n-2698
DESCRIPTION
ELABORAÇÃO DE SERVIÇOS GEORREFERENCIADOSTRANSCRIPT

N-2698 SET / 2003
PROPRIEDADE DA PETROBRAS 21 páginas
ELABORAÇÃO DE SERVIÇOS GEORREFERENCIADOS
Procedimento
Esta Norma substitui e cancela a sua revisão anterior.
Cabe à CONTEC - Subcomissão Autora, a orientação quanto à interpretação do texto desta Norma. O Órgão da PETROBRAS usuário desta Norma é o responsável pela adoção e aplicação dos seus itens.
CONTEC Comissão de Normas
Técnicas
Requisito Técnico: Prescrição estabelecida como a mais adequada e que deve ser utilizada estritamente em conformidade com esta Norma. Uma eventual resolução de não segui-la ("não-conformidade" com esta Norma) deve ter fundamentos técnico-gerenciais e deve ser aprovada e registrada pelo Órgão da PETROBRAS usuário desta Norma. É caracterizada pelos verbos: “dever”, “ser”, “exigir”, “determinar” e outros verbos de caráter impositivo.
Prática Recomendada: Prescrição que pode ser utilizada nas condições previstas por esta Norma, mas que admite (e adverte sobre) a possibilidade de alternativa (não escrita nesta Norma) mais adequada à aplicação específica. A alternativa adotada deve ser aprovada e registrada pelo Órgão da PETROBRAS usuário desta Norma. É caracterizada pelos verbos: “recomendar”, “poder”, “sugerir” e “aconselhar” (verbos de caráter não-impositivo). É indicada pela expressão: [Prática Recomendada].
SC - 12
Cópias dos registros das “não-conformidades” com esta Norma, que possam contribuir para o seu aprimoramento, devem ser enviadas para a CONTEC - Subcomissão Autora.
As propostas para revisão desta Norma devem ser enviadas à CONTEC - Subcomissão Autora, indicando a sua identificação alfanumérica e revisão, o item a ser revisado, a proposta de redação e a justificativa técnico-econômica. As propostas são apreciadas durante os trabalhos para alteração desta Norma.
Normas Gerais de Projeto
“A presente Norma é titularidade exclusiva da PETRÓLEO BRASILEIROS.A. – PETROBRAS, de uso interno na Companhia, e qualquer reproduçãopara utilização ou divulgação externa, sem a prévia e expressaautorização da titular, importa em ato ilícito nos termos da legislação pertinente, através da qual serão imputadas as responsabilidadescabíveis. A circulação externa será regulada mediante cláusula própria deSigilo e Confidencialidade, nos termos do direito intelectual e propriedadeindustrial.”
Apresentação
As Normas Técnicas PETROBRAS são elaboradas por Grupos de Trabalho - GTs (formados por especialistas da Companhia e das suas Subsidiárias), são comentadas pelas Unidades da Companhia e das suas Subsidiárias, são aprovadas pelas Subcomissões Autoras - SCs (formadas por técnicos de uma mesma especialidade, representando as Unidades da Companhia e as suas Subsidiárias) e homologadas pelo Plenário da CONTEC (formado pelos representantes das Unidades da Companhia e das suas Subsidiárias). Uma Norma Técnica PETROBRAS está sujeita a revisão em qualquer tempo pela sua Subcomissão Autora e deve ser reanalisada a cada 5 anos para ser revalidada, revisada ou cancelada. As Normas Técnicas PETROBRAS são elaboradas em conformidade com a norma PETROBRAS N - 1. Para informações completas sobre as Normas Técnicas PETROBRAS, ver Catálogo de Normas Técnicas PETROBRAS.

N-2698 SET / 2003
2
1 OBJETIVO 1.1 Esta Norma estabelece as diretrizes básicas para os serviços de aquisição de dados georreferenciados relativos à feições submarinas e terrestres, que compõem sistemas de informações geográficas (GIS) e são utilizados na elaboração de mapas. 1.2 Esta Norma se aplica a projetos iniciados a partir da data de sua edição. 1.3 Esta Norma contém Requisitos Técnicos e Práticas Recomendadas. 2 DOCUMENTOS COMPLEMENTARES Os documentos relacionados a seguir são citados no texto e contêm prescrições válidas para a presente Norma.
Decreto 89.817 de 20/06/1984 que Estabelece as Instruções Reguladoras das Cartográficos Produzidos em Levantamentos Oceanográficos”; Hidrográficos (LH) Executados por Entidades Extra Marinha”; Normas Técnicas da Cartografia Nacional; Instrução da Marinha do Brasil IT04 - “Normas para Confecção e Documentos; Instrução da Marinha do Brasil IT A-06A - “Procedimentos para Levantamentos.
3 DEFINIÇÕES Para os propósitos desta Norma são adotadas as definições indicadas nos itens 3.1 a 3.17. 3.1 “Differential Global Positioning System” - DGPS Técnica de determinação de coordenadas que utiliza correções diferenciais para obtenção de melhor precisão. Normalmente, refere-se a DGPS quando se tratando de determinação de coordenadas em tempo real. Neste caso, é necessária 1 ligação via rádio entre as unidades fixa e móvel. 3.2 Mapeamento Aerofotogramétrico Consiste em um conjunto de processos destinados à obtenção de dados georreferenciados na forma de mapas, ortofotocartas, mosaicos, entre outros, utilizando fotografias aéreas métricas. 3.3 Posicionamento Absoluto com o GPS Técnica de determinação de coordenadas em que um único receptor é utilizado, sem aplicação de correções diferenciais ou otimizações orbitais.

N-2698 SET / 2003
3
3.4 Posicionamento Cinemático com o GPS Técnica de determinação de coordenadas que utiliza as fases das portadoras L1 e L2 ou simplesmente L1, na qual o equipamento móvel desloca-se continuamente durante o rastreamento. 3.5 Posicionamento Cinemático em Tempo Real ou RTK Técnica de determinação de coordenadas em tempo real que utiliza as fases das portadoras L1 e L2, associadas usualmente a uma conexão de rádio VHF ou UHF. 3.6 Posicionamento Pseudocinemático com o GPS Técnica de determinação de coordenadas que utiliza as fases das portadoras L1 e L2, na qual o equipamento móvel ocupa cada estação por aproximadamente 5 minutos e repete a ocupação, no mínimo, 1 hora após a ocupação precedente. 3.7 Posicionamento Relativo (ou Diferencial) com o GPS Técnica de determinação de coordenadas na qual mais de 1 receptor é utilizado simultaneamente, sendo que, pelo menos, um dos receptores tem sua antena instalada em um ponto de coordenadas e altitude conhecidas. A este receptor dá-se o nome de receptor base, “master” ou de referência. A técnica prevê simultaneidade no rastreamento e exige pós-processamento. 3.8 Posicionamento Relativo Estático Interferométrico com o GPS Técnica de determinação de coordenadas que utiliza as fases das portadoras L1 e L2, ou simplesmente L1, na qual, pelo menos, 2 receptores permanecem rastreando por período superior a 30 minutos. 3.9 Posicionamento Relativo Estático com o GPS Utilizando o Código Técnica de determinação de coordenadas que utiliza um dos códigos C/A ou Y. 3.10 Posicionamento Relativo Estático Rápido com o GPS Técnica de determinação de coordenadas que utiliza as fases das portadoras L1 e L2 com tempo de rastreamento entre 5 minutos e 20 minutos nos pontos a determinar. 3.11 Resolução Espacial Parâmetro que define o tamanho do menor objeto que o sensor do satélite consegue imagear e representar na imagem.

N-2698 SET / 2003
4
3.12 Resolução Espectral Define a quantidade de regiões (faixas) do espectro eletromagnético que o sensor é capaz de registrar energia eletromagnética e gerar uma imagem. 3.13 Resolução Temporal Define o intervalo de tempo para obtenção de 2 imagens sucessivas da mesma região da terra. 3.14 Resolução Radiométrica Define a quantidade de bits utilizados por cada pixel para armazenar os dados obtidos pelo sensor, traduzida diretamente pela quantidade de níveis de cinza que podem ser utilizados para representar cada pixel de uma imagem. 3.15 Sonografia Técnica de imageamento de feições submersas que utiliza equipamentos de varredura lateral e que possuem transdutores especialmente desenhados para emitir um pulso sonoro de curta duração, em geral, menor que 1 milisegundo, em um feixe orientado lateralmente, com lóbulo horizontal estreito, usualmente menor que 2° e com lóbulo vertical largo, normalmente maior que 20°. 3.16 Eco-Batimetria Averiguação, determinação e estudo da profundidade das massas de água, independentemente da constituição e outras condições físicas ou químicas da água, bem como da natureza e qualidade do fundo, incluindo a representação gráfica do relevo, através da utilização de equipamentos denominados ecobatímetros. 3.17 “Stop and Go” Técnica diferencial de determinação de coordenadas na qual o equipamento móvel desloca-se sem perder a recepção da fase da portadora, com permanência nos pontos a determinar coordenadas de 3 s a 120 s. 4 CRITÉRIOS GERAIS 4.1 As especificações técnicas para a elaboração de serviços georreferenciados devem conter, no mínimo, as seguintes informações:
a) objetivo: definição da finalidade básica; b) normas e documentos aplicáveis; c) definições; d) equipamentos utilizados; e) referências; f) tolerâncias;
N-2698 SET / 2003
5
g) descrição dos serviços; h) requisitos de segurança, saúde ocupacional e meio ambiente; i) equipe técnica envolvida na execução dos serviços.
4.2 Todos os equipamentos utilizados devem ser calibrados e aferidos periodicamente, de acordo com as recomendações dos fabricantes e ter precisão compatível com as tolerâncias estabelecidas. 4.3 Referenciais Geodésicos 4.3.1 Os serviços georreferenciados no âmbito desta Norma devem referir-se ao Sistema Geodésico Brasileiro (SGB) no “datum” horizontal SAD-69 (Vértice de Chuá - MG) e “datum” vertical definido pelo marégrafo de Imbituba - SC. 4.3.2 A critério da PETROBRAS pode ser adotado outro “datum”, com parâmetros de transformação para outros referenciais definidos pelo padrão de utilização de referenciais geodésicos da PETROBRAS. 4.3.3 Recomenda-se que todos os levantamentos planimétricos estejam referenciados à RBMC (Rede Brasileira de Monitoramento Contínuo) do Instituto Brasileiro de Geografia e Estatística (IBGE), pertencente ao Sistema Geodésico Brasileiro (SGB) ou em redes dela decorrentes. Recomenda-se que os levantamentos altimétricos estejam referenciados à rede altimétrica do SGB. Recomenda-se, ainda, que os levantamentos batimétricos estejam corrigidos do nível de referência conforme definido pelas tábuas de marés publicadas pela Marinha do Brasil. [Prática Recomendada] 4.3.4 As alturas elipsoidais obtidas por rastreamento de satélites devem ser reduzidas ao nível médio do mar através do mapa geoidal. Os valores das ondulações geoidais devem ser obtidos da interpolação sobre mapa geoidal ou obtidos de modelo digital oficialmente recomendado pelo IBGE. No caso de levantamentos em escalas cadastrais, recomenda-se a adoção de um modelo/mapa geoidal local pré-existente ou a ser elaborado quando da execução do georreferenciamento. 4.3.5 Os valores de coordenadas e alturas elipsoidais originalmente em WGS-84 (sistema de referência do GPS) devem ser transformados para o “datum” geodésico oficial ao qual as ondulações geoidais estão referidas. O mapa geoidal do Brasil, publicado pelo IBGE/EPUSP (Escola Politécnica da Universidade de São Paulo) fornece valores de separação entre o geóide e o elipsóide associado ao SAD-69, adotando como convenção que valores positivos de ondulação geoidal (N) correspondem ao geóide “acima” do elipsóide. 4.4 Padrão de Exatidão Cartográfica Recomenda-se que todos os levantamentos objetivem a consecução do mapeamento dentro das especificações classe A do Padrão de Exatidão Cartográfica (PEC), de acordo com o estabelecido no Decreto 89.817 de 20/06/1984. [Prática Recomendada]

N-2698 SET / 2003
6
5 AQUISIÇÃO DE DADOS 5.1 Posicionamento por Satélite A técnica de posicionamento por satélite a ser adotada deve ser a que atenda às especificações de precisão de cada projeto. Em princípio, as metodologias utilizadas para determinação de coordenadas e altitudes com o GPS com finalidade de georreferenciamento devem ser diferenciais, conforme definido no item 3.2. 5.1.1 Diretrizes para a Utilização das Técnicas de Posicionamento por Satélite 5.1.1.1 Posicionamento Absoluto As informações planimétricas obtidas à partir desta técnica têm precisão da ordem de 20 m e somente devem ser utilizadas quando a escala de trabalho for igual ou menor que 1:40000. Notas: 1) As informações altimétricas dela originadas não devem ser utilizadas devido a
baixa precisão da técnica. 2) As coordenadas armazenadas nos receptores são sempre relacionadas ao
“datum” WGS-84, mesmo que se tenha definido parâmetros para visualização das coordenadas, no mostrador do receptor, em outro “datum”.
3) Atenção especial deve ser dada à configuração do receptor quanto ao “datum” das coordenadas apresentadas, principalmente em relação aos parâmetros de transformação de “datum”, uma vez que mesmo os sistemas pré-definidos nos rastreadores podem estar utilizando indevidamente parâmetros não oficiais.
5.1.1.2 Posicionamento Relativo ou Diferencial Esta técnica está definida no item 3.7. Para o posicionamento diferencial estático a estação de referência deve ser um ponto implantado através da técnica de Posicionamento Relativo Estático Interferométrico (ver item 3.8), pertencente ou referenciado ao Sistema Geodésico Brasileiro (SGB). Tendo em vista minimizar problemas quando da aquisição de dados, recomenda-se: [Prática Recomendada]
a) rastrear um mínimo de 5 satélites simultaneamente, nas 2 estações; b) utilizar, preferencialmente, antenas que possuam meios para mitigação de
multicaminhamento, tais como, plano de terra ou “choke ring”; c) restringir a distância máxima entre a estação de referência e a(s) móvel(is) de
acordo com o especificado pelo fabricante; d) utilizar para “Position Dilution of Precision” (PDOP) valores iguais ou menores
que 4; e) utilizar como elevação mínima dos satélites 10° para estações de referência e
15° para as estações móveis; f) utilizar intervalos de coleta de dados sincronizados entre as estações; g) utilizar na estação de referência intervalo igual ou inferior a 6 s para envio das
correções diferenciais quando se tratar de DGPS; h) utilizar na estação de referência intervalo de 1 s para envio das correções
quando utilizada a técnica Posicionamento Cinemático em Tempo Real ou RTK;
N-2698 SET / 2003
7
i) utilizar na estação móvel 30 s como o tempo máximo para uso da última
correção recebida, no caso de perda de sinal DGPS; j) utilizar unicamente as coordenadas e altitudes determinadas através da
solução RTK FIX com a técnica de posicionamento cinemático em tempo real ou RTK.
5.1.1.3 Posicionamento Relativo Estático Interferométrico O georreferenciamento de pontos de controle deve ser executado utilizando esta técnica. Os pontos de controle destinam-se a fornecer arcabouço de pontos com coordenadas e altitudes, para utilização em outros levantamentos de ordem inferior. Com vistas à correta obtenção da fase de batimento das portadoras nos levantamentos estáticos recomenda-se: [Prática Recomendada]
a) que os receptores possuam especificações geodésicas, ou seja, capacidade de armazenar fases de batimento (ϕ) das portadoras L1 ou L1/L2;
b) que as antenas possuam meios para mitigação de multicaminhamento, tais como, plano de terra ou “choke rings”;
c) que o tempo de ocupação nas estações (referência e móvel) esteja em consonância com a TABELA 1;
d) verificar a configuração recomendada pelo fabricante do equipamento de modo a certificar-se que as orientações do fabricante estão sendo seguidas conforme apresentado nos itens subseqüentes;
e) verificar se durante todo o período de rastreamento se a geometria da configuração assegurou valores de “Geometric Dilution of Precision” (GDOP) inferiores a 6;
f) garantir que o número mínimo de satélites rastreados simultaneamente durante o período seja 4, sendo desejáveis 5 ou mais;
g) configurar a elevação mínima para rastreamento em 15° na(s) unidade(s) móvel(eis) e 10° no(s) equipamento(s) operando na(s) estação(ões) de referência;
h) observar o intervalo de gravação das observáveis de 15 s; quando associados a estações de referência, cujo intervalo difere de 15 s, estes valores podem ser modificados de modo a coincidir os instantes de observação, desde que não sejam inferiores a 10 s e superiores a 30 s;
i) utilizar no processamento dos dados, a Dupla Diferença de fase (DD), com solução pela fixação dos inteiros (DD Fix);
j) verificar, nos relatórios de processamento, se o valor do erro médio quadrático dos resíduos de cada sessão (RMS dos resíduos após o ajustamento) foi inferior a 0,01 m;
k) analisar os testes estatísticos do ajustamento de observações, preferencialmente, o teste chi-quadrado;
l) verificar, nos relatórios de processamento, se a solução obtida em cada sessão satisfez o teste estatístico de razão entre as variâncias (“ratio test”).
N-2698 SET / 2003
8
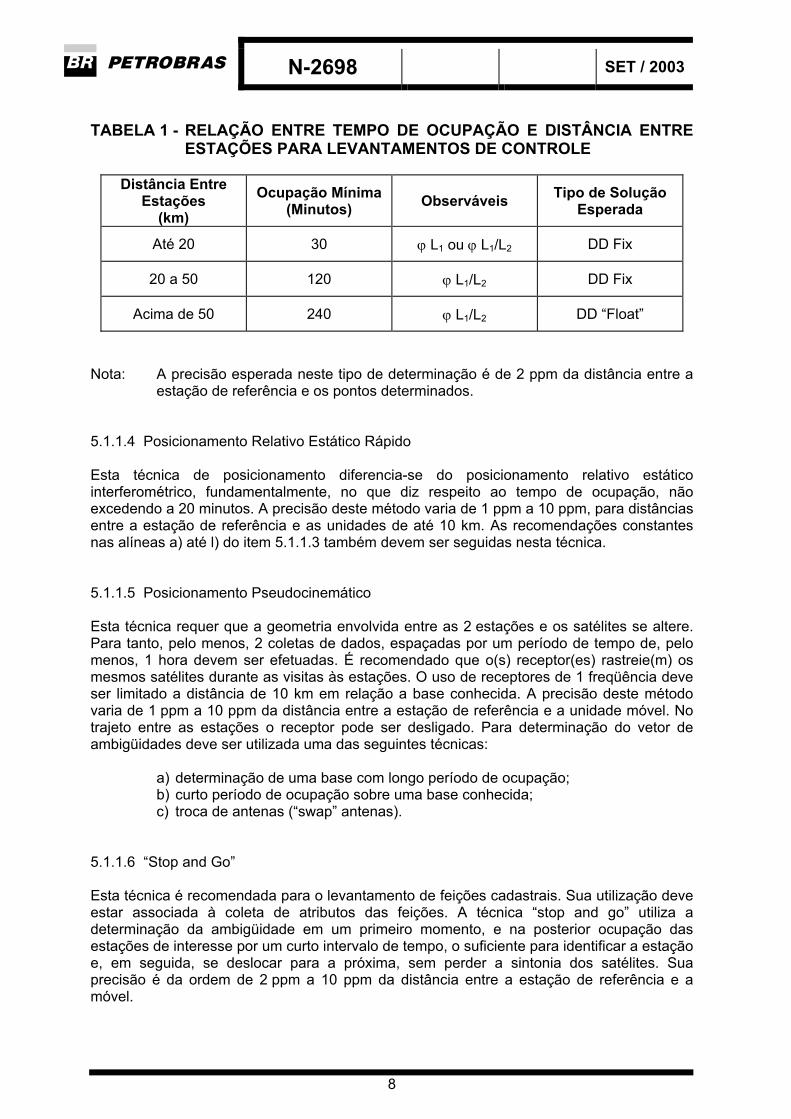
TABELA 1 - RELAÇÃO ENTRE TEMPO DE OCUPAÇÃO E DISTÂNCIA ENTRE
ESTAÇÕES PARA LEVANTAMENTOS DE CONTROLE
Distância Entre Estações
(km) Ocupação Mínima
(Minutos) Observáveis Tipo de Solução Esperada
Até 20 30 ϕ L1 ou ϕ L1/L2 DD Fix
20 a 50 120 ϕ L1/L2 DD Fix
Acima de 50 240 ϕ L1/L2 DD “Float”
Nota: A precisão esperada neste tipo de determinação é de 2 ppm da distância entre a
estação de referência e os pontos determinados. 5.1.1.4 Posicionamento Relativo Estático Rápido Esta técnica de posicionamento diferencia-se do posicionamento relativo estático interferométrico, fundamentalmente, no que diz respeito ao tempo de ocupação, não excedendo a 20 minutos. A precisão deste método varia de 1 ppm a 10 ppm, para distâncias entre a estação de referência e as unidades de até 10 km. As recomendações constantes nas alíneas a) até l) do item 5.1.1.3 também devem ser seguidas nesta técnica. 5.1.1.5 Posicionamento Pseudocinemático Esta técnica requer que a geometria envolvida entre as 2 estações e os satélites se altere. Para tanto, pelo menos, 2 coletas de dados, espaçadas por um período de tempo de, pelo menos, 1 hora devem ser efetuadas. É recomendado que o(s) receptor(es) rastreie(m) os mesmos satélites durante as visitas às estações. O uso de receptores de 1 freqüência deve ser limitado a distância de 10 km em relação a base conhecida. A precisão deste método varia de 1 ppm a 10 ppm da distância entre a estação de referência e a unidade móvel. No trajeto entre as estações o receptor pode ser desligado. Para determinação do vetor de ambigüidades deve ser utilizada uma das seguintes técnicas:
a) determinação de uma base com longo período de ocupação; b) curto período de ocupação sobre uma base conhecida; c) troca de antenas (“swap” antenas).
5.1.1.6 “Stop and Go” Esta técnica é recomendada para o levantamento de feições cadastrais. Sua utilização deve estar associada à coleta de atributos das feições. A técnica “stop and go” utiliza a determinação da ambigüidade em um primeiro momento, e na posterior ocupação das estações de interesse por um curto intervalo de tempo, o suficiente para identificar a estação e, em seguida, se deslocar para a próxima, sem perder a sintonia dos satélites. Sua precisão é da ordem de 2 ppm a 10 ppm da distância entre a estação de referência e a móvel.

N-2698 SET / 2003
9
5.1.1.7 Posicionamento Relativo Cinemático O posicionamento relativo cinemático tem como observação fundamental, a fase de onda da portadora, embora o uso da pseudodistância também seja importante na solução do vetor de ambigüidade. Na solução do vetor de ambigüidades deve ser utilizada uma das opções a seguir:
a) solução antes do início do movimento; b) estimar em conjunto com os dados coletados em movimento.
Notas: 1) Para o caso da alínea a) deste item, a determinação do vetor de ambigüidades
deve ser realizada utilizando uma das seguintes técnicas: a) determinação de uma base com longo período de ocupação; b) curto período de ocupação sobre uma base conhecida; c) troca de antenas (“swap” antenas).
2) Para o caso da alínea b) da Nota 1), desde que não haja perda de sintonia com os satélites, o vetor de ambigüidade não sofre alteração e para um tempo de captação em torno de 30 minutos, é possível solucionar a ambigüidade em conjunto com as coordenadas da antena.
3) Os dados desse tipo de posicionamento podem ser processados após a coleta (pós-processado), ou durante a própria coleta, uma vez estabelecida uma via de comunicação com a estação de referência. [Prática Recomendada]
5.1.2 As técnicas descritas no item 5.1.1 estão resumidas na TABELA 2, com aplicações e precisões ao nível de significância de 5 %.
TABELA 2 - TÉCNICAS DE POSICIONAMENTO
Técnica Distância Máxima
(km) Observação Precisão
Horizontal Aplicação
Posicionamento Absoluto n. a. Código C/A 20 m Navegação, reconhecimento
DGPS 500 Código C/A 1 m a 5 m Navegação de precisão, obras de engenharia, dragagem
DGPS Pós-Processado 800 Código C/A e L1
0,3 m a 7 m
Navegação de precisão, obras de engenharia, dragagem
Estático 50 Código C/A e L1
2 ppm Levantamentos geodésicos
Estático Acima de 50
Código C/A e L1/L2
1 ppm a 2 ppm Levantamentos geodésicos
Estático Rápido 10 Código C/A e L1/L2
1 ppm a 10 ppm
Levantamentos geodésicos e topográficos
Pseudocinemático 10 Código C/A e L1/L2
1 ppm a 10 ppm Levantamentos topográficos
“Stop & Go” 15 Código C/A e L1
2 ppm a 10 ppm
Levantamentos cadastrais e topográficos
RTK 15 Código C/A e L1/L2
1 cm + 2 ppm
Monitoramento e levantamentos em tempo real de alta precisão

N-2698 SET / 2003
10
5.2 Imagem de Satélite As imagens de satélite constituem outra fonte para aquisição de dados georreferenciados, estando listadas na TABELA 3 algumas características técnicas dos principais satélites imageadores. A escolha de que satélite/sensor utilizar deve ser baseada na precisão requerida pelo trabalho e na resolução espacial. Entretanto, a resolução espacial não é o parâmetro final de precisão da imagem, pois o seu georreferenciamento pode introduzir novos erros. Na TABELA 3, a coluna “Escala” refere-se à máxima ampliação possível, considerando as correções do imageamento e desconsiderando os erros de georreferenciamento.
TABELA 3 - CARACTERÍSTICAS TÉCNICAS DE ALGUNS SATÉLITES
Satélite/Sensor Bandas Resolução Espacial
Resolução Temporal Escala
LANDSAT 5/TM 7 Bandas Multiespectrais 30 m 16 dias 1:60000
7 Bandas Multiespectrais 30 m 16 dias 1:60000 LANDSAT 7/ETM+
Banda Pancromática 15 m 16 dias 1:30000
4 Bandas Multiespectrais 20 m 1 dia a 4 dias 1:40000 SPOT 1/2/3/HRV
Banda Pancromática 10 m 1 dia a 4 dias 1:20000
4 Bandas Multiespectrais 20 m 1 dia a 4 dias 1:40000 SPOT 4/HRVIR
Banda Pancromática 10 m 1 dia a 4 dias 1:20000
4 Bandas Multiespectrais 4 m 3 dias a 5 dias 1:8000 IKONOS II
Banda Pancromática 1 m 3 dias a 5 dias 1:2000
4 Bandas Multiespectrais 2,6 m 1,5 dia a 4 dias 1:6000 QUICKBIRD
Banda Pancromática 0,7 m 1,5 dia a 4 dias 1:1500
EROS Banda Pancromática 1,8 m 1,8 dia a 4 dias 1:3600
4 Bandas Multiespectrais 23,5 m 24 dias 1:100000 IRS 1C-1D/Liss III Banda Pancromática 5,8 m 5 dias 1:15000
Banda C (5,3 GHz) 1:16000 RADARSAT I
Polarização HH 8 m a 100 m 4 dias a 6 dias
1:2000000
Nota: Na contratação para aquisição de imagens de satélite georreferenciadas deve ser
especificado:
a) os parâmetros de transformação de “datum” de acordo com o padrão de utilização de referenciais geodésicos da PETROBRAS;
b) o percentual máximo de cobertura de nuvens.

N-2698 SET / 2003
11
5.3 Aerolevantamento 5.3.1 Cobertura Aerofotogramétrica 5.3.1.1 A cobertura aerofotogramétrica deve ser executada numa escala de 3 vezes a 5 vezes menores que a escala do mapeamento desejado. 5.3.1.2 A superposição entre fotos no sentido longitudinal deve ser de, no mínimo, 60 % (± 5 %) e lateral de 30 % (± 5 %). 5.3.1.3 A cobertura deve ser executada com câmara métrica, cujo objetivo e distância focal estejam de acordo com as características e objetivos do vôo, montada em aeronave que permita voar a altitude compatível com estes requisitos. 5.3.1.4 O ângulo de rotação horizontal entre exposições consecutivas deve ser mantido o menor possível, sendo admitida como tolerância a média por faixa de 3° e, em casos isolados, de 8°, no máximo. 5.3.1.5 A inclinação do eixo ótico da câmara deve ser inferior a 3° por foto e inferior a 2° na média por faixa. 5.3.1.6 Devem ser utilizados filmes com poder resolutivo de, no mínimo, 50 linhas/mm. 5.3.1.7 Os negativos obtidos não podem apresentar alterações dimensionais superiores a 0,2 mm. 5.3.1.8 Recomenda-se a elaboração de fotoíndice em escala 4 vezes menor que a da cobertura aerofotogramétrica. [Prática Recomendada] 5.3.2 Apoio de Campo para Aerotriangulação 5.3.2.1 O apoio planimétrico para aerotriangulação deve ser executado, preferencialmente, por rastreamento de satélites GPS, conforme item 5.1.1. 5.3.2.2 O apoio altimétrico pode ser executado por rastreamento de satélites GPS, conforme itens 4.3.4 e 5.1.1 ou por nivelamento clássico. [Prática Recomendada] 5.3.2.3 As linhas de nivelamento geométrico básico devem partir e chegar em Referências de Nível (RRNN) distintas ou serem obtidas por nivelamento ou contranivelamento. Em ambos os casos, a tolerância de fechamento deve ser de 12 mm k , sendo k o comprimento da linha em quilômetros.

N-2698 SET / 2003
12
5.3.3 Aerotriangulação 5.3.3.1 A aerotriangulação deve ser executada por método analítico ou semi-analítico, por feixe ou modelos independentes, para adensamento dos pontos de apoio planialtimétricos. 5.3.3.2 A medição das coordenadas dos pontos nas imagens deve ser feita utilizando-se aparelhos de 1ª ordem equipados com registradores eletrônicos de coordenadas ou em estações fotogramétricas analíticas. 5.3.4 Restituição Estereofotogramétrica 5.3.4.1 A restituição estereofotogramétrica deve ser executada com instrumentos restituidores de primeira ordem. 5.3.4.2 As curvas de nível devem ter eqüidistância compatível com as escalas da cobertura aerofotogramétrica e do mapeamento a ser realizado, conforme a TABELA 4.
TABELA 4 - EQÜIDISTÂNCIA DAS CURVAS DE NÍVEL
Escala Eqüidistância Curvas Mestras
1:2000 1 m 5 m
1:5000 2 m 10 m
1:10000 5 m 25 m
1:25000 10 m 50 m
1:50000 20 m 100 m
1:100000 50 m 250 m
1:250000 100 m 500 m
1:1000000 100 m 500 m
5.3.5 Perfilamento a Laser No caso do uso de equipamento a laser aerotransportado para obtenção de dados altimétricos, as curvas de nível devem ser geradas automaticamente a partir da malha de pontos cotados levantados no perfilamento.

N-2698 SET / 2003
13
5.3.6 Mosaico Digital 5.3.6.1 O mosaico digital deve ser gerado a partir dos diafilmes da cobertura aerofotogramétrica. 5.3.6.2 Os diafilmes selecionados devem ser digitalizados em equipamento fotogramétrico de alta precisão e que atendam às seguintes exigências:
a) formato mínimo 24 cm x 24 cm; b) resolução geométrica mínima de 25 micra; c) resolução radiométrica mínima de 24 bits; d) precisão mínima de 5 micra.
5.3.6.3 O georrefenciamento deve estar de acordo com os itens 4.3.1. e 4.3.2 desta Norma. 5.3.6.4 O programa de tratamento de imagem deve permitir tratamento nos seguintes aspectos:
a) ajuste radiométrico (luminosidade, descontinuidade das imagens adjacentes, etc.);
b) níveis de contraste; c) tonalidade; d) homogeneização das imagens; e) mosaicagem permitindo principalmente a correta relação entre as folhas
adjacentes e também no caso de emendas entre fotos. 5.3.7 Ortofotocartas Digitais 5.3.7.1 Os diafilmes a serem digitalizados devem atender às exigências do item 5.3.6.2 desta Norma. 5.3.7.2 O modelo digital do terreno para ortoretificação deve ser gerado a partir dos elementos altimétricos da restituição ou com dados do perfilamento a laser ou por correlação de imagens. 5.3.7.3 O programa de tratamento de imagem deve permitir tratamento conforme item 5.3.6.4 desta Norma. 5.3.7.4 O georreferenciamento deve estar de acordo com os itens 4.3.1 e 4.3.2 desta Norma. 5.3.8 Mapas Vetoriais 5.3.8.1 A referência plani-altimétrica deve estar de acordo com o item 4.3 desta Norma.

N-2698 SET / 2003
14
5.3.8.2 Recomenda-se seguir o padrão de divisão da Carta Internacional ao Milionésimo contendo, em todas as folhas, informações marginais utilizadas pelo IBGE. [Prática Recomendada] 5.3.8.3 A estruturação do arquivamento dos dados vetoriais, assim como cores, tipos e espessuras de linhas devem obedecer às orientações da PETROBRAS. 5.3.8.4 Toponímia, legenda, informações marginais, reticulados da projeção e cruzetas geodésicas devem ser armazenados em arquivos à parte. 5.3.8.5 A simbologia deve obedecer aos padrões utilizados pelo IBGE, pela Diretoria do Serviço Geográfico do Exército Brasileiro (DSG) e pela PETROBRAS. 5.3.8.6 Na representação das feições lineares os elementos devem apresentar conectividade. 5.3.8.7 Os arquivos digitais devem ser em 2D, a exceção da hipsografia e da hidrografia que devem ser em 3D. 5.4 Levantamento Submarino 5.4.1 Sonografia 5.4.1.1 O mapeamento sonográfico, utilizando equipamento denominado sonar (“sound navigation and ranging”), pode ser aplicado na identificação de feições no piso marinho. A qualidade final do levantamento e suas imagens dependem, fundamentalmente, dos parâmetros de aquisição utilizados. O georreferenciamento das imagens depende ainda de um conhecimento aprofundado da propagação da onda acústica no meio considerado. As prescrições deste tipo de levantamento estão vinculadas ao tipo de montagem e freqüência acústica. [Prática Recomendada] 5.4.1.2 Recomenda-se seguir a Instrução da Marinha do Brasil IT04 para a consecução deste tipo de levantamento. [Prática Recomendada] 5.4.2 Eco-Batimetria 5.4.2.1 O mapeamento com ecobatímetros pode ser utilizado na determinação da fisiografia do piso marinho. A especificação da aquisição de dados varia com os objetivos da aplicação, principalmente no que tange a freqüência de trabalho, montagem de equipamentos e tratamento dos dados.
N-2698 SET / 2003
15
5.4.2.2 Para a consecução deste tipo de levantamento, recomenda-se seguir as prescrições das normas da Marinha do Brasil, em especial a Instrução Técnica IT A-06A. [Prática Recomendada] 5.4.3 Hidroacústica O georreferenciamento de feições submarinas pode ser realizado a partir de determinação de coordenadas através de métodos hidroacústicos, geralmente referidos como LBL ou SSBL. [Prática Recomendada] 5.4.3.1 Determinação de Coodenadas por SSBL A determinação de coordenadas através de SSBL é realizada através de medidas lineares e angulares entre 2 transdutores, um instalado normalmente no caso de navio e outro em ROV ou estrutura a ser posicionada. O método é utilizado para posicionamento de ROV e levantamentos de feições contínuas (dutos, linhas) em “follow sub”. A precisão estimada para este tipo de levantamento é de 2 % da lâmina d’água. Recomenda-se o uso de SSBL, no que tange a mapeamento, na determinação de coordenadas de equipamentos e outras feições pontuais como poços, sinalizações, até 600 m de lâmina d’água. Recomenda-se ainda: [Prática Recomendada]
a) que antes de campanhas de levantamento sejam verificadas as configurações de instalação do sistema acústico;
b) que seja realizado teste de desempenho do sistema acústico; c) que seja determinada a velocidade do som na água antes do início da
operação. 5.4.3.2 Determinação por LBL Para a consecução do posicionamento baseado em LBL há necessidade de se operar redes submarinas de referência implantadas no fundo do mar. As considerações desta Norma se aplicam à banda de freqüência média (MF) de 17 kHz a 33 kHz. As alíneas seguintes comentam os procedimentos para a implantação destas redes:
a) rede, constituída de, no mínimo, 4 “transponders”, deve circunscrever a área de trabalho e as distâncias entre vértices é função da lâmina d’água; de um modo geral, as linhas base não devem ultrapassar 2,5 vezes a lâmina d’água, para profundidade acima de 100 m, e em profundidades menores, a relação lâmina d’água versus afastamento entre “transponders” se altera, sendo o limite dado pelas condições de propagação acústica, devendo esta relação ser inferior a 7;
b) a melhor configuração deve, não só levar em conta a geometria do levantamento como também, as características acústicas da área e do equipamento;
c) o lançamento pode ser realizado em modo de queda livre ou com auxílio de guincho e dispositivo de liberação acústica, recomendando-se os seguintes procedimentos: - lançamento com auxílio de guincho e função “release” de um “transponder”
(liberação acústica), sendo as coordenadas aproximadas, obtidas no instante da liberação, consideradas como as coordenadas de lançamento (o “transponder” é largado a 10 m do piso marinho);

N-2698 SET / 2003
16
- queda livre, onde há necessidade de determinação de coordenadas
aproximadas dos “transponders” por outro método, quais sejam: determinação por ROV em SSBL ou determinação de deriva e aplicação do afastamento na posição dos demais “transponders”;
d) após o lançamento e configuração do sistema, 2 calibrações são necessárias para a obtenção do georreferenciamento, sendo a precisão obtida neste tipo de levantamento é invariante com a lâmina d’água e estimada em 5 m;
e) para a calibração local devem ser atendidos os seguintes requisitos: - devem ser determinadas as coordenadas dos “transponders” em sistemas
locais, levógiros de origem no “transponder” mais a sudoeste ou próximo do centro da rede e orientação similar a do sistema UTM;
- a realização deste sistema é feita pela diferença das coordenadas SSBL entre um determinado “transponder” (arbitrado como a origem) e os demais;
- recomenda-se que os desvios-padrão, utilizados para as equações de injunção posicional, sejam estimados em 1,5 % da lâmina d’água;
- o número de linhas-base observadas (ida e volta) é dependente do sistema que está sendo utilizando, porém, recomenda-se que sejam observadas, no mínimo, 20 distâncias por linha-base;
f) para a calibração global, devem ser atendidos os seguintes requisitos: - a calibração global deve ser realizada logo após a calibração local; - consiste na determinação de parâmetros entre o sistema local e o sistema
absoluto, ou global, realizado pelo DGPS; nesta calibração, as variâncias das observações DGPS devem ser declaradas como 9 m²; as variâncias das observações nos sistemas locais devem ser as calculadas pelo ajustamento a cada evento;
- devem ser coletadas, pelo menos, 20 observações (sistemas locais e DGPS) em cada posição intermediária (entre “transponders”) e no centro da rede (5 posições no total);
- recomenda-se que, se não houver a possibilidade de realizar a calibração global (por limitações de equipamento ou de instalação) recorrer a características de comunicação entre sistemas acústicos como, por exemplo, a determinação em SSBL de, no mínimo, 2 “transponders” ou o “boxin”;
- recomenda-se que na calibração global sejam considerados georreferenciamentos já existentes, podendo inclusive utilizá-los como injunção posicional na consecução da própria calibração; - a estimativa de precisão de uma calibração global é de 4 m.
5.5 Georreferenciamento para Geopig 5.5.1 Recomenda-se que o georreferenciamento para operação com o geopig siga as prescrições para o levantamento geodésico de precisão para a determinação de pontos plani-altimétricos de controle conforme descrito no item 5.1.1, exceto os itens 5.1.1.1 e 5.1.1.2. [Prática Recomendada] 5.5.2 No caso de exigência de altitudes (e não altura elipsoidal), deve-se transportar para a área de trabalho uma RN que serve como referência altimétrica para o levantamento. 5.5.3 Para passagem de geopig em dutos com trechos submarinos, recomenda-se o levantamento dos sistemas de alturas e profundidades (relação entre data altimétrico e batimétrico) válidos para trecho levantado. [Prática Recomendada]

N-2698 SET / 2003
17
6 ARMAZENAMENTO DE DADOS 6.1 Diretrizes Gerais 6.1.1 Para o armazenamento das informações georreferenciadas, recomenda-se a utilização de um Sistema Gerenciador de Banco de Dados que possibilite o armazenamento de dados gráficos e alfanuméricos em consonância com o padrão “OPEN GIS”. [Prática Recomendada] 6.1.2 Os modelos de dados devem ser os definidos pela PETROBRAS. No caso de inexistência de modelos, devem ser criados modelos sempre levando em consideração, os já existentes no que se refere à ligação entre eles. Nota: Quando uma determinada feição estiver sendo modelada, e esta feição tiver
algum tipo de ligação com outras feições, as tabelas de uso comum devem ser aquelas já existentes.
6.1.3 Na utilização do banco de dados, recomenda-se: [Prática Recomendada]
a) utilizar padrões para as abreviaturas de tabelas e para os nomes de tabelas, colunas, índices, usuários, referências, “check constraints”, “triggers”, procedimentos, funções e visões, conforme o item 6.2;
b) utilizar na implementação do banco, uma estrutura sempre com 2 tabelas para cada feição, uma contendo apenas dados não-gráficos e outra contendo os dados gráficos e um “link” para a tabela anterior.
6.2 Especificações para Modelagem de Dados 6.2.1 Os nomes de tabelas devem atender aos seguintes requisitos:
a) somente devem ser utilizadas letras maiúsculas, com até 18 caracteres; b) não devem ser utilizados acentos, preposições e artigos; c) deve reproduzir o melhor possível o nome da entidade; d) deve ser utilizado “underscore” (“_”) para separar seqüências de caracteres; e) deve ser evitado fundir pedaços de palavras em uma única seqüência de
caracteres (exemplo: ANÁLISE DE PROPRIEDADES, não deve virar ANPROP e sim AN_PROP).
6.2.2 As abreviaturas de tabelas (mnemônico) devem atender aos seguintes requisitos:
a) para tabelas com uma única seqüência de caracteres devem ser usados os 4 primeiros caracteres desta seqüência (exemplo: SONDA SOND);
b) para tabelas com 2 seqüências de caracteres devem ser usados os 2 primeiros caracteres de cada seqüência (exemplo: TIPO_SONDA TISO);
c) para tabelas com 3 seqüências de caracteres deve ser usado o primeiro caracter de cada uma das 2 primeiras seqüências e os 2 primeiros caracteres da terceira seqüência; (exemplo: FLUIDO_CLIENTE_EXT FCEX);

N-2698 SET / 2003
18
d) para tabelas com 4 seqüências de caracteres deve ser usado o primeiro caracter de cada uma das seqüências (exemplo: EMP_CAT_SERV_PROD ECSP);
e) para tabelas com mais de 4 seqüências de caracteres deve ser usado, pelo menos, o primeiro caràcter da primeira seqüência;
f) se em uma mesma base de dados o procedimento acima gerar abreviaturas iguais, as duplicidades devem ser resolvidas escolhendo-se outro modo de gerar as abreviaturas.
6.2.3 Os nomes de colunas devem atender aos seguintes requisitos:
a) somente devem ser utilizadas letras maiúsculas, com até 18 caracteres; b) o quinto e o oitavo caracter devem ser “underscore” (“_”); c) os 4 primeiros caracteres devem ser os da abreviatura da tabela; d) o sexto e o sétimo caràcter devem ser iguais aos 2 caracteres do tipo de
informação do atributo que deu origem à coluna, de acordo com a TABELA 5; e) do nono caràcter em diante deve-se abreviar o nome do atributo que deu
origem a coluna seguindo as recomendações válidas para nomes de tabela (exemplos: POCO_CD_POCO e FLUI_NM_FLUIDO);
f) toda coluna que esteja definida como FK (chave estrangeira) em uma tabela deve manter o mesmo nome da tabela da qual se originou se for a única referência; se houver mais de uma referência para a mesma coluna os 8 primeiros caracteres devem ser iguais ao definido na tabela de origem; após os 8 primeiros caracteres, deve ser utilizado qualquer conjunto de caracteres que os diferencie (exemplo: PAIS_CD_PAIS: FK na tabela UNIDADE_FEDERACAO, conforme FIGURA 1).
TABELA 5 - TIPO DE INFORMAÇÃO
BL Blob CD Código (Numérico ou Alfanumérico) DT Data HR Data-Hora IN Indicador MD Medida NM Nome (Nome de um item de dados) NR Número PR Percentagem SG Sigla (Numérica ou Alfanumérica) TX Texto (Descrição de um item de dados) VL Valor Monetário QN Quantidade
FIGURA 1 - NOME DE COLUNA E CHAVE ESTRANGEIRA

N-2698 SET / 2003
19
6.2.4 Os nomes de chaves devem começar com “PK_”, seguido pela abreviatura (mnemônico) definida para a tabela do banco de dados (exemplos: SONDA PK_SOND e TIPO_SONDA PK_TISO). 6.2.5 Os nomes de índices devem atender aos seguintes requisitos:
a) começar por “IN_”; b) começar por “UN_” se o índice for único (exemplo: POCO
UN_POCO_POCO_CD_POCO); c) começar por “IA_” se o índice for agrupado; d) começar por “UA_” se o índice for único e agrupado; e) usar a abreviatura da tabela após os 3 primeiros caracteres; f) se o índice não for agrupado deve-se usar após os 7 primeiros caracteres o
nome da coluna que compõe o índice; se o índice for agrupado e existir mais de um índice deste tipo para uma tabela eles devem receber após os 7 primeiros caracteres “_1”, “_2”, ou qualquer conjunto de caracteres que os diferencie (exemplo: EQUIPAMENTO IA_EQUI_1).
6.2.6 Os nomes de referências devem atender aos seguintes requisitos:
a) começar com “FK_”, seguido pela abreviatura da tabela que está originando a FK, um underscore (“_”) e a abreviatura da tabela que recebe a coluna, nesta ordem;
b) caso exista mais de uma referência do mesmo tipo para uma tabela referenciando uma mesma tabela, elas devem receber após os 12 primeiros caracteres “_01”, “_02” ou qualquer conjunto de caracteres que os diferencie, conforme FIGURA 2.
FIGURA 2 - NOMES DE REFERÊNCIA 6.2.7 Os nomes de “check constraints” devem atender aos seguintes requisitos:
a) começar com “CK_”, seguido pelo nome da coluna, caso a “check constraint” se refira a uma coluna específica; se a “check constraint” relacionar um grupo de colunas da tabela após os 3 primeiros caracteres usar o mnemônico da tabela (exemplo de “check constraint” relacionada a coluna trev_tx_tipo_revest da tabela tipo_revest: TIPO_REVEST -> CK_TREV_TX_TIPO_REVEST);

N-2698 SET / 2003
20
b) caso exista mais de uma “check constraint” para uma mesma coluna ou agrupamento de colunas da tabela, as “check constraint” devem receber após o nome da coluna ou após o mnemônico da tabela os caracteres “_1”, “_2” ou qualquer conjunto de caracteres que os diferencie (exemplo de “check constraint” que envolve um grupo de colunas da tabela tipo_revest: TIPO_REVEST CK_TREV_1).
6.2.8 Os nomes de “triggers” devem atender aos seguintes requisitos:
a) começar com “TR_”, seguido pelo mnemônico da tabela com 4 caracteres, seguido pelo evento que disparou o “trigger”: - upd - “update”; - del - “delete”; - ins - “insert”; - iud - “insert/update/delete” (ou combinação que indique os eventos);
b) colocar a sequência “_1”, “_2”, ... , “_n”, após os 10 caracteres, se houver mais de um “trigger” para o mesmo evento (exemplo: TIPO_REVEST TR_TREV_DEL_1).
6.2.9 Os nomes de “stored procedures” devem atender aos seguintes requisitos:
a) começar com “P_”, seguido pelo mnemônico da tabela com 4 caracteres; caso a “procedure” seja disparada por um “trigger” do banco de dados, após os 7 primeiros caracteres deve vir o evento que disparou a procedure: - upd -“update”; - del - “delete”; - ins - “insert”; - iud - “insert/update/delete” (ou combinação que indique os eventos);
b) colocar a sequência “_1”, “_2”, ... , “_n”, após os 10 caracteres se houver mais de uma “procedure” para o mesmo evento (exemplo: TIPO_REVEST P_TREV_DEL_1);
c) caso a “procedure” seja disparada através de uma referência direta em um aplicativo, colocar um descritivo resumido do que a procedure faz após os 2 primeiros caracteres (exemplo: P_Calcula_Royalties).
6.2.10 Os nomes de “packages” devem começar com “PG_” seguido por um descritivo resumido do “package”. 6.3 Metadados Todas as bases de dados devem ser acompanhadas de seus respectivos metadados. Na falta de um Sistema de Metadados, recomenda-se que os metadados contenham, entre outras, as seguintes informações: (Prática Recomendada)
a) tipo de dado/formato: vetor ou raster; b) características espectrais, radiométricas e geométricas do sensor; c) georreferenciado (sim ou não); d) se georreferenciado, estatísticas do processo [quantidade de pontos, software
utilizado, modelo matemático (transformação afim, projetiva, etc), erro médio quadrático, etc];
e) “datum” e projeção cartográfica, com seus respectivos parâmetros; f) data de aquisição e de validade;

N-2698 SET / 2003
21
g) transformações realizadas e os parâmetros utilizados; h) origem do dado; i) precisão e escala associada; j) metodologia de aquisição.
_____________