material de apoio: análise matemática - 2º semestre
DESCRIPTION
Material de apoio: análise matemática - 2º semestreTRANSCRIPT

Professor Cícero José – Uniban 2011
1
CAPÍTULO IV Séries – Contexto Histórico
Zenão de Eléa (490 – 425 a.C.) escreveu um livro com 40 paradoxos1 relativos ao contínuo e ao
infinito. Pelo menos quatro dos paradoxos influenciaram o desenvolvimento da matemática para
explicar os fenômenos relevantes. Infelizmente, o livro não sobreviveu até os tempos modernos, assim
conhecemos estes paradoxos a partir de outras fontes. Os paradoxos de Zenão sobre o movimento
desconcertaram matemáticos por séculos. No final eles envolvem a soma de um número infinito de
termos positivos a um número finito, o qual é a essência da convergência de uma série infinita de
números. Vários matemáticos contribuíram para o entendimento das propriedades de sequências e
séries. Este ensaio destaca as contribuições de alguns daqueles matemáticos que estudaram sequências
e séries.
Um destes paradoxos é o de Aquiles e a tartaruga. Aquiles, o herói grego, e a tartaruga decidem
apostar uma corrida de 100m. Como Aquiles é 10 vezes mais rápido que a tartaruga, esta recebe a
vantagem de começar a corrida 80m na frente da linha de largada.
No intervalo de tempo em que Aquiles percorre os 80m que o separam da Tartaruga, esta
percorre 8m e continua na frente de Aquiles.
No intervalo de tempo em que ele percorre mais 8m, a tartaruga já anda mais 0,8m... Dessa
forma, não importa quanto tempo se passe, Aquiles nunca alcançará a tartaruga.
A solução clássica para esse paradoxo envolve a utilização do conceito de limite e convergência
de séries numéricas.
O paradoxo surge ao supor intuitivamente que a soma de infinitos intervalos de tempo é infinita,
de tal forma que seria necessário passar um tempo infinito para Aquiles alcançar a tartaruga.
No entanto, os infinitos intervalos de tempo descritos no paradoxo formam uma progressão
geométrica e sua soma converge para um valor finito, em que Aquiles encontra a tartaruga. Na nossa
simbologia, temos: n
i = 1
1 1 11 + + + ... = 1 + n10 100 10� .
Zenão não foi o único matemático da Antiguidade a trabalhar com sequências. Vários dos
matemáticos gregos da Antiguidade usaram seu método de exaustão (um argumento sequencial) para
mediar áreas de figuras e regiões. Usando sua técnica refinada de raciocínio chamada de “método”,
Arquimedes (287 – 212 a.C.) alcançou vários resultados importantes envolvendo áreas e volumes de
várias figuras e sólidos. Na verdade, ele construiu vários exemplos e tentou explicar como somas
1 Um paradoxo é uma declaração aparentemente verdadeira que leva a uma contradição lógica, ou a uma situação que contradiz a intuição comum. Em termos simples, um paradoxo é "o oposto do que alguém pensa ser a verdade". A identificação de um paradoxo baseado em conceitos aparentemente simples e racionais tem, por vezes, auxiliado significativamente o progresso da ciência, filosofia e matemática.

Professor Cícero José – Uniban 2011
2
infinitas poderiam ter resultados finitos. Dentre seus vários resultados estavam que a área sob um arco
parabólico é sempre dois terços da base vezes a altura. Seu trabalho não foi tão completo ou rigoroso,
como alguns matemáticos que vieram depois dele e desenvolveram sequências e séries como Newton e
Leibniz, mas foi tão impressionante quanto. Embora Arquimedes tenha sido obstruído pela falta de
precisão e notação eficiente, foi capaz de descobrir muitos dos elementos da análise moderna de
sequências e séries.
O próximo contribuinte importante para esta área da matemática foi Fibonacci (1170 – 1240). Ele
descobriu uma sequência de inteiros na qual cada número é igual à soma dos dois antecessores (1, 1, 2,
3, 5, 8,…), introduzindo-a em termos de modelagem de uma população reprodutiva de coelhos. Esta
sequência tem muitas propriedades curiosas e interessantes e continua sendo aplicada em várias áreas
da matemática moderna. Durante o mesmo período, astrônomos chineses desenvolveram técnicas
numéricas para analisar resultados experimentais. Durante os séculos XIII e XIV, matemáticos
chineses usaram a ideia de diferenças finitas para analisar tendências em seus dados. Hoje, métodos
como os deles são usados para entender o comportamento a longo prazo e os limites de sequências
infinitas. Este trabalho inicial na Ásia levou a mais investigação e análise de várias progressões e
séries, mas teve pouca influência sobre os matemáticos europeus.
Oresme (1325 – 1382) estudou taxas de variação, como velocidade e aceleração, usando uma
aproximação sequencial. Seu principal trabalho, “De configurationibus”, foi o primeiro a apresentar
gráficos de velocidade. O argumento que usamos para mostrar a divergência da série harmônica foi
inventado por Oresme em sua publicação. Duzentos anos depois, Stevin (1548 – 1620) avançou a
matemática providenciando uma simbologia mais fácil de compreender. Ele entendeu os conceitos
físicos e matemáticos da aceleração devido à gravidade. Somou séries e analisou sequências, mas
parou um pouco antes de definir ou explicar limites e convergência. O contemporâneo de Stevin,
Galileu (1564 – 1642), aplicou matemática às ciências especialmente na astronomia. Baseado no seu
estudo de Arquimedes, Galileu melhorou a compreensão de hidrostática, desenvolveu os resultados
para o movimento em queda livre sob a ação da gravidade e os movimentos dos planetas. Até sugeriu
que poderia existir uma terceira propriedade entre o finito e o infinito.
À medida que o desenvolvimento do cálculo foi tomando forma, o progresso no entendimento de
séries infinitas teve um papel no desenvolvimento do cálculo diferencial e integral. Pascal era
fascinado pelos resultados impressionantes que vinham das somas infinitas, mas era confundido pelo
seu conceito. Para ele, o infinito era alguma coisa para admirar, mas impossível de entender. Pascal
preferiu a abordagem geométrica de St. Vincent (1584–1667) para séries e sua convergência em vez da
nova abordagem analítica de Fermat e Descartes (1596–1650) que não conseguia visualizar ou
entender. Apesar da limitação de Pascal para entender séries, ele, junto com Descartes e Fermat, usou
cálculos com séries nas contribuições aos fundamentos do cálculo diferencial e integral.
Professor Cícero José – Uniban 2011
3
Até a metade do século XVII, matemáticos tinham desenvolvido e analisado séries de números.
O tempo tinha chegado para investigar sequências e séries de funções. Tanto Newton e Leibniz
desenvolveram representações de séries para funções. Usando métodos algébricos e geométricos,
Newton calculou as séries para as funções trigonométricas sen(x) e cos(x) e para a função exponencial.
Estes resultados são encontrados nos trabalhos de Newton intitulados “Method of Fluxions and Infinite
Series” e “Analysis with Infinite Series”. Newton utilizou séries para desenvolver muitos resultados de
cálculo, tais como área, comprimento de arco e volumes. Leibniz somou sequências de recíprocas de
números poligonais e, seguindo o trabalho de St. Vincent somou e analisou várias sequências
geométricas. Leibniz usou uma abordagem seqüencial de valores infinitamente próximos para explicar
o conceito de limite. Embora nunca tenha pensado na derivada como um limite, descobriu muitos dos
resultados que agora estudamos em cálculo usando limites.
Brook Taylor (1685–1731) não foi o primeiro a inventar a estrutura e o processo que chamamos
de série de Taylor, e a série de Maclaurin não foi desenvolvida por Colin Maclaurin (1698–1746).
James Gregory (1638–1675) estava trabalhando com séries de Taylor quando Taylor tinha apenas
alguns anos de idade. Gregory também publicou a série de Maclaurin para muitas funções
trigonométricas antes que Maclaurin tivesse nascido. Taylor não conhecia o trabalho de Gregory
quando publicou seu livro “Methodus incrementorum directa et inversa”, o qual continha o que
chamamos agora de série de Taylor. Ele tinha desenvolvido independentemente um método baseado
em cálculo para gerar representações de funções em séries. Posteriormente, Maclaurin citou um
trabalho de Taylor em um livro de cálculo que escreveu em 1742. O livro de Maclaurin popularizou
representações de funções em séries, e embora Maclaurin nunca tenha afirmado que as tinha
descoberto, a série de Taylor centrada em a = 0 tornou-se posteriormente conhecida como série de
Maclaurin. Johann Bernoulli (1667–1748) também fez uma descoberta independente do teorema de
Taylor.
Euler usou frequentemente séries infinitas em seu trabalho para desenvolver novos métodos ou
para modelar problemas aplicados. Publicou “Mechanica” em 1736, onde aplicou sistematicamente o
cálculo à mecânica e desenvolveu novos métodos para resolver equações diferenciais usando séries de
potências. Estabeleceu a notação de somatório que usamos hoje, usando sigma para o símbolo da
soma. D’Alembert (1717 – 1783) escreveu cinco artigos a respeito de métodos para integrar equações
diferenciais. Embora tenha recebido pouca educação científica formal, é claro que ele conhecia os
trabalhos de Newton, L’Hospital e dos Bernoullis. D’Alembert publicou muitos trabalhos sobre
matemática e física matemática, culminado com seu trabalho principal, “Traité de dynamique”.
Considerou a derivada como um limite da diferença de quocientes, o que o colocou à frente dos seus
pares no entendimento do cálculo. Também desenvolveu o teste da razão para determinar a
Professor Cícero José – Uniban 2011
4
convergência de muitas séries. Através do trabalho de D’Alembert, a natureza da pesquisa sobre séries
estava mudando de cálculos práticos para uma fundamentação mais teórica.
Lagrange estendeu o trabalho de Euler nas equações de movimento e o entendimento da energia
potencial. Publicou “Mécanique analytique” (1787), que aplicava cálculo ao movimento de objetos. O
maior trabalho de Lagrange foi na teoria e aplicação do cálculo. Ele sentiu que a série de Taylor
desempenhava um papel fundamental no entendimento do cálculo, embora ainda evitasse o limite e as
propriedades de convergência de sequências e séries. Bolzano (1781–1848) confrontou este assunto,
apontando que a convergência era importante para entender e usar séries. Tentou explicar convergência
associando-a com a ideia de subconjuntos limitados. Bolzano acreditava no método de Lagrange para
usar séries de Taylor como a base para o cálculo. Fourier (1768–1830) fez contribuição ao estudo e
cálculo da difusão de calor e à solução de equações diferenciais. “Théorie analytique de la chaleur” (A
Teoria Analítica do Calor, 1822) contém uso extenso de séries consistindo de funções trigonométricas
que hoje chamamos de séries de Fourier. Apesar disso, contribuiu muito pouco para a teoria destas
séries, as quais eram conhecidas, muito antes, por Euler, Daniel Bernoulli e Lagrange.
Finalmente, a comunidade matemática foi motivada a estabelecer fundamentos mais teóricos para
as idéias de limite e convergência de sequências e séries. Cauchy (1789-1857) foi o primeiro a definir
por completo as ideias de convergência e convergência absoluta de séries infinitas. Este trabalho foi
feito em conjunto com o desenvolvimento de uma análise rigorosa do cálculo. Também foi o primeiro
a desenvolver uma teoria sistemática para números complexos e a transformada de Fourier para
equações diferenciais. Contudo, ambos Cauchy e seu colega Niels Henrik Abel (1802–1829) ignoraram
a utilidade das séries divergentes. Abel escreveu em 1828 “séries divergentes são a invenção do diabo,
e é uma vergonha basear nelas qualquer demonstração”.
Runge (1856 – 1927) desenvolveu o método de resolução baseado em sequências para solucionar
numericamente equações diferenciais junto com M. W. Kutta (1867 – 1944). Sequências e séries
tornaram-se ferramentas padrão para aproximar funções e calcular resultados em computação
numérica.
O matemático indiano autodidata Srinivasa Ramanujan (1887 – 1920) usou sequências e séries de
potências para desenvolver resultados em teoria de números. O trabalho de Ramanujan era teórico e
produziu numerosos resultados importantes usados por matemáticos no século XX. Seus colaboradores
britânicos Godfrey Harold (G.H.) Hardy (1877 – 1947) e John Littlewood (1885 – 1977) usaram seu
conhecimento de séries para produzir avanços importantes em teoria de números e estenderam a
utilidade das séries para muitas áreas da matemática.

Professor Cícero José – Uniban 2011
5
CAPÍTULO V
Séries 1. Definição
Se tentarmos adicionar os termos de uma sequência infinita
a1 + a2 + a3 + ... + na + ... que é denominada uma série infinita (ou apenas uma série) e é denotada, por abreviação, pelo símbolo:
nn = 1
a∞
� ou na�
Para definir a soma de infinitas parcelas, consideram-se as somas parciais. S1 = a1
S2 = a1 + a2
S3 = a1 + a2 + a3
e, em geral,
Sn = a1 + a2 + a3 + ... + an – 1 + na = n
ii = 1
a�
2. Sequências das somas parciais
Essas somas parciais formam uma nova sequência {Sn}, que pode ou não ter um limite. Se
nnlimS = S
→∞ existir (como um número finito), então chamaremos soma da série infinita na� .
Definição 1: Dada uma série nn = 1
a∞
� = a1 + a2 + a3 + ..., denotamos por Sn sua n-ésima soma parcial:
Sn = n
ii = 1
a� = a1 + a2 + a3 + ... + na
Se a sequência {Sn} for convergente e nnlimS = S
→∞ existir como um número real, então a série
na� é denominada convergente, e escrevemos:
a1 + a2 + a3 + ... + na = S ou nn = 1
a∞
� = S

Professor Cícero José – Uniban 2011
6
O número S é chamado soma da série. Caso contrário, a série é dita divergente.
Assim, quando escrevemos nn = 1
a∞
� queremos dizer que, adicionando um número suficiente de
termos da série, podemos chegar tão próximo quanto quisermos do número S. Note que:
nn = 1
a∞
� = n
ini = 1
lim a→∞�
3. Série Geométrica Um exemplo importante de uma série infinita é a série geométrica. Série Geométrica é toda série
escrita na forma a + ar + ar2 + ar3 + ar4 + ... + arn – 1 + ... = n 1
n = 1
ar∞
−� , com a � 0 e r é a razão.
Cada termo é obtido a partir do anterior pela multiplicação dele por uma razão em comum r.
3.1. Soma de uma série geométrica Se r = 1, então Sn = a + a + ... + a = na → ± ∞ . Como nn
limS = S→∞
não existe, a série geométrica
diverge neste caso.
Se r � 1, temos:
Sn = a + ar + ar2 + ar3 + ar4 + ... + arn – 1
e
rSn = ar + ar2 + ar3 + ar4 + ar5 + ... arn – 1 + arn
Subtraindo essas equações, obtemos: Sn – rSn = a – arn
Sn(1 – r) = a(1 – rn)
Sn = ( )na 1 r
1 r
−−
Se –1 < r < 1, temos que rn � 0 quando n � �; assim,
( )n
nn n
a 1 r alimS = lim =
1 r 1 r→∞ →∞
−− −

Professor Cícero José – Uniban 2011
7
Então, quando r < 1 (–1 < r < 1) a série geométrica converge e tem soma S = a
1 r−.
Para r > 1 ( r < –1 ou r > 1), a série diverge, pois a sequência {rn} é divergente.
Resumindo
Vejamos alguns exemplos:
Exemplo 1: Encontre a soma da série geométrica 10 20 40
5 + + ...3 9 27
− −
Resolução: O primeiro termo é a = 5 e a razão é r = 23
− . Como r = 23
< 1, a série é convergente e
sua soma é:
10 20 40
5 + + ...3 9 27
− − = 5 5
= = 352
133
� �− −� �� �
Exemplo 2: A série 2n 1 n
n = 1
2 3∞
−� é convergente ou divergente?
Resolução: Vamos reescrever o n-ésimo termo da série na forma arn – 1:
2n 1 n
n = 1
2 3∞
−� = ( ) ( )n n 12
n = 1
2 3∞
− −� = n
n 1n = 1
43
∞
−� = n
n 1n = 1
43 3
∞
−��
= n
n = 1
43
3
∞ � �� �� �
�
Reconhecemos essa série como uma série geométrica com a = 4 e r = 43
. Como r > 1, a série
diverge.
A série geométrica n 1
n = 1
ar∞
−� = a + ar + ar2 + ...
• é convergente se r < 1 e suam soma é n 1
n = 1
ar∞
−� = a
1 r−.
• é divergente se r > 1.

Professor Cícero José – Uniban 2011
8
Exemplo 3: Escreva o número 2,317 = 2,3171717... como uma razão de inteiros.
Resolução: Temos que 2,3171717... = 2,3 + 3 5 7
17 17 17 + + + ...
10 10 10
Depois do primeiro termo temos uma série geométrica com a = 3
1710
e r = 2
110
. Portanto:
2,317 = 2,3 + 3
2
1710
11
10−
= 2,3 +
171 000
99100
= 23 17
+ 10 990
= 1147495
Exemplo 4: Uma bola é solta a uma distância de 1 metro do chão. Supondo que a cada queda suba 23
da altura anterior, determine a distância total percorrida pela bola até parar.
Resolução:
Note que, a partir do segundo termo, 2 4
+ + ...3 9
é uma série como uma série geométrica com
a = 23
e r = 23
. Como a bola, quando jogada, sobe e desce a mesma altura temos:
D = 1 + 22 4
+ + ...3 9
� �� �� �
= 1 + 2 �
23
21
3−
= 1 + 2 �
2313
D = 1 + 2 � 2 = 5
Portanto, a distância total percorrida é de 5 metros.
1 m 2 2
1 = 3 3� 2 2 4
= 3 3 9�

Professor Cícero José – Uniban 2011
9
4. Teste da divergência
Teorema 1: Se a série na� converge, então x lim
→ ∞an = 0.
Prova: Seja Sn = a1 + a2 + ... + na . Então an = Sn – Sn – 1. Como na� é convergente, a sequência {Sn}
é convergente. Seja nnlimS = S
→∞. Como n – 1 � � quando n � �, também temos n 1n
limS = S−→∞.
Portanto:
( )n n n 1 n n 1n n n nlim a = lim S S = limS limS− −→∞ →∞ →∞ →∞
− − = S – S = 0
A recíproca desse teorema não é verdadeira em geral. Se nnlim a = 0
→∞, não podemos concluir que
na� seja convergente.
O Teste para Divergência vem do Teorema 1, porque, se a série não for divergente, ela é
convergente e, assim, nnlim a = 0
→∞.
Vejamos mais um exemplo:
Exemplo 5: Mostre que a série 2
2n = 1
n5n + 4
∞
� diverge.
Resolução: nnlim a
→∞ =
2
2n
nlim
5n + 4→∞ =
2
n 22
nlim
4n 5 +
n
→∞ � �� �� �
= 1
5 + 0 =
15
� 0
Desse modo, a série diverge pelo Teste para Divergência.
Teste da divergência
Se nnlim a
→∞ não existir ou se nn
lim a 0→∞
≠ , então a série nn = 1
a∞
� é divergente.

Professor Cícero José – Uniban 2011
10
4.1. Teorema de séries convergentes
Se na� e nb� forem séries convergentes, então também o serão:
(i) nn = 1
ca∞
� = nn = 1
c a∞
�
(ii) ( )n nn = 1
a + b∞
� = nn = 1
a∞
� + nn = 1
b∞
�
(iii) ( )n nn = 1
a b∞
−� = nn = 1
a∞
� – nn = 1
b∞
�
Exercícios 95) Qual é a diferença entre uma sequência e uma série? 96) O que é uma série convergente? O que é uma série divergente?
97) Explique o significado de se dizer que nn = 1
a∞
� = 5.
98) Seja n
2na =
3n + 1.
a) Determine se { na } é convergente.
b) Determine se nn = 1
a∞
� é convergente.
99) Determine se as séries abaixo são convergentes ou divergentes. Se for convergente, calcule sua soma.
a) 4 8
3 + 2 + + + ...3 9
b) 5 25 125
3 + + ...2 8 32
− − −
c) n 1
n = 1
25
3
−∞ � �� �� �
�
d) ( )n 1
nn = 1
34
−∞ −�
e) n
n + 1n = 0
�
3
∞
�
f) n = 1
nn + 5
∞
�
g) 2n = 2
2n 1
∞
−�
h) 2
2k = 2
kk 1
∞
−�
i) n n
nn = 1
3 + 26
∞
�
j) n
n = 1
2∞
�
k) n = 1
arc tg n∞
�
Professor Cícero José – Uniban 2011
11
100) Expresse os números abaixo como uma razão de inteiros, usando o conceito de série geométrica. a) 0,2 = 0,2222... b) 3,417 = 3,417417417... c) 0,123456 101) Encontre os valores de x para os quais a série converge. Calcule a soma da série para aqueles
valores de x.
a) n
nn = 1
x3
∞
� c) ( )n
n = 1
x 4∞
−�
b) n n
n = 0
4 x∞
� d) ( )n
nn = 0
x + 32
∞
�
102) Qual é o valor de c se n
n = 2
(1 + c) = 2∞
−� ?
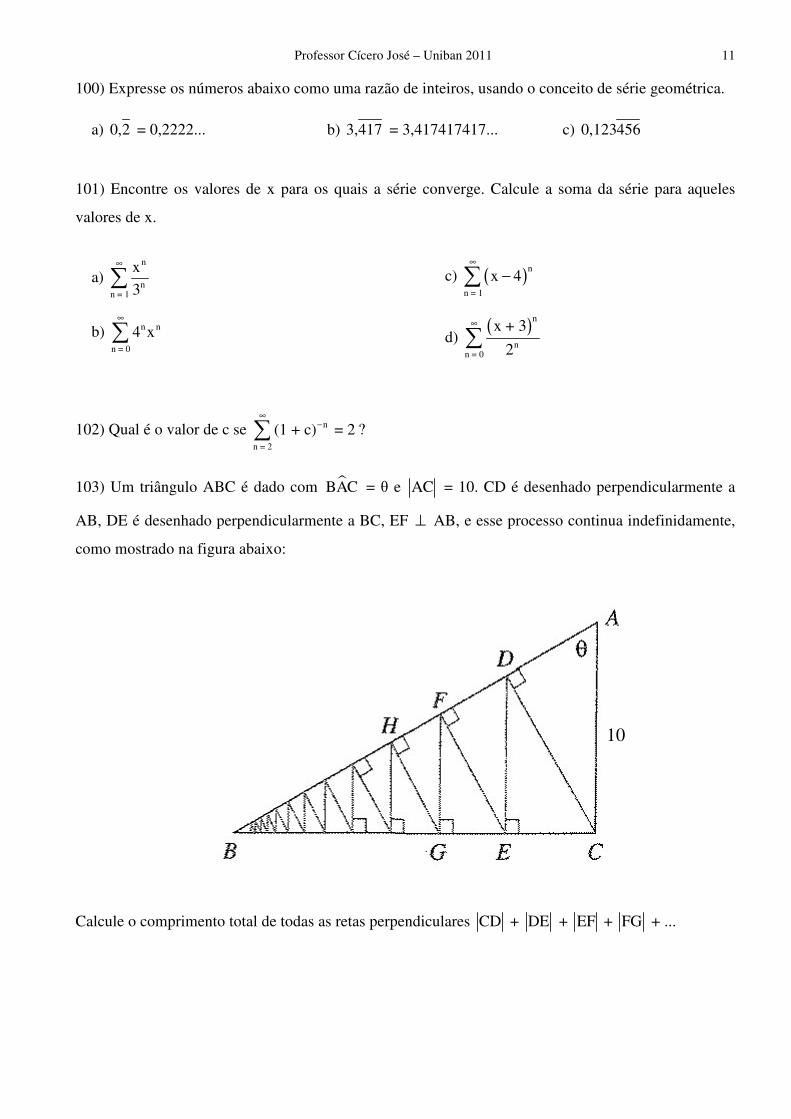
103) Um triângulo ABC é dado com �BAC = � e AC = 10. CD é desenhado perpendicularmente a
AB, DE é desenhado perpendicularmente a BC, EF ⊥ AB, e esse processo continua indefinidamente,
como mostrado na figura abaixo:
Calcule o comprimento total de todas as retas perpendiculares CD + DE + EF + FG + ...
10

Professor Cícero José – Uniban 2011
12
5. Tipos de Testes
5.1. Teste da Integral Nem sempre conseguimos encontrar a soma exata de uma série. Conseguimos fazer isso para as
séries geométricas. Geralmente não é fácil calcular nnlim S
→∞. Por isso vamos apresentar algumas teses
que nos permitam determinar se uma série é convergente ou divergente sem encontrar sua soma
explicitamente, porém, tais métodos nos fornecerão boas estimativas de somas.
Nosso primeiro teste envolve as integrais impróprias.
Vejamos dois exemplos:
Exemplo 1: Seja a série 2n = 1
1n
∞
� , cujos termos são os recíprocos dos quadrados de inteiros positivos.
2n = 1
1n
∞
� = 2 2 2 2 2
1 1 1 1 1 + + + + + ...
1 2 3 4 5
Não existe uma fórmula simples para a soma Sn dos n primeiros termos, mas a tabela abaixo
sugere que as somas parciais estão se aproximando de um número próximo de 1,64 n � � e, assim,
parece que a série é convergente.
n
Sn = n
2i = 1
1i�
5 1,4636
10 1,5498
50 1,6251
100 1,6350
500 1,6429
1 000 1,6439
5 000 1,6447
Podemos confirmar geometricamente tal afirmação analisando a área dos retângulos sob a curva
y = 2
1x
(ver figura 5.1.). Nela, a base de cada retângulo é um intervalo de comprimento 1 e a altura é
igual ao valor da função y = f(x) = 2
1x
no extremo direito do intervalo.

Professor Cícero José – Uniban 2011
13
Figura 5.1. Área sob a curva y = 21
x
Excluindo-se o primeiro retângulo, a área total dos retângulos remanescentes será menor do que a
área sob a curva y = 2
1x
para x � 1, que é o valor da integral 21
1dx
x
∞
� . Calculando temos:
21
1dx
x
∞
� = b
21b
1lim dx
x→∞ � = b 2
1blim x dx−
→∞ � = b1
b1
xlim
1
−
→∞ −
21
1dx
x
∞
� = b
b1
1lim
x→∞
� �−� �� �
= b
1lim 1
b→∞
� �− −� �� �
= –(0 – 1) = 1
Assim temos que a figura mostra que todas as somas parciais são menores do que:
1 + 21
1dx
x
∞
� = 2
Então as somas parciais são limitadas. Sabemos também que as somas parciais são crescentes
(porque todos os termos são positivos). Portanto as somas parciais convergem (pelo Teorema da
Sequência Monotônica) e, dessa maneira, a série é convergente. Logo, a soma da série (o limite das
somas parciais) é também menor que 2:
2n = 1
1n
∞
� = 2 2 2 2 2
1 1 1 1 1 + + + + + ...
1 2 3 4 5 < 2
NOTA: A soma exata dessa série foi calculada pelo matemático suíço Leonhard Euler (1707–1783) e é
2�
6.

Professor Cícero José – Uniban 2011
14
Exemplo 2: Vamos analisar agora a série n = 1
1n
∞
� = 1 1 1 1 1
+ + + + + ...1 2 3 4 5
2n = 1
1n
∞
� = 2 2 2 2 2
1 1 1 1 1 + + + + + ...
1 2 3 4 5
Analogamente ao exemplo 1, temos a tabela abaixo que nos dá uma ideia do comportamento da
série.
n
Sn = n
i = 1
1i
�
5 3,2317
10 5,0210
50 12,7524
100 18,5896
500 43,2834
1 000 61,8010
5 000 139,9681
A tabela de valores de Sn sugere que as somas parciais não estão se aproximando de um número;
assim, suspeitamos que essa série possa ser divergente. Vamos, novamente, fazer uma análise gráfica
(ver figura 5.2.), porém desta vez, usaremos retângulos cujos topos estão acima da curva y = 1x
,
com base de comprimento 1 e altura y = f(x) = 1x
, à esquerda do intervalo.
Figura 5.2. Área sob a curva y = 1
x

Professor Cícero José – Uniban 2011
15
Logo, a soma das áreas dos retângulos é 1 1 1 1 1
+ + + + + ...1 2 3 4 5
= n = 1
1n
∞
� , maior
do que a área sob a curva y = 1x
para x � 1, que é igual a 1
1 dx
x
∞
� . Calculando, temos:
1
1 dx
x
∞
� = b
1b
1lim dx
x→∞ � = 1
b2
1blim x dx
−
→∞ � =
b12
b
1
xlim
12
→∞
1
1 dx
x
∞
� = ( )b
2 lim b 1→∞
−� = ( )2 1∞ − = �
A integral imprópria 1
1 dx
x
∞
� é divergente, ou seja, a área sob a curva é infinita, isto conclui
que, a série estudada é divergente.
Resumindo
NOTA: Quando você usar o Teste da Integral, lembre-se de que não é necessário começar a série ou
a integral em n = 1. Por exemplo, testando a série
2n = 4
1(n 3)
∞
−� usamos 24
1 dx
(x 3)
∞
−�
Teste da Integral Suponha que f seja um função contínua, positiva e decrescente em [1, �[ e seja an =
f(n). Então a série nn = 1
a∞
� é convergente se, e somente se, a integral imprópria 1
( ) dxf x∞
�
for convergente. Em outras palavras:
i) Se 1
( ) dxf x∞
� for convergente, então nn = 1
a∞
� é convergente.
ii) Se 1
( ) dxf x∞
� for divergente, então nn = 1
a∞
� é divergente.

Professor Cícero José – Uniban 2011
16
Também não é necessário que f seja sempre decrescente. O que é importante é que f seja
finalmente decrescente, isto é, decrescente para x maior que algum número N. Então, nn = N
a∞
� é
convergente, e assim nn = 1
a∞
� é convergente.
Vejamos mais dois exemplos:
Exemplo 3: Teste a série 2n = 1
1n + 1
∞
� para convergência ou divergência.
Resolução: A função f(x) = 2
1x + 1
é contínua, positiva e decrescente em [1, �[ e assim usamos o
teste da Integral.
21
1 dx
x + 1
∞
� = 21b
1lim dx
x + 1
∞
→∞ � = b
1blim (arc tg x)
→∞
21
1 dx
x + 1
∞
� = ( )blim arc tg b arc tg 1
→∞− =
� �
2 4− =
�
4
Como a integral 21
1 dx
x + 1
∞
� é convergente, temos que pelo teste da integral, a série 2n = 1
1n + 1
∞
�
é convergente.
Exemplo 4: Teste a série n
n = 1
ne∞
−� para convergência ou divergência.
Resolução: A função f(x) = xxe− é contínua, positiva e decrescente em [1, �[ e assim usamos o teste
da Integral.
x
1xe dx
∞ −� =
b x
1blim xe dx−
→∞ � (I)
Resolvendo separadamente a integral b x
1xe dx−
� por partes temos:
u = x dv = e–x dx
dudx
= 1 xdv = e−� �
du = dx v = xe1
−
− = xe−−

Professor Cícero José – Uniban 2011
17
Voltando a integral temos:
b x
1xe dx−
� = x ( ) bx
1e−− – ( )b x
1e dx−−�
b x
1xe dx−
� = –(be–b – 1 � e–1) + ( ) bx
1e−−
b x
1xe dx−
� = –be–b + e–1 – (e–b – e–1) = –be–b + e–b + 2e–1
Substituindo o resultado da integral em (I) vem:
x
1xe dx
∞ −� = ( )b b 1
blim be + e + 2e− − −
→∞− = 2e–1 =
2e
Como a integral b x
1xe dx−
� é convergente, temos que pelo teste da integral, a série n
n = 1
ne∞
−� é
convergente.
Exercícios 104) Use o Teste da Integral para determinar se a série é convergente ou divergente.
a) 4n = 1
1n
∞
�
b) n = 1
13n + 1
∞
�
c) n
n = 1
ne∞
−�
d) 1 1 1 1
1 + + + + + ...8 27 64 125
e) 3n = 1
5 2 nn
∞ −�
f) 2n
n = 1
ne∞
−�
g) k = 2
1n ln n
∞
�
h) 3n = 1
1n + n
∞
�
Professor Cícero José – Uniban 2011
18
105) A medida do lado de um triângulo equilátero mede 10 cm. Unindo-se os pontos médios de seus
lados, obtém-se um segundo triângulo equilátero. Unindo-se os pontos médios dos lados do novo
triângulo equilátero obtém-se um terceiro, e assim por diante, indefinidamente. Calcule a soma dos
perímetros de todos esses triângulos.
106) Divide-se um segmento de comprimento m em três partes iguais e retira-se a parte central. Para
cada um dos segmentos restantes repete-se o processo, retirando-se suas partes centrais e assim
sucessivamente. Determine a soma dos comprimentos retirados.
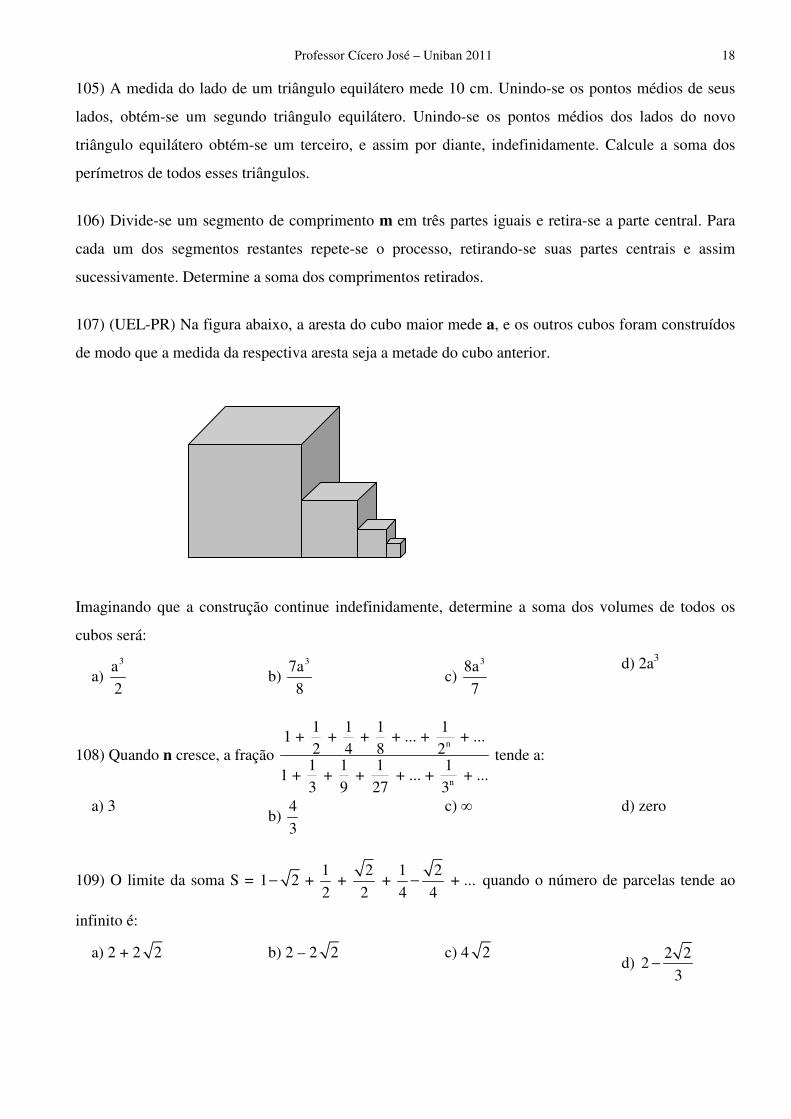
107) (UEL-PR) Na figura abaixo, a aresta do cubo maior mede a, e os outros cubos foram construídos
de modo que a medida da respectiva aresta seja a metade do cubo anterior.
Imaginando que a construção continue indefinidamente, determine a soma dos volumes de todos os
cubos será:
a) 3a
2 b)
37a8
c) 38a
7
d) 2a3
108) Quando n cresce, a fração n
n
1 1 1 11 + + + + ... + + ...
2 4 8 21 1 1 1
1 + + + + ... + + ...3 9 27 3
tende a:
a) 3 b)
43
c) �
d) zero
109) O limite da soma S = 1 2 1 2
1 2 + + + + ...2 2 4 4
− − quando o número de parcelas tende ao
infinito é:
a) 2 + 2 2
b) 2 – 2 2
c) 4 2 d)
2 22
3−

Professor Cícero José – Uniban 2011
19
5.2. Teste da Razão (Teste de D’Alembert)
Dada qualquer série na� , podemos considera a série correspondente
nn = 1
a∞
� = 1 2 3a + a + a + ...
cujos termos são os valores absolutos dos termos da série original.
Definição: Uma série na� é chamada absolutamente convergente se a série de valores na� for
convergente.
Note que, se na� for uma série com termos positivos, então na = an e assim a convergência
absoluta é a mesma coisa que a convergência nesse caso.
Demonstração (i) A ideia é comparar a série dada com uma série geométrica convergente. Como L < 1, podemos
escolher um número r tal que L < r < 1. Como n + 1
nn
alim
a→∞ = L e L < r, o quociente n + 1
n
aa
será
Teste da Razão
Seja nn = 1
a∞
� uma série de termos não nulos e seja L = n + 1
nn
alim
a→∞. Então:
i) Se L < 1, a série é absolutamente convergente, logo convergente.
ii) Se L > 1, (incluindo L = �), a série é divergente.
iii) Se L = 1, o teste não é conclusivo; isto é, nenhuma conclusão pode ser tirada
sobre a convergência ou divergência de na� .

Professor Cícero José – Uniban 2011
20
finalmente menor que r; isto é, existe um inteiro N tal que n + 1
n
aa
< r sempre que n � N, ou,
equivalentemente,
n + 1a < na r sempre que n � N (1)
Colocando n sucessivamente igual a N, N + 1, N +2, ... em (1), obtemos
N + 1a < Na r
N + 2a < N + 1a r < Na r2
N + 3a < N + 2a r < Na r3
e, em geral, N + ka < Na rk para todo k � 1 (2)
Agora a série
kN
k = 1
a r∞
� = Na r + Na r2 + Na r3 + ...
é convergente porque é uma série geométrica com 0 < r < 1. Assim a desigualdade (2), mostra que a
série
nn = N + 1
a∞
� = N + kk = 1
a∞
� = N + 1a + N + 2a + N + 3a + ...
é convergente também. Segue-se que a série nn = 1
a∞
� é convergente. (Lembre-se de que um número
finito de termos não afeta a convergência.) Portanto, na� é absolutamente convergente.
(ii) Se n + 1
n
aa
� L > 1 ou n + 1
n
aa
� �, então o quociente n + 1
n
aa
será finalmente maior que 1; isto é,
existe um inteiro N tal que n + 1
n
aa
> 1 sempre que n � N. Isso significa que n + 1a > na quando n � N,
e assim nnlim a
→∞ � 0. Portanto, na� diverge pelo Teste da Divergência.

Professor Cícero José – Uniban 2011
21
NOTA
A parte (iii) do Teste da Razão diz que, se n + 1
nn
alim
a→∞ = 1, o Teste da Razão não dá nenhuma
informação. Por exemplo, para a série convergente 2
1n� , temos:
n + 1
nn
alim
a→∞ =
2
n
2
1(n + 1)lim
1n
→∞ =
2
2n
nlim
(n + 1)→∞ =
2
2n
nlim
n + 2n + 1→∞ =
2
n 22
nlim
2 1n 1 + +
n n
→∞ � �� �� �
= 1
Enquanto a série divergente 1n� , obtemos:
n + 1
nn
alim
a→∞ =
n
1n + 1lim
1n
→∞ =
n
nlim
n + 1→∞ =
n
nlim
1n 1 +
n
→∞ � �� �� �
= 1
Portanto, se n + 1
nn
alim
a→∞ = 1, a série na� pode convergir ou divergir. Nesse caso, o Teste da
Razão falha e devemos usar algum outro teste.
Vejamos alguns exemplos:
Exemplo 1: Teste a convergência da série nn = 1
n2
∞
� .
Resolução: Temos que n + 1
n
aa
= n + 1
n
n + 12
n2
= n
n + 1
n + 1 2
2 n� =
n
n
n + 1 2
2 2 n�
� =
n + 12n
.
Então: n + 1
nn
alim
a→∞ =
n
n + 1lim
2n→∞ =
n
n + 1lim
2n→∞ =
n
1n 1 +
nlim2n→∞
� �� �� � =
12
< 1
Portanto, a série nn = 1
n2
∞
� é convergente.

Professor Cícero José – Uniban 2011
22
Exemplo 2: Teste a convergência da série 3
nn = 1
n3
∞
� .
Resolução: Temos que n + 1
n
aa
=
3
n + 1
3
n
(n + 1)3n3
= 3 n
n + 1 3
(n + 1) 3
3 n� =
3 n
3 n
(n + 1) 3
n 3 3�
� =
31 n + 13 n� �� �� �
Então: n + 1
nn
alim
a→∞ =
3
n
1 n + 1lim
3 n→∞
� �� �� �
= 3
n
1 1lim 1 +
3 n→∞
� �� �� �
= 1
13� =
13
< 1
Portanto, a série 3
nn = 1
n3
∞
� é convergente.
Exemplo 3: Teste a convergência da série n = 1
1n
∞
� .
Resolução: Temos que n + 1
n
aa
=
1n + 1
1n
= 1 n
n + 1 1
� = n
n + 1.
Então: n + 1
nn
alim
a→∞ =
n
nlim
n + 1→∞ =
n
nlim
n + 1→∞ =
n
nlim
1n 1 +
n
→∞ � �� �� �
= 1
Portanto, nada podemos concluir a respeito da série.
Exemplo 4: Teste a convergência da série n
n = 1
3n!
∞
� .
Resolução: Temos que n + 1
n
aa
=
n + 1
n
3(n + 1)!
3n!
= n + 1
n
3 n!
(n + 1)! 3� =
n
n
3 3 n!
(n + 1) n! 3�
��
= 3
(n + 1)
Então: n + 1
nn
alim
a→∞ =
n
3lim
n + 1→∞ =
n
3lim
n + 1→∞ =
3∞
= 0 < 1
Portanto, a série n
n = 1
3n!
∞
� é convergente.

Professor Cícero José – Uniban 2011
23
Exemplo 5: Teste a convergência da série n
n = 1
nn!
∞
� .
Resolução: Temos que n + 1
n
aa
=
n + 1
n
(n + 1)(n + 1)!
nn!
= n + 1
n
(n + 1) n!
(n + 1)! n� =
n
n
(n + 1) (n + 1) n!
(n + 1) n! n�
��
= n
n
(n + 1)n
Então: n + 1
nn
alim
a→∞ =
n
nn
(n + 1)lim
n→∞ =
n
nn
(n + 1)lim
n→∞ =
n
n
n + 1lim
n→∞
� �� �� �
= n
n
1lim 1 +
n→∞
� �� �� �
= e > 1
Portanto, a série n
n = 1
nn!
∞
� é divergente.
Observação: n
n
1lim 1 +
n→∞
� �� �� �
= e
Exercícios
110) O que você pode dizer sobre a série na� em cada um dos seguintes casos?
a) n + 1
nn
alim
a→∞ = 8 b) n + 1
nn
alim
a→∞ = 0,8 c) n + 1
nn
alim
a→∞ = 1
111) Use o Teste da Razão para determinar se a série é convergente ou divergente.
a) n
n = 0
10n!
∞
�
b) 4
n = 1
1n
∞
�
c) n = 1
n5 + n
∞
�
d) n = 1
1(2n)!
∞
�
e) 1/n
3n = 1
en
∞
�
f) n
n 1n = 1
n 34
∞
−��
g) n
2n + 1k = 2
10(n + 1)4
∞
�
h) n
1 + 3nn = 1
n3
∞
�
112) Encontre a soma da série 2n + 1
nn = 1
25
∞
� .
113) Expresse a dízima periódica 4,17326326326... como uma razão de números inteiros.

Professor Cícero José – Uniban 2011
24
6. Séries atribuídas a matemáticos
6.1. Série de Taylor Publicado em 1715 em seu “Methodus incrementorum directa et inversa”. Taylor era graduado
em Cambridge e era um entusiástico admirador de Newton e secretário da Royal Society. Interessava-
se muito por perspectiva: sobre este assunto publicou dois livros em 1715 e 1719, no segundo dos
quais deu o primeiro enunciado geral do princípio dos pontos de desaparecimento. No entanto, seu
nome hoje é lembrado quase exclusivamente em conexão com a série
f (x + a) = f (a) + f’(a) x + f” (a) 2x
2! + f´” (a)
3x3!
+ ... + f (n) (a) nx
n! + ...
que apareceu em seu “Methodus incrementorum”.
6.2. Série de Maclaurin
A chamada série de Maclaurin, que aparece em seu “Treatise of Fluxions” de 1742 é apenas um
caso especial da série de Taylor, publicada por Brook Taylor. Essa série se torna a familiar série de
Taylor substituindo a por zero. A série de Taylor geral era conhecida já por Gregory muito antes, e em
essência também por Jean Bernoulli; mas Taylor não sabia disso. Além disso, a série de Maclaurin
tinha aparecido no “Methodus differentialis” de Stirling mais de uma dúzia de anos antes de ser
publicada por Maclaurin.
f (x) = f (0) + f’(0) x + f” (0) 2x
2! + f´” (0)
3x3!
+ ... + f (n) (0) nx
n! + ...
6.3. Série de Fourier
Existe uma enorme diferença entre estudar séries de Fourier e séries de potências, pois uma série
de Fourier funciona como um processo global enquanto que uma série de potências é local.
Apresentaremos alguns problemas mostrando que nem sempre é viável trabalhar com séries de
potências, mas pelo contrário, temos a necessidade de trabalhar com Séries de Fourier em sistema
práticos. Jean B. Fourier (1768–1830) foi pioneiro na investigação destes problemas. No livro “Théorie
Analytique de la Chaleur”, escrito em 1822, ele introduziu o conceito conhecido atualmente como
Série de Fourier, que é muito utilizado nas ciências em geral, principalmente nas áreas envolvidas com:

Professor Cícero José – Uniban 2011
25
Matemática, Engenharia, Computação, Música, Ondulatória, Sinais Digitais, Processamento de
Imagens, etc. Sua série é:
f(x) = 0a2
+ n nn = 1
n�x n�xa cos + b sen
L L
∞ � �� �� �
�
Observe que no intervalo –L < x < L é simétrico em relação à origem. A equação acima é
chamada de série de Fourier de f no intervalo (–L, L).
7. Aplicações das séries de Taylor / Maclaurin Através desta série podemos escrever funções trigonométricas, logarítmicas, exponenciais, em
forma de uma função polinomial.
Com a aplicação das séries, podemos demonstrar uma belíssima relação matemática, que une em
uma só fórmula, o número de Euler, os números complexos e as funções trigonométricas seno e
co-seno. Essa relação é conhecida como fórmula de Euler, e é definida por eit = cos t + i sen t, onde i
representa um número complexo definido por i2 = −1.
Leonhard Euler (1707–1783) foi um homem com uma memória prodigiosa e um poder de
concentração fenomenal. Euler teve interesses universais; foi teólogo, físico, astrônomo, linguista,
psicólogo, conhecedor dos clássicos e, principalmente matemático. Euler foi considerado um
verdadeiro gênio do século. Em Matemática, fez contribuições permanentes para a Álgebra,
Trigonometria, Geometria Analítica, Cálculo, Cálculo das Variações, Equações Diferenciais, Variável
Complexa, Teoria dos Números e Topologia. Sua produção matemática parece não ter sido afetada
pelos 13 filhos ou pela cegueira que o acometeu em seus 17 últimos anos de vida. Euler escreveu mais
de 700 trabalhos e 32 livros sobre matemática e foi responsável pela introdução de muitos símbolos
(tais como e, � e i = 1− ) e notações que ainda são usadas (como f(x), �, sen x e cos x). Euler nasceu
em Basileia, Suíça, em 15 de abril de 1707 e morreu de derrame cerebral em São Petersburgo em 18 de
setembro de 1783, quando trabalhava na corte da imperatriz russa Catarina, a Grande.
Veja a seguir a demonstração da importante Relação de Euler.

Professor Cícero José – Uniban 2011
26
8. Relação de Euler Vamos provar que eit = cost + i sen t. f(t) = sen t f(0) = 0
f’(t) = cos t f’(0) = 1
f’’(t) = –sen t f’’(0) = 0
f’”(t) = –cos t f’”(0) = –1
fiv(t) = sen t fiv(0) = 0
fv(t) = cos t fv(0) = 1
Desenvolvendo a função seno temos:
sen t = 0 + 1(x – 0) + 02!
(x – 0)2 + ( 1)
3!−
(x – 0)3 + 04!
(x – 0)4 + 15!
(x – 0)5 + …
sen t = x – x3!
+ 5x
5! –
7x7!
+ 9x
9! + ……… + (–1) n �
2n + 1x(2n + 1)!
f(t) = cos t f(0) = 1
f’(t) = –sen t f’(0) = 0
f’’(t) = –cos t f’’(0) = –1
f’”(t) = sen t f’”(0) = 0
fiv(t) = cos t fiv(0) = 1
fv(t) = –sen t fv(0) = 0
Desenvolvendo a função cosseno temos:
cos t = 1 + 0 . (x – 0) + ( 1)
2!−
(x – 0)2 + 03!
(x – 0)3 + 14!
(x – 0)4 + 05!
(x – 0)5 + …
cos t = 1 – 2x
2! +
4x4!
– 6x
6! +
8x8!
+ ……… + (–1) n �2nx
(2n)!
Desenvolvendo a função exponencial temos: f(t) = eit f(0) = 1
f’(t) = ieit f’(0) = i
f’’(t) = i2eit f’’(0) = i2
f’”(t) = i3eit f’”(0) = i3
fiv(t) = i4eit fiv(0) = i4
fv(t) = i5eit fv(0) = i5
eit = 1 + i � (x – 0) + 2i
2!(x – 0)2 +
3i3!
(x – 0)3 + 4i
4!(x – 0)4 +
5i5!
(x – 0)5 + 6i
5!(x – 0)6 + …
eit = 1 + xi + 2x
2!i2 +
3x3!
i3 + 4x
4!i4 +
5x5!
i5 + 6x
6!i6 + …

Professor Cícero José – Uniban 2011
27
Mas:
i0 = 1
i1 = i
i2 = –i
i3 = –i
i4 = 1
i5 = i
i6 = –1
Então:
eit = 1 + xi + (–1) � 2x
2! + (–i) �
3x3!
+ 1 � 4x
4!i4 + i �
5x5!
+ (–1) � 6x
6! + …
eit = 1 + xi – 2x
2! +
4x4!
+ ……. + xi – 3x
3!i +
5x5!
i …
Portanto:
eit = 2 4
cos t
x x1 + + ...
2! 4!� �
−� �� ����������
+ i 3 5
sen t
x xx + + ...
3! 5!� �
−� �� ����������
eit = cos t + i sen t Se fizermos t = �, obtemos a bela identidade de Euler:
eit = cos t + i sen t
eit = ei� = – 1
ei� + 1 = 0

Professor Cícero José – Uniban 2011
28
CAPÍTULO VI
Equações Diferenciais
1. O que é uma equação diferencial? Em Matemática, uma equação diferencial é uma equação cuja incógnita é uma função que
aparece na equação sob a forma das respectivas derivadas. As equações diferenciais são essenciais
para o campo da Física.
As equações diferenciais dividem-se em dois tipos:
a) Uma equação diferencial ordinária (EDO) contém apenas funções de uma variável e derivadas
daquela mesma variável.
b) Uma equação diferencial parcial (EDP) contém funções com mais do que uma variável e suas
derivadas parciais.
As Equações Diferenciais têm as seguintes propriedades:
I) a solução pode existir ou não;
II) caso exista, a solução é única ou não.
Exemplos de equações diferenciais ordinárias
1. y” + 3y´ + 6y = sin (x)
2. (y”)3 + 3y + 6y = tg (x)
3. y” + 3y y = ex
4. y´ = f(x, y)
5. M(x, y)dx + N(x, y)dy = 0
Exemplos de Equações Diferenciais Parciais
a) Equação do calor : ut = a2uxx
b) Equação do calor : ut = a2(uxx + uyy)
c) Equação da Onda : utt = a2uxx
d) Equação da Onda : utt = a2(uxx + uyy)
e) Equação de Laplace : uxx + uyy = 0
f) Equação de Laplace : uxx + uyy + uzz = 0
g) ux = x + y
h) uxxx + 2 y uxx + x ux uy + (ux)2 = sin (xy)
2. Ordem e grau A ordem da equação diferencial é a ordem da mais alta derivada da função incógnita que ocorre
na equação.
Grau é o valor do expoente para a derivada mais alta da equação, quando a equação tem a
“forma” de um polinômio na função incógnita e em suas derivadas como, por exemplo:
A y(3) + B y(2) + C y(1) + D y(0) = 0

Professor Cícero José – Uniban 2011
29
Exemplos:
1. y” + 3y´ + 6y = sen (x) e y” + 3y y´ = ex têm ordem 2 e grau 1
2. (y”)3 + 3(y´)10 + 6y = tg (x) tem ordem 2 e grau 3
3. dydx
= 5x + 3 tem ordem 1 e grau 1
4. ey 2
2
d ydx
+ 22
dydx
� �� �� �
= 1 tem ordem 2 e grau 1
5. 32
2
d ydx
� �� �� �
+ 3y 7
dydx
� �� �� �
+ y3 2
dydx
� �� �� �
= 5x tem ordem 2 e grau 3
3. Notação Usam-se frequentemente os símbolos y’, y”, y’”, y(4), ..., y(n) para representar as derivadas de
ordem, respectivamente, primeira, segunda, terceira, quarta, ..., enésima de y em relação à variável
independente x. Assim, y” representa 2
2
d ydx
se a variável independente é x, mas representa 2
2
d ydp
se a
variável independente é p. Se a variável independente é o tempo, usualmente denotada por t, é comum
substituírem-se as linhas por pontos. Assim, y•
, y••
e y•••
representam dydt
, 2
2
d ydt
e 3
3
d ydt
,
respectivamente.
Observe-se o uso dos parênteses em y(n) para distinguir da potência yn.
4. Definição de solução Uma solução de uma equação diferencial na função incógnita y e na variável independente x, no
intervalo I, é uma função y(x) que verifica identicamente a equação para todo x em I.
Vejamos alguns exemplos: Exemplo 1: Determine se y = x2 – 1 é uma solução da equação diferencial (y’)4 + y2 = –1.
Resolução: Notemos, de início, que o primeiro membro da equação deve ser não-negativo para toda
função real y(x) e todo x, pois é a soma de potências pares, enquanto o segundo membro é negativo.
Como nenhuma função y(x) satisfaz tal equação, a equação diferencial dada não tem solução.
Professor Cícero José – Uniban 2011
30
Exemplo 2: Determine se y = c1 sen 2x + c2 cos 2x, com c1 e c2 constantes arbitrárias, é solução de
y” + 4y = 0?
Resolução: Diferenciando y, obtemos:
y’ = c1 cos 2x � 2 + c2 (–sen 2x) � 2
y’ = 2c1 cos 2x – 2c2 sen 2x
y” = 2c1 (–sen 2x) � 2 – 2c2 cos 2x � 2
y” = –4c1 sen 2x – 4c2 cos 2x
Substituindo na equação, vem: y" + 4y = (–4c1 sen 2x – 4c2 cos 2x) + 4(c1 sen 2x + c2 cos 2x)
= –4c1 sen 2x – 4c2 cos 2x + 4c1 sen 2x + 4c2 cos 2x
= (–4c1 + 4c1) sen 2x + (– 4c2 + 4c2) cos 2x = 0
Assim, y = c1 sen 2x + c2 cos 2x satisfaz a equação diferencial para todos os valores de x, sendo, por
conseguinte, uma solução no intervalo (–�, �).
5. Solução Particular e Solução Geral Uma solução particular de uma equação diferencial é qualquer solução da mesma. A solução
geral da equação diferencial é o conjunto de todas as suas soluções.
Por exemplo, a solução geral do exemplo 2, item 4, é y = c1 sen 2x + c2 cos 2x. Isto é, toda
solução particular da referida equação tem esta forma geral. Algumas soluções particulares são:
• y = 5 sen 2x – 3 cos 2x (com c1 = 5 e c2 = –3)
• y = sen 2x (com c1 = 1 e c2 = 0)
• y = 0 (com c1 = c2 = 0)
6. Resolução de Equações Diferenciais Ordinárias de ordem n > 1 Resolver ou integrar uma equação diferencial é determinar todas as funções que, sob a forma
finita, verificam a equação, ou seja, é obter uma função de variáveis livres que, substituída na equação,
transforme-a numa identidade.
Aprenderemos, aqui, dois tipos de equações diferenciais: Equações diferenciais de variáveis
separáveis e Equações diferenciais lineares homogêneas.

Professor Cícero José – Uniban 2011
31
6.1. Equações separáveis de primeira ordem Seja uma equação diferencial M(x, y) dx + N(x, y) dy = 0. Se M é uma função apenas da variável
x, isto é M = M(x) e N é uma função apenas da variável y, isto é N = N(y), então a equação dada fica
na forma:
M(x) dx + N(y) dy = 0
e ela é chamada equação separável. Isto é motivado pelo fato que é possível separar as funções de
modo que cada membro da igualdade possua uma função com apenas uma variável. Desse modo,
podemos realizar a integração de cada membro por um processo “simples”. Vejamos alguns exemplos:
Exemplo 1: Resolva a equação diferencial y’ = xy
.
Resolução: Podemos escrever a equação diferencial dada como:
dydx
= xy
y dy = x dx
Integrando cada termo independentemente, teremos: y dy = x dx� �
2y
2 + C1 =
2x2
+ C2
e reunindo as constantes em uma constante C, teremos x2 – y2 = C, e esta relação satisfaz à equação
diferencial dada.
Exemplo 2: Resolva a equação y’= xy.
Resolução: Reescrevendo a equação diferencial dada temos:
dydx
= xy
dyy
= x dx
Integrando cada termo independentemente, teremos:
dy
= x dxy� �

Professor Cícero José – Uniban 2011
32
ln y = 2x
2 + C
Aplicando a definição de logaritmos vem:
y =
2x + C
2e� �� �� �� �
y = 2x
C2 e e± � = 2x
2 Ce±
Explicitamente, a solução é y = 2x
2Ce , onde C = C e± .
Observação: Será omitido doravante o sinal de valor absoluto em todas as operações em que
intervenham logaritmos, ficando subentendido, todavia, que tal operação só tem sentido para os valores
absolutos das funções a que se aplica.
Exemplo 3: Resolva a equação eydx – x2dy = 0
Resolução: Separando os diferenciais e reescrevendo a equação diferencial dada temos:
ey dx = x2 dy
2
dxx
= y
dye
Integrando cada termo independentemente, teremos:
y 2e dy = x dx− −� �
ye1
−
− =
1x1
−
− + C
e–y = x–1 + C e–y = 1x
− + C
Calculando o logaritmo em ambos os membros vem:
ln e–y = 1
ln + Cx
� �−� �� �
–y � ln e = 1
ln + Cx
� �−� �� �
–y = 1
ln + Cx
� �−� �� �
(ln e = 1)
y = –1
ln + Cx
� �−� �� �
Professor Cícero José – Uniban 2011
33
Exemplo 4: Resolva a equação y’ = 2x.
Resolução: Reescrevendo a equação diferencial dada temos:
dydx
= 2x
dy = 2x dx
Integrando cada termo independentemente, teremos:
dy = 2x dx� �
y = 22x
2 + C
y = x2 + C
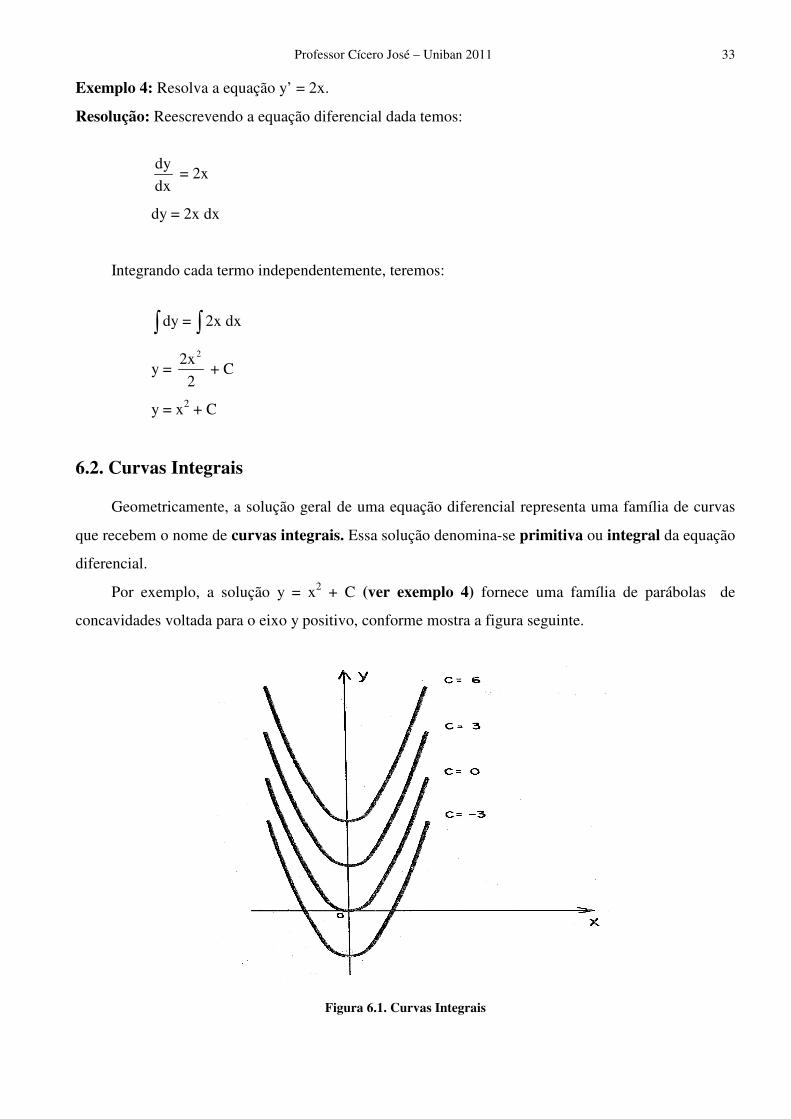
6.2. Curvas Integrais Geometricamente, a solução geral de uma equação diferencial representa uma família de curvas
que recebem o nome de curvas integrais. Essa solução denomina-se primitiva ou integral da equação
diferencial.
Por exemplo, a solução y = x2 + C (ver exemplo 4) fornece uma família de parábolas de
concavidades voltada para o eixo y positivo, conforme mostra a figura seguinte.
Figura 6.1. Curvas Integrais

Professor Cícero José – Uniban 2011
34
Exercícios 114) Nas seguintes equações diferenciais, determine a ordem e o grau. a) y’” – 5xy’ = ex + 1
b) s2
2
2
d tds
+ st dtds
= s
c) 554
4
d ydx� �� �� �
+ 710
dydx� �� �� �
+ y7 – y5 = x
d) y 2
2
d ydx
= y2 + 1
e) (y”)7 – 3yy’ + xy = 0
115) Verifique se a função dada é uma solução da equação diferencial. Função Equação Diferencial a) y = 2e–x + xe–x y” + 2y’ + y = 0
b) y = 1 y” + 2y’ + y = x
c) y = ex y” – y = 0
d) y = xe2x y” – 4y’ + 4y = ex
e) 2y’ + y = 0 y = ex/2
f) y’ – 2y = e3x y = e3x + 10e2x
g) y’ = 25 + y2 y = 5 tg 5x
116) Mostre que y = ln x é uma solução de xy” + y’ = 0 em I = (0, �) mas não é solução em
I = (–�, �).
117) Resolva as seguintes equações diferenciais:
a) dx = 1
2y + 3 dy
b) y’ = 2
3
x2x + 1
c) dydx
= x � ln x
d) y’” = x
Professor Cícero José – Uniban 2011
35
e) y” = e –2x
f) y’ = x3 � sen (5x4 – 1)
g) y” = sen 2x – cos 4x
h) y’ = x2 (x3 + 1)8
i) y’ = 2x
x + 1
j) y’ = 2x 9
x 3−−
118) Resolva as seguintes equações de variáveis separáveis: a) y dx – x dy = 0
b) (1 + y) dx – (1 – x) dy = 0
c) xy y’ = 1 – x2
d) (3xy + 3x – y – 1) dx – xy dy = 0
e) (xy – 2x – y + 2) dx + xy dy = 0
f) 4x dy – y dx = 0
g) e2x – 3y dy = dx
h) y2cos(ln x) dx = x � e1/y dy
i) (x2 + x) dy = (x + 2) dx
j) y’ = x3 � sec2(5x4 – 1)
Professor Cícero José – Uniban 2011
36
6.3. Equações diferenciais lineares homogêneas de ordem 2 Uma equação diferencial linear homogênea de segunda ordem tem a forma
P(x) 2
2
d ydx
+ Q(x) dydx
+ R(x) y = 0 (1)
onde P, Q e R são funções contínuas.
Dois fatos básicos permitem-nos resolver equações lineares homogêneas. O primeiro estabelece
que, se conhecermos duas soluções y1 e y2 de tal equação, então a combinação linear y = c1y1 + c2y2 é
também uma solução.
Demonstração:
Uma vez que y1 e y2 são soluções da equação (1), temos:
P(x) "1y + Q(x) '
1y + R(x)y1 = 0
e
P(x) "2y + Q(x) '
2y + R(x)y2 = 0
Portanto, usando as regras básicas para diferenciação, temos: P(x)y” + Q(x)y’ + R(x)y
= P(x) (c1y1 + c2y2)” + Q(x) (c1y1 + c2y2)’ + R(x) (c1y1 + c2y2)
= P(x) (c1"1y + c2
"2y ) + Q(x) (c1
'1y + c2
'2y )’ + R(x) (c1y1 + c2y2)
= c1"1y P(x) + c2
"2y P(x) + c1
'1y Q(x) + c2
'2y Q(x) + c1y1 R(x)+ c2y2 R(x)
= c1"1y P(x) + c1
'1y Q(x) + c1y1 R(x) + c2
"2y P(x) + c2
'2y Q(x) + c2y2 R(x)
= c1[P(x) "1y + Q(x) '
1y + R(x) y1] + c2[P(x) "2y + Q(x) '
2y + R(x)y2)
= c1(0) + c2(0) = 0
Assim, y = c1y1 + c2y2 é uma solução da equação (1).
Teorema 1: Se y1(x) e y2(x) são soluções da equação linear homogênea (1) e c1 e c2 são constantes
quaisquer, então a função y(x) = c1y1(x) + c2y2(x) é também uma solução da equação (1).

Professor Cícero José – Uniban 2011
37
O outro fato que precisamos é dado pelo seguinte teorema, provado em cursos mais avançados.
Dizemos que a solução geral é uma combinação linear de duas soluções linearmente independentes
y1 e y2. Isso significa que nem y1 nem y2 é um múltiplo constante do outro. Por exemplo, as funções
f(x) = x2 e g(x) = 5x2 são linearmente dependentes, mas f(x) = ex e g(x) = xex são linearmente
independentes.
O teorema 2, muito útil; diz que, se conhecermos duas soluções particulares linearmente
independentes, então conheceremos todas as soluções.
Em geral, não é fácil descobrir soluções particulares para uma equação linear de segunda ordem.
Mas é sempre possível fazer isso se as funções P, Q e R forem funções constantes, isto é, se a equação
diferencial tiver a forma:
ay" + by’ + cy = 0 (2)
onde a, b e c são constantes e a � 0.
Não é difícil pensar em alguns prováveis candidatos para as soluções particulares da equação (2)
se enunciarmos verbalmente. Estamos examinando para uma função y tal que uma constante vezes sua
segunda derivada y” mais outra constante vezes y’ mais a terceira constante vezes y é igual a 0.
Sabemos que a função exponencial y = emx (onde m é uma constante) tem a propriedade que sua
derivada é uma constante múltipla dela mesma: y’ = memx. Além disso, y” = m2emx. Substituindo essas
derivadas na equação (2) veremos que v = emx é uma solução se
am2emx + bmemx + cemx = 0
ou
(am2 + bm + c)emx = 0
Mas emx é diferente de zero. Assim, y = emx é uma solução da equação (2) se m é uma raiz da
equação
am2 + bm + c = 0 (3)
Teorema 2: Se y1 e y2 forem soluções linearmente independentes da equação (1), então a solução
geral é dada por y(x) = c1y1(x) + c2y2(x), onde c1 e c2 são constantes arbitrárias.

Professor Cícero José – Uniban 2011
38
A equação (3) é denominada equação auxiliar (ou equação característica) da equação
diferencial ay” + by’ + cy = 0. Note que ela é uma equação algébrica que foi obtida da equação
diferencial substituindo-se y” por m2, y’ por m, e y por 1.
Separamos em três casos de acordo com o sinal do discriminante b2 – 4ac. 1º caso: Raízes reais distintas (� > 0) Nesse caso as raízes m1 e m2 da equação auxiliar são reais e distintas; logo y1 = 1m xe e y2 = 2m xe
são duas soluções linearmente independentes da equação (2). (Note que 2m xe não é um múltiplo
constante de 1m xe ). Portanto, pelo teorema 2, temos o seguinte fato:
Vejamos alguns exemplos:
Exemplo 1: Resolva a equação y” + y’ – 6y = 0.
Resolução: A equação auxiliar é m2 + m – 6 = 0, onde temos (m – 2)(m + 3) = 0, cujas raízes são
m = 2, –3. Portanto, a solução geral da equação diferencial dada é y = c1e2x + c2e–3x.
OBSERVAÇÃO: Podemos verificar que isso é de fato uma solução diferenciando e substituindo
na equação diferencial.
Exemplo 2: Resolva a equação 32
2
d ydx
+ dydx
– y = 0.
Resolução: A equação auxiliar é 3m2 + m – 1 = 0. Neste caso aqui recorremos à fórmula resolutiva.
� = 12 – 4(3)(–1) = 1 + 12 = 13
m = 1 13
6− ±
Uma vez que as raízes são reais e distintas, a solução geral é y = c1( )1 + 13 x/6
e−
+ c2( )1 13 x/6
e− −
.
Se as raízes m1 e m2 da equação auxiliar am2 + bm + c = 0 são reais e diferentes, então a
solução geral de ay” + by’ + cy = 0 é:
y = c1
1m xe + c22m xe

Professor Cícero José – Uniban 2011
39
2º caso: Raízes reais com multiplicidade maior que 1 (� = 0) Nesse caso m1 = m2, isto é, as raízes da equação auxiliar são reais e iguais. Vamos denotar por m
os valores comuns m1 e m2. Como � = 0, de m = 2b ± b 4ac
2a− −
temos m = b2a
− , logo 2am + b = 0.
Sabemos que y1 = emx é uma solução da equação (2). Agora verifiquemos que y2 = xemx é também
uma solução.
a "
2y + b '2y + cy2 = a(2memx + m2xemx) + b(emx + mxemx) + cxemx
= 2amemx + am2xemx + bemx + bmxemx + cxemx
= 2amemx + bemx + am2xemx + bmxemx + cxemx
= (2am + b)emx + (am2 + bm + c)xemx
= 0(emx) + 0(xemx) = 0
O primeiro termo é 0, pois 2am + b = 0; o segundo termo é 0, pois m é uma raiz da equação
auxiliar. Uma vez que y1 = emx e y2 = xemx são soluções linearmente independentes, o teorema 2 nos
fornece a solução geral.
Exemplo 3: Resolva a equação 4y” + 12y’ + 9y = 0.
Resolução: A equação auxiliar é 4m2 + 12m + 9 = 0, que fatorada fica (2m + 3)2 = 0, cuja única raiz é
m = 32
− . Portanto, a solução geral da equação diferencial dada é y = c1e–3x/2 + c2e–3x/2.
Exemplo 4: Resolva a equação y’” – 2y” – 4y’ + 8y = 0.
Resolução: A equação auxiliar é m3 – 2m2 – 4m + 8 = 0. Fatorando por agrupamento temos:
m2(m – 2) – 4(m – 2) = 0
(m – 2) (m2 – 4) = 0
(m – 2) (m – 2) (m + 2) = 0
(m – 2)2 (m + 2) = 0
Temos que raiz m = 2 tem multiplicidade 2, e a raiz m = –2 tem multiplicidade 1. Portanto, a
solução geral da equação diferencial dada é y = c1e2x + c2xe2x + c3e–2x.
Se a equação auxiliar am2 + bm + c = 0 tem apenas uma raiz real m, então a solução geral de
ay” + by’ + cy = 0 é:
y = c1emx + c2xemx

Professor Cícero José – Uniban 2011
40
3º caso: Raízes não reais (� < 0) Nesse caso as raízes m1 e m2 da equação são números complexos. Podemos escrever m1 = + i e m2 = – i onde � e � são números reais.
Usando a equação de Euler ei� =cos � + i sen �, escrevemos a equação diferencial como:
y = C11m xe + C2
2m xe = C1e( + i)x + C2e( – i)x
y = C1ex � eix + C2ex � e–ix
y = C1ex (cos x + i sen x) + C2ex (cos x – i sen x)
y = ex [C1 (cos x + i sen x) + C2 (cos x – i sen x)] y = ex (C1 cos x + i C1 sen x + C2 cos x – C2 i sen x) y = ex (C1 cos x + C2 cos x + i C1 sen x – C2 i sen x) y = ex [(C1 + C2) cos x + i (C1 – C2) sen x] y = ex [(C1 + C2) cos x + i (C1 – C2) sen x] y = ex (c1 cos x + i c2 sen x)
onde c1 = C1 + C2, c2 = i(C1 – C2). Isso nos dá todas as soluções (reais ou complexas) da equação
diferencial. As soluções são reais quando as constantes c1 e c2 são reais.
Resumindo temos:
Exemplo 5: Resolva a equação y” – 6y’ + 13y = 0.
Resolução: A equação auxiliar é m2 – 6m + 13 = 0. Utilizando a fórmula resolutiva temos:
� = (–6)2 – 4(1)(13) = 36 – 52 = –16
m = 6 16
2± −
= 6 4i
2±
= 3 ± 2i
Logo, a solução geral da equação diferencial é y = e3x (c1 cos 2x + c2 sen 2x).
Se as raízes da equação auxiliar am2 + bm + c = 0 forem os números complexos
m1 = + i e m2 = – i, então a solução geral de ay” + by’ + cy = 0 será
y = ex (c1 cos x + c2 sen x)

Professor Cícero José – Uniban 2011
41
Exemplo 6: Resolva a equação y” – 2y’ + 10y = 0.
Resolução: A equação auxiliar é m2 – 2m + 10 = 0. Utilizando a fórmula resolutiva temos:
� = (–2)2 – 4(1)(10) = 4 – 40 = –36
m = 2 36
2± −
= 2 6i
2±
= 1 ± 2i
Logo, a solução geral da equação diferencial é y = ex (c1 cos 3x + c2 sen 3x).
6.4. Equações diferenciais lineares homogêneas de ordem n > 2 A resolução de equações diferenciais homogêneas de ordem n > 2 é análoga à de ordem 2.
Vejamos alguns exemplos:
Exemplo 7: Resolva a equação y’” – y” – 4y’ + 4y = 0
Resolução: Essa equação diferencial é de ordem 3. Temos como equação auxiliar (ou equação
característica):
m3 – m2 – 4m + 4 = 0 Fatorando por agrupamento vem:
m2(m – 1) – 4(m – 1) = 0
(m – 1) (m2 – 4) = 0
(m – 1) (m + 2) (m – 2) = 0
m = 1, m = – 2, m = 2
Portanto, a solução geral da equação diferencial dada é y = c1ex + c2e–2x + c3e2x.
Exercícios 119) Resolva as seguintes equações diferenciais: a) y” – 6y’ + 8y = 0
b) y” + 8y’ + 41y = 0
c) y” – 2y’ + y = 0
d) 4y” + y = 0
e) 4y” + y’ = 0
f) 2
2
d ydt
– 2dydt
– y = 0
g) 2
2
d ydt
+ dydt
+ y = 0
h) 62
2
d ydx
– dydx
– 2y = 0
i) 2
2
d ydx
– 8dydx
+ 16y = 0
j) 2
2
d ydx
– 2dydx
+ 5y = 0

Professor Cícero José – Uniban 2011
42
120) Resolva a equação 3 2
3 2
d y d y dy + 3 4 12y = 0
dx dx dx− − .
121) Resolva a equação 4 3
4 3
d y d y + = 0
dx dx.
122) Mostre que y” – y’ – 2y = 0 tem 2 soluções distintas do tipo y = eax.
123) Verifique que y = ln x é solução de x3 3
3
d ydx
– 6x dydx
+ 12y = 12 lnx – 4.
124) Determine se as séries abaixo são convergentes ou divergentes. Se for convergente, calcule sua soma.
a) nn = 0
310
∞
� b) n
nn = 0
1 23
∞ −� c) n + 2
n = 0
12
∞
� d) n 1
nn = 0
( 5)4
−∞ −� e)
n + 3
nn = 0
23
∞
�
125) Deixa-se cair uma bola de borracha de uma altura de 6 metros sobre uma superfície plana. Cada
vez que a bola atinge o plano, caindo de uma altura h, ela retorna a uma altura 14
h. Determine a
distância total percorrida pela bola.
126) Use o teste da integral para determinar se cada série abaixo converge ou diverge:
a) 3
n = 1
1n n
∞
� b) 2n = 1
1n + 4
∞
� c) 2
3n = 1
3nn + 16
∞
� d) 2
n = 1
1000n
∞ � �� �� �
�
127) Use o teste da razão para determinar se cada série abaixo converge ou diverge:
a) n
nn = 1
5n 4
∞
��
b) 3
n = 1
n + 1n!
∞
� c) n
n = 1
7n!
∞
� d) n
nn = 1
1 + e2
∞
�
128) Aplicando o teste da divergência, verifique se as séries abaixo convergem ou divergem.
a) n = 1
100n
∞
� b) 2
2n = 1
n5n + 1
∞
� c) 2
n = 1
5n3n + 1
∞
� d) 2
2n = 1
2n + 19n + 5
∞
�
Professor Cícero José – Uniban 2011
43
CAPÍTULO VII
Aplicações das Equações Diferenciais
As equações diferenciais são usadas para construir modelos matemáticos de fenômenos físicos
tais como na dinâmica de fluidos e em mecânica celeste. Deste modo, o estudo de equações
diferenciais é um campo extenso na matemática pura e na matemática aplicada.
Equações diferenciais têm propriedades intrinsecamente interessantes tais como:
• solução pode existir ou não.
• caso exista, a solução é única ou não.
As equações diferenciais têm inúmeras aplicações práticas em Medicina, Engenharia, Química,
Biologia, Psicologia e outras diversas áreas do conhecimento. As soluções destas equações são usadas,
por exemplo, para projetar pontes, automóveis, aviões e circuitos elétricos. Vejamos algumas situações
problemas envolvendo equações diferenciais.
Exemplo 1: Uma curva é definida pela condição de ter em todos os pontos (x, y), a inclinação
dydx
igual ao dobro da soma das coordenadas do ponto. Expresse a condição por meio de uma equação
diferencial.
Resolução: A equação é: dydx
= 2(x + y)
Exemplo 2: Determine a curva y = f(x) cuja tangente (tem inclinação) em cada ponto é proporcional à
abscissa do ponto.
Resolução: A equação da curva é: dydx
= kx
Exemplo 3: Em uma comunidade de 45 000 pessoas, a taxa de crescimento de uma epidemia de gripe
é conjuntamente proporcional ao número de pessoas y que a contraíram e ao número de pessoas que
não a contraíram.
Resolução: A equação é: dydx
= ky(45 000 – y)
Professor Cícero José – Uniban 2011
44
Exemplo 4: Em um campus universitário com 5 000 alunos, onde se esperava uma assembleia
estudantil um aluno ouviu que certo estudante polêmico iria fazer, durante a assembleia, um discurso
explosivo. Essa informação foi transmitida para amigo que, por sua vez, a transmitiram a outros. A
taxa com que se espalhou essa informação é conjuntamente proporcional ao número de pessoas y que a
ouviram e ao número de pessoas que não a ouviram.
Resolução: A equação é: dydx
= ky(5 000 – y)
1. Aplicações da função exponencial natural Modelos matemáticos envolvendo potências de e ocorrem em muitos campos, tais como
Química, Física, Biologia, Psicologia, Sociologia, Administração e Economia. Os modelos que
envolvem, por exemplo, as leis de crescimento e decaimento, surgem quando a taxa de variação de
uma quantidade em relação ao tempo é proporcional à quantidade existente num dado instante. Por
exemplo, é possível que a taxa de crescimento da população de uma comunidade seja proporcional à
população existente num dado instante. Em Biologia, sob certas circunstâncias, a taxa de crescimento
de uma cultura de bactérias é proporcional à quantidade de bactérias presentes em qualquer instante
dado. Numa reação química é frequente o caso em que a velocidade da reação é proporcional à
quantidade da substância presente; por exemplo, sabe-se experimentalmente que a taxa de decaimento
do rádio é proporcional à quantidade de rádio existente num dado momento. Uma aplicação em
Administração ocorre quando os juros são compostos continuamente.
Em tais casos, se o tempo for representado por t unidades e se y unidades representar o total da
quantidade presente em qualquer instante, então dydt
= kt, onde k é uma constante e y > 0 para todo
t � 0. Se y cresce com o aumento de t, então k > 0 e temos a lei de crescimento natural. Se y decresce
quando t aumenta então k < 0 e temos a lei do decaimento natural.
Vejamos dois exemplos. Exemplo 5: A taxa de crescimento da população de uma certa cidade é proporcional ao número de
habitantes. Se a população em 1950 era de 50 000 e em 1980, de 75 000, qual a população esperada em
2020?
Resolução: Seja t o tempo em anos, decorrido desde 1950. Seja y a população em t anos. Temos os
seguintes dados:
Para 1950, t = 0 y = 50 000 e Para 1980, t = 30 y = 75 000

Professor Cícero José – Uniban 2011
45
Queremos determinar o valor de y para t = 70 (ano de 2020). A equação diferencial é:
dydt
= ky dyy
= k dt
dyy�
= k dt� ln y = kt + C
y = ekt + C y = ekt � ec
y = Cekt
Substituindo os valores conhecidos na última função vem: 50 000 = Cek . 0
50 000 = Ce0
50 000 = C
C = 50 000
Então, a temos a seguinte função: y = 50 000ekt
y = 50 000 ( )t
30k 30e
y = 50 000 ( )t
301,5
Substituindo t por 70, vem:
y = 50 000 ( )70301,5
y = 128 780 Resposta: Portanto, a população esperada em 2020 é de 128 780 habitantes. Exemplo 6: A taxa de decaimento do rádio é proporcional à quantidade presente em qualquer instante.
Se houver 60 mg de rádio agora e sua meia vida for de 1690 anos, qual a quantidade de rádio daqui a
100 anos? (Em problemas envolvendo a lei do decaimento natural, a meia vida de uma substância
é o tempo para que ela seja reduzida à metade da quantidade inicial).
Resolução: Seja t o tempo em anos, decorrido desde 1950. Seja y o número de miligramas de rádio
presentes em t anos. Temos os seguintes dados:
t = 0 y = 60 e t = 1960 y = 30
75 000 = 50 000ek . 30
e30k = 1,5

Professor Cícero José – Uniban 2011
46
Queremos determinar o valor de y para t = 100. A equação diferencial é:
dydt
= ky dyy
= k dt
dyy�
= k dt� ln y = kt + C
y = ekt + C y = ekt � ec
y = Cekt
Substituindo os valores conhecidos na última função vem: 60 = Cek . 0
60 = Ce0
60 = C
C = 60
Então, a temos a seguinte função: y = 60ekt
y = 60 ( )t
1960k 1960e
y = 60 ( )t
19600,5
Substituindo t por 70, vem:
y = 60 ( )100
19600,5
y = 57,9 Resposta: Portanto, daqui a 100 anos haverá 57,9 mg de rádio. 2. Lei de Resfriamento de Newton Outra aplicação das equações diferenciais na Física é a lei do resfriamento de Newton, que
estabelece que a razão na qual um corpo varia de temperatura é proporcional à diferença entre a
temperatura do corpo e a do meio ambiente que o cerca.
Por exemplo, antes de tomar um café, geralmente esperamos um pouco até que o líquido esfrie.
Uma xícara de café fica quase intragável se esfriar até chegar à temperatura ambiente.
30 = 60ek . 1960
e1960k = 0,5

Professor Cícero José – Uniban 2011
47
Suponha, então, que T(t) denote a temperatura de um corpo no instante t e que a temperatura do
meio ambiente seja constante, igual a Tm. Se dTdt
representa a taxa de variação da temperatura do
corpo, então a lei de resfriamento de Newton poderá ser expressa matematicamente da seguinte forma:
dTdt
= k(T – Tm),
em que k é uma constante de proporcionalidade. Como, por hipótese, o corpo está esfriando, devemos
ter T > Tm; logo, k < 0.
Vejamos um exemplo.
Exemplo 7: Se um corpo estiver no ar, cuja temperatura é 35º e resfria-se de 120º a 60º em 40 min, use
a lei do resfriamento de Newton para determinar a temperatura do corpo depois de 100 min.
Resolução: Seja t o tempo decorrido desde que o corpo começou a esfriar. Seja y graus a temperatura
do corpo em t min. Temos os seguintes dados:
t = 0 y = 120 e t = 40 y = 60 Queremos determinar o valor de y para t = 100. A equação diferencial é:
dydt
= k(y – 35) dy
y 35−= k dt
dy
y 35−� = k dt� ln y 35− = kt + C
y – 35 = ekt + C y – 35 = ekt � ec
y – 35 = Cekt y = 35 + Cekt
Substituindo os valores conhecidos na última função vem: 120 = 35 + Cek . 0
85 = Ce0
C = 85
60 = 35 + 85ek . 40
25 = 85e40k
e40k = 5
17

Professor Cícero José – Uniban 2011
48
Então, a temos a seguinte função:
y = 35 + 85ekt
y = 35 + 85 ( )t
40k 40e
y = 35 + 85
t405
17� �� �� �
Substituindo t por 100, vem:
y = 35 + 85 � 2,5
517� �� �� �
y = 39 Resposta: Portanto, após 100 minutos a temperatura do corpo será 39º. Exercícios
129) Em qualquer ponto (x, y) de uma determinada curva, a reta tangente tem uma inclinação igual a
4x – 5. Se a curva contém o ponto (3, 7), determine sua equação.
130) A função custo marginal2 C’ é dada por C’(x) = 4x – 8 quando C(x) é o custo total da produção de
x unidades. Se o custo da produção de 5 unidades for de R$ 20,00, ache a função custo total.
131) O ponto (3, 2) está numa curva e em qualquer ponto sobre a curva a inclinação da reta tangente é
igual a 2x – 3. Ache uma equação da curva.
132) A inclinação da reta tangente num ponto qualquer (x, y) da curva é 3 x . Se o ponto (9, 4) está na
curva, determine uma equação para ela.
133) Uma partícula move-se ao longo de uma linha reta, no SI. Se a = 2t – 1 e v = 3 e s = 4 quando
t = 1, determine as funções espaço e velocidade em funções de t.
2 Em economia e finanças, custo marginal é a mudança no custo total de produção advinda da variação em uma unidade da quantidade produzida.

Professor Cícero José – Uniban 2011
49
134) Um operário recém-contratado realiza uma tarefa com maior eficiência a cada dia que passa; de
tal forma que se y unidades forem produzidas por dia após t dias no trabalho, então dydx
= k(80 – y),
onde k é uma constante positiva e y < 80 para todo t � 0. O empregado produz 20 unidades no primeiro
dia de trabalho e 50 unidades por dia após 10 dias de trabalho. Quantas unidades por dia ele estará
produzindo após 30 dias de trabalho?
135) Ache uma equação da reta tangente à curva y = ln x no ponto de abscissa 2.
136) Numa certa cultura a taxa de crescimento das bactérias é proporcional à população presente. Se
existirem 1 000 bactérias inicialmente e a quantidade dobrar em 12 minutos, quanto tempo levará até
que haja 1 000 000 de bactérias?
137) A taxa de crescimento natural da população de certa cidade é proporcional à população. Se a
população aumenta de 40 000 para 60 000 em 40 anos, quando a população será de 80 000?
138) O crescimento das bactérias numa certa cultura se faz segundo uma taxa proporcional ao número
de bactérias presentes. Se inicialmente existem 1 000 bactérias e o número dobra em 30 minutos,
quantas bactérias haverá em 2 horas?
139) Se a meia vida do rádio for de 1 690 anos, que porcentagem da quantidade presente agora restará
após:
a) 100 anos? b) 1 000 anos?
140) A mortalidade no inverno de uma certa espécie de animal selvagem numa dada região do
hemisfério norte apresenta uma taxa proporcional ao número de indivíduos presentes em qualquer
momento. Havia 2 400 indivíduos da espécie em 21 de dezembro (primeiro dia de inverno) e 30 dias
depois havia 2 000. Quantos indivíduos da espécie deverão sobreviver ao inverno? Isto é, quantos
estarão vivendo 90 dias após 21 de dezembro?
141) Um peru assado é retirado do forno quando sua temperatura alcança 85ºC e é colocado em uma
mesa onde a temperatura é de 24ºC.
a) Se a temperatura do peru for de 66ºC depois de meia hora, qual será a temperatura dele após 45
minutos?
b) Quando terá o peru se resfriado a uma temperatura de 38ºC?
(Use a lei do resfriamento de Newton)

Professor Cícero José – Uniban 2011
50
142) Use a lei do resfriamento de Newton para determinar a temperatura de um corpo num ambiente
onde a temperatura é 40ºC, se 30 minutos atrás a temperatura do corpo era 150ºC e 10 minutos atrás
era 90ºC.
143) Um aluno que está estudando uma língua estrangeira tem 50 verbos para serem memorizados. A
taxa a qual o estudante pode memorizar esses verbos é proporcional ao número de verbos que restam a
ser memorizados, isto é, se o estudante memoriza y verbos em t minutos, então dydx
= k(50 – y).
Suponha que inicialmente nenhum verbo tenha sido memorizado e que nos primeiros 30 minutos 20
verbos foram memorizados. Quantos verbos serão memorizados em:
a) 1 hora?
b) 2 horas?
c) Após quantas horas restará apenas um verbo para ser memorizado?
144) Determine os valores de m para que y = emx seja uma solução para cada equação diferencial
abaixo:
a) y” – 5y’ + 6y = 0
b) y” + 10y’ + 25y = 0
145) Determine os valores de m para que y = xm seja uma solução para cada equação diferencial
abaixo:
a) x2y” – y = 0
b) x2y” + 6xy’ + 4y = 0

Professor Cícero José – Uniban 2011
51
Respostas dos exercícios
CAPÍTULO V Séries
95) Uma sequência é uma lista ordenada de números, ao passo que uma série é a soma de uma lista de
números.
96) Uma série é convergente se a sequência de somas parciais for uma sequência convergente. Uma
série é divergente se ela não convergir.
97) nn = 1
a∞
� = 5 significa que adicionando suficientemente uma quantidade de termos da sequência, a
série chegará próximo do número 5. Em outras palavras, significa que nnlim S
→∞ = 5, onde Sn é a soma
parcial. 98a) É convergente b) É divergente
99a) 9 b) divergente c) 15
d) 17
e) divergente f) divergente
g) 32
h) divergente
i) 32
j) divergente k) divergente
100a) 29
b) 1138333
c) 41 111
333 000
101a) –3 < x < 3; x
3 x− b)
1 1 < x <
4 4− ;
11 4x−
c) 3 < x < 5; x 45 x
−−
d) 1 < x < 5; 2
x + 1−
102) 3 12−
103) 10
104a) convergente
b) divergente
c) convergente
d) convergente
e) convergente
f) convergente
g) divergente
h) convergente
105) 60 106) m
Professor Cícero José – Uniban 2011
52
107) Alternativa C 108) Alternativa A 109) Alternativa D 110a) A série é divergente b) A série é convergente c) Pode convergir ou divergir
111a) convergente
b) convergente
c) divergente
d) convergente
e) convergente
f) convergente
g) convergente
h) divergente
112) 8 113) 416 90999 900
CAPÍTULO VI Equações Diferenciais
114a) Ordem 3 e grau 1 b) Ordem 2 e grau 1
c) Ordem 4 e grau 5 d) Ordem 2 e grau 1
e) Ordem 2 e grau 7
115a) É solução b) Não é solução c) É solução d) É solução
e) Não é solução f) É solução g) É solução
116) Em (0, �) temos que y’ = 1x
e y” = 2
1x
− . Levando esses valores na equação diferencial,
obtemos:
xy” + y’ = x 2
1x
� �−� �� �
+ 1x
= 1x
− + 1x
= 0
Assim, pois, y = ln x é solução em (0, �). Mas y = ln x não poder ser solução em (–�, �) pois
logaritmo não é definido para valores não positivos.
117a) y = 2xce 32
−
b) y = 3ln 2x + 1
6 + C
c) y = 2x ln x2
–2x
4 + C
d) y = 4x
24 + C1
2x2
+ C2x + C3
e) y = 2xe
4
−
+ C1x + C2
f) y = 4cos(5x 1)
20−− + C
g) y = sen 2x
4− +
cos 4x16
+ C1x + C2
h) y = 3 9(x + 1)27
+ C
i) y = 2x
2– x + ln x + 1 + C
j) y = 2x
2 + 3x + C

Professor Cícero José – Uniban 2011
53
118a) y = Cx
b) y = C
1 x−– 1
c) 2 2y = 2ln x x + C−
d) y – ln y + 1 = 3x – ln x + C
e) y + 2 ln y 2− = –x + ln x + C
f) y = C14x ou y4 = Cx
g) 3y 2x3e = e + C
2− −
h) 1ye = –sen(ln x) + C
i) y = 2x
lnx + 1
+ C
j) y = 4tg(5x 1)
+ C20
−
119a) y = c1e2x + c2e4x
b) y = e–4x (c1 cos 5x + c2 sen 5x)
c) y = c1ex + c2xex
d) y = c1 cosx2
� �� �� �
+ c2 senx2
� �� �� �
e) y = c1 + c2e–x/4
f) y = ( ) ( )1 + 2 t 1 2 t
1 1c e + c e−
g) y = x/21 1
3 3e c cos t + c sen t
2 2−
�� � � �� � � � �� � � �� � � � �� �
h) y = c1e–x/2 + c2e2x/3
i) y = c1e4x + c2xe4x
j) y = ex (c1 cos 2x + c2 sen 2x)
120) y = c1e2x + c2e–3x + c3e–2x 121) y = c1 + c2x + c3x2 + c4e–x
122) Demonstração 123) Demonstração
124a) 103
b) 32
−
c) 14
d) diverge e) 24
125) 10 metros 126a) converge b) converge c) diverge d) converge 127a) diverge
b) converge absolutamente
c) converge absolutamente
d) diverge
128a) converge b) converge c) diverge d) converge
Professor Cícero José – Uniban 2011
54
CAPÍTULO VII Aplicações das Equações Diferenciais
129) y = 2x2 – 5x + 4 130) C(x) = 2x2 – 8x + 10
131) y = x2 – 3x + 2 132) y = 2 3x – 7
133) v = t2 – t + 3
S = 13
t3 – 12
t2 + 3t + 76
134) O empregado estará produzindo 72 unidades por dia.
135) y = x
1 + ln 26
− 136) 119,6 min 137) 68,4 anos
138) 16 000 139a) 96% b) 66% 140) 1 389
141a) 59ºC b) 118 min 142) 73,7º
143a) 32 b) 43,5 c) 3,83
144a) m = 2 e m = 3 b) m = –5
144a) m = 1 5
2±
b) m = –1 e m = –4
Professor Cícero José – Uniban 2011
55
Bibliografia
AVILA, G. Análise Matemática para Licenciatura. 3ª Ed. São Paulo: Edgard Blücher, 2009. 246 p.
ISBN: 8521203950
COURANT, R.; ROOBINS, H. O que é Matemática? São Paulo: Ciência Moderna, 2000. 621 p.
ISBN: 8573930217
GUIDORIZZI, H. L. Curso de Cálculo, vol. 2. Rio de Janeiro: 2001.
HOFFMANN, L. D.; BRADLEY, G. L. Cálculo: um curso moderno e suas aplicações. Rio de Janeiro:
LTC, 2002. ISBN: 9788521616525
LIMA, E. L. Curso de Análise, vol. 1. Coleção Projeto Euclides. 12ª ed. Rio de Janeiro: IMPA, 2008.
431 p. ISBN: 978-85-244-118-3
LIMA, E. L. Análise Real. Vol. 1. 10ª ed. Coleção Matemática Universitária. Rio de Janeiro: IMPA,
2008. 431 p. ISBN: 978-85-244-0048-3
STEWART, J. Cálculo. Vol. 1. 6ª ed. São Paulo: Cengage Learning, 2010.
STEWART, J. Cálculo. Vol. 2. 5ª ed. São Paulo: Cengage Learning, 2010.
THOMAS, G. B. Cálculo vol.1. 10ª ed. São Paulo: Pearson, 2005.
ZILL, D. G. e CULLEN, M. R. Equações Diferenciais, Volume 1. Tradução Antonio Zumpano. 3ª ed.
São Paulo: Pearson Makron Books, 2001.
Professor Cícero José – Uniban 2011
56
Anexo I Caos
Por John H. Hubbard (Departamento de Matemática – Cornell University) Uma história famosa de ficção cientifica conta que um político, após ter ganho uma eleição,
realizou uma viagem em uma máquina do tempo de volta à era dos dinossauros. Enquanto estava lá,
tomou todo o cuidado para não perturbar nada. Mesmo assim, ele pisou sem querer em uma folha de
grama e a entortou. Quando voltou ao seu tempo, descobriu que neste mundo modificado ele tinha
perdido a eleição.
Isto é que os matemáticos têm em mente quando dizem que um sistema apresenta caos: mínimas
variações na condição inicial de um sistema podem decisivamente afetar o resultado. Estamos falando
do efeito borboleta. O bater das asas de uma borboleta no Japão pode ter um efeito decisivo no tempo,
um mês depois, nos Estados Unidos?
A maioria das pessoas consideraria essa questão absurda, ridícula, sem pensar duas vezes. Mas eu
acho que é uma questão relevante, se o intervalo de tempo for de pelo menos seis meses, e proponho
aqui dar algumas razoes quantitativas para minhas conclusões.
Uma justificativa para o efeito borboleta não é de maneira alguma óbvia. Não temos uma
máquina do tempo disponível; não podemos voltar no tempo seis semanas, pegar uma borboleta (sem
perturbar nada, qualquer que seja o significado disto) e então retornar e observar as consequências.
Precisamos tomar outro caminho.
Para ajudá-lo a acompanhar a ideia, descreverei um “modelo lúdico” que mostra claramente o
“efeito borboleta”, através do qual as ideias que serão apresentadas podem ser entendidas.
Considere o sistema (puramente matemático) no qual, a cada tique do relógio, um ângulo é
dobrado. Um estado do sistema é um ângulo, e ele evolui dobrando seu valor a cada instante. Em
símbolos, você pode descrever o sistema como uma sequência de ângulos 0� , 1� , ..., em que 0� é o
estado inicial do sistema e n + 1 n� = 2� .
Esse sistema representa o comportamento do efeito borboleta. Se 0� for perturbado por um
bilionésimo de uma volta, então o estado após 30 tiques do relógio é completamente desconhecido. Na
verdade, a incerteza em nosso conhecimento sobre o estado do sistema dobra a cada tique; após 30
tiques, nossa incerteza é agora de 302
1 000 000 000. Ou seja, mais de um volta; nada mais sabemos.
O exemplo acima traz uma noção-chave em todas as descrições de caos: entropia. Isso é
essencialmente a taxa de dissipação de informação. Há várias maneiras de descrever essa taxa com
precisão, e elas têm vários nomes (por exemplo, exponencial de Lyapunov), mas, para o propósito

Professor Cícero José – Uniban 2011
57
deste texto, vou me contentar com o tempo de duplicação: o tempo necessário para uma pequena
incerteza se duplicar.
Como faríamos para estimar esse tempo no sistema formado pelos fatores meteorológicos? É
claro que não podemos “escolher dois estados iniciais separados um do outro por um épsilon e medir a
taxa em que divergem”, mas podemos fazer alguma coisa parecida com isso. Podemos verificar épocas
passadas com condições meteorológicas semelhantes. Então podemos ver quanto tempo levou para
uma mudança dessas condições. Isso tem sido feito, proporcionando o cálculo de um tempo de
duplicação de dois dias e meio.
Você também pode ir ao departamento de meteorologia de um grande instituto de pesquisa e
perguntar qual é o tempo de duplicação calculado por suas melhores simulações computacionais. Você
obterá o mesmo valor.
A próxima questão com que devemos nos deparar é: o que corresponde ao número um
bilionésimo acima? Qual proporção do sistema (a atmosfera) representa nosso distúrbio (uma
borboleta)? Uma maneira (talvez contestável) de estimar isso é simplesmente medir a razão das
massas. O peso de uma borboleta grande é cerca de 1 grama, e a massa da atmosfera pesa 5 � 1021
gramas.
A pressão atmosférica é de aproximadamente 1 kg/cm2, ou seja, há 1 kg de ar acima de todo
centímetro quadrado da terra. A área de uma esfera de raio r é 4 � r2, e o raio da terra é de cerca de 6
000 km. Então, o peso da massa atmosférica é 1 000 � 4 � � � (6 � 108)2 gramas. Logo, uma borboleta
não é um bilionésimo do tamanho do sistema; ela é precisamente mil-bilhão-bilionésimo.
Como 5 � 1021 é aproximadamente 272, deve levar cerca de 72 períodos de duplicação para os
efeitos de uma única borboleta induzirem perturbações em uma escala global.
Uma consequência dessa análise é que previsões do tempo para períodos longos são
completamente impossíveis. É inconcebível que alguém possa saber o estado da atmosfera como
consequência do efeito de uma borboleta, ou mesmo em uma escala mil bilhões de vezes maior.
Perturbações dessa escala decisivamente afetam a atmosfera em um mês.
Físicos, químicos, astrônomos e matemáticos estão mostrando agora que uma enorme quantidade
de sistemas apresentam “caos”, no sentido de que estão se expandindo e têm um tempo de duplicação
para erros.
Um exemplo foi dado pelo meteorologista E. Lorenz, cuja descoberta pode ter sido o começo
dessa linha inteira. Em 1961, ele estava realizando uma simulação meteorológica. Os computadores da
época eram primitivos, por isso os dados tinham de ser drasticamente simplificados, para tornar
possível o trabalho computacional. Ele observou vários comportamentos a partir de seu modelo,
aparentemente bem satisfatórios, até o dia em que decidiu examinar alguma coisa que ele já tinha
computado durante um período de tempo mais longo. Ele registrou o que pensou ser as condições
Professor Cícero José – Uniban 2011
58
iniciais originais, foi tomar uma xícara de café e quando voltou percebeu que seu novo tempo não
estava de acordo com a previsão anterior de seu modelo.
Ele notou que registrara as condições iniciais com menos decimais que as condições iniciais da
simulação anterior; e isso causara a discrepância. Após simplificar ainda mais seu modelo, Lorenz
descobriu que o seguinte sistema de equações diferenciais exibia o mesmo tipo caótico de
comportamento:
x’ = 10(y – x)
y’ = 28x – y – xz
z’ = 83
z + xy
Trabalhos posteriores nessas equações e outras em R3 mostraram que comportamento caótico e
atratores fractais são comuns.
A presença de caos tem um efeito devastador sobre as previsões, mas algumas vezes é útil; às
vezes, o caos pode ser controlado.
A NASA não é capaz de construir foguetes com combustível suficiente para alcançar grandes
distâncias. Então, eles fizeram com que o foguete tocasse delicadamente em Vênus, roubando dele um
pouco da energia potencial necessária para alcançar a fantástica velocidade requerida. Apenas uma
pequena variação na trajetória pode provocar uma grande variação na velocidade do foguete, e
trajetória é um projeto factível. Mas imagine como isso dificulta previsões para longas trajetórias como
órbitas de cometas, por exemplo.
A presença de caos também tem consequência filosóficas, como, por exemplo, o conflito entre
determinismo e contingência. Como o ser humano pode ser livre se o universo é completamente
governado por leis determinísticas?
Se as equações exibem caos, então segue-se que você não pode saber se são determinísticas, não
importa o tempo que observe o sistema. Se você fosse observar uma sequência de ângulos, cada um
com 15 decimais, nunca poderia saber se está observando uma sequência de duplicações exatas de um
ângulo ou o mesmo sistema perturbado em uma escala menor que 10–15 (tal como erro de
arredondamento).
Analogamente, se o cérebro não estivesse seguindo exatamente as leis da física, mas se
encontrasse perturbado (por forças espirituais, liberdade, deus) em uma escala imensurável, sem afetar
drasticamente o sistema (eu duvido que alguém reaja da mesma forma com eletrodos em seu cérebro),
então, embora você nunca soubesse, em talvez 4 segundos, poderia decisivamente alterar todas as
decisões. Precisamente, seria necessário o conhecimento sobre o tempo de duplicação do cérebro. A
introspecção me diz que isso deve ser talvez 0,1 segundo, o tempo de uma compreensão elementar.
Professor Cícero José – Uniban 2011
59
Talvez, algum dia, os neurologistas cheguem a uma estimativa mais confiável. Se isso for acurado,
então 4 segundos serão os 40 tempos de duplicação, e 240 ≈ 1012 é aproximadamente o número de
neurônios do cérebro.
Pessoalmente, não acho que haja um deus atrapalhando as leis físicas em meu cérebro, mas isso
não é possível saber. O caos nos impede de saber tais coisas.
De modo mais geral, embora eu tenho a segurança que você poderia esperar um cientista, acho
que o mundo é essencialmente incompreensível, com toda sorte de pequenos eventos tendo enormes
consequências sem nenhuma esperança de previsão ou entendimento.
Se você acha absurda a ideia de que suas menores ações provavelmente influenciam todo o
mundo futuro, pense no seguinte fato: a menor variação no comportamento sexual de qualquer pessoa
no ano 800 d.C., teria certamente afetado o mundo de várias maneiras incalculáveis.
Fonte: Zill, Dennis G. Equações Diferenciais, volume 1. tradução: Antonio Zumpano. 3.ed. São
Paulo: Pearson Makron Books, 2001. pp. 221-224.

Professor Cícero José – Uniban 2011
60
Anexo II O colapso da ponte Tacoma Narrows
Por Gilbert N. Lewis (Departamento de Matemática e Ciência da Computação – Michigan
Technological University)
As oscilações no caso de ressonância tornam-se muito grande após um certo período de tempo.
Em um sistema físico, isso seria catastrófico, pois o aumento contínuo das amplitudes de oscilação
quebrariam o sistema. Como exemplos, podemos citar as asas de um avião e soldados marchando
sobre uma ponte. Nesses exemplos, as forças periódicas com frequência igual à frequência natural das
estruturas foram impressas na direção das vibrações, ocasionando a destruição das estruturas por
ressonância.
Outro exemplo usado para ilustrar o fenômeno de ressonância é o colapso da ponte Tacoma
Narrows no estado de Washington. A ponte foi aberta ao tráfego no verão de 1940. Grandes oscilações
da pista foram logo observadas, sempre quando havia vento. A ponte passou a ser chamada de
“Galloping Gertie” (ponte galopante) e tornou-se uma atração turística. As pessoas gostavam de
observar as vibrações e mesmo dirigir através da ponte em uma excitante montanha-russa. Finalmente,
em 7 de novembro de 1940, toda a estrutura do vão foi fragmentada pelas grandes vibrações e houve o
colapso. (Ver figura 1)
Figura 1
Durante 50 anos, a ressonância foi responsabilizada pelo colapso. Pensava-se que, quando o
vento soprava horizontalmente, formavam-se vórtices de vento alternados de baixo para cima e de
cima para baixo, criando então uma força vertical periódica que agia na mesma direção da vibração da
ponte. (ver figura 2). Ainda, supunham que a frequência dessa força periódica era exatamente igual à
frequência natural da ponte, ocasionado então grande amplitude de vibrações e causando a queda da
ponte. Essa explicação foi (talvez erroneamente) atribuída ao notório engenheiro von Karman. Em sua
autobiografia, ele explicou que o colapso da ponte foi realmente devido aos vórtices de von Karman.
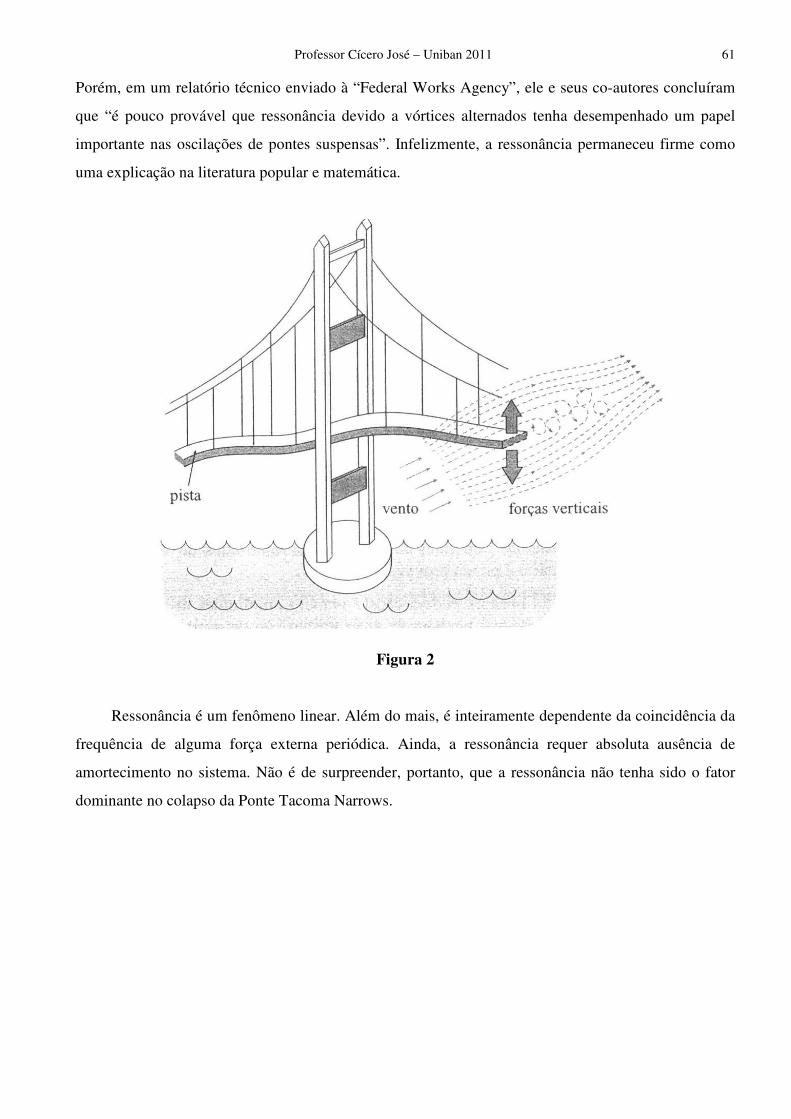
Professor Cícero José – Uniban 2011
61
Porém, em um relatório técnico enviado à “Federal Works Agency”, ele e seus co-autores concluíram
que “é pouco provável que ressonância devido a vórtices alternados tenha desempenhado um papel
importante nas oscilações de pontes suspensas”. Infelizmente, a ressonância permaneceu firme como
uma explicação na literatura popular e matemática.
Figura 2
Ressonância é um fenômeno linear. Além do mais, é inteiramente dependente da coincidência da
frequência de alguma força externa periódica. Ainda, a ressonância requer absoluta ausência de
amortecimento no sistema. Não é de surpreender, portanto, que a ressonância não tenha sido o fator
dominante no colapso da Ponte Tacoma Narrows.

Professor Cícero José – Uniban 2011
62
Se não foi ressonância, então qual é a explicação? Uma pesquisa recente forneceu uma
explicação alternativa para o colapso da ponte. Lazer e McKenna argumentam que efeitos não-lineares,
e não ressonância linear, foram os principais fatores que provocaram grandes oscilações da ponte. Não
há dúvida de que o vento através da pista proporcionou a força externa que causou o movimento. Essa
força poderia mesmo se dever parcialmente aos vórtices, como von Karman sugeriu. Porém, interações
não-lineares entre a ponte e as forças externas são causas mais prováveis para o colapso.
Na teoria linear, os cabos agem como uma mola elástica. Assim, o modelo matemático leva à
uma equação diferencial do tipo 2
22
d x dx + 2� + � x = F(t)
dt dt, ou à equação
22
02
d x + � x + F sen t
dt, se
não há presença de amortecimento. Este último caso, em que há ressonância, é a única situação
possível na teoria linear, em que pequenas forças externas poderiam causar grandes amplitudes de
vibrações. Como mencionamos antes, esse cenário é pouco provável.
Por outro lado, efeitos não-lineares podem causar grandes amplitudes de vibrações com forças de
pequenas amplitudes. Podem também explicar a transição de oscilações unidimensionais para
oscilações transversais (torção), as quais foram as principais responsáveis pelo colapso da ponte.
Compare a estrutura
reforçada da ponte
Tacoma nessa fotografia,
mostrando a ponte
reconstruída, com a
estrutura delicada de
1940, bem visível nas
fotografias anteriores.
Professor Cícero José – Uniban 2011
63
A ideia básica no modelo de Lazer-McKenna é a seguinte. Quando os cabos verticais estão sob
tensão (o peso da ponte está puxando-os para baixo), eles agem como uma mola elástica, e neste caso a
equação diferencial é linear. Porém, quando forças externas provocam oscilações na ponte (ventos e
possivelmente tremores de terra), os cabos não estarão sempre sob tensão, e haverá somente a
gravidade atuando. Em outras palavras, o termo da lei de Hooke, km
� �� �� �
x na equação
2
2
d x dx k f(t) + + x =
dt m dt m m, não estará presente. Essa transição de um tipo de equação diferencial
linear para outro é uma fonte de não-linearidade. Outras fontes de não-linearidade em pontes suspensas
devem ser incluídas no modelo não-linear e não-simétrico ou interações dos cabos verticais com os
cabos principais ou com as torres de suporte. Essa não-linearidade é combinada pelo fato de que cabos
diferentes podem estar sob tensão em instantes diferentes. O resultado dessa não-linearidade,
argumentam Lazer e McKenna, podem ser oscilações de grandes amplitudes sob moderadas forças
externas.
Um outro aspecto das equações não-lineares é a imprevisibilidade. Isso pode explicar, por
exemplo, por que a ponte experimentou oscilações de grande amplitude sob a ação de pequenos ventos
e ficou perfeitamente estável sob a ação de fortes ventos.
Como Lazer e McKenna observaram a teoria não-linear de pontes suspensas ainda não foi
completamente desenvolvida. Porém, simulações numéricas do modelo estão de acordo com as
observações. Parece que essa abordagem proporcionará explicações mais precisas para o colapso da
Ponte Tacoma Narrows.
Fonte: Zill, Dennis G. Equações Diferenciais, volume 1. tradução: Antonio Zumpano. 3.ed. São
Paulo: Pearson Makron Books, 2001. pp. 270-273.