métodos de posicionamento por gnss eac-066: geodésia …paulo.borges/... · 2018-12-03 · dados...
TRANSCRIPT
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
1/72
1
EAC-066: Geodésia Espacial
Prof. Paulo Augusto Ferreira Borges
https://intranet.ifs.ifsuldeminas.edu.br/~paulo.borges/
Métodos de Posicionamento por GNSS
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
2/72
Posicionar um objeto
significa determinar as suas
coordenadas em relação a um
referencial específico. O
posicionamento por GNSS pode
ser realizado por diferentes
métodos e procedimentos.
Métodos de Posicionamento por GNSS
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
3/72
1- Quanto ao método:
a) Posicionamento absoluto, autônomo ou por ponto: as coordenadas
estão associadas diretamente a um referencial geocêntrico;
b) Posicionamento relativo: quando as coordenadas são determinadas
em relação à um referencial materializado por um ou mais vértices com
coordenadas conhecidas.
c) Posicionamento em rede: dados de uma rede são empregados para
determinar as coordenadas da estação.
d) Posicionamento DGPS: alguns consideram posicionamento absoluto,
e outros relativo.
Classificação
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
4/72
2- Quanto à característica do objeto:
a) Posicionamento Estático: O objeto (aparelho) a ser posicionado está
em repouso.
b) Posicionamento Cinemático: O objeto (aparelho) a ser posicionado
está em movimento.
Classificação
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
5/72
3- Outros princípios:
a) Posicionamento em tempo real: a estimativa da posição da estação
de interesse ocorre quase que simultaneamente com a coleta das
observações.
b) Posicionamento pós-processado: as posições dos pontos em que os
dados foram coletados são estimadas num processamento posterior,
permitindo aplicar técnicas mais rigorosas de controle de qualidade.
Classificação
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
6/72
Neste posicionamento basta um receptor, é empregado em navegações
de baixa precisão e em levantamentos expeditos.
Posicionamento por Ponto
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
7/72
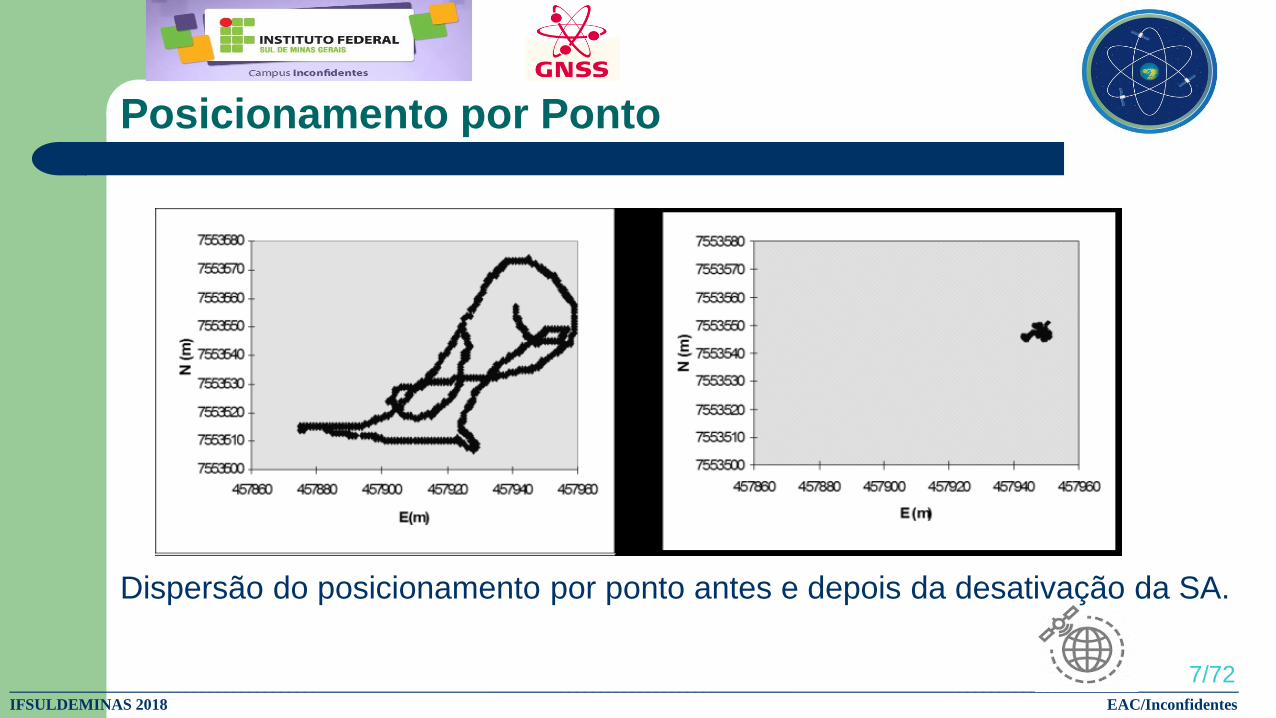
Dispersão do posicionamento por ponto antes e depois da desativação da SA.
Posicionamento por Ponto
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
8/72
No posicionamento por ponto os principais erros são a
qualidade da observável; a acurácia dos parâmetros das
mensagens de navegação; cálculo das coordenadas dos satélites
e erro do relógio do satélite. E ainda os erros causados por
ionosfera, troposfera, multicaminho, etc., que podem ser
negligenciados.
Posicionamento por Ponto
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
9/72
Diz-se do posicionamento por ponto preciso, quando com as
observáveis pseudodistância ou fase da onda portadora, ou ambas,
coletadas por receptores de simples ou dupla frequência, utilizam-se
efemérides precisas. Com este método, as coordenadas do vértice de
interesse são determinadas de forma absoluta, que dispensa o uso de
receptor instalado sobre um vértice de coordenadas conhecidas.
Posicionamento por Ponto Preciso (PPP)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
10/72
No PPP, obtêm-se alto nível de acurácia, quando todos os erros
são tratados adequadamente, ou seja, modelados, corrigidos ou
minimizados, e com um longo período de coleta de dados das
observações de receptores de dupla frequência.
Posicionamento por Ponto Preciso (PPP)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
11/72
No Brasil temos o serviço online para a realização do PPP, fornecido pelo IBGE,
chamado de IBGE-PPP, o qual é produto de uma parceria ente a Coordenação de
Geodésia do IBGE e a Geodetic Survey Division of Natural Resources of Canadá
(NRCan). Trata-se de um serviço online e gratuito para o pós-processamento de
dados GNSS, disponível desde abril de 2009, que faz uso do software CSRS-PPP
(GPS Precise Point Positioning) desenvolvido pela NRCan (IBGE, 2018d). O IBGE-
PPP possibilita aos usuários com receptores GPS e/ou GLONASS, adquirir
coordenadas de altas precisões referenciadas ao SIRGAS 2000 e ao ITRF.
Posicionamento por Ponto Preciso (PPP)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
12/72
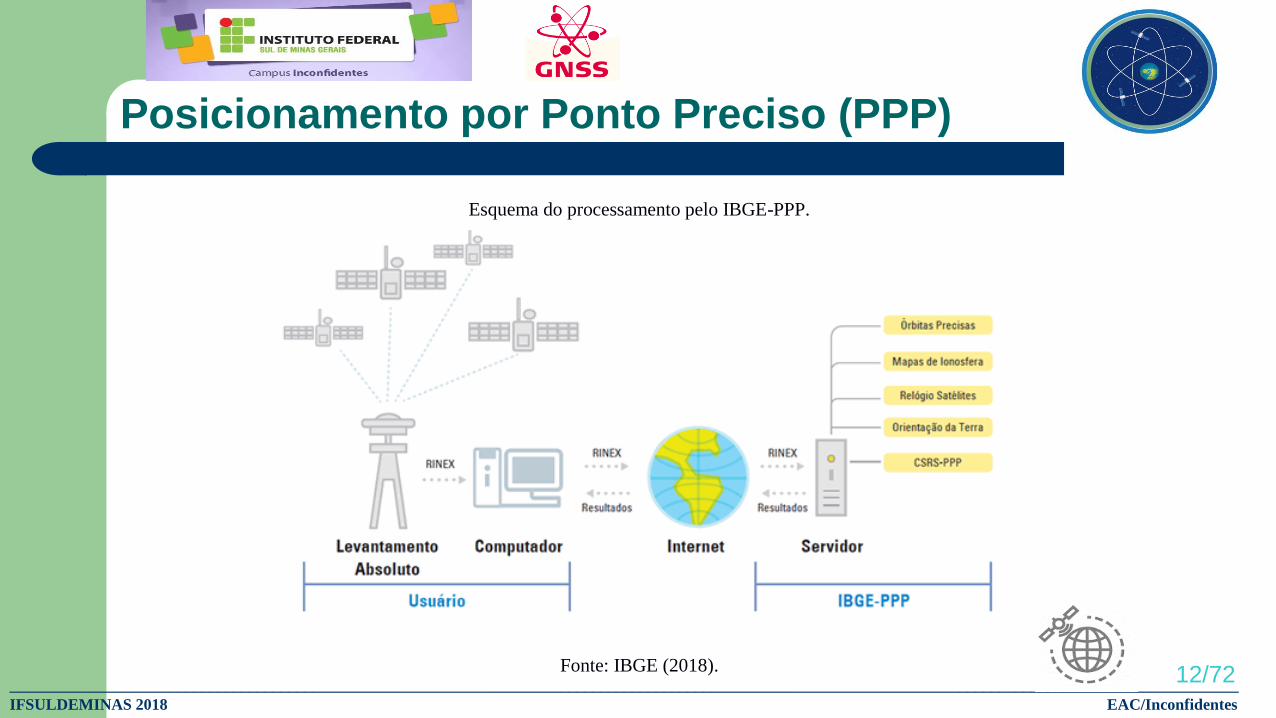
Posicionamento por Ponto Preciso (PPP)
Esquema do processamento pelo IBGE-PPP.
Fonte: IBGE (2018).
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
13/72
Posicionamento por Ponto Preciso (PPP)
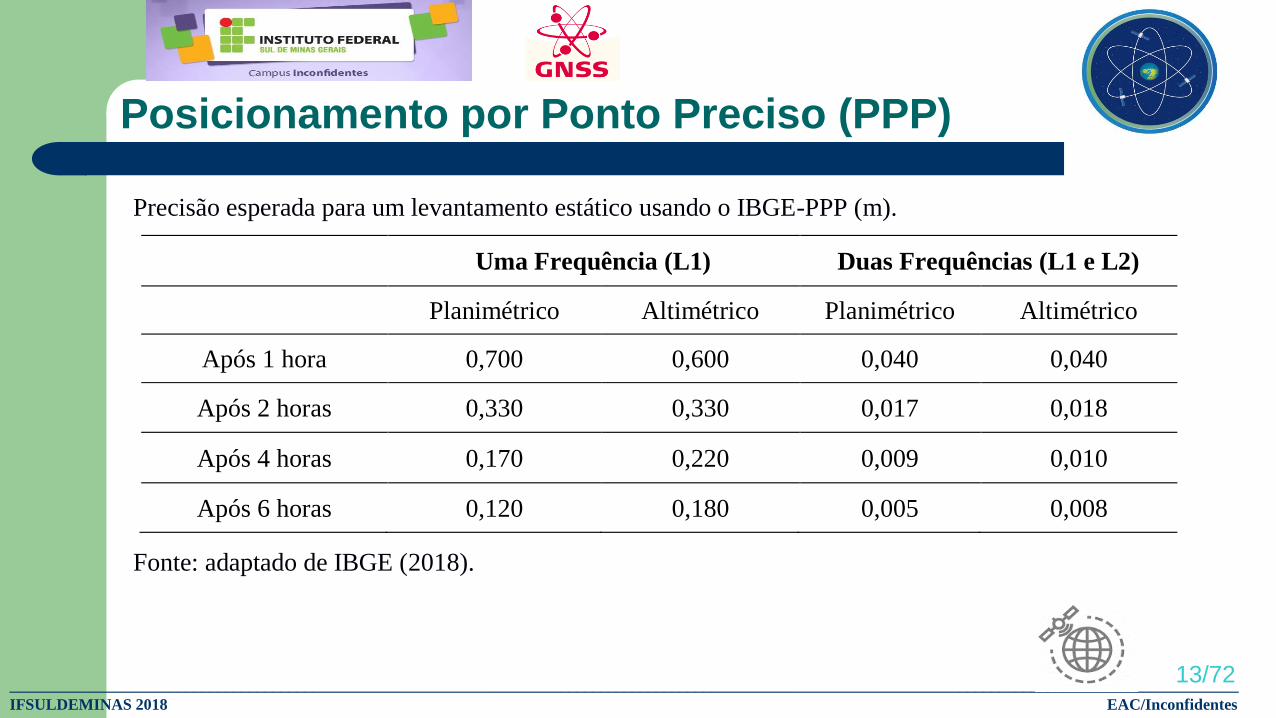
Precisão esperada para um levantamento estático usando o IBGE-PPP (m).
Uma Frequência (L1) Duas Frequências (L1 e L2)
Planimétrico Altimétrico Planimétrico Altimétrico
Após 1 hora 0,700 0,600 0,040 0,040
Após 2 horas 0,330 0,330 0,017 0,018
Após 4 horas 0,170 0,220 0,009 0,010
Após 6 horas 0,120 0,180 0,005 0,008
Fonte: adaptado de IBGE (2018).
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
14/72
Para esse posicionamento, algumas organizações têm
disponibilizado de forma on-line o PPP, que processa dados no modo
estático e cinemático. Tais como:
• JPL: http://apps.gdgps.net/index.php
• OPUS: http://www.ngs.noaa.gov/OPUS/
• NRCan: http://www.nrcan.gc.ca/earth-sciences/geomatics/geodetic-
reference-systems/tools-applications/10925#ppp
• GAPS: http://gaps.gge.unb.ca/
• AUPOS: http://www.ga.gov.au/bin/gps.pl
• IBGE: http://www.ppp.ibge.gov.br/ppp.htm
Posicionamento por Ponto Preciso (PPP)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
15/72
O PPP em tempo real deve-se ao fato de alguns centros passarem a disponibilizar os
produtos essenciais para o PPP (efemérides e correções dos relógios dos satélites)
em tempo real. Organizações prestam serviços de PPP on-line em tempo real:
• JPL – GDGPS: http://www.gdgps.net/
• IBGE:http://www.ibge.gov.br/home/geociencias/geodesia/rbmc/ppp_tempo_real.shtm
• BNC do BKG: http://igs.bkg.bund.de/ntrip/download
• RT PPP – Prof. Haroldo Marques (2012) – UFPE:
http://www.fct.unesp.br/#!/pesquisa/grupos-de-estudo-e-pesquisa/gege/pps-on-
line/rtppponline/
• RTKLib: http://www.rtklib.com/
Posicionamento por Ponto Preciso (PPP)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
16/72
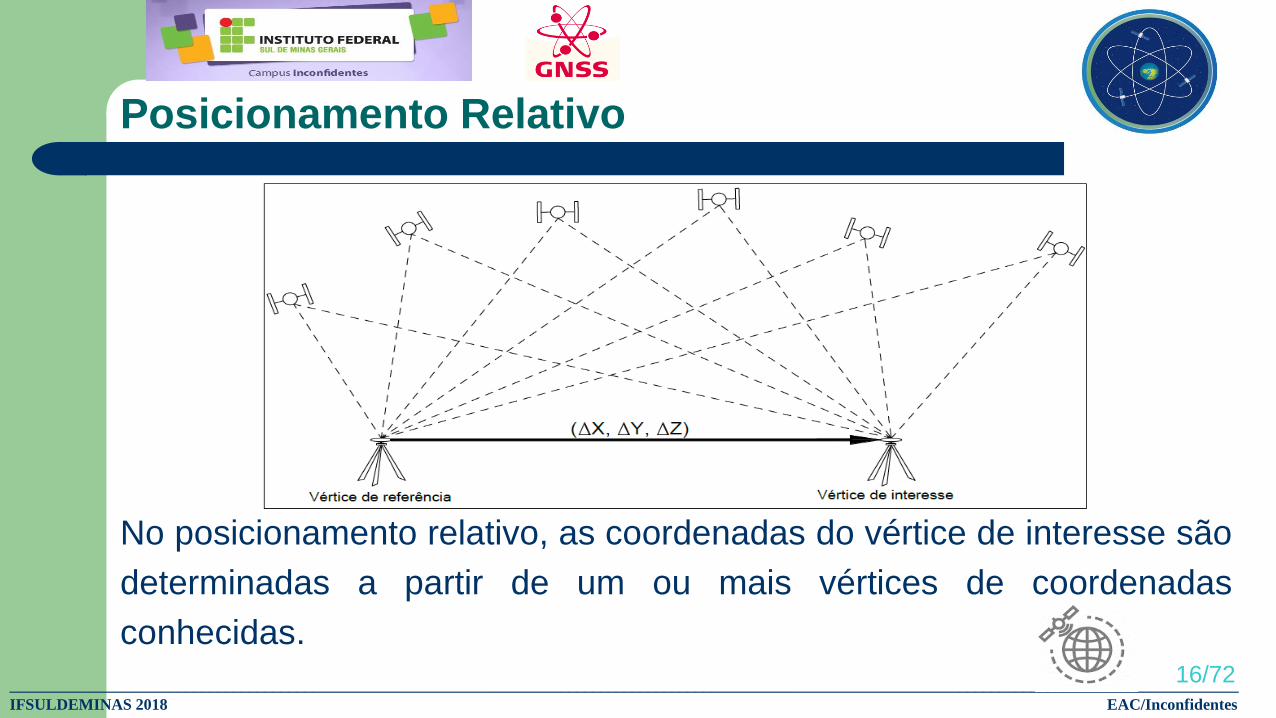
No posicionamento relativo, as coordenadas do vértice de interesse são
determinadas a partir de um ou mais vértices de coordenadas
conhecidas.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
17/72
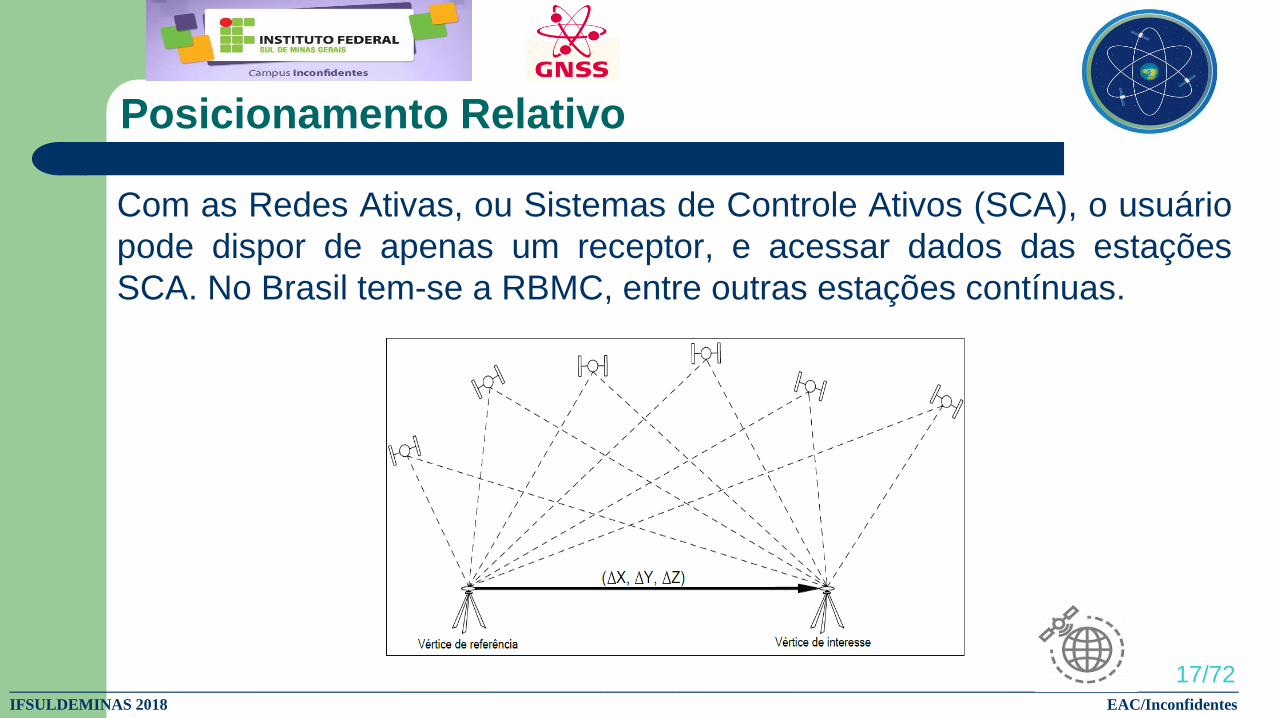
Com as Redes Ativas, ou Sistemas de Controle Ativos (SCA), o usuário
pode dispor de apenas um receptor, e acessar dados das estações
SCA. No Brasil tem-se a RBMC, entre outras estações contínuas.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
18/72
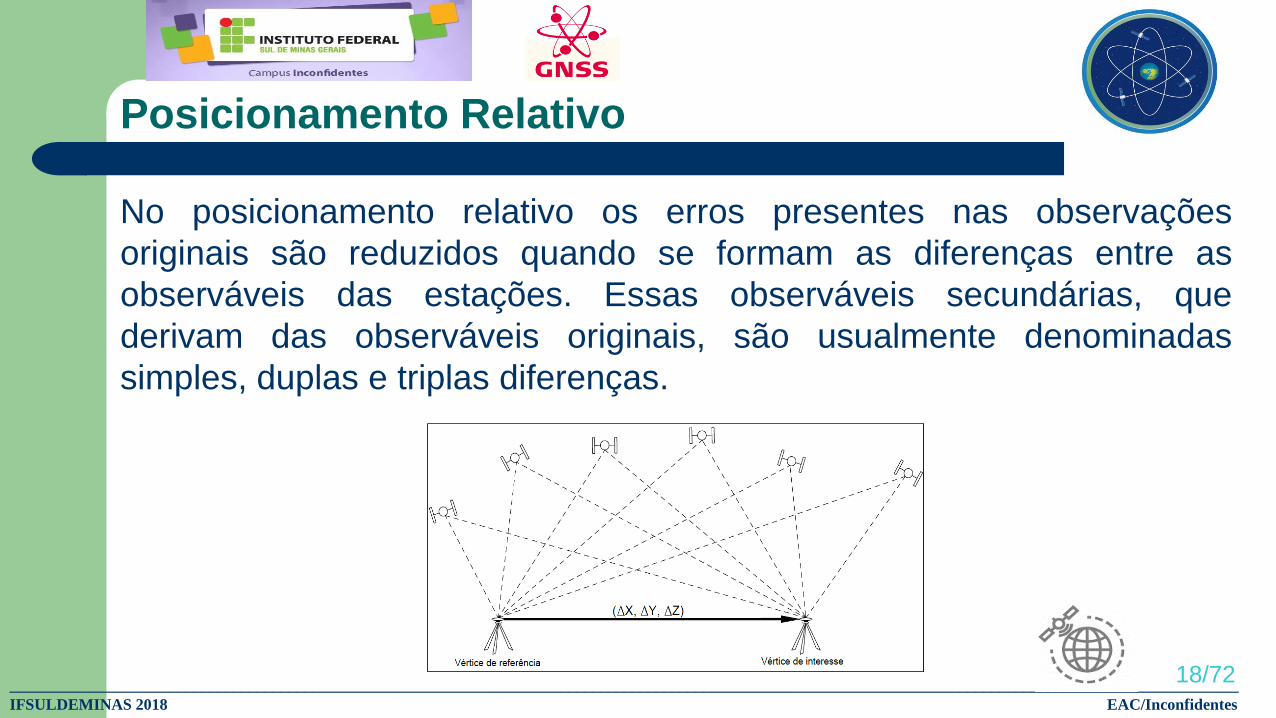
No posicionamento relativo os erros presentes nas observações
originais são reduzidos quando se formam as diferenças entre as
observáveis das estações. Essas observáveis secundárias, que
derivam das observáveis originais, são usualmente denominadas
simples, duplas e triplas diferenças.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
19/72
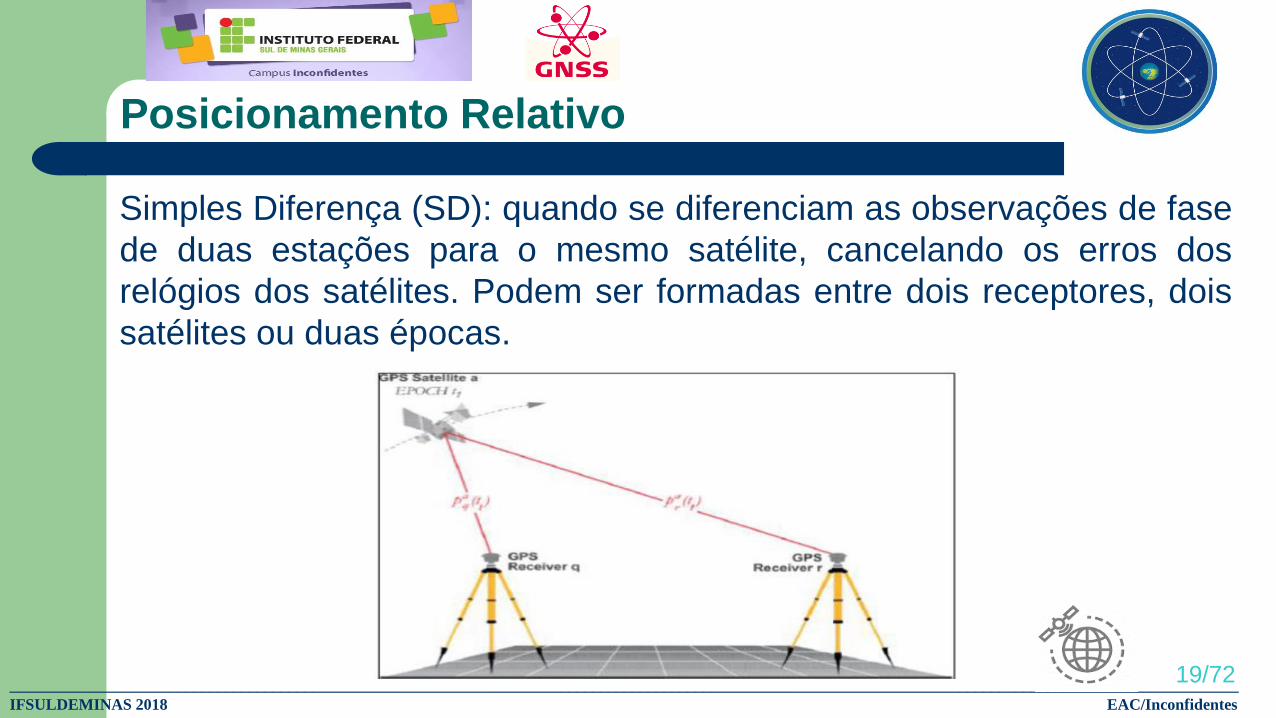
Simples Diferença (SD): quando se diferenciam as observações de fase
de duas estações para o mesmo satélite, cancelando os erros dos
relógios dos satélites. Podem ser formadas entre dois receptores, dois
satélites ou duas épocas.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
20/72
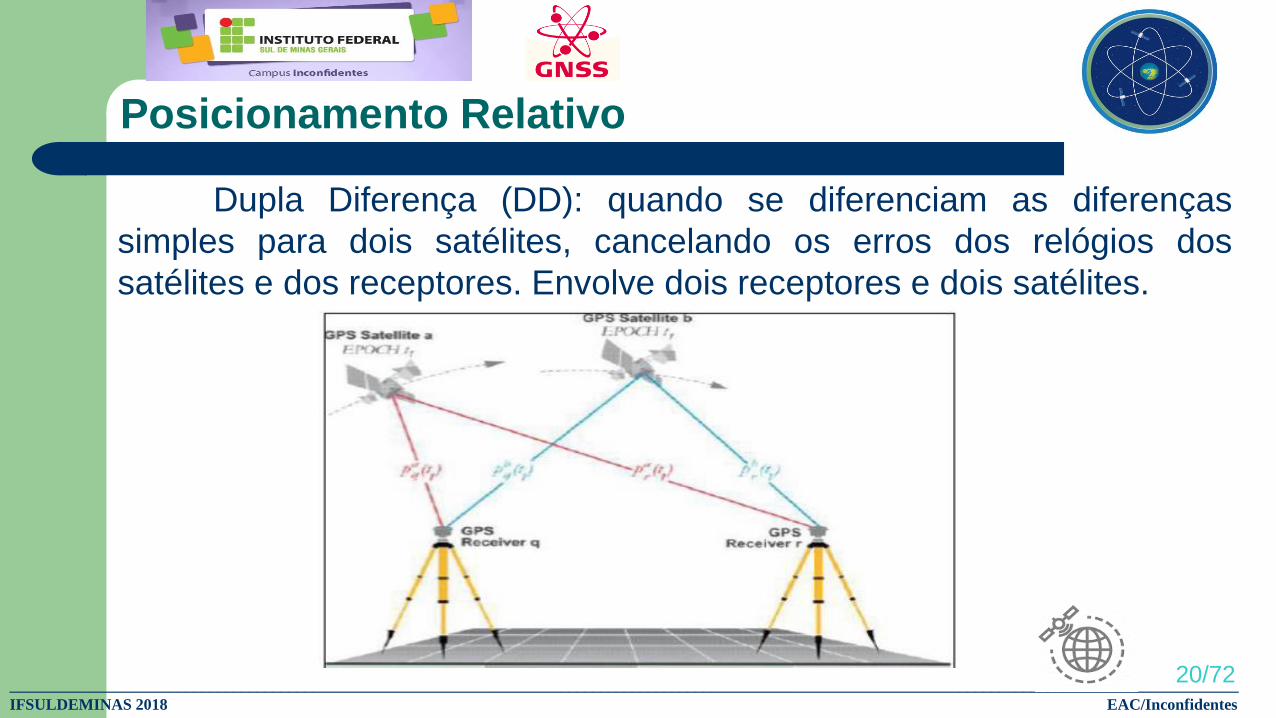
Dupla Diferença (DD): quando se diferenciam as diferenças
simples para dois satélites, cancelando os erros dos relógios dos
satélites e dos receptores. Envolve dois receptores e dois satélites.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
21/72
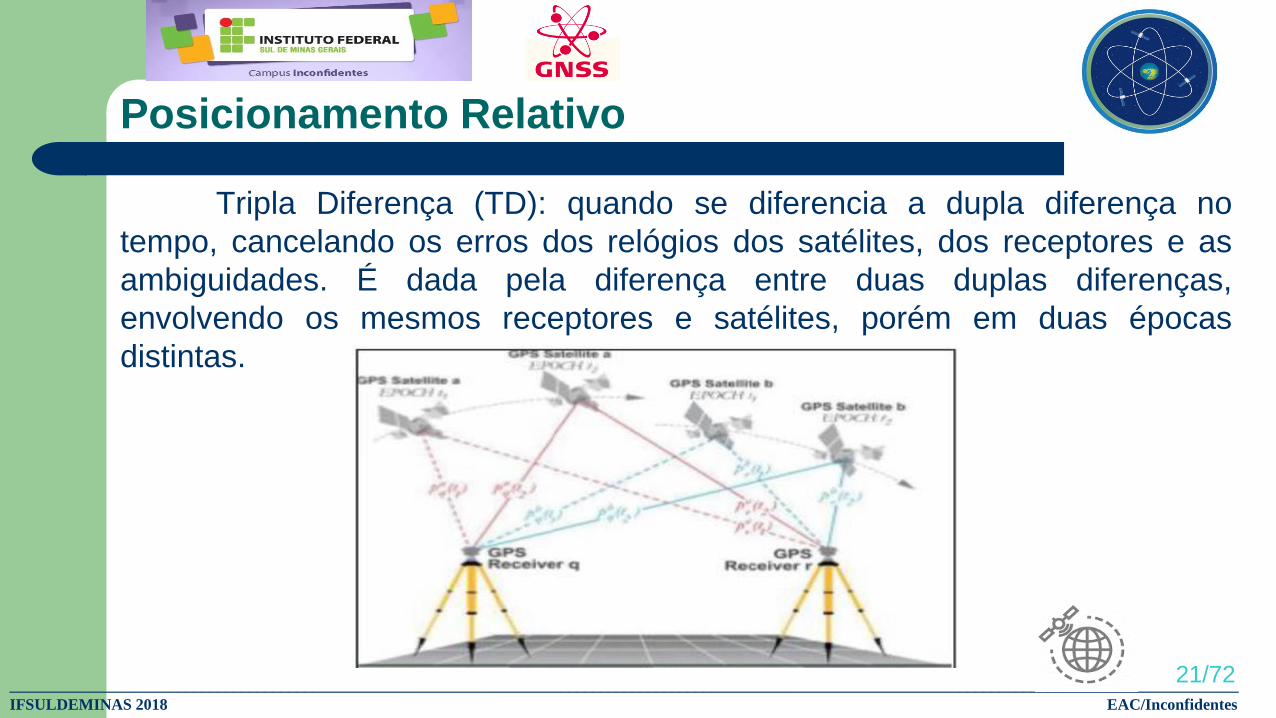
Tripla Diferença (TD): quando se diferencia a dupla diferença no
tempo, cancelando os erros dos relógios dos satélites, dos receptores e as
ambiguidades. É dada pela diferença entre duas duplas diferenças,
envolvendo os mesmos receptores e satélites, porém em duas épocas
distintas.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
22/72
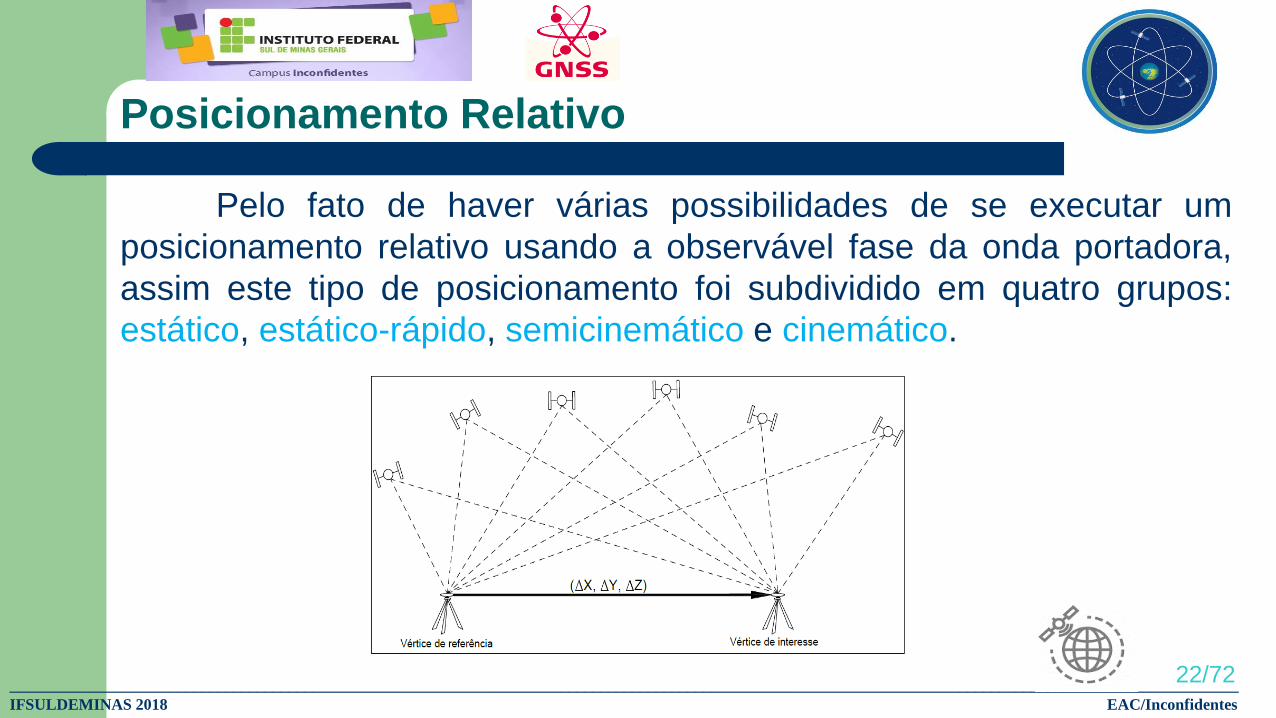
Pelo fato de haver várias possibilidades de se executar um
posicionamento relativo usando a observável fase da onda portadora,
assim este tipo de posicionamento foi subdividido em quatro grupos:
estático, estático-rápido, semicinemático e cinemático.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
23/72
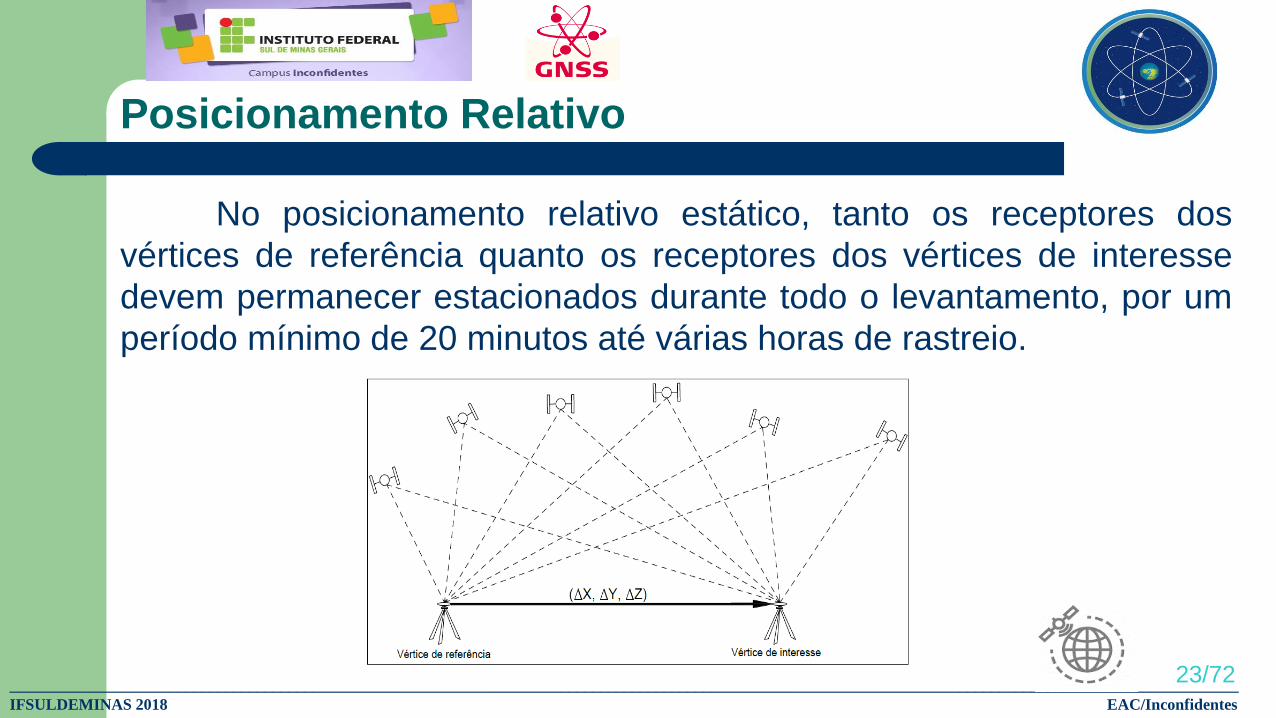
No posicionamento relativo estático, tanto os receptores dos
vértices de referência quanto os receptores dos vértices de interesse
devem permanecer estacionados durante todo o levantamento, por um
período mínimo de 20 minutos até várias horas de rastreio.
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
24/72
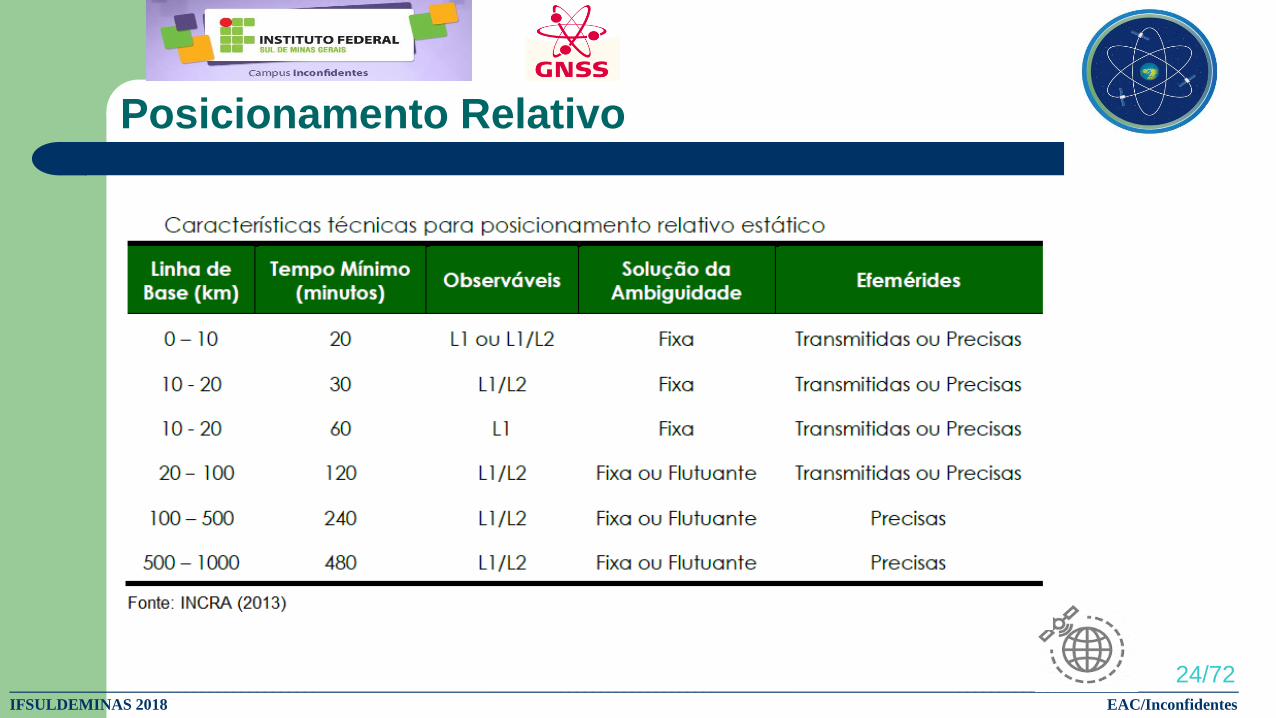
Posicionamento Relativo
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
25/72
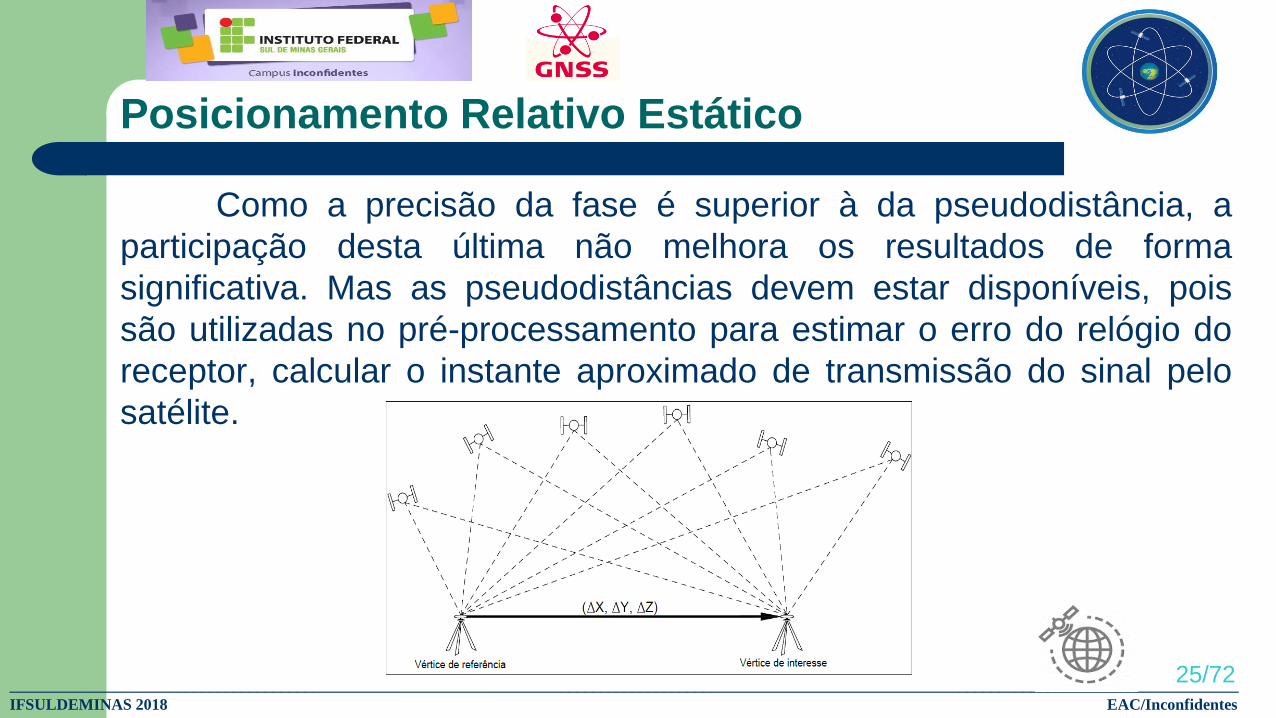
Como a precisão da fase é superior à da pseudodistância, a
participação desta última não melhora os resultados de forma
significativa. Mas as pseudodistâncias devem estar disponíveis, pois
são utilizadas no pré-processamento para estimar o erro do relógio do
receptor, calcular o instante aproximado de transmissão do sinal pelo
satélite.
Posicionamento Relativo Estático

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
26/72
A figura mostra que, depois de
certo período de coleta de dados, a
precisão, tanto das coordenadas
quanto das ambiguidades, se
estabiliza.
Posicionamento Relativo Estático
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
27/72
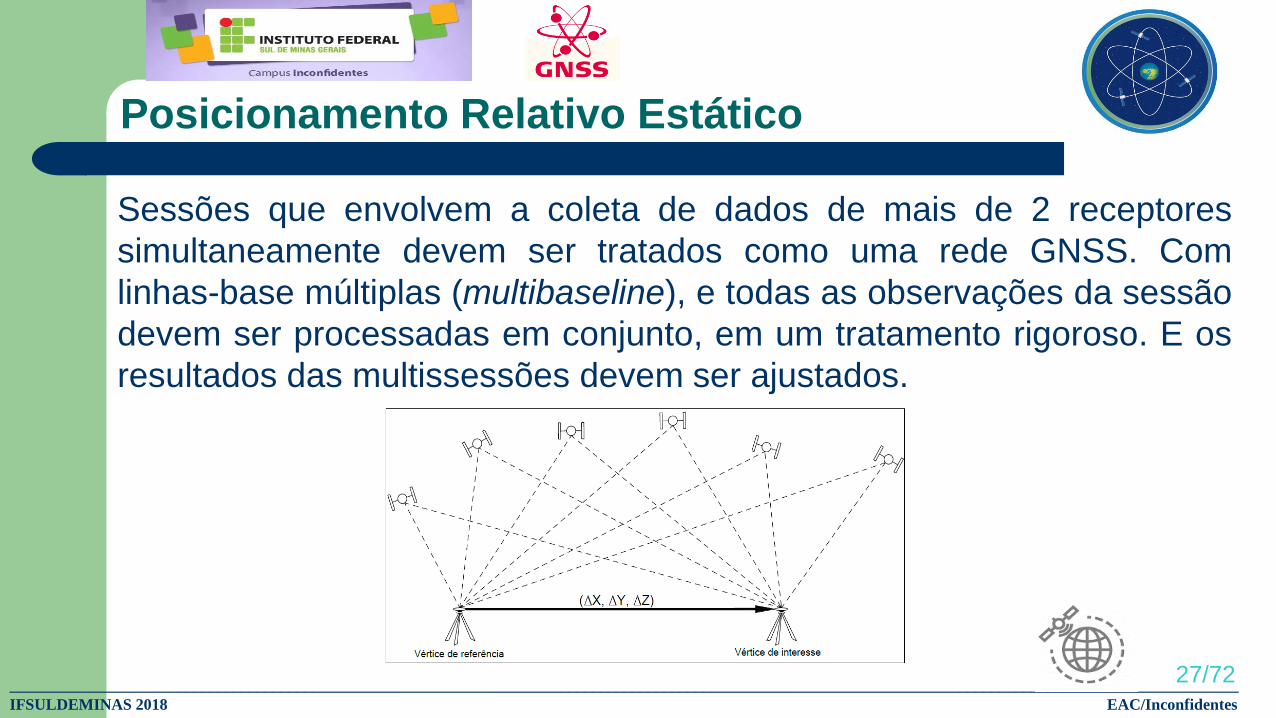
Sessões que envolvem a coleta de dados de mais de 2 receptores
simultaneamente devem ser tratados como uma rede GNSS. Com
linhas-base múltiplas (multibaseline), e todas as observações da sessão
devem ser processadas em conjunto, em um tratamento rigoroso. E os
resultados das multissessões devem ser ajustados.
Posicionamento Relativo Estático
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
28/72
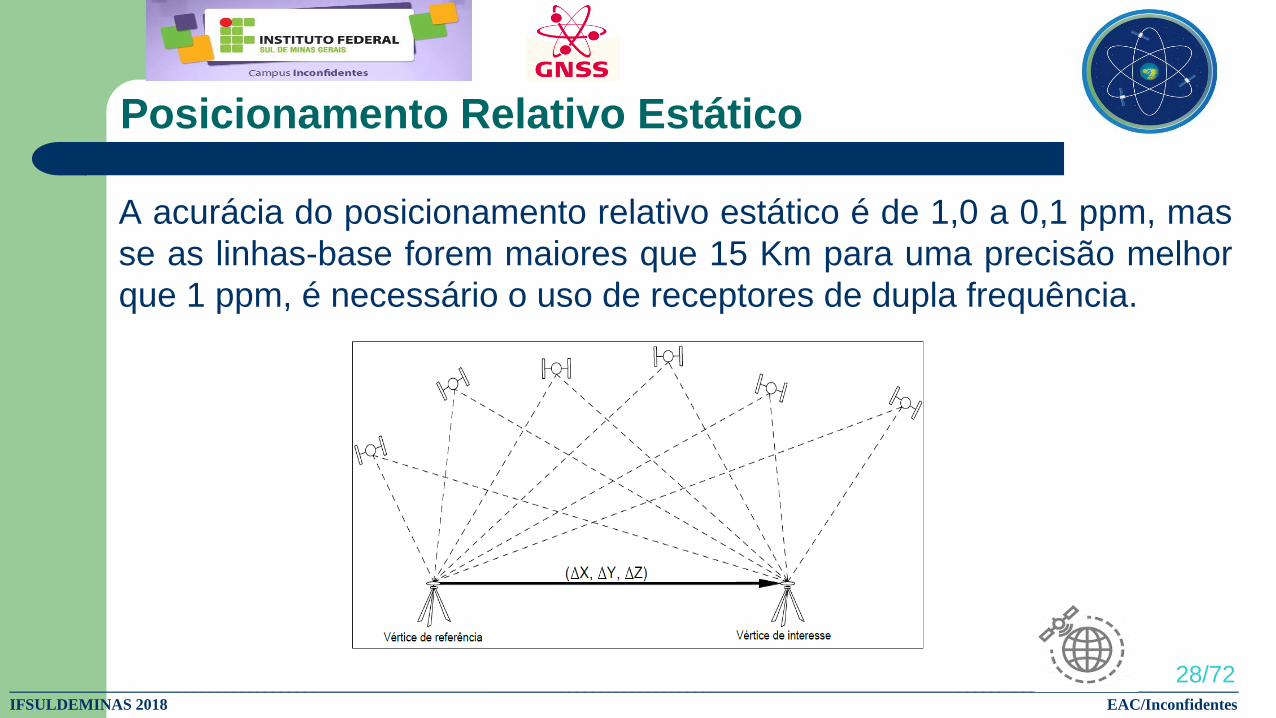
A acurácia do posicionamento relativo estático é de 1,0 a 0,1 ppm, mas
se as linhas-base forem maiores que 15 Km para uma precisão melhor
que 1 ppm, é necessário o uso de receptores de dupla frequência.
Posicionamento Relativo Estático
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
29/72
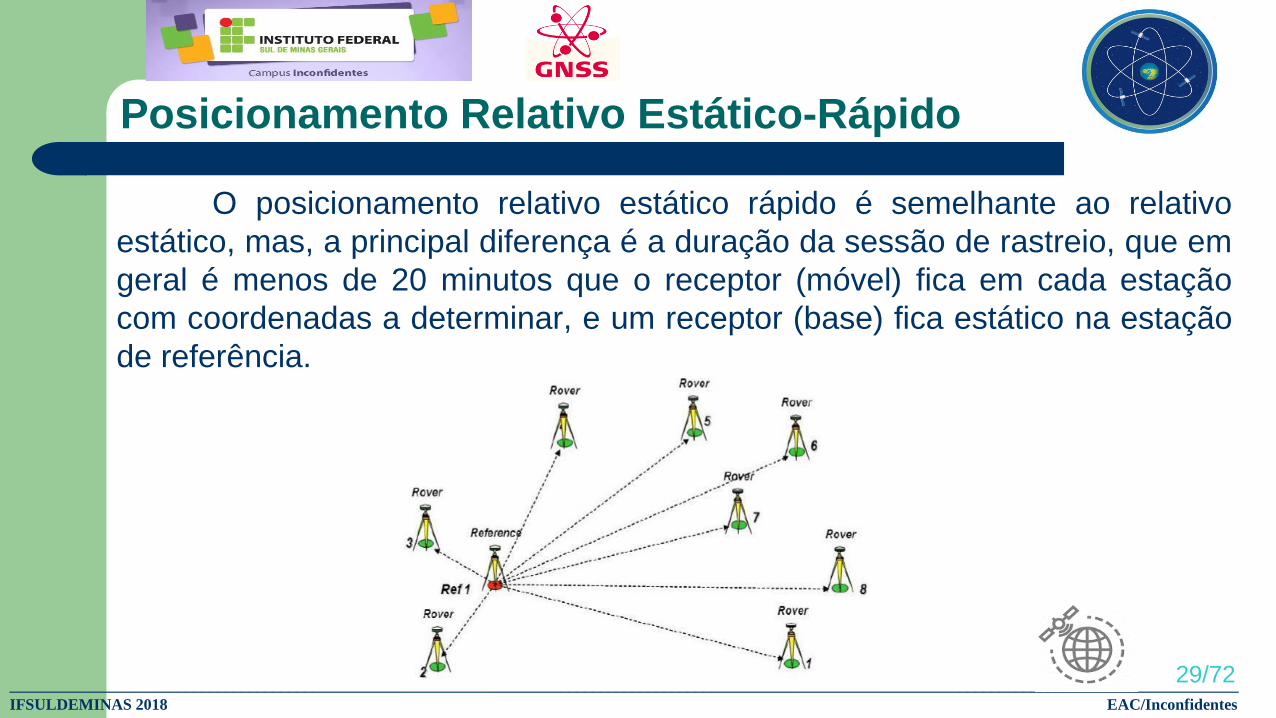
O posicionamento relativo estático rápido é semelhante ao relativo
estático, mas, a principal diferença é a duração da sessão de rastreio, que em
geral é menos de 20 minutos que o receptor (móvel) fica em cada estação
com coordenadas a determinar, e um receptor (base) fica estático na estação
de referência.
Posicionamento Relativo Estático-Rápido
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
30/72
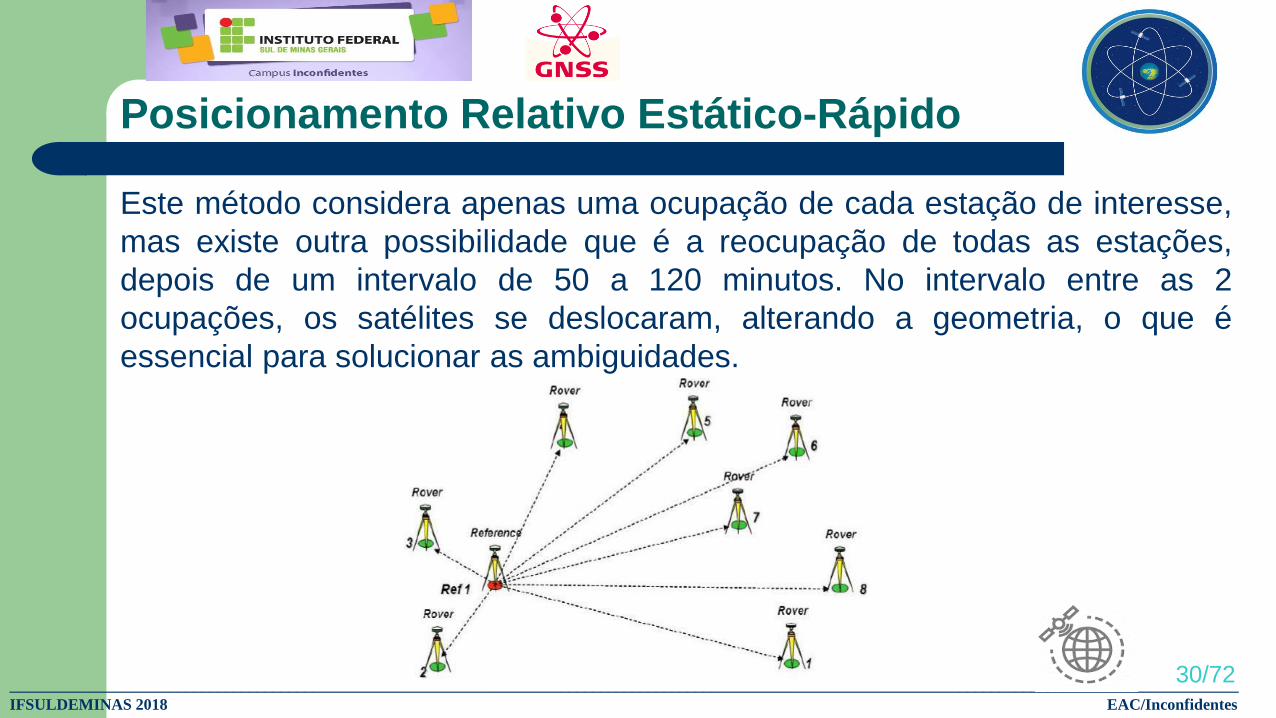
Este método considera apenas uma ocupação de cada estação de interesse,
mas existe outra possibilidade que é a reocupação de todas as estações,
depois de um intervalo de 50 a 120 minutos. No intervalo entre as 2
ocupações, os satélites se deslocaram, alterando a geometria, o que é
essencial para solucionar as ambiguidades.
Posicionamento Relativo Estático-Rápido
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
31/72
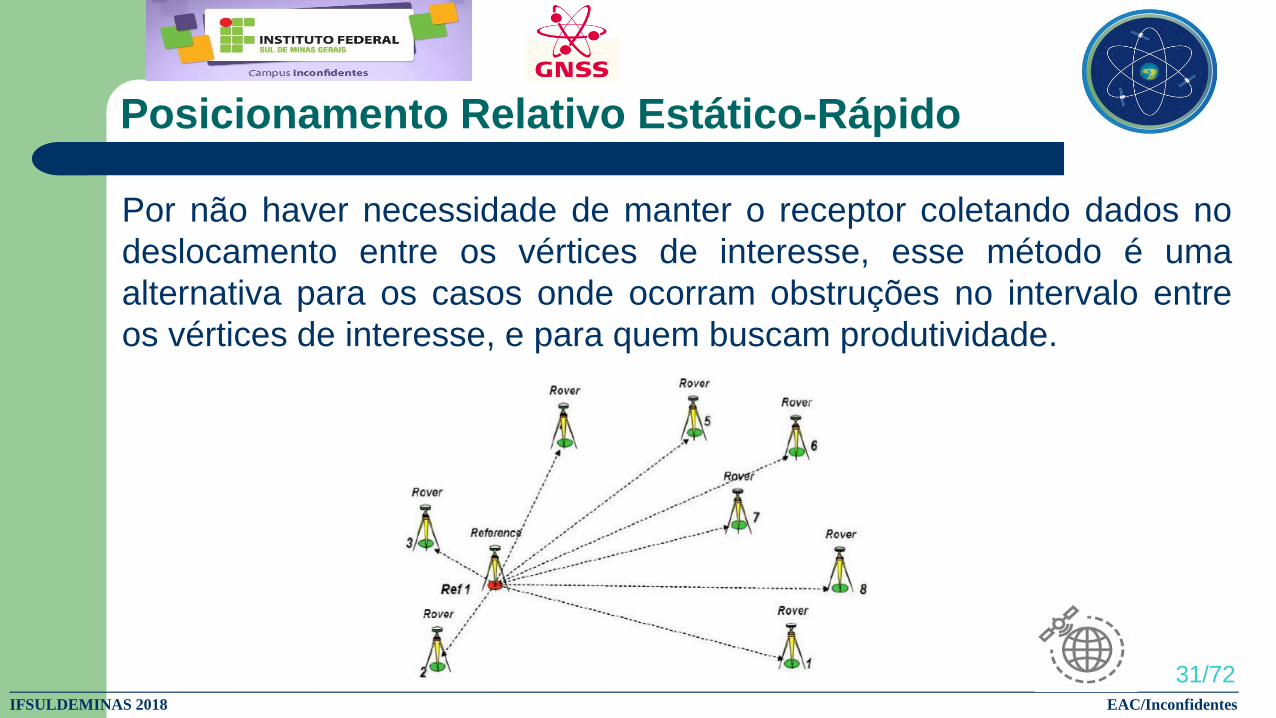
Por não haver necessidade de manter o receptor coletando dados no
deslocamento entre os vértices de interesse, esse método é uma
alternativa para os casos onde ocorram obstruções no intervalo entre
os vértices de interesse, e para quem buscam produtividade.
Posicionamento Relativo Estático-Rápido
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
32/72
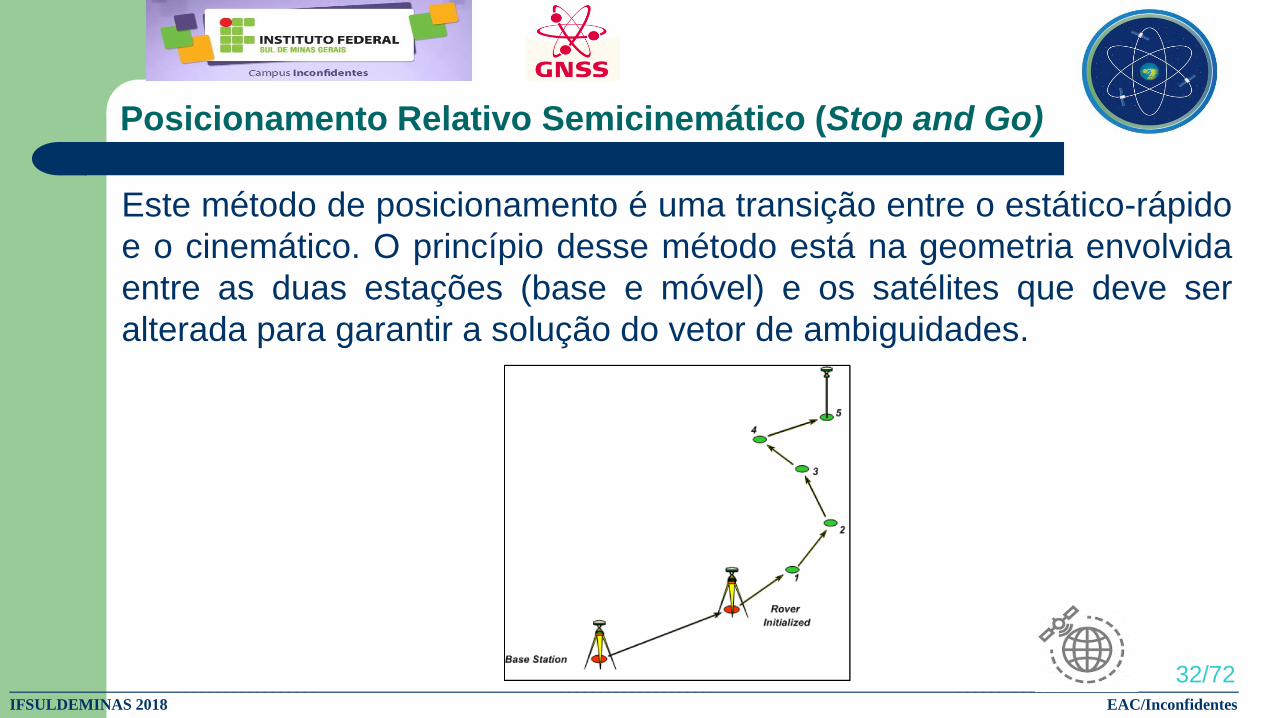
Este método de posicionamento é uma transição entre o estático-rápido
e o cinemático. O princípio desse método está na geometria envolvida
entre as duas estações (base e móvel) e os satélites que deve ser
alterada para garantir a solução do vetor de ambiguidades.
Posicionamento Relativo Semicinemático (Stop and Go)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
33/72
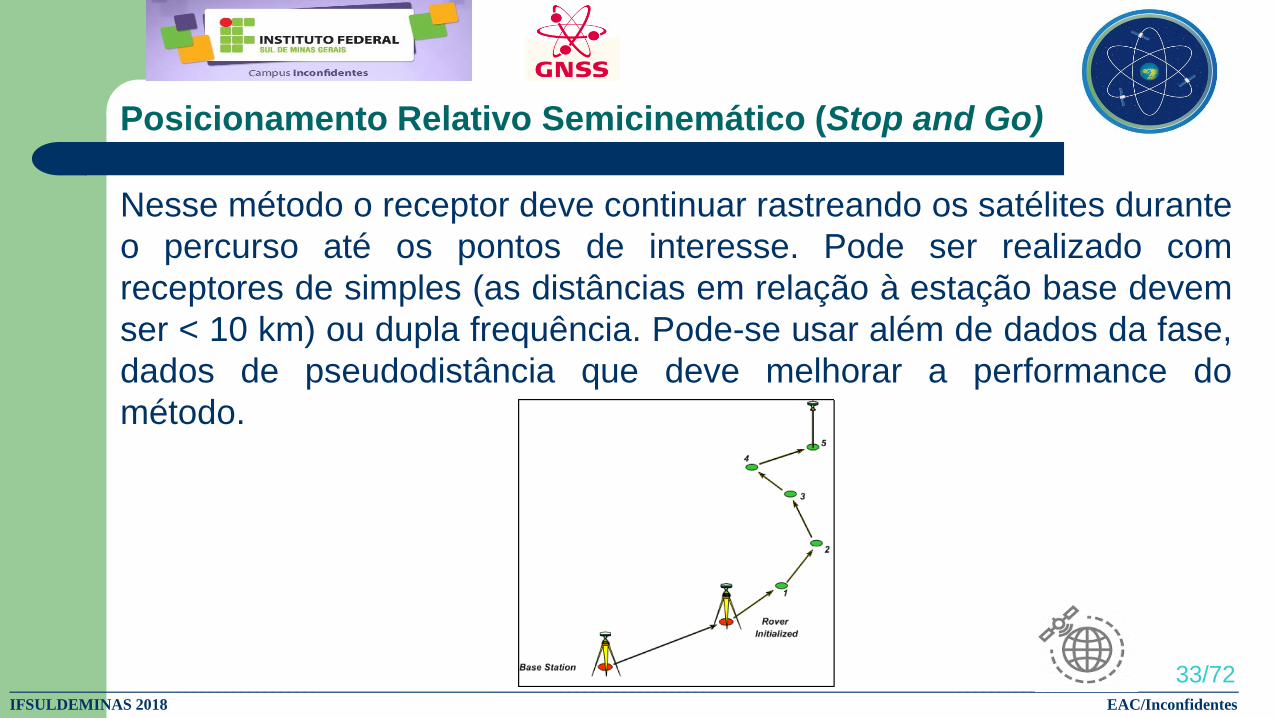
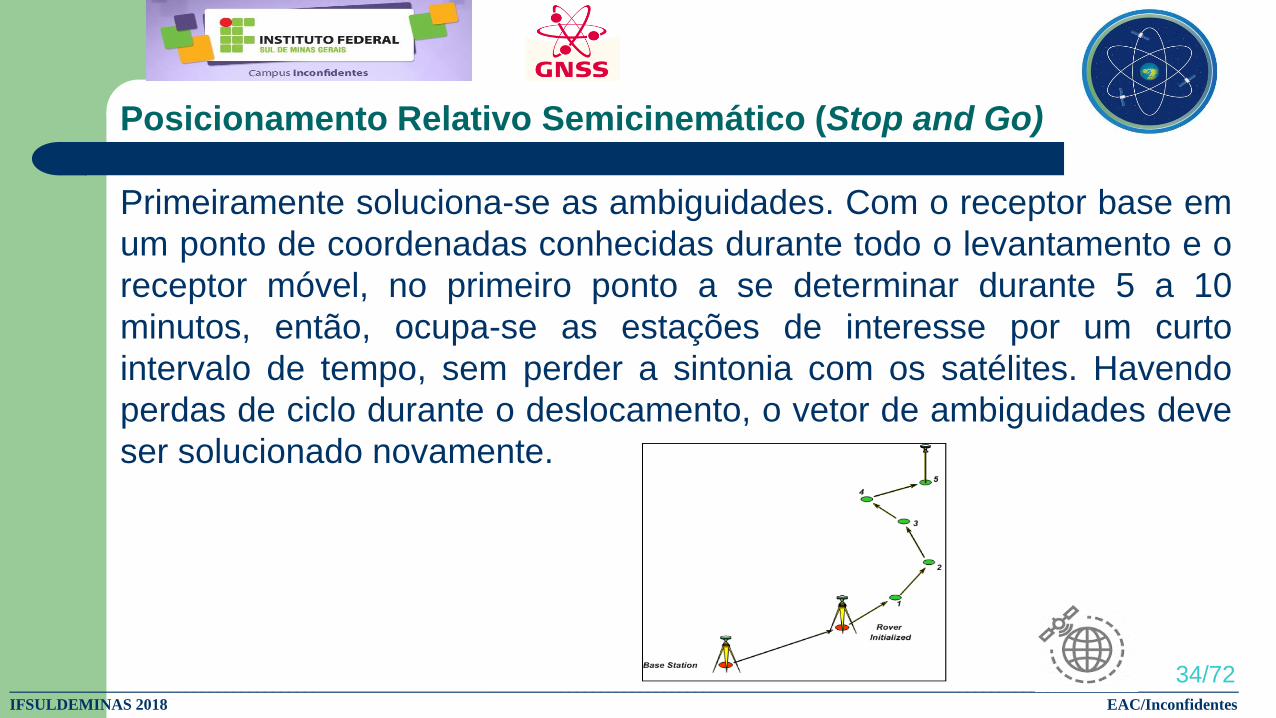
Nesse método o receptor deve continuar rastreando os satélites durante
o percurso até os pontos de interesse. Pode ser realizado com
receptores de simples (as distâncias em relação à estação base devem
ser < 10 km) ou dupla frequência. Pode-se usar além de dados da fase,
dados de pseudodistância que deve melhorar a performance do
método.
Posicionamento Relativo Semicinemático (Stop and Go)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
34/72
Primeiramente soluciona-se as ambiguidades. Com o receptor base em
um ponto de coordenadas conhecidas durante todo o levantamento e o
receptor móvel, no primeiro ponto a se determinar durante 5 a 10
minutos, então, ocupa-se as estações de interesse por um curto
intervalo de tempo, sem perder a sintonia com os satélites. Havendo
perdas de ciclo durante o deslocamento, o vetor de ambiguidades deve
ser solucionado novamente.
Posicionamento Relativo Semicinemático (Stop and Go)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
35/72
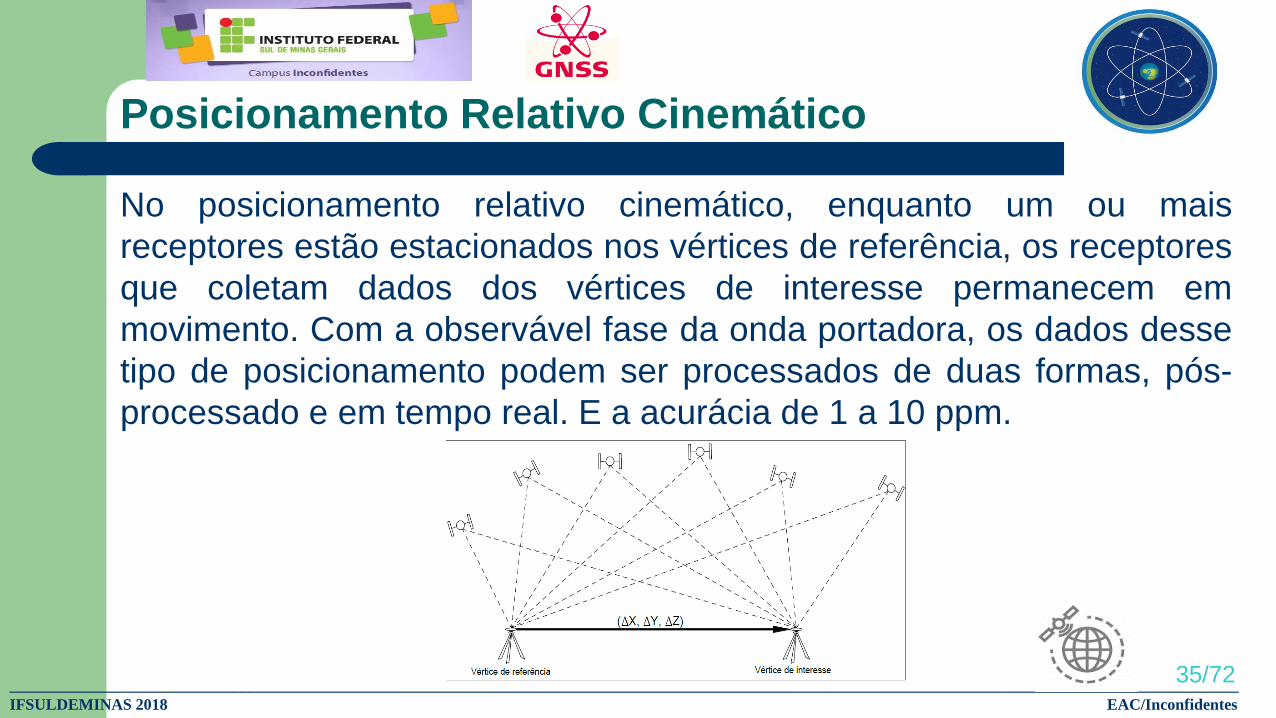
No posicionamento relativo cinemático, enquanto um ou mais
receptores estão estacionados nos vértices de referência, os receptores
que coletam dados dos vértices de interesse permanecem em
movimento. Com a observável fase da onda portadora, os dados desse
tipo de posicionamento podem ser processados de duas formas, pós-
processado e em tempo real. E a acurácia de 1 a 10 ppm.
Posicionamento Relativo Cinemático
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
36/72
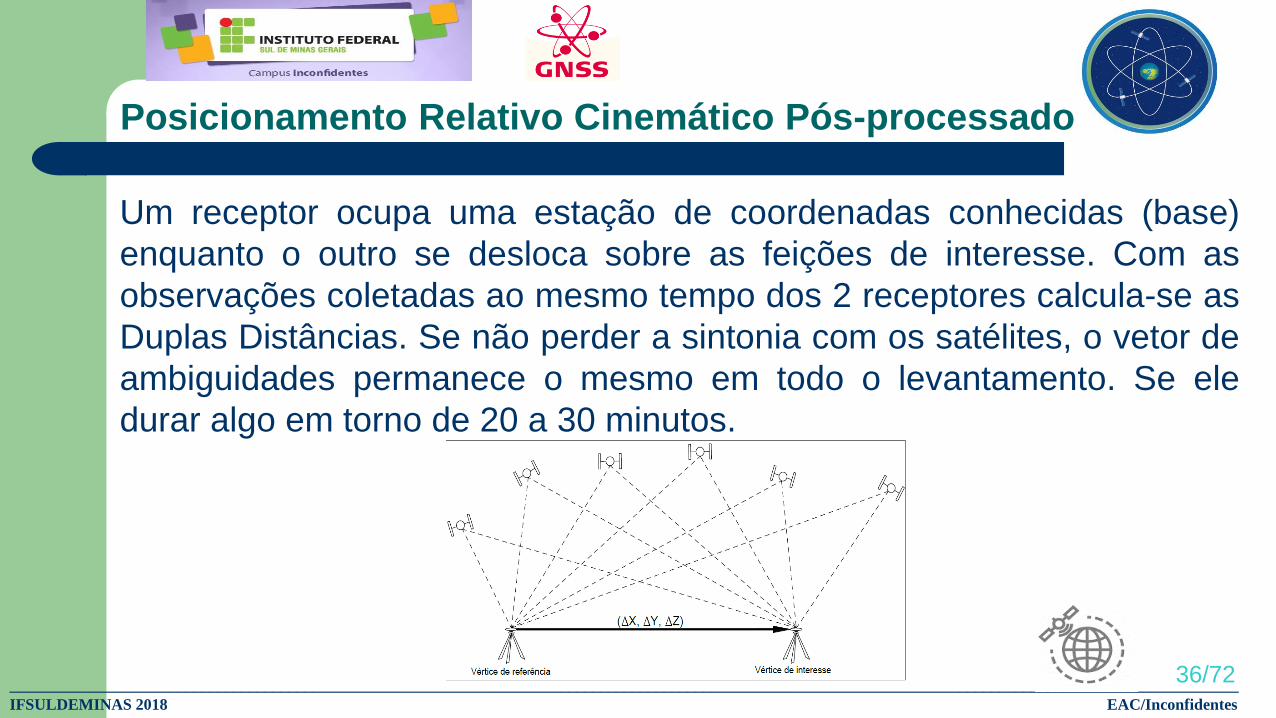
Um receptor ocupa uma estação de coordenadas conhecidas (base)
enquanto o outro se desloca sobre as feições de interesse. Com as
observações coletadas ao mesmo tempo dos 2 receptores calcula-se as
Duplas Distâncias. Se não perder a sintonia com os satélites, o vetor de
ambiguidades permanece o mesmo em todo o levantamento. Se ele
durar algo em torno de 20 a 30 minutos.
Posicionamento Relativo Cinemático Pós-processado
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
37/72
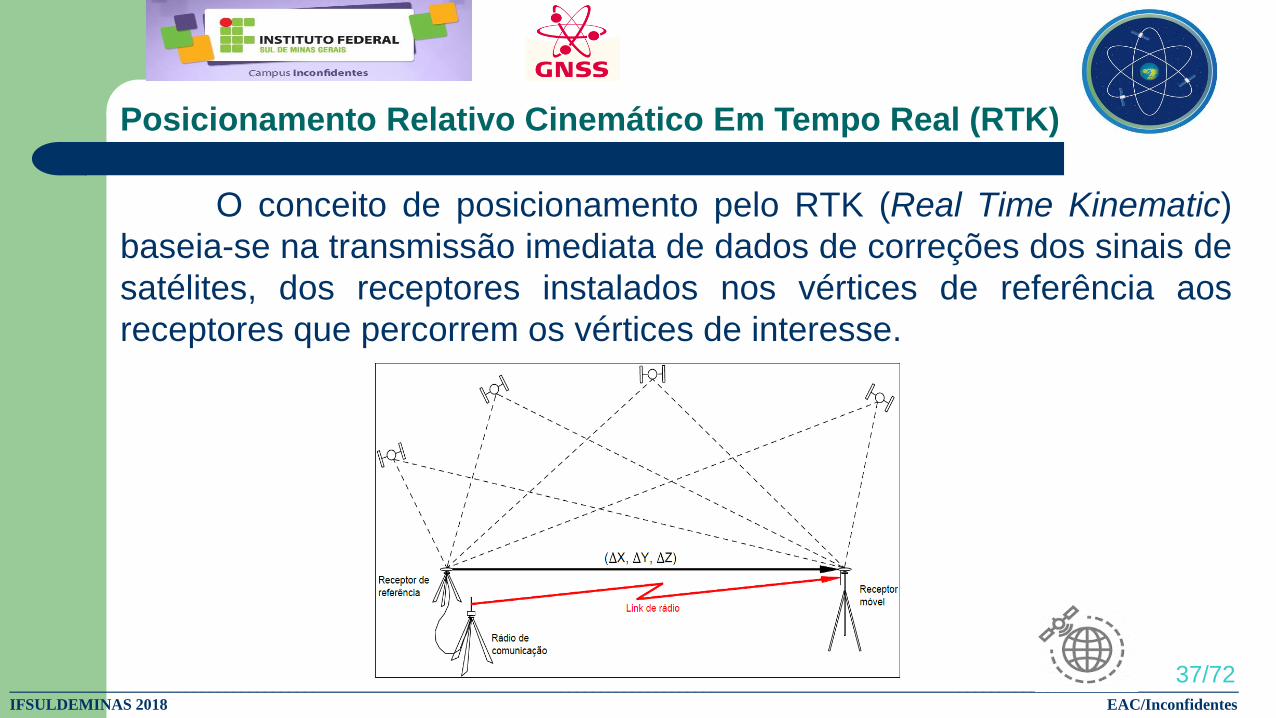
O conceito de posicionamento pelo RTK (Real Time Kinematic)
baseia-se na transmissão imediata de dados de correções dos sinais de
satélites, dos receptores instalados nos vértices de referência aos
receptores que percorrem os vértices de interesse.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
38/72
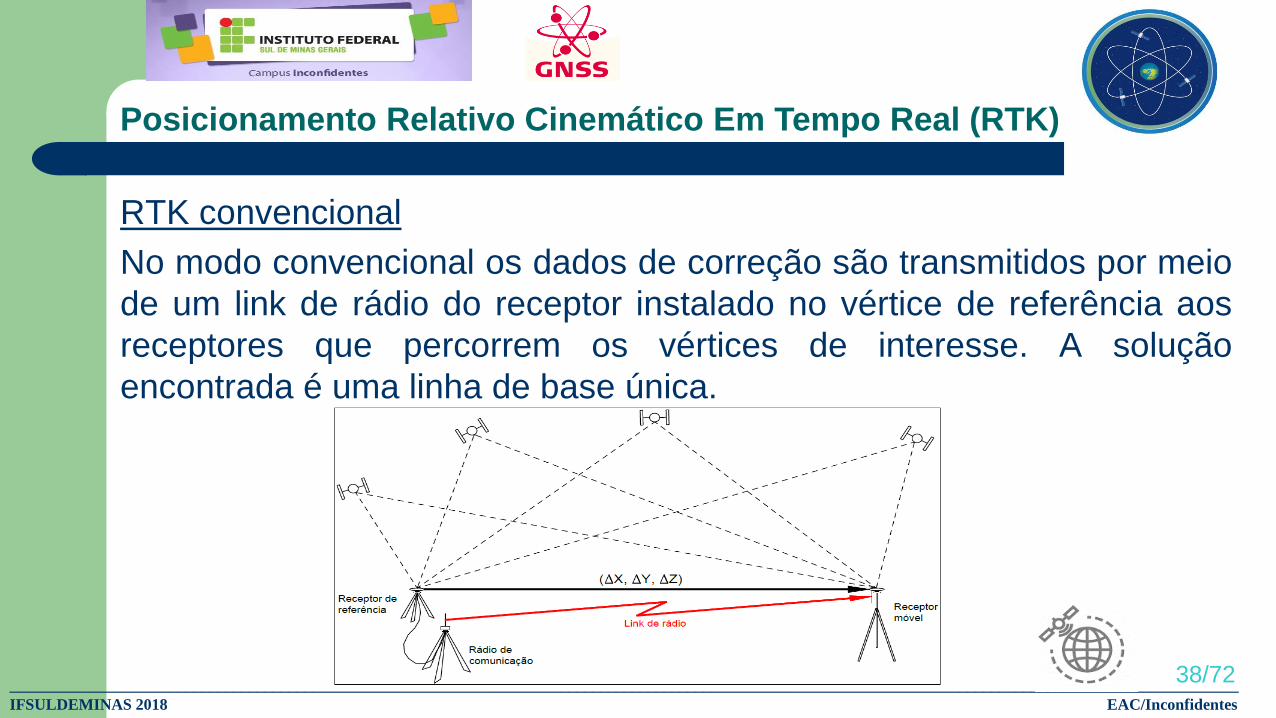
RTK convencional
No modo convencional os dados de correção são transmitidos por meio
de um link de rádio do receptor instalado no vértice de referência aos
receptores que percorrem os vértices de interesse. A solução
encontrada é uma linha de base única.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
39/72
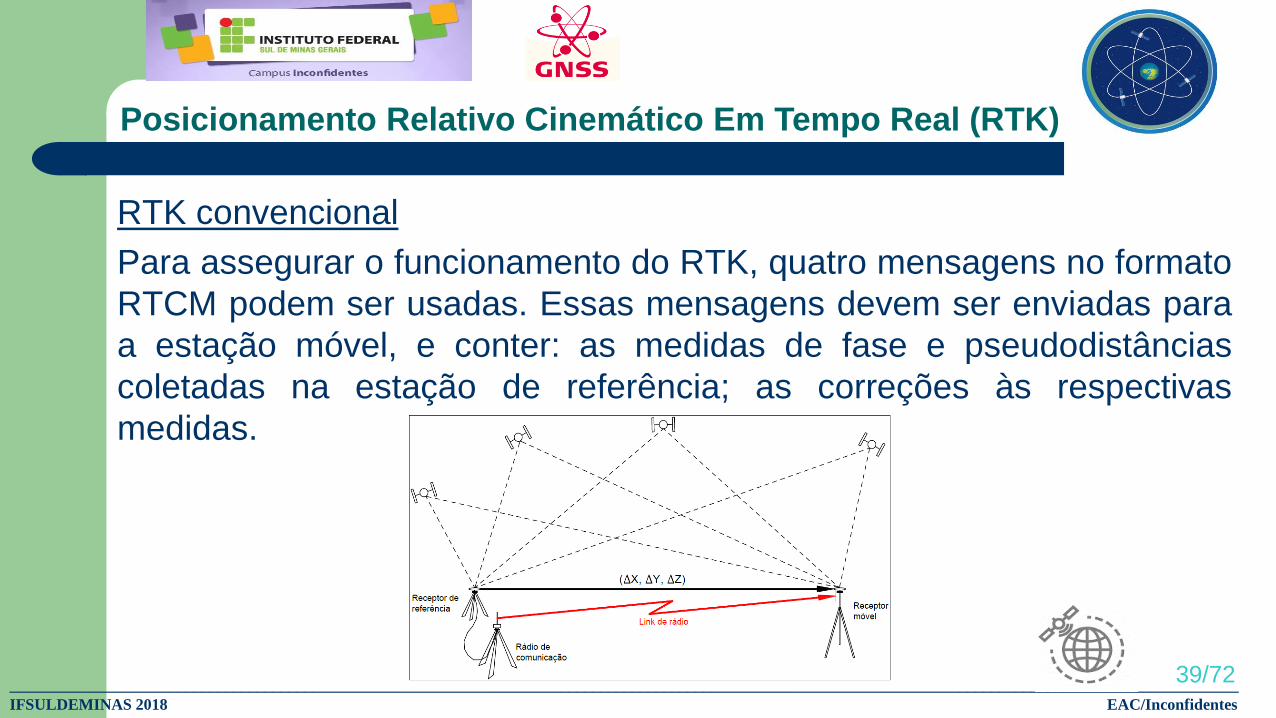
RTK convencional
Para assegurar o funcionamento do RTK, quatro mensagens no formato
RTCM podem ser usadas. Essas mensagens devem ser enviadas para
a estação móvel, e conter: as medidas de fase e pseudodistâncias
coletadas na estação de referência; as correções às respectivas
medidas.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
40/72
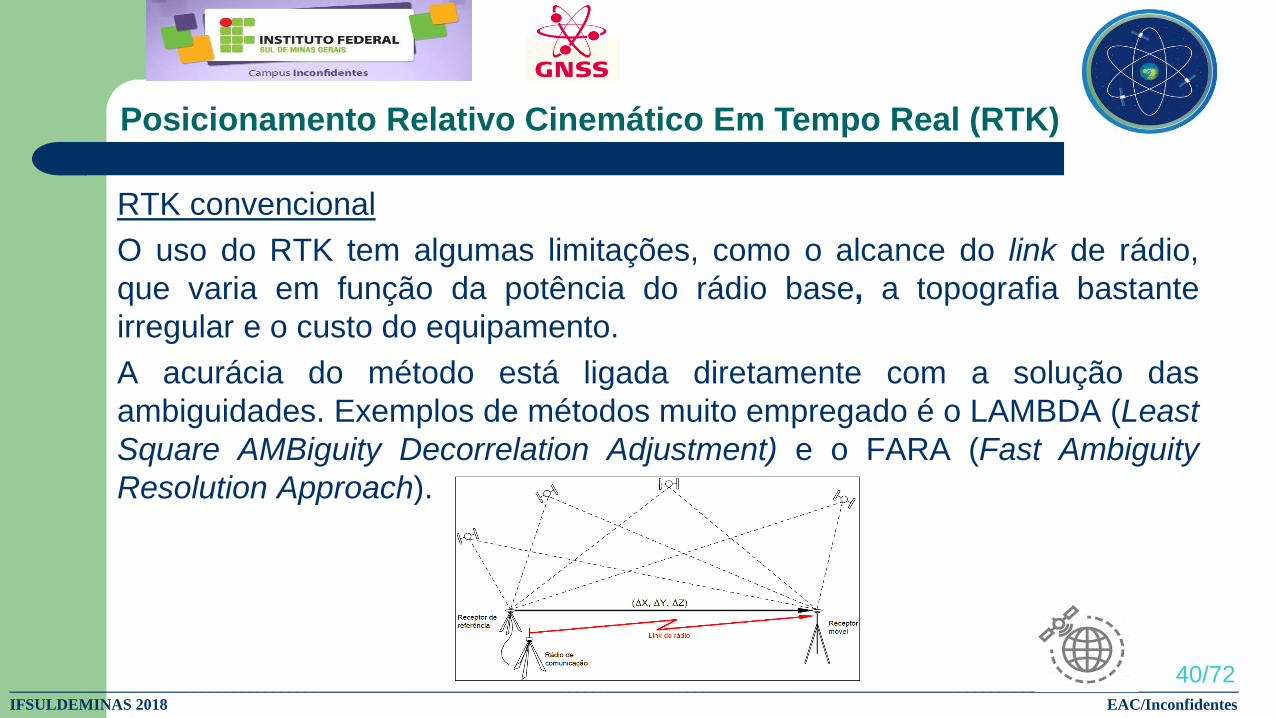
RTK convencional
O uso do RTK tem algumas limitações, como o alcance do link de rádio,
que varia em função da potência do rádio base, a topografia bastante
irregular e o custo do equipamento.
A acurácia do método está ligada diretamente com a solução das
ambiguidades. Exemplos de métodos muito empregado é o LAMBDA (Least
Square AMBiguity Decorrelation Adjustment) e o FARA (Fast Ambiguity
Resolution Approach).
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
41/72
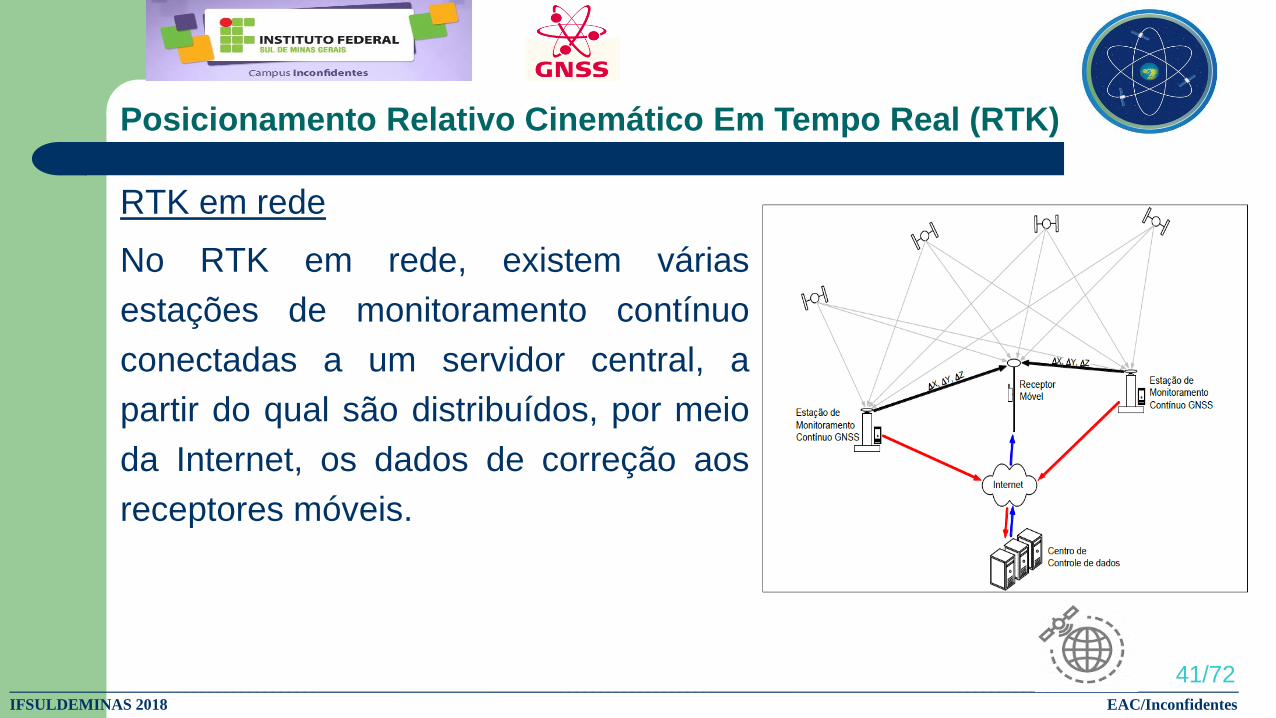
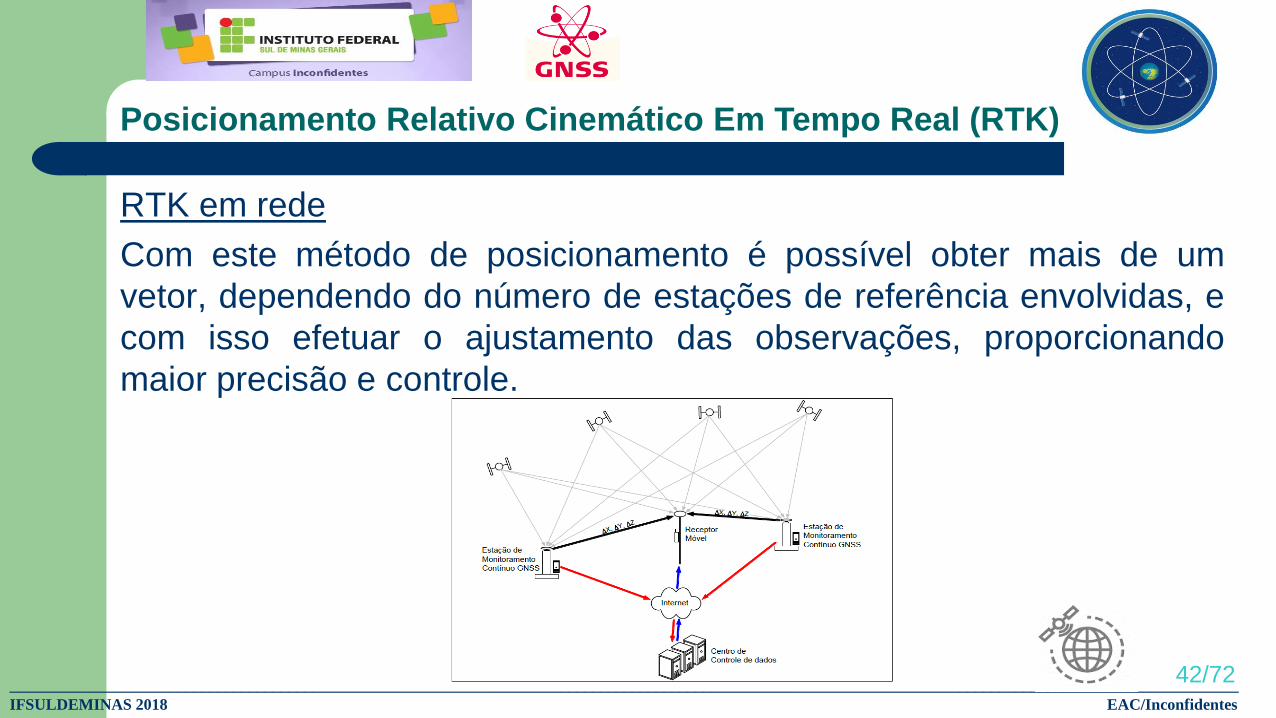
RTK em rede
No RTK em rede, existem várias
estações de monitoramento contínuo
conectadas a um servidor central, a
partir do qual são distribuídos, por meio
da Internet, os dados de correção aos
receptores móveis.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
42/72
RTK em rede
Com este método de posicionamento é possível obter mais de um
vetor, dependendo do número de estações de referência envolvidas, e
com isso efetuar o ajustamento das observações, proporcionando
maior precisão e controle.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
43/72
RTK em rede
Foram desenvolvidos alguns algoritmos para correções a partir dos
dados das estações da rede, como:
• A Interpolação e Ajustamento Condicional que se concentram na
geração de correções para a fase;
• MAC que faz correções padronizadas da rede disponibilizadas por
uma estação mestre;
• RTX que corrige através de dados de observações e correções.
• VRS (Virtual Reference Station) cria estrutura de uma estação virtual
nas proximidades do usuário.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
44/72
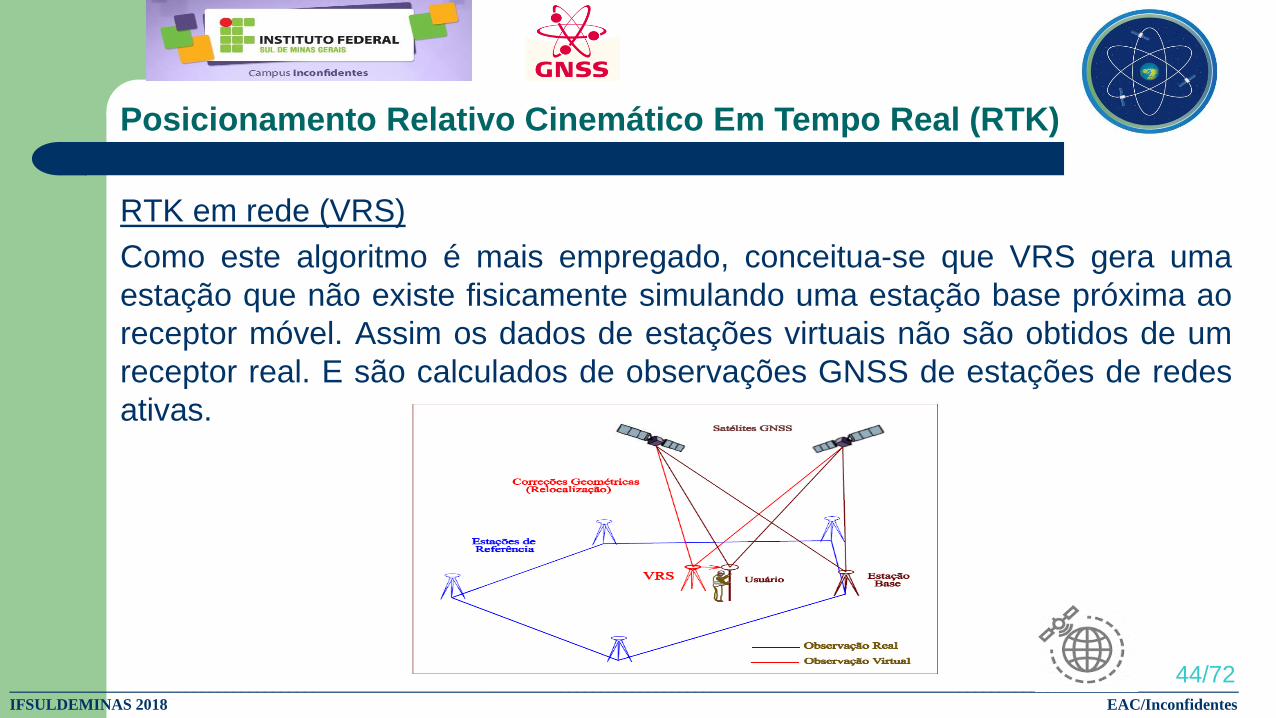
RTK em rede (VRS)
Como este algoritmo é mais empregado, conceitua-se que VRS gera uma
estação que não existe fisicamente simulando uma estação base próxima ao
receptor móvel. Assim os dados de estações virtuais não são obtidos de um
receptor real. E são calculados de observações GNSS de estações de redes
ativas.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
45/72
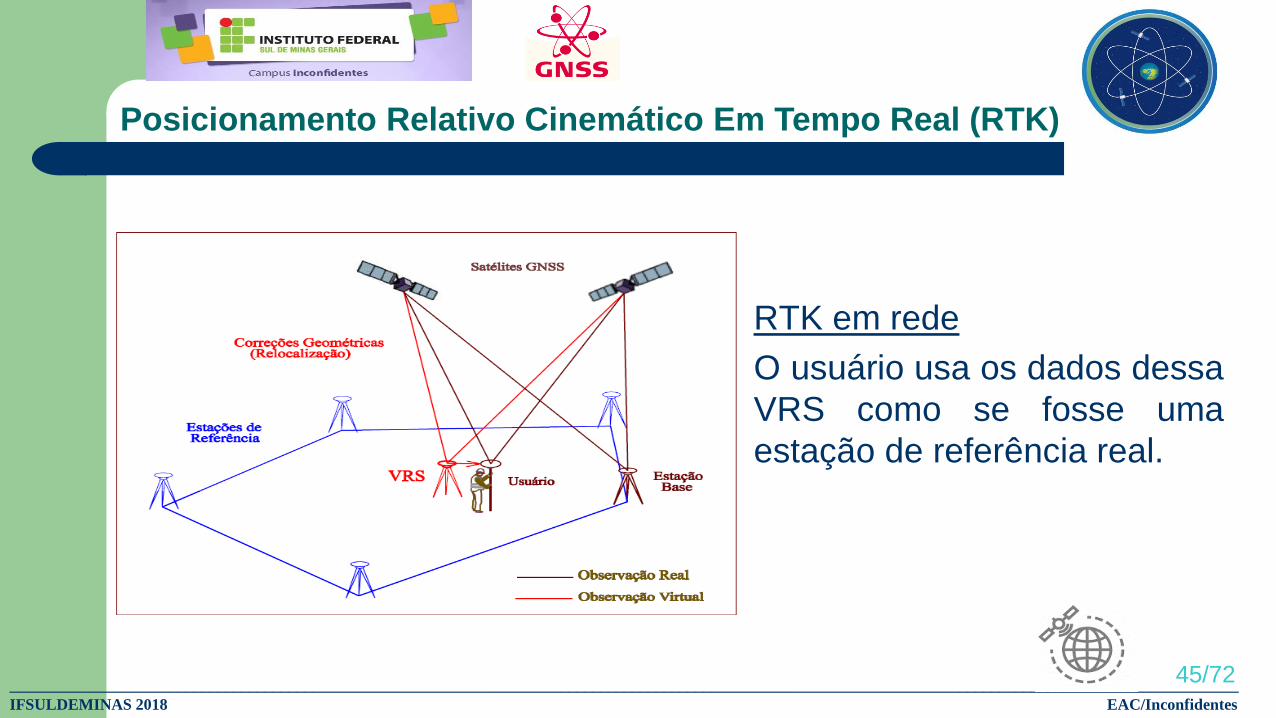
RTK em rede
O usuário usa os dados dessa
VRS como se fosse uma
estação de referência real.
Posicionamento Relativo Cinemático Em Tempo Real (RTK)

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
46/72
RTK em rede
O IBGE fornece gratuitamente um
serviço de RTK em rede, que
disponibiliza dados de correção via
protocolo Internet conhecido por
Networked Transport of RTCM via
Internet Protocol (NTRIP), em formato
definido pelo Radio Technical
Committee for Maritime Service
(RTCM).
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
47/72
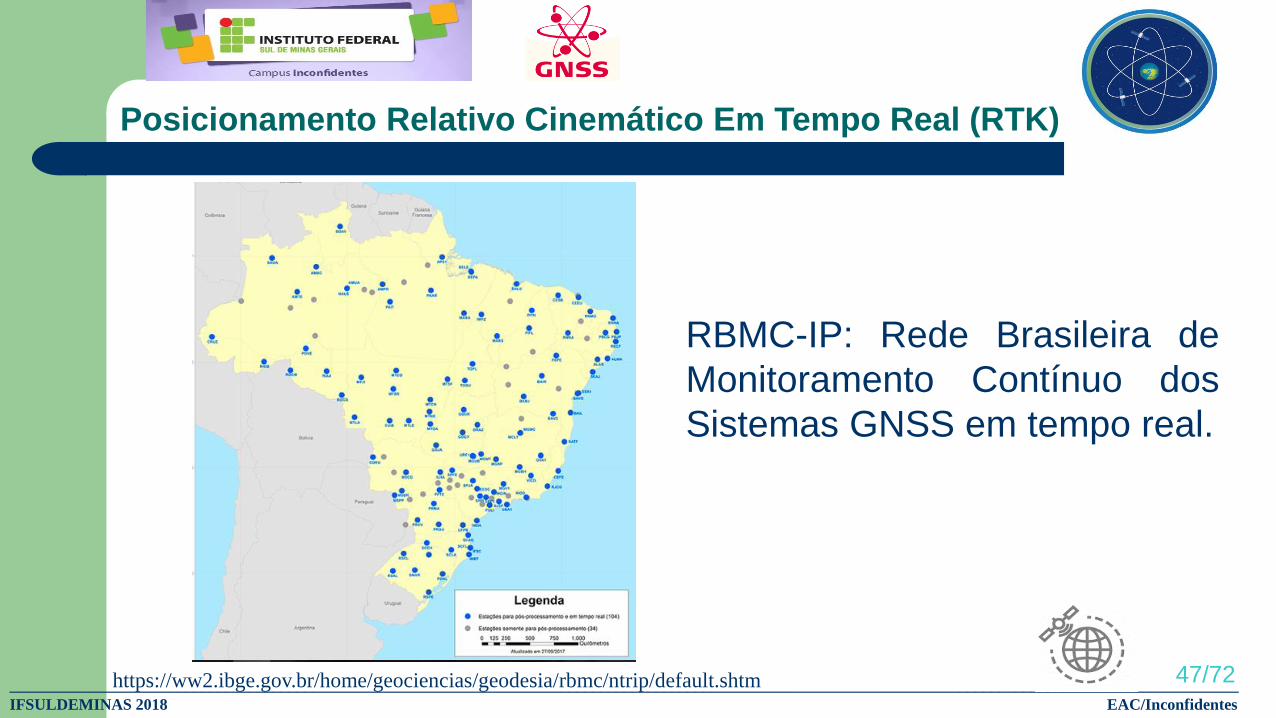
RBMC-IP: Rede Brasileira de
Monitoramento Contínuo dos
Sistemas GNSS em tempo real.
https://ww2.ibge.gov.br/home/geociencias/geodesia/rbmc/ntrip/default.shtm
Posicionamento Relativo Cinemático Em Tempo Real (RTK)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
48/72
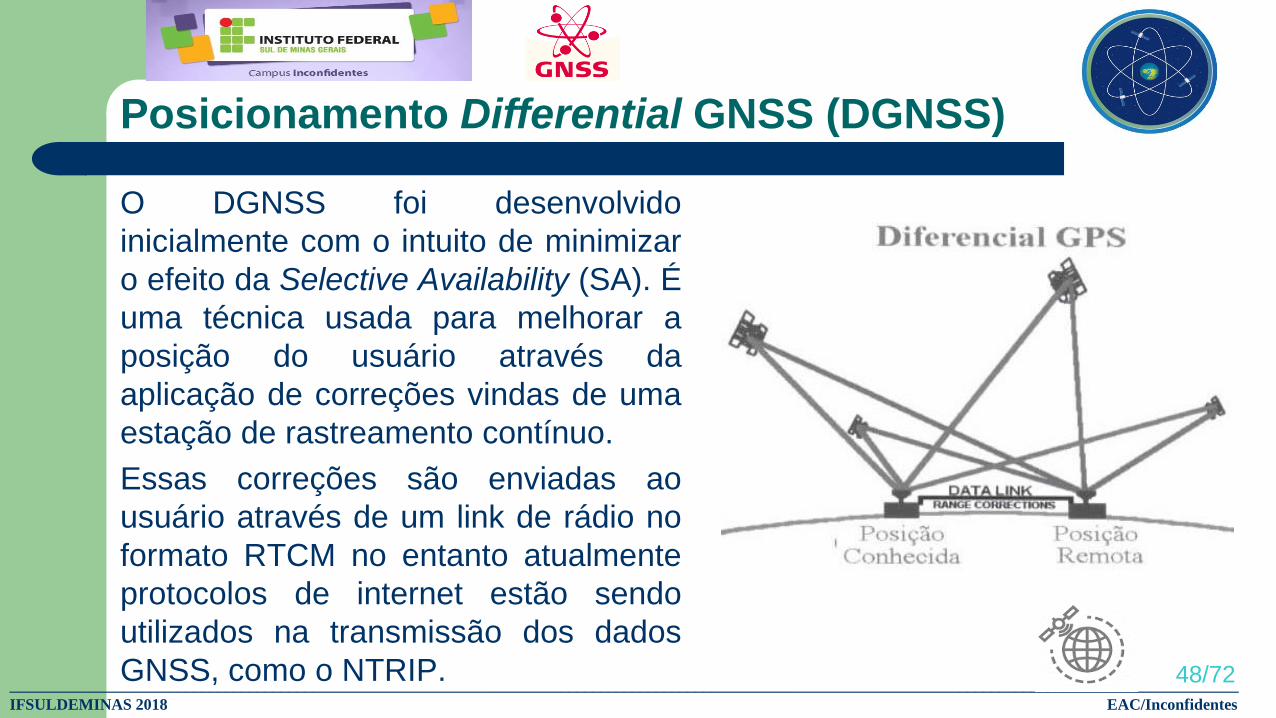
O DGNSS foi desenvolvido
inicialmente com o intuito de minimizar
o efeito da Selective Availability (SA). É
uma técnica usada para melhorar a
posição do usuário através da
aplicação de correções vindas de uma
estação de rastreamento contínuo.
Essas correções são enviadas ao
usuário através de um link de rádio no
formato RTCM no entanto atualmente
protocolos de internet estão sendo
utilizados na transmissão dos dados
GNSS, como o NTRIP.
Posicionamento Differential GNSS (DGNSS)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
49/72
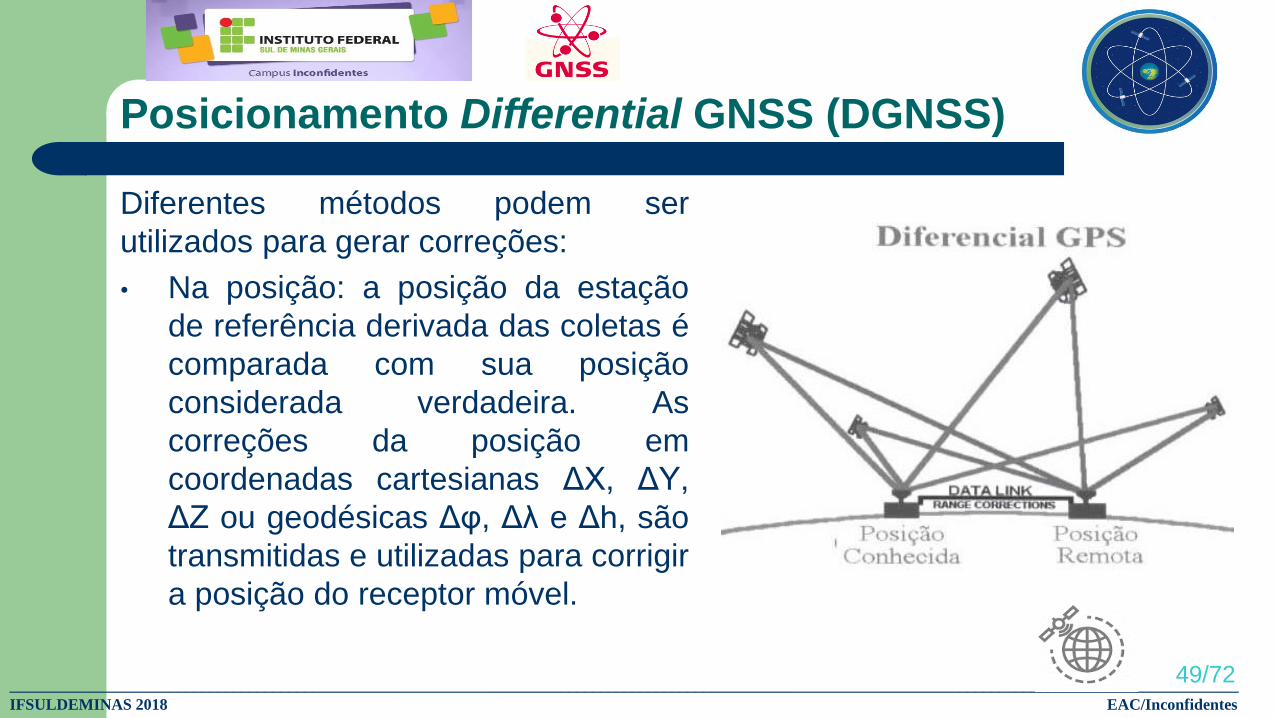
Diferentes métodos podem ser
utilizados para gerar correções:
• Na posição: a posição da estação
de referência derivada das coletas é
comparada com sua posição
considerada verdadeira. As
correções da posição em
coordenadas cartesianas ΔX, ΔY,
ΔZ ou geodésicas Δφ, Δλ e Δh, são
transmitidas e utilizadas para corrigir
a posição do receptor móvel.
Posicionamento Differential GNSS (DGNSS)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
50/72
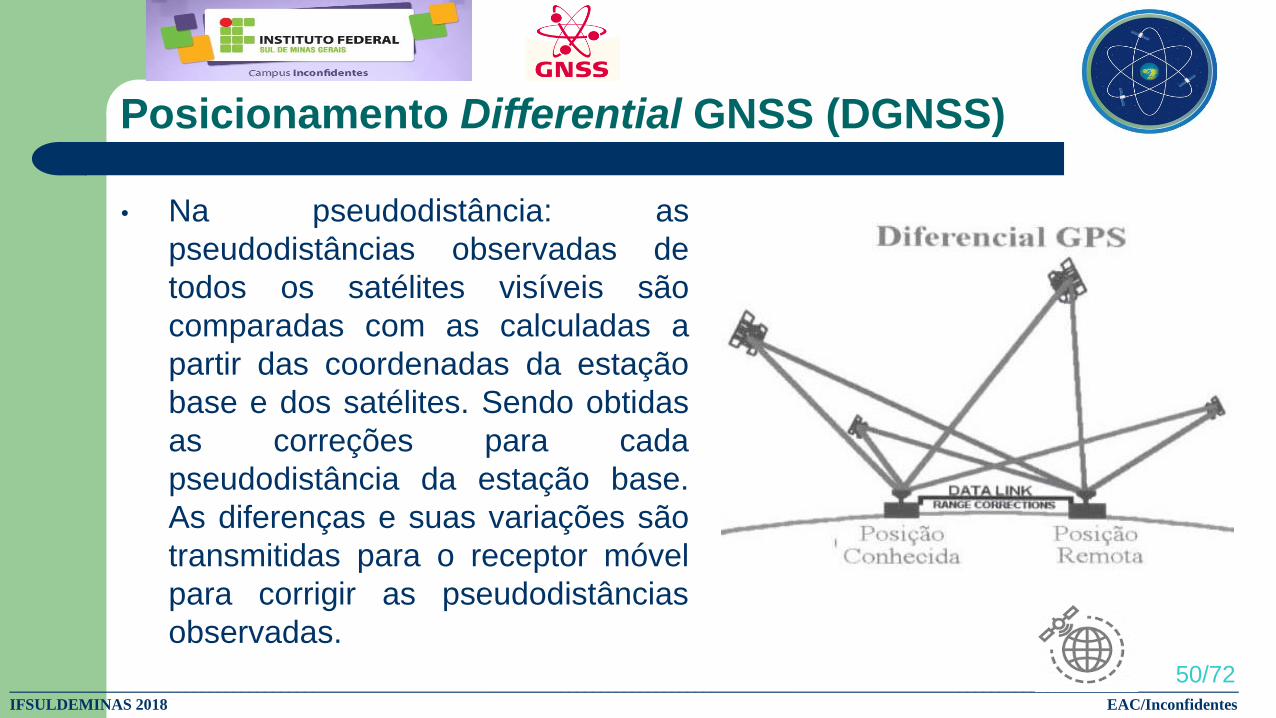
• Na pseudodistância: as
pseudodistâncias observadas de
todos os satélites visíveis são
comparadas com as calculadas a
partir das coordenadas da estação
base e dos satélites. Sendo obtidas
as correções para cada
pseudodistância da estação base.
As diferenças e suas variações são
transmitidas para o receptor móvel
para corrigir as pseudodistâncias
observadas.
Posicionamento Differential GNSS (DGNSS)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
51/72
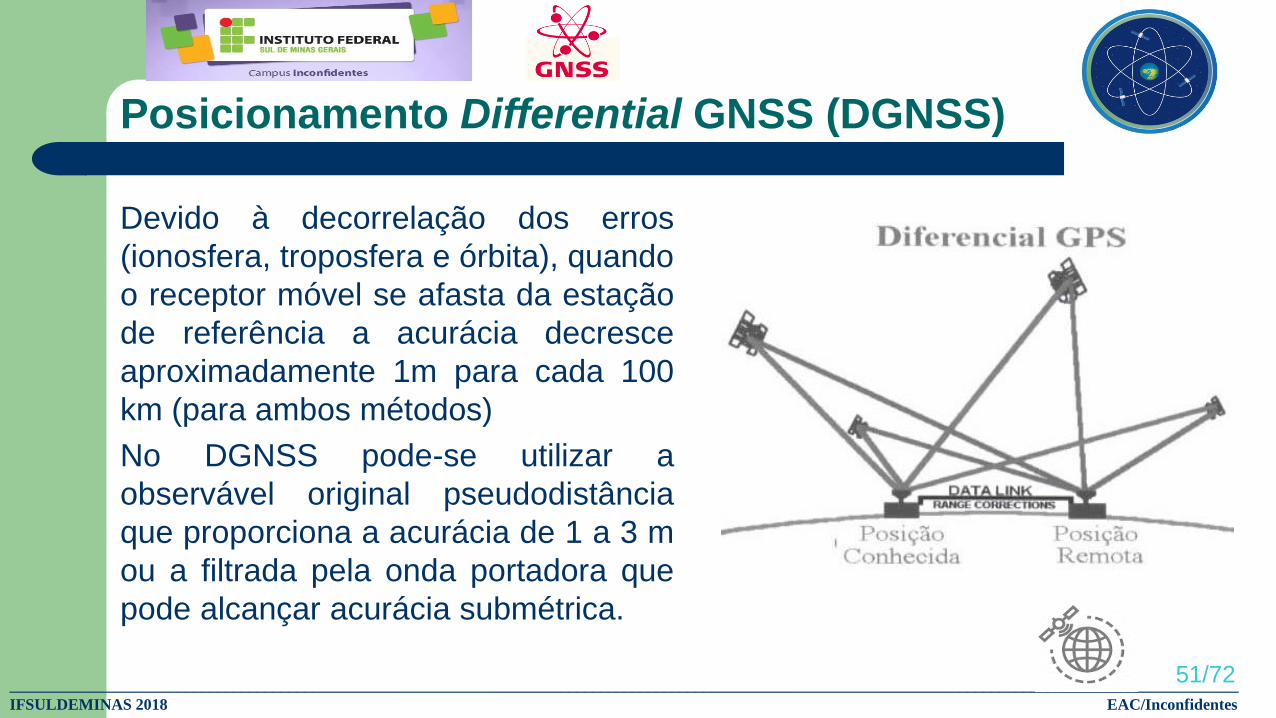
Devido à decorrelação dos erros
(ionosfera, troposfera e órbita), quando
o receptor móvel se afasta da estação
de referência a acurácia decresce
aproximadamente 1m para cada 100
km (para ambos métodos)
No DGNSS pode-se utilizar a
observável original pseudodistância
que proporciona a acurácia de 1 a 3 m
ou a filtrada pela onda portadora que
pode alcançar acurácia submétrica.
Posicionamento Differential GNSS (DGNSS)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
52/72
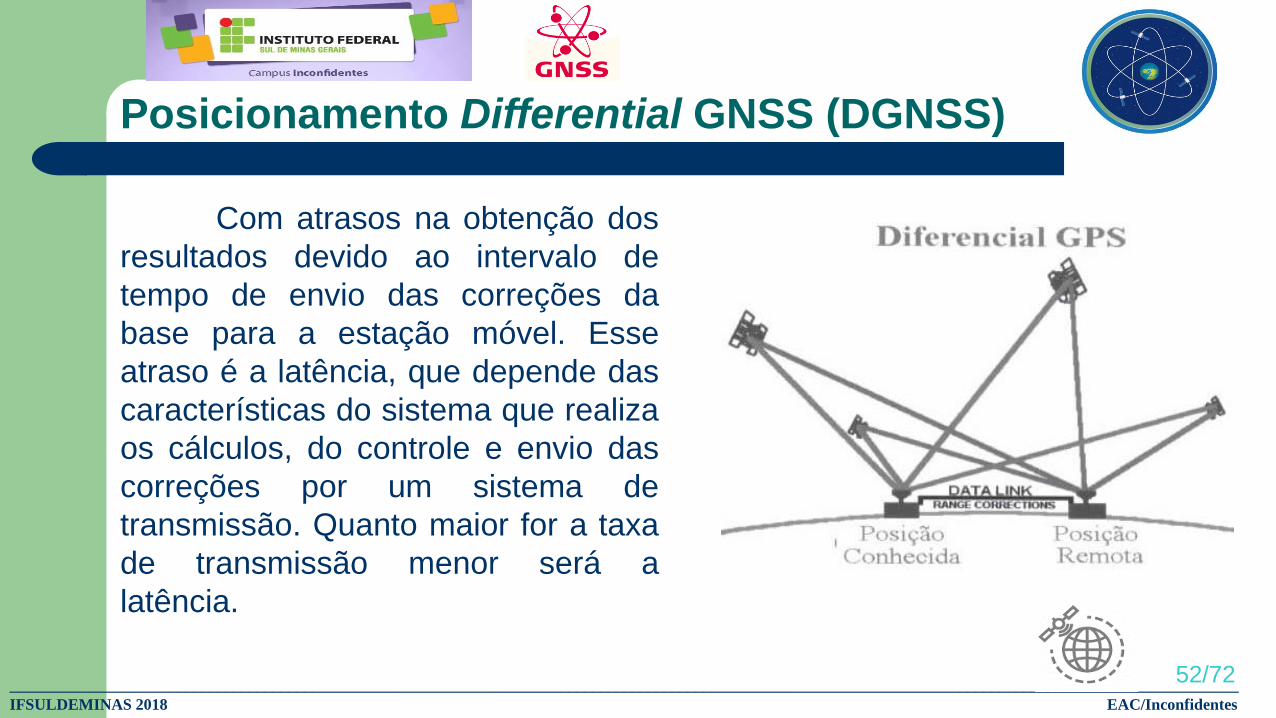
Com atrasos na obtenção dos
resultados devido ao intervalo de
tempo de envio das correções da
base para a estação móvel. Esse
atraso é a latência, que depende das
características do sistema que realiza
os cálculos, do controle e envio das
correções por um sistema de
transmissão. Quanto maior for a taxa
de transmissão menor será a
latência.
Posicionamento Differential GNSS (DGNSS)
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
53/72
Desenvolvimento do WADGNSS (Wide Area DGNSS) com
objetivo de reduzir as deficiências do DGNSS, principalmente a
decorrelação espacial dos erros.
O WADGNSS proporciona um vetor de correções composto de
erros das efemérides e do relógio para cada satélite, parâmetros
inerentes aos efeitos ionosféricos e refração troposférica.
Posicionamento WADGNSS
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
54/72
As medidas coletadas em cada estação são enviadas para a
estação monitora, a qual estima e analisa as componentes do
vetor de correções. As correções são transmitidas para os
usuários via um sistema de comunicação apropriado, como, por
exemplo, satélites de comunicação geoestacionários, redes FM,
etc.
Exemplos: WAAS nos Estados Unidos; EGNOS na Europa; MSAS
no Japão; GAGAN na Índia. Sistema Omnistar (Fugro); e StarFire
(John Deere).
Posicionamento WADGNSS

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
55/72
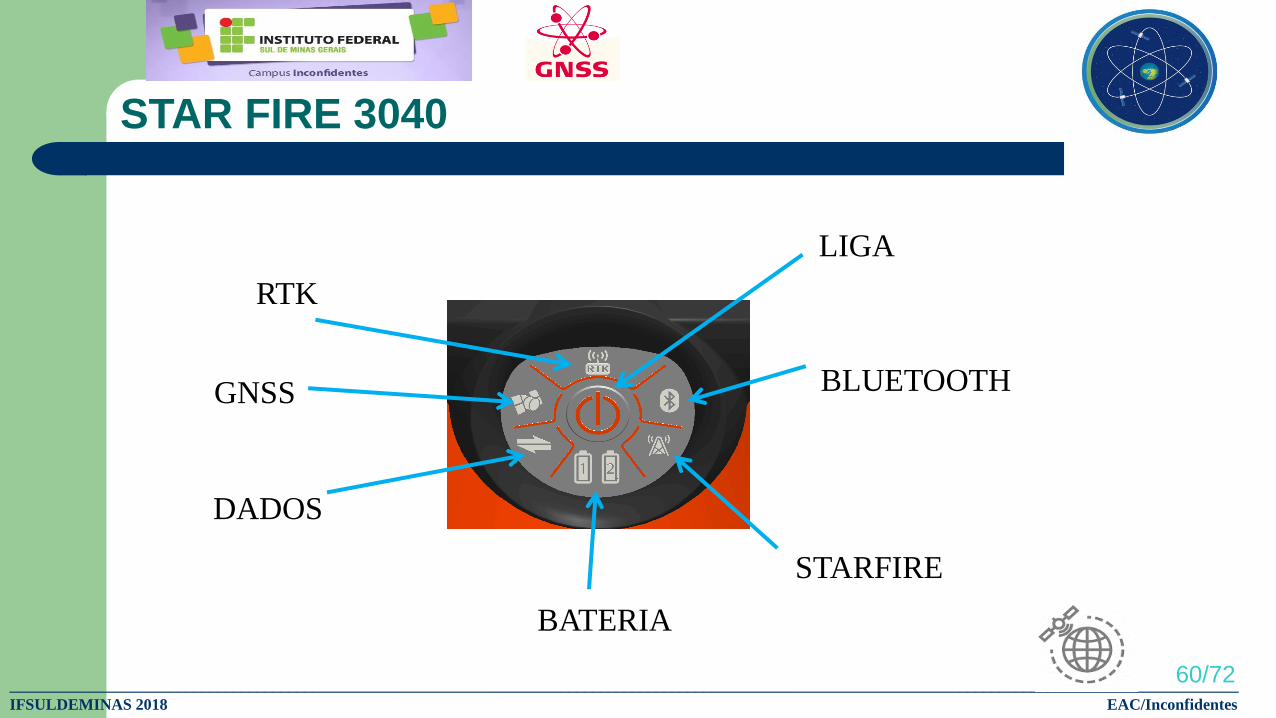
STAR FIRE 3040

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
56/72
Características Técnicas do Sistema:
➢ 66 Canais Independentes:
• GPS - L1, L2, L2C & L5 Fase, CA, L1P, L2P & L2C código;
• GLONASS - G1 & G2 Fase, CA & P código;
• GALILEO - E1 e E5a;
• SBAS - WAAS, EGNOS, MSAS & GAGAN.
➢Métodos de Levantamento: Portadora, RTK, StarFire (GSBAS)
e Modo Navegação;
STAR FIRE 3040

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
57/72
Duas Baterias Internas com autonomia de 10h e entrada
para energia externa;
Interface de comunicação: Bluetooth, USB,
Serial RS232;
Memória SD CARD 2 GB;
STAR FIRE 3040

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
58/72
Smart Antena;
Antena Calibrada NGS;1.450 kg – com baterias;
STAR FIRE 3040

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
59/72
Rádio Interno (403 – 473 MHZ);
Rádio Externo (403 – 473 MHZ);
1 Watt
STAR FIRE 3040
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
60/72
RTK
GNSS
DADOS
BATERIA
STARFIRE
BLUETOOTH
LIGA
STAR FIRE 3040
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
61/72
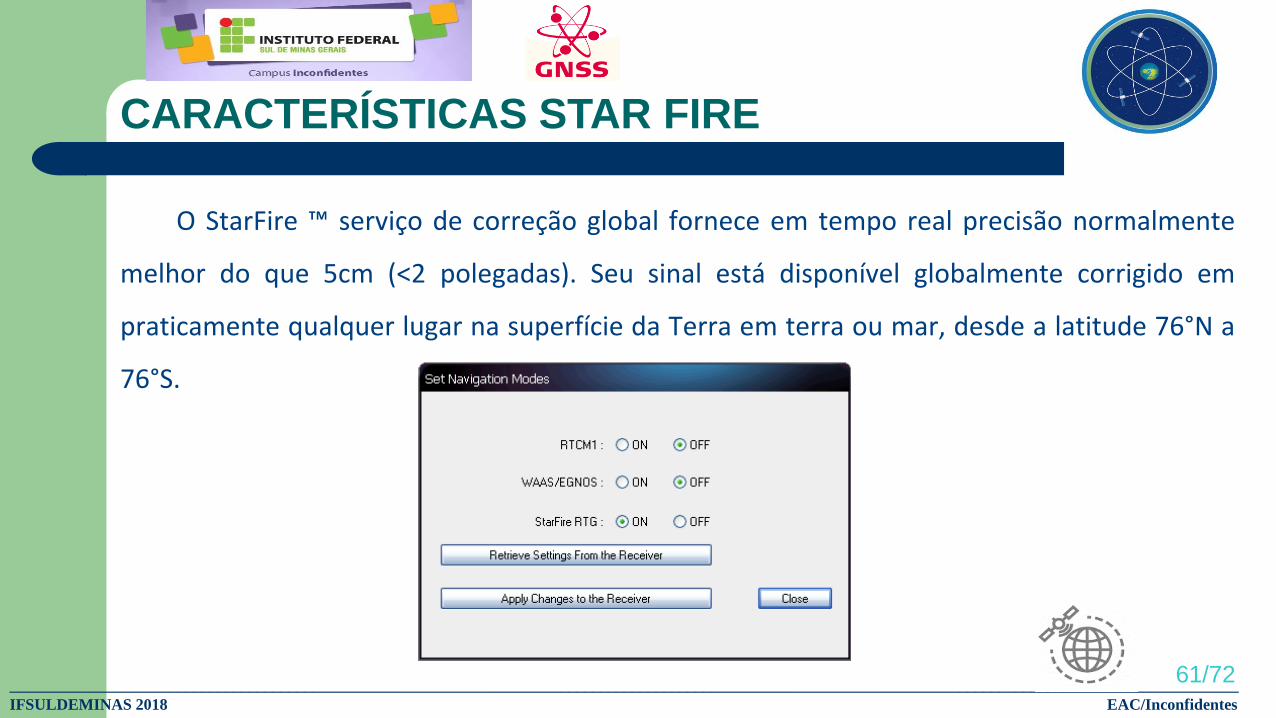
O StarFire ™ serviço de correção global fornece em tempo real precisão normalmente
melhor do que 5cm (<2 polegadas). Seu sinal está disponível globalmente corrigido em
praticamente qualquer lugar na superfície da Terra em terra ou mar, desde a latitude 76°N a
76°S.
CARACTERÍSTICAS STAR FIRE
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
62/72
Para conseguir isso, StarFire ™ utiliza uma rede de mais de 60 estações de
referência GNSS em todo o mundo para calcular a órbita de satélites GNSS e
correções de relógio. Dois centros de processamento completamente redundante e
links de comunicação múltiplos assegurar a disponibilidade contínua de correções
StarFire ™ GPS. Essas correções são transmitidas através de satélites
geoestacionários, proporcionando uma cobertura mundial e permitindo a navegação
em tempo real e preciso, sem a necessidade de estações de base locais (via UHF).
CARACTERÍSTICAS STAR FIRE

__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
63/72
Sistema GSBAS com as respectivas áreas de cobertura. Em vermelhotêm se a distribuição das estações globais de referência usadas pelosistema StarFire™.
CARACTERÍSTICAS STAR FIRE
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
64/72
A Rede StarFire apresenta um grande avanço em relação aos sistemas de
correções locais, uma vez que o sistema considera que as fontes de erro dos sinais
dos satélites GNSS são consideradas de forma independente. A órbita dos satélites
GNSS e as correções de relógio são calculados a partir de uma rede de
monitoramento global de receptores de dupla frequência. Essas correções são
transmitidas via links de satélite geoestacionários diretamente aos receptores
StarFire, resultando em latência mínima de dados desde que se considere uma
máscara de elevação mínima de 10° para os satélites geoestacionários.
CARACTERÍSTICAS STAR FIRE
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
65/72
Todos os receptores StarFire utilizam um receptor GNSS multifrequência que
mede o atraso ionosférico para cada satélite. Atrasos troposféricos zenital são
calculados a partir de vários épocas de observação obtendo-se um modelo a partir
de observações redundantes.
O sistema é altamente robusto, com a capacidade de calcular um conjunto
completo de correções, mesmo que algumas das estações de referência se tornem
indisponíveis. Com um tempo de atualização de 99,999%, os usuários tem a certeza
da disponibilidade global e da acurácia do sistema.
CARACTERÍSTICAS STAR FIRE
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
66/72
A fim de avaliar as opções de posicionamento por satélite disponíveis, as fontesprimárias de erros que contribuem para a obtenção das correções precisam serentendidos. Erros na Base e no Rover incluem:
✓ Erro de Órbita dos Satélites
✓ Erro do Relógio dos Satélites
✓ Erro do Relógio do Receptor
✓ Ionosfera
✓ Troposfera
✓ Multicaminhamento
✓ Marés Terrestres
CARACTERÍSTICAS STAR FIRE - GSBAS vs. dGNSS
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
67/72
✓ O modo como estes erros são corrigidos podem ser divididos em duas grandes classes:
✓ Sistema de correção diferencial GNSS (dGNSS)
✓ Beacon
✓ Correções dGNSS Comerciais
✓ RTK UHF/NTRIP
✓ Widelane RTK
✓ Sistema de Aumento Global (GSBAS)
✓ StandAlone GPS *
✓ WAAS
✓ EGNOS
✓ MSAS
✓ StarFire
* Aumento StandAlone GPS consiste em órbita dosatélite e atualizações relógio que são gerados peloSegmento de Controle GPS e distribuídos para ousuário com um modelo ionosférico na estrutura dosinal GPS. É este princípio básico da determinação decada fonte de erro de forma independente quedistingue GSBAS de DGNSS.
CARACTERÍSTICAS STAR FIRE - GSBAS vs. dGNSS
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
68/72
CARACTERÍSTICAS STAR FIRE - GSBAS vs. dGNSS
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
69/72
A acurácia de cinco centímetros no posicionamento pelo serviço StarFire ™ é obtida a partirde uma licença aos usuários finais da linha de receptores GNSS SF Series.
Existem dois tipos de licenças StarFire ™:
✓ Somente nos Continentes (Exclui todos os Oceanos)
✓ Cobertura Global
As licenças podem ser adquiridas com os seguintes tempos de acesso:
✓ Mensal (30 dias)
✓ Trimestral (90 dias)
✓ Semestral (180 dias)
✓ Anual (365 dias)
Acesso ao Serviço StarFire
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
70/72
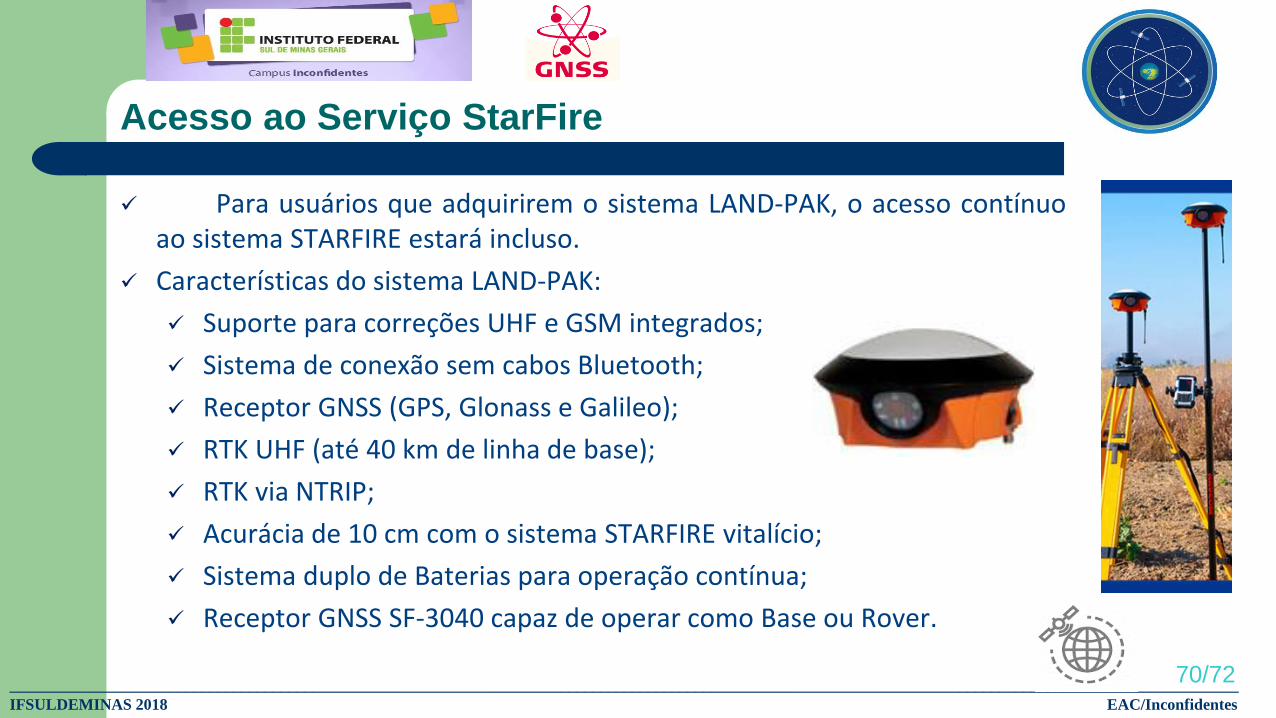
✓ Para usuários que adquirirem o sistema LAND-PAK, o acesso contínuoao sistema STARFIRE estará incluso.
✓ Características do sistema LAND-PAK:
✓ Suporte para correções UHF e GSM integrados;
✓ Sistema de conexão sem cabos Bluetooth;
✓ Receptor GNSS (GPS, Glonass e Galileo);
✓ RTK UHF (até 40 km de linha de base);
✓ RTK via NTRIP;
✓ Acurácia de 10 cm com o sistema STARFIRE vitalício;
✓ Sistema duplo de Baterias para operação contínua;
✓ Receptor GNSS SF-3040 capaz de operar como Base ou Rover.
Acesso ao Serviço StarFire
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
71/72
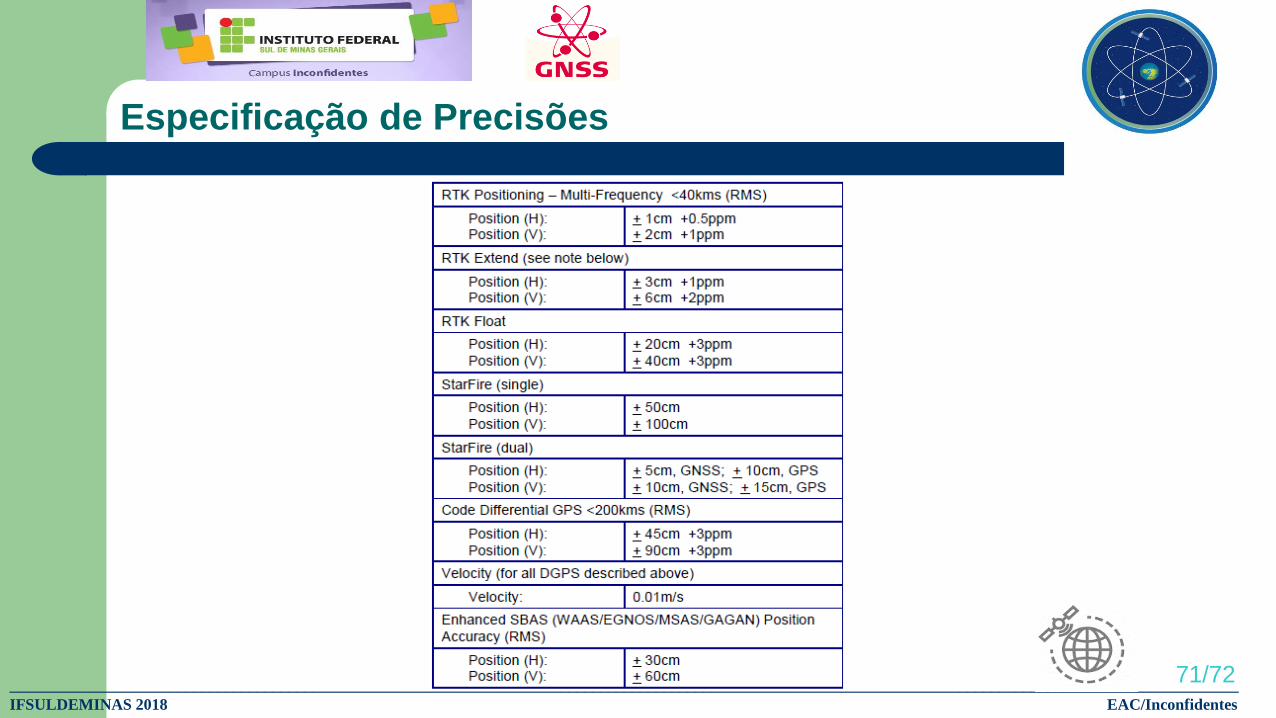
Especificação de Precisões
__________________________________________________________________________________________________________________________________________________________
IFSULDEMINAS 2018 EAC/Inconfidentes
72/72
GUANDALINI, Marcos. Análise metodológica do posicionamento relativo através do GNSS e suas
aplicações na engenharia: uso da técnica RTK/GSM. São Paulo, 2012. 211 p.
IBGE. RBMC-IP - Rede Brasileira de Monitoramento Contínuo dos Sistemas GNSS em tempo real.
Disponível em: <https://ww2.ibge.gov.br/home/geociencias/geodesia/rbmc/ntrip/default.shtm> . Acesso em:
16/ 05/ 2018
IBGE. Revista brasileira de geografia. Disponível em:
<https://biblioteca.ibge.gov.br/visualizacao/periodicos/115/rbg_1992_v54_n4.pdf>. Acesso em: 18 abr.
2018.
INCRA. Manual técnico de posicionamento: Georreferenciamento de Imóveis Rurais. 1 ed. Brasília:
MINISTÉRIO DO DESENVOLVIMENTO AGRÁRIO, 2013. 34 p.
MONICO, J. F. G. Posicionamento pelo GNSS: Descrição, fundamentos e aplicações. São Paulo:
UNESP, 2008. 476 p.
Referências Bibliográficas