ministerio da defesa´ curso de mestrado em … · amados pais edson bossa e servina sanches bossa...
TRANSCRIPT

MINISTERIO DA DEFESAEXERCITO BRASILEIRO
DEPARTAMENTO DE CIENCIA E TECNOLOGIAINSTITUTO MILITAR DE ENGENHARIA
CURSO DE MESTRADO EM ENGENHARIA ELETRICA
THIAGO HENRIQUE SANCHES BOSSA
METODOLOGIA BASEADA EM TESTES DE RESPOSTA EMFREQUENCIA PARA AVALIACAO DE ESTABILIZADORES DE
SISTEMAS DE POTENCIA
Rio de Janeiro2011

INSTITUTO MILITAR DE ENGENHARIA
THIAGO HENRIQUE SANCHES BOSSA
METODOLOGIA BASEADA EM TESTES DE RESPOSTA EMFREQUENCIA PARA AVALIACAO DE ESTABILIZADORES DE
SISTEMAS DE POTENCIA
Dissertacao de Mestrado apresentada ao Curso deMestrado em Engenharia Eletrica do Instituto Militarde Engenharia, como requisito parcial para obtencao dotıtulo de Mestre em Ciencias em Engenharia Eletrica.
Orientador: TC Paulo Cesar Pellanda, Dr. ENSAECo-orientador: Nelson Martins, Ph. D.
Rio de Janeiro2011

c2011
INSTITUTO MILITAR DE ENGENHARIAPraca General Tiburcio, 80-Praia VermelhaRio de Janeiro-RJ CEP 22290-270
Este exemplar e de propriedade do Instituto Militar de Engenharia, que podera incluı-lo em base de dados, armazenar em computador, microfilmar ou adotar qualquer formade arquivamento.
E permitida a mencao, reproducao parcial ou integral e a transmissao entre bibliotecasdeste trabalho, sem modificacao de seu texto, em qualquer meio que esteja ou venha aser fixado, para pesquisa academica, comentarios e citacoes, desde que sem finalidadecomercial e que seja feita a referencia bibliografica completa.
Os conceitos expressos neste trabalho sao de responsabilidade do autor e dos orienta-dores.
B745m Bossa, Thiago Henrique SanchesMetodologia Baseada em Testes de Resposta em Fre-
quencia para Avaliacao de Estabilizadores de Sistemasde Potencia, Thiago Henrique Sanches Bossa. – Rio deJaneiro: Instituto Militar de Engenharia, 2011.
98 p.:il.
Dissertacao: (mestrado) – Instituto Militar de Enge-nharia, Rio de Janeiro, 2011.
1. Engenharia Eletrica – dissertacao. 2. Sistemas depotencia. 3. Estabilizadores de potencia. I. Tıtulo. II.Instituto Militar de Engenharia.
CDD 621.317
2

INSTITUTO MILITAR DE ENGENHARIA
THIAGO HENRIQUE SANCHES BOSSA
METODOLOGIA BASEADA EM TESTES DE RESPOSTA EMFREQUENCIA PARA AVALIACAO DE ESTABILIZADORES DE
SISTEMAS DE POTENCIA
Dissertacao de Mestrado apresentada ao Curso de Mestrado em Engenharia Eletricado Instituto Militar de Engenharia, como requisito parcial para obtencao do tıtulo deMestre em Ciencias em Engenharia Eletrica.
Orientador: TC Paulo Cesar Pellanda, Dr. ENSAECo-orientador: Nelson Martins, Ph. D.
Aprovada em 28 de janeiro de 2011 pela seguinte Banca Examinadora:
TC Paulo Cesar Pellanda, Dr. ENSAE do IME - Presidente
Nelson Martins, Ph. D. do CEPEL
Cap Alberto Mota Simoes, Dr. ENSAE do IME
Prof. Aguinaldo Silveira e Silva, Ph. D. da UFSC
Rio de Janeiro2011
3

Este trabalho e dedicado... A minha famılia, meusamados pais Edson Bossa e Servina Sanches Bossae meu irmao Diogo Henrique Sanches Bossa. Elesforam exemplos de perseveranca, honestidade e com-petencia, me apoiando e incentivando nos momen-tos mais difıceis com muito amor e compreensao. Aminha futura esposa, Priscila Machado de Araujo,pelo amor dedicado a mim.
4

AGRADECIMENTOS
Antes de tudo a DEUS, principalmente por me ter concedido a honra de ter tra-
balhado e convivido com profissionais do mais alto grau de competencia, seriedade e
simplicidade, que permitiu desenvolver esta dissertacao com grande prazer e satisfacao
pessoal e profissional.
Ao meu orientador, TC Prof. Paulo Cesar Pellanda, pela atencao e profissionalismo
com que acompanhou a realizacao deste trabalho, alem da oportunidade de mestrado
incialmente oferecida a mim.
Ao meu co-orientador, Dr. Nelson Martins, pela atencao e profissionalismo com que
acompanhou a realizacao deste trabalho, sobretudo, pela grande amizade e incentivo que
muito contribuıram para que eu o concluısse com exito.
A todos os professores e funcionarios do Departamento de Engenharia Eletrica do
Instituto Militar de Engenharia que, de alguma forma, contribuıram para a realizacao
deste trabalho.
A Coordenacao de Aperfeicoamento de Pessoal de Nıvel Superior (CAPES) pelo apoio
financeiro.
A meus pais Edson e Nina, e meu irmao Diogo, que, mesmo a distancia, foram
verdadeiras fontes de apoio e inspiracao.
Finalmente, um agradecimento muito especial a minha noiva Priscila, companheira
idonea, pelo incansavel, compreensivo e amoroso apoio na realizacao deste trabalho.
5

”[...] se vi mais longe, foi porque estava sobre os om-bros de gigantes.”(Isaac Newton).
6

SUMARIO
LISTA DE ILUSTRACOES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
LISTA DE TABELAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
LISTA DE ABREVIATURAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1 INTRODUCAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.1 Contexto e Motivacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3 Organizacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 ESTUDO DA ESTABILIDADE DE SISTEMAS DE POTENCIA . 21
2.1 Introducao a Estabilidade dos Sistemas de Potencia . . . . . . . . . . . . . . . . . . . . . . 21
2.1.1 Conceito de Sistema Eletrico de Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.2 Questao da Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.1.3 Estabilidade de Angulo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.1.4 Estabilidade a Pequenos Sinais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.2 Modelo Maquina Barra Infinita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.2.1 Maquina Sıncrona: Modelo Classico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.2.2 Maquina Sıncrona: Fluxo de Campo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.2.3 Adicao do Sistema de Excitacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.2.4 Efeito do Estabilizador de Sistema de Potencia . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.3 Modelo Multimaquina . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.3.1 Abordagem Tradicional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.3.2 Abordagem para Sistemas de Grande Porte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
3 CANAL DE PERTURBACAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.1 Conceituacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.2 Aplicacao ao Gerador Sıncrono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
3.3 Aplicacao a um Caso Classico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.4 Exemplo Grafico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.4.1 Sistema I . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.4.2 Sistema II . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
7

3.4.3 Analise dos Sistemas Exemplos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
4 MODELAGEM DE UMA USINA MULTIGERADORES . . . . . . . . . 48
4.1 Modelo Usina Multigeradores Barra Infinita . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
4.2 Modelo em Espaco de Estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.3 Transformacao de Similaridade Modal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.4 Canal de Perturbacao Multivariavel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.5 Transformacao Modal da Matriz de Transferencia . . . . . . . . . . . . . . . . . . . . . . . . 56
4.6 Analogia com Impedancias de Sequencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
4.7 Abordagem por Zeros Multivariaveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.7.1 Modo Gerador Agregado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
4.7.2 Modo Intraplanta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5 PROPOSTA DE ENSAIO DE CAMPO . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.1 Pratica Atual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
5.2 Teste Proposto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2.1 Diagrama do Ensaio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.2.2 Fundamentacao Teorica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
6 RESULTADOS DO ENSAIO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.1 Teste de Campo Realizado na UHE Itaipu 60 Hz . . . . . . . . . . . . . . . . . . . . . . . . 67
6.1.1 Ruıdo nos Sinais Medidos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
6.1.2 Descricao do SIN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
6.2 Resposta de cada Gerador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
6.3 Modo Gerador Agregado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
6.4 Modo Intraplanta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
6.5 Analise de Sensibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
6.6 Analise de Robustez a Assimetrias . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.6.1 Assimetria Localizada em Unidades Externas . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
6.6.2 Assimetria Localizada na Unidade Interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
7 CONCLUSAO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
8 REFERENCIAS BIBLIOGRAFICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
8
9 APENDICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
9.1 APENDICE 1: Zeros Multivariaveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9.2 APENDICE 2: Sistema Exemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
9.2.1 Modelagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
9.2.2 Modelo em Espaco de Estados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
9.2.3 Transformacao de Similaridade Modal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
9.2.4 Transformacao de Similiaridade em Frequencia . . . . . . . . . . . . . . . . . . . . . . . . . . 93
9.2.5 Aplicacao dos Zeros Multivariaveis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
9.2.5.1Modo Gerador Agregado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
9.2.5.2Modo Intraplanta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
9.2.6 Proposta de Ensaio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
9

LISTA DE ILUSTRACOES
FIG.2.1 Controles associados ao sistema de potencia: em negrito, a malha
de controle objeto de estudo deste trabalho. . . . . . . . . . . . . . . . . . . . . . . . 22
FIG.2.2 Classificacao da estabilidade de um sistema de potencia: em negrito,
o ramo objeto deste estudo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
FIG.2.3 a) Sistema de potencia em estudo e seu respectivo b) modelo SMIB
(Maquina Barra Infinita). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
FIG.2.4 Representacao das componentes do torque eletrico. . . . . . . . . . . . . . . . . . . 28
FIG.2.5 Sistema equivalente utilizando modelo classico de gerador. . . . . . . . . . . . . 29
FIG.2.6 Diagrama de blocos representando a maquina sıncrona. . . . . . . . . . . . . . . 31
FIG.2.7 Sistema de excitacao simplificado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
FIG.2.8 Representacao da maquina sıncrona e do sistema de excitacao. . . . . . . . . 33
FIG.2.9 Representacao da maquina sıncrona e seus controles. . . . . . . . . . . . . . . . . . 35
FIG.2.10 Representacao da maquina sıncrona e seus controles utilizando con-
ceito de GEP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
FIG.2.11 Estrutura de um PSS tıpico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
FIG.2.12 Estrutura do modelo multimaquina de um sistema de potencia,
onde * denotam equacoes algebricas e ** equacoes diferenciais. . . . . . . . 37
FIG.3.1 Sistema canonico com canal de perturbacao. . . . . . . . . . . . . . . . . . . . . . . . . 40
FIG.3.2 Diagrama de blocos do canal de perturbacao referente a um gerador
sıncrono e seu PSS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
FIG.3.3 a)–b) Sistema Maquina Barra infinita (SMIB) e sua c) represen-
tacao em diagrama de blocos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
FIG.3.4 Sistema exemplo I. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
FIG.3.5 Sistema exemplo II. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
FIG.3.6 a) Grafico de modulo para ambos os sistemas em malha fechada:
HIzw e HII
zw. b) Fase do Sistema I. c) Fase do Sistema II. Mapas de
polo-zero para d) Sistema I e e) Sistema II. . . . . . . . . . . . . . . . . . . . . . . . . 47
FIG.4.1 Usina multigeradores conectada a uma barra infinita atraves de
uma impedancia (MPIB). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
10
FIG.4.2 Diagrama de blocos multivariavel do sistema MPIB destacando a
chave (F), que promove a abertura virtual simultanea dos lacos
de torque de amortecimento mecanico de todas as UGs. . . . . . . . . . . . . . 50
FIG.4.3 Circuito eletrico do sistema MPIB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
FIG.5.1 Diagrama de um ensaio de campo convencional. . . . . . . . . . . . . . . . . . . . . . 62
FIG.5.2 Grafico de resposta em frequencia de VT1(s)/VREF1(s) para um ger-
ador agregado (-.-.-), para o gerador #1 de uma usina de n-
unidades, com n = 2 ( ), n = 4 (—), n = 10 (-.-.-) e para uma
unica unidade (1/10 do tamanho do gerador agregado) conectado
a uma barra infinita (equivalente ao modo intraplanta) (· · · ). . . . . . . . 64
FIG.5.3 Diagrama esquematico do ensaio de campo proposto. . . . . . . . . . . . . . . . . 65
FIG.6.1 a) VPSSd1 e RVPSSd1. b) VPSS1 e RVPSS1,VPSSd1
. c) VPSS2 e 10 ×RVPSS2,VPSSd1
; A curva (—) e o sinal nao-tratado, enquanto ( ) e
o sinal filtrado; o sinal senoidal aplicado e de 0.5 Hz. d) VPSS2 e
RVPSS2,VPSSd1para um sinal senoidal de 2 Hz. . . . . . . . . . . . . . . . . . . . . . . 69
FIG.6.2 Diagrama geografico do SIN. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
FIG.6.3 Diagrama simplificado de Itaipu 60 Hz e 50 Hz e suas interligacoes
com o SIN. Os valores em preto indicam capacidade maxima de
geracao/transformacao, enquanto que os dados em vermelho in-
dicam o carregamento aproximado durante o ensaio. . . . . . . . . . . . . . . . . 71
FIG.6.4 Grafico de resposta em frequencia de P (s) = VPSS1(s)/VPSSd1(s)
obtidos de simulacoes (—) e ensaio de campo (F). . . . . . . . . . . . . . . . . . . 72
FIG.6.5 Grafico de resposta em frequencia de T (s) = VPSS2(s)/VPSSd1(s)
obtidos de simulacoes (—) e ensaio de campo (F). . . . . . . . . . . . . . . . . . . 73
FIG.6.6 Grafico de resposta em frequencia de Hagzw(s) obtido de simula-
coes (—), ensaio de campo (F) e um ajuste de curvas de 2a or-
dem (-.-.-). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
FIG.6.7 Grafico de resposta em frequencia de H ipzw(s) obtido de simula-
coes (—), ensaio de campo (F) e um ajuste de curvas de 3a or-
dem (-.-.-). Foi incluıdo tambem o grafico de resposta em frequen-
cia de P (s) obtido via ensaio de campo (|.|.|.|), contido na FIG. 6.4. . . . . 75
FIG.6.8 Resultados simulados para polos de malha aberta (sem PSS) (⃝),
11

suas sensibilidades a adicao de PSSs com ganhos incrementais (→)
e polos de malha fechada (com PSS) associados (×). . . . . . . . . . . . . . . . 76
FIG.6.9 Grafico de resposta em frequencia de Hagzw(s) obtido de simulacoes
usando modelo simetrico (—) e modelo com assimetria na unidade
externa (-.-.-). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
FIG.6.10 Grafico de resposta em frequencia de Hagzw(s) obtido de simulacoes
usando carregamento simetrico instavel ( ) e para unidade per-
turbada com um carregamento 20% menor (—). . . . . . . . . . . . . . . . . . . . . 79
FIG.9.1 Usina 3-unidades conectada a uma barra infinita atraves de uma
impedancia (3PIB). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
FIG.9.2 Circuito eletrico do sistema 3PIB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
FIG.9.3 Diagrama de blocos de uma usina 3-geradores, destacando entradas
e saıdas dos canais de perturbacao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
12

LISTA DE TABELAS
TAB.1.1 Evolucao do SIN (ONS – OPERADORNACIONAL DO SISTEMA,
2008) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
TAB.2.1 Comportamento do torque eletrico gerado pelo sistema de exci-
tacao. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
TAB.3.1 Polos, zeros de Hzw(s) e respostas em frequencia dos sistemas ex-
emplos de segunda ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
TAB.6.1 Desempenho da usina de Itaipu 60 Hz no SIN. . . . . . . . . . . . . . . . . . . . . . . 72
TAB.6.2 Desempenho do modo intraplanta da usina de Itaipu 60 Hz. . . . . . . . . . . 74
TAB.9.1 polos e zeros relativos a direcao do modo agregado. . . . . . . . . . . . . . . . . . . 97
TAB.9.2 polos e zeros relativo a direcao do modo intraplanta. . . . . . . . . . . . . . . . . . 97
13

LISTA DE ABREVIATURAS
ABREVIATURAS
3PIB - 3-generator Power plant Infinite Bus
CEPEL - Centro de Pesquisas em Energia Eletrica
DFT - Discrete Fourier Transform
FACTS - Flexible AC Transmission System
FT - Funcao de Transferencia
FTMA - Funcao de Transferencia de Malha Aberta
FTMF - Funcao de Transferencia de Malha Fechada
HVDC - High Voltage Direct Current
IDZ - Input Decoupling Zero
MIMO - Multiple input - Multiple output
MPIB - Multigenerator Power plant Infinite Bus
ODZ - Output Decoupling Zero
POD - Power Oscillation Damping
PSS - Power System Stabilizer
pu - por unidade
SEP - Sistema Eletrico de Potencia
SIN - Sistema Interligado Nacional
SISO - Single Input - Single Output
SIMO - Single Input - Multiple Output
SMIB - Single-Machine Infinite Bus
SNR - Signal-to-Noise Ratio
SVC - Static Var Compensator
TCSC - Thyristor Controlled Series Capacitor
UG - Unidade Geradora
UHE - Usina Hidroeletrica
14

RESUMO
Este trabalho propoe uma nova metodologia de ensaio de campo para verificar a efe-tividade dos estabilizadores de potencia (PSS) no amortecimento dos modos de oscilacaoeletromecanica em usinas multigeradores. A proposta se fundamenta na extensao multi-variavel do conceito de canal de perturbacao, proposto teoricamente para uma formulacaoSISO. O conceito permite verificar o desempenho de um gerador tanto em malha aberta(sem o PSS) quanto em malha fechada (com PSS) por meio de medicoes em malha fechada,enquanto sua formulacao MIMO permite a determinacao independente dos modos geradoragregado e intraplanta de uma usina multigeradores.
O teste de campo foi conduzido pela primeira vez na UHE Itaipu 60 Hz em 2008, queenvolveu um teste de resposta em frequencia em duas unidades geradoras, consistindo naaplicacao de sinais no sistema de excitacao de um dos geradores com respectivas medicoesno proprio gerador e num gerador vizinho.
As funcoes de transferencia referentes aos canais de perturbacao de ambos geradoresforam identificadas e os modos gerador agregado e intraplanta foram determinados. Asrespostas obtidas do ensaio de campo concordaram com os resultados de simulacao com-putacional, validando a metodologia de ensaio. Os resultados do ensaio confirmaram aefetividade dos PSSs de Itaipu 60 Hz em amortecer adequadamente o modo de oscilacaodominante da usina (modo gerador agregado), alem de revelar que a usina teria um de-sempenho oscilatorio inaceitavel caso os PSSs fossem desativados. Adicionalmente, osresultados tambem indicaram que o atual ajuste do PSS nao altera significativamente oamortecimento do modo intraplanta, mantendo seu desempenho em nıveis adequados.
Uma analise de sensibilidade, baseada em simulacoes, foi realizada para verificar sea nova proposta de ensaio e robusta a possıveis violacoes na simetria da planta, que euma das premissas basicas do metodo. Os resultados confirmaram que o novo ensaio decampo e significativamente robusto a desvios em parametros e carregamentos que existemna pratica, sendo seguramente recomendado em aplicacoes praticas.
15

ABSTRACT
This work proposes a new field test technique to adequately assess the oscillationdamping effectiveness of the power system stabilizer (PSS) in a multigenerator powerplant. This proposal is based on the multivariable extension of the disturbance channelconcept, theoretically designed for a SISO formulation. This concept allows assessingboth open-loop (without PSS) and closed-loop (with PSS) responses from closed-loopmeasurements, while its MIMO formulation allows the separate identification of bothaggregate and intraplant behaviors.
The field test was first carried out at the Itaipu 60 Hz power station in 2008, whichinvolved a SIMO frequency response test in two generating units, consisting in the injectionof a series of sinusoids in the excitation system of a generating unit and the measurementof determined output in the same unit and in a neighbor generator.
The transfer functions relating the disturbance channels of the two generators wereidentified, and the aggregate and intraplant modes were determined. The results obtainedfrom field tests showed a good match with the ones obtained from simulations, validatingthe test methodology. The field test results confirmed the effectiveness of the Itaipu 60 HzPSSs in damping the dominant oscillation mode (aggregate generator mode), as well asit revealed that the power plant would have an unacceptable damping performance if allPSSs were disabled. In addition, the results also indicate that the current PSS settingdoes not change significatively the characteristics of the intraplant mode.
A sensitivity analysis, based on computer simulations, was also carried out to verifywhether the new field test is robust to possible violations in plant symmetry, which isone the method’s basic assumption. The results confirmed that the new field test is quiteresilient to the parameter and dispatch imbalances that exist in practice and, therefore,can be safely recommended for wider practical use.
16
1 INTRODUCAO
1.1 CONTEXTO E MOTIVACAO
Com o crescimento dos sistemas eletricos de potencia, houve a necessidade de am-
pliacao da capacidade de geracao de energia, a qual demandava a integracao dos novos
parques geradores, geralmente distantes dos centos de carga. Exemplos desses casos sao
as usinas termicas mine mouth (“boca de mina”), que eram instaladas proximas as minas
de carvao, e das usinas hidreletricas, construıdas em lugares com maior aproveitamento
hidraulico. Com o inıcio da operacao dessas novas usinas e de suas respectivas longas
linhas de transmissao, foram observadas as primeiras oscilacoes eletromecanicas.
Com o aumento da importancia da confiabilidade de um SEP, a capacidade dos sis-
temas de potencia em suportar contingencias era um criterio de projeto, motivando o
uso de diversos equipamentos e sistemas de controle que maximizassem a capacidade de
transmissao da energia gerada (ROGERS, 2000b).
Dentre os sistemas de controle utilizados num SEP, destaca-se o regulador de tensao
(Automatic Voltage Regulator – AVR), devido a sua grande influencia na estabilidade tran-
sitoria de um gerador, recebendo ainda mais importancia com o advento das excitatrizes
estaticas que, por serem rapidas e possuirem um alto ganho, aumentaram significativa-
mente a capacidade do sistema em suportar contingencias severas.
Entretanto, a acao desse tipo de regulador de tensao introduzia amortecimento ne-
gativo as oscilacoes quando os geradores se encontravam altamente carregados e com
interconexoes fracas, provocando desligamentos das interligacoes minutos depois de os ge-
radores terem suportado uma contingencia. Esta e uma situacao operativa caracterıstica
dos sistemas eletricos dos EUA e Canada (PAL, 2005), bem como do sistema brasileiro,
que possuem grandes parques geradores conectados aos centros de carga por longas linhas
de transmissao, destacando o caso brasileiro da usina de Itaipu.
A alternativa encontrada foi introduzir sinais de controle adicionais nas referencias de
alguns reguladores de tensao, com a finalidade de adicionar um torque de amortecimento
positivo aos geradores. O controlador que produz tal sinal e denominado estabilizador de
sistemas de potencia (Power System Stabilizer – PSS), cujo sinal de realimentacao classi-
17

camente utilizado e a velocidade do rotor, apesar de existirem outras variacoes (KUNDUR,
1994).
Desde entao, os PSSs, com ajustes apropriados, tem praticamente eliminado proble-
mas de oscilacao eletromecanica, aumentando consideravalmente os limites seguros de
transmissao de potencia ativa. Esses controladores foram aplicados no setor de 60 Hz na
usina de Itaipu em 1991.
O ajuste dos PSSs das unidades geradoras de Itaipu 60 Hz foi realizado aplicando
a metodologia mais utilizada na epoca, que considerava a representacao do sistema de
potencia pelo modelo maquina barra infinita (Single Machine Infinite Bus – SMIB), des-
crito em (DE MELLO, 1969). O ajuste era validado por ensaios convencionais (LEE,
1980; LARSEN, 1981; BERUBE, 2007; KUNDUR, 1989, 2003; ROGERS, 2000a).
Esse ajuste eliminou a ocorrencia de oscilacoes pouco amortecidas na usina e apresen-
tou um bom desempenho frente a perturbacoes. Em 1998, o ajuste implantado foi avaliado
com a analise da estabilidade a pequenos sinais, em um modelo multimaquinas, pelo uso
do programa PacDyn, do CEPEL, tambem apresentando bom desempenho. Desde entao,
o Sistema Interligado Nacional (SIN) teve sua configuracao alterada significativamente
(TAB. 1.1), com novas interligacoes importantes (destacando a entrada em operacao do
terceiro circuito Foz do Iguacu-Ivaipora 765 kV) e possıveis reflexos nos modos de os-
cilacoes locais e inter-areas do sistema.
TAB. 1.1: Evolucao do SIN (ONS – OPERADOR NACIONAL DO SISTEMA, 2008)Elementos modelados SIN em 1998 SIN em 2007
Barras 2380 3647Linhas 3450 5175
Maquinas 124 191PSS 52 102
Cargas nao-lineares 2536 3639
Apesar dessas alteracoes, o desempenho dinamico do setor de 60 Hz de Itaipu tem sido
satisfatorio, como bem mostrou (DA SILVA, 2006), o que nao descarta a possibilidade de
serem reavaliados.
Assim, houve a necessidade de avaliar os efeitos que a evolucao do sistema eletrico
teve no desempenho dinamico da usina, com o intuito de determinar a necessidade de
se melhorar os ajustes dos PSSs de Itaipu 60 Hz, de forma a aumentar os limites de
estabilidade desta importante interligacao do SIN.
O trabalho desenvolvido por (MARTINS, 2007) sugeriu uma nova metodologia de
18

analise da efetividade de controladores por realimentacao (introduzindo o conceito de canal
de perturbacao), contemplando o caso da analise de efetividade de PSSs. No entanto, a
metodologia foi aplicada somente em ambiente de simulacao, e ainda representava cada
usina por um unico gerador equivalente. Uma vez que a usina de Itaipu 60 Hz continha 10
unidades em paralelo, a metodologia proposta teve que ser estendida ao caso de multiplas
unidades antes da sua aplicacao em uma planta real, por meio de um ensaio de campo.
Este trabalho foi desenvolvido nesse contexto, onde a abordagem de (MARTINS, 2007)
foi nao so estendida ao caso multigeradores como aplicada a usina de Itaipu 60 Hz com
exito, introduzindo uma nova metodologia de ensaio de campo, que apresenta inumeras
vantagens em relacao aos metodos de ensaio convencionais.
1.2 OBJETIVOS
Este trabalho visa apresentar uma nova metodologia de ensaio de usinas multigeradores
bem como os resultados da sua aplicacao ao caso da usina de Itaipu 60 Hz, ao mesmo
tempo que procura construir sua fundamentacao teorica de maneira didatica, por meio
do cumprimento sequencial dos seguintes objetivos intermediarios:
• apresentar conceitos basicos da estabilidade eletromecanica de sistemas de potencia;
• descrever detalhadamente a metodologia proposta em (MARTINS, 2007);
• estender a formulacao de (MARTINS, 2007) para o caso de uma usina com multiplas
unidades geradoras;
• formular uma proposta de ensaio a partir da aplicacao da nova metodologia;
• descrever as condicoes de realizacao do ensaio em Itaipu 60 Hz;
• apresentar os resultados do ensaio e compara-los com os obtidos via simulacao com-
putacional.
Os principais resultados e contribuicoes deste trabalho foram aceitos para publicacao
em periodico cientıfico internacional (BOSSA, 2011).
19

1.3 ORGANIZACAO
No Capıtulo 2 sao apresentados alguns conceitos basicos de estabilidade de sistemas
de potencia, bem como os principais modelos dinamicos utilizados na analise de estabi-
lidade eletromecanica. No Capıtulo 3 e abordado o conceito do canal de perturbacao,
desenvolvido por (MARTINS, 2007). No Capıtulo 4 e apresentada a extensao do conceito
do canal de perturbacao para o caso de uma usina contendo multiplas unidades gerado-
ras. No Capıtulo 5 e apresentada a proposta de ensaio. No Capıtulo 6 sao avaliados os
resultados da aplicacao da metodologia proposta na UHE de Itaipu 60 Hz. Conclusoes e
comentarios finais sao apresentados no Capıtulo 7. O Apendice traz uma breve descricao
sobre o conceito de zeros multivariaveis, bem como a aplicacao da metodologia proposta
a um sistema exemplo simbolico, para fins didaticos.
20

2 ESTUDO DA ESTABILIDADE DE SISTEMAS DE POTENCIA
Um sistema eletrico de potencia (SEP) e composto por uma infinidade de elemen-
tos dinamicos, tais como maquinas sıncronas, sistemas de excitacao, SVCs, TCSCs, etc.
Para o estudo da estabilidade de um SEP, este deve ser modelado matematicamente de
forma a representar adequadamente a dinamica dos elementos de interesse. Uma vez
que este trabalho esta contido na area de estabilidade eletromecanica, torna-se necessario
definir, descrever e justificar a modelagem utilizada na formulacao e analise do desem-
penho dinamico de uma usina conectada a um SEP, que e o alvo deste capıtulo. Tambem
e apresentada, inicialmente, uma breve resenha acerca dos principais conceitos de estabi-
lidade de um SEP.
2.1 INTRODUCAO A ESTABILIDADE DOS SISTEMAS DE POTENCIA
2.1.1 CONCEITO DE SISTEMA ELETRICO DE POTENCIA
Um SEP tem a funcao basica de disponibilizar energia eletrica aos consumidores de
forma segura, confiavel e economicamente viavel. Os SEPs variam em tamanho e comple-
xidade, porem todos consistem basicamente em multiplas fontes geradoras conectadas a
cargas por uma complexa rede de transmissao, que transmite energia por grandes distan-
cias, com a finalidade de abastecer consumidores espalhados numa grande area. Entre-
tanto, um SEP deve ser projetado e operado de forma a atender a requisitos fundamentais,
destacados por (KUNDUR, 1994):
• deve ser capaz de atender uma demanda variavel, sendo necessario possuir reservas
de potencia ativa e reativa nos geradores e equipamentos, pois a energia eletrica nao
pode ser armazenada em quantidades significativas;
• o sistema deve suprir energia a um mınimo custo e menor impacto ecologico;
• o fornecimento de energia deve atingir padroes mınimos de qualidade.
A qualidade da energia eletrica e verificada atraves da avaliacao de algumas carac-
terısticas da energia fornecida, sendo as principais:
21

• constancia de frequencia;
• constancia de tensao;
• grau de confiabilidade.
Para atender a estes padroes de qualidade sao empregados varios nıveis de controle,
envolvendo um arranjo complexo de equipamentos. A FIG. 2.1 identifica os varios sub-
sistemas de um sistema de potencia e os controles associados aos equipamentos.
FIG. 2.1: Controles associados ao sistema de potencia: em negrito, a malha de controleobjeto de estudo deste trabalho.
2.1.2 QUESTAO DA ESTABILIDADE
Estabilidade de um SEP e a propriedade desse sistema de retornar a um ponto de
equilıbrio (ponto de operacao) depois de ser submetido a uma perturbacao. Essa carac-
22

terıstica depende da configuracao do SEP, do seu ponto inicial de operacao e do tipo de
perturbacao.
Tradicionalmente, o problema de estabilidade consiste em manter a operacao sıncrona
do sistema, pois para a operacao satisfatoria do sistema, todos os geradores de energia
eletrica (maquinas sıncronas) devem permanecer sincronizados. No entanto, instabilidade
pode ocorrer sem perda de sincronismo, como e o caso do colapso de tensao.
Para a avaliacao da estabilidade de um SEP, e verificado o comportamento do sistema
quando submetido a uma perturbacao. Pequenas perturbacoes na forma de variacoes de
carga ocorrem constantemente no sistema e este deve ser capaz de abastecer o maximo de
carga possıvel operando de maneira segura sob essas condicoes. O SEP tambem deve ser
capaz de suportar perturbacoes mais severas, tais como perda de um grande gerador ou
carga, perda de interligacao entre subsistemas, curto-circuito em linhas de transmissao,
entre outros.
A estabilidade de um SEP e extremamente complexa quando abordada como um unico
problema, sendo impraticavel sua modelagem e estudo. Portanto, tornou-se necessaria a
classificacao da estabilidade em categorias, permitindo uma melhor analise do problema,
identificacao dos fatores que mais contribuem para a instabilidade e a formacao de metodos
que aperfeicoem a operacao estavel do sistema.
A FIG. 2.2 representa a classificacao do problema da estabilidade de um SEP, elabo-
rada segundo os seguintes criterios:
• natureza fısica da instabilidade (ex: angulo ou tensao);
• magnitude da perturbacao (ex: grande ou pequena);
• dispositivos, processos e tempo de analise que devem ser considerados para deter-
minar a estabilidade;
• metodo mais apropriado para calculo e predicao da estabilidade.
2.1.3 ESTABILIDADE DE ANGULO
A ocorrencia de alguma perturbacao no sistema, como por exemplo a perda de uma
linha de transmissao, muda a topologia do sistema alterando significativamente a potencia
eletrica fornecida pelo gerador ligado a esta linha, criando assim desbalanco entre a poten-
cia eletrica fornecida pelo gerador e a potencia mecanica aplicada ao rotor da maquina.
23

FIG. 2.2: Classificacao da estabilidade de um sistema de potencia: em negrito, o ramoobjeto deste estudo.
Esse desbalanco causa aceleracao ou desaceleracao no rotor da maquina, provocando uma
variacao no seu angulo interno que, se for suficientemente grande, leva o gerador a um
ponto de operacao instavel sendo necessario desconecta-lo do sistema.
A estabilidade de angulo do rotor e a capacidade das maquinas sıncronas de um SEP
de permanecerem em sincronismo. O problema da estabilidade envolve o estudo das os-
cilacoes eletromecanicas inerentes a um sistema de potencia. Por conveniencia de analise,
e comum classificar a estabilidade de angulo do rotor em duas categorias: estabilidade
transitoria e estabilidade a pequenos sinais.
A estabilidade transitoria esta relacionada com a capacidade do sistema de manter
o sincronismo quando submetido a uma perturbacao severa (ex: perda de interligacoes,
curto-circuito em grandes transformadores). Neste caso, a resposta do sistema envolve
grandes excursoes angulares do rotor sendo influenciado significativamente pela relacao
24

nao-linear potencia-angulo.
A estabilidade a pequenos sinais e a propriedade do sistema suportar pequenas per-
turbacoes mantendo o sincronismo. Neste tipo de analise, o sistema de equacoes que
descrevem a resposta do sistema podem ser linearizadas em torno do ponto de operacao,
facilitando a analise dos fatores que influenciam na estabilidade do sistema.
2.1.4 ESTABILIDADE A PEQUENOS SINAIS
Os SEPs sao continuamente excitados por pequenas perturbacoes (e.g. pequenas
variacoes de carga do sistema) e devem manter o sincronismo frente a essas variacoes.
Uma vez que as equacoes utilizadas para representar a dinamica do sistema sao lineares,
a estabilidade de angulo de um gerador pode ser avaliada a partir do comportamento do
seu torque eletrico incremental (2.1).
∆Te , KeS∆δ︸ ︷︷ ︸∆TeS
+KeD∆ω︸ ︷︷ ︸∆TeD
(2.1)
A constante KeS e o coeficiente da componente da variacao do torque eletrico que
esta em fase com a variacao do angulo do rotor (∆δ). Esta componente e denominada
de torque sincronizante e diz respeito a intensidade com a qual as maquinas tendem
a restabelecer o equilıbrio. O coeficiente KeD representa a componente do torque que
esta em fase com o desvio de velocidade do rotor (∆ω), sendo denominado torque de
amortecimento, responsavel por amortecer as oscilacoes entre os rotores dos geradores ate
que estes atinjam um ponto de equilıbrio.
A estabilidade do sistema depende da existencia de ambas componentes de torque
para cada uma das maquinas sıncronas (STEVENSON JR., 1982). A falta de torque
sincronizante suficiente resulta em instabilidade monotonica, com o aumento progressivo
do angulo do rotor e consequente perda de sincronismo. Por outro lado, a falta de torque
de amortecimento resulta em oscilacoes rotoricas de amplitude crescente, caracterizando
uma instabilidade oscilatoria.
Atualmente, o principal problema tem sido o amortecimento insuficiente de oscilacoes
(KeD insuficiente ou ate negativo), principalmente devido ao uso de excitatrizes rapidas
(KUNDUR, 1994; ROGERS, 2000b; PAL, 2005; ROGERS, 1990). Abaixo segue uma
descricao dos principais modos de oscilacao e suas causas (PAL, 2005).
• Modo local, maquina-sistema ou gerador agregado: esta associado com a oscilacao
das unidades geradoras de uma usina contra o restante do sistema.
25

• Modo intraplanta: diz respeito as oscilacoes entre as unidades geradoras de uma
mesma usina.
• Modo inter-area: esta associado a oscilacao entre conjuntos de geradores; geralmente
e causado por grupos de maquinas fortemente acopladas ligados a outros grupos por
interligacoes fracas.
• Modo de controle: esta relacionado com o ajuste inadequado dos controles das
unidades geradoras (sistema de excitacao) e de outros dispositivos do sistema.
• Modo torsional: e oriundo de uma possıvel interacao entre o movimento rotacional
do eixo turbina-gerador com ajustes de controles de dispositivos do sistema, tais
como excitacao das maquinas, reguladores de velocidade, linhas com compensacao
serie, entre outros.
Em suma, o grande foco do estudo da estabilidade angular a pequenos sinais e iden-
tificar as caracterısticas das oscilacoes de potencia existentes num SEP e fornecer subsı-
dios para ajuste de elementos de controle (principalmente reguladores de tensao e estabi-
lizadores de potencia) de forma a melhorar o desempenho dinamico deste SEP.
2.2 MODELO MAQUINA BARRA INFINITA
Geralmente, um SEP e demasiado extenso em termos de quantidade de elementos
representados, o que exige um grande esforco computacional ao considerar a dinamica de
todos eles na resposta do sistema. Desta forma, nem sempre e vantajoso modelar todo
sistema para analisar a estabilidade de algum elemento, pois so uma pequena parcela dos
elementos do SEP esta efetivamente acoplada a dinamica do elemento em estudo.
Uma vez que existe um grande interesse em avaliar individualmente a estabilidade de
uma unica usina, i.e., seus geradores e controles locais associados, o sistema de poten-
cia pode ser aproximado por um modelo equivalente simplificado. Neste equivalente
(FIG. 2.3), conhecido por modelo Maquina Barra Infinita (Single-Machine Infinite Bus
– SMIB), todo o SEP que se conecta a essa usina e representado por um gerador “in-
finito” (i.e., sua tensao e frequencia sao fixas para qualquer perturbacao), de forma que a
conexao entre a usina e a barra infinita e modelada por uma impedancia externa (Zeq),
conforme FIG. 2.3b. Alem disso, considerando que uma usina geralmente e composta por
multiplas unidades geradoras (UGs) identicas, neste modelo ela e representada por um
26

unico gerador agregado, identico a cada unidade geradora, porem com potencia igual a
soma de todas as UGs em paralelo. Desta forma, so o comportamento coerente da usina
e modelado, desprezando as possıveis interacoes entre UGs da mesma usina (modo de
oscilacao intraplanta).
FIG. 2.3: a) Sistema de potencia em estudo e seu respectivo b) modelo SMIB (MaquinaBarra Infinita).
O fato deste metodo nao modelar a dinamica dos elementos internos do SEP ao qual
o gerador em estudo esta conectado possibilita um melhor entendimento dos fatores que
afetam o comportamento dinamico da usina e seus controles associados. Esta metodologia
e utilizada principalmente para estimar os modos de oscilacao eletromecanicos inerentes
a um sistema de potencia, dando informacoes a respeito da frequencia natural e amorte-
cimento dessas oscilacoes.
∆ω2H = ∆TM −∆Te−∆TD (2.2)
∆δ = ω0∆ω (2.3)
O estudo de oscilacoes eletromecanicas nas maquinas de um SEP tem sua origem na
equacao de balanco de uma maquina sıncrona (2.2).
∆Te , KeS∆δ︸ ︷︷ ︸∆TeS
+KeD∆ω︸ ︷︷ ︸∆TeD
(2.4)
∆TD , KD∆ω (2.5)
Esta equacao, ja linearizada, relaciona o torque mecanico aplicado ao rotor pela fonte
primaria de energia (∆TM) com o torque eletrico produzido pelo gerador (∆Te) e a vari-
acao de velocidade do rotor (∆ω) onde: H e a constante de inercia do gerador, ω e a
27

velocidade do rotor e ω0 a velocidade sıncrona em rad/s, δ e o angulo do rotor em rad,
KeS, KeD sao constantes e ∆TeS, ∆TeD os torques eletricos sincronizante e de amorte-
cimento, respectivamente. Os sımbolos KD e TD representam a constante e o torque de
amortecimento mecanico, respectivamente.
Sabendo que os fenomenos transitorios envolvidos com estabilidade de angulo sao da
ordem de fracoes de segundos e que o amortecimento mecanico de um rotor e geral-
mente desprezıvel e difıcil de ser determinado, duas simplificacoes podem ser feitas na
equacao (2.2):
• e desprezado o efeito do regulador de velocidade (∆TM = 0);
• o amortecimento mecanico do rotor tambem e desprezado (KD = 0).
Logo:
2H∆ω = −∆TeS −∆TeD (2.6)
O torque eletrico pode ser dividido em duas componentes, conforme a equacao (2.4),
e o sistema pode ser representado pelo diagrama de blocos da FIG. 2.4.
FIG. 2.4: Representacao das componentes do torque eletrico.
Formulando a equacao caracterıstica desse sistema, encontram-se os seus autovalores,
os quais sao as raızes desta equacao:
s2 +KeD2H
s+KeSω0
2H= 0 (2.7)
λ1,2 = −ζωn ± jωn
√1− ζ2 (2.8)
ωn =
√KeSω0
2H(2.9)
28

ζ =KeD4Hωn
(2.10)
Esses autovalores descrevem o modo de oscilacao eletromecanico do SEP para pequenas
perturbacoes. Assim, pode-se verificar que um torque eletrico com componente KeD
negativo produzira autovalores com amortecimento negativo, dando origem a um modo
de oscilacao instavel.
De fato, as componentes KeS e KeD dependem da frequencia devido a dinamica da
maquina sıncrona e dos seus controles associados. Para maior clareza, o modelo SMIB
sera construıdo passo-a-passo, onde, em cada subsecao subsequente, a ordem do modelo
sera incrementada, de modo a esclarecer o seu efeito no modo de oscilacao do sistema.
2.2.1 MAQUINA SINCRONA: MODELO CLASSICO
Para exemplificar, sera utilizado o modelo classico de uma maquina sıncrona na de-
terminacao do comportamento do torque eletrico, conforme diagrama da FIG. 2.5.
FIG. 2.5: Sistema equivalente utilizando modelo classico de gerador.
A potencia eletrica fornecida e definida por:
Pe = Te =E ′V
XT
sin(δ) (2.11)
onde: E ′ e a tensao transitoria do gerador em valores por unidade (pu); XT = X ′d+Xe
e a soma das reatancias transitoria X ′d e equivalente da rede Xe; V e a tensao da barra
infinita.
A partir da linearizacao da equacao acima, obtem-se:
∆Te =dTe
dδ
∣∣∣∣δ=δ0
∆δ =E ′V cos(δ0)
XT
∆δ (2.12)
29

Assim, verifica-se que a variacao de torque eletrico so possui componente em fase com
a variacao de angulo KeS.
KeS =dTe
dδ
∣∣∣∣δ=δ0
=E ′V cos(δ0)
XT
(2.13)
Considerando o amortecimento mecanico da maquina nulo, tem-se que KD = 0. De-
senvolvendo a equacao caracterıstica deste sistema e seus respectivos autovalores:
s2 +KeSω0
2H= 0 (2.14)
λ1,2 = ±j
√KeSω0
2H(2.15)
A partir dos autovalores (2.15) para esse modelo de gerador, o sistema e oscilatorio
nao amortecido, por so possuir a componente sincronizante do torque. Nas proximas
secoes, a modelagem apresentada procura se assemelhar com a notacao e desenvolvimento
utilizados em (KUNDUR, 1994).
2.2.2 MAQUINA SINCRONA: FLUXO DE CAMPO
Para o estudo do sistema e utilizado o modelo de maquina sıncrona em coordenadas
dq0 representando a variacao do fluxo de campo (reacao de armadura) e sua saturacao.
Para este modelo, o torque eletrico linearizado do gerador e definido por:
∆Te = ∆Ψdiq0 +Ψd0∆iq −∆Ψqid0 −Ψq0∆id (2.16)
onde ∆Ψ sao os fluxos incrementais, d e q significam de eixo de direto e quadratura
respectivamente, i e a corrente eletrica e 0 denota valor da grandeza antes da linearizacao.
A partir de manipulacoes algebricas e escolha apropriada de variaveis, descritas de-
talhadamente em (KUNDUR, 1994), o sistema pode ser representado pelo diagrama da
FIG. 2.6.
O torque eletrico pode ser calculado conforme a seguinte deducao:
GFD =K3
1 + sT3
(2.17)
∆ΨFD = GFD(∆EFD −K4∆δ) = −K4GFD∆δ (2.18)
∆TeFD = ∆ΨFDK2 = −K4GFDK2∆δ (2.19)
∆TeFD = ∆TeAR = ∆ΨFDK2 = −K4GFDK2∆δ = −K4K3K2
1 + sT3
∆δ (2.20)
30

FIG. 2.6: Diagrama de blocos representando a maquina sıncrona.
∆TeS = K1∆δ (2.21)
∆Te = ∆TeS +∆TeFD (2.22)
A partir da analise da equacao (2.20), verifica-se que a reacao de armadura produz uma
parcela de torque eletrico (∆TeAR) variavel com a frequencia. Este torque varia desde
puramente dessincronizante, quando em regime permanente, ate puramente de amorteci-
mento, para altas frequencias.
2.2.3 ADICAO DO SISTEMA DE EXCITACAO
Uma maquina sıncrona tem sua tensao terminal (E) gerada por inducao eletromag-
netica, produzido pela rotacao do fluxo magnetico do rotor, sendo este ultimo produzido
pela corrente de campo (FITZGERALD, 1961). Assim, a corrente de campo, e conse-
quentemente, a tensao terminal do gerador, pode ser ajustada atraves da aplicacao de
uma tensao adequada nos terminais do circuito de campo, chamada tensao de campo
(EFD).
A funcao basica do sistema de excitacao, tambem chamado de AVR (Automatic Voltage
Regulator, e controlar de maneira automatica a tensao da armadura da maquina sıncrona
(E) a partir do controle direto da tensao aplicada no enrolamento de campo da maquina
(EFD).
O sistema de excitacao pode ser dividido em 3 partes principais, identificados na
FIG. 2.7:
• Regulador: e o elemento de controle do sistema de excitacao, responsavel por, a
partir de um erro de controle entre a tensao de referencia (VREF ) e a tensao terminal
do gerador (E), gerar um sinal que ajustara a tensao no enrolamento de campo
31

(EFD), de forma a deixar a tensao no terminal do gerador num valor proximo ao
desejado (referencia).
• Excitatriz: e o elemento amplificador do sistema de excitacao, responsavel por trans-
formar o sinal de controle oriundo do regulador em um valor de tensao de campo,
provendo corrente de exicitacao para o campo do gerador. Atualmente, sao uti-
lizadas excitatrizes estaticas, i.e., circuitos retificadores que fornecem tensao e cor-
rente DC ao enrolamento de campo, sendo alimentados pela propria tensao terminal
da maquina. Por serem baseados em eletronica de potencia, possuem tempo de res-
posta menor que 2 ciclos eletricos (35ms) e sao dimensionados com capacidade de
fornecer elevadas tensoes de campo (ate 8 pu).
• Limitadores: responsaveis por limitarem a acao do regulador/excitatriz de forma a
operarem dentro da curva de capacidade da maquina sıncrona, respeitando limites
transitorios e de regime permanente de tensao de campo, corrente de campo, subex-
citacao, temperatura, etc. Devido a utilizacao de um modelo linear, a influencia
desses limitadores serao descartadas.
FIG. 2.7: Sistema de excitacao simplificado.
As caracterısticas e desempenho dos sistemas de excitacao sao amplamente estudados,
pois sao os maiores responsaveis pelo desempenho dinamico da unidade geradora, por
possuirem uma grande influencia sobre o fluxo de potencia ativa durante um transitorio
eletromecanico (DE MELLO, 1969, 1978). Isso sera ilustrado na FIG. 2.8, a partir da
integracao desse sistema de excitacao simplificado ao modelo SMIB, realizada a partir
de transformacoes algebricas que expressem a tensao no terminal da maquina (∆E) em
termos dos estados do modelo (∆δ e ∆ΨFD).
32

FIG. 2.8: Representacao da maquina sıncrona e do sistema de excitacao.
A partir do diagrama, as seguintes relacoes podem ser deduzidas:
∆TeAR = −K4GFD
1 +GFDGexK6
K2∆δ (2.23)
∆TeAV R = −K5GFDGex
1 +GFDGexK6
K2∆δ (2.24)
∆TeFD = ∆TeAR +∆TeAV R (2.25)
De modo a simplificar a analise, a funcao de transferencia (FT) do sistema de ex-
citacao (Gex(s), da FIG. 2.7) pode ser representado por um ganho KX = KCKA. Isso
e perfeitamente factıvel, uma vez que as excitatrizes estaticas possuem acao quase que
instantanea (TA → 0).
∆TeAV R = −K5K2K3KX
(1 + sT3) +K3K6KX
∆δ (2.26)
Antes de analisar a influencia do sistema de excitacao no amortecimento das oscilacoes,
deve-se atentar para o valor da constante K5, o qual, dependendo do ponto de operacao,
pode se tornar negativo. Normalmente este valor e positivo, porem, num sistema em que
o gerador esta em alto carregamento e conectado ao sistema por uma elevada impedancia
de transmissao, esta constante torna-se negativa.
O efeito que o sistema de excitacao tem no torque eletrico e descrito pela equacao
(2.26), cuja interpretacao encontra-se condensada na TAB. 2.1, conforme sintetizado por
(KUNDUR, 1994).
A partir dessas informacoes, fica evidente o comportamento conflituoso das atuais
excitatrizes estaticas. O sistema de excitacao com regulador de alto ganho, aliado a alta
velocidade e capacidade de fornecimento de tensao da excitatriz eletronica, promove um
33

TAB. 2.1: Comportamento do torque eletrico gerado pelo sistema de excitacao.Valores de K5 Valores de KX Regime permanente Durante oscilacao
Negativo Grande Fortemente sincronizante Fortemente instabilizantePequeno Fracamente sincronizante Fracamente instabilizante
Positivo Grande Fortemente dessincronizante Fortemente estabilizantePequeno Fracamente dessincronizante Fracamente estabilizante
aumento significativo no torque de sincronismo em regime permanente, o qual e necessario
para um bom desempenho em estabilidade transitoria a grandes perturbacoes. Entretanto,
esse alto ganho tambem introduz um amortecimento negativo para frequencias tıpicas de
oscilacoes (entre 0.1 e 2.0 Hz), sendo o principal causador de instabilidade oscilatoria num
sistema de potencia (BAKER, 1975; DE MELLO, 1969; PAL, 2005).
2.2.4 EFEITO DO ESTABILIZADOR DE SISTEMA DE POTENCIA
Tendo conhecimento da instabilidade oscilatoria introduzida pelos atuais sistemas de
excitacao, bem como do seu otimo desempenho frente a grandes perturbacoes, a melhor
solucao adotada foi criar um sistema de controle suplementar que amorteca esses modos
de oscilacao insuficientemente amortecidos ou ate instaveis. Surge entao a figura do esta-
bilizador de sistema de potencia, mais conhecido por PSS (Power System Stabilizer), que
consiste num controle por realimentacao cujo objetivo primario e introduzir uma com-
ponente de torque eletrico proporcional ao desvio de velocidade do rotor (BOLLINGER,
1980; WATSON, 1973).
Um PSS classico, que possui realimentacao de velocidade (∆ω), e entao integrado
ao sistema de excitacao conforme FIG. 2.9. Existem PSSs que utilizam outros sinais
estabilizantes em sua realimentacao, tais como potencia eletrica e frequencia (CHOW,
2000; KEAY, 1971; DE MELLO, 1978), destacando-se o PSS2A, integral da potencia
acelerante (BERUBE, 2007), que e o mais usado atualmente. Estes tipos de PSS nao
serao abordados aqui por estarem alem do escopo deste trabalho.
A partir do sistema da FIG. 2.9, o torque eletrico provido pelo PSS pode ser deduzido:
∆TeFD = ∆TeAR +∆TeAV R +∆TePSS (2.27)
∆TePSS = GPSSGFDGex
1 +GFDGexK6
K2∆ω (2.28)
Para facilitar o entendimento da acao do PSS, surge o conceito do GEP (s) que significa
Generator-Exciter-to-Power system (DE MELLO, 1969), que nada mais e do que a FTMA
34

FIG. 2.9: Representacao da maquina sıncrona e seus controles.
entre a entrada do sinal do PSS e o torque eletrico produzido por este, conforme (2.29).
∆Te
∆VPSS
= GEP = K2GFDGex
1 +GFDGexK6
(2.29)
Assim a expressao do torque eletrico introduzido pelo PSS pode ser compactada:
∆TPSS = GPSSGEP∆ω (2.30)
O GEP (s) pode ser melhor visualizado simplificando a FIG. 2.9 atraves da equacao
(2.29), cujo diagrama resultante (FIG. 2.10) se assemelha com o proposto por (HEFFRON,
1952), utilizado inicialmente por (DE MELLO, 1969).
A partir de (2.30), verifica-se que o PSS tenta acrescentar um torque em fase com a
variacao da frequencia do rotor (∆ω). Para isso, a funcao de transferencia GPSS(s) deve
ser projetada de forma a compensar o atraso de fase introduzido pela excitacao e pelo
circuito de campo da maquina, que e representado pela funcao de transferencia GEP (s)
(LARSEN, 1981).
O PSS possui a seguinte estrutura basica (KUNDUR, 1994):
• Bloco washout : e um filtro passa-alta que previne que a tensao de campo seja afetada
por qualquer variacao de regime permanente da velocidade da maquina, evitando
uma acao (indesejada) do PSS. O valor de TW e escolhido de forma a oferecer uma
banda de passagem para sinais contendo modos de oscilacao local e inter-areas,
agindo somente durante transitorios.
35

FIG. 2.10: Representacao da maquina sıncrona e seus controles utilizando conceito deGEP .
FIG. 2.11: Estrutura de um PSS tıpico.
• Bloco avanco de fase: consiste no principal parametro do PSS, que deve ser ajustado
de forma a neutralizar o atraso de fase introduzido por GEP (s). Como e impossıvel
realizar uma compensacao perfeita do atraso de fase do GEP (s) em toda faixa de
frequencia, o projeto dos blocos de avanco de fase buscam um compromisso entre
melhor ajuste para faixa proxima do modo de oscilacao menos amortecido (geral-
mente modo local, ou gerador agregado) e maior compensacao para outras faixas
de frequencia (modo intraplanta, em frequencias mais altas, e modo interarea em
frequencias mais baixas).
• Bloco de ganho: deve ser ajustado de forma a prover adequada taxa de amorteci-
mento as oscilacoes. Ganhos muito altos nao sao praticados pois, apesar de proverem
grande amortecimento ao modo de oscilacao desejado, podem alterar significativa-
mente a frequencia dos modos de oscilacao, causando ate mesmo instabilizacao de
outros modos. Isso ocorre principalmente em casos onde e necessario conciliar amor-
tecimento de modos distantes no espectro de frequencia (e.g. modos inter-area e
36

intraplanta) (LARSEN, 1981). Nesses casos, e recomendado o uso de tecnicas de
ajustes coordenados (JABR, 2010a).
Em suma, o sinal do PSS tem a finalidade de gerar um torque eletrico efetivamente
em fase com a variacao de velocidade nas frequencias de oscilacao que se deseja melhorar
o amortecimento, sendo imprescindıvel em sistemas radiais (KUNDUR, 1989).
2.3 MODELO MULTIMAQUINA
Um SEP pode ser estudado de maneira mais completa a partir da elaboracao de um
modelo em espaco de estados que contenha a dinamica de todos os elementos perten-
centes a este SEP, tais como: maquinas sıncronas e seus controles associados (AVR, PSS,
regulador de velocidade), sistemas HVDC, dispositivos FACTS (SVCs e TCSCs), cargas
dinamicas e outros tipos de maquinas (geradores eolicos), entre outros.
Tal modelo completo do sistema e denominado de modelo multimaquina. A FIG. 2.12
mostra um diagrama esquematico dessa representacao.
FIG. 2.12: Estrutura do modelo multimaquina de um sistema de potencia, onde * denotamequacoes algebricas e ** equacoes diferenciais.
A partir desta representacao, podem ser estudadas as interacoes entre os diversos
elementos do sistema de potencia, permitindo identificar problemas que nao poderiam
ser representados num modelo SMIB. Assim, surgiram diversas tecnicas que lancam mao
da representacao multimaquina em espaco de estados do SEP para ajustar de maneira
37

coordenada dispositivos de controle, com o intuito de solucionar eficientemente proble-
mas de oscilacoes eletromecanicas (JABR, 2010b; MARTINS, 1990a; DE MELLO, 1980;
MARTINS, 2000).
O desenvolvimento aqui apresentado da modelagem multimaquina de pequenos sinais,
tanto por meio da abordagem tradicional quanto por meio das tecnicas utilizadas em
sistemas de grande porte, segue notacao utilizada em (MARTINS, 1990b).
2.3.1 ABORDAGEM TRADICIONAL
Um SEP e modelado dinamicamente por um sistema de equacoes nao-lineares tanto
diferenciais quanto e algebricas, conforme (2.31).
x = f(x, z)
0 = g(x, z)(2.31)
onde x e o vetor de estados e z o vetor de variaveis algebricas.
A analise da estabilidade a pequenos sinais de um SEP envolve a linearizacao de (2.31)
para um ponto de operacao (x0, z0):[∆x
0
]=
[J1 J2
J3 J4
]+
[∆x
∆z
](2.32)
A matriz de estado do sistema de potencia pode ser obtida eliminando o vetor de
variaveis algebricas ∆z em (2.32).
∆x = [J1 − J−12 J4J3]︸ ︷︷ ︸A
∆x (2.33)
Com a escolha apropriada das matrizes de entrada e saıda, o modelo de espaco de
estados pode ser construıdo.
∆x = A∆x+Bu
∆y = CT∆x+Du(2.34)
Atraves desta representacao em espaco de estados, e possıvel obter informacoes deta-
lhadas sobre cada uma das oscilacoes caracterısticas do sistema, destacando aqui algumas:
• frequencia da oscilacao e respectivo amortecimento (autovalores);
• quais elementos do sistema (geralmente maquinas sıncronas) mais contribuem com
um determinado modo de oscilacao e como eles agem dentro deste modo (fatores de
participacao);
38
• quais variaveis do sistema possibilitam identificar mais facilmente o modo de os-
cilacao (observabilidade);
• quais entradas tem maior influencia num modo de oscilacao (controlabilidade);
• parametros de quais controladores tem maior influencia num modo de oscilacao
(sensibilidade).
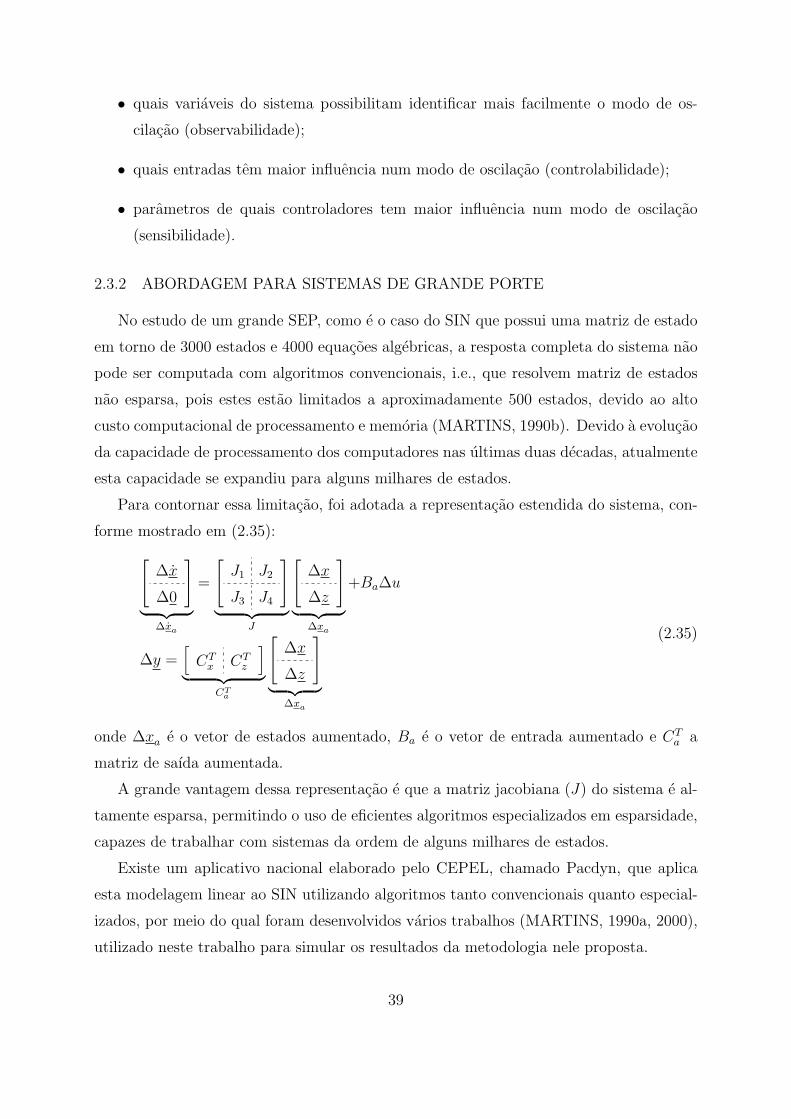
2.3.2 ABORDAGEM PARA SISTEMAS DE GRANDE PORTE
No estudo de um grande SEP, como e o caso do SIN que possui uma matriz de estado
em torno de 3000 estados e 4000 equacoes algebricas, a resposta completa do sistema nao
pode ser computada com algoritmos convencionais, i.e., que resolvem matriz de estados
nao esparsa, pois estes estao limitados a aproximadamente 500 estados, devido ao alto
custo computacional de processamento e memoria (MARTINS, 1990b). Devido a evolucao
da capacidade de processamento dos computadores nas ultimas duas decadas, atualmente
esta capacidade se expandiu para alguns milhares de estados.
Para contornar essa limitacao, foi adotada a representacao estendida do sistema, con-
forme mostrado em (2.35):[∆x
∆0
]︸ ︷︷ ︸
∆xa
=
[J1 J2
J3 J4
]︸ ︷︷ ︸
J
[∆x
∆z
]︸ ︷︷ ︸
∆xa
+Ba∆u
∆y =[CT
x CTz
]︸ ︷︷ ︸
CTa
[∆x
∆z
]︸ ︷︷ ︸
∆xa
(2.35)
onde ∆xa e o vetor de estados aumentado, Ba e o vetor de entrada aumentado e CTa a
matriz de saıda aumentada.
A grande vantagem dessa representacao e que a matriz jacobiana (J) do sistema e al-
tamente esparsa, permitindo o uso de eficientes algoritmos especializados em esparsidade,
capazes de trabalhar com sistemas da ordem de alguns milhares de estados.
Existe um aplicativo nacional elaborado pelo CEPEL, chamado Pacdyn, que aplica
esta modelagem linear ao SIN utilizando algoritmos tanto convencionais quanto especial-
izados, por meio do qual foram desenvolvidos varios trabalhos (MARTINS, 1990a, 2000),
utilizado neste trabalho para simular os resultados da metodologia nele proposta.
39
3 CANAL DE PERTURBACAO
Ometodo proposto neste trabalho se baseia extensivamente nos conceitos apresentados
em (MARTINS, 2007), os quais permitem a obtencao de polos de malha aberta de um
sistema dinamico a partir de medidas em malha fechada. Portanto, neste capıtulo, o
conceito do canal de perturbacao e exposto de maneira detalhada para um caso SISO,
i.e. uma usina e representada por um unico gerador agregado (equivalente), conforme
proposto originalmente em (MARTINS, 2007). Tambem foram adicionados exemplos
numericos para facilitar a visualizacao do conceito, cujo entendimento e fundamental
para compreensao de capıtulos posteriores, onde o metodo aqui descrito e estendido para
uma formulacao multigeradores (MIMO).
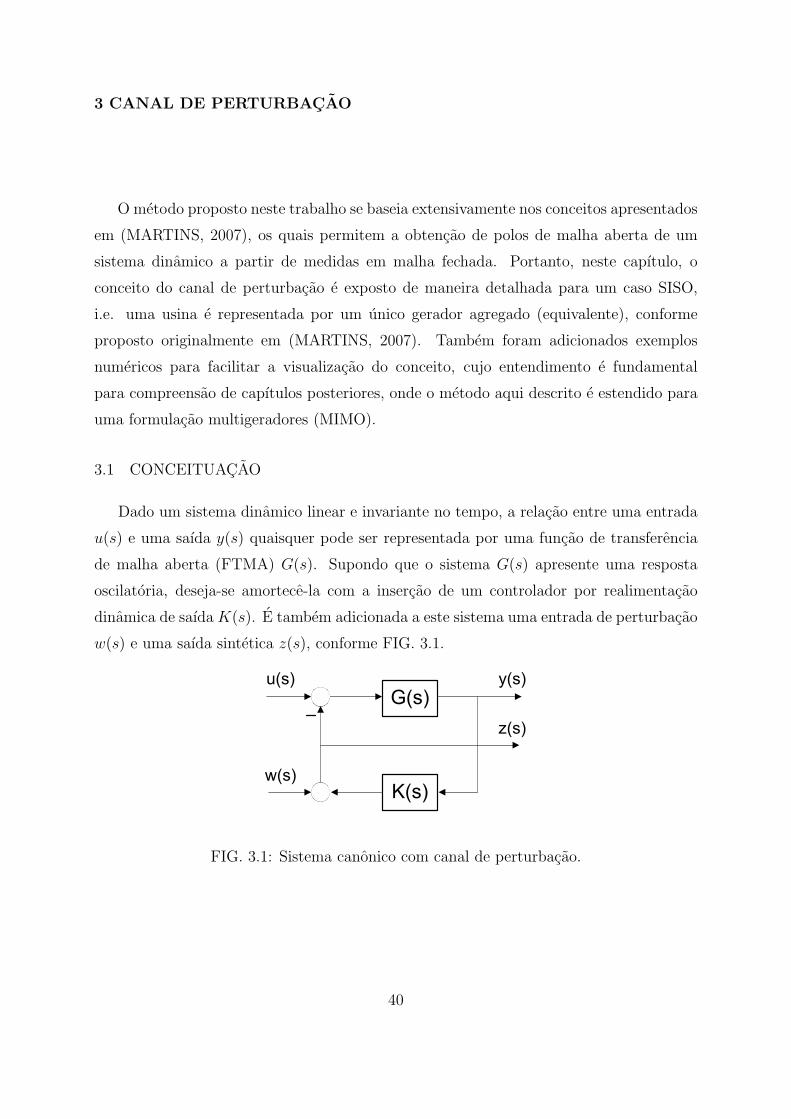
3.1 CONCEITUACAO
Dado um sistema dinamico linear e invariante no tempo, a relacao entre uma entrada
u(s) e uma saıda y(s) quaisquer pode ser representada por uma funcao de transferencia
de malha aberta (FTMA) G(s). Supondo que o sistema G(s) apresente uma resposta
oscilatoria, deseja-se amortece-la com a insercao de um controlador por realimentacao
dinamica de saıdaK(s). E tambem adicionada a este sistema uma entrada de perturbacao
w(s) e uma saıda sintetica z(s), conforme FIG. 3.1.
FIG. 3.1: Sistema canonico com canal de perturbacao.
40

Este sistema canonico pode ser representado pela seguinte matriz de transferencia:[y(s)
z(s)
]=
[Hyu(s) Hyw(s)
Hzu(s) Hzw(s)
]︸ ︷︷ ︸
H(s)
[u(s)
w(s)
](3.1)
Detaca-se que Hyu(s) e a funcao de transferencia (FT) do canal de controle em malha
fechada e Hzw(s) representa a relacao entre a entrada de perturbacao e a soma da resposta
da realimentacao com o sinal de perturbacao (canal de perturbacao). Substituindo G(s)
e K(s) na equacao (3.1), as FTs podem ser explicitadas na equacao (3.2).
H =
[G −G
GK 1
]1
1 +GK(3.2)
Sabendo que:
G(s) =nG(s)
dG(s)e K(s) =
nK(s)
dK(s)(3.3)
tem-se:
Hyu(s) =y(s)
u(s)=
nGdKdGdK + nGnK
(3.4)
Hzw(s) =z(s)
w(s)=
dGdKdGdK + nGnK
(3.5)
Pode-se verificar atraves da equacao (3.5) que a definicao da funcao Hzw(s) fornece
informacoes importantes a respeito do sistema. Os polos dessa funcao sao os polos de
malha fechada do sistema, que refletem o desempenho do sistema compensado pela reali-
mentacao. Ja o seu conjunto de zeros contem os polos do sistema de malha aberta, que
refletem o desempenho do sistema como se estivesse operando sem o estabilizador.
A capacidade deste metodo em fornecer dados sobre o desempenho especıfico de um
controlador por realimentacao pode ser melhor entendida tendo em vista a deducao al-
ternativa abaixo, onde se verifica que a FT Hzw(s) e a razao entre a resposta de malha
fechada e de malha aberta do sistema (3.6).
Hzw(s) =G−1(s)G(s)
1 +G(s)K(s)=
Hyu(s)
G(s)(3.6)
Uma vez que esta funcao de transferencia contem informacoes tanto da resposta em
malha aberta como em malha fechada, sua determinacao (seja experimental ou por si-
mulacoes) permite avaliar a efetividade do estabilizador no amortecimento dos modos
de oscilacao do sistema, fornecendo subsıdios para avaliar a necessidade de reajuste ou
mudanca do controlador.
41

3.2 APLICACAO AO GERADOR SINCRONO
Uma vez apresentada uma nova abordagem de estudo de um sistema dinamico canonico,
este metodo pode ser entao aplicado para se estudar o desempenho de um gerador sin-
cronizado ao sistema juntamente com seu respectivo PSS.
Para representar adequadamente a maquina e o seu estabilizador no sistema eletrico, a
entrada u(s) e definida como tensao de referencia do regulador de tensao em pu (∆VREF )
e a saıda y(s) como a variacao da velocidade do rotor (∆ω) em pu. O controlador inserido
na realimentacao, K(s), e a FT do proprio PSS, chamada de GPSS(s), ao passo que a
FTMA G(s) representa a dinamica do conjunto gerador-sistema eletrico na ausencia do
PSS. Reescrevendo o diagrama da FIG. 3.1, tem-se o sistema representado na FIG. 3.2.
FIG. 3.2: Diagrama de blocos do canal de perturbacao referente a um gerador sıncrono eseu PSS.
Os resultados obtidos por esta abordagem sao de interesse para a identificacao e con-
trole do amortecimento de oscilacoes em sistemas eletricos de potencia. Os zeros do-
minantes de Hzw(s) representam os modos de oscilacao inerentes ao sistema em malha
aberta, ou seja, com o PSS virtualmente desligado. Por sua vez, os polos representam as
oscilacoes existentes no sistema com o PSS em funcionamento.
Esta abordagem, quando aplicada a um sistema de potencia, apresenta as seguintes
vantagens:
• o desempenho de um gerador conectado a rede pode ser verificado atraves de ensaio
de campo especıfico, o qual tambem permite inferir qual seria este desempenho na
ausencia dos PSSs, sem a necessidade de abrir fisicamente a malha (i.e., desligar o
PSS);
• os zeros e polos da FT do canal de perturbacao permitem identificar os modos de
oscilacao caracterısticos dessa usina em relacao ao sistema, tanto em malha aberta
(ausencia dos PSSs) como em malha fechada (com PSSs);
42

• com estes dados tambem e possıvel verificar a efetividade do ajuste do PSS, fornecendo
subsıdio para o projeto ou ajustes, mas tambem de sinais estabilizadores aplicados
a equipamentos FACTS, tais como SVC e TCSC.
Estas vantagens justificam a utilizacao deste metodo, no que diz respeito a ajustes e
validacao de estabilizadores de sistemas de potencia, sobretudo em usinas multigeradores,
onde metodos convencionais sao pouco efetivos (ver secoes 5.1 e 6.4).
3.3 APLICACAO A UM CASO CLASSICO
A metodologia descrita na secao anterior sera aplicada a um sistema SMIB classico
(FIG. 3.3b), semelhante ao ja descrito na secao 2.2. Uma vez que este modelo apresenta
um torque eletrico puramente sincronizante, a seguinte simbologia foi modificada: ∆TS ,∆TeS e KS , KeS.
FIG. 3.3: a)–b) Sistema Maquina Barra infinita (SMIB) e sua c) representacao em dia-grama de blocos.
A expressao para o coeficiente de torque sincronizante KS e facilmente derivado do
circuito eletrico na FIG. 3.3b:
KS =dTS
dδ
∣∣∣∣δ=δ0
=E ′V cos δ0Xe+Xg
(3.7)
onde: E ′ e a tensao transitoria do gerador em pu; Xg = X ′d + Xtr e a soma das
reatancias transitoriaX ′d e de seu transformador elevador associadoXtr; Xe e a reatancia
equivalente da rede; V e a tensao da barra infinita e δ0 e o angulo de carga.
43

A FIG. 3.3c e uma representacao em diagrama de blocos do sistema SMIB da FIG. 3.3a–
b, no formato utilizado na FIG. 3.2. De modo a aplicar a metodologia descrita na secao
anterior, o coeficiente de amortecimento mecanico KD sera considerado como um contro-
lador por realimentacao de saıda, analogo ao GPSS(s) da FIG. 3.2.
Definindo:
κ , KS
2He 2γ , KD
2H(3.8)
a funcao de transferencia de malha fechada (FTMF) (chave F fechada)Hyu(s) da FIG. 3.3c
e dada por:
Hyu(s) =ω(s)
TM(s)=
s2H
s2 + 2γs+ κω0
(3.9)
e a FTMA (chave F aberta) G(s) e dada por:
G(s) =ω(s)
TM(s)=
s2H
s2 + κω0
(3.10)
A FTMF do canal de perturbacao (Hzw) e:
Hzw(s) =Tp(s)
Td(s)=
Hyu(s)
G(s)=
s2 + κω0
s2 + 2γs+ κω0
(3.11)
A equacao (3.11) mostra que os zeros de Hzw(s) sao os polos de G(s), os quais nao
possuem amortecimento, enquanto os polos de Hzw(s) sao os polos da FTMF, os quais
governam a resposta atual do sistema (com amortecimento mecanico).
3.4 EXEMPLO GRAFICO
Para melhor visualizar a aplicacao deste conceito, foram sugeridos dois sistemas de
segunda ordem que procuram relacionar as configuracoes de polo-zero com as respectivas
respostas em frequencia. A referencia (GRUND, 1990) mostra 8 configuracoes de pares
de polo/zero que os autores consideraram em sua tecnica de construcao de equivalentes
em sistemas de potencia, dos quais somente dois (casos 3 e 6 em (GRUND, 1990)) sao de
interesse para este trabalho, uma vez que eles se aplicam aos dois tipos de resultados que
podem ser esperados da aplicacao deste conceito em uma usina conectada a um sistema
de potencia. Abaixo serao descritos os 2 sistemas que exemplificam os casos de interesse.
44

3.4.1 SISTEMA I
O Sistema I retrata o caso de uma usina que possui seu modo eletromecanico instavel
sem a presenca do PSS, o qual e uma possibilidade factıvel dentro de um SEP. A FT
GI(s), que e instavel em malha aberta, representa a dinamica de um gerador sincronizado
a um SEP, sendo estabilizada pelo seu PSS (KI(s)), a semelhanca das FIGs. 3.1 e 3.2,
tendo seu diagrama de blocos representados na FIG. 3.4.
FIG. 3.4: Sistema exemplo I.
A FTMA deste sistema e dada por:
GI(s) =s+ 3.373
s2 − 0.339s+ 31.98(3.12)
e a FTMF e dada por (HIyu(s)):
HIyu(s) =
GI(s)
1 +GI(s)KI(s)=
s+ 3.373
s2 + 1.885s+ 39.48(3.13)
e, finalmente, a FT do canal de perturbacao e dada por:
HIzw(s) =
HIyu(s)
GI(s)=
s2 − 0.339s+ 31.98
s2 + 1.885s+ 39.48(3.14)
3.4.2 SISTEMA II
O Sistema II representa o caso de uma usina cujo modo eletromecanico possui amor-
tecimento insuficiente sem o PSS, que e o caso da Usina de Itaipu 60 Hz, cujos resultados
tanto de simulacoes computacionais quanto de ensaios de campo sao mostrados no Capı-
tulo 6.
O Sistema II apresenta a mesma estrutura do Sistema I, com FTMA GII(s) e estabi-
lizador KII(s), tendo seu diagrama de blocos representados na FIG. 3.5.
45

FIG. 3.5: Sistema exemplo II.
A FTMA deste sistema e dada por:
GII(s) =s+ 4.87
s2 + 0.339s+ 31.98(3.15)
a FTMF e dada por (HIIyu(s)):
HIIyu(s) =
GII(s)
1 +GII(s)KII(s)=
s+ 4.87
s2 + 1.885s+ 39.48(3.16)
e, finalmente, a FT do canal de perturbacao e dada por:
HIIzw(s) =
HIIyu(s)
GII(s)=
s2 + 0.339s+ 31.98
s2 + 1.885s+ 39.48(3.17)
3.4.3 ANALISE DOS SISTEMAS EXEMPLOS
A TAB. 3.1 lista os pares de polo/zero para os sistemas exemplos I e II, cujos polo-zero
e respostas em frequencia sao apresentadas na FIG. 3.6.
TAB. 3.1: Polos, zeros de Hzw(s) e respostas em frequencia dos sistemas exemplos desegunda ordem
Sistemas Zeros Polos Figuras
+0.17± j5.65 −0.94± j6.21 mapa P-Z: FIG. 3.6d
I ωd = 0.90Hz ωd = 0.99Hz Modulo: FIG. 3.6a
ζ = −3.0% ζ = 15.0% Fase: FIG. 3.6b
−0.17± j5.65 −0.94± j6.21 mapa P-Z: FIG. 3.6e
II ωd = 0.90Hz ωd = 0.99Hz Modulo: FIG. 3.6a
ζ = 3.0% ζ = 15.0% Fase: FIG. 3.6c
Uma vez que os polos de malha fechada dos dois sistemas sao identicos, os graficos e
tabela apresentados esclarecem que, por meio do seu par de zeros dominantes, a FT do
46

canal de perturbacao mostra como seria a resposta do gerador em malha aberta (i.e. PSS
desabilitado), estando este gerador em malha fechada (PSS habilitado).
−1 −0.5 0
0
2
4
6
8d)
Imag
inár
io
Real
−1 −0.5 0
0
2
4
6
8e)
Imag
inár
ioReal
0 0.5 1 1.5 2
−15
−10
−5
0
a) M
ódul
o (d
B)
Frequência (Hz)
0 0.5 1 1.5 2
−300
−200
−100
0
b) F
ase
(gra
us)
Frequência (Hz)
0 0.5 1 1.5 2−20
020406080
c) F
ase
(gra
us)
Frequência (Hz)
FIG. 3.6: a) Grafico de modulo para ambos os sistemas em malha fechada: HIzw e HII
zw.b) Fase do Sistema I. c) Fase do Sistema II. Mapas de polo-zero para d) Sistema I e e)Sistema II.
O Sistema II representa o caso de uma usina cujo modo eletromecanico possui amor-
tecimento insuficiente sem o PSS, que e o caso da Usina de Itaipu 60 Hz, cujos resultados
tanto de simulacoes computacionais e de ensaios de campo sao mostrados no Capıtulo 6.
47

4 MODELAGEM DE UMA USINA MULTIGERADORES
Em estudos de estabilidade eletromecanica, as usinas (que geralmente possuem varios
geradores identicos em paralelo), sao, em sua maioria, representadas por um unico ger-
ador agregado, de potencia equivalente ao total da capacidade de todas as UGs de cada
usina. Esse procedimento e util e amplamente utilizado, pois reduz o numero de estados
necessarios para representar o comportamento da usina, que, por questoes de simetria, e
identico ao comportamento coerente das UGs. Esse fato justifica a referencia (MARTINS,
2007) ter desenvolvido o conceito do canal de perturbacao para um caso SISO, existindo
somente uma realimentacao de controle.
Na pratica, uma usina de grande porte e composta de varios geradores (cada um
com seu dispositivo de controle), inviabilizando um ensaio de campo que pudesse fornecer
diretamente as informacoes de malha aberta, conforme abordado no capıtulo anterior.
Assim, para a viabilizacao de um ensaio de campo capaz de fornecer tais informacoes
para uma usina multigeradores, este capıtulo trata da extensao do conceito de canal de
perturbacao para o caso MIMO, levando em conta os varios geradores que compoem a
usina, permitindo inferir a resposta de um suposto gerador agregado a partir de dados de
ensaio, envolvendo medicoes em apenas dois geradores.
Para explanar a metodologia, ela e aplicada a um sistema do tipo usina multigeradores
barra infinita (Multigenerator Power plant Infinite Bus – MPIB), semelhantemente ao
sistema SMIB, abordado na secao 3.3.
4.1 MODELO USINA MULTIGERADORES BARRA INFINITA
A FIG. 4.1 representa uma usina multigeradores conectada a uma barra infinita atraves
de uma linha de transmissao radial. A usina do sistema MPIB possui n unidades gerado-
ras igualmente carregadas, representadas por modelo classico de maquina sıncrona com
parametros identicos.
As equacoes linearizadas para o sistema MPIB formam um sistema de 2n estados,
sendo a extensao multivariavel das equacoes de balanco (swing equations) utilizadas an-
48

FIG. 4.1: Usina multigeradores conectada a uma barra infinita atraves de uma impedancia(MPIB).
teriormente no modelo SMIB:
∆ω2HI = ∆TM −∆TS −∆TD (4.1)
∆δ = ω0∆ω (4.2)
onde
∆TD = KDI︸︷︷︸KD
∆ω e ∆TS = KS∆δ (4.3)
e H e a constante de inercia do gerador, I e a matriz identidade (n×n), ω e δ sao vetores
contendo os angulos e velocidades dos rotores dos n geradores em paralelo, KS e KD sao
matrizes de constantes, ∆TM e o vetor de torque mecanico ∆TS e ∆TD sao os vetores
contendo os torques de sincronismo e amortecimento dos geradores, respectivamente.
O canal de perturbacao do sistema SMIB (FIG. 3.3c), que e um sistema SISO, pode
ser estendido para sua versao MIMO para representar adequadamente o canal de pertur-
bacao multivariavel do sistema MPIB, conforme FIG. 4.2. As entradas (∆TM , ∆Td) e
saıdas (∆ω, ∆Tp) anteriormente escalares, aparecem agora como vetores (∆TM, ∆Td)
e (∆ω,∆Tp).
O par entrada/saıda do canal de perturbacao pode ser equacionado a partir da inspecao
da FIG. 4.2:
∆Tp = KD∆ω e ∆Td = −∆TM (4.4)
A matriz KS, de dimensao n × n, que descreve as relacoes de torque sincronizante
entre as n UGs e a barra infinita, e definida pela linearizacao da potencia eletrica de cada
gerador para uma dada condicao de operacao do sistema, sendo sua deducao explicada a
seguir.
49

FIG. 4.2: Diagrama de blocos multivariavel do sistema MPIB destacando a chave (F), quepromove a abertura virtual simultanea dos lacos de torque de amortecimento mecanicode todas as UGs.
A expressao nao-linear para a potencia ativa do i-esimo gerador (Pgi), que e equiva-
lente ao seu torque eletrico em pu, TSi, pode ser estabelecida aplicando a Lei das Malhas
de Kirchoff ao circuito eletrico da FIG. 4.3 (KIMBARK, 1948):
FIG. 4.3: Circuito eletrico do sistema MPIB.
Todas as constantes das maquinas e reatancias do sistema estao expressas em pu na
base de uma UG, e portanto, a reatancia externa do sistema se torna Xe/n.
Pgi = TSi=
E ′i
Xe+Xg
(V sin δi +
Xe
nXg
n∑k = 1
k = i
E ′k sin(δi − δk)
)(4.5)
A linearizacao de (4.5), estendida aos n geradores de uma planta, produz a equacao
50

matricial:
∆TS =
[∂(TS1 , ..., TSn)
∂(δ1, ..., δn)
∣∣∣∣δ1,...,δn=δ0
]︸ ︷︷ ︸
KS
∆δ (4.6)
A simetria topologica do sistema e a operacao equilibrada (E ′i = E ′
k = E ′ e δi =
δk = δ0) permitem simplificacoes consideraveis, as quais sao ainda mais reduzidas pela
adocao de sımbolos para representar as expressoes algebricas que repetidamente ocorrem
nos elementos matriciais do sistema linearizado. Assim, a matriz de torques sincronizantes
KS pode ser representada:
KS =
ks km · · · km
km ks km...
. . .
km · · · km ks
(4.7)
onde
ks=E ′V cos δ0Xe+Xg
+ (n− 1)E ′2Xe
nXg(Xe+Xg)
km=− E ′2Xe
nXg(Xe+Xg)(4.8)
4.2 MODELO EM ESPACO DE ESTADOS
A partir das equacoes (4.1) a (4.7), o sistema MPIB pode ser modelado por um sistema
de equacoes diferenciais em (4.9). Para melhor visualizacao, a notacao ∆ sera omitida
nas equacoes restantes.
2Hω1 +KDω1 + ksδ1 + kmδ2 + ...+ kmδn = TM1 − Td1
δ1 = ω0ω1
2Hω2 +KDω2 + kmδ1 + ksδ2 + ...+ kmδn = TM2 − Td2
δ2 = ω0ω2
...
2Hωn +KDωn + kmδ1 + kmδ2 + ...+ ksδn = TMn − Tdn
δn = ω0ωn
(4.9)
Para uma representacao ainda mais compacta, os seguintes termos sao definidos:
α , ks2H
, β , km2H
, 2γ =KD
2H(4.10)
51

Similarmente ao procedido com o sistema SMIB, as constantes de amortecimento
mecanico, KD, sao considerads como controles por realimentacao a serem “virtualmente”
desabilitados. O objetivo aqui e avaliar o impacto da eliminacao simultanea dos torques
de amortecimento mecanico em todas as n unidades geradoras em paralelo, baseados em
conceitos de (MARTINS, 2007) descritos no Capıtulo 3.
Nota-se que o sistema tem 2n estados, 2n entradas e 2n saıdas, e pode ser representado
pelo modelo de espaco de estados abaixo, que e facilmente derivavel de (4.9)-(4.10):
x = Ax+[Bu Bw
]︸ ︷︷ ︸
B
[TM
Td
]
[ω
Tp
]=
[CT
y CTz
]︸ ︷︷ ︸
CT
x+
[Dyu Dyw
Dzu Dzw
]︸ ︷︷ ︸
D
[TM
Td
] (4.11)
onde
A =
−2γ −α 0 −β · · · 0 −β
w0 0 0 0 · · · 0 0
0 −β −2γ −α · · · 0 −β
0 0 w0 0 · · · 0 0...
......
.... . .
......
0 −β 0 −β · · · −2γ −α
0 0 0 0 · · · w0 0
B =[Bu Bw
]=
1
2H
1 0 · · · 0 −1 0 · · · 0
0 0 · · · 0 0 0 · · · 0
0 1 · · · 0 0 −1 · · · 0
0 0 · · · 0 0 0 · · · 0...
. . ....
. . .
0 0 · · · 1 0 0 · · · −1
0 0 · · · 0 0 0 · · · 0
52

CT =[CT
y CTz
]=
1 0 · · · 0 KD 0 · · · 0
0 0 · · · 0 0 0 · · · 0
0 1 · · · 0 0 KD · · · 0
0 0 · · · 0 0 0 · · · 0...
. . ....
. . .
0 0 · · · 1 0 0 · · · KD
0 0 · · · 0 0 0 · · · 0
D =
[Dyu Dyw
Dzu Dzw
]=
0 0 · · · 0 0 0 · · · 0
0 0 · · · 0 0 0 · · · 0...
. . ....
. . .
0 0 · · · 0 0 0 · · · 0
0 0 · · · 0 1 0 · · · 0
0 0 · · · 0 0 1 · · · 0...
. . ....
. . .
0 0 · · · 0 0 0 · · · 1
com
x =
ω1
δ1
ω2
δ2...
ωn
δn
,
[TM
Td
]=
TM1
TM2
...
TMn
Td1
Td2...
Tdn
,
[ω
Tp
]=
ω1
ω2
...
ωn
Tp1
Tp2...
Tpn
53

4.3 TRANSFORMACAO DE SIMILARIDADE MODAL
Amatriz de estados anteriomente descrita possui uma estrutura especial, como mostrado
em (4.12)-(4.13):
A =
a b · · · b
b a · · · b...
. . ....
b b · · · a
(4.12)
a =
[−2γ −α
w0 0
]e b =
[0 −β
0 0
](4.13)
onde α, γ e β sao dados em (4.10) e ω0 e a velocidade angular sıncrona.
Matrizes de tal estrutura bloco-simetrica podem ser diagonalizadas por uma matriz de
transformacao linear P, mostrada em (4.14), onde m e a dimensao dos blocos a e b. Esta
matriz de transformacao e mais apropriada do que aquela descrita em (ARAUJO, 1991;
ROGERS, 2000a), uma vez que essa efetivamente bloco-diagonaliza a matriz de estados,
independentemente da ordem de seus blocos.
P =
Im×m Im×m Im×m · · · Im×m
Im×m −Im×m 0m×m · · · 0m×m
Im×m 0m×m −Im×m · · · 0m×m
......
. . ....
Im×m 0m×m 0m×m · · · −Im×m
(4.14)
Aplicando a transformacao de similaridade acima descrita a matriz de estado de (4.11),
que e bloco-simetrica (2× 2), obtem-se sua forma bloco-diagonal:
A = P−1AP =
−2γ −(α+ (n− 1)β) 0 0 · · · 0 0
w0 0 0 0 · · · 0 0
0 0 −2γ −(α− β) · · · 0 0
0 0 w0 0 · · · 0 0...
......
. . ....
...
0 0 0 0 · · · −2γ −(α− β)
0 0 0 0 · · · w0 0
(4.15)
Usando os sımbolos a e b para denotar esses blocos, a matriz diagonalizada pode ser
54
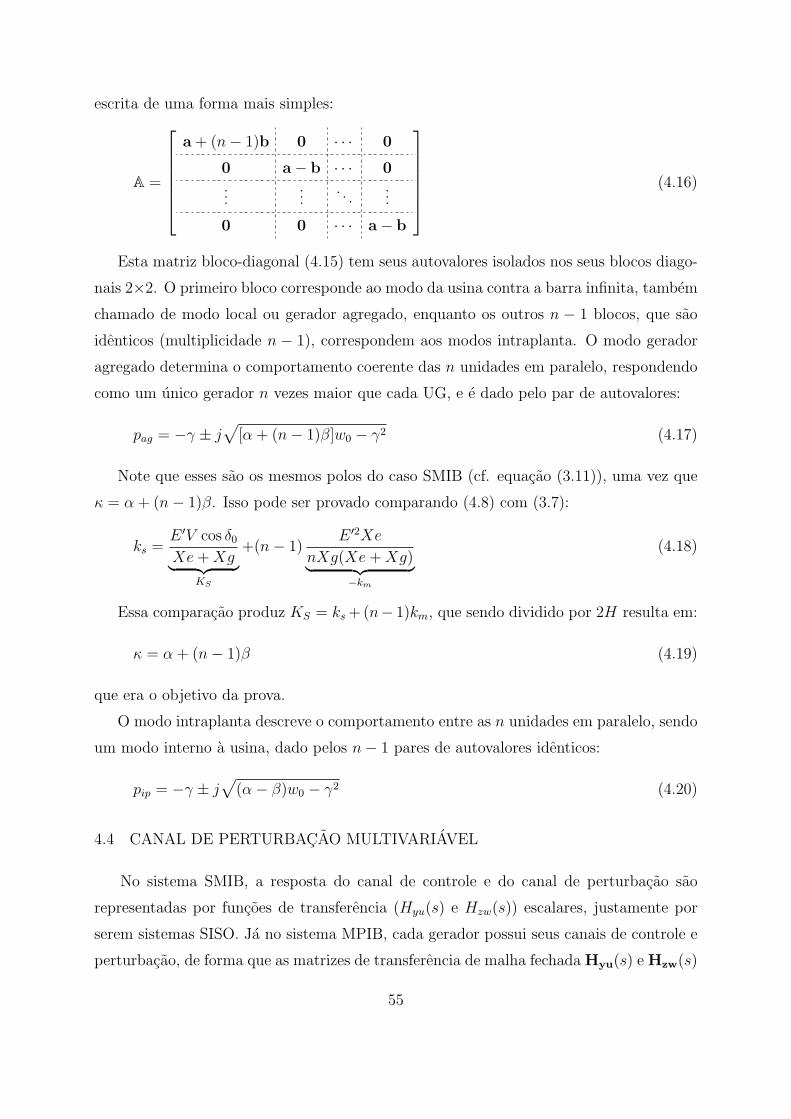
escrita de uma forma mais simples:
A =
a+ (n− 1)b 0 · · · 0
0 a− b · · · 0...
.... . .
...
0 0 · · · a− b
(4.16)
Esta matriz bloco-diagonal (4.15) tem seus autovalores isolados nos seus blocos diago-
nais 2×2. O primeiro bloco corresponde ao modo da usina contra a barra infinita, tambem
chamado de modo local ou gerador agregado, enquanto os outros n − 1 blocos, que sao
identicos (multiplicidade n − 1), correspondem aos modos intraplanta. O modo gerador
agregado determina o comportamento coerente das n unidades em paralelo, respondendo
como um unico gerador n vezes maior que cada UG, e e dado pelo par de autovalores:
pag = −γ ± j√
[α+ (n− 1)β]w0 − γ2 (4.17)
Note que esses sao os mesmos polos do caso SMIB (cf. equacao (3.11)), uma vez que
κ = α+ (n− 1)β. Isso pode ser provado comparando (4.8) com (3.7):
ks =E ′V cos δ0Xe+Xg︸ ︷︷ ︸
KS
+(n− 1)E ′2Xe
nXg(Xe+Xg)︸ ︷︷ ︸−km
(4.18)
Essa comparacao produz KS = ks+(n− 1)km, que sendo dividido por 2H resulta em:
κ = α+ (n− 1)β (4.19)
que era o objetivo da prova.
O modo intraplanta descreve o comportamento entre as n unidades em paralelo, sendo
um modo interno a usina, dado pelos n− 1 pares de autovalores identicos:
pip = −γ ± j√
(α− β)w0 − γ2 (4.20)
4.4 CANAL DE PERTURBACAO MULTIVARIAVEL
No sistema SMIB, a resposta do canal de controle e do canal de perturbacao sao
representadas por funcoes de transferencia (Hyu(s) e Hzw(s)) escalares, justamente por
serem sistemas SISO. Ja no sistema MPIB, cada gerador possui seus canais de controle e
perturbacao, de forma que as matrizes de transferencia de malha fechadaHyu(s) e Hzw(s)
55

relacionam, respectivamente, os canais de controle e de perturbacao dos n geradores, com
u = TM como vetor de referencia, w = Td como entrada de perturbacao, y = ω como a
saıda controlada e z = Tp como a saıda sintetica.
As matrizes de transferencia Hyu(s) e Hzw(s) podem ser determinadas a partir do
modelo em espaco de estados (4.11):
Hyu(s) = Cy(sI−A)−1Bu +Dyu (4.21)
Hzw(s) = Cz(sI−A)−1Bw +Dzw (4.22)
A estrutura de Hyu(s) e Hzw(s) e mostrada em (4.23) e (4.24), respectivamente:ω1
ω2
...
ωn
︸ ︷︷ ︸
ω
=
R(s) Q(s) · · · Q(s)
Q(s) R(s) · · · Q(s)...
.... . .
...
Q(s) Q(s) · · · R(s)
︸ ︷︷ ︸
Hyu(s)
TM1
TM2
...
TMn
︸ ︷︷ ︸
TM
(4.23)
Tp1
Tp2...
Tpn
︸ ︷︷ ︸
Tp
=
P (s) T (s) · · · T (s)
T (s) P (s) · · · T (s)...
.... . .
...
T (s) T (s) · · · P (s)
︸ ︷︷ ︸
Hzw(s)
Td1
Td2...
Tdn
︸ ︷︷ ︸
Td
(4.24)
4.5 TRANSFORMACAO MODAL DA MATRIZ DE TRANSFERENCIA
As matrizes de transferencia Hyu(s) e Hzw(s) em (4.23) e (4.24) tambem possuem a
estrutura simetrica da matriz de estado (cf. eq. (4.12)), podendo ser diagonalizada pela
matriz P :
P =
1 1 1 · · · 1
1 −1 0 · · · 0
1 0 −1 · · · 0...
.... . .
...
1 0 0 · · · −1
(4.25)
56

As matrizes de transferencia diagonalizadas H′yu(s) = P−1Hyu(s)P e H′
zw(s) =
P−1Hzw(s)P sao dadas por:
H′yu(s) =
Hag
yu(s) 0 · · · 0
0 H ipyu(s) · · · 0
......
. . ....
0 0 · · · H ipyu(s)
(4.26)
H′zw(s) =
Hag
zw(s) 0 · · · 0
0 H ipzw(s) · · · 0
......
. . ....
0 0 · · · H ipzw(s)
(4.27)
onde
Hagyu(s)=R(s) + (n− 1)Q(s) =
s2H
s2 + 2γs+ [α+ (n− 1)β]w0
(4.28)
H ipyu(s)=R(s)−Q(s) =
s2H
s2 + 2γs+ (α− β)w0
(4.29)
Hagzw(s)=P (s) + (n− 1)T (s) =
s2 + [α+ (n− 1)β]w0
s2 + 2γs+ [α+ (n− 1)β]w0
(4.30)
H ipzw(s)=P (s)− T (s) =
s2 + (α− β)w0
s2 + 2γs+ (α− β)w0
(4.31)
As funcoes racionais (4.28)–(4.31) sao funcoes de transferencia modais: (4.28) e (4.30)
estao associadas ao modo gerador agregado; (4.29) e (4.31) estao associados ao modo
intraplanta.
A matriz de transferencia de malha aberta (chave F da FIG. 4.2 aberta) diagonalizada,
G′(s), descrevendo o canal de controle, pode ser calculada atribuindo γ = 0 (KD = 0) em
(4.28) e (4.29):
G′(s) =
S(s) + (n− 1)U(s) 0 · · · 0
0 S(s)− U(s) · · · 0...
.... . .
...
0 0 · · · S(s)− U(s)
(4.32)
onde
Gag(s)=S(s) + (n− 1)U(s) =s2H
s2 + [α+ (n− 1)β]w0
(4.33)
Gip(s)=S(s)− U(s) =s2H
s2 + (α− β)w0
(4.34)
57

As equacoes (4.30) e (4.31) mostram que os zeros MIMO de Hzw(s) sao os polos de
G(s), que sao as raızes das equacoes caracterısticas de (4.33) e (4.34), considerando as
multiplicidades associadas.
Deve-se notar que Hagyu(s), G
ag(s) e Hagzw(s), em (4.28), (4.33) e (4.30), sao escalares
e identicas a Hyu(s), G(s) e Hzw(s) do sistema SMIB, dados em (3.9), (3.10) e (3.11),
respectivamente, cuja prova ja foi apresentada em (4.18).
Portanto, a expressao para a FT do gerador agregado de uma usina n-geradores, ja
citada em (4.30), pode ser generalizada:
Hagzw(s) = P (s) + (n− 1)T (s) (4.35)
Analogamente ao modo gerador agregado, a funcao de transferencia modal associada
ao comportamento intraplanta e dada por:
H ipzw(s) = P (s)− T (s) (4.36)
Portanto, esta provado que ambos os comportamentos dinamicos de uma usina, de
gerador agregado e intraplanta, podem ser tratados como um problema SISO. Essa pro-
priedade nao esta limitada apenas a matriz de transferencia do canal de perturbacao
Hzw(s), sendo valida para matrizes de transferencia relacionando outro conjunto de vari-
aveis, desde que seja preservada a simetria.
4.6 ANALOGIA COM IMPEDANCIAS DE SEQUENCIA
E apropriado tracar um paralelo com o calculo de impedancias de sequencia de um
sistema trifasico equilibrado usando componentes simetricas.
Uma matriz de impedancia Zbal, para tal circuito, tem exatamente a mesma simetria
estrutural da matriz Hzw(s), em (4.24), com impedancias proprias Zs = P (s) nas 3 fases
e impedancias mutuas iguais Zm = T (s), entre cada par de fases (KIMBARK, 1948).Va
Vb
Vc
=
Zs Zm Zm
Zm Zs Zm
Zm Zm Zs
︸ ︷︷ ︸
Zbal
Ia
Ib
Ic
(4.37)
A equacao relacionando as tensoes e correntes trifasicas com a matriz Zbal pode ser
diagonalizada por uma transformacao de similaridade baseada na conhecida matriz de
58

componentes simetricas (uma decomposicao modal), chamada aqui de matriz T (4.38),
produzindo as equacoes independentes (4.40):
T =1
3
1 1 1
1 1∠120 1∠− 120
1 1∠− 120 1∠120
(4.38)
Z′bal = T −1ZbalT (4.39)V0
V1
V2
=
Zs + 2Zm 0 0
0 Zs − Zm 0
0 0 Zs − Zm
︸ ︷︷ ︸
Z′bal
I0
I1
I2
(4.40)
onde os subscritos 0,1,2 indicam sequencias zero, positiva and negativa, respectivamente.
Verifica-se que as matrizes de transferencia decompostas pela transformacao modal em
(4.28)–(4.31), particularizadas para o caso de 3 UGs (n = 3), sao analogas a decomposicao
de uma carga trifasica equilibrada em componentes de sequencia, onde a componente de
sequencia 0 corresponde ao modo agregado, enquanto que as componentes de sequencia
negativa e positiva correspondem ao modo intraplanta.
4.7 ABORDAGEM POR ZEROS MULTIVARIAVEIS
De forma semelhante ao caso SISO (sistema SMIB), o conceito de zeros pode ser
extendido ao caso MIMO (sistema MPIB), onde um subconjunto de zeros multivariaveis
da matriz de transferencia Hzw(s) corresponde aos polos deste sistema em malha aberta
(MARTINS, 2007), i.e., com todas as malhas de realimentacao de velocidade desativadas
(FIG. 4.2 com chave F aberta). Neste caso, os zeros de transmissao contem informacoes
sobre como seria a resposta de uma usina multigeradores caso ela tivesse com todos os
seus PSSs desativados.
Essa extensao multivariavel pode ser demonstrada a partir do calculo dos zeros de
transmissao do sistema MPIB (4.11), conforme (LAUB, 1978), obtendo assim:
zag=±j√[α+ (n− 1)β]w0
zip=±j√(α− β)w0 (4.41)
onde zag e o par de zeros de transmissao caracterıstico do modo gerador agregado, en-
quanto que zip e o par de polos caracterıstico do modo intraplanta, sendo que este ultimo
tem multiplicidade n− 1.
59

Uma vez encontrados os zeros de transmissao de Hzw(s), pode ser calculada uma base
para o espaco nulo (N ) de Hzw(zi) para cada zero zi a fim de determinar as orientacoes
das entradas que causam estes zeros de transmissao (state zero input):
N (Hzw(zag)) = { [1 1 1 · · · 1]T } (4.42)
N (Hzw(zip)) = { [1 −1 0 · · · 0]T , [1 0 −1 · · · 0]T ,..., [1 0 0 · · · −1]T } (4.43)
E importante notar que todas as orientacoes de N (Hzw(zi) coincidem com os autove-
tores canonicos que formam as colunas da matriz de transformacao P , em (4.25).
4.7.1 MODO GERADOR AGREGADO
Adotando como direcao de entrada N (Hzw(zag)), segue que Td1 = Td2 = ... = Tdn ,Td.
Tp1
Tp2...
Tpn
=
P (s) T (s) · · · T (s)
T (s) P (s) · · · T (s)...
.... . .
...
T (s) T (s) · · · P (s)
Td
Td...
Td
(4.44)
Tp1
Tp2...
Tpn
=
P (s) + (n− 1)T (s)
P (s) + (n− 1)T (s)...
P (s) + (n− 1)T (s)
[Td
](4.45)
Verifica-se que a expressao P (s) + (n − 1)T (s) da equacao (4.45) e identica a equacao
(4.35), mostrando que quando as entradas sao coerentes o par de zeros de transmissao zag
e formado, caracterizando a resposta do modo agregado sem acao da realimentacao KD
(malha aberta). Verifica-se que para esta direcao de entrada tambem ocorrem outros pares
de zeros, responsaveis por bloquear o modo de oscilacao intraplanta, mostrado em (4.30).
Estes zeros sao denominados IDZ (input decoupling zeros), pois esta direcao da entrada
(N (Hzw(zag))) cancela o efeito de outros modos caracterısticos do sistema (KAILATH,
1980; VIDYASAGAR, 1985; ZHOU, 1996). Isso pode ser provado alterando o vetor de
entrada Bw para B′w, fazendo B′
w = BwN (Hzw(zag)) e verificando que[zagI − A B′
w
]perde posto (ver apendice).
60

4.7.2 MODO INTRAPLANTA
Adotando agora como direcao de entrada uma das direcoes de N (Hzw(zip)), por exem-
plo [1 −1 0 · · · 0]T , tem-se Td1 = −Td2 , Td e Td3 = ... = Tdn = 0:
Tp1
Tp2...
Tpn
=
P (s) T (s) · · · T (s)
T (s) P (s) · · · T (s)...
.... . .
...
T (s) T (s) · · · P (s)
Td
−Td...
0
(4.46)
Tp1
Tp2...
Tpn
=
P (s)− T (s)
−(P (s)− T (s))...
0
[Td
](4.47)
Verifica-se que a expressao P (s) − T (s) da equacao (4.47) e identica a equacao (4.36),
mostrando que quando a soma das entradas se anulam, o par de zeros de transmissao zip
e formado, caracterizando a resposta do modo intraplanta sem acao da realimentacao KD
(malha aberta).
Neste caso, para direcoes N (Hzw(zip)) existem IDZs que bloqueiam o modo gerador
agregado (4.31), de forma que H ipzw so possui o modo intraplanta. Isso pode ser provado
alterando o vetor de entrada Bw para B′′w, fazendo B′′
w = BwN (Hzw(zip)) e verificando
que[zipI − A B′′
w
]perde posto (ver apendice 9.1).
61

5 PROPOSTA DE ENSAIO DE CAMPO
Uma breve descricao da pratica corrente relacionada a ensaios de campo para comis-
sionamento de PSS e apresentada na primeira parte deste capıtulo, de forma a fornecer
uma melhor perspectiva da pratica atual e da contribuicao do novo metodo proposto neste
trabalho. Em seguida, e apresentada uma descricao do metodo proposto.
5.1 PRATICA ATUAL
Em testes convencionais, um sinal de perturbacao e aplicado a referencia do regulador
de tensao (VREF ) e a tensao no terminal (VT ) e monitorada para todas as unidades, tanto
para condicao de malha aberta (PSS daquela unidade desabilitado) quanto de malha
fechada (PSS habilitado). Alem de VT , o sinal de velocidade do rotor ω, para cada
unidade, e monitorado. Isso permite verificar se o ajuste de fase do PSS esta adequado, o
que significa garantir que a curva de fase do diagrama de Bode da FTMF VT (s)/VREF (s) se
pareca com a fase da FTMF ω(s)/VREF (s) (LARSEN, 1981; KUNDUR, 2003; BERUBE,
2007).
FIG. 5.1: Diagrama de um ensaio de campo convencional.
62

No entanto, para uma usina multigeradores, a medida que o numero de UGs aumenta,
o metodo convencional torna-se pouco efetivo, pois as variaveis medidas apresentam um
conteudo modal intraplanta mais expressivo do que a informacao do modo gerador agre-
gado. Isto pode ser verificado com a ajuda da FIG. 5.2, onde fica claro que a medida que
o numero de unidades em paralelo n aumenta, a resposta em frequencia de uma unica
unidade geradora (P (s), -.-.-) tende para a resposta intraplanta (P (s)− T (s), · · · ).A FIG. 5.2 contem as respostas em frequencia da FT VT1(s)/VREF1(s), relacionada
a unidade #1 para varios sistemas MPIB. As cinco diferentes usinas sendo comparadas
possuem: 1 unidade de 6000 MW, 2×3000 MW, 4×1500 MW, 10×600 MW e uma unica
unidade de 600 MW conectada a uma barra infinita pelo seu transformador elevador.
Na simulacao destes sistemas foram utilizados modelos de 5a ordem de maquina sıncrona
com polos salientes, cujos parametros sao identicos aos das maquinas de Itaipu 60 Hz.
Os sistemas de controle associados aos geradores (AVR, regulador de velocidade e PSS)
eram de baixa ordem com ajustes tıpicos, uma vez que as simulacoes tem o proposito de
esclarecimento e generalizacao, nao necessitando reproduzir exatamente a complexidade
dos controladores das UGs de Itaipu 60 Hz.
Portanto, ensaios de campo convencionais (SISO), quando aplicadas a usinas multi-
geradores, tendem a mostrar mais claramente o impacto do PSS no modo intraplanta do
que no modo gerador agregado, sendo que o ajuste do PSS visa melhorar prioritariamente
o amortecimento do modo mais crıtico da usina no SEP, que geralmente e o modo local,
tambem denominado gerador agregado.
5.2 TESTE PROPOSTO
5.2.1 DIAGRAMA DO ENSAIO
O ensaio de campo proposto consiste em aplicar uma perturbacao em alguma unidade
geradora de uma usina (sinal VPSSd1) e monitorar as respostas da mesma unidade (sinal
VPSS1) e de uma outra (sinal VPSS2), como mostrado na FIG. 5.3.
O teste proposto esta direcionado a identificacao de maneira independente do modo
gerador agregado (modo local) e do modo intraplanta, na presenca e ausencia dos PSSs
desta usina.
Os procedimentos para o teste sao os listados abaixo:
a) Um sinal de perturbacao (a entrada VPSSd1) e aplicado em uma determinada unidade
63

0 0.5 1 1.5 2 2.5 3
−10
−5
0M
ódul
o (d
B)
Frequência (Hz)
0 0.5 1 1.5 2 2.5 3
−100
−50
0
Fas
e (g
raus
)
Frequência (Hz)
FIG. 5.2: Grafico de resposta em frequencia de VT1(s)/VREF1(s) para um gerador agre-gado (-.-.-), para o gerador #1 de uma usina de n-unidades, com n = 2 ( ), n = 4 (—),n = 10 (-.-.-) e para uma unica unidade (1/10 do tamanho do gerador agregado) conectadoa uma barra infinita (equivalente ao modo intraplanta) (· · · ).
geradora. Esse sinal pode ser um ruıdo branco, degrau, pulso, sequencia de pulsos ou
senoides de varias frequencias, etc. Para exemplificar, supoe-se que o sinal utilizado
sera um conjunto de senoides. Inicialmente aplica-se uma senoide de frequencia
inicial.
b) Os sinais de saıda VPSS1, na unidade perturbada, e VPSS2, na unidade vizinha,
sao monitorados. E sugerido escolher uma unidade vizinha somente para reduzir o
comprimento dos cabos utilizados no ensaio de campo.
c) Os sinais de entrada e saıda monitorados.
d) Uma nova senoide com frequencia maior e aplicada, repentindo os itens a) a c) ate
que toda a banda de frequencia de interesse tenha sido aplicada.
64

FIG. 5.3: Diagrama esquematico do ensaio de campo proposto.
e) Os sinais adquiridos sao filtrados, e as relacoes de modulo/fase entre os pares en-
trada/saıda para cada frequencia aplicada sao determinadas a partir do uso da
implementacao numerica da Transformada de Fourier, a DFT (Discrete Fourier
Transform).
f) Os dados do item e) sao agrupados, orginando um grafico de resposta em frequencia
de P (s) e T (s).
g) As respostas em frequencias desejadas Hagzw(s) e H ip
zw(s) sao calculadas pelo uso de
(4.35) e (4.36), cujos polos e zeros dominantes sao entao identificados por uma rotina
de Matlabr(fitmagfrd, do Control System Toolbox ), a qual identifica uma funcao de
transferencia contınua que mais se aproxima da resposta em frequencia fornecida.
OBS Para que a metodologia produza resultados validos, todas as UGs da usina devem
possuir os mesmos ajustes de controladores, carregamento e tensao terminal, de
forma que a premissa de simetria estrutural da planta nao seja violada.
Mais uma vez, e importante salientar que informacoes da dinamica de malha aberta
do sistema multivariavel e obtida de medicoes realizadas no sistema em malha fechada.
65

5.2.2 FUNDAMENTACAO TEORICA
Tendo em vista o conteudo apresentado nos Capıtulos 3 e 4, sugere-se um novo ensaio
de campo para obter a resposta em frequencia do gerador agregado, sendo este equivalente
a soma ponderada de duas funcoes de transferencia escalares que podem ser facilmente
medidas. Esse ensaio de campo envolve aplicar uma entrada de perturbacao em um
gerador (Td =[Td1 0 · · · 0
]T) e monitorar as saıdas do gerador perturbado, Tp1,
e de um gerador vizinho, Tp2:Tp1
Tp2...
Tpn
=
P (s) T (s) · · · T (s)
T (s) P (s) · · · T (s)...
.... . .
...
T (s) T (s) · · · P (s)
Td1
0...
0
(5.1)
Tp1
Tp2...
Tpn
=
P (s)
T (s)...
T (s)
[Td1
](5.2)
onde
Tp1Td1
= P (s) (5.3)
Tp2Td1
=TpnTd1
= T (s) (5.4)
Verifica-se assim que este ensaio permite identificar as FTs P (s) e T (s), necessarias
para inferir os modos gerador agregado e intraplanta, conforme as equacoes (4.35) e (4.36).
66

6 RESULTADOS DO ENSAIO
Este capıtulo descreve o ensaio de campo realizado nos geradores de Itaipu 60 Hz e
seus respectivos resultados, que e a aplicacao pratica da metodologia proposta e descrita
neste trabalho.
O teste de campo foi realizado utilizando como sinal de entrada uma sequencia de
senoides com uma faixa de frequencia especıfica. As medidas de resposta em frequencia
foram realizadas sequencialmente, para valores discretos de frequencia em intervalos de
0.1 Hz, dentro da faixa de 0.1 Hz a 3 Hz. A simulacao de resposta em frequencia, utilizando
o melhor modelo computacional disponıvel das 8 unidades geradoras individualizadas e
do SIN, foi realizada para fim de comparacao.
6.1 TESTE DE CAMPO REALIZADO NA UHE ITAIPU 60 HZ
A metodologia descrita no Capıtulo 4, para uma usina de multiplos geradores com
modelos classicos, e igualmente aplicavel a uma usina mais complexa conectada a um
grande SEP. Assim, o ensaio de campo proposto na secao 5.2 foi aplicado na verificacao
da efetivades dos PSSs da UHE de Itaipu 60Hz.
As respostas em frequencia das unidades foram obtidas a partir da aplicacao de uma
famılia de sinais senoidais, cada um com duracao de 60 segundos e frequencia constante.
A frequencia, nesta famılia de sinais, abrangia a faixa de 0.1 Hz a 3 Hz, com um intervalo
de 0.1 Hz. A aquisicao de dados foi realizada numa taxa de amostragem de 200 Hz.
O sinal de entrada de perturbacao foi sempre aplicado na UG U11 e os sinais de saıda
medidas nas UGs U11 e U12.
Esses dados do teste foram entao filtrados por uma rotina de processamento de sinais,
que estima os valores medios de magnitude e fase de P (s) e T (s), para cada uma das
frequencias aplicadas.
6.1.1 RUIDO NOS SINAIS MEDIDOS
Uma vez que a relacao sinal-ruıdo (signal-to-noise ratio – SNR) da medicao de T (s) foi
pobre, um filtro de correlacao (FRANKLIN, 1998) foi utilizado. Tal filtro e basicamente
67

dado por (6.1), onde x,y sao dois sinais discretos quaisquer, x,y sao suas respectivas medias
e N e o numero de amostras:
Ry,x(τ) =1
2N + 1
N∑k=−N
[y(k)− y][x(k − τ)− x] (6.1)
Quando y = x, Ry,x denomina-se correlacao cruzada. Para y = x, Rx,x e simplificado para
Rx, denominado autocorrelacao.
Esse filtro calcula a fase e magnitude dos pares de sinais correlacionados RVPSS1,VPSSd1/
/RVPSSd1e RVPSS2,VPSSd1
/RVPSSd1, que mantem magnitude/fase dos respectivos pares de
sinais originais (VPSS1/VPSSd1 e VPSS2/VPSSd1), como demonstrado em (FRANKLIN,
1998). As FIGs. 6.1a a 6.1c mostram os sinais nao-tratados de VPSSd1, VPSS1 e VPSS2,
superpostos aos seus sinais filtrados, para um unico valor de frequencia (0.5 Hz). A
FIG. 6.1d mostra os sinais nao-tratado e filtrado de VPSS2, para uma frequencia de 2 Hz,
onde o SNR parece estar muito mais favoravel do que em 0.5 Hz.
6.1.2 DESCRICAO DO SIN
O SIN, no momento do ensaio de campo em Itaipu 60 Hz (14 de setembro de 2008),
possuıa as seguintes estatısticas: 100 GW de capacidade instalada, demanda maxima de
66 GW e 87000 km de linhas de transmissao acima de 220 kV. A base de dados do modelo
dinamico do ano de 2008 possuıa 3600 barras, 5000 linhas e 180 usinas modeladas com seus
sistemas de controle da excitacao e reguladores de velocidade, sendo 80 delas equipadas
com PSSs. Praticamente todas as usinas foram representadas por um gerador agregado
com seus controles de excitacao e velocidade, com poucas excecoes. Outros equipamentos
relevantes conectados ao sistema de transmissao do SIN foram tambem modelados: 4
SVCs, 4 TCSCs equipados com controladores POD (Power Oscillation Damping) bem
como um grande elo HVDC de 6000 MW, sendo este alimentado por Itaipu 50 Hz, cuja
capacidade de geracao chega a 7000 MW. A FIG. 6.2 mostra as dimensoes continentais
do SIN.
A usina de Itaipu 60 Hz possui 10 unidades geradoras (UGs U10 a U18 e U18A), cada
uma com 700 MW de capacidade e e representada, juntamente com seus controles associ-
ados, por 18 variaveis de estado. A geracao maxima desta planta requer que 9 unidades
estejam operando a 700 MW, totalizando 6300 MW, que sao entregues principalmente ao
subsistema Sudeste atraves de 3 linhas de 765kV com 900 km de extensao. Tambem ha
68

0 1 2 3 4 5−2
0
2
a) V
PS
Sd1
(V)
Tempo (s)
0 1 2 3 4 5−2
0
2b)
VP
SS
1(V)
Tempo (s)
0 1 2 3 4 5−1
0
1
c) V
PS
S2(V
)
Tempo (s)
0 1 2 3 4 5−1
0
1
d) V
PS
S2(V
)
Tempo (s)
FIG. 6.1: a) VPSSd1 e RVPSSd1. b) VPSS1 e RVPSS1,VPSSd1
. c) VPSS2 e 10× RVPSS2,VPSSd1; A
curva (—) e o sinal nao-tratado, enquanto ( ) e o sinal filtrado; o sinal senoidal aplicadoe de 0.5 Hz. d) VPSS2 e RVPSS2,VPSSd1
para um sinal senoidal de 2 Hz.
uma interconexao com o subsistema Sul, que ocorre numa substacao a 300 km de Itaipu
(Subestacao de Ivaipora – PR).
O modelo do SIN utilizado nas simulacoes contidas neste trabalho tem 3100 estados e
e estavel para o ponto de operacao escolhido, o qual acredita-se que reproduz adequada-
mente as condicoes do SIN no momento dos testes de campo.
O ensaio de campo foi realizado numa manha de domingo, com o SIN operando em
condicoes de demanda reduzida (inferior a 45 GW), de forma a nao submeter o sistema a
um risco desnecessario. Havia 8 unidades em operacao, cada uma gerando aproximada-
mente 500 MW e com um fator de potencia atrasado de 0.99. A FIG. 6.3 mostra de
maneira mais clara a conexao entre a usina de Itaipu e o SIN.
69

FIG. 6.2: Diagrama geografico do SIN.
6.2 RESPOSTA DE CADA GERADOR
As FIGs. 6.4 e 6.5 comparam os graficos de resposta em frequencia das funcoes de
transferencia P (s) = VPSS1(s)/VPSSd1(s) (U11) e T (s) = VPSS2(s)/VPSSd1(s) (U12), obti-
das do ensaio de campo e de simulacoes.
70

FIG. 6.3: Diagrama simplificado de Itaipu 60 Hz e 50 Hz e suas interligacoes com o SIN.Os valores em preto indicam capacidade maxima de geracao/transformacao, enquanto queos dados em vermelho indicam o carregamento aproximado durante o ensaio.
6.3 MODO GERADOR AGREGADO
Haviam 8 unidades em operacao no momento do ensaio de campo e, portanto, a
resposta do gerador agregado Hagzw(s) (4.35) pode ser obtida por uma combinacao linear
dos dois sinais medidos, como mostrado abaixo:
Hagzw(s) = P (s) + 7T (s) =
VPSS1(s)
VPSSd1(s)+ 7
VPSS2(s)
VPSSd1(s)(6.2)
A FIG. 6.6 mostra os graficos de resposta em frequencia derivados do uso de (6.2),
tanto para os resultados da simulacao quanto das medicoes do ensaio. Uma rotina (fit-
magfrd) da biblioteca Robust Control Toolbox produziu um ajuste de 2a ordem (tambem
mostrado na FIG. 6.6) para o grafico derivado das medicoes de campo. Os pares de zeros
e polos produzidos por esse ajuste sao mostrados na tabela TAB. 6.1. Como descrito
anteriormente, esse par de zeros corresponde ao par de polos do gerador agregado, que
existiria caso todos os PSSs fossem desabilitados.
71

0 0.5 1 1.5 2 2.5 3−20
−10
0
10
Mód
ulo
(dB
)
Frequência (Hz)
0 0.5 1 1.5 2 2.5 3−50
0
50
100
Fas
e (g
raus
)
Frequência (Hz)
FIG. 6.4: Grafico de resposta em frequencia de P (s) = VPSS1(s)/VPSSd1(s) obtidos desimulacoes (—) e ensaio de campo (F).
TAB. 6.1: Desempenho da usina de Itaipu 60 Hz no SIN.
Fonte de resultados Zeros de Hagzw(s) Polos de Hag
zw(s)
Simulacoes Dinamicas −0.14± j5.29 −2.05± j6.38
Computacionais ωd = 0.84Hz ωd = 1.02Hz
do modelo do SIN ζ = 2.7% ζ = 30.6%
Ajuste de Curva −0.16± j5.44 −2.04± j6.14
das medicoes do ωd = 0.87Hz ωd = 0.98Hz
ensaio de campo ζ = 2.9% ζ = 31.5%
Note que o amortecimento e insuficiente quando calculado tanto das medidas do ensaio
de campo (2.9%) quanto das simulacoes computacionais (2.7%). Esses resultados clara-
mente indicam que os PSSs existentes contribuem decisivamente para o amortecimento
das oscilacoes do gerador agregado, cuja frequencia e de 0.87 Hz (das medidas do ensaio)
ou 0.84 Hz (pelas simulacoes). Uma inspecao visual do grafico de resposta em frequencia
72
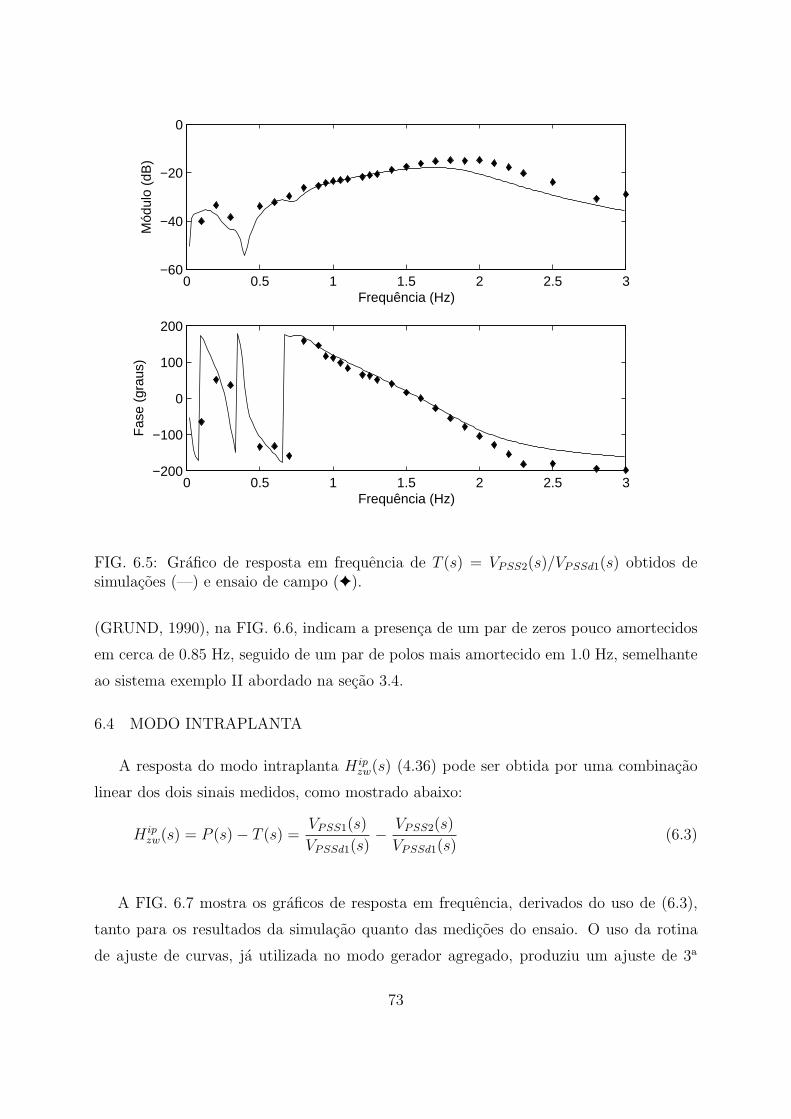
0 0.5 1 1.5 2 2.5 3−60
−40
−20
0
Mód
ulo
(dB
)
Frequência (Hz)
0 0.5 1 1.5 2 2.5 3−200
−100
0
100
200
Fas
e (g
raus
)
Frequência (Hz)
FIG. 6.5: Grafico de resposta em frequencia de T (s) = VPSS2(s)/VPSSd1(s) obtidos desimulacoes (—) e ensaio de campo (F).
(GRUND, 1990), na FIG. 6.6, indicam a presenca de um par de zeros pouco amortecidos
em cerca de 0.85 Hz, seguido de um par de polos mais amortecido em 1.0 Hz, semelhante
ao sistema exemplo II abordado na secao 3.4.
6.4 MODO INTRAPLANTA
A resposta do modo intraplanta H ipzw(s) (4.36) pode ser obtida por uma combinacao
linear dos dois sinais medidos, como mostrado abaixo:
H ipzw(s) = P (s)− T (s) =
VPSS1(s)
VPSSd1(s)− VPSS2(s)
VPSSd1(s)(6.3)
A FIG. 6.7 mostra os graficos de resposta em frequencia, derivados do uso de (6.3),
tanto para os resultados da simulacao quanto das medicoes do ensaio. O uso da rotina
de ajuste de curvas, ja utilizada no modo gerador agregado, produziu um ajuste de 3a
73

0 0.5 1 1.5 2 2.5 3−30
−20
−10
0
10
Mód
ulo
(dB
)
Frequência (Hz)
0 0.5 1 1.5 2 2.5 3−50
0
50
100
Fas
e (g
raus
)
Frequência (Hz)
FIG. 6.6: Grafico de resposta em frequencia de Hagzw(s) obtido de simulacoes (—), ensaio
de campo (F) e um ajuste de curvas de 2a ordem (-.-.-).
ordem (tambem mostrado na FIG. 6.7) para o grafico derivado das medicoes de campo.
Os pares de zeros e polos produzidos por esse ajuste sao mostrados na tabela TAB. 6.2.
Como descrito anteriormente, esse par de zeros corresponde ao par de polos do modo
intraplanta, que existiria se todos os PSSs fossem desabilitados.
TAB. 6.2: Desempenho do modo intraplanta da usina de Itaipu 60 Hz.
Fonte de resultados Zeros de Hipzw(s) Polos de Hip
zw(s)
Simulacoes dinamicas −1.07± j7.89 −2.34± j11.44
Computacionais ωd = 1.25Hz ωd = 1.82Hz
do modelo do SIN ζ = 13.1% ζ = 20.1%
Ajuste de curva −0.65± j8.32 −2.12± j12.19
das medicoes do ωd = 1.35Hz ωd = 1.94Hz
Ensaio de campo ζ = 7.8% ζ = 17.1%
74
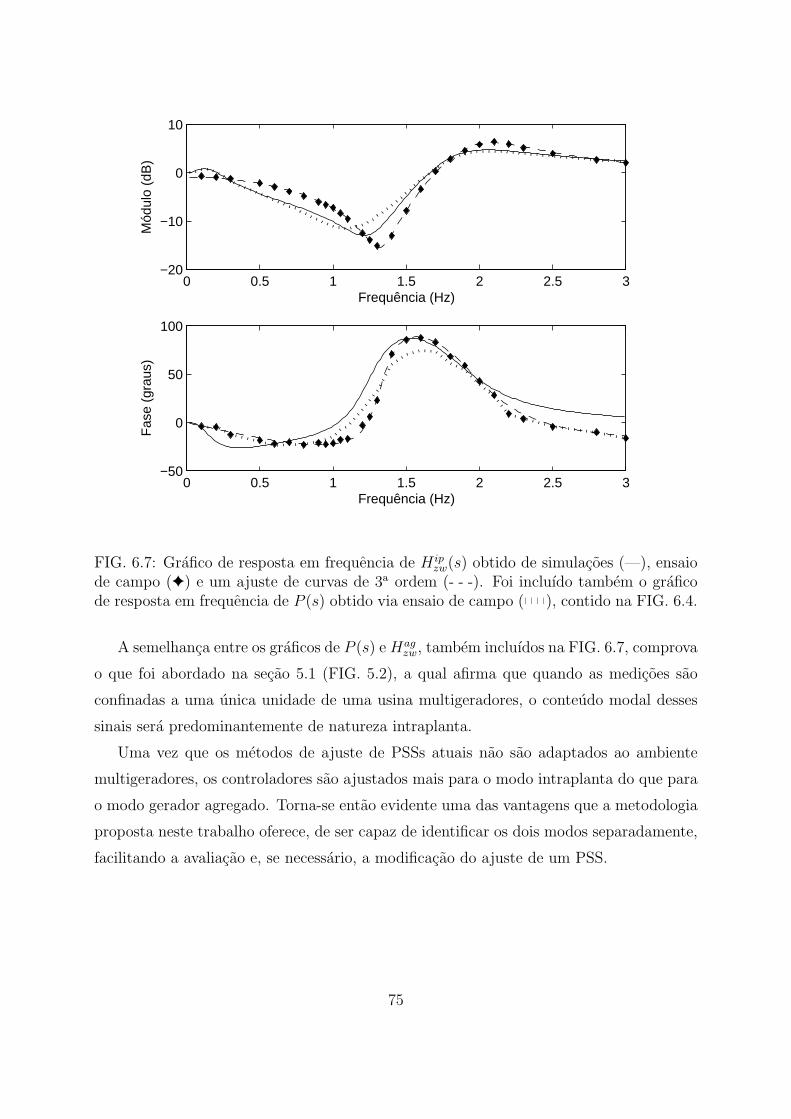
0 0.5 1 1.5 2 2.5 3−20
−10
0
10
Mód
ulo
(dB
)
Frequência (Hz)
0 0.5 1 1.5 2 2.5 3−50
0
50
100
Fas
e (g
raus
)
Frequência (Hz)
FIG. 6.7: Grafico de resposta em frequencia de H ipzw(s) obtido de simulacoes (—), ensaio
de campo (F) e um ajuste de curvas de 3a ordem (-.-.-). Foi incluıdo tambem o graficode resposta em frequencia de P (s) obtido via ensaio de campo (|.|.|.|), contido na FIG. 6.4.
A semelhanca entre os graficos de P (s) eHagzw, tambem incluıdos na FIG. 6.7, comprova
o que foi abordado na secao 5.1 (FIG. 5.2), a qual afirma que quando as medicoes sao
confinadas a uma unica unidade de uma usina multigeradores, o conteudo modal desses
sinais sera predominantemente de natureza intraplanta.
Uma vez que os metodos de ajuste de PSSs atuais nao sao adaptados ao ambiente
multigeradores, os controladores sao ajustados mais para o modo intraplanta do que para
o modo gerador agregado. Torna-se entao evidente uma das vantagens que a metodologia
proposta neste trabalho oferece, de ser capaz de identificar os dois modos separadamente,
facilitando a avaliacao e, se necessario, a modificacao do ajuste de um PSS.
75

6.5 ANALISE DE SENSIBILIDADE
O amortecimento e a frequencia dos polos dominantes de malha fechada (com PSS),
tanto do modo agregado quanto do modo intraplanta, sao consideravelmente maiores que
seus respectivos polos de malha aberta (sem PSS). Isso se deve as grandes sensibilidades
dos polos sem PSS (zeros de Hagzw(s) e H ip
zw(s)) a adicao simultanea de PSSs com ganhos
incrementais em todas as unidades geradoras de Itaipu 60 Hz. A sensibilidade de um polo
foi definida, neste caso como:
−→s = lim∆KPSS→0
λI − λ0
∆KPSS
(6.4)
onde λ0 e polo sem PSS, λI e o polo com o PSS de ganho infinitesimal e ∆KPSS consiste
no infinitesimo de ganho adicionado ao PSS.
FIG. 6.8: Resultados simulados para polos de malha aberta (sem PSS) (⃝), suas sensi-bilidades a adicao de PSSs com ganhos incrementais (→) e polos de malha fechada (comPSS) associados (×).
Essas sensibilidades lineares sao −→s ag = 1.09∠154o e −→s ip = 1.74∠121o para os polos
agregados e intraplanta, respectivamente, apontando um alto (e positivo) impacto dos
PSSs nesses dois pares de polos (cf. FIG. 6.8). Alem disso, as magnitudes e angulos
dessas sensibilidades justificam claramente porque os polos de malha fechada intraplanta
sofrem um grande aumento na sua parte imaginaria (frequencia) quando comparado aos
76

polos do modo agregado, enquanto que estes ultimos tem um aumento maior na sua parte
real negativa (amortecimento).
6.6 ANALISE DE ROBUSTEZ A ASSIMETRIAS
Nota-se que existem algumas discrepancias entre os dados simulados e medidos, os
quais poderiam ser atribuıdos a ordem inadequada dos modelos utilizados na simulacao,
ruıdos de medicao, simetria inexata da usina com multiplos geradores e impossibilidade
de garantir estacionariedade durante o longo perıodo de teste (90 minutos neste caso).
Uma vez que a influencia de cada um desses fatores na qualidade dos resultados sao de
difıcil determinacao, foi investigado, ainda que qualitativamente, o efeito que a violacao
da hipotese de simetria tem na efetividade do metodo.
Foi realizado um conjunto de simulacoes com o intuito de avaliar a robustez do metodo
a assimetrias na planta. A robustez do ensaio de campo proposto foi investigada para
assimetrias localizadas em unidades que nao estao sob teste (referidas como unidades
“externas” bem como para assimetrias na unidade sob teste que esta sendo excitada pelo
sinal de perturbacao (referida como unidade “interna”).
6.6.1 ASSIMETRIA LOCALIZADA EM UNIDADES EXTERNAS
A analise deste tipo de assimetria e de particular interesse, considerando que a unidade
geradora U18A de Itaipu 60 Hz tem AVR e PSS de estruturas diferentes das outras
unidades. Esse estudo utilizou o fluxo de carga e dados dinamicos usados para produzir
os resultados das secoes anteriores, introduzindo uma pequena modificacao: a) os ganhos
do AVR e PSS de uma unidade externa foram aumentados em 50%; b) o despacho da
mesma unidade externa foi reduzido em 20% e compensado pelo aumento na geracao das
outras 7 unidades, incluindo a unidade interna.
As respostas em frequencia simuladas para os casos base e com assimetria externa sao
comparadas na FIG. 6.9, mostrando que os erros introduzidos sao irrelevantes e que o
novo teste e, portanto, robusto a consideraveis nıveis de assimetria externa (localizada em
1 das 8 unidades geradoras).
6.6.2 ASSIMETRIA LOCALIZADA NA UNIDADE INTERNA
O fluxo de potencia do SIN foi modificado, com o nıvel de geracao de Itaipu 60 Hz
aumentado para 5000 MW, mantendo as demais condicoes operativas do caso utilizado
77

0 0.5 1 1.5 2 2.5 3−25
−20
−15
−10
−5
0
5
Mód
ulo
(dB
)
Frequencia (Hz)
0 0.5 1 1.5 2 2.5 3−50
0
50
100
Fas
e (g
raus
)
Frequencia (Hz)
FIG. 6.9: Grafico de resposta em frequencia de Hagzw(s) obtido de simulacoes usando
modelo simetrico (—) e modelo com assimetria na unidade externa (-.-.-).
nas simulacoes do ensaio.
Simulacoes do sistema nesta condicao mostram oscilacoes instaveis na ausencia do
PSS de Itaipu 60 Hz. Essa instabilidade e corretamente identificada nas respostas em
frequencia da FIG. 6.10 (linha espessa), que aponta para a presenca de um par de zeros
a direita do plano complexo. Esta condicao e similar ao sistema exemplo I, da secao 3.4,
cuja resposta em frequencia tem a mesma forma da FIG. 3.6a-b.
A assimetria introduzida na usina de Itaipu esta localizada na unidade a qual o sinal
de perturbacao e aplicado (unidade interna), que foi ajustada para um carregamento 20%
menor que a das 7 unidades restantes. Esta e uma condicao plausıvel ja que a operacao do
sistema eletrico seguiria a pratica usual de reduzir o carregamento da unidade sob teste,
de forma a minimizar o impacto de um possıvel desligamento da unidade por problemas
no ensaio.
Nota-se que um valor de carregamento 20% menor para a maquina perturbada (linha
fina da FIG. 6.10) fez o par de zeros instaveis se aproximar do eixo imaginario. Para
esta condicao de estudo, uma reducao maior que 20% no seu carregamento levaria a falsa
78

0.6 0.7 0.8 0.9 1 1.1 1.2
−40
−30
−20
−10
0
Mód
ulo
(dB
)
Frequencia (Hz)
0.6 0.7 0.8 0.9 1 1.1 1.2
−300
−200
−100
0
Fas
e (g
raus
)
Frequencia (Hz)
FIG. 6.10: Grafico de resposta em frequencia de Hagzw(s) obtido de simulacoes usando
carregamento simetrico instavel ( ) e para unidade perturbada com um carregamento20% menor (—).
estimacao de uma estabilidade em malha aberta (a resposta em frequencia deixaria de
ser similar a do sistema exemplo I e se tornaria semelhante ao sistema II da FIG. 3.6),
enquanto que o modo gerador agregado em malha aberta continua efetivamente instavel.
Estes resultados indicam que o novo teste e tambem robusto a assimetrias localizadas
em unidade interna, tendo em vista que uma diferenca de 20% no carregamento esta muito
superior aos pequenos desvios de simetria encontrados na operacao real de uma grande
usina.
79

7 CONCLUSAO
A metodologia descrita, as simulacoes computacionais e os resultados do teste de
campo permitiram obter valiosa informacao sobre o controle do amortecimento das os-
cilacoes da usina de Itaipu 60 Hz. O novo teste de campo provou ser de facil implementacao
e de baixo risco para o sistema eletrico, o qual confirmou a efetividade do ajuste corrente
do PSS de Itaipu 60 Hz no amortecimento dos modos de oscilacao agregado e intraplanta.
A decomposicao modal da matriz de transferencia utilizada nesse trabalho e analoga
aquela utilizada na decomposicao em impedancias de sequencia de um circuito trifasico
balanceado (KIMBARK, 1948), como descrito na secao 4.6. Essa abordagem proporciona
uma analise mais clara e simples do que a abordagem alternativa de zeros multivariaveis
utilizada em (MARTINS, 2007) e detalhada na secao 4.7 e Apendice 9.1.
As discrepancias verificadas entre as respostas em frequencia dos resultados simulados
e do ensaio de campo sao aceitaveis considerando que esse e um novo teste e que existem
possıveis fontes de erros.
Uma analise de sensibilidade, baseada em simulacoes, foi realizada para verificar se
o novo teste de campo e robusto a possıveis violacoes na simetria da usina, que e uma
das premissas basicas do metodo. Os resultados confirmaram que o novo teste de campo
e resistente a desbalancos de carregamento e de parametros que existem na pratica e,
portanto, pode ser recomendado para aplicacoes praticas mais abrangentes.
E importante salientar que esse novo teste de campo identifica os polos sem PSS (tanto
intraplanta quanto agregado) com uma maior precisao que os polos com PSS. Essa e uma
consequencia direta do uso de ajuste de curvas ou outro metodo de estimacao, que tem
a inerente caracterıstica de determinar mais precisamente oscilacoes pouco amortecidas,
por estas causarem picos mais acentuados no modulo das respostas em frequencia.
Adicionar uma nova juncao de soma a saıda de um PSS digital e uma tarefa trivial
em PSSs modernos, micro-processados e equipados com “touch screens” e recursos “drag-
and-drop” na construcao de diagrama de blocos de controle. A disponibilizacao de tais
modernos PSSs no mercado ajuda a tornar o teste proposto em mais um teste padrao
para sistemas de excitacao de usinas.
Uma grande contribuicao da metodologia proposta neste trabalho e a identificacao e
80

separacao das respostas dos modos agregado e intraplanta, uma importante questao que
e frequentemente negligenciada em metodos de ajustes de PSS atuais.
81

8 REFERENCIAS BIBLIOGRAFICAS
ARAUJO, C. S. e CASTRO, J. C. Application of power system stabilizer in a plant withidentical units. Em IEE Proceedings – C, volume 138, pags. 11–18, January 1991.
BAKER, D. H., KRAUSE, P. C. e RUSCHE, P. A. An investigation of excitationsystem interaction. IEEE Trans. on PAS, PAS-94(3):705–715, May/June 1975.
BERUBE, G. R. e HAJAGOS, L. M. Integral of accelerating power type stabilizers. EmIEEE Tutorial Course - Power System Stabilization via Excitation Control (07TP185),chapter 4. 2007.
BOLLINGER, K. E., HURLEY, J., KEAY, F., LARSEN, E. e LEE, D. C. Power sys-tem stabilization via excitation control. Em IEEE Tutorial Course - Power SystemStabilization via Excitation Control (81 EHO 175-0 PWR). 1980.
BOSSA, T. H. S., MARTINS, N., PELLANDA, P. C. e DA SILVA, R. J. G. C. A fieldtest to determine PSS effectiveness at multigenerator power plants. IEEETrans. PWRS, Accepted for publication 2011.
CHOW, J. H., SANCHEZ-GASCA, J. J., REN, H. e S.WANG. Power system dampingcontroller design using multiple input signals. IEEE Control Syst. Mag., 20(4):82–90, August 2000.
DA SILVA, R. J. G. C. Verificacao do desempenho dinamico da usina de Itaipu atravesde indicadores. Em X SEPOPE, Florianopolis, 2006.
DE MELLO, F. P. e CONCORDIA, C. Concepts of synchronous machine stabilityas affected by excitation control. IEEE Trans. on PAS, PAS-88:316–329, 1969.
DE MELLO, F., HANNETT, L. e UNDRILL, J. Practical approaches to supple-mentary stabilizing from accelerating power. IEEE Trans. on PAS, PAS-97:1515–1522, September/October 1978.
DE MELLO, F., NOLAN, P., LASKOWSKI, T. e UNDRILL, J. Coordinated appli-cation of stabilizer for multi-machine power systems. IEEE Trans. on PAS,PAS-99(3):892–901, May/June 1980.
FITZGERALD, A. E. e KINGSLEY, C. Electric Machinery. McGraw-Hill, secondedition, 1961.
FRANKLIN, G. F., POWEL, J. D. e WORKMAN, M. Digital Control of DynamicSystems. Addison Wesley Longman, third edition, 1998.
82

GRUND, C. E., O’KEEFE, R. J., PASERBA, J. J. e CARLSON, D. L. Developmentof low–order control design models from standard stability models. Em IEEE/PESWorking Group on Special Stability Controls - Eigenanalysis and Frequency DomainMethods for System Dynamic Performance (90TH0292-3-PWR). 1990.
HEFFRON, W. G. e PHILLIPS, R. A. Effect of modern amplidyne voltage regula-tors on underexcited operation of large turbine generators. AIEE, 71:692–697,1952.
JABR, R. A., PAL, B. C. e MARTINS, N. Robust and coordinated tuning of powersystem stabilizer gains using sequential linear programing. IET Generation,Transmission and Distribution, 4(8):893–904, 2010a.
JABR, R. A., PAL, B. C., MARTINS, N. e FERRAZ, J. C. R. A sequential conic pro-gramming approach for the coordinated and robust design of power systemstabilizers. IEEE Trans. PWRS, 25(3):1627–1637, August 2010b.
KAILATH, T. Linear Systems. Prentice-Hall, 1980.
KEAY, F. e SOUTH, W. Design of a power system stabilizer sensing frequencydeviation. IEEE Trans. on PAS, PAS-90:707–713, March/April 1971.
KIMBARK, E. W. Power System Stability, volume I. John Wiley & Sons, 1948.
KUNDUR, P., BERUBE, G. R., HAJAGOS, L. M. e BEAULIEU, R. E. Practical utilityexperience with and effective use of power system stabilizers. Em IEEE PES Meeting,volume 3, pags. 1777–1785, July 2003.
KUNDUR, P., KLEIN, M., ROGERS, G. J. e ZYWNO, M. S. Aplication of powersystem stabilizer for enhancement of overall system stability. IEEE Trans.PWRS, 4(2):614–626, May 1989.
KUNDUR, P. Power System Stability and Control. McGraw-Hill, 1994.
LARSEN, E. e SWANN, D. Applying power system stabilizers, parts I, II, andIII. IEEE Trans. on PAS, PAS-100:3017–3046, Jun 1981.
LAUB, A. J. e MOORE, B. C. Calculation of transmission zeros using QZ tech-niques. Automatica, 14:557–566, 1978.
LEE, D. Field testing techniques. Em IEEE Tutorial Course - Power System Stabilizationvia Excitation Control (81 EHO 175-0 PWR), chapter 4. 1980.
MARTINS, N. e LIMA, L. T. G. Determination of suitable locations for power sys-tem stabilizers and static var compensators for damping electromechanicaloscillations in large power systems. IEEE Trans. PWRS, 5(4):1455–1469, 1990a.
MARTINS, N. e LIMA, L. T. G. Eigenvalue and frequency domain analisys of small-signal eletromechanical stability problems. Em IEEE/PES Working Group on SpecialStability Controls - Eigenanalysis and Frequency Domain Methods for System DynamicPerformance (90TH0292-3-PWR). 1990b.
83
MARTINS, N. e LIMA, L. T. G. Impact of interactions among power systemcontrols. CIGRE Special Publication 38.02.16, Technical Brochure 166, 2000.
MARTINS, N., PELLANDA, P. C. e ROMMES, J. Computation of transfer functiondominant zeros with applications to oscillation damping control of largepower system. IEEE Trans. PWRS, 22(4):1657–1664, November 2007.
ONS – OPERADOR NACIONAL DO SISTEMA. Base de dados de arquivos dinamicos,2008.
PAL, B. e CHAUDHURI, B. Robust Control in Power Systems. Springer, 2005.
ROGERS, G. The application of power system stabilizers to a multigeneratorplant. IEEE Trans. PWRS, 15(1):350–355, Feb 2000a.
ROGERS, G. Power System Oscillations. Kluwer Academic Publishers, 2000b.
ROGERS, G. J. e KUNDUR, P. Small signal stability of power systems. Em IEEE/PESWorking Group on Special Stability Controls - Eigenanalysis and Frequency DomainMethods for System Dynamic Performance (90TH0292-3-PWR). 1990.
ROSENBROCK, H. H. State-Space and Multivariable Theory. Wiley, New York,1970.
SCHRADER, C. B. e SAIN, M. K. Research on system zeros: a survey. Int. J.Control, 50(4):1407–1433, 1989.
STEVENSON JR., W. D. Elements of Power System Analysis. McGraw-Hill,fourth edition, 1982.
VIDYASAGAR, M. Control System Synthesis: A Factorization Approach. MITPress, 1985.
WATSON, W. e COULTES, M. Experience with supplementary damping signalsfor generator static excitation systems. IEEE Trans. on PAS, PAS-92:199–203,January/ February 1973.
ZHOU, K., DOYLE, J. e GLOVER, K. Robust and Optimal Control. Prentice-Hall,1996.
84

9 APENDICES
85

9.1 APENDICE 1: ZEROS MULTIVARIAVEIS
Nesta secao encontra-se uma revisao bibliografica sobre conceito de zeros multivaria-
veis.
Existem muitas diferentes abordagens para a definicao de zeros de sistemas multiva-
riaveis (veja (SCHRADER, 1989) para uma extensa revisao). De maneira geral, ha uma
distincao entre zeros de transmissao e zeros invariantes.
Dado o seguinte sistema em espaco de estados e a respectiva matriz de transferencia:{x = Ax+Bu
y = CTx+Du(9.1)
H(s) = CT (sI−A)−1B+D (9.2)
Definicao 9.1. Um numero z0 ∈ C e chamado zero de transmissao se ele satisfaz
posto(H(z0)) < postonormal(H(s)),
onde postonormal(H(s)) e o maior posto possıvel da matriz de transferencia H(s) para ao
menos algum s ∈ C, como a definicao comum de posto normal de uma funcao matricial
racional generica (possivelmente polinomial ou impropria)(veja (ZHOU, 1996)).
Note que com essa definicao nao e suficiente ter uma entrada de H(z0) igual a zero,
e nao necessariamente ter H(z0) = 0. No caso SISO, entretanto, z0 ∈ C e chamado um
zero de transmissao de se H(z0) = CT (z0I−A)−1B+D = 0.
Com Σ(s) denotando a matriz de Rosenbrock (ROSENBROCK, 1970):
Σ(s) =
[sI−A B
−CT D
]. (9.3)
Os zeros de transmissao sao um subconjunto dos zeros invariantes de um sistema, que sao
definidos da seguinte forma:
Definicao 9.2.Um numero z0 ∈ C e chamado um zero invariante se ele satisfaz
posto(Σ(z0)) < postonormal(Σ(s)). (9.4)
86

O conjunto de zeros de transmissao e invariantes, definidos em termos das frequencias
com o qual a matriz de transferencia H(s) e a matriz do sistema Σ(s) perdem o posto,
(Definicoes 9.1 e 9.2), nao incluem informacoes quanto a multiplicidade. A multiplicidade
dos zeros pode ser determinada utilizando a definicao via forma de Smith-McMillan ou via
um definicao equivalente em termos dos menores de H(s) ou Σ(s) (veja (VIDYASAGAR,
1985)). Similarmente ao calculo de polos dominantes repetidos, a multiplicidade dos
zeros de transmissao dominantes pode tambem ser determinada utilizando os algoritmos
SADPA (SAMDP) aplicados aH−1(s) (MARTINS, 2007), contanto que a matriz de estado
do sistema inverso nao seja defectiva.
Se o sistema (4.11) e mınimo, o conjunto de zeros de transmissao, definido viaH(s), e o
conjunto de zeros invariantes, definido via Σ(s), sao coincidentes. Por outro lado, quando
o sistema nao e controlavel ou observavel, isso nao e mais valido. Os valores de frequencia
complexa as quais pertencem ao conjunto de zeros invariantes mas nao pertencem ao
conjunto dos zeros de transmissao, pertencem a um conjunto conhecido como zeros de
desacoplamento. Zeros de desacoplamento de entrada e saıda sao definidos via forma de
Smith
[(sI−A) −B] e
[sI−A
C
], (9.5)
respectivamente, e estao associados com as frequencias complexas para as quais essas
matrizes perdem o posto. A situacao onde alguns zeros invariantes sao tambem zeros
de desacoplamento de saıda (entrada) esta obviamente associada ao fato que alguns dos
modos do sistema, nas mesmas frequencias complexas, sao entao nao-observaveis (nao-
controlaveis). Pode tambem ocorrer a existencia de frequencias complexas tais que ambas
matrizes em (9.5) perdem posto. Os valores de frequencia correspondentes sao entao
chamados de zeros de desacoplamento de entrada-saıda do sistema e estao relacionados a
existencia simultanea de modos nao-controlaveis e nao-observaveis.
87

9.2 APENDICE 2: SISTEMA EXEMPLO
Este capıtulo visa esclarecer a metodologia apresentada neste trabalho, atraves da
sua aplicacao em um sistema de potencia simples, com parametros simbolicos. O sistema
exemplo utilizado e uma particularizacao daquele apresentado no Capıtulo 4, para somente
3 geradores, de modo a facilitar a compreensao dos principais conceitos.
9.2.1 MODELAGEM
A FIG. 9.1 representa uma usina multimaquina conectada a uma barra infinita atraves
de uma linha the transmissao radial. A usina do sistema 3-generator Power Plant Infinite
Bus (3PIB) possui 3 unidades geradoras igualmente carregadas, representadas por modelo
classico de maquina sıncrona com parametros identicos.
FIG. 9.1: Usina 3-unidades conectada a uma barra infinita atraves de uma impedancia(3PIB).
A partir do equacionamento do circuito eletrico do sistema de 3 maquinas (FIG. 9.2),
a expressao para potencia ativa de cada gerador pode ser determinada (ver equacao (4.5)):
Pgi = TSi=
E ′i
Xe+Xg
(V sin δi +
Xe
3Xg
3∑k = 1
k = i
E ′k sin(δi − δk)
)(9.6)
Assumindo uma operacao equilibrada (E ′1 = E ′
2 = E ′3 = E ′ e δ1 = δ2 = δ3 = δ0), a
88

FIG. 9.2: Circuito eletrico do sistema 3PIB.
linearizacao do sistema para um ponto de operacao produz:TS1
TS2
TS3
=
dTS1
dδ1
dTS1
dδ2
dTS1
dδ3dTS2
dδ1
dTS2
dδ2
dTS2
dδ3dTS3
dδ1
dTS2
dδ3
dTS3
dδ3
︸ ︷︷ ︸
KS
∆δ1
∆δ2
∆δ3
(9.7)
A equacao linear matricial em (9.7) define a matriz de torque sincronizante KS, con-
forme (4.7) e (4.8):
KS =
ks km km
km ks km
km km ks
(9.8)
onde
ks=E ′V cos δ0Xe+Xg
+ 2E ′2Xe
3Xg(Xe+Xg)
km=− E ′2Xe
3Xg(Xe+Xg)(9.9)
A dinamica eletromecanica deste sistema de 3 unidades classicas pode ser visualizado
atraves do diagrama de blocos da FIG. 9.3. As constantes de amortecimento mecanico,
KD, sao considerados como controles por realimentacao a serem “virtualmente” desabi-
litados. O objetivo aqui e avaliar o impacto da eliminacao simultanea dos torques de
amortecimento mecanico em todas as n unidades geradoras em paralelo a partir de con-
ceitos apresentados em (MARTINS, 2007). Por brevidade, a notacao ∆ sera omitida nas
equacoes e figuras deste apendice.
89

FIG. 9.3: Diagrama de blocos de uma usina 3-geradores, destacando entradas e saıdasdos canais de perturbacao.
90

9.2.2 MODELO EM ESPACO DE ESTADOS
O modelo representado pela FIG. 9.3 pode ser descrito por um sistema de equacoes
diferenciais (9.10) que, juntamente com as definicoes de (9.11), origina o modelo em espaco
de estados do sistema MPIB, conforme equacao (9.12) (ver equacoes (4.9) a (4.11)):
2Hω1 +KDω1 + ksδ1 + kmδ2 + kmδ3 = TM1 − Td1
δ1 = ω0ω1
2Hω2 +KDω2 + kmδ1 + ksδ2 + kmδ3 = TM2 − Td2
δ2 = ω0ω2
2Hω3 +KDω3 + kmδ1 + kmδ2 + ksδ3 = TM3 − Td3
δ3 = ω0ω3
(9.10)
α , ks2H
, β , km2H
, 2γ , KD
2H(9.11)
x = Ax+[Bu Bw
]︸ ︷︷ ︸
B
[TM
Td
]
[ω
Tp
]=
[CT
y CTz
]︸ ︷︷ ︸
CT
x+
[Dyu Dyw
Dzu Dzw
]︸ ︷︷ ︸
D
[TM
Td
] (9.12)
onde
A =
−2γ −α 0 −β 0 −β
w0 0 0 0 0 0
0 −β −2γ −α 0 −β
0 0 w0 0 0 0
0 −β 0 −β −2γ −α
0 0 0 0 w0 0
B =[Bu Bw
]=
1
2H
1 0 0 −1 0 0
0 0 0 0 0 0
0 1 0 0 −1 0
0 0 0 0 0 0
0 0 1 0 0 −1
0 0 0 0 0 0
91

CT =[CT
y CTz
]=
1 0 0 KD 0 0
0 0 0 0 0 0
0 1 0 0 KD 0
0 0 0 0 0 0
0 0 1 0 0 KD
0 0 0 0 0 0
D =
[Dyu Dyw
Dzu Dzw
]=
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
com
x =
ω1
δ1
ω2
δ2
ω3
δ3
,
[TM
Td
]=
TM1
TM2
TM3
Td1
Td2
Td3
,
[ω
Tp
]=
ω1
ω2
ω3
Tp1
Tp2
Tp3
9.2.3 TRANSFORMACAO DE SIMILARIDADE MODAL
A matriz de estados acima possui uma estrutura especial ja abordada na secao 4.3,
como mostrado em (9.13)-(9.14):
A =
a b b
b a b
b b a
(9.13)
onde
a =
[−2γ −α
w0 0
]e b =
[0 −β
0 0
](9.14)
Aplicando a transformacao de similaridade P a matriz de estado A, que e bloco-
92

simetrica (2× 2), sua forma bloco-diagonal e obtida:
P =
I2×2 I2×2 I2×2
I2×2 02×2 −I2×2
I2×2 −I2×2 02×2
(9.15)
A = P−1AP =
−2γ −(α+ 2β) 0 0 0 0
w0 0 0 0 0 0
0 0 −2γ −(α− β) 0 0
0 0 w0 0 0 0
0 0 0 0 −2γ −(α− β)
0 0 0 0 w0 0
(9.16)
A =
a+ 2b 0 0
0 a− b 0
0 0 a− b
(9.17)
A matriz bloco-diagonal em (9.16) tem seus autovalores isolados nos seus blocos di-
agonais 2×2. O primeiro bloco corresponde ao modo da usina contra a barra infinita,
enquanto os outros 2 blocos, que sao identicos, correspondem aos modos intraplanta, de
multiplicidade 2. O modo gerador equivalente determina o comportamento coerente das
3 unidades em paralelo, agindo como um unico gerador equivalente, que e 3 vezes maior
que as unidades individuais, e e dado pelo par de autovalores:
p1,2 = −γ ± j√(α+ 2β)w0 − γ2 (9.18)
que sao os mesmos polos do caso SMIB (cf. equacao (3.11)), uma vez que α+2β = κ (cf.
equacao (4.19)). O modo intraplanta descreve o comportamento entre as 3 unidades em
paralelo, interno a usina, e sao dados pelos 2 pares de autovalores identicos:
p3,4 = p5,6 = −γ ± j√(α− β)w0 − γ2 (9.19)
9.2.4 TRANSFORMACAO DE SIMILIARIDADE EM FREQUENCIA
As matrizes de transferencia dos canais multivariaveis de controle (Hyu(s)) e de per-
turbacao (Hzw(s)) sao de dimensao 3×3:
Hyu(s) = Cy(sI−A)−1Bu +Dyu (9.20)
Hzw(s) = Cz(sI−A)−1Bw +Dzw (9.21)
93

ω1
ω2
ω3
︸ ︷︷ ︸
ω
=
R(s) Q(s) Q(s)
Q(s) R(s) Q(s)
Q(s) Q(s) R(s)
︸ ︷︷ ︸
Hyu(s)
TM1
TM2
TM3
︸ ︷︷ ︸
TM
(9.22)
Tp1
Tp2
Tp3
︸ ︷︷ ︸
Tp
=
P (s) T (s) T (s)
T (s) P (s) T (s)
T (s) T (s) P (s)
︸ ︷︷ ︸
Hzw(s)
Td1
Td2
Td3
︸ ︷︷ ︸
Td
(9.23)
onde:
R(s)=s2H
[s2 + 2γs+ (α+ β)ω0]
[s2 + 2γs+ (α+ 2β)w0][s2 + 2γs+ (α− β)w0](9.24)
Q(s)=−βw0
2Hs
[s2 + 2γs+ (α+ 2β)w0][s2 + 2γs+ (α− β)w0](9.25)
P (s)=s4 + 2γs3 + (2α+ β)w0s
2 + 2γαw0s+ (α2 + αβ − 2β2)w20
[s2 + 2γs+ (α+ 2β)w0][s2 + 2γs+ (α− β)w0](9.26)
T (s)=2γβw0s
[s2 + 2γs+ (α+ 2β)w0][s2 + 2γs+ (α− β)w0](9.27)
Uma vez que as matrizes de transferencia Hyu(s) e Hzw(s) possuem uma simetria
especial (ja abordada na secao 4.5), elas podem ser diagonalizadas atraves da matriz de
transformacao P , originando as matrizes de transferencia modais H′yu(s) e H′
zw(s):
P =
1 1 1
1 −1 0
1 0 −1
(9.28)
H′yu(s) = P−1Hyu(s)P =
Hag
yu(s) 0 0
0 H ipyu(s) 0
0 0 H ipyu(s)
(9.29)
H′zw(s) = P−1Hzw(s)P =
Hag
zw(s) 0 0
0 H ipzw(s) 0
0 0 H ipzw(s)
(9.30)
94

onde
Hagyu(s)=R(s) + 2Q(s) =
s2H
s2 + 2γs+ (α+ 2β)w0
(9.31)
H ipyu(s)=R(s)−Q(s) =
s2H
s2 + 2γs+ (α− β)w0
(9.32)
Hagzw(s)=P (s) + 2T (s) =
s2 + (α+ 2β)w0
s2 + 2γs+ (α+ 2β)w0
(9.33)
H ipzw(s)=P (s)− T (s) =
s2 + (α− β)w0
s2 + 2γs+ (α− β)w0
(9.34)
A matriz de transferencia de malha aberta (chaves F1, F2 e F3 da FIG. 9.3 abertas)
diagonalizada G′(s), descrevendo o canal de controle, pode ser calculada fazendo γ = 0
(KD = 0) em (9.31) e (9.32):
G′(s) =
S(s) + 2U(s) 0 0
0 S(s)− U(s) 0
0 0 S(s)− U(s)
(9.35)
onde
Gag(s)=S(s) + 2U(s) =s2H
s2 + (α+ 2β)w0
(9.36)
Gip(s)=S(s)− U(s) =s2H
s2 + (α− β)w0
(9.37)
As equacoes (9.33) e (9.34) mostram que os zeros MIMO de Hzw(s) sao os polos de
G(s), que sao dados pela equacoes caracterısticas de (9.36) e (9.37), considerando as
multiplicidades associadas.
Deve-se notar que Hagyu(s), G
ag(s) e Hagzw(s), em (9.31), (9.36) e (9.33), sao escalares
e identicas a Hyu(s), G(s) e Hzw(s) do sistema SMIB, dados em (3.9), (3.10) e (3.11),
respectivamente, cuja prova ja foi apresentada em (4.18).
A expressao para o modo gerador agregado de uma usina 3-geradores e:
Hagzw(s) = P (s) + 2T (s) (9.38)
Analogamente ao modo gerador agregado, a funcao de transferencia modal associada
ao comportamento intraplanta e dada por:
H ipzw(s) = P (s)− T (s) (9.39)
Portanto, esta provado que ambos os comportamentos dinamicos de gerador agregado
e intraplanta podem ser tratados como um problema SISO.
95

9.2.5 APLICACAO DOS ZEROS MULTIVARIAVEIS
Calculando os zeros de transmissao de Hzw(s) conforme (LAUB, 1978) obtem-se:
z1,2=±j√
(α+ 2β)w0
z3,4=±j√
(α− β)w0 (9.40)
z5,6=±j√
(α− β)w0
Uma vez encontrados os zeros de transmissao de Hzw(s), pode ser calculado o espaco
nulo (N ) de Hzw(zi) para cada zero zi a fim de determinar as orientacoes das entradas
que causam estes zeros:
N (Hzw(z1,2)) = { [1 1 1]T } (9.41)
N (Hzw(z3,4,5,6)) = { [1 −1 0]T , [1 0 −1]T } (9.42)
E importante notar que todas as orientacoes de N (Hzw(zi) coincidem com os autove-
tores que formam as colunas da matriz de transformacao P.
9.2.5.1 MODO GERADOR AGREGADO
Adotando como direcao de entrada N (Hzw(z1,2)), segue que Td1 , Td2 , Td3 , Td.Tp1
Tp2
Tp3
=
P (s) T (s) T (s)
T (s) P (s) T (s)
T (s) T (s) P (s)
Td
Td
Td
(9.43)
Tp1
Tp2
Tp3
=
P (s) + 2T (s)
P (s) + 2T (s)
P (s) + 2T (s)
[Td
](9.44)
Verifica-se que a expressao P (s) + 2T (s) da equacao (9.44) e identica a equacao (9.38),
mostrando que quando as entradas sao coerentes o par de zeros de transmissao z1,2 e mani-
festado, o que caracteriza a resposta do modo local sem acao da realimentacao KD (malha
aberta). Verifica-se tambem que a direcao N (Hzw(z1,2)) produz zeros IDZs, responsaveis
por bloquear o modo intraplanta, conforme explicitado na TAB. 9.1.
96

TAB. 9.1: polos e zeros relativos a direcao do modo agregado.
Zeros de Transmissao Zeros de desacoplamento polos
z1,2 = ±j√
(α+ 2β)w0 p1,2 = −γ ± j√(α+ 2β)w0 − γ2
−γ ± j√(α− β)w0 − γ2 p3,4 = −γ ± j
√(α− β)w0 − γ2
−γ ± j√(α− β)w0 − γ2 p5,6 = −γ ± j
√(α− β)w0 − γ2
9.2.5.2 MODO INTRAPLANTA
Similarmente ao procedimento anterior, sera agora adotado como direcao de entrada
uma das direcoes de N (Hzw(z3,4,5,6)). Escolhendo a direcao [1 −1 0]T ,temos Td1 =
−Td2 , Td e Td3 = 0.Tp1
Tp2
Tp3
=
P (s) T (s) T (s)
T (s) P (s) T (s)
T (s) T (s) P (s)
Td
−Td
0
(9.45)
Tp1
Tp2
Tp3
=
P (s)− T (s)
−(P (s)− T (s))
0
[Td
](9.46)
Verifica-se que a expressao P (s)− T (s) da equacao (9.46) e identica a equacao (9.39),
mostrando que quando a soma das entradas se anulam, o par de zeros de transmissao z3,4,5,6
e manifestado, o que caracteriza a resposta do modo intraplanta sem acao da realimentacao
KD (malha aberta). Verifica-se tambem que a direcao N (Hzw(z3,4,5,6)) produz zeros IDZs,
responsaveis por bloquear o modo gerador agregado, conforme TAB. 9.2.
TAB. 9.2: polos e zeros relativo a direcao do modo intraplanta.
Zeros de Transmissao Zeros de desacoplamento polos
−γ ± j√(α+ 2β)w0 − γ2 p1,2 = −γ ± j
√(α+ 2β)w0 − γ2
−γ ± j√(α− β)w0 − γ2 p3,4 = −γ ± j
√(α− β)w0 − γ2
z5,6 = ±j√
(α− β)w0 p5,6 = −γ ± j√(α− β)w0 − γ2
9.2.6 PROPOSTA DE ENSAIO
A metodologia de ensaio descrita na secao 5.2.1 e aplicada neste exemplo, onde e apli-
cada uma entrada de perturbacao em um gerador (Td =[Td1 0 0
]T) e monitoradas
97

as saıdas do gerador perturbado, Tp1, e de um gerador vizinho, Tp2:Tp1
Tp2
Tp3
=
P (s) T (s) T (s)
T (s) P (s) T (s)
T (s) T (s) P (s)
Td1
0
0
(9.47)
Tp1
Tp2
Tp3
=
P (s)
T (s)
T (s)
[Td1
](9.48)
onde
Tp1Td1
= P (s) (9.49)
Tp2Td1
= T (s) (9.50)
Similarmente ao apresentado na secao 5.2.2, os dados do ensaio permitem a obtencao de
P (s) e T (s), necessarios para determinacao das FTs relativas aos modos gerador agregado
Hagzw(s) e intraplanta H ip
zw(s).
98