inpe-7117-tdi/669 desenvolvimento de uma...
TRANSCRIPT
INPE-7117-TDI/669
DESENVOLVIMENTO DE UMA TECNOLOGIA FOTOGRAMÉTRICO-DIGITAL PARA A MEDIÇÃO E A DOCUMENTAÇÃO DE EDIFICAÇÕES
Lília de Sá Silva
Dissertação de Mestrado do Curso da Pós-Graduação em Computação Aplicada,orientada pelo Dr. José Antônio Gonçalves Pereira, aprovada em
03 de abril de 1998.
INPESão José dos Campos
1998
519.674
SILVA, L.S. Desenvolvimento de uma tecnologia fotogramétrico-digital para a medição e a documentação de edificações. /L.S. Silva – São José dos Campos: INPE, 1998. 115p. – (INPE-7117-TDI/669).
1.Computação gráfica. 2.CAD. 3.Arquitetura (computação). 4.Fotogrametria. 5.Estereofotogrametria. I.Título.



A Deus e à minha mãe querida,
com muito carinho, em sinal de
minha eterna gratidão.

AGRADECIMENTOS
Ao Dr. José Antônio Gonçalves Pereira, pela orientação positiva ao longo
dos estudos que nortearam a pesquisa.
Ao Mestre Paulo César Gurgel de Albuquerque e ao Mestre Ricardo
Rodrigues Rangel, pela gentil colaboração nos estudos sobre fotogrametria e
programação orientada a objetos.
Aos meus queridos amigos, pais e irmãos, pelo incentivo constante em meus
esforços.

RESUMO
Um projeto de restauração arquitetônica de um prédio antigo pode ser feito
com mais facilidade se for assistido por um sistema computacional capaz de gerar as
dimensões originais da construção. Neste trabalho foi desenvolvido um sistema
fotogramétrico-digital que oferece um método prático de determinação das dimensões
reais de um prédio para fins de restauração futura. Desenhos arquitetônicos inexistentes
de prédios antigos parcialmente danificados podem ser obtidos com razoável precisão
usando-se o sistema apresentado. O sistema é capaz de fornecer dados tridimensionais
da construção usando pares estereoscópicos de fotos do prédio e um microcomputador.
Com esta aplicação as tradicionais e caras câmeras estereométricas tanto quanto os
instrumentos restituidores de imagens são substituídos por câmeras comuns
relativamente baratas e um microcomputador. Após muitas experiências realizadas com
este método foram obtidos dados tridimensionais do objeto estudado com desvios de
medidas não superiores a 2,8% do valores reais. Por outro lado, apenas poucas
dimensões apresentaram desvios superiores a 1% e um número grande delas não
apresentou absolutamente qualquer desvio. Os desvios dos valores reais apresentados
foram atribuídos a falhas acontecidas durante a tomada das fotos e revelação das
mesmas. Foi pesquisada a qualidade esterescópica das imagens tomando-se vários
conjuntos de pares fotográficos esterescópicos do objeto, computando-se seus dados e
comparando-os com as dimensões reais do objeto. Imagens digitalizadas e o algoritmo
baseado na teoria das paralaxes forneceu os dados 3D os quais foram usados no projeto
de restauração. Pelo processamento destes dados em um programa CAD foi possível
obter os desenhos arquitetônicos do prédio original.


DEVELOPMENT OF A PHOTOGRAMMETRIC-DIGITAL TECHNOLOGY TO
MEASUREMENT AND DOCUMENTATION OF BUILDINGS
ABSTRACT
An architectonic restoration project of an old building can more easily made
when assisted by a computer system able to generate the original dimensions of the
construction. A photogrammetric digital system was developed in this work to offer a
very practical method for computing actual dimensions of a building for future
restoration. Non existing architectonic drawings of partially damaged old buildings can
be obtained with very acceptable precision using the system presented. By using
stereoscopic pairs of photos of the building and a microcomputer the system is
capable to produce construction´s tridimensional data. In this application the traditional
and expensive stereometric cameras as much as the restorative instruments of images
are replaced by relatively cheap usual photographic cameras and a microcomputer.
After several experiences carried out with this method, tridimensional data were
obtained from the studied object with deviations no greater than 2.8% of the real values.
On the other hand only few dimensions were above 1% deviation and a great number of
them did not show any deviation at all. The deviations of the real values were imputed
to faults brought about during the photos taking and photos developing. The
stereoscopic quality of the images was investigated by taking several sets of
stereoscopic pairs of photos, computing their data and comparing them with the real
object dimensions. Scanned images and the algorithm based on parallax theory supplied
reliable 3D data which were used in the restoration project. By processing these data
with a CAD system it was possible to obtaining the architectonic drawings of the
original building .


SUMÁRIO
Pág.
LISTA DE FIGURAS ....................................................................................................15
CAPÍTULO 1 - INTRODUÇÃO. ...........................................................................................19
CAPÍTULO 2 - CONCEITOS DE FOTOGRAMETRIA.............................................................25
2.1 - Visualização Estereoscópica...................................................................................28
2.2 - Pares Estereoscópicos.............................................................................................28
2.3 - Câmeras...................................................................................................................31
2.4 - Elementos de Controle............................................................................................35
2.5 - Parâmetros para Cobertura Fotogramétrica.............................................................35
2.5.1 - Escala...................................................................................................................36
2.5.2 - Distância da câmera à edificação.........................................................................37
2.5.3 - Comprimento da área coberta .............................................................................37
2.5.4 - Altura da área coberta .........................................................................................38
2.5.5 - Elevação da câmera..............................................................................................38
2.5.6 - Superposição horizontal.......................................................................................39
2.5.7- Bases .....................................................................................................................40
2.5.8 - SuperposiçãoVertical...........................................................................................41
2.5.9 - Número de fotografias..........................................................................................42
CAPÍTULO 3 - REGISTRO DE IMAGENS.................................................................43
3.1 - Técnica baseada em feições ...................................................................................45
3.2 - Técnica baseada em área ........................................................................................46
3.2.1- Modelo Gaussiano para o Registro ......................................................................52
CAPÍTULO 4 - MÉTODO DA PARALAXE ............................................................................57
CAPÍTULO 5 - SISTEMAS CAD EM ARQUITETURA ..........................................................61
CAPÍTULO 6 - IMPLEMENTAÇÃO COMPUTACIONAL ........................................................63
6.1 - Descrição dos Recursos de Programação ..............................................................63
6.2 - Metodologia de Programação Orientada a Objetos................................................63
6.3 - Recursos e Interface gráfica utilizada ...................................................................72
CAPÍTULO 7 -APLICAÇÃO E RESULTADOS ......................................................................79
7.1 - O Sistema Desenvolvido.........................................................................................79
7.2 - Levantamento de dados fotogramétricos ................................................................80
7.2.1 - Histórico da tomada de fotografias .....................................................................81
7.2.2.- Comentários ........................................................................................................92
7.3 - Processamento dos Dados Fotogramétricos ...........................................................94
7.3.1 - Abertura de Arquivos ..........................................................................................94
7.3.2 - Registro de Imagens ............................................................................................95
7.3.3 - Cálculo das Coordenadas 3D ..............................................................................98
7.3.4 - Criação de Desenhos .........................................................................................100
7.4 - Resultados da Aplicação .....................................................................................101
CAPÍTULO 8 - CONCLUSÕES ...........................................................................................107
REFERÊNCIAS BIBLIOGRÁFICAS ....................................................................................109
BIBLIOGRAFIA COMPLEMENTAR ..................................................................................113

LISTA DE FIGURAS
Pág.
1.1 - Exemplo de um aparelho restituidor da Zeiss acoplado a uma plotadora............... 21
1.2 - Fases de implementação do sistema fotogramétrico-digital................................... 22
2.1 - Desenhos de elevação, seção e perspectiva de uma edificação...............................26
2.2 - Elevação de uma edificação documentada com vários componentes.................... 27
2.3 - Par estereoscópico de fotografias com superposição horizontal aproximada de
60%........................................................................................................................29
2.4 - Base geométrica de uma fotografia.........................................................................30
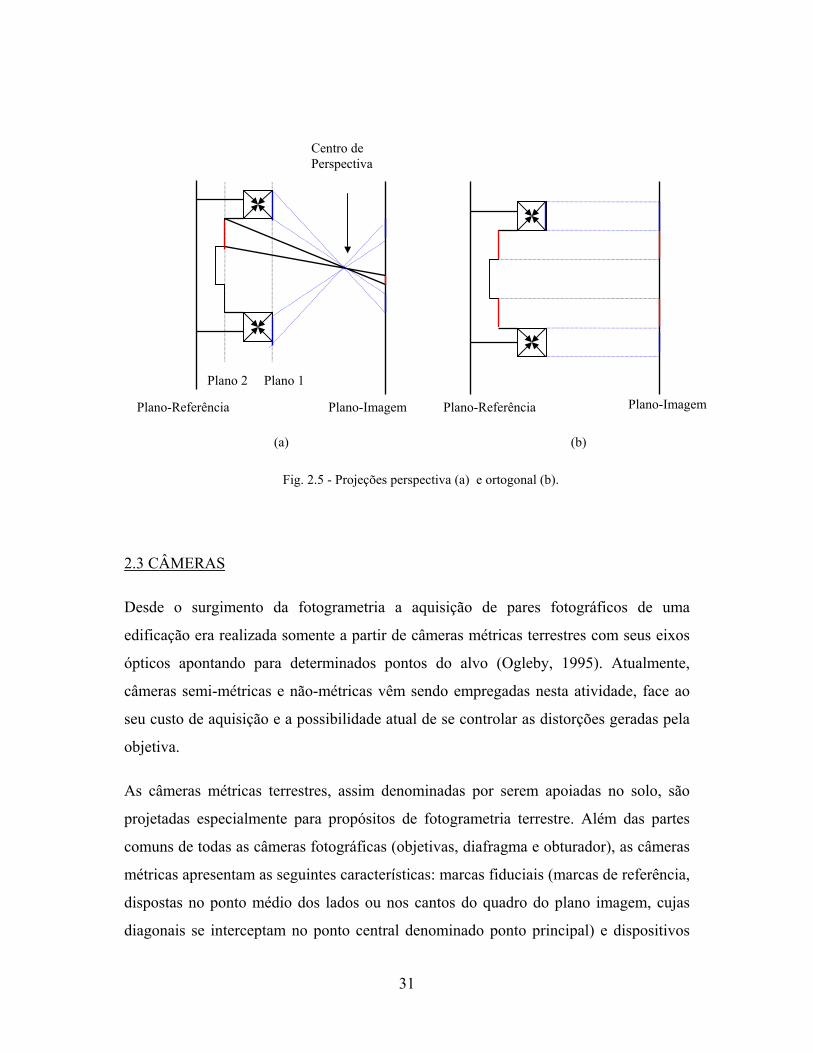
2.5 - Projeções perspectiva (a) e ortogonal (b).................................................................31
2.6 - Características de câmeras métricas ......................................................................32
2.7 - Câmera estereométrica Zeiss SMK5.5/0808/120 ..................................................33
2.8 - Fotografia obtida a partir de uma Rolleiflex 6006, contendo 121 cruzes
reseau em formato 60x60 mm..............................................................................34
2.9 - Vista de cima da cobertura fotogramétrica de uma edificação...............................36
2.10 - Relação Foto x Área coberta ................................................................................37
2.11 - Vista lateral da cobertura de uma edificação ......................................................38
2.12 - Superposição horizontal de fotos ........................................................................39
2.13 - Vista de cima da superposição horizontal ...........................................................40
2.14 - Superposição vertical de faixas ...........................................................................41
2.15 - Vista lateral da superposição vertical ..................................................................42
3.1 - Janelas do registro baseado em área ......................................................................47
3.2 - Representação dos limites de decisão do teste seqüencial de razão de
probabilidades sob modelo gaussiano...................................................................55
4.1 - Par estereoscópico de fotos terrestres horizontais obtidas através de
câmeras com eixos fiduciais paralelos entre si, a uma mesma elevação
e paralelos ao objeto fotografado..........................................................................57
6.1 - Notação Coad & Yourdon para Classe...................................................................64
6.2 - Declaração de atributos e serviços da classe Gerente.............................................65
6.3 - Funções Construtor e Destrutor...............................................................................66
6.4 - Notação para Herança.............................................................................................66
6.5 - Notação para Conexão de Mensagem.....................................................................67
6.6 - Notação para a estrutura Todo-Parte.......................................................................68
6.7 - Janela típica da aplicação........................................................................................69
6.8 - Botão para agilizar abertura de arquivos.................................................................70
6.9 - Tabela de associação de mensagens........................................................................70
6.10 - Janelas filhas dispostas lado a lado na janela principal.........................................72
6.11 - Código para organização horizontal das janelas...................................................72
6.12 - Janela do WorkShop apresentando o projeto desenvolvido..................................73
6.13 - Etapas de compilação no ambiente da Borland.....................................................73
6.14 - Código básico de um menu..................................................................................74
6.15 - Menu de interface para o usuário..........................................................................74
6.16 - Janela para seleção de nome de arquivo................................................................75
6.17 - Código do evento abertura de arquivo imagem...................................................75
6.18 - Cursor e marcadores de pixels..............................................................................76
6.19 -Edição de uma caixa de diálogo.............................................................................77
6.20 - Código para acesso à caixa de diálogo..................................................................77
7.1 - Imagens e respectivos histogramas da fachada da capela original..........................89
7.2 - Imagens e histogramas do segundo conjunto de fotos da fachada da maquete.......90
7.3 - Imagens e histogramas do quarto conjunto de fotos da fachada da maquete..........90
7.4 - Imagens e histogramas do sexto conjunto de fotos da fachada da maquete............91
7.5 - Imagens e histogramas do oitavo conjunto de fotos da fachada da maquete..........91
7.6 - Imagens e histogramas do oitavo conjunto de fotos da lateral da maquete............92
7.7 - Janela principal do sistema......................................................................................95
7.8 - Facilidade para seleção de pontos...........................................................................95
7.9 - Tela para definição de dimensões...........................................................................96
7.10 - Ponto de referência selecionado pelo usuário.......................................................96
7.11 - Ponto de registro identificado pelo sistema...........................................................97
7.12 - Menu para entrada de valores................................................................................98
7.13 -Menu para solicitação de cálculo de coordenadas..................................................99
7.14 - Seleção e busca do detalhe Cruz...........................................................................99
7.15 - Coordenadas 3D do detalhe Cruz........................................................................100
7.16 - Desenhos de fachada criados no AutoCAD........................................................100
7.17 - Vistas perspectivas no AutoCAD........................................................................101

19
CAPÍTULO 1
INTRODUÇÃO
No decorrer do tempo, as edificações sofrem alterações provocadas por fatores
ambientais ou por ação antrópica. Estas alterações conduzem a iniciativa de restauração,
visando manter as características primitivas da edificação ou promovendo a sua
reconstrução, modificando algumas vezes o estilo arquitetônico originalmente
concebido.
Restauração e reconstrução de edificações são projetos especializados que envolvem
conhecimentos técnicos, estéticos e históricos (Lemos, 1972) e requerem um
planejamento adequado para que sejam empreendidos com êxito.
Uma contribuição valiosa para o planejamento e a realização destes projetos de forma
rápida, precisa e econômica, é a disponibilidade de informações métricas e gráficas da
edificação, significativas para estas atividades, a partir de modelos tridimensionais que
representem parcial ou totalmente o objeto em questão.
A obtenção de medidas preliminares das edificações vem sendo realizada desde 1850
através de técnicas fotogramétricas (Karara, 1989). Por outro lado, a representação
geométrica computacional destas informações apresenta-se, a cada dia, mais realística,
com o aperfeiçoamento dos sistemas digitais de desenho.
Seguindo esta abordagem, o objetivo deste trabalho é desenvolver uma tecnologia
fotogramétrico-digital, utilizando-se máquinas fotográficas comuns (não-métricas), para
facilitar a construção de modelos geométricos, através dos quais seja possível realizar
medições e documentar as edificações de maneira satisfatória.
A maioria das fotografias de edificações existentes são imagens isoladas e, embora
possam fornecer considerável informação visual quanto às condições da edificação
(Ogleby, 1995), do ambiente onde esta foi construída e permitam extrair informações
métricas bidimensionais referentes à forma e às dimensões da edificação, pouco
20
contribuem para a obtenção de informações quantitativas tridimensionais necessárias
para a construção de modelos.
A partir de pares fotográficos especiais podem ser obtidas informações tridimensionais
(3D) relevantes. De fato, em 1867, o arquiteto alemão Albrecht Meydenbauer realizou
um levantamento de obras arquitetônicas através de um processo baseado no uso de
duas fotografias do mesmo objeto (Paredes, 1987), obtidas de pontos de vista diferentes.
As atividades para o traçado de edificações utilizando informações 3D, face ao
desenvolvimento das técnicas computacionais, tendem a se tornar mais precisas e
econômicas, dispensando operadores com habilidades de percepção estereoscópica e de
manuseio de equipamentos restituidores como era comum no passado.
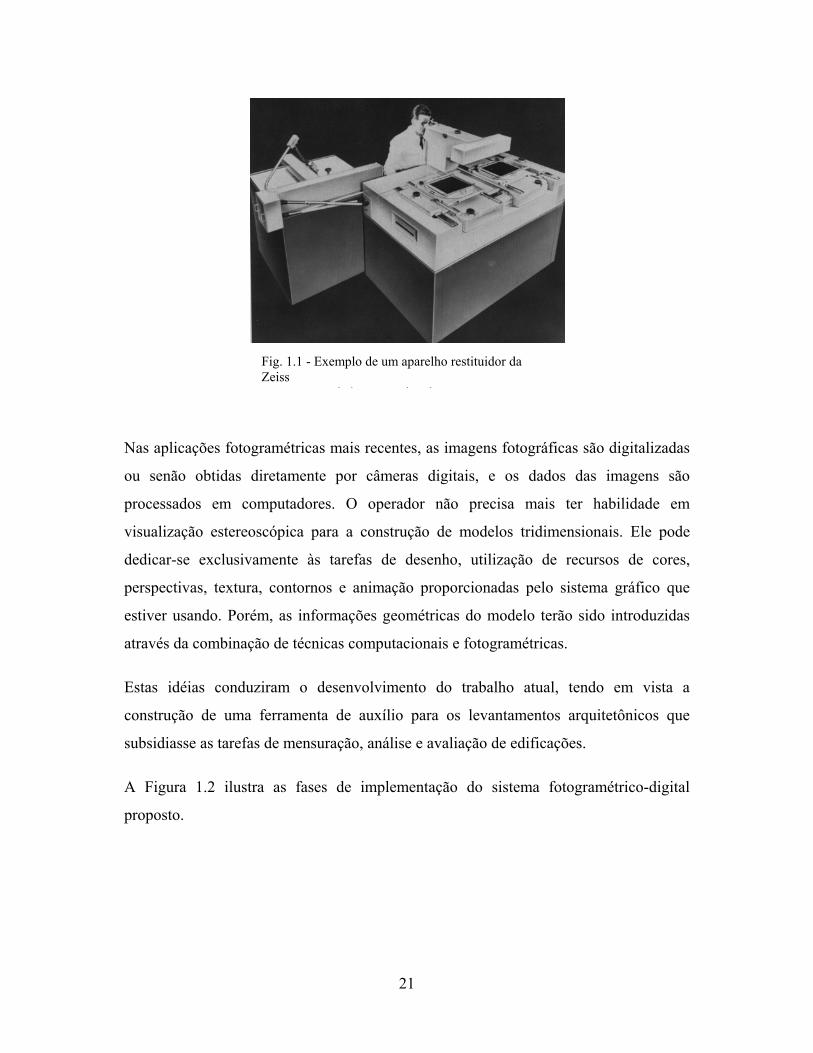
A técnica tradicional para a construção de modelos tridimensionais emprega
instrumentos denominados restituidores, através dos quais a imagem tridimensional
gerada, denominada modelo estereoscópico, pode ser observada, medida e delineada.
Nestes instrumentos, duas fotografias especiais, denominadas par estereoscópico, são
ajustadas e acomodadas, uma a uma, aos olhos do observador por meios óptico-
mecânicos, conforme mostra a Figura 1.1. Este ajuste é feito de modo a permitir a
visualização e traçado do modelo pelo operador, através de um lápis acoplado ao
restituidor e um pantógrafo. Com engrenagens ajustadas manualmente, mantém-se as
relações entre as escalas do modelo fotográfico e do modelo restituído. Após traçado o
desenho, este pode ser apresentado na tela do computador e impresso em plotadoras ou
impressoras.
21
Nas aplicações fotogramétricas mais recentes, as imagens fotográficas são digitalizadas
ou senão obtidas diretamente por câmeras digitais, e os dados das imagens são
processados em computadores. O operador não precisa mais ter habilidade em
visualização estereoscópica para a construção de modelos tridimensionais. Ele pode
dedicar-se exclusivamente às tarefas de desenho, utilização de recursos de cores,
perspectivas, textura, contornos e animação proporcionadas pelo sistema gráfico que
estiver usando. Porém, as informações geométricas do modelo terão sido introduzidas
através da combinação de técnicas computacionais e fotogramétricas.
Estas idéias conduziram o desenvolvimento do trabalho atual, tendo em vista a
construção de uma ferramenta de auxílio para os levantamentos arquitetônicos que
subsidiasse as tarefas de mensuração, análise e avaliação de edificações.
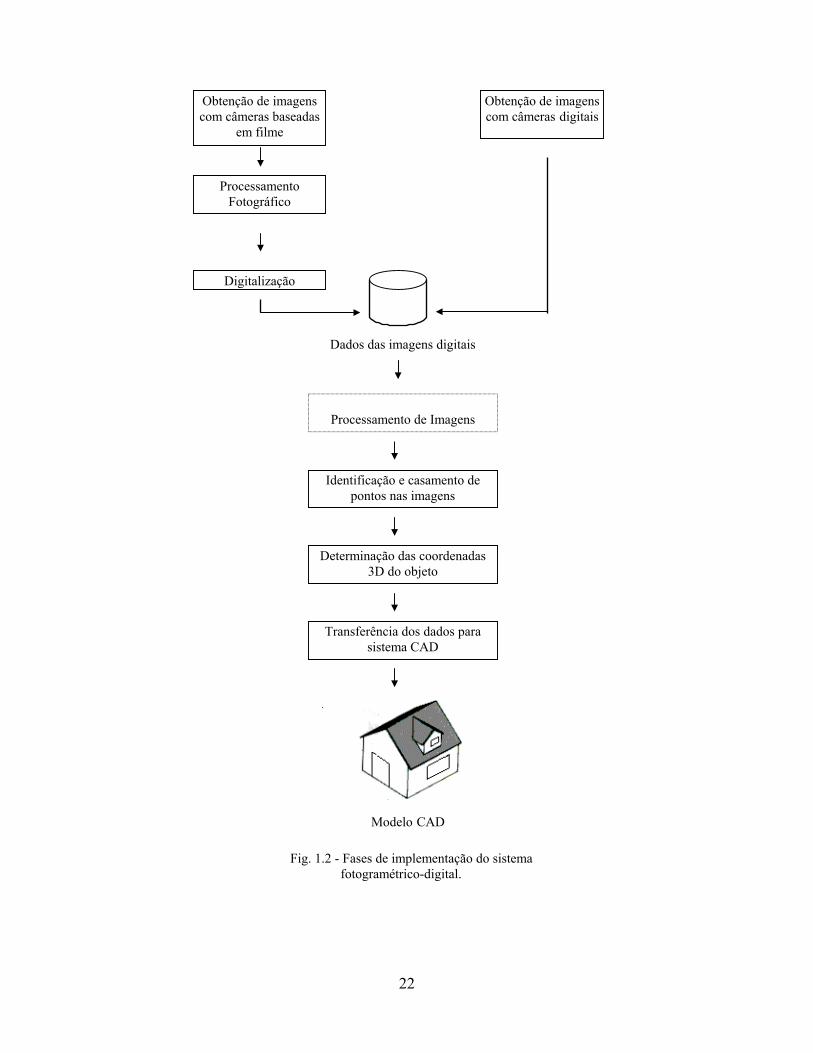
A Figura 1.2 ilustra as fases de implementação do sistema fotogramétrico-digital
proposto.
Fig. 1.1 - Exemplo de um aparelho restituidor daZeiss
l d l d
22
Obtenção de imagenscom câmeras baseadas
em filme
Obtenção de imagenscom câmeras digitais
ProcessamentoFotográfico
Digitalização
Dados das imagens digitais
Identificação e casamento depontos nas imagens
Determinação das coordenadas3D do objeto
Transferência dos dados parasistema CAD
Modelo CAD
Fig. 1.2 - Fases de implementação do sistema fotogramétrico-digital.
Processamento de Imagens
23
As imagens de entrada deverão ser obtidas através de câmeras fotográficas digitais ou
baseadas em filme. Estas fotografias serão tomadas aos pares e com uma determinada
relação entre si. Se a câmera for baseada em filme, as imagens precisarão ser
digitalizadas. Após digitalizadas, as imagens podem necessitar passar por algum tipo de
processamento, tal como realce, correções geométricas e outros.
Em seguida, serão identificados e casados pontos homólogos de interesse entre as
imagens digitalizadas e, a partir destes pontos, serão calculadas as coordenadas 3D da
edificação fotografada.
As informações tridimensionais obtidas na fase anterior servirão de base para a
construcão de modelos em Projetos Assistidos por Computador (Computer Aided
Design – CAD), os quais poderão ser acessados de imediato ou futuramente para
auxiliar as tarefas de restauração, reconstrução ou reforma de edificações.
Os conceitos estudados para a realização de cada uma destas fases do sistema serão
mencionados nos capítulos a seguir.
No Capítulo 2, são descritos os conceitos básicos de fotogrametria e apresentada a
forma de obtenção de parâmetros de cobertura fotogramétrica.
As técnicas de registro de imagens e método da paralaxe são abordados nos Capítulos 3
e 4 respectivamente.
No Capítulo 5, é apresentado resumidamente o estudo sobre os sistemas CAD.
As ferramentas e técnicas empregadas para a implementação do sistema proposto são
descritas no Capítulo 6.
A aplicação e resultados do sistema desenvolvido são apresentadas no Capítulo 7.
No Capítulo 8 é descrita a conclusão final deste trabalho.

25
CAPÍTULO 2
CONCEITOS DE FOTOGRAMETRIA
A fotogrametria é a ciência aplicada, a técnica e a arte de extrair a forma geométrica, as
dimensões e a posição dos objetos através de medidas efetuadas sobre sua imagem
fotográfica (Tavares et. al, 1991). Em outras palavras, a combinação de técnicas
fotográficas e propriedades geométricas, resulta em um método pelo qual informações
métricas podem ser obtidas a partir de fotografias, evitando, assim, o trabalho exaustivo
ou senão difícil de medição manual do objeto.
Para a obtenção de informações tridimensionais de edificações, faz-se necessário o
emprego de, no mínimo, duas fotografias da mesma edificação para a obtenção de seus
parâmetros geométricos. Seguindo esta abordagem, considerar-se-á neste trabalho as
bases da fotogrametria terrestre à pequena distância, onde os processos fotogramétricos
permitem que pares de fotografias (pares estereoscópicos) sejam observados,
interpretados e medidos. Além da realização de medições precisas e adequadas (Lyons
et. al, 1984), a fotogrametria terrestre permite:
• Fazer medições de componentes da edificação inacessíveis e, portanto, não
possíveis de serem medidos diretamente (Wolf, 1983) ou de edificações
grandes, complexas ou que apresentem perigo para o trabalho de medição
manual (Burns, 1984);
• Obter medidas de objetos e detalhes delicados sem precisar tocá-los. Como este
método utiliza nenhum ou mínimo contato físico com o objeto, em comparação
à medição manual (Wolf, 1983), é mais indicado para os trabalhos realizados em
monumentos históricos e obras de arte;
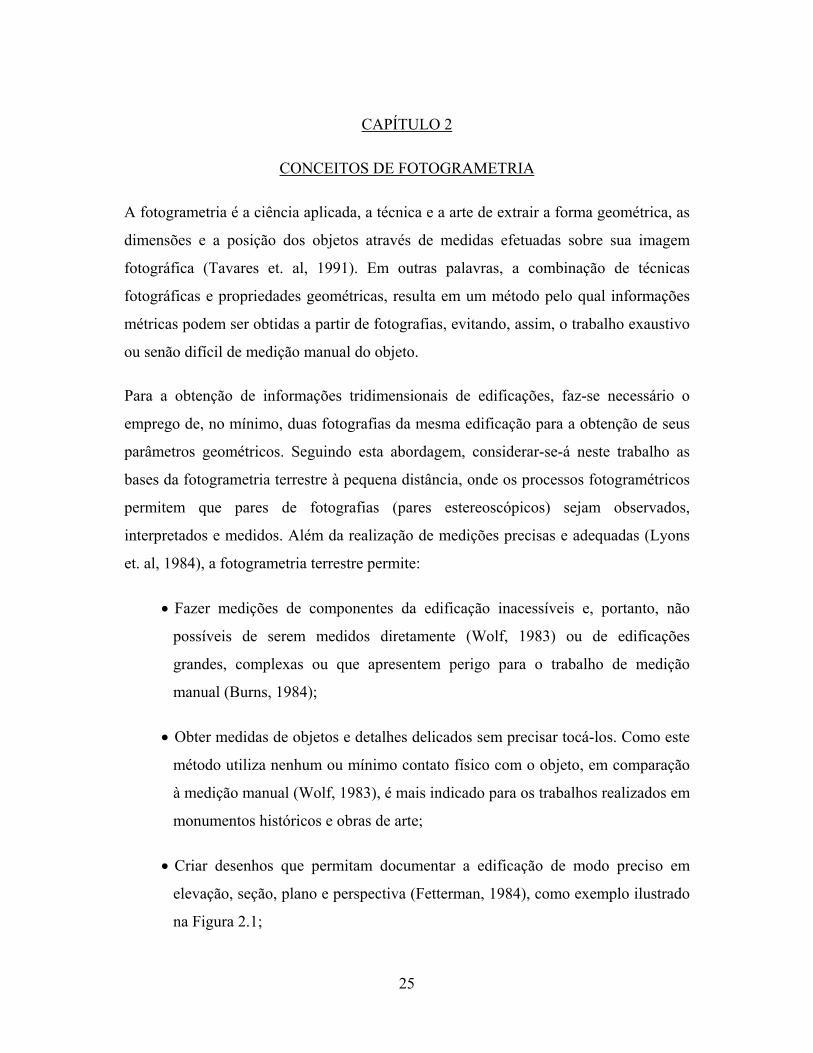
• Criar desenhos que permitam documentar a edificação de modo preciso em
elevação, seção, plano e perspectiva (Fetterman, 1984), como exemplo ilustrado
na Figura 2.1;
26
• Produzir um conjunto de desenhos que subsidiem a reconstrução ou restauração
de uma edificação, mesmo que esta tenha sido total ou parcialmente destruída;
• Documentar, a partir das elevações, os componentes da edificação, conforme
apresenta-se na Figura 2.2. Este levantamento, um primeiro passo essencial em
preservação, documenta não apenas os materiais da edificação e sua posição,
mas também proporciona uma avaliação subjetiva de sua condição;
Fig 2.1 - Desenhos de elevação, seção e perspectiva de uma edificação.
27
• Facilitar a obtenção de um amplo domínio de informações sobre a edificação
devido à coletânea de dados em geral, enquanto a medição à mão registra, em
determinado momento, apenas a informação desejada; as informações não
levantadas que possam ser necessárias futuramente são perdidas. Além disto,
devido à precisão da fotogrametria, pode-se detectar irregularidades e
deformações em uma edificação, com melhor desempenho que o dos
levantamentos manuais (Burns, 1984).
Fig. 2.2 - Elevação de uma edificação documentada com vários componentes.
28
• Documentar a edificação em menor tempo, face aos riscos de desmoronamento
ou devido à sua localização em área restrita, onde as tarefas de documentação
manual tornar-se-iam perigosas, impossíveis ou nada econômicas;
• Obter menor custo-benefício em relação aos métodos não fotogramétricos.
Todavia, ao decidir-se pelo método fotogramétrico, certos aspectos devem ser levados
em consideração (Fetterman, 1984), tais como: condições da edificação existente, tempo
e recursos econômicos disponíveis, capacidade dos instrumentos utilizados e a
qualidade do resultado final desejado.
Além disto, um dos pré-requisitos para a obtenção de um bom produto fotogramétrico é
a aquisição de fotografias de boa qualidade, que contenham detalhes bem definidos, os
quais possam ser observados e medidos com grande precisão (Karara, 1989).
2.1 VISUALIZAÇÃO ESTEREOSCÓPICA
Visualização estereoscópica é a reprodução artificial da visão binocular humana a partir
de um par de fotografias (Tavares et. al, 1991). São apresentadas aos olhos do
observador um par de fotografias de um mesmo objeto, obtidas de pontos de vista
diferentes. O olho esquerdo visualiza a imagem da fotografia tomada do ponto de vista à
esquerda e o olho direito, a imagem da fotografia tomada á direita. O cérebro recebe as
duas imagens fundindo-as imediatamente em uma única imagem que reproduz a
tridimensionalidade do objeto.
2.2 PARES ESTEREOSCÓPICOS
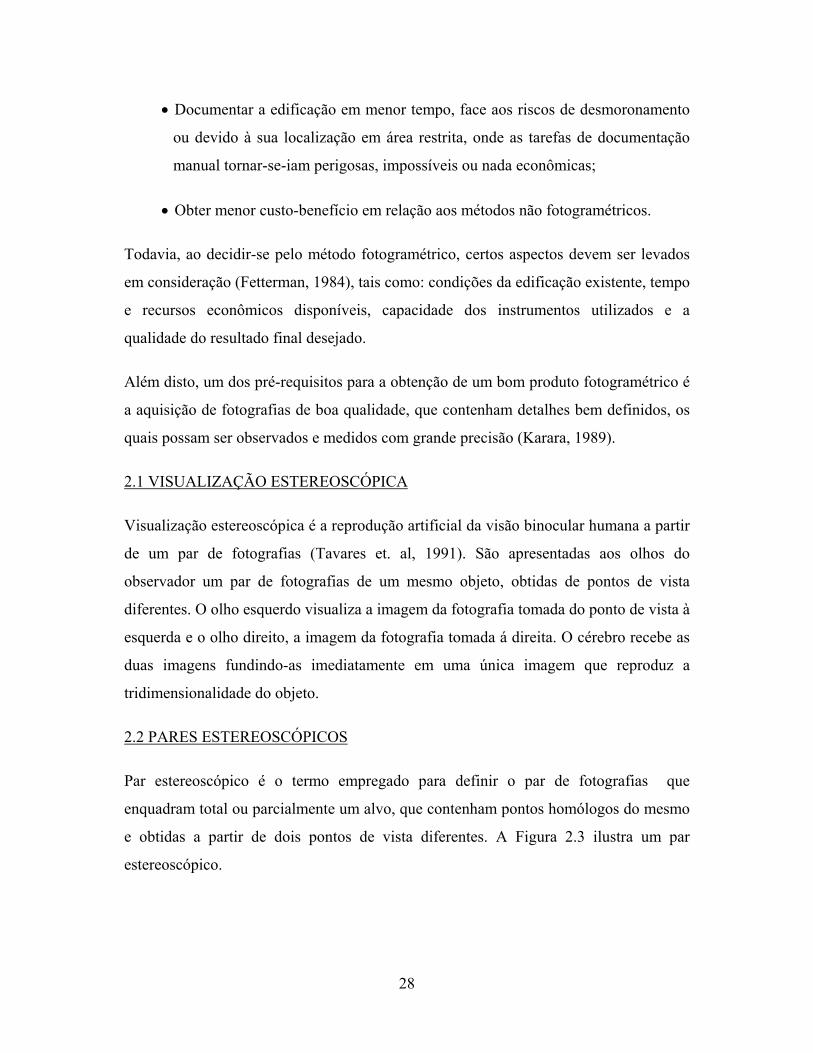
Par estereoscópico é o termo empregado para definir o par de fotografias que
enquadram total ou parcialmente um alvo, que contenham pontos homólogos do mesmo
e obtidas a partir de dois pontos de vista diferentes. A Figura 2.3 ilustra um par
estereoscópico.
29
A quantidade de pares estereoscópicos necessária para documentar uma edificação
depende da natureza e das dimensões da edificação e de seu ambiente (Burns, 1984). Os
obstáculos (árvores e estruturas adjacentes) que prejudicam a obtenção das fotografias
da edificação podem elevar o número de pares estereoscópicos necessário. Caso a
estrutura analisada apresente detalhes muito complexos, o número de pares
estereoscópicos requerido também aumentará, pois o levantamento irá requerer maior
definição de detalhe e, em conseqüência, uma escala maior da foto. Porém, no mínimo
um par estereoscópico é necessário para reproduzir características tridimensionais de
uma edificação (Karara, 1989).
A principal função da estereofotogrametria é possibilitar a reconstrução geométrica de
um objeto tridimensional para propósitos de medição a partir de duas ou mais projeções
perspectivas diferentes do objeto. Enquanto os métodos e os equipamentos utilizados
para a aquisição e a transformação das imagens se diferenciam muito em sofisticação,
as propriedades geométricas das imagens fotográficas são as mesmas.
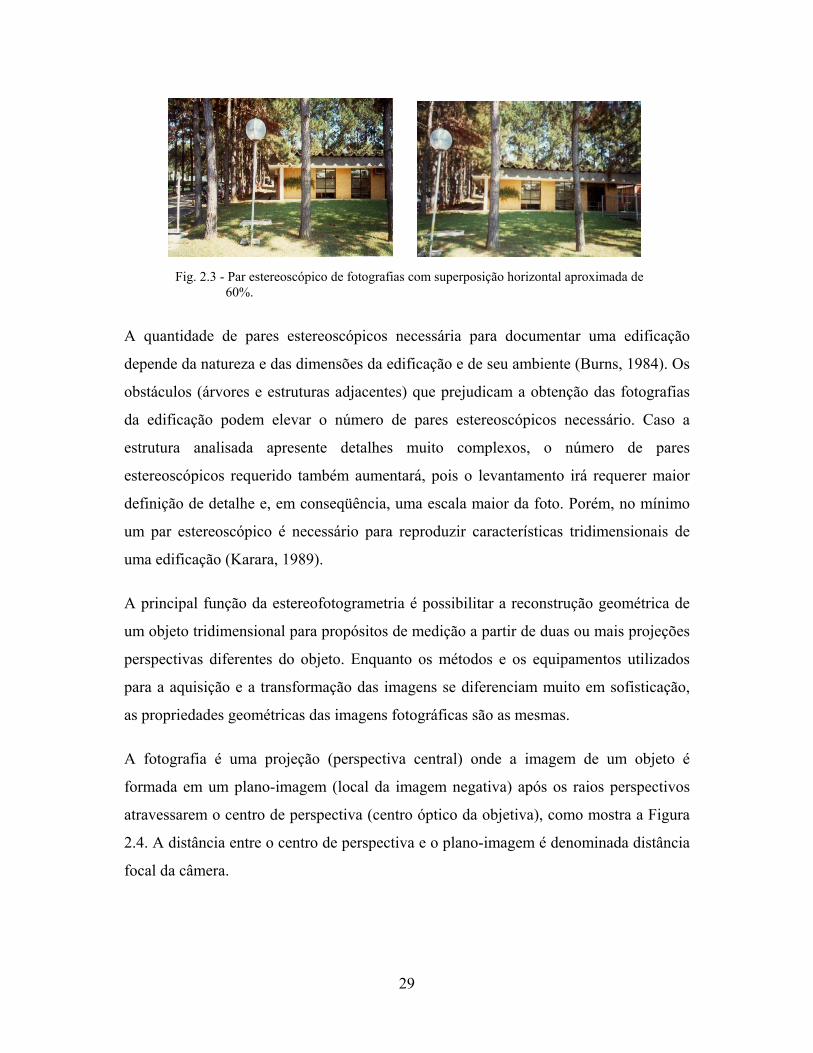
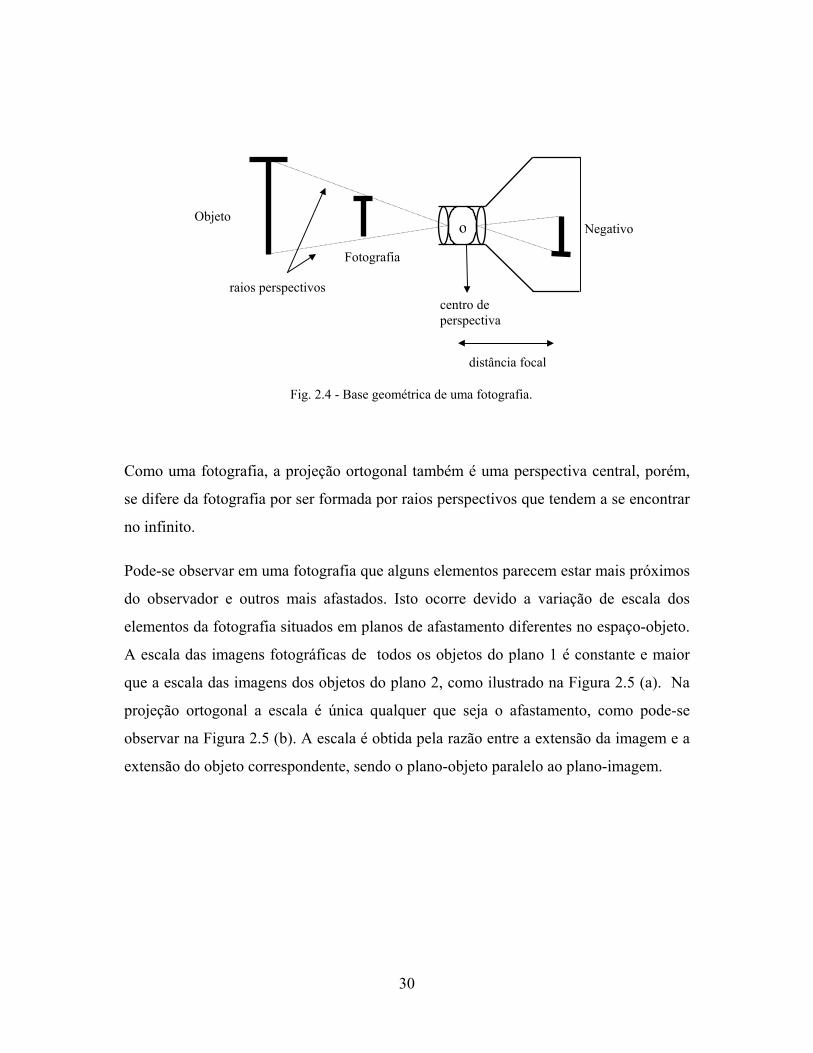
A fotografia é uma projeção (perspectiva central) onde a imagem de um objeto é
formada em um plano-imagem (local da imagem negativa) após os raios perspectivos
atravessarem o centro de perspectiva (centro óptico da objetiva), como mostra a Figura
2.4. A distância entre o centro de perspectiva e o plano-imagem é denominada distância
focal da câmera.
Fig. 2.3 - Par estereoscópico de fotografias com superposição horizontal aproximada de 60%.
30
Como uma fotografia, a projeção ortogonal também é uma perspectiva central, porém,
se difere da fotografia por ser formada por raios perspectivos que tendem a se encontrar
no infinito.
Pode-se observar em uma fotografia que alguns elementos parecem estar mais próximos
do observador e outros mais afastados. Isto ocorre devido a variação de escala dos
elementos da fotografia situados em planos de afastamento diferentes no espaço-objeto.
A escala das imagens fotográficas de todos os objetos do plano 1 é constante e maior
que a escala das imagens dos objetos do plano 2, como ilustrado na Figura 2.5 (a). Na
projeção ortogonal a escala é única qualquer que seja o afastamento, como pode-se
observar na Figura 2.5 (b). A escala é obtida pela razão entre a extensão da imagem e a
extensão do objeto correspondente, sendo o plano-objeto paralelo ao plano-imagem.
Negativo
distância focal
o
centro deperspectiva
raios perspectivos
Objeto
Fotografia
Fig. 2.4 - Base geométrica de uma fotografia.
31
2.3 CÂMERAS
Desde o surgimento da fotogrametria a aquisição de pares fotográficos de uma
edificação era realizada somente a partir de câmeras métricas terrestres com seus eixos
ópticos apontando para determinados pontos do alvo (Ogleby, 1995). Atualmente,
câmeras semi-métricas e não-métricas vêm sendo empregadas nesta atividade, face ao
seu custo de aquisição e a possibilidade atual de se controlar as distorções geradas pela
objetiva.
As câmeras métricas terrestres, assim denominadas por serem apoiadas no solo, são
projetadas especialmente para propósitos de fotogrametria terrestre. Além das partes
comuns de todas as câmeras fotográficas (objetivas, diafragma e obturador), as câmeras
métricas apresentam as seguintes características: marcas fiduciais (marcas de referência,
dispostas no ponto médio dos lados ou nos cantos do quadro do plano imagem, cujas
diagonais se interceptam no ponto central denominado ponto principal) e dispositivos
Fig. 2.5 - Projeções perspectiva (a) e ortogonal (b).
Plano-Imagem
Centro dePerspectiva
Plano-Referência Plano-Imagem Plano-Referência
Plano 1Plano 2
(a) (b)

32
para manter o filme plano, tais como as placas de vidro ou as placas para aderência a
vácuo, colocados no clichê (quadro do negativo). Algumas destas características são
ilustradas na Figura 2.6. Além disto, a orientação das fotografias fica totalmente a cargo
do operador da câmera, que controla o seu posicionamento manualmente. Embora estas
câmeras sejam, em geral, grandes, difíceis de manusear e caras em relação às não-
métricas, produzem fotografias com as especificações técnicas desejadas para a
utilização no processo fotogramétrico de delineamento do modelo da edificação
(Ogleby, 1995).
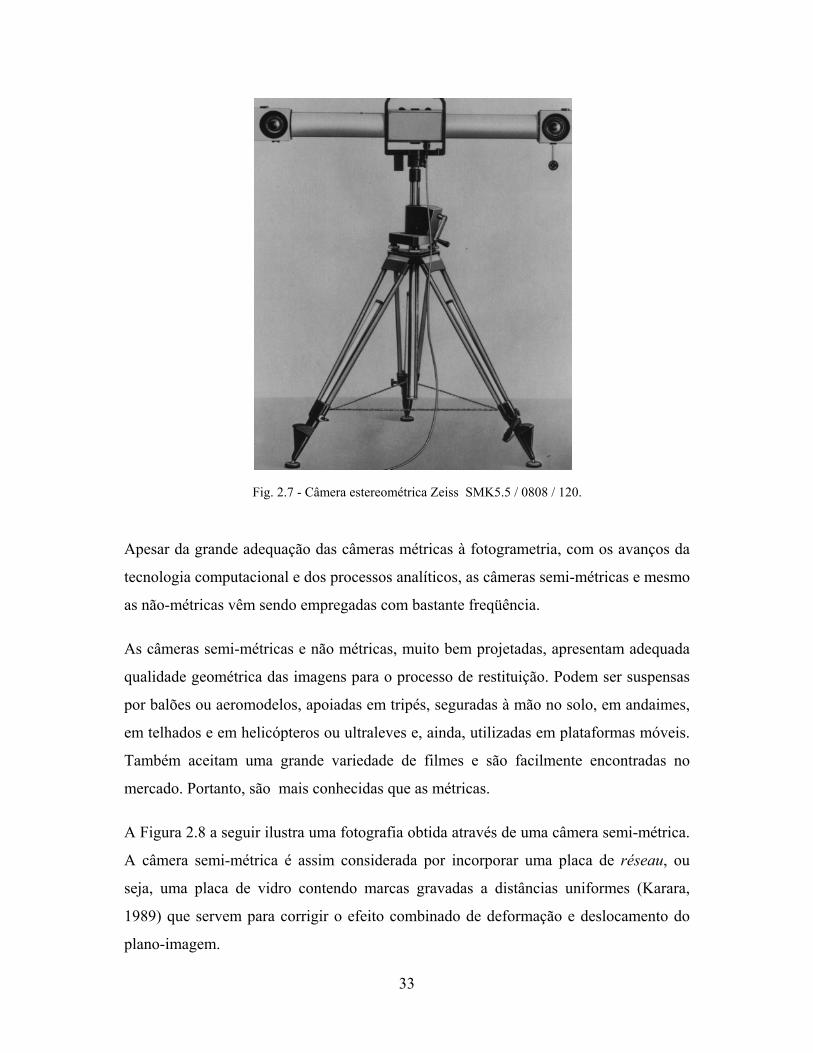
O sistema ilustrado na Figura 2.7 a seguir, composto por duas câmeras métricas
idênticas fixadas às extremidades de uma base rija apoiada no solo e com eixos ópticos
paralelos entre si, é denominado câmera estereométrica.
Câmera métrica
placa de nivelamentodo filme
oo
eixo óptico
objetivas
filme
Tipos de marcas fiduciaisobturador
diafragma
Fig. 2.6 - Características de câmeras métricas.
33
Apesar da grande adequação das câmeras métricas à fotogrametria, com os avanços da
tecnologia computacional e dos processos analíticos, as câmeras semi-métricas e mesmo
as não-métricas vêm sendo empregadas com bastante freqüência.
As câmeras semi-métricas e não métricas, muito bem projetadas, apresentam adequada
qualidade geométrica das imagens para o processo de restituição. Podem ser suspensas
por balões ou aeromodelos, apoiadas em tripés, seguradas à mão no solo, em andaimes,
em telhados e em helicópteros ou ultraleves e, ainda, utilizadas em plataformas móveis.
Também aceitam uma grande variedade de filmes e são facilmente encontradas no
mercado. Portanto, são mais conhecidas que as métricas.
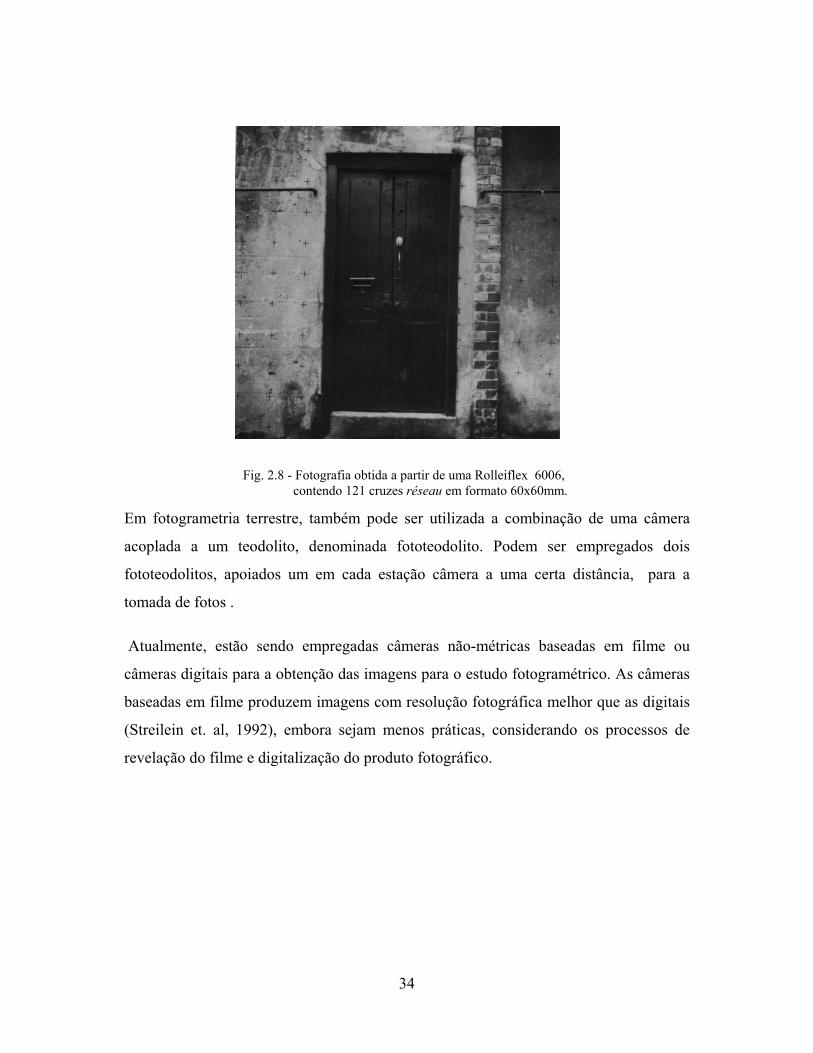
A Figura 2.8 a seguir ilustra uma fotografia obtida através de uma câmera semi-métrica.
A câmera semi-métrica é assim considerada por incorporar uma placa de réseau, ou
seja, uma placa de vidro contendo marcas gravadas a distâncias uniformes (Karara,
1989) que servem para corrigir o efeito combinado de deformação e deslocamento do
plano-imagem.
Fig. 2.7 - Câmera estereométrica Zeiss SMK5.5 / 0808 / 120.
34
Em fotogrametria terrestre, também pode ser utilizada a combinação de uma câmera
acoplada a um teodolito, denominada fototeodolito. Podem ser empregados dois
fototeodolitos, apoiados um em cada estação câmera a uma certa distância, para a
tomada de fotos .
Atualmente, estão sendo empregadas câmeras não-métricas baseadas em filme ou
câmeras digitais para a obtenção das imagens para o estudo fotogramétrico. As câmeras
baseadas em filme produzem imagens com resolução fotográfica melhor que as digitais
(Streilein et. al, 1992), embora sejam menos práticas, considerando os processos de
revelação do filme e digitalização do produto fotográfico.
Fig. 2.8 - Fotografia obtida a partir de uma Rolleiflex 6006, contendo 121 cruzes réseau em formato 60x60mm.
35
2.4 ELEMENTOS DE CONTROLE
Para ajustar as fotografias a uma determinada escala, bem como para orientar os eixos
ópticos das câmeras e a posição das mesmas em relação a um sistema de projeção
adotado, devem ser estabelecidos pontos ou detalhes bem definidos, localizados na
edificação a ser fotografada ou próximos desta, ou também inseridos posteriormente nas
imagens fotográficas. Estes elementos são conhecidos como pontos de controle
fotogramétrico (Loch, 1985).
Existem algumas condições para a distribuição dos pontos de controle sobre a
edificação (Loch, 1985):
• que estejam à maior distância possível entre si, para que a determinação da
escala possa ser feita com maior rigor;
• que sejam pontos de fácil identificação, para evitar enganos;
• que estejam em região de boa estereoscopia, ou seja, em região cujos pontos em
sua grande maioria possuam correspondentes homólogos no par estereoscópico,
para que a observação destes pontos seja a mais correta possível;
• que estejam em região de fácil acesso, para facilitar a medição.
É conveniente que todos os pontos de controle existentes na edificação a fotografar
sejam marcados de antemão de tal modo que apareçam o mais nitidamente possível nas
fotografias. Geralmente, as marcas são feitas em forma de cruz com cores que se
destacam bem no ambiente local.
2.5 PARÂMETROS PARA COBERTURA FOTOGRAMÉTRICA
Como já mencionado, para a realização do levantamento de uma edificação através da
estereoscopia, são necessárias, no mínimo, duas fotografias tomadas de posições
diferentes.

36
Se uma fotografia da edificação é obtida de uma determinada posição e, após deslocada
a câmera horizontalmente, outra fotografia for obtida, produz-se duas imagens que serão
adequadas à observação estereoscópica, desde que haja, entre estas, uma área comum.
Para o projeto de obtenção das fotos, deve-se ter como elementos conhecidos e pré-
estabelecidos as indicações da edificação a fotografar, tais como forma, dimensões e sua
localização. Deve-se também conhecer a escala em que pretende-se obter as fotografias
(Wolf, 1983).
2.5.1 ESCALA
A Figura 2.9 ilustra duas fotografias obtidas a uma mesma distância de uma edificação,
de dois pontos de vista semelhantes.
L
D
lf
o1 o2
Fig. 2.9 - Vista de cima da cobertura fotogramétrica de uma edificação.
A razão entre o comprimento l do clichê e o comprimento L da área coberta é igual à
razão entre a distância focal f da câmera e a distância D da câmera à edificação. Esta
razão é conhecida como escala da foto e pode ser representada por:
ElL
fD
= =

37
Por convenção (Wolf, 1983), a escala de uma representação gráfica é uma fração de
numerador unitário; sendo assim, a escala de uma fotografia pode ser expressa por uma
fração do tipo:
E Df
=1
.
2.5.2 DISTÂNCIA DA CÂMERA À EDIFICAÇÃO
Estabelecendo-se a escala da fotografia, pode-se calcular a distância D da câmera à
edificação, representada por: DfE
= , visto que a distância focal f é conhecida “a
priori”.
2.5.3 COMPRIMENTO DA ÁREA COBERTA
Uma fotografia pode cobrir uma área contendo a edificação inteira ou apenas uma parte
da edificação. Na fotografia, esta área é reproduzida em tamanho menor, conforme
ilustrado na Figura 2.10.
Área coberta
Foto
Para a determinação do comprimento da área coberta por uma única fotografia, utiliza-
se a relação: LlE
= , proveniente de El
L= , onde l é o comprimento do clichê e
L é o comprimento da área coberta pela fotografia.
Fig. 2.10 - Relação Foto x Área coberta
L
l
hH

38
2.5.4 ALTURA DA ÁREA COBERTA
Analogamente, para a determinação da altura da área coberta por uma única fotografia,
utiliza-se a relação: HhE
= , proveniente de EhH
= , onde h é a altura do clichê e H
é a altura da área coberta pela fotografia.
2.5.5 ELEVAÇÃO DA CÂMERA
A câmera deve ser elevada a uma altura que proporcione a cobertura completa da área
de interesse da edificação. Para isto, a altura Hc da câmera adicionada á metade da
altura L2 da área total coberta pela fotografia deve resultar em um valor igual ou maior
que a altura H da área de interesse contendo a edificação a ser coberta, o que pode ser
observado na Figura 2.11, onde D é a distância da câmera à edificação.
Representando matematicamente o que foi mencionado anteriormente, tem-se:
HLHc ≥+2
2
2.5.6 SUPERPOSIÇÃO HORIZONTAL
L2
H
Hc
D
Fig. 2.11 - Vista lateral da cobertura de uma edificação.
39
Para disponibilizar as fotografias para observação estereoscópica é necessário que as
mesmas sejam tomadas com suficiente superposição horizontal.
Para a determinação desta superposição, a distância entre os centros das câmeras deve
ser menor que o comprimento da área coberta.
Na tomada das fotografias, 50% da imagem da primeira deveria se repetir na segunda e
assim sucessivamente para as demais fotografias necessárias. Entretanto, é muito
grande a possibilidade de uma fotografia apresentar um pouco menos de 50% da
imagem da fotografia adjacente. Por exemplo, se a fotografia superpor apenas 49% da
anterior adjacente, 1% da imagem ficará descoberta estereoscopicamente. A parte que
não é coberta por ambas as fotografias gera uma lacuna estereoscópica. Para evitar
lacunas estereoscópicas, os fotogrametristas costumam prevenir-se obtendo fotografias
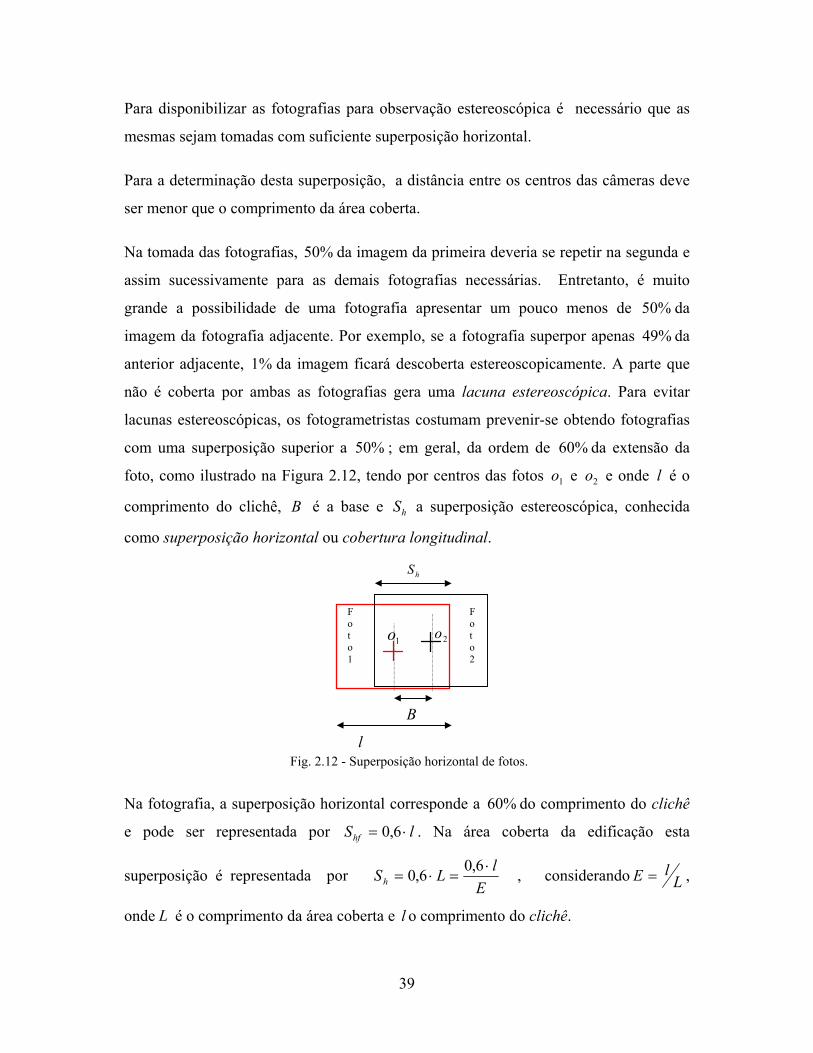
com uma superposição superior a 50% ; em geral, da ordem de 60% da extensão da
foto, como ilustrado na Figura 2.12, tendo por centros das fotos o1 e o2 e onde l é o
comprimento do clichê, B é a base e Sh a superposição estereoscópica, conhecida
como superposição horizontal ou cobertura longitudinal.
Na fotografia, a superposição horizontal corresponde a 60% do comprimento do clichê
e pode ser representada por S lhf = ⋅0 6, . Na área coberta da edificação esta
superposição é representada por E
lLSh⋅
=⋅=6,06,0 , considerando E l
L= ,
onde L é o comprimento da área coberta e l o comprimento do clichê.
Foto1
Foto2
o1 o2
Fig. 2.12 - Superposição horizontal de fotos.
Sh
B
l

40
De acordo com a Figura 2.13, a relação matemática empregada para a obtenção da
superposição horizontal das fotografias pode ser expressa em porcentagem de L por:
SL B
Lh =− ⋅( ) 100
∴ B LSh= ⋅ −( )1
100 ∴ B
lE
Sh= ⋅ −( )1100
onde Sh é a superposição horizontal, L é o comprimento da área coberta, E a escala
empregada e B é a distância entre os pontos principais das fotografias.
De modo geral, convém tomar como referência as medidas da fotografia para a dedução
das relações matemáticas envolvidas a fim de facilitar os cálculos.
2.5.7 BASES
Havendo a superposição horizontal de duas fotografias consecutivas, tem-se conhecido
o deslocamento da segunda fotografia em relação à primeira. No caso da superposição
de 60% , o deslocamento ou a distância entre os centros das fotografias denominado
base das fotos será de 40% e representado por: b l= ⋅0 4, . No terreno, o valor
correspondente à base das fotos será determinado por: B Ll
E= ⋅ =
⋅0 4
0 4,
,, ou seja, o
valor de B corresponde a 40% de L , o que corresponde à extensão do trecho onde não
houve superposição.
L
l
o2o1B
Fig. 2.13 - Vista de cima da superposição horizontal.

41
Quando a área da edificação a fotografar abranger dimensões que não possam ser
cobertas por uma única faixa de fotografias superpostas na horizontal, haverá a
necessidade de adicionar outras faixas fotográficas na vertical.
O ideal seria que as faixas fossem apenas justapostas na vertical. Porém, com este
procedimento, corre-se o risco de se gerar lacunas entre as faixas verticais.
Na prática, para prevenir isto, as faixas verticais devem apresentar uma superposição
vertical de 30%, o que corresponde, com base na medida da fotografia, a S lvF = ⋅0 3, e,
na área da edificação a fotografar, S Ll
Ev = ⋅ =⋅
0 30 3
,,
. Para garantir esta superposição,
é preciso dispor as faixas com uma distância entre seus eixos a cerca de 70% da altura
H da área fotografada, ou seja: E
hHD f⋅
==7,0.7,0 ; onde h é a altura da foto.
A distância fD entre as faixas será, então, representada pelo deslocamento entre os
eixos e das faixas, conforme apresentado na Figura 2.14.
Examinando a Figura 2.15, a relação matemática genérica para o cálculo da distância
Df entre os eixos das faixas é determinada por:
SH D
Hvf
=− ⋅( ) 100
∴ D HS
fv= ⋅ −( )1
100 ∴ D
hE
Sf
v= ⋅ −( )1100
e
fD
Fig. 2.14 - Superposição vertical de faixas.
H
30%L
42
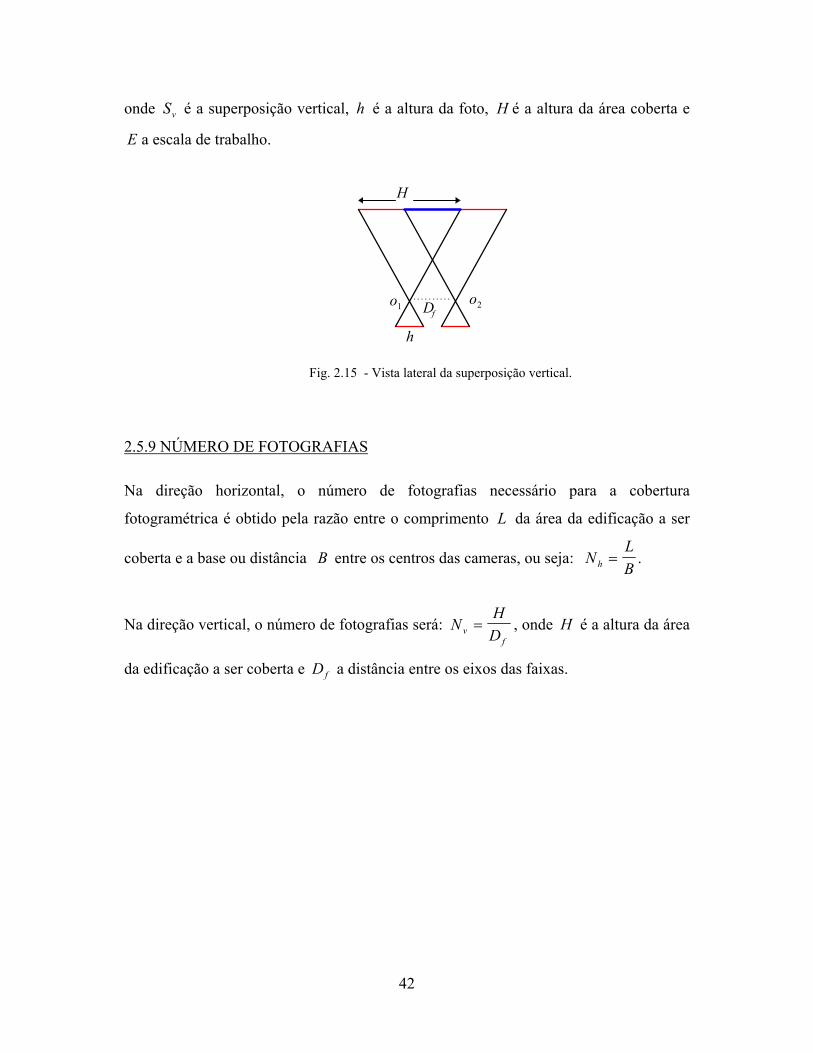
onde Sv é a superposição vertical, h é a altura da foto, H é a altura da área coberta e
E a escala de trabalho.
2.5.9 NÚMERO DE FOTOGRAFIAS
Na direção horizontal, o número de fotografias necessário para a cobertura
fotogramétrica é obtido pela razão entre o comprimento L da área da edificação a ser
coberta e a base ou distância B entre os centros das cameras, ou seja: NLBh = .
Na direção vertical, o número de fotografias será: NHDv
f= , onde H é a altura da área
da edificação a ser coberta e Df a distância entre os eixos das faixas.
o1
H
h
Dfo2
Fig. 2.15 - Vista lateral da superposição vertical.
43
CAPÍTULO 3
REGISTRO DE IMAGENS
Em várias aplicações de processamento de imagens é necessário realizar uma
comparação pixel-a-pixel de duas imagens do mesmo espaço-objeto obtidas a partir de
diferentes sensores ou a partir de um mesmo sensor em tempos diferentes. Para isto, é
necessário registrar espacialmente as imagens e, deste modo, corrigir os deslocamentos
de translação e rotação entre as imagens e as diferenças de escala e de vista perspectiva
(Pratt, 1991). Geralmente é possível eliminar ou minimizar muitas destas fontes de erro
de registro pela calibração correta do sensor. Entretanto, em muitos casos, uma detecção
de erro de registro “a posteriori” e subseqüente correção devem ser realizadas.
Fundamental em vários problemas práticos nas área de sensoriamento remoto,
reconhecimento de padrões e análise de imagens médicas, o processo de registro de
imagens também é aplicado em visão computacional para a obtenção da informação
tridimensional de uma edificação a partir de um par estereoscópico de imagens
(Fonseca, 1995).
Registrar duas imagens de uma mesma cena significa superpô-las de modo que pontos
comuns das imagens coincidam espacialmente com seus correspondentes pontos no
objeto originalmente imageado (Mascarenhas, 1989).
Este processo de casamento ou sobreposição é realizado através de uma transformação
espacial que relaciona as coordenadas espaciais das imagens e modela a distorção
geométrica entre estas. A imagem considerada como o padrão de referência, sobre a
qual a segunda é sobreposta, é denominada imagem de referência, e a imagem a ser
casada com a imagem de referência é denominada imagem de busca.
O processo de registro de imagens é realizado em quatro fases (Fonseca, 1995):
a) Identificação de feições: é identificado um conjunto de feições (objetos)
relevantes nas duas imagens, tais como interseções de linhas, contornos de
44
regiões, regiões, pontos de borda, marcas inseridas antes da obtenção da
imagem e outras. Estas feições devem estar presentes e, de preferência, bem
delineadas em ambas as imagens.
b) Casamento das feições: é estabelecida a correspondência entre as feições. Cada
feição da imagem de busca é casada com a correspondente feição na imagem
de referência. As feições, assim casadas, são identificadas por coordenadas
espaciais que identificam as suas posições nas imagens.
c) Transformação espacial: são determinadas as funções de mapeamento. Estas
funções modelam a transformação espacial que será aplicada à imagem de
busca, usando a informação dos pontos obtidos na fase anterior.
d) Interpolação: aplica-se a transformação espacial sobre a imagem de busca e
esta, após transformada, é exibida sobre a grade de pontos da imagem de
referência.
As feições geralmente consideradas em estudos de edificações são cantos de portas e
janelas, arestas de paredes, pontos relevantes em rachaduras, irregularidades e detalhes
arquitetônicos clararamente visíveis. Para a determinação de coordenadas reais destas
feições, as fases de identificação e casamento das mesmas em pares de imagens
estereoscópicas são essenciais. Para efetuar o registro das imagens, pode ser empregado
o método manual ou o método automático.
No método manual, as fases de identificação das feições nas imagens e o casamento
destas feições são realizadas simultaneamente e com a assistência de um intérprete. As
imagens são visualizadas na tela do computador e o usuário escolhe as feições
correspondentes que aparecem nas duas imagens.
A cada feição identificada é designada uma coordenada-imagem (x,y) de um ponto
contido nesta feição e os pares de coordenadas correspondentes nas duas imagens são
especificados como pontos de controle.
45
Para se obter um registro de boa precisão, uma grande quantidade de pontos de controle,
bem distribuídos em toda a extensão da imagem, devem ser selecionados. Esta tarefa é
tediosa e repetitiva e, muitas vezes, o processo não é eficiente quando a quantidade de
dados é muito grande (Fonseca, 1995). Neste caso, torna-se importante empregar
técnicas de registro automático ou semi-automático que requeiram mínima ou nenhuma
supervisão humana.
Tomando por base a natureza das feições utilizadas, os métodos de registro automático
podem ser agrupados em duas categorias: técnicas baseadas em feições e técnicas
baseadas em área.
3.1 TÉCNICA BASEADA EM FEIÇÕES
Neste método, a imagem é representada de forma compacta por um conjunto de feições
e o processo de casamento é realizado neste mesmo espaço de representação. Contornos
de regiões e bordas são freqüentemente usados como feições e são extraídos por meio
de técnicas computacionais de segmentação e detecção de bordas, tais como Operador
de Canny, Operador Laplaciano da Gaussiana e Crescimento de Região (Fonseca,
1995). Geralmente, os algoritmos de casamento de feições utilizam os parâmetros:
atributos de forma (perímetro e extensão), cor, textura e parâmetros relacionados ao
arranjo das feições, por exemplo, distância entre estas. Os centróides de regiões
fechadas, pontos salientes ao longo de contornos ou posições de máxima curvatura
podem ser usados como pontos de controle. Cada feição na primeira imagem é
comparada com as feições candidatas em potencial ao casamento na segunda imagem,
usando os seus atributos. O par de feições que possuir atributos similares será aceito
como par casado.
Seja qual for a técnica utilizada, para que um registro baseado em feições de boa
precisão seja garantido é fundamental que a feições escolhidas satisfaçam as seguintes
condições (Fonseca, 1995):
a) estejam presentes em ambas as imagens;
46
b) sejam bem distribuídas em toda a imagem;
c) estejam localizadas em áreas de alto contraste;
d) sejam únicas nas suas áreas de vizinhança.
3.2 TÉCNICA BASEADA EM ÁREA
Quando uma imagem é adquirida por câmeras fotográficas esta pode conter distorções
radiométricas, provocadas por variações atmosféricas e erros de medição dos
instrumentos utilizados, e distorções geométricas, provocadas pela posição angular e
por deslocamentos da câmera em relação ao objeto fotografado. As distorções
radiométricas afetam os valores de cor dos pixels da imagem; as distorções geométricas
modificam a geometria da imagem de modo que a posição, o tamanho e a forma do
pixel são alterados durante o processo de aquisição das imagens (Fonseca, 1995).
Admitindo que as fotografias sejam obtidas por instrumentos corretamente calibrados,
sob condições metereológicas favoráveis e que o planejamento fotogramétrico garanta a
produção de imagens com aproximadamente a mesma escala e isentas de rotação, a
distorção geométrica que certamente estará contida nas imagens terá sido produzida
pela tomada das fotos em posições diferentes.
Neste caso, a técnica de registro utilizada para a identificação e casamento dos pontos
homólogos de interesse reduz-se a encontrar a translação conveniente entre as duas
imagens; daí a denominação registro translacional. O procedimento mais comum usado
é definir uma medida de similaridade entre as imagens, computá-la para cada translação
possível e tomar a translação de melhor medida (Mascarenhas, 1989). Como medida de
similaridade podemos considerar, por exemplo, a somátoria dos desvios quadraticos das
tonalidades de cinza de pixels homologos de duas imagens fotográficas comparadas. A
somatória de menor valor é o melhor resultado de similaridade entre as imagens
comparadas.

47
Procedimentos de registro translacional podem ser usados para a determinação dos
pontos homólogos. Em geral, considera-se pequenas regiões da imagem que contenham
características atípicas e procura-se encontrar estas mesmas características na outra
imagem. Segundo Mascarenhas (1989), este método produz bons resultados desde que
as diferenças (distorções) entre as duas imagens não sejam grandes, pelo menos para as
pequenas regiões consideradas.
Nos métodos baseados em área sob as condições acima, uma pequena janela de pontos
na imagem de referência é estatisticamente comparada com janelas de mesmo tamanho
na imagem de busca
Seja a imagem de busca B contendo L linhas e C colunas, e n janelas Jv ,
v n= 1 2, ,..., , contendo M linhas e N colunas cada e centro em ( , )a bv v extraídas da
imagem R de referência, de ′L linhas e ′C colunas, conforme ilustrado na Figura 3.1.
Seja SB uma subimagem de B com M linhas e N colunas, sendo M L< e N C< .
O valor de cada pixel de SB localizado na posição ( )i l j m+ +, em B pode ser
representado por ( )B i l j m+ +, , onde i e j são as coordenadas do canto superior
Fig. 3.1 - Janelas de registro baseado em área.
L
C
(i,j)
M
N
L’
C’
M
N
SBJv
*( , )a bv v
B R
(0,0)

48
esquerdo de SB , variando de 0 ≤ ≤ −i L M e 0 ≤ ≤ −j C N ; l e m variam de
0 1≤ ≤ −l M , 0 1≤ ≤ −m N .
O método consiste em comparar cada janela Jv de R com todas as subimagens SB de
B. Após encontrar a subimagem SB que “melhor casa” com Jv , seus centros ( , )a bv v e
( )( ) ( )( )( )M i N j− + − +1 2 1 2, são tomados como pontos correspondentes.
O processo de comparação utiliza medidas de similaridade entre duas janelas contendo
as imagens estereoscópicas. Existem vários métodos para a obtenção das medidas de
similaridade, porém, as técnicas de correlação (correlação normalizada e o coeficiente
de correlação) e a detecção de similaridade seqüencial são os métodos mais empregados
(Pratt, 1991).
A correlação normalizada para a janela de referência Jv e a subimagem SB , definidas
acima, pode ser matematicamente representada por:
( )( ) ( )
( ) ( )R i j
J l m SB l m
J l m SB l m
m o
N
l
M
v
m
N
l
M
vm
N
l
M,
, * ,
, * ,= =
−
=
−
=
−
=
−
=
−
=
−
∑∑
∑∑ ∑∑
1
0
1
0
1
0
12 2
0
1
0
1
O melhor casamento ocorre quando o valor de ( )R i j, for máximo.
Outra alternativa, o coeficiente de correlação, representado por:
( )( )( ) ( )( )
( )( ) ( )( )R i j
j l m SB l m
j l m SB l m
vm o
N
l
M
vm
N
l
M
m
N
l
M,
, * ,
, * ,=
− −
− −
=
−
=
−
=
−
=
−
=
−
=
−
∑∑
∑∑∑∑
µ µ
µ µ
1
1
20
1
12
22
0
1
0
1
0
1
0
1
determina a medida de similaridade entre as duas janelas sobre uma escala absoluta em
[ ]−11, , onde µ1 e µ2 são as médias, ou seja, valores de intensidade média de pixels da
janela Jv e da subimagem SB , respectivamente.
49
Por muito tempo, o método da correlação limitava-se ao problema de registro de
imagens com uma pequena diferença de rotação entre si. Em 1993, Zheng e Chellapa
propuseram uma solução em que o problema de rotação era primeiramente corrigido
(Fonseca, 1995).
Embora a técnica de correlação seja extremamente eficiente, seu custo computacional é
elevado. Para uma dada posição de referência ( )i j, M N* pontos da subimagem SB
são comparados com os correspondentes M N* pontos na janela Jv . Na correlação, é
examinado o número máximo ( ) ( ) ( )[ ]M N L M C N* * *− − destes pares, ou
seja, cada posição de referência é examinada exaustivamente com alta precisão. Assim,
muito esforço computacional é desperdiçado (Pereira, 1983) pela grande quantidade de
cálculos realizados, sendo que apenas para um conjunto restrito de pontos na
vizinhança do ponto de registro é importante obter-se extrema precisão.
Por outro lado, no intuito de reduzir os cálculos na busca da similaridade entre imagens,
foi proposta em 1972 por Barnea e Silverman (Mascarenhas, 1989) uma classe de
algoritmos mais eficientes, por realizarem uma busca sequencial que pode terminar
antes que todos os MxN pares para uma determinada posição de referência sejam
testados. Estes são conhecidos como Algoritmos de Detecção Seqüencial de
Semelhança (Sequential Similarity Detection Algoritms - SSDA).
O método de Barnea e Silverman implementa a diferença absoluta entre os valores dos
pixels das duas imagens; diferença esta representada por ( ) ( )J l m SB l mvm
N
l
M
, ,−=
−
=
−
∑∑0
1
0
1
e em
um método de busca seqüencial. Este método consiste em acumular a medida de
similaridade definida pela equação acima para todos os valores de nível de cinza dos
pixels dentro de uma janela até que esta medida ultrapasse um valor de limiar pré-
estabelecido. Ao ser encontrada a medida acumulada que ultrapassa o limiar, armazena-
se o número de pixels examinados e este servirá como uma taxa de avaliação do teste.
Após examinadas todas as subimagens, considerar-se-á o melhor casamento a
subimagem que possuir a maior taxa.

50
Para uma melhor estimação dos limiares do teste dos algoritmos de SSDA, foi proposta
por Pereira (1983) uma abordagem baseada no Teste Seqüencial de de Wald.
A teoria do teste seqüencial de hipóteses de Wald apresenta uma regra para se tomar,
em qualquer etapa de um experimento, uma das seguintes decisões:
1) aceitar uma hipótese H ;
2) rejeitar uma hipótese H ;
3) continuar o experimento com nova observação.
Baseando-se na primeira observação, é tomada uma das três decisões acima. Se uma das
duas primeiras decisões for tomada, o experimento termina. Se for tomada a terceira
decisão, faz-se uma segunda observação e, baseando-se nas duas primeiras observações,
toma-se novamente uma das três decisões. Caso a decisão 3 for novamente escolhida,
faz-se uma terceira observação e assim sucessivamente até que se tome uma das duas
primeiras decisões.
Deste modo, o experimento é conduzido seqüencialmente.
Os procedimentos que utilizam os métodos seqüenciais aplicados a testes estatísticos de
hipóteses têm o mérito de reduzir muito o número de observações necessárias (Erthal,
1985) , quando comparados com procedimentos igualmente confiáveis baseados em
tamanhos fixos de amostra.
Seja X uma variável aleatória com densidade ( )f X ,θ , onde θ é o parâmetro a ser
testado. Baseado nas observações sucessivas x x1 2, , ... de X (observações
consideradas independentes), o problema consiste em testar a hipótese H0 (hipótese
nula) de que θ θ= 0 contra a hipótese H1 (hipótese alternativa) de que θ θ= 1 e, deste
modo, determinar qual a função densidade que governa as observações (Erthal, 1985).
51
Segundo Wald, o teste seqüencial é efetuado da seguinte maneira: para cada amostra
( )x x xn1 2, , ... , é calculada a razão de verossimilhança ff
n
n
1
0, onde
( )( )
ff
f xf x
n
n
i
ii
m1
0
1
01
==∏
,,θ
θ (1)
( m n= 1 2, , ... , ; m e n denotam estados intermediário e final respectivamente, n é uma
variável aleatória)
Se Bff
An
n< <1
0, (2)
o experimento continua com uma observação adicional;
Se ff
An
n
1
0≥ , (3)
o processo termina com a rejeição de H0 (aceitação de H1);
Se ff
Bn
n
1
0≤ , (4)
o processo termina com a aceitação de H0 .
As constantes A e B são determinadas a partir da escolha dos valores das
propabilidades de erro α e β (α é a probabilidade de rejeição de H0 quando esta for
verdadeira e β é a probabilidade de aceitação de H0 quando esta for falsa). Os valores
aproximados de A e B (Pereira, 1983) são obtidos por:
A =−1 βα
(5)
B =−βα1
(6)
52
3.2.1 MODELO GAUSSIAN O PARA O REGISTRO
Uma aplicação do teste seqüencial de Wald utilizando a variância de erro de registro de
imagens foi realizada pioneiramente por Pereira (Erthal, 1985) .
Duas imagens esteroscópicas apresentam diferenças entre si do ponto de vista
geométrico. Pode-se imaginar que pequenos segmentos destas imagens, que coincidem
aproximadamente um com o outro, apresentariam pequenas variações em escala e
orientação. Pereira simulou esta situação adicionando o ruído Gaussiano de média zero,
independente de sinais e independentes entre si nas duas imagens.
Admitindo-se que as duas imagens tenham distribuição normal, a distribuição da
imagem ruidosa também será gaussiana, com média equivalente a média da imagem
original e com variância dada pela soma das variâncias da imagem original e do ruído,
ou seja:
V V VI S N= + (7)
onde VS é a variância da cena original e VN é a variância do ruído.
A idéia apresentada por Pereira é testar a variância da diferença entre as duas imagens
para cada posição de referência.
Para ponto situado fora da região de registro, a variância da diferença entre as duas
imagens é dada por
V V V V V VDij
I I S N N= + = + +1 2 1 22 (8)
E para ponto situado dentro da região de registro, esta variância é determinada por
$V V VDij
N N= +1 2 (9)
53
admitindo-se que a cena original é a mesma e apenas os ruídos associados com cada
imagem sejam, em geral, não correlacionados e com variâncias diferentes.
Um teste seqüencial de razão de probabilidades com probabilidades de erro α e β
pode ser realizado para testar a hipótese H0 de que σ σ= 0 contra a hipótese
alternativa H1 de que σ σ σ= ≠1 0 .
Sejam x x xn1 2, , ... , as sucessivas observações do pixel x. O conjunto ( , , ... , )x x xn1 2
representa uma amostra e cada observação xi (i-ésima observação) desta amostra
resulta na diferença de valor de cor entre dois pixels. A função densidade de
probabilidade de casamento das amostras ( , , ... , )x x xn1 2 é dada por
( )
f en n
x
n
ii
n
=∑−
=1
22
22
1
12
π σσ* (10)
A independência das amostras, que encontra-se implícita na equação anterior, é
garantida pela varredura aleatória dos pixels na janela.
A razão ff
n
n
1
0 é calculada a cada estágio do experimento e observações adicionais são
realizadas se as seguintes desigualdades forem satisfeitas:
βα
βα1
11
0−< <
−ff
n
n (11)
O teste termina com a aceitação de H0 se
ff
n
n
1
0
1≤
− βα
(12)
e com a rejeição de H0 se
54
ff
n
n
1
0
1≥
− βα
(13)
Considerando D = −1 1
02
12σ σ
e S = logσσ
12
02 estas desigualdades podem ser expressas por:
xnS
DAi
i
n
n2
1
21
=∑ ≤ −
+=
logβα (14)
e xnS
DRi
i
n
n2
1
21
=∑ ≥
−+
=log
βα (15)
Uma representação gráfica das três decisões acima é apresentada na Figura 3.2 onde
lD0
21= −
logβα , (16)
lD1
21
=
−log
βα (17)
e a inclinação das retas é dada por SD
.

55
Nesta Figura, l0 é o limiar de rejeição do ponto, para um valor acima deste limiar o
ponto analisado não é de registro e l1 é o limiar de aceitação do ponto, todo valor
abaixo deste indica que o ponto analisado é de registro. O intervalo entre estes dois
limiares representa a fase de continuidade do teste.
aceitaçãode H0
o testecontinua
rejeiçãode H0
l0
xi2∑
l1
(erro acumulado)
m (tamanho da amostra)
Fig. 3.2 - Representação dos limites de decisão do teste seqüencial de razão de probabilidades sob modelo Gaussiano
57
CAPÍTULO 4
MÉTODO DA PARALAXE
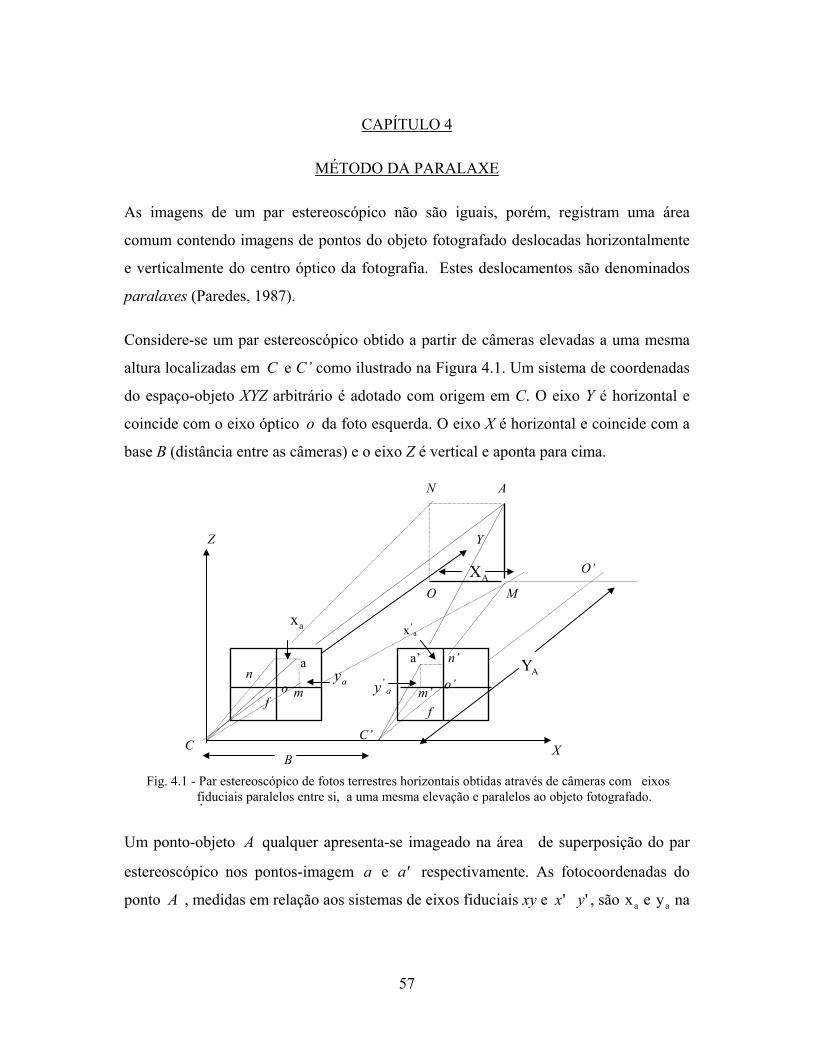
As imagens de um par estereoscópico não são iguais, porém, registram uma área
comum contendo imagens de pontos do objeto fotografado deslocadas horizontalmente
e verticalmente do centro óptico da fotografia. Estes deslocamentos são denominados
paralaxes (Paredes, 1987).
Considere-se um par estereoscópico obtido a partir de câmeras elevadas a uma mesma
altura localizadas em C e C’ como ilustrado na Figura 4.1. Um sistema de coordenadas
do espaço-objeto XYZ arbitrário é adotado com origem em C. O eixo Y é horizontal e
coincide com o eixo óptico o da foto esquerda. O eixo X é horizontal e coincide com a
base B (distância entre as câmeras) e o eixo Z é vertical e aponta para cima.
.
Um ponto-objeto A qualquer apresenta-se imageado na área de superposição do par
estereoscópico nos pontos-imagem a e ′a respectivamente. As fotocoordenadas do
ponto A , medidas em relação aos sistemas de eixos fiduciais xy e x' y' , são xa e ya na
o’o
O
N A
M
O’
Z
XC’
C
a a’
Y
B
XA
nm’m
n’
xa x a'
ya y a'
YA
ff
Fig. 4.1 - Par estereoscópico de fotos terrestres horizontais obtidas através de câmeras com eixos fiduciais paralelos entre si, a uma mesma elevação e paralelos ao objeto fotografado.

58
foto esquerda e x a' e y a' na foto direita. O eixo X do objeto e o eixo x da imagem são
paralelos e o eixo Z do objeto e o eixo y da imagem também.
A diferença algébrica dos deslocamentos horizontais xa e x a' do ponto-imagem A em
relação ao centro óptico da fotografia é denominada paralaxe absoluta do ponto A e
pode ser representada por p x xa a a= − ' . A paralaxe é medida ao longo das abcissas das
imagens de um par estereoscópico devidamente orientado no espaço-fotografia.
Se um par estereoscópico de fotos terrestres horizontais é obtido com duas câmeras
cujos eixos sejam perpendiculares à base, equações da paralaxe podem ser
desenvolvidas para calcular as coordenadas tridimensionais dos pontos de interesse
situados na área de sobreposição. Neste trabalho, são apresentadas as equações da
paralaxe para o caso de fotografias obtidas a partir de câmeras elevadas a uma mesma
altura do solo. O caso de câmeras elevadas a alturas diferentes é encontrado em Wolf
(1983).
As equações da paralaxe para calcular as coordenadas tridimensionais X A , YA e ZA
do ponto A podem ser desenvolvidas através de semelhança de triângulos.
Da semelhança dos triângulos Com e COM , tem-se:
XY
xf
A
A
a=
onde f é a distância focal da câmera.
Assim, Xxf
YAa
A= ⋅ (a)
Também, dos triângulos semelhantes ′ ′ ′C o m e ′ ′ ′C O M , tem-se:
B XY
xf
A
A
a−=− '
59
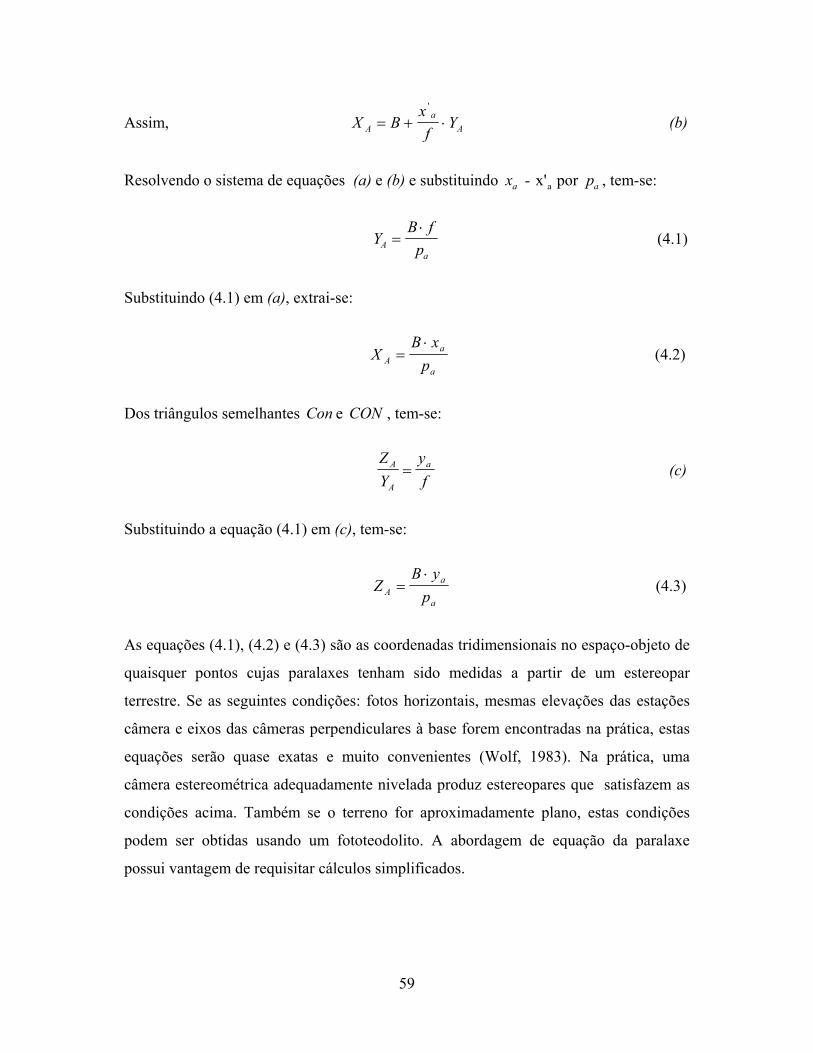
Assim, X Bxf
YAa
A= + ⋅'
(b)
Resolvendo o sistema de equações (a) e (b) e substituindo xa - x a' por pa , tem-se:
YB f
pAa
=⋅
(4.1)
Substituindo (4.1) em (a), extrai-se:
XB x
pAa
a=
⋅ (4.2)
Dos triângulos semelhantes Con e CON , tem-se:
ZY
yf
A
A
a= (c)
Substituindo a equação (4.1) em (c), tem-se:
ZB y
pAa
a=
⋅ (4.3)
As equações (4.1), (4.2) e (4.3) são as coordenadas tridimensionais no espaço-objeto de
quaisquer pontos cujas paralaxes tenham sido medidas a partir de um estereopar
terrestre. Se as seguintes condições: fotos horizontais, mesmas elevações das estações
câmera e eixos das câmeras perpendiculares à base forem encontradas na prática, estas
equações serão quase exatas e muito convenientes (Wolf, 1983). Na prática, uma
câmera estereométrica adequadamente nivelada produz estereopares que satisfazem as
condições acima. Também se o terreno for aproximadamente plano, estas condições
podem ser obtidas usando um fototeodolito. A abordagem de equação da paralaxe
possui vantagem de requisitar cálculos simplificados.


61
CAPÍTULO 5
SISTEMAS CAD EM ARQUITETURA
Os sistemas CAD são sistemas gráficos baseados em pontos, vetores e técnicas de
computação gráfica interativa, que permitem operações tais como produção de desenhos
bi e tridimensionais, geração de perspectivas, mudanças de escala, alterações de layout,
criação de bibliotecas de símbolos e outras (Gobbi, 1994). Com estes sistemas pode-se
criar, manipular e representar computacionalmente desenhos de melhor qualidade e de
forma mais rápida que com os métodos tradicionais de representação em papel. Isto
tudo, através de bons programas e equipamentos a custo acessível. Estes programas são
eficazes na realização de tarefas minuciosas, repetitivas, trabalhosas e que exigem muita
habilidade e muito tempo no caso de serem executadas manualmente.
Atualmente, muitos projetos arquitetônicos têm sido subsidiados por modelos
tridimensionais gerados em sistemas CAD a partir de dados provenientes do processo
fotogramétrico.
Streilein (1992) desenvolveu um sistema digital capaz de gerar informações
tridimensionais geométricas e semânticas (com significado histórico) de objetos
arquitetônicos a partir de produtos fotogramétricos, de tal modo que pudessem ser
prontamente utilizadas em projetos de arquitetura. Para a demonstração deste sistema
foi escolhida a igreja “Chiesa de Nostre Signora di Fatima”, situada em Giova, na
Suiça, com 14 m de comprimento e 10 m de altura e profundidade.
Além deste projeto outros, como a restauração da Capela do Mosteiro Snagov - um
monumento histórico do século 14 situado na Romênia (Gutu, 1992), a documentação
do exterior da Torre de Pisa (Baji et. al, 1992) e a reconstrução das edificações
danificadas por incêndio - Milford House, em Surrey - Inglaterra, St. Mary-at-Hill, em
Londres e a Uppark House em West Sussex - Inglaterra (Stevens et al, 1990) são
projetos que foram significantemente beneficiados por sistemas fotogramétrico-digitais.
62
Dentre os vários sistemas CAD existentes dirigidos à aplicações arquitetônicas os mais
utilizados (D’issy, 1995) são o AutoCAD da AutoDesk e o MicroStation da Intergraph.
Para a criação de desenhos nestes sistemas introduz-se coordenadas de pontos,
comandos e outras informações necessárias, através de arquivos ou em linha de
comando. Por exemplo, rotinas em linguagem AutoLisp (Kramer, 1995) podem ser
desenvolvidas para entrada de pontos e operações dentro do sistema gráfico do
AutoCAD e Scripts (Omura, 1995) também podem ser construídas para a execução de
comandos do AutoCAD em seqüência pré-determinada.
De posse dos dados de entrada obtidos por uma das técnicas mencionadas
anteriormente, e do conhecimento de uso dos recursos gráficos do sistema empregado é
possível recuperar os desenhos das formas originais da edificação ou elaborar novos
desenhos para o caso de reforma da edificação. Junto com os desenhos podem ser
armazenadas informações métricas e semânticas significativas da edificação que podem
ser acessadas a qualquer momento.
63
CAPÍTULO 6
IMPLEMENTAÇÃO COMPUTACIONAL
6.1 DESCRIÇÃO DOS RECURSOS DE PROGRAMAÇÃO
Para a implementação computacional do sistema apresentado neste trabalho intitulado
Estereofotogrametria Digital foi empregada a metodologia de Programação Orientada a
Objetos por melhor atender as necessidades de programação, principalmente, aquelas
relacionadas ao desenvolvimento da interface sistema-usuário.
Com a abordagem de orientação a objetos para Windows tornou-se possível a criação de
janelas, caixas de diálogos, gerenciamento de múltiplas janelas, seleção de regiões das
imagens e outros benefícios, tais como reutilização de partes do código e redução do
esforço de manutenção do mesmo.
Os recursos de software e hardware utilizados foram a linguagem C, o compilador
Borland C++, ambiente operacional Windows 95 e um microcomputador Pentium 166
Mhz com 32 Mb de RAM.
6.2 METODOLOGIA DE PROGRAMAÇÃO ORIENTADA A OBJETOS
A metodologia orientada a objetos engloba os conceitos de objetos, classes e serviços.
Objetos são entidades modeladas por uma classe.
Classe é uma entidade abstrata composta por nome, atributos e serviços.
Como apresentada nos métodos de Análise e Projeto Orientados a Objetos propostos por
Peter Coad e Eduard Yourdon (Rangel, 1998), uma classe pode ser apresentada segundo a
notação da Figura 6.1. O retângulo externo indica que a classe pode ter pelo menos um
objeto, ou seja, pode ser instanciada.
64
Nome da classe representa o conjunto dos objetos que estão sendo modelados.
Atributos da classe são as informações que devem ser armazenadas sobre cada objeto que
está sendo modelado.
Serviços da classe são as operações, simples ou complexas, oferecidas pela classe, que
podem ser utilizadas sobre qualquer objeto que está sendo modelado.
Os atributos e serviços podem ser declarados como public (que podem ser acessados por
quem instancia um objeto desta classe) ou private (que só podem ser manipulados por
rotinas internas da classe).
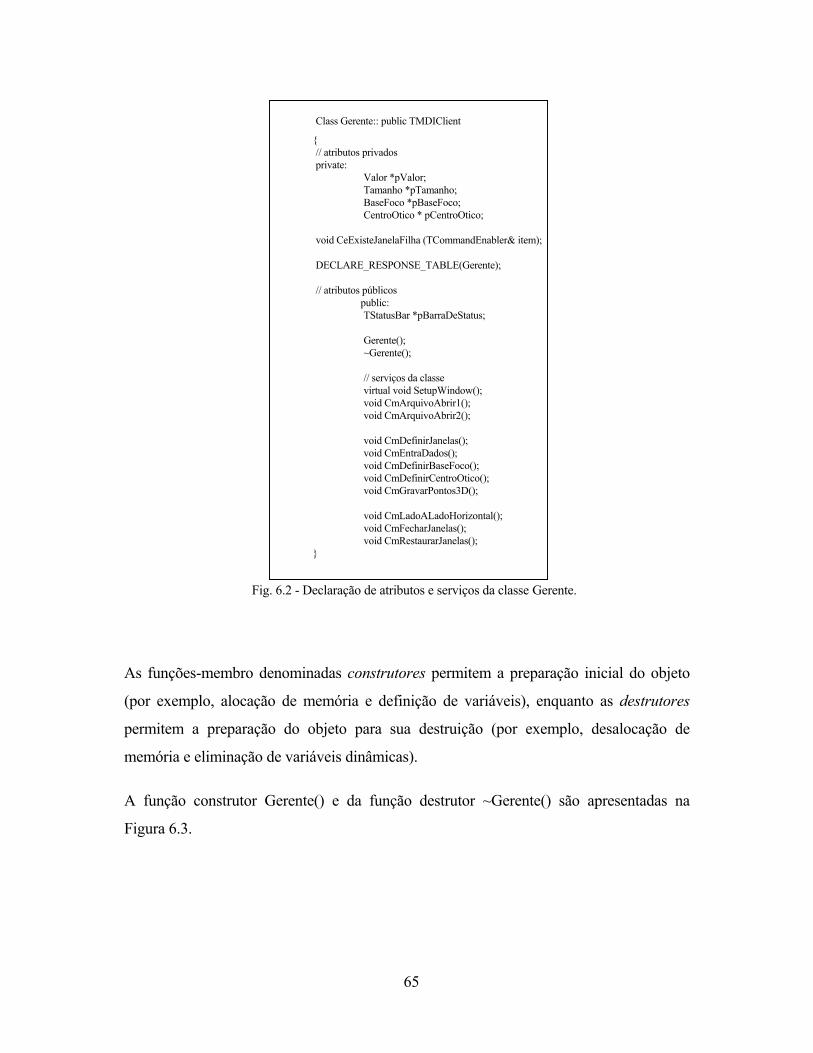
Como exemplo, no código do sistema desenvolvido, foi definida a classe Gerente,
responsável pelos serviços de abertura de arquivos de imagens, solicitação ao usuário para
entrada de dados, chamada de funções para o tratamento dos dados e de gerenciamento de
múltiplas janelas.
A Figura 6.2 ilustra a declaração dos atributos e serviços da classe Gerente.
Fig. 6.1 - Notação Coad & Yourdon para Classe.
65
Class Gerente:: public TMDIClient
{// atributos privadosprivate:
Valor *pValor;Tamanho *pTamanho;BaseFoco *pBaseFoco;CentroOtico * pCentroOtico;
void CeExisteJanelaFilha (TCommandEnabler& item);
DECLARE_RESPONSE_TABLE(Gerente);
// atributos públicospublic:TStatusBar *pBarraDeStatus;
Gerente();~Gerente();
// serviços da classevirtual void SetupWindow();void CmArquivoAbrir1();void CmArquivoAbrir2();
void CmDefinirJanelas();void CmEntraDados();void CmDefinirBaseFoco();void CmDefinirCentroOtico();void CmGravarPontos3D();
void CmLadoALadoHorizontal();void CmFecharJanelas();void CmRestaurarJanelas();
}
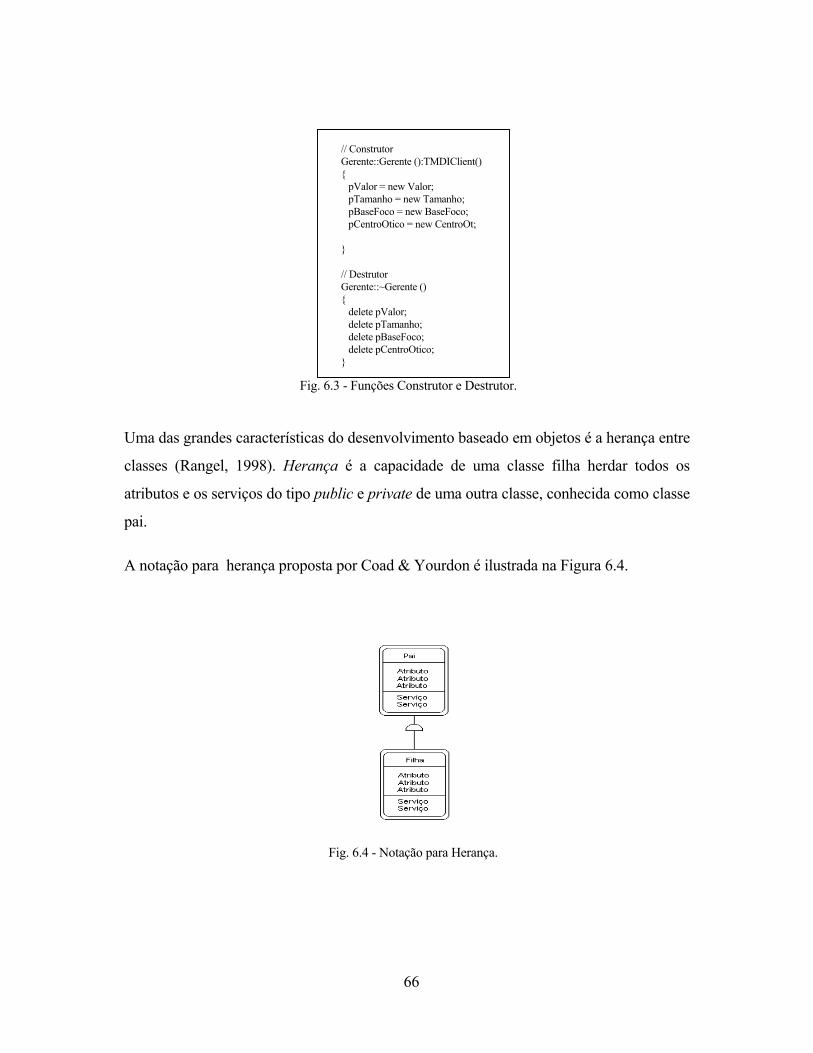
As funções-membro denominadas construtores permitem a preparação inicial do objeto
(por exemplo, alocação de memória e definição de variáveis), enquanto as destrutores
permitem a preparação do objeto para sua destruição (por exemplo, desalocação de
memória e eliminação de variáveis dinâmicas).
A função construtor Gerente() e da função destrutor ~Gerente() são apresentadas na
Figura 6.3.
Fig. 6.2 - Declaração de atributos e serviços da classe Gerente.
66
// ConstrutorGerente::Gerente ():TMDIClient(){ pValor = new Valor; pTamanho = new Tamanho; pBaseFoco = new BaseFoco; pCentroOtico = new CentroOt;
}
// DestrutorGerente::~Gerente (){ delete pValor; delete pTamanho; delete pBaseFoco; delete pCentroOtico;}
Uma das grandes características do desenvolvimento baseado em objetos é a herança entre
classes (Rangel, 1998). Herança é a capacidade de uma classe filha herdar todos os
atributos e os serviços do tipo public e private de uma outra classe, conhecida como classe
pai.
A notação para herança proposta por Coad & Yourdon é ilustrada na Figura 6.4.
Fig. 6.3 - Funções Construtor e Destrutor.
Fig. 6.4 - Notação para Herança.
67
A informação ‘class Gerente:public TMDIClient’ que é apresentada na definição da classe
Gerente da Figura 6.2 informa ao compilador que a classe Gerente herda todos os
atributos e serviços públicos e privados da classe TMDIClient além daqueles que já
contém.
Na Análise e Projeto Orientados a Objetos, quando uma classe (emissora) acessa serviços
de outra classe (receptora), diz-se que houve uma Conexão de Mensagem entre elas. Pode-
se definir polimorfismo como a possibilidade de se enviar uma mensagem a um objeto,
cuja execução irá depender do tipo de objeto instanciado.
A notação para conexão de mensagem encontra-se na Figura 6.5.
Fig 6.5 - Notação para Conexão de Mensagem.
O Windows permite que se prepare aplicações compatíveis com diferentes máquinas. Para
proporcionar esta interface entre seu programa e os vários periféricos do equipamento, tais
como impressoras e placas de video, foi criada uma biblioteca de rotinas a ser empregada
no desenvolvimento de sistemas, denominada camada “Application Programming
Interface” (API).
Como a API não é orientada a objetos, a Borland projetou a biblioteca “Object Windows
Library” (OWL) que se encontra entre as rotinas do programa e a API e que permite o
desenvolvimento de sistemas totalmente orientados a objetos. Quando se programa sobre
a biblioteca OWL, somente são acessadas as rotinas oferecidas pela OWL e não
diretamente as da API, o que permite que o software continue estável e possa ser utilizado
mesmo que a API seja alterada. A OWL possui mais de 200 classes prontas para as mais
68
diversas tarefas, como, por exemplo, a criação de janelas, caixas de diálogos, multitarefa,
gerenciamento de janelas múltiplas e outras (Rangel, 1998).
Uma das classes da OWL de maior utilidade, a TApplication, fornece os procedimentos
básicos necessários a uma aplicação, tais como a criação da janela principal do sistema e o
processamento de mensagens entre aplicações. Esta classe é descendente da classe
TModule.
Um objeto da classe TApplication não possui rotinas de interface para a criação de
janelas, caixas de diálogo e outros. Funcionalmente, esta classe apenas possibilita a
existência da aplicação no ambiente e se responsabiliza pelo tratamento das mensagens
que recebe do Gerente de Tarefas do Windows.
A função InitMainWindow, descrita na classe Tapplication inicializa dinamicamente um
objeto da classe TFrameWindow, uma classe descendente direto da classe TWindow.
Na classe TFrameWindow são descritos todos os procedimentos básicos necessários à
criação, manutenção e controle de janelas.
Na Análise e Projeto Orientados a Objetos entende-se que a classe Tapplication possui um
objeto da classe TFrameWindow. Segundo o método Coad & Yourdon, trata-se de uma
estrutura Todo-Parte, como ilustrado na Figura 6.6, onde Tapplication é o todo e
TFrameWindow a parte.
Fig. 6.6 - Notação para a estrutura Todo-Parte.
69
O valor 1 da Figura 6.6 indica que a classe Todo possui exatamente um objeto da classe
Parte a faixa 0,n assinala que um objeto da classe Parte pode pertencer a nenhum ou a
muitos objetos da classe Todo. Não há herança entre as classes envolvidas na estrutura
Todo-Parte.
Quando a classe TFrameWindow é instanciada, uma janela típica do Windows é
apresentada na tela, conforme apresentado na Figura 6.7. Esta janela, que pode ser vista e
manuseada , representa o objeto da classe TFrameWindow.
Fig. 6.7 - Janela típica da aplicação.
Para aperfeiçoar e agilizar a interação sistema-usuário a janela principal foi decorada com
a barra de status e a barra de ferramentas. Estas barras de auxílio são janelas filhas
apresentadas na janela principal.
Na biblioteca OWL encontra-se a classe TStatusBar, contendo recursos necessários para a
construção da Barra de Status e as classes TControlBar, TButtonGadget e
TSeparatorGadget, que possibilitam a construção e a utilização da Barra de Ferramentas.
A finalidade da barra de status é apresentar mensagens informativas de uma situação e a
barra de ferramentas contém botões que aceleram a abertura de arquivos e permitem a
organização das janelas em cascata ou lado a lado. O botão com desenho da letra R da
Figura 6.8 é apresentado na janela principal da aplicação. Ao ser pressionado,
rapidamente abre-se uma janela solicitando ao usuário a seleção do nome do arquivo a ser
aberto correspondente à imagem de referência.
70
Fig. 6.8 - Botão para agilizar abertura de arquivos.
No Windows, uma porção do sistema é dedicada ao controle de eventos que podem
ocorrer por muitos motivos diferentes, tais como acionamentos do mouse, entradas via
teclado, tarefas finalizadas. Estas rotinas fazem parte do Componente Gerenciamento de
Tarefas, como conhecido na orientação a objetos (Rangel, 1998).
Quando o Gerente de Tarefas percebe um evento ou uma solicitação do usuário,
imediatamente prepara uma mensagem de aviso e a envia à aplicação correspondente.
Assim, na descrição de uma classe, deve-se definir quais serviços serão acionados com a
chegada de uma mensagem. Essas associações são feitas dentro de uma macro
padronizada, a tabela de associação de mensagens, denominada
DEFINE_RESPONSE_TABLE1, onde normalmente, precisamos mencionar os nomes
das classes filha e pai.
Por exemplo, quando um objeto da classe Gerente receber uma mensagem
CM_ARQUIVOABRIR1 deverá acionar o serviço CmArquivoAbrir1. Na Figura 6.9 é
descrito o código de uma tabela de associação de mensagens.
DEFINE_RESPONSE_TABLE1(Gerente, TMDIClient)
EV_COMMAND (CM_ARQUIVOABRIR1, CmArquivoAbrir1), EV_COMMAND (CM_LADOALADOHORIZONTAL, CmLadoALadoHorizontal), EV_COMMAND (CM_FECHARJANELAS, CmFecharJanelas),
END_RESPONSE_TABLE;
Para o sistema desenvolvido houve a necessidade de se trabalhar com mais duas janelas,
além da principal, nas quais seriam apresentadas as imagens de busca e de referência. Para
Fig. 6.9 - Tabela de associação de mensagens.
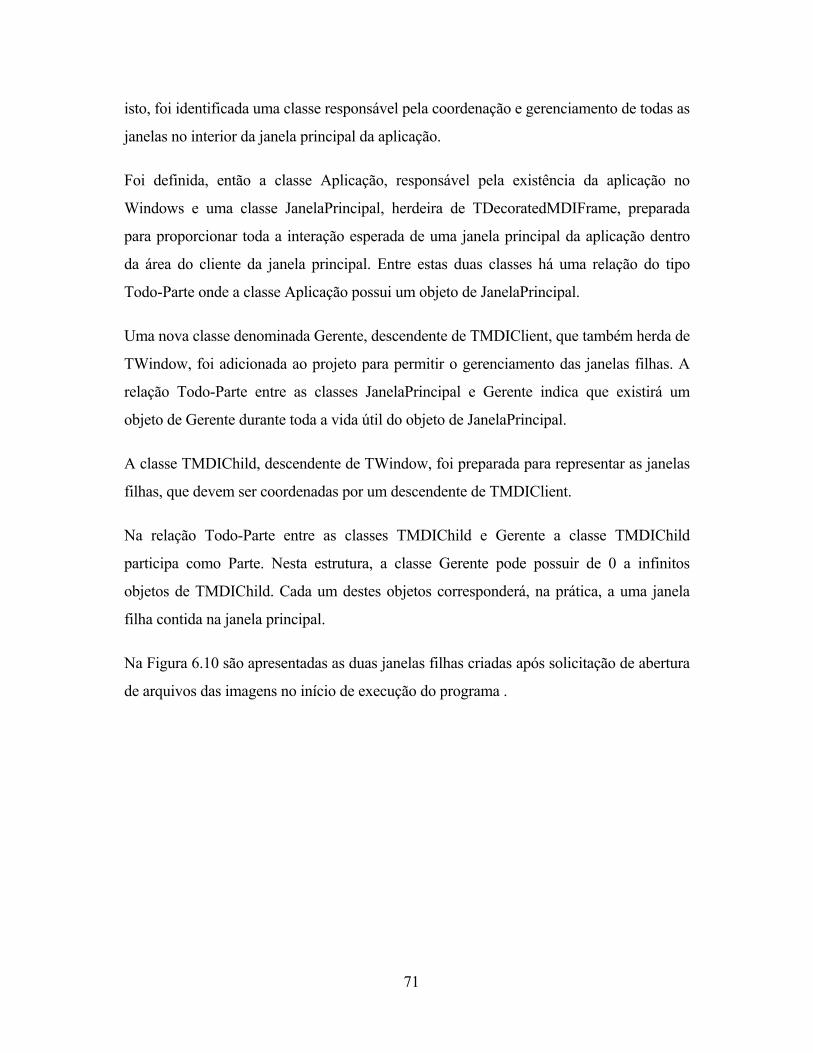
71
isto, foi identificada uma classe responsável pela coordenação e gerenciamento de todas as
janelas no interior da janela principal da aplicação.
Foi definida, então a classe Aplicação, responsável pela existência da aplicação no
Windows e uma classe JanelaPrincipal, herdeira de TDecoratedMDIFrame, preparada
para proporcionar toda a interação esperada de uma janela principal da aplicação dentro
da área do cliente da janela principal. Entre estas duas classes há uma relação do tipo
Todo-Parte onde a classe Aplicação possui um objeto de JanelaPrincipal.
Uma nova classe denominada Gerente, descendente de TMDIClient, que também herda de
TWindow, foi adicionada ao projeto para permitir o gerenciamento das janelas filhas. A
relação Todo-Parte entre as classes JanelaPrincipal e Gerente indica que existirá um
objeto de Gerente durante toda a vida útil do objeto de JanelaPrincipal.
A classe TMDIChild, descendente de TWindow, foi preparada para representar as janelas
filhas, que devem ser coordenadas por um descendente de TMDIClient.
Na relação Todo-Parte entre as classes TMDIChild e Gerente a classe TMDIChild
participa como Parte. Nesta estrutura, a classe Gerente pode possuir de 0 a infinitos
objetos de TMDIChild. Cada um destes objetos corresponderá, na prática, a uma janela
filha contida na janela principal.
Na Figura 6.10 são apresentadas as duas janelas filhas criadas após solicitação de abertura
de arquivos das imagens no início de execução do programa .
72
Fig. 6.10 - Janelas filhas dispostas lado a lado na janela principal.
O código que permite a organização das janelas lado a lado na horizontal é ilustrado na
Figura 6.11.
void Gerente::CmLadoALadoHorizontal(){
TileChildren(MDITILE_HORIZONTAL);}
6.11 - Código para organização horizontal das janelas
6.3 RECURSOS E INTERFACE GRÁFICA UTILIZADA
Para simplificar e agilizar a implementação de facilidades de interação com o usuário, o
ambiente de programação da Borland definiu um arquivo de recursos para conter a
descrição de todos os recursos disponíveis na aplicação: menus, bitmaps, identificadores,
caixas de diálogo, ícones, cursores, tabelas de associação de textos e teclas aceleradoras.
O arquivo de recursos é um arquivo texto com extensão .rc que descreve tudo o que foi
criado ou adicionado ao projeto através do WorkShop.
O WorkShop é um aplicativo acoplado ao ambiente de desenvolvimento da Borland que
permite a editoração visual e interativa dos recursos do projeto. A janela do WorkShop
ilustrada na Figura 6.12 apresenta os arquivos que foram incluídos no projeto deste
trabalho.
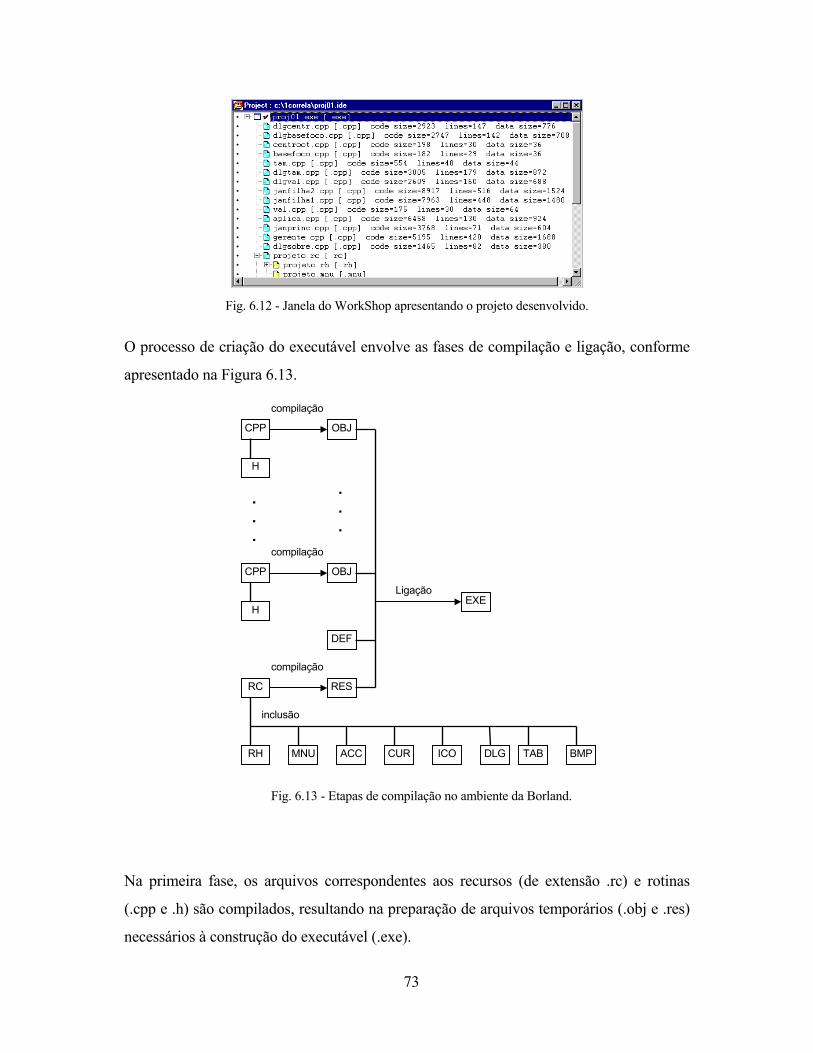
73
Fig. 6.12 - Janela do WorkShop apresentando o projeto desenvolvido.
O processo de criação do executável envolve as fases de compilação e ligação, conforme
apresentado na Figura 6.13.
Fig. 6.13 - Etapas de compilação no ambiente da Borland.
Na primeira fase, os arquivos correspondentes aos recursos (de extensão .rc) e rotinas
(.cpp e .h) são compilados, resultando na preparação de arquivos temporários (.obj e .res)
necessários à construção do executável (.exe).
CPP
H
OBJ
CPP
H
OBJ
.
.
.
.
.
.
DEF
RC RES
MNURH CURACC DLGICO BMPTAB
EXE
compilação
compilação
compilação
Ligação
inclusão
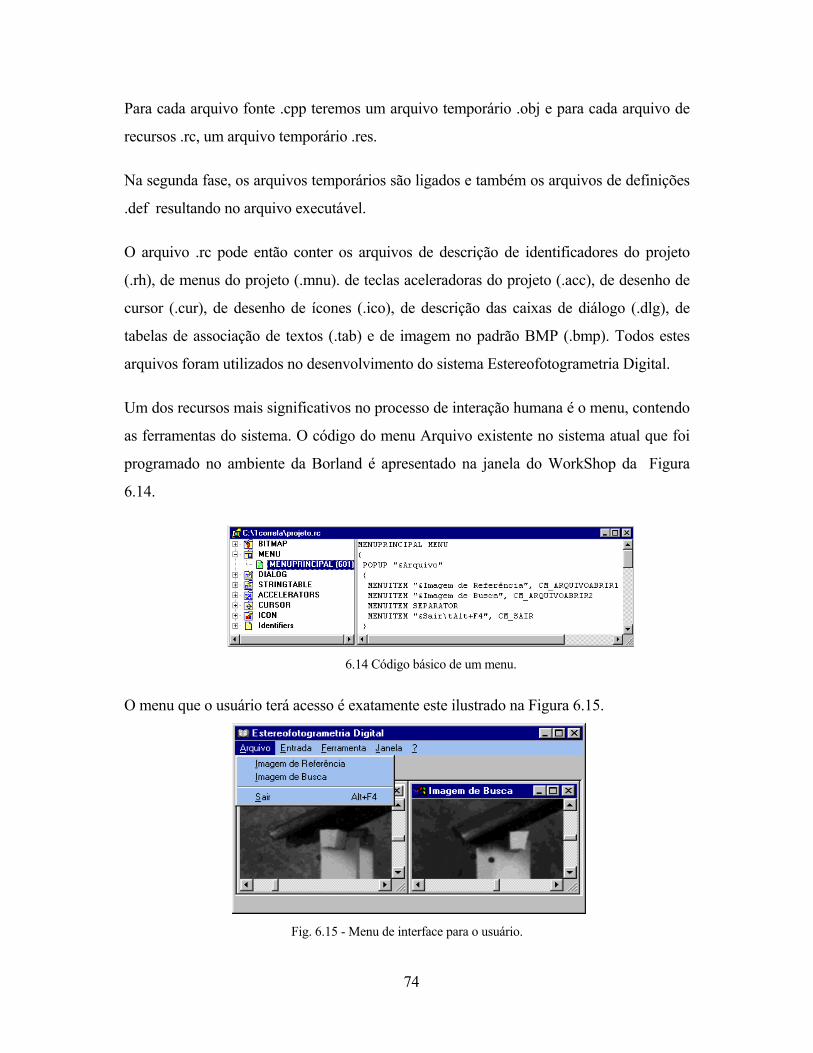
74
Para cada arquivo fonte .cpp teremos um arquivo temporário .obj e para cada arquivo de
recursos .rc, um arquivo temporário .res.
Na segunda fase, os arquivos temporários são ligados e também os arquivos de definições
.def resultando no arquivo executável.
O arquivo .rc pode então conter os arquivos de descrição de identificadores do projeto
(.rh), de menus do projeto (.mnu). de teclas aceleradoras do projeto (.acc), de desenho de
cursor (.cur), de desenho de ícones (.ico), de descrição das caixas de diálogo (.dlg), de
tabelas de associação de textos (.tab) e de imagem no padrão BMP (.bmp). Todos estes
arquivos foram utilizados no desenvolvimento do sistema Estereofotogrametria Digital.
Um dos recursos mais significativos no processo de interação humana é o menu, contendo
as ferramentas do sistema. O código do menu Arquivo existente no sistema atual que foi
programado no ambiente da Borland é apresentado na janela do WorkShop da Figura
6.14.
6.14 Código básico de um menu.
O menu que o usuário terá acesso é exatamente este ilustrado na Figura 6.15.
Fig. 6.15 - Menu de interface para o usuário.
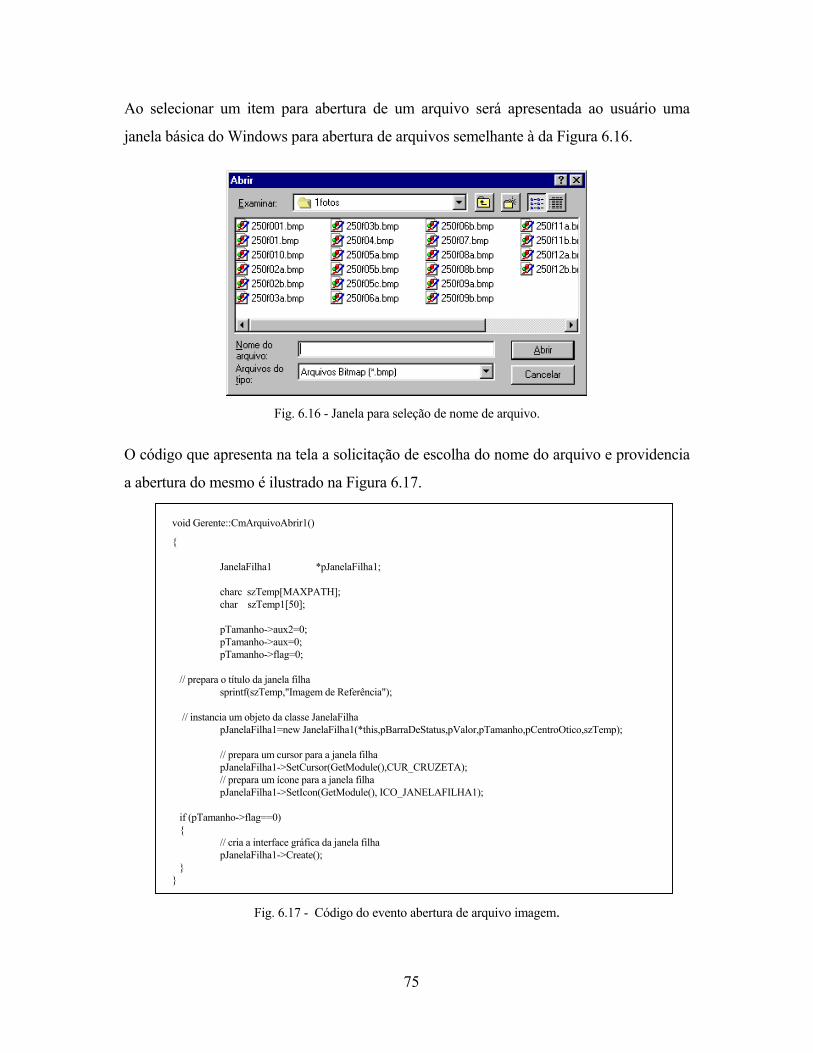
75
Ao selecionar um item para abertura de um arquivo será apresentada ao usuário uma
janela básica do Windows para abertura de arquivos semelhante à da Figura 6.16.
Fig. 6.16 - Janela para seleção de nome de arquivo.
O código que apresenta na tela a solicitação de escolha do nome do arquivo e providencia
a abertura do mesmo é ilustrado na Figura 6.17.
void Gerente::CmArquivoAbrir1()
{
JanelaFilha1 *pJanelaFilha1;
charc szTemp[MAXPATH]; char szTemp1[50];
pTamanho->aux2=0; pTamanho->aux=0; pTamanho->flag=0;
// prepara o título da janela filhasprintf(szTemp,"Imagem de Referência");
// instancia um objeto da classe JanelaFilhapJanelaFilha1=new JanelaFilha1(*this,pBarraDeStatus,pValor,pTamanho,pCentroOtico,szTemp);
// prepara um cursor para a janela filhapJanelaFilha1->SetCursor(GetModule(),CUR_CRUZETA);// prepara um ícone para a janela filhapJanelaFilha1->SetIcon(GetModule(), ICO_JANELAFILHA1);
if (pTamanho->flag==0) {
// cria a interface gráfica da janela filhapJanelaFilha1->Create();
}}
Fig. 6.17 - Código do evento abertura de arquivo imagem.
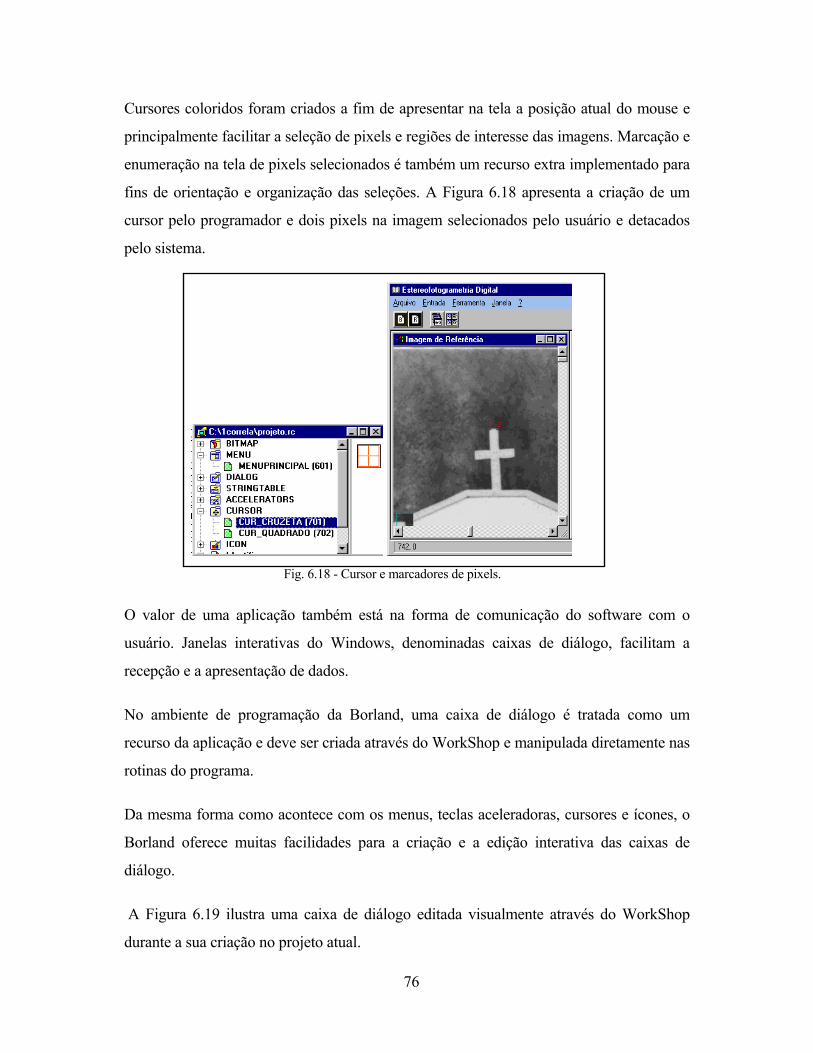
76
Cursores coloridos foram criados a fim de apresentar na tela a posição atual do mouse e
principalmente facilitar a seleção de pixels e regiões de interesse das imagens. Marcação e
enumeração na tela de pixels selecionados é também um recurso extra implementado para
fins de orientação e organização das seleções. A Figura 6.18 apresenta a criação de um
cursor pelo programador e dois pixels na imagem selecionados pelo usuário e detacados
pelo sistema.
Fig. 6.18 - Cursor e marcadores de pixels.
O valor de uma aplicação também está na forma de comunicação do software com o
usuário. Janelas interativas do Windows, denominadas caixas de diálogo, facilitam a
recepção e a apresentação de dados.
No ambiente de programação da Borland, uma caixa de diálogo é tratada como um
recurso da aplicação e deve ser criada através do WorkShop e manipulada diretamente nas
rotinas do programa.
Da mesma forma como acontece com os menus, teclas aceleradoras, cursores e ícones, o
Borland oferece muitas facilidades para a criação e a edição interativa das caixas de
diálogo.
A Figura 6.19 ilustra uma caixa de diálogo editada visualmente através do WorkShop
durante a sua criação no projeto atual.
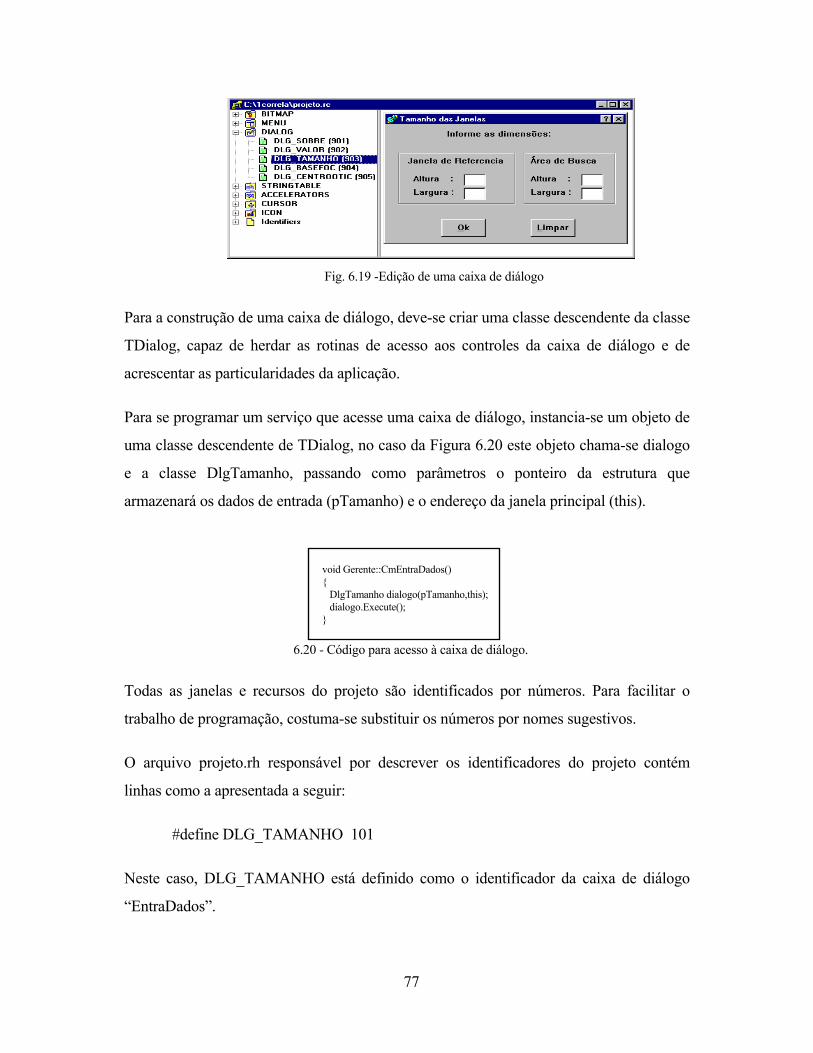
77
Fig. 6.19 -Edição de uma caixa de diálogo
Para a construção de uma caixa de diálogo, deve-se criar uma classe descendente da classe
TDialog, capaz de herdar as rotinas de acesso aos controles da caixa de diálogo e de
acrescentar as particularidades da aplicação.
Para se programar um serviço que acesse uma caixa de diálogo, instancia-se um objeto de
uma classe descendente de TDialog, no caso da Figura 6.20 este objeto chama-se dialogo
e a classe DlgTamanho, passando como parâmetros o ponteiro da estrutura que
armazenará os dados de entrada (pTamanho) e o endereço da janela principal (this).
void Gerente::CmEntraDados(){ DlgTamanho dialogo(pTamanho,this); dialogo.Execute();}
6.20 - Código para acesso à caixa de diálogo.
Todas as janelas e recursos do projeto são identificados por números. Para facilitar o
trabalho de programação, costuma-se substituir os números por nomes sugestivos.
O arquivo projeto.rh responsável por descrever os identificadores do projeto contém
linhas como a apresentada a seguir:
#define DLG_TAMANHO 101
Neste caso, DLG_TAMANHO está definido como o identificador da caixa de diálogo
“EntraDados”.
78
A API do Windows foi projetada de tal modo que as rotinas básicas foram padronizadas
para serem executadas sobre qualquer tipo de equipamento gráfico, interface esta
conhecida como “Graphics Device Interface” (GDI).
Para que as funções da GDI reconheçam cada dispositivo, as características do dispositivo
devem ser agrupadas em um único contexto denominado Contexto de Dispositivo. Os
parâmetros necessários à criação de desenhos, tais como cor atual, estilo de linha, paleta
de cores e tipo de preenchimento, estarão armazenados no Contexto do Dispositivo.
Para a manipulação gráfica de um dispositivo é preciso instanciar um objeto que sirva
como interface a este dispositivo.
A Borland preparou classes específicas para a representação de contextos de dispositivos,
conjunto conhecido como Subsistema Gráfico. A mais importante é a classe TDC, cujo
conteúdo encapsula todas as variáveis e funções da API, proporcionando atributos e
serviços capazes de acessar qualquer dispositivo gráfico.
A classe TDC e as suas descendentes criam uma interface entre as funções da sua
aplicação e as rotinas gráficas da interface de programação do Windows.
Neste trabalho, foi empregada a classe TClientDC, descendente da TDC, segundo a qual
foi instanciado um objeto para representar o contexto da área do cliente.
Também foram utilizadas, durante a programação, as classes TColor, TPen, TBrush,
TFont, TBitmap e TPalette, entre outras, para permitir a personalização do tipo de caneta,
do padrão de preenchimento, da fonte de texto, da manipulação de imagens bitmap e da
paleta de cores do contexto de dispositivo, respectivamente.
79
CAPÍTULO 7
APLICAÇÃO E RESULTADOS
7.1- O SISTEMA DESENVOLVIDO
O sistema desenvolvido se aplica ao levantamento de dados de edificações visando a
documentação e o armazenamento destes dados para sua utilização imediata ou futura
em projetos arquitetônicos de reconstrução e restauração.
Para a demonstração da eficácia do sistema foi inicialmente escolhida uma edificação
de pequeno porte, com riqueza de detalhes suficiente para o teste pretendido.
O objetivo do teste foi comprovar a confiabilidade do sistema computacional quanto à
obtenção de informações tridimensionais (3D) do objeto (edificação) dentro dos limites
de precisão pré-estabelecidos pelo cliente e com a utilização de máquinas fotográficas
comuns (não-métricas). A princípio, foi estabelecido como limite de aceitação das
medidas um desvio máximo de 5%.
O teste consiste em três etapas:
a) Levantamento de dados fotogramétricos:
• tomada de fotos da edificação, revelação e ampliação das fotos ;
• digitalização e análise das imagens;
a) Processamento dos dados fotogramétricos:
• obtenção das dimensões de elementos significativos da edificação pelo
processo computacional desenvolvido;
• confecção de desenhos com o auxílio do CAD a partir de dados obtidos por
medição direta no objeto e dados fornecidos pelo sistema desenvolvido
80
b) Resultados da aplicação
• comparação dos desenhos para a verificação dos desvios resultantes;
• julgamento da confiabilidade do sistema pela comparação dos desvios
apresentados com o desvio máximo esperado
7.2- LEVANTAMENTO DE DADOS FOTOGRAMÉTRICOS
A primeira etapa do teste compreendeu a escolha da edificação a ser fotografada, a
tomada das fotos, revelação, ampliação e digitalização das fotos e análise das imagens
digitalizadas.
O objeto de estudo escolhido, a princípio, foi a capela de Santa Cruz, localizada na
estrada do Bom Sucesso, nas proximidades do Km10, em São José dos Campos - SP.
A escolha desta capela baseou-se no atendimento dos seguintes itens :
• local aberto, sem sombras de edifícios vizinhos, facilitando a iluminação da
capela;
• dimensões gerais da capela (altura: 6,0 m - largura: 4,5 m - profundidade: 6,5
m) favoráveis ao levantamento fotogramétrico;
• condições do terreno com afastamento necessário para a tomada das fotos;
• apresentação de detalhes com linhas de contorno bem definidas;
• riqueza de detalhes suficiente para o estudo (cruz, varanda, frontão, realces da
parede, detalhes arquitetônicos na parte superior da fachada e colunas na
varanda);
• estado geral da construção com sinais de envelhecimento de pintura e alvenaria;
Para comprovar a confiabilidade do sistema computacional implementado seria
necessário realizar tarefas repetitivas e exaustivas de medição de vários detalhes
81
arquitetônicos (elementos) da capela para a comparação e reavaliação das medidas reais
com as medidas resultantes do algoritmo.
Para simplificar este procedimento e realizá-lo em condições mais facilmente
controláveis, decidiu-se utilizar uma maquete da capela Santa Cruz em escala 1:14.
As fotos da capela original e da maquete foram digitalizadas por meio de um scanner de
mesa HPScanJet 4c/3c produzindo imagens de 256 níveis de cinza e resolução de 250
dpi, com boa qualidade visual e no formato BMP.
Através de um estereoscópio de bolso de marca OPTO-EB1 foram analisadas as
imagens quanto à qualidade estereoscópica.
Para a obtenção dos pares estereoscópicos foram tomados os seguintes cuidados:
câmera fixa em altura constante, deslocamento da maquete, plano da câmera paralelo à
face da edificação, iluminação geral difusa, utilização de flash, distância fixa do objeto
à câmera, nivelamento da base de apoio da maquete e marcação de pontos de controle.
7.2.1 HISTÓRICO DA TOMADA DE FOTOGRAFIAS
A obtenção de fotos com a qualidade estereoscópica adequada para fins fotogramétricos
somente foi possível após várias tentativas.
À medida que se foi descobrindo a influência dos parâmetros das técnicas fotográficas
sobre a qualidade das imagens e conseqüentemente sobre os resultados do cálculo das
coordenadas tridimensionais, novos conjuntos de fotos foram sendo tomados, são estes:
• Primeiro Conjunto De Fotos
Objeto: Capela Santa Cruz
O objetivo da tomada das primeiras fotos foi a familiarização com as técnicas de
tomadas de fotografias para fins fotogramétricos; o conhecimento de parâmetros de
maquinas fotográficas e medidas a serem efetuadas em campo; o uso de marcas de

82
referência, niveladores e teodolito e aprendizagem em contornar as dificuldades do
terrreno.
Dados:
Máquina: Vivitar V3000S 50 1:1.7 dia.52 mm
Número de fotos: 6
Altura da máquina: constante
Escala: Fachada 1/100 Lateral varanda 1/46
Distância do objeto: 15 metros
Distância focal: 50 mm
Abertura do diafragma: f8
Filme : ASA 100 colorido
Cópias: 10x15 (cm)
Fator de ampliação : 150/36
Bases: 2,88 metros
O objetivo foi alcançado.
• Segundo Conjunto De Fotos
Objeto: casa de fazenda
Dados:
Máquina: Vivitar V3000S 50 mm 1:1.7 dia.52 mm
Número de fotos: 11
Escala: 1/100
Distância do objeto : menor 7,33 metros ; maior 10 metros
Distância focal: 50 mm
Abertura: f 8
Filme: ASA 100 preto e branco
Cópias: 10x15 (cm)
83
Fator de ampliação : 150/36
Bases: 4 bases de 2,80 metros para cobrir toda a casa. (deslocamento horizontal e
paralelo à fachada).
O mesmo para a cobertura com superposição vertical.
As fotos foram tomadas com sobreposição horizontal e vertical. A superposição
vertical foi necessária pois o espaço de terreno na frente da casa era pequeno. A
superposição horizontal foi obtida com altura constante da máquina. A superposição
vertical foi obtida inclinando-se a máquina em direção ao telhado.
Seria necessária uma rotina adicional no algoritmo para corrigir os valores obtidos com
a câmera rotacionada.
As fotos obtidas produziram efeito estereoscópico razoável.
A partir do terceiro conjunto de fotos, foi empregada a maquete da capela.
As razões pelas quais a maquete foi utilizada em substituição à capela original foram:
• Disponibilidade do objeto ao lado do computador para verificação constante de
medidas calculadas pelo algoritmo;
• Possibilidade de movimentar rapidamente a equipe para tomada de novas fotos.
• Facilidade na tomada de fotos considerando diversas bases sem as dificuldades
de terreno.
• Possibilidade de se controlar a iluminância independente das condições
climáticas.
84
• Terceiro Conjunto De Fotos
Objeto: Maquete da capela Santa Cruz.
Dados:
Local: Studio São Paulo
Fotógrafo: Donizetti
Máquina: Vivitar V3000S 50 mm 1:1.7 dia.52 mm
Número de fotos: 20
Escala: 1/7
Distância do objeto: 1,375 metros
Distância focal: 50 mm
Abertura: f 8
Filme: ASA 100 preto e branco
Cópias : 8x13 (cm)
Fator de ampliação : 130/36
Bases: 30 cm; 36cm; 40 cm
O objetivo foi alcançado quanto ao aprendizado de tomada de fotos em estudio. Erros
de iluminação e má qualidade das cópias impediram a utilização destas para teste do
algoritmo.
• Quarto Conjunto De Fotos
Objeto: Maquete da capela Santa Cruz
Dados:
Local : Estúdio Fotoptica Sérgio
Fotógrafo: Sérgio
Máquina: Nikon F4 - 100 mm
85
Número de fotos: 20
Escala: 1/6
Distância do objeto: 2,8 metros
Distância focal: 100 mm
Abertura : f 8
Filme: ASA 100
Cópias: 10x15 (cm)
Fator de ampliação ; 150/36
Bases: 36 cm; 55,7 cm
Estas foram as primeiras fotos que apresentaram resultados satisfatórios.
A menos de alguns desvios inaceitáveis, como no caso da coluna vista da lateral da
varanda, os demais pontos foram considerados bons.
• Quinto Conjunto De Fotos
Objeto: Maquete da capela Santa Cruz
Objetivou-se com estas fotos encontrar as causas de discrepância de algumas medidas.
Dados:
Local : Estúdio Fotoptica Sérgio
Fotógrafo: Sérgio
Máquina: Nikon F4 - 100 mm profissional
Número de fotos: 10
Escala: 1/6
Distância do objeto: 2,8 metros
Distância focal: 100 mm
Abertura: f 8
Filme: ASA 100
Cópias: 10x15 (cm)
86
Fator de ampliação : 150/36
Bases: 36cm ; 55,7 cm
Estas fotos foram tomadas focalizando-se um ponto de referência previamente afixado e
destacado no plano de fundo da fotografia. Desta forma, as coordenadas do ponto de
interseção do eixo óptico com o plano de fundo da fotografia podem ser extraídas das
imagens na tela. Este ponto passou a ser a origem do sistema de referência de
coordenadas da foto para a determinação das paralaxes.
Nas fotos anteriores a origem do sistema de coordenadas de referência, para a medição
das paralaxes, era considerado como o centro geométrico das imagens. Com a mudança
acima mencionada os resultados melhoraram sensivelmente. Tal providência se fez
necessária visto que os profissionais dedicados à revelação e ampliação das fotografias
não se preocupam em fazer coincidir o centro geométrico da ampliação com o centro de
interseção do eixo óptico com o plano da foto.
• Sexto Conjunto De Fotos
Objeto: Maquete da capela Santa Cruz
Dados:
Local : Sítio do Dr. José Antônio Gonçalves Pereira
Fotógrafo : Dr. José Antonio Gonçalves Pereira
Máquina: Leica FIII - Elmar 50mm 1:3,5
Número de fotos: 8
Escala: 1/4
Distância do objeto: 0,91 metros
Distância focal: 50 mm
Abertura : f16
Filme : ASA 100 preto e branco
Cópias: 10x15 (cm)
Fator de ampliação: 150/36
87
Bases: 10 cm ; 20 cm; 30 cm; 40 cm; 50cm .
As fotos foram tomadas no fim da tarde, com o tempo nublado, tendo sido prejudicadas
por esse motivo.
Assim mesmo foram obtidos alguns bons resultados com estas fotos.
• Sétimo Conjunto De Fotos
Objeto: Maquete da capela Santa Cruz
Dados:
Local: Residência da orientanda
Fotógrafa: Lília
Máquina: Vivitar V3000S 50 mm 1:1.7 semi profissional
Número de fotos: 30
Escala: 1/ 6
Distância do objeto: 1,425 m
Distância focal: 50 mm
Abertura: f 16
Filme: ASA 125
Cópias: 10x15 (cm)
Fator de ampliação : 150/36
Bases: 30 cm; 36 cm; 46 cm; 56 cm; 60cm; 66 cm.
Pretendia-se obter fotos com melhor estereocopia para aprimorar resultados. Porém
houve falhas na iluminação do ambiente que prejudicaram o resultado destas fotos.
• Oitavo Conjunto De Fotos
Objeto : Maquete da capela Santa Cruz
Dados:
88
Local: Estúdio Fotoptica Sérgio
Fotógrafo: Sérgio
Máquina: Nikon F4 - 50 mm
Número de fotos: 28
Escala: 1/6
Distância objeto: 1,25 m
Distância focal: 50 mm
Filme: ASA 125 preto e branco
Cópias: 10x15 (cm)
Fator de ampliação: 150/36
Abertura: f 16
Bases: 20 cm; 26cm; 30 cm; 36cm;40 cm; 46 cm; 50 cm; 56 cm; 60 cm; 66 cm.
Foram tomadas fotos da fachada e da lateral da varanda somente.
Os resultados foram satisfatórios. Este conjunto foi utilizado para a apresentação dos
resultados finais.
As Figuras 7.1 a 7.6 apresentadas a seguir ilustram alguns dos vários pares de
fotografias obtidos neste trabalho.
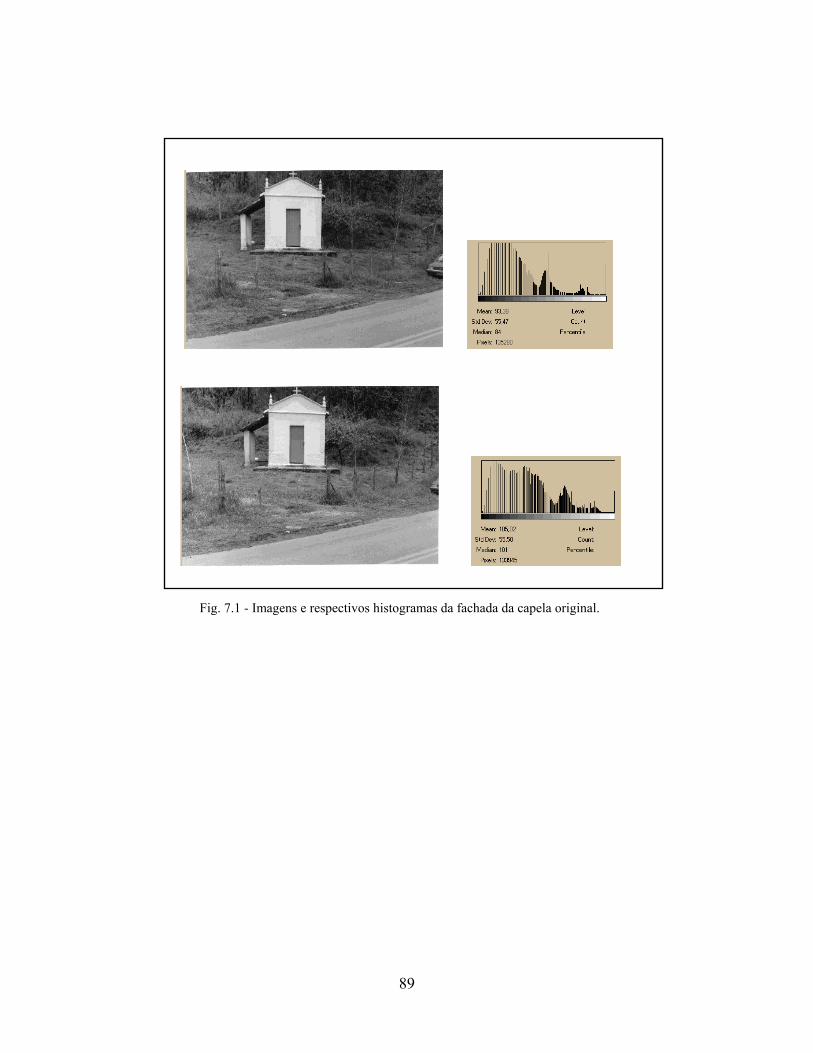
89
Fig. 7.1 - Imagens e respectivos histogramas da fachada da capela original.
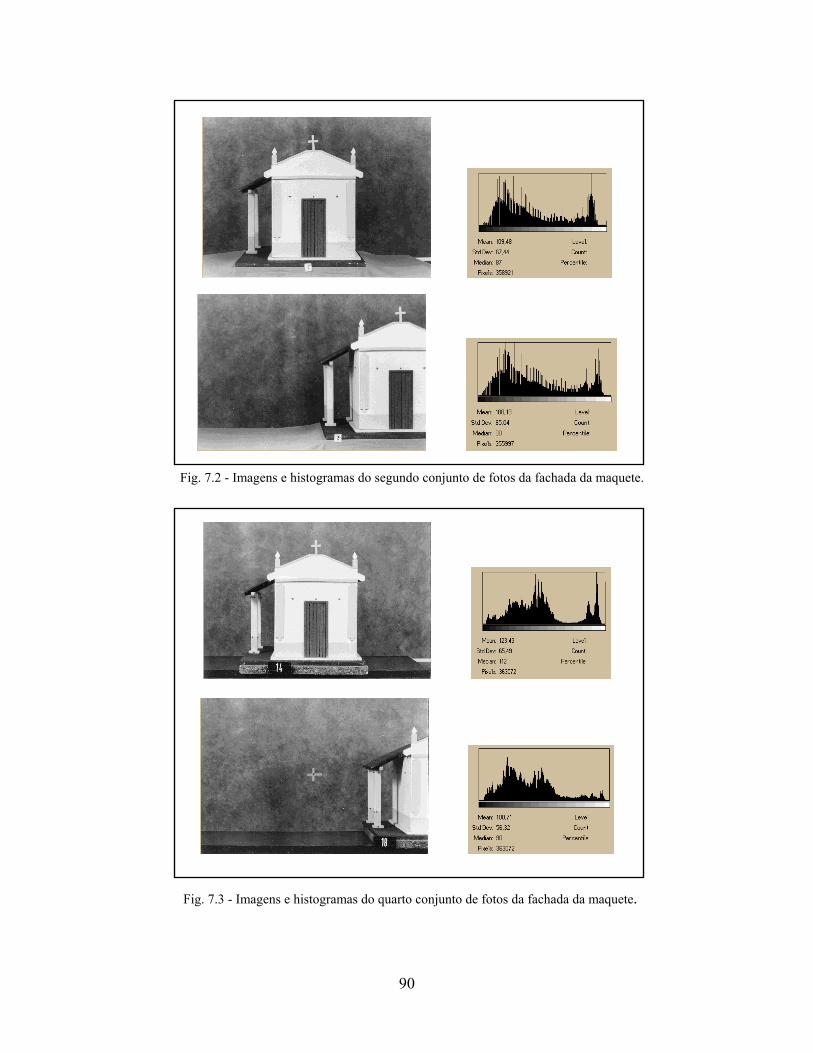
90
Fig. 7.2 - Imagens e histogramas do segundo conjunto de fotos da fachada da maquete.
Fig. 7.3 - Imagens e histogramas do quarto conjunto de fotos da fachada da maquete.
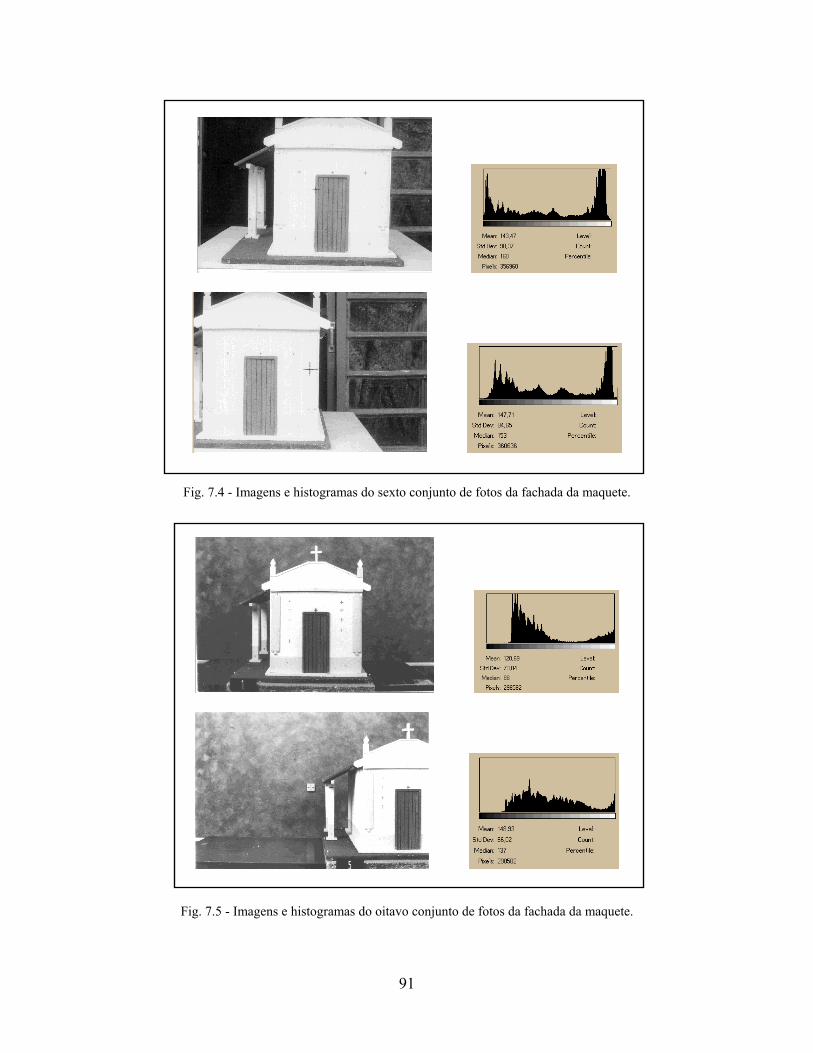
91
Fig. 7.4 - Imagens e histogramas do sexto conjunto de fotos da fachada da maquete.
Fig. 7.5 - Imagens e histogramas do oitavo conjunto de fotos da fachada da maquete.
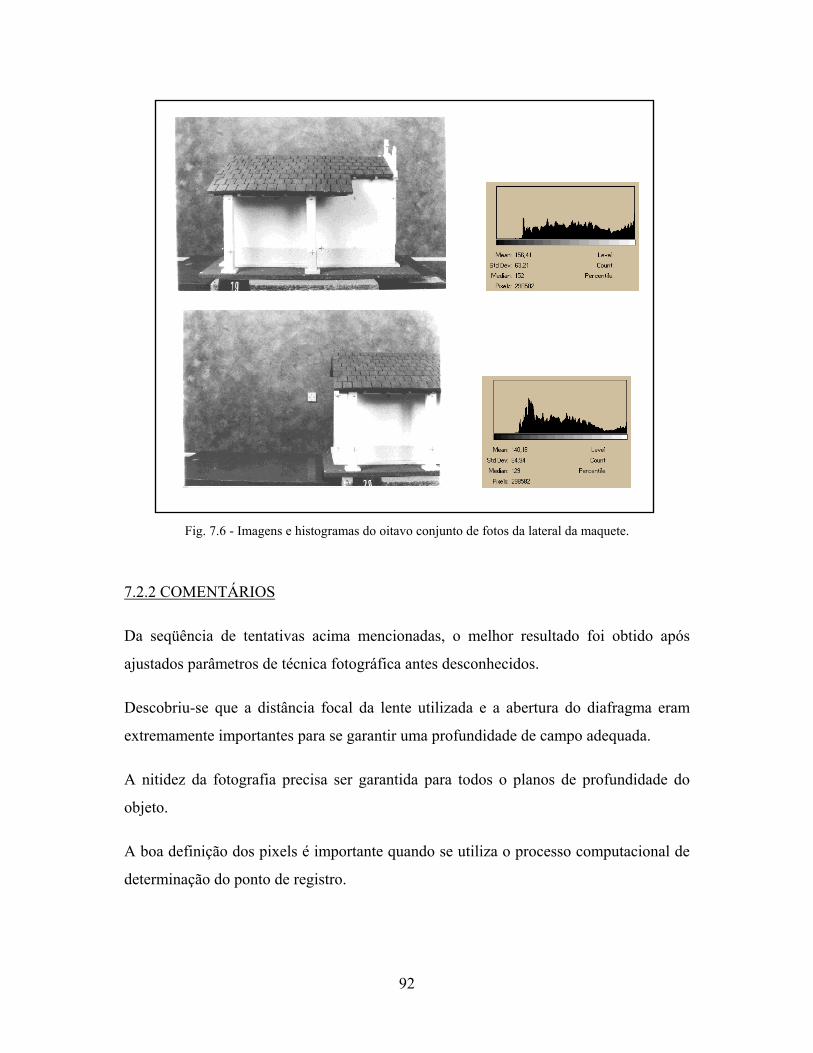
92
Fig. 7.6 - Imagens e histogramas do oitavo conjunto de fotos da lateral da maquete.
7.2.2 COMENTÁRIOS
Da seqüência de tentativas acima mencionadas, o melhor resultado foi obtido após
ajustados parâmetros de técnica fotográfica antes desconhecidos.
Descobriu-se que a distância focal da lente utilizada e a abertura do diafragma eram
extremamente importantes para se garantir uma profundidade de campo adequada.
A nitidez da fotografia precisa ser garantida para todos o planos de profundidade do
objeto.
A boa definição dos pixels é importante quando se utiliza o processo computacional de
determinação do ponto de registro.
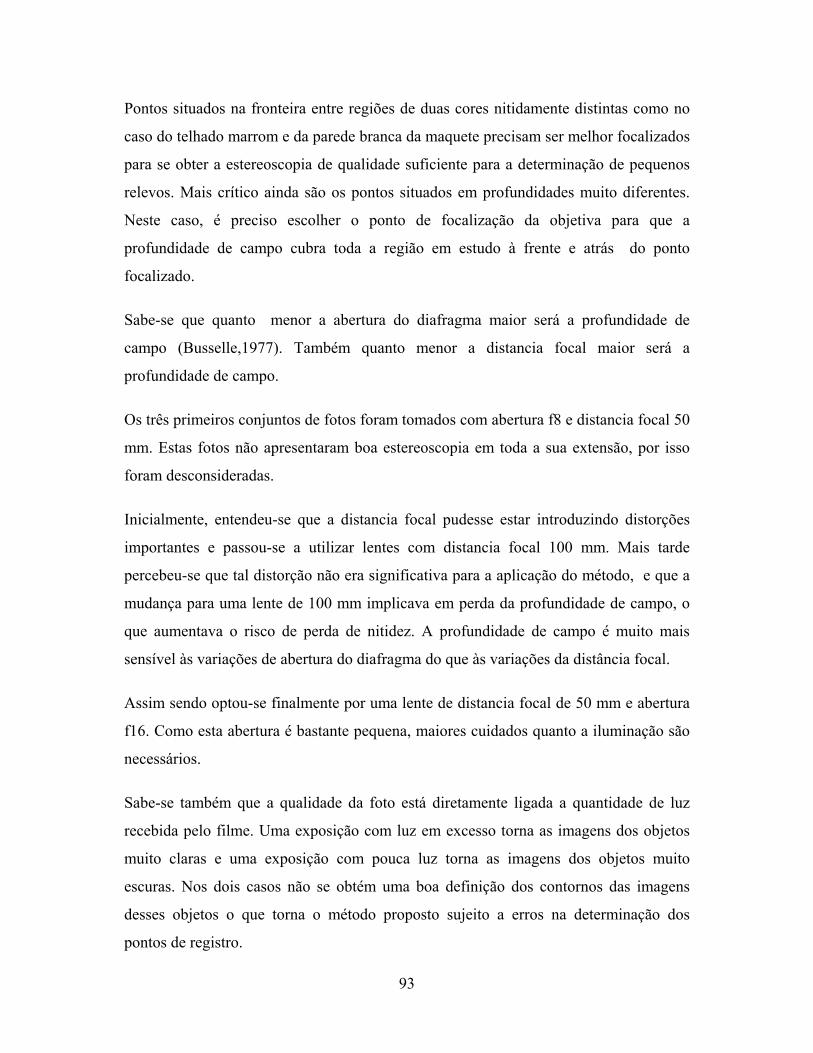
93
Pontos situados na fronteira entre regiões de duas cores nitidamente distintas como no
caso do telhado marrom e da parede branca da maquete precisam ser melhor focalizados
para se obter a estereoscopia de qualidade suficiente para a determinação de pequenos
relevos. Mais crítico ainda são os pontos situados em profundidades muito diferentes.
Neste caso, é preciso escolher o ponto de focalização da objetiva para que a
profundidade de campo cubra toda a região em estudo à frente e atrás do ponto
focalizado.
Sabe-se que quanto menor a abertura do diafragma maior será a profundidade de
campo (Busselle,1977). Também quanto menor a distancia focal maior será a
profundidade de campo.
Os três primeiros conjuntos de fotos foram tomados com abertura f8 e distancia focal 50
mm. Estas fotos não apresentaram boa estereoscopia em toda a sua extensão, por isso
foram desconsideradas.
Inicialmente, entendeu-se que a distancia focal pudesse estar introduzindo distorções
importantes e passou-se a utilizar lentes com distancia focal 100 mm. Mais tarde
percebeu-se que tal distorção não era significativa para a aplicação do método, e que a
mudança para uma lente de 100 mm implicava em perda da profundidade de campo, o
que aumentava o risco de perda de nitidez. A profundidade de campo é muito mais
sensível às variações de abertura do diafragma do que às variações da distância focal.
Assim sendo optou-se finalmente por uma lente de distancia focal de 50 mm e abertura
f16. Como esta abertura é bastante pequena, maiores cuidados quanto a iluminação são
necessários.
Sabe-se também que a qualidade da foto está diretamente ligada a quantidade de luz
recebida pelo filme. Uma exposição com luz em excesso torna as imagens dos objetos
muito claras e uma exposição com pouca luz torna as imagens dos objetos muito
escuras. Nos dois casos não se obtém uma boa definição dos contornos das imagens
desses objetos o que torna o método proposto sujeito a erros na determinação dos
pontos de registro.
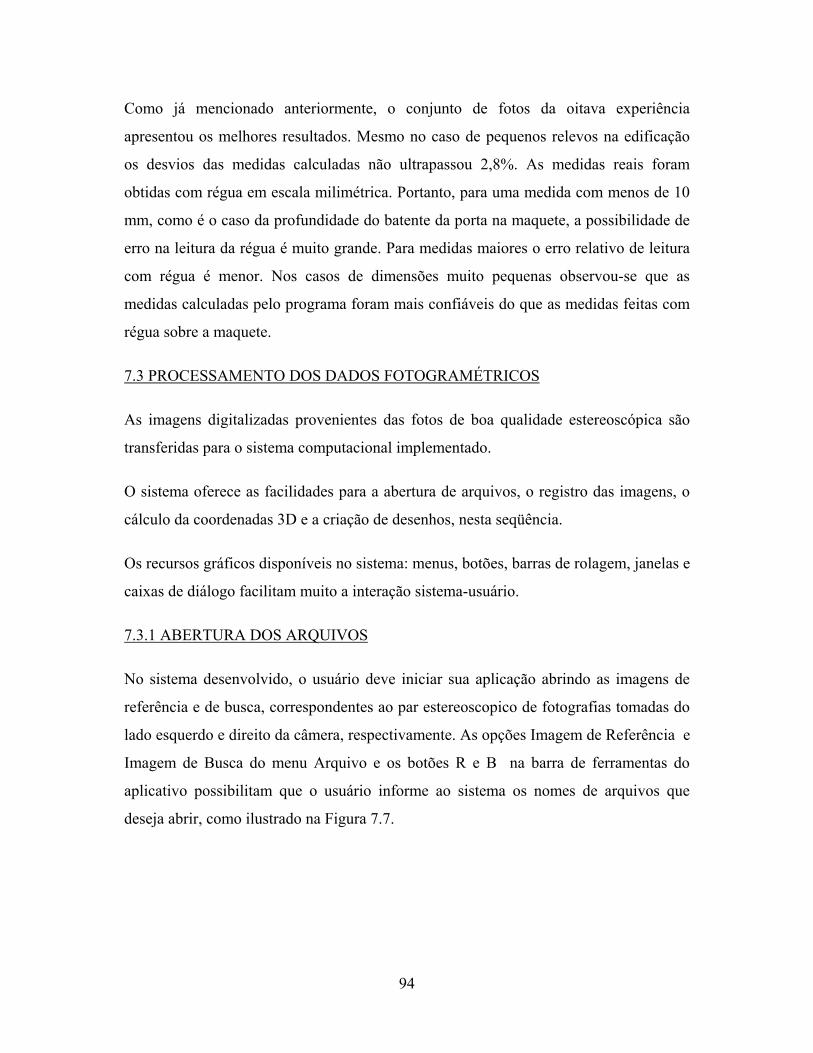
94
Como já mencionado anteriormente, o conjunto de fotos da oitava experiência
apresentou os melhores resultados. Mesmo no caso de pequenos relevos na edificação
os desvios das medidas calculadas não ultrapassou 2,8%. As medidas reais foram
obtidas com régua em escala milimétrica. Portanto, para uma medida com menos de 10
mm, como é o caso da profundidade do batente da porta na maquete, a possibilidade de
erro na leitura da régua é muito grande. Para medidas maiores o erro relativo de leitura
com régua é menor. Nos casos de dimensões muito pequenas observou-se que as
medidas calculadas pelo programa foram mais confiáveis do que as medidas feitas com
régua sobre a maquete.
7.3 PROCESSAMENTO DOS DADOS FOTOGRAMÉTRICOS
As imagens digitalizadas provenientes das fotos de boa qualidade estereoscópica são
transferidas para o sistema computacional implementado.
O sistema oferece as facilidades para a abertura de arquivos, o registro das imagens, o
cálculo da coordenadas 3D e a criação de desenhos, nesta seqüência.
Os recursos gráficos disponíveis no sistema: menus, botões, barras de rolagem, janelas e
caixas de diálogo facilitam muito a interação sistema-usuário.
7.3.1 ABERTURA DOS ARQUIVOS
No sistema desenvolvido, o usuário deve iniciar sua aplicação abrindo as imagens de
referência e de busca, correspondentes ao par estereoscopico de fotografias tomadas do
lado esquerdo e direito da câmera, respectivamente. As opções Imagem de Referência e
Imagem de Busca do menu Arquivo e os botões R e B na barra de ferramentas do
aplicativo possibilitam que o usuário informe ao sistema os nomes de arquivos que
deseja abrir, como ilustrado na Figura 7.7.
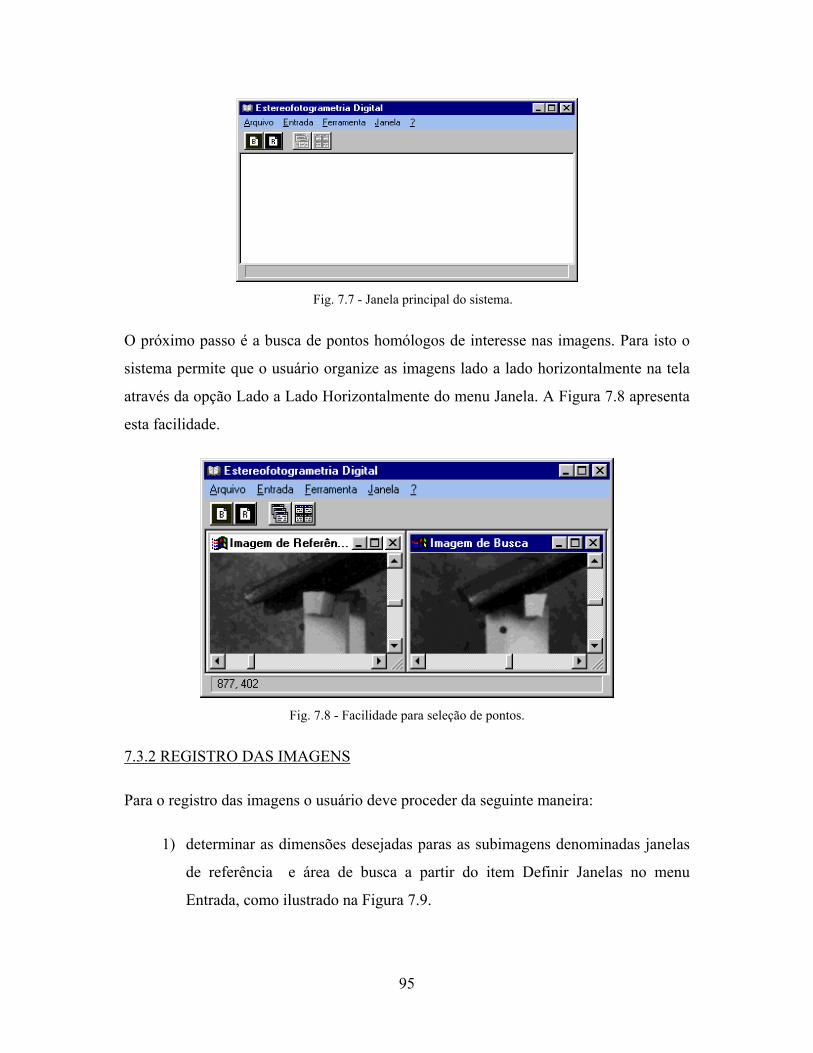
95
Fig. 7.7 - Janela principal do sistema.
O próximo passo é a busca de pontos homólogos de interesse nas imagens. Para isto o
sistema permite que o usuário organize as imagens lado a lado horizontalmente na tela
através da opção Lado a Lado Horizontalmente do menu Janela. A Figura 7.8 apresenta
esta facilidade.
Fig. 7.8 - Facilidade para seleção de pontos.
7.3.2 REGISTRO DAS IMAGENS
Para o registro das imagens o usuário deve proceder da seguinte maneira:
1) determinar as dimensões desejadas paras as subimagens denominadas janelas
de referência e área de busca a partir do item Definir Janelas no menu
Entrada, como ilustrado na Figura 7.9.
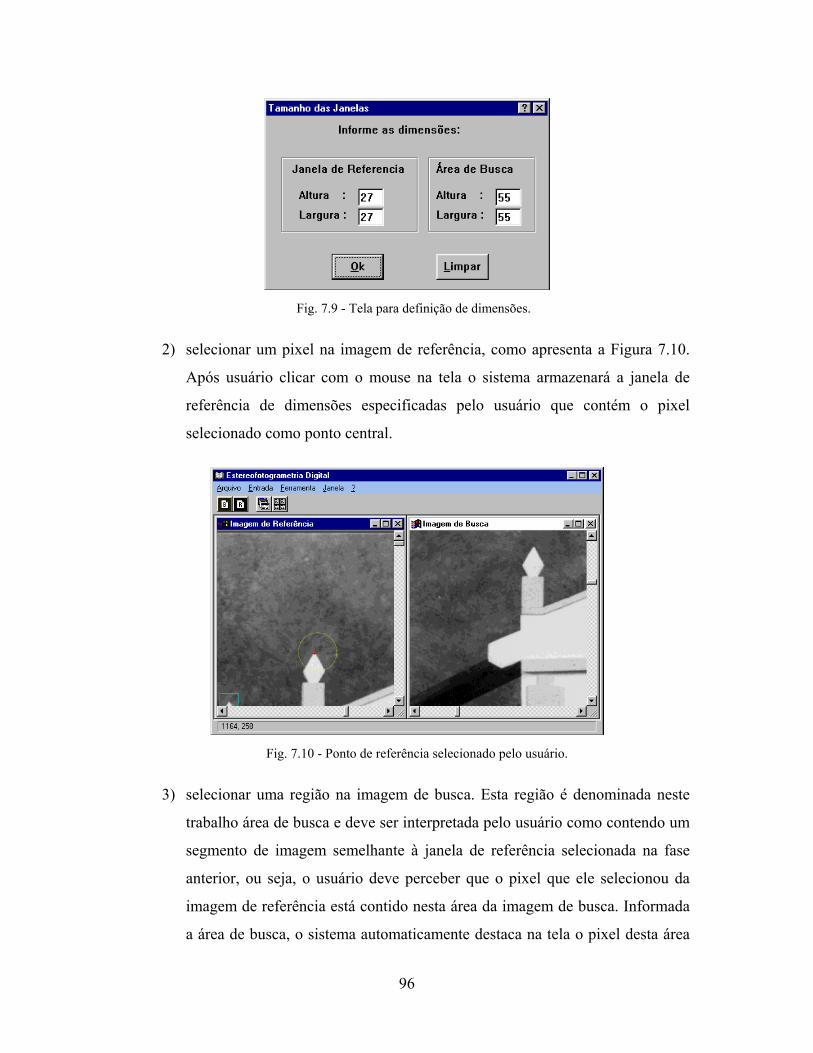
96
Fig. 7.9 - Tela para definição de dimensões.
2) selecionar um pixel na imagem de referência, como apresenta a Figura 7.10.
Após usuário clicar com o mouse na tela o sistema armazenará a janela de
referência de dimensões especificadas pelo usuário que contém o pixel
selecionado como ponto central.
Fig. 7.10 - Ponto de referência selecionado pelo usuário.
3) selecionar uma região na imagem de busca. Esta região é denominada neste
trabalho área de busca e deve ser interpretada pelo usuário como contendo um
segmento de imagem semelhante à janela de referência selecionada na fase
anterior, ou seja, o usuário deve perceber que o pixel que ele selecionou da
imagem de referência está contido nesta área da imagem de busca. Informada
a área de busca, o sistema automaticamente destaca na tela o pixel desta área
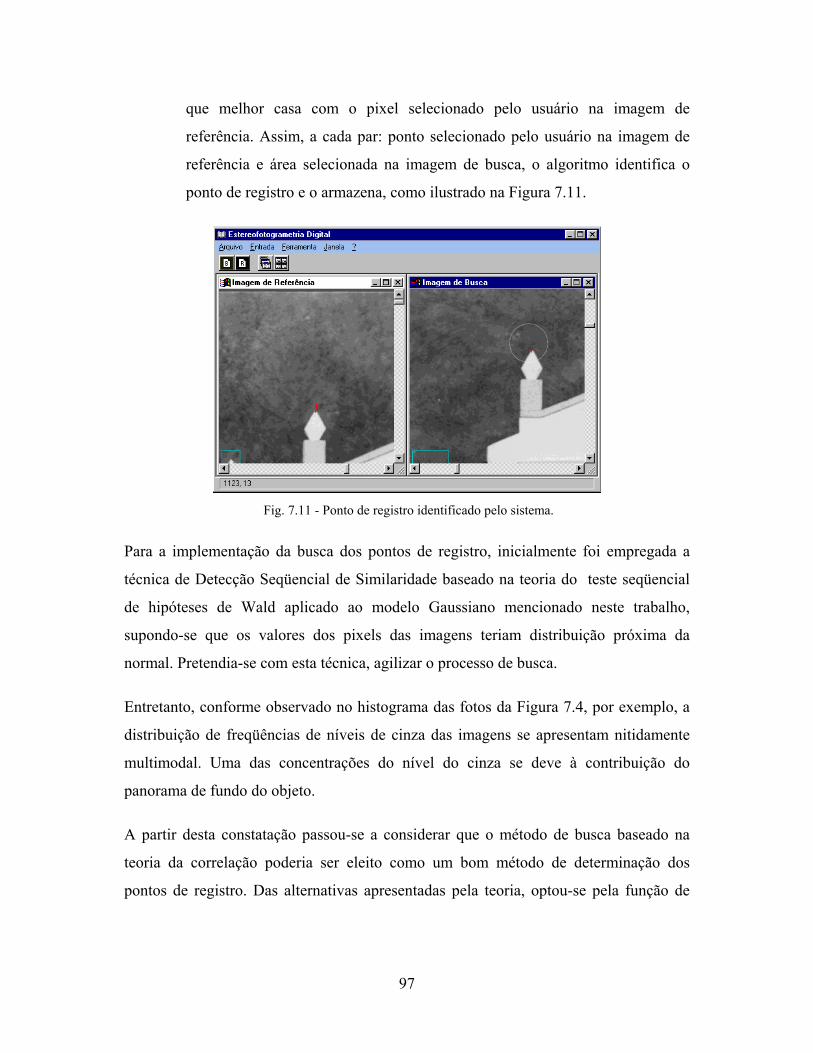
97
que melhor casa com o pixel selecionado pelo usuário na imagem de
referência. Assim, a cada par: ponto selecionado pelo usuário na imagem de
referência e área selecionada na imagem de busca, o algoritmo identifica o
ponto de registro e o armazena, como ilustrado na Figura 7.11.
Fig. 7.11 - Ponto de registro identificado pelo sistema.
Para a implementação da busca dos pontos de registro, inicialmente foi empregada a
técnica de Detecção Seqüencial de Similaridade baseado na teoria do teste seqüencial
de hipóteses de Wald aplicado ao modelo Gaussiano mencionado neste trabalho,
supondo-se que os valores dos pixels das imagens teriam distribuição próxima da
normal. Pretendia-se com esta técnica, agilizar o processo de busca.
Entretanto, conforme observado no histograma das fotos da Figura 7.4, por exemplo, a
distribuição de freqüências de níveis de cinza das imagens se apresentam nitidamente
multimodal. Uma das concentrações do nível do cinza se deve à contribuição do
panorama de fundo do objeto.
A partir desta constatação passou-se a considerar que o método de busca baseado na
teoria da correlação poderia ser eleito como um bom método de determinação dos
pontos de registro. Das alternativas apresentadas pela teoria, optou-se pela função de
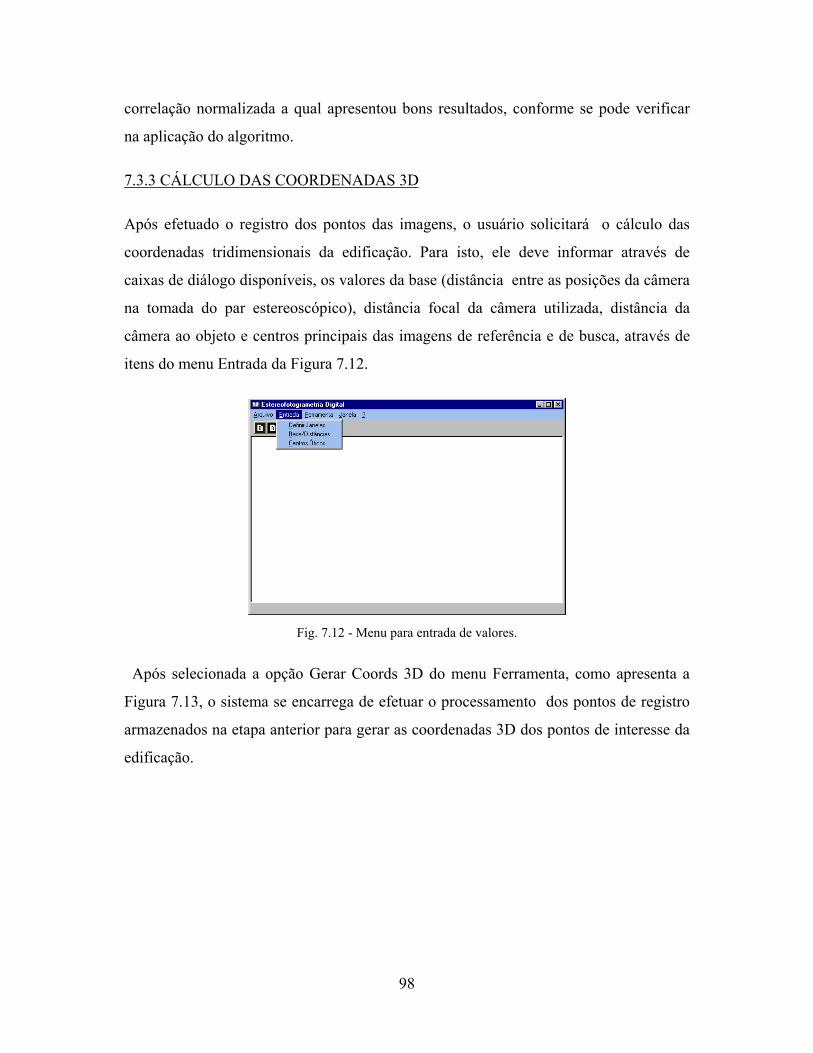
98
correlação normalizada a qual apresentou bons resultados, conforme se pode verificar
na aplicação do algoritmo.
7.3.3 CÁLCULO DAS COORDENADAS 3D
Após efetuado o registro dos pontos das imagens, o usuário solicitará o cálculo das
coordenadas tridimensionais da edificação. Para isto, ele deve informar através de
caixas de diálogo disponíveis, os valores da base (distância entre as posições da câmera
na tomada do par estereoscópico), distância focal da câmera utilizada, distância da
câmera ao objeto e centros principais das imagens de referência e de busca, através de
itens do menu Entrada da Figura 7.12.
Fig. 7.12 - Menu para entrada de valores.
Após selecionada a opção Gerar Coords 3D do menu Ferramenta, como apresenta a
Figura 7.13, o sistema se encarrega de efetuar o processamento dos pontos de registro
armazenados na etapa anterior para gerar as coordenadas 3D dos pontos de interesse da
edificação.
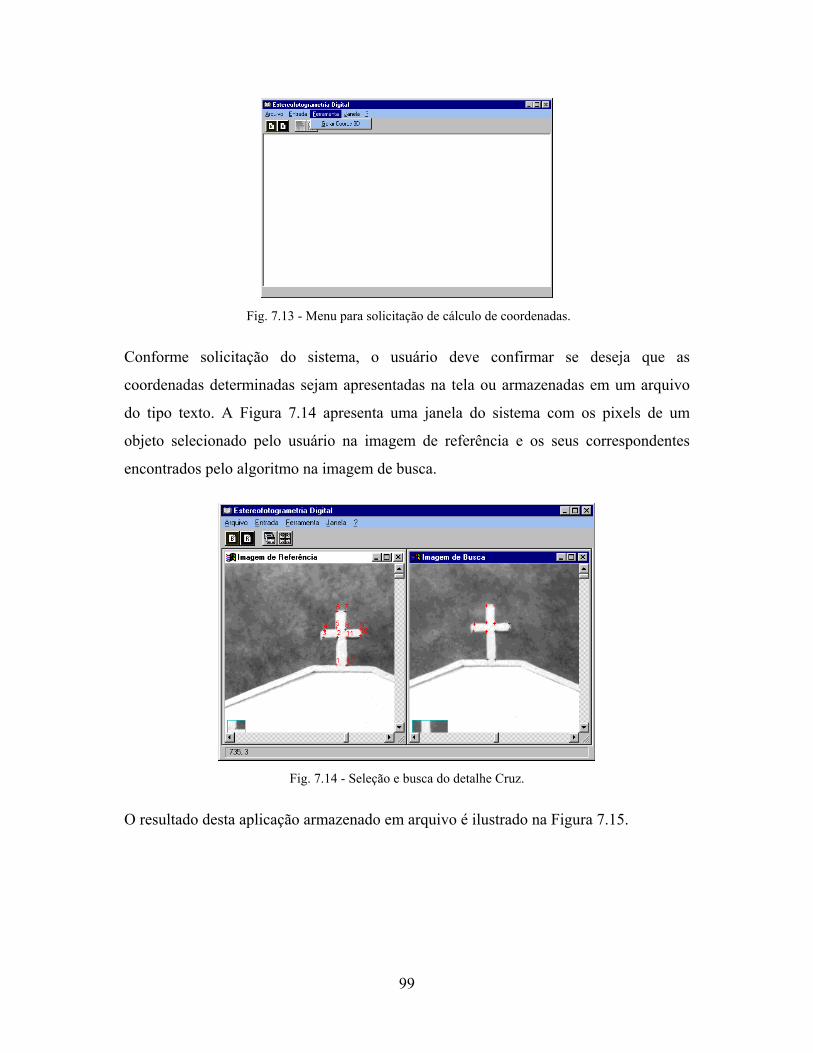
99
Fig. 7.13 - Menu para solicitação de cálculo de coordenadas.
Conforme solicitação do sistema, o usuário deve confirmar se deseja que as
coordenadas determinadas sejam apresentadas na tela ou armazenadas em um arquivo
do tipo texto. A Figura 7.14 apresenta uma janela do sistema com os pixels de um
objeto selecionado pelo usuário na imagem de referência e os seus correspondentes
encontrados pelo algoritmo na imagem de busca.
Fig. 7.14 - Seleção e busca do detalhe Cruz.
O resultado desta aplicação armazenado em arquivo é ilustrado na Figura 7.15.
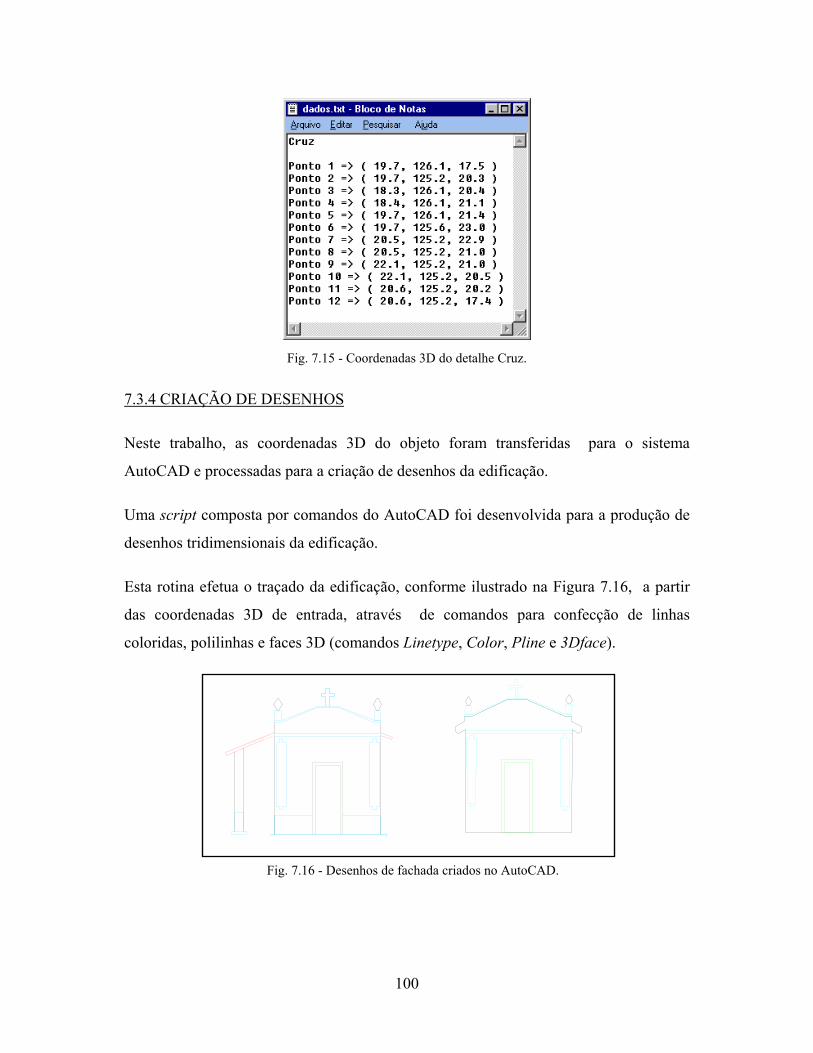
100
Fig. 7.15 - Coordenadas 3D do detalhe Cruz.
7.3.4 CRIAÇÃO DE DESENHOS
Neste trabalho, as coordenadas 3D do objeto foram transferidas para o sistema
AutoCAD e processadas para a criação de desenhos da edificação.
Uma script composta por comandos do AutoCAD foi desenvolvida para a produção de
desenhos tridimensionais da edificação.
Esta rotina efetua o traçado da edificação, conforme ilustrado na Figura 7.16, a partir
das coordenadas 3D de entrada, através de comandos para confecção de linhas
coloridas, polilinhas e faces 3D (comandos Linetype, Color, Pline e 3Dface).
Fig. 7.16 - Desenhos de fachada criados no AutoCAD.
101
Com os recursos de rotação do AutoCAD (Rotate3D), diferentes vistas da edificação
podem ser observadas e nesta etapa são visualizadas as profundidades calculadas pelo
aplicativo, como apresentado na Figura 7.17.
Fig. 7.17 - Vistas perspectivas no AutoCAD.
7.4 RESULTADOS DA APLICAÇÃO
Os resultados da aplicação do sistema computacional desenvolvido são apresentados na
Tabela 1.1. As medidas são apresentadas em centímetros.

102
TABELA 1.1 - RESULTADOS COMPARATIVOS
Foto 2 : coord. Centro (665,432) Foto 1 : coord. Centro (667,422) base: 20cmFrontão
Coluna A Coluna B Coluna C Coluna DValores Calculados Valores Reais
(+ ou - 0.1cm)Diferença Absoluta
C=|A-B|Desvio Percentual
Ponto X Y Z X Ymédio Z Dx Dy Dz X Y Z1 3.6 126.1 6.8 3.6 125.9 6.7 0 0.2 0.1 0 0.2 1.52 3.6 125.6 7.8 3.6 125.9 7.8 0 0.3 0 0 0.2 03 36.8 125.6 7.7 36.6 125.9 7.8 0.2 0.3 0.1 0.5 0.2 1.54 37.0 126.1 6.8 36.6 125.9 6.7 0.4 0.2 0.1 1.1 0.2 1.5
PortaPonto X Y Z X Ymédio Z Dx Dy Dz X Y Z
1 15.2 124.8 -22.2 15.2 125.4 -22.3 0 0.6 0.1 0 0.4 0.42 15.3 125.2 -0.7 15.2 125.4 -0.7 0.1 0.2 0 0.7 0.2 03 24.7 125.6 -0.7 24.7 125.4 -0.7 0 0.2 0 0 0.2 04 24.6 125.6 -22.3 24.7 125.4 -22.3 0.1 0.2 0 0.4 0.2 05 24.1 126.1 -22.4 24.1 125.4 -22.3 0 0.7 0.1 0 0.5 0.46 24.1 125.6 -1.4 24.1 125.4 -1.4 0 0.2 0 0 0.2 07 15.9 125.2 -1.3 15.9 125.4 -1.3 0 0.2 0 0 0.2 08 15.8 124.8 -22.2 15.9 125.4 -22.3 0.1 0.6 0.1 0.6 0.5 0.4
CruzPonto X Y Z X Ymédio Z Dx Dy Dz X Y Z
1 19.7 126.1 17.5 19.7 125.5 17.5 0 0.6 0 0 0.5 02 19.7 125.2 20.3 19.7 125.5 20.3 0 0.3 0 0 0.3 03 18.4 126.1 20.3 18.3 125.5 20.3 0.1 0.6 0 0.5 0.5 04 18.4 126.1 21.1 18.3 125.5 21.0 0.1 0.6 0.1 0.5 0.5 0.55 19.7 125.6 21.2 19.7 125.5 21.0 0 0.1 0.2 0 0.1 1.06 19.8 125.6 23.0 19.7 125.5 23.0 0.1 0.1 0 0.5 0.1 07 20.5 125.2 23.0 20.5 125.5 23.0 0 0.3 0 0 0.2 08 20.5 125.2 21.0 20.4 125.5 21.0 0 0.3 0 0 0.2 09 22.1 125.2 21.0 22.0 125.5 21.0 0.1 0.3 0 0.5 0.2 010 22.1 125.2 20.3 22.0 125.5 20.3 0.1 0.3 0 0.5 0.2 011 20.6 125.2 20.3 20.6 125.5 20.3 0 0.3 0 0 0.2 012 20.6 125.2 17.4 20.6 125.5 17.5 0 0.3 0.1 0 0.2 0.6
(continua)
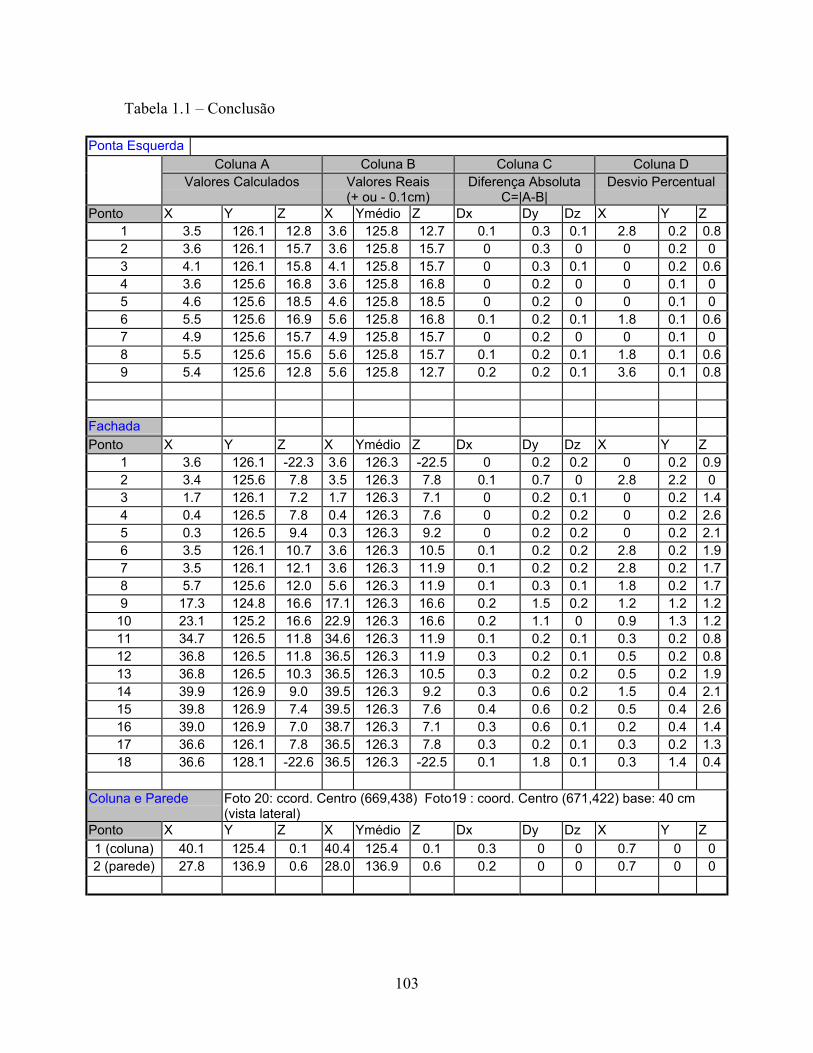
103
Tabela 1.1 – Conclusão
Ponta EsquerdaColuna A Coluna B Coluna C Coluna D
Valores Calculados Valores Reais(+ ou - 0.1cm)
Diferença AbsolutaC=|A-B|
Desvio Percentual
Ponto X Y Z X Ymédio Z Dx Dy Dz X Y Z1 3.5 126.1 12.8 3.6 125.8 12.7 0.1 0.3 0.1 2.8 0.2 0.82 3.6 126.1 15.7 3.6 125.8 15.7 0 0.3 0 0 0.2 03 4.1 126.1 15.8 4.1 125.8 15.7 0 0.3 0.1 0 0.2 0.64 3.6 125.6 16.8 3.6 125.8 16.8 0 0.2 0 0 0.1 05 4.6 125.6 18.5 4.6 125.8 18.5 0 0.2 0 0 0.1 06 5.5 125.6 16.9 5.6 125.8 16.8 0.1 0.2 0.1 1.8 0.1 0.67 4.9 125.6 15.7 4.9 125.8 15.7 0 0.2 0 0 0.1 08 5.5 125.6 15.6 5.6 125.8 15.7 0.1 0.2 0.1 1.8 0.1 0.69 5.4 125.6 12.8 5.6 125.8 12.7 0.2 0.2 0.1 3.6 0.1 0.8
FachadaPonto X Y Z X Ymédio Z Dx Dy Dz X Y Z
1 3.6 126.1 -22.3 3.6 126.3 -22.5 0 0.2 0.2 0 0.2 0.92 3.4 125.6 7.8 3.5 126.3 7.8 0.1 0.7 0 2.8 2.2 03 1.7 126.1 7.2 1.7 126.3 7.1 0 0.2 0.1 0 0.2 1.44 0.4 126.5 7.8 0.4 126.3 7.6 0 0.2 0.2 0 0.2 2.65 0.3 126.5 9.4 0.3 126.3 9.2 0 0.2 0.2 0 0.2 2.16 3.5 126.1 10.7 3.6 126.3 10.5 0.1 0.2 0.2 2.8 0.2 1.97 3.5 126.1 12.1 3.6 126.3 11.9 0.1 0.2 0.2 2.8 0.2 1.78 5.7 125.6 12.0 5.6 126.3 11.9 0.1 0.3 0.1 1.8 0.2 1.79 17.3 124.8 16.6 17.1 126.3 16.6 0.2 1.5 0.2 1.2 1.2 1.2
10 23.1 125.2 16.6 22.9 126.3 16.6 0.2 1.1 0 0.9 1.3 1.211 34.7 126.5 11.8 34.6 126.3 11.9 0.1 0.2 0.1 0.3 0.2 0.812 36.8 126.5 11.8 36.5 126.3 11.9 0.3 0.2 0.1 0.5 0.2 0.813 36.8 126.5 10.3 36.5 126.3 10.5 0.3 0.2 0.2 0.5 0.2 1.914 39.9 126.9 9.0 39.5 126.3 9.2 0.3 0.6 0.2 1.5 0.4 2.115 39.8 126.9 7.4 39.5 126.3 7.6 0.4 0.6 0.2 0.5 0.4 2.616 39.0 126.9 7.0 38.7 126.3 7.1 0.3 0.6 0.1 0.2 0.4 1.417 36.6 126.1 7.8 36.5 126.3 7.8 0.3 0.2 0.1 0.3 0.2 1.318 36.6 128.1 -22.6 36.5 126.3 -22.5 0.1 1.8 0.1 0.3 1.4 0.4
Coluna e Parede Foto 20: ccord. Centro (669,438) Foto19 : coord. Centro (671,422) base: 40 cm(vista lateral)
Ponto X Y Z X Ymédio Z Dx Dy Dz X Y Z1 (coluna) 40.1 125.4 0.1 40.4 125.4 0.1 0.3 0 0 0.7 0 02 (parede) 27.8 136.9 0.6 28.0 136.9 0.6 0.2 0 0 0.7 0 0
104
Na primeira coluna desta tabela são apresentadas as coordenadas 3D de pontos
singulares da maquete da capela Santa Cruz obtidas por processamento computacional.
As coordenadas dos mesmos pontos correspondentes no objeto, medidas diretamente
sobre a maquete com o auxílio de régua graduada em milímetros são apresentadas na
segunda coluna. Na terceira coluna são apresentados os desvios absolutos entre os
valores da primeira e da segunda colunas. Na quarta coluna são apresentados os desvios
percentuais tomando-se por base a medida real.
O sistema computacional foi aplicado aos detalhes arquitetônicos da fachada na
seguinte ordem: frontão, porta, cruz, ponta esquerda e fachada. Coordenadas de um
ponto situado na parede lateral da maquete, lado da varanda e coordenadas de um ponto
de uma das colunas da mesma varanda foram considerados.
Os valores desta tabela foram extraídos do sistema com a finalidade de se calcular os
desvios absolutos e relativos para comprovar a confiabilidade do método. Entretanto
para a criação dos desenhos 3D em AutoCAD um número muito maior de coordenadas
de pontos situados em toda a extensão da capela foram processados.
Analisando-se os resultados apresentados observa-se para os detalhes arquitetônicos a
seguir que:
• Frontão
O desvio relativo máximo é de 1,5% . O desvio absoluto máximo é de 4 milímetros, o
qual é correspondente a um desvio relativo de 1,1 %.
• Porta
O desvio relativo máximo é de 0,7% correspondente a um desvio absoluto de 1
milímetro. O desvio absoluto máximo foi de 7 milímetros o que corresponde a um
desvio relativo de 0,5%.
105
• Cruz
O desvio relativo máximo é de 0,6% correspondente a um desvio absoluto de 1
milímetro. O desvio absoluto máximo é de 6 milímetros correspondente a um desvio
relativo de 0,5 %.
• Ponta Esquerda
O desvio relativo máximo é de 3,6% correspondente a um desvio absoluto de 2
milímetros. O desvio absoluto máximo é de 3 milímetros correspondente a um desvio
relativo de 0,2%.
• Fachada
O desvio relativo máximo é de 2,8% correspondente a um desvio absoluto de 1
milímetro O desvio absoluto máximo é de 18 milímetros correspondente a um desvio
relativo de 1,4%.
• Coluna e Parede
O desvio relativo máximo foi de 0,7% correspondente a um desvio absoluto de 3
milímetros. O desvio absoluto e relativo na medida da distância da coluna da varanda à
parede lateral foi zero.
Os desvios relativos são menores do que o limite máximo arbitrado no início do
trabalho como sendo satisfatório. Este limite de desvio foi estabelecido como sendo
igual a 5%.
As coordenadas no eixo dos Y que representam a distância aproximada do centro da
objetiva ao objeto fotografado são calculadas uma a uma pelo procedimento
computacional, o mesmo não acontecendo quando se considera a medida real deste
afastamento. Neste caso seria impraticável medir-se uma a uma com trena as distâncias
da parede ao centro da objetiva. Adota-se portanto como medida real de afastamento a
média das medidas calculadas pelo computador.
106
A distância medida com trena durante a tomada de fotos , da maquina fotográfica ao
objeto fotografado, entre o plano da face da objetiva e um ponto da face da fachada,
foi de 125 cm. Dado que a parede não é completamente plana, nem rigorosamente
paralela a face da objetiva preferiu-se usar a média dos valores calculados pelo
computador. O procedimento computacional apresenta esta medida variando no entorno
de 126,3 cm o que é mais correto, já que esta medida deve ser feita considerando-se o
ponto de encontro dos raios luminosos em um plano no interior da objetiva e não em
sua face como é possível medir.
A maioria dos desvios apresentados são mais facilmente atribuídos a erros feitos com a
utilização de régua na medição feita sobre a maquete. Observou-se que as medidas
calculadas pelo procedimento computacional são bastante confiáveis.
As coordenadas da tabela acima foram fornecidas ao sistema AutoCAD para a criação
de desenhos de detalhes da maquete. Foram criados desenhos de vistas semelhantes da
maquete a partir de dados calculados pelo programa e de dados obtidos por medição
direta sobre a maquete. Tranparências de vistas semelhantes obtidas a partir dos dados
acima foram comparadas por sobreposição das mesmas. O resultado da comparação das
transparências foi considerado satisfatório.
107
CAPÍTULO 8
CONCLUSÕES
Os resultados obtidos com o sistema computacional ora apresentado para restituir
edificações através de levantamento fotogramétrico terrestre mostram a viabilidade do
método fotogramétrico digital.
Muito ainda falta em matéria de pesquisa e desenvolvimento do método e acredita-se
que muito trabalho computacional em cima dos dados levantados ainda precisa ser
executado.
Uma análise das imagens mais aprofundada seria necessária para se determinar qual o
modelo matemático que melhor resultados traria na determinação dos pontos de
registro.
Também é necessária a busca de maiores conhecimentos na tomada de fotografias para
fins fotogramétricos, para se determinar quais são os fatores que afetam mais a precisão
das medidas e desta forma orientar o trabalho das equipes envolvidas na tomada das
fotos.
Para se evitar o desperdício de tempo e trabalho os pares estereoscópios obtidos devem
ser selecionados previamente quanto à qualidade estereoscópica com auxílio de um
estereoscópio antes da digitalização dos mesmos. As fotografias que não apresentarem
boa estereoscopia quando examinadas com o estereoscópio devem ser descartadas, pois
os valores de coordenadas tridimensionais calculados a partir destes pares não serão
satisfatórios.
Na tomada de fotos em campo é necessário que as condições climáticas sejam
favoráveis, ou seja , que haja suficiente luminosidade, de preferência de igual
intensidade, para o par de fotos a serem superpostas.

108
Enfim, é fácil perceber o vastíssimo campo de conhecimentos que precisa ser dominado
por um grupo de pessoas interagindo entre si para que os resultados finais sejam
satisfatórios.
No caso de trabalhos de pequeno e médio porte, envolvendo fotogrametria digital, o
sistema desenvolvido pode ser utilizado, desde que os desvios das medidas reais
apresentados pelo sistema estejam de acordo com as exigências do cliente.

109
REFERÊNCIAS BIBLIOGRÁFICAS
Baji, E.; Rampolli, M. Analytical photogrammetric survey of the leaning tower of
pisa. ISPRS - International Society for Photogrammetry and Remote
Sensing, v. 29, n. 5, p. 174-181, 1992.
Burns, J. A. Photogrammetry and the historic american buildings survey / historic
american engineering record, national park service In: Workshop on State-of-
The-Art Close-Range Photogrammetry & Surveying. San Antonio, 1984.
Close-range photogrammetry & surveying: State-of-The-Art: developping
the art of application. Falls Church: ASP, 1984.
Busselle, M. Master photography. London: Michell Beazley Publishers, 1977
D’issy, M. CAD em toda obra. CADesign, v. 7, n. 24, 1995.
Erthal, G. J. Registro translacional de imagens: métodos correlacionais e
seqüenciais. São José dos Campos. 76 p. (INPE-3456-TDL/189). Dissertação
(Mestrado em Computação Aplicada) – Instituto Nacional de Pesquisas
Espaciais, 1984.
Fetterman, M. Photogrammetry for architecture and historic preservation In:
Workshop on State-of-The-Art Close-Range Photogrammetry & Surveying.
San Antonio, 1984. Close-range photogrammetry & surveying: State-of-
The-Art: developping the art of application. Falls Church: ASP, 1984.
Fonseca, L. M. G. Registro automático de imagens: uma revisão. São José dos
Campos, 45 p. Tese (Doutorado em Computação Aplicada) – Instituto Nacional
de Pesquisas Espaciais, 1998.
Gobby, C. AutoCAD 12 estudos dirigidos para arquitetura e engenharia 2. ed.
São Paulo: Érica, 1994.
110
Gutu, A. An architectural photogrammetric application survey of the church
within snagov monastery romania. ISPRS - International Society for
Photogrammetry and Remote Sensing, v. 29, n. 5, p. 402-408, 1992.
Karara, H. M. Non-topographic photogrammetry. 2.ed. New York: Edwards
Brothers, 1989.
Kramer, W. Programando em autoLisp. São Paulo: Makron Books, 1995.
Lemos, C. Dicionário de arquitetura brasileira. São Paulo: EDART, 1972.
Loch, C.; Lapolli, M. E. Elementos básicos da fotogrametria e sua utilização
prática. Florianópolis: UFSC, 1985.
Lyons, T. R.; Ebert, J. I. Photogrammetric measurement and monitoring of historic
and prehistoric structures In: Workshop on State-of-The-Art Close-Range
Photogrammetry & Surveying. San Antonio, 1984. Close-range
photogrammetry & surveying: State-of-The-Art: developping the art of
application. Falls Church: ASP, 1984.
Mascarenhas, N. D. A.; Velasco, F. R. D. Processamento digital de imagens.
2.ed. Buenos Aires: Kapelusz, 1989.
Ogleby, C. L. Advances in the digital recording of cultural monuments. ISPRS
Journal of Photogrammetry and Remote Sensing, v. 50, n. 3, p. 8-19, 1995.
Omura, G. Dominando o autoCAD 13 para windows. Rio de Janeiro: Livros
Técnicos e Científicos, 1995.
Paredes, E. A. Práticas aerofotogramétricas e suas aplicações na engenharia.
2.ed. Maringá: IBGE, 1987.
Pereira, J. A. G. Digital image registration by sequential analysis Computer and
Graphics, v. 8, n. 3, p. 247-253, 1984.
111
Pereira, J. A. G. Métodos de registro de imagens usando técnicas de testes
seqüenciais de hipóteses. São José dos Campos. 103 p. (INPE-2681-TDL/124)
Dissertação (Doutorado em Computação Aplicada) – Instituto Nacional de
Pesquisas Espaciais, 1982.
Pratt, W.K. Digital image processing. 2.ed. New York: John Willey, 1991.
Rangel, R. R. Programação orientada a objetos com borland C++ para
windows. São José dos Campos: Rangel Publicações, 1998.
Ryan, R. A. Close-range photogrammetry for architectural recording: three case
studies. In: Workshop on State-of-The-Art Close-Range Photogrammetry &
Surveying. San Antonio, 1984. Close-range photogrammetry & surveying:
State-of-The-Art: developping the art of application. Falls Church: ASP,
1984.
Stevens, D.; Mckay, W.M. The combined use of photogrammetry and CAD in the
reconstruction of fire damaged buildings In: Meeting on Close-Range
Photogrammetry Meets Machine Vision Conference. Zurich: Sept. 3-7, 1990.
Proceedings. Bellingham: SPIE, 1990. p.345-346.
Streilein, A.; Beyer, H.; Kersten, T. Digital photogrammetric techniques for
architectural design. ISPRS - International Society for Photogrammetry and
Remote Sensing, v. 29, n. 5, p. 825-831, 1992.
Tavares, P. E. M.; Fagundes, P. M. Fotogrametria. Rio de Janeiro: UERJ, 1991.
Wolf, P. R. Elements of photogrammetry with air photo interpretation and
remote sensing. 2.ed. New York: McGraw-Hill, 1983.

113
BIBLIOGRAFIA COMPLEMENTAR
Aubin, S.; Pau, J. L’image photogrammetrique de synthese. In: Meeting on Close-
Range Photogrammetry Meets Machine Vision Conference. Zurich, Sept. 3-7,
1990. Proceedings. Bellingham: SPIE, 1990. p.348-349.
Carbonnell, M. L’historie et la situation prèsent des applications de la
photogrammétrie a L’architecture In: Congres International de
Photogrammetrie, 2., Lausanne. Rapport. s. l. s. e., 1968.
Cavallin, J. Perspectiva linear cônica. 2.ed. Curitiba: A. M. Cavalcante, 1976.
Crespo, A. A. Estatística: noções. 9.ed. São Paulo: Saraiva, 1993.
Csaki, G. Application of computer-assisted photogrammetry in the documentation
of excavations and care of monuments in Egypt. In: Meeting on Close-Range
Photogrammetry Meets Machine Vision Conference. Zurich, Sept. 3-7, 1990.
Proceedings. Bellingham: SPIE, 1990. p.340-341.
Eastman, C. M. The evolution of CAD: integrating multiple representations.
Building and Environment, v. 26, n.1, p. 17-23, 1991.
Ferreira, A. B. H. Minidicionário da língua portuguesa. 3.ed. Rio de Janeiro:
Nova Fronteira, 1993.
Foley, J. D.; van Dam, A.; Feiner, S. K.; Hughes, J. F. Computer graphics:
principles and practice. 2.ed. NewYork: Addison-Wesley, 1990.
Fraser, C. A. ; Gustafson, P.C.; Chapman, M. A. The monitoring of movement of
brick and precast panels on the jubilee auditorium, Calgary, Canada In:
Workshop on State-of-The-Art Close-Range Photogrammetry & Surveying.
San Antonio, 1984. Close-range photogrammetry & surveying: State-of-
The-Art: developping the art of application. Falls Church: ASP, 1984.
114
Gillen, L. Applications of photogrammetry for archaeology and historical
architecture In: Workshop on State-of-The-Art Close-Range Photogrammetry &
Surveying. San Antonio, 1984. Close-range photogrammetry & surveying:
State-of-The-Art: developping the art of application. Falls Church: ASP,
1984.
Hearn, D.; Baker, M. P. Computer graphics. New Jersey: Prentice-Hall, 1986.
Jain, A. K. Fundamentals of digital image processing. New Jersey: Prentice-
Hall, 1989.
Knopp, D. E. Interactive photogrammetric system for mapping 3D objects. In:
Meeting on Close-Range Photogrammetry Meets Machine Vision Conference.
Zurich, Sept. 3-7, 1990. Proceedings. Bellingham: SPIE, 1990. p.338-339.
Maia, J. C. Introdução à fotogrametria. São José dos Campos: INPE, 1975.
(INPE-679-NTI/017)
Manso, F. A. Apoio suplementar para aerotriangulação e restituição. Brasília:
Gráfica Brasil Central, 1976.
Nagajara, H. N. An application of Monte Carlo analyses in terrestrial and close
range photogrammetry. In: Meeting on Close-Range Photogrammetry Meets
Machine Vision Conference. Zurich, Sept. 3-7, 1990. Proceedings.
Bellingham: SPIE, 1990. p.347-348.
Pappas, C. ; Murray, W. H. Borland C++ 4.0. 4.ed. São Paulo: Makron Books,
1994.
Searls, C. L. ; Thomasen S. E. Repair of the terra-cota facade of Atlanta City Hall.
Dynamics, stabilisation and restoration. Los Angeles, 1992.

115
Stephani, M.; Tang, L. Experiences with visualization of architectural objects. In:
Meeting on Close-Range Photogrammetry Meets Machine Vision Conference.
Zurich, Sept. 3-7, 1990. Proceedings. Bellingham: SPIE, 1990. p.343-344.
Stocker, D. F. CAD versus practice. Building and Environment, v. 26, n. 1, p.
13-15, 1991.
Uren, J.; Thomas P. R. A new low-cost analytical plotter applied to architectural
drawings and crack propagation studies. In: Meeting on Close-Range
Photogrammetry Meets Machine Vision Conference. Zurich, Sept. 3-7, 1990.
Proceedings. Bellingham: SPIE, 1990. p.350-351.