introdu o aos sistemas de controle atrav s da rede
TRANSCRIPT

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Introdução aos Sistemas de Controle Através da
Rede
A. P. C. Gonçalves
Universidade Estadual de Campinas - UNICAMP
1◦ Semestre de 2014
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 1 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Material baseado em
J. P. Hespanha et. al., “A Survey of Recent Results inNetworked Control Systems”,Proceedings of the IEEE, Vol. 95,pp 138–162, 2007 e suas referências.
A. Leon-Garcia, “Probability, Statistics, and Random Processesfor Electrical Engineering”, Pearson Prentice Hall, 2008.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 2 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Introdução
O uso de um rede para conectar elementos distribuídos noespaço resulta em uma arquitetura flexível e diminuição decustos de manutenção e instalação.
Aplicação em diversas áreas como
rede de sensores móveis,
cirurgia remota,
colaboração háptica pela internet,
estradas automáticas e
veículos aéreos não tripulados.
Intersecção entre as teorias de controle e de comunicação
A teoria de controle enfoca o estudo de sistemas dinâmicos
interconectados por canais ideais.
A teoria de comunicação estuda a transmissão de informação
por canais imperfeitos.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 3 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Canais com banda limitada
Taxa máxima de bits que um canal pode transmitir de formaconfiável (Shannon).
Determinação da taxa mínima de bits necessária paraestabilizar um sistema linear por realimentação.
Os dados são transmitidos em unidades atômicas chamadaspacotes. Pode-se considerar que mandar um único bit oumilhares de bits dentro de um pacote consumiria os mesmosrecursos da rede.
Um canal com banda limitada transmitiria um número finitode pacotes por unidade de tempo, mas cada pacote poderiacarregar um número alto (possivelmente infinito) de bits.
Para Shannon, tais canais teriam capacidade infinita, mas aestabilidade e o desempenho do sistema em malha fechadaseria limitado pela rede.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 4 / 24
Introdução Processos Markovianos Modelos de erro de transmissão em canais
Amostragem e Atraso
Sinais contínuos, para ser transmitidos em uma rede devemser:
amostrados,
codificados,
transmitidos através da rede,
decodificados no lado receptor.
O atraso total entre a amostragem e a decodificação pode seraltamente variável:
congestionamento de rede,
qualidade do canal.
Pacotes informam quando foram gerados, controlador podeestimar o atraso.
Tentativa de estabelecer um limitante superior para o intervalode amostragem que garanta estabilidade.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 5 / 24
Introdução Processos Markovianos Modelos de erro de transmissão em canais
Perda de pacotes
Dados podem ser perdidos enquanto em trânsito pela rede.
Perdas de pacotes acontecem por erros de transmissão na redefísica (mais comum em redes sem fio) ou por buffer overflows
devido a congestionamento da rede.
Tempos de transmissão longos podem implicar emreordenamento de pacotes e perda caso o receptor descartesinais muito antigos.
Protocolos confiáveis, como TCP, garantem a entrega dospacotes, mas tais protocolos não são muito úteis para controle,pois a retransmissão de dados antigos não é muito útil, emgeral.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 6 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Arquitetura
PlantaPlanta
Sensores Sensores AtuadoresAtuadores
Rede
Enc.Enc. Dec.Dec.
ControladorControlador
Figura: Controle através da rede
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 7 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Arquitetura
Planta
SensoresAtuadores
Rede
Dec. Enc.
Controlador
Figura: Controle através da rede simplificado
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 8 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Processos Markovianos
Seja uma sequencia de variáveis aleatórias possivelmentedependentes (θ1, θ2, θ3, . . .) de termo geral θk , onde oparâmetro k é um valor crescente, normalmente o tempo.
Este processo tem a propriedade de Markov se qualquerpredição do próximo valor da sequencia θk+1, conhecidos osvalores predecessores (θ1, θ2, . . . , θk), puder se basear somenteno último valor θk .
Ou seja, o valor futuro de uma variável aleatória em umprocesso markoviano não depende de sua história passada,somente do valor atual.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 9 / 24
Introdução Processos Markovianos Modelos de erro de transmissão em canais
Cadeia de Markov
Em termos de probabilidades condicionais, a propriedade deMarkov pode ser resumida por
Prob(θk+1 = j |θk , θk−1, · · · , θ1, θ0) = Prob(θk+1 = j |θk)
Quando um processo de Markov só pode assumir valores emum conjunto finito ou contável, ele recebe o nome de Cadeia
de Markov
Em geral, se o conjunto onde a cadeia assume seus valorestem N elementos, ele é representado por K = {1, 2, . . . ,N}
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 10 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
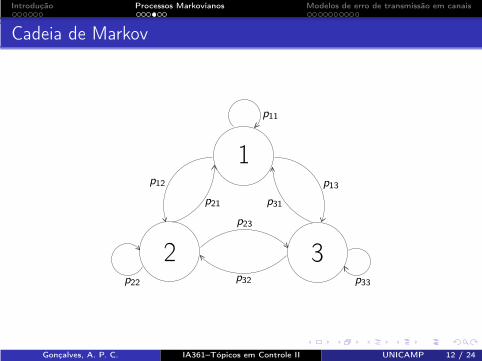
Cadeia de Markov
No instante k = 0 definimos a distribuição inicial deprobabilidade µi = Prob(θ0 = i), e i ∈ K.
A probabilidade conjunta para os primeiros n + 1 valores dacadeia é dada por
Prob(θn = in, · · · , θ0 = i0) =
Prob(θn = in|θn−1 = in−1) . . .Prob(θi = i1|θ0 = i0)Prob(θ0 = i0)
Vamos assumir que as probabilidades para mudanças de estadoem cada passo são fixas e não variam com o tempo, ou sejapij = Prob(θk+1 = j |θk = i),para todo k ∈ N.
Assim, a cadeia de Markov θk é completamente definida porsua distribuição inicial µi , i ∈ K e por sua matriz de
probabilidades de transição P = [pij ] ∈ RN×N .
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 11 / 24
Introdução Processos Markovianos Modelos de erro de transmissão em canais
Cadeia de Markov
p11
p12 p13
p21
p22
p23
p31
p32 p33
1
2 3
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 12 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Exemplo: Cadeia de Markov para fala em pacotes
Se o n-ésimo pacote contém silêncio, a probabilidade dopróximo conter fala é α (1 − α para silêncio).
Se o n-ésimo pacote contém fala, então a probabilidade dopróximo conter silêncio é β (1 − β para fala).
P =
[
1 − α α
β 1 − β
]
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 13 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Exemplo: Estoque de lâmpadas
Uma casa tem duas lâmpadas novas em estoque no dia 0.
Em um dia qualquer, a probabilidade de um lâmpada da casaqueimar é p (q = 1 − p de nenhuma lâmpada queimar)
O número de lâmpadas em estoque segue uma cadeia deMarkov
P =
1 0 0p q 00 p q
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 14 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Canal de Gilbert
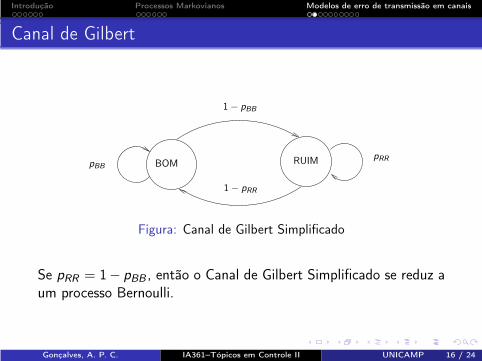
Cadeia de Markov com dois modos: BOM e RUIM.
No modo BOM, a transmissão ocorre sem erros.
No modo RUIM, há uma probabilidade peR de ocorrer erros.
Se peR = 1, diz-se que o canal de Gilbert é do tiposimplificado.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 15 / 24
Introdução Processos Markovianos Modelos de erro de transmissão em canais
Canal de Gilbert
replacements
RUIMBOMpRR
1 − pRR
pBB
1 − pBB
Figura: Canal de Gilbert Simplificado
Se pRR = 1− pBB , então o Canal de Gilbert Simplificado se reduz aum processo Bernoulli.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 16 / 24
Introdução Processos Markovianos Modelos de erro de transmissão em canais
Gilbert-Elliot
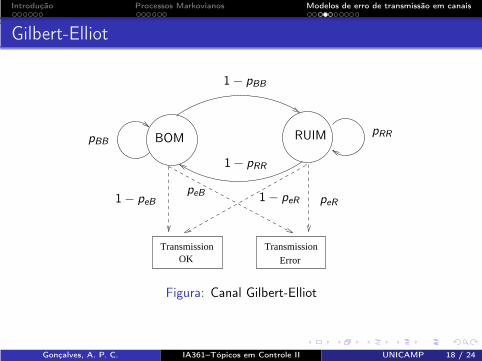
Generalização do modelo Gilbert.
Também considera uma cadeia com dois modos, mas comprobabilidade não nula de erro no modo BOM, peB > 0.
Naturalmente, peR > peB .
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 17 / 24
Introdução Processos Markovianos Modelos de erro de transmissão em canais
Gilbert-Elliot
TransmissionTransmissionErrorOK
RUIMBOMpRR
1 − pRR
pBB
1 − pBB
peB1 − peB peR1 − peR
Figura: Canal Gilbert-Elliot
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 18 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Gilbert-Elliot
Em “Modelos Discretos para Análise de Ocorrência de Errosem Redes sem Fio”, G. A. B. Marcondes, Mestrado Inatel,2005, há várias comparações entre modelos estocásticos e umcanal com desvanecimento Raileigh não seletivo.
Para a transmissão de 10 milhões de bits, tempo de coerênciado canal igual a 10 vezes o tempo de símbolo, taxa detransmissão de 1bps e relação sinal ruído de 1 dB
As probabilidades que melhor refletem o modelo foram:
peB = 0.04, peR = 0.29
pBB = 0.87, pRR = 0.75
Outras comparações para os modelos apresentados aquipodem ser encontradas.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 19 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Fritchman
Cadeia de Markov com N modos divididos em doisagrupamentos ou clusters U1 e U2.
A probabilidade de erro para os modos pertencentes a U1 ézero e para os modos em U2 é unitária.
1 2 i i + 1 N
U1 U2
Figura: Canal Fritchman
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 20 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
Fritchman
O modelo Fritchman pode ser simplificado.
Não há transições entre modos diferentes dentro do mesmoagrupamento.
Só existe um modo correspondendo a falhas de transmissão.
1 2 N − 1 N
Figura: Canal Fritchman Simplificado
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 21 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
McCullough
O modelo McCullough pode ser visto como um generalizaçãodo modelo Gilbert-Elliot model.
Ele pode representar qualquer número de modos no canal,para modelar diversos fenômenos físicos com diferentesprobabilidades de erro.
Para cada modo, há uma probabilidade de erro e umaprobabilidade complementar de sucesso na transmissão.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 22 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
McCullough
1 2
erroerro
sucessosucesso
Q11
Q12 Q21
Q22
P11
P12 P21
P22
p1
1 − p1
p2
1 − p2
Figura: Canal McCullough com dois modos
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 23 / 24

Introdução Processos Markovianos Modelos de erro de transmissão em canais
McCullough
Se Pij = Qij , o modelo Gilbert-Elliot é recuperado.
Por outro lado, se P11 = P22 = 1 e P12 = P21 = 0 astransições entre modos só ocorrem depois de um erro detransmissão.
Este modelo mais simples é bastante usado na literatura.
Gonçalves, A. P. C. IA361–Tópicos em Controle II UNICAMP 24 / 24