motor es
TRANSCRIPT

�������������� �
��������
����������������������������

Os motores de indução trifásicos são máquinas intrinsecamente eficientes.


Sendo assim, por que concentrar esforços de eficientização neste tipo de uso final?
Motivação 1
• Quantidade de motores instalados
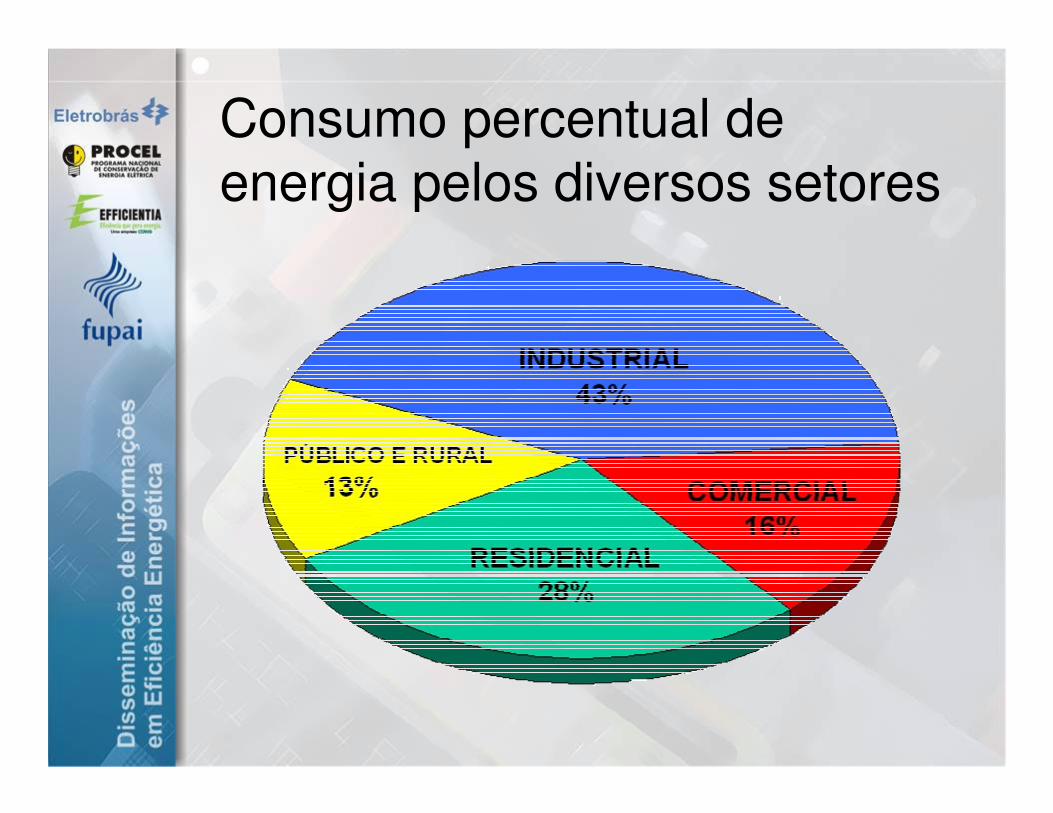
Consumo percentual de energia pelos diversos setores

Distribuição do consumo entre usos finais
Motivação 2
• A aplicação ineficiente
A máquina “Motor de Indução”
Nikola Tesla (1856-1943)
• Nasceu na Iugoslávia• Engenheiro e poeta• Mudou- se para os EUA
em 1880.• Inventou o motor de
indução em 1888.• Inventou e patenteou a
lâmpada fluorescente.• Previu as comunicações
via rádio.
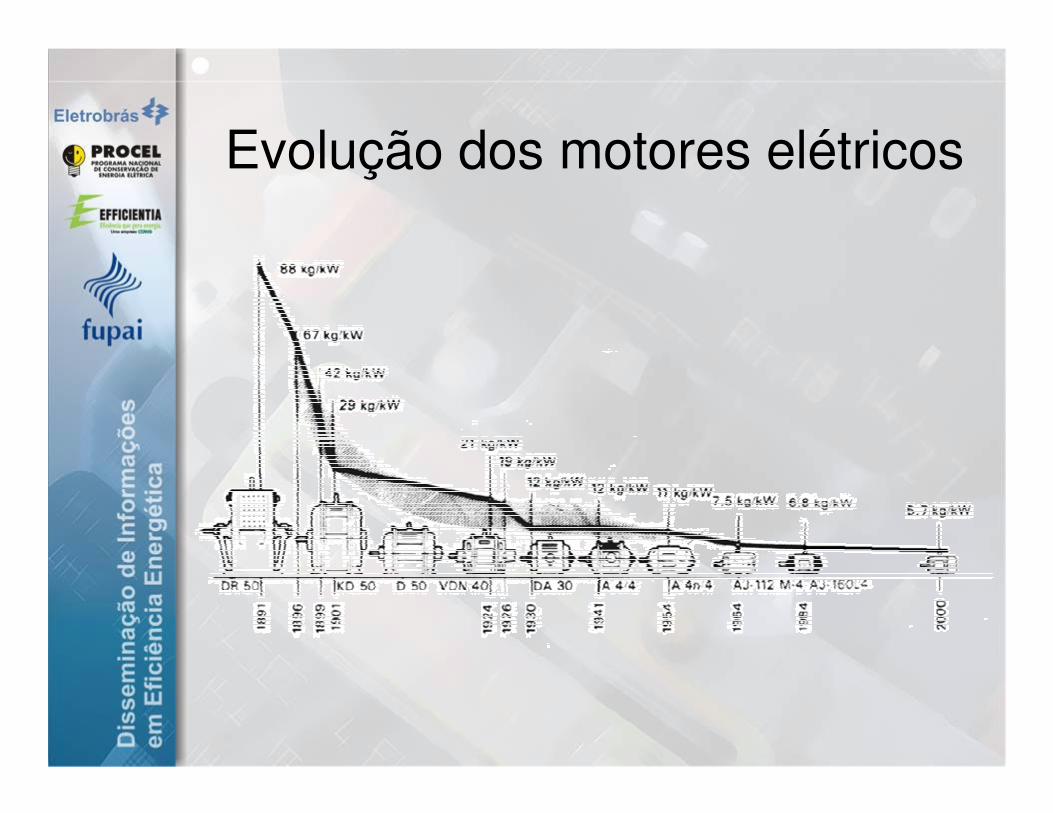
Evolução dos motores elétricos
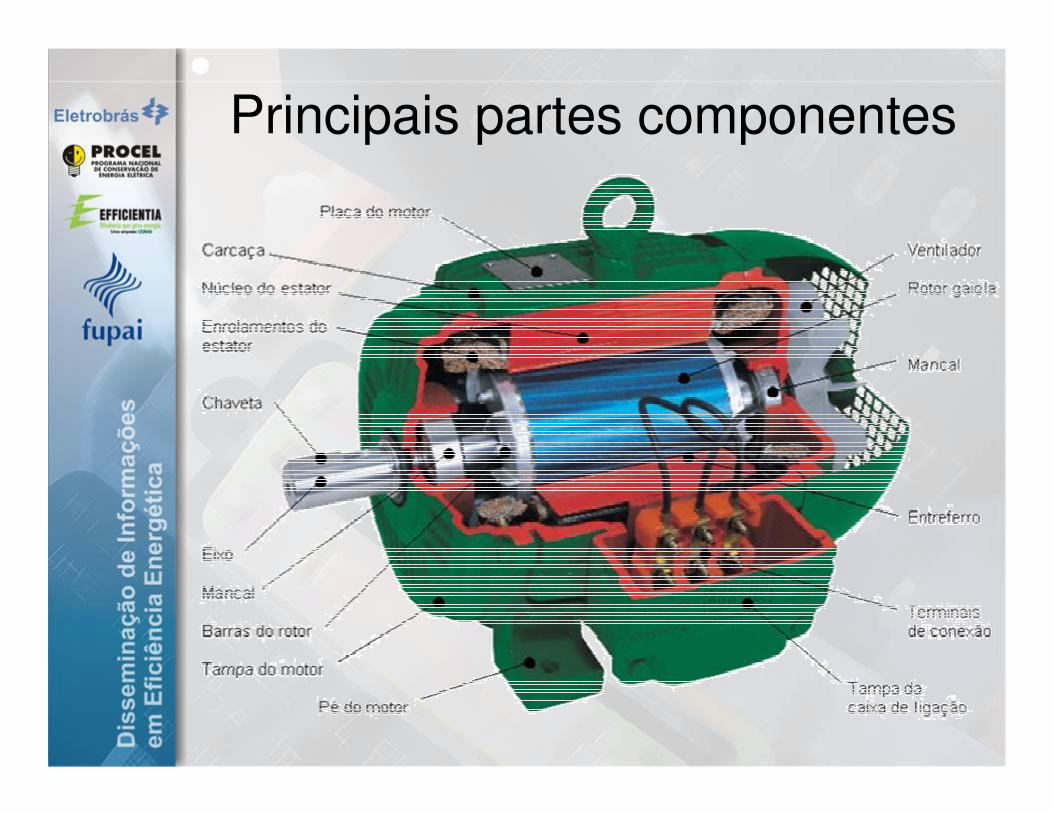
Principais partes componentes
Campo Girante
O princípio de funcionamento do motor de indução.
“Correntes elétricas defasadas 120o no tempo, percorrendo
enrolamentos defasados 120o no espaço”


Modelo do estator
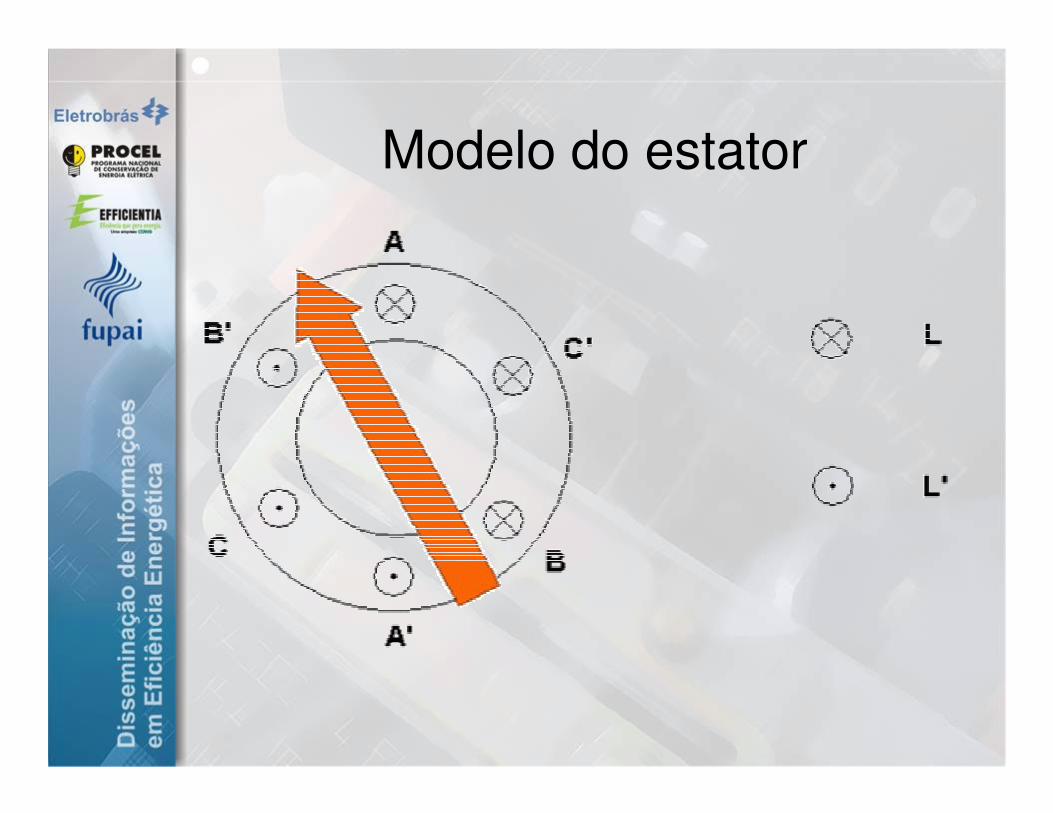
Modelo do estator

Criação do campo girante

Tipos de rotores
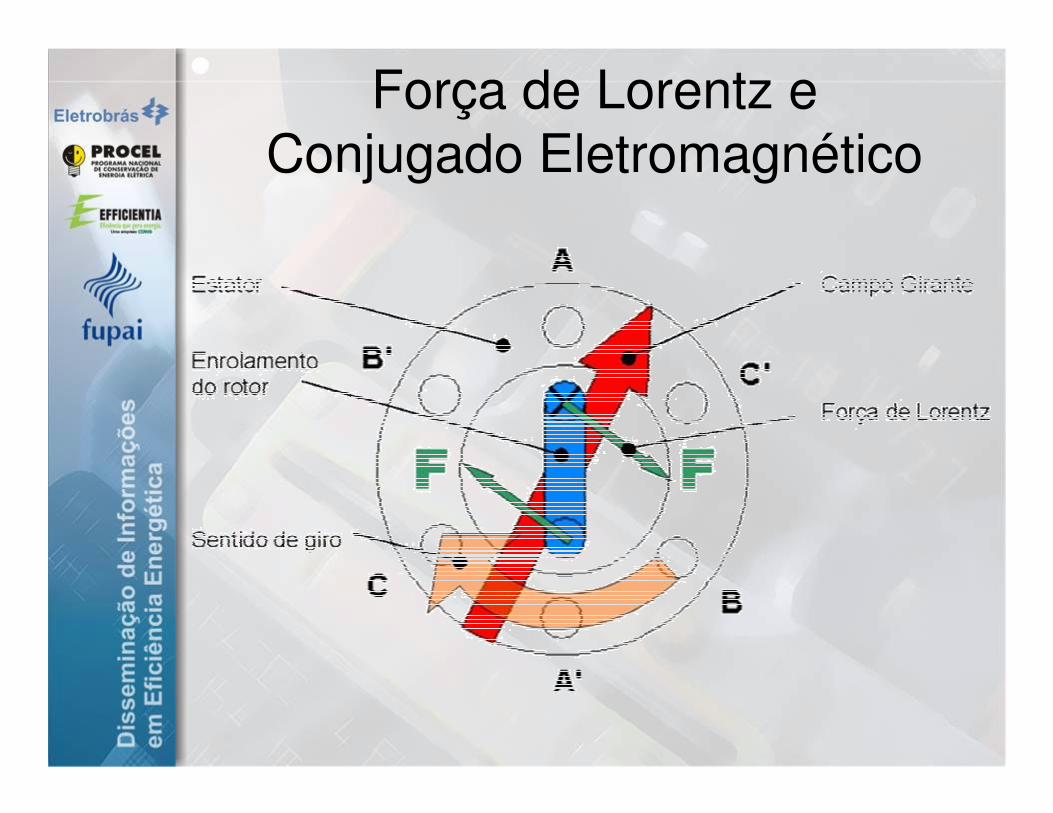
Força de Lorentz e Conjugado Eletromagnético
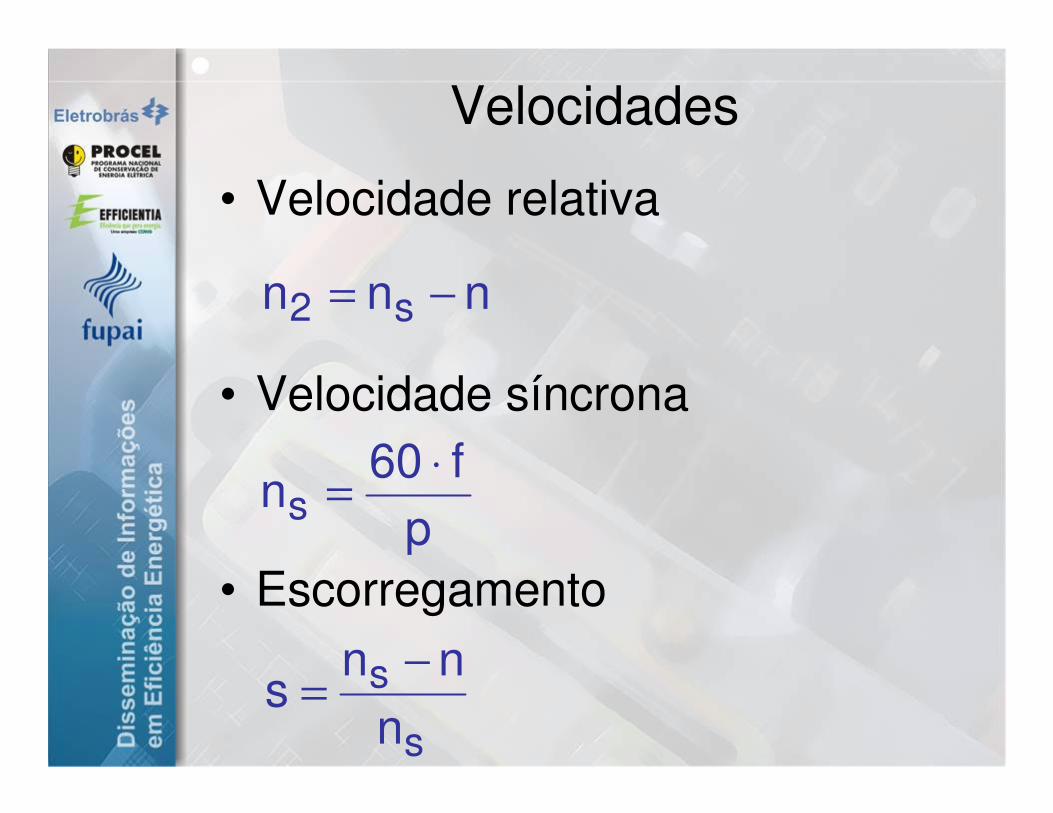
Velocidades
• Velocidade relativa
• Velocidade síncrona
• Escorregamentop
f60ns
⋅=
nnn s2 −=
s
sn
nns
−=



Os dados de placa (NBR7094/NBR5031)


Tensões e correntes nominais e diagramas de ligações quando
aplicávelNúmero de série (n°°°°) e/ou
código de data de fabricação
Modelo atribuído pelo fabricante, podendo incluir o
tipo de carcaça
Potência(s) nominal(is) em cv e em kW
Freqüência nominaldo motor
Rotação(ões) nominal(is)Rendimento nominal (%)Fator de potência
nominalRelação corrente de partida por corrente
nominal
Classe de isolamento do estator e do rotorCategoria do motor,
característica da curva de conjugado
Característica de regime de operação do motorGrau de proteção
conforme NBR9884
Fator de serviço
Informações de rolamentos, lubrificação e manutenção
Nome e/ou marca do fabricante com denominação
principal do equipamento, número de fases e norma
aplicável.
Informações de conformidade com certificação de eficiência
energética

Outras informações de interesse quando diferentes das especificações de norma
• Sobrevelocidade admissível;• Temperaturas ambiente máxima e mínima
admissíveis;• Temperatura máxima da água;• Altitude de trabalho definida em projeto;• Fator de serviço;• Número de rolamentos;• Sentido de rotação.

Partida de motores

Dinâmica da partida
• Movimento retilínio
• Movimento circular:
• Em rpm:
amF ⋅=
dtd
JMω⋅=
dtdn
J602
M ⋅⋅π⋅=

dtdn
J602
MMM CM ⋅⋅π⋅=−=

����⋅⋅π⋅=⋅−
⋅⋅π⋅= � J60
2dn
MM1
J60
2t
tn
0 CMp

Perdas e Rendimento

Rendimento
el
mPP=η PPP mel Σ+=
el
el
m
m
el
mP
PPPP
PPP Σ−=
Σ+==η
Pel Pm
ΣΣΣΣ P

Perdas
• Perdas por efeito Joule no estator;
• Perdas por efeito Joule no rotor;• Perdas no Ferro (Histerese e
Foucault);• Perdas por Atrito e Ventilação;• Perdas Adicionais ou Dispersão.

Distribuição das perdas em condições nominais

Distribuição das perdas em diferentes cargas

Distribuição percentual das perdas em diferentes cargas

Distribuição das perdas para diferentes motores

Motor de Alto Rendimento


Motor de projeto padronizado

Motor de alto rendimento

Motor de alto rendimento
η η= ⋅�
��
�
��A
B
A
nn
3

Motor de alto rendimento

Motor de alto rendimento

Quantidade de motores vendidos

Quantidade de motores vendidos

Circuito Equivalente

Modelagem do rotorEsE2 ⋅=
2s2 xsx ⋅=
fsf2 ⋅=
22
2
22
22
xjs/rE
xsjrEs
I
⋅+=
⋅⋅+⋅=

Modelagem do rotor2
2222
222 Irs
s1rI)s/r(P ⋅�
�
���
� ⋅−+=⋅=
m2j2
222
222 PPIrs
s1IrP +=⋅⋅−+⋅=

Circuito equivalente

Circuito equivalente( )
( ) srI
s1s
s1rIP
M1
22
2
1
22
2mi
⋅ω⋅=
−⋅ω
−⋅⋅=
ω=
( )22th
22
th
th2
xXsrR
VI
++��
���
� +
=
( )22th
22
th
2th
1
2
xXsr
R
V
srm
M
++��
���
� +
⋅⋅ω
⋅=


Estratégia de ação
• Verificar a instalação elétrica• Localizar motores mal
dimensionados• Avaliar alternativas de
baixos custos• Avaliar economicidade
da substituição• Avaliar alternativas tecnológicas

Análise de Carregamento

Métodos normalizados
Freio mecânicoDinamômetroMáquina calibradaOposição elétrica ou mecânicaSeparação das perdasPerdas totaisDiagrama circular

Análise comparativa
82
84
86
88
90
92
94
5 10 20 75
Potência [cv]
Ren
dim
ento
[%]
JEC 37 IEC 34-2 IEEE 112

Métodos expeditos
São métodos de fácil e rápida aplicação em campo.

Métodos expeditos
E utilizam equipamentos simples.

Métodos expeditos
Dados de fabricantesLinearizaçãoDiagrama circular inversoCircuito equivalenteFórmula de KlössDados de catálogo

Dados de Fabricantes
• Se baseia em curvas fornecidas por fabricantes para a avaliação das condições de carregamento e operação.

Motor de 100 cv

Motor de 90 cv

Método do circuito-equivalente
• Consiste em se obter os parâmetros do circuito equivalente do motor a partir dos dados de catálogo, a fim de se avaliar as suas condições operativas.


Dados disponíveis
Potência nominal – PN (cv)Tensão nominal – UN (V)Rotação nominal – nN (rpm)Rendimento a 50% de carga – η50 (pu)Rendimento a 100% de carga – η100 (pu)Fator de potência a 50% de carga – FP50 (pu)Fator de potência a 100% de carga – FP100 (pu)Conjugado de partida por conjugado nominal – MP (pu)Conjugado máximo por conjugado nominal – MK (pu)Corrente de partida por corrente nominal – IP (pu)

Determinação de r1 e rm
100S100
100HF
21001 Mn
602P
PIr3 ⋅⋅π−η
=+⋅⋅
50S50
50HF
2501 Mn
602P
PIr3 ⋅⋅π−η
=+⋅⋅
�
�� −⋅−−⋅
⋅= )ss(211
s2M
M 2100100
100
10050
100100N
N100
FPU3
PI
η⋅⋅⋅=
5050N
N50
FPU3
P50,0I
η⋅⋅⋅⋅
=

Determinação de r1 e rm
100S100
100HF
21001 Mn
602P
PIr3 ⋅⋅π−η
=+⋅⋅
50S50
50HF
2501 Mn
602P
PIr3 ⋅⋅π−η
=+⋅⋅
[ ])aa(r)bb(21
P 50100150100HF −⋅−−⋅=
50100
501001 aa
bbr
−−=
HF
2N
m PU
r =

Determinação de r2
21
2
k
2p21 r
sr
xx −���
����
�=+
)s1(II3MP
rN
2P
2100
P100p2
−⋅⋅⋅⋅=
k
2/1
21
2
N2
P2
100
PN1
2
P1002 sr
)s1(II3
MPr
IIU
r ⋅��
��
�
��
��
�+
��
���
−⋅⋅⋅⋅
+−���
����
�
⋅=
( )2p21
2
P100p21 rr
IIU
xx +−���
����
�
⋅=+
1MM
MM
ss
2
N
k
N
k
N
k −���
����
�⋅=

Determinação de xm

Determinação de x1 e de x2p
( )2p21
2
P100p21 rr
IIU
xx +−���
����
�
⋅=+

Determinação de x1 e de x2p
( )2p21
2
P100p21 rr
IIU
xx +−���
����
�
⋅=+

Determinação de x2
2p2
2p2
p2p21P
rx
rEkM
+
⋅⋅=
2
p21K x2
EkM
⋅⋅
=
p2
2p2
2p2
k
p2 r2
xr
M
Mx
⋅+
⋅=
22
22
221
)xs(r
rEskM
⋅+
⋅⋅⋅=

Características operativas
mm22
11
x1
jr1
xjs/r1
1xjr
UI
⋅−+⋅+
+⋅+=
22
112 xjs/r
I)xjr(UI
⋅+⋅⋅+−=
sr
I290
M 222 ⋅⋅
π⋅=
[ ]xS1xN
CC )s1(n
n
P260
M −⋅⋅⋅π⋅
=+
FPIU3PC
⋅⋅⋅=η

Método do Diagrama Circular Inverso
• A partir de três pontos pode-se obter uma circunferência. Esta idéia é aplicada para a determinação do diagrama circular de um motor sem a necessidade dos ensaios de rotor livre e de rotor bloqueado.

PDPE=η
OPPD
FP =
OPI =
PFPE
n =
PFkM 1 ⋅=PDkP 2 ⋅=
PEkP 2c ⋅=

iii FPIx ⋅=
2iii FP1Iy −⋅=
i
ii
IU3P
FP⋅⋅
= iC0 xx =
Ryy C0 −=
20
200 yxI +=
��
���
���
����
�=
0
00 x
yarctancosFP

�
�
=
=
−
⋅⋅⋅⋅−
=3
1i
20i
3
1i
2i0i
)yy(
U3IR3)yy(
N
( ) ( )[ ]
�
�
=
=
−
−⋅���
���
−⋅−−⋅−−
=3
1i
20i
3
1i0i0i0i
s
i0i
)yy(
)yy()yy(Nxxnn
xx
M

( ) 02K xM1
RM2x +
+
⋅⋅=
( ) 02K yM1
R2y +
+
⋅=
2K
2KK yxI +=
�
��
���
����
�=
K
KK x
yarctancosFP

Método da Linearização
• Parte da linearização da região de operação da curva de conjugado versus rotação do motor e da curva de corrente versus rotação.

Método da linearização
���
����
�
−−⋅=
Ns
tsNt nn
nnMM

Método da linearização
)nn(IIII
nn Ns0N
0tst −⋅��
�
����
�
−−−=

Corrente em vazio
0.00 20.00 40.00 60.00 80.00 100.00POTÊNCIA (cv)
0.00
20.00
40.00
60.00
80.00Io
/In (%
)
)Pln(4,76,63(%)I N0 ⋅−=

Comportamento térmico
0.0 10.0 20.0 30.0 40.0 50.0 60.0TEMPO (min)
0.0
50.0
100.0
150.0
200.0
250.0C
OR
RE
NTE
(A)

Comportamento térmico
0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0TEMPO (min)
0.00
4.00
8.00
12.00
16.00
ELE
V. T
EM
P. (
C)

Comportamento térmico
0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0TEMPO (min)
0.00
20.00
40.00
60.00
80.00
ELE
V. T
EM
P. (
C)



Influência da tensão
0.00 0.50 1.00 1.50 2.00 2.50DESBALANÇO (%)
0.00
4.00
8.00
12.00
AU
ME
NT
O D
AS
PE
RD
AS
(%
)

Influência da tensão
0.00 1.00 2.00 3.00 4.00 5.00DESBALANÇO (%)
0.70
0.80
0.90
1.00
CO
NJU
GA
DO
(p.
u.)


Caracterização da Carga

Característica da carga
dtdn
J602
MM CM ⋅⋅π=−
dtdn
J602
)nkk(M x21M ⋅⋅π=⋅+−
A carga ficará totalmente caracterizada com o conhecimento de k1, k2, J e x!

Característica estática da carga
x21C nkkM ⋅+=
x=0 x=1
x=2 x=-1

No desligamento
+=
+
⋅π−=
ott
oC
dtdn
602
)t(MJ
n
t
dn/dt
to
dtdn
J602
MM CM ⋅⋅π=−
NS
otSNoMoC nn
)t(nnM)t(M)t(M
−−⋅==
−−+
0)t(M oM =+

Ainda no desligamento
n
tto
dtdn
J602
nkk x21 ⋅⋅π=⋅−−
tn
J602
dtdn
J602
y∆∆⋅⋅π≅⋅⋅π=
xnz =
zkky 21 ⋅−−=

Exemplo:

Verificação pelo tempo de partida
t JM M
dnpM C
n t= ⋅ ⋅−
⋅�260
10
π
Se o tempo de partida for menor que o tempo de rotor bloqueado, pode-se substituir o motor!

Ações de baixo custo

Aplicação eficiente: limpeza

Aplicação eficiente: correias

Aplicação eficiente: op. vazio
PV Tk4T ⋅⋅>
k Categoria
2,50 N
2,00 H
1,35 D

Aplicação Eficiente

Aplicações dos motores

Bombas com recirculação

Bombas com restrição

Controle de velocidade

Aplicação em bombas

Aplicação em bombas

Aplicação em bombas

Aplicação em bombas


0
5
10
15
20
25
30
35
40
45
50
55
60
65
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160
Vazão (m3/h)
Pres
são
(mca
)
Curva da Bomba
Curva do Sistema

Aplicação em compressores

Aplicação em compressores

Análise Econômica

Enfoques a serem observados:
• Substituição de motor existente• Compra de um motor novo

Indicadores de viabilidade
• Economia mensal em kWh• Economia mensal em R$• Taxa interna de retorno• Tempo de recuperação de capital• Relação benefício/custo

Economia e Custos
η×××= 1
PH736,0E
TE1
PH736,0CO ×η
×××=
���
����
�
η−
η×××=
ARP
11P8760736,0EA
TE11
P8760736,0$EAARP
���
����
�
η−
η×××=

Tempo de Retorno
12T11
P736,0TEA
PRPRTRI
dARP
PAR
××���
����
�
η−
η××+×
−=
( )
( )i1log
PRPRi12T11
P736,0TEA
12T11
P736,0TEAlog
TRIPARd
ARP
dARP
+
�����
�
�
�����
�
�
−×−××���
����
�
η−
η××+×
××���
����
�
η−
η××+×
=

Vidas úteis de motores

Regimes de Serviço

Regime contínuo - S1

Regime intermitente – S6
tN = funcionamento em carga constantetV = frenagem em vazioθθθθmáx = temperatura máxima atingida durante o ciclo.
%100tt
tciclodeFator
VN
N ⋅+
=

Regimes S2 e S3

Regimes S4 e S5

Regimes S7 e S8

Análise Térmica
AA T/t0
T/tF e)e1( −− ⋅θ+−⋅θ∆=θ∆
Onde:
∆θ∆θ∆θ∆θF = Elevação de temperatura final (r.p.);TA = Constante de tempo de aquecimento;θθθθ0 = Temperatura inicial.

Casos particulares
Na partida:
ANAPA
LIMP
N2
N
PF
T5,2a5,1TT
nn
II
≅=
θ∆⋅⋅���
����
�=θ∆

Casos particulares
Em carga:
ANA
LIM
2
NF
TT
II
=
θ∆⋅���
����
�=θ∆

Casos particulares
Em vazio:
AN0AA
LIM
2
N
0F
TTT
II
==
θ∆⋅���
����
�=θ∆

Casos particulares
Na frenagem elétrica:
APAFA
LIMF
N2
N
FF
TTT
nn
II
==
θ∆⋅⋅���
����
�=θ∆

Casos particulares
Na parada:
ANRA T)3a5,1(TT ×≅=

Constantes térmicas típicas

Máximas elevações de temperatura

Comportamento térmico
0.0 10.0 20.0 30.0 40.0 50.0 60.0TEMPO (min)
0.0
50.0
100.0
150.0
200.0
250.0C
OR
RE
NTE
(A)

Comportamento térmico
0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0TEMPO (min)
0.00
4.00
8.00
12.00
16.00
ELE
V. T
EM
P. (
C)

Comportamento térmico
0.0 50.0 100.0 150.0 200.0 250.0 300.0 350.0TEMPO (min)
0.00
20.00
40.00
60.00
80.00
ELE
V. T
EM
P. (
C)