exame e1 testet2
TRANSCRIPT
ExameE1/TesteT2deControlo LEE‐ISTpp.1/5
Licenciatura em Engenharia Electrónica
Controlo Exame E1 / Teste T2
13 de Janeiro de 2010
Duração: E1-3 horas; T2-2 horas
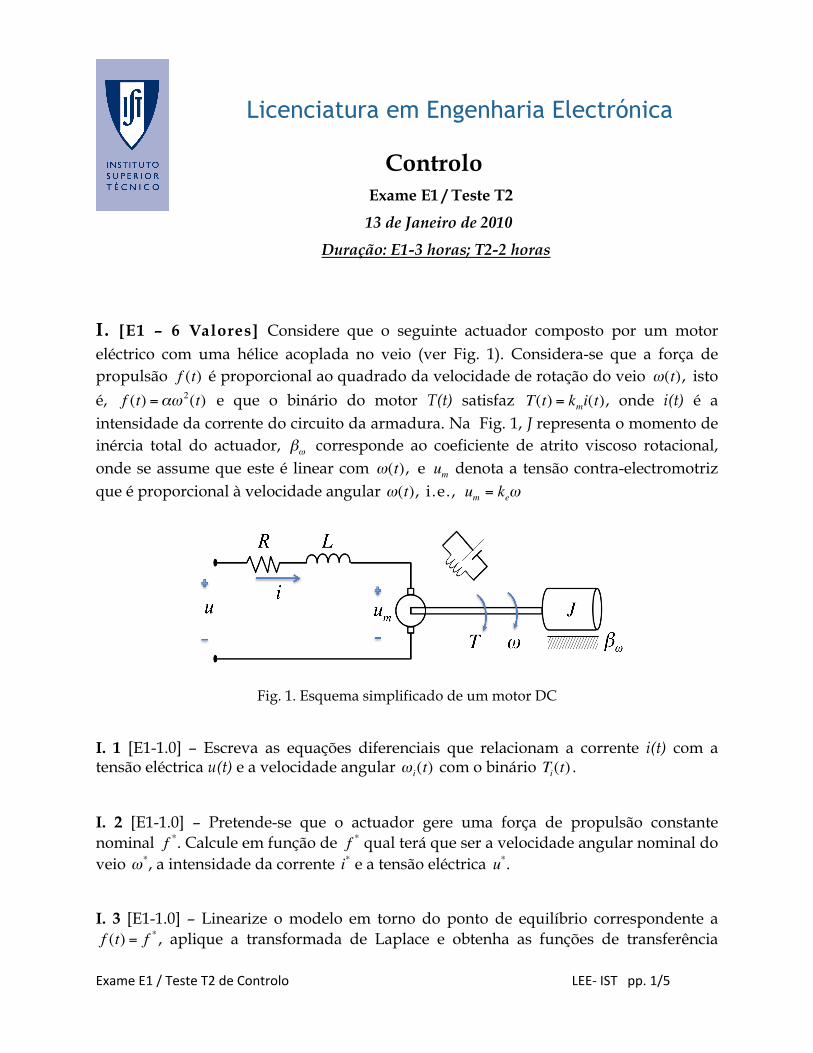
I. [E1 – 6 Valores] Considere que o seguinte actuador composto por um motor eléctrico com uma hélice acoplada no veio (ver Fig. 1). Considera-se que a força de propulsão
€
f (t) é proporcional ao quadrado da velocidade de rotação do veio
€
ω(t), isto é,
€
f (t) =αω 2(t) e que o binário do motor T(t) satisfaz
€
T(t) = kmi(t), onde i(t) é a intensidade da corrente do circuito da armadura. Na Fig. 1, J representa o momento de inércia total do actuador,
€
βω corresponde ao coeficiente de atrito viscoso rotacional, onde se assume que este é linear com
€
ω(t), e
€
um denota a tensão contra-electromotriz que é proporcional à velocidade angular
€
ω(t), i .e.,
€
um = keω
Fig. 1. Esquema simplificado de um motor DC
I. 1 [E1-1.0] – Escreva as equações diferenciais que relacionam a corrente i(t) com a tensão eléctrica u(t) e a velocidade angular
€
ω i(t) com o binário
€
Ti(t) .
I. 2 [E1-1.0] – Pretende-se que o actuador gere uma força de propulsão constante nominal
€
f *. Calcule em função de
€
f * qual terá que ser a velocidade angular nominal do veio
€
ω*, a intensidade da corrente
€
i* e a tensão eléctrica
€
u*.
I. 3 [E1-1.0] – Linearize o modelo em torno do ponto de equilíbrio correspondente a
€
f (t) = f * , aplique a transformada de Laplace e obtenha as funções de transferência
ExameE1/TesteT2deControlo LEE‐ISTpp.2/5
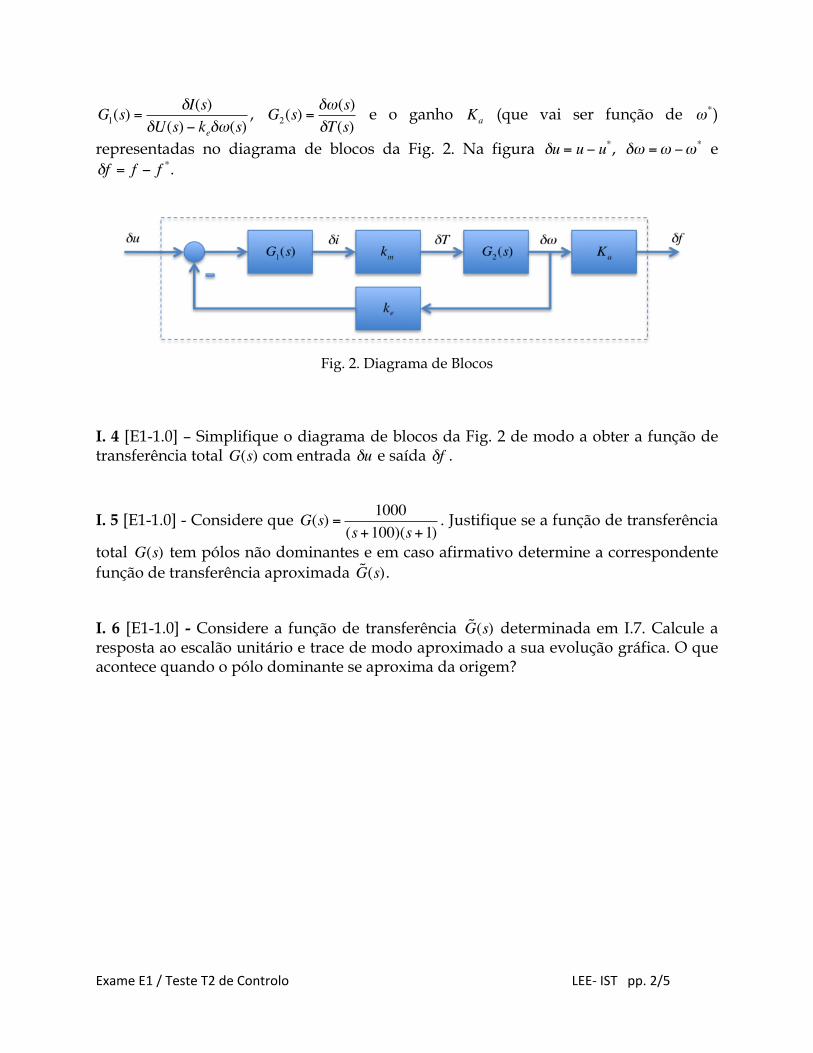
€
G1(s) =δI(s)
δU(s) − keδω(s),
€
G2(s) =δω(s)δT(s)
e o ganho
€
Ka (que vai ser função de
€
ω*)
representadas no diagrama de blocos da Fig. 2. Na figura
€
δu = u − u*,
€
δω =ω −ω* e
€
δf = f − f *.
Fig. 2. Diagrama de Blocos
I. 4 [E1-1.0] – Simplifique o diagrama de blocos da Fig. 2 de modo a obter a função de transferência total
€
G(s) com entrada
€
δu e saída
€
δf .
I. 5 [E1-1.0] - Considere que
€
G(s) =1000
(s+100)(s+1). Justifique se a função de transferência
total
€
G(s) tem pólos não dominantes e em caso afirmativo determine a correspondente função de transferência aproximada
€
˜ G (s).
I. 6 [E1-1.0] - Considere a função de transferência
€
˜ G (s) determinada em I.7. Calcule a resposta ao escalão unitário e trace de modo aproximado a sua evolução gráfica. O que acontece quando o pólo dominante se aproxima da origem?

ExameE1/TesteT2deControlo LEE‐ISTpp.3/5
II. [E1–7 Valores, T2-8 Valores] Pretende-se controlar em malha fechada o seguinte sistema instável
€
G(s) =Y (s)U(s)
=100s−10
II. 1 [E1-1.0] – Considere um controlador proporcional K(s) = k. Calcule a gama de valores de k para o qual o sistema em malha fechada é estável.
II. 2 [E1-1.0] - Mostre que o sistema de controlo em malha fechada não permite garantir em regime estacionário um erro de seguimento a comandos do tipo escalão.
II. 3 [E1-1.0; T2-1.5] – De modo a garantir erro estacionário nulo a sinais de comando constantes, considera-se o seguinte controlador integral K(s) = 1/s. Trace o diagrama de Bode assimptótico (magnitude e fase) do ganho de malha K(s)G(s).
II. 4 [E1-1.0; T2-1.5] - Trace o diagrama de Nyquist do ganho de malha e analise a estabilidade do sistema em malha fechada.
II. 5 [E1-1.0; T2-1.0] – Justifique apoiando nos diagramas de Bode e de Nyquist do ganho de malha que um controlador integral do tipo K(s)=k/s com k positivo não é suficiente para estabilizar o sistema em malha fechada.
II. 6 [E1-1.0] – Recorrendo ao traçado do Root-Locus comprove o resultado anterior e proponha uma estrutura de controlador que permitiria que os pólos fossem colocados numa zona desejada definida pela máxima sobreelevação pretendida e pelo tempo mínimo de estabelecimento. Justifique.
II. 7 [E1-1.0; T2-2.0] – Considere agora o seguinte controlador
€
K(s) = k pz
s+ zs(s+ p)
com k=1, z = 0.1 rad/s e p = 1000 rad/s. Trace o diagrama de Bode assimptótico (magnitude e fase) do ganho de malha e o digrama de Nyquist. Prove que neste caso o sistema em malha fechada é estável.

ExameE1/TesteT2deControlo LEE‐ISTpp.4/5
II. 8 [T2-1.0] – Suponha que existe ruído n no sensor que mede a saída y e que este se concentra na gama de frequências [1000, 10000] rad/s. Pretende-se que o controlador proporcional garanta os requisitos anteriores e atenue o ruído de pelo menos -20 dB. Determine o aumento do ganho k tolerável de modo a que o sistema seja estável e que este requisito seja garantido.
II. 9 [T2-1.0] – Calcule a diminuição do ganho k tolerável de modo a que os requisitos anteriores (estabilidade e atenuação do ruído) continuem a ser garantidos.
III. [E1–7 Valores, T2-12 Valores]Considere o sistema de controlo em malha fechada representado na Fig. 1, onde r é o sinal de referência, y o sinal de saída e
€
P(s) =10s+10
representa a função de transferência do sistema a controlar. Na figura o sistema está sujeito à acção da perturbação d e do ruído n no sensor que mede a saída y.
Fig. 1. Sistema de controlo
III. 1 [E1-4.0; T2-8.0] – Projecte um controlador K(s) de modo que o sistema em malha fechada seja estável e satisfaça os seguintes requisitos:
i) Erro estacionário nulo de seguimento de sinais constantes de comando r.
ii) Erro estacionário nulo de seguimento de sinais de comando tipo rampa (isto é, r(t)=t).
iii) Ganho unitário (0 db) à frequência de 0.1 rad/s do ganho de malha.
iv) Seguimento de sinais de referência r na gama de frequências [0, 0.01] rad/s com erro menor ou igual a -40 db.

ExameE1/TesteT2deControlo LEE‐ISTpp.5/5
v) Atenuação da perturbação d na gama de frequências [0, 0.001] rad/s de pelo menos -80 db.
vi) Atenuação do ruído n na gama de frequências [10, 1000] rad/s de pelo menos -60 db.
v) Margem de fase PM maior ou igual a 35o
vi) Margem de ganho positiva G+M maior ou igual a +20 db.
Justifique todos os passos. Em particular, trace os diagramas de Bode assimptóticos e de Nyquist necessários.
III. 2 [E1-1.5; T2-2.0] - Pretende-se analisar o comportamento do sistema em malha fechada quando existe um atraso
€
τ na transmissão de informação entre o controlador K(s) e o sistema a controlar P(s). Calcule (utilizando a informação proveniente do diagrama de Bode assimptótico do ganho de malha) o valor máximo
€
τ tolerado tal que o sistema de controlo em malha fechada permaneça estável. III. 3 [E1-1.5; T2-2.0] – Considere agora que o sensor tem uma largura de banda limitada
e suponha que a sua dinâmica é governada pela função de transferência
€
H(s) =p
s+ p
com p = 0.1 rad/s.. Será que o sistema em malha fechada é estável? Justifique utilizando o diagrama de Bode e o critério de Nyquist.