movimientos en el plano2
TRANSCRIPT


ÍNDICE DEL TEMA
1. Transformaciones geométricas.
2. Movimientos. Tipos de movimientos.
3. Traslaciones. Vectores.
4. Giros.
5. Simetrías axiales.
6. Frisos, mosaicos, cenefas y rosetones.

1. TRANSFORMACIONES GEOMÉTRICAS
• Una transformación geométrica hace corresponder a cada figura del plano F otra figura F’, que llamamos homóloga.
• Un elemento es invariante si se corresponde consigo mismo en la transformación.
El sol a través de la ventana deforma la imagen de la ventana. Es una transformación.
Deformación de un dibujo sobre un trozo de globo
2. Movimientos. Tipos de movimientos
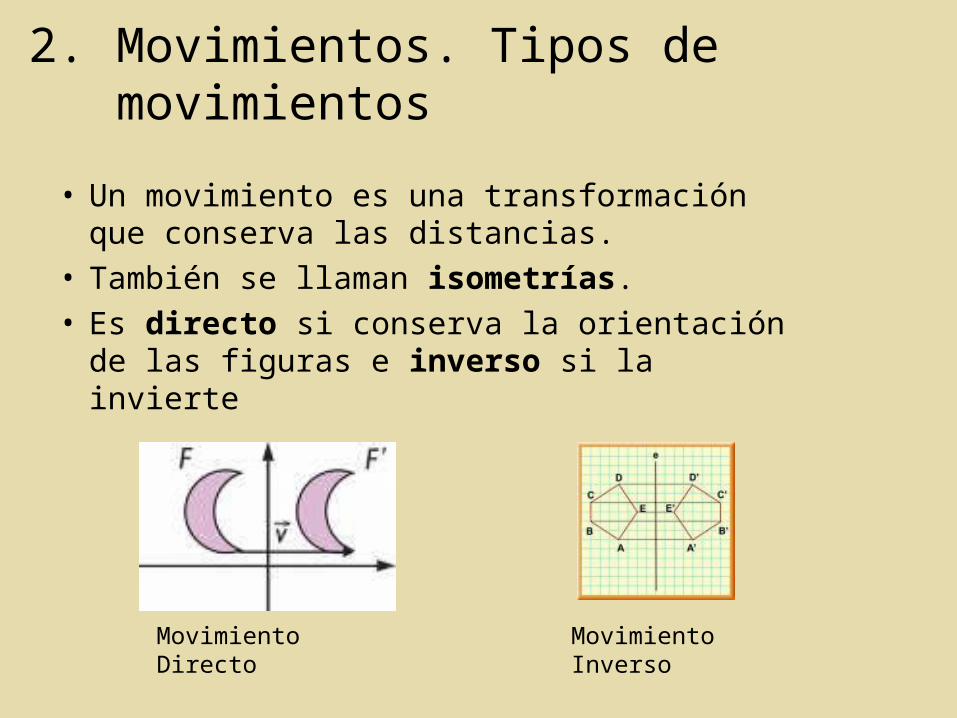
• Un movimiento es una transformación que conserva las distancias.
• También se llaman isometrías.• Es directo si conserva la orientación de
las figuras e inverso si la invierte
Movimiento Directo Movimiento Inverso
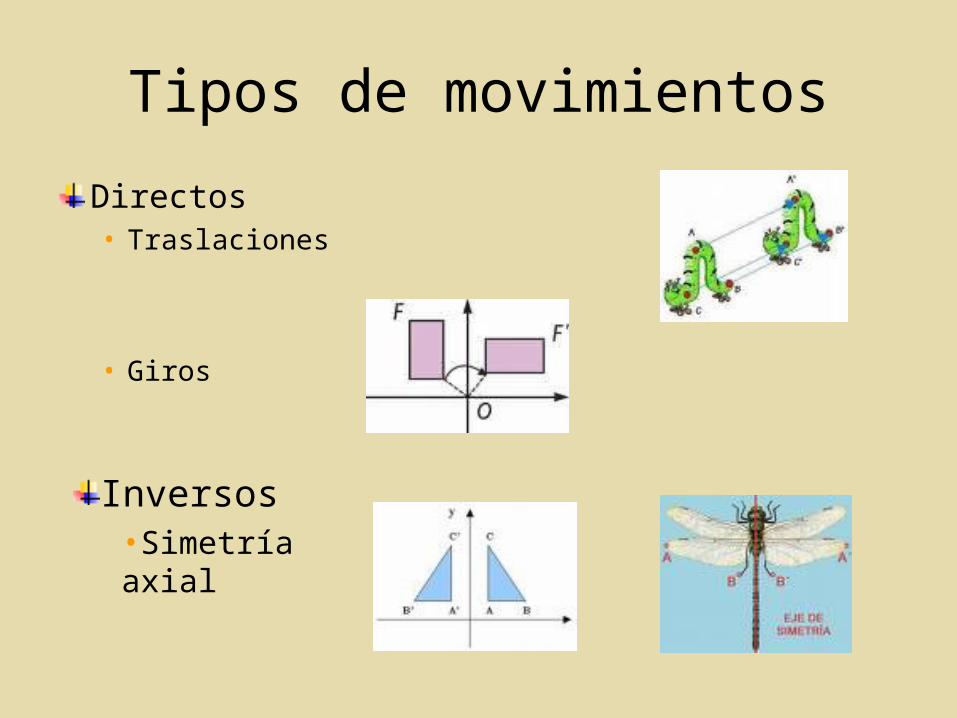
Tipos de movimientos
Directos• Traslaciones
• Giros
Inversos•Simetría axial

3. TRASLACIONESA. VECTORES
– Son segmentos orientados– Tres características fundamentales
• Módulo : longitud del vector• Dirección: recta que lo contiene• Sentido: indicado por la punta de la flecha
En el ejemplo:
El vector se llama
Su sentido es de A hacia B
Su módulo es
)2,3(BA
1323 22 BA
Sus componentes son 3 y 2

3. TRASLACIONES
B. SUMA DE VECTORES
i. Suma analítica: se suman cada una de sus componentesEjemplo:
ii. Suma geométrica:
)3,3()52,21(
entonces ,)5(2,vy )2,1(
vu
u
3. TRASLACIONES
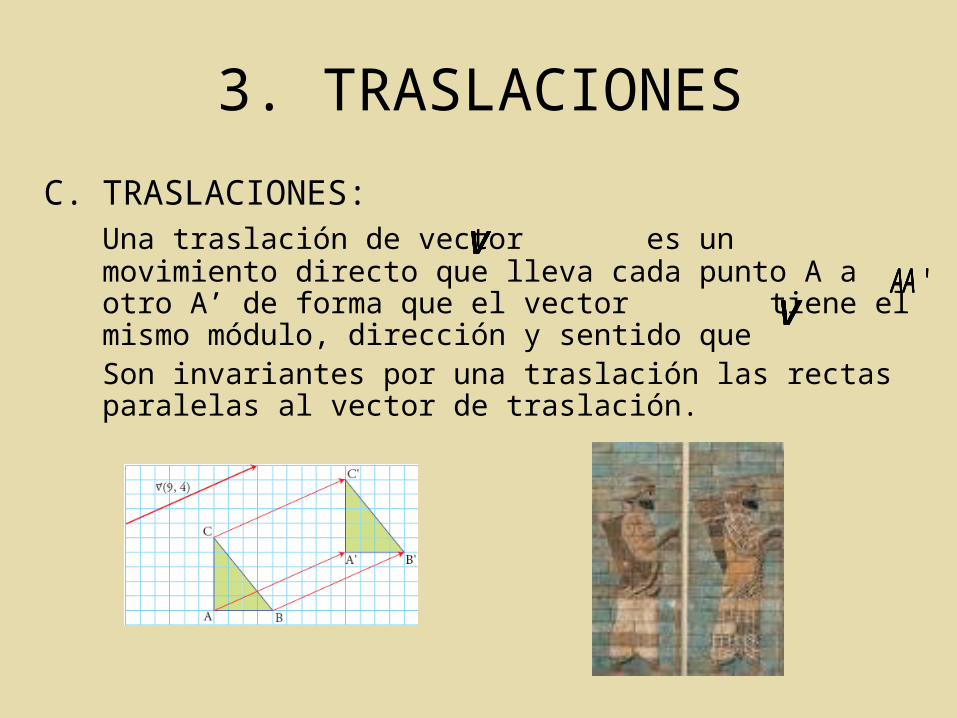
C. TRASLACIONES:Una traslación de vector es un movimiento directo que lleva cada punto A a otro A’ de forma que el vector tiene el mismo módulo, dirección y sentido que Son invariantes por una traslación las rectas paralelas al vector de traslación.
v
'
AAv
v
v '
AA
v
vv
v
v '
AA
v
v
v
v '
AA
v
v
3. TRASLACIONES
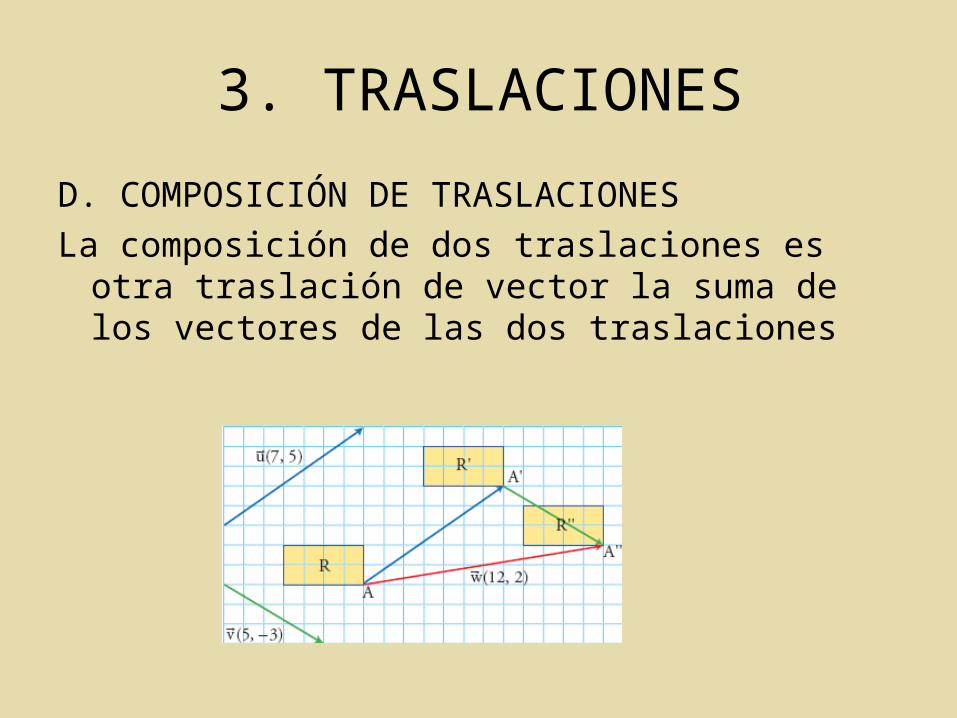
D. COMPOSICIÓN DE TRASLACIONES
La composición de dos traslaciones es otra traslación de vector la suma de los vectores de las dos traslaciones

4. GIROS• Se llama giro de centro O y ángulo a la
transformación que a cada punto A le hace corresponder un punto A’ de forma que OA=OA’ y el ángul AOA’ es
• El giro es positivo si va en sentido contrario a las agujas del reloj.
• Los giros son movimientos directos: conservan la forma y el tamaño de las figuras.
4. GIROS
• El único punto doble de un giro es O.• Las circunferencias de centro O son
figuras dobles.• Una figura tiene centro de giro O de orden
n si al girarla alrededor de O coincide consigo misma n veces.

SIMETRÍAS CENTRALES
• Las simetrías centrales son giros de ángulo 180º

5. SIMETRÍAS AXIALES• Una simetría axial de eje la recta r es un
movimiento inversoinverso que lleva cada punto A a otro A’ de forma que la recta r es la mediatriz del segmento AA’
• Las figuras se ‘reflejan’ en r como si fuera un espejo.

COMPOSICIÓN DE SIMETRÍAS AXIALES
• La composición de dos simetrías axiales de ejes paralelos es una traslación
• La composición de dos simetrías axiales de ejes concurrentes es un giro.
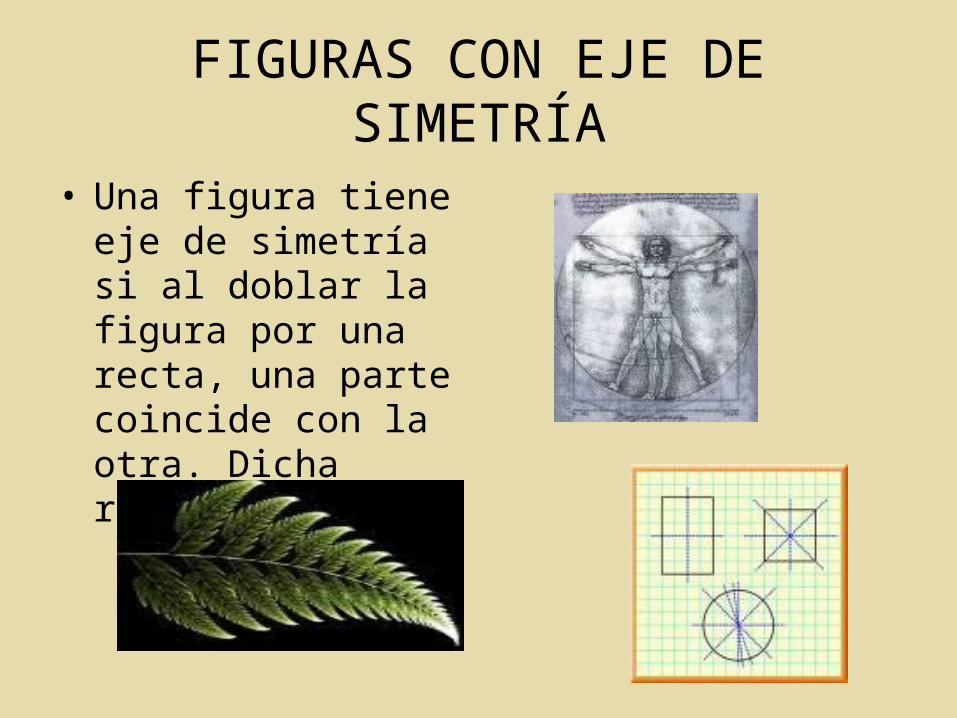
FIGURAS CON EJE DE SIMETRÍA
• Una figura tiene eje de simetría si al doblar la figura por una recta, una parte coincide con la otra. Dicha recta es el eje.
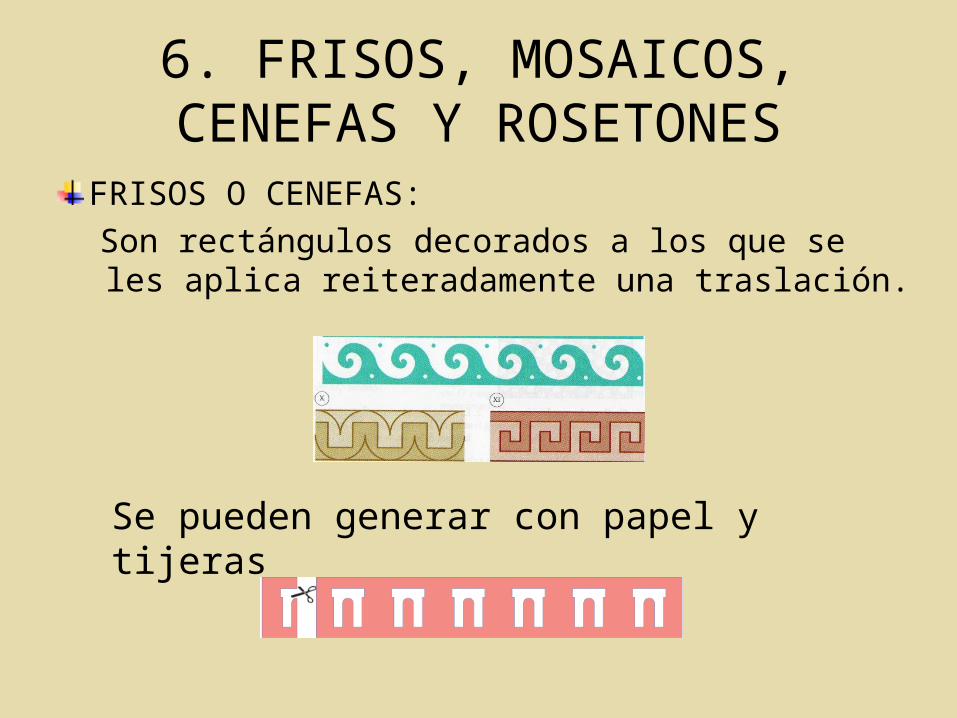
6. FRISOS, MOSAICOS, CENEFAS Y ROSETONES
FRISOS O CENEFAS:
Son rectángulos decorados a los que se les aplica reiteradamente una traslación.
Se pueden generar con papel y tijeras
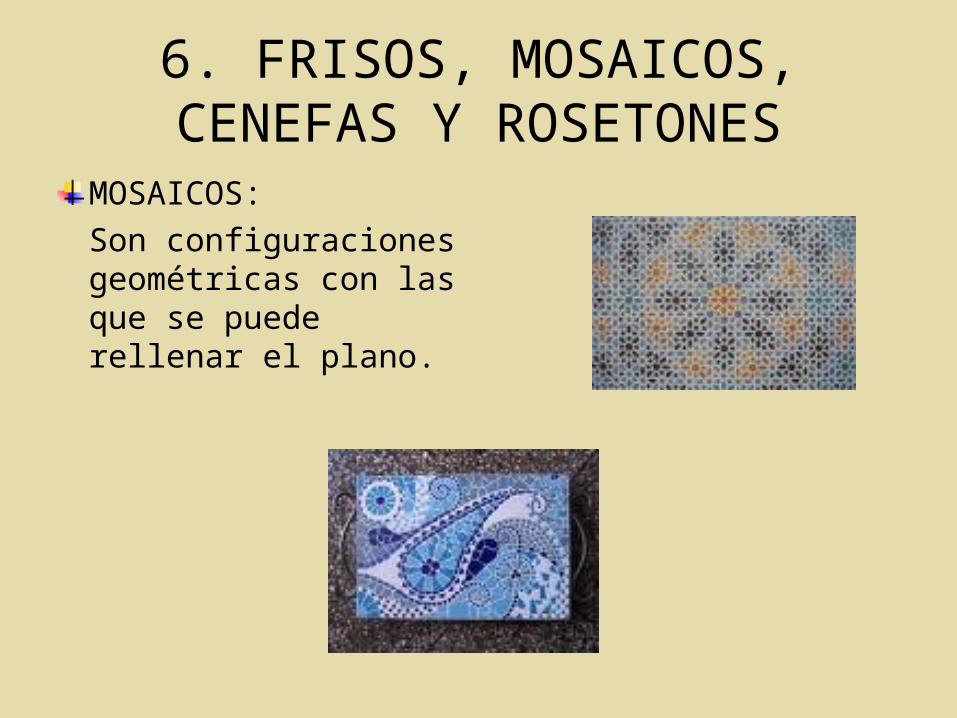
6. FRISOS, MOSAICOS, CENEFAS Y ROSETONES
MOSAICOS:
Son configuraciones geométricas con las que se puede rellenar el plano.
6. FRISOS, MOSAICOS, CENEFAS Y ROSETONES
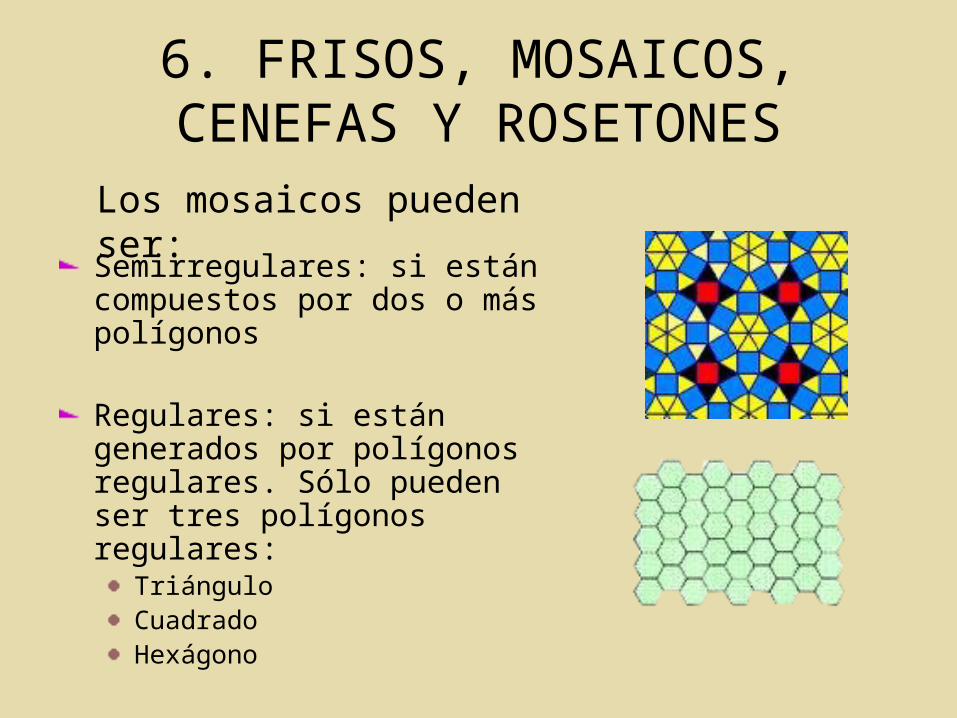
Semirregulares: si están compuestos por dos o más polígonos
Regulares: si están generados por polígonos regulares. Sólo pueden ser tres polígonos regulares:
TriánguloCuadradoHexágono
Los mosaicos pueden ser:

6. FRISOS, MOSAICOS, CENEFAS Y ROSETONES
Son adornos en forma circular
En todos ellos hay un motivo que se repite mediante girosgiros
ROSETONES