p r o j e to e d e s e n v o l v i me n to d e s i s te ma
TRANSCRIPT

MATHEUS RAMOS MORGADO
Projeto e desenvolvimento de sistema eletrônico embarcado
para skate da Fábrica do Futuro POLI
São Paulo
2019

1
MATHEUS RAMOS MORGADO
Projeto e desenvolvimento de sistema eletrônico embarcado
para skate da Fábrica do Futuro POLI
Trabalho de Formatura apresentado à Escola Politécnica da Universidade de São Paulo para obtenção do título de Bacharel em Engenharia
São Paulo
2019

2
MATHEUS RAMOS MORGADO
Projeto e desenvolvimento de sistema eletrônico embarcado
para skate da Fábrica do Futuro POLI
Trabalho de Formatura apresentado à Escola Politécnica da Universidade de São Paulo para obtenção do título de Bacharel em Engenharia Área de Concentração: Engenharia de Sistemas Eletrônicos Orientadores: Profa. Dra. Roseli de Deus Lopes Prof. Dr. Eduardo de Senzi Zancul
São Paulo
2019

3
Autorizo a reprodução e divulgação total ou parcial deste trabalho, por qualquer meio convencional ou eletrônico, para fins de estudo e pesquisa, desde que citada a fonte.
Catalogação na publicação

4
AGRADECIMENTOS
À minha mãe e irmã, pelo constante apoio e incentivo nos meus projetos.
À minha companheira, Camila, por me acompanhar nos momentos mais difíceis.
Ao Archisman, Beatriz, Henrique, Lorenna, Lucas, Luiz, Mariana, e todos que
trabalham na Fábrica do Futuro, por colaborarem com sugestões para o projeto.
À Isabella, por indicar fabricantes de circuito impresso para o projeto.
Ao Daniel, por realizar a impressão de peças 3D para o projeto.
Ao Prof. Seabra, pelos conselhos e recomendações durante todo o projeto.
À Profa. Roseli e Prof. Eduardo, por desde 2014 confiarem no meu trabalho e me
proporcionarem a participação em projetos acadêmicos incríveis, além de
trabalharem ativamente por uma educação mais inovadora e conectada com a
realidade da indústria e os problemas da sociedade.
Ao Fundo Patrimonial Amigos da Poli, por investir direta e indiretamente na minha
formação profissional e no desenvolvimento da Fábrica do Futuro.

5
RESUMO
Com o crescente uso de dados no desenvolvimento de produtos, o impacto da
Indústria 4.0 no setor industrial e a implementação de fábricas de ensino em
diversas universidades ao redor do mundo, torna-se evidente a necessidade da
Escola Politécnica da USP se atualizar para acompanhar as inovações de diferentes
áreas. O objetivo principal deste projeto consiste em contribuir no aperfeiçoamento
do produto-exemplo estudado na Fábrica do Futuro POLI, uma fábrica de ensino
inspirada nos conceitos da Indústria 4.0. Foi projetado e implementado um sistema
eletrônico para ser fixado ao skate da fábrica, em que é possível monitorar a
velocidade atingida, a distância percorrida e os movimentos do skate. A
implementação desse sistema foi dividida em dois módulos, um módulo responsável
pelo cálculo de velocidade e distância utilizando um sensor magnético, e um outro
módulo que calcula a posição e orientação do skate utilizando um acelerômetro e
giroscópio. Como resultado, obteve-se um sistema de monitoramento completo com
potencial para contribuir com pesquisas e atividades acadêmicas realizadas na
Fábrica do Futuro POLI.
Palavras-chave: Fábrica de ensino. Indústria 4.0. Sistemas embarcados. Digital twin.

6
ABSTRACT
With the increasing use of data in product development, the impact of Industry 4.0 on
the industrial sector and the implementation of educational factories in several
universities around the world, it becomes evident that "Escola Politécnica - USP"
needs to keep abreast of innovations in different areas. The main objective of this
project is to contribute to the improvement of the product-example studied in "Fábrica
do Futuro POLI", a learning factory inspired by the concepts of Industry 4.0. An
electronic system was designed and implemented to be fixed to the skateboard of the
factory, in which it was possible to monitor the speed reached, the distance traveled
and the movements of the skate. The implementation of this system was divided into
two modules, a module responsible for calculating speed and distance using a
magnetic sensor, and another module that calculates the position and orientation of
the skate using an accelerometer and gyroscope. As a result, a complete monitoring
system with the potential to contribute to research and academic activities carried out
at "Fábrica do Futuro POLI" was obtained.
Keywords: Learning factory. Industry 4.0. Embedded systems. Digital twin.

7
LISTA DE FIGURAS
Figura 1 Projeto de uma fábrica com tecnologias da 4ª Revolução Industrial
13
Figura 2 Contextualização da Fábrica do Futuro POLI 14
Figura 3 Vista explodida de exemplo de motor de skate elétrico 17
Figura 4 Exemplo de sistema elétrico e de controle de skate elétrico 17
Figura 5 Exemplo de aplicativo para skate conectado 18
Figura 6 Árvore de objetivos 19
Figura 7 Principais dimensões do shape de um skate 22
Figura 8 Mercado global de digital twins 24
Figura 9 Módulo A: Representação do Nível 0 29
Figura 10 Módulo B: Representação do Nível 0 30
Figura 11 Módulo A: Representação do Nível 1 31
Figura 12 Módulo B: Representação do Nível 1 32
Figura 13 Planejamento de atividades para 2019 33
Figura 14 Painel de gerenciamento de tarefas 34
Figura 15 Módulo A: Identificação do ímã acoplado na roda 36
Figura 16 Módulo A: Exemplo de funcionamento do teste realizado 37
Figura 17 Módulo B: Simulação da movimentação do skate 38
Figura 18 Esquemas elétricos: Módulo A e Módulo B 39
Figura 19 Layout da PCI: Módulo A e Módulo B 40
Figura 20 PCIs fabricadas: Módulo A (frente) e Módulo B (verso) 41
Figura 21 Módulo A: Banco de dados na nuvem 42
Figura 22 Módulo A: Interface com última medição realizada e led desligado
42

8
Figura 23 Módulo A: Interface com dados históricos e led ligado 43
Figura 24 Módulo B: Interface de visualização 3D e skate físico 44
Figura 25 Módulo B: Variáveis utilizadas para representar a movimentação do skate
44
Figura 26 Módulo B: Interface de monitoramento apresentando Roll, Pitch e Yaw
45
Figura 27 Dimensões do suporte para módulos 45
Figura 28 Visualização 3D do projeto de suporte para módulos 46
Figura 29 Resultado da impressão 3D do suporte para módulos 46
Figura 30 Módulos eletrônicos com componentes soldados e suporte 47
Figura 31 Módulos eletrônicos fixados no skate 47
Figura 32 Visão geral do skate com módulos fixados 48
Figura 33 Módulo de iluminação em funcionamento 48
Figura 34 Skate com módulos em funcionamento 49
Figura 35 Módulo A: Demonstração de funcionamento 50
Figura 36 Módulo A: Visualização do banco de dados durante teste 51
Figura 37 Módulo B: Demonstração de funcionamento 52
Figura 38 Apresentação do projeto em reportagem televisiva 53
Figura 39 Apresentação do projeto em visita técnica 54

9
LISTA DE TABELAS
Tabela 1 Requisitos de marketing 20
Tabela 2 Requisitos de marketing x Requisitos de engenharia 21
Tabela 3 Comparativo de modelos nacionais de skate elétrico 23
Tabela 4 Alternativas de solução x Requisitos de engenharia 25
Tabela 5 Análise de alternativas: Didático 26
Tabela 6 Análise de alternativas: Monitoramento de velocidade e distância
27
Tabela 7 Análise de alternativas: Monitoramento de movimentos 27
Tabela 8 Solução escolhidas x Requisitos de engenharia 28
Tabela 9 Módulo A: Descrição do Nível 0 30
Tabela 10 Módulo B: Descrição do Nível 0 30
Tabela 11 Módulo A: Descrição de custos de componentes 35
Tabela 12 Módulo B: Descrição de custos de componentes 35
Tabela 13 Módulo A: Resultados do teste com protótipo 37
Tabela 14 Módulo A: Resultados do teste com módulo implementado 51

10
SUMÁRIO
1 INTRODUÇÃO 13
1.1 CONTEXTUALIZAÇÃO DO PROJETO 13
1.2 IDENTIFICAÇÃO DAS NECESSIDADES DO CLIENTE 15
1.3 DECLARAÇÃO DOS OBJETIVOS DO PROJETO 15
1.4 PESQUISA DE LEVANTAMENTO DA SITUAÇÃO 16
1.4.1 Visão geral 16
1.4.2 Tecnologias relevantes 17
1.4.3 Árvore de objetivos 18
2 ESPECIFICAÇÃO DE REQUISITOS 20
2.1 REQUISITOS DE MARKETING 20
2.2 REQUISITOS DE ENGENHARIA 20
2.3 RESTRIÇÕES TÉCNICAS 21
2.4 BENCHMARKING COMPETITIVO 22
2.4.1 Principais dimensões de um skate 22
2.4.2 Mercado nacional de skates elétricos 23
2.4.3 Mercado global de digital twins 24
3 GERAÇÃO DE CONCEITOS 25
3.1 ALTERNATIVAS 25
3.2 AVALIAÇÃO INICIAL 25
3.3 ANÁLISE DE FORÇAS E FRAQUEZAS 25
3.3.1 Didático 26
3.3.2 Monitoramento de velocidade e distância 26
3.3.3 Monitoramento de movimentos 27
3.4 ALTERNATIVAS ESCOLHIDAS 28
4 DECOMPOSIÇÃO FUNCIONAL 29

11
4.1 PROJETO NÍVEL 0 29
4.1.1 Módulo A - Monitoramento de velocidade e distância 29
4.1.2 Módulo B - Monitoramento de movimentos 30
4.2 PROJETO NÍVEL 1 31
4.2.1 Módulo A - Monitoramento de velocidade e distância 31
4.2.2 Módulo B - Monitoramento de movimentos 31
5 GERENCIAMENTO DO PROJETO 33
5.1 CRONOGRAMA DE ATIVIDADES 33
5.2 GERENCIAMENTO DE TAREFAS 34
5.3 ORÇAMENTO E COMPRAS 34
6 PROTOTIPAÇÃO 36
6.1 MÓDULO A - MONITORAMENTO DE VELOCIDADE E DISTÂNCIA 36
6.2 MÓDULO B - MONITORAMENTO DE MOVIMENTOS 38
7 IMPLEMENTAÇÃO 39
7.1 DESENVOLVIMENTO DE HARDWARE 39
7.1.1 Esquema elétrico 39
7.1.2 Layout de placa de circuito impresso 40
7.1.3 Fabricação de placa de circuito impresso 40
7.2 DESENVOLVIMENTO DE SOFTWARE 41
7.2.1 Módulo A - Monitoramento de velocidade e distância 41
7.2.2 Módulo B - Monitoramento de movimentos 43
7.3 FABRICAÇÃO DE SUPORTE PARA MÓDULOS 45
7.4 MONTAGEM E FIXAÇÃO DE MÓDULOS 46
8 RESULTADOS 49
8.1 VISÃO GERAL 49
8.2 MÓDULO A - MONITORAMENTO DE VELOCIDADE E DISTÂNCIA 50
8.3 MÓDULO B - MONITORAMENTO DE MOVIMENTOS 52

12
8.4 APRESENTAÇÕES EXCLUSIVAS 53
9 CONSIDERAÇÕES FINAIS 55
REFERÊNCIAS BIBLIOGRÁFICAS 56
APÊNDICE A - Ranking de Objetivos 58

13
1 INTRODUÇÃO
1.1 CONTEXTUALIZAÇÃO DO PROJETO
O presente trabalho está inserido no âmbito da Fábrica do Futuro POLI, um
novo laboratório didático coordenado pelo curso de Engenharia de Produção, que
aplica o conceito de indústria 4.0 em um ambiente de ensino e pesquisa (NAOE,
2016), onde estudantes de diferentes cursos de engenharia podem entender como
as tecnologias da chamada Quarta Revolução Industrial (LASI et al., 2014) podem
ser utilizadas na indústria.
Figura 1 - Projeto de uma fábrica com tecnologias da 4ª Revolução Industrial
Fonte: CB INSIGHTS, 2018.
A concepção desse laboratório de ensino segue uma tendência já observada
em diferentes países e escolas de engenharia (WAGNER et al., 2012). Além disso, a
implementação de uma fábrica de aprendizagem se baseia em três princípios: aulas
expositivas não são o suficiente para o aprendizado; estudantes se beneficiam de
experiências interativas hands-on; e a participação em conjunto e integrada de
alunos, faculdade e indústria no processo de aprendizagem, gera benefícios
tangíveis para todos os envolvidos (LAMANCUSA et al., 2008).

14
Figura 2 - Contextualização da Fábrica do Futuro POLI
Fonte: Elaborado pelo autor.
Desde a sua concepção em 2015, a Fábrica do Futuro POLI tem sido objeto
de estudo para diversos estudantes de graduação e pós-graduação, principalmente
do curso de Engenharia de Produção. Descreve-se, a seguir, o conteúdo de três
trabalhos de formatura realizados no âmbito da Fábrica do Futuro POLI, relevantes e
relacionados a este trabalho.
O primeiro trabalho foi responsável por definir o escopo da fábrica e mapear a
infraestrutura necessária para implementação. Após um extenso estudo de
iniciativas relacionadas, recomenda que todos os processos deveriam ser guiados
por um produto-exemplo, sendo sugerido como produto representante uma bicicleta
(SILVA, 2015).
Já no trabalho subsequente, após uma revisão do projeto de concepção da
fábrica e da escolha do produto-exemplo, recomenda utilizar o skate como
produto-exemplo, tendo como referência os seguintes critérios: variedade de
materiais e processos produtivos; simplicidade da estrutura e de seus componentes;
possibilidade de incorporar serviços agregados; e facilidade em realizar uma
produção customizada (NAKANO, 2016). Além disso, o trabalho também detalha os
componentes que fariam parte da fábrica e estabelece um foco maior na montagem
do skate e não na produção de peças para o skate (CHENG, 2016).
Por fim, o terceiro e mais recente trabalho relacionado à Fábrica do Futuro
POLI, detalha a implementação de uma versão inicial do laboratório de ensino,
descrevendo com detalhes os demonstradores para o ensino de tecnologias

15
relacionadas à indústria 4.0. Em relação ao produto-exemplo, o autor sugere que o
skate tivesse uma caixa de conectividade acoplada à sua estrutura para possibilitar o
skate se conectar à internet e transmitir informações como distância percorrida e
nível de desgaste das rodas (GUIMARÃES, 2017).
1.2 IDENTIFICAÇÃO DAS NECESSIDADES DO CLIENTE
A partir da análise dos trabalhos anteriores sobre a Fábrica do Futuro POLI e
de entrevistas com os atuais responsáveis pelo laboratório, foi identificado que o
produto-exemplo, em suas condições no momento do início deste trabalho, ainda era
muito simples e não possuía nenhum tipo de conectividade ou sensoriamento, o que
impossibilitava a criação de um modelo digital do skate que conseguisse representar
o produto físico real.
Considerando as limitações funcionais do produto-exemplo naquele momento
e que o desenvolvimento de um digital twin promoveria uma integração ciber-física
da manufatura (QI; TAO, 2018) na Fábrica do Futuro POLI, foi identificada a
necessidade do projeto e desenvolvimento de um sistema eletrônico embarcado
para obter dados do skate, a fim de possibilitar futuras pesquisas e análises com os
dados obtidos.
1.3 DECLARAÇÃO DOS OBJETIVOS DO PROJETO
O objetivo deste projeto foi desenvolver um sistema eletrônico para ser
acoplado ao skate da Fábrica do Futuro POLI, permitindo a aquisição de dados que
serão utilizados inicialmente para aprimorar o modelo digital do produto-exemplo,
podendo futuramente possibilitar análises de dados mais complexas como o estudo
do comportamento do usuário com o skate e a previsão da manutenção do skate.
O sistema possibilitará ao estudante que visitar a Fábrica do Futuro POLI
interagir com o skate em tempo real e obter dados como velocidade atingida e
distância percorrida, além de permitir que o professor desenvolva atividades
didáticas práticas e discuta sobre as tecnologias embarcadas no skate.

16
Espera-se que este projeto sirva como base para novos trabalhos de
formatura e que sirva de exemplo e contribua para uma maior integração de
atividades da Fábrica do Futuro POLI com outros espaços e laboratórios da
POLI-USP focados em inovação (InovaLab@Poli), empreendedorismo (Núcleo de
Empreendedorismo da USP) e tecnologias móveis (Samsung OCEAN USP).
1.4 PESQUISA DE LEVANTAMENTO DA SITUAÇÃO
1.4.1 Visão geral
Os desafios relacionados à mobilidade urbana têm sido pauta para o
desenvolvimento de políticas públicas, projetos acadêmicos de pesquisa e modelos
de negócio inovadores relacionados ao conceito de servitização (BAINES et al.,
2007).
No Brasil, a mais recente empresa que decidiu entrar no mercado de
mobilidade chama-se Yellow, uma startup que oferece como serviço o
compartilhamento de bicicletas e patinetes elétricos. Apesar de ser uma solução
nova no Brasil, esse mesmo modelo já foi testado e replicado em diversos países
como China, Estados Unidos e França (BARIFOUSE, 2018).
Além de bicicletas e patinetes elétricos, os skates elétricos também estão
sendo utilizados, principalmente no chamado first mile/last mile – trajetos curtos
antes e depois de usar transporte público.
Diversas empresas têm se destacado no mercado de skates elétricos, mas
uma em especial está atraindo altos investimentos: a Inboard Technology. Após
arrecadar mais de 400 mil dólares numa plataforma de crowdfunding, a empresa,
que se diferencia por integrar a bateria e toda o circuito eletrônico ao shape do
skate, recebeu na sua última rodada de investimentos cerca de 8 milhões de dólares
(SHIEBER, 2017).
Visto que o esporte skateboarding será uma nova modalidade nos próximos
jogos olímpicos, em 2020, existe um potencial crescimento de atletas profissionais
nos próximos anos, assim como o surgimento de dispositivos que consigam

17
monitorar as manobras realizadas pelo skatista e de empresas que ofereçam
serviços a fim de colaborar com a preparação de atletas para competições.
1.4.2 Tecnologias relevantes
A partir da pesquisa de skates tecnológicos de referência no mercado, foi
possível perceber que a instalação de motores elétricos já é uma realidade em
skates comercializados fora do Brasil, e o que diferencia uma empresa da outra
costuma ser a potência do motor oferecido e o serviço agregado à motorização.
Figura 3 - Vista explodida de exemplo de motor de skate elétrico
Fonte: INBOARD TECHNOLOGY, 2016.
Além disso, algumas empresas, como a Mellow Boards, oferecem ao skatista
a possibilidade de controlar a velocidade do skate por meio de um controle físico ou
integrado a um aplicativo no smartphone.
Figura 4 - Exemplo de sistema elétrico e de controle de skate elétrico
Fonte: MELLOW BOARDS, 2017.

18
Já a Syrmo, uma startup criada em 2013, desenvolveu um dispositivo que
após ser acoplado ao skate, transmite via tecnologia Bluetooth os movimentos do
skate para um aplicativo, permitindo acompanhar em tempo real o skatista.
Figura 5 - Exemplo de aplicativo para skate conectado
Fonte: SYRMO, 2014.
1.4.3 Árvore de objetivos
Por meio da realização de entrevistas e conversas informais com pessoas
relacionadas à Fábrica do Futuro POLI com amigos que andam de skate
frequentemente e com colegas de curso, foi possível obter uma lista de requisitos e
funcionalidades relevantes para um skate moderno e tecnológico.
Após analisar cada item, chegou-se a 15 necessidades hierarquizadas por
similaridade funcional, para as quais foram calculados pesos a partir do
ranqueamento de objetivos, permitindo assim a construção completa da árvore de
objetivos. Os cálculos realizados para obter cada peso mostrado na árvore de
objetivos estão detalhados no Apêndice A.

19
Figura 6 - Árvore de objetivos
Fonte: Elaborado pelo autor.

20
2 ESPECIFICAÇÃO DE REQUISITOS
2.1 REQUISITOS DE MARKETING
A partir da análise realizada para obter os pesos apresentados anteriormente
na árvore de objetivos, foi possível definir uma lista de requisitos de marketing para o
projeto de sistema eletrônico embarcado.
Tabela 1 - Requisitos de marketing
# Requisitos de Marketing
1 Medição da velocidade atingida
2 Medição da distância percorrida
3 Monitoramento da posição e orientação
4 Motorização
5 Sistema de sinalização e iluminação
6 Leve
7 Pequeno
8 Fácil de transportar
9 Plug and Play (conexão rápida e prática)
10 Uso de ferramentas Open Source
11 Manual técnico bem elaborado
12 Design intuitivo (fácil usabilidade)
13 Estrutura resistente
14 Reutilizável
15 Fácil manutenção
Fonte: Elaborado pelo autor.
2.2 REQUISITOS DE ENGENHARIA
Após a definição dos requisitos de marketing, foram especificados e
justificados os requisitos de engenharia correspondentes para cada grupo de
requisitos de marketing do sistema eletrônico embarcado.

21
Tabela 2 - Requisitos de marketing x Requisitos de engenharia
Requisitos de Marketing
Requisitos de Engenharia Justificativa
6. Leve, 7. Pequeno, 8. Fácil de transportar
As dimensões não devem ultrapassar 4" x 2" x 8" (L x A x P).
O sistema deve ser acoplado abaixo da prancha do skate no espaço entre os pares de rodas. Estimativa realizada a partir do estudo de modelos de skates.
4.Motorização, 5. Sistema de sinalização e iluminação, 13. Estrutura resistente, 14. Reutilizável, 15. Fácil manutenção
O custo de produção total do sistema e do skate não deve exceder o valor de R$ 800.
Estimativa baseada na análise de preço de skates elétricos vendidos no Brasil.
9. Plug and Play, 11. Manual técnico bem elaborado, 12. Design intuitivo
O tempo médio para explicação, instalação e configuração do sistema não deve ultrapassar 30 minutos.
Considerando uma explicação didática eficiente para estudantes sem conhecimentos prévios do sistema, estima-se que 30 minutos seja suficiente.
1. Medição da velocidade atingida, 2. Medição da distância percorrida, 10. Open Source
O usuário deve conseguir acompanhar a velocidade atingida e a distância percorrida por meio de um dispositivo móvel.
A integração do skate a um aplicativo estimula o desenvolvimento de projetos e amplia o número de tópicos estudados a partir do produto-exemplo.
3. Monitoramento da posição e orientação, 10. Open Source
O sistema deve implementar o monitoramento da posição e orientação do skate durante uso.
O monitoramento constante dos movimentos do skate permite o desenvolvimento de um modelo 3D digital aprimorado do skate físico.
Fonte: Elaborado pelo autor.
2.3 RESTRIÇÕES TÉCNICAS
Foi definido que a escolha de componentes do sistema eletrônico deveria
considerar itens acessíveis e de baixo custo, para facilitar a reposição em caso de
mau funcionamento e não comprometer o orçamento da Fábrica do Futuro POLI. Por
isso, foi selecionado para uso neste projeto o microcontrolador ESP8266 NodeMcu

22
ESP-12, em razão de seu baixo custo e fácil acesso. Também foi considerada a
otimização da eficiência energética do sistema, para evitar a necessidade de
carregamento frequente da bateria que fornece energia elétrica ao sistema.
Uma vez que é esperado que a Fábrica do Futuro POLI receba a visita e
colaboração de diversos estudantes, professores e pesquisadores, a placa de
circuito impresso foi projetada e desenvolvida para ser relativamente fácil de ser
compreendida e não apresentar riscos de segurança para os visitantes.
2.4 BENCHMARKING COMPETITIVO
2.4.1 Principais dimensões de um skate
Utilizando como referência o modelo de skate da Fábrica do Futuro POLI, foi
realizada uma pesquisa para entender a variação das dimensões do shape de um
skate convencional. Esse estudo foi importante para obter uma estimativa do espaço
disponível para o acoplamento do sistema eletrônico embarcado no skate.
Em relação à largura (width) os modelos de skates variam entre 7” e 10”, essa
costuma ser a principal dimensão para escolha de um skate. Enquanto que a
distância entre parafusos internos (wheelbase) varia entre 13” e 15”.
Figura 7 - Principais dimensões do shape de um skate
Fonte: WAREHOUSE SKATEBOARDS, 2014.

23
2.4.2 Mercado nacional de skates elétricos
Uma vez que não foi encontrado um produto comercializado no Brasil
parecido com o projeto de sistema eletrônico embarcado proposto, foi realizada uma
análise comparativa de modelos de skates elétricos, visto que uma evolução
provável desse trabalho seja o desenvolvimento de um módulo de motorização.
A principal conclusão obtida da análise de skates elétricos nacionais foi que a
variação do preço está diretamente relacionado à potência do motor, sendo que as
demais especificações são bem semelhantes entre os modelos analisados.
Tabela 3 - Comparativo de modelos nacionais de skates elétricos
Audisat SE100 Maxfind MaxC Maxfind MaxA
Preço R$819,00 R$1.999,90 R$2.990,00
Controle
remoto Possui Possui Possui
Velocidade
máxima 20 km/h 20 km/h 28 km/h
Peso 5,6 kg 3,5 kg 5,5 kg
Peso
máximo
suportado
120 kg 80 kg 100 kg
Potência do
motor 350 W 500 W 1000 W
Capacidade
da bateria 2200 mAh 2200 mAh 2200 mAh
Autonomia
da bateria 3 horas 14 km 12 km
Fonte https://www.submarino.com.br/pr
oduto/28890426/skate-eletrico-a
udisat-se-100-10km-h-120kg
https://www.submarino.com.br
/produto/31100178/skate-eletri
co-maxfind-maxc-preto
https://www.submarino.com.
br/produto/43131561/skate-el
etrico-maxfind-max-a
Fonte: Elaborado pelo autor.

24
2.4.3 Mercado global de digital twins
Dado que o sistema eletrônico que será acoplado no skate tem como principal
objetivo adquirir dados para aprimorar o modelo digital do produto-exemplo, foi
realizada uma análise das empresas que têm investido no mercado de digital twins –
termo técnico utilizado para se referir à réplica digital de um sistema físico.
De acordo com relatório do Instituto Market Research Future (2018),
espera-se que o mercado global de digital twin tenha um crescimento de 2017 até
2023 de 37%. Além disso, atualmente as principais aplicações dessa tecnologia têm
sido para o design de aeronaves e turbinas, sendo as corporações de destaque
desse setor: General Electric, IBM Corporation, Microsoft Corporation, Oracle
Corporation, Cisco Systems, Inc., PTC, Inc., Ansys, Inc., Dassault Systèmes,
Siemens AG, Robert Bosch GmbH.
Figura 8 - Mercado global de digital twins
Fonte: MARKET RESEARCH FUTURE, 2018.

25
3 GERAÇÃO DE CONCEITOS
3.1 ALTERNATIVAS
Após definir e analisar todas as especificações de requisitos de marketing e
engenharia do projeto, foi realizado um brainstorming de possíveis soluções para
cada requisito de engenharia.
Tabela 4 - Alternativas de solução x Requisitos de engenharia
Dimensões restritas Baixo custo Didático Monitoramento de
velocidade e distância Monitoramento de
movimentos
Componentes SMD
Componentes usados ou seminovos
Manual técnico Sensor de efeito hall Acelerômetro e Giroscópio
Modularização Ferramentas de laboratórios da USP
Treinamento de monitores
Sensor de velocidade encoder
Integração com smartphone
Vídeo-aula
Fonte: Elaborado pelo autor.
3.2 AVALIAÇÃO INICIAL
A partir de uma avaliação breve das alternativas de solução, considerou-se
descartar: o uso de componentes SMD pela complexidade técnica e alto custo; e a
compra de componentes usados ou seminovos pela dificuldade de analisar a
qualidade e procedência.
3.3 ANÁLISE DE FORÇAS E FRAQUEZAS
Para avaliar as alternativas de solução remanescentes, utilizou-se o método
de análise de forças e fraquezas, em que se atribui pesos para cada ponto forte e
fraco, sendo que no final, a alternativa com maior soma é escolhida como solução
mais adequada para ser desenvolvida.

26
3.3.1 Didático
Para o requisito didático, o resultado da análise de forças e fraquezas foi:
manual técnico (+2), treinamento de monitores (-1) e videoaula (-1).
Tabela 5 - Análise de alternativas: Didático Forças Fraquezas
Manual técnico
• Alta padronização ( + + + + ) • Realização de atualizações e correções de forma fácil ( + + )
• Necessidade de imprimir novas versões em caso de atualização ( – ) • Pouca interação com o usuário ( – – – )
Treinamento de monitores
• Diminuição da demanda do professor responsável ( + + + ) • Compartilhamento do conhecimento ( + + )
• Necessidade de realizar edital de inscrição e treinamentos ( – – ) • Alta rotatividade ( – – – – )
Videoaula
• Conteúdo apresentado de forma interativa ( + + + + ) • Demonstração de situações na prática ( + + + )
• Planejamento complexo para obter uma didática eficiente ( – – – ) • Dificuldade de acessar rapidamente um tópico específico ( – – – – )
Fonte: Elaborado pelo autor.
3.3.2 Monitoramento de velocidade e distância
Para o requisito monitoramento de velocidade atingida e distância percorrida,
o resultado da análise de forças e fraquezas foi: sensor de efeito hall (+1) e sensor
de velocidade encoder (-2).

27
Tabela 6 - Análise de alternativas: Monitoramento de velocidade e distância Forças Fraquezas
Sensor de efeito hall
• Fácil implementação do sensor ( + + ) • Não interfere na estrutura do skate ( + + + + )
• Possibilidade de interferência eletromagnética ( – – – ) • Necessidade de acoplar um ímã ( – – )
Sensor de velocidade
encoder
• Medição com alta precisão ( + + + ) • Sensores disponíveis no almoxarifado do PSI-EPUSP ( + + )
• Medição impactada em ambientes com vibração mecânica ( – – – ) • Necessidade de realizar adaptações na estrutura física do skate ( – – – – )
Fonte: Elaborado pelo autor.
3.3.3 Monitoramento de movimentos
Para o requisito monitoramento de movimentos do skate, o resultado da
análise de forças e fraquezas foi: acelerômetro e giroscópio (+2) e integração com
smartphone (-2).
Tabela 7 - Análise de alternativas: Monitoramento de movimentos Forças Fraquezas
Acelerômetro e Giroscópio
• Integração com microcontrolador ( + + + ) • Monitoramento preciso do skate ( + + + )
• Componente de alto custo ( – ) • Baixa resistência à impactos ( – – – )
Integração com
smartphone
• Redução do custo total do sistema embarcado no skate ( + + ) • Aproveitamento de sensores do smartphone do usuário ( + + + )
• Complexidade técnica considerável para desenvolver aplicativo mobile ( – – – ) • Medidas com baixa precisão ( – – – – )
Fonte: Elaborado pelo autor.

28
3.4 ALTERNATIVAS ESCOLHIDAS
Considerando os resultados obtidos na avaliação inicial de alternativas e da
análise de forças e fraquezas, foram obtidas as alternativas de soluções
consideradas mais adequadas para cada requisito de engenharia do sistema
eletrônico embarcado.
Tabela 8 - Solução escolhidas x Requisitos de engenharia
Dimensões restritas Baixo custo Didático Monitoramento de
velocidade e distância Monitoramento de
movimentos
Modularização Ferramentas de laboratórios da USP Manual técnico Sensor de efeito hall Acelerômetro e
Giroscópio
Fonte: Elaborado pelo autor.

29
4 DECOMPOSIÇÃO FUNCIONAL
A fim de obter um nível maior de detalhamento e entendimento do sistema
eletrônico embarcado, foi elaborada uma decomposição funcional, tendo como
referência a abordagem Top-Down – metodologia iterativa em que se divide um
módulo inicial em vários sub módulos, define a entrada, a saída e o comportamento,
até atingir componentes tangíveis.
4.1 PROJETO NÍVEL 0
Devido à restrição de espaço livre para acoplamento do sistema embarcado
abaixo do shape do skate e a preferência da Fábrica do Futuro POLI pela
modularização da solução, decidiu-se que o sistema eletrônico embarcado deveria
ser dividido em 2 módulos independentes: o módulo A, para monitorar a velocidade
atingida e a distância percorrida, e o módulo B, para monitorar os movimentos do
skate.
Dessa forma, os estudantes que irão interagir com o produto-exemplo
poderão escolher qual dos módulos acoplar no skate, aumentando o número de
possibilidades de customização e diminuindo a complexidade de projeto de um
módulo único com diversas funcionalidades.
4.1.1 Módulo A - Monitoramento de velocidade e distância
Para detalhar o funcionamento do módulo de monitoramento de velocidade
atingida e distância percorrida pelo skate, foi elaborado um diagrama de blocos e
uma tabela descritiva.
Figura 9 - Módulo A: Representação do Nível 0
Fonte: Elaborado pelo autor.

30
Tabela 9 - Módulo A: Descrição do Nível 0
Módulo Monitoramento de velocidade e distância
Entradas Energia elétrica, Rotação da roda
Saídas Banco de dados
Funcionalidade
Interpreta a rotação da roda do skate e
envia para um banco de dados a medição
da velocidade e distância
Fonte: Elaborado pelo autor.
4.1.2 Módulo B - Monitoramento de movimentos
Para detalhar o funcionamento do módulo de monitoramento de movimentos
do skate, foi elaborado um diagrama de blocos e uma tabela descritiva.
Figura 10 - Módulo B: Representação do Nível 0
Fonte: Elaborado pelo autor.
Tabela 10 - Módulo B: Descrição do Nível 0
Módulo Monitoramento de movimentos
Entradas Energia elétrica, Movimentos do skate
Saídas Website
Funcionalidade
Interpreta a posição e orientação do skate e envia
os dados para um website responsável por simular
os movimentos do skate em tempo real
Fonte: Elaborado pelo autor.

31
4.2 PROJETO NÍVEL 1
4.2.1 Módulo A - Monitoramento de velocidade e distância
Após a representação do nível 0 do módulo para monitoramento de
velocidade atingida e distância percorrida pelo skate, realizou-se a representação do
nível 1, a fim de explicar detalhadamente a relação entre os submódulos internos.
Figura 11 - Módulo A: Representação do Nível 1
Fonte: Elaborado pelo autor.
4.2.2 Módulo B - Monitoramento de movimentos
Após a representação do nível 0 do módulo para monitoramento de
movimentos do skate, realizou-se a representação do nível 1, a fim de explicar
detalhadamente a relação entre os submódulos internos.

32
Figura 12 - Módulo B: Representação do Nível 1
Fonte: Elaborado pelo autor.

33
5 GERENCIAMENTO DO PROJETO
O projeto de formatura do curso de Engenharia Elétrica - Ênfase em
Eletrônica e Sistemas da Escola Politécnica da USP é dividido basicamente em 2
etapas. Durante um semestre é realizado o planejamento e o protótipo do projeto a
ser avaliado, enquanto que no semestre seguinte é realizada a implementação,
validação e documentação do projeto.
A etapa 1 foi realizada durante o 2º semestre de 2018 e a etapa 2 durante o
1º semestre de 2019. Tendo em vista que o projeto foi realizado individualmente e
que teve um nível de dificuldade técnica razoavelmente elevado, foi elaborado um
cronograma de referência para organizar as atividades realizadas e construído um
painel de tarefas para otimizar a gestão de tempo.
5.1 CRONOGRAMA DE ATIVIDADES
A fim de apresentar uma visão geral do desenvolvimento do projeto aos
orientadores, foi elaborado um cronograma com atividades-chave. Resumidamente,
a fase de desenvolvimento do projeto consistiu em estudo de produtos relacionados,
compra de componentes, desenvolvimento de provas de conceito, implementação,
validação e documentação.
Figura 13 - Planejamento de atividades para 2019
Fonte: Elaborado pelo autor.

34
5.2 GERENCIAMENTO DE TAREFAS
Tendo em vista que o cronograma do projeto representa uma visão pouco
detalhada do dia a dia do projeto, foi construído um painel, na aplicação web Asana,
para gerenciamento das tarefas do projeto, a fim de auxiliar na gestão de tempo e
colaborar com a priorização entre tarefas.
Inicialmente, todas as tarefas a serem realizadas foram colocadas na coluna
Backlog, e classificadas de acordo com a data para ser realizada. As atividades com
maior prioridade eram colocadas na coluna To Do, enquanto que as atividades que
estavam sendo realizadas eram colocadas na coluna In Progress. Por fim, quando a
tarefa era concluída, bastava colocar uma confirmação e alterar para a coluna Done.
Figura 14 - Painel de gerenciamento de tarefas
Fonte: Elaborado pelo autor.
5.3 ORÇAMENTO E COMPRAS
Como o sistema eletrônico embarcado está inserido no contexto da Fábrica
do Futuro POLI e tem como objetivo servir de objeto de estudo para estudantes,
professores e pesquisadores, para realizar a compra de componentes para o projeto,
foi possível utilizar parte do orçamento que o laboratório conseguiu em uma parceria
com o Fundo Patrimonial Amigos da Poli.
35
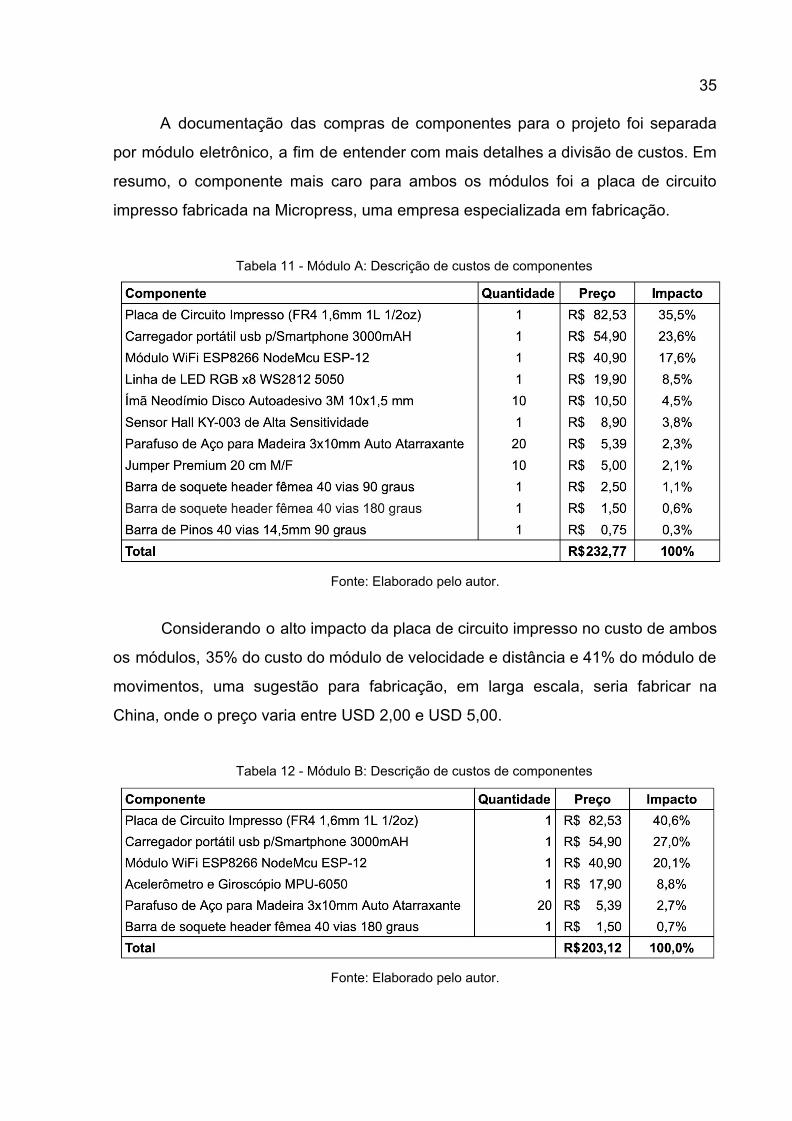
A documentação das compras de componentes para o projeto foi separada
por módulo eletrônico, a fim de entender com mais detalhes a divisão de custos. Em
resumo, o componente mais caro para ambos os módulos foi a placa de circuito
impresso fabricada na Micropress, uma empresa especializada em fabricação.
Tabela 11 - Módulo A: Descrição de custos de componentes
Fonte: Elaborado pelo autor.
Considerando o alto impacto da placa de circuito impresso no custo de ambos
os módulos, 35% do custo do módulo de velocidade e distância e 41% do módulo de
movimentos, uma sugestão para fabricação, em larga escala, seria fabricar na
China, onde o preço varia entre USD 2,00 e USD 5,00.
Tabela 12 - Módulo B: Descrição de custos de componentes
Fonte: Elaborado pelo autor.

36
6 PROTOTIPAÇÃO
6.1 MÓDULO A - MONITORAMENTO DE VELOCIDADE E DISTÂNCIA
Para verificar a possibilidade e dificuldade de implementação do módulo de
monitoramento de distância percorrida e velocidade atingida, foi desenvolvido um
protótipo, baseado em Thomsen (2014), que funciona da seguinte forma: quando o
sensor de efeito hall identifica o aumento do campo magnético em sua proximidade,
um led vermelho acende e um sinal é enviado para o microcontrolador (Arduino
Uno), confirmando a proximidade do ímã fixado na roda do skate.
Figura 15 - Módulo A: Identificação do ímã acoplado na roda
Fonte: Elaborado pelo autor.
Além disso, a fim de validar a eficiência do protótipo, foi elaborado um teste
em que o sensor de efeito hall realizava a contagem do número de voltas da roda do
skate dentro de um intervalo de tempo de 5s. Sabendo que uma volta completa da
roda corresponde a um deslocamento de 16cm do skate, bastou o microcontrolador
multiplicar 16cm pelo número de voltas para saber a distância percorrida pelo skate
em um intervalo de 5s, e depois dividir essa distância percorrida por 5s para
encontrar a velocidade atingida em cm/s em um intervalo de 5s de medição.

37
Figura 16 - Módulo A: Exemplo de funcionamento do teste realizado
Fonte: Elaborado pelo autor.
Tabela 13 - Módulo A: Resultados do teste realizado
Fonte: Elaborado pelo autor.

38
6.2 MÓDULO B - MONITORAMENTO DE MOVIMENTOS
Além do desenvolvimento do protótipo para monitoramento de velocidade e
distância, foi construído também um protótipo para monitoramento de movimentos,
baseado em Townsend et al. (2015), com o objetivo de analisar o grau de
complexidade para configurar e implementar o módulo eletrônico embarcado
responsável por monitorar os movimentos do skate.
No protótipo construído foi utilizado o sensor MPU-6050, que contém um
acelerômetro e um giroscópio num único chip tipo MEMS. Além disso, o sensor
possui alta precisão devido ao conversor analógico digital de 16-bits integrado para
cada canal, possibilitando a captura dos canais X, Y e Z ao mesmo tempo.
Com base nas medições realizadas pelo sensor, o Módulo WiFi ESP8266
NodeMcu ESP-12 conectado ao sensor envia as medições para uma interface web
(desenvolvida pelo autor e descrita na seção 7.2.2) associada a um modelo de skate
3D, possibilitando simular a movimentação de um objeto virtual com base nos
movimentos do sensor real físico.
Figura 17 - Módulo B: Simulação da movimentação do skate
Fonte: Elaborado pelo autor.

39
7 IMPLEMENTAÇÃO
Visto que os resultados apresentados na Tabela 13 confirmam que o protótipo
de monitoramento de velocidade e distância possui o funcionamento esperado, e
que a Figura 17 comprova que o protótipo de monitoramento de movimentos tem a
capacidade de controlar a movimentação do modelo digital do skate, foi dado início à
próxima fase do projeto, a de implementação.
A fase de implementação corresponde ao desenvolvimento dos módulos
descritos anteriormente, e foi subdividida em: (1) desenvolvimento do hardware dos
módulos eletrônicos; (2) desenvolvimento dos softwares que interpretam os dados
adquiridos pelos sensores de cada módulo; (3) fabricação de um suporte para os
módulos; e (4) montagem e fixação dos módulos no skate.
7.1 DESENVOLVIMENTO DE HARDWARE
7.1.1 Esquema elétrico
Após realizar a construção dos protótipos em protoboards, os circuitos
elétricos foram representados graficamente em esquemas elétricos utilizando o
Autodesk EAGLE, um software de automação de projetos eletrônicos.
Figura 18 - Esquemas elétricos: Módulo A e Módulo B
Fonte: Elaborado pelo autor.

40
7.1.2 Layout de placa de circuito impresso
Com base nos esquemas elétricos elaborados, foram desenvolvidos os
layouts da placa de circuito impresso (PCI) de cada módulo, também utilizando o
Autodesk EAGLE. A fim de facilitar a fabricação de suportes, ambos os módulos
foram projetados com a mesma altura e largura de placa.
Figura 19 - Layout da PCI: Módulo A e Módulo B
Fonte: Elaborado pelo autor.
7.1.3 Fabricação de placa de circuito impresso
Uma vez definido o layout de cada módulo eletrônico, foi possível gerar os
arquivos gerber, necessários para a fabricação industrial da placa de circuito
impresso. Com base no levantamento de orçamentos em 4 empresas: TEC-CI, VB
Circuitos, Micropress e ART-CI, foi escolhida a empresa Micropress como fabricante
das placas de circuito impresso do projeto, pela alta qualidade e desconto oferecido.

41
Figura 20 - PCIs fabricadas: Módulo A (frente) e Módulo B (verso)
Fonte: Elaborado pelo autor.
7.2 DESENVOLVIMENTO DE SOFTWARE
7.2.1 Módulo A - Monitoramento de velocidade e distância
Para o desenvolvimento do banco de dados do módulo de monitoramento de
velocidade atingida e distância percorrida, foi utilizado um banco de dados
hospedado na nuvem que possui integração facilitada com aplicações web, sensores
e bibliotecas para o microcontrolador utilizado no projeto.
Além disso, cabe ressaltar que a configuração do banco de dados, a
integração com o microcontrolador e a criação da plataforma web para visualização
de dados foram baseadas no projeto de Viebrantz (2017).
O software do módulo A é subdividido em: (1) código do microcontrolador
ESP-12E que faz a aquisição de dados e envia via WiFi; (2) banco de dados
hospedado na nuvem (Firebase Realtime Database) que recebe os dados via WiFi; e
(3) interface web responsável por apresentar os dados adquiridos, verificar se o
skate está em movimento e controlar a lanterna de led do skate.

42
Figura 21 - Módulo A: Banco de dados na nuvem
Fonte: Elaborado pelo autor.
Figura 22 - Módulo A: Interface com última medição realizada e led desligado
Fonte: Elaborado pelo autor.

43
Figura 23 - Módulo A: Interface com dados históricos e led ligado
Fonte: Elaborado pelo autor.
7.2.2 Módulo B - Monitoramento de movimentos
O desenvolvimento da interface para visualização 3D dos dados adquiridos
pelo sensor MPU-6050, que tem embarcado um chip que realiza o processamento
digital de movimentos, foi baseado nos projetos descritos em Alomar (2017) e
Llamas (2016).
O software do módulo B é subdividido em: (1) código do microcontrolador
(ESP-12E) que envia os dados processados pelo sensor via WiFi; e (2) interface web
que recebe os dados via WiFi e simula em tempo real no modelo virtual do skate os
movimentos do skate físico.
A interface web de visualização 3D foi hospedada em um servidor local
Apache e desenvolvida com as linguagens de programação HTML5 e PHP e a
biblioteca Three.js. Durante o desenvolvimento da interface foi considerado o uso de
um servidor na nuvem, mas para garantir baixa latência do sistema e rápida
atualização do modelo virtual, foi escolhido um servidor local para hospedagem.

44
Figura 24 - Módulo B: Interface de visualização 3D e skate físico
Fonte: Elaborado pelo autor.
Além da visualização do modelo virtual do skate, a interface web também
apresenta um monitoramento em tempo real de ângulos que representam a
movimentação do sensor de posição e orientação em torno de três eixos ortogonais
localizados próximo ao centro de massa do shape do skate - os eixos longitudinal,
lateral e perpendicular. O movimento em torno do eixo longitudinal é chamado de
roll, o movimento em torno do eixo lateral é chamado de pitch e o movimento em
torno do eixo perpendicular é chamado de yaw.
Figura 25 - Módulo B: Variáveis utilizadas para representar a movimentação do skate
Fonte: Adaptado de HOW THINGS FLY, 2012.

45
Figura 26 - Módulo B: Interface de monitoramento apresentando Roll, Pitch e Yaw
Fonte: Elaborado pelo autor.
7.3 FABRICAÇÃO DE SUPORTE PARA MÓDULOS
A fim de facilitar o acoplamento das placas de circuito impresso no skate e
garantir uma segurança maior dos módulos eletrônicos, foi projetado e fabricado em
um suporte sob medida em uma das impressoras 3D da Fábrica do Futuro POLI.
Figura 27 - Dimensões do suporte para módulos
Fonte: Elaborado pelo autor.

46
Figura 28 - Visualização 3D do projeto de suporte para módulos
Fonte: Elaborado pelo autor.
Cabe ressaltar que o suporte foi projetado para ser utilizado com os dois tipos
de módulo, mas que futuramente seria interessante projetar modelos de suporte
mais customizados que protejam os módulos da chuva e de intempéries climáticas.
Figura 29 - Resultado da impressão 3D do suporte para módulos
Fonte: Elaborado pelo autor.
7.4 MONTAGEM E FIXAÇÃO DE MÓDULOS
Após a fabricação das placas de circuito impresso, o desenvolvimento de
software e a criação de um suporte, realizou-se a solda de componentes em cada
módulo, o encaixe do módulo com o suporte e por fim, a fixação no skate por meio
de parafusos para madeira auto atarraxantes.

47
Figura 30 - Módulos eletrônicos com componentes soldados e suporte
Fonte: Elaborado pelo autor.
Figura 31 - Módulos eletrônicos fixados no skate
Fonte: Elaborado pelo autor.

48
Figura 32 - Visão geral do skate com módulos fixados
Fonte: Elaborado pelo autor.
Por fim, apesar do módulo de iluminação não ter um peso considerável na
árvore de objetivos representada na Figura 6, foi implementado e fixado um sistema
de iluminação de LED controlado pela mesma interface utilizada para apresentação
dos dados de monitoramento de velocidade e distância.
Figura 33 - Módulo de iluminação em funcionamento
Fonte: Elaborado pelo autor.

49
8 RESULTADOS
8.1 VISÃO GERAL
Os resultados mostrados nas seções a seguir explicam detalhadamente o
funcionamento dos módulos eletrônicos desenvolvidos. Resumidamente, em todos
os testes realizados as medições apresentaram resultados consistentes, ou seja, a
cada repetição do teste, o módulo eletrônico se comportou da mesma forma. Além
disso, apesar da metodologia usada em cada teste não ser tão sofisticada, as
medições foram suficientes para obter conclusões prévias.
Durante os processos de implementação e testes foi observado que os
sistemas embarcados projetados possuem potencial não só para incentivar e
aprimorar novas pesquisas no contexto da indústria 4.0 e da Fábrica do Futuro POLI,
mas também para se tornarem produtos comercializáveis com foco em colaborar no
treinamento de skatistas profissionais.
Figura 34 - Skate com módulos em funcionamento
Fonte: Elaborado pelo autor.

50
8.2 MÓDULO A - MONITORAMENTO DE VELOCIDADE E DISTÂNCIA
A fim de validar as medidas realizadas pelo módulo de monitoramento de
velocidade e distância, foi realizado um teste parecido com o descrito na seção 6.1.
Dado um intervalo de tempo 5s, o sensor de efeito hall realizou a contagem do
número de voltas da roda do skate nesse intervalo, enquanto que o microcontrolador
fez o cálculo da distância percorrida acumulada e da velocidade atingida durante o
intervalo de 5s, e enviou essas medições para um banco de dados na nuvem.
Além de verificar a eficiência de medições, esse teste também serviu para
validar se a interface web informa corretamente se o skate está em movimento e
apresenta em tempo real os dados enviados pelo sensor acoplado ao módulo.
Figura 35 - Módulo A: Demonstração de funcionamento
Fonte: Elaborado pelo autor.

51
Figura 36 - Módulo A: Visualização do banco de dados durante teste
Fonte: Elaborado pelo autor.
Considerando os resultados apresentados na Tabela 14, pode-se observar
que a medição realizada pelo módulo testado possui uma variação de até 30%
comparado com o valor esperado de medição. Além disso, dada a dificuldade
considerável de realizar visualmente a contagem do número de voltas efetuadas
pela roda do skate, seria interessante, futuramente, colocar o skate sobre uma
esteira de academia e comparar as medições do módulo com a medição da própria
esteira, como feito no trabalho realizado em Hare (2012).
Tabela 14 - Módulo A: Análise de resultados do teste realizado
Fonte: Elaborado pelo autor.

52
8.3 MÓDULO B - MONITORAMENTO DE MOVIMENTOS
Para validar o funcionamento e observar os resultados da implementação do
módulo de monitoramento de movimentos, foi realizado um teste que consistiu em
posicionar o skate em 6 posições diferentes para então observar a posição do
modelo digital do skate e a variação nas medições de Roll, Pitch e Yaw.
Tendo em vista os resultados apresentados, pode-se considerar que o
modelo digital desenvolvido consegue representar a posição e orientação do modelo
físico em algumas posições pré-determinadas.
Figura 37 - Módulo B: Demonstração de funcionamento

53
Fonte: Elaborado pelo autor.
8.4 APRESENTAÇÕES EXCLUSIVAS
Nos meses de abril e junho de 2019, a Fábrica do Futuro POLI esteve em
destaque. Participou de uma reportagem da GloboNews sobre o futuro da educação
e recebeu visita técnica de associados da Associação Brasileira de Internet Industrial
(ABII). Em ambos momentos foram apresentados resultados parciais do projeto e
recebidas recomendações e sugestões de melhoria.
Figura 38 - Apresentação do projeto em reportagem televisiva
Fonte: GLOBONEWS, 2019.

54
Figura 39 - Apresentação do projeto em visita técnica
Fonte: Fábrica do Futuro POLI.

55
9 CONSIDERAÇÕES FINAIS
Tendo em vista a declaração de objetivos do projeto descrita na seção 1.3
deste documento e os resultados apresentados na seção 8, pode-se afirmar que o
projeto e desenvolvimento do sistema eletrônico embarcado para o modelo de skate
da Fábrica do Futuro POLI foi bem sucedido e tem um grande potencial para
contribuir no avanço das pesquisas do laboratório e com atividades práticas nas
disciplinas dos cursos de Engenharia da Escola Politécnica e de outras instituições
parceiras.
Além disso, o projeto contribuiu de forma significativa na formação acadêmica
do autor, visto que para elaborar e construir os módulos eletrônicos do sistema
embarcado foi necessário estudar não apenas circuitos eletrônicos e sensores, mas
também aprender sobre requisitos de marketing, comportamento do usuário e
inovações relacionadas ao setor de mobilidade urbana.
Considerando que esse projeto continuará a ser desenvolvido outros
estudantes no contexto da Fábrica do Futuro POLI, sugere-se como principais
melhorias a desenvolver e implementar: a otimização do processo de envio de dados
via WiFi, integração de módulos eletrônicos e integração de dados de GPS do
celular com o módulo de monitoramento de velocidade e distância.
Espera-se também que esse projeto tenha impacto em pesquisas futuras
sobre o tema skate conectado e que, de alguma forma, sirva de inspiração para
outros estudantes realizarem projetos de formatura para o aprimoramento de
laboratórios de pesquisa e desenvolvimento da Universidade de São Paulo.

56
REFERÊNCIAS BIBLIOGRÁFICAS
ALOMAR, A. Proyecto #3 ESP8266 – Manipular Modelo 3D con MPU6050 (PHP + WebGL + Three.js). 2017. Disponível em: <http://www.sinaptec.alomar.com.ar/2017/ 10/proyecto-3-esp8266-manipular-modelo-3d.html>. Acesso em: abr. 2019. BAINES, T. S. et al. State-of-the-art in product-service systems. Proceedings of the Institution of Mechanical Engineers, Part B: Journal of Engineering Manufacture. v. 221, n. 10, p. 1543-1552, 2007. BARIFOUSE, R. Redes de bicicletas sem estações chegam ao Brasil: solução ou novo problema para as cidades? BBC News Brasil, 2018. Disponível em: <https://www.bbc.com/portuguese/brasil-45039832>. Acesso em: set. 2018. CB INSIGHTS. Future Factory: How Technology Is Transforming Manufacturing. Research Briefs, 2018. Disponível em: <https://www.cbinsights.com/research/future- factory-manufacturing-tech-trends/>. Acesso em: mar. 2019. CHENG, Y. W. Fábrica POLI: detalhamento de uma fábrica de ensino no contexto da Indústria 4.0. São Paulo, 140 p., 2016. GLOBONEWS. Temporada 2: O futuro já começou. GloboNews em Movimento, jun. 2019. Disponível em: <https://globosatplay.globo.com/globonews/v/7682518/>. Acesso em: jun. 2019. GUIMARÃES, M. O. Fábrica do Futuro POLI – Implementação de uma fábrica de ensino voltada para a Indústria 4.0. São Paulo, 135 p., 2017. HARE, J. Skateboard/longboard speedometer project. IOP Publishing: Journal of Physics Education. v. 47, n. 4, p. 409-417, 2012. HOW THINGS FLY. Roll, Pitch, and Yaw. Smithsonian National Air and Space Museum, 2012. Disponível em: <https://howthingsfly.si.edu/flight-dynamics/roll-pitch- and-yaw>. Acesso em: jun. 2019. INBOARD TECHNOLOGY. M1. 2016. Disponível em: <https://www.inboardtech nology.com/products/m1-electric-skateboard>. Acesso em: out. 2018. LAMANCUSA, J. S. et al. The Learning Factory: Industry-Partnered Active Learning. Journal of Engineering Education, v. 97, n.1, p. 5-11, 2008. LASI, H. et al. Industry 4.0. Business & Information Systems Engineering, vol. 6, no. 4, pp. 239-242, 2014. LLAMAS, L. Determinar la orientación con Arduino y el IMU MPU-6050. 2016. Disponível em: <https://www.luisllamas.es/arduino-orientacion-imu-mpu-6050/>. Acesso em: abr. 2019.

57
MARKET RESEARCH FUTURE. Digital Twin Market Research Report - Global Forecast 2023. Half-Cooked Research Reports, 100 p., 2018. Disponível em: <https: //www.marketresearchfuture.com/reports/digital-twin-market-4504>. Acesso em: nov. 2018. MELLOW BOARDS. Buy The Finest Electric Skateboard & Longboard Kit. 2017. Disponível em: <https://www.mellowboards.com/en/electric-skateboard-kit>. Acesso em: out. 2018. NAKANO, D. Laboratório Didático Fábrica do Futuro POLI. Edital Pró-Reitoria de Graduação, Programa Santander Universidades: e-Grad, ed. 2015-2016, 2016. NAOE, A. Fábrica inteligente vai trazer a indústria do futuro para a universidade. Jornal da USP, 2016. Disponível em: <https://jornal.usp.br/?p=9489>. Acesso em: ago. 2018. QI, Q.; TAO, F. Digital Twin and Big Data Towards Smart Manufacturing and Industry 4.0: 360 Degree Comparison. IEEE Access, vol. 6, pp. 3585-3593, 2018. SHIEBER, J. Inboard Technology raises $8 million to be the Tesla of electric skateboards. TechCrunch, 2017. Disponível em: <https://techcrunch.com/2017/11/ 16/inboard-technology-raises-8-million-to-be-the-tesla-of-electric-skateboards/amp>. Acesso em: nov. 2018. SILVA, J. C. Fábrica POLI: Concepção de uma fábrica de ensino no contexto da Indústria 4.0. São Paulo, 121 p., 2015. SYRMO. A smart pad that tracks your session trick by trick. 2014. Disponível em: <http://syrmo.com/>. Acesso em: nov. 2018. THOMSEN, A. Sensor Hall KY-003 com Servo Tower Pro SG-5010. Blog FilipeFlop, 2014. Disponível em: <https://www.filipeflop.com/blog/sensor-hall-servo -tower-pro-sg5010>. Acesso em: nov. 2018. TOWNSEND, K. et al. Adafruit BNO055 Absolute Orientation Sensor. Adafruit Learning System, 2015. Disponível em: <https://learn.adafruit.com/adafruit-bno055- absolute-orientation-sensor?view=all>. Acesso em: nov. 2018. VIEBRANTZ, A. Sensoriamento e Controle Realtime com Firebase e ESP8266. Medium, 2017. Disponível em: <https://medium.com/@alvaroviebrantz/sensoriament o-realtime-com-firebase-e-esp8266-6e54b9bff1c1>. Acesso em: mar. 2019. WAGNER, U. et al. The State-of-the-Art and Prospects of Learning Factories. Procedia CIRP, vol. 3, p. 109-114, 2012. WAREHOUSE SKATEBOARDS. Skateboard Deck Buying Guide. 2014. Disponível em: <https://www.warehouseskateboards.com/help/Skateboard-Decks-Buying-Guide >. Acesso em: out. 2018.

58
APÊNDICE A - Ranking de Objetivos
Ranking de Objetivos - Nível 1
Tecnológico Portátil Fácil de usar Durável Média Geométrica Peso
Tecnológico 1 3 2 3 2,06 0,45
Portátil 1/3 1 1/3 1/2 0,49 0,11
Fácil de usar 1/2 3 1 2 1,32 0,28
Durável 1/3 2 1/2 1 0,76 0,16
Fonte: Elaborado pelo autor
Ranking de Objetivos - Nível 2 (Tecnológico)
Velocidade
atingida Distância percorrida
Posição e Orientação Motorização Sinalização
e Iluminação Média
Geométrica Peso
Velocidade atingida 1 1 2 4 3 1,89 0,32
Distância percorrida 1 1 2 4 3 1,89 0,32
Posição e Orientação 1/2 1/2 1 3 2 1,08 0,18
Motorização 1/4 1/4 1/3 1 1/2 0,40 0,07
Sinalização e Iluminação 1/3 1/3 1/2 2 1 0,64 0,11
Fonte: Elaborado pelo autor
Ranking de Objetivos - Nível 2 (Portátil)
Leve Pequeno Fácil de transportar
Média Geométrica Peso
Leve 1 1/3 2 0,87 0,25
Pequeno 3 1 3 2,08 0,59
Fácil de transportar 1/2 1/3 1 0,55 0,16
Fonte: Elaborado pelo autor

59
Ranking de Objetivos - Nível 2 (Fácil de usar)
Plug and
Play Open Source
Manual técnico
Design intuitivo
Média Geométrica Peso
Plug and Play
1 1/3 3 2 1,19 0,26
Open Source 3 1 2 3 2,06 0,45
Manual técnico 1/3 1/2 1 1/2 0,54 0,12
Design intuitivo 1/2 1/3 2 1 0,76 0,17
Fonte: Elaborado pelo autor
Ranking de Objetivos - Nível 2 (Durável)
Estrutura resistente Reutilizável Fácil
manutenção Média
Geométrica Peso
Estrutura resistente 1 1/3 1/2 0,55 0,16
Reutilizável 3 1 2 1,82 0,54
Fácil manutenção 2 1/2 1 1,00 0,30
Fonte: Elaborado pelo autor