iterated local search aplicado ao planejamento operacional ... file12 a 15/09/06 goiânia,go...
TRANSCRIPT

12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
Iterated Local Search Aplicado ao Planejamento Operacional de Lavra em Minas a Céu Aberto Considerando Alocação Dinâmica de Caminhões
Frederico Augusto C. Guimarães, Marcone Jamilson Freitas Souza, Tatiana Alves Costa Universidade Federal de Ouro Preto (UFOP)
Departamento de Computação, Programa de Pós-Graduação em Engenharia Mineral [email protected], [email protected], [email protected]
Ouro Preto, MG, CEP 35.400-000
Felippe Pereira da Costa Universidade Federal de Ouro Preto (UFOP) e Companhia Vale do Rio Doce (CVRD)
Programa de Pós-Graduação em Engenharia Mineral [email protected]
RESUMO
Este trabalho trata do planejamento operacional de lavra em minas a céu aberto com alocação dinâmica de caminhões. Este problema consiste na mistura de minérios provenientes de várias frentes de lavra, levando-se em consideração metas de produção e qualidade, restrições operacionais e a alocação dos equipamentos de carga e transporte necessários ao processo. No sistema de alocação dinâmica de caminhões, após as descargas nos pontos de basculamento, cada caminhão pode se dirigir a uma frente diferente para novo carregamento, aumentando a produtividade da frota. Dada a sua complexidade combinatorial, o problema foi resolvido pela metaheurística Iterated Local Search (ILS). As soluções geradas pelo método foram comparadas com as produzidas por um modelo de programação matemática da literatura. Experimentos computacionais mostram a superioridade do método baseado na metaheurística ILS, tanto na qualidade da solução final, quanto na rapidez para a obtenção de soluções de melhor qualidade.
PALAVRAS-CHAVE: Planejamento operacional de lavra em minas a céu aberto, Determinação de Ritmo de Lavra em minas a céu aberto, Metaheurísticas, Iterated Local Search.
ABSTRACT
The focus of this work is the mine production planning in open pit mine with truck dynamic allocation. This problem consists in the ore blending coming of various work benches, considering production and quality goals, operations constraints, and the load and haulage allocation. In the truck dynamic allocation system, after the end of each cycle, one truck can be headed to a different load point, preventing the formation of queue. Due to its combinatorial complexity, the problem was solved using the metaheuristic Iterated Local Search Method (ILS). This methodology was compared to a mathematical programming model from literature. Computational experiments show the superiority of method based on the ILS metaheuristic, in the quality of the final solution as well as in the speed in producing solutions of better quality.
KEYWORDS: Mining planning in open pit mine, Metaheuristics, Iterated Local Search.
XXXVIII SBPO [ 1369 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
1. Introdução O planejamento operacional de lavra a curto prazo em minas a céu aberto consiste em
determinar qual o ritmo de lavra deve ser implementado em cada frente, de modo a oferecer à usina de beneficiamento uma alimentação adequada. Como cada frente de lavra possui características de qualidade diferentes, tais como o teor de determinado elemento químico ou a percentagem de minério em determinada granulometria, ela deve contribuir com uma quantidade apropriada de minério para que o produto final esteja em conformidade com as exigências do cliente. Em um planejamento operacional de lavra com alocação dinâmica (POLAD), os caminhões não ficam fixos a uma determinada frente de lavra, como no modelo estático. Ao contrário, podem ser direcionados a diferentes frentes de lavra compatíveis, aumentando a produtividade da frota. Trabalhos relacionados a modelos de programação matemática com alocação dinâmica e estática de caminhões podem ser encontrados em Costa et al. (2004, 2005).
Entre as metodologias utilizadas na mineração para resolver o POLAD destacam-se a programação linear (WHITE et al, 1982; WHITE & OLSON, 1986; PINTO & MERSCHMANN, 2001), programação linear por metas (COSTA et al., 2004), heurísticas convencionais (EZAWA & SILVA, 1995) e Algoritmos Genéticos (ALVARENGA, 1997). A justificativa para sua abordagem por metodologias heurísticas é que o problema de se determinar o ritmo de lavra em uma mineração se reduz ao Problema da Mochila Inteira Múltipla com restrições adicionais (COSTA, 2005), o qual é classificado na literatura como NP-difícil (PAPADIMITRIOU & STEIGLITZ,1998). Desta forma, para problemas de dimensões mais elevadas, os modelos de programação matemática têm aplicabilidade restrita, devido ao elevado tempo de processamento requerido para atingir a otimalidade. Além disso, com as metodologias heurísticas é possível incluir mais facilmente as restrições operacionais.
Neste trabalho propõe-se uma metodologia heurística para resolver o POLAD, baseada no Método Iterated Local Search (ILS). O método é comparado com um modelo de programação matemática da literatura, de Costa et al. (2004), o qual é um modelo mais amplo que os apontados anteriormente, reunindo várias restrições operacionais típicas em empresas mineradoras. A comparação com outros modelos heurísticos não foi possível devido à indisponibilidade dos respectivos sistemas implementados e a impossibilidade de reprodução dos métodos a partir das informações contidas nos trabalhos em que eram descritos.
2. Modelo de Programação Matemática Nesta seção é apresentado o modelo de programação matemática para o POLAD,
proposto por Costa et al. (2004). Para este modelo, sejam os seguintes dados de entrada:
M : Conjunto de frentes de minério; E : Conjunto de frentes de estéril; F : Conjunto de frentes formado por M E∪ S : Conjunto dos parâmetros de qualidade analisados no minério; C : Conjunto de equipamentos de carga; V : Conjunto de equipamentos de transporte; Pr : Ritmo de lavra recomendado (t/h); Pl : Ritmo de lavra mínimo (t/h); Pu : Ritmo de lavra máximo (t/h); β- : Penalidade por desvio negativo da produção (por produção abaixo da estipulada); Β+ : Penalidade por desvio positivo da produção; tij : Teor do parâmetro j na frente i (%); trj : Teor recomendado para o parâmetro j na mistura (%); tlj : Teor mínimo admissível para o parâmetro j na mistura (%); tuj : Teor máximo admissível para o parâmetro j na mistura (%); αj
+ : Penalidade por desvio negativo para o parâmetro j na mistura; αj
- : Penalidade por desvio positivo para o parâmetro j na mistura; Qli : Ritmo de lavra mínimo para a frente i (t/h); Qui : Ritmo de lavra máximo para a frente i (t/h);
XXXVIII SBPO [ 1370 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
rem : Relação estéril/minério requerida; Clk : Produção mínima do equipamento de carga k (t/h); Cuk : Produção máxima do equipamento de carga k (t/h); capl : Capacidade do caminhão l (t); Til : Tempo total de ciclo do caminhão l na frente i (min);
glk : 1 se o caminhão é compatível com o equipamento de carga ;0 caso contrário.
l k⎧⎨⎩
Sejam as seguintes variáveis de decisão:
xi : Ritmo de lavra da frente i (t/h);
yik : 1 se o equipamento de carga opera na frente ;0 caso contrário.
k i⎧⎨⎩
nil : Número de viagens que um caminhão l realiza à frente i; P- : Desvio negativo do ritmo de lavra em relação ao recomendado (t/h); P+ : Desvio positivo do ritmo de lavra em relação ao recomendado (t/h); dj
- : Desvio negativo do parâmetro j na mistura (t/h); dj
+ : Desvio positivo do parâmetro j na mistura (t/h);
O modelo de programação matemática relativo ao problema de alocação dinâmica de caminhões (POLAD) é apresentado pelas Equações (2.1)-(2.21).
j j j jj S j S
min d d P Pα α β β− − + + − − + +
∈ ∈
+ + +∑ ∑
(2.1)
s.a: ij j ii M
( t tu )x∈
−∑
≤
0
j S∀ ∈
(2.2)
ij j ii M
( t tl )x∈
−∑
≥
0
j S∀ ∈
(2.3)
ij j i j ji M
( t tr )x d d− +
∈
− + −∑
=
0
j S∀ ∈
(2.4)
ii M
x∈∑
≤
Pu
(2.5)
ii M
x∈∑
≥
Pl
(2.6)
ii M
x P P− +
∈
+ −∑
=
Pr
(2.7)
ix ≤ iQu i F∀ ∈
(2.8)ix ≥ iQl i F∀ ∈
(2.9)ix ≥
0 i F∀ ∈
(2.10)j jd ,d+ −
≥
0
j S∀ ∈
(2.11)
P ,P+ −
≥
0
(2.12)
i ii E i M
x rem x∈ ∈
−∑ ∑
≥
0
(2.13)
ikk C
y∈∑
≤
1
i F∀ ∈
(2.14)
ikk F
y∈∑
≤
1
k C∀ ∈
(2.15)
iky
∈
{ }0 1,
i F ,k C∀ ∈ ∈
(2.16)
i k ikk C
x Cu y∈
−∑
≤
0
i F∀ ∈
(2.17)
≥
0
i F∀ ∈
(2.18)
XXXVIII SBPO [ 1371 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
i k ikk C
x Cl y∈
−∑
60il il ikk C
n T y∈
− ∑
≤
0
0lki F ,l V ,g∀ ∈ ∈ ≠
(2.19)
il ili F
n T∈∑
≤
60
l V∀ ∈
(2.20)
i il ll V
x n cap∈
−∑
=
0
i F∀ ∈
(2.21)
iln
∈ +Ζ
i F ,l V∀ ∈ ∈
(2.22)
A Equação (2.1) representa a função objetivo, em que se deseja minimizar os desvios de qualidade e produção em relação aos valores requeridos. As Restrições (2.2) e (2.3) definem limites máximos e mínimos para os parâmetros de controle, enquanto as Restrições (2.5) e (2.6) limitam a quantidade máxima e mínima de produto final. As Restrições (2.8) e (2.9) definem as quantidades máximas e mínimas a serem retiradas de cada frente de lavra. As Restrições (2.4) e (2.7) visam medir os desvios de qualidade e produção, respectivamente, em relações aos valores requeridos. A Restrição (2.13) diz respeito ao atendimento da relação estéril/minério. Já a Restrição (2.14) define que cada frente possui um único equipamento de carga, enquanto que a Restrição (2.15) define que cada equipamento de carga opera em uma única frente. As Restrições (2.17) e (2.18) limitam, respectivamente, o ritmo de lavra máximo e mínimo. A Restrição (2.19) refere-se às compatibilidades dos caminhões com os equipamentos de cargas alocados às frentes. A Restrição (2.20) exige que um caminhão opere no máximo 60 minutos e a Restrição (2.21) faz com que o ritmo de lavra de uma frente seja igual à produção realizada pelos caminhões alocados à frente. As demais restrições expressam a integralidade e não-negatividade das variáveis de decisão.
3. Metodologia proposta
3.1. Representação de uma Solução Neste trabalho, uma solução do POLAD é representada por uma matriz Q|F|×(1+|V|) de
valores inteiros, sendo F o conjunto de frentes e V o conjunto de caminhões. Para clareza de apresentação, a matriz Q|F|×(1+|V|) será decomposta em duas submatrizes A e B, com Q = [A | B], sendo A = (ai)|F|×1 e B = (nil)|F|x|V|. A submatriz A|F|×1 representa a alocação dos equipamentos de carga ao conjunto F de frentes e o respectivo status de cada um desses equipamentos com relação ao fato de estarem ativos ou não. A submatriz B|F|×|V| representa o número de viagens que serão realizadas pelos caminhões às frentes.
A Figura 1 exemplifica uma solução para uma instância do problema. Nesta figura, as linhas representam as frentes de lavra disponíveis no conjunto F, a coluna CARGA representa a alocação dos equipamentos de carga às frentes de lavra e as demais colunas indicam o número de viagens que serão realizadas pelo conjunto V de caminhões disponíveis.
CARGA Cam1 Cam2 ... CamV F1 <Car1, 1> 8 X ... X F2 <D, 0> 0 0 ... 0 F3 <Car8, 0> 0 0 ... 0 ... ... ... ... ... ... FF <Car5, 1> 0 9 ... 3
Figura 1 - Representação de uma solução
Neste exemplo observa-se, na coluna CARGA, linha F1, a dupla <Car1, 1>, indicando que o equipamento de carga Car1 está alocado à frente F1 e em operação. Na coluna CARGA, linha F3, a dupla <Car8, 0> indica que o equipamento de carga Car8 está alocado à frente F3, mas não está em operação. Observa-se, ainda, na coluna CARGA, linha F2, o valor <D, 0> informando que não existe equipamento de carga alocado à frente F2 e que, portanto, esta frente
XXXVIII SBPO [ 1372 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
está disponível. As demais colunas representam o número de viagens a serem realizadas por um caminhão a uma frente, considerando a compatibilidade entre o caminhão e o equipamento de carga alocado à frente. Uma célula com o valor X indica incompatibilidade entre o caminhão e o respectivo equipamento de carga.
3.2. Determinação da Solução Inicial Uma solução inicial s para o POLAD é gerada aleatoriamente, sendo esse processo
dividido em duas etapas. Na primeira, os equipamentos de carga disponíveis são numerados e a seguir esses valores são aleatoriamente distribuídos na submatriz A, com cada célula recebendo um único valor no máximo. Na segunda etapa, atribui-se para cada célula nil da submatriz B, um valor aleatório compreendido entre o número mínimo e o máximo de viagens a serem realizadas pelo caminhão l à frente i, desde que exista compatibilidade entre o equipamento de carga alocado à frente i e o caminhão l.
3.3. Função de Avaliação Uma solução s é avaliada de acordo com a função objetivo f2(s), definida na Equação
(3.1). Essa função, que deve ser minimizada, mensura o desvio dos objetivos considerados e penaliza o não atendimento às restrições do problema.
As restrições consideradas são aquelas explicitadas no modelo de programação matemática descrito na seção 2 (à exceção das Restrições (2.4) e (2.7)), as quais se não forem satisfeitas, geram soluções inviáveis, a saber: produção da mina excede os limites de especificação, parâmetros de controle no produto final extrapolam os limites de especificação de qualidade, relação estéril/minério excede os limites especificados, taxa de utilização dos caminhões superior ao máximo permitido e produção dos equipamentos de carga excede a capacidade de produção especificada. Os objetivos considerados são aqueles explicitados pela Equação (2.1), isto é: (a) o atendimento às metas de qualidade (Restrição (2.4)); (b) o atendimento à meta de produção (Restrição (2.7)) e, adicionalmente, (c) o atendimento a uma relação estéril/minério recomendada; (d) o atendimento a uma certa taxa de utilização de caminhões e, finalmente, (e) a utilização do menor número possível de caminhões.
2 ( ) ( ) ( ) ( ) ( ) ( ) ( )p q r u c nj l i
j S l V i F
f s f s f s f s f s f s f s∈ ∈ ∈
= + + + + +∑ ∑ ∑ Equação (3.1)
em que:
S : Conjunto dos parâmetros de controle; V : Conjunto dos equipamentos de transporte (caminhões); F : Conjunto das frentes de lavra. F = M ∪ E, onde M é o conjunto de frentes de minério e
E o conjunto de frentes de estéril; fp(s) : Função que avalia s quanto à produção; fj
q(s) : Função que avalia s quanto à qualidade do j-ésimo parâmetro de controle; fr(s) : Função que avalia s quanto à relação estéril/minério; fl
u(s) : Função que avalia s quanto à taxa de utilização do l-ésimo caminhão; fi
c(s) : Função que avalia s quanto à produção do equipamento de carga alocado à i-ésima frente de lavra;
fn(s) : Função que avalia s quanto ao número total de caminhões utilizados.
Mostra-se, a seguir, como cada uma dessas componentes da função 2 ( )f s é avaliada.
3.3.1 Produção de minério Quanto à produção de minério, uma solução s é avaliada segundo a Equação (3.2).
XXXVIII SBPO [ 1373 ]

12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
( )p pf s Pr Pθ= × −
Equação (3.2) em que:
P : Produção de minério (t/h); Pr : Meta de produção de minério (t/h); θp : Peso associado à avaliação da produção.
O valor P da produção de minério é obtido pelo somatório de todas as viagens realizadas pelos caminhões às frentes de minério multiplicadas pelas suas respectivas capacidades de carga, conforme Equação (3.3).
lMi Vl
ilcapnP ∑∑∈ ∈
=
Equação (3.3) em que:
M : Conjunto de frentes de minério; V : Conjunto de caminhões; nil : Número de viagens que um caminhão l faz à uma frente
i em uma hora; capl : Capacidade do caminhão l (t).
De acordo com o valor de P são aplicados diferentes valores de θp, assumindo valores αp- e αp+ para penalizar uma solução que apresenta uma produção abaixo ou acima, respectivamente, da produção mínima e máxima previamente estabelecida. θp assume os valores βp- e βp+ para penalizar uma produção factível mas que esteja, respectivamente, abaixo ou acima da meta estipulada.
3.3.2 Qualidade da Mistura A qualidade da mistura é mensurada pelo desvio em relação às metas relativas aos
parâmetros de controle. A Equação (3.4) avalia esse desvio para o j-ésimo parâmetro de controle.
( )q q qj j j j jf s Qr Q j Sθ= ×Δ × − ∀ ∈
Equação (3.4)
em que:
Qj : Quantidade encontrada na mistura para o parâmetro j (t/h);
Qrj : Quantidade recomendada para o parâmetro j na mistura (t/h);
θjq : Peso associado à avaliação da
qualidade do parâmetro j; Δj
q : Multiplicador associado ao parâmetro j. Os valores de Qj e Qrj são avaliados conforme as Equações (3.5) e (3.6),
respectivamente.
j ij ii M
Q t x j S∈
= ∀ ∈∑
Equação (3.5)
j j ii M
Qr tr x j S∈
= × ∀ ∈∑
Equação (3.6)
O multiplicador Δjq é utilizado para equiparar os parâmetros de controle em uma mesma
ordem de grandeza, de modo que os pesos θjq sejam aplicados coerentemente. De forma análoga
ao caso anterior, são aplicados diferentes valores de θjq de acordo com o valor de Qj.
3.3.3 Relação Estéril/Minério A relação estéril/minério mede a proporção de estéril lavrado em relação ao minério e é
avaliada pela Equação (3.7).
( )r rf s Rr Rθ= × −
Equação (3.7) em que:
R : Produção de estéril na mistura (t/h); Rr : Meta de Produção de estéril na mistura (t/h); θr : Peso associado à avaliação da relação estéril/minério.
Os valores R e Rr são determinados de acordo com as Equações (3.7) e (3.8).
ii E
R x∈
=∑
Equação (3.8)
ii M
Rr rem x∈
= ×∑
Equação (3.9)
XXXVIII SBPO [ 1374 ]

12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
De forma semelhante à seção 3.3.1, são aplicados diferentes valores de θr, de acordo com o valor encontrado para R.
3.3.4 Utilização dos Caminhões Os caminhões são avaliados de acordo com a carga transportada, dada em toneladas de
minério por hora, conforme Equação (3.10).
( )u ul l l lf s Ut U l Vθ= × − ∀ ∈
Equação (3.10) em que:
Ul : Carga transportada pelo caminhão l (t/h); Url : Meta de carga transportada pelo
caminhão l (t/h); θl
u : Peso associado à avaliação da utilização do caminhão l.
A taxa de utilização de um caminhão l (TUl) é dada pela Equação (3.11), que retorna o percentual do tempo em que o caminhão é efetivamente utilizado em uma hora de operação. Til refere-se ao tempo de ciclo do caminhão l na frente de lavra i. O quanto este percentual representa em toneladas de minério (Ul) é calculado pela Equação (3.12). A meta de utilização Url para um caminhão l é obtida através do produto da taxa de utilização requerida TUl para o caminhão pela sua utilização máxima em toneladas, conforme Equação (3.13).
60
il ili F
l
n TTU l V∈= ∀ ∈
∑
Equação (3.11)
l il li F
U n cap l V∈
= ∀ ∈∑
Equação (3.12)
ll l
l
UUr TUr l VTU
= × ∀ ∈
Equação (3.13)
Do mesmo modo que na seção 3.3.1, são aplicados diferentes valores de θlu de acordo
com o valor obtido para TUl. O fator αlu+ penaliza uma solução que apresenta um caminhão sendo
utilizado acima da sua utilização máxima. Já os fatores βlu+ e βl
u- penalizam uma utilização factível mas que estejam, respectivamente, abaixo ou acima da meta especificada.
3.3.5 Produção dos Equipamentos de Carga Cada equipamento de carga deve operar em uma faixa de produção que garanta a sua
viabilidade operacional. A produção do equipamento de carga é avaliada conforme o ritmo de lavra da frente à qual está alocado, como mostra a Equação (3.14).
( ) c ci k k if s Cu x i Fθ= × − ∀ ∈
Equação (3.14) em que:
xi : Ritmo de lavra da frente i (t/h); k : Equipamento de carga que está
operando na frente i; Cuk : Produção máxima do equipamento de
carga k alocado à frente i (t/h); θk
c : Peso associado à avaliação da produção do equipamento de carga k alocada à frente i.
Assim como descrito anteriormente, são aplicados diferentes valores de θkc, de acordo
com o valor corrente de xi. Os fatores αkc- e αk
c+ penalizam uma solução que apresenta um equipamento de carga com produção abaixo ou acima, respectivamente, da produção mínima e máxima previamente estabelecida. Já o fator βk
c+ penaliza um ritmo de lavra que esteja entre o limite mínimo e máximo de produção.
3.3.6 Número Total de Caminhões Utilizados A Equação (3.15) retorna o número total de caminhões em operação, que se procura
reduzir.
XXXVIII SBPO [ 1375 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
( )n nl
i F
f s TUβ∈
= × ⎡ ⎤⎢ ⎥∑
Equação (3.15)
em que:
TUl : Taxa de utilização do caminhão l , em %, obtida de acordo com a Equação (3.11);
βn : Peso associado à avaliação do número total de caminhões utilizados.
Pela Equação (3.15) tem-se que TUl = 1 Vl∈∀ se TUl > 0 e TUl = 0, caso contrário.
3.4. Estruturas de Vizinhança Para explorar o espaço de soluções do POLAD foram desenvolvidos seis tipos
diferentes de movimentos, apresentados a seguir, para definir seis estruturas de vizinhança Nk(s).
3.4.1 Movimento Carga - NCG(s) Consiste em trocar duas células distintas ai e ak da matriz A, ou seja, trocar os
equipamentos de carga que operam nas frentes i e k, caso as duas frentes possuam equipamentos de carga alocados que estejam em operação. No caso de apenas uma das frentes possuir equipamento de carga em operação e a outra estiver disponível, esse movimento consistirá em realocar o equipamento de carga à frente disponível.
3.4.2 Movimento Operação Frente - NOF(s) Consiste em alterar o status de uma célula ai da matriz A, ou seja, consiste em retirar de
operação o equipamento de carga que esteja ativo na frente i, deixando-a disponível, ou retornar à operação o equipamento de carga que esteja inativo.
3.4.3 Movimento Número de Viagens - NNV(s) Nesse movimento, uma célula nil da matriz B é selecionada e seu valor acrescido ou
decrescido de uma unidade, retornando-se como vizinho aquele que apresentar o melhor valor da função de avaliação. Portanto, esse movimento consiste em aumentar ou diminuir em uma viagem o número de viagens de um caminhão l em uma frente i onde esteja operando um equipamento de carga compatível.
3.4.4 Movimento Realocar Viagem de um Caminhão - NVC(s) Esse movimento consiste em selecionar duas células nil e nkl da matriz B e repassar uma
unidade de nil para nkl. Assim, nesse movimento, um caminhão l deixa de realizar uma viagem em uma frente i para realizá-la em outra frente k.
3.4.5 Movimento Realocar Viagem de uma Frente - NVF(s) Duas células nil e nik da matriz B são selecionadas e uma unidade de nil é realocada para
nik. Portanto, esse movimento consiste em realocar uma viagem de um caminhão l para um caminhão k que esteja operando na frente i.
3.4.6 Movimento Operação Caminhão - NOC(s) Consiste em selecionar uma célula nil da matriz B e zerar seu conteúdo, significando
retirar de atividade um caminhão l que esteja operando em uma frente i.
3.5. ILS aplicado ao POLAD O método Iterated Local Search (ILS) (Glover & Kochenberger, 2003) é baseado na
idéia de que um procedimento de busca local pode ser melhorado gerando-se novas soluções de partida, as quais são obtidas por meio de perturbações na solução ótima local. A perturbação precisa ser suficientemente forte para permitir que a busca local explore diferentes soluções, mas também fraca o suficiente para evitar um reinício aleatório. A Figura 2 ilustra o pseudo-código do algoritmo ILS básico.
XXXVIII SBPO [ 1376 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
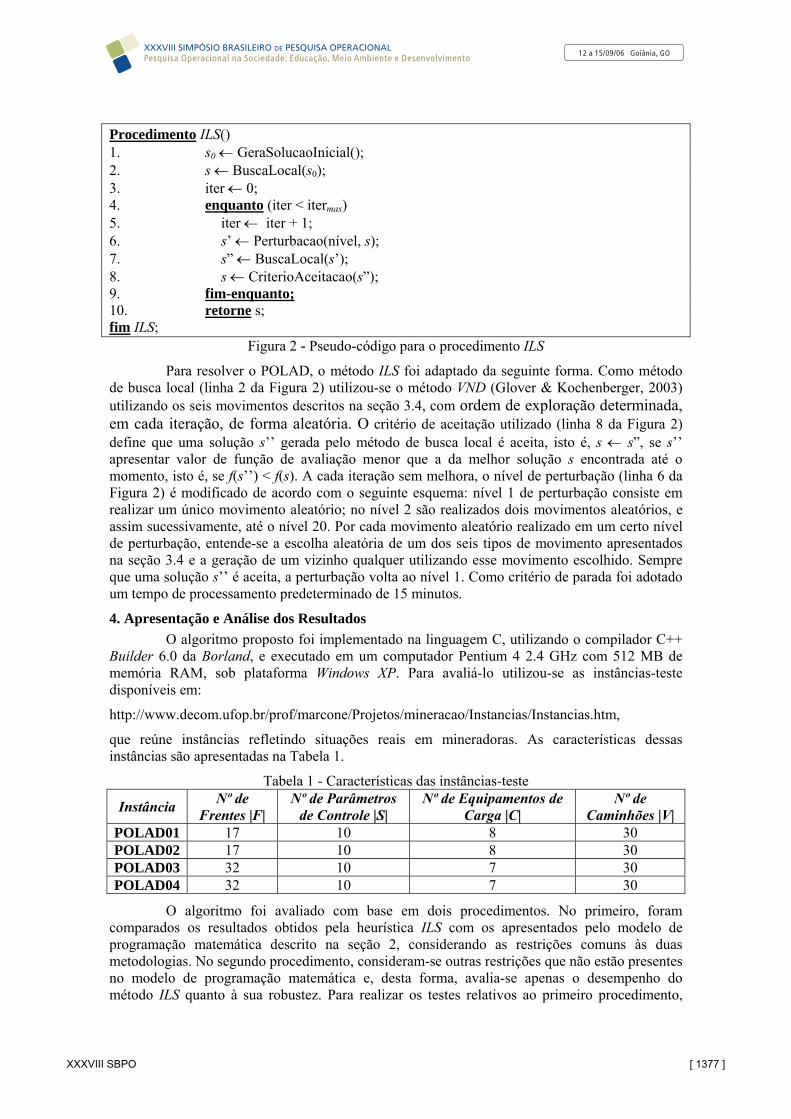
Procedimento ILS() 1. s0 ← GeraSolucaoInicial(); 2. s ← BuscaLocal(s0); 3. iter ← 0; 4. enquanto (iter < itermax) 5. iter ← iter + 1; 6. s’ ← Perturbacao(nível, s); 7. s” ← BuscaLocal(s’); 8. s ← CriterioAceitacao(s”); 9. fim-enquanto; 10. retorne s; fim ILS;
Figura 2 - Pseudo-código para o procedimento ILS
Para resolver o POLAD, o método ILS foi adaptado da seguinte forma. Como método de busca local (linha 2 da Figura 2) utilizou-se o método VND (Glover & Kochenberger, 2003) utilizando os seis movimentos descritos na seção 3.4, com ordem de exploração determinada, em cada iteração, de forma aleatória. O critério de aceitação utilizado (linha 8 da Figura 2) define que uma solução s’’ gerada pelo método de busca local é aceita, isto é, s ← s”, se s’’ apresentar valor de função de avaliação menor que a da melhor solução s encontrada até o momento, isto é, se f(s’’) < f(s). A cada iteração sem melhora, o nível de perturbação (linha 6 da Figura 2) é modificado de acordo com o seguinte esquema: nível 1 de perturbação consiste em realizar um único movimento aleatório; no nível 2 são realizados dois movimentos aleatórios, e assim sucessivamente, até o nível 20. Por cada movimento aleatório realizado em um certo nível de perturbação, entende-se a escolha aleatória de um dos seis tipos de movimento apresentados na seção 3.4 e a geração de um vizinho qualquer utilizando esse movimento escolhido. Sempre que uma solução s’’ é aceita, a perturbação volta ao nível 1. Como critério de parada foi adotado um tempo de processamento predeterminado de 15 minutos.
4. Apresentação e Análise dos Resultados O algoritmo proposto foi implementado na linguagem C, utilizando o compilador C++
Builder 6.0 da Borland, e executado em um computador Pentium 4 2.4 GHz com 512 MB de memória RAM, sob plataforma Windows XP. Para avaliá-lo utilizou-se as instâncias-teste disponíveis em:
http://www.decom.ufop.br/prof/marcone/Projetos/mineracao/Instancias/Instancias.htm,
que reúne instâncias refletindo situações reais em mineradoras. As características dessas instâncias são apresentadas na Tabela 1.
Tabela 1 - Características das instâncias-teste
Instância Nº de Frentes |F|
Nº de Parâmetros de Controle |S|
Nº de Equipamentos de Carga |C|
Nº de Caminhões |V|
POLAD01 17 10 8 30 POLAD02 17 10 8 30 POLAD03 32 10 7 30 POLAD04 32 10 7 30
O algoritmo foi avaliado com base em dois procedimentos. No primeiro, foram comparados os resultados obtidos pela heurística ILS com os apresentados pelo modelo de programação matemática descrito na seção 2, considerando as restrições comuns às duas metodologias. No segundo procedimento, consideram-se outras restrições que não estão presentes no modelo de programação matemática e, desta forma, avalia-se apenas o desempenho do método ILS quanto à sua robustez. Para realizar os testes relativos ao primeiro procedimento,
XXXVIII SBPO [ 1377 ]

12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
utiliza-se a função objetivo apresentada na Equação (4.1). Já para o segundo procedimento, a função objetivo considerada é a mostrada na Equação (3.1), seção 3.3.
1( ) j j j jj S j S
f s d d P Pα α β β− − + + − − + +
∈ ∈
= + + +∑ ∑ Equação (4.1)
em que:
f1(s) : Função de avaliação da solução s com relação ao desvios de qualidade e produção da mistura;
dj- : Desvio negativo do parâmetro j na mistura (t/h);
dj+ : Desvio positivo do parâmetro j na mistura (t/h);
P- : Desvio negativo do ritmo de lavra em relação ao recomendado (t/h); P+ : Desvio positivo do ritmo de lavra em relação ao recomendado (t/h); αj
+ = αj- = 1 Sj∈∀ ; β+ = β- = 100.
Os parâmetros utilizados nos testes realizados são apresentados na Tabela 2.
Tabela 2 - Parâmetros do ILS
Peso Multiplicadores associados à qualidade da mistura
Produção de Minério αp- = αp+ = 100 × |S|
βp- = βp+ = 10 × |S|
Qualidade da Mistura α j
q- = α jq+= |S| Sj∈∀
βjq- = βj
q+ = 1 Sj∈∀
Relação Estéril/Minério
αr- = αr+ = 200 × |S| βr- = βr+ = |S|
Utilização dos Caminhões
αlu+ = |S| Vl ∈∀
βlu+ e βl
u- = 1 Vl ∈∀
Produção dos Equip. de Carga
αkc- = αk
c+ = 100 × |S| Ck ∈∀ βk
c+ = |S| Ck ∈∀
Número Total de Caminhões βn = 1
POLAD01 e POLAD02: Δ j
q = 1 Sj∈∀ POLAD03 e POLAD04: Δ j
q = 1 ∀j = 1, 8, 9 e 10 Δj
q = 100 ∀j = 2 e 3 Δj
q = 1000 ∀j = 4 e 5 Δj
q = 10 ∀j = 6 e 7
O ILS foi executado 10 vezes para cada instância, partindo-se de sementes diferentes de números aleatórios. Para avaliar seu desempenho foi calculado o desvio (Gap) dado pela Equação (4.2).
10*
1*
1 ( )10 i
ifo fo
Gapfo
=
−=
∑
Equação (4.2)
Em que: fo* : melhor resultado encontrado para a instância-teste
considerada; foi : resultado da i-ésima execução do algoritmo;
Na Equação (4.2), fo = f1(s) se o procedimento usado for o primeiro (I) e fo = f2(s) se o procedimento usado for o segundo (II).
XXXVIII SBPO [ 1378 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
Tabela 3 - Resultados do POLAD pelos procedimentos I e II Procedimento I Procedimento II
Instância PM1 ( *)f s ILS
1 ( *)f s Gap (%) ILS2 ( *)f s Gap (%) Tempo (s)
POLAD01 216,80(1) 216,80(2) 211,99 0,0 2638,83 0,2 789,2
POLAD02 2751,79(1) 2751,79(2) 2731,71 0,0 5248,99 0,1 822,1
POLAD03 1962,90(1) 1584,50(2) 585,30 80,6 3736,94 71,0 842,1
POLAD04 3021,83(1) 2706,45(3) 2706,45 3,6 59795,83 0,1 819,4
(1) Melhor solução em 15 minutos de processamento; (2) Melhor solução em 240 minutos; (3) Solução ótima, obtida em 80 minutos de processamento.
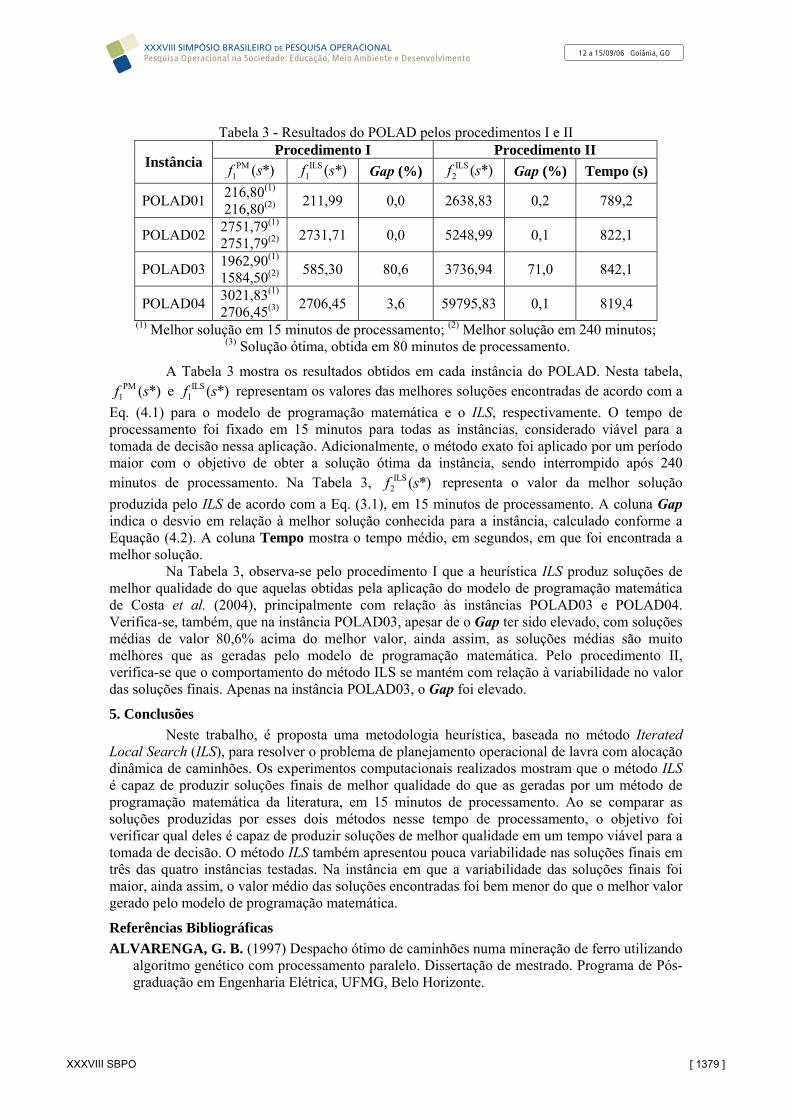
A Tabela 3 mostra os resultados obtidos em cada instância do POLAD. Nesta tabela, PM
1 ( *)f s e ILS1 ( *)f s representam os valores das melhores soluções encontradas de acordo com a
Eq. (4.1) para o modelo de programação matemática e o ILS, respectivamente. O tempo de processamento foi fixado em 15 minutos para todas as instâncias, considerado viável para a tomada de decisão nessa aplicação. Adicionalmente, o método exato foi aplicado por um período maior com o objetivo de obter a solução ótima da instância, sendo interrompido após 240 minutos de processamento. Na Tabela 3, ILS
2 ( *)f s representa o valor da melhor solução produzida pelo ILS de acordo com a Eq. (3.1), em 15 minutos de processamento. A coluna Gap indica o desvio em relação à melhor solução conhecida para a instância, calculado conforme a Equação (4.2). A coluna Tempo mostra o tempo médio, em segundos, em que foi encontrada a melhor solução.
Na Tabela 3, observa-se pelo procedimento I que a heurística ILS produz soluções de melhor qualidade do que aquelas obtidas pela aplicação do modelo de programação matemática de Costa et al. (2004), principalmente com relação às instâncias POLAD03 e POLAD04. Verifica-se, também, que na instância POLAD03, apesar de o Gap ter sido elevado, com soluções médias de valor 80,6% acima do melhor valor, ainda assim, as soluções médias são muito melhores que as geradas pelo modelo de programação matemática. Pelo procedimento II, verifica-se que o comportamento do método ILS se mantém com relação à variabilidade no valor das soluções finais. Apenas na instância POLAD03, o Gap foi elevado.
5. Conclusões Neste trabalho, é proposta uma metodologia heurística, baseada no método Iterated
Local Search (ILS), para resolver o problema de planejamento operacional de lavra com alocação dinâmica de caminhões. Os experimentos computacionais realizados mostram que o método ILS é capaz de produzir soluções finais de melhor qualidade do que as geradas por um método de programação matemática da literatura, em 15 minutos de processamento. Ao se comparar as soluções produzidas por esses dois métodos nesse tempo de processamento, o objetivo foi verificar qual deles é capaz de produzir soluções de melhor qualidade em um tempo viável para a tomada de decisão. O método ILS também apresentou pouca variabilidade nas soluções finais em três das quatro instâncias testadas. Na instância em que a variabilidade das soluções finais foi maior, ainda assim, o valor médio das soluções encontradas foi bem menor do que o melhor valor gerado pelo modelo de programação matemática.
Referências Bibliográficas ALVARENGA, G. B. (1997) Despacho ótimo de caminhões numa mineração de ferro utilizando
algoritmo genético com processamento paralelo. Dissertação de mestrado. Programa de Pós-graduação em Engenharia Elétrica, UFMG, Belo Horizonte.
XXXVIII SBPO [ 1379 ]
12 a 15/09/06 Goiânia, GOPesquisa Operacional na Sociedade: Educação, Meio Ambiente e DesenvolvimentoXXXVIII SIMPÓSIO BRASILEIRO PESQUISA OPERACIONALDE
COSTA, F. P. (2005) Aplicações de técnicas de otimização a problemas de planejamento operacional de lavra em minas a céu aberto. Dissertação de mestrado. Programa de Pós-graduação em Engenharia Mineral, UFOP, Ouro Preto.
COSTA, F. P.; SOUZA, M. J. F. & PINTO, L. R. (2004) Um modelo de alocação dinâmica de caminhões. Revista Brasil Mineral, v. 231, p. 26-31.
EZAWA, L. & SILVA, K. S. (1995) Alocação dinâmica de caminhões visando qualidade. In Anais do VI Congresso Brasileiro de Mineração, p. 15-19, Salvador, Bahia.
GLOVER, F. & KOCHENBERGER, G. (2003) Handbook of metaheuristics. Kluwer Academic Publishers, Boston.
PAPADIMITRIOU, C. H. & STEIGLITZ, K. (1998) Combinatorial Optimization: Algorithms and Complexity. Dover Publications, Inc., New York.
PINTO, L. R. & MERSCHMANN, L. H. C. (2001) Planejamento operacional de lavra de mina usando modelos matemáticos. Revista Escola de Minas, v. 54, n.3, p.211-214.
WHITE, J. W.; ARNOLD, M. J. & CLEVENGER, J. G. (1982) Automated open-pit truck dispatching at Tyrone. Engineering and Mining Journal, v. 183, n.11, p.76-84.
WHITE, J. W. & OLSON, J. P. (1986) Computer-based dispatching in mines with concurrent operanting objectives. Mining Engineering, v. 38, n.11, p.1045-1054.
XXXVIII SBPO [ 1380 ]