 1135 0.80 (50, -15) 7.989 50 1135 0.80 (50, -15) 7.9810 50 1135 0.80 (100, 1) 7.9811 50 1135 0.80 (100, 1) 7.9812 50 7666 5.46 (100, 1) 53.8913 100 7666 5.46 (100, -1) 53.8914 50 7666 5.46 (100, -15) 53.8915 50 170 0.12 (100, -13) 1.2016 50 170 0.12 (100, -13) 1.2017 50 1135 0.80 (100, -13) 7.9818 50 N/A N/A (100, -22) N/A Muito baixo19 100 N/A N/A (100, -22) N/A Muito baixo20 100 170 0.12 (100, -5) 1.2021 100 170 0.12 (100, 3) 1.2022 100 574 0.40 (100, -8) 4.0423 100 574 0.40 (100, 3) 4.0424 50 1135 0.80 (100, -7) 7.9825 100 1135 0.80 (100, -7) 7.9826 100 1135 0.80 (100, -7) 7.9827 100 2569 1.83 (100, 4) 18.0628 100 2569 1.83 (50, 0) 18.0629 100 2569 1.83 (50, 0) 18.0630 100 4226 3.01 (50, 0) 29.7031 100 4226 3.01 (50, 0) 29.7032 100 5951 4.24 (50, 0) 41.8333 100 5951 4.24 (50, 0) 41.8334 100 7666 5.46 (50, 0) 53.8935 100 7666 5.46 (50, -9) 53.8936 100 10995 7.83 (50, -9) 77.2937 100 10995 7.83 (50, 2) 77.2938 250 14274 10.17 (50, -4) 100.3439 250 14274 10.17 (50, -4) 100.3440 1× 104 14274 10.17 (50, -4) 100.3441 1× 105 14274 10.17 (50, -4) 100.3442 5× 104 14274 10.17 (50, -4) 100.34
54
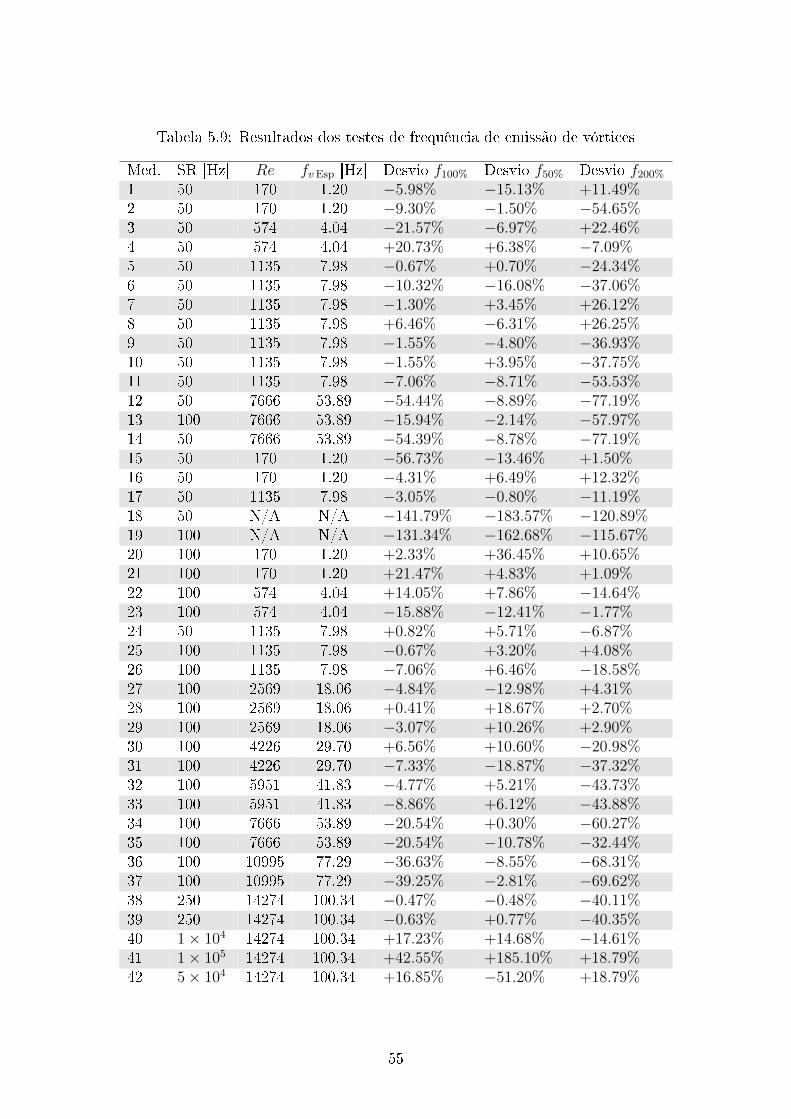
Tabela 5.9: Resultados dos testes de frequência de emissão de vórtices
Med. SR [Hz] Re fv Esp [Hz] Desvio f100% Desvio f50% Desvio f200%
1 50 170 1.20 −5.98% −15.13% +11.49%2 50 170 1.20 −9.30% −1.50% −54.65%3 50 574 4.04 −21.57% −6.97% +22.46%4 50 574 4.04 +20.73% +6.38% −7.09%5 50 1135 7.98 −0.67% +0.70% −24.34%6 50 1135 7.98 −10.32% −16.08% −37.06%7 50 1135 7.98 −1.30% +3.45% +26.12%8 50 1135 7.98 +6.46% −6.31% +26.25%9 50 1135 7.98 −1.55% −4.80% −36.93%10 50 1135 7.98 −1.55% +3.95% −37.75%11 50 1135 7.98 −7.06% −8.71% −53.53%12 50 7666 53.89 −54.44% −8.89% −77.19%13 100 7666 53.89 −15.94% −2.14% −57.97%14 50 7666 53.89 −54.39% −8.78% −77.19%15 50 170 1.20 −56.73% −13.46% +1.50%16 50 170 1.20 −4.31% +6.49% +12.32%17 50 1135 7.98 −3.05% −0.80% −11.19%18 50 N/A N/A −141.79% −183.57% −120.89%19 100 N/A N/A −131.34% −162.68% −115.67%20 100 170 1.20 +2.33% +36.45% +10.65%21 100 170 1.20 +21.47% +4.83% +1.09%22 100 574 4.04 +14.05% +7.86% −14.64%23 100 574 4.04 −15.88% −12.41% −1.77%24 50 1135 7.98 +0.82% +5.71% −6.87%25 100 1135 7.98 −0.67% +3.20% +4.08%26 100 1135 7.98 −7.06% +6.46% −18.58%27 100 2569 18.06 −4.84% −12.98% +4.31%28 100 2569 18.06 +0.41% +18.67% +2.70%29 100 2569 18.06 −3.07% +10.26% +2.90%30 100 4226 29.70 +6.56% +10.60% −20.98%31 100 4226 29.70 −7.33% −18.87% −37.32%32 100 5951 41.83 −4.77% +5.21% −43.73%33 100 5951 41.83 −8.86% +6.12% −43.88%34 100 7666 53.89 −20.54% +0.30% −60.27%35 100 7666 53.89 −20.54% −10.78% −32.44%36 100 10995 77.29 −36.63% −8.55% −68.31%37 100 10995 77.29 −39.25% −2.81% −69.62%38 250 14274 100.34 −0.47% −0.48% −40.11%39 250 14274 100.34 −0.63% +0.77% −40.35%40 1× 104 14274 100.34 +17.23% +14.68% −14.61%41 1× 105 14274 100.34 +42.55% +185.10% +18.79%42 5× 104 14274 100.34 +16.85% −51.20% +18.79%
55

5.7 Perl de Intensidade Turbulenta
Para a análise de perl de intensidade turbulenta, levou-se em conta séries de me-
dições de velocidade em túnel aberto e alguns em caso de emissão de vórtices. O
percentual de intensidade turbulenta IT pode ser encontrado pelas relações a seguir
[9] [13].
Ui = [U1, U2, . . . UN ] (5.4)
Umed =1
N·
N∑i=1
Ui (5.5)
u′rms =
√√√√ 1
N − 1
N∑i=1
(Umed − Ui)2 (5.6)
IT =u′rms
Umed
× 100% (5.7)
Seja uma série Ui de dados de velocidade, composta de N medidas U1, U2, . . . UN
da Equação 5.4, a velocidade média Umed é encontrada pela Equação 5.5. Para o
cálculo das utuações u′, levamos em conta o valor RMS, ou root mean square. A
utuação média u′rms se dá pela Equação 5.6. A intensidade turbulenta IT é a razão
entre a utuação média e a velocidade média, dada pela Equação 5.7.
As análises de perl de intensidade turbulenta encontram-se abaixo. A Ta-
bela 5.10 mostra a variação da utuação e da intensidade turbulenta conforme a
velocidade média varia. As Figuras 5.15 e 5.16 apresentam, respectivamente, essas
distribuições de utuação de velocidade e de intensidade turbulenta para os vários
valores de velocidade média.
Podemos notar que no escoamento livre há um aumento da utuação u′rms até em
torno de Umed próximo de 5 m/s, a partir do qual há uma estabilização da utuação
em u′rms ≈ 0.26 m/s até um leve aumento em 14 m/s. Para o escoamento em vórtice,
a utuação u′ sempre aumenta continuamente até sofrer uma redução em 16 m/s.
O escoamento em vórtice, como esperado, apresenta utuações muito mais elevadas
que o escoamento livre sem cilindro, e também os valores de Umed são maiores para
um mesma velocidade de escoamento incidente U∞ devido aos próprios vórtices.
Para a distribuição de intensidade turbulenta IT , o comportamento oposto é
observado. A intensidade turbulenta começa em valores altos, reduzindo e se esta-
bilizando em torno de 2.5% em altas velocidades para escoamento livre, enquanto
no escoamento em vórtices reduz para 5% continuamente sem estabilizar. Os va-
lores altos de IT para baixos Umed são devidos ao baixo denominador na fórmula
da Equação 5.7 de IT . A variação na condição de vórtice também se explica pela
redução da variação em ondas e formação de um perl de esteira menos oscilante.
56
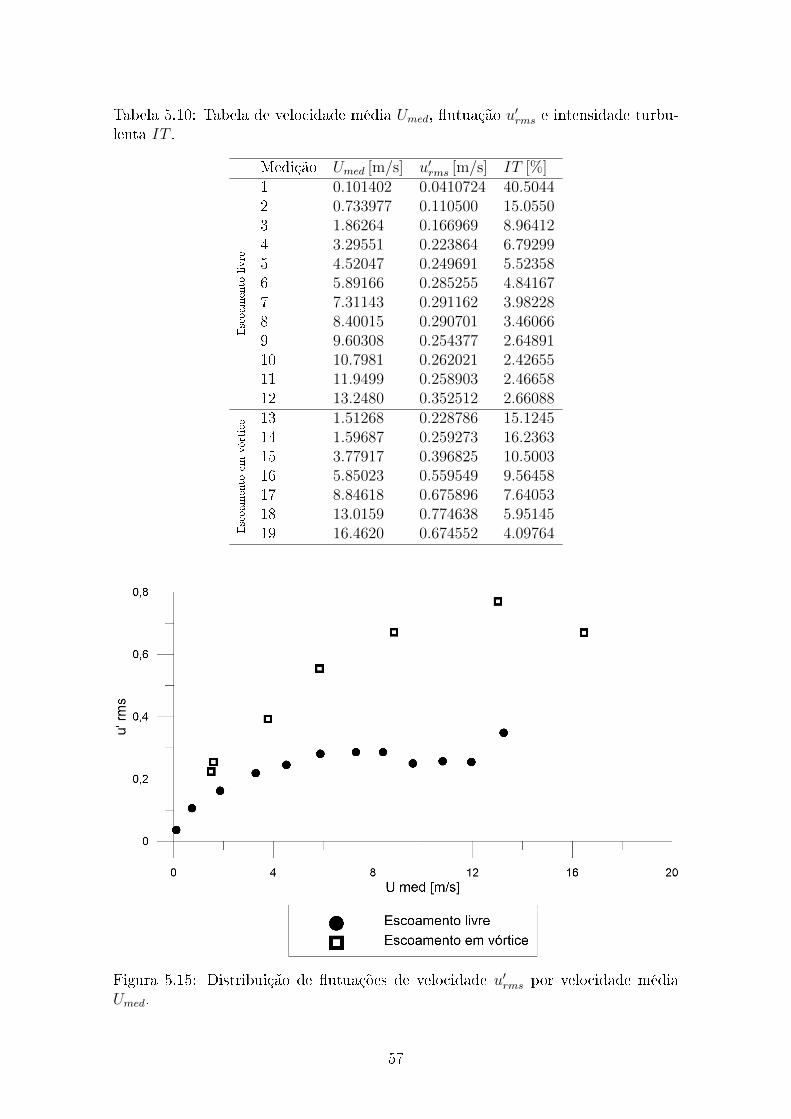
Tabela 5.10: Tabela de velocidade média Umed, utuação u′rms e intensidade turbu-lenta IT .
Medição Umed [m/s] u′rms [m/s] IT [%]
Escoamentolivre
1 0.101402 0.0410724 40.50442 0.733977 0.110500 15.05503 1.86264 0.166969 8.964124 3.29551 0.223864 6.792995 4.52047 0.249691 5.523586 5.89166 0.285255 4.841677 7.31143 0.291162 3.982288 8.40015 0.290701 3.460669 9.60308 0.254377 2.6489110 10.7981 0.262021 2.4265511 11.9499 0.258903 2.4665812 13.2480 0.352512 2.66088
Escoamentoem
vórtice 13 1.51268 0.228786 15.1245
14 1.59687 0.259273 16.236315 3.77917 0.396825 10.500316 5.85023 0.559549 9.5645817 8.84618 0.675896 7.6405318 13.0159 0.774638 5.9514519 16.4620 0.674552 4.09764
Figura 5.15: Distribuição de utuações de velocidade u′rms por velocidade médiaUmed.
57
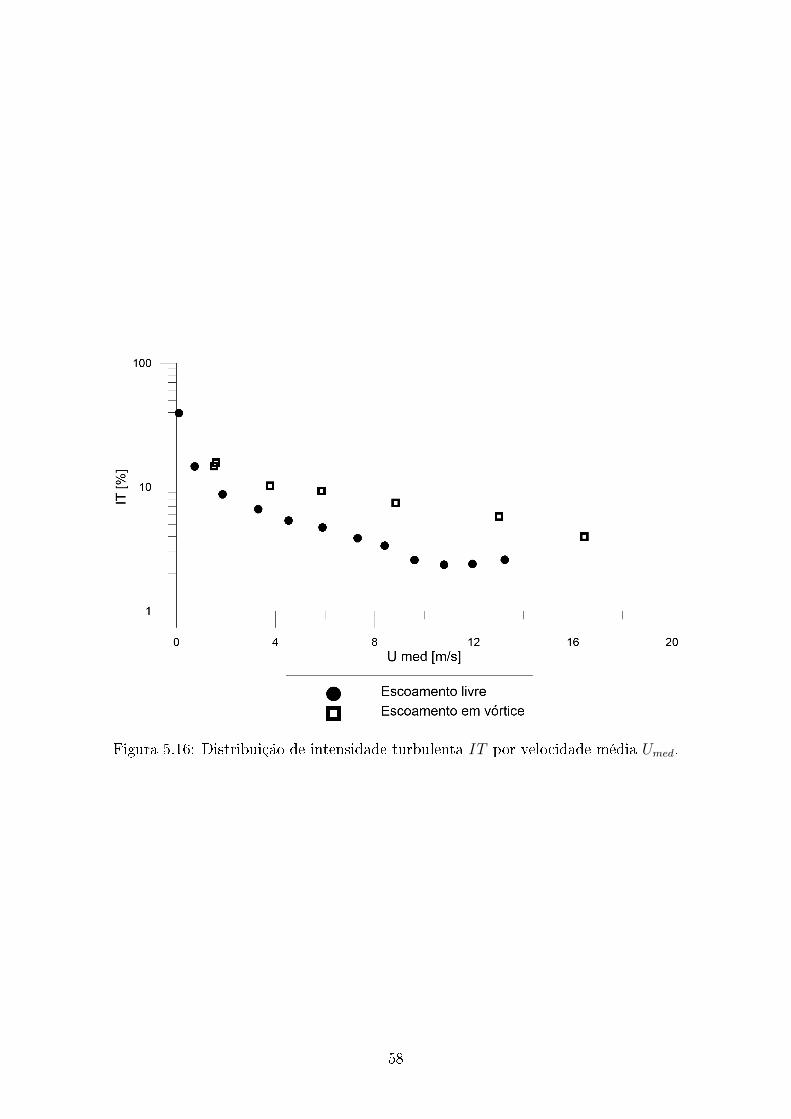
Figura 5.16: Distribuição de intensidade turbulenta IT por velocidade média Umed.
58
Capítulo 6
Conclusões
Conforme vimos no Capítulo 1, a ideia proposta neste trabalho foi vericar a possi-
bilidade de se construir um instrumento de medição de velocidade, ou anemômetro,
utilizando o sensor do tipo termistor, e comparar com resultados esperados. Res-
pondendo às propostas do Capítulo 1, é possível construir um instrumento capaz de
medir velocidade utilizando o sensor termistor, vericamos que é possível medir e
repetir as medições com o sensor de forma conável. Os resultados foram compara-
dos com valores esperados e com a literatura e estiveram de acordo entre si e por
último chegamos a conclusão que o sensor é viável e pode ser usado para medição
de velocidades. Essa proposta foi executada com sucesso ao longo deste trabalho e
portanto faremos uma recapitulação do que foi conquistado com este trabalho.
Vimos no Capítulo 2 a teoria básica por trás da instrumentação e conceitos que
foram abordados ao longo do texto. Essa introdução ao assunto fundamenta as bases
para a análise do instrumento e prepara o leitor para o Capítulo 3, que contém um
aprofundamento maior sobre o tema.
A metodologia explorada no Capítulo 3 apresentou trabalhos anteriores de uso na
anemometria, com destaque para o trabalho de PERRY [8] e BRUUN [9] no campo
da anemometria a o quente, que contribuíram signicativamente para o avanço
na área. O trabalho de MOORE [14] também foi de fundamental compreensão e
entendimento para a formulação deste trabalho, pois é um dos principais trabalhos
de medição de velocidade utilizando o sensor do tipo termistor. A metodologia de
JØRGENSEN [15] (DANTEC ) também foi importante para estabelecer as bases de
escolha de parâmetros e método de medição.
No Capítulo 4 vimos a construção e descrição do instrumento, desde a esco-
lha da ponte do instrumento, componentes utilizados no equipamento, escolha de
parâmetros e análise do comportamento esperado. Caracterizamos o termistor uti-
lizado, comentamos métodos de otimização e redução de ruído e estabelecemos as
calibrações e incertezas que serão utilizadas.
O Capítulo 5 apresentou os resultados encontrados para o instrumento. Rela-
59
cionamos a calibração de velocidades com a saída do instrumento em voltagem e
otimizamos a resposta para a faixa de medição utilizada. Otimizamos também os
parâmetros de resposta dinâmica de acordo com a metodologia do Capítulo 3, obti-
vemos a resposta em frequências, medimos e comparamos o perl de velocidade atrás
do cilindro, identicamos a frequência de emissão de vórtices da esteira e medimos
o perl de intensidade turbulenta.
O presente Capítulo 6 sumariza e reúne o que foi avançado com este trabalho,
além de apresentar diculdades e sugestões.
6.1 Análise Crítica e Sugestões para trabalhos fu-
turos
Dentre as principais limitações e diculdades do trabalho podemos listar a baixa
quantidade de literatura no quesito de sensores híbridos de anemometria a termis-
tor, que surge como uma grande oportunidade para avanços nesta área. Outra
diculdade é o comportamento ruidoso do sinal, que deve sempre ser levado em
consideração ao se tomar medições. O leitor deve se atentar para que esses ruídos
de medição sejam tratados de forma boa
Uma modicação sugerida para trabalhos futuros seria a implementação de um
ajustador de RG e Voff para ajuste de medições conforme a necessidade sem requerer
a substituição dos componentes do circuito. Isso pode ser útil quando se desejar
variar muito a faixa de medição para medições mais sensíveis.
Além disso, um modelo portátil em uma caixa para transportar o instrumento
também seria de grande uso pois permitiria o transporte do instrumento de forma
mais fácil e também reduziria o tempo de Setup de medição. Outra modicação
proposta seria a criação de uma interface para aquisição de dados em um compu-
tador, usando uma placa de aquisição e algum software de captura de dados. Com
isso, é possível obter medições mais conáveis ainda e o uso também pode se tornar
mais fácil para usuários mais leigos do instrumento.
60
Referências Bibliográcas
[1] FOX, R. W., MCDONALD, A. T., PRITCHARD, P. Introduction to uid me-
chanics. 5th. 5 ed. New York, N.Y., New York: John Wiley & Sons, Inc,
2010.
[2] FIGLIOLA, R. S., BEASLEY, D. E. Teoria e Projeto para Medições Mecânicas.
4 ed. Rio de Janeiro, LTCLivros Técnicos e Cientícos, 2007. (Tradução
e revisão técnica: Geraldo Augusto Campolina França, Ricardo Nicolau
Nassar Koury, Marcos Pinotti Barbosa).
[3] FIGLIOLA, R. S., BEASLEY, D. Theory and design for mechanical measure-
ments. 5 ed. New York, John Wiley & Sons, 2011.
[4] MALVINO, A. P. Eletrônica: Vol. 1. 4 ed. São Paulo, Makron Books/Pearson,
1997. (Tradução: Romeu Abdo).
[5] BENTLEY, J. P. Principles of Measurement Systems. 4 ed. Harlow, England,
U.K., Pearson Education, 2005.
[6] ALCIATORE, D. G., HISTAND, M. Introduction to Mechatronics and Measu-
rement Systems. 4 ed. New York, N.Y., Mc Graw Hill, 2012.
[7] KING, L. V. XII. On the convection of heat from small cylinders in a stream of
uid: Determination of the convection constants of small platinum wires
with applications to hot-wire anemometry, Philosophical transactions of
the royal society of London. series A, containing papers of a mathematical
or physical character, v. 214, n. 509-522, pp. 373432, 1914.
[8] PERRY, A. E. Hot-Wire Anemometry. 1 ed. New York, N.Y., Oxford University
Press, 1982.
[9] BRUUN, H. H. Hot-Wire Anemometry: Principles and Signal Analysis. 1 ed.
New York, N.Y., Oxford University Press, 1995.
[10] INMETRO, INSTITUTO NACIONAL DE METROLOGIA, QUALIDADE E
TECNOLOGIA. Avaliação de dados de medição: Guia para a expres-
61
são de incerteza de medição (GUM 2008). 1 ed. Duque de Caxias, R.J.,
INMETRO Rio de Janeiro, 2012.
[11] INMETRO, INSTITUTO NACIONAL DE METROLOGIA, QUALIDADE E
TECNOLOGIA. Vocabulário Internacional de Metrologia: Conceitos
Fundamentais e Gerais e Termos Associados (VIM 2012). 1 ed. Duque
de Caxias, R.J., INMETRO Rio de Janeiro, 2012.
[12] KUNDU, P. K., COHEN, I. Fluid Mechanics. 2 ed. San Diego, C.A., Academic
Press, 2002.
[13] SCHLICHTING, H. Boundary Layer Theory. 7 ed. New York, N.Y., McGraw
Hill, 1979.
[14] MOORE, J. A Thermistor Based Sensor for Flow Measurement in Water. MSc
thesis, Dublin City University, Dublin, Ireland, 2003.
[15] JØRGENSEN, F. E. How to measure turbulence with hot-wire anemometers:
a practical guide. 2001.
[16] KATZ, I. M., SHAUGHNESSY, E. Digital temperature compensation of a
thermistor owmeter, Journal of Physics E: Scientic Instruments, v. 20,
n. 5, pp. 561, 1987.
[17] LABARBERA, M., VOGEL, S. An inexpensive thermistor owmeter for aqua-
tic biology 1, Limnology and Oceanography, v. 21, n. 5, pp. 750756, 1976.
[18] FREYMUTH, P. Frequency response and electronic testing for constant-
temperature hot-wire anemometers, Journal of Physics E: Scientic Ins-
truments, v. 10, n. 7, pp. 705, 1977.
[19] OMEGA ENGINEERING. Thermistor Elements. 2018, (Acesso em
04/09/2018). Disponível em: <https://www.omega.com/prodinfo/
thermistor.html>.
[20] NISHIOKA, M., SATO, H. Measurements of velocity distributions in the
wake of a circular cylinder at low Reynolds numbers, Journal of Fluid
Mechanics, v. 65, n. 1, pp. 97112, 1974.
62
Apêndice A
Diagrama do circuito
O diagrama completo do circuito encontra-se a seguir na Figura A.1. Os parâmetros
utilizados para a versão nal do circuito foram os especicados no Capítulo 4 como
os parâmetros ótimos para o funcionamento.
63

Figura A.1: Diagrama completo do circuito nal.
64
Apêndice B
Código da Análise Fourier para
Frequência de Emissão de Vórtices
O código para análise das frequências de emissão de vórtices fv encontra-se a se-
guir, junto com um gráco de exemplo para um caso. O algoritmo está escrito na
linguagem doWolfram Mathematica, e foi executado na versão 11.1.1.0 do programa.
O código consiste de um gerador de strings para acessar os nomes dos arquivos
na pasta, e um algoritmo para calcular a distribuição Fourier de sinais. No exemplo
abaixo, calculamos para o índice do teste número #26 (F0008CH1.CSV).
SetDirectory[NotebookDirectory[]];
filenames = Join[
Table["F" <> IntegerString[i, 10, 4] <> "CH1.CSV", i, 54, 70],
Table["F" <> IntegerString[i, 10, 4] <> "CH1.CSV", i, 00, 24]
];
Do[
file = filenames[[i]];
dados =
Transpose[Transpose[Import[file, "CSV"]][[4 ;; 5, 11 ;; -391]]];
dados[[All, 2]] = dados[[All, 2]] - Mean[dados[[All, 2]]];
grafico =
ListPlot[dados, Joined -> True, PlotRange -> All,
FrameLabel -> "t", "V", Frame -> True, PlotLabel -> file];
grafico // Print;
tdata = dados[[All, 2]];
deltat = dados[[2, 1]] - dados[[1, 1]];
nn = Length@tdata;
sr = 1 / deltat;
65
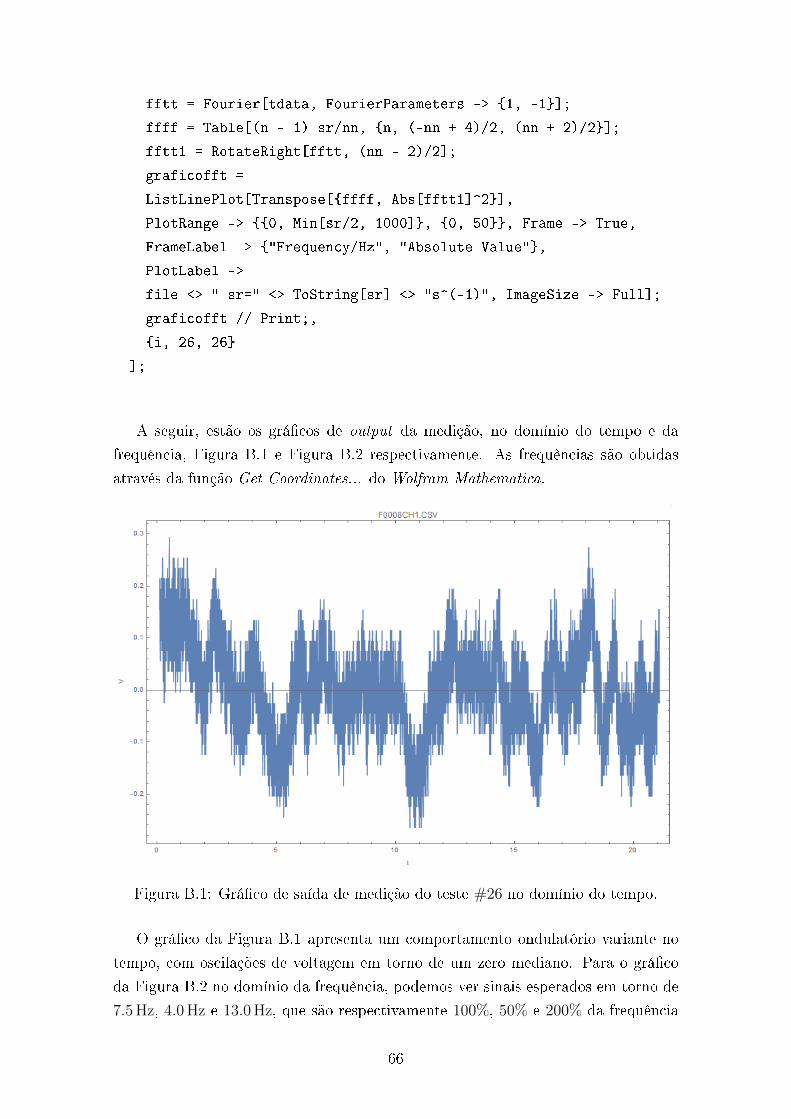
fftt = Fourier[tdata, FourierParameters -> 1, -1];
ffff = Table[(n - 1) sr/nn, n, (-nn + 4)/2, (nn + 2)/2];
fftt1 = RotateRight[fftt, (nn - 2)/2];
graficofft =
ListLinePlot[Transpose[ffff, Abs[fftt1]^2],
PlotRange -> 0, Min[sr/2, 1000], 0, 50, Frame -> True,
FrameLabel -> "Frequency/Hz", "Absolute Value",
PlotLabel ->
file <> " sr=" <> ToString[sr] <> "s^(-1)", ImageSize -> Full];
graficofft // Print;,
i, 26, 26
];
A seguir, estão os grácos de output da medição, no domínio do tempo e da
frequência, Figura B.1 e Figura B.2 respectivamente. As frequências são obtidas
através da função Get Coordinates... do Wolfram Mathematica.
Figura B.1: Gráco de saída de medição do teste #26 no domínio do tempo.
O gráco da Figura B.1 apresenta um comportamento ondulatório variante no
tempo, com oscilações de voltagem em torno de um zero mediano. Para o gráco
da Figura B.2 no domínio da frequência, podemos ver sinais esperados em torno de
7.5 Hz, 4.0 Hz e 13.0 Hz, que são respectivamente 100%, 50% e 200% da frequência
66
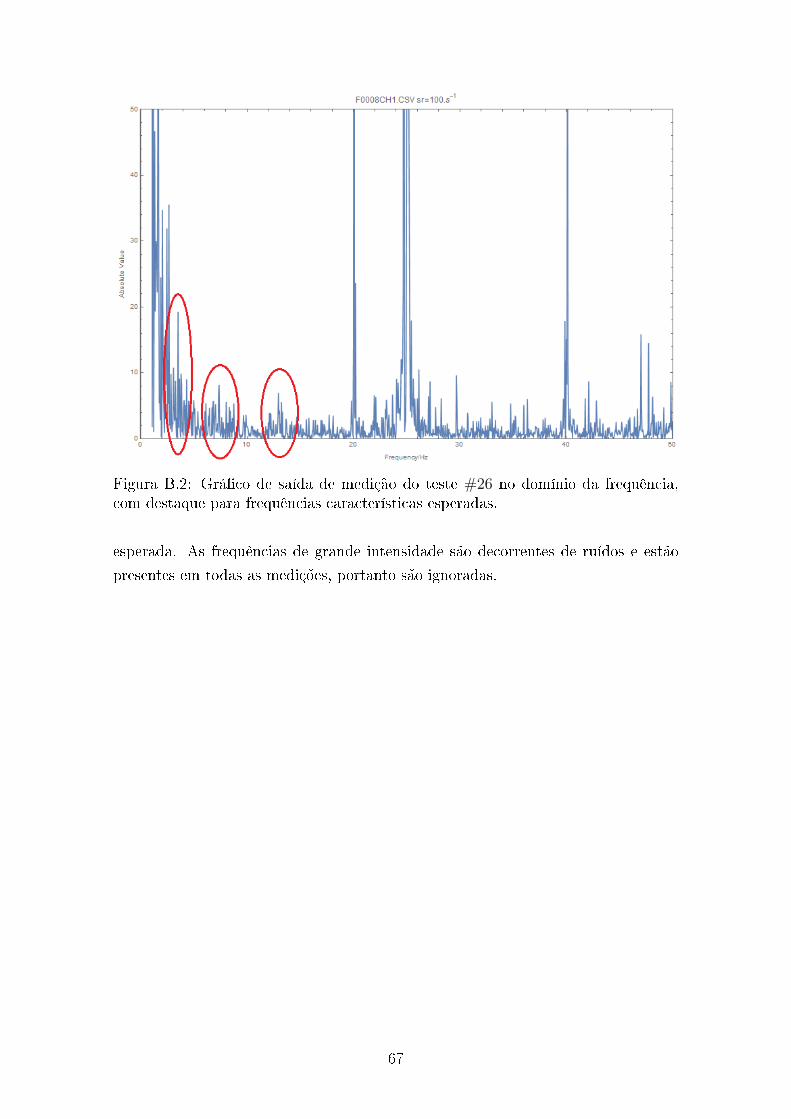
Figura B.2: Gráco de saída de medição do teste #26 no domínio da frequência,com destaque para frequências características esperadas.
esperada. As frequências de grande intensidade são decorrentes de ruídos e estão
presentes em todas as medições, portanto são ignoradas.
67
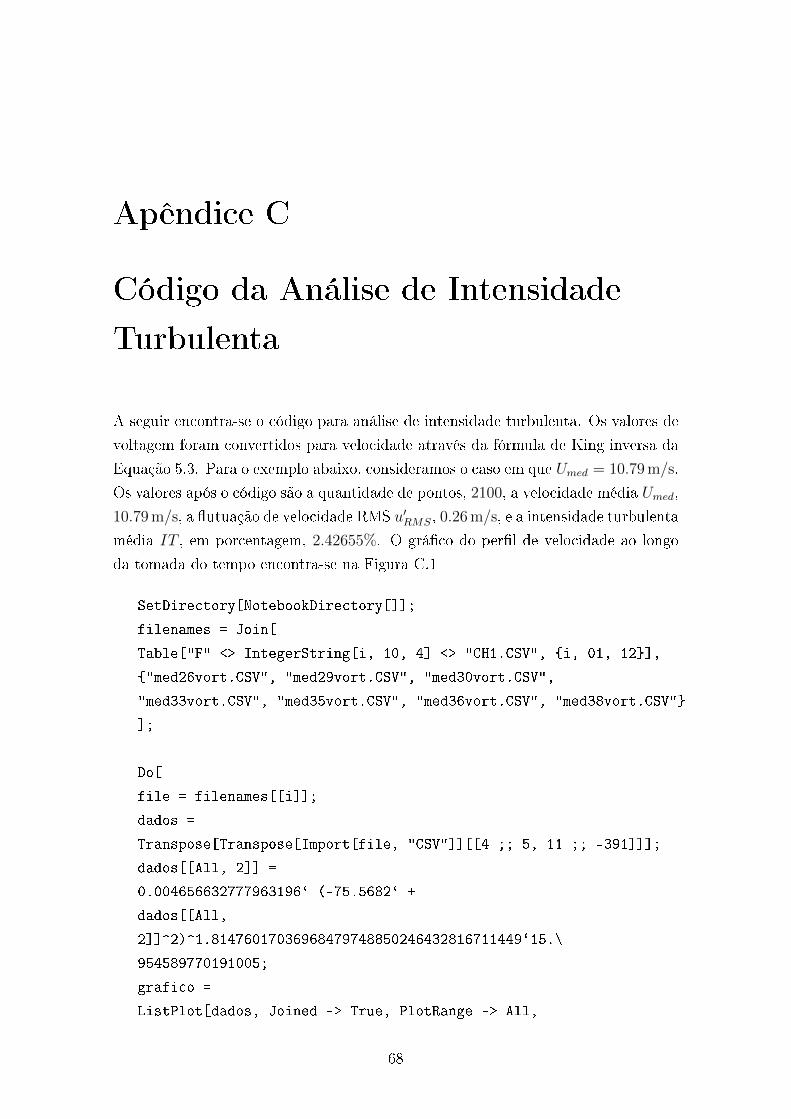
Apêndice C
Código da Análise de Intensidade
Turbulenta
A seguir encontra-se o código para análise de intensidade turbulenta. Os valores de
voltagem foram convertidos para velocidade através da fórmula de King inversa da
Equação 5.3. Para o exemplo abaixo, consideramos o caso em que Umed = 10.79 m/s.
Os valores após o código são a quantidade de pontos, 2100, a velocidade média Umed,
10.79 m/s, a utuação de velocidade RMS u′RMS, 0.26 m/s, e a intensidade turbulenta
média IT , em porcentagem, 2.42655%. O gráco do perl de velocidade ao longo
da tomada do tempo encontra-se na Figura C.1
SetDirectory[NotebookDirectory[]];
filenames = Join[
Table["F" <> IntegerString[i, 10, 4] <> "CH1.CSV", i, 01, 12],
"med26vort.CSV", "med29vort.CSV", "med30vort.CSV",
"med33vort.CSV", "med35vort.CSV", "med36vort.CSV", "med38vort.CSV"
];
Do[
file = filenames[[i]];
dados =
Transpose[Transpose[Import[file, "CSV"]][[4 ;; 5, 11 ;; -391]]];
dados[[All, 2]] =
0.004656632777963196` (-75.5682` +
dados[[All,
2]]^2)^1.81476017036968479748850246432816711449`15.\
954589770191005;
grafico =
ListPlot[dados, Joined -> True, PlotRange -> All,
68
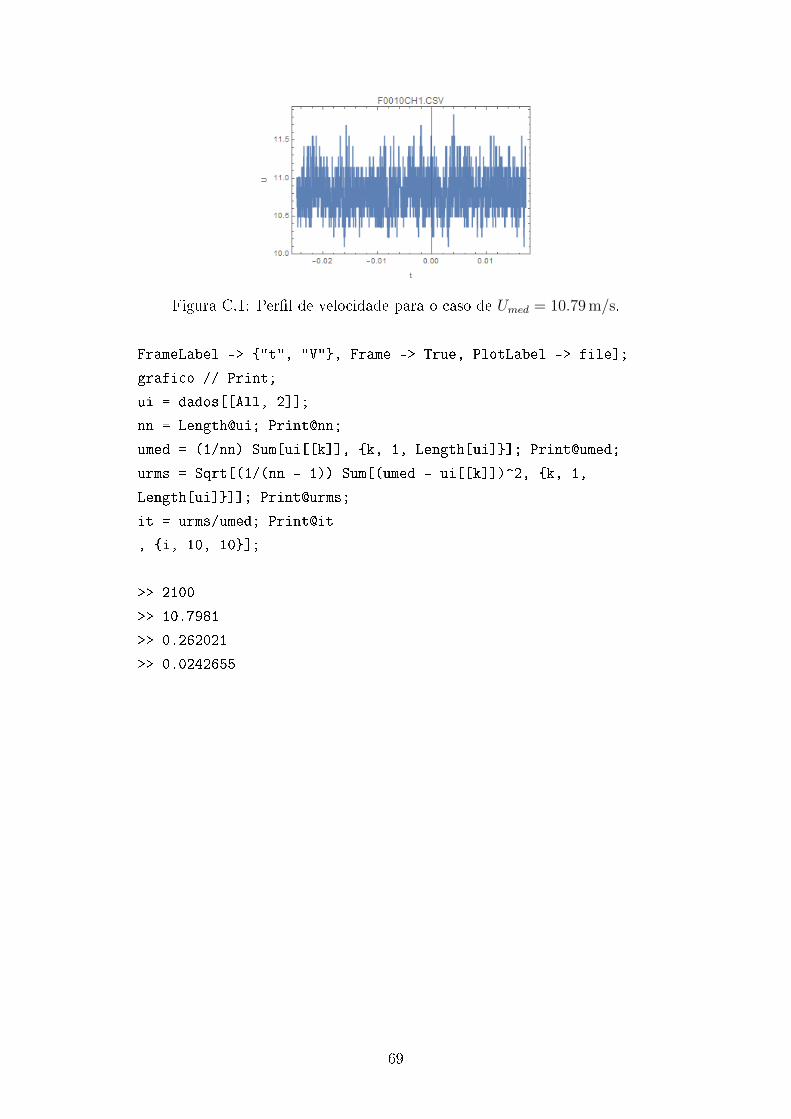
Figura C.1: Perl de velocidade para o caso de Umed = 10.79 m/s.
FrameLabel -> "t", "V", Frame -> True, PlotLabel -> file];
grafico // Print;
ui = dados[[All, 2]];
nn = Length@ui; Print@nn;
umed = (1/nn) Sum[ui[[k]], k, 1, Length[ui]]; Print@umed;
urms = Sqrt[(1/(nn - 1)) Sum[(umed - ui[[k]])^2, k, 1,
Length[ui]]]; Print@urms;
it = urms/umed; Print@it
, i, 10, 10];
>> 2100
>> 10.7981
>> 0.262021
>> 0.0242655
69