pontifÍcia universidade catÓlica do paranÁ programa …€¦ · adaptation to a wheelchair...
TRANSCRIPT

PONTIFÍCIA UNIVERSIDADE CATÓLICA DO PARANÁ
PROGRAMA DE PÓS-GRADUAÇÃO EM TECNOLOGIA EM SAÚDE
TECNOLOGIA ASSISTIVA: CONSTRUÇÃO DE UM ARTEFATO
PARA A ADEQUAÇÃO DA POSTURA SENTADA EM CRIANÇA COM
PARALISIA CEREBRAL E COM MÚLTIPLA DEFICIÊNCIA
CURITIBA
2006

CRISTIANE GONÇALVES RIBAS
TECNOLOGIA ASSISTIVA: CONSTRUÇÃO DE UM ARTEFATO
PARA A ADEQUAÇÃO DA POSTURA SENTADA EM CRIANÇA COM
PARALISIA CEREBRAL E COM MÚLTIPLA DEFICIÊNCIA
Dissertação apresentada ao Programa de Pós-Graduação em Tecnologia em Saúde, da Pontifícia Universidade Católica do Paraná, como requisito parcial à obtenção ao título de Mestre em Tecnologia em Saúde.
Orientadora: Profª Drª Vera Lúcia Israel
CURITIBA
2006

CRISTIANE GONÇALVES RIBAS
TECNOLOGIA ASSISTIVA: CONSTRUÇÃO DE UM ARTEFATO
PARA A ADEQUAÇÃO DA POSTURA SENTADA EM CRIANÇA COM
PARALISIA CEREBRAL E COM MÚLTIPLA DEFICIÊNCIA
Dissertação apresentada ao Programa de Pós-Graduação em Tecnologia em Saúde, da Pontifícia Universidade Católica do Paraná, como requisito parcial à obtenção ao título de Mestre em Tecnologia em Saúde. Orientadora: Profª Drª Vera Lúcia Israel
COMISSÃO EXAMINADORA
Profª Drª Beatriz Fernandes Pontifícia Universidade Católica do Paraná
Profª Drª Claudia Santos UNIVAP/SP Prof. Dr Paulo Alcântara
Pontifícia Universidade Católica do Paraná
Curitiba, 31 de março de 2006

Dedico este trabalho aos meus filhos,
Pedro Henrique e João Guilherme, pois
foram eles que me ensinaram a não
desanimar nos momentos mais difíceis.

AGRADECIMENTOS
À Deus.
À minha família, pela ajuda e incentivo e, pela minha ausência principalmente
aos meus filhos Pedro Henrique e João Guilherme.
À minha orientadora Profª Drª Vera Lúcia Israel, pelo incentivo e especialmente
por acreditar em um trabalho com crianças com paralisia cerebral e múltipla
deficiência.
À Profª Drª Elisângela Ferreti Manfra e aos demais professores, funcionários e
alunos, colegas e amigos do PPGTS, que contribuíram para esta pesquisa.
Aos funcionários do Pequeno Cotolengo do Paraná; especialmente Marly
Tokarski, Padre Valdeci Marcolino e ao Mauro Lima que me ajuduram a
confeccionar o molde e o artefato idealizado.
Às crianças com paralisia cerebral e com múltipla deficiência, que são a razão
dessa nossa luta.
E a todos os amigos que, de alguma maneira, colaboraram para a realização
deste trabalho.

“Tudo vale a pena quando a alma não é pequena.” Fernando Pessoa

RESUMO
O principal objetivo deste trabalho foi construir, avaliar e adequar à cadeira de rodas um artefato, para crianças com paralisia cerebral e com múltipla deficiência, por meio de um sistema de tecnologia assistiva de baixo custo. A Tecnologia Assistiva é considerada como qualquer item construído artesanalmente ou em série, e têm sido muito utilizada para auxiliar crianças e jovens com incapacidade na educação e reabilitação.Embora esta clientela represente uma pequena porcentagem da população com necessidades especiais, apresentam, comumente, encurtamentos musculares, contraturas musculares e deformidades ósseas. A metodologia utilizada foi à confecção de um artefato de poliuretano, adaptado para a cadeira de rodas, no lugar do assento e do encosto padrão. A efetividade do artefato foi mensurada por meio da Fotometria, com a criança sentada na cadeira de rodas padrão, antes e depois da terapia, bem como no artefato depois da terapia. Foi realizado o mesmo procedimento da Fotometria com duas crianças sem deficiência, para se obter um padrão de normalidade da mensuração estabelecida. Os resultados apresentados foram satisfatórios,com uma importante melhora nos ângulos avaliados, mostrando uma maior simetria corporal e, conseqüentemente, melhor postura da criança na cadeira de rodas. A grande contribuição deste artefato é a melhoria da qualidade de vida da criança com paralisia cerebral e com múltipla deficiência e a possibilidade de torná-la o mais funcional possível, mediante as suas capacidades e potencialidades e, evitando maiores complicações no seu quadro motor.
Palavras-chave: Fisioterapia, Tecnologia Assistiva, Paralisia cerebral com múltipla deficiência, Fotometria, Artefato.

ABSTRACT
The main purpose of this study was to build, assess and adapt a device for children with cerebral palsy and multiple disability, to be used in a wheelchair, with children in the sitting position, using a low cost system for assistive technology. The Assistive Technology is considered any constructed artesian item , or in series, and has been very used to assist children and young with incapacities, in the education and rehabilitation. These clients represent a small percentage of the population with special needs, but in general are those more compromised, commonly presenting muscle shortening, muscle contractures and bone deformities. The method used was the construction of a polyurethane device and then its adaptation to a wheelchair replacing the standard seat and back. The device effectiveness was measured by Photometry with children sitting in the standard wheelchair, before and after therapy and with the device after therapy. The same Photometry procedure was conducted with children without disability to get a normality standard for the measurement established. Results presented were satisfactory, showing a greater symmetry and, consequently, a better posture of children in the wheelchair. The great contributions of this device are its low cost and the possibility of making children become the most functional possible through their abilities and potentials and a better quality of life, avoiding further complications in their motor condition.
Key words: Physical Therapy, Assistive Technology, Cerebral Palsy with multiple disabilities, Photometry, Workmanship.
SUMÁRIO
1 INTRODUÇÃO............................................................................................................... 2 REVISÃO DE LITERATURA........................................................................................ 2.1 Paralisia Cerebral....................................................................................................... 2.1.2 Biomecânica do sentar............................................................................................... 2.1.3 Plasticidade Cerebral................................................................................................. 2.1.4 Aprendizagem Motora............................................................................................... 2.2 Equipe Interdisciplinar................................................................................................. 2.3 Avaliação Quantitativa em Fisioterapia....................................................................... 2.3.1 Cinemetria................................................................................................................. 2.4 Tecnologia Assistiva.................................................................................................... 2.4.1 Dispositivos de Tecnologia Assistiva para crianças com paralisia .......................... cerebral e com múltiplas deficiências 2.4.2 Artefato..................................................................................................................... 3 METODOLOGIA............................................................................................................ 3.1 Participante................................................................................................................... 3.2 Local e Período............................................................................................................. 3.3 Materiais e Equipamentos............................................................................................ 3.4 Delineamento da Pesquisa............................................................................................ 3.5 Procedimento de coleta de dados................................................................................. 3.6 Procedimento de análise de dados................................................................................ 4 RESULTADOS............................................................................................................... 5 DISCUSSÃO................................................................................................................... 6 CONSIDERAÇÕES FINAIS.......................................................................................... GLOSSÁRIO...................................................................................................................... REFERÊNCIAS................................................................................................................. APÊNDICE.......................................................................................................................... ANEXOS.........................................................................................................................
20 22 22 30 37 39 46 49 51 53 57 65 71 71 73 73 74 74 78 98 110 119 121 124 134 137

LISTA DE FIGURAS Figura 01- Representação esquemática do acometimento do tônus muscular em lesão ......... 24 cerebral do tipo diplegia
Figura 02 - Representação esquemática do acometimento do tônus muscular em lesão ....... 24 cerebral do tipo quadriplegia
Figura 03 - Representação esquemática do acometimento do tônus muscular em lesão ....... 24 cerebral do tipo emiplegia Figura 04 - Representação esquemática do acometimento do tônus muscular em lesão ....... 25
cerebral paraplegia Figura 05 - Reflexo Tõnico Labiríntico................................................................................... 28 Figura 06 - Demonstração da limitação da flexão da coxa...................................................... 29 Figura 07 – Criança na cadeira de rodas. ................................................................................ 29 Figura 08 - Apresentação Anatômica do quadril..................................................................... 30 Figura 09 - Representação Anatômica da Cintura Pélvica...................................................... 31 Figura 10 - Músculo Iliopsoas, vista anterior.......................................................................... 32 Figura 11 - Músculo Sartório, vista anterior............................................................................ 33 Figura 12 - Músculo Reto da Coxa.......................................................................................... 34 Figura 13 - Músculo Tensor da fáscia lata............................................................................... 34 Figura 14 - Cadeira de rodas modelo Star Juvenil................................................................... 58 Figura 15 – Cadeira de rodas modelo Star Baby..................................................................... 59 Figura 16 – Cadeira de rodas modelo Universal...................................................................... 59 Figura 17 – Cadeira de rodas Gazela Ultra Lite. Para Excepcional......................................... 60 Figura 18 – Cadeira de rodas Conforma Tilt........................................................................... 60 Figura 19 – Cadeira de rodas Conforma Tilt JR...................................................................... 61 Figura 20 – Cadeira de rodas ULTRA Lite 2000 – Infantil..................................................... 61 Figura 21 – Cadeira de rodas Conforma Fechamento Frontal................................................. 62 Figura 22 – Almofada para cadeira de rodas........................................................................... 62

Figura 23 – Colete de Milwaukee............................................................................................ 63 Figura 24 – Colete de Milwaukee sem anel cervical............................................................... 63 Figura 25 - O . T. L. S.................……….............………………………………………….... 64 Figura 26 - Colete Infra-Axilar Bivalvado............................................................................... 64 Figura 27 - Colete Infra-Axilar de Wilmington....................................................................... 64 Figura 28 - Ilustração de Poliuretano com célula fechada....................................................... 69
Figura 29: Ilustração da célula aberta...................................................................................... 70 Figura 30 - Produção prática de Poliuretano............................................................................ 70 Figura 31 – Demonstração dos ângulos que foram avaliados.................................................. 75
Figura 32 - Esquema da distância entre a cadeira de rodas, tripé e o ângulo da ................... 77 máquina fotográfica
Figura 33 - Número de fotos.................................................................................................... 78 Figura 34- Número de ângulos................................................................................................. 79 Figura 35 - Número da imagem .............................................................................................. 79 Figura 36 - Ângulo 1................................................................................................................ 80 Figura 37 – Ângulo 2............................................................................................................... 80 Figura 38 - Ângulo 3................................................................................................................ 81 Figura 39 - Ângulo A4............................................................................................................. 81 Figura 40 – Equação para o cálculo do ângulo interno entre dois vetores, V1 e V2............... 82 Figura 41 – Cadeira de rodas utilizada.................................................................................... 86 Figura 42 – Encosto da cadeira de rodas................................................................................. 86 Figura 43 – Assento da cadeira de rodas................................................................................. 87 Figura 44 – Modelo do caixote para o assento........................................................................ 88 Figura 45 – Modelo de caixote para o encosto........................................................................ 89 Figura 46 - Material utilizado para a confecção do artefato.................................................... 90 Figura 47 - Caixote de madeira............................................................................................... 90
Figura 48- Derramamento da mistura...................................................................................... 91 Figura 49 - Mistura do material............................................................................................... 91 Figura 50 – Mistura do material 2........................................................................................... 92 Figura 51 – Proteção do molde o molde.................................................................................. 92 Figura 52 - Posicionando o molde no assento......................................................................... 93 Figura 53 – Moldagem do poliuretano.................................................................................... 93 Figura 54 - Assento moldado................................................................................................... 94 Figura 55 - Moldagem do encosto........................................................................................... 94 Figura 56 - Derramamento da mistura no molde do encosto................................................... 95 Figura 57 - Misturando isoarofibra e poliolarofibra................................................................ 95 Figura 58 - Moldando o encosto.............................................................................................. 96 Figura 59 - Tirando a ráfia....................................................................................................... 96 Figura 60 - Assento e encosto moldado de frente.................................................................... 97 Figura 61 - Criança S1............................................................................................................. 98 Figura 62 - Criança S2............................................................................................................. 99 Figura 63 – Criança P1 antes do atendimento........................................................................ 100 Figura 64 - Criança P1 depois do atendimento fisioterapêutico............................................ 101 Figura 65 – Criança P1 depois do atendimento fisioterapêutico utilizando-se do ................ 103
artefato de poliuretano

LISTA DE GRÁFICOS
Gráfico 01 Comparação das Fotometrias entre A1,A2 A3 e A4 e 90O ............................. 105

LISTA DE QUADROS
Quadro 01 – Resumo dos sistemas dinâmicos na aprendizagem motora................................ 42 Quadro 02 - Métodos de medição em Biomecânica ............................................................... 51 Quadro 03 – Fatores relacionados ao não uso da tecnologia assistiva..................................... 54 Quadro 04 – Fatores relativos a não adesão com intervenção e saúde.................................... 55 Quadro 05- Modelo do Desenvolvimento Humano ................................................................ 56 Quadro 06 – Reação de produção do poliuretano ................................................................... 68 Quadro 07 – Estrutura molecular do poliuretano..................................................................... 68 Quadro 08– Somatória dos postos......................................................................................... 107
1 INTRODUÇÃO
Dentre as múltiplas áreas de atuação da Fisioterapia destaca-se a
Neuropediatria, um dos mais tradicionais nichos de atuação do Fisioterapeuta. A consagração
deste campo de trabalho deveu-se, em um primeiro momento, à própria projeção e
reconhecimento deste profissional na área da saúde, que passou a integrá-la como ferramenta
essencial no processo de reabilitação. Por outro lado, a neuropediatria encontra perspectivas
limitadas junto a outros profissionais da saúde, em especial aos pacientes portadores de
Paralisia Cerebral. Esta patologia caracteriza-se por concentrar seu tratamento na seqüela e
não na doença propriamente dita. Como resultado, constatam-se desde discretos distúrbios
motores e/ou cognitivos até danos graves e extensos que se expressam em deficiências
visuais, auditivas e severo comprometimento motor.
Devido à evolução da tecnologia em saúde, principalmente das unidades de
terapia intensiva neonatais, a cada dia, crianças que nascem com extremo baixo peso, entre
400 e 500 gramas e estão sobrevivendo, e em alguns casos com importantes seqüelas de
paralisia cerebral.
Deste modo, é fundamental que a tecnologia assistiva desenvolva esforços
no intuito de minimizar as conseqüências das longas horas sobre a cadeira de rodas. O
posicionamento adequado da criança contribui sobremaneira para um melhor
desenvolvimento, evitando complicações e contribuindo para uma melhor qualidade de vida
destes pacientes (FINNIE, 1999), além de estimular a assimilação de padrões de postura e
movimento mais fisiológicos, facilitando o mecanismo da plasticidade cerebral
(ANUNCIATTO, 2002).
As cadeiras de rodas são fabricadas em tamanho padrão o que, via de regra,
dificulta a adaptação de indivíduos com posturas tão peculiares. Mesmo as mais sofisticadas,
com regulagens e acessórios especiais, não permitem que o ajuste se molde às deformidades
já instaladas na criança.
O objetivo deste trabalho foi de tentar minimizar a dificuldade de manter a
criança com paralisia cerebral e com múltipla deficiência sentada adequadamente na cadeira
de rodas, propondo um artefato, que após passar por etapas de adequação e modelagem,
substituísse o assento e o encosto da cadeira original. Este foi confeccionado com o
Poliuretano (PU), que é um tipo de espuma flexível, num procedimento em caixote, segundo
Vilar (1998). Primeiramente, foi elaborado o assento e posteriormente o encosto de acordo
com o padrão postural da criança, após a sessão de Fisioterapia, estando desta forma na
postura mais adequada e simétrica possível dentro da sua capacidade motora.
O meio utilizado para a análise da eficácia do artefato confeccionado foi a
Fotometria, por meio de ângulos previamente estabelecidos, com a criança na posição sentada
na cadeira de rodas, antes e depois da terapia, com e sem a utilização do artefato. Isso
possibilitou avaliar se o artefato facilita a aprendizagem motora da criança, seus padrões
normais de movimento e postura e o seu novo engrama de movimento.
Este modelo está sendo utilizado principalmente com crianças e jovens com
incapacidades, no intuito de auxilia-los na sua educação e reabilitação (BESIO e
Salminen,2004).
É importante a mudança de paradigmas dos profissionais desta área, pois a
necessidade de se desenvolver instrumentos de tecnologia assistiva para pessoas com
deficiência motora é cada vez maior.

2 REVISÃO DE LITERATURA
2.1 Paralisia Cerebral
A Paralisia Cerebral (PC) vem sendo discutida há muitos anos. Little, citado
por Rotta (2005), a descreveu pela primeira vez em 1843, como uma encefalopatia crônica da
infância e a definiu como uma patologia ligada a diferentes causas e classificações,
principalmente à rigidez muscular. Em 1862, estabeleceu-se uma relação entre este quadro e o
parto anormal.
Em 1897, Freud sugeriu a expressão PC, ao referir-se a um grupo de
crianças com transtornos motores mais ou menos severos devido a uma lesão no Sistema
Nervoso Central (SNC), semelhantes ou não ao transtorno da Síndrome de Little que havia
sido descrita anteriormente (ROTTA, 2005). Santana (2003) relata que o termo PC foi
utilizado principalmente para diferenciar esta patologia do termo paralisia infantil, seqüela da
poliomielite e que resultava em uma paralisia flácida.
A partir do Simpósio de Oxford, em 1959, definiu-se PC por uma seqüela de
agressão encefálica, que se caracteriza, primordialmente, por um transtorno persistente, mas
não invariável do tono, da postura e do movimento, que aparece na primeira infância. A PC
passou a ser conceituada como encefalopatia crônica não evolutiva da infância, constituindo
um grupo heterogêneo, tanto do ponto de vista etiológico, quanto em relação ao comum, por
apresentar, predominantemente, sintomatologia motora à qual se juntam, em diferentes
combinações, outros sinais e sintomas (ROTTA, 2002).
Um dos conceitos mais aceitos de PC ou Encefalopatia crônica não
evolutiva é a desordem da postura e do movimento que acomete o cérebro imaturo e não é
progressiva (BOBATH, 1982).
Para se entender o processo de evolução da PC são necessários
conhecimentos sobre neuro-desenvolvimento normal embrionário e fetal humano.
Existem várias causas que podem levar à Paralisia Cerebral. De acordo com
Lianza (2001), os fatores etiológicos da PC são classificados em fatores pré (antes), peri
(durante) e pós (após) natais.
Os fatores pré-natais são as infecções congênitas, a hipoxemia cerebral, os
distúrbios do metabolismo materno, a subnutrição da gestante, os traumas e o uso de
medicações.
Nas complicações peri-natais encontram-se as hemorragias cerebrais por
trauma de parto, a prematuridade, a hipóxia e fatores obstétricos.
As causas pós-natais são a icterícia grave não tratada no momento certo, as
meningoencefalites bacterianas, as encefalopatias bacterianas desmielinizantes pós-infecções
ou pós-vacinas, os traumatismos cranioencefálicos, e as convulsões neonatais (PATO, 2002).
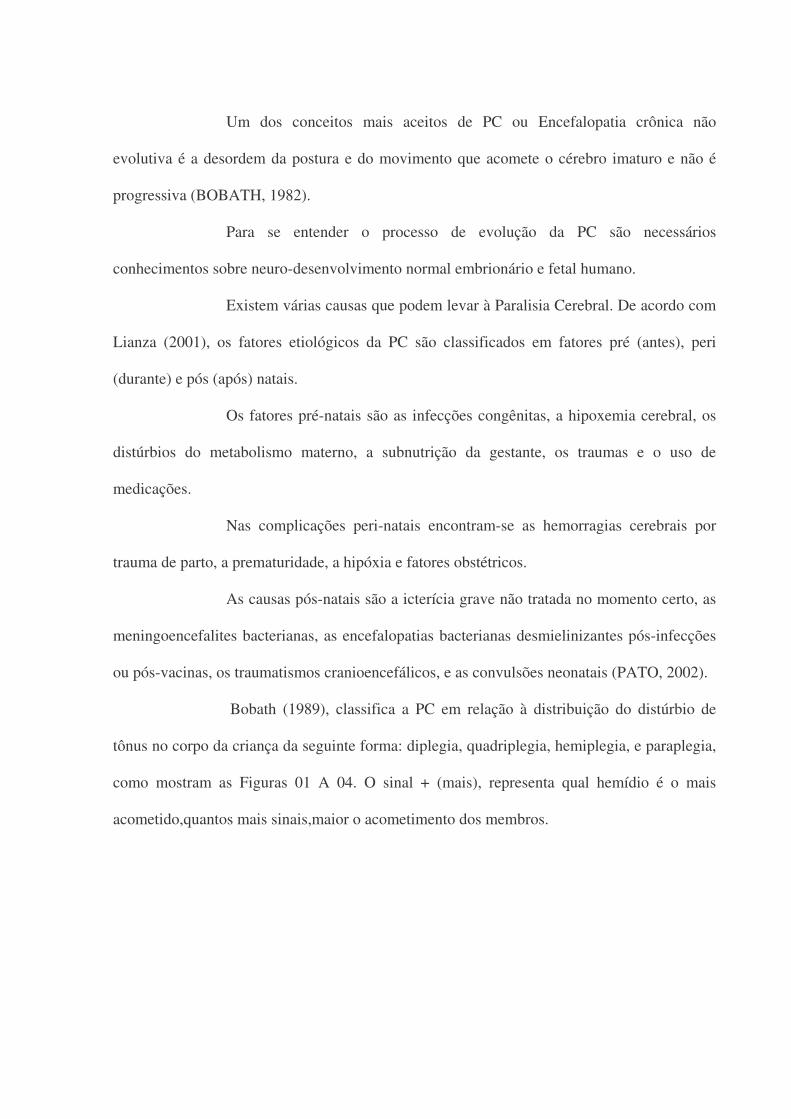
Bobath (1989), classifica a PC em relação à distribuição do distúrbio de
tônus no corpo da criança da seguinte forma: diplegia, quadriplegia, hemiplegia, e paraplegia,
como mostram as Figuras 01 A 04. O sinal + (mais), representa qual hemídio é o mais
acometido,quantos mais sinais,maior o acometimento dos membros.
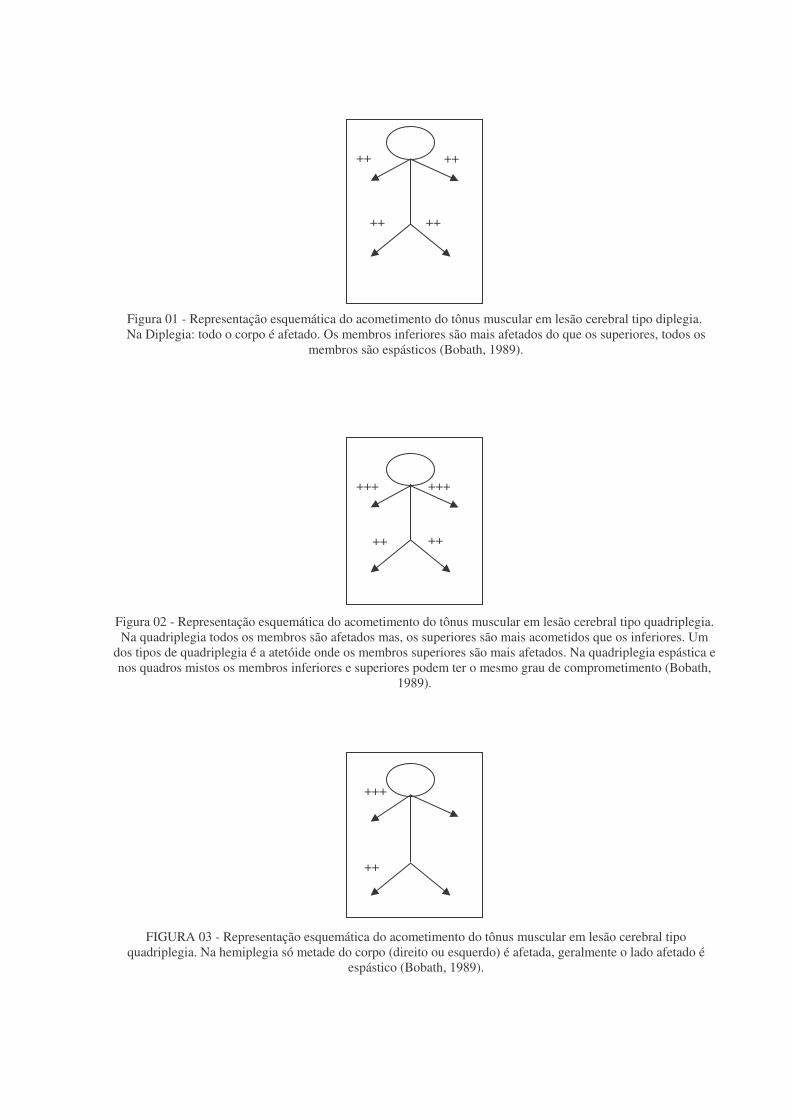
Figura 01 - Representação esquemática do acometimento do tônus muscular em lesão cerebral tipo diplegia. Na Diplegia: todo o corpo é afetado. Os membros inferiores são mais afetados do que os superiores, todos os
membros são espásticos (Bobath, 1989).
Figura 02 - Representação esquemática do acometimento do tônus muscular em lesão cerebral tipo quadriplegia. Na quadriplegia todos os membros são afetados mas, os superiores são mais acometidos que os inferiores. Um
dos tipos de quadriplegia é a atetóide onde os membros superiores são mais afetados. Na quadriplegia espástica e nos quadros mistos os membros inferiores e superiores podem ter o mesmo grau de comprometimento (Bobath,
1989).
FIGURA 03 - Representação esquemática do acometimento do tônus muscular em lesão cerebral tipo quadriplegia. Na hemiplegia só metade do corpo (direito ou esquerdo) é afetada, geralmente o lado afetado é
espástico (Bobath, 1989).
++ ++
++ ++
+++ +++
++ ++
++
+++
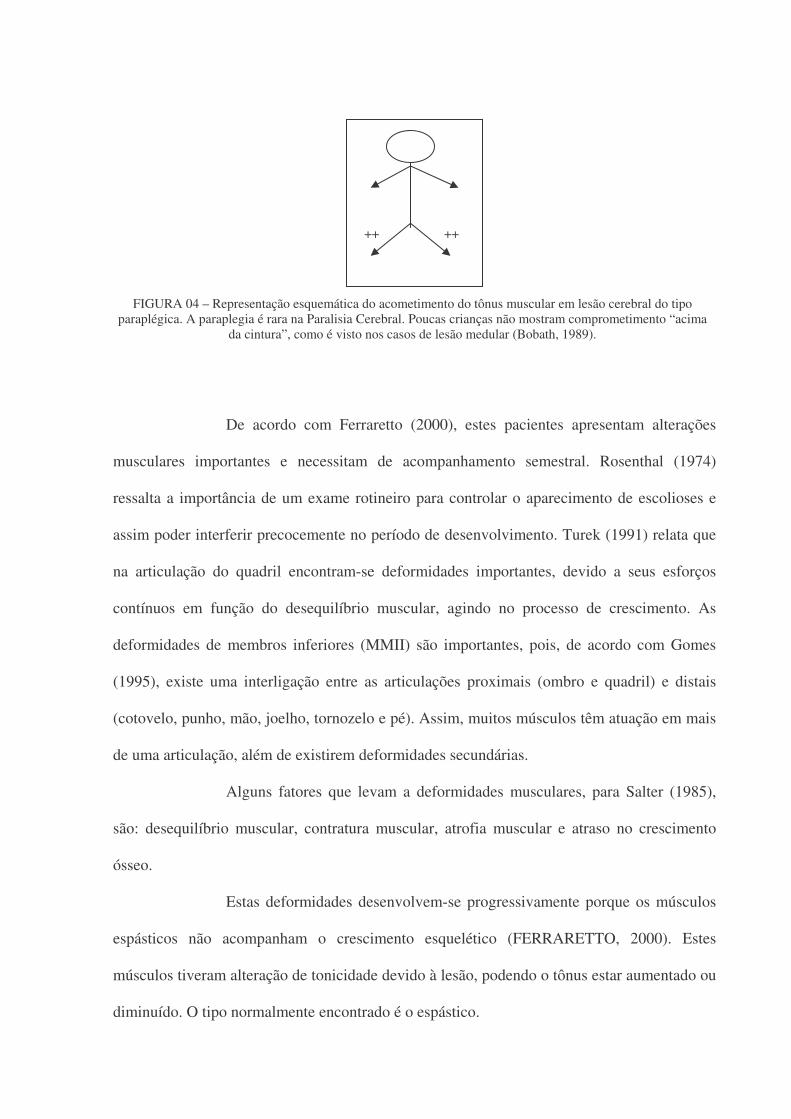
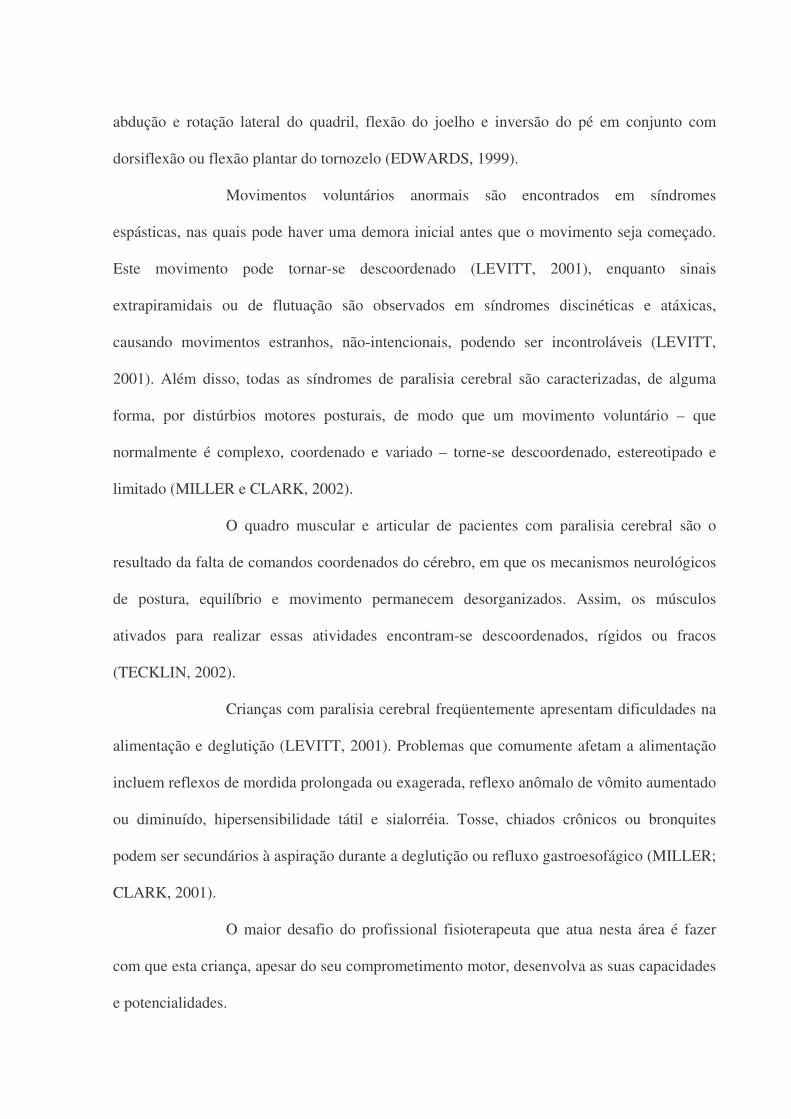
FIGURA 04 – Representação esquemática do acometimento do tônus muscular em lesão cerebral do tipo paraplégica. A paraplegia é rara na Paralisia Cerebral. Poucas crianças não mostram comprometimento “acima
da cintura”, como é visto nos casos de lesão medular (Bobath, 1989).
De acordo com Ferraretto (2000), estes pacientes apresentam alterações
musculares importantes e necessitam de acompanhamento semestral. Rosenthal (1974)
ressalta a importância de um exame rotineiro para controlar o aparecimento de escolioses e
assim poder interferir precocemente no período de desenvolvimento. Turek (1991) relata que
na articulação do quadril encontram-se deformidades importantes, devido a seus esforços
contínuos em função do desequilíbrio muscular, agindo no processo de crescimento. As
deformidades de membros inferiores (MMII) são importantes, pois, de acordo com Gomes
(1995), existe uma interligação entre as articulações proximais (ombro e quadril) e distais
(cotovelo, punho, mão, joelho, tornozelo e pé). Assim, muitos músculos têm atuação em mais
de uma articulação, além de existirem deformidades secundárias.
Alguns fatores que levam a deformidades musculares, para Salter (1985),
são: desequilíbrio muscular, contratura muscular, atrofia muscular e atraso no crescimento
ósseo.
Estas deformidades desenvolvem-se progressivamente porque os músculos
espásticos não acompanham o crescimento esquelético (FERRARETTO, 2000). Estes
músculos tiveram alteração de tonicidade devido à lesão, podendo o tônus estar aumentado ou
diminuído. O tipo normalmente encontrado é o espástico.
++ ++

A espasticidade é um tipo de tônus aumentado na paralisia cerebral e é
decorrente de lesão no córtex motor do cérebro (TECKLIN, 2002). Os sinais característicos
de espasticidade incluem hiperreflexia resultante de uma hiperexcitabilidade do reflexo de
estiramento, que é caracterizada como uma resposta do extensor plantar e clônus dos pés.
A função motora fina estará debilitada e os movimentos singulares isolados
serão dificultados. Pode ser definida como hipertonia, a maior resistência ao estiramento
passivo, que pode depender da velocidade, hipersensibilidade aos estímulos sensoriais,
clônus, reflexos tendíneos profundos hiperativos e postura ou movimento anormal dos
membros (HALEY; INÁCIO in RATLIFFE, 2002).
A espasticidade transformará as sinergias que, de acordo com Rosa Neto
(2002), são ações coordenadas de vários músculos com vistas a uma única ação. Em sinergias
anormais de movimento, podem ser incluídas as reações associadas (BOBATH, 1989). Para
Muller (KONG, 2004), estas reações são movimentos patológicos que aparecem como
padrões estereotipados anormais de desenvolvimento, os quais são acentuados pelo esforço e
padrões extensor ou flexor de movimento. O equilíbrio, o início e a velocidade do movimento
podem estar afetados. A espasticidade poderá também causar deficiência de força muscular,
instabilidade postural, dificuldade nas atividades de vida diária, mobilidade articular e marcha
alterada, desenvolvimento de contraturas e deformidades na coluna e nos membros (MILLER;
CLARK, 2002).
Os aspectos característicos da espasticidade, para Edwards (1999), são: um
maior reflexo de estiramento, anormalidade postural, padrões de movimento de massa, co-
contração inadequada e fragmentações padrão, desempenhar movimento isolado de uma
articulação, exagero de reflexos esteroceptivos dos membros que produzem retirada em flexão
ou espasmos extensores e o sinal de Babinski. A resposta nos membros inferiores é de flexão,
abdução e rotação lateral do quadril, flexão do joelho e inversão do pé em conjunto com
dorsiflexão ou flexão plantar do tornozelo (EDWARDS, 1999).
Movimentos voluntários anormais são encontrados em síndromes
espásticas, nas quais pode haver uma demora inicial antes que o movimento seja começado.
Este movimento pode tornar-se descoordenado (LEVITT, 2001), enquanto sinais
extrapiramidais ou de flutuação são observados em síndromes discinéticas e atáxicas,
causando movimentos estranhos, não-intencionais, podendo ser incontroláveis (LEVITT,
2001). Além disso, todas as síndromes de paralisia cerebral são caracterizadas, de alguma
forma, por distúrbios motores posturais, de modo que um movimento voluntário – que
normalmente é complexo, coordenado e variado – torne-se descoordenado, estereotipado e
limitado (MILLER e CLARK, 2002).
O quadro muscular e articular de pacientes com paralisia cerebral são o
resultado da falta de comandos coordenados do cérebro, em que os mecanismos neurológicos
de postura, equilíbrio e movimento permanecem desorganizados. Assim, os músculos
ativados para realizar essas atividades encontram-se descoordenados, rígidos ou fracos
(TECKLIN, 2002).
Crianças com paralisia cerebral freqüentemente apresentam dificuldades na
alimentação e deglutição (LEVITT, 2001). Problemas que comumente afetam a alimentação
incluem reflexos de mordida prolongada ou exagerada, reflexo anômalo de vômito aumentado
ou diminuído, hipersensibilidade tátil e sialorréia. Tosse, chiados crônicos ou bronquites
podem ser secundários à aspiração durante a deglutição ou refluxo gastroesofágico (MILLER;
CLARK, 2001).
O maior desafio do profissional fisioterapeuta que atua nesta área é fazer
com que esta criança, apesar do seu comprometimento motor, desenvolva as suas capacidades
e potencialidades.
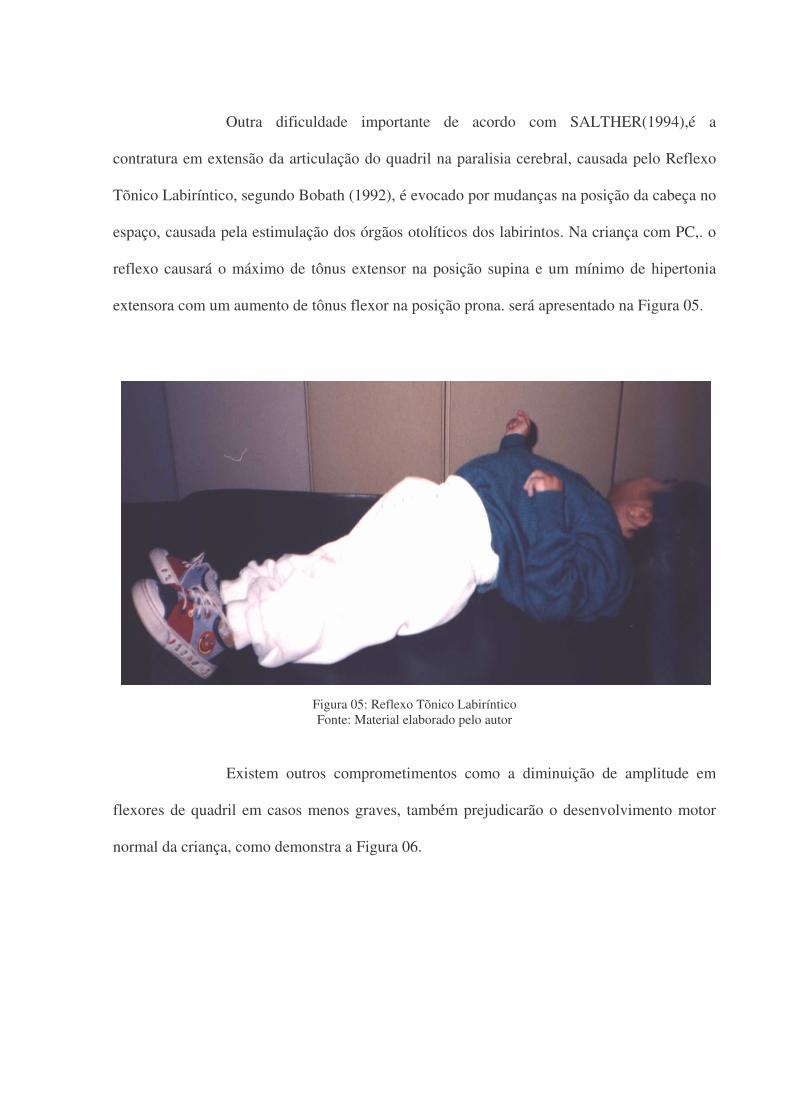
Outra dificuldade importante de acordo com SALTHER(1994),é a
contratura em extensão da articulação do quadril na paralisia cerebral, causada pelo Reflexo
Tõnico Labiríntico, segundo Bobath (1992), é evocado por mudanças na posição da cabeça no
espaço, causada pela estimulação dos órgãos otolíticos dos labirintos. Na criança com PC,. o
reflexo causará o máximo de tônus extensor na posição supina e um mínimo de hipertonia
extensora com um aumento de tônus flexor na posição prona. será apresentado na Figura 05.
Figura 05: Reflexo Tõnico Labiríntico Fonte: Material elaborado pelo autor
Existem outros comprometimentos como a diminuição de amplitude em
flexores de quadril em casos menos graves, também prejudicarão o desenvolvimento motor
normal da criança, como demonstra a Figura 06.
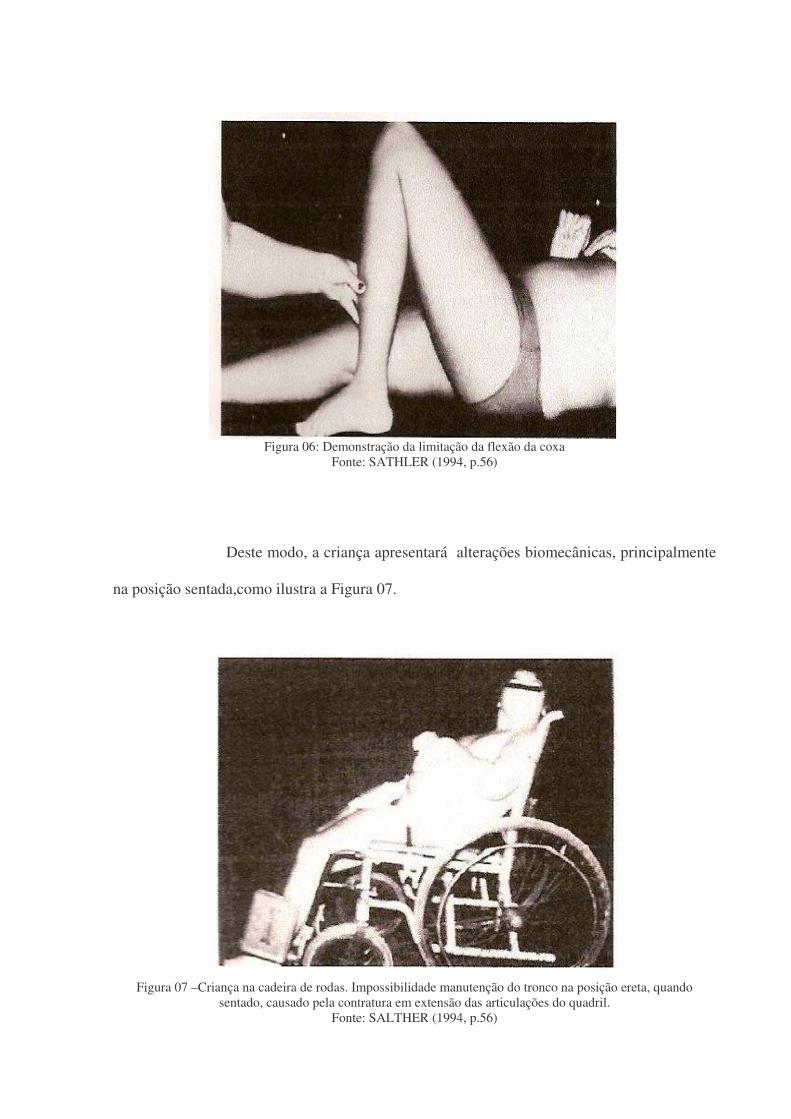
Figura 06: Demonstração da limitação da flexão da coxa
Fonte: SATHLER (1994, p.56)
Deste modo, a criança apresentará alterações biomecânicas, principalmente
na posição sentada,como ilustra a Figura 07.
Figura 07 –Criança na cadeira de rodas. Impossibilidade manutenção do tronco na posição ereta, quando
sentado, causado pela contratura em extensão das articulações do quadril. Fonte: SALTHER (1994, p.56)

Mediante estas alterações biomecânicas, as crianças com PC terão uma
alteração na sua musculatura, devido a presença da espasticidade, perdendo as funções de
estabilização e função normal da cintura pélvica, alterando a biomecânica normal do sentar.
2.1.2 Biomecânica do Sentar
Para descrever a biomecânica do sentar é importante ressaltar os ossos e os músculos
envolvidos neste movimento.
O quadril, como mostra a Figura 08, é uma articulação relativamente estável
devido a sua capacidade de sustentação que esta atua, na descarga de peso e na locomoção
(FLOYD E THOMPSON,2002).
Figura 08: Apresentação Anatômica do quadril Fonte: NETTER (2004, p.463)
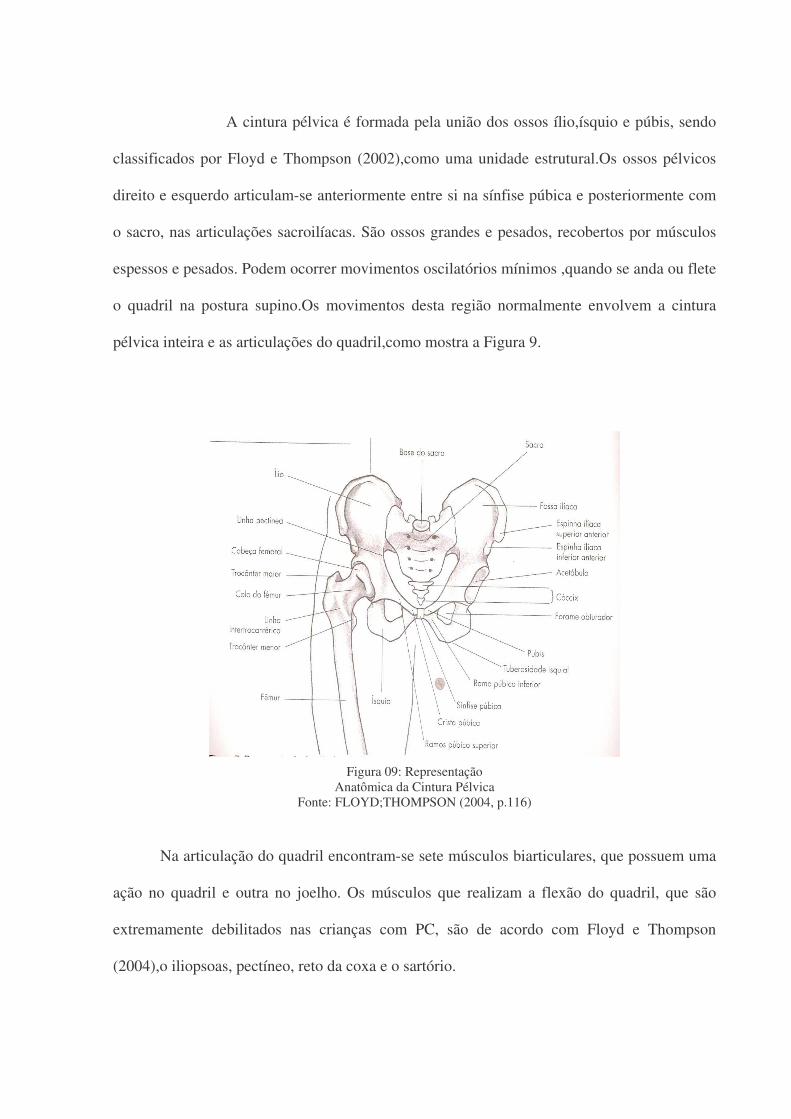
A cintura pélvica é formada pela união dos ossos ílio,ísquio e púbis, sendo
classificados por Floyd e Thompson (2002),como uma unidade estrutural.Os ossos pélvicos
direito e esquerdo articulam-se anteriormente entre si na sínfise púbica e posteriormente com
o sacro, nas articulações sacroilíacas. São ossos grandes e pesados, recobertos por músculos
espessos e pesados. Podem ocorrer movimentos oscilatórios mínimos ,quando se anda ou flete
o quadril na postura supino.Os movimentos desta região normalmente envolvem a cintura
pélvica inteira e as articulações do quadril,como mostra a Figura 9.
Figura 09: Representação Anatômica da Cintura Pélvica
Fonte: FLOYD;THOMPSON (2004, p.116)
Na articulação do quadril encontram-se sete músculos biarticulares, que possuem uma
ação no quadril e outra no joelho. Os músculos que realizam a flexão do quadril, que são
extremamente debilitados nas crianças com PC, são de acordo com Floyd e Thompson
(2004),o iliopsoas, pectíneo, reto da coxa e o sartório.
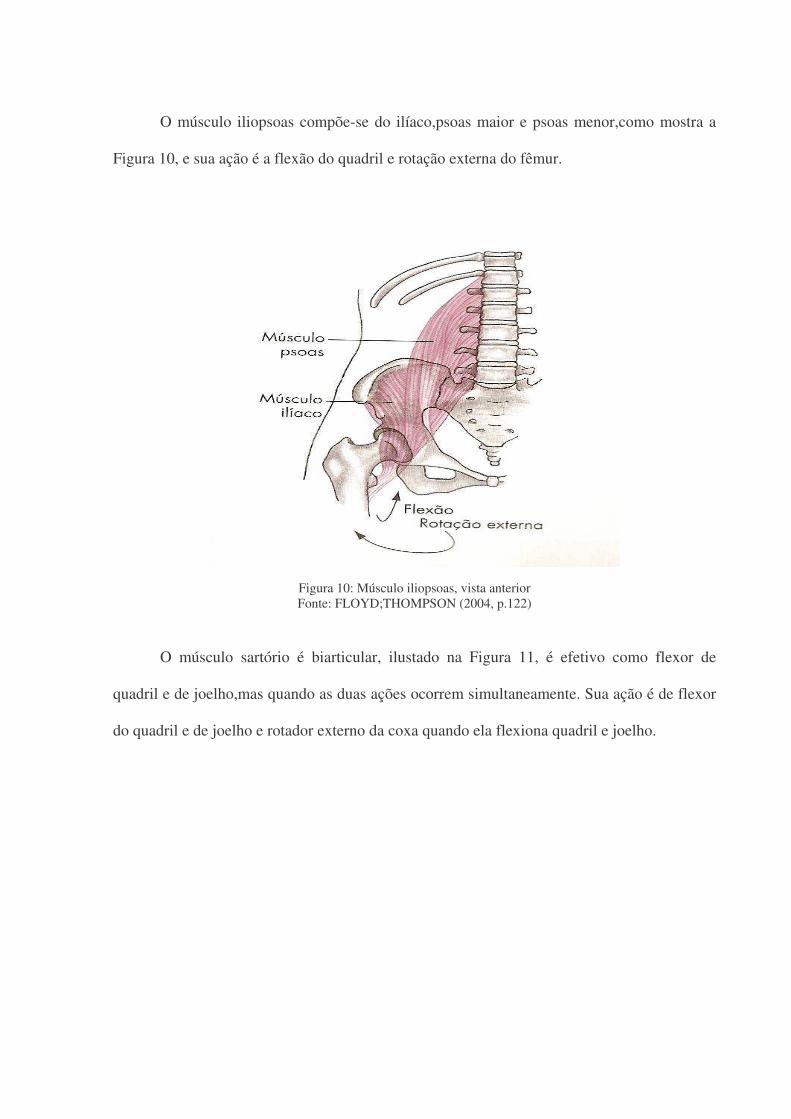
O músculo iliopsoas compõe-se do ilíaco,psoas maior e psoas menor,como mostra a
Figura 10, e sua ação é a flexão do quadril e rotação externa do fêmur.
Figura 10: Músculo iliopsoas, vista anterior Fonte: FLOYD;THOMPSON (2004, p.122)
O músculo sartório é biarticular, ilustado na Figura 11, é efetivo como flexor de
quadril e de joelho,mas quando as duas ações ocorrem simultaneamente. Sua ação é de flexor
do quadril e de joelho e rotador externo da coxa quando ela flexiona quadril e joelho.

Figura 11: Músculo Sartório, vista anterior Fonte: FLOYD;THOMPSON (2004,p.123)
O músculo reto da coxa, Figura 12, tem como ação a flexão do quadril e a extensão do
joelho.

Figura 12: Músculo Reto da Coxa Fonte: FLOYD;THOMPSON (2004,p.124)
O tensor da fáscia lata é usado quando ocorre flexão e rotação interna como apresenta
a Figura 13. Tem como ação a abdução do quadril, flexão do quadril e tendência a girar o
quadril internamente quando ele se flexiona.
Figura 13:Músculo tensor da fáscia lata FONTE: FLOYD; THOMPSON (2004,p.125)

Na posição sentada em um indivíduo sem alteração motora, Smith et al. (1997)
relatam que o quadril já está flexionado a cerca de 90o ,a flexão adicional de quadril exige
uma maior ação dos flexores do quadril na região encurtada do seu trajeto. No momento em
que a flexão do ângulo agudo do quadril é realizada, o sartório e o tensor da fáscia lata podem
ser sentidos contraindo-se fortemente, apesar dos músculos perderem muito da sua capacidade
de desenvolver tensão e são incapazes de realizar o movimento sem a ajuda do iliopsoas.
Na postura sentada, os músculos flexores de quadril, especialmente o
íliopsoas, controlam as vértebras e a pelve sobre o fêmur quando o indivíduo se inclina para
trás e retorna á posição ereta (SMITH et al., 1997).
Nas crianças com PC, toda a função desta musculatura estará alterada.
Devido a estas alterações biomecânicas, as crianças com PC não possuem
movimentação ativa, precisando de terceiros para mobilizá-las e colocá-las na posição sentada
na cadeira de rodas, lembrando que esta é a posição que ela mais permanece.
As crianças que apresentam PC grave demonstram habilidades funcionais
significativamente inferiores em todas as áreas de desempenho funcional, em relação às
crianças com gravidade leve (MANCINI, 2004). Há maior dificuldade ainda se ela possuir
outras deficiências associadas, chamadas de múltiplas deficiências, que, de acordo com Eckert
(2003), são caracterizadas por uma associação entre diferentes deficiências, com ampla
possibilidade de combinações entre os fatores etiológicos.
A múltipla deficiência é uma condição heterogênea que identifica diferentes
grupos (KIRK; JAMES, 1991), que apresentam diferentes deficiências, que afetam de forma
mais ou menos grave, o físico, o psíquico e o sensorial. Estas deficiências são independentes,
ou seja, uma das deficiências não condiciona que exista outra deficiência. Ratliffe (2002) cita
que estas crianças possuem personalidades e características únicas, apesar de possuírem o
mesmo tipo de lesão.

Além das dificuldades anteriormente citadas, as crianças com PC podem
apresentar outros problemas, mas nem todos são relacionados com as lesões cerebrais. Os que
mais freqüentemente podem se manifestar são: a epilepsia, a deficiência mental, visual,
auditiva, dificuldades de aprendizagem, dificuldades na fala e alimentação e a disfunção
sensorial. De acordo com Andrade (1997), as lesões sensoriais dividem-se em dois tipos: as
primárias, que são as lesões cerebelares (ataxia), e nos gânglios da base (atetose) responsáveis
por problemas motores e sensoriais; e as secundárias, que são as dificuldades sensoriais
devido à falta de habilidade motora.
Em função das dificuldades que esta clientela apresenta, poucas são as
pesquisas na área de deficiência múltipla, pois a evolução do seu quadro motor é lenta, devido
a sua complexidade. Mas, se adequadamente tratada, ela desenvolve o seu quadro motor da
melhor maneira possível, devido ao mecanismo de plasticidade cerebral. Para Rodrigues e
Miranda (2000), este é o processo pelo qual o sistema nervoso tenta manter as funções com os
neurônios íntegros que restaram após uma lesão.
Para que esta evolução motora aconteça é necessário que seja utilizada uma
gama de artefatos para facilitar as atividades cotidianas da criança com lesão cerebral grave.
A tecnologia assistiva, de acordo com Vimieri et al. (2004), é qualquer
produto utilizado para facilitar as atividades cotidianas da pessoa com de deficiência visando
uma real utilidade. Pode-se mencionar a cadeira de rodas, que se torna um componente
extremamente importante para o processo de reabilitação e deve ser adequada para cada tipo
de patologia e tamanho do paciente, respeitando as diferenças de cada indivíduo.
Uma das maiores dificuldades que a criança com paralisia cerebral e com
múltiplas deficiências apresenta é a dificuldade desta clientela fletir o quadril, devido a
contratura em extensão da articulação de quadril que os mesmos apresentam

(SATHLER,1994). Este tipo de contratura se caracteriza pela limitação da flexão da
articulação do quadril, decorrente do encurtamento dos músculos extensores.
Esta contratura levará a criança a apresentar dificuldade para manter a
postura sentada de forma adequada,dificultando o mecanismo de plasticidade cerebral.
2.1.3 Plasticidade Cerebral
Entende-se por plasticidade cerebral a capacidade do cérebro em se
reorganizar, realizando qualquer modificação do sistema nervoso central, incluindo a
habituação, o aprendizado, a memória e a recuperação da lesão (LUNDY-EKMAN, 2000).
A plasticidade cerebral tem sido estudada há vários anos, mas apenas na
década de 90 houve novas descobertas que esclareceram a função do Sistema Nervoso. Foi
denominada a “Década do Cérebro”, quando se conseguiu observar o cérebro de uma forma
mais dinâmica e não-estática, como era entendido anteriormente (ANNUNCIATTO, 2002).
As teorias da plasticidade cerebral mostram novos horizontes, justificando a
melhora principalmente de pacientes neurológicos, esclarecendo que há possibilidade do
cérebro se reorganizar mediante estímulos adequados do ambiente.
Existem algumas Teorias da Plasticidade Cerebral de acordo com
Annunciatto (2002):
a) teoria da compensação, na qual o outro lado do cérebro compensaria o
hemídio lesado;
b) teoria do brotamento, na qual o neurônio lesado se “ligaria” com um são,
desde que não se tenha lesado o núcleo da célula para substituir esta função;
c) teoria da equipotencialidade, na qual as áreas adjacentes substituiriam as
áreas lesadas;
d) teoria na qual a lesão inicial é muito maior que a lesão real, devido ao
edema causado pelo trauma.
Em função destas teorias, comprovou-se a real capacidade da célula nervosa
em se regenerar em crianças (Arjona, 2003) e em adultos com lesão (Plautz et al., (2003),
além de explicar a significativa evolução de determinados pacientes neurológicos, mesmo
quando o quadro motor inicial é muito grave (Kong, 2004).
Nas crianças, a condição de regeneração do cérebro é maior do que em um
adulto, pois o mesmo está em desenvolvimento e realizando novas sinapses a cada minuto.
Sheperd (1995) destaca a capacidade do cérebro infantil, se adequadamente estimulado, de se
desenvolver muito mais do que o cérebro de uma criança não estimulada.
Muller, citado por Kong (2004), mostra a importância do tratamento
precoce iniciado na Suíça, nos anos 40, comprovando a capacidade do cérebro em se
reorganizar mediante estímulos adequados. Pela freqüente repetição e integração do
movimento adequadamente estimulado, bem como pelo manejo diário, torna-se possível
“sobrepor-se à anormalidade”, desde que esta lesão não seja grande e extensa. Desta forma,
acontecerá a aprendizagem motora. Através da repetição que o paciente aprenderá o engrama
de movimento, que é a capacidade do indivíduo compreender e executar o movimento de uma
forma mais adequada (O`SULLIVAN e SCHIMITZ, 2000).
Para que a plasticidade cerebral ocorra, estes estímulos devem ser
contínuos, de maneira que o cérebro receba a informação correta do movimento a maior parte
do tempo possível. Assim, “aprenderá” e “incorporará” o movimento correto e não o
patológico (BOBATH, 1982).

A plasticidade não é sinônimo de cura, mas sim uma capacidade que a
célula nervosa saudável tem de tentar estabelecer conexões ou restabelecer contatos quando o
sistema nervoso é lesado (ANNUNCIATTO, 2002). Quando este é lesado, pode ou não
apresentar seqüelas. Caso elas ocorram, podem ser denominadas de deficiências, que para
Eckert (2003), correspondem a uma anomalia no corpo ou no funcionamento de um órgão ou
sistema, podendo ter qualquer etiologia, impedindo o indivíduo de determinadas ações.
Independente de a lesão causar ou não seqüelas no paciente, é importante
que a aprendizagem motora desta criança ocorra da melhor forma possível.
2.1.4 Aprendizagem Motora
Para que uma criança possa se desenvolver de forma adequada é necessário
que ela passe por um processo de aprendizagem motora, tendo ela uma dificuldade motora ou
não.
O ser humano descobre o mundo por meio do movimento, pela curiosidade
de ver e aprender. É com o movimento que se aprendem várias atividades motoras e as
diferentes formas de desenvolvê-las. Por se tratar de um tema complexo, que envolve
mecanismos ainda não completamente elucidados, a explicação sobre o controle motor do
movimento humano vem se tornando um freqüente objeto de estudo da comunidade
científica, aprimorando-se ao longo do tempo (MAGILL, 2000).
Atualmente uma das teorias mais aceita é a dos Sistemas Dinâmicos. De
Melo, citado por Guedes (2001), explica que esta teoria consiste em uma abordagem que
busca a multidisciplinaridade para fundamentar seus pressupostos, demonstrando a idéia do

movimento humano como um sistema complexo que se comporta de maneira semelhante a
qualquer outro sistema, seja físico ou biológico. A teoria não apresenta uma progressão linear,
ou seja, não se inicia do movimento mais fácil para o mais difícil, mas se adapta às
necessidades do novo movimento.
A teoria dos sistemas dinâmicos, de acordo com Schmidt (2001), explica
como este sistema varia com o tempo, passando de um estado para outro devido ao efeito de
uma variável específica. Ela está centrada na existência da representação de uma ação central,
influenciada por diferentes fatores como: estado estável, variáveis coletivas, parâmetros de
controle, percepção do ambiente e percepção do movimento humano (MAGILL, 2000).
O estado estável é caracterizado pela variação mínima do comportamento,
com alto grau de consistência e baixo grau de variabilidade, ou seja, a pessoa domina
completamente o movimento, sem variações do mesmo. Quando se tenta aperfeiçoar este
movimento, tornando-o mais complexo, ele pode ser impossibilitado, voltando ao estado
estável anterior.
Para se identificar alterações na teoria dos sistemas dinâmicos, dois fatores
são extremamente importantes: as variáveis coletivas e os parâmetros de controle
(SCHMIDT, 2001).
As variáveis coletivas são os fatores que definem o padrão de movimento
que deve ser identificado de acordo com o tipo de ação, como os ritmos (rápido ou lento, alto
ou baixo), que correspondem à “fase relativa”. As variáveis que não têm ritmos específicos
(padrão de movimento de direcionamento discreto) caracterizam o equilíbrio e a rigidez
muscular, causada por um aumento de tensão no músculo. Os parâmetros de controle do
movimento são a força e a velocidade do movimento humano.
A relação entre a percepção do ambiente e o movimento humano facilitará a
elaboração de padrões de movimentos adequados para atingir o objetivo da ação em
determinada situação.
A auto-organização é outro componente importante desta teoria, pois a ação
motora coordenada se auto-organiza, dentro do quadro das características das condições
ambientais e dinâmicas dos membros, e não é estabelecida por nenhum programa motor
(MAGILL, 2000). Para que essa auto-organização ocorra é preciso que o sistema nervoso
central esteja íntegro, para que os músculos e articulações atuem em conjunto. Essa é
denominada capacidade de auto-regulação do movimento corporal.
Quando se ensina uma criança, por exemplo, a chutar uma bola,
inicialmente ela o realiza com o seu lado dominante e da maneira mais fácil para ela (estado
estável). Após alguns treinos ela aprende a técnica ideal para se chutar a bola. Essa mudança
causa uma perturbação (movimento perturbado), uma maior dificuldade para ela realizar o
movimento correto. O estado estável, que era o estado de preferência da criança, é alterado,
acontecendo assim uma piora no desempenho do chute. Esta mudança, entretanto, influencia
no comportamento motor desta criança, visando a aquisição de um novo padrão
comportamental de movimento (SCHMIDT, 2001).
Nesta fase, ela teria muito mais habilidade em relação ao ritmo, força e
velocidade do gesto motor, pela adaptação ao movimento. É importante que ela possua um
sistema nervoso íntegro para conseguir realizar e agilizar o movimento, para que esse seja
coordenado e possua a percepção do ambiente e do seu próprio movimento para melhorar o
seu desempenho.O quadro 01, mostra a seqüência dos sistemas dinâmicos na aprendizagem
motora.

QUADRO 01 - RESUMO DOS SISTEMAS DINÂMICOS NA APRENDIZAGEM MOTORA FONTE: ARAÚJO (2005)
No Quadro 01 visualiza-se que a criança necessita identificar e captar os
sinais necessários para a realização do movimento, planejar o desenvolvimento da ação a ser
realizada, organizar as respostas necessárias e realizar os ajustes práticos para realizar o
movimento desejado.
Para que todo este sistema ocorra de forma adequada, é necessário que os
mecanismos de “feedforward” (que é a antecipação do movimento, ou seja, a capacidade de
perceber o tamanho do objeto que será pego, a textura, a força para jogar ou chutar uma bola)
e o “feedback” (que é a resposta que oferecemos a qualquer tipo de estímulo, seja motor ou
mental) também estejam íntegros para a perfeita realização do movimento (FERRARETTO,
2000) e para um controle motor adequado.
Rosa Neto (2002) define o controle motor como um funcionamento
harmonioso dos diferentes grupos musculares para a execução de um movimento complexo.
Para que aconteça um controle motor organizado é necessário que ocorra
um controle adequado do tônus, que é definido por Miller e Clark (2002) como a resistência
passiva ao alongamento oferecida por um grupo muscular, quando manipulado. Este tônus é
Organização de respostas
Planejamento
Realização de Ajustes
Capitação de sinais

dinâmico e pode ser alterado pelo posicionamento, por um fator emocional, comportamental e
ambiental. Mesmo sofrendo essas influências, a qualidade do tônus serve para descrever ou
definir postura, qualidade de movimento e para que a coordenação motora ocorra é necessário
que vários outros sistemas (por exemplo, sistemas de coordenação, visão e audição) ocorram
em sincronia.
Para que este controle se desenvolva, o sistema nervoso precisa de
estímulos externos adequados e de um tônus postural normal, descrito por Bernstein
citado por Edwards (1999) como o estado de prontidão da musculatura do corpo na
preparação para a manutenção da postura ou desempenho de um movimento. O tônus
postural normal permite ao indivíduo, segundo os mesmos autores, manter uma postura
vertical contra a força da gravidade, adaptar-se para uma variada base de suporte e
permitir o movimento seletivo para atingir habilidades funcionais.
O tônus postural normal é muito importante para que ocorra uma
coordenação motora ideal (EDWARDS, 1999).
Segundo Spoms e Edelman in Muller e Clarck (2002), para que ocorra uma
coordenação motora adequada é necessária a ação conjunta das três variáveis: a produção
espontânea de vários tipos de movimentos; a capacidade de perceber os efeitos do
movimento, permitindo uma seleção de movimentos com base na função adequada para cada
tipo de movimento; e a seleção de movimento funcional, reforçando as conexões sinápticas
nos circuitos nervosos.
O controle motor depende, então, de uma seqüência de movimentos com
características variáveis e invariáveis armazenadas no sistema nervoso e de estímulos externos
adequados (EDWARDS, 1999).
Para a criança desenvolver-se adequadamente, necessita de todas estas
variáveis, mas cada uma vai agir de acordo com a sua capacidade, curiosidade e estímulos

recebidos do meio externo (KONG, 2004). Em função desses quesitos, as crianças que
possuem um sistema nervoso íntegro apresentarão um desenvolvimento diferenciado, mais
rápido ou mais lento, dependendo do meio em que estão inseridas (KONG, 2004).
O cérebro de um lactente está em desenvolvimento e se organizando, desde
a vida intra-uterina até os primeiros anos de vida. Por este motivo à estimulação externa é
essencial, pois o cérebro é muito suscetível a influências negativas como toxinas, infecções,
má nutrição ou traumas (MILLER e CLARK, 2002).
Ocorrendo qualquer fator agressivo ao cérebro em desenvolvimento, suas
conexões nervosas serão deficitárias e, conseqüentemente, a criança terá dificuldades em
realizar movimentos normais, demonstrando um controle motor inadequado. Desenvolverá
padrões patológicos de movimento, causando um dano permanente e não-progressivo, que
afeta a postura e o movimento da criança (BOBATH, 1982), ocorrendo uma lesão cerebral.
Miller e Clark (2002) citam a Paralisia Cerebral (PC), sugerindo uma
disfunção motora secundária a uma lesão no Sistema Nervoso Central imaturo, não
progressiva. O diagnóstico é estabelecido pela história de atraso motor e confirmação de que
o paciente não está perdendo a função, ou seja, que a lesão não é progressiva. Exames
neurológicos complementares ajudam a estabelecer o diagnóstico e o prognóstico.
Não se chega a um diagnóstico precoce apenas pela presença de sinais
anormais isolados, mas por uma combinação de achados que incluem atraso motor, sinais
neurológicos positivos, atividade do reflexo primário e reações posturais anormais. (MILLER
e CLARK, 2002).
Quando se solicita um movimento para uma criança com alteração motora –
por exemplo, pegar um copo de plástico inicialmente ela realiza o movimento de qualquer
forma, buscando apenas o seu objetivo inicial de pegar o copo. Este é um caso típico de
dificuldade de aprendizagem motora. Com o passar do tempo o fisioterapeuta organiza o
tônus desta criança para que ela possa pegá-lo de maneira mais fácil, produzindo um novo
padrão de movimento no qual ela gaste menos energia para realizá-lo. Esta criança não possui
o mecanismo de antecipação do movimento e nem o de resposta ao movimento. A falta
destes, dificultará o seu aprendizado motor e impedirá que a teoria dos sistemas dinâmicos
atue de forma adequada (FERRARETTO, 2000), pois ela não consegue adequar o movimento
à sua necessidade. A criança necessita de uma readaptação do seu sistema nervoso para que
ele volte a desempenhar esta ou qualquer função da melhor forma possível
(ANNUNCIATTO, 2002), e isso só acontecerá se ela estiver inserida em um ambiente
adequado, facilitando a ocorrência da plasticidade cerebral (KONG, 2004).
A terapia aquática é um dos meios de favorecer o mecanismo de
plasticidade cerebral. Ruoti, Morris e Cole (2000), relatam que o uso da água como meio de
cura data de muitos séculos.
No caso específico da PC espástica, o principal benefício é a redução da
espasticidade ocasionada pela piscina terapêutica aquecida. Bates e Hanson (1998) citam que
a água é o melhor meio para a espasticidade, pois promove o relaxamento muscular. A
imersão na água aquecida promove uma resposta sensorial que afeta os nervos da pele
significativamente, incluindo aqueles sensíveis à temperatura, toque e pressão.
A espasticidade grave cursa com rigidez muscular, ausência ou dificuldade
de movimentação ativa, presença de padrões de postura e de movimento fixados, e a
abordagem têm grandes valia, pois certas posições corporais assumidas na água são mais
fáceis de ser controladas (BECKER; COLE, 2000).
De acordo com Israel e Pardo (2000), para utilizar o potencial motor, o
programa de ensino consiste em treinar habilidades motoras residuais, de acordo com os
comportamentos motores que são considerados fundamentais para uma independência e
adaptação no meio aquático. A terapia aquática permite vivências motoras precoces e livres

de equipamentos. Para que este aprendizado ocorra de forma adequada foram definidas
estratégias de ação que foram organizadas em fases de tratamento pela autora referida. Estas
fases foram denominadas de: ambientação, domínio do meio líquido, relaxamento, exercícios
terapêuticos especializados e condicionamento orgânico global.
O paciente quadriplégico espástico grave diminui sua espasticidade na água
em relação ao solo. Aumentam as amplitudes de movimento e a mobilização articular. Os
padrões de membros superiores tornam-se menos flexores, redução da escoliose e maior
facilidade em realizar movimentação voluntária, melhorando globalmente o seu quadro motor
(ISRAEL e PARDO 2000).
2.2 Equipe Interdisciplinar
Para que os pacientes com paralisia cerebral e com múltipla deficiência
tenham o tratamento mais adequado possível, é imprescindível que ela esteja sendo
acompanhada por uma equipe interdisciplinar. Bark (2005) relata que é inconcebível avaliar
uma criança sem conhecer o contexto em que ela está inserida, comentando ainda que, dentro
de uma visão sistêmica, deve-se observar o sistema individual (como funciona sua
comunicação e interação consigo mesma) e o sistema familiar (como se dão às interações com
a família, na escola e em todo sistema do qual ela faz parte), inclusive das crianças mais
comprometidas.
Apesar de todos os problemas físicos e motores apresentados, as crianças
com múltiplas deficiências também possuem qualidades e capacidades que necessitarão ser

desenvolvidas, para que a sua motricidade seja a mais funcional possível, podendo utilizar
habilidades motoras utilizadas no seu cotidiano.
Não se deve confundir estes comportamentos, relacionados às dificuldades
motoras, com uma baixa capacidade cognitiva. Isso poderá gerar uma imagem preconceituosa
sobre as capacidades e potencialidades para uma vida independente e autônoma.
A criança com PC é capaz de desenvolver habilidades e não
necessariamente apresentará as complicações motoras anteriormente citadas em função do
fenômeno da plasticidade cerebral (TECKLIN, 2002). Ela poderá desenvolver outros
movimentos específicos e até recuperar a função perdida (ANNUNCIATTO, 2002). O
importante é avaliar e estimular suas habilidades possíveis e, por meio de um trabalho de
qualidade, feito por uma equipe de saúde competente, procurar desenvolvê-las.
É muito importante a colaboração das pessoas próximas (pais ou
cuidadores), pois darão continuidade ao trabalho interdisciplinar quando a criança estiver em
casa, fora do ambiente de terapia.
Mesmo que este desenvolvimento seja mínimo, quem o rodeia deverá passar
a percebê-lo como uma pessoa que também possui potencialidades (SHEPERD, 1995), e
muitas vezes, as conquistas podem ser posicionamentos adequados para um melhor controle
das reações neurológicas.
Kong (2004) descreve pré-requisitos necessários para uma boa evolução do
tratamento fisioterapêutico, associados aos trabalhos de toda equipe multidisciplinar.
O início de terapia precoce é muito importante. Ela deve ser iniciada entre o
terceiro e o quinto mês de vida quando os reflexos não estão fixos e não existem padrões
anormais de movimento instalados.

Na qualidade da terapia deve-se buscar movimentos ativos da criança para
conseguir realizar sua atividade motora de forma independente, saber esperar até que a reação
apareça, visar o controle da postura e do movimento em favor do autocontrole da criança.
Fornecer instruções de trabalhos conjuntos com pais e/ou cuidadores, sendo
necessário um trabalho integrado com a família para se obter um bom resultado no tratamento
(NAGARAJAPPA, 2003). É preciso explicar para eles o problema da criança e ensiná-los a
brincar com ela de forma adequada, buscando a estimulação e o controle do movimento.
A integração da terapia ao dia-a-dia demonstrando a forma adequada de
carregar o bebê, dar banho, postura correta ao alimentar, vestir e desvestir são atividades
importantes que dão continuidade à terapia. Desta forma, a criança vivencia, durante vários
momentos do dia, movimentos e padrões normais, pois quanto mais estímulo à criança
receber, melhor será sua resposta ao tratamento (FINNIE, 1999), facilitando a plasticidade
cerebral.
Para se obter uma boa evolução no tratamento, a família e a criança devem
estar motivadas. A dosagem da terapia é importante para que os manuseios sejam efetivos. O
importante é a qualidade e não a quantidade. O acompanhamento contínuo é importante em
todas as idades, cada uma com as suas peculiaridades, desde a fase motora até a fase escolar.
Körding e Wolpert (2004) citam a importância da qualidade do
envolvimento dos pais e da família, que auxilia no desenvolvimento cognitivo da criança. Os
anos iniciais da criança são extremamente importantes para o seu desenvolvimento.
É muito importante que o trabalho interdisciplinar realmente ocorra para
poder explorar o máximo das capacidades e potencialidades das crianças, trabalhando suas
funções e habilidades. A participação da família e da comunidade é relevante para o processo
terapêutico.

Poulsen e Ziviani (2004) descrevem a necessidade de se trabalhar bem a
criança para que ela possa brincar como qualquer outra, apesar da sua incoordenação motora.
É importante observar suas características individuais, físicas e psicológicas e o material que
pode auxiliá-la. Dentre estes materiais, encontra-se a cadeira de rodas, que é um tipo de
tecnologia assistiva. Ela geralmente é adaptada para auxiliar a criança durante todas as suas
atividades cotidianas.
2.3 Avaliação Quantitativa em Fisioterapia
Vários profissionais trabalham com crianças com paralisia cerebral e com
múltiplas deficiências, avaliando a evolução do paciente de forma qualitativa. Hall (2000)
relata que uma análise qualitativa pode oferecer informações insuficientes se for abordada de
forma normal, mas à medida que aumenta a complexidade da habilidade ou o nível do detalhe
anatômico, aumenta-se também o nível de planejamento. Sendo assim, é necessária uma
avaliação mais detalhada, que complemente os laudos, diagnósticos e favoreça a evolução
motora adequada, de crianças com paralisia cerebral e com múltiplas deficiências.
As avaliações qualitativas realizadas pelos profissionais fisioterapeutas são
realizadas por meio de vídeos, fotos e do próprio desenvolvimento motor da criança. Uma das
únicas formas de mensuração quantitativa que a Fisioterapia apresenta para avaliar crianças
com paralisia cerebral é um teste chamado GMFM (“Gross Motor Function Measure”), ou
seja, a medição da coordenação motora ampla, que tem como proposta avaliar a função
motora global na criança portadora de PC, sem se preocupar com a qualidade do
desenvolvimento da função (RUSSEL et al., 1989; CAMPOS et al., 2004).

Em função desta dificuldade, buscou-se uma forma de avaliação qualitativa
diferenciada de mensuração biomecânica, que pudesse demonstrar a evolução das crianças e a
sua postura de permanência na cadeira de rodas, principalmente das crianças com paralisia
cerebral e com múltiplas deficiências, pois estas têm pouca atividade motora voluntária para
poder evitar todas as alterações biomecânicas anteriormente citadas.
Amadio (2000) classifica os procedimentos de medição em biomecânica nas
seguintes categorias:
a) procedimentos mecânicos – observações diretas de grandezas que não se
alteram muito rapidamente;
b) procedimentos eletrônicos – grandezas mecânicas são transformadas em
elétricas, permitindo uma medição dinâmica;
c) processamento de imagens – representação óptica e geométrica do objeto
a ser analisado.
Os métodos utilizados pela biomecânica possuem diferentes campos de
aplicação e entre eles encontram-se a Biomecânica Reabilitativa, que estuda os movimentos
em pessoas com deficiências motoras ou sensoriais, procurando utilizar-se da tecnologia
assistiva.
De acordo com Amadio (1996) e Baumman (1995), os modelos de medição
utilizados pela Biomecânica para abordar diversas formas de movimento são: Cinemetria,
Dinamometria, Eletromiografia e Antropometria.
Neste estudo foi utilizada a Fotometria, que está inserida na Cinemetria
como meio de medição para posturas estáticas, em função do tipo de clientela participante.
O Quadro 02 mostra como a Cinemetria se encontra na Biomecânica.

PARADIGMA DO MOVIMENTO HUMANO
Quadro 02 - Métodos de medição em biomecânica
Fonte: BAUMANN (1995)
2.3.1 Cinemetria
A Cinemetria é uma dos métodos de medição utilizados pela Biomecânica
para abordar as diversas formas de movimento (AMADIO, 1996). Assim, o movimento
poderá ser descrito e modelado matematicamente, permitindo uma maior compreensão dos
mecanismos internos reguladores e executores do movimento do corpo humano.
Posição e orientação
dos segmentos corporais
Forças externas e
distribuição da pressão
Atividade muscular
cinemetria dinamometria eletromiografia antropometria
Modelo Modelo
Força gravítica Energia
mecânica inércia
Momentos líquidos
Forças internas
Parâmetros para o modelo corporal

É um método que utiliza fotos ou filmagem para analisar o movimento
humano, tendo por base a escolha de imagens do movimento. Em sua posterior análise são
utilizados marcadores que podem ser divididos basicamente em dois grupos, de acordo com
Rose e Gamble (1998): os ativos, que emitem uma luz infravermelha ao sensor, e os passivos,
que são refletores que podem refletir a luz ambiente ou a luz projetada de volta ao sensor.
Os marcadores serão utilizados para identificar as articulações escolhidas e
se evitar a utilização de tecidos moles e eixos de rotação (MORAES, 2000).
Os procedimentos para a realização da cinemetria na primeira fase incluem
a filmagem de um objeto de calibração e do movimento em estudo, por meio de câmeras
colocadas em um só plano – bidimensional – ou em diversos planos, o tridimensional.
Este sistema de análise cinemática tridimensional de movimentos humanos
tem, para Barros (1995), uma utilização em processos de recuperação de pessoas com
distúrbios, deficiências, anomalias ou limitações.
Na segunda fase é utilizado um sistema vídeo-analógico de medição do
movimento, no qual se capturará dados de um procedimento manual ou automático de
digitalização dos pontos de referência anatômica do indivíduo, em cada fotograma. Este
procedimento tem como objetivo a criação de imagens animadas de modelos especiais,
representando o sujeito através de segmentos rígidos e articulados, correspondentes aos
diversos segmentos anatômicos a realizar a tarefa em estudo (ROSE e GAMBLE, 1998).
Após a digitalização das imagens, os dados são filtrados, as informações
obtidas são corrigidas, aumentando a fidedignidade dos resultados. Os dados podem ser
recolhidos para o estudo de forma numérica ou gráfica.
A avaliação, neste estudo, foi realizada de forma estática pela fotometria,
com a utilização de fotografia digital, utilizando marcadores nos pontos escolhidos e
calculados os ângulos para, posteriormente, depois da intervenção realizada, ser reavaliado da

mesma maneira. Esta é uma das formas de se avaliar as pessoas com maior comprometimento
motor, pois sua motricidade voluntária é praticamente inexistente.
2.4 Tecnologia Assistiva
A Tecnologia Assistiva tem contribuído muito nas ciências humanas e da
saúde, tendo um importante papel na vida de jovens e de crianças nos dias de hoje. Besio e
Salminen (2004) citam a importância desta tecnologia nos processos de aprender e ensinar,
mas a tecnologia em si não é suficiente, sem se levar em conta à maneira como ela vai ser
utilizada.
Denomina-se Tecnologia Assistiva, de acordo com Vimieiri et al. (2004),
qualquer item, peça de equipamento, artefato ou sistema de produtos, que pode ser adquirido
comercialmente ou desenvolvido de forma artesanal, produzido em série, modificado ou sobre
medida, utilizado para aumentar, manter ou melhorar as habilidades de pessoas com
limitações funcionais, sejam físicas ou sensoriais.
Um dos tipos de tecnologia assistiva mais utilizada pelos pacientes com
deficiências é a cadeira de rodas, que os auxilia na sua locomoção.
Estudos realizados por Routthier et al. (2004) mostraram as dificuldades que
as pessoas com paralisia cerebral (PC) encontram para utilizar a cadeira de rodas,
principalmente em relação às barreiras arquitetônicas como tipo de calçadas, meio fios,
aclives e declives.

Algumas pessoas se negam a utilizar esta tecnologia assistiva, inclusive pais
de crianças com PC e múltipla deficiência. Wessels et al. (2003) realizou uma pesquisa para
se saber o por quê. Os resultados serão demonstrados a seguir nos quadros 3 e 4.
Pessoal (cliente).
Idade, sexo, diagnóstico, próprias expectativas.
Expectativas do círculo social, aceitação de problemas, maturidade
emocional, motivação interior.
Progressão e severidade da desabilidade, uso de múltiplos recursos.
Relativo a recursos múltiplos.
Qualidade e aparência do recurso.
Relativo ao ambiente do usuário.
Suporte do seu círculo social, barreiras físicas, oportunidades, produção
destes recursos.
Intervenção.
Opinião dos usuários, instruções e treinamento, correto processo de
instalação, serviços de manutenção.
Quadro 03 – Fatores Relacionados ao não uso da tecnologia assistiva Fonte: Wessels et al. (2003, p. 236)
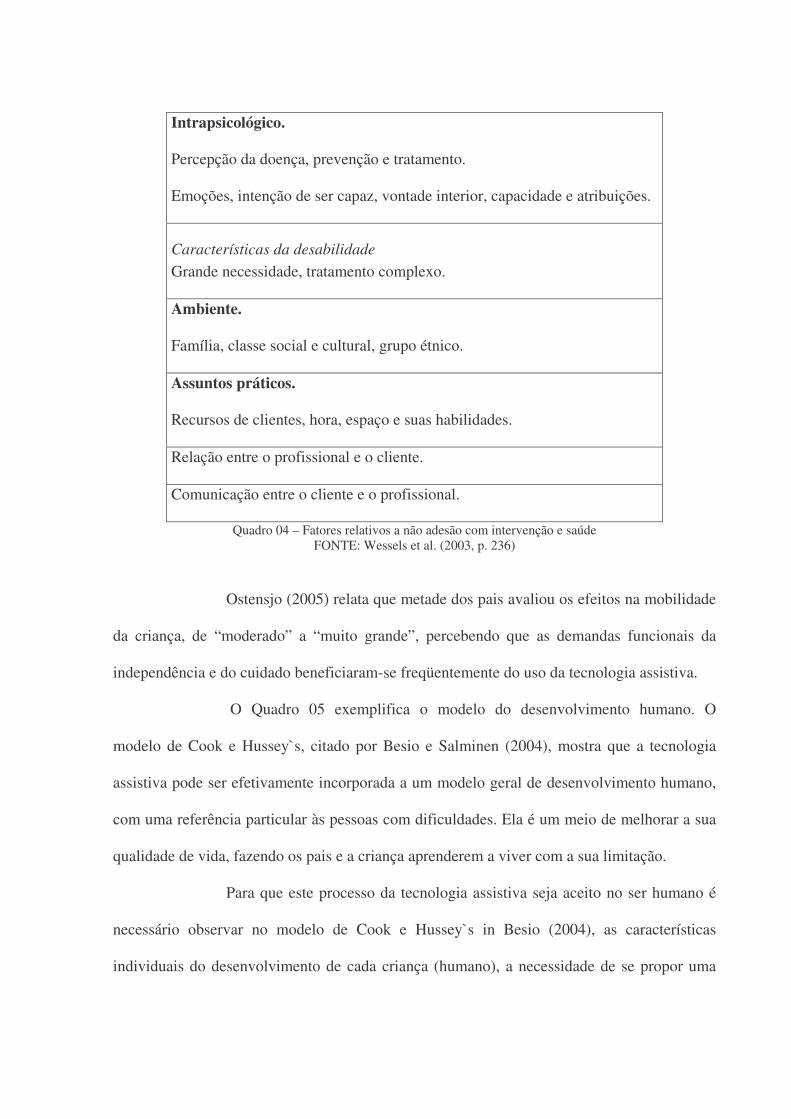
Intrapsicológico.
Percepção da doença, prevenção e tratamento.
Emoções, intenção de ser capaz, vontade interior, capacidade e atribuições.
Características da desabilidade Grande necessidade, tratamento complexo.
Ambiente.
Família, classe social e cultural, grupo étnico.
Assuntos práticos.
Recursos de clientes, hora, espaço e suas habilidades.
Relação entre o profissional e o cliente.
Comunicação entre o cliente e o profissional.
Quadro 04 – Fatores relativos a não adesão com intervenção e saúde FONTE: Wessels et al. (2003, p. 236)
Ostensjo (2005) relata que metade dos pais avaliou os efeitos na mobilidade
da criança, de “moderado” a “muito grande”, percebendo que as demandas funcionais da
independência e do cuidado beneficiaram-se freqüentemente do uso da tecnologia assistiva.
O Quadro 05 exemplifica o modelo do desenvolvimento humano. O
modelo de Cook e Hussey`s, citado por Besio e Salminen (2004), mostra que a tecnologia
assistiva pode ser efetivamente incorporada a um modelo geral de desenvolvimento humano,
com uma referência particular às pessoas com dificuldades. Ela é um meio de melhorar a sua
qualidade de vida, fazendo os pais e a criança aprenderem a viver com a sua limitação.
Para que este processo da tecnologia assistiva seja aceito no ser humano é
necessário observar no modelo de Cook e Hussey`s in Besio (2004), as características
individuais do desenvolvimento de cada criança (humano), a necessidade de se propor uma

atividade específica a ser realizada (atividade) e os aspectos tecnológicos (tecnologia
assistiva).
Os objetivos desta soma entre o humano, a atividade e a tecnologia assistiva
são buscar a autonomia das crianças com deficiências, a melhora do seu quadro motor, o
aumento da sua capacidade de comunicação e a facilitação em novas aquisições de
habilidades motoras e de linguagem.
Quadro 05 - Modelo do Desenvolvimento Humano Cook e Hussey´s (BESIO, 2004, p.50)
Este modelo está sendo muito utilizado principalmente com crianças e
jovens com incapacidades, no intuito de auxiliá-los na sua educação e reabilitação (BESIO e
SALMINEN, 2004).
É importante a mudança de paradigmas dos profissionais desta área, pois a
necessidade de se desenvolver instrumentos de tecnologia assistiva para pessoas com
deficiências motoras é cada vez maior. A expectativa de bons resultados mediante a terapia
torna-se limitada à medida que se percebe que num dia de vinte e quatro horas, este indivíduo
CONTEXTO
Tecnologia Assistiva
Humano
Atividade
poderá passar, em condições ideais de tratamento, uma hora em tratamento motor, de oito a
dez horas dormindo e às treze horas restantes sobre a sua cadeira. O avanço tecnológico faz da
intervenção assistida a grande perspectiva para o futuro. Pouco mais se pode descobrir a
respeito de novas técnicas cinesioterapêuticas. A biologia faz avanço nas pesquisas sobre
células-tronco, mas não se sabe quando haverá consenso neste procedimento e depois disso,
ainda se estará facilmente acessível à população. Muitos dos materiais hoje utilizados na
indústria ou na construção civil podem ser adaptados para a elaboração de novos artefatos,
para tecnologia assistiva. Além disso, os avançados tecnológicos são mais simples já que não
envolvem pesquisas em seres humanos. Novos materiais e novos equipamentos perpetuarão,
ao longo dos dias, os ganhos obtidos com as terapias (USBERCO e SALVADOR, 2000).
Esta tecnologia, hoje restrita a poucos familiares e profissionais, seja pela
carência de divulgação ou ainda por constituir-se numa novidade, restringe também seus
beneficiários já que demanda investimentos e recursos financeiros para o seu alcance.
A obtenção e o reconhecimento de resultados positivos deverão
democratizar a tecnologia assistiva, beneficiando camadas mais carentes da população, nas
quais, epidemiológicamente, concentra-se grande parte da população portadora de múltipla
deficiência.
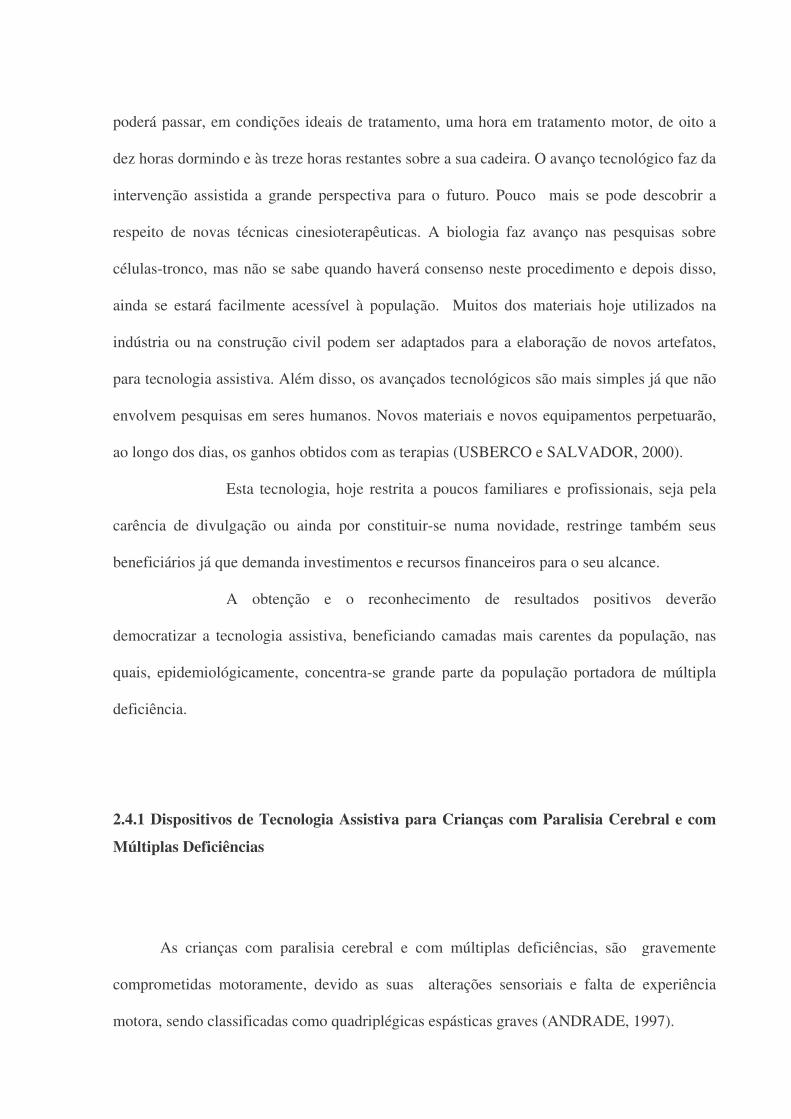
2.4.1 Dispositivos de Tecnologia Assistiva para Crianças com Paralisia Cerebral e com
Múltiplas Deficiências
As crianças com paralisia cerebral e com múltiplas deficiências, são gravemente
comprometidas motoramente, devido as suas alterações sensoriais e falta de experiência
motora, sendo classificadas como quadriplégicas espásticas graves (ANDRADE, 1997).

Mediante as dificuldades de locomoção que essas crianças apresentam, elas
necessitam de dispositivos de tecnologia assistiva, para facilitar as suas atividades de vida
diária, e, principalmente a sua locomoção.
A AACD (Associação de Assistência à Criança Defeituosa) em São Paulo, e a
Ortobrás no Rio Grande do Sul são algumas das empresas que fabricam cadeiras de roda para
crianças com paralisia cerebral e com múltiplas deficiências, ilustradas nas Figuras de 14 a
21.
A grande dificuldade da utilização destas cadeiras e dos outros dispositivos
é que eles são confeccionados a partir de modelos padrão, não atendendo as alterações
motoras peculiares a cada criança., abaixo serão descritos os principais modelos de cadeira de
rodas hoje no mercado.
Figura 14 - Cadeira de rodas modelo Star Juvenil Contém um conjunto de assento e encosto anatômico recoberto com tecido automotivo, assento com abdutor de pernas, de 10º a 30º, mantendo o conjunto assento, encosto e pés
em 90º, desmontável, adaptável ao assento do veículo, inclinação por exclusivo sistema de pistão, acionado através de pedal, cinto de segurança, apoio para braços removível, apoio para pés removível, regulável em altura e profundidade, acionamento de freios através de pedal, indicado para usuários até 50 kg e largura do assento: 36
ou 40 cm. Fonte: www.ortobrás.com.br acessado em 16/03/2006.

Figura 15 – Cadeira de rodas modelo Star Baby. Conjunto de assento e encosto anatômico recoberto com tecido automotivo, assento com abdutor de pernas, possibilita inclinação de 10º a 30º, mantendo o conjunto assento,
encosto e pés em 90º; desmontável, adaptável ao assento do veículo; cinto de segurança; apoio para braços removível; apoio para pés removível, regulável em altura e profundidade; acionamento de freios através de
pedal; indicado para usuários até 30 kg; largura do assento: 30 ou 36 cm. Fonte: www.ortobrás.com.br acessado em 16/03/2006.
Figura 16 – Cadeira de rodas modelo Universal. Apoio para braços removível; apoio para pés regulável; sistema quick release; rodas traseiro aro 16 “ou 20”; rodas dianteiras aro 6 “. · Largura do assento: ·Infantil: 30 33 ou 36
cm·Juvenil: 36 ou 40 cm ·Adulto: 40, 44 ou 48 cm·”. Fonte: www.ortobrás.com.br acessado em 16/03/2006.

Figura 17 – Cadeira de rodas Gazela Ultra Lite. Para Excepcional. Construída em liga de alumínio temperado; pintura epóxi, dobrável em "L"; rolamentos blindados nas quatro rodas, inclusive no eixo vertical do garfo; rodas traseiras de 24 “infláveis; rodas dianteiras de 6" maciças; com protetor de raios; sistema de desmontagem rápida
quick release nas quatro rodas; freios bilaterais; apoio de pés fixos e reguláveis na altura; estofamento 100% capota impermeável acolchoada; com abdutor de pernas acolchoado; com apoio de cabeça acolchoado e
regulável na altura; apoio de braços removíveis com proteção lateral acolchoada.
Fonte: www.ortobrás.com.br acessado em 16/03/206.
Figura 18 – Cadeira de rodas Conforma Tilt Construída em liga de alumínio temperado; com pintura epóxi; com exclusivo sistema de desmontagem "tilt"; rodas traseiras de 20 “infláveis; rodas dianteiras de 7" maciças; sistema de desmontagem rápida quick release nas quatro rodas; rolamentos blindados nas quatro rodas inclusive no eixo
vertical do garfo; freios bilaterais; com apoio de braços removíveis; com protetor de raios; com cinto de segurança tipo mochila; com 5 posições de reclinar, sempre mantendo a posição de 90º Graus do conjunto
assento /encosto e apoio de pés, protetor de roupas incorporado ao braço, sistema modular assento e encosto em espuma de alta densidade e revestido com estofamento automotivo, apoio de pés removível e regulável na altura e na profundidade; com fita de fixação de pé; apoio cabeça em espuma de alta densidade revestida com estofado
automotivo e regulável na altura e na profundidade
��������� ������ ��� � ��������� ������ ��� �����������������! �"�#�$�%�# &�$$�"

Figura 19 – Cadeira de rodas Conforma Tilt JR: Construída em liga de alumínio temperado; com pintura epóxi, com exclusivo sistema de desmontagem "tilt"; rodas traseiras de 16 “infláveis; rodas dianteiras de sete" maciças; sistema de desmontagem rápida quick release nas quatro rodas; rolamentos blindados nas quatro rodas inclusive
no eixo vertical do garfo; freios bilaterais; com apoio de braços removíveis; com cinto de segurança tipo mochila; com 5 posições de reclinar sempre mantendo a posição de 90º Graus do conjunto assento /encosto e apoio de pés; protetor de roupas incorporado ao braço• Sistema modular assento e encosto em espuma de alta densidade e revestido com estofamento automotivo; apoio de pés acolchoado removível e regulável na altura e na profundidade; com fita de fixação de pé; apoio cabeça em espuma de alta densidade revestida com estofado
automotivo e regulável na altura e na profundidade.
'�(�)+* ,�- .�.�.0/ (21 * (23�1 4�5�/ 67(�80/ 3�1 9�67,�575�9�:�(;,28=<+>�? @�A�? B�@�@�>�/
Figura 20 – Cadeira de rodas ULTRA Lite 2000 - INFANTIL Construída em liga de alumínio temperado; com pintura epóxi; dobrável em "L" tipo monobloco; rodas traseiras de 20 “infláveis e dianteiras de 6" maciças; eixo
quick release nas quatro rodas, inclusive no eixo vertical do garfo; estofamento 100% nylon acolchoado com almofada incorporada ao assento; assento rígido incorporado na estrutura; pedal fixo com regulagem na altura e na profundidade; com regulagem de ângulo de encosto, de inclinação de assento, do centro de gravidade, e de
altura do assento; com freios bilaterais; com aro de impulsão em liga de alumínio temperado e mesmo acabamento da estrutura; com prolongador de encosto; com protetor de raios; com protetor de roupas.
Fonte: www.ortobrás.com.br acessado em 16/03/2006.

Figura 21 - Cadeirade rodas Conforma Fechamento Construída em liga de alumínio temperado; pintura epóxi, com exclusivo sistema fechamento frontal; rodas traseiras de 20 “infláveis; rodas dianteiras de 7" maciças; sistema quick release nas quatro rodas, inclusive no eixo vertical do garfo; freios bilaterais; apoio de pés
regulável na altura; com fita de fixação de pé; sistema modular assento e encosto em espuma de alta densidade e revestido com estofamento automotivo; com cinto de segurança tipo mochila; apoio cabeça em espuma de alta densidade revestida com estofado automotivo e regulável na altura, com mochila no encosto. Esta é a cadeira
cedida pelo Sistema Único de Saúde (SUS), na cidade de Curitiba.
Fonte: www.ortobrás.com.br acessado em 16/03/2006.
Na tentativa de melhorar a postura das crianças com paralisia cerebral e com múltiplas
deficiências sentadas na cadeira de rodas, pois todas as cadeiras possuem modelo padrão, são
utilizados artefatos, como a almofada, demonstrada na Figura 22.
Figura 22 - Almofada para cadeira de rodas. Pode ser preenchida com água ou ar, e é utilizada na cadeira de rodas. Tamanho
infantil e adulto. Fonte: www.aacd.com.br acessado em 16/03/2006.

Apesar da utilização de cadeiras de rodas adequadas, as crianças com lesões
mais graves desenvolvem alterações posturais importantes como as escolioses nas
quadriplegias espásticas graves, pois, com o passar do tempo o estofamento da cadeira de
rodas que é feita de poliuterano, acaba se moldando ao padrão da criança, não corrigindo
adequadamente a sua postura, mantendo a criança no seu padrão patológico.
Uma alternativa para se evitar as escolioses, que são muito comuns nesta
clientela é a utilização de coletes ortopédicos, mostrados das Figuras 23 a 27.
Figura 23 – Colete de Milwaukee. Utilizado para o tratamento de alterações posturais. Confeccionados após molde de gesso a correta colocação das almofadas permite a correção da escoliose e cifose. Materiais: duralumínio, aço inox, polipropileno, tiras e espumas.
Fonte: www.aacd.com.br acessado em 16/03/2006.
Figura 24– Colete de Milwaukee sem anel cervical Construído a partir do colete de milwaukee, porém sem o anel cervical. É prescrito para o tratamento de escolioses baixas e lombares. Materiais: duralumínio, aço inox, polipropileno, tiras e espumas.
Fonte: www.aacd.com.br acessado em 16/03/2006.
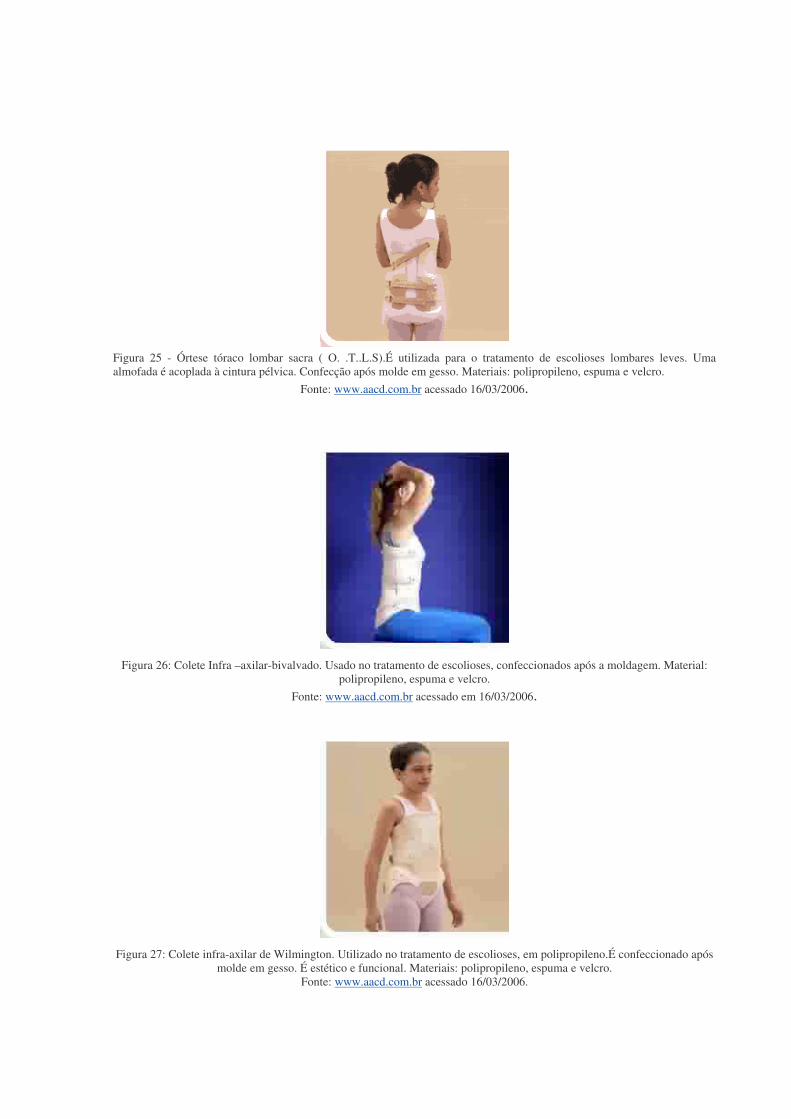
Figura 25 - Órtese tóraco lombar sacra ( O. .T..L.S).É utilizada para o tratamento de escolioses lombares leves. Uma almofada é acoplada à cintura pélvica. Confecção após molde em gesso. Materiais: polipropileno, espuma e velcro.
Fonte: www.aacd.com.br acessado 16/03/2006.
Figura 26: Colete Infra –axilar-bivalvado. Usado no tratamento de escolioses, confeccionados após a moldagem. Material: polipropileno, espuma e velcro.
Fonte: www.aacd.com.br acessado em 16/03/2006.
Figura 27: Colete infra-axilar de Wilmington. Utilizado no tratamento de escolioses, em polipropileno.É confeccionado após
molde em gesso. É estético e funcional. Materiais: polipropileno, espuma e velcro. Fonte: www.aacd.com.br acessado 16/03/2006.

O material utilizado para a confecção dos coletes ortopédicos é muito rígido, e
machuca as crianças com paralisia cerebral e com múltiplas deficiências, que têm
quadriplegia espástica grave devido à sua alteração de tônus, e principalmente devido à sua
pele ser muito delicada e com falta de estimulação sensorial.
Em função destas dificuldades, optou-se por construir um artefato que melhorasse a
postura da criança com paralisia cerebral e com múltiplas deficiências na posição sentada na
cadeira de rodas.
2.4.2 Artefato
O material para a confecção do artefato, utilizado neste trabalho, foi o
Poliuretano (PU), um tipo de polímero composto (FONSECA, 2001) formado de
macromoléculas, obtido pela combinação de monômeros (moléculas pequenas). Este
fenômeno é chamado de polimerização.
A polimerização, para Crove (2000), é a reação entre dois ou mais
monômeros, resultando em uma molécula de outra substância, o polímero, que apresenta
segmentos similares ao monômero que lhe deu origem.
Os polímeros existem na natureza e o primeiro polímero sintético com
interesse industrial foi o nitrato de celulose, obtido em 1869. A partir dele, com a descoberta
das reações envolvidas no processo e com o desenvolvimento tecnológico, grande quantidade
de novos polímeros puderam ser sintetizados (USBERCO e SALVADOR, 2000).
Crove (2000), classifica os polímeros em três critérios distintos descritos a
seguir:

a) quanto ao processo de preparação: os polímeros podem ser denominados de
homopolímeros (polímeros de adição), onde os monômeros são idênticos, copolímeros cujos
monômeros são diferentes, e de condensação onde a formação dá-se com a retirada de
moléculas de pequena massa molecular.
b) quanto à resposta ao aquecimento: são divididos em termoplásticos, que são
polímeros filiformes, moldáveis com a variação da temperatura e os termofixos, que são
polímeros tridimensionais, resistentes fisicamente às variações térmicas.
c) quanto à ocorrência: existem os naturais, que existem na natureza e os sintéticos,
que são os obtidos artificialmente.
O PU é um polímero classificado como de condensação, termoplástico e
sintético.
Os polímeros de condensação (FELTRE, 2000), são obtidos pela reação de
dois monômeros, com a eliminação de uma substância mais simples, como por exemplo, à
água, e em algumas vezes por rearranjos entre as moléculas dos monômeros.
Usberco e Salvador (2000) citam que o polímero de rearranjo mais comum é
o PU, pois ele é um tipo de polímero que requer um ou mais monômeros que sofrerão
rearranjos em suas estruturas. De acordo com Fonseca (2000), ele é o único polímero de
condensação formado numa reação na qual não há liberação de moléculas.
O PU é o material utilizado para a obtenção de espumas moldadas, que pode
ser a espuma flexível, a qual tem aplicação no estofamento de móveis e veículos, ou a espuma
rígida ou semi-rígida, que é utilizada em moldura de quadros e espelhos e parte decorativa de
móveis (MANO 1991).
Estas espumas flexíveis são classificadas dentro dos materiais de
engenharia, de acordo com Mano (1991), como polímeros sintéticos, não-clássicos. Os
materiais clássicos seriam as madeiras, os cerâmicos, os vidros e os metais.

Vilar (1998), explica que as matérias-primas são vigorosamente misturadas
e o produto resultante é vertido em um molde aberto ou é injetado em um molde fechado. O
autor relata ainda que apenas 20% das espumas flexíveis são realizadas em moldes fechados.
Estas chamadas de espumas moldadas (MANO, 1991), são usadas principalmente em
assentos e encostos de veículos, acolchoamento de móveis, revestimento de tapetes, entre
outros.
Existem dois processos de moldagem de espumas: o de moldagem a quente,
usada há quase trinta anos, e o mais recente, que é o de moldagem a frio (VILAR, 1998), o
que faz da espuma de poliuretano, uma das alternativas para adaptar as cadeiras de rodas de
acordo com a necessidade de cada usuário.
O poliuretano tem como características o peso molecular variável e
densidade entre 1-20 e 1-30. Quando celular sua densidade chega a 0,01. Pode ser
termoplástico ou termorrígido, amarelo e translúcido (MANO 1991).
É um material com propriedades marcantes, como a excepcional resistência
à abrasão, facilidade de fabricação de peças de formas complexas de grandes dimensões e
baixo custo de processamento (MANO 1991).
Para se obter o PU, Mano (1991) mostra que é necessário um monômero do
tipo éster. É também usado um polímero (conforme a funcionalidade dos monômeros e o
emprego ou não de agentes de cura, poderá ser termoplástico ou temorrígido), que pode ser
obtido pela reação entre di-isocianato de para-fenileno e o etilenoglicol (Quadro 06 e Quadro
7).
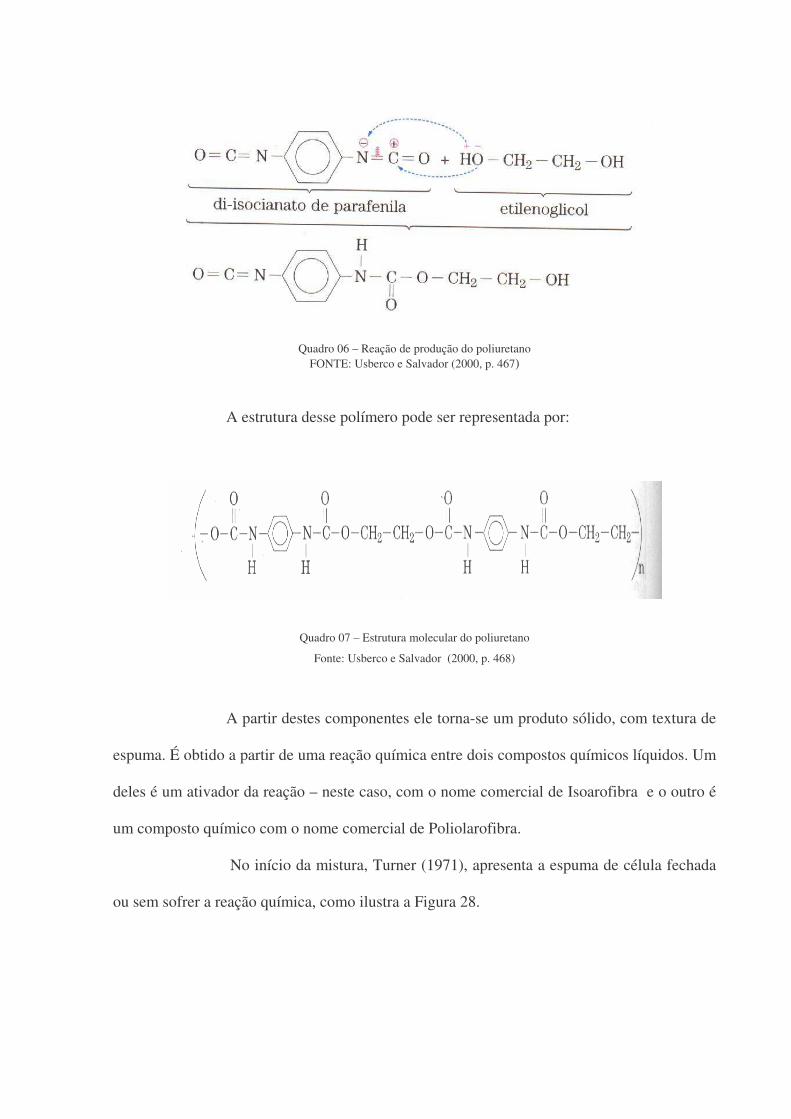
Quadro 06 – Reação de produção do poliuretano FONTE: Usberco e Salvador (2000, p. 467)
A estrutura desse polímero pode ser representada por:
Quadro 07 – Estrutura molecular do poliuretano
Fonte: Usberco e Salvador (2000, p. 468)
A partir destes componentes ele torna-se um produto sólido, com textura de
espuma. É obtido a partir de uma reação química entre dois compostos químicos líquidos. Um
deles é um ativador da reação – neste caso, com o nome comercial de Isoarofibra e o outro é
um composto químico com o nome comercial de Poliolarofibra.
No início da mistura, Turner (1971), apresenta a espuma de célula fechada
ou sem sofrer a reação química, como ilustra a Figura 28.

Figura 28 - Ilustração de Poliuretano com célula fechada
Fonte: Turner (1971, p. 106)
Em poucos minutos todas as reações têm lugar, promovendo um balanço
adequado entre as mesmas. A espuma se expande na cavidade, preenchendo-a, resultando na
estabilidade da mistura reagente e na alta qualidade dos produtos obtidos.
Um polímero termoplástico fundido e quente, de acordo com Turner (1971),
que contenha um solvente volátil dissolvido sob pressão pode “espumar” quando a pressão é
reduzida. Já um pré-polímero ou monômero líquido pode ser convertido em uma espuma,
introduzindo-se ar ou CO2 com agitação mecânica, realizando uma reação química que
produza uma espuma de resina com ligações cruzadas.
Quando estas reações ocorrem, a espuma passa a ser de célula aberta, como
ilustra a Figura 29.
Preto: Poliuterano Branco: Ar

Figura 29: Ilustração da célula aberta Fonte: Turner (1991, p. 107)
Na produção de poliuretano, ocorre um aumento de volume e da liberação
de calor (USBERCO e SALVADOR 2000). A Figura 30 ilustra a produção de poliuretano.
Figura 30 - Produção prática de Poliuretano Fonte: Usberco e Salvador (2000, p. 468).
O resultado é uma espuma flexível, que será utilizada neste trabalho, para
uma adaptação mais adequada das cadeiras de rodas para os usuários mais comprometidos
fisicamente e facilitar o padrão postural que é muito alterado no paciente com Paralisia
Cerebral.
Preto: Poliuretano Branco: Ar

3 METODOLOGIA
Para a realização deste trabalho, foram utilizadas análises qualitativas de
mensuração, com dados quantitativos, por meio da fotometria .
3.1 Participante
A população escolhida foi de pacientes com paralisia cerebral e com
múltipla deficiência, moradores no Pequeno Cotolengo do Paraná – Dom Orione. O tipo de
amostra escolhida foi por conveniência, que é comum na área de saúde (VIEIRA, 2004). A
participante da pesquisa para a confecção deste artefato foi à criança que apresentou maior
dificuldade de posicionamento na cadeira de rodas, mesmo após o tratamento da Fisioterapia.
Foram avaliadas todas as crianças residentes no Lar Anjo da Guarda.
Os critérios de inclusão da pesquisa foram:
a) ser criança com paralisia cerebral e com múltiplas deficiências;
b) estar institucionalizada no Pequeno Cotolengo do Paraná;
c) ter condições de saúde;
d) não possuir alterações osteo-articulares que limitem a posição sentada;
e) ter importante alteração ósteo-articular em coluna vertebral;
f) criança com dificuldade de ficar bem posicionada na cadeira de rodas;
padrão, mesmo após o atendimento fisioterapêutico;
g) criança que utilizou cadeira Ortobrás tamanho M (médio);
h) não estar em processo de adoção.

Estes critérios foram elaborados de acordo com o Termo de Consentimento
Livre e Esclarecido Comitê de Ética, Resolução-196/96 (APÊNDICE 1). O projeto foi
aprovado pelo Comitê de Ética sob registro no Comitê de Ética e Pesquisa da Pontifícia
Universidade Católica do Paraná, sob o número 431 (ANEXO A).
Após minuciosa avaliação fisioterapêutica (ANEXO B), das crianças
moradoras do Lar Anjo da Guarda, e conversa com a profissional responsável pelo setor de
Fisioterapia da Instituição, optou-se por utilizar a avaliação fisioterapêutica e realizar a
confecção do artefato com a paciente S. F. de 14 anos e 04 meses,que neste estudo será
chamada de P1, com paralisia cerebral e com múltipla deficiência, pois ela cumpria todos os
critérios de inclusão e apresentava uma escoliose de 105o graus, a qual impedia o seu correto
posicionamento na cadeira de rodas, para se validar a eficácia do artefato.
A paciente escolhida apresentava peso de 20,900 quilogramas; estatura de
1,29 metros. Seu peso em relação ao seu peso ideal era de 48,58%, média relativa a uma
criança de 06 anos e 07 meses; sua estatura em relação à sua idade era de 80,12%, média
relativa a uma criança de 08 anos e 06 meses; e seu peso em relação à sua idade era de
79,46%. Estes dados foram obtidos de acordo com a tabela do Nacional Center Statistics for
Health in Shils (2003) - (ANEXO C).
Pelas médias acima citadas, percebe-se que a criança não apresentava seu
peso e altura bem abaixo da média para a sua idade, principalmente seu peso em relação ao
ideal era menos da metade do esperado para a sua idade.

3.2 Local e Período
O local escolhido foi o Pequeno Cotolengo do Paraná – Dom Orione, cujos
moradores são institucionalizados, ou seja, residem neste local, e são pessoas com paralisia
cerebral e com múltipla deficiência. A pesquisa prática foi realizada, nos meses de abril a
outubro do ano de 2005.
3.3 Materiais e Equipamentos
Utilizou-se durante a pesquisa:
a) cadeira de rodas da marca Ortobrás, tamanho médio (Figuras 24,25 e 26);
b) marcadores pretos redondos da marca Pimaco;
c) máquina digital marca Samsung, modelo Digimax 201;
d) um tripé da marca Vanguard VT-214 B
e) roupa de banho para a criança;
f) programa de computador em ambiente MATLAB.
g) isoarofibra;
h) poliolarofibra;
i) espátulas de madeira;
j) ráfia;
k) folha renovável de papel;
l) chapas de madeira tipo pinus;
m) serra tico-tico da marca Cel, para confeccionar o caixote de madeira.
Outra grande vantagem da espuma é o seu custo, cerca de R$40,00 para a
fabricação de dois artefatos (dois assentos e dois encostos), não encarecendo o produto final.

3.4 Delineamento da Pesquisa
Inicialmente, foi realizada uma avaliação fisioterapêutica na paciente.
Depois, foi realizada a intervenção fisioterapêutica, onde foi realizada a terapia aquática e
depois a confecção do artefato, que foi dividida em confecção do assento e depois do encosto,
e a avaliação final.
3.5 Procedimentos de Coleta de Dados
Em um estudo piloto realizado no início desta pesquisa, a fotometria foi
realizada com crianças menores, em uma faixa etária de 02 (dois) a 05 (cinco) anos. Após a
medição dos ângulos antes e depois da terapia, percebeu-se uma melhora imediata no padrão
postural das mesmas, muito próximo da normalidade, o que não justificaria a elaboração de
um artefato para as mesmas, já que só a terapia oferece um resultado significativo. É
importante ressaltar que, como passar das horas, as crianças voltam a apresentar o seu padrão
motor patológico.
A avaliação postural por meio da fotometria foi realizada com 03 (três)
crianças, uma com paralisia cerebral com seqüelas de múltiplas deficiências (P1), e 02 (duas)
crianças da mesma idade com as mesmas características: gêmeos idênticos, com mesma altura
e mesmo peso (S1 e S2), para poder avaliar as diferenças entre sujeitos.
Antes de realizar as sessões de terapia aquática, a criança (P1), foi colocada
na cadeira de rodas, sentada, com trajes de banho, em ambiente aquecido – no setor de

hidroterapia do Pequeno Cotolengo do Paraná – Dom Orione. Foram utilizados marcadores
pretos redondos da marca Pimaco bilateralmente,posicionado nos seguintes pontos: na parte
externa da clavícula e abaixo da última costela. Os ângulos estudados estão apresentados na
Figura 31.
Figura 31 – Demonstração dos ângulos que foram avaliados
Ângulo 1(A1) – O ângulo da parte externa da clavícula direita, ligando-se ao
ponto abaixo da última costela direita, formando o eixo X1; e o ponto abaixo da última
costela direita ligando-se ao ponto abaixo da última costela esquerda, formando o eixo Y1.
Ângulo 2 (A2) – O ponto abaixo da última costela direita, ligando-se à crista
ilíaca direita, formando o eixo X2; e a crista ilíaca direita ligando-se à crista ilíaca esquerda,
formando o eixo Y2.
Ângulo 3 (A3) – O ângulo da parte externa da clavícula esquerda, ligando-
se ao ponto abaixo da última costela esquerda, formando o eixo X3; e o ponto abaixo da
A1
A2
A3
A4

última costela esquerda ligando-se ao ponto abaixo da última costela direita, formando o eixo
Y3.
Ângulo 4 (A4) – O ponto abaixo da última costela esquerda, ligando-se à
crista ilíaca esquerda, formando o eixo X4; e a crista ilíaca esquerda ligando-se à crista ilíaca
direita, formando o eixo Y4.
Os eixos X e Y foram traçados para poder mensurar, em graus, qual seria o
ângulo de uma criança sem deficiência sentada adequadamente em uma cadeira. Desta forma,
foi possível, comparar estes ângulos normais aos ângulos da criança com paralisia cerebral e
com múltiplas deficiências, para realizar a adaptação na cadeira de rodas.
O resultado ideal é que todos os ângulos sejam de 90º, ou o que a criança
apresente maior simetria possível, principalmente entre os ângulos contra-laterais.
O tripé foi colocado a uma altura de 1,10 m, e a uma distância de 1,02 cm
da cadeira. A câmera ficou posicionada em um ângulo de 40 graus, e foi elevada em 28 cm.
Um esquema de montagem para tomada de dados está ilustrado na Figura
32.

.
Figura 32- Esquema da distância entre a cadeira de rodas, tripé e o ângulo da máquina
fotográfica usadas nas coleta dos dados por meio das fotografias.
O ângulo do encosto da cadeira foi de 38o e o ângulo do encosto do assento
foi de 55o, representados na Figura 32. Estas medidas foram mantidas, pois são as posições
em que a maioria das crianças permanece na Instituição.
3.6.Procedimento de Análise de Dados
Para se obter mais fidedignidade nos resultados,optou-se por realizar a
validação estatística para testes de validação,por meio de um Teste de Hipótese, que será
posteriormente descrito.
enco
sto
móv
el
Distância cadeira de rodas –tripé 1,02
Altura do tripé 1,10
28 cm de elevação
40° ângulo
Máquina Cadeira de rodas
55O
38o

As fotografias foram inseridas dentro do ambiente Matlab, e com o
“mouse”, se clicou-se em cada fotografia no marcador, necessário para formar os ângulos a
serem estudados. A seguir será descrito o programa Matlab.
Figura 33 –Número de fotos. Na primeira fase do programa onde é solicitado número de fotos
Foto 34 – Número de ângulos. Nesta interface é solicitado o numero de ângulos

Figura 35 – Número da imagem. Nesta interface é solicitada o numero da imagem a ser selecionada
Figura 36 - Ângulo 1. Para se calcular o ângulo A1, clicou-se o cursor no bordo lateral da clavícula direita, abaixo da última costela direita e abaixo da última costela esquerda, nos marcadores previamente colocados, e o valor do ângulo A1 aparece a
seguir .

Figura 37- Ângulo 2.No ângulo A2, clicou-se o cursor nos marcadores , abaixo da última costela direita, na crista ilíaca direita e na crista ilíaca esquerda. abaixo da última costela direita, na crista ilíaca direita e na crista ilíaca esquerda, ao lado do resultado do àngulo
A1 apresenta-se o valor do ângulo A2.
Figura 38- Ângulo 3.Para se obter o ângulo A3, clicou-se o cursor nos marcadores no bordo lateral da clavícula esquerda, abaixo da última costela esquerda e abaixo da última costela direita, ao lado do ângulo A2 mostra-se o valor do ângulo A3.

Figura 39- Ângulo A4. O ângulo A4, foi obtido, clicando o cursor nos marcadores, abaixo da última costela esquerda, na crista ilíaca esquerda e na crista ilíaca direita, ao final da utilização do programa estão os valores dos quatro ângulos.
Optou-se por realizar 10 (dez) vezes a medição de cada ângulo, para
diminuir a margem de erro nos resultados.
Para se calcular os ângulos utilizou-se o programa MATLAB, que é um
software destinado a fazer cálculos com matrizes (MATLAB= MATrix LaboRATORY). Os
comandos do MATLAB são muito próximos da forma como se escreve expressões algébricas,
tornado mais simples o seu uso. Podem ser incorporadas rotinas pré definidas,ou seja, pacotes
para cálculos específicos (SANTOS,2005).
Dentro das funções do MATLAB, foi utilizado um algoritmo (ANEXO D),
cujas referências estão ilustradas na Figura 40.

Figura 40 – Equação para o cálculo do ângulo interno entre dois vetores, V1 e V2.
O algoritmo calcula o ângulo internas entre duas retas, definidas por três
pontos, mostradas na Figura 40. Para tanto, a rotina usa a definição de produto interno entre
os dois vetores, como mostra a Equação 2:
22
22
21
21 dydx.dydx
dy . dy dx . dx cos arc �
2121
++
+=
Sendo: dx1 = x1 – x0 dx2 = x2 – x0 dy1 = y1 – y0 dy2 = y2 – y0
A equação utilizada para o cálculo do desvio padrão, que está de acordo
com Newbold (2003), é a medida de dispersão mais te empregada, pois leva em consideração
a totalidade dos valores da variável em estudo. É um indicador de variabilidade bastante
estável. O desvio padrão baseia-se nos desvios em torno da média aritmética e a sua equação
(x1, y1). θ (x0, y0) (x2,y2)

básica pode ser traduzida como: a raiz quadrada da média aritmética dos quadrados dos
desvios, representada por S, como mostra a Equação 3.
Onde:
S = desvio padrão
n = numero de medidas
X = a medida
X = media aritmética das medidas
A equação do coeficiente de variação simples, (NEWBOLD, 2003), também
foi aplicada (Equação 4).O coeficiente de variação simples é a variação entre o desvio padrão
e a média.
Onde:
X = a medida __ X = media aritmética das medidas
É importante ressaltar que as crianças escolhidas sem deficiência (S1 e S2)
são gêmeos idênticos, com o mesmo peso (15 quilos) e com a mesma altura (1,03 metros), na
época da coleta de dados. Apesar de apresentarem as mesmas características físicas,
apresentaram diferentes resultados na fotometria, justificando a necessidade de se calcular
estas variáveis.
nS
XX� ��
���
� −−
=
2
0%100 ≥=−
− X se X X
sCV

Para se comprovar efetivamente a eficácia do artefato, optou-se pela
realização de um Teste de Hipótese.
Para realizar o Teste de Hipótese, decidiu-se pelo teste não-paramétrico,
com amostras dependentes (VIEIRA, 2004), chamadas de Teste de Friedman (Equação5),
cuja equação é mostrada a seguir:
Onde :
2rx = são valores críticos do Teste de Friedman
N= numero de ângulos
k= média da 10 medições
A verificação de uma hipótese (BERQUÓ, 2003), significa aceitação ou não
de que as observações poderiam ter provindo de uma população específica, pela referida
hipótese que se quer testar.
A hipótese de nulidade ou “null hypothesis” é a que postula que não há
diferenças entre as populações ou grupos em comparação, com relação ao fator, à
característica ou à condição de interesse (VIEIRA, 2004). Ela é representada por Ho. Neste
trabalho foram comparadas a postura da criança com paralisia cerebral e com múltipla
deficiência, na cadeira de rodas sentada, antes da terapia, após a terapia e após a terapia com o
artefato.
Uma alternativa para a hipótese de nulidade é a hipótese alternativa que
postula haver diferença entre a população ou grupos em comparação, em relação ao fator, à
característica ou à condição de interesse (VIEIRA, 2004). Ela é representada por H1.
)1(3)1(
12 22 +−+
= � kNRkNk
x r

Neste estudo, Ho significa que o artefato é eficiente para crianças com
paralisia cerebral e com múltiplas deficiências e H1 significa que o artefato é ineficiente para
crianças com paralisia cerebral e com múltiplas deficiências.
No teste não-paramétrico, utilizado neste trabalho, não são calculados nos
dados originais, mas em postos (VIEIRA, 2004). Para se obter os postos (VIEIRA, 1980),
colocam-se os dados em forma crescente, com o pior resultado tendo valor 1; o resultado
médio valor 2; e o melhor resultado valor 3, neste trabalho específico, para se validar ou não a
eficácia da tecnologia assistiva.
Inicialmente foi elaborada a confecção dos caixotes de madeira, para a
fabricação de espuma em caixote, que é um procedimento típico de acordo com Vilar (1998).
Foi tirado o encosto e o assento da cadeira de rodas padrão, para poder
medir e moldar o caixote de madeira, mostrados na Figura 41, 42 e 43.
Figura 41 - Cadeira de rodas padrão utilizada

Figura 42 – Encosto da cadeira de rodas padrão
Figura 43 – Assento da cadeira de rodas padrão
Tanto o assento, quanto a cadeira de rodas padrão, apresentam assimetrias,
pois a postura da criança os molda com o passar do tempo.

A apresentação do processo de confeccção do artefato para posição sentada
em poliuretano está descrita a partir da Figura 46 até a Figura 60.
Para a confeccção do caixote foram utilizados pedaços de madeira tipo
pinus e, medidos , cortados com serra tico-tico e pregados como mostram as Figuras 44 e 45.
38 cm de largura e 36 cm de comprimento
Figura 44 – Modelo do caixote para o assento
6 cm 10 cm
6 cm 10 cm
10 cm 13 cm 10 cm
5 cm 5 cm
6 cm de altura
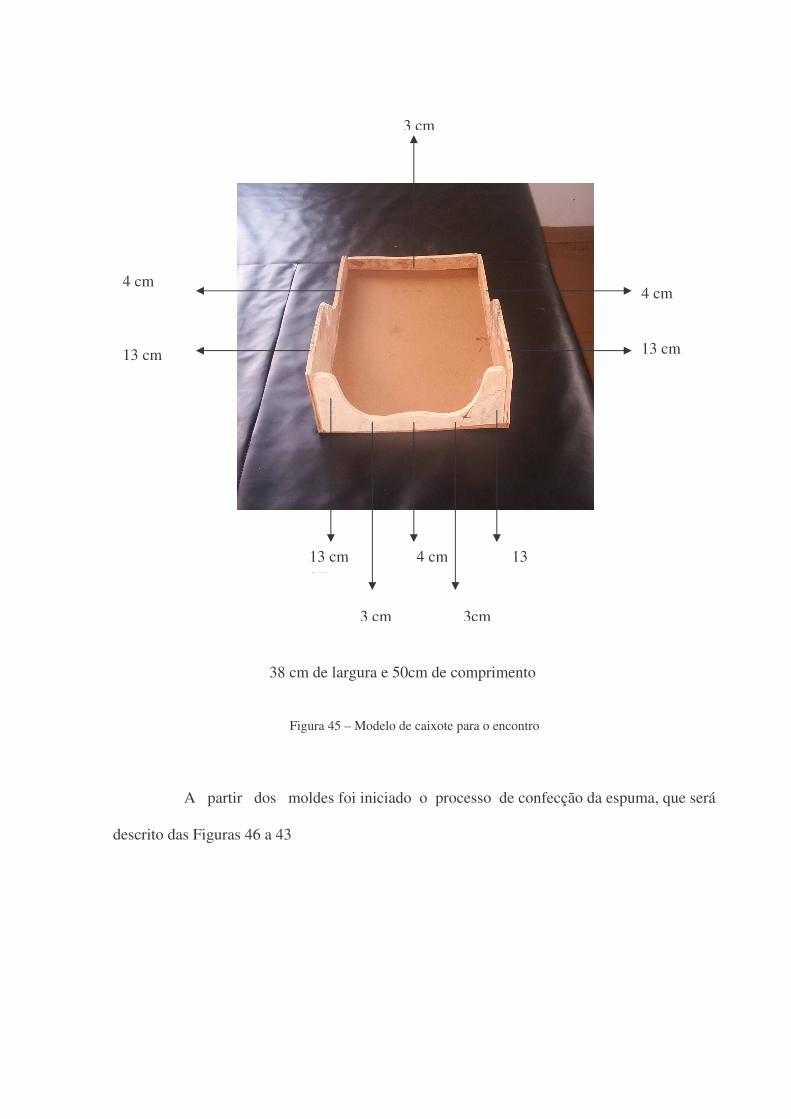
38 cm de largura e 50cm de comprimento
Figura 45 – Modelo de caixote para o encontro
A partir dos moldes foi iniciado o processo de confecção da espuma, que será
descrito das Figuras 46 a 43
3 cm
4 cm 13 cm
13 cm 4 cm 13 cm
3 cm 3cm
4 cm 13 cm

Figura 46 - Material utilizado para a confecção do artefato de poliuretano – Mistura dos dois líquidos - Isocianato e Poliol.
Figura 47 - Caixote de madeira- revestido com folha renovável de papel. Este caixote foi moldado com madeira tipo pinus.
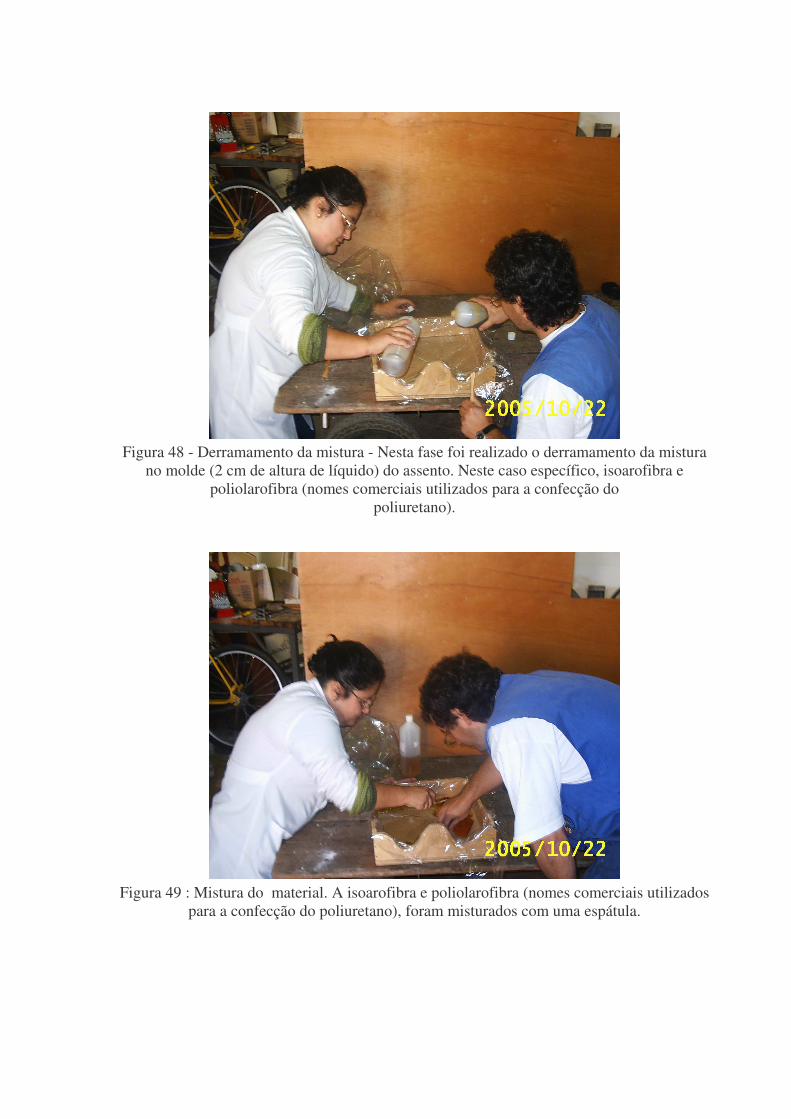
Figura 48 - Derramamento da mistura - Nesta fase foi realizado o derramamento da mistura no molde (2 cm de altura de líquido) do assento. Neste caso específico, isoarofibra e
poliolarofibra (nomes comerciais utilizados para a confecção do poliuretano).
Figura 49 : Mistura do material. A isoarofibra e poliolarofibra (nomes comerciais utilizados para a confecção do poliuretano), foram misturados com uma espátula.
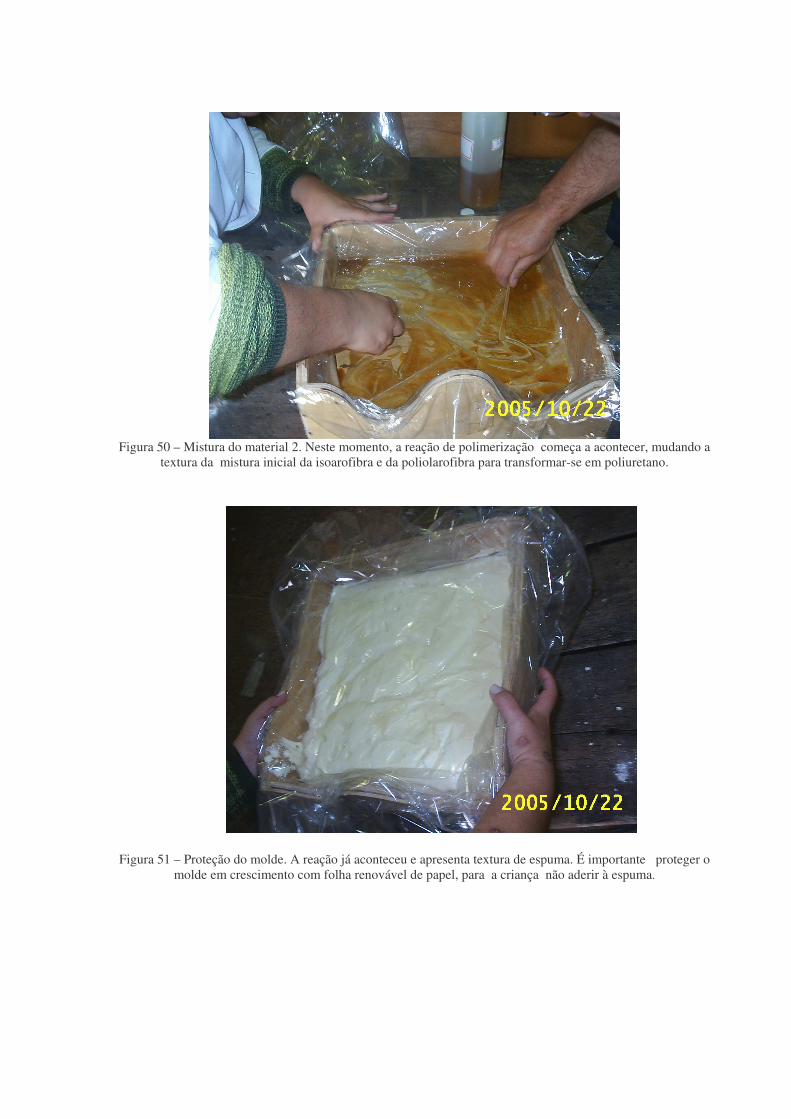
Figura 50 – Mistura do material 2. Neste momento, a reação de polimerização começa a acontecer, mudando a
textura da mistura inicial da isoarofibra e da poliolarofibra para transformar-se em poliuretano.
Figura 51 – Proteção do molde. A reação já aconteceu e apresenta textura de espuma. É importante proteger o molde em crescimento com folha renovável de papel, para a criança não aderir à espuma.

Figura 52 – Posicionamento do molde no assento. Enquanto se coloca o molde do assento na cadeira, ocorre o crescimento da espuma. O crescimento ocorre em pouco tempo, 2 a 3 minutos, se o dia estiver quente.
Figura 53 – Moldagem do poliuretano. A criança deve ser imediatamente posicionada no molde, após ter realizado a terapia aquática , sobre a ráfia, para dar forma a espuma em crescimento, de acordo com as
características motoras ideais da criança (P1), visando a simetria do quadril.

Figura 54 - Assento moldado. Depois de retirada da criança.
Figura 55 - Moldagem do encosto. Mudança de posição da cadeira. Nesta fase, foi necessário deitar o encosto na horizontal, para a mistura não escorrer na vertical. Optou-se por colocar a folha de papel renovável para revestir
o molde por baixo, e por cima a ráfia, para facilitar a retirada do material.

Figura 56 - Derramamento da mistura no molde do encosto. Neste caso específico, isoarofibra e poliolarofibra.
Figura 57 – Mistura da isoarofibra e poliolarofibra. Misturando o material com a espátula.

Figura 58 – Moldagem do encosto. O encosto foi moldado com a cadeira deitada para facilitar a simetria da criança (P1).
Figura 59 – Remoção da ráfia. Após a retirada da criança do encosto

Figura 60 - Assento e encosto moldado em vista frontal. Nesta foto, percebe-se claramente a assimetria de coluna
desta criança, e os pontos de maior pressão, no lado direito, que favorecem a formação de escaras.
Após a moldagem, a criança foi colocada novamente na cadeira de rodas,
com os pontos marcados. Em seguida, foi fotografada da mesma maneira que antes e
reavaliada por meio da fotometria, para se quantificar a melhora da postura em graus.
Este procedimento não ofereceu risco nenhum às crianças envolvidas na
pesquisa. Elas foram apenas fotografadas, não foi realizado nenhum procedimento invasivo e
os marcadores usados foram etiquetas colocadas na pele e facilmente removidas, pois, como o
ambiente para as fotografias era aquecido, os marcadores caíram naturalmente.
As fotos foram levadas novamente à Pontifícia Universidade Católica do Paraná, onde no
programa específico (Matbab) foram calculados os ângulos da postura da criança, por meio da
Fotometria.

4 RESULTADOS
Após a realização das fotometrias, os resultados obtidos estão apresentados
nas Tabelas de 01 a 13 . As Figuras 61 a 65 que precedem as tabelas, ilustram os ângulos
apresentados nas mesmas.
Figura 61 – Criança S1
Tabela 01 - 10 Medições realizadas com S1
A1 A2 A3 A4 77,92º 94,14º 88,01º 88,12º 79,30º 95,54º 85,22º 79,40º 78,03º 95,36º 88,36º 80,35º 79,03º 94,35º 88,45º 81,65º 77,98º 96,16º 87,98º 87,58º 78,09º 94,58º 88,84º 84,63º 77,96º 95,57º 88,96º 85,41º 79,53º 94,36º 89,56º 86,47º 79,48º 95,78º 89,45º 87,83º 78,47º 94,65º 88,58º 87,96º
Tabela 02 - Média entre os ângulos A1, A2, A3 e A4, desvio padrão e coeficiente de variação
de S1
A1
A2
A3
A4

ÂNGULOS A1 A2 A3 A4 Média das 10 fotometrias 78,58º 95,05º 88,34º 84,94º Desvio padrão 0,68º 0,71º 1,22º 3,33º Coeficiente de variação 0,87% 0,75% 1,38% 3,92%
Figura 62 - Criança S2
Tabela 03 - 10 Medições realizadas com S2
A1 A2 A3 A4 91,28º 88,66º 83,79º 85,20º 89,30º 94,86º 81,58º 86,40º 90,25º 94,58º 81,67º 85,65º 89,36º 87,36º 82,99º 86,52º 89,54º 91,69º 81,75º 85,31º 90,12º 92,36º 81,46º 85,67º 90,01º 92,28º 81,67º 86,24º 90,84º 93,47º 82,24º 86,49º 91,03º 90,40º 83,45º 86,78º 90,21º 89,88º 83,21º 86,12º
A1
A2
A3
A4
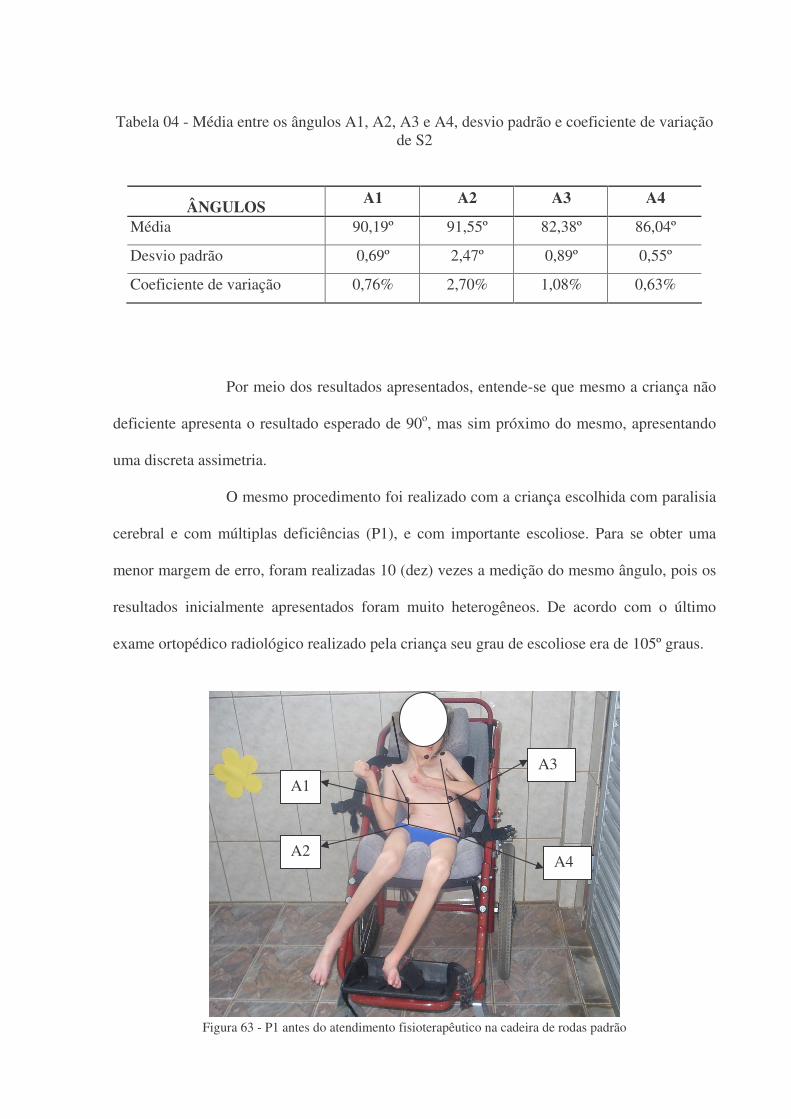
Tabela 04 - Média entre os ângulos A1, A2, A3 e A4, desvio padrão e coeficiente de variação de S2
ÂNGULOS A1 A2 A3 A4
Média 90,19º 91,55º 82,38º 86,04º
Desvio padrão 0,69º 2,47º 0,89º 0,55º
Coeficiente de variação 0,76% 2,70% 1,08% 0,63%
Por meio dos resultados apresentados, entende-se que mesmo a criança não
deficiente apresenta o resultado esperado de 90o, mas sim próximo do mesmo, apresentando
uma discreta assimetria.
O mesmo procedimento foi realizado com a criança escolhida com paralisia
cerebral e com múltiplas deficiências (P1), e com importante escoliose. Para se obter uma
menor margem de erro, foram realizadas 10 (dez) vezes a medição do mesmo ângulo, pois os
resultados inicialmente apresentados foram muito heterogêneos. De acordo com o último
exame ortopédico radiológico realizado pela criança seu grau de escoliose era de 105º graus.
Figura 63 - P1 antes do atendimento fisioterapêutico na cadeira de rodas padrão
A1
A2
A3
A4

Tabela 05 - 10 Medições realizadas com P1 antes da terapia
A1 A2 A3 A4 115,92º 111,11º 82,32º 58,37º 122,52º 103,86º 80,45º 57,97º 119,69º 105,91º 80,94º 59,79º 116,69º 115,85º 78,70º 54,53º 118,14º 100,77º 80,37º 61,04º 121,95º 109,56º 82,76º 60,60º 120,98º 107,27º 81,89º 62,15º 118,38º 108,34º 80,24º 59,42º 121,01º 110,27º 80,94º 63,76º 122,92º 104,03º 86,07º 61,84º
Tabela 06 – Média entre os ângulos A1, A2, A3 e A4, desvio padrão e coeficiente de variação de P1 antes da terapia
ÂNGULOS A1 A2 A3 A4 Média 119,82º 107,70º 81,47º 59,95º Desvio padrão 2,45º 4,32º 1,99º 2,60º Coeficiente de variação 2,05% 4,01% 2,45% 4,33%
Figura 64 – P1 depois do atendimento fisioterapêutico na cadeira de rodas padrão
A1
A2
A3
A4

Tabela 07 - 10 Medições realizadas com P1 depois da terapia
A1 A2 A3 A4 90,09º 115,57º 103,46º 47,71º 90,86º 133,40º 100,04º 47,15º 89,64º 111,24º 97,96º 52,79º 92,77º 132,06º 98,02º 46,70º 89,79º 115,43º 99,62º 45,70º 97,11º 111,89º 103,04º 45,09º 90,14º 150,38º 97,92º 42,35º 89,49º 135,56º 104,01º 45,31º 89,41º 137,84º 100,74º 40,77º 91,90º 130,83º 98,04º 51,75º
Tabela 08 – Média entre os ângulos A1, A2, A3 e A4, desvio padrão e coeficiente de variação de P1 depois da terapia
ÂNGULOS A1 A2 A3 A4 Media 91,12º 127,42º 100,29º 46,53º Desvio padrão 2,38º 13,16º 2,44º 3,70º Coeficiente de variação 2,61% 10,33% 2,43% 7,95%
Após a realização da primeira Fotometria sem a Fisioterapia e da segunda
com a Fisioterapia, foi confeccionada a espuma de poliuretano, moldada de acordo com as
necessidades da paciente. Depois da elaboração do artefato, a paciente foi fotografada
novamente em uma postura mais adequada, após o tratamento fisioterapêutico e com a
adaptação confeccionada especialmente para ela.
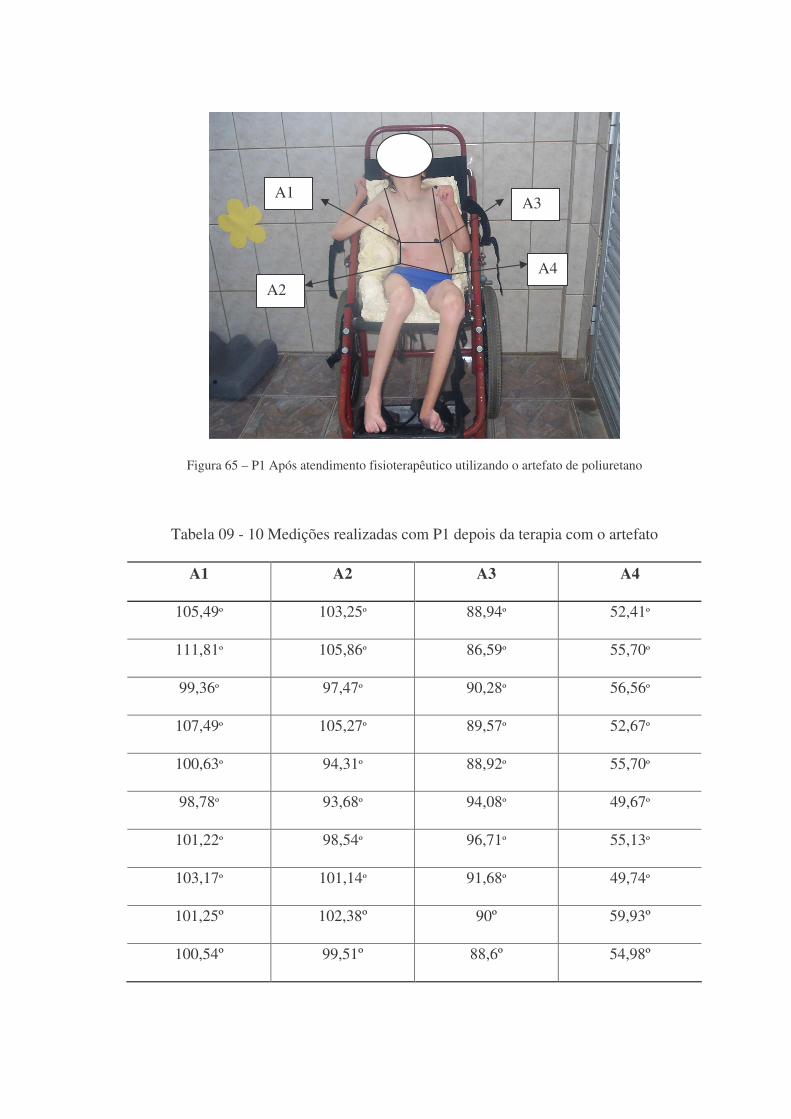
Figura 65 – P1 Após atendimento fisioterapêutico utilizando o artefato de poliuretano
Tabela 09 - 10 Medições realizadas com P1 depois da terapia com o artefato
A1 A2 A3 A4
105,49º 103,25º 88,94º 52,41º
111,81º 105,86º 86,59º 55,70º
99,36º 97,47º 90,28º 56,56º
107,49º 105,27º 89,57º 52,67º
100,63º 94,31º 88,92º 55,70º
98,78º 93,68º 94,08º 49,67º
101,22º 98,54º 96,71º 55,13º
103,17º 101,14º 91,68º 49,74º
101,25º
102,38º 90º 59,93º
100,54º
99,51º 88,6º 54,98º
A1
A2
A3
A4
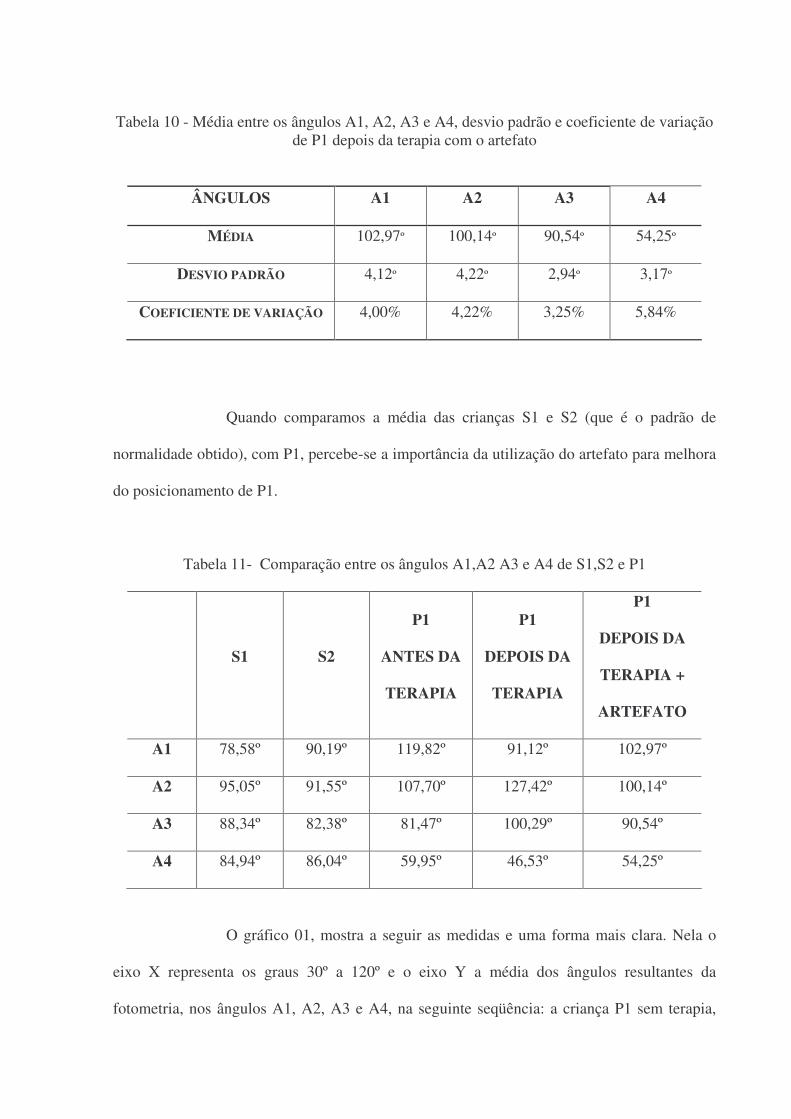
Tabela 10 - Média entre os ângulos A1, A2, A3 e A4, desvio padrão e coeficiente de variação de P1 depois da terapia com o artefato
ÂNGULOS A1 A2 A3 A4
MÉDIA 102,97º 100,14º 90,54º 54,25º
DESVIO PADRÃO 4,12º 4,22º 2,94º 3,17º
COEFICIENTE DE VARIAÇÃO 4,00% 4,22% 3,25% 5,84%
Quando comparamos a média das crianças S1 e S2 (que é o padrão de
normalidade obtido), com P1, percebe-se a importância da utilização do artefato para melhora
do posicionamento de P1.
Tabela 11- Comparação entre os ângulos A1,A2 A3 e A4 de S1,S2 e P1
S1 S2
P1
ANTES DA
TERAPIA
P1
DEPOIS DA
TERAPIA
P1
DEPOIS DA
TERAPIA +
ARTEFATO
A1 78,58º 90,19º 119,82º 91,12º 102,97º
A2 95,05º 91,55º 107,70º 127,42º 100,14º
A3 88,34º 82,38º 81,47º 100,29º 90,54º
A4 84,94º 86,04º 59,95º 46,53º 54,25º
O gráfico 01, mostra a seguir as medidas e uma forma mais clara. Nela o
eixo X representa os graus 30º a 120º e o eixo Y a média dos ângulos resultantes da
fotometria, nos ângulos A1, A2, A3 e A4, na seguinte seqüência: a criança P1 sem terapia,

com terapia, com terapia mais o artefato e a média das duas crianças que não possuem
deficiência S1 e S2.

107,70
81,47
59,95
119,82
91,12
127,42
100,29
46,53
100,14 102,97
54,25
90,54 84,44 93,30 85,49 85,36
0,00
30,00
60,00
90,00
120,00
150,00
A1 A2 A3 A4 ângulos
graus
sem terapia com terapia terapia + artefato sem lesão padrão de normalidade
Gráfico 1 – Comparação das fotometrias entre A1,A2,A3 e A4 e 90º.

Foi utilizado um teste de hipótese, não-paramétrico, para se avaliar a
hipótese de nulidade. O escolhido foi o Teste de Friedman , que serve para testar a hipótese de
vários grupos relacionados, com a mesma distribuição (VIEIRA, 2004). É um teste indicado
para poucos dados ou pressuposições, exigidas pela análise da variância, estando estas
comprometidas. Propõe que a medição em análise seja medida em escala ordinal ou
numérica. Os dados obtidos estão mostrados na tabela 12.
Tabela 12 – Valores resultantes da fotometria de P1 antes da terapia, depois da terapia e depois da terapia com a utilização do artefato
VALORES
ANTES TERAPIA DEPOIS TERAPIA TERAPIA + ARTEFATO
A1 119,82º 91,12º 102,97º
A2 107,70º 127,42º 100,14º
A3 81,47º 100,29º 90,54º
A4 59,95º 46,53º 54,25º
Neste caso, os postos foram classificados de acordo com os resultados dos
ângulos das crianças sem lesão, que foi o critério estabelecido como parâmetro de
normalidade.
A média dos ângulos entre S1 e S2 foram: A1 = 88,45o , A2 = 90,83o, A3 =
84,65o e A4 = 84,78o.
A partir destes dados foram estabelecidos os postos: 3 – mais próximo do
parâmetro normal; 2 – posição média em relação ao parâmetro normal; 1 – mais distante do
parâmetro normal, como mostra a Tabela 13.

Tabela 13 – Valores de P1 e postos Fonte:(Vieira ,2004)
VALORES POSTOS
ANTES
TERAPIA
DEPOIS
TERAPIA
TERAPIA +
ARTEFATO
ANTES
TERAPIA
DEPOIS
TERAPIA
TERAPIA +
ARTEFATO
A1 119,82° 91,12° 102,97° 1 3 2
A2 107,70° 127,42° 100,14° 2 1 3
A3 81,47° 100,29° 90,54° 2 1 3
A4 59,95° 46,53° 54,25° 3 1 2
A partir dos postos, foram iniciados os cálculos do Teste de Friedman, cujos
resultados foram:
POSTOS Antes Terapia Depois Terapia Terapia + Artefato
1 3 2 2 1 3 2 1 3 3 1 2 R 9 6 9 = 24
R2 81 36 81 = 198
Quadro 08 – Somatória dos postos
R é a somatória dos valores dos postos e a raiz quadrada desta somatória é
R2
O “N” representa o número de ângulos avaliados (N = 4), o “k” representa o
número de vezes que ocorreu a medição (10 vezes para se obter a media) , K+1=3+1=4, e os
graus de liberdade, que é o K-1, que é igual a 2.

O 2
rx teve como resultado o valor de 1,5, que e a resposta ao Teste de
Friedman.
De acordo com Vieira (2004, p.41), “quando as amostras são pequenas, a
distribuição da variável2
rx não se aproxima satisfatoriamente da distribuição de 2x . Se K
= 3 e N varia entre 2 e 9, ou K = 4 e N varia entre 2 e 4 deve-se usar p-valor”.
O p-valor é o valor associado a uma estatística de teste que indica a
probabilidade de um valor tão, ou mais extremo que o observado, ocorrer apenas por acaso
em várias repetições de um experimento (VIEIRA, 2004).
Nos valores críticos para 2
rx do Teste de Friedman (ANEXO E), o p-
valor corresponde a 0,653 ou 65,3%, que é o mínimo nível de significância (�) que conduz à
rejeição da null hypothesis. Considerando intervalos de confiança iguais ou superiores a 90%,
implica em níveis de significância (valores de � ) iguais ou inferiores a 10%, sendo estes
inferiores ao p-valor obtido de 65,3%, conduzindo portanto à aceitação da null hypothesis de
que o artefato é eficiente para crianças com paralisia cerebral e múltipla deficiência.
Após a apresentação destes resultados ficou evidente a mudança de postura
da paciente, visando uma melhor simetria corporal, evitando maiores encurtamentos
musculares, contraturas musculares e deformidades ósseas, apesar dos resultados não
apresentam o ângulo esperado (90o), sendo importante ressaltar que mesmo as crianças
normais não apresentaram os valores esperados .
Os resultados apresentados na Tabela 12, demonstram que houve melhora
do posicionamento da criança, tanto de maneira qualitativa, quanto quantitativa.
Em uma avaliação qualitativa, percebe-se maior simetria postural, melhor
alinhamento de membros inferiores e de membros superiores,e, principalmente um
posicionamento de quadril e joelhos mais adequados a 90º . Depois de utilizado o artefato, a

paciente melhorou significativamente o seu controle de cabeça, melhorando a sua simetria,
não necessitando mais de apoio para a mesma.
Analisando o artefato, percebe-se a importante escoliose da paciente de 105º
, e, os pontos de maior pressão, que favorecem a formação de escaras.
Na avaliação qualitativa, a maioria dos ângulos obteve melhor resultado
apos a terapia e com o uso do artefato. Nos ângulos A2 e A3, os resultados obtidos foram os
ângulos mais próximos do normal que e de 90º. Os ângulos A1 e A4, que são contra-laterais
aos ângulos A1 e A3 obtiveram os segundos melhores resultados.
Com o uso do artefato e apos a realização da terapia, o angulo A1 teve como
resultado 102,97º , que e contra-lateral ao angulo A3, cujo resultado foi de 90,54º ,
apresentando uma diferença de 12,43º . O angulo A2 teve como resultado 100,14º , e o
angulo A4, que e o contra-lateral apresentou 54,25º . A diferença nestes ângulos foi de 65.89.
A princípio, este resultado parece não ser importante, devido a grande
diferença em graus, principalmente entre os ângulos A2 e A4. Mas, é extremamente
importante relembrar a escoliose da paciente e de 105º , que é uma escoliose muito grave.
5 DISCUSSÃO
O artefato foi desenvolvido com o objetivo de melhorar a postura de uma
criança com paralisia cerebral com múltiplas deficiências e com graves contraturas e
deformidades. A participante selecionada para a confecção do mesmo está inserida em uma
Instituição, onde recebe atendimento de Fisioterapia diariamente, durante aproximadamente
40 (quarenta minutos).Depois do processo de intervenção fisioterapêutica, a criança é
colocada em sua cadeira de rodas, sem a especial preocupação de manutenção de uma postura
adequada. Considerando o mecanismo de plasticidade cerebral (SHEPERD, 1995), a
manutenção da postura, conquistada após a terapia aquática seria fundamental para que os
ganhos terapêuticos não fossem perdidos. Tal preocupação ganha ressonância quando se situa
a criança no contexto institucional , lembrando que a atenção básica feita pela equipe de
cuidadoras, torna-se insuficiente para a manutenção do posicionamento adequado, tendo em
vista a rotatividade dos profissionais , a relação do número de cuidadoras por criança ou
mesmo a falta de conhecimento específico que valorize as orientações dadas pela equipe
terapêutica.
O Gráfico 01 mostrou as medidas de uma forma mais clara. Nele o eixo X
representa os graus de 30 a 120o e o eixo Y a média dos ângulos resultantes da fotometria, nos
ângulos A1, A2, A3 e A4, na seguinte seqüência: a criança P1, sem terapia, com terapia, com
terapia mais o artefato e a média das duas crianças que não possuem deficiência S1 e S2.
Nele, pode-se notar que no ângulo A1, a criança permanece bastante
assimétrica em relação ao hemídio contra-lateral. Com o artefato e a terapia, o ângulo
calculado, muito simétrico em relação ao hemídio contra-lateral. E, as crianças sem lesão
apresentaram como media a o ângulo de menor que o esperado que era de 90O ,mostrando que
mesmo as crianças normais, não são totalmente simétricas .

Neste caso, a melhor medida foi a com terapia, mas quando se analisam as
medidas globalmente em relação ao hemídio contra-lateral, o A3 , entende-se que houve uma
diferença significativa. Já com o artefato e com a terapia, o ângulo calculado obteve uma
diferença muito pequena. Este resultado mostra a eficiência do artefato e da terapia nos
resultados do A1.
O ângulo A2, sem terapia, tem como resultado um ângulo mais agudo que o
resultado com terapia, este resultado se deve à importante escoliose da criança. Com o
artefato e a terapia, o ângulo calculado foi menos obtuso, e as crianças sem deficiência
apresentaram como media o ângulo bem próximo do normal. Neste angulo pode-se notar a
eficiência da terapia e do artefato.
O resultado sem terapia em relação ao ângulo A3 foi um ângulo mais obtuso
, com uma pequena diferença , em relação ao ângulo contra-lateral (A1). Com o artefato e
com a terapia, o ângulo calculado foi a ideal. As crianças sem alterações motoras
apresentaram o ângulo mais agudo que a criança que realizou a terapia e se utilizou do
artefato.
Com relação ao A4, houve muitas diferenças em relação aos valores das
outras medições, em função da criança apresentar uma importante escoliose para o lado
oposto. Sem terapia, o ângulo apresentado foi de um ângulo agudo, e no seu hemídio contra-
lateral A2, foi de um ângulo obtuso. Com a terapia o resultado foi mais agudo, e no hemídio
contra-lateral A2, o ângulo foi mais obtuso. Com o artefato e com a terapia o ângulo
calculado foi menos agudo, e o A2 (contra-lateral) foi menos obtuso . Nas crianças sem lesão
o resultado foi menor que o ideal.
Esta foi à única situação em que o artefato e a terapia não obtiveram os
melhores resultados, apesar de ser considerada uma variação muito pequena.

A informação do movimento é manipulada pelo indivíduo por meio de uma
seqüência de ações, para obtenção de uma resposta (CIDADE, 1999).
Breau et al. (2003) demonstram que crianças com comprometimento motor
e cognitivo grave sofrem dores freqüentemente, principalmente pela falta de movimentação;
quanto menor a habilidade motora, maior incidência de algia; por isso a necessidade de
estarem adequadamente posicionadas e serem mobilizadas, no mínimo, a cada 02 (duas) horas
(O’SULLIVAN e SCHMITZ, 2000). Estas crianças gastam muita energia para realizar
quaisquer movimentos simples (STALLINGS et al, 1996), pois estes são realizados de forma
inadequada. Desta forma ela cansa muito mais rápido, impedindo um movimento ordenado e
conseqüentemente uma evolução motora adequada.
Para se obter um bom resultado após a intervenção fisioterapêutica. Neves
(2006), sugere a importância da repetição, neste caso específico, de uma postura adequada,
para o reaprendizado de habilidades pós-lesão, e também relata que tanto a recuperação
funcional motora quanto estrutural são dependentes da experiência.
Para a criança com paralisia cerebral e com múltiplas deficiências manter
uma postura adequada ela precisa repeti-la para ocorrer o refinamento e fortalecimento
sináptico (NEVES, 2006), ou seja, quanto mais tempo ela ficar em uma postura adequada,
melhor a resposta motora.
Outra dificuldade enfrentada na Instituição é o sentimento de compaixão
que os visitantes e voluntários sentem pelas crianças. Muitas vezes, eles não cumprem as
orientações propostas pela Fisioterapia, pois a criança geralmente não se sente confortável na
postura determinada, e não utilizam o material para ajudar no seu posicionamento.
As crianças que são submetidas à intervenção precoce entre 0 a 1 ano
(MAHONEY et al., 2004), melhoram o seu desempenho motor e a qualidade do seu
movimento, principalmente havendo ajuda da família para reforçar o movimento adequado.
Ketelaar et al. (2001), apresenta a importância da terapia funcional, para um melhor
desempenho do paciente, facilitando a plasticidade cerebral (ANNUNCIATTO, 2002).
A intervenção precoce tem um grande potencial para provocar significativas
mudanças na vida de uma criança jovem com inaptidões (JUDGE, 2002), com ajuda de
artefatos e outros materiais.
A espuma de poliuretano facilita porque trabalho do fisioterapeuta,
prolongando os ganhos terapêuticos, independente da disponibilidade de alguém que possa
mobilizar esta criança ao longo do dia. FINNIE ( 1999) reforça que a criança com paralisia
cerebral e múltiplas deficiências desenvolverá contraturas e deformidades se não for
posicionada adequadamente.
A utilização simultânea da terapia e do artefato mostrou-se positiva na
análise da fotometria, indicando uma postura mais simétrica e mais relaxada, sem fixação de
padrões patológicos. O que indica que a condição de portadores de contraturas musculares e
deformidades articulares, em virtude de uma gravidade do quadro músculo-esquelético, pode
beneficiar-se da associação de tais medidas.
Nesta postura, será possível que ocorra uma aprendizagem motora adequada
(MAGILL, 2000), facilitando o processo da plasticidade cerebral (ANUNCIATTO, 2002) e
tornando este paciente o mais funcional e independente possível (SHEPHERD, 1995).
Complicações respiratórias como as broncoaspirações advindas de um posicionamento
inadequado da cabeça durante a alimentação, (FINNIE, 1999), são achados freqüentes em
indivíduos nos quais este parâmetro não é controlado.
Em função desta dificuldade prática, buscou-se desenvolver um artefato que
fosse realmente eficiente para esta clientela, que apresenta um grave quadro motor e com
particularidades nas suas deformidades e alterações posturais. Sendo elaborado, portanto, um
artefato voltado para as necessidades específicas da criança em questão ,considerando-se o
grave quadro de escoliose desta paciente.
Os resultados demonstraram que o artefato foi efetivo, melhorando a postura
da criança que foi avaliada por meio da fotometria, pela comparação dos ângulos.Outra
evidência positiva foi à melhora da simetria corporal, melhorando, conseqüentemente, a uma
diminuição do seu grau de escoliose.
A tecnologia está intensamente presente em artefatos usados por esta
clientela, que se utiliza principalmente da cadeira de rodas como meio de locomoção.O
material de adaptação destas cadeiras está cada vez mais confortável, entretanto,uma das
grandes dificuldades encontradas é que os artefatos possuem medidas padrão,não atendendo
às necessidades individuais de cada pessoa com deficiência. Cada paciente apresentará uma
alteração motora específica e, na prática, os fisioterapeutas acabam realizando adaptações
simples e economicamente viáveis como a utilização de rolos e almofada, buscando a
manutenção da postura. Estas medidas, embora possam contribuir com a proposta terapêutica,
estão longe de serem efetivas, já que os materiais se deslocam e não possuem uma adaptação
perfeita à deformidade que se pretende minimizar.
Shull et al. (2004) mostram que a Tecnologia Assistiva, combinada com os
procedimentos sociais relevantes, pode ser usada eficazmente no processo de intervenção e
evolução em crianças com inabilidades múltiplas profundas.
A Tecnologia Assistiva é definida por Steelman (2002) como dispositivos
que podem ajudar uma pessoa com uma inaptidão, executando atividades difíceis ou
mesmo impossíveis de serem realizadas. É o caso deste artefato, feito para melhorar a postura
na cadeira de rodas da criança com paralisia cerebral e com múltipla deficiência.
Simms (2003) relata que as famílias geralmente preferem deixar para mais
tarde o uso da tecnologia assistiva, pois ainda consideram seus filhos muitos pequenos para

tal utilização. Mas Sullivan e Lewis (2000), manifestam a necessidade da utilização desta
tecnologia de forma precoce, para que as crianças adquiram mais facilmente o aprendizado
cognitivo, emocional, motor e, ainda, a motivação em geral, independente do seu tipo de
deficiência.
No Brasil, os familiares tendem a adotar uma postura protecionista, de
acordo com Mancini (2004), zelando diretamente por seus filhos. Já na cultura norte-
americana, os pais enfatizam valores diferenciados como maior independência e autonomia. É
necessário enfatizar que talvez este seja um fator que impeça um melhor desempenho
funcional das crianças deficientes no Brasil, e, provavelmente, seja o motivo pelo qual os
pais e cuidadores desistem de utilizar a tecnologia assistiva.
Outra causa importante está relacionada ao envolvimento do consumidor da
tecnologia assistiva com a continuação ou não do seu uso. A literatura demonstrou que
quando os consumidores não são envolvidos na seleção dos dispositivos de tecnologia
assistiva, é mais provável que descontinuem o seu uso (CARROLL, 1993; BROADNAX,
1992; TEWEY et al., 1994). A relação inversa significante entre envolvimento de consumidor
e a continuação de tecnologia assistiva provêem justificação adicional para profissionais que
envolvem os indivíduos com inaptidões em todos os aspectos da decisão. O envolvimento do
consumidor não é um conceito novo no campo de reabilitação e foi discutido extensivamente
na literatura. Vários autores notaram que um modelo consumidor-dirigido proporciona ao
consumidor um senso de propriedade e responsabilidade que freqüentemente conduzem a uso
continuado de tecnologia assistiva (MALLIK, 1993; O'DAY, 1994; REED, 1995; SCHERER,
1993).
A aproximação com a família é prática recomendada para a tecnologia
assistiva (PARETTE e BROTHERSON, 2004), demonstrando as necessidades da criança e

buscando combinar o processo de tomada de decisão com os valores culturais e as prioridades
da família.
Parette e Brotherson (2004) citam fases importantes para esta tomada de
decisão. Inicialmente, o processo de planejamento do serviço; num segundo momento,
trabalhar com as famílias através da formação cultural e buscar um processo da reciprocidade
cultural para que a informação significativa seja internalizada no processo de tomada de
decisão.
Os resultados destes estudos apóiam a literatura em tecnologia assistiva,
relativa à importância do envolvimento do consumidor. Porém, o envolvimento do
consumidor não se tornou uma prática implementada completamente no processo de
reabilitação. Um procedimento indicado para diminuir a taxa de não-continuação na utilização
de dispositivos de tecnologia assistiva e satisfação de usuário são envolvê-lo, ou o seu
responsável, na seleção, aquisição, treinamento e implementação de dispositivos de
tecnologia assistiva (REISS e WALKER, 2000).
Outra maneira de se diminuir o abandono da utilização da tecnologia
assistiva seria uma atuação multidisciplinar, mostrando aos responsáveis pela criança a
necessidade da utilização do mesmo pois, a maioria dos dispositivos foi abandonada
imediatamente ou dentro do primeiro ano de terapia (VERZA et al., 2006).
O artefato confeccionado teve a intenção de fazer o paciente e/ou o
familiar/cuidador participar efetivamente da confecção, mostrando a eles a importância do
mesmo e do seu uso contínuo, para manter a posição adequada do paciente após a terapia,
oferecendo a oportunidade para o cérebro da criança receber o adequado engrama de
movimento (O’ SULLIVAN e SCHMITZ, 2000), e obter mudanças de determinantes motoras
patológicas (BARTLETT e PALISANO, 2000). A criança escolhida para a pesquisa recebe
40 (quarenta) minutos de atendimento diário (de segunda à sexta-feira), não recebendo

atendimentos nos finais de semana. Durante a semana ela recebe 03 (três) horas e 10 (dez)
minutos de estímulo adequado para o seu cérebro, ficando 168 (cento e sessenta e oito) horas,
sem esta informação ideal, não realizando uma aprendizagem motora adequada.
Cidade (1999) relata que quando se analisa a aprendizagem motora da
criança com deficiência, não se pode desconsiderar a atuação de suas habilidades cognitivas
(atenção, memória, resolução de problemas e generalização da aprendizagem) durante o
processo da aprendizagem motora. A dificuldade de realizar determinada tarefa vai depender
da deficiência do indivíduo e do seu nível de comprometimento. Ferraretto (2000), reforça a
necessidade da criança possuir o feedforward (mecanismo de antecipação do movimento), e o
feedback (mecanismo de resposta), para uma aprendizagem motora adequada.
As crianças que possuem lesões cerebrais com comprometimento motor,
quando não cuidadas e posicionadas de forma inadequada, utilizam suas potencialidades
como podem, independentemente das fases anteriormente citadas. Métayer (2001) afirma que,
de forma inconsciente, elas utilizam o seu padrão anormal de movimento para atingir os seus
objetivos. Caso consigam, fixam ainda mais este padrão inadequado, causando contraturas e
deformidades.
Há quatro fatores que são muito importantes na aquisição de habilidade
motoras na criança com paralisia cerebral e com múltiplas deficiências (BARTLETT e
PALISANO, 2002). Estes fatores são a condição do tônus muscular, o número de membros
afetados, seu equilíbrio e suas alterações sensoriais. Não se pode esquecer da mobilidade das
articulações, a força e a resistência. Finalmente, há também os fatores familiares, para se
conhecer as suas expectativas e como eles podem auxiliar estas crianças.
Os responsáveis pela criança (pais, mães e cuidadores), devem participar
ativamente do processo de reabilitação e ter consciência da necessidade do mesmo, buscando
uma melhor qualidade de vida. Os estigmas atribuídos à pessoa portadora de deficiência, de
acordo com Tani (2005), são freqüentemente mal elaborados, gerando distorções e,
principalmente, rotulando que todos os indivíduos portadores da mesma necessidade especial
apresentam comportamentos semelhantes.
A maioria das crianças com paralisia cerebral e com múltiplas deficiências
têm como único meio de locomoção a cadeira de rodas, e permanecem nela a maior parte do
tempo.
A maneira como estas crianças sentam-se chama a atenção, principalmente
com relação à quantidade de tempo que elas passam na posição sentada e devido às anomalias
posturais e as conseqüências ortopédicas (MÉTAYER, 2001) que elas podem desenvolver.
A cadeira, além de representar um meio de manutenção das posturas
corrigidas, é também um auxílio para adoção da mesma (MÉTAYER, 2001). É extremamente
importante que a criança sente-se da maneira mais adequada possível nesta cadeira de rodas,
para receber os estímulos corretos de maneira contínua (BOBATH, 1989).

6 CONSIDERAÇÕES FINAIS
O principal objetivo da confecção deste artefato foi melhorar o
posicionamento sentado, na cadeira de rodas, da criança com paralisia cerebral e com
múltiplas deficiências e que este fosse de baixo custo, para ser acessível ao maior número de
crianças.
O artefato contribui muito na questão social melhorando a qualidade de vida
das crianças com PC, evitando complicações que levam a intervenções cirúrgicas. A melhora
da postura da criança com deficiência participante (P1), pode evitar complicações como
encurtamentos musculares, contraturas musculares, deformidades ósseas e até complicações
respiratórias, como pneumonia, por exemplo no caso da alimentação não ser feita na posição
ideal, ocasionando pequenas bronco-aspirações.
Após a análise dos resultados, mediante apresentação dos gráficos e da
Fotometria, o principal objetivo da pesquisa foi alcançado.
O artefato de poliuretano (PU) foi confeccionado e foi colocado dentro da
cadeira de rodas no lugar do assento e do encosto padrão. A postura da criança com paralisia
cerebral e com múltiplas deficiências melhorou significativamente, principalmente em relação
à assimetria corporal devido a sua importante escoliose.
Por meio da Fotometria, foi possível avaliar de forma quantitativa, a
melhora da postura sentada na cadeira de rodas, em crianças com paralisia cerebral e com
múltiplas deficiências, onde na maioria das situações a avaliação é realizada de forma
qualitativa.
A simetria corporal que a criança obteve na utilização do artefato e da
terapia foi expressiva, tanto numa avaliação qualitativa, quanto quantitativa. Nesta pesquisa
foi utilizada a mensuração dos ângulos pela Fotometria.
Tornou-se evidente a necessidade de se readequar as cadeiras de rodas,
como a tecnologia assistiva, às necessidades de cada criança com paralisia cerebral e com
múltipla deficiência, pois cada uma vai apresentar diferentes padrões motores, contraturas e
deformidades. Para que aconteça uma aprendizagem do movimento, a criança precisa receber
o estímulo correto de maneira contínua, facilitando o mecanismo da plasticidade cerebral.
Muito pouco se pesquisa e se investe em relação às crianças com paralisia
cerebral e com múltipla deficiência, pois esta é uma clientela muito pequena, 0,2% dos 10%
da população com deficiência e, principalmente, porque não apresenta resultados imediatos e
não é vista como “produtiva” para a sociedade em geral.
Com o avanço da tecnologia e da assistência à saúde, elas estão
sobrevivendo, cada vez mais com menores pesos (devido a partos extremamente prematuros).
Essas crianças merecem ter uma vida com qualidade e, principalmente, serem felizes, dentro
das suas capacidades e potencialidades, independente do grau cultural ou social de suas
famílias ou das instituições que as abrigam.
Sugere-se então, a confecção de artefatos de baixo custo e de diferentes
materiais, para crianças com paralisia cerebral e com múltiplas deficiências em diversas faixas
etárias, e com uma maior número de participantes. Em função desta realidade, é muito
importante que se realizem mais pesquisas com esta clientela, buscando novos tipos de
tecnologias assistivas, principalmente de baixo custo.

GLOSSÁRIO
Aprendizagem: processo de integração neurosensorial das experiências vivenciadas pelo ser humano durante o seu desenvolvimento. Aptidão motora: capacidade de realizar um movimento motor intencional, através da integração e da maturação do sistema nervoso central. Área motora: Área onde nasce o feixe piramidal responsável pelos movimentos voluntários. Assimetria: falta de proporção entre as partes. Assimilação: integração de todos os dados novos, antigos e conhecidos. Atáxica: lesão cerebral que resulta em tremor. Cerebelo: desempenha papel importante no controle da atividade motora voluntária, tanto na planificação como na correção de tal ato, durante a sua realização. Clônus: tremor. CO2: Gás carbônico. Contra-lateral: contrário, oposto. Convulsão: manifestação motora de um distúrbio de atividade elétrica neuronal. Deficiência: limitação no desenvolvimento das habilidades pertinentes ao ser humano. Desenvolvimento: representa a aquisição de funções cada vez mais complexas. Ocupa-se de fenômenos que indicam a diferenciação progressiva dos órgãos e de suas especializações, no amadurecimento da sua função. Diagnóstico: processo pelo qual se avalia o fator determinante de uma patologia, bem como seus sinais e sintomas. Discinética: muitos movimentos corporais.
Espasmos extensores: aumento de tônus em extensão.
Eplepsia: distúrbio da atividade elétrica cerebral (neuronal).
Espasticidade: estado de hipertonia muscular que se produz quando há uma contração simultânea de grupos musculares agonistas e antagonistas. Estímulo: agente externo que provoca uma sensação determinada sobre o osso corpo.
Etiologia: estudo das causas de inadaptação e enfermidades.
Gânglios basais: massa cerebral situada na base dos hemisférios cerebrais.
Hemídio: lado.
Hipertonia: aumento do tônus postural.
Hiperreflexia: aumento dos reflexos tendinosos.
Hipóxia: falta de oxigênio.
Inclusão: processo pelo qual se prepara a sociedade para admitir portadores de deficiência.
Motricidade: conjunto de funções que permitem o movimento.
Órgãos otolíticos: estruturas que ajudam o equilíbrio.
Percepção: processo pelo qual se torna consciência do mundo exterior.
Plasticidade: mudanças produzidas no sistema nervoso como resultado da experiência (aprendizagem). Postura: posição ou postura do corpo dada pela maturidade do SNC controlada pela sensibilidade proprioceptiva. Propriocepção: conceito definido por Sherrington para expressar a capacidade de perceber a posição das extremidades do corpo no espaço e a de detectar a força dos movimentos e a resistência que se opõe a eles. Prono: barriga para baixo.
Reação: resposta a um estímulo.
Reflexo: ato motor mais simples como resposta a um determinado estímulo.
Reflexo Tônico Labiríntico: reflexo patológico que não está presente no desenvolvimento motor normal Sialorréia: incapacidade de controlar a saliva na boca.
Simetria: apresenta correspondência no tamanho e forma das partes.
Sinal de Babisnki: sinal de lesão cerebral
SNC: sistema nervoso central.
Supino: barriga para cima
Tônus muscular: estado de tensão ativa e involuntária do músculo.
Fonte: ROSA NETO (2002)
REFERÊNCIAS
AMADIO, A. C. Fundamentos Biomecânicos para análise do movimento humano. Ed. Universidade de São Paulo. São Paulo, 1996
AMADIO, A. C. E BARBANTI, V. J. A biomecânica do movimento humano e suas relações interdisciplinares. São Paulo: Estação Liberdade - Escola de Educação Física e Esporte da Universidade de São Paulo, 2000.
ANDRADE, in Ribas C. G. Procedimento Fisioterápico envolvendo a cinesioterapia como recurso terapêutico principal. Monografia (Especialização em Cinesioterapia Neuro-sensório-motora) - Pontifícia Universidade Católica do Paraná, 1997.
ANNUNCIATTO, N. et al. Neuroplasticidade: fundamentos para reabilitação do paciente neurológico adulto. Revista Fisioterapia em movimento. v. 14, n. 2, p. 11-20, out. 2001/ mar. 2002.
ARAÚJO. F. II Congresso de Especialidades Pediátricas – Criança 2005. Embratel Convention Center, ago. 2005. Curitiba. ARJONA, E. P. Plasticity in the Human Nervous System. Investigations with Transcranial Magnetic Stimulation. Neurological Research. Guildford: Dec. 2003, v. 25, n. 8; p. 887. Periodical. BARK in SELLA, A. P. Estimulação precoce: um desafio para o desenvolvimento infantil. Curitiba: Protexto, 2005. BARTLETT, D. J.; PALISANO, R. J. A Multivariate model of determinants of motor change for children with cerebral palsy. Physical Therapy. Washington: jun. 2000, v. 80, Iss. 6; p. 598, 17 p.
BARTLETT, D. J.; PALISANO, R. J. Physical Therapist’s Perceptions of Factors Influencing the Acquisition of Motor Abilities of Children With Cerebral Palsy: Implications for Clinical Reasoning. Physical Therapy. Washington: mar. 2002, v. 82, Iss.6; p. 237, 11 p.

BARROS, R. M. L. E; BRENZIKOFER, R. Exemplo de reconstrução tridimensional de um rodante com câmeras sincronizadas por software. IV Congresso de Biomecânica. Brasília, 1995-147-53. BATES, A ; HANSON,N. Exercícios aquáticos terapêuticos. Manole: São Paulo, 1998.
BAUMMAN, W. Métodos de medição e campos de aplicação da biomecânica: estado da arte e perspectivas. VI Congresso Brasileiro de Biomecânica. Brasilia, 1995.
BECKER, B; COLE. A . J. Terapia Aquática Moderna. Manole: São Paulo, 2000.
BERWUÓ, E. S; SOUZA. J. M. P; GOTLIEB, S. L. D. Bioestatística. São Paulo: Epu, 1981.
BESIO, S.; SALMINEN, A. L. Children and Youngsters and Technology. Technology & Disability; 2004, v. 16, issue 3, p. 115, 3p. Article. BESIO, S.; SALMINEN, A. L. Using assistive technologies to facilitate play by children with motor impairments: A methodological proposal. Technology & Disability, 2004, v.16, issue 3, p. 119, 12 p. Article. BESIO, S.; SALMINEN, A. L.; LINDSTRAND, P.; BRODIN, J. Parents and children view ICT. Technology & Disability; 2004, v. 16, issue 3, p. 179, 5 p. Article. BERNSTIN in EDWARDS, S. M. C. S. P. Fisioterapia Neurológica – uma abordagem centrada na resolução de problemas. Trad. Maria da Graça Figueiró da Silva. Porto Alegre: Artes Médicas Sul, 1999. BREAU, L.M et al. The incidence of pain in children with severe cognitive impairments. Archives of Pediatrics & Adolescent Medicine (Medline), dec. 2003, v. 157, issue 12, p. 1219. BOBATH, B. Atividade reflexa normal e anormal causada por lesões cerebrais. São Paulo, 1982. BOBATH, B. Desenvolvimento motor nos diferentes tipos de paralisia cerebral. São Paulo, 1989.
BOBATH, K. Uma Base Neurofisiológica para o Tratamento da Paralisia Cerebral. 2. ed. São Paulo, 1992. CAMPOS, T. M. et al. Escalas padronizadas de avaliação do desenvolvimento neuromotor de lactentes. Temas sobre desenvolvimento. São Paulo, v.13, n. 77, p. 5-11, 2004. CARROLL & PHILLIP, 1993; PHILLIP & BROADNAX, 1992; TEWEY et al., 1994; AL DE ET., 1995 in REISS, M. L. R.; WACKER, R. R. Factors associated with assistive tecnology discontinuance among individuals with disabilities. Journal of Reabilitation. Alexandria: jul/aug/sep 2000, v. 66, issue 3, p. 44, 7 p. CARR, J.; SHEPHERD, R. Ciência do movimento. Fundamentos para a Fisioterapia na Reabilitação. 2. ed. São Paulo, 2003. CIDADE, R. E.; TAVARES, M. da C. G. C. F.; LADEWIG, I. Aprendizagem motora e cognição em portadores de deficiência. SOBAMA, Revista Sociedade Brasileira de Atividade Motora Adaptada. v. 3, n. 3, p. 17-20, ago. 1999. COOK; HUSSEY´S in BESIO, S.; SALMINEN, A. L., LINDSTRAND P., BRODIN J. Parents and children view ICT. Technology & Disability; 2004, v. 16, issue3, p.179, 5 p. Article. CROVE, G. J. Química: o homem e a natureza. Coleção química: o homem e a natureza. São Paulo, 2000. DE MELO, J. P. In: Guedes, C. (org). Aprendizagem motora na escola. Atividade física e esportes: conteúdos e perspectivas evolutivas. João Pessoa, 2001. ECKERT, H.M. Desenvolvimento Motor. São Paulo, 2003. EDWARDS, S. Fisioterapia Neurológica - Uma abordagem centrada na resolução de problemas. Porto Alegre, 1999. FERRARETTO, I. Paralisia Cerebral. Aspectos práticos. São Paulo, 2000. FELTRE, R. Química. 5. ed. ver e ampl, São Paulo, 2000.

FINNIE,N. O manuseio em casa da criança com paralisia cerebral. 2. ed, São Paulo, 1999.
FITT in CARR, J.; SHEPHERD, R. Ciência do movimento. Fundamentos para a Fisioterapia na reabilitação. 2. ed. São Paulo, 2003.
FLOYD, T. R; THOMPSON, W. C. Manual de Cinesiologia Estrutural. São Paulo,2002.
FONSECA, M. R. M. da. Completamente química: química orgânica. Coleção completamente química, ciências, tecnologia e sociedade. São Paulo, 2001. GUEDES, C. (org). Atividade física e esportes: conteúdos e perspectivas evolutivas. João Pessoa, 2001.
GOMES. C. et al. in LIANZA, S. Paralisia Cerebral. Medicina Física e Reabilitação. 2. ed. Rio de Janeiro, 1995, p. 288-303. GRADEL, 1991; REED AL DE ET., 1995; WILLIAMS, 1991 in REISS, M. L. R.; WACKER, R. R. Factors associated with assistive tecnology discontinuance among individuals with disabilities. Journal of Reabilitation. Alexandria: jul/aug/sep. 2000, v. 66, issue 3, p. 44, 7 p. HALEY E INÁCIO IN RATLIFFE, K. T. Fisioterapia Clínica pediátrica. São Paulo, 2002. HALL, S. J. Biomecânica básica. 3. ed., Rio de Janeiro, 2000. ISRAEL,V. L; PARDO, M. B. L. Hidroterapia: Proposta de um programa de Ensino no Trabalho com o Lesado Medular em Piscina Térmica. Fisioterapia em Movimento, v. XIII, n.1, abr/set. 2000, p.111-127. JUDGE, S. Family – Centered Assistive Technology Assessment and Intervention Practices for Early Intervention. Infants and Young Children. Frederick: jul. 2002, v.15, Issue.1, p. 60, 9 p. KETELAAR, M. et al. Effects of a functional therapy program on motor abilities of children with cerebral palsy. Physical Therapy. Washington, set.2001, v. 81, Iss. 9, p. 1534, 12 p.
KIRK, S. A. G., JAMES J. Educação da criança excepcional. 2. ed., São Paulo, 1991. KONG, E. <www.Abradimene.com.Br/htm/artigos/artigos_1. htm> Acessado em 24/04/2004. KÖRDING, K. P., WOLPERT, D. M. The loss function of sensoriomotor learning. Proceedings of the National Academy of Science of the United States of America 2004, Jun 29; 101 (26), p. 9839-42. Date of Electronic Publication: 2004 Jun 21. Article. LEVITT., S. O Tratamento da Paralisia Cerebral e do Retardo Motor. 3. ed., São Paulo, 2001. LITTLE IN ROTTA, N. T., OHLWEILER, L., RIESGO, R., Rotinas em Neuropediatria. Porto Alegre, 2005. LIANZA, S. Medicina da Reabilitação. 2. ed., Rio de Janeiro, 2002. LUNDY-EKMAN, L. Neurociência: fundamentos para a reabilitação. Rio de Janeiro, 2000. MAGILL, R. A. Aprendizagem Motora - conceitos e aplicações. São Paulo, 2000. MALLIK; OLDER, 1993; O'DAY; COCORAN, 1994; REED; RHOADES, 1995; SCHERER, 1993 in REISS, M. L. R.; WACKER, R. R. Journal of Reabilitation. Alexandria: jul/aug/sep. 2000, v. 66, Iss. 3, p. 44, 7 p. MANCINI, M.C. et al. Gravidade da paralisia cerebral e desempenho funcional. Revista Brasileira de Fisioterapia, v. 8. n. 3, 2004, p. 253-260. MANO, E. B. Polímeros como materiais de engenharia. São Paulo, 1991. MÉTAYER, M. L. Reeducação cerebromotora da criança - Educação terapêutica. 2. ed., 2001. MILLER, G; CLARK, G. D. Paralisias Cerebrais. São Paulo, 2002. MULLER IN KONG. <www.Abradimene.com.Br/htm/artigos/artigos_1. htm> Acessado em 24/04/2004.

MAHONEY,G. et al. Early Motor Intervention: The need for new Treatment Paradigms. Infants and Young Children. Frederick: oct/dec. 2004, v. 17, Iss. 4, p. 291, 10 p. MORAES, J. C. T. B. Instrumentação para análise biomecânica do movimento humano. In A biodinâmica do movimento humano e suas relações interdisciplinares. São Paulo, Estação Liberdade. Escola de Educação Física e Esporte da USP, 2000. NAGARAJAPPA, D. Home management of the children with cerebral palsy. Nursing Journal of India; Oct. 2003, 94, 10, Pro Quest Medical Library. NETTER, H. F. Atlas de Anatomia Humana. Porto Alegre, 2004. NEVES, M. A. O.; COELHO JR, E. S; BASTOS, V. H. Reabilitação motora e plasticidade neural: fundamentação teórico conceitual para a recuperação funcional após lesões no sistema nervoso central. Neurociências, v. 3, n 1, jan/fev. 2006. NEWBOLD. P., CARLSON, W. L., THORNE, B. Statistics for business and Economics. 5. ed., Upper Saddler River, New Jersey, 2003. OSTENSJO, S; CARLBERG, E. B; VOLLESRAD. N. The use and impact of assistive devices and other environmental modifications on everyday activities and care in young children with cerebral palsy. Disability & Rehabilitation; 7/22/2005, v. 27, Issue 14, p. 849-861, 13 p. O`SULLIVAN, S. J.; SCHMITZ, T. J. Fisioterapia - Avaliação e Tratamento. 2. ed. São Paulo, 2000. PARETTE, H. P.; BROTHERSON, M. J. Family - Centered and Culturally Responsive Assistive Technology Decision Making. Infants & Young Children: An Interdisciplinary Journal of Special Care Practices, oct/dec. 2004, v. 17, Issue 4, p. 355-367, 13 p. PATO,T.R e cols. Epidemiologia na paralisia cerebral. Acta Fisiátrica 9 (2), p. 71-76, 2002.
PLAUTZ, E. J; BARBAY, S.; FROST, S. B.; FRIEL, K. M. et al. Post - infarct cortical plasticity and behavioral recovery using current cortical stimulayion and rehabilitative training: A feasibility study in primates. Neurological Reserch. Guildford: dec. 2003, v. 25, n. 8, p. 801. Periodical.

POULSEN, A.; ZIVIANI, J. M. Can I play too? Physical activity engagement of children with developmental coordination disorders. Canadian Journal of Occupation Therapy. Revue canadienne d´ergotherapie, 2004 Apr; 71 (2), pp.100-7. Journal Article. RATLIFFE, K. T. Fisioterapia Clínica pediátrica. São Paulo, 2002. REISS, M. L. R; WACKER, R. R. Factors associated with assistive tecnology discontinuance among individuals with disabilities. Journal of Reabilitation. Alexandria: jul/aug/sep. 2000, v. 66, Iss. 3, p. 44, 7 p.
RIBAS, C. G. Procedimento Fisioterápico envolvendo a cinesioterapia como recurso
terapêutico principal. Monografia (Especialização em Cinesioterapia Neuro-sensório-
motora) Pontifícia Universidade Católica do Paraná, 1997.
RODRIGUES, M. F; MIRANDA, S. M. A estimulação da criança especial em casa. São Paulo, 2000. ROSA NETO, F. Manual de avaliação motora. Porto Alegre, 2002. ROSE, J.; GAMBLE, J.G. Marcha Humana. São Paulo, 1998. ROSENTHAL, R. K. et al. The occurrence of scoliosis in cerebral palsy. Development Medicine and Child, v.16, p. 666-667, 1974. ROTTA, N. T. Paralisia Cerebral, novas perspectivas terapêuticas. Jornal de Pediatria. Sociedade Brasileira de Pediatria, v. l78, l.1, 2002. ROTTA, N. T, OHLWEILER, L.; RIESGO, R. Rotinas em Neuropediatria Porto Alegre, 2005. ROUTTHIER, F.; VICENT, C.; DESROSIERS. J.; NADEAU, S.; GUERETTE, C. Development of an obstacle course assessment of wheelchair user performance (OCAWUP): A content validity study. Technology & Disability. 2004, v.16, Issue 1, p. 19, 13 p., 3 diagrams, 1 bw. Article.

RUOTI, R. G.; MORRIS, D. M.; COLE, A. J. Reabilitação Aquática. São Paulo, 2000. RUSSEL, D. et al. The Gross motor function measure: a means to evaluate the effects of Physical Therapy. Developmental Medicine and Child Neurology, v.31, p.341-352, 1989. SALTER, R. B. Distúrbios neuromusculares.In: Distúrbios e lesões do sistema músculo esquelético. 2o ed. Rio de Janeiro: Médica e científica, 1985-239-68. SATHLER,M. Tratamento da contratura em extensão da articulação do quadril na paralisia cerebral. Revista Brasileira Ortopedia, v. 29. Nos ½ - jan/fev, 1994. SANTANA, J. M.; SANTANA, V. J.; ALMEIDA, R. D. Paralisia Cerebral e suas formas de apresentação clínica: uma revisão teórica. <ww.interfisio.com.br> Acessado em 10/10/2005.
SANTOS, R. R. <www.mat.ufmg.br/~regi> Acessado em 27/12/2005.
SIMMS, B. Assistive tecnology for early childhood. The excepcional parent. Boston: aug. 2003, v. 33, Iss. 8, p. 72.
SCHARWARTZMAN, J. S. Paralisia cerebral. Temas sobre desenvolvimento. v. 3, n.13, p. 4-21, 1993. SCHMIDT, R.; WRISBERG, C. A. Aprendizagem e Performance Motora: uma aprendizagem baseada problema. 2. ed. Rio de Janeiro, 2001. SHULL, J.; DEITZ, J.; BILLINGSLEY, F.; WENDEL, S.; KARTIN, D. Assistive technology programming for a young child with profound disabilities: a single-subject study. Physical & Occupational Therapy In Pediatrics [Phys Occup Ther Pediatr], 2004; v. 24 (4), pp. 47-62. SCOTT, S. B. Manual de mobilização para os cuidados de crianças com distúrbios neurológicos, 2001. SELLA, A. P. Estimulação precoce: um desafio para o desenvolvimento infantil. Curitiba, 2005. SHEPERD, R. B. Fisioterapia em pediatria. 3. ed., São Paulo, 1995.

SNELL IN KIRK, S. A. G.; JAMES, J. Educação da criança excepcional. 2. ed. São Paulo, 1991. SPOMS E EDLMAN IN MILLER, G. E CLARK, G. D. Paralisias Cerebrais. São Paulo, 2002. STALLINGS,V. A et al. Energy expenditure of children and adolescents with severe disabilities: A cerebral palsy model. The American Journal of Clinical Nutrition. Bethesda, oct. 1996, v. 64, Iss. 4, p. 627, 8 p. STEELMAN, J. D. Asssistive Technology: Good for all students. Principal Leader ship. (Middle Level ed.) Reston: nov. 2002, v. 3, p. 62, 4 p. SULLIVAN, M; LEWIS. M. Assistive technology for the very young: Creating responsive environments. Infants and Young Children. Frederick: Apr. 2000. v. 12, Iss. 4, p. 34, 19 p. TANI, G. Comportamento Motor - Aprendizagem e Desenvolvimento. Rio de Janeiro, 2005. TECKLIN, J. S. Fisioterapia Pediátrica. 3. ed., Porto Alegre, 2002. TUREK, K. S. L. Paralisia Cerebral: Ortopedia e Princípios e sua Aplicação. 4. ed., São Paulo, 1991, p. 646-681. TURNER, A. Polímeros Orgânicos. São Paulo, 1971. USBERCO, J.; SALVADOR. E. Química – Química Orgânica III. 6. ed., São Paulo, 2000. VIEIRA, S. Bioestatística: Tópicos Avançados. 2. ed., Rio de Janeiro, 2004. VIEIRA, S. Introdução à Bioestatística. 3. ed., Revista 3. ed. ampliada., Rio de Janeiro, 1980, 13o Reimpressão. VILAR, W. D. Química e tecnologia dos poliuretanos. Rio de Janeiro, 1998. VERZA, R; CARVALHO, M. L. L; BATTAGLIA,M, A.; UCCELLI, M. M. An Interdisciplinary Approach to evaluating the need for Assistive Technology Reduces

Equipment Abandonment. Multiple Sclerosis (Arnold Publishers), feb. 2006, v.12. Issue 1, p. 88-93, 6 p. VIMIEIRI, C.; NASCIMENTO, B.; MARTINS, H.; NAGEM, M.; PINOTTI, M. Aplicação de músculos artificiais pneumáticos em órteses de quadril. Anais do 7o Encontro de Extensão da Universidade Federal de Minas Gerais.Belo Horizonte. 12 a 15 de setembro de 2004. WESSELS, R.; DIJCKS, B.; SOEDE, M.; GELDERBLOM, G. J. DE WITTLE L. Non-use of provided assistive technology devices, a literature overview. Technology & Disability, 2003, v. 15, Issue 4, p. 236, 8 p., 3 charts. Article. WORLD HEALTH ORGANIZATION. International Classification of function and disability. Beta-2 Version. Genebra: WHO, 1999.

APÊNDICE
Apêndice 1 – Termo de Consentimento Livre e Esclarecido Pequeno Cotolengo
Apêndice 2 – Termo de Consentimento Livre e Esclarecido Crianças sem Deficiência

APÊNDICE 1 TERMO DE CONSENTIMENTO LIVRE E ESCLARECIDO
O trabalho em questão, tem como título: Análise Biomecânica visando a adaptação de
cadeira de rodas para crianças portadoras de paralisia cerebral com múltiplas deficiências. Serão avaliadas crianças de 2 a 5 anos, pois esta é a fase que as crianças começam a permanecer mais tempo na cadeira de rodas e onde ocorre a plasticidade cerebral que é a capacidade do cérebro se reorganizar mais facilmente mediante ao estímulo externo recebido. As mesmas serão colocadas na cadeira de rodas, sentadas, com trajes de banho, em ambiente aquecido. Serão utilizados marcadores pretos redondos da marca Pimaco bilateralmente nos seguintes pontos: na parte externa da clavícula, abaixo da última costela , na crista ilíaca anterior, na patela e na linha maléolo lateral no tornozelo anteriormente. As crianças serão fotografadas com máquina digital marca Samsung, modelo Digimax 201 a 1(um) metro de distância e 1 (um) metro de altura, em função da altura da cadeira de rodas.
Serão calculados os ângulos da postura das crianças , através do meio de medição chamado de Cinemetria,e comparados com os ângulos das crianças normais.
O objetivo é que com o cálculo dos ângulos normais seja possível adaptar o material chamado de poliuretano ao assento da cadeira de rodas, que inicialmente será moldado ao assento e após algum tempo ele se torna uma espuma de densidade mais alta, que facilitaria o posicionamento da criança. Quando a adaptação estiver pronta as crianças serão colocadas novamente na cadeira de rodas, os pontos serão marcados , elas serão fotografadas e avaliadas para se quantificar a melhora da postura.
Este procedimento não oferece risco nenhum às crianças, visto que elas apenas serão fotografadas, não será realizado nenhum procedimento invasivo e os marcadores são etiquetas colocadas na pele e facilmente retiradas pois como o ambiente para as fotografias é aquecido elas caem naturalmente.
As fotos e os dados obtidos serão confidenciais e utilizados unicamente no trabalho acima descrito. Serão colocadas tarjas nos olhos das crianças para garantir a sua privacidade.Este trabalho poderá ser apresentado em Congressos Nacionais e Internacionais, sempre mantendo a privacidade dos integrantes da pesquisa.
Em virtude do exposto acima autorizo a menor S. F. a participar da pesquisa.
Curitiba, 20 de outubro de 2004
_____________________ __________________ Cristiane Gonçalves Ribas Padre Braz Ricardo Pesquisadora Diretor Geral do Pequeno Cotolengo do Paraná

APÊNDICE 2 TERMO DE CONSENTIMENTO LIVRE E ESCLARECIDO
O trabalho em questão, tem como título: Adaptação de cadeira de rodas para crianças portadoras de paralisia cerebral com múltiplas deficiências visando melhorar sua qualidade de vida. Serão avaliadas crianças de 2 a 5 anos, pois esta é a fase que as crianças começam a permanecer mais tempo na cadeira de rodas e onde ocorre a plasticidade cerebral que é a capacidade do cérebro se reorganizar mais facilmente mediante ao estímulo externo recebido. As mesmas serão colocadas na cadeira de rodas, sentadas, com trajes de banho, em ambiente aquecido. Serão utilizados marcadores pretos redondos da marca Pimaco bilateralmente nos seguintes pontos: na parte externa da clavícula, abaixo da última costela , na crista ilíaca anterior, na patela e na linha maléolo lateral no tornozelo anteriormente. As crianças serão fotografadas com máquina digital marca Samsung, modelo Digimax 201 a 1(um) metro de distância e 1 (um) metro de altura, em função da altura da cadeira de rodas.
Serão calculados os ângulos da postura das crianças , através do meio de medição chamado de Cinemetria, para se obter valores de referências dos ângulos em crianças normais,para posteriormente se comparar com crianças portadoras de paralisia cerebral com múltipla deficiência.
Este procedimento não oferece risco nenhum à criança, visto que ele apenas será fotografado, não será realizado nenhum procedimento invasivo e os marcadores são etiquetas colocadas na pele e facilmente retiradas pois como o ambiente para as fotografias é aquecido elas caem naturalmente.
As fotos e os dados obtidos serão confidenciais e utilizados unicamente no trabalho acima descrito. Serão colocadas tarjas nos olhos das crianças para garantir a sua privacidade.Este trabalho poderá ser apresentado em Congressos Nacionais e Internacionais, sempre mantendo a privacidade dos integrantes da pesquisa.
Em virtude do exposto acima autorizo o menor J. G. R. N. S. a participar da pesquisa.
Curitiba, 20 de outubro de 2004
_____________________ __________________ Cristiane Gonçalves Ribas Marcelo Nery Serafim Pesquisadora Responsável pelo menor
ANEXOS
ANEXO A - TERMO DE CONSENTIMENTO DO COMITÊ DE ÉTICA, RESOLUÇÃO-196/96
ANEXO B - AVALIAÇAO FISIOTERAPÊUTICA
ANEXO C - TABELA NACH
ANEXO D – ALGORITMO
ANEXO E – TABELA DE VALORES CRÍTICOS PARA 2
rx NO TESTE DE FRIEDMAN

ANEXO A
TERMO DE CONSENTIMENTO DO COMITÊ DE ÉTICA, RESOLUÇÃO-196/96

ANEXO B
AVALIAÇÃO FISIOTERAPÊUTICA 1) DADOS PESSOAIS Nome: Endereço: Telefone: Data de nascimento: Escolaridade: Nome do pai: Profissão: Escolaridade: Nome da mãe: Profissão: Escolaridade: Religião: Encaminhado por: Diagnóstico médico: Médico responsável: Medicação: II) ANAMNESE III) REAÇÕES E REFLEXOS IV) PADRÕES MOTORES a) Estáticos b) Dinâmicos
V) LOCOMOÇÃO VI) ALTERAÇÕES MIO-TENDINOSAS VII) ALTERAÇÕES CARDIOVASCULARES VIII) ALTERAÇÕES RESPIRATÓRIAS IX) ALTERAÇÕES ÓSTEOARTICULARES X) PROBLEMAS ASSOCIADOS (FALA, ESTADO MENTAL) XI) OBSERVAÇÕES COMPLEMENTARES

ANEXO C
Tabela de percentis
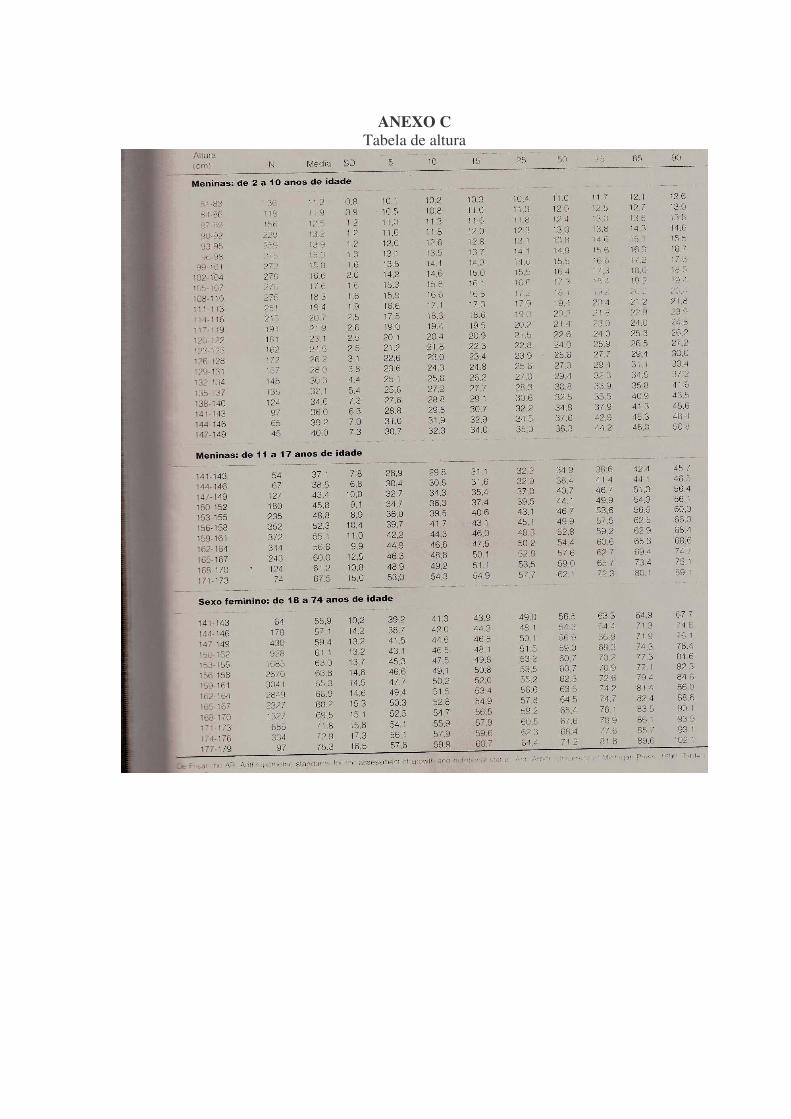
ANEXO C Tabela de altura
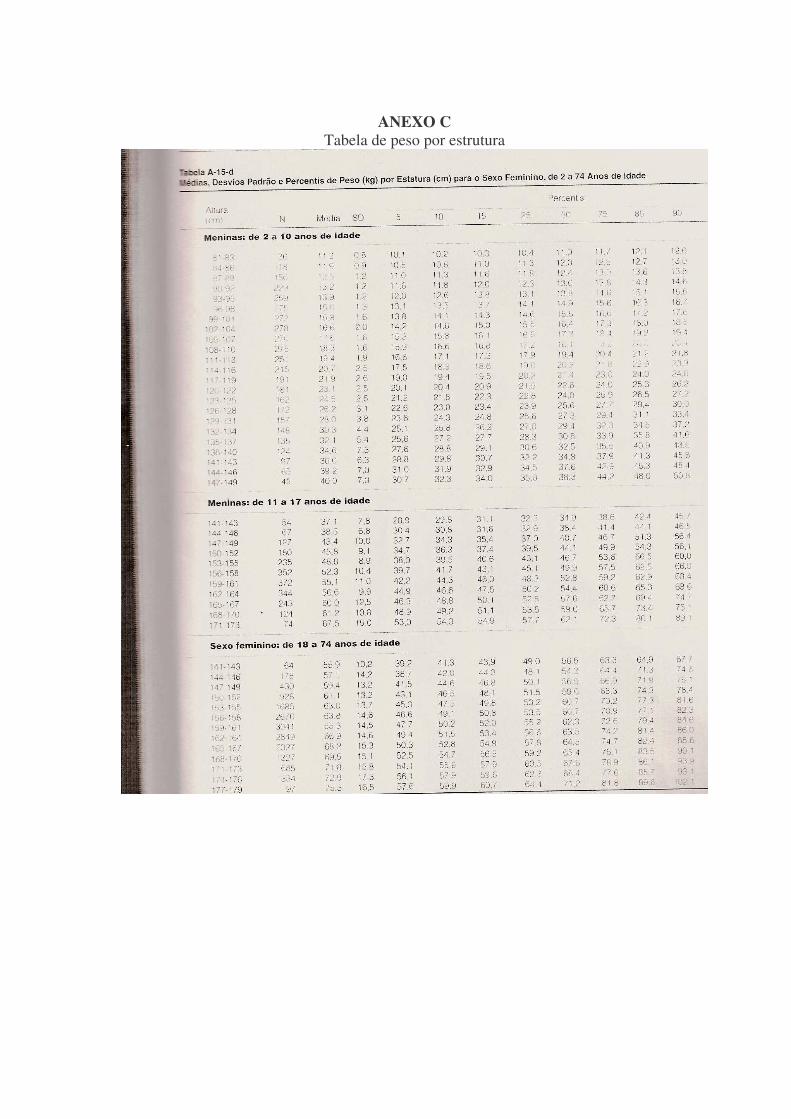
ANEXO C Tabela de peso por estrutura

ANEXO D
ALGORITMO UTILIZADO PARA O CÁLCULO DOS ÂNGULOS EM AMBIENTE MATLAB
function [ang] = ângulos (nang) nfotos=input('Quantas fotos?') nang=input('Quantos ângulos?') global 1mang for j=1:nfotos nome_do_arquivo=input('Nome do arquivo com imagem: ', 's') I = imread(nome_do_arquivo) image(I) for i=1:nang [x,y]=ginput(3) dx1=x(1)-x(2) dx2=x(3)-x(2) dy1=y(1)-y(2) dy2=y(3)-y(2) aux=acos((dx1*dx2+dy1*dy2)/(sqrt(dx1*dx1+dy1*dy1)*sqrt(dx2*dx2+dy2*dy2))) mang(j,i)=180*(aux/pi) end end function [ang] = ângulos(nang) nang=input('Quantos ângulos?'); nome_do_arquivo=input('Nome do arquivo com imagem: ', 's') I = imread(nome_do_arquivo) %I = imread('Amostra.jpg'); image(I); %c=cell(nang,2); for i=1:nang %nome_do_ângulo=input('Nome do angulo: ','s'); %nome(i)=nome_do_ângulo; [x,y]=ginput(3); dx1=x(1)-x(2); dx2=x(3)-x(2); dy1=y(1)-y(2); dy2=y(3)-y(2); ang(i)=(180/pi)*acos((dx1*dx2+dy1*dy2)/(sqrt(dx1*dx1+dy1*dy1)*sqrt(dx2*dx2+dy2*dy2))); % intf('Ângulo %s = %f\n', nome_do_ângulo,ang(i)) %c(i,1)=nome_do_ângulo; %c(i,2)=ang(i); end %celldisp(c); %for i=1:nang % sprintf('Ângulo %s = %f\n', nome(i),ang(i)); %end
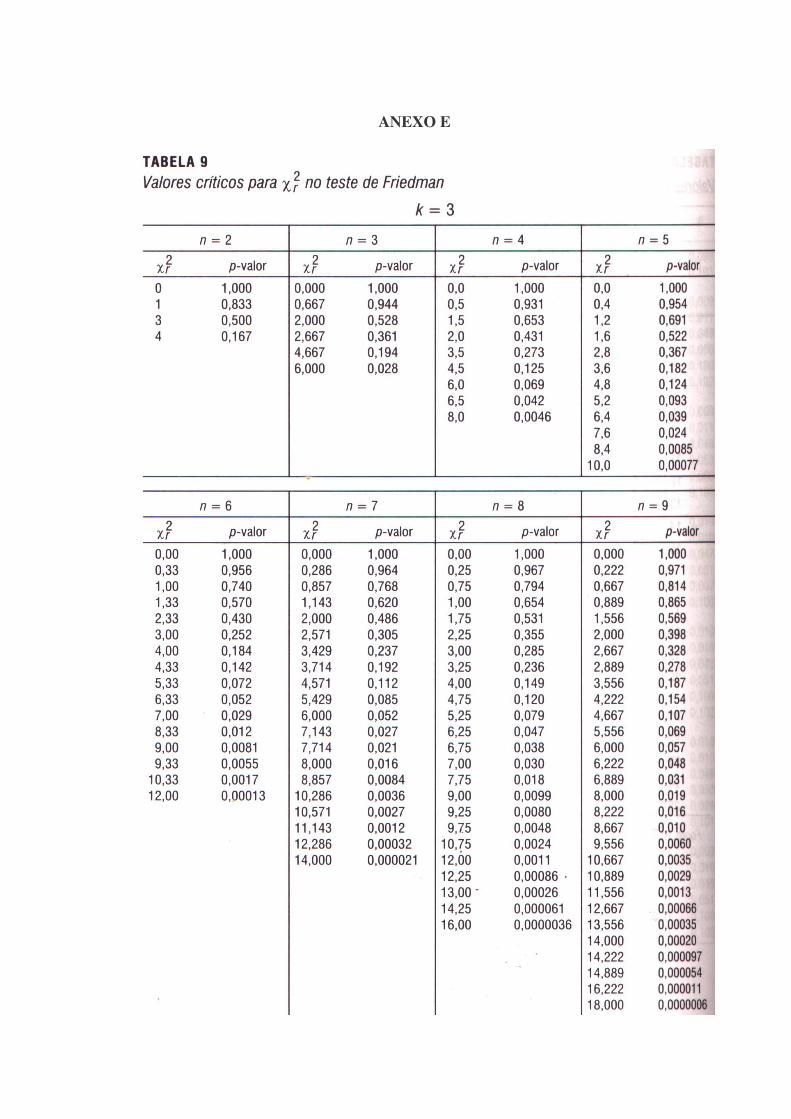
ANEXO E