projeto de controle com estrutura variÁvel e … · a equação diferencial (1) é ... variante no...
TRANSCRIPT

PROJETO DE CONTROLE COM ESTRUTURA VARIÁVEL E MODOS DESLIZANTES DE ORDEMCOMPLETA POR D-ESTABILIDADE
HELOISE ASSISFAZZOLARI∗, PEDRO CAETANO DE OLIVEIRA †, ALFREDO DEL SOLE LORDELO†, EMERSON
RAVAZZI PIRES DA SILVA ‡, JOSÉPAULO FERNANDESGARCIA§, MARCELO CARVALHO M INHOTO TEIXEIRA§,EDVALDO ASSUNÇÃO§
∗Universidade Estadual de Campinas - UNICAMPFaculdade de Engenharia Elétrica e de Computação - FEEC
Departamento de Sistemas e Energia - DSEAvenida Albert Einstein 400, 13083-852, Campinas, SP, Brasil
†Universidade Federal do ABC - UFABCCentro de Engenharia, Modelagem e Ciências Sociais Aplicadas - CECS
Rua Abolição s/n, 09210-180, Santo André, SP, Brasil
‡Universidade Tecnológica Federal do Paraná - UTFPRAvenida Alberto Carazzai 1640, 86300-000, Cornélio Procópio, PR, Brasil
§Univ Estadual Paulista - UNESPDepartamento de Engenharia Elétrica - DEELaboratório de Pesquisa em Controle - LPC
Avenida José Carlos Rossi 1370, 15385-000, Ilha Solteira, SP, Brasil
Emails: [email protected], [email protected],[email protected], [email protected],[email protected], [email protected],
Abstract— This article presents a systematic technique for Full-Order Sliding Mode Control design applied to linear time-invariant systems, through Linear Matrix Inequality (LMI), based in the robust eigenvalue placement in a specific region of theleft-half complex plane, calledD-stable region. The determination ofD-stable region is directly related to the performance indicesfor the desired transient response of the controlled system for the uncertain parameters of the system, which can be related tooperating conditions, structural faults or tolerances in its components. An experimental implementation of this controller strategy,applied in the position control of an active suspension, illustrates the main characteristics of the proposed procedure.
Keywords— Variable Structure Control, Sliding Modes, Robust Eigenvalue Placement, Control System Design, Linear MatrixInequality.
Resumo— Este artigo apresenta uma técnica sistemática de projeto da superfície de chaveamento para o Controle com EstruturaVariável e Modos Deslizantes de Ordem Completa aplicada em sistemas lineares e invariantes no tempo, através de DesigualdadeMatricial Linear (LMI), do inglêsLinear Matrix Inequality, baseada na alocação robusta de autovalores em uma região específicado semi-plano esquerdo do plano complexo, denominada regiãoD-estável. A determinação da regiãoD-estável está diretamenterelacionada com os índices de desempenho desejados para a resposta transitória do sistema controlado perante as incertezas nosparâmetros do sistema, que podem estar relacionados às condições de operação, falhas estruturais ou tolerâncias nos seus compo-nentes. Uma implementação experimental desta estratégia de projeto e controle, aplicada no controle de posição de uma suspensãoativa, ilustra as principais características do procedimento proposto.
Keywords— Controle com Estrutura Variável, Modos Deslizantes, Alocação Robusta de Autovalores, Projeto de Sistemas deControle, Desigualdade Matricial Linear.
1 Introdução
O Controle com Estrutura Variável e ModosDeslizantes (CEV-MD) se baseia na seleção daestrutura do controlador, em resposta à mudança doestado do sistema, para que se obtenha o desempenhodinâmico desejado. Isto é realizado através de umalei de controle com chaveamento em alta frequência,que força a trajetória do sistema a se manter em umadeterminada superfície do espaço de estado por todo otempo subsequente. O sistema fica, então, insensívelà variação de certos parâmetros e distúrbios enquantoa trajetória de estado estiver sobre esta superfície,denominada superfície de chaveamento. Este tipo de
controle é caracterizado pela existência dos modosdeslizantes, que ocorrem quando o estado do sistemacruza repetidamente a superfície de chaveamento,devido ao fato de que qualquer movimento na vizi-nhança da superfície está direcionado a ela. Os modosdeslizantes apresentam duas características muitoimportantes no desempenho robusto e no projeto doCEV-MD. A primeira característica é que o elementoque implementa a função descontínua chaveia emalta frequência e, consequentemente, implementa umalto ganho, que é teoricamente infinito, atenuandoa influência dos distúrbios e incertezas do sistema.A segunda característica é que a ordem da equaçãodo sistema resultante é reduzida, pois a trajetória
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2222
dos modos deslizantes pertence a uma superfície dedimensãoinferior a do sistema original. Assim, osistema em modos deslizantes se comporta como umsistema autônomo e de ordem inferior, chamado desistema equivalente, cujo movimento é diferente dosseus subsistemas constituintes. Portanto, um sistemade ordemn comm entradas de controle, quando emmodos deslizantes, torna-se um sistema autônomo deordemn − m, cuja superfície de chaveamento podeser projetada pela alocação den − m autovaloresatravés da fórmula deAckermann, conforme descritoem (Ackermann and Utkin, 1998). O CEV-MD édescrito e analisado detalhadamente em (Utkin, 1977),(Utkin, 1978), (Utkin, 1992) e (DeCarlo et al., 1988).De forma alternativa, o Controle com EstruturaVariável e Modos Deslizantes de Ordem Com-pleta (CEV-MDOC) é apresentado em (Utkin andShi, 1996), no qual a ordem da equação dinâmica dosistema em modos deslizantes é igual à ordem do sis-tema original. A principal vantagem do CEV-MDOC,em comparação com o CEV-MD, é que ele apresentaas carcterísticas de robustez a partir do estado inicial.Durante a fase de alcançabilidade do CEV-MD,antes da ocorrência dos modos deslizantes, o sistemanão possui esta propriedade. Em (Ackermann andUtkin, 1998) e (Ackermann and Utkin, 1994), édescrito um procedimento de projeto da superfície dechaveamento do CEV-MDOC para sistemas linearese invariantes no tempo, sujeitos a distúrbios, atravésda alocação den autovalores pela solução da equaçãode Ackermann. No CEV-MDOC, o procedimentode projeto é feito em termos do sistema originalao invés das equações que descrevem os modosdeslizantes, como no CEV-MD. Outra vantagem doCEV-MDOC é que para sistemas de segunda ordemou de ordem maior (considerando a dominânciarelativa na alocação de autovalores), como o controlemantém a ordem do sistema, o projeto da superfíciede chaveamento pode ser baseado nas especificaçõesde desempenho para a resposta transitória de umsistema de segunda ordem na forma padrão paraentradas em degrau ou rampa, tais como máximosobressinal, tempo de pico e tempo de acomodação,como descrito em (Ogata, 2009). Em (Utkin andShi, 1996), a solução da equação deAckermannparao problema de projeto da superfície de chaveamentopara o CEV-MDOC leva em consideração apenasos valores nominais dos parâmetros do sistema. Opresente artigo apresenta uma metodologia alternativade projeto para a superfície de chaveamento para oCEV-MDOC que considera incertezas nos parâmetrosdo sistema devido à tolerâncias em componentes,falhas estruturais ou diferentes condições de operação.O objetivo é projetar a superfície de chaveamentopara o CEV-MDOC, de maneira que os autovaloresdesejados sejam robustamente alocados em umaregião no semi-plano esquerdo do plano complexo,diretamente relacionada com os índices de desem-penho previamente especificados para a respostatransitória do sistema controlado, conhecida como
regiãoD-estável, para todos os possíveis conjuntos deparâmetros incertos do sistema. A formulação desteproblema de projeto é feita através de DesigualdadeMatricial Linear (LMI), do inglês Linear MatrixInequality, de maneira que os parâmetros do sistemasejam descritos através de uma combinação convexados vértices de um politopo. A segunda seção doartigo apresenta o CEV-MDOC. A terceira seção doartigo apresenta a formulação do problema de projetoda superfície de chaveamento para o CEV-MDOCatravés daD-estabilidade e LMIs para o sistema comparâmetros incertos. A quarta seção do artigo apre-senta a implementação experimental do CEV-MDOCno controle de posição de uma suspensão ativa comincerteza na carga suspensa. Finalizando, a quintaseção do artigo apresenta as conclusões gerais.
2 Controle com estrutura variável e modosdeslizantes de ordem completa
O CEV-MDOC, descrito em (Ackermann and Utkin,1994), (Utkin and Shi, 1996) e (Ackermann and Utkin,1998), é apresentado a seguir. Para simplicidade dedemonstração, porém sem perda de generalidade, con-sidere o sistema SISO, do inglêsSingle-Input Single-Output, controlável, descrito pelas equações
x(t) = Ax(t) + b[u(t) + f(x, t))], (1)
y(t) = cx(t), (2)
de maneira quex(t) ∈ Rn×1, u(t) ∈ R e y(t) ∈ R
são, respectivamente, o vetor de estado, a entrada decontrole e a saída do sistema. Também,A ∈ R
n×n,b ∈ R
n×1 e c ∈ R1×n são, respectivamente, a ma-
triz de estado, os vetores de entrada e de saída. Ovetor f(x, t) é uma perturbação não linear com umlimitante superiorf0(x, t) conhecido, de modo que|f(x, t)| < f0(x, t). A equação diferencial(1) écomplementada pela seguinte equação diferencial adi-cional de primeira ordem
z(t) = −bTAx(t)− b
Tbua(t), (3)
na qual
ua(t) = −kx(t) (4)
cujo estado inicial éz(0) = −bTx(0). A entrada de
controleu(t) é uma função descontínua dos estadosx(t) ez(t) e é dado por
u(t) = −M(x, t)sign(s), (5)
na qual
s(t) = bTx(t) + z(t). (6)
Comos(t)s(t) < 0 paras(t) 6= 0 e s(t) → 0 comt → ∞, temos ques(t) = b
Tx(t) + z(t) = 0. Então,
z(0) = −bTx(0), implicando ques(0) = b
Tx(0) +
z(0) = 0. De fatos(t) = 0 = bTx(t)+z(t), ∀t ≥ 0 e,
portanto,z(t) = −bTx(t). Logo, o modo deslizante
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2223

existe para todot ≥ 0. A projeção de movimento noespaços de dimensão um é dado por
s(t) = bTx(t) + z(t),
= bT{Ax(t) + b[u(t) + f(x, t)]} −
−bTAx(t)− b
Tbua(t),
= bTAx(t) + b
Tbu(t) + b
Tbf(x, t)−
−bTAx(t)− b
Tbua(t),
= bTb[u(t) + f(x, t)− ua(t)].
A condição para a existência de modos deslizantes é
M(x, t) > |ua(t)|+ f0(x, t), (7)
que surge já no instante inicial, poiss(0) = 0. Asolução da equaçãos(t) = 0 em relação au(t) ésubstituída em(1), obtendo-se a equação de modosdeslizantes no planos(t) = 0, dada por
x(t) = Ax(t) + bua(t). (8)
Em particular, a entrada de controleua(t) pode serprojetada através da alocação de autovalores e o com-portamento do sistema, na presença de um distúrbiof(x, t), é descrito pela equação(8), que é linear e in-variante no tempo. Se o CEV-MDOC admite apenasos valoresM0 e−M0, então a amplitude do controleM0 deve satisfazer(7), significando que as condiçõesiniciais e o distúrbio devem ser limitados. O subsis-tema adicional(3), com a sua respectiva condição ini-cial, assegura a existência de modos deslizantes para adinâmica desejada com uma ordem igual a do sistemaoriginal.
3 Projeto da superfície de chaveamento para oCEV-MDOC através daD-estabilidade e LMIs
Da equação(8) com a realimentação(4), temos que
x(t) = (A− bk)x(t). (9)
Na presença de incertezas paramétricas no modelomatemático do sistema, a matriz de estado e o vetor deentrada na equação(8) podem ser representados comouma combinação convexa dos vértices de politopos, demodo que
x(t) =
r∑
i=1
αiAix(t) +
s∑
j=1
βjbjua(t), (10)
no qual
αi > 0, i = 1, . . . , r,
r∑
i=1
αi = 1 (11)
e
βj > 0, j = 1, . . . , s,
s∑
i=1
βj = 1, (12)
em quer e s são as quantidades de vértices dos poli-topos deA e b, respectivamente. Desta forma, pelaequação(9), temos que
x(t) =
r∑
i=1
αiAi −
s∑
j=1
βjbjk
x(t). (13)
A seguir, é definida a regiãoD-estável para alocaçãorobusta de autovalores apresentada em (Chilali andGahinet, 1996).
Definição 1 Dada uma regiãoD no semi-plano es-querdo do plano complexo, uma matrizA ∈ R
n×n éditaD-estável se todos os seus autovalores estão con-tidos na regiãoD.
Para a formulação do problema de alocação robusta deautovalores em termos de LMIs, considere a definiçãoda regiãoD-estávelS(γ, r, θ) em termos dos númeroscomplexoss = x + jy descrita em (Chilali andGahinet, 1996), na qual
S(γ, r, θ) =
x < −γ < 0,|x+ jy| < r,tg(θ)x < −|y|,
é limitada pela interseção dos pontos do semi-plano àesquerda da reta vertical em(−γ, 0), paraγ > 0; dospontos internos à circunferência de raior e; dos pontosinternos ao cone2θ. A regiãoS(γ, r, θ) é representadaem cinza na Figura 1.
Im(s)
Re(s)
r
θS(γ, r, θ)
γ
Figura 1: RegiãoS(γ, r, θ).(Chilali and Gahinet, 1996)
Conforme descrito em (Ogata, 2009), para um sis-tema linear e invariante no tempo de segunda ordemna forma padrão, podemos obter o fator de amorte-cimentoζ e a frequência natural não amortecidaωn
em termos do máximo sobressinal e do tempo de aco-modação desejados para a resposta transitória do sis-tema controlado, de maneira que
Mp = e
−ζπ√1−ζ2 ⇒ ζ =
√
[ln(Mp)]2
[ln(Mp)]2+ π
2
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2224

e
ts =4
ζωn
⇒ ωn =4
ζts
.
Assim, considerando as substituições de variáveisθ = arccos(ζ), r = ωn e γ = ζωn, obtemosa definição da regiãoS(γ, r, θ), em termos deζ eωn, associando-a aos pontos não alcançáveis da fron-teira daD-estabilidade para o máximo sobressinal e otempo de acomodação, dados por
λ1,2=−ζωn±jωn
√
1− ζ2=−γ±jr
√
1−[cos(θ)]2.
O seguinte Lema, descrito em (Chilali and Gahinet,1996), apresenta condições em termos de LMIs paraa garantia daD-estabilidade de sistemas lineares e in-variantes no tempo na regiãoS(γ, r, θ).
Lema 2 O sistema autônomo linear e invariante notempo
x(t) = Ax(t) (14)
éD-estável na regiãoS(γ, r, θ), se e somente se, exis-tir uma matriz simétricaP ∈ R
n×n, de maneira queas seguintes LMIs sejam factíveis:
P > 0, (15)
2γP +AP + PAT< 0, (16)
[
−rP AP
PAT
−rP
]
< 0 (17)
e[
senθ(AP + PAT ) cosθ(AP − PA
T )
cosθ(PAT−AP ) senθ(AP + PA
T )
]
< 0.
(18)
Prova: Veja (Chilali and Gahinet, 1996). 2
O seguinte Lema, descrito em (Leite and Peres, 2003),apresenta uma extensão dos resultados do Lema 2para sistemas incertos, descritos através de incertezaspolitópicas.
Lema 3 O sistema realimentado com incertezaspolitópicas linear e invariante no tempo
x(t) = Ax(t), (19)
no qual
A =
r∑
i=1
αiAi −
s∑
j=1
βjbjk,
em que
αi > 0, i = 1, . . . , r,
r∑
i=1
αi = 1 (20)
e
βj > 0, j = 1, . . . , s,
s∑
i=1
βj = 1, (21)
sendo quer e s são as quantidades de vértices dospolitopos deA eb éD-estável na regiãoS(γ, r, θ), see somente se, existir uma matriz simétricaP ∈ R
n×n,de maneira que as seguintes LMIs sejam factíveis:
P > 0, (22)
2γP +AiP − bjX + PATi −X
TbTj < 0, (23)
[
−rP AiP − bjX
PATi −X
TbTj −rP
]
< 0 (24)
e[
senθ(AiP − bjX + PATi −X
TbTj )
cosθ(PAi −XTbTj −AiP + bjX)
cosθ(AiP − bjX − PATi +X
TbTj )
senθ(AiP − bjX + PATi −X
TbTj )
]
< 0. (25)
O vetor de ganho de realimentação de estado é dadopor k = XP
−1.
Prova: Segundo (Chilali and Gahinet, 1996), o sis-tema(19) é D-estável, se e somente se, existir umamatrizP simétrica e definida positiva, tal que
L⊗ P +H ⊗ (AP ) +HT⊗ (AP )T < 0
na qualL e H definem uma função característica daregião LMIsD(fd(λ) = L +Hλ +H
Tλ < 0). Se-
gundo (Chilali et al., 1999), as LMIs são invariantescom relação à intersecção de conjuntos, de forma queo sistema(19) é D-estável em relação a uma regiãoD = D1 ∩D2 ∩ · · · ∩Dn, se e somente se, existir umamatrizP simétrica e definida positiva que satisfaça
Li ⊗P +Hi ⊗ (AP ) +HTi ⊗ (AP )T < 0, (26)
parai = 1, · · · , n. Para sistemas incertos, as LMIssão válidas desde que a matrizA possa ser represen-tada como uma função afim dos parâmetros incertos.De acordo com a Figura 1, a região desejada para aalocação dos autovalores éD = D1 ∩ D2 ∩ D3, naqual D1 define a região dos pontos do semi-plano àesquerda da reta vertical em(−γ, 0), paraγ > 0; D2
define a região dos pontos internos à circunferênciade raior e; D3 define a região dos pontos internos aocone2θ. A regiãoD1 pode ser descrita porL = 2γ eH = 1. Assim, a equação(26) será dada por
2γP +AP + PAT< 0.
A regiãoD2 pode ser descrita por
L =
[
−r 00 −r
]
e H =
[
0 10 0
]
.
Assim, a equação(26) será dada por[
−rP AP
PAT
−rP
]
< 0.
A regiãoD3 pode ser descrita porL = 0 e
H =
[
senθ cosθ
−cosθ senθ
]
.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2225

Assim, a equação(26) será
[
senθ(AP + PAT ) cosθ(AP − PA
T )
cosθ(PAT−AP ) senθ(AP + PA
T )
]
< 0.
Se todas estas LMIs forem satisfeitas, então os au-tovalores da matriz de estadoA pertencem à regiãoS(γ, r, θ). O vetor de ganho de realimentação de es-tadok é obtido, de forma análoga, para o sistema comincertezas(19), de maneira que a regiãoD1 pode serdescrita, conforme apresentado em (Boyd et al., 1994),por
2γP + (Ai − bjk)P + P (Ai − bjk)T< 0 ⇒
⇒ 2γP+AiP−bjkP+PATi −Pk
TbTj < 0. (27)
A desigualdade(27) não é uma LMI. Porém, fazendoX = kP , obtemos a LMI
2γP +AiP − bjX + PATi −X
TbTj < 0, (28)
de maneira que o vetor de ganho de realimentação deestado é determinado pork = XP
−1. A regiãoD2
pode ser descrita por[
−rP (Ai − bjk)PP (Ai − bjk)
T−rP
]
< 0 ⇒
⇒
[
−rP AiP − bjkP
PATi − Pk
TbTj −rP
]
< 0.
(29)A desigualdade(29) não é uma LMI. Porém, fazendoX = kP , obtemos a LMI
[
−rP AiP − bjX
PATi −X
TbTj −rP
]
< 0, (30)
de maneira que o vetor de ganho de realimentação deestado é determinado pork = XP
−1. A regiãoD3
pode ser descrita por[
senθ[(Ai − bjk)P + P (Ai − bjk)T ]
cosθ[P (Ai − bjk)T− (Ai − bjk)P ]
cosθ[(Ai − bjk)P − P (Ai − bjk)T ]
senθ[(Ai − bjk)P + P (Ai − bjk)T ]
]
< 0. (31)
A desigualdade(31) não é uma LMI. Porém, fazendoX = kP , obtemos a LMI
[
senθ(AiP − bjX + PATi −X
TbTj )
cosθ(PAi −XTbTj −AiP + bjX)
cosθ(AiP − bjX − PATi +X
TbTj )
senθ(AiP − bjX + PATi −X
TbTj )
]
< 0, (32)
de maneira que o vetor de ganho de realimentação deestado é determinado pork = XP
−1. Assim, se e-xistir uma matrizP simétrica e definida positiva quesatisfaça as LMIs (28), (30) e (32), então, pode-se en-contrar um ganho de realimentação de estadok quesatisfaça as especificações de desempenho desejadas.2
4 Controle de posição da suspensão ativa
O desempenho robusto do CEV-MDOC foi veri-ficado experimentalmente no controle de posiçãode uma suspensão ativa da QUANSERc© que, porpossuir arquitetura aberta, permite a implemen-tação de técnicas de controle originais através doQUARC c©/MATLAB c©/SIMULINK c©. O sistema decontrole completo consiste de uma placa de controle eaquisição de dados acoplada a um computador, umafonte amplificadora, cabos de conexão e a suspen-são ativa com os sensores. Na estrutura da suspensãoativa, existem dois pares de molas, doisencodersóp-ticos e um acelerômetro que, em conjunto, medem asposições do pavimento e das massas da carga suspensae da carga não suspensa. As velocidades das massasda carga suspensa e da carga não suspensa são obtidasatravés de filtros de segunda ordem. Um motor DCconectado às massas da carga suspensa e da carga nãosuspensa atua no controle da suspensão ativa.
A Figura 2 apresenta o diagrama esquemático dasuspensão ativa. A massaMs representa a carga sus-pensa, que é formada por1/4 da massa suspensa deum veículo (1/4da carroceria), e é suportada pelamola ks e pelo amortecedorbs. A massaMus re-presenta1/4 da massa não suspensa de um veículo(um conjunto de roda e pneu) e é suportada pela molakus e pelo amortecedorbus. O controle das vibraçõescausadas pelas irregularidades no pavimento é feitoatravés de um motor DC conectado entre as massasMs eMus, resultando na força de controleFc.
zs(t)
zus(t)
zr(t)
acelerômetro(⇒ zs(t))
encoderóptico(⇒ zus(t))
Ms → 1
4damassa do veículo
Mus → massa da roda e pneu
suspensão ativaks bsFc
kus bus
conjunto roda e pneu
Figura 2: Diagrama esquemático da suspensão ativa.(da Silva et al., 2013) (Quanser, 2009)
A carga útil suspensa na suspensão ativa é com-posta por dois discos metálicos idênticos, de massa0, 4975kg cada um. Assim, a massaMs pode assumirvalores entre1, 455kg (sem os dois discos) e2, 450kg(com os dois discos). O vetor de estado é definidocomo
x(t) =
x1(t)x2(t)x3(t)x4(t)
=
zs(t)− zus(t)zs(t)
zus(t)− zr(t)zus(t)
.
Na presença de incertezas paramétricas, a matriz deestado e o vetor de entrada são representados como
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2226

uma combinação convexa dos vértices de dois poli-topos, como descrito na equação(10). A Tabela1 apresenta os valores dos parâmetros do modelomatemático da suspensão ativa.Tabela 1: Valores dos parâmetros da suspensão ativa.
Parâmetro Valor
ks 900 N/m
kus 2500 N/m
bs 7, 5 Ns/m
bus 5, 0 Ns/m
[Ms] [1, 455; 2, 450] kgMus 1, 0 kg
O primeiro politopo é dado por
A1 =
0 1 0 −1−367, 4 −3, 061 0 3, 061
0 0 0 1900, 0 7, 500 −2500 −12, 50
e
A2 =
0 1 0 −1−618, 6 −5, 155 0 5, 155
0 0 0 1900, 0 7, 500 −2500 −12, 50
.
O segundo politopo é dado por
b1 =
00, 4082
0−1
e b2 =
00, 6873
0−1
.
A solução numérica das LMIs foram obtidas com osoftwareMATLAB c© e osolver SeDuMi, apresentadoem (Sturm, 1999). O desempenho especificado paraa resposta transitória do sistema foi um sobressinalmáximo Mp = 78% e um tempo de acomodaçãots = 0, 7s. Desta forma, temos queζ = 0, 07884e ωn = 72, 48rad/s, que definem os valores daregião S(γ, r, θ) como θ = arccos(ζ) = 1, 492,r = ωn = 72, 48 e γ = ζωn = 5, 714. Logo,λ1,2 = −5, 714 ± j72, 25. A solução do conjunto deLMIs (22), (23), (24) e (25), no Lema3, resulta novetor de ganho de realimentação de estado do CEV-MDOC, na equação(4), dado por
k =[
−13, 06 66, 66 58, 34 −14, 72]
.
A equação(8) pode ser descrita através de um sistemade equações diferenciais intervalares, dado por
x(t) = [A]x(t) + [b]ua(t), (33)
na qual a matriz de estado intervalar[A] ∈ IRn×n e
o vetor de entrada intervalar[b] ∈ IRn×1 contém as
incertezas paramétricas do sistema, sendo definidas,respectivamente, como
[A] =
0 1 0 −1
−ks
[Ms]−
bs[Ms]
0 bs[Ms]
0 0 0 1ks
Mus
bsMus
−kus
Mus−
(bs+bus)Mus
e
[b] =
01
[Ms]
0−
1Mus
nos quais [Ms] é um conjunto compacto, ou seja,fechado e limitado, representando todos os possíveisvalores deMs entre a carga suspensa mínima e máxi-ma da suspensão ativa. O seguinte Teorema, conhe-cido comoTeorema das Arestas, permite descrever oespaço de raízes de um polinômio intervalar, de formalimitada, através das raízes de suas arestas.
Teorema 4 Considere um polinômio intervalar dadopor
[c(s)] =
n∑
i=0
[ci+1]sn−i
,
com0 /∈ [c1]. O espaço de raízes ou espectro de[c(s)],denotado porS([c(s)]), é definido como o conjunto detodas as raízes de[c(s)] = 0, quando os coeficientesde [c(s)] assumem valores em[c] := [c−, c
+] e é li-mitado pelas raízes de suas arestas[c−, c
+].
Prova: Veja (Bartlett et al., 1988). 2
Através do Teorema 4, é possível descrever, na Figura3, o conjunto de todos os possíveis autovalores demalha fechada para o sistema incerto, como o espectrodedet(sI − [A] + [b]k), contido na regiãoS(γ, r, θ).A Figura 4 apresenta, em detalhe, esta região no semi-plano esquerdo superior, para melhor visualização.Em ambas as figuras, também pode-se observar os au-tovalores de malha fechada nas situações de carga sus-pensa mínima e máxima na suspensão ativa.
−80 −60 −40 −20 0 20 40 60 80−80
−60
−40
−20
0
20
40
60
80
0.985
0.160.340.50.64
0.76
0.86
0.94
0.985
10
20
30
40
50
60
70
80
10
20
30
40
50
60
70
80
0.160.340.50.64
0.76
0.86
0.94
Real Axis (seconds−1)
Imag
inar
y A
xis
(sec
onds
−1 )
λ1
λ2
Figura 3: RegiãoS(γ, r, θ) contendoS([det(sI −
[A] + [b]k)]) (em amarelo) e os autovalores de malhafechada para carga suspensa mínima (em azul) e má-xima (em vermelho) na suspensão ativa.
O CEV-MDOC descrito pelas equações(3), (4),(5) e (6), foi implementado paraM0 = 35N ,com uma entrada de referência em onda quadrada,com uma amplitudezr(t) = 0, 03m, frequência
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2227
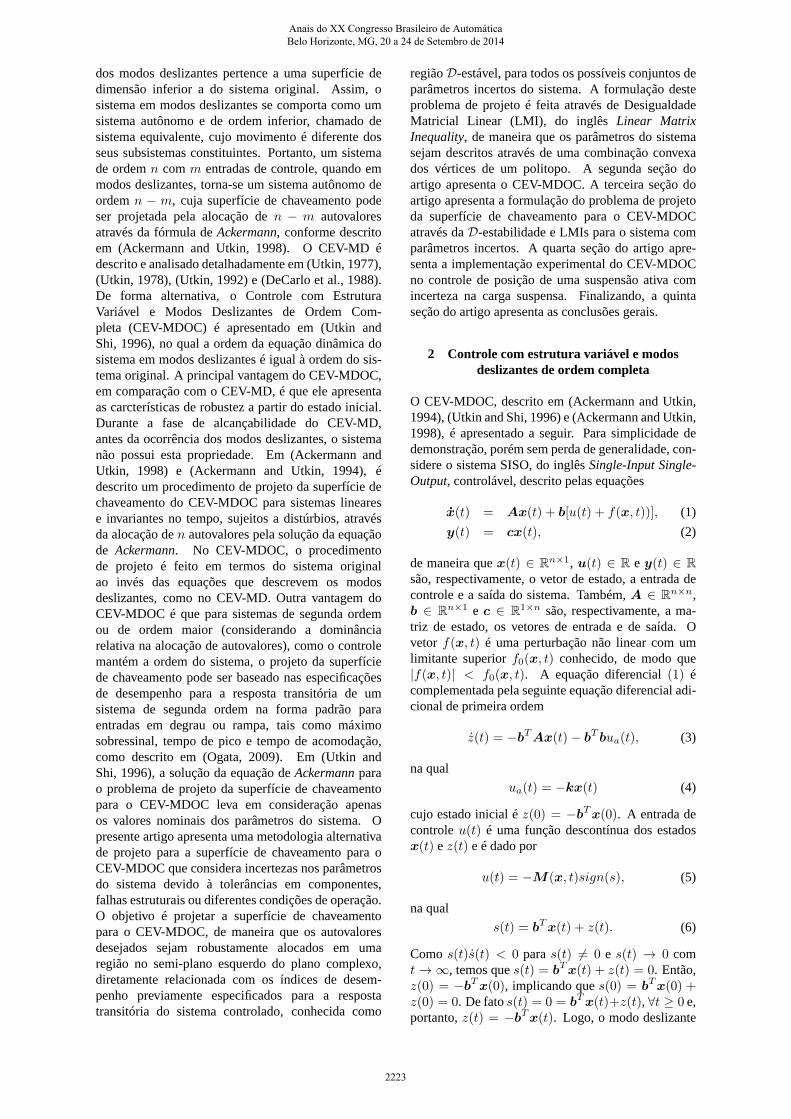
1/3Hz e largura de pulso de50%. Como o CEV-MDOC é sensível a atrasos, para que o controle fun-cionasse, foi necessário utilizar o preditor de estadodescrito em (Garcia et al., 2009) e ajustar a frequên-cia de amostragem em8kHz, que é equivalente a umperíodo de amostragem de125µs.
Figura 4: Detalhe do semi-plano esquerdo superior daregiãoS(γ, r, θ) contendoS([det(sI − [A] + [b]k)])(em amarelo) e os autovalores de malha fechada paracarga suspensa mínima (em azul) e máxima (em ver-melho) na suspensão ativa.
O comportamento ideal do CEV-MDOC (oudo CEV-MD) é alcançado quando a frequência dechaveamento se torna infinita. A implementaçãoprática deste controle resulta em um fenômeno co-nhecido como trepidação (chattering). Isto se deveao fato de que o elemento que implementa o chavea-mento apresenta um atraso de resposta, fazendo comque a trajetória tenha uma sobrelevação em relação àsuperfície de chaveamento, proporcionalmente a esteatraso, toda vez que ocorre o chaveamento. Em al-guns casos, a trepidação pode excitar modos de altafrequência não modelados, levando à degradação daação de controle ou a um desgaste prematuro do atu-ador. Uma maneira de evitar os efeitos indesejáveis datrepidação é introduzir uma camada limite em tornoda superfície de chaveamento, aproximando o chavea-mento descontínuo por um controle contínuo dentrodesta camada limite. Uma proximação contínua parasign(s(t)), apresentada em (Shtessel et al., 2013), édada pela função sigmóide
sign(s(t)) ≈s(t)
(|s(t)|+ ǫ),
naqualǫ > 0 é um escalar positivo e suficientementepequeno. Pode-se notar que, paras(t) 6= 0,
sign(s(t)) = limǫ→0
s(t)
(|s(t)|+ ǫ).
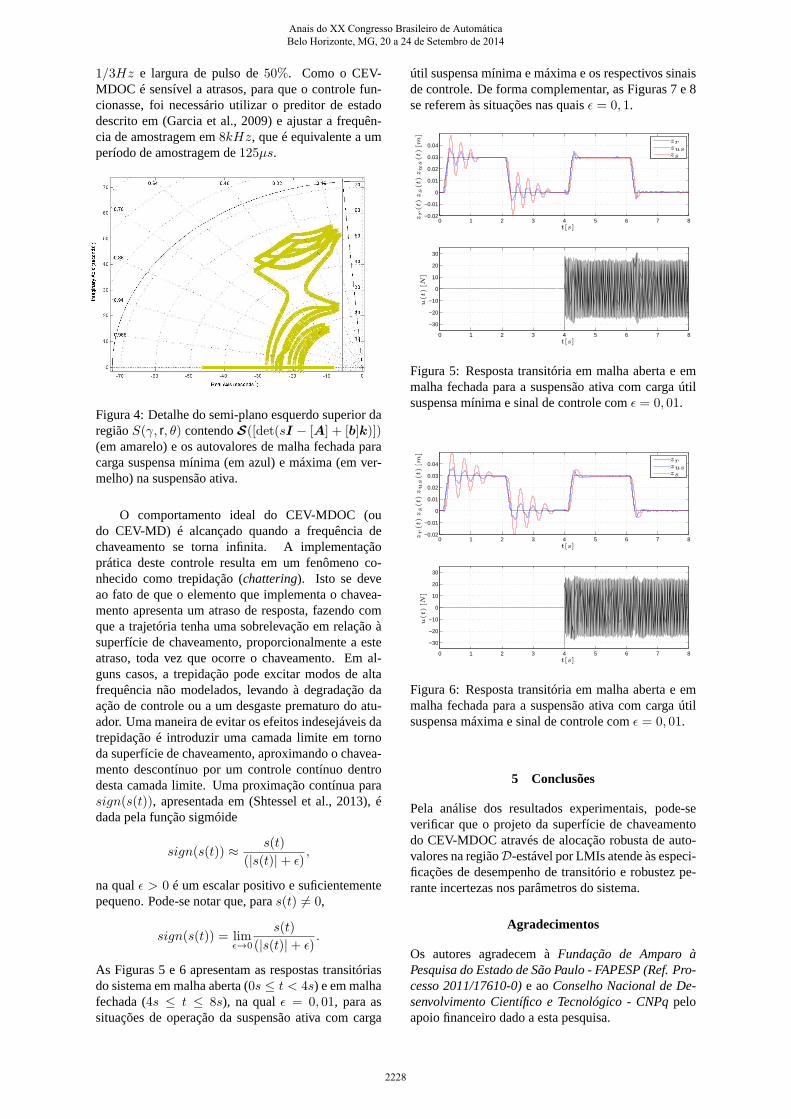
As Figuras 5 e 6 apresentam as respostas transitóriasdo sistema em malha aberta (0s≤ t < 4s) e em malhafechada (4s≤ t ≤ 8s), na qualǫ = 0, 01, para assituações de operação da suspensão ativa com carga
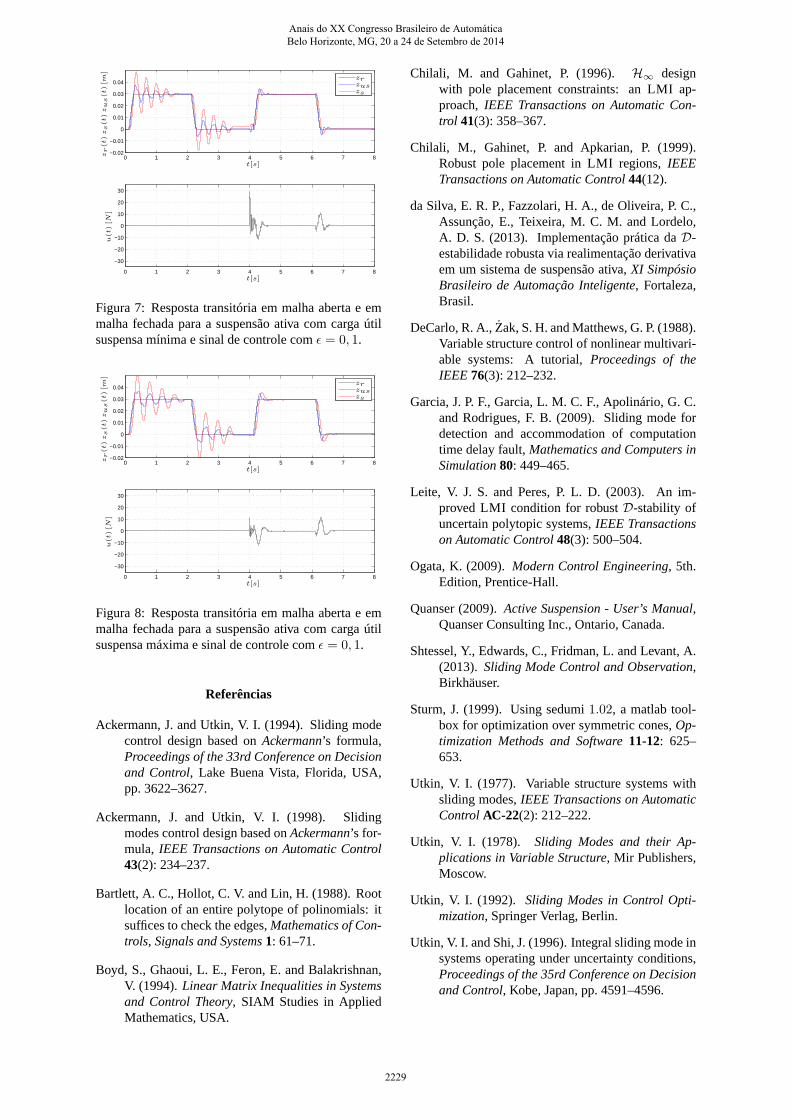
útil suspensa mínima e máxima e os respectivos sinaisde controle. De forma complementar, as Figuras 7 e 8se referem às situações nas quaisǫ = 0, 1.
0 1 2 3 4 5 6 7 8−0.02
−0.01
0
0.01
0.02
0.03
0.04
0 1 2 3 4 5 6 7 8
−30
−20
−10
0
10
20
30
t[s]
t[s]
zr(t)zs(t)zus(t)[m
]u(t)[N
]
zrzuszs
Figura 5: Resposta transitória em malha aberta e emmalha fechada para a suspensão ativa com carga útilsuspensa mínima e sinal de controle comǫ = 0, 01.
0 1 2 3 4 5 6 7 8−0.02
−0.01
0
0.01
0.02
0.03
0.04
0 1 2 3 4 5 6 7 8
−30
−20
−10
0
10
20
30
t[s]
t[s]
zr(t)zs(t)zus(t)[m
]u(t)[N
]
zrzuszs
Figura 6: Resposta transitória em malha aberta e emmalha fechada para a suspensão ativa com carga útilsuspensa máxima e sinal de controle comǫ = 0, 01.
5 Conclusões
Pela análise dos resultados experimentais, pode-severificar que o projeto da superfície de chaveamentodo CEV-MDOC através de alocação robusta de auto-valores na regiãoD-estável por LMIs atende às especi-ficações de desempenho de transitório e robustez pe-rante incertezas nos parâmetros do sistema.
Agradecimentos
Os autores agradecem àFundação de Amparo àPesquisa do Estado de São Paulo - FAPESP (Ref. Pro-cesso 2011/17610-0)e aoConselho Nacional de De-senvolvimento Científico e Tecnológico - CNPqpeloapoio financeiro dado a esta pesquisa.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2228
0 1 2 3 4 5 6 7 8−0.02
−0.01
0
0.01
0.02
0.03
0.04
0 1 2 3 4 5 6 7 8
−30
−20
−10
0
10
20
30
t[s]
t[s]
zr(t)zs(t)zus(t)[m
]u(t)[N
]
zrzuszs
Figura 7: Resposta transitória em malha aberta e emmalha fechada para a suspensão ativa com carga útilsuspensa mínima e sinal de controle comǫ = 0, 1.
0 1 2 3 4 5 6 7 8−0.02
−0.01
0
0.01
0.02
0.03
0.04
0 1 2 3 4 5 6 7 8
−30
−20
−10
0
10
20
30
t[s]
t[s]
zr(t)zs(t)zus(t)[m
]u(t)[N
]
zrzuszs
Figura 8: Resposta transitória em malha aberta e emmalha fechada para a suspensão ativa com carga útilsuspensa máxima e sinal de controle comǫ = 0, 1.
Referências
Ackermann, J. and Utkin, V. I. (1994). Sliding modecontrol design based onAckermann’s formula,Proceedings of the 33rd Conference on Decisionand Control, Lake Buena Vista, Florida, USA,pp. 3622–3627.
Ackermann, J. and Utkin, V. I. (1998). Slidingmodes control design based onAckermann’s for-mula, IEEE Transactions on Automatic Control43(2): 234–237.
Bartlett, A. C., Hollot, C. V. and Lin, H. (1988). Rootlocation of an entire polytope of polinomials: itsuffices to check the edges,Mathematics of Con-trols, Signals and Systems1: 61–71.
Boyd, S., Ghaoui, L. E., Feron, E. and Balakrishnan,V. (1994).Linear Matrix Inequalities in Systemsand Control Theory, SIAM Studies in AppliedMathematics, USA.
Chilali, M. and Gahinet, P. (1996). H∞ designwith pole placement constraints: an LMI ap-proach,IEEE Transactions on Automatic Con-trol 41(3): 358–367.
Chilali, M., Gahinet, P. and Apkarian, P. (1999).Robust pole placement in LMI regions,IEEETransactions on Automatic Control44(12).
da Silva, E. R. P., Fazzolari, H. A., de Oliveira, P. C.,Assunção, E., Teixeira, M. C. M. and Lordelo,A. D. S. (2013). Implementação prática daD-estabilidade robusta via realimentação derivativaem um sistema de suspensão ativa,XI SimpósioBrasileiro de Automação Inteligente, Fortaleza,Brasil.
DeCarlo, R. A.,Zak, S. H. and Matthews, G. P. (1988).Variable structure control of nonlinear multivari-able systems: A tutorial,Proceedings of theIEEE76(3): 212–232.
Garcia, J. P. F., Garcia, L. M. C. F., Apolinário, G. C.and Rodrigues, F. B. (2009). Sliding mode fordetection and accommodation of computationtime delay fault,Mathematics and Computers inSimulation80: 449–465.
Leite, V. J. S. and Peres, P. L. D. (2003). An im-proved LMI condition for robustD-stability ofuncertain polytopic systems,IEEE Transactionson Automatic Control48(3): 500–504.
Ogata, K. (2009).Modern Control Engineering, 5th.Edition, Prentice-Hall.
Quanser (2009).Active Suspension - User’s Manual,Quanser Consulting Inc., Ontario, Canada.
Shtessel, Y., Edwards, C., Fridman, L. and Levant, A.(2013). Sliding Mode Control and Observation,Birkhäuser.
Sturm, J. (1999). Using sedumi1.02, a matlab tool-box for optimization over symmetric cones,Op-timization Methods and Software11-12: 625–653.
Utkin, V. I. (1977). Variable structure systems withsliding modes,IEEE Transactions on AutomaticControlAC-22(2): 212–222.
Utkin, V. I. (1978). Sliding Modes and their Ap-plications in Variable Structure, Mir Publishers,Moscow.
Utkin, V. I. (1992). Sliding Modes in Control Opti-mization, Springer Verlag, Berlin.
Utkin, V. I. and Shi, J. (1996). Integral sliding mode insystems operating under uncertainty conditions,Proceedings of the 35rd Conference on Decisionand Control, Kobe, Japan, pp. 4591–4596.
Anais do XX Congresso Brasileiro de Automática Belo Horizonte, MG, 20 a 24 de Setembro de 2014
2229