navegação robótica por odor
TRANSCRIPT
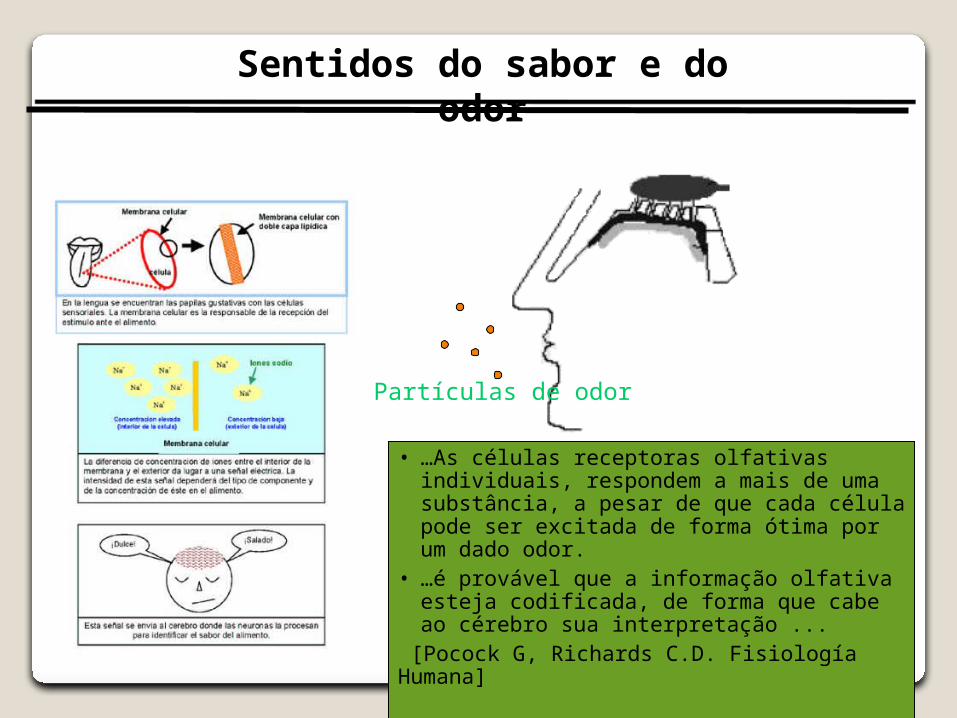
Sentidos do sabor e do odor
• …As células receptoras olfativas individuais, respondem a mais de uma substância, a pesar de que cada célula pode ser excitada de forma ótima por um dado odor.
• …é provável que a informação olfativa esteja codificada, de forma que cabe ao cérebro sua interpretação ...
[Pocock G, Richards C.D. Fisiología Humana]
Partículas de odor
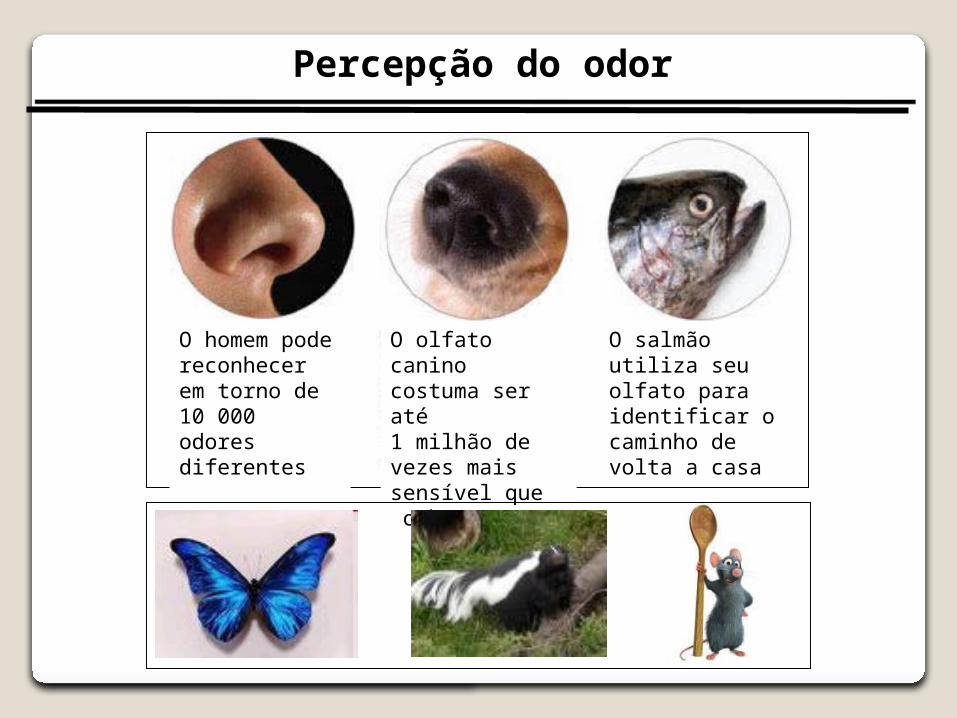
O homem pode reconhecer em torno de 10 000 odores diferentes
O olfato canino costuma ser até 1 milhão de vezes mais sensível que o homem
O salmão utiliza seu olfato para identificar o caminho de volta a casa
Percepção do odor
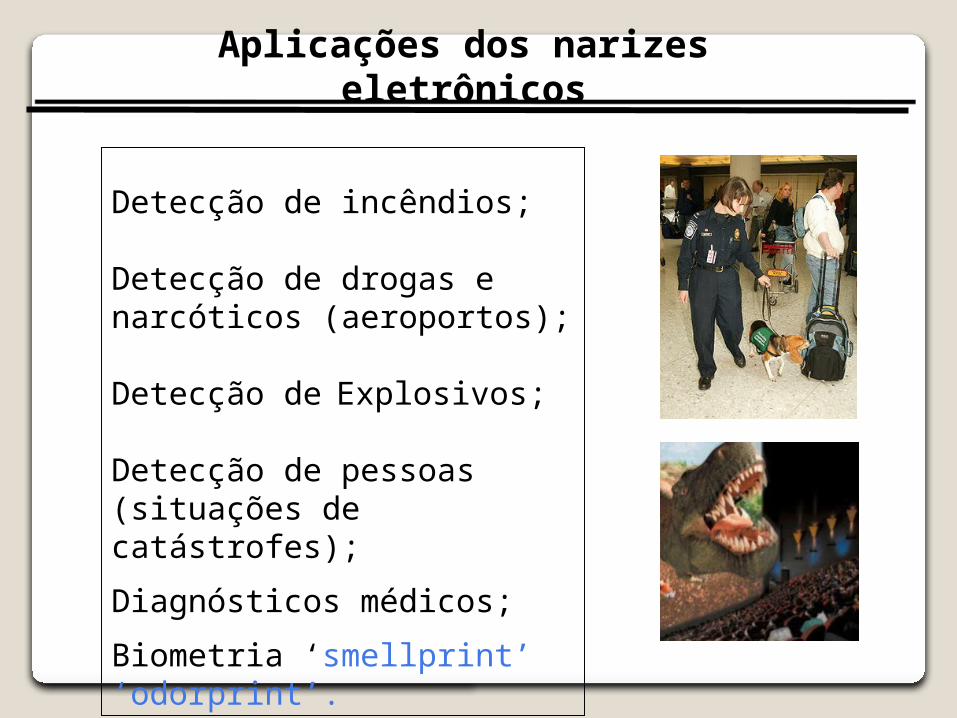
Detecção de incêndios;
Detecção de drogas e narcóticos (aeroportos);
Detecção de Explosivos;
Detecção de pessoas (situações de catástrofes);
Diagnósticos médicos;
Biometria ‘smellprint’ ‘odorprint’.
Aplicações dos narizes eletrônicos
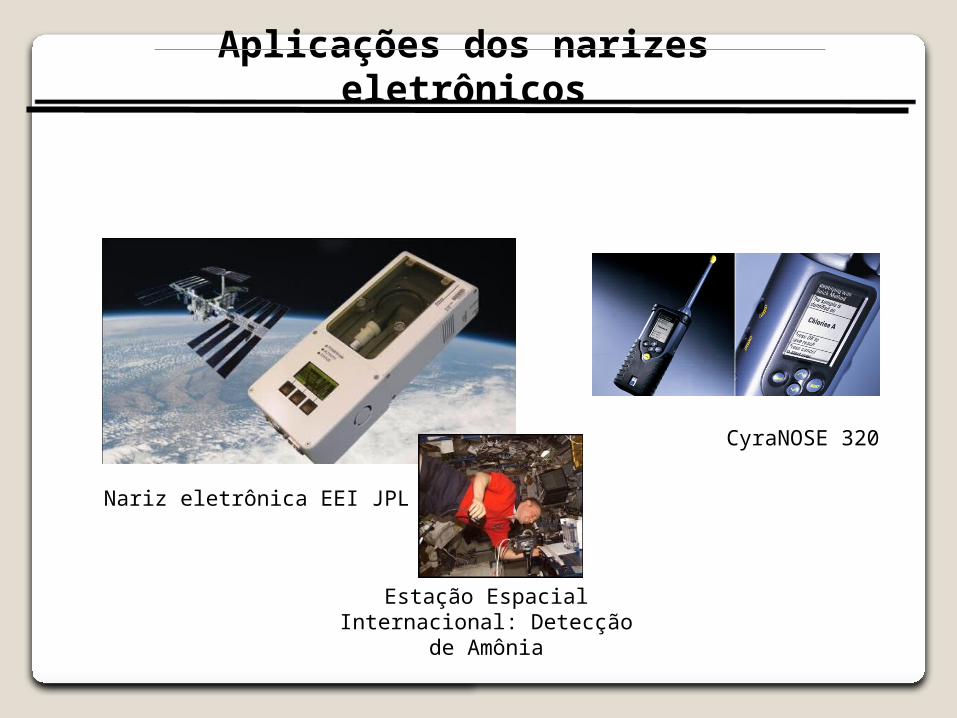
Nariz eletrônica EEI JPL
CyraNOSE 320
Aplicações dos narizes eletrônicos
Estação Espacial Internacional: Detecção de Amônia
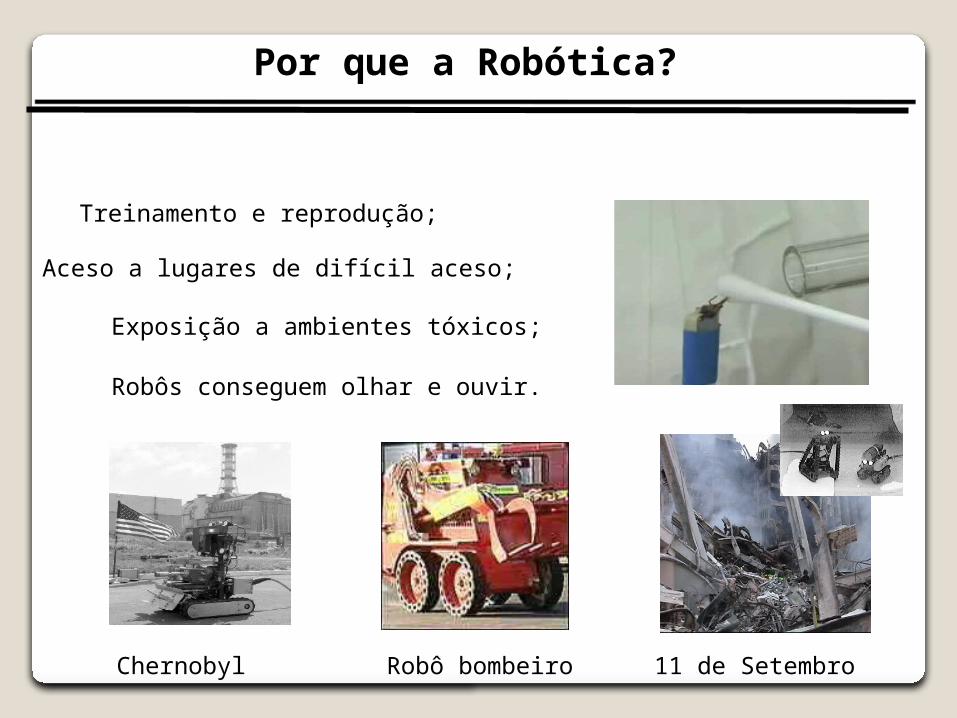
Por que a Robótica?
Treinamento e reprodução;
Aceso a lugares de difícil aceso;
Exposição a ambientes tóxicos;
Chernobyl Robô bombeiro 11 de Setembro
Robôs conseguem olhar e ouvir.
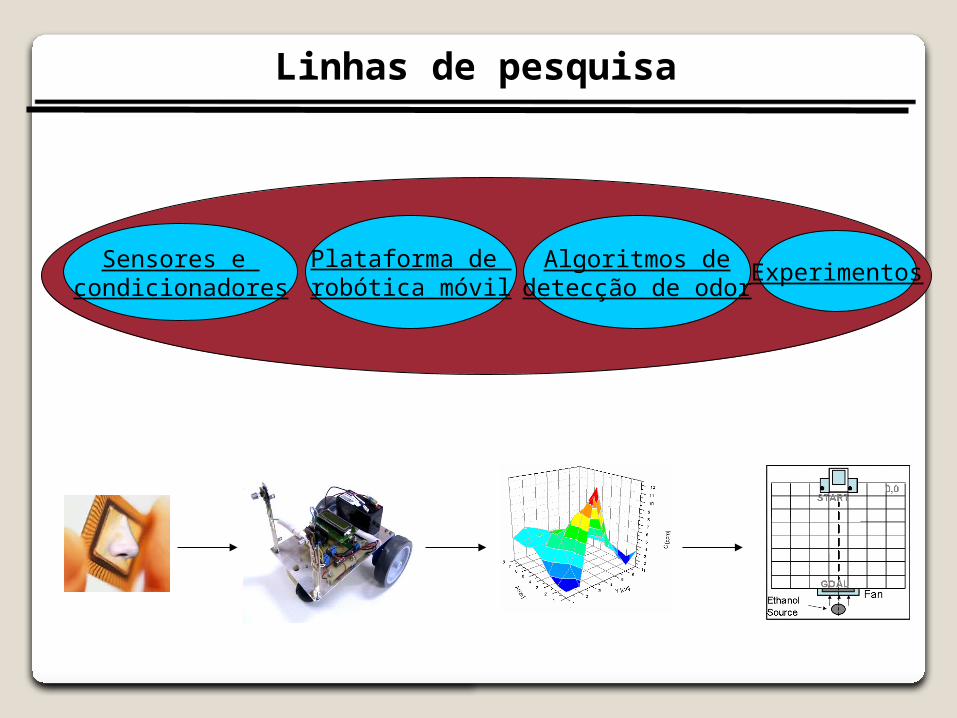
Linhas de pesquisa
ExperimentosAlgoritmos dedetecção de odor
Sensores e condicionadores
Plataforma de robótica móvil

Desafios
Necesidade de adquirir grande quantidade de informações do ambiente;
As concentrações a determinar são cada vez menores (maior exatidão e precisão nas medidas);
Se requer pequenos tempos de resposta;
Baixo custo;
Medidas in-situ;
Integração de todo o processo (sensoriamento, condicionamento, processamento).
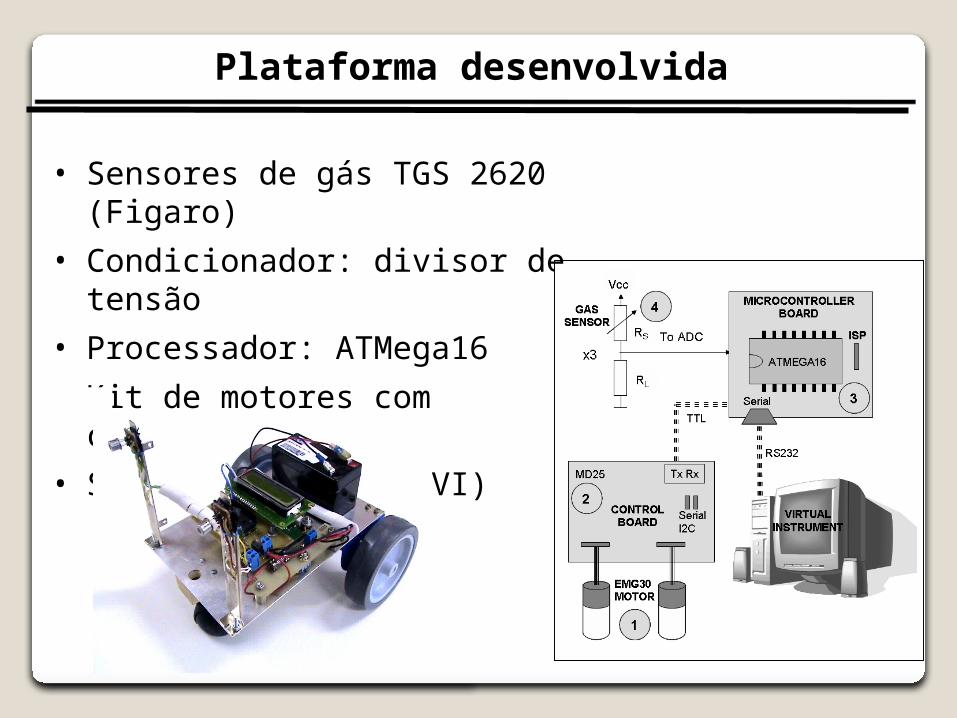
Plataforma desenvolvida
• Sensores de gás TGS 2620 (Figaro)
• Condicionador: divisor de tensão
• Processador: ATMega16
• Kit de motores com controlador
• Software Labview (VI)
Software
• Pesquisa por comportamentos biológicos
• Desenvolvimento de algoritmos de navegação baseada em sinais de odor
• Simulações
• Análise de desempenho de diferentes algoritmos
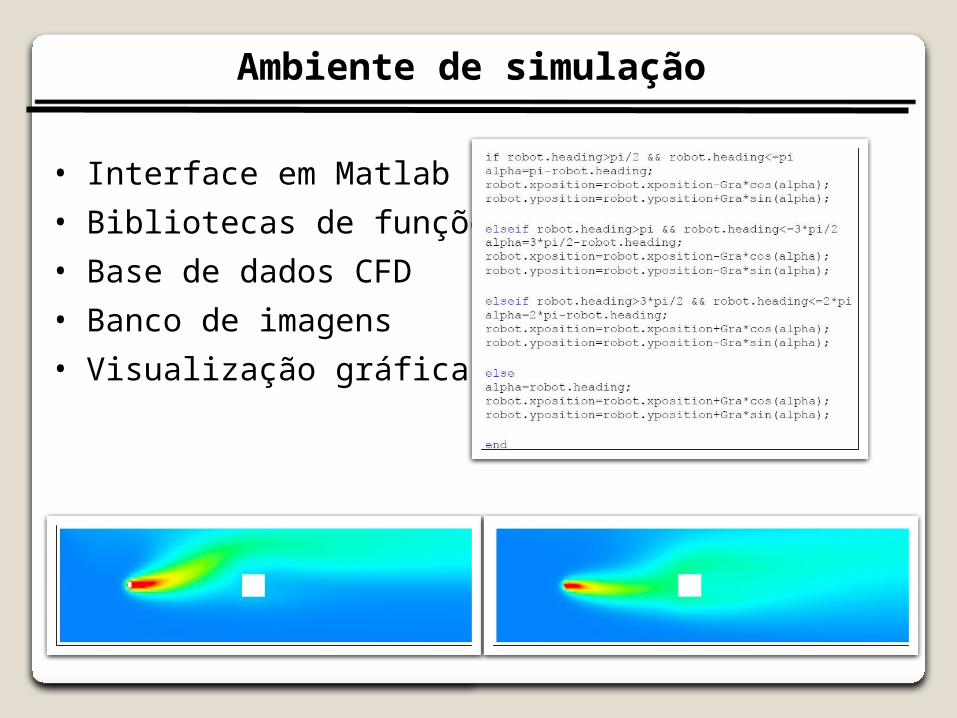
Ambiente de simulação
• Interface em Matlab
• Bibliotecas de funções
• Base de dados CFD
• Banco de imagens
• Visualização gráfica
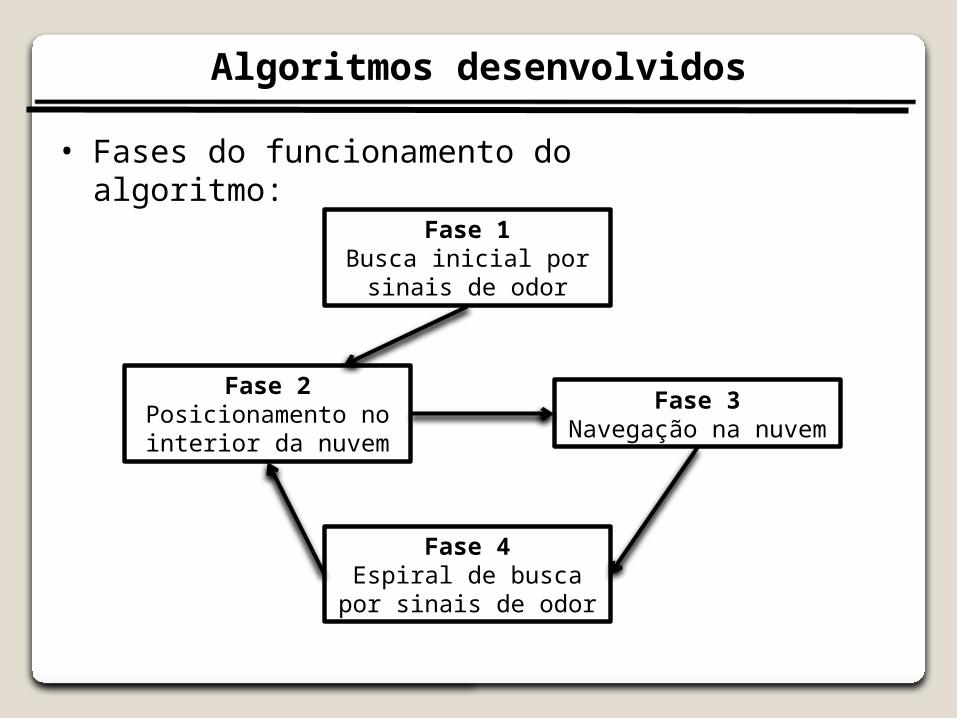
Algoritmos desenvolvidos
Fase 1Busca inicial por sinais de odor
Fase 2Posicionamento no interior da nuvem
Fase 3Navegação na nuvem
Fase 4Espiral de busca por
sinais de odor
• Fases do funcionamento do algoritmo:
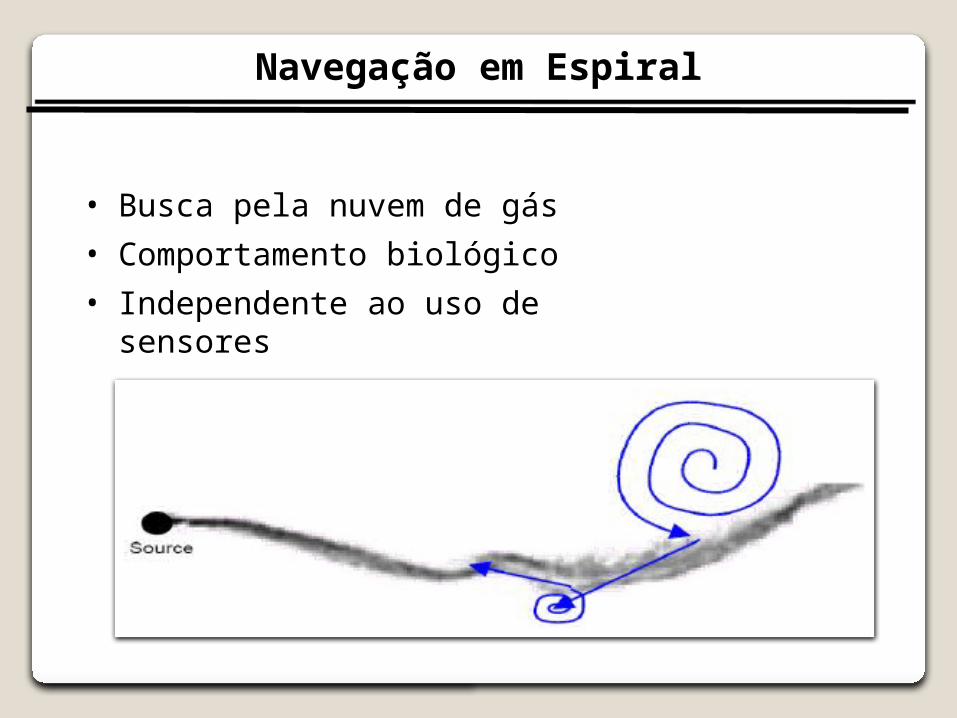
Navegação em Espiral
• Busca pela nuvem de gás
• Comportamento biológico
• Independente ao uso de sensores
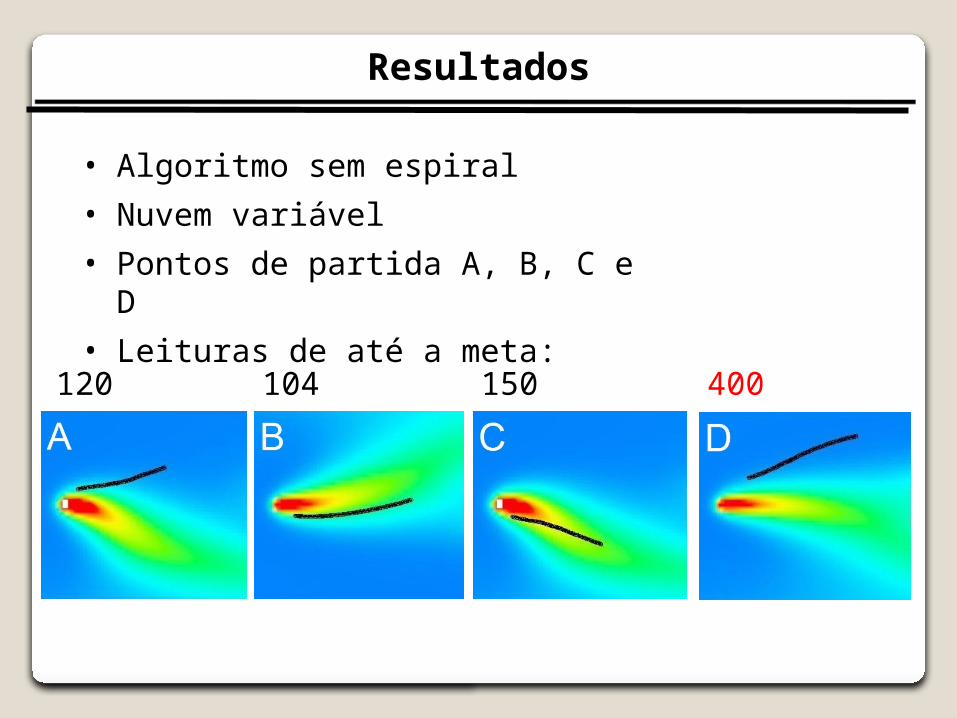
Resultados
• Algoritmo sem espiral
• Nuvem variável
• Pontos de partida A, B, C e D
• Leituras de até a meta:
120 104 150 400
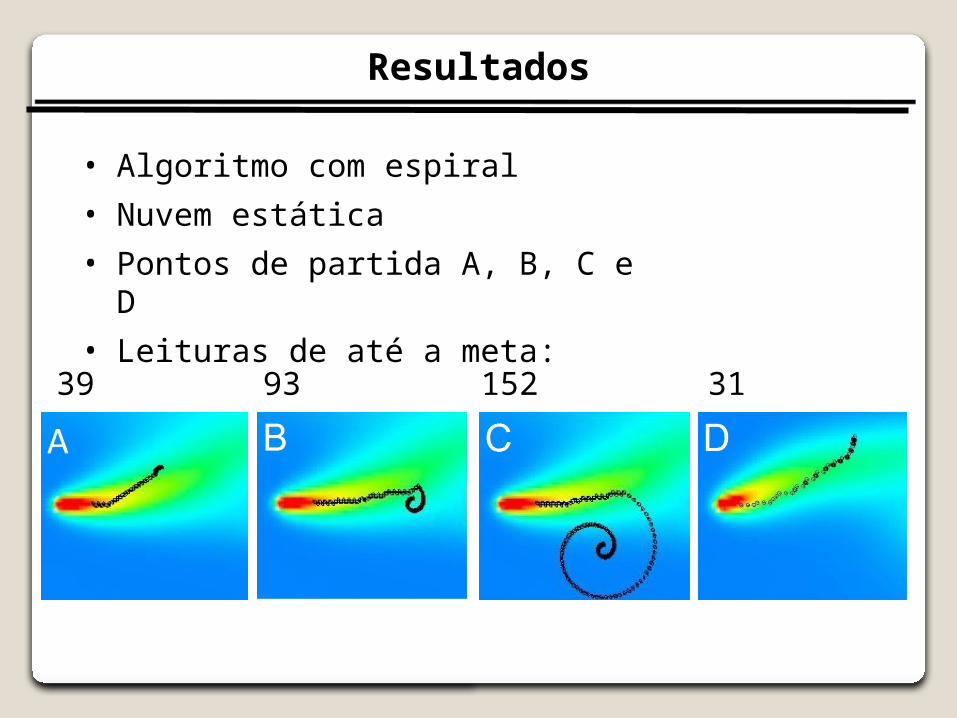
Resultados
• Algoritmo com espiral
• Nuvem estática
• Pontos de partida A, B, C e D
• Leituras de até a meta:
39 93 152 31
Resultados
• Autonomia em situações com nuvem de gás estática
• Busca da nuvem após perda de sinal
• Chegada à origem do gás em tempo menor
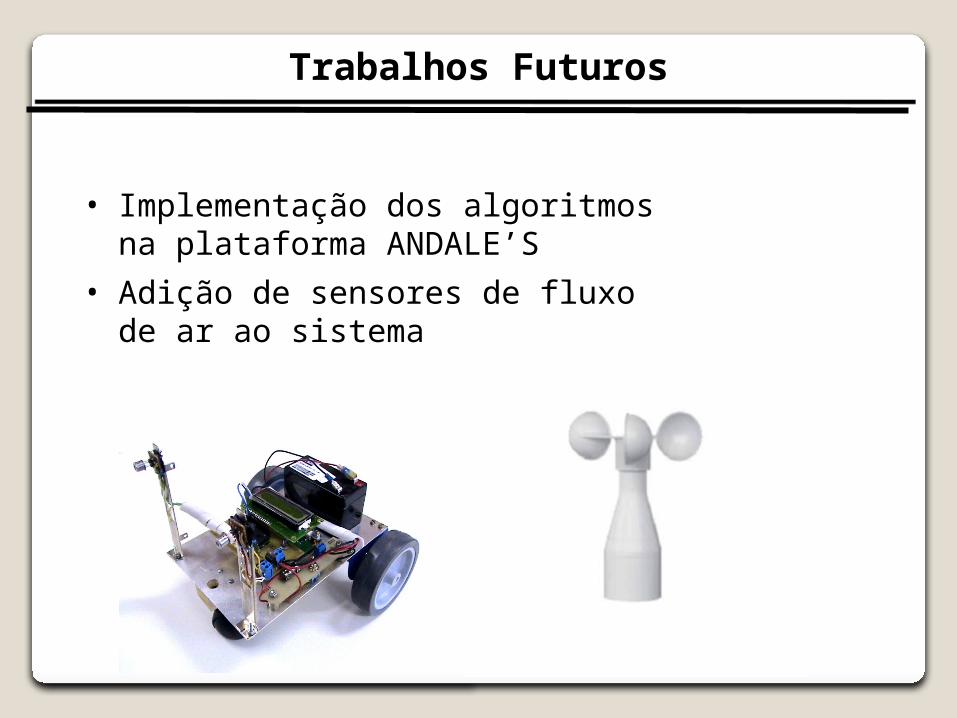
Trabalhos Futuros
• Implementação dos algoritmos na plataforma ANDALE’S
• Adição de sensores de fluxo de ar ao sistema
Conclusões
A detecção de odor está gerando um crescente interesse na comunidade acadêmica e diversas são as aplicações e as implicações sociais dessa problemática.
O objetivo almejado nesta pesquisa é o de contribuir no desenvolvimento de robôs equipados com a habilidade de detectar e localizar odores, permitindo entender melhor os mecanismos biológicos presentes nos animais, de modo a poder substituí-los, auxiliando o homem nessas tarefas.