projeto de graduaÇÃo ii - app.uff.brapp.uff.br/riuff/bitstream/1/1799/1... · 3.2.1 vetor...
TRANSCRIPT
UNIVERSIDADE FEDERAL FLUMINENSE
TCE - Escola de Engenharia
TEM - Departamento de Engenharia Mecânica
PROJETO DE GRADUAÇÃO II
Título do Projeto:
DETERMINAÇÃO DO MÓDULO DE CISALHAMENTO DE
UMA BORRACHA DE SILICONE REFORÇADA COM
NANOPARTÍCULAS DE ALUMINA
Autor:
DANIEL MENDONÇA MOREIRA
Orientador:
LUIZ CARLOS DA SILVA NUNES
Data: 29 de março de 2016
DANIEL MENDONÇA MOREIRA
DETERMINAÇÃO DO MÓDULO DE CISALHAMENTO DE
UMA BORRACHA DE SILICONE REFORÇADA COM
NANOPARTÍCULAS DE ALUMINA
Trabalho de Conclusão de Curso apresentado
ao Curso de Engenharia Mecânica da Universidade
Federal Fluminense, como requisito parcial para obtenção
do grau de Engenheiro Mecânico.
Orientador:
Prof. Luiz Carlos da Silva Nunes
Niterói
2016
Ficha Catalográfica elaborada pela Biblioteca da Escola de Engenharia e Instituto de Computação da UFF
DEDICATÓRIA
Dedico este trabalho, primeiramente, à minha família, por me permitir chegar até aqui, me
apoiando nos momentos mais difíceis. Aos amigos, que serviram de fundamental apoio e
inspiração para continuar no caminho. Aos técnicos e professores, que compartilharam seu
conhecimento importante para minha formação. Em especial, ao professor Luiz Carlos da Silva
Nunes por me orientar e ser presente na elaboração deste trabalho.
AGRADECIMENTOS
Agradeço primeiramente à minha família, por todo suporte dado a mim, seja emocional ou
financeiro, paciência, compreensão e dureza nos momentos necessários. Aos amigos que
estiveram ao lado servindo de apoio e inspiração nos estudos.
Aos professores do curso de graduação em Engenharia Mecânica da Universidade Federal
Fluminense, Pelos ensinamentos e críticas construtivas durante o curso de graduação,
despertando em mim o interesse cada vez maior pela busca do conhecimento.
Em especial, ao professor Luiz Carlos da Silva Nunes, por me orientar neste trabalho e me
apresentar a uma nova área de conhecimento na engenharia, tema deste projeto de graduação,
enriquecendo, assim, meus conhecimentos como engenheiro. Obrigado pela oportunidade.
RESUMO
O objetivo deste trabalho é determinar o módulo de cisalhamento inicial de uma borracha de
silicone reforçada com diferentes concentrações de nanopartícula de alumina. Os dados
experimentais foram obtidos a partir um trabalho de dissertação de mestrado, onde corpos de
prova de compósito foram submetidos a um ensaio de cisalhamento puro. Para determinar os
valores do módulo de cisalhamento cinco modelos clássicos para materiais hiperelásticos
encontrados na literatura foram usados: Mooney-Rivin [2], Yeoh [2], Gent [2], Ogden [2] e
López-Pamies [2]. Pode-se observar que os modelos de Ogden [2], Lopez-Pamies [2] e Gent
[2] apresentaram os melhores resultados
Palavras-Chave: alumina; nanopartículas; módulo de cisalhamento; modelos teóricos
ABSTRACT
The objective of this study is to determine the initial shear modulus of silicone rubber reinforced
with different concentrations of alumina nanoparticles. The experimental data were obtained
from a master's dissertation, where composite samples were subjected to a pure shear test. To
determine the values of the five classic models shear modulus for hyperelastic materials found
in the literature were used: Mooney-Rivin [2], Yeoh [2], Gent [2] Ogden [2] and Lopez-Pamies
[2]. It can be seen that Ogden model [2], Lopez-Pamies [2] and Gent [2] exhibited the best
results
.Key-Words: alumina; nanoparticles; shear modulus; theoretical models
LISTA DE ILUSTRAÇÕES
Figura 2.1: Haste com padrão quadriculado ........................................................................................................ 14 Figura 2.2: Corpo aleatório não deformado e deformado ................................................................................... 15 Figura 2.3: Exemplos de deformações .................................................................................................................. 19 Figura 2.4: Deformação de um elemento retangular .......................................................................................... 20 Figura 2.5: Rotação de um elemento de um corpo rígido no plano bidimensional x-y. ..................................... 24 Figura 3.1: Configuração atual e de referência .................................................................................................... 31 Figura 3.2: Campo de deslocamento U de uma partícula .................................................................................... 32 Figura 3.3: Deformação de uma curva material Γ numa curva espacial γ .......................................................... 33 Figura 3.4: Deformação de uma linha material de tamanho dε numa linha espacial de tamanho ................... 35 Figura 3.5: Vetores tração agindo num elemento de superfície infinitesimal com normais apontadas para fora ............................................................................................................................................................................... 39 Figura 4.1: Gráfico tensão x estiramento para 3.5% em volume de nanopartículas .......................................... 53 Figura 4.2: Médias dos ensaios ............................................................................................................................. 54 Figura 4.3: Gráfico comparativo entre modelos .................................................................................................. 59 Figura 4.4: Ajuste do modelo de Mooney-Rivlin [2] referente à 5% em volume de nanopartículas .................. 60 Figura 4.5: Ajuste do modelo de López-Pamies [2] referente à 5% em volume de nanopartículas ................... 61 Figura 4.6: Ajuste do modelo de Ogden [2] referente à 5% em volume de nanopartículas ............................... 62 Figura 4.7: Ajuste do modelo de Yeoh [2] referente à 5% em volume de nanopartículas .................................. 63 Figura 4.8: Ajuste do modelo de Gent [2] referente à 5% em volume de nanopartículas .................................. 64 Figura 4.9: Erros residuais para cada modelo teórico .......................................................................................... 65
LISTA DE TABELAS
Tabela 4.1: Módulo de cisalhamento inicial segundo modelo de Mooney-Rivlin [2] ......................................... 56 Tabela 4.2: Módulo de cisalhamento via modelo de López-Pamies [2] – 1 termo .............................................. 57 Tabela 4.3: Módulo de cisalhamento inicial via modelo de Yeoh [2] .................................................................. 58 Tabela 4.4: Módulo de cisalhamento inicial segundo Modelo de Ogden [2] ...................................................... 58 Tabela 4.5: Módulo de cisalhamento segundo modelo de Gent [2] .................................................................... 59
SUMÁRIO
1 INTRODUÇÃO 12
1.1 MOTIVAÇÃO 12
1.2 OBJETIVO 13
2 FORMULAÇÃO MATEMÁTICA – DEFORMAÇÕES INFINITESIMAIS 14
2.1 DEFORMAÇÕES GERAIS 14
2.2 TEORIA DAS PEQUENAS DEFORMAÇÕES: RELAÇÕES GEOMÉTRICAS 19
2.3 MATERIAIS ELÁSTICOS LINEARES – LEI DE HOOKE 25
3 FORMULAÇÃO MATEMÁTICA – DEFORMAÇÕES FINITAS 29
3.1 CINEMÁTICA 29 3.1.1 CONCEITOS DE PARTÍCULA E CORPO CONTÍNUO 29 3.1.2 CONFIGURAÇÃO ESPACIAL 30 3.1.3 CAMPO DE DESLOCAMENTO 31 3.1.3 GRADIENTE DE DEFORMAÇÃO 33 3.1.4 TENSOR DEFORMAÇÃO 35
3.2 CONCEITOS DE TENSÃO 38 3.2.1 VETOR TRAÇÃO E VETOR TENSÃO 39 3.2.2 TEOREMA DE TENSÃO DE CAUCHY 40
3.3 EQUAÇÕES CONSTITUTIVAS 41 3.3.1 MATERIAL HIPERELÁSTICO 42 3.3.2 MATERIAIS HIPERELÁSTICOS ISOTRÓPICOS 43 3.3.3 MATERIAIS HIPERELÁSTICOS INCOMPRESSÍVEIS 44 3.3.4 MATERIAIS HIPERELÁSTICOS ISOTRÓPICOS INCOMPRESSÍVEIS 45
3.4 CISALHAMENTO PURO 46
3.5 EXEMPLOS DE MODELOS PARA FUNÇÃO ENERGIA DE DEFORMAÇÃO 48
4 DADOS EXPERIMENTAIS: APRESENTAÇÃO, RESULTADOS E DISCUSSÕES 52
4.1 APRESENTAÇÃO DOS DADOS EXPERIMENTAIS 52
4.2 ANÁLISE DOS DADOS 53 4.2.1 OBTENÇÃO DO MÓDULO DE CISALHAMENTO 55 4.2.2 ANÁLISE DE ERRO DOS MODELOS 59
5 CONCLUSÕES 66
12
1 INTRODUÇÃO
1.1 MOTIVAÇÃO
Historicamente, a ideia de misturar dois ou mais materiais diferentes de modo a obter
um novo material, cujas propriedades mecânicas estejam em valor intermediário
comparado aos seus componentes puros, já é largamente utilizada desde os princípios das
“indústrias” civil e bélica que testemunharam o uso de madeira, pele e tendões de animais
para fabricação de arco e flecha, ou madeira e argila para construção de casas. Portanto,
a ideia de um elemento de reforço imerso em um elemento de forma, combinando as suas
propriedades, já é conhecida e usada há muito tempo e em muitos campos de nossa vida.
Um exemplo mais atual é o uso do concreto armado. Chamado no campo da engenharia
civil de “casamento perfeito”, os materiais combinados contemplam as propriedades de
resistência à tração do aço com a resistência à compressão do concreto, criando assim um
novo material com propriedades particulares que não necessariamente seja a soma das
propriedades dos materiais inicias.
No campo da aviação civil e aeroespacial, já é comprovada a necessidade de substituir
as ligas de aço reforçadas que, apesar de sua comprovada eficácia, apresentam
deficiências como alto custo, peso inadequado e complexidade na sua fabricação.
Materiais compósitos abririam um novo leque de ideias e aplicações que vão desde
componentes estruturais básicos, como juntas, estruturas interiores, sistemas de ar
condicionado e elétrico (já largamente utilizados), como sua utilização na estrutura do
avião, como, por exemplo, na construção das asas e até na própria carenagem. Com baixo
peso, estes novos materiais trariam algumas vantagens, como eficiência energética e
baixo custo, diminuindo, desta forma, não só o gasto com combustíveis, como também o
tempo de viagem. Materiais compósitos também são utilizados na indústria
automobilística de alto desempenho, não só em carros de corrida de diversas categorias,
como também nos de luxo, para diminuir o peso e o custo de fabricação, aumentando,
assim, a eficiência energética.
13
A vasta gama de nanopartículas condutoras, ou não, de eletricidade, térmica ou
magnética, por exemplo, abrem uma pluralidade de utilidades, que vão desde
componentes estruturais até áreas como biomedicina e nanotecnologia. Atualmente, os
principais alvo de pesquisa, tendo em vista o grande número de publicações na área, são
os materiais poliméricos reforçados com nanopartículas. A vasta gama de nanopartículas
condutoras, ou não, de eletricidade, térmica, magnética, por exemplo, abrem uma
pluralidade de utilidades, que vão desde componentes estruturais até áreas como
biomedicina e nanotecnologia.
Não importando o campo de aplicação, a falta de um banco de dados completo para
materiais compósitos ainda impede sua utilização em larga escala. A necessidade de
prever o comportamento do material em diversas situações de carregamento e esforço
deve ser uma prioridade para garantir a segurança de qualquer projeto.
1.2 OBJETIVO
O objetivo principal deste trabalho é a determinação do módulo de cisalhamento de
um material compósito, mais especificamente de uma borracha de silicone reforçada com
nanopartículas de alumina (𝐴𝑙2𝑆𝑂3). Para tal, foram escolhidos na literatura modelos
teóricos a serem ajustados aos dados experimentais obtidos em ensaio de tração, a saber:
Yeoh[2], Lópes-Pamies[2], Ogden[2], Gent[2], Mooney-Rivlin[2]. O tratamento de
dados será feito no software MatLab. Tendo em mãos as propriedades mecânicas do
material, será então possível prever o comportamento do material sob tensão,
determinando possíveis falhas estruturais e se essas eventuais falhas poderão ser sanadas.
Nos capítulos 2 e 3 serão apresentados os conceitos que serviram de base para a
elaboração do presente trabalho, tais como os modelos cinemáticos, de tensão, grandes e
pequenas deformações etc. No capítulo 4 serão apresentados os dados experimentais, sua
fonte, modelos de tratamento usados, resultados e discussões. Por fim, no capítulo 5, todas
as conclusões relacionadas ao trabalho realizado são apresentadas.
14
2 FORMULAÇÃO MATEMÁTICA – DEFORMAÇÕES INFINITESIMAIS
2.1 DEFORMAÇÕES GERAIS
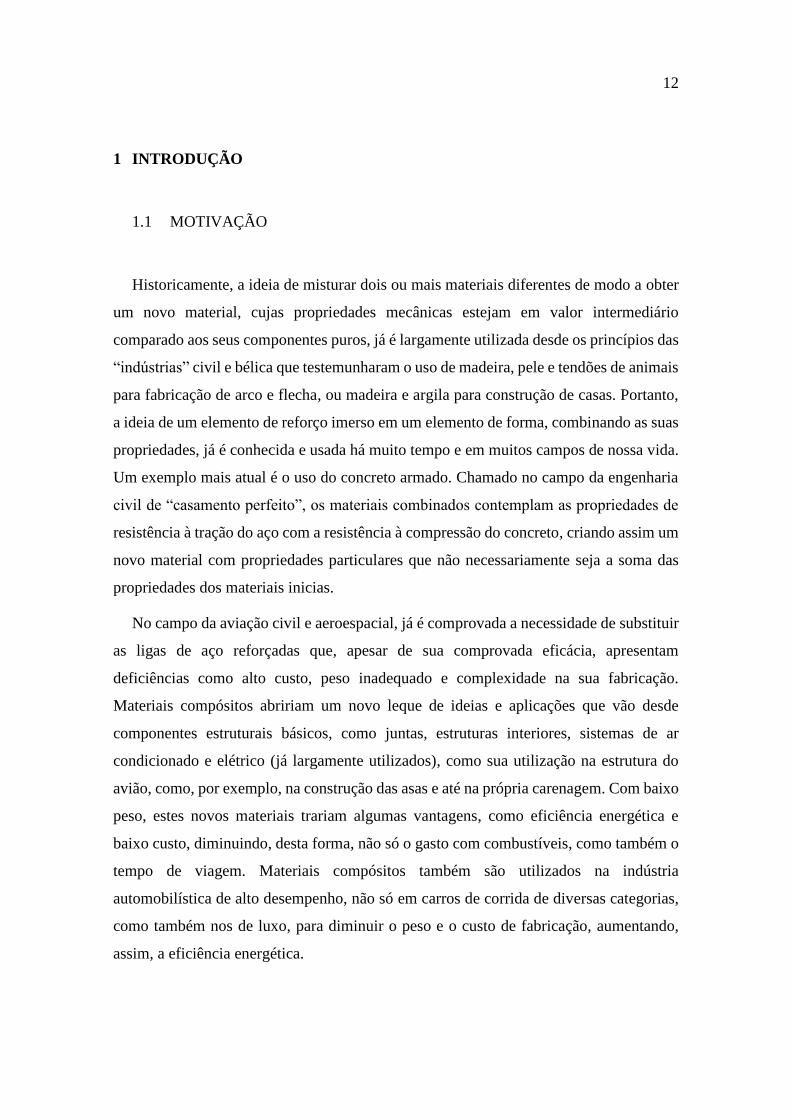
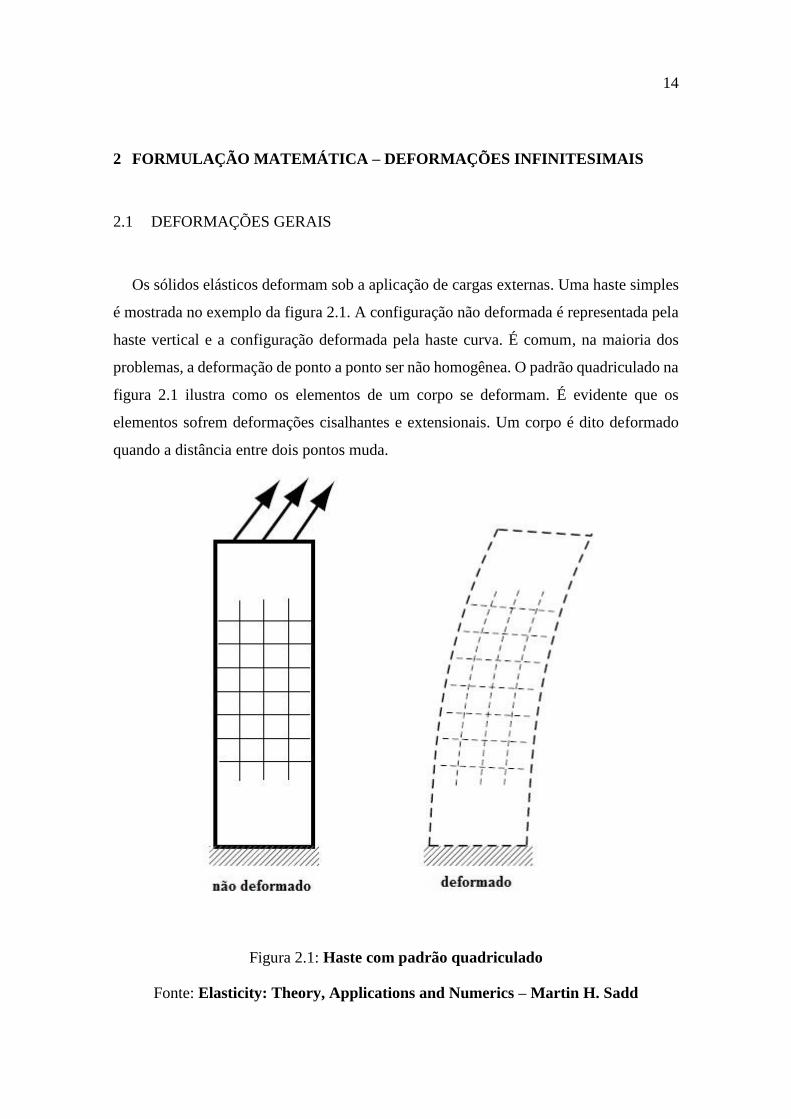
Os sólidos elásticos deformam sob a aplicação de cargas externas. Uma haste simples
é mostrada no exemplo da figura 2.1. A configuração não deformada é representada pela
haste vertical e a configuração deformada pela haste curva. É comum, na maioria dos
problemas, a deformação de ponto a ponto ser não homogênea. O padrão quadriculado na
figura 2.1 ilustra como os elementos de um corpo se deformam. É evidente que os
elementos sofrem deformações cisalhantes e extensionais. Um corpo é dito deformado
quando a distância entre dois pontos muda.
Figura 2.1: Haste com padrão quadriculado
Fonte: Elasticity: Theory, Applications and Numerics – Martin H. Sadd
15
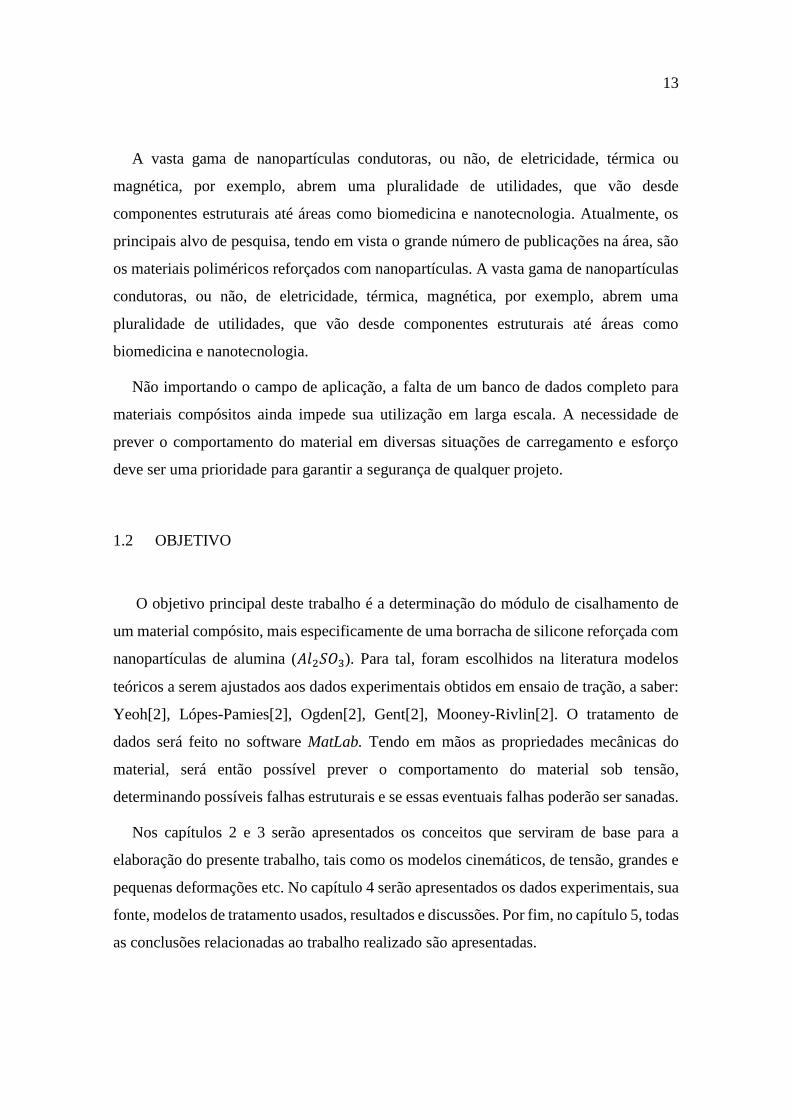
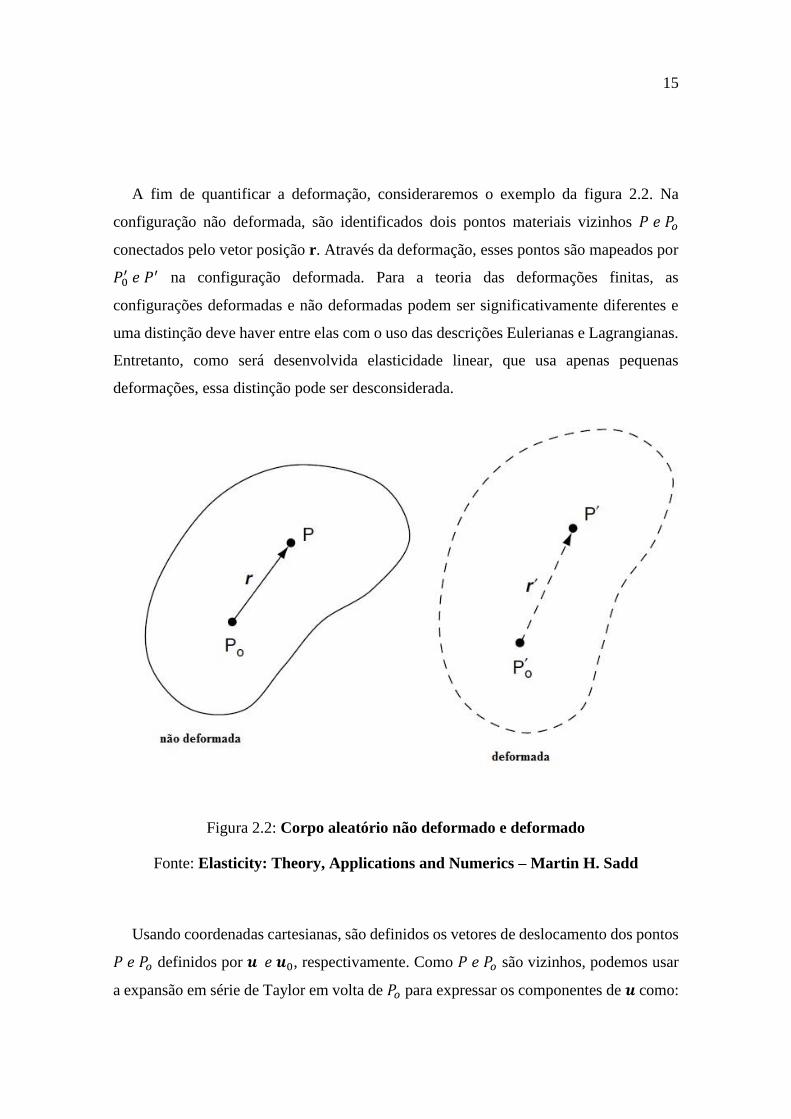
A fim de quantificar a deformação, consideraremos o exemplo da figura 2.2. Na
configuração não deformada, são identificados dois pontos materiais vizinhos 𝑃 𝑒 𝑃𝑜
conectados pelo vetor posição r. Através da deformação, esses pontos são mapeados por
𝑃0′ 𝑒 𝑃′ na configuração deformada. Para a teoria das deformações finitas, as
configurações deformadas e não deformadas podem ser significativamente diferentes e
uma distinção deve haver entre elas com o uso das descrições Eulerianas e Lagrangianas.
Entretanto, como será desenvolvida elasticidade linear, que usa apenas pequenas
deformações, essa distinção pode ser desconsiderada.
Figura 2.2: Corpo aleatório não deformado e deformado
Fonte: Elasticity: Theory, Applications and Numerics – Martin H. Sadd
Usando coordenadas cartesianas, são definidos os vetores de deslocamento dos pontos
𝑃 𝑒 𝑃𝑜 definidos por 𝒖 𝑒 𝒖0, respectivamente. Como 𝑃 𝑒 𝑃𝑜 são vizinhos, podemos usar
a expansão em série de Taylor em volta de 𝑃𝑜 para expressar os componentes de 𝒖 como:
16
𝑢 = 𝑢0 +
∂𝑢
∂𝑥𝑟𝑥 +
∂𝑢
∂y𝑟𝑦 +
∂𝑢
∂z𝑟𝑧 (2.1)
𝑣 = 𝑣0 +
∂v
∂𝑥𝑟𝑥 +
∂v
∂y𝑟𝑦 +
∂𝑣
∂z𝑟𝑧 (2.2)
𝑤 = 𝑤0 +
∂𝑤
∂x𝑟𝑥 +
∂w
∂y𝑟𝑦 +
∂w
∂z𝑟𝑧 (2.3)
Nota-se que os componentes de maior ordem da expansão em série de Taylor foram
desconsiderados, pois os componentes de r são pequenos. A mudança no vetor posição
pode ser escrita da forma:
𝛥𝒓 = 𝒓′ − 𝒓 = 𝒖 − 𝒖0 (2.4)
Usando as equações (2.1), (2.2) e (2.3), temos:
𝛥𝑟𝑥 =
∂𝑢
∂𝑥𝑟𝑥 +
∂𝑢
∂y𝑟𝑦 +
∂𝑢
∂z𝑟𝑧 (2.5)
𝛥𝑟𝑦 =
∂v
∂𝑥𝑟𝑥 +
∂v
∂y𝑟𝑦 +
∂𝑣
∂z𝑟𝑧 (2.6)
𝛥𝑟𝑧 =
∂𝑤
∂x𝑟𝑥 +
∂w
∂y𝑟𝑦 +
∂w
∂z𝑟𝑧 (2.7)

17
ou em forma reduzida, notação indicial:
𝛥𝑟𝑖 = 𝑢𝑖,𝑗𝑟𝑗 (2.8)
O tensor 𝑢𝑖,𝑗 é chamado de tensor gradiente de deslocamento e pode ser escrito na
forma matricial, da forma:
𝑢𝑖,𝑗 =
[ ∂𝑢
∂𝑥
∂𝑢
∂y
∂𝑢
∂z∂v
∂𝑥
∂v
∂y
∂𝑣
∂z∂𝑤
∂x ∂w
∂y ∂w
∂z ]
(2.9)
Este tensor ainda pode ser decomposto em partes simétricas e antissimétricas da
forma:
𝑢𝑖,𝑗 = 𝑒𝑖𝑗 + 𝑤𝑖𝑗, onde (2.10)
𝑒𝑖𝑗 =
1
2(𝑢𝑖,𝑗 + 𝑢𝑗,𝑖) (2.11)
𝑤𝑖𝑗 =
1
2(𝑢𝑖,𝑗 − 𝑢𝑗,𝑖) (2.12)
O tensor 𝑒𝑖𝑗 é chamado de tensor deformação e o tensor 𝑤𝑖𝑗 é chamado de tensor
rotação. Pelas equações (2.8) e (2.10), pode-se deduzir que para pequenas deformações,
a mudança no vetor posição entre pontos vizinhos pode ser expressa pela soma de

18
componentes de deformação e rotação. Combinando as equações (2.4), (2.8) e (2.10) e
escolhendo 𝑟𝑖 = 𝑑𝑥𝑖, também podemos escrever o resultado geral na forma:
𝑢𝑖 = 𝑢𝑖𝑜 + 𝑒𝑖𝑗𝑑𝑥𝑗 + 𝑤𝑖𝑗𝑑𝑥𝑗 (2.13)
Como estamos considerando um campo de deslocamento geral, os resultados
anteriores incluem tanto deformação e movimento de corpo rígido. Lembrando que um
vetor 𝑤𝑖 pode ser associado com o tensor rotação pela relação 𝑤𝑖 = − 1
2휀𝑖𝑗𝑘𝑤𝑗𝑘 e usando
essa definição, podemos encontrar:
𝜔1 = 𝜔32 =
1
2(∂𝑢3
∂𝑥2−
∂𝑢2
∂𝑥3) (2.14)
𝜔2 = 𝜔13 =
1
2(∂𝑢1
∂𝑥3−
∂𝑢2
∂𝑥3) (2.15)
𝜔3 = 𝜔21 =
1
2(∂𝑢2
∂𝑥1−
∂𝑢1
∂𝑥2) (2.16)
e pode ser dada na forma tensorial 𝒘 = (1
2)(𝛻 𝑥 𝒖 ).
19
2.2 TEORIA DAS PEQUENAS DEFORMAÇÕES: RELAÇÕES GEOMÉTRICAS
Será estabelecida nesta sessão uma interpretação geométrica dos resultados mostrados
na sessão anterior. Variáveis e equações de elasticidade são quantidades de campo
definidos em cada ponto material de um corpo contínuo. Entretanto, equações de campo
particulares são comumente desenvolvidas, primeiro investigando o comportamento de
elementos infinitesimais e depois, um processo de limitação é usado permitindo o
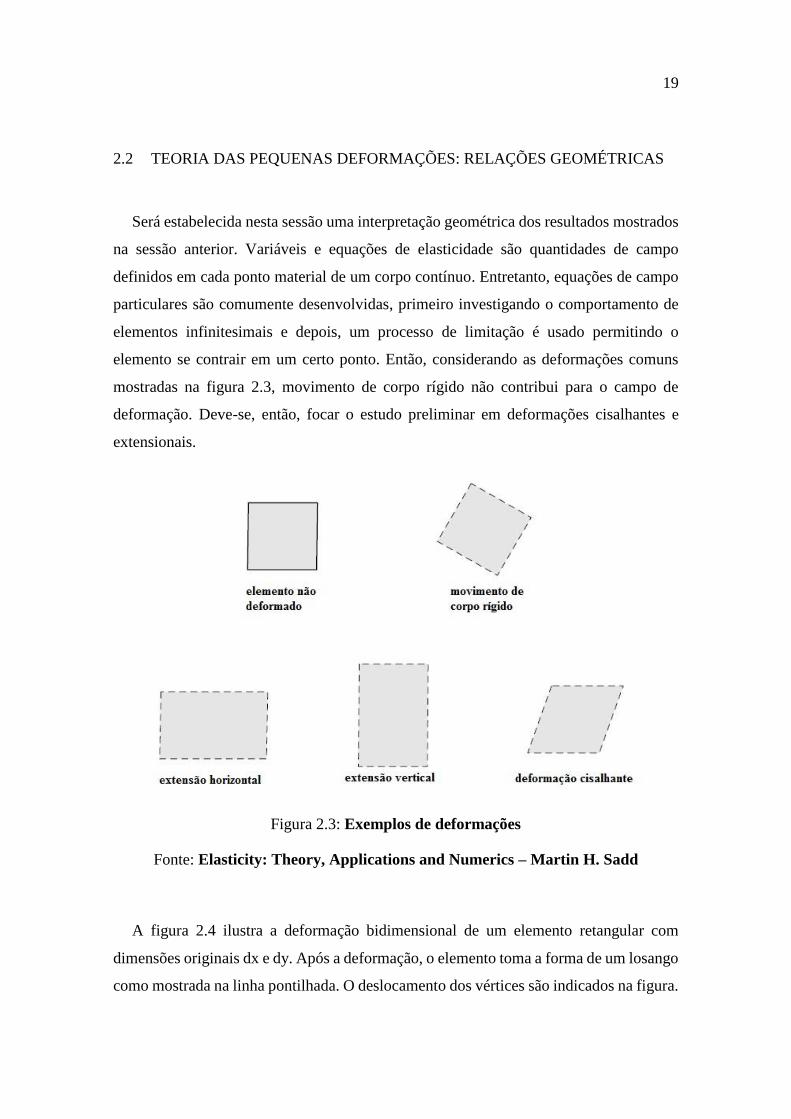
elemento se contrair em um certo ponto. Então, considerando as deformações comuns
mostradas na figura 2.3, movimento de corpo rígido não contribui para o campo de
deformação. Deve-se, então, focar o estudo preliminar em deformações cisalhantes e
extensionais.
Figura 2.3: Exemplos de deformações
Fonte: Elasticity: Theory, Applications and Numerics – Martin H. Sadd
A figura 2.4 ilustra a deformação bidimensional de um elemento retangular com
dimensões originais dx e dy. Após a deformação, o elemento toma a forma de um losango
como mostrada na linha pontilhada. O deslocamento dos vértices são indicados na figura.
20
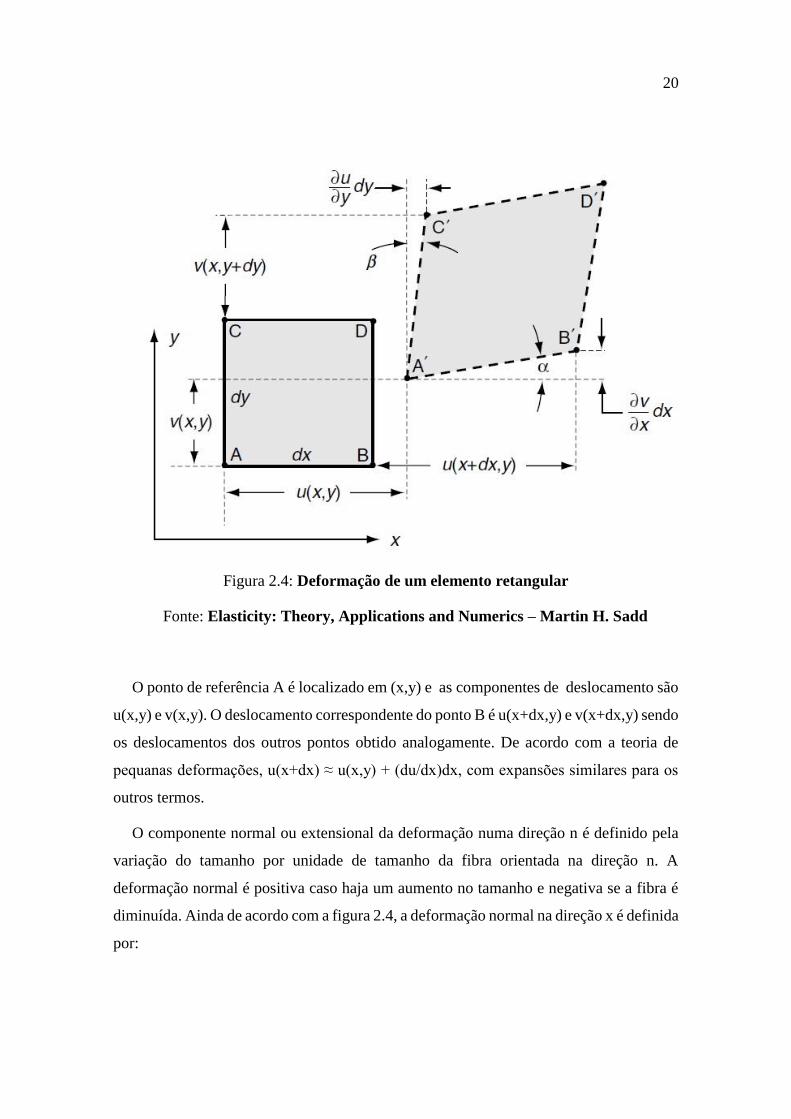
Figura 2.4: Deformação de um elemento retangular
Fonte: Elasticity: Theory, Applications and Numerics – Martin H. Sadd
O ponto de referência A é localizado em (x,y) e as componentes de deslocamento são
u(x,y) e v(x,y). O deslocamento correspondente do ponto B é u(x+dx,y) e v(x+dx,y) sendo
os deslocamentos dos outros pontos obtido analogamente. De acordo com a teoria de
pequanas deformações, u(x+dx) ≈ u(x,y) + (du/dx)dx, com expansões similares para os
outros termos.
O componente normal ou extensional da deformação numa direção n é definido pela
variação do tamanho por unidade de tamanho da fibra orientada na direção n. A
deformação normal é positiva caso haja um aumento no tamanho e negativa se a fibra é
diminuída. Ainda de acordo com a figura 2.4, a deformação normal na direção x é definida
por:

21
휀𝑥 = 𝐴′𝐵′−𝐴𝐵
𝐴𝐵, onde (2.17)
𝐴′𝐵′ = [(𝑑𝑥 +
∂𝑢
∂𝑥𝑑𝑥)2 + (
∂𝑣
∂𝑥𝑑𝑥)2]
12
= [1 + 2∂𝑢
∂𝑥+ (
∂𝑢
∂𝑥)2
+ (∂𝑣
∂𝑥)2𝑑𝑥]
12 ≈ (1 +
∂𝑢
∂𝑥) 𝑑𝑥
(2.18)
onde, de acordo com a teoria de pequenas deformações, foram desconsiderados os termos
de maior ordem. Usando esses resultados e o fato de que AB = dx, a deformação normal
na direção x é reduzida para:
휀𝑥 =
∂𝑢
∂𝑥 (2.19)
e de maneira similiar, a deformação normal na direção y será:
휀𝑦 =
∂𝑣
∂𝑦 (2.20)
A deformação cisalhante e envolve mudanças de ângulos, como mostrada na figura
2.4. Tal deformação é definida como a mudança de ângulo entre duas direções
originalmente ortogonais num material contínuo. Essa definição é, na verdade, referida
como deformação cisalhante de engenharia. A teoria da elasticidade aplicada usa
geralmente um tensor que requer uma definição de deformação cisalhante correspondente
à metade da mudança de ângulo entre os eixos ortogonais. Medida em radianos, a
deformação cisalhante é positiva se o ângulo direito entre as direções positivas dos eixos
positivos diminuem. Então, o sinal da deformação cisalhante depende dos eixos

22
escolhidos. Na figura 2.4, a deformação cisalhante de engenharia, com respeito aos eixos
x e y definidos, tem a forma:
γ𝑥𝑦 =
1
2− ⊾𝐶′𝐴′𝐵′ = 𝛼 + 𝛽 (2.21)
Para pequenas deformações 𝛼 ≈ tan𝛼 𝑒 𝛽 ≈ tan𝛽, e a deformação cisalhante pode
ser expressa da forma:
γ𝑥𝑦 =
∂𝑣∂𝑥
𝑑𝑥
∂𝑢∂𝑥
𝑑𝑥 + 𝑑𝑥+
∂𝑢∂𝑦
𝑑𝑦
∂𝑣∂𝑦
𝑑𝑦 + 𝑑𝑦=
∂𝑢
∂𝑦+
∂𝑣
∂𝑥 (2.22)
onde foram desconsiderados novamente os termos de maior ordem nos gradientes de
deslocamento. Por um simples intercâmbio entre x e y, u e v, é aparente que γ𝑥𝑦 = γ𝑦𝑥.
Considerando o comportamento similar nos planos y-z e x-z, esses resultados podem
ser facilmente estendidos para a forma tridimensional, produzindo:
휀𝑥 =
∂𝑢
∂𝑥, 휀𝑦 =
∂𝑣
∂𝑦, 휀𝑤 =
∂𝑤
∂𝑧 (2.23)
γ𝑥𝑦 =
∂𝑢
∂𝑦+
∂𝑣
∂𝑥, γ𝑦𝑧 =
∂𝑣
∂𝑧+
∂𝑤
∂𝑦, γ𝑥𝑧 =
∂𝑤
∂𝑥+
∂𝑢
∂𝑧 (2.24)
Então, são definidos três componentes normais e três componentes de deformação
cisalhante levando a um total de seis componentes independentes que descrevem
completamente a teoria de pequenas deformações. Esse conjunto de equações é referido

23
como relações de deslocamento-deformação. Entretanto, esses resultados são escritos em
termos de componentes de deformação de engenharia, e a teoria da elasticidade prefere
usar o tensor 𝑒𝑖𝑗 definido em (2.11) e (2.12). Isso representa apenas uma pequena
mudança, pois a deformação normal é idêntica à deformação extensional.
Portanto, usando o tensor 𝑒𝑖𝑗, a relação deslocamento-deformação pode ser expressa
da forma:
휀𝑥 = ∂𝑢
∂𝑥, 휀𝑦 =
∂𝑣
∂𝑦, 휀𝑧 =
∂𝑤
∂𝑧 (2.25)
𝑒𝑥𝑦 =
1
2(∂𝑢
∂𝑦+
∂𝑣
∂𝑥) , 𝑒𝑦𝑧 =
1
2(∂𝑣
∂𝑧+
∂𝑤
∂𝑦) , 𝑒𝑥𝑧 =
1
2(∂𝑢
∂𝑧+
∂𝑤
∂𝑦), (2.26)
Pode-se usar também o tensor na forma indicial mostrada na equação (2.27):
𝑒𝑖𝑗 =
1
2(𝑢𝑖,𝑗 + 𝑢𝑗,𝑖)
(2.27)
Pode-se ainda usar a notação matricial representada pela equação (2.28):
e = 𝟏
𝟐[𝛻𝒖 + (𝛻𝒖)𝑇] (2.28)
onde e é a matriz deformação e 𝛻𝒖 é o gradiente de deslocamento.
A deformação é um tensor de segunda ordem simétrico e é comumente escrito na
forma matricial mostrada na equação (2.29):
24
𝒆 = [𝒆] = [
𝑒𝑥 𝑒𝑥𝑦 𝑒𝑥𝑧
𝑒𝑥𝑦 𝑒𝑦 𝑒𝑦𝑧
𝑒𝑥𝑧 𝑒𝑦𝑧 𝑒𝑧
] (2.29)
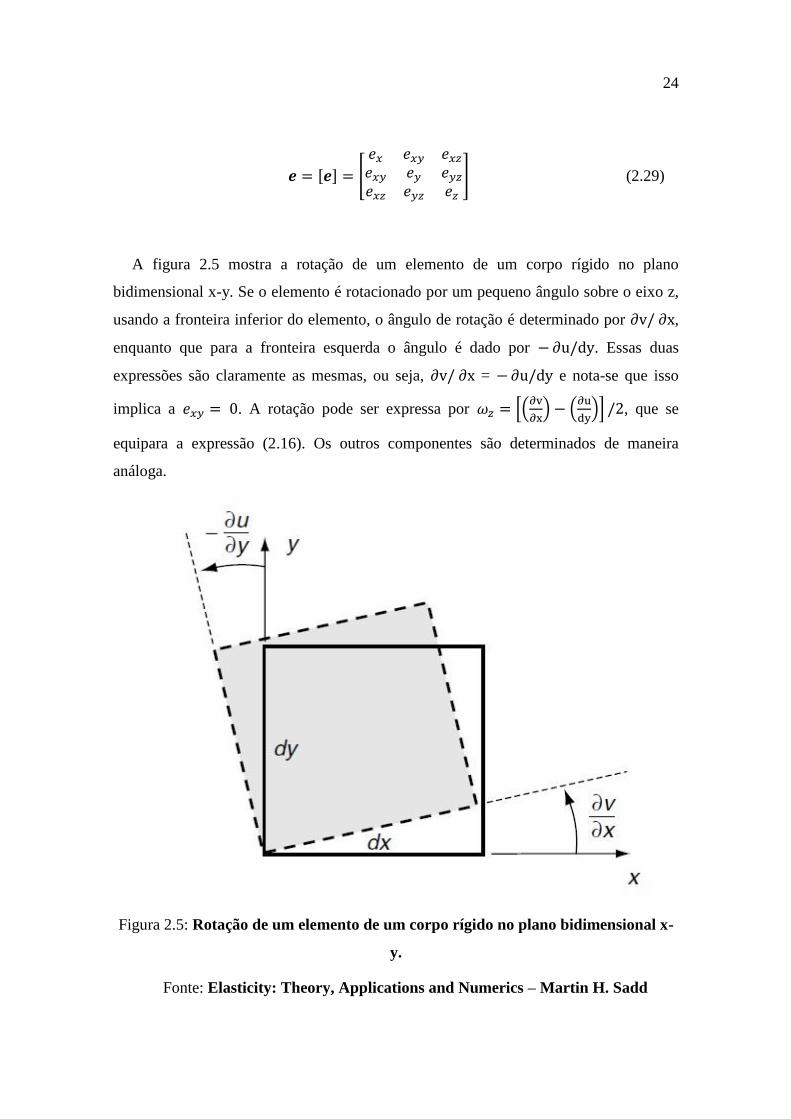
A figura 2.5 mostra a rotação de um elemento de um corpo rígido no plano
bidimensional x-y. Se o elemento é rotacionado por um pequeno ângulo sobre o eixo z,
usando a fronteira inferior do elemento, o ângulo de rotação é determinado por ∂v/ ∂x,
enquanto que para a fronteira esquerda o ângulo é dado por −∂u/dy. Essas duas
expressões são claramente as mesmas, ou seja, ∂v/ ∂x = − ∂u/dy e nota-se que isso
implica a 𝑒𝑥𝑦 = 0. A rotação pode ser expressa por 𝜔𝑧 = [(∂v
∂x) − (
∂u
dy)] /2, que se
equipara a expressão (2.16). Os outros componentes são determinados de maneira
análoga.
Figura 2.5: Rotação de um elemento de um corpo rígido no plano bidimensional x-
y.
Fonte: Elasticity: Theory, Applications and Numerics – Martin H. Sadd

25
Relações para a constante rotacional 𝜔𝑧 pode ser integrada dando o resultado:
𝑢∗ = 𝑢0 − 𝜔𝑧𝑦 (2.30)
𝑣∗ = 𝑣0 + 𝜔𝑧𝑥 (2.31)
onde 𝑢0 𝑒 𝑣0 são constantes arbitrárias de translação nas direções x e y, respectivamente.
Esse resultado então especifica a forma geral do campo de deslocamento para a forma
bidimensional de um movimento de corpo rígido.
Para o caso tridimensional, a forma mais geral do deslocamento de um corpo rígido
pode ser expressa por:
𝑢∗ = 𝑢0 − 𝜔𝑧𝑦 + 𝜔𝑦𝑧 (2.32)
𝑣∗ = 𝑣0 − 𝜔𝑥𝑧 + 𝜔𝑧𝑥 (2.33)
𝑤∗ = 𝑤0 − 𝜔𝑦𝑥 + 𝜔𝑥𝑦 (2.34)
2.3 MATERIAIS ELÁSTICOS LINEARES – LEI DE HOOKE
A fim de construir uma lei constitutiva geral para materiais elásticos lineares, é
assumido que cada componente de tensão é linearmente relacionada ao componente de
deformação.
𝜎𝑥 = 𝐶11𝑒𝑥 + 𝐶12𝑒𝑦 + 𝐶13𝑒𝑧 + 2𝐶14𝑒𝑥𝑦 + 2𝐶15𝑒𝑦𝑧 + 2𝐶16𝑒𝑧𝑥 (2.35)
26
𝜎𝑦 = 𝐶21𝑒𝑥 + 𝐶22𝑒𝑦 + 𝐶23𝑒𝑧 + 2𝐶24𝑒𝑥𝑦 + 2𝐶25𝑒𝑦𝑧 + 2𝐶26𝑒𝑧𝑥 (2.36)
𝜎𝑧 = 𝐶31𝑒𝑥 + 𝐶32𝑒𝑦 + 𝐶33𝑒𝑧 + 2𝐶34𝑒𝑥𝑦 + 2𝐶35𝑒𝑦𝑧 + 2𝐶36𝑒𝑧𝑥 (2.37)
𝜏𝑥𝑦 = 𝐶41𝑒𝑥 + 𝐶42𝑒𝑦 + 𝐶43𝑒𝑧 + 2𝐶44𝑒𝑥𝑦 + 2𝐶45𝑒𝑥𝑧 + 2𝐶46𝑒𝑧𝑥 (2.38)
𝜏𝑦𝑧 = 𝐶51𝑒𝑥 + 𝐶52𝑒𝑦 + 𝐶53𝑒𝑧 + 2𝐶54𝑒𝑥𝑦 + 2𝐶55𝑒𝑦𝑧 + 2𝐶56𝑒𝑧𝑥 (2.39)
𝜏𝑧𝑥 = 𝐶16𝑒𝑥 + 𝐶26𝑒𝑦 + 𝐶36𝑒𝑧 + 2𝐶46𝑒𝑥𝑦 + 2𝐶56𝑒𝑦𝑧 + 2𝐶66𝑒𝑧𝑥 (2.40)
onde os coeficientes 𝐶𝑖𝑗 são parâmetros do material e os fatores multiplicativos 2
aparecem pela simetria da deformação. Essas relações podem ser agrupadas numa matriz
da forma:
[ 𝜎𝑥
𝜎𝑦
𝜎𝑧
𝜏𝑥𝑦
𝜏𝑦𝑧
𝜏𝑧𝑥]
=
[ 𝐶11 𝐶12 . . . 𝐶16
𝐶21 . . . . .. . . . . .. . . . . .. . . . . .
𝐶61 . . . . 𝐶66]
[
𝑒𝑥
𝑒𝑦
𝑒𝑧
2𝑒𝑥𝑦
2𝑒𝑦𝑧
2𝑒𝑧𝑥]
(2.41)
Outra forma de escrever essas relações seria na forma condensada 𝜎𝑖𝑗 = 𝐶𝑖𝑗𝑘𝑙𝜎𝑘𝑙, onde
𝐶𝑖𝑗𝑘𝑙 é um tensor de elasticidade de quarta ordem cujos componentes incluem todos os
parâmetros necessários para caracterizar o material. Baseado na simetria dos tensores de
deformação, o tensor elasticidade deve ter as seguintes propriedades:

27
𝐶𝑖𝑗𝑘𝑙=𝐶𝑗𝑖𝑘𝑙 (2.42)
𝐶𝑖𝑗𝑘𝑙 = 𝐶𝑖𝑗𝑙𝑘 (2.43)
Em geral, o tensor de quarta ordem 𝐶𝑖𝑗𝑘𝑙 tem 81 componentes, porém com as relações
(2.42) e (2.43) esse número é reduzido a 36. Assumindo o material como sendo
homogêneo e isotrópico, o tensor de elasticidade de quarta ordem deve satisfazer:
𝐶𝑖𝑗𝑘𝑙 = 𝑄𝑖𝑚𝑄𝑗𝑛𝑄𝑘𝑝𝑄𝑙𝑞𝑄𝑚𝑛𝑝𝑞 (2.44)
Pode ser mostrado que a forma mais geral satisfaz a condição de isotropia dada por:
𝐶𝑖𝑗𝑘𝑙 = 𝛼𝛿𝑖𝑗𝛿𝑘𝑙 + 𝛽𝛿𝑖𝑘𝛿𝑗𝑙 + 𝛾𝛿𝑖𝑙𝛿𝑗𝑘 (2.45)
onde 𝛼, 𝛽 e 𝛾 são constantes arbitrárias. Usando a forma geral (2.44) e a relação tensão-
deformação (2.41) em sua forma condensada obtemos a relação mostrada na equação
(2.46):
𝜎𝑖𝑗 = 𝜆𝑒𝑘𝑘𝛿𝑖𝑗 + 2𝜇𝑒𝑖𝑗 (2.47)
As constantes particulares 𝜆 𝑒 𝜇 são chamadas de constante de Lamé e módulo de
cisalhamento (ou rigidez), respectivamente. A equação (2.46) ainda pode ser escrita da
forma escalar individual mostrada nas relações (2.46)
𝜎𝑥 = 𝜆(𝑒𝑥 + 𝑒𝑦 + 𝑒𝑧) + 2𝜇𝑒𝑥 (2.47)

28
𝜎𝑦 = 𝜆(𝑒𝑥 + 𝑒𝑦 + 𝑒𝑧) + 2𝜇𝑒𝑦
𝜎𝑧 = 𝜆(𝑒𝑥 + 𝑒𝑦 + 𝑒𝑧) + 2𝜇𝑒𝑧
𝜏𝑥𝑦 = 2𝜇𝑒𝑥𝑦
𝜏𝑦𝑧 = 2𝜇𝑒𝑦𝑧
𝜏𝑧𝑥 = 2𝜇𝑒𝑧𝑥
A relação (2.46) ou sua forma individual escalar (2.47) são chamadas de lei de Hooke
generalizada para sólidos elásticos isotrópicos lineares.
29
3 FORMULAÇÃO MATEMÁTICA – DEFORMAÇÕES FINITAS
A seguir será detalhada toda a base matemática para a formulação do problema de
deformações finitas, assim como os conceitos e abordagens necessários para o seu correto
entendimento. Este capítulo será divido principalmente entre: cinemática, equações
constitutivas e energia de deformação.
3.1 CINEMÁTICA
Apesar da afirmação de que todos os corpos que constituem o mundo real serem
compostos de moléculas, estas formadas por partículas subatômicas, uma abordagem
microscópica não é capaz de modelar com precisão aceitável um problema de engenharia.
Para isso, usamos a abordagem da mecânica do contínuo. Tal abordagem não leva em
conta a complexidade associada a escala molecular. Ao invés de considerarmos uma
infinidade de partículas que constituem o universo de um corpo, consideramos um
sistema macroscópico homogêneo e formado a partir da junção de todas essas partículas
microscópicas, derivando assim as equações que governam a física dos problemas.
Resumidamente, a mecânica do contínuo estuda: cinemática, conceitos de tensão e
deformação e equações de balanço de energia e quantidade de movimento.
3.1.1 CONCEITOS DE PARTÍCULA E CORPO CONTÍNUO
A abordagem macroscópica foi desenvolvida independentemente da teoria
microscópica e submolecular. Um corpo contínuo é considerado fundamentalmente como
sendo composto por partículas subatômicas (ou pontos materiais, ou partículas contínuas)
em distribuição contínua e homogênea.
É importante ressaltar que uma partícula (ou ponto material, ou partícula contínua) se
refere a um acúmulo de um grande número de moléculas, mas pequeno o suficiente para
ser considerado como partícula. Portanto, um corpo contínuo terá uma massa e volume
30
homogêneos (ou aproximadamente homogêneo) e é caracterizado por quantidades
macroscópicas.
3.1.2 CONFIGURAÇÃO ESPACIAL
Um corpo B formado por uma infinidade de partículas P ocupará um espaço euclidiano
tridimensional. Tal espaço terá como origem O os vetores unitários 𝑒𝑎, 𝑎 = 1, 2 ,3. Em
um instante 𝑡0, o corpo ocupará uma região no espaço denotada por 𝛺0. Na medida em
que o corpo se move pelo espaço em instantes 𝑡𝑛 o corpo assumirá uma região 𝛺𝑛, 𝑛 =
1, 2, … , 𝑛. No instante 𝑡0 a configuração é chamada de configuração inicial e coincide
com a configuração de referência. Com isso, uma partícula, neste instante, ocupará um
ponto no espaço dentro da região 𝛺0 dado pelo vetor posição, nesse caso de referência,
simbolizado por X. Após um dado instante 𝑡𝑛, n > 0, movendo-se através do espaço, dada
partícula ocupará um ponto região 𝛺𝑛, chamada de configuração atual (ou deformada)
e será simbolizada pelo vetor posição (ou atual) x. Então, as configurações inicial (de
referência) e atual (deformada) serão denotadas respectivamente por X = 𝑋𝐴 𝑬𝑎, x = 𝑥𝐴
𝒆𝑎, sendo 𝑋𝐴 e 𝑥𝐴 coordenadas materiais e atuais, respectivamente, no espaço euclidiano
e 𝐸𝑎 𝑒 𝑒𝑎 os vetores unitários de bases coincidentes e origens na origem do sistema
cartesiano com “A” e “a” variando de 1 a 3. A Figura 3.1, a seguir, ilustra essa situação.
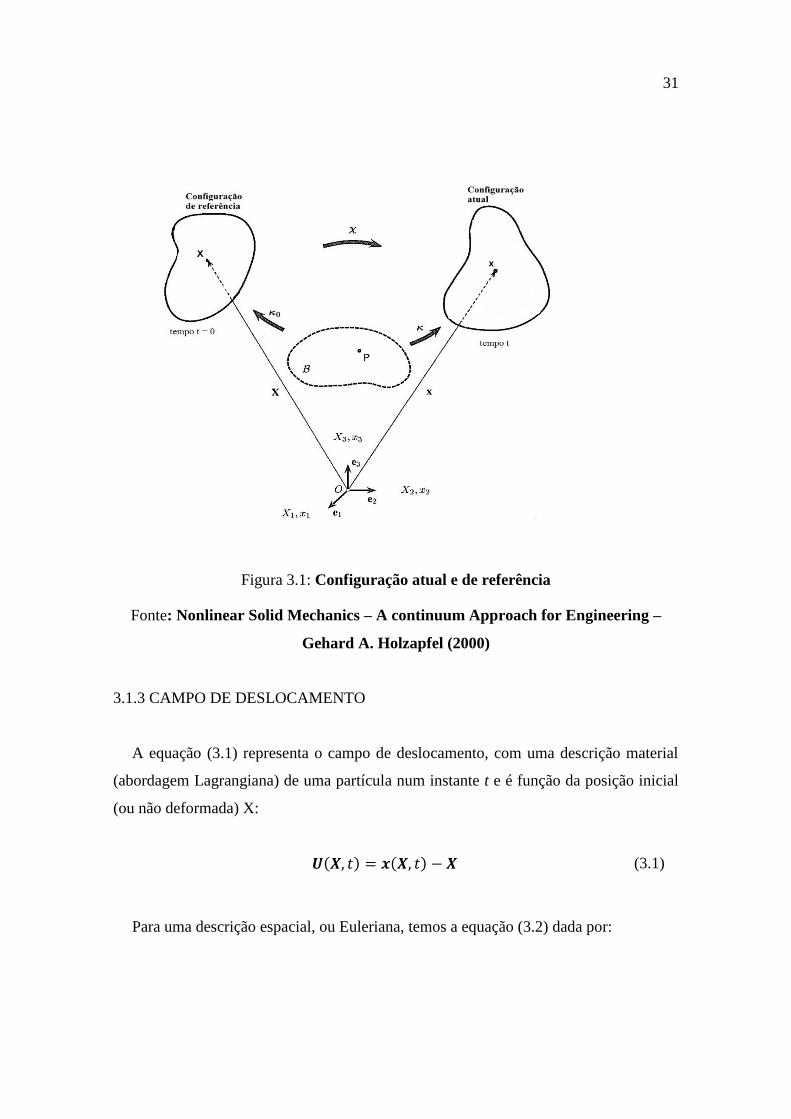
31
Figura 3.1: Configuração atual e de referência
Fonte: Nonlinear Solid Mechanics – A continuum Approach for Engineering –
Gehard A. Holzapfel (2000)
3.1.3 CAMPO DE DESLOCAMENTO
A equação (3.1) representa o campo de deslocamento, com uma descrição material
(abordagem Lagrangiana) de uma partícula num instante t e é função da posição inicial
(ou não deformada) X:
𝑼(𝑿, 𝑡) = 𝒙(𝑿, 𝑡) − 𝑿 (3.1)
Para uma descrição espacial, ou Euleriana, temos a equação (3.2) dada por:
32
𝒖(𝒙, 𝑡) = 𝒙 − 𝑿(𝒙, 𝑡),
(3.2)
onde x é a configuração de referência representada pela soma da sua configuração inicial
X(x,t) com o campo de deslocamento u em um tempo t. A equação (3.4) relaciona as
descrições espacial (3.1) e material (3.2) da forma:
𝑼(𝑿, 𝑡) = 𝑼[𝜒−1(𝐱, t), t] = 𝒖(𝒙, 𝑡)
(3.3)
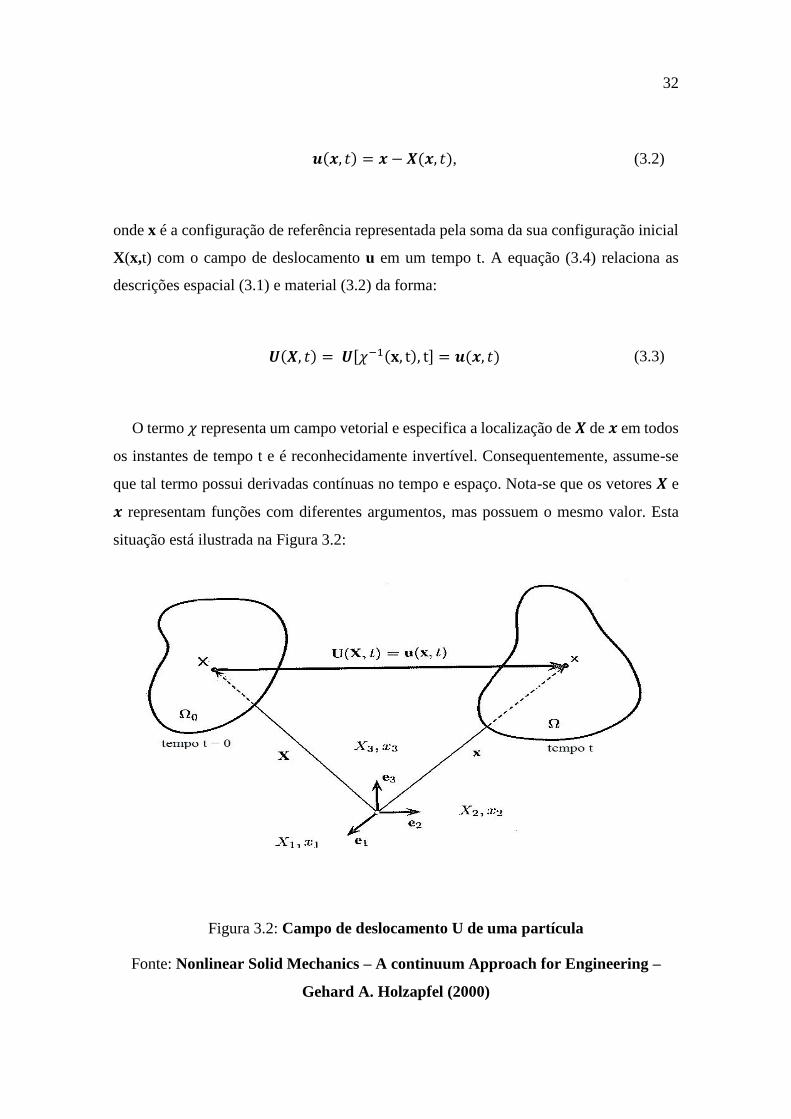
O termo 𝜒 representa um campo vetorial e especifica a localização de 𝑿 de 𝒙 em todos
os instantes de tempo t e é reconhecidamente invertível. Consequentemente, assume-se
que tal termo possui derivadas contínuas no tempo e espaço. Nota-se que os vetores 𝑿 e
𝒙 representam funções com diferentes argumentos, mas possuem o mesmo valor. Esta
situação está ilustrada na Figura 3.2:
Figura 3.2: Campo de deslocamento U de uma partícula
Fonte: Nonlinear Solid Mechanics – A continuum Approach for Engineering –
Gehard A. Holzapfel (2000)
33
3.1.3 GRADIENTE DE DEFORMAÇÃO
O objetivo deste capítulo é estudar as deformações (mudança de forma e tamanho) dos
corpos contínuos que ocorrem quando movidos de uma configuração de referência 𝛺0
para uma configuração atual Ω.
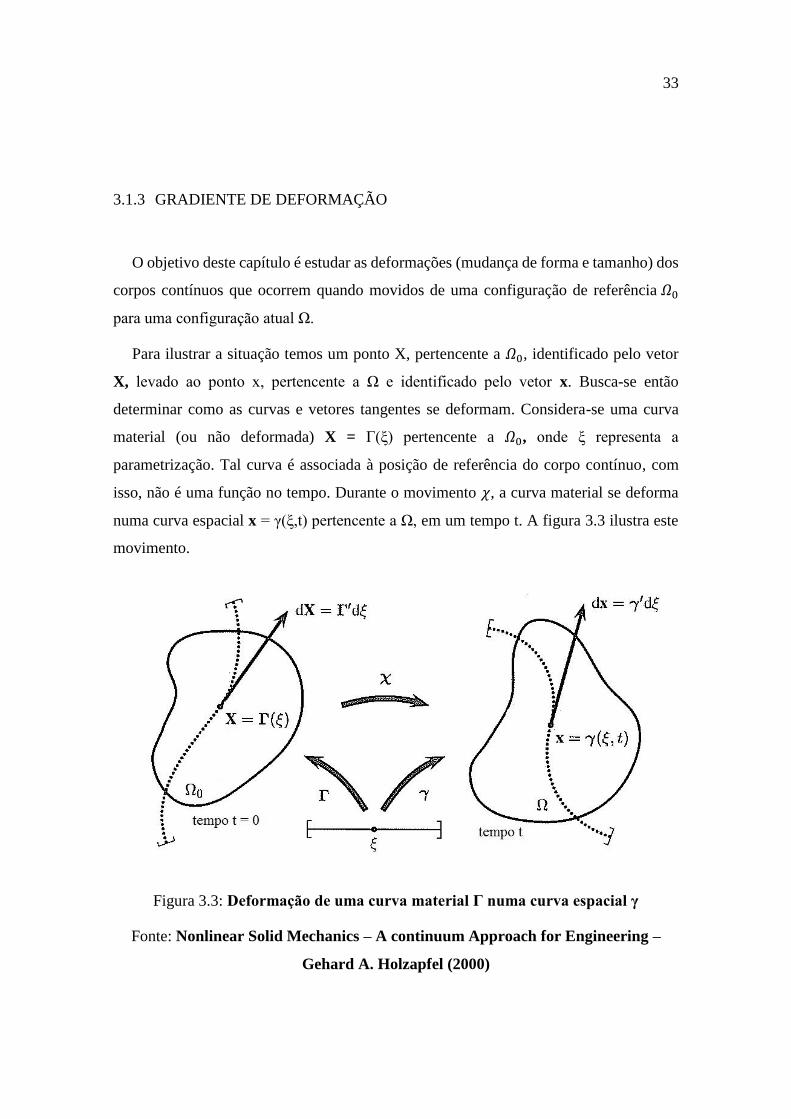
Para ilustrar a situação temos um ponto X, pertencente a 𝛺0, identificado pelo vetor
X, levado ao ponto x, pertencente a Ω e identificado pelo vetor x. Busca-se então
determinar como as curvas e vetores tangentes se deformam. Considera-se uma curva
material (ou não deformada) X = Γ(ξ) pertencente a 𝛺0, onde ξ representa a
parametrização. Tal curva é associada à posição de referência do corpo contínuo, com
isso, não é uma função no tempo. Durante o movimento 𝜒, a curva material se deforma
numa curva espacial x = γ(ξ,t) pertencente a Ω, em um tempo t. A figura 3.3 ilustra este
movimento.
Figura 3.3: Deformação de uma curva material Γ numa curva espacial γ
Fonte: Nonlinear Solid Mechanics – A continuum Approach for Engineering –
Gehard A. Holzapfel (2000)
34
A curva espacial fixada num tempo t é definida pela equação paramétrica:
𝒙 = γ(ξ,t) = 𝝌 ( Γ(ξ), t) ou 𝑥𝑎 = γ𝑎(ξ,t) = 𝜒𝑎( 𝛤𝐴(ξ), t)) (3.4)
Uma convenção normalmente utilizada denota dx como o vetor tangente espacial e dX
como o vetor tangente material e são definidos por:
𝑑𝒙 = 𝛾′(ξ, t) e dX = 𝜞′(ξ, t), (3.5)
sendo dx e dX vetores elementares infinitesimais na configuração atual e de referência,
respectivamente, comumente citados como elemento linear espacial (deformado) e
elemento linear material (ou não deformado), também respectivamente.
Manipulando as equações (3.4) e (3.5) e usando a regra da cadeia podemos obter a
relação entre dx e dX dada por:
d𝐱 = 𝐅(𝐗, t) d𝐗 , onde (3.6)
F(X,t) = Gradx(X,t) = 𝑑𝝌(𝑿,𝑡)
𝑑𝑿𝜞′(ξ, t) (3.7)
Para a mecânica do contínuo não linear, a quantidade F é de grande importância para
as medidas de deformação e é chamado de gradiente de deformação. Em geral, F tem
nove componentes para todo o tempo t, e caracteriza o comportamento do movimento da
vizinhança de um ponto.
35
3.1.4 TENSOR DEFORMAÇÃO
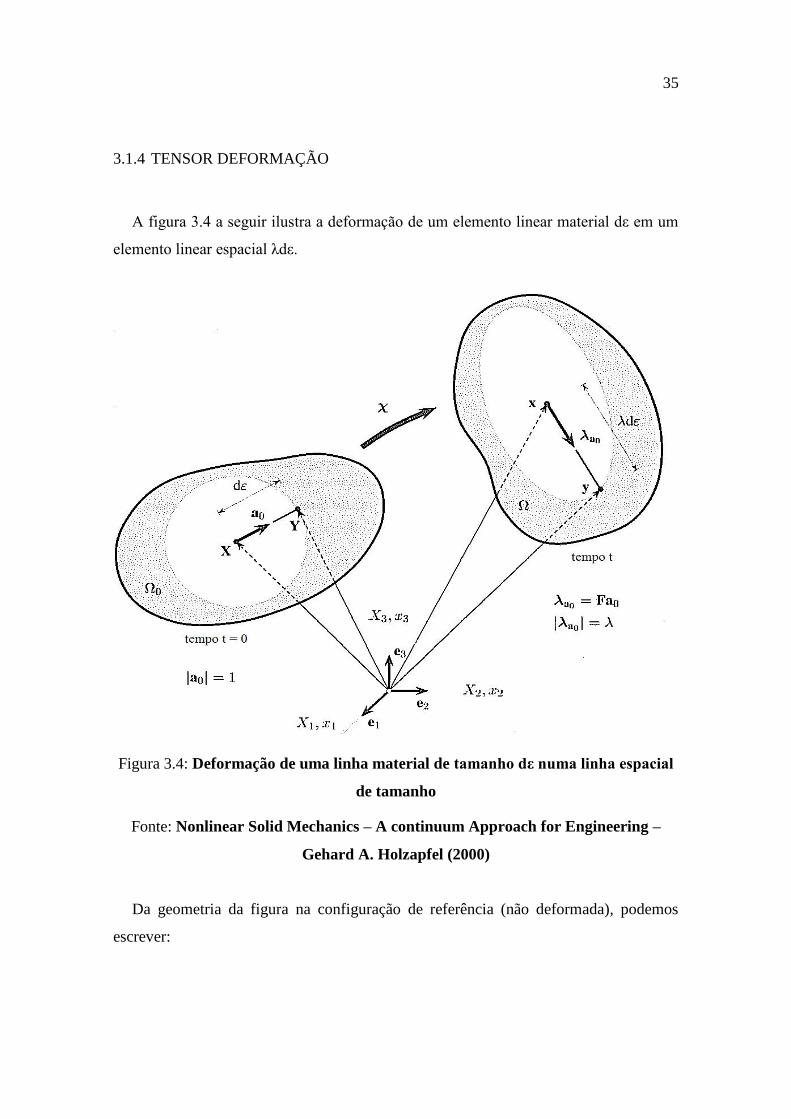
A figura 3.4 a seguir ilustra a deformação de um elemento linear material dε em um
elemento linear espacial λdε.
Figura 3.4: Deformação de uma linha material de tamanho dε numa linha espacial
de tamanho
Fonte: Nonlinear Solid Mechanics – A continuum Approach for Engineering –
Gehard A. Holzapfel (2000)
Da geometria da figura na configuração de referência (não deformada), podemos
escrever:

36
𝒀 = 𝒀 + (𝑿 − 𝑿) = 𝑿 + |𝒀 − 𝑿|
𝒀 − 𝑿
|𝒀 − 𝑿|= 𝑿 + 𝑑𝑿, (3.8)
𝑑𝑿 = 𝑑휀𝒂0, 𝑜𝑛𝑑𝑒 𝑑휀 = |𝒀 − 𝑿| 𝑒 𝒂𝟎 = 𝒀 − 𝑿
|𝒀 − 𝑿|
(3.9)
É assumida a convenção onde 𝑑𝑿 = 𝒀 − 𝑿 = dε, onde este representa a distância entre
os pontos X e Y pertencentes a 𝛺0. Desse modo, 𝑑휀 = |𝒀 − 𝑿| com 𝑑𝜀
|𝑿|<<1. O vetor
unitário 𝒂𝟎 descreve a direção do elemento de linha na posição de referência X. Além
disso, também podemos usar a relação:
𝑑𝐗. d𝐗 = dε𝒂𝟎. dε𝒂𝟎 = 𝑑휀𝟐
(3.10)
Devido ao movimento do corpo, dois pontos X e Y pertencentes à 𝛺0 se transformam
nas suas posições deformadas x e y pertencentes à nova região Ω. A questão agora é
definir o quanto x e y estão próximos em relação à sua configuração de referência. Com
o uso da expansão de Taylor temos a relação:
𝒚 = 𝝌(𝒀, 𝑡) = 𝝌(𝑿 + dε𝒂𝟎, 𝑡) = 𝝌(𝑿, 𝑡) + 𝑑휀𝑭(𝑿, 𝑡)𝒂𝟎 + 𝑜(𝒀 − 𝑿), (3.11)
onde “𝑜(𝒀 − 𝑿)” se refere ao erro que tende a zero muito mais rápido que (𝒀 − 𝑿).
Tendo em vista que 𝒙 = 𝝌(𝑿, 𝑡) e das equações (3.9) e (3.10), podemos escrever:
𝒚 − 𝒙 = 𝑑휀𝑭(𝑿, 𝑡)𝒂𝟎 + 𝑜(𝒀 − 𝑿) = 𝑭(𝑿, 𝑡)(𝒀 − 𝑿) + 𝑜(𝒀 − 𝑿),
(3.12)

37
onde claramente podemos observar que o termo 𝑭(𝒀 − 𝑿) se aproxima linearmente de
𝒚 − 𝒙. Quanto mais X e Y se aproximam, melhor é a aproximação e menor será 𝑑휀 =
(𝒀 − 𝑿).
O próximo passo é definir o vetor estiramento 𝝀𝑎0 na direção do vetor unitário 𝑎0 em
X pertencente a 𝛺0, onde:
𝝀𝑎0(𝑿, 𝑡) = 𝑭(𝑿, 𝑡)𝒂𝟎 ,
(3.13)
com tamanho λ = |𝝀𝑎0|. Então, o comprimento de um elemento linear espacial
(originalmente na direção 𝒂0), é obtido a partir da equação (3.12) descartando os termos
de ordem quadrática. Então:
|𝒚 − 𝒙| = [(𝒚 − 𝒙)(𝒚 − 𝒙)]1/2 = (𝝀𝑎0𝝀𝑎0
)1/2𝑑휀 = 𝜆𝑑휀
(3.14)
Em suma, um elemento linear material dX em X com comprimento 𝑑휀 num tempo t =
0 terá comprimento λdε em um tempo t>0. O elemento será estendido, não estendido ou
comprimido caso λ>1, λ=0 ou λ<1, respectivamente.
É definido ainda que:
𝜆2 = 𝝀𝑎0𝝀𝑎0
= 𝑭𝑎0𝑭𝑎0
= 𝒂𝟎𝑭𝑇𝑭𝑎0
= 𝒂𝟎𝑪𝑎0 , onde 𝑪 = 𝑭𝑇𝑭,
(3.15)
onde foi introduzido o tensor de Cauchy-Green a direita como uma importante ferramenta
para a medição da deformação nas coordenadas materiais. Desta última equação
aprendemos que para determinar o alongamento de uma fibra, precisamos apenas da
direção 𝒂𝟎 em um ponto X pertencente a 𝛺0 e um tensor C de segunda ordem. É
importante ressaltar que C é simétrico, então:
38
𝑪 = 𝑭𝑇𝑭 = (𝑭𝑇𝑭)𝑇 = 𝑪𝑇 e u . Cu > 0 para todo u ≠ 0
(3.16)
𝑑𝑒𝑡𝑪 = (𝑑𝑒𝑡𝑭)𝟐 = 𝐽𝟐 > 0
(3.17)
O tensor deformação de Piola, denotado por b, é definido pelo inverso do tensor
Cauchy-Green, 𝒃 = 𝑪−1, com 𝑪−1 = (𝑭𝑇𝑭)−1 = 𝑭−1𝑭−𝑇.
É também definida a variação em comprimentos quadrados, ou seja, (𝜆𝑑휀)2 − 𝑑휀2:
1
2[(𝜆𝑑휀)2 − 𝑑휀2] =
1
2[ (𝑑휀𝒂𝟎). 𝑭
𝑇𝑭(𝑑휀𝒂𝟎) − 𝑑휀2] = 𝑑𝑿. 𝑬𝑑𝑿, (3.18)
𝑬 =
1
2(𝑭𝑇𝑭 − 𝑰) (3.19)
e expressa a deformação na direção de 𝒂𝟎 em um ponto X pertencente à 𝛺0. E é chamado
de tensor de Green-Lagrange e assim como I e C, também é simétrico.
3.2 CONCEITOS DE TENSÃO
A deformação de um corpo durante um movimento contínuo gera interações no interior
de um corpo e suas vizinhanças. Tais interações são chamadas de tensão e tem unidade
de força por unidade de área. Este conceito é crucial para a mecânica do contínuo.
Será conveniente trabalhar com tensores, expressados em relação às suas coordenadas
espaciais, devido ao fato de que as configurações de referência são comumente
desconhecidas. Alguns tensores importantes são associados aos nomes de Piola,
Kirchhoff, Biot, Green, Naghdi ou Mandel.
39
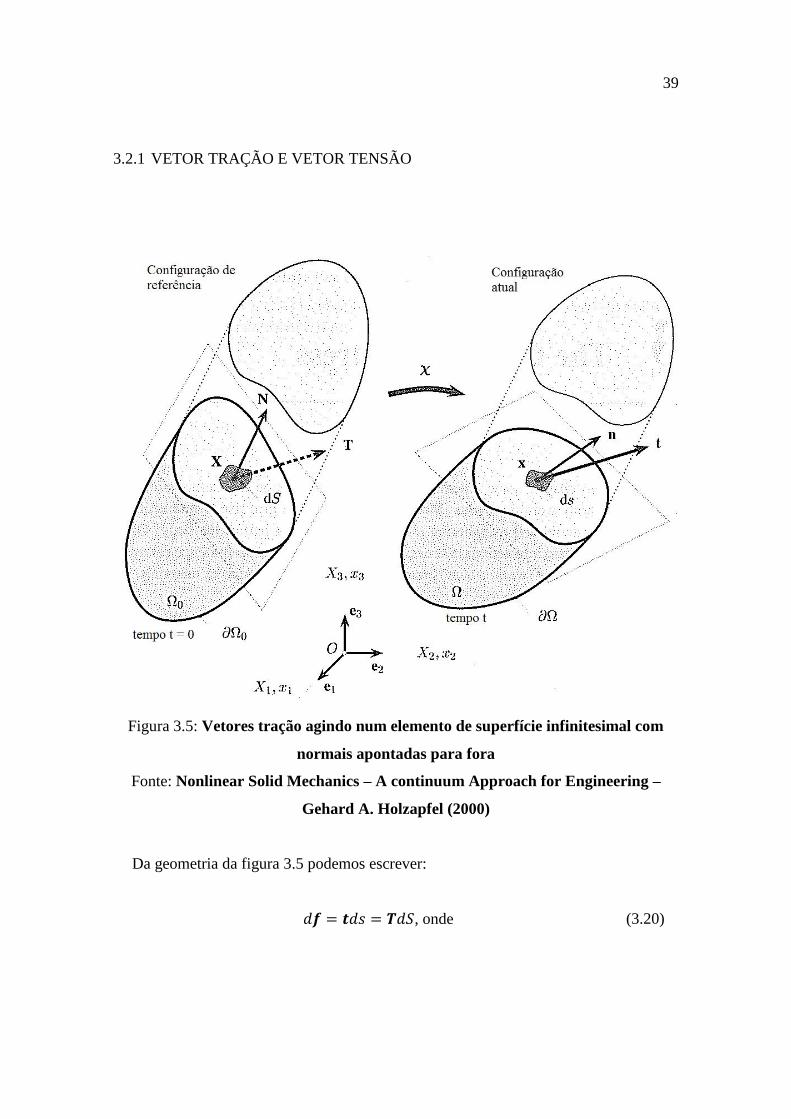
3.2.1 VETOR TRAÇÃO E VETOR TENSÃO
Figura 3.5: Vetores tração agindo num elemento de superfície infinitesimal com
normais apontadas para fora
Fonte: Nonlinear Solid Mechanics – A continuum Approach for Engineering –
Gehard A. Holzapfel (2000)
Da geometria da figura 3.5 podemos escrever:
𝑑𝒇 = 𝒕𝑑𝑠 = 𝑻𝑑𝑆, onde (3.20)
40
𝒕 = 𝒕(𝒙, 𝑡, 𝒏), 𝑻 = 𝑻(𝑿, 𝑡, 𝑵) (3.21)
T representa o vetor tração de Piola-Kirchhoff (força medida por unidade de área de
superfície da configuração de referência). t representa o vetor tração de Cauchy (força
medida por unidade de área de superfície da configuração atual).
3.2.2 TEOREMA DE TENSÃO DE CAUCHY
Os tensores de segunda ordem 𝛔 e 𝑷 se apresentam da forma:
𝒕(𝒙, 𝑡, 𝒏) = 𝛔(𝐱, t)𝐧, (3.22)
𝑻(𝑿, 𝑡, 𝑵) = 𝑷(𝑿, 𝑡)𝑵, (3.23)
onde 𝛔 denota o tensor espacial simétrico chamado de tensor tensão de Cauchy, ou
simplesmente tensor de Cauchy (tensão real), e P é o tensor tensão de Piola-Kirchhoff
(tensão de engenharia). N e n são vetores unitários normais à superfície e dão direção os
vetores t e T.
Esta última relação tem como consequência imediata a relação entre t, T e seus vetores
normais correspondentes:
𝒕(𝒙, 𝑡, 𝒏) = −𝒕(𝒙, 𝑡, −𝒏) (3.24)
𝑻(𝑿, 𝑡, 𝑵) = −𝑻(𝑿, 𝑡, −𝑵)
(3.25)
41
A relação entre o tensor de Cauchy e o primeiro tensor de Piola-Kirchoff é dada pela
equação:
𝛔(𝒙, 𝑡)𝒏𝑑𝑠 = 𝑷(𝑿, 𝑡)𝑵𝑑𝑆 (3.26)
e usando a fórmula de Nanson, podemos escrever P da forma:
𝑷 = 𝐽𝝈𝑭−𝑇, (3.27)
e é chamado de transformação de Píola. A expressão explícita para o Tensor tensão σ que
tem como expressão simétrica nada mais é que o inverso da relação anterior e é dada por:
𝝈 = 𝐽−1𝑷𝑭𝑇 (3.28)
3.3 EQUAÇÕES CONSTITUTIVAS
As equações vistas até agora são fundamentais para descrever os princípios da
cinemática e conceitos de tensão podendo ser aplicadas em qualquer corpo que se
enquadra na concepção de corpo contínuo. Entretanto, essas equações não possuem a
capacidade de distinguir um material do outro.
Para o caso de corpos deformáveis, as equações já descritas não são suficientes para
determinar o comportamento do material. Desta forma, devemos estabelecer novas
equações na forma de leis constitutivas desenvolvidas para especificar o material em
questão. Uma equação constitutiva pode descrever o estado de tensão em qualquer ponto
x de um corpo contínuo em um instante t e é necessariamente diferente para cada tipo de
corpo.
42
Dentre os campos da mecânica do contínuo, podemos citar os fluidos contínuos, com
por exemplo os gases (óleo, água, ar etc.) e sólidos (borracha, metal, cerâmica, madeira
etc.). É importante ressaltar que todos os campos da mecânica do contínuo diferem apenas
nas equações constitutivas.
3.3.1 MATERIAL HIPERELÁSTICO
Para caracterizar um material hiperelástico é apresentada a função energia de
deformação, representada pela letra grega 𝜓 e definida por unidade de volume. A função
𝜓 = 𝜓(𝐅), onde 𝐅 é um tensor de deformação, é um exemplo típico de uma função escalar
de um tensor que assumimos ser contínuo.
Restringimos agora o campo dos materiais hiperelástiscos para a subclasse de
materiais homogêneos. Tal material tem a propriedade de que seus constituintes internos
sejam uniformes numa escala do contínuo. Para este material, a função energia de
deformação depende apenas do tensor F.
Um material hiperelástico possui a expressão:
𝑷 =
∂ψ(𝐅)
∂𝐅
(3.29)
e pelo uso da relação 𝛔 = 𝐽−1𝑷𝑭𝑇 = 𝛔𝑻 para o tensor de tensão de Cauchy simétrico,
temos:
𝛔 = 𝐽−𝟏
∂ψ(𝐅)
∂𝐅𝑭𝑇 = 𝐽−𝟏𝐅(
∂ψ(𝐅)
∂𝐅)𝑻 (3.30)
Estes tipos de equações já são conhecidas como equações (puramente mecânicas)
constitutivas, ou equações de estado, e estabelecem um modelo empírico ou axiomático

43
para aproximar o comportamento real da matéria. Tal modelo é chamado de material ou
constitutivo. Essas duas últimas relações são derivadas de uma função escalar de energia,
o que implica ter uma estrutura conservativa.
A derivada da função energia de deformação em relação ao tensor F determina o
gradiente de ψ. Este é um tensor de segunda ordem chamado de primeiro tensor tensão
de Piola-Kirchhoff, denotado por P.
Um material perfeitamente elástico é tal que não possui geração de entropia interna
durante seu movimento. Por conveniência, é considerado perfeitamente elástico todo o
material que se assume ter dissipação interna de entropia nula.
Derivando a segunda lei da termodinâmica 𝐷𝑖𝑛𝑡 = 𝑤𝑖𝑛𝑡−�̇� ≥̇ 0, é obtido:
𝐷𝑖𝑛𝑡 = 𝑤𝑖𝑛𝑡−�̇� (3.31)
onde esta igualdade declina para zero para a classe de materiais perfeitamente elásticos.
Com essa expressão, a diferenciação da função energia de deformação, isto é, �̇�(𝑭) =
∂ψ(𝐅)
∂𝐅: �̇�, fornece:
𝐷𝑖𝑛𝑡 = 𝑷: �̇� − �̇� = 𝑷 − ∂ψ(𝐅)
∂𝐅: �̇� = 0 (3.32)
3.3.2 MATERIAIS HIPERELÁSTICOS ISOTRÓPICOS
A função energia de deformação será restringida para uma classe de materiais
isotrópicos. Isotropia é baseada na ideia física de que a resposta do material, quando
estudada num experimento de tensão-deformação, é a mesma em qualquer direção. Um
exemplo aproximado de um material hiperelástico isotrópico é a borracha.
44
Se uma função tensor de valor escalar é invariante sobre rotação, podemos expressá-
la em termos de seus invariantes principais. Este é um resultado fundamental para funções
escalares isotrópicas. Tendo isso em vista, as energias de deformação podem ser
expressadas por um conjunto de invariantes do tensor deformação de Cauchy-Green
simétrico C.
𝜓 = 𝜓[𝐼1(𝑪)𝐼2(𝑪)𝐼3(𝑪)] (3.33)
3.3.3 MATERIAIS HIPERELÁSTICOS INCOMPRESSÍVEIS
Esta classe de materiais abrange todo material que sustenta a capacidade de manter seu
volume constante. Podem ser assumidos incompressíveis alguns tipos de materiais de
modo que apenas movimentos isocóricos são possíveis. Esta suposição é comumente
empregada na mecânica do contínuo computacional.
Em suma, materiais hiperelásticos incompressíveis mantém seu volume constante
durante um processo específico e são caracterizados por:
𝐽 = 1 (3.34)
De modo a derivar as equações constitutivas gerais para materiais incompressíveis, é
postulado uma função energia de deformação ψ, tal que:
𝜓 = 𝜓(𝑭) − 𝑝(𝐽 − 1), (3.35)
onde p é um escalar chamado de multiplicador de lagrange e só pode ser determinado
através das equações de equilíbrio e condições de contorno do problema.

45
Diferenciando a equação (3.35) em relação ao gradiente de formação F e usando a
identidade, chegamos à equação geral constitutiva para o primeiro tensor de Piola-
Kirchhoff P da forma:
𝑃 = −𝑝𝑭−𝑇 +
∂ψ(𝐅)
∂𝐅
(3.36)
e multiplicando por 𝑭−1 pela esquerda, concluímos que o segundo tensor tensão de Piola-
Kirchhoff toma a forma:
𝑆 = −𝑝𝑭−1𝑭−𝑇 + 𝑭−1
∂ψ(𝐅)
∂𝐅= −𝑝𝑪−1 + 2
∂ψ(𝐂)
∂𝐂 (3.37)
Entretanto, multiplicando a equação (3.51) por 𝑭𝑇 pelo lado direito, conclui-se através
da equação (3.28) que o tensor tensão Cauchy simétrico 𝝈 pode ser expressado por:
𝝈 = −𝑝𝑰 +
∂ψ(𝐅)
∂𝐅𝑭𝑇 = −𝑝𝑰 + 𝑭(
∂ψ(𝐅)
∂𝐅)𝑇 (3.38)
As equações (3.37), (3.38) e (3.39) são as equações constitutivas fundamentais gerais
usadas para definir materiais hiperelásticos incompressíveis em deformações finitas.
3.3.4 MATERIAIS HIPERELÁSTICOS ISOTRÓPICOS INCOMPRESSÍVEIS
Para o caso de isotrotropia, já foi destacada a dependência da função energia de
deformação ψ no tensor de Cauchy-Green C e seus invariantes de deformação. Entretanto,
para o caso incompressível assumimos a restrição cinemática 𝐼3 = 𝑑𝑒𝑡𝑪 = 𝑑𝑒𝑡𝒃 = 1,
consequentemente, os dois invariantes principais 𝐼1 𝑒 𝐼2 são as únicas variáveis de
deformação independentes.

46
Uma função energia de deformação aceitável para materiais hiperelásticos isotrópicos
incompressíveis é dada por:
𝜓 = 𝜓[𝐼1(𝑪), 𝐼2(𝑪)] −
1
2𝑝(𝐼3 − 1) = 𝜓[𝐼1(𝒃), 𝐼2(𝒃)] −
1
2𝑝(𝐼3 − 1) (3.39)
onde p/2 é um multiplicador de Lagrange indeterminado.
Para examinarmos a equação constitutiva associada em termos dos dois principais
invariantes de deformação, derivamos a equação (3.54) com relação ao tensor 𝑪.
𝑺 = 2
∂𝜓(𝐼1, 𝐼2)
∂𝑪−
∂𝑝(𝐼3 − 1)
∂𝑪= −𝑝𝑪−1 + 2(
∂𝜓
∂𝐼1+ 𝐼1
∂𝜓
∂𝐼2) 𝑰 − 2
∂𝜓
∂𝐼2𝑪 (3.40)
Duas formas alternativas de 𝝈, são mostradas a seguir:
𝛔 = −p𝐈 + 2 (
∂𝜓
∂𝐼1+ 𝐼1
∂𝜓
∂𝐼2) 𝒃 − 2𝐼1
∂𝜓
∂𝐼2𝒃2 (3.41)
𝛔 = −p𝐈 + 2
∂𝜓
∂𝐼1𝒃 − 2
∂𝜓
∂𝐼2𝒃−1 (3.42)
3.4 CISALHAMENTO PURO
Analisaremos agora um caso de uma lâmina fina, onde a largura é muito maior que a
altura, de um material incompressível hiperelástico fixada na configuração de referência
e tracionada no sentido de sua altura. Para este caso temos uma porção do corpo de prova
sujeito ao cisalhamento puro, carregamento amplamente conhecido na literatura.

47
Voltando a equação (3.42), assumimos deformação cisalhamento homogênea. Com
isso, temos os estiramentos principais dados por 𝜆1∗ = 𝜆, 𝜆2
∗ = 1 𝑒 𝜆3∗ =
1
𝜆 satisfazendo a
condição de incompressibilidade (3.49). Além disso temos b, tensor de Cauchy-Green
esquerdo, para o caso em questão é dado por:
𝒃 = 𝑭𝑭𝑇 = [
𝜆² 0 00 1 00 0 𝜆−2
] (3.43)
𝒃−1 = [
𝜆−2 0 00 1 00 0 𝜆2
] (3.44)
e assumindo estado plano de tensão, ou seja, 𝜎33 = 0 , temos que o multiplicador de
Lagrange, para este caso, tem valor:
p = 2(𝜆−2
∂𝜓
∂𝐼1− 𝜆2
∂𝜓
∂𝐼2) (3.45)
Usando as equações (3.43), (3.44) e (3.45) podemos reescrever a equação geral (3.42)
para a tensão no caso de cisalhamento puro:
𝛔 = 2(𝜆−2
∂𝜓
∂𝐼1− 𝜆2
∂𝜓
∂𝐼2) + 2
∂𝜓
∂𝐼1[𝜆² 0 00 1 00 0 𝜆−2
] − 2∂𝜓
∂𝐼2[𝜆−2 0 00 1 00 0 𝜆2
] (3.46)
os valores das tensões nas direções principais são:

48
𝜎11 = −2 (𝜆−2
∂𝜓
∂𝐼1− 𝜆2
∂𝜓
∂𝐼2) + 2𝜆2
∂𝜓
∂𝐼1− 2𝜆−2
∂𝜓
∂𝐼2
= 2(𝜆2 − 𝜆−2) (∂𝜓
∂𝐼1+
∂𝜓
∂𝐼2),
(3.47)
𝜎22 = −2 (𝜆−2 ∂𝜓
∂𝐼1− 𝜆2 ∂𝜓
∂𝐼2) + 2 (
∂𝜓
∂𝐼1−
∂𝜓
∂𝐼2) = 2(1 − 𝜆−2) (
∂𝜓
∂𝐼1+
𝜆2 ∂𝜓
∂𝐼2),
(3.48)
em que o módulo de cisalhamento será:
𝜇 = 2 (∂𝜓
∂𝐼1+
∂𝜓
∂𝐼2) (3.49)
3.5 EXEMPLOS DE MODELOS PARA FUNÇÃO ENERGIA DE DEFORMAÇÃO
Modelo de Mooney-Rivlin [2]
Um dos primeiros modelos propostos para a função energia de deformação foi
apresentado por Mooney e estendido por Rivlin. O modelo de Mooney-Rivlin [2],
largamente conhecido, é dado por:
𝜓𝑀𝑅 = 𝐶10(𝐼1 − 3) + 𝐶01(𝐼2 − 3), (3.50)

49
com o coeficiente de cisalhamento inicial dado por 𝜇0 = 2(𝐶10 + 𝐶01). A partir da
equação (3.47), chegamos à equação da tensão principal segundo tal modelo e será
mostrada a seguir:
𝜎11 = 𝜇0(𝜆2 − 𝜆−2)
(3.51)
Modelo de Yeoh [2]
O modelo proposto por Yeoh [2], que se refere aos materiais Neo-Hookeanos
generalizados, é baseado em três termos dependentes apenas do primeiro invariante de
deformação. O modelo de Yeoh [2] é definido por:
𝜓𝑌 = 𝐶1(𝐼1 − 3) + 𝐶2(𝐼1 − 3)2 + 𝐶3(𝐼1 − 3)3, (3.52)
onde 𝐶1, 𝐶2 e 𝐶3 são parâmetros do material. O módulo de cisalhamento inicial é dado
por 𝜇0 = 2𝐶1. A equação (3.53) e (3.54) ilustram respectivamente o módulo de
cisalhamento e a tensão principal com o uso do modelo de Yeoh [2]:
𝜇 = 2(𝐶1 + 2𝐶2(𝐼1 − 3) + 3𝐶3(𝐼1 − 3)2) (3.53)
𝜎11 = 2(𝜆2 − 𝜆−2)[𝐶1 + 2𝐶2(𝜆2 + 𝜆−2 − 2) + 3𝐶3(𝜆
2 + 𝜆−2 − 2)²] (3.54)

50
Modelo de López-Pamies [2]
Um modelo simples para sólidos elásticos, como a borracha, foi proposto por López-
Pamies [2]. A função energia de deformação, segundo o modelo, é dada por:
𝜓𝐿𝑃 = ∑31−𝛼𝑟
2𝛼𝑟
𝑀𝑟=1 𝜇𝑟(𝐼1
𝛼𝑟 − 3𝛼𝑟), (3.55)
onde M indica o número de termos, enquanto 𝜇𝑟 𝑒 𝛼𝑟, são parâmetros do material sendo
𝜇𝑟 > 0 e 𝛼𝑟 > 1/2. O módulo de cisalhamento inicial é dado por 𝜇 = ∑ 𝜇𝑟𝑀𝑟=1 .
Considerando apenas o primeiro termo do somatório, ou seja, 𝑀 = 1, temos a tensão
principal dada por:
𝜎11 = 3𝜇1
(𝜆4 − 1)
𝜆4 + 𝜆2 + 1(𝜆2 + 𝜆−2 + 1
3)𝛼1 (3.56)
Modelo de Ogden [2]
Um modelo alternativo para materiais hiperelásticos foi postulado por Ogden [2], onde
a função energia de deformação é função de seus estiramentos principais, ao invés de seus
invariantes. O modelo de Ogden [2] é expresso por:
𝜓𝑂 = ∑𝜇𝑝
𝛼𝑝
𝑁
𝑝=1
(𝜆1
𝛼𝑝 + 𝜆2
𝛼𝑝 + 𝜆3
𝛼𝑝 − 3) (3.57)
A partir da equação (3.57), considerando apenas o primeiro termo da série, obtemos a
equação da tensão principal, com a qual o ajuste será feito. Além disso, 𝜇 =1
2∑ 𝜇𝑝
𝑀𝑟=1 𝛼𝑝.
51
𝜎11 = 𝜇1(𝜆𝛼1 − 𝜆−𝛼1) (3.58)
μ = 𝜇1𝛼1
2 (3.59)
Para o caso onde é considerado dois termos da equação (3.57), temos:
𝜎11 = 𝜇1(𝜆𝛼1 − 𝜆−𝛼1) + 𝜇2(𝜆
𝛼2 − 𝜆−𝛼2) (3.60)
μ = 𝜇1𝛼1
2+
𝜇2𝛼2
2 (3.61)
Modelo de Gent [2]
Gent propôs um modelo baseado em logaritmo com argumento linear no conceito de
limitar sua extensibilidade. O modelo de Gent [2] é dado pela equação (3.62) para função
energia de deformação:
𝜓𝐺 = −µ
2𝐽𝑚 ln(1 −
𝐼1−3
𝐽𝑚) (3.62)
Consequentemente, a equação da tensão principal fica da forma:
𝜎11 = µ𝐽𝑚
𝐽𝑚 − 𝐼1 + 3(𝜆2 − 𝜆−2) = µ
𝐽𝑚𝐽𝑚 − 𝜆2 − 𝜆−2 + 2
(𝜆2 − 𝜆−2) (3.63)
52
4 DADOS EXPERIMENTAIS: APRESENTAÇÃO, RESULTADOS E
DISCUSSÕES
Os dados experimentais utilizados no presente trabalho foram retirados da dissertação
de mestrado BENEVIDES, R. 2015. Para mais detalhes acerca dos materiais, processos
de fabricação, ensaio ou outros detalhes, ver [1].
4.1 APRESENTAÇÃO DOS DADOS EXPERIMENTAIS
Com a ajuda da célula de carga, a carga atuante no corpo de prova foi medida em cada
instante do ensaio. A tensão medida experimentalmente foi a tensão nominal dada pela
divisão da carga pela área inicial. A tensão nominal P, ou tensão de engenharia, é dada
pelo primeiro tensor tensão de Piola-Kirchhoff, mostrado na equação (4.1), onde F é a
carga e 𝐴0 a área inicial.
𝑃 =
𝐹
𝐴0 (4.1)
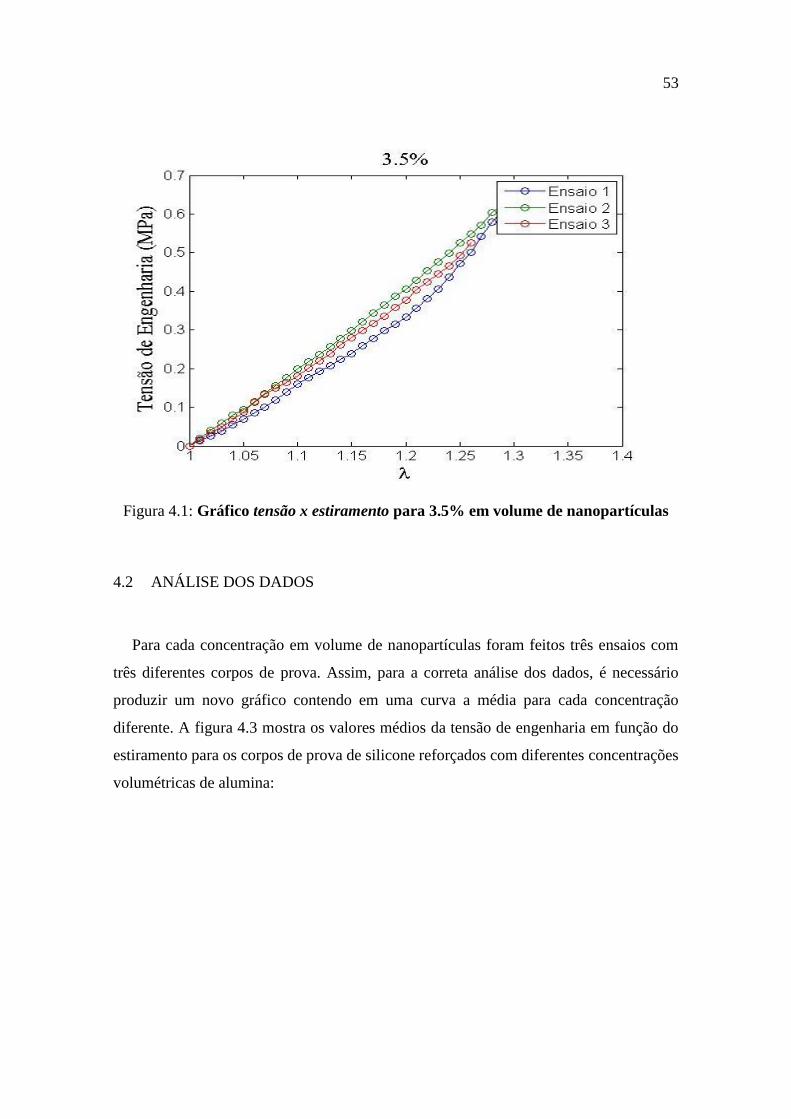
A partir dos dados obtidos no ensaio, foram gerados gráficos relativos a cada
concentração de nanopartículas. Será apresentado aqui, apenas por questão de
conveniência e ilustração, o resultado do ensaio para um corpo de prova com 3,5% em
volume de nanopartículas, ocultando os demais. Tal resultado está ilustrado na Figura 4.2.
53
Figura 4.1: Gráfico tensão x estiramento para 3.5% em volume de nanopartículas
4.2 ANÁLISE DOS DADOS
Para cada concentração em volume de nanopartículas foram feitos três ensaios com
três diferentes corpos de prova. Assim, para a correta análise dos dados, é necessário
produzir um novo gráfico contendo em uma curva a média para cada concentração
diferente. A figura 4.3 mostra os valores médios da tensão de engenharia em função do
estiramento para os corpos de prova de silicone reforçados com diferentes concentrações
volumétricas de alumina:
54
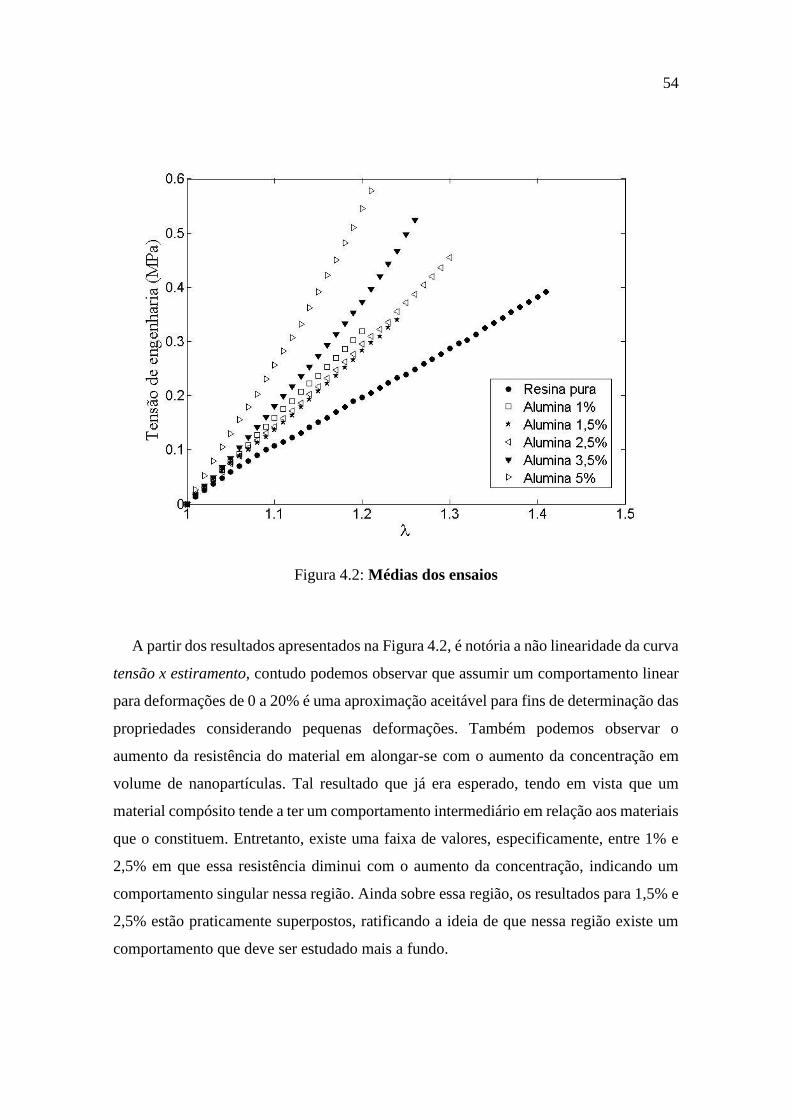
Figura 4.2: Médias dos ensaios
A partir dos resultados apresentados na Figura 4.2, é notória a não linearidade da curva
tensão x estiramento, contudo podemos observar que assumir um comportamento linear
para deformações de 0 a 20% é uma aproximação aceitável para fins de determinação das
propriedades considerando pequenas deformações. Também podemos observar o
aumento da resistência do material em alongar-se com o aumento da concentração em
volume de nanopartículas. Tal resultado que já era esperado, tendo em vista que um
material compósito tende a ter um comportamento intermediário em relação aos materiais
que o constituem. Entretanto, existe uma faixa de valores, especificamente, entre 1% e
2,5% em que essa resistência diminui com o aumento da concentração, indicando um
comportamento singular nessa região. Ainda sobre essa região, os resultados para 1,5% e
2,5% estão praticamente superpostos, ratificando a ideia de que nessa região existe um
comportamento que deve ser estudado mais a fundo.

55
4.2.1 OBTENÇÃO DO MÓDULO DE CISALHAMENTO
Primeiro resultado: Modelo de Mooney-Rivlin [2]
A tensão de engenharia, embora prática, não é precisa, pois a área da seção transversal
muda com a deformação do corpo durante o ensaio, portanto, deve ser transformada em
tensão real antes de prosseguir com a análise, através da simples manipulação, a seguir.
Sendo a área inicial e final de seção transversal do corpo de prova dadas por 𝐴0 e “A”,
respectivamente, “L” seu comprimento perpendicular à sua área, “F” a força aplicada e
assumindo incompressibilidade, temos:
𝐴0. 𝐿0 = 𝐴 . 𝐿 (4.2)
𝐴 = 𝐴0. 𝐿0
𝐿 (4.3)
𝜎 =𝐹
𝐴=
𝐹. 𝐿
𝐴0. 𝐿0 (4.4)
𝜎 = 𝑃. 𝜆 (4.4)
A partir da equação (3.49), temos:

56
𝜇 = 2 (
∂𝜓
∂𝐼1+
∂𝜓
∂𝐼2) (4.5)
É possível trabalhar tanto com os dados experimentais reais, quanto com os dados
experimentais nominais para fins de análise, porém deve-se tomar cuidado com o tipo de
ajuste feito. Os modelos teóricos presentes na literatura e exemplificados na seção 3.5, se
dão em tensões reais, portanto, para se trabalhar com os dados nominais, deve-se
transformar a equação da tensão real em tensão nominal via o uso da equação (4.4).
Analogamente, podemos transformar os dados de tensão nominal em tensão real, também
através da equação (4.4), caso se queira trabalhar com os modelos reais. No presente
trabalho, todos os modelos foram transformados para equações de tensão nominal.
Sabe-se que o termo referente ao segundo invariante tem valores próximos à zero.
Combinando as equações (4.4) e (3.47), chegamos a primeira equação de ajuste do
modelo teórico e que coincide com o modelo de Mooney-Rivlin [2]. Transformando-a na
tensão nominal, o modelo toma a forma ilustrada na equação (4.6):
𝑃 =
𝜇(𝜆2 − 𝜆−2)
𝜆
(4.6)
Utilizando a ferramenta de ajuste de curvas cftools do software MatLab, os modelos
teórios foram ajustados em relação a todas as curvas de tensão x estiramento relativas a
cada concentrações em volume de nanopartículas ϕ, atendo-se ao fato de que tais valores
de µ se referem ao módulo de cisalhamento inicial 𝜇0. Tais valores iniciais são mostrados
na tabela 4.1 a seguir:
Φ (%) 0 1.0 1.5 2.5 3.5 5
𝜇0 (MPa) 0.310 ±
0.002
0,48 ±
0.01
0.42 ±
0.01
0.44 ±
0.01
0.55 ±
0.01
0. 80 ±
0.02
Tabela 4.1: Módulo de cisalhamento inicial segundo modelo de Mooney-Rivlin [2]
57
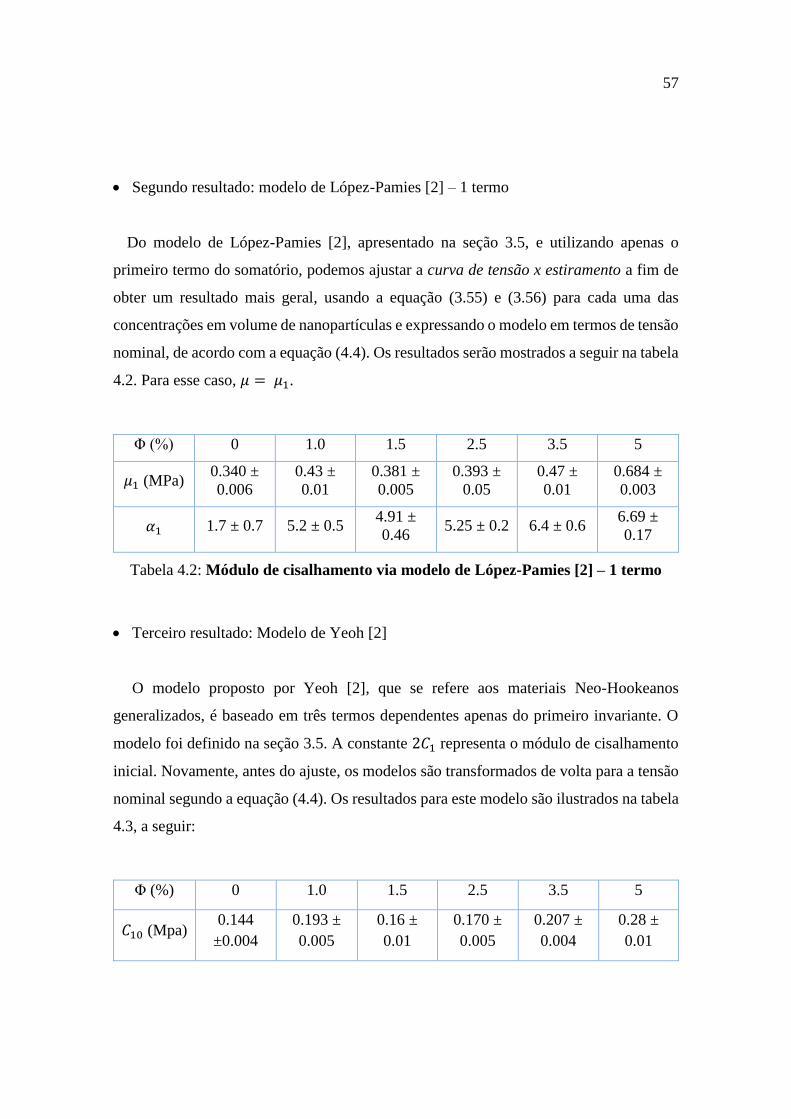
Segundo resultado: modelo de López-Pamies [2] – 1 termo
Do modelo de López-Pamies [2], apresentado na seção 3.5, e utilizando apenas o
primeiro termo do somatório, podemos ajustar a curva de tensão x estiramento a fim de
obter um resultado mais geral, usando a equação (3.55) e (3.56) para cada uma das
concentrações em volume de nanopartículas e expressando o modelo em termos de tensão
nominal, de acordo com a equação (4.4). Os resultados serão mostrados a seguir na tabela
4.2. Para esse caso, 𝜇 = 𝜇1.
Φ (%) 0 1.0 1.5 2.5 3.5 5
𝜇1 (MPa) 0.340 ±
0.006
0.43 ±
0.01
0.381 ±
0.005
0.393 ±
0.05
0.47 ±
0.01
0.684 ±
0.003
𝛼1 1.7 ± 0.7 5.2 ± 0.5 4.91 ±
0.46 5.25 ± 0.2 6.4 ± 0.6
6.69 ±
0.17
Tabela 4.2: Módulo de cisalhamento via modelo de López-Pamies [2] – 1 termo
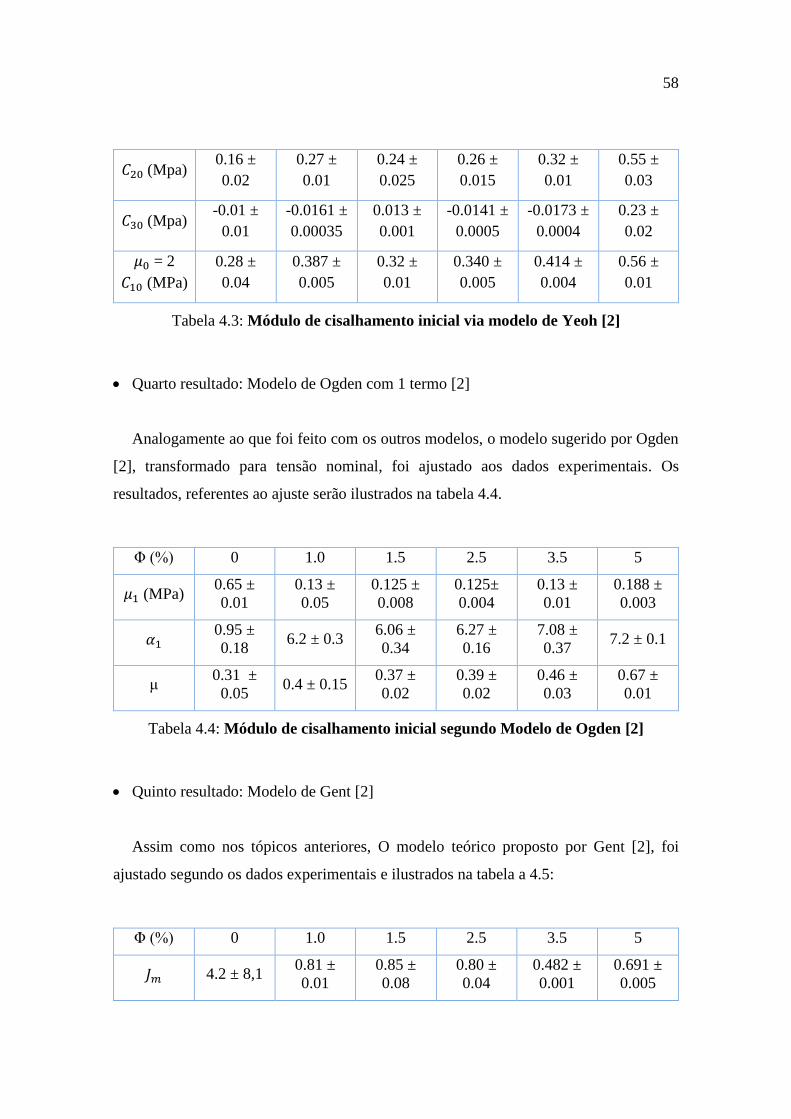
Terceiro resultado: Modelo de Yeoh [2]
O modelo proposto por Yeoh [2], que se refere aos materiais Neo-Hookeanos
generalizados, é baseado em três termos dependentes apenas do primeiro invariante. O
modelo foi definido na seção 3.5. A constante 2𝐶1 representa o módulo de cisalhamento
inicial. Novamente, antes do ajuste, os modelos são transformados de volta para a tensão
nominal segundo a equação (4.4). Os resultados para este modelo são ilustrados na tabela
4.3, a seguir:
Φ (%) 0 1.0 1.5 2.5 3.5 5
𝐶10 (Mpa) 0.144
±0.004
0.193 ±
0.005
0.16 ±
0.01
0.170 ±
0.005
0.207 ±
0.004
0.28 ±
0.01
58
𝐶20 (Mpa) 0.16 ±
0.02
0.27 ±
0.01
0.24 ±
0.025
0.26 ±
0.015
0.32 ±
0.01
0.55 ±
0.03
𝐶30 (Mpa) -0.01 ±
0.01
-0.0161 ±
0.00035
0.013 ±
0.001
-0.0141 ±
0.0005
-0.0173 ±
0.0004
0.23 ±
0.02
𝜇0 = 2
𝐶10 (MPa)
0.28 ±
0.04
0.387 ±
0.005
0.32 ±
0.01
0.340 ±
0.005
0.414 ±
0.004
0.56 ±
0.01
Tabela 4.3: Módulo de cisalhamento inicial via modelo de Yeoh [2]
Quarto resultado: Modelo de Ogden com 1 termo [2]
Analogamente ao que foi feito com os outros modelos, o modelo sugerido por Ogden
[2], transformado para tensão nominal, foi ajustado aos dados experimentais. Os
resultados, referentes ao ajuste serão ilustrados na tabela 4.4.
Φ (%) 0 1.0 1.5 2.5 3.5 5
𝜇1 (MPa) 0.65 ±
0.01
0.13 ±
0.05
0.125 ±
0.008
0.125±
0.004
0.13 ±
0.01
0.188 ±
0.003
𝛼1 0.95 ±
0.18 6.2 ± 0.3
6.06 ±
0.34
6.27 ±
0.16
7.08 ±
0.37 7.2 ± 0.1
μ 0.31 ±
0.05 0.4 ± 0.15
0.37 ±
0.02
0.39 ±
0.02
0.46 ±
0.03
0.67 ±
0.01
Tabela 4.4: Módulo de cisalhamento inicial segundo Modelo de Ogden [2]
Quinto resultado: Modelo de Gent [2]
Assim como nos tópicos anteriores, O modelo teórico proposto por Gent [2], foi
ajustado segundo os dados experimentais e ilustrados na tabela a 4.5:
Φ (%) 0 1.0 1.5 2.5 3.5 5
𝐽𝑚 4.2 ± 8,1 0.81 ±
0.01
0.85 ±
0.08
0.80 ±
0.04
0.482 ±
0.001
0.691 ±
0.005
59
μ (Mpa) 0.304 ±
0.006
0.43 ±
0.06
0.383 ±
0.004
0.39 ±
0.04
0.65 ±
0.07
0.62 ±
0.05
Tabela 4.5: Módulo de cisalhamento segundo modelo de Gent [2]
4.2.2 ANÁLISE DE ERRO DOS MODELOS
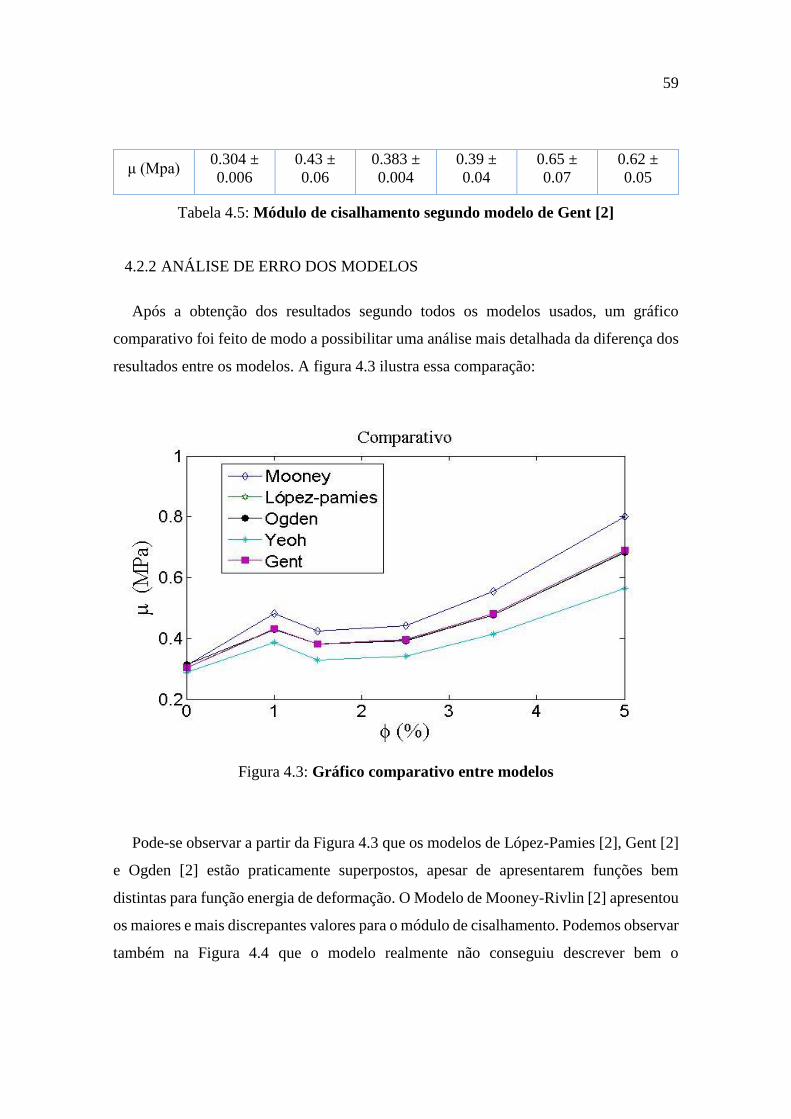
Após a obtenção dos resultados segundo todos os modelos usados, um gráfico
comparativo foi feito de modo a possibilitar uma análise mais detalhada da diferença dos
resultados entre os modelos. A figura 4.3 ilustra essa comparação:
Figura 4.3: Gráfico comparativo entre modelos
Pode-se observar a partir da Figura 4.3 que os modelos de López-Pamies [2], Gent [2]
e Ogden [2] estão praticamente superpostos, apesar de apresentarem funções bem
distintas para função energia de deformação. O Modelo de Mooney-Rivlin [2] apresentou
os maiores e mais discrepantes valores para o módulo de cisalhamento. Podemos observar
também na Figura 4.4 que o modelo realmente não conseguiu descrever bem o
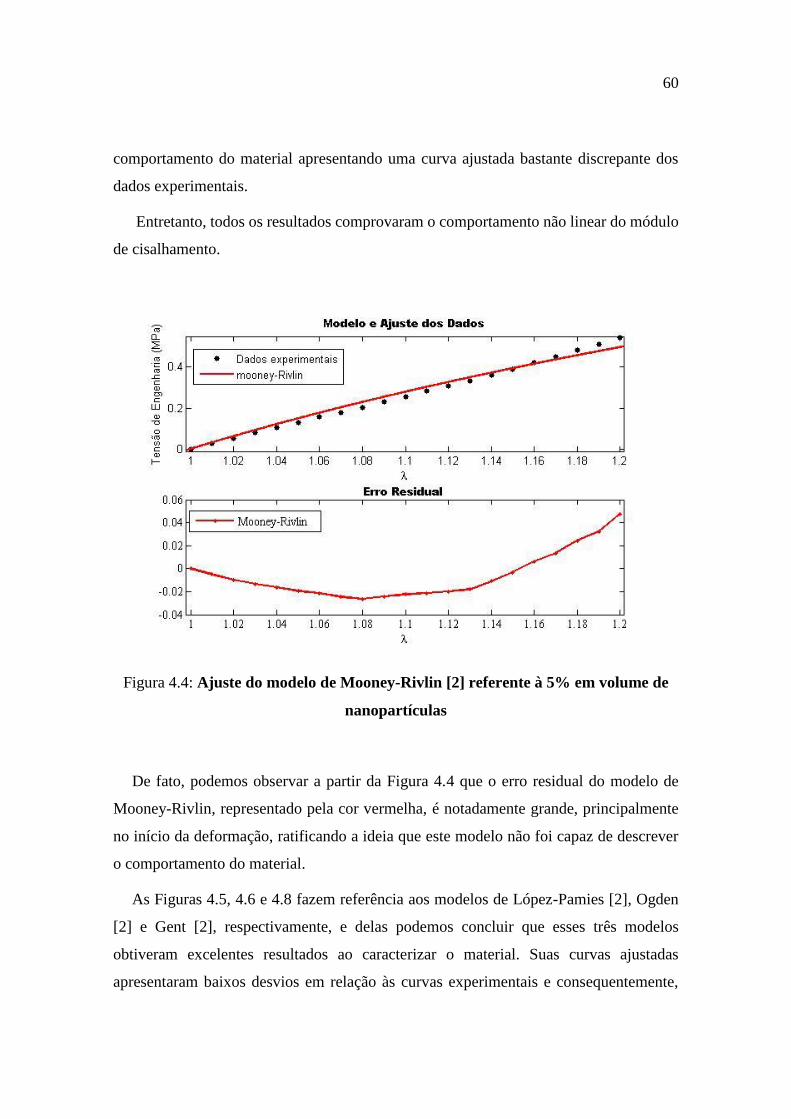
60
comportamento do material apresentando uma curva ajustada bastante discrepante dos
dados experimentais.
Entretanto, todos os resultados comprovaram o comportamento não linear do módulo
de cisalhamento.
Figura 4.4: Ajuste do modelo de Mooney-Rivlin [2] referente à 5% em volume de
nanopartículas
De fato, podemos observar a partir da Figura 4.4 que o erro residual do modelo de
Mooney-Rivlin, representado pela cor vermelha, é notadamente grande, principalmente
no início da deformação, ratificando a ideia que este modelo não foi capaz de descrever
o comportamento do material.
As Figuras 4.5, 4.6 e 4.8 fazem referência aos modelos de López-Pamies [2], Ogden
[2] e Gent [2], respectivamente, e delas podemos concluir que esses três modelos
obtiveram excelentes resultados ao caracterizar o material. Suas curvas ajustadas
apresentaram baixos desvios em relação às curvas experimentais e consequentemente,
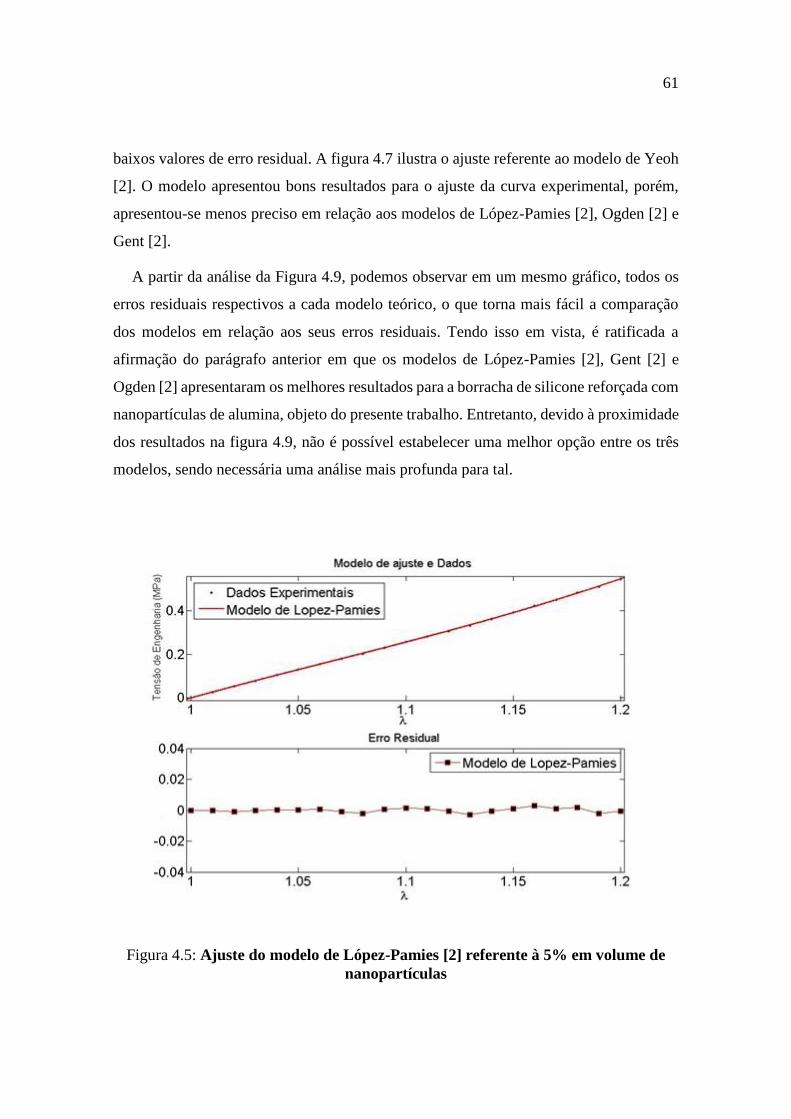
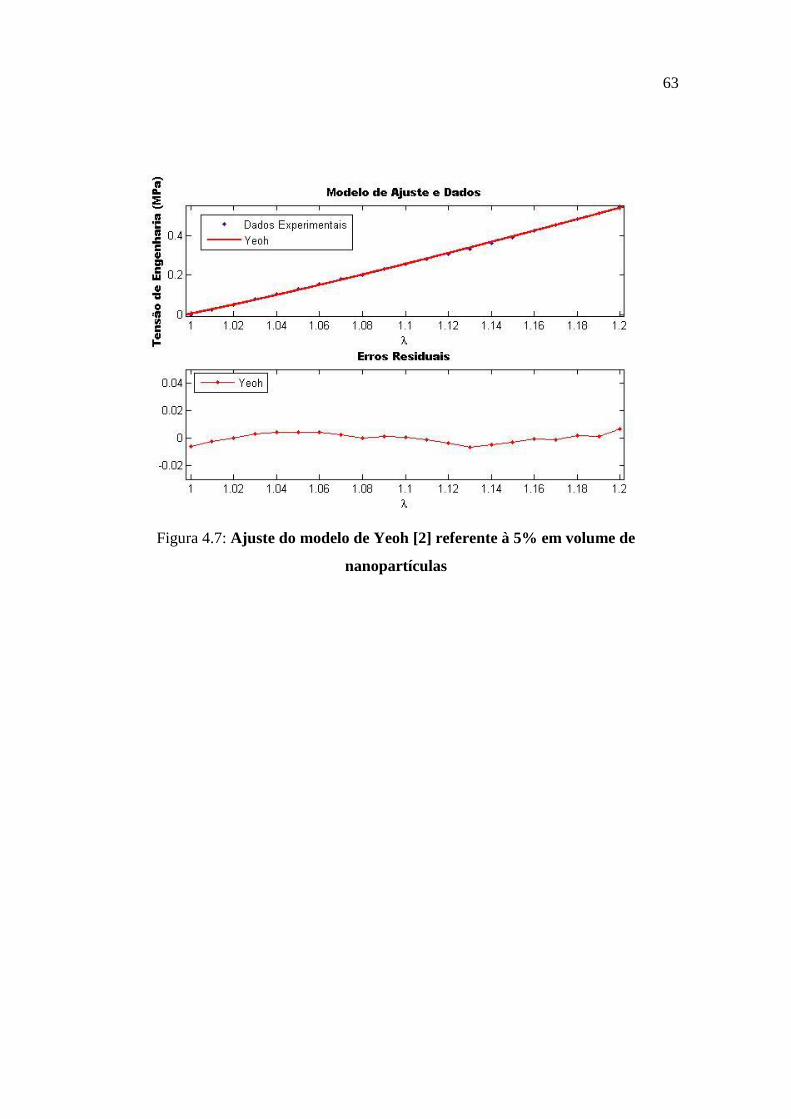
61
baixos valores de erro residual. A figura 4.7 ilustra o ajuste referente ao modelo de Yeoh
[2]. O modelo apresentou bons resultados para o ajuste da curva experimental, porém,
apresentou-se menos preciso em relação aos modelos de López-Pamies [2], Ogden [2] e
Gent [2].
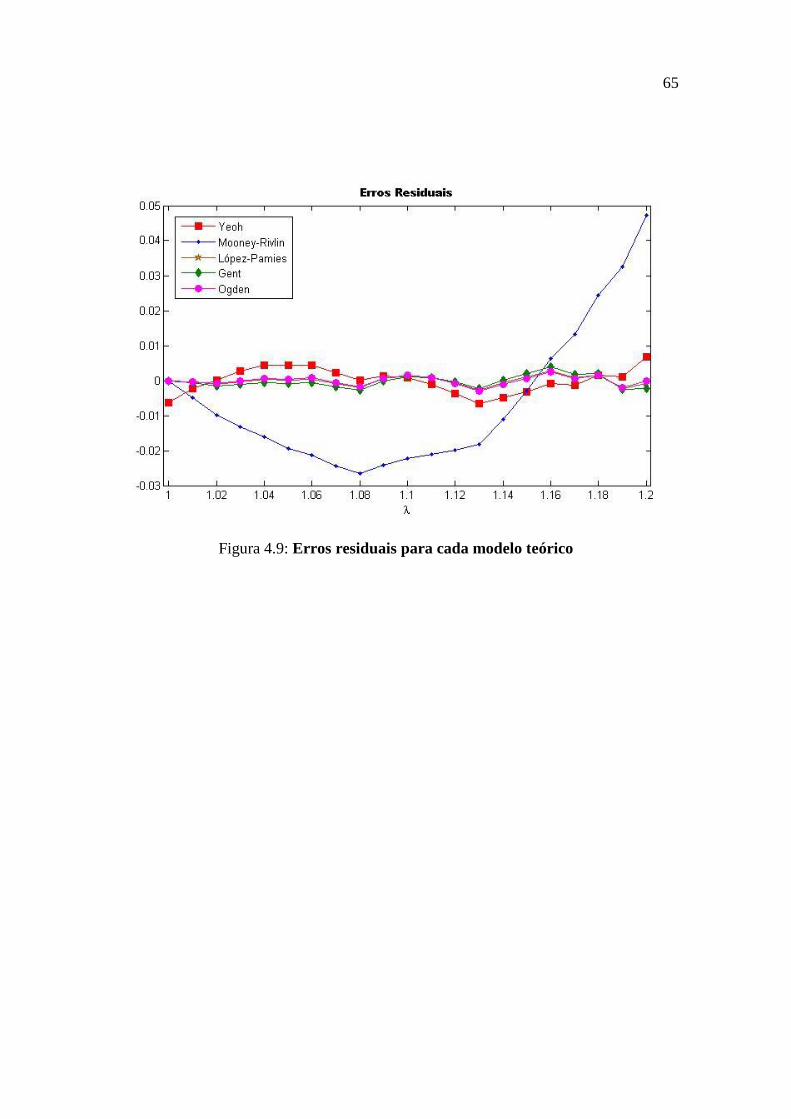
A partir da análise da Figura 4.9, podemos observar em um mesmo gráfico, todos os
erros residuais respectivos a cada modelo teórico, o que torna mais fácil a comparação
dos modelos em relação aos seus erros residuais. Tendo isso em vista, é ratificada a
afirmação do parágrafo anterior em que os modelos de López-Pamies [2], Gent [2] e
Ogden [2] apresentaram os melhores resultados para a borracha de silicone reforçada com
nanopartículas de alumina, objeto do presente trabalho. Entretanto, devido à proximidade
dos resultados na figura 4.9, não é possível estabelecer uma melhor opção entre os três
modelos, sendo necessária uma análise mais profunda para tal.
Figura 4.5: Ajuste do modelo de López-Pamies [2] referente à 5% em volume de
nanopartículas

62
Figura 4.6: Ajuste do modelo de Ogden [2] referente à 5% em volume de
nanopartículas
63
Figura 4.7: Ajuste do modelo de Yeoh [2] referente à 5% em volume de
nanopartículas
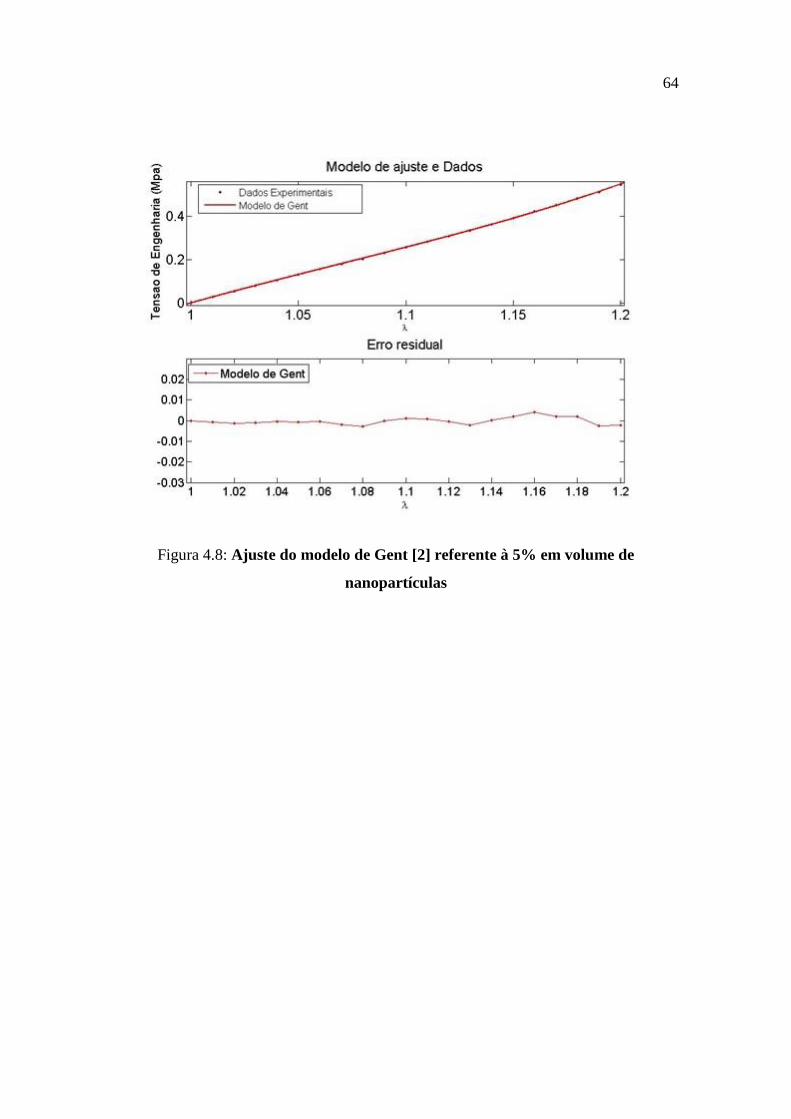
64
Figura 4.8: Ajuste do modelo de Gent [2] referente à 5% em volume de
nanopartículas
65
Figura 4.9: Erros residuais para cada modelo teórico
66
5 CONCLUSÕES
No presente trabalho, o principal objetivo foi determinar o módulo de cisalhamento de
uma borracha de silicone reforçada com nanopartículas de alumina de acordo com
modelos pré-selecionados da literatura. Um segundo objetivo foi eleger um modelo,
dentre os escolhidos, como o que melhor caracterizasse o material em questão. De acordo
com a dissertação de mestrado [1] de onde os dados experimentais foram obtidos, os
corpos de prova padronizados foram sujeitos ao cisalhamento puro e através do uso de
correlação de imagens de digitais, os deslocamentos de região deformada foram obtidos.
A partir do software MatLab, as curvas de tensão x estiramento foram ajustadas, segundo
os modelos propostos, de modo a obter o módulo cisalhamento via determinação das
constantes presentes nos modelos.
Neste trabalho, foram usados um total de seis modelos: López-Pamies, Yeoh, Ogden,
Mooney-Rivlin e Gent. Os resultados para o comportamento do módulo de cisalhamento
obtidos estão condizentes com o previsto pela na literatura e os modelos de Gent, Ogden
e López-Pamies apresentaram os melhores ajustes, e, consequentemente, os menores
erros residuais.
67
REFERÊNCIAS BIBLIOGRÁFICAS
[1] R. O. Benevides, “Comportamento Mecânico da Borracha de Silicone
Reforçada com Diferentes Concentrações de Nanopartículas de Alumina”
UFF, Niterói, 2015.
[2] L. Nunes, D. Castello, C. Matt and P. d. Santos, "Parameter estimation
using digital image correlation and inverse problems," Brazilian Society of
Mechanical Sciences and Engineering, pp. 433-443, 2007.
[3] Gerhard A. Holzapfel. Nonlinear Solid Mechanics A Continuum
Approach for Engineering. John Wiley & Sons, LTD, 2000.
[4] O. H. Yeoh. Some forms of the strain energy function for rubber. Rubber
Chem. Technol, 66:754–771, 1993.
[5] T.G. Ritto, L.C.S. Nunes, “Bayesian model selection of hyperelastic
models for simple and purê shear at large deformations” Journal of
Computers and Structures, 156:101-109, 2015
[6] Zaoyang Guo, Xiaohao Shi, Yang Chen, Huapeng Chen d, Xiongqi Peng,
Philip Harrison f, “Mechanical modeling of incompressible particle-
reinforced neo-Hookean composites based on numerical homogenization”,
Journal of Mechanics of Materials, 70:1-17, 2014
[7] Lopez-Pamies O. “A new I1-based hyperelastic model for rubber elastic
Materials”, 338:3–11, 2010
[9] J. Wen, J. E. Mark, “Mechanical properties and structural
characterization of poly(dimethylsiloxane) elastomers reinforced with
zeolite fillers” Journal of Material Science, 29:499-503, 1994
[10] Oscar Lopez-Pamies. A new I1-based hyperelastic model for rubber
elastic materials. Comptes Rendus Mecanique, 338:3–11, 2010.
68
[11] Oscar Lopez-Pamies. An exact result for the macroscopic response of
particle-reinforced neo-hookean solids. Journal of Applied Mechanics, 77,
2010.