mec^anica e ondas fasc¶‡culo 16 - fenix.tecnico.ulisboa.pt · 16.1 trabalho e energia no...
TRANSCRIPT

Mecanica e Ondas
fascıculo 16
April 29, 2008
Contents
16.1 Trabalho e energia no movimento rotacional . . . . . . . . . . . . 29816.2 Teorema do trabalho-energia no movimento rotacional . . . . . . 29816.3 Impulso angular . . . . . . . . . . . . . . . . . . . . . . . . . . . 30016.4 Cilindros/esferas a rolar . . . . . . . . . . . . . . . . . . . . . . . 30316.5 Movimento de rolamento de um corpo rıgido . . . . . . . . . . . 30416.6 Precessao do giroscopio . . . . . . . . . . . . . . . . . . . . . . . 31216.7 Dinamica linear do giroscopio . . . . . . . . . . . . . . . . . . . . 31516.8 Precessao giroscopica . . . . . . . . . . . . . . . . . . . . . . . . . 316
Mario J. PinheiroDepartamento de Fısica e Instituto de Plasmas e Fusao NuclearInstituto Superior Tecnicoemail: [email protected]
297

“Wise is he who enjoys the show offered by the world.”
- Fernando Pessoa
16.1 Trabalho e energia no movimento rotacional
Uma forca actuando sobre um corpo em movimento efectua trabalho sobre ocorpo. O trabalho efectuado pela forca
−→F fazendo com que o corpo rode de um
arco elementar ds = rdθ no intervalo de tempo dt e
dW = (−→F · d−→s ) = (F sin φ)rdθ (16.1)
onde F sinφ e a componente tangencial de−→F . A componente radial nao realiza
trabalho porque e perpendicular a d−→s (Vd. Fig. 1).
O torque exercido pela forca e
τz = (F sin φ)r (16.2)
e o trabalho elementar associado
dW = τzdθ
W =∫ θ2
θ1τzdθ.
(16.3)
Se o torque for constante tem-se
W = τz∆θ. (16.4)
A potencia associada ao trabalho por unidade de tempo e dada por
P =dW
dt= τz
dθ
dt= τzω. (16.5)
16.2 Teorema do trabalho-energia no movimento rota-cional
O trabalho feito efectuado pelo torque produz uma variacao da energia cineticado corpo de acordo com a sequencia:
τ → α ω1 → ω2.
De facto, verificamos que
τ = Iα = Idω
dt= I
dω
dθ
dθ
dt= I
dω
dθω, (16.6)
298
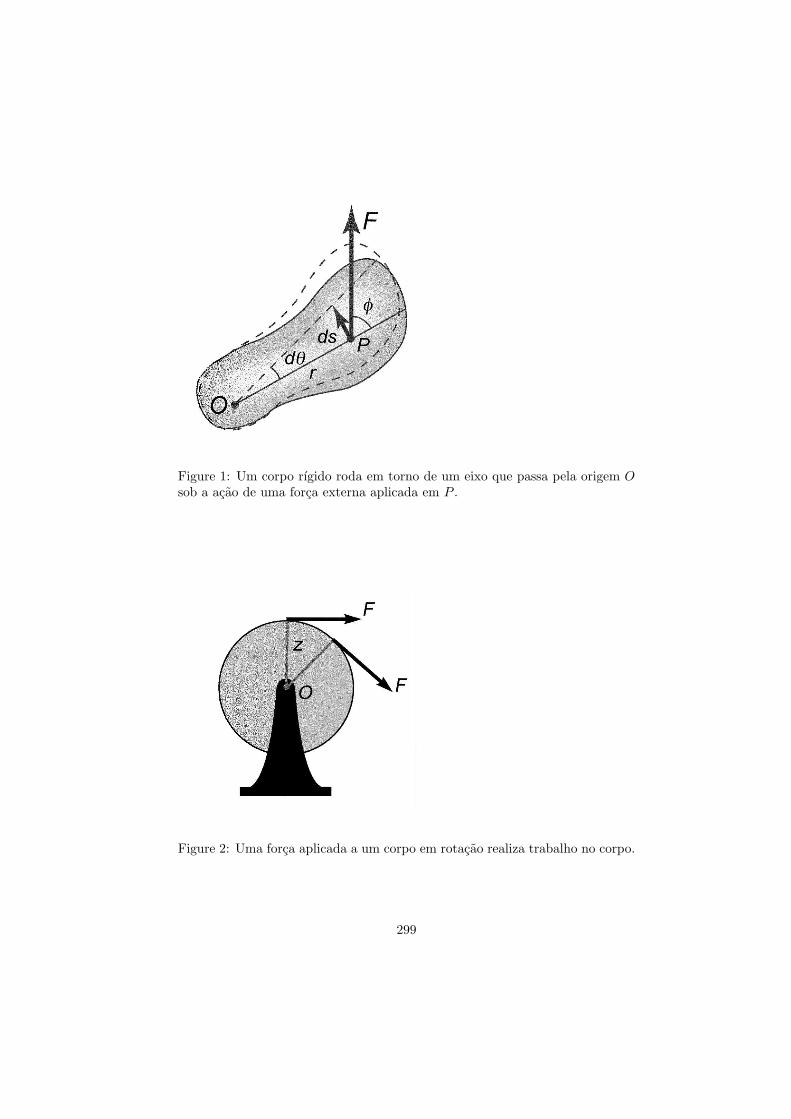
Figure 1: Um corpo rıgido roda em torno de um eixo que passa pela origem Osob a acao de uma forca externa aplicada em P .
Figure 2: Uma forca aplicada a um corpo em rotacao realiza trabalho no corpo.
299

ou seja:τdθ = dW = Iωdω. (16.7)
Finalmente, o trabalho total efectuado e assim dado pelo somatorio dos trabal-hos elementares
W =∫ θ2
θ1
τdθ′ =∫ ω2
ω1
Iω′dω′ =12Iω2
2 −12Iω2
1 . (16.8)
W = ∆K = Kf −Ki =12Iω2
2 −12Iω2
1 . (16.9)
Se a forca actuante e conservativa (forca gravıtica, elastica, electrostatica) entaoo trabalho realizado e o negativo da variacao da energia potencial:
−∆U = −U2 + U1 =12Iω2
2 −12Iω2
1 , (16.10)
ou seja12Iω2
1 + U1 =12Iω2
2 + U2. (16.11)
No movimento rotacional verifica-se a conservacao da energia mecanica:
E =12Iω2 + U = Const. (16.12)
Exemplo 1: Massas ligadas.
Duas massas estao ligadas por uma corda que passa por uma polia com momentode inercia I (Fig. 3). Quais sao as velocidades lineares das massas depois de semoverem da altura h?
Como e suposto nao haver atrito, a energia mecanica conserva-se:
E1 = E2
K1 + U1 = K2 + U2
0 = 12m1v
2 + 12m2v
2 + 12Iω2 + m1gh−m2hg.
(16.13)
Mas sendo v = Rω, obtem-se rapidamente
v =
√2(m2 −m1)gh
m1 + m2 + IR2
. (16.14)
Podıamos ter seguida uma resolucao diferente, obtendo τ = Iα, resolvendo paraα e 2ah = v2, a = e daqui v.
300

Figure 3: Duas massas ligadas por uma corda suspensa numa polia.
16.3 Impulso angular
Mostramos previamente que se definirmos um impulso linear
−→I =
∫ t2
t1
−→F (t)dt (16.15)
a variacao do momento linear d−→pdt =
−→F no intervalo de tempo ∆ = t2 − t1 e tal
que∆−→p = −→p f −−→p i =
−→I . (16.16)
De modo semelhante, partindo da equacao fundamental da dinamica rotacional
d−→L
dt= −→τ (16.17)
podemos escrever −→L f −−→L i = ∆
−→L = −→τ ∆t
=−→J
∴ −→J =∫ t2
t1
−→τ dt
(16.18)
e assim verificar que a variacao do momento angular iguala o impulso angular.
Exemplo 2: Considere um sistema mecanico constituıdo por dois discos commomentos de inercia I e I ′, cada um deles em rotacao com velocidades angulares
301
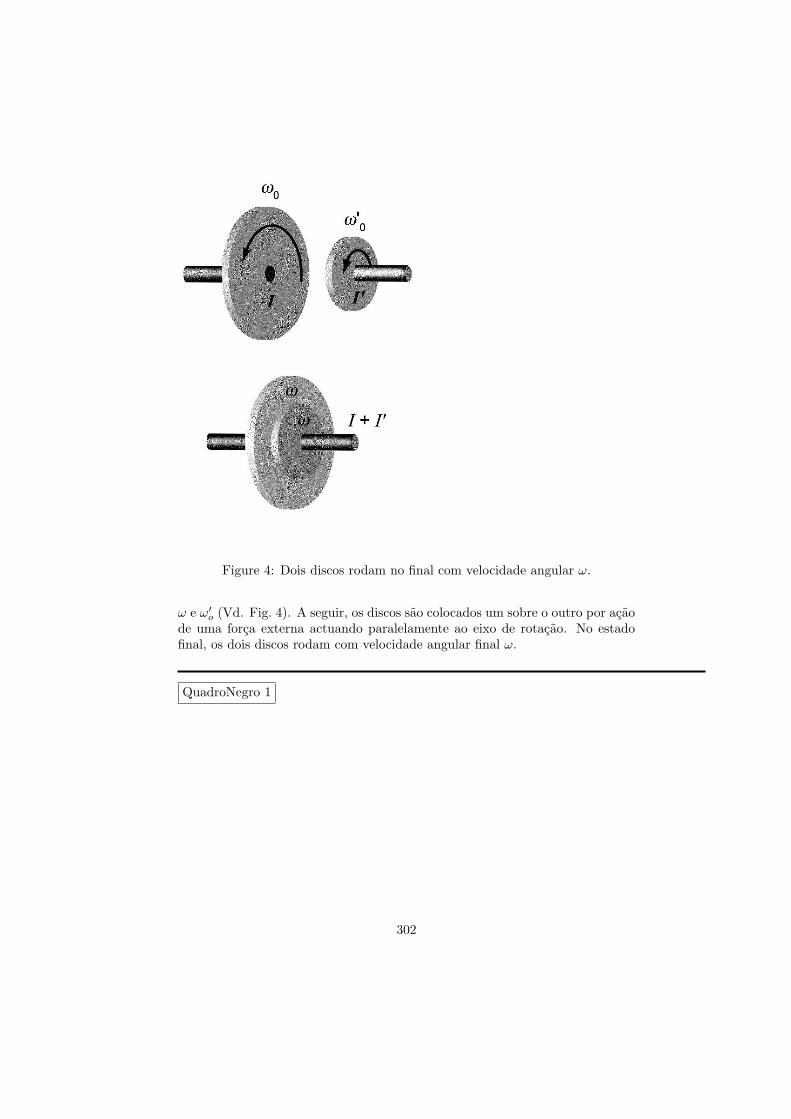
Figure 4: Dois discos rodam no final com velocidade angular ω.
ω e ω′o (Vd. Fig. 4). A seguir, os discos sao colocados um sobre o outro por acaode uma forca externa actuando paralelamente ao eixo de rotacao. No estadofinal, os dois discos rodam com velocidade angular final ω.
QuadroNegro 1
302
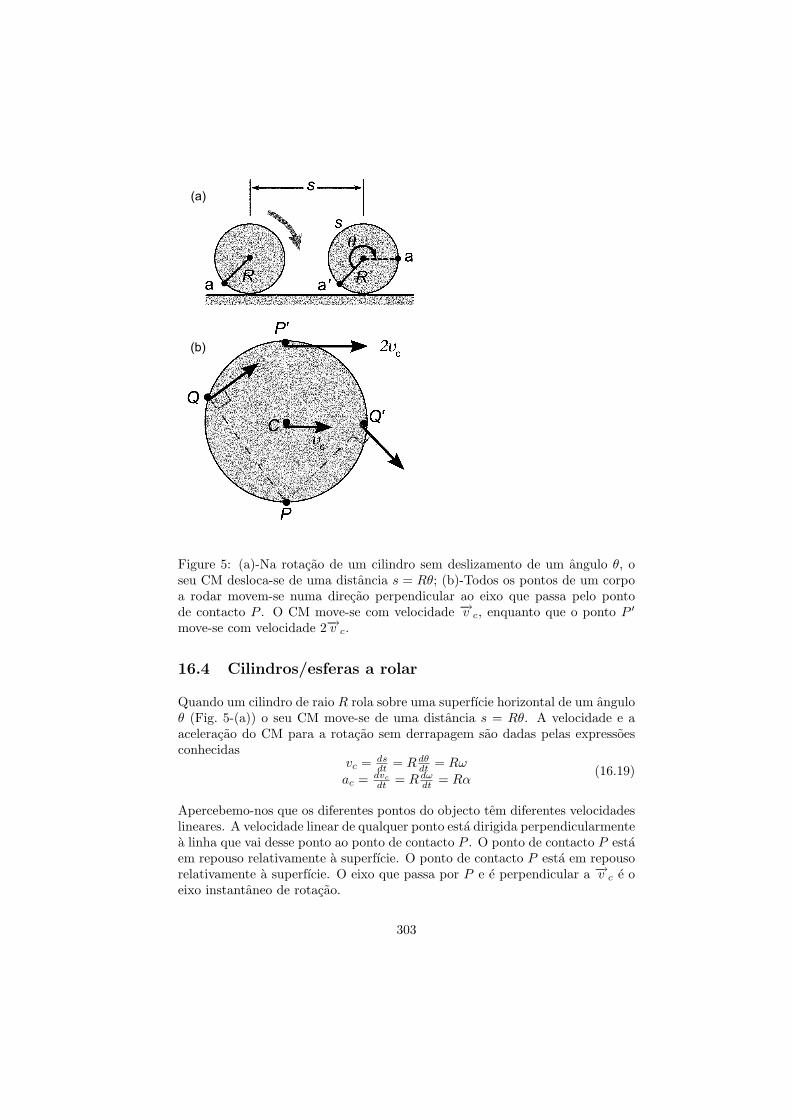
Figure 5: (a)-Na rotacao de um cilindro sem deslizamento de um angulo θ, oseu CM desloca-se de uma distancia s = Rθ; (b)-Todos os pontos de um corpoa rodar movem-se numa direcao perpendicular ao eixo que passa pelo pontode contacto P . O CM move-se com velocidade −→v c, enquanto que o ponto P ′
move-se com velocidade 2−→v c.
16.4 Cilindros/esferas a rolar
Quando um cilindro de raio R rola sobre uma superfıcie horizontal de um anguloθ (Fig. 5-(a)) o seu CM move-se de uma distancia s = Rθ. A velocidade e aaceleracao do CM para a rotacao sem derrapagem sao dadas pelas expressoesconhecidas
vc = dsdt = R dθ
dt = Rω
ac = dvc
dt = R dωdt = Rα
(16.19)
Apercebemo-nos que os diferentes pontos do objecto tem diferentes velocidadeslineares. A velocidade linear de qualquer ponto esta dirigida perpendicularmentea linha que vai desse ponto ao ponto de contacto P . O ponto de contacto P estaem repouso relativamente a superfıcie. O ponto de contacto P esta em repousorelativamente a superfıcie. O eixo que passa por P e e perpendicular a −→v c e oeixo instantaneo de rotacao.
303

Um ponto generico Q sobre o cilindro possui componentes horizontal e verticalda velocidade. Em particular, os pontos P e P ′ tem especial interesse.
P : vp = 0C : vc = Rω
P ′ : vP ′ = 2Rω.(16.20)
Repare que todos os pontos do cilindro possuem a mesma velocidade angularω. Assim, podemos concluir o seguinte:
Na translacao todos os pontos tem a mesma velocidade v = vc (Fig. 6-(a)).
Na rotacao, vc = Rω, todos os pontos tem a mesma velocidade angular ω e avelocidade linear e proporcional a distancia ao eixo de rotacao (Fig. 6-(b)).
No movimento combinado de translacao e rotacao (Fig. 6-(b)), tem-se:
vP = vc −Rω = 0vc = vc + 0 = vc
vP ′ = vc + ωR = 2vc
(16.21)
O que ha de notavel e que o efeito combinado da translacao do CM e da rotacaoem torno de um eixo que passa pelo CM e equivalente a uma rotacao pura coma mesma velocidade angular em relacao a um eixo que passa pelo ponto decontacto do corpo rolante:
K = 12IP ω2
IP = Ic + MR2
∴ K = 12Icω
2 + 12MR2ω2
= 12Icω
2 + 12Mv2
c
(16.22)
Conclui-se assim que a energia cinetica total de um objecto em rolamento e asoma da energia cinetica rotacional em torno do eixo do CM mais a energiacinetica de translacao do CM.
Iremos enunciar em seguida dois teoremas sem os demonstrar.
Teorema 1: O deslocamento de um corpo rıgido pode ser decomposto em doismovimentos independentes: a translacao do centro de massa e a rotacao emtorno do CM.
Teorema 2: O movimento de rotacao em torno do CM depende somente dotorque em relacao ao CM, independentemente do movimento de translacao.
16.5 Movimento de rolamento de um corpo rıgido
Um tipo de movimento rotacional de um corpo rıgido acontece quando o eixo derotacao e paralelo a ele proprio, isto e, a sua orientacao e constante no espaco.Situacoes onde se encontra o movimento combinado de translacao e de rotacao:bola, cilindro, roda sobre superfıcies planas.
304
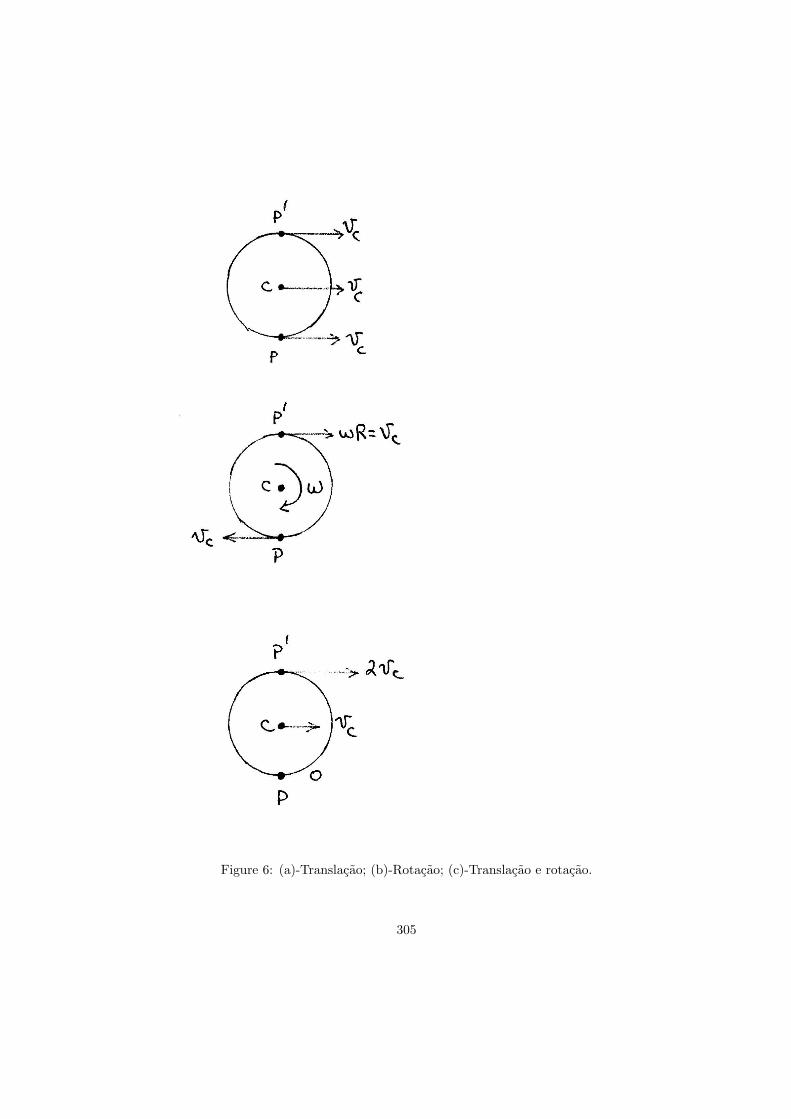
Figure 6: (a)-Translacao; (b)-Rotacao; (c)-Translacao e rotacao.
305

As equacoes do movimento sao:
−→P = M d
−→R
dt =∫
d−→rdt dm
d−→P
dt = M d−→V
dt = M d2−→Rdt =
∑−→F ext
K = 12MV 2 + 1
2
∫v2
cdm
(16.23)
Para o momento angular temos
−→L = [
−→R ×−→P ] +
∫
M
[−→r c ×−→v c]dm (16.24)
−→L =
−→L or +
−→L s. (16.25)
−→L or - momento angular orbital do CM em relacao a origem.−→L s - momento angular intrınseco (ou de “spin”) em relacao ao eixo que passapelo CM.
Pode-se mostrar qued−→L s
dt= −→τ c (16.26)
onde −→τ c e o torque em relacao ao CM produzido pelas forcas externas. Esteresultado e independente do tipo de movimento do CM que, em especial, podeser acelerado. O CM seria neste caso um referencial nao-inercial.
O movimento combinado de translacao e rolamento e um caso de especialrelevancia. A orientacao de
−→L s e constante no espaco com torque paralelo
a−→L s, embora o modulo possa variar.
Como o objecto possui um movimento geral de translacao do CM com umarotacao em torno do mesmo CM que se mantem paralelo a si mesmo (ex: sistemaTerra-Sol, Vd. Fig. 7), podemos escrever
τs = Isdωdt = Isα
K = 12MV 2 + 1
2Isω2.
(16.27)
Exemplo 3: Objecto redondo rolando num plano inclinado (Fig. 8).
Um objecto redondo parte do topo do plano inclinado a partir do estado derepouso. Supoe-se nao haver derrapagem. O movimento de rolamento so epossıvel na presenca de atrito que produz o torque em relacao ao CM.
Nao ha perda de energia porque o ponto de contacto nao se move relativamentea superfıcie! A energia mecanica total conserva-se.
vc = Rω
K = 12Ic
(vc
R
)2 + 12Mv2
c
= 12
[Ic
R2 + M]v2
c .
(16.28)
306

Figure 7: Sistema Terra-Sol.
∆U = −Mgh∆K = −∆U
12 ( Ic
R2 + M)v2c = Mgh
vc =√
2gh
1+ IcMR2
.
(16.29)
No caso particular do objecto redondo ser uma esfera, tem-se Ic = 25MR2,
donde podemos obter
vc =
√2gh
1 + 25
MR2
MR2
=
√107
gh. (16.30)
Supondo que a esfera percorre a distancia x, qual e a aceleracao alcancada?
Sendo h = x sin θ a altura donde parte a esfera, obtemos sucessivamente:
v2c = 10
7 gx sin θv2
c = 2acxac = 5
7g sin θ(16.31)
A aceleracao e menor do que a alcancada por um objecto que nao rola.
Exemplo 4: Rolamento sem derrapagem, Fig. 9.
Qualquer objecto redondo de raio R e massa M rola em torno do seu CMa medida que desce no plano inclinado de declive θ. Seja I = βMR2 o seumomento de inercia. Temos que resolver o sistema de equacoes
∑τc = Icα
τf + τg + τN = Rf + 0 + 0 = Iα∑fx = Mg sin θ − f = Mac
(16.32)
307

Figure 8: Objecto redondo rolando sobre plano inclinado. A energia mecanicaconserva-se se nao ocorrer derrapagem.
Figure 9: Diagrama de forcas de uma esfera solida rolando sobre um planoinclinado.
Se o movimento for de rolamento sem derrapagem, temos
vc = Rω; ac = Rα (16.33)
Mg sin θ − IRα = Mg sin θ − β MR2
Rac
R= Mg sin θ − βMac = Mac
∴ ac = g sin θ1+β .
(16.34)
Nao havendo derrapagem a fricao e estatica
fs ≤ µsN
fs = IαR = βMR2
R1R
g sin θ1+β ≤ µsMg cos θ
∴ tan θ ≤ µs1+β
β .
(16.35)
308

Figure 10: Disco sobre superfıcie lisa.
Para um angulo superior ao θ determinado pela equacao precedente, o objectodeslizara a medida que rolar no plano inclinado. Porem, se comecar a deslizar,os pressupostos mudam porque v 6= ωR e a 6= αR!
• arco: β = 1;
• cilindro: β = 1/2;
• esfera: β = 2/5.
(ac)esfera = 57g sin θ;
(ac)cilindro = 23g sin θ;
(ac)arco = 12g sin θ.
(16.36)
Exemplo 5: Um disco plano encontra-se sobre uma superfıcie plana que naooferece atrito (Fig. 10). A forca
−→F e aplicada na extremidade da corda que se
encontra enrolada em torno do disco. O disco roda em torno do seu eixo verticale move-se horizontalmente. Aplicacao numerica: M = 2 kg, R = 10 cm, F = 5N.
a) Aceleracao do CM:
ac =F
M=
52
= 2.5m/s2. (16.37)
b) Torques:
α =τc
Ic=
FR12MR2
=2F
MR=
2× 52× 0.10
= 50rad/s2. (16.38)
c) Qual e a aceleracao do extremo livre da corda?
309
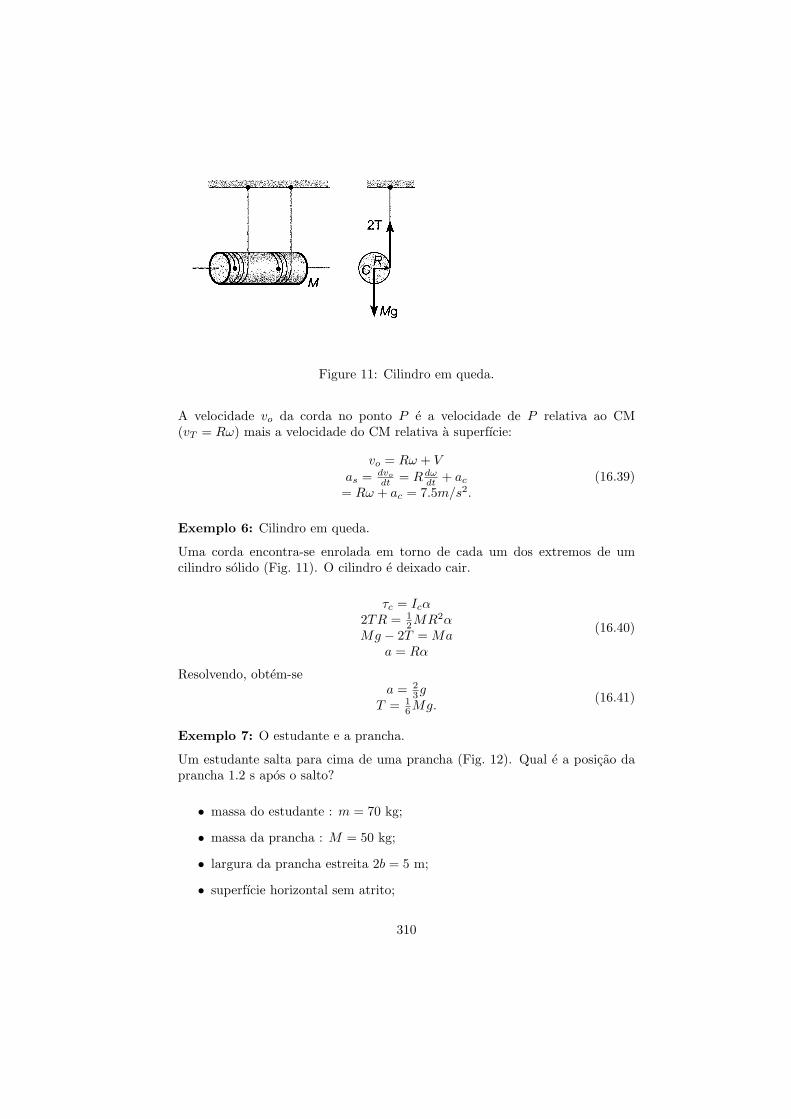
Figure 11: Cilindro em queda.
A velocidade vo da corda no ponto P e a velocidade de P relativa ao CM(vT = Rω) mais a velocidade do CM relativa a superfıcie:
vo = Rω + V
as = dvo
dt = R dωdt + ac
= Rω + ac = 7.5m/s2.(16.39)
Exemplo 6: Cilindro em queda.
Uma corda encontra-se enrolada em torno de cada um dos extremos de umcilindro solido (Fig. 11). O cilindro e deixado cair.
τc = Icα2TR = 1
2MR2αMg − 2T = Ma
a = Rα
(16.40)
Resolvendo, obtem-sea = 2
3gT = 1
6Mg.(16.41)
Exemplo 7: O estudante e a prancha.
Um estudante salta para cima de uma prancha (Fig. 12). Qual e a posicao daprancha 1.2 s apos o salto?
• massa do estudante : m = 70 kg;
• massa da prancha : M = 50 kg;
• largura da prancha estreita 2b = 5 m;
• superfıcie horizontal sem atrito;
310

Figure 12: Estudante + prancha.
• velocidade inicial do estudante : v = 3 m/s.
• sistema inicial : prancha + estudante a correr
• sistema final : (prancha + estudante) em movimento como corpo rıgido.
Nao ha forcas horizontais e portanto, o momento−→P hor conserva-se:
QuadroNegro 2
311

Figure 13: Movimento do CM no problema do estudante e da prancha.
Mostramos na Fig. 14 uma comparacao entre as grandezas fısicas do movimentolinear e rotacional.
16.6 Precessao do giroscopio
Um giroscopio e basicamente constituıdo por um volante ou roda em rotacaorapida, possuindo uma energia cinetica muito superior a energia potencial grav-itacional. Foucault definiu em 1852 o giroscopio como um aparelho que exibeum momento angular forte 1. Considere um giroscopio suportado num pontoorigem O, tal como se encontra ilutrsado na Fig. 15. Suponha que o movimentodo CM e de precessao em relacao ao eixo vertical:
N = Mg (16.42)
O torque em relacao a origem O e:
−→τ o = [−→R ×−→F ]
= mgl sin γ(16.43)
O modulo e τ = mgl sin γ, a direcao e sempre perpendicular a −→ω s e M−→g . −→τ enormal ao plano definido por −→ω s e −→ω p =
−→Ω.
1L. Foucault, “Sur une nouvelle demonstration experimentale du mouvement de la terrefondee sur la fixite du plan de rotation”, Compt. Rend. 35, 421 (1852).
312
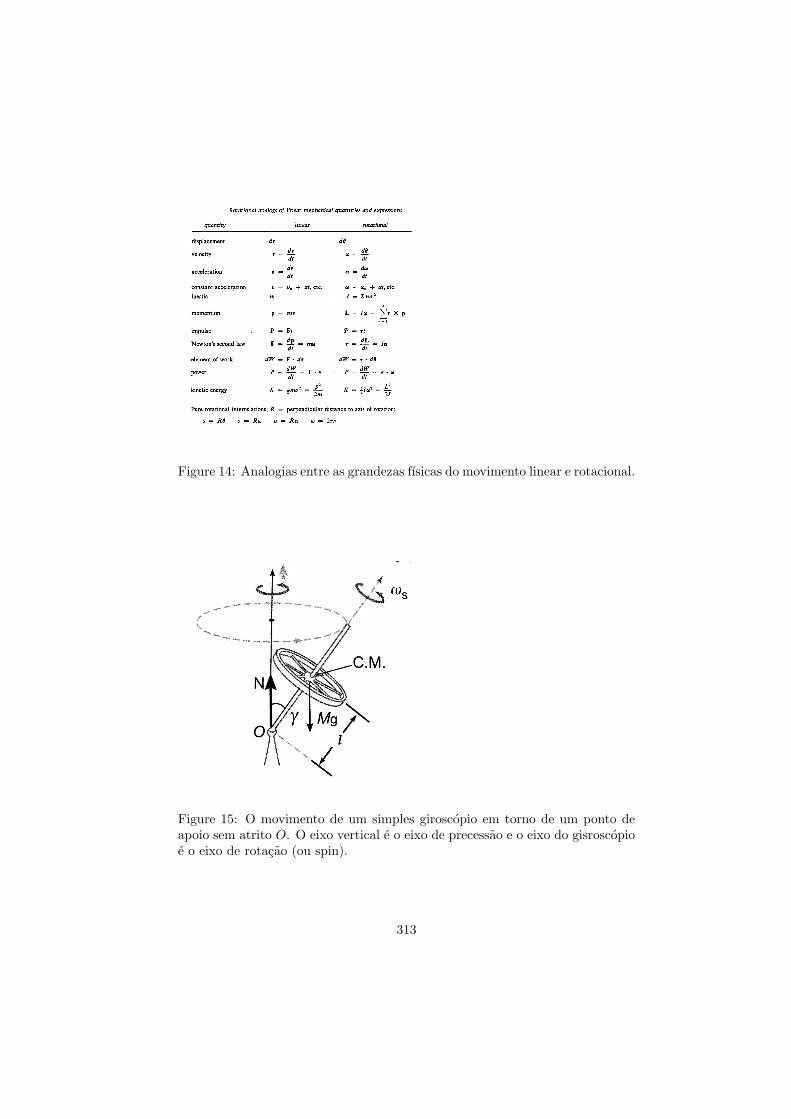
Figure 14: Analogias entre as grandezas fısicas do movimento linear e rotacional.
Figure 15: O movimento de um simples giroscopio em torno de um ponto deapoio sem atrito O. O eixo vertical e o eixo de precessao e o eixo do gisroscopioe o eixo de rotacao (ou spin).
313

Figure 16: Variacao do momento angular durante o intervalo de tempo dt.
O movimento de um simples giroscopio em torno de um ponto de apoio sematrito O descreve um movimento de precessao em relacao ao eixo vertical −→ω p eum movimento de rotacao (ou spin) em relacao ao seu eixo de simetria.
Assumindo que o movimento de precessao e muito lento, de modo que −→ω p ¿ −→ω s
e possamos desprezar o momento angular devido a precessao, podemos escrever
∴ Lo ∼ Iωs
d−→L
dt = −→τ (16.44)
Num intervalo de tempo dt a variacao do momento angular e dado por
| d−→L |=| −→τ | dt = Mgl sin γdt (16.45)
como se mostra na Fig. 16.
O angulo dφ varrido pelo eixo no intervalo de tempo dt e
dφ =dL
Lo sin γ=
Mgl sin γdt
Lo sin γ, (16.46)
onde aparece uma frequencia de precessao
Ω = ωp =dφ
dt=
Mgl
Lo. (16.47)
Como se depreende o movimento de precessao e independente do angulo deinclinacao e de facto o movimento pode ser horizontal.
Podemos reescrever a expresso anterior na forma
ωpLo sin γ = Mgl sin γ−→τ o = [−→ω p ×−→L o]
(16.48)
314
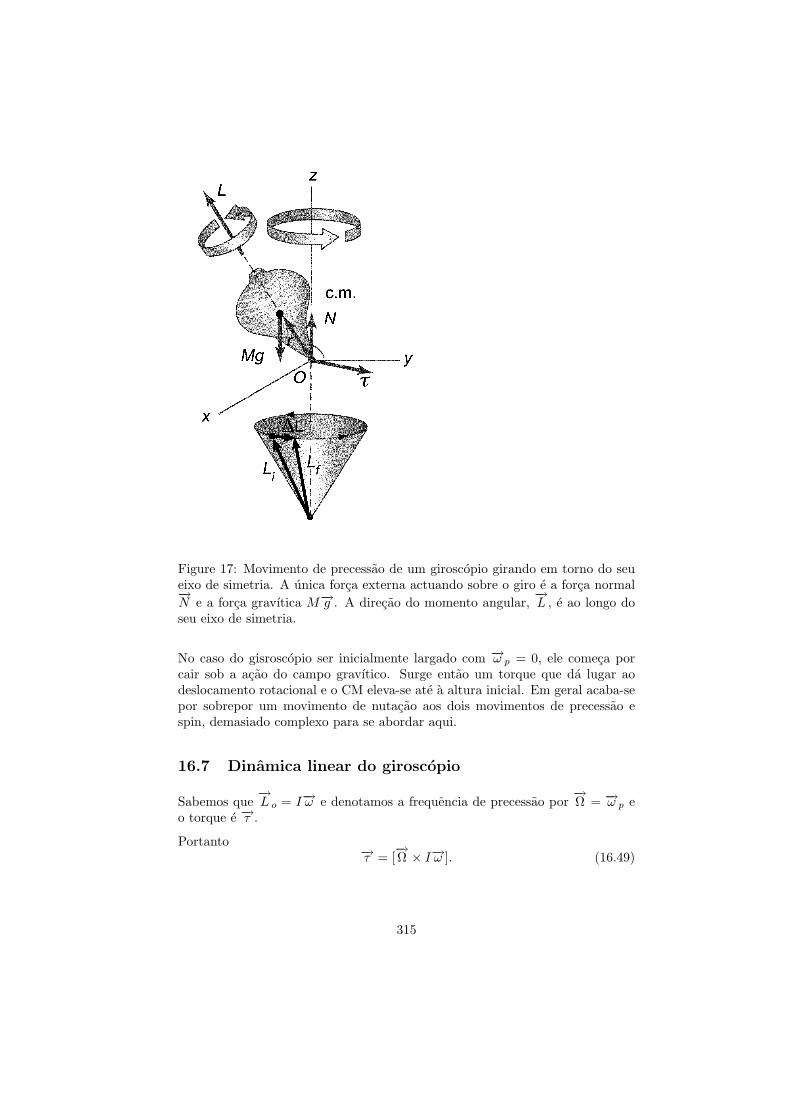
Figure 17: Movimento de precessao de um giroscopio girando em torno do seueixo de simetria. A unica forca externa actuando sobre o giro e a forca normal−→N e a forca gravıtica M−→g . A direcao do momento angular,
−→L , e ao longo do
seu eixo de simetria.
No caso do gisroscopio ser inicialmente largado com −→ω p = 0, ele comeca porcair sob a acao do campo gravıtico. Surge entao um torque que da lugar aodeslocamento rotacional e o CM eleva-se ate a altura inicial. Em geral acaba-sepor sobrepor um movimento de nutacao aos dois movimentos de precessao espin, demasiado complexo para se abordar aqui.
16.7 Dinamica linear do giroscopio
Sabemos que−→L o = I−→ω e denotamos a frequencia de precessao por
−→Ω = −→ω p e
o torque e −→τ .
Portanto −→τ = [−→Ω × I−→ω ]. (16.49)
315

16.8 Precessao giroscopica
Considere 2 partıculas de massa m ligadas por meio de uma haste rıgida decomprimento 2L. O momento angular e Ls em relacao ao eixo z. As massastem a velocidade vo (Fig. 18).
Suponha que o torque e aplicado durante um intervalo de tempo curto ∆t nomomento em que a haste se encontra ao longo do eixo dos x:
∑(−→F + (−−→F )) = 0, (16.50)
e o CM nao se move.
Ocorre uma variacao do momento de cada uma das massas:
∆−→p = m∆−→v =−→F ∆t. (16.51)
Portanto ∆−→v e perpendicular a −→v o.
Tal significa que ocorre uma mudanca da direcao da velocidade e a haste rodaem torno de uma nova direcao - o eixo de rotacao inclina-se ligeiramente de umangulo ∆ϕ:
∆ϕ ∼ ∆v
vo=
F∆t
mvo(16.52)
O torque e τ = 2FL e Ls = 2mvoL onde L e o comprimento da haste
∴ ∆ϕ = F∆tmvo
= 2LF∆t2Lmvo
= τ∆tLs
(16.53)
ondeΩ =
∆ϕ
∆t=
τ
Ls(16.54)
denota a frequencia de precessao, como ja foi referido.
316
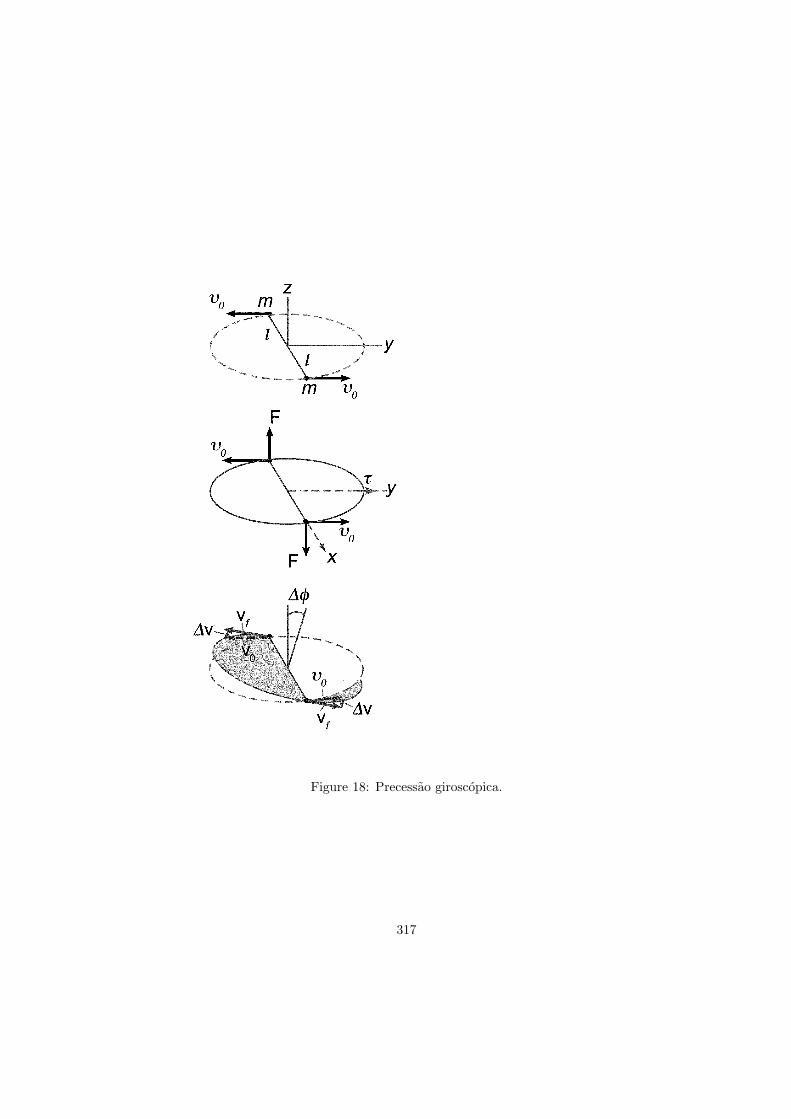
Figure 18: Precessao giroscopica.
317
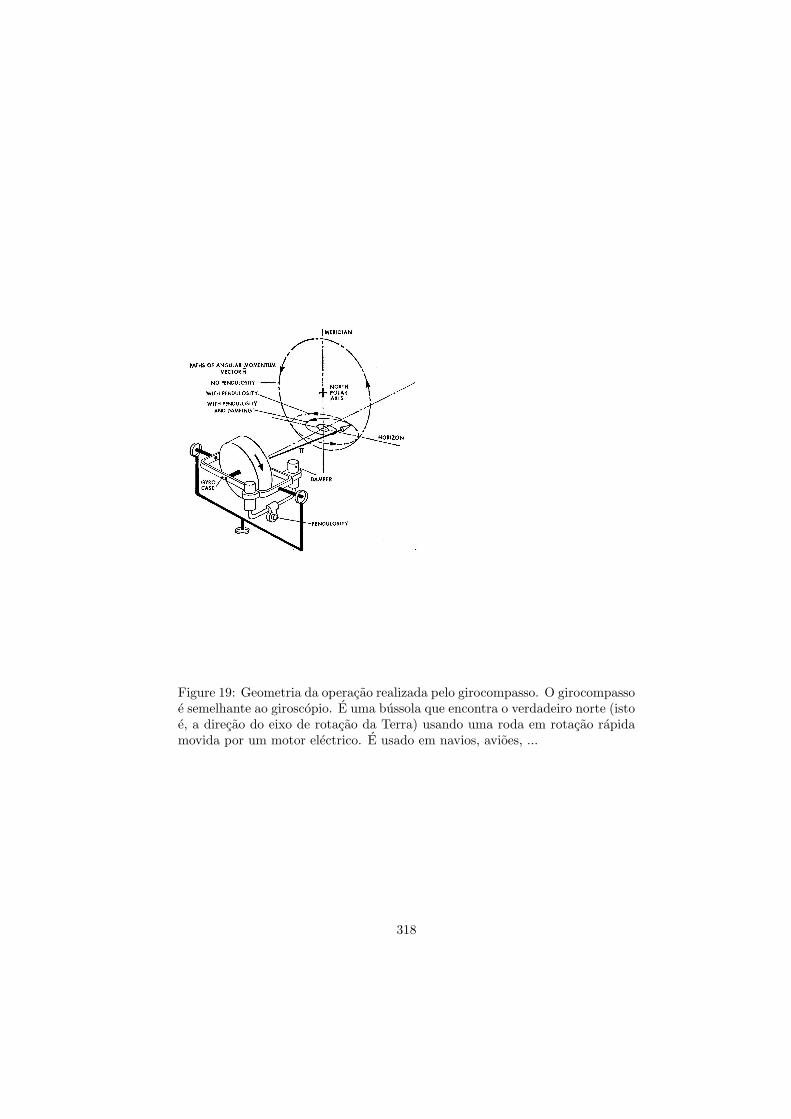
Figure 19: Geometria da operacao realizada pelo girocompasso. O girocompassoe semelhante ao giroscopio. E uma bussola que encontra o verdadeiro norte (istoe, a direcao do eixo de rotacao da Terra) usando uma roda em rotacao rapidamovida por um motor electrico. E usado em navios, avioes, ...
318