legenda questões - joinville.udesc.br · 2 ª lista de exercícios (ali0001) prof. helder g. g. de...
TRANSCRIPT

2ª Lista de Exercícios (ALI0001)Prof. Helder G. G. de Lima1
Legenda
Cálculos Conceitos Teoria
Questões
1. Revise todos os axiomas da definição de espaço vetorial 𝑉 sobre o corpo de escalaresR, verificando a validade de cada um deles nos seguintes conjuntos. Em cada item, asoperações de adição e multiplicação por escalar que aparecem no lado esquerdo são as doespaço vetorial que está sendo definido, e as do lado direito são operações usuais de R.
(a) 𝑉 = R𝑛, formado por todas as sequências de 𝑛 números reais, e
(𝑥1, . . . , 𝑥𝑛) + (𝑦1, . . . , 𝑦𝑛) = (𝑥1 + 𝑦1, . . . , 𝑥𝑛 + 𝑦𝑛)
𝑘 · (𝑥1, . . . , 𝑥𝑛) = (𝑘𝑥1, . . . , 𝑘𝑥𝑛)
(b) 𝑉 = 𝑀𝑚×𝑛(R), formado por todas as matrizes de ordem 𝑚× 𝑛, com 𝑚,𝑛 fixos e
(𝐴+𝐵)𝑖𝑗 = (𝐴)𝑖𝑗 + (𝐵)𝑖𝑗, para 1 ≤ 𝑖 ≤ 𝑚 e 1 ≤ 𝑗 ≤ 𝑛,
(𝑘 ·𝐵)𝑖𝑗 = 𝑘(𝐴𝑖𝑗), para 1 ≤ 𝑖 ≤ 𝑚 e 1 ≤ 𝑗 ≤ 𝑛
(c) 𝑉 = ℱ(R) = ℱ(−∞,+∞), formado por todas as funções 𝑓 : R → R e
(𝑓 + 𝑔)(𝑥) = 𝑓(𝑥) + 𝑔(𝑥), ∀𝑥 ∈ R(𝑘 · 𝑓)(𝑥) = 𝑘(𝑓(𝑥)), ∀𝑥 ∈ R
(d) 𝑉 = C, formado por todos os números complexos e
(𝑎+ 𝑏i) + (𝑐+ 𝑑i) = (𝑎+ 𝑐) + (𝑏+ 𝑑)i
𝑘 · (𝑎+ 𝑏i) = (𝑘𝑎) + (𝑘𝑏)i
(e) 𝑉 = R∞, formado por todas as sequências infinitas de números reais, e
(𝑥1, 𝑥2, . . .) + (𝑦1, 𝑦2, . . .) = (𝑥1 + 𝑦1, 𝑥2 + 𝑦2, . . .)
𝑘 · (𝑥1, . . . , 𝑥𝑛) = (𝑘𝑥1, 𝑘𝑥2, . . .)
2. Verifique se as operações definidas a seguir fazem com que os conjuntos 𝑉 indicados sejamespaços vetoriais. Em particular, determine se há algum elemento 𝑧 ∈ 𝑉 que faz o papelde “vetor nulo”, ou seja, que satisfaz 𝑧 + 𝑣 = 𝑣,∀𝑣 ∈ 𝑉 , e para cada vetor 𝑣 ∈ 𝑉 , indiquequal 𝑥 ∈ 𝑉 é o seu “oposto”, no sentido de que 𝑥+ 𝑣 = 𝑧.
1 Este é um material de acesso livre distribuído sob os termos da licença Creative Commons Atribuição-
CompartilhaIgual 4.0 Internacional

(a) 𝑉 = R, sendo
{𝑥+ 𝑦 = 𝑥+ 𝑦 + 1, ∀𝑥 ∈ 𝑉, 𝑦 ∈ 𝑉
𝑘 · 𝑥 = 𝑘𝑥+ 𝑘 − 1, ∀𝑘 ∈ R,∀𝑥 ∈ 𝑉
(b) 𝑉 = R2, sendo
{(𝑥, 𝑦) + (𝑢, 𝑣) = (𝑥+ 𝑢, 𝑦 + 𝑣), ∀(𝑥, 𝑦) ∈ 𝑉, ∀(𝑢, 𝑣) ∈ 𝑉
𝑘 · (𝑥, 𝑦) = (−3𝑘𝑥+ 𝑘𝑦, 5𝑘𝑥− 2𝑘𝑦), ∀𝑘 ∈ R,∀(𝑥, 𝑦) ∈ 𝑉
(c) 𝑉 = R2, sendo
{(𝑥, 𝑦) + (𝑢, 𝑣) = (𝑥+ 𝑢+ 1, 𝑦 + 𝑣 − 2), ∀(𝑥, 𝑦) ∈ 𝑉, ∀(𝑢, 𝑣) ∈ 𝑉
𝑘 · (𝑥, 𝑦) = (𝑘𝑥+ 𝑘 − 1, 𝑘𝑦 − 2𝑘 + 2), ∀𝑘 ∈ R,∀(𝑥, 𝑦) ∈ 𝑉
3. Seja 𝑉 = R4, o espaço vetorial das quádruplas de números reais, com as operações usuais.Mostre que os seguintes subconjuntos são subespaços vetoriais de 𝑉 :
(a) 𝑈 = {(𝑎, 𝑏, 𝑐, 𝑑) ∈ R4 | 𝑎− 𝑏 = 𝑐+ 𝑑}.(b) 𝑊 = {(𝑎, 𝑏, 𝑐, 𝑑) ∈ R4 | 𝑐 = 𝑑 = 0}.
4. Seja 𝑉 = 𝑀3×3(R), o espaço vetorial das matrizes quadradas de ordem 3, com as operaçõesusuais. Mostre que os seguintes subconjuntos são subespaços vetoriais de 𝑉 :
(a) As matrizes simétricas: 𝑆 = {𝑋 ∈ 𝑀3×3(R) | 𝑋𝑇 = 𝑋}.(b) As matrizes antissimétricas: 𝐴 = {𝑋 ∈ 𝑀3×3(R) | 𝑋𝑇 = −𝑋}.(c) As matrizes que comutam com uma matriz 𝐵 fixada: 𝐶 = {𝑋 ∈ 𝑉 | 𝐵𝑋 = 𝑋𝐵}.(d) 𝑈 = {𝐴 = (𝑎𝑖𝑗) ∈ 𝑀3×3(R) | 𝑎𝑖𝑗 = 0 sempre que 𝑖+ 𝑗 = 4}.
5. Seja 𝑉 = ℱ(R). Mostre que os seguintes subconjuntos são subespaços vetoriais de 𝑉 :
(a) O conjunto 𝑃∞ formado por todas as funções polinomiais (de qualquer grau):
𝑃∞ = {𝑝(𝑥) ∈ ℱ(R) | 𝑝(𝑥) = 𝑎𝑛𝑥𝑛+. . .+𝑎1𝑥
1+𝑎0, para algum natural 𝑛, e 𝑎𝑖 ∈ R}.
(b) Dado um natural 𝑛, o conjunto 𝑃𝑛 de todos polinômios de grau menor ou igual a 𝑛:
𝑃𝑛 = {𝑞(𝑥) ∈ 𝑃∞ | grau(𝑞(𝑥)) ≤ 𝑛}.
(c) As funções pares, isto é, tais que 𝑓(−𝑥) = 𝑓(𝑥), para todo 𝑥 ∈ R.(d) As funções ímpares, isto é, tais que 𝑓(−𝑥) = −𝑓(𝑥), para todo 𝑥 ∈ R.(e) O conjunto 𝐶0(R) das funções contínuas(f) O conjunto 𝐶1(R) das funções deriváveis cuja derivada é contínua
6. Em cada item, determine se 𝑈 é ou não um subespaço do espaço vetorial 𝑉 indicado:
(a) 𝑉 = R2 e 𝑈 = {(𝑥, 𝑦) ∈ R2 | 𝑦 + 2𝑥 = 5}(b) 𝑉 = R2 e 𝑈 = {(𝑥, 𝑦) ∈ R2 | 𝑦 = −4𝑥}
(c) 𝑉 = 𝑀3×1(R), 𝑈 = {𝑋 ∈ 𝑀3×1(R) | 𝐴𝑋 = 0}, sendo 𝐴 =
[1 2 34 5 6
].
(d) 𝑉 = 𝑀2×2(R) e 𝑈 = {𝑍 ∈ 𝑀2×2(R) | 𝑍 tem zeros em sua diagonal}(e) 𝑉 = 𝑀2×2(R) e 𝑈 = {𝐵 ∈ 𝑀2×2(R) | det(𝐵) = 0}(f) 𝑉 = ℱ(R) e 𝑈 = {𝑓 ∈ ℱ(R) | 𝑓 é um polinômio de grau exatamente igual a 3}(g) 𝑉 = ℱ(R) e 𝑈 = {𝑓 ∈ ℱ(R) | 𝑓 ′(−1) = 𝑓 ′(1) = 0}
2

7. Sejam 𝐴 =
[11 15 −13 7 16
], 𝐵 =
[2 11 −181 −8 1
]e 𝐶 =
[−3 −6 6−2 4 2
]vetores de 𝑀3×2(R).
Resolva a seguinte equação na variável 𝑋 ∈ 𝑀3×2(R):𝐴−𝑋
5− 𝑋 +𝐵
2= 𝐶.
8. Prove que os únicos subespaços de R (com as operações usuais) são o trivial {0} e R.(dica: mostre que se 𝑈 é um subespaço de R e 𝑈 = {0} então 𝑈 = R)
9. Seja 𝑈 um subespaço de um espaço vetorial 𝑉 . Explique por que 𝑊 = {𝑥 ∈ 𝑉 | 𝑥 ∈ 𝑈}não pode ser um subespaço de 𝑉 .
10. Para cada um dos subespaços vetoriais 𝑈 e 𝑉 a seguir, obtenha o subespaço 𝑈 ∩ 𝑉 :
(a) 𝑈 = {𝑎𝑥3+𝑏𝑥2+𝑐𝑥+𝑑 ∈ 𝑃3(R) | 3𝑎−𝑏+𝑐+𝑑 = 0} e 𝑉 = {𝑝(𝑥) ∈ 𝑃3(R) | 𝑝′(−1) = 0}(b) 𝑈 = {𝑔 ∈ ℱ(R) | 𝑔 é par} e 𝑉 = {𝑔 ∈ ℱ(R) | 𝑔 é ímpar}(c) 𝑈 = {𝑀 ∈ 𝑀𝑛×𝑛(R) | 𝑀 é antissimétrica} e 𝑉 = {𝑀 ∈ 𝑀𝑛×𝑛(R) | 𝑀 é simétrica}
11. Seja 𝑉 um espaço vetorial qualquer e 𝑈 um subespaço de 𝑉 . Prove que para quaisquervetores 𝑥, 𝑦 ∈ 𝑉 vale o seguinte: se 𝑥 ∈ 𝑈 e 𝑦 − 𝑥 ∈ 𝑈 então 𝑦 ∈ 𝑈 .
12. Dê exemplos de subespaços vetoriais 𝑉1 e 𝑉2 de R3 que satisfaçam as seguintes condições(e explique porque satisfazem):
(a) 𝑉1 ∪ 𝑉2 não é subespaço vetorial de R3
(b) 𝑉1 ∪ 𝑉2 é subespaço vetorial de R3
13. Sejam 𝑉1 e 𝑉2 quaisquer subespaços de um espaço vetorial 𝑊 arbitrário. Prove que para𝑉1 ∪ 𝑉2 ser subespaço vetorial de 𝑊 é preciso que 𝑉1 ⊆ 𝑉2 ou que 𝑉2 ⊆ 𝑉1.
14. Explique todas as afirmações verdadeiras a seguir, e dê contra-exemplos para as demais.
(a) A interseção de dois subespaços vetoriais de 𝑉 nunca é vazia.
(b) Se 𝑉 = ger {𝑢1, 𝑢2, 𝑢3} então {𝑢1, 𝑢2, 𝑢3} é uma base de 𝑉
(c) Se {𝑢, 𝑣} é linearmente dependente (L.D.) então um dos vetores é múltiplo do outro.
(d) Se 𝑢 = 0 então os vetores 𝑢 e −𝑢 são linearmente independentes (L.I.).
(e) Se {𝑢, 𝑣} é L.I. e {𝑣, 𝑤} é L.I. então {𝑢, 𝑣, 𝑤} é L.I..
(f) Se {𝑢} é L.I. e {𝑣} é L.I. então {𝑢, 𝑣} é L.I..
(g) É possível que 𝑢 ∈ ger {𝑣, 𝑤} sem que ocorra 𝑢 ∈ ger {𝑣} nem 𝑢 ∈ ger {𝑤}.
15. É verdade que R4 = ger {(1,−1, 0, 0), (0, 0, 1,−1), (0, 2, 1, 0), (0, 0, 1, 1)}? Por que?
16. Encontre um conjunto de vetores geradores de um dos seguintes subespaços de 𝑀3×3(R):
(a) 𝐷 = {𝑋 ∈ 𝑀3×3(R) | 𝑋 é diagonal }(b) 𝑊 = {𝐴 ∈ 𝑀3×3(R) | 𝐴 é antissimétrica }(c) 𝑈 = {𝐵 ∈ 𝑀3×3(R) | 𝐵 é simétrica }
17. Verifique se os conjuntos {𝑣1, . . . , 𝑣𝑛} a seguir são formados por vetores linearmente in-dependentes (L. I.) ou linearmente dependentes (L. D.):
(a) 𝑣1 = (0, 3,−9), 𝑣2 = (1, 4,−10), 𝑣3 = (2, 5,−11) em R3.
3

(b) 𝑣1 = (0, 3,−9), 𝑣2 = (1, 4,−10) em R3.
(c) 𝑣1 =
[0 22 0
], 𝑣2 =
[1 00 4
], 𝑣3 =
[1 00 0
], 𝑣4 =
[0 10 0
], 𝑣5 =
[1 23 4
]em 𝑀2×2(R).
(d) 𝑣1 = 𝑥3+𝑥2+𝑥+1, 𝑣2 = 𝑥2+𝑥+1, 𝑣3 = 𝑥+1, 𝑣4 = 1 no espaço de polinômios 𝑃4.
18. Encontre uma base e a dimensão de cada um dos seguintes espaços vetoriais:
(a) 𝑉 = R4 = {(𝑥, 𝑦, 𝑧, 𝑤) | 𝑥 ∈ R, 𝑦 ∈ R, 𝑧 ∈ R, 𝑤 ∈ R}.
(b) 𝑉 = 𝑀2×3(R) ={[
𝑎 𝑏 𝑐𝑝 𝑞 𝑟
]| 𝑎 ∈ R, 𝑏 ∈ R, 𝑐 ∈ R, 𝑝 ∈ R, 𝑞 ∈ R, 𝑟 ∈ R
}.
(c) 𝑉 = 𝑃5 = {𝑝(𝑥) ∈ ℱ(R) | 𝑝(𝑥) é um polinômio de grau ≤ 5}.
19. Encontre uma base e a dimensão do subespaço 𝑊 de 𝑉 nos seguintes casos:
(a) 𝑉 = R3 e 𝑊 = {(𝑥, 𝑦, 𝑧) | 𝑧 = 0} (o plano horizontal que passa pela origem).
(b) 𝑉 = 𝑀2×2(R) e 𝑊 = {𝑆 ∈ 𝑉 | 𝑆𝑇 = 𝑆} (as matrizes simétricas 2× 2)
(c) 𝑉 = ℱ(R) e 𝑊 = {𝑝(𝑥) = 𝑎𝑥2 + 𝑏𝑥 + 𝑐 ∈ 𝑃2 | 𝑝′(6) = 0} (geometricamente, estasfunções correspondem a parábolas com vértice em (6, 𝑓(6))).
(d) 𝑉 = R4 e 𝑊 = {(𝑥, 𝑦, 𝑧, 𝑤) | 𝑥+ 2𝑤 = 0,−𝑦 = −2𝑤,𝑤 = 𝑧/2}.
20. Encontre um subconjunto de 𝑆 = {(1, 1, 1), (1, 1, 0), (1, 0, 1), (0, 1, 1)} que seja base de R3.
21. Mostre que {0, 𝑣1, . . . , 𝑣𝑛} é um conjunto de vetores linearmente dependente, isto é, todoconjunto de vetores contendo o vetor nulo é linearmente dependente.
22. Prove que se 𝑊 = ger {𝑣1, . . . , 𝑣𝑛} e 𝑧 ∈ 𝑊 então 𝑊 = ger {𝑣1, . . . , 𝑣𝑛, 𝑧}.
23. Prove que se 𝑆1 = {𝑢1, 𝑢2, 𝑢3} é um conjunto de vetores linearmente independentes, então𝑆2 = {𝑢1, 𝑢2} também é um conjunto de vetores linearmente independentes.
24. Dada uma matriz 𝐴, denote por 𝐿(𝐴) o espaço linha (subespaço gerado pelas linhas de𝐴), por 𝐶(𝐴) o espaço coluna (subespaço gerado pelas colunas de 𝐴) e por 𝑁(𝐴) o núcleode 𝐴 (o espaço das matrizes coluna 𝑋 que satisfazem 𝐴𝑋 = 0). Encontre uma base e adimensão de 𝐿(𝐴), 𝐶(𝐴) e 𝑁(𝐴) para as seguintes matrizes:
(a) 𝐴 =
[1 −11 1
]
(b) 𝐴 =[1 2 3 4
](c) 𝐴 =
[1 0 1 00 1 0 −1
](d) 𝐴 =
[1 0 2 0 32 0 4 0 6
]𝑇25. Se 𝑈 e 𝑉 são subespaços de um espaço vetorial 𝑊 , denota-se o conjunto de todas as
somas de elementos de 𝑈 com elementos de 𝑉 por 𝑈+𝑉 = {𝑥+𝑦 ∈ 𝑊 | 𝑥 ∈ 𝑈 e 𝑦 ∈ 𝑉 }.Esta soma é chamada de soma direta, e denotada por 𝑈 ⊕ 𝑉 , se ocorrer 𝑈 ∩ 𝑉 = {0}.Encontre 𝑈 + 𝑉 para os seguintes subespaços 𝑈 e 𝑉 e verifique se é uma soma direta:
(a) Em 𝑊 = R4, os subespaços 𝑈 = {(𝑥, 𝑦, 𝑧, 𝑤) ∈ R4 | 𝑥 + 𝑦 = 0 = 𝑧 + 𝑤} e𝑉 = {(𝑎, 𝑏, 𝑐, 𝑑) ∈ R4 | 𝑏 = 2𝑐}.
(b) Os subespaços 𝑈 = {𝑀 ∈ 𝑀3×3(R) | 𝑀𝑇 = −𝑀} das matrizes antissimétricas e𝑉 = {𝑁 ∈ 𝑀3×3(R) | 𝑁𝑇 = 𝑁} das matrizes simétricas de 𝑊 = 𝑀3×3(R).
4

(c) Os subespaços 𝑈 = {𝑞(𝑥) = 𝑏0 + 𝑏1𝑥 + 𝑏2𝑥2 + 𝑏3𝑥
3 | 𝑞(−𝑥) = −𝑞(𝑥),∀𝑥 ∈ R} e𝑉 = {𝑝(𝑥) = 𝑎0 + 𝑎1𝑥+ 𝑎2𝑥
2 + 𝑎3𝑥3 | 𝑝(−𝑥) = 𝑝(𝑥),∀𝑥 ∈ R} do espaço vetorial 𝑃3.
26. Encontre uma base e a dimensão de cada uma das somas 𝑈 + 𝑉 do exercício anterior.
27. Mostre que se 𝑢, 𝑣 e 𝑤 são vetores L. I. então os vetores 𝑢+ 𝑣, 𝑢− 𝑣 e 𝑢− 𝑤 são L. I.
28. Mostre que se 𝐵 = {𝑢, 𝑣} é uma base de 𝑉 então 𝑉 = ger {𝑢} ⊕ ger {𝑣}.
29. Sejam 𝑈 = ger {(1, 0, 0), (2, 1, 1)} e 𝑉 = ger {(0,−1, 0), (0, 0, 1)} subespaços de R3.
(a) Encontre uma base e a dimensão de 𝑈 ∩ 𝑉 .
(b) Verifique se R3 = 𝑈 + 𝑉 e se R3 = 𝑈 ⊕ 𝑉 .
30. Mostre que se 𝐵 = {𝑢, 𝑣} é uma base de 𝑉 então 𝐵′ = {𝑢+ 𝑣, 𝑢− 𝑣} também é base.
5

Respostas
1. Todos os axiomas de espaço vetorial devem ser checados individualmente. A comutativi-dade da adição, por exemplo, seria verificada como segue:
(a) (𝑥1, . . . , 𝑥𝑛) + (𝑦1, . . . , 𝑦𝑛) = (𝑥1 + 𝑦1, . . . , 𝑥𝑛 + 𝑦𝑛)= (𝑦1 + 𝑥1, . . . , 𝑦𝑛 + 𝑥𝑛) = (𝑦1, . . . , 𝑦𝑛) + (𝑥1, . . . , 𝑥𝑛).
O vetor nulo é a sequência com as 𝑛 coordenadas iguais a zero: 0 = (0, . . . , 0).
(b) (𝐴+𝐵)𝑖𝑗 = (𝐴)𝑖𝑗 + (𝐵)𝑖𝑗 = (𝐵)𝑖𝑗 + (𝐴)𝑖𝑗 = (𝐵 + 𝐴)𝑖𝑗.
O vetor nulo é a matriz nula 0 = 0𝑚×𝑛 em que 0𝑖𝑗 = 0,∀𝑖, 𝑗.(c) (𝑓 + 𝑔)(𝑥) = 𝑓(𝑥) + 𝑔(𝑥) = 𝑔(𝑥) + 𝑓(𝑥) = (𝑔 + 𝑓)(𝑥),∀𝑥 ∈ R.
O vetor nulo é a função constante igual a zero: 𝑓(𝑥) = 0,∀𝑥 ∈ R.(d) (𝑎+ 𝑏i) + (𝑐+ 𝑑i) = (𝑎+ 𝑐) + (𝑏+ 𝑑)i = (𝑐+ 𝑎) + (𝑑+ 𝑏)i = (𝑐+ 𝑑i) + (𝑎+ 𝑏i).
O vetor nulo é o número complexo (e, de fato, real) 0 = 0 + 0i.
(e) (𝑥1, 𝑥2, . . .) + (𝑦1, 𝑦2, . . .) = (𝑥1 + 𝑦1, 𝑥2 + 𝑦2, . . .)= (𝑦1 + 𝑥1, 𝑦2 + 𝑥2, . . .) = (𝑦1, 𝑦2, . . .) + (𝑥1, 𝑥2, . . .).
O vetor nulo é a sequência infinita com todas as posições iguais a zero: 0 = (0, 0, . . .).
2. (a) R é um espaço vetorial com as operações indicadas. O vetor nulo é −1 e −𝑥− 2 é ooposto do vetor 𝑥.
(b) R2 não é espaço vetorial com as operações indicadas, pois
1 · (𝑥, 𝑦) = (−3𝑥+ 𝑦, 5𝑥− 2𝑦) = (𝑥, 𝑦), para vários valores de 𝑥, 𝑦.
(c) R2 é um espaço vetorial com as operações indicadas. O vetor nulo é (−1, 2) e o vetoroposto de (𝑥, 𝑦) é (−𝑥− 2,−𝑦 + 4).
3. (a) Se 𝑢 = (𝑎, 𝑏, 𝑐, 𝑑) ∈ 𝑈 e 𝑣 = (𝑝, 𝑞, 𝑟, 𝑠) ∈ 𝑈 , então 𝑎 − 𝑏 = 𝑐 + 𝑑 e 𝑝 − 𝑞 = 𝑟 + 𝑠.Assim, como 𝑢+ 𝑣 = (𝑎+ 𝑝, 𝑏+ 𝑞, 𝑐+ 𝑟, 𝑑+ 𝑠) tem-se
(𝑎+ 𝑝)− (𝑏+ 𝑞) = (𝑎− 𝑏) + (𝑝− 𝑞) = (𝑐+ 𝑑) + (𝑟 + 𝑠) = (𝑐+ 𝑟) + (𝑑+ 𝑠),
ou seja, 𝑢+ 𝑣 ∈ R. Do mesmo modo, se 𝑘 ∈ R, tem-se 𝑘𝑢 = (𝑘𝑎, 𝑘𝑏, 𝑘𝑐, 𝑘𝑑) e
𝑘𝑎− 𝑘𝑏 = 𝑘(𝑎− 𝑏) = 𝑘(𝑐+ 𝑑) = 𝑘𝑐+ 𝑘𝑑,
ou seja, 𝑘𝑢 ∈ R. Note ainda que o vetor 0 = (0, 0, 0, 0) ∈ 𝑈 .
(b) 𝑊 = {(𝑎, 𝑏, 𝑐, 𝑑) ∈ R4 | 𝑐 = 𝑑 = 0}. Dados (𝑎, 𝑏, 0, 0) ∈ 𝑊 e (𝑐, 𝑑, 0, 0) ∈ 𝑊 , tem-se
(𝑎, 𝑏, 0, 0) + (𝑐, 𝑑, 0, 0) = (𝑎+ 𝑐, 𝑏+ 𝑑, 0 + 0, 0 + 0) = (𝑎+ 𝑐, 𝑏+ 𝑑, 0, 0) ∈ 𝑊 e
𝑘(𝑎, 𝑏, 0, 0) = (𝑘𝑎, 𝑘𝑏, 𝑘0, 𝑘0) = (𝑘𝑎, 𝑘𝑏, 0, 0) ∈ 𝑊
4. (a) Se 𝑋 e 𝑌 são matrizes simétricas então 𝑋𝑇 = 𝑋 e 𝑌 𝑇 = 𝑌 . Consequentemente,(𝑋 + 𝑌 )𝑇 = 𝑋𝑇 + 𝑌 𝑇 = 𝑋 + 𝑌 , ou seja, 𝑋 + 𝑌 é simétrica. Dado 𝑘 ∈ R,(𝑘𝑋)𝑇 = 𝑘(𝑋𝑇 ) = 𝑘𝑋, ou seja, 𝑘𝑋 é simétrica. Note que a matriz nula também ésimétrica.
(b) Se 𝑋 e 𝑌 são matrizes antissimétricas então 𝑋𝑇 = −𝑋 e 𝑌 𝑇 = −𝑌 . Consequen-temente, (𝑋 + 𝑌 )𝑇 = 𝑋𝑇 + 𝑌 𝑇 = −𝑋 + (−𝑌 ) = −(𝑋 + 𝑌 ), ou seja, 𝑋 + 𝑌 éantissimétrica. Dado 𝑘 ∈ R, (𝑘𝑋)𝑇 = 𝑘(𝑋𝑇 ) = 𝑘(−𝑋) = −(𝑘𝑋), ou seja, 𝑘𝑋 éantissimétrica. Note que a matriz nula também é antissimétrica.
6

(c) Se 𝑋 e 𝑌 comutam com 𝐵, então 𝐵𝑋 = 𝑋𝐵 e 𝐵𝑌 = 𝑌 𝐵. Consequentemente,𝐵(𝑋 + 𝑌 ) = 𝐵𝑋 + 𝐵𝑌 = 𝑋𝐵 + 𝑌 𝐵 = (𝑋 + 𝑌 )𝐵, ou seja, 𝑋 + 𝑌 comuta com𝐵. Dado 𝑘 ∈ R, 𝐵(𝑘𝑋) = 𝑘(𝐵𝑋) = 𝑘(𝑋𝐵) = (𝑘𝑋)𝐵, ou seja, 𝑘𝑋 comuta com 𝐵.Note que 𝐵0 = 0𝐵 = 0, isto é, a matriz nula também comuta com 𝐵.
(d) 𝑈 = {𝐴 = (𝑎𝑖𝑗) ∈ 𝑀3×3(R) | 𝑎𝑖𝑗 = 0 sempre que 𝑖 + 𝑗 = 4}. A condição que define
o conjunto 𝑈 indica que para toda matriz 𝐴 ∈ 𝑈 é da forma 𝐴 =
⎡⎣ 0 0 𝑎130 𝑎22 0𝑎31 0 0
⎤⎦,pois 𝑎11 = 𝑎12 = 𝑎21 = 𝑎23 = 𝑎32 = 𝑎33 = 0 (em particular, a matriz nula 3× 3 estáem 𝑈). Além disso, ao somar 𝐴 ∈ 𝑈 com 𝐵 ∈ 𝑈 , as entradas [𝐴 + 𝐵]𝑖𝑗 em que𝑖+ 𝑗 = 4 serão iguais a zero pois
[𝐴+𝐵]𝑖𝑗 = 𝑎𝑖𝑗 + 𝑏𝑖𝑗 = 0 + 0 = 0.
Logo, 𝐴 + 𝐵 ∈ 𝑈 , e este é um conjunto fechado para a adição. Em relação àmultiplicação por um escalar 𝑘 ∈ R, tem-se:
[𝑘𝐴]𝑖𝑗 = 𝑘𝑎𝑖𝑗 = 𝑘0 = 0,
ou seja, 𝑘𝐴 ∈ 𝑈 (a multiplicação por escalar é fechada em 𝑈), e conclui-se que 𝑈 éum subespaço de 𝑀3×3(R).
5. (a) Se 𝑝 e 𝑞 são polinômios e 𝑐 ∈ R, a soma 𝑝+𝑞 e o produto 𝑐·𝑝 também são polinômios,logo 𝑝 + 𝑞 ∈ 𝑃∞ e 𝑐𝑝 ∈ 𝑃∞. Mais precisamente, se 𝑝(𝑥) = 𝑎𝑛𝑥
𝑛 + . . . + 𝑎1𝑥1 + 𝑎0 e
𝑞(𝑥) = 𝑏𝑚𝑥𝑚 + . . .+ 𝑏1𝑥
1 + 𝑏0, com 𝑚,𝑛 ∈ N e 𝑎𝑖, 𝑏𝑖 ∈ R então 𝑝+ 𝑞 é dado por
(𝑝+ 𝑞)(𝑥) = 𝑝(𝑥) + 𝑞(𝑥) = (𝑎𝑛𝑥𝑛 + . . .+ 𝑎1𝑥
1 + 𝑎0) + (𝑏𝑚𝑥𝑚 + . . .+ 𝑏1𝑥
1 + 𝑏0)
= (𝑎𝑘 + 𝑏𝑘)𝑥𝑘 + . . .+ (𝑎1 + 𝑏1)𝑥
1 + (𝑎0 + 𝑏0) ∈ 𝑃∞,
onde 𝑘 é o maior dos graus 𝑚 e 𝑛. De forma análoga,
(𝑐 · 𝑝)(𝑥) = 𝑐 · 𝑝(𝑥) = 𝑐(𝑎𝑛𝑥𝑛 + . . .+ 𝑎1𝑥
1 + 𝑎0)
= (𝑐𝑎𝑛)𝑥𝑛 + . . .+ (𝑐𝑎1)𝑥
1 + (𝑐𝑎0) ∈ 𝑃∞.
Perceba que o polinômio nulo (𝑝(𝑥) = 0) é o vetor nulo neste espaço vetorial.
(b) Dado um natural 𝑛, o conjunto 𝑃𝑛 de todos polinômios de grau menor ou igual a 𝑛:
𝑃𝑛 = {𝑝(𝑥) ∈ 𝑃∞ | grau(𝑝(𝑥)) ≤ 𝑛}.
Pelo exercício anterior, a soma de polinômios resulta em um polinômio, e a multi-plicação de um polinômio por um escalar real qualquer também é um polinômio.Levando isso em conta, para ver que 𝑃𝑛 é um subespaço vetorial de ℱ(R) bastalembrar que se 𝑝, 𝑞 ∈ 𝑃𝑛 então:
� grau(𝑝+ 𝑞) < grau(𝑝) + grau(𝑞), se os termos de maior grau são opostos
� grau(𝑝+ 𝑞) = grau(𝑝) + grau(𝑞), nos demais casos
� grau(𝑐 · 𝑝) = grau(𝑝) se 𝑐 = 0;
� grau(𝑐 · 𝑝) = grau(0) < grau(𝑝), se 𝑐 = 0
Este último item também mostra que o polinômio nulo é um elemento de 𝑃𝑛.
7

(c) Se 𝑓 e 𝑔 são funções pares, então para todo 𝑥 ∈ R tem-se
(𝑓 + 𝑔)(−𝑥) = 𝑓(−𝑥) + 𝑔(−𝑥) = 𝑓(𝑥) + 𝑔(𝑥) = (𝑓 + 𝑔)(𝑥),
ou seja, 𝑓 + 𝑔 também é par. Analogamente, dado qualquer 𝑐 ∈ R,
(𝑐𝑓)(−𝑥) = 𝑐𝑓(−𝑥) = 𝑐𝑓(𝑥) = (𝑐𝑓)(𝑥),
e portanto 𝑐𝑓 também é par, e o conjunto dado é um subespaço de ℱ(R). A funçãoconstante igual a zero, que é o vetor nulo deste espaço, é uma função par.
(d) Se 𝑓 e 𝑔 são funções ímpares, então para todo 𝑥 ∈ R tem-se
(𝑓+𝑔)(−𝑥) = 𝑓(−𝑥)+𝑔(−𝑥) = (−𝑓(𝑥))+(−𝑔(𝑥)) = −(𝑓(𝑥)+𝑔(𝑥)) = −(𝑓+𝑔)(𝑥),
ou seja, 𝑓 + 𝑔 também é ímpar. Analogamente, dado qualquer 𝑐 ∈ R,
(𝑐𝑓)(−𝑥) = 𝑐𝑓(−𝑥) = 𝑐(−𝑓(𝑥)) = −𝑐(𝑓(𝑥)) = −(𝑐𝑓)(𝑥),
e portanto 𝑐𝑓 também é ímpar e o conjunto é fechado para ambas as operações doespaço vetorial, ou seja, é um subespaço de ℱ(R). A função constante igual a zerotambém é uma função ímpar.
(e) Como a soma de funções contínuas é contínua e a multiplicação de funções contínuaspor constantes resulta em funções contínuas, conclui-se que 𝐶0(R) é fechado paraambas as operações do espaço vetorial, e consequentemente é um subespaço de ℱ(R).
(f) Sejam 𝑓, 𝑔 ∈ 𝐶1(R) e 𝑐 ∈ R. Então:� As funções 𝑓 e 𝑔 são deriváveis e suas derivadas são contínuas. Como a somade funções deriváveis é uma função derivável, 𝑓 + 𝑔 também é derivável e vale(𝑓 + 𝑔)′ = 𝑓 ′ + 𝑔′. Além disso, pelo exercício anterior 𝑓 ′ + 𝑔′ é contínua, pois ésoma de funções contínuas. Logo, 𝑓 + 𝑔 é uma função derivável cuja derivada écontínua, ou seja, 𝑓 + 𝑔 ∈ 𝐶1(R).
� Sendo 𝑓 derivável, a função 𝑐𝑓 também é derivável e (𝑐𝑓)′ = 𝑐(𝑓 ′). Mas 𝑓 ′ écontínua, então 𝑐(𝑓 ′) também é (pelo exercício anterior), ou seja, 𝑐𝑓 ∈ 𝐶1(R).
Como as duas operações são fechadas, segue que 𝐶 ′(R) é um subespaço de ℱ(R).
6. (a) Como (0, 0) é o vetor nulo de R2 e (0, 0) ∈ 𝑈 , pois 0 + 2 · 0 = 5, este conjunto 𝑈não é um subespaço vetorial de R2 (geometricamente, é uma reta que não passa pelaorigem). Note que a adição e a multiplicação por escalar não são fechadas em 𝑈 .Por exemplo, (0, 5) + (3,−1) = (3, 4) ∈ 𝑈 pois 3 + 2 · (−1) = 5.
(b) Sejam (𝑎, 𝑏) ∈ 𝑈 , (𝑐, 𝑑) ∈ 𝑈 e 𝑘 ∈ R. Então� (𝑎, 𝑏) + (𝑐, 𝑑) = (𝑎+ 𝑐, 𝑏+ 𝑑) ∈ 𝑈 pois 𝑏+ 𝑑 = (−4𝑎) + (−4𝑐) = −4(𝑎+ 𝑐).
� 𝑘(𝑎, 𝑏) = (𝑘𝑎, 𝑘𝑏) ∈ 𝑈 pois 𝑘𝑏 = 𝑘(−4𝑎) = −4(𝑘𝑎).
Portanto, 𝑈 é um subespaço vetorial de R2 (é a reta que passa pela origem e tem adireção do vetor (1,−4))
(c) 𝑈 = {𝑋 ∈ 𝑀3×1(R) | 𝐴𝑋 = 0} é um subespaço vetorial de 𝑉 = 𝑀3×1(R) pois� 𝐴0 = 0, ou seja, a matriz nula 3× 1 pertence a 𝑈 .
� Se 𝐴𝑋1 = 0 e 𝐴𝑋2 = 0 então 𝐴(𝑋1 +𝑋2) = 𝐴𝑋1 + 𝐴𝑋2 = 0 + 0.
� Se 𝐴𝑋 = 0 e 𝑡 ∈ R então 𝐴(𝑡𝑋) = 𝑡(𝐴𝑋) = 𝑡0 = 0.
8

Em outras palavras, 𝑈 é fechado para as operações do espaço vetorial 𝑉 .
Note que as propriedades acima são válidas independentemente de quais sejam osnúmeros que aparecem na matriz 𝐴, então não é necessário expandir os produtos emtermos das entradas das matrizes. De fato, 𝑈 = 𝑁(𝐴), isto é, é o espaço nulo de 𝐴.
(d) Note que 𝑈 =
{[0 𝑧12𝑧21 0
]| 𝑧12, 𝑧21 ∈ R
}e que para todo 𝑋, 𝑌 ∈ 𝑈 e 𝑚 ∈ R tem-se:
� 𝑋 + 𝑌 =
[0 𝑥12
𝑥21 0
]+
[0 𝑦12𝑦21 0
]=
[0 𝑥12 + 𝑦12
𝑥21 + 𝑦21 0
]∈ 𝑈
� 𝑚𝑋 = 𝑚
[0 𝑥12
𝑥21 0
]=
[0 𝑚𝑥12
𝑚𝑥21 0
]∈ 𝑈
Portanto, 𝑈 é um subespaço vetorial de 𝑉 .
(e) O conjunto 𝑈 consiste das matrizes 2 × 2 que são inversíveis. Como 𝐼 e −𝐼 sãomatrizes inversíveis (det(𝐼) = det(−𝐼) = 1 = 0), e sua soma 𝐼 + (−𝐼) = 0 não éinversível (pois det(0) = 0), conclui-se que 𝑈 não é fechado para a adição, e comotal não é um subespaço de 𝑉 . A multiplicação por escalar também não é fechadaem 𝑈 , pois a ao multiplicar uma matriz inversível por zero o resultado é a matriznula, que não pertence a 𝑈 .
(f) Os polinômios de grau 3 não formam um espalo vetorial pois, por exemplo, se 𝑝(𝑥) =4𝑥3 + 5𝑥 e 𝑞(𝑥) = −4𝑥3 então 𝑝(𝑥) + 𝑞(𝑥) = 5𝑥 que não tem grau 3.
(g) Sejam 𝑓, 𝑔 ∈ 𝑈 . Então 𝑓 ′(−1) = 𝑓 ′(1) = 0 e 𝑔′(−1) = 𝑔′(1) = 0. Consequentemente:
� (𝑓 + 𝑔)′(1) = 𝑓 ′(1) + 𝑔′(1) = 0 + 0 = 0
� (𝑓 + 𝑔)′(−1) = 𝑓 ′(−1) + 𝑔′(−1) = 0 + 0 = 0
Isto significa que a adição é fechada em 𝑈 . De forma análoga, para todo 𝑐 ∈ R vale:
� (𝑐𝑓)′(1) = 𝑐(𝑓 ′(1)) = 𝑐 · 0 = 0
� (𝑐𝑓)′(−1) = 𝑐(𝑓 ′(−1)) = 𝑐 · 0 = 0
Isto significa que a multiplicação por escalar também é fechada, e assim 𝑈 é umsubespaço vetorial de ℱ(R).
7. Sabendo que 𝐴,𝐵 e 𝑋 são elementos do espaço vetorial 𝑀3×2, pode-se utilizar as propri-edades deste espaço (associatividade, comutatividade, etc) para “isolar a incógnita 𝑋”, deforma análoga ao que seria feito se 𝐴,𝐵 e 𝑋 fossem números reais:
𝐴−𝑋
5− 𝑋 +𝐵
2= 𝐶 ⇔ 10
(𝐴−𝑋
5− 𝑋 +𝐵
2
)= 10𝐶 ⇔ 2(𝐴−𝑋)− 5(𝑋 +𝐵) = 10𝐶
⇔ 2𝐴− 2𝑋 − 5𝑋 − 5𝐵 = 10𝐶 ⇔ −7𝑋 = −2𝐴+ 10𝐶 + 5𝐵
⇔ 𝑋 =1
7(2𝐴− 10𝐶 − 5𝐵)
Assim, 𝑋 = 17
(2
[11 15 −13 7 16
]− 10
[−3 −6 6−2 4 2
]− 5
[2 11 −181 −8 1
])=
[6 5 43 2 1
]8. Se 𝑈 é um subespaço de R e 𝑈 = {0} então 𝑈 tem algum elemento não nulo. Denote-o por
𝑏. Para ver que todo número real 𝑥 também tem que estar em 𝑈 basta escrever 𝑥 = (𝑥𝑏) ·𝑏,
pois sendo 𝑈 um subespaço vetorial de R ele é fechado para a multiplicação por escalare portanto a multiplicação de 𝑏 ∈ 𝑈 pelo escalar 𝑥
𝑏deve resultar em um elemento de 𝑈 ,
isto é, 𝑥 ∈ 𝑈 . Portanto 𝑈 = R.
9. O conjunto 𝑊 = {𝑥 ∈ 𝑉 | 𝑥 ∈ 𝑈} não é um subespaço de 𝑉 pois 0 ∈ 𝑈 mas 0 ∈ 𝑊 .
9

10. (a) Primeiramente lembre-se que se 𝑝(𝑥) = 𝑎𝑥3+𝑏𝑥2+𝑐𝑥+𝑑 então 𝑝′(𝑥) = 3𝑎𝑥2+2𝑏𝑥+𝑐e 𝑝′(−1) = 3𝑎− 2𝑏+ 𝑐. Assim,
𝑈 ∩ 𝑉 = {𝑎𝑥3 + 𝑏𝑥2 + 𝑐𝑥+ 𝑑 ∈ 𝑃3(R) | 3𝑎− 𝑏+ 𝑐+ 𝑑 = 0 e 3𝑎− 2𝑏+ 𝑐 = 0}.
Em outras palavras, os coeficientes de 𝑝(𝑥) são soluções do sistema linear homogêneo{3𝑎− 𝑏+ 𝑐+ 𝑑 = 0
3𝑎− 2𝑏+ 𝑐 = 0
Escalonando a matriz associada ao sistema, obtem-se:[3 −1 1 13 −2 1 0
]13𝐿1−→
[1 −1/3 1/3 1/33 −2 1 0
]𝐿2−3𝐿1−→
[1 −1/3 1/3 1/30 −1 0 −1
]−𝐿2−→
[1 −1/3 1/3 1/30 1 0 1
]𝐿1+
13𝐿2−→
[1 0 1/3 2/30 1 0 1
]ou seja, 𝑎 = 1
3(−𝑐− 2𝑑) e 𝑏 = −𝑑, em que 𝑐, 𝑑 ∈ R são variáveis livres. Assim,
𝑈 ∩ 𝑉 =
{𝑎𝑥3 + 𝑏𝑥2 + 𝑐𝑥+ 𝑑 ∈ 𝑃3(R) | 𝑎 =
−𝑐− 2𝑑
3e 𝑏 = −𝑑, sendo 𝑐, 𝑑 ∈ R
}=
{(−𝑐− 2𝑑
3
)𝑥3 + (−𝑑)𝑥2 + 𝑐𝑥+ 𝑑 | 𝑐, 𝑑 ∈ R
}.
(b) Se 𝑔 ∈ 𝑈 então para todo 𝑥 ∈ R ocorre 𝑔(−𝑥) = 𝑔(𝑥) e se, além disso, 𝑔 ∈ 𝑉então para todo 𝑥 ∈ R vale 𝑔(−𝑥) = −𝑔(𝑥). Neste caso, para todo 𝑥 ∈ R tem-se𝑔(𝑥) = 𝑔(−𝑥) = −𝑔(𝑥), ou seja 2𝑔(𝑥) = 0 e portanto 𝑔(𝑥) = 0.
Assim, a única função que está simultaneamente em 𝑈 e em 𝑉 é a função constanteigual a zero, que é o vetor nulo de ℱ(R), isto é, 𝑈 ∩ 𝑉 = {0}.
(c) Se 𝑀 ∈ 𝑈 então 𝑀𝑇 = 𝑀 e se, além disso, 𝑀 ∈ 𝑉 então 𝑀𝑇 = −𝑀 . Neste caso,tem-se 𝑀 = 𝑀𝑇 = −𝑀 , ou seja 2𝑀 = 0 e portanto 𝑀 = 0.
Assim, a única matriz que é simétrica e antissimétrica é a matriz nula, ou seja,𝑈 ∩ 𝑉 = {0}.
11. Para quaisquer 𝑥, 𝑦 ∈ 𝑉 tem-se 𝑦 = (𝑦 − 𝑥) + 𝑥. Então se 𝑥 ∈ 𝑈 e 𝑦 − 𝑥 ∈ 𝑈 e 𝑈 é umsubespaço de 𝑉 , então 𝑈 é fechado para a adição, e consequentemente 𝑦 = (𝑦−𝑥)+𝑥 ∈ 𝑈 .
12. Dê exemplos de subespaços vetoriais 𝑉1 e 𝑉2 de R3 que satisfaçam as seguintes condições(e explique porque satisfazem):
(a) Sejam
� 𝑉1 = {(𝑥, 𝑦, 𝑧) ∈ R3 | 𝑧 = 0}� 𝑉2 = {(𝑥, 𝑦, 𝑧) ∈ R3 | 𝑥 = 0}
Então o conjunto 𝑉1 ∪𝑉2 = {(𝑥, 𝑦, 𝑧) ∈ R3 | 𝑧 = 0 ou 𝑥 = 0} não é um subespaço deR3 pois (1, 1, 0) ∈ 𝑉1∪𝑉2 e (0, 1, 1) ∈ 𝑉1∪𝑉2 mas (1, 1, 0)+(0, 1, 1) = (1, 2, 1) ∈ 𝑉1∪𝑉2.
(b) Sejam
� 𝑉1 = R3
� 𝑉2 = {(0, 0, 0)}Então 𝑉1 ∪ 𝑉2 = R3 ∪ {(0, 0, 0)} = R3, que é, naturalmente, um subespaço de R3.
10
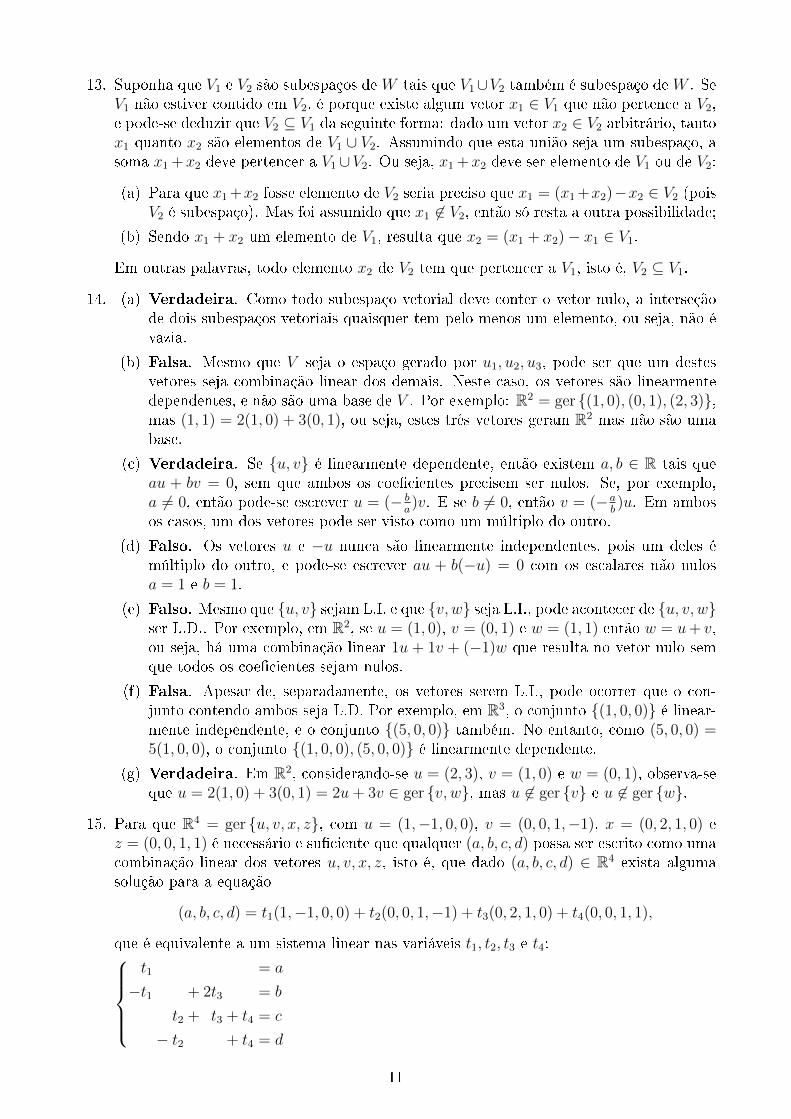
13. Suponha que 𝑉1 e 𝑉2 são subespaços de 𝑊 tais que 𝑉1∪𝑉2 também é subespaço de 𝑊 . Se𝑉1 não estiver contido em 𝑉2, é porque existe algum vetor 𝑥1 ∈ 𝑉1 que não pertence a 𝑉2,e pode-se deduzir que 𝑉2 ⊆ 𝑉1 da seguinte forma: dado um vetor 𝑥2 ∈ 𝑉2 arbitrário, tanto𝑥1 quanto 𝑥2 são elementos de 𝑉1 ∪ 𝑉2. Assumindo que esta união seja um subespaço, asoma 𝑥1+𝑥2 deve pertencer a 𝑉1 ∪𝑉2. Ou seja, 𝑥1+𝑥2 deve ser elemento de 𝑉1 ou de 𝑉2:
(a) Para que 𝑥1+𝑥2 fosse elemento de 𝑉2 seria preciso que 𝑥1 = (𝑥1+𝑥2)−𝑥2 ∈ 𝑉2 (pois𝑉2 é subespaço). Mas foi assumido que 𝑥1 ∈ 𝑉2, então só resta a outra possibilidade;
(b) Sendo 𝑥1 + 𝑥2 um elemento de 𝑉1, resulta que 𝑥2 = (𝑥1 + 𝑥2)− 𝑥1 ∈ 𝑉1.
Em outras palavras, todo elemento 𝑥2 de 𝑉2 tem que pertencer a 𝑉1, isto é, 𝑉2 ⊆ 𝑉1.
14. (a) Verdadeira. Como todo subespaço vetorial deve conter o vetor nulo, a interseçãode dois subespaços vetoriais quaisquer tem pelo menos um elemento, ou seja, não évazia.
(b) Falsa. Mesmo que 𝑉 seja o espaço gerado por 𝑢1, 𝑢2, 𝑢3, pode ser que um destesvetores seja combinação linear dos demais. Neste caso, os vetores são linearmentedependentes, e não são uma base de 𝑉 . Por exemplo: R2 = ger {(1, 0), (0, 1), (2, 3)},mas (1, 1) = 2(1, 0) + 3(0, 1), ou seja, estes três vetores geram R2 mas não são umabase.
(c) Verdadeira. Se {𝑢, 𝑣} é linearmente dependente, então existem 𝑎, 𝑏 ∈ R tais que𝑎𝑢 + 𝑏𝑣 = 0, sem que ambos os coeficientes precisem ser nulos. Se, por exemplo,𝑎 = 0, então pode-se escrever 𝑢 = (− 𝑏
𝑎)𝑣. E se 𝑏 = 0, então 𝑣 = (−𝑎
𝑏)𝑢. Em ambos
os casos, um dos vetores pode ser visto como um múltiplo do outro.
(d) Falso. Os vetores 𝑢 e −𝑢 nunca são linearmente independentes, pois um deles émúltiplo do outro, e pode-se escrever 𝑎𝑢 + 𝑏(−𝑢) = 0 com os escalares não nulos𝑎 = 1 e 𝑏 = 1.
(e) Falso. Mesmo que {𝑢, 𝑣} sejam L.I. e que {𝑣, 𝑤} seja L.I., pode acontecer de {𝑢, 𝑣, 𝑤}ser L.D.. Por exemplo, em R2, se 𝑢 = (1, 0), 𝑣 = (0, 1) e 𝑤 = (1, 1) então 𝑤 = 𝑢+ 𝑣,ou seja, há uma combinação linear 1𝑢 + 1𝑣 + (−1)𝑤 que resulta no vetor nulo semque todos os coeficientes sejam nulos.
(f) Falsa. Apesar de, separadamente, os vetores serem L.I., pode ocorrer que o con-junto contendo ambos seja L.D. Por exemplo, em R3, o conjunto {(1, 0, 0)} é linear-mente independente, e o conjunto {(5, 0, 0)} também. No entanto, como (5, 0, 0) =5(1, 0, 0), o conjunto {(1, 0, 0), (5, 0, 0)} é linearmente dependente.
(g) Verdadeira. Em R2, considerando-se 𝑢 = (2, 3), 𝑣 = (1, 0) e 𝑤 = (0, 1), observa-seque 𝑢 = 2(1, 0) + 3(0, 1) = 2𝑢+ 3𝑣 ∈ ger {𝑣, 𝑤}, mas 𝑢 ∈ ger {𝑣} e 𝑢 ∈ ger {𝑤}.
15. Para que R4 = ger {𝑢, 𝑣, 𝑥, 𝑧}, com 𝑢 = (1,−1, 0, 0), 𝑣 = (0, 0, 1,−1), 𝑥 = (0, 2, 1, 0) e𝑧 = (0, 0, 1, 1) é necessário e suficiente que qualquer (𝑎, 𝑏, 𝑐, 𝑑) possa ser escrito como umacombinação linear dos vetores 𝑢, 𝑣, 𝑥, 𝑧, isto é, que dado (𝑎, 𝑏, 𝑐, 𝑑) ∈ R4 exista algumasolução para a equação
(𝑎, 𝑏, 𝑐, 𝑑) = 𝑡1(1,−1, 0, 0) + 𝑡2(0, 0, 1,−1) + 𝑡3(0, 2, 1, 0) + 𝑡4(0, 0, 1, 1),
que é equivalente a um sistema linear nas variáveis 𝑡1, 𝑡2, 𝑡3 e 𝑡4:⎧⎪⎪⎪⎨⎪⎪⎪⎩𝑡1 = 𝑎
−𝑡1 + 2𝑡3 = 𝑏
𝑡2 + 𝑡3 + 𝑡4 = 𝑐
− 𝑡2 + 𝑡4 = 𝑑
11

ou ainda, à equação matricial⎡⎢⎢⎣1 0 0 0−1 0 2 00 1 1 10 −1 0 1
⎤⎥⎥⎦⎡⎢⎢⎣𝑡1𝑡2𝑡3𝑡4
⎤⎥⎥⎦ =
⎡⎢⎢⎣𝑎𝑏𝑐𝑑
⎤⎥⎥⎦ .
Note que esta matriz poderia ser construída diretamente a partir dos vetores, copiando-seas coordenadas de 𝑢, 𝑣, 𝑥 e 𝑧 para as colunas da matriz. Como a matriz é quadrada, o sis-tema terá solução se, e somente se, ela for inversível, o que será verdade se o determinanteda matriz for diferente de zero. Calculando-o pela primeira linha, obtém-se:
1 0 0 0−1 0 2 00 1 1 10 −1 0 1
= 1 ·
0 2 01 1 1−1 0 1
= −2 ·
1 1−1 1
= −2(1 · 1− (−1) · 1) = −4 = 0.
Então, de fato, qualquer (𝑎, 𝑏, 𝑐, 𝑑) é combinação linear dos quatro vetores dados, isto é,𝑅4 = ger {𝑢, 𝑣, 𝑥, 𝑧}.
16. (a) Para toda matriz diagonal 𝑋 ∈ 𝑀3×3(R) tem-se
𝑋 =
⎡⎣𝑎 0 00 𝑏 00 0 𝑐
⎤⎦ = 𝑎
⎡⎣1 0 00 0 00 0 0
⎤⎦+ 𝑏
⎡⎣0 0 00 1 00 0 0
⎤⎦+ 𝑐
⎡⎣0 0 00 0 00 0 𝑐
⎤⎦ ,
com 𝑎, 𝑏, 𝑐 ∈ R. Então estas três matrizes geram 𝐷.
(b) Para toda matriz antissimétrica 𝐴 ∈ 𝑀3×3(R) tem-se
𝐴 =
⎡⎣ 0 𝑎 𝑏−𝑎 0 𝑐−𝑏 𝑐 0
⎤⎦ = 𝑎
⎡⎣ 0 1 0−1 0 00 0 0
⎤⎦+ 𝑏
⎡⎣ 0 0 10 0 0−1 0 0
⎤⎦+ 𝑐
⎡⎣0 0 00 0 10 −1 0
⎤⎦ ,
com 𝑎, 𝑏, 𝑐 ∈ R. Então estas três matrizes geram 𝑊 .
(c) Para toda matriz simétrica 𝐵 ∈ 𝑀3×3(R) tem-se
𝐵 =
⎡⎣𝑎 𝑏 𝑐𝑏 𝑑 𝑒𝑐 𝑒 𝑓
⎤⎦ = 𝑎
⎡⎣1 0 00 0 00 0 0
⎤⎦+ 𝑏
⎡⎣0 1 01 0 00 0 0
⎤⎦+ 𝑐
⎡⎣0 0 10 0 01 0 0
⎤⎦+ 𝑑
⎡⎣0 0 00 1 00 0 0
⎤⎦+ 𝑒
⎡⎣0 0 00 0 10 1 0
⎤⎦+ 𝑓
⎡⎣0 0 00 0 00 0 1
⎤⎦ ,
com 𝑎, 𝑏, 𝑐, 𝑑, 𝑒, 𝑓 ∈ R. Então estas 6 matrizes geram 𝑈 .
17. (a) 𝑣1 = (0, 3,−9), 𝑣2 = (1, 4,−10), 𝑣3 = (2, 5,−11) em R3.
Suponha que 𝑐1, 𝑐2 e 𝑐3 sejam escalares tais que 𝑐1𝑣1 + 𝑐2𝑣2 + 𝑐3𝑣3 = 0, isto é, que
𝑐1(0, 3,−9) + 𝑐2(1, 4,−10) + 𝑐3(2, 5,−11) = (0, 0, 0)
ou ainda,(𝑐2 + 2𝑐3, 3𝑐1 + 4𝑐2 + 5𝑐3,−9𝑐1 − 10𝑐2 − 11𝑐3) = (0, 0, 0)
12
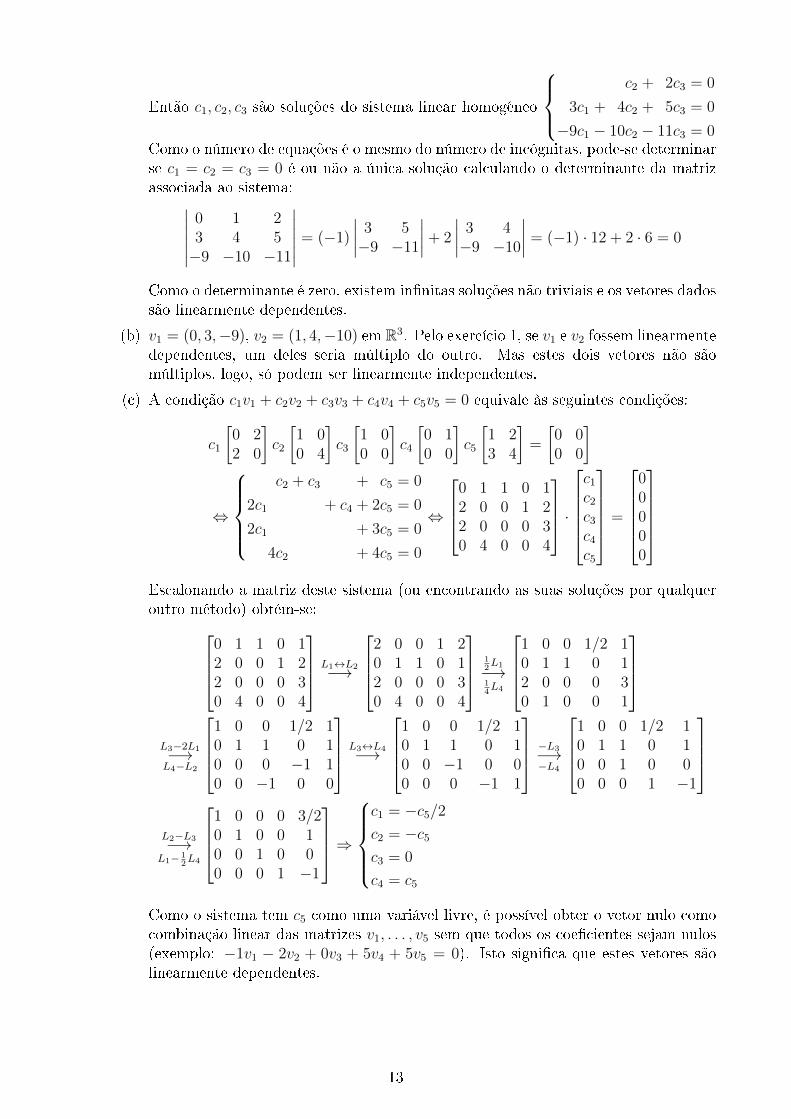
Então 𝑐1, 𝑐2, 𝑐3 são soluções do sistema linear homogêneo
⎧⎪⎨⎪⎩𝑐2 + 2𝑐3 = 0
3𝑐1 + 4𝑐2 + 5𝑐3 = 0
−9𝑐1 − 10𝑐2 − 11𝑐3 = 0Como o número de equações é o mesmo do número de incógnitas, pode-se determinarse 𝑐1 = 𝑐2 = 𝑐3 = 0 é ou não a única solução calculando o determinante da matrizassociada ao sistema:
0 1 23 4 5−9 −10 −11
= (−1)
3 5−9 −11
+ 2
3 4−9 −10
= (−1) · 12 + 2 · 6 = 0
Como o determinante é zero, existem infinitas soluções não triviais e os vetores dadossão linearmente dependentes.
(b) 𝑣1 = (0, 3,−9), 𝑣2 = (1, 4,−10) em R3. Pelo exercício 1, se 𝑣1 e 𝑣2 fossem linearmentedependentes, um deles seria múltiplo do outro. Mas estes dois vetores não sãomúltiplos, logo, só podem ser linearmente independentes.
(c) A condição 𝑐1𝑣1 + 𝑐2𝑣2 + 𝑐3𝑣3 + 𝑐4𝑣4 + 𝑐5𝑣5 = 0 equivale às seguintes condições:
𝑐1
[0 22 0
]𝑐2
[1 00 4
]𝑐3
[1 00 0
]𝑐4
[0 10 0
]𝑐5
[1 23 4
]=
[0 00 0
]
⇔
⎧⎪⎪⎪⎨⎪⎪⎪⎩𝑐2 + 𝑐3 + 𝑐5 = 0
2𝑐1 + 𝑐4 + 2𝑐5 = 0
2𝑐1 + 3𝑐5 = 0
4𝑐2 + 4𝑐5 = 0
⇔
⎡⎢⎢⎣0 1 1 0 12 0 0 1 22 0 0 0 30 4 0 0 4
⎤⎥⎥⎦ ·
⎡⎢⎢⎢⎢⎣𝑐1𝑐2𝑐3𝑐4𝑐5
⎤⎥⎥⎥⎥⎦ =
⎡⎢⎢⎢⎢⎣00000
⎤⎥⎥⎥⎥⎦Escalonando a matriz deste sistema (ou encontrando as suas soluções por qualqueroutro método) obtém-se:⎡⎢⎢⎣
0 1 1 0 12 0 0 1 22 0 0 0 30 4 0 0 4
⎤⎥⎥⎦ 𝐿1↔𝐿2−→
⎡⎢⎢⎣2 0 0 1 20 1 1 0 12 0 0 0 30 4 0 0 4
⎤⎥⎥⎦ 12𝐿1−→
14𝐿4
⎡⎢⎢⎣1 0 0 1/2 10 1 1 0 12 0 0 0 30 1 0 0 1
⎤⎥⎥⎦𝐿3−2𝐿1−→𝐿4−𝐿2
⎡⎢⎢⎣1 0 0 1/2 10 1 1 0 10 0 0 −1 10 0 −1 0 0
⎤⎥⎥⎦ 𝐿3↔𝐿4−→
⎡⎢⎢⎣1 0 0 1/2 10 1 1 0 10 0 −1 0 00 0 0 −1 1
⎤⎥⎥⎦ −𝐿3−→−𝐿4
⎡⎢⎢⎣1 0 0 1/2 10 1 1 0 10 0 1 0 00 0 0 1 −1
⎤⎥⎥⎦𝐿2−𝐿3−→𝐿1− 1
2𝐿4
⎡⎢⎢⎣1 0 0 0 3/20 1 0 0 10 0 1 0 00 0 0 1 −1
⎤⎥⎥⎦ ⇒
⎧⎪⎪⎪⎨⎪⎪⎪⎩𝑐1 = −𝑐5/2
𝑐2 = −𝑐5
𝑐3 = 0
𝑐4 = 𝑐5
Como o sistema tem 𝑐5 como uma variável livre, é possível obter o vetor nulo comocombinação linear das matrizes 𝑣1, . . . , 𝑣5 sem que todos os coeficientes sejam nulos(exemplo: −1𝑣1 − 2𝑣2 + 0𝑣3 + 5𝑣4 + 5𝑣5 = 0). Isto significa que estes vetores sãolinearmente dependentes.
13

(d) A condição 𝑎𝑣1 + 𝑏𝑣2 + 𝑐𝑣3 + 𝑑𝑣4 = 0 equivale às seguintes condições:
𝑎(𝑥3 + 𝑥2 + 𝑥+ 1) + 𝑏(𝑥2 + 𝑥+ 1) + 𝑐(𝑥+ 1) + 𝑑 = 0𝑥3 + 0𝑥2 + 0𝑥+ 0
⇔ 𝑎𝑥3 + (𝑎+ 𝑏)𝑥2 + (𝑎+ 𝑏+ 𝑐)𝑥+ (𝑎+ 𝑏+ 𝑐+ 𝑑) = 0𝑥3 + 0𝑥2 + 0𝑥+ 0
⇔
⎧⎪⎪⎪⎨⎪⎪⎪⎩𝑎 = 0
𝑎+ 𝑏 = 0
𝑎+ 𝑏+ 𝑐 = 0
𝑎+ 𝑏+ 𝑐+ 𝑑 = 0
⇔
⎧⎪⎪⎪⎨⎪⎪⎪⎩𝑎 = 0
𝑏 = 0
𝑐 = 0
𝑑 = 0
Como a única forma de obter o vetor nulo como combinação linear dos polinômios dadosé usar todos os coeficientes iguais a zero, resulta que eles são linearmente independentes.
18. (a) Pode-se verificar que 𝐵 = {(1, 0, 0, 0), (0, 1, 0, 0), (0, 0, 1, 0), (0, 0, 0, 1)} é uma basede R4 e disto resulta que dim(R4) = 4.
(b) 𝐵 =
{[1 0 00 0 0
],
[0 1 00 0 0
],
[0 0 10 0 0
],
[0 0 01 0 0
],
[0 0 00 1 0
],
[0 0 00 0 1
]}é uma
base de 𝑀2×3(R) (por que?) e consequentemente dim(𝑀2×3(R)) = 6.
(c) 𝐵 = {1, 𝑥, 𝑥2, 𝑥3, 𝑥4, 𝑥5} é uma base de 𝑃5 (verifique!) e portanto dim(𝑃5) = 6.
19. (a) Tem-se 𝑢 ∈ 𝑊 se e somente se 𝑢 = (𝑥, 𝑦, 0), para algm 𝑥, 𝑦,∈ R. Neste caso,𝑢 = 𝑥(1, 0, 0)+ 𝑦(0, 1, 0). Portanto os vetores 𝑣1 = (1, 0, 0) e 𝑣2 = (0, 1, 0) geram 𝑊 .Mas estes vetores são linearmente independentes, pois se 𝑘1𝑣1 + 𝑘2𝑣2 = 0 então
𝑘1(1, 0, 0) + 𝑘2(1, 0, 0) = (𝑘1, 𝑘1, 0) = (0, 0, 0)
o que significa que 𝑘1 = 𝑘2 = 0. Em outras palavras, o vetor nulo só pode ser obtidocomo combinação linear de 𝑣1 e 𝑣2 se todos os coeficientes forem nulos. Portanto,𝐵 = {(1, 0, 0), (0, 1, 0)} é uma base de 𝑊 , e conclui-se que dim(𝑊 ) = 2.
(b) Um vetor 𝑢 ∈ 𝑉 pertence a 𝑊 se, e somente se
𝑢 =
[𝑎 𝑏𝑏 𝑐
]= 𝑎
[1 00 0
]+ 𝑏
[0 11 0
]+ 𝑐
[0 00 1
],= 𝑎𝑣1 + 𝑏𝑣2 + 𝑐𝑣3
em que 𝑣1 =
[1 00 0
], 𝑣2 =
[0 11 0
]e 𝑣3 =
[0 00 1
]e 𝑎, 𝑏, 𝑐 ∈ R. Isto significa que
𝑊 = ger {𝑣1, 𝑣2, 𝑣3}. Além disso, se 𝑚1𝑣1 +𝑚2𝑣2 +𝑚3𝑣3 = 0, tem-se
𝑚1
[1 00 0
]+𝑚2
[0 11 0
]+𝑚3
[0 00 1
]=
[𝑚1 𝑚2
𝑚2 𝑚3
]=
[0 00 0
],
isto é, cada 𝑚𝑖 = 0, o que significa que os vetores 𝑣1, 𝑣2, 𝑣3 são L.I. e 𝐵 = {𝑣1, 𝑣2, 𝑣3}é uma base de 𝑊 . Consequentemente, dim(𝑊 ) = 3.
(c) 𝑉 = ℱ(R) e 𝑊 = {𝑝(𝑥) = 𝑎𝑥2 + 𝑏𝑥 + 𝑐 ∈ 𝑃2 | 𝑝′(6) = 0} (geometricamente, estasfunções correspondem a parábolas com vértice em (6, 𝑓(6))).
Dado 𝑝(𝑥) = 𝑎𝑥2+𝑏𝑥+𝑐 ∈ 𝑃2 tem-se 𝑝′(𝑥) = 2𝑎𝑥+𝑏. Então 𝑝(𝑥) ∈ 𝑊 se, e somentese 2𝑎(6) + 𝑏 = 0, ou seja, 𝑏 = −12𝑎. Assim, todo elemento de 𝑊 é da forma
𝑝(𝑥) = 𝑎𝑥2 + (−12𝑎)𝑥+ 𝑐 = 𝑎 · (𝑥2 − 12𝑥) + 𝑐 · 1,
com 𝑎, 𝑐 ∈ R. Em outras palavras, os polinômios 𝑞1 = 𝑥2 − 12𝑥 e 𝑞2 = 1 geram 𝑊 .Estes vetores também são linearmente independentes pois
14

𝑐1(𝑥2 − 12𝑥) + 𝑐2(1) = 0 ⇔ 𝑐1𝑥
2 − 12𝑐1𝑥 + 𝑐2 = 0 ⇔
⎧⎪⎨⎪⎩𝑐1 = 0
−12𝑐1 = 0
𝑐2 = 0
⇔
{𝑐1 = 0
𝑐2 = 0
Portanto, 𝐵 = ger {1, 𝑥2 − 12𝑥} é uma base de 𝑊 e dim(𝑊 ) = 2.
(d) Como ⎧⎪⎨⎪⎩𝑥+ 2𝑤 = 0
−𝑦 = −2𝑤
𝑤 = 𝑧/2
⇔
⎧⎪⎨⎪⎩𝑥 = −2𝑤
𝑦 = 2𝑤
𝑧 = 2𝑤
resulta que 𝑢 ∈ 𝑊 se, e somente se, 𝑢 = (−2𝑤, 2𝑤, 2𝑤,𝑤) = 𝑤(−2, 2, 2, 1), com𝑤 ∈ R. Em outras palavras, 𝑊 = ger {(−2, 2, 2, 1)}. Como este vetor é diferente dezero, 𝐵 = {(−2, 2, 2, 1)} é L.I. pois
𝑘(−2, 2, 2, 1) = (0, 0, 0, 0) ⇒
⎧⎪⎪⎪⎨⎪⎪⎪⎩−2𝑘 = 0
2𝑘 = 0
2𝑘 = 0
𝑘 = 0
⇒ 𝑘 = 0.
Portanto 𝐵 é uma base para 𝑊 e dim(𝑊 ) = 1.
20. Como (1, 1, 1) = 12((1, 1, 0) + (1, 0, 1) + (0, 1, 1)), pode-se dizer que 𝑆 é L.D. (pois um dos
vetores é combinação linear dos demais, ou porque o sistema linear associado tem soluçõesnão nulas) e portanto não forma uma base de R3. No entanto, se forem consideradosapenas os vetores 𝑣1 = (1, 1, 0), 𝑣2 = (1, 0, 1) e 𝑣3 = (0, 1, 1), então o subconjunto 𝐵 ={𝑣1, 𝑣2, 𝑣3} será uma base de R3 pois 𝑅3 = ger {𝑣1, 𝑣2, 𝑣3} e estes três vetores são L.I. Defato, qualquer (𝑎, 𝑏, 𝑐) ∈ R3 pode ser escrito como combinação linear de 𝑣1, 𝑣2 e 𝑣3 pois
(𝑎, 𝑏, 𝑐) = 𝑥(1, 1, 0) + 𝑦(1, 0, 1) + 𝑧(0, 1, 1) ⇔
⎧⎪⎨⎪⎩𝑥+ 𝑦 = 𝑎
𝑥+ 𝑧 = 𝑏
𝑦 + 𝑧 = 𝑐
⇔
⎧⎪⎨⎪⎩𝑥 = 1
2(𝑎+ 𝑏− 𝑐)
𝑦 = 12(𝑎− 𝑏+ 𝑐)
𝑧 = 12(−𝑎+ 𝑏+ 𝑐)
Além disso, com base no cálculo acima, o único modo de obter (𝑎, 𝑏, 𝑐) = (0, 0, 0) comocombinação linear de 𝑣1, 𝑣2 e 𝑣3 é considerando todos os coeficientes 𝑥 = 𝑦 = 𝑧 = 0.
21. Para que um conjunto de vetores seja L.D. deve ser possível expressar o vetor nulo comocombinação linear deles sem que todos os coeficientes desta combinação linear sejam zero.No caso dos vetores 0, 𝑣1, . . . , 𝑣𝑛, pode-se usar, por exemplo, os escalares 𝑐0 = 7, 𝑐1 =0, 𝑐2 = 0, . . . , 𝑐𝑛 = 0 pois 7 · 0+0 · 𝑣1+ . . .+0 · 𝑣𝑛 = 0. Como pelo menos o escalar 𝑐0 = 0,conclui-se que os vetores são linearmente dependentes.
22. Sejam 𝑊 = ger {𝑣1, . . . , 𝑣𝑛} e 𝑧 ∈ 𝑊 , isto é, 𝑧 = 𝑘1𝑣1 + . . . + 𝑘𝑛𝑣𝑛, com 𝑘1, . . . , 𝑘𝑛 ∈ R.Sendo 𝑈 = ger {𝑣1, . . . , 𝑣𝑛, 𝑧}, pode-se dizer que os conjuntos 𝑈 e 𝑊 são iguais se forexplicado por que todo elemento de 𝑊 pertence a 𝑈 e vice-versa (𝑊 ⊆ 𝑈 e 𝑈 ⊆ 𝑊 ).
� Se 𝑢 ∈ 𝑊 , então 𝑢 é uma combinação linear dos vetores 𝑣𝑖, isto é, 𝑢 = 𝑐1𝑣1+. . .+𝑐𝑛𝑣𝑛.Mas então é claro que 𝑢 também é combinação linear dos vetores 𝑣𝑖 e de 𝑧 pois bastaconsiderar um coeficiente zero para 𝑧, como em 𝑢 = 𝑐1𝑣1 + . . . + 𝑐𝑛𝑣𝑛 + 0 · 𝑧. Istoquer dizer que 𝑧 ∈ ger {𝑣1, . . . , 𝑣𝑛, 𝑧} = 𝑈 , ou seja, que 𝑊 ⊆ 𝑈 .
15

� Por outro lado, todo 𝑢 ∈ 𝑊 é combinação linear de 𝑣1, . . . , 𝑣𝑛, 𝑧, isto é,
𝑢 = 𝑑1𝑣1 + . . .+ 𝑑𝑛𝑣𝑛 + 𝑑𝑛+1𝑧
= 𝑑1𝑣1 + . . .+ 𝑑𝑛𝑣𝑛 + 𝑑𝑛+1(𝑘1𝑣1 + . . .+ 𝑘𝑛𝑣𝑛)
= (𝑑1 + 𝑑𝑛+1𝑘1)𝑣1 + . . .+ (𝑑𝑛 + 𝑑𝑛+1𝑘𝑛)𝑣𝑛.
Portanto 𝑢 é uma combinação linear dos vetores 𝑣1, . . . , 𝑣𝑛, o que quer dizer que𝑢 ∈ ger {𝑣1, . . . , 𝑣𝑛} = 𝑊 , ou seja, que 𝑈 ⊆ 𝑊 .
Em resumo, ao adicionar a uma lista de vetores 𝑣𝑖 um vetor 𝑧 que já esteja no espaçogerado por eles, o espaço gerado por todos estes vetores continuará sendo o mesmo.
23. Suponha que 𝑎𝑢1 + 𝑏𝑢2 = 0. Então 𝑎𝑢1 + 𝑏𝑢2 +0𝑢3 = 0, ou seja, tem-se uma combinaçãode 𝑢1, 𝑢2, 𝑢3 que resulta no vetor nulo. Mas por hipótese, 𝑢1, 𝑢2, 𝑢3 são L.I., então estacombinação linear precisa ter todos os coeficientes iguais a zero, isto é, 𝑎 = 𝑏 = 0. Assim,mostrou-se que não há outra forma de obter o vetor nulo como combinação linear de 𝑢1
e 𝑢2, isto é, 𝑢1 e 𝑢2 são L.I.
24. (a) i. Como o espaço linha da matriz 𝐴 e o espaço linha de sua forma escalonadareduzida são os mesmos, pode-se utilizar as linhas não nulas da forma reduzidacomo vetores geradores de 𝐿(𝐴). Para a matriz dada, o escalonamento consistirádestes passos: [
1 −11 1
]𝐿2−𝐿1−→
[1 −10 2
]12𝐿2−→
[1 −10 1
]𝐿1+𝐿2−→
[1 00 1
]Então 𝐿(𝐴) = ger
{[1 0
],[0 1
]}= {
[𝑎 𝑏
]| 𝑎, 𝑏,∈ R} = 𝑀1×2(R). Além
disso, é claro que estes dois vetores linha são L.I. pois 𝑎[1 0
]+𝑏
[0 1
]=
[𝑎 𝑏
]só pode ser igual a
[0 0
]se 𝑎 e 𝑏 forem ambos nulos. Em outras palavras, estes
dois vetores formam uma base de 𝐿(𝐴), que portanto é um espaço vetorial dedimensão dois.
ii. Para o espaço coluna de 𝐴, pode-se usar como geradores as colunas de 𝐴 quecorrespondem às posições dos pivôs da forma reduzida. Especificamente, tem-se
𝐶(𝐴) = ger
{[11
],
[−11
]}. Estes dois vetores coluna são 𝐿.𝐼. pois nenhum deles
é múltiplo do outro. Então eles formam uma base de 𝐶(𝐴) e dim(𝐶(𝐴)) = 2.
iii. O núcleo 𝑁(𝐴) consiste dos vetores
[𝑥𝑦
]tais que
[1 −11 1
] [𝑥𝑦
]=
[00
], isto é, as
coordenadas 𝑥, 𝑦 são soluções do sistema linear
{𝑥− 𝑦 = 0
𝑥 + 𝑦 = 0.
Isto implica que 𝑥 = 𝑦 = 0 e que 𝑁(𝐴) =
{[00
]}. Portanto, o conjunto vazio
∅ é uma base de 𝑁(𝐴). Perceba que não faria sentido que a base tivesse algumvetor não nulo, pois senão ela geraria um espaço maior do que o espaço nulo; etambém não faz sentido considerar apenas o vetor nulo como uma base, já queele não seria L.I.. Logo a dimensão de 𝑁(𝐴) é zero (não há vetores na base).
(b) Note que 𝐴 =[1 2 3 4
]está na forma escalonada reduzida por linhas, então:
i. 𝐿(𝐴) = ger{[
1 2 3 4]}
e como este conjunto é L.I., dim(𝐿(𝐴)) = 1
ii. 𝐶(𝐴) = ger{[
1]}
e como o conjunto é L.I. dim(𝐶(𝐴)) = 1
16

iii. 𝑁(𝐴) =
⎧⎪⎪⎨⎪⎪⎩⎡⎢⎢⎣−2𝑦 − 3𝑧 − 4𝑤
𝑦𝑧𝑤
⎤⎥⎥⎦ | 𝑦, 𝑧, 𝑤 ∈ R
⎫⎪⎪⎬⎪⎪⎭ = ger
⎧⎪⎪⎨⎪⎪⎩⎡⎢⎢⎣−2100
⎤⎥⎥⎦ ,
⎡⎢⎢⎣−3010
⎤⎥⎥⎦ ,
⎡⎢⎢⎣−4001
⎤⎥⎥⎦⎫⎪⎪⎬⎪⎪⎭ e
como os três vetores são L.I., dim(𝐿(𝐴)) = 3
(c) A matriz 𝐴 =
[1 0 1 00 1 0 −1
]está na forma escalonada reduzida então:
i. 𝐿(𝐴) = ger{[
1 0 1 0],[0 1 0 −1
]}e dim(𝐿(𝐴)) = 2 (os vetores são L.I.)
ii. 𝐶(𝐴) = ger
{[10
],
[01
]}e dim(𝐶(𝐴)) = 2.
iii. 𝑁(𝐴) =
⎧⎪⎪⎨⎪⎪⎩⎡⎢⎢⎣−𝑧𝑤𝑧𝑤
⎤⎥⎥⎦ | 𝑦, 𝑧, 𝑤 ∈ R
⎫⎪⎪⎬⎪⎪⎭ = ger
⎧⎪⎪⎨⎪⎪⎩⎡⎢⎢⎣−1010
⎤⎥⎥⎦ ,
⎡⎢⎢⎣0101
⎤⎥⎥⎦⎫⎪⎪⎬⎪⎪⎭ e dim(𝐿(𝐴)) = 2.
(d) A forma escalonada reduzida de 𝐴 =
⎡⎢⎢⎢⎢⎣1 20 02 40 03 6
⎤⎥⎥⎥⎥⎦ é
⎡⎢⎢⎢⎢⎣1 20 00 00 00 0
⎤⎥⎥⎥⎥⎦, entãoi. 𝐿(𝐴) = ger
{[1 2
]}e dim(𝐿(𝐴)) = 1.
ii. 𝐶(𝐴) = ger
⎧⎪⎪⎪⎪⎨⎪⎪⎪⎪⎩
⎡⎢⎢⎢⎢⎣10000
⎤⎥⎥⎥⎥⎦⎫⎪⎪⎪⎪⎬⎪⎪⎪⎪⎭ e dim(𝐶(𝐴)) = 1.
iii. 𝑁(𝐴) =
{[−2𝑦𝑦
]| 𝑦 ∈ R
}= ger
{[−21
]}e dim(𝐿(𝐴)) = 1.
25. (...)
26. (...)
27. Suponha que 𝑎(𝑢+𝑣)+𝑏(𝑢−𝑣)+𝑐(𝑢−𝑤) = 0. Então (𝑎+𝑏+𝑐)𝑢+(𝑎−𝑏)𝑣+(−𝑐)𝑤 = 0 ecomo 𝑢, 𝑣, 𝑤 são L.I. esta combinação linear só resulta no vetor nulo se os três coeficientesforem zero, isto é, se ⎧⎪⎨⎪⎩
𝑎+ 𝑏+ 𝑐 = 0
𝑎− 𝑏 = 0
−𝑐 = 0
Mas a única solução deste sistema é 𝑎 = 𝑏 = 𝑐 = 0, o que implica que vetores 𝑢+ 𝑣, 𝑢− 𝑣e 𝑢− 𝑤 são L.I..
28. Se 𝐵 = {𝑢, 𝑣} é uma base de 𝑉 então 𝑉 = ger {𝑢} ⊕ ger {𝑣}, pois:
� 𝑉 = ger {𝑢}+ger {𝑣}. De fato, como 𝐵 é base, seus elementos geram 𝑉 , ou seja todo𝑤 ∈ 𝑉 pode ser escrito na forma 𝑤 = 𝛼𝑢 + 𝛽𝑣, com 𝛼, 𝛽 ∈ R. Mas 𝛼𝑢 ∈ ger {𝑢}e 𝛽𝑣 ∈ ger {𝑣}, então 𝑤 ∈ ger {𝑢} + ger {𝑣}, o que significa que 𝑉 ⊆ ger {𝑢} +ger {𝑣}. Reciprocamente, dado 𝑤 ∈ ger {𝑢}+ger {𝑣}, tem-se 𝑤 ∈ 𝑉 , pois a soma desubespaços de 𝑉 também é um subespaço de 𝑉 . Assim, ger {𝑢}+ ger {𝑣} ⊆ 𝑉 .
17
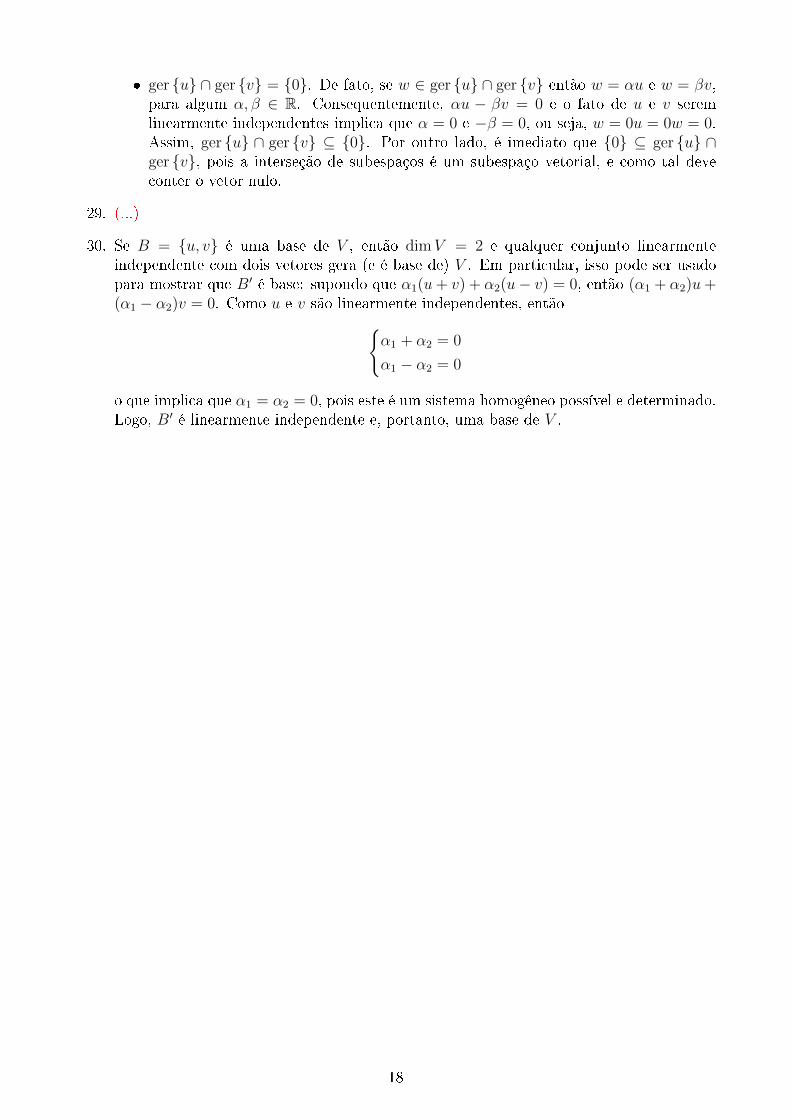
� ger {𝑢} ∩ ger {𝑣} = {0}. De fato, se 𝑤 ∈ ger {𝑢} ∩ ger {𝑣} então 𝑤 = 𝛼𝑢 e 𝑤 = 𝛽𝑣,para algum 𝛼, 𝛽 ∈ R. Consequentemente, 𝛼𝑢 − 𝛽𝑣 = 0 e o fato de 𝑢 e 𝑣 seremlinearmente independentes implica que 𝛼 = 0 e −𝛽 = 0, ou seja, 𝑤 = 0𝑢 = 0𝑤 = 0.Assim, ger {𝑢} ∩ ger {𝑣} ⊆ {0}. Por outro lado, é imediato que {0} ⊆ ger {𝑢} ∩ger {𝑣}, pois a interseção de subespaços é um subespaço vetorial, e como tal deveconter o vetor nulo.
29. (...)
30. Se 𝐵 = {𝑢, 𝑣} é uma base de 𝑉 , então dim𝑉 = 2 e qualquer conjunto linearmenteindependente com dois vetores gera (e é base de) 𝑉 . Em particular, isso pode ser usadopara mostrar que 𝐵′ é base: supondo que 𝛼1(𝑢+ 𝑣) + 𝛼2(𝑢− 𝑣) = 0, então (𝛼1 + 𝛼2)𝑢+(𝛼1 − 𝛼2)𝑣 = 0. Como 𝑢 e 𝑣 são linearmente independentes, então{
𝛼1 + 𝛼2 = 0
𝛼1 − 𝛼2 = 0
o que implica que 𝛼1 = 𝛼2 = 0, pois este é um sistema homogêneo possível e determinado.Logo, 𝐵′ é linearmente independente e, portanto, uma base de 𝑉 .
18