matemática versus robótica educacional · introduÇÃo este caderno pedagógico se destina a...
TRANSCRIPT
PROFESSOR PDE: MARIA APARECIDA DE ALMEIDA
PROFESSOR ORIENTADOR Dr. EMERSON ROLKOUSKI -setor de exatas UFPR
Desenvolvimento de conteúdos matemáticos por meio do trabalho com dispositivos robóticos
1
Matemática
versus
Robótica Educacional
ROBÓTICA VERSUS MATEMÁTICA
SUMÁRIO
INTRODUÇÃO ............................................................................................ 03
OBJETIVOS DO SUPER LOGO ............................................................................05
METODOLOGIA DE ENSINO-APRENDIZAGEM................................................06
INTRODUÇÃO A LINGUAGEM LOGO ...............................................................07
COMANDOS BÁSICOS .......................................................................................08
CONSTRUINDO DESENHOS NO SUPERLOGO ................................................11
ANIMAÇÃO ..........................................................................................................14
CONSTRUÇÃO DA MAQUETE ...........................................................................16
FALANDO SOBRE OS PRISMAS .........................................................................18
CONSTRUÇÃO DO PROTÓTIPO .........................................................................21
FUNCIONAMENTO DO PROTÓTIPO ............ ....................................................23
PROCEDIMENTOS EM SUPERLOGO..................................................................25
CONSIDERAÇÕES FINAIS ..................................................................................26
REFERENCIAS BIBLIOGRÁFICAS .....................................................................27
2
INTRODUÇÃO
Este caderno pedagógico se destina a desenvolver conteúdos matemáticos por meio de atividades de robótica
computacional.
Trata-se de um material em versão preliminar que está aguardando as contribuições advindas da implementação na
escola e do GTR.
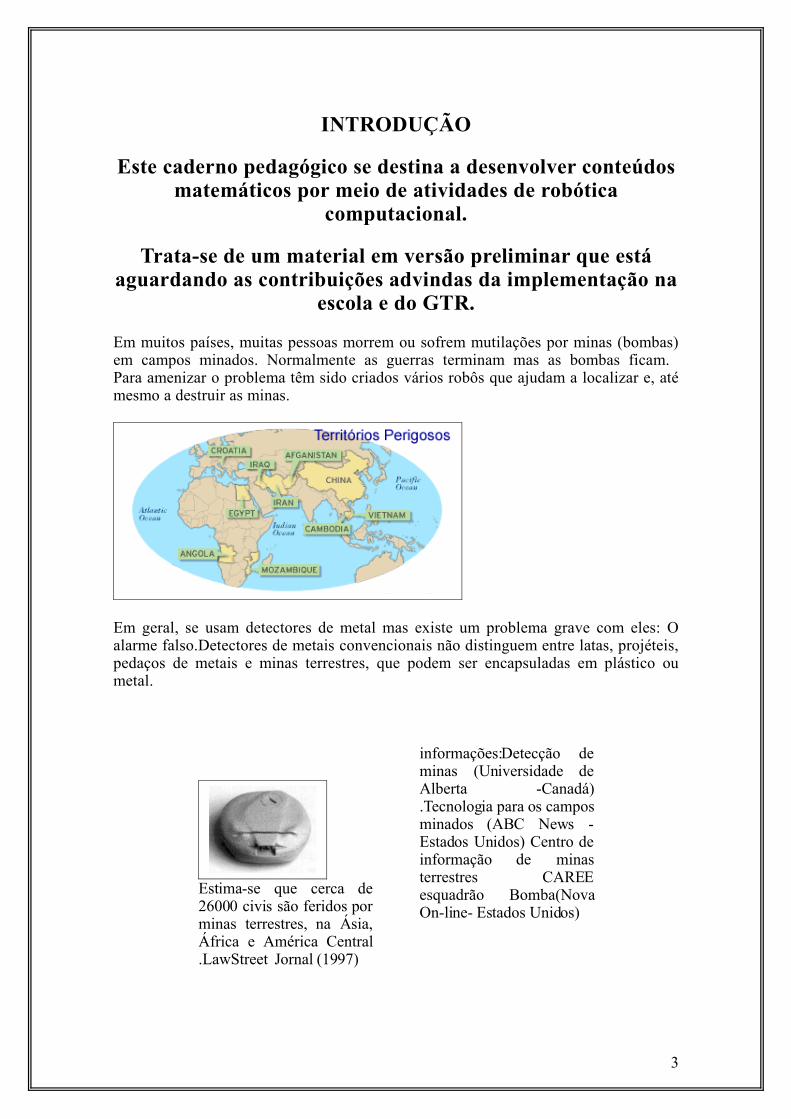
Em muitos países, muitas pessoas morrem ou sofrem mutilações por minas (bombas) em campos minados. Normalmente as guerras terminam mas as bombas ficam. Para amenizar o problema têm sido criados vários robôs que ajudam a localizar e, até mesmo a destruir as minas.
Em geral, se usam detectores de metal mas existe um problema grave com eles: O alarme falso.Detectores de metais convencionais não distinguem entre latas, projéteis, pedaços de metais e minas terrestres, que podem ser encapsuladas em plástico ou metal.
Estima-se que cerca de 26000 civis são feridos por minas terrestres, na Ásia, África e América Central .LawStreet Jornal (1997)
informações:Detecção de minas (Universidade de Alberta -Canadá) .Tecnologia para os campos minados (ABC News - Estados Unidos) Centro de informação de minas terrestres CAREE esquadrão Bomba(Nova On-line- Estados Unidos)
3
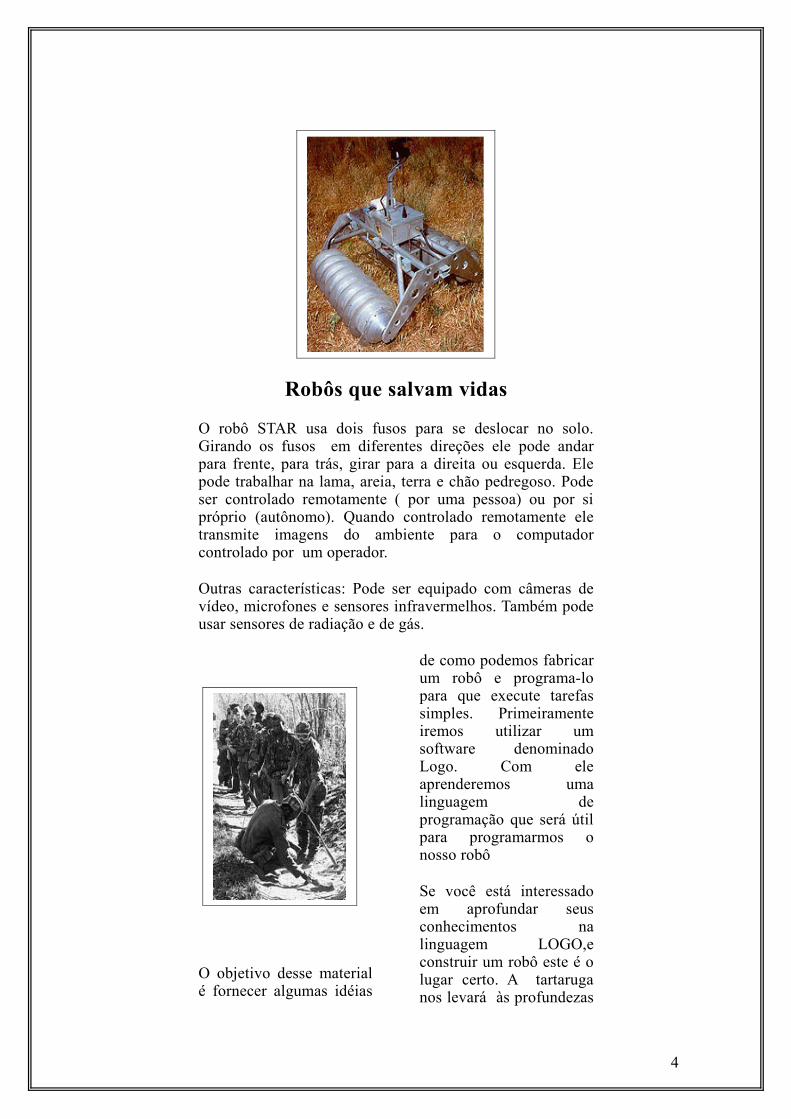
Robôs que salvam vidas
O robô STAR usa dois fusos para se deslocar no solo. Girando os fusos em diferentes direções ele pode andar para frente, para trás, girar para a direita ou esquerda. Ele pode trabalhar na lama, areia, terra e chão pedregoso. Pode ser controlado remotamente ( por uma pessoa) ou por si próprio (autônomo). Quando controlado remotamente ele transmite imagens do ambiente para o computador controlado por um operador.
Outras características: Pode ser equipado com câmeras de vídeo, microfones e sensores infravermelhos. Também pode usar sensores de radiação e de gás.
O objetivo desse material é fornecer algumas idéias
de como podemos fabricar um robô e programa-lo para que execute tarefas simples. Primeiramente iremos utilizar um software denominado Logo. Com ele aprenderemos uma linguagem de programação que será útil para programarmos o nosso robô
Se você está interessado em aprofundar seus conhecimentos na linguagem LOGO,e construir um robô este é o lugar certo. A tartaruga nos levará às profundezas
4
da Internet para encontrar verdadeiros tesouros do LOGO.
Você tem alguma idéia de como construir um robô?
Os sistemas robotizados fazem parte de nossa sociedade já há bastante tempo. Temos elevadores que, com simples toque de um botão, nos levam ao andar desejado, param e abre-se a porta, tudo automaticamente. Sacamos dinheiro, efetuamos depósitos e pagamentos em caixas eletrônicos, sem interagir com um humano. O portão da garagem pode ser acionado de longe, ainda dentro do veículo. Na indústria, a precisão dos robôs é indispensável. Na medicina, vidas são salvas graças ao avanço tecnológico. E, de simples mecanismos a sofisticados robôs, vê-se uma abrangência muito grande da tecnologia. Mas o que é robótica educacional?
É caracterizada por ambientes de aprendizagem onde se pode montar e programar um carrinho-robô ou sistema robotizado. Vai desde a simulação na tela do computador a um robô inteligente . O ser humano vive hoje num ambiente ocupado também por máquinas e cada vez mais a interação homem x máquina estará presente no cotidiano de cada um e a escola não podem ficar ao largo dessa realidade. É na interação com o meio que a pessoa aprende e se modifica. Ninguém aprende algo que não estiver inserido no meio ambiente em que vive. É preciso antes proporcionar um ambiente de aprendizagem para depois esperar que o aluno interaja e nele aprenda.
OBJETIVOS
Auxiliar o trabalho do professor na introdução de conceitos fundamentais de robótica ressaltando sua relação com a disciplina de Matemática
Propiciar ao educando a formação de habilidades manuais, na construção do protótipo
Propor a montagem de um processo de simulação, tanto a nível gráfico como de forma concreta através de maquetes ou protótipos enfatizando a necessidade do uso de poliedros diversos.
5
Levar o educando a reconhecer que os erros podem gerar um processo de reflexão o que permitirá sua correção e garantirá maior segurança na resolução de problemas, no trabalho da linguagem de programação
Elaborar uma seqüência de passos que implica uma organização no tempo e espaço, favorecendo o desenvolvimento da habilidade para se estabelecer relações espaciais e temporais.
Propor um modelo matemático para as situações apresentadas.
Generalizar o protótipo mediante o uso da linguagem formal matemática
Reconhecer a importância do cálculo de área no cotidiano
Identificar polígonos regulares, seus elementos
Reconhecer e aplicar relações entre polígonos semelhantes.
Metodologia de ensino / aprendizagem
APRENDER ENSINANDO:O aluno aprende um determinado conteúdo, no ambiente LOGO, ao tentar ensinar o computador a resolver algum problema relacionado com este conteúdo. Esta idéia de que quem ensina é o aluno, e não o computador, além de reforçar o princípio de que o controle está nas mãos do aluno, enseja uma compreensão mais profunda dos conteúdos na medida em que o aluno é forçado a refletir sobre os processos envolvidos ao ensinar estes conteúdos ao computador.
APRENDER A APRENDER:A reflexão sobre os processos utilizados na resolução de problemas permite a possibilidade que estes processos sejam generalizados e extrapolados para outras situações.
CONCRETIZAÇÃO DE PROCESSOS ABSTRATOS procurar ensinar o computador a resolver um determinado problema, o aluno precisa primeiramente resolvê-lo, muitas vezes de maneira muito concreta, sendo forçado, desta forma, a encara o que muitas vezes é um problema abstrato de uma maneira concreta.
6
APRENDER COM ERRO Ao testar e depurar suas intuições e conjeturas, o aluno aprende que um erro, muitas vezes, é altamente instrutivo e cheio de significado pedagógico.
SIMPLICIDADE A simplicidade dos comandos básicos da linguagem LOGO possibilita mesmo ao iniciante, com quase nenhuma experiência em programação, a resolução de problemas
CRIATIVIDADE Ao se possibilitar que o aluno estruture sua própria situação de aprendizagem, LOGO oferece as condições básicas para o desenvolvimento da criatividade.
Introdução á linguagem de programação Logo
Logo é uma linguagem de programação que foi desenvolvida no Massachusetts Institute of Technology (MIT), Boston E.U.A., pelo Professor Seymour Papert (Papert, 1980). Como linguagem de programação o Logo serve para nos comunicarmos com o computador. Entretanto, ela apresenta características especialmente elaboradas para implementar uma metodologia de ensino baseada no computador (metodologia Logo) e para explorar aspectos do processo de aprendizagem. Assim, o Logo tem duas raízes: uma computacional e a outra pedagógica. Do ponto de vista computacional, as características do Logo que contribuem para que ele seja uma linguagem de programação de fácil assimilação são: exploração de atividades espaciais, fácil terminologia e capacidade de criar novos termos ou procedimentos.
7
Os conceitos espaciais são utilizados em atividades para comandar uma Tartaruga que se move no chão (tartaruga de solo) ou na tela do computador em atividades gráficas. Isto se deve ao fato dessas atividades envolverem conceitos espaciais que são adquiridos nos primórdios da nossa infância, quando começamos a engatinhar. Entretanto, estes conceitos permanecem a nível intuitivo. No processo de comandar a Tartaruga para ir de um ponto a outro, estes conceitos devem ser explicitados. Isto fornece as condições para o desenvolvimento de conceitos espaciais, numéricos, geométricos, uma vez que podemos exercitá-los, depurá-los, e utilizá-los em diferentes situações.
“Conhecimento é apenas parte da compreensão A verdadeira compreensão vem com a experiência adquirida “
Prof.Seymour Papert
Primeiros passosComandos básicos
O programa superlogo precisa do ambiente Windows 3x ou superior.Veja na figura abaixo como é a tela de entrada do superlogo
8
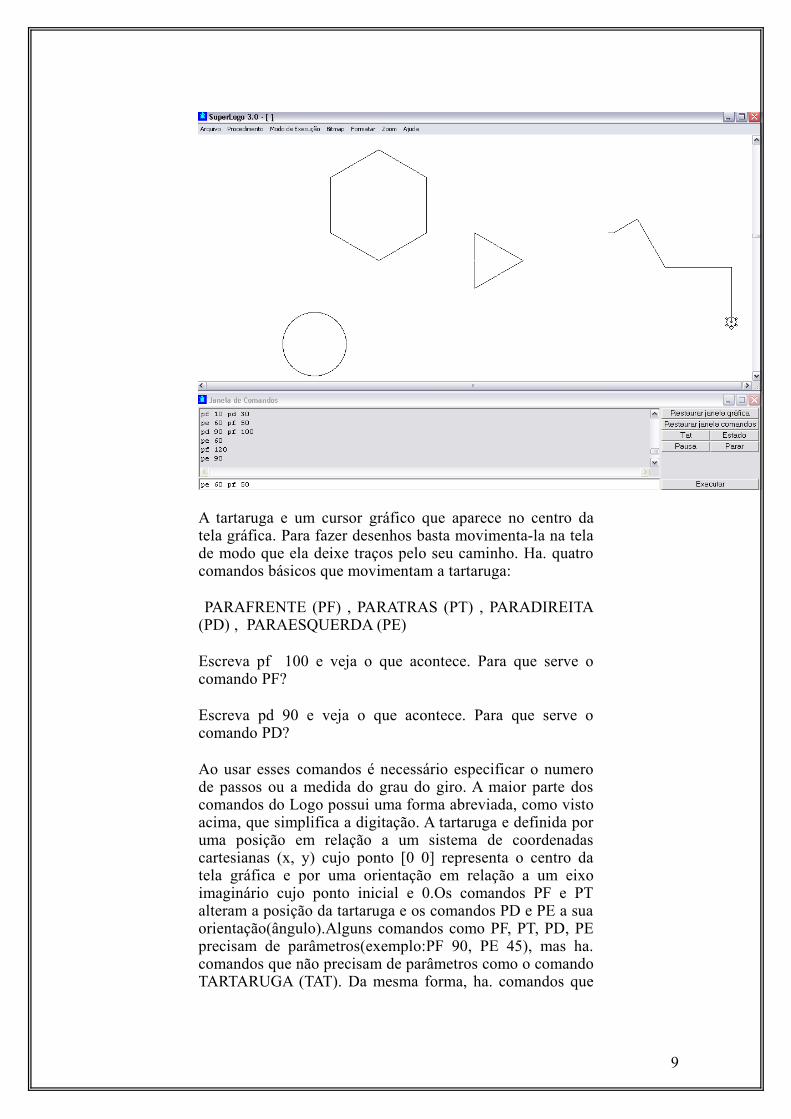
A tartaruga e um cursor gráfico que aparece no centro da tela gráfica. Para fazer desenhos basta movimenta-la na tela de modo que ela deixe traços pelo seu caminho. Ha. quatro comandos básicos que movimentam a tartaruga:
PARAFRENTE (PF) , PARATRAS (PT) , PARADIREITA (PD) , PARAESQUERDA (PE)
Escreva pf 100 e veja o que acontece. Para que serve o comando PF?
Escreva pd 90 e veja o que acontece. Para que serve o comando PD?
Ao usar esses comandos é necessário especificar o numero de passos ou a medida do grau do giro. A maior parte dos comandos do Logo possui uma forma abreviada, como visto acima, que simplifica a digitação. A tartaruga e definida por uma posição em relação a um sistema de coordenadas cartesianas (x, y) cujo ponto [0 0] representa o centro da tela gráfica e por uma orientação em relação a um eixo imaginário cujo ponto inicial e 0.Os comandos PF e PT alteram a posição da tartaruga e os comandos PD e PE a sua orientação(ângulo).Alguns comandos como PF, PT, PD, PE precisam de parâmetros(exemplo:PF 90, PE 45), mas ha. comandos que não precisam de parâmetros como o comando TARTARUGA (TAT). Da mesma forma, ha. comandos que
9
precisam de mais de um parâmetro. Os parâmetros podem ser números, palavras ou Listas. Palavra e uma seqüência de caracteres precedida por aspas ( "). Numero é um tipo especial de palavra, que dispensa o uso de aspas para facilitar as operações aritméticas. Um número constituído somente por Dígitos, podendo ser um valor inteiro ou real (com ponto decimal). Lista é um conjunto de palavras, números ou listas escrito entre colchetes ( [ ] ).A omissão de um parâmetro quando ele é necessário produz uma mensagem de erro.
Outros comandos básicos são:
USENADA (UN) = tartaruga se movimenta sem deixar traços.
USEBORRACHA (UB) = apagar traço na tela.
USELÁPIS (UL) = retorna a movimentar-se desenhando os traços.
DESAPAREÇATAT (DT) = tartaruga fica invisível.
APAREÇATAT (AT) = tartaruga volta a ser visível.
TAT = limpa a tela, recoloca a tartaruga no centro da tela.
Professor, para a introdução dos comandos básicos do logo sugerimos a resolução das seguintes atividades.
Vejamos um exemplo simples, que faz com que a tartaruga desenhe um
quadrado. Devemos digitar na tela do SuperLogo(janela de comandos) o seguinte:
PF 80
PE 90
PF 80
PE 90
PF 80
PE 90
PF 80
Lembrando que após cada comando clicar no botão Executar ou ENTER
COMANDO APRENDA E REPITA
10
Os comandos que movimentam a Tartaruga podem ser utilizados numa série de atividades . Por exemplo, explorar o tamanho da tela ou realizar uma atividade simples, como o desenho de figuras geométricas.
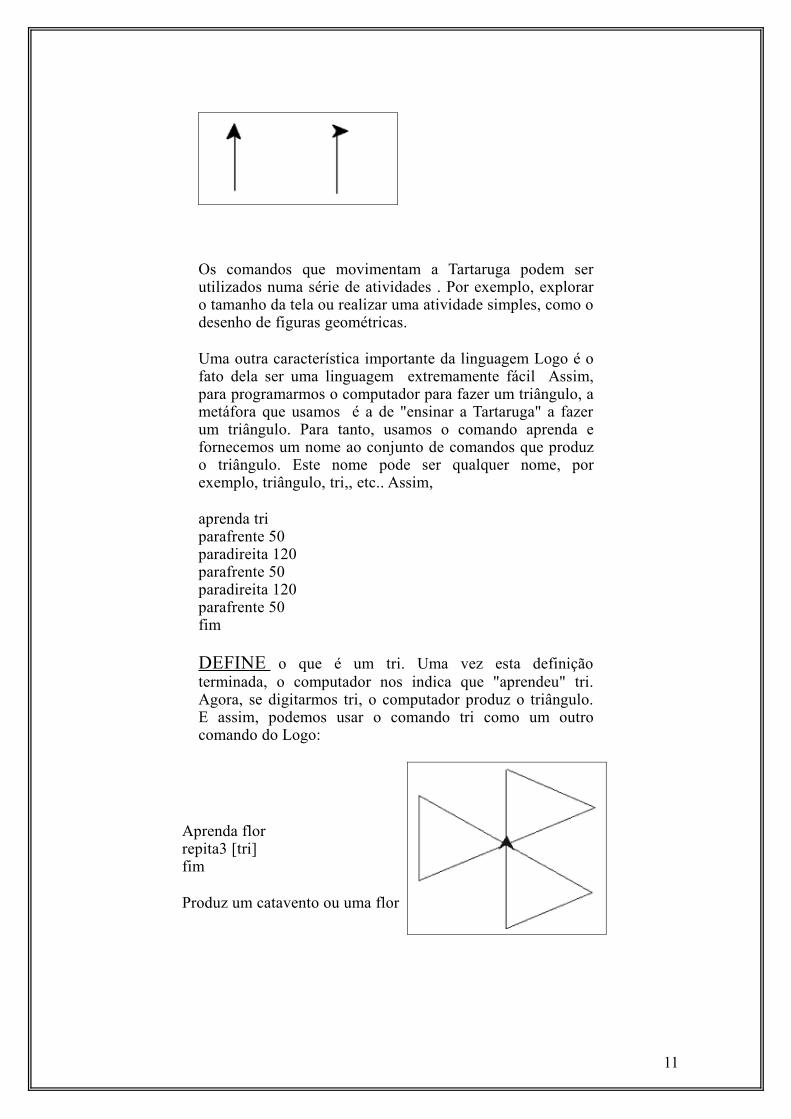
Uma outra característica importante da linguagem Logo é o fato dela ser uma linguagem extremamente fácil Assim, para programarmos o computador para fazer um triângulo, a metáfora que usamos é a de "ensinar a Tartaruga" a fazer um triângulo. Para tanto, usamos o comando aprenda e fornecemos um nome ao conjunto de comandos que produz o triângulo. Este nome pode ser qualquer nome, por exemplo, triângulo, tri,, etc.. Assim,
aprenda triparafrente 50paradireita 120parafrente 50paradireita 120parafrente 50fim
DEFINE o que é um tri. Uma vez esta definição terminada, o computador nos indica que "aprendeu" tri. Agora, se digitarmos tri, o computador produz o triângulo. E assim, podemos usar o comando tri como um outro comando do Logo:
Aprenda florrepita3 [tri]fim
Produz um catavento ou uma flor
11
A medida que se explora os comandos do Logo começa-se a ter idéias de projetos para serem desenvolvidos na tela. Ela pode propor fazer o desenho de uma casa, de um vaso, etc.. Neste instante a metodologia Logo de ensino-aprendizagem começa a se materializar.
Os domínios de aplicação do Logo estão em permanente desenvolvimento, com o objetivo de atrair um maior número de usuários e motivar os alunos a usarem o computador para elaborarem as mais diferentes atividades. Entretanto, o objetivo não deve ser centrado no produto que o aluno desenvolve, mas na filosofia de uso do computador e como ele está facilitando a assimilação de conceitos que permeiam as diversas atividades. Portanto, é o processo de ensino-aprendizagem que é o cerne do Logo e é este que deve ser discutido e explicitado. Agora é a sua vez teste estes comando de movimentação da tartaruga,
Observação: Para limpar a janela de textos e a gráfica ao mesmo tempo , vá até a opção arquivo- novo.
CONSTRUINDO DESENHOS NO SUPERLOGO
Nesta atividade o professor deverá apresentar um cartaz com os principais comandos e suas funções.Desenvolveremos atividades para interagir com o programa .Daremos início a construção das primeiras formas geométricas.Para desenhar o quadrado imagine você dando ordem para seu colega para andar formando um quadrado invisível no chão, como se ele fosse um robô e não sabe o que significa quadrado .Como você faria isso ?
Escreva no seu caderno os comandos necessários para você cumprir esta atividade.
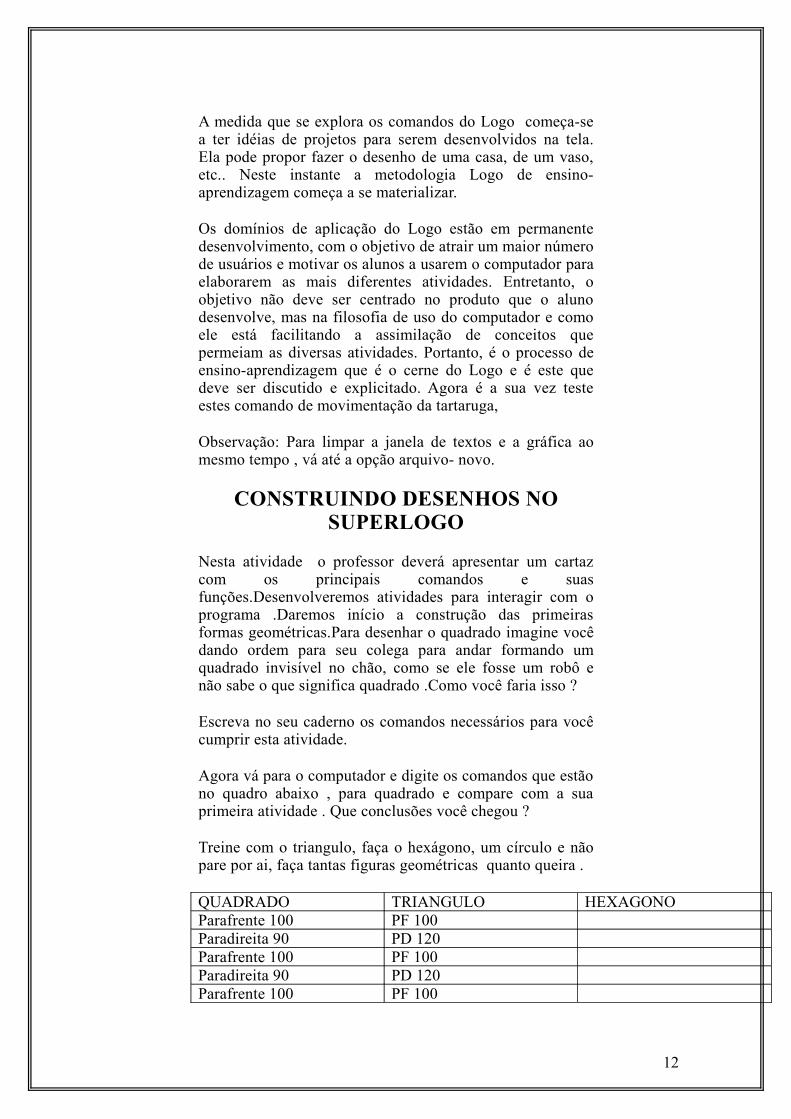
Agora vá para o computador e digite os comandos que estão no quadro abaixo , para quadrado e compare com a sua primeira atividade . Que conclusões você chegou ?
Treine com o triangulo, faça o hexágono, um círculo e não pare por ai, faça tantas figuras geométricas quanto queira .
QUADRADO TRIANGULO HEXAGONOParafrente 100 PF 100Paradireita 90 PD 120Parafrente 100 PF 100Paradireita 90 PD 120Parafrente 100 PF 100
12
Paradireita 90 PD 120Parafrente 100Paradireita 90
Devemos observar que os comandos PARA FRENTE e PARATRAS indicam a quantidade de passos que a tartaruga deve executar , isto pode ser comparado em linguagem matemática como perímetros, das figuras planas que significa o contorno da figura .No exemplo do quadrado como a tartaruga executa o comando parafrente 100 , são cem passos, portanto o Perímetro desse quadrado é 400 passos de tartaruga.Viu como é fácil determinar o perímetro de figuras planas.Indique em seu caderno o perímetros de todas as figuras que você desenhou.
UTILIZAREMOS O COMANDO APRENDA e REPITA , que nos auxiliará muito.
quadrado triangulo decágonoAprenda quadrado Para triangulo? repita 4 [ pf 300 pd 90] ? repita [ pf 100 pd 120]Fim Fim quadrado triangulo
Além de comparar os diferentes ângulos para as diferentes figuras geométricas podendo assim diferenciar ângulos internos e externos.Agora vamos para uma atividade mais elaborada .Vamos construir um MOINHO utilizando formas geométricas diferentes.O moinho é uma figura geométrica plana composta por retângulos e triângulos .O professor deverá apresentar um cartaz com a figura e aproveitar para discutir o perímetro dessa figura .vejamos os comandos para construí-lo.
13
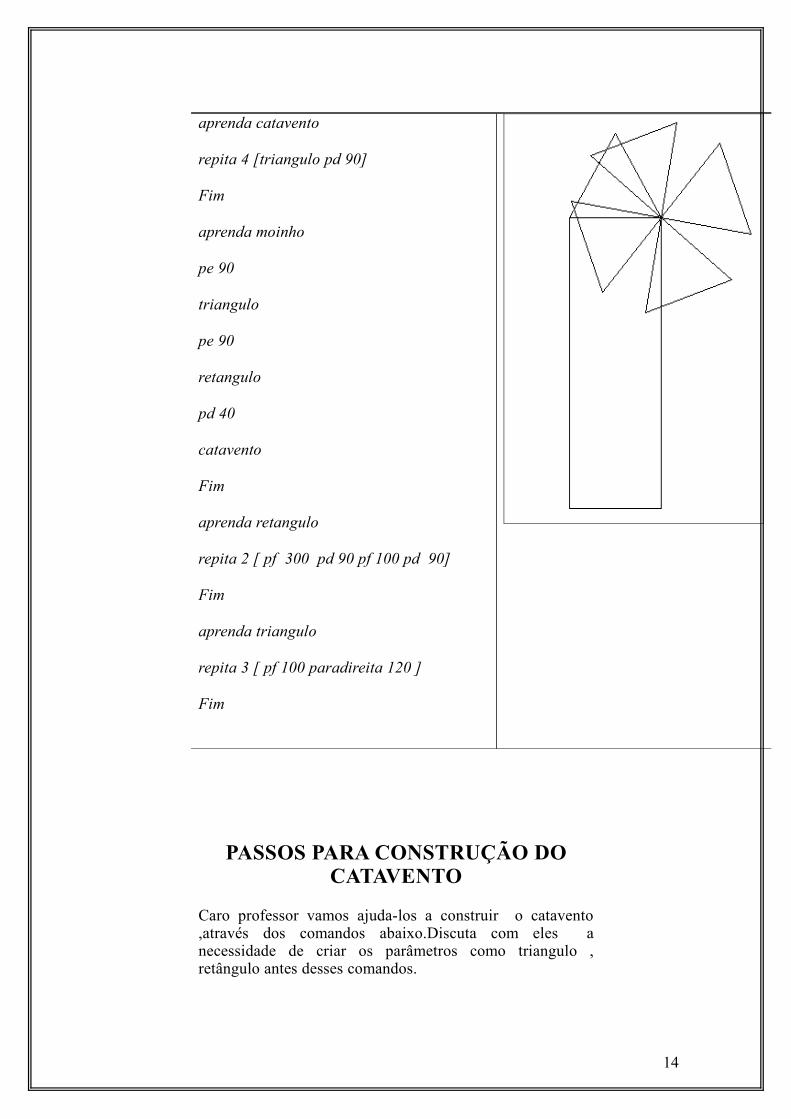
aprenda catavento
repita 4 [triangulo pd 90]
Fim
aprenda moinho
pe 90
triangulo
pe 90
retangulo
pd 40
catavento
Fim
aprenda retangulo
repita 2 [ pf 300 pd 90 pf 100 pd 90]
Fim
aprenda triangulo
repita 3 [ pf 100 paradireita 120 ]
Fim
PASSOS PARA CONSTRUÇÃO DO CATAVENTO
Caro professor vamos ajuda-los a construir o catavento ,através dos comandos abaixo.Discuta com eles a necessidade de criar os parâmetros como triangulo , retângulo antes desses comandos.
14
Uselápis
Esq 90
Triangulo
Esq 90
Retângulo
Centro
Catavento
Agora aprenderemos a colorir , associando a pintura a área de figuras planas . Esse espaço que você vai colorir do retângulo é chamado área do retângulo ,que podemos representar matematicamente por uma fórmula Aretângulo = Base x altura .Nesta etapa utilizaremos comandos como pinta,mudecp,mudecf e outros.Como vimos o lápis da tartaruga pode assumir diferentes cores.Com este recurso é possível pintar áreas perfeitamente delimitadas da tela, através do comando PINTE.
TABELA DE CORES
A seguir apresentamos uma tabela de referência com os números e nomes das cores que podem ser utilizadas como parâmetros dos comandos: mudecl, mudecp, mudecf
0 -preto
1 –azul escuro
2 –verde escuro
3 –azul turquesa escuro
4 –vermelho escuro
5 –roxo escuro
6 -marrom
7 -cinza claro
8 - cinza escuro
9 -verde água
10 -verde claro
11 –turquesa claro
12 -vermelho escuro
13 -rosa choque
14 -amarelo
15 -branco
Para pintar é necessário seguir alguns passos. Veja como exemplo como proceder para pintar o interior do retângulo.
15
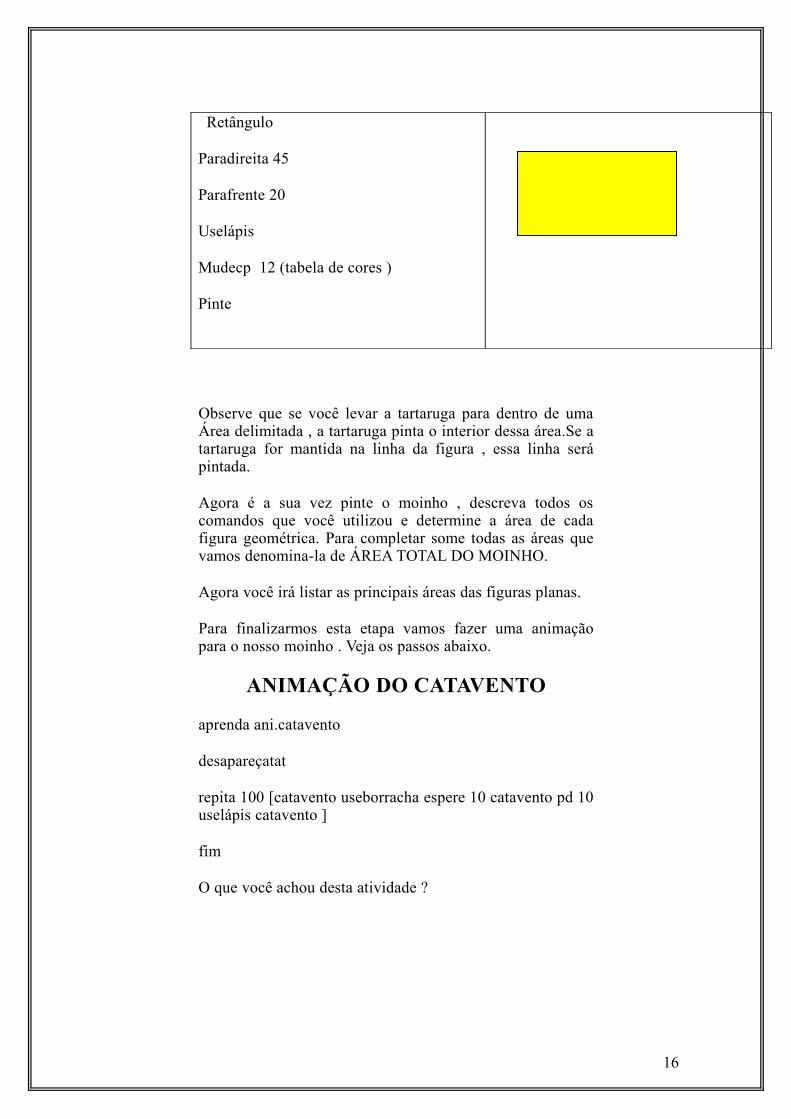
Retângulo
Paradireita 45
Parafrente 20
Uselápis
Mudecp 12 (tabela de cores )
Pinte
Observe que se você levar a tartaruga para dentro de uma Área delimitada , a tartaruga pinta o interior dessa área.Se a tartaruga for mantida na linha da figura , essa linha será pintada.
Agora é a sua vez pinte o moinho , descreva todos os comandos que você utilizou e determine a área de cada figura geométrica. Para completar some todas as áreas que vamos denomina-la de ÁREA TOTAL DO MOINHO.
Agora você irá listar as principais áreas das figuras planas.
Para finalizarmos esta etapa vamos fazer uma animação para o nosso moinho . Veja os passos abaixo.
ANIMAÇÃO DO CATAVENTO
aprenda ani.catavento
desapareçatat
repita 100 [catavento useborracha espere 10 catavento pd 10 uselápis catavento ]
fim
O que você achou desta atividade ?
16
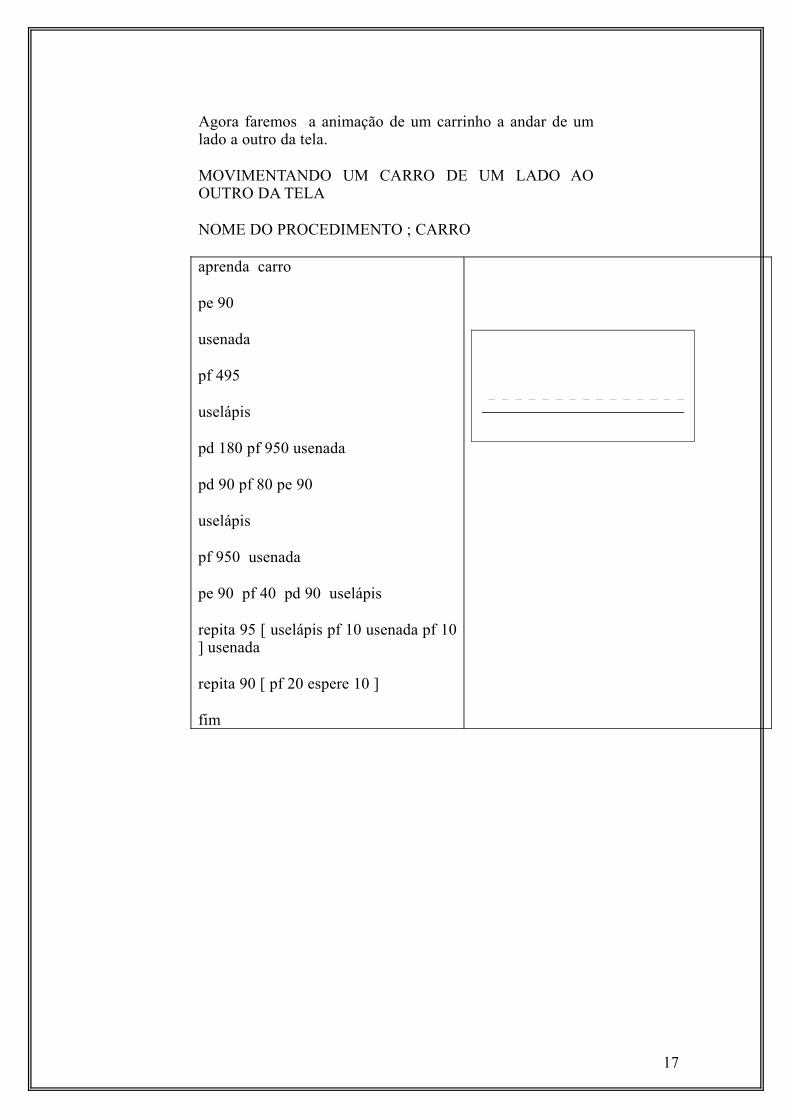
Agora faremos a animação de um carrinho a andar de um lado a outro da tela.
MOVIMENTANDO UM CARRO DE UM LADO AO OUTRO DA TELA
NOME DO PROCEDIMENTO ; CARRO
aprenda carro
pe 90
usenada
pf 495
uselápis
pd 180 pf 950 usenada
pd 90 pf 80 pe 90
uselápis
pf 950 usenada
pe 90 pf 40 pd 90 uselápis
repita 95 [ uselápis pf 10 usenada pf 10 ] usenada
repita 90 [ pf 20 espere 10 ]
fim
17
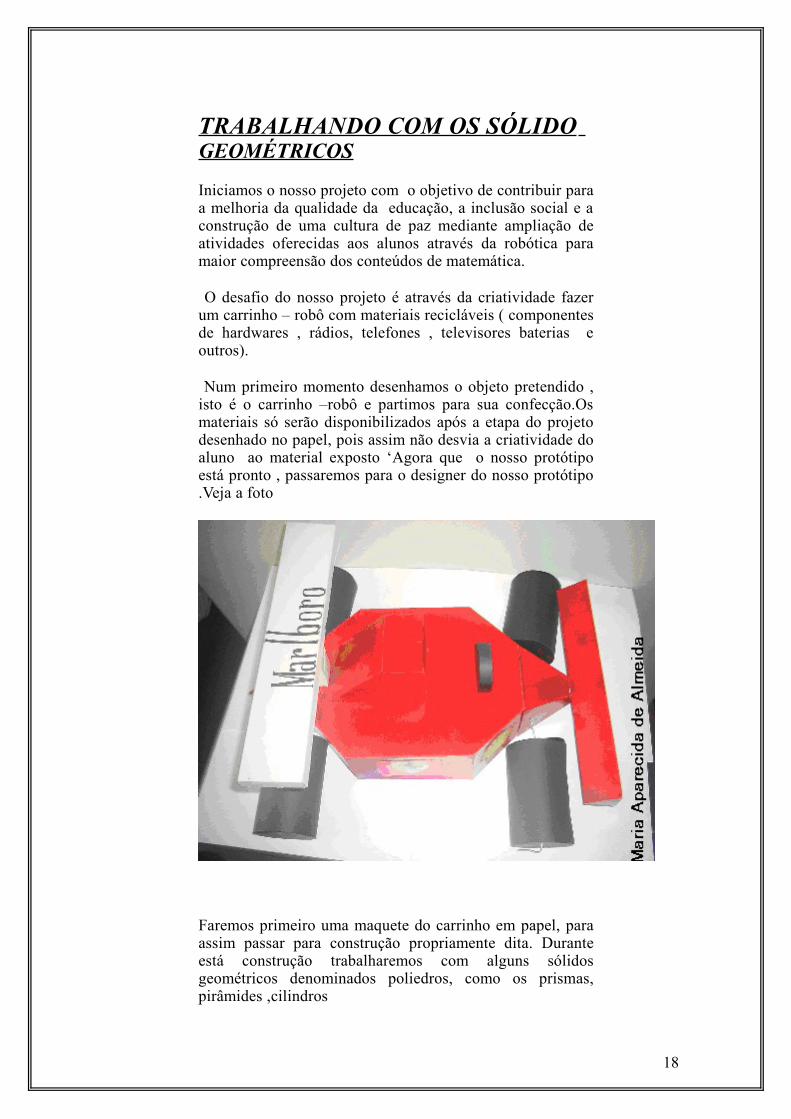
TRABALHANDO COM OS SÓLIDO GEOMÉTRICOS
Iniciamos o nosso projeto com o objetivo de contribuir para a melhoria da qualidade da educação, a inclusão social e a construção de uma cultura de paz mediante ampliação de atividades oferecidas aos alunos através da robótica para maior compreensão dos conteúdos de matemática.
O desafio do nosso projeto é através da criatividade fazer um carrinho – robô com materiais recicláveis ( componentes de hardwares , rádios, telefones , televisores baterias e outros).
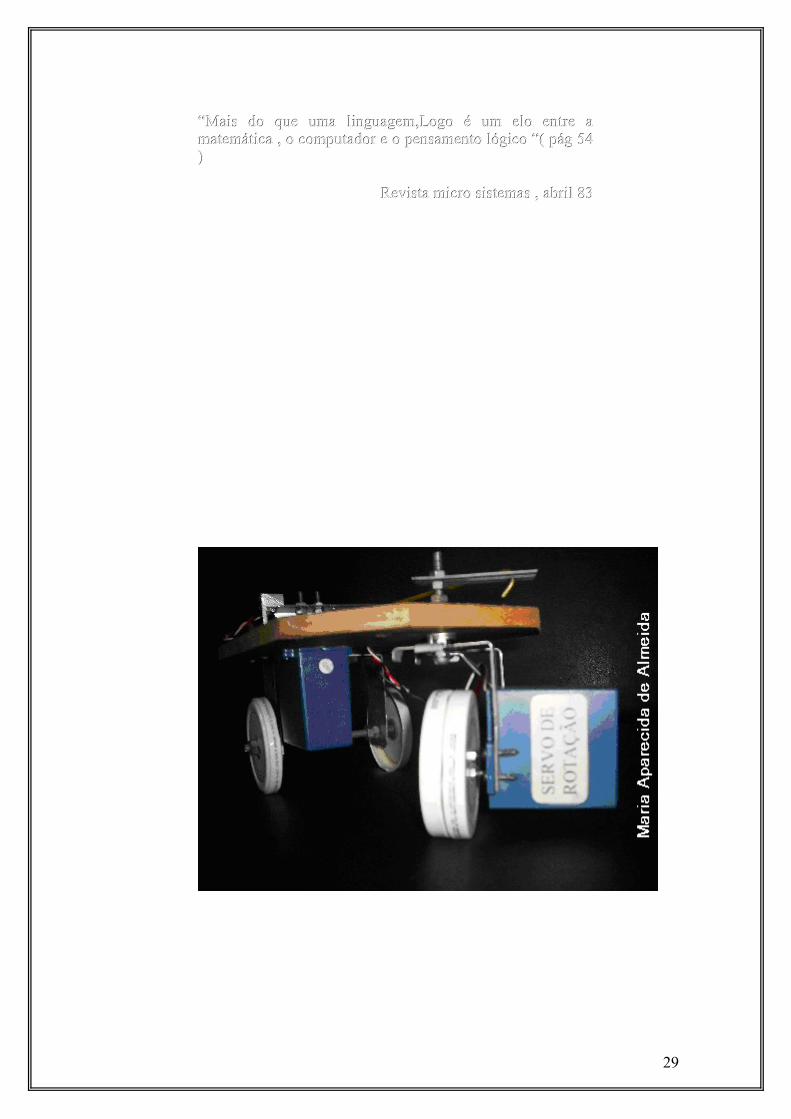
Num primeiro momento desenhamos o objeto pretendido , isto é o carrinho –robô e partimos para sua confecção.Os materiais só serão disponibilizados após a etapa do projeto desenhado no papel, pois assim não desvia a criatividade do aluno ao material exposto ‘Agora que o nosso protótipo está pronto , passaremos para o designer do nosso protótipo .Veja a foto
Faremos primeiro uma maquete do carrinho em papel, para assim passar para construção propriamente dita. Durante está construção trabalharemos com alguns sólidos geométricos denominados poliedros, como os prismas, pirâmides ,cilindros
18

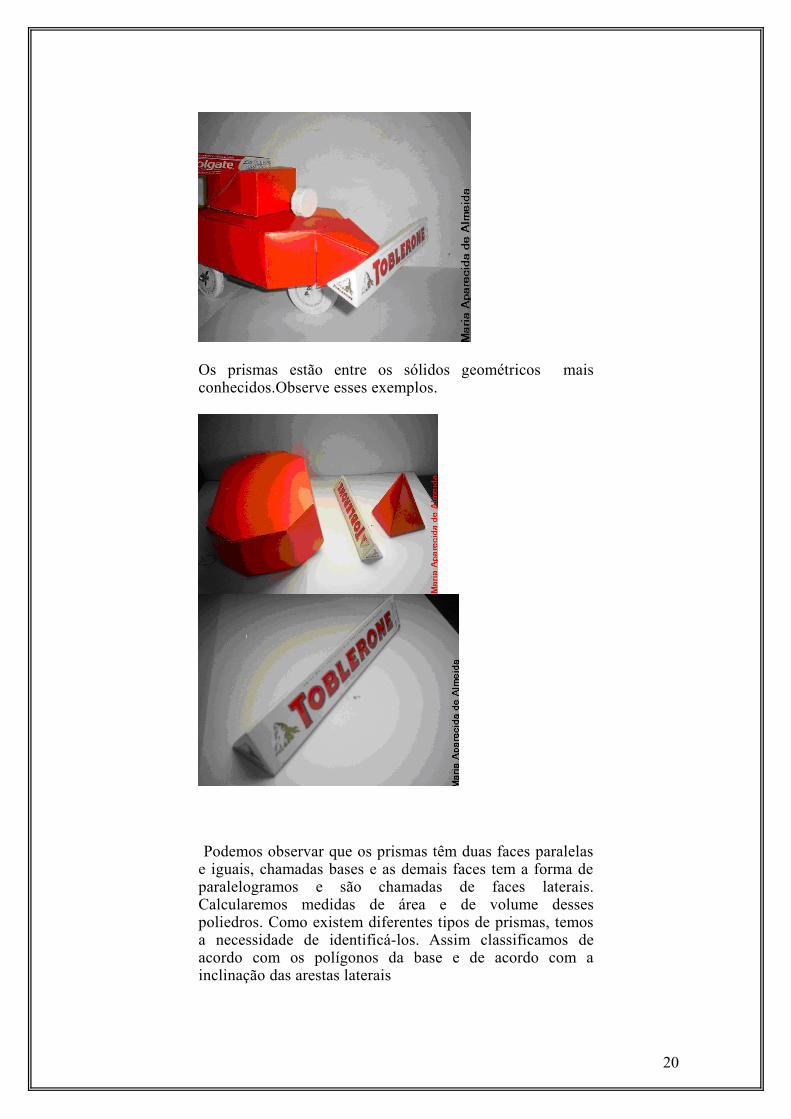
Os prismas estão entre os sólidos geométricos mais conhecidos.Observe esses exemplos.
Podemos observar que os prismas têm duas faces paralelas e iguais, chamadas bases e as demais faces tem a forma de paralelogramos e são chamadas de faces laterais. Calcularemos medidas de área e de volume desses poliedros. Como existem diferentes tipos de prismas, temos a necessidade de identificá-los. Assim classificamos de acordo com os polígonos da base e de acordo com a inclinação das arestas laterais
19
Os prismas estão entre os sólidos geométricos mais conhecidos.Observe esses exemplos.
Podemos observar que os prismas têm duas faces paralelas e iguais, chamadas bases e as demais faces tem a forma de paralelogramos e são chamadas de faces laterais. Calcularemos medidas de área e de volume desses poliedros. Como existem diferentes tipos de prismas, temos a necessidade de identificá-los. Assim classificamos de acordo com os polígonos da base e de acordo com a inclinação das arestas laterais
20
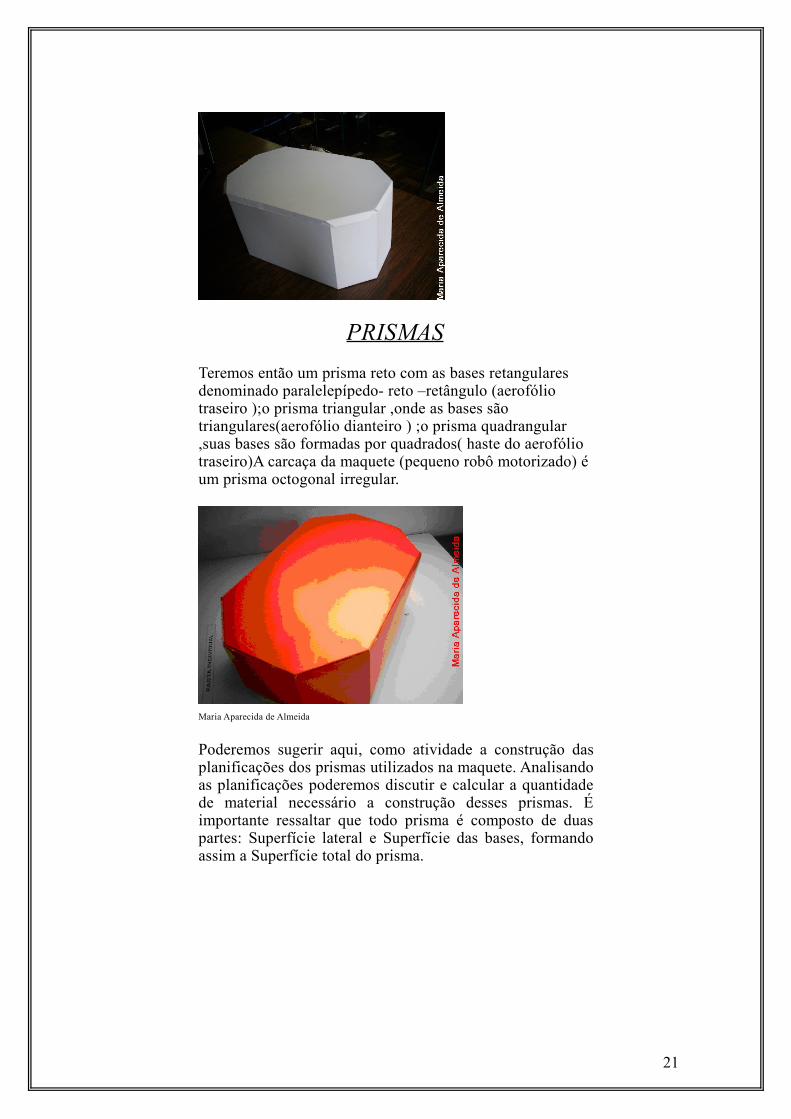
PRISMAS
Teremos então um prisma reto com as bases retangulares denominado paralelepípedo- reto –retângulo (aerofólio traseiro );o prisma triangular ,onde as bases são triangulares(aerofólio dianteiro ) ;o prisma quadrangular ,suas bases são formadas por quadrados( haste do aerofólio traseiro)A carcaça da maquete (pequeno robô motorizado) é um prisma octogonal irregular.
Maria Aparecida de Almeida
Poderemos sugerir aqui, como atividade a construção das planificações dos prismas utilizados na maquete. Analisando as planificações poderemos discutir e calcular a quantidade de material necessário a construção desses prismas. É importante ressaltar que todo prisma é composto de duas partes: Superfície lateral e Superfície das bases, formando assim a Superfície total do prisma.
21

Agora vamos imaginar um prisma reto regular onde o número de lados da base aumente cada vez mais indefinidamente. Que figura geométrica obteremos de acordo Com essas condições? A nossa base vai se tornar um círculo.
.Observando a maquete poderemos destacar essa forma geométrica na construção das rodas e do volante que
22

denominamos de cilindro.É importante ter em mente que um cilindro pode ser associado, a um prisma.Isto facilitará a compreensão dos cálculos de área e volume deste sólido.
Como atividade podemos propor a construção de um cilindro circular reto, utilizando cartolina ou outro material qualquer. Para tal construção teremos que recortar dois círculos e um retângulo, que representa a planificação deste sólido.O retângulo obtido na planificação corresponde á superfície lateral do cilindro, enquanto que os dois círculos são as suas bases. Assim se torna fácil determinar a quantidade de material necessário para a construção dos cilindros( rodas do carrinho)
PIRÂMIDES
Citaremos agora a figura geométrica denominada pirâmide. Nosso enfoque é responder questões relacionadas com a sua construção geométrica, tais como a área e o volume que a pirâmide ocupa. Classificamos as pirâmides pelo tipo de polígono que forma a base. A pirâmide utilizada na construção da maquete tem como base um quadrado, assim denominamos pirâmide quadrangular. Podemos observar que os polígonos que aparecem nas faces laterais são triângulos. A partir dessas informações poderemos calcular a quantidade de material necessário para sua construção
23
.
ROBOTIZANDO
CONSTRUÇÃO DO PROTÓTIPO
ORIENTAÇÕES PARA A CONSTRUÇÃO DO PROTÓTIPO
Iniciaremos nosso trabalho com uma indagação?
24
O que eles aprenderão com isso? E isso não favorecerá os meninos em relação as meninas? Com relação a primeira aqui estaremos dando importância a questão como relacionamento do educando com a tecnologia, sua idéia de aprendizagem, seu senso de identidade,Quanto a questão de gênero,as mulheres devem participarem na formação da cultura da informática do futuro.Carro de corrida diferente
Introdução
“A idéia do pensamento concreto nos capacita a considerar um tipo diferente de teoria.Ao planejar , construir, programar, depurar e refletir sobre o trabalho desenvolvido o aluno tem a oportunidade de lidar com problemas reais e atuar para criar u ma ou mais soluções que atendam o objetivo proposto
ObjetivosConstrução de um veículo capaz de efetuar movimentos comandados através do computador
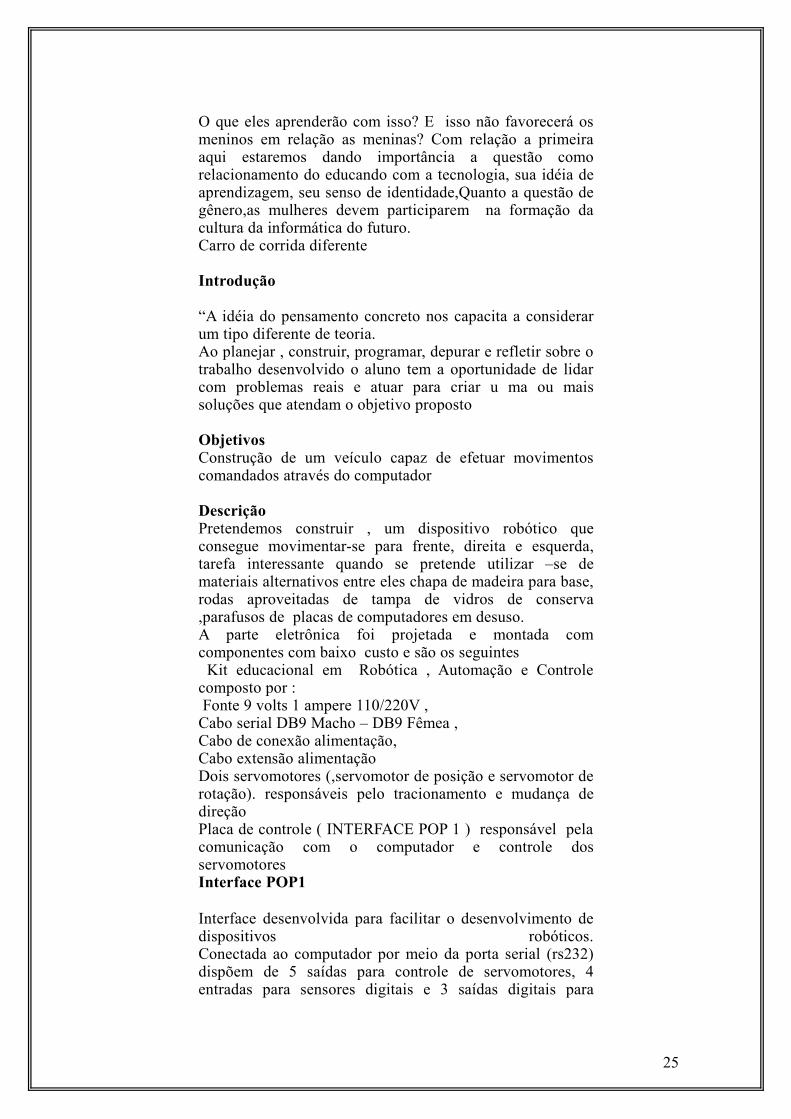
DescriçãoPretendemos construir , um dispositivo robótico que consegue movimentar-se para frente, direita e esquerda, tarefa interessante quando se pretende utilizar –se de materiais alternativos entre eles chapa de madeira para base, rodas aproveitadas de tampa de vidros de conserva ,parafusos de placas de computadores em desuso.A parte eletrônica foi projetada e montada com componentes com baixo custo e são os seguintes Kit educacional em Robótica , Automação e Controle composto por : Fonte 9 volts 1 ampere 110/220V ,Cabo serial DB9 Macho – DB9 Fêmea ,Cabo de conexão alimentação,Cabo extensão alimentaçãoDois servomotores (,servomotor de posição e servomotor de rotação). responsáveis pelo tracionamento e mudança de direçãoPlaca de controle ( INTERFACE POP 1 ) responsável pela comunicação com o computador e controle dos servomotoresInterface POP1
Interface desenvolvida para facilitar o desenvolvimento de dispositivos robóticos.Conectada ao computador por meio da porta serial (rs232) dispõem de 5 saídas para controle de servomotores, 4 entradas para sensores digitais e 3 saídas digitais para
25
controles de dispositivos como relés.Pode ser controlada a partir de qualquer linguagem de programação que tenha recursos para acesso a porta serial. O protocolo de comunicação é aberto.
MontagemO esquema abaixo mostra a configuração da montagem da base
FUNCIONAMENTO
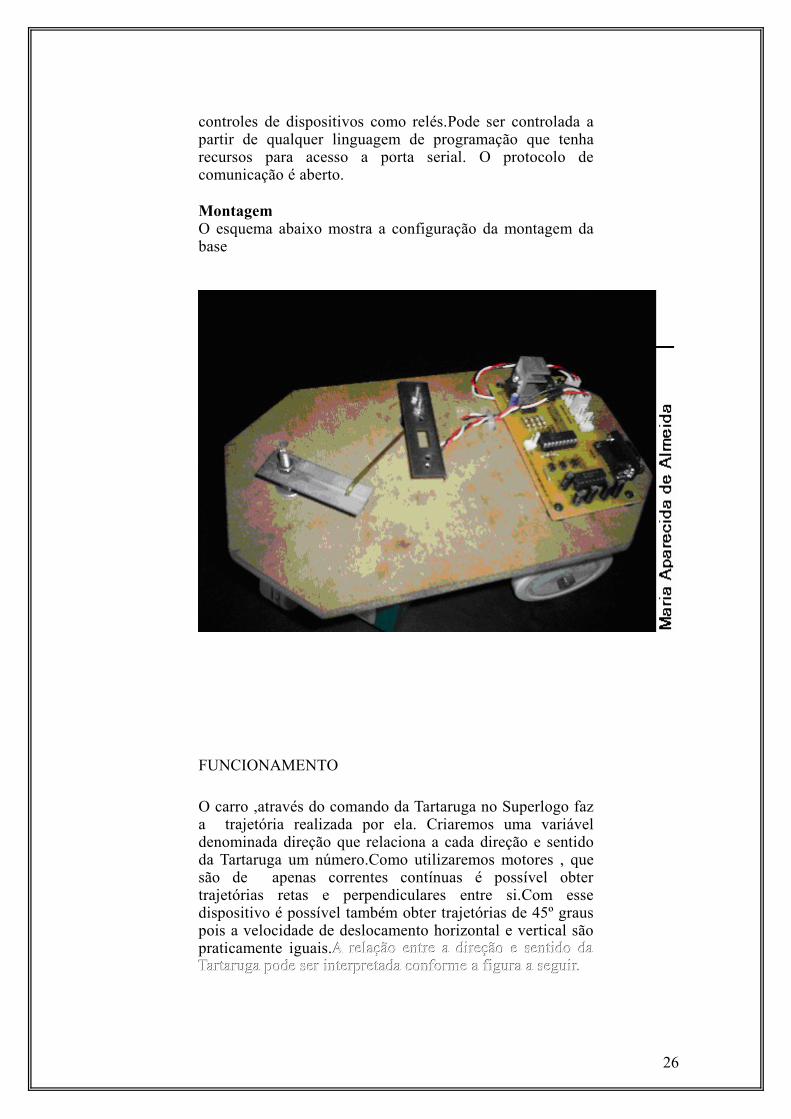
O carro ,através do comando da Tartaruga no Superlogo faz a trajetória realizada por ela. Criaremos uma variável denominada direção que relaciona a cada direção e sentido da Tartaruga um número.Como utilizaremos motores , que são de apenas correntes contínuas é possível obter trajetórias retas e perpendiculares entre si.Com esse dispositivo é possível também obter trajetórias de 45º graus pois a velocidade de deslocamento horizontal e vertical são praticamente iguais.A relação entre a direção e sentido daA relação entre a direção e sentido da Tartaruga pode ser interpretada conforme a figura a seguir. Tartaruga pode ser interpretada conforme a figura a seguir.
26
Controle da interface de robótica com o SupeLogo
CControle do dispositivo
Vamos desenvolver passoVamos desenvolver passo a passo o programa paraa passo o programa para controle deste dispositivocontrole deste dispositivo do SuperLogo. Usaremos os procedimentos apresentados ado SuperLogo. Usaremos os procedimentos apresentados a seguir,que tem a função de acessar a porta paralela e enviarseguir,que tem a função de acessar a porta paralela e enviar a interface os comandos necessários ao controle dosa interface os comandos necessários ao controle dos movimentos movimentos
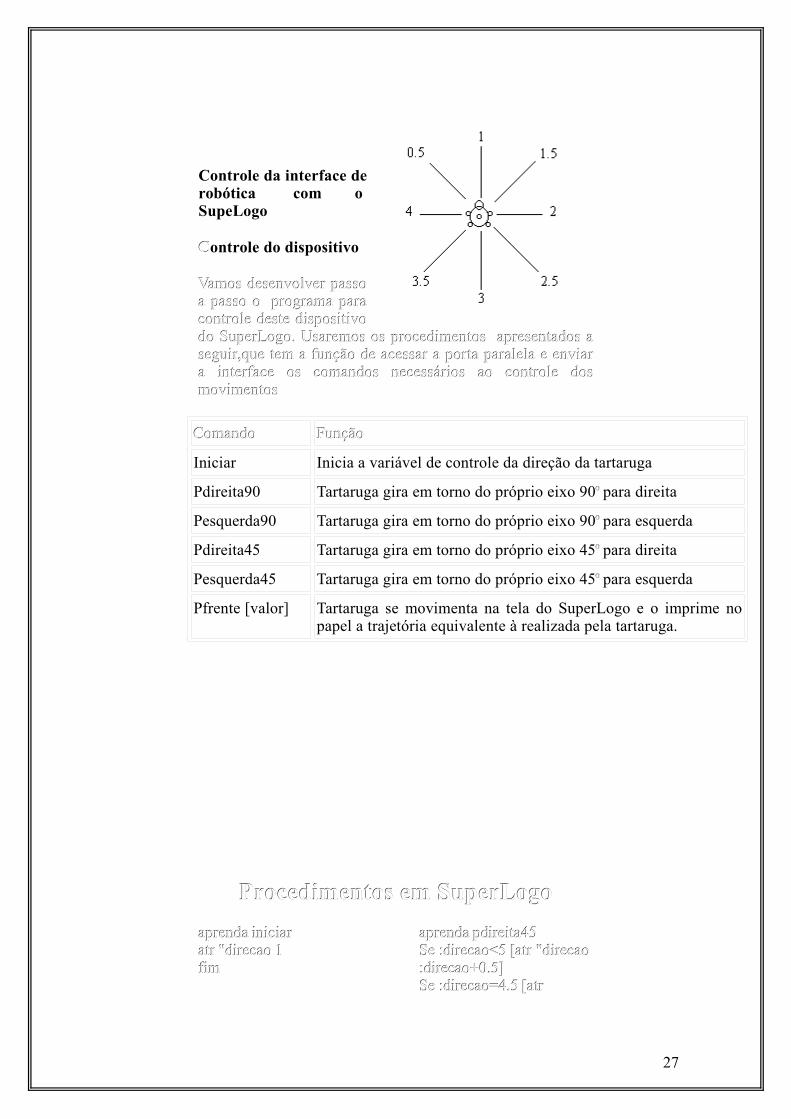
ComandoComando FunçãoFunção
Iniciar Inicia a variável de controle da direção da tartaruga
Pdireita90 Tartaruga gira em torno do próprio eixo 90o o para direita
Pesquerda90 Tartaruga gira em torno do próprio eixo 90o o para esquerda
Pdireita45 Tartaruga gira em torno do próprio eixo 45o o para direita
Pesquerda45 Tartaruga gira em torno do próprio eixo 45o o para esquerda
Pfrente [valor] Tartaruga se movimenta na tela do SuperLogo e o imprime no papel a trajetória equivalente à realizada pela tartaruga.
Procedimentos em SuperLogoProcedimentos em SuperLogo
aprenda iniciar aprenda iniciar atr "direcao 1 atr "direcao 1 fim fim
aprenda pdireita45 aprenda pdireita45 Se :direcao<5 [atr "direcaoSe :direcao<5 [atr "direcao :direcao+0.5] :direcao+0.5] Se :direcao=4.5 [atrSe :direcao=4.5 [atr
27
"direcao 0.5] "direcao 0.5] pd 45 pd 45 fim fim
aprenda pdireita90 aprenda pdireita90 Se :direcao<5 [atr "direcaoSe :direcao<5 [atr "direcao :direcao+1] :direcao+1] Se :direcao=5 [atr "direcaoSe :direcao=5 [atr "direcao 1] 1] pd 90 pd 90 fim fim
aprenda pesquerda45 aprenda pesquerda45 Se :direcao>0 [atr "direcaoSe :direcao>0 [atr "direcao :direcao-0.5] :direcao-0.5] Se :direcao=0 [atr "direcaoSe :direcao=0 [atr "direcao 4] 4] pe 45 pe 45 fim fim
aprenda pesquerda90 aprenda pesquerda90 Se :direcao>0 [atr "direcaoSe :direcao>0 [atr "direcao :direcao-1] :direcao-1] Se :direcao=0 [atr "direcaoSe :direcao=0 [atr "direcao 4] 4] pe 90 pe 90 fim fim
aprenda pfrente :unid aprenda pfrente :unid atr "tempo 21 atr "tempo 21 pfpf :unid Se :direcao=0.5 [ pop1motorfrente [a] pop1 revertemotor [b] ligamotor [a ligamotor [a b] Espere :tempo*:unid pop1desligamotor [desligamotor [a b] ] Se :direcao=1[ pop1revertemotor [b] pop1ligamotor [b]ligamotor [b]
Espere :tempo*:unid pop1desligamotor [desligamotor [b] ] Se :direcao=1.5 [ pop1revertemotor [a b] revertemotor [a b] pop1ligamotor [a b]ligamotor [a b] Espere :tempo*:unid pop1desligamotor [a b] desligamotor [a b] ] ] Se :direcaSe :direcao=2 [ pop1revertemotor [a] pop1ligamotor [a]ligamotor [a] Espere :tempo*:unid pop1desligamotor [desligamotor [a] ] Se :direcao=2.5 [ pop1motorfrente [b] pop1revertemotor [a] pop1ligamotor [a b]ligamotor [a b] Espere :tempo*:unid pop1desligamotor [a b] desligamotor [a b] ] ] Se :direcaoSe :direcao=3 [ pop1motorfrente [b] pop1ligamotor [b]ligamotor [b] Espere :tempo*:unid pop1desligamotor [desligamotor [b] ] Se :direcao=3.5 [ pop1motorfrente [a b] pop1ligamotor [a b]ligamotor [a b] Espere :tempo*:unid pop1desligamotor [desligamotor [a b] ] Se :direcao=4 [ pop1motorfrente motorfrente [a] pop1ligamotor [a]ligamotor [a] Espere :tempo*:unid pop1desligamotor [a] desligamotor [a] ] ] fim fim
CCONSIDERAÇÃO FINAIS
28
“Mais do que uma linguagem,Logo é um elo entre a“Mais do que uma linguagem,Logo é um elo entre a matemática , o computador e o pensamento lógico “( pág 54matemática , o computador e o pensamento lógico “( pág 54 ))
Revista micro sistemas , abril 83Revista micro sistemas , abril 83
29

REFERENCIAS BIBLIOGRÁFICASREFERENCIAS BIBLIOGRÁFICAS
(*) Este texto foi redigido para a construção de um material(*) Este texto foi redigido para a construção de um material didático do curso PDE 2007 iniciado em abril/ 2007 comdidático do curso PDE 2007 iniciado em abril/ 2007 com término previsto para DEZ/2008 mas utiliza idéias e tesestérmino previsto para DEZ/2008 mas utiliza idéias e teses já desenvolvidas nos seguintes trabalhos:já desenvolvidas nos seguintes trabalhos:
PAPERT, Seymour. A máquina das crianças; repensando a escola na era da informática. Porto Alegre, Artes Médicas, 1994.
DANTE, L.R. Tudo é Matemática. São Paulo, Ed. Ática,DANTE, L.R. Tudo é Matemática. São Paulo, Ed. Ática, 2002.2002.
PCN – Parâmetros Curriculares Nacionais (ensinoPCN – Parâmetros Curriculares Nacionais (ensino fundamental).fundamental).
Oficina realizada no IX ENEM – Encontro Nacional deOficina realizada no IX ENEM – Encontro Nacional de Educação Matemática.Educação Matemática.
Manual do SuperLogo, NIED, UNICAMP, 1994.
DA ROCHA, H. V.; FREIRE, F.; PRADO, M. E. DA ROCHA, H. V.; FREIRE, F.; PRADO, M. E. Memo n35http://www.nied.unicamp.br/publicacoeshttp://www.nied.unicamp.br/publicacoes, 2000. 34 p.
DA ROCHA, H. V.; FREIRE, F.; PRADO, M. E. MemoMemo n36n36.http://www.nied.unicamp.br/publicacoeshttp://www.nied.unicamp.br/publicacoes, 2000. 34 p.
PAPERT, S. LOGO: computadores e educação LOGO: computadores e educação segunda. ed. Brasiliense, 986.
Rocha, H.V.; Freire, F.M.P.; Prado, M.E.B.B.. (1999)Rocha, H.V.; Freire, F.M.P.; Prado, M.E.B.B.. (1999) Tartaruga, Figuras,Palavras, Listase Procedimento: Um Primeiro Passeio pelo Logo.. Campinas, SP: MEMO no 35,Campinas, SP: MEMO no 35,NIED / UNICAMP.NIED / UNICAMP.
30