fcm da série 300 - autorem.fr 300/design guide... · temos especialistas em acionamentos no mundo...
TRANSCRIPT

FCM da Série 300
1MG.03.B6.28 - VLT é marca registrada Danfoss
Índice
Capítulo 1 Segurança .................................................... página 3
Capítulo 2 Introdução ..................................................... página 5
Capítulo 3 Conceito do produto ..................................... página 7
Capítulo 4 Seleção do motor FC .................................... página 9
Capítulo 5 Dados técnicos ........................................... página 13
Capítulo 6 Especificações mecânicas ......................... página 19
Capítulo 7 Controle Local ............................................ página 27
Capítulo 8 Parâmetros ................................................. página 37
Capítulo 9 Comunicação serial .................................... página 73
Capítulo 10 Condições especiais ................................... página 83
Capítulo 11 Lista de advertências e alarmes ................. página 93
Capítulo 12 Lista de parâmetros ................................... página 99
Capítulo 13 Índice ........................................................ página 103
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss2
Ao ler este Guia de Projeto, encontrará vários símbolosque requerem uma atenção especial.
Os símbolos usados são os seguintes:
Indica uma advertência geral.
Indica alguma coisa que o leitor deve notar.
Indica uma advertência de alta tensão.
Sím
bo
los

FCM da Série 300
3MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 1Capítulo 1Capítulo 1Capítulo 1Capítulo 1 Segurança ..................................................... página 4
Seg
urança
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss4
Seg
uran
ça NOTA!:É da responsabilidade do usuário ou doeletricista especializado garantir o aterramento
e uma proteção corretos de acordo com as normas eos padrões nacionais e locais aplicáveis.
Normas de segurança1. O VLT® DriveMotor (motor FC) deve ser desconec-
tado da rede elétrica se forem necessários reparos.Verifique se a rede elétrica foi desligada e se passouo tempo necessário antes de remover as ligaçõesdo motor e da rede (4 minutos).
2. O equipamento deve ser aterrado corretamente, ousuário deve ser protegido contra a fonte dealimentação e o motor de sobrecarga, conformenormas locais.O uso dos RCD’s (relés ELCB) está descrito nocapítulo 10.
3. As correntes de fuga à terra são superiores a 3,5mA. Isto significa que o motor FC necessita umainstalação fixa permanente, assim como umaterramento de proteção reforçado.
Advertência contra partidas indesejadas1. O motor pode ser parado mediante os comandos
digitais, os comandos via serial, as referências ouuma parada local, enquanto o conversor defreqüência estiver ligado à rede. Se por causa dasegurança pessoal for necessário garantir que parti-das indesejadas não aconteçam, estas funções deparada não serão suficientes.
2. Durante a programação de parâmetros, o motorpode partir.
3. Um motor que houver parado pode voltar afuncionar se houver uma falha nos circuitoseletrônicos do motor FC ou se a sobrecargatemporária ou a queda de fornecimento de energiacessar.
Todas as operações devem ser efetuadaspor pessoal treinado apropriadamente.
Use todos os elementos de levantamento fornecidos,p. ex., ambos os pontos de levantamento, seestiverem apropriados, ou um ponto de levantamentoindividual, se estiver apropriado*.
Levantamento vertical - Impeça a rotação semcontrole.
Empilhadeira - Não levante outro equipamentoapenas com pontos de levantamento do motor.
Antes da instalação, verifique a corrosão, se há danosna proteção do ventilador, no eixo, na montagem dabase/estrutura e se há parafusos soltos.Verifique os detalhes da placa de identificação.
Certifique-se de que a superfície da estrutura estánivelada, se a estrutura está equilibrada e se não estádesalinhada.
Os vedantes e/ou guarnições e as proteções devemser ajustados corretamente.
Corrija a tensão da correia.
Por favor observe as regras de "derating"; consultar"Condições especiais".
Nota: o levantamento (manual) máximo é de 20 kgabaixo do ombro, mas acima do nível do solo. Pesobruto máximo:- Tamanho de carcaça 80: 15 kg- Tamanho de carcaça 90 & 100: 30 kg- Tamanho de carcaça 112: 45 kg- Tamanho de carcaça 132: 80 kg
A tensão do motor FC é perigosa quandoo motor é conectado à rede elétrica. A ins-talação incorreta do motor FC pode cau-
sar danos ao equipamento, ferimentos graves ou morte.
Portanto, as instruções deste manual, bem como asnormas nacionais e locais e as normas de segurançadevem ser obedecidas.
Tocar as partes elétricas pode ser mortal, mesmodepois de desligar a rede elétrica.Aguarde pelo menos 4 minutos.
- A instalação deve ter um isolamento e fusíveiscorretos.
- As tampas e as entradas dos cabos devem estarencaixadas.
FCM da Série 300
5MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 2Capítulo 2Capítulo 2Capítulo 2Capítulo 2 Introdução .................................................... página 6
Introd
ução

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss6
Intr
od
ução Publicações técnicas específicas sobre o FCM da Série 300:
Guia de Projeto: Fornece todas as informações para finalidade deprojeto, bem como uma boa visão sobre atecnologia, gama de produtos, dados técnicos,controle, programação, etc.
Setup Rápido: Ajuda os usuários a instalar e operar rapidamenteuma unidade do motor FCM da Série 300.
O Guia de Setup Rápido: é sempre entreguecom a unidade.
Se tiver dúvidas com relação ao FCM da Série 300, entre em contato telefônicoconosco. Temos especialistas em acionamentos no mundo inteiro, prontos parasugerir aplicações, programação, treinamento e assistência técnica.
Documentação disponívelO quadro abaixo dá uma visão geral das publicações disponíveis para oFCM da Série 300.
Todosusuários
X = número da versãoYY = língua
Diversos
SetupRápido:
MG.03.FX.YY
Guia deProjeto
MG.03.BX.YY
ManualPROFIBUS
MG.03.EX.YY
Promoção
BrochuraMB.03.CX.YY
ArtigosMZ.03.AX.YY
VLT SoftwareDialog
MG.50.EX.YY
Folha deDados
MD.03.AX.YY

FCM da Série 300
7MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 3Capítulo 3Capítulo 3Capítulo 3Capítulo 3 Conceito do produto .................................... página 8
Co
nceito d
o p
rod
uto
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss8
Co
ncei
to d
o p
rod
uto
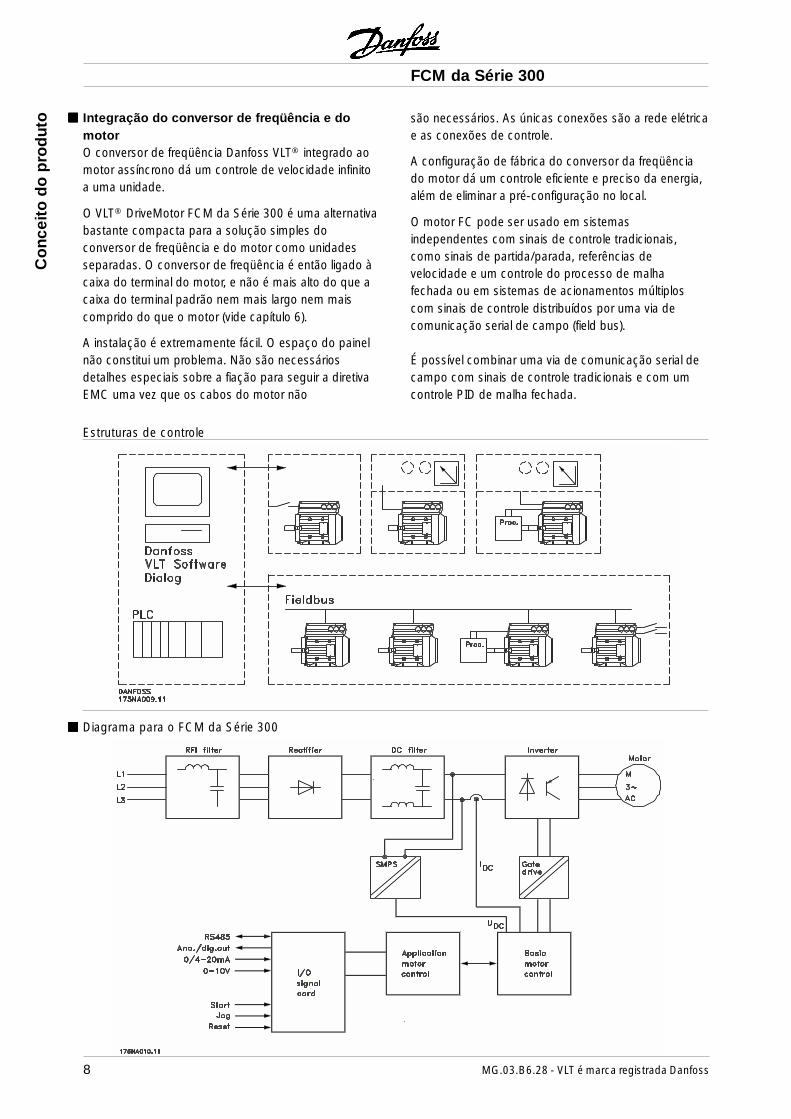
Estruturas de controle
Diagrama para o FCM da Série 300
Integração do conversor de freqüência e domotorO conversor de freqüência Danfoss VLT® integrado aomotor assíncrono dá um controle de velocidade infinitoa uma unidade.
O VLT® DriveMotor FCM da Série 300 é uma alternativabastante compacta para a solução simples doconversor de freqüência e do motor como unidadesseparadas. O conversor de freqüência é então ligado àcaixa do terminal do motor, e não é mais alto do que acaixa do terminal padrão nem mais largo nem maiscomprido do que o motor (vide capítulo 6).
A instalação é extremamente fácil. O espaço do painelnão constitui um problema. Não são necessáriosdetalhes especiais sobre a fiação para seguir a diretivaEMC uma vez que os cabos do motor não
são necessários. As únicas conexões são a rede elétricae as conexões de controle.
A configuração de fábrica do conversor da freqüênciado motor dá um controle eficiente e preciso da energia,além de eliminar a pré-configuração no local.
O motor FC pode ser usado em sistemasindependentes com sinais de controle tradicionais,como sinais de partida/parada, referências develocidade e um controle do processo de malhafechada ou em sistemas de acionamentos múltiploscom sinais de controle distribuídos por uma via decomunicação serial de campo (field bus).
É possível combinar uma via de comunicação serial decampo com sinais de controle tradicionais e com umcontrole PID de malha fechada.

FCM da Série 300
9MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 4Capítulo 4Capítulo 4Capítulo 4Capítulo 4 Gama de produtos ..................................... página 10
Pedidos ...................................................... página 10
Seleção
do
mo
tor FC

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss10
Gama de produtosVLT® DriveMotor da Série 300 FCM,motores de 2 ou 4 pólosTipo Potência Alimentação
do motorFCMFCMFCMFCMFCM 305305305305305 0,55 kWFCMFCMFCMFCMFCM 307307307307307 0,75 kWFCMFCMFCMFCMFCM 311311311311311 1,1 kWFCMFCMFCMFCMFCM 315315315315315 1,5 kWFCMFCMFCMFCMFCM 322322322322322 2,2 kW trifásica de 380-480 VFCMFCMFCMFCMFCM 330330330330330 3,0 kWFCMFCMFCMFCMFCM 340340340340340 4,0 kWFCMFCMFCMFCMFCM 355*355*355*355*355* 5,5 kWFCMFCMFCMFCMFCM 375*375*375*375*375* 7,5 kW
Cada tipo da gama de produtos está disponível emdiferentes versões.
Versões do InversorControle do Drive:- ST: versão Standard- SP: versão para PROFIBUS
Filtro RFI:Inversor com filtro RFI integrado, classe A1 (industrial)ou classe B1 (doméstico).
Refrigeração:- TEVF: Motor refrigerado por um ventilador
acoplado ao eixo (IC 411)- FV: Motor refrigerado por um ventilador
independente (IC 416)
Versões da montagem- Montagem pés (B3)- Montagem flange (B5)- Montagem lateral (B14)- Montagem da base + flange (B35)- Montagem da base + lateral (B34)Vide capítulo 6.
Posição da caixa do inversor: No topo, no lado direitoou no lado esquerdo.Furo de drenagem (+ posição): Nenhum, entre pés,nos pés opostos, extremidade do acionamentovertical, extremidade vertical sem acionamento, 90° àdireita do pé, 90° à esquerda do pé.Kits de freios: Sem freios, freios com ou semdesengate manual.
Sel
eção
do
mo
tor
FC
PedidoTire uma cópia dos formulários de pedido da página 12.Preencha e envie o seu pedido pelo correio ou fax paraa filial de vendas mais próxima da Danfoss.
Com base no seu pedido, o motor FCM da Série 300recebe um código, que é composto da seguinte forma:
FCM 330-P-T4-ST-S55-R1-100LT-4-1-B05-215-T-D1
Isto significa que o motor FC encomendado é umFCM 330 para uma tensão de rede trifásica de 380-480 V (T4) para aplicações de processos (P). Oinversor é uma versão standard para controle remoto(ST) em uma carcaça IP 55 (S55) com filtro RFIintegrado, classe A1 (R1). O tamanho da carcaça domotor é 100LT. O motor dispõe de 4 polos (4) e érefrigerado por um ventilador acoplado ao eixo (1). Omotor é para montagem em flange (B05) e o tamanhoda flange é 215 mm. A caixa do inversor é montadano topo do motor (T) e o furo de drenagem estálocalizado entre os pés (D1).
Se desejar fazer o seu pedido utilizando diretamente ocódigo, por favor utilize os códigos dados entreparêntesis no lado esquerdo dos formulários depedidos. A seqüência de caracteres do código é escritano topo de cada parte do formulário (número docaractere).
O formulário de pedido da unidade básica deve sersempre completado. Quando o código for escrito,escreva sempre os caracteres da seqüência básica (1-30). Junto com a confirmação do pedido, o clienterecebe um código de 8 caracteres que deverá serutilizado quando for feito um novo pedido.
Software PC da Danfoss para comunicação serialTodas as unidades FCM da Série 300 têm uma portaRS 485 padrão, que lhes permite comunicar, p. ex.,com um PC. Um programa intitulado VLT SoftwareDialog está disponível com este objetivo (vide capítulo 9).
Números de pedidos, VLT® Software DialogVLT® Software Dialog 175Z0953
Inclui os módulos Basic, Logging, Template, Guided Tour em6 idiomas (dinamarquês, inglês, alemão, italiano, espanhol efrancês).
Acessórios para o motor FCEstá disponível, para o motor FC, uma Base Local deOperação (Local Operation Pad - LOP) para o ponto deajuste local e para a partida/parada. O LOP vemacondicionado em um IP 66. Também está disponívelum Painel de Controle Local (Local Control Panel -LCP 2), que constitui uma completa interface deoperação, programação e monitoramento do motor FC.
Números de pedido, acessórios:Teclado de Operação Local (LOP) 175N0128Painel de Controle Local (LCP 2) 175N0131Kit de montagem remota (LCP 2) 175N0160Kit de plugues (LCP 2) 175N0161Cabo do kit de plugues (LCP 2) 175N0162Cabo (montagem direta) (LCP 2) 175N0165Kit de plugues de serviço (LCP 2) 175N0166
FCM da Série 300
11MG.03.B6.28 - VLT é marca registrada Danfoss
Seleção
do
mo
tor FC
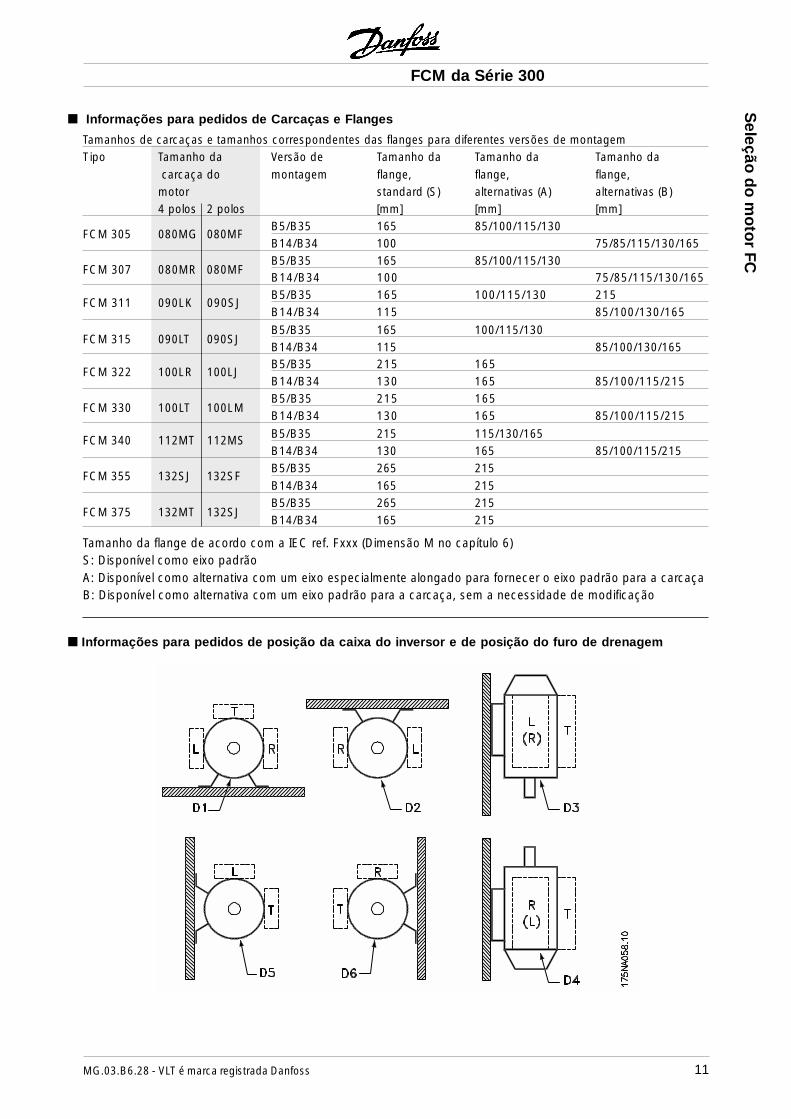
Tamanhos de carcaças e tamanhos correspondentes das flanges para diferentes versões de montagemTipo Tamanho da Versão de Tamanho da Tamanho da Tamanho da
carcaça do montagem flange, flange, flange,motor standard (S) alternativas (A) alternativas (B)4 polos 2 polos [mm] [mm] [mm]
FCM 305 080MG 080MFB5/B35 165 85/100/115/130B14/B34 100 75/85/115/130/165B5/B35 165 85/100/115/130
FCM 307 080MR 080MFB14/B34 100 75/85/115/130/165
FCM 311 090LK 090SJB5/B35 165 100/115/130 215B14/B34 115 85/100/130/165
B5/B35 165 100/115/130FCM 315 090LT 090SJ
B14/B34 115 85/100/130/165
FCM 322 100LR 100LJB5/B35 215 165B14/B34 130 165 85/100/115/215B5/B35 215 165
FCM 330 100LT 100LMB14/B34 130 165 85/100/115/215
FCM 340 112MT 112MS B5/B35 215 115/130/165B14/B34 130 165 85/100/115/215
FCM 355 132SJ 132SFB5/B35 265 215B14/B34 165 215B5/B35 265 215
FCM 375 132MT 132SJB14/B34 165 215
Informações para pedidos de Carcaças e Flanges
Tamanho da flange de acordo com a IEC ref. Fxxx (Dimensão M no capítulo 6)S: Disponível como eixo padrãoA: Disponível como alternativa com um eixo especialmente alongado para fornecer o eixo padrão para a carcaçaB: Disponível como alternativa com um eixo padrão para a carcaça, sem a necessidade de modificação
Informações para pedidos de posição da caixa do inversor e de posição do furo de drenagem

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss12
Número do FCM da Série 300 solicitado
Formulário de pedido FCM da Série 300
Tipo FCM (caractere n.º 1-6) FCMSelecione o tipo FCM necessário na gama de produ-tos da página anterior e preencha os quadrados.
Gama de aplicação (carac.n°.7)
(P) Processo
Tensão da rede (car. n.º 8-9)
(T4) trifásica 380-480 V CAMarque conforme apropriado.
Vs. do inversor (car. n.º 10-11)
(ST) Norma
(SP) PROFIBUSMarque conforme apropriado.
Proteção (car. n.º 12-14)
(S55) IP 55
(S56) IP 56
(S66) IP 66
Filtro RFI (car. n.º 15-16)
(R1) com filtro integrado, classe A1
(R2) com filtro integrado, classe B1Marque conforme apropriado.
Tamanho da carcaça (carac. n°.17-21):Preencha os quadrados com o valor apropriado dacoluna 2 e 3 na tabela da página 11.
Polaridade (car. n.º 22)
(4) 4 pólos
(2) 2 pólosMarque conforme apropriado.
Refrigeração (car. n.º 23)
(1) (IC 411) Ventilador acoplado ao eixo
(6) (IC 416) Unidade de ventilação forçadaMarque conforme apropriado.
Sel
eção
do
mo
tor
FC Formulário de pedido FCM da Série 300
Montagem vs. tamanho da flange (carac. n°.24-29)
(B03) B3 Pé 0 0 0
(B05) B5 Flange tamanho da flange
(B35) Pé e Flange tamanho da flange
(B14) Lateral tamanho da flange
(B34)Lateral e Face tamanho da flangeMarque quando for o caso e selecione o tamanho daflange na tabela da página 11.
Posição da caixa do inversor (car. n.º 30)
(T) Topo
(R) Lado direito
(L) Lado esquerdoMarque conforme apropriado.A posição da caixa do inversor é vista da extremidadedo acionador. (Ver desenho na página 11).
Posição do furo de drenagem (car. n.º 31-32)
(00) Nenhuma
(D1) Entre os pés
(D2) Nos pés opostos
(D3) Extremidade do acionamento vertical
(D4)Extremidade do sem-acionamento vertical
(D5) 90° à direita do pé
(D6) 90° à esquerda do péMarque conforme apropriado.(Ver desenho na página 11).
Outras opções (contate a
Danfoss para obter o código)
Pedido por:
Data:

FCM da Série 300
13MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 5Capítulo 5Capítulo 5Capítulo 5Capítulo 5 FCM 305-375 trifásico, 380-480 V ............. página 14
Dados técnicos gerais ................................ página 14
Dad
os técnico
s
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss14
Dad
os
técn
ico
s
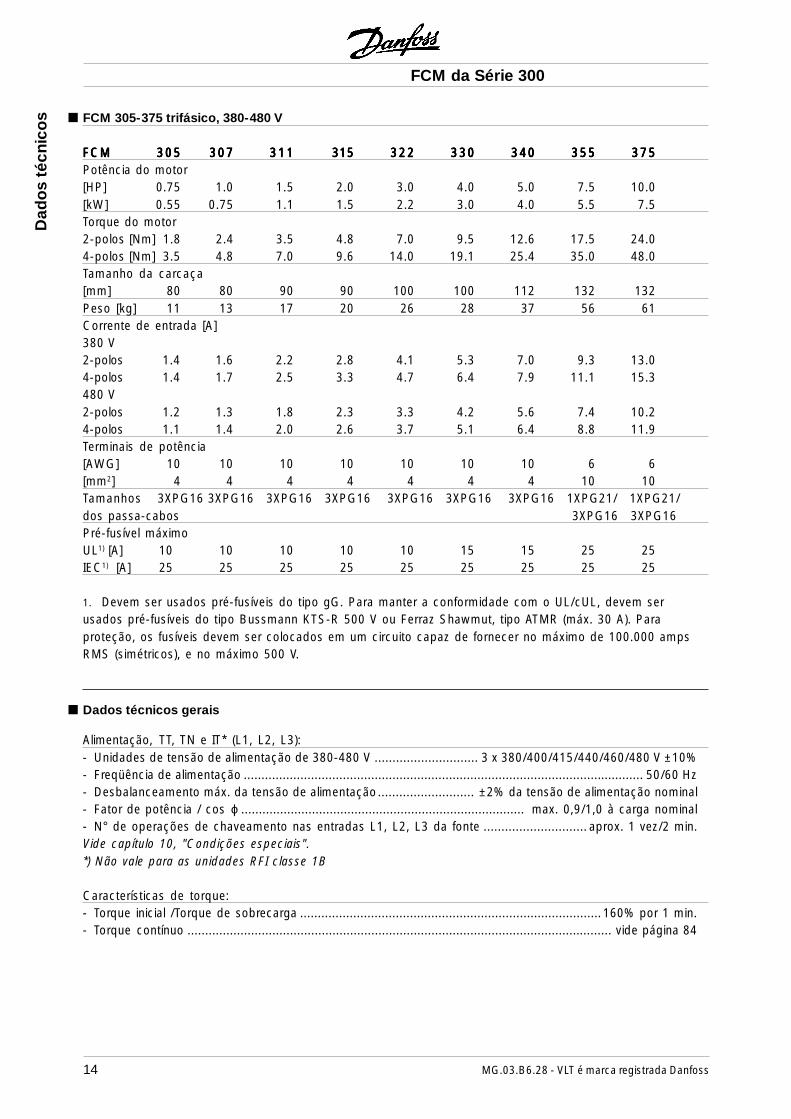
Alimentação, TT, TN e IT* (L1, L2, L3):- Unidades de tensão de alimentação de 380-480 V ............................. 3 x 380/400/415/440/460/480 V ±10%- Freqüência de alimentação ................................................................................................................. 50/60 Hz- Desbalanceamento máx. da tensão de alimentação........................... ±2% da tensão de alimentação nominal- Fator de potência / cos ϕ ................................................................................ max. 0,9/1,0 à carga nominal- N° de operações de chaveamento nas entradas L1, L2, L3 da fonte ............................. aprox. 1 vez/2 min.Vide capítulo 10, "Condições especiais".*) Não vale para as unidades RFI classe 1B
Características de torque:- Torque inicial /Torque de sobrecarga ..................................................................................... 160% por 1 min.- Torque contínuo ........................................................................................................................ vide página 84
FCM 305-375 trifásico, 380-480 V
Dados técnicos gerais
FCMFCMFCMFCMFCM 305305305305305 307307307307307 311311311311311 315 315 315 315 315 322322322322322 330330330330330 340340340340340 355355355355355 375375375375375Potência do motor[HP] 0.75 1.0 1.5 2.0 3.0 4.0 5.0 7.5 10.0[kW] 0.55 0.75 1.1 1.5 2.2 3.0 4.0 5.5 7.5Torque do motor2-polos [Nm] 1.8 2.4 3.5 4.8 7.0 9.5 12.6 17.5 24.04-polos [Nm] 3.5 4.8 7.0 9.6 14.0 19.1 25.4 35.0 48.0Tamanho da carcaça[mm] 80 80 90 90 100 100 112 132 132Peso [kg] 11 13 17 20 26 28 37 56 61Corrente de entrada [A]380 V2-polos 1.4 1.6 2.2 2.8 4.1 5.3 7.0 9.3 13.04-polos 1.4 1.7 2.5 3.3 4.7 6.4 7.9 11.1 15.3480 V2-polos 1.2 1.3 1.8 2.3 3.3 4.2 5.6 7.4 10.24-polos 1.1 1.4 2.0 2.6 3.7 5.1 6.4 8.8 11.9Terminais de potência[AWG] 10 10 10 10 10 10 10 6 6[mm2] 4 4 4 4 4 4 4 10 10Tamanhos 3XPG16 3XPG16 3XPG16 3XPG16 3XPG16 3XPG16 3XPG16 1XPG21/ 1XPG21/dos passa-cabos 3XPG16 3XPG16Pré-fusível máximoUL1) [A] 10 10 10 10 10 15 15 25 25IEC1) [A] 25 25 25 25 25 25 25 25 25
1. Devem ser usados pré-fusíveis do tipo gG. Para manter a conformidade com o UL/cUL, devem serusados pré-fusíveis do tipo Bussmann KTS-R 500 V ou Ferraz Shawmut, tipo ATMR (máx. 30 A). Paraproteção, os fusíveis devem ser colocados em um circuito capaz de fornecer no máximo de 100.000 ampsRMS (simétricos), e no máximo 500 V.
FCM da Série 300
15MG.03.B6.28 - VLT é marca registrada Danfoss
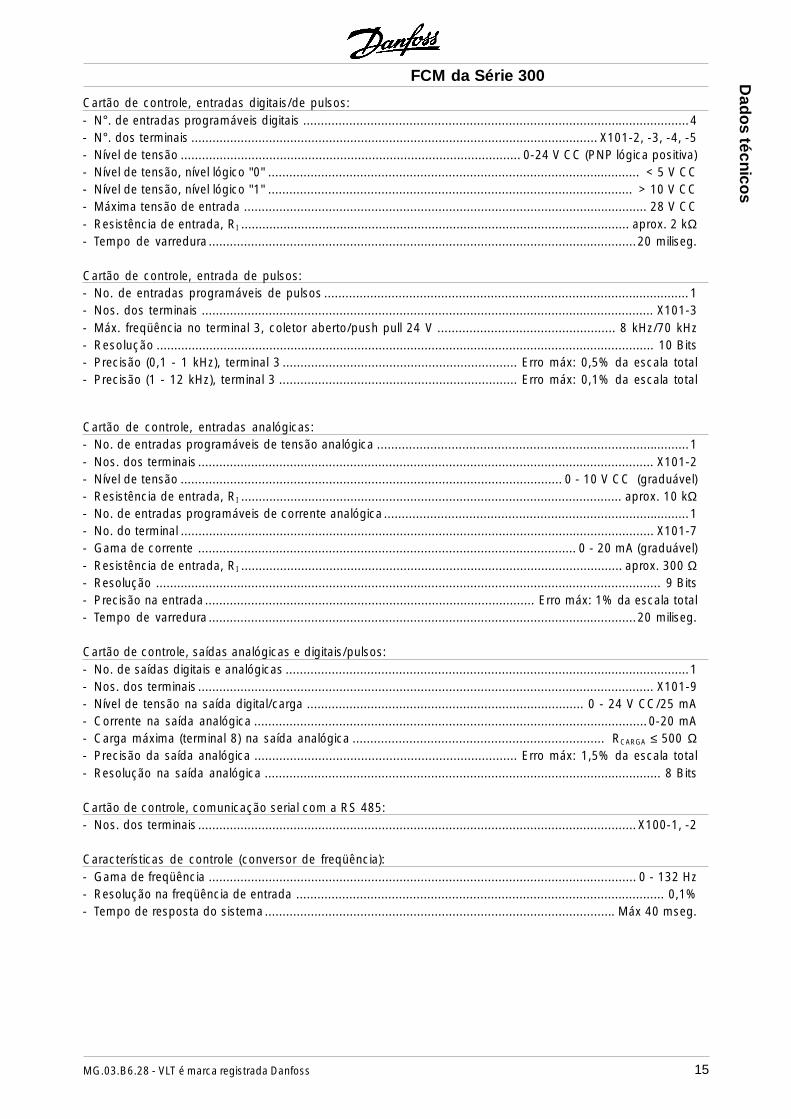
Cartão de controle, entradas digitais/de pulsos:- N°. de entradas programáveis digitais .............................................................................................................4- N°. dos terminais ................................................................................................................... X101-2, -3, -4, -5- Nível de tensão ................................................................................................ 0-24 V CC (PNP lógica positiva)- Nível de tensão, nível lógico "0" ......................................................................................................... < 5 V CC- Nível de tensão, nível lógico "1" ....................................................................................................... > 10 V CC- Máxima tensão de entrada .................................................................................................................. 28 V CC- Resistência de entrada, RI .............................................................................................................. aprox. 2 kΩ- Tempo de varredura .........................................................................................................................20 miliseg.
Cartão de controle, entrada de pulsos:- No. de entradas programáveis de pulsos ....................................................................................................... 1- Nos. dos terminais ................................................................................................................................ X101-3- Máx. freqüência no terminal 3, coletor aberto/push pull 24 V .................................................. 8 kHz/70 kHz- Resolução ............................................................................................................................................. 10 Bits- Precisão (0,1 - 1 kHz), terminal 3 .................................................................. Erro máx: 0,5% da escala total- Precisão (1 - 12 kHz), terminal 3 ................................................................... Erro máx: 0,1% da escala total
Cartão de controle, entradas analógicas:- No. de entradas programáveis de tensão analógica ........................................................................................1- Nos. dos terminais ................................................................................................................................. X101-2- Nível de tensão ............................................................................................................ 0 - 10 V CC (graduável)- Resistência de entrada, RI ............................................................................................................ aprox. 10 kΩ- No. de entradas programáveis de corrente analógica ......................................................................................1- No. do terminal ...................................................................................................................................... X101-7- Gama de corrente ........................................................................................................... 0 - 20 mA (graduável)- Resistência de entrada, RI ............................................................................................................ aprox. 300 Ω- Resolução ............................................................................................................................................... 9 Bits- Precisão na entrada ............................................................................................. Erro máx: 1% da escala total- Tempo de varredura .........................................................................................................................20 miliseg.
Cartão de controle, saídas analógicas e digitais/pulsos:- No. de saídas digitais e analógicas ..................................................................................................................1- Nos. dos terminais ................................................................................................................................. X101-9- Nível de tensão na saída digital/carga .............................................................................. 0 - 24 V CC/25 mA- Corrente na saída analógica ............................................................................................................... 0-20 mA- Carga máxima (terminal 8) na saída analógica ....................................................................... RCARGA ≤ 500 Ω- Precisão da saída analógica .......................................................................... Erro máx: 1,5% da escala total- Resolução na saída analógica ................................................................................................................ 8 Bits
Cartão de controle, comunicação serial com a RS 485:- Nos. dos terminais ............................................................................................................................ X100-1, -2
Características de controle (conversor de freqüência):- Gama de freqüência ......................................................................................................................... 0 - 132 Hz- Resolução na freqüência de entrada ........................................................................................................ 0,1%- Tempo de resposta do sistema................................................................................................... Máx 40 mseg.
Dad
os técnico
s
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss16
Dad
os
técn
ico
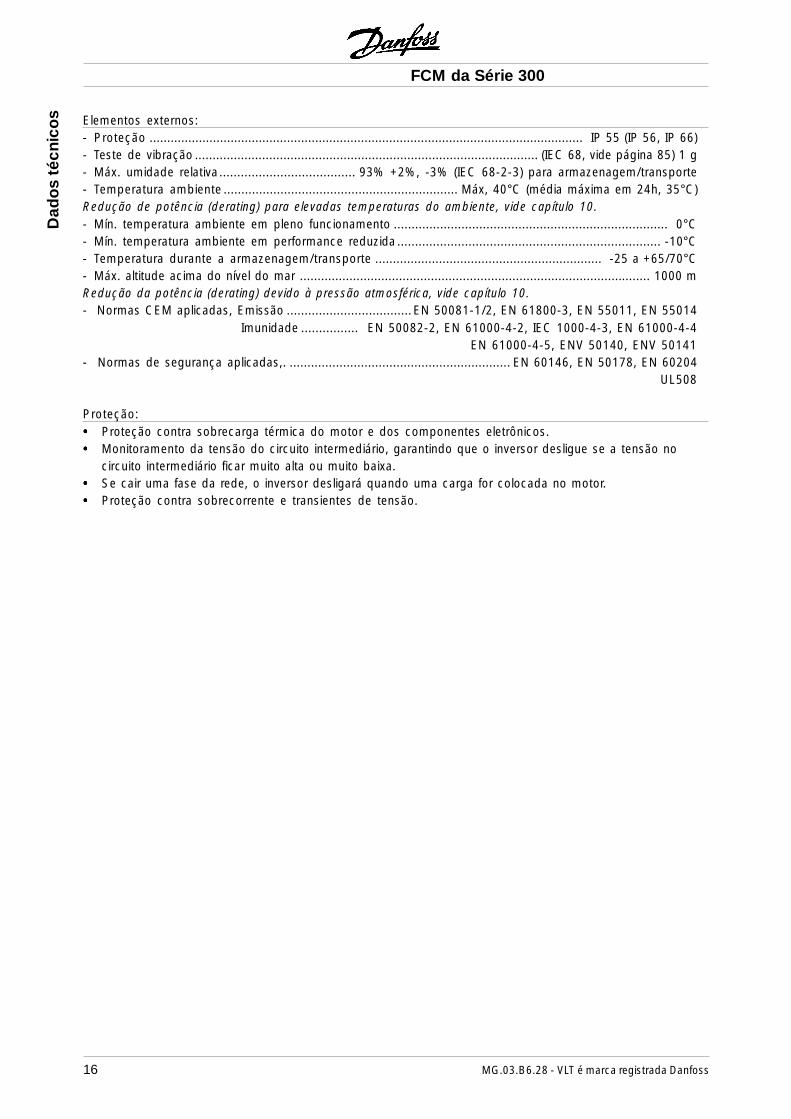
s Elementos externos:- Proteção ........................................................................................................................... IP 55 (IP 56, IP 66)- Teste de vibração ................................................................................................. (IEC 68, vide página 85) 1 g- Máx. umidade relativa...................................... 93% +2%, -3% (IEC 68-2-3) para armazenagem/transporte- Temperatura ambiente .................................................................. Máx, 40°C (média máxima em 24h, 35°C)Redução de potência (derating) para elevadas temperaturas do ambiente, vide capítulo 10.- Mín. temperatura ambiente em pleno funcionamento ............................................................................. 0°C- Mín. temperatura ambiente em performance reduzida .......................................................................... -10°C- Temperatura durante a armazenagem/transporte ................................................................ -25 a +65/70°C- Máx. altitude acima do nível do mar ................................................................................................... 1000 mRedução da potência (derating) devido à pressão atmosférica, vide capítulo 10.- Normas CEM aplicadas, Emissão ...................................EN 50081-1/2, EN 61800-3, EN 55011, EN 55014
Imunidade ................ EN 50082-2, EN 61000-4-2, IEC 1000-4-3, EN 61000-4-4EN 61000-4-5, ENV 50140, ENV 50141
- Normas de segurança aplicadas,. .............................................................. EN 60146, EN 50178, EN 60204 UL508
Proteção:••••• Proteção contra sobrecarga térmica do motor e dos componentes eletrônicos.••••• Monitoramento da tensão do circuito intermediário, garantindo que o inversor desligue se a tensão no
circuito intermediário ficar muito alta ou muito baixa.••••• Se cair uma fase da rede, o inversor desligará quando uma carga for colocada no motor.••••• Proteção contra sobrecorrente e transientes de tensão.

FCM da Série 300
17MG.03.B6.28 - VLT é marca registrada Danfoss
Disposição dos terminais (para a instalação, vide o Setup Rápido MG.03.Fx.xx)
X101: Bloco de terminais para os sinais de controle analógico/digital
N° do terminal Função Exemplo1 Entrada analógica (0-20 mA) Sinal de feedback2 Entrada analógica(0-10V)/digital 2 Referência de velocidade3 Entrada digital (ou pulso) 3 Reset4 Entrada digital (ou parada precisa) 4 Partida5 Entrada digital (ou outra) 5 Jog (velocidade fixa)6 Alimentação de 24 VCC para entradas digitais (máx. 150 mA)7 Alimentação de 10 VCC para potenciômetro (máx. 15 mA)8 0 V para os terminais 1-7 e 99 Saída analógica(0-20 mA)/digital Indicação de falha
X100:Bloco de terminais para a comunicação de dados
N° do terminal Função1 P RS 485 para conexão com2 N RS 485 o bus ou PC3 5 V DC Alimentação para4 0 V DC o bus da RS 485
Para as versões do PROFIBUS, consulte o manualMG90AXYY.
LED 300-304LED 300 (vermelho): Trip por falhaLED 301 (amarelo): AdvertênciaLED 302 (verde): Sistema ligadoLED 303-304: Comunicação
- Reset a ser fechado por pouco
tempo para resetar os trips por falha
- Partida a ser fechada para mudar
para o modo de funcionamento
- Jog funcionará em velocidade fixa
enquanto estiver fechado (10 Hz)
- Referência de velocidade (0-10 V)
determina a velocidade enquanto
estiver no modo de funcionamento
Diagrama de conexão - programação de fábrica
Screen
Reset (pushbutton)
Partida
Jog
Refer. de velocidade
Dad
os técnico
s

FCM da Série 300
19MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 6Capítulo 6Capítulo 6Capítulo 6Capítulo 6 Descrição do motor FC ............................. página 20
Manuseio do motor FC .............................. página 21
Dimensões ................................................. página 22
Instalação do motor FC ............................. página 24
Manutenção .............................................. página 25
Unidades de ventilação forçada ................ página 26
Esp
ecificações m
ecânicas

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss20
Esp
ecifi
caçõ
es m
ecân
icas
ItemItemItemItemItem DescriçãoDescriçãoDescriçãoDescriçãoDescrição1 Palheta (quando ajustado)2 Vedação do óleo da extremidade do
acionador3 Parafuso de blindagem lateral4 Acionador e blindagem lateral5 Arruela de pré-carga6 Rolamento7 Chave do eixo8 Conjunto do rotor9 Conjunto do estator, com ou sem pés10 Bloco do conector11 Gaxeta12 Pé destacável13 Arruela e parafuso de fixação do pé14 Trava do pino de retenção do rolamento15 Blindagem lateral não acionada16 Pino de retenção do rolamento17 Ventilador18 Tampa do ventilador
ItemItemItemItemItem DescriçãoDescriçãoDescriçãoDescriçãoDescrição19 Arruela e parafuso da tampa do ventilador20 Batoque aparafusado21 O-ring22 Caixa ISM23 Estrape do cabo24 Parafusos do estrape do cabo25 Tampa da caixa ISM26 Parafuso27 Arruela28 Blindagem lateral da face29 Blindagem lateral da flange30 Mossa do freio31 Pino de retenção da mossa do freio32 Chapa do adaptador e do freio33 Eixo do macho curto34 Tampa do ventilador do freio35 Tampa do ventilador de ventilação forçada36 Caixa do terminal
Descrição do motor FC:O motor FC consiste nas seguintes peças:
FCM da Série 300
21MG.03.B6.28 - VLT é marca registrada Danfoss
Esp
ecificações m
ecânicas
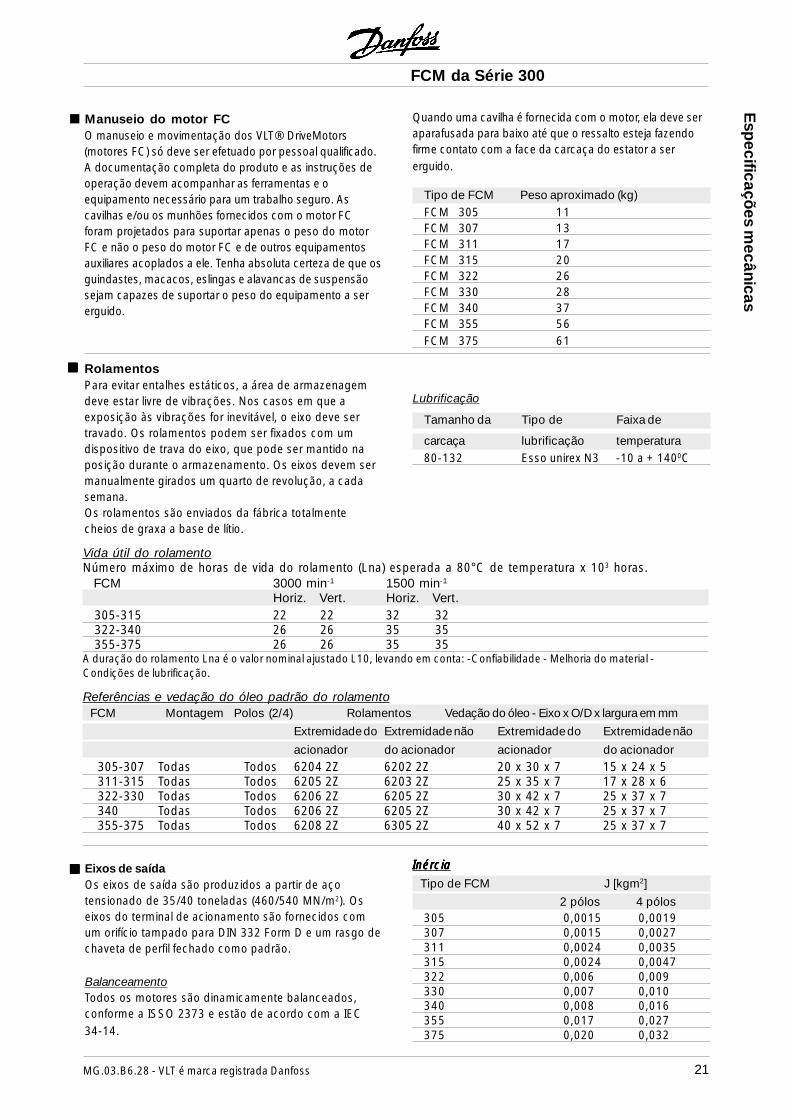
O manuseio e movimentação dos VLT® DriveMotors(motores FC) só deve ser efetuado por pessoal qualificado.A documentação completa do produto e as instruções deoperação devem acompanhar as ferramentas e oequipamento necessário para um trabalho seguro. Ascavilhas e/ou os munhões fornecidos com o motor FCforam projetados para suportar apenas o peso do motorFC e não o peso do motor FC e de outros equipamentosauxiliares acoplados a ele. Tenha absoluta certeza de que osguindastes, macacos, eslingas e alavancas de suspensãosejam capazes de suportar o peso do equipamento a sererguido.
Manuseio do motor FC Quando uma cavilha é fornecida com o motor, ela deve seraparafusada para baixo até que o ressalto esteja fazendofirme contato com a face da carcaça do estator a sererguido.
Tipo de FCM Peso aproximado (kg)FCM 305 11FCM 307 13FCM 311 17FCM 315 20FCM 322 26FCM 330 28FCM 340 37FCM 355 56FCM 375 61
RolamentosPara evitar entalhes estáticos, a área de armazenagemdeve estar livre de vibrações. Nos casos em que aexposição às vibrações for inevitável, o eixo deve sertravado. Os rolamentos podem ser fixados com umdispositivo de trava do eixo, que pode ser mantido naposição durante o armazenamento. Os eixos devem sermanualmente girados um quarto de revolução, a cadasemana.Os rolamentos são enviados da fábrica totalmentecheios de graxa a base de lítio.
Lubrificação
Tamanho da Tipo de Faixa de
carcaça lubrificação temperatura80-132 Esso unirex N3 -10 a + 1400C
Vida útil do rolamentoNúmero máximo de horas de vida do rolamento (Lna) esperada a 80°C de temperatura x 103 horas.
FCM 3000 min-1 1500 min-1
Horiz. Vert. Horiz. Vert. 305-315 22 22 32 32 322-340 26 26 35 35 355-375 26 26 35 35
A duração do rolamento Lna é o valor nominal ajustado L10, levando em conta: -Confiabilidade - Melhoria do material -Condições de lubrificação.
Referências e vedação do óleo padrão do rolamentoFCM Montagem Polos (2/4) Rolamentos Vedação do óleo - Eixo x O/D x largura em mm
Extremidade do Extremidade não Extremidade do Extremidade não
acionador do acionador acionador do acionador305-307 Todas Todos 6204 2Z 6202 2Z 20 x 30 x 7 15 x 24 x 5311-315 Todas Todos 6205 2Z 6203 2Z 25 x 35 x 7 17 x 28 x 6322-330 Todas Todos 6206 2Z 6205 2Z 30 x 42 x 7 25 x 37 x 7340 Todas Todos 6206 2Z 6205 2Z 30 x 42 x 7 25 x 37 x 7355-375 Todas Todos 6208 2Z 6305 2Z 40 x 52 x 7 25 x 37 x 7
Eixos de saídaOs eixos de saída são produzidos a partir de açotensionado de 35/40 toneladas (460/540 MN/m2). Oseixos do terminal de acionamento são fornecidos comum orifício tampado para DIN 332 Form D e um rasgo dechaveta de perfil fechado como padrão.
BalanceamentoTodos os motores são dinamicamente balanceados,conforme a ISSO 2373 e estão de acordo com a IEC34-14.
InérciaInérciaInérciaInérciaInércia
Tipo de FCM J [kgm2]
2 pólos 4 pólos305 0,0015 0,0019307 0,0015 0,0027311 0,0024 0,0035315 0,0024 0,0047322 0,006 0,009330 0,007 0,010340 0,008 0,016355 0,017 0,027375 0,020 0,032

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss22
FCMFCMFCMFCMFCM 305305305305305 307307307307307 311311311311311 315315315315315 322322322322322 330330330330330 340340340340340 355355355355355 375375375375375TTTTTam. da caram. da caram. da caram. da caram. da carcaçacaçacaçacaçacaça 8080808080 8080808080 9090909090 9090909090 100100100100100 100100100100100 112112112112112 132132132132132 132132132132132D [mm] 19 19 24 24 28 28 28 38 38E [mm] 40 40 50 50 60 60 60 80 80ED [mm] 32 32 40 40 50 50 50 70 70ED1 [mm] 4 4 5 5 5 5 5 5 5DH M6x16 M6x16 M8x19 M8x19 M10x22 M10x22 M10x22 M12x28 M12x28F [mm] 6 6 8 8 8 8 8 10 10G [mm] 15,5 15,5 20 20 24 24 24 33 33
Montagem em pé - B3Montagem em pé - B3Montagem em pé - B3Montagem em pé - B3Montagem em pé - B3
FCMFCMFCMFCMFCM
GeralGeralGeralGeralGeral 305305305305305 307307307307307 311311311311311 315315315315315 322322322322322 330330330330330 340340340340340 355355355355355 375375375375375TTTTTam. da caram. da caram. da caram. da caram. da carcaçacaçacaçacaçacaça 8080808080 8080808080 9090909090 9090909090 100100100100100 100100100100100 112112112112112 132132132132132 132132132132132A [mm] 125 125 140 140 160 160 190 216 216B [mm] 100 100 125 125 140 140 140 140 178C [mm] 50 50 56 56 63 63 70 89 89H [mm] 80 80 90 90 100 100 112 132 132K [mm] 10 10 10 10 12 12 12 12 12AA [mm] 27 27 28 28 28 28 35 38 38AB [mm] 157 157 165 165 184 184 218 242 242BB [mm] 127 127 152 152 170 170 170 208 208BC [mm] 13,5 13,5 38,5 13,5 15 15 15 53 15L [mm] 298 298 342 342 397 397 410 490 490AC [mm] 158 158 178 178 199 199 215 255 255HD [mm] 219,5 219,5 234 234 264 264 291 335 335EB [mm] 1,5 1,5 1,5 1,5 6 6 6 6 6FCL [mm] 206 206 230 230 256 256 286 358 358FCW[mm] 141 141 158 158 176 176 197 245 245
Extremidade do eixo do acionadorExtremidade do eixo do acionadorExtremidade do eixo do acionadorExtremidade do eixo do acionadorExtremidade do eixo do acionador
Esp
ecifi
caçõ
es m
ecân
icas Dimensões
FCM da Série 300
23MG.03.B6.28 - VLT é marca registrada Danfoss
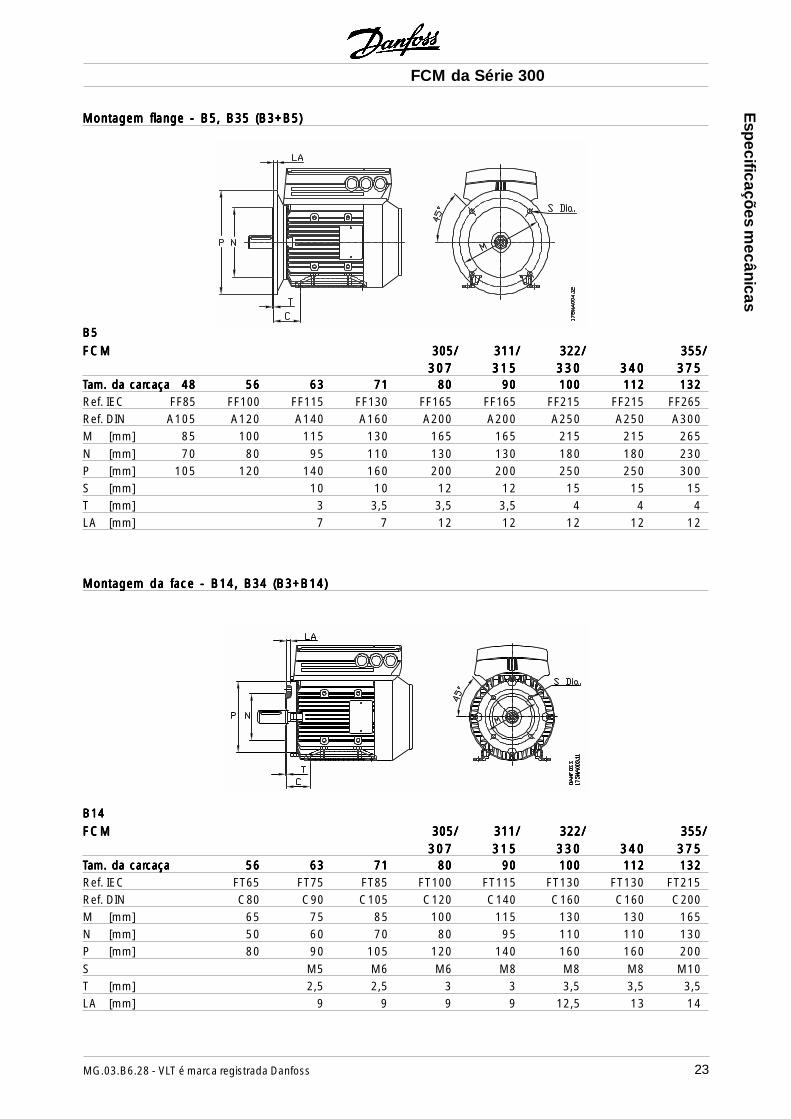
B14B14B14B14B14
FCMFCMFCMFCMFCM 305/ 305/ 305/ 305/ 305/ 311/ 311/ 311/ 311/ 311/ 322/ 322/ 322/ 322/ 322/ 355/ 355/ 355/ 355/ 355/307307307307307 315315315315315 330330330330330 340340340340340 375375375375375
TTTTTam. da caram. da caram. da caram. da caram. da carcaçacaçacaçacaçacaça 5656565656 6363636363 7171717171 8080808080 9090909090 100100100100100 112112112112112 132132132132132Ref. IEC FT65 FT75 FT85 FT100 FT115 FT130 FT130 FT215Ref. DIN C80 C90 C105 C120 C140 C160 C160 C200M [mm] 65 75 85 100 115 130 130 165N [mm] 50 60 70 80 95 110 110 130P [mm] 80 90 105 120 140 160 160 200S M5 M6 M6 M8 M8 M8 M10T [mm] 2,5 2,5 3 3 3,5 3,5 3,5LA [mm] 9 9 9 9 12,5 13 14
Montagem flange - B5, B35 (B3+B5)Montagem flange - B5, B35 (B3+B5)Montagem flange - B5, B35 (B3+B5)Montagem flange - B5, B35 (B3+B5)Montagem flange - B5, B35 (B3+B5)
B5B5B5B5B5
FCMFCMFCMFCMFCM 305/ 305/ 305/ 305/ 305/ 311/ 311/ 311/ 311/ 311/ 322/ 322/ 322/ 322/ 322/ 355/ 355/ 355/ 355/ 355/307307307307307 315315315315315 330330330330330 340340340340340 375375375375375
TTTTTam. da caram. da caram. da caram. da caram. da carcaçacaçacaçacaçacaça 4848484848 5656565656 6363636363 7171717171 8080808080 9090909090 100100100100100 112112112112112 132132132132132Ref. IEC FF85 FF100 FF115 FF130 FF165 FF165 FF215 FF215 FF265Ref. DIN A105 A120 A140 A160 A200 A200 A250 A250 A300M [mm] 85 100 115 130 165 165 215 215 265N [mm] 70 80 95 110 130 130 180 180 230P [mm] 105 120 140 160 200 200 250 250 300S [mm] 10 10 12 12 15 15 15T [mm] 3 3,5 3,5 3,5 4 4 4LA [mm] 7 7 12 12 12 12 12
Montagem da face - B14, B34 (B3+B14)Montagem da face - B14, B34 (B3+B14)Montagem da face - B14, B34 (B3+B14)Montagem da face - B14, B34 (B3+B14)Montagem da face - B14, B34 (B3+B14)
Esp
ecificações m
ecânicas

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss24
Instalação do motor FC
Os motores FC devem ser instalados com o espaçoadequado para a manutenção de rotina. Recomenda-sedeixar livre um mínimo de 0,75 m de espaço de manobraem torno do motor. O espaço apropriado em torno domotor, especialmente na entrada do ventilador (50 mm) étambém necessário para facilitar o fluxo de ar.Em um local onde vários motores FC estão instaladospróximos uns dos outros, deve-se tomar cuidado paraassegurar que não haja re-circulação do ar quenteoriundo da exaustão. Os alicerces devem ser sólidos,rígidos e nivelados.
Ajustando pinhões, roldanas e acoplamentos.Ajustando pinhões, roldanas e acoplamentos.Ajustando pinhões, roldanas e acoplamentos.Ajustando pinhões, roldanas e acoplamentos.Ajustando pinhões, roldanas e acoplamentos.Estes devem Ter diâmetro compatível com os nossoslimites padrão e ajustados no eixo com um movimentode rosca. Deve-se prestar atenção à correta proteção detodas as partes móveis.
O rosqueamento dos encaixes no eixo domotor FC com um martelo ou marreta causadanos ao rolamento. Isto leva a um aumento
no ruído gerado pelo rolamento e em uma reduçãosignificativa em sua vida útil.
Esp
ecifi
caçõ
es m
ecân
icas
Quando a aplicação necessitar de um acoplamentodireto, os eixos devem estar corretamente alinhadosem todos os três planos. Um mau alinhamento podeser uma fonte importante de ruído e vibração.
Deve-se deixar espaço para a flutuação da extremidade epara a expansão térmica em ambos os planos axial evertical. É preferível usar acoplamentos de acionamentoflexível.
Alinhamento
Cargas máximas permissíveis axial e radial externas em N1 - rolamentos de esfera padrão
Eixo horizontal Eixo vertical
Carga em direção Carga se afasta Eixo para cima Eixo para cima
Tamanho da ao motor do motor Carga Carga Carga Carga
carcaça Pólos Acima Abaixo Acima Abaixo Max. radial2
80 2 275 441 481 245 294 432 6384 373 549 569 343 392 520 785
90 2 412 638 598 294 373 520 8244 540 765 716 402 471 628 903
100 2 853 853 932 932 814 814 12074 1010 1010 1118 1118 961 961 1393
112 2 853 853 932 932 814 814 12074 1010 1010 1118 1118 961 961 1393
132S 2 1059 1403 1570 952 1216 1305 17854 1265 1609 1825 1138 1472 1481 1972
132M 4 1256 1609 1854 1109 1501 1462 2040
1 Todos os valores são baseados na duração de 20.000 horas do rolamento Lna.Lna = valor nominal de duração ajustado para L10, levando em conta: -Confiabilidade - Melhoria do material -Condições de lubrificação.
2 Carga radial máxima permissível na extremidade do eixo (montagem horizontal).
FCM da Série 300
25MG.03.B6.28 - VLT é marca registrada Danfoss
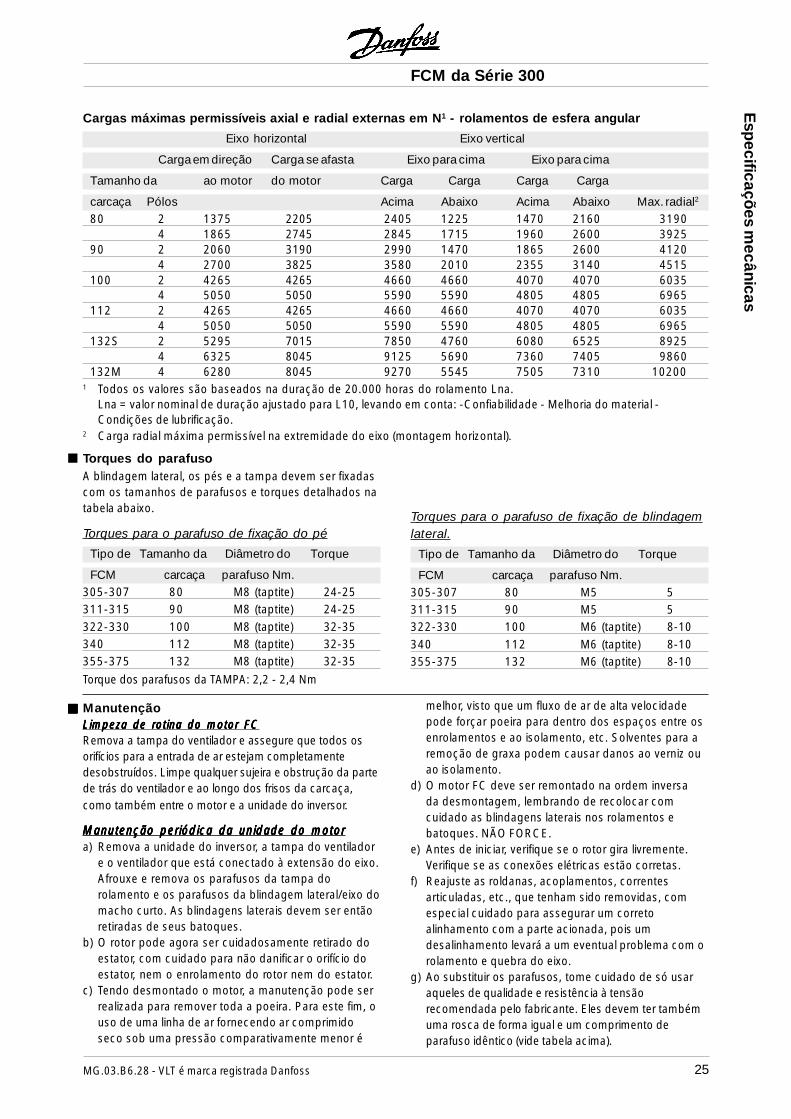
Cargas máximas permissíveis axial e radial externas em N1 - rolamentos de esfera angular
Eixo horizontal Eixo vertical
Carga em direção Carga se afasta Eixo para cima Eixo para cima
Tamanho da ao motor do motor Carga Carga Carga Carga
carcaça Pólos Acima Abaixo Acima Abaixo Max. radial2
80 2 1375 2205 2405 1225 1470 2160 31904 1865 2745 2845 1715 1960 2600 3925
90 2 2060 3190 2990 1470 1865 2600 41204 2700 3825 3580 2010 2355 3140 4515
100 2 4265 4265 4660 4660 4070 4070 60354 5050 5050 5590 5590 4805 4805 6965
112 2 4265 4265 4660 4660 4070 4070 60354 5050 5050 5590 5590 4805 4805 6965
132S 2 5295 7015 7850 4760 6080 6525 89254 6325 8045 9125 5690 7360 7405 9860
132M 4 6280 8045 9270 5545 7505 7310 102001 Todos os valores são baseados na duração de 20.000 horas do rolamento Lna.
Lna = valor nominal de duração ajustado para L10, levando em conta: -Confiabilidade - Melhoria do material -Condições de lubrificação.
2 Carga radial máxima permissível na extremidade do eixo (montagem horizontal).
Esp
ecificações m
ecânicas
Torques do parafusoA blindagem lateral, os pés e a tampa devem ser fixadascom os tamanhos de parafusos e torques detalhados natabela abaixo.
Torques para o parafuso de fixação do pé
Tipo de Tamanho da Diâmetro do Torque
FCM carcaça parafuso Nm.305-307 80 M8 (taptite) 24-25311-315 90 M8 (taptite) 24-25322-330 100 M8 (taptite) 32-35340 112 M8 (taptite) 32-35355-375 132 M8 (taptite) 32-35
Torques para o parafuso de fixação de blindagemlateral.
Tipo de Tamanho da Diâmetro do Torque
FCM carcaça parafuso Nm.305-307 80 M5 5311-315 90 M5 5322-330 100 M6 (taptite) 8-10340 112 M6 (taptite) 8-10355-375 132 M6 (taptite) 8-10
Torque dos parafusos da TAMPA: 2,2 - 2,4 Nm
ManutençãoLimpeza de rotina do motor FCLimpeza de rotina do motor FCLimpeza de rotina do motor FCLimpeza de rotina do motor FCLimpeza de rotina do motor FCRemova a tampa do ventilador e assegure que todos osorifícios para a entrada de ar estejam completamentedesobstruídos. Limpe qualquer sujeira e obstrução da partede trás do ventilador e ao longo dos frisos da carcaça,como também entre o motor e a unidade do inversor.
Manutenção periódica da unidade do motorManutenção periódica da unidade do motorManutenção periódica da unidade do motorManutenção periódica da unidade do motorManutenção periódica da unidade do motora) Remova a unidade do inversor, a tampa do ventilador
e o ventilador que está conectado à extensão do eixo.Afrouxe e remova os parafusos da tampa dorolamento e os parafusos da blindagem lateral/eixo domacho curto. As blindagens laterais devem ser entãoretiradas de seus batoques.
b) O rotor pode agora ser cuidadosamente retirado doestator, com cuidado para não danificar o orifício doestator, nem o enrolamento do rotor nem do estator.
c) Tendo desmontado o motor, a manutenção pode serrealizada para remover toda a poeira. Para este fim, ouso de uma linha de ar fornecendo ar comprimidoseco sob uma pressão comparativamente menor é
melhor, visto que um fluxo de ar de alta velocidadepode forçar poeira para dentro dos espaços entre osenrolamentos e ao isolamento, etc. Solventes para aremoção de graxa podem causar danos ao verniz ouao isolamento.
d) O motor FC deve ser remontado na ordem inversada desmontagem, lembrando de recolocar comcuidado as blindagens laterais nos rolamentos ebatoques. NÃO FORCE.
e) Antes de iniciar, verifique se o rotor gira livremente.Verifique se as conexões elétricas estão corretas.
f) Reajuste as roldanas, acoplamentos, correntesarticuladas, etc., que tenham sido removidas, comespecial cuidado para assegurar um corretoalinhamento com a parte acionada, pois umdesalinhamento levará a um eventual problema com orolamento e quebra do eixo.
g) Ao substituir os parafusos, tome cuidado de só usaraqueles de qualidade e resistência à tensãorecomendada pelo fabricante. Eles devem ter tambémuma rosca de forma igual e um comprimento deparafuso idêntico (vide tabela acima).
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss26
Esp
ecifi
caçõ
es m
ecân
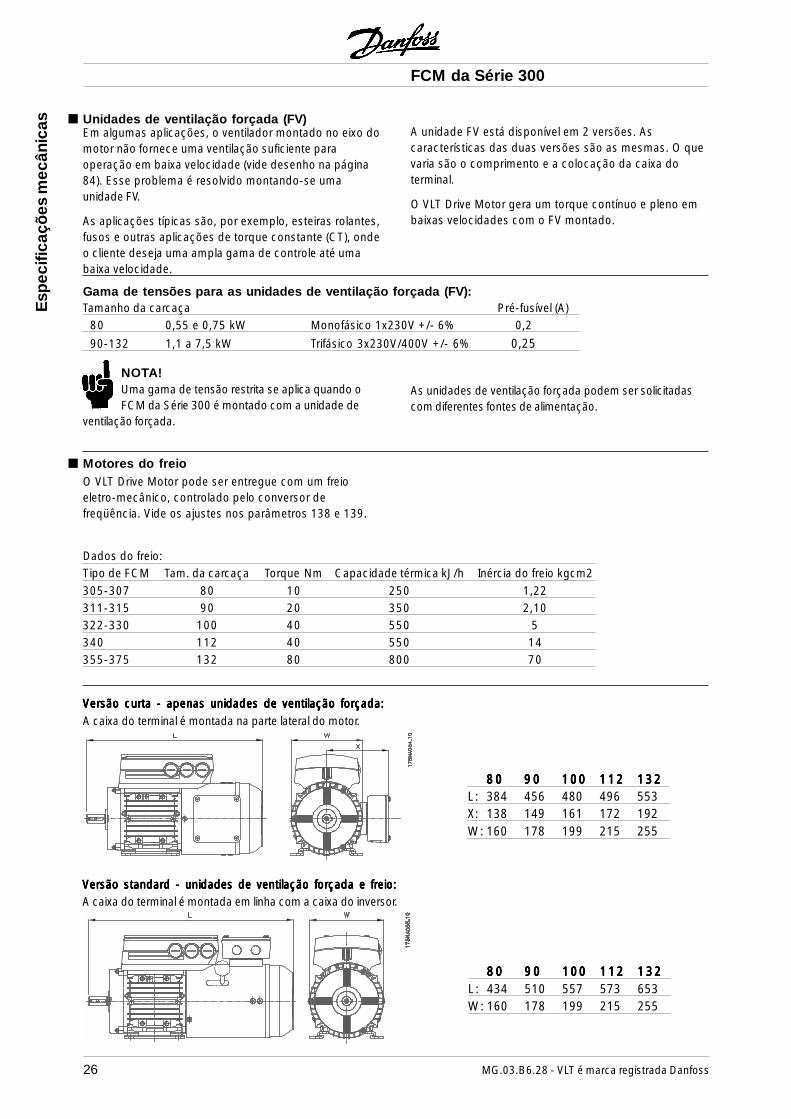
icas Unidades de ventilação forçada (FV)
Em algumas aplicações, o ventilador montado no eixo domotor não fornece uma ventilação suficiente paraoperação em baixa velocidade (vide desenho na página84). Esse problema é resolvido montando-se umaunidade FV.
As aplicações típicas são, por exemplo, esteiras rolantes,fusos e outras aplicações de torque constante (CT), ondeo cliente deseja uma ampla gama de controle até umabaixa velocidade.
A unidade FV está disponível em 2 versões. Ascaracterísticas das duas versões são as mesmas. O quevaria são o comprimento e a colocação da caixa doterminal.
O VLT Drive Motor gera um torque contínuo e pleno embaixas velocidades com o FV montado.
Versão curta - apenas unidades de ventilação forçada:Versão curta - apenas unidades de ventilação forçada:Versão curta - apenas unidades de ventilação forçada:Versão curta - apenas unidades de ventilação forçada:Versão curta - apenas unidades de ventilação forçada:A caixa do terminal é montada na parte lateral do motor.
8 08 08 08 08 0 9 09 09 09 09 0 100100100100100 112112112112112 132132132132132L: 384 456 480 496 553X: 138 149 161 172 192W: 160 178 199 215 255
Versão standard - unidades de ventilação forçada e freio:Versão standard - unidades de ventilação forçada e freio:Versão standard - unidades de ventilação forçada e freio:Versão standard - unidades de ventilação forçada e freio:Versão standard - unidades de ventilação forçada e freio:A caixa do terminal é montada em linha com a caixa do inversor.
8 08 08 08 08 0 9 09 09 09 09 0 100100100100100 112112112112112 132132132132132L: 434 510 557 573 653W: 160 178 199 215 255
Gama de tensões para as unidades de ventilação forçada (FV):Tamanho da carcaça Pré-fusível (A)
80 0,55 e 0,75 kW Monofásico 1x230V +/- 6% 0,2
90-132 1,1 a 7,5 kW Trifásico 3x230V/400V +/- 6% 0,25
NOTA!Uma gama de tensão restrita se aplica quando oFCM da Série 300 é montado com a unidade de
ventilação forçada.
Dados do freio:Tipo de FCM Tam. da carcaça Torque Nm Capacidade térmica kJ/h Inércia do freio kgcm2305-307 80 10 250 1,22311-315 90 20 350 2,10322-330 100 40 550 5340 112 40 550 14355-375 132 80 800 70
O VLT Drive Motor pode ser entregue com um freioeletro-mecânico, controlado pelo conversor defreqüência. Vide os ajustes nos parâmetros 138 e 139.
Motores do freio
As unidades de ventilação forçada podem ser solicitadascom diferentes fontes de alimentação.

FCM da Série 300
27MG.03.B6.28 - VLT é marca registrada Danfoss
Co
ntrole Lo
cal
Capítulo 7Capítulo 7Capítulo 7Capítulo 7Capítulo 7 Painel de controle ...................................... página 28
Display ........................................................ página 28
Funções das teclas .................................... página 29
Indicações e leituras do display ................. página 30
Modo display .............................................. página 30
Modo display - seleção da leitura .............. página 30
Modo menu rápido em comparaçãocom o modo menu .................................... página 31
Programação rápida medianteo menu rápido ............................................ página 31
Seleção de parâmetros ............................. página 32
Modo menu ............................................... página 32
Grupos de parâmetros ............................... página 32
Troca de dados .......................................... página 32
Troca de um texto ..................................... página 32
Troca infinitesimal do valornumérico dos dados .................................. página 33
Estrutura do menu ..................................... página 34
Kit do plugue de serviço ............................ página 35
Kit de plugues ............................................ página 35
Kit de montagem remota .......................... página 35
Local Operation Pad(LOP, painel de operação local) ................. página 36

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss28
Co
ntro
le L
oca
l Painel de controleO motor FC tem opcionalmente um Painel de ControleLocal - LCP 2 que faz uma interface completa paraoperação e monitoramento do motor FC.
NOTA!:O LCP da Série VLT 5000 (código 175Z0401)não pode ser usado para o motor FC. Entretanto,
o LCP 2 geral (código 175N0131) pode ser usado tantopara a Série VLT 5000, FCM 300 e VLT 2800.
Instalação do LCPO LCP 2 está conectado ao terminal X100, 1-4 (videinstrução separada MI.03.AX.YY).
Funções do LCPAs funções do painel de controle podem ser divididasem três grupos:
• display• teclas para mudar os parâmetros de programação• teclas para a operação local
Todos os dados são indicados no display alfanuméricode 4 linhas, que no funcionamento normal temcapacidade de apresentar sempre 4 variáveis deoperação e 3 condições de funcionamento. Durante aprogramação, todas as informações necessárias parauma programação de parâmetros rápida e eficiente omotor FC será exibido. Como suplemento ao display,existem três LEDs para tensão, advertência e alarme.Todos os parâmetros do programa do motor FC podemser mudados imediatamente no painel de controle,
A 3ª linha normalmente está em branco e é usada nomodo menu para apresentar o número do parâmetroselecionado ou o número do grupo do parâmetro e oseu nome.
A 4ª linha é usada no estado de funcionamento paraapresentar um texto de "status" ou no modo demudança de dados para apresentar o valor doparâmetro selecionado.
Uma seta indica o sentido da rotação do motor.Além disso, o Setup selecionado é apresentadocomo Setup Ativo no parâmetro 004. Ao
programar um Setup diferente do Setup Ativo, o númerodo Setup que está sendo programado aparecerá àdireita. Este segundo número de Setup ficará piscando.
LEDsNa parte inferior do painel de controle há um LEDvermelho de alarme, um LED amarelo de advertência eum LED verde indicador de tensão.
vermelho amarelo verde
DisplayO display no painel de controle local tem luz de fundo eum total de 4 linhas alfanuméricas juntas à um campoque apresenta a direção da rotação (seta) e o Setupselecionado bem como o set up no qual a programaçãoé efetuada, se for o caso.
1ª linha
2ª linha
3ª linha
4ª linha
A 1ª linha apresenta continuamente até 3 medidas, noestado de funcionamento normal, ou um texto queexplica a segunda linha.
A 2ª linha sempre apresenta uma medida com arespectiva unidade, independentemente do "status"(exceto no caso de alarme ou advertência).
12345678901234567890
1234567812345678901234567890
12345678901234567890
exceto se a função tiver sido bloqueada mediante oparâmetro 18.
FCM da Série 300
29MG.03.B6.28 - VLT é marca registrada Danfoss
Co
ntrole Lo
cal
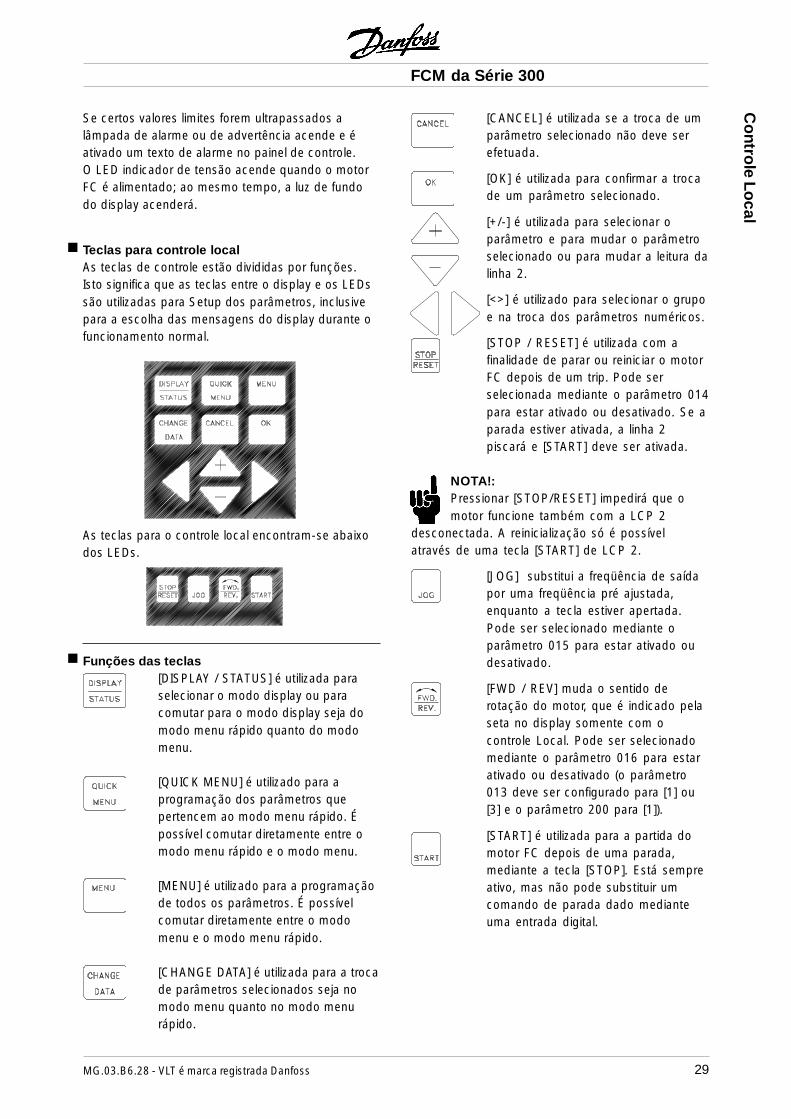
[CANCEL] é utilizada se a troca de umparâmetro selecionado não deve serefetuada.
[OK] é utilizada para confirmar a trocade um parâmetro selecionado.
[+/-] é utilizada para selecionar oparâmetro e para mudar o parâmetroselecionado ou para mudar a leitura dalinha 2.
[<>] é utilizado para selecionar o grupoe na troca dos parâmetros numéricos.
[STOP / RESET] é utilizada com afinalidade de parar ou reiniciar o motorFC depois de um trip. Pode serselecionada mediante o parâmetro 014para estar ativado ou desativado. Se aparada estiver ativada, a linha 2piscará e [START] deve ser ativada.
NOTA!:Pressionar [STOP/RESET] impedirá que omotor funcione também com a LCP 2
desconectada. A reinicialização só é possívelatravés de uma tecla [START] de LCP 2.
[JOG] substitui a freqüência de saídapor uma freqüência pré ajustada,enquanto a tecla estiver apertada.Pode ser selecionado mediante oparâmetro 015 para estar ativado oudesativado.
[FWD / REV] muda o sentido derotação do motor, que é indicado pelaseta no display somente com ocontrole Local. Pode ser selecionadomediante o parâmetro 016 para estarativado ou desativado (o parâmetro013 deve ser configurado para [1] ou[3] e o parâmetro 200 para [1]).
[START] é utilizada para a partida domotor FC depois de uma parada,mediante a tecla [STOP]. Está sempreativo, mas não pode substituir umcomando de parada dado medianteuma entrada digital.
Se certos valores limites forem ultrapassados alâmpada de alarme ou de advertência acende e éativado um texto de alarme no painel de controle.O LED indicador de tensão acende quando o motorFC é alimentado; ao mesmo tempo, a luz de fundodo display acenderá.
Teclas para controle localAs teclas de controle estão divididas por funções.Isto significa que as teclas entre o display e os LEDssão utilizadas para Setup dos parâmetros, inclusivepara a escolha das mensagens do display durante ofuncionamento normal.
As teclas para o controle local encontram-se abaixodos LEDs.
Funções das teclas[DISPLAY / STATUS] é utilizada paraselecionar o modo display ou paracomutar para o modo display seja domodo menu rápido quanto do modomenu.
[QUICK MENU] é utilizado para aprogramação dos parâmetros quepertencem ao modo menu rápido. Épossível comutar diretamente entre omodo menu rápido e o modo menu.
[MENU] é utilizado para a programaçãode todos os parâmetros. É possívelcomutar diretamente entre o modomenu e o modo menu rápido.
[CHANGE DATA] é utilizada para a trocade parâmetros selecionados seja nomodo menu quanto no modo menurápido.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss30
Indicações e leituras do displayAs indicações e as leituras do display são diferentes- vide a lista na página 32 - dependendo se o motorFC estiver em funcionamento normal ou sendoprogramado.
Modo displayNo funcionamento normal, até 4 diferentes variáveisoperacionais podem ser indicadas: 1,1, 1,2, 1,3 e 2.A linha 4 indica o estado de funcionamento atual,alarmes e advertências que aconteceram.
Modo display - seleção da leituraHá três opções relacionadas à escolha de estado deleitura no modo Display - I, II e III. A escolha doestado de leitura determina o número da leitura devariáveis operacionais.
Co
ntro
le L
oca
l
As variáveis operacionais 1,1, 1,2, e 1,3 na primeiralinha e a variável operacional na segunda linha sãoselecionadas mediante os parâmetros n° 009, 010,011 e 012.
• Estado de leitura I:Este estado de leitura é o padrão depois da partidaou depois da iniciação.
A linha 2 apresenta o valor dos dados de umavariável operacional com a correspondente unidade;a linha 1 apresenta um texto que explica a linha 2, cf.tabela. No exemplo, foi selecionada a freqüênciacomo variável, mediante o parâmetro 009.Durante o funcionamento normal outra variável podeser lida imediatamente usando as teclas [+/-].
50.0 HZFREQUENCY
MOTOR IS RUNNING
STATUS
VAR 2VAR 1.1 VAR 1.2 VAR 1.3
NOTA!:Se as teclas para o controle local foramselecionadas como ativadas, permanecerão
ativas seja quando a freqüência VLT tiver sidoprogramada para o controle local ou quandoprogramada para o controle remoto mediante oparâmetro 002, exceto [FWD/REV], que estásempre ativada na operação local.
NOTA!:Se nenhuma função de parada externa forselecionada e a tecla [STOP] tiver sido
selecionada como inativa através do parâmetro014, o motor FC pode ser iniciado e só pode serparado desconectando a tensão do motor.
Estados de I: II: III:leitura:
Linha 1 Descrição da Valor dos dados Descrição dasvariável para as 3 variáveis 3 variáveisoperacional operacionais operacionaisna linha 2 na linha 1 na linha 1
A seguinte tabela apresenta as unidades relativas àsvariáveis na primeira e na segunda linha (vide parâmetro009).
Variável operacional: Unidade:
Referência [%]Referência [unit]*Feedback [unit]*Freqüência [Hz]Freqüência x escala [-]Corrente do motor [A]Torque [%]Potência [kW]Potência [HP]Tensão do motor [V]Tensão da barra CC [V]Carga térmica do FC [%]Horas de funcionamento [Horas]Status da entrada, entradas digitais [Binary code]Referência externa [%]Status Word [Hex]Temperatura do dissipador [ºC]Palavra de alarme [Hex]Palavra de controle [Hex]Palavra de advertência 1 [Hex]Palavra de advertência 2 [Hex]Entrada analógica 1 [mA]Entrada analógica 2 [V]
*) Selecionado no parâmetro 416.A unidade é mostrada no estado de leitura 1 linha 1; caso contrárioé mostrado 'U'.
FCM da Série 300
31MG.03.B6.28 - VLT é marca registrada Danfoss
Co
ntrole Lo
cal
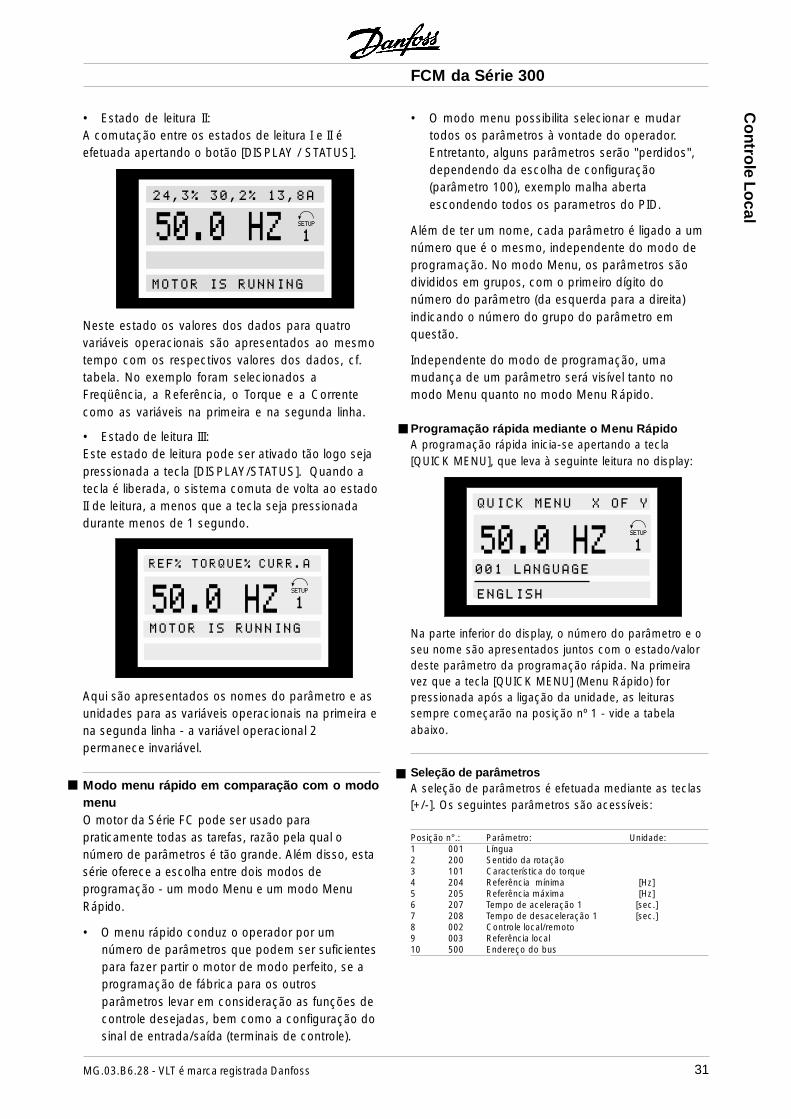
Programação rápida mediante o Menu RápidoA programação rápida inicia-se apertando a tecla[QUICK MENU], que leva à seguinte leitura no display:
Na parte inferior do display, o número do parâmetro e oseu nome são apresentados juntos com o estado/valordeste parâmetro da programação rápida. Na primeiravez que a tecla [QUICK MENU] (Menu Rápido) forpressionada após a ligação da unidade, as leiturassempre começarão na posição nº 1 - vide a tabelaabaixo.
Seleção de parâmetrosA seleção de parâmetros é efetuada mediante as teclas[+/-]. Os seguintes parâmetros são acessíveis:
Posição n°.: Parâmetro: Unidade:1 001 Língua2 200 Sentido da rotação3 101 Característica do torque4 204 Referência mínima [Hz]5 205 Referência máxima [Hz]6 207 Tempo de aceleração 1 [sec.]7 208 Tempo de desaceleração 1 [sec.]8 002 Controle local/remoto9 003 Referência local10 500 Endereço do bus
• Estado de leitura III:Este estado de leitura pode ser ativado tão logo sejapressionada a tecla [DISPLAY/STATUS]. Quando atecla é liberada, o sistema comuta de volta ao estadoII de leitura, a menos que a tecla seja pressionadadurante menos de 1 segundo.
Aqui são apresentados os nomes do parâmetro e asunidades para as variáveis operacionais na primeira ena segunda linha - a variável operacional 2permanece invariável.
Modo menu rápido em comparação com o modo
menuO motor da Série FC pode ser usado parapraticamente todas as tarefas, razão pela qual onúmero de parâmetros é tão grande. Além disso, estasérie oferece a escolha entre dois modos deprogramação - um modo Menu e um modo MenuRápido.
• O menu rápido conduz o operador por umnúmero de parâmetros que podem ser suficientespara fazer partir o motor de modo perfeito, se aprogramação de fábrica para os outrosparâmetros levar em consideração as funções decontrole desejadas, bem como a configuração dosinal de entrada/saída (terminais de controle).
MOTOR IS RUNNING
50.0 HZ24,3% 30,2% 13,8A
• Estado de leitura II:A comutação entre os estados de leitura I e II éefetuada apertando o botão [DISPLAY / STATUS].
Neste estado os valores dos dados para quatrovariáveis operacionais são apresentados ao mesmotempo com os respectivos valores dos dados, cf.tabela. No exemplo foram selecionados aFreqüência, a Referência, o Torque e a Correntecomo as variáveis na primeira e na segunda linha.
50.0 HZREF% TORQUE% CURR.A
MOTOR IS RUNNING
• O modo menu possibilita selecionar e mudartodos os parâmetros à vontade do operador.Entretanto, alguns parâmetros serão "perdidos",dependendo da escolha de configuração(parâmetro 100), exemplo malha abertaescondendo todos os parametros do PID.
Além de ter um nome, cada parâmetro é ligado a umnúmero que é o mesmo, independente do modo deprogramação. No modo Menu, os parâmetros sãodivididos em grupos, com o primeiro dígito donúmero do parâmetro (da esquerda para a direita)indicando o número do grupo do parâmetro emquestão.
Independente do modo de programação, umamudança de um parâmetro será visível tanto nomodo Menu quanto no modo Menu Rápido.
50.0 HZQUICK MENU X OF Y
ENGLISH
001 LANGUAGE

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss32
Co
ntro
le L
oca
l Troca de dadosIndependentemente do modo pela qual foiselecionado o parâmetro: menu rápido ou modomenu, o procedimento para mudar os dados é omesmo.Apertando a tecla [CHANGE DATA] obtém-se oacesso à troca do parâmetro selecionado. No displaya quarta linha sublinhando o estado/valor piscaráhabilitando a troca.O procedimento para a mudança de dados dependedo parâmetro selecionado representar um valornumérico ou um texto.
Troca de um textoSe um parâmetro selecionado for um texto, estetexto é mudado mediante as teclas [+/-].
Modo menuO modo menu inicia-se apertando a tecla [MENU],isto apresenta a seguinte leitura no display:
A linha 3 do display mostra o número e o nome dogrupo de parâmetros.
Grupos de parâmetrosNo modo menu os parâmetros estão divididos emgrupos. A seleção do grupo de parâmetros éefetuada mediante as teclas [<>].Há acesso aos seguintes grupos de parâmetros:
Grupo n° Grupo de parâmetros:0 Operação & Display1 Carga & Motor2 Referência & Limites3 Entradas & Saídas4 Funções especiais5 Comunicação serial6 Funções técnicas* Para informações sobre o grupo de parâmetros 800e 900 para o PROFIBUS, consulte o manualMG.03.EX.YY do FCM Profibus.
Quando o grupo de parâmetros desejado forselecionado, cada parâmetro pode ser escolhidomediante as teclas [+/-]:
A terceira linha do display mostra número e nome doparâmetro, enquanto o estado/valor do parâmetroselecionado são mostrados na linha 4.
A última linha do display apresenta o texto que serádigitalizado (memorizado) quando for confirmadomediante o botão [OK].
50.0 HZFREQUENCY
0.. KEYB. & DISPLAY
FREQUENCY
001 LANGUAGE
50.0 HZENGLISH
FREQUENCY
50.0 HZ001 LANGUAGE
ENGLISH
FCM da Série 300
33MG.03.B6.28 - VLT é marca registrada Danfoss
Co
ntrole Lo
cal
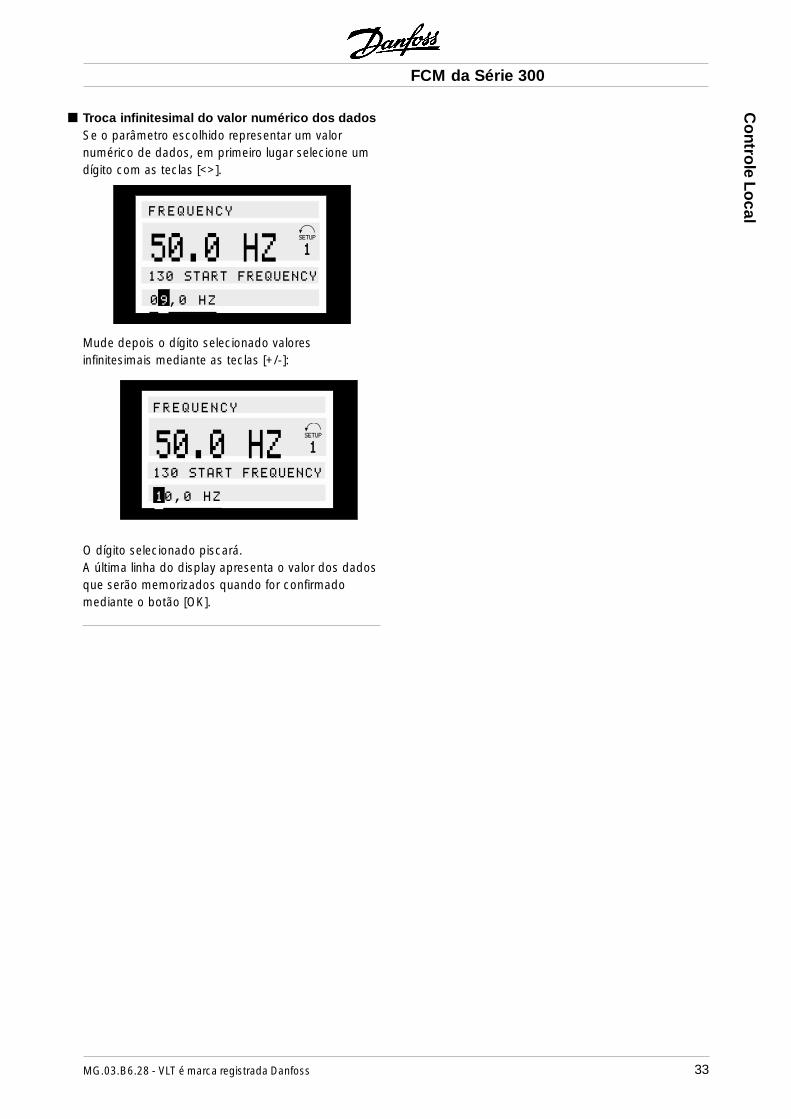
Troca infinitesimal do valor numérico dos dadosSe o parâmetro escolhido representar um valornumérico de dados, em primeiro lugar selecione umdígito com as teclas [<>].
Mude depois o dígito selecionado valoresinfinitesimais mediante as teclas [+/-]:
O dígito selecionado piscará.A última linha do display apresenta o valor dos dadosque serão memorizados quando for confirmadomediante o botão [OK].
FREQUENCY
50.0 HZ130 START FREQUENCY
09,0 HZ
FREQUENCY
50.0 HZ130 START FREQUENCY
10,0 HZ

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss34
Co
ntro
le L
oca
l Estrutura do menu MODO DISPLAY
MODO MENU RÁPIDO
MODO TROCA DE DADOS MODO TROCA DE DADOS
Seleção deparâmetro
Seleção dovalor dedados
Seleçãodo grupo
MODO DADOS
VAR 1.1 VAR 1.2 VAR 1.3
VAR 2STATUS
FREQUENCY
50.0 HZ0 KEYB. & DISPLAY
QUICK MENU X OF Y
50.0 HZ
50.0 HZ 50.0 HZ
FREQUENCY
FREQUENCY QUICK MENU X OF Y
001 LANGUAGE
001 LANGUAGE
001 LANGUAGE
ENGLISH
ENGLISH
MODO MENU
001 LANGUAGE
ENGLISH
ENGLISH
50.0 HZ
FCM da Série 300
35MG.03.B6.28 - VLT é marca registrada Danfoss
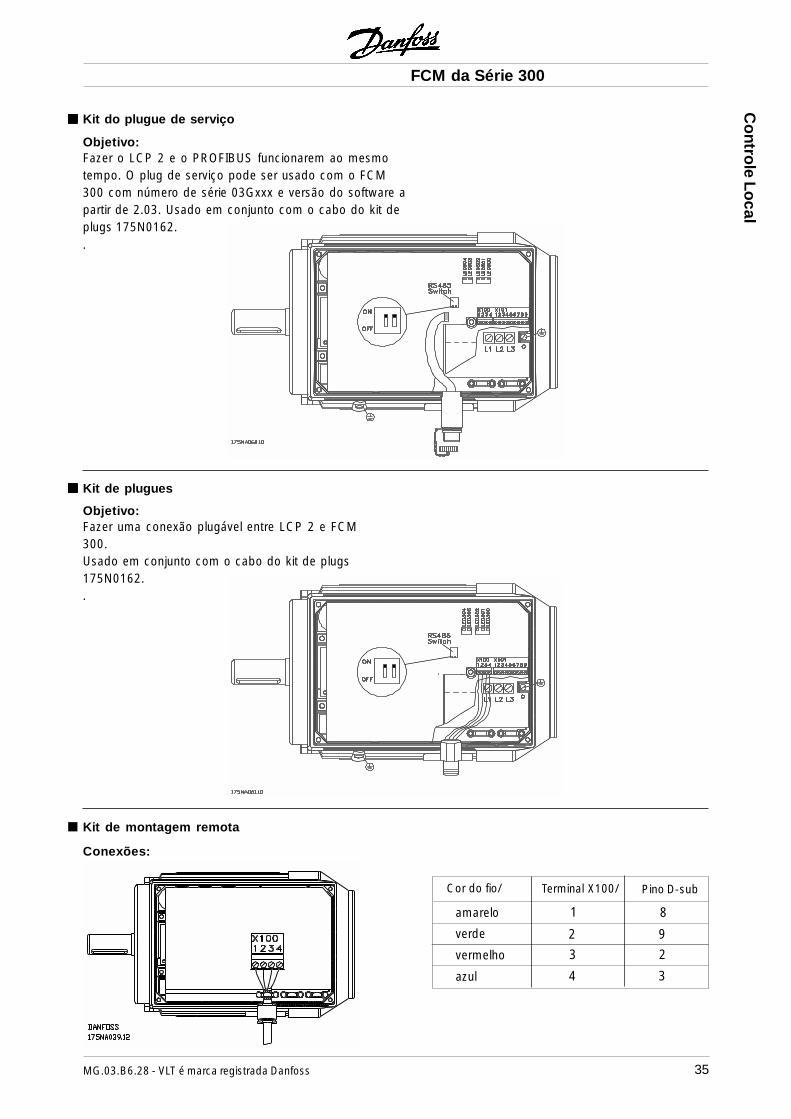
Objetivo:Fazer o LCP 2 e o PROFIBUS funcionarem ao mesmotempo. O plug de serviço pode ser usado com o FCM300 com número de série 03Gxxx e versão do software apartir de 2.03. Usado em conjunto com o cabo do kit deplugs 175N0162..
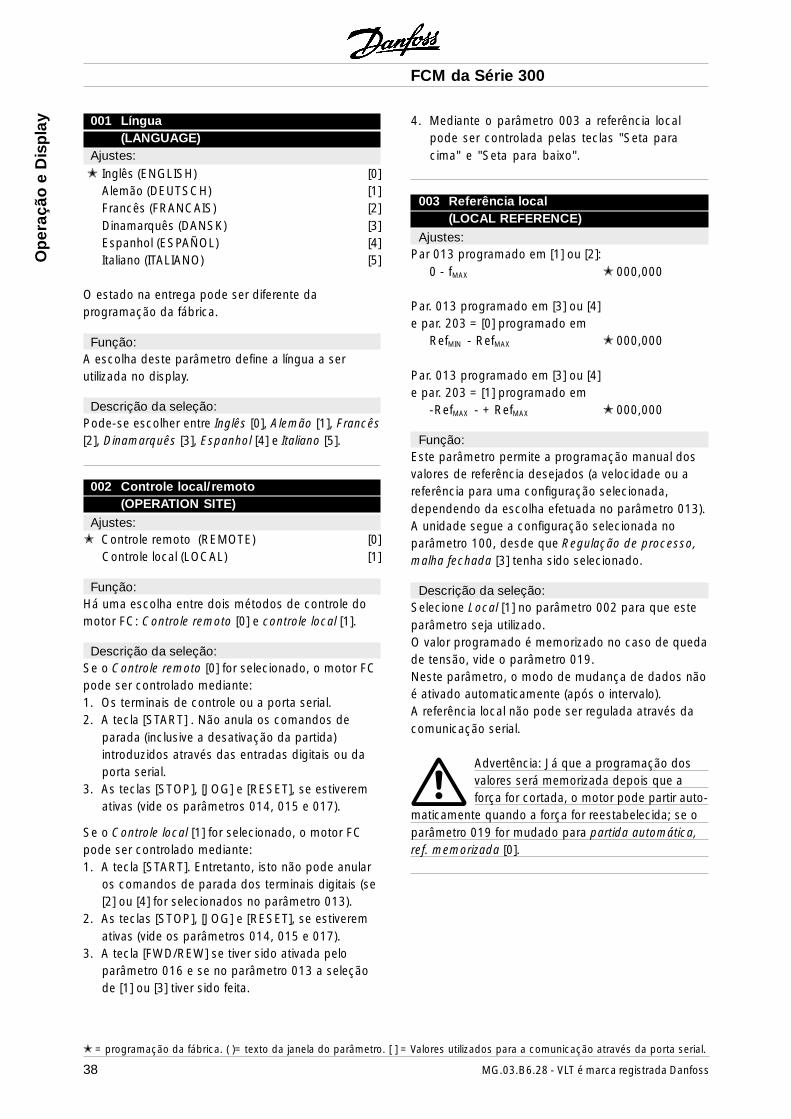
Objetivo:Fazer uma conexão plugável entre LCP 2 e FCM300.Usado em conjunto com o cabo do kit de plugs175N0162..
Co
ntrole Lo
cal
Kit do plugue de serviço
Kit de plugues
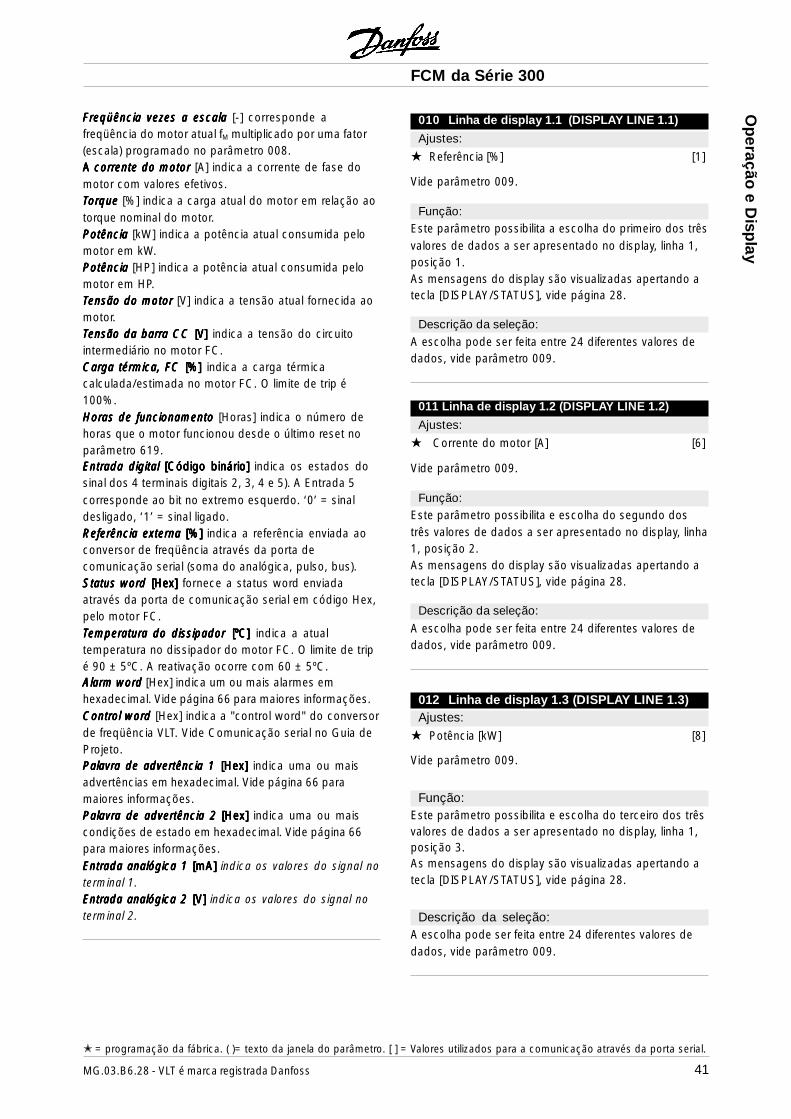
Cor do fio/ Terminal X100/
1
4
3
2
Pino D-sub
8
3
2
9
Kit de montagem remota
Conexões:
amarelo
verde
vermelho
azul

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss36
Função/configuraçõesFunção/configuraçõesFunção/configuraçõesFunção/configuraçõesFunção/configurações TTTTTecla (Part.)ecla (Part.)ecla (Part.)ecla (Part.)ecla (Part.) TTTTTecla (Part.)ecla (Part.)ecla (Part.)ecla (Part.)ecla (Part.) TTTTTecla (Parada)ecla (Parada)ecla (Parada)ecla (Parada)ecla (Parada)
Default - operação em velocidade duplaDefault - operação em velocidade duplaDefault - operação em velocidade duplaDefault - operação em velocidade duplaDefault - operação em velocidade dupla Funcionar na Funcionar em Parada(conectar o fio roxo): (conectar o fio roxo): (conectar o fio roxo): (conectar o fio roxo): (conectar o fio roxo): Sem referência 10 Hz** (e reset* -alterações na programação de fábrica. ajustada (+/-) vel. de jog se houver trip)
Function 2 - operação em modo duploFunction 2 - operação em modo duploFunction 2 - operação em modo duploFunction 2 - operação em modo duploFunction 2 - operação em modo duplo(conectar o fio roxo):(conectar o fio roxo):(conectar o fio roxo):(conectar o fio roxo):(conectar o fio roxo): Funcionar Funcionar ParadaSelecionar os modos de operação com Setup 1 com Setup 2 (e reset* -desejados nos Setups 1 e 2 (use par. 4-6) se houver trip)Parâmetro 335 = 18 (selecionar Setup)
Function 3 - operação em direção duplaFunction 3 - operação em direção duplaFunction 3 - operação em direção duplaFunction 3 - operação em direção duplaFunction 3 - operação em direção dupla(conectar o fio cinza):(conectar o fio cinza):(conectar o fio cinza):(conectar o fio cinza):(conectar o fio cinza): Funcionar Funcionar ParadaParâmetro 335 = 10 (iniciar reversão) para a frente em reversão (e reset* -Parâmetro 200 = 1 (ambas direções) se houver trip)
No momento da energização, a unidade estarásempre no modo de parada. A referênciaconfigurada será armazenada durante adesenergização. Se você desejar tornarpermanente o modo de partida, conecte o terminal6 ao terminal 4 e não conecte o fio roxo/cinza aoterminal 4. Isto significa que a função de parada noLOP está desabilitada.
NOTA!:Após a arrumação, corte ou isole os fiosem excesso.
Use as teclas +/- para ajustar a referência
Color de cableColor de cableColor de cableColor de cableColor de cable TTTTTerminalerminalerminalerminalerminal FunciónFunciónFunciónFunciónFunciónBranco 2 ReferênciaMarrom 3 ResetRoxo ou Cinza 4 Vide tabela abaixo
do botãoVerde 5 Vide tabela abaixo
do botãoVermelho 6 +24VAmarelo 7 +10VAzul 8 Terra
FiaçãoFiaçãoFiaçãoFiaçãoFiação
Local Operation Pad (LOP, painel de operação local)
Kit de montagem remota (cont.) Porta dopainel
Unidade decontrole
* Se não for necessário reset, não conecte o fiomarrom
** ou defina o parâmetro 213
Co
ntro
le L
oca
l

FCM da Série 300
37MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 8Capítulo 8Capítulo 8Capítulo 8Capítulo 8 Operação e Display ................................... página 38
Carga e Motor ........................................... página 44
Referências e Limites ................................ página 47
Entradas e Saídas ...................................... página 52
Funções especiais ..................................... página 58
Comunicação serial ................................... página 63
Funções técnicas ....................................... página 69
Parâm
etros
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss38
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
001 Língua(LANGUAGE)
Ajustes: Inglês (ENGLISH) [0]
Alemão (DEUTSCH) [1]Francês (FRANCAIS) [2]Dinamarquês (DANSK) [3]Espanhol (ESPAÑOL) [4]Italiano (ITALIANO) [5]
O estado na entrega pode ser diferente daprogramação da fábrica.
Função:A escolha deste parâmetro define a língua a serutilizada no display.
Descrição da seleção:Pode-se escolher entre Inglês [0], Alemão [1], Francês[2], Dinamarquês [3], Espanhol [4] e Italiano [5].
002 Controle local/remoto(OPERATION SITE)
Ajustes: Controle remoto (REMOTE) [0]
Controle local (LOCAL) [1]
Função:Há uma escolha entre dois métodos de controle domotor FC: Controle remoto [0] e controle local [1].
Descrição da seleção:Se o Controle remoto [0] for selecionado, o motor FCpode ser controlado mediante:1. Os terminais de controle ou a porta serial.2. A tecla [START] . Não anula os comandos de
parada (inclusive a desativação da partida)introduzidos através das entradas digitais ou daporta serial.
3. As teclas [STOP], [JOG] e [RESET], se estiveremativas (vide os parâmetros 014, 015 e 017).
Se o Controle local [1] for selecionado, o motor FCpode ser controlado mediante:1. A tecla [START]. Entretanto, isto não pode anular
os comandos de parada dos terminais digitais (se[2] ou [4] for selecionados no parâmetro 013).
2. As teclas [STOP], [JOG] e [RESET], se estiveremativas (vide os parâmetros 014, 015 e 017).
3. A tecla [FWD/REW] se tiver sido ativada peloparâmetro 016 e se no parâmetro 013 a seleçãode [1] ou [3] tiver sido feita.
Op
eraç
ão e
Dis
pla
y 4. Mediante o parâmetro 003 a referência localpode ser controlada pelas teclas "Seta paracima" e "Seta para baixo".
003 Referência local(LOCAL REFERENCE)
Ajustes:Par 013 programado em [1] ou [2]:
0 - fMAX 000,000
Par. 013 programado em [3] ou [4]e par. 203 = [0] programado em
RefMIN - RefMAX 000,000
Par. 013 programado em [3] ou [4]e par. 203 = [1] programado em
-RefMAX - + RefMAX 000,000
Função:Este parâmetro permite a programação manual dosvalores de referência desejados (a velocidade ou areferência para uma configuração selecionada,dependendo da escolha efetuada no parâmetro 013).A unidade segue a configuração selecionada noparâmetro 100, desde que Regulação de processo,malha fechada [3] tenha sido selecionado.
Descrição da seleção:Selecione Local [1] no parâmetro 002 para que esteparâmetro seja utilizado.O valor programado é memorizado no caso de quedade tensão, vide o parâmetro 019.Neste parâmetro, o modo de mudança de dados nãoé ativado automaticamente (após o intervalo).A referência local não pode ser regulada através dacomunicação serial.
Advertência: Já que a programação dosvalores será memorizada depois que aforça for cortada, o motor pode partir auto-
maticamente quando a força for reestabelecida; se oparâmetro 019 for mudado para partida automática,ref. memorizada [0].

FCM da Série 300
39MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Descrição da seleção:A Programação de Fábrica [0] contém os dados defábrica e pode ser usada como fonte de dados se osoutros Setups tiverem que retornar a um estadoconhecido.Os Setups de 1 [1] 2 [2] são Setups individuais quepodem ser utilizados como for necessário. Podem serprogramados livremente, independente do Setupselecionado, controlando desse modo as funções domotor FC.
NOTA!:Se uma mudança geral de dados ou a cópia deum Setup ativo for efetuado, isto influirá
imediatamente no funcionamento da unidade.
006 Cópia de Setups (SETUP COPY)Ajustes:
Nenhuma cópia (NO COPY) [0]Cópia no Setup 1 de # (COPY TO SETUP 1) [1]Cópia no Setup 2 de # (COPY TO SETUP 2) [2]Cópia em todos Setups de # (COPY TO ALL) [5]
# = o Setup selecionado no parâmetro 005
Função:Uma cópia é feita do Setup selecionado no parâmetro005 para um dos outros Setups ou para todos osoutros Setups simultaneamente.
NOTA!:É possível copiar somente com o motor paradovia um comando de parada.
A cópia levará não mais que 3 segundos e teráterminado quando o parâmetro 006 voltar ao valor 0.
Op
eração e D
isplay
004 Setup (ACTIVE SETUP)Ajustes:
Setup da fábrica (FACTORY SETUP) [0] Setup 1 (SETUP 1) [1]
Setup 2 (SETUP 2) [2]Setup múltiplo (MULTI SETUP) [5]
Função:A seleção deste parâmetro define o número do Setupdesejado para controlar o motor FC.
Todos os parâmetros podem ser programados em doisindividuais Setups, Setup 1 e Setup 2. Além disso, háum Setup pré-programado, chamado Setup de fábrica,que não pode ser modificado.
Descrição da seleção:Programação de Fábrica [0] contém os dados defábrica. Pode ser utilizado como fonte de dados quandoos outros Setups devem retornar para um estadoconhecido.
Os parâmetros 005 e 006 permitem copiar de umSetup para outro.
Os Setups 1 [1] e 2 [2] são dois Setups individuais quepodem ser selecionados conforme for necessário.
O Setup múltiplo [5] é utilizado caso a comutaçãoremota seja desejada. Os terminais 2, 3, 4 e 5 bemcomo a porta serial podem ser utilizados para acomutação entre Setups.
005 Programação do Setup (EDIT SETUP)Ajustes:
Setup de fábrica (FACTORY SETUP) [0]Setup 1 (SETUP 1) [1]Setup 2 (SETUP 2) [2]
Setup ativo (ACTIVE SETUP) [5]
Função:É a seleção de Setup na qual a programação (mudançade dados) deve ocorrer durante o funcionamento. Épossível programar os dois Setups, independente doSetup que for selecionado como ativo (selecionado noparâmetro 004).

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss40
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
009 Linha de display 2 (DISPLAY LINE 2)
Ajustes:
Nenhum [0]Referência [%] (REFERENCE [%]) [1]Referência [unit] (REFERENCE [UNIT]) [2]Feedback [unit] (FEEDBACK [UNIT]) [3]
Freqüência [Hz] (FREQUENCY [Hz]) [4]Freqüência vezes a escala [-] (FREQUENCY x SCALE) [5]Corrente do motor [A] (MOTOR CURRENT [A]) [6]Torque [%] (TORQUE [%]) [7]Potência [kW] (POWER [kW]) [8]Potência [HP] (POWER [hp] [US]) [9]Tensão do motor [V] (MOTOR VOLTAGE [V]) [11]Tensão da barra CC [V] (DC LINK VOLTAGE [V]) [12]Carga térmica, FC [%] (FC THERMAL [%]) [14]Horas de funcionamento [Horas](RUNNING HOURS) [15]Entrada digital [Binary code] (DIGITAL INPUT [BIN]) [16]Referência externa [%] (EXTERNAL REF [%]) [21]Status Word [Hex] (STATUS WORD [HEX]) [22]Temperatura do dissipador [°C](HEATSINK TEMP [°C]) [25]Palavra de alarme [Hex](ALARM WORD [HEX]) [26]Palavra de controle [Hex] (CONTROL WORD [HEX]) [27]Palavra de advertência 1 [Hex](WARNING WORD 1 [HEX]) [28]Palavra de advertência 2 [Hex](WARNING WORD 2 [HEX]) [29]Entrada analógica 1 [mA] (ANALOG INPUT 1 [mA]) [30]Entrada analógica 2 [V] (ANALOG INPUT 2 [V]) [31]
Função:
Este parâmetro permite a seleção do valor dos dados aserem apresentados na linha 2 do display.Os parâmetros de 010 a 012 permitem a utilização detrês valores de dados adicionais para seremapresentados na linha 1.
Op
eraç
ão e
Dis
pla
y 007 Cópia via LCP (LCP COPY)Ajustes:
Nenhuma cópia (NO COPY) [0]Carregue todos os parâmetros(UPLOAD ALL PARAM) [1]Descarregue todos os parâmetros(DOWNLOAD ALL) [2]Descarregue os parâmetros independentes dapotência (DOWNLOAD SIZE INDEP.) [3]
Função:O parâmetro 007 é utilizado caso seja necessário utilizara função de cópia no painel de controle "LCP".Portanto, você pode copiar facilmente copiar o(s)valor(es) do(s) parâmetro(s) de um motor FC para outro.
Descrição da seleção:Selecione Carregue todos os parâmetros [1] casotodos os valores devem ser gravados no painel decontrole "LCP".Selecione Descarregue todos os parâmetros [2], casotodos os valores de parâmetros transmitidos tenhamque ser copiados para o motor FC no qual o painelde controle tenha sido montado.Selecione Descarregue os parâmetros independentesda potência [3], caso apenas os parâmetrosindependentes da potência devam ser transferidos.Este procedimento é utilizado caso haja transferênciapara um motor FC que tenha uma potência nominaldiferente daquela de onde se origina o Setup doparâmetro.
NOTA!:A carga/descarga só pode ser efetuada nomodo Parada e apenas entre as unidades
com a mesma versão principal de base de dados(vide par. 626).
008 Fator de escala do display (FREQUENCY SCALE)
Ajustes:0,01 - 100,00 [1 - 10000]
1,00 [100]
Função:Este parâmetro seleciona o fator a ser multiplicadopela freqüência do motor fM, para a apresentação nodisplay, quando os parâmetros 009-012 foremprogramados para freqüência vezes o escala [5].
Descrição da seleção:Programa o fator desejado para o escala.
NOTA!:No parâmetro 009, não é possível selecionar"nenhum" [0]
Descrição da seleção:
A referência A referência A referência A referência A referência [%][%][%][%][%] corresponde à referência total (somado digital/analógica/pré-programado/bus/ref.congelada/catch-up e slow-down).Referência Referência Referência Referência Referência [unidade][unidade][unidade][unidade][unidade] fornece a soma das referências,utilizando a unidade indicada com base na configuraçãodo parâmetro 100 (Hz, Hz e rpm).
FeedbackFeedbackFeedbackFeedbackFeedback [unidade][unidade][unidade][unidade][unidade] indica os valores do terminal 1utilizando a unidade/escala selecionada no parâmetro414, 415 e 416.FreqüênciaFreqüênciaFreqüênciaFreqüênciaFreqüência [Hz][Hz][Hz][Hz][Hz] dá a freqüência do motor, ou seja, afreqüência de saída para o motor.
FCM da Série 300
41MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
010 Linha de display 1.1 (DISPLAY LINE 1.1)
Ajustes:
Referência [%] [1]
Vide parâmetro 009.
Função:Este parâmetro possibilita a escolha do primeiro dos trêsvalores de dados a ser apresentado no display, linha 1,posição 1.As mensagens do display são visualizadas apertando atecla [DISPLAY/STATUS], vide página 28.
Descrição da seleção:
A escolha pode ser feita entre 24 diferentes valores dedados, vide parâmetro 009.
Freqüência vezes a escalaFreqüência vezes a escalaFreqüência vezes a escalaFreqüência vezes a escalaFreqüência vezes a escala [-] corresponde afreqüência do motor atual fM multiplicado por uma fator(escala) programado no parâmetro 008.A A A A A corrente do motorcorrente do motorcorrente do motorcorrente do motorcorrente do motor [A] indica a corrente de fase domotor com valores efetivos.TTTTTorqueorqueorqueorqueorque [%] indica a carga atual do motor em relação aotorque nominal do motor.Potência Potência Potência Potência Potência [kW] indica a potência atual consumida pelomotor em kW.PotênciaPotênciaPotênciaPotênciaPotência [HP] indica a potência atual consumida pelomotor em HP.TTTTTensão do motorensão do motorensão do motorensão do motorensão do motor [V] indica a tensão atual fornecida aomotor.TTTTTensão da barra CC ensão da barra CC ensão da barra CC ensão da barra CC ensão da barra CC [V] [V] [V] [V] [V] indica a tensão do circuitointermediário no motor FC.Carga térmica, FC Carga térmica, FC Carga térmica, FC Carga térmica, FC Carga térmica, FC [%] [%] [%] [%] [%] indica a carga térmicacalculada/estimada no motor FC. O limite de trip é100%.Horas de funcionamentoHoras de funcionamentoHoras de funcionamentoHoras de funcionamentoHoras de funcionamento [Horas] indica o número dehoras que o motor funcionou desde o último reset noparâmetro 619.Entrada digitalEntrada digitalEntrada digitalEntrada digitalEntrada digital [Código binário][Código binário][Código binário][Código binário][Código binário] indica os estados dosinal dos 4 terminais digitais 2, 3, 4 e 5). A Entrada 5corresponde ao bit no extremo esquerdo. ‘0’ = sinaldesligado, ‘1’ = sinal ligado.Referência externaReferência externaReferência externaReferência externaReferência externa [%] [%] [%] [%] [%] indica a referência enviada aoconversor de freqüência através da porta decomunicação serial (soma do analógica, pulso, bus).Status word Status word Status word Status word Status word [Hex] [Hex] [Hex] [Hex] [Hex] fornece a status word enviadaatravés da porta de comunicação serial em código Hex,pelo motor FC.TTTTTemperatura do dissipador emperatura do dissipador emperatura do dissipador emperatura do dissipador emperatura do dissipador [ºC] [ºC] [ºC] [ºC] [ºC] indica a atualtemperatura no dissipador do motor FC. O limite de tripé 90 ± 5ºC. A reativação ocorre com 60 ± 5ºC.Alarm wordAlarm wordAlarm wordAlarm wordAlarm word [Hex] indica um ou mais alarmes emhexadecimal. Vide página 66 para maiores informações.Control word Control word Control word Control word Control word [Hex] indica a "control word" do conversorde freqüência VLT. Vide Comunicação serial no Guia deProjeto.Palavra de advertência 1 Palavra de advertência 1 Palavra de advertência 1 Palavra de advertência 1 Palavra de advertência 1 [Hex][Hex][Hex][Hex][Hex] indica uma ou maisadvertências em hexadecimal. Vide página 66 paramaiores informações.Palavra de advertência 2Palavra de advertência 2Palavra de advertência 2Palavra de advertência 2Palavra de advertência 2 [Hex] [Hex] [Hex] [Hex] [Hex] indica uma ou maiscondições de estado em hexadecimal. Vide página 66para maiores informações.Entrada analógica 1 Entrada analógica 1 Entrada analógica 1 Entrada analógica 1 Entrada analógica 1 [mA][mA][mA][mA][mA] indica os valores do signal noterminal 1.Entrada analógica 2 Entrada analógica 2 Entrada analógica 2 Entrada analógica 2 Entrada analógica 2 [V][V][V][V][V] indica os valores do signal noterminal 2.
Op
eração e D
isplay
011 Linha de display 1.2 (DISPLAY LINE 1.2)
Ajustes:
Corrente do motor [A] [6]
Vide parâmetro 009.
Função:Este parâmetro possibilita e escolha do segundo dostrês valores de dados a ser apresentado no display, linha1, posição 2.As mensagens do display são visualizadas apertando atecla [DISPLAY/STATUS], vide página 28.
Descrição da seleção:
A escolha pode ser feita entre 24 diferentes valores dedados, vide parâmetro 009.
012 Linha de display 1.3 (DISPLAY LINE 1.3)Ajustes:
Potência [kW] [8]
Vide parâmetro 009.
Função:Este parâmetro possibilita e escolha do terceiro dos trêsvalores de dados a ser apresentado no display, linha 1,posição 3.As mensagens do display são visualizadas apertando atecla [DISPLAY/STATUS], vide página 28.
Descrição da seleção:A escolha pode ser feita entre 24 diferentes valores dedados, vide parâmetro 009.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss42
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
013 Programação das referências locais(LOC CTRL/CONFIG.)
Ajustes:Desabilitada (DISABLE) [0]Controle LCP e malha aberta.(LCP CTRL/OPEN LOOP) [1]Controle LCP digital e malha aberta.(LCP+DIG CTRL/OP.LOOP) [2]Controle LCP/ como parâmetro 100.(LCP CTRL/AS P100) [3]
Controle LCP digital/ como parâmetro 100.(LCP+DIG CTRL/AS P100) [4]
Função:Aqui será selecionada a função desejada caso o controlelocal tiver sido selecionado no parâmetro 002.Vide também a descrição do parâmetro 100.
Descrição da seleção:Com Desabilitada [0], o ajuste de referência local atravésdo parâmetro 003 será bloqueado.Somente é possível mudar para desabilitada [0] a partirde uma das outras opções de ajuste do parâmetro 013,quando o motor FC tiver sido ajustado para Controleremoto [0] no parâmetro 002.
Controle LCP e malha aberta [1] é usado quando avelocidade tem que ser ajustada (em Hz) através doparâmetro 003, quando o motor FC tiver sido ajustadopara controle local [1] no parâmetro 002.
Se o parâmetro 100 não tiver sido programado comoRegulação de velocidade, malha aberta [0], comute parachave de Regulação de velocidade, malha aberta [0].
O Controle LCP digital e malha aberta [2] funciona comoo Controle LCP e malha aberta [1], a única diferença éque quando o parâmetro 002 tiver sido programadopara Operação local [1], o motor é controlado pelasentradas digitais.
Controle LCP/ como parâmetro 100 [3] é selecionado sea referência tiver que ser programada através doparâmetro 003.
O Controle LCP digital/ como parâmetro 100 [4] funcionacomo o Controle LCP/ como parâmetro 100 [3], emboraquando o parâmetro 002 tiver sido programado paraOperação local [1], o motor pode ser controlado pelasentradas digitais.
Op
eraç
ão e
Dis
pla
y NOTA!:Mudar de Controle remoto para Controle LCPdigital e malha aberta:
A freqüência atual do motor e o sentido de rotaçãodevem ser mantidos. Se o sentido atual de rotaçãonão corresponder ao sinal de reversão (referêncianegativa), a freqüência do motor fM será regulada para0 Hz.
Mudar de Controle LCP digital e malha aberta paraControle remoto:A configuração selecionada (parâmetro 100) seráativada. As mudanças são efetuadas sem nenhummovimento brusco.
Mudar de Controle remoto para Controle LCP/ comoparâmetro 100 ou Controle LCP digital/ comoparâmetro 100:A referência atual deve ser mantida. Caso o sinal dereferência for negativo, a referência local seráregulada para 0.
Mudar de Controle LCP/ como parâmetro 100 ouControle remoto LCP como parâmetro 100 paraControle remoto:A referência será substituída pelo sinal de referênciaativo para controle remoto.
014 Parada local (LOCAL STOP)Ajustes:
Desabilitado (DISABLE) [0] Habilitado (ENABLE) [1]
Função:Este parâmetro ativa/desativa a função de parada viapainel de controle.Esta tecla é utilizada quando o parâmetro 002 forselecionado para Controle remoto [0] ou Local [1].
Descrição da seleção:Se desabilitado [0] for selecionada neste parâmetro, atecla [STOP] será desativada.
NOTA!:Se Habilitado for selecionada, a tecla [STOP]anula todos os outros comandos de partida.

FCM da Série 300
43MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Op
eração e D
isplay
018 Bloqueio para a mudança de dados(DATA CHANGE LOCK)
Ajustes:
Não bloqueado (NOT LOCKED) [0]Bloqueado (LOCKED) [1]
Função:
Neste parâmetro, o software pode "bloquear" ocontrole, isto significa que mudanças de dados nãopodem ser efetuadas via LCP 2 (contudo, isto é aindapossível através do porte de comunicação serial).
Descrição da seleção:
Se Bloqueado [1] for selecionado, mudanças de dadosnão podem ser efetuadas.
019 Estado operacional na energização,controle local (POWER UP ACTION)
Ajustes:
Partida automática, ref. memorizada(AUTO RESTART) [0]
Parada forçada, ref. memorizada(LOCAL=STOP) [1]Parada forçada, regula a ref. no 0(LOCAL=STOP, REF=0) [2]
Função:
Programação do modo de funcionamento desejadoquando a tensão de alimentação for ligada.Esta função somente pode ser ativada em conjuntocom Controle local [1] no parâmetro 002.
Descrição da seleção:
Partida automática, ref. memorizada [0] é selecionadacaso a unidade deva partir com a referência local(regulada no parâmetro 003) e as condições de partida/parada fornecidas pela tecla [START/STOP] antes dodesligamento da alimentação de tensão.Parada forçada, ref. memorizada [1] é utilizada caso aunidade deva permanecer parada quando a alimentaçãode tensão for ligada, até que a tecla [START] sejaapertada. Depois do comando da partida, a referêncialocal é regulada no parâmetro 003.Parada forçada, regula a ref. no 0 [2] é selecionada casoa unidade deva permanecer parada quando a tensão dealimentação for ligada. A referência local (parâmetro003) é resetado em zero.
NOTA!:Na operação com o controle remoto (parâmetro002), a condição de partida/parada na
energização dependerá dos sinais de controle externo.Se a Partida com pulso estiver selecionada noparâmetro 332-335, o motor permanecerá paradodepois que a rede elétrica for ligada.
015 Jog local (LOCAL JOGGING)Ajustes:
Desabilitado (DISABLE) [0]Habilitado (ENABLE) [1]
Função:Neste parâmetro a função jogging pode ser ativada/desativada pelo painel de controle.
Descrição da seleção:Se Desabilitado [0] for selecionada neste parâmetro, atecla [JOG] será desativada.
016 Reversão local(LOCAL REVERSING)
Ajustes: Desabilitado (DISABLE) [0]
Habilitado (ENABLE) [1]
Função:Neste parâmetro, a função reversão pode serselecionada/removida pelo painel de controle.Esta tecla só pode ser usada se o parâmetro 002 tiversido programado para Operação local [1] e o parâmetro013 para Controle LCP com malha aberta [1] ouControle LCP como parâmetro 100 [3].
Descrição da seleção:Se Desabilitado [0] for selecionada neste parâmetro, atecla [FWD/REV] será desativada.Vide também o parâmetro 200.
017 Reset local de trip (LOCAL RESET)Ajustes:
Desabilitado (DISABLE) [0] Habilitado (ENABLE) [1]
Função:Neste parâmetro, a função de reset pode serselecionada/removida do teclado.Esta tecla pode ser utilizada quando o parâmetro 002for regulado para Controle remoto [0] ou Local [1].
Descrição da seleção:Se Desabilitado [0] for selecionada neste parâmetro, atecla [RESET] será desativada.
NOTA!:Somente selecione Desabilitado [0] se um sinalexterno de reset foi ligado via as entradas digitais.
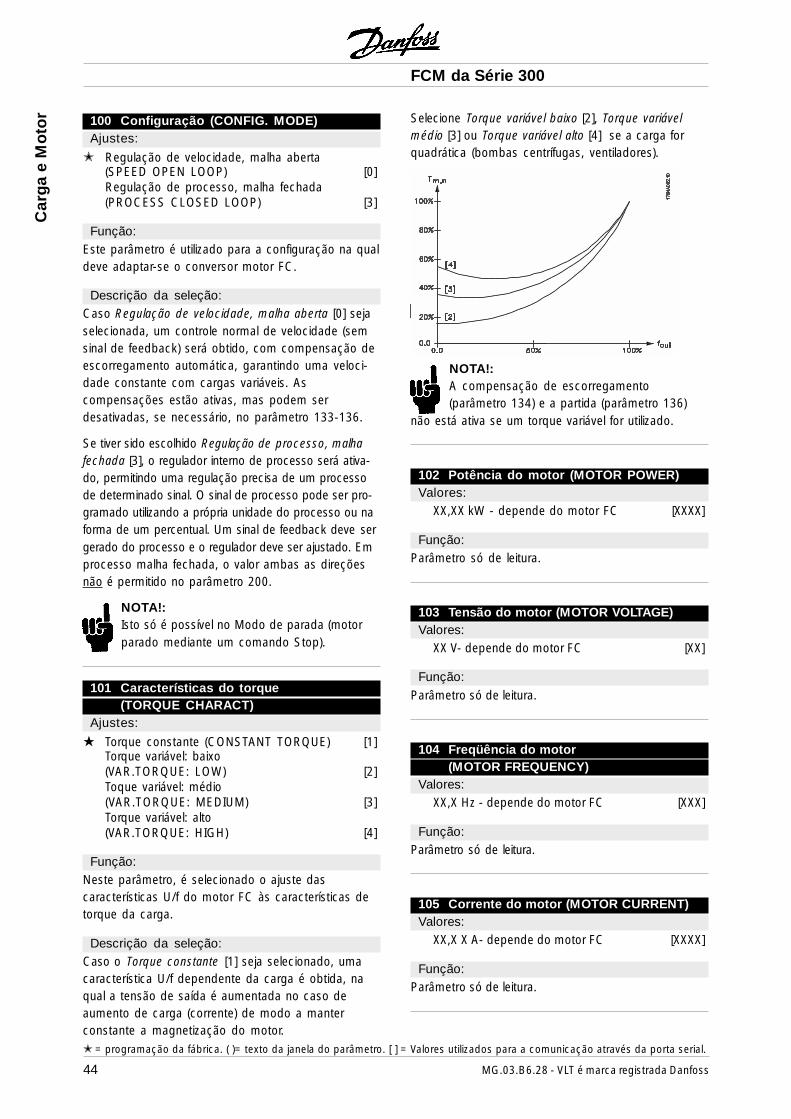
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss44
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
100 Configuração (CONFIG. MODE)Ajustes:
Regulação de velocidade, malha aberta(SPEED OPEN LOOP) [0]Regulação de processo, malha fechada(PROCESS CLOSED LOOP) [3]
Função:Este parâmetro é utilizado para a configuração na qualdeve adaptar-se o conversor motor FC.
Descrição da seleção:Caso Regulação de velocidade, malha aberta [0] sejaselecionada, um controle normal de velocidade (semsinal de feedback) será obtido, com compensação deescorregamento automática, garantindo uma veloci-dade constante com cargas variáveis. Ascompensações estão ativas, mas podem serdesativadas, se necessário, no parâmetro 133-136.
Se tiver sido escolhido Regulação de processo, malhafechada [3], o regulador interno de processo será ativa-do, permitindo uma regulação precisa de um processode determinado sinal. O sinal de processo pode ser pro-gramado utilizando a própria unidade do processo ou naforma de um percentual. Um sinal de feedback deve sergerado do processo e o regulador deve ser ajustado. Emprocesso malha fechada, o valor ambas as direçõesnão é permitido no parâmetro 200.
NOTA!:Isto só é possível no Modo de parada (motorparado mediante um comando Stop).
101 Características do torque(TORQUE CHARACT)
Ajustes:
Torque constante (CONSTANT TORQUE) [1]Torque variável: baixo(VAR.TORQUE: LOW) [2]Toque variável: médio(VAR.TORQUE: MEDIUM) [3]Torque variável: alto(VAR.TORQUE: HIGH) [4]
Função:Neste parâmetro, é selecionado o ajuste dascaracterísticas U/f do motor FC às características detorque da carga.
Descrição da seleção:Caso o Torque constante [1] seja selecionado, umacaracterística U/f dependente da carga é obtida, naqual a tensão de saída é aumentada no caso deaumento de carga (corrente) de modo a manterconstante a magnetização do motor.
Car
ga
e M
oto
r Selecione Torque variável baixo [2], Torque variávelmédio [3] ou Torque variável alto [4] se a carga forquadrática (bombas centrífugas, ventiladores).
NOTA!:A compensação de escorregamento(parâmetro 134) e a partida (parâmetro 136)
não está ativa se um torque variável for utilizado.
102 Potência do motor (MOTOR POWER)Valores:
XX,XX kW - depende do motor FC [XXXX]
Função:Parâmetro só de leitura.
103 Tensão do motor (MOTOR VOLTAGE)Valores:
XX V- depende do motor FC [XX]
Função:
Parâmetro só de leitura.
104 Freqüência do motor(MOTOR FREQUENCY)
Valores:XX,X Hz - depende do motor FC [XXX]
Função:Parâmetro só de leitura.
105 Corrente do motor (MOTOR CURRENT)Valores:
XX,X X A- depende do motor FC [XXXX]
Função:Parâmetro só de leitura.

FCM da Série 300
45MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
106 Velocidade nominal do motor(MOTOR NOM. SPEED)
Valores:XX rpm - depende do motor FC [XX]
Função:Parâmetro só de leitura.
126 Tempo de frenagem CC(DC BRAKING TIME)
Ajustes:0,0 - 60,0 seg. [0-600]
10,0 seg. [100]
Função:
Este parâmetro é para ajustar o tempo de frenagem CCpara a qual a tensão de frenagem CC (parâmetro 132)deve estar ativa.
0,0 seg. = OFF
Descrição da seleção:
Programe o tempo desejado.
127 Freqüência de ativação da frenagem CC(DC BRAKE CUT-IN)
Ajustes:0,0 - fMAX (parâmetro 202) [0 - ]
0,0 Hz = OFF [0]
Função:Este parâmetro é para a programação da freqüência deativação CC na qual a corrente de frenagem CC(parâmetro 132) deve ser ativada, em relação a umcomando de parada.
Descrição da seleção:Programe a freqüência desejada.
128 Proteção térmica do motor(MOT.THERM. PROTEC)
Ajustes: Desabilitado (DISABLE) [0]
Habilitado (ENABLE) [1]
Função:A temperatura do motor é medida com um termistor(opcional).
132 Tensão de frenagem CC(DC BRAKE VOLTAGE)
Ajustes:0 - 100 % [0-100]
0 % [0]
Função:Se o estator em um motor assíncrono for alimentadocom tensão CC, aparecerá um torque de frenagem. Otorque de frenagem depende da tensão de frenagemCC selecionada. A tensão de frenagem CC é indicadacomo um percentual da tensão máxima de frenagem.
Descrição da seleção:Ajuste a tensão desejada como um valor percentual datensão máxima de frenagem.
NOTA!:A tensão de frenagem CC não pode ser utilizadacomo freio de retenção.
133 Tensão de partida (START VOLTAGE)Ajustes:
0,00 - 100,00 V [0-10000] Depende do motor
Função:Você pode ajustar a tensão do motor abaixo do pontode enfraquecimento do campo independentemente dacorrente do motor. Use este parâmetro para compensarum torque de partida demasiado baixo.
A tensão de partida é a tensão de 0 Hz.
NOTA!:Se a tensão de partida estiver configurada comoalta, ela pode levar a uma saturação magnética
e superaquecimento, o que pode causar trip no motorFC. Portanto, tenha cuidado ao utilizar a tensão departida.
Descrição da seleção:Ajuste a tensão de partida desejada.
Carg
a e Mo
tor
Descrição da seleção:Se Desabilitar [0] for selecionado, o trip não seránecessário quando o motor estiver em sobrecarga.
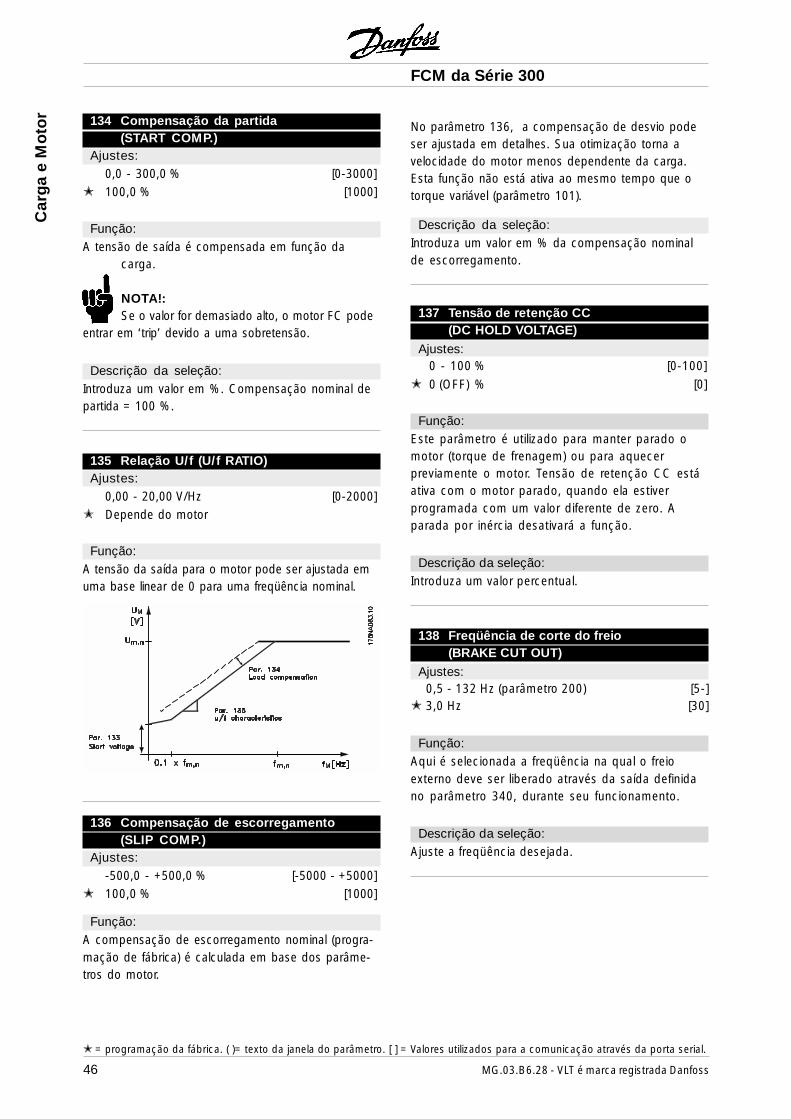
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss46
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
134 Compensação da partida(START COMP.)
Ajustes:0,0 - 300,0 % [0-3000]
100,0 % [1000]
Função:A tensão de saída é compensada em função da
carga.
NOTA!:Se o valor for demasiado alto, o motor FC pode
entrar em ‘trip’ devido a uma sobretensão.
Descrição da seleção:Introduza um valor em %. Compensação nominal departida = 100 %.
135 Relação U/f (U/f RATIO)Ajustes:
0,00 - 20,00 V/Hz [0-2000] Depende do motor
Função:A tensão da saída para o motor pode ser ajustada emuma base linear de 0 para uma freqüência nominal.
136 Compensação de escorregamento(SLIP COMP.)
Ajustes:-500,0 - +500,0 % [-5000 - +5000]
100,0 % [1000]
Função:A compensação de escorregamento nominal (progra-mação de fábrica) é calculada em base dos parâme-tros do motor.
Car
ga
e M
oto
r
137 Tensão de retenção CC(DC HOLD VOLTAGE)
Ajustes:0 - 100 % [0-100]
0 (OFF) % [0]
Função:Este parâmetro é utilizado para manter parado omotor (torque de frenagem) ou para aquecerpreviamente o motor. Tensão de retenção CC estáativa com o motor parado, quando ela estiverprogramada com um valor diferente de zero. Aparada por inércia desativará a função.
Descrição da seleção:Introduza um valor percentual.
138 Freqüência de corte do freio(BRAKE CUT OUT)
Ajustes:0,5 - 132 Hz (parâmetro 200) [5-]
3,0 Hz [30]
Função:Aqui é selecionada a freqüência na qual o freioexterno deve ser liberado através da saída definidano parâmetro 340, durante seu funcionamento.
Descrição da seleção:Ajuste a freqüência desejada.
No parâmetro 136, a compensação de desvio podeser ajustada em detalhes. Sua otimização torna avelocidade do motor menos dependente da carga.Esta função não está ativa ao mesmo tempo que otorque variável (parâmetro 101).
Descrição da seleção:Introduza um valor em % da compensação nominalde escorregamento.

FCM da Série 300
47MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
200 Direção da rotação (ROTATION)Ajustes:
Só sentido horário, 0-132 Hz(132 Hz CLOCK WISE) [0]Ambas direções, 0-132 Hz(132 Hz BOTH DIRECT.) [1]Somente no sentido anti-horário, 0-132 Hz(132 Hz COUNTERCLOCKW.) [2]
Função:Este parâmetro garante a proteção contra umareversão indesejada.
Ao usar o modo Processo, malha fechada (parâmetro100), o parâmetro 200 não deve ser modificado paraAmbas direções [1].
Descrição da seleção:Selecione a direção desejada vista da extremidade doacionador do motor.
Observe que se for selecionado Somente no sentidohorário, 0-132 Hz [0] / Somente no sentido anti-horário,0-132 Hz [2], a freqüência de saída será limitada aointervalo fMIN - fMÁX.
Se Ambas direções, 0-132 Hz [1] for selecionado, afreqüência de saída estará limitada à gama fMÁX (afreqüência mínima não é significativa).
Referências e Lim
ites
NOTA!:Isto só é possível no Modo de Parada (motorparado mediante um comando Stop).
201 Freqüência mín. de saída(MIN OUTPUT FREQ)
Ajustes:0,0 HZ - fMÁX (parâmetro 202) [0 - ]
0,0 HZ [0]
Função:Neste parâmetro, pode ser selecionado um limitemínimo de freqüência do motor que corresponde àfreqüência mínima na qual o motor funciona.
A freqüência mínima nunca pode ser maior que afreqüência máxima fMÁX.
Se foi selecionado ambos sentidos no parâmetro 200,a freqüência mínima não é significativa.
Descrição da seleção:Pode ser escolhido um valor de 0,0 Hz até a freqüênciamáxima selecionada no parâmetro 202 (fMÁX).
139 Freqüência de ativação da frenagem(BRAKE CUT IN)
Ajustes:0,5 - 132 Hz (parâmetro 200) [5-]
3,0 Hz [30]
Função:
Aqui é selecionada a freqüência na qual o freioexterno deve ser ativado, através da saída definida noparâmetro 340, quando o motor está desacele-rando até parar.
Descrição da seleção:Ajuste a freqüência desejada.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss48
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
202 Freqüência máx. de saída(MAX OUTPUT FREQ)
Ajustes:fMÍN (parâmetro 201) - fGAMA (132 Hz, par. 200)
fGAMA
Função:Neste parâmetro, pode ser selecionado um limitemáximo de freqüência do motor que corresponde àfreqüência máxima na qual o motor funciona.
Vide também o parâmetro 205.
Descrição da seleção:Pode ser selecionado um valor de fMÍN até 132 Hz.
203 Gama de referência/feedback(REF/FEEDB. RANGE)
Ajustes:
Mín - Máx (MIN-MAX) [0]- Máx - +Máx (-MAX-+MAX) [1]
Função:Este parâmetro decide se o sinal de referência deveser positivo ou se pode ser tanto positivo quandonegativo.
NOTA!:A entrada analógica (referência/feedback) sópode ser positiva.
Escolha Mín - Máx [0] se Regulação de velocidade,malha aberta, tiver sido selecionado no parâmetro 100.
Descrição da seleção:Selecione a gama desejada.
Ref
erên
cias
e L
imit
es 204 Referência mínima(MIN. REFERENCE)
Ajustes:-100.000,000 - RefMÁX (par. 205) [ -100000000 - ]
0,000 [0]
Depende do parâmetro 100.
Função:A referência Mínima indica o valor mínimo que pode serassumido pela soma de todas as referências.
A referência Mínima só está ativa se tiver sido ajustadoMín - Máx [0] no parâmetro 203; contudo, está sempreativa em Regulação de processo, malha fechada(parâmetro 100).
Descrição da seleção:Ativada somente quando o parâmetro 203 tiver sidoprogramado em Mín - Máx [0].
Programe o valor desejado.
205 Referência máxima(MAX. REFERENCE)
Ajustes:RefMÍN (parâmetro 204) - 100.000,000 [ - 100000000]
50,000 HZ [50000]
Função:A Referência máxima dá o valor máximo que pode serassumido pela soma de todas as referências. Se oparâmetro 100 tiver sido selecionado como malhaaberta, a configuração máxima é 132 Hz.Se malha fechada tiver sido selecionado, a referênciamáxima não pode ser definida com um valor mais altoque o feedback máximo (parâmetro 415).
Descrição da seleção:
Programe o valor desejado.
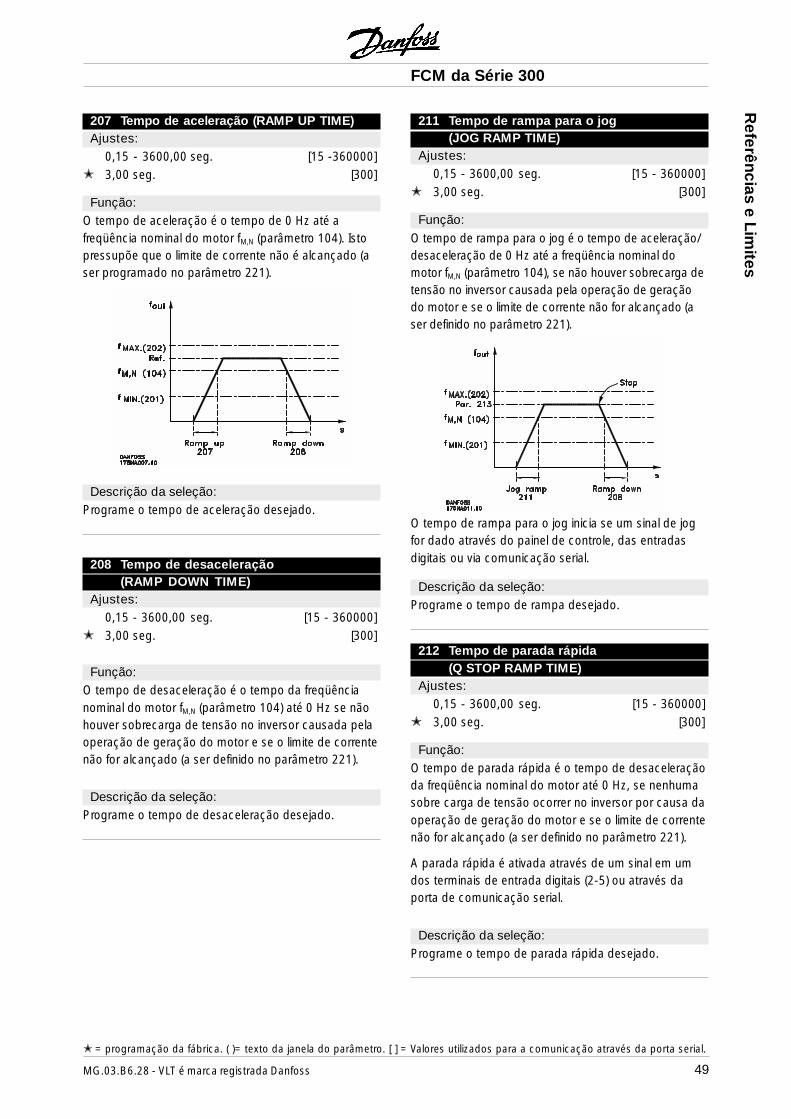
FCM da Série 300
49MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
207 Tempo de aceleração (RAMP UP TIME)Ajustes:
0,15 - 3600,00 seg. [15 -360000] 3,00 seg. [300]
Função:O tempo de aceleração é o tempo de 0 Hz até afreqüência nominal do motor fM,N (parâmetro 104). Istopressupõe que o limite de corrente não é alcançado (aser programado no parâmetro 221).
Descrição da seleção:Programe o tempo de aceleração desejado.
208 Tempo de desaceleração(RAMP DOWN TIME)
Ajustes:0,15 - 3600,00 seg. [15 - 360000]
3,00 seg. [300]
Função:O tempo de desaceleração é o tempo da freqüêncianominal do motor fM,N (parâmetro 104) até 0 Hz se nãohouver sobrecarga de tensão no inversor causada pelaoperação de geração do motor e se o limite de correntenão for alcançado (a ser definido no parâmetro 221).
Descrição da seleção:Programe o tempo de desaceleração desejado.
Referências e Lim
ites
211 Tempo de rampa para o jog(JOG RAMP TIME)
Ajustes:0,15 - 3600,00 seg. [15 - 360000]
3,00 seg. [300]
Função:
O tempo de rampa para o jog é o tempo de aceleração/desaceleração de 0 Hz até a freqüência nominal domotor fM,N (parâmetro 104), se não houver sobrecarga detensão no inversor causada pela operação de geraçãodo motor e se o limite de corrente não for alcançado (aser definido no parâmetro 221).
O tempo de rampa para o jog inicia se um sinal de jogfor dado através do painel de controle, das entradasdigitais ou via comunicação serial.
Descrição da seleção:Programe o tempo de rampa desejado.
212 Tempo de parada rápida(Q STOP RAMP TIME)
Ajustes:0,15 - 3600,00 seg. [15 - 360000]
3,00 seg. [300]
Função:O tempo de parada rápida é o tempo de desaceleraçãoda freqüência nominal do motor até 0 Hz, se nenhumasobre carga de tensão ocorrer no inversor por causa daoperação de geração do motor e se o limite de correntenão for alcançado (a ser definido no parâmetro 221).
A parada rápida é ativada através de um sinal em umdos terminais de entrada digitais (2-5) ou através daporta de comunicação serial.
Descrição da seleção:Programe o tempo de parada rápida desejado.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss50
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Ref
erên
cias
e L
imit
es 213 Freqüência de jog (JOG FREQUENCY)Ajustes:
0,0 HZ - parâmetro 202 [0 - ] 10,0 HZ [100]
Função:A freqüência de jog fJOG é a freqüência de saída na qualo conversor de motor FC funciona quando a função dejog estiver ativada.
Descrição da seleção:Programe a freqüência desejada.
214 Função de referência (REF FUNCTION)Ajustes:
Soma (SUM) [0]Externo/ajustado (EXTERNAL/PRESET) [2]
Função:É possível definir como as referências ajustadas devemser somadas às outras referências. Para este objetivo, éutilizada a Soma. Também é possível - utilizando afunção Externa/ajustado selecionar se uma comutaçãoentre as referências externas ou as referênciasajustadas forem desejadas.
Descrição da seleção:Se for selecionada a Soma [0], uma das referências pré-ajustadas (parâmetros 215-216) é somada como umapercentagem da maxima referência possivel.
Se for selecionado o Externo/pré-ajustado [2], é possívelcomutar entre as referências externas ou as referênciaspré-ajustadas, mediante o terminal 2, 3, 4 ou 5(parâmetro 332, 333, 334 ou 335). As referências pré-ajustadas representarão um percentual da gama dereferência.
A referência externa é a soma das referências analó-gicas, pulsos e referências da via de comunicaçãoserial.
NOTA!:Se a Soma for selecionada, uma das referênciaspré-ajustadas estará sempre ativa. Se as
referências pré-ajustadas não devem ter influência,devem ser programadas para 0% (como naprogramação de fábrica).
215 Referência pré-ajustada 1 (PRESET REF. 1)216 Referência pré-ajustada 2 (PRESET REF. 2)Ajustes:
-100,00 % - +100,00 % [-10000 - +10000]% da gama de referência/referência externa
0,00 % [0]
Função:Duas diferentes referências pré-ajustadas podem serprogramadas nos parâmetros 215-216.
A referência pré-ajustada é apresentada como umapercentagem do valor RefMÁX ou como uma percen-tagem das outras referências externas, dependendo daseleção efetuada no parâmetro 214. Se a RefMÍN ≠ 0tiver sido programada, a referência pré-ajustada comopercentagem será calculada com base na diferençaentre as referências RefMÁX e RefMÍN, depois disso o valoré somado a RefMÍN.
Descrição da seleção:
Programe a(s) referência(s) fixa(s) que deve(m) ser asopções.
Para usar as referências fixas, é necessário terselecionado Habilita referência pré-ajustada para osbornes 2, 3, 4 ou 5 (parâmetros 332-335).
A escolha entre as referências fixas pode ser feita pelaativação dos bornes 2, 3, 4 ou 5 - vide tabela abaixo.
Bornes 2/3/4/5Ref. pré-ajustada
Ref. pré-ajustada 1 0Ref. pré-ajustada 2 1
219 Catch-up/slow-down(CATCH UP/SLW DWN)
Ajustes:0,00 - 100,00 % [0 - 10000]
0,00 % [0]
Função:Este parâmetro possibilita a introdução de um valorpercentual (relativo) que será somado ou subtraído dosinal de referência pré-ajustado.
Descrição da seleção:Se a opção Catch-up foi selecionada através de um dosterminais 2, 3, 4 ou 5 (parâmetros 332 - 335), o valorpercentual (relativo) selecionado no parâmetro 219 seráadicionado à referência total.
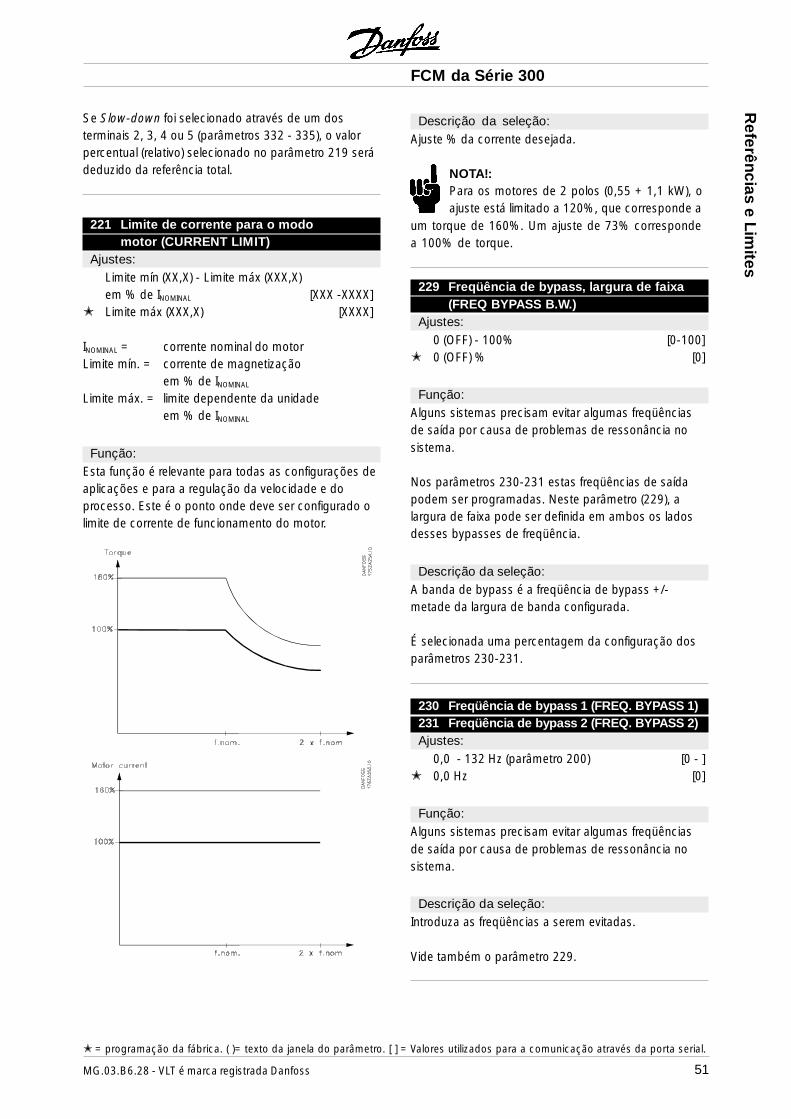
FCM da Série 300
51MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Referências e Lim
ites
Se Slow-down foi selecionado através de um dosterminais 2, 3, 4 ou 5 (parâmetros 332 - 335), o valorpercentual (relativo) selecionado no parâmetro 219 serádeduzido da referência total.
221 Limite de corrente para o modomotor (CURRENT LIMIT)
Ajustes:Limite mín (XX,X) - Limite máx (XXX,X)em % de INOMINAL [XXX -XXXX]
Limite máx (XXX,X) [XXXX]
INOMINAL = corrente nominal do motorLimite mín. = corrente de magnetização
em % de INOMINAL
Limite máx. = limite dependente da unidadeem % de INOMINAL
Função:Esta função é relevante para todas as configurações deaplicações e para a regulação da velocidade e doprocesso. Este é o ponto onde deve ser configurado olimite de corrente de funcionamento do motor.
Descrição da seleção:Ajuste % da corrente desejada.
NOTA!:Para os motores de 2 polos (0,55 + 1,1 kW), oajuste está limitado a 120%, que corresponde a
um torque de 160%. Um ajuste de 73% correspondea 100% de torque.
229 Freqüência de bypass, largura de faixa(FREQ BYPASS B.W.)
Ajustes:0 (OFF) - 100% [0-100]
0 (OFF) % [0]
Função:Alguns sistemas precisam evitar algumas freqüênciasde saída por causa de problemas de ressonância nosistema.
Nos parâmetros 230-231 estas freqüências de saídapodem ser programadas. Neste parâmetro (229), alargura de faixa pode ser definida em ambos os ladosdesses bypasses de freqüência.
Descrição da seleção:A banda de bypass é a freqüência de bypass +/-metade da largura de banda configurada.
É selecionada uma percentagem da configuração dosparâmetros 230-231.
230 Freqüência de bypass 1 (FREQ. BYPASS 1)231 Freqüência de bypass 2 (FREQ. BYPASS 2)Ajustes:
0,0 - 132 Hz (parâmetro 200) [0 - ] 0,0 Hz [0]
Função:Alguns sistemas precisam evitar algumas freqüênciasde saída por causa de problemas de ressonância nosistema.
Descrição da seleção:Introduza as freqüências a serem evitadas.
Vide também o parâmetro 229.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss52
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Ent
rad
as e
Saí
das
331 Terminal 1, entrada analógicade tensão (AI [mA] 1 FUNCT)
Ajustes: Nenhuma operação (NO OPERATION) [0]
Referência (REFERENCE) [1]Sinal de feedback (FEEDBACK) [2]
Função:Este parâmetro permite a seleção da opção desejadano terminal 1.
A graduação do sinal de entrada é efetuada nosparâmetros 338 e 339.
Descrição da seleção:Nenhuma operação. É selecionada se o motor FC nãoreagir aos sinais conectados ao terminal.
Referência. É selecionada para ativar a mudança dereferência através de um sinal de referência analógico.
Se outras entradas estiverem conectadas, estas sãoadicionadas, tomando em consideração os sinais.
Feedback. É selecionada se for usada regulação malhafechada com um sinal analógico.
NOTA!:Se a Referência ou o Feedback tiverem sidoselecionados em mais de um terminal, estes
sinais serão adicionados.
317 Time-out(LIVE ZERO TIME O)
Ajustes:1 - 99 seg. [1 - 99]
10 seg. [10]
Função:Se o valor do sinal de referência conectado à entrada,terminal 1, descer abaixo dos 50% do valor noparâmetro 336 durante um período mais longo do que otempo programado no parâmetro 317, a funçãoselecionada no parâmetro 318 será ativada.
Descrição da seleção:Programe o tempo desejado.
318 Função após o time-out(LIVE ZERO FUNCT.)
Ajustes:
Desligado (OFF) [0]Parada e trip (STOP AND TRIP) [5]
Função:Este parâmetro permite uma escolha da função a serativada se o valor do sinal de referência conectado àentrada, terminal 1, descer abaixo dos 50% do valor doparâmetro 336 durante um período mais longo do que otempo programado no parâmetro 317.
Se uma função "time-out" (parâmetro 318) ocorrer aomesmo tempo como uma função "time-out" do bus(parâmetro 514), a função "time-out" (parâmetro 318)será ativada.
327 Referência por pulso, freqüência máx.(PULSE REF/FB MAX)
Ajustes:100 - 70000 Hz [100 - 70000]
5000 HZ [5000]
Função:Neste parâmetro, o valor do sinal é programado emcorrespondência ao valor máximo de referênciaprogramado nos parâmetros 205/415.
Descrição da seleção:Ajuste a freqüência de pulsos desejada.
NOTA!:Limite de freqüência:Coletor aberto 24 V: 8 kHzPush pull 24 V: 70 kHz

FCM da Série 300
53MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Entrad
as e Saíd
as
332 Terminal 2, entrada analógica/digital(DIGITAL INPUT 2)
333 Terminal 3, entrada digital(DIGITAL INPUT 3)
334 Terminal 4, entrada digital(DIGITAL INPUT 4)
335 Terminal 5, entrada digital(DIGITAL INPUT 5)
Parâmetro 332 333 334 335Entrada digital no terminal n.º 2 3 4 5
Ajustes:Nenhuma função (NO OPERATION) [0] [0] [0] [0]Resetar (RESET) [1] [1] [1] [1]Parada por inércia, inverso (MOTOR COAST INVERSE) [2] [2] [2] [2]Reset e parada por inércia, inverso (RESET & COAST INV.) [3] [3] [3] [3]Parada rápida, inverso (QUICK STOP INVERSE) [4] [4] [4] [4]Frenagem CC ativa, inverso (DC-BRAKE INVERSE) [5] [5] [5] [5]Parada, inverso (STOP INVERSE) [6] [6] [6] [6]Partida (START) [7] [7] [7] [7]Partida com pulso (LATCHED_START) [8] [8] [8] [8]Reversão (REVERSING) [9] [9] [9] [9]Partida com reversão (START REVERSING) [10] [10] [10] [10]Partida sentido horário, ativa (ENABLE FORWARD) [11] [11] [11] [11]Partida sentido anti-horário, ativa (ENABLE REVERSE) [12] [12] [12] [12]Jog (JOGGING) [13] [13] [13] [13]Referência congelada (FREEZE REFERENCE) [14] [14] [14] [14]Saída congelada (FREEZE OUTPUT) [15] [15] [15] [15]Aceleração (SPEED UP) [16] [16] [16] [16]Desaceleração (SPEED DOWN) [17] [17] [17] [17]Seleção de Setup (SETUP SELECT) [18] [18] [18] [18]Catch-up (CATCH UP) [19] [19] [19] [19]Slow-down (SLOW DOWN) [20] [20] [20] [20]Referência pré-programada (PRESET REF.) [21] [21] [21] [21]Referência pré-programada, ligada (PRESET REF. ON) [22] [22] [22] [22]Parada precisa, inversão (PRECISE STOP) [23]Referência de pulso (PULSE REFERENCE) [24]Feedback de pulso (PULSE FEEDBACK) [25]Referência analógica (REFERENCE) [30]Feedback analógico (FEEDBACK) [31]Reset e partida (RESET AND START) [32] [32] [32] [32]
Função:Nos parâmetros 332-335, é possível escolher entre asdiferentes funções possíveis relacionadas com asentradas nos terminais 2-5. As opções de funções sãomostradas na tabela abaixo.
Descrição da seleção:Nenhuma função Nenhuma função Nenhuma função Nenhuma função Nenhuma função é selecionada se o motor FC nãoreagir aos sinais transmitidos ao terminal.
ResetarResetarResetarResetarResetar, zera o motor FC após um alarme; entretanto,nem todos os alarmes podem ser resetados sem quehaja desconexão da rede elétrica.
Parada por inércia, inversoParada por inércia, inversoParada por inércia, inversoParada por inércia, inversoParada por inércia, inverso. O estado lógico '0' leva auma parada por inércia.
Reset e parada por inércia, inverso. Reset e parada por inércia, inverso. Reset e parada por inércia, inverso. Reset e parada por inércia, inverso. Reset e parada por inércia, inverso. É usada paraativar a parada por inércia ao mesmo tempo que oreset.
O estado lógico ‘0’ leva a uma parada por inércia e aoreset.
Parada rápida, inverso. Parada rápida, inverso. Parada rápida, inverso. Parada rápida, inverso. Parada rápida, inverso. É usada para parar o motor deacordo com a rampa de parada rápida (programada noparâmetro 212).
O estado lógico ‘0’ leva a uma parada rápida.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss54
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Ent
rad
as e
Saí
das JogJogJogJogJog é utilizado para substituir a freqüência de saída pela
freqüência de jog regulada no parâmetro 213. O tempode rampa pode ser regulado no parâmetro 211. O jognão será ativado se um comando de parada tiver sidodado (inibidora de partida).
O jog anula uma parada (stand-by).
Referência congeladaReferência congeladaReferência congeladaReferência congeladaReferência congelada - congela a referência atual. Areferência congelada agora é a condição para utilizarAceleração e Desaceleração digital.
Se aceleração e desaceleração digital for usada, avelocidade sempre segue a rampa 2 (parâmetros de207/208) no intervalo entre 0 e RefMÁX.
Saída congeladaSaída congeladaSaída congeladaSaída congeladaSaída congelada - congela a atual freqüência domotor (Hz). A freqüência congelada do motor agora éponto de partida/condição para Aceleração e Desace-leração a ser utilizado.
A saída congelada prevalece sobre partida/espera,compensação de escorregamento e controle deprocesso de malha fechada.
Se for usada a aceleração/desaceleração, a mudançade velocidade sempre acompanhará a rampa normal(parâmetros 207/208) na gama de 0 - fM,N.
Aceleração Aceleração Aceleração Aceleração Aceleração eeeee DDDDDesaceleração sãoesaceleração sãoesaceleração sãoesaceleração sãoesaceleração são selecionadas se umcontrole digital para aumentar/diminuir a velocidade fordesejado. Esta função será ativada somente se aReferência congelada ou a Saída congelada foremselecionadas.
Desde que exista estado lógico ‘1‘ no borneselecionado para aceleração, a referência ou afreqüência de saída aumentará.
Desde que exista estado lógico ‘1‘ no borneselecionado para desaceleração, a referência ou afreqüência de saída diminuirá.
Pulsos (estado lógico ‘1‘ valor alto mínimo durante 20ms e uma pausa mínima de 20 ms) implicarão numamudança de 0,1% na velocidade (referência) ou 0,1 Hz(freqüência de saída).
Exemplo:Borne Ref. congelada/2-5 2-5 Saída congelada
Nenhuma mudançade velocidade 0 0 1Desaceleração 0 1 1Aceleração 1 0 1Desaceleração 1 1 1
A frenagem CCfrenagem CCfrenagem CCfrenagem CCfrenagem CC é utilizada para a parada do motor pelaenergização com uma tensão CC por um determinadotempo, vide os parâmetros 126 a 127.
Note que esta função só fica ativa se os valores dosparâmetros 126-127 forem diferentes de 0.O estado lógico ‘0’ leva à frenagem CC.
Uma parada é ativada interrompendoUma parada é ativada interrompendoUma parada é ativada interrompendoUma parada é ativada interrompendoUma parada é ativada interrompendo a tensão ao ter-minal. Isto quer dizer que se o terminal não tiver tensão,o motor não poderá funcionar. A parada será efetuadade acordo com a rampa selecionada (parâmetros 207/208).
Nenhum dos comandos de paradaanteriormente mencionados é para serutilizado como disjuntor no caso de reparos.
É melhor desligar da rede elétrica.
PartidaPartidaPartidaPartidaPartida, é selecionada se o comando partida/parada fordesejado. O "1" lógico = partida, o "0" lógico = parada(stand-by).
Partida com pulsoPartida com pulsoPartida com pulsoPartida com pulsoPartida com pulso - se um pulso for fornecido durantepelo menos 20 ms, o motor partirá, se nenhumcomando Parada, inverso estiver ativo.
A ReversãoReversãoReversãoReversãoReversão é utilizada para mudar a direção de rotaçãodo eixo do motor. ‘0’ lógico não levará à reversão. ‘1’lógico levará à reversão. O sinal de reversão só mudará adireção de rotação; não ativa a função de partida.
Não deve ser usado no modo Regulação de processo,malha fechada.
Partida com reversãoPartida com reversãoPartida com reversãoPartida com reversãoPartida com reversão é utilizada para partida/parada epara reversão com o mesmo sinal. Nenhum sinal departida é possível ao mesmo tempo. Atua como rever-são de partida com pulso, desde que a partida compulso tenha sido selecionada para um outro terminal.
Não deve ser usado no modo Regulação de processo,malha fechada.
Partida sentido horário, ativa Partida sentido horário, ativa Partida sentido horário, ativa Partida sentido horário, ativa Partida sentido horário, ativa é usada se o eixo domotor tiver que girar apenas no sentido horário napartida.
Não deve ser usado no modo Regulação de processo,malha fechada.
Partida sentido anti-horário, ativa Partida sentido anti-horário, ativa Partida sentido anti-horário, ativa Partida sentido anti-horário, ativa Partida sentido anti-horário, ativa é usada se o eixodo motor tiver que girar no sentido anti-horário napartida.
Não deve ser usado no modo Regulação de processo,malha fechada.

FCM da Série 300
55MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Entrad
as e Saíd
as
Seleção de Setup, Seleção de Setup, Seleção de Setup, Seleção de Setup, Seleção de Setup, permite uma seleção de um dosdois Setups; contudo, isto pressupõe que o parâmetro004 foi programado no Multi Setup.
Catch-up/Catch-up/Catch-up/Catch-up/Catch-up/SSSSSlow downlow downlow downlow downlow down é selecionado se o valor dereferência deve ser aumentado ou reduzido de um valorpercentual programável parâmetro 219.
Slow-down Catch-upVelocidade nãomudada 0 0Reduz de % 1 0Aumenta de % 0 1Reduz de % 1 1
Referência pré-programadaReferência pré-programadaReferência pré-programadaReferência pré-programadaReferência pré-programada permite uma seleção deuma das duas referências pré-programadas, de acordocom a tabela no parâmetro 215 e 216. Para ficar ativa,a Referência pré-programada deve ser selecionada.
Referência pré-programada, ligada Referência pré-programada, ligada Referência pré-programada, ligada Referência pré-programada, ligada Referência pré-programada, ligada é utilizada parapassar da referência externa para a referência pré-programada. É assumido que Externa/pré-programada(2) foi selecionada no parâmetro 214. ‘0’ lógico =referências externas ativas; ‘1’ lógico = uma das duasreferências pré-programadas está ativa.
Parada precisaParada precisaParada precisaParada precisaParada precisa corrige o tempo de desaceleração paraobter uma precisão repetitiva e elevada do ponto deparada.
Referência de pulsoReferência de pulsoReferência de pulsoReferência de pulsoReferência de pulso é selecionada se uma seqüênciade pulso (freqüência) de 0 Hz for utilizada,correspondendo a RefMÍN, parâmetro 204. A freqüênciaé programada no parâmetro 327, correspondendo aRefMÁX.
Feedback de pulsoFeedback de pulsoFeedback de pulsoFeedback de pulsoFeedback de pulso é selecionado se uma seqüênciade pulso (freqüência) for selecionada como sinal defeedback. Vide também a página 50.
Referência analógicaReferência analógicaReferência analógicaReferência analógicaReferência analógica é selecionada para ativar umamudança ou uma referência através de um sinal dereferência analógica. Vide também a página 50.
Se estiverem conectadas outras entradas, elas sãoadicionadas, tomando em consideração os sinais.
Feedback analógicoFeedback analógicoFeedback analógicoFeedback analógicoFeedback analógico é selecionado se for utilizada aregulação da malha fechada com um sinal analógico.
Reset e partidaReset e partidaReset e partidaReset e partidaReset e partida é usada para ativar a partida aomesmo tempo que o reset.
A escala do sinal de entrada é efetuada nosparâmetros 338 e 339.
NOTA!:Se Referência ou Feedback foram selecionadosem mais de um terminal, eles receberão seus
respectivos sinais.
336 Terminal 1, escala mínima(AI 1 SCALE LOW)
Ajustes:0,0 - 20,0 mA [0 - 200]
0,0 mA [0]
Função:Este parâmetro é utilizado para a programação do valordo sinal que corresponde ao valor de referência mínimoprogramado no parâmetro 204.
Se a função Time-out do parâmetro 317 for utilizada, ovalor deve ser > 2 mA.
Descrição da seleção:Ajuste o valor da corrente desejado.
337 Terminal 1, escala máxima(AI 1 SCALE HIGH)
Ajustes:0,0 - 20,0 mA [0 - 200]
20,0 mA [200]
Função:Este parâmetro é utilizado para a programação do valordo sinal que fornece o valor máximo de referênciaregulado no parâmetro 205.
Descrição da seleção:
Ajuste o valor da corrente desejado.
338 Terminal 2, escala mínima(AI 2 SCALE LOW)
Ajustes:0,0 - 10,0 V [0 - 100]
0,0 V [0]
Função:Este parâmetro é utilizado para a programação do valordo sinal que corresponde ao valor de referência mínimoprogramado no parâmetro 204.
Descrição da seleção:Ajuste o valor da tensão desejado.
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss56
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Ent
rad
as e
Saí
das 339 Terminal 2, escala máxima
(AI 2 SCALE HIGH)Ajustes:
0,0 - 10,0 V [0 - 100] 10,0 V [100]
340 Terminal 9, funções de saída (OUTPUT FUNC.)Ajustes:
Nenhuma função (NO OPERATION) [0]Sinal de pronto (UNIT READY) [1]Habilitado, nenhuma advertência (ENABLE/NO WARNING) [2]Funcionando (MOTOR RUNNING) [3]Funcionando nenhuma advertência (RUNNING NO WARNING) [4]Rodando na referência nenhuma advertência (RUNNING ON REFERENCE) [5]Alarme (FAULT) [6]Falha ou advertência (FAULT OR WARNING) [7]Limite de corrente (CURRENT LIMIT) [8]Advertência térmica (THERMAL WARNING) [9]Reversão (REVERSE) [10]OFF 123 (OFF 123 RELAY) [11]Freqüência atual 0-20 mA (0-FMAX = 0-20 mA) [12]Freqüência atual 4-20 mA (0-FMAX = 4-20 mA) [13]ReferênciaMÍN - referênciaMÁX: 0-20 mA (REF MIN-MAX = 0-20 mA) [14]ReferênciaMÍN - referênciaMÁX: 4-20 mA (REF MIN-MAX =4-20 mA) [15]FeedbackMÍN - feedbackMÁX: 0-20 mA (FB MIN-MAX =0-20 mA) [16]FeedbackMÍN - feedbackMÁX: 4-20 mA (FB MIN-MAX =4-20 mA) [17]Corrente atual 0-20 mA (0-IMAX = 0-20 mA) [18]Corrente atual 4-20 mA (0-IMAX = 4-20 mA) [19]Freio mecânico (MECHANICAL BRAKE) [20]
Função:Esta saída pode funcionar como uma saída quer digitalquer analógica. Se utilizada como uma saída digital(valores dos dados entre [0] - [20]), um sinal de 24 VCC é transmitido, se utilizado como uma saídaanalógica é transmitido um sinal de 0-20 mA, um sinalde 4-20 mA ou uma saída de pulso.
Descrição da seleção:Sinal de Unidade pronta, o motor FC está pronto para autilização.
Habilitado, nenhuma advertência, o motor FC estápronto para a utilização; nenhum comando de partidaou parada foi dado (inibidor de partida). Nenhumaadvertência.
Funcionando, a freqüência de saída é superior a 0,1 Hz.Foi indicado um comando de partida.
Funcionando, nenhuma advertência, a freqüência desaída é superior a 0,1 Hz. Foi indicado um comando departida. Nenhuma advertência.
Rodando na referência, nenhuma advertência, velocidadede acordo com a referência. Nenhuma advertência.
Alarme, a saída é ativada por um alarme.
Alarme ou advertência, a saída é ativada por um alarmeou uma advertência.
Limite de corrente, o limite de corrente do parâmetro221 foi excedido.
Advertência térmica, conversor de freqüência acima dolimite de temperatura.
Reversão.‘1’ lógico = relé ativado, 24 V CC na saídaquando o sentido da rotação é horário. ‘0’ lógico = relénão ativado, nenhum sinal na saída, quando o sentidoda rotação do motor é anti-horário.
Função:Este parâmetro é utilizado para a programação do valordo sinal que fornece o valor máximo de referênciaregulado no parâmetro 205.
Descrição da seleção:Ajuste o valor da tensão desejado.

FCM da Série 300
57MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Entrad
as e Saíd
as
OFF 123 relay, se o Profidrive [0] houver sidoselecionado no parâmetro 512, a saída está ativada.Se OFF1, OFF2 ou OFF3 (bit da control word) for nívellógico ‘1’.
0-fMÁX (parâmetro 202) ⇒ 0-20 mA e0-fMÁX (parâmetro 202) ⇒ 4-20 mA
ReferênciaMÍN - ReferênciaMÁX: 0-20 mA eReferênciaMÍN - ReferênciaMÁX: 4-20 mA
FeedbackLOW - FeedbackHIGH: 0-20 mA eFeedbackLOW - FeedbackHIGH: 4-20 mA
0-IVLT, MÁX ⇒ 0-20 mA e0-IVLT, MÁX ⇒ 4-20 mA
Freio mecânico, habilita o controle de um freiomecânico externo opcional (vide também parâmetros138 e 139).

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss58
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
405 Função de reset (RESET MODE)Ajustes:
Reset manual (MANUAL RESET) [0]Reset automático x 1 (AUTOMATIC X 1) [1]Reset automático x 2 (AUTOMATIC X 2) [2]Reset automático x 3 (AUTOMATIC X 3) [3]Reset automático x 4 (AUTOMATIC X 4) [4]Reset automático x 5 (AUTOMATIC X 5) [5]Reset automático x 6 (AUTOMATIC X 6) [6]Reset automático x 7 (AUTOMATIC X 7) [7]Reset automático x 8 (AUTOMATIC X 8) [8]Reset automático x 9 (AUTOMATIC X 9) [9]Reset automático x 10 (AUTOMATIC X 10) [10]Reset na energização(RESET AT POWER-UP) [11]
Função:Este parâmetro permite selecionar a função de resetapós um trip.
Após o trip, o motor FC pode partir novamente após1,5 Seg.
Descrição da seleção:Se o Reset manual (0) for selecionado, o reset deveser efetuado através das entradas digitais.
Se o motor FC tiver que realizar um reset automático(máx. 1-10 vezes dentro de 10 minutos) após o trip,selecione os valores dos dados [1]-[10].
Advertência: O motor pode partir semaviso até 10 x 5 seg após o trip.
411 Freqüência de chaveamento(SWITCH FREQ.)
Ajustes:1,5 -14,0 kHz [1500 - 14000]
Dependente da unidade
Função:O valor determina a freqüência da portadora do inver-sor. Se a freqüência de chaveamento for alterada, istopode ajudar a minimizar possíveis ruídos do motor.
Descrição da seleção:Quando o motor estiver funcionando, a freqüência decomutação é ajustada no parâmetros 411 até serobtida a freqüência na qual o ruído será o mais baixopossível.
Vide também o parâmetro 446 - padrão dechaveamento. Vide redução de potência (derating) nocapítulo 10.
NOTA!:As freqüências da portadora superiores a 4 kHzpodem causar um ‘trip’ térmico, dependendo
da temperatura ambiente.
412 Freqüência da portadora variável(VAR CARRIER FREQ)
Ajustes:Desabilitado (DISABLE) [0]Freq. da portadora variável(VAR. CARRIER. FREQ) [1]
Temperatura dep. freq. da port.(TEMP.DEP.FREQ) [2]
Função:Esta função torna possível mudar a freqüência daportadora dependente da carga. Contudo, a freqüênciamáxima da portadora é determinada pelo valorprogramado no parâmetro 411.
Descrição da seleção:Selecione Desabilitado [0] se uma freqüência daportadora fixa for desejada. Programe a freqüência daportadora no parâmetro 411.
Se Freqüência de chaveamento variável [1] forselecionado, a freqüência de chaveamento diminuirácom o aumento da freqüência de saída. Isto é utilizadonas aplicações com características de torque quadrado(bombas centrífugas e ventiladores) em que a cargadiminui dependendo da freqüência de saída.
Funç
ões
esp
ecia
is 400 Funções do freio (BRAKE FUNCTIONS)Ajustes:
DESLIGADO (OFF) [0]Freio CA (AC BRAKE) [4]
Função:Freio CA [4] pode ser selecionado para melhorar afrenagem.
Descrição da seleção:Selecione Freio CA [4] se forem geradas cargas decurta duração.

FCM da Série 300
59MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
413 Fator de sobremodulação(OVERMODULATION)
Ajustes:Desligado (OFF) [0]
Ligado (ON) [1]
Função:Este parâmetro permite a programação do fator desobremodulação da tensão de saída.
Descrição da seleção:Desligado significa que não há sobremodulação datensão de saída o que significa que o ‘ripple’ de torquedo eixo do motor é evitado. Este pode ser um bomrecurso, por exemplo nas máquinas lixadeiras.
Ligado significa que pode ser obtida uma tensão desaída maior que a tensão da rede (até 5% a mais).
414 Feedback mínimo(MIN. FEEDBACK)
Ajustes:-100.000,000 - FBHIGH (par. 415) [-100000000-]
0,000 [0]
Função:Os parâmetros 414 e 415 são utilizados para escalar agama do feedback nos valores físicos utilizados pelooperador. O valor também será os limites da referência(parâmetros 204 e 205).
Utilize juntamente com Regulação de processo, malhafechada (parâmetro 100).
Funções esp
eciais
Descrição da seleção:Só está ativa quando o parâmetro 203 tiver sidoprogramado para Mín-Máx [0].
415 Feedback máximo(MAX. FEEDBACK)
Ajustes:(par. 414) FBLOW - 100.000,000 [-100000000]
1.500,000 [1500000]
Função:Vide a descrição do parâmetro 414.
416 Unidade de referência/feedback(REF/FEEDB. UNIT)
Valores:Nenhum [0] t/min [21]
% [1] t/h [22]ppm [2] m [23]rpm [3] Nm [24]bar [4] m. por seg. [25]ciclos por min. [5] m. por min. [26)pulsos por seg. [6] °F [27]unidades por seg. [7] em WG [28]unidades por min. [8] galões por seg. [29]unidades por h. [9] pés3 por seg. [30]°C [10] galões por min. [31]Pa [11] pés3 por min. [32]l por seg. [12] galões por h. [33]m3 por seg. [13] pés3 por h. [34]l por min. [14] lb/s [35]m3 por min. [15] libras por min. [36]l por h. [16] libras por h. [37]m3 por h. [17] libras por pés [38]kg. por seg. [18] pés por seg. [39]kg. por min. [19] pés por min. [40]kg. por h. [20] Hz [41]
Função
Escolha entre as diferentes unidades para seremmostradas no display.Esta unidade também é usada diretamente emRegulação de processo, malha fechada como umaunidade de Máxima/Mínima (parâmetros 204/205)referência e Máximo/Mínimo feedback (parâmetros414/415) .A possibilidade de escolha de uma unidade noparâmetro 416 dependerá da escolha feita nosseguintes parâmetros:Par. 002 Controle local/remoto.Par. 013 Programação das referências locais
como par. 100.Par. 100 Configuração.
Se a Freqüência da portadora dependente datemperatura [2] for selecionada, a freqüência daportadora diminuirá com uma temperatura do inversorcrescente, vide o desenho abaixo.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss60
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
437 Controle normal/inverso do PID deprocesso (PROC NO/INV CTRL)
Ajustes:
Normal (NORMAL) [0]Inverso (INVERSE) [1]
Função:É possível escolher se o regulador do processo deveaumentar/diminuir a freqüência de saída se houver umadiferença entre o sinal de referência e o sinal dofeedback.Utilizado juntamente com Regulação de processo,malha fechada (parâmetro 100).
Descrição da seleção:Se o motor FC tiver que reduzir a freqüência de saídacaso o sinal de feedback aumente, selecione Normal[0].Se o motor FC tiver que aumentar a freqüência de saídacaso o sinal de feedback aumente, selecione Inverso [0].
Funç
ões
esp
ecia
is 438 "Anti windup" no processo PID(PROC ANTI WINDUP)
Ajustes:Desligado (DISABLE) [0]
Ligado (ENABLE) [1]
Função:É possível selecionar se um regulador de processo devecontinuar regulando numa falha, mesmo que não sejapossível aumentar/reduzir a freqüência de saída.Usado em conjunto com Regulação de processo,malha fechada (parâmetro 100).
Descrição da seleção:A programação de fábrica vem como Habilitado [1],o que significa que o vínculo de integração éinicializado com relação à freqüência de saída real,caso o limite de corrente ou a freqüência máx./mín.tenha sido alcançada. O regulador de processo nãoserá ativado novamente, até que o erro seja zero ouseu sinal tenha mudado.
Selecione Desabilitado [0] se o integrador tiver quecontinuar integrando sobre um erro, mesmo que nãoseja possível remover o erro através dessa regulação.
NOTA!:Se o Desabilitado [0] for selecionado, significaque quando a falha muda de sinal, o integrador
primeiro terá que integrar a partir do nível obtido comoresultado da falha anterior, antes que haja qualquermudança na freqüência de saída.
439 Freqüência de partida no processo PID(PROC START VALUE)
Ajustes:fMÍN-fMÁX (parâmetros 201 e 202) X,X
parâmetro 201
Função:Quando surge o sinal de partida, o motor FC reagirá naforma de Regulação de velocidade, malha aberta.Somente quando a freqüência de partida programadafor alcançada é que ele mudará para Regulação deprocesso, malha fechada. Além disso, é possível pro-gramar uma freqüência que corresponda à velocidadena qual o processo normalmente funciona, o que farácom que as condições requeridas pelo processo sejamalcançadas mais depressa.
Usado em conjunto com Regulação de processo,malha fechada (parâmetro 100).
Se o parâmetro 100 for selecionado comoRegulação de processo, malha fechada, a unidadeselecionada no parâmetro 416 será usada quandoforem exibidas tanto a referência (par. 009-12:Referência [unit]) como o feedback (par. 009-12:Feedback [unit]).
Selecione o parâmetro 002 como Controle localSe o parâmetro 013 for escolhido como ControleLCP e malha aberta ou Controle LCP digital e malhaaberta, a referência será dada em Hz,independentemente da escolha feita no parâmetro416. Se o parâmetro 013 for escolhido comoControle LCP/como par. 100 ou Controle LCP/comopar. 100, a unidade ficará como descrito acima noparâmetro 002, Controle remoto.
NOTA!:Isto se aplica à exibição de Referência [unit] eFeedback [unit]. Se Referência [%] ou
Feedback [%] for selecionado, o valor será mostradona forma de um percentual do intervalo selecionado.
Descrição da seleção:Selecione a unidade desejada para o sinal dereferência/feedback.
Selecione o parâmetro 002 como Controle remotoSe o parâmetro 100 for selecionado como Regulaçãode velocidade, malha fechada ou Regulação detorque, malha aberta, a unidade selecionada noparâmetro 416 poderá ser usada nos displays (par.009-12 Feedback [unit]) dos parâmetros deprocesso.

FCM da Série 300
61MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
441 Tempo de integração do processo PID(PROC. INTEGR. T.)
Ajustes:0,01 - 9999 seg. (OFF) [1 - 999900]
9999 seg. [999900]
Função:O integrador proporciona um ganho crescente sehouver um erro constante entre o ponto programado eo sinal de feedback. Quanto maior o erro, mais rápido oganho aumenta. O tempo de integração é aquelerequerido pelo integrador para alcançar o mesmo ganhoque o ganho proporcional.
Usado em conjunto com Regulação de processo,malha fechada (parâmetro 100).
Funções esp
eciais
Descrição da seleção:Pode-se obter uma regulação rápida num tempocurto de integração. Entretanto, esse tempo pode setornar muito curto, podendo levar o processo a tornar-se instável em caso de exceder os limites.
Se o tempo de integração for longo, podem ocorrerimportantes desvios do nível de referência requerido, umavez que o regulador de processo levará mais tempo pararegular com relação a um determinado erro.
442 Tempo de diferenciação do processo PID(PROC. DIFF. TIME)
Ajustes:0,00 (OFF) - 10,00 seg. [0 - 1000]
0,00 seg. [0]
Função:O diferenciador não reage a um erro constante. Ele sófornece algum ganho se houver mudança no erro.
Quanto mais rápido o erro mudar, maior será o ganhodo diferenciador. O ganho é proporcional à velocidadena qual o erro muda.
Usado em conjunto com Regulação de processo,malha fechada (parâmetro 100).
Descrição da seleção:Através de um tempo diferencial mais longo é possívelter um controle rápido. No entanto, esse tempo podese tornar demasiadamente longo, tornando o processoinstável no caso de exceder os limites.
443 Limite de ganho diferencial no processoPID (PROC. DIFF. GAIN)
Ajustes:5,0 - 50,0 [50 - 500]
5,0 [50]
Função:
É possível programar um limite para o ganho dodiferenciador.
O ganho do diferenciador aumentará se houvermudanças rápidas, razão pela qual pode ser vantagemlimitar este ganho, daí obtendo-se um ganho normal dodiferenciador nas mudanças lentas e um ganhoconstante do diferenciador onde ocorrem as mudançasrápidas do erro.
Usado em conjunto com Regulação de processo,malha fechada (parâmetro 100).
Descrição da seleção:Programe a freqüência de partida necessária.
NOTA!:Se o motor FC estiver funcionando no limite decorrente antes de se chegar à freqüência de
partida desejada, o regulador de processo não estaráativo. Para que o regulador seja ativado de qualquermaneira, a freqüência de partida deve ser reduzida para ovalor real da freqüência de saída. Isto pode ser feitodurante a operação.
440 Ganho proporcional no processo PID(PROC. PROP. GAIN)
Ajustes:0,00 (OFF) - 10,00 [0 - 1000]
0,01 [1]
Função:O ganho proporcional indica o número de vezes em queo erro entre o ponto programado e o sinal de feedbackdeve ser aplicado.
Usado em conjunto com Regulação de processo,malha fechada (parâmetro 100).
Descrição da opção:Pode-se obter uma regulação rápida através de um altoganho, mas se o ganho for muito alto, o processo podetornar-se instável em caso de exceder os limites.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss62
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Funç
ões
esp
ecia
is 445 Início rápido(FLYING START)
Ajustes: Desabilitado (DISABLE) [0]
OK - mesma direção (OK-SAME DIRECTION) [1]OK - ambas direções (OK-BOTH DIRECTIONS) [2]DC - freio antes da partida(DC-BRAKE BEF. START) [3]
Função:Esta função permite assumir o controle de um motorque está girando livremente, por causa de uma quedade tensão na rede.
Descrição da seleção:Selecione Desabilitado se esta função não fornecessária.
OK - mesma direção: Escolhida se o motor puder rodarsó na mesma direção no corte (cut-in).
OK - ambas direções: Escolhida se o motor puder rodarem ambas direções no corte.
CC- freio - antes da partida: Selecionada se o motordeve parar usando o freio CC antes do motor acelerarpara a velocidade desejada. O tempo do freio CC deveser programado no parâmetro 126.
Limitações:1. Uma inércia muito baixa causará uma aceleração da
carga, o que pode ser perigoso ou impedir um Iníciorápido com sucesso. Ao invés disso, use um freioCC.
2. Se a carga for excitada através de um "sistema demoinho de vento", por exemplo, a unidade podeapresentar um trip em função da sobretensão.
3. O Início rápido não funciona com menos de 250rpm.
446 Padrão de chaveamento(SWITCH PATTERN)
Ajustes:60° AVM (60° AVM) [0]
SFAVM (SFAVM) [1]
Descrição da opção:Normalmente não é necessário que o cliente defina esteparâmetro.
Descrição da opção:Selecione um limite apropriado para o ganho dodiferenciador.
444 Período do filtro de baixa passagem doprocesso PID (PROC. FILTER TIME)
Ajustes:0,01 - 10,00 seg. [1 - 1000]
0,1 seg. [1]
Função:As oscilações do sinal de feedback são amortecidaspor um filtro de baixa passagem para reduzir suainfluência na regulação. Isto pode ser uma vantagem,por exemplo, se houver muito ruído no sistema.
Usado em conjunto com Regulação de processo,malha fechada (parâmetro 100).
Descrição da opção:Selecione a constante de tempo desejada (τ). Se forprogramada uma constante de tempo (τ), por exemplo,de 100 ms, a freqüência de corte do filtro de baixapassagem será de 1/0,1 = 10 RAD/s, correspondendoa (10/2 x π) = 1,6 Hz.
O regulador de processo, portanto, regulará apenas umsinal de feedback que varie de uma freqüência inferior a1,6 Hz. Se o sinal de feedback variar numa freqüênciasuperior a 1,6 Hz, o regulador do processo PID nãoreagirá.

FCM da Série 300
63MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Co
municação
serial
500 Endereço (BUS ADDRESS)Ajustes:
1 - 126 [1 -126] 1 [1]
Função:Este parâmetro permite a especificação do endereço decada motor FC. Esta característica é utilizada emrelação a ligação com o PLC/Micro Computador.
Descrição da seleção:Cada motor FC individual pode ter um endereço entre 1 e126. O endereço 0 é utilizado se um aparelho principal(PLC ou Micro Computador) desejar enviar uma palavraque deve ser recebida ao mesmo tempo por todos osmotores FC ligados à porta serial. Neste caso, o motor FCnão comunicará a recepção. Se o número de unidadesligadas (motor FC + aparelho principal) for maior que 31,um repetidor deve ser aplicado. O parâmetro 500 nãopode ser selecionado mediante a porta serial.
501 Taxa Baud (BAUDRATE)Ajustes:
300 Baud (300 BAUD) [0]600 Baud (600 BAUD) [1]1200 Baud (1200 BAUD) [2]2400 Baud (2400 BAUD) [3]4800 Baud (4800 BAUD) [4]
9600 Baud (9600 BAUD) [5]
Função:Este parâmetro é para a programação da velocidade naqual os dados devem ser transmitidos pela ligaçãoserial. A taxa Baud é definida como o número de bitstransferidos por segundo.
Descrição da seleção:A velocidade de transmissão do motor FC deve serregulada num valor que corresponde à velocidade detransmissão do PLC/Micro.
Função:Os parâmetros 502-508 permitem uma escolha para ocontrole do motor FC pelos terminais (entrada digital) e/ou pelo bus serial.
Se Lógica e ou Bus for selecionado, o comando emquestão pode ser ativado somente se transmitido viacomunicação serial. No caso de Lógica e, o comandotambém deve ser ativado por uma das entradas digitais.
Descrição da seleção:A Entrada digital [0] é selecionada se o comando decontrole em questão deve ser ativado somente por umaentrada digital.
Bus [1] é selecionada se o comando de controle emquestão deve ser ativado somente por um bit na palavrade controle (comunicação serial).
A Lógica e [2] é selecionada se o comando de controleem questão deve ser ativado somente quando um sinalfor transmitido (sinal ativo = 1) por ambos: uma palavrade controle e uma entrada digital.
Entrada digital505-508 Bus Comando de controle
0 0 00 1 01 0 01 1 1
A Lógica ou [3] é selecionada se o comando de controleem questão deve ser ativado quando um sinal for dado(sinal ativo = 1) pela palavra de controle ou por umaentrada digital.
502 Parada por inércia (COASTING SELECT)503 Parada rápida (Q STOP SELECT)504 Freio-CC (DC BRAKE SELECT)505 Partida (START SELECT)506 Reversão (REVERSING SELECT)507 Seleção de Setup (SETUP SELECT)508 Seleção de velocidade
(PRES.REF. SELECT)Ajustes:
Entrada digital (DIGITAL INPUT) [0]Bus (SERIAL PORT) [1]Lógica e (LOGIC AND) [2]
Lógica ou (LOGIC OR) [3]

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss64
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Co
mun
icaç
ão s
eria
l
O parâmetro 502 = Lógica eEntrada digital Bus Comando de controle
0 0 1 Parada por inércia0 1 0 Motor funcionando1 0 0 Motor funcionando1 1 0 Motor funcionando
O parâmetro 502 = Lógica ouEntrada digital Bus Comando de controle
0 0 1 Parada por inércia0 1 1 Parada por inércia1 0 1 Parada por inércia1 1 0 Motor funcionando
509 Jog bus 1 (BUS JOG 1 FREQ.)Ajustes:
0,0 - parâmetro 202 [0 - ] 10,0 HZ [100]
Função:Aqui a programação de uma velocidade fixa (jog) éativada mediante a porta serial.
Esta função é a mesma do parâmetro 213.
Descrição da seleção:A freqüência do jog fJOG pode ser selecionada na faixaentre fMÍN (parâmetro 201) e fMÁX (parâmetro 202).
510 Jog bus 2 (BUS JOG 2 FREQ.)Ajustes:
0,0 - parâmetro 202 [0 - ] 10,0 HZ [100]
Função:Aqui a programação de uma velocidade fixa (jog) éativada mediante a porta serial.
Esta função é a mesma do parâmetro 213.
Descrição da seleção:A freqüência do jog fJOG pode ser selecionada na faixaentre fMÍN (parâmetro 201) e fMÁX (parâmetro 202).
512 Perfil do telegrama (TELEGRAM PROFILE)Ajustes:
Profidrive (PROFIDRIVE) [0] FC Drive (FC DRIVE) [1]
Função:
Há a seleção entre dois perfis de palavra de controlediferentes.
Descrição da seleção:Selecione o perfil de palavra de controle desejado.
Vide capítulo 9, comunicação serial, no guia de projeto,para maiores informações sobre os perfis de palavra decontrole.
NOTA!:Isto só é possível com o FCM em STOP (depoisde um comando de parada).
513 Timeout de bus(BUS TIMEOUT TIME)
Ajustes:De 1 a 99 seg. 1 seg.
Função:
Este parâmetro regula o máximo tempo de espera entrea recepção de duas mensagens consecutivas. Se estetempo for ultrapassado, supõem-se que a comunicaçãoserial parou e a reação desejada é programada noparâmetro 514.
Descrição da seleção:Programe o tempo desejado.
Entrada digital505-508 Bus Comando de controle
0 0 00 1 11 0 11 1 1
NOTA!:Os parâmetros 502-504 tratam com as funçõesde parada - vide os exemplos relativos a 502
(parada por inércia) a seguir. O comando de paradaativo é "0".

FCM da Série 300
65MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Co
municação
serial
514 Bus de função do intervalo de tempo(BUS TIMEOUT FUNC)
Ajustes:
Desligado (OFF) [0]Saída congelada (FREEZE OUTPUT) [1]Parada (STOP) [2]Jog (JOGGING) [3]Velocidade máx. (MAX SPEED) [4]Parada e trip (STOP AND TRIP) [5]
Função:Este parâmetro seleciona a reação desejada para omotor FC, quando for ultrapassado o tempo de esperado Bus (parâmetro 513).Se as escolhas de [1] a [5] estiverem ativadas, os relés01 e 04 serão desativados.
Descrição da seleção:A freqüência de saída do motor FC pode: ser congeladacom os valores atuais, com a referência congelada,parar, ir para freqüência de jog (parâmetro 213), ir para afreqüência de saída máxima (parâmetro 202) ou parar eativar um "trip".
515 Leitura de dados: Referência %(REFERENCE)
Valores:XXX,X % [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado corresponde a referência total(soma de digital/analógico/preset/bus/ref. congelada/catch-up e slow-down).
Este valor é atualizado a cada 320 milissegundos.
516 Leitura de dados: Unidade de referência(REFERENCE [UNIT])
Valores:X,XXX Hz ou rpm. [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:Indica o valor de estado da unidade dado na base daescolha da soma de referência.
Este valor é atualizado a cada 320 milissegundos.
517 Leitura de dados: Feedback(FEEDBACK [UNIT])
Valores:X,XXX [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:Indica o valor do estado dos terminais 1/2 na unidade/escala selecionada nos parâmetros 414 e 415.
Este valor é atualizado a cada 320 milissegundos.
518 Leitura de dados: Freqüência(FREQUENCY)
Valores:XXX,X Hz [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado corresponde à atual freqüência domotor.
Este valor é atualizado a cada 320 milissegundos.
519 Leitura de dados: Freqüência x escala(FREQUENCY X SCALE)
Valores:
XXX,X Hz [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor corresponde à freqüência atual de saída fMmultiplicada pelo valor predefinido no parâmetro 008Fator de escala do display da freqüência de saída.
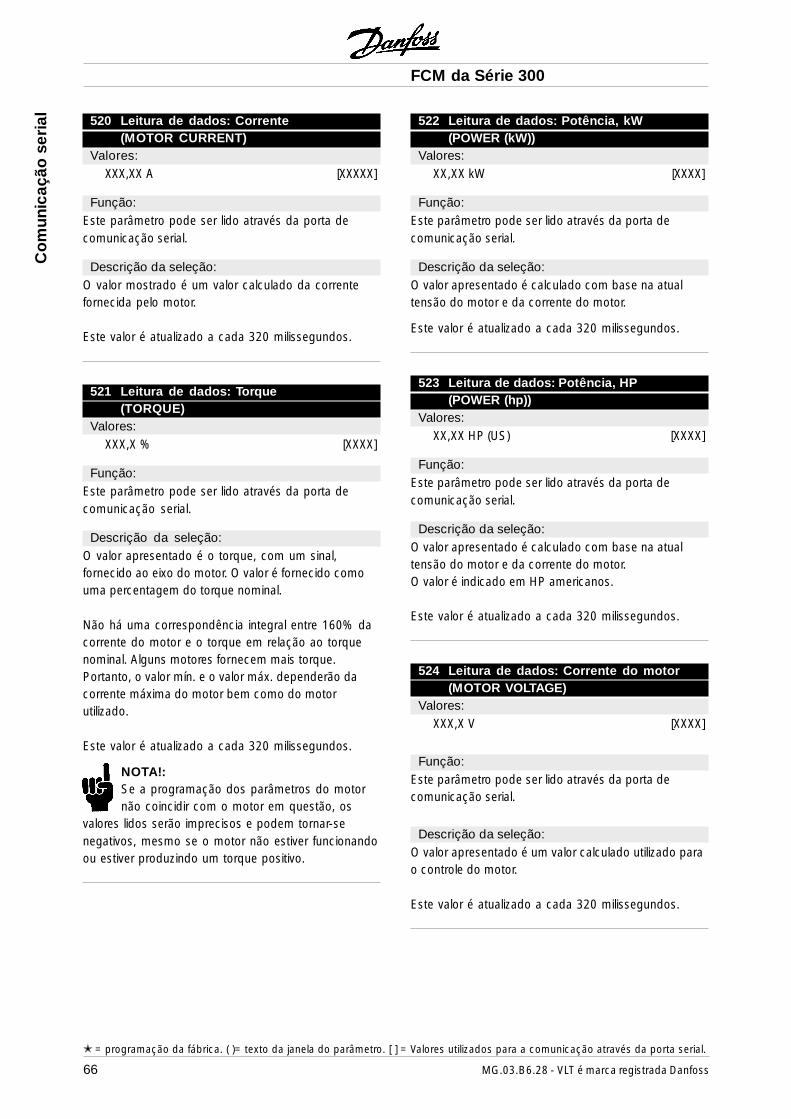
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss66
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Co
mun
icaç
ão s
eria
l
520 Leitura de dados: Corrente(MOTOR CURRENT)
Valores:XXX,XX A [XXXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor mostrado é um valor calculado da correntefornecida pelo motor.
Este valor é atualizado a cada 320 milissegundos.
521 Leitura de dados: Torque(TORQUE)
Valores:XXX,X % [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado é o torque, com um sinal,fornecido ao eixo do motor. O valor é fornecido comouma percentagem do torque nominal.
Não há uma correspondência integral entre 160% dacorrente do motor e o torque em relação ao torquenominal. Alguns motores fornecem mais torque.Portanto, o valor mín. e o valor máx. dependerão dacorrente máxima do motor bem como do motorutilizado.
Este valor é atualizado a cada 320 milissegundos.
NOTA!:Se a programação dos parâmetros do motornão coincidir com o motor em questão, os
valores lidos serão imprecisos e podem tornar-senegativos, mesmo se o motor não estiver funcionandoou estiver produzindo um torque positivo.
522 Leitura de dados: Potência, kW(POWER (kW))
Valores:XX,XX kW [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado é calculado com base na atualtensão do motor e da corrente do motor.
Este valor é atualizado a cada 320 milissegundos.
523 Leitura de dados: Potência, HP(POWER (hp))
Valores:XX,XX HP (US) [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado é calculado com base na atualtensão do motor e da corrente do motor.O valor é indicado em HP americanos.
Este valor é atualizado a cada 320 milissegundos.
524 Leitura de dados: Corrente do motor(MOTOR VOLTAGE)
Valores:XXX,X V [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado é um valor calculado utilizado parao controle do motor.
Este valor é atualizado a cada 320 milissegundos.

FCM da Série 300
67MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
525 Leitura de dados: Tensão de ligação CC(DC LINK VOLTAGE)
Valores:XXXX V [XXXX]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado é um valor medido.
Este valor é filtrado, isto quer dizer que aproximada-mente 1,3 segundos podem passar após a mudançade um valor na entrada até que a leitura dos dadosmude os valores.
Este valor é atualizado a cada 320 milissegundos.
527 Leitura de dados: Temperatura do FC(FC THERMAL)
Valores:0 - 100% [0 - 100]
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:Somente números inteiros são visualizados.
Este valor é atualizado a cada 160 milissegundos.
528 Leitura de dados: Entrada digital(DIGITAL INPUT)
Valores:Unidade
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado indica o estado do sinal dos 4terminais digitais (2, 3, 4 e 5).
Este valor é atualizado a cada 20 milissegundos.
533 Leitura de dados: Referência externa %(EXT. REFERENCE)
Valores:-200,0 - +200,0 %
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor apresentado fornece, em termos percentuais, asoma de referências externas (soma de analógico/bus/pulso).
Este valor é atualizado a cada 80 milissegundos.
534 Leitura de dados: Mensagem de estado,binário (STATUS WORD)
Valores:Unidade
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:Indica a "status word" transmitida através da porta decomunicação serial.
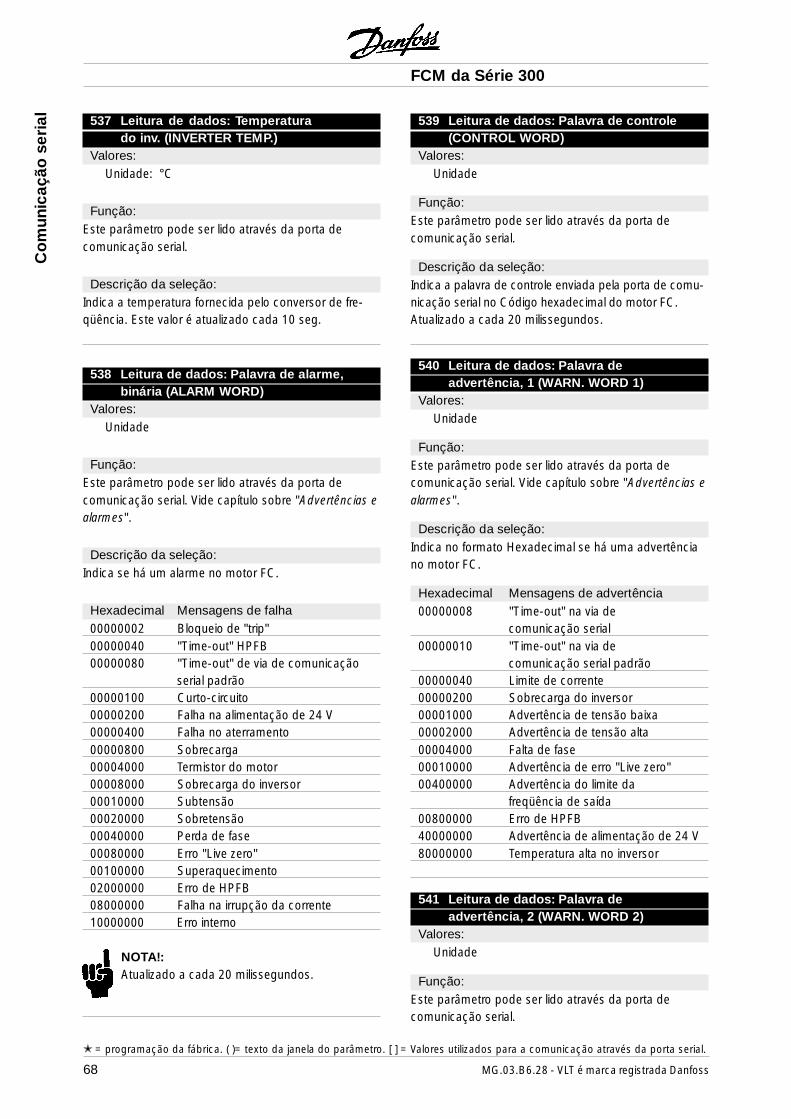
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss68
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Co
mun
icaç
ão s
eria
l
537 Leitura de dados: Temperaturado inv. (INVERTER TEMP.)
Valores:Unidade: °C
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:Indica a temperatura fornecida pelo conversor de fre-qüência. Este valor é atualizado cada 10 seg.
538 Leitura de dados: Palavra de alarme,binária (ALARM WORD)
Valores:Unidade
Função:Este parâmetro pode ser lido através da porta decomunicação serial. Vide capítulo sobre "Advertências ealarmes".
Descrição da seleção:Indica se há um alarme no motor FC.
Hexadecimal Mensagens de falha00000002 Bloqueio de "trip"00000040 "Time-out" HPFB00000080 "Time-out" de via de comunicação
serial padrão00000100 Curto-circuito00000200 Falha na alimentação de 24 V00000400 Falha no aterramento00000800 Sobrecarga00004000 Termistor do motor00008000 Sobrecarga do inversor00010000 Subtensão00020000 Sobretensão00040000 Perda de fase00080000 Erro "Live zero"00100000 Superaquecimento02000000 Erro de HPFB08000000 Falha na irrupção da corrente10000000 Erro interno
NOTA!:Atualizado a cada 20 milissegundos.
539 Leitura de dados: Palavra de controle(CONTROL WORD)
Valores:Unidade
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:Indica a palavra de controle enviada pela porta de comu-nicação serial no Código hexadecimal do motor FC.Atualizado a cada 20 milissegundos.
540 Leitura de dados: Palavra deadvertência, 1 (WARN. WORD 1)
Valores:Unidade
Função:Este parâmetro pode ser lido através da porta decomunicação serial. Vide capítulo sobre "Advertências ealarmes".
Descrição da seleção:Indica no formato Hexadecimal se há uma advertênciano motor FC.
Hexadecimal Mensagens de advertência00000008 "Time-out" na via de
comunicação serial00000010 "Time-out" na via de
comunicação serial padrão00000040 Limite de corrente00000200 Sobrecarga do inversor00001000 Advertência de tensão baixa00002000 Advertência de tensão alta00004000 Falta de fase00010000 Advertência de erro "Live zero"00400000 Advertência do limite da
freqüência de saída00800000 Erro de HPFB40000000 Advertência de alimentação de 24 V80000000 Temperatura alta no inversor
541 Leitura de dados: Palavra deadvertência, 2 (WARN. WORD 2)
Valores:Unidade
Função:Este parâmetro pode ser lido através da porta decomunicação serial.

FCM da Série 300
69MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Descrição da seleção:Indica no formato Hexadecimal se há uma advertênciano motor FC.
Hexadecimal Mensagens de estado01 Rampning04 Partida sentido horário/anti-horário08 Slow down10 Catch-up
8000 Limite de freqüência
542 Leitura de dados: Terminal 1,entrada analógica (ANALOG INPUT 1)
Valores:Unidade: mA
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor mostrado indica o valor do sinal no terminal 1.
A escala (parâmetros 336 e 337) não influencia a leitura.Os min. e os máx. são determinados pelo ajuste dooffset e do ganho do conversor AD.
Este valor é atualizado cada 20 milissegundos.
543 Leitura de dados: Terminal 2,entrada analógica (ANALOG INPUT 2)
Valores:
Unidade: X,X V
Função:Este parâmetro pode ser lido através da porta decomunicação serial.
Descrição da seleção:O valor mostrado indica o valor do sinal no terminal 2.
A escala (parâmetros 338 e 339) não influencia a leitura.Os min. e os máx. são determinados pelo ajuste dooffset e do ganho do conversor AD.
Este valor é atualizado cada 20 milissegundos.
600 Dados operacionais: Horas defuncionamento (OPERATING HOURS)
Valores:Unidade: horas0,0 - 130.000,0
Função:
Este parâmetro pode ser lido através da porta decomunicação serial ou do display. O valor não pode serresetado.
Descrição da seleção:Indica o número de horas em que o motor FC esteveem operação.
O valor é armazenado no motor FC a cada hora etambém quando o aparelho é desligado.
601 Dados operacionais: Horas defuncionamento (RUNNING HOURS)
Valores:Unidade: horas0,0 - 130.000,0
Função:Este parâmetro pode ser lido através da porta decomunicação serial ou do display. O valor pode serresetado através do parâmetro 619.
Descrição da seleção:Indica o numero de horas na qual o motor FC esteveem operação desde reset no parâmetro 619.
O valor é armazenado no motor FC a cada hora etambém quando o aparelho é desligado.
603 Dados operacionais: Número deintervenções (POWER UP’S)
Valores:Unidade: número0 - 9999
Função:Este parâmetro pode ser lido através da porta decomunicação serial ou do display.
Descrição da seleção:Informa o número vezes que a fonte de alimentaçãoenergizou o motor FC.
Funções técnicas
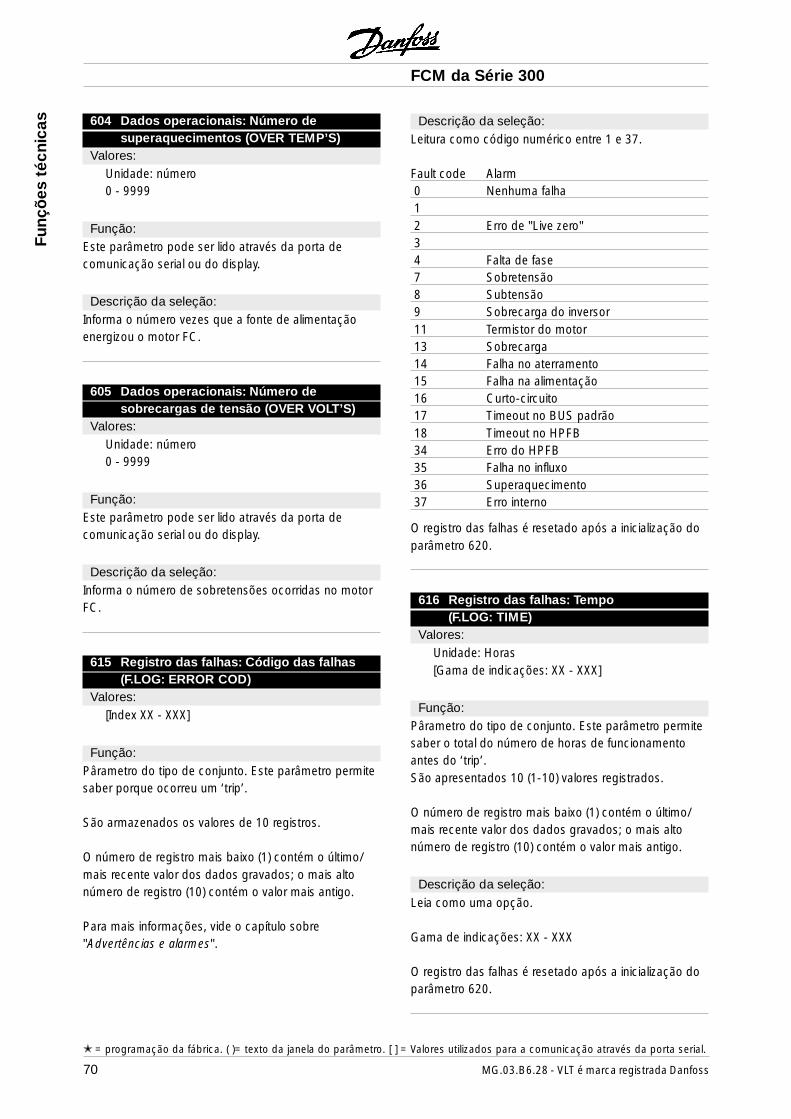
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss70
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
Funç
ões
téc
nica
s 604 Dados operacionais: Número desuperaquecimentos (OVER TEMP’S)
Valores:Unidade: número0 - 9999
Função:Este parâmetro pode ser lido através da porta decomunicação serial ou do display.
Descrição da seleção:Informa o número vezes que a fonte de alimentaçãoenergizou o motor FC.
605 Dados operacionais: Número desobrecargas de tensão (OVER VOLT’S)
Valores:Unidade: número0 - 9999
Função:Este parâmetro pode ser lido através da porta decomunicação serial ou do display.
Descrição da seleção:Informa o número de sobretensões ocorridas no motorFC.
615 Registro das falhas: Código das falhas(F.LOG: ERROR COD)
Valores:[Index XX - XXX]
Função:Pârametro do tipo de conjunto. Este parâmetro permitesaber porque ocorreu um ‘trip’.
São armazenados os valores de 10 registros.
O número de registro mais baixo (1) contém o último/mais recente valor dos dados gravados; o mais altonúmero de registro (10) contém o valor mais antigo.
Para mais informações, vide o capítulo sobre"Advertências e alarmes".
Descrição da seleção:Leitura como código numérico entre 1 e 37.
Fault code Alarm0 Nenhuma falha12 Erro de "Live zero"34 Falta de fase7 Sobretensão8 Subtensão9 Sobrecarga do inversor11 Termistor do motor13 Sobrecarga14 Falha no aterramento15 Falha na alimentação16 Curto-circuito17 Timeout no BUS padrão18 Timeout no HPFB34 Erro do HPFB35 Falha no influxo36 Superaquecimento37 Erro interno
O registro das falhas é resetado após a inicialização doparâmetro 620.
616 Registro das falhas: Tempo(F.LOG: TIME)
Valores:Unidade: Horas[Gama de indicações: XX - XXX]
Função:Pârametro do tipo de conjunto. Este parâmetro permitesaber o total do número de horas de funcionamentoantes do ‘trip’.São apresentados 10 (1-10) valores registrados.
O número de registro mais baixo (1) contém o último/mais recente valor dos dados gravados; o mais altonúmero de registro (10) contém o valor mais antigo.
Descrição da seleção:
Leia como uma opção.
Gama de indicações: XX - XXX
O registro das falhas é resetado após a inicialização doparâmetro 620.

FCM da Série 300
71MG.03.B6.28 - VLT é marca registrada Danfoss
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
617 Registro das falhas: Valor(F.LOG: VALUE)
Valores:[Índice de XX - XXX]
Função:Pârametro do tipo de conjunto. Este parâmetro permitesaber com qual corrente ou tensão um determinado‘trip’ ocorreu.
Descrição da seleção:Leitura como um valor.
Gama de indicações: 0,0 a 999,9.
O registro das falhas é resetado após a inicialização doparâmetro 620.
619 Reset do contador das horas defuncionamento (RESET RUN. HOUR)
Ajustes: Nenhum reset (DO NOT RESET) [0]
Reset (RESET COUNTER) [1]
Função:Colocar o contador das horas de funcionamento emzero (parâmetro 601).
Descrição da seleção:Se Reset [1] tiver sido selecionado o contador dashoras de funcionamento do motor FC será resetado.
620 Modo funcionamento (OPERATION MODE)Ajustes:
Funcionamento normal(NORMAL OPERATION) [0]Teste do cartão de controle(CONTROL CARD TEST) [2]Iniciação (INITIALIZE) [3]
Função:Além do funcionamento normal, este parâmetro podeser utilizado para dois testes diferentes.
Todos os parâmetros (exceto os parâmetros 603-605)também podem ser iniciados manualmente.
Funções técnicas
Descrição da seleção:Funcionamento normal [0] é selecionado para ofuncionamento normal do motor, com o motor naaplicação selecionada.
Teste do cartão de controle [2] é selecionado se fordesejado o controle das entradas analógicas e digitais; dassaídas analógicas, digitais e dos relés, bem como datensão de controle de +10 V. Para este teste é necessáriauma ligação de teste com ligações internas. Setup: Saídaanalógica/digital para as entradas digitais 3, 4 e 5, alémde uma alimentação de 10 V para a entrada 2analógica/digital.
Iniciação [3] é selecionada se desejar a programação dafábrica sem resetar os parâmetros 500, 501 + 600-605.A inicialização fica ativa após a energização.
621 Placa de identificação: Tipo FC(FC TYPE)
Valores:Depende da unidade
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial.
Descrição da seleção:
Tipo indica o tamanho da unidade e o respectivofuncionamento básico.
624 Placa de identificação: nº de versão dosoftware (SOFTWARE VERSION)
Valores:
Depende da unidade
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial.
Descrição da seleção:Versão do software fornece o número da sua versão.
625 Placa de identificação: nº deidentificação do LCP (LCP VERSION)
Valores:Depende da unidade
Função:Os dados-chave o da unidade podem ser lidos na viaporta de comunicação serial ou do display.Por exemplo: ID 1.42 2 kB.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss72
= programação da fábrica. ( )= texto da janela do parâmetro. [ ] = Valores utilizados para a comunicação através da porta serial.
628 Placa de identificação: Tipo de opçãoda aplicação (APP. OPTION)
Valores:
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial ou do display.
630 Placa de identificação: n.º de código daopção de comunicação (COM. ORDER NO)
Valores:
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial ou do display.
632 Identificação do software BMC(BMC SW VERSION)
Valores:
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial ou do display.
633 Identificação da base de dados do motor(MOTOR DATA VERS.)
Valores:
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial ou do display.
Funç
ões
téc
nica
s 626 Placa de identificação: n.º de identificaçãoda base de dados (DATABASE VER.)
Valores:Depende da unidade
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial ou do display.
634 Identificação da unidade para acomunicação (UNIT ID)
Valores:
Função:Os dados-chave da unidade podem ser lidos na viaporta de comunicação serial ou do display.
635 Número de identificação do software(SW. PART NO.)
Valores:
Função:
Indica o número de identificação do software.
Para informações sobre o grupo de parâmetros 800 -900 para o PROFIBUS, consulte o manualMG.03.EX.YY do FCM Profibus.

FCM da Série 300
73MG.03.B6.28 - VLT é marca registrada Danfoss
Co
municação
serial
Capítulo 9Capítulo 9Capítulo 9Capítulo 9Capítulo 9 Software PC da Danfoss ........................ página 74
Bus serial ................................................ página 75
Transmissão de telegramas .................... página 75
Estrutura dos telegramas ....................... página 75
Bytes de dados ...................................... página 76

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss74
Software Danfoss de comunicação serialpara PCA utilização da comunicação serial permite o monitora-mento, a programação e o controle de um ou váriosmotores FC a partir de um computador central. Todosos FCMs da Série 300 têm uma porta RS 485 padrão,que lhe permite comunicar, p. ex., com um PC. Umprograma intitulado VLT® Software Dialog estádisponível com este objetivo.
O VLT® Software Dialog vem em três módulos e contémos programas incluídos no módulo Básico, além deoutros.
O módulo Básico abrange:
TEST RUNé utilizado para controlar e testar um motorFC, incluindo:- configuração do valor de referência,- visualização simultânea dos parâmetros
selecionados graficamente,- opção de vínculos DDE, por exemplo,
com uma planilha.
PARAMETER SETUPé usado para configuração e transferênciade conjuntos de parâmetros, incluindo:- a configuração dos parâmetros do
motor FC,- conjuntos de parâmetros que podem ser
obtidos de e copiados para ummotor FC,
- documentação/impressão daconfiguração, incluindo diagramas.
BUS ADDRESS SETUPé utilizado para programar os endereços debus nos motores FC individuais que estãoconectados ao mesmo bus.- programação dos endereços do bus- armazenamento da lista de unidades- relatório da lista de unidades
O módulo "Logging" abrange:
LOGGINGé usado para captura e visualização dedados operacionais históricos ou emtempo real.- representação gráfica na forma de
curvas de determinados parâmetrosselecionados de vários motores FC,
- captura de dados para arquivos,- opção de vínculos DDE, por exemplo,
com uma planilha.
MODEM SETUPé utilizado para configurar o modem.- configura o modem do motor FC
através da porta de comunicaçãodo PC.
O módulo "Template" abrange:
TEMPLATE SETUPé usado para configurar arquivos"template" para o PARAMETER SETUP- o arquivo "template" funciona como
uma máscara que limita o número deparâmetros à disposição, quando tiverque ser criado ou editado um arquivo deparâmetros no PARAMETER SETUP
- o arquivo "template" pode conter valorespré-ajustados dos parâmetros do motor FC.
NOTA!:Os módulos "logging" e "template" requerema presença de um módulo Básico instaladono mesmo PC.
"Guided tour" abrange:
"Guided tour" do oferece umademonstração do programa VLT SoftwareDialog.
Co
mun
icaç
ão s
eria
l
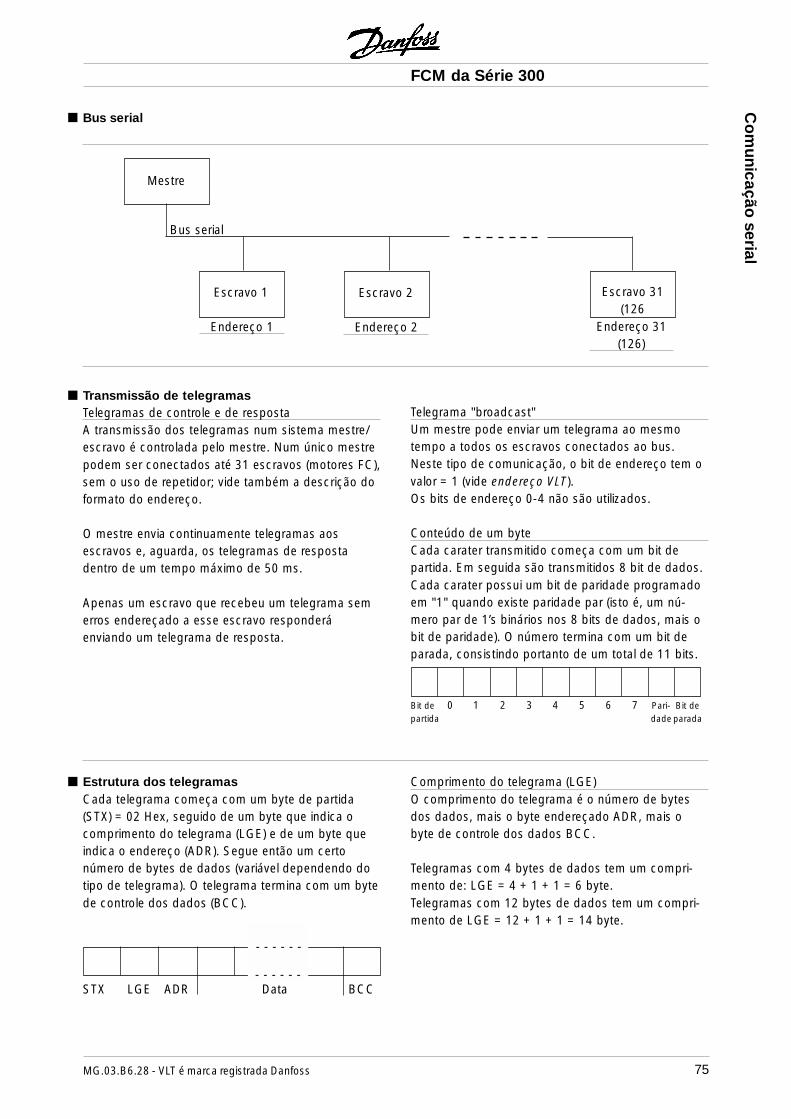
FCM da Série 300
75MG.03.B6.28 - VLT é marca registrada Danfoss
Co
municação
serial
Bus serial
Mestre
Escravo 31(126
Escravo 2Escravo 1
Endereço 1 Endereço 2 Endereço 31(126)
Bus serial
Transmissão de telegramasTelegramas de controle e de respostaA transmissão dos telegramas num sistema mestre/escravo é controlada pelo mestre. Num único mestrepodem ser conectados até 31 escravos (motores FC),sem o uso de repetidor; vide também a descrição doformato do endereço.
O mestre envia continuamente telegramas aosescravos e, aguarda, os telegramas de respostadentro de um tempo máximo de 50 ms.
Apenas um escravo que recebeu um telegrama semerros endereçado a esse escravo responderáenviando um telegrama de resposta.
Telegrama "broadcast"Um mestre pode enviar um telegrama ao mesmotempo a todos os escravos conectados ao bus.Neste tipo de comunicação, o bit de endereço tem ovalor = 1 (vide endereço VLT).Os bits de endereço 0-4 não são utilizados.
Conteúdo de um byteCada carater transmitido começa com um bit departida. Em seguida são transmitidos 8 bit de dados.Cada carater possui um bit de paridade programadoem "1" quando existe paridade par (isto é, um nú-mero par de 1’s binários nos 8 bits de dados, mais obit de paridade). O número termina com um bit deparada, consistindo portanto de um total de 11 bits.
Bit de 0 1 2 3 4 5 6 7 Pari- Bit departida dade parada
Comprimento do telegrama (LGE)O comprimento do telegrama é o número de bytesdos dados, mais o byte endereçado ADR, mais obyte de controle dos dados BCC.
Telegramas com 4 bytes de dados tem um compri-mento de: LGE = 4 + 1 + 1 = 6 byte.Telegramas com 12 bytes de dados tem um compri-mento de LGE = 12 + 1 + 1 = 14 byte.
Estrutura dos telegramasCada telegrama começa com um byte de partida(STX) = 02 Hex, seguido de um byte que indica ocomprimento do telegrama (LGE) e de um byte queindica o endereço (ADR). Segue então um certonúmero de bytes de dados (variável dependendo dotipo de telegrama). O telegrama termina com um bytede controle dos dados (BCC).
STX LGE ADR Data BCC
- - - - - -
- - - - - -

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss76
Co
mun
icaç
ão s
eria
l Byte de dadosO bloco dos bytes de dados é dividido em doisblocos menores:1. Os bytes de parâmetro utilizados para transferir
parâmetros entre o mestre e os escravos2. Os bytes de processo, que compreendem
- "control word" e o valor de referência(do mestre ao escravo)
- "status word" e freqüência de saída atual(do escravo ao mestre)
Esta estrutura vale para o telegrama de comando(mestre→escravo) e o telegrama de resposta(escravo→mestre).
Bytes de parâmetros Bytes de processo
PKE IND PWEhigh PWElow PCD1 PCD2
00 00 00 00 00 00 00 00 00 00 00 00Existem dois tipos de telegramas:- estrutura com 12 bytes como acima, com
bloco dos bytes de parâmetros e dos bytes deprocesso
- 4 bytes, que é o bloco de processo dotelegrama de 12 bytes.
1. Byte de parâmetros
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0
Comandos e respostas (AK)Os bits n.º 12-15 são utilizados para transmitir oscomandos do mestre ao escravo e a respostaenviada do escravo ao mestre.
Endereço VLT (ADR)São utilizados dois diferentes formatos de endereço:1. Formato do endereço do protocolo USS Siemens
7 6 5 4 3 2 1 0
00000
Bit 7 = 0Bit 6 não é utilizadoBit 5 = 1: "broadcast", os bits de endereço
(0-4) não são utilizadosBit 5 = 0: sem "broadcast"Bit 0-4 = endereço VLT 1-31
2. Formato Danfoss:
7 6 5 4 3 2 1 0
11111
Bit 7 = 1Bit 0-6 = endereço VLT 1-127 (0 = "broadcast")
Byte de controle de dados (BCC)Os bytes de controle de dados podem ser melhorexplicados através de um exemplo: antes do primeirocaractere do telegrama ser recebido, BCC = 0
7 6 5 4 3 2 1 0BCC
00000 00000 00000 00000 00000 00000 00000 00000
Depois que foi recebido o primeiro caractere:BCCNOVO = BCCVELHO EXOR "primeiro byte"
(EXOR = porta"exclusive or")
BCCVELHO = 0 0 0 0 0 0 0 0EXOR
"primeiro byte" = 0 0 0 0 0 0 1 0 (O2H)
BCCNOVO = 0 0 0 0 0 0 1 0Cada byte adicional, subsequente é captado porBCCVELHOEXOR e indica um novo BCCNOVO, p. ex.:
BCCVELHO = 0 0 0 0 0 0 1 0EXOR
"segundo byte" = 1 1 0 1 0 1 1 0 (D6H)
BCCNOVO = 1 1 0 1 0 1 0 0
O resultado depois do último caractere recebido éBCC.
PNU
PKE
AK
Com
ando
s e
resp
osta
s
Núm
ero
dopa
râm
etro
Não
util
izad
o
IND PWEhigh PWElow
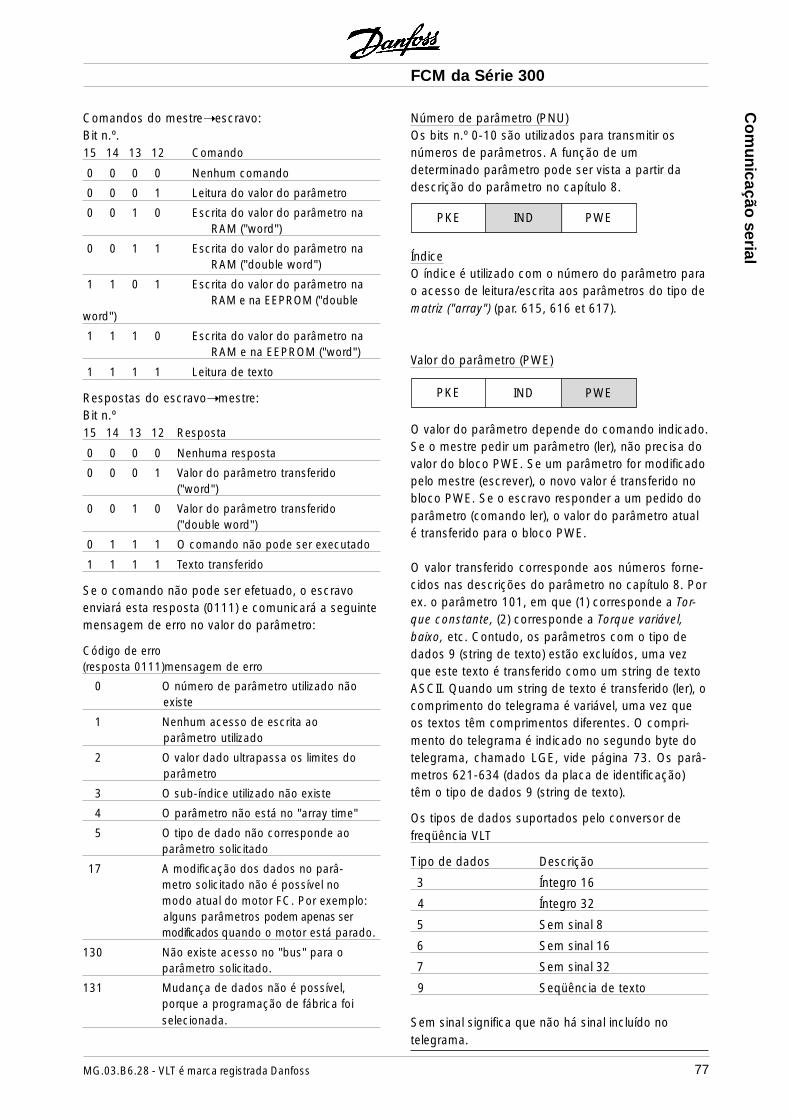
FCM da Série 300
77MG.03.B6.28 - VLT é marca registrada Danfoss
Co
municação
serial
Comandos do mestre escravo:Bit n.º.15 14 13 12 Comando
0 0 0 0 Nenhum comando
0 0 0 1 Leitura do valor do parâmetro
0 0 1 0 Escrita do valor do parâmetro naRAM ("word")
0 0 1 1 Escrita do valor do parâmetro naRAM ("double word")
1 1 0 1 Escrita do valor do parâmetro naRAM e na EEPROM ("double
word")
1 1 1 0 Escrita do valor do parâmetro naRAM e na EEPROM ("word")
1 1 1 1 Leitura de texto
Respostas do escravo mestre:Bit n.º15 14 13 12 Resposta
0 0 0 0 Nenhuma resposta
0 0 0 1 Valor do parâmetro transferido("word")
0 0 1 0 Valor do parâmetro transferido("double word")
0 1 1 1 O comando não pode ser executado
1 1 1 1 Texto transferido
Se o comando não pode ser efetuado, o escravoenviará esta resposta (0111) e comunicará a seguintemensagem de erro no valor do parâmetro:
Código de erro(resposta 0111)mensagem de erro
0 O número de parâmetro utilizado nãoexiste
1 Nenhum acesso de escrita aoparâmetro utilizado
2 O valor dado ultrapassa os limites doparâmetro
3 O sub-índice utilizado não existe
4 O parâmetro não está no "array time"
5 O tipo de dado não corresponde aoparâmetro solicitado
17 A modificação dos dados no parâ-metro solicitado não é possível nomodo atual do motor FC. Por exemplo:alguns parâmetros podem apenas sermodificados quando o motor está parado.
130 Não existe acesso no "bus" para oparâmetro solicitado.
131 Mudança de dados não é possível,porque a programação de fábrica foiselecionada.
Número de parâmetro (PNU)Os bits n.º 0-10 são utilizados para transmitir osnúmeros de parâmetros. A função de umdeterminado parâmetro pode ser vista a partir dadescrição do parâmetro no capítulo 8.
ÍndiceO índice é utilizado com o número do parâmetro parao acesso de leitura/escrita aos parâmetros do tipo dematriz ("array") (par. 615, 616 et 617).
Valor do parâmetro (PWE)
O valor do parâmetro depende do comando indicado.Se o mestre pedir um parâmetro (ler), não precisa dovalor do bloco PWE. Se um parâmetro for modificadopelo mestre (escrever), o novo valor é transferido nobloco PWE. Se o escravo responder a um pedido doparâmetro (comando ler), o valor do parâmetro atualé transferido para o bloco PWE.
O valor transferido corresponde aos números forne-cidos nas descrições do parâmetro no capítulo 8. Porex. o parâmetro 101, em que (1) corresponde a Tor-que constante, (2) corresponde a Torque variável,baixo, etc. Contudo, os parâmetros com o tipo dedados 9 (string de texto) estão excluídos, uma vezque este texto é transferido como um string de textoASCII. Quando um string de texto é transferido (ler), ocomprimento do telegrama é variável, uma vez queos textos têm comprimentos diferentes. O compri-mento do telegrama é indicado no segundo byte dotelegrama, chamado LGE, vide página 73. Os parâ-metros 621-634 (dados da placa de identificação)têm o tipo de dados 9 (string de texto).
Os tipos de dados suportados pelo conversor defreqüência VLT
Tipo de dados Descrição
3 Íntegro 16
4 Íntegro 32
5 Sem sinal 8
6 Sem sinal 16
7 Sem sinal 32
9 Seqüência de texto
Sem sinal significa que não há sinal incluído notelegrama.
PKE IND PWE
PKE IND PWE
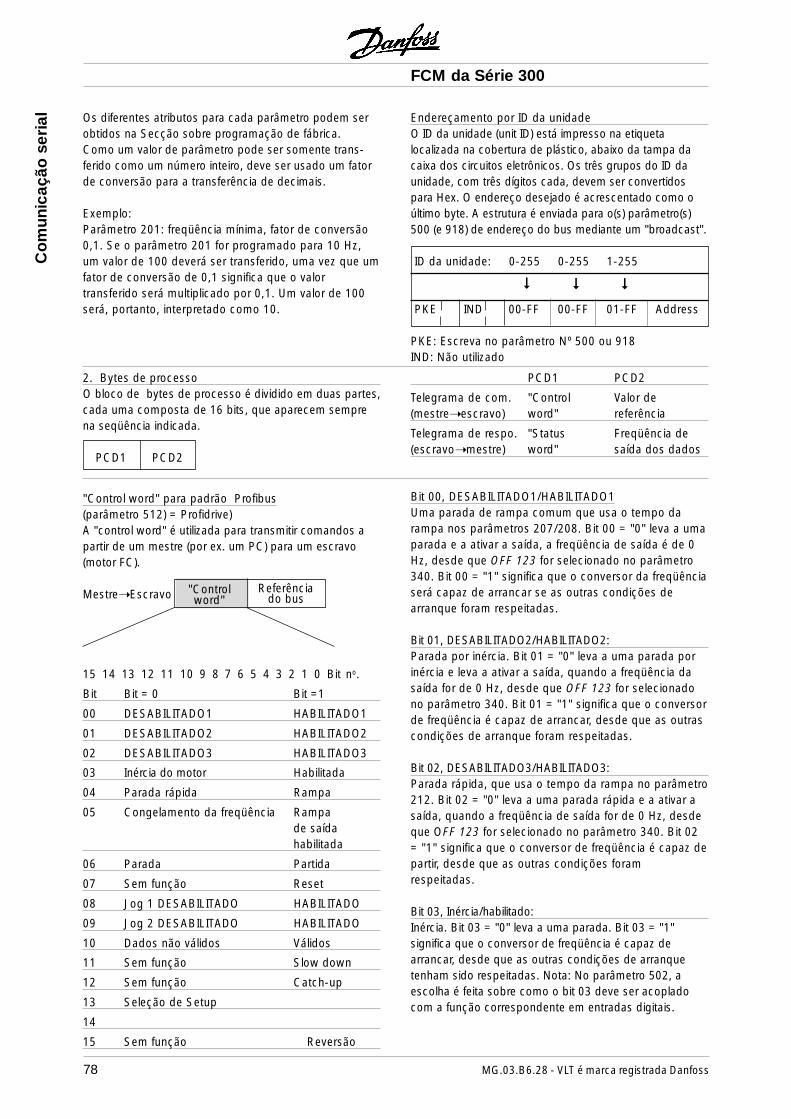
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss78
Co
mun
icaç
ão s
eria
l
PCD1 PCD2
Telegrama de com. "Control Valor de(mestre escravo) word" referência
Telegrama de respo. "Status Freqüência de(escravo mestre) word" saída dos dados
2. Bytes de processoO bloco de bytes de processo é dividido em duas partes,cada uma composta de 16 bits, que aparecem semprena seqüência indicada.
PCD1 PCD2
"Control word" para padrão Profibus(parâmetro 512) = Profidrive)A "control word" é utilizada para transmitir comandos apartir de um mestre (por ex. um PC) para um escravo(motor FC).
Mestre Escravo
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Bit no.
Bit Bit = 0 Bit =1
00 DESABILITADO1 HABILITADO1
01 DESABILITADO2 HABILITADO2
02 DESABILITADO3 HABILITADO3
03 Inércia do motor Habilitada
04 Parada rápida Rampa
05 Congelamento da freqüência Rampade saídahabilitada
06 Parada Partida
07 Sem função Reset
08 Jog 1 DESABILITADO HABILITADO
09 Jog 2 DESABILITADO HABILITADO
10 Dados não válidos Válidos
11 Sem função Slow down
12 Sem função Catch-up
13 Seleção de Setup
14
15 Sem função Reversão
"Controlword"
Referênciado bus
Bit 00, DESABILITADO1/HABILITADO1Uma parada de rampa comum que usa o tempo darampa nos parâmetros 207/208. Bit 00 = "0" leva a umaparada e a ativar a saída, a freqüência de saída é de 0Hz, desde que OFF 123 for selecionado no parâmetro340. Bit 00 = "1" significa que o conversor da freqüênciaserá capaz de arrancar se as outras condições dearranque foram respeitadas.
Bit 01, DESABILITADO2/HABILITADO2:Parada por inércia. Bit 01 = "0" leva a uma parada porinércia e leva a ativar a saída, quando a freqüência dasaída for de 0 Hz, desde que OFF 123 for selecionadono parâmetro 340. Bit 01 = "1" significa que o conversorde freqüência é capaz de arrancar, desde que as outrascondições de arranque foram respeitadas.
Bit 02, DESABILITADO3/HABILITADO3:Parada rápida, que usa o tempo da rampa no parâmetro212. Bit 02 = "0" leva a uma parada rápida e a ativar asaída, quando a freqüência de saída for de 0 Hz, desdeque OFF 123 for selecionado no parâmetro 340. Bit 02= "1" significa que o conversor de freqüência é capaz departir, desde que as outras condições foramrespeitadas.
Bit 03, Inércia/habilitado:Inércia. Bit 03 = "0" leva a uma parada. Bit 03 = "1"significa que o conversor de freqüência é capaz dearrancar, desde que as outras condições de arranquetenham sido respeitadas. Nota: No parâmetro 502, aescolha é feita sobre como o bit 03 deve ser acopladocom a função correspondente em entradas digitais.
Os diferentes atributos para cada parâmetro podem serobtidos na Secção sobre programação de fábrica.Como um valor de parâmetro pode ser somente trans-ferido como um número inteiro, deve ser usado um fatorde conversão para a transferência de decimais.
Exemplo:Parâmetro 201: freqüência mínima, fator de conversão0,1. Se o parâmetro 201 for programado para 10 Hz,um valor de 100 deverá ser transferido, uma vez que umfator de conversão de 0,1 significa que o valortransferido será multiplicado por 0,1. Um valor de 100será, portanto, interpretado como 10.
Endereçamento por ID da unidadeO ID da unidade (unit ID) está impresso na etiquetalocalizada na cobertura de plástico, abaixo da tampa dacaixa dos circuitos eletrônicos. Os três grupos do ID daunidade, com três dígitos cada, devem ser convertidospara Hex. O endereço desejado é acrescentado como oúltimo byte. A estrutura é enviada para o(s) parâmetro(s)500 (e 918) de endereço do bus mediante um "broadcast".
ID da unidade: 0-255 0-255 1-255
PKE IND 00-FF 00-FF 01-FF Address
PKE: Escreva no parâmetro Nº 500 ou 918IND: Não utilizado
FCM da Série 300
79MG.03.B6.28 - VLT é marca registrada Danfoss
Co
municação
serial
Bit 04, Parada rápida / rampa:É uma parada rápida que utiliza o tempo de rampado parâmetro 212. Bit 04 = "0" determina uma para-da rápida. Bit 04 = "1" significa que o conversor defreqüência será capaz de partir, se forem satisfeitasas outras condições para a partida.Nota: No parâmetro 503 é definido como o Bit 04deve ser combinada com a função correspondentenas entradas digitais.
Bit 05, Congelamento da freqüência de saída /habilitação da rampa:Bit 05 = "0" significa que uma dada freqüência desaída, é mantida mesmo se a referência é alterada.Bit 05 = "1" significa que o conversor de freqüência énovamente capaz de efetuar o controle segundo areferência estabelecida.
Bit 06, Parada / Rampa de partidaUma parada de rampa comum que utiliza o tempo darampa nos parâmetros 207/208; além disso, a saídaficará ativada quando a freqüência de saída for de 0 Hz,desde que OFF 123 for selecionado no parâmetro 340.Bit 06 = "1" significa que o conversor de freqüênciaserá capaz de partir se forem satisfeitas as outrascondições para a partida. Nota: No parâmetro 505, aescolha é feita baseada em como o Bit 06 estácombinado (ligado) com a função correspondentenas entradas digitais.
Bit 07, Sem função / reset:Reset de alarme de "trip". Bit 07 = "0" significa quenão existe reset. Bit 07 = "1" significa que o "trip" éresetado.Após o reset, a unidade precisará deaproximadamente 1,5 segundos para ficar pronta. A"status word" indicará o estado quando ela estiverpronta.
Bit 08, Jog 1 DESABILITADO / HABILITADO:Ativação da velocidade pré-programada noparâmetro 509 (JOG bus 1). JOG 1 é somentepossível se o Bit 04 = "0" e os Bits 00-03 = "1".
Bit 09, Jog 2 DESABILITADO / HABILITADOAtivação da velocidade pré-programada noparâmetro 510 (JOG bus 2). JOG 2 é possível só se oBit 04 = "0" e os Bits 00-03 = "1". Se o JOG 1 e oJOG 2 forem ambos ativados (Bit 08 e 09 = "1"), JOG1 tem prioridade superior, vale dizer que será utilizadaa velocidade programada no parâmetro 509.
Bit 10, Dados não válidos / VálidosUtilizado para indicar se no motor FC a "controlword" é para ser utilizada ou ignorada. Bit 10 = "0"significa que a "control word" é ignorada. Bit 10 =
"1" significa que a "control word" é utilizada. Estafunção é importante porque a "control word" estásempre contida no telegrama, independentementedo tipo de telegrama utilizado; significando que épossível separar a "control word" se esta não estiversendo utilizada em conexão com a atualização ou aleitura dos parâmetros.
Bit 11, Sem função / "slow down"É utilizada para reduzir a referência de velocidadeatravés do valor contido no parâmetro 219. Bit 11 ="0" significa que não há variação da referência. Bit 11= "1" significa que a referência é reduzida.
Bit 12, Sem função / "catch-up"É utilizada para aumentar a referência da velocidadeatravés do valor contido no parâmetro 219. Bit 12 ="0" significa que não há variação da referência. Bit 12= "1" significa que a referência é aumentada. Seambos foram ativados, "slow down" e "catch-up"simultaneamente (Bits 11 e 12 = "1"), slow down temprioridade superior, significando que a referência davelocidade é reduzida.
Bit 13, Seleção de "Setup"O Bit 13 é utilizado para efetuar seleção entre os doisSetups do menu, de acordo com a seguinte tabela:
Setup Bit 131 02 1
Esta função é somente possível se, no parâmetro004, for selecionada "Setup múltiplo".
NOTA!:O parâmetro 507 é utilizado para escolhercomo o Bit 13 deve ser combinado (ligado) às
funções correspondentes nas entradas digitais.
Bit 15, Sem função / ReversãoReversão do sentido de rotação do motor. Bit 15 ="0" não determina reversão. Bit 15 = "1" determinareversão.
NOTA!:Se não for indicado, o Bit da "control word" écombinado com a função correspondente nas
entradas digitais como uma função com lógica "or".
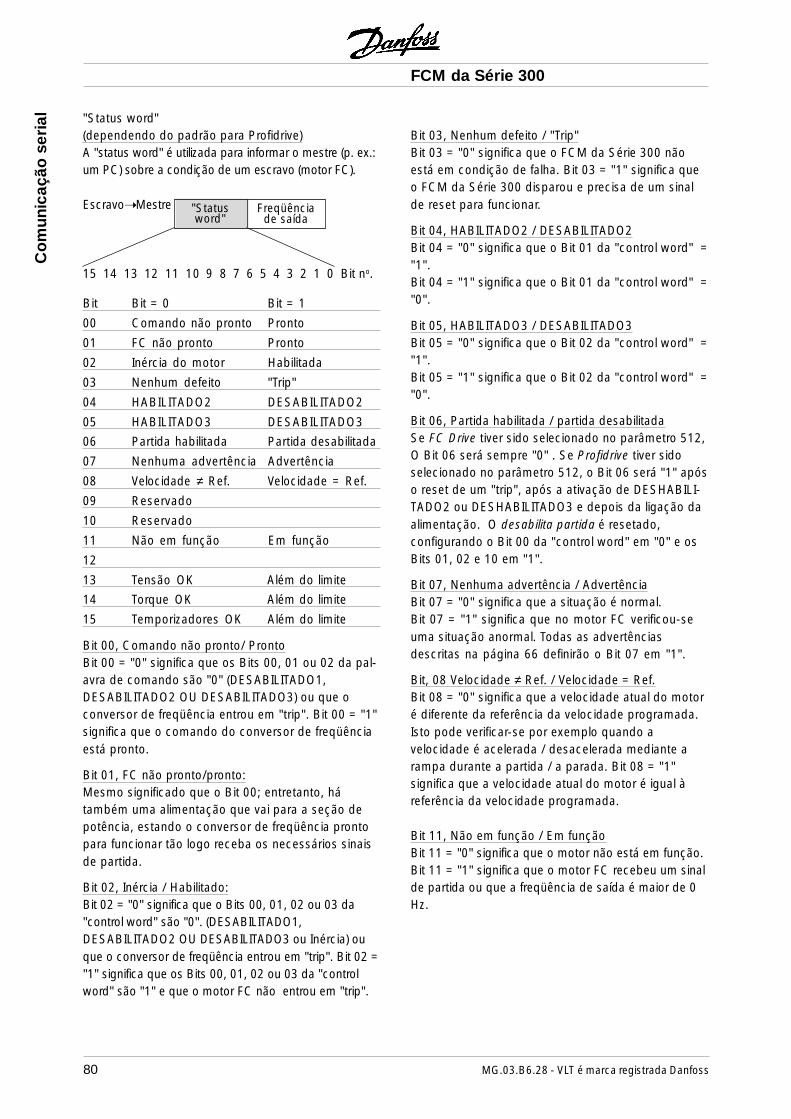
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss80
Co
mun
icaç
ão s
eria
l "Status word"(dependendo do padrão para Profidrive)A "status word" é utilizada para informar o mestre (p. ex.:um PC) sobre a condição de um escravo (motor FC).
Escravo Mestre
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Bit no.
Bit Bit = 0 Bit = 1
00 Comando não pronto Pronto
01 FC não pronto Pronto
02 Inércia do motor Habilitada
03 Nenhum defeito "Trip"
04 HABILITADO2 DESABILITADO2
05 HABILITADO3 DESABILITADO3
06 Partida habilitada Partida desabilitada
07 Nenhuma advertência Advertência
08 Velocidade ≠ Ref. Velocidade = Ref.
09 Reservado
10 Reservado
11 Não em função Em função
12
13 Tensão OK Além do limite
14 Torque OK Além do limite
15 Temporizadores OK Além do limite
Bit 00, Comando não pronto/ ProntoBit 00 = "0" significa que os Bits 00, 01 ou 02 da pal-avra de comando são "0" (DESABILITADO1,DESABILITADO2 OU DESABILITADO3) ou que oconversor de freqüência entrou em "trip". Bit 00 = "1"significa que o comando do conversor de freqüênciaestá pronto.
Bit 01, FC não pronto/pronto:Mesmo significado que o Bit 00; entretanto, hátambém uma alimentação que vai para a seção depotência, estando o conversor de freqüência prontopara funcionar tão logo receba os necessários sinaisde partida.
Bit 02, Inércia / Habilitado:Bit 02 = "0" significa que o Bits 00, 01, 02 ou 03 da"control word" são "0". (DESABILITADO1,DESABILITADO2 OU DESABILITADO3 ou Inércia) ouque o conversor de freqüência entrou em "trip". Bit 02 ="1" significa que os Bits 00, 01, 02 ou 03 da "controlword" são "1" e que o motor FC não entrou em "trip".
Freqüênciade saída
"Statusword"
Bit 03, Nenhum defeito / "Trip"Bit 03 = "0" significa que o FCM da Série 300 nãoestá em condição de falha. Bit 03 = "1" significa queo FCM da Série 300 disparou e precisa de um sinalde reset para funcionar.
Bit 04, HABILITADO2 / DESABILITADO2Bit 04 = "0" significa que o Bit 01 da "control word" ="1".Bit 04 = "1" significa que o Bit 01 da "control word" ="0".
Bit 05, HABILITADO3 / DESABILITADO3Bit 05 = "0" significa que o Bit 02 da "control word" ="1".Bit 05 = "1" significa que o Bit 02 da "control word" ="0".
Bit 06, Partida habilitada / partida desabilitadaSe FC Drive tiver sido selecionado no parâmetro 512,O Bit 06 será sempre "0" . Se Profidrive tiver sidoselecionado no parâmetro 512, o Bit 06 será "1" apóso reset de um "trip", após a ativação de DESHABILI-TADO2 ou DESHABILITADO3 e depois da ligação daalimentação. O desabilita partida é resetado,configurando o Bit 00 da "control word" em "0" e osBits 01, 02 e 10 em "1".
Bit 07, Nenhuma advertência / AdvertênciaBit 07 = "0" significa que a situação é normal.Bit 07 = "1" significa que no motor FC verificou-seuma situação anormal. Todas as advertênciasdescritas na página 66 definirão o Bit 07 em "1".
Bit, 08 Velocidade ≠ Ref. / Velocidade = Ref.Bit 08 = "0" significa que a velocidade atual do motoré diferente da referência da velocidade programada.Isto pode verificar-se por exemplo quando avelocidade é acelerada / desacelerada mediante arampa durante a partida / a parada. Bit 08 = "1"significa que a velocidade atual do motor é igual àreferência da velocidade programada.
Bit 11, Não em função / Em funçãoBit 11 = "0" significa que o motor não está em função.Bit 11 = "1" significa que o motor FC recebeu um sinalde partida ou que a freqüência de saída é maior de 0Hz.
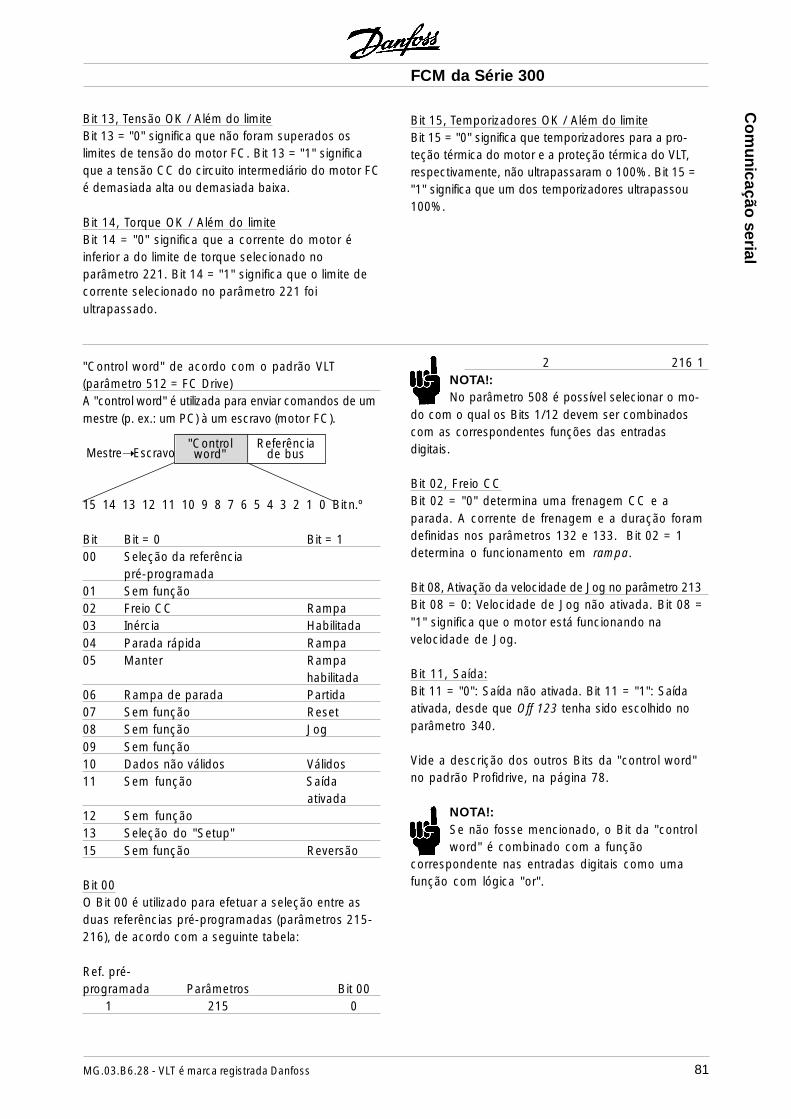
FCM da Série 300
81MG.03.B6.28 - VLT é marca registrada Danfoss
Co
municação
serial
Bit 13, Tensão OK / Além do limiteBit 13 = "0" significa que não foram superados oslimites de tensão do motor FC. Bit 13 = "1" significaque a tensão CC do circuito intermediário do motor FCé demasiada alta ou demasiada baixa.
Bit 14, Torque OK / Além do limiteBit 14 = "0" significa que a corrente do motor éinferior a do limite de torque selecionado noparâmetro 221. Bit 14 = "1" significa que o limite decorrente selecionado no parâmetro 221 foiultrapassado.
Bit 15, Temporizadores OK / Além do limiteBit 15 = "0" significa que temporizadores para a pro-teção térmica do motor e a proteção térmica do VLT,respectivamente, não ultrapassaram o 100%. Bit 15 ="1" significa que um dos temporizadores ultrapassou100%.
"Control word" de acordo com o padrão VLT(parâmetro 512 = FC Drive)A "control word" é utilizada para enviar comandos de ummestre (p. ex.: um PC) à um escravo (motor FC).
Mestre Escravo
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Bit n.º
Bit Bit = 0 Bit = 100 Seleção da referência
pré-programada01 Sem função02 Freio CC Rampa03 Inércia Habilitada04 Parada rápida Rampa05 Manter Rampa
habilitada06 Rampa de parada Partida07 Sem função Reset08 Sem função Jog09 Sem função10 Dados não válidos Válidos11 Sem função Saída
ativada12 Sem função13 Seleção do "Setup"15 Sem função Reversão
Bit 00O Bit 00 é utilizado para efetuar a seleção entre asduas referências pré-programadas (parâmetros 215-216), de acordo com a seguinte tabela:
Ref. pré-programada Parâmetros Bit 00
1 215 0
Referênciade bus
"Controlword"
2 216 1NOTA!:No parâmetro 508 é possível selecionar o mo-
do com o qual os Bits 1/12 devem ser combinadoscom as correspondentes funções das entradasdigitais.
Bit 02, Freio CCBit 02 = "0" determina uma frenagem CC e aparada. A corrente de frenagem e a duração foramdefinidas nos parâmetros 132 e 133. Bit 02 = 1determina o funcionamento em rampa.
Bit 08, Ativação da velocidade de Jog no parâmetro 213Bit 08 = 0: Velocidade de Jog não ativada. Bit 08 ="1" significa que o motor está funcionando navelocidade de Jog.
Bit 11, Saída:Bit 11 = "0": Saída não ativada. Bit 11 = "1": Saídaativada, desde que Off 123 tenha sido escolhido noparâmetro 340.
Vide a descrição dos outros Bits da "control word"no padrão Profidrive, na página 78.
NOTA!:Se não fosse mencionado, o Bit da "controlword" é combinado com a função
correspondente nas entradas digitais como umafunção com lógica "or".

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss82
Co
mun
icaç
ão s
eria
l "Status word" para o padrão VLT:A "status word" é utilizada para informar o mestre(Por ex.: um PC) sobre as condições do escravo(motor FC).
Escravo Mestre
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Bit no.
Bit Bit = 0 Bit = 100 Controle não pronto Pronto01 FC não pronto Pronto02 Inércia Habilitada03 Sem defeito "Falha"04 Reservado05 Reservado06 Reservado07 Sem advertência Advertência08 Velocidade ≠ Ref. Velocidade = Ref.09 Controle local Controle no "bus"10 Fora da faixa Freqüência OK11 Não rodando Rodando1213 Tensão OK Além do limite14 Torque OK Além do limite15 Temporizadores OK Além do limite
Bit 01, FC não pronto/pronto:Bit 01 = "0" significa que o conversor de freqüênciaapresentou uma "falha".Bit 01 = "1" significa que o conversor de freqüênciaestá pronto.
Bit 02, Inércia/habilitada:Bit 02 = "0" significa que o Bit 03 da "control word" é"0" (Inércia) ou que o motor FC apresentou "umafalha". O Bit 02 = "1" significa que o Bit 03 da"control word" é "1" e que o motor FC nãoapresentou "uma falha".
Vide descrição de outros Bits na "status word" parao Profidrive standard, página 78.
Valor de referência bus
Freqüênciade saída
Mestre Escravo
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Bit no.
O valor de referência da freqüência é transmitida aoconversor de freqüência sob forma de uma "word" de16 Bit. O valor é transmitido como um número inteiro(0-32767). 16384 (4000 Hex) corresponde ao 100%(os valores negativos são formados por intermédio deum complemento de 2).
A referência de bus tem o seguinte formato:Parâmetro 203 = "0"
"refMÍN-refMÁX"0-16384 (4000 Hex) ~ 0-100% ~ refMÍN - refMÁX
Parâmetro 203 = "1"-refMÁX - +refMÁX
-16384 (. . . Hex) - +16384 (4000 Hex) ~-100- +100% ~ -refMÁX- +refMÁX
Freqüência de saída atual
Escravo Mestre
15 14 13 12 11 10 9 8 7 6 5 4 3 2 1 0 Bit no.
O valor atual da freqüência de saída do conversor defreqüência é transmitido sob forma de uma "word" de16 Bit. O valor é transmitido como um número inteiro(0-32767). 16384 (4000 Hex) corresponde ao 100%(os valores negativos são formados por intermédio deum complemento de 2).
"Controlword"
"Statusword"
Freqüênciade saída
Referência debus
"Statusword"

FCM da Série 300
83MG.03.B6.28 - VLT é marca registrada Danfoss
Co
ndiçõ
es especiais
Capítulo 10 Isolamento galvânico .............................. página 84
Corrente de fuga à terra ......................... página 84
Condições de funcionamento extremas. página 85
Ruído ....................................................... página 85
"Derating" ................................................. página 86
"Derating" devido à temperatura ambiente . página 86
"Derating" devido à pressão atmosférica. página 86
"Derating" devido a velocidade defuncionamento baixa............................... página 86
"Derating" para alta freqüênciade chaveamento .................................... página 87
Vibração e choque ................................. página 87
Umidade atmosférica .............................. página 87
Eficiência ................................................. página 87
Interferência da rede dealimentação/harmônicas ........................ página 88
Fator de potência ................................... página 88
O que é a etiqueta CE ........................... página 88
A diretiva de maquinaria (89/392/CEE) ... página 88
A diretiva de baixa tensão (73/23/CEE) .. página 88
A diretiva CEM (89/336/CEE) ................. página 89
O que está abrangido ............................. página 89
Motor do conversor de VLT® DriveMotorda Danfoss e a marca CE ...................... página 89
Conformidade com a diretivaCEM 89/336/CEE ................................... página 89
Padrões CEM ......................................... página 90
Ambiente agressivo ................................ página 91
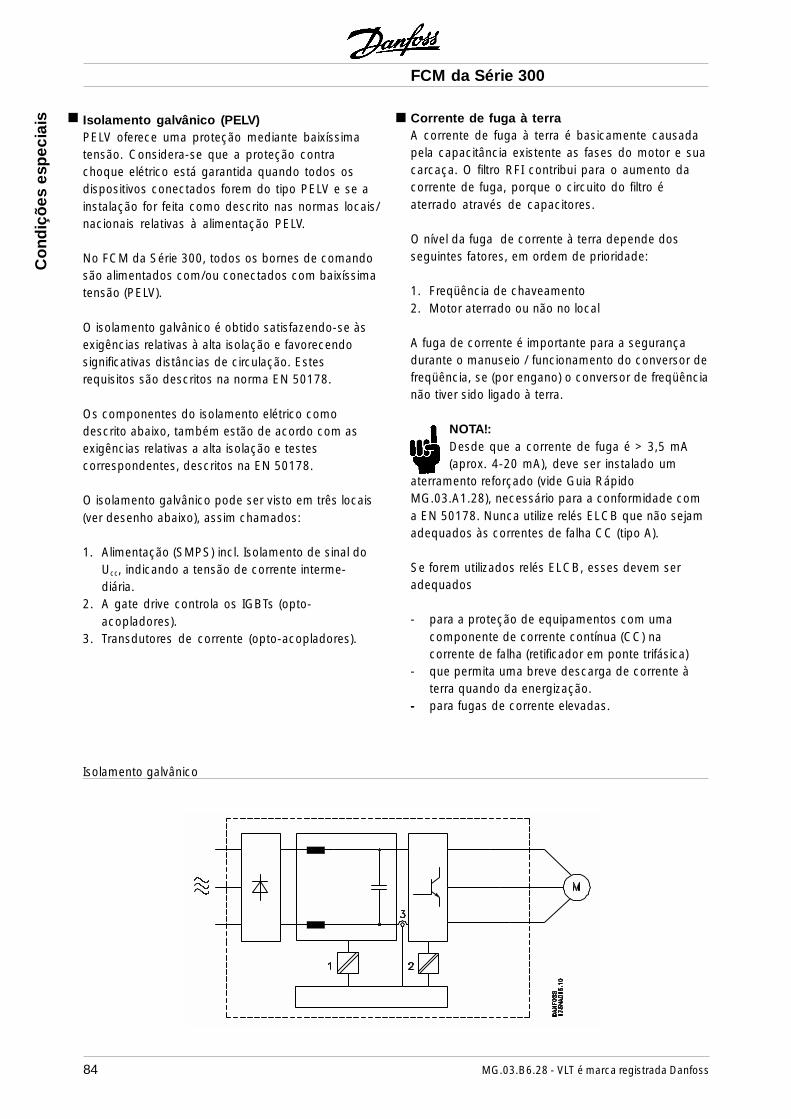
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss84
Co
ndiç
ões
esp
ecia
is Isolamento galvânico (PELV)PELV oferece uma proteção mediante baixíssimatensão. Considera-se que a proteção contrachoque elétrico está garantida quando todos osdispositivos conectados forem do tipo PELV e se ainstalação for feita como descrito nas normas locais/nacionais relativas à alimentação PELV.
No FCM da Série 300, todos os bornes de comandosão alimentados com/ou conectados com baixíssimatensão (PELV).
O isolamento galvânico é obtido satisfazendo-se àsexigências relativas à alta isolação e favorecendosignificativas distâncias de circulação. Estesrequisitos são descritos na norma EN 50178.
Os componentes do isolamento elétrico comodescrito abaixo, também estão de acordo com asexigências relativas a alta isolação e testescorrespondentes, descritos na EN 50178.
O isolamento galvânico pode ser visto em três locais(ver desenho abaixo), assim chamados:
1. Alimentação (SMPS) incl. Isolamento de sinal doUcc, indicando a tensão de corrente interme-diária.
2. A gate drive controla os IGBTs (opto-acopladores).
3. Transdutores de corrente (opto-acopladores).
Corrente de fuga à terraA corrente de fuga à terra é basicamente causadapela capacitância existente as fases do motor e suacarcaça. O filtro RFI contribui para o aumento dacorrente de fuga, porque o circuito do filtro éaterrado através de capacitores.
O nível da fuga de corrente à terra depende dosseguintes fatores, em ordem de prioridade:
1. Freqüência de chaveamento2. Motor aterrado ou não no local
A fuga de corrente é importante para a segurançadurante o manuseio / funcionamento do conversor defreqüência, se (por engano) o conversor de freqüêncianão tiver sido ligado à terra.
NOTA!: Desde que a corrente de fuga é > 3,5 mA(aprox. 4-20 mA), deve ser instalado um
aterramento reforçado (vide Guia RápidoMG.03.A1.28), necessário para a conformidade coma EN 50178. Nunca utilize relés ELCB que não sejamadequados às correntes de falha CC (tipo A).
Se forem utilizados relés ELCB, esses devem seradequados
- para a proteção de equipamentos com umacomponente de corrente contínua (CC) nacorrente de falha (retificador em ponte trifásica)
- que permita uma breve descarga de corrente àterra quando da energização.
----- para fugas de corrente elevadas.
Isolamento galvânico

FCM da Série 300
85MG.03.B6.28 - VLT é marca registrada Danfoss
Condições de funcionamento extremasTensão excessiva gerada no motorA tensão no circuito intermediário aumenta quando omotor funciona como gerador. Isto ocorre em doiscasos específicos:1. Quando a carga alimenta o motor (em relação à
uma freqüência constante na saída do conversor),isto é, a carga gera energia.
2. Durante a desaceleração ("ramp-down") se o mo-mento de inércia é alto, a carga é baixa e o tempode rampa de desaceleração é muito breve parapermitir que a energia seja dissipada no conversorde freqüência VLT, no motor e na instalação.
A unidade de controle tenta corrigir a rampa se forpossível.
O inversor desliga-se para proteger os transistores eos capacitores do circuito intermediário quando foratingido um certo nível de tensão.
Queda de alimentaçãoDurante uma queda de alimentação, o FCM da Série300 permanece ligado até a tensão do circuitointermédio descer abaixo do nível de parada mínimo,que é habitualmente 15% inferior à tensão de alimen-tação nominal mínima do FCM da Série 300.
O intervalo de tempo antes do inversor parardepende da tensão da rede antes do corte e dacarga do motor.
Sobrecarga estáticaQuando o FCM da Série 300. estiver sobrecarre-gado (o limite de corrente no parâmetro 221 tiversido atingido), a unidade de controle reduzirá afreqüência de saída numa tentativa de reduzir acarga.
Se a sobrecarga for excessiva, pode ocorrer umacorrente que desligue o motor FC depois deaproximadamente 1,5 seg.
RuídoSão mostrados abaixo os valores típicos medidos auma distância de 1 m da unidade, em carga plena:
Co
ndiçõ
es especiais
2 polos 4 polosFCM 305 54 dB(A)FCM 311 58 dB(A)FCM 315 59 dB(A)FCM 322 58 dB(A)FCM 330 61 dB(A)FCM 340 62 dB(A) 63 dB(A)FCM 355 64 dB(A) 60 dB(A)FCM 375 61 dB(A)
BalanceamentoO FCM 300 é balanceado para a classe R, deacordo com a ISO2373 (balanceamento reduzido).Para aplicações críticas, especialmente em altavelocidade (>4000 RPM), pode ser necessário umbalanceamento especial (classe S).

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss86
Co
ndiç
ões
esp
ecia
is
"Derating" devido à temperatura ambienteA temperatura ambiente (TAMB.MAX) é a máxima permi-tida. A temperatura média (TAMB.AVG) medida em 24horas deve ser pelo menos 5°C inferior.
Se o FCM da Série 300 for operado a temperaturasacima de 40°C, é necessário uma redução("derating") do valor contínuo de corrente na saída.
"Derating" devido à pressão atmosféricaAbaixo de 1000 m de altitude não é necessárianenhuma redução de potência.
Acima dos 1000 m, a temperatura ambiente (TAMB) oua corrente máxima de saída (lVLT, MAX) deve serreduzida de acordo com o diagrama abaixo.
1) Redução da intensidade da corrente de saída emrelação à altitude a TAMB = máx. 40°C
2) Em função de TAMB versus altitude a 100% dacorrente de saída.
"Derating" devido à velocidade defuncionamento baixaQuando uma bomba centrífuga ou um ventilador sãocontrolados por meio de um motor FC, não énecessário reduzir a saída para uma baixa velocidade,porque a característica de carga das bombascentrífugas/ventiladores garante automaticamente aredução necessária.
Os motores FC que funcionam em aplicações detorque de carga constante continuamente em baixavelocidade devem fazer redução de potência("derating", vide diagrama) ou deve ser utilizado umventilador independente (opção 6 de refrigeração).
O torque nominal (100%) pode ser conseguido em até15 minutos a um ciclo de trabalho de até 25% embaixa velocidade.
"Derating" (Redução de potência)O motor FCM da Série 300 é termicamente protegido,caso sejam excedidos os limites. Em altastemperaturas, a freqüência de chaveamento serágradualmente reduzida até 2 kHz e o motor finalmenteentrará em trip.
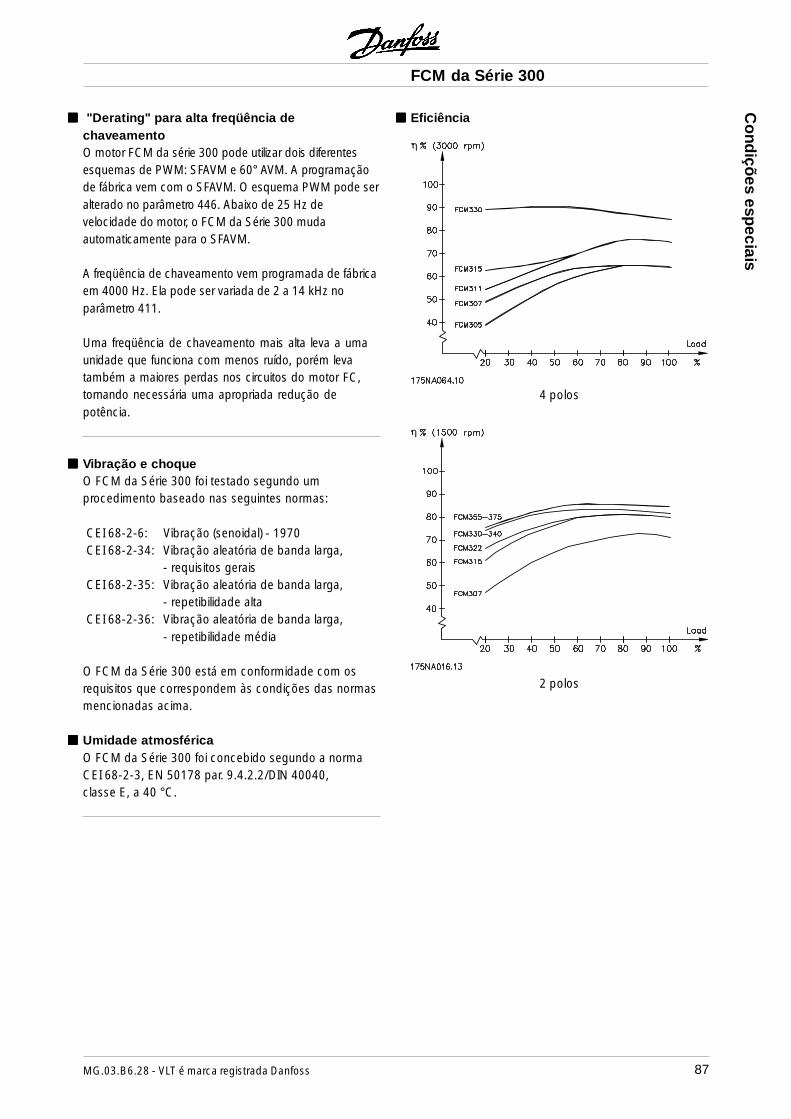
FCM da Série 300
87MG.03.B6.28 - VLT é marca registrada Danfoss
Co
ndiçõ
es especiais
"Derating" para alta freqüência dechaveamentoO motor FCM da série 300 pode utilizar dois diferentesesquemas de PWM: SFAVM e 60° AVM. A programaçãode fábrica vem com o SFAVM. O esquema PWM pode seralterado no parâmetro 446. Abaixo de 25 Hz develocidade do motor, o FCM da Série 300 mudaautomaticamente para o SFAVM.
A freqüência de chaveamento vem programada de fábricaem 4000 Hz. Ela pode ser variada de 2 a 14 kHz noparâmetro 411.
Uma freqüência de chaveamento mais alta leva a umaunidade que funciona com menos ruído, porém levatambém a maiores perdas nos circuitos do motor FC,tornando necessária uma apropriada redução depotência.
Vibração e choqueO FCM da Série 300 foi testado segundo umprocedimento baseado nas seguintes normas:
CEI 68-2-6: Vibração (senoidal) - 1970CEI 68-2-34: Vibração aleatória de banda larga,
- requisitos geraisCEI 68-2-35: Vibração aleatória de banda larga,
- repetibilidade altaCEI 68-2-36: Vibração aleatória de banda larga,
- repetibilidade média
O FCM da Série 300 está em conformidade com osrequisitos que correspondem às condições das normasmencionadas acima.
Umidade atmosféricaO FCM da Série 300 foi concebido segundo a normaCEI 68-2-3, EN 50178 par. 9.4.2.2/DIN 40040,classe E, a 40 °C.
Eficiência
4 polos
2 polos

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss88
THD = (%)
Interferência da rede de alimentação/harmônicasO motor FC recebe uma corrente não-sinusoidal darede, que aumenta a corrente de entrada IRMS. Umacorrente não senoidal pode transformar-se medianteuma análise de Fourier e dividir-se em correntessenoidais com diferentes freqüências. Isto produzharmônicas de corrente diferentes IN com 50 Hz comofreqüência básica:
Harm. de cor. I1 I5 I7 l11
Hz 50 Hz 250 Hz 350 Hz 550 HzIN/l1 [%] 100% 44% 29% 8%
As harmônicas de corrente não contribuem direta-mente para o consumo de energia elétrica, mas au-mentam a perda de potência na instalação (transfor-mador, cabos). Por isto, em instalações com cargaretificada alta, é importante manter a corrente harmô-nica a um nível baixo para não sobrecarregar o trans-formador e não superaquecer os cabos.
Algumas harmônicas de corrente podem interferir noequipamento de comunicação ligado ao mesmo trans-formador ou causar ressonância se utilizarem bancos decapacitores para a correção do fator de potência.
Para assegurar correntes harmônicas baixas, o FCM daSérie 300 usa bobinas no circuito intermediário, comopadrão.THD (corrente) ≤ 54%.A distorção de tensão da alimentação de rede dependeda dimensão das harmônicas de corrente multiplicadapela impedância da rede interna para a freqüência emquestão.A distorção de tensão total THD é calculada com basena tensão das harmônicas individuais utilizando aseguinte fórmula:
Co
ndiç
ões
esp
ecia
is Fator de potênciaO fator de potência é a relação entre I1 e IRMS.O fator de potência para o controle trifásico é
=
O fator da potência indica a extensão até que pontomotor FC impõe uma carga ao fornecimento da rede.
Quanto mais baixo é o fator de potência mais alto é oIRMS para a mesma potência em kW.
Além disso, um fator de potência alto indica que asvárias harmônicas de corrente são baixas.
IRMS = I12 + I52 + I72 + . . . + In2
O que é a etiqueta CE?O objetivo das etiquetas CE é evitar obstáculos técnicosàs transações comerciais no âmbito dos países daEFTA e da U.E. (União Européia). A U.E. introduziu aetiqueta CE como uma forma simples de mostrar se umproduto está em conformidade com as diretivasrelevantes da U.E. A etiqueta CE não informa acerca daqualidade ou especificações de um produto. Osconversores de freqüência estão cobertos por trêsdiretivas da UE.
A diretiva de maquinaria (89/392/CEE)Todas as máquinas com peças com movimento críticoestão cobertas pela diretiva das máquinas, publicada nodia 1º de Janeiro de 1995. Uma vez que o conversor defreqüência é em grande parte elétrico e que o motorserá sempre colocado em conexão com outrasmáquinas, não é abrangido pela diretiva das máquinas.Contudo, se o motor FC for fornecido para ser utilizadonuma máquina, fornecemos informações sobre osaspectos de segurança relacionados com o motor FC.Estas informações são fornecidas através de umadeclaração do fabricante.
A diretiva de baixa tensão (73/23/CEE)Os conversores de freqüência devem ser dotados demarca CE em conformidade com a diretiva sobre baixatensão. Esta diretiva aplica-se a todo o equipamento eaparelhos elétricos que utilizem tensão de 50 a1000 V CA e 75 a 1500 V CC.
3 x U x I1 x cos ϕ1
3 x U x IRMS
I1Fator de potência = =
IRMS
I1 x cos ϕ 1
IRMS ≈ 0,9 desde que cos ϕ = 1
U1
√ U22 + . . . + UN
2
FCM da Série 300
89MG.03.B6.28 - VLT é marca registrada Danfoss
Co
ndiçõ
es especiais
A diretiva CEM (89/336/CEE)CEM é a abreviação para ’compatibilidade eletromag-nética’. A presença de compatibilidade eletromagnéticasignifica que a interferência mútua entre os diferentescomponentes/aparelhos é tão pequena que não chegaa afetar o funcionamento dos aparelhos. A diretivarelativa à CEM entrou em vigor no dia 1º de Janeiro de1996. Esta diretiva faz uma distinção entrecomponentes, aparelhos, sistemas e instalações.
O que está abrangido?O "Guidelines on the Application of Council Directive(Guia sobre a Aplicação da Diretiva do Conselho) 89/336/CEE" da União Européia indica três situaçõestípicas sobre a utilização do motor FC. Para cada umadestas situações é explicado se a questão estáabrangida pela diretiva de CEM e se tem que possuir amarca CE.
1. O motor FC é vendido diretamente ao consumidorfinal, isto aplica-se por exemplo se o motor FC forvendido para uso doméstico. O consumidor finalnão é um especialista. A instalação do motor FC éfeita por ele próprio para uso numa máquina que éum dos seus passatempos ou então num eletro-doméstico etc. Para estas aplicações o motor FCdeverá ter a marca CE em conformidade com adiretiva CEM.
2. O motor FC é vendido para ser instalado no localonde é utilizado por um técnico profissional deinstalações. Pode ser uma instalação fabril ou deaquecimento/ventilação, que foi projetada e insta-lada por profissionais do ramo. Nem o motor FCnem a instalação completa necessitam de marcaCE, de acordo com a diretiva CEM. Todavia o apa-relho deve ser conforme aos requisitos CEM funda-mentais da diretiva. O técnico pode assegurar-sedisto usando componentes, aparelhos e sistemasque têm a marca CE em conformidade com adiretiva CEM.
3. O motor FC é vendido como parte de um sistemacompleto. O sistema é comercializado completo.Pode ser um sistema de ar condicionado. Todo osistema deverá ter a marca CE em conformidadecom a diretiva CEM. O fabricante que fornecer osistema pode garantir a marca CE conforme adiretiva CE seja usando componentes com marcaCE, seja testando a CEM do sistema. Se escolherutilizar somente componentes com marca CE, nãoserá preciso testar o sistema inteiro.
Motor do FCM da Série 300 da Danfoss e amarca CEAs marcas CE constituem uma característica positivaquando utilizadas para os fins às quais foram criadas,isto é, facilitar as transações comerciais no âmbito dospaíses da U.E. e da EFTA.
No entanto, as marcas CE poderão cobrir muitas ediversas especificações. Este é o motivo pelo qual amarca CE pode difundir nos instaladores uma falsasensação de segurança quando o conversor de fre-qüência é utilizado como componente num sistema.
As especificações abrangidas podem, com efeito, serbastante diferentes. Esta é a razão pela qual a marcaCE pode dar uma falsa impressão de segurança aosinstaladores quando utilizarem um motor FC como umcomponente num sistema ou num aparelho.
Nós colocamos marcas CE nos nossos VLT®
DriveMotors, em conformidade com a diretiva de baixatensão. Sobre esta base é concedida uma declaraçãode conformidade com a diretiva CEM. Damos umadeclaração de conformidade para confirmar o fato deque a nossa marca CE está conforme a diretiva sobre abaixa tensão
A marca CE aplica-se igualmente à diretiva CEM, noManual de Operação para uma instalação conforme osrequisitos CEM e a filtragem de acordo com a CEM.Sobre esta base é concedida uma declaração deconformidade com a diretiva CEM.
O Guia Rápido fornece instruções detalhadas sobre ainstalação para garantir que a instalação está correta deacordo com a CEM. Além disso, especificamos quaisas normas e quais dos diferentes produtos seencontram em conformidade com as mesmas.
Oferecemos os filtros indicados nas especificações ealém disso estamos à sua disposição para outros tiposde assistência que contribuam obter os melhoresresultados em termos de CEM.
Conformidade com a diretiva CEM 89/336/CENa grade maioria dos casos, o VLT® DriveMotor é utilizadopelos profissionais deste ramo, como um componentecomplexo que faz parte de um aparelho, sistema ouinstalação maiores. Chamamos a atenção para o fato queas responsabilidades finais sobre a CEM no aparelho, siste-ma ou instalação serão do técnico instalador. Para ajudar otécnico, a Danfoss preparou normas para a instalação coma CEM para o Sistema de Acionamento Elétrico. As normase níveis de teste determinados para Sistemas deTransmissão de Potência são compatíveis desde que sejamseguidas as instruções para instalação correta de CEM. Vejaa Seção sobre instalação elétrica.
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss90
Co
ndiç
ões
esp
ecia
is Normas CEMNOTA!:- Todas as especificações CEM são indicadascom programações de fábrica.
- Freqüência máxima da portadora de 4 kHz.- Cabos de controle/dados blindados devem serutilizados para proteção contra sobretensão.
- O motor FC deve ser conectado à terra demodo a seguir a norma.
- Impedância da linha máxima/mínimaZMÁX = 0,24 + j0,15 ohm; ZMÍN = 0 + j0 ohm.(EN 61800-3 nós de comutação).
Padrões genéricosOs padrões genéricos estão indicados com a diretivaCEM (89/336/CEE).
O motor FC está de acordo com:EN 50081-11), EN50082-1,Ambiente residencial, comercial e de indústria ligeira.
EN 50081-2, EN 50082-2,Ambiente industrial.
1) Os níveis de emissão descritos pela EN 50081-1 sósão cumpridos pelos motores FC com o filtroopcional classe B-1.
Além disso, o motor FC está de acordo com:DIN V DE 0160/19902)
2) Proteção contra sobretensão 7.3.1 classe 1.
Normas dos produtosAs normas dos produtos são indicadas com aEN 61800-3 (IEC 1800-3).
O motor FC está de acordo com:EN 61800-3, distribuição sem limites3).EN 61800-3, distribuição com limites.
3) Os níveis de emissões indicados pela EN 61800-3com distribuição sem limites são atendidas apenaspelos motores FC com filtro opcional* de classe B-1.
Normas básicas, emissões- EN 55011: Limites e métodos de medição de rádio
interferência, característicos do equipamento derádiofreqüência industrial, científico e médico (ISM).
- EN 55022: Limites e métodos de medição de rádiointerferência, característicos do equipamento deinformática.
- EN 61000-3-2: Limites para as emissões decorrentes harmônicas (corrente de entrada doequipamento ≤16 A).
- EN 61000-3-4: Limites para as emissões decorrentes harmônicas (corrente de entrada doequipamento ≥16 A).
Padrões básicos, imunidade- EN 61000-2-4 (IEC 1000-2-4):
Níveis de compatibilidadeSimulação de flutuações de tensão e de freqüência,de nós harmônicos e de comutação na linha depotência.
- EN 61000-4-2 (IEC 1000-4-2):Descarga eletrostática (ESD)Simulação de descarga eletrostática.
- EN 61000-4-4 (IEC 1000-4-4):Transitórios rápidos, picos 5/50 nS.Simulação de transitórios causados pela portadorade contactores, relés e de dispositivos similares.
- EN 61000-4-5 (IEC 1000-4-5):Sobretensões 1.2/50 µS.Simulação de transitórios causados por um raio quecaia próximo à instalação.
- EN 61000-4-6 (IEC 1000-4-6):Campo eletromagnético de radiofreqüência.Amplitude modulada.Simulação de interferência causada peloequipamento de transmissão de rádio.
- ENV 50140:Campo eletromagnético de radiofreqüência.Modulação por pulsos.Simulação de interferência causada por telefonescelulares GSM.
Aspectos gerais das emissões CEMPara uma blindagem de alta freqüência, os cabosblindados utilizados por Profibus, pela via de comu-nicação serial padrão, pelos cabos de controle e pelainterface de sinais devem em geral ser conectados aoinvólucro em ambas extremidades.
Aspectos gerais da imunidade em CEMSe houver problemas com interferência de baixafreqüência (malhas de aterramento), o cabo blindadousado pelo Profibus, a via de comunicação padrão, oscabos de controle e a interface de sinais podem serdeixados abertos em uma das extremidades.
FCM da Série 300
91MG.03.B6.28 - VLT é marca registrada Danfoss
Ambiente agressivoAssim como todos os equipamentos eletrônicos, oconversor de freqüências VLT contém um grandequantidade de componentes mecânicos e elétricos,os quais são sempre vulneráveis aos efeitos doambiente.
Por este motivo, o conversor defreqüências VLT não deve ser instaladoem ambientes onde o ar esteja carregado
de líquidos, gases ou partículas, que podem afetar edanificar os componentes eletrônicos. A nãoobservação das medidas de proteção pode resultarem paradas, reduzindo assim a vida útil do conversorde freqüências VLT.
Os líquidos podem ser transportados pelo ar,condensando-se no conversor de freqüências VLT.Além disto, líquidos podem causar corrosão decomponentes e partes metálicas.Vapor d’água, óleo e água do mar podem causarcorrosão de componentes e partes metálicas.Em ambientes com estas características, recomenda-se a utilização de equipamento protegido, ≥ classeIP 54.
Em ambientes com altas temperaturas e umidade, apresença de gases corrosivos como enxofre,nitrogênio e compostos clorados provocará reaçõesquímicas nos componentes do conversor defreqüências VLT. Estas reações resultarãorapidamente em danos aos componentes eletrônicos.
NOTA!A montagem do conversor de freqüências VLTem ambientes agressivos aumentará o risco de
paradas, além de reduzir consideravelmente sua vidaútil.
Antes de instalar o conversor de freqüências VLT,deve-se verificar a presença de líquidos, partículas egases no ar. A presença de água ou óleo sobre peçasmetálicas, e a corrosão de partes metálicas, sãoindicações características de líquidos nocivos emsuspensão no ar.É muito freqüente a ocorrência de níveis excessivos departículas de pó em ambientes industriais e locais comequipamentos elétricos.Uma indicação da presença de gases agressivos noar é o escurecimento de barramentos e terminais decobre.
Am
biente ag
ressivo


FCM da Série 300
93MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 11Capítulo 11Capítulo 11Capítulo 11Capítulo 11 Lista de advertências e alarmes ................ página 94
E se o motor não der partida? .................. página 94
Avisos ......................................................... página 95
Palavras de aviso 1 + 2 epalavra de alarme ...................................... página 97
Ad
vertências e alarmes

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss94
Ad
vert
ênci
as e
ala
rmes Lista de advertências e alarmes
A tabela fornece as diferentes advertências e alarmese indica se a falha bloqueia o motor FC. Após obloqueio de trip, a alimentação da rede elétricadeverá ser desligada e a falha deverá ser corrigida.Religue a alimentação e reinicialize o motor FC antesde estar pronto.
Sempre que uma cruz estiver colocada ao mesmotempo sob advertência e alarm, isto poderá significar
No. Descrição Advertência Trip Trip bloqueado2 Falha "Live zero" (LIVE ZERO ERROR) X X4 Queda de fase (MAINS PHASE LOSS) X X X5 Advertência de tensão alta (DC LINK VOLTAGE HIGH) X6 Advertência de tensão baixa (DC LINK VOLTAGE LOW) X7 Sobretensão (DC LINK OVERVOLT) X X8 Subtensão (DC LINK UNDERVOLT) X9 Sobrecarga do inversor (INVERTER TIME) X X11 Termistor do motor (MOTOR THERMISTOR) X12 Limite de corrente (CURRENT LIMIT) X13 Sobrecorrente(OVERCURRENT) X X14 Falha de terra (EARTH FAULT) X X15 Falha na alimentação (SWITCH MODE FAULT) X X16 Curto-circuito (CURR.SHORT CIRCUIT) X X17 Timeout de bus padrão (STD BUS TIMEOUT) X X18 Timeout no bus HPFB (HPFB TIME OUT) X X33 Fora da gama de freqüência (OUT FREQ RNG/ROT LIM) X34 Erro no HPFB (HPFB ALARM) X X35 Falha de "inrush" (INRUSH FAULT) X X36 Superaquecimento (OVERTEMPERATURE) X X37 Erro interno (INTERNAL ERROR) X X
que uma advertência precede o alarme. Podetambém significar que é possível programar se umadeterminada falha deverá resultar em umaadvertência ou em um alarme. Isto é possível, p. ex.,no parâmetro 404 Verificação do freio. Depois de umtrip, alarme e advertência piscarão, mas se a falha forcorrigida, somente alarme piscará. Depois de umareinicialização, o motor FC estará pronto para iniciarnovamente a operação.
E se o motor não der partida?- Verifique se nenhum parâmetro foi modificado
desde o momento da entrega (programação defábrica). Use o Painel de Controle Local ou aporta serial para reconfigurar com aprogramação de fábrica.
- Verifique se nenhum comando [STOP] foi ativadoatravés do teclado opcional do painel de controle
Advertência: Deve-se ter extremacautela ao manusear a unidade coma tampa aberta.
(parada local). O [STOP] do Painel de Controlesó pode ser reinicializado através do botão[START] do painel de controle.
- Verifique os diodos emissores de luz (LEDs)através de um orifício na tampa interna deisolamento (ver desenho na página 16),conforme a tabela abaixo:
VerdeVerdeVerdeVerdeVerde AmareloAmareloAmareloAmareloAmarelo VermelhoVermelhoVermelhoVermelhoVermelho AçãoAçãoAçãoAçãoAçãoLED 302LED 302LED 302LED 302LED 302 LED 301LED 301LED 301LED 301LED 301 LED 300LED 300LED 300LED 300LED 300APAGADO APAGADO APAGADO Aplique a eletricidadeACESO APAGADO APAGADO Aplique a partida e os sinais de referência (ver desenho na p. 16)ACESO APAGADO ACESO Aplique e remova o sinal de reset, conforme o desenho na p.16ACESO ACESO ACESO Desligue a alimentação elétrica até que todos os LEDs se apaguem.
Para mais informações, vide o Setup Rápido MG.03.Fx.xx.

FCM da Série 300
95MG.03.B6.28 - VLT é marca registrada Danfoss
Ad
vertências e alarmes
AvisosO display indica alternadamente estado normal eaviso. Um aviso é apresentado na primeira e nasegunda linha do display. Vide os seguintes exemplos:
NO MOTOR
WARN. 3
As tensões informadas são as do circuito intermediário do motor FC.
Mensagens de alarmeO alarme aparece na 2a e 3a linhas do display. Veja oexemplo abaixo:
WARNING/ALARM 2Falha de "Live zero": (LIVE ZERO ERROR)O sinal de corrente no terminal 1 é menor que 50%do valor definido no parâmetro 336 Terminal 1, escalamínima.
WARNING/ALARM 4Queda de fase(MAINS PHASE LOSS):Ausência de fase no lado da alimentação.Verifique a tensão de alimentação para o motor FC.
WARNING 5Aviso de alta tensão(DC LINK VOLTAGE HIGH):A tensão do circuito intermediário (CC) é maior que olimite de sobretensão do sistema de controle. Vejatabela nesta página. O motor FC ainda está ativo.
WARNING 6Advertência de tensão baixa(DC LINK VOLTAGE LOW):A tensão do circuito intermediário (CC) está abaixodo limite de subtensão do sistema de controle (veja atabela abaixo). O motor FC ainda está ativo.
ALARM 7Sobretensão (DC LINK OVERVOLT):Se a tensão (CC) do circuito intermediário ultrapassaro limite de sobretensão do inversor (vide tabela),ocorrerá um trip no motor FC. Além disso, a tensãoserá apresentada no display.
ALARM 8Subtensão (DC LINK UNDERVOLT):Se a tensão (CC) do circuito intermediário cair abaixodo limite de subtensão do inversor (vide tabela nestapágina), ocorrerá um trip no motor FC após 3 - 28seg., dependendo da unidade. Além disso, a tensãoserá apresentada no display. Verifique se a tensão dealimentação é igual à do motor FC; vide dadostécnicos.
WARNING/ALARM 9Sobrecarga do inversor (INVERTER TIME):A proteção térmica eletrônica do inversor informa seque o motor FC está prestes a entrar em trip, porcausa de uma sobrecarga (corrente muito altadurante muito tempo). O contador para a proteçãotérmica eletrônica do inversor fornece umaadvertência a 95% e provoca um trip a 100%,enquanto dispara um alarme. O motor FC não podeser reajustado até que o contador esteja abaixo de90%.
ALARM:12 SETUP
1
TRIP (RESET)
TORQUE LIMIT
Limites de trip/alarme/avisos:Série do motor FC 3 x 380 - 480 V
[V CC]Subtensão ASIC 410Aviso de baixa tensão 440Aviso de alta tensão 760Sobretensão ASIC 760*
* 760 V em 5 segundos ou 800 V imediatamente.

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss96
Ad
vert
ênci
as e
ala
rmes Advertências e alarmes, cont.
ALARM 11Termistor do motor (MOTOR THERMISTOR):Se houver um termistor montado e se o parâmetro128 estiver programado como Habilitar [1], ocorreráum trip no motor FC se ele esquentardemasiadamente.
WARNING 12Limite de corrente (CURRENT LIMIT):A corrente está maior que o valor no parâmetro 221(com o motor em funcionamento).
ALARM 13Sobrecorrente (OVERCURRENT):O limite da corrente de pico do inversor(aproximadamente 230% da corrente nominal) foiultrapassado. Ocorrerá o trip do motor FC, enquantoemite um alarme.Desligue o motor FC e verifique se o eixo do motorpode ser girado.
ALARM 14Falha de terra (EARTH FAULT):Há uma descarga das fases de saída à terra, ou nocabo entre o inversor e o motor ou no próprio motor.
ALARM 15Falha na fonte de alimentação(SWITCH MODE FAULT):Falha na fonte de alimentação no modo dechaveamento (alimentação interna de 24 V).Contate o seu fornecedor Danfoss.
ALARM 16Curto-circuito (CURR.SHORT CIRCUIT)Há um curto-circuito nos terminais do motor ou nopróprio motor.Contate o seu fornecedor Danfoss.
NOTA!:Se ocorrerem cargas de choque, pode ser queeste alarme apareça.
WARNING/ALARM 17Timeout no bus padrão (STD BUS TIMEOUT)Não há comunicação com o motor FC.A advertência só estará ativa quando o parâmetro 514tiver sido definido com outro valor diferente de OFF.Se o parâmetro 514 tiver sido definido como Parada etrip, ele primeiro emitirá uma advertência e então faráa desaceleração até o trip, enquanto soa um alarme.O parâmetro 513 Freqüência do Bus pode ter sidoaumentado.
WARNING/ALARM 18Timeout no bus HPFB (HPFB BUS TIMEOUT):Não há comunicação com o motor FC. A advertênciasó estará ativa quando o parâmetro 804 tiver sidodefinido com outro valor diferente de OFF.Se o parâmetro 804 tiver sido definido como Parada etrip, ele primeiro emitirá uma advertência e então fará adesaceleração até o trip, enquanto soa um alarme.O parâmetro 803 Timeout no bus pode ter sidoaumentado.
WARNING 33Fora da gama de freqüência:Esta advertência é ativada quando a freqüência desaída tiver alcançado o parâmetro 201 Freqüênciamín. de saída ou o parâmetro 202 Freqüência máx. desaída.
WARNING/ALARM 34Erro no HPFB (HPFB ALARM)A comunicação do profibus não está funcionandocorretamente.
ALARM 35Falha de "inrush" (INRUSH FAULT):Esta advertência ocorre quando a unidade tiver sidoligada um grande número de vezes no intervalo de 1minuto.
WARNING/ALARM 36Superaquecimento (OVERTEMPERATURE):Ocorre uma advertência aos 78ºC e um trip do motorFC aos 90ºC. A unidade pode ser resetada quando atemperatura estiver abaixo dos 70ºC.
ALARM 37Erro interno (INTERNAL ERROR):Ocorreu um erro no sistema. Contate o seu fornecedorDanfoss.
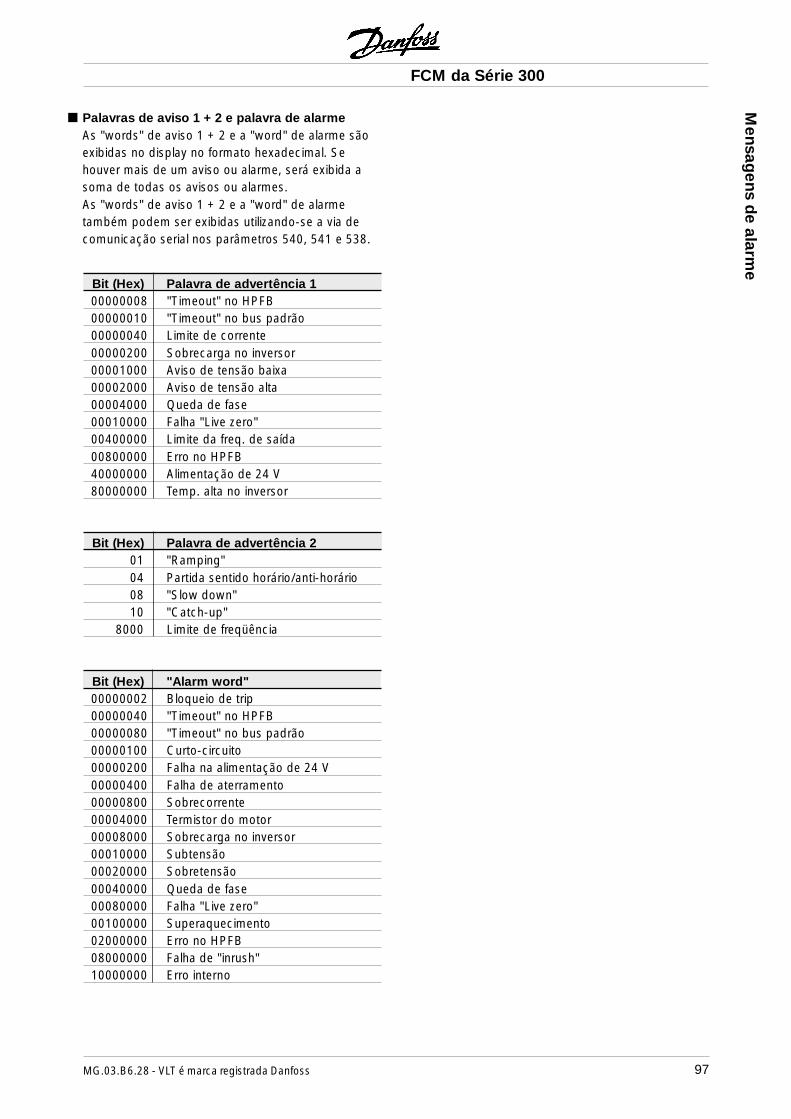
FCM da Série 300
97MG.03.B6.28 - VLT é marca registrada Danfoss
Mensag
ens de alarm
e
Palavras de aviso 1 + 2 e palavra de alarmeAs "words" de aviso 1 + 2 e a "word" de alarme sãoexibidas no display no formato hexadecimal. Sehouver mais de um aviso ou alarme, será exibida asoma de todas os avisos ou alarmes.As "words" de aviso 1 + 2 e a "word" de alarmetambém podem ser exibidas utilizando-se a via decomunicação serial nos parâmetros 540, 541 e 538.
Bit (Hex) Palavra de advertência 100000008 "Timeout" no HPFB00000010 "Timeout" no bus padrão00000040 Limite de corrente00000200 Sobrecarga no inversor00001000 Aviso de tensão baixa00002000 Aviso de tensão alta00004000 Queda de fase00010000 Falha "Live zero"00400000 Limite da freq. de saída00800000 Erro no HPFB40000000 Alimentação de 24 V80000000 Temp. alta no inversor
Bit (Hex) Palavra de advertência 201 "Ramping"04 Partida sentido horário/anti-horário08 "Slow down"10 "Catch-up"
8000 Limite de freqüência
Bit (Hex) "Alarm word"00000002 Bloqueio de trip00000040 "Timeout" no HPFB00000080 "Timeout" no bus padrão00000100 Curto-circuito00000200 Falha na alimentação de 24 V00000400 Falha de aterramento00000800 Sobrecorrente00004000 Termistor do motor00008000 Sobrecarga no inversor00010000 Subtensão00020000 Sobretensão00040000 Queda de fase00080000 Falha "Live zero"00100000 Superaquecimento02000000 Erro no HPFB08000000 Falha de "inrush"10000000 Erro interno

FCM da Série 300
99MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 12Capítulo 12Capítulo 12Capítulo 12Capítulo 12 Lista de parâmetros ................................. página 100
Lista de p
arâmetro
s

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss100
List
a d
e p
arâm
etro
s
Campo/número de Programações Número deFunção programações/valor de fabrica parâmetroLanguage 6 English Parameter 001Local/remote control 2 Remote control Parameter 002Local reference 000.000 Parameter 003Active Setup 4 Setup 1 Parameter 004Programming Setup 4 Active Setup Parameter 005Copying of Setups 4 No copying Parameter 006LCP copy 4 No copying Parameter 007Display scaling of motor frequency 1 100 Parameter 008Display line 2 24 Frequency [Hz] Parameter 009Display line 1.1 Reference [%] Parameter 010Display line 1.2 Motor current [A] Parameter 011Display line 1.3 Power [kW] Parameter 012Local control/configaration 5 LCP digital control Parameter 013Local stop 2 Possible Parameter 014Local jog 2 Not possible Parameter 015Local reversing 2 Not possible Parameter 016Local reset of trip 2 Possible Parameter 017Lock for data change 2 Not locked Parameter 018Operating state at power up, local.. 3 Forced stop, use saved ref. Parameter 019Configuration 2 Speed regulation open loop Parameter 100Torque characteristics 4 Constant torque Parameter 101Motor power XX.XX kW - dep. on unit Parameter 102Motor voltage XX.XX V - dep. on unit Parameter 103Motor frequency XX.X Hz - dep. on unit Parameter 104Motor current XX.XX A - dep. on unit Parameter 105Rated motor speed XX rpm - dep. on unit Parameter 106DC braking time 0.0 (off) - 60.0 sec. 10.0 sec. Parameter 126DC brake cut-in frequency 0.0 Hz - fMAX 0.0 Hz Parameter 127Motor thermal protection 2 Disable Parameter 128DC braking voltage 0-100 % 0.0 % Parameter 132Start voltage 0.00 - 100.00 V Motor dependent Parameter 133Start compensation 0.0 - 300.0 % 100.0 % Parameter 134U/f ratio 0.00 - 20.00 V/Hz Motor dependent Parameter 135Slip compensation -500.0 - +500.0 % 100.0 % Parameter 136DC holding voltage 0 - 100 % 0 % Parameter 137Brake cut out frequency 0.5 - 132 Hz 3.0 Hz Parameter 138Brake cut in frequency 0.5 - 132 Hz 3.0 Hz Parameter 139Rotation direction 3 Only clockwise 0 - 132 Hz Parameter 200Min. output frequency (fMIN) 0.0 Hz - fMAX 0.0 Hz Parameter 201Max. output frequency (fMAX) fMIN - fRANGE fRANGE (132 Hz) Parameter 202Reference/feedback range Min. - max./-max.- +max. Min. - Max. Parameter 203Minimum reference -100,000.000 - RefMAX 0.000 Parameter 204Maximum reference RefMIN - 100,000.000 50.000 Parameter 205Ramp-up time 1 0.15 - 3600.00 sec. 3.00 sec. Parameter 207Ramp-down time 1 0.15 - 3600.00 sec. 3.00 sec. Parameter 208Jog ramp time 0.15 - 3600.00 sec. 3.00 sec. Parameter 211Quick stop ramp-down time 0.15 - 3600.00 sec. 3.00 sec. Parameter 212Jog frequency 0 Hz - fMAX 10.0 Hz Parameter 213Reference function 2 Sum Parameter 214
Funções para programar, controlar e monitorar via serial (PROFIBUS) ou PC.
Op
eraç
ão e
Dis
pla
yO
per
ação
e D
isp
lay
Op
eraç
ão e
Dis
pla
yO
per
ação
e D
isp
lay
Op
eraç
ão e
Dis
pla
yC
arga
e m
otor
Car
ga e
mot
orC
arga
e m
otor
Car
ga e
mot
orC
arga
e m
otor
Lim
ites
e r
Lim
ites
e r
Lim
ites
e r
Lim
ites
e r
Lim
ites
e r e
ferê
ncia
sef
erên
cias
efer
ênci
asef
erên
cias
efer
ênci
as

FCM da Série 300
101MG.03.B6.28 - VLT é marca registrada Danfoss
Lista de p
arâmetro
s
Ent
rad
as e
saí
das
Ent
rad
as e
saí
das
Ent
rad
as e
saí
das
Ent
rad
as e
saí
das
Ent
rad
as e
saí
das
Funç
ões
esp
ecia
isFu
nçõe
s es
pec
iais
Funç
ões
esp
ecia
isFu
nçõe
s es
pec
iais
Funç
ões
esp
ecia
isC
omun
icaç
ão s
eria
lC
omun
icaç
ão s
eria
lC
omun
icaç
ão s
eria
lC
omun
icaç
ão s
eria
lC
omun
icaç
ão s
eria
l
Campo/número de Programações Número deFunção programações/valor de fabrica parâmetroPreset reference 1 -100.00 % - +100.00 % 0.00 % Parameter 215Preset reference 2 -100.00 % - +100.00 % 0.00 % Parameter 216Catch up/slow down value 0.00 - 100.00 % 0.00 % Parameter 219Current limit for motor mode Min.- max. limit in % of IRATED Max. limit Parameter 221Frequency bypass, bandwidth 0 (off) - 100 % 0 % Parameter 229Frequency bypass 1 0.0 - 132 Hz 0.0 Hz Parameter 230Frequency bypass 2 0.0 - 132 Hz 0.0 Hz Parameter 231Time out 1 -99 sec. 10 sec. Parameter 317Function after time out Off/Stop and trip Off Parameter 318Pulse reference/feedback, 100 - 70000 Hz 5000 Hz Parameter 327max. freq.Terminal 1, analog input current 3 No operation Parameter 331Terminal 2, digital input 25 Reference Parameter 332Terminal 3, digital input 25 Reset Parameter 333Terminal 4, digital input 24 Start Parameter 334Terminal 5, digital input 23 Jog Parameter 335Terminal 1, min. scaling 0.0 - 20.0 mA 0.0 mA Parameter 336Terminal 1, max. scaling 0.0 - 20.0 mA 20.0 mA Parameter 337Terminal 2, min. scaling 0.0 - 10.0 V 0.0 V Parameter 338Terminal 2, max. scaling 0.0 - 10.0 V 10.0 V Parameter 339Output functions 21 No operation Parameter 340Brake function Off/AC braking Off Parameter 400Reset function 11 Manual reset Parameter 405Switching frequency 2.0 - 14.0 kHz Unit dependent Parameter 411Variable switching frequency 3 Temp. dep. sw. freq. Parameter 412Overmodulation function Off/On On Parameter 413Minimum feedback -100000 - FBHIGH 0 Parameter 414Maximum feedback FBLOW - 100,000 1500 Parameter 415Reference/feedback unit 42 % Parameter 416Process PID normal/inverse ctrl. Normal/inverse Normal Parameter 437Process PID anti windup Disable/Enable Enable Parameter 438Process PID start frequency fMIN - fMAX fMIN Parameter 439Process PID proportional gain 0.00 (off) - 10.00 0.01 Parameter 440Process PID integral time 0.01 - 9999 sec. (off) 9999 sec. Parameter 441Process PID differentation time 0.00 (off) - 10.00 sec. 0.00 sec. Parameter 442Process PID different. gain limit 5 -50 5 Parameter 443Process PID lowpass filter time 0.0 - 10.00 sec. 0.1 sec. Parameter 444Flying start 4 Disable Parameter 445Switching pattern 2 SFAVM Parameter 446Bus address 1 - 126 1 Parameter 500Baudrate 300 - 9600 Baud/6 9600 Baud Parameter 501Coasting 4 Logic or Parameter 502Quick-stop 4 Logic or Parameter 503DC-brake 4 Logic or Parameter 504Start 4 Logic or Parameter 505Reversing 4 Logic or Parameter 506Selection of setup 4 Logic or Parameter 507Selection of speed 4 Logic or Parameter 508Bus jog 1 0.0 - fMAX 10.0 Hz Parameter 509Bus jog 2 0.0 - fMAX 10.0 Hz Parameter 510Telegram profile Profidrive/FC Drive FC Drive Parameter 512Bus time interval 1 sec. Parameter 513Bus time interval function 6 Off Parameter 514

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss102
List
a d
e p
arâm
etro
s
Campo/número de Programações Número deFunção programações/valor de fabrica parâmetroData read-out: Reference XXX.X Parameter 515Data read-out: Refer. unit Hz/rpm Parameter 516Data read-out: Feedback Parameter 517Data read-out: Frequency Hz Parameter 518Data read-out: Frequency x scale Hz Parameter 519Data read-out: Current A x 100 Parameter 520Data read-out: Torque % Parameter 521Data read-out: Power kW Parameter 522Data read-out: Power hp Parameter 523Data read-out: Motor voltage V Parameter 524Data read-out: DC link voltage V Parameter 525Data read-out: FC therm. 0 - 100 % Parameter 527Data read-out: Digital input Parameter 528Data read-out: External reference -200.0 - +200.0 % Parameter 533Data read-out: Status word, binary Parameter 534Data read-out: FC temperature °C Parameter 537Data read-out: Alarm word, binary Parameter 538Data read-out: Control word, binary Parameter 539Data read-out: Warning word, 1 Parameter 540Data read-out: Warning word, 2 Parameter 541Data read-out: Terminal 1, analog input mA X 10 Parameter 542Data read-out: Terminal 2, analog input V X 10 Parameter 543Operating data: Operating hours 0 - 130,000.0 hours Parameter 600Operating data: Hours run 0 - 130,000.0 hours Parameter 601Operating data: Number of power-up's 0 - 9999 Parameter 603Operating data: Number of overtemp. 0 - 9999 Parameter 604Operating data: Number of overvoltages 0 - 9999 Parameter 605Fault log, read-out: Error code Index XX - XXX Parameter 615Fault log, read-out: Time Index XX - XXX Parameter 616Fault log, read-out: Value Index XX - XXX Parameter 617Reset of hours-run counter No reset/reset No reset Parameter 619Operation mode 3 Normal function Parameter 620Nameplate: FC motor type Depends on unit Parameter 621Nameplate: Software version no. Depends on unit Parameter 624LCP version Depends on unit Parameter 625Nameplate: Database identification no. Depends on unit Parameter 626Nameplate: Application option type Parameter 628Nameplate: Communication option type Parameter 630BMC software identification Parameter 632Motor database identification Parameter 633Unit identification for communication Parameter 634Software part No. Parameter 635
Funç
ões
técn
icas
Funç
ões
técn
icas
Funç
ões
técn
icas
Funç
ões
técn
icas
Funç
ões
técn
icas

FCM da Série 300
103MG.03.B6.28 - VLT é marca registrada Danfoss
Capítulo 13Capítulo 13Capítulo 13Capítulo 13Capítulo 13 Índice ....................................................... página 104
Índice
FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss104
Índ
ice A
A diretiva CEM (89/336/CEE) ................................................ 89A diretiva de baixa tensão (73/23/CE) .................................. 88A diretiva de maquinaria (89/392/CE) ................................... 88Advertência contra partidas indesejadas ................................. 4Advertência de alta tensão .................................................... 95Advertências ........................................................................... 95Ambiente agressivo ................................................................ 91
BBloqueio para a mudança de dados ..................................... 43Bolt torques ............................................................................. 25Bus da função do intervalo ........................................ de tempo65Bus serial ................................................................................ 75Byte de dados ........................................................................ 76
Byte de parâmetros ........................................................... 76Bytes de processo ............................................................. 78
CChaveamento na entrada ...................................................... 85Conceito do produto ................................................................ 7Condições de funcionamento extremas ............................... 85
Queda de alimentação ...................................................... 85Sobrecarga estática .......................................................... 85Tensão excessiva gerada no motor .................................. 85
Conformidade com a diretiva CEM 89/336/CE .................... 89Controle local/remoto ............................................................. 38Cópia via LCP ........................................................................ 40Corrente de fuga à terra ........................................................ 84
DDados técnicos gerais ............................................................ 14
Alimentação, TT e NT, (L1, L2, L3) ................................... 14Características de controle ................................................ 15Características de torque .................................................. 14Cartão de controle, comunicação serial com a RS 48 .... 15Cartão de controle, entrada de pulsos ............................. 15Cartão de controle, entradas analógicas .......................... 15Cartão de controle, entradas digitais/de pulsos ............... 15Cartão de controle, saídas analógicas e digitais/p .......... 15Elementos externos ........................................................... 16FCM 305-375 for 3 phases, 380-480 V ............................ 14
”Derating” ............................................................................... 86"Derating” devido à pressão atmosférica .............................. 86”Derating” devido a velocidade de funcionamento ba ......... 86“Derating” para alta freqüência de chaveamento ................. 87Display .................................................................................... 28Display mode .......................................................................... 30
EEficiência ................................................................................ 87Escala de display da freqüência do .................................. moto40Especificaciones mecánicas
Dimensiones ...................................................................... 22Instalación del motor FC .................................................... 24Mantenimiento ................................................................... 25Unidades de ventilación forzada (FV) ............................... 26
Especificações mecânicasDimensões ......................................................................... 22Instalação do motor FC ..................................................... 24Manuseio do motor FC ...................................................... 21Manutenção ....................................................................... 25Unidades de ventilação forçada (FV) ............................... 26
Estado de leitura I: .................................................................. 30Estado de leitura II: ................................................................. 31Estado de leitura III: ................................................................ 31Estado operacional na energização, .................... controle loca43Estrutura do menu .................................................................. 34Estrutura dos telegramas
Byte de controle de dados (BCC) ..................................... 76Comprimento do telegrama (LGE) .................................... 75Endereço VLT (ADR) ......................................................... 76
FFator de potência ................................................................... 88Funções das teclas ................................................................ 29
GGama de produtos ................................................................. 10
Versões da montagem ...................................................... 10Versões do Inversor ........................................................... 10
Guia de Projeto ........................................................................ 6
IIndicações e leituras so display ............................................. 30Integração do conversor de freqüência e do motor ................ 8
Diagrama-chave para a Série FCM 300 ............................. 8Estruturas de controle .......................................................... 8
Integration of frequency converter and motor ....................... 25Interferência da rede de alimentação/harmônicas ............... 88Isolamento galvânico (PELV) ................................................. 84
JJogging local .......................................................................... 43
LLEDs
LED 300-304 ..................................................................... 17LEDs indicadores ................................................................... 28Língua ..................................................................................... 38Linha de display 1.1 ............................................................... 41Linha de display 1.2 ............................................................... 41Linha de display 1.3 ............................................................... 41Linha de display 2 .................................................................. 40
MMechanische Spezifikationen
Maße .................................................................................. 22Wartung.............................................................................. 25
MODO DADOS ...................................................................... 34MODO DISPLAY .................................................................... 34Modo display ........................................................................... 30Modo display - seleção da leitura .......................................... 30MODO MENU ........................................................................ 34Modo menu ............................................................................ 32MODO MENU RÁPIDO .......................................................... 34MODO TROCA DE DADOS ................................................... 34Motor do conversor de freqüência VLT da Danfoss e .......... 89
NNormas de segurança .............................................................. 4
OO que é a etiqueta CE? ......................................................... 88O que está abrangido? .......................................................... 89
PPainel de controle .................................................................. 28Parada local ............................................................................ 42Parameter selection ............................................................... 31Parâmetros ............................................................................. 37
Aktiv meny ......................................................................... 39

FCM da Série 300
105MG.03.B6.28 - VLT é marca registrada Danfoss
Índice
“Anti windup” no processo PID ......................................... 60Características do torque .................................................. 44Catch-up/slow-down ......................................................... 50Compensação da partida .................................................. 46Compensação de escorregamento .................................. 46Configuração ..................................................................... 44Controle normal/inverso do PID de processo ................... 60Cópia de setups ................................................................. 39Corrente do motor ............................................................. 44Dados operacionais: Horas de funcionamento ................ 69Dados operacionais: Número de intervenções ................ 69Dados operacionais: Número de sobrecargas de ten ...... 70Dados operacionais: Número de superaquecimentos ..... 70Direção da rotação ............................................................ 47Endereço ........................................................................... 63Fator de sobremodulação ................................................. 59Feedback máximo ............................................................. 59Feedback mínimo .............................................................. 59Freio-CC ............................................................................ 63Freqüência da portadora variável ...................................... 58Freqüência de ativação da frenagem CC ........................ 45Freqüência de bypass 1 .................................................... 51Freqüência de bypass 2 .................................................... 51Freqüência de bypass, largura de faixa ............................ 51Freqüência de chaveamento ............................................ 58Freqüência de jog .............................................................. 50Freqüência de partida no processo PID ........................... 60Freqüência do motor ......................................................... 44Freqüência mín. de saída .................................................. 47Função após o time-out .................................................... 52Função de reset ................................................................. 58Gama de referência/feedback .......................................... 48Ganho proporcional no processo PID ............................... 61Identificação da base de dados do motor ........................ 72Identificação da unidade para a comunicação ................ 72Identificação do software BMC ......................................... 72Início rápido ........................................................................ 62Jog bus 1 ........................................................................... 64Jog bus 2 ........................................................................... 64Leitura de dados: Corrente ................................................ 66Leitura de dados: Corrente do motor ................................ 66Leitura de dados: Entrada digital ...................................... 67Leitura de dados: Feedback ............................................. 65Leitura de dados: Freqüência ........................................... 65Leitura de dados: Mensagem de estado,binário .............. 67Leitura de dados: Palavra de advertência, 1 .................... 68Leitura de dados: Palavra de advertência, 2 .................... 68Leitura de dados: Palavra de alarme,binária .................... 68Leitura de dados: Palavra de controle VLT, binári ............ 68Leitura de dados: Potência, HP ........................................ 66Leitura de dados: Potência, kW ........................................ 66Leitura de dados: Referência % ........................................ 65Leitura de dados: Referência externa% ........................... 67Leitura de dados: Temperatura do dissipador .................. 68Leitura de dados: Temperatura do VLT ............................ 67Leitura de dados: Tensão de ligação CC ......................... 67Leitura de dados: Terminal 1, entrada analógica ............. 69Leitura de dados: Terminal 2, entrada analógica ............. 69Leitura de dados: Torque .................................................. 66Leitura de dados: Unidade de referência ......................... 65Limite de ganho diferencial no processo PID ................... 61Limite do torque para o modomotor .................................. 51Limite máximo da freqüência de saída ............................. 48Modo funcionamento ........................................................ 71Padrão de chaveamento ................................................... 62Parada por inércia ............................................................. 63Parada rápida ..................................................................... 63
Referência máxima ............................................................ 48Referência mínima ............................................................. 48Referência por pulso, freqüência máx. ............................. 52Referência pré-ajustada 1 ................................................. 50Referência pré-ajustada 2 ................................................. 50Registro das falhas: Código das falhas ............................. 70Registro das falhas: Tempo ............................................... 70Registro das falhas: Valor .................................................. 71Relação U/f ........................................................................ 46Reset do contador das horas de funcionamento ............. 71Reversão ............................................................................ 63Seleção de setup ............................................................... 63Seleção de velocidade ...................................................... 63Taxa Baud .......................................................................... 63Tempo de aceleração 1 .................................................... 49Tempo de desaceleração 1 .............................................. 49Tempo de diferenciação do processo PID ....................... 61Tempo de frenagem CC .................................................... 45Tempo de integração do processo PID ............................ 61Tempo de parada rápida ................................................... 49Tempo de rampa para o jog .............................................. 49Tensão de frenagem CC ................................................... 45Tensão de partida .............................................................. 45Tensão do motor ................................................................ 44Terminal 1, entrada analógicade tensão ......................... 52Terminal 1, escala máxima................................................ 55Terminal 1, escala mínima................................................. 55Terminal 2, entrada analógica/digital ................................ 53Terminal 2, escala máxima................................................ 56Terminal 2, escala mínima................................................. 55Terminal 3, entrada digital ................................................. 53Terminal 4, entrada digital ................................................. 53Terminal 5, entrada digital ................................................. 53Terminal 9, output functions .............................................. 56Time out ............................................................................. 52Tipo de referência .............................................................. 50Velocidade nominal do motor ........................................... 45
Partida .................................................................................... 63Pedido .................................................................................... 10
Formulário de pedido ......................................................... 12Perfil do telegrama ................................................................. 64Período do filtro de baixa passagem do processo ................ 62Placa de identificação: n.º de identificação do .................... 71Placa de identificação: n.º de código da opção d ................ 72Placa de identificação: n.º de identificação ......................... da72Placa de identificação: n.º de versão do software ................ 71Placa de identificação: Tipo de opção da aplicaç ................ 72Placa de identificação: tipo VLT ........................................... 71Plug kit .................................................................................... 35Potência do motor .................................................................. 44Programação das referências locais ..................................... 42Programação rápida mediante o menu rápido ..................... 31
RRCD ........................................................................................ 84Referência local ..................................................................... 38

FCM da Série 300
MG.03.B6.28 - VLT é marca registrada Danfoss106
Remote mounting kit .............................................................. 36Reset local de trip ................................................................... 43Reversão local ........................................................................ 43
SSegurança ................................................................................ 4Seleção de parâmetros .......................................................... 31Service plug kit ....................................................................... 35Sobrecarga do inversor .......................................................... 95Subtensão .............................................................................. 95
TTeclas para controle local ...................................................... 29Transmissão de telegramas ................................................... 75
Conteúdo de um byte ........................................................ 75Telegrama “broadcast” ...................................................... 75Telegramas de controle e de resposta ............................. 75
Troca de dados ...................................................................... 32Troca de um texto .................................................................. 32Troca infinitesimal do valor numérico dos dados .................. 33
UUmidade atmosférica ............................................................. 87Unidade de processo ............................................................. 59
VVibração e choque ................................................................. 87
Índ
ice

