motor brushless
DESCRIPTION
Motor BrushlessTRANSCRIPT
Motores elétricos
Link: http://adamone.rchomepage.com/guide5.htm
Elétrica de aeronaves modelo alimentado ganhou popularidade, principalmente porque a
motores elétricos são mais silenciosos, limpos e muitas vezes mais fácil de iniciar e operar
do que os motores de combustão.
Eles precisam de baterias para operar e
apesar de alguns desenvolvimentos nesta
área; as baterias ainda são um pouco
mais pesados como fonte de energia em comparação
com o combustível a gás.
Assim, o insecto elétrica tem que se esforçar para
construir o modelo mais leve possível
a fim de obter uma ala razoável
carga e / ou um tempo de vôo razoável.
Operação do motor elétrico é baseado no princípio eletromagnético.
Quando a corrente elétrica flui através de uma bobina cria um campo magnético com um
força proporcional ao valor da corrente, o número de voltas da bobina
e é inversamente proporcional ao comprimento da bobina.
A força do campo magnético irá aumentar ainda mais através da introdução de um chamado
material ferromagnético no interior da bobina.
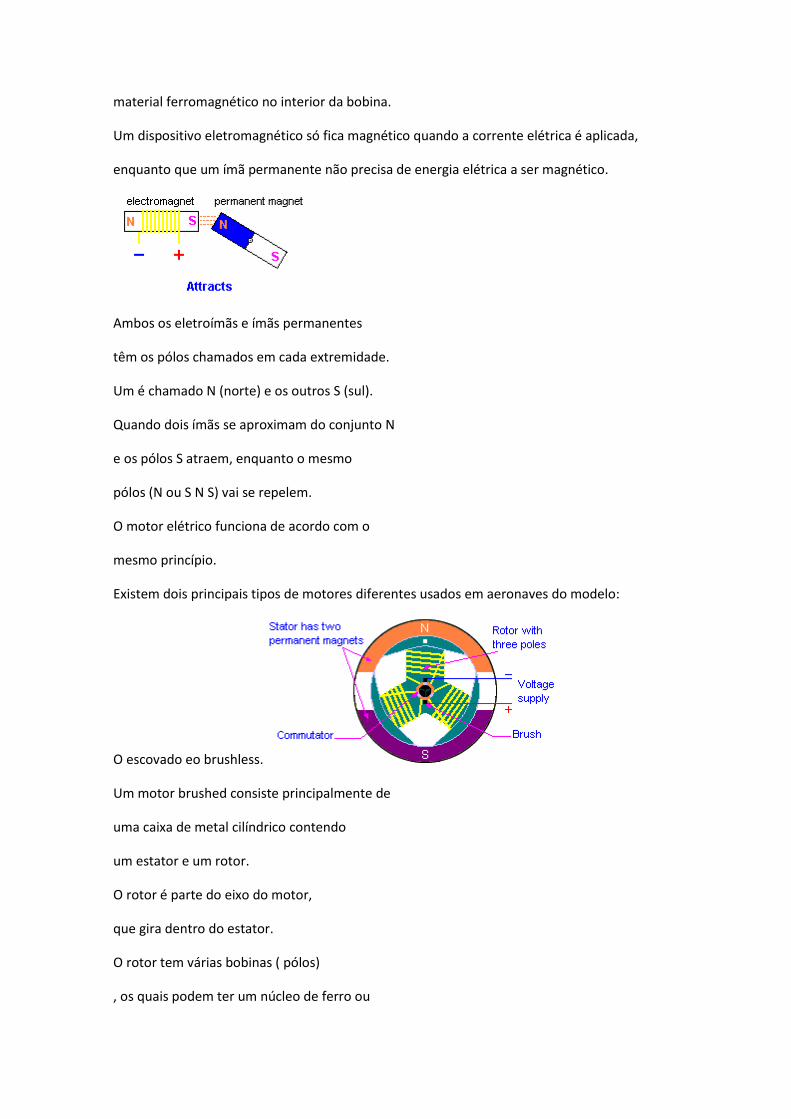
Um dispositivo eletromagnético só fica magnético quando a corrente elétrica é aplicada,
enquanto que um ímã permanente não precisa de energia elétrica a ser magnético.
Ambos os eletroímãs e ímãs permanentes
têm os pólos chamados em cada extremidade.
Um é chamado N (norte) e os outros S (sul).
Quando dois ímãs se aproximam do conjunto N
e os pólos S atraem, enquanto o mesmo
pólos (N ou S N S) vai se repelem.
O motor elétrico funciona de acordo com o
mesmo princípio.
Existem dois principais tipos de motores diferentes usados em aeronaves do modelo:
O escovado eo brushless.
Um motor brushed consiste principalmente de
uma caixa de metal cilíndrico contendo
um estator e um rotor.
O rotor é parte do eixo do motor,
que gira dentro do estator.
O rotor tem várias bobinas ( pólos)
, os quais podem ter um núcleo de ferro ou
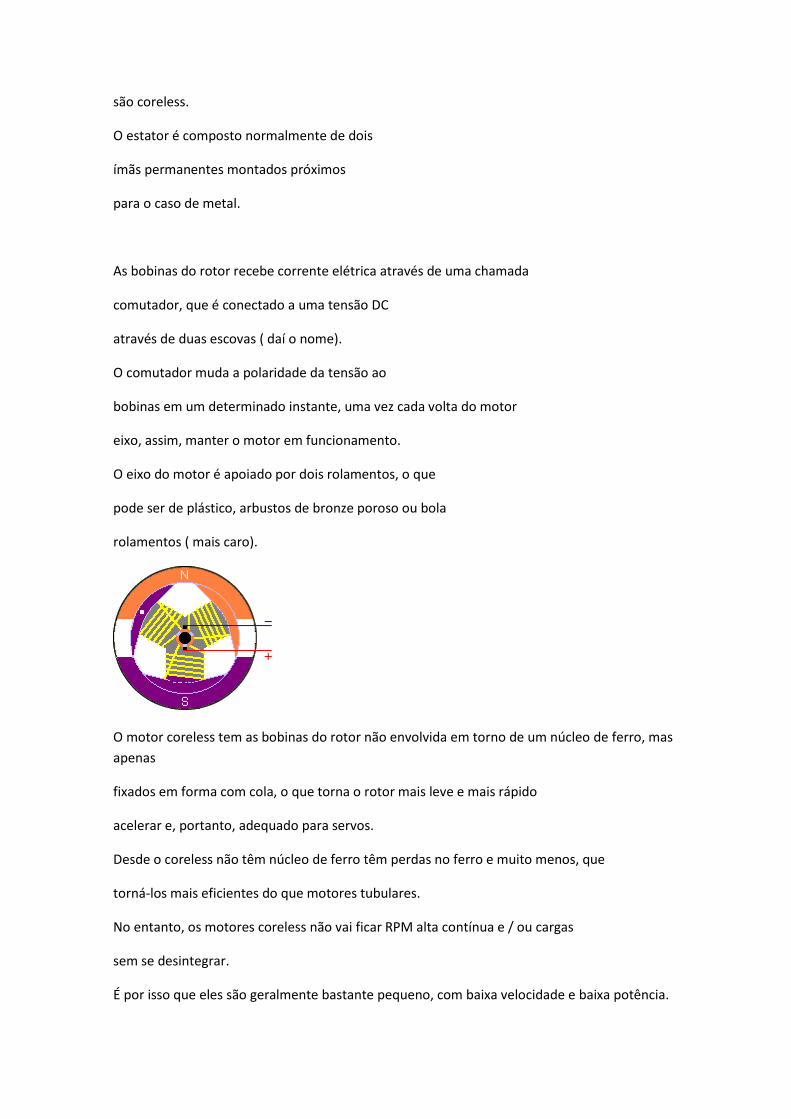
são coreless.
O estator é composto normalmente de dois
ímãs permanentes montados próximos
para o caso de metal.
As bobinas do rotor recebe corrente elétrica através de uma chamada
comutador, que é conectado a uma tensão DC
através de duas escovas ( daí o nome).
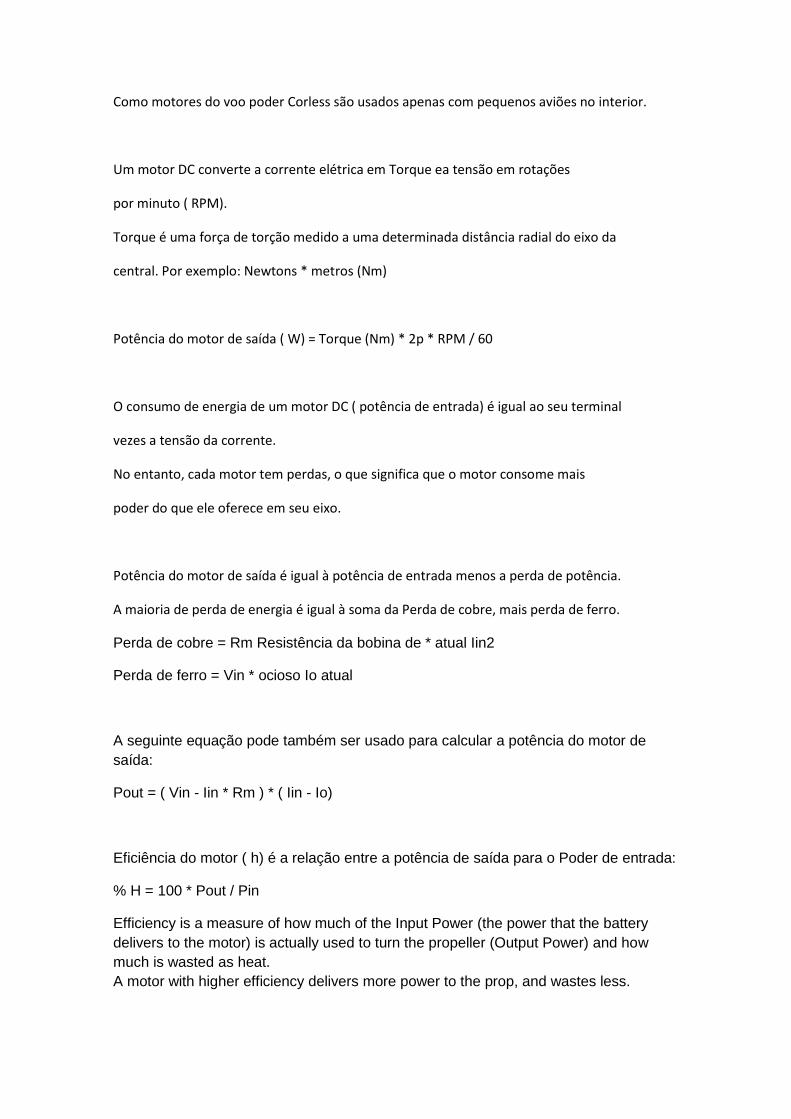
O comutador muda a polaridade da tensão ao
bobinas em um determinado instante, uma vez cada volta do motor
eixo, assim, manter o motor em funcionamento.
O eixo do motor é apoiado por dois rolamentos, o que
pode ser de plástico, arbustos de bronze poroso ou bola
rolamentos ( mais caro).
O motor coreless tem as bobinas do rotor não envolvida em torno de um núcleo de ferro, mas
apenas
fixados em forma com cola, o que torna o rotor mais leve e mais rápido
acelerar e, portanto, adequado para servos.
Desde o coreless não têm núcleo de ferro têm perdas no ferro e muito menos, que
torná-los mais eficientes do que motores tubulares.
No entanto, os motores coreless não vai ficar RPM alta contínua e / ou cargas
sem se desintegrar.
É por isso que eles são geralmente bastante pequeno, com baixa velocidade e baixa potência.
Como motores do voo poder Corless são usados apenas com pequenos aviões no interior.
Um motor DC converte a corrente elétrica em Torque ea tensão em rotações
por minuto ( RPM).
Torque é uma força de torção medido a uma determinada distância radial do eixo da
central. Por exemplo: Newtons * metros (Nm)
Potência do motor de saída ( W) = Torque (Nm) * 2p * RPM / 60
O consumo de energia de um motor DC ( potência de entrada) é igual ao seu terminal
vezes a tensão da corrente.
No entanto, cada motor tem perdas, o que significa que o motor consome mais
poder do que ele oferece em seu eixo.
Potência do motor de saída é igual à potência de entrada menos a perda de potência.
A maioria de perda de energia é igual à soma da Perda de cobre, mais perda de ferro.
Perda de cobre = Rm Resistência da bobina de * atual Iin2
Perda de ferro = Vin * ocioso Io atual
A seguinte equação pode também ser usado para calcular a potência do motor de
saída:
Pout = ( Vin - Iin * Rm ) * ( Iin - Io)
Eficiência do motor ( h) é a relação entre a potência de saída para o Poder de entrada:
% H = 100 * Pout / Pin
Efficiency is a measure of how much of the Input Power (the power that the battery
delivers to the motor) is actually used to turn the propeller (Output Power) and how
much is wasted as heat.
A motor with higher efficiency delivers more power to the prop, and wastes less.
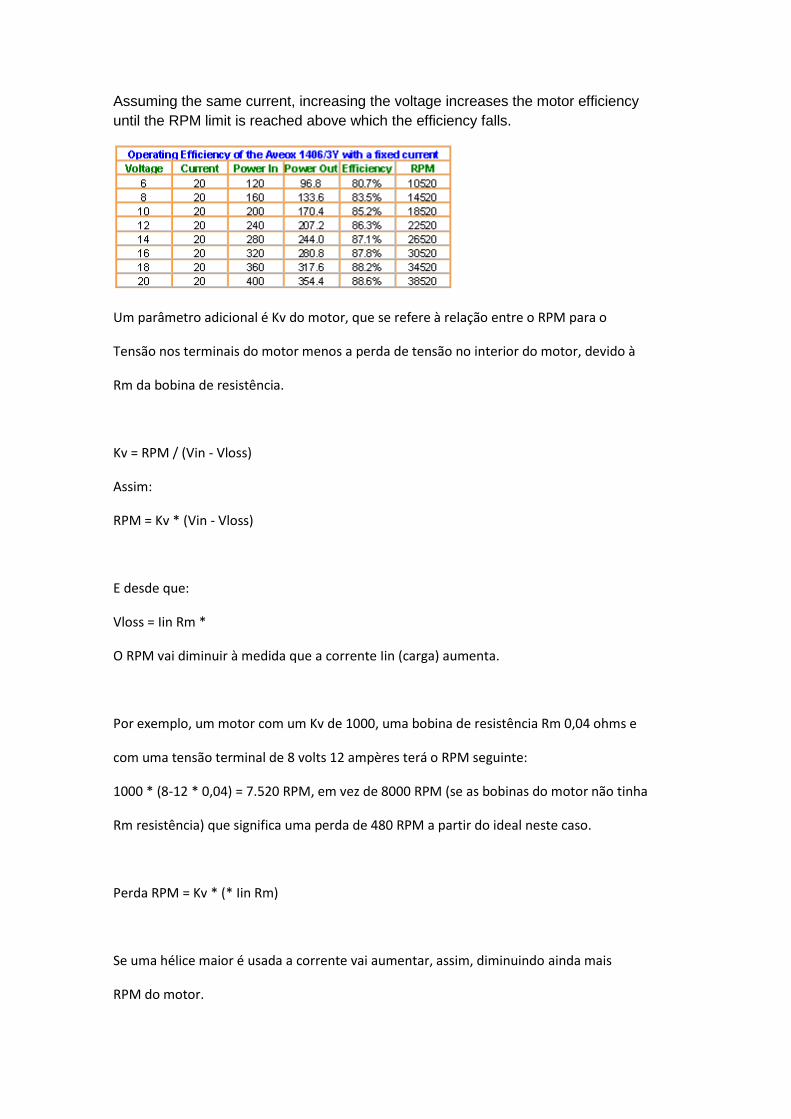
Assuming the same current, increasing the voltage increases the motor efficiency
until the RPM limit is reached above which the efficiency falls.
Um parâmetro adicional é Kv do motor, que se refere à relação entre o RPM para o
Tensão nos terminais do motor menos a perda de tensão no interior do motor, devido à
Rm da bobina de resistência.
Kv = RPM / (Vin - Vloss)
Assim:
RPM = Kv * (Vin - Vloss)
E desde que:
Vloss = Iin Rm *
O RPM vai diminuir à medida que a corrente Iin (carga) aumenta.
Por exemplo, um motor com um Kv de 1000, uma bobina de resistência Rm 0,04 ohms e
com uma tensão terminal de 8 volts 12 ampères terá o RPM seguinte:
1000 * (8-12 * 0,04) = 7.520 RPM, em vez de 8000 RPM (se as bobinas do motor não tinha
Rm resistência) que significa uma perda de 480 RPM a partir do ideal neste caso.
Perda RPM = Kv * (* Iin Rm)
Se uma hélice maior é usada a corrente vai aumentar, assim, diminuindo ainda mais
RPM do motor.
Assim, em aplicações de alta corrente Rm uma baixa resistência é necessária para evitar
muita perda de RPM.
Na realidade Rm a bobina de resistência aumenta à medida que a temperatura aumenta, o
que
significa que o RPM irá diminuir ao longo do tempo, mesmo que a tensão de entrada é
constante.
Se o eixo do motor é realizado de modo que não pode mover-se em tudo, ele está na condição
de preso.
Em tal condição o motor vai chamar a corrente máxima possível da
bateria e provavelmente será destruída.
A corrente consumida na condição parado é calculado de acordo com a Lei de Ohm:
Istall = Vin / Rm
Outro parâmetro é o torque do motor em função da atual.
É chamado Kt e é expressa em polegadas onças por ampères (unidades imperiais):
Kt = 1352 / Kv
A quantidade de torque por ampères depende Kv do motor.
Quanto maior o Kv, menor o torque por ampere.
Kv alta Torque = Baixa por ampères
Kv baixo Torque = Alta por ampères
Como o RPM real é inferior ao ideal, devido à resistência Rm, o real
torque também é menor do que o ideal devido ao idle (sem carga) Io atual.
O torque real é calculado da seguinte forma:
Torque = Kt * (Iin - Io)
Torque para o mesmo:
Kv alta - precisa de mais atual
Kv baixo - precisa de mais tensão
Kv do motor é muito dependente do número bobinas "de voltas. Um número elevado
de voltas dá um Kv baixa e vice-versa.
Assim, pode-se perguntar, o que Kv é o melhor?
A resposta é, depende do tipo de avião e sobre o tipo de vôo.
Por exemplo:
Para a mesma potência, menor Kv permite o uso de um suporte de maior diâmetro, dando
maior impulso à custa da velocidade máxima, enquanto que uma maior Kv requer um menor
prop, girando-o a RPM mais elevada, resultando em uma maior velocidade máxima, mas em
menor impulso.
Então, se você pretende passar, têm subir rápido, boa aceleração, são capazes de usar um
prop de maior diâmetro e velocidade máxima não é de preocupação, o Kv baixa é preferível.
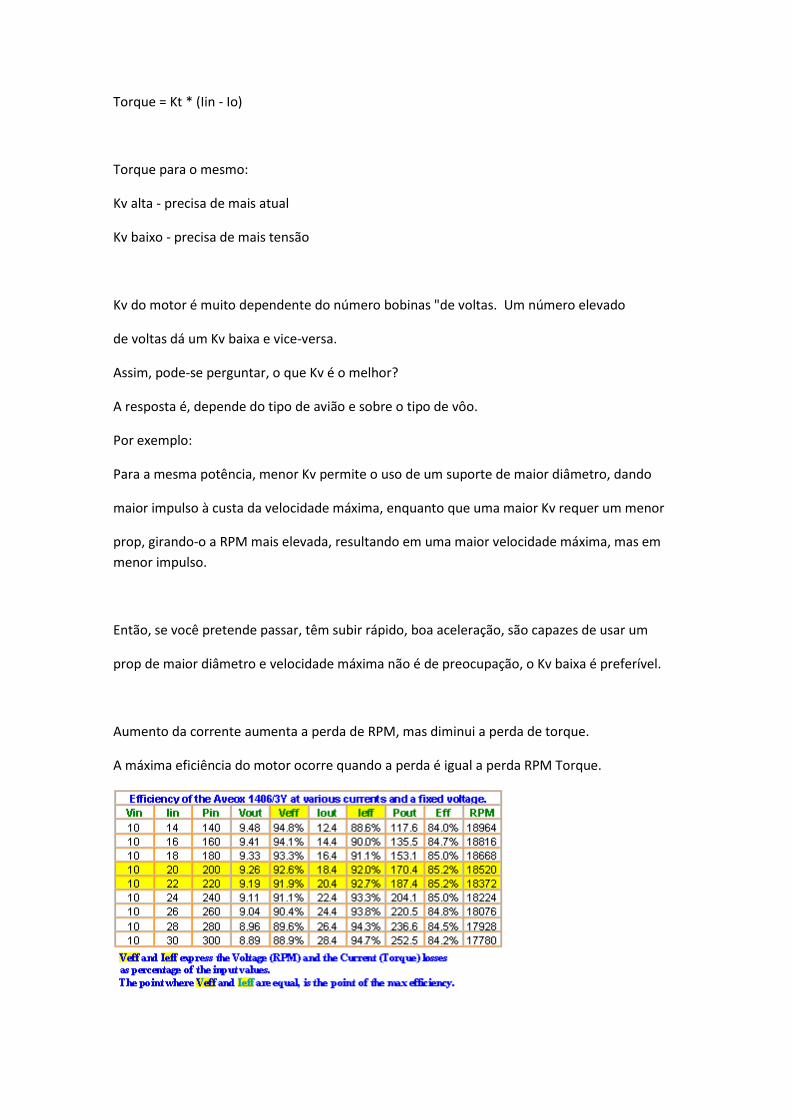
Aumento da corrente aumenta a perda de RPM, mas diminui a perda de torque.
A máxima eficiência do motor ocorre quando a perda é igual a perda RPM Torque.

Cada tipo de motor tem uma tensão ideal, atuais e em que RPM max do motor
eficiência é obtida.
Esses valores são frequentemente mostrados em folhas de dados do fabricante.
Motores escovado 'eficiência são normalmente entre 30 e 80 %, dependendo do
tipo e preço.
Para estimar a eficiência de uma dada Motor clique aqui
Maioria dos motores fornecidos em kits para iniciantes têm o estator feita de baixo custo
ferrite material magnético. Eles são chamados de ferrite ou " pode" motores.
" Can" motores são bastante ineficiente e não pode ser
abertos e servidos como outros motores de maior qualidade.
No entanto, eles são baratos e mais kits vai voar muito bem
com estes motores, por isso é ok para usar um "pode " motor para
o seu primeiro avião.
" Rare hearth " motores, tais como
Cobalto e neodímio são
considerado muito superior
ferrite para motores, mas eles são
também muito mais caro.
Ao contrário de ferrite ímãs, o raro "
terra " ímãs resistir a altas
temperaturas sem perder a sua
propriedades magnéticas.
Motores elétricos têm designações diversas, tais como 280, 300, 400, 480 e 600,
que se referem ao comprimento de caso e também dar uma idéia de seu poder e peso.
Por exemplo, um motor de 480 tem cerca de 48 milímetros de comprimento caso, é mais
pesado e é capaz de
entregar mais potência do que um motor 280.
Geralmente um motor 280 é adequado para modelos de energia até 400gr e um motor de 480
pode ser adequado para modelos até 800gr, enquanto um motor de 600 modelos de energia
pode -se
a 1200gr, assumindo acionamento direto (sem redução de caixa).
Como regra geral, a potência de entrada para um avião de esportes (sem FED) deve ser de
cerca
110 W / kg (50 W / lb), a fim de obter razoável características de vôo.
Planadores e parkflyers pode precisar de muito menos energia, 65 W / kg ( 30 W / kg ),
enquanto o
escala e acrobacias pode precisar de muito mais poder, por exemplo, > 200 W / kg (90 W / lb).
Este assumindo que o motor tem eficiência cerca de 75%.
TEM UMA TABELA
No entanto, o poder de peso recomendado acima não é por si só suficiente
para garantir se o avião vai voar no todo ou em seu desempenho de vôo, como outros
fatores devem ser levados em conta, tais como a velocidade de passo do hélice,
que se refere aos tempos hélice rpm campo.
Note que o rpm estática é menor do que quando o modelo está voando.
A velocidade intervalo mínimo recomendado é de 2-3 vezes a velocidade do avião parar.
A velocidade de estol de uma aeronave em mph (tanto o modelo e em larga escala) é de
aproximadamente
igual a quatro vezes a raiz quadrada da carga alar em onças por pé quadrado.
Para calcular a velocidade da aeronave stall aproximada clique aqui
Para calcular a velocidade de vôo da aeronave nível aproximado clique aqui
Outro fator é o Thrust estática, que se refere a quanto a aeronave é puxado
empurrada para a frente ou pelo sistema de energia quando o avião está parado.
O Thrust estáticos devem ser, pelo menos, aproximadamente 1 / 3 do peso da aeronave.
No entanto, a fim de ser capaz de pairar (modelos 3-D), o Thrust estática deve
ser maior do que o peso do avião.
Para estimar clique na prop do Thrust aproximada estática aqui
Note que o Thrust estática não é suficiente para prever como o avião vai voar,
como outros fatores como a velocidade de arremesso prop também devem ser considerados.
Medir e comparar as hélices Thrust "estática pode ser enganosa, como o
lâminas de um suporte dado pode stall, resultando em uma pressão estática de baixa no banco
de ensaios,
enquanto ele pode dar um excelente desempenho em vôo e até mesmo superar os outros
que têm um Thrust melhor Static.
Potência de saída = velocidade de arremesso Thrust *
Assim, com um poder dado, mais o impulso que você tem, menos a velocidade de topo que
você começa.
Em outras palavras, assumindo o mesmo poder:
& Campo grande diâmetro pequeno = mais pressão, velocidade menos top (como baixa
velocidade em um carro).
& Campo pequeno diâmetro grande impulso = menos, mais velocidade (como alta velocidade
em um carro).
A relação de diâmetro para lançar-hélice para modelos esporte deve ser 2:01 ao 01:01
No caso do campo é muito alto relacionadas com diâmetro, a prop torna-se ineficiente na
baixa velocidade de avanço, como quando durante a decolagem e / ou escalada.
No outro extremo da escala, uma hélice projetado para maior eficiência na tomada de
off e escalada (diâmetro & breu grande), vai acelerar o modelo muito rapidamente
a partir do repouso, mas vai dar menor velocidade máxima.
O desempenho de um modelo eléctrico alimentado também é muito afetado pela
resistência interna de pilhas e baterias.
A menor resistência da bateria interna, a menos que tenha restrição no fornecimento
o necessário poder.
Para a mesma capacidade, a bateria com maior taxa de descarga máxima recomendada
tem menor resistência interna.
Para estimar os resultados de uma determinada combinação Prop Motor & clique aqui
Um bom programa que pode ajudá-lo a projetar seu próximo avião RC, prevendo a sua
desempenho e sugerindo hélices e rácios caixa de velocidades pode ser encontrada aqui.
Para mais informações visite Apenas Fun Plane.
Caixas de velocidades são muitas vezes utilizados para reduzir o do motor
rpm no eixo da hélice, aumentando o seu torque
e permitindo o uso de propulsores maiores.
Uma vez que as pás da hélice também são mais eficientes
em rpm moderada, esta combinação é muitas vezes vale -
enquanto, apesar do aumento de peso.
Dentro de casa e modelos aviador lento, muitas vezes uma caixa de câmbio
que permite o uso de relativamente menor e mais leve
motores melhorar o desempenho de vôo lento e
prolongando o tempo de vôo.
A desvantagem é que a velocidade máxima é reduzida.
Alta velocidade, como os modelos alimentados por Fãs Ducted Elétrica, (FED ) requerem
alto Kv motores que têm eficiência máxima em alta rotação (típico acima 25,000 RPM).
Alguns fatores devem ser levados em conta ao desenhar a propulsão do FED
sistema, tais como a admissão ( entrada) deve ter aproximadamente a mesma área que a Fan
Swept Área FSA, a fim de evitar a perda de eficiência. Também deve ser tomado cuidado
durante o projeto de ambos a ingestão (entrada ) ea exaustão (saída) de dutos.
A fim de reduzir as perdas de eficiência devido à turbulência e arraste, o duto interno
superfícies devem ser tão liso e reto possível.
Círculos são os melhores seções transversais do duto para minimizar o arrasto de superfície.
A área de escape é geralmente de cerca de 85 a 95% da FSA para melhor desempenho.
Alguns exemplos de
dutos são apresentados
nas fotos à direita.
Para uma determinada potência, o sistema de propulsão do FED tem muitas vezes menor
relação empuxo / peso
em comparação com um sistema de hélice convencional, e alguns FED precisa ser mão -
lançados ou bungee - lançado, pois não pode tomar - fora da terra.
Uma vez no ar o FED pode atingir a velocidade bastante elevada embora.
O tempo de vôo de um modelo elétrico alimentado depende de algumas variáveis como:
Aeronave características de vôo ( com base na carga alar e elevador), a combinação
motor / hélice, a eficiência do motor ( Pout / Pin ) e por último mas não menos importante, o
baterias razão energia / peso.
O tempo de vôo em minutos = ( capacidade da bateria / média corrente consumida ) x 60.
Modelos de vôo elétrico pode ser construída pequenos e leves o suficiente para voar dentro
de uma
pavilhão desportivo.
Eles são os modelos chamados interior, tendo aprox. 75 centímetros de envergadura (30 ")
com
peso inferior a 200g ( 7 onças ) e voar mais rápido que 8- 16 km / h ( 10 mph 5 ).
O chamado Parque Fliers
são um pouco mais rápido.
Eles são muitas vezes feitas de
material de espuma e pode
voar a velocidades em qualquer lugar
a partir de 25 km / h até cerca de
40km / h (16 a 25 mph ).
Eles são bastante sensíveis
aos ventos fortes, por isso é
Recomenda -los voar
durante o tempo calmo.
Para fotos e mais
informações sobre Interior / Park
Fliers verificar: Aeronutz
Reunião de Aspach Electro - Alemanha
É claro, é também bastante
possível construir mais
maior potência elétrica
modelos de aeronaves.
Para ver algumas belas
exemplos basta verificar
aqui e / ou aqui.
Como o rpm do motor aumenta requer a bobinas do rotor a ser energizado, mais cedo
de modo que comecem a força do campo magnético total no tempo para reagir com o do
estator
campo magnético.
Além disso, quando a carga aumenta, o campo magnético no rotor aumenta bobinas,
que interage com o campo magnético do estator, produzindo uma resultante rodada
campo magnético.
Alguns motores permitem que o ângulo de pincéis "para ser alterado pelo mesmo valor
a rotação de campo, aumentando assim a eficiência do motor em uma determinada carga.
Isso é chamado de motor "timing".
Um motor elétrico pode ser cronometrada em carga pelo mudando lentamente a escova
titular
ângulo ao medir a corrente.
O ângulo da escova ideal é quando o motor consome menos corrente.
Não há ângulo fixo de tempo ideal, pois as mudanças melhor momento como o ângulo
motor de carga e mudanças de velocidade.
Se o motor foi cronometrada em rotação no sentido horário tem que ser re-cronometrados
em caso
a rotação precisa ser revertida.
Direção do motor de rotação pode ser revertida pela polaridade invertendo a tensão
nos terminais de abastecimento.
Um motor cronometrado recebe maior corrente idle (sem carga).
Motores escovados precisa de alguma manutenção, uma vez que ambos os pincéis e as comm.
vai usar depois de um tempo devido ao atrito.
Motores mais qualidade permitem a substituição da escova.
O comutador próprio também precisa de limpeza, pois reúne os depósitos de carbono e
lamaçal devido ao pó de grafite das escovas.
Pode ser limpo por uma ação de polimento muito leve com scotchbrite ou com um tão
chamada pau comutador.
O lamaçal também pode ser limpo, enquanto o motor estiver funcionando manualmente,
usando um
gotas de álcool.
Se comutador é corroído ou mostra as médias escova pulando e conversando que ele tem
sobreaquecido e ficou deformado (de volta). Ele precisa ser reparado, como
polimento não irá curar a deformação.
Escovas são normalmente feitas de três compostos diferentes:
Cobre grafite e prata.
Escovas feitas de prata são normalmente usados em competições, pois têm
baixa resistência, mas que produzem o desgaste maior comutador e também têm
usar pincel médio e lubrificação. Escovas de prata produzem lodo que apenas
podem ser removidas por torneamento do comutador.
Escovas de cobre não produzem lodo e funcionam melhor em altas rotações. Estes
escovas produzir desgaste do comutador médio e têm desgaste elevado e escova
lubrificação baixo.
Escovas de grafite produzir desgaste do comutador baixa, têm baixo desgaste das escovas e
lubrificação de alta, mas têm alta resistência, o que significa que eles não são adequados
para corridas.
Geralmente é necessário para "break-in" um novo motor escovado de forma que as escovas
flat
obter uma superfície curva e aumentando assim a área de contato com o comutador.
Execução de um motor com escovas novas flat em plena carga vai causar uma série de arcos,
que coloca as superfícies de contato e degrada o desempenho.
O "break-in" pode ser feito com o motor sem carga (sem prop), em
aproximadamente 1 / 2 a tensão nominal por aproximadamente uma hora ou duas. As
escovas devem ter uma
superfície curva sem faíscas / arco.
Alguns motores de alta qualidade não precisa ser "quebrado-in". Este será mencionado
no manual do motor respectivo. Em caso de dúvida, basta quebrá-lo dentro
Faíscas que ocorrem entre as escovas eo comutador pode causar rádio
interferência.
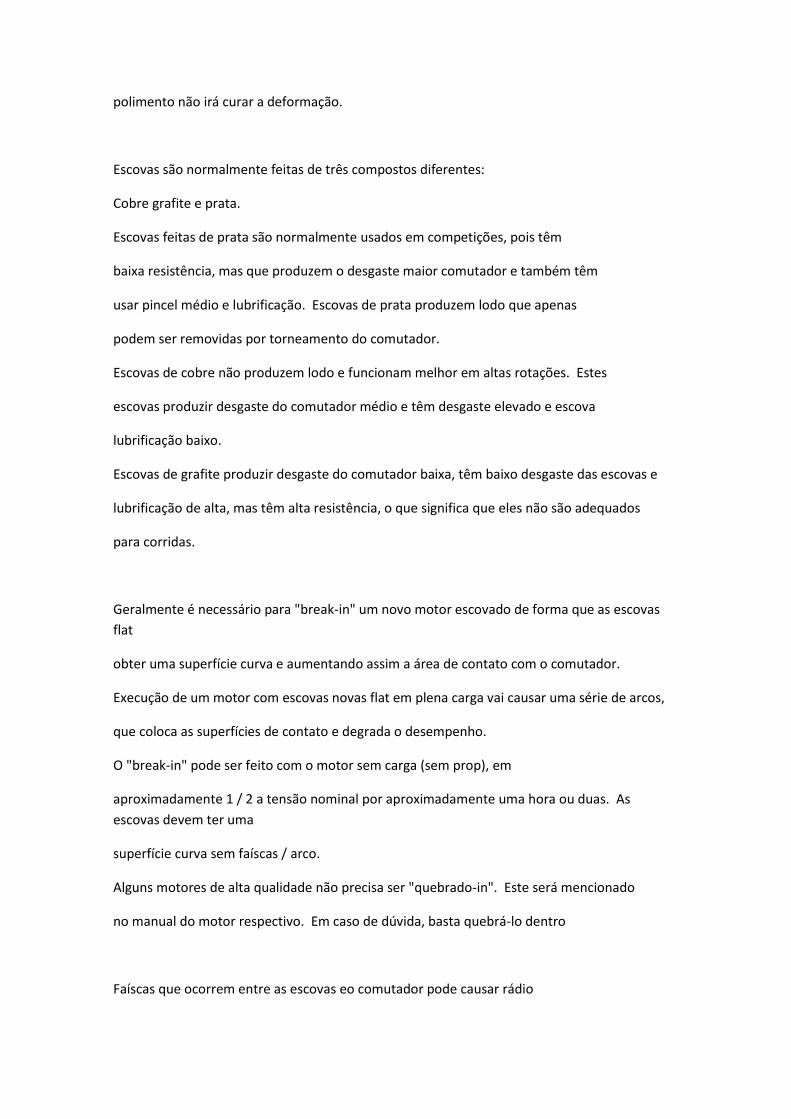
, A fim de evitar interferência de rádio é recomendado o uso de cerâmica
capacitores soldadas entre cada terminal do motor ea carcaça do motor.
Para segurança extra contra interferências, um capacitor terceiro também deve ser instalado
entre os terminais do motor.
Nota: muitos velocidade Graupner xxx motores têm os 2 primeiro desses capacitores
já instaladas internamente.
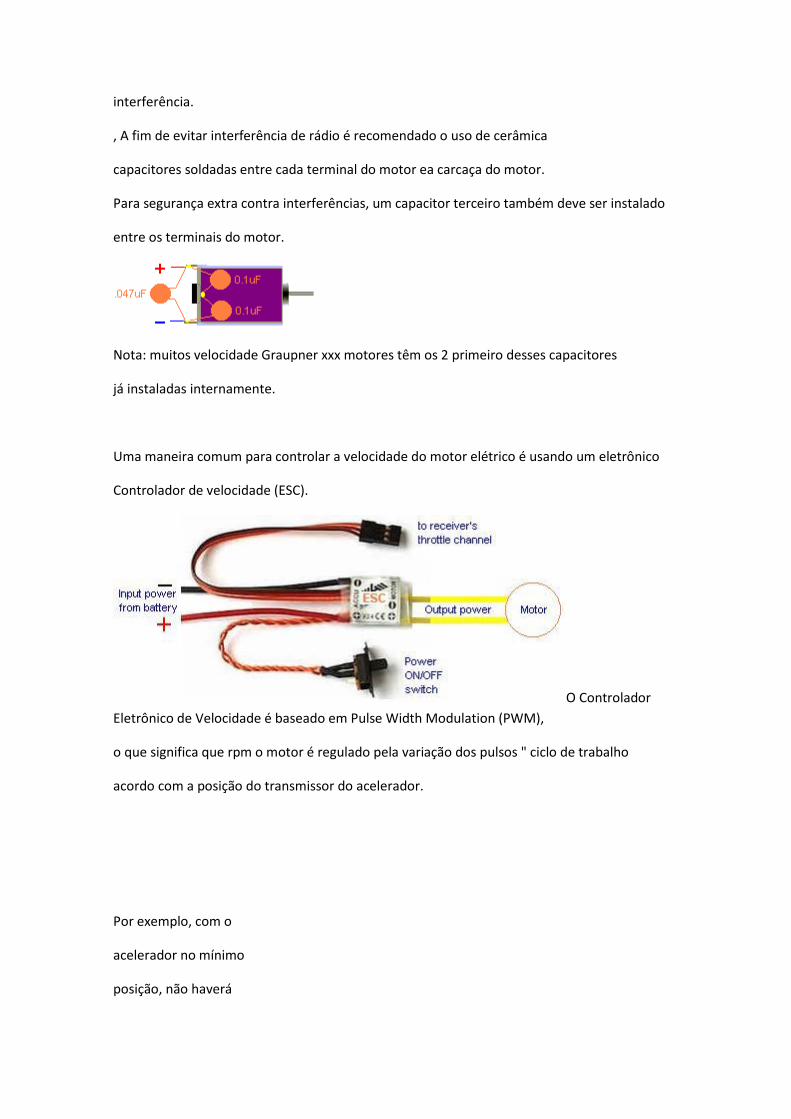
Uma maneira comum para controlar a velocidade do motor elétrico é usando um eletrônico
Controlador de velocidade (ESC).
O Controlador
Eletrônico de Velocidade é baseado em Pulse Width Modulation (PWM),
o que significa que rpm o motor é regulado pela variação dos pulsos " ciclo de trabalho
acordo com a posição do transmissor do acelerador.
Por exemplo, com o
acelerador no mínimo
posição, não haverá
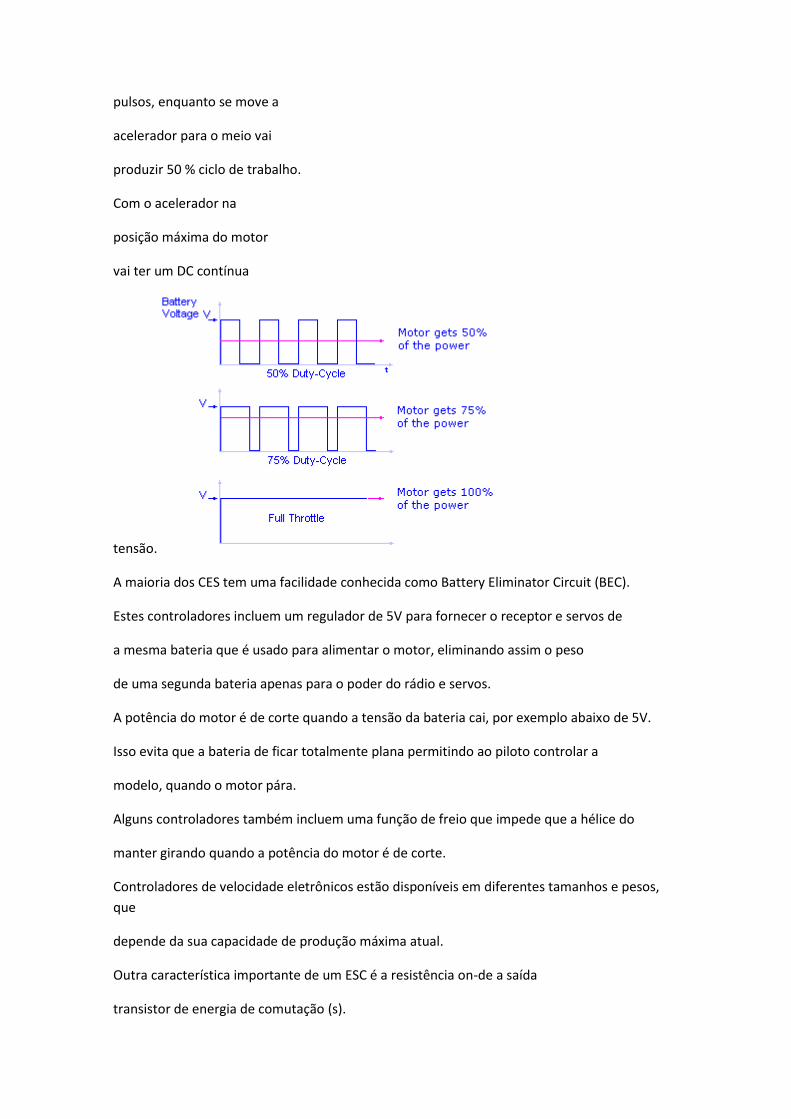
pulsos, enquanto se move a
acelerador para o meio vai
produzir 50 % ciclo de trabalho.
Com o acelerador na
posição máxima do motor
vai ter um DC contínua
tensão.
A maioria dos CES tem uma facilidade conhecida como Battery Eliminator Circuit (BEC).
Estes controladores incluem um regulador de 5V para fornecer o receptor e servos de
a mesma bateria que é usado para alimentar o motor, eliminando assim o peso
de uma segunda bateria apenas para o poder do rádio e servos.
A potência do motor é de corte quando a tensão da bateria cai, por exemplo abaixo de 5V.
Isso evita que a bateria de ficar totalmente plana permitindo ao piloto controlar a
modelo, quando o motor pára.
Alguns controladores também incluem uma função de freio que impede que a hélice do
manter girando quando a potência do motor é de corte.
Controladores de velocidade eletrônicos estão disponíveis em diferentes tamanhos e pesos,
que
depende da sua capacidade de produção máxima atual.
Outra característica importante de um ESC é a resistência on-de a saída
transistor de energia de comutação (s).
O sobre a resistência deverá ser tão baixo quanto possível, desde que seu valor é proporcional
para a perda de potência dissipada pelo transistor de saída (s): P = R x I2
A resistência on-é normalmente entre aprox. 0,012 e 0.0010ohm. O valor
depende de quantas saída paralela de transistores conectados ao ESC real tem.
Quanto maior a capacidade do atual quanto menor a resistência do deve ser.
Estes números são normalmente mostrados na folha de dados do CES, juntamente com o BEC
valor de corte de tensão eo max. corrente de saída para o receptor e servos.
Como medida de segurança CES muitos têm uma função que não vai permitir que o motor
começar a correr, a menos que o acelerador é inicialmente definido na posição mínima.
Outro dispositivo de segurança é o interruptor armar chamada conectado entre o
motor e do controlador.
O interruptor de armar deve ser desligado até que o avião está pronto para taxiar na pista
ou ser mão-lançado.
Após o vôo, o interruptor de armar devem ser desligados assim que possível.
Isso impedirá que o motor de começar a correr no caso de o stick do acelerador é movido
para a frente sem querer.
A fim de manter os contatos armar mudar em boa forma (menor resistência)
é aconselhável nunca o ligar / desligar sob o poder. Isto significa que o armamento
interruptor deve ser ligado / desligado quando o acelerador está na posição mínima.
Quanto mais poderoso o motor, mais necessidade para a segurança de um interruptor de
armar.
Uma abordagem razoável é utilizar um detector de armar em modelos de vôo maior que
velocidade de 400 tamanho (cerca de 100 watts e acima).
Grandes baterias são capazes de fornecer correntes muito elevados quando em curto ou
quando a hélice fica bloqueado.
Tais correntes elevadas são suficientes para aquecer e derreter componentes / fiação, que
pode levar a um incêndio.
Algumas organizações que oferecem seguros para modeladores requerem um fusível em
modelos movidos a eletricidade.
Para escolher a classificação correta para o fusível basta colocar o maior e mais alto pitch-
prop que você espera para voar. Medir o consumo de corrente do seu sistema de energia
no banco e multiplicar o valor em cerca de 1,25.
Esta margem de 25% deve evitar golpes incômodo. Encontre o fusível com uma classificação
na
ou apenas acima deste nível atual.
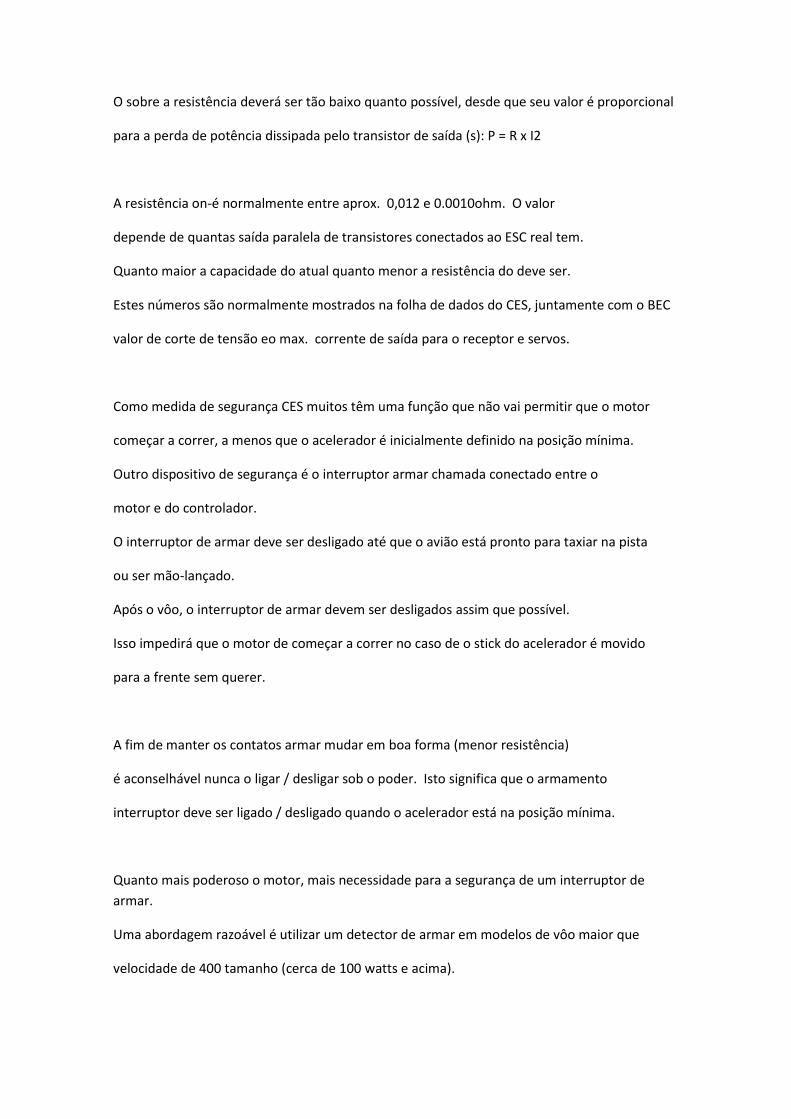
Outro tipo de motores eléctricos para aeronaves do modelo são os brushless chamados.
Estes motores são pouco mais caro
mas eles têm maior eficiência.
Normalmente entre 80 a 90%.
Já que não têm escovas, há
é menos atrito e praticamente sem peças
ao desgaste, além dos rolamentos.
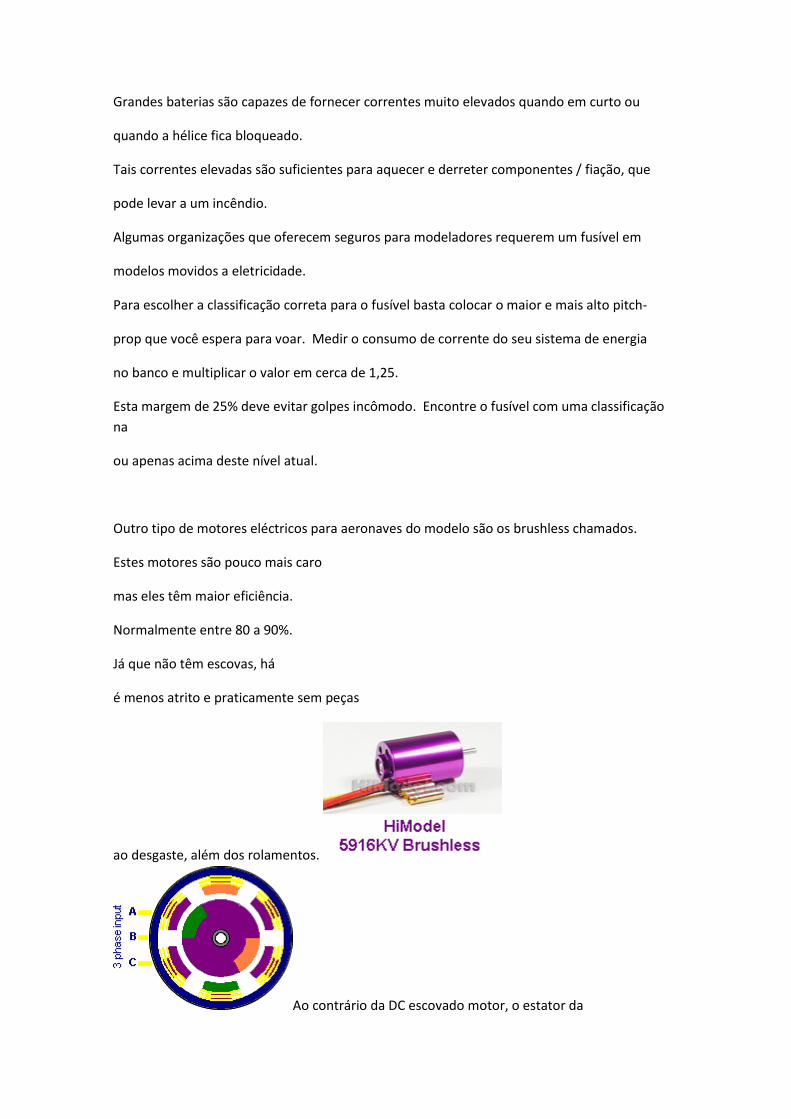
Ao contrário da DC escovado motor, o estator da
motor brushless tem bobinas, enquanto o rotor é constituído
normalmente de ímãs permanentes.
O estator de um convencional ( inrunner ) brushless
motor é parte de seu estojo, enquanto o rotor
gira dentro dele.
A caixa de metal atua como um dissipador de calor, irradiar a
calor gerado pelas bobinas do estator, mantendo assim
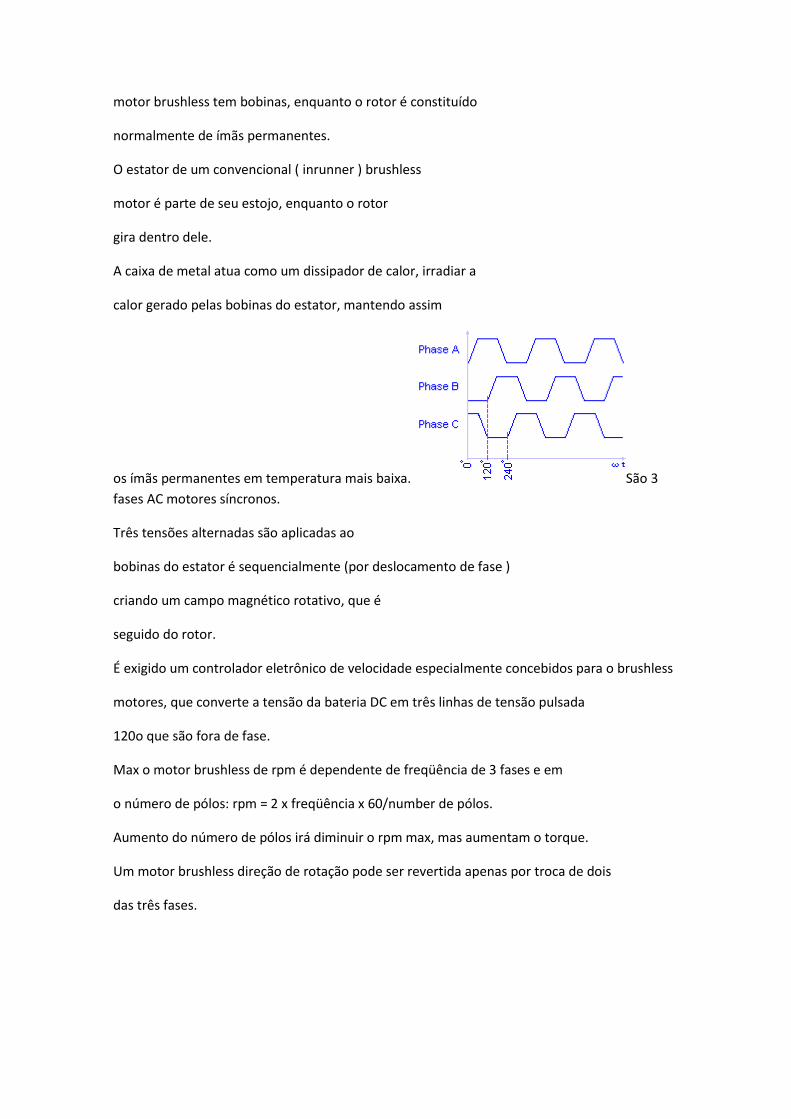
os ímãs permanentes em temperatura mais baixa. São 3
fases AC motores síncronos.
Três tensões alternadas são aplicadas ao
bobinas do estator é sequencialmente (por deslocamento de fase )
criando um campo magnético rotativo, que é
seguido do rotor.
É exigido um controlador eletrônico de velocidade especialmente concebidos para o brushless
motores, que converte a tensão da bateria DC em três linhas de tensão pulsada
120o que são fora de fase.
Max o motor brushless de rpm é dependente de freqüência de 3 fases e em
o número de pólos: rpm = 2 x freqüência x 60/number de pólos.
Aumento do número de pólos irá diminuir o rpm max, mas aumentam o torque.
Um motor brushless direção de rotação pode ser revertida apenas por troca de dois
das três fases.
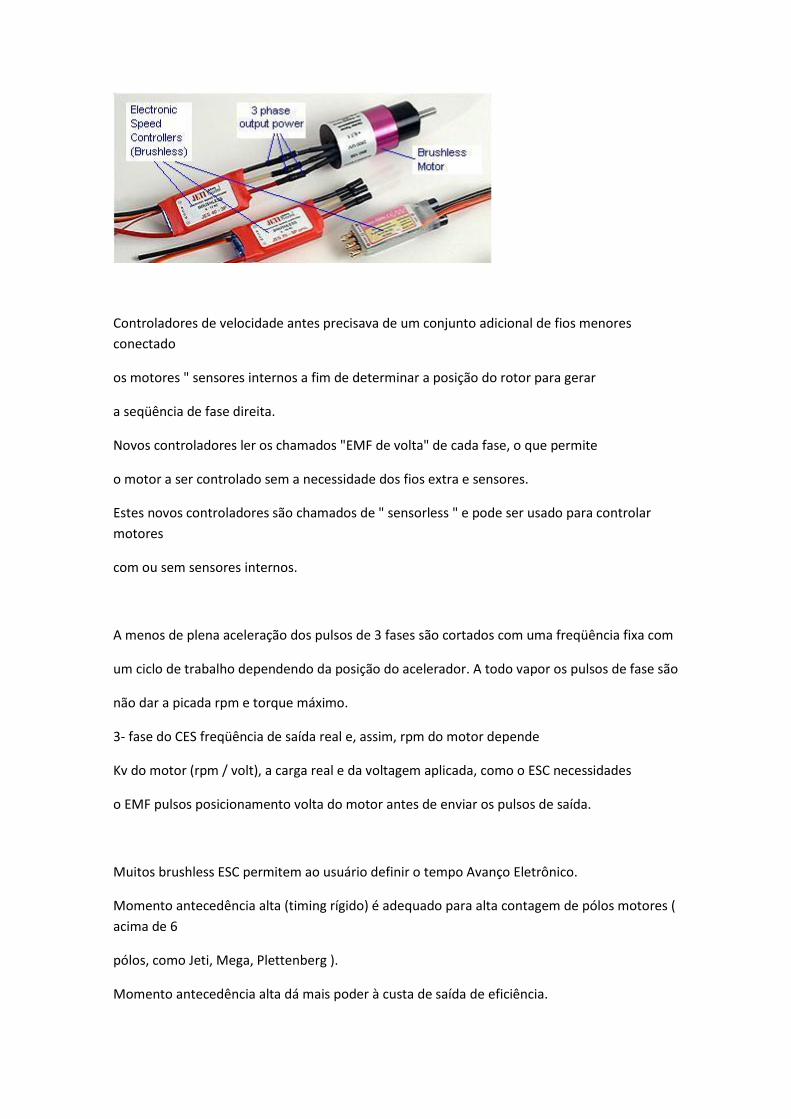
Controladores de velocidade antes precisava de um conjunto adicional de fios menores
conectado
os motores " sensores internos a fim de determinar a posição do rotor para gerar
a seqüência de fase direita.
Novos controladores ler os chamados "EMF de volta" de cada fase, o que permite
o motor a ser controlado sem a necessidade dos fios extra e sensores.
Estes novos controladores são chamados de " sensorless " e pode ser usado para controlar
motores
com ou sem sensores internos.
A menos de plena aceleração dos pulsos de 3 fases são cortados com uma freqüência fixa com
um ciclo de trabalho dependendo da posição do acelerador. A todo vapor os pulsos de fase são
não dar a picada rpm e torque máximo.
3- fase do CES freqüência de saída real e, assim, rpm do motor depende
Kv do motor (rpm / volt), a carga real e da voltagem aplicada, como o ESC necessidades
o EMF pulsos posicionamento volta do motor antes de enviar os pulsos de saída.
Muitos brushless ESC permitem ao usuário definir o tempo Avanço Eletrônico.
Momento antecedência alta (timing rígido) é adequado para alta contagem de pólos motores (
acima de 6
pólos, como Jeti, Mega, Plettenberg ).
Momento antecedência alta dá mais poder à custa de saída de eficiência.
Momento antecedência baixa ( tempo suave) é adequado para baixo pole contar motores. dá
maior eficiência com alguma perda de potência de saída e é recomendado quando longa
tempo de execução é o principal objetivo.
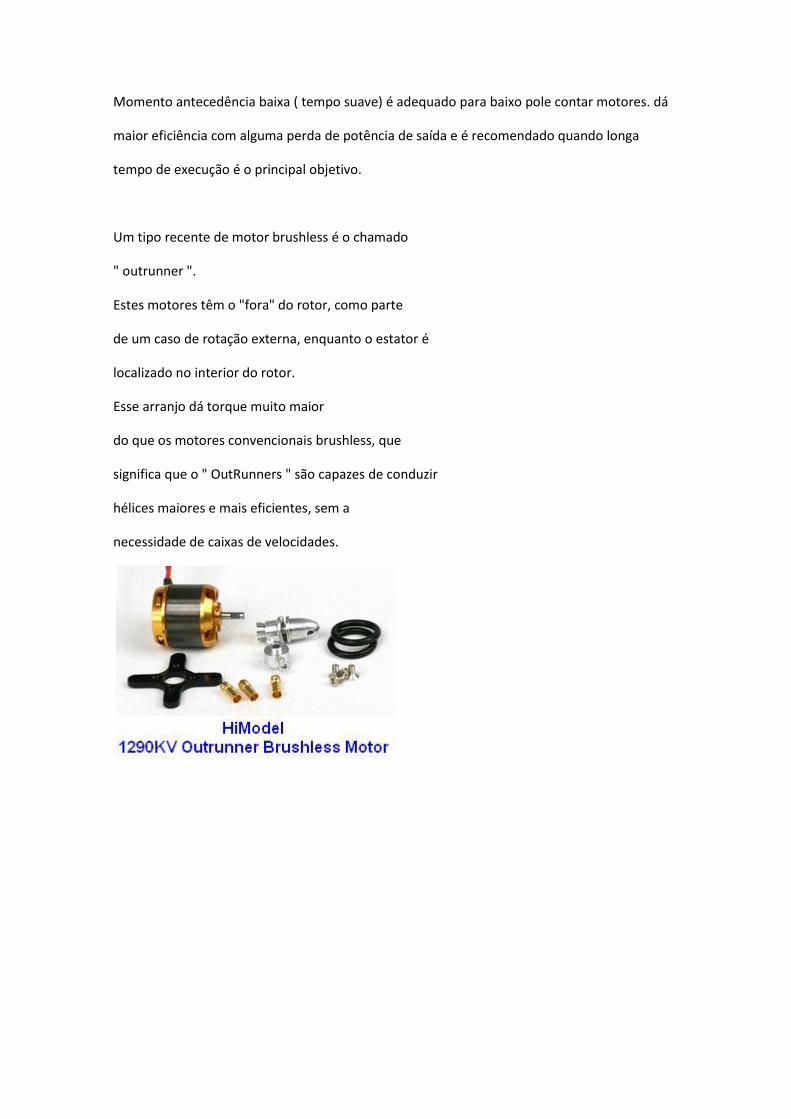
Um tipo recente de motor brushless é o chamado
" outrunner ".
Estes motores têm o "fora" do rotor, como parte
de um caso de rotação externa, enquanto o estator é
localizado no interior do rotor.
Esse arranjo dá torque muito maior
do que os motores convencionais brushless, que
significa que o " OutRunners " são capazes de conduzir
hélices maiores e mais eficientes, sem a
necessidade de caixas de velocidades.