introduÇÃo À estereologia - aulas na uenfaulas.e-agps.info/estereologia/estereologia.pdf · o...
TRANSCRIPT

CURSO DE
INTRODUÇÃO
À
ESTEREOLOGIA
PPGECM
ANGELUS G. P. DA SILVA
MARÇO/2007

INTRODUÇÃO
À
ESTEREOLOGIA
PROF. ANGELUS G.P. DA SILVA
PROGRAMA DE PÓS-GRADUAÇÃO EM ENGENHARIA E CIÊNCIA DOS MATERIAIS
UNIVERSIDADE ESTADUAL DO NORTE
FLUMINENSE
MARÇO DE 2007

ÍNDICE
Capítulo 1- Introdução 1Capítulo 2 – Antecedendo a medição 6
2.2- Estruturas 62.2- Amostragem 82.3- Escolha da amostragem 10
2.3.1- A escolha dos planos de corte 112.3.2- A escolha de linhas de teste 182.3.3- A escolha de pontos 23
2.4- Outras considerações sobre desvios de medição e softwares de medição estereológica
24
Capítulo 3- Fração volumétrica 313.1- Fração de pontos 313.2- Fração linear 323.3- Fração de área 33
Capítulo 4- Cálculo de superfície 36Superfícies internas de espessura finita 39Interfaces de partículas dispersas em uma matriz 39Equação de Tomkeief para objetos tridimensionais 41Método de Saltikov para determinação da área superficial
específica de partículas
42Capítulo 5- Medidas de comprimento 44
5.1- Comprimento de linhas em planos 445.2- Perímetro de curvas fechadas em planos 475.3- Comprimento de linhas no espaço tridimensional 495.4- Livre caminho médio em estrutura bifásica dispersa 50
Capítulo 6- Relações gerais para corpos convexos 546.1- Considerações preliminares 546.2- Definições básicas 546.3- Penetração por linhas de teste 556.4- Penetração por planos 576.5- Relação entre área transversal média e altura projetada
média
596.6- Relação entre área superficial e área projetada média 606.7- Relação entre área projetada média e intercepto linear
médio 61
Capítulo 7- O problema do unfolding 62Capítulo 8- Contigüidade 65

FUNDAMENTOS DE ESTEREOLOGIA INTRODUÇÃO
1
INTRODUÇÃO As propriedades dos materiais são influenciadas em grande medida por sua estrutura. A estrutura das rochas revela os mecanismos de sua formação. No campo da biologia, a estrutura de células, órgãos e tecidos está intimamente relacionada a sua funcionalidade. É óbvio, pois, o interesse de engenheiros, geólogos e biólogos em investigar e caracterizar as estruturas de seus “objetos” de estudo.
As estruturas são geralmente tridimensionais, opacas ou semitransparentes e microscópicas. Isto representa uma enorme dificuldade de observação. A opacidade impede a visualização de seu interior. Estruturas transparentes permitem a visualização do interior, porém a observação é dificultada pelo ajuste do foco do microscópio. Adicionalmente, a medição de elementos estruturais interiores não é possível ou precisa a partir do exterior.
Estruturas opacas devem ser observadas com uso de seções de corte ou por reconstrução a partir de fatias finas. O primeiro recurso é o mais utilizado. Consiste em secionar a estrutura e prepará-la adequadamente para observação por microscópio. O que se vê é um plano de corte da estrutura, uma imagem bidimensional dos elementos tridimensionais reais da estrutura. O segundo método consiste em fatiar finamente a estrutura e, observando os detalhes bidimensionais de cada lado da fatia, tentar reconstruí-la tridimensionalmente. Esta é uma tarefa árdua, de resultados por vezes insatisfatórios.
Estruturas transparentes podem ser observadas dos modos descritos acima, ou podem ser observadas a partir de um plano de projeção. Isto consiste de iluminar a estrutura em uma determinada direção. A luz que é transmitida através dela, interage diferentemente com os diversos elementos da estrutura, por possuírem transparências distintas. Estes elementos projetam sombras em um anteparo exterior à estrutura. Este é o plano de projeção.
As imagens dos planos de corte e de projeção são as fontes de informação disponíveis para caracterizar a estrutura tridimensional. Uma estrutura qualquer é formada por elementos que podem ser classificados como volumosos, superficiais, lineares ou puntiformes. Quando a estrutura é secionada, os elementos volumosos aparecem no plano de corte como uma área bidimensional. Os elementos superficiais aparecem como uma linha. Os elementos lineares surgem como pontos e os puntiformes aparecem somente se estiverem na região secionada. A dimensão das imagens dos elementos no plano de corte é sempre uma unidade inferior à dimensão real do elemento estrutural.
Quando a estrutura é vista a partir de um plano de projeção, os elementos volumosos projetam uma sombra bidimensional. Os elementos superficiais também projetam uma sombra bidimensional. Os elementos lineares projetam uma sombra também linear e os puntiformes projetam pontos sobre o plano de projeção. As Figuras 1.1 e 1.2 ilustram uma estrutura hipotética contendo os elementos estruturais fundamentais, vistos a partir de um plano de corte e de um plano de projeção, respectivamente.

FUNDAMENTOS DE ESTEREOLOGIA INTRODUÇÃO
2
Os elementos estruturais citados de forma genérica correspondem nos casos reais a grãos (elementos de volume), contornos de grãos ou membranas (elementos superficiais) ou a linhas de discordância (elementos lineares). Deve-se levar em conta que alguns elementos podem ser ou estar aproximados. Por exemplo, inclusões muito finas podem ser consideradas pontos. Membranas finas, que são na verdade elementos de volume, podem ser consideradas elementos superficiais.
a b
Figura 1.1: Estrutura tridimensional sendo secionada (a) e a visualização dos diferentes elementos estruturais em um plano de corte (b).
a b
Figura 1.2: Estrutura tridimensional (a), quando iluminada do topo, produz na face inferior a projeção dos elementos estruturais (b).

FUNDAMENTOS DE ESTEREOLOGIA INTRODUÇÃO
3
A questão que emerge destes modos de observação de estruturas reais é: como caracterizar uma estrutura tridimensional, se somente seus aspectos em duas dimensões são observados, seja em um plano de corte seja em um plano de projeção? A resposta para esta questão é a seguinte: usando uma ferramenta que consiga transformar os aspectos em duas dimensões nos aspectos tridimensionais reais de interesse. Esta ferramenta denomina-se estereologia.
A estereologia pode ainda ser definida como um conjunto de procedimentos baseados em geometria e probabilidade que, a partir de medições ou contagem de elementos estereológicos de uma imagem plana de uma estrutura tridimensional, produz informações sobre características da estrutura original.
As características estruturais que podem ser determinadas pela estereologia são: volumes de certos elementos estruturais (o que pode representar a determinação de composição de materiais ou frações de fases presentes), áreas de elementos superficiais planos ou não, comprimentos de elementos lineares, nível de vizinhança entre fases presentes em uma estrutura (denominada contigüidade) e tamanhos de elementos volumétricos (como grãos), entre outras.
Por ser mais direcionado à engenharia, este curso aborda somente os procedimentos para tratar imagens obtidas de estruturas secionadas.
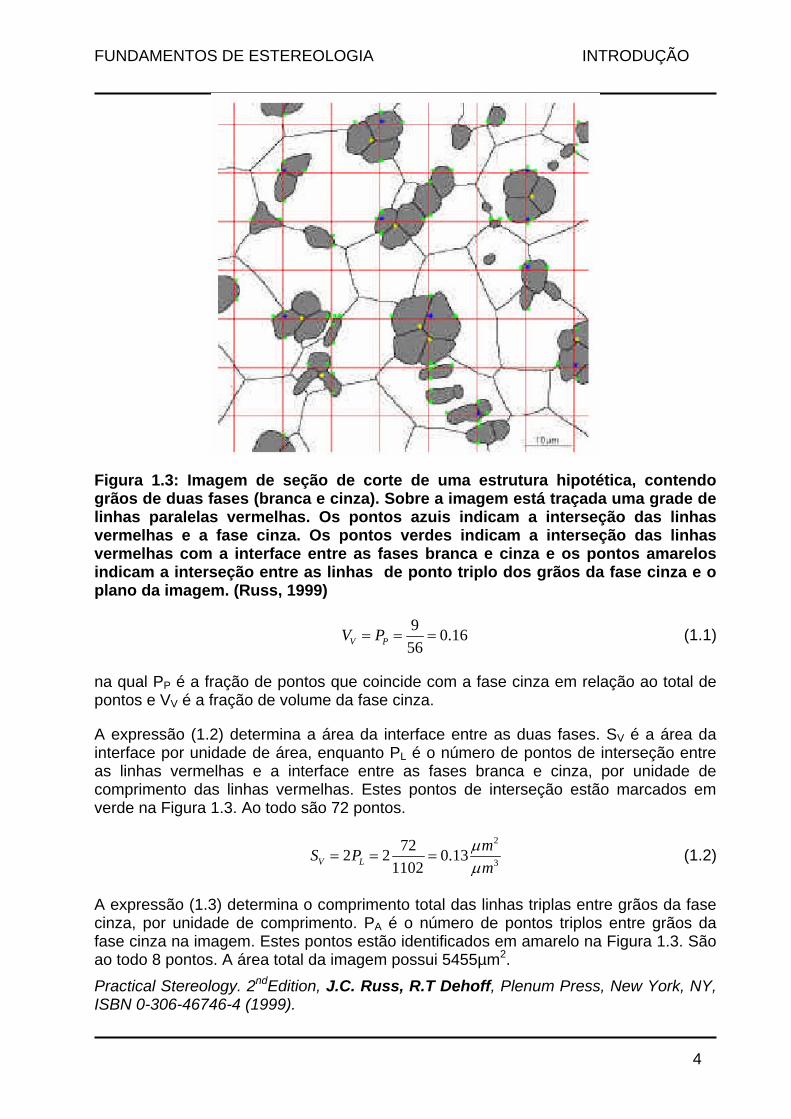
Um exemplo prático de como a estereologia é empregada para caracterizar uma estrutura é mostrado a seguir. A Figura 1.3 exibe a seção de corte de uma estrutura hipotética de um material bifásico. Existe uma fase matriz, de coloração clara, da qual observam-se claramente seus contornos de grão, e uma fase cinza, cujos grãos situam-se tanto nos contornos de grão quanto no interior dos grãos da fase clara. Os grãos a fase cinza encontram-se muitas vezes agrupados. Esta imagem nada mais pe de que uma seção de corte da estrutura real. As seções de cor cinza são seções dos grãos da fase cinza.
Sobre a imagem foi traçada uma malha de linhas vermelhas paralelas. Estas linhas viabilizam a medição. O encontro destas linhas gera 56 pontos. Estes pontos também são usados na medição. O comprimento total das 15 linhas paralelas é de 1106µm. Isto depende da escala em que foi feita a imagem.
A interface entre as fases branca e cinza é uma superfície. A estereologia pode determinar sua área. É possível ainda determinar qual a fração volumétrica que a fase cinza ocupa na estrutura. Em três dimensões, o encontro de três grãos da fase cinza é uma linha. A estereologia permite determinar o comprimento total das linhas de encontro entre conjuntos de três grãos, denominadas linhas de ponto triplo. Os cálculos são surpreendentemente simples.
Contando-se quantos pontos de interseção das retas vermelhas coincidem com a fase cinza, indicados em azul na Figura 1.3, chega-se a 9. A fração volumétrica de uma fase é dada pela expressão (1.1).
FUNDAMENTOS DE ESTEREOLOGIA INTRODUÇÃO
4
Figura 1.3: Imagem de seção de corte de uma estrutura hipotética, contendo grãos de duas fases (branca e cinza). Sobre a imagem está traçada uma grade de linhas paralelas vermelhas. Os pontos azuis indicam a interseção das linhas vermelhas e a fase cinza. Os pontos verdes indicam a interseção das linhas vermelhas com a interface entre as fases branca e cinza e os pontos amarelos indicam a interseção entre as linhas de ponto triplo dos grãos da fase cinza e o plano da imagem. (Russ, 1999)
9 0.1656V PV P= = = (1.1)
na qual PP é a fração de pontos que coincide com a fase cinza em relação ao total de pontos e VV é a fração de volume da fase cinza.
A expressão (1.2) determina a área da interface entre as duas fases. SV é a área da interface por unidade de área, enquanto PL é o número de pontos de interseção entre as linhas vermelhas e a interface entre as fases branca e cinza, por unidade de comprimento das linhas vermelhas. Estes pontos de interseção estão marcados em verde na Figura 1.3. Ao todo são 72 pontos.
2
3
722 2 0.131102V L
mS Pm
μμ
= = = (1.2)
A expressão (1.3) determina o comprimento total das linhas triplas entre grãos da fase cinza, por unidade de comprimento. PA é o número de pontos triplos entre grãos da fase cinza na imagem. Estes pontos estão identificados em amarelo na Figura 1.3. São ao todo 8 pontos. A área total da imagem possui 5455µm2. Practical Stereology. 2ndEdition, J.C. Russ, R.T Dehoff, Plenum Press, New York, NY, ISBN 0-306-46746-4 (1999).

FUNDAMENTOS DE ESTEREOLOGIA INTRODUÇÃO
5
3
82 2 0.00295455V A
mL Pmμμ
= = = (1.3)
A medição estereológica é apenas uma das fases de análise de imagens. Para que ela posa ser realizada, outras etapas devem ser executadas anteriormente. A influência destas etapas na qualidade dos resultados será posteriormente discutida, porém esta influência é cumulativa em respeito às imperfeições. Ou seja, os maus resultados em cada etapa anterior são acumulados, de modo refletir no erro das medições estereológicos. O fluxograma exibido na Figura 1.4 exibe a seqüência de etapas que antecedem a medição estereológica. Estas etapas não serão objeto de estudo deste curso.
Figura 1.4: Fluxograma de etapas de preparação e caracterização de imagens.
AMOSTRA
Preparação Metalográfica, ceramográfica, petrográfica ou biológica
MICROSCÓPIO
Observação e Tipificação da Estrutura
Procedimento de Seleção de Imagens
Regras de Seleção
Registro da Imagem
Armazenamento da imagem
Processamento da Imagem
MEDIÇÃO ESTEREOLÓGICA

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
6
ANTECEDENDO A MEDIÇÃO.
2.1. ESTRUTURAS As estruturas de interesse para a engenharia podem ser classificadas de diversos modos. Com respeito à quantidade de fases presentes podem ser ditas monofásicas ou multifásicas. A Figura 2.1 ilustra uma estrutura monofásica vista em uma seção de corte. Note que os grãos preenchem todo o espaço. Nas multifásicas, o espaço é preenchido por duas ou mais fases. Uma das fases pode ser porosidade. Caso uma das fases esteja presente em pequena quantidade, ela é dita estar dispersa entre as demais. Quanto maior a fração em volume desta fase, maior a probabilidade de seus grãos estarem em contato, como primeiros vizinhos. A conexão entre grãos de mesma fase pode ser caracterizada através de parâmetros estruturais denominados contigüidade e continuidade e está relacionada a propriedades dos materiais, como condutividade elétrica ou resistência à propagação de trincas. A estereologia reconhece as diferenças entre as estruturas mono e multifásicas através de equações específicas. A Figura 2.2 ilustra uma seção de corte de uma estrutura bifásica na qual grãos da fase dispersa estão em contato mútuo.
Figura 2.1: Seção de corte de uma estrutura monofásica. Em uma estrutura bifásica é comum empregar para as fases os nomes de fase dispersa e de fase matriz. A fase matriz, em geral, é a fase presente em maior fração volumétrica, de modo que ela envolve a outra fase, a fase dispersa. Contudo, existem casos em que a fase “envolvente” não é a de maior fração volumétrica. A Figura 2.3 mostra uma seção transversal de uma estrutura de um metal duro contendo 16% em peso de cobalto. Durante a sinterização, uma fase líquida rica em cobalto é formada e envolve as partículas de carbeto. Esta fase une as partículas de carbeto e é denominada de fase ligante. As estruturas podem ainda ser consideradas orientadas ou aleatórias. Isto diz respeito a uma possível orientação espacial de todos ou de alguns elementos presentes na

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
7
estrutura. A Figura 2.4 exibe uma estrutura hipotética monofásica orientada, em que os grãos são alongados e orientados em uma direção definida. Estruturas assim podem ser obtidas por laminação. Os grãos são orientados na direção de laminação. Estruturas orientadas exigem um tratamento estereológico específico. Este tratamento não será apresentado no curso.
Figura 2.2: Plano de corte de uma estrutura bifásica de W-19%pesoCu. Os grãos arredondados (fase mais clara) de tungstênio estão imersos em uma matriz de cobre. Existem grãos de tungstênio isolados pela matriz e grãos que se tocam.
Figura 2.3: Plano de corte da estrutura de uma liga de metal duro WC-16%pesoCo. A fase ligante, rica em Co, envolve os grãos de WC, às vezes como uma fina camada.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
8
Figura 2.4: Plano de corte de uma estrutura monofásica deformada. Na operação, os grãos sofreram alongamento na direção horizontal. As estruturas podem ainda caracterizadas como homogêneas ou como heterogêneas. Nestas últimas, alguma característica estrutural varia espacialmente, configurando um gradiente. A característica que varia pode ser a fração de uma determinada fase da estrutura ou o tamanho de grão, por exemplo. Esta característica pode, mas não necessariamente, variar conforme um certo padrão, como o tamanho de grão que varia conforme um gradiente linear de temperatura ao qual a estrutura possa ter sido submetida. A medição estereológica de estruturas homogêneas é muito mais simples de que a de estruturas heterogêneas, como será visto a seguir. 2.2. AMOSTRAGEM As equações estereológicas podem ser denominadas estatisticamente exatas. Isto porque a dedução destas equações impõe como condição que toda a estrutura seja medida. Isto pressupõe um infinito número de medidas dos elementos estruturais. Nestas condições, o valor medido corresponde ao valor exato do parâmetro estrutural que se está determinando, desconsiderando os erros próprios do ato de medir, como a precisão do instrumento usado na medição.
Na prática, as condições impostas para a dedução nunca são satisfeitas, pois um número finito de elementos estruturais é medido. Isto significa que em situações reais, as medições estereológicas apresentam um desvio do valor real, cuja magnitude depende não apenas do número de elementos estruturais medidos, mas também do procedimento utilizado para determinar as regiões empregadas na medida.
Em um procedimento real de medição, somente os elementos estruturais de uma amostragem retirada da estrutura são medidos e não todos os elementos desta estrutura. Os valores medidos na amostragem representarão os valores da estrutura inteira. Deste modo, é de suma importância para a acurácia da medição que a amostragem sobre a qual são feitas as medidas espelhe o mais fielmente possível as características da estrutura real.
Toda a atenção deve ser dada à escolha da amostragem a ser usada na medida. A este respeito, o seguinte lema deve ser observado: a amostragem deve ser representativa da estrutura e aleatoriamente determinada. Seguir este lema exige de quem está caracterizando a estrutura conhecimento prévio sobre ela. O operador deve

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
9
ter em mente o que deseja caracterizar e usa isto para selecionar as regiões da estrutura das quais será obtida a amostragem. Por exemplo, se o operador deseja investigar propriedades volumétricas, ele deve eliminar as regiões próximas à superfície da estrutura. Em muitos materiais, a estrutura superficial difere por diversas razões da estrutura volumétrica. A dificuldade de se medir estruturas heterogêneas decorre exatamente de se obter amostragens que representem com fidelidade os gradientes presentes.
A escolha da amostragem depende de que tipo de medida deseja-se realizar. A estereologia faz uso de diversas ferramentas (denominadas a partir de agora de ferramentas de medição estereológica ou FME) para medir as imagens das estruturas. Estas ferramentas são pontos, linhas, planos e volumes. Somente os três primeiros serão vistos neste curso. Quando as FMEs são empregadas, elas interagem com os elementos estruturais, gerando elementos ou eventos estereológicos (EE). Por exemplo, um grão, que é um elemento estrutural volumétrico, quando penetrado por uma linha (FME), dá origem a um segmento que é a interseção da linha com o grão. A penetração do grão pela linha é a interação mencionada e o segmento é o elemento estereológico. O mesmo ocorre quando uma linha cruza uma membrana. Um ponto é gerado. Ou quando um plano intercepta um grão. Uma seção deste grão é gerada. A medição dos elementos estereológicos pode ser simplesmente a contagem dos pontos, o comprimento do segmento ou a área da seção do grão.
Dentre todos os procedimentos de medição utilizados pela estereologia, aqueles que lidam com a contagem de elementos são os preferidos seja por medição manual seja por medição automatizada. Isto se deve a maior simplicidade, facilidade de medição, rapidez e menores desvios de medida associados ao método. Por isso, somente os procedimentos estereológicos que utilizam a contagem de elementos serão considerados neste curso. A Figura 2.5 ilustra uma seção transversal de uma estrutura hipotética sobre a qual foram traçados FMEs (pontos e linhas). O plano de corte em si é também uma FME.
Os EEs que podem ser medidos são: i- Número de grãos interceptados pelo plano de corte: 52 ii- Área das seções dos grãos interceptados pelo plano de corte: ? iii- Número de grãos interceptados pelas linhas de teste traçadas sobre a
imagem da estrutura: 47. iv- Número de contornos de seções de grãos interceptados pelas linhas de
teste: 91. v- Comprimento dos segmentos de interseção entre as seções dos grãos e as
linhas de teste: ? vi- Número de pontos traçados sobre as seções dos grãos: 11.
Os valores referentes à contagem de eventos podem ser imediatamente determinados. Erros eventuais destas contagens resultam de desatenção ou de medição não sistemática. Já as medições de comprimento e de área são mais trabalhosas. As medidas de comprimento podem ser feitas manualmente, com o auxílio de uma régua. As fontes de erro associadas à medição de comprimento são mais numerosas e por isso os erros são mais significativos de que aqueles envolvidos em contagem de eventos. As medidas de área necessitam do uso de equipamentos especialistas. Outras fontes de erro estão envolvidas e, novamente, estes erros são mais

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
10
significativos de que aqueles de contagem. Programas de computador especialistas em estereologia podem ser usados para a determinação de comprimentos e áreas. Através deste recurso, as medições de comprimento e de área são muito mais rapidamente feitas, porém outras fontes de erro devem ser consideradas. Este assunto será abordado adiante.
Figura 2.5: Estrutura bifásica hipotética sobre a qual foram traçadas retas e pontos. Estas e o próprio plano de corte são as ferramentas de medição estereológicas que podem ser usadas para medir.
2.3. ESCOLHA DA AMOSTRAGEM As medições estereológicas que serão tratadas aqui, conforme já mencionado, serão feitas sobre a imagem de um plano de corte da estrutura. Sobre esta imagem serão então traçadas linhas de teste ou uma malha de pontos. A primeira preocupação com respeito à amostragem será, portanto, a de se escolher um plano de corte que seja representativo da estrutura e aleatório. A segunda é a de escolher uma imagem deste plano que seja aleatória.
Antes do início da escolha da amostragem, deve-se saber se a estrutura é heterogênea e que parâmetros estruturais serão medidos. Estruturas homogêneas não requerem cuidados especiais, uma vez que todos os planos de corte e todas as regiões de um dado plano de corte são equivalentes. Todavia, a escolha de planos de corte em estruturas heterogêneas é mais complicada. O tipo de parâmetro a ser medido irá determinar o número de imagens usadas na medição.
Existe uma relação entre o desvio de medida e o número de eventos contados para a determinação do parâmetro estrutural. Considere o exemplo em que uma estrutura bifásica, a fração volumétrica de uma das fases, esteja sendo medida por meio da contagem de pontos coincidentes com a dada fase. Se N pontos foram traçados sobre a imagem, mas somente n coincidiram sobre a dada fase, então esta fase ocupa uma fração n/N do volume total da estrutura e o desvio relativo associado a esta medida é

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
11
de nn
. Portanto, se a fase ocupar 25% do volume da estrutura e se 400 pontos forem
desenhados sobre a imagem da estrutura, cerca de 100 coincidirão com a fase medida.
O desvio relativo associado à medição será de 100 0,1100
= . Ou seja, 10% de desvio
relativo.
Para controlar o desvio de medição, é necessário prever o número de EEs a serem usados. Isto determinará o número de planos de corte e de imagens da estrutura que será usado na medida. Não é recomendado aumentar o número de EEs, aumentando a densidade de pontos ou de linhas de teste traçadas sobre a imagem. Isto poderia ser feito, por exemplo, diminuindo a distância entre os pontos traçados. Experimentos mostraram que assim a medição converge mais lentamente ao valor exato do parâmetro sob medida. O ideal é que a distância entre dois pontos seja do tamanho dos grãos da fase cuja fração volumétrica está sendo medida. Dito de uma forma mais geral, que abranja outros EEs, o ideal é que poucos EEs sejam medidos em cada imagem da estrutura, e que muitas imagens sejam usadas na medição.
O número de imagens usadas em uma medição estereológica está diretamente relacionado ao número de planos de corte escolhidos. Sobre isto cabe uma observação de cunho prático. A caracterização estrutural pode ter como objetivo o controle de qualidade de peças em uma linha de produção, bem como pode dar-se para o conhecimento da estrutura de amostras produzidas em um trabalho de pesquisa e desenvolvimento. No primeiro caso, há disponibilidade de amostras suficientes, processadas sob as mesmas condições, para se realizar a medição com um desvio julgado razoável. No segundo caso, é comum que as amostras sejam únicas e pequenas. Isto limita o número de secionamentos da estrutura e assim, o número de seções de corte usadas na medição. Com isto, o desvio de medição tende a ser maior ou pode não ser controlado. Caso a amostra seja única, porém seja grande, é possível dividir a amostra em partes menores e proceder como se cada parte fosse uma amostra diferente.
2.3.1. A Escolha dos Planos de Corte Em estruturas homogêneas, todos os planos de corte são equivalentes. Portanto, para este tipo de estrutura é suficiente secionar a estrutura em planos paralelos.
Em estruturas heterogêneas, outro procedimento deve ser usado. Existem duas formas de se proceder isto. Uma é a escolha puramente aleatória. Outra é a escolha sistemática. Ambas são corretas, mas a segunda forma faz os valores medidos convergirem mais rapidamente para o valor verdadeiro.
A escolha sistemática de planos de corte consiste simplesmente de secionar a amostra em direções que são regularmente espaçadas entre si. Para isto pode-se lançar mão de poliedros regulares. A Figura 2.6 ilustra o cubo (seis faces quadradas), o octaedro (oito faces triangulares), o dodecaedro (doze faces pentagonais) e o icosaedro (vinte faces triangulares). A cada face destes poliedros está associada uma direção que é ortogonal à face. As direções de cada face estão regularmente espaçadas. Como estes poliedros possuem um par de faces paralelas (mesma direção), eles serão secionados ao meio, para eliminar esta duplicidade, e serão assim usados.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
12
a b c d Figura 2.6: poliedros regulares. a) cubo, b) octaedro, c) dodecaedro, d) icosaedro.
A escolha sistemática dos planos de corte pode ser feita como descrito a seguir. Suponha que quatro planos de corte devem ser produzidos. Para tal número de planos de corte, a metade do octaedro será usada. Quatro amostras devem ser usadas (ou uma amostra grande dividida em quatro partes).
Passo 1: Uma direção natural ou característica será apontada na amostra. Esta direção pode ser uma direção de deformação, de um gradiente de temperatura no interior do forno no qual a amostra foi tratada ou de composição, ou simplesmente a direção da gravidade no momento em que a estrutura foi formada. Esta mesma direção será identificada em cada amostra. Veja Figura 2.7.
Figura 2.7: Uma direção é identificada na amostra. Neste caso, a direção vertical, indicada pela haste azul.
Passo 2: Uma amostra é inserida na metade do octaedro. A direção de uma das faces é identificada na amostra. Esta amostra será secionada naquela direção. Veja Figura 2.8.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
13
Figura 2.8: A amostra é inserida no sólido e uma face é aleatoriamente selecionada. A direção perpendicular a esta face indica a direção do corte da amostra. Neste caso, a face lateral direita foi escolhida, conforme indica a haste azul inclinada na direção perpendicular a esta face.
Passo 3: Aquela amostra é secionada em fatias na direção perpendicular àquela identificada no passo anterior. A espessura de cada fatia depende, em princípio, do número de imagens que é necessário para produzir o desvio planejado e, é claro, das facilidades laboratoriais disponíveis. Veja Figura 2.9.
Figura 2.9: A amostra é então secionada em fatias na direção indicada.
Passo 4: Outra amostra é colocada na metade do octaedro, na mesma orientação da anterior e uma face diferente é escolhida.
Passo 5: A segunda amostra é secionada em fatias da mesma espessura do caso anterior. O número de fatias produzidas em cada direção do corte, em geral, é diferente e depende da geometria da amostra.
Passo 6: A terceira amostra é colocada na mesma direção das anteriores, no interior do meio octaedro e uma direção diferente é escolhida. A amostra é depois fatiada naquela
FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
14
direção, tendo as fatias a espessura dos casos anteriores. A última amostra é colocada e o procedimento é repetido.
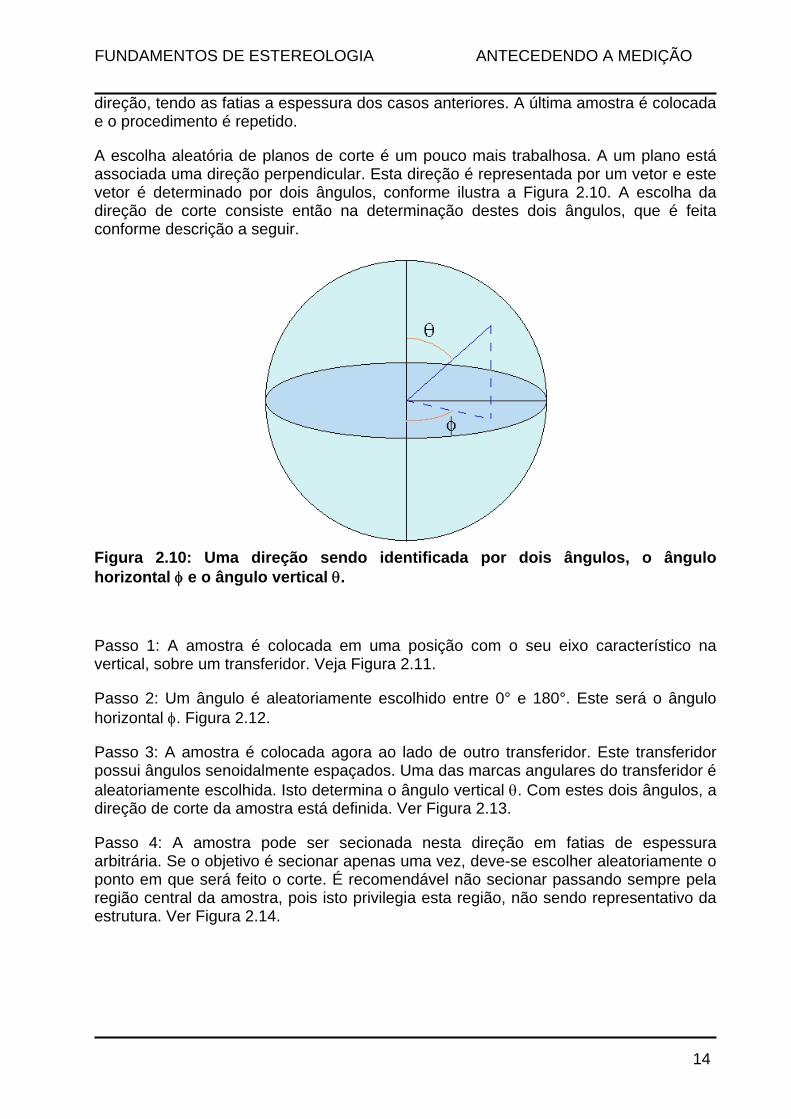
A escolha aleatória de planos de corte é um pouco mais trabalhosa. A um plano está associada uma direção perpendicular. Esta direção é representada por um vetor e este vetor é determinado por dois ângulos, conforme ilustra a Figura 2.10. A escolha da direção de corte consiste então na determinação destes dois ângulos, que é feita conforme descrição a seguir.
Figura 2.10: Uma direção sendo identificada por dois ângulos, o ângulo horizontal φ e o ângulo vertical θ.
Passo 1: A amostra é colocada em uma posição com o seu eixo característico na vertical, sobre um transferidor. Veja Figura 2.11.
Passo 2: Um ângulo é aleatoriamente escolhido entre 0° e 180°. Este será o ângulo horizontal φ. Figura 2.12.
Passo 3: A amostra é colocada agora ao lado de outro transferidor. Este transferidor possui ângulos senoidalmente espaçados. Uma das marcas angulares do transferidor é aleatoriamente escolhida. Isto determina o ângulo vertical θ. Com estes dois ângulos, a direção de corte da amostra está definida. Ver Figura 2.13.
Passo 4: A amostra pode ser secionada nesta direção em fatias de espessura arbitrária. Se o objetivo é secionar apenas uma vez, deve-se escolher aleatoriamente o ponto em que será feito o corte. É recomendável não secionar passando sempre pela região central da amostra, pois isto privilegia esta região, não sendo representativo da estrutura. Ver Figura 2.14.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
15
(a) (b)
Figura 2.11: (a) Amostra com direção característica indicada por haste azul. (b) Vista de topo de amostra sobre um transferidor.
Figura 2.12: Vista de topo de amostra sobre um transferidor. Uma haste lateral identifica uma direção horizontal indicada por um ângulo aleatoriamente sorteado entre 0 e 180º.
Passo 5: Repetindo o mesmo procedimento para outra amostra, tem-se um novo plano de corte aleatório. Lembrar de posicionar sempre a amostra na mesma posição inicial.
O transferidor de ângulos senoidalmente espaçados pode ser obtido gerando-se, por exemplo, noventa números entre 1 e –1, igualmente espaçados, e em seguida determinar o arcseno destes números. Isto gera 90 ângulos senoidalmente espaçados. A Figura 2.15 ilustra um transferidor assim gerado. Note que na proximidade dos pólos, os ângulos são mais espaçados de que próximo ao equador. Isto deve ser assim porque ângulos igualmente espaçados privilegiam as direções mais próximas aos

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
16
pólos. Escolhendo aleatoriamente um número entre 1 e 90 gera um ângulo. Este será o ângulo θ.
Figura 2.13: A amostra é posicionada sobre um transferidor senoidal de modo que sua direção característica coincida com o ângulo zero do transferidor (haste horizontal). Um ângulo é aleatoriamente sorteado para identificar uma direção (indicada pela haste inclinada). A direção correspondente ao ângulo horizontal escolhido no passo anterior é indicada pela haste azul vertical.
Figura 2.14: A amostra é secionada perpendicularmente à direção vertical sorteada. A amostra pode também ser fatiada.
Uma vez determinados os planos de corte, deve-se determinar, nestes planos, as imagens que serão utilizadas para as medidas. Isto é feito sob microscópio (supondo o caso comum em que os traços estruturais são visíveis apenas ao microscópio), após as etapas de lixamento e polimento, e eventual ataque químico. Uma vez que o plano de corte esteja devidamente preparado para observação, a amostra é posicionada no

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
17
microscópio e movida aleatoriamente sem que seja observada. Isto garante que o local em que será registrada a imagem da estrutura é aleatoriamente escolhido. Somente após este local ter sido determinado, é recomendado observá-lo e ajustar o foco para o registro fotográfico. Outras imagens podem ser feitas sobre o mesmo plano de corte, deslocando a amostra lateralmente e/ou verticalmente de distâncias iguais. Desta forma, uma matriz de imagens pode ser produzida de um único plano de corte, como ilustra a Figura 2.16.
Figura 2.15: Transferidor com ângulos senoidalmente espaçados entre –90° e 90°.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
18
Figura 2.16: Uma primeira imagem é feita sobre o plano de corte em um local aleatoriamente escolhido. As demais imagens são feitas deslocando-se a amostra regularmente lateral e verticalmente.
2.3.2. A Escolha de Linhas de Teste Caso linhas de teste devam ser usadas como FMEs, estas devem interceptar a estrutura de modo que qualquer região da estrutura tenha a mesma probabilidade de ser interceptada pelas linhas. Entretanto, tais linhas devem ser traçadas sobre planos de corte.
Se os planos de corte tiverem sido determinados conforme os procedimentos descritos na seção 2.3.1, as linhas de teste traçadas sobre estes planos serão automaticamente também aleatórias. Basta colocar um transferidor sobre a imagem da estrutura e escolher aleatoriamente um ângulo entre 0 e 180°C. Em seguida traçar um feixe de retas paralelas igualmente distanciadas na direção escolhida. Veja Figura 2.17.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
19
Figura 2.17: Feixe de retas paralelas ortogonal a uma direção definida por um ângulo aleatório θ com respeito a um eixo de referência de direção arbitrária (DA).
É possível traçar linhas aleatórias sobre planos não aleatórios. Este procedimento é adequado ao caso em que nenhum EE que requer planos aleatórios é necessário para a medição estereológica em curso. Os passos para isto são descritos a seguir:
Passo 1: A amostra é posicionada com sua direção característica na vertical sobre um transferidor. Um ângulo é aleatoriamente escolhido. Este ângulo dará a direção horizontal do plano de corte. Veja Figura 2.18.
Figura 2.18: Vista de topo de amostra colocada sobre um transferidor. A direção característica é vertical e um ângulo é aleatoriamente sorteado, correspondendo à direção apontada pela haste azul inclinada. Passo 2: A amostra é secionada paralelo à direção característica (ângulo vertical de 0°) e também ortogonal à direção horizontal escolhida. A amostra pode ser fatiada ou um

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
20
plano de corte apenas pode ser obtido secionando-se a amostra em um ponto aleatoriamente escolhido ao longo da direção escolhida. Veja Figura 2.19.
Figura 2.19: A amostra é secionada em um plano ortogonal à direção horizontal sorteada. A amostra poderia também ser fatiada. Note que o plano de corte é paralelo à direção característica.
Passo 3: As imagens deste plano de corte podem ser tomadas conforme descrição no final da seção anterior. A direção característica da amostra deve estar identificada em cada imagem. Uma matriz de ciclóides é traçada sobre cada imagem, estando seus eixos paralelos entre si e perpendicular à direção característica. Ver Figura 2.20.
Figura 2.20: Matriz de ciclóides traçada sobre a imagem de um plano de corte. O eixo das ciclóides deve ser ortogonal à direção característica da amostra.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
21
Passo 4: Outra amostra deve ser posicionada da mesma forma que a primeira e um outro ângulo horizontal deve ser escolhido. Esta amostra deve ser secionada como descreve o passo 2. Isto deve ser repetido para tantas amostras quantas necessárias.
Uma ciclóide é a curva descrita por um ponto no contorno de um disco que gira. Esta curva pode ser obtida traçando-se, em um plano cartesiano, os pontos dados pelas seguintes equações paramétricas:
sin( )x R t R tω ω= − 2.1
cos( )y R R tω= − 2.2
em que x e y são as coordenadas do ponto sobre a borda do disco no instante t, R é o raio do disco e ω é a velocidade angular do disco. Para um disco de raio unitário que gira com velocidade angular unitária, a ciclóide correspondente é mostrada na Figura 2.22 para um giro completo. Conectando uma ciclóide a outra e dispondo-as paralelamente, obtêm-se uma matriz de ciclóides, como mostra a Figura 2.23.
Figura 2.22: A ciclóide é uma curva que descreve a trajetória de um ponto desenhado sobre o contorno de um disco que gira. A curva mostrada na ilustra a trajetória ao longo de um giro completo do disco.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
22
Figura 2.23: Matriz de ciclóides. Estas curvas funcionam como linhas de teste em medições estereológicas.
Caso deseje-se traçar retas como linhas de teste e não ciclóides, o procedimento deve ser alterado. Isto é feito porque uma reta é identificada por um vetor paralelo a ela. Tal vetor é definido por dois ângulos, como ilustra a Figura 2.10. O ângulo horizontal pode ser aleatoriamente escolhido com a ajuda de um transferidor comum, mas o ângulo vertical deve ser escolhido com um transferidor de ângulos senoidalmente espaçados. Isto deve ser assim, pois do contrário retas de alta inclinação seriam preferencialmente escolhidas. Neste tipo de transferidor, os ângulos de alta inclinação estão mais distanciados entre si de que os de baixa inclinação, como já mencionado.
O uso de ciclóides elimina este problema, pois esta curva já é “senoidalmente calibrada”. Note que as porções da curva com alta inclinação (próximas da vertical) são bem mais curtas de que as porções de baixa inclinação (próximas da horizontal). Por esta razão, o feixe de ciclóides deve ser disposto com seu eixo ortogonal à direção característica da estrutura. O procedimento é alterado a partir do terceiro passo:
Passo 3 alterado: As imagens deste plano de corte podem ser tomadas conforme descrição no final da seção anterior. A direção característica da amostra deve estar identificada em cada imagem. Cada imagem registrada deve ser colocada sobre um transferidor com ângulos senoidalmente espaçados, como o mostrado na Figura 2.15. Um número entre 0 e 90 é aleatoriamente escolhido. Isto gera o ângulo vertical da reta. Um feixe de retas paralelas é traçado sobre a imagem naquela direção. Assim, as retas traçadas terão o ângulo horizontal do plano de corte e o ângulo vertical indicado pelo transferidor. Veja Figura 2.24. O mesmo deve ser feito para outras amostras.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
23
Figura 2.24: Feixe de retas paralelas traçadas sobre o plano de observação com a ajuda de um transferidor senoidal. O transferidor é posicionado em alinhamento com a direção característica. Um ângulo é aleatoriamente sorteado e o feixe de retas é traçado com a inclinação daquele ângulo. O feixe de retas possui direção aleatória.
2.3.3. A Escolha de Pontos Pontos são os EEs mais fáceis de serem traçados sobre uma estrutura justamente por não possuírem dimensão. Assim, não possuem também orientação, como planos e retas. Para traçar pontos, deve-se apenas atentar para que eles sejam homogeneamente dispersos através da estrutura. Isto pode ser feito da seguinte maneira.
Passo 1: A amostra é secionada em fatias paralelas de espessura arbitrária (dependente apenas do número de imagens necessárias para se obter um desvio de magnitude desejada).
Passo 2: Imagens de cada plano são tomadas conforme já descrito no final da seção 2.3.1 e pontos são traçados sobre estas imagens.
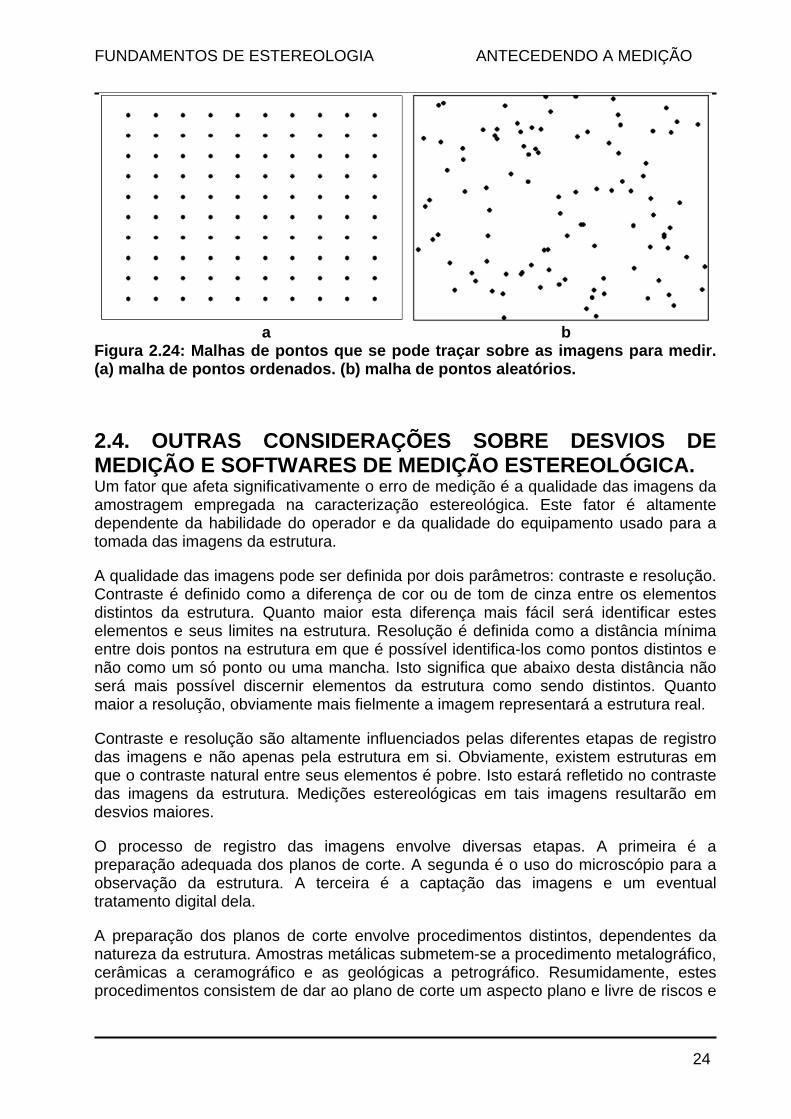
Como já mencionado, é recomendado que a distância média entre os pontos não seja inferior ao tamanho médio dos elementos estruturais que se deseja medir, por exemplo, as seções dos grãos secionados pelo plano de corte. Os pontos podem ser traçados sobre a imagem de duas maneiras: de modo aleatório ou de modo sistemático. As duas maneiras são ilustradas na Figura 2.24. O modo sistemático é preferível, pois o valor medido apresenta menor desvio para um dado número total de pontos traçados. Isto deve-se ao fato de que no método aleatório aparecem pontos tão próximos que coincidem sobre um mesmo elemento estrutural sendo medido.
FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
24
a b Figura 2.24: Malhas de pontos que se pode traçar sobre as imagens para medir. (a) malha de pontos ordenados. (b) malha de pontos aleatórios.
2.4. OUTRAS CONSIDERAÇÕES SOBRE DESVIOS DE MEDIÇÃO E SOFTWARES DE MEDIÇÃO ESTEREOLÓGICA. Um fator que afeta significativamente o erro de medição é a qualidade das imagens da amostragem empregada na caracterização estereológica. Este fator é altamente dependente da habilidade do operador e da qualidade do equipamento usado para a tomada das imagens da estrutura.
A qualidade das imagens pode ser definida por dois parâmetros: contraste e resolução. Contraste é definido como a diferença de cor ou de tom de cinza entre os elementos distintos da estrutura. Quanto maior esta diferença mais fácil será identificar estes elementos e seus limites na estrutura. Resolução é definida como a distância mínima entre dois pontos na estrutura em que é possível identifica-los como pontos distintos e não como um só ponto ou uma mancha. Isto significa que abaixo desta distância não será mais possível discernir elementos da estrutura como sendo distintos. Quanto maior a resolução, obviamente mais fielmente a imagem representará a estrutura real.
Contraste e resolução são altamente influenciados pelas diferentes etapas de registro das imagens e não apenas pela estrutura em si. Obviamente, existem estruturas em que o contraste natural entre seus elementos é pobre. Isto estará refletido no contraste das imagens da estrutura. Medições estereológicas em tais imagens resultarão em desvios maiores.
O processo de registro das imagens envolve diversas etapas. A primeira é a preparação adequada dos planos de corte. A segunda é o uso do microscópio para a observação da estrutura. A terceira é a captação das imagens e um eventual tratamento digital dela.
A preparação dos planos de corte envolve procedimentos distintos, dependentes da natureza da estrutura. Amostras metálicas submetem-se a procedimento metalográfico, cerâmicas a ceramográfico e as geológicas a petrográfico. Resumidamente, estes procedimentos consistem de dar ao plano de corte um aspecto plano e livre de riscos e

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
25
ondulações o máximo possível para que as imagens destes elementos não se confundam com elementos estruturais verdadeiros e para que a intensidade do feixe de luz refletida seja aumentada, no caso específico do uso de microscopia ótica. As diferenças entre os procedimentos metalográfico, ceramográfico e petrográfico referem-se aos materiais, equipamentos e tempos usados para lixamento e polimento dos planos de corte. A preparação de amostras biológicas segue um procedimento completamente diferente. A descrição da preparação das amostras não é o escopo deste curso.
Em muitos materiais, a superfície polida deve ser quimicamente atacada e/ou sofrer um tratamento térmico. Isto é feito com o objetivo de aumentar o contraste entre diferentes elementos estruturais. Por exemplo, o nital (solução de ácido nítrico e álcool etílico) é um reagente usado em aços. Seu efeito é revelar os contornos de grão e os grãos perlíticos. Os contornos de grão são revelados por serem mais reativos. Então, eles reagem mais rapidamente com o agente químico, originando um baixo relevo na superfície. Isto facilita sua visualização ao microscópio. Assim, os limites entre grãos vizinhos de uma mesma fase podem ser identificados.
A boa preparação do plano de corte é uma condição necessária, mas não suficiente, para o registro de imagens de boa qualidade. Dito de outro modo: a má preparação do plano de corte, em geral, compromete definitivamente a qualidade da imagem. Procedimentos posteriores raramente conseguem revelar elementos estruturais não mostrados devido à má preparação, ou recuperar distorções de elementos estruturais introduzidas durante a preparação ou ainda eliminar totalmente elementos que não pertencem à estrutura real. O sucesso da boa preparação é resultado da disponibilidade de equipamentos adequados ao trabalho, da existência de uma rotina de preparação específica para o material sendo trabalhado e da experiência de quem prepara a amostra. Os recursos que possui o microscópio usado para a observação do plano de corte preparado e a habilidade com a qual é manejado são outros fatores que definem a qualidade da imagem produzida. Recursos tais como ampliação usada na observação, intensidade de iluminação, ajuste fino de foco, uso de luz polarizada, campo escuro são opções e/ou cuidados a serem tomados para aumentar a qualidade das imagens.
O equipamento usado para registrar a imagem é outro fator a ser considerado. O caso mais comum é registrar a imagem e depois executar o procedimento de medição. Em casos menos comuns, a medição é feita diretamente ao microscópio. Isto exige um aparato adicional conectado ao microscópio. Este método, porém, não permite a posterior repetição da medição.
Os equipamentos mais comumente usados para o registro das imagens são a câmera fotográfica com filme de celulóide e a câmera digital. As do último tipo estão sendo cada vez mais usadas, pois geram imagens em formato que pode ser usado em computadores e podem receber tratamento posterior em programas de edição de imagens. Entretanto, a resolução de tais equipamentos ainda não é comparável àquela das câmeras de filme de celulóide.
Em algumas ocasiões, as imagens são registradas por uma câmera de celulóide, são impressas em papel fotográfico e são então convertidas ao formato digital por meio de

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
26
um scanner. Este procedimento é equivalente ao registro diretamente por câmera digital e vem acompanhado de perda de qualidade de imagem.
Não é raro que antes de se proceder a medição, as imagens sofram um retoque em programas de edição de imagens. Os objetivos de tais tratamentos são: tentar eliminar traços das imagens sabidamente não pertencentes à estrutura, aumentar o contraste entre os elementos estruturais, reforçar traços estruturais não muito nítidos, eliminar gradientes de luminosidade na imagem, etc. É importante salientar que qualquer intervenção que se faça sobre a imagem, não importando com qual objetivo, alterará traços verdadeiros da estrutura que foram registrados sobre a imagem. E isto resultará em desvio do valor medido. Deve-se, portanto, considerar a razão custo/benefício dessas intervenções. A Figura 2.25 esquematiza as opções de registro e tratamento de imagens.
Figura 2.25: O registro da imagem para medição pode ser feito de várias formas diferentes.
Considerando que as imagens da amostragem foram feitas e estão com qualidade aceitável, a medição pode ser realizada. A medição estereológica pode ser executada manualmente, automaticamente ou de modo semi-automático. No primeiro modo, todo o trabalho é realizado pelo operador. Ele traça as FMEs sobre as imagens e procede a contagem de EEs, a medição de comprimentos e de áreas que forem necessárias. É neste modo de medição que os procedimentos de contagem de eventos mostram sua vantagem sobre aqueles que envolvem medidas de comprimento e de área. Medições manuais podem durar horas de trabalho contínuo.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
27
A medição automática envolve a utilização de programas de computador que realizam todo o procedimento de medida (contagem, comprimento e área) sem a assistência do operador, que apenas indica que medições serão feitas em quais imagens. O programa realiza as medidas e fornece um relatório com os resultados estatisticamente tratados. Os programas mais modernos e robustos trazem embutidos recursos de edição de imagens. Assim, as imagens podem ser trabalhadas também por rotinas automáticas e logo em seguida medidas pelo mesmo programa. Dezenas de imagens podem ser tratadas e medidas em questão de segundos. No entanto, nem tudo funciona maravilhosamente como as sentenças anteriores induzem a pensar. O ponto fraco destes programas é o reconhecimento dos elementos estruturais e dos elementos estereológicos a serem medidos. Com respeito a isto, o olho humano é muito superior aos algoritmos de reconhecimento empregados pelos programas de computador.
O desempenho dos programas de medição estereológica é altamente dependente da qualidade e da complexidade da estrutura. Suponha que um determinado programa está sendo empregado para a determinação da quantidade de uma certa fase em uma estrutura multifásica, através da contagem de pontos coincidentes com a fase cuja fração se quer determinar. O programa deve reconhecer perfeitamente toda a extensão e os contornos daquela fase para que pontos traçados sobre ela possam ser corretamente contabilizados.
a b Figura 2.26: (a) Imagem de microscopia eletrônica (modo ERE) de uma estrutura de metal duro. (b) Zoom de uma interface carbeto/metal/carbeto. Nota-se que os grãos de carbeto apresentam diversas tonalidades de cinza e que a fronteira da camada de metal ligante não está nitidamente identificada.
Os algoritmos de reconhecimento baseiam-se principalmente nas características dos pixels de um dado elemento estrutural. Pixels de características semelhante são associados a um tipo de elemento estrutural. Caso elementos diferentes possuam pixels de características parecidas, estes elementos podem ser reconhecidos como elementos idênticos, provocando erros de medição. Estruturas naturalmente complexas e/ou mal preparadas apresentam elementos estruturais de aparência semelhante. Isto

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
28
confunde o programa. A Figura 2.26(a) exibe a estrutura de uma liga de metal duro, registrada no modo de elétrons retro-espalhados de um microscópio eletrônico de varredura. Os grãos de carbeto de tungstênio (mais claros) estão dispersos em uma matriz rica em cobalto. A Figura 2.26(b) exibe um zoom da mesma estrutura, destacando a interface de dois grãos de carbeto com a fase ligante. Perceba que o tom de cinza dos pixels não varia bruscamente, marcando a fronteira grão/matriz. Ao invés disso, há uma variação gradual. Em que ponto irá o programa reconhecer o contorno de grão?
A Figura 2.27 ilustra a mesma imagem mostrada na Figura 2.26(b), porém com uma alteração. Pixels de vários tons claros de cinza foram coloridos. Caso o programa reconheça a região colorida como os grãos de carbeto, outras regiões que poderiam pertencer aos grãos de carbeto não seriam contabilizadas, resultando em erros.
Figura 2.27: Região ampliada da Fig.2.26(a) que sofreu coloração de pixels de alguns tons de cinza. Um programa que use este algoritmo de reconhecimento trabalha com imprecisões para identificar os limites das fases.
Erros de medição de comprimento e de área também são cometidos por programas de computador. A Figura 2.28(a,b) ilustra ambos os casos. O programa mede a área de uma região multiplicando o número de pixels da região pela área do pixel, que é fixa. E mede o comprimento de uma linha, somando o comprimento das arestas dos pixels que compõem a linha. A Figura 2.28(a) mostra que não é possível ajustar, com pixels retangulares, contornos curvos. Assim, partes da região não terão a área computada, enquanto que partes não pertencentes à região podem ter a área computada como pertencente à região. A Figura 2.28(b) mostra que medindo comprimentos através da soma das arestas resulta em valores maiores de que o real.
Obviamente, a medição manual possui também suas fontes de erro. Porém a maior diferença entre os métodos manual e automático diz respeito à eficiência de reconhecimento dos elementos estruturais. O julgamento humano ainda é superior.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
29
A escolha do procedimento manual ou automático para a execução da medida deve ser resultado da análise da relação custo/benefício. O método automático leva vantagem em rotinas de controle de qualidade em estruturas. Nestes casos, o mesmo tipo de estrutura, de peças fabricadas quase que da mesma maneira, são examinadas. A amostragem segue uma rotina pré-estabelecida. A preparação do plano de corte é feita de um mesmo modo. As imagens são registradas segundo o mesmo procedimento e eventualmente editadas semelhantemente. O resultado é a medição de imagens de qualidade uniforme, de estruturas que possuem praticamente os mesmos elementos. Nestas condições, é possível desenvolver um método de reconhecimento dos elementos estruturais que apresente desempenho comparável ao do olho humano e que este desempenho se mantenha imagem após imagem. Em situações como esta, a medição automática é incomparavelmente superior.
a
b
Figura 2.28: (a) Representação de uma região preenchida por pixels. Os pixels não conseguem preencher os contornos curvos. Multiplicar o número de pixels por sua área não iguala a área da região. (b) Uma reta inclinada representada em nível de pixels. A soma das arestas dos pixels não é igual ao comprimento da reta. É sempre maior.

FUNDAMENTOS DE ESTEREOLOGIA ANTECEDENDO A MEDIÇÃO
30
Por outro lado, quando se trabalha com amostras produzidas em um trabalho de pesquisa e desenvolvimento, tem-se uma situação distinta. Geralmente há poucas amostras e suas estruturas possuem características variáveis. Não compensa o trabalho de otimizar um método de preparação da superfície de corte, de edição das imagens, nem de desenvolvimento de uma rotina de reconhecimento. Para estes casos, a medição manual é mais eficiente.
A medição semi-automática é uma forma híbrida. Ela une a capacidade de reconhecimento do cérebro humano, via ação do operador, com as facilidades de medição da máquina.

FUNDAMENTOS DE ESTEREOLOGIA FRAÇÃO VOLUMÉTRICA
31
FRAÇÃO VOLUMÉTRICA A determinação de frações volumétricas de fases em uma estrutura é a medição mais conhecida e mais fácil de fazer em estereologia. Esta determinação pode ser feita de três maneiras distintas: fração de pontos, fração linear e fração de área. As fórmulas será a seguir demonstradas, e seu uso descrito.
As relações são:
V PV P= (3.1)
V LV L= (3.2)
V AV A= (3.3)
Em que VV→ é a fração volumétrica AA→ é a fração de área LL→ é a fração linear e PP→ é a fração de pontos. Estes parâmetros serão definidos adiante.
3.1- FRAÇÃO DE PONTOS Considere uma estrutura hipotética contida em um volume teste V cúbico de arestas l, como ilustrado na Fig. 3.1. Esta estrutura é bifásica, havendo grãos de fase α (o grão) imerso em uma fase matriz β.
Figura 3.1: fase α, grãos vermelhos, imersos em uma fase matriz. Volume teste cúbico.
Se colocarmos um ponto aleatório em qualquer posição do volume teste, a probabilidade de que este ponto atinja a fase α, P, é dada por (3.4)
FUNDAMENTOS DE ESTEREOLOGIA FRAÇÃO VOLUMÉTRICA
32
VPVα= (3.4)
em que Vα é o volume da fase α.
Se N pontos forem colocados aleatoriamente no volume teste, espera-se que um
número NS deles atinja a fase α, sendo SVN NP NVα= = . Manipulando esta expressão,
chegamos a SN VN V
α= . O lado esquerdo representa a fração dos pontos que coincide
com a fase α, (PP)α, e o lado direito representa a fração volumétrica da fase α, (VV)α. Chega-se, portanto a (3.5).
( ) ( )V PV Pα α= (3.5)
Eliminando a referência à fase α, a expressão equivale a (3.1).
A utilização prática desta expressão é descrita a seguir. Supondo que as imagens da estrutura foram selecionadas de acordo com o procedimento explicado na seção (2.3.3), Uma grade de N pontos regularmente espaçados, ou aleatoriamente determinados, é traçada sobre a imagem. O número de pontos utilizados depende do desvio que se deseja ter. Isto influi no número de imagens a ser feito. Deve-se observar a distância entre os pontos, a qual não deve ser inferior ao tamanho característico da fase α (tamanho de grãos, por exemplo). Uma vez traçada a grade de pontos, procede-se uma contagem de quantos dos pontos traçados estão sobre a fase α. Isto é NS. Dividindo NS pelo número total de pontos, tem-se a fração volumétrica da fase α.
3.2- FRAÇÃO LINEAR Considere a estrutura e o arranjo ilustrados na Fig. 3.2. Seja l a aresta do cubo. Suponha um elemento de volume V l x yδ δ δ= cruzando verticalmente a estrutura,
conforme ilustrado na Fig. 3.2, em posição aleatória no plano X-Y. Seja ( )VVVVα
α = a
fração da fase α na estrutura. Sendo assim, espera-se que o volume da fase α, δVα, contida no elemento de volume δV seja ( )VV V Vα αδ δ= .
Suponha uma reta no interior do elemento de volume paralela a seu eixo principal e localizada no centro de sua base. Se as arestas δx e δy tenderem a zero, o elemento de volume tende à reta. Esta reta pode interceptar grãos da fase α. Seja Lα(x,y) o comprimento da interseção da fase α com a reta localizada no ponto (x,y) do plano de base do volume teste. O volume da fase α contida no elemento de volume é descrita por (3.6)
( , )V L x y x yα αδ δ δ= (3.6)
O volume da fase α pode então ser calculado por (3.7)

FUNDAMENTOS DE ESTEREOLOGIA FRAÇÃO VOLUMÉTRICA
33
1 0
0 0
( , )V L x y dxdyα α= ∫ ∫ (3.7)
O valor médio de Lα(x,y) é dado por
2 2
1 1( , )b
L L x y dxdy Vl lα α α= =∫∫ (3.8)
Figura 3.2: Volume teste cúbico da estrutura sendo interceptado por elemento de volume vertical dentro da qual há uma reta teste.
Observe que integral dupla é o volume da fase α. Manipulando esta expressão, chega-se a 2V l Lα α= . Dividindo ambos os lados pelo volume do cubo teste, obtêm-se finalmente
23
V L LlV l lα α α= =
O termo da esquerda é a fração volumétrica da fase α e o termo da direita é definido como a fração linear da fase α. Chega-se, portanto, à expressão seguinte, a qual, eliminando-se o índice referente à fase α, torna-se igual à expressão (3.2). ( ) ( )V LV Lα α= (3.9)
Na prática, esta expressão é usada da seguinte maneira: supõe-se inicialmente que as imagens e a grade de linhas paralelas foram selecionadas e traçadas conforme o procedimento descrito na seção 2.3.2. Mede-se o comprimento dos segmentos das retas de teste que interceptaram a fase α. Estes comprimentos são somados, sendo Lα. Divide-se isto pelo comprimento total de todas as retas de teste. Este é o resultado final. A Fig. 3.3 ilustra o procedimento.
3.3. FRAÇÃO DE ÁREA A Fig. 3.4 descreve um volume teste de uma estrutura bifásica sendo interceptada por um elemento de volume na forma de fatia fina de espessura δy. Seja l a aresta do cubo. O volume do elemento é dado por 2V l yδ δ= . Esta fatia contém um plano paralelo à

FUNDAMENTOS DE ESTEREOLOGIA FRAÇÃO VOLUMÉTRICA
34
sua face maior e que passa no centro de sua espessura. Seja ( )VVVVα
α = a fração
volumétrica da fase α na estrutura.
Figura 3.3: segmentos de interseção entre as retas de teste e as seções dos grãos.
Figura 3.4: volume teste sendo interceptado por uma fatia vertical na qual passa um plano paralelo.
O volume da fase α contida no elemento de volume é dado por
2( ) ( )V VV V V V l yα α αδ δ δ= =
Seja Aα(y) uma função que dá o valor da área da fase α que é interceptada pelo elemento de volume que corta o cubo teste na coordenada y, então o volume da fase alfa dentro do cubo teste é

FUNDAMENTOS DE ESTEREOLOGIA FRAÇÃO VOLUMÉTRICA
35
0
( )l
V A y dyα α= ∫ (3.10)
e seu valor médio é dado por
0
1 ( )l
A A y dylα α= ∫ (3.11)
Como a integral corresponde ao volume da fase α, então temos VAlα
α = . Re-
escrevemos esta expressão e dividimos ambos os lados pelo volume teste
V AlAV V Aα α
αα
= =
O lado esquerdo é a fração volumétrica da fase α e o lado direito é a fração de área desta fase. Assim, a expressão toma a forma seguinte, ( ) ( )V AV Aα α= (3.12)
Que é equivalente à expressão (3.3), se retirarmos o índice da fase α.
Na prática esta expressão é aplicada do seguinte modo: supondo que o plano teste e suas imagens foram obtidos segundo o procedimento descrito na seção (2.3.1), emprega-se um programa que meça a área das seções dos grãos da fase α e divide-se este valor pela área da imagem. O resultado é o valor desejado.
Note que dos três métodos equivalentes descritos, o de contagem de pontos é o mais simples, fácil e preciso. Simples porque o procedimento de escolha das imagens e da grade de pontos é o menos complicado de todos. Fácil porque o procedimento envolve apenas a contagem e não medidas de comprimento ou de área. Preciso porque os erros envolvidos em contagem são sempre inferiores aos envolvidos em medidas de comprimento e de área.

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
36
CÁLCULO DE SUPERFÍCIE De modo bastante simples, é possível determinar áreas de superfícies em estruturas. Superfícies podem ser contornos de grãos, interfaces ou membranas.
Considere a Figura 4.1. Trata-se de um volume teste de volume V e de arestas l, dentro do qual há um elemento de superfície de área δA. Suponha que este volume teste seja interceptado por uma reta paralela ao eixo Z, de posição arbitrária no plano X-Y. A probabilidade P1 deste elemento de volume ser interceptado pela reta vertical é dada por
1 2
cosAPl
δ θ= (4.1)
em que o numerador é a área da sombra que o elemento de superfície projeta sobre o plano X-Y e θ é o ângulo entre uma reta perpendicular à reta teste e a linha ortogonal ao elemento de superfície.
Figura 4.1: elemento de superfície inclinado de θ sendo interceptado por reta teste. Se mudarmos a orientação do cubo, preservando a estrutura, o ângulo θ irá mudar. Se procedermos ao mesmo cálculo de P1 para diversas orientações do cubo teste, a probabilidade de a reta interceptar o elemento de superfície na j-ésima posição é dada por
1 2
cos jj AP
lδ θ
= (4.2)
Se calcularmos a probabilidade média para todas as orientações, encontramos

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
37
1 2 2
coscosj
j
A APl l
δ θ δ θ= = (4.3)
mas 1cos2jθ = , logo a expressão (4.3) torna-se
1 2
12
APlδ
= (4.4)
Suponha agora que uma superfície de área A está inserida no volume de teste. Dividimos a superfície em n segmentos de superfície de mesma área δA. Como a superfície pode ter qualquer forma, podemos mesmo ser descontínua, fechada ou aberta, o vetor perpendicular a cada segmento terá ângulos diferentes com respeito à direção Z. A probabilidade de uma reta de teste interceptar a superfície inteira é dada por
1 1 2 2 21
( )2 2 2
nA A n A AP P n
l l lδ δ
= = = =∑ (4.5)
Note que o termo entre parêntesis é a área total da superfície. Agora, se ao invés de uma, traçarmos N retas de teste verticais e paralelas através do cubo de teste, espera-se que um número NC delas intercepte a superfície, que é dado por
1 22A
CNAN NPl
= = (4.6)
Considerando que o comprimento total das N linhas é L Nl= , então multiplicando numerador e denominador do lado direito de (4.6) por l, temos
22 2CNA l L ANl l V
= = (4.7)
Re-escrevendo (4.7), chegamos a 2 CN AL V
= . Definimos AV
como sendo a área de
superfície por unidade de volume da estrutura, SV. Enquanto que CNL
tem um
significado especial. Ele representa o número de vezes que as retas de teste interceptaram a superfície por unidade de comprimento de reta de teste, denotado por PL. Podemos finalmente escrever
2V LS P= (4.8)
Na prática, esta expressão é usada da seguinte maneira: 1. As imagens e as retas de teste são produzidas segundo o procedimento descrito na
seção (2.3.2). 2. Medimos o comprimento total das linhas de teste e contamos o número de vezes
que as linhas de teste interceptam a superfície. Como foi dito, não importa se a

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
38
superfície seja aberta, fechada, contínua ou descontínua. A superfície é vista na imagem como uma linha.
3. Dividimos este número pelo comprimento total das linhas e empregamos em (4.8). Esta será a área por unidade de volume da estrutura.
4. Para determinar a área da superfície basta multiplicar o valor encontrado no item anterior pelo volume de teste.
Figura 4.2: Corte de estrutura contendo dois tipos de superfícies: interface dos grãos e membranas descontínuas (vistas apenas como linhas). As áreas de ambas podem ser determinadas. As retas de teste cortam 24 vezes as interfaces dos grãos e 4 vezes as membranas.
Temos agora que demonstrar que 1cos2jθ = . Para isso considere a Fig. 4.3. Trata-se
de um hemisfério e um eixo vertical. Um anel de “largura” angular dθ está destacado. Qualquer segmento de superfície deste anel terá o vetor perpendicular a ele inclinado em θ com respeito ao eixo vertical. Se dividirmos este hemisfério em segmentos de área igual, vemos que a probabilidade de termos um segmento inclinado com ângulo θ depende da área de cada anel. A área de cada anel varia em função de θ. Sendo assim, a probabilidade de uma reta interceptar um segmento inclinado em θ depende deste ângulo, sendo menor para ângulos menores, ou seja, para segmentos mais próximos do topo do hemisfério.
A probabilidade de termos um segmento com inclinação entre θ e θ+dθ é dada por
2
área do anel (2 )( )( )área do hemisfério 2
rsen rdP d sen dr
π θ θθ θ θ θπ
= = = (4.9)
sendo r o raio do hemisfério. O valor médio de cosθ é, portanto,
2 2
0 0
1cos ( ) cos cos2
P d sen d
π π
θ θ θ θ θ θ θ= = =∫ ∫ (4.10)

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
39
Figura 4.3: Hemisfério com anel de largura angular dθ, posicionado em uma inclinação θ. Sua área varia conforme a inclinação. O número de segmentos de área igual em cada segmento depende da área do respectivo segmento. Superfícies internas de espessura finita. Em muitas ocasiões, o que está sendo tratado como uma superfície possui espessura finita, ou seja, trata-se de fato de um corpo tridimensional. Neste caso, existem duas alternativas.
1- Pode ser interessante considerar o corpo como uma verdadeira superfície. Assim, o tratamento segue aquele descrito no item anterior.
2- Pode ser mais conveniente tratar o corpo como tridimensional. Neste caso, sua superfície passa a ser o dobro maior. Assim, ao contarmos o número de vezes que as retas de teste interceptam a superfície, multiplicamos este valor por dois. Deste modo, consideramos a área das superfícies da frente e de trás.
Interfaces de partículas dispersas em uma matriz Neste ponto, é importante salientar uma diferença entre contagens que podem ser feitas em uma estrutura. Na seção anterior, introduziu-se o parâmetro PL como sendo o número de vezes que retas de teste cruzavam a interface, dividido pelo comprimento da linha de teste. Vamos considerar o caso de uma estrutura binária de partículas de uma fase α imersa em uma matriz, conforme as situações ilustradas na Fig. 4.4. Supomos que estamos contando o número de vezes que a linha teste cruza a interface entre um grão da fase α e a fase matriz. No caso ilustrado em (a), temos que todos os grãos de α estão totalmente dispersos na matriz, além disso, todos os grãos são convexos. A contagem é 6 (pontos azuis). Uma outra forma de contagem é a do número de grãos interceptados pela linha teste, ou ainda o número de interceptos entre os grãos e a linha teste (segmentos vermelhos cheios), por unidade de comprimento, denotado por NL. Esta contagem é 3. Para este caso, temos que 2L LP N= .
No caso visto em (b), vê-se que a linha teste intercepta tangencialmente um dos grãos de α. Quando isto ocorre, o intercepto é contado como ½. Assim, a contagem de intercepto será 4,5. No caso de estarmos contando quantos interceptos foram gerados, situações de tangência são também contadas como ½. Contudo, quando o número de tangentes é muito elevado, a relação 2L LP N= não vale. Nestes casos, PL e NL devem ser contados separadamente, ao invés obtidos a partir do outro.

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
40
Na situação (c), tem-se que existe um grão côncavo. Este tipo de grãos pode ser interceptado pelas retas de teste mais de uma vez. O número de interceptos da reta com a interface é de 8. O número de interceptos é de 4. Note aqui a diferença entre contar grãos e contar interceptos. Para este caso, é válida a relação 2L LP N= .
Na situação (d), tem-se que dois grãos da fase α possuem uma interface comum. Para este caso, a interface comum é contada apenas uma vez. No caso, a contagem é 7, sendo seis de interfaces α-matriz e uma da interface α-α. Já a contagem do número de segmentos de interceptos é 4. Em casos assim, usamos a relação
( ) 2( ) ( )2
L L ML
P PN αα αα
+=
em que (NL)α é a contagem do número de interceptos com a fase α por unidade de comprimento.
Figura 4.4: situações em que se deseja calcular a contagem de segmentos de interceptos e o número de interceptos da linha teste com a interface dos grãos. A situação (e) representa o caso em que se deseja determinar o número de grãos que foram interceptados pelo plano de corte na área delimitada retangular. Os grãos totalmente no interior do retângulo são contados integralmente. Os grãos que são cortados pelo contorno são contados parcialmente (1/2). Assim, o resultado é 4. Digno de observação ainda é a diferenciação entre estruturas do tipo dispersa, como aquelas mostradas na Fig. 4.4 e a estrutura monofásica, conforme ilustrada na Fig. 4.5. Neste tipo de estrutura, os grãos pertencem a uma fase somente. Eles se tocam sem deixar vazios. Para casos assim, L LP N= . Note que cada segmento de intercepto de grão não totalmente incluído no campo é contado como ½.
Figura 4.5: contagem de interceptos em estruturas monofásicas.

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
41
Em casos como aqueles representados por (a) e (c), a expressão (4.8) pode ser re-escrita como
( ) 4( )V LS Nα α= (4.11)
Equação de Tomkeief para objetos tridimensionais. Podemos usar a expressão (4.8) para demonstrar um resultado um resultado interessante que define um comprimento característico de objetos tridimensionais. Primeiramente suponha uma esfera. É intuitivo propor que seu tamanho é o diâmetro. No entanto, quando se trata de geometria não regular, definir um tamanho característico não é nada óbvio. Uma das maneiras de se definir isto é usando o conceito de intercepto linear médio. Suponha um objeto interceptado por um número muito grande de retas aleatoriamente orientadas. Medindo o comprimento do segmento de interseção entre cada reta e o objeto (intercepto linear) e fazendo a média aritmética, tem-se o intercepto linear médio
3 31
1 ( )N
ii
L LN =
= ∑ (4.12)
Em que o índice 3 significa que se trata de um comprimento característico do espaço tridimensional. Esta medição pode ser feita da seguinte maneira: objetos iguais são embutidos em uma resina. Supõe-se que estes objetos estão aleatoriamente orientados no espaço e homogeneamente dispersos na resina. Fazemos um corte nessa estrutura. Os objetos são secionados. Uma grade de retas é traçada sobre o plano de corte. Medimos o comprimento total dos segmentos e dividimos pelo comprimento total das retas de teste. Isto é LL. Contamos o número de segmentos de interceptos lineares e dividimos pelo comprimento total de retas de teste. Isto é NL. O intercepto linear médio é dado por
3L
L
LLN
= (4.13)
As expressões (4.12) e (4.13) são equivalentes, se um número elevado de segmentos aleatoriamente escolhidos é medido.
Sabemos que V LV L= e que ( ) 4( )V LS Nα α= . Substituindo as duas expressões em (4.13), temos
3( ) ( )4( ) ( )
4
V VL
VL V
V VLL SN Sα α
α α
= = = (4.14)
Se for considerada uma única partícula dentro de um volume de teste, tem-se que (VV)α é o próprio volume da partícula e (SV)α é sua superfície. Assim, (4.14) torna-se
3 4VLS
= (4.15)
Isto significa que o intercepto linear médio de uma esfera de raio R é
FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
42
3
3 2
4434
4 3
R
L RR
π
π= =
Considerando agora um conjunto de partículas de diferentes formas e tamanhos, mas todas convexas, a expressão (4.14) continua válida. Dividindo numerador e denominador pelo número de partículas por unidade de volume NV, tem-se
( )3
( )
4 4
V
V
V
V
VN VLS SN
α
α
αα
= = (4.16)
Em que o numerador é o volume médio de partícula e o denominador é a área superficial média das partículas. Esta expressão pode ser rearranjada para determinar a superfície específica média das partículas a partir da medição do intercepto linear médio. Isto dá indicação da reatividade química e da sinterabilidade de um pó.
3
4SV Lα
α
= (4.17)
Método de Saltikov para determinação da área superficial específica de partículas. Saltikov propôs um método para determinar a área superficial específica de um pó ou de grãos de uma fase dispersa. Para o caso de um pó, deve-se embutir uma porção representativa de partículas em uma resina. Prepara-se adequadamente uma seção de corte. Partículas do pó serão secionadas. Para o caso de uma estrutura com grãos dispersos em uma matriz, seciona-se a estrutura e prepara-se o plano de corte adequadamente. Uma grade de linhas é traçada sobre a imagem, como ilustra a Fig. 4.6. Os pontos de encontro entre as linhas de teste formam a grade de pontos. Assim, a grade de retas gera também a grade de pontos. Seja Si a área superficial da i-ésima partícula e Vi seu volume. A área total será a somatória das áreas individuais e o volume total será o somatório dos volumes. Dividindo a área total pelo volume total tem-se a área superficial específica do pó. Dividindo-se agora a área total pelo volume da estrutura, tem-se a área total por unidade de volume. Dividindo-se o volume total das partículas, ou grãos, pelo volume da estrutura, tem-se a fração volumétrica das partículas ou dos grãos dispersos na estrutura.
i
i VT
ii V
T
SS SV
VV VV
= =
∑∑
∑∑
Sabe-se, contudo que 2V LS P= e que V PV P= . Logo, temos finalmente

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
43
2V L
V P
S PV P
= (4.18)
O uso desta expressão é muito simples. Na Fig. 4.5, o número de vezes que as retas de teste cruzam a interface das partículas ou grãos é 10. Dividindo-se isto pelo comprimento total das linhas de teste, obtêm-se PL. O número de pontos da grade que cai dentro das partículas ou grãos é 4. Dividindo-se isto pelo total de pontos da grade de pontos, 6, tem-se PP.
Figura 4.6: ilustração de aplicação do método de Saltikov para determinação da área superficial específica.

FUNDAMENTOS DE ESTEREOLOGIA MEDIDAS DE COMPRIMENTO
44
MEDIDAS DE COMPRIMENTO Existem dois cálculos de comprimento em estruturas que interessam. Um é o do comprimento de linhas em um plano. Este é o caso de se calcular o comprimento de linhas de contorno de grão em uma imagem de plano de corte, ou o de calcular o comprimento de trincas no plano de corte. O outro tipo de cálculo refere-se ao comprimento de uma linha no espaço tridimensional. Um exemplo típico o comprimento de linhas de discordâncias.
5.1- Comprimento de linhas em planos. Suponha um segmento pequeno de uma linha em um plano cartesiano, conforme mostra a Fig. 5.1. De tão pequeno, o segmento é aproximado por um segmento de reta. Suponha também que o quadrado teste é interceptado por uma reta vertical que corta o eixo X em um ponto aleatório. O ângulo de inclinação do segmento em relação à reta vertical é θ.
Figura 5.1: Segmento de comprimento δL é interceptado por uma reta de teste. A inclinação entre o segmento e a reta de teste é de θ. Se o comprimento do segmento é δθ, então sua sombra projetada sobre o eixo X é δLsenθ. Seja l a aresta do quadrado teste, a probabilidade P1 deste segmento ser interceptado pela reta é
1LsenP
lδ θ
= (5.1)
Obviamente, o ângulo de inclinação depende da orientação dada aos eixos cartesianos. Mudando a orientação dos eixos, muda o ângulo de inclinação θ e, por conseguinte a probabilidade P1. Escolhendo um número muito grande de eixos com diferentes orientações, a probabilidade de o segmento ser interceptado pela reta teste para a j-ésima orientação é
1jj Lsen
Pl
δ θ= (5.2)
Como não podemos ficar medindo o ângulo de inclinação de cada segmento de reta com a reta de teste utilizada, é razoável trabalhar com a probabilidade média, ao invés

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
45
de com a probabilidade de cada caso. Assim, para um dado segmento, a probabilidade média dele ser interceptado por uma reta teste é dada por
1j
j
Lsen LP senl l
δ θ δ θ= = (5.3)
Porém, 2jsenθ
π= , então (5.3) torna-se
12 LP
lδ
π= (5.4)
Suponha agora uma linha qualquer, contínua ou descontínua, de comprimento total L. Dividimos esta linha em n segmentos iguais de comprimento δL. A probabilidade PT desta linha ser interceptada pela reta de teste é
11
2 2 ( ) 2n
T ii
L n L LP P nl l lδ δ
π π π=
⎛ ⎞= = = =⎜ ⎟⎝ ⎠
∑ (5.5)
Suponha que temos agora N retas de teste verticais. Espera-se que o número de retas que interceptaram a linha seja
2C T
NLN NPlπ
= = (5.6)
O comprimento total das N retas de teste é TL Nl= . Sendo assim, as igualdades a seguir são válidas
2T
T
LN Nll l A= =
em que AT é a área do quadrado teste. Substituindo a expressão acima em (5.6), temos
2 TC
T
LNAπ
= (5.7)
ou ainda
2
C
T T
NLA L
π= (5.8)
O termo da esquerda é o comprimento da linha por unidade de área teste, enquanto
que a razão C
T
NL
é o número de vezes que a linha foi interceptada pelas linhas de teste
por unidade de linha teste. A expressão (5.8) pode ser re-escrita como
2A LL Pπ
= (5.9)
FUNDAMENTOS DE ESTEREOLOGIA MEDIDAS DE COMPRIMENTO
46
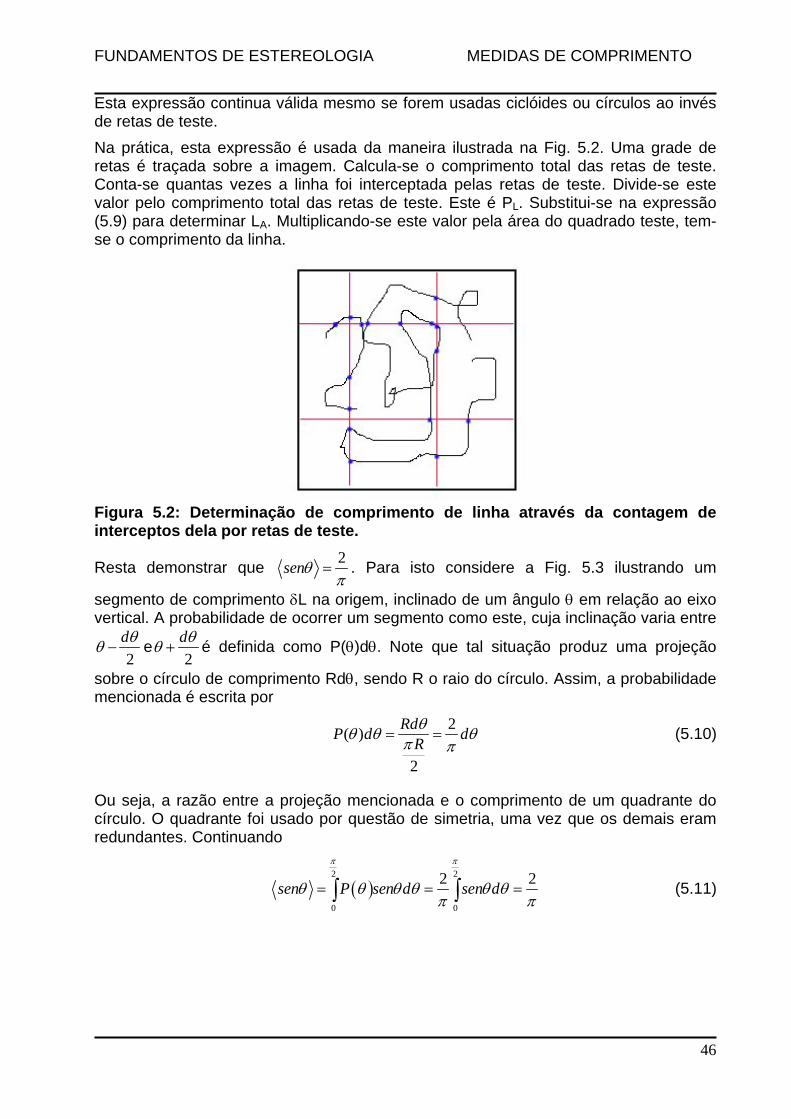
Esta expressão continua válida mesmo se forem usadas ciclóides ou círculos ao invés de retas de teste. Na prática, esta expressão é usada da maneira ilustrada na Fig. 5.2. Uma grade de retas é traçada sobre a imagem. Calcula-se o comprimento total das retas de teste. Conta-se quantas vezes a linha foi interceptada pelas retas de teste. Divide-se este valor pelo comprimento total das retas de teste. Este é PL. Substitui-se na expressão (5.9) para determinar LA. Multiplicando-se este valor pela área do quadrado teste, tem-se o comprimento da linha.
Figura 5.2: Determinação de comprimento de linha através da contagem de interceptos dela por retas de teste.
Resta demonstrar que 2senθπ
= . Para isto considere a Fig. 5.3 ilustrando um
segmento de comprimento δL na origem, inclinado de um ângulo θ em relação ao eixo vertical. A probabilidade de ocorrer um segmento como este, cuja inclinação varia entre
2dθθ − e
2dθθ + é definida como P(θ)dθ. Note que tal situação produz uma projeção
sobre o círculo de comprimento Rdθ, sendo R o raio do círculo. Assim, a probabilidade mencionada é escrita por
2( )
2
RdP d dRθθ θ θπ π
= = (5.10)
Ou seja, a razão entre a projeção mencionada e o comprimento de um quadrante do círculo. O quadrante foi usado por questão de simetria, uma vez que os demais eram redundantes. Continuando
( )2 2
0 0
2 2sen P sen d sen d
π π
θ θ θ θ θ θπ π
= = =∫ ∫ (5.11)

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
47
Figura 5.3: A probabilidade de um segmento ter angulação em certo intervalo é proporcional à projeção deste intervalo angular sobre o perímetro do círculo.
5.2- Perímetro de curvas fechadas em planos. Suponha um grão sendo secionado por um plano teste. Há uma seção dele no plano. Esta seção é uma curva fechada, podendo ser côncava ou convexa. Suponha ainda que esta seção é interceptada por uma reta. Isto dará origem a um segmento de interseção entre a reta e a seção, denominado intercepto linear e representado como L2, em que o índice 2 indica que trata-se de um intercepto obtido de uma seção planar, e não de um intercepto de um grão tridimensional. Utilizando um número muito grande de retas aleatoriamente orientadas que cortam a seção, haverá muitos interceptos lineares. A média aritmética destes interceptos é definido como o intercepto linear médio
2 21
1 ( )N
iL LN
= ∑ (5.12)
Uma forma equivalente de definição e de medição deste intercepto médio é pegar o grande número de seções exatamente iguais aleatoriamente orientadas sobre um plano e traçar sobre elas uma grade de retas de teste. Haverá muitos interceptos entre as retas e as seções. Definindo LL como sendo o comprimento de todos os interceptos por unidade de reta de teste e NL como sendo o número de interceptos por unidade de reta de teste, o intercepto linear médio pode ser definido equivalentemente por
2L
L
LLN
= (5.13)
Sabemos que L AL A= e que 2L
LPN = . A expressão (5.13) pode ser re-escrita como
2 2 A
L
ALP
= (5.14)
Supondo agora que todas as seções são convexas, o perímetro médio das seções é dado por

FUNDAMENTOS DE ESTEREOLOGIA MEDIDAS DE COMPRIMENTO
48
AP
A
LLN
= (5.15)
em que LA é o comprimento total dos perímetros (comprimento de linha) por unidade de área teste e NA é o número de seções (e não de interceptos lineares – por isso a suposição de seções puramente convexas) por unidade de área teste. Utilizando a expressão (5.9), obtemos
2
LP
A
PLN
π= (5.16)
Esta expressão permite o cálculo do perímetro médio de seção através da contagem de pontos e da contagem de seções. Veja na Fig. 5.4 o procedimento ilustrado. Uma grade de retas de teste é traçada sobre as seções convexas existentes em uma área de teste de área conhecida. O comprimento total das retas de teste é medido. Contamos o número de interseções entre o perímetro das seções e as retas de teste dividimos pelo comprimento total das retas de teste. Este é PL. Contamos o número de seções existentes na área teste e dividimos por sua área. Este é NA. Aplicando a expressão (5.16), chega-se ao perímetro médio.
Figura 5.4: Contagens utilizadas para determinação de perímetro médio de seção. Há 16 interseções e 4 seções. A área média de seção é dada por
A
A
AAN
= (5.17)
Em que NA é o número de seções por unidade de área teste e AA é a área de todas as seções dividida pela área do quadrado teste. Substituindo (5.16) e (5.17) em (5.14), obtemos
2 2 2A
PA P
AN ALLN L
π
π
= = (5.18)
Esta expressão relaciona o intercepto linear médio, o perímetro médio e a área média de seção. Ela é equivalente é duas dimensões à expressão (4.14) em três dimensões.

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
49
Para uma única seção, a área média é a área da própria seção e o perímetro médio é o perímetro da própria seção. Portanto, temos para uma única seção
2P
ALL
π= (5.19)
Esta expressão pode ser empregada no espaço tridimensional, caso uma condição especial seja atendida. Isto significa que a expressão pode relacionar o perímetro de seção de grão, que é um parâmetro bidimensional, a um parâmetro tridimensional. Se existem muitas seções de grãos no plano de corte examinado, então a área média de seção no plano de corte converge para a área média de seção dos grãos. Da mesma forma, a medida de intercepto médio nas seções do plano de corte, 2L , converge para o valor do intercepto linear do grão, 3L , possibilitando o uso do perímetro médio de seção e área média de seção, os quais podem ser determinados em seções de corte por softwares analisadores, ao intercepto linear médio do grão.
Para uma estrutura monofásica, tem-se que L LP N= e 1L AL A= = . Supondo que todos os grãos são convexos, a expressão (5.13) torna-se
21 1
L L
LP N
= = (5.20)
e a expressão (5.17) torna-se
1
A
AN
= (5.21)
Considerando a expressão (5.9) que dá o comprimento de uma linha e lembrando que em uma estrutura monofásica o perímetro deve ser contado em dobro, pois cada contorno de grãos representa o perímetro de cada grão em contato, o perímetro médio de grão é
2
22 2 1L
AP L
A
PL AL APN L
A
πππ= = = = (5.22)
Ou ainda
2
PLA L
π= (5.23)
5.3- Comprimento de linhas do espaço tridimensional. Suponha um segmento de linha com comprimento δL dentro de um volume de teste cúbico de aresta l. Este segmento está inclinado de um ângulo θ em relação ao eixo Y, como ilustra a Fig. 5.5. O segmento projeta sobre o eixo Y uma sombra de comprimento δLcosθ.

FUNDAMENTOS DE ESTEREOLOGIA MEDIDAS DE COMPRIMENTO
50
Figura 5.5: Segmento de linha interceptado por plano vertical. O segmento faz um ângulo θ com o eixo Y. Um plano paralelo ao plano X-Z corta o cubo de teste cortando o eixo Y em um ponto qualquer. A probabilidade de o segmento ser interceptado pelo plano é dada por
1cosLPl
δ θ= (5.24)
Se mudarmos a direção do cubo de teste, o ângulo de inclinação muda e com isso muda a probabilidade. Como das outras vezes, mudamos a orientação do volume de teste e tiramos a probabilidade média de um plano interceptar o segmento. Ela é dada por
1
cos 1cos2
jj
L L LPl l l
δ θ δ δθ= = = (5.25)
pois, como vimos, o valor médio do cosseno é meio. Suponha agora uma linha e não mais um segmento de linha. Esta linha tem comprimento L e pode ser dividida em n segmentos de comprimento δL. A probabilidade de um plano cortar esta linha é dada por
1
1 1 12 2 2
n
Ti
L n L LPl l lδ δ
=
= = =∑ (5.26)
Se N planos paralelos ao primeiro forem colocados no cubo. Espera-se que um número deles intercepte a linha. Este número é dado por
2 2
2 32 2 2 2T
C TT
ANL NL l L Nl LN NPl l l l V
= = = = = (5.27)
em que AT é a área de todos os N planos de teste e VT é o volume do cubo teste. A expressão (5.27) pode ser rearranjada para
2 C
T T
NLV A
= (5.28)
O termo da esquerda é o comprimento da linha por unidade de volume. O termo da direita é o número de interseções entre os N planos e a linha teste. Contudo, N planos
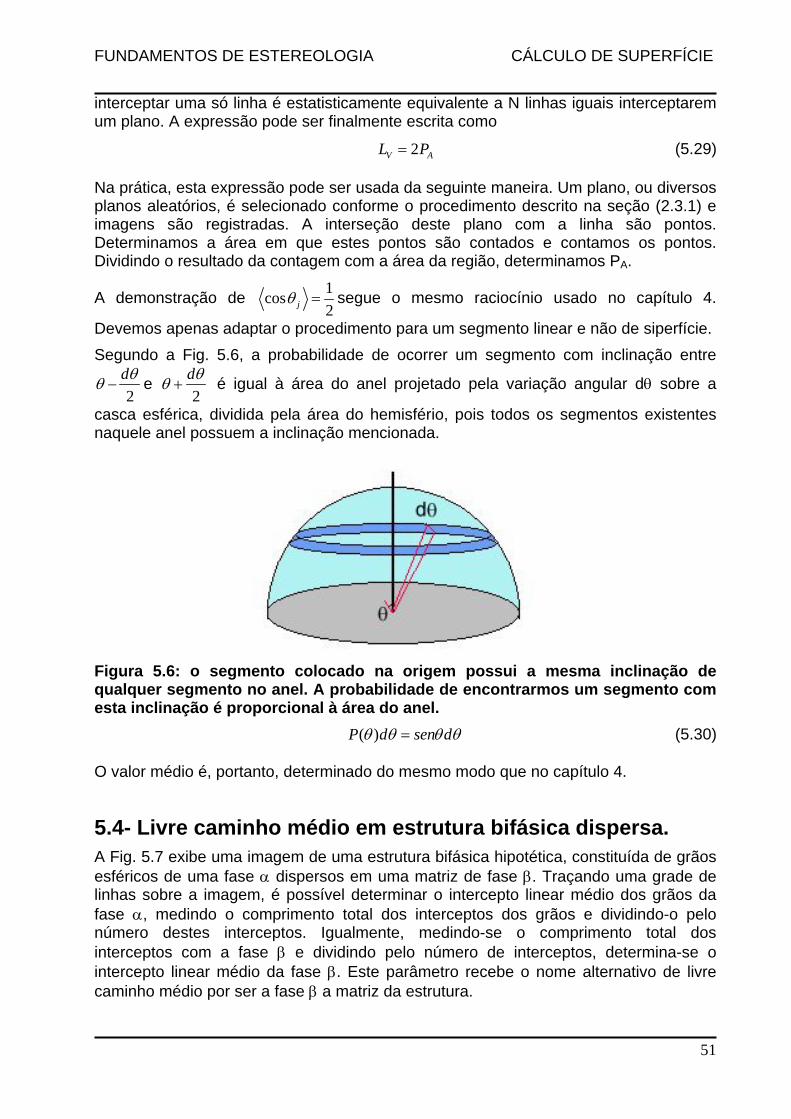
FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
51
interceptar uma só linha é estatisticamente equivalente a N linhas iguais interceptarem um plano. A expressão pode ser finalmente escrita como
2V AL P= (5.29)
Na prática, esta expressão pode ser usada da seguinte maneira. Um plano, ou diversos planos aleatórios, é selecionado conforme o procedimento descrito na seção (2.3.1) e imagens são registradas. A interseção deste plano com a linha são pontos. Determinamos a área em que estes pontos são contados e contamos os pontos. Dividindo o resultado da contagem com a área da região, determinamos PA.
A demonstração de 1cos2jθ = segue o mesmo raciocínio usado no capítulo 4.
Devemos apenas adaptar o procedimento para um segmento linear e não de siperfície. Segundo a Fig. 5.6, a probabilidade de ocorrer um segmento com inclinação entre
2dθθ − e
2dθθ + é igual à área do anel projetado pela variação angular dθ sobre a
casca esférica, dividida pela área do hemisfério, pois todos os segmentos existentes naquele anel possuem a inclinação mencionada.
Figura 5.6: o segmento colocado na origem possui a mesma inclinação de qualquer segmento no anel. A probabilidade de encontrarmos um segmento com esta inclinação é proporcional à área do anel. ( )P d sen dθ θ θ θ= (5.30)
O valor médio é, portanto, determinado do mesmo modo que no capítulo 4.
5.4- Livre caminho médio em estrutura bifásica dispersa. A Fig. 5.7 exibe uma imagem de uma estrutura bifásica hipotética, constituída de grãos esféricos de uma fase α dispersos em uma matriz de fase β. Traçando uma grade de linhas sobre a imagem, é possível determinar o intercepto linear médio dos grãos da fase α, medindo o comprimento total dos interceptos dos grãos e dividindo-o pelo número destes interceptos. Igualmente, medindo-se o comprimento total dos interceptos com a fase β e dividindo pelo número de interceptos, determina-se o intercepto linear médio da fase β. Este parâmetro recebe o nome alternativo de livre caminho médio por ser a fase β a matriz da estrutura.

FUNDAMENTOS DE ESTEREOLOGIA MEDIDAS DE COMPRIMENTO
52
O livre caminho médio ganha um significado especial, pois em alguns materiais compósitos a fase matriz desempenha um papel de aglutinante da fase dispersa, sendo responsável pela condutividade elétrica, ou pela tenacidade do material. Neste último caso, o livre caminho médio está relacionado à dureza e à tenacidade do material.
O livre caminho médio da fase matriz β é definido como
3
( )( )
( )L
L
LL
Nβ
ββ
λ≡ = (5.31)
Porém, ( ) ( )L VL Vβ β= . Considerando ainda que como a estrutura é binária, então ( ) 1 ( )V VV Vβ α= − . Adicionalmente, ( ) ( )L LN Nβ α= , pois sendo a estrutura dispersa, sobre uma linha, grãos e fase matriz estão alternadas. Com isso, a expressão (5.31) torna-se
1 ( )( )
V
L
VN
α
α
λ −= (5.32)
Figura 5.7: Plano de corte de uma estrutura binária constituída de fase matriz e fase dispersa de seções circulares. Sobre a imagem está traçada uma grade de retas de teste com as quais se pode medir o intercepto linear e o livre caminho médio. Ao contrário do que é afirmado por alguns autores de que o livre caminho médio representa um parâmetro bidimensional, ele é um parâmetro tridimensional, pois a definição de livre caminho médio (5.31) é válida em 2D e 3D. Manipulando adequadamente a expressão (5.32)
( )
( )( )( ) ( )3
1 1( )
V V
L L L
V VL
N N Nα α
ααα α
λ σ−
= = − = − (5.33)
Podemos encontrar o significado do termo σ. Veja na Fig. 5.8, uma linha de círculos representando seções médias de grãos. Seja o diâmetro destes grãos 3L e a distância

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
53
entre os contornos de dois grãos próximos λ, então σ pode ser interpretado como a distância média entre os centros de grãos vizinhos.
Figura 5.8: O termo σ significa a distância entre os centros de grãos vizinhos de tamanho característico sendo o intercepto linear médio. O intercepto médio e o livre caminho médio podem ser escritos como na equação (4.14)
( )( )3 4 V
V
VL
Sα
α
= (5.34)
e
( )( )
4 V
V
V
Sβ
β
λ = (5.35)
como ( ) ( )1V VV Vβ α= − e ( ) ( )V VS S
α β= , então (5.35) torna-se
( )
( ) ( )( )( ) ( ) 3
1 44 44 V V
V V V V
V VL
S S S Sα α
α α α α
λ−
= = − = − (5.36)
Porém, ( )
34( )V V
LS Vα α
= . Assim, podemos re-escrever (5.36) finalmente como
( )
( )3
1 V
V
VL
Vα
α
λ⎡ ⎤−
= ⎢ ⎥⎢ ⎥⎣ ⎦
(5.37)
Nesta expressa, nota-se que mantendo a fração volumétrica da fase α constante, aumentando o tamanho dos grãos de α, o livre caminho médio da matriz aumenta. É deste artifício que se vale alguns compósitos de fase dispersa dura para aumentar a tenacidade de um material mantendo inalterada sua composição.

FUNDAMENTOS DE ESTEREOLOGIA CORPOS CONVEXOS
54
RELAÇÕES GERAIS PARA CORPOS CONVEXOS Existe uma série de expressões matemáticas simples que relacionam importantes parâmetros geométricos de corpos convexos de qualquer forma. Em seguida essas relações serão apresentadas e deduzidas. Elas são úteis quando se está trabalhando com grãos convexos e se deseja explorar alguma de suas propriedades geométricas. Estas relações estão limitadas a um corpo só. Elas não são apropriadas para se trabalhar com conjunto de corpos. Algumas delas são úteis de fato apenas se certas propriedades tais como área superficial, volume etc são perfeitamente conhecidas.
6.1- Considerações preliminares. Para a derivação das relações a seguir, alguns pontos descritos a seguir são supostos verdadeiros:
1- A área projetada média calculada tomando todas as orientações possíveis da partícula é igual à área projetada média de muitas partículas de mesma forma e tamanho, aleatoriamente distribuídas no espaço.
2- Um plano ou linha de teste que intercepta um corpo n vezes é estatisticamente equivalente a n planos ou linhas de teste aleatórias interceptando o corpo uma única vez cada.
3- A fração de linhas paralelas e uniformemente espaçadas que interceptam um corpo dentro de um volume teste é igual à razão entre a área projetada do corpo e a do volume teste. A fração de planos paralelos e uniformemente espaçados que interceptam um corpo dentro de um volume teste é igual à razão entre a altura projetada do corpo e do volume teste.
6.2- Definições básicas. Antes de iniciar as demonstrações faz-se necessário uma descrição dos diversos parâmetros geométricos relacionados aos corpos.
1- Volume do corpo, V.
2- Área superficial do corpo convexo, S.
3- Intercepto de um corpo convexo, L3. O segmento formado pela interceptação do corpo convexo por uma reta.
4- Intercepto médio de um corpo convexo, 3L : é calculado tomando-se a média aritmética de uma grande quantidade representativa de interceptos do corpo.
5- Área de seção de um corpo convexo, A. A área da seção formada pelo corte do corpo por um corpo convexo. Esta seção será obrigatoriamente convexa.

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
55
6- Área média de seção de um corpo convexo, A : é calculada tomando-se a média aritmética de uma grande quantidade representativa de áreas de seção do corpo.
7- Área projetada de um corpo convexo, A’. A Fig. 6.1 ilustra o que é a área projetada de um corpo. Iluminando um corpo em dada direção, uma sombra do corpo será projetada naquela direção. A área da sombra é definida como a área projetada do corpo naquela direção. É equivalente à seção de choque do corpo. Obviamente, este parâmetro depende do tamanho e da forma do corpo e da direção tomada.
8- Área projetada média de um corpo convexo, 'A : é a média aritmética das áreas projetadas tomadas em muitas direções estatisticamente representativas de todas as direções possíveis.
9- Altura projetada de um corpo convexo, H’. A Fig. 6.1 também ilustra o significado deste parâmetro. Ele é a altura da sombra projetada do corpo. Portanto também depende da direção. Pode também ser denominada distância efetiva de corte, pois o corpo será necessariamente cortado ao menos uma vez por planos paralelos com distância menor do que essa.
10- Altura projetada média de um corpo convexo, 'H : é a média aritmética das alturas projetadas tomadas em um grande conjunto representativo de direções.
Figura 6.1: Corpo convexo prismático em um volume teste cúbico. Há três projeções do corpo nas três direções principais. A área de cada sombra é a área projetada. Em cada sombra projetada há uma linha indicando a altura projetada do corpo.
6.3- Penetração por linhas de teste. Suponha um corpo convexo no interior de um volume cúbico teste de aresta l. Uma reta de comprimento l intercepta o volume teste na direção Z, mas em um ponto (x,y) aleatório. A probabilidade de ocorre a interceptação do corpo pela reta é dada por

FUNDAMENTOS DE ESTEREOLOGIA CORPOS CONVEXOS
56
1 2
'APl
= (6.1)
em que A’ é a área projetada do corpo naquela direção e o denominador é a área da face do cubo. Se N retas paralelas interceptarem o volume teste em posições (x,y) aleatórias (veja Fig. 6.2), espera-se que um certo número n delas intercepte o corpo
1 2
'An PN Nl
= = (6.2)
Figura 6.2: Conjunto de retas verticais interceptando volume teste no qual existe um corpo convexo. Um número de linhas proporcional à área projetada do corpo na direção Z irá interceptar o corpo. O comprimento total das linhas de teste é
TL Nl= (6.3)
Dividindo (6.2) por (6.3), tem-se
12 3
' ' 'L
T
n A N A A NL Nll l V
= = = = (6.4)
Em que N1L é o número de vezes que o corpo foi interceptado pelas retas por unidade de comprimento das retas.
Suponha que sejam colocados agora no cubo teste ℵ corpos convexos iguais, porém aleatória e independentemente orientados. Cada corpo terá uma área projetada na direção das retas. Os valores das áreas projetadas variam desde um valor mínimo a um valor máximo. Dividindo este intervalo de áreas projetadas em classes, para um corpo com área projetada da i-ésima classe, vale a seguinte expressão para o número de retas que interceptam o corpo
'
1i iL
ANV
= (6.5)

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
57
Supondo que há ℵi partículas com esta classe de área projetada, então o número de vezes que as N retas interceptam essas ℵi partículas por unidade de comprimento é
'
i iL i
ANV
=ℵ (6.6)
Considerando agora todas as classes de área projetada, o número de vezes que as N retas interceptam o conjunto de ℵ partículas é
'
' '1 1
1 ... ...i i iL L i i
AN N A AV V
ℵ ⎡ ⎤= = = ℵ + +ℵ +⎣ ⎦∑ ∑ (6.7)
Dividindo isto pelo número total de partículas ℵ, tem-se
' '
1 1 ... ...1 'i iL A AN AV V⎡ ⎤ℵ + +ℵ +
= =⎢ ⎥ℵ ℵ⎣ ⎦ (6.8)
Pois o termo entre colchetes é a média ponderada da área projetada do corpo, tendo o número de partículas em cada classe de área projetada como peso. A expressão (6.8) pode ainda ser re-escrita como
' 'L VN A AVℵ
= = ℵ (6.9)
Em que NL é o número de vezes que as ℵ partículas são interceptadas por unidade de comprimento, e ℵV é a densidade volumétrica de partículas. Esta expressão relaciona o número de partículas existentes no espaço ao número dessas partículas que são atingidas por uma reta de teste que atravessa este espaço.
6.4- Penetração por planos. Suponha um corpo convexo dentro de um volume teste cúbico de aresta l, conforme mostra a Fig. 6.3. Este volume teste é interceptado por um plano paralelo a X-Y em algum ponto Z aleatório. A probabilidade deste plano interceptar o corpo convexo é dada por
1'HP
l= (6.10)
sendo H’ a altura projetada do corpo na direção Z. Caso N planos paralelos ao mostrado na Fig. 6.3 cortarem o volume, um certo número deles cortará o corpo
1'Hn PN N
l= = (6.11)
A área total dos N planos é 2TA Nl= . Dividindo o número de vezes que o corpo é
interceptado pelos N planos pela área total dos planos, encontra-se
12
' 'A
T
n NH H NA lNl V
= = = (6.12)
Suponha agora que ℵ corpos idênticos, mas aleatoriamente orientados são colocados no cubo. O número de corpos é tal que o universo das orientações possíveis esteja

FUNDAMENTOS DE ESTEREOLOGIA CORPOS CONVEXOS
58
representado. Cada orientação possui uma altura projetada. Haverá uma altura projetada mínima e outra máxima. Este intervalo de alturas projetadas é dividido em classes. Para corpos com a i-ésima classe de altura projetada, a expressão (6.12) passa a ser escrita como
'
1i iA
HNV
= (6.13)
Suponha agora que ℵ corpos idênticos, mas aleatória e independentemente orientados, são colocados no volume teste. Se, destes ℵ corpos idênticos, ℵi tiverem altura projetada na i-ésima classe, então, o número de vezes que estes corpos serão interceptados é
'
i iA i
HNV
=ℵ (6.14)
Figura 6.3: Corpo convexo em um volume teste cúbico sendo interceptado por um plano de corte. A probabilidade disso ocorre é proporcional à altura projetada do corpo na direção ortogonal ao plano de corte.
O número de interceptações com todo o conjunto de prismas será
'
'1iA i i i
HN HV V
= ℵ = ℵ∑ ∑ (6.15)
Dividindo isto pelo total de corpos
'1 'i iA HN H
V Vℵ
= =ℵ ℵ∑ (6.16)
Como o somatório representa a média ponderada da altura projetada, tendo o número de corpos em cada classe de altura projetada como peso, pode-se finalmente escrever
' 'A VN H HVℵ
= = ℵ (6.17)
Esta expressão relaciona o número de corpos existentes no espaço ao número destes corpos que são interceptados pelo plano de corte.

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
59
6.5- Relação entre área transversal média e altura projetada média. Suponha um corpo convexo de volume V e sua altura projetada H’ na direção Z. Para calcular a altura projetada média do corpo, deve-se fazer a média aritmética das alturas projetadas do corpo na direção Z em um conjunto representativo do universo de orientações possíveis.
Suponha o corpo em uma dada posição, sendo sua altura projetada no eixo Z de H’. O corpo é fatiado ortogonalmente ao eixo Z em fatias de espessura δz bem pequena. O volume de cada fatia é dada por
V A zδ δ= (6.18)
sendo A a área da seção transversal daquela fatia correspondente. O volume do corpo é dado por
ii i
V V A zδ δ= =∑ ∑ (6.19)
sendo Ai a área da i-ésima fatia. Esta fatia corresponde a uma coordenada z.
A área transversal média do corpo calculada em uma dada posição j do corpo é
ij
ij
j
AA
N=∑
(6.20)
na qual Nj é o número de fatias em que o corpo foi fatiado na j-ésima posição.
A altura projetada do corpo varia conforme a posição em que ele se encontra. Para um número representativo de posições do corpo, NP, tem-se que a altura projetada média do corpo é
'
'j
j
P
HH
N=∑
(6.21)
Para uma dada posição j, tem-se
'
i i ii i i
j ij j j j
A A z Vz VA
N z N z H H
δ δδδ δ
= = = =∑ ∑ ∑
(6.22)
Considerando agora todas as diferentes e representativas posições do corpo, a área média de seção transversal do corpo pode ser determinada por
j j
j
jj
A NA
N=∑∑
(6.23)

FUNDAMENTOS DE ESTEREOLOGIA CORPOS CONVEXOS
60
Onde o denominador é o número total de fatias (seções consideradas), o que inclui todas as posições j e o número de seções em cada posição, Nj. O somatório do numerador inclui a área média de seção para uma dada posição j e o peso daquela posição no conjunto total das posições. Multiplicando numerador e denominador por δz, tem-se
'
' '
j j j j jj j j
j j jj j j
A N z A H VA
N z H H
δ
δ= = =∑ ∑ ∑∑ ∑ ∑
(6.24)
Mas o volume do corpo independe da posição, então j Pj
V N V=∑ . Substituindo isso em
(6.24), tem-se finalmente que
'
'j
j
P
HV A AH
N= =
∑ (6.25)
6.6- Relação entre área superficial e área projetada média. Suponha um corpo convexo no interior de um cubo teste de aresta l, como o mostrado na Fig. 6.4. Suponha que este corpo é iluminado na direção Z de cima para baixo. Ele projetará uma sombra sobre o plano X-Y. A superfície do corpo é dividida em duas. A parte superior é iluminada. A parte inferior fica na sombra. Se o corpo fosse dividido em duas partes, segundo o critério das superfícies iluminada e sombreada, ambas as porções projetariam a mesma sombra.
Figura 6.4: Corpo convexo projetando uma sombra no plano X-Y. As superfícies superior e inferior do corpo projetam sombras semelhantes.
Se a superfície é dividida em n segmentos de área δSi, então cada segmento projetará sobre o plano X-Y uma área

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
61
' cosi i iA Sδ δ θ= (6.26)
Sendo θi o ângulo entre o eixo Z, de iluminação, e o vetor normal ao segmento δSi. Assim, a seguinte expressão é verdadeira, sendo o fator dois no lado direito referente ao fato de que as superfícies (iluminada e sombreada) projetam sombras (sobrepostas) idênticas (mesma área)
1
cos 2 'n
i ii
S Aδ θ=
=∑ (6.27)
Para aquela direção de iluminação particular. Fazendo o mesmo para muitas diferentes posições, pode-se determinar a área projetada média
1 1 1
12 ' cos cos 2 ' 22
n n n
i i i i ii i i
A S S S A Aδ θ δ θ δ= = =
= = = = =∑ ∑ ∑ (6.28)
A média do cosseno já foi calculada anteriormente (Capítulo 4) e o somatório de δSi é a área total da superfície, então
4 'S A= (6.29)
6.7- Relação entre área projetada média e intercepto linear médio.
Manipulando adequadamente as expressões 4 'S A= e 3 4VLS
= , chega-se a
3'V A L= (6.30)

FUNDAMENTOS DE ESTEREOLOGIA UNFOLDING
62
O PROBLEMA DO UNFOLDING Conforme visto no capítulo anterior, pelas relações (6.9) e (6.17), é possível relacionar o número de grãos existentes no espaço ao número desses grãos que estão presentes em retas traçadas através da estrutura para medidas estereológicas e ao número de grãos presentes em planos de corte que secionam a estrutura para medidas estereológicas. Isto é importante, como mostra o exemplo a seguir.
Suponha que em uma estrutura existem ℵ grãos de mesma forma, mas de volumes distintos. Sejam ' '
1 2e A A as áreas projetadas médias de cada um deles e ' '1 2 e H H suas
alturas projetadas médias. A população de cada tipo de grão é ℵ1 e ℵ2, sendo ℵ1 =ℵ2.
Traçando retas de teste através da estrutura, certa quantidade de grãos será interceptada pelas retas. Esta quantidade é dada pela expressão (6.9). Supondo que
' '1 22A A= , então
1 ' 2 212 2L V LN A N= ℵ = (7.1)
pois 1 2V Vℵ =ℵ . Esta relação significa que a população de grãos do tipo 1 interceptada
pelas retas de teste é o dobro da população de grãos do tipo 2, embora elas sejam iguais no espaço. Alguém que estivesse realizando uma medida estereológica usando linhas de teste e pudesse diferenciar entre os dois tipos de grãos da estrutura poderia erroneamente afirmar que os grãos do tipo 1 são mais numerosos. Em um plano de corte da estrutura, seções de grãos de ambos os tipos estão presentes. Supondo que ' '
1 22H H= , então, segundo (6.17)
1 ' 1 ' 2 21 22 2A V V AN H H N= ℵ = ℵ = (7.2)
Do mesmo modo, vê-se que esta expressão indica a presença maior de grãos de maior altura projetada média no plano de corte. Isto pode conduzir à falsa idéia de que a população daquele tipo de grãos é maior.
Contudo, tendo este detalhe em mente, é possível usar as expressões (6.9) e (6.17) para retirar informações acerca da verdadeira população de grãos da estrutura a partir de contagem de populações feitas com uso de retas de teste e de planos de teste. A este procedimento dá-se o nome de unfolding.
Será demonstrado em seguida o fundamento do procedimento de unfolding a partir de contagem de grãos em linhas de teste.
Suponha que uma estrutura possua uma população de grãos de tamanhos que varia em certo intervalo. Este intervalo de tamanho de grão é dividido em R classes, em que a quantidade de grãos pertencentes a cada classe de tamanho de grão por unidade de volume é dada por { }1 ,..., ,...,i R
V V Vℵ ℵ ℵ .

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
63
Quando uma grade e linhas de teste é traçada através da estrutura, grãos de cada classe de tamanho são interceptados. Para a i-ésima classe de tamanho, a quantidade de grãos interceptados por unidade de comprimento da linha teste é de
'i iL i VN A= ℵ (7.3)
Sendo 'iA a área projetada média dos grãos da i-ésima classe. O número total de grãos
interceptados pelas retas de teste por unidade de comprimento é
'
1 1
R Ri i
L L i Vi i
N N A= =
= = ℵ∑ ∑ (7.4)
Cada encontro entre grão e reta de teste gera um intercepto linear, cujo comprimento varia em determinado intervalo. Este intervalo de interceptos lineares pode ser dividido em S classes. Seja j
LN o número de interceptos lineares da j-ésima classe por unidade de comprimento. Um grão da i-ésima classe de tamanho tem probabilidade Pi,j de produzir um intercepto linear da j-ésima classe. Com isso, o número de interceptos lineares da j-ésima classe por unidade de comprimento produzidos por grãos da i-ésima classe de tamanho é dado por
, ', ,
i j i iL i j L i j i VN P N P A= = ℵ (7.5)
Depois de considerada a expressão (7.3).
O número de interceptos lineares da j-ésima classe por unidade de comprimento pode ser escrito como
, ',
1 1
R Rj i j i
L L i j i Vi i
N N P A= =
= = ℵ∑ ∑ (7.6)
Esta é a expressão básica. Suponha agora que retas são traçadas sobre imagens da estrutura e que os interceptos entre as retas e as seções dos grãos são medidos e, em seguida, classificados. Seja j
LN o número de interceptos lineares da j-ésima classe, então a diferença entre este valor medido experimentalmente e o estimado pela expressão (7.6) é dada por
j jL LN NΔ = − (7.7)
O chi-quadrado é definido como sendo
( )2
22 2 ',
1 1 1 1
S S S Rj j i j
L L i j i V Lj j j i
N N P A Nχ= = = =
⎡ ⎤⎛ ⎞= Δ = − = ℵ −⎢ ⎥⎜ ⎟
⎝ ⎠⎣ ⎦∑ ∑ ∑ ∑ (7.8)
Esta expressão tem que ser minimizada, mantendo como vínculo que os valores iVℵ nunca podem ser negativos. Estes valores correspondem à verdadeira (estimada)
população de grãos da estrutura, determinada a partir da população de grãos interceptados por retas de teste. É possível deduzir expressão equivalente para a população de grãos interceptada por planos de corte.

FUNDAMENTOS DE ESTEREOLOGIA UNFOLDING
64
Resta ainda falar sobre a determinação da probabilidade Pi,j e da área projetada média. Elas devem ser determinadas numericamente.
A probabilidade Pi,j pode ser determinada através de simulação computacional. O grão com a geometria e tamanho desejados é definido e executa-se a interceptações deste grão por N retas aleatoriamente orientadas, sendo N um valor satisfatoriamente elevado. Os interceptos lineares são medidos e classificados. Seja Nj o número de interceptos da j-ésima classe, então a probabilidade de um grãos daquela classe de tamanho produzir um intercepto da j-ésima classe é dada por
,j
i j
NP
N= (7.9)
Repetindo este procedimento para grãos de todas as classes de tamanho, determina-se todos os valores de Pi,j.
A determinação da área projetada é mais complicada. Isto requer o uso de expressões como algumas introduzidas no capítulo 6, envolvendo volume e área superficial de corpos convexos.

FUNDAMENTOS DE ESTEREOLOGIA CÁLCULO DE SUPERFÍCIE
65
CONTIGÜIDADE Muitas das estruturas aqui exibidas e trabalhadas são bifásicas cujos da fase dispersa encontram-se completamente separados entre si. Na maioria das estruturas, contudo, isto não se verifica, havendo uma fração considerável de grãos da fase dispersa em contato mútuo. Isto é tanto mais comum quanto maior for o teor da fase dispersa e quanto maior a tendência de aglomeração dos grãos desta fase. Outras razões existem para se ter estruturas em que os grãos da fase dispersa não estejam completamente separados.
A existência de tais contatos pode influenciar certas propriedades do material. Caso a fase dispersa seja condutora elétrica e a fase matriz seja isolante. A ocorrência de contatos entre grãos da fase matriz afeta a condutividade elétrica do compósito. Outro exemplo é o de uma fase matriz dúctil e uma fase dispersa frágil. Os contatos afetam a tenacidade à fratura, uma vez que eles funcionam como caminhos de propagação de trincas.
Figura 8.1: Grãos esféricos de fase α em uma matriz β. Os grãos de α mantêm contato. A estrutura é cortado por um plano.
Existe um parâmetro estereológico relacionado a contatos entre grãos da mesma fase. É a contigüidade. Veja a Fig. 8.1. São grãos de uma fase com certo nível de contato. Eles possuem uma interface. A contigüidade é definida como a razão entre a área desta interface e área superficial total dos grãos, contabilizando aqui a área da interface. Denominando a fase dispersa de α e a fase matriz de β, a interface entre a fase α e a fase β de α-β e a interface entre dois grãos da fase α de α-α, a contigüidade pode ser matematicamente definida como
( )
( ) ( )2
2V
V V
SC
S Sα α
α αα α α β
−−
− −
=+
(8.1)
(SV)α-α é a área da interface entre grãos da fase α por unidade de volume. Esta interface é contada em dobro uma vez que são duas superfícies de grão juntas. (SV)α-β é a área da interface entre a fase α e a fase β por unidade de volume.

FUNDAMENTOS DE ESTEREOLOGIA CONTIGÜIDADE
66
A área de uma interface pode ser medida a partir da contagem de interceptos entre a interface e linhas de teste através de
2V LS P= (8.2)
Sendo PL o número de vezes que a interface foi interceptada pelas linhas de teste por unidade de comprimento. Substituindo (8.2) em (8.1), tem-se
( )
( ) ( )4
4 2L
L L
PC
P Pα α
α αα α α β
−−
− −
=+
(8.3)
A Fig. 8.2 ilustra o processo de medição da contigüidade. A grade de linhas de teste intercepta as interfaces e são contabilizadas estas interseções.
Figura 8.2: Imagem do plano de corte mostrado na figura 8.1. Uma grade de retas de medição é traçada sobre a imagem. Há 6 interseções entre as retas e a interface α-β e uma interseção entre as linhas e a interface α-α.