programação semafórica: uma proposta de otimização apoiada...
TRANSCRIPT

UNIVERSIDADE ESTADUAL DE CAMPINAS
Faculdade de Engenharia Civil, Arquitetura e Urbanismo
Adilson Romualdo do Carmo
Programação Semafórica: Uma Proposta de Otimização
Apoiada em um Modelo Geo-Temporal
Campinas
2016

Adilson Romualdo do Carmo
Programação Semafórica: Uma Proposta de Otimização
Apoiada em um Modelo Geo-Temporal
Dissertação de Mestrado apresentada à
Faculdade de Engenharia Civil, Arquitetura e
Urbanismo da Unicamp, para obtenção do título
de Mestre em Engenharia Civil na área de
Transportes.
Orientador: Prof. Dr. Diogenes Cortijo Costa
ESTE EXEMPLAR CORRESPONDE À VERSÃO FINAL
DA DISSERTAÇÃO DEFENDIDA PELO ALUNO
ADILSON ROMUALDO DO CARMO E ORIENTADO
PELO PROF. DR. DIOGENES CORTIJO COSTA.
ASSINATURA DO ORIENTADOR: ____________________________________________________
Campinas
2016


UNIVERSIDADE ESTADUAL DE CAMPINAS FACULDADE DE ENGENHARIA CIVIL, ARQUITETURA E URBANISMO
Programação Semafórica: Uma Proposta de Otimização Apoiada em um Modelo Geo-Temporal
Adilson Romualdo do Carmo
Dissertação de mestrado aprovada pela Banca Examinadora, constituída por:
Diogenes Cortijo Costa
Presidente e Orientador Departamento de Geotecnia e Transportes – FEC – UNICAMP
Prof.ª Dr.ª Maria Teresa Françoso Departamento de Geotecnia e Transportes – FEC – UNICAMP
Prof.ª Dr.ª Ana Paula Camargo Larocca
Departamento de Transportes da Escola de Engenharia da USP – São Carlos
Prof.ª Dr.ª Maria Lúcia Galves (Suplente)
Departamento de Geotecnia e Transportes – FEC – UNICAMP
Prof. Dr. Antonio Clóvis Pinto Ferraz (Suplente) Departamento de Transportes da Escola de Engenharia da USP – São
Carlos)
A Ata da defesa com as respectivas assinaturas dos membros encontra-se no processo de vida acadêmica do aluno.
Campinas, 18 de outubro de 2016

Agradecimentos
A Jeová Deus, pela dádiva da vida, pelos ensinamentos propiciados e pela força
necessária para superar momentos difíceis.
Aos meus pais, Otávio e Lázara, e às minhas irmãs, Gislene e Cintia, pelo apoio e
carinho. Aos meus cunhados Wilson e Cristiano e à minha adorável sobrinha Júlia,
minha linda princesa.
Um agradecimento especial ao meu orientador, Diogenes Cortijo Costa, pela dedicação,
amizade, paciência e incentivo durante o meu trabalho.
Aos professores da Faculdade de Engenharia Civil, Arquitetura e Urbanismo e do
Instituto de Computação da Universidade Estadual de Campinas, pelos ensinamentos
transmitidos e que muito contribuíram para o meu desenvolvimento acadêmico e
profissional. Aos funcionários de ambas unidades, pela presteza e atenção.
À Ana Maria, minha esposa e companheira de vida, pelo carinho, amor e constante
incentivo para prosseguir, mesmo sabendo que isto nos tiraria um pouco da convivência
diária.
À EMDEC (Empresa Municipal de Desenvolvimento de Campinas) pelo fornecimento
da base georeferenciada dos semáforos da cidade de Campinas e que possibilitou o
desenvolvimento deste trabalho.

“We are as clouds that veil the midnight moon;
How restlessly they speed, and gleam, and quiver,
Streaking the darkness radiantly!—yet soon
Night closes round, and they are lost for ever:
Or like forgotten lyres, whose dissonant strings
Give various response to each varying blast,
To whose frail frame no second motion brings
One mood or modulation like the last.
We rest.—A dream has power to poison sleep;
We rise.—One wandering thought pollutes the day;
We feel, conceive or reason, laugh or weep;
Embrace fond woe, or cast our cares away:
It is the same!—For, be it joy or sorrow,
The path of its departure still is free:
Man’s yesterday may ne’er be like his morrow;
Nought may endure but Mutability.”
MUTABILITY
By Percy Bysshe Shelley

Resumo
Este trabalho procura avaliar o potencial da utilização de um Sistema de Informações
Geográficas - SIG - no auxílio à programação semafórica urbana e propor uma
arquitetura que contemple a questão espaço-temporal na análise dos principais eixos de
congestionamento de uma cidade. Esta arquitetura trata do armazenamento de pesquisas
de volume de tráfego, do cálculo das medidas de desempenho e da integração com um
Sistema de Informações Geográficas para avaliar possíveis alternativas na
reconfiguração do sistema de circulação viária e da própria programação semafórica
para a região estudada, a partir da análise das métricas mais significativas do
monitoramento do sistema de trânsito. O trabalho foi validado através da
implementação da arquitetura usando a base cartográfica digital do município de
Campinas.

Abstract
This dissertation aims to evaluate the possibility of utilization of a GIS tool to help the
urban traffic signal programming and to propose an architecture that addresses the issue
of space-time analysis in the most affected streets in a city. This architecture considers
the storage of volume traffic, the performance measures calculation and the integration
with a Geographic Information System to evaluate possible alternatives in the
reconfiguration of the circulation system and traffic signal programming itself for the
region studied, from the analysis of the most relevant traffic monitoring measures. The
work was validated through the implementation of the architecture using the digital
cartographic base of the city of Campinas.

Lista de Figuras
Figura 1: Viagens por ano, por modo principal (bilhões de viagens) - Ano 2013......... 22
Figura 2: Tempo médio de viagem por faixa de população e modo agregado (minutos) -
Ano 2013 ....................................................................................................................... 23
Figura 3: Custo das externalidades por tipo e faixa de população (bilhões de reais/ano) -
Ano 2013 ....................................................................................................................... 24
Figura 4: Custo da mobilidade por tipo e faixa de população (bilhões/ano) - Ano 2013
.........................................................................................................................................25
Figura 5: Operações de Crossover e Mutação ............................................................... 29
Figura 6: Esquema de uma Rede Neural ....................................................................... 32
Figura 7: Componentes de um SIG ............................................................................... 43
Figura 8: A Abordagem Orientada a Objetos ............................................................... 46
Figura 9: Arquitetura em Três Camadas para Processamento Distribuído ................... 50
Figura 10: Paradigma do Desenvolvimento Evolutivo ................................................. 53
Figura 11: Estados, Métodos e Mensagens de um Objeto ............................................ 54
Figura 12: Impacto dos Métodos de Análise e Projeto Formais no Esforço para
Construir e Manter Bancos de Dados Espaciais ........................................................... 55
Figura 13: Variação Diária do Volume de Tráfego ....................................................... 64
Figura 14: Relações entre Volume, Velocidade e Densidade em Fluxos Não
Interrompidos ................................................................................................................ 66
Figura 15: Ciclo, Fase e Intervalo ................................................................................. 72
Figura 16: Tempo Morto no Ciclo ................................................................................ 75
Figura 17: Interseção de Duas Vias Controladas por Semáforo ................................... 77
Figura 18: Esquema de Alocação do Tempo de um Semáforo ..................................... 79
Figura 19: Zona de Dilema num Cruzamento Semaforizado ........................................ 82
Figura 20: Modelo de Fila D/D/1 numa Interseção com Capacidade de Aproximação
que Excede a Demanda ................................................................................................. 88
Figura 21: Arquitetura Proposta para o Sistema ........................................................... 95
Figura 22: Diagrama de Entidades e Relacionamentos da Solução Proposta ............... 98
Figura 23: Esquema Resultante do Modelo Entidade-Relacionamento ...................... 100
Figura 24: Diagrama de Fluxo de Dados da Solução Proposta (Nível 0) .................... 101
Figura 25: Diagrama de Fluxo de Dados da Solução Proposta (Nível 1) .................... 102
Figura 26: Diagrama de Estrutura da Solução Proposta .............................................. 103
Figura 27: Diagrama de Dispersão entre Variáveis ..................................................... 107
Figura 28: Pesquisa Cordon Line RMC - 2011 ........................................................... 115
Figura 29: Distribuição do Número de Viagens em Campinas Segundo o Modo de
Transporte .................................................................................................................... 116
Figura 30: Taxa de Motorização na Cidade de Campinas ........................................... 117
Figura 31: Total de Acidentes na Cidade de Campinas (1995 - 2011) ........................ 118
Figura 32: Índice de Mortalidade por 100 Mil Habitantes na Cidade de Campinas ... 119
Figura 33: Custo Social e UPS dos Acidentes de Trânsito .......................................... 119
Figura 34: Módulo de Cadastro de Semáforos - Identificação .................................... 121
Figura 35: Módulo de Cadastro de Semáforos - Fluxo de Veículos ........................... 122
Figura 36: Módulo do Cálculo das Métricas de Desempenho ..................................... 123
Figura 37: Módulo de Cadastro das Pesquisas de Volume e Tráfego ......................... 124
Figura 38: Módulo de Geração de Mapas ................................................................... 125
Figura 39: Exemplo de Mapa - Fila Máxima .............................................................. 126
Figura 40: Exemplo de Mapa - Taxa Média de Chegada ....................................... 126
Figura 41: Exemplo de Mapa - Tempo Máximo de Espera ........................................ 127
Figura 42: Exemplo de Mapa - Veículos que Chegam à Intersecção no Ciclo .......... 127
Figura 43: Exemplo de Mapa - Métricas Combinadas ............................................... 128
Figura 44: Exemplo de Mapa - Semáforos e Zoneamento ......................................... 129
Figura 45: Exemplo de Mapa - Zonas Quentes de Semáforos ................................... 130
Figura 46: Estimativa de Fluxos Futuros .................................................................... 131
Figura 47: Exemplo de Mapa - Fluxo Atual - Espera Média ..................................... 132
Figura 48: Exemplo de Mapa - Fluxo Projetado - Espera Média .............................. 132

Lista de Tabelas
Tabela 1: Custos Internos e Externos em Transportes ....................................... 21
Tabela 2: Porcentagem de Custos para Implantação de um SIG ....................... 52
Tabela 3: Tempo de Perda no Início de Movimento de Veículos ...................... 74
Tabela 4: Tempo Perdido Durante a Hora em Ciclos Diferenciados .................. 84
Tabela 5: Fatores de Ajuste da Largura de Faixa ............................................... 85
Tabela 6: Fatores de Ajuste de Equivalência entre Veículos .............................. 85

Lista de Abreviaturas
ABNT - Associação Brasileira de Normas Técnicas
ANTP - Associação Nacional de Transportes Públicos
AVLS - Automatic Vehicle Location Systems
COCAR – Comissão de Cartografia.
CTA – Controle de Tráfego por Área.
EMDEC – Empresa Municipal de Desenvolvimento de Campinas.
DDE – Dynamic Data Exchange.
DXF - Drawing Exchange Format.
GIS – Geographical Information Systems.
IBGE – Instituto Brasileiro de Geografia e Estatística.
ITS – Intelligent Transportation Systems.
IVHS - Intelligent Vehicle Highway Systems
MUTCD - Manual on Uniform Traffic Control Devices
ONU - Organização da Nações Unidas
RMC - Região Metropolitana de Campinas
SIG – Sistemas de Informações Geográficas.
SIG-T - Sistemas de Informações Geográficas em Transportes.
SQL – Structured Query Language.
STM - Secretaria de Transportes Metropolitanos
UPS - Unidade de Padrão de Severidade
UVPD – Unidade de Veículos de Passageiros Diretos.

Lista de Símbolos
T - unidade de tempo
X(n) - Vetor n-dimensional que denota o volume, a velocidade e a densidade
Y(n) - Vetor n-dimensional que engloba atrasos, número de paradas e bloqueios
U(n) - Vetor n-dimensional composto do ciclo semafórico e tempo de offset
ξ(k) - Vetor que relaciona as influências externas na corrente de tráfego
Ψ(k) - Vetor das perturbações causadas por sistemas sensores
W - Vetor de pesos associados
ξ(.) - Média
τ2(.) - Variância
d - Distância percorrida
V - Volume
D - Densidade
S - Velocidade
λ - Taxa de fluxo médio
d - atraso médio
C - Capacidade da aproximação [veic./h]
S - fluxo de saturação [veic./h]
g - tempo de verde efetivo [s]
c - comprimento do ciclo [s]
A - tempo de luz amarela [s]
p - tempo perdido no início do verde e no final do amarelo(tempo morto [s])
r - tempo de vermelho efetivo

Sumário
1. Introdução 15
1.1. Considerações Iniciais 15
1.2. Justificativa e Motivação da Pesquisa 16
1.3. Objetivo Geral 17
1.4. Objetivos Específicos 17
1.5. Metodologia de Pesquisa 18
1.6. Estrutura do Trabalho 19
2. Revisão Bibliográfica 20
2.1. Macro Características do Trânsito 20
2.2. Métodos de Programação Semafórica 27
2.3. Resumo 34
3. Sistemas de Informações Geográficas 35
3.1. Bases Cartográficas Digitais 35
3.2. Sistemas de Informações Geográficas 41
3.3. Sistemas de Informações Geográficas Aplicados a Transportes 58
3.4. Resumo 61
4. Sistemas de Controle de Trânsito e Programação Semafórica 62
4.1. Engenharia de Tráfego 62
4.2. Fluxo de Tráfego 63
4.3. Programação Semafórica 69
4.4. A Integração entre o SIG e a Engenharia de Tráfego 89
4.5. Resumo 93
5. Modelo Proposto 94
5.1. Arquitetura Proposta 94
5.2. Aspectos de Implantação 97
5.3. Resumo 113
6. Estudo de Caso 114
6.1. Contexto do Sistema 114
6.2. Produtos Gerados 121
6.3. Resumo 133
7. Conclusões 134
7.1. Contribuições 134
7.2. Extensões 135
Referências Bibliográficas 137

15
Capítulo 1
Introdução
1.1 Considerações Iniciais
O século XXI será o primeiro de população predominantemente urbana. Relatório da
ONU aponta um grau crescente de urbanização. Atualmente, 54% da população mundial vive
em áreas urbanas, cifra que pode aumentar para 66% em 2050, resultando no aparecimento de
mega-cidades - aquelas com mais de 10 milhões de habitantes. Em 1990 estas eram apenas
10, mas em 2014 esse grupo já totalizava 28 e abrigava 12% da população do planeta [1]
, fato
que evidencia sua importância na sociedade humana.
Em decorrência desse fenômeno, surgirão problemas que, se não forem abordados sob
uma perspectiva abrangente, poderão inviabilizar o desenvolvimento sustentável dessas
cidades. Questões como o descarte dos resíduos domésticos e industriais, o uso dos recursos
hídricos, dos serviços de saúde, de educação, de segurança, de infraestrutura e transportes,
entre outros, deverão fazer parte de um planejamento sistêmico em diferentes níveis
institucionais. Uma das áreas de maior importância estratégica para o desenvolvimento de
todos os países e suas cidades são os sistemas de transporte e circulação.
Concorda-se que os sistemas de transportes e sua infraestrutura são um dos vetores
mais significativos para a promoção do desenvolvimento econômico. De fato, Mikkelsen e
Møller[2]
enfatizam esse ponto, embora ressaltem a não existência de uma teoria bem definida
que estabeleça a relação entre os sistemas viários (infraestrutura e sistemas operacionais) e o
desenvolvimento. Entretanto, os autores apontam o consenso estabelecido acerca dessa
relação, visto que o aperfeiçoamento do sistema viário existente ou a introdução de
equipamentos viários numa região desprovida desses recursos gera um incremento da
atividade econômica com a redução dos custos de transporte e facilidades de acesso à
dinâmica social de múltiplas regiões de interesse.

16
Dessa forma, o movimento de pessoas e cargas torna-se um dos grandes desafios das
sociedades contemporâneas. Uma rede de transporte bem planejada proporciona, por
exemplo, um incremento na capacidade de escoamento da produção agrícola e industrial, o
que é um fator importante para a redução de custos relacionados ao frete, além de propiciar o
aumento de divisas e manutenção do equilíbrio da balança comercial.
Paradoxalmente, esse dinamismo econômico propiciado pelos sistemas de transporte
acarreta também um dos maiores problemas dos grandes centros urbanos mundiais em que se
constitui o trânsito. Tome-se, como exemplo, o caso da cidade de São Paulo onde as
estimativas otimistas apontam perdas de R$ 1,79 bilhão anuais em acidentes,
congestionamentos e gastos na saúde pública[3]
com o trânsito; outras pesquisas apontam que
essas perdas podem ser até sete vezes maiores. Considerado nessa cifra, os congestionamentos
respondem por R$ 345 milhões, onde se incluem o consumo extra de combustível, a poluição
e o desgaste da infraestrutura viária; o restante do montante total é gasto com os acidentes.
Cintra[4]
salienta que as despesas geradas pelos congestionamentos são crescentes ao longo do
tempo e passaram de R$ 7 bilhões em 2002 para R$ 10 bilhões em 2012, enquanto que os
custos do tempo perdido saltaram de R$ 10,3 bilhões para R$ 30,2 bilhões no mesmo período
perfazendo assim perdas superiores a R$ 40 bilhões anuais. Apesar dos altos custos
relacionados aos acidentes e dos sérios impactos na vida dos acidentados e seus familiares, a
maior queixa dos condutores de São Paulo é a perda de tempo nos congestionamentos, que
aumentam em até 53% o tempo de viagem dos automóveis, e em 36% dos ônibus[3]
.
1.2 Justificativa e Motivação da Pesquisa
A utilização eficiente do sistema viário requer a busca de métodos que permitam o
fluxo máximo de veículos, bem como garantias de mobilidade para os pedestres, observando
o critério de segurança para ambos. Atualmente, constata-se que o crescimento simultâneo do
fluxo de veículos e da população nos principais centros urbanos mundiais agravou o problema
dos congestionamentos, gerando atrasos que acarretam perdas significativas de recursos
financeiros.

17
Uma solução completa para as perdas descritas anteriormente exige ações coordenadas
de gestão do órgão executivo de trânsito. Por exemplo, as perdas decorrentes do
congestionamento podem ser amenizadas pela adoção de algumas medidas de ordem prática,
como a reprogramação semafórica das vias mais atingidas.
Vários métodos de programação foram propostos ao longo das últimas décadas, como
o clássico método de Webster (1958). Abordagens recentes propõem a adoção de métodos
inovadores para o tratamento dessa questão, como os controladores de semáforo baseados em
lógica fuzzy, redes neurais e a aplicação da teoria de algoritmos genéticos.
O desenvolvimento deste trabalho é motivado pela necessidade de produzir um
modelo que otimize os recursos para permitir a fluidez máxima do trânsito urbano.
Considerando que o território físico é o meio no qual o deslocamento de veículos e pessoas
acontece, procura-se avaliar a introdução de uma ferramenta de geoprocessamento para a
gestão do sistema semafórico de uma cidade.
1.3 Objetivo Geral
O objetivo desta dissertação é estudar as potencialidades da utilização de um sistema
de informações geográficas como auxílio à programação semafórica. Propõe-se uma
arquitetura que englobe bases cartográficas digitais, SIG’s e métodos de programação
semafórica num ambiente de análise de medidas de desempenho da rede de semáforos de uma
cidade operando em modo isolado, fornecendo também o tempo de alocação a cada estágio e
projeções de comportamento do trânsito.
1.4 Objetivos Específicos
O estudo dos principais métodos de programação semafórica;
A avaliação do potencial das ferramentas de SIG (Sistemas de Informações
Geográficas) para auxiliar na resolução do problema;

18
A proposta de uma arquitetura de integração entre diferentes tecnologias para
programação semafórica; e
A implementação da arquitetura proposta e a discussão das dificuldades encontradas e
resultados obtidos.
1.5 Metodologia de Pesquisa
A metodologia desta pesquisa requer considerações quanto à natureza, objetivo e
procedimentos técnicos. Dessa forma, identifica-se os atributos:
Natureza: Trata-se de uma pesquisa aplicada, isto é, um trabalho voltado para a
geração de conhecimento para auxiliar na resolução de um problema prático que
atinge muitas cidades brasileiras;
Objetivo: Promover uma investigação exploratória de recursos tecnológicos
disponíveis para a construção de uma solução integrada para o tratamento da
programação semafórica num ambiente que utiliza uma base cartográfica digital e sua
rede de semáforos;
Procedimento técnico:
o Revisão bibliográfica;
o Estudo de conceitos teóricos para embasar o modelo;
o Obtenção de dados para a construção do produto;
o Definição da tecnologia a ser utilizada;
o Construção e teste de integração do produto.
O modelo proposto será validado através de um estudo de caso aplicado à cidade de
Campinas. O contexto da cidade será analisado, estudando os principais eixos que são
afetados por congestionamentos, e a possível incorporação de métodos dinâmicos para
determinação dos respectivos volumes de tráfego. A seguir, o modelo construído será testado
visando determinar a sua eficácia na resolução do problema considerado. Os órgãos
gerenciadores do trânsito poderão então utilizar os conceitos e ferramenta gerados para prover
um sistema de transporte e trânsito mais seguro e com maior fluidez.

19
1.6 Estrutura do Trabalho
Esta dissertação está organizada da seguinte forma: O capítulo 2 cita algumas
estatísticas relacionadas à mobilidade, introduz os conceitos básicos necessários ao
entendimento da programação semafórica e as potencialidades de alguns métodos
alternativos, como redes neurais, modelos fuzzy e algoritmos genéticos. O capítulo 3 apresenta
os sistemas de informações geográficas, base para o desenvolvimento do produto proposto.
Posteriormente, o capítulo 4 trata dos modelos de gerenciamento de trânsito e do método de
programação semafórica a ser utilizado no trabalho, além de analisar a viabilidade da
incorporação de uma ferramenta SIG para o tratamento do problema. O capítulo 5 descreve a
arquitetura proposta e os aspectos da implantação da solução. Na sequência, o capítulo 6
proporciona um estudo de caso com os conceitos desenvolvidos. Finalmente, o capítulo 7
apresenta as conclusões e as propostas de extensões para o trabalho.

20
Capítulo 2
Revisão Bibliográfica
A construção do modelo proposto neste trabalho exige a discussão dos seguintes
conceitos: bases cartográficas, sistemas de informações geográficas e programação
semafórica. Este capítulo apresenta algumas estatísticas relacionadas à mobilidade urbana e
também um panorama da questão da programação semafórica; O tópico relativo às
geotecnologias (bases cartográficas e sistemas de informações geográficas) será abordado
mais detalhadamente no capítulo 3.
A seção 2.1 apresenta alguns conceitos e dados que enfatizam a importância do tema.
Posteriormente, a seção 2.2 trata dos métodos tradicionais de programação semafórica e
algumas variantes. Para encerrar o capítulo, a seção 2.3 apresenta um resumo do capítulo.
2.1 Macro Características do Trânsito
A importância e os impactos dos sistemas de transporte na vida diária da população
são consideráveis. Clark[5]
menciona que o sistema de transporte é o construtor e o destruidor
de cidades. De fato, a relação entre ambos é tão intensa que o desenvolvimento de uma cidade
afeta as escolhas dos modais de transporte e este, por sua vez, afeta de maneira decisiva o
futuro da própria cidade. Esta relação entre ambos é bastante complexa e o seu equilíbrio é
uma questão vital para a sustentabilidade da urbe. Nos grandes centros urbanos americanos e
europeus, observa-se um fluxo crescente de migração da população em direção aos subúrbios,
ocasionado entre outros fatores pela saturação das áreas centrais. Daí, conclui-se que o
planejamento de uma política de transportes não deve ser dissociado da política de uso e
ocupação do solo.
O quadro não é diferente nos países emergentes. Cite-se o caso de São Paulo, a maior
cidade brasileira. Apesar da estrutura viária contar com 44 mil ruas e avenidas, totalizando 17

21
mil quilômetros de extensão, a mesma não comporta os veículos que por ela circulam
diariamente. O tempo perdido nos congestionamentos cresceu 15% ao ano no período de 2005
a 2007. Esse tempo desperdiçado aumenta de maneira significativa o chamado custo Brasil[4]
.
Vasconcellos et al.[6]
realizaram um estudo sobre a quantificação das chamadas
“deseconomias” do transporte urbano, ou seja, os gastos oriundos da ineficiência dos sistemas
de transporte e trânsito. O estudo aponta o congestionamento, o desperdício de combustíveis e
a degradação da qualidade ambiental como os fatores mais significativos, decorrentes da
deficiência no planejamento e gestão dos sistemas de transporte e de uso e ocupação do solo.
O congestionamento, por exemplo, refere-se ao tempo adicional imposto aos usuários logo
que um veículo entra na via. Tais problemas são denominados “externalidades”, e envolvem
custos e benefícios que não são pagos ou recebidos pelas pessoas. Por este princípio
econômico, os custos não compensados levam a uma utilização não ótima do equipamento
viário. Exemplos destes custos internos e externos são relacionados abaixo:
Tabela 1: Custos Internos e Externos em Transportes
Categoria de Custos Internos Externos
Despesas de Transporte Aquisição, manutenção e operação do
veículo
Tarifa de transporte público
Estacionamento pago por
terceiros
Infraestrutura Imposto de circulação
Imposto sobre combustíveis
Custo de infraestrutura não
cobertos
Congestionamento Tempo do próprio usuário Tempo dos demais usuários
Ambientais Poluição sobre o próprio usuário Poluição sofrida pelos demais
usuários
Acidentes Seguro pago pelo usuário
Custo de acidentes pago pelo usuário
Custo de acidentes pago pelos
demais envolvidos
Dor e sofrimento impostos ao
demais envolvidos
Fonte: Vasconcellos et al. [6]
Uma pesquisa realizada pela ANTP[7]
e publicada em 2015 apresenta alguns dados
interessantes relacionados à mobilidade urbana no Brasil, bem como alguns custos e
problemas oriundos. A figura 1 mostra que a população dos municípios com mais de 60 mil
habitantes (universo considerado para esta pesquisa) realizou 64,3 bilhões de viagens por

22
modo principal, correspondendo a uma mobilidade média de 1,74 viagens por habitante por
dia. Observa-se, ainda, neste gráfico o total de viagens realizada pelos diversos modais em
azul, destacando-se no conjunto em verde o número de viagens pelo transporte coletivo
(municipal, metropolitano e trilhos), transporte individual (automóveis e motos) e transporte
não motorizado (a pé e bicicleta).
Figura 1 - Viagens por ano, por modo principal (bilhões de viagens) – Ano 2013
Fonte: Adaptado da ANTP[7]
Na figura 2, nota-se que os tempos médios de viagem variam entre 38 minutos
(transporte coletivo nos municípios entre 500 mil e 1 milhão de habitantes) e 8 minutos
(transporte individual nos municípios com população entre 60 e 100 mil habitantes).
municípios com população entre 60 mil e 100 mil habitantes). Os dados mostram que o tempo
gasto com o transporte coletivo é sempre superior ao demais modais. Contudo, é importante
salientar que não se deve considerar apenas o tempo de deslocamento ao analisar a questão da
mobilidade, pois fatores adicionais contribuem de maneira significativa para a eficiência e
eficácia do sistema de modo global, como por exemplo, a emissão de poluentes, os custos
Total de
viagens

23
decorrentes dos acidentes e também os dos congestionamentos, que são cada vez maiores nos
grandes centros urbanos do planeta.
Figura 2 - Tempo médio de viagem por faixa de população e por modo agregado - Ano
2013
Fonte: Adaptado da ANTP[7]
Assim, o custo destas "externalidades" (poluição e acidentes) é bastante
representativo, conforme se verifica no gráfico da figura 3. No tocante à poluição, observa-se
que, em cidades com mais de um milhão de habitantes, o transporte individual gera um custo
aproximadamente 145% maior em relação ao transporte coletivo. Esse índice mantém-se
bastante elevado também nas cidades médias.
Situação ainda mais dramática pode ser observada com relação aos acidentes. O
transporte individual responde pela imensa maioria das ocorrências, sobretudo nas cidades de
grande e médio portes. Há apenas equilíbrio nas cidades de pequeno porte. Nas cidades com
mais de um milhão de habitantes, o custo total de acidentes ocasionados pelo transporte
37 38
35 35
29
36
18 16
11
8 8
15 15 16 16 16
17 16
23 23
21 20
18
22
0
5
10
15
20
25
30
35
40
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60
-10
0 m
il
Sist
ema
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60
-10
0 m
il
Sist
ema
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60
-10
0 m
il
Sist
ema
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60
-10
0 m
il
Sist
ema
Coletivo Individual Não Motorizado Total (ponderado)
Tempo
em
minutos

24
individual chega a superar a cifra de 500% quando comparado ao gerado pelo transporte
coletivo.
Figura 3 - Custo das externalidades por tipo e faixa de população (bilhões de reais/ano)
– Ano 2013
Fonte: Adaptado da ANTP[7]
Ademais é necessário observar a existência dos custos sociais no processo, pois o
poder público deve providenciar a estrutura que garante a mobilidade tanto para as pessoas
que utilizam o transporte coletivo quanto para aqueles que optam pela utilização do transporte
privado. A figura 4 ilustra esta situação. Constata-se, ainda, que os custos associados ao
transporte individual são sempre superiores.
Nas cidades com mais de um milhão de habitantes o custo pessoal pelo modo de
transporte individual é da ordem de 3.71 vezes superior ao custo individual pelo transporte
coletivo, ao passo que o custo social no mesmo cenário se mantém praticamente estável,
conforme contata-se na figura 4.
1,1
0,3 0,4 0,40,1
0,90,3 0,5 0,5
0,2
2,7
0,7 0,5 0,3 0,1
5,5
2
2,83,1
1,2
0
0 0 0
0
1
2
3
4
5
6
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
> 1
.00
0.0
00
50
0-1
.00
0 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
T Coletivo - Poluição T Coletivo - Acidentes T Individual - Poluição T Individual -Acidentes
Custo
(Bilhões R$)

25
Figura 4 - Custo da mobilidade por tipo e faixa de população (bilhões/ano) - Ano 2013
Fonte: Adaptado da ANTP[7]
Os dados apresentados até aqui demonstram que os custos associados ao transporte
individual são bastante superiores ao transporte coletivo. Esse fato é agravado também pela
política governamental de estimular a venda de veículos novos com reduções ocasionais de
impostos, quando o mais prudente seria estabelecer uma política nacional de transportes
públicos de massa. Uma das consequências imediatas desse quadro é o aumento de
congestionamentos e aumento da degradação ambiental nas maiores cidades do país.
Por outro lado, propostas contraditórias para mitigar os problemas do
congestionamento nas vias públicas estão em estudo como a restrição à circulação de
automóveis e a implantação do pedágio urbano. Entretanto, estas medidas podem causar
debates intensos entre os vários atores sociais e sua implantação nem sempre é tranquila.
20,8
5 5,9 5,31,7
38,7
2 0,1 0,1 0,2 0,1 2,5
77,2
22,5 23 21,7
7,7
152,1
2,2 1,1 2,1 2,3 1
8,7
0
20
40
60
80
100
120
140
160>
1.0
00
.00
0
500
-1.0
00 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
Bra
sil
> 1
.00
0.0
00
500
-1.0
00 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
Bra
sil
> 1
.00
0.0
00
500
-1.0
00 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
Bra
sil
> 1
.00
0.0
00
500
-1.0
00 m
il
25
0-5
00
mil
10
0-2
50
mil
60-1
00 m
il
Bra
sil
T Coletivo - Custo Individual T Coletivo - Custo Público T Individual - Custo Individual T Individual - Custo Público
Custo (bilhões
R$)

26
Medidas mais palatáveis, como a reprogramação semafórica, pode ser uma alternativa
menos dramática e mais rápida para minimizar os problemas ocasionados pelos
congestionamentos, sem no entanto ser a solução definitiva.
No Brasil, os grandes centros urbanos possuem órgãos próprios e empregam
tecnologias modernas para a gestão dos seus sistemas de trânsito. Contudo, embora a teoria da
programação semafórica exista há muito tempo e seus resultados comprovem sua eficácia,
pode-se encontrar cidades brasileiras de porte médio (50.000 a 400.000 habitantes) que não
utilizam a tecnologia e os métodos formais para o tratamento do problema. Bezerra et al.[8]
realizaram uma pesquisa com esse grupo de cidades no estado de São Paulo. Os autores
selecionaram 95 dos 103 municípios que se enquadram nesta categoria, obtendo o retorno de
44% deles. Neste universo, os pesquisadores apontam que uma parcela significativa do
universo pesquisado realiza o cálculo da programação semafórica de forma empírica com
observação em campo (37.5%). Outras 32.5% destas cidades utilizam métodos teóricos com
coleta de dados em campo e cálculo manual. Uma parcela adicional de 17.5% utiliza uma
mescla entre estas duas abordagens. Há ainda casos de cidades que utilizam métodos
empíricos com observação em campo, métodos teóricos sem coleta de dados no campo e
casos em que os tempos são calculados pelo fabricante do equipamento com dados fornecidos
pelo órgão responsável. Além disso, segundo os autores desta pesquisa, nenhuma destas
cidades utilizava softwares para o cálculo dos tempos dos semáforos.
A mesma pesquisa mostra que 62.5% destas cidades trabalham com a coordenação de
semáforos nas vias principais. O mesmo percentual se aplica àquelas que realizam contagens
de tráfego. No entanto, um percentual menor (50%) aplica o conceito de equivalência veicular
para os veículos pesados. Os veículos em conversão são considerados por apenas 5% do
universo desta pesquisa, ao passo que 12.5% realizam a contagem de pedestres. Soma-se a
isto o fato de que somente 35% destas cidades realizam análise de desempenho dos seus
semáforos. A maior parte delas (86%) considera o tamanho da fila gerada. O restante analisa
também o atraso.

27
Os resultados desta pesquisa evidenciam a enorme carência de gestão do trânsito nas
cidades brasileiras. Nota-se que, com exceção da grandes cidades, por óbvia necessidade, as
cidades médias e pequenas ainda padecem da falta de uma estrutura adequada para o
ordenamento do seu trânsito. Nesses casos, a prudência recomenda agir o quanto antes, pois o
sistema de circulação tende a piorar sempre na ausência de uma política adequada para o
tratamento da questão.
2.2 Métodos de Programação Semafórica
A função dos semáforos é alternar o direito de passagem de veículos e pedestres num
ponto de uma via pública que permite fluxos veiculares conflitantes. Este dispositivo deve ser
utilizado com critério pois, quando instalado num local inadequado, causa perturbações
profundas na corrente de tráfego. Além do fator localização, deve-se dimensionar
cuidadosamente cada uma de suas fases para não induzir os motoristas ao descumprimento
das regras de circulação impostas pelo equipamento, fato este que pode gerar acidentes.
Ao longo do tempo vários métodos foram propostos para otimizar o funcionamento
dos semáforos; Dentre eles destaca-se o clássico de Webster que será posteriormente
detalhado. O método de Webster foi adotado amplamente em várias cidades e mostrou-se
adequado para intersecções em modo isolado, pois utiliza uma série de parâmetros de controle
que contribuem para minimizar o atraso geral na corrente de tráfego, permitindo ainda o
cálculo da fila média gerada, o que fornece subsídios para a recalibragem do sistema quando
necessário.
Françoso[9]
relaciona alguns dos principais métodos utilizados para a operação de
semáforos com tempo fixo e as estimativas do tempo de espera e do tamanho das filas geradas
por estas abordagens distintas. A autora propõe também um novo método e analisa a
aderência relativa entre a expressão clássica de Webster para cálculo do atraso experimentado
pelos veículos e a abordagem proposta.
Em outra vertente, os processos matemáticos e a ciência computacional fornecem
subsídios interessantes para que novas fronteiras que tratam deste problema sejam exploradas,
dado o caráter aleatório dos cenários reais. Destaca-se a utilização dos algoritmos genéticos,

28
das redes neurais e da lógica fuzzy. Todas estas são áreas promissoras e sua utilização pode ser
ainda mais facilitada pela disseminação da informática e aumento do poder de processamento
dos sistemas computacionais atuais. Estas técnicas estão sob a égide da inteligência artificial.
Russell et al.[10]
a definem como a ciência que procura compreender e construir agentes
inteligentes. Tais agentes são capazes de perceber as condições do ambiente no qual estão
inseridos e reagir a estímulos. Essa característica é bastante apropriada à programação
semafórica, pois permite ao sistema responder às dinâmicas das variáveis que definem uma
corrente de tráfego. Em Liu[11]
encontra-se uma definição matemática para o problema
genérico, que consiste em minimizar o atraso total do tráfego, ajustando parâmetros como
ciclos, sequência de fases, entre outros e pode ser formulado por:
Min PI(k) = ∑ wiyi(k) = WTY(k)
s.t. X(k+1) = f(X(k), U(k), θ, k) + ξ(k), U(k) DU
Y(k) = g(X(k), U(k), k) + Ψ(k)
X(k) = [x1(k), x2(k), …, xn(k)]T
Y(k) = [y1(k), y2(k), …, xm(k)]
T
Onde, T é uma unidade de tempo, X(k) é um vetor n-dimensional que denota o volume
a velocidade e a densidade. Y(k) é um vetor de saída que engloba atrasos, número de paradas
e bloqueios. U(k) é um vetor de controle l-dimensional composto do ciclo e tempo de offset e
pertence à região viável DU. ξ(k) é um vetor que relaciona as influências externas na corrente
de tráfego. O vetor Ψ(k) inclui perturbações causadas por sistemas sensores. W é um vetor
com os pesos associados. As funções f e g são funções não lineares. Os métodos seguintes
podem auxiliar na resolução do problema acima.
Algoritmos Genéticos
Prothmann et al.[12]
definem os algoritmos genéticos como uma área de pesquisa da
ciência da computação que investiga a aplicação de técnicas de resolução de problemas
inspiradas em aspectos da natureza. Deve-se notar que a resolução de alguns problemas

29
científicos pode apresentar dificuldades de grau distinto. Alguns problemas são obscuros e
não parecem oferecer uma solução plausível. Por outro lado, outros podem fornecer uma
solução ótima que necessita ser pesquisada num conjunto numeroso de soluções possíveis,
mas não tão boas, daí a necessidade de técnicas de busca eficiente.
Os algoritmos genéticos imitam a evolução biológica, partindo de um conjunto inicial
(chamado população) de soluções geradas aleatoriamente. Após isso, o algoritmo seleciona
novas combinações através de operadores de seleção, mutação e crossover (Figura 5). Esse
processo se repete pela extração das melhores características dos pais e sua prole, construindo
assim uma nova geração. Em outras palavras, as soluções são aperfeiçoadas a cada iteração do
algoritmo. Basicamente a estratégia de evolução envolve os seguintes passos: inicialização;
representação das soluções potenciais; mecanismo de seleção de pais e sobreviventes;
operações de variação; verificação de adequação e critério de parada.
Figura 5: Operações de Crossover e Mutação
Crossover
Cromossomo 1 11011 | 00100110110
Cromossomo 2 11011 | 11000011110
Filho 1 11011 | 11000011110
Filho2 11011 | 00100110110
Mutação
Filho Original 1 1101111000011110
Filho Original 2 1101100100110110
Filho com Mutação 1 1100111000011110
Filho com Mutação 2 1101101100110110
Pai 02
Filho 02
Recombinação
G11 Y11 R11
G12 Y11 R12
G21 Y21 R21
G22 Y21 R22 Pai 01
G11 Y11 R21
G12 Y11 R22
G21 Y21 R11
G22 Y21 R12
Filho 01

30
Assim, para aplicações de algoritmos genéticos em programação semafórica, gera-se
inicialmente uma população, para a qual o tempo de verde dos indivíduos é alocado de
maneira aleatória dentro de uma faixa permitida. Posteriormente, cada indivíduo da população
é avaliado através do seu grau de aptidão. Este processo aponta os pais mais adequados para a
geração da prole seguinte. Em seguida, os mecanismos de recombinação e mutação são
aplicados. Uma nova avaliação da população gerada é realizada, buscando os mais aptos para
a sobrevivência. Este processo se repete até a obtenção da condição de parada do algoritmo.
Exemplos da utilização dessa técnica na resolução dos problemas de programação
semafórica podem ser encontrados nos trabalhos de Liu[11]
, Prothmann et al.[12]
e Montana et
al.[13]
. O primeiro autor relaciona trabalhos para otimizar planos semafóricos utilizando
combinações de tempos de ciclos, offsets e splits simultaneamente. Os resultados demonstram
que o desempenho global pode ser aperfeiçoado através da diminuição do atraso médio dos
veículos e do número médio de paradas. Prothmann et al.[12]
acrescentam que esta abordagem
é utilizada em cenários distintos: Controles de tempo fixo e variado, intersecções isoladas e
em rede, otimização de objetivo único e multi-objetivos. Como exemplo de eficiência do
método, os autores citam o caso de ganho de 8% no desempenho sobre sistemas mais
tradicionais. Montana et al.[13]
propõem um método que considera o uso de múltiplas
constantes para vários tipos de intersecções, o que permite uma adaptação às geometrias e
taxas de fluxo veicular variados, induzindo à comunicação, especialização e cooperação entre
conjuntos semafóricos. Os autores afirmam que os resultados são ainda preliminares, mas
promissores, visto que foram capazes de obter médias globais melhores.
Kalganova et al.[14]
estudaram a aplicação dos algoritmos genéticos na coordenação
semafórica múltipla através da otimização dos tempos de verde e vermelho de cada elemento
da rede minimizando assim o atraso global. Os autores representam os tempos dos elementos
da rede como um único cromossomo, cuja capacidade corresponde ao atraso total dos
veículos utilizando o trecho em estudo. Esta capacidade é obtida através de simulação, com a
introdução de taxas aleatórias de chegada de veículos nas bordas da rede, o que garante um
modelo robusto para cenários variados. No entanto, os autores apontam a necessidade de
testar o método numa rede mais ampla, bem como estabelecer métricas comparativas de
desempenho com outros modelos.

31
Redes Neurais
Haykin[15]
define uma rede neural como “um processador paralelo e distribuído
constituído de unidades de processamento simples, que tem a propensão natural para
armazenar conhecimento experimental, disponibilizando-o para uso”[Haykin, 1999, p. 24].
Ainda conforme o autor, uma rede neural assemelha-se ao cérebro humano em dois aspectos:
1. O conhecimento é adquirido pela rede do seu ambiente de contexto através de um
processo de aprendizagem.
2. A força da conexão entre os neurônios, conhecidas como sinapse, é utilizada para
armazenar o conhecimento adquirido, associando-se um peso.
O procedimento utilizado para executar o processo de aprendizagem é denominado
“algoritmo de aprendizagem”, cuja função é ajustar os pesos sinápticos de maneira ordenada
para atingir a função objetivo desejada. A modificação dos pesos relaciona-se à forma
tradicional de filtros lineares adaptativos, testada com sucesso em vários casos práticos.
Ademais, a rede pode modificar sua própria topologia, imitando o cérebro humano, onde
neurônios podem morrer e novas conexões sinápticas podem aparecer. Dessa forma, dispõe-se
de uma estrutura bastante flexível, cujo poder deriva basicamente da grande estrutura
distribuída, da capacidade de aprender e de generalizar. Essas características conferem grande
plasticidade ao modelo, que é a sua capacidade de se adaptar ao ambiente no qual está
inserido.
Alguns modelos de programação semafórica utilizam-se das redes neurais devido a
sua capacidade de lidar com cenários não lineares. Liu[11]
afirma que há três casos de
aplicação das redes neurais em controle semafórico. No primeiro caso, a rede é utilizada
exclusivamente para modelagem, aprendizagem e controle. No segundo caso, a capacidade de
generalização da rede neural é usada com base em outros métodos como, por exemplo, para
aperfeiçoar a precisão de controladores fuzzy. O autor cita o exemplo de uma rede que foi
utilizada como um modelo de previsão para o sistema de tráfego, contrapondo-se ao modelo
de previsão tradicional, que nem sempre é preciso. Finalmente, no terceiro caso, a rede neural

32
é combinada com outros métodos para ampliar a capacidade de generalização conjunta. Nesse
caso, o resultado do processo de aprendizagem deve convergir para um ponto ótimo global.
Kagolanu[16]
utiliza uma arquitetura de redes neurais como apoio à lógica fuzzy para
aperfeiçoar o desempenho de intersecção semaforizada (Figura 6). Trata-se de um modelo de
três camadas totalmente conectado: a camada de entrada, a camada oculta e a camada de
saída. O procedimento de treinamento é induzido via retro-propagação com uma função de
transferência do tipo sigmóide.
Figura 6: Esquema de uma Rede Neural
Fonte: Adaptado de Kagolanu[16]
O modelo mostra a relação existente entre as variáveis de entrada do tráfego (o
volume, o atraso e as informações da fase) e as de saída, que apresenta os valores ideais para a
operação do sistema. Além disso, a camada de entrada funciona como um distribuidor para a
camada oculta e o algoritmo opera em duas fases. Na primeira, chamada de aprendizagem,
ocorre o ajuste ótimo de pesos para um padrão típico. Na segunda fase, a previsão adaptativa,
o algoritmo recalcula os pesos conforme os valores recebidos através dos sensores de entrada.
Os dados de treinamento baseiam-se numa amostragem típica do fluxo veicular para a região
considerada.
Otimização
Treinamento

33
Chao et al.[17]
utilizam um modelo estendido que calcula o número de veículos que
passa num cruzamento na fase verde, além do tempo que cada um necessita para a travessia.
Posteriormente, os dados coletados são utilizados em um método de estimativa para
reconhecimento de padrões de fluxo de tráfego em intersecções semaforizadas. Cria-se, então,
um agrupamento distinguindo o grau do fluxo (alto, moderado e leve) para as aproximações
do cruzamento. Os autores apontam que o algoritmo proposto consome menos tempo de
treinamento, menos memória para processamento e gera resultados mais precisos. Além disso,
quando mudanças no fluxo são observadas, o método necessita ajustar apenas uma fração dos
dados, o que contribui para a eficiência global do algoritmo, fazendo com que o mesmo seja
uma solução interessante para controle em tempo real.
Lógica Fuzzy
A modelagem de fenômenos do mundo real nem sempre é possível a partir de
entidades definidas de maneira absoluta. A incerteza, que não é um atributo raro, precisa ser
incorporada de maneira apropriada nos modelos que se propõem a estudar questões do mundo
real. Durante muito tempo a incerteza foi tratada através da teoria de probabilidades. No
entanto, atualmente essa característica é abordada em termos de conjuntos fuzzy e
sobrepostos. O método fuzzy permite que a natureza incerta, complexa e vaga de um objeto,
seja representada através da pertinência parcial a conjuntos sobrepostos[18]
. A vantagem desta
abordagem é permitir a representação e a manipulação mais precisa de conceitos e posterior
tomada de decisão.
A aplicação desse conceito na programação semafórica pode ser observada no trabalho
de Gadêlha et al.[19]
. Os autores realizaram uma experiência em um controlador eletrônico
microprocessado; Apresentou-se o algoritmo fuzzy e a sua implementação neste equipamento.
A experiência foi realizada na operação de um cruzamento isolado simples com duas
aproximações. A partir do levantamento dos fluxos de veículos para um dia típico e da
determinação de um tempo máximo de duração do verde, definiu-se as variáveis de entrada e
saída, as regras de inferência e o universo de discurso, como se segue:
Variáveis de entrada: fluxo de veículos na Rua A, fluxo de veículos na Rua B.

34
Variáveis de saída: tempo de verde para a Rua A, tempo de verde para a Rua B.
Universo de discurso: variáveis de entrada = [0,60] (veículos/tempo).
variáveis de saída = intervalo[10,39] (segundos).
Os fluxos são quantificados na escala: pequeno, médio pequeno, médio, médio grande
e grande. Após descrever os detalhes de operação do algoritmo, os autores apresentaram os
seguintes resultados: redução de 30% no comprimento médio da fila e redução de 20% no
atraso médio por veículo. Os resultados demonstram, a princípio, a viabilidade do método.
Relatos da eficiência da lógica fuzzy em programação semafórica podem ser
encontrados também em Wei et al.[20]
. Neste trabalho os autores testaram esta abordagem na
determinação do tempo do ciclo para um cruzamento com quatro aproximações, que permite
adaptações conforme mudanças observadas na corrente de tráfego. Os autores trabalharam
com o conceito de “grau de urgência”, que descreve as diferentes demandas dos usuários pelo
sinal verde. O algoritmo descrito é capaz de decidir entre alongar ou abreviar a fase atual de
operação e iniciar um novo ciclo. Os autores relataram a redução de 15 a 25% no número de
paradas e de 15 a 30% no atraso médio.
2.3 Resumo
Este capítulo apresentou algumas considerações sobre os problemas decorrentes das
ineficiências do sistema viário em atender todos os movimentos. Observa-se que a
complexidade dos problemas de trânsito gera perdas de milhões de reais anualmente. Além
disso, foi possível constatar a precariedade em várias cidades brasileiras no que tange a
utilização de métodos formais para o tratamento da programação semafórica. O problema do
congestionamento pode ser amenizado pela escolha do local apropriado para a instalação dos
semáforos e a sua correta programação. O capítulo aborda o método tradicional de Webster
para a programação semafórica e os resultados reportados por alguns modelos alternativos. Os
autores destes estudos apontam ganhos interessantes no desempenho global do fluxo veicular
urbano, embora alguns deles enfatizem a necessidade de testes mais amplos.

35
Capítulo 3
Sistemas de Informações Geográficas
Os Sistemas de Informações Geográficas são tecnologias que trabalham com dados e
informações organizados no espaço geográfico, com recursos versáteis de análise de dados e
geração de produtos que subsidiam o processo de tomada de decisão, sempre que o espaço for
em ente importante a ser considerado. Neste trabalho o SIG será um dos componentes do
modelo a ser desenvolvido. Contudo, a proficiência nesta ferramenta depende da aquisição de
um acervo grande de conceitos, os quais serão abordados neste capítulo.
A seção 3.1 apresenta os conceitos relacionados a bases cartográficas digitais.
Posteriormente, a seção 3.2 trata dos sistemas de informações geográficas (SIG). A seção 3.3
introduz uma categoria especial de SIG, a saber, o SIG-T, que são sistemas de informações
geográficos aplicados a transportes. Para encerrar o capítulo, a seção 3.4 apresenta um resumo
dos conceitos.
3.1 Bases Cartográficas Digitais
O primeiro requisito a ser observado para a utilização de um Sistema de Informações
Geográficas é a produção de uma base cartográfica digital. O processo de construção de uma
base cartográfica digital deve ser efetuado seguindo uma série de normas e procedimentos. No
Brasil, a construção de uma base cartográfica é embasada por uma legislação cartográfica
específica e uma série de normas, decretos, portarias, resoluções e emendas, entre as quais,
pode-se citar: Execução de Levantamento Topográfico (NBR 13.133), Rede de Referência
Cadastral Municipal (14.166).
É importante salientar que, mesmo considerando os estes aspectos, uma base
cartográfica pode apresentar características diversas, dependendo da aplicação a ser atendida.

36
Por esta razão, questões como a escala apropriada, a geração da ortofoto e o processo
de reambulação devem ser cuidadosamente planejados, pois os custos envolvidos podem ser
elevados. Uma carta em escala de 1:5000 pode ser suficiente para muitas aplicações em um
SIG. No entanto, para aplicações voltadas para a área de transporte recomenda-se ao menos a
escala 1:1000 contendo elementos como: arruamento, principais edificações, a definição do
meio fio, calçadas, posteamento e vegetação de grande porte.
Elaboração de uma Base Cartográfica Digital.
A Norma Brasileira nº 14.166 define uma base cartográfica como o conjunto de cartas
e plantas integrantes do Sistema Cartográfico Municipal que, apoiadas na rede de referência
cadastral, apresentam no seu conteúdo básico as informações territoriais necessárias ao
desenvolvimento de planos, de anteprojetos, de projetos, de cadastro técnico e imobiliário
fiscal, de acompanhamento de obras e outras atividades projetuais que devam ter o terreno
como referência[21]
.
A elaboração de uma base cartográfica digital é uma tarefa complexa que deve ser
efetivada com a ajuda de especialistas. O primeiro ponto a ser observado é a definição clara
do propósito do projeto, ou seja, o levantamento das camadas de informação que constarão na
base e que viabilizarão a implantação dos mais variados projetos, tanto por parte dos órgãos
públicos quanto privados. Para tanto, dispõe-se normalmente de três métodos: topografia
clássica, levantamento aerofotogramétrico e sensoriamento remoto orbital. A seguir,
apresenta-se de maneira breve conceitos sobre cada um deles.
A topografia clássica é viável quando a área a ser mapeada não é muito extensa, pois o
trabalho de campo exigido, nessa situação, é bastante significativo. Essa modalidade de
levantamento considera a terra plana e utiliza instrumentos para a medição de ângulos e
distâncias, calculando posições utilizando geometria e trigonometria planas. A introdução de
equipamentos mais modernos nessa área (estações totais) contribuiu muito para o aumento da
produtividade na aquisição de dados por essa técnica[22]
. Sua utilização exige o cumprimento
da Norma Brasileira nº 13.133 (1994), que aborda a execução de levantamentos topográficos
e da Norma Brasileira 14.166 (1998) que fixa as diretrizes para a implantação da Rede de
Referência Cadastral Municipal, que tem como objetivo amarrar os serviços de topografia

37
visando a sua correta inclusão nas plantas cadastrais do município, tanto para fins públicos
quanto legais.
O levantamento aerofotogramétrico utiliza um avião com câmera métrica que toma
fotografias sequenciais parcialmente sobrepostas, em faixas paralelas, recobrindo toda a área
de interesse[22]
. De forma resumida, deve-se considerar a seguintes etapas:
1. Planejamento e Execução do Voo: Considera-se principalmente a delimitação da área
a ser mapeada, a altura e a velocidade da aeronave, o sentido e a linha de voo, o
número de faixas, as fotos por faixa, a distância focal da câmera e as superposições
lateral e longitudinal.
2. Trabalho de Laboratório: Os filmes obtidos são revelados (caso não sejam utilizadas
câmeras digitais) para a produção das fotos que podem ser gravadas em papel e
diapositivos e posteriormente são utilizados nas fases de restituição e reambulação.
Também são confeccionados o foto-índice e o mosaico.
3. Apoio Terrestre para Restituição: Consiste na determinação das coordenadas de
pontos bem identificáveis no território e que serão utilizados na restituição analógica e
analítica como pontos de controle.
4. Aerotriangulação: Essa etapa envolve a obtenção de coordenadas e altitudes de pontos
claramente identificáveis nas fotos com o objetivo de aumentar a densidade dos pontos
planialtimétricos.
5. Ortofoto Digital: Tem como produto as fotos aéreas retificada ortogonalmente,
permitindo, assim, a visualização direta das imagens. Podem conter ainda detalhes
como malhas de coordenadas e altimetria, mas sua interpretação nem sempre é direta.
6. Restituição Aerofotogramétrica: Tem por finalidade a produção dos mapas a partir das
ortofotos, extraindo as feições a partir do modelo estereoscópico, ajustados e
referenciados através dos pontos de controle.
7. Reambulação: É a etapa final e envolve a coleta de dados relativos à toponímia,
hidrografia, divisões administrativas e políticas e demais elementos que não podem ser
obtidos diretamente das fotos.
No que tange o sensoriamento remoto orbital, Barnsley[23]
o define como a tecnologia
que utiliza instrumentos (sensores), plataformas (satélites orbitais, aeronaves) e técnicas de
processamento de dados para derivar informações sobre propriedades físicas, químicas e

38
biológicas da superfície do planeta sem recorrer ao contato físico direto, e que são obtidas a
partir da medida das variações da radiação eletromagnética emitida ou refletida, dependendo
do tipo do sensor utilizado (ativo ou passivo).
Muitos usuários tem utilizado o SR para produção de bases cartográficas. Contudo, o
processo por esse método apresenta deficiências quanto a precisão e exatidão para cartas que
serão utilizadas em SIG’s cadastrais, como aqueles específicos de transportes, cujas escalas
são consideradas grandes (1:1.000 e 1:5.000). Apesar dos avanços observados com essa
tecnologia recentemente, o sensoriamento remoto ainda carece de aprimoramentos para a
elaboração de bases cartográficas para projetos de engenharia.
Aplicações Tradicionais e Novas Fronteiras para a Cartografia e as Bases Cartográficas.
Uma base cartográfica digital elaborada a partir da observação de todos os preceitos
cartográficos tem o potencial de auxiliar na resolução de qualquer problema que tenha como
base o território.
Martínez[24]
relaciona algumas das aplicações mais tradicionais com finalidades
cadastrais, urbanísticas, fiscais, jurídicas e gestão dos serviços técnicos municipais. Para o
autor, uma base cartográfica, especialmente em escala grande, age como um valioso
instrumento de comunicação dos projetos urbanísticos. O autor cita, como exemplo, a
utilização de bases cartográficas em projetos técnicos para o traçado de redes de serviço
(telefone, eletricidade, saneamento, gás, TV a cabo) onde, tanto os dados topográficos como a
distribuição das parcelas que afetam o empreendimento, precisam ser conhecidas para o caso
de desapropriações ou manutenções posteriores.
Costa[25]
, por sua vez, reforça esses tópicos de aplicação e adiciona outros,
especialmente na área de transportes. O autor explica que o planejamento de transportes
procura otimizar os modos de transportes para a circulação de pessoas e mercadorias,
minimizando problemas como a demora no tempo dos deslocamentos, congestionamentos e
acidentes de trânsito, garantindo assim melhorias nas condições operacionais dos fluxos. Para
tanto, faz-se necessário a obtenção de um inventário de toda a infraestrutura que é parte do
sistema viário da região de interesse referenciado no espaço, e a sua posterior incorporação a
uma base cartográfica. Esse produto tem ainda a potencialidade de ser utilizado em tópicos

39
como: elaboração de mapas de carregamento, planta cadastral do sistema viário,
gerenciamento do sistema de transporte coletivo, localização de pontos negros de acidentes,
projeto e cadastro da sinalização de trânsito, além de projetos básicos e executivos de
quaisquer elementos pertencentes ao sistema viário.
Outra vertente de aplicações de uma base cartográfica digital é a que diz respeito ao
cadastro técnico multifinalitário. Um cadastro envolve a organização de um acervo de
informações relacionadas a um determinado tópico para atingir um determinado fim ou servir
a uma aplicação. De maneira mais específica, o cadastro técnico multifinalitário pressupõe a
inclusão de um variado número de dados que descreve as entidades pertencentes ao território
em análise e que auxiliam no processo de tomada de decisões, por parte de agentes públicos
ou privados, e que considera tanto o patrimônio público como o privado, bem como as leis
que regem sua posse. O cadastro multifinalitário tem também grande importância para a
gestão dos sistemas de transporte e trânsito, pois pode abarcar dados do sistema viário,
circulação e volumes, gerando assim, um acervo importante para aperfeiçoar a mobilidade
urbana.
Loch[26]
apresenta um perfil evolutivo do cadastro técnico multifinalitário,
considerando desde as primeiras aplicações com o intuito de aumentar a arrecadação fiscal até
a visão mais moderna, que considera além das aplicações tributárias, questões como: a gestão
do território sob o ponto de vista da segurança jurídica, as exigências ambientais, a
incorporação de recursos tecnológicos e a integração entre diferentes órgãos gestores do
território.
Observa-se pelo exposto até esse ponto que um dos impactos mais significativos na
cartografia e nas bases cartográficas foi ocasionado pela introdução da informática em seus
domínios. A facilidade para a produção de novos mapas e a disseminação dos mesmos para
qualquer pessoa com acesso a softwares específicos de SIG (Sistemas de Informações
Geográficas) e à internet transformou as bases cartográficas digitais em um instrumento
valioso para a navegação, a a visualização e compreensão do espaço geográfico no qual a
população está inserida. Esse fato abre espaços para novos desafios e possibilidades.
O atendimento das necessidades de acesso a dados cartográficos por um público com
perfil diferenciado torna necessário o desenvolvimento de interfaces bastante amigáveis que

40
maximizem a interatividade na exploração de dados cartográficos. Dessa forma, a cartografia
procura explorar também a utilização de recursos multimídias para a disponibilização dos
seus produtos, sobretudo os dados distribuídos via internet e telefonia celular, provendo
mapas em tempo real e acesso a um variado número de localização de facilidades de serviços
disponíveis ao cidadão.
Ramos[27]
aborda o tópico acima, explicando que “novos mapas, impossíveis de serem
concebidos em papel, com recursos como animação, interatividade, hipertextualidade,
multimídia, são uma realidade e estão cada vez mais presente no cotidiano”. A possibilidade
de inclusão de tais recursos em um mapa torna a experiência com a cartografia muito mais
interativa e deve-se considerar o fato de que a sociedade atual tem mais facilidade para
absorver conhecimentos e registrar os dados em sua memória quando essa experiência
envolve estímulos visuais. A autora observa, também, que a introdução do conceito de
hipertexto possibilitou o surgimento de outro conceito relacionado, o de hipermapa. Trata-se
de um mapa navegável que explora o conceito de hipertextualidade através da incorporação
de referências geográficas. Além disso, pode-se associá-lo a um banco de dados contendo os
elementos para uma exploração interativa mais efetiva como texto, vídeo, áudio, animações e
fotos.
Neste cenário surgiu um novo conceito, a Cartografia Móvel. Reichenbacher[28]
a
define como “as teorias, os métodos e as tecnologias de visualização cartográfica adaptativa e
dinâmica de informações geográficas e seu uso interativo em dispositivos móveis onde a
visualização se ajusta a um ou mais componentes de um determinado contexto de utilização
(localização, tempo, usuário, atividades, informação e sistemas)”. Deve-se considerar que, se
por um lado, estes dispositivos móveis apresentam algumas restrições na exibição de alguns
detalhes dos mapas, por outro lado são extremamente interessantes no provimento de
informações em tempo real. Além disso, o próprio usuário torna-se partícipe na seleção e
geração dos dados do seu interesse, o quê não é possível com a cartografia tradicional e seus
mapas estáticos.
Diante do exposto pode-se inferir que o processo de construção de uma base
cartográfica é um instrumento crucial para a gestão ordenada do território, gerando
documentos idôneos acerca do processo de apropriação do território por parte da população,
dos órgãos públicos e privados. Assim, fica claro o potencial do produto no ordenamento do

41
território e na promoção do desenvolvimento econômico e social dos municípios que
investem na estruturação de uma base cartográfica digital. Considerando que a base de
atuação legal de qualquer instância de governo é o território cria-se, em consequência, um
estimulo considerável para a produção e manutenção de uma base cartográfica associada a um
cadastro técnico multifinalitário. Entretanto, a consolidação deste processo no Brasil é lenta.
A precariedade dos produtos cartográficos é acentuada e, mesmo municípios com mais
recursos, ainda prescindem de uma base cartográfica digital em escala apropriada para apoio
às atividades de planejamento e gestão do território. Na realidade, poucos estão tomando
ações efetivas referentes à consolidação das informações geográficas que visem a elaboração
de uma base cartográfica digital associada a um cadastro técnico multifinalitário[29]
.
Para a finalidade deste trabalho recomenda-se a produção de uma base cartográfica em
escala 1:1000, obtida a partir de um voo aerofotogramétrico. Esta escala permite o tratamento
adequado da malha viária, com a inclusão de todos os eixos e a incorporação da rede
semafórica. Trata-se de uma escala adequada para a boa visualização de mapas temáticos e
análise das vias mais afetadas pelos congestionamentos.
3.2 Sistemas de Informações Geográficas
Do mesmo modo que a montagem de uma base cartográfica digital exige o
envolvimento de pessoas com grandes conhecimentos técnicos, assim também ocorre com a
implantação de um Sistema de Informações Geográficas (SIG).
Um SIG pode ser definido de múltiplas maneiras, dependendo do enfoque que se
deseje priorizar. Pode-se enfatizar a própria ferramenta de SIG, o banco de dados que gera
seus dados ou ainda a organização na qual o sistema está inserido como um todo. Burrough[18]
apresenta algumas dessas definições:
1. Definição como ferramenta tecnológica (Burrough[18]
): Um poderoso conjunto
de ferramentas para coleta, armazenamento, recuperação, transformação e
exibição de dados espaciais do mundo real.

42
2. Definição como Banco de Dados (Smith et al.1apud Burrough
[18]): Um sistema
de banco de dados onde os dados são indexados espacialmente, e sobre os
quais opera um conjunto de procedimentos para responder perguntas sobre
entidades espaciais na base de dados.
3. Definição Organizacional (Cowen2 apud Burrough
[18]): Um sistema de apoio à
tomada de decisões envolvendo a integração entre dados georeferenciados num
ambiente de resolução de problemas.
Tomlinson[30]
, por sua vez, sugere a adoção de um modelo e reforça a maior
flexibilidade do mesmo em relação às definições precedentes. Segundo o autor, por tratar-se
de uma tecnologia horizontal, isto é, capaz de atender aplicações em praticamente todas as
áreas da sociedade moderna, é desejável considerar um modelo independente de qualquer
contexto específico. Dessa maneira, cria-se informação consistente para toda a organização,
de maneira clara e concisa. Os dados são atualizados com frequência, compartilhados entre
departamentos, evitando-se ainda a duplicação de esforços para o manutenção do ambiente.
Assim, o autor propõe o modelo esquematizado na figura 7. Analisando o modelo,
pode-se observar alguns pontos. Primeiramente, são os dados brutos que tornam todo o
sistema funcional. Os dados geográficos distinguem-se pela presença de coordenadas
referenciadas a um sistema de projeção cartográfica e contidos no cadastro técnico
multifinalitário. Normalmente estes dados são organizados no banco de dados como layers
individualizados e representados através das primitivas geométricas básicas (pontos, linhas e
polígonos) ou no modo raster. Além disso, a riqueza dos atributos descritivos determinará o
poder da solução implantada. Dados históricos são frequentemente registrados em papel,
assim torna-se necessário digitalizá-los ou submetê-los a um scanner com os devidos
cuidados de controle de qualidade. Os dados geométricos que descrevem o território atual
devem ser elaborados observando os preceitos descritos na seção anterior referente à
montagem de uma nova base cartográfica digital.
1 Smith, T.R., Menon, S., Starr, J.L., and Estes, J.E., Requirements and Principles for the Implementation and
Construction of Large-scale Geographical Information Systems, International Journal of Geographical
Information Systems, 1:13-3, 1987. 2 Cowen, D.J., GIS versus CAD versus DBMS: What are the Differences ?, Photogrammetric Engineering and
Remote Sensing, 54: 1551-4, 1988.

43
Figura 7: Componentes de um SIG
Fonte: Adaptado de Tomlinson[30]
Uma vez reunidas essas informações de maneira sistemática num único banco de
dados eletrônico, torna-se possível as xanálises geográficas e a produção de novos mapas,
através da operação interativa com um operador ou da operação com sistemas previamente
construídos.
Os produtos gerados incluem novos dados baseados em atributos, em formas
geométricas ou ainda em ambos. Esses dados podem ser produzidos no formato de tabelas,
relatórios ou mapas e apresentadas na própria tela de um computador, numa impressora ou
serem até disseminadas através da internet ou de uma intranet.
Observa-se que, nas várias raízes dos sistemas de informações geográficas, a
versatilidade do produto está diretamente ligada à estrutura de um banco de dados que
represente de maneira fidedigna a realidade geográfica através dos objetos geométricos e seus
atributos, possibilitando assim a criação de outras entidades geográficas ou a recuperação de
informações baseadas nas primitivas do geoprocessamento e da teoria de banco de dados.

44
Tópicos a serem considerados na implantação de um SIG
Alguns quesitos devem ser ponderados com critério quando da definição das
funcionalidades a serem incorporadas num SIG, entre os quais, destacam-se: considerações
sobre espaço e tempo, qualidade dos dados, arquitetura do sistema, banco de dados e análise
espacial, SIG como ferramenta de gerenciamento e as aplicações operacionais a serem
contempladas no sistema. Apresenta-se a seguir detalhes acerca destes tópicos.
Considerações sobre Espaço e Tempo
A representação de fenômenos espaciais e sua associação a uma escala temporal
sempre foi fonte de debates entre os pesquisadores dos mais variados ramos da ciência que
tratam da questão espaço-tempo, como a matemática, a física, a filosofia e a geografia.
Couclelis[31]
aborda esse ponto e cita as perspectivas conflitantes decorrentes das
várias formas de representação do espaço e tempo em sistemas de informações geográficas. A
autora enfatiza os problemas da representação de espaços absolutos e não métricos, bem como
a incorporação de entidades e fenômenos inexatos. Desse fato, temos quatro perspectivas
diferentes no processo de modelagem dos dados:
1. A empírica, que procura captar as propriedades espaço-temporais das entidades em
estudo (cidade, lagos, áreas verdes, etc.);
2. A formal, que considera as primitivas de pontos, linhas, áreas e superfície e as
restrições impostas pelo modelo digital;
3. A experimental, que considera conceitos cognitivos para a conversão de dados
geográficos de maneira que possam ser assimilados com mais facilidade pelo
público alvo;
4. A social, que considera as perguntas a serem respondidas pelo sistema e as
ontologias mais apropriadas para cada caso.
Essas perspectivas são conflitantes, pois nem sempre uma contempla a visão da outra.
Por exemplo, a tríade ponto-linha-área não é adequada para a representação de fenômenos que
envolvem algum grau de incerteza, sendo recomendável nesse caso a incorporação de
conceitos fuzzy. Da mesma forma, conceitos temporais não são tratados de forma idêntica nas

45
perspectivas descritas anteriormente.
A multiplicidade de conceitos e recursos descritos permite a combinação de um grande
número de dados e descoberta de padrões que não são evidentes, caso analisados de maneira
separada. Dessa forma, a incorporação de objetos e processos que povoam a realidade
geográfica introduz novos paradigmas de espaço e tempo. Almeida[32]
relaciona esses novos
paradigmas:
Reciprocidade: Capacidade de análise de fenômenos e processos espaço-temporais de
maneira sistêmica, considerando efeitos recíprocos em sistemas inter-relacionados.
Simultaneidade: Diz respeito ao acesso imediato às informações em meio digital e a
possibilidade de tomada de decisões em tempo real. Nesse aspecto a integração entre
SIGs e a internet ou dispositivos móveis de comunicação é vital.
Interatividade: Consiste na criação de mecanismos que ampliam as possibilidades de
participação da sociedade na definição dos rumos a serem seguidos na transformação
do espaço geográfico. Faz-se uso das ferramentas do tipo SSP (Sistemas de Suporte ao
Planejamento) que integra o conceito de e-Planning, que permite a participação
popular através de fóruns on-line. Assim, um cidadão interessado pode ser um agente
na transformação do espaço geográfico.
Intemporalidade: Permite a realização de um grande número de tarefas independente
das restrições de espaço e tempo como, por exemplo, acesso a serviços bancários,
compras, videoconferências e pesquisas em instituições estrangeiras.
Recursividade: Possibilita a replicação das estruturas do espaço geográfico e suas
intercomunicações, bem como a consequente análise dos efeitos das mudanças inter-
relacionadas.
Com relação à questão temporal em SIG’s, deve-se observar que essa dimensão
ganhou uma importância significativa nos últimos anos em razão da necessidade de analisar
as alterações espaciais no território e buscar inferir um padrão de comportamento para as
mesmas. Esse efeito temporal é obtido a partir do armazenamento de um novo registro na
base de dados sempre que ocorra uma mudança significativa para o espaço representado.
Assim, os projetistas devem considerar as estruturas mais adequadas para o armazenamento
dos fenômenos e a granularidade temporal a ser adotada.

46
Peuquet[33]
apresenta algumas das estruturas mais aceitas para essa tarefa e suas
vantagens e desvantagens. A autora cita a abordagem da “foto instantânea” que registra as
alterações num layer de informação tendo como referencial uma linha de tempo. A
desvantagem desse método é grande quantidade de espaço de armazenamento em disco
necessário para acomodar essa estrutura. Outra possibilidade é a representação baseada em
entidades, que é mais eficiente do ponto de vista computacional. Todavia, é crescente a
tendência de utilização do modelo orientado a objetos ou do objeto-relacional, porquanto os
conceitos de encapsulamento e herança propiciam a flexibilidade necessária para a
manipulação de dados com características temporais. A figura 8 ilustra essa estrutura.
Figura 8: A abordagem orientada a objetos
Fonte: Adaptado de Peuquet[33]
Uma classe pode ser entendida como uma família de objetos que possuem
características em comum. Estas, por sua vez, dão origem aos objetos, que são componentes
de software reutilizáveis. Praticamente todo substantivo que descreve um ente do mundo real
pode ser representado como um objeto caracterizado por atributos e comportamentos. A
grande vantagem desta abordagem é a maior facilidade de compreensão, correção e
atualização de sistemas[34]
. Em consequência, o desenvolvimento de soluções computacionais
para o tratamento de dados e informações ganha muito em termos de produtividade.
Classe
Objeto
Geográfico
Ge
Componente
não espacial
Ge
Localização
Ge
Componente
Temporal
Ge
É um
Ge
Versões
Localização
Ge
Versões
Atributo A
Ge
Versões
Atributo B
Ge
Versões
Atributo C
Ge
Inicio
Ge
Fim
Ge Eventos
Ge

47
Para explorar com mais intensidade o poder dessa estrutura é necessário que o sistema
gerenciador de banco de dados disponha de uma linguagem de manipulação de dados
igualmente rica e eficiente. Para tanto, o desenvolvimento da linguagem SQL/Temporal, que é
uma extensão da linguagem SQL original, é um avanço incorporado em vários sistemas
gerenciadores de banco de dados atuais.
Qualidade dos Dados
A complexidade inerente à coleta de dados geográficos torna muito difícil a
elaboração de uma base cartográfica totalmente livre de erros. Não é raro o aparecimento de
diferenças entre o conteúdo registrado na base cartográfica e o seu equivalente no banco de
dados. Essas diferenças são normalmente decorrentes de erros nas medições, mas podem
ocorrer também a ausência ou indisponibilidade de dados. Normalmente, define-se o erro
como a discrepância entre o valor codificado no banco e o valor de fato de um atributo. Nesse
ponto aplica-se o conceito de qualidade de dados da representação.
É importante que essa propriedade seja considerada com muita atenção, visto que os
sistemas de informações geográficas são utilizados como ferramenta de gestão e tomada de
decisão, e quando esta é tomada com base em parâmetros deficientes pode apresentar um alto
custo econômico e social, ou gerar até mesmo disputas judiciais. Esse grau de incerteza pode
ser embutido até mesmo como um atributo na base de dados, calculando sempre esse valor
para os produtos gerados.
Veregin[35]
apresenta uma visão dos componentes que caracterizam a qualidade dos
dados, suas interações e dependências. Segundo o autor, a qualidade dos dados pode variar
espacialmente, temporalmente e tematicamente e para cada uma dessas dimensões
consideram-se os seguintes componentes:
Acurácia: A acurácia espacial pode ser considerada nas dimensões horizontal (x,y) e
vertical (z). O erro médio é uma das métricas utilizadas para aferir a qualidade dos
dados e deve ser o menor possível. A acurácia temporal diz respeito à concordância
entre os valores registrados na base para esta dimensão e as coordenadas temporais de
fato. A acurácia temática procura analisar tanto os atributos quantitativos quanto
qualitativos através da seleção de alguns dos elementos na base e posterior

48
comparação com os elementos observáveis em campo, gerando uma tabulação cruzada
de dados.
Precisão ou Resolução: Também conhecida como granularidade. Diz respeito à
quantidade de detalhes que podem ser diferenciados numa amostra de dados. Existe
um limite para a resolução de qualquer amostra devido à aplicação do processo de
generalização, já que é praticamente impossível capturar um grande número de
detalhes de um fenômeno geográfico. A resolução espacial tem origem nos sistemas
de sensoriamento remoto e relaciona-se à área do mundo real representada por um
pixel. A resolução temporal refere-se à duração mínima de um evento que é
identificável. A resolução temática depende da escala adotada é diferenciada conforme
valores qualitativos e quantitativos.
Consistência: Refere-se à ausência de contradições aparentes na base de dados. A
consistência espacial trata basicamente da verificação da conformidade às regras
topológicas para dados geográficos. A consistência temporal procura garantir que dois
eventos diferentes não ocorram para a mesma entidade no mesmo espaço de tempo. A
consistência temática é feita através da introdução de atributos redundantes e a
posterior análise da correlação entre os mesmos para um tema específico.
Completude: Trata-se da verificação da concordância entre a especificação do modelo
de dados elaborado e a abstração do universo específico para a aplicação em questão.
As dimensões mencionadas anteriormente devem ser verificadas para garantir a
integridade do modelo concebido.
Outro ponto a ser observado em relação à qualidade de dados é a propagação dos erros
em modelos espaciais, visto que o processo de produção de dados geográficos está sujeito a
erros. Dados são coletados em campo, classificados, generalizados ou até mesmo estimados.
Podem ainda sofrer variações de natureza espacial e temporal, dessa forma, erros podem ser
introduzidos na base e propagados durante o processo de análise geográfica, ou até mesmo
amplificados. Daí a necessidade de considerar as técnicas para o controle da propagação de
erros.
Basicamente, a teoria de propagação de erros para atributos quantitativos utiliza como
passo inicial a fórmula U(.) = g(A1(.), A2(.),...,AM(.)), onde:
U(.) é o resultado de uma operação geográfica nos M atributos de entrada Ai,

49
conforme apresentado por Heuvelink[36]
e considera principalmente a média ξ(.) e a variância
τ2(.). Esse tipo de análise é adequado quando a função g(.) é do tipo linear. Entretanto, para a
uma análise mais elaborada utiliza-se série de Taylor de primeira ordem ou o método de
Monte Carlo.
É importante observar que os métodos citados permitem determinar o quanto uma
entrada em particular contribui para a propagação do erro numa análise geográfica. Assim, o
usuário pode determinar a viabilidade de investir no retrabalho de coleta de dados para um
layer específico.
Arquitetura do Sistema
As décadas recentes introduziram profundas mudanças na concepção tecnológica dos
produtos utilizados em informática. Novos paradigmas provocaram uma grande redução nos
custos de equipamentos e produtos de software, fato que foi determinante para a introdução
maciça desses recursos em organizações empresariais de portes variados. Além disso,
observa-se a utilização crescente por parte do público em geral.
Com relação a equipamentos, observa-se a utilização disseminada de computadores de
porte cada vez menor, mas com alto poder de processamento. Esse fato estimulou a
configuração de um ambiente computacional distribuído, onde equipamentos se conectam
através de uma rede local, metropolitana ou até mesmo mundial. Os avanços recentes na
comunicação através de banda larga e na computação móvel tornam interessante a integração
desses equipamentos com uma grande rede global.
Coleman[37]
cita a arquitetura em três camadas para a organização de uma rede desse
tipo, conforme ilustra a figura 9. Os pacotes de SIG’s procuram incorporar também os vários
avanços da tecnologia da informação. Neste tipo de arquitetura pessoas, em qualquer parte do
mundo, podem ser usuários e geradores de dados para um ambiente SIG, e a internet funciona
como um grande canal de geração e troca de dados. Observa-se, também, aperfeiçoamentos
na própria arquitetura interna dos softwares de SIG. As empresas proprietárias desenvolvem e
comercializam módulos independentes que realizam funções específicas. Assim, o usuário
final pode adquirir algumas funções do seu interesse, barateando o custo final do produto. É
possível também a integração com pacotes de desenvolvimento de produtos de software de

50
outras empresas, o que permite aos usuários desenvolver aplicativos personalizados para suas
necessidades.
Figura 9: Arquitetura em três camadas para processamento distribuído
Fonte: Adaptado de Coleman[37]
Para que toda essa estrutura funcione de maneira adequada deve-se considerar a
interoperabilidade do sistema. Essa propriedade garante a possibilidade de migração de um
sistema para outro através da aderência a padrões neutros de intercâmbio de dados. Sondheim
et al.[38]
. citam a infraestrutura de comunicação, a interface de programas aplicativos e uma
arquitetura comum para a definição de objetos como meios de implementação da
interoperabilidade. Assim, um sistema autônomo é capaz de trocar dados e processar todo tipo
de requisições através de um modelo comum. Dentre as opções citadas, os autores enumeram
a adoção de um formato comum para o intercâmbio de dados como arquivos no formato DXF,
criado pela Autodesk e aceito como padrão para a entrada de dados em SIGs. Nesse caso, um
tradutor embutido no software se encarrega de incorporá-lo ao sistema para a utilização,
entretanto, deve-se ter em mente que pode ocorrer perda de informações nesse processo. Por
essa razão esforços foram canalizados para estabelecer um padrão de troca de dados
geográficos, separando-se o modelo lógico da codificação de dados, como o sistema
americano SDTS (Spatial Data Transfer Standard) ou o canadense SAIF (Spatial Archieve
and Interchange Format).
Rede
Local
Estação Trabalho Estação Trabalho Estação Trabalho
Servidor Rede longa distância

51
Em outra vertente, Sondheim et al.[38]
citam a atuação do OGC (Open Gis
Consortium) na consolidação de uma interface comum baseada na tecnologia de computação
distribuída. Essa especificação engloba dois componentes mais significativos:
O OGM (Open Geodata Model): Coleção de dados e métodos organizados numa
biblioteca hierárquica de classes que contempla tipo de dados espaciais fundamentais,
incluindo sua representação geométrica, referência espacial e conteúdo semântico.
Serviços de Arquitetura: Mecanismo pelo qual os objetos e suas interfaces podem ser
associados em consultas complexas, transformações e funções analíticas. Permite
ainda a criação de um catálogo para identificação, avaliação e interpretação de
informações geográficas complexas disponíveis numa rede dispersa.
A adesão aos preceitos acima por parte de usuários, vendedores de software e
produtores de dados contribuirão para a quebra de sistemas monolíticos, visto que a utilização
de banco de dados distribuídos, browsers, tradutores inteligentes e ferramentas comuns de
modelagem de dados criam condições para uma grande estrutura comum com a finalidade de
possibilitar o intercâmbio de dados e softwares aplicativos.
Por fim, é necessário dedicar atenção também ao processo de customização das
aplicações em SIG. Maguire[39]
define a customização como o processo de adaptar um sistema
genérico à especificações individuais. Esse processo envolve a modificação das interfaces
gráficas padrão, complementadas pela incorporação de programas especialmente
desenvolvidos que acessam os recursos centrais de um software SIG e do banco de dados.
Deve-se notar que esse é precisamente um dos maiores fatores do sucesso dos sistemas de
SIG, pois a customização torna possível sua utilização em áreas de natureza diversas.
Considera-se que a customização é um dos elementos de custo mais alto no projeto de
implantação de um ambiente de geoprocessamento, juntamente com o processo de captura dos
dados. A tabela 2 ilustra este fato. Neste exemplo, o ambiente simples compõe-se de dois
servidores e oito clientes, ao passo que o ambiente empresarial conta com aproximadamente
trinta e cinco clientes e um servidor possante. Além disso, no primeiro caso os dados foram
adquiridos sem nenhum levantamento em campo.

52
Tabela 2: Porcentagem de custos para implantação de um SIG
Ambiente Simples Ambiente Empresarial
Hardware 22 7
Software 13 12
Dados 6 23
Customização 4 30
Treinamento 55 28
Fonte: Maguire[39]
No Brasil os custos envolvidos para a aquisição de dados são consideravelmente mais
elevados. Isto se deve à implantação tardia da cultura cartográfica e da implantação de
cadastros no país, ao contrário de outros países, que se preocuparam em estruturar agências
com este intuito. Como exemplo, pode-se citar um estudo realizado para o município de
Campinas apontando que o custo para a construção da base cartográfica digital corresponde a
57% do valor do projeto. O cadastro técnico exige outros 37% do valor global estimado, ao
passo que a aquisição de softwares consumiria apenas 6% deste montante[40]
.
Considerando que o processo de customização pode apresentar custos elevados,
procura-se utilizar métodos adequados para atingir os resultados esperados, como os
propostos pela engenharia de software. Sommerville[41]
a define como uma disciplina de
engenharia relacionada a todos os aspectos de produção de um software, desde os primeiros
estágios de especificação, manutenção até o momento em que o sistema deixa de ser utilizado.
Para tanto, a engenharia de software utiliza paradigmas como o ciclo de vida clássico, o
paradigma evolutivo e o paradigma espiral. Maguire[39]
aponta as vantagens dos dois últimos,
pois há a possibilidade do desenvolvimento através do uso de ferramentas gráficas, com a
disponibilidade de resultados rápidos para a avaliação do usuário, fato que contribui para a
redução dos custos finais.
A adoção de um dos paradigmas de desenvolvimento citados anteriormente maximiza
a possibilidade das expectativas dos usuários serem plenamente atendidas, ou seja, a entrega
de um produto que cumpra todos os requisitos e desenvolvido no tempo e custo previstos.
Ilustra-se, a seguir, o esquema do paradigma evolutivo:

53
Figura 10: Paradigma do Desenvolvimento Evolutivo
Fonte: Adaptado de Sommerville[41]
Banco de Dados e Análise Espacial
A montagem do banco de dados é uma das etapas mais importantes na implantação de
um sistema de processamento de dados. Um banco de dados pode ser definido como “uma
coleção de dados relacionados. Dados são entendidos como fatos conhecidos que podem ser
registrados” [Elmasri,R., Navathe, S.B.,2011, p. 4]. Assim, um banco de dados representa um
aspecto do mundo real, conhecido como universo de discurso, organizado de maneira lógica
para atender a um propósito específico [42]
.
O modelo hierárquico e de redes foram os primeiros a serem utilizados na área de
banco de dados. Contudo, o modelo que prevaleceu durante muito tempo foi o relacional,
desenvolvido a partir de uma proposta de Codd num artigo publicado em 1970[43]
. O modelo
relacional pressupõe a estruturação de um banco de dados como uma coleção de arquivos de
registros do mesmo tipo contendo um conjunto de atributos organizados na forma de tabelas.
O DBMS (Data Base Management System), encarrega-se de gerenciar todo o processo de
utilização do banco de dados por um grupo de usuários.
No que tange a área de informações geográficas, Worboys[44]
destaca que há duas
formas para a organização de dados no modelo relacional: a agregação de todos os dados
(espaciais e não-espaciais) numa única base (abordagem integrada), ou a separação dos dados
espaciais dos não-espaciais (abordagem hibrida). Embora, em teoria, ambas sejam passíveis
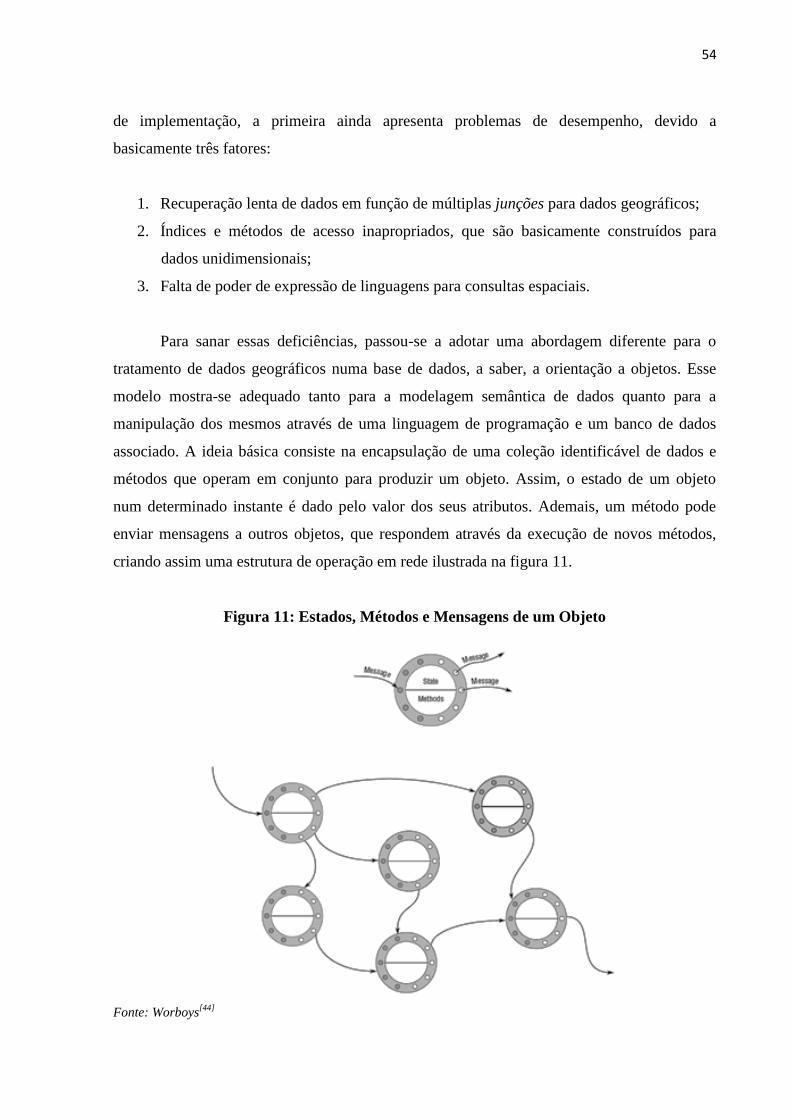
54
de implementação, a primeira ainda apresenta problemas de desempenho, devido a
basicamente três fatores:
1. Recuperação lenta de dados em função de múltiplas junções para dados geográficos;
2. Índices e métodos de acesso inapropriados, que são basicamente construídos para
dados unidimensionais;
3. Falta de poder de expressão de linguagens para consultas espaciais.
Para sanar essas deficiências, passou-se a adotar uma abordagem diferente para o
tratamento de dados geográficos numa base de dados, a saber, a orientação a objetos. Esse
modelo mostra-se adequado tanto para a modelagem semântica de dados quanto para a
manipulação dos mesmos através de uma linguagem de programação e um banco de dados
associado. A ideia básica consiste na encapsulação de uma coleção identificável de dados e
métodos que operam em conjunto para produzir um objeto. Assim, o estado de um objeto
num determinado instante é dado pelo valor dos seus atributos. Ademais, um método pode
enviar mensagens a outros objetos, que respondem através da execução de novos métodos,
criando assim uma estrutura de operação em rede ilustrada na figura 11.
Figura 11: Estados, Métodos e Mensagens de um Objeto
Fonte: Worboys[44]

55
Outra característica importante do modelo é a possibilidade da utilização dos conceitos
de herança e polimorfismo. O primeiro permite a criação de novos objetos a partir da
modificação de um objeto existente, herdando as propriedades e métodos da super-classe,
bem como acrescentando métodos próprios. O polimorfismo possibilita que um operador,
com mesmo nome, possua diferentes construções. Essa flexibilidade garante a modelagem de
objetos com estruturas internas complexas através da composição de outras unidades.
Para que o modelo descrito anteriormente funcione a contento é necessário um banco
de dados com suporte pleno às operações típicas. Um sistema gerenciador de banco de dados
orientado a objeto procura fornecer os recursos necessários para garantir as funcionalidades
pertinentes ao modelo. Entretanto, observa-se com mais frequência a utilização de uma
abordagem hibrida na utilização de banco de dados, ou seja, a adoção do modelo objeto-
relacional, que combina os pontos fortes do modelo relacional e orientado a objeto. Em outras
palavras, procura-se combinar toda a funcionalidade do modelo orientado a objeto e seu poder
para modelagem semântica de dados e programação de sistemas com a eficiência de
desempenho do modelo relacional.
A adoção de um método formal como descrito propicia um ganho significativo em
termos de custo e tempo de desenvolvimento pois quanto antes o problema for resolvido
menor o seu custo. Outro fator a ser considerado é que a documentação gerada num processo
formal facilita as manutenções futuras e eventuais migrações do sistema. Esses fatos podem
ser comprovados no gráfico da figura 12 apresentado no trabalho de Bédard[45]
:
Figura 12: Impacto dos métodos de análise e projeto formais no esforço para construir e
manter bancos de dados espaciais
Fonte: Adaptado de Bédard[45]

56
Deve-se considerar ainda que em decorrência do desenvolvimento da tecnologia da
informação, a aquisição de dados, inclusive os geográficos, cresceu de forma significativa.
Em consequência, a interação dos usuários com um banco de dados geográficos será mais
profícua se os mesmos possuírem domínio teórico da área de análise espacial, possibilitando
assim a identificação das propriedades de distribuição espacial e a resolução de problemas de
ordem geográfica. Algumas das técnicas utilizadas incluem a estatística espacial, a
inteligência computacional e as redes neurais, embora muitos desses recursos não estejam
ainda incorporados aos produtos comerciais.
A estatística espacial toma por base o princípio de que objetos espaciais próximos são
associados de alguma forma, o que permite derivar significados e projeções a respeito dos
mesmos, utilizando métodos como a associação espacial, análise de padrões, geoestatística,
classificação, modelos de regressão e amostragem espacial[46]
. Esses modelos são de natureza
estática, mas modelos dinâmicos começam a serem desenvolvidos para aumentar a
interatividade do usuário com os sistemas de informações geográficas, através de seleções,
supressões, rotações e demais operações aplicadas a objetos geográficos.
Outras inovações estão também em desenvolvimento como: ferramentas de análise
espacial inteligente para exploração de banco de dados, agentes baseados em vida artificial
para busca sem-fim de padrões e relações existentes, animação computacional para projeção
do espaço geográfico em superfícies multi-dimensionais[47]
.
SIG como Ferramenta de Gerenciamento
A maneira como uma organização percebe e direciona o processo de implantação de
um SIG determina o seu sucesso ou o seu fracasso, e no centro dessa estratégia está o
processo de gerenciamento. Um descuido desse aspecto acarretará invariavelmente perdas
financeiras e de dados, além de comprometer a própria reputação de um sistema dessa
natureza na organização. Em outras palavras, trata-se de definir como o produto pode auxiliar
na execução dos objetivos organizacionais estratégicos, disponibilizando dados de forma mais
rápida e com qualidade. Deve possibilitar ainda a identificação de novas demandas do público
usuário, bem como a canalização dos recursos para atendê-los.
O processo de implementação pode assumir várias formas, dependendo da natureza da
57
organização e do escopo desejado, conforme observa Bernhardsen[48]
. O autor sugere que esse
processo inclua as seguintes fases:
Avaliação do estado atual da empresa;
Desenvolvimento de um modelo de negócios;
Identificação e especificação de requisitos;
Produção de um plano estratégico;
Análise benefício-custo;
Identificação e aquisição de dados;
Definição do hardware e software;
Obtenção do suporte necessário;
Escolha de um fornecedor do SIG;
Implantação do sistema;
Operação e manutenção do sistema;
Um sistema dessa envergadura causa transformações profundas no ambiente
organizacional. Por isso, os objetivos devem ser muito bem definidos e o escopo do sistema
bem delineado, tendo o cuidado de não inserir dados além do que é possível ser atualizado.
Um guia importante do processo de implementação é a análise benefício-custo, que pode ser
aplicada em várias etapas do projeto, e auxilia na avaliação da importância dos diferentes
requisitos.
Pelo fato do processo exigir um comprometimento considerável de recursos
financeiros, humanos e tecnológicos, o estudo benefício-custo torna-se ainda mais necessário,
conforme enfatiza também Obermeyer[49]
. De maneira simplificada, a análise benefício-custo
procura precificar tanto os custos quanto os benefícios, considerando para ambos, os aspectos
tangíveis e intangíveis. Ademais, essa abordagem inclui a taxa de desconto, que tem como
objetivo analisar os efeitos do tempo e da inflação econômica. Esse tópico é importante
mesmo em cenários de taxas baixas de inflação, pois o efeito cumulativo da mesma pode ter
um impacto considerável no resultado final. Deve-se utilizar análise benefício-custo com
bastante critério para sensibilizar a gerência de uma empresa ou agentes públicos acerca da
viabilidade da implantação de um SIG, visto que os custos iniciais são bastante elevados.
Uma vez instalado o sistema, torna-se necessário adotar procedimentos para o bom

58
desempenho operacional. Sugarbaker[50]
observa que o suporte ao cliente, o suporte às
operações, o gerenciamento de dados e o desenvolvimento de aplicações estão entre os
tópicos que merecem maior atenção. Essa estrutura deve estar em sintonia com as
necessidades da empresa adaptando-se, quando for o caso, às mudanças de negócio, ao
mesmo tempo em que a organização procura assimilar os avanços tecnológicos.
3.3 Sistemas de Informações Geográficas Aplicados a Transportes
O avanço dos sistemas de comunicação prometia diminuir ou mesmo abolir a distância
entre as pessoas. Entretanto, constata-se hoje que essa previsão não se confirmou e observa-se
diariamente congestionamentos crescentes nos grandes centros urbanos. A necessidade de
aperfeiçoar a mobilidade urbana é um tema cada vez mais reconhecido entre as autoridades
governamentais e os especialistas do setor.
Os sistemas de informações geográficas aplicados a transportes podem contribuir de
maneira significativa para minimizar os impactos das ineficiências das estruturas de
transportes nas cidades. Miller et al.[51]
esclarecem que os profissionais da área utilizam essa
tecnologia para o planejamento, projeto e gerenciamento da infraestrutura de transportes;
aperfeiçoamento da segurança dos sistemas de transporte e trânsito; estudos de impactos
ambientais e configuração de arranjos de logística, entre outros.
O sucesso desta área de aplicação deve-se, naturalmente, a consolidação da própria
ciência do geoprocessamento, conforme discutido nos tópicos anteriores. Adicionalmente, há
uma tendência crescente da demanda pela resolução de problemas urbanos cada vez mais
complexos, como os sistemas de transporte e trânsito. No cerne dessa questão está o
reconhecimento de que ações no uso do solo, transporte e trânsito são indissociáveis.
Os sistemas de transporte e trânsito existem para superar discrepâncias geográficas em
termos de recursos, mercadorias e serviços. Atuam movendo pessoas, materiais e informações
do local de origem para os destinos. Esse processo acarreta profundas mudanças de
acessibilidade, que por sua vez, geram novas demandas de deslocamentos, promovendo
alterações no uso padrão do solo, e outros desdobramentos daí decorrentes [51]
.
Há ainda o consenso de que os sistemas de transporte e trânsito desempenham papel

59
crucial no nível de qualidade de vida da população e sustentabilidade do planeta.
Adicionalmente, observa-se uma série de problemas como: urbanização sem controle,
crescimento da frota de veículos e utilização massiva de combustíveis fósseis. Esse cenário
contribui para o agravamento de problemas de mobilidade, exclusão social e aumento da
poluição do ar, degradando, assim, a qualidade de vida da população.
Procurando reverter alguns desses problemas, ou ao menos minimizá-los, a ciência dos
sistemas de informações geográficas aplicados a transporte (SIG-T) desenvolveu uma série de
conceitos e propostas para tratar dessa área específica. Essa ferramenta fundamenta-se num
arcabouço científico capaz de prover os usuários com recursos que possibilitam a solução de
múltiplos problemas.
Os princípios fundamentais incluem a modelagem de dados, fontes e integração da
informação. A modelagem trata basicamente de construir um modelo digital do sistema de
fato, considerando também a natureza multi-modal do sistema real e os relacionamentos entre
seus objetos[51]
. A integração com a ciência computacional e a matemática é bastante
acentuada nessa etapa, visto que as técnicas de modelagem de banco de dados tradicionais,
data warehousing e a teoria de grafos mostram-se adequadas para a montagem da rede, bem
como a incorporação de eventos como a condição do pavimento ou pontos negros de
acidentes. Sistemas SIG-T utilizam-se ainda da teoria de bancos de dados distribuídos e
intercâmbio de diferentes tipos de dados em plataformas distintas.
A computação contribui ainda com algoritmos de fluxo em rede que desempenham
papel fundamental em problemas como roteamento de veículos e busca do melhor caminho,
sendo que este necessita, muitas vezes, de resposta em tempo real. Outro caso tratado pelo
SIG-T é a alocação ótima de recursos, que são importantes na configuração de sistemas de
logística. Quando utilizados no provimento de serviços, podem ser aplicados também para
estudar a demanda induzida pelos mesmos, bem como a montagem de matrizes origem-
destino. Outra aplicação para esse tipo de sistema é a operação de clustering, ou agrupamento,
que permite a delimitação de regiões como distritos policiais ou áreas de vendas. Essa
operação procura criar regiões equilibradas em termos de perfil, o que possibilita o
atendimento mais adequado das carências[52]
.
Waters[52]
apresenta também o importante tópico de planejamento em transportes,

60
através do modelo do sistema de transporte urbano, que procura identificar os pólos geradores
de tráfego e a sua distribuição (quantas viagens), modal utilizado e as rotas preferenciais dos
usuários. Essa tarefa é bastante complexa, devido ao número de variáveis envolvidas, tais
como: gênero do usuário, idade, renda, ocupação, tamanho da família, posse de automóvel,
número de filhos e acessibilidade local. Ademais, sistemas sofisticados são projetados e
construídos sob a égide da integração do SIG-T com os sistemas de comunicação. Sobretudo,
nos países economicamente desenvolvidos, observam-se iniciativas nos domínios do IVHS e
do AVLS. O primeiro abarca aplicações como a identificação dos veículos, cobrança
automática de tarifas, pesagem em movimento, detecção de colisões, informações aos
motoristas e orientação de deslocamentos. O segundo refere-se à localização de veículos em
qualquer unidade de tempo, através de um dispositivo de localização do tipo GPS. Há relatos
de casos[52]
onde a utilização desse sistema contribui para otimizar o uso dos meios de
transporte público, reduzindo o tempo de espera dos usuários, ao mesmo tempo em que
promove economia de recursos para as empresas operadoras, como na cidade Quebec, no
Canadá, citada pelo autor[52]
. Na realidade, os dois grupos citados acima fazem parte de um
conjunto maior, denominado ITS (Intelligent Transportation Systems).
O cenário descrito acima é também benéfico ao meio-ambiente, visto que um número
menor de veículos seria necessário para atender a demanda de transporte. Além disso, fornece
subsídios para determinar os fatores que influenciam a relação uso do solo/sistema de
transporte, permitindo a modelagem de estados futuros do sistema.
Apesar da contribuição dos sistemas de transporte para o avanço da economia e do
aperfeiçoamento da mobilidade urban notam-se, também, os problemas gerados por uma
matriz que utiliza, sobretudo, a queima de combustíveis fósseis. A degradação da qualidade
do ar é inquestionável, além de aumentar as possibilidades da ocorrência de acidentes,
principalmente no caso do transporte de cargas perigosas. Dessa forma, os sistemas SIG-T
procuram considerar também os impactos gerados pela rede de transporte nos sistemas
atmosférico e hidrológico. Considera ainda providências a serem tomadas no caso de
acidentes com cargas perigosas. Todas essas aplicações exigem uma grande interação entre os
sistemas de transporte e a geografia, o que faz com que os sistemas de informação geográfica
voltadas para transportes encontrem uma área fértil de aplicações[51]
.

61
3.4 Resumo
Este capítulo apresentou uma visão global sobre os conceitos necessários ao
entendimento da dissertação, a saber, os fundamentos da geotecnologia e as suas
possibilidades de utilização. Procurou-se definir uma base cartográfica digital, apresentar as
aplicações tradicionais de cadastro urbano, bem como as novas fronteiras de aplicação. Além
disso, são introduzidos os conceitos a serem observados na implantação de um sistema dessa
natureza. Este tópico é importante devido a não observância dos mesmos tanto pelos órgãos
públicos quanto pelos privados gerando assim projetos que não são bem sucedidos, com perda
de recursos e tempo. Finalmente, discorre de maneira breve sobre as aplicações da tecnologia
nos sistemas de transporte e trânsito.

62
Capítulo 4
Sistemas de Controle de Trânsito e Programação
Semafórica
Este capítulo tem como objetivo apresentar alguns conceitos de engenharia de tráfego
que serão utilizados no desenvolvimento do modelo proposto. A seção 4.1 conceitua a
engenharia de tráfego. A seção 4.2 introduz os parâmetros básicos utilizados pela engenharia
de tráfego para regular o sistema de trânsito de uma malha viária. Em seguida, a seção 4.3
aborda a programação semafórica. Na sequencia, a seção 4.4 analisa as possibilidades de
utilização uma ferramenta de SIG para auxilio à programação semafórica. A seção 4.5 resume
o capítulo.
4.1 Engenharia de Tráfego
A engenharia de tráfego tem como objetivo a aplicação de princípios científicos,
ferramentas, métodos e técnicas para prover o movimento seguro, rápido, confortável,
conveniente e econômico de pessoas e mercadorias[53]
. Para tanto, a engenharia de tráfego
deve tratar do planejamento, projeto geométrico e operação do tráfego de ruas e rodovias,
suas redes, terminais e seus relacionamentos com outros modos de transporte. Além disso, a
engenharia de tráfego trata de problemas que não são somente dependentes de fatores físicos,
mas também do comportamento humano dos condutores e pedestres. Este trabalho é
desenvolvido em etapas. Primeiramente, as características dos movimentos de tráfego, do
condutor, do veículo e do fluxo de tráfego são estudadas. Os elementos abaixo devem ser
considerados num estudo deste tipo.
O condutor;
O veículo;
O tempo de viagem, a velocidade e o retardamento;
Volumes de tráfego;
Origem e destino;
Capacidade;
Estacionamento, carga e descarga.
Acidentes.

63
Posteriormente, os estudos a serem desenvolvidos incluem a adoção de medidas de
regulamentação e de controle, como as leis e as regras para o controle dos condutores, dos
veículos e dos pedestres. Também são realizados estudos para a operação dos veículos no
fluxo de tráfego, como o controle de interseções, das velocidades permitidas, das vias de mão
única, do sentido de circulação e dos estacionamentos. Essa fase abarca também o projeto, a
instalação e a operação de dispositivos como os semáforos, as sinalizações no pavimento e as
placas de sinalização. Estes estudos embasarão as justificativas técnicas e legais para a
intervenção na malha viária.
4.2 Fluxo de Tráfego
O fluxo de tráfego forma-se pela interação dos elementos relacionados anteriormente e
são descritos por parâmetros que se enquadram em duas classes distintas:
Parâmetros Macroscópicos: Descrevem o fluxo de tráfego como um todo.
Parâmetros Microscópicos: Descrevem o comportamento individual de cada
veículo e sua iteração com os demais veículos da malha viária.
Modelo Macroscópico
O modelo macroscópico utiliza três parâmetros fundamentais: o volume, a velocidade
e a densidade.
Volume: Definido como o número de veículos passando por um ponto durante um
intervalo de tempo e normalmente é expresso em volume horário, diário ou anual. Existe
também o conceito de “taxa de fluxo horário”, que é o volume horário equivalente obtido a
partir de um intervalo de observação inferior a uma hora. A contagem pode ser feita em uma
única faixa de rolamento ou em todas as faixas. Pode referir-se ainda a um único sentido do
tráfego ou a ambos[54]
. Deve-se considerar também a composição do tráfego, pois os veículos
diferem entre si quanto ao tamanho, peso e velocidade e estes fatores influenciam no projeto
geométrico da via e no planejamento do sistema de transportes. Por isso, adota-se um fator de
equivalência (um ônibus ou caminhão correspondem de dois a cinco automóveis), e
transforma-se o montante total num volume de carros de passageiros. Deve-se ressaltar que o

64
volume apresenta variações, tanto independentes quanto dependentes, do tempo. As
independentes são as decorrentes, por exemplo, de acidentes, de manutenção da via, chuva e
quebra de semáforo. Entretanto, as variações de maior interesse para a engenharia de tráfego
são as dependentes do tempo, pois estas repetem-se em função do tempo e de forma cíclica
para uma parcela considerável da malha viária, o que permite a realização de estudos de
planejamento do tráfego. Um exemplo típico pode ser observado na figura 13. O gráfico
apresenta dois picos (manhã e tarde), mas ocorre também um volume relativamente alto das
12 às 14 horas. Além disso, constata-se que 70% das viagens diárias ocorrem no intervalo
entre 7:00h e as 19:00h. Flutuações semelhantes podem ser observadas para volumes
semanais e anuais[54]
.
Figura 13: Variação Diária do Volume de Tráfego
12
9
6
3
0 6 12 18 24
% VDM
Horas do Dia
14
Fonte: Adaptado de Setti[54]
Velocidade: Definida como a taxa entre a distância percorrida numa unidade de tempo,
normalmente expressa em km/h. Trata-se de uma medida importante na avaliação da
qualidade de serviço ofertada aos condutores[55]
. Adotam-se medidas diferenciadas para o
estudo desse parâmetro devido às variações individuais na distribuição da corrente
observável, sendo que as mais comuns são a Velocidade Média Temporal (VMT) e a
Velocidade Média Espacial (VME). A primeira é a média aritmética das velocidades
instantâneas de veículos individuais que passam por uma seção de controle e é dada pela
seguinte fórmula:
VMT =
Onde,

65
n = Número de veículos que passam pelo trecho de controle;
d = Distância percorrida;
ti = Tempo de percurso do i-ésimo veículo.
A segunda é a média harmônica da amostra. Trata-se da relação entre o deslocamento
total dos veículos e o tempo total gasto pelos mesmos. É calculada pela fórmula:
VME =
A definição das variáveis é idêntica ao caso anterior. Deve-se observar, entretanto, que
a velocidade sofre a influência dos seguintes fatores: o motorista, o veículo, a via, o horário, o
clima e a regulamentação.
Densidade: Definida como o número de veículos que ocupam um determinado trecho
da via, e é expresso em veículos/km. Este parâmetro é importante para a caracterização da
qualidade de operação do tráfego, pois reflete a proximidade de um veículo em relação aos
demais, influenciando assim a liberdade de manobras[55]
. Essa liberdade de movimento é
ditada pelos conceitos de espaçamento e headway. O espaçamento é a distância entre dois
veículos sucessivos numa mesma faixa medida em relação à parte dianteira. O headway3 é o
tempo transcorrido entre a passagem de dois veículos numa seção de controle e numa mesma
faixa.
A relação entre os três parâmetros básicos é dada pela seguinte fórmula:
V = D * S onde, V = Volume,
D = Densidade e
S = Velocidade
3 Termo consagrado da língua inglesa correspondente à frequência e usado mais comumente em inglês em
tráfego

66
Para esta fórmula, utiliza-se a velocidade média no espaço, que é diferente da
velocidade média temporal, conforme visto anteriormente.
A relação entre os parâmetros pode ser verificada na Figura 14. O modelo
macroscópico, cuja calibração é bastante simples, feita a partir de análise de regressão,
mostra-se uma ferramenta adequada para a análise de fluxos ininterruptos. A variação mais
simples do modelo, proposta por Greenshields4, utiliza um modelo linear para estudar as
relações entre os parâmetros macroscópicos. Por sua vez, Greenberg5 sugere a adoção de um
modelo não linear. Este é adequado para os casos de tráfego bastante intenso[54]
.
Figura 14: Relações entre Volume, Velocidade e Densidade em Fluxos Não-
Interrompidos
Fonte: Adaptado de HCM[55]
4 Greenshields, B.D., A Study of Highway Capacity, Proceedings of the Highway Research Board, v. 14, 1934.
5 Greenberg, H., An Analysis of Traffic Flow, Transportation Research, v.7, 1959.

67
Modelo Microscópico
Mannering et al.[56]
explicam que o modelo microscópico tem como finalidade analisar
o comportamento individual de cada veículo na corrente de tráfego. Desta forma, os fluxos
são estudados através de modelos que estimam os intervalos entre chegadas sucessivas de
veículos, ou seja, a distribuição dos headways. Os autores esclarecem que a abordagem mais
simples considera que os intervalos entre as passagens dos veículos sucessivos são constantes,
definindo assim, um modelo determinístico. Apesar da simplificação inerente ao modelo, há
aplicações práticas no domínio da engenharia de tráfego às quais essa variante é apropriada,
como o estudo dos headways entre os veículos que partem de uma fila num semáforo.
No entanto, na prática, esta situação apresenta restrições, pois os intervalos de chegada
são normalmente aleatórios. Por isso, um modelo probabilístico de chegadas representa de
forma mais fidedigna o processo de passagem de veículos por uma via urbana. Assim, o
problema passa a ser o de selecionar uma distribuição estatística mais adequada para a
representação dos headways. Considerando o fato de que é mais prático contar o número de
veículos que passa por um ponto de controle do que os intervalos que os separam, e sabendo-
se que a taxa média de chegadas é igual ao inverso do headway médio, os modelos
microscópicos baseiam-se, normalmente, nesta taxa média de chegadas[56]
. Um dos modelos
que se enquadram nesta categoria é a distribuição de Poisson, expressa por:
P(n) =
Onde,
P(n): Probabilidade de n veículos chegarem durante um intervalo de duração t;
t: intervalo de observação;
λ: taxa de fluxo médio no intervalo de tempo t.
O modelo descrito acima é bastante utilizado no estudo de filas. As filas constituem
um dos problemas de maior interesse para os engenheiros de tráfego, pois podem representar
uma parcela significativa do tempo dos condutores, gerando consideráveis prejuízos
econômicos, além de influenciar o nível de serviço das vias. Assim, o modelo de filas procura

68
determinar as medidas de desempenho de um sistema (tempo médio de espera na fila, tempo
médio total no sistema, comprimento da fila, etc.)[54]
. Para tanto, utiliza os seguintes
parâmetros:
Padrão de chegadas: representa como os veículos chegam à fila;
Padrão de partidas: forma como os veículos deixam a fila;
Número de canais de serviço: corresponde ao número de veículos que podem deixar a
fila simultaneamente;
Disciplina da fila: a ordem em que os veículos são atendidos;
O sistema de notação dos modelos em fila é composto de duas letras e um número,
separados por barras (X/Y/z), que indicam respectivamente, o processo de chegada, o
processo de partidas e o número de canais. A letra D representa processos determinísticos,
isto é, headways uniformes, ao passo que a letra M representa uma distribuição
exponencial[56]
. Na prática os modelos mais utilizados são o D/D/1, o M/D/1 e o M/M/1.
A teoria de filas pode ser utilizada na análise de fluxos de tráfego nos
congestionamentos gerados por estrangulamento nas vias, isto é, locais onde a capacidade de
atendimento da via é inferior à demanda. Esses gargalos podem ser de origem incidental ou
recorrente. O fator que os diferem é a previsibilidade, que se aplica ao segundo caso, mas não
ao primeiro. Um exemplo do segundo caso é o estudo de fluxos de veículos em interseções
semaforizadas.
Mannering et al.[56]
apresentam as medidas de desempenho para uma interseção
semaforizada no modelo D/D/1. Pode-se calcular, por exemplo, os seguintes indicadores:
tempo de dissipação da fila após o inicio do verde efetivo; a taxa de veículos parados; o
número máximo de veículos na fila; o atraso total veicular por ciclo; o atraso médio veicular
por ciclo e o atraso máximo de qualquer veículo (assumindo o regime FIFO – First In First
Out). Os autores prosseguem a explanação para o caso de chegadas estocásticas. Embora este
caso represente melhor a realidade, a complexidade introduzida é considerável. O atraso no
modelo probabilístico pode ser determinado a partir do modelo de Webster[57]
:

69
d’ = d +
- 0.65
onde,
d’ é o atraso médio veicular, d é o atraso médio calculado pelo método D/D/1, x é a
taxa entre as chegadas e a capacidade na aproximação (λc/µg), c é o comprimento do ciclo e λ
a taxa média de chegada.
A teoria descrita acima de maneira breve, ajuda a embasar o problema da busca da
otimização da programação semafórica; Este problema é relativamente complexo e não existe
uma solução universal para o mesmo. Os modelos de teoria de fila fornecem uma
aproximação da situação real, mas a solução ideal para o problema necessita do número
preciso de veículos que chegam numa aproximação; Neste caso, os cruzamentos que dispõem
de sensores em tempo real são capazes de fornecer respostas mais satisfatórias em termos de
desempenho global; Contudo, ainda que uma aproximação possua os referidos sensores, o
problema da programação semafórica não se encerra, pois é necessário definir a base para a
sua otimização. Por exemplo, pode-se minimizar o atraso veicular total ou o número de
paradas dos veículos. Naturalmente que os métodos geram resultados diferenciados, o que
garante um ramo ainda frutífero para pesquisas futuras.
4.3 Programação Semafórica
O objetivo de um semáforo é alternar o direito de passagem entre pontos conflitantes
de uma via urbana, evitando assim, acidentes em decorrência da disputa de espaço entre
veículos automotores e destes com pedestres. Um controle típico apresenta uma sequencia de
indicação verde, amarela e vermelha. É possível encontrar também setas indicadoras nos
grupos semafóricos para a orientação dos condutores[58]
. Desta forma, os semáforos
influenciam de maneira significativa as correntes de tráfego, podendo gerar grandes
congestionamentos que afetam o desempenho global do sistema viário. Por outro lado, um
semáforo bem instalado e programado corretamente contribui para o escoamento ordenado
dos veículos, aumentando a capacidade da interseção e diminuindo ainda as possibilidades de
acidentes.

70
Os semáforos são instalados e operados pelas autoridades de trânsito; um projeto bem
realizado pode gerar os seguintes benefícios:
Redução da frequência de acidentes, sobretudo colisões transversais;
Aumento da fluidez e garantia da ordem do tráfego de veículos;
Permissão de fluxo contínuo de pelotões ao longo de uma via, através da operação
coordenada;
Controle do trânsito de forma mais econômica e eficiente.
No lado oposto, um projeto de semáforo mal executado ocasiona:
Aumento da frequência de acidentes;
Geração de atrasos excessivos, aumentando a poluição atmosférica;
Indução à desobediência por parte dos motoristas;
O estudo de instalação de um grupo semafórico deve considerar os seguintes
aspectos[54]
:
Levantamento de volumes de tráfego: contagem de veículos e pedestres nas
aproximações durante um período representativo das condições operacionais;
Estudo de velocidade: determinação das distribuições de velocidades instantâneas
nas aproximações;
Levantamento plani-altimétrico: indica a geometria e condições físicas do
cruzamento, incluindo canalizações, restrições de visibilidade, entradas de
veículos, etc.;
Estudo de acidentes: levantamento do número e tipo de acidentes registrados no
cruzamento durante pelo menos um ano;
Estudo de retardamento: para determinação do atraso ao longo da via principal;
Esse conjunto de critérios encontra-se sistematizado e ampliado em um manual
conhecido através da sigla MUTCD (Manual on Uniform Traffic Control Devices).
Wrigth[59]
afirma que o manual é um guia operacional que tem o objetivo de fornecer

71
padrões uniformes para a utilização segura e eficiente das vias e equipamentos públicos. Sua
utilização é ampla no Brasil para o estudo de implantação de semáforos. O manual aponta os
seguintes fatores a serem observados para a instalação de um semáforo: volume veicular
mínimo, interrupção de fluxo contínuo, volume de pedestres, cruzamento de escolares,
sistema de progressão semafórica, histórico de acidentes, sistema de cruzamento de vias
arteriais, ou uma combinação dos itens citados. É importante lembrar que toda interseção não
deve possuir apenas um grupo focal, visto que existe a possibilidade de queima de lâmpadas
do conjunto, o que torna o sistema não operacional, ademais, a colocação de mais de um
grupo aumenta a visibilidade do equipamento na aproximação. Define-se a seguir alguns
conceitos para a operação de um semáforo.
Ciclo: Rotação completa dos estágios luminosos por todas as indicações possíveis;
Duração do ciclo: Tempo necessário para a execução completa de um ciclo,
medido em segundos;
Aproximação: Trechos de via que convergem para a interseção.
Estágio: Período no qual não ocorre mudança na indicação luminosa.
Fase: É a parte do ciclo alocada a uma corrente de tráfego (ou combinação de duas
ou mais correntes) com o direito de passagem durante um ou mais intervalos, ou
seja, é o estágio verde mais os estágios de mudança e desobstrução que o
acompanham;
Intervalo: Um período no ciclo em que todas as luzes indicadoras permanecem
inalteradas;
Plano Semafórico: Conjunto de parâmetros introduzidos no controlador ou na
central de controle que define a sequência e as durações dos tempos exibidos pelos
semáforos.
A figura 15 ilustra os conceitos de ciclo, fase e intervalo com um exemplo de
cruzamento simples com duas ruas de mão única. Os veículos que trafegam na direção sul-
norte (Fase 1) são orientados pelo grupo de semáforos G1, ao passo que os veículos que
circulam no sentido oeste-leste (Fase 2) utilizam-se do grupo G2. Nota-se também a
existência de quatro intervalos:
I1: O grupo G1 mostra verde e o G2 vermelho (Fase 1);
I2: O grupo G1 mostra amarelo e o G2 continua vermelho (Fase 1);

72
I3: O grupo G2 exibe o verde e o G1 vermelho (Fase 2);
I4: O grupo G2 mostra amarelo e o G1 vermelho (Fase 2).
Figura 15: Ciclo, Fase e Intervalo
N
S
O L G1
G1
G2
G2
Croquis
Sequência de Fases
Fase 1
Fase 2
G1
G2
I1 I2 I3 I4 TC
Fonte:Adaptado de Setti[54]
Tipos de Controladores
O controlador é um equipamento instalado junto ao semáforo e controla a sua
operação, atua acionando as luzes para cada aproximação conforme uma estratégia definida.
Os controladores modernos alocam o tempo de maneira variada desde o simples pré-
temporizado a complexos modos atuados do tipo multi-fase[55]
.
A seguir são descritos os tipos de controladores em relação à sua função:
Controle Pré-Temporizado: A sequência de fases é exibida numa escala pré-
determinada e repetitiva. Cada fase possui um tempo de verde fixo, um tempo de
mudança e um intervalo de limpeza que são repetidos em cada ciclo e geram um
ciclo de comprimento constante;
Controle Atuado: O tempo alocado para todas as aproximações da interseção é

73
adaptado conforme dados gerados pelos sensores de detecção de veículos. Cada
fase é sujeita a um intervalo mínimo e máximo de alocação do tempo de verde e
uma fase pode ser suprimida caso não seja detectada demanda, assim, o
comprimento do ciclo total pode variar frequentemente;
Controle Semi-Atuado: Um sensor é instalado na via secundária, enquanto que a
principal recebe verde contínuo. A via secundária recebe permissão de passagem
quando uma demanda suficiente é registrada. O direito de passagem sempre é
transferido para a via principal quando a demanda da via secundária está abaixo do
necessário ou quando o tempo limite é excedido. Este método é adequado para
locais onde a demanda da via secundária é consideravelmente inferior a da via
principal.
Os controladores que operam de maneira dinâmica exigem a presença de detectores de
veículos. Há vários tipos como os baseados em radar, ultra-som ou infravermelho. O mais
utilizado é o chamado laço indutivo, que funciona com um fio embutido no pavimento ligado
a um dispositivo por onde passa uma corrente elétrica. Esse arranjo gera um campo magnético
que sofre uma perturbação quando um corpo metálico passa sobre o laço.
Cálculo da Programação Semafórica pelo Método de Webster
A capacidade de escoamento de uma via semaforizada é proporcional ao tempo de
verde alocado e à largura da via; Numa primeira aproximação pode-se considerar o fluxo
ininterrupto. Se, por exemplo, a capacidade de escoamento é de 2000 veículos na
aproximação e 50% do tempo fica alocado ao verde, tem-se que 1000 veículos poderiam
atravessar o cruzamento, todavia, estudos práticos, como os realizados por Greenshields6,
demonstram que sempre há uma perda associada no início do deslocamento, conforme
ilustrada na Tabela 3. Esta perda é maior no início do ciclo e se torna estável a partir do
quinto veículo, quando o sistema atinge o headway de saturação.
6 Greenshields, B.D., A Study of Highway Capacity, Proceedings of the Highway Research Board, v. 14, 1934.

74
Tabela 3: Tempo de Perda no Início de Movimento de Veículos
Tempo Entre Veículos
(seg)
No do Veículo na Fila Tempo que leva para entrar
no Cruzamento (seg)
- 1 3,8
3,1 2 6,9
2,7 3 9,6
2,2 4 11,8
2,1 5 13,9
2,1 6 16,0
Fonte: Greenshields apud Setti[54]
O experimento mostra que para um semáforo com ciclo de 60 segundos, dentre os
quais 30 segundos alocados para o verde, a capacidade real seria:
Tempo de passagem dos 5 primeiros veículos: 13,9 segundos.
Tempo de verde restante: 30 – 13,9 = 16,1 segundos.
Total de veículos que ainda passam no ciclo: 16,1 / 2,1 = 7,66 = 8 veículos.
Total de veículo por hora: (8 + 5) * 60 = 780 veículos.
Observa-se assim que o fluxo real é inferior à capacidade, mas outros fatores
contribuem também para essa redução como: veículos em conversão que necessitam reduzir a
velocidade para realizar a manobra; ônibus e caminhões, pois são veículos mais lentos;
permissão de estacionamento nas proximidades; rampas ascendentes e descendentes e o fluxo
de pedestres no entorno[55]
.
Por outro lado, Vilanova[60]
afirma que alguns veículos da fase que se encerra
ultrapassam o cruzamento mesmo quando o seu tempo de verde está encerrado. Na figura 16,
observa-se que o fluxo de passagem está terminando para a via A e alguns veículos passam no
amarelo. A quantidade de veículos que transpassa o cruzamento é representada pela área
hachurada entre a linha azul que descreve o movimento, a ordenada do fim do verde e o eixo
das abscissas.

75
Figura 16: Tempo Morto no Ciclo
Fonte: Vilanova[60]
A grandeza Taf,A representa o tempo necessário para esgotar o Vf,a (volume que
corresponde à área hachurada) caso o fluxo passasse a uma taxa igual ao fluxo de saturação.
Pode-se entender esta grandeza como um prolongamento do tempo de verde e é calculado
pela fórmula:
Taf,A =
Onde,
Taf,A = Tempo aproveitado no final do movimento A;
Vf,a = Quantidade de veículos do movimento A que consegue passar após o término do verde
(amarelo);
FSA = Fluxo de saturação do movimento A.
Nota-se ainda que após a abertura do semáforo para a fase B há uma perda de tempo
76
até que os veículos atinjam o fluxo de saturação FSB, conforme previsto por Greenshields7.
Assim, o tempo de verde efetivo para o movimento B do gráfico é:
Tverde efetivo, B = Tverde,B + Taf,B – Tpi,B
Onde,
Tverde efetivo, B = Tempo de verde efetivo do movimento B em um ciclo;
Tverde,B = Tempo do foco verde para o ciclo;
Taf,B = Tempo aproveitado no final do movimento B;
Tpi,B = Tempo perdido no início do movimento B.
Da Figura 13, pode-se calcular o tempo morto ou tempo total perdido:
Tmorto,A-B = Tam,A + Tvl,A + Tpi,B – Taf,B
Onde,
Tmorto,A-B = Período de transição entre o verde do movimento A para o movimento B, onde o
fluxo é considerado igual a zero para ambos os movimentos;
Tam,A = Tempo de amarelo do movimento A;
Tvl,A = Tempo de vermelho de limpeza do movimento A;
Tpi,B = Tempo perdido no início do movimento B;
Há de se considerar ainda os casos onde existe o estágio exclusivo para pedestres, que
é tratado como um tempo morto adicional. Dessa forma, o tempo morto total é dado por:
Tmorto = + Testágios de pedestres
Onde,
Tmorto = Tempo morto durante o ciclo (parcela que não pode ser utilizada para escoamento);
= Tempo morto entre os estágios i e (i+1);
Testágios de pedestres = Tempo total do estágio de pedestres (verde + vermelho intermitente).
7 Nota na página 75

77
Consideremos agora uma aproximação isolada de duas vias de mão única como na
figura 17:
Figura 17: Interseção de Duas Vias Controladas por Semáforo
A capacidade desta aproximação é dada por:
C = s
Onde,
C = Capacidade da aproximação [veic./h];
S = fluxo de saturação [veic./h];
g = tempo de verde efetivo [s];
c = comprimento do ciclo [s].
O fluxo de saturação é o volume máximo que passa pela interseção se o semáforo
permanecesse continuamente no verde e a fila nunca terminasse. Trata-se também do
headway mínimo observado entre os veículos, o chamado headway de saturação. O
comprimento do ciclo é o tempo necessário para a exibição de todas as indicações
semafóricas e o tempo de verde efetivo (g) é dado por:
g = G + A – p
onde,

78
G = tempo durante o qual a luz verde está acesa [s];
A = tempo durante o qual a luz amarela está acesa[s];
p = tempo perdido no início do verde e no final do amarelo, isto é, o tempo morto [s].
O tempo de vermelho efetivo, r, é o tempo no qual os carros de uma aproximação não
podem cruzar a interseção, ou seja, é a diferença entre o tempo do ciclo (c) e o tempo do
verde efetivo (g)[54]
.
r = c – g.
Para o cálculo dos tempos alocados a cada estágio toma-se o tempo base de uma hora
e determina-se o volume nas aproximações. A seguir, calcula-se a relação (Fn/FSn) * 1 hora
para cada aproximação n (relação entre o volume observado e o fluxo de saturação para a n-
ésima aproximação). Essa taxa fornece o tempo necessário ao escoamento do fluxo na
respectiva aproximação.
Deve-se considerar posteriormente o tempo perdido no cruzamento, visto que nenhum
veículo pode cruzar o semáforo neste período. É importante observar que quanto mais breve
for o ciclo mais intervalos de tempo morto surgirão, o que pode prejudicar o desempenho
global da aproximação. Este tempo é calculado através da seguinte expressão (1 hora / Tciclo) *
Tmorto. Em outras palavras, é o produto do número de ciclos na hora pelo tempo morto
utilizado em cada ciclo.
A Figura 18 ilustra os componentes a serem contemplados no projeto de um plano
semafórico. Caso a soma dos tempos alocados às aproximações e ao tempo morto for inferior
à uma hora, tem-se uma sobra, caso contrário, uma das aproximações não poderá ser
totalmente atendida.

79
Figura 18: Esquema de Alocação do Tempo de um Semáforo
Fonte: Vilanova[60]
Desta forma, considera-se que o ciclo mínimo é o que gera zero para a parcela Sobra. Assim,
pode-se escrever:
yA * 1 hora + yB * 1 hora +
* Tmorto = 1 hora
Ou,
yA + yB +
* Tmorto = 1
Que pode ser reescrita como:
Tciclo min. =
Ou ainda de maneira mais geral:
Tciclo min. =
Onde,
Tciclo min. = Tempo do ciclo mínimo;
Tmorto = Tempo morto do ciclo, ou seja, onde não há deslocamento;
= Somatória das taxas de ocupação de todas as aproximações;
n = Número de aproximações.

80
O ciclo ótimo pode ser definido como o tempo do ciclo mínimo quando a taxa de
chegada à aproximação é constante, pois a espera dos veículos é a menor possível. No
entanto, devem ser considerados fatores imprevisíveis no sistema, como: taxas de chegadas
irregulares, fatores climáticos (chuvas causam diminuição na velocidade dos veículos) e
incidentes ao longo da via (quebra de veículos, colisões, operações de manutenção, etc.).
Dessa forma, torna-se necessário alocar uma parcela do tempo do ciclo aos eventos aleatórios,
o que é possível através da parcela identificada na Figura 18 como “sobra”. A consequência
deste fato é que é necessário trabalhar com tempos de ciclo superiores ao mínimo. Concorda-
se que a melhor abordagem para este problema consiste em gerar os menores atrasos e tempos
mínimos de espera, considerando tanto o fluxo médio quanto os eventos aleatórios.
A proposta de Webster para a calibração de semáforos isolados contempla o cenário
descrito anteriormente, ou seja, determina-se o atraso médio sofrido pelos veículos, de tal
forma que este seja o menor possível. Para uma grande variedade de condições Webster
determinou que o atraso médio sofrido pelos veículos numa interseção controlada por
semáforo é mínimo quando o ciclo é calculado pela fórmula abaixo[54]
:
C =
Onde,
C = comprimento ótimo do ciclo [s];
L = Tempo total perdido (morto) por ciclo [s];
Yi = Relação volume/fluxo de saturação para a aproximação crítica para a fase i;
n = Número de fases.
Nota-se que o valor do tempo total perdido é multiplicado por 1.5 e ainda acrescido de
cinco segundos para acomodar as imprevisibilidades da corrente de tráfego. Para um
cruzamento com duas fases, o tempo de verde efetivo é dado por:
gr = C – L = C –
onde,

81
C = tempo do ciclo [s];
L = tempo total perdido por ciclo [s];
Li = tempo perdido na fase i;
n = número de fases.
O tempo perdido na fase i é dado por:
Li = (I – ta) + pi
onde,
Li = tempo perdido na fase i;
I = entreverdes, ou seja, ta + tr;
ta = tempo de amarelo;
tr = tempo de vermelho geral;
pi = tempo perdido.
A definição do tempo de verde leva em conta a aproximação crítica em cada fase, ou
seja, a que apresenta a maior relação entre o volume (demanda) e o fluxo de saturação
(oferta), dessa forma, o tempo de verde efetivo da fase i, gi, é dado por:
gi =
* gr
onde,
gi = tempo de verde efetivo para a fase i [s];
Yi = taxa de ocupação do movimento i;
=somatória das taxas de ocupação de todos os movimentos críticos i;
n = número de movimentos críticos.
O tempo de luz verde para cada fase pode ser determinado por
Gi = gi + li – Ai
onde,
Gi = tempo de indicação de verde para a fase i [s];
gi = tempo de verde efetivo para a fase i [s];

82
li = tempo perdido na fase i [s];
Ai = tempo de luz amarela na fase i [s];
O próximo passo do processo é a determinação do tempo de amarelo; A função
principal desta indicação é alertar os motoristas para a iminente mudança para a indicação
vermelha, de tal forma que eles possam tomar a decisão de atravessar ou não o cruzamento.
Esse cálculo exige muita atenção, pois uma escolha inadequada provoca o aparecimento das
zonas de dilema, que é uma área próxima à interseção onde um veículo não pode nem parar
com segurança antes de atingir o cruzamento e nem sair do mesmo sem exceder a velocidade
segura de aproximação[54]
. A Figura 19 ilustra esta situação.
Figura 19: Zona de Dilema num Cruzamento Semaforizado
xP
xa w
Deve
Atravessar
Pode
Escolher
Deve
Parar
Sentido do veículo
Fonte: Adaptado de Setti[54]
Na figura acima Xp designa a distância necessária para o veículo parar. Esta distância
é dada por:
Xp = V * t +
Onde,
V = velocidade do veículo [m/s];
t = tempo de percepção e reação do condutor até frear [s];
d = taxa de desaceleração depois da aplicação do freio [m/s2].
Observa-se pela figura anterior que os veículos na via a uma distância inferior a Xp

83
devem atravessar o cruzamento. A distância a ser percorrida pelo veículo é, portanto Xa + W
+ L (comprimento do veículo). Se a velocidade do veículo for V e t o tempo de transição,
temos:
Xa + W + L = V * T
Para a travessia em segurança da interseção o tempo T deverá ser tal que Xa é maior
ou igual Xp. Portanto,
Xa > Xp
Ou,
V * T – (W + L) > V * t + V2/2d
V * T = V * t + V2/2d – (W + L)
T > t + V/ 2d + (W + L)/V
Onde,
T = tempo de transição;
t = tempo de percepção e reação (adota-se l seg.);
V = velocidade de operação da via (dado do problema);
d = desaceleração (adota-se 4,5 m/s2)
W = largura da via a cruzar; e
L = comprimento do veículo (adota-se 5 m).
Na prática não se adota o amarelo menor que três segundos, nem maior que quatro
segundos devido a questões de segurança, além disso, esse valor deve ser padronizado para
uma mesma região geográfica para não induzir os condutores a avaliações equivocadas nas
travessias. Caso o tempo do amarelo exceda o padrão, deve-se transformar o tempo excedente
em vermelho integral[55]
.
É interessante observar que tempos de ciclos mais longos possibilitam a passagem de

84
um número maior de veículos. Este fato decorre do ganho obtido com relação ao tempo
morto, que é menor num ciclo mais longo. Por exemplo, consideremos um período de uma
hora e um tempo morto de seis segundos. Um ciclo de 80s ocorrerá 45 vezes com uma perda
total de 270s, ao passo que um ciclo de 120s ocorrerá 30 vezes gerando uma perda de 180s,
portanto o ciclo mais longo gera um ganho de 90s de amarelo que é transformado em verde,
possibilitando assim um escoamento maior de veículos. No entanto, este ganho diminui com o
aumento do tempo do ciclo; assim, verifica-se a diminuição dos benefícios com ciclos longos,
daí a necessidade de limitar o ciclo em um determinado valor, além disso, deve-se considerar
o efeito psicológico de um ciclo longo sobre os condutores. Uma demora acentuada para obter
o direito de passagem provavelmente induzirá os motoristas ao descumprimento das
orientações do semáforo. A tabela seguinte ilustra este fato, considerando um tempo morto de
8 s.
Tabela 4: Tempo Perdido Durante a Hora em Ciclos Diferenciados
Tempo de Ciclo (s)
Tempo perdido
durante a hora (s)
Ganho em relação ao
ciclo anterior (s)
40 720 -
50 576 144
60 480 96
70 411 69
80 360 51
90 320 40
100 288 32
110 262 26
120 240 22
130 222 18
140 206 16
150 192 14
Fonte: Adaptado de Vilanova[60]
A abordagem de Webster não é a única para o tratamento do problema em questão. Na
realidade, a complexidade inerente à tarefa exige o conhecimento profundo da teoria
desenvolvida e experiência prática para a obtenção de resultados satisfatórios. Um exemplo
pode ser visto no trabalho de Ming[61]
; o autor apresenta uma abordagem para o cálculo do
ciclo de verdes ótimos quando o fluxo de saturação não é constante. Experimentos realizados
na cidade de São Paulo relatam resultados positivos para um fluxo de saturação de 0.88[60]
.

85
Cálculo da Programação Semafórica pelo Método Simplificado
A variedade de métodos disponíveis para o cálculo da programação semafórica é um
forte indício da complexidade do problema. De fato, a dificuldade de tratar um problema que
envolve cenários com alto grau de aleatoriedade fez surgir alguns métodos para a
determinação do ciclo ótimo: o americano (HCM), o inglês (Webster) e o francês (extensão
do inglês)[54]
. Um ponto em comum entre os métodos citados é expressar a capacidade por
metro de largura e não por faixa de tráfego. Isto não representa uma situação realista, visto
que na ausência da demarcação de faixas no solo, os veículos se posicionam de maneira
desorganizada, gerando um número diferenciado de filas. Para corrigir esta distorção
costuma-se utilizar no Brasil uma variação do método inglês que contempla as faixas de solo
definida na tabela abaixo[54]
.
Tabela 5: Fatores de Ajuste da Largura de Faixa
L (m) 2.40 2.70 3.00 a 3.60 3.90 4.20 4.50
FL 0.88 0.93 1.00 1.03 1.045 1.06
Fonte:Adaptado de Setti[54]
É necessário ajustar também o fluxo de equivalência entre os veículos:
Tabela 6: Fatores de Ajuste da Equivalência entre Veículos
Tipo do Veículo Fator de Equivalência (uvpd – unidade de
veículos de passageiros diretos)
1 caminhão 1.75 uvpd
1 ônibus 2.25 uvpd
1 veículo em conversão 1.25 uvpd
Fonte: Adaptado de Setti[54]
Para fins didáticos, ilustra-se o processo de cálculo com um exemplo:
Seja uma interseção semaforizada com duas aproximações (sul e oeste) com os fluxos
descritos na sequencia. A largura da aproximação sul é de 7.4m e permite o acostamento
numa faixa de 2m, enquanto que a largura da aproximação oeste é de 7m sem acostamento. A

86
capacidade é de 1600 uvpd por faixa e por hora de luz verde para ambas as aproximações.
Entrada Sul AUTOS ÔNIBUS CAMINHÕES
FLUXO DIRETO 600 20 30 FLUXO EM CONVERSÃO 200 2 20
Entrada Oeste AUTOS ÔNIBUS CAMINHÕES
FLUXO DIRETO 500 25 20 FLUXO EM CONVERSÃO 180 3 15
Para a aproximação sul, sobram duas faixas de 2.70 m. Assim:
FS = 600 + 20 * 2.25 + 30 * 1.75 + (200 + 2 * 2.25 + 20 * 1.75) * 1.25 = 997 uvpd/hora
CS = 1600 * 2 * 0.93 = 2976 uvpd/hora verde
yS = FS/CS = 0.335 (Este número diz que o fluxo para esta aproximação será escoado se
33.5% do tempo do ciclo for alocado ao verde).
Para a aproximação oeste temos:
FO = 500 + 25 * 2.25 + 20 * 1.75 + (180 + 3 * 2.25 + 15 * 1.75) * 1.25 = 858 uvpd/hora
CO = 1600 * 2 * 1 = 3200 uvpd/hora verde
yS = FO/CO = 858 / 3200 = 0.268
Tempo do Ciclo:
Tc = Σ y = 0.335 + 0.268 = 0.603
Tempo de Transição (admitindo-se uma velocidade(V) de 40 km/h = 11.11m/s, tempo
de percepção(t) de 1s, taxa de desaceleração(d) de 4.5 m/s2, tempo perdido nas
aproximações de 2s e comprimento do veículo de 5m):
TTS = t +
+
= 1 +
+
= 3.31 3.5s
TTO = t +
+
= 1 +
+
= 3.35 3.5s
TPS = 3.5 – 2 = 1.5
TPO = 3.5 – 2 = 1.5
Σ TP = TPS + TPO = 3s

87
Tempo do Ciclo Ótimo:
TCO =
=
=
= 23.92s (24s)
Tempo de Verde para as Aproximações:
TVS = 24 * 0.335 = 8.04 s
TVO = 24 * 0.268 = 6.43 s
Como a engenharia de tráfego não recomenda tempo de amarelo inferior a três
segundos nem superior a quatro segundos e pelo menos doze segundos de tempo de verde
tem-se finalmente:
TVS = 12 segundos.
TVO = 12 segundos.
Tempo de Transição (amarelo) para ambos: 3.5 segundos.
Pode-se agora gerar um diagrama de tempos para a interseção em questão:
Medidas de Desempenho
As medidas de desempenho têm como objetivo estudar a adequação do sistema à
demanda existente, ou seja, estabelecer o grau de qualidade do serviço oferecido aos usuários
da via. No caso de interseções semaforizadas, a teoria de filas é um instrumento bastante útil

88
para avaliar o comportamento do semáforo, permitindo avaliar a eficiência dos dispositivos e
implantar alterações caso seja constatado um estrangulamento. Os modelos mais utilizados
para estes estudos são o D/D/1 e o M/D/1.
O modelo D/D/1 pressupõe a análise das seguintes métricas: Taxa média de chegada;
taxa média partida; taxa de ocupação; grau de congestionamento; tempo de dissipação da fila;
parcela do tempo do ciclo com fila; fila máxima; tempo máximo de espera na fila; espera total
por ciclo; espera média; proporção de veículos que param no cruzamento e fila média. A
figura 20 ilustra uma interseção com capacidade de aproximação que excede a demanda.
Figura 20: Modelo de Fila D/D/1 numa Interseção com Capacidade de Aproximação que
Excede a Demanda
Fonte: Adaptado de Mannering[56]
Desta forma, tem-se:
λ = taxa média de chegadas [veic./s];
µ = taxa média de partidas [veic./s];
t = tempo total decorrido;
to = tempo necessário para a dissipação da fila formada durante a fase vermelha [s];
tVDE = tempo de verde efetivo [s];
tVME = tempo de vermelho efetivo [s];
tc = tempo do ciclo [s];

89
Descreve-se a seguir os cálculos das medidas de desempenho segundo o modelo
D/D/1 para a aproximação sul do exemplo citado anteriormente. Neste caso, a indicação de
verde é de 12 s; o tempo de amarelo é de 3.5 s e o tempo total perdido por ciclo é de 4s. Como
o volume de saturação é 1600 veic./hora de verde, por faixa e temos duas faixas, o fluxo de
saturação da aproximação é de 3200 veic./h. O volume observado é de 872 veic./h. Assim
temos:
Tempo de verde efetivo: 12 + 3.5 – 4 = 11.5 s
Tempo de vermelho efetivo: Tc – Tempo de verde efetivo = 31 – 11.5 = 19.5
λ (taxa média de chegada): volume/3600 = 872/3600 = 0.242
µ (taxa média de partida): fluxo de saturação/3600 = 3200/3600 = 0.888
γ (taxa de ocupação): λ/ µ = 0.242 / 0.888 = 0.272
Veículos que chegam à interseção em um ciclo: λ * tc = 0.242 * 31 = 7.502 veic.
Veículos que podem passar pela interseção em um ciclo: µ * tc = 0.888 * 31 = 27.528
veic.
ρ (grau de congestionamento): 7.502/27.528 = 0.272
T0 (tempo de dissipação da fila): (γ * Tvme)/(1 – γ) = (0.272 * 19.5)/(1-0.272) =
5.304/0.728 = 7.28 s
PQ (Parcela do tempo do ciclo com fila): (Tvme + T0)/TC = (19.5 + 7.28)/31 = 0.863
QMAX (fila máxima): λ * Tvme = 0.242 * 19.5 = 4.72 veic.
WMAX (tempo máximo de espera): 19.5 (ocorre quando o veículo chega e o semáforo
fica vermelho).
WTOT (espera total por ciclo): (λ * Tvme2)/2*(1- γ) = (0.242 * 19.5
2)/2(1-0.272) =
92.0205/1.456 = 63.20 veic.s
WMED (espera média): WTOT/( λ * TC) = 63.20 / (0.242 * 31) = 8.424 s
PS (proporção de veículos que param no cruzamento): λ * (Tvme + T0) / λ * Tc =
0.242 * (19.5 + 7.28) / 0.242 * 31 = 0.863
q (fila média): WTOT / Tc = 63.20/31 = 2.038 veic.
4.4 A Integração entre o SIG e a Engenharia de Tráfego
A relevância de um sistema de informações geográficas para a engenharia de tráfego é
considerável devido à natureza essencialmente espacial dos dados pertinentes aos sistemas de

90
transporte e trânsito. A possibilidade de análise de dados em rede, estatística e análise espacial
tornam o SIG uma ferramenta única para a integração de um grande conjunto de entidades
espaciais, bem como os atributos que as descrevem. Outro ponto a ser observado é que a
utilização de um SIG permite a interação com um ambiente de análise mais amigável ao
usuário, além da possibilidade da geração de produtos como: mapas temáticos, gráficos,
acesso simultâneo a múltiplas camadas de dados espaciais e a possibilidade de operação com
outros produtos de software para gerar soluções customizadas.
As iniciativas de utilização dos SIG na engenharia de tráfego geraram novos usos,
benefícios e desafios, para tanto, é primordial a incorporação da rede viária ao sistema, além
das informações de topografia, tipo e uso do solo. Aplicações típicas dos SIG na engenharia
de tráfego incluem[62]
:
Gerenciamento e manutenção de vias;
Modelagem do tráfego;
Análise de acidentes;
Roteamento de veículos;
Análise de impactos ambientais;
Previsão de demandas de viagens;
Transporte de cargas perigosas;
Um cadastro que permite, por exemplo, o gerenciamento das vias engloba o inventário
(tipo do pavimento, faixas, extensão, largura), os dados históricos (data do projeto, tipo de
construção, reabilitação, manutenção preventiva) entre outros. Posteriormente, com a ajuda de
dados de volume, é possível efetuar análises do desempenho do pavimento e estimar a sua
vida útil. Pode-se ainda traçar estratégia de investimento para recuperação e ampliação da
malha viária.
A análise de acidentes de trânsito, que é uma área que recebe considerável atenção por
parte dos pesquisadores, não se satisfaz apenas com o simples georeferenciamento das
ocorrências e sua exibição em um mapa. Atualmente as ferramentas de análise espacial são
utilizadas para a identificação dos fatores determinantes das ocorrências e das correlações
existentes. Queiroz et al.[63]
utilizam esse arcabouço para caracterizar e diferenciar

91
geograficamente as concentrações de acidentes em uma plataforma SIG; Os resultados
permitem auxiliar na tarefa de fiscalização, engenharia e educação dos usuários das vias.
A identificação dos pontos de congestionamento é outro assunto de interesse para os
engenheiros de tráfego. A partir da representação destes pontos no mapa, o órgão gestor do
trânsito na cidade pode avaliar cenários múltiplos e sugerir corredores alternativos para o
escoamento do tráfego nas áreas mais saturadas. Pode auxiliar também na avaliação da
necessidade de uma reprogramação semafórica numa área mais abrangente, algo que seria
mais trabalhoso sem o uso de uma plataforma SIG. Contudo, a utilização de Sistemas de
Informações Geográficas em Transportes (SIG-T) em programação semafórica, que é o foco
deste trabalho, é relativamente restrita. Produtos de software como o TRANSYT e o
TRANSCAD incorporam recursos interessantes para a gestão do sistema viário, mas
apresentam custos relativamente altos. O TRANSYT, por exemplo, permite o cálculo de
planos de sincronismo para a operação dos sistemas de controle de tráfego por área (CTA).
Um CTA é um agrupamento onde a operação de uma interseção é afetada pelas interseções
vizinhas.
A produção acadêmica no que tange a integração entre os sistemas de informações
geográficas e a programação semafórica é baixa. Sarasua[64]
, um dos poucos autores com
trabalho publicado no assunto, especifica um protótipo para facilitar a produção de modelos
no TRANSYT, através da utilização de funções externas e sistemas especialistas. A proposta
do autor contempla um conjunto de rotinas para a incorporação de uma base cartográfica
adequada à utilização em programação semafórica. Esta base é composta por uma camada de
eixos das vias e outra de pontos representando as interseções. Assim, tem-se a representação
da topologia, dos dados operacionais e de tecnologia dos controladores nas interseções, da
velocidade de fluxo livre, etc. Adicionalmente, o autor incorpora ao modelo o conceito de
bases temporais para a representação de informações dependentes de variações típicas do
tempo na rede.
Por sua vez, Oliveira et al.[65]
revisitam o trabalho de Sarasua[64]
e propõem um arranjo
que utiliza um SIG-T na produção de planos de sincronismo semafórico utilizando o
TRANSYT. Os autores esclarecem que utilizam o SIG-T para a extração de informações de
topologia que posteriormente são codificadas para o TRANSYT. Na sequencia, o SIG-T gera
mapas temáticos para visualizar o desempenho dos planos produzidos. Segundo os autores, o

92
modelo é um refinamento do trabalho de Sarasua[65]
, pois incorpora funções que permitem a
exploração dos recursos de visualização de um SIG-T, além de prover maior funcionalidade e
interatividade com os usuários. A abordagem inclui um método para direcionar os resultados
do modelo de simulação do TRANSYT 9, bem como a programação semafórica proposta para
o SIG-T.
A funcionalidade desejada é viabilizada pela utilização de tecnologias de
desenvolvimento visual de componentes externos ao SIG; Trata-se de uma arquitetura
integrada que incorpora o ambiente de desenvolvimento Delphi, o TransCAD e o TRANSYT.
Observa-se, neste projeto, que o SIG fornece as relações topologias essenciais à
coordenação semafórica, como a distância entre as interseções e os nomes das aproximações.
As rotinas externas executam a interface entre o SIG e o TRANSYT, auxiliando a entrada de
dados, o processamento e o gerenciamento dos dados de saída.
Os dados incorporados ao modelo incluem o nome do logradouro, polos geradores de
tráfego e velocidades livres de percurso. Há ainda a possibilidade de adequação do sistema a
outros usos, como a gerência de pavimentos e o roteamento.
À estrutura de nós estão associadas informações provenientes de dois conjuntos de
tabela; o primeiro armazena os dados que são independentes do tempo (topologia, fluxo de
saturação, identificação e geometria), ao passo que o segundo armazena os dados temporais
(volume nas aproximações, planos de sincronismo, entreverdes, etc.). A comunicação entre os
diferentes módulos é efetuada via DDE (Dynamic Data Exchange), um recurso do ambiente
Windows que permite a troca de dados e informações entre programas, durante a execução.
Na etapa final os planos gerados pelo TRANSYT são processados por um módulo
denominado “Gerenciador” que os traduz para uma tabela associada a uma camada do SIG.
Esta tabela corresponde à rede utilizada pelo TRANSYT permitindo, assim, a visualização
das medidas de desempenho no ambiente SIG.
O TRANSYT é um produto amplamente utilizado e de comprovada eficácia. Desta
forma, a incorporação de um módulo capaz de realizar análises geográficas à ferramenta tem
o potencial de enriquecer as análises de planos semafóricos.

93
4.5 Resumo
Este capítulo definiu a engenharia de tráfego e os elementos a serem considerados na
implantação de um equipamento viário, bem como os métodos utilizados para a gestão do
sistema de trânsito. Foram apresentados os modelos macroscópico, microscópico e os
parâmetros que embasam o estudo do fluxo de veículos. A abordagem mais tradicional para o
cálculo dos ciclos semafóricos é contemplada junto com as métricas de desempenho das
interseções semaforizadas. Finalmente analisa-se a viabilidade da utilização de uma
ferramenta SIG como recurso complementar para os problemas da engenharia de tráfego.

94
Capítulo 5
Modelo Proposto
O projeto de um sistema de programação semafórica envolve múltiplos requisitos.
Primeiramente, para que o modelo seja eficaz, uma grande amostra de dados de pesquisa de
fluxo veicular é necessária e isto exige o projeto cuidadoso de uma base de dados capaz de
gerenciar este volume. Para o modelo proposto neste trabalho, considerações adicionais são
necessárias. A proposta de integração com um modelo geográfico pressupõe a incorporação e
o tratamento de uma base cartográfica digital. Os preceitos para a construção de uma base
cartográfica foram discutidos no capítulo 3, bem como os principais pontos a serem
observados na implantação de um SIG. Além disto, deve-se projetar um ambiente capaz de
interagir de maneira amigável com os usuários do produto.
5.1 Arquitetura Proposta
O aspecto temporal da solução proposta pressupõe a coleta do volume de tráfego para
a malha viária do município, caracterizando-o segundo os conceitos apresentados no capítulo
quatro:
Veículos de passageiro em fluxo direto e fluxo em conversão;
Ônibus em fluxo direto e fluxo em conversão;
Caminhões em fluxo direto e fluxo em conversão.
Adicionalmente, deve-se registrar o dia e o horário da pesquisa do fluxo veicular para
garantir a precisão na estimativa de volumes futuros, visto que o sistema a ser construído
utilizará métodos estatísticos de regressão linear baseado em séries históricas.
A solução proposta é baseada em um sistema integrado, composto de três módulos: o
módulo de Cadastro, o módulo de Análise e Consulta de Dados e o módulo de Apresentação
de Dados. Estes módulos usarão os dados armazenados num banco de dados unificado,
conforme o diagrama ilustrado na figura 21.
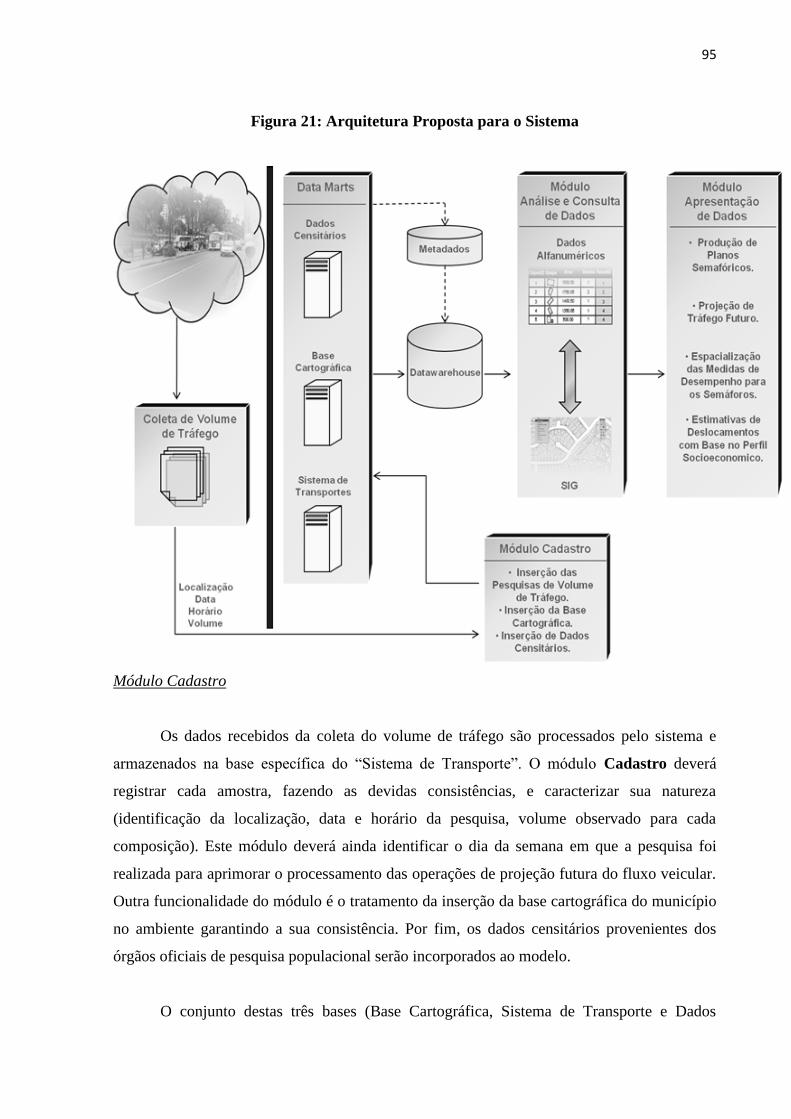
95
Figura 21: Arquitetura Proposta para o Sistema
Módulo Cadastro
Os dados recebidos da coleta do volume de tráfego são processados pelo sistema e
armazenados na base específica do “Sistema de Transporte”. O módulo Cadastro deverá
registrar cada amostra, fazendo as devidas consistências, e caracterizar sua natureza
(identificação da localização, data e horário da pesquisa, volume observado para cada
composição). Este módulo deverá ainda identificar o dia da semana em que a pesquisa foi
realizada para aprimorar o processamento das operações de projeção futura do fluxo veicular.
Outra funcionalidade do módulo é o tratamento da inserção da base cartográfica do município
no ambiente garantindo a sua consistência. Por fim, os dados censitários provenientes dos
órgãos oficiais de pesquisa populacional serão incorporados ao modelo.
O conjunto destas três bases (Base Cartográfica, Sistema de Transporte e Dados

96
Censitários), também denominados de Data Marts, após passarem pelo processo de
normalização, darão origem a um grande Banco de Dados a ser utilizado pelo produto
desenvolvido, e serão reunidos em um datawarehouse. Este, por sua vez, fornecerá os dados
necessários ao sistema para a produção dos planos semafóricos.
Módulo Análise e Consulta de Dados
Este módulo terá como função o processamento de todas as consultas dos usuários.
Deve ser projetado um arranjo que permita a recuperação e síntese de informações
alfanuméricas sob múltiplas perspectivas. Por exemplo, pode-se fornecer recursos para uma
pesquisa baseada em um único atributo de todos os semáforos; outra possibilidade é a
recuperação de informações múltiplas para um ou vários equipamentos semafóricos. Pode-se
ainda rever dados pontuais das pesquisas volumétricas de tráfego. Além disso, o módulo
deverá implementar as funções para o cálculo da programação semafórica. Neste trabalho o
método adotado será o cálculo simplificado conforme detalhado no capítulo quatro. Também
faz parte deste módulo o cálculo das métricas de desempenho para cada elemento da rede.
As projeções de desempenho do tráfego na cidade também serão realizadas pelo
módulo Análise e Consulta de Dados. Conforme descrição anterior, estas projeções serão
realizadas tomando como base o histórico de observações registradas para cada interseção
semaforizada da cidade. Empregar-se-á os métodos estatísticos de regressão linear para a
estimativa de cenários futuros, com a busca de curva de melhor ajuste para cada situação.
Outra função deste módulo é a possibilidade de consulta dos equipamentos
diretamente na base cartográfica associada. Desta forma, garante-se uma interação maior dos
usuários com o sistema, através da apresentação da espacialização da rede de semáforos, bem
como dos atributos que os caracterizam.
Módulo Apresentação de Dados
Este módulo tem como objetivo prover e formatar o resultado das análises e consultas
solicitadas pelos usuários. Deverá disponibilizar uma interface amigável para que a interação
seja a mais natural possível.

97
Os planos semafóricos poderão ser apresentados na forma de relatórios gerenciais
tradicionais, ou ainda exibidos na base cartográfica, mostrando o tempo alocado a cada
intervalo e as diversas medidas de desempenho para cada semáforo da rede. Outra
funcionalidade prevista é a geração do diagrama de tempos para interseções selecionadas.
Os dados sobre as projeções para cenários futuros também serão apresentados por este
módulo. Na realidade, o módulo replicará as funções de exibição para o cálculo da
programação semafórica para uma única amostra. A diferença é que o sistema deverá ativar
previamente a função de estimativas de volumes futuros.
A exibição dos dados integrados na base cartográfica permitirá aos usuários a
visualização conjunta de múltiplos aspectos do sistema de programação semafórica da cidade,
permitindo aos mesmos a identificação antecipada de possíveis problemas futuros, bem como
a avaliação de soluções potenciais.
5.2 Aspectos de Implantação
Neste tópico apresenta-se o esquema do banco de dados utilizado e o diagrama de
fluxos de dados que interage sobre o mesmo para viabilizar o modelo proposto.
Adicionalmente são fornecidos o diagrama de projeto e as provas de corretude dos principais
algoritmos utilizados.
Banco de Dados
O banco de dados será construído segundo o modelo relacional. Trata-se de um
modelo que usa o conceito matemático de relações, que se assemelha a uma tabela de valores
e cuja base é a lógica de predicados de primeira-ordem[42/43]
. Representa-se na figura 22 o
esquema do banco de dados segundo a notação do modelo de entidades e relacionamentos:

98
Figura 22: Diagrama de Entidades e Relacionamentos da Solução Proposta
O diagrama mostra que a Prefeitura Municipal é a responsável pelo sistema global. A
área de planejamento tem a incumbência de atualizar e fornecer a base cartográfica digital, ao
passo que a área de transportes gerencia todos os aspectos do sistema de trânsito. Na notação
formal do modelo, o símbolo “U” adjacente ao arco significa uma operação de união. Assim,
a entidade “Prefeitura” é formada pela união de todas as suas secretarias.
A base cartográfica digital é formada pela união de todas as camadas (limite
municipal, divisões territoriais, logradouros, etc.) geradas conforme os preceitos descritos no
capítulo três.
O símbolo do losango designa uma associação entre as entidades representadas e os
valores que acompanham os vértices correspondem à cardinalidade do relacionamento, ou
seja, o número de elementos deste conjunto que participa da associação. Desta forma, pode-se
deduzir que a Secretaria de Planejamento é a única responsável pelo fornecimento da base

99
cartográfica. A Secretaria de Transportes é a única com atribuições para gerenciar o sistema
de trânsito.
Observa-se ainda pelo diagrama que a Secretaria de Transportes será a responsável
pelo processo de contagem dos veículos. Num nível mais amplo, nota-se que todo o sistema
de trânsito é gerenciado pela área de transportes. Este subsistema é tratado no diagrama como
uma nova entidade que agrega os logradouros da cidade, os veículos que por eles trafegam,
bem como os elementos de sinalização que regulam o fluxo de veículos: placas de
advertência, sinalização de solo e semáforos. Ademais, o diagrama indica que um número
qualquer de veículos pode transitar por um logradouro, e, da mesma forma, dado um veículo,
este pode percorrer um número qualquer de logradouros. Indica-se também que um
logradouro pode conter um número qualquer de elementos de sinalização, o que descreve
perfeitamente uma situação real, visto que é preciso inseri-los na maioria das interseções de
um trecho urbano. Por fim, as placas de regulamentação e controle disciplinam o fluxo de um
número qualquer de veículos e, dado um veículo, seu percurso pode ser controlado por um
conjunto qualquer destes elementos.
O modelo de entidades e relacionamentos (MER) fornece os elementos necessários
para a implementação do banco de dados num sistema computadorizado. Assim, uma
entidade do MER gera um arquivo no banco de dados. Este esquema define ainda os atributos
que farão parte deste arquivo, bem como a composição da chave primária. As associações
estabelecem os atributos que deverão ser replicados nos arquivos relacionados.
A figura 23 ilustra o esquema resultante do diagrama de entidades e relacionamentos
proposto.

100
Figura 23: Esquema Resultante do Modelo Entidade-Relacionamento Proposto
Neste esquema, os prefixos Entr1 e Entr2 referem-se às duas aproximações do
cruzamento em questão. A sigla FD designa “Fluxo direto” enquanto que FC refere-se a
“Fluxo em conversão”. A tabela “Semáforos Consolidados” tem como objetivo agrupar os
dados provenientes da tabela “Históricos”, para um período de pesquisa previamente
estipulado. Deve-se observar, ainda, que as tabelas da base de dados foram normalizadas (3ª
Forma Normal) conforme recomendações da teoria de banco de dados. Desta forma, evita-se
as anomalias de atualização dos dados que compõem a base.
Diagrama de Fluxo de Dados
O diagrama de fluxo de dados é uma das ferramentas mais utilizadas para a
especificação de um sistema. Trata-se de uma especificação semiformal das funcionalidades

101
descrevendo o sistema como uma coleção de dados que são manipulados por funções
(componentes). Os dados são armazenados em banco de dados, ou podem estar contidos em
fluxo de dados unindo duas ou mais funções. A vantagem do seu uso é a simplicidade da
notação, o que garante o rápido entendimento por parte dos usuários. A figura 24 designa o
diagrama de contexto para o sistema em estudo. Neste nível (0), o diagrama utiliza um único
processo e as entidades que interagem com o sistema.
Figura 24: Diagrama de Fluxo de Dados da Solução Proposta (Nível 0)
O propósito do diagrama de nível zero é identificar as entidades que interagem com o
sistema, bem como os dados que devem ser fornecidos e/ou recebidos nesta interação. O
retângulo com as pontas arredondadas indica um processo onde ocorre uma transformação.
Neste nível utiliza-se um único processo, onde todas as funções serão embutidas. O diagrama
do próximo nível, apresentado na figura 25, ilustra com mais detalhes os relacionamentos
existentes para a consecução dos objetivos do projeto.

102
Figura 25: Diagrama de Fluxo de Dados da Solução Proposta (Nível 1)
Neste nível observa-se a decomposição no sistema em funções mais elementares. Cada
função desempenha uma tarefa específica, que pode ser descrita com mais detalhes no nível
seguinte. Os fluxos de dados que entram e saem de um processo devem ser mantidos quando
ocorrer um novo detalhamento. Neste nível são introduzidos também os arquivos a serem
utilizados pelo sistema.

103
Diagrama de Estrutura do Projeto
O diagrama de estrutura do projeto deriva-se do diagrama de fluxo de dados
apresentado no item anterior. O propósito deste diagrama é ilustrar a segmentação de um
sistema em módulos – caixas pretas – mostrando sua hierarquia, organização e
comunicação[66]
. A figura 26 é o diagrama final dos módulos para a solução proposta.
Figura 26: Diagrama de Estrutura da Solução Proposta

104
Algoritmos
O último item desta seção tem como objetivo descrever e analisar os principais
algoritmos utilizados. Um algoritmo é um procedimento computacional bem definido que
transforma um conjunto de dados de entrada em um conjunto de dados de saída, visando
atingir um objetivo pré-estabelecido. A especificação do problema estabelece a relação que
deve existir entre os dados de entrada e os dados de saída[67]
. Posteriormente estes algoritmos
são utilizados para a codificação do sistema em um computador. O processo de análise de um
algoritmo engloba três quesitos:
1. Finitude: O algoritmo para ?
2. Corretude: O algoritmo cumpre seu objetivo ?
3. Complexidade do Tempo: Análise do tempo necessário para cumprir sua função no
pior caso.
As provas de corretude serão baseadas no princípio de Loops invariantes, que
especificam as condições que se mantêm verdadeiras em todas as iterações do algoritmo[67]
.
Para tanto, deve-se demonstrar três fatos sobre um loop invariante:
a) Inicialização: Uma condição é verdadeira previamente a primeira iteração do
algoritmo.
b) Manutenção: Se algo é verdadeiro antes da iteração do loop, ele se mantém
verdadeiro antes da iteração seguinte.
c) Término: No encerramento do loop, o invariante fornece uma propriedade útil que
auxilia na compreensão da corretude do algoritmo.
A complexidade do tempo é analisada pelo número de instruções básicas (operações
elementares) executadas a partir de uma entrada. A teoria da complexidade de algoritmos
utiliza, para isto, a notação assintótica, que é uma abordagem para o estudo do
comportamento do algoritmo para instâncias de tamanho elevado. Assim, se um algoritmo
possui complexidade de tempo de pior caso θ(n2), podemos afirmar que o tempo de execução
deste algoritmo é limitado superiormente por um polinômio da forma an2.

105
Algoritmo 1: Programação_Semafórica
Entrada: Dados_Aproximações (Largura_Via, Capacidade, Acostamento, Fluxos)
Saída: Tempo_Ciclo, Tempo_Verde, Tempo_Amarelo, Tempo_Vermelho
Inicio
1. Soma_Tempo_Perdido = 0; Soma_Parcial = 0
2. Para i =1 até Total_Aproximações Faça
3. X(i) = Calc_Prog_Semaforo(i)
4. Soma_Parcial = Soma_Parcial + X(i)
5. Tt(i) = TempoAmarelo(i)
6. Soma_Tempo_Perdido = Soma_Tempo_Perdido + Tt(i)
7. Próximo
8. Tempo_Ciclo_Otimo = (1.5 * Soma_Tempo_Perdido + 5) / (1 – Soma_Parcial)
9. Para i =1 até Total_Aproximações Faça
10. Tempo_Verde(i) = Tempo_Ciclo_Otimo * X(i)
11. Se Tempo_Verde(i) < 15 então Tempo_Verde(i) = 15
12. Ajustar Tempo_Amarelo(i) {> 3s e < 4s}
13. Tt(i) = TempoAmarelo(i)
14. Soma_Tempo_Perdido = Soma_Tempo_Perdido + Tt(i)
15. Tempo_Vermelho(i) = Tempo_Verde(i) + Tempo_Amarelo(i)
16. Próximo
17. Tempo_Ciclo = Tempo_Verde + Tempo_Amarelo + Tempo_Vermelho
18. Exibir Tempo_Ciclo, Tempo_Verde, Tempo_Amarelo, Tempo_Vermelho
Fim
O algoritmo 1 tem como objetivo calcular o tempo do ciclo total do semáforo pelo
método de Webster, determinado os tempos do vermelho, do amarelo e do verde. O algoritmo
possui dois laços (linhas 2-7 e 9-16). Para cada um deles o valor da variável i é incrementado
para cada um dos semáforos da interseção até o valor (Total_Aproximações +1), quando o
laço se encerra e as instruções seguintes são executadas. As demais instruções são operações
sequenciais de cálculo e atribuição. Portanto, o algoritmo interrompe a execução na linha 18 e
o primeiro critério (Finitude) é satisfeito.
O segundo critério (Corretude) é provado pelo loop invariante. O cálculo do ciclo
ótimo exige a determinação da soma dos tempos perdidos e do tempo do amarelo para cada
aproximação. No inicio do algoritmo as variáveis (Soma_Tempo_Perdido e Soma_Parcial)
possuem valores nulos. O primeiro loop aciona a rotina para o cálculo da relação entre o fluxo
e a capacidade e o tempo do amarelo de maneira incremental. A seguir, o algoritmo gera o
tempo do ciclo ótimo no passo 8. O segundo loop determina o tempo do verde de cada
aproximação, ao mesmo tempo em que ajusta o tempo do amarelo para as aproximações. Com
isto é possível calcular também o tempo do vermelho. Na condição de término temos os

106
elementos necessários para o cálculo do ciclo total da aproximação. Logo, o algoritmo está
correto.
O terceiro critério analisa a eficiência do algoritmo. Afirma-se anteriormente que o
algoritmo possui dois laços que são executados n vezes (uma para cada aproximação) e
instruções diretas de cálculo e atribuição. Assim, o tempo de execução do algoritmo é 2 *
θ(n), que resulta na complexidade de tempo θ(n). Donde se conclui que o algoritmo opera em
tempo polinomial no tamanho da entrada.
Algoritmo 2: Cálc_Prog_Semaforo
Entrada: Dados_Aproximações (Largura_Via, Capacidade, Acostamento, Fluxos)
Saída: Tempo_Ciclo, Tempo_Verde, Tempo_Amarelo, Tempo_Vermelho
Inicio
1. Inicializar Tabela_Faixas
2. Para o Semáforo Selecionado Faça
3. Obter Largura_Via
4. Obter Dados_Acostamento
5. Determinar Número_Faixas
6. Fat_Ajuste_Via = 1
7. Enquanto (Fat_Ajuste_Via < 5) e (Largura_Via > Tabela_Faixa
(Fat_Ajuste_Via, 2)) Faça
8. Fat_Ajuste_Via = Fat_Ajuste_Via + 1
9. Fluxo_Total = Fluxo_Direto + Fluxo_Conversão
10. XCapacidade = Capacidade * Número_Faixas * Fator_Ajuste
11. Calc_Prog_Semaforo = XCapacidade / Fluxo_Total
12. Próximo
Fim
A função do algoritmo 2 é determinar a vazão possível em cada aproximação. Para
tanto, considera os dados da largura da via, a existência de acostamento e os fluxos locais.
Com exceção do loop das linhas 7 e 8, as instruções do algoritmo são cálculos simples e
operações de atribuição. O referido loop é controlado pela variável Fat_Ajuste_Via que é
iniciado na linha anterior com o valor 1. Este trecho do algoritmo pesquisa a tabela de faixas
para determinar o ajuste da largura da faixa. Como o valor é incrementado em uma unidade
por ciclo do loop (tabela de fator de ajuste da largura da via) e o limitante superior é cinco, o
critério de finitude é satisfeito.
Quanto à corretude, deve-se observar que a vazão é dada pela relação entre a

107
capacidade e o fluxo total. No primeiro passo, o algoritmo gera uma matriz com os limitantes
inferiores e superiores da largura das vias, bem como os respectivos fatores de ajuste. A
seguir, o algoritmo considera a largura da via e desconta o espaço para um eventual
acostamento, obtendo o fator de ajuste. A linha 9 totaliza todos os tipos de fluxo para a
aproximação. A instrução seguinte ajusta a capacidade final da aproximação e fornece o
resultado para a etapa seguinte calcular a vazão desejada. Por conseguinte, o algoritmo está
correto.
A complexidade de tempo é dada por θ(n) quando o cálculo é necessário para toda a
rede semafórica do município. Portanto, este algoritmo também opera em tempo polinomial
no tamanho da entrada.
O algoritmo seguinte é utilizado para estimar o fluxo futuro de um semáforo tendo
como base o histórico registrado em diferentes dias e horários. Para tanto utilizar-se-á os
modelos de regressão linear. Estes modelos são utilizados com frequência em muitas
aplicações científicas para o equacionamento de relações entre variáveis[58]
. Estas relações
podem ser obtidas a partir de estudos experimentais em campo ou laboratório. A figura 27
representa a relação entre as variáveis X e Y para um experimento.
Figura 27: Diagrama de Dispersão entre Variáveis
A reta y = ax + b que melhor se ajusta à amostra de dados é denominada reta dos
mínimos quadrados. O método para a obtenção desta reta determina os coeficientes que

108
minimizam a soma dos desvios (d1, d2, d3, ..., dn) elevados ao quadrado. Este modelo pode ser
adequado para estimativas futuras de tráfego, visto que é possível observar um padrão
relativamente homogêneo de comportamento do tráfego em algumas ruas e avenidas,
considerando fatores como: horas de rush; proximidade de polos atratores de tráfego;
sazonalidade de fluxo em algumas áreas, sobretudo unidades educacionais; variações
temporais, como fluxos diurno e noturno; fluxos para dias úteis e finais de semana. Assim, se
for registrado o fluxo para as aproximações para um período longo, pode-se admitir que o
modelo gera estimativas razoáveis para o comportamento do fluxo, não obstante o caráter
aleatório do mesmo.
Em termos matemáticos, encontrar o valor a e b da equação anterior significa
minimizar a soma[58]
:
S =
onde,
S = Soma dos desvios
Yi = Valor real observado para a variável Xi
di = Valor correspondente de Xi na equação da reta y.
Para minimizar o valor de S em relação às variáveis a e b, deve-se expressar a equação
anterior em termos destes parâmetros. Assim, substituindo a equação da reta na fórmula
anterior, tem-se:
S =
Aplicando-se a derivada parcial em relação aos parâmetros e igualando-as a zero,
obtem-se:
= 0
= 0
Dividindo por 2 e reorganizando os termos, obtem-se o sistema que fornece os valores

109
de a e b.
na + =
+
=
A grande utilidade de se equacionar um fenômeno é a possibilidade de extrair
informações sobre o mesmo que somente uma linguagem matemática possibilita. Contudo,
deve-se observar que o ajustamento por reta pode apresentar inconsistências, sobretudo
quando o valor dos desvios é grande. Por esta razão, é recomendável averiguar se o
ajustamento por outras curvas oferece uma somatória de desvios de quadrados menor. Uma
possibilidade é o ajustamento por uma equação de parábola cuja forma é y = a + bx + cx2. A
resolução do sistema abaixo fornece os valores para os parâmetros a, b e c.
Σ y = aN + bΣx + cΣx2
Σ(xy) = aΣx + bΣx2 + cΣx
3
Σ(x2y) = aΣx
2 + bΣx
3 + cΣx
4
Uma terceira forma de estimativa é ajustamento por uma curva exponencial. Sua
equação é representada por y = abx e é bastante útil em análises onde uma variável cresce ou
decresce muito em relação à variação da outra. Neste caso os coeficientes a e b são
determinados pelo sistema:
Σ y = a’N + b’Σx
Σ(xy’) = a’Σx + b’Σx2
Onde,
a = ea’
e b = eb’
.
Na solução proposta, o sistema deverá selecionar a curva que melhor se ajusta ao
cenário em questão para que as estimativas sejam as mais confiáveis possíveis. Para tanto, o
algoritmo deverá selecionar a amostra de dados a ser utilizada na pesquisa e calcular os
desvios para cada um dos três tipos de curva explicitados anteriormente. Tendo selecionado a

110
curva mais adequada ao cenário estipulado, o algoritmo deverá projetar o volume de tráfego
para o período futuro desejado na pesquisa. Esta é a função o algoritmo 3, descrito abaixo:
Algoritmo 3: Curva_Mínimos_Quadrados
Entrada: Dados_Aproximações (Fluxos), Amostra_Base_Pesquisa, Período_Projeção
Saída: Estimativa_Tráfego_Futuro
Inicio
1. Inicializar Tabela_Tipo_Fluxo
2. Obter Registros(Amostra_Base_Pesquisa)
3. Obter Data_Projeção
4. Para Cada Registro Faça
5. Gerar Tabela_Tipo_Fluxo
6. Próximo
7. Obter Coeficientes_Reta
8. Obter Coeficientes_Parábola
9. Obter Coeficientes_Exponencial
10. D1 = Somatoria_Desvio_Reta
11. D2 = Somatoria_Desvio_Parábola
12. D3 = Somatoria_Desvio_Exponencial
13. Dx = Curva(Minimo(D1, D2, D3))
14. Projetar_Fluxo_Trafego(Dx, Data_Projeção)
15. Retornar (Projeção_Tráfego)
Fim
O algoritmo 3 possui um único laço (linhas 4 a 6), cuja finalidade é alocar os fluxos
para as entradas corretas na Tabela_Tipo_Fluxo, que registra os fluxos para cada tipo de
veículo. Como a cardinalidade desta amostra é finita (linha 2), o laço encerra-se após o
processamento da Amostra_Base_Pesquisa. As demais instruções são operações de atribuição
e cálculos diretos e, portanto, o algoritmo encerra-se na linha 15, validando o critério de
finitude.
A corretude do algoritmo é garantida pelo fato de, após a execução das instruções da
linha 9, dispor-se de todos os coeficientes necessários para cada uma das curvas de
ajustamento. Estes coeficientes podem ser obtidos de maneira simples através da aplicação da
regra de Cramer para a resolução de sistemas lineares do tipo n x n, como é o caso das curvas
de ajustamento do modelo proposto. Após isto, as instruções entre as linha 10 e 12 calculam a
somatória dos desvios mínimos para cada curva de ajustamento. Na linha 13 ocorre a seleção
da curva com o menor desvio mínimo quadrado. Finalmente, o fluxo é projetado na instrução
seguinte aplicando a data de projeção desejada na curva de ajustamento selecionada.

111
Este algoritmo também é executado em tempo polinomial, já que o mesmo é limitado
pela cardinalidade da seleção da linha 2. Assim se n registros forem selecionados para compor
a amostra, o algoritmo será executado no tempo de θ(n).
O último algoritmo da solução proposta tem como finalidade apresentar as medidas de
desempenho dos volumes de tráfego espacializadas numa base cartográfica digital.
Algoritmo 4: Gerar_Mapas_Medidas_Desempenho
Entrada: Dados_Aproximações (Largura_Via, Capacidade, Acostamento, Fluxos)
Saída: Mapa_Métricas_Desempenho
Inicio
1. Tipo_Projeção = Selecionar (Fluxo_Atual, Fluxo_Futuro)
2. Para i =1 até Total_Aproximações Faça
3. Se Tipo_Projeção = “Fluxo_Futuro”
4. Call Curva_Mínimos_Quadrados
5. Call Programação_Semafórica
6. Call Métricas_Desempenho
7. Próximo
8. Load Layer (Base_Cartográfica, Limite_Municipal)
9. Load Layer (Base_Cartográfica, Logradouros)
10. Load Layer (Base_Cartográfica,Semáforos)
11. Enquanto OPCAO(Metrica_Desempenho) <> “FIM” Faça
12. Gerar Mapa_Métrica (Metrica_Desempenho)
13. Load Layer (Base_Cartográfica, Mapa_Métrica)
14. Exibir Mapa
Fim
O algoritmo 4 começa por selecionar o tipo de projeção a ser utilizada na geração do
mapa de métricas (linha1). Caso a situação desejada seja a projeção do tráfego para um
cenário futuro, a rotina para o cálculo da curva de mínimos quadrados (algoritmo 3) é
chamada, caso contrário o algoritmo utiliza a amostra corrente para a aproximação. A
instrução seguinte invoca a rotina para o cálculo da programação semafórica (algoritmo 1).
Posteriormente, as medidas de desempenho são calculadas para todas as aproximações. O laço
entre as linhas 2 e 7 é controlado pela variável i e é incrementado em uma unidade e limitado
superiormente pelo total de semáforos do município. As instruções entre as linhas 8 e 10
carregam as camadas a serem exibidas no sistema. O laço entre as linhas 11 e 14 apresentam
as métricas selecionadas pelo usuário na base cartográfica digital até que o usuário decida

112
encerrar este módulo. Assim, o critério de finitude se aplica ao algoritmo.
Ademais, observamos que os algoritmos precedentes estão corretos. O algoritmo 4
invoca os demais algoritmos para a consecução do seu objetivo. Pode-se assim inferir que o
critério de corretude também é verificado para o algoritmo 4.
Da mesma forma que os algoritmos 1, 2 e 3 são executados em tempo polinomial e o
algoritmo 4 basicamente os utiliza através de uma chamada de rotina, concluí-se que a
execução do algoritmo 4 é limitada superiormente no tempo por uma função polinomial. Em
outras palavras, trata-se também de um algoritmo eficiente do ponto de vista computacional.
A arquitetura proposta forneceu os elementos para a construção de um sistema
computadorizado que tem como objetivo realizar a gestão da rede semafórica em modo
isolado de uma cidade. O sistema foi implementado em um ambiente único que integra
diversas ferramentas, dentre as quais destaca-se:
Linguagens de programação: HTML (HyperText Markup Language), PHP (PHP
Hypertext Preprocessor), Javascript e Java;
Banco de dados: PostgreSQL para gestão de dados alfanuméricos, com a extensão
POSTGIS para o tratamento de dados espaciais;
Servidor de mapas para internet: Apache, Mapserver com a extensão Pmapper.
O HTML está no cerne de toda aplicação voltada à Internet. Consiste numa linguagem
que permite a apresentação de textos com links embutidos no documento capazes de
direcionar a navegação para outros documentos em servidor local ou remoto[68]
. O PHP é uma
linguagem de programação para ser executada em um servidor e gerar como resultado um
documento HTML[69]
. Dessa forma, pode-se gerar conteúdo sob demanda, conforme opções
selecionadas pelo usuário. A linguagem Java é bastante poderosa e inclui os conceitos de
orientação a objetos para o desenvolvimento de aplicações empresariais de larga escala,
sistemas distribuídos e baseados em internet[34]
. O Javascript é utilizado principalmente para
adicionar funcionalidades de programação às páginas da internet, como animações e, também,
para aumentar o grau de interatividade com o usuário final[34]
.
O banco de dados PostgreSQL segue o modelo objeto-relacional e é um dos mais

113
avançados servidores de banco de dados disponíveis. Dentre suas principais características
destaca-se o poder da orientação a objetos, o processamento de transações, a integridade
referencial, múltiplas linguagens procedurais e a extensibilidade[70]
. Por sua vez, o POSTGIS
é uma extensão espacial para o banco de dados PostgreSQL que adiciona os tipos de dados
espaciais, bem como mais de 300 funções de manipulação de dados espaciais, criando assim
um ambiente completo para o tratamento de dados georeferenciados[71]
. Por fim, a
disponibilização desses dados ao usuário final é feita através de um servidor Apache para web
e do servidor de mapas Mapserver. Este cria imagens de mapas a partir de dados espaciais
digitais, tanto em formato raster quanto vetor[72]
.
O produto gerado abarca as funcionalidades de todo esse conjunto de ferramentas. O
sistema permite o cadastramento da rede semafórica, dos fluxos observados e das pesquisas
de tráfego. Posteriormente, o mesmo calcula o ciclo ótimo de cada semáforo e possibilita a
incorporação de uma base cartográfica digital para auxílio à pesquisa e à geração de mapas
temáticos de medidas de desempenho, criando condições de antever o comportamento do
trânsito em cenários futuros fornecendo, assim, subsídios para minimizar os possíveis
problemas.
5.3 Resumo
Este capítulo especificou a arquitetura proposta para aperfeiçoar a gestão do sistema
semafórico em modo isolado de um município. Procurou-se introduzir métodos formais para a
construção do produto (modelagem de banco de dados, engenharia de software, análise e
projeto estruturados, prova de correção dos algoritmos), visto que a sua adoção apresenta
benefícios consideráveis para o ciclo de vida do sistema, conforme relatado no capítulo três.

114
Capítulo 6
Estudo de Caso
Este capítulo tem como objetivo apresentar os resultados para o modelo elaborado. A
solução proposta neste trabalho foi validada através da utilização da base cartográfica do
município de Campinas-SP com a incorporação dos semáforos georeferenciados. A seção 6.1
deste capítulo especifica o contexto do sistema. Em seguida, a seção 6.2 mostra as
potencialidades do sistema na análise de cenários variados de demanda de tráfego através dos
produtos gerados. A seção 6.3 resume o capítulo.
6.1 Contexto do Sistema
Com uma população superior a um milhão de habitantes - dados do IBGE do censo de
2010 - a cidade de Campinas é a sede da Região Metropolitana de Campinas (RMC). Os vinte
municípios que a integram caracterizam-se pela complementaridade de funções econômicas
tais como: produção industrial diversificada, centro avançado de serviços médicos,
entroncamento estratégico multimodal para o transporte de cargas apoiando a exportação e
importação, centro de apoio ao desenvolvimento agropecuário e a presença de um importante
aeroporto em nível nacional e internacional[73]
. Por ser o centro desta região e oferecer
serviços de grande amplitude, seja em saúde, educação, trabalho ou lazer, a cidade de
Campinas atrai inclusive pessoas provenientes das regiões vizinhas, o que naturalmente
acarreta impactos no seu sistema viário. O fluxo externo que adentra a cidade é viabilizado
por uma privilegiada malha rodoviária, formada por algumas das melhores rodovias do país.
Uma pesquisa origem-destino e cordon line realizada em 2011 pela STM (Secretaria
de Transportes Metropolitanos) dimensiona com precisão o fluxo de deslocamento realizado
pela população num dia útil típico fornecendo elementos que os caracterizam[74]
. A pesquisa
aponta que são realizadas 4,75 milhões de viagens diárias na RMC, dentre as quais 72,6% por
modo motorizado. Uma pesquisa semelhante realizada pela mesma STM em 2003 concluiu
que os deslocamentos motorizados na RMC totalizavam 64,16% das viagens. Esse
incremento mostra uma tendência crescente no uso do transporte motorizado observada em
anos recentes. A figura 28 mostra os resultados da pesquisa cordon line do fluxo de veículos

115
por posto e movimento (dia todo).
Figura 28: Pesquisa Cordon Line RMC - 2011
Fonte: STM[74]
Na cidade de Campinas, o sistema viário interno compõe-se de aproximadamente treze
mil vias assim caracterizadas: 4 vias de trânsito rápido (trecho da Aquidabã, Lix da Cunha,
Prestes Maia e Rodovia Milton Tavares de Lima); 151 vias arteriais; 538 vias coletoras e
12.303 vias locais. Na base disponível para o modelo construído, os cruzamentos
semaforizados perfazem um total de 433 sendo que 370 são operados por controladores
eletrônicos, 29 possuem programação fixa e 34 permanecem no amarelo piscante. Neste
conjunto, 205 equipamentos operam com fase exclusiva para pedestres[75]
.
A última pesquisa origem-destino para a cidade de Campinas, realizada em 2003,
aponta que são realizadas diariamente 1.546.833 viagens, assim distribuídas[75]
:

116
Figura 29: Distribuição do Número de Viagens em Campinas Segundo o Modo de
Transporte
Fonte: Adaptado da EMDEC[75]
A mesma pesquisa informa que pouco mais da metade dos deslocamentos por veículo
individual (55%) ocorre por motivo de trabalho, ao passo que a educação gera 21% deste total
e os demais motivos respondem por um montante de 24%. Nos deslocamentos por circulação
a pé, que representam a maior parte das viagens realizadas, o motivo principal é a educação
(61%), enquanto que 27% são devidos ao trabalho e o restante (12%) diz respeito a outros
motivos.
Nota-se, assim, que aproximadamente 50% dos deslocamentos diários na cidade
dependem dos veículos automotores; Este fato está em consonância com a atual taxa de
motorização (habitantes/veículos) da população local, uma das mais elevadas do país e com
tendência de alta. Estimativas da EMDEC (Empresa Municipal de Desenvolvimento de
Campinas) apontam que esta taxa cresceu de 1.47 em 2010 para 1.31 em 2014, conforme se
observa na figura 30. Isto significa um aumento de 12.21% no período; a cada dia, a cidade
recebe, em média, 113 veículos novos.
27
23
30
20
0
5
10
15
20
25
30
35
Transporte Coletivo Veículo Individual A pé Outros
Po
rce
nta
gem
Modos de Transporte

117
Figura 30: Taxa de Motorização na Cidade de Campinas
Fonte: Adaptado da EMDEC[76]
A primeira consequência deste quadro é o aumento acentuado dos níveis de
congestionamento nas principais ruas da cidade. Uma série de matérias publicada no jornal
"Correio Popular" em abril de 2011 traçou um panorama do problema[77]
. Constata-se que o
trânsito da cidade está próximo do seu limite. Além do aumento da taxa de motorização,
outros fatores contribuem para agravar o problema: transporte coletivo insuficiente, falta de
políticas públicas de desestímulo ao uso do carro, vias com capacidade aquém do necessário e
pouco investimento em infraestrutura.
O resultado imediato é que o trânsito trava as vias estratégicas; tome-se como exemplo
as avenidas que servem às regiões Sudoeste e Noroeste - John Boyd Dunlop, Amoreiras, Ruy
Rodriguez e Lix da Cunha. Há períodos do dia em que a velocidade média chega a 12 km/h.
Nas regiões Norte e Leste, o problema manifesta-se em decorrência da expansão urbana, pois
a população dos condomínios ali localizados utilizam as rodovias como avenidas.
Na região central e adjacências, as vias expressas não conseguem cumprir o seu papel.
Em algumas delas, concebidas para permitir um deslocamento de até 60km/h, não é possível
trafegar a mais de 40km/h. Ademais, na área central observa-se fatores que agravam ainda
esse cenário: vias estreitas, estacionamento liberado ao longo de artérias importantes de
tráfego e desrespeito à sinalização.
2,58
2,40
2,32
2,23
2,18
2,13
2,09
2,06
2,02
1,98
2,00
1,89
1,71
1,63
1,56
1,47
1,39
1,33
1,33
1,31
0
0,5
1
1,5
2
2,5
3
1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014
Taxa de motorização(habitantes/veículos)

118
Segundo dados da EMDEC de 2012, no trânsito campineiro a velocidade média cai
1,5% ao ano com o aumento da frota. Esse mesmo estudo aponta que nos principais eixos a
velocidade média é de 18km/h ao longo do dia e se reduz para 15 km/h no horário de pico[78]
.
Num outro dado disponível à respeito do trânsito campineiro, constata-se que o
crescimento de veículos supera o de habitantes[79]
. Em 2014, a população da cidade cresceu
0,85%, enquanto a frota teve aumento de 2,6%. Com isso, a população local tem,
proporcionalmente, mais veículos que a médias brasileira, mexicana e argentina. Projeções
apontam que a cidade deve ter um carro por morador em sete anos, caso esse ritmo seja
mantido.
Outra consequência deste alto grau de motorização é o conflito no uso do espaço
público. O sistema de circulação, que envolve tanto veículos quanto pedestres, é sempre uma
fonte de preocupação para as autoridades gestoras do trânsito. O resultado deste conflito é a
ocorrência de acidentes, que geram prejuízos econômicos e, sobretudo, traumas profundos nas
vitimas. Desta forma, torna-se necessário a adoção de medidas que aumentem a segurança, ao
mesmo tempo em que garantam a fluidez do sistema. Embora as estatísticas apontem
reduções ocasionais na taxa de acidentes e vítimas, os números ainda causam preocupação,
como demonstram os gráficos seguintes.
Figura 31: Total de Acidentes na Cidade de Campinas (1995-2011)
Fonte: Adaptado da EMDEC[80]
17
82
0
19
21
5
20
71
3
20
49
0
21
18
2
19
37
0
17
77
8
16
13
6
14
74
0
16
56
7
17
27
4
17
05
3
18
98
3
19
47
9
17
89
0
17
70
0
17
81
8
0
5000
10000
15000
20000
25000
Tota
l de
acid
ente
s

119
Figura 32: Índice de Mortalidade por 100 mil Habitantes na Cidade de Campinas
Fonte: Adaptado da EMDEC[76]
Figura 33: Custo Social e UPS dos Acidentes de Trânsito
Fonte: Adaptado da EMDEC[80]
Segundo dados deste relatório, o custo dos acidentes em 2003 foi de R$ 94.000.000,00
e em 2011 atingiu R$ 134.000.000,00, um aumento de 43%. No mesmo período a UPS –
Unidade de Padrão de Severidade – sofreu um incremento de 33%. Em outras palavras, os
acidentes estão apresentando consequências mais sérias para as vítimas. A UPS consiste numa
média ponderada que considera os acidentes fatais e os não fatais.
96
93
96
98
29
77
99
50
24
1006
918
1031
887
1045
706
1059
420
1039
297
1056
644
1064
669
1080
113
1088
611
1039
297
1144
862
1154
617
11,24
9,56
10,25
8,84 8,928,32
9,06
11,55
12,87
11,08
9,63
13,6
7,1
8,828,31
0
2
4
6
8
10
12
14
16
850000
900000
950000
1000000
1050000
1100000
1150000
1200000
População Indice Mortalidade2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014
126
114 107
94
110
126 127
143 149
132 130 134
32 30 27 24 28 32 32 36 37 33 32 32
0
20
40
60
80
100
120
140
160
2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011
Custo Social UPS

120
Nota-se que há um desafio duplo na questão: aumentar a fluidez do trânsito e
aprimorar a segurança das pessoas que utilizam o sistema viário.
Como mencionado anteriormente, as propostas para aumentar o escoamento deste
fluxo crescente de veículos podem não ser factíveis. Algumas são extremamente custosas,
outras impopulares. Por exemplo, o custo com desapropriações para ampliação de algumas
ruas e avenidas é certamente proibitivo na maior parte das cidades brasileiras com alto grau de
urbanização. Medidas como a adoção do pedágio urbano para restringir o acesso dos veículos
automotores à região central das cidades causam debates acalorados entre os favoráveis e os
contrários à ideia. Assim, a solução mais plausível parece ser a promoção do aumento da
eficiência do sistema de trânsito da cidade.
Diante deste panorama, propõe-se a adoção de ação capaz de propiciar ganhos de
eficiência no sistema global através de um sistema adaptável de programação semafórica.
Para tanto, serão utilizadas pesquisas de fluxos realizadas ao longo dos anos para análise de
tendência do comportamento do tráfego. A solução operará ainda em um ambiente espacial,
capaz de prover funções de visualização e análise das métricas de desempenho para a
identificação dos pontos mais críticos do sistema viário.
Espera-se que este recurso forneça subsídios para o estudo de medidas alternativas
para o sistema de circulação, sobretudo nos pontos que apresentarem as maiores restrições de
desempenho, além de contribuir para o aumento da segurança do sistema, tanto para os
condutores de veículos quanto para os pedestres.
Desta forma, a integração de um sistema adaptável de programação semafórica a um
sistema de informações geográficas é uma alternativa bastante viável. A tecnologia permite a
análise espacial das medidas de desempenho, facilitando o entendimento do relacionamento
entre os vários semáforos que compõem a rede. Isto não seria possível com a produção de
relatórios ou planos que apresentassem os resultados obtidos sem os mapas incorporados, fato
que mostra a vantagem do uso de um SIG. Ademais pode-se incorporar ao modelo dados
bastante úteis para análises mais completas como os polos geradores de tráfego e o
zoneamento do território.
Outro fator determinante para a geração do produto é o fato desta integração ter sido

121
pouco explorada nos trabalhos acadêmicos, conforme observações realizadas no capítulo
quatro.
6.2 Produtos Gerados
A figura 34 apresenta o módulo de cadastro dos semáforos. Na primeira aba,
observam-se os atributos que caracterizam os semáforos: Número identificador; localização;
disponibilidade de aparelho fotosensor; área de origem; número de fases e data de
implantação do aparelho.
Figura 34: Módulo de Cadastro de Semáforos - Identificação
A figura 35 mostra, para cada aproximação, como é feito o cadastro da largura da via,
da capacidade (uvpd), da existência e largura do acostamento e dos fluxos diretos e em
conversão para cada tipo de veículo (automóveis, ônibus e caminhão). Observa-se ainda os
botões que permitem efetivar a operação de gravação dos dados, o cancelamento da entrada, o
acionamento da função de pesquisa de volume para o cruzamento selecionado e também a
geração de um relatório com as suas principais características.

122
Figura 35: Módulo de Cadastro de Semáforos - Fluxos de Veículos
A figura 36 apresenta o modelo de relatório apresentado ao ativar o botão "Gerar
Ficha" ilustrado anteriormente. Esta ficha tem como finalidade fornecer todos os itens
cadastrados pelo usuário, para fins de controle e acompanhamento do desempenho do
dispositivo.
Esse relatório identifica a aproximação através do seu código e fornece os dados
relevantes complementares: área de origem, disponibilidade de foto sensor, número de fases,
data da implantação. Além disso, para cada aproximação há uma entrada com os dados
pertinentes como: nome, existência e largura de acostamento, fluxos direto e em conversão e
também as medidas de desempenho, conforme o modelo D/D/1 detalhado no capítulo 4. Para
enriquecer ainda mais o relatório, apresenta-se também o diagrama de tempo da programação
semafórica e mapas de localização do aparelho.

123
Figura 36: Módulo do Cálculo das Métricas de Desempenho
O módulo seguinte do sistema tem como objetivo realizar o cadastro das pesquisas de
fluxo para o município em dias e horários diferenciados. A figura 37 ilustra a tela concebida
para esta tarefa. Nota-se que o lay-out da tela deste módulo é bastante semelhante ao do
módulo de cadastro do semáforo.

124
Na primeira aba apresenta-se a identificação pré-gravada do semáforo apenas para fins
de conferência, sem a possibilidade de edição desses dados. Logo abaixo, disponibiliza-se os
campos básicos de cadastro: data da pesquisa, bem como os horários de inicio e término da
pesquisa. Além disso, na aba posterior, o sistema apresenta duas guias (uma para cada
aproximação) para o preenchimento dos dados que caracterizam os fluxos separados por tipo
de veículos (automóveis, ônibus e caminhão), fazendo também a distinção entre o fluxo direto
e o fluxo em conversão. Com isso, cria-se condições para o registro de uma série longa de
pesquisa, o que vai tornar mais rica a qualidade da estimativa de fluxos futuros.
Figura 37: Módulo de Cadastro das Pesquisas de Volume de Tráfego
A tela principal do sistema oferece ainda uma opção para o cálculo da programação
semafórica de toda a rede cadastrada. Nessa operação gera-se também todas as medidas de
desempenho para os conjuntos semafóricos. Essa operação sempre deve ser executada antes
das análises espaciais, pois o sistema utiliza a última posição consolidada registrada no banco
de dados. Ilustra-se, a seguir, alguns mapas temáticos do produto.

125
Figura 38: Módulo de Geração de Mapas
A figura 38 apresenta a tela inicial de apresentação da base cartográfica com os
semáforos georeferenciados. À direita, observa-se um painel com as camadas para viabilizar
as análises geográficas das métricas de desempenho dos semáforos. Esse painel engloba itens
do recorte geográfico da cidade ( loteamentos, unidades territoriais básicas, plantas de
referência cadastral e macrozonas), elementos de trânsito (arruamento, rodovias, semáforos e
polos geradores de tráfego), uso e ocupação do solo e as métricas associadas.
O processo de análise espacial das métricas é bastante simples. Basta ativar a opção
desejada e o sistema redesenha o mapa oferecendo, ainda, os recursos pertinentes quando
mapas são objetos de análise, como: aproximação, afastamento, reposicionamento em uma
área desejada e detalhamento de um objeto selecionado. Como exemplo, a figura 39 apresenta
um recorte de uma área da cidade, com a respectiva rede semafórica associado ao tema "fila
máxima". Observa-se que os pontos vermelhos são os mais críticos dessa área, ao passo que
os amarelos são de intensidade média e os verdes e azuis os mais suaves. A ferramenta
enfatiza esse ponto dimensionando os objetos proporcionalmente.

126
Figura 39: Exemplo de Mapa - Fila Máxima
Um exemplo adicional pode ser visto na figura 40, que ilustra a taxa média de
chegada. Novamente, os pontos mais críticos são realçados pela cor vermelha e a sua
dimensão ajustada de maneira proporcional ao tema.
Figura 40: Exemplo de Mapa - Taxa Média de Chegada

127
O sistema construído permite também a análise por recortes geográficos mais amplos.
O mapa da figura 41 apresenta a métrica "tempo máximo de espera", divido pelos loteamentos
do município, ao passo que na figura 42 a métrica "veículos que chegam à intersecção num
ciclo, respeitando a divisão de unidade territorial básica na cidade de Campinas.
Figura 41: Exemplo de Mapa - Tempo Máximo de Espera
Figura 42: Exemplo de Mapa - Veículos que Chegam à Intersecção no Ciclo

128
Os exemplos precedentes deixam claro que o sistema é bastante maleável e permite a
incorporação de qualquer recorte geográfico para análises múltiplas. Pode-se, por exemplo,
utilizar recortes menores, talvez mais adequados para monitoramentos mais específicos, como
os controles de tráfego por área, que são utilizados em muitas cidades de médio e grande
porte.
Outro recurso do produto apresentado é a possibilidade de análises combinando
diferentes métricas de avaliação do tráfego, conforme mostra o mapa da figura 43.
Figura 43: Exemplo de Mapa - Métricas Combinadas
No caso acima, sobrepõe-se as métricas "veículos que passam pela intersecção num
ciclo" e "fila média". Observa-se, nesse caso, que embora em alguns locais os veículos que
passam por um conjunto semafórico seja considerável, ainda assim forma-se filas grandes.
Esse tipo de análise permite identificar precisamente as áreas mais afetadas e em que grau
essas medidas se relacionam. A partir desse momento, o gestor do tráfego urbano está em
posição de tomar medidas corretivas com muito mais eficácia. Nota-se ainda que é possível
combinar as métricas de cada intersecção com o conjunto geográfico de sua localização, o que
aumenta ainda mais o poder de análise de cenários do modelo.

129
A flexibilidade do produto construído é significativa. Pode-se, por exemplo,
incorporar dados relacionados ao zoneamento e uso e ocupação do solo, bem como polos
geradores de tráfego, conforme apresenta o mapa da figura 44.
Figura 44: Exemplo de Mapa - Semáforos e Zoneamento
Neste mapa observa-se o zoneamento municipal em conjunto com os semáforos com a
métrica "grau de congestionamento". Tome-se, como exemplo, a faixa lilás que, no caso,
representa uma área de uso predominante habitacional multifamiliar vertical. O adensamento
daí decorrente em anos recentes agravou o sistema de trânsito local. Nota-se que a maioria
dos semáforos apresenta alto grau de congestionamento.
Dessa forma, o produto passa a ser interessante para a gestão em nível estratégico de
uma cidade, inclusive balizando a viabilidade de implantação de novos empreendimentos. É
importante ressaltar que quaisquer itens adicionais podem ser facilmente incorporado ao
sistema. Uma análise cruzada do fluxo atual, com o zoneamento permitido, os polos geradores
de trafego presentes e em estudo de implantação garantem que situações de congestionamento
adicionais sejam evitadas, garantindo assim qualidade de vida para os habitantes.
O projeto concebido permite ainda funcionalidades extras. O gerenciador de banco de

130
dados selecionado possibilita a conexão com pacotes de softwares de geoprocessamento,
dentre os quais alguns de código aberto, como por exemplo o Quantum GIS. Este possui uma
interface gráfica bastante amigável e de fácil utilização, abarcando recursos para tratamento
de dados raster e vetorial, bem como um conjunto de operações espaciais[81]
. Assim, torna-se
possível efetuar análises não contempladas no modelo. Um exemplo pode ser visto na figura
45, onde é apresentado uma mapa do tipo "calor", que são utilizados para identificar grupos
onde existe uma elevada concentração de atividade.
Figura 45: Exemplo de Mapa - Zonas Quentes de Semáforos
No exemplo acima, constata-se que a região central é a mais crítica em termos
operacionais, o que confirma a exatidão do modelo. O alto fluxo que circula por essa região
aponta a localização das áreas mais críticas ao bom encaminhamento da corrente de tráfego.
Nota-se, também, uma malha circular ao redor dessa primeira região mais crítica, que
funciona como uma zona de transição que capta o movimento das regiões periféricas. Por
último, a área verde identifica as áreas onde o fluxo não é tão intenso, com perfil mais
residencial e alguns serviços locais.

131
Por fim, o módulo de projeção de fluxo é capaz de estimar os volumes futuros para
cada aproximação, considerando fluxos direto e em conversão para automóveis, ônibus e
caminhões. Inicialmente uma rotina separa as amostras da pesquisa que serão utilizadas como
base para a geração da equação de ajuste pelo método dos mínimos quadrados, conforme
explicado no capítulo 5, e ilustrado na figura 46. Na mesma tela é solicitado o parâmetro de
projeção a ser utilizado no cálculo, isto é, a unidade de tempo, que representa o número de
meses, para o computo dos fluxos desejados.
Figura 46: Estimativa de Fluxos Futuros
Neste ponto, o sistema aciona a função de projeção de fluxos (reta dos mínimos
quadrados). Posteriormente, os resultados das estimativas e as métricas projetadas podem ser
analisadas na opção "Mapas" do menu principal. As figuras 47 e 48 apresentam exemplos de
mapas de fluxo gerados a partir desse recurso do software.
Ressalta-se, contudo, que a precisão dessa estimativa depende bastante da qualidade e
do número de elementos da amostragem. Quanto mais elementos o espaço amostral tiver,
mais preciso será o resultado final.

132
Figura 47: Exemplo de Mapa - Fluxo Atual - Espera Média
Figura 48: Exemplo de Mapa - Fluxo Projetado - Espera Média
Observando-se os mapas acima, confirma-se a utilidade deste módulo do produto. Nas
áreas em destaque, verifica-se a mudança de cenário no decorrer do tempo. Enquanto que na
figura 47, essas áreas não chegam a constituir um problema para a métrica "espera média", o
mesmo não acontece com a situação representada pelo mapa da figura 48, onde o fluxo foi

133
projetado para 12 meses. O modelo de regressão linear foi capaz de antever uma situação
futura, mantendo as tendências atuais, e traduzi-la para números que representam uma boa
aproximação do que pode vir a ocorrer no tempo designado. Assim, o órgão gestor do trânsito
municipal ganha um instrumento adicional para agir de maneira preventiva em eixos que
podem se tornar novos problemas na rede de circulação.
Constata-se, desta forma, que o sistema cumpre os requisitos especificados no que
tange à parte cadastral dos semáforos, pesquisas de volume de tráfego, cálculo da
programação semafórica e espacialização de métricas de desempenho para uma interseção
isolada.
6.3 Resumo
O presente capítulo apresentou uma caracterização da região geográfica selecionada
para testar a validade do modelo proposto no trabalho. Foram apresentados fatos referentes à
atratividade da Região Metropolitana de Campinas e o fluxo de movimento daí decorrente.
Em seguida, algumas estatísticas foram apresentadas para retratar os impactos gerados na
malha viária da cidade de Campinas, sobretudo os relacionados à dimensão do fluxo, os tipos
mais importantes de movimento e a acidentalidade ocasionada no uso das vias públicas. Por
fim, apresenta-se o modelo computacional proposto no trabalho, com algumas ilustrações de
uso possível.

134
Capítulo 7
Conclusões
7.1 Contribuições
A gestão eficiente do sistema semafórico de uma cidade propicia ganhos na utilização
do sistema viário como a redução dos congestionamentos e da poluição ambiental. Esta gestão
pode ser aperfeiçoada pela utilização de ferramentas que possibilitem o cálculo automático da
programação semafórica de cada interseção, bem como das medidas de desempenho
associadas. Os principais objetivos deste trabalho foram estudar os métodos de programação
de ciclos de semáforos mais utilizados e propor uma arquitetura que permitia a integração de
um destes métodos com um ambiente de sistemas de informações geográficas.
A princípio, verificou-se que a ineficiência do sistema de trânsito nos grandes centros
urbanos acarreta perdas significativas de recursos financeiros. Posteriormente, foram relatadas
algumas experiências com abordagens que propõem conceitos diferenciados para a
programação semafórica. A seguir, foram introduzidos alguns conceitos sobre os sistemas de
informações geográficas e os tópicos a serem observados para o seu uso correto. A etapa
seguinte consistiu em estudar princípios de gestão do sistema de trânsito e a verificação da
produção acadêmica na área.
O resultado desta pesquisa foi a elaboração de uma arquitetura para um sistema de
gestão da programação semafórica de uma cidade que contempla a questão espacial da
medida de desempenho da rede semafórica. O modelo gerado adota a programação para
semáforos isolados. A proposta abarca ainda um módulo para estimar o fluxo futuro gerado a
partir de uma série histórica. O ambiente gerado permite a interatividade com os usuários
através da disponibilização de ferramentas gráficas. Assim, o produto construído permite a
gestão do ciclo semafórico desde o cadastro de cada unidade na malha viária, pesquisas de
volumes, cálculos de programação semafórica, geração de relatórios técnicos e produção de
mapas temáticos de medidas de desempenho.
O modelo proposto foi validado através da utilização de dados provenientes da cidade

135
de Campinas.
Em síntese, as principais contribuições deste trabalho foram:
Apresentação de custos e problemas da ineficiência do sistema de trânsito,
sobretudo congestionamentos;
Averiguação de modelos existentes para o tratamento da programação semafórica;
Estudos sobre a integração de um Sistema de Informação Geográfica com modelos
de controle de trânsito para aperfeiçoar a gestão do trânsito urbano;
Proposta de uma arquitetura integrada para a gestão geo-temporal da programação
semafórica;
Implementação da arquitetura através de um sistema de ambiente único, adotando-
se uma abordagem formal;
Observa-se ainda que a solução gerada pode até mesmo suprir uma carência
identificada em cidades que não dispõem de ferramentas automatizadas para a gestão
semafórica da sua malha viária.
7.2 Extensões
As extensões possíveis para este trabalho são:
Integração com sistemas de comunicação: A versatilidade do sistema pode ser
ampliada pela incorporação de um sistema de comunicação de dados em tempo
real. Assim, a instalação de sensores capazes de detectar o fluxo de maneira
dinâmica e a sua posterior transmissão a uma central de controle tem o potencial
de incrementar o poder da solução que seria ajustado conforme a demanda
verificada em eixos específicos.
Operação do modelo em rede coordenada: O modelo construído opera com a
programação de semáforos isolados. Trata-se de uma simplificação do modelo
normalmente adotado nos grandes centros urbanos. A solução proposta pode ser
interessante uma vez que um elemento otimizado isoladamente pode contribuir
para a melhoria do fluxo numa região mais ampla. Contudo, sabe-se que a situação

136
ideal contempla a otimização de semáforos em rede pois, conforme mencionado
anteriormente, um exerce influência sobre os demais. Dessa forma, uma extensão
possível para este trabalho seria a construção de um modelo que operasse em uma
rede totalmente coordenada.
Incorporação de outros métodos: Uma terceira extensão ao modelo seria a
incorporação dos métodos de redes neurais, lógica fuzzy e algoritmos genéticos
para o tratamento da programação semafórica. Conforme estudos relatados no
capítulo dois, pesquisadores apontam ganhos de eficiência em alguns cenários pela
adoção destes métodos. Assim, pode-se incorporar funções para cada uma das
variantes acima e verificar a sua adequação a uma cidade específica.
Avaliação geográfica comparativa do desempenho de diferentes métodos:
Finalmente, outra extensão é a incorporação do modelo geográfico para avaliação
comparativa das medidas de desempenho geradas pelos métodos propostos no item
anterior, bem como a previsão de cenários futuros pelos mesmos.
Em suma, o modelo ora proposto pode ser implantado em municípios com população
de até 1.000.000 de habitantes que, na maioria das vezes, não conta com um órgão executivo
de trânsito com a capacitação técnica em projetos de semaforização, e recursos financeiros
para aquisição de grandes sistemas. Deste modo entende-se que este trabalho contribuiu
efetivamente para parte da solução dos problemas de trânsito apontados, que tendem a se
agravar com o aumento desenfreado da frota brasileira no final da década de 2000 e meados
desta década.

137
Referências Bibliográficas
[1] United Nations, Department of Economic and Social Affairs, Population Division (2014).
World Urbanization Prospects: The 2014 Revision, Highlights (ST/ESA/SER.A/352), 2014.
[2] Thagesen, Bent, Highway and Traffic Engineering in Developing Countries, E & FN Spon, 1996.
[3] IPEA (Instituto de Pesquisa Econômica Aplicada) – Jornal OESP – Caderno Especial de Trânsito -
09/12/2006.
[4] Cintra, M., A Crise do Trânsito em São Paulo e seus Custos, 2013.
[5] Clark, C., Transport: Maker and Breaker of Cities, The Town Planning Review, Vol. 28, No. 4,
Liverpool Univerty Press, 1958.
[6] Vasconcellos, E.A., Lima, I.M.O., Quantificação das Deseconomias do Transporte Urbano: Uma
Resenha das Experiências Internacionais, IPEA, 1998.
[7] ANTP, Sistema de Informações da Mobilidade Urbana - Relatório Geral 2013, 2015.
[8] Bezerra, B.S., Ferraz, A.C.P., Estado da Prática na Operação de Semáforos nas Cidades Médias
do Estado de São Paulo, Departamento de Transporte, Escola de Engenharia de São Carlos, 2005.
[9] Françoso, M.T., Estudo sobre Semáforos Isolados com Tempos Fixos, Dissertação de Mestrado,
Escola de Engenharia de São Carlos, Universidade de São Paulo, 1990.
[10] Russell, S.J., Norvig, P., Artificial Intelligence – A Modern Approach, 3rd
Edition, Prentice-Hall
Inc., 2010.
[11] Liu, Z., A Survey of Intelligence Methods in Urban Traffic Signal Control, International Journal
of Computer Science and Network Security, Vol. 7 Nº 7, 2007.
[12] Prothmann, H., Rochner, F., Tomforde, S., Branke, J., Müller-Schloer, C., Schmeck, H., Organic
Control of Traffic Light, C. Rong et al. (Eds.): ATC 2008, LNCS 5060, pp. 219-233, Springer-Verlag,
Berlin, Heidelberg, 2008.
[13] Montana, D.J., Czerwinski, S., Evolving Control Laws for a Network of Traffic Signals, Oxford
University Press, 1993.
[14] Kalganova, T., Russell, G., Cumming, A., Multiple Traffic Signal Control Using a Genetic
Algorithm, in Artificial Neural Nets and Genetic Algorithms, Springer Computer Science, 1999.
[15] Haykin, S., Neural Networks – A Comprehensive Foundation, 2nd
Edition, Prentice Hall, 1999.
[16] Kagolanu, K., Fink, R., Smartt, H., Powell, R., Larsen, E., An Intelligent Traffic Controller, Idaho
National Engineering Laboratory, 1995.

138
[17] Chao, K.-H., Lee, R.-H., Wang, M.-H., An Intelligent Traffic Light Control Based on Extension
Neural Networks, I. Lovrek, R.J. Howlett, and L.C. Jain (Eds.): KES 2008, Part I, LNAI 5177, pp. 17–
24, Springer-Verlag, Berlin Heidelberg 2008, 1995.
[18] Burrough, Peter A., McDonnell, Rachael A., Principles of Geographical Information Systems,
Oxford University Press, 2000.
[19] Gadêlha, J.C., Loureiro, C.F.G., Cunha, H., Aplicação de Lógica “Fuzzy” no Controle
Semafórico de Interseções Isoladas, em Transporte em Transformação IV – Trabalhos Vencedores do
Prêmio CNT Produção Acadêmica 1999, Makron Books, 2001.
[20] Wei, W., Wang, M., Traffic Signal Control Using Fuzzy and Neural Network, Department of
Road and Traffic Engineering, Changsha Communications University, Changsha, China,2001.
[21] ABNT – Associação Brasileira de Normas Técnicas, Rede de Referência Cadastral Municipal –
NBR 14.166, Rio de Janeiro, 1998.
[22] Timbó, Marcos A., Elementos de Cartografia, Departamento de Cartografia, UFMG, 2001.
[23] Barnsley, M., Digital Remotely-sensed Data and their Caracteristics, in Geographical
Information Systems, Principles, Techniques, Management and Applications, John Wiley & Sons, Inc,
2005.
[24] Martínez, Ramón M. Lorenzo, Cartografía – Urbanismo y Desarrollo Inmobiliario, Cie
Inversiones Editoriales Dossat, 2004.
[25] Costa, Diogenes Cortijo, Diretrizes para elaboração e uso de bases cartográficas no
planejamento municipal: urbano, rural e transportes, Tese de Doutorado, São Paulo, 2001.
[26] Loch, Carlos, Cadastro Técnico Multifinalitário: rural e urbano, Cambridge, MA: Lincoln
Institute of Land Policy, 2007.
[27] Ramos, Cristiane da Silva, Visualização Cartográfica e Cartografia Multimídia – Conceitos e
Tecnologias, Editora UNESP, 2005.
[28] Reichenbacher, Tumash, Mobile Cartography – Adaptive Visualization of Geographic
Information on Mobile Devices, Institut für Photogrammetrie und Kartographie, Fakultät für
Bauingenieur, Technischen Universität München, 2003.
[29] Françoso, M.T., Diretrizes para Planejamento Assistido por Computador em Prefeituras de
Médio Porte, Tese de Doutorado, Universidade de São Paulo, 1998.
[30] Tomlinson, Roger, Thinking about GIS – Geographic Information System Planning for
Managers, ESRI Press – Redlands, California, 2003.
[31] Couclelis, H., Space, Time, Geography, in Geographical Information Systems, Principles,
Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.

139
[32] Almeida, Cláudia Maria de, O Diálogo entre as Dimensões Real e Virtual do Urbano, em
Geoinformação em Urbanismo: Cidade Real x Cidade Virtual, Cláudia Maria de Almeida, Gilberto
Câmara e Antonio Miguel V. Monteiro, São Paulo: Oficina de Textos, 2007.
[33] Peuquet, D.J., Time in GIS and Geographical Databases, in Geographical Information Systems,
Principles, Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[34] Deitel, P.J., Deitel, H.M., Java: How to Program - Early Objects, 10th edition, Prentice Hall,
2015.
[35] Veregin, Howard, Data Quality Parameters, in Geographical Information Systems, Principles,
Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[36] Heuvelink, G.B.M., Propagation of Error in Spatial Modelling with GIS, in Geographical
Information Systems, Principles, Techniques, Management and Applications, John Wiley & Sons, Inc,
2005.
[37] Coleman, D.J., Geographical Information Systems in Networked Environment, in Geographical
Information Systems, Principles, Techniques, Management and Applications, John Wiley & Sons, Inc,
2005.
[38] Sondheim, M., Gardels, K., Buehler, K., GIS Interoperability, in Geographical Information
Systems, Principles, Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[39] Maguire, J.D., GIS Customisation, in Geographical Information Systems, Principles, Techniques,
Management and Applications, John Wiley & Sons, Inc, 2005.
[40] Consórcio Base-Esteio-Intertechne-Aerocarta, Diagnóstico da Situação Atual da Prefeitura
Municipal de Campinas Referente à Cartografia, Cadastro e Geoprocessamento – Relatório Final,
1995.
[41] Sommerville, Ian, Software Engineering, 9th Edition, Addison-Wesley, 2011.
[42] Elmasri, R., Navathe, S.B., Fundamentals of Database Systems, 6th Edition, Addison-Wesley,
2011.
[43] Codd, E., A Relational Model for Large Shared Data Banks, Communications of the ACM
13:377:87, 1970.
[44] Worboys, M.F., Relational Databases and Beyond, in Geographical Information Systems,
Principles, Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[45] Bédard, Y., Principles of Spatial Database Analysis and Design, in Geographical Information
Systems, Principles, Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[46] Getis, A., Spatial Statics, in Geographical Information Systems, Principles, Techniques,
Management and Applications, John Wiley & Sons, Inc, 2005.
140
[47] Openshaw, S., Alvanides, S., Applying Geocomputation to the Analysis of Spatial Distributions,
in Geographical Information Systems, Principles, Techniques, Management and Applications, John
Wiley & Sons, Inc, 2005.
[48] Bernhardsen, T., Choosing a GIS, in Geographical Information Systems, Principles, Techniques,
Management and Applications, John Wiley & Sons, Inc, 2005.
[49] Obermeyer, N.J., Measuring the benefits and costs of GIS, in Geographical Information Systems,
Principles, Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[50] Sugarbaker, L.J., Managing an operational GIS, in Geographical Information Systems,
Principles, Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[51] Miller, H.J., Shaw, S., Geographic Information Systems for Transportation: Principles and
Applications, Oxford University Press, 2001.
[52] Waters, N.M., Transportation GIS: GIS-T, in Geographical Information Systems, Principles,
Techniques, Management and Applications, John Wiley & Sons, Inc, 2005.
[53] Wohl, M., Martin, B.V., Traffic System Analysis for Engineers and Planners, McGraw-Hill
Series in Transportation, 1967.
[54] Setti, J.R.A., Fluxo de Veículos e Capacidade Viária, Universidade de São Paulo, 2001.
[55] Transportation Research Board, Highway Capacity Manual – HCM 2000, National Academy of
Sciences, 2000.
[56] Mannering, F.L., Kilareski, W.P., Principles of Highway Engineering and Traffic Analysis, John
Wiley & Sons, Inc., 1990.
[57] Webster, F.V., Cobbe, B.M., Traffic Signals, Road Research Technical Paper 56, HMSO,
London, 1962.
[58] Papacostas, C.S., Prevedouros, P.D., Transportation Engineering and Planning, Prentice-Hall
Inc., 2nd
Edition, 1993.
[59] Wright, P.H., Highway Engineering, John Wiley & Sons, Inc., 6th Edition, 1996.
[60] Vilanova, L., Fundamentos da Programação Semafórica, Sinal de Trânsito - Engenharia,
Operação e Educação de Trânsito, 2005. Paper disponível em http://www.sinaldetransito.com.br
(acessado em 28/07/2009).
[61] Ming, S.H., Cálculo do Ciclo de Verdes Ótimos quando o Fluxo de Saturação não é Constante,
Série Notas Técnicas, Publicação Técnica da Companhia de Engenharia de Tráfego – CET-SP, 2001.
Paper disponível em http://www.cetsp.com.br (acessado em 25/07/2009).
[62] Gupta, P., Sikdar, P.K., Jain, N., Kumar, K., Geographical Information System in Transportation
Planning, Map Asia Conference, 2003.

141
[63] Queiroz, M.P., Loureiro, C.F.G., Yamashita, Y., Caracterização de Padrões Pontuais de
Acidentes de Trânsito Aplicando as Ferramentas de Análise Espacial, XVIII Congresso de Pesquisa e
Ensino em Transportes, 2004.
[64] Sarasua, W.A., Applying Geographic Information System Technology to Traffic Signal
Coordination, in Transportation Research Record, Nº 1456, National Academy Press, pp. 54-63, 1994.
[65] Oliveira, M.G.S., Ribeiro, P.C.M., Aplicação de Sistemas de Informações Geográficas em
Coordenação Semafórica, em Transporte em Transformação II – Trabalhos Vencedores do Prêmio
CNT Produção Acadêmica 1997, Makron Books, 1999.
[66] Page-Jones, M., Projeto Estruturado de Sistemas, McGraw-Hill, 1988.
[67] Cormen, T.H., Leiserson, C.E., Rivest, R.L., Introduction to Algorithms, 3rd
Edition, MIT Press,
McGraw-Hill, 2009.
[68] David, M., HTML 5 - Designing Rich Internet Applications, Focal Press - Elsevier, 2010.
[69] Doyle, M., Beggining PHP 5.3, Wiley Publising Inc., 2010.
[70] Douglas, K., Douglas, S., PostgreSQL, 2nd
Edition, Sams Publishing, 2005.
[71] Obe, R., Hsu, L., PostGis in Action, 2nd
Edition, Manning Publicationc Co., 2015.
[72] Kropla, B., Beginning MapServer - Open Source GIS Development, Apress, 2005.
[73] Emplasa, Sumário de Dados da Região Metropolitana de Campinas, 2002.
[74] STM, Pesquisa Origem e Destino Domiciliar e Cordon Line - Síntese dos Resultados, 2012.
[75] Emdec, Empresa Municipal de Desenvolvimento de Campinas, 2008.
[76] Emdec, Empresa Municipal de Desenvolvimento de Campinas, Acidentes de Trânsito em
Campinas – 2014, 2015.
[77] Jornal Correio Popular, Série de Reportagens sobre o Trânsito de Campinas, Edições de
25/04/2011 a 30/04/2011.
[78] Jornal Correio Popular, Trânsito:15km/h no Rush Campineiro, Edição de 15/07/2012.
[79] Jornal Correio Popular, Crescimento de Veículos Supera o de Habitantes, Edição de 21/09/2014.
[80] Emdec, Empresa Municipal de Desenvolvimento de Campinas, Acidentes de Trânsito em
Campinas – 2011, Edição nº 21, 2012.
[81] QGIS Project, QGIS User Guide, Version 2.6, 2014.