ii. modelagem matemÁtica (cont. - divisÃo de …davists/ensino/mp272/pdf 3.pdf · uma matriz de...
TRANSCRIPT

II. MODELAGEM MATEMÁTICA (cont.)
Prof. Davi Antônio dos Santos ([email protected])
Departamento de Mecatrônica
www.mec.ita.br/~davists
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
DIVISÃO DE ENGENHARIA MECÂNICA
MP-272: CONTROLE E NAVEGAÇÃO DE MULTICÓPTEROS
Março/2017
São José dos Campos
Sumário
II. MODELAGEM MATEMÁTICA (cont.)
II.3. Movimento de Rotação
II.3.1. Sistemas de Coordenadas
II.3.2. Representação de Atitude
II.3.3. Cinemática de Atitude
II.3.4. Dinâmica de Atitude
MP-272: Controle e Navegação de Multicópteros 2
II.3. Movimento de Rotação
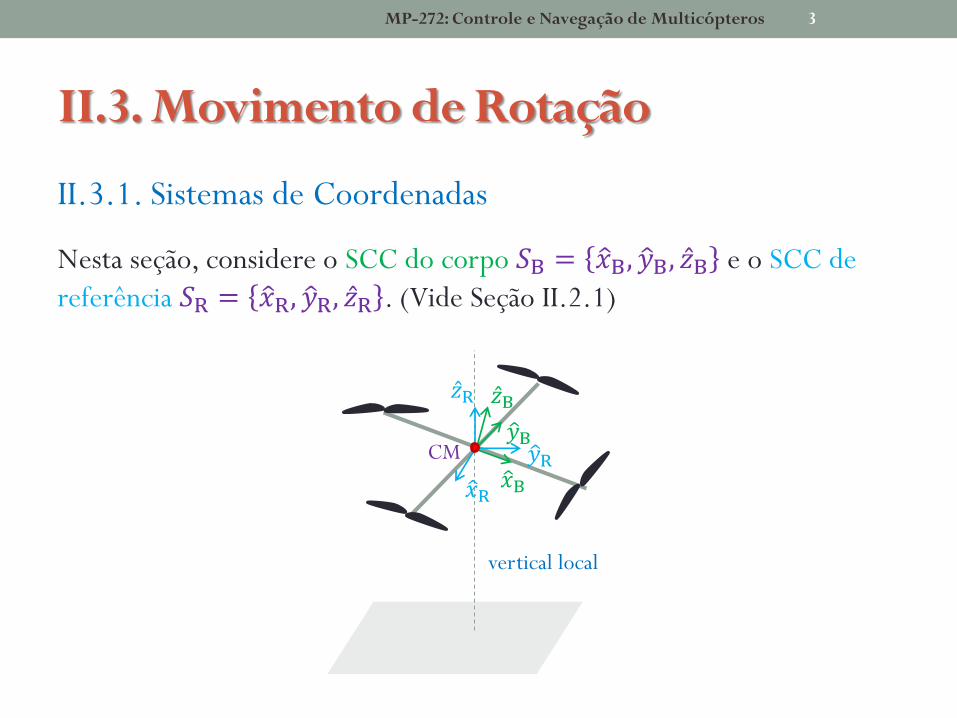
II.3.1. Sistemas de Coordenadas
Nesta seção, considere o SCC do corpo 𝑆B = 𝑥 B, 𝑦 B, 𝑧 B e o SCC de
referência 𝑆R = 𝑥 R, 𝑦 R, 𝑧 R . (Vide Seção II.2.1)
3 MP-272: Controle e Navegação de Multicópteros
vertical local
CM
𝑥 B
𝑦 B
𝑧 B
𝑥 R
𝑦 R
𝑧 R
II.3. Movimento de Rotação
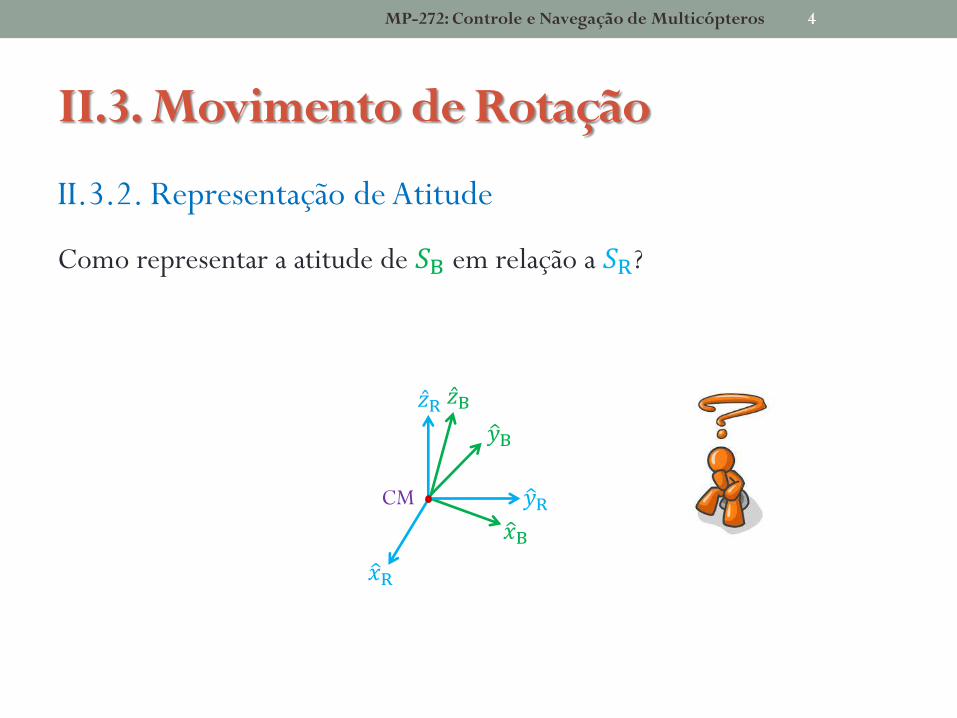
II.3.2. Representação de Atitude
Como representar a atitude de 𝑆B em relação a 𝑆R?
4 MP-272: Controle e Navegação de Multicópteros
𝑥 B
𝑦 B
𝑧 B
𝑥 R
𝑦 R
𝑧 R
CM
II.3. Movimento de Rotação
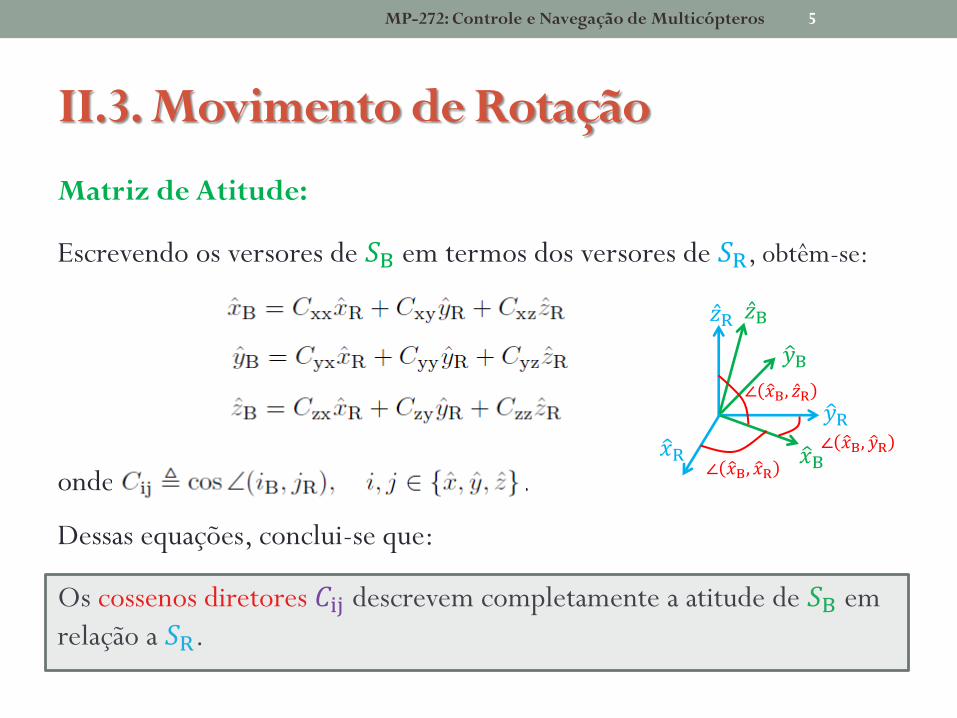
Matriz de Atitude:
Escrevendo os versores de 𝑆B em termos dos versores de 𝑆R, obtêm-se:
onde .
Dessas equações, conclui-se que:
Os cossenos diretores 𝐶ij descrevem completamente a atitude de 𝑆B em
relação a 𝑆R.
5 MP-272: Controle e Navegação de Multicópteros
𝑥 R
𝑦 R
𝑦 B
𝑥 B
𝑧 R 𝑧 B
∠ 𝑥 B, 𝑥 R
∠ 𝑥 B, 𝑧 R
∠ 𝑥 B, 𝑦 R

II.3. Movimento de Rotação
Logo, a atitude pode ser representada pela chamada Matriz de Atitude:
que também é chamada de
•Matriz de Cossenos Diretores (sigla em inglês: DCM)
•Matriz de Rotação
6 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Transformação de Representações:
Seja um vetor arbitrário v. Suas representações 𝐯B em SB e 𝐯R em SR se
relacionam por
7 MP-272: Controle e Navegação de Multicópteros
𝑥 B
𝑦 B
𝑧 B
𝑥 R
𝑦 R
𝑧 R
CM v

II.3. Movimento de Rotação
Rotações Sucessivas:
Sejam as seguintes representações de rotação:
Pode-se mostrar que [Ref. 1, Apêndice B]:
8 MP-272: Controle e Navegação de Multicópteros
• De 𝑆A para 𝑆C: 𝐃C/A
• De 𝑆A para 𝑆B: 𝐃B/A
• De 𝑆B para 𝑆C: 𝐃C/B
𝑆A
𝑆B
𝑆C 𝐃B/A 𝐃C/B
𝐃C/A

II.3. Movimento de Rotação
Ortonormalidade:
Uma matriz de atitude qualquer 𝐃B/R é dita ser ortonormal, pois suas
linhas e colunas são ortogonais e possuem norma Euclidiana unitária.
Essa propriedade implica em
9 MP-272: Controle e Navegação de Multicópteros
II.3. Movimento de Rotação
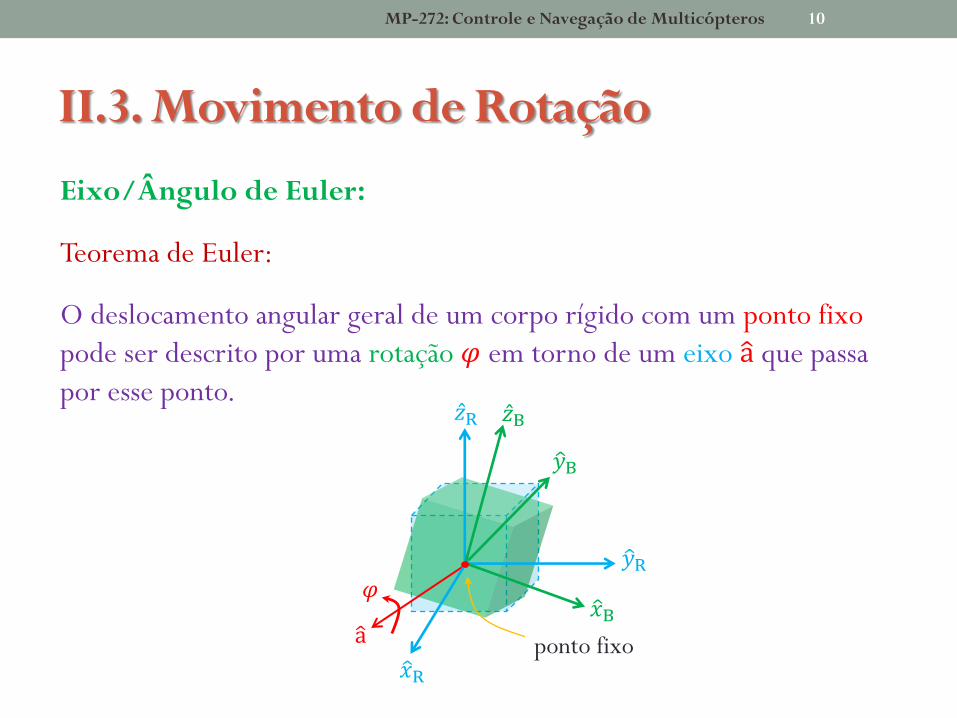
Eixo/Ângulo de Euler:
Teorema de Euler:
O deslocamento angular geral de um corpo rígido com um ponto fixo
pode ser descrito por uma rotação 𝜑 em torno de um eixo a que passa
por esse ponto.
10 MP-272: Controle e Navegação de Multicópteros
a
𝜑
ponto fixo 𝑥 R
𝑦 R
𝑦 B
𝑥 B
𝑧 R 𝑧 B

II.3. Movimento de Rotação
A atitude de 𝑆B em relação a 𝑆R pode ser representada pelo par:
em que 𝜑 é o chamado ângulo principal de Euler e 𝐚, que consiste numa
representação de a (em 𝑆B ou em 𝑆R), é o chamado eixo principal de
Euler.
11 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Relação com a Matriz de Atitude:
Represente a atitude de SB em relação a SR por 𝜑, 𝐚 . A matriz de
atitude 𝐃B/R pode ser expressa como [Ref. 1, Capítulo 2]:
onde
12 MP-272: Controle e Navegação de Multicópteros
II.3. Movimento de Rotação
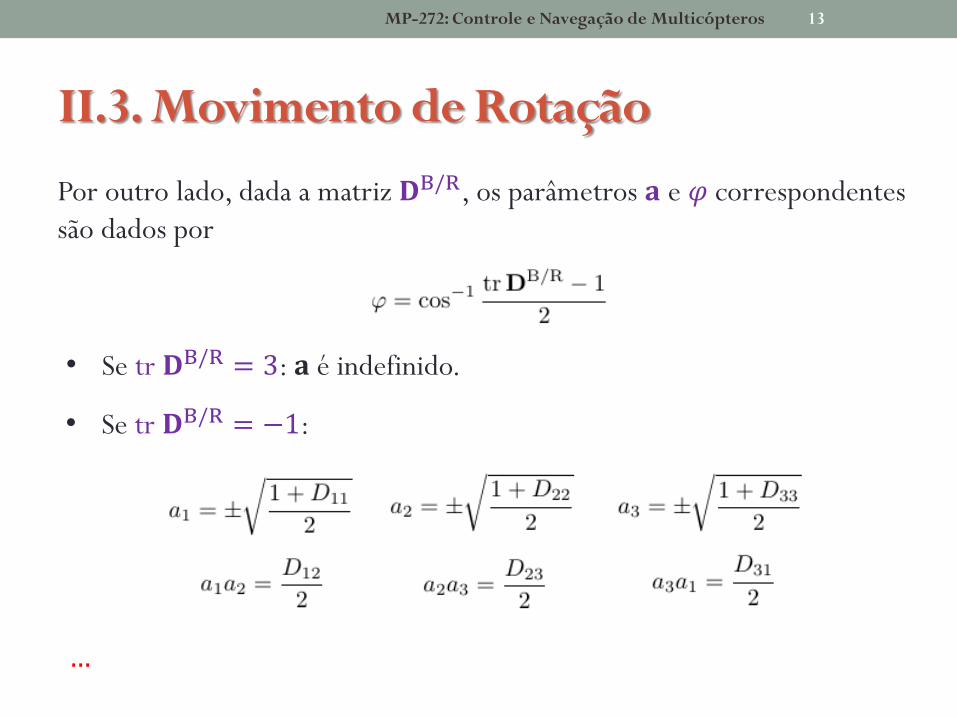
Por outro lado, dada a matriz 𝐃B/R, os parâmetros 𝐚 e 𝜑 correspondentes
são dados por
13 MP-272: Controle e Navegação de Multicópteros
• Se tr 𝐃B/R = 3: 𝐚 é indefinido.
• Se tr 𝐃B/R = −1:
…

II.3. Movimento de Rotação
• Se tr 𝐃B/R ≠ −1 e tr 𝐃B/R ≠ 3:
14 MP-272: Controle e Navegação de Multicópteros
II.3. Movimento de Rotação
Observação:
1. Há ambiguidade na representação de atitude por Eixo/Ângulo de
Euler, pois, por exemplo,
𝜑, 𝐚 e −𝜑,−𝐚 representam a mesma atitude.
15 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Parâmetros de Euler (quaternion):
Os parâmetros de Euler são, por definição, os componentes do vetor
onde
16 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Relação com a Matriz de Atitude:
Represente a atitude de SB em relação a SR por 𝜂, 𝜺 . A matriz de
atitude 𝐃B/R pode ser expressa como
Por outro lado, dada a matriz 𝐃B/R,
17 MP-272: Controle e Navegação de Multicópteros
II.3. Movimento de Rotação
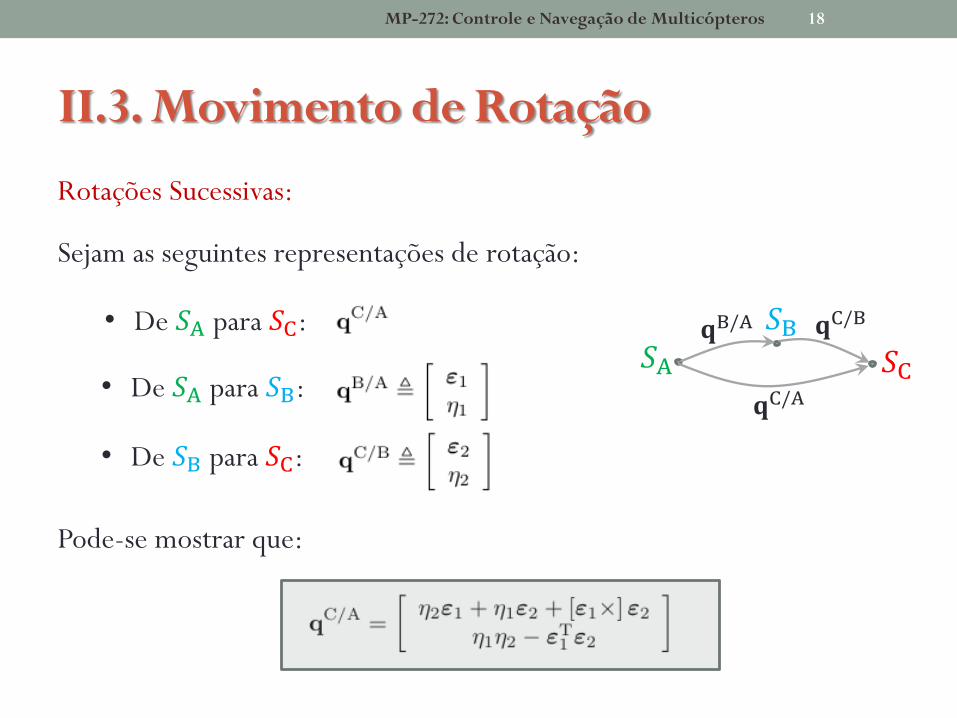
Rotações Sucessivas:
Sejam as seguintes representações de rotação:
Pode-se mostrar que:
18 MP-272: Controle e Navegação de Multicópteros
• De 𝑆A para 𝑆C:
• De 𝑆A para 𝑆B:
• De 𝑆B para 𝑆C:
𝑆A
𝑆B
𝑆C 𝐪B/A 𝐪C/B
𝐪C/A

II.3. Movimento de Rotação
Observações:
1. O vetor 𝐪 apresenta norma unitária, i.e.
2. Há ambiguidade na representação de atitude por parâmetros de Euler,
pois
𝐪 e −𝐪 representam a mesma atitude.
19 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Vetor de Gibbs:
O Vetor de Gibbs 𝐠 ∈ ℝ3 é, por definição,
Na literatura, o 𝐠 é ainda conhecido como:
• Parâmetros de Euler-Rodrigues
• Parâmetros de Rodrigues
20 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Relação com a Matriz de Atitude:
Represente a atitude de SB em relação a SR por 𝐠. A matriz de atitude
𝐃B/R pode ser expressa como
Por outro lado, dada a matriz 𝐃B/R,
21 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Rotações Sucessivas:
Sejam as seguintes representações de rotação:
Pode-se mostrar que:
22 MP-272: Controle e Navegação de Multicópteros
• De 𝑆A para 𝑆C:
• De 𝑆A para 𝑆B:
• De 𝑆B para 𝑆C:
𝑆A
𝑆B
𝑆C
𝐠B/A 𝐠C/B
𝐠C/A
II.3. Movimento de Rotação
Observações:
1. Não há ambiguidade na representação de atitude por Vetor de Gibbs.
2. O vetor 𝐠 se torna infinito para um ângulo de rotação múltiplo ímpar
de 180𝑜.
23 MP-272: Controle e Navegação de Multicópteros
II.3. Movimento de Rotação
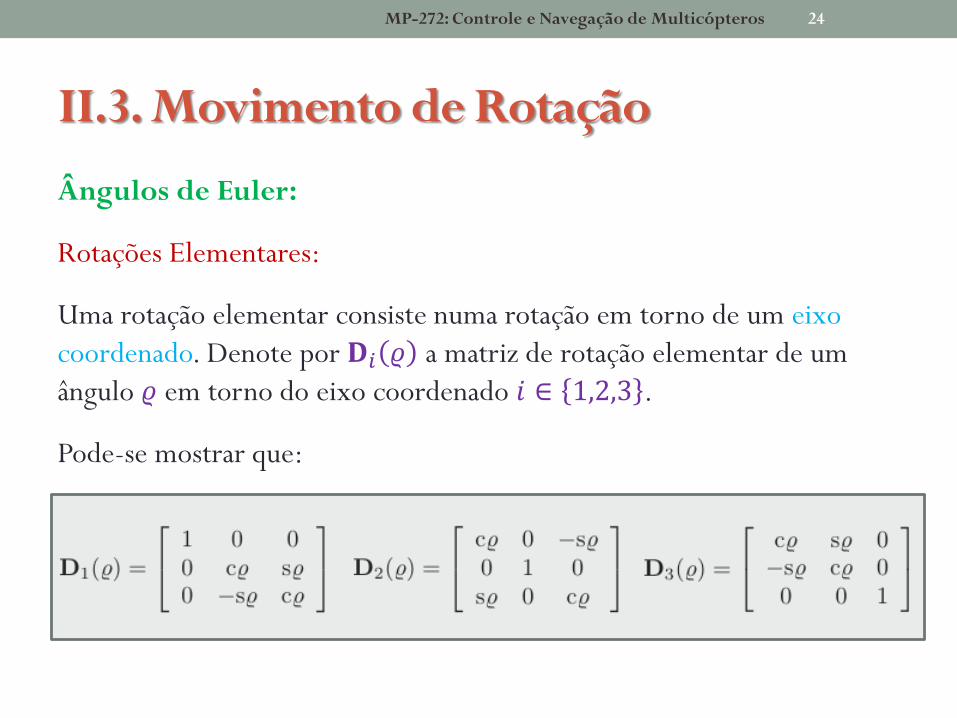
Ângulos de Euler:
Rotações Elementares:
Uma rotação elementar consiste numa rotação em torno de um eixo
coordenado. Denote por 𝐃𝑖 𝜚 a matriz de rotação elementar de um
ângulo 𝜚 em torno do eixo coordenado 𝑖 ∈ 1,2,3 .
Pode-se mostrar que:
24 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Representação de Atitude Tridimensional:
A atitude tridimensional pode ser representada por uma sequência de três
rotações elementares, tal que cada rotação seja diferente da rotação
anterior. Há 12 possíveis sequências:
Adotaremos as sequências:
123 e 321
25 MP-272: Controle e Navegação de Multicópteros
313, 212,121, 131, 323, 232
123, 321, 132, 312, 231, 213

II.3. Movimento de Rotação
Relação com a Matriz de Atitude (321):
Represente a atitude de SB em relação a SR pelos ângulos de Euler 𝜓, 𝜃 e
𝜙 tomados na sequência de eixos 321. A matriz de atitude 𝐃B/R pode ser
expressa como
26 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Por outro lado, dada a matriz 𝐃B/R, obtêm-se
27 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Relação com a Matriz de Atitude (123):
Represente a atitude de SB em relação a SR pelos ângulos de Euler 𝜙, 𝜃 e
𝜓 tomados na sequência de eixos 123. A matriz de atitude 𝐃B/R pode ser
expressa como
28 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Por outro lado, dada a matriz 𝐃B/R, obtém-se
29 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Observações:
1. Os ângulos de Euler consistem na melhor escolha de representação de
atitude no que concerne à visualização.
2. Os ângulos de Euler consistem na pior escolha de representação de
atitude no que concerne ao custo computacional.
30 MP-272: Controle e Navegação de Multicópteros
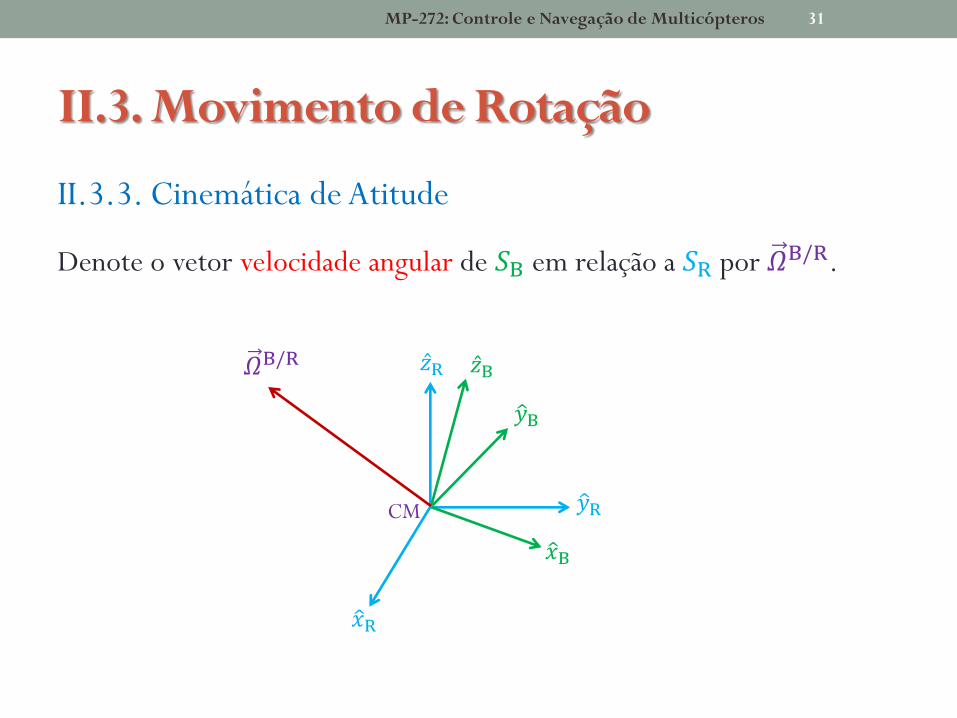
II.3. Movimento de Rotação
II.3.3. Cinemática de Atitude
Denote o vetor velocidade angular de 𝑆B em relação a 𝑆R por 𝛺B/R.
31 MP-272: Controle e Navegação de Multicópteros
𝑥 R
𝑦 R
𝑧 R
𝑥 B
𝑦 B
𝑧 B
CM
𝛺B/R

II.3. Movimento de Rotação
Como descrever o movimento rotacional de 𝑆B em relação a 𝑆R em
função de 𝛺B/R ?
32 MP-272: Controle e Navegação de Multicópteros
𝑥 R
𝑦 R
𝑧 R
𝑥 B
𝑦 B
𝑧 B
CM
𝛺B/R

II.3. Movimento de Rotação
Cinemática em Matriz de Atitude:
Seja 𝛀BB/R
a representação de 𝛺B/R em 𝑆B. Pode-se mostrar que a cine-
mática de atitude de 𝑆B em relação a 𝑆R é modelada em matriz de atitude
por [2]:
33 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Cinemática em Eixo/Ângulo de Euler:
Seja 𝛀BB/R
a representação de 𝛺B/R em 𝑆B. Pode-se mostrar que a cine-
mática de atitude de 𝑆B em relação a 𝑆R é descrita em eixo/ângulo de
Euler por [Ref. 1, p.24-25]:
34 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Cinemática em Quaternion:
Seja 𝛀BB/R
a representação de 𝛺B/R em 𝑆B. Pode-se mostrar que a cine-
mática de atitude de 𝑆B em relação a 𝑆R é modelada em quaternion por
onde
35 MP-272: Controle e Navegação de Multicópteros
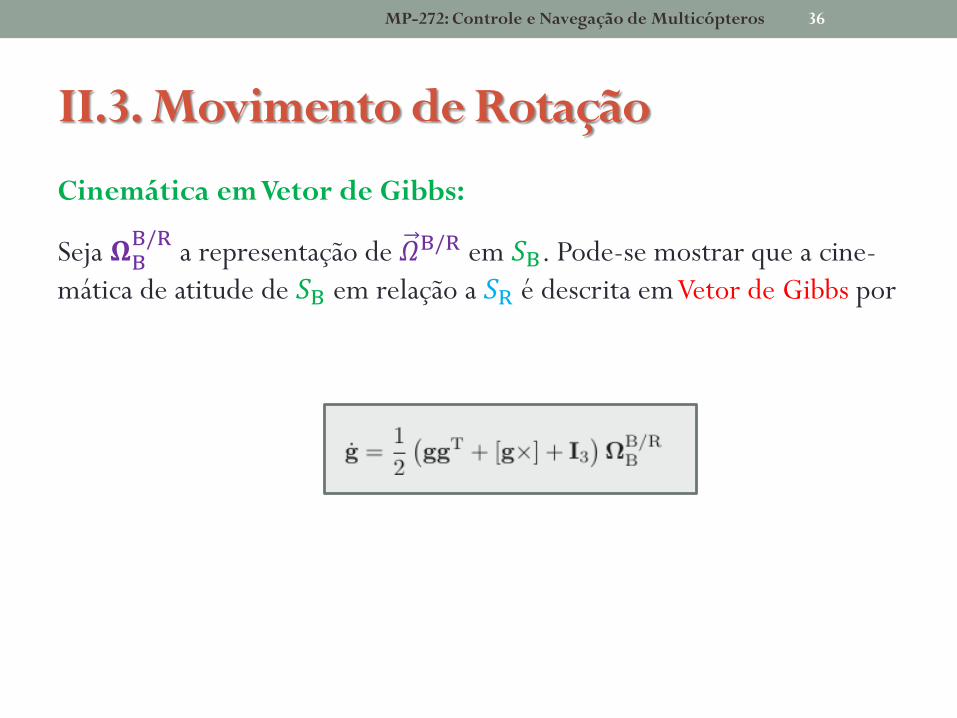
II.3. Movimento de Rotação
Cinemática em Vetor de Gibbs:
Seja 𝛀BB/R
a representação de 𝛺B/R em 𝑆B. Pode-se mostrar que a cine-
mática de atitude de 𝑆B em relação a 𝑆R é descrita em Vetor de Gibbs por
36 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Cinemática em Ângulos de Euler 321:
Seja 𝛀BB/R
a representação de 𝛺B/R em 𝑆B. Pode-se mostrar que a cine-
mática de atitude de 𝑆B em relação a 𝑆R é descrita em Ângulos de Euler
321 por
onde
37 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
Cinemática em Ângulos de Euler 123:
Seja 𝛀BB/R
a representação de 𝛺B/R em 𝑆B. Pode-se mostrar que a cine-
mática de atitude de 𝑆B em relação a 𝑆R é descrita em Ângulos de Euler
123 por
onde
38 MP-272: Controle e Navegação de Multicópteros
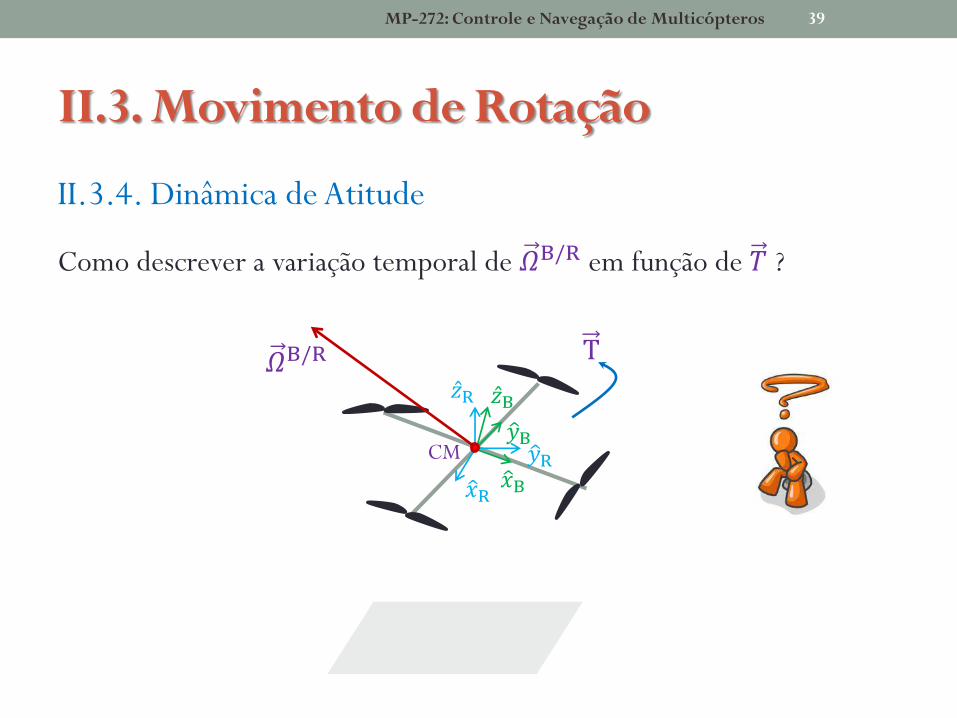
II.3. Movimento de Rotação
II.3.4. Dinâmica de Atitude
Como descrever a variação temporal de 𝛺B/R em função de 𝑇 ?
39 MP-272: Controle e Navegação de Multicópteros
𝛺B/R T
CM
𝑥 B
𝑦 B
𝑧 B
𝑥 R
𝑦 R
𝑧 R
II.3. Movimento de Rotação
Considere que
• O veículo seja um corpo rígido.
• O momentum angular resultante da rotação dos rotores seja
desprezível.
40 MP-272: Controle e Navegação de Multicópteros

II.3. Movimento de Rotação
A variação temporal da velocidade angular 𝛺B/R em função dos torques
externos de controle 𝑇c e de perturbação 𝑇p é descrita em 𝑆B pela
Equação de Dinâmica:
onde JB é a matriz de inércia do veículo.
41 MP-272: Controle e Navegação de Multicópteros

Referências
1. HUGHES, P. C. Spacecraft Attitude Dynamics. Dover, 2004.
2. SCHUSTER, M. A Survey of Attitude Representations. The Journal
of Astronautical Sciences, 41(4), 1993, 439-517.
42 MP-272: Controle e Navegação de Multicópteros
43
Obrigado pela presença
e atenção!
MP-272: Controle e Navegação de Multicópteros