plano das idÉias - puc-rio · diferentes maneiras a formas final. 4.1 - pesquisa de similares ......
TRANSCRIPT

Departamento de Artes e design
PLANO DAS IDÉIAS
Aluno: Antonio Carlos Santos Thiele
Orientador: Claudio Freitas Magalhães
1 - Introdução
Este projeto foi uma continuidade da pesquisa “Plano das Ideias”, que propõe uma exploração
da transformação da superfície plana, utilizando diversos materiais e processos, afim de gerar
soluções que possam ser utilizadas em diferentes aplicações na inovação de produtos. A maior
parte dos produtos vem evoluindo de forma incremental a partir de um processo de design
convencional (PUGH, 1990). A configuração de um carro é a mesma desde que surgiu o
conceito de carro. Um dos aspectos deste processo é a divisão entre o espaço do problema e o
espaço da solução. Pode ser dito que esta divisão problema-solução caracterizaria um projeto,
ou seja, a solução surge de um problema pré-definido e anteriormente analisado. A eficiência
desta sequencialidade é questionada pela velocidade das mudanças. Para resolver esta questão,
propõe-se uma maior sobreposição das etapas do processo de projeto como meio para reduzir
tempo e recursos. Desta forma, contextos dinâmicos ou produtos inovadores exigiriam
processos com maior sobreposição entre o espaço do problema e da solução em um projeto
(IANSIT, 1995). Em uma situação extrema, em projetos altamente inovadores, ligados a
estratégias de previsão do futuro, esta sequência pode ser invertida. A fase da análise do
problema é a chave para conseguir um descolamento de uma estrutura de produto já existente,
ou seja, de concepções institucionalizadas. Partindo de experimentações e soluções, algumas
empresas de ponta questionam suas estratégias, redirecionam conhecimentos e capacitações
tecnológicas a partir concepções de produtos (Philips Corporate Design, 1996). Desassociam o
projeto de um problema específico pré-determinado, porém, relacionado com algum aspecto
que caracteriza seu ambiente, seus recursos ou com seu contexto futuro de atuação. Observa-se
assim, a contextualização do método ao projeto (BAXTER, 1995, PMI, 1996).
2 - Objetivos
Esta pesquisa pretendeu investigar a potencialidade de inovação da geração de conceitos e
soluções, a partir da exploração da transformação do plano, antecedendo a definição de
problemas e ou oportunidades de projeto, utilizando transposições entre mídias físicas e digitais
para a realização de modelos e protótipos experimentais. Para efeito da delimitação desta
pesquisa, pretendeu-se estudar o contexto dos produtos produzidos a partir de materiais
transformados e disponibilizados em chapas planas. Pretendeu-se partir da solução para o
problema: através da geração de protótipos e soluções formais genéricas chega-se ao problema
de projeto. A situação de projeto é induzida pela solução. Especificamente, em função de
oportunidades apresentadas durante o período no Núcleo de Exploração Tridimensional, nesta
pesquisa foram desenvolvidos os seguintes projetos: (1) desenvolvimento exploratório de
transformação do plano baseado em sistema paramétrico digital de geração de variantes do
princípio “deployer” ou “chapa expandida”; (2) Desenvolvimento de uma mesa com estrutura
baseada no sistema deployer em aço inox cortado a laser; (3) desenvolvimento de um robô que
imprime formas tridimensionais de forma autônoma, e (4) desenvolvimento de um sistema de
geração de variações parametrizadas para uma peça de joalheria.

Departamento de Artes e design
3 - Metodologia
Visando identificar a potencialidade da geração de formas a partir da transformação do plano
como incitação para soluções ou desenvolvimento de produtos inovadores, foi realizada
pesquisa iconográfica de produtos desenvolvidos a partir da transformações de planos, feitos
de diversos materiais, que geravam resultados tridimensionais quando torcidos e esticados.
Foram utilizados na pesquisa recursos de prototipagem rápida, como corte á lazer, impressoras
3D e fresadoras, com o intuito de materializar as estruturas virtuais produzidas na pesquisa.
Foram pesquisadas as possibilidades oferecidas pela modelagem paramétrica utilizando o
Grasshopper, um plug-in para o software de modelagem tridimensional Rhinoceros. Foi
escolhido o princípio de transformação do plano "deployer". Nossos estudos consistiram em
simplificar o deploye até encontrar sua estrutura mínima, e a partir desta, gerar possibilidades
de parametrização. A forma encontrada, batizada de módulo, consiste de um quadrado com dois
corte paralelos. Com os parâmetros definidos foi possível criar controladores numéricos para
cada um deles dentro do software, e por meio deles, foi possível controlar e modificar o desenho
instantaneamente. Quando um valor é alterado todo o desenho se reajusta seguindo uma
programação preestabelecida. Desta maneira foi possível gerar variantes de forma em tempo
real, variando os valores dados de entrada no programa. Alguns módulos de cada um dos
experimentos foram transformados em modelos físicos tridimensionais no papel Duplex com o
auxílio de uma máquina de corte a lazer, entre outros recursos. Seguindo a estratégia de
transformação do plano, as peças foram torcidas e dobradas com o intuito de gerar novas
formas.
4 - deploye
Neste ano abordamos o método de construção deploye. Este é um método para criação de
formas volumétricas a partir da expansão de chapas planas. Esse comportamento é gerado
através de cortes na chapa. A direção, forma dos cortes e sentido da força aplicada alteram de
diferentes maneiras a formas final.
4.1 - Pesquisa de similares
O deploye ou chapa expandida é normalmente encontrado na indústria na forma de grades e
pisos metálicos. Está é uma solução de fabricação simples, barata e que gera estruturas
volumétricas grandes porem leves. Como pode ser visto nas imagens 1 e 2
Imagem 1, grade frontal de um carro. Imagem 2, piso composto por deployer.

Departamento de Artes e design
O deploye também é usado em peças artísticas por sua leveza visual e flexibilidade. Como no
trabalho da designer Sarah Krieger.
Imagem 3, luminárias baseadas em deployer desenvolvidas por Sarah Krieger.
Grasshopper
Na indústria esse tipo de diagrama é obtido através de maquinários específicos para corte, que
utilizam uma estrutura com laminas que são pressionadas contra a chapa como um carimbo,
Manualmente o processo é feito com o uso de estiletes e laminas. Nesta pesquisa não usamos
nenhum dos dois métodos, pois o primeiro não possibilita grande flexibilidade de desenhos e o
segundo é muito demorado e impreciso. O método de produção escolhido foi o corte a laser que
é rápido e muito preciso por ser computadorizado.
Devido ao maquinário escolhido os desenhos devem ser vetoriais. Tradicionalmente são
usados softwares de desenho vetorial para gerar os arquivos como: Illustrator, inkscape, Corel
e etc. Porem esses programas são limitados quando o trabalho exige modificações constantes
e em grande escala nos desenhos. Para atender a esta demanda foi empregado o "plugin" de
modelagem paramétrica para Rhinocerros chamado grasshopper.
" Grasshopper é um editor gráfico de algoritmos integrado com ferramentas de modelagem
do software Rhino 3D. Ao contrário do RhinoScript, Grasshopper não requer nenhum
conhecimento de programação ou “scripitagem”, mas ainda assim permite que designers
construam "definitions" desde as mais simples as mais inspiradoras."
(DAVIDSON., Scott. About Grasshopper. Disponível em: <http://www.grasshopper3d.com/>. Acesso em: 10 jul. 2014.)
Ele nos possibilita definir padrões que são aplicados ao desenho e toda a estrutura se
reconstrói para comportar estes novos valores. Exemplo: Imagine que um arquiteto projete um
teto com estruturas tubulares de 10 cm de raio mas no momento da compra do material só
existem tubos de 12 cm. Na modelagem convencional o teto deve ser remodelado, mas com a
modelagem paramétrica basta mudar o valor do parâmetro "raio do tubo", definido na
construção do arquivo, que toda a estrutura se reconstrói automaticamente, poupando tempo e
trabalho.

Departamento de Artes e design
5 - Abordagens de parametrização
Nesta pesquisa nos focamos em compreender o método construtivo do deployer para criar os
parâmetros de geração dos desenhos. Primeiramente definimos um corte simples como o
parâmetro base para a criação do deployer.
Como primeira tentativa de parametrização criamos um grid com os cortes atrelados aos nós da
grade, como é visto na imagem 4, e posteriormente duplicamos esta grade, representado pela
imagem 5. As variações possíveis eram diferentes posições do segundo grid e tamanho dos
quadrados.
Imagem 4, cortes atrelados ao grid. Imagem 5, grid base para os cortes duplicado
Essa estratégia tinha como problemas o não reconhecimento de um módulo e excessiva
liberdade entre os grids.
Dentro deste raciocínio tiveram testes em paralelo abordando uma maior liberdade de formas
para os cortes e formas alternativas de geração de desenhos. Nestes exemplos usamos um
padrão de crescimento, onde para cada nível a linha aumenta 2 milímetros lateralmente.
Imagem 6, cortes com crescimento progressivo. Imagem 7, cortes com desenho ondular.

Departamento de Artes e design
Alguns dos experimentos livres foram prototipados com o auxílio de uma cortadora a laser. A
imagem 8 mostra um experimento com cortes ondulados, como o papel usado era muito
expeço e não foram feitos vincos não foi possível gerar o deployer, mas torcendo o modelo
obtivemos uma forma tubular com laterais de desenho orgânico, como é visto na imagem 9.
Imagem 8, chapa com cortes curvos. Imagem 9, chapa com cortes curvos em forma tubular.
Imagem 10, cortes com crescimento progressivo orgânicos. Imagem 11, cortes com crescimento progressivo.
Tomando como inspiração o projeto de Sarah Krieger nós buscamos ampliar o conceito de
deployer radial juntando duas estruturas em apenas uma.
Imagem 12, Trabalho de Sarah Krieger Imagem 13, Estudo com deployer radial duplo.

Departamento de Artes e design
Na imagem 14 usamos as áreas de influência. Onde esses círculos eram posicionados eles
geravam alterações nos tamanhos dos cortes.
Imagem 14, deployer formado por áreas de influência.
Mesmo conseguindo gerar o deployer básico com esta abordagem não nos possibilitava
trabalhar com o módulo básico de geração do deployer. Pensávamos que uma linha era o
módulo básico do deployer, mas percebemos que não. Este é formado pela interação entre dois
cortes paralelos em posições diferentes. Para encontrar uma solução buscamos inspiração na
padronagem para tecidos onde um módulo fixo é replicado formando um padrão. Esse conceito
pode ser visto na imagem 15 produzida pelo professor Luiz Rocha.
Imagem 15, conceitos de padronagem apresentados pelo professor Luiz Rocha.
Departamento de Artes e design
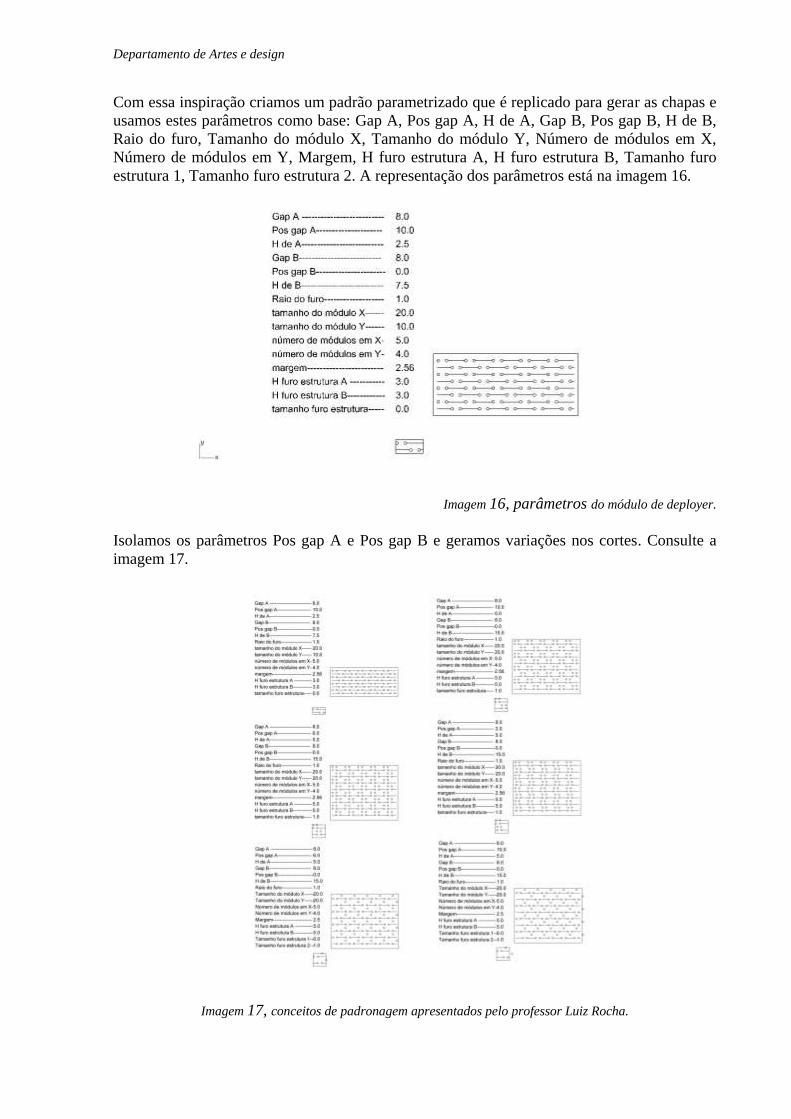
Com essa inspiração criamos um padrão parametrizado que é replicado para gerar as chapas e
usamos estes parâmetros como base: Gap A, Pos gap A, H de A, Gap B, Pos gap B, H de B,
Raio do furo, Tamanho do módulo X, Tamanho do módulo Y, Número de módulos em X,
Número de módulos em Y, Margem, H furo estrutura A, H furo estrutura B, Tamanho furo
estrutura 1, Tamanho furo estrutura 2. A representação dos parâmetros está na imagem 16.
Imagem 16, parâmetros do módulo de deployer.
Isolamos os parâmetros Pos gap A e Pos gap B e geramos variações nos cortes. Consulte a
imagem 17.
Imagem 17, conceitos de padronagem apresentados pelo professor Luiz Rocha.

Departamento de Artes e design
Primeiro variamos a posição do gap. A variação da posição dos gaps não foi bem sucedida para
gerar o deploye sem vincar o papel, uma vez que é preferível que o fim de um corte coincida
com a região central do corte que vem acima deste. Parametrizamos furos estruturais, que são
conhecimento acumulado de pesquisas anteriores. Eles servem para canalizar as pressões das
dobraduras da chapa fragilizando determinadas regiões.
Imagem 18,proposta de um porta lápis. Imagem 19, deployer formado com vincos no papel.
Depois variamos o tamanho dos cortes mantendo o centro dos gaps. Como os cortes guiam as
forças no momento em que a chapa é tencionada os cortes devem ser feitos em zigzag, como
está presente na imagem 20.
Imagem 20, variação de tamanho dos cortes mantendo o centro dos gaps.

Departamento de Artes e design
Mesa Deployer
De acordo com variações em nossos estudos chegamos a uma versão de deploye onde
eliminamos alguns cortes e criamos uma tira. Os cortes são orientados em forma ondular,
como pode ser visto na imagem 21 que representa a variação do número de módulos.
Posteriormente foi feito um estudo em papel com o corte escolhido, visto na imagem 21
Imagem 21, fita de deployer paramétrica. Imagem 22, protótipo de deployer em papel.
Foram cortadas duas chapas de aço inox com o padrão através de parceria realizada em
projeto anterior com a empresa FALMEC do Brasil SA. Com este material geramos formas
derivadas da expansão das chapas e começamos um trabalho de explora de possibilidades de
produtos.
Imagem 23, chapas obtidas com a FALMEC. Imagem 24, chapa expandida.

Departamento de Artes e design
A partir da chapa expandida foi possível imaginar algumas alternativas como a criação de
uma curva:
Imagem 25, Forma circular obtida com deployer.
Foi desenvolvida uma mesinha com a base compondo a estrutura do pé e o tampo em madeira.
Este produto foi exposto da Rio+Design 2013 no Jóquei Clube do Rio de Janeiro na Semana de
Design O Globo em novembro de 2014, imagem 26.
Imagem 26, mesa em exposição no Rio+Design 2013.

Departamento de Artes e design
Demais projetos
NEXTBOT
Neste ano desenvolvemos um projeto em parceria com o laboratório LIFE (Laboratório de
interfaces físicas e lógicas). O projeto batizado como nextBot trata se de um robô que executa
desenhos em uma grande folha usando os gestos das mãos dos usuários. Este trabalho foi
exposto na mostra Rio+design de 2013.
Os gestos do usuário são capturados através de um Kinec, originalmente usado como controle
do console XBOX da microsoft.
Imagem 27, robô NEXTBOT executando um desenho.
3D&BOT
Como desdobramento do projeto NEXTBOT desenvolvemos o robô 3D&BOT. Nesta versão o
robô ganhou mais força e volume e passou a criar modelos em 3D agindo de forma semelhante
a uma prototipadora. A experiência em gerar redenhos bidimensionais, que tivemos com o
projeto anterior, nos possibilitou a construção de modelos 3D, uma vez que eles são o resultado
do empilhamento de várias camadas bidimensionais.
Imagem 28, robô 3D&BOT executando modelos tridimencionais.

Departamento de Artes e design
Anel paramétrico par adaptação de gemas
Neste projeto atendemos a uma demanda vinda de uma empresa de joias. Como no Brasil a
lapidação de pedras preciosas não gera pedras de tamanho sempre iguais a indústria precisa
gerar modelos virtuais diferentes para cada peça, para depois serem prototipados e fundidos.
Neste processo perde-se tempo e recursos. Afim de solucionar este problema aplicamos os
conhecimentos em modelagem paramétrica adquiridos nos anos de pesquisa. Como estudo de
caso usamos o anel "Chuveiro".
Imagem 29, modelo fornecido para o trabalho.
Dividimos seu desenho em duas partes para possibilitar a parametrização. A primeira parte foi
nomeada de coroa, onde ficam cravadas as pedras, e a segundo de corpo, onde é fixada a coroa
e fica a abertura para o dedo. Essa parametrização é altamente configurável, mas podemos
destacar três parâmetros principais: o tamanho da pedra principal, o raio médio das pedras
menores e o raio da abertura para o dedo.
Imagem 30, definition da Coroa.

Departamento de Artes e design
De acordo com o formato da pedra que será cravada na coroa o sistema altera o desenho e o
número de cravas ao redor da coroa. Na imagem 31 a pedra possui 8 por 9 milímetros e na
imagem 32 a pedra possui 5 por 9 milímetros.
Imagem 31, Coroa com 8 por 9 milímetros. Imagem 32, Coroa com 5 por 9 milímetros
Conclusões
Neste ano foram desenvolvidos projetos para a Exposição Rio+Design 2013, no Jóquei Club
do Rio de Janeiro: (1) Uma mesa com tampo de madeira e estrutura baseada no sistema
Deployer feita em aço inox cortada a laser e, (2) em parceria com o Laboratório de Interfaces
Físicas Digitais – LIFE, o projeto batizado como NextBot, que se trata de um robô que executa
desenhos em uma grande folha usando os gestos das mãos dos usuários. Os gestos do usuário
são capturados através de um Kinec, originalmente usado como controle do console XBOX da
Microsoft. Como desdobramento do projeto NextBot desenvolvemos o robô 3D&BOT que foi
exposto na Exposição Rio+Design Milão 2014. Nesta versão o robô ganhou mais força e
volume e passou a criar modelos em 3D agindo de forma semelhante a uma impressora 3D. A
experiência em gerar desenhos bidimensionais, que tivemos com o projeto anterior, nos
possibilitou a construção de modelos 3D, uma vez que eles são o resultado do empilhamento
de várias camadas bidimensionais. Neste ano também foi desenvolvido um desenho digital
parametrizado de um anel para se adaptar a diferentes tamanhos de gemas lapidadas. A partir
de um desafio vindo da empresa do setor joalheiro, parceira do NEXT, o projeto tenta resolver
o problema da falta de padrão no tamanho das gemas, que obriga a indústria a gerar modelos
tridimensionais virtuais diferentes para cada peça, para depois serem prototipados e fundidos.
Neste processo perde-se tempo e recursos. Afim de solucionar este problema aplicamos os
conhecimentos em modelagem paramétrica adquiridos nos anos de pesquisa. Como estudo de
caso usamos o anel "Chuveiro". Dividimos seu desenho em duas partes para possibilitar a
parametrização. A primeira parte foi nomeada de coroa, onde ficam cravadas as pedras, e a
segundo de corpo, onde é fixada a coroa e fica a abertura para o dedo. Essa parametrização é
altamente configurável, mas podemos destacar três parâmetros principais o tamanho da pedra
principal, o raio médio das pedras menores e o raio da abertura para o dedo.

Departamento de Artes e design
Referências
KRIEGER, Sarah. Expandable structures in interaction with light. 2011. Disponível em:
<http://www.grasshopper3d.com/photo/sarsresearch05-1>. Acesso em: 12 jul. 2014.
ROCHA, Luiz. O que é Rapport. 2014. Disponível em:
<http://estampaholic.com/2014/04/10/o-que-e-rapport/>. Acesso em: 10 jul. 2014.
DAVIDSON., Scott. About Grasshopper. Disponível em:
<http://www.grasshopper3d.com/>. Acesso em: 10 jul. 2014.
Imagens
Imagem da grade frontal de um carro.Fonte:
http://www.google.com.br/imgres?imgurl=http%3A%2F%2F1.bp.blogspot.com%2F_eG5eaP
3Mxqc%2FTPT-
F3IcqbI%2FAAAAAAAAAko%2FKYcdlre1KvY%2Fs1600%2FChapa%252BExpandida.jp
g&imgrefurl=http%3A%2F%2Fchapasexpandidas.blogspot.com%2F2010%2F11%2Fchapas-
expandidas_30.html&h=1200&w=1600&tbnid=L3ddxwpF8s-
LOM%3A&zoom=1&docid=tq_7veuO_nxZ4M&ei=GteyU7rzJI7ksASl6IHICg&tbm=isch&
ved=0CHcQMyg8MDw&iact=rc&uact=3&dur=984&page=4&start=47&ndsp=22 (carro)
Imagem de uma grade usada como piso, fonte:
http://img.ibiubi.com.br/produtos/0/2/0/2/2/5/9/1/img/07_mesanino-500-m%C2%B2-chapa-
expandida-r$-70-000_grande.jpg