ethernet industriallyceumonline.usf.edu.br/salavirtual/documentos/1892.pdfsdcd – sistemas digitais...
TRANSCRIPT

1
Ronaldo Teixeira Couto
RA 002200600198 – 10˚ semestre
ETHERNET INDUSTRIAL
Itatiba – SP
Dezembro 2010
2
Ronaldo Teixeira Couto
RA 002200600198 – 10˚ semestre
ETHERNET INDUSTRIAL
Monografia apresentada à disciplina
trabalho de Conclusão de Curso, do Curso de Engenharia de computação
da Universidade São Francisco, sob a orientação da Profª Ms Débora
Meyhofer Ferreira, como exigência parcial para conclusão do
curso de graduação.
Itatiba – SP
Dezembro 2010

3
Monografia de Projeto Final de Graduação sob o título “Ethernet Industrial”, defendida
por Ronaldo Teixeira Couto e aprovada em xx de dezembro de 2010, em
Itatiba, Estado de São Paulo, pela banca examinadora constituída pelos professores:
________________________________ Profa. Ms Débora Meyhofer Ferreira.
Orientadora
________________________________ Profa. Ms Vânia Franciscon Vieira
Co-orientador
4
AGRADECIMENTOS
Agradeço principalmente a Deus. Em seguida, às pessoas que me ajudaram nesse longo
e difícil caminho até aqui. Não cito nomes pois são muitos a agradecer, não gostaria de ser
injusto com que não fosse aqui inserido.
Agradeço a meus amigos. Posso dizer hoje que consegui não só um grupo de amigos,
mas aumentar minha família com vários irmãos e irmãs. Vocês que compartilharam comigo
esses últimos anos, tanto para pular nos momentos alegres, ou chorar nos tristes. Muito
obrigado. Amo vocês.
Agradeço a minha mãe e meu pai. Vocês que através de trancos e barrancos mas
também acalantos, souberam me criar e me conduziram a este momento tão importante da
minha vida. Eu sei que se orgulham de mim, mas quero que saibam que me orgulho mais
ainda de vocês dois.
Agradeço ao meu filho Matheus por tolerar a falta do pai em algumas situações que se
passaram em seus aprendizados. Você é a bênção de Deus.
À minha orientadora, Profa. Ms. Débora Meyhofer Ferreira, pela paciência e atenção em
suprir minhas lacunas de conhecimento e experiência, na análise e correção do texto da
dissertação, bem como nas informações e conselhos que auxiliaram na elaboração do modelo
final.
Agradeço aos professores da USF que passaram na minha trajetória até aqui,
partilhando seus conhecimentos e orientações.

5
COUTO, Ronaldo Teixeira. Ethernet industrial. 2010. Monografia – Curso de Engenharia de Computação da Unidade Acadêmica da Área de Exatas da Universidade São Francisco, Itatiba.
RESUMO
As redes industriais, até a alguns anos, eram ambientes isolados dentro das empresas,
sem nenhuma interação com o ambiente corporativo. Estas redes eram constituídas, em sua
maioria, de sistemas proprietários, redes determinísticas e tecnologias dedicadas, sendo as
mais conhecidas PROFIBUS, Devicenet, Fieldbus, entre outras. No entanto, novas demandas
de mercado, como necessidade de monitoramento e gerenciamento rigorosos da produção
pelas empresas, fizeram com que as redes industriais se integrassem às redes de TI
(Tecnologia da Informação) da corporação. O padrão Ethernet, que hoje representa mais de
90% das redes corporativas acabou migrando para o ambiente industrial, porém com algumas
modificações. Nesse trabalho é apresentado as redes tradicionalmente usadas nas indústrias e
as principais adaptações no Ethernet para que ele venha a ser um substituto equivalente.
Palavras-chave: Ethernet, indústria, redes

6
ABSTRACT
Industrial networks, until a few years, were isolated environments within the enterprise,
without any interaction with the corporate environment. These networks were composed
mostly of the proprietary systems, Deterministic and dedicated technologies, the most known
PROFIBUS, DeviceNet, Fieldbus, and others. However, new market demands, as the need for
strict monitoring and management of production companies, have made industrial networks is
to integrate networks of IT (Information Technology) of the corporation. The Ethernet
standard, which today represents over 90% of corporate networks has migrated to the
industrial environment, but with some modifications. This paper shows the networks
traditionally used in industries and major adaptations in Ethernet so it will be an equivalent
substitute.
Keywords: Ethernet, industry, networks
7
Sumário
LISTA DE SIGLAS...................................................................................................................8
LISTA DE FIGURAS................................................................................................................9
LISTA DE TABELAS..............................................................................................................10
1. INTRODUÇÃO...................................................................................................................11
2. REDES INDUSTRIAIS...................................................................................................... 14
2.1 Fieldbus..........................................................................................................................17
2.1.1 Nível de Protocolo.................................................................................................18
2.1.2 Vantagens do Fieldbus.........................................................................................19
2.2 Profibus..........................................................................................................................20
2.3 AS-Interface...................................................................................................................22
2.4 CAN- Controller Área Network.....................................................................................25
2.5 DeviceNet.......................................................................................................................27
3. ETHERNET INDUSTRIAL.................................................................................................30
3.1 O meio físico IEEE802.3 para redes Ethernet industriais...............................................32
3.2 Vantagens da ethernet.....................................................................................................34
3.3 Desvantagens Iniciais para o Padrão de Campo.............................................................35
3.4 Melhoramentos da Rede Ethernet...................................................................................35
3.4.1 Switch como solução para o determinismo............................................................37
3.5 Quadro Ethernet..............................................................................................................38
4. PROFINET...........................................................................................................................40
5. ETHERNET/IP.....................................................................................................................43
5.1 Estudo de caso: Rockweel Automation adota Ethernet IP..............................................45
6 REDE FIELDBUS HSE(High Speed Ethernet).....................................................................48
7. ETHERCAT……………………………………………………………………………......50
8. CONCLUSÃO......................................................................................................................54
9. TRABALHOS FUTUROS...................................................................................................56
10. REFERÊNCIAS BIBLIOGRÁFICAS................................................................................57

8
Lista De Siglas
CI – Control Net International
CIP – Control And Information Protocol
CLP – Controlador Lógico Programável
CSMA/CD - Carrier Sense Multiple access with Collision Detection
DEC – digital equipament corporation
EPA – Enhanced Performance Architecture
FDDI – Fiber Distributed Data Interface
FIP – French national standard
IEA – Industrial Ethernet Association
IEC – International Electrotechnical Commission
IEEE – Instituto De Engenherios eletricistas e eletronicos
IONA – Industrial Open Ethernet Association
IP – Internet Protocol
ISA – The International Society for Measurement and Control
ISO – International Organization for Standardization
LAN – Local Area network
MAC – Media access control
MAP – Manufacturing Automation Protocol
ODVA – Open Devicenet Vendor Association
OSI – Open Systems Interconnection
PC – Personal Computer
SAP – Traduzido do Alemão - Análise de Sistemas e Desenvolvimento de Programas
CNC – Comandos Numéricos Computadorizados
SDCD – Sistemas Digitais de Controle Distribuído
TCP – Transmission Control Protocol
TI – Tecnologia Da Informação
UDP – User Datagram Protocol

9
LISTA DE FIGURAS
Figura 1.1 - Níveis de redes industriais....................................................................................16
Figura 1.2 - Tipos de equipamentos em cada nível de uma Rede Industrial............................16
Figura 1.3 - Equipamentos de cada nível de uma rede industria..............................................16
Figura 2.1 - Operação conjunta: Softwares Supervisórios+Fieldbus+instrumentos...............18
Figura 2.1.1 - Fieldbus Nível de Protocolo..............................................................................19
Figura 2.3.1 - Rede AS-I...........................................................................................................24
Figura 2.4.1 - Codificação NRZ...............................................................................................26
Figura 3.1.1 - Topologia para uma rede Ethernet industrial.....................................................34
Figura 3.1.2 - Conectores..........................................................................................................34
Figura 3.4.1.1 - Switch Ethernet industrial com prioridade de Transmissão............................38
Figura 4.1 - Arquitetura TCP/IP para Profinet.........................................................................40
Figura 4.2 - Profibus e Ethernet................................................................................................41
Figura 4.3 - Comparativo de tempos da rede Profinet..............................................................42
Figura 5.1 - Comunicação Explícita e Implícita.......................................................................44
Figura 6.1 - Rede HSE e rede H1..............................................................................................48
Figura 7.1 - Topologia da Ethercat...........................................................................................50
Figura 7.2 - Quadro Ethernet com EtherCat.............................................................................51
Figura 7.3 - Arquitetura EtherCat mestre/escravo....................................................................51
Figura 7.4 - Quadro Ethernet com Ethercat..............................................................................51
Figura 7.5 - Ethercat em quadro Ethernet ou sobre UDP.........................................................52
Figura 7.6 - EtherCat, tranferência de dados............................................................................52
Figura 7.7 - Estrutura interna do dispositivo escravo...............................................................53
10
LISTA DE TABELAS
Tabela 1 - Características físicas das redes Ethernet industriais...............................................33
Tabela 2 - Novos standards do padrão IEEE 802.....................................................................35
Tabela 3 - Tabela comparativa rede H1 x HSE........................................................................49
Tabela 4 - Níveis de cada protocolo Ethernet Industrial...........................................................54

11
1. INTRODUÇÃO
Em uma indústria moderna coexistem muitos dispositivos e equipamentos destinados ao
controle, por exemplo, os controladores lógicos programáveis, os sistemas digitais de
controle distribuído(SDCD), computadores de gerência, de projetos, sensores, etc. A
integração através de redes industriais visa unir todos estes dispositivos com o objetivo de
aumentar o rendimento e diminuir os custos.
Tal como em outros mercados de comunicação de dados (Telefonia, Rádios, Emissoras
de Televisão, Internet, etc), os sistemas de transmissão de dados nas indústrias começaram de
forma bastante simples, utilizando conexões do tipo serial RS-232 e RS-485. Porém, com o
passar do tempo, as indústrias foram desenvolvendo sistemas mais complexos, com
tecnologias próprias, protocolos, softwares e hardwares apropriados para suas necessidades,
exigindo assim, um desenvolvimento da tecnologia relacionada.
Redes industriais são sistemas distribuídos com diversos elementos que trabalham de
forma simultânea com o objetivo de supervisionar e controlar um determinado processo. Uma
troca rápida e precisa de informações entre sensores, atuadores, computadores, CLPs
(controlador lógico programável), entre outros [OLIVEIRA].
Apesar do vários fabricantes, as redes industriais podem ser modeladas em 3 níveis
hierárquicos para a interconexão de diferentes tipos de equipamentos, havendo inclusive um
paralelo com o modelo OSI [OLIVEIRA].
O mais alto da hierarquia é o que interliga os equipamentos responsáveis pelo
planejamento da produção, controle de estoque, previsões de vendas, etc. Ao ser implantado,
são usados softwares gerenciais, tais como sistema SAP (traduzido do alemão - Análise de
sistemas e desenvolvimento de programas), Arena e outros.
No nível médio é onde se encontram os CLPs e CNCs (comandos numéricos
computadorizados) responsáveis pelo controle e informações a respeito de robôs, máquinas-
ferramentas, transportadores e etc. No nível mais baixo dessa hierarquia temos o que se refere
à parte física onde localizam-se sensores, atuadores, contadores e etc.[MONTEZ].

12
A classificação das redes industriais é baseada nos três níveis, mas não é exclusiva para
cada um. O tipo de equipamento conectado por cada tipo de rede industrial divide- se da
seguinte maneira [MONTEZ]:
• Rede Sensorbus - dados no formato de bits – Conecta equipamentos simples e
pequenos diretamente na rede. Não cobrem grandes distâncias. Tem o objetivo de manter os
custos os mais baixos possíveis;
• Rede Devicebus - dados no formato de bytes – Preenche os espaços do Sensorbus e
Fieldbus e pode cobrir distância de 500 m. Tem a mesma capacidade de transferência do
Sensorbus, mas consegue gerenciar mais equipamentos e dados;
• Rede Fieldbus - dados no formato de pacotes de mensagens – Interliga os
equipamentos de I/O mais inteligentes e pode cobrir maiores distâncias. O processo de
transferência pode ser longo, mas consegue a comunicação com diversos tipos de dados.
Um dos protocolos mais utilizados na indústria para a comunicação em Fieldbus é o
PROFIBUS (Process Field bus).
A Ethernet é a mais famosa rede de comunicação interna, é um dos protocolos que
fazem parte da arquitetura TCP/IP e foi criado por Robert M. Metcalfe, na década de 70. O
padrão TCP/IP é uma das arquiteturas mais difundidas para comunicação a longa, média e
curta distância envolvendo computadores, surgiu também em meados dos anos 70. Assim,
tentando uma padronização das redes industriais adotou-se há alguns anos tal padrão no meio
industrial, dando origem às redes Ethernet Industriais.
O PROFIBUS é um bom protocolo de informações até o nível de gerenciamento.
Embora o PROFIBUS possa tratar do gerenciamento, a Ethernet é mais indicada para isto
(RTI).
A evolução do Fieldbus (barramento de campo) para a Ethernet não esta transcorrendo
exatamente tão rápido quanto previsto no passado [RTI2].
A idéia básica da Ethernet industrial é simples: aproveite o protocolo como base para
todos os processos de comunicação em máquinas, equipamentos e linhas completas de
produção. Com a Ethernet aberta, oferecendo um caminho uniforme com acessos e saídas

13
padronizadas, as infra-estruturas de rede podem ser montadas e operadas de forma mais
simples, mais rápida, com maior capacidade de desempenho, e também com custo mais
atraente. No entanto, a Ethernet industrial também apresenta desvantagens para certas
aplicações.
Esse trabalho se propõe a estudar as principais tecnologias de rede industrial existente
atualmente no mercado comparando-as com a Ethernet.

14
2 REDES INDUSTRIAIS
Devido a crescente informatização das empresas, tornou-se necessário a troca de
informações entre equipamentos, dando origem as redes industriais, com o objetivo de
informatizar todas as etapas do processo produtivo. O processo de produção passa por várias
etapas executadas por diferentes elementos presentes no ambiente industrial, sendo que a
tendência neste ambiente é de se ter vários subsistemas com certa autonomia, com cada um
sendo responsável por parte do processo de produção.
São bastante diversificados os equipamentos presentes em cada subsistema do ambiente
industrial, temos computadores usados para projeto e supervisão, controladores de alto nível
que coordenam todo o processo de produção e no chão de fábrica são usados robôs, esteiras,
tornos, sensores, atuadores, etc. Todos esses componentes não são interligados diretamente,
redes são usadas para integrar os equipamentos presentes em um determinado subsistema
responsável por parte do processo de produção.
O desenvolvimento das redes industriais visa unir todos estes dispositivos com o
objetivo de aumentar o rendimento e diminuir custos. As principais vantagens são: [LOPEZ].
• Visualização e supervisão do processo de produção;
• Aquisição de dados do processo mais eficiente e rápida;
• Melhora do rendimento do processo;
• Aumento do intercâmbio de dados de processo entre sensores e departamentos
vizinhos ;
• Programação remota, sem necessidade de acesso físico a dispositivos de chão
de fábrica;
Algumas redes trabalham baseadas em transmissão de bits, em nível mais baixo do que
as demais, denominadas de redes de Sensores. Outras, em nível intermediário – visando
dispositivos de campo, trabalham transmitindo bytes, são chamadas de Device bus, Device
Net, PROFIBUS DP, LONworks e Interbus-S. Há redes que trabalham em nível mais
15
elevado, como uma variedade de informações maiores – derivadas de instrumentos mais
complexos, transmitindo blocos de informações, denominadas de Fieldbusses, como a
IEC/ISA SP-50, da qual derivou a Fieldbuss Foundation, a PROFIBUS PA e o protocolo Hart
(figura 1.2) [LOPEZ].
Atualmente, existem dezenas de sistemas Fieldbus e, freqüentemente, novos sistemas
são desenvolvidos e lançados no mercado. Cada um destes sistemas foi desenvolvido em data
diferente, por uma companhia ou associação diferente e por diferente propósito. A escolha de
um padrão para sua aplicação envolve requisitos de necessidade e preferência. Neste capítulo
são apresentados os principais sistemas de Fieldbus, apontando vantagens, desvantagens e
tecnologias de cada um deles.
Cada subsistema adota o tipo de rede mais adequado para si levando em conta o tipo
de equipamento que utiliza e os requisitos da atividade que executa, os requisitos do ambiente
industrial e seus processos de produção são geralmente diferentes daqueles presentes em redes
locais de computadores, especificar um tipo de rede para cada ambiente industrial pode ser
necessário. Alguns requisitos de redes industrias são importantes, como: boa resistência
mecânica, resistência a chama, umidade e corrosão, alta imunidade a ruídos, taxa de erros
baixa ou quase nula, tempo de acesso e de propagação limitados, tempo entre falhas e tempo
de reparos baixo, boa modularidade e possibilidade de interconexão [LOPEZ].
Para a implantação de um sistema como esse, a empresa terá que realizar uma pesquisa
detalhada para saber qual sistema baseado em redes serviria para sanar as suas necessidades.
No mercado existem empresas especializadas na integração desses sistemas, mas nem sempre
é o certo para todas, o padrão poderá acarretar outros problemas ou não resolver os já
existentes.
O ponto positivo nessa padronização é que disponibilizam em 3 níveis hierárquicos para
a interconexão de diferentes tipos de equipamentos (Figura 1.1).
O mais alto da hierarquia é o que interliga os equipamentos responsáveis pelo
planejamento da produção, controle de estoque, previsões de vendas, etc. Ao ser implantado,
são usados softwares gerenciais, tais como sistema SAP, Arena e outros. Nesse nível o
protocolo TCP/IP com padrão Ethernet é o mais utilizado.

16
No nível médio é onde encontram-se os CLPs e CNCs responsáveis pelo controle e
informações a respeito de robôs, máquinas- ferramentas, transportadores e etc. No nível mais
baixo dessa hierarquia temos o que se refere à parte física onde localizam-se sensores,
atuadores, contadores e etc. (figura 1.3).
Figura 1.1 – Níveis de redes industriais Figura 1.2 – Tipos de equipamentos em cada nível de uma Rede Industrial.
Figura 1.3 – Equipamentos de cada nível de uma rede industrial[OLIVEIRA]

17
2.1 Fieldbus
Fieldbus é um sistema de rede de comunicação industrial para controle em tempo real. É
um protocolo desenvolvido para automação de Sistemas de Fabricação, elaborado pela
FieldBus Foundation e normalizado pela ISA-The International Society for Measurement and
Control [OLIVEIRA].
Em meados de 1960 o sinal analógico de 4-20mA (miliampére) foi introduzido para
realizar o controle de dispositivos industriais. Aproximadamente em 1980, os sensores
inteligentes começaram a ser desenvolvidos e implementados usando um controle digital. Isso
motivou a necessidade de integrar vários tipos de instrumentações digitais em campos de
comunicações, visando otimizar a performance dos sistemas. Dessa forma se tornou óbvio
que um padrão era necessário para formalizar o controle dos dispositivos
inteligentes[OLIVEIRA].
Fieldbus é um termo genérico empregado para descrever tecnologias de comunicação
industrial; o termo Fieldbus abrange muitos diferentes protocolos para redes industriais. Tal
tecnologia é usada na indústria para substituir o sinal analógico de 4- 20 mA (miliampére).
Os Fieldbuses eliminam a necessidade de se utilizar várias interfaces ponto-a-ponto,
uma para cada equipamento, eles substituem as interfaces digitais ponto-a-ponto (como
RS232, RS422, etc.) por um barramento ao qual todos os equipamentos são conectados, os
Fieldbuses são geralmente usados na comunicação em ambiente industrial e veicular.
Existem diversos tipos de Fieldbus: PROFIBUS (norma alemã), ISA SP-50 (norma
americana), FIP (norma francesa) etc.
Como pode ser observado da figura abaixo, o protocolo Fieldbus visa a interligação de
instrumentos e equipamentos, possibilitando o controle e monitoração dos processos.
Geralmente é utilizado com os chamados Softwares Supervisórios (SCADA, etc.), que
permitem a aquisição e visualização desde dados de sensores até status de equipamentos
(Figura 2.1) [FIELDBUS].

18
Figura 2.1 – Operação conjunta: Softwares Supervisórios+Fieldbus+instrumentos
[MAHALIK]
Atualmente, diversas indústrias já adotam as redes Fieldbus, seja adaptando plantas já
existentes, ou mesmo projetando novas plantas inteiramente interligadas segundo os padrões.
Muitas pesquisas têm sido feitas no sentido de melhorar ainda mais o padrão, de forma que as
discussões estão longe de um fim.
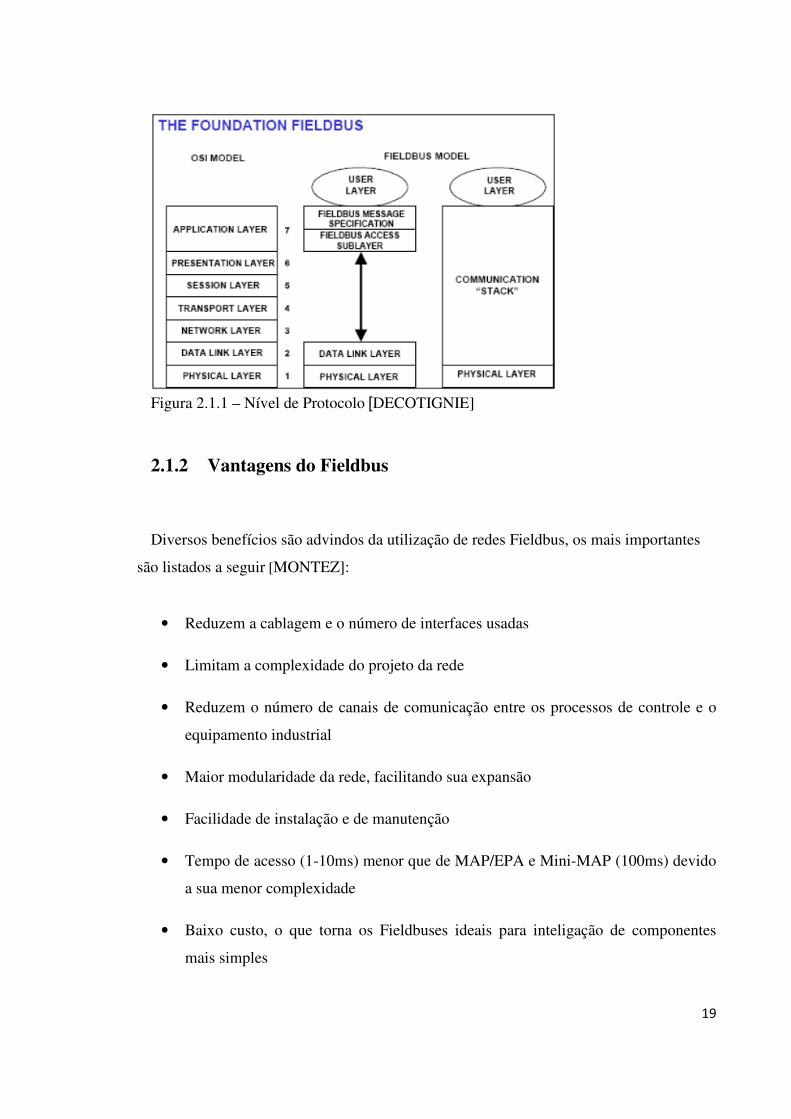
2.1.1 Nível de Protocolo
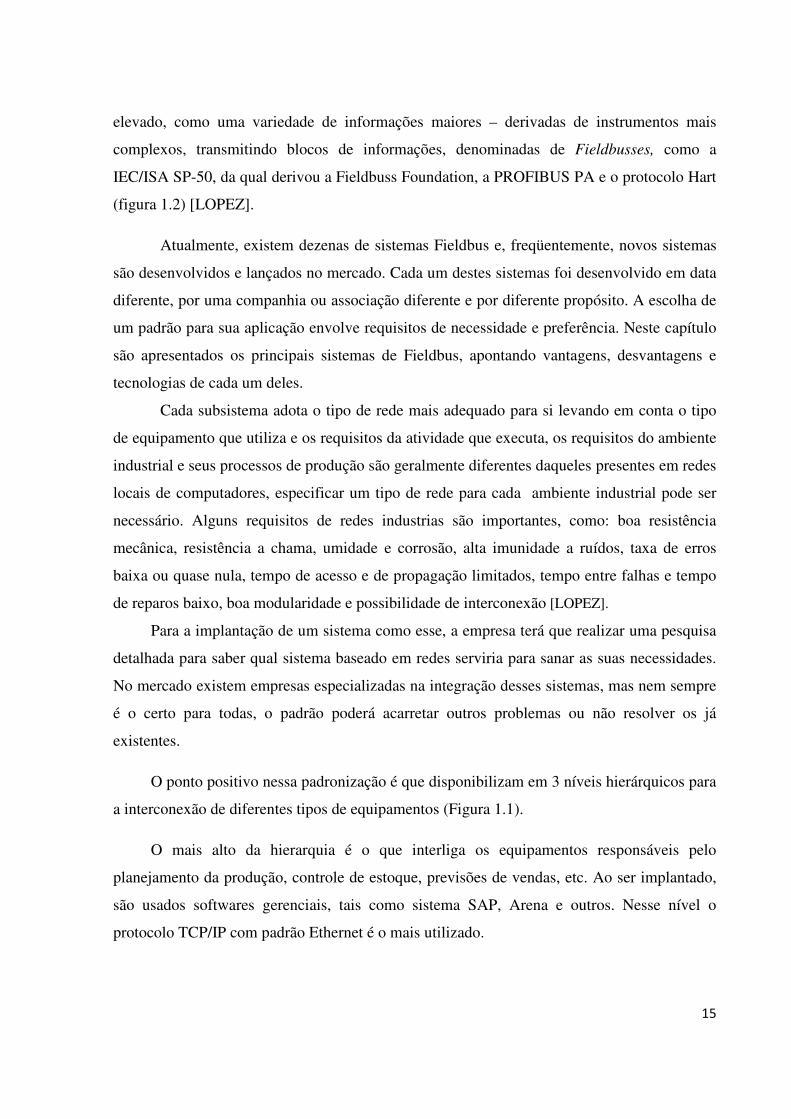
Fieldbus foi desenvolvido baseado no padrão OSI/ISO, porém não contém todos os seus
níveis. A figura 2.1.1 faz a comparação entre os dois modelos. Como pode ser visto na figura,
o protocolo Fieldbus é dividido em dois níveis principais: Nível Físico (interligação entre os
instrumentos e equipamentos) e Nível de Software (tratam das formas de comunicação entre
os equipamentos).
19
Figura 2.1.1 – Nível de Protocolo [DECOTIGNIE] 2.1.2 Vantagens do Fieldbus
Diversos benefícios são advindos da utilização de redes Fieldbus, os mais importantes
são listados a seguir [MONTEZ]:
• Reduzem a cablagem e o número de interfaces usadas
• Limitam a complexidade do projeto da rede
• Reduzem o número de canais de comunicação entre os processos de controle e o
equipamento industrial
• Maior modularidade da rede, facilitando sua expansão
• Facilidade de instalação e de manutenção
• Tempo de acesso (1-10ms) menor que de MAP/EPA e Mini-MAP (100ms) devido
a sua menor complexidade
• Baixo custo, o que torna os Fieldbuses ideais para inteligação de componentes
mais simples

20
• Maior compatibilidade devido ao uso de padrões
• Eliminação da dependência de um só fornecedor, reduzindo ainda mais os custos
devido à competição
2.2 Profibus
PROFIBUS (acrônimo de Process Field Bus) é o tipo mais popular sistema de
comunicação em rede Fieldbus, sendo que em 2004, estimava-se que existiriam mais de 10
milhões de nós instalados mundialmente[PROFIBUS].
Com a necessidade de padronização da comunicação entre máquinas do processo
industrial, surgiu em 1986 uma corrente européia com o propósito de criar meios comuns de
troca de informações entre esses equipamentos. Com isso tornou-se possível a comunicação
entre os mais diversos dispositivos tais como CNC, PLC, PC e outros mesmo que de
fabricantes diferentes. Por volta de 1990 a maioria dos sistemas industriais já se comunicavam
com protocolos “standard”, e o PROFIBUS era uma das opções. [PROFIBUS].
Baseado no protocolo SINEC L2 desenvolvido pela Siemens, o PROFIBUS tornou-se
uma das plataformas mais abertas do mundo. O PROFIBUS pertence a um grupos de
protocolos que compartilham o conceito de “Fieldbus”. Este conceito surgiu quando
verificou-se que apenas automatizar as máquinas de uma linha de produção não era suficiente
para garantir uma alta qualidade e produção [Saber]. O conceito “Fieldbus” compartilha a
idéia da descentralização da inteligência, ou seja, a informação não está apenas armazenada
num único membro do processo como por exemplo o “PC Manager”, mas distribuída em uma
rede desde o chão de fábrica até os níveis mais superiores da gerência. O PROFIBUS pode ser
utilizado nos mais diversos níveis do processo industrial, para isso, uma série de derivações
do PROFIBUS surgiram, tais como[SIEMENS]::
• PROFIBUS DP (Periferia Distribuída de I/Os): foi a primeira versão criada.
Indicada para o chão de fábrica, onde o volume de informações é grande e há
a necessidade de uma alta velocidade de comunicação para que os eventos
sejam tratados num tempo adequado.
21
• PROFIBUS FMS (Field Message Specification): esta versão é uma evolução
do PROFIBUS DP e destina-se a comunicação ao nível de células (nível onde
se encontram os PLCs). O FMS é tão poderoso que pode suportar o volume de
dados até o nível gerencial, mesmo não sendo uma prática ideal.
• PROFIBUS PA (Process Automation): Esta é a versão mais moderna do
PROFIBUS. Uma característica interessante deste protocolo é que os dados
podem trafegar pela mesma linha física da alimentação DC, o que economiza
tempo de instalação e cabos. Sua performance é semelhante ao DP.
Como PROFIBUS é um padrão aberto de rede de comunicação industrial, utilizado em
um amplo espectro de aplicações em automação da manufatura, de processos e predial. Sua
total independência de fabricantes e sua padronização são garantidas pelas normas EN50170 e
EN50254. Com o PROFIBUS, dispositivos de diferentes fabricantes podem comunicar-se
sem a necessidade de qualquer adaptação na interface. O PROFIBUS já é suportado por mais
de 100 empresas, sua comunicação pode ser com conexão: comunicação confiável ou sem
conexão: para broadcast ou multcast [SIEMENS].
O PROFIBUS pode trafegar tanto por um meio elétrico como por um meio óptico. No
caso do meio ser elétrico, este precisa obedecer o padrão RS485. No caso do meio óptico, a
fibra pode ser plástica ou de vidro. As vantagens em se utilizar o meio óptico é que devido ao
seu comprimento de onda, possui uma alta imunidade a ruídos[SIEMENS].
O PROFIBUS pode ser usado tanto em aplicações com transmissão de dados em alta
velocidade como em tarefas complexas e extensas de comunicação.
Através de seu contínuo esforço de desenvolvimento tecnológico, o PROFIBUS é o
sistema de comunicação industrial mais bem preparado para o futuro. A Organização de
Usuários PROFIBUS está atualmente trabalhando na implementação de conceitos universais
para integração vertical baseada em TCP/IP.
É comum utilizarmos como protocolo cooperante o padrão ethernet industrial.
Utilizando uma placa “Gateway” que é encarregada de ser o “tradutor” entre os dois
protocolos, é possível que ocorra a integração dos dados do nível de processo (chão de
fábrica) com o nível gerencial [PROFIBUS].
Existem vários outros protocolos que se encaixam no conceito de “Fieldbus” e que são
concorrentes diretos do PROFIBUS. Podemos citar por exemplo o Interbus, CANopen,

22
DeviceNet entre outros.
2.3 AS-Interface
AS-Interface (Actuator Sensor Interface) é uma rede simples para conexão direta de
sensores binários e atuadores no nível mais baixo da automação (nível I/O) para nível superior
e dispositivos de controle. Em outras palavras, AS-Interface é um sistema de conexão
eletromecânica que utiliza dois fios no transporte de dados e alimentação elétrica em distância
até 100 metros, sem repetidores [LOPEZ].
A especificação, desenvolvida por um grupo de fabricantes de sensores / atuadores, é
completamente aberta e independente de fabricante. Projetado basicamente para uso nos
níveis inferiores dos processos de automação, em que dispositivos de campo simples
fornecem informações para a rede controlada por CLP ou PC. Utiliza arquitetura de
configuração mestre / escravo e velocidade de transmissão 167 kbps.
AS-Interface pode ser compreendido como substituição digital para as tradicionais
arquiteturas com topologia de árvore. Um chip especial foi desenvolvido para uso em
dispositivos ou módulos conectados ao sistema [LOPEZ].
AS-Interface não foi desenvolvido para competir com os sistemas Fieldbus de alto
nível. Ele foi projetado para a conexão de dispositivos tais como sensores e atuadores com
baixo custo de conexão por nó. Pouco treinamento é necessário para familiarizar o pessoal de
instalação e manutenção.
A alimentação elétrica é proveniente de uma fonte de 24 Vcc totalmente isolada dos
sinais de dados. Assim, os dados podem ser modulados de forma a neutralizar os efeitos
eletromagnéticos.
Cada rede AS-I possui um mestre, que pode ser um CLP ou um PC, o qual executa o
programa de automação. Cada rede pode incluir até 31 escravos. Os módulos conectados
podem ser ativos ou passivos.
Os módulos do tipo ativo são escravos que podem conectar até 4 dispositivos do tipo
não-inteligente, significando o envolvimento na rede de 124 entradas e 124 saídas. Os
módulos do tipo passivo conectam dispositivos inteligentes.
Os escravos são solicitados pelo mestre a enviar informações utilizando polling com
chaveamento de 167 kHz. A mensagem de dados trocada entre o mestre e os escravos é
23
chamada de telegrama. Um telegrama tem 4 bits que podem ser usados como entrada ou saída
e são ajustados em fábrica, significando que AS-I também pode ser usado para sinalização
analógica, porém com velocidade menor. Dados adicionais são transmitidos durante cada
ciclo para perfazer outras funções.
Cada escravo tem endereço único, que pode ser ajustado pelo mestre ou programação. A
detecção de erro força a retransmissão da mensagem quando ocorre alguma anormalidade.
Caso ocorra falha na transmissão, somente um par de telegramas (mestre para escravo e
escravo para mestre) tem que ser retransmitido. Isto é feito ao final de cada ciclo, num tempo
de 150 µs. Se houver nova falha na retransmissão, fica caracterizado um erro de configuração,
o qual é enviado ao host para a tomada de decisão programada.
Sob condições de forte ruído eletromagnético, um sistema pode fazer no máximo uma
repetição de mensagem por ciclo sem afetar a performance. Na ocorrência de ruído muito
alto, o sistema pode parar momentaneamente. A recuperação é imediata após o
desaparecimento do ruído. Todos os componentes, inclusive os dados armazenados, são
recuperados. Escravos perdidos são automaticamente aceitos outra vez.
Os serviços do mestre são: inicialização da rede, identificação dos dispositivos na rede,
ajuste de parâmetros dos escravos, diagnóstico do bus e escravos, enviar mensagem de erro ao
host (CLP ou PC) e ajustar o endereço de escravos substituídos.
AS-Interface possui duas formas de conexão com o primeiro nível de controle. A
primeira forma é a conexão direta. Neste caso, o mestre é parte de um CLP ou PC, com seu
próprio ciclo de tempo. Como AS-I é um sistema aberto, qualquer fabricante de CLP ou PC
pode desenvolver e incluir um mestre em seu sistema.
A segunda forma de conexão é através de Fieldbus de alto nível, utilizando-o como um
sub-sistema. Neste caso, todos os dados da rede são processados em um nó do Fieldbus. Este
nó é conectado ao nível de controle juntamente com outros componentes do Fieldbus.
Para aplicações em tempo real, é necessária uma análise do ciclo de tempo e da
integração entre os dois sistemas.
A principal área de trabalho do AS-Interface é a rede de sensores e atuadores binários e
estes são normalmente usados nas aplicações orientadas para a segurança e confiabilidade.
Fontes de erro que não são relevantes em aplicações padrões, devem ser resolvidos na
transmissão de mensagens orientadas para segurança [LOPEZ].
24
Principais fontes de erro:
- Falha no hardware do escravo não reconhecida pelo diagnóstico do bus.
- Distúrbios na transmissão que causem o não reconhecimento de falhas na mensagem.
- Falha no hardware do mestre ou do host, causando erro no processamento.
Um projeto de automação controlado por bus, com redundância, envolve a duplicação no
número de escravos (duplicação de endereços), estrutura do bus, mestre e host de controle,
incrementando significativamente os custos. Outra alternativa é duplicar a estrutura do bus, o
que é mais econômico.
A implementação de segurança é obtida através de sinais dinâmicos transmitidos para o
bus e um monitor de segurança. Este monitor é introduzido como um elemento universal da
rede, onde as mensagens orientadas para segurança são processadas. Ele supervisiona o
tráfego de dados entre mestre e escravo, recebe as mensagens dos escravos específicos da
segurança e dispara a função de emergência se ocorrer um alarme programado na aplicação
ou erro no processo da aplicação.
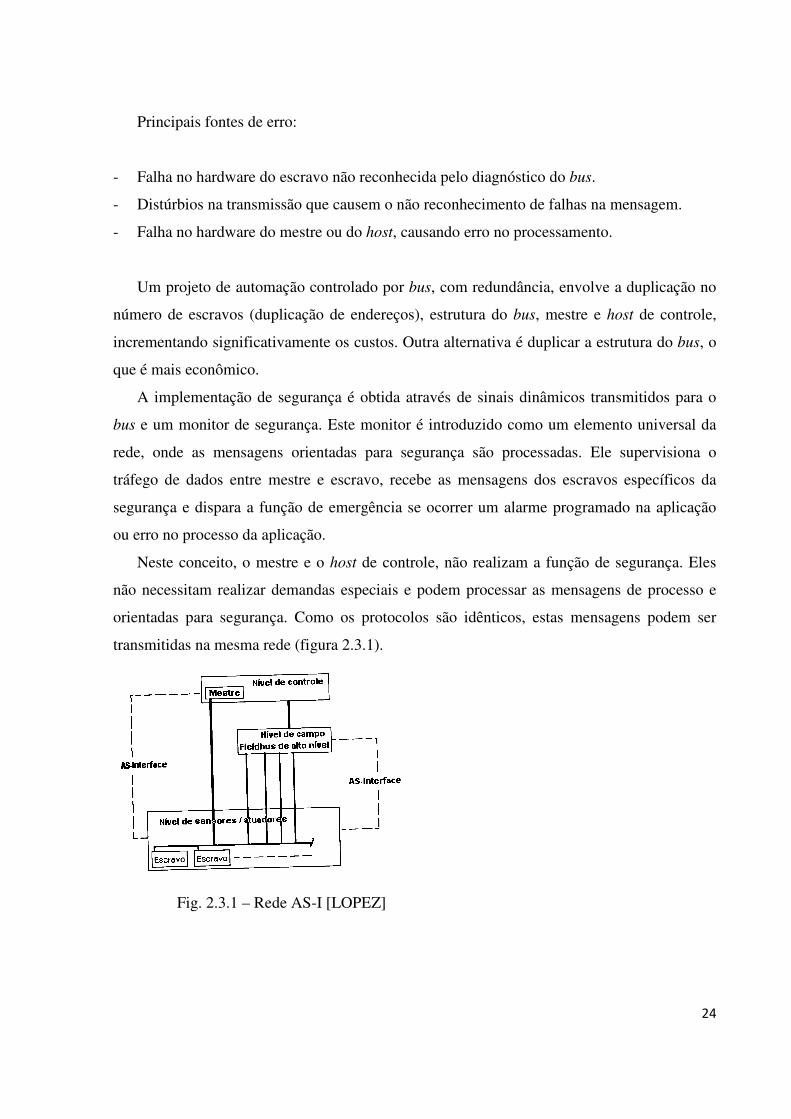
Neste conceito, o mestre e o host de controle, não realizam a função de segurança. Eles
não necessitam realizar demandas especiais e podem processar as mensagens de processo e
orientadas para segurança. Como os protocolos são idênticos, estas mensagens podem ser
transmitidas na mesma rede (figura 2.3.1).
Fig. 2.3.1 – Rede AS-I [LOPEZ]

25
2.4 CAN – Controller Area Network
Com aumento da sofisticação dos processos de manufatura e a crescente necessidade
de se implantar plantas de supervisão e controle de processos, gerou-se a necessidade de numa
planta um grande número de pontos de coleta de dados e pontos de atuação do sistema de
controle no processo. Num sistema convencional de controle (SDCD, SCADA), seria
necessária a interligação de cada um dos pontos até o centro de processamento do controle,
sendo necessário uma grande quantidade de cabos e horas de instalação [MONTEZ].
A tecnologia Fieldbus surgiu com a necessidade da indústria em racionalizar o
material gasto e, também, de reduzir o tempo de instalação, reduzindo muito o custo do
projeto e facilitando a manutenção. As grandes instalações, feitas com base na tecnologia
convencional, consumia muito tempo e material para interligar os sensores, botões,
solenóides, etc. Neste tipo de instalação, a transmissão de dados entre dispositivos de entrada
e saída é feita através de cabos multi-vias (Point-to-point wiring) [MONTEZ].
Atualmente as redes para sensores e atuadores tem um papel muito importante na
automação de máquinas e sistemas, tanto nas áreas de processos, quanto na de manufatura. Na
utilização de uma rede para sensores e atuadores espera-se obter uma série de vantagens
econômicas e funcionais em que se destacam:
- Baixo custo de planejamento e instalação;
- Configuração e manutenção simplificada;
- Flexibilidade;
- Diagnósticos de erros;
- Compatibilidade;
- Disponibilidade no mercado mundial;
- Alta viabilidade econômica;
- Confiabilidade.
O CAN é um protocolo de comunicação serial para aplicações em tempo real baseado na
norma ISO 11898 e ISO11519-2, desenvolvido inicialmente pela Robert Bosch para
utilização em redes de comunicação serial em veículos, teve seu desenvolvimento mais
recentemente voltado para sensores discretos, embora não tenha ficado somente com esta

26
limitação. Atualmente, este protocolo vem sendo utilizado por diversos fabricantes como:
Eaton Cuttler-Hammer, Allen Bradley, Honeywell, etc.
O CAN consiste basicamente de um padrão de hardware com diferentes tipos de frames,
regras de decisão para a transmissão de mensagens e métodos para detecção e correção de
erros. A especificação CAN define a camada física e de enlace do modelo de referência
OSI/ISO.
Os dispositivos CAN utilizam o modo "multi-cast" para se comunicarem com o
barramento, que consiste em rotular a mensagem através de um identificador único na rede.
Cada dispositivo efetua o teste de aceitabilidade no identificador para determinar se a
mensagem deverá ou não ser processada. O identificador ainda é responsável pela prioridade
da mensagem através de seu valor numérico (quanto menor o valor do identificador, maior
será sua prioridade).
O barramento CAN utiliza a codificação NRZ (Non Return to Zero) com bit-stuffing (para
assegurar o sincronismo), para comunicação de dados em um barramento diferencial a dois
fios (geralmente par trançado) (figura 2.4.1).
Fig. 2.4.1 – Codificação NRZ [MONTEZ]
O padrão ISO 11898 recomenda que os chips de interface sejam desenvolvidos de
maneira que a comunicação possa continuar mesmo que um dos dois fios do barramento
esteja rompido ou curto-circuitado à fonte de alimentação ou ainda curto-circuitado ao terra.

27
A utilização de identificadores ao invés de endereços na rede facilita a configuração do
sistema tornando-se mais flexível, podendo suportar ainda, a capacidade de receptores
múltiplos e multi-mestre. A comunicação de dados é feita através do método CSMA/CD
(Carrier Sense, Multiple Access with Collision Detect), com Non-Destructive Bitwise
Arbitration que soluciona os problemas de colisões através de uma lógica "E" por fios no qual
um estado dominante 0 sobrepõe-se a um estado 1, sendo assim, o identificador com menor
valor terá maior prioridade na transmissão da mensagem.
2.6 DeviceNet
DeviceNet é baseada no sistema CAN, usando padrão de identificação 11 bits. A
especificação e protocolo são abertos. Os fabricantes de hardware e desenvolvedores de
software devem ser licenciados por Open DeviceNet Vendor Association Inc. [DEVICENET].
Os dois principais propósitos do DeviceNet são:
- Transporte de informação controle-orientada associada com dispositivos sensores e
atuadores;
- Transporte de outras informações utilizadas indiretamente pelo sistema controlado.
Características:
- Tipo de bus: mestre / escravo;
- Número de nós: 64;
- Distância de cabo trunk X velocidade de transmissão: 500 metros em 125 kbps; 250
metros em 250 kbps; 100 metros em 500 kbps;
- Distância cumulativa (soma de todas as linhas drop no cabeamento) de cabo drop,
considerar a distância máxima entre dispositivos de 6 metros: 156 metros em 125 kbps; 78
metros em 250 kbps; 39 metros em 500 kbps;
- Meio de transmissão: par trançado com blindagem – alimentação elétrica e sinal de
processo no mesmo cabo de rede;
- Bits / mensagem: 64 bidirecional;
28
- Segurança: diagnóstico e alarmes;
- Topologia: linear;
- Flexibilidade: dispositivos I/O ilimitados, interação entre instrumentos e compatibilidade
plug and play.
DeviceNet é um protocolo baseado em conexão no qual todos os dispositivos têm
estabelecida uma prioridade para conectar à rede.
A troca de informação requer o atendimento dos seguintes fundamentos:
- Identidade – as informações de um dispositivo são armazenadas e ajudam outros
dispositivos na identificação dentro da rede. Cada dispositivo tem seus próprios
parâmetros (atributos), que definem a sua atuação;
- Roteador de mensagem – transaciona a mensagem recebida e decide seu destino;
- Dispositivo DeviceNet – este dispositivo armazena todas as informações do sistema;
- Conexão – realiza a conexão do módulo e transaciona mensagem explícita e mensagem
I/O.
A mensagem explícita contém as informações do módulo. A mensagem I/O contém as
informações de estado dos dados na entrada e saída do módulo. Para operar em tempo real,
esta mensagem deve ser enviada o mais rápido possível e possuir um identificador CAN baixo
(maior prioridade).
O método da conectividade direta proporciona comunicação otimizada e função de
diagnóstico entre dispositivos.
Principais características do DeviceNet versão 2.0:
- Os dispositivos podem ser configurados no estado off-line. Não há necessidade de plugar
o dispositivo na rede e utilizar o gerenciador on-line;
- Os dispositivos podem transmitir mensagem piloto, em período de tempo determinado,
informando o seu estado para os outros nós. Isto facilita a função de diagnóstico que não
precisa enviar mensagens solicitando o estado de cada nó, reduzindo o tempo de processo
e ocupação da banda;
29
- Modificação automática dos valores de configuração (identificação) dos dispositivos
sempre que um atributo não volátil é alterado. Isto é útil quando é necessária a
substituição de dispositivos;
- Novos dispositivos desenvolvidos para o acionamento de motores de corrente alternada
(contactoras, sobrecarga e starters).
30
3 ETHERNET INDUSTRIAL
A grande maioria das empresas hoje em dia não usa um único protocolo de dados, mas
dois, como por exemplo, Ethernet e PROFIBUS, ou até vários. A troca dos barramentos de
campo por soluções Ethernet segue a necessidade de uma tecnologia de rede uniforme, que vá
da gerência até a célula de fabricação. Assim, os dados das ilhas de produção e das máquinas
podem ser obtidos em toda a rede da empresa. As vantagens são evidentes: mais
funcionalidade nos equipamentos de campo significa, simultaneamente, maior capacidade e
flexibilidade da empresa e, dessa forma, mais dinâmica nos processos[RTI2].
A Ethernet não foi projetada para trabalhar na automação industrial, mas ela vem sendo
modificada com êxito para atender aos requisitos básicos da comunicação de dados entre os
processos industriais. É a tecnologia de rede local (LAN) mais popular e mais utilizada no
mundo, mais de 95% das redes locais de computadores usam este padrão que agora também
esta sendo usada no chão de fábrica [RTI1].
Ela foi desenvolvida pela Xerox na década de 70, em cooperação com a DEC (Digital
Equipment Corporation) e a Intel, que desenvolveram o padrão na década de 80. Em 1985 a
Ethernet foi aceita oficialmente como padrão 802.3 do IEEE.
A Ethernet é baseada no envio de pacotes, na detecção de colisão (CSMA/CD). Ela
define cabeamento e sinais elétricos para a camada física, e formato de pacotes e protocolos
para a camada de controle de acesso ao meio (Media Access Control - MAC) do modelo OSI.
A Ethernet foi padronizada pelo IEEE como 802.3. A partir dos anos 90, ela vem sendo a
tecnologia de LAN mais amplamente utilizada e tem tomado grande parte do espaço de outros
padrões de rede como Token Ring, FDDI e ARCNET [MONTEZ].
A rede Ethernet passou por uma longa evolução nos últimos anos se constituindo na
rede de melhor faixa e desempenho para uma variada gama de aplicações. As Redes Ethernet
iniciaram operando a velocidades de 3Mbps. Atualmente temos redes operando a 10Gbps, o
que a constitui numa rede de melhor faixa e desempenho para uma gama de aplicações.
Quanto a rede física, existem três possibilidades: par trançado e blindado, cabo coaxial de 75
Ω ou fibra óptica.
Ultimamente há um crescente interesse da Indústria pela rede Ethernet, como uma
possível alternativa para o chão de fábrica e no controle de processos. Hoje nós temos o
padrão IEEE 1451, que determina como os sensores e atuadores podem ser ligados
31
diretamente a uma rede de controle, incluindo a Ethernet, que devido ao baixo custo do chip
reduziria muito o custo comparado com outros tipos de conexões. Um dos grandes
suportadores desta solução é a HP que combina este tipo de conexão com embedded Java e o
uso de um web browser por instrumento. Com a miniaturização e a redução do custo dos web
browsers esta tecnologia pode se tornar muito atrativa.
A Ethernet iniciou sua migração para o ambiente industrial, trazendo consigo todo o
potencial dos protocolos TCP/IP utilizados na Internet, que podem revolucionar o chão de
fábrica, a utilização da Ethernet para o chão de fábrica visa substituir as redes industriais
utilizadas em sistemas de controle que automatizam processos produtivos.
O potencial da Ethernet Industrial extrapola sua utilização como rede de comunicação,
como um mero emprego de uma tecnologia de rede local de TI (Tecnologia da Informação) na
área industrial, a Ethernet possibilitará a utilização de vários protocolos usados na Internet
(TCP/IP, HTTP, SNMP, etc.) o que pode mudar drasticamente a maneira como lidamos com
as informações no chão de fábrica.
O meio físico da Ethernet, cabos e conectores que interligam os PCs, impressoras, e
outros periféricos lidam com uma série de protocolos de comunicação tais como IP, TCP e
vários outros protocolos de comunicação em redes. Este conjunto de protocolos e
conectividade aplica-se também ao ambiente de escritório. Ele permite aos usuários
compartilhar arquivos, acessar impressoras, enviar e-mails, consultar a Internet, bem como
desempenhar outras atividades de comunicações usadas em um ambiente de escritório. As
necessidades do "chão-de-fábrica" são muito mais exigentes e precisam atender a alguns
requisitos especiais. Nestes ambientes, os controladores devem acessar os dados a partir de
sistemas, estações de trabalho e dispositivos de entrada e saída de dados. Em operações
normais o software faz com que um usuário aguarde enquanto uma tarefa está sendo
executada. Os dados do “chão-de-fábrica”, por outro lado, são sensíveis ao tempo e requerem
comunicação em tempo real. A parada de um robô ou de um sistema responsável pelo
enchimento de garrafas em uma linha de produção no tempo correto requer uma temporização
muito precisa em relação ao aceso de um arquivo em um servidor remoto ou a abertura de
uma página em uma web site.
Tanto a disponibilidade de informações quanto o acesso a elas são atualmente
conseguidos por software padrão, pelo menos dentro de uma empresa. A padronização das
interfaces de dados entre as diferentes aplicações possibilita a continuidade necessária para

32
tanto. A Ethernet como padrão, em conjunto com os protocolos TCP/IP ou UDP/IP,
possibilita a comunicação através de todos os níveis, sem interrupções.
Exigências especiais às redes e aos barramentos em nível de processo são: capacidade
de operação em tempo real, elevada disponibilidade, rápida e automática reconfiguração após
falhas, segurança da transmissão de dados, redundância, além de elevadas exigências
ambientais em caso de compatibilidade eletromagnética e resistência à temperatura e
vibrações. Isso também não muda quando a Ethernet for utilizada como técnica de
comunicação.
Há vário Fieldbus no ambiente industrial, Devicenet, PROFIBUS, Interbus, Fieldbus
Foundation, todos podem ser usados de acordo com a preferência da empresa e, ás vezes, com
a aplicação desejada; atualmente cada fabricante já tem sua solução para o ambiente industrial
em Ethernet: Profinet da associação PROFIBUS (que é a evolução do PROFIBUS-DP), o
Ethernet/IP da ODVA(onde o IP quer dizer Industrial Protocol) e cuja proposta é uma
evolução do Devicenet e Controlnet, e o HSE, High Speed Ethernet da Fieldbus
Foudation(que interconecta as redes H1) são exemplos e padrões [LOPEZ].
Resumo dos fatores que contribuíram para a construção da rede Ethernet Industrial:
–Uso de switches para evitar a arbitragem de barramento;
–Uso de canais dedicados de 10 Mbps a 100 Mbps;
–Padrão IEEE 802.1p/Q que acrescenta campos de prioridade e de Quality of Service
(QoS) ao frame Ethernet tradicional;
–Canal full duplex para eliminar colisões;
–Rede Fast Ethernet no backbone levando a velocidade de até 200 Mbps
3.1 O meio físico IEEE802.3 para redes Ethernet industriais
A estrutura física da Ethernet é muito importante na indústria devido ao ambiente
agressivo em que se instala. Para o meio físico, pode ser utilizada a seguinte configuração
para qualquer uma das redes Ethernet industrial.

33
Tabela 1 – Características físicas das redes Ethernet industriais [RTI4].
Para a configuração utilizando par trançado blindado, o cabo possui dois pares (quatro
vias), categoria 5. Há a possibilidade de utilização de repetidores (hubs industriais) ou
switches industriais que podem aumentar a distância da rede para até 500 metros (utilizando
par trançado).
Já para a configuração utilizando fibra óptica é possível utilizar repetidores ópticos e,
dependendo do tipo de fibra utilizada (monomodo ou multimodo), pode-se chegar a distâncias
de dezenas de quilômetros, colocando vários repetidores em cascata durante o percurso do
sinal óptico.
A topologia da rede é, comumente, projetada em estrela, utilizando o mestre (controller)
como elemento central da rede, os switches industriais especiais para derivar e interligar os
elementos da rede e os módulos de campo (nodes) onde são conectados os sensores e
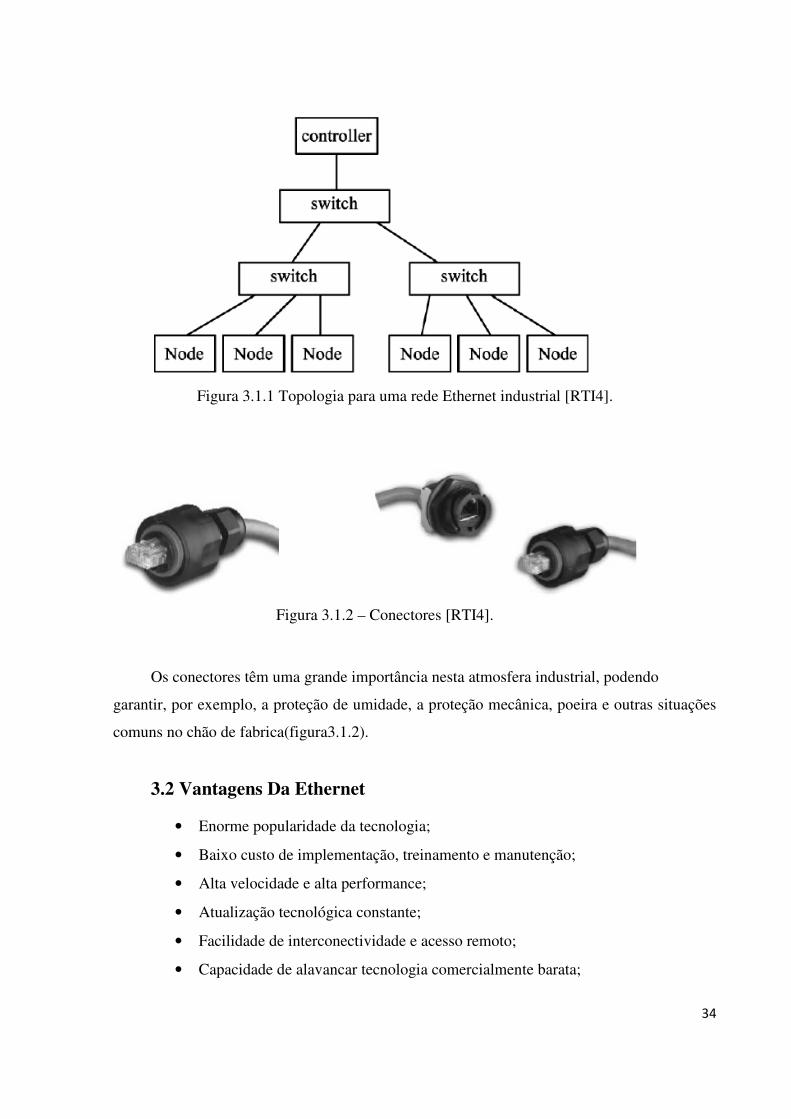
atuadores. A figura 3.1.1 ilustra uma topologia típica para uma rede Ethernet industrial.
34
Figura 3.1.1 Topologia para uma rede Ethernet industrial [RTI4].
Figura 3.1.2 – Conectores [RTI4].
Os conectores têm uma grande importância nesta atmosfera industrial, podendo
garantir, por exemplo, a proteção de umidade, a proteção mecânica, poeira e outras situações
comuns no chão de fabrica(figura3.1.2).
3.2 Vantagens Da Ethernet
• Enorme popularidade da tecnologia;
• Baixo custo de implementação, treinamento e manutenção;
• Alta velocidade e alta performance;
• Atualização tecnológica constante;
• Facilidade de interconectividade e acesso remoto;
• Capacidade de alavancar tecnologia comercialmente barata;

35
• Todos falam sobre ela;
• Os principais fabricantes de CLP ou SCD suportam sistemas de Fieldbus
específicos, mas todos suportam Ethernet.
• Capacidade de transportar elevado fluxo de informações entre o processo
industrial e a corporação;
• Elevado número de pessoal técnico qualificado;
• Habilidade de prover diagnóstico e atuação remotamente;
3.2 Desvantagens Iniciais Para Padrão De Campo
• Ausência de interoperabilidade pela falta da camada de aplicação (por si só,
apresenta definições apenas para as camadas 1 e 2 do modelo OSI/ISO);
• Falta de determinismo e tempo de resposta insuficiente para algumas aplicações;
• Dificuldades de sincronismo a nível de ms;
• Falta de solução para segurança intrínseca
3.3 Melhoramentos da rede Ethernet
A rede Ethernet teve que receber várias modificações para se tornar mais adaptada ao
ambiente industrial:
Foram criados diversos novos padrões:
Tabela 2: Novos standards do padrão IEEE 802 [RTI2].
Para reduzir o número de colisões e a conseqüente degradação de performance da rede
Ethernet, o que a inviabiliza para algumas aplicações industriais, muitos melhoramentos
foram realizados. O simples aumento da banda de 10Mbps para 100 Mbps foi um fator
36
significativo. O uso de switches é o segundo ponto importante. Se cada dispositivo estiver
ligado a uma porta de um switch que pode bufferizar a mensagem antes de retransmiti-la a
outro nodo, as colisões ficariam reduzidas ao caso em que um mesmo nodo deseja transmitir e
receber uma mensagem. Finalmente através de um ligação full duplex entre o dispositivo e
switch, o problema é completamente solucionado.
As deficiências da rede Ethernet, a partir de agora denominada de Ethernet
compartilhada são:
• Largura de banda é compartilhada e não dedicada
o Compartilhamento necessita de arbitragem do barramento sem o conceito de
prioridade
o Compartilhamento resulta em colisões quando 2 ou mais dispositivos desejam
transmitir simultaneamente.
o Colisões bloqueiam a rede e impedem outros dispositivos de transmitir.
• Mais dispositivos em um segmento aumenta a probabilidade de colisão.
• Broadcast de mensagens consumiriam grande banda
• Não existe como diferenciar o tráfego de alta e de baixa prioridade.
• Não existe como assegurar um caminho de baixo atraso para o tráfego de
tempo real.
Sistematizando os seguintes fatores contribuíram para a construção de uma rede
Ethernet industrial:
• Uso de switches para evitar a arbitragem de barramento
• Uso de canais dedicados de 10 Mbps a 100 Mbps.
• Padrão IEEE802.1p/Q que acrescenta campos de prioridade e de Quality of
Service (QoS) ao frame Ethernet tradicional.
• Canal full duplex para eliminar colisões.
• Rede Fast Ethernet no backbone levando a velocidade a até 200 Mbps.

37
QoS (quality of service) é uma maneira de alocar recursos em switches e roteadores de
tal forma que os dados cheguem ao seu destino de forma rápida, consistente e confiável.
3.3.1 Switch como solução para o determinismo
No principio a Ethernet não foi considerada ideal para a industria por não ser
determinística. No meio de acesso ao sistema CSMA/CD as colisões são detectadas e em
seguida há contagem de tempo aleatória para uma nova transmissão. Este método não parecia
uma solução muito atraente para a indústria porque não se garantia realmente que os dados
fossem realmente transmitidos. Podem ocorrer várias colisões sucessivas e algumas
informações podem perder sua importância durante este tempo em que ocorrem os conflitos.
O uso do switch amenizou este problema (figura 3.4.1.1).
O switch é composto de várias portas com buffer mantendo o controle de colisão,
especificada no método CSMA/CD. Se houver duas transmissões simultâneas, como o switch
tem portas independentes, pode-se transmitir o frame de uma porta e guardar o frame da outra
em um buffer para ser transmitida posteriormente. Assim, assegura-se que sempre um dado
transmitido vai chegar ao seu destino. Desta forma, a Ethernet teve realmente uma chance
mais concreta de penetrar no chão-de-fábrica e se havia alguma duvida da sua participação na
indústria, hoje sua presença no chão-de-fábrica é um fato concreto[PRODUTOS].
Mesmo com o uso de switchs, eventuais colisões poderiam acontecer: se houvesse um
broadcasting no switch, poderia haver eventuais colisões com um dispositivo transmitindo
numa mesma porta. Para resolver mais este problema, o sistema full duplex foi aplicado, onde
há um canal de transmissão e um canal de recepção, evitando assim a situação citada
anteriormente, pois mesmo que o switch dê um broadcasting e um dispositivo transmita neste
mesmo momento, eles estariam fisicamente em conexões diferentes e desta forma não
ocorreria colisão. Assim a Ethernet pode ser considerada mais aplicável ao ambiente
industrial.

38
Figura 3.4.1.1 – Switch Ethernet industrial com prioridade de Transmissão [Sixnetio]
3.4 Quadro Ethernet
• Camada de Enlace Quadro Ethernet:
• Preâmbulo: utilizado para a sincronização dos relógios (sete bytes de 10101010) • SFD: delimitador de início (um byte: 10101011). • Destino:Endereço do destinatário do quadro com seis bytes. • Fonte: Endereço do fonte (origem) do quadro com seis bytes • Tipo: Tipo da informação que está sendo enviada • Dados: Dados propriamente ditos (vindos da camada superior) • FCS(Checksum): bits para detecção de erros A evolução do quadro Ethernet: Quadro Ethernet industrial:
39
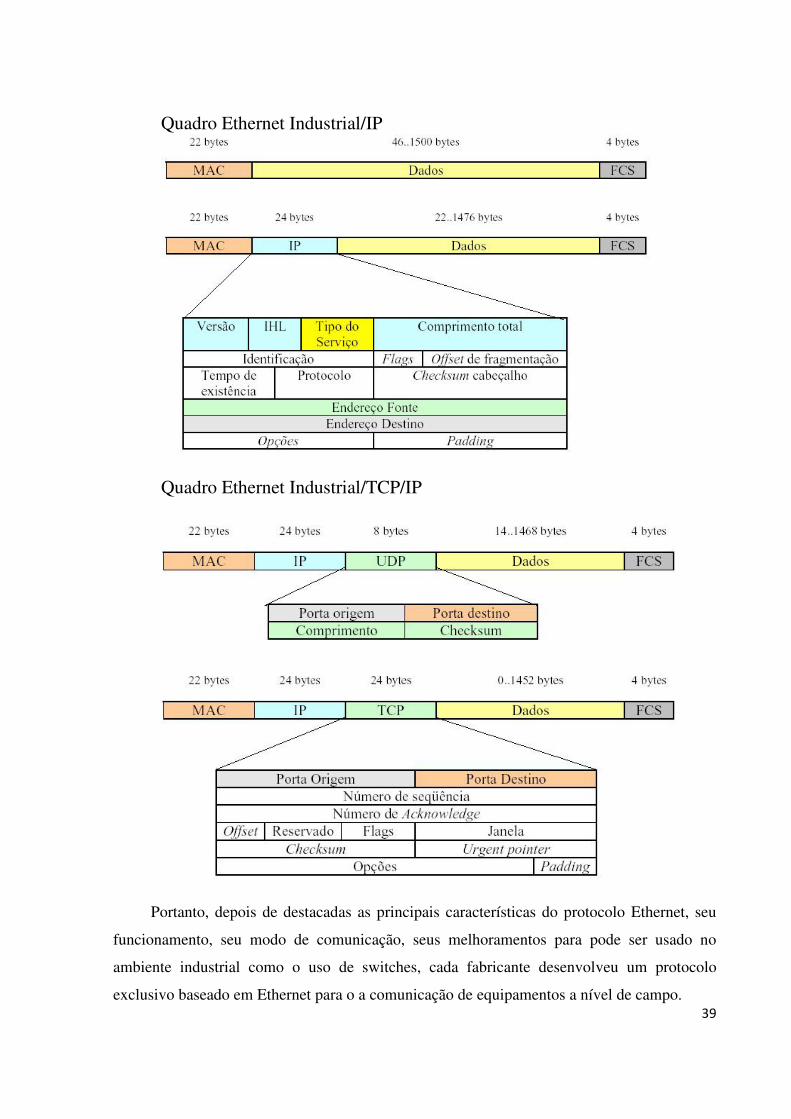
Quadro Ethernet Industrial/IP
Quadro Ethernet Industrial/TCP/IP
Portanto, depois de destacadas as principais características do protocolo Ethernet, seu
funcionamento, seu modo de comunicação, seus melhoramentos para pode ser usado no
ambiente industrial como o uso de switches, cada fabricante desenvolveu um protocolo
exclusivo baseado em Ethernet para o a comunicação de equipamentos a nível de campo.

40
4 PROFINET
PROFINET é um protocolo de Ethernet Industrial proposto pela PROFIBUS
International. Profinet suporta a integração de um simples dispositivo de campo e aplicações
de tempo crítico em comunicações Ethernet, bem como a integração de automação de
sistemas distribuídos baseados em componentes. Ele foi concebido para ser um sistema de
comunicações para quaisquer fornecedores, capaz de se comunicar com os diferentes sistemas
BUS através de um servidor proxy. Há uma solução de real-time "RT", com capacidades
semelhantes às do PROFIBUS-DP e uma solução isócrona em tempo real "IRT", com um
jitter de 1 µs. A solução em tempo real é baseada unicamente em software, posto que para
IRT são necessárias ASICS específicas[PROFINET].
Basicamente, há dois tipos de redes Profinet: Profinet IO e Profinet CBA. O Profinet IO
é utilizado em aplicações em tempo real (rápidas) e o Profinet CBA é utilizado em aplicações
onde o tempo não é crítico, por exemplo, na conversão para rede PROFIBUS DP. A figura 4.1
ilustra como o Profinet definiu suas camadas baseadas na arquitetura TCP/IP[PROFINET].
Figura 4.1 – Arquitetura TCP/IP para Profinet [LARSSON]
Nota-se pela figura acima que o Profinet pode ter três formas distintas de operação,
sendo duas delas para tempo real e uma para não tempo real.

41
A primeira maneira baseia-se na arquitetura TCP/IP pura, utilizando Ethernet na camada
um e dois, o IP na camada três e o TCP ou UDP na camada quatro. Essa arquitetura é
chamada de Non-real time (Non-RT), pois seu tempo de processamento aproxima-se dos
100ms. A grande aplicação nesse tipo de comunicação é de configuração da rede ou na
comunicação com os Proxis, utilizando o Profinet CBA. Os Proxis são conversores de um
determinado protocolo em outro (por exemplo, de Profinet para PROFIBUS DP ou de
Profinet para Fieldbus X), conforme mostrado na figura 4.2.
Figura 4.2: PROFIBUS e Ethernet TCP/IP [JASPERNEITE]
A segunda maneira baseia-se no chamado Soft Real Time (SRT), caracterizando-se por
ser um canal que interliga diretamente a camada da Ethernet à aplicação. Com a eliminação
de vários níveis de protocolo, há uma redução no comprimento das mensagens transmitidas,
necessitando de menos tempo para transmitir os dados na rede. Podem-se utilizar os dois tipos
de Profinet, CBA e IO, nesse caso [PROFINET].
A terceira maneira baseia-se no conceito de Isochronous Real Time (IRT), para
aplicações em que o tempo de resposta é crítico e deve ser menor do que 1ms. Uma aplicação
típica deste conceito é o controle de movimento de robôs, quando o tempo de atualização dos
dados deve ser pequeno. Utiliza-se apenas o Profinet IO para esse caso.
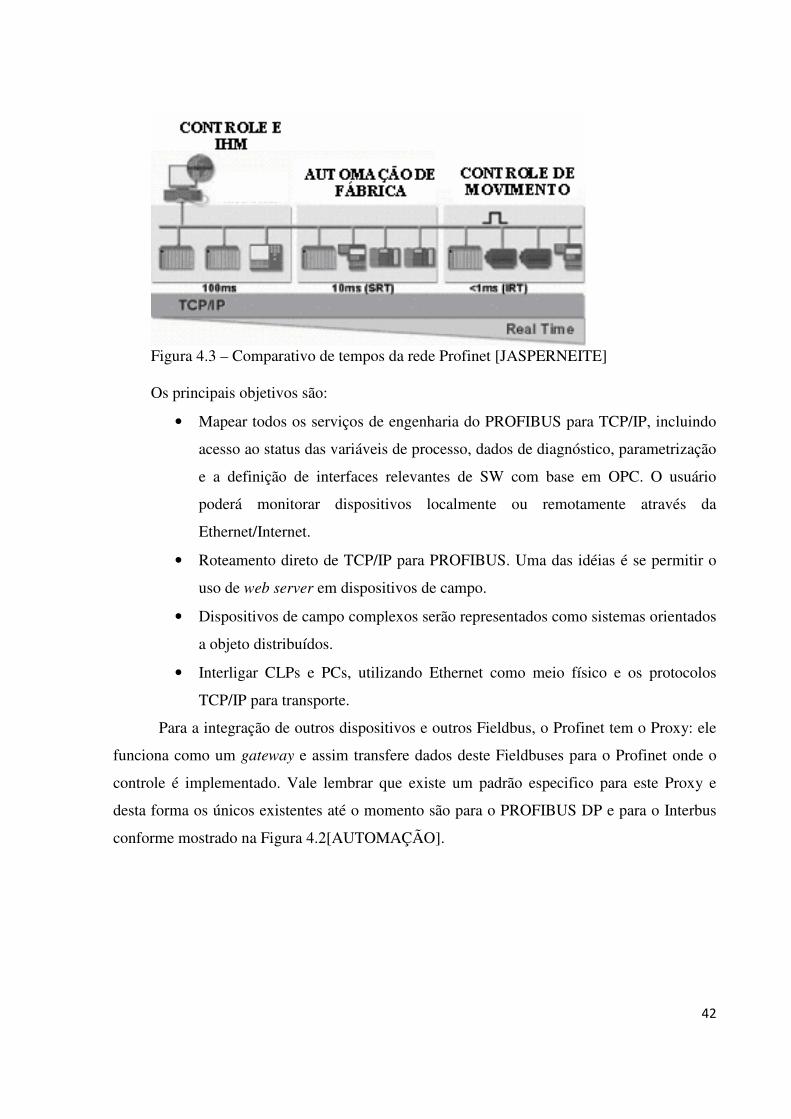
A figura 4.3 ilustra os conceitos do Non-Real-Time (aplicações com tempos de
varredura em torno de 100ms), Soft Real Time (aplicações com tempos de varredura em torno
de 10ms) e Isochronous Real Time (aplicações com tempos de varredura menores do que
1ms).
42
Figura 4.3 – Comparativo de tempos da rede Profinet [JASPERNEITE] Os principais objetivos são:
• Mapear todos os serviços de engenharia do PROFIBUS para TCP/IP, incluindo
acesso ao status das variáveis de processo, dados de diagnóstico, parametrização
e a definição de interfaces relevantes de SW com base em OPC. O usuário
poderá monitorar dispositivos localmente ou remotamente através da
Ethernet/Internet.
• Roteamento direto de TCP/IP para PROFIBUS. Uma das idéias é se permitir o
uso de web server em dispositivos de campo.
• Dispositivos de campo complexos serão representados como sistemas orientados
a objeto distribuídos.
• Interligar CLPs e PCs, utilizando Ethernet como meio físico e os protocolos
TCP/IP para transporte.
Para a integração de outros dispositivos e outros Fieldbus, o Profinet tem o Proxy: ele
funciona como um gateway e assim transfere dados deste Fieldbuses para o Profinet onde o
controle é implementado. Vale lembrar que existe um padrão especifico para este Proxy e
desta forma os únicos existentes até o momento são para o PROFIBUS DP e para o Interbus
conforme mostrado na Figura 4.2[AUTOMAÇÃO].
43
5 Ethernet/IP Como a Ethernet está ganhando aceitação na área industrial. Computadores pessoais,
impressoras e outros periféricos com interfaces prontas para Ethernet estão migrando para a
área industrial e, quando usado com switches inteligentes e roteadores este padrão de rede
ganha ainda maior aceitação no "chão-de-fábrica". Apenas a falta de normatização de uma
camada de aplicação específica e conectividade específica para esta área têm sido barreiras
para a aceitação definitiva da Ethernet no cenário industrial.
Ethernet/IP(Ethernet Industrial Protocol) é um padrão de rede industrial aberto que
suporta mensagem em tempo real e troca de mensagens. O Ethernet/IP usa o chip de
comunicação Ethernet padrão e também o mesmo meio físico, é um protocolo de camada de
aplicação industrial para aplicações de automação. Construída sobre os protocolos TCP/IP,
esta interface utiliza hardware e software já estabelecidos para definir um protocolo de
camada de aplicação para a configuração, acesso e controle de dispositivos de automação
industrial. A Ethernet/IP classifica nós de rede por tipos de dispositivos conforme pré-
definidos por procedimentos específicos. O protocolo de camada de aplicação Ethernet/IP
baseia-se no “Protocolo de Informação e Controle” (CIP, Control and Information Protocol)
usado em ambos DeviceNet e ControlNet. Construída sobre estes protocolos a Ethernet/IP
oferece um sistema integrado transparente desde o “chão-de-fábrica" até a rede
corporativa[ODVA].
A Ethernet/IP é um protocolo de camada de aplicação que foi projetado para o ambiente
industrial. Há quatro grupos de normatização que reuniram esforços para desenvolver e
promover a Ethernet/IP como uma aplicação publicamente disponível para automação: O
ODVA (Open DeviceNet Vendor Association), a IONA (Industrial Open Ethernet
Association), a CI (Control Net International) e a IEA (Industrial Ethernet Association). O
objetivo comum a todos estes grupos é mostrar como a Ethernet pode se tornar um padrão
comum apropriado para uma ampla escala de dispositivos de automação. Estes mesmos
grupos estão trabalhando em requisitos que são necessários aos ambientes hostis de “chão-de-
fábrica”[ODVA].
A Ethernet/IP usa todos os protocolos de Ethernet tradicional incluindo o TCP, o IP e as
tecnologias de sinalização e acesso ao meio físico encontrado em todas as interfaces de rede
Ethernet. Por basear-se em tecnologias padronizadas para Ethernet, a Ethernet/IP operará de
modo transparente com todos os dispositivos padrões Ethernet disponível atualmente. Ainda

44
mais importante, baseando-se em tecnologia Ethernet e em todas as outras envolvidas com
Ethernet, a Ethernet/IP estará também envolvida com todas elas.
A Ethernet/IP está sendo construída a partir de um padrão amplamente usado em
DeviceNet e ControlNet conhecido como CIP. Este padrão organiza dispositivos em rede
como uma coleção de objetos. Ele define acesso, procedimentos e extensões que permitem
dispositivos diferentes serem acessado usando-se um protocolo comum. A Ethernet/IP está
baseada em um padrão amplamente entendido e implementado [ETHERNET].
As vantagens do CIP sobre Ethernet/IP são muitas; uma delas é oferecer meios de
acesso que uma ferramenta de configuração possa ser usada para configurar dispositivos CIP
em diferentes redes a partir de um único ponto de acesso sem um software proprietário. A
classificação de todos os dipositivos como objetos diminui os custos de treinamento e start-up
requeridos quando novos dispositivos forem incorporados à rede. A Ethernet/IP diminui os
tempos de resposta e permite um maior throughput que DeviceNet e/ou ControlNet. A
Ethernet/IP conecta dispositivos do nível de barramento ao nível de controle e ao nível
corporativo por meio de uma interface de aplicação consistente[ETHERNET].
A CIP provê uma grande quantidade de padrões e serviços de acesso de dados e para
controle de dispositivos na rede via as chamadas mensagens “implícitas” e “explícitas”
mostradas na Figura 5.1. O pacote de dados CIP pode ser encapsulado antes que eles sejam
enviados via Ethernet e é inserido um cabeçalho no datagrama que depende da característica
do serviço.
Figura 5.1 - Comunicação Explícita e Implícita[BROOKS]

45
A Figura 5.1 mostra como os dados são enviados para rede usando-se o protocolo UDP
ou o protocolo TCP.
• A Transferência de dados não crítica – tipicamente pacotes grandes, conexões
explícitas de um produtor para um consumidor. Os pacotes de Informações usam
o protocolo TCP/IP e tem a vantagem das características de tratamento de dados
do TCP, ou seja, sendo orientados a conexão garante o envio e o recebimento
dos dados.
• Os Dados de I/O (Input/Output) usam transferência crítica de dados, tipicamente
pacotes de dados pequenos. Troca de dados I/O são conexões implícitas de
longo alcance entre um produtor e um consumidor. Pacotes de Dados de I/O
usam o protocolo UDP/IP e tem a vantagem da alta velocidade (throughput) do
UDP. Neste caso não há verificação de recepção, uma vez que, conforme
discutido no início deste trabalho, qualquer dados retransmitido na Ethernet já
estará obsoleto.
• Há também uma sincronização em Tempo-Real que é uma sincronização cíclica
de dados entre um produtor e um consumidor ou consumidores. Os pacotes de
Sincronização em Tempo-Real usam o protocolo UDP/IP. Como são dados de
sincronismo, é necessária a velocidade oferecida pelo UDP.
5.1 Estudo de caso: Rockweel Automation adota Protocolo Ethernet/IP
Nos capítulos anteriores deste trabalho, foram vistas as evoluções das arquiteturas das
redes industriais com o desenvolvimento de novos barramentos que trouxeram benefícios para
os seus usuários: empresas e desenvolvedores de sistemas, principalmente a evolução do
protocolo Ethernet neste ambiente; a Rockwell Automation, empresa norte americana de
automação industrial com soluções de informação e controle de automação emergiu como um
líder do mercado, lançando milhares de produtos Ethernet durante a evolução do padrão.
Desenvolve-se um software para combinar uma ou mais tipos de redes de dispositivos,
de controle e de informações, bem como para proporcionar uma maneira mais eficiente de
combinar estas redes sem prejudicar o desempenho. Criar uma arquitetura de Rede Aberta
para garantir o fluxo eficiente de informações e o controle dos dados em toda sua empresa.
46
Ou seja, simplificar as comunicações com um protocolo único e aberto entre um
dispositivo no chão da fábrica e o setor de TI, gerando aumento na flexibilidade e na
produtividade enquanto reduz os custos. Poder controlar, configurar e armazenar dados
provenientes de qualquer ponto no seu sistema.
Combinando recursos Ethernet com a inovação da Rockwell Automation, foi criada a
arquitetura aberta NetLinx, que combina serviços de rede CIP e interfaces abertas de software
para garantir o fluxo eficiente de informações e o controle dos dados em toda sua empresa.
NetLinx utiliza o CIP suportado pela ODVA, que torna transparente a comunicação
entre dispositivo, controle e os vários níveis de informação. A Arquitetura NetLinx é a base
de três redes abertas: DeviceNet, ControlNet e EtherNet/IP.
A Arquitetura NetLinx abrange todos os componentes necessários à conexão do sistema
de manufatura com sua empresa. Um protocolo de comunicação comum e interfaces abertas
de software/hardware conectam dispositivos de fábrica à Internet. Todas as três redes da
Arquitetura NetLinx usam o protocolo CIP para comunicação. A parte Control do CIP é
usada para a transmissão de mensagens em tempo real ou transmissão implícita de
mensagens. A parte Information do CIP é usada para o intercâmbio de mensagens, também
chamado de transmissão explícita de mensagens. O protocolo CIP é o principal componente
da Arquitetura de Rede Aberta NetLinx.
A Arquitetura De Rede Aberta Netlinx fornece um conjunto padrão de serviços com
base no modelo produtor/consumidor para movimentar dados de controle em tempo real em
todas as três redes dentro da Arquitetura NetLinx; permite a conexão a qualquer rede e a
configuração e coleta de dados a partir de qualquer rede. Todas dão suporte a configurações
peer to peer e multimaster.
Portanto, com a Rede Netlinx é possível economizar tempo e esforço durante a
configuração do sistema e fornece monitoramento remoto e solução de problemas. Não são
necessários controladores, tabelas de roteamento nem lógica adicional para movimentar os
dados entre as redes.
Netlinx possui uma base de conhecimento comum - reduz o treinamento necessário
durante a conexão a redes diferentes dentro da Arquitetura NetLinx, fornecendo ferramentas e
recursos de configuração semelhantes.
Com a Arquitetura de Rede Aberta NetLinx podemos:

47
• Controlar: fornecer intercâmbio de dados em tempo real através de vários métodos.
• Configurar: fornecer a capacidade de configurar todos os dispositivos de rede a
partir de uma única localização central.
• Coletar: fornecer uma solução perfeita para a exibição IHM, tendência e análise,
gerenciamento de receita ou para manutenção e solução de problemas.
A Arquitetura de Rede Aberta NetLinx é eficiente em virtude de seu modelo de rede
produtor/consumidor e interfaces padrão de hardware e software. Nas redes
produtor/consumidor, se um nó precisar do pacote, ele o consumirá. A origem enviará esse
pacote uma vez e todos os nós consumirão o mesmo pacote, se necessário. Esta inovação
resulta em:
• maior eficiência, pois os dados são produzidos uma vez, seja qual for o número de
consumidores
• sincronização, pois os dados chegam a cada nó no mesmo momento
Produtor/consumidor é também melhor porque:
• os nós podem ser sincronizados facilmente para que haja um desempenho mais
preciso
• os dispositivos podem se comunicar de forma autônoma e peer to peer – não há
necessidade de um mestre de sistema, controlador ou memória extra de controlador
para o gerenciamento da rede.

48
6 Rede Fieldbus HSE (high speed Ethernet) :
A organização Fieldbus Foundation é uma fundação formada por empresas de
automação de controle de processos e manufatura para desenvolver um barramento de campo
simples, aberto, internacional e interoperável. Inicialmente foi criada a rede H1 Fieldbus, um
barramento de campo utilizado em Sistemas Distribuídos de Controle (DCS) no nível de
dispositivos e subsistemas de entrada e saída [FIELDBUS].
Com a incorporação da tecnologia Ethernet, foi definida a High Speed Ethernet (HSE),
utilizada no nível dos controladores e na sua interligação com os níveis superiores das
aplicações comerciais, uma rede de alta velocidade que opera a 100 Mb/s que é baseada
apenas em protocolos padrões abertos, incluindo soluções para redundância capazes de tratar
múltiplas falhas simultâneas [FIELDBUS].
Um sistema Fieldbus Foundation oferece algo mais que a simples interoperabilidade,
pois não basta concentrar os dados apenas no nível dos sistemas SCADA como no caso do
OPC, os dispositivos precisam trocar informações. Os usuários desejam algo fácil de usar sem
um tedioso processo de configuração manual incluindo tipos de dados, números de registro e
escalas. O HSE leva a interoperabilidade ao nível plug-and-play, incluindo uma linguagem de
programação orientada a blocos de função que permite aos usuários criar estratégias de
controle distribuídas através de rede utilizando dispositivos de múltiplos fabricantes.
A Fieldbus Foundation incorporou a rede Ethernet dentro de sua especificação
H2. Esta rede não visa substituir a rede H1, mas estender seu espectro de aplicação para a
interligação de dispositivos como CLPs e sistemas de supervisão (figura 6.1). Esta rede usa
UDP/IP sobre as camadas de enlace Ethernet.
Figura 6.1: Rede HSE e rede H1 [BERGE]

49
Tabela 3: Tabela comparativa rede H1 x HSE [BERGE]
A rede HSE suporta todas as funcionalidades da camada de enlace de dados da
especificação H1. Isto teve de ser feito para possibilitar o sincronismo de uma ligação em
cascata entre malhas localizadas entre segmentos H1 independentes. A interligação entre uma
rede H1 e rede HSE se dá através de um “linking device” que converte o dado de diversos
segmentos H1 em mensagens, utilizando os protocolos standards da Internet. Os instrumentos
de campo também podem bypassar o protocolo H1 e transmitir usando o protocolo HSE
diretamente.

50
7 EtherCat
EtherCAT é uma tecnologia, um protocolo, desenvolvida pela Beckhoff com excelentes
capacidades em tempo real para Ethernet determinística. Trata-se de um código aberto(open
source) que utiliza o protocolo Ethernet em ambiente industrial. Esta tecnologia suporta as
principais configurações: estrela, linha de arvore (figura 7.1)[RTI]. Os dispositivos(CLPs –
controladores lógicos programáveis, módulos de E/S) podem ser conectados diretamente entre
si, dispensando o uso de hubs e switches. Ela é uma extensão do padrão Ethernet IEEE 802.3
para transferir dados com sincronização de tempo previsível e preciso, possuindo
características semelhantes à Ethernet convencional como: padrão de velocidade 100BaseTX
utilizando cabos de par trançado Categoria 5E e distância máxima de 100 m entre
dispositivos. Podemos usar também fibra óptica[RTI3].
Figura 7.1 – Topologia da Ethercat [RTI3] O padrão Ethercat específica uma forma de comunicação onde a troca de mensagens
entre os dispositivos ocorre por telegramas que são inseridos dentro de um quadro Ethernet.
Um aspecto importante para a Ethernet industrial é o PTP – Precision Time Protocol,
que distribui sincronismo para todos os participantes da rede(por exemplo, controle de
sistemas de máquinas em que os eixos estão sincronizados), mantém um deadline com uma
variação de atraso(jitter) menor que 1µs e garante alto desempenho[RTI3].
Para garantir realmente uma comunicação em tempo real de alto desempenho, é
necessário atribuir uma “ligação direta” entre a estrutura de hardware (tempo real) e de
aplicação (dados RT) (figura 7.2).
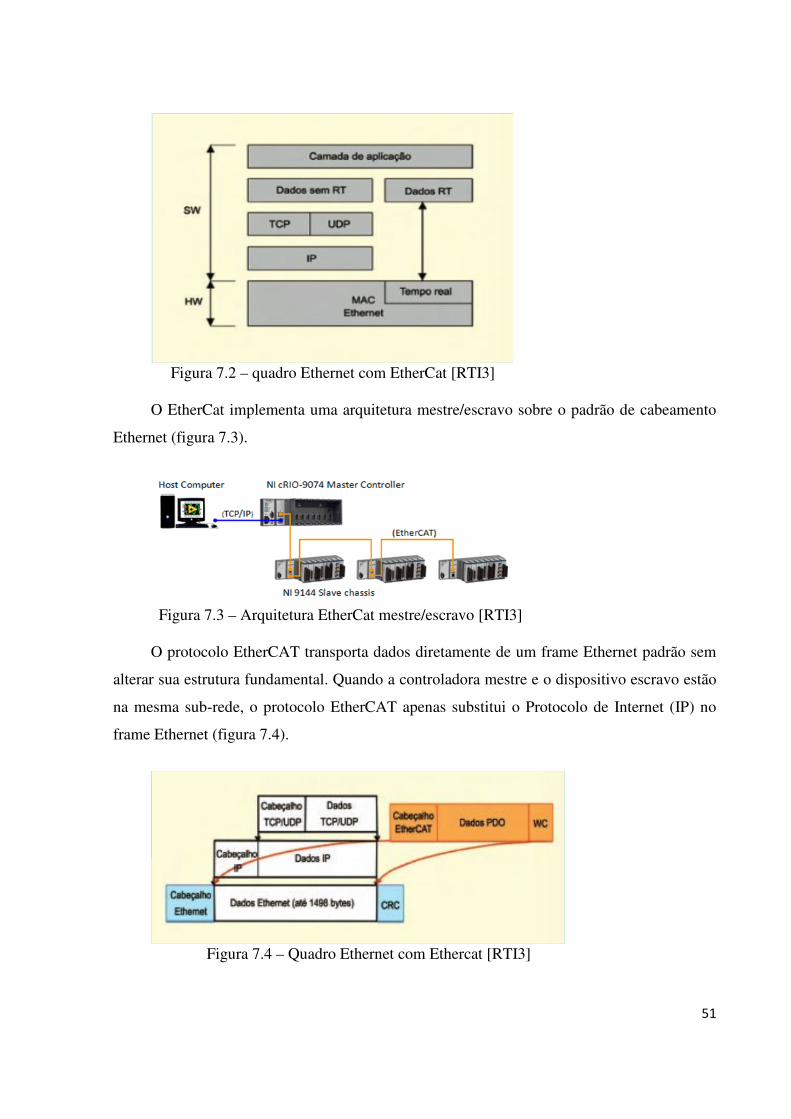
51
Figura 7.2 – quadro Ethernet com EtherCat [RTI3] O EtherCat implementa uma arquitetura mestre/escravo sobre o padrão de cabeamento
Ethernet (figura 7.3).
Figura 7.3 – Arquitetura EtherCat mestre/escravo [RTI3] O protocolo EtherCAT transporta dados diretamente de um frame Ethernet padrão sem
alterar sua estrutura fundamental. Quando a controladora mestre e o dispositivo escravo estão
na mesma sub-rede, o protocolo EtherCAT apenas substitui o Protocolo de Internet (IP) no
frame Ethernet (figura 7.4).
Figura 7.4 – Quadro Ethernet com Ethercat [RTI3]

52
Opcionalmente, ele pode ser transportado em um UDP – User Datagram Protocol para
poder se comunicar com dispositivos em outras sub-redes (figura 7.5).
Figura 7.5 – Ethercat em quadro Ethernet ou sobre UDP [RTI3] A comunicação ocorre através da troca de dados entre mestre e escravos (por exemplo,
CLP e dispositivos de E/S – entrada e saída) e geralmente é feita através de objetos de
processamento de dados(PDOs – Process Data Objects). Cada PDO tem um endereço para
um escravo em particular ou múltiplos escravos, e essa combinação de dados e endereços
torna-se um telegrama EtherCat. Um frame Ethernet pode conter múltiplos telegramas, e
múltiplos frames podem ser necessários para garantir todos os telegramas requeridos para um
ciclo de controle[RTI].
Os equipamentos com comunicação EtherCat lêem seus dados endereçados a eles
enquanto o quadro passa pelo nó. Dessa forma, os dados de entrada são inseridos enquanto o
telegrama passa (figura 7.6).
Figura 7.6 – EtherCat, transferência de dados [RTI3] Quando o dispositivo 1 encontra o pacote Ethernet enviado pelo mestre, ele
automaticamente começa a fluir o pacote para o dispositivo 2, isso ocorre durante a leitura e a
escrita no pacote com apenas alguns nanosegundos de atraso. Como o pacote continua
passando de escravo a escravo, ele pode existir em múltiplos dispositivos ao mesmo tempo.

53
A figura 7.7 ilustra a estrutura interna de um dispositivo escravo onde os dados podem
ser comutados da interface de transmissão(TX) para a de recepção(RX), se não for detectada
portadora em umas das linhas RX [RTI3].
Figura 7.7 – Estrutura interna do dispositivo escravo [RTI3] O EtherCAT é projetado para atender aplicações com grande quantidade de canais e
atingir um alto desempenho para aplicações de ponto simples como uma malha de controle.
Como o escravo poder ler e escrever no mesmo frame, a estrutura do telegrama EtherCAT é
otimizada para E/S descentralizadas. Além disso, o processamento completo do protocolo
acontece em hardware e, portanto, independente do tempo de execução da pilha do protocolo,
desempenho da CPU ou implementação de software[RTI3].
Outro fator importante para concepção de redes determinísticas é a responsabilidade da
controladora mestre de sincronizar todos os dispositivos escravos ao mesmo tempo usando
clocks distribuídos. De todos os dispositivos escravos, um deles deve conter o clock mestre
que sincroniza os clocks dos outros dispositivos escravos[RTI3].

54
8 CONCLUSÃO
Com a realização deste trabalho, foi possível conhecer vários Fieldbus no ambiente
industrial, Devicenet, PROFIBUS, Interbus, Fieldbus Foundation e outros usados em muitas
aplicações, foi também possível ampliar o conhecimento de um sistema interligado em rede,
apresentando como resultado importantes características da rede Ethernet industrial no nível
de usuário de sistemas de automação. Todos podem ser usados de acordo com a preferência
da empresa e, às vezes, com a aplicação desejada. O que era necessário era que estes
Fieldbuses, de fabricantes diferentes, pudessem ser adaptados à tecnologia Ethernet e desta
forma pudessem interagir uns com os outros.
Com a existência de uma grande quantidade de soluções para Ethernet Industrial,
acabou-se por não ter a interoperabilidade desejada. Isto porque cada fabricante ou grupo
desenvolveu suas soluções incompatíveis com os demais, por exemplo, Profinet da associação
PROFIBUS não se comunica com o Ethernet/IP da ODVA.
De uma forma ou outra a Ethernet conseguiu sua penetração no ambiente industrial,
porém alguns problemas começaram a surgir nesta fase inicial.
O artigo evidencia as tecnologias inovadoras do mercado de redes industriais, mostra o
funcionamento e as características de cada um dos principais protocolos e visões de aplicação.
Assim, o usuário final pode ter uma boa noção dos equipamentos e tecnologias novas
que estão surgindo no mercado mundial.
Com este trabalho podemos montar uma tabela e dividir cada protocolo Ethernet
Industrial em 4 níveis:
Tabela 4 – níveis de cada protocolo Ethernet Industrial
Organizações
Patrocinadoras
Aplicações
designadas
Transporte Aplicações
Ethernet/IP ODVA, Control-Net International, Rockwell Automation, Omron,
Qualquer discreto ou híbrido fabricado (PLC)
TCP e UDP Protocolo de informação e
controle (CIP – Control anda
information protocol)

55
HSE-
Foundation
Fieldbus
Fieldbus Foundation
Controle de processo (DCS)
UDP
Fieldbus Function Blocks
PROFInet
PROFIBUS International
Complexo maquinário (PLC)
UDP, TCP plus propietário
DCOM, PROFI-net Object Model
Ethercat Beckhoff CLPs –controladores lógicos programáveis, módulos de E/S
TCP e UDP Objetos de processamento de dados(PDOs – Process Data Objects)

56
9 TRABALHOS FUTUROS
Neste trabalho descreveu-se como esta inovação, a utilização do padrão já consolidado
no escritório: Ethernet, pretende atender os requisitos de tempo real e determinismo tão
necessários no ambiente industrial. Isso Foi feito através de um estudo teórico e comparativo
entre as redes que usam Ethernet e as demais. Foi pensado na realização de uma simulação de
rede industrial usando Ethernet, mas pela falta de tempo não foi possível a implementação,
para a continuação do trabalho realizado vai ser feita uma simulação no software NS
(Network Simulator) visando estabelecer um comparativo através de modelos similares às
redes industriais
Será feito uma simulação de um cenário usando esse tipo de rede, a Ethernet Industrial,
assim como a comparação com uma planta real.

57
Referências Bibliográficas
[AUTOMAÇÃO] Profinet, Siemens Automação: Revista Eletrônica. Disponível em: www.automation.siemens.com/profinet/html_76/produkte/ertec_400.htm. Visitado em 09/2010.
[BERGE] Jonas Berge, Ethernet in Process Control, The industrial Ethernet book 3, Summer 2000, Issue 3, pp31..33
[BROOKS] BROOKS, Paul. Ethernet/IP – Industrial Protocol. IEEE Article, Rockwell Automation’s European Market Manager, Belgium, 2001, 505-514p.
[DECOTIGNE] DECOTIGNIE,J., “A perspective on Ethernet-TCP/IP as a fieldbus”, IFAC International Conference on Fieldbus Systems and their Applications, 2001, France.
[DEVICENET] Odva, DeviceNet: Revista Eletrônica. Disponível em: http://www.odva.org/Home/ODVATECHNOLOGIES/DeviceNet/DeviceNetTechnologyOverview/tabid/72/Default.aspx. Visitado em 10/2010.
[ETHERNET] Industrial Ethernet: Revista eletrônica. Disponível em : www.ethernet.industrial-networking.com/ieb/articledisplay.asp?id=854. Visitado em 10/2010.
[FIELDBUS] Organização Foundation Fieldbus Internacional, Technical Overview. Revista Eletrônica. Disponível em : <www.fieldbus.org>. Visitado em 04/2010.
[JASPERNEITE] JASPERNEITE, J.; FELD J. PROFINET: An Integration Platform for heterogeneous Industrial Communication Systems. IEEE Article, Phoenix Contact and Siemens, Germany,2005, 815-822p.
[LOPEZ] LOPEZ, Ricardo Aldabó. Sistemas de Redes para controle e
Automação. Editora Express. 2000.
[LARSSON] LARSSON, Lars. Fourteen Industrial Ethernet solutions under the spotlight. The Industrial Ethernet Books, Issue 28, September 2005. Dispoível em: <www.ethernet.industrial-networking.com/articles/articledisplay.asp?id=854>. Visitado em 10/2010.
[MONTEZ]
MONTEZ, C., “Redes de Comunicação Para Automação
Industrial”,2005.
58
[ODVA] ETHERNET/IP. Specification Release 1.0. Disponível no site: <www.odva.org>.Visitado em 06/2010.
[OLIVEIRA] OLIVEIRA, L.,”Redes para Automação Industrial”,2005.
[MAHALIK] MAHALIK, N. “Fieldbus Technology - Industrial Network Standards
for Real-Time Distributed Control”, 2003.
[PRODUTOS] Catálogo de produtos e fabricantes, Associação Profinet Internacional: Revista Eletrônica. Disponível em: <www.profibus.com/pn/technology/description/>. Visitado em 08/2010.
[PROFIBUS] Associação PROFIBUS internacional – Divisão Profibus. Dispoível em : <www.profibus.org>. Acesso em 05/2010.
[PROFINET] Associação PROFIBUS Internacional – Divisão Profinet. Disponível em:
<www.profibus.com/pn/>. Visitado em 04/2010.
[RTI1] Revista rti - REDES, TELECOM E INSTALAÇÕES, São Paulo:ed. aranda, N. 95, ano IX, Abril de 2008.
[RTI2] Revista rti - REDES, TELECOM E INSTALAÇÕES, São Paulo:ed. aranda, N. 107, ano X, Abril de 2009.
[RTI3] Revista rti - REDES, TELECOM E INSTALAÇÕES, São Paulo:ed. aranda, N. 115, ano X, Dezembro de 2009.
[RTI4] Revista rti - REDES, TELECOM E INSTALAÇÕES, São Paulo:ed. aranda, N. 90, ano VIII, Novembro de 2007.
[SABER] Revista Saber Eletrônica: Ed. Saber - Nr.334 ANO 36 Novembro/2000.
[SIEMENS] Siemens AG Internacional. Curso Web de Profinet. Revista Eletrônica. Disponível em : <www.sitrain.com/modules/profinet_en/times/index_1024.htm>. Visitado em 08/2010.
[SIXNETIO] Sixnetio, Equipamentos para Ethernet industrial: Revista Eletrônica. Disponível em: <www.sixnetio.com/html_files/products_and_groups/switch_ring.htm>. Visitado em 09/2010.

59

60