gerador eólico baseado na máquina de indução com conversor matricial ... · conversor matricial...
TRANSCRIPT
Gerador Eólico Baseado na Máquina de Indução com
Conversor Matricial Ligado no Rotor
Ricardo Jorge Pires dos Santos
Dissertação para obtenção do Grau de Mestre em
Engenharia Electrotécnica e de Computadores
Júri
Presidente: Prof. Doutor Joaquim António Fraga Gonçalves Dente
Orientador: Prof. Doutor Gil Domingos Marques
Co-orientador: Prof. Doutora Sónia Ferreira Pinto
Vogal: Prof. Doutor José Fernando Alves da Silva
Setembro de 2007

1
Agradecimentos
Embora uma dissertação seja, na sua essência, um trabalho individual, não posso
deixar de agradecer sinceramente às pessoas cujos contributos individuais permitiram, de uma
forma ou de outra, ultrapassar mais esta etapa do meu percurso universitário.
Assim, em primeiro lugar, quero agradecer ao Professor Gil Marques, o orientador
deste trabalho, e à Professora Sónia Pinto, a co-orientadora, pela enorme disponibilidade e
dedicação demonstrados no esclarecimento de dúvidas, na resolução dos problemas que
foram surgindo, bem como por todos os conselhos e sugestões prestados no desenvolvimento
do trabalho e na elaboração deste relatório.
À minha família, agradeço essencialmente o suporte material e psicológico que sempre
me proporcionou, sem o qual nada seria possível.
À minha namorada, agradeço o papel que teve na minha motivação, e pelo sentido
crítico que revelou em algumas ocasiões, particularmente na análise deste documento.

2
Resumo
A progressiva escassez das fontes de energia tradicionais, baseadas nos combustíveis
fósseis, bem como preocupações ambientais, muito particularmente a alarmante questão do
aquecimento global, têm servido de incentivo à procura de novas soluções para geração de
energia eléctrica. Neste panorama, a energia eólica tem assumido um crescente protagonismo,
sendo na actualidade uma solução interessante, viável e promissora.
Neste trabalho, apresenta-se um método para controlo da potência activa e reactiva de
um gerador eólico, baseado na máquina de indução duplamente alimentada (DFIG), com um
conversor matricial ligado ao rotor. O controlo de potências é obtido, recorrendo a um algoritmo
recentemente desenvolvido, o DPC, que compara os valores destas grandezas, medidas no
estator, com os definidos para referência, aplicando um controlo vectorial sobre o rotor. Este
processo exige o conhecimento da posição do rotor, recorrendo-se para isso, neste trabalho, a
um observador MRAS como forma de evitar o uso de sensores de fluxo. O conversor matricial
aplica uma excitação em tensão alternada ao rotor da DFIG, seguindo uma estratégia que
associa o controlo de potência pelo método DPC/MRAS, com um algoritmo de controlo do
factor de potência da máquina, processando assim apenas uma fracção da energia total
trocada com a rede.
Estudos realizados através de simulação mostram que o sistema exibe uma boa
performance, permitindo um controlo eficaz das potências e mantendo a frequência de saída
constante. O sistema MRAS, em particular, demonstrou possibilitar a detecção coerente da
posição do rotor.
Palavras-chave:
Energia eólica, Máquina de indução, DPC, MRAS, Conversor Matricial.

3
Abstract
The progressive depletion of traditional energy sources, based on fossil fuels, as well as
environmental concerns, particularly the ones related to global warming, are acting as major
motivations on the pursuit for new electric power generation solutions.
A method for control of active and reactive power of a wind power generator is
presented in this paper, using a doubly fed induction (DFIG) machine with a matrix converter
connected to the rotor. The power control is reached using a recently developed control
algorithm, the direct power control (DPC), which allows the powers to be measured in the stator,
compared with the ones defined as reference, and then controlling the machine through the
rotor, using a vector control strategy. This method inherently needs the knowledge of the rotor
flux position, which is achieved, in this work, by a model reference adaptive system (MRAS)
observer, avoiding the use of rotor flux sensors. The matrix converter applies an AC excitation
to the rotor, using a strategy that combines the DPC/MRAS method, with a power factor control
algorithm, having the advantage of processing only a fraction of the total energy flow,
exchanged with the grid.
The system shows a good performance under simulation, allowing an effective active
and reactive power control, as well as keeping the output frequency constant. The MRAS,
particularly, is demonstrated as a good method for rotor positioning.
Keywords:
Wind power generation, Induction machine, DPC, MRAS, Matrix converter.

4
Índice
1. Introdução------------------------------------------------------------------------------------------- 10
2. Controlo Directo de Potência (DPC-Direct Power Control) ---------------------------- 13
2.1- Máquina de Indução Duplamente Alimentada ----------------------------------------------------- 13
2.2-Abordagem Teórica ao Sistema DPC-------------------------------------------------------------------- 15
2.3-Influência sobre as potências dos vectores de tensão em DPC -------------------------------- 17
2.4-Algoritmo de controlo --------------------------------------------------------------------------------------- 19
2.5. Identificação de sectores do fluxo do rotor --------------------------------------------------------- 20
2.6-Determinação dos parâmetros do controlador PI -------------------------------------------------- 22
2.7-Análise de Estabilidade do Sistema de Estimação do Fluxo do Rotor ------------------------ 24
2.8-Observador e controlador de estabilidade: Sistema Robusto ---------------------------------- 26
2.9-Resultados de simulação ao sistema MRAS robusto ---------------------------------------------- 27
3. Conversão Matricial ------------------------------------------------------------------------------ 30
3.1-Introdução à Conversão Matricial ----------------------------------------------------------------------- 30
3.2-Topologia do Conversor Matricial ----------------------------------------------------------------------- 31
3.3-Controlo do Conversor Matricial------------------------------------------------------------------------- 32
3.3.1-Estados de comutação do conversor matricial trifásico ---------------------------------------------- 32
3.3.2-Modulação de Vectores no Espaço (SVM – Space Vector Modulation) ---------------------------- 35
3.3.3-Controlo Por Modo de Deslizamento -------------------------------------------------------------------- 37
3.3.4 Controlo do Conversor -------------------------------------------------------------------------------------- 38
4. Controlo da DFIG com conversor matricial no rotor ------------------------------------ 41
4.1-Controlo da Potência Activa e Reactiva a partir da Tensão de Saída do Conversor ----- 42
4.2-Controlo do Factor de Potência de Entrada do Conversor--------------------------------------- 44
4.3-Modelo do Sistema de Controlo ------------------------------------------------------------------------- 47
5. Simulação do Controlo da DFIG com Conversor Matricial no Rotor---------------- 49
5.1-Modelo de Simulação em Ambiente MATLAB / SIMULINK ------------------------------------- 49
5.1.1-Análise do Bloco “Rede”. ----------------------------------------------------------------------------------- 50
5.2.2-Análise do Bloco “Zona de Tensão”.---------------------------------------------------------------------- 50
5
5.2.3-Análise do Bloco “Zona de Corrente” -------------------------------------------------------------------- 51
5.2.4-Análise do Bloco “Cálculo de Potências”. --------------------------------------------------------------- 52
5.2.5-Análise do Bloco “Transformação de Concordia”. ----------------------------------------------------- 53
5.2.6-Análise do Bloco “Transformação de Park”. ------------------------------------------------------------ 53
5.2.7-Análise do Bloco “Comutação de Corrente”. ----------------------------------------------------------- 54
5.2.8-Análise do Bloco “DPC/MRAS”. --------------------------------------------------------------------------- 54
5.2.9-Análise do Bloco “Controlo”. ------------------------------------------------------------------------------ 57
5.2.10-Análise do Bloco “Conversor Matricial” ---------------------------------------------------------------- 58
5.2.11-Análise do Bloco “Filtro de Entrada” ------------------------------------------------------------------- 58
5.2.12-Análise do Bloco “Máquina de Indução”. -------------------------------------------------------------- 59
5.3-Parâmetros de Simulação: Valores Por Unidade --------------------------------------------------- 61
5.4-Análise de Resultados de Simulação ------------------------------------------------------------------- 63
5.4.1-Controlo de Potência na DFIG ----------------------------------------------------------------------------- 63
5.4.2-Bidireccionalidade do fluxo de potência no conversor ----------------------------------------------- 67
6. Conclusão -------------------------------------------------------------------------------------------- 70
Referências Bibliográficas ------------------------------------------------------------------------------ 71
ANEXO A - TRANSFORMAÇÃO CONCORDIA ------------------------------------------------------- 73
ANEXO B - TRANSFORMAÇÃO DE PARK ------------------------------------------------------------ 74
ANEXO C - MÁQUINA DE INDUÇÃO DUPLAMENTE ALIMENTADA (DFIG) ----------------- 76
ANEXO D - MODULAÇÃO DE VECTORES NO ESPAÇO-------------------------------------------- 80
D1- Localização dos Vectores de Tensão de Saída ------------------------------------------------------- 80
D2 – Localização dos Vectores de corrente de entrada ------------------------------------------------ 82
ANEXO E – LOCALIZAÇÃO DOS EIXOS dq ----------------------------------------------------------- 84
ANEXO F - TABELAS DE VECTORES DE TENSÃO --------------------------------------------------- 85
ANEXO G – EXEMPLO DE CÁLCULO DE UM ESTADO DO CONVERSOR MATRICIAL ----- 88
ANEXO H - MODULAÇÃO DE VECTORES NO ESPAÇO-------------------------------------------- 89
ANEXO I - CONDIÇÃO DE GARANTIA DE FACTOR DE POTÊNCIA UNITÁRIO NA CARGA
------------------------------------------------------------------------------------------------------------------ 90
6
Lista de Tabelas
TABELA 2.1. VECTORES DE TENSÃO A APLICAR AO ROTOR NO CONTEXTO DO CONTROLO DPC -------------------------------- 20
TABELA 3.1. ESTADOS DE COMUTAÇÃO POSSÍVEIS DO CONVERSOR MATRICIAL TRIFÁSICO. ---------------------------------- 34
TABELA 3.2. ESTADOS POSSÍVEIS DO CONVERSOR MATRICIAL TRIFÁSICO.---------------------------------------------------- 36
TABELA 4.1. VECTORES A APLICAR, DE ACORDO COM O SENTIDO DE VARIAÇÃO NAS COMPONENTES , EXIGIDO PELO DPC,
PARA CADA ZONA DA TENSÃO À ENTRADA DO CONVERSOR MATRICIAL. ------------------------------------------------- 44
TABELA 4.2. IDENTIFICAÇÃO DAS ZONAS DE CORRENTE DE SAÍDA ------------------------------------------------------------- 45
TABELA 4.3. VECTORES A APLICAR, POR ZONA DE CORRENTE, DE ACORDO COM A VARIAÇÃO NAS COMPONENTES EXIGIDO
PELO DPC, COM A FUNÇÃO DE COMUTAÇÃO E PARA AS ZONAS 4 E 5 DE TENSÃO.--------------------------------- 47
TABELA 5.1. RELAÇÃO ENTRE AS TENSÕES COMPOSTAS E OS MÁXIMOS E MÍNIMOS INSTANTÂNEOS. ------------------------- 51
TABELA 5.2. IDENTIFICAÇÃO DAS ZONAS DE TENSÃO. ------------------------------------------------------------------------ 51
TABELA 5.3. RELAÇÕES ENTRE AS CORRENTES E DETECÇÃO PASSAGEM POR ZERO. -------------------------------------------- 52
TABELA 5.4. RELAÇÕES ENTRE AS TABELAS AUXILIARES. ---------------------------------------------------------------------- 52
TABELA 5.5. IDENTIFICAÇÃO DAS ZONAS DE CORRENTE. ---------------------------------------------------------------------- 52
TABELA 5.6. TABELA DE ERROS DE POTÊNCIA. -------------------------------------------------------------------------------- 55
TABELA 5.7. TABELA DE SELECÇÃO DE VECTORES DE TENSÃO DPC. ----------------------------------------------------------- 55
TABELA F.1. VECTORES DE TENSÃO, PARA AS ZONAS 12 E 1 DA TENSÃO DE SAÍDA DO CONVERSOR--------------------------- 85
TABELA F.2. VECTORES DE TENSÃO, PARA AS ZONAS 2 E 3 DE TENSÃO DE SAÍDA DO CONVERSOR ---------------------------- 85
TABELA F.3. VECTORES DE TENSÃO, PARA AS ZONAS 4 E 5 DE TENSÃO DE SAÍDA DO CONVERSOR ---------------------------- 86
TABELA F.4. VECTORES DE TENSÃO, PARA AS ZONAS 6 E 7 DE TENSÃO DE SAÍDA DO CONVERSOR ---------------------------- 86
TABELA F.5. VECTORES DE TENSÃO, PARA AS ZONAS 8 E 9 DE TENSÃO DE SAÍDA DO CONVERSOR ---------------------------- 86
TABELA F.6. VECTORES DE TENSÃO, PARA AS ZONAS 10 E 11 DE TENSÃO DE SAÍDA DO CONVERSOR ------------------------- 87
Lista de Figuras
FIGURA 2.1. DIAGRAMA VECTORIAL DAS GRANDEZAS ELÉCTRICAS DO ESTATOR E ROTOR EM COORDENADAS DQ. ................ 16
FIGURA 2.2. DISPOSIÇÃO ESPACIAL DOS ENROLAMENTOS TRIFÁSICOS DO ROTOR. ......................................................... 17
FIGURA 2.3. DIAGRAMA DE FASORES DE TENSÃO EM DPC. ...................................................................................... 17
FIGURA 2.4. VECTORES DO FLUXO DO ROTOR EM FUNCIONAMENTO COMO GERADOR. .................................................. 18
FIGURA 2.5. VARIAÇÃO DA POTÊNCIA CONTROLADA EM TORNO DOS SEUS VALORES DE REFERÊNCIA. ................................ 20
FIGURA 2.6. MODELO DO OBSERVADOR MRAS. ................................................................................................... 22
FIGURA 2.7. MODELO MRAS LINEARIZADO. ........................................................................................................ 23
FIGURA 2.8. REPRESENTAÇÃO DA CORRENTE SEGUNDO O FLUXO. ............................................................................. 25
FIGURA 2.9. GRÁFICO DA CORRENTE . ........................................................................................................... 25
FIGURA 2.10. ERRO DO CONTROLADOR. .............................................................................................................. 26

7
FIGURA 2.11. GRÁFICO DE POSIÇÃO ANGULAR DO FLUXO DO ESTATOR....................................................................... 26
FIGURA 2.12. BLOCO DE SIMULAÇÃO DO SISTEMA DE OBSERVAÇÃO E CONTROLO DE ESTABILIDADE. ................................ 27
FIGURA 2.13. GRÁFICO DE POSIÇÃO ANGULAR DO FLUXO DO ESTATOR....................................................................... 27
FIGURA 2.14. FORMA DE ONDA DO ERRO DO SISTEMA MRAS. .......................................................................... 28
FIGURA 2.15. CORRENTE I_DR........................................................................................................................... 28
FIGURA 3.1. TOPOLOGIA DO CONVERSOR MATRICIAL TRIFÁSICO. .............................................................................. 31
FIGURA 3.2. MONTAGEM DO INTERRUPTOR BIDIRECCIONAL. ................................................................................... 32
FIGURA 3.3. REPRESENTAÇÃO DE VECTORES NO PLANO : ................................................................................... 37
FIGURA 3.4. DESLIZAMENTO DENTRO DA BANDA DE HISTERESE DEFINIDA. .................................................................. 38
FIGURA 4.1. GERADOR EÓLICO BASEADO NA DFIG, COM CONVERSOR MATRICIAL NO ROTOR. ........................................ 41
FIGURA 4.2. REPRESENTAÇÃO DAS TENSÕES COMPOSTAS DE ENTRADA E SUAS SIMÉTRICAS. ........................................... 42
FIGURA 4.3. REPRESENTAÇÃO DE VECTORES DA TENSÃO DE SAÍDA PARA AS ZONAS: A) ZONA 12 B) ZONA 1. .................... 43
FIGURA 4.4. REPRESENTAÇÃO DE VECTORES DA CORRENTE DE ENTRADA PARA AS ZONAS: A) ZONA 12 B) ZONA 1. ............. 46
FIGURA 4.5. LOCALIZAÇÃO DOS EIXOS D E Q PARA AS ZONAS 4 E 5 DE TENSÃO E ZONA 1 DE CORRENTE. ............................ 46
FIGURA 4.6. MODELO PARA IMPLEMENTAÇÃO DO SISTEMA DE CONTROLO ................................................................. 48
FIGURA 5.1. MODELO USADO NA SIMULAÇÃO DO CONTROLO DA DFIG COM CONVERSOR MATRICIAL NO ROTOR. .............. 49
FIGURA 5.2. DIAGRAMA DE BLOCOS DA REDE TRIFÁSICA. ........................................................................................ 50
FIGURA 5.3. -DIAGRAMA DE BLOCOS USADO NA IDENTIFICAÇÃO DAS ZONAS DE TENSÃO. ............................................... 50
FIGURA 5.4. DIAGRAMA DE BLOCOS USADO NA IDENTIFICAÇÃO DAS ZONAS DE CORRENTE.............................................. 52
FIGURA 5.5. DIAGRAMA DE BLOCOS ONDE SE PROCEDE AO CÁLCULO DAS POTÊNCIAS. ................................................... 53
FIGURA 5.6. DIAGRAMA DE BLOCOS PARA A TRANSFORMAÇÃO DE CONCORDIA (CORRENTES DE ENTRADA). ...................... 53
FIGURA 5.7. DIAGRAMA DE BLOCOS PARA A TRANSFORMAÇÃO DE PARK. ................................................................... 54
FIGURA 5.8. DIAGRAMA DE BLOCOS DO CONTROLADOR DE FACTOR DE POTÊNCIA. ....................................................... 54
FIGURA 5.9. BLOCO DE SELECÇÃO DOS VECTORES RESPONSÁVEIS PELO CONTROLO DE POTÊNCIA. .................................... 55
FIGURA 5.10. BLOCOS DE SIMULAÇÃO DO SISTEMA MRAS. .................................................................................... 56
FIGURA 5.11. LOCALIZAÇÃO DOS VECTORES DE TENSÃO NO PLANO ΑΒ. ...................................................................... 57
FIGURA 5.12. BLOCO DE SELECÇÃO DOS VECTORES A APLICAR E RESPECTIVO COMANDO DOS SEMICONDUTORES COMUTADOS.
............................................................................................................................................................ 57
FIGURA 5.13. BLOCO DE SIMULAÇÃO DA MATRIZ DE SEMICONDUTORES BIDIRECCIONAIS DO CONVERSOR. ........................ 58
FIGURA 5.14. FILTRO LRC DE ENTRADA ............................................................................................................... 59
FIGURA 5.15. DIAGRAMA DE BLOCOS DA MÁQUINA DE INDUÇÃO.............................................................................. 60
FIGURA 5.16. MODELO SIMPLIFICADO DOS ENROLAMENTOS DO ROTOR DA DFIG. ....................................................... 60
FIGURA 5.17. POTÊNCIA ACTIVA. ....................................................................................................................... 63
FIGURA 5.18. POTÊNCIA REACTIVA..................................................................................................................... 64
FIGURA 5.19. POTÊNCIA ACTIVA. ....................................................................................................................... 64
FIGURA 5.20. CORRENTES NO ESTATOR............................................................................................................... 65
FIGURA 5.21. CORRENTES NO ROTOR. ................................................................................................................ 65
FIGURA 5.22. TENSÃO NA FASE A, À SAÍDA DO CONVERSOR. .................................................................................... 66

8
FIGURA 5.23. CORRENTES NA ENTRADA DO CONVERSOR. ........................................................................................ 66
FIGURA 5.24. FLUXOS NO ROTOR DA MÁQUINA. .................................................................................................. 67
FIGURA 5.25. POTÊNCIA ACTIVA E REACTIVA. ....................................................................................................... 68
FIGURA 5.26. TENSÃO E CORRENTE NA SAÍDA DO CONVERSOR (LADO DA REDE). .......................................................... 68
FIGURA 5.27. POTÊNCIA ACTIVA E REACTIVA. ....................................................................................................... 69
FIGURA 5.28. TENSÃO E CORRENTE NA SAÍDA DO CONVERSOR (LADO DA REDE). .......................................................... 69
Figura 7.1. Representação dos referenciais parados e em movimento em coordenadas dq. ................... 74
FIGURA 7.2. BLOCOS USADOS PARA A SIMULAÇÃO DA MÁQUINA DE INDUÇÃO. ............................................................ 76
FIGURA 7.3. BLOCO MÁQUINA DE INDUÇÃO DQ. ................................................................................................... 77
FIGURA 7.4. BLOCO PARA OBTENÇÃO DOS FLUXOS DO ESTATOR. .............................................................................. 78
FIGURA 7.5. BLOCO FLUXOS/CORRENTE. ............................................................................................................. 78
FIGURA 7.6. BLOCO PARA CÁLCULO DO BINÁRIO ................................................................................................... 79
FIGURA 7.7. VECTORES DE TENSÃO A) ZONA 1 B) ZONA 2 ...................................................................................... 80
FIGURA 7.8. VECTORES DE TENSÃO A) ZONA 3 B) ZONA 4 ...................................................................................... 80
FIGURA 7.9. VECTORES DE TENSÃO A) ZONA 5 B) ZONA 6 ...................................................................................... 80
FIGURA 7.10. VECTORES DE TENSÃO A) ZONA 7 B) ZONA 8 .................................................................................... 81
FIGURA 7.11. VECTORES DE TENSÃO A) ZONA 9 B) ZONA 10 .................................................................................. 81
FIGURA 7.12. VECTORES DE TENSÃO A) ZONA 11 B) ZONA 12 ................................................................................ 81
FIGURA 7.13. VECTORES DE CORRENTE A) ZONA 1 B) ZONA 2 ................................................................................. 82
FIGURA 7.14. VECTORES DE CORRENTE A) ZONA 3 B) ZONA 4 ................................................................................. 82
FIGURA 7.15. VECTORES DE CORRENTE A) ZONA 5 B) ZONA 6 ................................................................................. 82
FIGURA 7.17. VECTORES DE CORRENTE A) ZONA 7 B) ZONA 8 ................................................................................. 83
FIGURA 7.18. VECTORES DE CORRENTE A) ZONA 9 B) ZONA 10 ............................................................................... 83
FIGURA 7.19. VECTORES DE CORRENTE A) ZONA 11 B) ZONA 12 ............................................................................. 83
FIGURA 7.21. VECTORES DE TENSÃO A) ZONA 12 E 1 B) ZONA 2 E 3 ........................................................................ 84
FIGURA 7.22. VECTORES DE TENSÃO A) ZONA 4 E 5 B) ZONA 6 E 7 .......................................................................... 84
FIGURA 7.23. VECTORES DE TENSÃO A) ZONA 8 E 9 B) ZONA 10 E 11 ...................................................................... 84
9
Lista de Abreviações
DFIG Doubly Fed Induction Machine
DPC Direct Power Control
DTC Direct Torque Control
IGBT Insulated Gate Bipolar Transistor
MRAS Model Reference Adaptive System
SVM Space Vector Modulation
SMC Sliding Mode Control
P.U. Per Unit / Por Unidade

10
1. Introdução
Vivemos hoje num mundo, em que as preocupações ambientais, e principalmente o
combate às alterações climáticas, assumiu um papel de enorme relevo nas agendas políticas,
nos meios de comunicação social, e na comunidade científica. Neste contexto, a investigação
de novas soluções para a crescente procura global de energias limpas, tem vindo a assumir um
papel de destaque no desenvolvimento sustentável das nações. Este trabalho pretende,
exactamente, ser uma pequena contribuição no sentido de alcançar esse objectivo, através do
estudo específico de uma tecnologia para aproveitamento de energia eólica.
As técnicas usadas, para a conversão da energia do vento em energia eléctrica, têm
sofrido uma considerável maturação, fruto do grande número de trabalhos de investigação
desenvolvidos nesta área. Dos primeiros geradores eólicos, baseados na máquina de indução
com rotor em gaiola de esquilo, em sistemas de velocidade constante a frequência constante,
passou-se, recentemente, a verificar uma convergência no sentido de usar a DFIG, em
aplicações de velocidade variável a frequência constante. De facto, este sistema, com uma
enorme variedade de técnicas de controlo à escolha, tem provado ser o mais eficaz, sendo
particularmente adequado para lidar com a característica de enorme variabilidade da
velocidade do vento (Jesus, Castro, 2007).
Este trabalho insere-se exactamente nessa tendência actual, tendo como objectivo o
desenvolvimento de um método de controlo das potências de um gerador eólico, baseado na
DFIG, com o estator ligado directamente à rede, e com o controlo a ser efectuado através de
um conversor matricial ligado ao rotor, sem recorrer a sensores de posição do rotor.
Convencionalmente, o controlo da potência activa e reactiva da DFIG é conseguido
através do controlo vectorial do fluxo do estator, com sensores de posição no rotor. Este
método tem a desvantagem de ser dependente da precisão com que estes dispositivos indicam
a posição do rotor, o que é particularmente complicado no caso da DFIG, bem como
desvantagens em termos de custo, robustez e manutenção. Outras técnicas existem, porém,
que contornam a necessidade de uso destes sensores, como o controlo directo de binário
(DTC), mas cujo uso se tem restringido à máquina de indução com rotor em gaiola (Datta,
Ranganathan, 2001).
Neste trabalho é usado um algoritmo recentemente desenvolvido, que permite controlar
a potência activa e reactiva directamente, logo em clara oposição às técnicas que recorrem a
um controlo indirecto através do binário e fluxo, designando-se por isso mesmo de controlo
directo de potência (DPC). Este método inovador, usa o estator como enrolamento de medida,
lendo aí a potência activa e reactiva que se pretende controlar, e aplica vectores de tensão ao
enrolamento de controlo, o rotor, por intermédio de um conversor electrónico. Este processo,
exige o conhecimento da posição do rotor, mas como se pretende evitar as desvantagens
decorrentes do uso de sensores, usou-se, neste trabalho, um observador de velocidade MRAS,
um método já há muito conhecido para controlo da máquina de indução com rotor em gaiola, e

11
recentemente introduzido para a DFIG. Este observador permite estimar a velocidade
rotacional, sendo a posição do rotor retirada por integração dessa grandeza (Datta,
Ranganathan, 2001), (Cárdenas, Peña, Asher, Clare, Cartes, 2005).
A aplicação do controlo vectorial, resultante do método integrado DPC/MRAS, é
executada por um conversor matricial trifásico, ligado entre o rotor e a rede. Trata-se de um
conversor AC-AC, que permite processar a energia de escorregamento da máquina e efectuar
o controlo das potências, por aplicação de uma excitação alternada ao rotor, dependendo
simultaneamente do sistema combinado DPC/MRAS e de um algoritmo de controlo do factor
de potência. A utilização deste conversor tem assim a enorme vantagem de conseguir controlar
as potências transitadas pela máquina, processando apenas a potência que circula entre o
rotor e a rede, o que representa uma fracção da potência total, e garantindo uma frequência de
saída constante. Isto é particularmente importante, dadas as limitações dos semicondutores
que constituem o conversor matricial, tipicamente IGBT „s. No controlo deste conversor, seguiu-
se uma estratégia baseada numa associação da técnica de modulação de vectores no espaço,
com o controlo por modo de deslizamento (Huber, Borojevic, Burany, 1992), (Silva 1998).
Com o que foi dito acima em mente, apresenta-se a figura 1.1, onde se apresentam,
de forma simplificada, os componentes principais do sistema que se pretende implementar.
Quanto ao modo como o trabalho, em si, vai ser desenvolvido, destacam-se duas
etapas principais. Inicialmente, estudam-se os métodos disponíveis para atingir cada um dos
objectivos individuais propostos, através da recolha e leitura cuidada de vários trabalhos de
investigação. Numa segunda fase, procede-se a um estudo por simulação, em ambiente
Matlab/Simulink.
Este documento regista os objectivos, motivação, conceitos teóricos, estudo em
simulação e resultados finais do projecto. Começa-se por introduzir o algoritmo DPC, no inicio
do capítulo 2, e ainda neste capítulo faz-se uma abordagem teórica ao observador MRAS, com
análise de estabilidade e simulação em várias condições.
Caixa Velocidade
s
Conversor AC / AC
DFIG Rede
Figura 1.1. Esquema de gerador eólico com DFIG e conversor electrónico.
12
No capítulo 3, introduz-se a conversão matricial. Apresenta-se um estudo topológico do
conversor, e as técnicas de modulação de vectores no espaço e controlo por modo de
deslizamento, essenciais ao seu controlo.
Uma vez abordados os princípios gerais dos capítulos anteriores, no capítulo 4
descreve-se em concreto o sistema que se pretende realizar, ou seja o controlo do gerador
eólico baseado na DFIG, com conversor matricial ligado ao rotor. Este capítulo, é
particularmente importante, ao expor o modo como os diferentes constituintes do trabalho
interagem entre si.
No capítulo 5, são realizadas as simulações do sistema criado. Faz-se uma análise
sucinta dos blocos principais, fala-se no uso em valores por unidade e tecem-se alguns
comentários aos resultados obtidos.
Finalmente, no capítulo 6 averigua-se até que ponto os objectivos propostos foram
atingidos, sumarizando as contribuições que este trabalho vem trazer para a área de
investigação no qual está inserido e são ainda dadas algumas indicações de alguns assuntos
que ficaram em aberto e poderão dar origem a trabalhos posteriores.

13
2. Controlo Directo de Potência (DPC-Direct Power Control)
2.1- Máquina de Indução Duplamente Alimentada
Os primeiros geradores, usados em aplicações de energia eólica, estavam equipados
com a máquina de indução com rotor em gaiola de esquilo. Esta máquina usa turbinas, em que
o controlo da potência, para valores acima da velocidade nominal do vento, é conseguido
através de características específicas no desenho das pás. Uma vez atingida a velocidade
nominal do vento, as turbinas deste tipo, designadas na literatura da especialidade por “stall”,
entram em perda aerodinâmica, limitando deste modo a potência mecânica transmitida. O
conjunto da máquina de indução com rotor em gaiola, com a regulação de potência através de
turbinas stall, foi durante bastante tempo o eleito para geração de energia eólica, sobretudo
pela sua simplicidade e baixo preço (Castro, 2007), (Jesus, Castro, 2007).
Um pouco mais recente, é o uso de geradores eólicos, equipados com máquinas
síncronas de velocidade ajustável. Estes geradores dispensam o uso de caixa de velocidades,
sendo a adaptação à frequência da rede realizada através de conversores de corrente
alternada - corrente contínua - corrente alternada (AC-DC-AC). O controlo da potência
mecânica transmitida é efectuado através da regulação do ângulo de passo das pás, usando o
sistema designado por “pitch” (Castro, 2007).
Actualmente, verifica-se uma convergência da maioria dos fabricantes, no sentido de
usar a máquina de indução com rotor bobinado, designada vulgarmente por máquina de
indução duplamente alimentada (DFIG), e controlo de potência através de turbinas do tipo
“pitch”, nos grandes aproveitamentos de energia eólica. Nestes sistemas, o rotor bobinado é
ligado à rede através de um conversor, permitindo o aproveitamento da energia de
escorregamento, constituindo um sistema de velocidade variável a frequência constante. A
maior complexidade relativa desta montagem, e o preço mais elevado, não foram suficientes
para deter a implantação desta tecnologia, pois tem sido demonstrado que aumenta
significativamente a produção de energia eléctrica, de forma a compensar alguns outros
inconvenientes que o seu uso acarreta (Castro, 2007), (Jesus, Castro, 2007).
É neste contexto, de progressiva adopção em projectos de geração de energia eólica,
que se optou pelo uso da DFIG, também neste trabalho. A escolha desta máquina, deve-se às
grandes vantagens operacionais que possui, como o facto, de resto já referido, de tanto o rotor
como o estator poderem transferir potência para a rede, aumentando o rendimento global do
sistema. A DFIG permite também o controlo das potências debitadas pela máquina, através da
aplicação de uma tensão de excitação ao rotor (Datta, Ranganathan, 2001), (Marques, 2006).
Os conversores electrónicos deverão, portanto, ser ligados entre o rotor da máquina e a rede,
enquanto o estator está ligado directamente. Este facto permite que, para variações limitadas
da velocidade de operação, os conversores de potência possam ser projectados para apenas
14
uma fracção da potência nominal da máquina, tipicamente à volta de 20%, pois apenas se
exige que processem a energia transitada, de, e para o rotor. Se, pelo contrário, o controlo se
desse através do estator, o conversor teria de processar a quase totalidade da energia
debitada pela máquina. Evita-se assim lidar, em muitas situações, com as limitações típicas de
potência dos semicondutores do conversor.
Interessa então abordar alguns aspectos teóricos do funcionamento desta máquina, e
desenvolver o estudo de estratégias que permitam o seu controlo. Para o efeito, usa-se o
modelo em que a máquina de indução é constituída por seis circuitos magneticamente ligados.
Neste caso, e se não for efectuada ligação de neutro, a soma das correntes do rotor e a soma
das correntes do estator são nulas. A máquina pode, nessas circunstâncias, ser modelada
recorrendo a apenas quatro variáveis independentes (Marques, 2001), (Fitzgerald, Kingsley,
2001). No caso concreto da DFIG, as quatro variáveis são obtidas a partir das três tensões
simples da rede, e das três tensões provenientes do sistema de controlo. Estas tensões
trifásicas são convertidas para um sistema de duas fases, recorrendo a uma transformação de
variáveis a potência constante, a transformação de Concordia (anexo A). O processo resume-
se de seguida, tomando como exemplo as três tensões trifásicas da rede (u1,u2,u3):
(1)
A aplicação desta transformação, permite obter o sistema de duas fases constituído por
e , uma vez que a componente homopolar, , é sempre nula. Todavia, e por uma
questão de simplificação das expressões matemáticas por detrás do modelo em estudo, é
desejável que se use o mesmo referencial matemático para os enrolamentos fixos do estator e
para os enrolamentos girantes do rotor. Ora a aplicação da transformação de Park, (anexo B)
às duas variáveis obtidas após a transformação de Concordia, u e u , permite exactamente
obter esse referencial comum.
A transformação é definida através de (2):
(2)
O ângulo , designado ângulo de transformação, representa a desfasagem entre o
referencial estático e o referencial em movimento. As equações da dinâmica da máquina são
de seguida apresentadas, segundo as suas componentes directa e em quadratura, dq,
respectivamente (3), (4):

15
(3)
(4)
Os fluxos do rotor e do estator, segundo as componentes directas e em quadratura,
serão:
(5)
(6)
O binário, por sua vez, será:
(7)
2.2-Abordagem Teórica ao Sistema DPC
Tipicamente, no contexto do controlo independente da potência activa e reactiva
fornecidas pela máquina de indução, em aplicações de geração eólica, é usado o princípio de
orientação de campo (do estator), implementado através do controlo vectorial do fluxo do
estator, recorrendo a sensores de posição do rotor (Marques, 2006), (Cárdenas, Peña, Asher,
Clare, Cartes, 2005). Com esta estratégia, estamos dependentes, em termos de performance,
da precisão com que é calculado o fluxo do estator, e da precisão dos sensores de posição,
cuja implementação apresenta dificuldades do ponto de vista prático, particularmente no caso
da DFIG (Datta, Ranganathan, 2001). Começou-se então, por analisar estratégias alternativas
aos processos de controlo baseadas no princípio de orientação de campo, nomeadamente o
controlo directo do fluxo e do binário, conhecido na leitura especializada por DTC. Todavia,
acabou por se optar por um método que permite o controlo directo das potências, sem recurso
a sensores de posição do rotor (DPC).
A ideia central do método DPC, e que o torna distinto das técnicas DTC, é a
possibilidade de se controlarem directamente a potência activa e reactiva, a partir do conversor
electrónico aplicado ao rotor, por comparação dos valores das potências medidas no estator,
com os valores definidos como referência. As medições são efectuadas num terminal da
máquina, o estator, enquanto o controlo é aplicado ao outro, o rotor. Este método permite
forçar a variação das potências fornecidas pela máquina, a manterem-se numa gama de
variação muito estreita, de acordo com os ganhos e bandas de histerese que se definem para
os controladores (Datta, Ranganathan, 2001).

16
Para melhor entender os aspectos teóricos do controlo directo de potência,
apresentam-se os diagramas vectoriais da figura 2.1, na qual estão representadas, de forma
aproximada, algumas das grandezas da máquina, nas suas componentes directa e em
quadratura. Pode-se demonstrar, que para controlar a potência activa, deve-se actuar sobre a
componente da corrente do estator, e para controlar a reactiva actua-se sobre a
componente . Isto é possível, por sua vez, pela manipulação das componentes das
correntes do rotor, e , respectivamente (Datta, Ranganathan, 2001), (Marques, 2006).
Nos gráficos (a) e (b), da figura 2.1, pode-se observar o efeito da variação dos fluxos do rotor, e
inferir daí, acerca do sentido de variação da potência activa e reactiva.
Na figura 2.1 a), representa-se um diagrama vectorial das grandezas eléctricas do
estator e rotor em coordenadas dq. Quando se tem =0 e variando de zero até ao
máximo, observa-se que o fluxo do rotor, , se desloca segundo A-B correspondendo
predominantemente a uma variação no ângulo , entre o fluxo no estator e o fluxo do rotor
, sem provocar variações nas suas amplitudes. Pode-se, através da manipulação desta
desfasagem entre os dois fluxos actuar, directamente e de uma forma previsível, sobre a
potência activa à saída do estator.
Na figura 2.1 b), em contrapartida, mantendo constante, e variando de 0 até ao
máximo, obtém-se uma variação do fluxo do rotor entre C e D, resultando numa variação
essencialmente na magnitude do fluxo . A potência reactiva trocada com a rede, pode ser
reduzida aumentando a magnitude do fluxo, e vice-versa. Do raciocínio desenvolvido acima,
resultam duas conclusões, que se destacam pela sua importância global (Datta, Ranganathan,
2001):
A potência activa no estator pode ser controlada actuando sobre a posição angular do
vector de fluxo do rotor, .
q q
D C
B
d d
A
a)
Figura 2.1. Diagrama vectorial das grandezas eléctricas do estator e rotor em coordenadas
dq.
b)

17
A potência reactiva pode ser controlada actuando sobre a magnitude do vector de fluxo
do rotor, .
Estes dois conceitos básicos são cruciais, como se verá, para determinar o estado de
comutação dos semicondutores do conversor, ligado entre o rotor e a rede, de modo a que seja
possível controlar a potência activa e reactiva.
2.3-Influência sobre as potências dos vectores de tensão em
DPC
Assumindo que a orientação espacial dos três enrolamentos trifásicos do rotor é o dado
pela figura 2.2, pode-se dividir o espaço de fasores da tensão em seis zonas distintas, com 60
graus cada, sendo que a cada uma delas corresponde um vector de tensão, como se indica na
figura 2.3.
Controlam-se os valores instantâneos da amplitude e velocidade angular do fluxo do
rotor, através da selecção criteriosa de um destes vectores de tensão, desde que para isso se
conheça a sua posição com rigor (Cárdenas, Peña, Asher, Clare, Cartes, 2005). A identificação
da posição angular do fluxo do rotor, será abordada na secção 2.5.
U1
U2 U3
U4
U5 U6
Sector 1
Sector 2 Sector 3
Sector 4
Sector 5 Sector 6
Fase b
Fase a
Fase c
Figura 2.2. Disposição espacial dos enrolamentos trifásicos do rotor.
Figura 2.3. Diagrama de fasores de tensão em DPC.

18
Considerando como positiva, a rotação na direcção anti-horária dos vectores de fluxo,
no referencial do rotor, pode-se verificar que o fluxo , está adiantado em relação ao fluxo ,
quando se considera o funcionamento como motor, e inversamente, estará em atraso em
relação a , em funcionamento como gerador. Na figura 2.4, pode-se visualizar o que foi
descrito, mas apenas para o funcionamento como gerador.
Por exemplo, na situação da figura 2.4, em que o fluxo do rotor se situa no sector 1, e a
máquina está a funcionar como gerador, a aplicação dos vectores de tensão U2 e U3, irá
acelerar o vector no sentido positivo, levando a um aumento da desfasagem entre os dois
fluxos, e , e consequentemente a um aumento da potência activa gerada pelo estator. No
sentido inverso, mas pelos mesmos motivos, a aplicação dos vectores U5 e U6 irá reduzir a
potência activa gerada.
O controlo da potência reactiva depende do fluxo (figura 2.1), ou seja da
componente de segundo o eixo d, coincidente com o sentido do fluxo . Uma vez que o
ângulo é pequeno, considera-se que a amplitude de é aproximadamente igual à amplitude
. Consequentemente, quando o fluxo do rotor se encontra no sector 1, a aplicação dos
vectores U2, U1 e U6, que têm em comum o facto de terem direcção segundo o eixo positivo
dos d, vai provocar um aumento da amplitude de , e em contrapartida, a aplicação dos
vectores U3, U4 e U5, provoca a sua diminuição. Um aumento na amplitude do fluxo , indica
que mais potência reactiva está a ser fornecida pelo rotor, ou seja menos potência reactiva
estará a ser pedida à rede, resultando em um aumento do factor de potência do estator (Datta,
Ranganathan, 2001), (Fitzgerald, Kingsley, 2001). Uma diminuição da amplitude do fluxo do
rotor irá exactamente no sentido inverso, provocando um decréscimo do factor de potência.
Generalizando o raciocínio desenvolvido em cima, pode-se perceber, que se o fluxo do
rotor da máquina estiver, em determinado momento, no sector k (k=1,2, …, 6), e considerando-
U1
U2 U3
U4
U5 U6
Sector 1
Sector 2 Sector 3
Sector 4
Sector 5 Sector 6
Figura 2.4. Vectores do fluxo do rotor em funcionamento como gerador.

19
se que as potências consumidas pelo estator são positivas e as potências geradas são
negativas (Marques, 2006), (Datta, Ranganathan, 2001):
A aplicação dos vectores U(k-1) e U(k-2), leva a um aumento da potência activa
fornecida pelo estator da máquina e a aplicação dos vectores U(k+1) e U(k+2), provoca
a sua redução.
A aplicação dos vectores U(k+2), U(k-2) e U(k+3), leva a um aumento da reactiva
pedida à rede pelo estator, assim como a aplicação dos vectores U(k), U(k+1) e U(k-1),
levam à sua redução.
Estas regras são centrais na estratégia de controlo, baseada na comutação de vectores
de tensão, que se explora de seguida.
2.4-Algoritmo de controlo
O algoritmo de controlo, consiste no cálculo das potências activa e reactiva, a partir da
corrente e tensão do lado do estator, comparação com os valores definidos para referência, e
tomada de decisão quanto aos vectores de tensão a aplicar no rotor. O cálculo das potências à
saída da máquina é efectuado a partir das correntes trifásicas do estator, e das tensões
trifásicas da rede (Datta, Ranganathan, 2001). Estas correntes e tensões são transformadas
para um sistema de duas fases, ( e ), através da aplicação da Transformação de
Concordia (anexo A), sendo então usadas as expressões seguintes:
Tensões da rede:
(8)
(9)
E as correntes:
(10)
(11)
Finalmente, as potências são calculadas a partir das expressões (8-11):
(12)
(13)
Parte-se do princípio que se tem um sistema trifásico equilibrado, logo, e como se pode
ver pelas expressões (12) e (13), apenas é necessário medir duas correntes, ( , e duas

20
tensões, ( . Uma vez calculadas as potências no estator da máquina, definem-se os
sinais de erro, que consistem na diferença entre os valores usados para referência e os valores
calculados, a variar entre uma gama estreita de valores, recorrendo a controladores de
histerese. Este conceito é ilustrado pela figura 2.5.
O erro na potência activa, como se pode ver por este exemplo, será positivo durante o
crescimento da potência activa calculada, para valores acima do valor de referência, atinge o
valor máximo, permitido pelos controladores de histerese, e dá origem a uma comutação. A
partir desse ponto, começa a diminuir, até atingir o valor mínimo negativo, permitido pelos
controladores, dando origem a nova comutação. O mesmo se passa para o caso das potências
reactivas da máquina.
A estratégia de controlo, por aplicação de vectores de tensão, descrita anteriormente,
encontra-se resumida na tabela 2.1. Nesta tabela, podem-se consultar quais os vectores de
tensão a aplicar, de acordo com o sector do fluxo, e com o sentido de variação das potências
desejado.
Tabela 2.1. Vectores de tensão a aplicar ao rotor no contexto do controlo DPC.
Sector 1 Sector 2 Sector 3 Sector 4 Sector 5 Sector 6
Perr<=0
Qerr > 0 U3 U4 U5 U6 U1 U2
Qerr <=0 U2 U3 U4 U5 U6 U1
Perr>0
Qerr>0 U5 U6 U1 U2 U3 U4
Qerr <=0 U6 U1 U2 U3 U4 U5
A identificação dos sectores do fluxo, referidos na tabela anterior, é motivo de
discussão na secção seguinte.
2.5. Identificação de sectores do fluxo do rotor
Neste trabalho, o controlo da DFIG é realizado sem o recurso a sensores de posição
dos fluxos do rotor. Consegue-se, desta forma, evitar que o desempenho do sistema fique
dependente da qualidade e precisão dos sensores de posição do rotor, e da precisão do
cálculo dos fluxos do estator, sendo que o alinhamento dos fluxos, usando este método, é
particularmente complexo no caso da DFIG (Datta, Ranganathan, 2001). O uso destes
dispositivos, além do que já foi referido, é caracterizado por ter custos elevados, necessidade
de manutenção frequente e baixa fiabilidade.
Figura 2.5. Variação da potência controlada em torno dos seus valores de referência.
Banda
histerese

21
Todavia, existe um método, vulgarmente designado na literatura da especialidade por
MRAS (Model Reference Adaptive System), amplamente usado em várias áreas, desde o
controlo de máquinas eléctricas, à robótica, e a aplicações militares, em sistemas de
navegação para mísseis, que pode ser usado para contornar as desvantagens do uso de
sensores. A ideia central é ter um controlador em malha fechada, em que os parâmetros vão
sendo alterados continuamente, de forma a permitir a adaptação do sistema a diversas
condições de funcionamento. A sua saída vai sendo comparada, em cada instante, com a
resposta ideal, dada por um modelo de referência, procedendo-se posteriormente aos devidos
ajustes. Em aplicações de máquinas eléctricas, o MRAS é comummente usado no controlo,
sem recurso a sensores de posição, da máquina de indução com rotor em gaiola, tendo
recentemente começado a ser estudado o seu uso no contexto do controlo da DFIG,
(Cárdenas, Peña, Asher, Clare, Cartes, 2005).
Este observador da velocidade do rotor é constituído por um modelo de tensão e por
um modelo de corrente. O modelo de tensão, em regime estacionário, é usado para determinar
o fluxo do estator, recorrendo às seguintes expressões:
(14)
(15)
Nestas equações, , e , são, respectivamente, as tensões, correntes e resistência
do estator.
O modelo de corrente, permite calcular o fluxo do estator, mas desta vez através das
correntes , da velocidade estimada , das indutâncias de magnetização, , indutâncias dos
enrolamentos do estator, , e ainda da corrente do rotor . Para o modelo de corrente, usam-
se as expressões seguintes:
(16)
(17)
No observador de velocidade MRAS, o fluxo é designado habitualmente como fluxo
de referência, e é o fluxo estimado. Actua-se então sobre a velocidade rotacional , de
forma a reduzir o erro entre o fluxo estimado e o fluxo de referência. A expressão do erro, em
componentes , obtidas aplicando a Transformação de Concordia (anexo A), será (18):
(18)
As equações (14-17), são usadas para implementar o observador de velocidade
MRAS, e o erro calculado na equação 18 é levado a zero pelo controlador proporcional integral
(PI). À saída do controlador proporcional integral, tem-se a velocidade angular, cuja integração
dá origem à posição angular, usada nas equações 16 e 17.
22
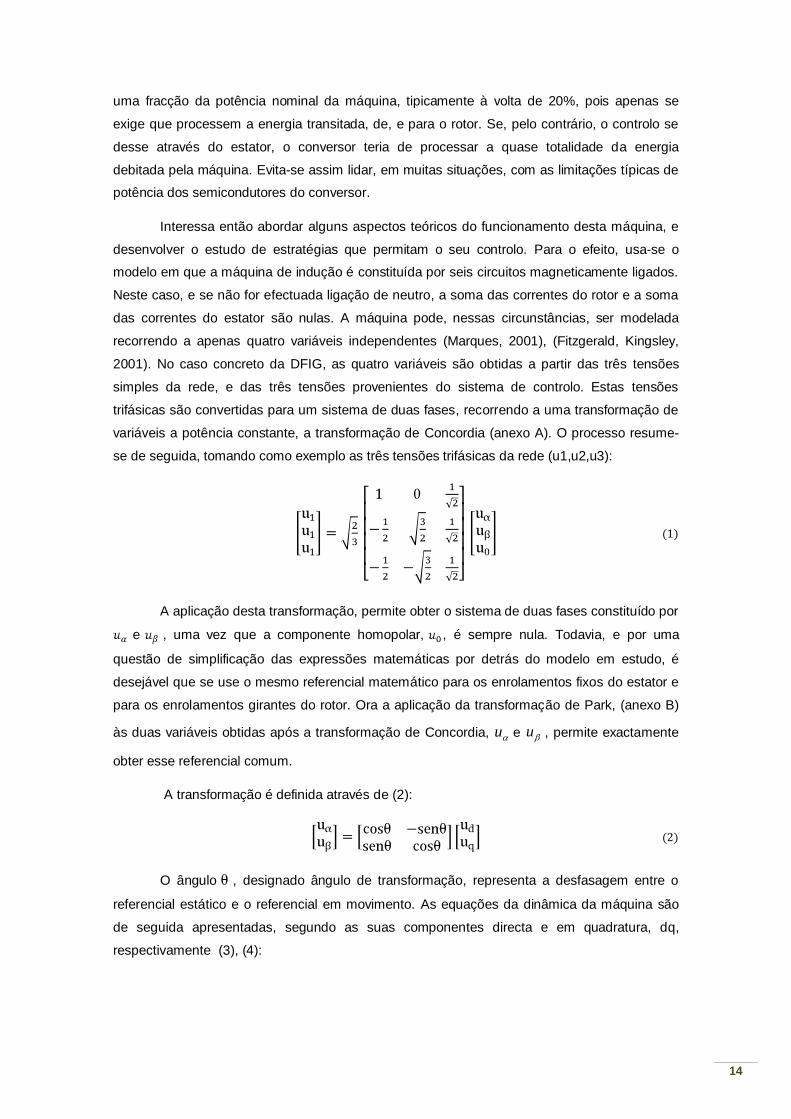
Na figura 2.6, apresenta-se o esquema de implementação do sistema MRAS. No
modelo de tensão, calcula-se o fluxo estimado, e usa-se um filtro passa banda, de modo a
efectuar a filtragem das componentes contínuas das tensões e correntes medidas. No modelo
de corrente, salienta-se que o ângulo é o ângulo estimado do rotor, obtido por integração da
sua velocidade angular.
2.6-Determinação dos parâmetros do controlador PI
O erro, expresso em componentes d-q, é dado por:
= - (19)
O erro, para o modelo linearizado, será:
= - + -
= - ( = 0) (20)
Deve-se notar, que o sistema está orientado de acordo com o fluxo do estator, daí
considerar-se =0. Efectuando a transformação de Park (Anexo B) sobre as equações 16 e
17, passa-se a ter estas expressões segundo componentes d-q, ou seja segundo um
referencial comum com o fluxo do rotor, resultando:
= + (21)
Tem-se, portanto, um sinal contínuo, apenas na situação em que a velocidade
estimada é igual à velocidade real. Se substituir nesta expressão , virá:
-
+
+
Modelo Tensão
Modelo Corrente
+
∫
∫
Figura 2.6. Modelo do observador MRAS.

23
= + (22)
= + (23)
Ora assumindo que = 0, as expressões de e , são dadas por,
respectivamente:
=> (24)
M Δ (25)
Através das expressões 20 e 22-25, constrói-se o modelo de controlo do sistema em
malha fechada, que se ilustra na figura seguinte (Marques, 2006), (Morgado, 2003).
A função de transferência, em malha aberta, será:
G (s) = = (26)
Na expressão (26) é o parâmetro proporcional e o parâmetro integral do
controlador PI, M o binário e a velocidade angular em valores p.u. Deduz-se assim a função
de transferência em malha fechada:
= (27)
Supondo =0, de forma a isolar o na expressão (27):
(28)
Tem-se apenas um pólo simples que se obtém por:
(29)
Cálculo do parâmetro proporcional do controlador PI:
Para T =10 (30)
+
-
Figura 2.7. Modelo MRAS linearizado.

24
Cálculo do parâmetro integral do controlador PI:
No denominador da equação 27, tem-se uma expressão do tipo:
(31)
Em que:
= = (32)
=3 = (33)
(34)
E as raízes do sistema são dadas por:
(35)
Logo, assumindo , e como já se conhece
(36)
Obtém-se finalmente:
(37)
2.7-Análise de Estabilidade do Sistema de Estimação do Fluxo
do Rotor
Nas primeiras simulações, encontrou-se um problema de estabilidade que requereu
especial atenção. Verificou-se que este sistema, tal como tem vindo a ser descrito, nem
sempre era capaz de indicar a posição correcta do fluxo. Para resolver este problema,
analisou-se o seu comportamento em várias condições de funcionamento, através de
pequenas variações do binário e do fluxo. Procedeu-se à análise da função de transferência
em malha fechada, da figura 2.7, de forma a determinar a condição de estabilidade do sistema.
Tem-se:
= (38)
Logo, sabendo que M, e são grandezas constantes, conclui-se, que para o
sistema ser estável, se tem de garantir que o produto , ou seja a componente da
corrente segundo o fluxo é sempre positiva. Esta componente da corrente é calculada, como se
pode perceber pela observação da figura 2.8, pelo produto interno das componentes alfa e beta

25
do fluxo do estator, no modelo de corrente, e das correntes do rotor, ambos em componentes
αβ, tal como está expresso na equação 39.
= + (39)
Como forma de confirmar o que acaba de ser dito, observou-se a variação da corrente
segundo o fluxo , para várias condições de funcionamento, de forma a relacionar
uma eventual perda de estabilidade do sistema, com a passagem desta grandeza por valores
negativos. Nas figuras 2.9, 2.10 e 2.11, observa-se claramente o ponto em que sistema perde
estabilidade, em t=0,1 segundos, correspondendo à aplicação de um impulso do binário de
referência. O sistema perde estabilidade, e consequentemente a capacidade de
reconhecimento do sector do fluxo do rotor, figura 2.11, exactamente no instante em que a
componente da corrente segundo o fluxo, figura 2.9, passa instantaneamente por zero, até
valores negativos. Observa-se, igualmente, o descontrolo do erro.
0 0.05 0.15 0.20.1-0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
tempo [s]
Co
rre
nte
id
r [p
u]
Figura 2.8. Representação da corrente segundo o fluxo.
Figura 2.9. Gráfico da corrente .

26
Figura 2.10. Erro do controlador.
Figura 2.11. Gráfico de posição angular do fluxo do estator.
2.8-Observador e controlador de estabilidade: Sistema Robusto
Tendo atenção ao que foi dito anteriormente, constata-se que o bom funcionamento
deste sistema está dependente da implementação de um observador e controlador de
estabilidade. Após equacionar várias soluções possíveis, optou-se por desenhar um bloco de
simulação, que permite inverter o sinal do erro , quando se detecta que o produto interno do
fluxo do estator pela corrente, , assume valores negativos. Esta troca de sinal,
corresponde a garantirmos, como se compreende observando a figura 2.7, um ganho de
realimentação sempre positivo em todas as situações, assegurando a robustez do sistema ao
problema de estabilidade descrito na secção anterior. Adicionou-se o bloco de observação e
controlo de estabilidade da figura 2.12, ao modelo inicialmente simulado.
0 0,150.05 0.1 0.2 -2
-1.5
-1
-0.5
0
0.5
1
tempo [s]
err
o [
pu
]
0 0.20.05 0.1 0.151
2
3
4
5
6
tempo [s]
Se
cto
res

27
Figura 2.12. Bloco de simulação do sistema de observação e controlo de estabilidade.
O processo usado para corrigir o problema de estabilidade, foi então, simplesmente, o
uso de um selector que passa para o controlador PI, o valor do erro , directamente, ou inverte
o seu sinal através da multiplicação por -1, nas situações em que, respectivamente, o produto
interno de é positivo ou negativo.
2.9-Resultados de simulação ao sistema MRAS robusto
Apresentam-se nas figuras 2.13, 2.14 e 2.15, os resultados da simulação do sistema
MRAS robusto, nomeadamente a variação do sector onde se encontra localizado o fluxo do
rotor, a variação do erro ao longo do tempo e a corrente .
Figura 2.13. Gráfico de posição angular do fluxo do estator.
1
Entrada PISelectorProduto Interno
Product2
Product1
-1
Gain
5
irBeta
4
FluxoBs
3
irAlfa
2
FluxoAs
1
erro
0 0.20.1 0.150.051
2
3
4
5
6
tempo [s]
Se
cto
res

28
Figura 2.14. Forma de onda do erro do sistema MRAS.
Figura 2.15. Corrente i_dr.
Observa-se uma boa correspondência da localização dos sectores, com o que seria de
esperar teoricamente, bem como uma rápida convergência do erro (cerca de 0.01s), para
valores próximos de zero, o que faz prever um bom comportamento dinâmico do sistema
MRAS. A resposta a escalões do binário ou fluxo de referência deixou de provocar perda de
estabilidade na detecção dos sectores.
Efectuou-se também, o estudo da dependência deste sistema a variações nos
parâmetros da máquina de indução. A sensibilidade aos parâmetros da máquina é
particularmente importante, pois permite saber se, no caso de se cometerem pequenos erros
de medição, ou no caso de se trabalharem com várias máquinas diferentes, é de esperar ou
não que este sistema se mantenha sempre fiável e com bom desempenho. Assim, variou-se a
resistência do rotor e os coeficientes de indução , e M, visto serem estes os parâmetros
usados nos cálculo dos fluxos pelo método MRAS, e repetiram-se as simulações para valores
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-0.005
0
0.005
0.01
0.015
0.02
0.025
0.03
0.035
tempo [s]
Err
o [
pu
]
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
tempo [s]
Co
rre
nte
id
r [p
u]

29
dez por cento acima e dez por cento abaixo dos parâmetros usados, inicialmente, para a
máquina de indução.
Verificou-se, que para variações na resistência o sistema se mantinha com óptimo
desempenho. Para variações dos coeficientes de indução da máquina até quatro por cento,
também se manteve um bom funcionamento do sistema. Para valores superiores a quatro por
cento, particularmente de , o sistema perdeu a capacidade de resposta adequada. Tal deve
ser tomado em conta como uma limitação do sistema desenvolvido, embora se possa
igualmente assumir, que valores de erro da ordem de grandeza dos que levam a esta
perturbação sejam de alguma forma incomuns.

30
3. Conversão Matricial
3.1-Introdução à Conversão Matricial
A conversão matricial, percorreu um longo caminho, desde a sua apresentação por
Lazlo Gyugyi e Brian Pelly, em 1976 (Gyugyi, Pelly, 1976), até chegar aos nossos dias como
uma das tecnologias mais promissoras, com potencial aplicação no controlo de accionamentos
electromecânicos, na melhoria da qualidade da energia eléctrica e em aproveitamentos de
energias renováveis (Aparício, Esteves, 2007), (Pinto, Aparício, Esteves, 2007). Estes
investigadores propuseram um conversor, que apresentava a possibilidade de operar,
simultaneamente, sobre as variáveis de entrada e de saída do conversor, limitando, no entanto,
a frequência de saída do conversor a valores inferiores á frequência de entrada.
Posteriormente, muitos outros trabalhos de investigação se realizaram, destacando-se,
na década de oitenta, a estratégia de modulação proposta por Alesina e Venturini . (Alesina,
Venturini, 1981) que, efectuando a comutação dos semicondutores a alta frequência, permite
obter tensões e correntes de entrada sinusoidais na saída do conversor, com frequência
regulável, assim como correntes de entrada sinusoidais com factor de potência ajustável. Além
disso, permite a bidireccionalidade no trânsito de energia. As tensões de saída estão, contudo,
limitadas a um máximo de cerca de 87% das tensões de entrada.
O conversor matricial faz parte da família de conversores directos AC-AC, por oposição
aos conversores indirectos AC-DC-AC, com malha intermédia DC de armazenamento de
energia. São constituídos por nove interruptores bidireccionais (Figura 3.1) em tensão e em
corrente (operação nos quatro quadrantes), obtidos recorrendo a uma associação de vários
semicondutores (Huber, Borojevic, Burany, 1992). Desta forma, estes conversores são quase
integralmente constituídos por semicondutores de silício, dispensando o uso dos grandes
bancos de condensadores electrolíticos, habitualmente presentes na malha intermédia DC dos
conversores indirectos. Esta característica representa um ganho considerável em termos de
fiabilidade, rendimento, volume e custos, uma vez que estes condensadores são normalmente
bastante dispendiosos, dão origem a perdas adicionais e representam uma parcela
considerável do espaço ocupado pelo conversor. Desta forma, o conversor matricial apresenta
melhores relações de potência/peso e potência/volume (Huber, Borojevic, 1995), (Wheeler,
Clare, Empringham, Bland, 2001), quando comparando com os conversores indirectos,
tornando-se particularmente adequado para aproveitamentos de energia eólica, dadas as
limitações em espaço e peso comportadas pelas estruturas (Castro, 2007). O conversor
matricial garante ainda a bidireccionalidade do trânsito de energia. Esta característica é
particularmente importante para este trabalho, uma vez que o conversor se encontra ligado ao
rotor de uma máquina de indução, que poderá funcionar como gerador (recuperando energia
para a rede), ou como motor (consumindo energia da rede) (Podlesak, Katsis, Wheeler, Clare,
Empringham, Bland, 2005).

31
Com as vantagens já analisadas e, apesar dos avanços tecnológicos das últimas
décadas, que permitiram resolver alguns problemas construtivos do conversor matricial, ainda
hoje são poucas as aplicações industriais conhecidas que usam esta tecnologia (Huber,
Borojevic, Burany, 1992). Será, por isso, razoável perguntar qual o motivo ou motivos que têm
impedido o seu uso generalizado, em variadas aplicações industriais. Em primeiro lugar, existe
o problema do projecto e implementação de algoritmos de controlo, suficientemente poderosos
para controlar todos os semicondutores comutados (habitualmente 18) a alta frequência, cuja
optimização tem consumido vários anos de pesquisa intensiva. Por outro lado, estes
conversores exigem um elevado número de semicondutores rápidos e capazes de processar
potências por vezes bastante elevadas, gerando um acréscimo considerável dos custos. A
conversão matricial, enfrenta ainda a inércia tipicamente presente, aquando da introdução de
uma nova tecnologia (Santana, Labrique, 1991), (Podlesak, Katsis, Wheeler, Clare,
Empringham, Bland, 2005).
Recentemente, tem vindo a crescer o interesse neste tipo de conversores para
projectos de sistemas de aproveitamento da energia eólica. Foi nesse sentido que se
desenvolveu este trabalho, por se reconhecer que esta tecnologia poderá permitir, num futuro
próximo, a obtenção de rendimentos elevados de conversão da energia disponível no vento em
energia eléctrica, empregando para isso equipamento de dimensões mais reduzidas, face aos
sistemas actualmente comercializados.
3.2-Topologia do Conversor Matricial
O conversor matricial é constituído por nove interruptores bidireccionais, dispostos por
três linhas com três interruptores cada, formando uma matriz de 3 3, de modo a que, em cada
instante, cada uma das três fases de saída, possa estar ligada a qualquer uma das três fases
de entrada (Holmes, Lipo, 1992). Na figura 3.1, apresenta-se a constituição topológica do
conversor. As tensões e correntes de entrada, à esquerda, são referidas usando letras
minúsculas, enquanto para as tensões e correntes de saída do conversor, se usam letras
maiúsculas. Esta convenção é seguida em todo o trabalho.
Entrada
Saída
Figura 3.1. Topologia do conversor matricial trifásico.
32
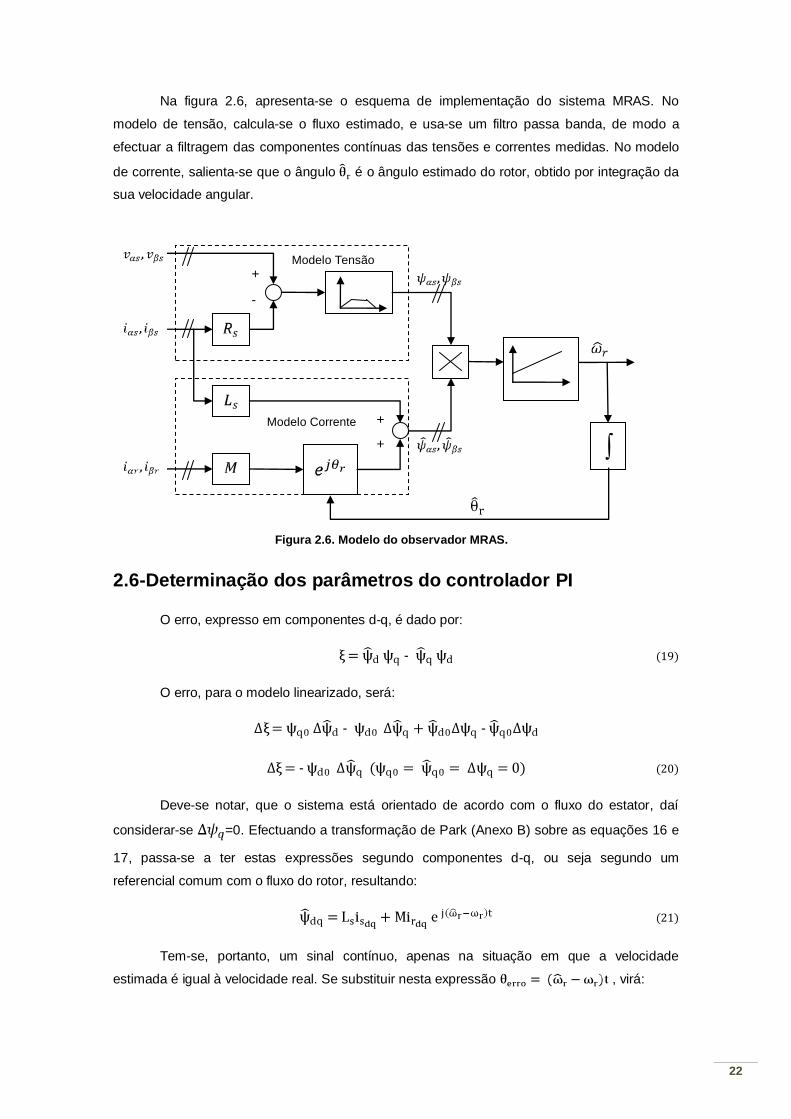
Uma vez que não existem interruptores bidireccionais disponíveis comercialmente,
Uma vez que não existem interruptores bidireccionais disponíveis comercialmente,
cada um destes dispositivos é construído a partir de dois semicondutores de corte comandado,
tipicamente transístores IGBT, com dois díodos em anti paralelo (Figura 3.2), (Holmes, Lipo,
1992). A associação destes semicondutores permite obter interruptores que funcionam nos
quatro quadrantes, sendo bidireccionais tanto em tensão como em corrente.
3.3-Controlo do Conversor Matricial
Nesta secção, desenvolvem-se os fundamentos teóricos envolvidos no comando dos
semicondutores, de modo a que seja possível controlar as tensões de saída e correntes de
entrada do conversor.
3.3.1-Estados de comutação do conversor matricial trifásico
Para controlar estes interruptores, começa-se por definir a matriz , em que o índice i
identifica a fase de saída à qual o interruptor está ligado, enquanto o índice j identifica a fase de
entrada.
Para controlar estes interruptores, começa-se por definir o estado dos interruptores ,
em que o índice i identifica a fase de saída à qual o interruptor está ligado, enquanto o índice j
identifica a fase de entrada (Figura 3.1). A variável terá o valor “1” quando o interruptor
estiver “ON” (a conduzir) e terá o valor “0” quando estiver “OFF” (no corte) (40):
i,j (40)
Partindo de (40) define-se a matriz S dos interruptores (41):
(41)
Figura 3.2. Montagem do Interruptor bidireccional.

33
A relação entre as tensões simples de saída, e as tensões simples de entrada,
, pode ser estabelecida (42), partindo da matriz S (41):
(42)
Podem-se igualmente estabelecer relações entre as tensões compostas de saída e as
tensões simples de entrada. Para tal, parte-se da relação entre tensões simples e compostas
(43):
(43)
Se nesta expressão se substituírem as tensões simples de saída pelas tensões
calculadas em (40), obtém-se:
(44)
Colocando as tensões simples em evidência, obtém-se a relação pretendida:
(45)
Ou na forma matricial:
(46)
A matriz permite relacionar as tensões compostas de saída, com as tensões simples
de entrada.
De forma semelhante, as relações entre as correntes de saída e as correntes de
entrada são obtidas, usando a transposta da matriz S:
(47)
Tem-se, portanto, dois estados por interruptor, e nove interruptores, o que configura um
total de 512 combinações possíveis. Mas analisando a figura 3.1, verifica-se existirem
algumas restrições topológicas, que reduzem grandemente o número de estados viáveis. Para
cargas com carácter indutivo, como é o caso deste trabalho (DFIG), é necessário ter pelo
menos um interruptor a conduzir em cada linha da matriz S, para que as fases de saída nunca
sejam deixadas em aberto, interrompendo a circulação das correntes. Todavia, deve-se

34
igualmente impedir que esteja em condução mais do que um interruptor de cada linha, de
forma a evitar o curto-circuito das fontes de tensão ligadas às fases de entrada. Estas
restrições obrigam a garantir a seguinte condição:
(48)
Conclui-se que se deve ter, em cada instante de comutação, um e apenas um
interruptor em condução por cada linha da matriz S. Com estas restrições, reduzem-se para 27
o número de combinações possíveis (Huber, Borojevic, 1995), como se pode ver na tabela 3.1.
Pode-se também consultar, para cada estado, quais as fases de entrada que estão ligadas a
cada uma das fases de saída, bem como as tensões simples e compostas de saída e correntes
de entrada que daí resultam. A título de exemplo, apresentam-se no anexo G os cálculos
efectuados, para obter a correspondência entre tensões e correntes de entrada, com as
tensões e correntes de saída, para um dos estados da tabela (Menino, Antunes, 2002).
Tabela 3.1. Estados de Comutação Possíveis do Conversor Matricial Trifásico.
Gru
po
s
Est
ado
s
B C
I
1 1 0 0 0 1 0 0 0 1 a b c
2 1 0 0 0 0 1 0 1 0 a c b - - -
3 0 1 0 1 0 0 0 0 1 b a c - - -
4 0 1 0 0 0 1 1 0 0 b c a
5 0 0 1 1 0 0 0 1 0 c a b
6 0 0 1 0 1 0 1 0 0 c b a - - -
II
7 1 0 0 0 1 0 0 1 0 a b b 0 - -
8 0 1 0 1 0 0 1 0 0 b a a - 0 -
9 0 1 0 0 0 1 0 0 1 b c c 0 - -
10 0 0 1 0 1 0 0 1 0 c b b - 0 -
11 0 0 1 1 0 0 1 0 0 c a a 0 - -
12 1 0 0 0 0 1 0 0 1 a c c - 0 -
13 0 1 0 1 0 0 0 1 0 b a b - 0 -
14 1 0 0 0 1 0 1 0 0 a b a - 0 -
15 0 0 1 0 1 0 0 0 1 c b c - 0 -
16 0 1 0 0 0 1 0 1 0 b c b - 0 -
17 1 0 0 0 0 1 1 0 0 a c a - 0 -
18 0 0 1 1 0 0 0 0 1 c a c - 0 0 -
19 0 1 0 0 1 0 1 0 0 b b a 0 - -
20 1 0 0 1 0 0 0 1 0 a a b 0 - -
21 0 0 1 0 0 1 0 1 0 c c b 0 - -
22 0 1 0 0 1 0 0 0 1 b b c 0 - -
23 1 0 0 1 0 0 0 0 1 a a c 0 - -
24 0 0 1 0 0 1 1 0 0 c c a 0 - -
III
25 1 0 0 1 0 0 1 0 0 a a a 0 0 0
26 0 1 0 0 1 0 0 1 0 b b b 0 0 0
27 0 0 1 0 0 1 0 0 1 c c c 0 0 0

35
Os 27 estados possíveis estão organizados na tabela segundo grupos, de forma a
juntar os que apresentam características semelhantes (Menino, Antunes, 2002).
I. O primeiro grupo inclui seis combinações, que têm em comum o facto de cada fase de
saída estar ligada a uma fase diferente de entrada.
II. No segundo grupo, que se divide em três subgrupos de seis estados cada, em um total
de , estão os estados em que duas fases de saída estão curto-circuitadas, e
consequentemente apenas aparecem na saída duas das três fases de entrada.
III. No terceiro grupo, temos as três combinações possíveis quando se curto circuitam as
três fases de saída. Neste caso, o conversor apresenta à saída apenas uma das fases
de entrada em cada estado.
3.3.2-Modulação de Vectores no Espaço (SVM – Space Vector
Modulation)
Uma vez conhecidos os 27 estados de comutação possíveis (tabela 3.1), torna-se
desejável, para realizar o processo de controlo do conversor, obter a representação das
tensões e correntes que resultam de cada um desses estados, na forma de vectores no espaço
bidimensional (plano αβ). Usando esta conhecida técnica de representação, pode-se decidir
qual o vector a aplicar de modo a garantir o controlo das variáveis do conversor, sem conhecer
directamente quais os interruptores a comutar, o que permite simplificar consideravelmente o
controlo do sistema (Huber, Borojevic, Burany, 1992), (Silva 1998). Por outro lado, torna-se
muito mais simples compreender o efeito da aplicação destes vectores sob as tensões ou
correntes a controlar, como se verá na próxima secção.
Observando a tabela 3.1, verifica-se que em cada estado de comutação, a soma das
tensões compostas de saída é sempre nula, ou seja está-se na presença de um sistema
trifásico equilibrado de tensões. Nestas condições, aplicando a transformação de Concordia
(Anexo A), transforma-se este sistema trifásico ( ) num sistema bifásico equivalente ( .
Obtém-se através desta técnica, uma representação de todos os 27 estados possíveis de
comutação da tabela 3.1, sob a forma de vectores de tensão em espaço bidimensional. As
correntes de entrada, constituem igualmente um sistema trifásico equilibrado, logo a aplicação
da transformação de Concordia, irá igualmente gerar um sistema de vectores em espaço
bidimensional. Como exemplo, apresentam-se no anexo H os cálculos efectuados, para a
representação de um dos estados da tabela 3.1, em vectores de tensão e corrente no plano αβ.
Verifica-se que os vectores de tensão e corrente no espaço, são caracterizados por um
módulo e argumento, ou seja distinguem-se pela amplitude e pelo desfasamento que
apresentam entre si, sendo estas características fulcrais no processo de decisão de vectores a
aplicar que se seguirá. Na tabela 3.2, apresentam-se os vectores da tabela 3.1, mas agora na
sua representação vectorial.

36
Tabela 3.2. Estados Possíveis do Conversor Matricial Trifásico.
Grupo Estado Vector
I
1 -
2 - - - + -
3 - - - - + 4 - + + 5 - + + 6 - - - + - +
II-a
7 +1 -
8 -1 - - -
9 +2
10 -2 - -
11 +3
12 -3 - -
II-b
13 +4 -
14 -4 - - -
15 +5
16 -5 - -
17 +6
18 -6 - -
II-c
19 +7 -
20 -7 - - -
21 +8
22 -8 - -
23 +9
24 -9 - -
III
25 0 - - 26 0 - - 27 0 - -
Nesta tabela, o grupo I junta todos os vectores que possuem argumento variável no
tempo, ou seja, não têm posição definida no espaço, girando no plano . Estes vectores não
foram usados no controlo do conversor deste trabalho, por se considerar que iriam aumentar
desnecessariamente a complexidade do controlador.
Os subgrupos do grupo II de vectores da tabela 3.1, onde , e ,
correspondem nesta tabela, respectivamente, aos grupos II-a, II-b e II-c. Neste grupo II
encontram-se os 18 vectores com argumento fixo. No entanto, estes vectores têm amplitude
variável no tempo (vectores pulsantes). Estes vectores são identificados na tabela através de
numeração, entre [-9;+9], para facilitar a sua posterior identificação e utilização.
O grupo III é constituído por três vectores nulos. Na figura 3.3, representam-se os
vectores de tensão e corrente no plano .

37
Os vectores de tensão e corrente da figura 3.3 têm sempre a mesma direcção no
espaço. Todavia, as suas amplitudes vão variar no tempo, reflectindo a variação das tensões
das fases de entrada que lhes dão origem, no caso dos vectores de tensão, ou das correntes
de saída, no caso dos vectores de corrente. Em cada instante têm-se, para cada uma das
direcções assinaladas na figura 3.3, três vectores com amplitudes diferentes, a que
correspondem outros três em sentido oposto no plano . Para efeitos de controlo do
conversor, serão sempre usados os dois com maiores amplitudes, de modo a garantir a
controlabilidade e rapidez de resposta do sistema.
Desta forma, para efectuar o controlo do conversor, têm-se 18 vectores pulsantes e 3
vectores nulos, sendo a escolha de um destes 3 últimos completamente indiferente, no que diz
respeito ao controlo do conversor.
3.3.3-Controlo Por Modo de Deslizamento
O controlo por modo de deslizamento é usado neste trabalho, conjuntamente com a
modulação de vectores no espaço, como forma de controlar o conversor matricial. Este método
é bastante atractivo, uma vez que permite a unificação do projecto de electrónica de comando
e de controlo, sob uma mesma teoria, dispensando o uso dos convencionais moduladores
PWM e controladores lineares, levando a ganhos consideráveis em termos de desempenho e
robustez de controlo, em relação à variação de parâmetros e das condições de funcionamento
(Santana, Labrique, 1991).
Para existirem condições de se proceder a uma eficiente conversão de energia
eléctrica, é essencial que os semicondutores usados funcionem como interruptores, o que
implica que os conversores electrónicos sejam sistemas cuja topologia é variante no tempo.
Por sua vez, o controlo de estruturas variantes no tempo baseia-se na aplicação de
descontinuidades na comutação, sempre que se atingem superfícies de descontinuidade (Silva,
1998).
1, 2, 0
a)
4, 5,
7, 8,
1, 4, 0
b)
2, 5,
7, 8,
Figura 3.3. Representação de vectores no plano :
a)Vectores de tensão simples de saída b)Vectores de corrente de entrada.

38
Esta é uma técnica de controlo não linear, particularmente adequada para uso em
conversores de electrónica de potência, em que a comutação entre superfícies de
descontinuidade a uma frequência elevada possibilita uma trajectória no espaço de estados
que desliza sob a superfície de descontinuidade. O controlo por modo de deslizamento é
realizado recorrendo à aplicação, ao conversor matricial, dos vectores espaciais determinados
na secção anterior de forma a comutar os interruptores, entre os dois estados possíveis
(0=OFF, 1=ON), e assim assegurar que as formas de onda que se pretendem controlar sigam,
aparte um pequeno erro de seguimento, as formas de onda definidas para referência (figura
3.4).
O controlo por modo de deslizamento apresenta algumas vantagens em relação aos
controladores lineares, tais como (Silva, 1998):
Redução de ordem do sistema.
Redução da sensibilidade a variações nos parâmetros do sistema e em relação as
perturbações externas.
Integração, em projecto único, das componentes de comando (moduladores) e de
controlo (reguladores).
Atenuação dos efeitos nocivos ao funcionamento, devido à presença de tempos mortos
e quedas de tensão de condução.
Por outro lado, e como seria de esperar, estes sistemas apresentam igualmente
desvantagens. Contudo, estas são relativamente insignificantes se comparadas com os
benefícios que advêm da flexibilidade proporcionada por esta solução, já que permitem o
projecto de controladores para vários conversores de potência. Têm-se então os seguintes
inconvenientes (Silva, 1998):
Necessidade de mais informação sobre o sistema para obter melhores desempenhos.
Limitação de curto-circuito não inerente ao projecto, embora se possa obter facilmente.
Forte variação da frequência de comutação, o que dificulta o projecto de filtros.
3.3.4 Controlo do Conversor
Em modo de deslizamento, a aplicação de um controlo que implicasse uma comutação
dos dispositivos semicondutores a frequência infinita, levaria a que as trajectórias no espaço de
Banda de Histerese
Descontinuidade
Figura 3.4. Deslizamento dentro da banda de histerese definida.

39
estados se dirigissem ao encontro da superfície de comutação e, a partir desse instante o
sistema seria capaz de seguir rigorosamente o sinal de referência.
No entanto, os interruptores são constituídos por semicondutores de potência, que são
incapazes de comutar a frequência infinita. Esta limitação dos semicondutores impossibilita o
sistema de seguir rigorosamente o sinal de referência, existindo sempre um erro. Define-se
então o erro de seguimento , que corresponde, em cada instante de funcionamento do
conversor, à diferença entre a grandeza de referência , e a grandeza que se pretende
controlar , ou seja,
(49)
Tendo em conta a existência de um dado erro dinâmico Δ, tendendo para zero em altas
frequências, chega-se à seguinte lei de controlo:
Δ (50)
Usando esta lei, pode-se garantir que o sistema será imune a perturbações e não é
dependente de variações de parâmetros do circuito, ou da região de operação do conversor
matricial em cada instante, sendo apenas dependente dos erros das variáveis de estado na
forma canónica, que quase sempre podem ser facilmente medidos ou estimados nos
conversores electrónicos de potência.
O comando aplicado a frequência finita ao conversor, terá necessariamente de ser
alternadamente positivo ou negativo, de modo a tentar anular o erro dinâmico Δ, provocando o
deslizamento sobre a superfície de comutação. Consequentemente, para que o sistema esteja
em modo de deslizamento, deve-se garantir em cada instante a seguinte condição:
(51)
Com efeito, percebe-se que:
a) Quando => , de modo a tentar anular o erro.
b) Quando => , de modo a tentar anular o erro.
Os sistemas controlados com base neste princípio devem exibir uma oscilação no
interior de uma banda de histerese, com largura definida segundo o erro que se considera
admissível (tipicamente largura de 2 Δ), centrada na forma de onda que se tomou para
referência. Sendo assim, tem-se a função de comando U(t):
(52)
É interessante observar, que o controlo por modo de deslizamento desencadeia a
comutação exactamente no instante necessário (Just In Time), de modo a satisfazer as

40
condições impostas. No caso de o erro ser demasiado grande, para uma determinada
aplicação, pode-se conseguir a sua diminuição impondo uma maior frequência de comutação,
até ao máximo permitido pelos semicondutores. Em contrapartida, nos casos onde for aceitável
um erro maior, pode-se diminuir a frequência de comutação usando semicondutores mais
lentos e baratos.
A função de comutação (50) permite obter o controlador, e a estratégia de comutação
definida em (52) permite obter o modulador. Esta estratégia deve assegurar, por um lado as
condições de estabilidade do sistema em modo de deslizamento, e por outro lado que a
trajectória no espaço de estados do sistema, embora se afaste por momentos, acabe sempre
por convergir para a superfície de comutação (condição de chegada).
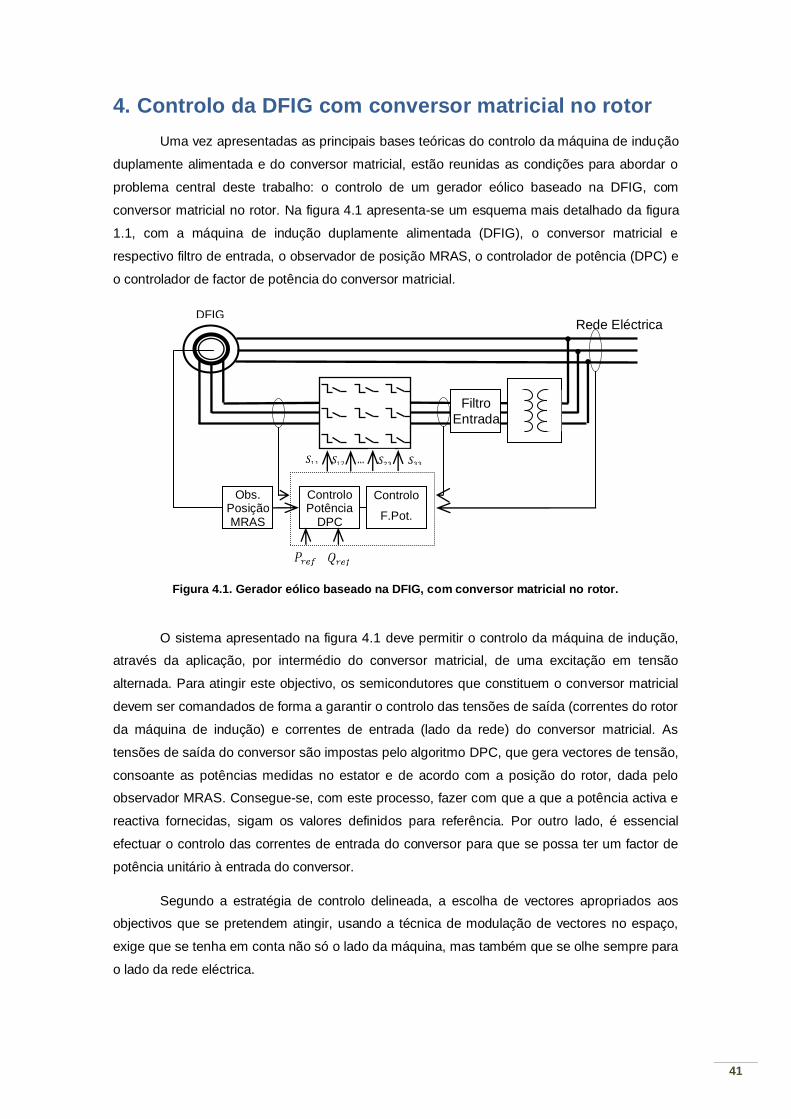
41
4. Controlo da DFIG com conversor matricial no rotor
Uma vez apresentadas as principais bases teóricas do controlo da máquina de indução
duplamente alimentada e do conversor matricial, estão reunidas as condições para abordar o
problema central deste trabalho: o controlo de um gerador eólico baseado na DFIG, com
conversor matricial no rotor. Na figura 4.1 apresenta-se um esquema mais detalhado da figura
1.1, com a máquina de indução duplamente alimentada (DFIG), o conversor matricial e
respectivo filtro de entrada, o observador de posição MRAS, o controlador de potência (DPC) e
o controlador de factor de potência do conversor matricial.
O sistema apresentado na figura 4.1 deve permitir o controlo da máquina de indução,
através da aplicação, por intermédio do conversor matricial, de uma excitação em tensão
alternada. Para atingir este objectivo, os semicondutores que constituem o conversor matricial
devem ser comandados de forma a garantir o controlo das tensões de saída (correntes do rotor
da máquina de indução) e correntes de entrada (lado da rede) do conversor matricial. As
tensões de saída do conversor são impostas pelo algoritmo DPC, que gera vectores de tensão,
consoante as potências medidas no estator e de acordo com a posição do rotor, dada pelo
observador MRAS. Consegue-se, com este processo, fazer com que a que a potência activa e
reactiva fornecidas, sigam os valores definidos para referência. Por outro lado, é essencial
efectuar o controlo das correntes de entrada do conversor para que se possa ter um factor de
potência unitário à entrada do conversor.
Segundo a estratégia de controlo delineada, a escolha de vectores apropriados aos
objectivos que se pretendem atingir, usando a técnica de modulação de vectores no espaço,
exige que se tenha em conta não só o lado da máquina, mas também que se olhe sempre para
o lado da rede eléctrica.
DFIG Rede Eléctrica
Obs. Posição MRAS
.
Controlo Potência
DPC
Controlo
F.Pot.
Filtro
Entrada
Figura 4.1. Gerador eólico baseado na DFIG, com conversor matricial no rotor.

42
A comutação dos interruptores do conversor é responsável por injectar na rede
eléctrica, correntes com harmónicas de alta frequência, dando origem a um tremor, com
características poluentes, que é de todo indesejado. Este problema pode ser resolvido, ou
muito atenuado, pela presença de um filtro RLC na entrada do conversor.
4.1-Controlo da Potência Activa e Reactiva a partir da Tensão
de Saída do Conversor
Como já se tinha referido, na secção 2.2, a técnica DPC permite controlar directamente
a potência activa e reactiva transferidas da máquina para a rede, através da escolha de um
vector de tensão apropriado, desde que para tal se conheça com rigor a posição do rotor.
Por outro lado, quando se abordou a modulação de vectores no espaço, na secção
3.3.2, estabeleceu-se a representação dos vectores de tensão simples de saída. Todavia, a
amplitude destes vectores, varia consoante a posição relativa das ondas das tensões de
entrada, criando um problema à sua utilização (Menino, Antunes, 2002). Para ultrapassar esta
dificuldade, divide-se um período das tensões compostas de entrada e suas simétricas, em
doze zonas distintas. O início e fim de cada uma dessas zonas, corresponde aos pontos onde
existe uma alteração da posição relativa das tensões de entrada, levando a mudanças tanto
em amplitude como em fase dos vectores de tensão, figura 4.2.
Figura 4.2. Representação das tensões compostas de entrada e suas simétricas.
Como se pode verificar, a mudança de uma zona para a seguinte, é estabelecida
quando uma determinada fase se cruza com outra, ou quando uma fase passa por zero. Na
figura 4.3, pode-se já visualizar a representação dos vectores de tensão no plano , para as
zonas 12 e 1 de tensão. Podem-se consultar as restantes representações no espaço, para
todas as zonas de tensão, no Anexo D.

43
Se o que se pretende realmente, é controlar a potência activa e reactiva que a máquina
troca com a rede eléctrica, então será necessário associar a escolha dos seis vectores de
tensão, segundo a estratégia do controlo directo de potência, tal como ficou estabelecido no
capítulo 2, com os dezoito vectores de tensão disponíveis para actuar sobre o conversor
matricial.
Comparando a figura 2.3 (DPC), com a figura 4.3 (conversor matricial), verifica-se que
existe uma correspondência directa no espaço bidimensional, entre os vectores do controlo
directo de potência e os vectores disponíveis para aplicar ao conversor matricial. Se o sistema
DPC determinar a aplicação do vector U3, por exemplo, isto significa ser desejável, de modo a
conseguir o controlo das potências, que se que provoque uma diminuição segundo a
componente e um aumento segundo a componente das tensões. Se as tensões de entrada
do conversor estiverem nas zonas 12 ou 1, e se pretender obter o mesmo efeito de variação
segundo as suas componentes no plano , então rapidamente se percebe, observando a
figura 4.3, que os vectores -6, +4, +5, do conversor matricial, serão os únicos que permitem
atingir esse objectivos. Todavia, e uma vez que se pretende ter a garantia de que a condição
(51) é verificada, apenas os dois vectores com maiores amplitudes são considerados. Nesse
caso, dever-se-ia utilizar um dos vectores -6 ou +4 (Menino, Antunes, 2002).
Se for escolhido o vector U6, significa que é necessário aumentar a componente e
diminuir a componente . Se a zona de tensão é a 5 (ver anexo E), conclui-se que os vectores
mais apropriados são o -5 e +4.
O raciocínio exposto pode ser repetido, para todas as zonas de tensão de entrada e
para cada um dos vectores do sistema DPC, sendo esses resultados sistematizados na tabela
4.1.
+2
+8
+1
-9
+7
+6
-4
-5
-3 -2 -1
+3
+5
+4
-6
-8
-7
+9
a) Zona 1 a) Zona 12
+7
+2
-9
+8
+6
-5
-4
-3 +1 -1 -2
+3
+4
+5
-6
-7
-8
+9
a) Zona 1
Figura 4.3. Representação de vectores da tensão de saída para as zonas: a) Zona 12 b) Zona 1.

44
Tabela 4.1. Vectores a aplicar, de acordo com o sentido de variação nas componentes , exigido
pelo DPC, para cada zona da tensão à entrada do conversor matricial.
Vector
DPC
Variação nas
componentes
da Tensão
Zonas de tensão à entrada do conversor matricial
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 = -3;+1 -3;+2 +2;-1 -1;+3 +3;-2 -2;+1
U2 +9;-7 +9;-8 -8;+7 +7;-9 -9;+8 +8;-7
U3 -6;+4 -6;+5 -4;+5 -4;+6 +6;-5 -5;+4
U4 = +3;-1 +3;-2 -2;+1 +1;-3 -3;+2 +2;-1
U5 -9;+7 -9;+8 +8;-7 -7;+9 +9;-8 -8;+7
U6 +6;-4 +6;-5 -5;+4 +4;-6 -6;+5 +5;-4
Note-se que as zonas das tensões de entrada estão organizadas na tabela duas a
duas. Acontece que os dois vectores com maiores amplitudes, por exemplo nas zonas 12 e 1,
e para um mesmo vector DPC, são coincidentes, não sendo necessário repetir o raciocínio
para cada uma delas. Por outro lado, para cada vector DPC, e para uma determinada zona de
tensão, existem sempre dois vectores disponíveis. A escolha do vector mais apropriado, de
entre os dois disponíveis, será realizada de modo a garantir o controlo do factor de potência do
lado da rede.
4.2-Controlo do Factor de Potência de Entrada do Conversor
Neste momento já se conhece o processo de selecção de vectores a aplicar, pelo
conversor matricial para controlo das potências da máquina. Resta cumprir um segundo
objectivo, o controlo do factor de potência de entrada do conversor (do lado da rede).
À luz do que já foi avançado, no âmbito do controlo por modo de deslizamento, secção
3.3.3, e uma vez identificada a variável a controlar, , bem como o seu valor de referência
(anexo I), o erro será dado por:
(53)
Devido à existência de um filtro de alta frequência que permite efectuar a ligação do
conversor matricial à rede eléctrica, a função de comutação , para o controlo das correntes
de entrada será dada por (Aparício, Esteves, 2007) (Pinto, Aparício, Esteves, 2007):
(54)
Para que exista modo de deslizamento, deve-se garantir, em cada instante, a seguinte
condição:

45
(55)
Por exemplo: quando a função de comutação for positiva, tem-se a indicação de
que o erro é positivo, ou seja a corrente apresenta valores inferiores aos definidos para
referência, pelo que a derivada de deverá ser negativa, de modo a tentar anular o erro de
seguimento. Para valores de negativos, usa-se o raciocínio inverso. Na simulação destas
leis de controlo, utiliza-se um comparador de histerese com dois níveis lógicos possíveis, “1” e
“-1”. Na situação em que a função de comutação é “-1”, sabe-se que é necessário diminuir o
valor das componentes em q das correntes de entrada, e então aplica-se um vector com
componente negativa segundo o eixo q. Quando, pelo contrário tivermos “1”, espera-se que o
sistema aplique um vector com componente positiva segundo o eixo q.
De forma semelhante ao que acontece com os vectores de tensão de entrada, também
os vectores de corrente são pulsantes, ou seja, a sua amplitude varia ao longo do tempo, o que
leva a repetir a divisão de um período, agora das correntes de saída, em doze zonas distintas.
Os critérios que levam à distinção de cada zona de corrente de saída são apresentados na
tabela 4.2.
Tabela 4.2. Identificação das zonas de corrente de saída.
ZONA CORRENTE >0
1 1 1 0 1 0 0
2 1 1 0 1 1 0
3 0 1 0 1 1 0
4 0 1 0 0 1 0
5 0 1 1 0 1 0
6 0 1 1 0 1 1
7 0 0 1 0 1 1
8 0 0 1 0 0 1
9 1 0 1 0 0 1
10 1 0 1 1 0 1
11 1 0 0 1 0 1
12 1 0 0 1 0 0
Na figura 4.4, pode-se observar a representação de vectores no espaço, para o
exemplo de duas zonas das correntes de saída, zonas 12 e 1. No anexo D, pode-se consultar a
representação de vectores para todas as doze zonas de corrente.

46
Na figura 4.5, representa-se a localização dos eixos d e q, para as zonas de tensão 4 e
5, e zona de corrente 1.
No anexo E, podem-se consultar as representações dos vectores de corrente da zona
1, para todas as zonas de tensão, agrupadas duas a duas. Para obter o mesmo efeito para
todas as outras zonas de corrente, bastaria, nas figuras desse anexo, substituir os vectores de
corrente de modo a corresponder à zona pretendida.
O processo de selecção de vectores, de forma a permitir o controlo do factor de
potência, pode ser entendido recorrendo a um exemplo, em que supõem as seguintes
condições:
Zona 4 ou 5 de tensão
Zona 12 ou 1 de corrente
Vector 4 do sistema DPC.
Função de comutação =- 1.
Uma vez que =- 1 deve-se provocar uma diminuição da componente segundo o eixo
q da corrente, aplicando um vector que leve à diminuição do erro de seguimento . Todavia,
+1
-7 -4
+3
-9 -6
-2
+8
+5
+7 +4
-1 -3
+9 +6
-5
-8
+2
a) Zona 1
-9
+8
+2
+1 -4
-7
+3 -6
-2
+5
+4 +7
-1 -3
+6 +9
-8
-5
a) Zona 12
+1 -7
-4
-2
+8
+5
+7 +4
-1 -5
-8
+2 d
q
Figura 4.4. Representação de vectores da corrente de entrada para as zonas: a) Zona 12 b) Zona 1.
Figura 4.5. Localização dos eixos d e q para as zonas 4 e 5 de tensão e zona 1 de corrente.

47
sabe-se (tabela 4.1) que, para que seja possível efectuar simultaneamente o controlo de
potência, apenas se podem seleccionar os vectores 2 e -1. Verifica-se, observando a figura 4.5,
que o único vector que obedece a todas estas condições será o +1. Se pelo contrário se
tivésse =+1, o vector seleccionado seria o -2. Com o vector 6 do controlo de potência e
função de comutação =+1, para as zonas de tensão 4 e 5, mas agora para a zona 8 e 9 de
corrente, selecciona-se o vector -5 e quando =-1 selecciona-se o vector +4
Repetindo o processo para todas as zonas de corrente e para todos os vectores do
controlo de potência, obtém-se a tabela 4.3. Os Resultados para todas as zonas de tensão e
corrente podem ser consultados no anexo F.
Tabela 4.3. Vectores a aplicar, por zona de corrente, de acordo com a variação nas componentes
exigido pelo DPC, com a função de comutação e para as zonas 4 e 5 de tensão.
Vector DTC
Variação nas
componentes
da Tensão
Zonas de corrente à saída do conversor matricial (Para as Zonas 4 e 5 de Tensão)
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 = +2 -1 +2 -1 -1 +2 -1 +2 -1 +2 +2 -1
U2 -8 +7 -8 +7 -8 +7 +7 -8 +7 -8 +7 -8
U3 -4 +5 +5 -4 +5 -4 +5 -4 -4 +5 -4 +5
U4 = +1 -2 +1 -2 -2 +1 -2 +1 -2 +1 +1 -2
U5 -7 +8 -7 +8 -7 +8 +8 -7 +8 -7 +8 -7
U6 -5 +4 +4 -5 +4 -5 +4 -5 -5 +4 -5 +4
4.3-Modelo do Sistema de Controlo
Todos os aspectos essenciais, sobre a constituição deste controlador, já foram
abordados, pelo que na figura 4.6 se apresenta a sua estrutura. O esquema apresentado serve
de base para as simulações do próximo capítulo.

48
,
,
,
, ,
-
+
-
+
Transformação
Park d,q αβ
Transformação
Concórdia
αβ a,b,c
DFIG
Função de comutação
Corrente
Algoritmo DPC
Cálculo de Potências
Estator
Selecção de Vectores
Observador
MRAS
Rede
Conversor Matricial
Figura 4.6. Modelo para implementação do sistema de controlo.

49
5. Simulação do Controlo da DFIG com Conversor Matricial no Rotor
Neste capítulo, expõem-se os procedimentos envolvidos na simulação, em ambiente
(MATLAB/SIMULINK), do controlador da máquina de indução, com conversor matricial ligado
ao rotor. Inicialmente, faz-se uma análise bloco a bloco do sistema a simular, tentando não
sobrecarregar demasiado as descrições com detalhes. Aborda-se também a questão do uso de
valores em por unidade (P.U.) e, no final do capítulo, analisam-se as simulações e discutem-se
os resultados.
5.1-Modelo de Simulação em Ambiente MATLAB / SIMULINK
Na figura 5.1 apresenta-se o esquema geral do controlador. Nas próximas secções,
faz-se a análise bloco a bloco, dos blocos considerados fundamentais. O controlo de potência
DPC e o observador MRAS estão, como se pode ver, inseridos no mesmo bloco, dado que o
correcto funcionamento de um depende do outro. O bloco “rede” encontra-se repetido, de modo
a evitar maior cruzamento de ligações.
Figura 5.1. Modelo usado na simulação do controlo da DFIG com conversor matricial no rotor.
v a
v b
v c
Zona Tensão
Zonas Tensão
iA
iB
iC
Zona Corrente
Zonas Corrente
ia
ib
ic
iAlf a
iBeta
Transformação Concórdia
iAlf a
iBeta
iq
Transf. Park
v av bv c
Rede1
v av bv c
Rede
Q*
P*
Ua
Ub
Uc
v A
v B
v C
Isabc
Irabc
Maquina de Indução
iaibicv av bv c
v afv bfv cf
iiaiibiic
Filtro Entrada
S11S12S13S21S22S23S31S32S33v a1v b1v c1iA1iB1iC1
ia
ib
ic
v A1
v B1
v C1
Conversor Matricial
Ps
Ps*
Qs
Qs*
v s
is
ir
VectorDPC
Controlo DPC/MRAS
v ectorDPC
Siq
Zona Tensão
Zona Corrente
S11S12S13S21S22S23S31S32S33
Controlo
iqSiq
Comutação de Corrente
Iabc
Rede
Ps
Qs
Calculo de
Potências

50
5.1.1-Análise do Bloco “Rede”.
Figura 5.2. Diagrama de blocos da rede trifásica.
A rede trifásica usada na simulação, é definida em (56), onde Vin=1 (em valores P.U.):
(56)
5.2.2-Análise do Bloco “Zona de Tensão”.
Neste bloco, realiza-se a identificação das zonas de tensão, processo crucial para a
correcta identificação dos vectores a aplicar. Para tal, começa-se por dividir um período das
tensões compostas de entrada (rede trifásica), em doze zonas diferentes, e de seguida
comparam-se duas das tensões compostas de entrada, com os valores máximos e mínimos
instantâneos.
Figura 5.3. -Diagrama de blocos usado na identificação das zonas de tensão.
Apresentam-se de seguida, as tabelas usadas,“W1”, “W2” e “Identificação da Zona”.
3
vc
2
vb
1
va
Sine Wave2
Sine Wave1
Sine Wave
1
Zona Tensão
W2
W1
max
MinMax1
min
MinMax
Identificação da Zona
u1
u2yfcn
E3
u1
u2yfcn
E2
u1
u2yfcn
E1
u1
u2yfcn
E
Add2
Add1
Add
3
vc
2
vb
1
va

51
Tabela 5.1. Relação entre as tensões compostas e os máximos e mínimos instantâneos.
= = =
1 1 1 1 1 1
1 0 2 1 0 2
0 1 3 0 1 3
0 0 4 0 0 4
Tabela 5.2. Identificação das zonas de tensão.
1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 4
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
Zona de Tensão 0 0 0 1 0 0 0 6 0 0 0 2 4 5 3 0
As zonas de tensão estão numeradas na tabela 5.2, de 0 a 6, com a seguinte
correspondência:
0- Zona de tensão indefinida
1- Zona de tensão 12 ou 1
2- Zona de tensão 2 ou 3
3- Zona de tensão 4 ou 5
4- Zona de tensão 6 ou 7
5- Zona de tensão 8 ou 9
6- Zona de tensão 10 ou 11
5.2.3-Análise do Bloco “Zona de Corrente”
Este bloco, permite identificar, em cada instante, a zona da corrente de saída, de forma
a ser possível escolher o vector de tensão mais adequado. A metodologia adoptada aqui, é
ligeiramente diferente da usada no bloco “Zona de Tensão”, tendo-se recorrido a comparações
através de controladores de histerese.

52
Figura 5.4. Diagrama de blocos usado na identificação das zonas de corrente.
Apresentam-se, de seguida, as tabelas usadas, “W1”, “W2”, “W3”, “X1” e “tabela de
zonas de corrente”:
Tabela 5.3. Relações entre as correntes e detecção passagem por zero.
0 0 1 0 0 1 0 0 1
0 1 2 0 1 2 0 1 2
1 0 3 1 0 3 1 0 3
1 1 4 1 1 4 1 1 4
Tabela 5.4. Relações entre as tabelas auxiliares.
1 1 1 1 2 2 2 2 3 3 3 3 4 4 4 4
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
Tabela 5.5. Identificação das zonas de corrente.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
1 0 0 0 0 0 0 0 0 0 12 0 0 0 1 0 0
2 0 0 8 0 0 0 0 0 0 11 9 10 0 0 0 0
3 0 0 0 0 4 3 5 0 0 0 0 0 0 2 0 0
4 0 0 7 0 0 0 6 0 0 0 0 0 0 0 0 0
Onde 0 define, como no caso das zonas de tensão, uma zona indefinida.
5.2.4-Análise do Bloco “Cálculo de Potências”.
Neste bloco, procede-se ao cálculo das potências, que posteriormente serão
comparadas com as potências definidas para referência, tal como enunciado no Capítulo 2.
1
Zona Corrente
X1
W3
W2
W1
Tabela de Zonas
de Corrente
Relay6
Relay5
Relay4
Relay3
Relay2
Relay1
0
Constant
Add6
Add5
Add4
Add3
Add2
Add1
3
iC
2
iB
1
iA

53
Figura 5.5. Diagrama de blocos onde se procede ao cálculo das potências.
As potências são calculadas a partir das correntes do estator e das tensões da rede,
em componentes αβ (Transformação de Concordia), de acordo com as expressões:
(57)
(58)
5.2.5-Análise do Bloco “Transformação de Concordia”.
Este bloco permite efectuar a transformação de Concordia (anexo A), sendo utilizado
em tensões e correntes. A sua estrutura pode ser observada na figura 5.6.
Figura 5.6. Diagrama de blocos para a Transformação de Concordia (correntes de entrada).
5.2.6-Análise do Bloco “Transformação de Park”.
Este bloco permite aplicar a Transformação de Park, amplamente usada ao longo deste
trabalho. Para tal usa-se o diagrama de blocos da figura 5.7:
2
Qs
1
Ps
a
b
c
alf a
beta
abcAB1
a
b
c
alf a
beta
abcAB
Product3
Product2
Product1
Product
Add1
Add
2
Rede
1
Iabc
2
iBeta
1
iAlfa
-K-
Gain7
-K-
Gain6
1/2
Gain5
1/2
Gain4
1
Gain3
-K-
Gain2
-K-
Gain1
-K-
Gain
Add4
Add3
3
ic
2
ib
1
ia

54
Figura 5.7. Diagrama de blocos para a Transformação de Park.
Neste caso específico, apenas se pretende obter a componente da corrente, para o
que se usa a seguinte expressão:
(59)
5.2.7-Análise do Bloco “Comutação de Corrente”.
Figura 5.8. Diagrama de blocos do controlador de factor de potência.
Este bloco é responsável por implementar a função de comutação de corrente ,
definida na secção 4.2.2. Recorde-se que o objectivo, é garantir , de forma a controlar o
factor de potência. Efectua-se uma comparação entre o valor de referência (zero) e o valor
instantâneo da corrente . Quando esta se afasta da referência, ainda que ligeiramente, dentro
da banda de histerese permitida pelo controlador, dá-se uma comutação e mudará de valor,
entre os dois níveis permitidos (-1 ou 1).
5.2.8-Análise do Bloco “DPC/MRAS”.
O bloco “DPC/MRAS”, da figura 5.9, é na verdade constituído por dois blocos distintos,
unidos em um por uma questão de conveniência. Em cima tem-se o diagrama de blocos onde
se implementa o algoritmo DPC, definido na secção 2.2, e em baixo apresenta-se o observador
MRAS, cuja análise detalhada pertence à secção 2.5.
1
iq
teta
t
2*pi*f
Omega
f(u)
Fcn1
2
iBeta
1
iAlfa
1
Siq
iqref
iqref 5
Ganho Controlador de HistereseComparador1
iq

55
Figura 5.9. Bloco de selecção dos vectores responsáveis pelo controlo de potência.
O controlo de potência utiliza dois comparadores de histerese, com dois níveis
possíveis cada. Quando as referências são superiores às potências estimadas, tem-se um erro
positivo, e vice-versa. A convenção usada, foi a de que, quando o erro de potência, quer activa
( ) quer reactiva ( , é positivo, o controlador de histerese deverá colocar na sua saída o
nível 1, e quando o erro de potência é negativo, o controlador terá na sua saída o nível 0.
Segundo esta convenção, existem quatro possibilidades distintas, no que diz respeito à
variação das potências.
Na tabela intermédia “Tabela de erros de potência”, atribui-se um número a cada uma
dessas possibilidades:
Tabela 5.6. Tabela de erros de potência.
Qerr
0 1
Pe
rr 0 2 1
1 4 3
No bloco “Selecção de vectores de tensão”, as quatro combinações de erros de
potência da tabela 5.6, são relacionados com a informação correspondente aos sectores, e na
sua saída tem-se o vector de controlo de potência apropriado às circunstâncias.
Tabela 5.7. Tabela de selecção de vectores de tensão DPC.
Sector 1 Sector 2 Sector 3 Sector 4 Sector 5 Sector 6
Perr<=0 Qerr > 0 1 U3 U4 U5 U6 U1 U2
Qerr <=0 2 U2 U3 U4 U5 U6 U1
Perr>0 Qerr>0 3 U5 U6 U1 U2 U3 U4
Qerr <=0 4 U6 U1 U2 U3 U4 U5
1
VectorDPC
Tabela erros
potencias
Selecção Vector Tensão
Yd
Yqsector
Sector
Relay2
Relay
rede
isabc
irabc
W r
Theta
FluxoAr^
FluxoBr^
Observador MRAS
10
Gain2
10
Gain1
7
ir
6
is
5
rede
4
Qs*
3
Qs
2
Ps*
1
Ps

56
Por sua vez, o bloco “Observador MRAS”, exibe a estrutura apresentada na figura 5.10.
Figura 5.10. Blocos de simulação do sistema MRAS.
O erro, dado pela expressão 18, é levado para valores próximos de zero através do
controlador PI. Este controlador, terá na sua saída o valor da velocidade angular do rotor, ,
mas a variável realimentada para o modelo de corrente, será o ângulo de posição do rotor,
obtido por integração dessa velocidade.
Este sistema permite o cálculo dos fluxos do rotor, nas suas componentes αβ (Anexo
A) no bloco do modelo de corrente. Pode-se, deste modo, obter a localização instantânea do
fluxo do rotor, condição que já se viu, na secção 2.2, ser de extrema importância para a
escolha dos vectores de tensão a aplicar ao rotor da máquina, no âmbito do controlo directo de
potência. Apresenta-se, de seguida, a figura 2.9, com a disposição espacial dos vectores de
tensão no plano αβ, e a correspondência entre a posição angular do fluxo do rotor e os
sectores.
Fluxos Referência
Fluxos Estimados
Angulo Theta
Fluxos Rotoricos
4
FluxoBr^
3
FluxoAr^ 2
Theta
1
W^r
a
b
c
alf a
beta
abcAB2
a
b
c
alf a
beta
abcAB1
a
b
c
alf a
beta
abcAB
Product3
Product
PID
PID Controller
UsA
IsA
UsB
IsB
FluxoA
FluxoB
Modelo Tensão
IsA
IsB
IrA
IrB
Theta
FluxoAs^
FluxoBs^
FluxoAr 1
FluxoBs 2
Modelo Corrente
1
s
Integrator
Wb
Gain2
Erro
3
irabc
2
isabc
1
rede
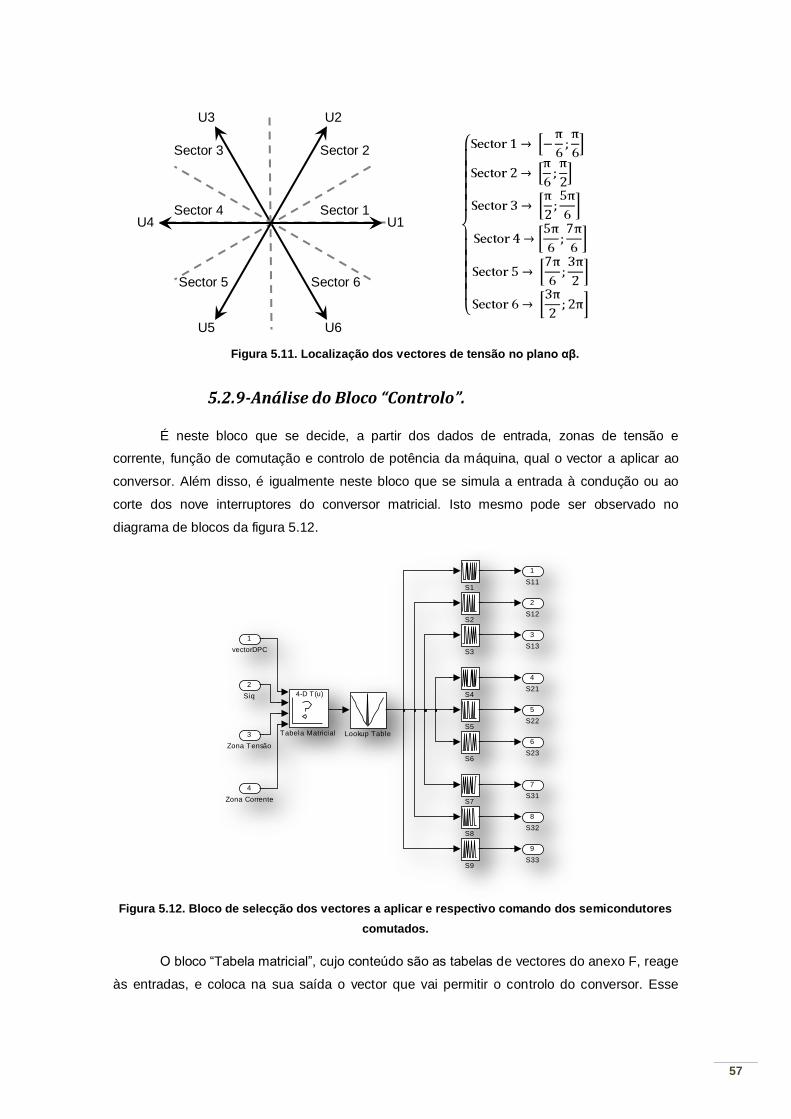
57
5.2.9-Análise do Bloco “Controlo”.
É neste bloco que se decide, a partir dos dados de entrada, zonas de tensão e
corrente, função de comutação e controlo de potência da máquina, qual o vector a aplicar ao
conversor. Além disso, é igualmente neste bloco que se simula a entrada à condução ou ao
corte dos nove interruptores do conversor matricial. Isto mesmo pode ser observado no
diagrama de blocos da figura 5.12.
Figura 5.12. Bloco de selecção dos vectores a aplicar e respectivo comando dos semicondutores
comutados.
O bloco “Tabela matricial”, cujo conteúdo são as tabelas de vectores do anexo F, reage
às entradas, e coloca na sua saída o vector que vai permitir o controlo do conversor. Esse
9
S33
8
S32
7
S31
6
S23
5
S22
4
S21
3
S13
2
S12
1
S11
4-D T(u)
Tabela Matricial
S9
S8
S7
S6
S5
S4
S3
S2
S1
Lookup Table
4
Zona Corrente
3
Zona Tensão
2
Siq
1
vectorDPC
U1
U2 U3
U4
U5 U6
Sector 1
Sector 2 Sector 3
Sector 4
Sector 5 Sector 6
Figura 5.11. Localização dos vectores de tensão no plano αβ.

58
vector será, por sua vez, a entrada das tabelas unidimensionais que comandam o interruptor à
abertura ou fecho (0=OFF/1=ON), de acordo com a tabela 3.1.
5.2.10-Análise do Bloco “Conversor Matricial”
Este bloco simula a matriz de semicondutores bidireccionais, que são a base topológica
do conversor matricial, relacionando as tensões compostas de saída com as tensões simples
de entrada, bem como as correntes de entrada e de saída, tal como estabelecido em (46) e
(47), respectivamente. Os interruptores são considerados ideais, e a convenção usada foi a de
que o nível lógico “1” corresponde ao estado de condução e o nível lógico “0” corresponde ao
estado de corte.
Figura 5.13. Bloco de simulação da matriz de semicondutores bidireccionais do conversor.
5.2.11-Análise do Bloco “Filtro de Entrada”
Neste caso, devido à grande dimensão do bloco usado para simulação do filtro RLC de
entrada, optou-se por colocar aqui apenas o seu modelo, figura 5.14.
6
vC1
5
vB1
4
vA1
3
ic
2
ib
1
ia
S11.iA+S21.iB+S31.iC5
S11.iA+S21.iB+S31.iC4
S11.iA+S21.iB+S31.iC3
S11.iA+S21.iB+S31.iC2
S11.iA+S21.iB+S31.iC1
S11.iA+S21.iB+S31.iC
15
iC1
14
iB1
13
iA1
12
vc1
11
vb1
10
va1
9
S33
8
S32
7
S31
6
S23
5
S22
4
S21
3
S13
2
S12
1
S11

59
As expressões usadas para o filtro, que reflectem as relações entre as tensões e
correntes assinaladas na figura 5.14, são apresentadas de seguida.
A expressão (60) permite calcular as correntes de linha nas três fases, em função das
três tensões compostas de entrada.
(60)
Na expressão (61) obtêm-se essas mesmas tensões compostas de saída do filtro:
(61)
5.2.12-Análise do Bloco “Máquina de Indução”.
Este bloco permite simular o comportamento da DFIG, em reacção às tensões de
excitação aplicadas pelo conversor matricial (figura 5.15).
En
tra
da
(re
de
)
Sa
ída (
con
ve
rso
r)
Figura 5.14. Filtro LRC de entrada.

60
Figura 5.15. Diagrama de blocos da máquina de indução.
Optou-se por não desenvolver, nesta secção, uma explicação detalhada do
funcionamento da máquina de indução, bem como o seu modelo para simulação, para evitar
sobrecarregar o corpo deste documento, podendo no entanto ser consultado no anexo C.
O bloco “simples/compostas” é, todavia, merecedor de menção especial. O neutro de
referência das tensões na sua entrada (tensões de saída do conversor), é o da rede trifásica,
mas o neutro das tensões na máquina terá de ser o neutro dos enrolamentos do rotor da
máquina. Na figura 5.16, tem-se um modelo simplificado dos enrolamentos do rotor.
A passagem das tensões com neutro de referência da rede, para o neutro de referência
dos enrolamentos, é obtida recorrendo às expressões seguintes:
(62)
2
Irabc
1
Isabc
v ABC v ABCw
Referência de Neutro
Mc
Uabcs
Mc
wRF
Uabcr
Mem
Isabc
Irabc
wm
Yd
Yq
Maquina Indução
0
01
6
vC
5
vB
4
vA
3
Uc
2
Ub
1
Ua
Neutro
Figura 5.16. Modelo simplificado dos enrolamentos do rotor da DFIG.

61
5.3-Parâmetros de Simulação: Valores Por Unidade
Neste projecto, optou-se pelo uso de valores por unidade (p.u.) para todas as
grandezas usadas, como por exemplo nas tensões, correntes e parâmetros da máquina de
indução, sendo as únicas excepções os tempos que foram considerados em segundos, e os
ângulos em radianos. O uso dos valores por unidade, deve-se ao facto de permitem uma
considerável simplificação das técnicas de estimação e controlo usadas. Referem-se de
seguida, algumas das vantagens principais decorrentes do uso deste sistema (MARQUES,
2006):
Facilidades de programação da electrónica usada, particularmente para os DSP de
vírgula fixa, devido ao facto de as grandezas usadas apresentarem uma gama de
variação muito limitada, em torno do intervalo [-1, 1]. Os ganhos de desempenho são
facilmente compreensíveis pois sabe-se que na programação dos DSPs, se tem de
definir logo no inicio o número de bits para a parte inteira e parte fraccionária
Pequena variabilidade nos parâmetros do esquema equivalente quando se muda de
máquina, não havendo portanto necessidade de proceder novamente à identificação
dos parâmetros característicos, o que confere a este sistema de unidades uma enorme
versatilidade.
Neste trabalho, a utilização dos valores em p.u., exigiu a alteração das equações da
máquina de indução, e o uso dos seguintes valores de referência.
-Tensão de referência: =220
-Corrente de referência: =8.1
-Velocidade angular eléctrica de referência: =100*
Com estes valores de base, podem-se agora obter todas as outras grandezas usadas
em valores p.u., através das seguintes relações:
-Impedâncias base: = / ;
-Fluxos ligados: = / ;
-Coeficientes de indução: = / ;
- Potência aparente trifásica: = (3/2) × × ;
- Velocidade angular mecânica: = /p;
- Binário: = / ;
- Tempo: como já foi referido, esta foi a única grandeza a ser conservada nas unidades
tradicionais, por uma questão de comodidade e facilidade de percepção, visto que a

62
conversão para valores por unidade, poderia lançar alguma confusão em relação à
percepção quantitativa dos valores obtidos.
Quanto aos parâmetros da DFIG, usaram-se valores em p.u. típicos para este tipo de
aplicações e para o tipo de máquina, valores cuja demonstração tem sido objecto de estudo em
diversos trabalhos de investigação (Petersson, 2005).
- Resistências do estator e do rotor: = =0.01 p.u.
- Coeficientes de indução do rotor e do estator e coeficiente de indução
mútuo com valores: = =3.1 p.u. e M=3 p.u.
- Constante de inércia: H=3 s
Quanto às equações da máquina, é necessário realizar algumas alterações, em relação
às equações normalmente usadas. Temos, então, as seguintes equações características da
dinâmica da máquina:
(63)
(64)
Dividem-se todas as unidades físicas, pelos correspondentes valores de base,
indicados no inicio deste anexo, vindo:
(65)
(66)
Obtém-se, finalmente, o seguinte sistema de equações, já em valores por unidade, que
como se pode ver mantém a estrutura das equações da dinâmica da máquina, à excepção do
termo 1/ e do desaparecimento do número de pares de pólos p.
(67)
(68)
E finalmente podem-se escrever as seguintes expressões:
(69)
= (70)
E o binário virá, em valores p.u.

63
) (71)
5.4-Análise de Resultados de Simulação
Nesta secção, expõem-se os resultados das simulações em computador, usando o
software Matlab/Simulink. São apresentadas formas de onda, para diversas situações, das
principais grandezas do sistema, nomeadamente erros dos controladores de histerese, tensões
e correntes do conversor e as potências transferidas pela máquina. Junto a cada figura, tecem-
se breves comentários, sobre se os resultados vão ou não ao encontro do esperado e
adiantam-se causas e possíveis soluções.
5.4.1-Controlo de Potência na DFIG
Um dos objectivos centrais deste trabalho é o controlo das potências debitadas pela
máquina. Os seus valores deverão seguir, aparte uma pequena margem de erro, os valores
definidos para referência, tal como foi referido na secção 2.4.
Realizou-se um ensaio, onde se testa a resposta do sistema, a um escalão de potência
activa de referência. Os valores adoptados para referência foram:
- = 0 p.u. inicialmente, e ao fim de t=0.04s, passa-se a ter =0.9 p.u.
- = 0,2 p.u.
Na figura 5.17, apresenta-se a evolução da potência activa, antes e após a aplicação
do escalão. Na figura 5.18, temos a forma de onda da potência reactiva.
Figura 5.17. Potência Activa.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
Po
ten
cia
Ac
tiv
a [
pu
]

64
Figura 5.18. Potência Reactiva.
Observa-se um controlo rigoroso da potência activa, com o sistema a responder
prontamente à entrada do novo valor de referência. O mesmo se pode afirmar em relação ao
controlo de potência reactiva. A banda de histerese do controlador de potência activa é de 0.01
p.u., e a do controlador de potência reactiva de 0.05 p.u., podendo-se ver que as formas de
onda da simulação se mantêm claramente dentro destes limites.
Na figura 5.19, repete-se a forma de onda da potência activa, com o objectivo de
averiguar a rapidez com que se dá a reacção do controlador.
Figura 5.19. Potência Activa.
Como se pode ver, a potência assume o valor final em menos de 0.4ms, o que de facto
é uma resposta extremamente rápida. Nesta figura, também se constata que o erro permitido
pelo controlador é muito pequeno, devido ao facto de as comutações do controlador se
sucederem a elevada frequência.
0 0.04 0.08 0.12 0.16 0.2 0.1
0.12
0.14
0.16
0.18
0.2
0.22
0.24
0.26
0.28
t[s]
Po
ten
cia
Re
ac
tiv
a [
pu
]
0.0392 0.0394 0.0396 0.0398 0.04 0.0402 0.0404 0.0406 0.0408 0.041-0.2
0
0.2
0.4
0.6
0.8
1
1.2
t [s]
Po
ten
cia
Ac
tiv
a [
pu
]
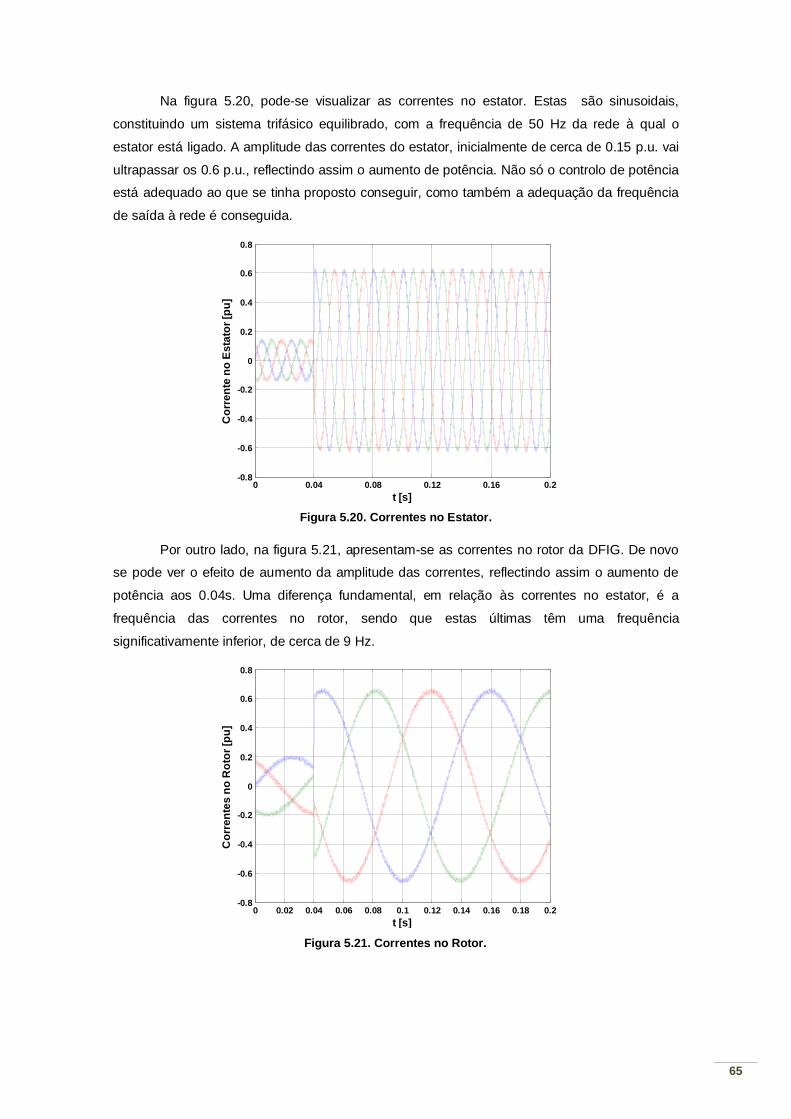
65
Na figura 5.20, pode-se visualizar as correntes no estator. Estas são sinusoidais,
constituindo um sistema trifásico equilibrado, com a frequência de 50 Hz da rede à qual o
estator está ligado. A amplitude das correntes do estator, inicialmente de cerca de 0.15 p.u. vai
ultrapassar os 0.6 p.u., reflectindo assim o aumento de potência. Não só o controlo de potência
está adequado ao que se tinha proposto conseguir, como também a adequação da frequência
de saída à rede é conseguida.
Figura 5.20. Correntes no Estator.
Por outro lado, na figura 5.21, apresentam-se as correntes no rotor da DFIG. De novo
se pode ver o efeito de aumento da amplitude das correntes, reflectindo assim o aumento de
potência aos 0.04s. Uma diferença fundamental, em relação às correntes no estator, é a
frequência das correntes no rotor, sendo que estas últimas têm uma frequência
significativamente inferior, de cerca de 9 Hz.
Figura 5.21. Correntes no Rotor.
0 0.04 0.08 0.12 0.16 0.2-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
t [s]
Co
rre
nte
no
Es
tato
r [p
u]
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
t [s]
Co
rre
nte
s n
o R
oto
r [p
u]

66
Na figura 5.22, apresenta-se uma das fases da tensão de saída do conversor matricial,
num intervalo de tempo entre os 0.06 e 0.08 segundos, de forma a se poder analisar com
algum detalhe.
Figura 5.22. Tensão na fase a, à saída do conversor.
Como se pode observar, esta tensão exibe uma forma de onda característica, devido
ao facto de resultar de comutação dos semicondutores a elevada frequência. De notar que os
interruptores são considerados como ideais, não se tendo em conta a queda de tensão nos
semicondutores.
Na figura 5.23, observam-se as correntes de entrada do conversor matricial, , ou
seja as correntes que se pretende controlar.
Figura 5.23. Correntes na entrada do conversor.
A distorção, presente nestas formas de onda deve-se, entre outros factores, ao facto de
não se ter usado o vector nulo, o que leva a um excesso de comutações dos semicondutores,
ou seja uma alta frequência que provoca oscilações e ruídos parasitas nas correntes.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
t [s]
Co
rren
tes E
ntr
ad
a [
p.u
.]
0.06 0.062 0.064 0.066 0.068 0.07 0.072 0.074 0.076 0.078 0.08 -1.5
-1
-0.5
0
0.5
1
1.5
t [s]
Te
ns
õe
s d
e S
aíd
a [
p.u
.]

67
Apresentam-se também as formas de onda dos fluxos do rotor, em regime permanente,
figura 5.24.
Figura 5.24. Fluxos no Rotor da Máquina.
As formas de onda analisadas indicam uma boa resposta do sistema à variação de
potência. As potências seguem, rapidamente, os valores de referência, e o conversor matricial
controla efectivamente as tensões de saída e correntes de entrada.
5.4.2-Bidireccionalidade do fluxo de potência no conversor
Neste ensaio, pretende-se demonstrar que o fluxo de potência, se pode efectuar nos
dois sentidos no conversor, ou seja, que este suporta igualmente a condição em que o rotor
recebe potência activa da rede, ou a fornece para a rede.
1º Ensaio:
- Funcionamento abaixo da velocidade de sincronismo (modo subsíncrono).
- =0 p.u. inicialmente e passa a =0.5 p.u., quando t=0.06s.
- =0.02 p.u.
Os resultados foram registados nas figuras 5.25 e 5.26.
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16 0.18 0.2-1.5
-1
-0.5
0
0.5
1
1.5
t [s]
Flu
xo
s n
o R
oto
r
Yd Yq

68
Figura 5.25. Potência Activa e Reactiva.
Figura 5.26. Tensão e corrente na entrada do conversor (lado da rede).
Note-se que as formas de onda da tensão e da corrente estão aproximadamente
em fase, e dado que a potência reactiva é quase nula, está-se na situação de factor de
potência unitário. A potência activa, neste caso, circula da rede, através do conversor matricial,
até ao rotor.
2º Ensaio:
- Funcionamento acima da velocidade de sincronismo (modo sobresíncrono).
- =0 p.u., inicialmente e passa a =-0.5 p.u. quando t=0.06s.
- =0.02 p.u.
As figuras 5.27 e 5.28 registam as formas de ondas obtidas.
0 0.05 0.1 0.15-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
t [s]
Po
ten
cia
s [
pu
]
0 0.05 0.1 0.15-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t [s]
Te
ns
ao
(v
a)
e C
orr
en
te (
isa
)

69
Figura 5.27. Potência Activa e Reactiva.
Figura 5.28. Tensão e corrente na entrada do conversor (lado da rede).
Ao contrário do ensaio 1, temos neste caso uma potência activa negativa, mas
mantém-se a potência reactiva próxima de zero, e as formas de onda da tensão e da
corrente , estão em oposição de fase. O rotor vai, nestas condições, fornecer potência activa
à rede, através do conversor matricial.
Confirma-se a possibilidade de fluxo de potência em ambas as direcções do conversor.
0 0.05 0.1 0.15-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
t [s]
Po
ten
cia
s [
pu
]
0 0.05 0.1 0.15-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
t [s]
Te
ns
ão
(u
a)
e C
orr
en
te (
isa
)

70
6. Conclusão
Neste trabalho, desenvolveu-se o estudo teórico, do controlo da potência activa e
reactiva, de um sistema destinado a geração eólica a velocidade variável e frequência
constante, sem recurso a sensores de posição dos fluxos do rotor e usando um conversor
matricial ligado entre o rotor da DFIG e a rede. Após uma fase inicial, de uma abordagem
meramente teórica, onde se analisaram as técnicas já existentes nesta área, seguiu-se a
tomada de decisão, acerca de quais incorporar neste projecto e um estudo detalhado, por
simulação, de forma a avaliar a validade dos modelos desenvolvidos.
O método proposto, para controlo das potências da máquina, é baseado no algoritmo
DPC. Apresenta aspectos de desempenho bastante apelativos, como o facto de permitir o
controlo independente da potência activa e reactiva, claramente visível em simulação. Este
método apresenta, adicionalmente, a vantagem de ser insensível aos parâmetros da DFIG,
uma vez que as potências que servem de entrada ao controlador directo de potência são
calculadas apenas com base nas tensões e correntes do estator. Em simulação, ficou
demonstrado um elevado grau de fiabilidade e rigor no controlo das potências, que se mantêm
em torno dos valores teoricamente permitidos pelas bandas de histerese dos controladores.
A detecção da posição dos fluxos do rotor, dispensando o recurso a sensores de
posição, foi atingida recorrendo a um observador MRAS. Os problemas de estabilidade,
observados nas primeiras simulações, foram resolvidos, e desenvolveu-se um sistema robusto,
insensível à maioria das perturbações. Os resultados de simulação mostram um elevado grau
desempenho do método, com uma detecção dos sectores do fluxo rigorosa, em condições
normais de funcionamento.
O conversor matricial desempenhou adequadamente a sua função de excitação, em
tensão alternada, do rotor da máquina, implementando o algoritmo DPC e, simultaneamente,
controlando o factor de potência. Os resultados obtidos confirmam claramente a capacidade do
conversor de processar um fluxo bidireccional de energia e garantir o controlo do factor de
potência. A frequência de saída é mantida constante e a distorção das ondas de entrada e
saída é aceitável, embora melhorias fossem possíveis, através da integração de vectores nulos
no controlo de potência e, consequentemente, nos vectores resultantes da modulação no
espaço, do conversor matricial.
O aperfeiçoamento do sistema MRAS, para uso específico neste tipo de sistemas, e
muito concretamente a redução da sua dependência em relação aos parâmetros da máquina,
poderá ser objecto de futuros trabalhos. Seria também interessante, dadas as limitações de
tempo a que este trabalho esteve sujeito, a construção de um protótipo experimental do
sistema, de forma a ser possível averiguar a concordância com os resultados obtidos em
simulação.

71
Referências Bibliográficas
Alesina, A.; Venturini, M.; “Solid State Power Conversion: A Fourier Analysis Approach to
Generalized Transformer Synthesis”; IEEE Transactions on Circuits and Systems, Vol. CAS-28,
No 4, April 1981, pp. 319-330.
Angkititrakul, S.; Erickson, R.,” Control and Implementation of a New Modular Matrix Converter”,
Colorado Power Electronics Center, University of Colorado, Boulder Boulder, CO 80309-0425,
USA, 2001.
Aparício, L.; Esteves, P.; “Conversor Matricial: Aplicação em Aproveitamentos Eólicos com
Máquina de Indução Duplamente Alimentada”, Trabalho Final de Curso da Licenciatura em
Engenharia Electrotécnica e de Computadores, Instituto Superior Técnico, Setembro de 2007.
Cárdenas,R.; Peña, R., Asher,G., Clare, J., Cartes, J.,” MRAS Observer for Doubly Fed
Induction Machines”, IEEE Transactions on Energy Conversion, Vol. 19, No. 2, June 2004.
Castro, R.; “Energias Renováveis e Produção Descentralizada – Introdução à Energia Eólica”;
Instituto Superior Técnico; Lisboa, Março de 2007.
Datta, R. ;Ranganathan, V.;”Direct Power Control of Grid-Connected Wound Rotor Induction
Machine Without Rotor Position Sensors”, IEEE Transactions on Power Electronics, Vol. 16,
No. 3, May 2001.
Datta, R.;Ranganathan, V.;” A Simple Position-Sensorless Algorithm for Rotor-Side Field-
Oriented Control of Wound-Rotor Induction Machine”,IEEE S0278-0046(01)06280-3, Agosto
2001.
Fitzgerald, A.; Kingsley, C.; Umans, S., “Electric Machinery”, Sixth Edition, McGraw-Hill, Ney
York, USA, 2001.
Gyugyi, L.; Pelly, B., “Static Power Frequency Changers – Theory, Performance & Application”,
John Wiley & Sons, 1976, ISBN 0-471-67800-7.
Holmes, D.; Lipo, T.; "Implementation of a Controlled Rectifier Using AC-AC Matrix Converter
Theory"; IEEE Transactions on Power Electronics, Vol. 7, No 1, January 1992, pp. 240-250.
Huber, L.; Borojevic, D., Burany, N.; “Analysis, design and implementation of the space-vector
modulator for forced-commutated cycloconvertors”, IEE Proceedings-B, Vol. 139, No. 2, March
1992.
Huber, L.; Borojevic, D.;, “Space Vector Modulated Three-phase to Three-phase Matrix
Converter with Input Power Factor Correction”, IEEE Transactions on Industry Applications, Vol.
31, No 6, Novemver/December 1995.

72
Jesus, J.; Castro, R., “Máquina de Indução Duplamente Alimentada (DFIG) em
Aproveitamentos de Energia Eólica”, Departamento de Engenharia Electrotécnica e de
Computadores, Instituto Superior Técnico, Lisboa, Abril de 2007.
Labrique, F.; Santana, J.; Electrónica de Potência; Fundação Calouste Gulbenkian,Lisboa,
Portugal, 1991.
Marques, G.; “A Computer Application for Teaching and Learning on the Induction Motor
Dynamics”, Secção de Máquinas Eléctricas e de Electrónica de Potência, Instituto Superior
Técnico, Lisboa, Portugal, 2001.
Marques, G.; “Controlo de Máquinas Eléctricas”; A.E.I.S.T., Lisboa, Fevereiro 2006.
Menino, A.; Antunes, J.; “Processamento Electricamente não Poluente de Energia Eléctrica”,
Trabalho Final de Curso da Licenciatura em Engenharia Electrotécnica e de Computadores,
Instituto Superior Técnico, Julho de 2002.
Morgado, E., “Controlo”, AEIST, Lisboa, 2003.
Petersson, A.; “Analysis, Modeling and Control of Doubly-Fed Induction Generators for Wind
Turbines”, Division of Electric Power Engineering, Department of Energy and Environment,
Chalmers University of Technology, Goteborg, Sweden 2005.
Pinto, S.; Aparício, L.; Esteves, P.; “Direct Controlled Matrix Converters in Variable Speed Wind
Energy Generation Systems”, IEEE PowerEng Conference 2007, Setúbal, Portugal, April 2007
Podlesak, T.; Katsis, D.; Wheeler, P.; Clare, J.; Empringham, L., Bland, M., “A 150-kVA Vector-
Controlled Matrix Converter Induction Motor Drive, IEEE Transactions on Industry Applications”,
Vol. 41, No. 3, May/June 2005.
Silva, J.Fernando; Electrónica Industrial; Fundação Calouste Gulbenkian, Lisboa, Portugal,
1998, Pag 829-845.
Wheeler, P.; Clare, J.; Empringham, L.; Bland, M.; "Matrix Converters: The Technology and
Potential for Exploitation"; The Drives and Controls Power Electronics Conference, London,
Section 5, March 2001.
7. SADSSSAD

73
ANEXO A - TRANSFORMAÇÃO CONCORDIA
A transformação de Concordia consiste na passagem das tensões ou correntes da
máquina, de um sistema trifásico ( ), para um sistema bifásico equivalente ( ).
Com este processo, consegue-se uma considerável simplificação na utilização das equações
da máquina de indução, bem como na manipulação de correntes e tensões no conversor
matricial. Por exemplo, para as correntes:
= (72)
O sistema trifásico original é convertido num sistema trifásico equivalente, com a
componente homopolar ( ) nula. Pode-se então definir a matriz C, que permite efectuar a
transformação de Concordia:
C= (73)
Finalmente, as tensões e correntes expressas nas componentes αβ, são obtidas
usando as expressões (74), (75):
(74)
(75)

74
ANEXO B - TRANSFORMAÇÃO DE PARK
A transformação de Park é de grande importância para o estudo das máquinas
eléctricas, consistindo numa transformação linear, que simplifica consideravelmente as
equações da máquina, introduzindo um conjunto de variáveis hipotéticas.
Fisicamente, a transformação de Park pode ser interpretada como a passagem da
máquina bifásica, obtida pela transformação de Concordia, com enrolamentos do estator fixos
e enrolamentos do rotor girantes, em uma máquina bifásica equivalente mas com enrolamentos
do estator e do rotor fixos. Tem-se então o sistema de eixos representado na figura B.1, em
que o ângulo θ é designado por ângulo de transformação.
Figura 7.1. Representação dos referenciais parados e em movimento em coordenadas dq.
Os eixos - da figura, correspondem às componentes directa e em quadratura do
estator e os eixos - correspondem às componentes directa e em quadratura do rotor. Os
eixos - rodam no sentido anti-horário, com uma velocidade que pode ser obtida pela
derivada do ângulo de transformação θ. Os eixos - são considerados em repouso para
este efeito.
Tem-se então dois enrolamentos em movimento, com correntes e e dois
estacionários com correntes e . Se decompusermos as forças electromotrizes dos
enrolamentos girantes segundo os eixos fixos e dividindo-se pelo número de espiras, podem-se
facilmente encontrar as relações seguintes:
. - . (76)
. + . (77)
A transformação de Park pode ser representada matricialmente, partindo das
expressões (76) e (77):

75
(78)
Ou genericamente, para qualquer variável definida em componentes , após aplicar a
Transformação de Concordia, pode-se escrever:
(79)
Consegue-se, pelo raciocínio exposto acima, a representação do estator e do rotor num
referencial comum, podendo estar ou não em movimento a uma velocidade arbitrária. As
equações da máquina de indução podem passar a ser representadas da seguinte forma:
(80)
(81)

76
ANEXO C - MÁQUINA DE INDUÇÃO DUPLAMENTE
ALIMENTADA (DFIG)
Neste anexo, analisa-se a simulação da DFIG, no programa de computador Simulink.
Apresenta-se na figura C.1, o diagrama de blocos usado nas simulações deste trabalho,
construído com base nas equações da secção 2.1.
Figura 7.2. Blocos usados para a simulação da máquina de indução.
Destaca-se desde já a presença dos blocos ABCdq, que convertem as tensões de
entrada da rede e as tensões do sistema de controlo no rotor em tensões de apenas duas
fases em referencial comum. Para o bloco ABCdq, ligado ao estator, o ângulo de
transformação theta é nulo, visto considerar-se que o referencial do estator está parado. No
caso do rotor, este ângulo vai sendo actualizado continuamente, de modo a reflectir a
desfasagem entre os dois referenciais. O bloco indução dq representa, como o nome indica, o
modelo da máquina de indução em variáveis dq e no referencial comum.
Na figura seguinte, tem-se o bloco indução dq, visto em detalhe:
6
yq
5
yd
4
wm
3
Irabc
2
Isabc
1
Mem
0
zero
wm1
uabc
d
q
angle
a
b
c
dqABC1
d
q
angle
a
b
c
dqABC
d
q
angle
a
b
SubSystem2
Mem1
Is
Uds
Uqs
wRef
Udr
Uqr
Mc
Mem
Ids
Iqs
Idr
Iqr1
Theta
wm1
Yd
Yq
Indução dq
-1
Gain
Demux
Demux
a
b
c
angle1
d
q
ABCdq1
a
b
c
angle1
d
q
ABCdq
3
Uabc1
2
Mc
1
Uabc

77
Figura 7.3. Bloco máquina de indução dq.
Os dois blocos Modelo do Estator e Modelo do Rotor são semelhantes, e são usados
para o cálculo dos fluxos do estator e do rotor. O fluxo , por exemplo, pode-se calcular a
partir de:
<=>
<=>
(82)
Sendo o processo de obtenção do fluxo qs em tudo semelhante, usa-se o bloco da
figura C.3 para o cálculo desses dois fluxos.
9
Yq
8
Yd
7
wm1
6
Theta5
Iqr1
4
Idr
3
Iqs
2
Ids
1
Mem
pp
XY GraphStator
Id
Iq
Yd
Yq
Mem
Momento
Udr
Idr
Wr
Iqr
Uqr
Ydr
Yqr
Modelo Rotor
Uds
Ids
Ws
Iqs
Uqs
Yds
Yqs
Modelo Estator
1
s
Integrator1
1
s
Integrator
Wb
Gain2
-K-
Gain
In1
In2
In3
In4
Out1
Out2
Out3
Out4
Fluxos /Currentes
6
Mc
5
Uqr
4
Udr
3
wRef
2
Uqs
1
Uds

78
Figura 7.4. Bloco para obtenção dos fluxos do estator.
No Bloco Fluxos/Corrente, estimam-se as correntes do estator e do rotor, nas suas
componentes dq (85), (86), a partir dos fluxos. O ganho Linv, presente no bloco, é a matriz
inversa das indutâncias da máquina:
(85)
(86)
Figura 7.5. Bloco Fluxos/Corrente.
Finalmente apresenta-se o bloco Momento da figura C.5., para o cálculo do binário
electromagnético da máquina.
2
Yqs
1
Yds
Product1
Product
1
s
Integrator1
1
s
Integrator
Wb
Gain3
Wb
Gain2
rs
Gain1
rs
Gain
5
Uqs
4
Iqs
3
Ws
2
Ids
1
Uds
4
Iqr
3
Idr
2
Iqs
1
Ids
K*u
Linv
Demux
4
Yqr
3
Ydr
2
Yqs
1
Yds
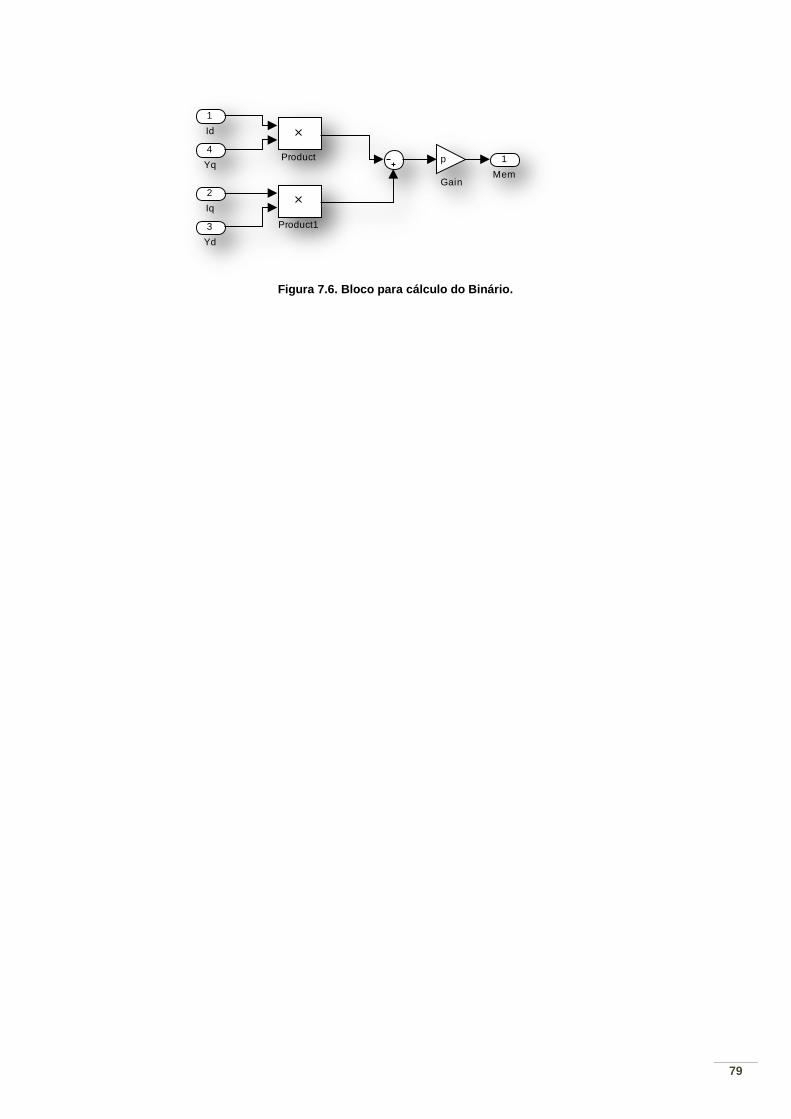
79
Figura 7.6. Bloco para cálculo do Binário.
1
Mem
Product1
Product p
Gain
4
Yq
3
Yd
2
Iq
1
Id

80
ANEXO D - MODULAÇÃO DE VECTORES NO ESPAÇO
D1- Localização dos Vectores de Tensão de Saída
Nas figuras seguintes, apresentam-se os vectores de tensão no plano αβ,
correspondentes a todas as zonas de tensão.
+9
+2
-7
+8
+4
-5
-6
-1 +3 -3 -2
+1
+6
+5
-4
-9
-8
+7
a) Zona 1 a)
+8
+3
-7
+9
+4
-6
-5
-1 +2 -2 -3
+1
+5
+6
-4
-8
-9
+7
a) Zona 1 b)
-7
-3
+8
-9
-5
+6
+4
+2 -1 +1 +3 -2
-4
-6
+5
+7
+9
-8
a) Zona 1 a)
-9
-1
+8
-7
-5
+4
+6
+2 -3 +3 +1
-2
-6
-4
+5
+9
+7
-8
a) Zona 1 b)
+2
+8
+1
-9
+7
+6
-4
-5
-3 -2 -1
+3
+5
+4
-6
-8
-7
+9
a) Zona 1 a)
+7
+2
-9
+8
+6
-5
-4
-3 +1 -1 -2
+3
+4
+5
-6
-7
-8
+9
a) Zona 1 b)
D.3. Vectores de Tensão a) Zona 5 b) Zona 6
D.2. Vectores de Tensão a) Zona 3 b) Zona 4
Figura 7.7. Vectores de Tensão a) Zona 1 b) Zona 2.
Figura 7.8. Vectores de Tensão a) Zona 3 b) Zona 4.
Figura 7.9. Vectores de Tensão a) Zona 5 b) Zona 6.

81
-6 +7
+3
-8
+9
+5
-6
-4
-2 +1 -1 -3
+2
+4
+6
-5
-7
-9
+8
a) Zona 1 a)
+9
+1
-8
+7
+5
-4
-2 +3 -3 -1
+2
+6
+4
-5
-9
-7
+8
a) Zona 1 b)
-9
-2
+7
-8
-4
+5
+6
+1 -3 +3 +2
-1
-6
-5
+4
+9
+8
-7
a) Zona 1 a)
-8
-3
+7
-9
-4
+6
+5
+1 -2 +2 +3
-1
-5
-6
+4
+8
+9
-7
a) Zona 1 b)
-8
+2 +1
-1
+9
-7
-6
+4
+5
+3 -2 -3
-5
-4
+6
+8
+7
-9
a) Zona 1 a)
-7
-2
+9
-8
-6
+5
+4
+3 -1 +1 +2
-3
-4
-5
+6
+7
+8
-9
a) Zona 1 b)
Figura 7.10. Vectores de Tensão a) Zona 7 b) Zona 8.
Figura 7.11. Vectores de Tensão a) Zona 9 b) Zona 10.
Figura 7.12. Vectores de Tensão a) Zona 11 b) Zona 12.

82
D2 – Localização dos Vectores de corrente de entrada
Nas figuras seguintes, apresentam-se os vectores de corrente de entrada no plano αβ,
correspondentes a todas as zonas de corrente.
-2
+4
-1 -
77
.1
6
+6 -3
-9
-5
+2
+8
+1 +7
-4 -6
+3 +9
-8
-2
+5
a) a) Zona 6
-1
+4 +7
-3 +6
+9
+2
-5
-8
-4 -7
+1 +3 -6
-9
+8
+5
b)
+5
-7
+4 +1
-9 +6
+3
+8
-5
-2
-4 -1
+7 +9 -6
-3
+2
+5
-8
a) a) Zona 6
+4 -7
-1
+6 -9
-3
-5
+8
+2
+7
+1
-4 -6
+9 +3
-2
-8
b)
-8
a) Zona 6
+1
-7 -4
+3 -9
-6
-2
+8
+5
+7 +4
-1 -3
+9 +6
-5
-8
+2
a) Zona 1 a)
-7 +1
+4
-9
+3 +6
+8
-2
-5
-1 -4
+7 +9
-3 -6
+5
+2
b)
Figura 7.13. Vectores de Corrente a) Zona 1 b) Zona 2.
Figura 7.14. Vectores de Corrente a) Zona 3 b) Zona 4.
Figura 7.15. Vectores de Corrente a) Zona 5 b) Zona 6.

83
+2
-4 +1
+7
-6 +3
+9
+5
-2
-8
-1 -7
+4 +6
-3 -
97
.2
0
+8
+2
-5
a) a) Zona 6
+1 -4
-7
+3 -6
-9
-2
+5
+8
+4 +7
-1 -3
+6 +9
-8
-5
b)
-5 +8
a) a) Zona 6 b)
+7 -4
-1
+9 -6
-3
-8
+5
+2
+4
+1
-7 -9
+6 +3
-2
-5
-4 +7
+1
-6 +9
+3
+5
-8
-2
-7 -1
+4 +6
-9 -3
+2
+8
+5
+8
+8
-1
+7 +4
-3 +9
+6
+2
-8
-5
-7
-4
+1 +3 -9
-6
-2
a) a) Zona 6
+7 -1
-4
+9 -3
-6
-8
+2
+5
+1 +4
-7 -9 +3
+6
-5
-2
b)
Figura 7.17. Vectores de Corrente a) Zona 7 b) Zona 8.
Figura 7.18. Vectores de Corrente a) Zona 9 b) Zona 10.
Figura 7.19. Vectores de Corrente a) Zona 11 b) Zona 12.

84
ANEXO E – LOCALIZAÇÃO DOS EIXOS dq
Nas figuras seguintes, pretende-se visualizar a localização dos eixos dq, para todas as
zonas de tensão estudadas, com a corrente na zona 1. Todavia, a localização destes eixos é
igual para todas as outras zonas de corrente, mudando apenas os vectores que em cada zona
estão disponíveis.
q
d
q
d
+1 -7
-4
-2
+8
+5
+7 +4
-1 -5
-8
+2
a) Zona 1 b)
-2
+8
+5 +9 -6
+3
-5
-8
+2
a) Zona 1 a)
a)
d
q
+1 -7
-4
+3 -9
-6
+7
+4
-1 -3
+9 +6 -5
-8
+2
-9 -6
+3
+6 +9
-3
+8
-2
+5
d
q
+1 -7
-4
-2
+8
+5
+7 +4
-1 -5
-8
+2
a) Zona 1 a) b)
d
q
+1 -7
-4
+3 -9
-6
+7
+4
-1 -3
+9 +6
d
q
a) Zona 1 b)
Figura 7.21. Vectores de Tensão a) Zona 12 e 1 b) Zona 2 e 3.
Figura 7.22. Vectores de Tensão a) Zona 4 e 5 b) Zona 6 e 7.
Figura 7.23. Vectores de Tensão a) Zona 8 e 9 b) Zona 10 e 11.

85
ANEXO F - TABELAS DE VECTORES DE TENSÃO
Nas figuras seguintes, apresentam-se os vectores de tensão usados para controlo das
tensões de saída e correntes de entrada do conversor matricial, através do método que
combina o controlo por modo de deslizamento e modulação de vectores no espaço. Estas
tabelas contêm toda a informação correspondente aos vectores a aplicar, para todas as zonas
de corrente e tensão, assim como o sentido de variação nas componentes da tensão que o
sistema DPC impõe, para que seja possível o correcto controlo das potências de saída do
gerador.
Tabela F.1. Vectores de tensão, para as Zonas 12 e 1 da tensão de saída do conversor.
Vector DTC
Variação nas
componentes
da Tensão
Zonas de corrente à saída do conversor matricial (Para as Zonas 12 e 1 de Tensão)
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 1 0 +1 -3 +1 -3 -3 +1 -3 +1 -3 +1 +1 -3
U2 1 1 -7 +9 -7 +9 -7 +9 +9 -7 +9 -7 +9 -7
U3 -1 1 -6 +4 +4 -6 +4 -6 +4 -6 -6 +4 -6 +4
U4 -1 0 +3 -1 +3 -1 -1 +3 -1 +3 -1 +3 +3 -1
U5 -1 -1 -9 +7 -9 +7 -9 +7 +7 -9 +7 -9 +7 -9
U6 1 -1 -4 +6 +6 -4 +6 -4 +6 -4 -4 +6 -4 +6
Tabela F.2. Vectores de tensão, para as Zonas 2 e 3 de tensão de saída do conversor.
Vector DTC
Variação nas
componentes
da Tensão
Zonas de corrente à saída do conversor matricial (Para as Zonas 2 e 3 de Tensão)
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 1 0 -3 +2 -3 +2 +2 -3 +2 -3 +2 -3 -3 +2
U2 1 1 +9 -8 +9 -8 +9 -8 -8 +9 -8 +9 -8 +9
U3 -1 1 +5 -6 -6 +5 -6 +5 -6 +5 +5 -6 +5 -6
U4 -1 0 -2 +3 -2 +3 +3 -2 +3 -2 +3 -2 -2 +3
U5 -1 -1 +8 -9 +8 -9 +8 -9 -9 +8 -9 +8 -9 +8
U6 1 -1 +6 -5 -5 +6 -5 +6 -5 +6 +6 -5 +6 -5

86
Tabela F.3. Vectores de tensão, para as Zonas 4 e 5 de tensão de saída do conversor.
Vector DTC
Variação nas
componentes
da Tensão
Zonas de corrente à saída do conversor matricial (Para as Zonas 4 e 5 de Tensão)
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 1 0 +2 -1 +2 -1 -1 +2 -1 +2 -1 +2 +2 -1
U2 1 1 -8 +7 -8 +7 -8 +7 +7 -8 +7 -8 +7 -8
U3 -1 1 -4 +5 +5 -4 +5 -4 +5 -4 -4 +5 -4 +5
U4 -1 0 +1 -2 +1 -2 -2 +1 -2 +1 -2 +1 +1 -2
U5 -1 -1 -7 +8 -7 +8 -7 +8 +8 -7 +8 -7 +8 -7
U6 1 -1 -5 +4 +4 -5 +4 -5 +4 -5 -5 +4 -5 +4
Tabela F.4. Vectores de tensão, para as Zonas 6 e 7 de tensão de saída do conversor.
Vector DTC
Variação nas
componentes
da Tensão
Zonas de corrente à saída do conversor matricial (Para as Zonas 6 e 7 de Tensão)
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 1 0 -1 +3 -1 +3 +3 -1 +3 -1 +3 -1 -1 +3
U2 1 1 +7 -9 +7 -9 +7 -9 -9 +7 -9 +7 -9 +7
U3 -1 1 +6 -4 -4 +6 -4 +6 -4 +6 +6 -4 +6 -4
U4 -1 0 -3 +1 -3 +1 +1 -3 +1 -3 +1 -3 -3 +1
U5 -1 -1 +9 -7 +9 -7 +9 -7 -7 +9 -7 +9 -7 +9
U6 1 -1 +4 -6 -6 +4 -6 +4 -6 +4 +4 -6 +4 -6
Tabela F.5. Vectores de tensão, para as Zonas 8 e 9 de tensão de saída do conversor.
Vector DTC
Variação nas
componentes
da Tensão
Zonas de corrente à saída do conversor matricial (Para as Zonas 8 e 9 de Tensão)
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 1 0 +3 -2 +3 -2 -2 +3 -2 +3 -2 +3 +3 -2
U2 1 1 -9 +8 -9 +8 -9 +8 +8 -9 +8 -9 +8 -9
U3 -1 1 -5 +6 +6 -5 +6 -5 +6 -5 -5 +6 -5 +6
U4 -1 0 +2 -3 +2 -3 -3 +2 -3 +2 -3 +2 +2 -3
U5 -1 -1 -8 +9 -8 +9 -8 +9 +9 -8 +9 -8 +9 -8
U6 1 -1 -6 +5 +5 -6 +5 -6 +5 -6 -6 +5 -6 +5

87
Tabela F.6. Vectores de tensão, para as Zonas 10 e 11 de tensão de saída do conversor.
Vector DTC
Variação nas
componentes
da Tensão
Zonas de corrente à saída do conversor matricial (Para as Zonas 10 e 11 de Tensão)
Zonas 12 e 1 Zonas 2 e 3 Zonas 4 e 5 Zonas 6 e 7 Zonas 8 e 9 Zonas 10 e11
U1 1 0 -2 +1 -2 +1 +1 -2 +1 -2 +1 -2 -2 +1
U2 1 1 +8 -7 +8 -7 +8 -7 -7 +8 -7 +8 -7 +8
U3 -1 1 +4 -5 -5 +4 -5 +4 -5 +4 +4 -5 +4 -5
U4 -1 0 -1 +2 -1 +2 +2 -1 +2 -1 +2 -1 -1 +2
U5 -1 -1 +7 -8 +7 -8 +7 -8 -8 +7 -8 +7 -8 +7
U6 1 -1 +5 -4 -4 +5 -4 +5 -4 +5 +5 -4 +5 -4

88
ANEXO G – EXEMPLO DE CÁLCULO DE UM ESTADO
DO CONVERSOR MATRICIAL
Apresentam-se neste anexo os cálculos efectuados, para obter a correspondência
entre tensões e correntes de entrada, com as tensões e correntes de saída, para um dos
estados da tabela 3.1. Escolhe-se um dos estados do segundo grupo desta tabela, por serem
estes os usados para o controlo do conversor. Por exemplo, para o estado sete, tem-se a
seguinte matriz S (Menino, Antunes, 2002):
(87)
E então as tensões simples de saída serão:
(88)
Para as correntes de entrada tem-se:
(89)
Tendo em conta a relação:
(90)
Virá finalmente:
(91)

89
ANEXO H - MODULAÇÃO DE VECTORES NO ESPAÇO
Como exemplo, demonstram-se os cálculos realizados para a representação do vector
correspondente ao estado 7 (tabela 3.1) no plano αβ (Menino, Antunes, 2002). Neste estado,
tem-se:
(92)
Logo, a aplicação da Transformação de Concordia (Anexo A), resulta em:
(93)
Contudo, para representar no plano αβ, interessa saber a amplitude e o argumento dos
vectores. Para a amplitude, virá:
(94)
O argumento será:
(95)
Procedendo do mesmo modo, para as correntes no estado 7, onde:
(96)
Amplitude:
= = (97)
Argumento:
(98)

90
ANEXO I - CONDIÇÃO DE GARANTIA DE FACTOR DE
POTÊNCIA UNITÁRIO NA CARGA
Para se ter factor de potência unitário, é necessário garantir que as correntes de
entrada estejam em fase com as tensões de entrada (Santana, Labrique, 1991). Começa-se
por analisar as condições que levam a que uma carga do conversor, independentemente da
sua natureza, tenha comportamento resistivo:
(99)
Ou de outra forma, desprezando a componente homopolar , e simplificando, fica-se
com o sistema:
(100)
A soma das correntes de fase é nula, visto que estamos a trabalhar com um sistema
trifásico equilibrado de correntes:
=0 (101)
Substituindo na expressão 100, vem:
(102)
Ou tendo em conta as expressões das correntes :
(103)
A subtracção da componente de desfasagem , com a componente de
desfasagem + , corresponde a uma rotação de -90º em relação à referência, e tem-se então:
(104)
Aplicando a transformação de Park (anexo B), de forma a obter o sistema em
componentes dq, vem:

91
(105)
Onde é o ângulo correspondente à aplicação da transformação de Park, designado
de ângulo de transformação. Simplificando estas expressões tem-se, finalmente:
(106)
Da observação desta expressão, conclui-se que ambas as correntes são
constantes no tempo. A condição que garante factor de potência unitário na carga será:
(107)
Ou seja, deve-se de garantir que a componente em q da corrente de entrada seja
sempre nula.