naveg ação au tó n o ma desafios técnicos e...
TRANSCRIPT

Faculdade de Engenharia da Universidade do Porto
Navegação Autónoma
Desafios Técnicos e Tecnológicos
Projeto FEUP 2016 - MIEIC:
Coordenadores gerais: Manuel Firmino e Sara Ferreira
Coordenador de curso: J.Magalhães Cruz
Equipa 1MIEIC06_1:
Supervisor: Jorge G. Barbosa Monitor: Pedro Romano Barbosa
Estudantes & Autores:
Filipa Durão: [email protected]
Henrique Sendim: [email protected]
Margarida Coutinho: [email protected]
Mariana Dias:[email protected]
Mariana Neto: [email protected]
Navegação Autónoma Desafios Técnicos e Tecnológicos

Resumo
A Navegação Autónoma é um sistema de movimentação ainda em desenvolvimento,
embora se tenha verificado um aumento substancial na melhoria destes sistemas nos
últimos anos. Este desenvolvimento acelerado está diretamente relacionado com o grande
crescimento tecnológico que se tem presenciado.
Esta tecnologia tem como intuito melhorar a vida das populações, proporcionando-lhes
uma movimentação facilitada e que não necessita de nenhuma habilitação prévia.
Propomos um novo produto, uma cadeira de rodas autónoma, que facilitaria a
movimentação de pessoas com mobilidade reduzida e diminuiria a sua dependência.
Palavras-Chave
Navegação Autónoma, mapeamento digital, radares, sensores, Google Car, sonda
Curiosity, LiDAR, Olli, automação.
Navegação Autónoma Desafios Técnicos e Tecnológicos 2/29
Lista de Figuras
Página 11: imagem 1 - Esquema de funcionamento da tecnologia LiDAR
Página 13: imagem 2 - Funcionamento do google car
Páginas 16 e 17: imagens 3 a 7 - Funcionamento do GESTALT
Página 19: imagem 8 - Funcionamento do Olli
Página 20: imagem 9 - Modelo do olli
Navegação Autónoma Desafios Técnicos e Tecnológicos 3/29

Agradecimentos
Gostaríamos de agradecer a algumas pessoas que tornaram a realização deste trabalho
possível e que nos ajudaram sempre que foi necessário.
Gostávamos de agradecer ao nosso monitor Pedro Romano pela sua disponibilidade e
atenção.
Gostávamos também de agradecer ao nosso supervisor, o Dr. Jorge Barbosa, pelo seu
tempo e pelo seu cuidado no esclarecimento das nossas dúvidas.
Por fim, achamos importante salientar a grande importância das palestras a que
assistimos na Semana do Projeto FEUP, pois foram essenciais para a concretização deste
trabalho.
Navegação Autónoma Desafios Técnicos e Tecnológicos 4/29

Índice
Resumo
Palavras-Chave
Agradecimentos
Índice
Lista de acrónimos
1. Introdução
2. A Navegação Autónoma
2.1 O que é a Navegação Autónoma
2.2 Principais desafios técnicos e tecnológicos
2.3 Aspectos virtuosos e perversos que a tecnologia permite
3. Tecnologias em utilização
3.1 O “Google Car”
3.1.1 Como é que funciona?
3.1.2 Localização
3.1.3 O sistema LiDAR
3.1.4 Radar
3.1.5 Câmeras de alta definição
3.1.6 Software
3.1.7 Desafios
3.2 A sonda “Curiosity”
3.2.1 Como funciona o Gestalt?
3.3 Olli, o mini-autocarro autónomo
3.4 Autonomous Haulage System (Komatsu)
3.4.1 Em que consiste?
3.4.2 Vantagens de utilizar este sistema em mineração
3.4.3 Diferentes níveis de automação
3.4.4 Deteção de obstáculos
4. Proposta de um novo produto
5. Conclusões
6. Referências bibliográficas
Navegação Autónoma Desafios Técnicos e Tecnológicos 5/29

Lista de acrónimos
GESTALT - Grid-based Estimation of Surface Traversability Applied to Local Terrain
LiDAR - Light Detection And Ranging
GPS - Global Positioning System
Navegação Autónoma Desafios Técnicos e Tecnológicos 6/29

1. Introdução
O presente trabalho foi realizado no âmbito da Unidade Curricular “Projeto FEUP”. Para
a sua realização, foi dividido em subtópicos e distribuído aos vários membros do grupo,
embora tenha havido cooperação entre os vários estudantes da equipa na execução de
cada um desses subtópicos.
Este relatório pretende dar a conhecer um pouco sobre o tema “Navegação Autónoma”
e os desafios que esta impõe à investigação científica atual. Pretende também clarificar o
seu modo de funcionamento e as suas vantagens e desvantagens.
O conceito de Navegação Autónoma consiste na autonomização praticamente total do
movimento de veículos. Esta autonomização está diretamente dependente da evolução da
informática e do investimento neste tipo de tecnologias.
Existem diversas investigações e inovações em curso nesta área, mas este relatório
foca quatro produtos já existentes. O Google Car, o autocarro Olli e o Komatsu em fases de
testes e utilização condicionada e a sonda Curiosity já em pleno funcionamento e totalmente
autónoma.
Neste relatório é também proposto um produto que tem como intuito melhorar a
qualidade de vida da porção da população com mobilidade reduzida, uma cadeira de rodas
elétrica que memoriza percursos e evita obstáculos utilizando uma tecnologia de movimento
autónomo.
Navegação Autónoma Desafios Técnicos e Tecnológicos 7/29

2. A Navegação Autónoma
2.1 O que é a Navegação Autónoma?
O objetivo da navegação autónoma é movimentar um veículo pelo espaço do modo
mais inteligente possível. Esta tarefa é dividida em múltiplas partes, entre as quais se
destacam a deteção de obstáculos imprevistos de forma eficaz e o cálculo do melhor
percurso para o objeto chegar ao seu destino. Para a existência de aparelhos que se
movimentam sozinhos e de forma independente pelo espaço físico, é necessário que o
objeto esteja previamente preparado para tal ação. (Bolles, robert e Bobick, aaron; 1989)
O primeiro passo para uma navegação autónoma eficaz é uma deteção exata dos
objetos circundantes. Para tal, é indispensável a utilização de sensores e/ou radares que
façam o mapeamento tridimensional do meio envolvente e que reajam de acordo com os
dados recebidos. Para isso, utiliza-se a programação, ou seja, criam-se programas que
analisem a informação e que reajam de acordo com as diretrizes nele indicadas para cada
acontecimento. Os programas têm de ser altamente sofisticados. A leitura dos dados
externos tem de ser transmitida ao software de forma a que este execute ordenadamente
todos os processos descritos no código, para que o output da máquina seja o movimento do
aparelho mais adaptado ao caso real em que se encontra. É extremamente importante que
a leitura dos dados seja feita com exatidão quando falamos de objetos com movimento
autónomo, pois estes influenciam o espaço à sua volta, interagem com ele. No caso de
esses objetos computorizados serem veículos que se movem nas ruas, interagem com
todos os indivíduos que por elas se movimentam e com toda imprevisibilidade do
comportamento humano, logo, é essencial que a execução das diretrizes de movimento seja
rápida e eficaz, para evitar danos.
Navegação Autónoma Desafios Técnicos e Tecnológicos 8/29
2.2 Principais desafios técnicos e tecnológicos
Os produtos que operam segundo a tecnologia de navegação autónoma devem ser
seguros, eficazes e lucrativos. Para tal, têm de ultrapassar diversos desafios que vão para
além da complexa invenção de softwares capazes de admitir a navegação de objetos sem
interferência humana. A criação de mapas detalhados e de outros mecanismos visuais
complementares, como a tecnologia ótica de deteção remota de LiDAR, permite a
movimentação facilitada de veículos, tanto em zonas urbanas, como noutros locais insólitos
(por exemplo, no fundo do oceano e noutros planetas) e a evasão a obstáculos ou
movimentos imprevistos, sem possibilidade de serem detetados por GPS ou por outros
sistemas de localização idênticos.
A escolha de trajetória é também de elevado grau de importância, uma vez que nem
sempre é possível um veículo mover-se numa superfície plana, o que tornaria a deteção de
objetos imprevistos mais fácil. Assim, se a superfície for irregular, terá de ser feita a
avaliação do que será mais vantajoso: mudar de trajetória e contornar o obstáculo para
evitar danificar o veículo ou avançar sobre o mesmo de forma mais lenta. Por outro lado, o
obstáculo em si tanto pode ser um objeto sólido, como pode ser, por exemplo, uma vala ou
água, sendo assim evidente a necessidade de um algoritmo complexo e eficaz que avalie
todos estes parâmetros em tempo real.
Uma forma futura de resolver os problemas associados à navegação em zonas urbanas
é através da tecnologia de comunicação V2X (Vehicle-to-everything ), um sistema em que os
veículos e infraestruturas estão conectados e dialogam entre si, permitindo partilhar
informações recebidas por sinais de trânsito inteligentes sobre as condições do terreno, o
estado do trânsito e a existência de obstáculos.
Em contrapartida, produtos diferentes com utilidades distintas apresentam, logicamente,
desafios técnicos específicos divergentes. Por exemplo, uma sonda em Marte tem
dificuldades de navegação diferentes a uma na Lua. Isto deve-se às condições ambientais
adversas e distintas (gravidade, iluminação, radiação, temperaturas, existência de atmosfera
ou poeiras) e aos atrasos de comunicação, consequências da distância de segundos ou
minutos-luz à Terra, aspetos que podem afetar o hardware (câmeras, processadores,
sensores etc) e os mecanismos que permitem a escolha de trajetória e deteção de
obstáculos, influenciando assim a eficácia da mobilidade e sucesso das missões do rover .
Navegação Autónoma Desafios Técnicos e Tecnológicos 9/29

2.3 Aspectos virtuosos e perversos que a tecnologia permite
A navegação autónoma aplicada a veículos que circulam em zonas urbanas possibilita
uma maior segurança às populações e uma maior fluidez do tráfego, uma vez que ocorre
uma diminuição de acidentes de viação e de vítimas mortais devido ao uso da tecnologia
sensorial e à eliminação de erros humanos.
Além disso, com esta tecnologia, deixa de fazer sentido ser obrigatório um indivíduo tirar
carta de condução para utilizar individualmente um automóvel, permitindo assim uma maior
independência de mobilidade a quem não a possa obter por motivos de saúde ou outros.
Quanto a aspetos negativos desta tecnologia, a funcionalidade destes veículos depende
intrinsecamente da recolha e armazenamento de informações sobre o utilizador,
nomeadamente os locais que frequenta, o que levanta diversas questões relativamente à
conservação da privacidade do utente. Por outro lado, em termos de segurança, hackers
podem infiltrar-se no software dos automóveis para tentarem controlar ou afetar o seu
desempenho ou rota, pondo assim em risco a vida de muitos. Uma avaria no sistema pode
também causar graves acidentes, como, por exemplo, o mau funcionamento de sensores
instalados no teto de carros quando chove intensamente ou de câmaras quando neva.
Eticamente e legalmente, podem surgir dilemas associados à escolha de cenários que
tenham em conta a minimização de danos e vítimas, sendo que umas vidas serão
injustamente valorizadas em detrimento de outras. Enquanto que, numa situação de um
acidente inevitável com vítimas humanas, se o condutor fosse uma pessoa, qualquer ação
que tomasse seria considerada uma reação, ou seja, legalmente, as suas ações não foram
ponderadas, sendo assim isento de culpa, com a navegação autónoma qualquer ação
tomada é uma escolha fruto de uma decisão ponderada dos programadores de um software .
Navegação Autónoma Desafios Técnicos e Tecnológicos 10/29

3. Tecnologias em utilização
3.1 O “Google Car”
Este projeto, liderado por Sebastian Thrun, vencedor do DARPA Grand Challenge de
2005 (uma corrida entre carros\robôs sem intervenção humana), iniciou-se em 2009 com
outros engenheiros, alguns dos quais já tinham participado nessa mesma competição.
Atualmente está a ser desenvolvida pela empresa “X”, anteriormente denominada por
“Google X”
3.1.1 Como é que funciona?
Estes modelos elétricos, funcionam com uma combinação de sensores e um software
para navegar, com acesso a mapas de uma precisão incrível e sistema de GPS. Este carros
já percorreram autonomamente cerca de 2400000 km.
Utilizando uma tecnologia de lasers, câmeras e sensores consegue monitorizar o mundo
à sua volta. Em conjunto com o software, estes dispositivos reconhecem outros carros,
pessoas, objetos, semáforos e obstáculos a evitar.
3.1.2 Localização
A tecnologia GPS fornece informação sobre a localização e informação horária desde
que esteja no campo de visão de pelo menos quatro aparelhos.
Neste caso, os carros planeiam o percurso usando o GPS e um conjunto de mapas
provenientes da parceria com a Tele Atlas.
Navegação Autónoma Desafios Técnicos e Tecnológicos 11/29

3.1.3 O sistema LiDAR
O LiDAR é usado maioritariamente para fazer mapas de alta resolução.
A criação de mapas detalhados e de outros mecanismos visuais complementares
permite a movimentação facilitada de veículos, tanto em zonas urbanas, como noutros
locais insólitos (por exemplo, no fundo do oceano e noutros planetas) e a evasão a
obstáculos imprevistos, sem possibilidade de serem detetados por GPS ou por outros
sistemas de localização idênticos.O LiDAR existe desde a década de 60 e já foi usado no
Apollo 15, um projeto lunar.
A LiDAR gera informação tridimensional precisa a partir da emissão de impulsos de luz
que determinam a posição de objetos no espaço - um sensor calcula o intervalo de tempo
entre a emissão de cada impulso e o retorno do mesmo, possibilitando o cálculo da distância
entre o objeto e a superfície, assim como a construção de um mapa complexo da sua
localização.
O funcionamento do LiDAR está esquematizado na imagem 1.
imagem 1 - Esquema de funcionamento da tecnologia LiDAR fonte:http://vcgi.vermont.gov/sites/vcgi/files/aboutvcgi/lidar/How_LiDAR_Works.jpg
Navegação Autónoma Desafios Técnicos e Tecnológicos 12/29

3.1.4 Radar
O problema do LiDAR é que não consegue distinguir a velocidade destes objetos, por
isso existem radares na frente do carro exatamente para isso. O radar funciona através de
ondas rádio e, com essa informação calcula as respetivas velocidades.
3.1.5 Câmeras de alta definição
Estas câmeras funcionam um pouco como a visão humana, nas quais são
“bombardeadas” por várias imagens e determinam aspetos como a dimensão de um objeto,
e o movimento periférico ou ainda semáforos.
As câmeras têm um campo de visão de 50 graus e são precisas até aos 30 metros.
3.1.6 Software
O software processa a informação em tempo real e altera o comportamento baseado
nesta, como outros carros, pedestres, etc.
Embora algumas ações estejam predefinidas, outras respostas são executadas com
base em experiências anteriores, e como os vários carros estão interligados, é possível que
numa situação complicada, já haja uma solução para esse problema.
Todo o funcionamento do Google Car está esquematizado na imagem 2.
Navegação Autónoma Desafios Técnicos e Tecnológicos 13/29

3.1.7 Desafios
Atualmente, estes modelos, não foram testados em ambientes com neve ou chuva
intensa, devido à ineficácia das câmeras nestas condições. Também há certas
preocupações quando a luz do sol está diretamente atrás de um semáforo, correndo o risco
de a câmera não conseguir perceber qual a cor nesse momento e também não consegue
distinguir civis de polícias, por isso no caso de um destes mandar parar o carro, não há
resposta. São ainda importantes pormenores a corrigir para que o sistema se torne
totalmente seguro para a utilização em massa.
imagem 2 - Funcionamento do google car fonte:http://media.economist.com/sites/default/files/imagecache/full-width/images/print-edition/20120901_TQC976_0.png
Navegação Autónoma Desafios Técnicos e Tecnológicos 14/29

3.2 A sonda “Curiosity”
Em Agosto de 2013 a NASA implementou na sonda Curiosity, que está ativa em Marte,
um sistema de Navegação Autónoma. Isto permite que agora a sonda tome decisões de
trajetos a tomar para chegar a um dado ponto necessário sem a vigilância e sem ordens
constantes dos operacionais na Terra. A sonda analisa o seu meio envolvente e calcula o
percurso a tomar de modo a evitar obstáculos e chegar à sua meta da maneira mais curta e
segura possível. Para isso, a sonda dispõe do sistema GESTALT ( Grid-based Estimation of
Surface Traversability Applied to Local Terrain). Nesta sonda, o sistema GESTALT é uma
modificação do sistema já anteriormente implementado nas sondas Spirit e Opportunity.
Esta alteração foi necessária pois a sonda Curiosity é maior e mais complexa que os
veículos anteriormente enviados a Marte.
3.2.1 Como funciona o Gestalt?
Este método consiste, abreviadamente, na análise de pares de imagens de um dado
local captado pela sonda e no desenvolvimento de um modelo tridimensional do terreno. Por
cada par de imagens a sonda Curiosity pode analisar até 16 000 pontos de referência para a
criação do modelo. Esse modelo é depois avaliado pela sonda segundo vários parâmetros,
de modo a garantir a total segurança da sonda, ou seja, de modo a que ela não caia, não
vire e não parta, entre outros. Por fim, de entre todos os caminhos avaliados pelo software,
a sonda percorre o mais curto dos caminhos seguros apresentados.
Navegação Autónoma Desafios Técnicos e Tecnológicos 15/29
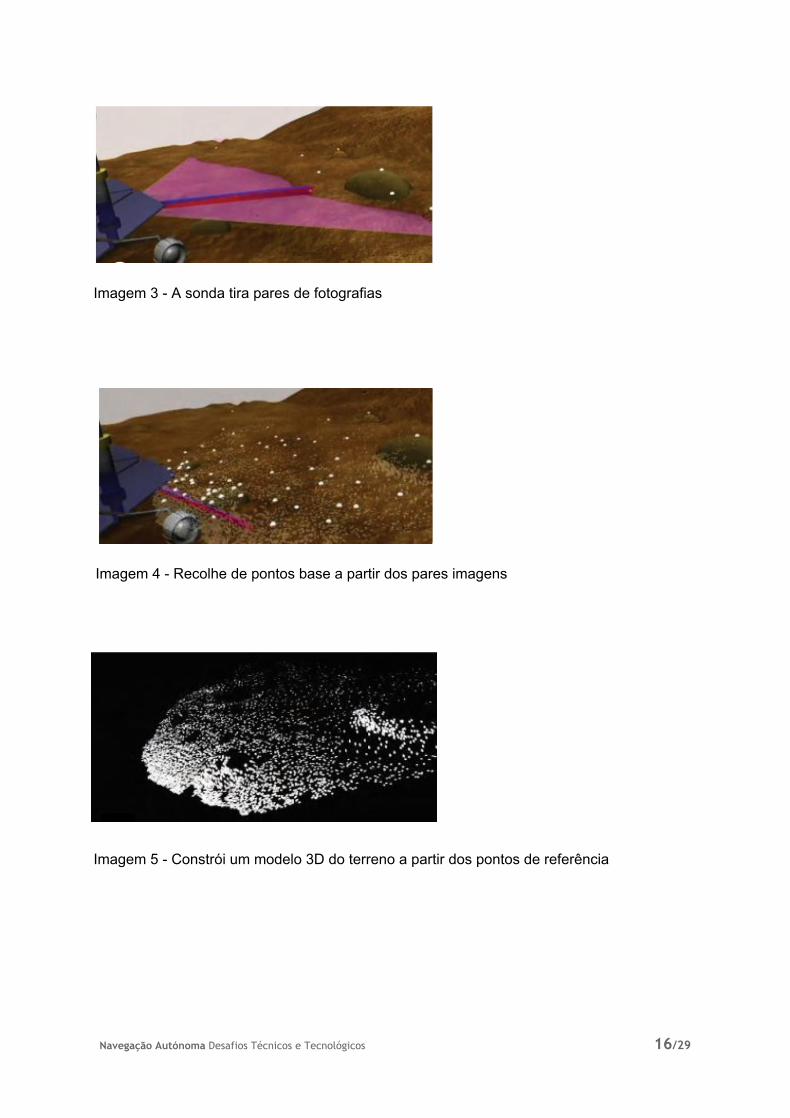
Imagem 3 - A sonda tira pares de fotografias
Imagem 4 - Recolhe de pontos base a partir dos pares imagens
Imagem 5 - Constrói um modelo 3D do terreno a partir dos pontos de referência
Navegação Autónoma Desafios Técnicos e Tecnológicos 16/29

Imagem 6 - A sonda analisa os diversos caminhos possíveis
Imagem 7 - A sonda escolhe o caminho mais curto a percorrer
Fonte das imagens de 3 a 7 http://mars.nasa.gov/mer/home/posters/OpportunityPosterBack.pdf
Navegação Autónoma Desafios Técnicos e Tecnológicos 17/29

3.3 Olli, o mini-autocarro autónomo
Local Moters, situada no Arizona, é a empresa automóvel que está por trás de um novo
projeto que revolucionará o mundo dos transportes em breve. Com a procura de produtos
promissores para o mundo inovador surge então Olli, o primeiro autocarro elétrico e
autónomo. O veículo é parcialmente reciclável e impresso em 3D, porém o aspeto que mais
o destaca é o facto de este ser o primeiro meio de transporte que usa um sistema de
aprendizagem cognitiva designado pela IBM, o Watson Internet of Things for Automotive.
Watson Internet of Things for Automotive é especialmente concebido para estas funções
de autocondução, sendo que, através de uma aplicação de localização, é possível saber
detalhadamente onde Olli circula. Através do Watson é também possível que os passageiros
interajam com o veículo através de quatro aspetos desenvolvidos a ter em consideração:
· “Speech to Text”: é usada para ultrapassar a barreira entre a forma escrita e a fala,
ou seja, é usada a inteligência do aparelho para combinar informações sobre a gramática e
sobre a estrutura da linguagem. Usa as capacidades de reconhecimento da voz para a
converter em vários idiomas de texto.
· “Text to Speech”: é a continuação do processo anterior, sendo que após o texto
produzido este último é convertido para áudio para os passageiros, com o mínimo de atraso,
numa grande gama de línguas já disponível.
· “Natural Language Classifier”: o sistema interpreta e classifica com a máximo rigor
a linguagem detetada.
· “Entity Extraction”: Olli extrai o máximo de informação dos passageiros a bordo de
modo a construir uma personalidade para os mesmos e, desta feita, o veículo é capaz de
dar possíveis dicas e sugestões
Para além do referido usa ainda a cloud para analisar os dados recolhidos pelos 30
sensores a bordo e aprender a partir dos mesmos. Estes sensores orientam-se não só a
partir do meio envolvente, que lhes permite a condução autónoma, como também usam os
dados disponíveis nos dispositivos móveis.
O esquema que sintetiza o funcionamento do Olli pode ser consultado na imagem 3.
Navegação Autónoma Desafios Técnicos e Tecnológicos 18/29

imagem 8 - Funcionamento do Olli fonte: https://meetolli.auto/manual.html
Edgar Sarmiento, um dos idealistas do Olli, afirma que o objetivo foi alcançado ao tornar
o veículo o mais flexível para o contexto citadino, já que foram alcançados os seguintes
pontos:
· Diminuição das unidades fabris: o método de fabrico digital é visto como um
enorme avanço, já que construção é feita apenas em 10 horas e não são necessárias tantas
unidades fabris, ou seja, o processo é curto e eficiente.
· Diminuição do tráfego: com o recurso a este meio de transporte é possível reduzir a
condução individual e, como consequência a taxa de carbono libertada será muito menor.
· Maior utilidade: a necessidade de as pessoas chegarem a um determinado local é
comum, e com o uso deste meio de transporte será mais facilitada, visto que irá ocorrer uma
diminuição do tráfego e o sistema do Olli adapta-se às necessidades individuais.
Olli já se encontra em estudos em determinados locais como Washington DC e em
breve também o fará em Miami e em Las Vegas, já nos finais do ano. Estes testes permitem
Navegação Autónoma Desafios Técnicos e Tecnológicos 19/29

avaliar a sua eficiência e, como consequência, melhorar algumas caraterísticas como o
transporte de poucas pessoas (apenas doze) e a sua curta velocidade, apenas 20 Km por
hora. Pretende-se que esta última barreira seja superada para que possa viajar na
autoestrada, e assim não ficar limitado apenas à cidade. Por fim, Olli é visto como uma
solução de transporte inteligente, seguro e sustentável, algo necessário já há muito tempo,
como refere John Rogers, cofundador de Local Moters.
imagem 9 - modelo do olli fonte: http://www.digitaltrends.com/cool-tech/local-motors-olli-driverless-bus/#/3
Navegação Autónoma Desafios Técnicos e Tecnológicos 20/29

3.4 Autonomous Haulage System (Komatsu)
3.4.1 Em que consiste?
O sistema de transporte autónomo da Komatsu usa navegação GPS para permitir que
grandes camiões elétricos de mineração sejam capazes de operar seguindo as instruções
de um plano complexo, em vez de serem manualmente controlados por um operador.
3.4.2 Vantagens de utilizar este sistema em mineração
Produtividade: Aumenta a produtividade ao melhorar o fluxo de tráfego e otimizando a
energia e combustível consumidos. A automação de veículos de mineração até à data
provocou uma redução dos custos de carga e transporte em 13%.
Sustentabilidade: A automação pode melhorar a qualidade de trabalho dos
trabalhadores ao reduzir a exposição deste a ambiente inseguros que possam danificar a
sua saúde, fornecendo em alternativa trabalhos técnicos e analíticos, assim como mitigação
e gerenciamento de riscos.
Segurança: Desde prevenção de colisões até deteção de obstáculos, cada kit de
automação possui múltiplas camadas de software, hardware e sensores de segurança,
salvaguardando tanto pessoas como máquinas.
Utilização: Estudos publicados estimam que frotas autônomas superam frotas
manualmente comandadas numa média de 12%. Esta melhoria é causada principalmente
pela eliminação das mudanças de turno, pausas obrigatórias e ausências não planeadas de
operadores.
3.4.3 Diferentes níveis de automação
Motorista Auxiliar: Apesar de ainda ser necessário a presença de um motorista no
veículo, melhoram significativamente a segurança do trabalho e a produtividade. Ao utilizar,
por exemplo, sistemas de deteção de obstáculos e consequente paragem automática.
Navegação Autónoma Desafios Técnicos e Tecnológicos 21/29

Controlo Remoto: O controlo remoto é o primeiro passo para se chegar à automação. Ao
usar um computador de mão, os operadores podem controlar veículos não tripulados de
uma distância segura.
Teleoperação: Obtido quando se adicionam câmaras e software de “command & control”
ao já existente controlo remoto. Deste modo é aumentada ainda mais a segurança dos
trabalhadores e são reduzidos os custos, visto que o operador tem a capacidade de
comandar vários veículos ao mesmo tempo.
Total Autonomia: Um operador pode controlar múltiplos veículos através de um servidor
baseado em software de “command & control “. Deste modo, os veículos autonomamente
executam tarefas que lhes são fornecidas, obtendo-se automação completa.
3.4.4 Deteção de obstáculos
Assegura a segurança dos veículos robóticos, utilizando tecnologias de
“see-and-stop” e “see-and-avoid” para reagir de forma segura a potenciais riscos presentes
no ambiente. Os veículos usam um conjunto avançado de sensores para criar um modelo
tridimensional do mundo que os rodeia.
Navegação Autónoma Desafios Técnicos e Tecnológicos 22/29

4. Proposta de um novo produto
A proposta do grupo neste tópico é uma cadeira de rodas autónoma para indivíduos
com deficiências motoras graves.
A cadeira seria uma adaptação das já existentes cadeiras de rodas elétricas, mas que
proporcionasse uma plataforma informática que permitisse o planeamento de percursos e a
memorização dos mesmos para aumentar a independência dos indivíduos que a utilizam.
Este produto poderia proporcionar uma melhoria na qualidade de vida dos indivíduos mais
incapacitados fisicamente e proporcionar-lhes mais independência.
A cadeira desviar-se-ia dos obstáculos no seu percurso e escolheria sempre o melhor
percurso a percorrer para chegar ao seu destino e transportar o paciente de forma segura. à
semelhança das cadeiras de rodas atuais, esta cadeira movimentar-se-ia dentro de espaços
fechados, tendo de estar preparada para esta diferença grande face aos veículos com
navegação autónoma.
Segundo fontes visitadas, as cadeiras de rodas elétricas atuais custam cerca de 5000€.
Assim, ponderando o custo da criação e implementação de um software de movimentação
autónoma, sabemos que o preço seria superior a esses 5000€.
Navegação Autónoma Desafios Técnicos e Tecnológicos 23/29

5. Conclusões
A Navegação Autónoma é uma tecnologia em grande evolução.
Por um lado, existem facetas que têm de ser melhoradas nos aparelhos já existentes e
nas tecnologias que estes usam, quer sejam pequenos detalhes de funcionamento que
afetam o funcionamento dos veículos de forma quase impercetível, quer sejam defeitos em
maior escala que têm de ser reparados para os sistemas poderem ser utilizados.
Por outro lado, o avanço que se tem verificado nos últimos anos tem superado
quaisquer expectativas que houvesse há poucas décadas atrás. Há veículos noutros
planetas a explorarem sozinhos e mandando dados para a Terra de forma autónoma, há
carros e camiões na rua que se movimentam apenas com base num software
implementado, há locais inacessíveis a humanos a serem explorados por estes robôs…
A Navegação Autónoma está a abrir portas a uma nova era na movimentação espacial.
Uma era mais segura, a partir do momento em que os softwares estiverem completos, pois
o fator “erro humano” causa cerca de 95% dos acidentes de viação atuais. Uma era mais
cómoda, pois os veículos conduzir-se-iam sozinhos e haveria mais tempo para o lazer e
descanso. Uma era que, no entanto, poderá ter uma taxa de desemprego maior que a atual,
pois motoristas de autocarros, comboios, táxis e qualquer transporte público seriam
desnecessários, pois o sistema autónomo seria o suficiente.
Todas as tecnologias trazem conforto ao dia-a-dia do homem, no entanto, na maioria
das vezes, só a algumas pessoas com um nível de vida mais elevado. É necessário
ponderar os prós e contras de cada inovação e perceber, no fim, se ela é vantajosa ou
prejudicial.
Navegação Autónoma Desafios Técnicos e Tecnológicos 24/29

6. Referências bibliográficas
Samuel Gibbs. “Google's self-driving car: How does it work and when can we drive one? “. Theguardian, https://www.theguardian.com/technology/2014/may/28/google-self-driving-car-how-does-
it-work (visitado a 13/10) Erico Guizzo. “How Google's Self-Driving Car Works”. IEEE Spectrum,
http://spectrum.ieee.org/automaton/robotics/artificial-intelligence/how-google-self-driving-car-works (visitado a 13/10)
Dave LeClair. “How Close Are We to Self-Driving Cars Being Available?”. MakeUseOf, http://www.makeuseof.com/tag/how-close-are-we-to-self-driving-cars-being-available/ (visitado a 13/10) T.S. “How does a self-driving car work?”. The Economist,
http://www.economist.com/blogs/economist-explains/2013/04/economist-explains-how-self-driving-car-works-driverless (visitado a 13/10)
Julian Smith. “Technology That Lets Self-Driving Cars, Robots See”. IQ by intel,
https://iq.intel.com/technology-that-lets-self-driving-cars-robots-see/ (visitado a 13/10) Bryan Clark. “How Self-Driving Cars Work: The Nuts and Bolts Behind Google’s
Autonomous Car Program”. MakeUseOf, http://www.makeuseof.com/tag/how-self-driving-cars-work-the-nuts-and-bolts-behind-googles-autonomous-car-program/ (visitado a 13/10)
Mike Brouillette. VCGI LiDAR Program. Vermont Center for Geographic Information,
http://vcgi.vermont.gov/LiDAR (visitado a 13/10) Lee Gomes. “Hidden Obstacles for Google’s Self-Driving Cars”. MIT Technology review,
https://www.technologyreview.com/s/530276/hidden-obstacles-for-googles-self-driving-cars/ (visitado a 13/10)
Tony O’Neill “Autonomous Haulage System (AHS)”. Autonomous Solutions Inc., https://www.asirobots.com/wp-content/uploads/AHS2015.pdf (visitado a 15/10) NREC and Caterpillar ”Autonomous Haulage System (AHS), a commercial system for
automating large off-highway trucks.” http://www.nrec.ri.cmu.edu/projects/ahs/ (visitado a 15/10)
Komatsu “Autonomous Haulage System”. Komatsu American Corp. https://www.youtube.com/watch?v=bHtMNFZLMWE (visitado a 13/10)
Navegação Autónoma Desafios Técnicos e Tecnológicos 25/29

John McGagh “Autonomous Haulage: An owner/operator story” . ©2014, Rio Tinto, All
Rights Reserved http://www.riotinto.com/documents/140923_IMARC_Presentation_John_McGagh.pdf
(visitado a 15/10)
“ Ollie- Forward-thinking Transportation”.
Meetolli.autohttps://meetolli.auto/manual.html#firstPage (visitado a 10/10)
“Ollie, autobús autónomo impreso en 3D.”. Los tiempos.
http://www.lostiempos.com/tendencias/tecnologia/20160623/olli-autobus-autonomo-impreso-
3d (visitado a 15/10)
“Ollie, your friendly neighborhood”. Localmotors.com https://localmotors.com/olli/
(visitado a 10/10)
Luke Doemehl. “ Ollie is the 3D- printed , autonomous, electric shuttle bus you’ve all
been waiting for.”. Digital Trends
http://www.digitaltrends.com/cool-tech/local-motors-olli-driverless-bus/#/2 (visitado a 15/10)
Kristen Hall- Geisler. “Autonomous Olli the Self-Driving Bus”. Popsci.com
http://www.popsci.com/autonomous-olli-self-driving-bus (visitado a 15/10)
Tamara Warren. “ This autonomous, 3D-printed bus starts giving rides in Washington,
DC today”. The Verge.
http://www.theverge.com/2016/6/16/11952072/local-motors-3d-printed-self-driving-bus-washi
ngton-dc-launch (visitado a 10/10)
Vítor M. “ Olli, o minibus autónomo, elétrico e fabricado na impressora 3D”. Pplware.
https://pplware.sapo.pt/gadgets/high-tech/olli-o-minibus-autonomo-electrico-e-fabricado-na-i
mpressora-3d/ (visitado 10/10)
“ Speech to Text”. IBM Watson Developer Cloud.
https://www.ibm.com/watson/developercloud/speech-to-text.html (visitado a 15/10)
Navegação Autónoma Desafios Técnicos e Tecnológicos 26/29

“ Text to Speech “. IBM Watson Developer
Cloud.https://www.ibm.com/watson/developercloud/text-to-speech.html (visitado a 15/10)
“ Natural Language Classifier”. IBM Watson Developer Cloud
https://www.ibm.com/watson/developercloud/nl-classifier.html (visitado 15/10)
“Navigating city streets”. Google. https://www.google.com/selfdrivingcar/how/ (visitado a
28-09-2016)
Silberg, gary e Wallace, richard. Center for Automotive Research.
https://www.kpmg.com/US/en/IssuesAndInsights/ArticlesPublications/Documents/self-driving
-cars-next-revolution.pdf (visitado a 29-09-2016)
Webster, guy. “NASA'S Mars Curiosity Debuts Autonomous Navigation”. Nasa.
http://www.jpl.nasa.gov/news/news.php?release=2013-259 (visitado a 10-10-2016)
Jet Propulsion Laboratory. ”Opportunity Poster Back”. Nasa.
http://mars.nasa.gov/mer/home/posters/OpportunityPosterBack.pdf (visitado a 02-10-2016)
Nasa .“Deep Space Navigation”. Nasa.
https://scienceandtechnology.jpl.nasa.gov/research/research-topics-list/communications-com
puting-software/deep-space-navigation (visitado a 02-10-2016)
Prince, alicia. “Unbelievable Benefits And Drawbacks Of The Self-Driving Car”. Lifehack.
http://www.lifehack.org/articles/technology/unbelievable-benefits-and-drawbacks-the-self-driv
ing-car.html (visitado a 29-09-2016)
Howard, bill. “V2V: What are vehicle-to-vehicle communications and how do they work?
”. ExtremeTech.
http://www.extremetech.com/extreme/176093-v2v-what-are-vehicle-to-vehicle-communic
ations-and-how-does-it-work (visitado a 29-09-2016)
Mobilitec.
Navegação Autónoma Desafios Técnicos e Tecnológicos 27/29

http://www.mobilitec.pt/mobilidade-cadeiras-rodas-electricas-cadeiras-electricas (visitado a
19-10-2016)
Yang, guang-Zhong. “Space Robotics & Autonomous Systems : Widening the horizon of
space exploration”. UK-RAS White papers.
https://www.surrey.ac.uk/sites/default/files/UK_RAS_wp_print_single_pages.pdf (visitado a
10-10-2016)
Bolles, robert e Bobick, aaron. “Exploiting Temporal Coherence in Scene Analysis for
Autonomous Navigation” em “1989 IEEE International Conference on Robotics and
Automation”, vol.2, páginas 990-996
Gao, yang. “Contemporary Planetary Robotics: An Approach Toward Autonomous
Systems”. Wiley-Vch.
https://books.google.pt/books/about/Contemporary_Planetary_Robotics.html?hl=pt-PT&id=9
dxKDAAAQBAJ (visitado a 17-10-2016)
Daniels, marie. http://phys.org/news/2014-08-technical-self-driving-cars.html (visitado a
18-10-2016)
2025ad. https://www.2025ad.com/in-the-news/blog/ad-the-technical-challenges/ (visitado
a 12-10-2016)
“Camião autónomo da Uber fez a primeira entrega depois de viajar 200 quilómetros
sozinho”. SapoTek.
http://tek.sapo.pt/multimedia/artigo/camiao_autonomo_da_uber_fez_a_primeira_entrega_de
pois_de_viajar_200_quilometros_-49370sgj.html (visitado a 29/10/2016)
Simões, maria.”Fatores de risco auto reportados associados aos acidentes rodoviários: um estudo sobre os condutores portugueses de veículos ligeiros ”. XV Curso de Mestrado de Saúde Pública. Universidade Nova de Lisboa, Escola Nacional de Saúde Pública. “https://run.unl.pt/bitstream/10362/14807/1/RUN%20-%20Disserta%C3%A7%C3%A3o%20de%20Mestrado%20-%20Maria%20Teresa%20Sim%C3%B5es.pdf “ página 28.
Navegação Autónoma Desafios Técnicos e Tecnológicos 28/29

Navegação Autónoma Desafios Técnicos e Tecnológicos 29/29