introdução à robótica móvel - ufrgs - instituto de...
TRANSCRIPT

Introdução à Robótica MóvelAula 4
Edson PrestesDepartamento de Informática Teóricahttp://www.inf.ufrgs.br/[email protected]

Paradigmas¢ Existem três paradigmas usados organizar a inteligência
em robôs [1]:� Hierárquico ou Deliberativo;� Reativo;� Híbrido.
¢ Em todos os casos, eles referem-se ao relacionamento entre as primitivas básicas:� Observar (SENSE);� Planejar (PLAN);� Atuar (ACT).

Comportamento animal¢ Comportamento é o elemento fundamental da
inteligência natural.
¢ É um mapeamento das entradas sensoriais para um padrão de ação motor que é usado para executar uma tarefa.
¢ Os etologistas dividem comportamentos em [1] :� Reflexivos : comportamentos puros de estimulo-resposta.
� Reativos : são aprendidos, consolidados e usados de forma inconsciente : andar de bicicleta. Comportamentos associadas à memória muscular são reativos.
� Conscientes: são deliberativos ou seja envolvem planejamento.

Comportamento animal¢ Os comportamentos reflexivos são particularmente
interessantes pois não necessitam de qualquer tipo de cognição.
¢ Eles podem ser divididos em:� reflexos : a resposta dura de acordo com o estimulo e é
proporcional a intensidade do estímulo.
� taxia : a resposta está associada a um movimento em uma direção em particular. Exemplo : quimiotaxia, fototaxia, etc.
� padrões de ação fixa: a resposta tem duração maior que o estímulo. Exemplo: comportamento de defesa de cavalos.

Comportamento animal¢ Existem quatro maneiras de adquirir comportamentos:
� Inatos: nascer com o comportamento. Exemplo: reflexo de regurgitar das andorinhas do mar;
� Seqüências de comportamentos inatos: nascer com uma seqüência de comportamentos. Exemplo: ciclo de acasalamento das vespas ;
� Inatos com memória: nascer com comportamentos que necessitam de inicialização. Exemplo: aprendizado da localização da colméia;
� Aprendidos : aprender a partir da interação com o mundo. Exemplo: comportamento de caça dos leões.

Paradigma Reativo¢ Intensamente usado de 1988 a 1992
¢ Corresponde a uma resposta ao paradigma hierárquico.
¢ Foi motivado por várias idéias oriundas da etologia.
¢ Desconsidera a fase planejamento, ligando a observação diretamente à ação.
¢ Um robô pode ter muitos pares de observação – ação. Cada par é também chamado comportamento.
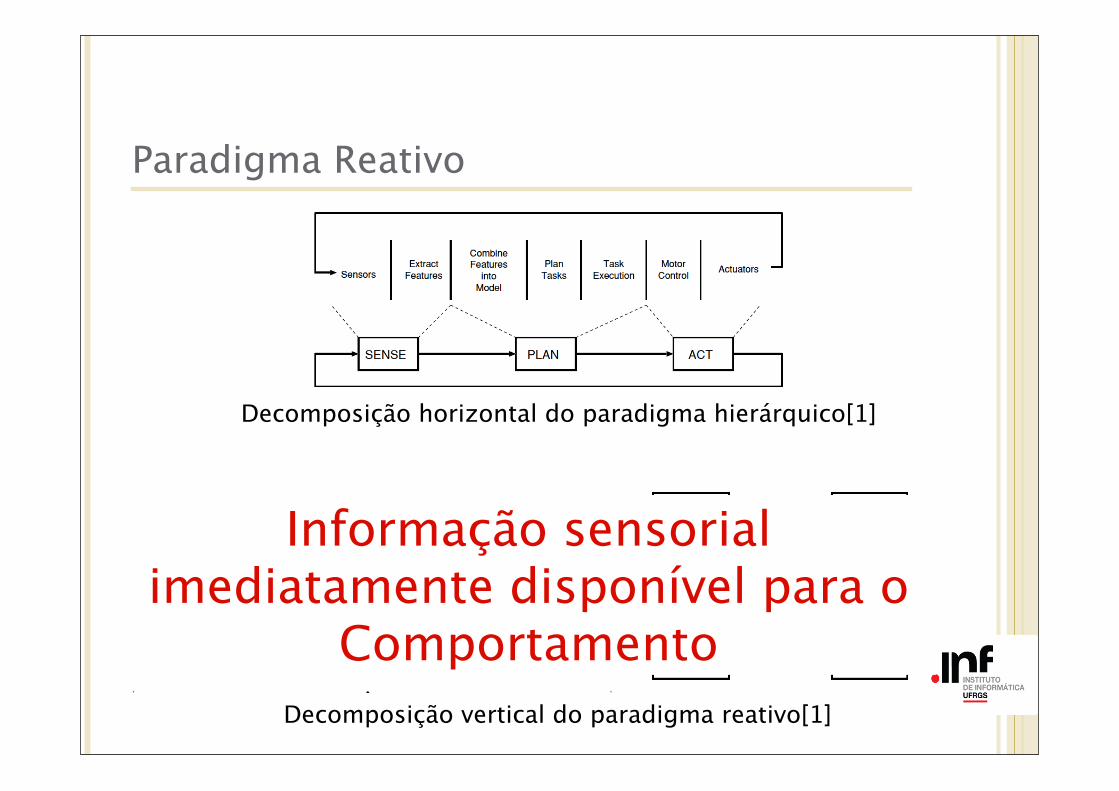
Paradigma Reativo
Decomposição horizontal do paradigma hierárquico[1]
Decomposição vertical do paradigma reativo[1]
Informação sensorial imediatamente disponível para o
Comportamento

Paradigma Reativo¢ As arquiteturas reativas possuem, em geral, as
seguintes características:� Os robôs fazem parte do mundo (“situated agents”).
� O comportamento global emerge a partir da interação de comportamentos individuais.
� O sensoriamento é local (egocêntrico).
� Seguem bons princípios de desenvolvimento de software.
� Modelos de comportamento de animais formam a base para comportamentos e para o sistema.
� Não possui memória. O comportamento persiste por um curto espaço de tempo após o término do estimulo.

Paradigma Reativo¢ A arquitetura reativa mais famosa é a arquitetura
subsumption proposta por Brooks [4,5].
¢ Brooks afirmava que o mundo era o melhor modelo e não era necessário nenhuma representação de mundo para produzir comportamentos inteligentes.
¢ Ela usa comportamentos estimulo-resposta.
¢ Versão inicial das arquiteturas reativas: um sensor por comportamento.
¢ Subsumption : to include or place within something larger or more comprehensive : encompass as a subordinate or component element (Merriam-Webster’s)
Paradigma Reativo¢ Arquitetura Subsumption
� Sua fama decorre do fato que comportamentos muito naturais foram produzidos pela arquitetura.
� Os robôs que usaram esta arquitetura foram os primeiros a andar, evitar colisões, escalar sem as pausas “move-pensa-move-pensa” do Shakey.

Paradigma Reativo¢ Arquitetura Subsumption
� Os módulos são agrupados em camadas de competência que reflete uma hierarquica de inteligência.
� Os módulos das camadas mais altas podem inibir ou substituir a saída dos comportamentos das camadas imediatamente mais baixa.
� Não possui representação do mundo.
� Uma tarefa é executada ativando a camada apropriada.

Paradigma Reativo¢ Arquitetura Subsumption - Exemplo
� Nível 0
Figuras extraídas de [1]

Paradigma Reativo¢ Arquitetura Subsumption - Exemplo
� Nível 1

Paradigma Reativo¢ Arquitetura Subsumption
� A combinação da saída produzida pelo nível mais alto com a produzida pelo nível mais baixo pode ser feita de suas maneiras:
¢ Inibição : a saída do nível mais alto inibe a propagação da saída do nível mais baixo. Ou seja, o nível mais baixo pode ter sua saída propagada ou não.
¢ Substituição : a saída do nível mais baixo é diretamente substituída pela saída do nível mais alto. Isto acontece apenas quando o nível mais alto produz uma saída, caso contrário, o que vale é a saída de nível mais baixo.
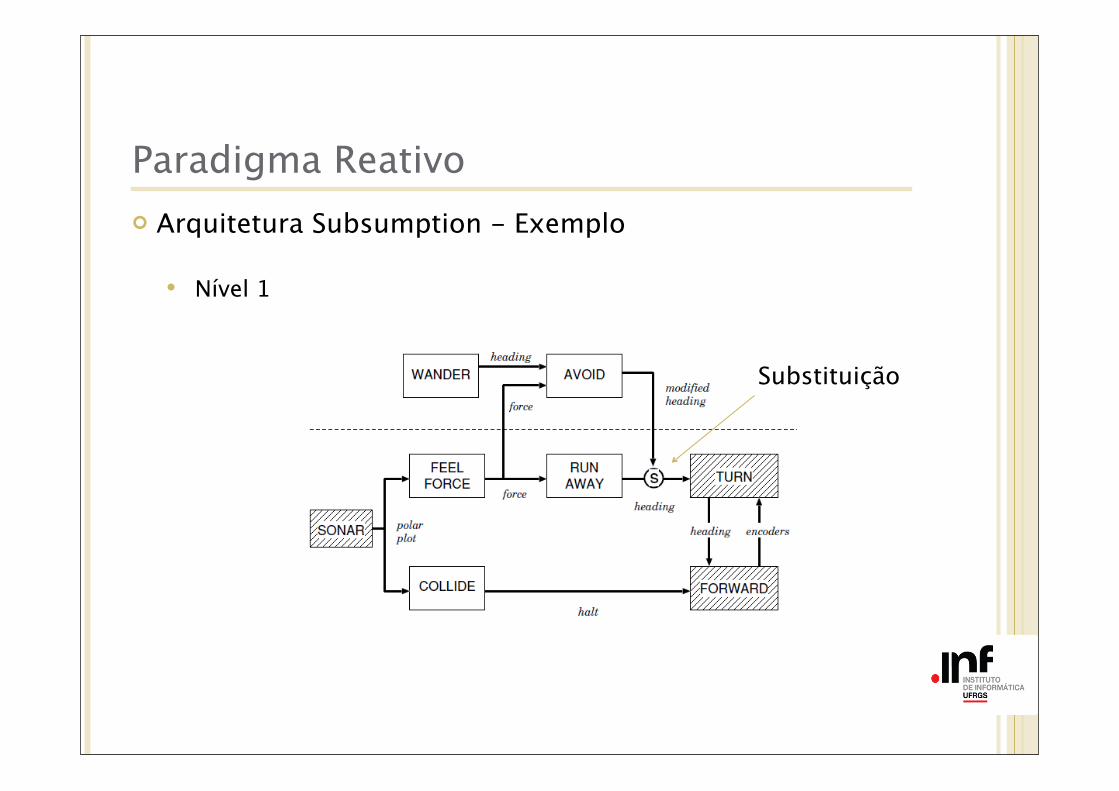
Paradigma Reativo¢ Arquitetura Subsumption - Exemplo
� Nível 1
Substituição

Paradigma Reativo¢ Arquitetura Subsumption - Exemplo
� Nível 2
Paradigma Híbrido¢ Por volta do inicio de 1990, a tendência era desenvolver
sistemas inteligentes usando o paradigma reativo.
¢ Usando este paradigma, os robô poderiam operar em tempo real usando processadores baratos.
¢ O principal problema com este paradigma era também o motivo de seu sucesso.
¢ A eliminação da capacidade de planejamento ou memorização fazia com que o robô não fosse capaz de planejar trajetórias ótimas, construir mapas, monitorar seu desempenho, etc.

Paradigma Híbrido¢ O robô realiza o planejamento decompondo uma tarefa
em sub-tarefas.
¢ Define os comportamentos a serem realizados em cada sub-tarefa.
¢ Então os comportamentos são executados como no paradigma reativo.
¢ As observações feitas pelos sensores do robô podem ser usada para atualizar o modelo do mundo.

Paradigma Híbrido¢Tenta unir as melhores características dos
paradigmas anteriores : � Capacidade de planejamento a médio e longo
prazo.
� Resposta em tempo real aos estímulos externos.

Paradigma Híbrido
Figura Extraída de [1]
ParteDeliberativa
ParteReativa

Paradigma Híbrido¢ Em geral, as arquiteturas híbridas possuem os seguintes
módulos:� Sequencer – gera um conjunto de comportamentos para realizar
uma dada sub-tarefa;
� Resource Manager – aloca recursos para os comportamentos.
� Cartographer – responsável por criar, armazenar e gerenciar mapas ou informações espaciais.
� Mission Planner – gerencia a comunição entre o robô e o ser humano.
� Performance monitoring and problem solving – permite ao robô saber seu progresso durante a realização de uma dada tarefa.
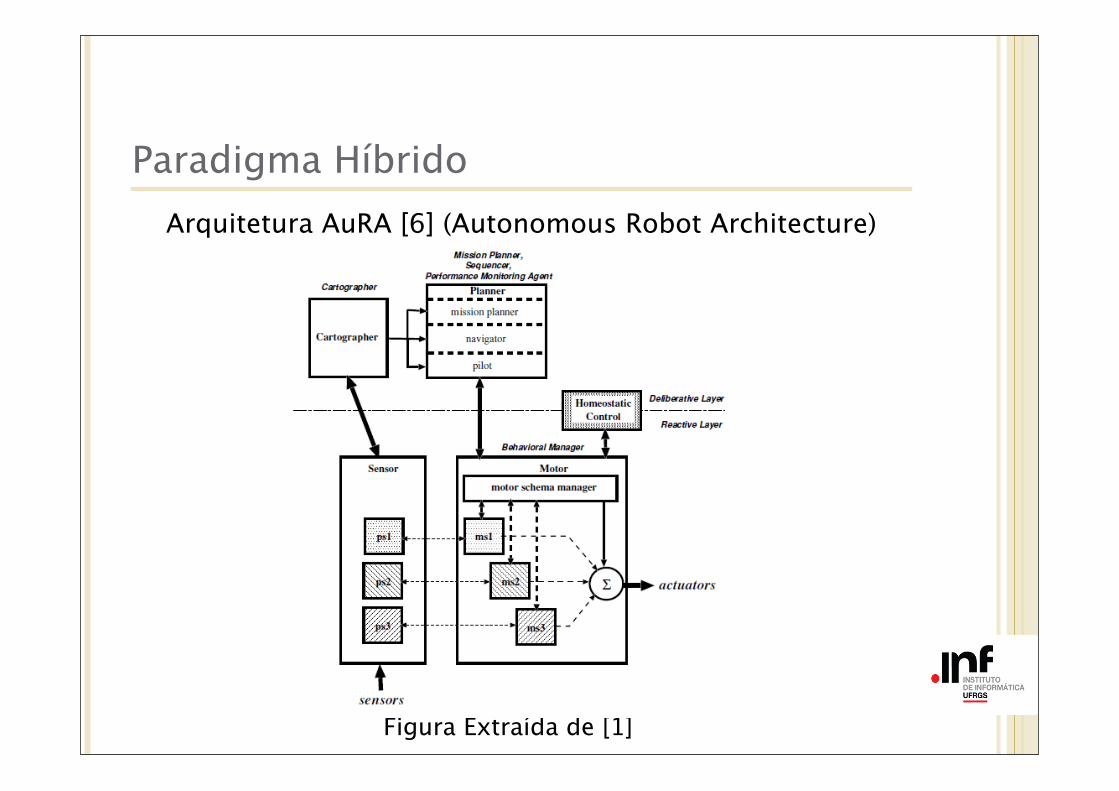
Paradigma HíbridoArquitetura AuRA [6] (Autonomous Robot Architecture)
Figura Extraída de [1]

Paradigma Híbrido¢ No caso da arquitetura AuRA
� Sequencer – Navigator, Pilot;
� Resource Manager – Motor Schema Manager.
� Cartographer – Cartographer.
� Mission Planner – Mission Planner.
� Performance monitoring and problem solving – Pilot, Navigator, Mission Planner.

Introdução¢ Exemplos de Arquiteturas
� Deliberativas ¢ SOAR [8], NASREM [7], etc.
� Reativas¢ Subsumption [4,5], Desai and Miller [15] , Ranganathan and
Koening[17].
� Híbridas¢ Bayouth, Nourbakhsh and Thorpe[10], Chan and Yow[11], e
Atlantis [12].
Introdução¢ [1] R. Murphy. Introduction to AI Robotics, MIT Press, 2000.
¢ [2] R. Murphy and D. Woods. Beyond Asimov: The Three Laws of Responsible Robotics. EEE Intelligent Systems, vol. 24, no. 4, pp. 14-20, July/Aug. 2009.
¢ [3]_. “Who's Proposing Ethical Guidelines for robots?” http://spectrum.ieee.org/blog/robotics/robotics-software/automaton/whos-proposing-ethical-guidelines-for-robots.
¢ [4] R. Brooks. A robust layered control system for a mobile robot. IEEE Journal of Robotics and Automation, 2(1):14–23, March 1986.
¢ [5] R. Brooks. Intelligence without representation. Artificial Intelligence Journal, 47:139–159, 1991.
¢ [6] R. Arkin. Motor schema-based mobile robot navigation. International Journal of Robotics Research, 4(8):92–112, 1989.

Introdução¢ [7] J.S. Albus, R. Lumia, J. Fiala, and Al Wavering. NASREM: The NASA/NBS Standard Reference
Model for Telerobot Control System Architecture. Proceedings of 20th International Symposium on Industrial Robots, Tokio, Japan, October 1989.
¢ [8] J.E. Laird, A. Newell, and P.S. Rosenbloom. Soar: An architecture for general intelligence. Artificial Intelligence, 33(1):1–64, 1987.
¢ [9] R. Ullrich. Robótica : Uma Introdução ( O porquê dos robôs e seu papel no trabalho. Editora Campus, 1987.
¢ [10] Bayouth, M. Nourbakhsh, I., Thorpe, C. A Hybrid Human-Computer Autonomous Vehicle Architecture. Third ECPD International Conference on Advanced Robotics, Intelligent Automation and Control, 1997
¢ [11] Chan, J. Yow, K. A Strategy-driven Framework for Multi-Robot Cooperation System. In Control Automation Robotics and Vision -ICARV’06 9th International Conference on, pages 1–6, 2006.
¢ [12] Gat, E. Integrating planning and reacting in a heterogeneous asynchronous architecture for controlling real-world mobile robots. AAAI, pages 809–815, 1992.

Introdução¢ [13] Russell, S. Norvig, P. Artificial Intelligence – A Modern Approach. Prentice Hall
International, 1995.
¢ [14] Pettersson, L. Control system architectures for autonomous agents. Technical report, Department of Machine Design, KTH, 1997.
¢ [15] Desai, R., Miller, D. A Simple Reactive Architecture for Robust Robots. IEEE International Conference on Robotics and Automation, 1998.
¢ [16] Shaw, M., Garlan, D. Software Architecture, Perspectives on an Emerging Discipline, Prentice Hall 1996.
¢ [17] Ranganathan, A., Koenig, S. A Reactive Robot Architecture with Planning on Demand. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2003.