estudo do desempenho de helicÓpteros monomotores operando no regime de ... · 3 estudo do...
TRANSCRIPT
1
INSTITUTO TECNOLÓGICO DE AERONÁUTICA
DIVISÃO DE PÓS-GRADUAÇÃO
ESTUDO DO DESEMPENHO DE HELICÓPTEROS
MONOMOTORES OPERANDO NO REGIME DE
AUTO-ROTAÇÃO
LUIZ EDUARDO MIRANDA JOSÉ RODRIGUES
SÃO JOSÉ DOS CAMPOS - 2001
2
Tese apresentada à divisão de Pós-Graduação do Instituto Tecnológico de Aeronáutica como
parte dos requisitos para a obtenção do título de Mestre em Ciência, na Área de Dinâmica de
Sistemas Aeroespaciais e Mecatrônica do Curso de Engenharia Aeronáutica e Mecânica.
LUIZ EDUARDO MIRANDA JOSÉ RODRIGUES
ESTUDO DO DESEMPENHO DE HELICÓPTEROS MONOMOTORES OPERANDO
NO REGIME DE AUTO-ROTAÇÃO
Tese aprovada em sua versão final pelos abaixo assinados
Prof. Dr DONIZETI DE ANDRADE
Orientador
Prof. Dr HOMERO SANTIAGO MACIEL
Chefe da Divisão de Pós-Graduação
Campo Montenegro
São José dos Campos, SP, Brasil
2001
3
ESTUDO DO DESEMPENHO DE HELICÓPTEROS MONOMOTORES
OPERANDO NO REGIME DE AUTO-ROTAÇÃO
LUIZ EDUARDO MIRANDA JOSÉ RODRIGUES Composição da Banca Examinadora:
Prof. Dr. Luiz Carlos Sandoval Góes – Presidente - ITA
Prof. Dr. Donizeti de Andrade – Orientador - ITA
Prof. Dr. Sandro da Silva Fernandes – Membro - ITA
Prof. Dr. Olympio Achilles de Faria Mello, Maj.-Eng. – Membro – IAE/CTA
Prof. Dr. Luis Carlos de Castro Santos – Membro – IME-USP
ITA, Setembro de 2001

4
Índice Índice ..................................................................................................................................1 Lista de Figuras .................................................................................................................iv Lista de Tabelas ...............................................................................................................viii Simbologia.........................................................................................................................ix Resumo ............................................................................................................................xiii Abstract............................................................................................................................xiv Agradecimentos ................................................................................................................xv Dedicatória ......................................................................................................................xvi I. Apresentação do Trabalho e Descrição do Objeto da Tese ..........................................21 I.1 Introdução ...............................................................................................................21 I.2 Pesquisa Bibliográfica.............................................................................................23 I.3 Motivação e Objetivo ..............................................................................................32 I.4 Estrutura da Tese .....................................................................................................33 II. Apresentação das Principais Características do Regime de Vôo Auto-Rotativo .........35 II.1 Introdução ..............................................................................................................35 II.2 Mecanismo Básico do Regime de Auto-Rotação ..................................................36 II.2.1 A Condição de Equilíbrio Auto-Rotativo .......................................................48 II.2.2 Características do Escoamento Sobre o Rotor ................................................53 III. Estudo e Desenvolvimento de Modelos para o Cálculo do Desempenho de Helicópteros no Regime de Auto-Rotação .......................................................................62 III.1 Introdução .............................................................................................................62 III.2 Formulação Básica dos Modelos Escolhidos .......................................................63 III.2.1 Modelo Utilizado para o Estudo da Transição do Vôo Pairado para a Condição de Auto-Rotação em Descida Vertical....................................................64
5
III.2.1.1 Hipóteses Básicas do Modelo.................................................................64 III.2.1.2 Determinação da Razão-de-Descida e Velocidade Angular do Rotor ................................................................................................................65 III.2.2 Modelo Utilizado para o Estudo do Regime de Auto-Rotação Estável na Condição da Descida Vertical e na Condição de Planeio da Aeronave Utilizanndo-se a Teoria da Quantidade-de-Movimento ...........................................69 III.2.2.1 Hipóteses Básicas do Modelo.................................................................70 III.2.2.2 Determinação da Velocidade Induzida...................................................71 III.2.2.3 Potência no Eixo do Rotor Principal em Auto-Rotação .........................74 III.2.2.4 Caso Específico (Auto-Rotação em Vôo Vertical) ................................76 III.2.2.4.1 Determinação da Velocidade Induzida em Auto-Rotação Vertical .............................................................................................................77 III.2.2.4.2 Potência no Eixo do Rotor Principal em Auto-Rotação Vertical....78 III.2.2.5 Regime de Auto-Rotação Ideal ..............................................................80 III.2.2.5.1 Auto-Rotação Ideal em Descida Vertical........................................80 III.2.2.5.2 Auto-Rotação Ideal em Descida Inclinada......................................82 III.2.3 Modelo Utilizado para o Traçado do "Diagrama Altura versus Velocidade" ..............................................................................................................84 III.2.3.1 Adimensionalização do "Diagama Altura versus Velocidade"..............86 III.2.3.2 Processo de Obtenção do Diagrama Dimensional..................................88 III.2.3.2.1 Obtenção da Altura Mínima hlo .......................................................90 III.2.3.2.2 Obtenção da Altura Crítica hcr.........................................................93 III.2.3.2.3 Obtenção da Velocidade Crítica Vcr ................................................93 III.2.3.2.4 Obtenção da Altura Máxima hhi ......................................................96 III.2.3.3 Análise de Sensibilidade com Relação aos Parâmetros de Projeto de Modo a Minimizar a Área de Restrição Imposta Pelo "Diagrama Altura versus Velocidade".................................................................98 III.2.3.3.1 Análise de Sensibilidade de hlo ........................................................99
6
III.2.3.3.2 Análise de Sensibilidade de hhi........................................................99 III.2.3.3.3 Análise de Sensibilidade de Vcr .....................................................100
IV Desenvolvimento Computacional dos Modelos Apresentados .................................102
IV.1 Introdução...........................................................................................................102 IV.2 Metodologia Utilizada para o Estudo da Transição do Vôo Pairado para a Auto-Rotação em Descida Vertical .........................................................................102 IV.3 Metodologia Utilizada para o Estudo da Auto-Rotação Estável........................106 IV.4 Metodologia Utilizada para o Estudo do Traçado do "Diagrama Altura versus Velocidade" .....................................................................................................109 V Apresentação e Análise Global dos Resultados .........................................................112 V.1 Introdução ............................................................................................................112 V.2 Apresentação dos Resultados para o Estudo da Transição entre o Vôo Pairado e o Regime de Auto-Rotação em Descida Vertical.......................................112 V.3 Apresentação dos Resultados para o Estudo do Regime de Auto-Rotação Estável Utilizando-se a Teoria da Quantidade-de-Movimento ..................................124 V.4 Apresentação dos Resultados para o Estudo do Traçado do "Diagrama Altura versus Velocidade"..........................................................................................143 VI Conclusões e Sugestões para Trabalhos Futuros.......................................................159 VI.1 Introdução...........................................................................................................159 VI.2 Sobre a Transição do Vôo Pairado para a Auto-Rotação em Descida Vertical .......................................................................................................................159 VI.3 Sobre o Estudo da Auto-Rotação Estável Utilizando-se a Teoria da Quantidade-de-Movimento.........................................................................................160 VI.4 Sobre o Estudo do Traçado do "Diagrama Altura versus Velocidade" .............161 VI.5 Sugestões para Trabalhos Futuros ......................................................................162 Apêndice A.....................................................................................................................163 Apêndice B.....................................................................................................................168 Referências Bibliográficas..............................................................................................171

7
Lista de Figuras
I.1 Diagrama Típico Altura versus Velocidade ................................................................22 II.1 Forças no Elemento-de-Pá em Auto-Rotação............................................................40 II.2 Forças Atuantes em Auto-Rotação no Regime de Planeio ........................................42 II.3 Estado de Operação Normal, Vôo à Frente com Potência.........................................43 II.4 Exemplo de Funcionamento do Contagiros ...............................................................44 II.5 Transição para Auto-Rotação ....................................................................................45 II.6 Regime de Auto-Rotação Estável..............................................................................46 II.7 Desaceleração e Pouso ...............................................................................................47 II.8 Diagrama de Equilíbrio Auto-Rotativo em Descida Vertical....................................50 II.9 Diagrama de Equilíbrio Auto-Rotativo em Vôo à Frente ..........................................51 II.10 Variação do Ângulo-de-ataque sobre o Disco do Rotor em Vôo à Frente ..............52
II.11 Estado de Operação Normal ....................................................................................55 II.12 Condição Para a Mudança do Sentido do Escoamento no Plano do Disco do Rotor e Condição-Limite para Mudança do Sentido do Escoamento na Esteira, Durante o estado de Anéis de Vórtices.............................................................................56 II.13 Estado de Molinete ..................................................................................................57 II.14 Visualização dos Estados de Operação do Rotor em Descida Vertical...................59 II.15 Visualização dos Estados de Operação do Rotor em Vôo à Frente .........................60 III.1 Diagrama de Forças sobre o Rotor ...........................................................................71
8
III.2 Representação Gráfica do Regime de Auto-Rotação Ideal......................................82 III.3 "Diagrama Altura versus Velocidade" em sua Forma Adimensional......................87 III.4 Forças Atuantes no Helicóptero Durante a Auto-Rotação em Descida Vertical .............................................................................................................................91 III.5 Parâmetro de Efeito Solo ..........................................................................................93 III.6 Obteção da Velocidade Crítica .................................................................................94 III.7 Variação de Vcr e hhi .................................................................................................97 V.1 Variação da Velocidade Induzida em Função do Tempo Após a Falha do Motor .........................................................................................................................113 V.2 Variação do Ângulo-de-Passo em Função do Tempo Após a Falha do Motor ...............................................................................................................113 V.3 Efeito da Variação do Ângulo-de-Passo na Variação da Razão-de-Descida da Aeronave em Função do Tempo Decorrido Após a Falha do Motor, I1=200 slug ft2 ...................................................................................116 V.4 Efeito da Variação do Ângulo-de-Passo na Variação da Velocidade Angular do Rotor em Função do Tempo Decorrido Após a Falha do Motor, I1=200 slug ft2 ......................................................................................116 V.5 Efeito da Variação da Velocidade Induzida na Variação da Razão-de-Descida da Aeronave em Função do Tempo Decorrido Após a Falha do Motor ...............................................................................................................120 V.6 Efeito da Variação da Velocidade Induzida na Variação da Velocidade Angular do Rotor em Função do Tempo Decorrido Após a Falha do Motor ................120 V.7 Efeito da Variação da Inércia do Rotor na Variação da Razão-de-Descida da Aeronave em Função do Tempo Decorrido Após a Falha do Motor ............................122 V.8 Efeito da Variação da Inércia do Rotor na Variação da Velocidade Angular do Rotor em Função do Tempo Decorrido Após a Falha do Motor ..............................122 V.9 Comparação Teórica da Relação de Velocidade Induzida com os Dados Experimentais da Referência [3] ( γ = 90º; θFP = 0º ).....................................125 V.10 Comparação Teórica da Relação de Velocidade Induzida com os Dados Experimentais da Referência [3] ( γ = 70º; θFP = 0º ).....................................127 V.11 Comparação Teórica da Relação de Velocidade Induzida com os Dados Experimentais da Referência [3] ( γ = 50º; θFP = 0º ).....................................128
9
V.12 Comparação Teórica da Relação de Velocidade Induzida com os Dados Experimentais da Referência [3] ( γ = 20º; θFP = 0º ).....................................128 V.13 Comparação Teórica da Relação Potência com os Dados Experimentais da Referência [3] ( γ = 90º; θFP = 0º ) ....................................................130 V.14 Comparação Teórica da Relação de Potência com os Dados Experimentais da Referência [3] ( γ = 70º; θFP = 0º ) ....................................................132 V.15 Comparação Teórica da Relação de Potência com os Dados Experimentais da Referência [3] ( γ = 50º; θFP = 0º ) ....................................................132 V.16 Comparação Teórica da Relação de Potência com os Dados Experimentais da Referência [3] ( γ = 20º; θFP = 0º ) ....................................................133 V.17 Análise Paramétrica da Variação de Potência em Relação à Velocidade de Planeio da Aeronave com Ângulo de Planeio γ=0º ...................................................135 V.18 Análise Paramétrica da Variação de Potência em Relação à Velocidade de Planeio da Aeronave com Ângulo de Planeio γ=30º .................................................135 V.19 Análise Paramétrica da Variação de Potência em Relação à Velocidade de Planeio da Aeronave com Ângulo de Planeio γ=60º .................................................136 V.20 Análise Paramétrica da Variação de Potência em Relação ao Ângulo de Inclinação de Planeio da Aeronave com Ângulo de Atitude do Plano das Pontas das Pás do Rotor θFP=-20º............................................................................139 V.21 Análise Paramétrica da Variação de Potência em Relação ao Ângulo de Inclinação de Planeio da Aeronave com Ângulo de Atitude do Plano das Pontas das Pás do Rotor θFP=0º ...............................................................................140 V.22 Análise Paramétrica da Variação de Potência em Relação ao Ângulo de Inclinação de Planeio da Aeronave com Ângulo de Atitude do Plano das Pontas das Pás do Rotor θFP=10º .............................................................................140 V.23 Comparação da Análise Paramé trica da Variação de Potência em Relação ao Ângulo de Inclinação do Planeio da Aeronave com Ângulo de Atitude do Plano das Pontas das Pás do Rotor θFP=-10º e θFP=10º ...........................................................142 V.24 "Diagrama Altura versus Velocidade" em sua Forma Dimensional para os Helicópteros UH-60L, UH-60A e BK-117 ....................................................................144 V.25 "Diagrama Altura versus Velocidade" em sua Forma Adimensional para os Helicópteros UH-60L, UH-60A e BK-117 ....................................................................145
10
V.26 Diagrama Dimensional para o Helicóptero Bell 47G-5 A, Apresentado como Helicóptero (a) na Referência [29], Considerando-se Variações de Peso e Altitude .....147 V.27 Diagrama Adimensional para o Helicóptero Bell 47G-5 A, Apresentado como Helicóptero (a) na Referência [29], Considerando-se Variações de Peso e Altitude ...........................................................................................................147 V.28a Diagrama Dimensional obtido na Referência [29] Através da Aplicação do Método Semi-Empírico Considerando-se a Variação de Altitude ................................149 V.28b Diagrama Dimensional obtido na Presente Tese Através da Aplicação do Método Analítico Proposto Considerando-se a Variação de Altitude............................150 V.28c Comparação da Teoria Apresentada no Presente Trabalho com os Resultados do Método Semi-Empírico Aplicado na Referência [29]........................151 V.29 Representação do Diagrama Dimensional para o Helicóptero da Referência [29] Considerando-se Variação de peso da Aeronave .................................153 V.30 Representação do Diagrama Dimensional para o Helicóptero da Referência [29] Considerando-se Variação da Inércia do Rotor Principal ....................155 V.31 Representação do Diagrama Dimensional para o Helicóptero da Referência [29] Considerando-se Variação da Área Equivalente de Placa Plana f ........156 A.1 Helicóptero AEROSPATIALE AS 350 B...............................................................163 A.2 Helicóptero MBB/KAWASAKI BK117 .................................................................164 A.3 Helicóptero SIKORSKY UH-60A ..........................................................................165 A.4 Helicóptero SIKORSKY UH-60L...........................................................................166 A.5 Helicóptero BELL 47G-5 A ....................................................................................167
11
Lista de Tabelas
IV.1 Parâmetros Físicos Utilizados na Transição entre o Vôo Pairado e a Auto-Rotação em Descida Vertical................................................................................105 IV.2 Condições iniciais em Vôo Pairado .......................................................................105 IV.3 Condições Finais com Redução de Passo Após a Falha do Motor ........................105 IV.4 Condições Finais sem Redução de Passo Após a Falha do Motor .........................106
IV.5 Parâmetros Físicos para o Estudo da Teoria da Quantidade-de-Movimento.............................................................................................109
IV.6 Valores Práticos para o traçado do "Diagrama Altura versus Velocidade"...........111 IV.7 Valores Experimentais Obtidos em Ensaio em Vôo ..............................................111 A.1 Parâmetros Técnicos do Helicóptero AEROSPATIALE AS 350 B .......................163 A.2 Parâmetros Técnicos do Helicóptero MBB KAWASAKI BK-117 ........................164 A.3 Parâmetros Técnicos do Helicóptero SIKORSKY UH-60A ..................................165 A.4 Parâmetros Técnicos do Helicóptero SIKORSKY UH-60L ...................................166 A.5 Parâmetros Técnicos do Helicóptero BELL 47G-5 A.............................................167

12
Simbologia
a Coeficiente Angular da Curva de Sustentação
A Área do Disco do Rotor Principal [ft²]
b Número de Pás do Rotor Principal c Corda da Pá do Rotor Principal [ft] cp Corda na Ponta das Pás [ft] cr Corda na Raiz das Pás [ft] CP Coeficiente de Potência Requerida Total CP0 Coeficiente de Potência de Perfil
CT Coeficiente da Tração
Cd0 Coeficiente de Arrasto
CL Coeficiente de Sustentação
D Força de Arrasto no Rotor [lb]
DP Força de Arrasto Parasita [ lb]
•
PE Variação da Energia Potencial em Função do Tempo f Área Equivalente de Placa Plana [ft²] F Vetor Força
FX Componente Horizontal da Tração no Rotor Principal [ lb]
FZ Componente Vertical da Tração no Rotor Principal [lb]
g Aceleração Local da Gravidade [ft/s²]
h Altitude de Vôo [ft]
13
hr Altura do Rotor em Relação ao Solo [ft]
hlo Altura Mínima em Relação ao Solo [ft]
hhi Altura Máxima em Relação ao Solo [ft]
hcr Altura Crítica em Relação ao Solo [ft]
I1 Momento de Inércia em “flap” das Pás do Rotor Principal [slug ft²]
IR Momento de Inércia Rotor Principal = mR² [slug ft²]
k Fator Empírico para Compensar Perdas Adicionais do Rotor Real
L Força de Sustentação [lb]
LSN Linha de Sustentação Nula do Perfil
m Massa do Helicóptero [lb]
n Fator de Carga
navg Fator de Carga Médio
P Potência Líquida no Rotor [HP]
Ph Potência Requerida para o Vôo Pairado [HP]
Preq Potência Requerida no Eixo do Rotor Principal [HP]
Ps Potência no Eixo do Rotor Principal em Auto-Rotação [HP]
P0 Potência de Perfil [HP]
Q Torque Atuante no Rotor Principal [lb ft]
r Posição Radial da Pá
R Raio da Pá do Rotor Principal [ft]
RA Resultante Aerodinâmica
t Instante de Tempo [s]
T Tração no Rotor Principal [lb]
u Velocidade Induzida (Para a Condição de Vôo Vertical) [ft/s]
u0 Componente Horizontal da Velocidade Induzida [ft/s]
14
V Velocidade Resultante Local [ft/s]
V Vetor Velocidade
•
V Aceleração Vertical da Aeronave [ft/s²]
Vcr Velocidade Crítica [knots]
VD Velocidade de Descida Vertical da Aeronave [ft/s]
VFF Velocidade de Vôo à Frente da Aeronave [ft/s]
VG Velocidade de Planeio da Aeronave [ft/s]
Vmin Velocidade na qual a Potência Requerida é Mínima [knots]
VR Velocidade Resultante [ft/s]
Vs Velocidade de Subida [ft/s]
Vt Velocidade na Ponta da Pá [ft/s]
W Peso do Helicóptero [lb]
W1 Componente Normal do Peso [lb]
W2 Componente Tangencial do Peso [lb]
wh Velocidade Induzida no Vôo Pairado [ft/s]
w0 Componente Vertical da Velocidade Induzida [ft/s]
X1, X2 Relação Adimensional Para o “Diagrama Altura versus Velocidade”
α Ângulo-de-Ataque das Pás do Rotor Principal [graus]
αR Ângulo-de-Ataque do Rotor Principal [graus]
′0δ , 1δ , 2δ Coeficientes para Cd0 em Função do Ângulo-de-Ataque das Pás
θ Ângulo-de-Passo das Pás do Rotor Principal [rad]
θFP Ângulo de Atitude do Plano das Pontas das Pás do Rotor [graus]
γ Ângulo-de-Planeio da Aeronave [graus]
Λ Parâmetro de Efeito Solo
15
λ Relação de Afilamento das Pás
µ Razão de Avanço do Helicóptero
µcr Velocidade de Vôo à Frente Normalizada Adimensional
σ Solidez do Rotor Principal = (bc)/(πR)
ρ Densidade do Ar [slug/ft³]
φ Ângulo-de-Ataque Induzido
χ Ângulo de Inclinação da Esteira
Ω Velocidade Angular de Rotação do Rotor Principal [rad/s]
•
Ω Aceleração Angular de Rotação do Rotor Principal [rad/s²]
Ω d Velocidade Angular de Projeto Para o Rotor Principal [rad/s]
Ω f Velocidade Angular de Rotação do Rotor no Momento do Pouso [rad/s]
∆ t Intervalo de Tempo [s]
16
Resumo
Nesta pesquisa são estudados os efeitos provocados pela perda de potência líquida através
do rotor de helicópteros monomotores ocasionando o regime de operação conhecido como auto-
rotação. São deduzidas as equações correspondentes desde o momento em que ocorre a perda de
potência até quando o regime de auto-rotação já está estabilizado. Para o estudo realizado, faz-se
uso das teorias da quantidade-de-movimento e do elemento-de-pá. Também é apresentado um
modelo semi-empírico para o traçado do “diagrama altura versus velocidade”. Nele estão
demonstradas as regiões nas quais o vôo da aeronave fica restrito no caso da auto-rotação.
Análises qualitativa e quantitativa do estudo realizado são levadas a cabo por meio de
comparações dos resultados obtidos neste trabalho com os obtidos por diversos autores e
disponíveis na literatura.
17
Abstract
This research deals with the study of the effects coming from the loss of net power
through the main rotor on singlerotor helicopters which leads to the autorotational operational
regime. Corresponding equations are obtained, covering from the moment the power loss is
detected to the subsequent stabilized autorotational regime. The study is based upon both
momentum and blade element theories. A semi-empirical model for the plotting of the height-
velocity diagram is also presented. This diagram shows the restricted areas concerning the
aircraft autorotational flight. Qualitative and quantitative analyses are both carried through by
means of correlations of the present study results with their counterparts available in the
literature.
18
Agradecimentos
Ao meu orientador, professor Donizeti de Andrade, por sua amizade, incentivo e
principalmente por sempre acreditar na realização do presente trabalho. Durante esses anos
aprendi a respeitá- lo e admirá- lo por toda sua paciência, orientação e dedicação.
Agradeço também ao corpo docente do Instituto Tecnológico de Aeronáutica por todo
conhecimento transmitido que muito contribuiu para meu crescimento profissional e pessoal.
A minha avó Juracy Lombardi Miranda por todo apoio e incentivo durante a realização
desta pesquisa.
A minha namorada Dailene Felix pelo amor, carinho e compreensão.

19
Dedicatória
A minha mãe Maria Bernadete Miranda que durante todos os passos de minha vida
sempre me ensinou a seguir o caminho correto estando presente em todos os momentos em que
dela precisei, sempre me orientando com todo carinho, apoio e incentivo. Ao meu avô Antonio
Miranda (in memoriam), que sempre estará presente em minhas lembranças e em minha vida.

20
“Ainda que eu fale a língua dos homens e dos anjos, se não tiver amor, serei como o
bronze que soa, ou como o címbalo que retine. Ainda que eu tenha o dom de profetizar e
conheça todos os mistérios e toda a ciência; ainda que eu tenha tamanha fé, a ponto de
transportar montanhas, se não tiver amor nada serei...” (1 Cor. 13,1-2)
21
CAPÍTULO I
APRESENTAÇÃO DO TRABALHO E DESCRIÇÃO DO OBJETO DA TESE
I.1 – INTRODUÇÃO
Neste primeiro capítulo é apresentada uma breve descrição do problema objeto da
presente tese, bem como a revisão bibliográfica utilizada como referência de estudos para a
realização da mesma. Também é apresentado o objetivo e a motivação que tornou possível a
realização da referida pesquisa.
Quando por algum motivo ocorre uma perda de potência, todo helicóptero pode entrar
no regime de operação conhecido como auto-rotação e então efetuar um pouso com segurança
sem maiores danos tanto para os tripulantes como para a aeronave. Mas para que o regime de
auto-rotação seja estabelecido, rápidas atitudes de comando devem ser tomadas pelo
comandante da aeronave assim que se perceba a falha no motor. Portanto, a experiência do
piloto no comando da aeronave deve ser grande, pois se o intervalo de tempo entre a perda de
potência e o comando for elevado, tem-se uma condição onde se pode tornar impraticável o
estabelecimento de um regime de auto-rotação estável. Se este for o caso, a aeronave pode
sofrer sérios danos, devido à possível alta velocidade de queda, transformada em energia de
impacto no solo/água e com isso acarretar iminente perigo de vida aos tripulantes e/ou
passageiros.
Uma restrição de operação importante de ser observada é o chamado “diagrama altura
versus velocidade”, diagrama este que obrigatoriamente deve constar do manual de vôo de
qualquer helicóptero. Esse diagrama mostra ao piloto da aeronave regiões de restrição tanto
em altura como em velocidade de vôo à frente, às quais o vôo da aeronave fica restrito. Uma
vez ocorrida perda de potência dentro dos limites restritivos do “diagrama altura versus
velocidade”, estabelece-se uma situação onde se torna impraticável o regime de auto-rotação
22
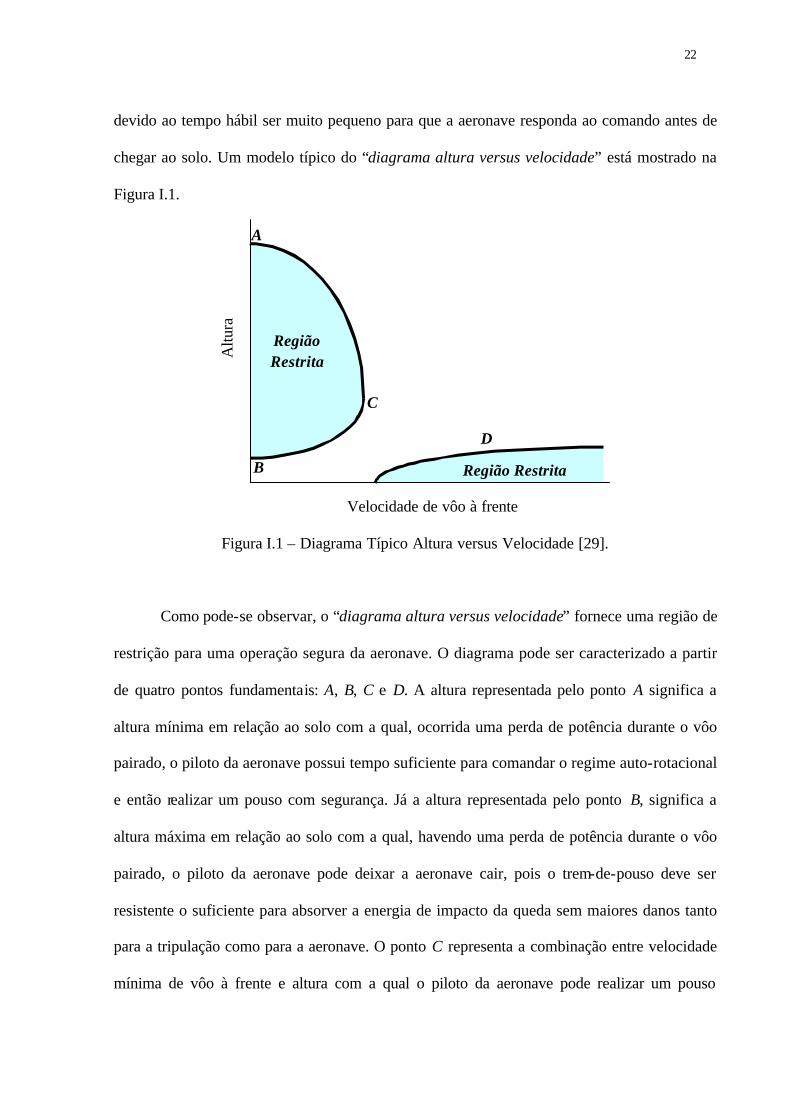
devido ao tempo hábil ser muito pequeno para que a aeronave responda ao comando antes de
chegar ao solo. Um modelo típico do “diagrama altura versus velocidade” está mostrado na
Figura I.1.
Figura I.1 – Diagrama Típico Altura versus Velocidade [29].
Como pode-se observar, o “diagrama altura versus velocidade” fornece uma região de
restrição para uma operação segura da aeronave. O diagrama pode ser caracterizado a partir
de quatro pontos fundamentais: A, B, C e D. A altura representada pelo ponto A significa a
altura mínima em relação ao solo com a qual, ocorrida uma perda de potência durante o vôo
pairado, o piloto da aeronave possui tempo suficiente para comandar o regime auto-rotacional
e então realizar um pouso com segurança. Já a altura representada pelo ponto B, significa a
altura máxima em relação ao solo com a qual, havendo uma perda de potência durante o vôo
pairado, o piloto da aeronave pode deixar a aeronave cair, pois o trem-de-pouso deve ser
resistente o suficiente para absorver a energia de impacto da queda sem maiores danos tanto
para a tripulação como para a aeronave. O ponto C representa a combinação entre velocidade
mínima de vôo à frente e altura com a qual o piloto da aeronave pode realizar um pouso
D
A
B
C
Região Restrita
Região Restrita
Velocidade de Vôo a Frente
Altura
Velocidade de vôo à frente
Altu
ra
23
seguro após a perda de potência, iniciando com segurança o regime de auto-rotação. A região
representada pelo ponto D no diagrama fornece uma área de operação restrita, pois tem-se
velocidades muito elevadas e alturas muito baixas em relação ao solo, caracterizando a
impossibilidade de estabilizar o regime de auto-rotação, pois o tempo é muito pequeno,
fazendo com que a aeronave possa transformar sua energia cinética elevada em energia de
impacto ao chocar-se com o solo/água.
Como se pode observar, qualquer helicóptero possui uma região de vôo restrita para o
estabelecimento do regime de auto-rotação. O presente trabalho apresenta um modelo visando
a analisar o envelope operacional da aeronave nesse particular regime. Para tanto, um estudo
detalhado sobre características auto-rotativas é realizado, sendo apresentadas as condições
desde a transição do vôo pairado para um regime auto-rotativo estável, aplicando-se as
equações da dinâmica, até um estudo sobre as características de desempenho da aeronave
durante a condição de auto-rotação estável, valendo-se neste caso, da teoria da quantidade-de-
movimento. Como complemento do trabalho também é apresentado um modelo para
“diagrama altura versus velocidade”, onde algumas sugestões são propostas a fim de se
reduzir a área de restrição imposta pelo mesmo quando baixas velocidades estão envolvidas.
Os resultados obtidos são comparados aos de estudos realizados por outros autores que
também se utilizaram de outras teorias e de resultados de ensaios em vôo e ensaios em túnel
de vento.
I.2 - PESQUISA BIBLIOGRÁFICA
A pesquisa bibliográfica realizada para este trabalho se baseia em livros e artigos
técnicos publicados desde a década de 1930 até o presente. O estudo do regime de auto-
rotação, tanto em descida vertical como na condição de planeio, sempre despertou interesse
24
técnico, pois é uma característica particular de autogiros e helicópteros, e que permite a
realização de um pouso seguro mesmo após falha completa do motor.
Como primeiro estudo pode-se citar o trabalho publicado por Wheatley [38] em 1932,
um artigo técnico que em poucas páginas trata das características de desempenho de um
autogiro na condição de planeio. Desse trabalho tem-se um importante resultado, ou seja,
nota-se que a razão-de-descida em auto-rotação na condição de planeio é menor que a razão-
de-descida em auto-rotação na condição de descida vertical. Embora seja um resultado obtido
para um autogiro na condição de planeio, também pode ser aplicado a qualquer tipo de
helicóptero operando no regime auto-rotacional.
Em 1941, tem-se o trabalho apresentado por Bailey [1]. Trata-se de um artigo técnico
que estabelece um método teórico, simplificado, para se determinar as características de um
rotor em vôo à frente. Neste trabalho, Bailey vale-se de um modelo matemático dinâmico
utilizando o movimento de “flapping” (batimento) das pás do rotor, e, através das expressões
de torque e tração, consegue encontrar uma relação entre as características de arrasto e
sustentação de um rotor em auto-rotação no regime de vôo de planeio.
Em 1947, num trabalho de Dingeldein & Schaefer [9], apresenta-se uma investigação
das características aerodinâmicas de um rotor de helicóptero operando também em regime de
planeio. Como principal resultado desse estudo tem-se a possibilidade do vôo do helicóptero
mesmo após uma substancial redução na potência disponível.
Em 1948, pode-se citar o trabalho publicado por Gustafson & Gessow [14] em que é
realizada a análise do desempenho de um rotor de helicóptero em diferentes condições de vôo.
Para a análise auto-rotativa alteram-se as pás do rotor original, utilizando-se pás com torção
de –8º, tendo como resultado uma razão-de-descida cerca de 15% menor que a razão-de-
descida obtida com o rotor original.
25
Ainda em 1948, Gessow [11] realiza um estudo de desempenho em regime auto-
rotativo, demonstrando os efeitos da torção nas pás do rotor durante a descida em auto-rotação
vertical da aeronave. Resultados são obtidos através de ensaios em vôo realizados em diversas
condições atmosféricas e de peso bruto da aeronave.
Já em 1949 Nikolsky & Seckel [26] publicam um estudo sobre a transição de um
helicóptero em vôo pairado para a condição de descida auto-rotativa vertical. Um estudo
analítico também é apresentado levando-se em consideração equações da dinâmica,
envolvendo o movimento de “flapping” das pás do rotor, além de apresentar com clareza as
variações de velocidade angular do rotor, ângulo-de-passo e velocidade de descida em função
do tempo decorrido após a falha do motor. Este estudo é de grande importância no contexto
do presente trabalho: resultados do modelo nele apresentado e da implementação numérica
aqui levada a cabo são comparados entre si, visando a encontrar respostas sobre quais as
melhores condições para se efetuar uma entrada segura no regime de auto-rotação a partir do
vôo pairado.
Publicado em 1949, o livro “Helicopter Engineering” de autoria de Young [39] retrata
o estudo da auto-rotação apresentando um modelo matemático prático para a realização do
cálculo da razão-de-descida em regime de auto-rotação vertical.
Outro trabalho, publicado por Gessow [12] em 1950, analisa o desempenho de um
helicóptero no regime de auto-rotação quando o rotor desse helicóptero é equipado com “tip
jets” (jatos nas pontas das pás). Analisam-se os efeitos causados na razão-de-descida da
aeronave em auto-rotação quando os “tip jets” estão inoperantes. Este estudo torna-se
importante pois se analisa até que ponto é interessante a colocação de “tip jets”.
Em 1950, Stepniewski [37], no livro “Introduction to Helicopter Aerodynamics”,
dedica um capítulo inteiro ao estudo do regime de auto-rotação. São apresentadas relações
básicas da curva de Glauert, importantes no estudo dos estados de operação do rotor, e sua
26
aplicação no cálculo da razão-de-descida da aeronave. Também é realizado um estudo a
respeito da curva de Hafner, que também pode ser utilizada para a auto-rotação em descida
vertical.
Publicado em 1951 por Nikolsky [27], o livro “Helicopter Analysis” também apresenta
uma pequena introdução ao estudo do regime de auto-rotação estável, exemplificando o
cálculo da velocidade de descida da aeronave por meio de exemplos numéricos.
Também em 1951, Castles & Gray [3], realizam um estudo em túnel de vento sobre as
relações empíricas entre velocidade induzida, tração e razão-de-descida do rotor de um
helicóptero. Como resultado desse trabalho tem-se tabelas e gráficos que demonstram a
influência da variação do diâmetro do rotor na variação da velocidade induzida durante o
regime auto-rotacional.
Já em 1952 Gessow & Myers [13], no livro “Aerodynamics of the Helicopter”,
dedicam um capítulo inteiro ao estudo do regime de auto-rotação em descida vertical. Nesse
capítulo estudam-se as forças que atuam no elemento-de-pá em auto-rotação e analisa-se o
equilíbrio auto-rotativo até a determinação do ângulo-de-ataque ótimo correspondente. Esse
trabalho é uma importante referência utilizada até hoje por diversos autores devido à clareza
com que as idéias estão expostas, mesmo sendo um dos primeiros livros sobre o assunto.
Outro importante trabalho publicado em 1952, é o relatório apresentado por
Slaymaker, Lynn & Gray [35]. Trata-se de um trabalho experimental a respeito da transição
do vôo pairado para a condição de auto-rotação em descida vertical. Para a realização do
experimento foram utilizados dois modelos com diâmetros diferentes. Importantes resultados
sobre rotação do rotor e razão-de-descida em função do tempo após a falha do motor são
obtidos por meio dos resultados experimentais demonstrados através de gráficos.
Em outro trabalho publicado em 1953, Slaymaker & Gray [36], novamente estudam o
desempenho da aeronave no regime de auto-rotação visando à redução da razão-de-descida
27
através da variação da energia cinética do rotor. Observa-se que a partir de modificações
realizadas na carga no disco e inércia do rotor, melhorias no desempenho da aeronave são
obtidas.
Na década de 1960, pode-se citar uma série de outros trabalhos, como o apresentado
por Heyson [17] em 1960, que se utiliza da teoria de vórtices para a determinação da
velocidade induzida em rotores de helicópteros, mostrando que os resultados são semelhantes
aos obtidos por meio da teoria da quantidade-de-movimento.
Também em 1960 Harris, Sloan & Ulrich [16] apresentam um estudo semelhante ao
de Stepniewski e dedicam um capítulo inteiro do livro “Typical Helicopter Performance
Calculation” ao estudo do desempenho auto-rotativo de um helicóptero.
Ainda em 1961 Heyson [18] apresenta um estudo que busca uma solução da teoria da
quantidade-de-movimento aplicada a aeronaves de vôo vertical. Desse trabalho, obtêm-se
importantes resultados com relação ao estudo da velocidade induzida e do ângulo de
inclinação da esteira durante o vôo da aeronave.
Um trabalho muito importante, e que é referência básica para qualquer estudo do
“diagrama altura versus velocidade”, é o apresentado em 1968 por Pegg [29], onde se propõe
um modelo semi-empírico para o traçado do “diagrama altura versus velocidade” de qualquer
tipo de helicóptero. Esse trabalho é a base para a realização do estudo do “diagrama altura
versus velocidade” apresentado como complemento da presente tese.
Um estudo sobre desempenho em auto-rotação foi desenvolvido por Pegg [30] em
1969, sendo exploradas as limitações encontradas no vôo auto-rotativo. Um importante
resultado é obtido desse trabalho: nota-se que com uma escolha adequada do ângulo-de-
planeio, obtêm-se um aumento da distância de planeio, em torno de 35%, o que significa um
aumento no tempo de planeio em torno de 30 segundos e, conseqüentemente, uma diminuição
28
na velocidade de descida da aeronave, propiciando desse modo um pouso com maior
segurança.
Pode-se citar o estudo desenvolvido em Moscou, na antiga União Soviética, por Bazov
[2] em 1969, que mais tarde, em 1972 foi traduzido pela NASA recebendo o nome de
“Helicopter Aerodynamics”. Neste trabalho, Bazov descreve todas as características
aerodinâmicas do vôo de um helicóptero, desde os princípios de vôo até estudos de vibrações
e estabilidade da aeronave. No Capítulo IX da citada referência é desenvolvido um estudo do
desempenho de um helicóptero no regime de auto-rotação tanto em descida vertical como na
condição de planeio. São realizados cálculos de razão-de-descida e ângulo-de-ataque ótimo, e
também um breve estudo sobre as restrições impostas pelo “diagrama altura versus
velocidade”. Este trabalho é um estudo completo sobre a aerodinâmica do helicóptero e
também importante referência na realização da presente tese, no que diz respeito à
apresentação das condições de desempenho em auto-rotação apresentadas no próximo
capítulo.
Seguindo esse contexto, pode-se citar o estudo desenvolvido pelo Exército dos Estados
Unidos no manual “Engineering Design Handbook” [15] em 1974, que dedica um capítulo
inteiro ao estudo do desempenho de helicópteros. Ali, cálculos sobre o regime auto-rotacional
são apresentados tanto em descida vertical como na condição de planeio. Também é realizado
um estudo sobre a distância de planeio e a transição do vôo auto-rotativo estável e o pouso da
aeronave. Uma análise do “diagrama altura versus velocidade” é realizada seguindo os
passos propostos por Pegg [29].
Em 1975 um relatório importante publicado por Heyson [19] apresenta a análise da
teoria da quantidade-de-movimento para helicópteros e autogiros na condição de planeio,
sendo comentadas as restrições operacionais encontradas. Nesse trabalho Heyson descreve
toda a análise da teoria da quantidade-de-movimento, explorando desde o vôo vertical até o
29
vôo à frente, buscando resultados de potência requerida e disponível e auto-rotação ideal.
Importantes conclusões sobre velocidade e potência são obtidas e também uma análise
paramétrica é realizada a fim de se determinar as diversas condições possíveis durante o
regime auto-rotacional. Este trabalho fornece resultados importantes e a teoria nele
apresentada é utilizada no desenvolver dessa tese, na aplicação da teoria da quantidade-de-
movimento com suas equações e soluções. Os resultados obtidos são apresentados e
comparados com os obtidos em estudos realizados em túnel de vento.
Em 1979 surge o trabalho apresentado por Keys & Stepniewski [21] no livro “Rotary
Wing Aerodynamics”, onde, no Volume II, Keys apresenta dados de desempenho auto-
rotacional na condição de descida vertical e planeio.
No início da década de 1980 pode-se citar o trabalho apresentado por Johnson [20] em
seu livro “Helicopter Theory”. A obra realiza uma análise importante do regime de auto-
rotação através da teoria do elemento-de-pá, onde se propõe um modelo para o cálculo da
velocidade de descida da aeronave. O livro “Helicopter Theory” é um dos trabalhos mais
completos e importantes no que diz respeito ao estudo da engenharia do helicóptero, sendo
importante referência de estudos na realização de qualquer pesquisa.
Em 1984 publica-se o livro “Helicopter Aerodynamics” de Prouty [32]. Trata-se de
importante material onde conceitos teóricos podem ser obtidos no que diz respeito ao estudo
da auto-rotação em planeio e à falha no motor.
Em 1986, novamente Prouty [33], no livro “Helicopter Performance, Stability and
Control”, trata do desempenho do helicóptero em auto-rotação, propondo métodos
importantes de análise nas condições de descida vertical, planeio e na determinação do
“diagrama altura versus velocidade”. Outro material importante que pode ser encontrado no
livro, é o Apêndice B, onde são encontrados diversos parâmetros de configuração de
diferentes helicópteros, de importância no desenvolvimento dessa tese.
30
Pode-se citar o trabalho apresentado por Lee [22] publicado em 1986, onde, o autor
visa, como principal objetivo do trabalho, à redução da região restritiva do “diagrama altura
versus velocidade”. Para tal, utiliza-se de uma formulação com teoria de controle ótimo a fim
de obter resultados significativos no desempenho de um helicóptero em auto-rotação.
Em 1988, Lee, Bryson & Hindson [23] apresentam um pequeno relatório sobre o
pouso de um helicóptero em auto-rotação, utilizando a teoria do controle ótimo, semelhante
ao apresentado por Lee [22]. Resultados semelhantes foram obtidos.
Outra análise sobre o “diagrama altura versus velocidade” é o estudo desenvolvido
por Pleasants & White [31], em 1988. Verifica-se uma significativa redução na área de
restrição imposta pelo “diagrama altura versus velocidade” quando se utiliza um método de
energia. Neste trabalho são analisados diversos tipos de helicópteros, e resultados importantes
são obtidos em termos de redução na área de restrição.
Já no final da década de 1980, Cerbe & Reichert [4] publicam um trabalho que
apresenta um modelo de otimização de pousos e decolagens de um helicóptero, estudando os
efeitos de uma falha de motor durante a decolagem, o que acarreta na aplicação de atitudes de
comando suficientes para a realização do pouso com segurança. Durante a investigação são
utilizados dados teóricos e experimentais para o helicóptero MBB - BO 105.
Shi-Cun [34], em artigo publicado em 1990, apresenta uma aproximação analítica
através da teoria de vórtices para o estudo do escoamento induzido no rotor de um helicóptero
em descida vertical. Como resultado, tem-se redução da circulação de vórtices na esteira
quando um helicóptero está operando na condição de descida vertical.
Em artigo publicado em 1991, Okuno, Kawachi & Azuma [28] apresentam o estudo do
traçado do “diagrama altura versus velocidade” utilizando-se a teoria do controle ótimo.
Analisa-se o pouso de uma aeronave operando na condição de auto-rotação, envolvendo
equações não- lineares do movimento, a partir de um modelo de corpo rígido com três graus-
31
de-liberdade. Através desse modelo, é possível se obter uma boa noção de aparência do
“diagrama altura versus velocidade” comparando-se com dados existentes de vôo.
Pode-se citar o trabalho realizado por Newman [25] publicado em 1994, no livro “The
Foundations of Helicopter Flight”, onde, no Capítulo 7, estuda-se o desempenho auto-
rotativo. Cálculos importantes são apresentados no intuito de se determinar a razão-de-descida
da aeronave.
Nos últimos anos, trabalhos importantes sobre auto-rotação vêm sendo desenvolvidos
através de diversos estudos. Uma série importante de trabalhos que pode ser citada contém os
estudos desenvolvidos por Chen & Zhao. Seguindo uma ordem cronológica, podem ser
mencionados os seguintes trabalhos: (1) Chen & Zhao [5] publicam em 1996 uma análise de
trajetórias ótimas para a operação de um helicóptero em regime de auto-rotação dentro dos
limites de uma área de vôo controlada. Análises de trajetórias de pouso são realizadas com a
finalidade de se obter o melhor desempenho da aeronave; (2) em 1996, Chen, Zhao & Sharma
[6] também se utilizam da teoria do controle ótimo, a fim de encontrar trajetórias ótimas para
uma operação segura da aeronave. Um modelo dinâmico é utilizado, sendo realizado o estudo
de falha no motor durante a aproximação até um heliponto localizado acima do nível do solo;
(3) novamente em 1996, Chen, Zhao & Carlson [7] têm publicado o estudo de trajetórias
ótimas para uma aeronave composta, quando ocorre falha total do motor. Novamente se lança
mão de equações não-lineares da dinâmica e da teoria de controle ótimo para que possam ser
determinados os limites do “diagrama altura versus velocidade” para um dado peso bruto da
aeronave.
Em 1998, McCormick [24], no livro “Aerodynamics of V/STOL Flight”, dedica um
capítulo inteiro ao estudo de asas rotativas, no qual características de desempenho no regime
de auto-rotação são investigadas utilizando-se as teorias da quantidade-de-movimento e
elemento-de-pá.
32
I.3 – MOTIVAÇÃO E OBJETIVO
Com a expansão do mercado de helicópteros no mundo todo, o número dessas
aeronaves vem crescendo continuamente. No Brasil a situação não é diferente, pois conta-se
hoje com uma frota interna de aeronaves de aplicação civil de mais de 650 aeronaves de
diferentes configurações [8] a números de 1998. Encontram-se dentro dessa grande
quantidade de aeronaves de diferentes especificações técnicas os helicópteros monomotores,
nos quais a operação se encontra restrita em algumas situações, como no caso do vôo sobre
aglomerações populacionais em grandes cidades e de pousos em helipontos localizados sobre
edifícios.
Tendo o helicóptero se tornado um meio de transporte muito utilizado dentro de
grandes cidades, devido a sua capacidade de percorrer em um curto espaço de tempo trajetos
que por vias terrestres levariam muito tempo, e a sua capacidade de executar pousos e
decolagens verticais em qualquer lugar, torna-se indispensável que esses vôos sejam
realizados dentro de um padrão de segurança.
Como é apresentado neste trabalho, qualquer helicóptero possui a capacidade de entrar
no regime estável de auto-rotação e executar um pouso seguro. Existem, porém, restrições
operacionais tanto em altura como em velocidade de vôo à frente, que acabam por tornar
impraticável o estabelecimento do regime de auto-rotação. Essas restrições operacionais
impedem o sobrevôo de helicópteros sobre áreas habitadas, prejudicando desse modo a
utilização de um meio de transporte que cada vez se torna mais útil.
Dados estatísticos obtidos pelo centro de estatística de acidentes do Exército dos
Estados Unidos demonstram que a porcentagem de pousos auto-rotativos sem sucesso tem
sido relativamente alta. Foi revelado que em torno de 30% de todos os pousos de emergência
auto-rotativas envolvendo os helicópteros AH-1, UH-1, OH-58 e OH-60, resultaram em
algum tipo de dano a aeronave ou a seus tripulantes [31].
33
Através de estudos realizados, nota-se que é possível a redução das restrições
operacionais de modo a permitir que a aeronave realize o vôo dentro de um limite operacional
seguro em regiões onde hoje em dia o sobrevôo está restrito.
Baseado nesses dados e estudos surge a motivação principal do presente trabalho,
onde pretende-se analisar as restrições de operação em auto-rotação dessas aeronaves. Para
tal, a presente pesquisa apresenta modelos teóricos que tratam desde o instante em que ocorre
a falha do motor, analisando-se a entrada em auto-rotação, o regime de auto-rotação estável e
estudo do “diagrama altura versus velocidade”, visando-se a encontrar respostas para os
principais problemas relacionados ao regime de vôo em estudo.
Como objetivo do presente trabalho, tem-se a análise dos problemas de restrição
operacional de um helicóptero operando no regime de auto-rotação e a proposição de
sugestões para que se melhorem as condições de envelope operacional da aeronave. São
utilizados os modelamentos da teoria da quantidade-de-movimento e da teoria do elemento-
de-pá, a fim de se encontrar soluções que reduzam a área de restrição de operação da
aeronave. Dentre elas podem ser apontadas: redução na razão-de-descida, aumento da
distância de planeio da aeronave e melhorias no desempenho da aeronave durante o vôo auto-
rotacional. Os resultados obtidos são comparados aos encontrados na aplicação de outras
teorias e resultados obtidos experimentalmente, tanto em túnel de vento como em ensaios em
vôo. Também é proposto um modelo matemático computacional genérico para ser aplicado
em qualquer configuração de aeronave, de modo que possibilite o traçado do “diagrama
altura versus velocidade”.
I.4 – ESTRUTURA DA TESE
O presente trabalho está estruturado em seis capítulos. No Capítulo I tem-se uma breve
descrição do problema a ser tratado, a apresentação da bibliografia utilizada na realização da
34
pesquisa, a motivação em que se baseia a presente pesquisa e o objetivo do trabalho. No
Capítulo II é apresentado o regime de vôo auto-rotacional para helicópteros monomotores
operando tanto em descida auto-rotacional vertical, como em descida auto-rotacional com
baixa velocidade de vôo à frente. No Capítulo III é apresentado um modelo matemático que
se utiliza da teoria da quantidade-de-movimento e da teoria do elemento-de-pá para a análise
detalhada do desempenho de um helicóptero, envolvendo a transição do vôo pairado para a
condição de auto-rotação e o estudo da auto-rotação estável de um helicóptero em relação às
suas características e condições operacionais. Também é apresentado um estudo de um
modelo adimensional para tratamento do “diagrama altura versus velocidade”, modelo este
que possui um grande poder de generalização, pois é semelhante para diversas configurações
da aeronave. No Capítulo IV é apresentada uma interface para implementação numérica dos
resultados teóricos, definidos os parâmetros a serem utilizados na resolução do problema e
apresentado o sistema de solução das equações propostas no Capítulo III. No Capítulo V são
mostrados os resultados obtidos com a teoria apresentada e feitas comparações com dados
teóricos e práticos, obtidos a partir de resultados experimentais, de túnel de vento e ensaio em
vôo, presentes na literatura. Finalmente, no Capítulo VI são apresentadas as conclusões e
recomendações para trabalhos futuros. No Apêndice A podem ser encontrados os principais
parâmetros geométricos e operacionais dos helicópteros testados no decorrer do presente
trabalho. No Apêndice B podem ser encontradas as deduções matemáticas das principais
equações utilizadas no presente trabalho.
35
CAPÍTULO II
APRESENTAÇÃO DAS PRINCIPAIS CARACTERÍSTICAS DO REGIME DE VÔO
AUTO-ROTATIVO
II.1 – INTRODUÇÃO
Uma das vantagens mais importantes de um helicóptero em relação aos outros tipos de
aeronaves é a sua capacidade de realizar pousos seguros mesmo após completa perda de
potência. O regime de operação que inclui tal capacidade é conhecido como auto-rotação.
Neste capítulo é apresentado um resumo teórico do regime auto-rotativo visando a
propiciar ao leitor um conceito básico sobre as principais características desse regime de
operação, incluindo descida vertical e descida em vôo à frente onde são ilustradas e
comentadas as forças atuantes na aeronave e no elemento-de-pá bem como o equilíbrio auto-
rotativo e considerações sobre as teorias da quantidade-de-movimento e elemento-de-pá.
Embora o modelamento matemático do regime de auto-rotação através das teorias da
quantidade-de-movimento e elemento-de-pá seja relativamente simples, seu estudo é de
grande importância no que diz respeito à segurança operacional da aeronave, pois, através das
teorias citadas é possível a determinação de importantes características operacionais no
regime de auto-rotação como determinação do ângulo-de-planeio que minimiza a razão-de-
descida e do melhor ângulo-de-passo com o qual o equilíbrio auto-rotativo é atingido.
Os conceitos aqui apresentados buscam abranger os principais fatores que
caracterizam o regime de auto-rotação; conceitos mais completos e profundos são
apresentados no Capítulo III do presente trabalho onde as teorias da quantidade-de-
movimento e elemento-de-pá são utilizadas para análise da transição entre a falha do motor e
o regime de auto-rotação, e para análise do regime de auto-rotação estável tanto na condição
de vôo vertical como na condição de planeio.
36
II.2 – MECANISMO BÁSICO DO REGIME DE AUTO-ROTAÇÃO
A auto-rotação pode ser definida como a condição de vôo na qual o rotor é mantido
em movimento de rotação por forças aerodinâmicas, preservando desse modo a sustentação,
já que pode não existir potência líquida através do rotor. Se a potência líquida através do rotor
for zero, fica claro que para produzir tração (potência induzida), e vencer o arrasto de perfil,
energia deve advir de alguma fonte externa. No autogiro, por exemplo, a falta de transmissão
de potência para o rotor é suprida através de uma hélice colocada na parte frontal da
fuselagem, impulsionando-o. Uma vez na condição “power off”, o he licóptero pode entrar no
regime de auto-rotação, sendo o rotor impulsionado pela força da gravidade. Portanto, como
pode-se observar, no caso do helicóptero operando em regime de auto-rotação, a falta de
potência líquida através do rotor é suprida pela energia potencial gravitacional referente à
posição na qual a aeronave se encontra. Daí pode-se dizer que a potência necessária para
produzir sustentação e manter o rotor com determinada velocidade de rotação provém da
redução da energia potencial gravitacional da aeronave devido à redução de sua altura com
relação ao solo, energia essa que se transforma em energia cinética de rotação no rotor.
Pode-se dizer também que um rotor em auto-rotação possui efeito semelhante a um
pára-quedas de mesmo diâmetro. Logicamente que seria um pára-quedas pequeno para
sustentar o peso da aeronave; portanto, haveria uma elevada taxa de descida vertical da
aeronave. Mas um helicóptero em auto-rotação é muito melhor que um helicóptero em queda
livre.
Antes de considerar o mecanismo pelo qual um elemento-de-pá do rotor atinge o
equilíbrio auto-rotativo, deve-se estabelecer um primeiro conceito para um rotor em auto-
rotação. Pode-se dizer que a potência para vencer o arrasto de perfil da pá e produzir
sustentação deve ser suprida pela força da gravidade que impulsiona o rotor em uma certa
37
razão-de-descida. No caso de descida vertical em auto-rotação com falha total do motor, a
potência fornecida pelo motor e transmitida para o rotor é nula. Portanto pode-se escrever:
( ) 00 =++= PuVTP D , (II.1)
onde: P = Potência líquida no rotor, T = Tração no rotor principal, VD = Velocidade de
descida vertical, u = Velocidade induzida (para a condição de vôo vertical), P0 = Potência de
arrasto de perfil.
Através da equação anterior pode-se observar que a redução de energia potencial dada
por (TVD) compensa as perdas de potência induzida (Tu) e perdas de potência de perfil (P0) do
rotor. Ao se desprezar as perdas de potência de perfil, tem-se a chamada auto-rotação ideal,
onde:
( ) 0=+= uVTP D . (II.2)
Quando as perdas de perfil são incluídas tem-se que a auto-rotação ocorre em:
( )TP
uVD0−=+ . (II.3)
Segundo Gessow & Myers [13], para rotores normais em auto-rotação, a potência de
arrasto de perfil representa de 25% a 50% das perdas totais no rotor. Portanto, quando a
aeronave está no regime de auto-rotação, a razão-de-descida depende da potência para vencer
o arrasto de perfil (potência de perfil), ressaltando-se que as pás do rotor devem possuir
seções com boas características aerodinâmicas, de modo a gerar a menor razão-de-descida
possível, ou seja, as pás do rotor devem gerar o mínimo arrasto de perfil.
38
Pode-se então através das três equações acima citadas estabelecer um balanço de
energia, pois como foi visto, o decréscimo da energia potencial compensa as perdas de
potência de perfil e de potência induzida do rotor. A Equação (II.3) pode ser
adimensionalizada como se segue, através da velocidade induzida no vôo pairado wh,
levando-se em conta que ( )ATwh ρ2= , onde ρ é a densidade do ar, A representa a área do
disco do rotor principal, 0PC é o coeficiente de potência de perfil e TC é o coeficiente de
tração do rotor principal:
2
230
T
P
h
D
C
Cw
uV−=
+. (II.4)
As equações apresentadas são aplicadas na situação específica de vôo auto-rotacional
em descida vertical; no caso da auto-rotação na condição de planeio, o conceito do balanço de
energia também pode ser aplicado, porém com algumas diferenças em relação ao vôo vertical.
Através da teoria da quantidade-de-movimento pode-se delinear as condições na qual o vôo
auto-rotativo em vôo à frente é possível, e, como ocorre na descida vertical, a potência
fornecida pelo motor ao rotor vai ser nula no caso de ocorrer falha total do motor. Assim, para
a condição de planeio, no caso de auto-rotação ideal, pode-se escrever:
( ) ( ) 0sencos 00 =+−+−= γγ GZGX VwFuVFP , (II.5)
onde: VG = Velocidade de Planeio, u0 = Componente horizontal da velocidade induzida, w0=
Componente vertical da velocidade induzida, FX = Componente horizontal da tração no rotor
39
principal, FZ = Componente vertical da tração no rotor principal, P = Potência líquida no rotor
e γ = Ângulo-de-planeio.
Se as perdas de perfil forem incluídas, a Equação II.5 pode ser escrita seguindo-se os
passos apresentados no balanço de energia para o vôo vertical. No Capítulo III, um estudo
mais detalhado a respeito da auto-rotação ideal é apresentado tanto para a auto-rotação
vertical como para a auto-rotação na condição de planeio. Uma vez conhecidos os conceitos
do balanço de energia, o próximo passo importante é conhecer as forças aerodinâmicas
presentes no elemento-de-pá e na aeronave tanto em vôo vertical como na condição de
planeio, e analisar como essas forças se comportam no regime de auto-rotação.
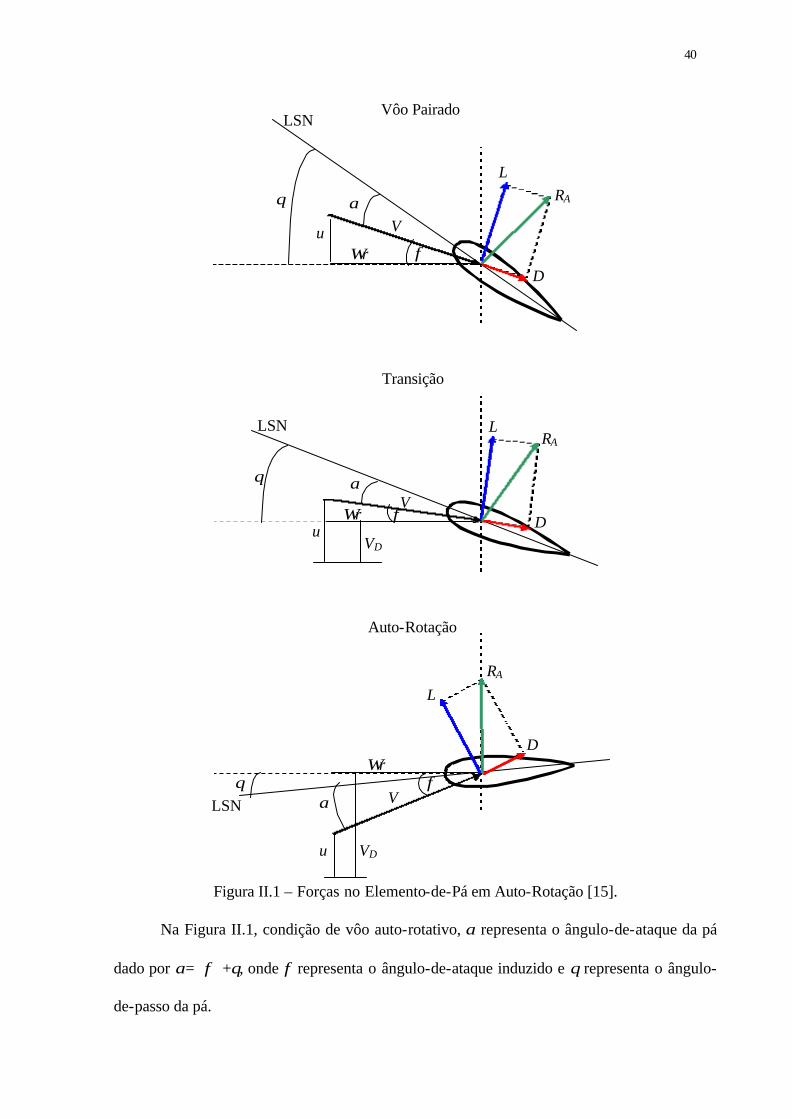
O mecanismo básico do vôo pairado e do regime de auto-rotação está esquematizado
na Figura II.1, que mostra os vetores sustentação e arrasto atuando sobre um elemento-de-pá
no vôo pairado, na transição e em auto-rotação estável na condição de descida vertical. Por
hipótese, o vetor sustentação se mantém com magnitude constante para os três modos de vôo
citados.
A Figura II.1 mostra um decréscimo do ângulo-de-passo das pás e um aumento da
razão-de-descida. Pode-se observar que conforme se altera a razão-de-descida, o vetor
sustentação L, que é sempre perpendicular à velocidade resultante local, inclina-se para frente
o suficiente para equilibrar o vetor arrasto D resultando em uma componente de força nula no
plano de rotação. Neste ponto de equilíbrio, nenhuma potência é requerida para manter o
elemento-de-pá rotacionando, tendo-se então o equilíbrio auto-rotativo.
40
Figura II.1 – Forças no Elemento-de-Pá em Auto-Rotação [15].
Na Figura II.1, condição de vôo auto-rotativo, α representa o ângulo-de-ataque da pá
dado por α=φ+θ, onde φ representa o ângulo-de-ataque induzido e θ representa o ângulo-
de-passo da pá.
Auto-Rotação
Transição
Vôo Pairado
θ
θ
α
u Ωr
L
D
RA
α
VD u
L RA
D Ωr
θ α
D
VD
RA
L
Ωr
u
V
V
V
φ
φ
φ
LSN
LSN
LSN
41
No vôo auto-rotativo, a velocidade resultante V (vento relativo) no elemento-de-pá
possui duas componentes, como ocorre no vôo pairado: a velocidade rotacional Ωr e a
velocidade induzida u, adicionalmente, existe a velocidade de descida vertical VD ou a
componente VG senγ quando se trata do vôo de planeio. A força de sustentação é
perpendicular ao vento relativo, tendendo a acelerar o elemento na direção de rotação,
enquanto que ao mesmo tempo o arrasto de perfil tende a desacelerá- lo.
No caso de um rotor completo, as forças de sustentação e arrasto em cada elemento-
de-pá não estão necessariamente balanceadas. Porém, estando o rotor em equilíbrio auto-
rotativo, o torque total devido à inclinação para frente dos vetores sustentação em todos os
elementos-de-pá vai balancear o torque devido ao arrasto em todos os elementos.
O balanceamento do torque em auto-rotação tanto é aplicado no vôo à frente como em
descida vertical. Na situação de vôo à frente, é comum dizer que a aeronave se encontra no
regime de planeio. Nesta situação de vôo nota-se que é possível a obtenção de razões-de-
descida bem menores, comparadas às da auto-rotação vertical. Portanto, em regime de auto-
rotação, o melhor desempenho da aeronave no que diz respeito a obtenção de menores razões-
de-descida ocorre com baixas velocidades de vôo à frente. Essa característica pode ser
observada facilmente através do equacionamento das forças atuantes no helicóptero em auto-
rotação representadas na Figura II.2.
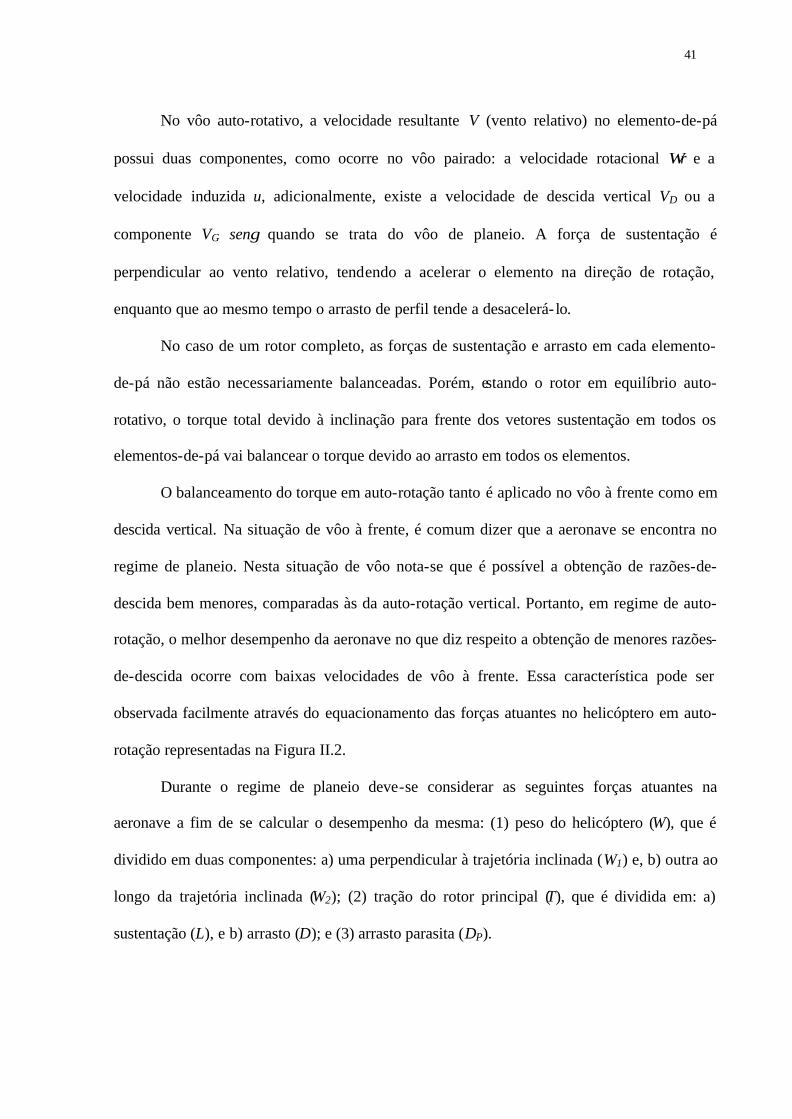
Durante o regime de planeio deve-se considerar as seguintes forças atuantes na
aeronave a fim de se calcular o desempenho da mesma: (1) peso do helicóptero (W), que é
dividido em duas componentes: a) uma perpendicular à trajetória inclinada (W1) e, b) outra ao
longo da trajetória inclinada (W2); (2) tração do rotor principal (T), que é dividida em: a)
sustentação (L), e b) arrasto (D); e (3) arrasto parasita (DP).
42
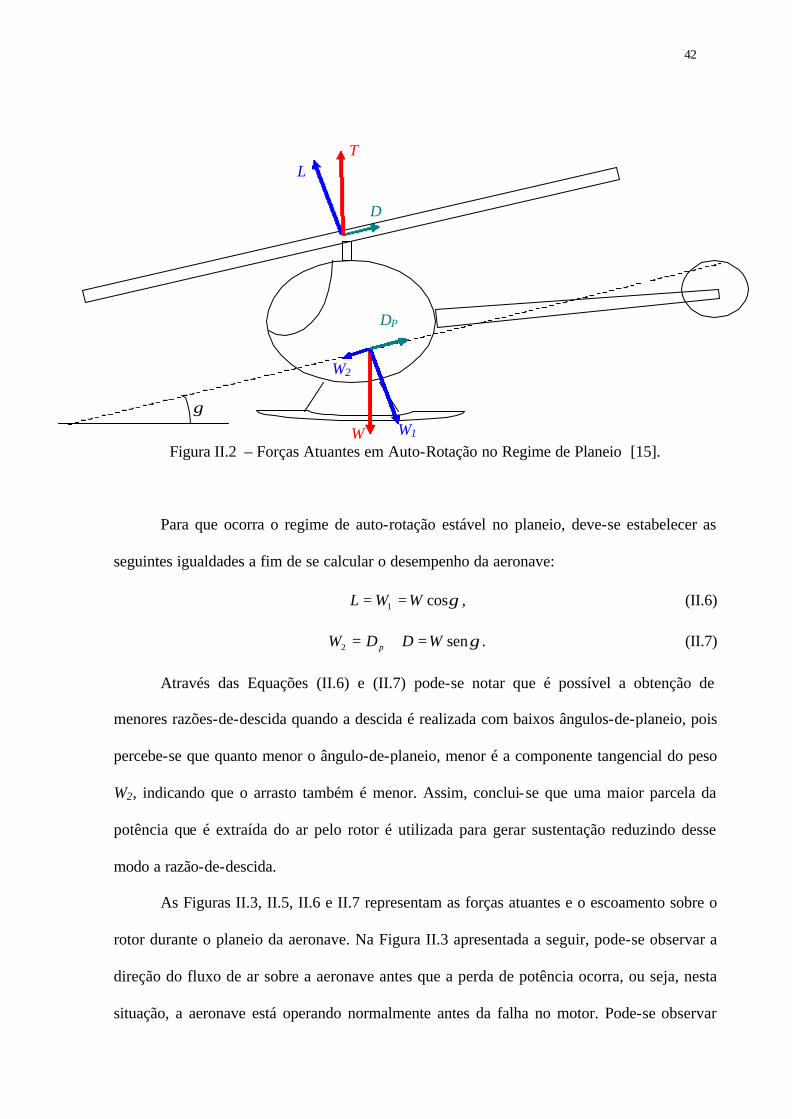
Figura II.2 – Forças Atuantes em Auto-Rotação no Regime de Planeio [15].
Para que ocorra o regime de auto-rotação estável no planeio, deve-se estabelecer as
seguintes igualdades a fim de se calcular o desempenho da aeronave:
γcos1 WWL == , (II.6)
γsen2 WDDW p =+= . (II.7)
Através das Equações (II.6) e (II.7) pode-se notar que é possível a obtenção de
menores razões-de-descida quando a descida é realizada com baixos ângulos-de-planeio, pois
percebe-se que quanto menor o ângulo-de-planeio, menor é a componente tangencial do peso
W2, indicando que o arrasto também é menor. Assim, conclui-se que uma maior parcela da
potência que é extraída do ar pelo rotor é utilizada para gerar sustentação reduzindo desse
modo a razão-de-descida.
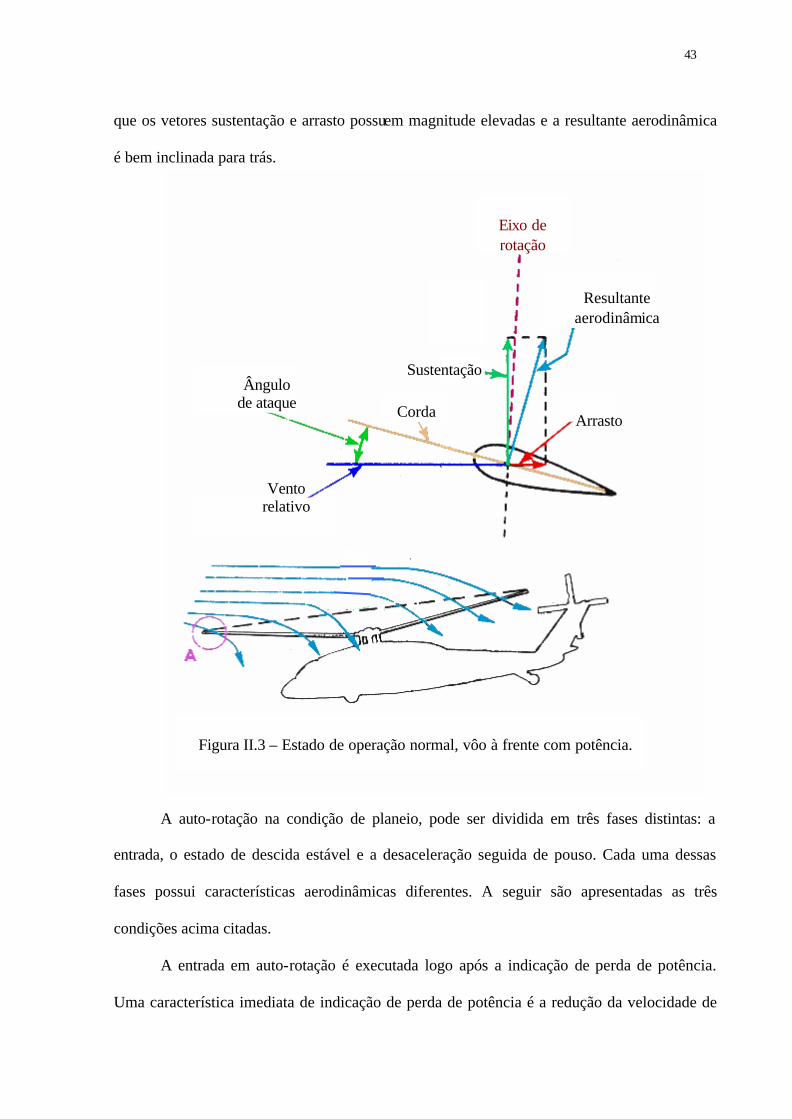
As Figuras II.3, II.5, II.6 e II.7 representam as forças atuantes e o escoamento sobre o
rotor durante o planeio da aeronave. Na Figura II.3 apresentada a seguir, pode-se observar a
direção do fluxo de ar sobre a aeronave antes que a perda de potência ocorra, ou seja, nesta
situação, a aeronave está operando normalmente antes da falha no motor. Pode-se observar
W W1
W2
γ
T L
D
DP
43
Eixo de rotação
Resultante aerodinâmica
Sustentação
Arrasto Corda
Ângulo de ataque
Vento relativo
que os vetores sustentação e arrasto possuem magnitude elevadas e a resultante aerodinâmica
é bem inclinada para trás.
Figura II.3 – Estado de operação normal, vôo à frente com potência.
A auto-rotação na condição de planeio, pode ser dividida em três fases distintas: a
entrada, o estado de descida estável e a desaceleração seguida de pouso. Cada uma dessas
fases possui características aerodinâmicas diferentes. A seguir são apresentadas as três
condições acima citadas.
A entrada em auto-rotação é executada logo após a indicação de perda de potência.
Uma característica imediata de indicação de perda de potência é a redução da velocidade de
44
rotação do rotor a valores abaixo de uma condição aceitável para se manter o vôo da
aeronave. Essa redução na velocidade de rotação do rotor se torna mais acentuada quando o
helicóptero está com altos ângulos-de-passo, e pode ser observada pelo piloto da aeronave
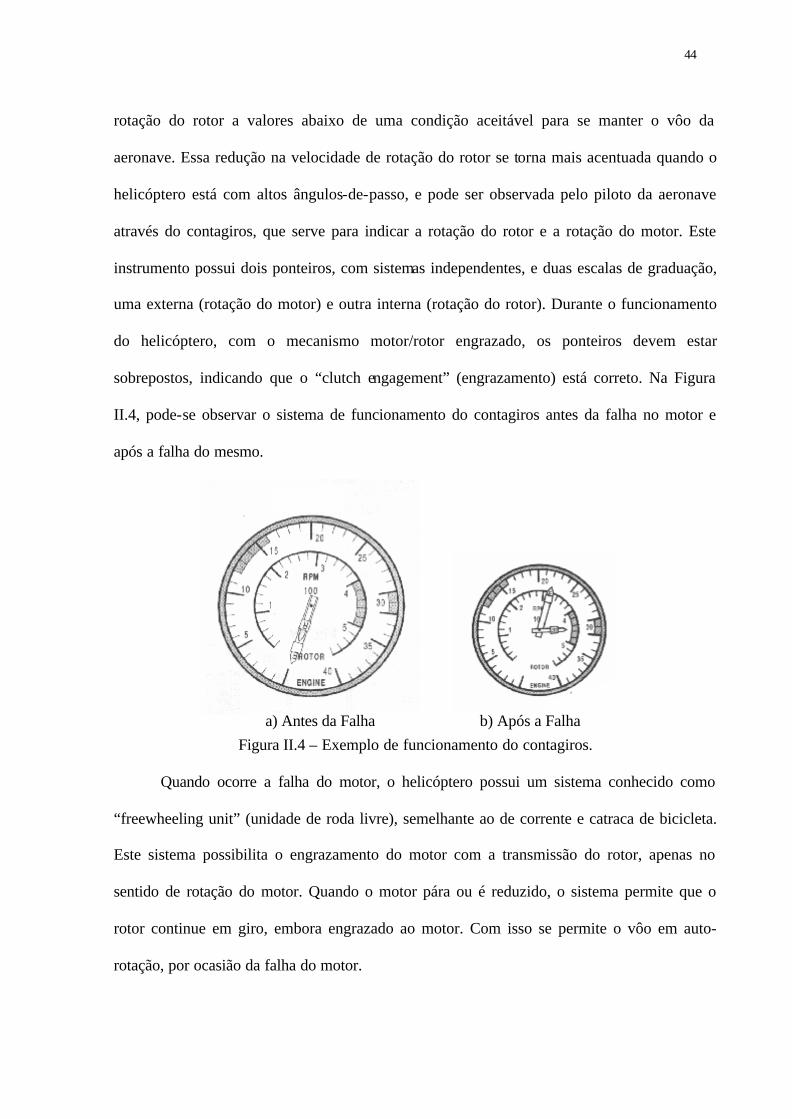
através do contagiros, que serve para indicar a rotação do rotor e a rotação do motor. Este
instrumento possui dois ponteiros, com sistemas independentes, e duas escalas de graduação,
uma externa (rotação do motor) e outra interna (rotação do rotor). Durante o funcionamento
do helicóptero, com o mecanismo motor/rotor engrazado, os ponteiros devem estar
sobrepostos, indicando que o “clutch engagement” (engrazamento) está correto. Na Figura
II.4, pode-se observar o sistema de funcionamento do contagiros antes da falha no motor e
após a falha do mesmo.
Figura II.4 – Exemplo de funcionamento do contagiros.
Quando ocorre a falha do motor, o helicóptero possui um sistema conhecido como
“freewheeling unit” (unidade de roda livre), semelhante ao de corrente e catraca de bicicleta.
Este sistema possibilita o engrazamento do motor com a transmissão do rotor, apenas no
sentido de rotação do motor. Quando o motor pára ou é reduzido, o sistema permite que o
rotor continue em giro, embora engrazado ao motor. Com isso se permite o vôo em auto-
rotação, por ocasião da falha do motor.
a) Antes da Falha b) Após a Falha
45
Resultante aerodinâmica
Sustentação Arrasto
Corda
Ângulo de ataque
Vento relativo
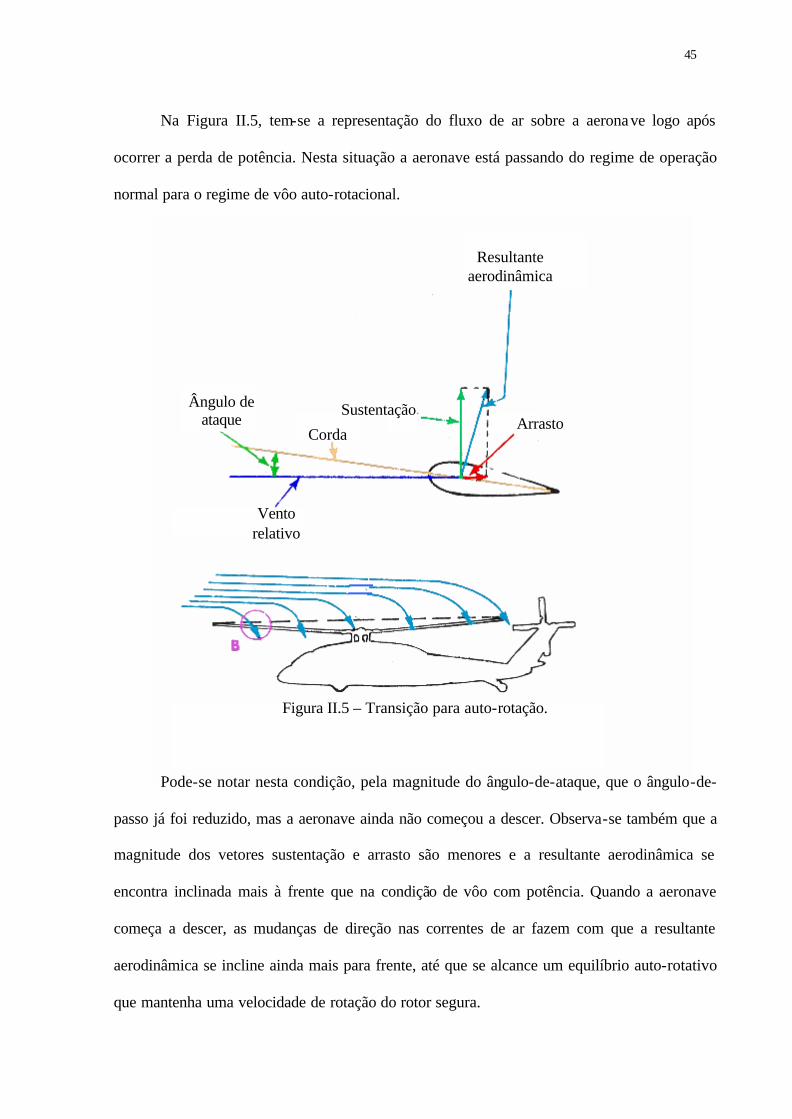
Na Figura II.5, tem-se a representação do fluxo de ar sobre a aeronave logo após
ocorrer a perda de potência. Nesta situação a aeronave está passando do regime de operação
normal para o regime de vôo auto-rotacional.
Figura II.5 – Transição para auto-rotação.
Pode-se notar nesta condição, pela magnitude do ângulo-de-ataque, que o ângulo-de-
passo já foi reduzido, mas a aeronave ainda não começou a descer. Observa-se também que a
magnitude dos vetores sustentação e arrasto são menores e a resultante aerodinâmica se
encontra inclinada mais à frente que na condição de vôo com potência. Quando a aeronave
começa a descer, as mudanças de direção nas correntes de ar fazem com que a resultante
aerodinâmica se incline ainda mais para frente, até que se alcance um equilíbrio auto-rotativo
que mantenha uma velocidade de rotação do rotor segura.
46
Resultante aerodinâmica
Sustentação
Arrasto
Inflow
Corda
Vento relativo
resultante
Ângulo de ataque
Componente do vento relativo no plano de rotação
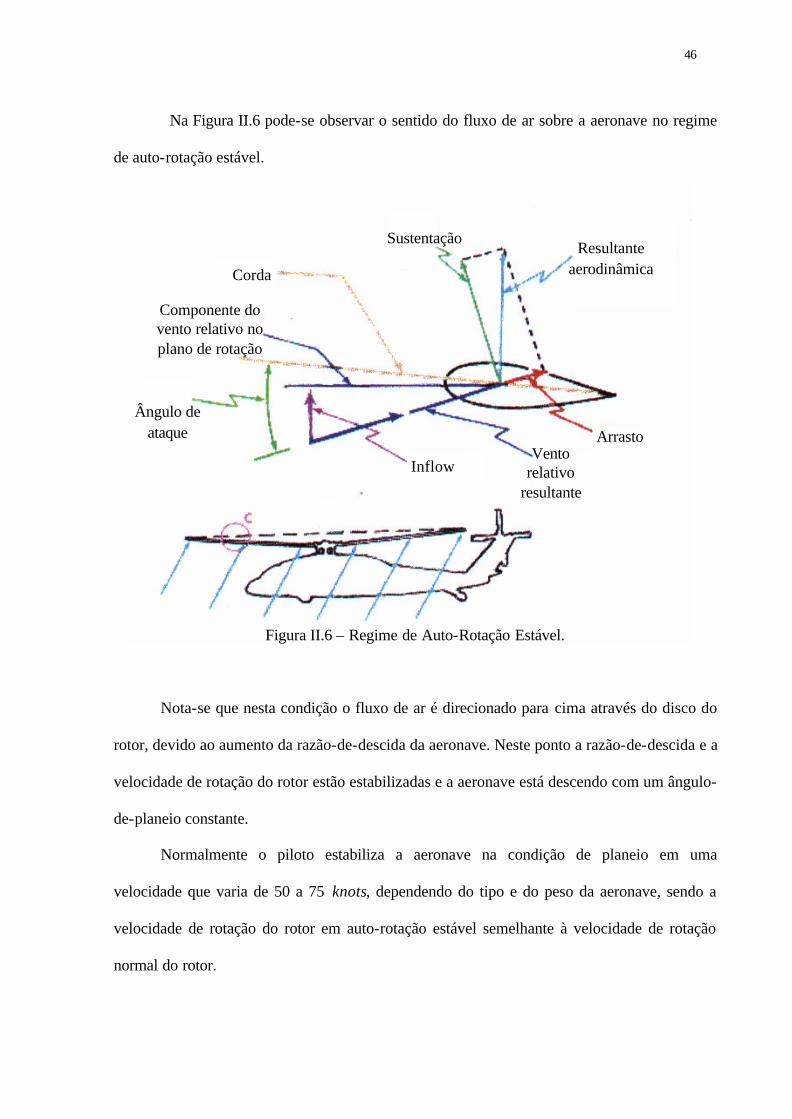
Na Figura II.6 pode-se observar o sentido do fluxo de ar sobre a aeronave no regime
de auto-rotação estável.
Figura II.6 – Regime de Auto-Rotação Estável.
Nota-se que nesta condição o fluxo de ar é direcionado para cima através do disco do
rotor, devido ao aumento da razão-de-descida da aeronave. Neste ponto a razão-de-descida e a
velocidade de rotação do rotor estão estabilizadas e a aeronave está descendo com um ângulo-
de-planeio constante.
Normalmente o piloto estabiliza a aeronave na condição de planeio em uma
velocidade que varia de 50 a 75 knots, dependendo do tipo e do peso da aeronave, sendo a
velocidade de rotação do rotor em auto-rotação estável semelhante à velocidade de rotação
normal do rotor.
47
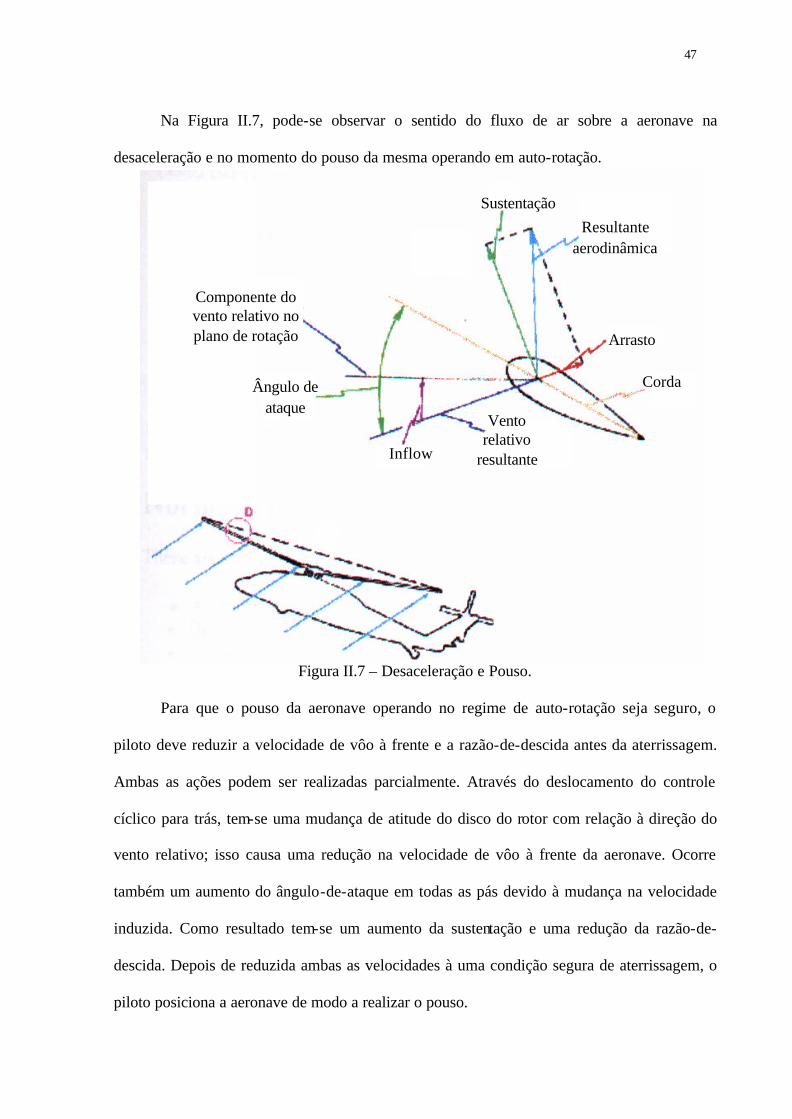
Na Figura II.7, pode-se observar o sentido do fluxo de ar sobre a aeronave na
desaceleração e no momento do pouso da mesma operando em auto-rotação.
Figura II.7 – Desaceleração e Pouso.
Para que o pouso da aeronave operando no regime de auto-rotação seja seguro, o
piloto deve reduzir a velocidade de vôo à frente e a razão-de-descida antes da aterrissagem.
Ambas as ações podem ser realizadas parcialmente. Através do deslocamento do controle
cíclico para trás, tem-se uma mudança de atitude do disco do rotor com relação à direção do
vento relativo; isso causa uma redução na velocidade de vôo à frente da aeronave. Ocorre
também um aumento do ângulo-de-ataque em todas as pás devido à mudança na velocidade
induzida. Como resultado tem-se um aumento da sustentação e uma redução da razão-de-
descida. Depois de reduzida ambas as velocidades à uma condição segura de aterrissagem, o
piloto posiciona a aeronave de modo a realizar o pouso.
Corda
Sustentação
Arrasto
Resultante aerodinâmica
Inflow
Vento relativo
resultante
Ângulo de ataque
Componente do vento relativo no plano de rotação
48
Normalmente, para a realização de um pouso, o piloto da aeronave pode optar por um
dos dois métodos apresentados a seguir:
a) Colocar o helicóptero em vôo de planeio com velocidade constante, e, quando
estiver a aproximadamente três metros do solo, movimentar lentamente o comando cíclico de
modo a fazer com que a aeronave fique paralela ao solo. A partir dessa condição o piloto deve
baixar o comando coletivo realizando desse modo o pouso da aeronave. Este método de pouso
é semelhante ao realizado pelos aviões, pois faz com que o helicóptero toque o solo com certa
velocidade de vôo à frente. Na literatura, esse método de pouso é conhecido como “run-on”.
b) O segundo método utilizado para a realização do pouso é conhecido por “flare-out”.
Essa manobra se caracteriza por elevar o nariz da fuselagem quando o helicóptero estiver
aproximadamente a doze metros do solo fazendo a aeronave pairar nesta posição e
gradualmente abaixa-se o comando coletivo realizando o restante do pouso. Esta manobra
requer alguns cuidados como, por exemplo, a utilização de protetor para o rotor de cauda, pois
o mesmo se aproxima do solo quando o nariz da aeronave é elevado.
II.2.1 – A CONDIÇÃO DE EQUILÍBRIO AUTO-ROTATIVO
Como citado anteriormente, no regime de auto-rotação o rotor deixa de receber
potência do motor. Nesta situação, o “inflow” está para cima através do disco, provocando um
deslocamento para frente do vetor sustentação, visando a atingir o equilíbrio auto-rotativo.
A fim de se manter a velocidade de rotação do rotor constante durante o vôo no regime
de auto-rotação, é importante que os vetores sustentação e arrasto estejam em equilíbrio, pois
assim não vai existir a presença de torque líquido no rotor (dQ = 0), garantindo o equilíbrio. E
esta situação pode ser representada na Equação (II.8):
( ) 0=−= LDrdrdQ φ . (II.8)
49
Como citado anteriormente, em auto-rotação apenas uma seção se encontra em
equilíbrio, enquanto que as outras estão produzindo ou absorvendo potência. Examinando a
condição de auto-rotação na descida vertical, representada na Figura II.1 é possível observar
que:
r
uVD
Ωφ
+= arctan . (II.9)
Daí pode-se concluir que o ângulo-de-ataque induzido é maior nas regiões próximas à
raiz da pá e menor nas regiões próximas à ponta da pá. Portanto, para uma determinada seção,
nota-se que a Equação (II.8) pode ser desbalanceada devido a presença de instabilidades que
provoquem aumento ou redução da velocidade induzida ocasionando a presença de torque
positivo ou negativo, ou seja, o rotor passa a fornecer potência ao escoamento ou então
absorver potência do escoamento que se traduz em torque acelerador (dQ<0) ou torque
desacelerador (dQ>0).
Como em auto-rotação não existe a presença de potência líquida no rotor, tanto o
torque acelerador como o torque desacelerador devem se equilibrar. Para uma dada razão-de-
descida, a velocidade na ponta da pá vai-se ajustar até que o equilíbrio seja alcançado.
A partir da Figura II.8, pode-se perceber que quando ocorre uma ligeira diminuição na
velocidade de rotação de equilíbrio, tem-se um aumento do ângulo-de-ataque induzido, φ.
Assim existe um deslocamento da região aceleradora para fora do disco, o que impõe um
torque acelerador líquido no rotor, que por sua vez age no sentido de aumentar a velocidade
de rotação de volta ao seu valor de equilíbrio. Do mesmo modo, se acontecer um aumento da
velocidade de rotação de equilíbrio, tem-se uma diminuição do ângulo-de-ataque induzido, φ,
e, portanto, um deslocamento da região desaceleradora para dentro do disco, criando assim
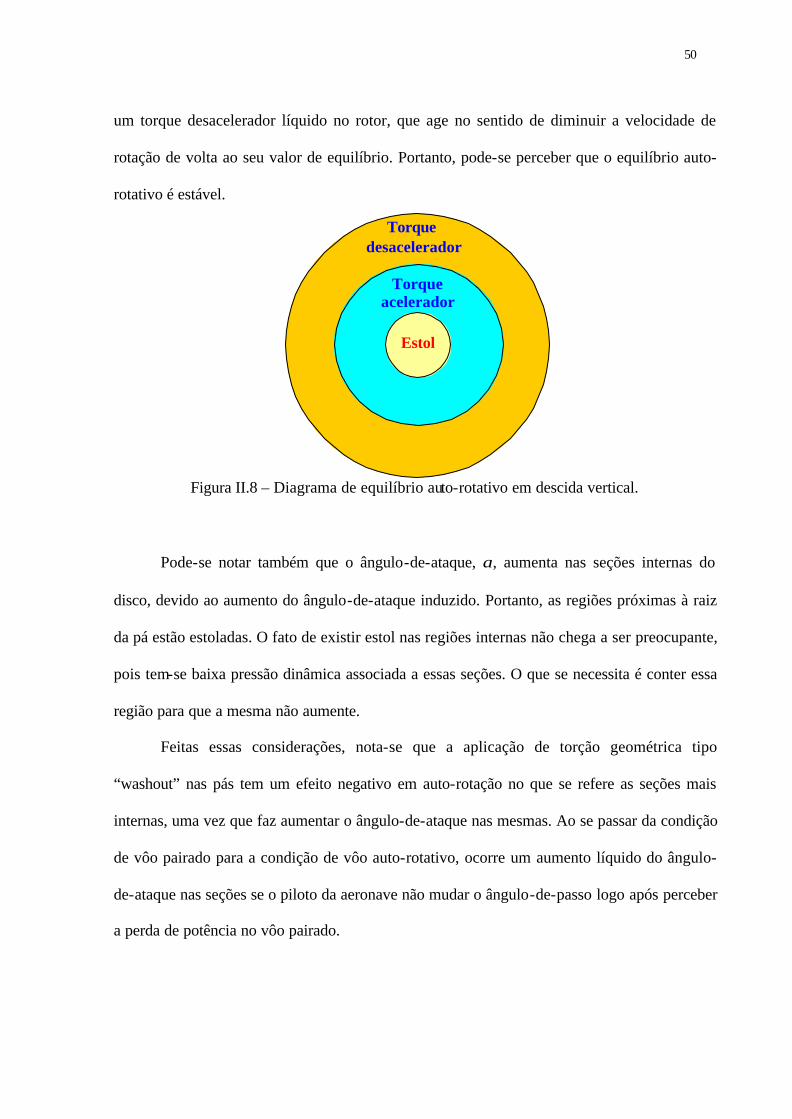
50
um torque desacelerador líquido no rotor, que age no sentido de diminuir a velocidade de
rotação de volta ao seu valor de equilíbrio. Portanto, pode-se perceber que o equilíbrio auto-
rotativo é estável.
Figura II.8 – Diagrama de equilíbrio auto-rotativo em descida vertical.
Pode-se notar também que o ângulo-de-ataque, α, aumenta nas seções internas do
disco, devido ao aumento do ângulo-de-ataque induzido. Portanto, as regiões próximas à raiz
da pá estão estoladas. O fato de existir estol nas regiões internas não chega a ser preocupante,
pois tem-se baixa pressão dinâmica associada a essas seções. O que se necessita é conter essa
região para que a mesma não aumente.
Feitas essas considerações, nota-se que a aplicação de torção geométrica tipo
“washout” nas pás tem um efeito negativo em auto-rotação no que se refere as seções mais
internas, uma vez que faz aumentar o ângulo-de-ataque nas mesmas. Ao se passar da condição
de vôo pairado para a condição de vôo auto-rotativo, ocorre um aumento líquido do ângulo-
de-ataque nas seções se o piloto da aeronave não mudar o ângulo-de-passo logo após perceber
a perda de potência no vôo pairado.
Torque desacelerador
Torque acelerador
Estol
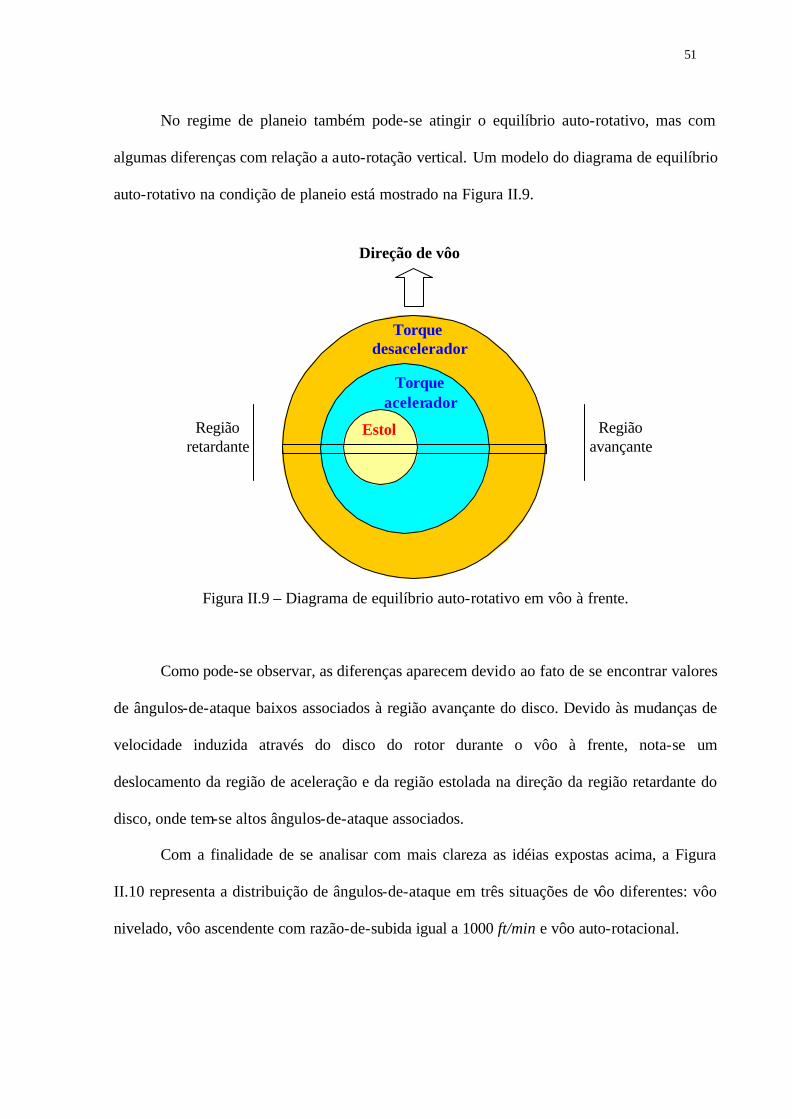
51
No regime de planeio também pode-se atingir o equilíbrio auto-rotativo, mas com
algumas diferenças com relação a auto-rotação vertical. Um modelo do diagrama de equilíbrio
auto-rotativo na condição de planeio está mostrado na Figura II.9.
Figura II.9 – Diagrama de equilíbrio auto-rotativo em vôo à frente.
Como pode-se observar, as diferenças aparecem devido ao fato de se encontrar valores
de ângulos-de-ataque baixos associados à região avançante do disco. Devido às mudanças de
velocidade induzida através do disco do rotor durante o vôo à frente, nota-se um
deslocamento da região de aceleração e da região estolada na direção da região retardante do
disco, onde tem-se altos ângulos-de-ataque associados.
Com a finalidade de se analisar com mais clareza as idéias expostas acima, a Figura
II.10 representa a distribuição de ângulos-de-ataque em três situações de vôo diferentes: vôo
nivelado, vôo ascendente com razão-de-subida igual a 1000 ft/min e vôo auto-rotacional.
Região avançante
Torque desacelerador
Torque acelerador
Estol
Direção de vôo
Região retardante
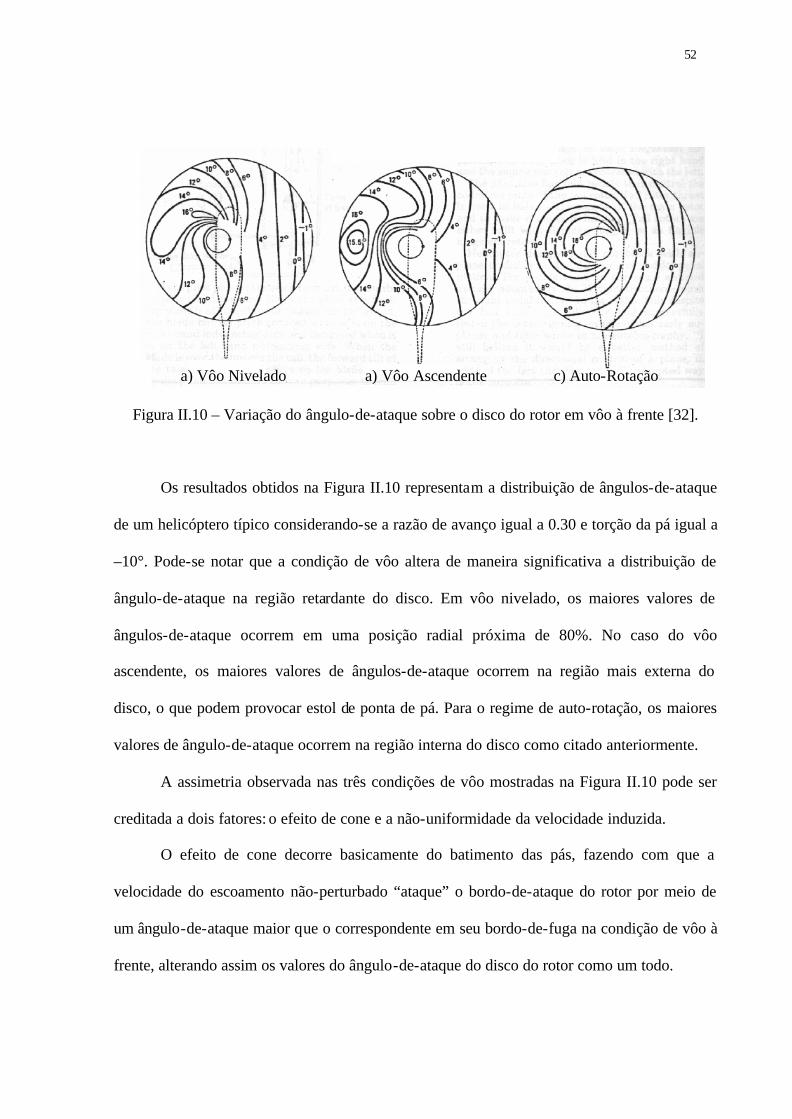
52
Figura II.10 – Variação do ângulo-de-ataque sobre o disco do rotor em vôo à frente [32].
Os resultados obtidos na Figura II.10 representam a distribuição de ângulos-de-ataque
de um helicóptero típico considerando-se a razão de avanço igual a 0.30 e torção da pá igual a
–10°. Pode-se notar que a condição de vôo altera de maneira significativa a distribuição de
ângulo-de-ataque na região retardante do disco. Em vôo nivelado, os maiores valores de
ângulos-de-ataque ocorrem em uma posição radial próxima de 80%. No caso do vôo
ascendente, os maiores valores de ângulos-de-ataque ocorrem na região mais externa do
disco, o que podem provocar estol de ponta de pá. Para o regime de auto-rotação, os maiores
valores de ângulo-de-ataque ocorrem na região interna do disco como citado anteriormente.
A assimetria observada nas três condições de vôo mostradas na Figura II.10 pode ser
creditada a dois fatores: o efeito de cone e a não-uniformidade da velocidade induzida.
O efeito de cone decorre basicamente do batimento das pás, fazendo com que a
velocidade do escoamento não-perturbado “ataque” o bordo-de-ataque do rotor por meio de
um ângulo-de-ataque maior que o correspondente em seu bordo-de-fuga na condição de vôo à
frente, alterando assim os valores do ângulo-de-ataque do disco do rotor como um todo.
a) Vôo Nivelado a) Vôo Ascendente c) Auto-Rotação
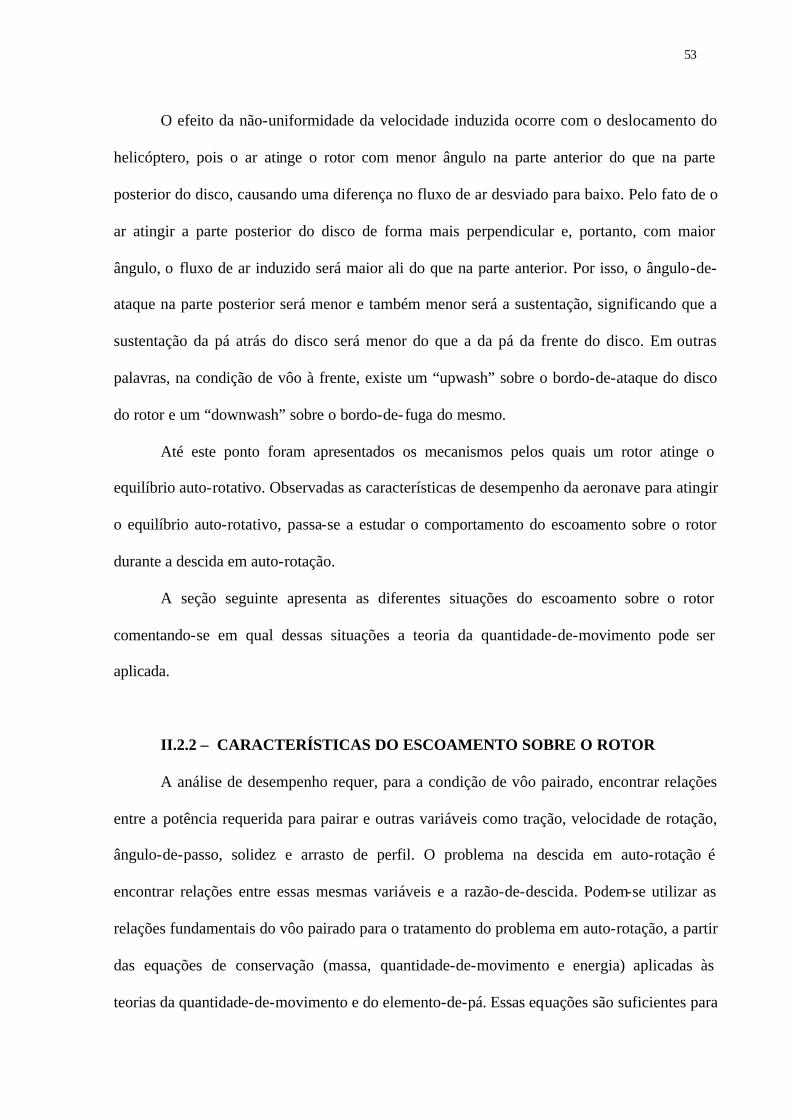
53
O efeito da não-uniformidade da velocidade induzida ocorre com o deslocamento do
helicóptero, pois o ar atinge o rotor com menor ângulo na parte anterior do que na parte
posterior do disco, causando uma diferença no fluxo de ar desviado para baixo. Pelo fato de o
ar atingir a parte posterior do disco de forma mais perpendicular e, portanto, com maior
ângulo, o fluxo de ar induzido será maior ali do que na parte anterior. Por isso, o ângulo-de-
ataque na parte posterior será menor e também menor será a sustentação, significando que a
sustentação da pá atrás do disco será menor do que a da pá da frente do disco. Em outras
palavras, na condição de vôo à frente, existe um “upwash” sobre o bordo-de-ataque do disco
do rotor e um “downwash” sobre o bordo-de-fuga do mesmo.
Até este ponto foram apresentados os mecanismos pelos quais um rotor atinge o
equilíbrio auto-rotativo. Observadas as características de desempenho da aeronave para atingir
o equilíbrio auto-rotativo, passa-se a estudar o comportamento do escoamento sobre o rotor
durante a descida em auto-rotação.
A seção seguinte apresenta as diferentes situações do escoamento sobre o rotor
comentando-se em qual dessas situações a teoria da quantidade-de-movimento pode ser
aplicada.
II.2.2 – CARACTERÍSTICAS DO ESCOAMENTO SOBRE O ROTOR
A análise de desempenho requer, para a condição de vôo pairado, encontrar relações
entre a potência requerida para pairar e outras variáveis como tração, velocidade de rotação,
ângulo-de-passo, solidez e arrasto de perfil. O problema na descida em auto-rotação é
encontrar relações entre essas mesmas variáveis e a razão-de-descida. Podem-se utilizar as
relações fundamentais do vôo pairado para o tratamento do problema em auto-rotação, a partir
das equações de conservação (massa, quantidade-de-movimento e energia) aplicadas às
teorias da quantidade-de-movimento e do elemento-de-pá. Essas equações são suficientes para
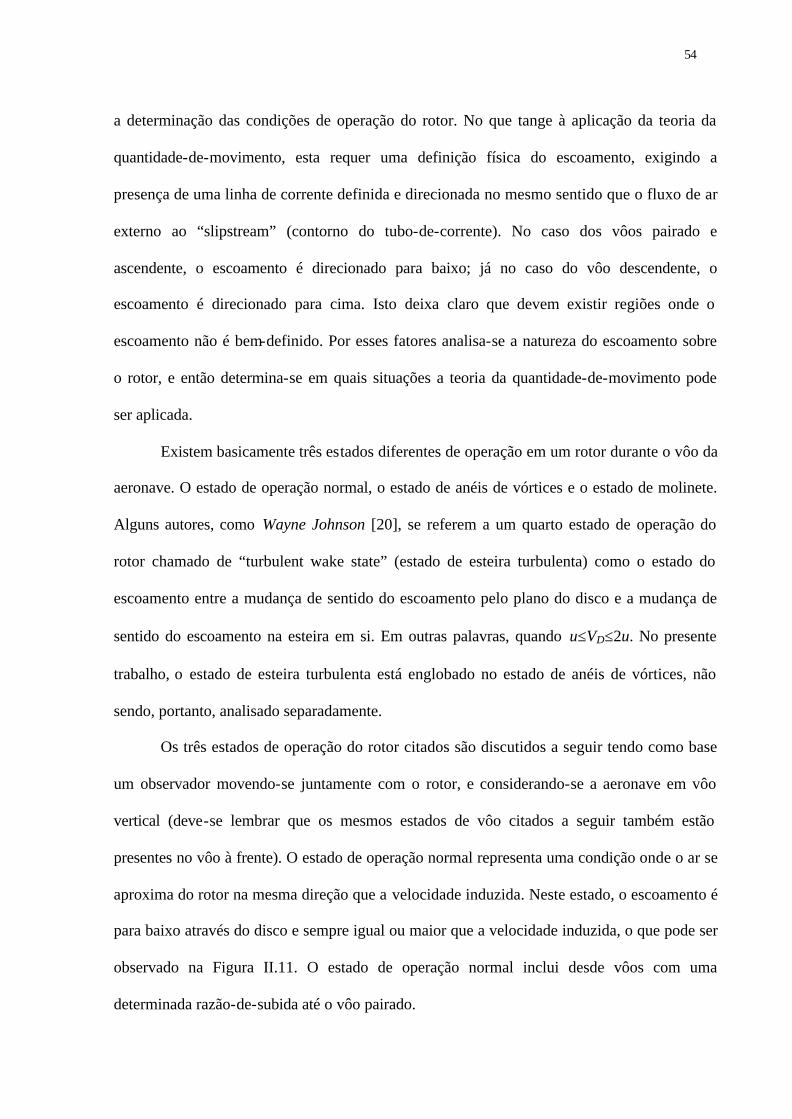
54
a determinação das condições de operação do rotor. No que tange à aplicação da teoria da
quantidade-de-movimento, esta requer uma definição física do escoamento, exigindo a
presença de uma linha de corrente definida e direcionada no mesmo sentido que o fluxo de ar
externo ao “slipstream” (contorno do tubo-de-corrente). No caso dos vôos pairado e
ascendente, o escoamento é direcionado para baixo; já no caso do vôo descendente, o
escoamento é direcionado para cima. Isto deixa claro que devem existir regiões onde o
escoamento não é bem-definido. Por esses fatores analisa-se a natureza do escoamento sobre
o rotor, e então determina-se em quais situações a teoria da quantidade-de-movimento pode
ser aplicada.
Existem basicamente três estados diferentes de operação em um rotor durante o vôo da
aeronave. O estado de operação normal, o estado de anéis de vórtices e o estado de molinete.
Alguns autores, como Wayne Johnson [20], se referem a um quarto estado de operação do
rotor chamado de “turbulent wake state” (estado de esteira turbulenta) como o estado do
escoamento entre a mudança de sentido do escoamento pelo plano do disco e a mudança de
sentido do escoamento na esteira em si. Em outras palavras, quando u≤VD≤2u. No presente
trabalho, o estado de esteira turbulenta está englobado no estado de anéis de vórtices, não
sendo, portanto, analisado separadamente.
Os três estados de operação do rotor citados são discutidos a seguir tendo como base
um observador movendo-se juntamente com o rotor, e considerando-se a aeronave em vôo
vertical (deve-se lembrar que os mesmos estados de vôo citados a seguir também estão
presentes no vôo à frente). O estado de operação normal representa uma condição onde o ar se
aproxima do rotor na mesma direção que a velocidade induzida. Neste estado, o escoamento é
para baixo através do disco e sempre igual ou maior que a velocidade induzida, o que pode ser
observado na Figura II.11. O estado de operação normal inclui desde vôos com uma
determinada razão-de-subida até o vôo pairado.
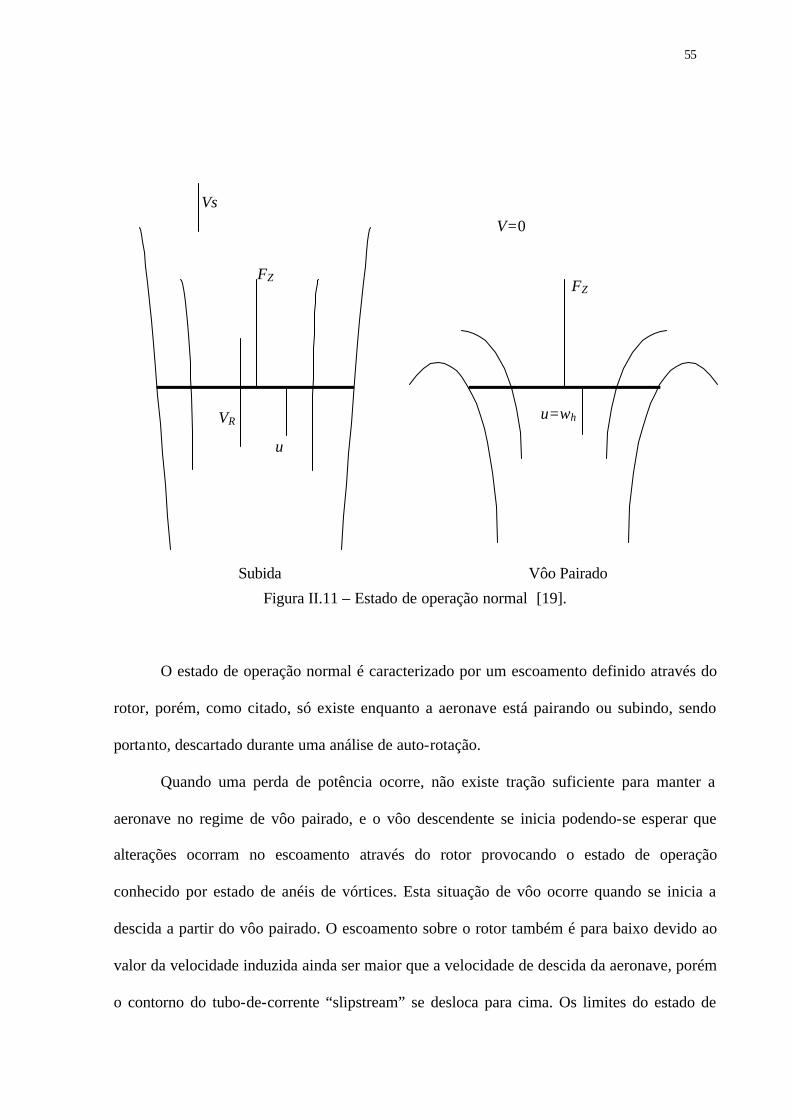
55
Figura II.11 – Estado de operação normal [19].
O estado de operação normal é caracterizado por um escoamento definido através do
rotor, porém, como citado, só existe enquanto a aeronave está pairando ou subindo, sendo
portanto, descartado durante uma análise de auto-rotação.
Quando uma perda de potência ocorre, não existe tração suficiente para manter a
aeronave no regime de vôo pairado, e o vôo descendente se inicia podendo-se esperar que
alterações ocorram no escoamento através do rotor provocando o estado de operação
conhecido por estado de anéis de vórtices. Esta situação de vôo ocorre quando se inicia a
descida a partir do vôo pairado. O escoamento sobre o rotor também é para baixo devido ao
valor da velocidade induzida ainda ser maior que a velocidade de descida da aeronave, porém
o contorno do tubo-de-corrente “slipstream” se desloca para cima. Os limites do estado de
VR
u
FZ FZ
Vs
V=0
u=wh
Subida Vôo Pairado
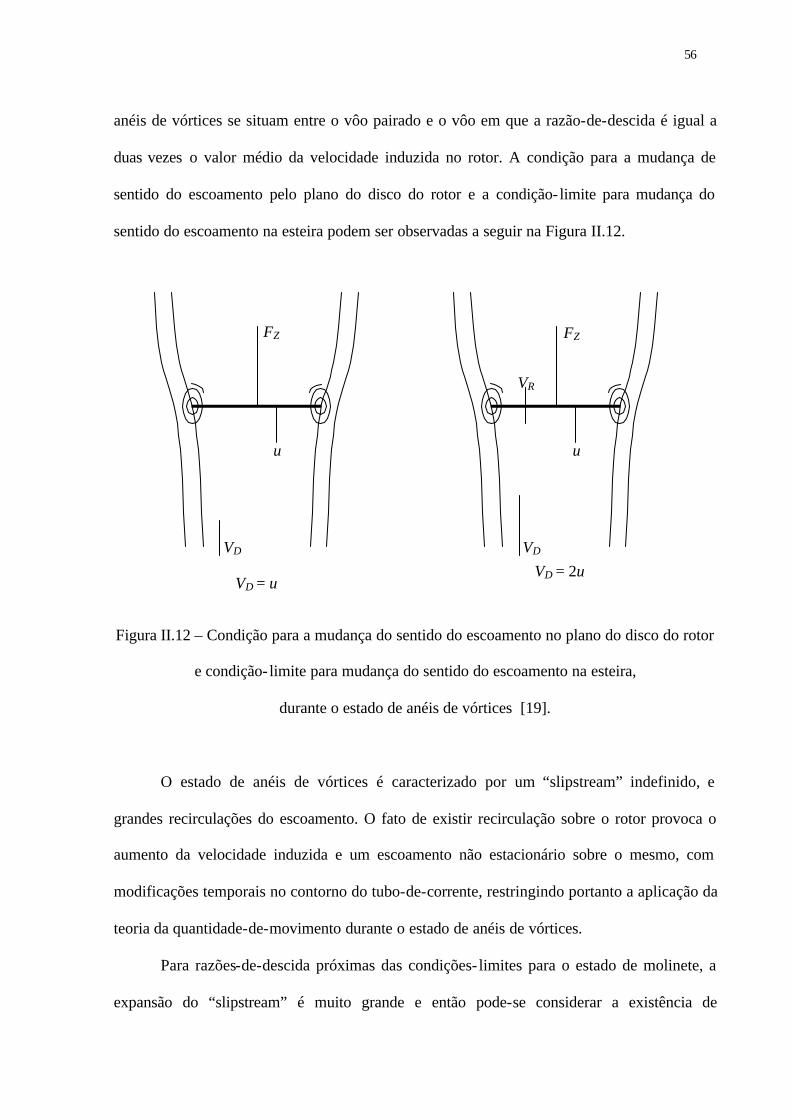
56
anéis de vórtices se situam entre o vôo pairado e o vôo em que a razão-de-descida é igual a
duas vezes o valor médio da velocidade induzida no rotor. A condição para a mudança de
sentido do escoamento pelo plano do disco do rotor e a condição- limite para mudança do
sentido do escoamento na esteira podem ser observadas a seguir na Figura II.12.
Figura II.12 – Condição para a mudança do sentido do escoamento no plano do disco do rotor
e condição- limite para mudança do sentido do escoamento na esteira,
durante o estado de anéis de vórtices [19].
O estado de anéis de vórtices é caracterizado por um “slipstream” indefinido, e
grandes recirculações do escoamento. O fato de existir recirculação sobre o rotor provoca o
aumento da velocidade induzida e um escoamento não estacionário sobre o mesmo, com
modificações temporais no contorno do tubo-de-corrente, restringindo portanto a aplicação da
teoria da quantidade-de-movimento durante o estado de anéis de vórtices.
Para razões-de-descida próximas das condições- limites para o estado de molinete, a
expansão do “slipstream” é muito grande e então pode-se considerar a existência de
FZ
u
VD
VD = 2u VD = u
VD
u
FZ
VR
57
recirculação e turbulência. Conforme a razão-de-descida aumenta, desaparecem os efeitos de
recirculação e turbulência, e o “slipstream” se torna bem definido novamente, com o rotor
passando a operar no estado de molinete “windmill brake state” o que pode ser observado na
Figura II.13.
Nesta situação de vôo, o escoamento é para cima através do rotor devido ao vôo
descendente da aeronave, tendo já havido a inversão no sentido do escoamento também na
esteira pois VD>2u. Assim, nota-se que a velocidade de descida VD é maior que a velocidade
induzida u; portanto, a velocidade resultante RV é para cima, e o “slipstream” se expande
sobre o rotor.
Figura II.13 – Estado de molinete [19].
Para a aplicação da teoria da quantidade-de-movimento, deve-se encontrar um
“slipstream” definido, o que faz com que a teoria da quantidade-de-movimento só possa ser
aplicada para o estado de operação normal ou para o estado de molinete. Como no estado de
operação normal a aeronave está subindo ou pairando, a única condição possível para a
VD
VR
u
FZ VD > 2u
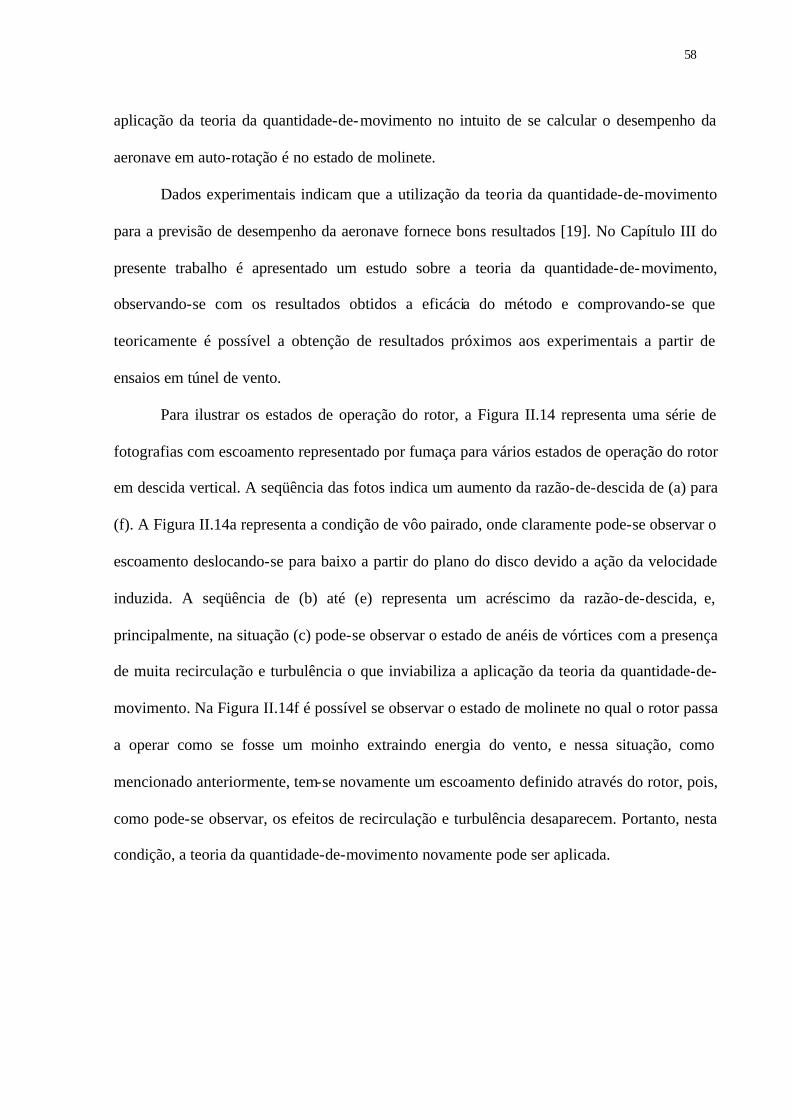
58
aplicação da teoria da quantidade-de-movimento no intuito de se calcular o desempenho da
aeronave em auto-rotação é no estado de molinete.
Dados experimentais indicam que a utilização da teoria da quantidade-de-movimento
para a previsão de desempenho da aeronave fornece bons resultados [19]. No Capítulo III do
presente trabalho é apresentado um estudo sobre a teoria da quantidade-de-movimento,
observando-se com os resultados obtidos a eficácia do método e comprovando-se que
teoricamente é possível a obtenção de resultados próximos aos experimentais a partir de
ensaios em túnel de vento.
Para ilustrar os estados de operação do rotor, a Figura II.14 representa uma série de
fotografias com escoamento representado por fumaça para vários estados de operação do rotor
em descida vertical. A seqüência das fotos indica um aumento da razão-de-descida de (a) para
(f). A Figura II.14a representa a condição de vôo pairado, onde claramente pode-se observar o
escoamento deslocando-se para baixo a partir do plano do disco devido a ação da velocidade
induzida. A seqüência de (b) até (e) representa um acréscimo da razão-de-descida, e,
principalmente, na situação (c) pode-se observar o estado de anéis de vórtices com a presença
de muita recirculação e turbulência o que inviabiliza a aplicação da teoria da quantidade-de-
movimento. Na Figura II.14f é possível se observar o estado de molinete no qual o rotor passa
a operar como se fosse um moinho extraindo energia do vento, e nessa situação, como
mencionado anteriormente, tem-se novamente um escoamento definido através do rotor, pois,
como pode-se observar, os efeitos de recirculação e turbulência desaparecem. Portanto, nesta
condição, a teoria da quantidade-de-movimento novamente pode ser aplicada.
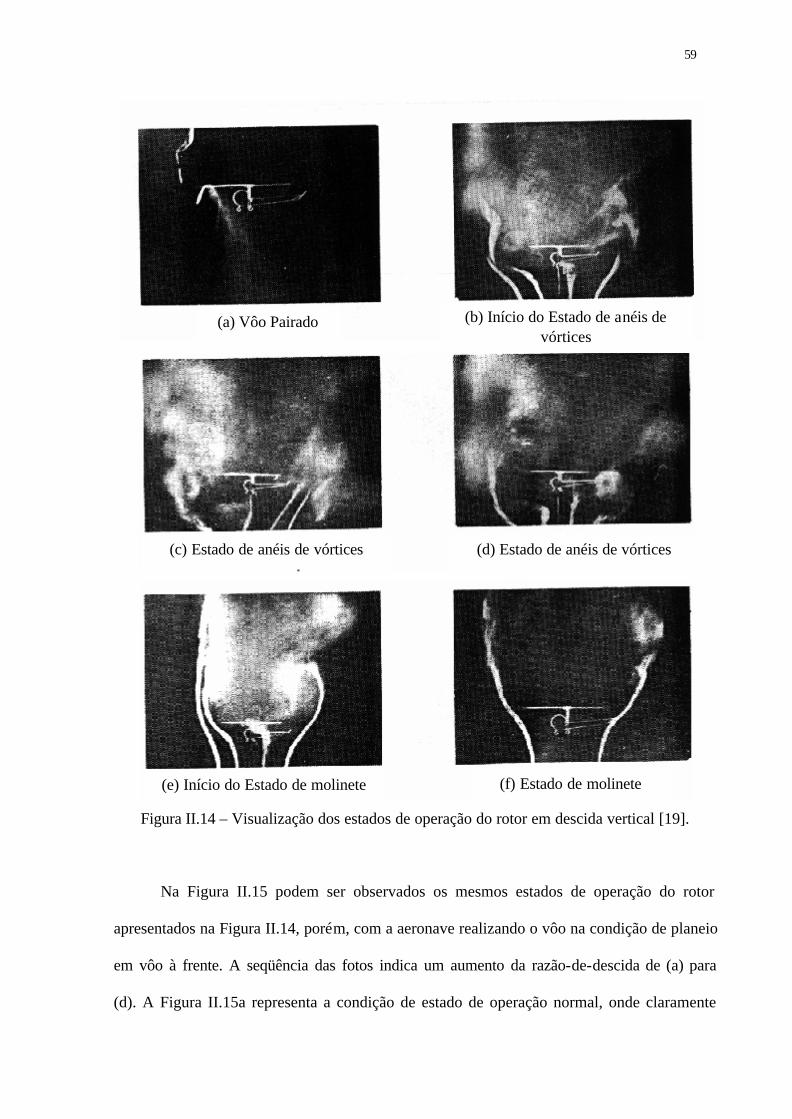
59
Figura II.14 – Visualização dos estados de operação do rotor em descida vertical [19].
Na Figura II.15 podem ser observados os mesmos estados de operação do rotor
apresentados na Figura II.14, porém, com a aeronave realizando o vôo na condição de planeio
em vôo à frente. A seqüência das fotos indica um aumento da razão-de-descida de (a) para
(d). A Figura II.15a representa a condição de estado de operação normal, onde claramente
(a) Vôo Pairado
(f) Estado de molinete (e) Início do Estado de molinete
(b) Início do Estado de anéis de vórtices
(c) Estado de anéis de vórtices (d) Estado de anéis de vórtices
60
pode-se observar o escoamento deslocando-se de cima para baixo a partir do plano do disco
devido à ação da velocidade induzida. Nas Figuras II.15b e II.15c pode-se notar que com o
acréscimo da razão-de-descida ocorrem mudanças na direção do escoamento pelo plano do
disco do rotor, e, principalmente na situação (c) pode-se observar o estado de anéis de vórtices
com a presença de recirculação e turbulência, o que inviabiliza a aplicação da teoria da
quantidade-de-movimento. Na Figura II.15d é possível se observar o início do estado de
molinete no qual o rotor passa a operar como se fosse um moinho extraindo energia do vento.
Figura II.15 – Visualização dos estados de operação do rotor em vôo à frente [19].
É importante comentar que a teoria da quantidade-de-movimento apresenta uma
fotografia ideal do desempenho do rotor, pois omite as perdas viscosas e todas as perdas
causadas pela não-uniformidade do escoamento sobre o rotor. Como a teoria da quantidade-
(b) Inicio do estado de anéis de vórtices (a) Estado de operação normal
(c) Estado de anéis de vórtices (d) Início do estado de molinete
61
de-movimento não pode ser aplicada no estado de anéis de vórtices, pois não existe a presença
de uma condição física definida, pode-se notar que com a teoria da quantidade-de-movimento
obtêm-se a máxima eficácia possível do rotor, pois é aplicada em condições limites com altas
razões-de-descida.
No capítulo seguinte são estudados os modelos matemáticos para tratamento do
desempenho de um helicóptero em auto-rotação, visando a analisar o envelope operacional da
aeronave utilizando-se as teorias da quantidade-de-movimento e elemento-de-pá.
62
CAPÍTULO III
ESTUDO E DESENVOLVIMENTO DE MODELOS PARA O CÁLCULO DO
DESEMPENHO DE HELICÓPTEROS NO REGIME DE AUTO-ROTAÇÃO
III.1 – INTRODUÇÃO
Neste capítulo são estudados e desenvolvidos modelos que tratam do regime de auto-
rotação no momento em que ocorre a falha no motor, da transição do vôo pairado para a auto-
rotação e do estudo do regime auto-rotacional estável. É também apresentado um modelo
semi-empírico para o traçado do “diagrama altura versus velocidade”. Para o
desenvolvimento desses modelos, apresenta-se uma seqüência lógica de resolução iniciando-
se pelo estudo desenvolvido por Nikolsky & Seckel na Referência “An Analysis of the
Transition of a Helicopter From Hovering to Steady Autorotative Vertical Descent” [26],
onde é proposto um modelo analítico para o estudo da transição do vôo pairado para a
condição de auto-rotação estável utilizando-se equações da dinâmica.
Numa segunda etapa apresenta-se o estudo do regime de auto-rotação estável durante
o planeio da aeronave, baseado em Heyson, Referência “A Momentum Analysis of
Helicopters and Autogyros in Inclined Descent With Coments on Operational Restrictions”
[19], que modela o desempenho auto-rotativo utilizando-se da teoria da quantidade-de-
movimento.
Como complemento apresenta-se um modelo teórico, semi-empírico, proposto por
Pegg na Referência “An Investigation of the Helicopter Height-Velocity Diagram Showing
Effects of Density Altitude and Gross Weight” [29], e que trabalha com o traçado do
“diagrama altura versus velocidade”. Nesta referência, através de variações nos parâmetros
operacionais da aeronave, é proposta uma análise de sensibilidade a fim de se reduzir a área
de restrição imposta pelo diagrama.
63
Deve-se ressaltar que para a realização dessa pesquisa optou-se por um modelamento
matemático teórico devido a uma série de dificuldades encontradas em se desenvolver estudos
experimentais com escoamentos em rotores de helicópteros, pois são escassos os laboratórios
experimentais para estudos dessa natureza em nosso país.
Tais modelamentos são muito difundidos e amplamente utilizados, fornecendo
resultados muito próximos da realidade quando comparados aos ensaios em túnel-de-vento e
ensaios em vôo, conforme discutido nesta tese.
III.2 – FORMULAÇÃO BÁSICA DOS MODELOS ESCOLHIDOS
Normalmente, o estudo do desempenho auto-rotativo de um helicóptero é realizado
através de modelos teóricos e de ensaios em túnel-de-vento e de ensaios em vôo.
No presente trabalho são apresentados modelos teóricos seguidos de soluções
computacionais das equações apresentadas, que fo rnecem resultados importantes do ponto de
vista das características de desempenho.
Quando se estuda o desempenho auto-rotativo de um helicóptero na condição de vôo
vertical ou na condição de planeio, é comum dividir a análise em dois casos distintos:
primeiramente é realizada uma análise da transição entre o vôo pairado ou vôo reto e nivelado
e o regime auto-rotativo estável, e, em uma segunda etapa, analisa-se o desempenho auto-
rotativo quando tal regime já está estabilizado. As principais equações matemáticas utilizadas
para a solução do problema são apresentadas e resolvidas no presente capítulo, sendo os
resultados correspondentes apresentados e comentados no Capítulo V do presente trabalho.
64
III.2.1 – MODELO UTILIZADO PARA O ESTUDO DA TRANSIÇÃO DO VÔO
PAIRADO PARA A CONDIÇÃO DE AUTO-ROTAÇÃO EM DESCIDA VERTICAL
O modelo aqui estudado e desenvolvido é o proposto por Nikolsky & Seckel [26] para
a transição entre o vôo pairado e a auto-rotação estável em descida vertical. Tal modelo está
inserido no contexto de uma série de estudos sobre a entrada em auto-rotação, apresentando
uma solução analítica do problema onde o autor utiliza-se de equações básicas da dinâmica,
mostrando resultados de uma análise das variações da velocidade angular de rotação do rotor
e da velocidade de descida vertical em função do tempo após a falha do motor. Também se
estudam os efeitos do momento de inércia das pás e são investigados os efeitos da redução do
ângulo-de-passo após a perda de potência. Como resultados, observa-se que a fim de se evitar
estol excessivo nas pás do rotor, o ângulo-de-passo deve ser reduzido imediatamente após se
perceber a perda de potência.
III.2.1.1 – HIPOTESES BÁSICAS DO MODELO
Como estado inicial, assume-se que a aeronave se encontra em vôo pairado estável,
onde as quantidades físicas são representadas pelo subscrito 0. Para o estado final, quando a
descida auto-rotativa está estabilizada, o subscrito f é utilizado para denotar as quantidades
físicas.
Por conveniência, assume-se que a velocidade induzida u varia com o tempo t após a
falha do motor do seguinte modo:
( )ff uuuu −+= 0 kte − , (III.1)
onde o coeficiente k é arbitrário e pode assumir diferentes valores.
Assume-se também que o ângulo-de-passo θ varia com o tempo exponencialmente, de
acordo com:
65
tataf eAeA 21
21−− ++=θθ , (III.2)
onde θf representa a posição final do ângulo-de-passo, A1, A2, a1 e a2 são arbitrários, exceto
quando:
fAA θθ −=+ 021 , (III.3)
onde as constantes A1, A2, a1 e a2 são escolhidas de modo a propiciar uma rápida análise da
redução de passo após a falha.
No estudo apresentado, apenas pás sem torção e afilamento 1, )1( == rp ccλ , são
analisadas. As equações desenvolvidas podem ser aplicadas para qualquer pá, bastando para
isso que se utilize da corda equivalente e do ângulo-de-torção correspondente.
III.2.1.2– DETERMINAÇÃO DA RAZÃO-DE-DESCIDA E VELOCIDADE
ANGULAR DO ROTOR
A fim de se calcular as variações de razão-de-descida e velocidade angular do rotor em
função do tempo decorrido após a falha do motor podem-se utilizar as seguintes equações que
representam a aceleração vertical da aeronave e a aceleração angular do rotor:
+
−−=
•2
3
322ΩθΩρ
RuV
gW
bacRgV D , (III.4)
e
( ) ( ) ( )
++′−−
−−−−
−=
•2
2210212
22
1
4
432
22ΩθδθδδΩδθδδρΩ uV
Ra
uVR
aI
cRDD ,
(III.5)
66
onde:•
V = aceleração vertical da aeronave, g = aceleração local da gravidade, ρ = densidade do
ar, b = número de pás do rotor principal, a = coeficiente angular da curva de sustentação, c =
corda, R = raio da pá, W = peso do helicóptero, VD = velocidade do helicóptero ao longo do
planeio (velocidade de descida vertical), u = velocidade induzida para a condição de vôo
vertical, θ = ângulo-de-passo, Ω = velocidade angular do rotor, I1 = momento de inércia em
flap das pás do rotor , •
Ω = aceleração angular do rotor e δ0’, δ1 e δ2 são os coeficientes de Cd0
em função de α.
As Equações (III.4) e (III.5) são obtidas a partir do equilíbrio das forças atuantes no
helicóptero em auto-rotação, bem como através da utilização da teoria do elemento-de-pá com
o intuito de se determinar a tração e o torque no elemento-de-pá. A dedução matemática
dessas equações pode ser encontrada no Apêndice B do presente trabalho.
Diferenciando-se a Equação (III.5) com relação ao tempo, tem-se:
( )( ) ( ) ( )
( ) ( ) ( )
+−++′
−−−
+
−+
−
−−−
−−
−
=
••
•
•••••••
221
22102
212
2
1
4
2423
32
2
ΩθδδθΩΩθδθδδ
Ωδθ
ΩΩδθδδρΩ
uVR
a
uVuVRa
uVuVR
aI
cR
D
DD
(III.6)
No instante de tempo igual a zero (momento da falha no motor), todos os termos das
Equações (III.4), (III.5), e (III.6) são conhecidos. Devido às variações em função do tempo
tanto na velocidade induzida quanto no ângulo-de-passo, não é aconselhável a solução das
Equações (III.4), (III.5), e (III.6) para um intervalo de tempo muito grande. Assim, um
processo passo-a-passo com pequenos intervalos de tempo (método de integração de Euler) é
utilizado, visando-se a encontrar resultados mais próximos da realidade, pois desse modo é
.
67
possível calcular os valores de velocidade de descida e velocidade de rotação do rotor em
cada fração de tempo analisado.
A partir dessas considerações, o primeiro passo para a solução do problema é o cálculo
das Equações (III.4), (III.5) e (III.6) com o objetivo de obter os valores iniciais ••••
000 ,, ΩΩV .
Após um certo intervalo de tempo, ∆t segundos, um novo valor da velocidade angular
do rotor pode ser encontrado a partir de uma série de Taylor truncada como na Equação
(III.7), e um novo valor da velocidade de descida vertical pode ser encontrado a partir da
Equação (III.8), que representa o método de integração numérica via regra do trapézio:
( ) ( )0
2
00 2
•••
++= Ω∆Ω∆ΩΩ∆t
tt , (III.7)
++=
••
tt VVt
VV ∆∆∆
00 2. (III.8)
Pode-se observar que a partir dos resultados numéricos obtidos nas Equações (III.4),
(III.5) e (III.6) surge um novo valor da velocidade angular do rotor que pode ser obtido
através da aplicação direta da Equação (III.7). Porém, o novo valor da velocidade de descida
vertical da aeronave ainda não pode ser determinado, pois como pode-se perceber na Equação
(III.8) existe um parâmetro desconhecido tV ∆
•
que representa a aceleração vertical da
aeronave após o intervalo de tempo adotado.
( )
+−−=
•2
3
322t
ttt
tt uV
RgW
bacRgV ∆
∆∆∆
∆∆ Ω
θΩρ. (III.9)
O valor numérico de tV ∆
•
pode ser obtido através da solução de um sistema formado
pelas Equações (III.8) e (III.9), o que é possível substituindo-se a Equação (III.8) na Equação
(III.9), obtendo-se tV ∆
•
, Equação (III.10). A Equação (III.9) é idêntica à Equação (III.4)
68
exceto pelo subscrito ∆t que é utilizado para denotar as características do final do intervalo de
tempo utilizado.
t
tt
tt
t
gWabcR
t
uVt
VRgW
bacRg
V
∆
∆∆
∆∆
∆
Ωρ∆
Ωθ∆Ωρ
81
32222
2
00
3
+
+
−+−
=
•
•
. (III.10)
Para obtenção de melhores resultados, o intervalo de tempo entre uma medida e outra
deve ser pequeno, pois quanto mais pontos são analisados mais precisos são esses resultados.
Para a realização do processo acima citado, o intervalo de tempo adotado se encontra entre
5.00 ≤≤ t∆ s.
Na Equação (III.10), os valores numéricos u∆t e θ∆t podem ser obtidos a partir das
soluções das Equações (III.1) e (III.2) no instante desejado.
Uma vez determinado o resultado numérico da Equação (III.10), a nova razão-de-
descida da aeronave após 0.5s pode ser encontrada a partir da Equação (III.8), finalizando
desse modo o processo de obtenção da variação da velocidade de descida vertical da aeronave
e da variação da velocidade angular do rotor após um pequeno intervalo de tempo.
Um processo passo-a-passo é utilizado, sendo a metodologia apresentada repetida
várias vezes, com os valores finais do passo anterior passando a ser considerados os valores
iniciais ••••
000 , ΩΩ eV do passo seguinte. Novamente um incremento de 0.5s é utilizado na
variação do tempo, e, novos valores de razão-de-descida e velocidade angular do rotor são
encontrados.
A questão principal desta análise é saber até que ponto o processo deve ser repetido.
Conforme observado no Capítulo II do presente trabalho, após uma entrada correta no regime
de auto-rotação, a tendência é que tanto a razão-de-descida da aeronave quanto a velocidade
angular do rotor se estabilizem, mantendo-se praticamente constante durante o vôo auto-
69
rotativo indicando que o equilíbrio foi atingido. Portanto, a repetição do processo deve ser
finalizada assim que se perceba uma constância dos valores numéricos encontrados na
solução das Equações (III.7) e (III.8), o que indica que a auto-rotação está estabilizada e, a
transição do vôo pairado para o regime auto-rotacional em descida vertical está completa.
Uma vez realizada a transição para o regime de auto-rotação, a preocupação é com o
comportamento da aeronave no regime de auto-rotação estável. Na seção seguinte, é
apresentado um modelo matemático teórico que se utiliza da teoria da quantidade-de-
movimento e permite avaliar as características do vôo na condição de auto-rotação estável
durante todo o planeio da aeronave tanto na condição de descida vertical como na condição de
descida inclinada.
III.2.2 – MODELO UTILIZADO PARA O ESTUDO DO REGIME DE AUTO-
ROTAÇÃO ESTÁVEL NA CONDIÇÃO DE DESCIDA VERTICAL E NA
CONDIÇÃO DE PLANEIO DA AERONAVE UTILIZANDO-SE A TEORIA DA
QUANTIDADE-DE-MOVIMENTO
O estudo desenvolvido e apresentado nesta seção baseia-se no trabalho apresentado
por Heyson [19], que analisa o regime de auto-rotação estável utilizando-se da teoria da
quantidade-de-movimento. O autor utiliza-se da teoria da quantidade-de-movimento para
modelar o escoamento sobre o rotor, encontrando variações de velocidade induzida e potência
no eixo do rotor conforme a razão-de-descida aumenta. A referência é rica em resultados.
As principais equações são apresentadas e resolvidas numericamente fornecendo
resultados que, quando comparados aos experimentais disponíveis, mostram que esta teoria
quando bem interpretada fornece bons subsídios para a predição do desempenho do rotor em
auto-rotação.
70
III.2.2.1– HIPÓTESES BÁSICAS DO MODELO
A teoria da quantidade-de-movimento se baseia nas leis básicas da conservação da
massa, da quantidade-de-movimento linear e da energia. No caso da aplicação em asas
rotativas, o rotor é modelado como um disco atuador de espessura infinitesimal e composto
por um número infinito de pás, acelerando uniformemente o ar através do disco e sem perdas
nas pontas. A potência requerida para produzir tração é dada apenas pela variação da energia
cinética axial do ar, desprezando-se as perdas por arrasto de perfil, rotação do escoamento e
efeitos viscosos.
No presente trabalho, a teoria da quantidade-de-movimento é aplicada com o rotor
operando no regime de auto-rotação, ou seja, as equações apresentadas dizem respeito a um
regime de vôo descendente onde se assume que o rotor possui uma velocidade uniforme VG ao
longo de uma rampa de planeio definida por um ângulo-de-planeio γ. Os diagramas de forças
que envolvem o rotor e as componentes das velocidades estão mostrados a seguir na Figura
III.1; onde: αR = ângulo de ataque do rotor, θFP = ângulo de atitude do plano das pontas das
pás (em relação ao plano horizontal de rotação do rotor), VG sen γ = componente vertical da
velocidade de planeio, VG cos γ = componente horizontal da velocidade de planeio, w0 =
componente vertical da velocidade induzida, u0 = componente horizontal da velocidade
induzida, VR = velocidade resultante atuante no rotor, FZ = componente vertical da tração no
rotor, FX = componente horizontal da tração no rotor e T = tração no rotor principal.
Com base na Figura III.1 é possível realizar o equacionamento da teoria da
quantidade-de-movimento durante o regime de auto-rotação. Utilizando-se as relações
geométricas presentes, podem-se encontrar relações matemáticas que determinam as
variações de velocidade induzida em função da velocidade de planeio da aeronave, bem como
a variação da potência no eixo conforme a razão-de-descida aumenta.
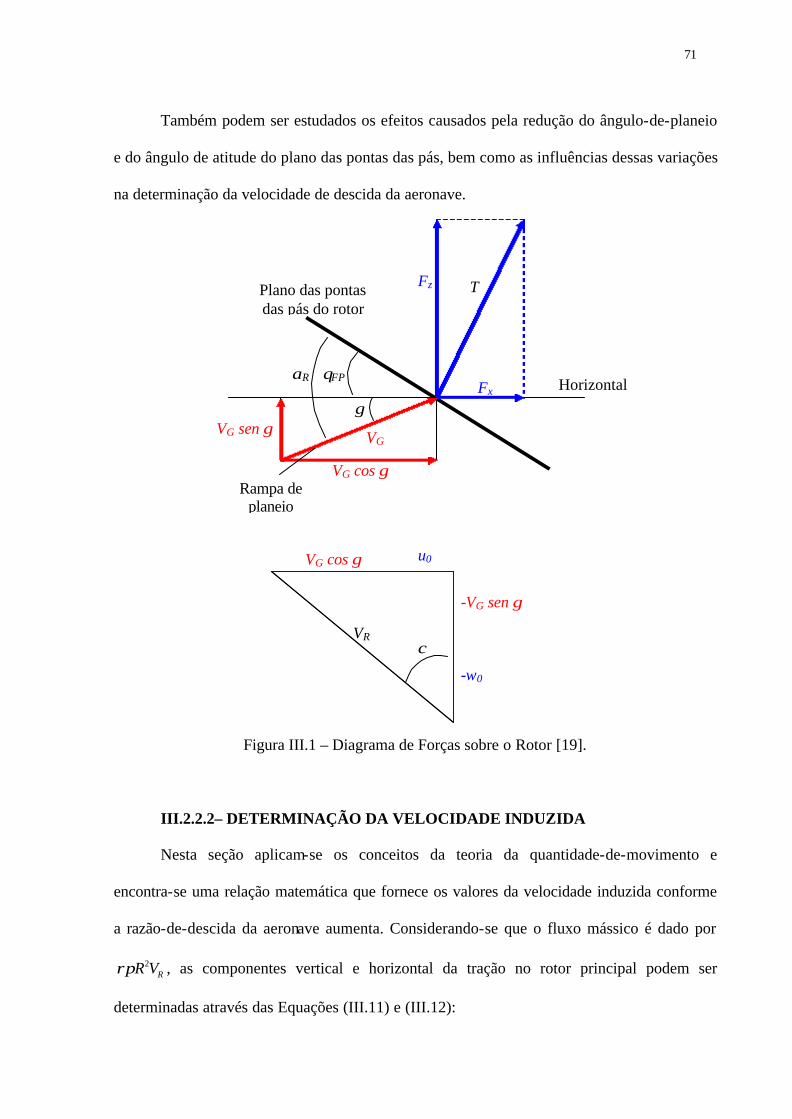
71
Também podem ser estudados os efeitos causados pela redução do ângulo-de-planeio
e do ângulo de atitude do plano das pontas das pás, bem como as influências dessas variações
na determinação da velocidade de descida da aeronave.
Figura III.1 – Diagrama de Forças sobre o Rotor [19].
III.2.2.2– DETERMINAÇÃO DA VELOCIDADE INDUZIDA
Nesta seção aplicam-se os conceitos da teoria da quantidade-de-movimento e
encontra-se uma relação matemática que fornece os valores da velocidade induzida conforme
a razão-de-descida da aeronave aumenta. Considerando-se que o fluxo mássico é dado por
RVR2ρπ , as componentes vertical e horizontal da tração no rotor principal podem ser
determinadas através das Equações (III.11) e (III.12):
Horizontal
Fz
Fx
T
θFP αR
γ
VG
VG cos γ
VG sen γ
VG cos γ u0
χ
-VG sen γ
-w0
VR
Plano das pontas das pás do rotor
Rampa de planeio
72
( )02 2wVRF RZ −= ρπ , (III.11)
( )02 2uVRF RX −= ρπ . (III.12)
Como o fluxo de massa através do rotor é constante, as componentes da tração FX e FZ
podem ser relacionadas diretamente com as componentes da velocidade induzida u0 e w0,
dividindo-se a Equação (III.12) pela Equação (III.11):
0
0
wu
FF
Z
X = . (III.13)
O vetor velocidade resultante para o rotor na condição de planeio pode ser obtido a
partir das relações geométricas do diagrama da Figura III.1, sendo representado por:
( ) ( )2
0
2
0 cossen uVVwV GGR ++−−= γγ . (III.14)
Generalizando-se o problema para qualquer tipo de helicóptero estudado, a Equação
(III.14) pode ser normalizada dividindo-se ambos os membros da equação pela componente
vertical da velocidade induzida -w0, e, utilizando-se da relação encontrada na Equação
(III.13). Tem-se, então:
2
0
2
00
sen1cos
++
+−= γγ
wV
FF
wV
wV G
Z
XGR . (III.15)
A partir desse ponto, é conveniente definir-se uma velocidade de referência wh, que
representa a componente vertical da velocidade induzida em vôo pairado; i.e., wh é o valor de
w0 quando VG e FX são nulos. Portanto, a Equação (III.15) pode ser solucionada, fornecendo
como resultado VR=-wh.
Aplicando-se este resultado na Equação (III.11), a velocidade de referência wh pode
ser determinada da seguinte forma:
22 RF
w Zh ρπ
−= . (III.16)
73
Deve-se observar que o sinal negativo na raiz quadrada da Equação (III.16) é adotado
para denotar que uma força positiva é produzida por uma velocidade induzida negativa.
Visando-se a simplificar o equacionamento do problema é interessante que se
relacionem as componentes da tração FX e FZ com o ângulo de atitude do plano das pontas das
pás, θFP. A partir do diagrama da Figura III.1 é possível encontrar a seguinte relação
trigonométrica:
FPZ
X tgFF
θ= . (III.17)
A partir das Equações (III.15), (III.16) e (III.17), faz-se uma série de substituições com
o intuito de se encontrar uma equação que forneça os valores de velocidade induzida em
função da velocidade de planeio da aeronave, que é representada por:
( ) ( ) 01cossen212
0
23
0
4
02 =−
+
++
+
hh
G
hFP
h
G
hFP w
wwV
ww
tgwV
ww
tg θγγθ . (III.18)
A Equação (III.18) pode ser facilmente resolvida numericamente, sendo o ponto de
partida para a análise do regime de auto-rotação proposto nesta seção do presente trabalho.
Em geral uma ou três raízes reais positivas podem ser obtidas para um dado valor de VG/wh.
Normalmente as raízes múltiplas ocorrem em altas velocidades de planeio ( hG wV > 2), e,
mais freqüentemente, para um ângulo-de-inclinação do plano da ponta das pás positivo. Como
essas raízes podem ser positivas ou negativas, reais ou imaginárias, são utilizadas apenas as
raízes reais positivas, desprezando as raízes complexas e as raízes reais negativas.
Uma vez fixados os valores do ângulo-de-planeio e do ângulo de atitude do plano das
pontas das pás, a Equação (III.18) fornece o valor normalizado adimensional da velocidade
induzida no rotor em função da velocidade de planeio da aeronave. A solução desta equação
74
fornece uma curva adimensional que quando bem interpretada, mostra claramente os estados
de operação do rotor durante o regime de auto-rotação, permitindo que se observe em quais
situações a teoria da quantidade-de-movimento pode ser aplicada. Também percebe-se que a
Equação (III.18) pode ser aplicada em qualquer situação de vôo, seja em vôo de planeio ou na
condição de vôo vertical, pois, o ângulo-de-planeio γ pode variar desde 0° até 90°.
III.2.2.3 – POTÊNCIA NO EIXO DO ROTOR PRINCIPAL EM AUTO-
ROTAÇÃO
Outro ponto de interesse durante a análise do regime de auto-rotação estável é a
determinação da potência no eixo do rotor principal que pode ser obtida através do produto
escalar entre os vetores força e velocidade. Utilizando-se a convenção de sinais aqui adotada,
tem-se que:
RS VTP •−= . (III.19)
Considerando-se que tanto a tração quanto a velocidade induzida atuante no rotor
possuem componentes nos planos vertical e horizontal, a Equação (III.19) pode ser reescrita
do seguinte modo:
( ) ( )γγ sencos 00 GZGXS VwFuVFP +−+−= . (III.20)
Considerando-se a condição de vôo pairado, a potência é obtida quando u0 e VG são
nulos, nesta situação nota-se que w0=wh. Portanto, a potência no eixo durante o vôo pairado é
dada por:
hZh wFP −= . (III.21)
Um valor adimensional para a potência pode ser obtido dividindo-se a Equação
(III.20) pela Equação (III.21). Substituindo-se a Equação (III.13) na relação encontrada,
obtém-se assim um resultado que após algumas simplificações é representado por:
75
γγ sen1cos 0
2
h
G
hZ
X
h
G
Z
X
h
S
wV
ww
FF
wV
FF
PP
+
++
= . (III.22)
Visando-se a encontrar uma equação que forneça a relação de potência tanto em
função da velocidade de planeio da aeronave como em função da velocidade induzida,
substitui-se a Equação (III.17) na Equação (III.22) obtendo-se:
γθ
γθ sencos
cos 20
h
G
FP
hFP
h
G
h
S
wVww
tgwV
PP
++= . (III.23)
Resolvendo-se numericamente a Equação (III.23) é possível analisar em quais
situações o rotor está fornecendo potência ao escoamento ou extraindo potência do mesmo.
Esta análise é fundamental no modelamento do vôo auto-rotativo quando se utiliza a teoria da
quantidade-de-movimento, pois também permite uma clara visualização dos estados de
operação do rotor.
O significado físico dos três termos do lado direito da Equação (III.22) são
importantes e notórios. O termo central representa a potência induzida requerida para produzir
as forças vertical e horizontal do rotor; w0/wh representa a potência requerida para produzir a
força vertical e ])/(1[ 2zx FF+ é um fator de expansão que indica que a resultante das forças
no rotor é uma soma vetorial das forças vertical e horizontal. O termo final representa uma
redução na potência causada pela redução da energia potencia l conforme o rotor perde altura.
O primeiro termo do lado direito da Equação (III.22) é de interesse particular pois os efeitos
são diferentes dependendo do sinal de FX/FZ. Se FX/FZ é negativo, este termo é positivo e
representa potência requerida para manter uma tração horizontal propulsiva, como por
exemplo, vencer o arrasto parasita da fuselagem. Por outro lado, se FX/FZ é positivo, o citado
76
termo é negativo e então o rotor está extraindo potência do ar no sentido de reduzir a potência
requerida.
No estudo realizado, nota-se que as Equações (III.22) e (III.23) contêm todos os
termos normalmente considerados na análise do desempenho de um rotor, com exceção da
potência de arrasto de perfil. É importante observar que o termo w0/wh é uma função implícita
de VG/wh, FX/FZ e γ. Assim, os termos das Equações (III.22) e (III.23) são interdependentes e,
particularmente em baixas velocidades, a mudança em um dos termos afeta os termos
remanescentes.
Como pode-se perceber, a Equação (III.23) é dependente do resultado encontrado na
Equação (III.18), pois, para cada valor de velocidade de planeio VG, existe um valor
correspondente de velocidade induzida w0, sendo a solução da Equação (III.23) possível
apenas quando os valores da velocidade induzida são conhecidos.
Durante a análise auto-rotativa utilizando-se a teoria da quantidade-de-movimento, a
solução numérica das Equações (III.18) e (III.23) é suficiente para a predição do desempenho
do rotor. Existe, porém, um caso particular onde o regime de auto-rotação é estabilizado em
descida vertical. Nesta situação específica de vôo, as mesmas equações podem ser aplicadas,
mas com algumas simplificações em relação ao regime de planeio. Na seqüência do trabalho é
apresentado esse caso particular e são comentadas e analisadas as principais diferenças
encontradas.
III.2.2.4 – CASO ESPECÍFICO (AUTO-ROTAÇÃO EM VÔO VERTICAL)
Quando a perda de potência ocorre a partir do vôo pairado, torna-se impraticável
estabilizar-se o regime de auto-rotação na condição de planeio, pois não existe uma
velocidade de translação horizontal da aeronave. Nessas condições específicas, o regime auto-
77
rotativo ocorre na condição de descida vertical da aeronave, ou seja, o ângulo-de-planeio γ é
igual a 90°.
Nesta seção é considerado este caso particular. Para a realização detalhada do estudo
proposto, as mesmas equações utilizadas na análise da condição de planeio podem ser
aplicadas para o vôo vertical, notando-se com clareza que tanto a Equação (III.18) como a
Equação (III.23) fornecem os valores de velocidade induzida e potência no eixo na condição
de auto-rotação vertical. No entanto, esses valores podem ser obtidos de um modo mais
simples em relação à condição de planeio.
A seguir são apresentadas as soluções simplificadas dessas equações, propiciando um
método mais rápido de solucionar o problema na condição de descida vertical.
III.2.2.4.1 – DETERMINAÇÃO DA VELOCIDADE INDUZIDA EM AUTO-
ROTAÇÃO VERTICAL
A velocidade induzida sobre o rotor pode ser calculada na condição de vôo auto-
rotativo em descida vertical considerando-se o ângulo-de-planeio γ igual a 90º e o ângulo de
atitude do plano das pontas das pás, θFP, igual a 0º. A partir dessas condições específicas,
pode-se escrever que:
2
0
4
0
1
1
+
=
wVw
w
Gh
, ou (III.24a)
0112
0
4
0 =−
+
wV
ww G
h
. (III.24b)

78
A Equação (III.24b) representa uma equação biquadrada, cuja solução é dada por:
0110
2
0 =−
+
wV
ww G
h
, e (III.25a)
0110
2
0 =+
+
wV
ww G
h
. (III.25b)
É importante observar que as Equações (III.25a) e (III.25b) são idênticas exceto pelos
sinais do segundo termo. As soluções para essas equações são, respectivamente,
421
21
2
0 +
+−=
h
G
h
G
h wV
wV
ww
, e (III.26a)
421
21
2
0 −
±−=
h
G
h
G
h wV
wV
ww
. (III.26b)
As Equações (III.26a) e (III.26b) representam uma forma simplificada da Equação
(III.18) utilizada na análise da condição de planeio. Nota-se que três raízes reais positivas
podem ser encontradas.
Na Equação (III.26a) observa-se um contínuo aumento da velocidade induzida
conforme a razão-de-descida aumenta. Na Equação (III.26b) dois valores reais positivos
podem ser encontrados, porém, devido à convenção de sinais presentes na equação, pode-se
observar que a mesma aplica-se apenas em altas razões-de-descida, ou seja, quando VG>2wh.
III.2.2.4.2 – POTÊNCIA NO EIXO DO ROTOR PRINCIPAL EM AUTO-
ROTAÇÃO VERTICAL
Para a condição de vôo vertical, a Equação (III.23) também pode ser aplicada; porém,
como citado, considera-se o ângulo-de-planeio γ igual a 90° e, o ângulo de atitude do plano
79
das pontas das pás, θFP, igual a 0°. A partir dessas condições específicas, a citada equação se
reduz a:
h
G
hh
S
wV
ww
PP
+= 0 . (III.27)
Na Equação (III.27), o primeiro termo do lado direito da equação representa a potência
induzida requerida para produzir tração. O termo final representa a redução na potência
requerida devido à redução da energia potencial conforme a aeronave perde altura. Se a
potência induzida permanecer constante durante o planeio, pode-se escrever o seguinte:
h
P
h
S
PE
PP
•
+= 1 , (III.28)
onde •
pE representa a redução da energia potencial da aeronave em função do tempo durante
a descida.
Observando-se as Equações (III.26a) e (III.26b), nota-se que em vôo vertical, a parcela
correspondente à potência induzida é dependente da razão-de-descida.
Substituindo essas equações na Equação (III.27), tem-se como resultado um par de
equações que fornecem a relação de potência em função da razão-de-descida da aeronave:
421
21
2
+
+=
h
G
h
G
h
S
wV
wV
PP
, e (III.29a)
421
21
2
−
±=
h
G
h
G
h
S
wV
wV
PP
. (III.29b)
A principal diferença encontrada em relação ao regime de planeio, deve-se ao fato que
em descida vertical, as Equações (III.29a) e (III.29b) podem ser resolvidas considerando-se
apenas a razão-de-descida da aeronave, ou seja, não existe a necessidade de se determinar a
80
velocidade induzida atuante no rotor, pois a mesma se encontra implicitamente inserida nessas
equações.
As Equações (III.26a) e (III.29a), podem ser aplicadas a pequenas razões-de-descida,
e, como VG/wh é negativo, fica evidente que a relação Ps/Ph na Equação (III.29a) sempre será
positiva, indicando que o rotor está fornecendo potência ao escoamento. Assim, nesta situação
a aeronave encontra-se na transição entre o vôo pairado e o regime de auto-rotação estável.
O regime de auto-rotação estável requer potência igual a zero ou negativa; portanto, a
mínima razão-de-descida em auto-rotação estável, prevista pela teoria em questão, é dada por
VG/wh=-2. Nesta razão-de-descida, a Equação (III.29b) fornece uma relação de potência igual
a –1, indicando que o rotor está extraindo potência do ar.
III.2.2.5 – REGIME DE AUTO-ROTAÇÃO IDEAL
Teoricamente uma situação ideal pode ser aplicada à operação de um rotor de
helicóptero. Sob essas condições específicas, a teoria da quantidade-de-movimento é aplicada
considerando-se que não existe potência líquida no eixo do rotor.
Como o regime de auto-rotação ideal se caracteriza por uma situação teórica,
impossível de se obter na prática, o modelo aqui apresentado é utilizado apenas a título de
ilustração, e os resultados teóricos são comparados aos obtidos nos ensaios em túnel-de-vento
comentando-se as principais diferenças entre um regime ideal e uma situação real.
III.2.2.5.1 - AUTO-ROTAÇÃO IDEAL EM DESCIDA VERTICAL
Na condição de auto-rotação em descida vertical, o regime ideal pode ser obtido a
partir da Equação (III.27), onde, considerando-se a relação de potência PS/Ph nula, obtém-se a
velocidade de planeio VG em função da componente vertical da velocidade induzida w0
através da seguinte equação:
81
0wVG −= . (III.30)
Substituindo-se a Equação (III.30) na Equação (III.15), e, considerando-se o ângulo-
de-planeio, γ, igual a 90°, é possível observar que durante um regime de auto-rotação ideal, a
velocidade resultante sobre o rotor é nula, i.e.,
0=RV . (III.31)
Nesta situação pode-se dizer que não existe escoamento através do rotor.
A componente de força vertical atuante no rotor em uma condição de auto-rotação
ideal pode ser determinada a partir de uma análise- limite da Equação (III.11). Considerando-
se a velocidade resultante VR tendendo a zero, e, a componente vertical da velocidade
induzida w0 tendendo a infinito, a citada equação pode ser reescrita do seguinte modo:
2
00
22 wwV
RF RZ
−= ρπ . (III.32)
Resolvendo-se a Equação (III.11) para w0, dividindo-se o resultado encontrado por
wh², Equação (III.16), obtém-se a relação (w0/wh²)=(-1/VR). Assim, pode-se escrever que
(w0/wh)²=(-w0/VR), ou (-VR/w0)=(wh/w0)². A partir dessas considerações, a Equação (III.32)
pode ser simplificada , resultando em:
222 hZ wRF ρπ= . (III.33)
Como não existe fluxo mássico pelo rotor, pode-se observar que a componente de
força vertical se mantém constante, podendo ser expressa em termos de wh conforme a
Equação (III.33), que somente pode ser obtida quando a componente vertical da velocidade
induzida w0 se aproxima de infinito. Em outras palavras, teoricamente, a auto-rotação ideal na
condição de vôo vertical só é possível em infinitas razões-de-descida [19], Equação (III.30).
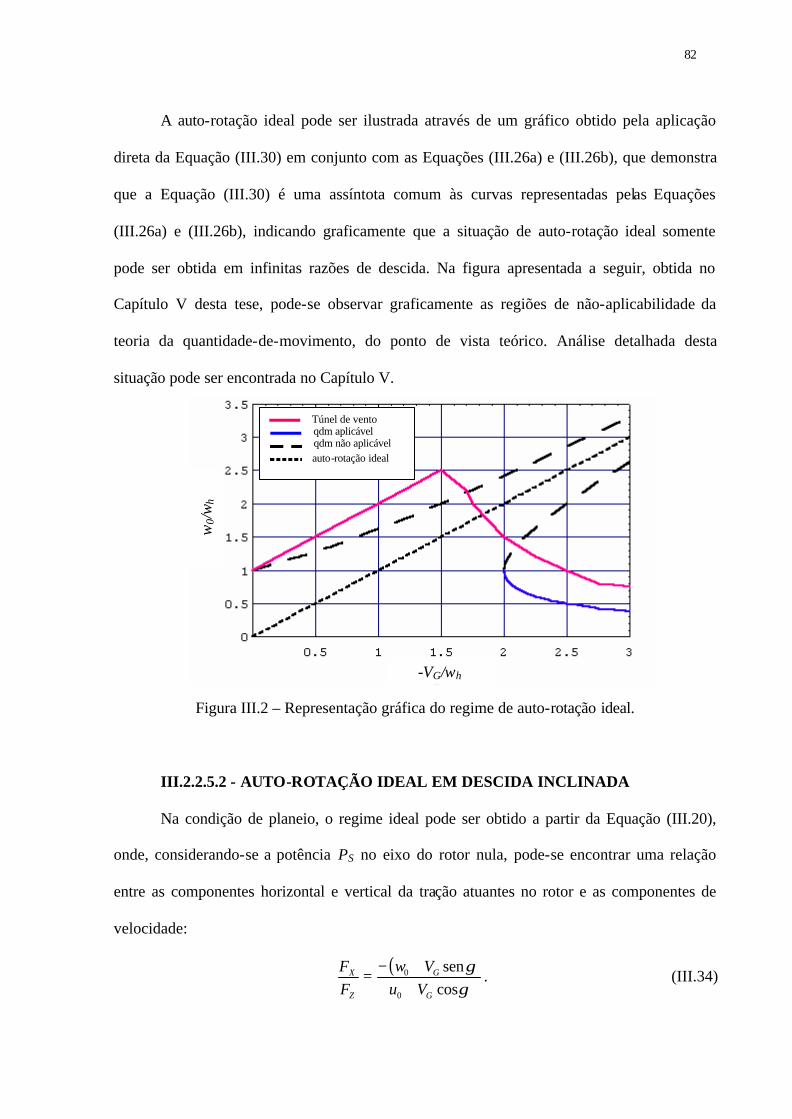
82
A auto-rotação ideal pode ser ilustrada através de um gráfico obtido pela aplicação
direta da Equação (III.30) em conjunto com as Equações (III.26a) e (III.26b), que demonstra
que a Equação (III.30) é uma assíntota comum às curvas representadas pelas Equações
(III.26a) e (III.26b), indicando graficamente que a situação de auto-rotação ideal somente
pode ser obtida em infinitas razões de descida. Na figura apresentada a seguir, obtida no
Capítulo V desta tese, pode-se observar graficamente as regiões de não-aplicabilidade da
teoria da quantidade-de-movimento, do ponto de vista teórico. Análise detalhada desta
situação pode ser encontrada no Capítulo V.
Figura III.2 – Representação gráfica do regime de auto-rotação ideal.
III.2.2.5.2 - AUTO-ROTAÇÃO IDEAL EM DESCIDA INCLINADA
Na condição de planeio, o regime ideal pode ser obtido a partir da Equação (III.20),
onde, considerando-se a potência PS no eixo do rotor nula, pode-se encontrar uma relação
entre as componentes horizontal e vertical da tração atuantes no rotor e as componentes de
velocidade:
( )γγ
cossen
0
0
G
G
Z
X
VuVw
FF
++−
= . (III.34)
Túnel de vento qdm aplicável qdm não aplicável auto-rotação ideal
-VG/wh
w0/
wh
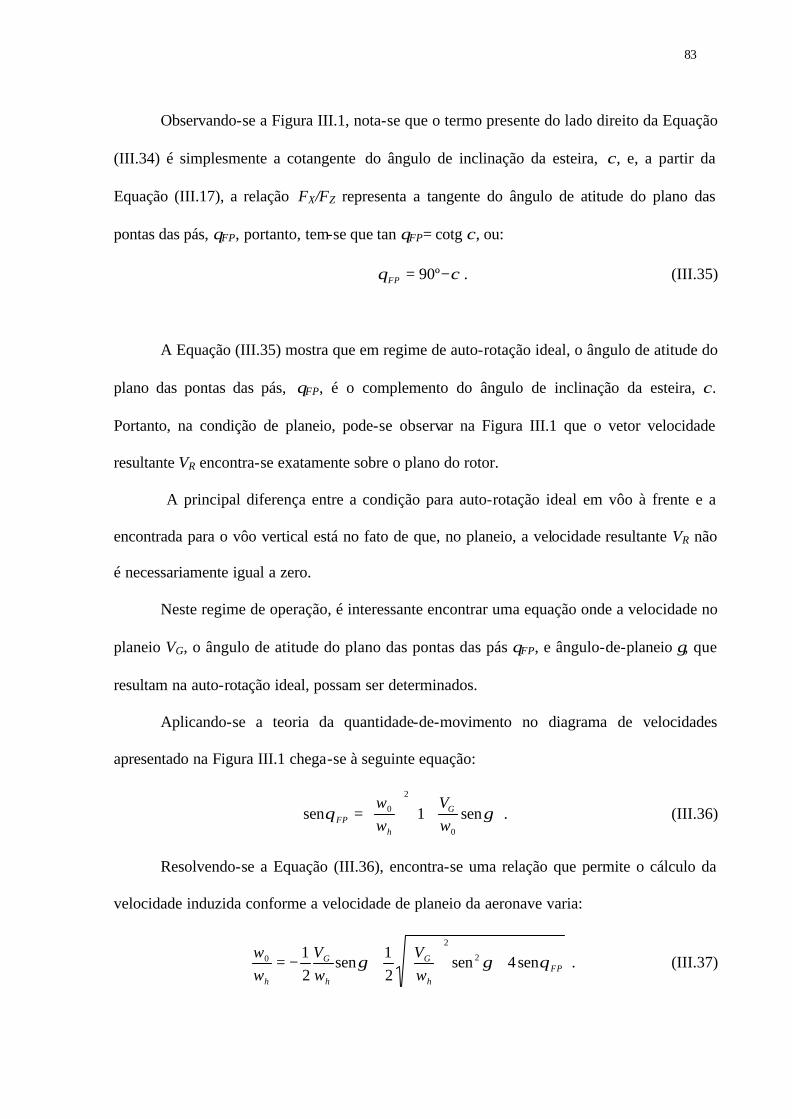
83
Observando-se a Figura III.1, nota-se que o termo presente do lado direito da Equação
(III.34) é simplesmente a cotangente do ângulo de inclinação da esteira, χ, e, a partir da
Equação (III.17), a relação FX/FZ representa a tangente do ângulo de atitude do plano das
pontas das pás, θFP, portanto, tem-se que tan θFP= cotg χ, ou:
χθ −= º90FP . (III.35)
A Equação (III.35) mostra que em regime de auto-rotação ideal, o ângulo de atitude do
plano das pontas das pás, θFP, é o complemento do ângulo de inclinação da esteira, χ.
Portanto, na condição de planeio, pode-se observar na Figura III.1 que o vetor velocidade
resultante VR encontra-se exatamente sobre o plano do rotor.
A principal diferença entre a condição para auto-rotação ideal em vôo à frente e a
encontrada para o vôo vertical está no fato de que, no planeio, a velocidade resultante VR não
é necessariamente igual a zero.
Neste regime de operação, é interessante encontrar uma equação onde a velocidade no
planeio VG, o ângulo de atitude do plano das pontas das pás θFP, e ângulo-de-planeio γ, que
resultam na auto-rotação ideal, possam ser determinados.
Aplicando-se a teoria da quantidade-de-movimento no diagrama de velocidades
apresentado na Figura III.1 chega-se à seguinte equação:
+
= γθ sen1sen
0
2
0
wV
ww G
hFP . (III.36)
Resolvendo-se a Equação (III.36), encontra-se uma relação que permite o cálculo da
velocidade induzida conforme a velocidade de planeio da aeronave varia:
FPh
G
h
G
h wV
wV
ww θγγ sen4sen
21
sen21 2
2
0 +
+−= . (III.37)
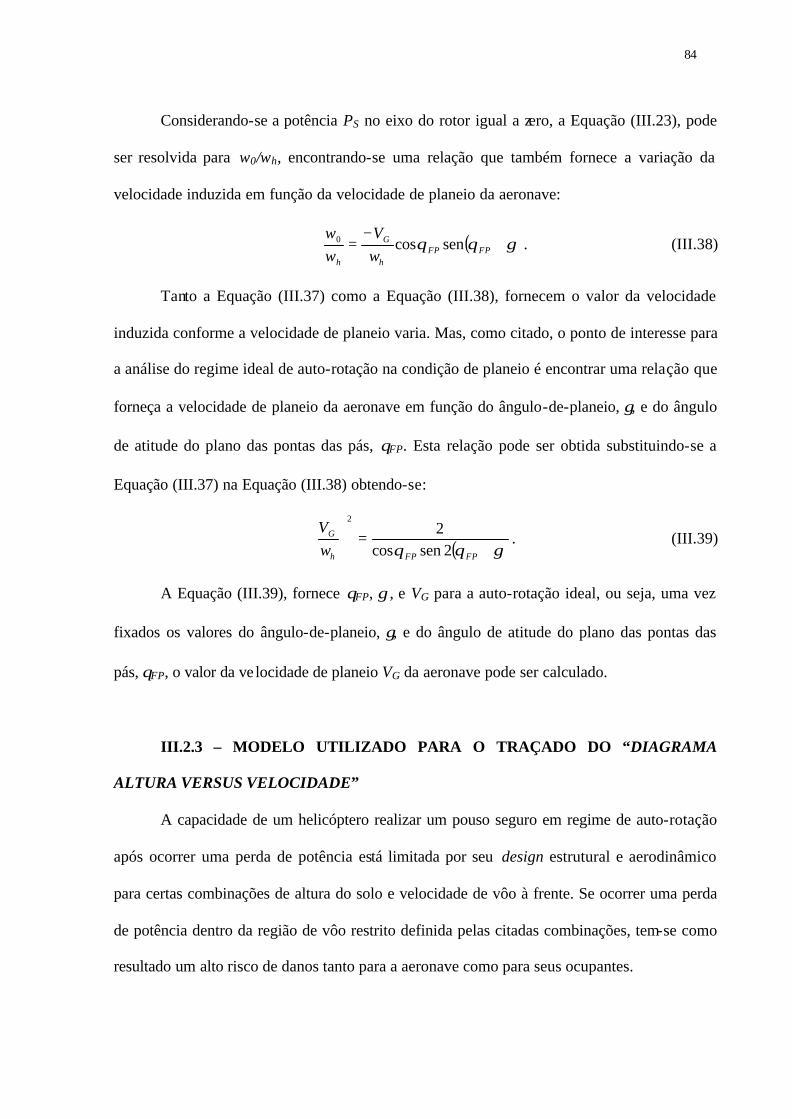
84
Considerando-se a potência PS no eixo do rotor igual a zero, a Equação (III.23), pode
ser resolvida para w0/wh, encontrando-se uma relação que também fornece a variação da
velocidade induzida em função da velocidade de planeio da aeronave:
( )γθθ +−
= FPFPh
G
h wV
ww
sencos0 . (III.38)
Tanto a Equação (III.37) como a Equação (III.38), fornecem o valor da velocidade
induzida conforme a velocidade de planeio varia. Mas, como citado, o ponto de interesse para
a análise do regime ideal de auto-rotação na condição de planeio é encontrar uma relação que
forneça a velocidade de planeio da aeronave em função do ângulo-de-planeio, γ, e do ângulo
de atitude do plano das pontas das pás, θFP. Esta relação pode ser obtida substituindo-se a
Equação (III.37) na Equação (III.38) obtendo-se:
( )γθθ +=
FPFPh
G
wV
2sencos2
2
. (III.39)
A Equação (III.39), fornece θFP, γ , e VG para a auto-rotação ideal, ou seja, uma vez
fixados os valores do ângulo-de-planeio, γ, e do ângulo de atitude do plano das pontas das
pás, θFP, o valor da ve locidade de planeio VG da aeronave pode ser calculado.
III.2.3 – MODELO UTILIZADO PARA O TRAÇADO DO “DIAGRAMA
ALTURA VERSUS VELOCIDADE”
A capacidade de um helicóptero realizar um pouso seguro em regime de auto-rotação
após ocorrer uma perda de potência está limitada por seu design estrutural e aerodinâmico
para certas combinações de altura do solo e velocidade de vôo à frente. Se ocorrer uma perda
de potência dentro da região de vôo restrito definida pelas citadas combinações, tem-se como
resultado um alto risco de danos tanto para a aeronave como para seus ocupantes.
85
Por muitos anos, modelos analíticos para o tratamento do “diagrama altura versus
velocidade” de helicópteros vêm sendo desenvolvidos.
Experimentos têm sido levados a cabo pela “Federal Aviation Administration” (FAA),
no intuito de se reduzir as restrições impostas pelo diagrama.
A proposta central do estudo dessa seção no presente trabalho é apresentar um modelo
semi-empírico que demonstra os efeitos de altitude densidade e peso bruto da aeronave no
“diagrama altura versus velocidade” para helicópteros monomotores com características
similares. Este modelo é baseado no trabalho publicado por Pegg [29] em 1968. Na presente
tese algumas modificações são realizadas com relação ao método original a fim de se
encontrar analiticamente a potência requerida em vôo à frente e a velocidade de vôo à frente
para potência mínima, pois, o trabalho apresentado por Pegg utiliza-se de gráficos e curvas
totalmente empíricos para o cálculo desses parâmetros.
A idéia central do método baseia-se na constatação que os diagramas obtidos
experimentalmente para diversos helicópteros de configuração convencional (1 rotor principal
e 1 rotor de cauda) apresentam formas aproximadamente similares, não importando qual seja
a condição de vôo do helicóptero testado. Através de um processo de adimensionalização
aplicado às coordenadas de altura e velocidade obtidas experimentalmente, é possível a
obtenção de um diagrama adimensional geral; que independe do tipo, e condição de operação
do helicóptero. Uma vez obtido esse diagrama adimensional, é possível obter um diagrama
dimensional através do processo inverso de dimensionalização proposto no presente trabalho.
Pode-se notar que a grande utilidade do método é a possibilidade de se estimar os
diagramas dimensionais para diversas condições de peso, altitude, parâmetros geométricos
(como área do rotor principal e solidez) e configuração da aeronave. Portanto, utilizando-se de
apenas alguns dados que determinam as características da aeronave, é possível a obtenção de
todo o diagrama e avaliar o efeito da variação de um determinado parâmetro sem a realização
86
de um vôo de teste. Isso permite que durante as fases iniciais do projeto de um novo
helicóptero seja possível a comparação de diversas configurações propostas para um
helicóptero a fim de se obter a menor restrição operacional possível.
III.2.3.1 – ADIMENSIONALIZAÇÃO DO “DIAGRAMA ALTURA VERSUS
VELOCIDADE”
Através de um método de adimensionalização, o “diagrama altura versus velocidade”
apresentado na Figura III.3 pode ser obtido, e, verifica-se que possui aparência similar para
qualquer tipo de helicóptero convencional analisado.
Este processo é baseado nos resultados dos testes realizados pela FAA e apresentados
na Referência [29], que indicam que para três combinações de altura e velocidade, hlo, hhi, e
(Vcr, hcr), as quais variam linearmente com a altitude e o peso bruto da aeronave, diagramas
similares são obtidos para qualquer tipo de helicóptero convencional testado.
Para o diagrama adimensional representado na Figura III.3, pode-se notar que:
a) O ponto crítico ( hcr,Vcr ) adimensionalisado possui coordenadas (1,1).
b) A altura máxima hhi e mínima hlo adimensionalisadas possuem coordenadas (0,0).
c) A velocidade normalizada adimensional de vôo à frente µcr está contida no intervalo
10 ≤≤ crµ .
d) X1 e X2 representam respectivamente as distâncias verticais superior e inferior ao
ponto de abscissa de valor unitário hcr adimensional e estão contidos no intervalo 10 ≤≤ X .
e) Duas curvas adimensionais são obtidas, uma para o ramo superior ao ponto (hcr,Vcr)
e uma para o ramo inferior ao ponto (hcr,Vcr). Portanto, existem na análise dois sistemas de
eixos verticais.

87
Figura III.3 – “Diagrama altura versus velocidade” em sua forma adimensional [29].
O primeiro passo para a realização do processo de adimensionalização, é encontrar
uma relação que forneça uma velocidade normalizada adimensional de vôo à frente µcr, que
pode ser obtida dividindo-se a velocidade dimensional de vôo à frente VFF, pela velocidade
crítica Vcr, fornecendo a seguinte equação:
cr
FFcr V
V=µ . (III.40)
0
0
1.0
1.0
(hcr,Vcr)
VFF/Vcr
hx1
Vx
hlo
hhi
hx2
crhi
xhi
hhhh
X−−
= 11
locr
lox
hhhh
X−−
= 22
88
O segundo passo do processo é encontrar uma altura adimensional, que pode ser
obtida dividindo-se a curva em duas regiões, uma superior ao ponto (hcr, Vcr), que é
representada pela altura adimensional X1, e a outra inferior ao mesmo ponto que é
representada pela altura adimensional X2.
Estes parâmetros de adimensionalização são dados por:
crhi
Xhi
hh
hhX
−
−= 1
1 , (III.41)
locr
lox
hh
hhX
−
−= 2
2 , (III.42)
onde: hlo, hhi, e hcr são fixos e hx1 e hx2 são as alturas do ramo superior e inferior da curva real
para um dado VFF.
III.2.3.2 – PROCESSO DE OBTENÇÃO DO DIAGRAMA DIMENSIONAL
As três combinações de altura e velocidade que devem ser determinadas antes da
curva atual de ensaio ser transformada em uma curva adimensional ou vice versa pelo uso do
método proposto, podem ser definidas como apresentado no Capítulo I do presente trabalho
do seguinte modo:
a) A altura mínima hlo, representa a altura onde, abaixo da qual, se uma perda de
potência ocorrer no vôo pairado consegue-se a realização de um pouso sem maiores danos
para a tripulação ou para a aeronave.
b) A altura representada por hhi, representa a altura onde, acima da qual, consegue-se
um pouso auto-rotativo seguro a partir do vôo pairado.
c) O ponto médio (Vcr,hcr), é a máxima velocidade na qual consegue-se estabilizar a
auto-rotação na altura hcr.
89
A seção anterior mostrou como calcular o diagrama adimensional a partir de um
diagrama dimensional obtido experimentalmente em vôo. No entanto, não se está interessado
em obter o diagrama adimensional, pois, como citado anteriormente, o diagrama adimensional
praticamente não varia de um helicóptero para outro. O que realmente interessa ao projetista
da aeronave, é justamente o processo inverso, ou seja, a partir de um diagrama adimensional,
calcular o diagrama dimensional levando-se em conta todos os parâmetros de operação e
configuração da aeronave.
A partir das Equações (III.40), (III.41) e (III.42) obtidas anteriormente, podem-se
escrever as equações que fornecem o diagrama dimensional em função do diagrama
adimensional do seguinte modo:
crcrFF VV µ= , (III.43)
( )crhihix hhXhh −−= 11, e (III.44)
( )crlolox hhXhh −+= 22, (III.45)
onde: hlo, hhi, e hcr são fixos e X1 e X2 são alturas do ramo superior e inferior da curva
adimensional para um dado valor de µcr.
Os valores de X1 e X2 podem ser lidos diretamente da Figura III.3, não importando
qual seja o helicóptero em questão. Assim, fica claro que a solução do problema se resume à
obtenção dos valores de hlo, hhi, hcr e Vcr.
A partir da análise dos resultados apresentados na Referência [29], podem-se
relacionar os gráficos obtidos com expressões matemáticas, visando desse modo a encontrar
uma solução analítica para o traçado do “diagrama altura versus velocidade” para um
determinado peso bruto e altitude, conforme comentado abaixo.
90
a) Para a determinação da variação da altura hlo com altitude-densidade e peso bruto da
aeronave, a equação para hlo deve ser calculada utilizando-se do equilíbrio das forças atuantes
no helicóptero.
b) Indicações da FAA demonstram que o ponto médio (hcr, Vcr) encontra-se próximo
de 95ft (29 m). Esta aproximação é determinada por resultados de ensaio em vôo.
c) Os dados também demonstram que através da análise de diagramas, o valor de hhi,
varia diretamente com o quadrado de Vcr.
Na seqüência são apresentadas as equações que determinam as combinações críticas
de altura e velocidade de vôo à frente, a fim de se aplicar o processo de geração de pontos
necessários à determinação do “diagrama altura versus velocidade” dimensional de um
helicóptero.
III.2.3.2.1 – OBTENÇÃO DA ALTURA MÍNIMA hlo
As equações que fornecem o ponto de altura mínima em relação ao solo são
desenvolvidas considerando-se a somatória das forças verticais do helicóptero. Este método é
válido somente como uma solução de primeira ordem do problema, não sendo utilizado para
se obter as características durante o tempo decorrido na análise de trajetórias. Como resultado
dessa análise, obtêm-se os efeitos de peso bruto e altitude densidade da aeronave no ponto de
altura mínima em relação ao solo.
Inicialmente assume-se que a aeronave está pairando com uma certa altura em relação
ao solo. A Figura III.4, representada a seguir, mostra as forças verticais que atuam no
helicóptero.
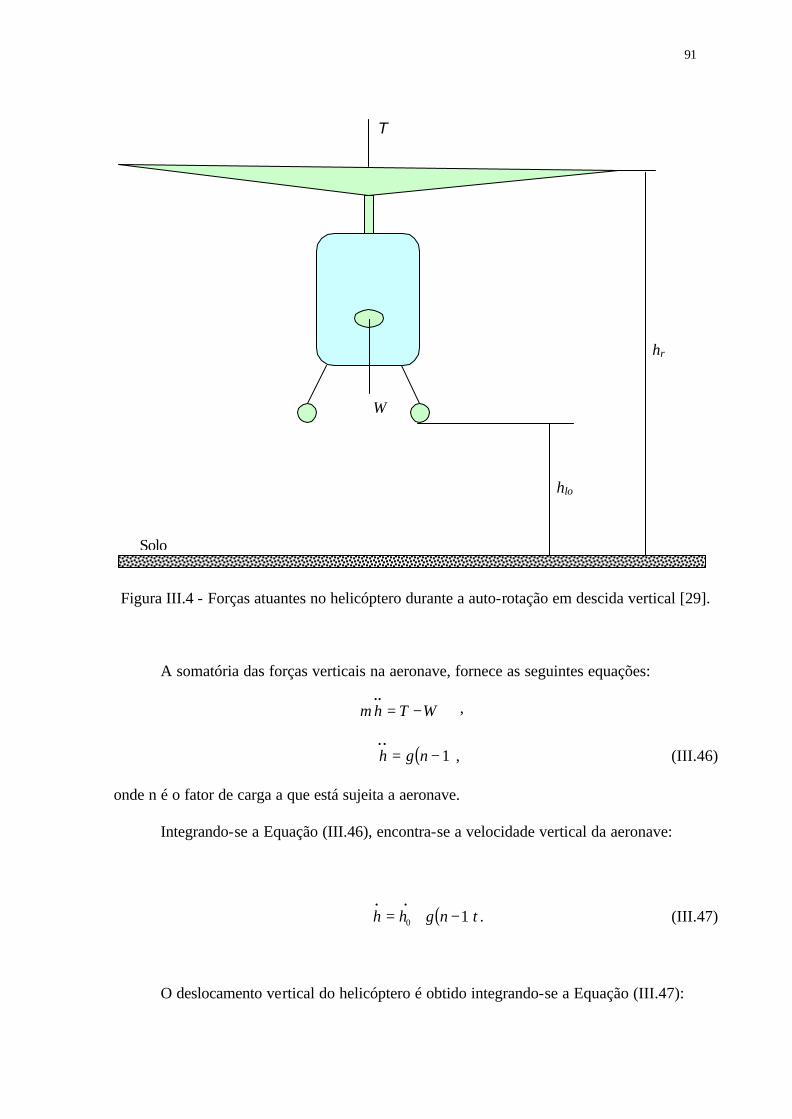
91
Figura III.4 - Forças atuantes no helicóptero durante a auto-rotação em descida vertical [29].
A somatória das forças verticais na aeronave, fornece as seguintes equações:
,
( )1−=••
ngh , (III.46)
onde n é o fator de carga a que está sujeita a aeronave.
Integrando-se a Equação (III.46), encontra-se a velocidade vertical da aeronave:
( )tnghh 10 −+=••
. (III.47)
O deslocamento vertical do helicóptero é obtido integrando-se a Equação (III.47):
hlo
T
hr
W
Solo
WThm −=••
92
( )2
12
0
tngthhhlo
∆∆ −+==•
. (III.48)
Se a velocidade vertical de impacto estiver especificada (Considerações estruturais do
trem de pouso), a partir da Equação (III.47), tem-se que:
1+=tg
Vn D
avg ∆, (III.49)
onde ∆t representa o tempo decorrido entre a falha do motor e o pouso da aeronave, podendo
ser representado do seguinte modo:
ΛΩ
ΩΩ
∆req
dR
d
f
PI
t550
12
−= , (III.50)
onde IR corresponde a inércia do rotor, Preq corresponde a potência requerida em HP, Λ é o
parâmetro de efeito solo, sendo a relação de velocidade angular Ωf /Ωd dada por:
σΩ
ΩT
d
f C24.2= , (III.51)
onde Ωf representa a velocidade angular de rotação do rotor no momento em que a aeronave
toca o solo após a falha do motor, e, Ωd representa a velocidade angular de projeto para o
rotor principal, sendo as Equações (III.50) e (III.51) obtidas a partir da Referência [29].
A partir das Equações (III.49), (III.50) e (III.51), pode-se obter a Equação (III.52) que
determina o valor de hlo expresso em ft:
−−=
σΛΩ T
req
DdRlo
CP
VIh 24.21
1100
2
, (III.52)
onde VD representa a velocidade de descida vertical da aeronave.
O parâmetro Λ presente na Equação (III.52), conhecido como parâmetro de efeito
solo, é definido como a relação entre a potência requerida sob a influência do efeito solo e a
potência requerida fora do efeito solo.
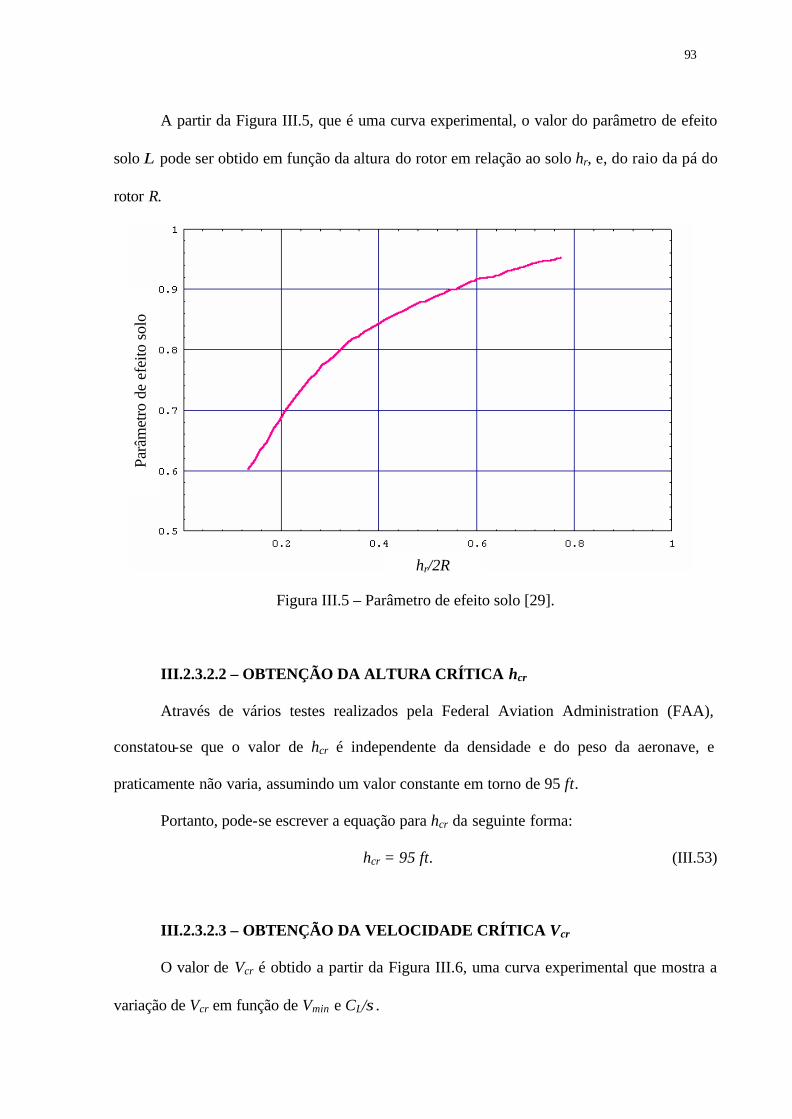
93
A partir da Figura III.5, que é uma curva experimental, o valor do parâmetro de efeito
solo Λ pode ser obtido em função da altura do rotor em relação ao solo hr, e, do raio da pá do
rotor R.
Figura III.5 – Parâmetro de efeito solo [29].
III.2.3.2.2 – OBTENÇÃO DA ALTURA CRÍTICA hcr
Através de vários testes realizados pela Federal Aviation Administration (FAA),
constatou-se que o valor de hcr é independente da densidade e do peso da aeronave, e
praticamente não varia, assumindo um valor constante em torno de 95 ft.
Portanto, pode-se escrever a equação para hcr da seguinte forma:
hcr = 95 ft. (III.53)
III.2.3.2.3 – OBTENÇÃO DA VELOCIDADE CRÍTICA Vcr
O valor de Vcr é obtido a partir da Figura III.6, uma curva experimental que mostra a
variação de Vcr em função de Vmin e CL/σ.
Parâ
met
ro d
e ef
eito
sol
o
hr/2R
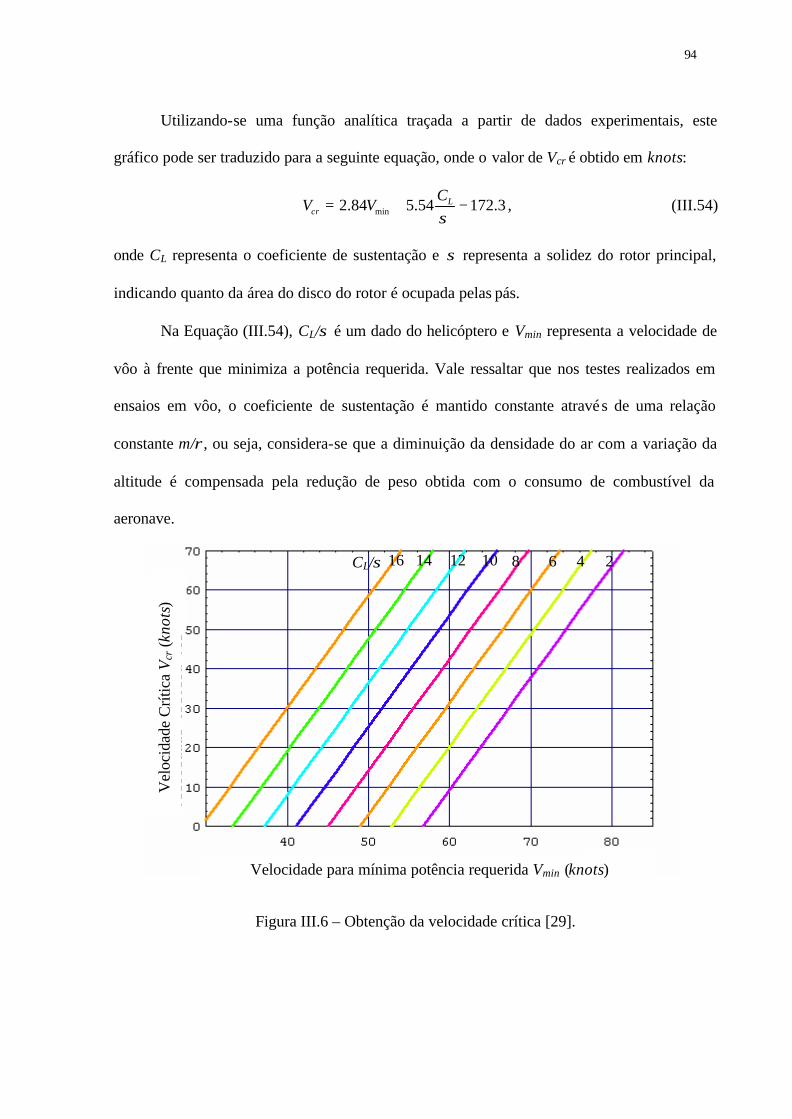
94
Utilizando-se uma função analítica traçada a partir de dados experimentais, este
gráfico pode ser traduzido para a seguinte equação, onde o valor de Vcr é obtido em knots:
3.17254.584.2 min −+=σ
Lcr
CVV , (III.54)
onde CL representa o coeficiente de sustentação e σ representa a solidez do rotor principal,
indicando quanto da área do disco do rotor é ocupada pelas pás.
Na Equação (III.54), CL/σ é um dado do helicóptero e Vmin representa a velocidade de
vôo à frente que minimiza a potência requerida. Vale ressaltar que nos testes realizados em
ensaios em vôo, o coeficiente de sustentação é mantido constante através de uma relação
constante m/ρ, ou seja, considera-se que a diminuição da densidade do ar com a variação da
altitude é compensada pela redução de peso obtida com o consumo de combustível da
aeronave.
Figura III.6 – Obtenção da velocidade crítica [29].
CL/σ 16 14 12 10 8 6 4 2
(kno
ts)
(knots) Velocidade para mínima potência requerida Vmin (knots)
Vel
ocid
ade
Crí
tica
Vcr
(kno
ts)
95
A fim de se determinar o valor de Vmin, pode-se utilizar um gráfico de variação da
potência requerida em função da velocidade de vôo à frente da aeronave e então observar que:
a) A potência induzida é a maior componente da potência total na condição de vôo
pairado, mas ela diminui rapidamente com o aumento da velocidade em vôo à frente.
b) A potência de arrasto de perfil apresenta um ligeiro aumento com a velocidade.
c) A potência parasita é praticamente desprezível em baixas velocidades, mas aumenta
proporcionalmente ao cubo da velocidade, e, portanto, em altas velocidades pode passar a ser
considerada a parcela dominante.
Portanto, pode-se notar que a potência total requerida apresenta um alto valor em vôo
pairado, e possui um valor mínimo em algum ponto VFF>0 e novamente volta a apresentar um
valor alto em altas velocidades devido ao aumento excessivo da potência parasita ou da
potência de perfil, uma vez que em altas velocidades efeitos de estol e compressibilidade
aumentam o valor desta última. Observa-se que para um dado peso da aeronave, existe uma
velocidade Vmin na qual a potência requerida é mínima. Este ponto é de grande importância,
pois, através dele é possível calcular Vcr.
A velocidade Vmin, na qual a potência requerida é mínima, pode ser facilmente obtida
através da curva de potência requerida; porém, um método analítico proposto por Johnson
[20] é utilizado na realização do presente trabalho, considerando-se para estimar esta
velocidade, a potência em vôo à frente da aeronave, do seguinte modo:
( ) 322
21
6.4182
0 µµσ
µ AfCkC
C dTP +++= , (III.55)
96
onde: R
VΩ
µ = é a razão de avanço do helicóptero, µ2
2TkC
é o termo devido a potência
induzida; ( )26.418
0 µσ
+dC
é o termo devido a potência de perfil e 3
21 µ
Af
é o termo devido
a potência parasita, sendo f a área equivalente de placa plana.
Pode-se então concluir que o ponto de potência requerida mínima é obtido derivando-
se a Equação (III.55) em relação à µ:
0=∂∂
µPC
, (III.56)
ou seja, os valores de µ procurados são tais que satisfaçam a seguinte equação:
02
315.1
2
2
2
2
0=++−
Af
CkC
dT µσµ
µ. (III.57)
Uma vez determinado o valor da velocidade na qual a potência requerida é mínima,
Vcr pode ser calculado a partir da Equação (III.54), considerando-se a relação CL/σ para a
aeronave em questão. Este procedimento é uma forma equivalente, em forma analítica, à
utilização da Figura III.6 na determinação de Vcr. Pode-se notar que a Equação (III.57) pode
fornecer como resultados raízes reais e complexas, positivas ou negativas, porém apenas as
raízes reais positivas têm o significado físico de interesse para a determinação da velocidade
de vôo à frente que minimiza a potência requerida. Assim desprezam-se as raízes negativas e
complexas que podem ser obtidas a partir da solução da Equação (III.57).
III.2.3.2.4 – OBTENÇÃO DA ALTURA MÁXIMA hhi
A Figura III.7, mostra alguns valores de hhi em função da velocidade crítica Vcr obtidos
experimentalmente pela FAA para três helicópteros diferentes ensaiados em diversas altitudes
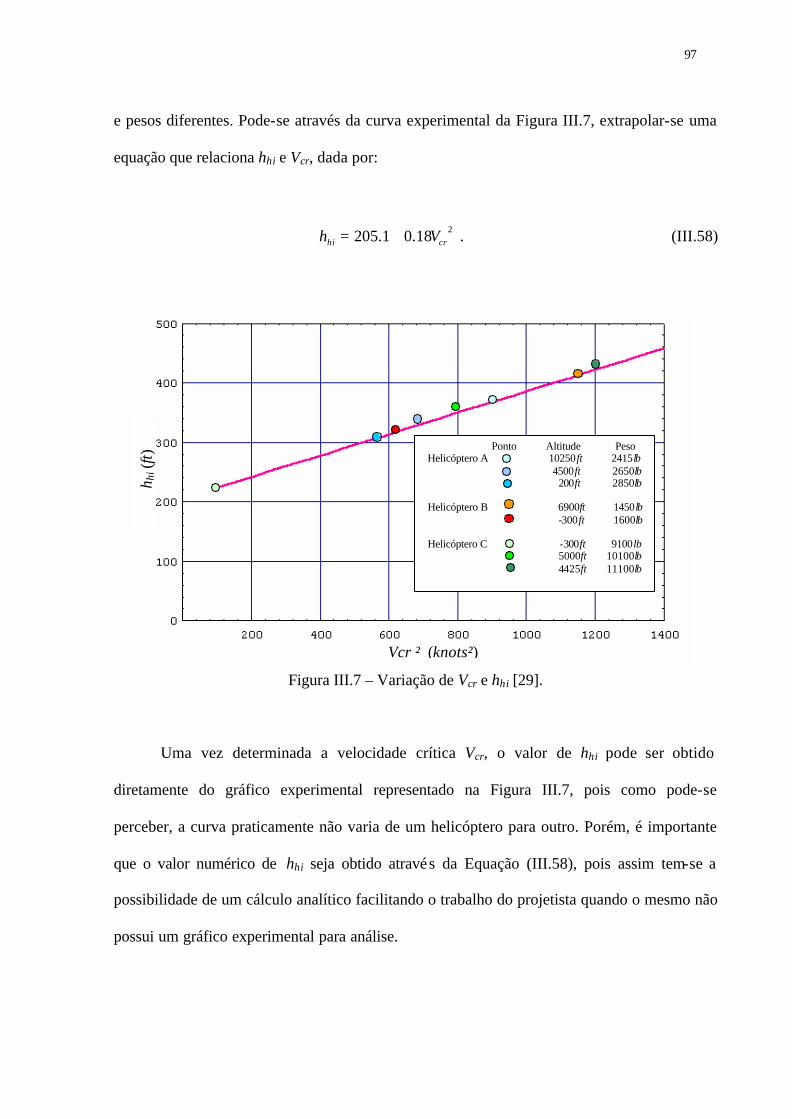
97
e pesos diferentes. Pode-se através da curva experimental da Figura III.7, extrapolar-se uma
equação que relaciona hhi e Vcr, dada por:
218.01.205 crhi Vh += . (III.58)
Figura III.7 – Variação de Vcr e hhi [29].
Uma vez determinada a velocidade crítica Vcr, o valor de hhi pode ser obtido
diretamente do gráfico experimental representado na Figura III.7, pois como pode-se
perceber, a curva praticamente não varia de um helicóptero para outro. Porém, é importante
que o valor numérico de hhi seja obtido através da Equação (III.58), pois assim tem-se a
possibilidade de um cálculo analítico facilitando o trabalho do projetista quando o mesmo não
possui um gráfico experimental para análise.
h hi (
ft)
Vcr ² (knots²)
Ponto Altitude Peso Helicóptero A 10250ft 2415lb 4500ft 2650lb 200ft 2850lb Helicóptero B 6900ft 1450lb -300ft 1600lb Helicóptero C -300ft 9100lb 5000ft 10100lb 4425ft 11100lb
98
III.2.3.3 – ANÁLISE DE SENSIBILIDADE COM RELAÇÃO AOS
PARÂMETROS DE PROJETO DE MODO A MINIMIZAR A ÁREA DE
RESTRIÇÃO IMPOSTA PELO “DIAGRAMA ALTURA VERSUS VELOCIDADE”
A análise anterior mostra que a forma do “diagrama altura versus velocidade” está
intimamente relacionada com os valores dos parâmetros hlo, hhi, e Vcr. Portanto, pode-se
concluir que o estudo da diminuição da área de restrição recai na análise de sensibilidade dos
valores de hhi, hlo, e Vcr levando-se em consideração as restrições das características de projeto
e operação da aeronave.
A região D do diagrama da Figura I.1 não é estudada nesta análise por se tratar de uma
região onde a aeronave se encontra com altas velocidades de vôo à frente e baixas altitudes.
Um processo de análise de sensibilidade dessa área produz efeitos praticamente
imperceptíveis e de pouca aplicação prática. No entanto, o piloto da aeronave deve estar
sempre atento às limitações encontradas nessa região quando operar dentro do regime de vôo
conhecido por NOE “nap of earth”, ou seja, vôo rasante a superfície. Se uma falha ocorrer no
motor nesta situação de vôo e a aeronave se encontrar dentro dos limites restritivos de altura e
velocidade de vôo à frente, limitadas pela região D do diagrama, não há tempo hábil
suficiente para uma entrada segura em auto-rotação e portanto ocorre um choque com o
solo/água onde toda energia cinética de rotação do rotor e de deslocamento da aeronave como
um todo é convertida em energia de impacto, ocasionando sérios danos tanto para os
tripulantes como para a aeronave.
A seguir são apresentadas algumas sugestões de projeto que, quando aplicadas de
maneira correta, podem contribuir para a redução da área de restrição imposta pelo diagrama.
99
III.2.3.4.1 – ANÁLISE DE SENSIBILIDADE DE hlo
A Equação (III.52) mostra que hlo é dado por:
−−=
σΛΩ T
req
DdRlo
CP
VIh 24.21
1100
2
.
É desejáve l que se tenha hlo o maior possível, porém, devido aos limites de restrição
estrutural do trem de pouso torna-se impraticável uma variação sensível no valor de hlo
visando a minimizar a área de restrição imposta pelo diagrama.
Levando-se em conta que VD é negativo, é desejável que se maximize o termo
ΛΩ
req
DdR
PVI
1100
2
e que se minimize o termo σ
TC.
Uma das possíveis soluções seria adicionarem-se pequenos pesos nas pontas das pás
do rotor, o que aumentaria a inércia IR; ou então aumentar o raio do rotor na intenção de se
aproveitar melhor o efeito solo, diminuindo desse modo o parâmetro Λ.
Também seria interessante que se diminuísse o peso da aeronave na intenção de se
reduzir CT/σ. No entanto, mesmo que se tenha uma aeronave cada vez mais leve, hlo possui
um limitante dado por:
ΛΩ
req
DdRlo P
VIh
1100
2
−= , (III.59)
que representa a condição limite para W = 0.
III.2.3.4.2 – ANÁLISE DE SENSIBILIDADE DE hhi
A Equação (III.58) fornece o valor de hhi. A intenção é que hhi possua um valor tão
baixo quanto possível, de onde se conclui que o valor de Vcr também deve ser o menor
100
possível. Portanto a redução de hhi recai na redução de Vcr. No entanto, mesmo que Vcr seja
nulo, hhi possui um limitante dado por:
hhi=205.1 ft. (III.60)
III.2.3.4.3 – ANÁLISE DE SENSIBILIDADE DE Vcr
Levando-se em conta que o “diagrama altura versus velocidade” possui um limitante
inferior dado pela Equação (III.59) e um limitante superior dado pela Equação (III.60), um
modo eficiente de reduzir a área de restrição imposta pelo diagrama seria tentar achatar o
diagrama, de forma que o ponto (Vcr, hcr) fique o mais próximo possível do eixo vertical.
Como hcr é fixo e não pode ser alterado, Vcr deve ser trabalhado de modo a ser
reduzido e apresentar um valor o mais conveniente possível.
O valor ótimo de Vcr, é representado por crV , e verifica-se de que forma as
características da aeronave devem ser alteradas para obtê- lo.
Matematicamente o valor numérico de Vcr é representado pela Equação (III.54):
3.17254.584.2 min −+=σ
Lcr
CVV .
A fim de se obter o valor de crV , isola-se Vmin na equação acima, de modo que a
seguinte relação seja obtida:
67.60951.1352.0min +−=σ
Lcr
CVV . (III.61)
Dividindo-se ambos os membros da Equação (III.61) por 0.592ΩR (fator de
conversão, pois na equação acima a unidade de Vmin é knots), tem-se:
+−= 48.102296.3595.0
1min σΩ
µ Lcr
CV
R, (III.62)
onde ΩR é dado em ft/s.
101
Substituindo a Equação (III.62) na Equação (III.57) e multiplicando ambos os
membros da equação por µ², obtém-se:
( ) ( ) 248.102296.3595.0
2
348.102296.3595.0
15.1 24
4
3
30 TL
crL
crd kCC
VRA
fCV
RC
=
+−+
+−
σΩσΩσ . (III.63)
Portanto, pode-se perceber que uma vez fixado o valor de crV , a Equação (III.63)
representa uma situação na qual as demais variáveis devem obedecer uma relação onde ao
final dos cálculos a velocidade critica Vcr apresente o valor pré-estabelecido crV .
Pode-se notar que, matematicamente, Vcr pode ser tão pequeno quanto se desejar desde
que as variáveis que definem as características da aeronave possuam uma combinação de
valores que satisfaça a Equação (III.63).
Obviamente, limitações de caráter físico ou tecnológico se encontram presentes, e
podem inviabilizar a solução da Equação (III.63) para determinadas faixas de valores de crV .
Observa-se que de qualquer forma a área de restrição imposta pelo diagrama poderia ser
teoricamente reduzida a um segmento de reta sobre o eixo vertical se o valor de crV for fixado
em zero.
Fazendo-se crV =0 na Equação (III.63), a seguinte equação é obtida:
( ) ( ) 248.102296.3
2
348.102296.3
15.1 24
4
3
30 TLLd kCC
RAfC
RC
=
+−+
+−
σΩσΩσ . (III.64)
Se esta última relação for estabelecida, as restrições impostas pelo diagrama só se
aplicariam para a condição de vôo pairado. Caso o helicóptero possua certa velocidade de vôo
à frente não nula, não existiria nenhuma restrição imposta.
No capítulo seguinte são apresentados os parâmetros físicos utilizados no presente
estudo a fim de se validar os modelos teóricos apresentados. Também é apresentada a
metodologia de solução das teorias apresentadas neste capítulo, comentando-se o processo de
solução das equações e o método computacional utilizado.
102
CAPÍTULO IV
DESENVOLVIMENTO COMPUTACIONAL DOS MODELOS APRESENTADOS
IV.1 – INTRODUÇÃO
A sistemática de solução adotada para as equações apresentadas no Capítulo III é
baseada em códigos computacionais elaborados no “software” Mathematica, tendo por
referência para o desenvolvimento da programação a publicação “Aritmética, Álgebra e
Cálculo com o Mathematica” [10].
Todas as rotinas construídas solucionam as equações propostas e fornecem resultados
gráficos que são analisados qualitativa e quantitativamente visando a encontrar soluções para
os principais problemas relacionados ao regime de auto-rotação.
Também são apresentados os principais dados numéricos utilizados no estudo dos
modelos de transição do vôo pairado para a auto-rotação em descida vertical e vôo de planeio
utilizando-se a teoria da quantidade-de-movimento e estudo do “diagrama altura versus
velocidade”. Também são apresentados parâmetros físicos e características operacionais de
alguns helicópteros, proporcionando desse modo validar os resultados numéricos (teóricos),
tendo por base resultados de ensaios operacionais do helicóptero.
IV.2 – METODOLOGIA UTILIZADA PARA O ESTUDO DA TRANSIÇÃO DO
VÔO PAIRADO PARA A AUTO-ROTAÇÃO VERTICAL
Ao realizar-se o estudo da transição entre o vôo pairado e a auto-rotação em descida
vertical algumas considerações sobre variação da velocidade induzida u e variação do ângulo-
de-passo θ foram apresentadas no capítulo anterior. Assim, o ponto de partida para a
realização dessa análise é a solução das Equações (III.1) e (III.2) que fornecem diagramas
representando as variações de u e θ em função do tempo decorrido após a falha do motor. A
103
partir dos diagramas obtidos, é possível encontrar os valores de u e θ em cada instante
desejado, o que contribui na sequência de solução do problema, pois os valores da variação da
velocidade de descida V em função do tempo t, e da variação da velocidade de rotação do
rotor Ω em função do tempo t, são dependentes da velocidade induzida e do ângulo-de-passo.
Uma vez calculados os valores de u e θ em cada instante desejado, torna-se possível a
solução numérica das Equações (III.4), (III.5) e (III.6), onde todas as variáveis são conhecidas
e podem ser encontradas no final dessa seção.
Durante a solução das equações citadas, três análises diferentes são realizadas com o
intuito de encontrar a melhor situação para se efetuar uma entrada segura em auto-rotação:
(1) Transição do vôo pairado para auto-rotação sem redução do ângulo-de-passo, ou
seja, mantendo-se o ângulo-de-passo na posição do instante da falha.
(2) Transição do vôo pairado para auto-rotação com redução lenta do ângulo-de-
passo.
(3) Transição do vôo pairado para auto-rotação com redução acelerada do ângulo-de-
passo.
A metodologia utilizada para a solução do problema está baseada na obtenção dos
valores de V e Ω para um determinado instante, onde esses valores podem ser obtidos a partir
das Equações (III.7) e (III.8).
Como os valores de u e θ sofrem variações conforme o tempo passa, fica claro que
para cada instante de tempo tem-se um valor diferente para V e Ω. Assim, as Equações (III.7)
e (III.8) não podem ser resolvidas considerando-se que u e θ são constantes e que apenas o
tempo varia. Dessa forma, para solucionar o problema, desenvolve-se um método passo a
passo de solução com pequenos intervalos de tempo, visando-se a obter o maior número de
pontos possíveis, obtendo resultados com maior precisão.
104
O intervalo de tempo total escolhido é ∆t=15 s, pois indica através dos resultados
obtidos, que tanto a velocidade de descida como a velocidade de rotação do rotor, já se
encontram estabilizadas após esse intervalo.
A rotina desenvolvida realiza em uma primeira etapa, a solução das Equações (III.1), e
(III.2), fornecendo uma tabela com os valores da velocidade induzida e do ângulo-de-passo
em função do tempo. Em seguida, são calculados os valores numéricos das Equações (III.4),
(III.5) e (III.6) considerando-se o instante de tempo igual a zero, ou seja, momento da falha do
motor, obtendo desse modo os valores iniciais 0
•
V , 0
•
Ω , e 0
••
Ω .
Uma vez obtidos os valores iniciais, a rotina desenvolvida se encarrega
automaticamente do cálculo da Equação (III.10), utilizando-se para tal solução os valores de
velocidade induzida e ângulo-de-passo quando ∆t=0.5 s, obtendo desse modo o valor da
aceleração vertical da aeronave tV ∆
•
, meio segundo após a falha do motor.
Com valores de 0V , 0
•
V , tV ∆
•
, 0Ω , 0
•
Ω e 0
••
Ω armazenados na memória do
computador, a rotina se encarrega do cálculo das Equações (III.7) e (III.8). Considerando-se o
intervalo de tempo ∆t=0.5 s, a solução dessas equações fornece os novos valores para V e Ω
em função do tempo decorrido, finalizando desse modo o primeiro passo para a solução do
problema.
Para a obtenção das combinações desejadas de velocidade de descida em função do
tempo e velocidade de rotação do rotor em função do tempo, repete-se o processo para os
trinta intervalos de tempo determinados. Esta repetição é realizada automaticamente pela
rotina desenvolvida através de um processo de “feedback”, onde os valores finais do intervalo
de tempo anterior, tornam-se os valores iniciais do intervalo seguinte.
No intuito de se validar o método proposto no presente trabalho, são utilizadas
algumas características físicas que permitem a solução numérica das equações propostas.
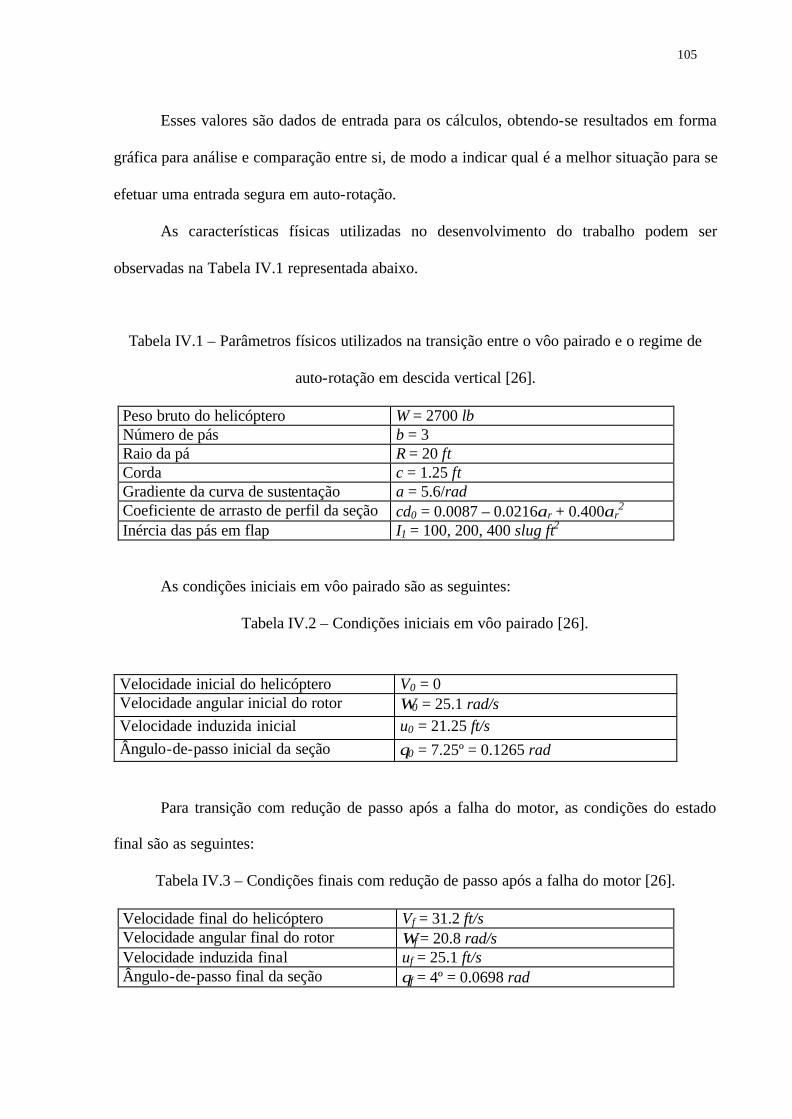
105
Esses valores são dados de entrada para os cálculos, obtendo-se resultados em forma
gráfica para análise e comparação entre si, de modo a indicar qual é a melhor situação para se
efetuar uma entrada segura em auto-rotação.
As características físicas utilizadas no desenvolvimento do trabalho podem ser
observadas na Tabela IV.1 representada abaixo.
Tabela IV.1 – Parâmetros físicos utilizados na transição entre o vôo pairado e o regime de
auto-rotação em descida vertical [26].
Peso bruto do helicóptero W = 2700 lb Número de pás b = 3 Raio da pá R = 20 ft Corda c = 1.25 ft Gradiente da curva de sustentação a = 5.6/rad Coeficiente de arrasto de perfil da seção cd0 = 0.0087 – 0.0216αr + 0.400αr
2 Inércia das pás em flap I1 = 100, 200, 400 slug ft2
As condições iniciais em vôo pairado são as seguintes:
Tabela IV.2 – Condições iniciais em vôo pairado [26].
Para transição com redução de passo após a falha do motor, as condições do estado
final são as seguintes:
Tabela IV.3 – Condições finais com redução de passo após a falha do motor [26].
Velocidade final do helicóptero Vf = 31.2 ft/s Velocidade angular final do rotor Ωf = 20.8 rad/s Velocidade induzida final uf = 25.1 ft/s Ângulo-de-passo final da seção θf = 4º = 0.0698 rad
Velocidade inicial do helicóptero V0 = 0 Velocidade angular inicial do rotor Ω0 = 25.1 rad/s Velocidade induzida inicial u0 = 21.25 ft/s Ângulo-de-passo inicial da seção θ0 = 7.25º = 0.1265 rad
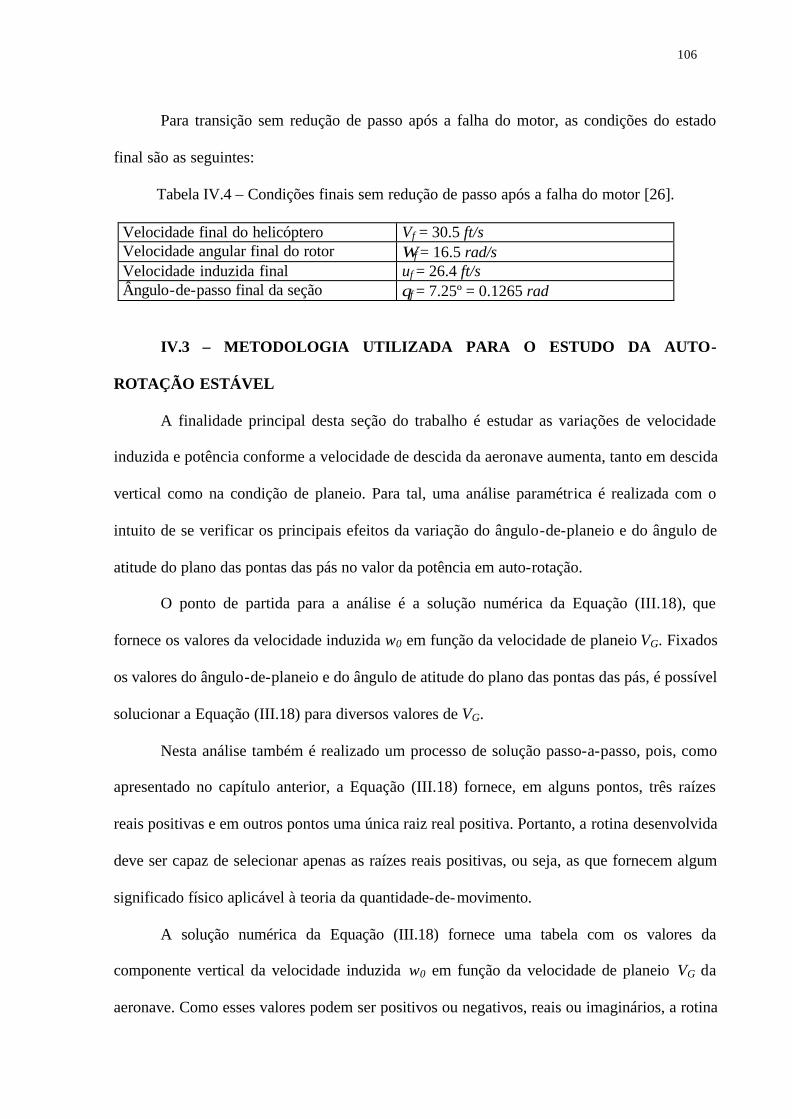
106
Para transição sem redução de passo após a falha do motor, as condições do estado
final são as seguintes:
Tabela IV.4 – Condições finais sem redução de passo após a falha do motor [26].
Velocidade final do helicóptero Vf = 30.5 ft/s Velocidade angular final do rotor Ωf = 16.5 rad/s Velocidade induzida final uf = 26.4 ft/s Ângulo-de-passo final da seção θf = 7.25º = 0.1265 rad
IV.3 – METODOLOGIA UTILIZADA PARA O ESTUDO DA AUTO-
ROTAÇÃO ESTÁVEL
A finalidade principal desta seção do trabalho é estudar as variações de velocidade
induzida e potência conforme a velocidade de descida da aeronave aumenta, tanto em descida
vertical como na condição de planeio. Para tal, uma análise paramétrica é realizada com o
intuito de se verificar os principais efeitos da variação do ângulo-de-planeio e do ângulo de
atitude do plano das pontas das pás no valor da potência em auto-rotação.
O ponto de partida para a análise é a solução numérica da Equação (III.18), que
fornece os valores da velocidade induzida w0 em função da velocidade de planeio VG. Fixados
os valores do ângulo-de-planeio e do ângulo de atitude do plano das pontas das pás, é possível
solucionar a Equação (III.18) para diversos valores de VG.
Nesta análise também é realizado um processo de solução passo-a-passo, pois, como
apresentado no capítulo anterior, a Equação (III.18) fornece, em alguns pontos, três raízes
reais positivas e em outros pontos uma única raiz real positiva. Portanto, a rotina desenvolvida
deve ser capaz de selecionar apenas as raízes reais positivas, ou seja, as que fornecem algum
significado físico aplicável à teoria da quantidade-de-movimento.
A solução numérica da Equação (III.18) fornece uma tabela com os valores da
componente vertical da velocidade induzida w0 em função da velocidade de planeio VG da
aeronave. Como esses valores podem ser positivos ou negativos, reais ou imaginários, a rotina
107
desenvolvida realiza a seleção apenas das raízes reais positivas, desprezando as raízes
complexas e as raízes reais negativas.
Na seqüência, são determinados os valores da variação da potência à medida que a
velocidade de planeio da aeronave aumenta. Fixados os valores de γ e θFP, a rotina
desenvolvida se encarrega de soluciona r a Equação (III.23), onde os valores de velocidade
induzida obtidos na solução da Equação (III.18) são aplicados para cada valor da velocidade
de planeio correspondente, pois como pode-se observar, a Equação (III.23) é dependente dos
valores encontrados na Equação (III.18).
Durante o regime de auto-rotação estável, aplicando-se a teoria da quantidade-de-
movimento, a solução das duas equações citadas é suficiente para uma análise completa dos
estados de operação do rotor. É interessante, no entanto, a realização de uma análise
paramétrica com o intuito de se determinar qual a melhor condição para que o regime de auto-
rotação se estabilize.
A análise paramétrica é realizada através de várias soluções seguidas das Equações
(III.18) e (III.23), adotando-se os valores sugeridos por Heyson [19]. Em uma primeira etapa,
faz-se a fixação do ângulo-de-planeio desde 0º (vôo horizontal) até 90º (auto-rotação em
descida vertical) com intervalos de 30º entre uma medida e outra; e, varia-se o ângulo de
atitude do plano das pontas das pás desde 20º até –20º com intervalos de 10º entre uma
medida e outra. Esta solução permite a obtenção de vários gráficos que fornecem a variação
da velocidade induzida em função da velocidade de planeio da aeronave, bem como a
variação da potência em função da velocidade de planeio. Quando comparadas entre si, essas
curvas demonstram claramente qual é a melhor situação para o regime de auto-rotação, ou
seja, pode-se notar qual é o melhor ângulo-de-planeio e qual o ângulo de atitude do plano das
pontas das pás mais adequado para que seja obtida a menor razão-de-descida.
108
Em uma segunda etapa, a análise paramétrica é realizada com a finalidade de se obter
um gráfico de potência em função do ângulo-de-planeio, onde, a partir de um valor fixo para a
velocidade de planeio, a Equação (III.23) é resolvida diversas vezes originando várias curvas
que quando comparadas entre si, demonstram para a região aplicável da teoria da quantidade-
de-movimento que quanto maior é o ângulo de planeio, maior é o valor da potência extraída
do ar pelo rotor. Este é um resultado de muita importância na análise auto-rotativa, sendo
comentado com maiores detalhes no Capítulo V do presente trabalho.
Para a condição de vôo vertical, as Equações (III.18) e (III.23) ficam reduzidas às
Equações (III.26) e (III.29), que fornecem os valores da velocidade induzida e potência em
função da velocidade de descida, respectivamente. O sistema de solução empregado pela
rotina de cálculos é o mesmo que para a condição de planeio; porém, considera-se o ângulo-
de-planeio γ=90° e o ângulo de atitude do plano das pontas das pás θFP=0°.
Os resultados obtidos através da teoria são comparados diretamente com resultados
práticos de ensaio em túnel de vento, e, demonstram com clareza os estados de operação do
rotor, bem como em quais situações a teoria da quantidade-de-movimento pode ser aplicada.
No caso da auto-rotação ideal, a rotina desenvolvida utiliza a Equação (III.30) para a
condição de vôo vertical, e resolve a Equação (III.38) para o vôo de planeio, fornecendo os
valores da variação da velocidade induzida em função da velocidade de planeio da aeronave
para ambas as condições de vôo em questão. Esses resultados são demonstrados em conjunto
com os obtidos anteriormente, pois desse modo é possível a comparação da situação ideal
com um regime real de vôo.
Para a aplicação da rotina especificada nesta seção do presente trabalho, são
fornecidos a seguir os principais dados numéricos necessários, onde são utilizadas variações
no ângulo-de-planeio e no ângulo de atitude do plano das pontas das pás, como pode ser
observado na Tabela IV.5 representada abaixo:
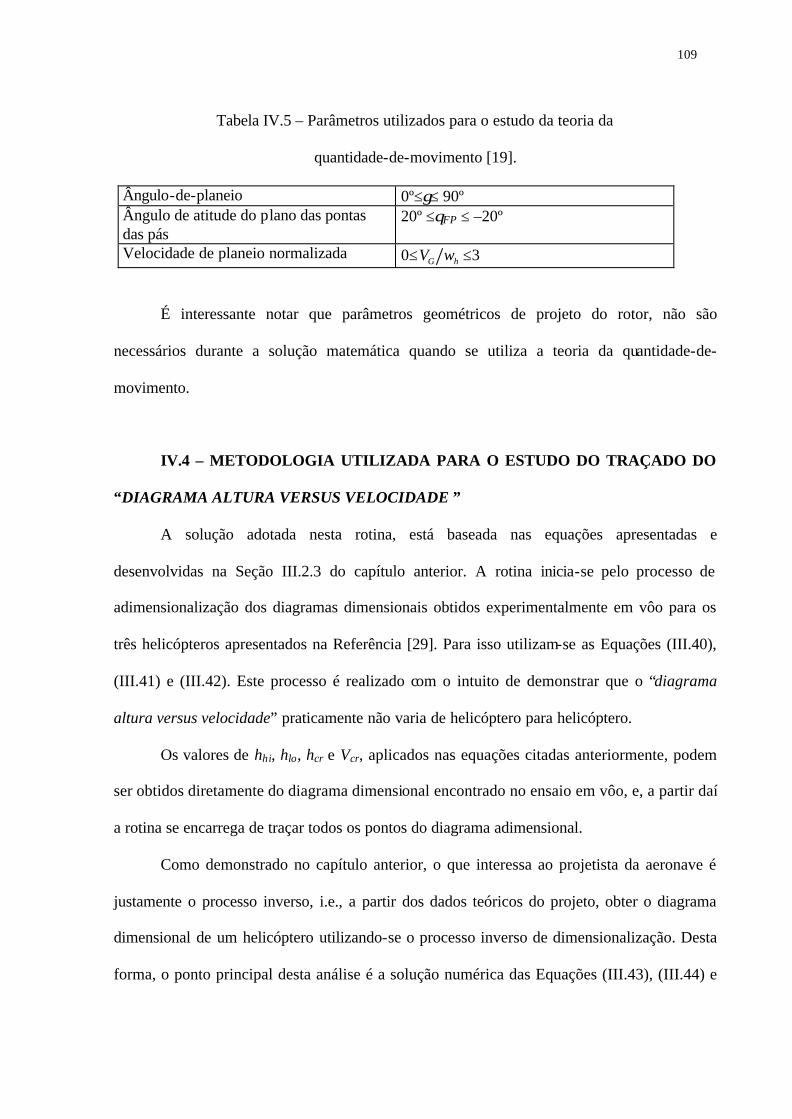
109
Tabela IV.5 – Parâmetros utilizados para o estudo da teoria da
quantidade-de-movimento [19].
Ângulo-de-planeio 0º≤γ≤ 90º Ângulo de atitude do plano das pontas das pás
20º ≤θFP ≤ –20º
Velocidade de planeio normalizada 0≤ hG wV ≤3
É interessante notar que parâmetros geométricos de projeto do rotor, não são
necessários durante a solução matemática quando se utiliza a teoria da quantidade-de-
movimento.
IV.4 – METODOLOGIA UTILIZADA PARA O ESTUDO DO TRAÇADO DO
“DIAGRAMA ALTURA VERSUS VELOCIDADE ”
A solução adotada nesta rotina, está baseada nas equações apresentadas e
desenvolvidas na Seção III.2.3 do capítulo anterior. A rotina inicia-se pelo processo de
adimensionalização dos diagramas dimensionais obtidos experimentalmente em vôo para os
três helicópteros apresentados na Referência [29]. Para isso utilizam-se as Equações (III.40),
(III.41) e (III.42). Este processo é realizado com o intuito de demonstrar que o “diagrama
altura versus velocidade” praticamente não varia de helicóptero para helicóptero.
Os valores de hhi, hlo, hcr e Vcr, aplicados nas equações citadas anteriormente, podem
ser obtidos diretamente do diagrama dimensional encontrado no ensaio em vôo, e, a partir daí
a rotina se encarrega de traçar todos os pontos do diagrama adimensional.
Como demonstrado no capítulo anterior, o que interessa ao projetista da aeronave é
justamente o processo inverso, i.e., a partir dos dados teóricos do projeto, obter o diagrama
dimensional de um helicóptero utilizando-se o processo inverso de dimensionalização. Desta
forma, o ponto principal desta análise é a solução numérica das Equações (III.43), (III.44) e
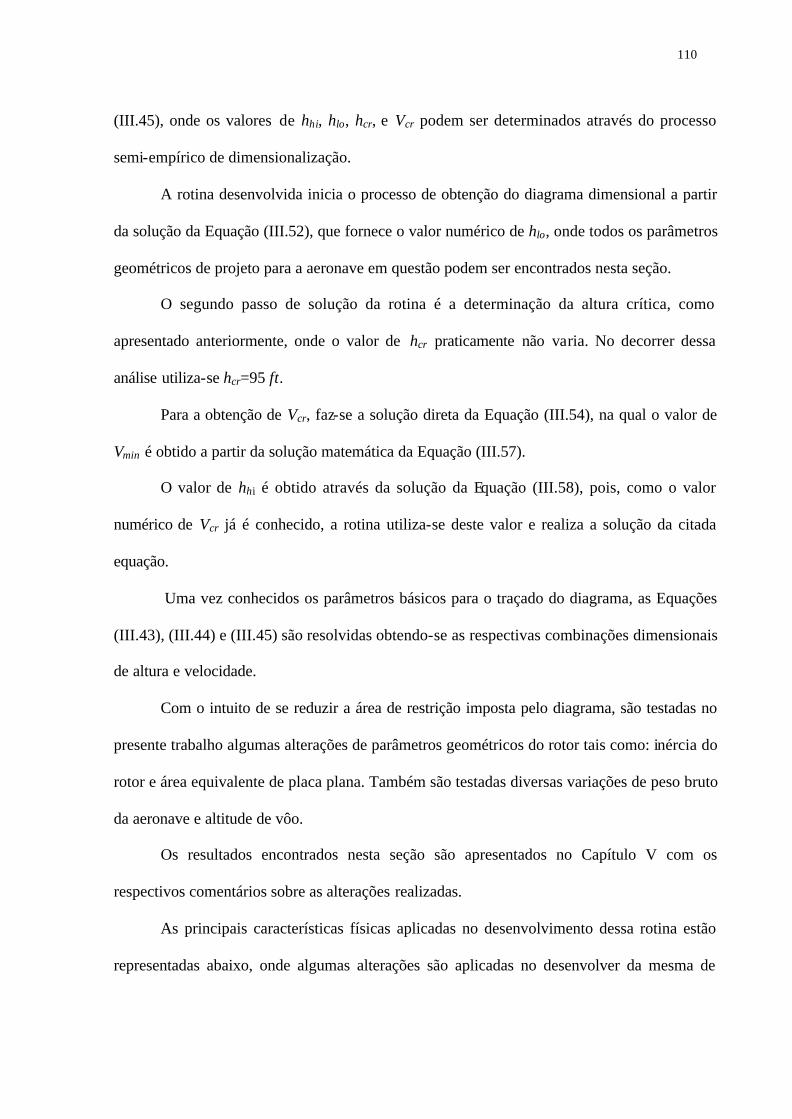
110
(III.45), onde os valores de hhi, hlo, hcr, e Vcr podem ser determinados através do processo
semi-empírico de dimensionalização.
A rotina desenvolvida inicia o processo de obtenção do diagrama dimensional a partir
da solução da Equação (III.52), que fornece o valor numérico de hlo, onde todos os parâmetros
geométricos de projeto para a aeronave em questão podem ser encontrados nesta seção.
O segundo passo de solução da rotina é a determinação da altura crítica, como
apresentado anteriormente, onde o valor de hcr praticamente não varia. No decorrer dessa
análise utiliza-se hcr=95 ft.
Para a obtenção de Vcr, faz-se a solução direta da Equação (III.54), na qual o valor de
Vmin é obtido a partir da solução matemática da Equação (III.57).
O valor de hhi é obtido através da solução da Equação (III.58), pois, como o valor
numérico de Vcr já é conhecido, a rotina utiliza-se deste valor e realiza a solução da citada
equação.
Uma vez conhecidos os parâmetros básicos para o traçado do diagrama, as Equações
(III.43), (III.44) e (III.45) são resolvidas obtendo-se as respectivas combinações dimensionais
de altura e velocidade.
Com o intuito de se reduzir a área de restrição imposta pelo diagrama, são testadas no
presente trabalho algumas alterações de parâmetros geométricos do rotor tais como: inércia do
rotor e área equivalente de placa plana. Também são testadas diversas variações de peso bruto
da aeronave e altitude de vôo.
Os resultados encontrados nesta seção são apresentados no Capítulo V com os
respectivos comentários sobre as alterações realizadas.
As principais características físicas aplicadas no desenvolvimento dessa rotina estão
representadas abaixo, onde algumas alterações são aplicadas no desenvolver da mesma de
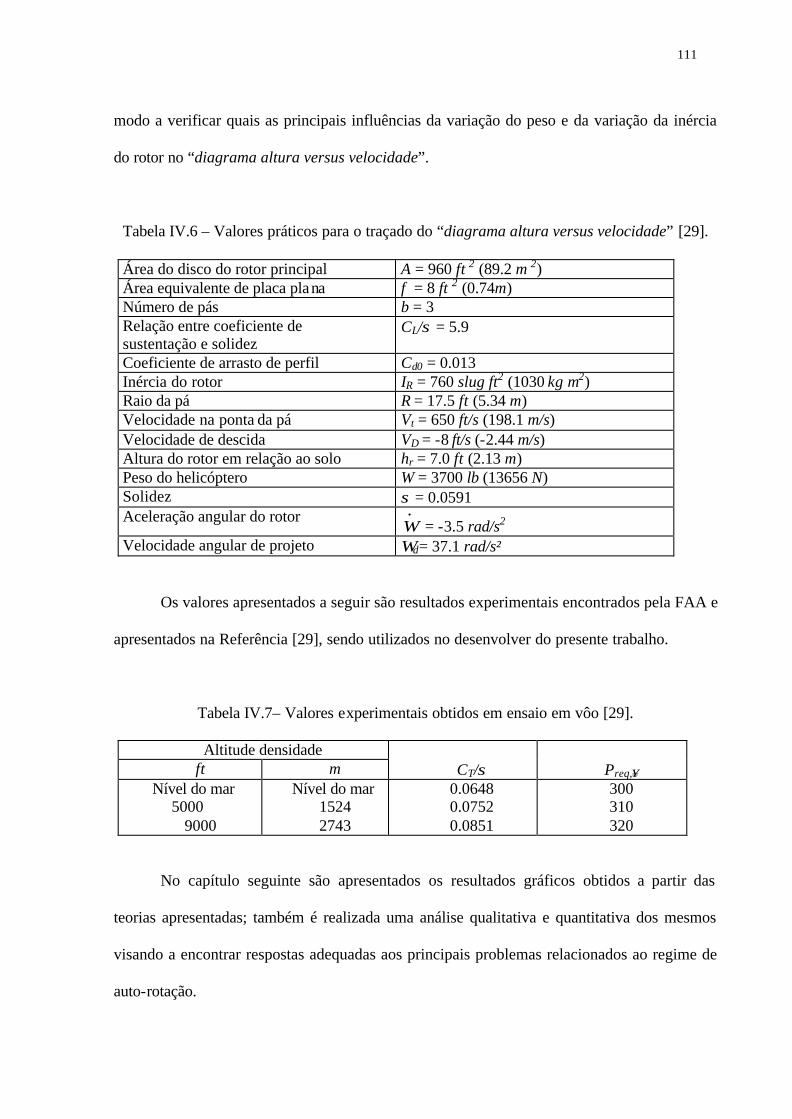
111
modo a verificar quais as principais influências da variação do peso e da variação da inércia
do rotor no “diagrama altura versus velocidade”.
Tabela IV.6 – Valores práticos para o traçado do “diagrama altura versus velocidade” [29].
Área do disco do rotor principal A = 960 ft 2 (89.2 m 2) Área equivalente de placa plana f = 8 ft 2 (0.74m) Número de pás b = 3 Relação entre coeficiente de sustentação e solidez
CL/σ = 5.9
Coeficiente de arrasto de perfil Cd0 = 0.013 Inércia do rotor IR = 760 slug ft2 (1030 kg m2) Raio da pá R = 17.5 ft (5.34 m) Velocidade na ponta da pá Vt = 650 ft/s (198.1 m/s) Velocidade de descida VD = -8 ft/s (-2.44 m/s) Altura do rotor em relação ao solo hr = 7.0 ft (2.13 m) Peso do helicóptero W = 3700 lb (13656 N) Solidez σ = 0.0591 Aceleração angular do rotor •
Ω = -3.5 rad/s2 Velocidade angular de projeto Ωd= 37.1 rad/s²
Os valores apresentados a seguir são resultados experimentais encontrados pela FAA e
apresentados na Referência [29], sendo utilizados no desenvolver do presente trabalho.
Tabela IV.7– Valores experimentais obtidos em ensaio em vôo [29].
Altitude densidade ft m
CT/σ
Preq,∞
Nível do mar 5000
9000
Nível do mar 1524 2743
0.0648 0.0752 0.0851
300 310 320
No capítulo seguinte são apresentados os resultados gráficos obtidos a partir das
teorias apresentadas; também é realizada uma análise qualitativa e quantitativa dos mesmos
visando a encontrar respostas adequadas aos principais problemas relacionados ao regime de
auto-rotação.
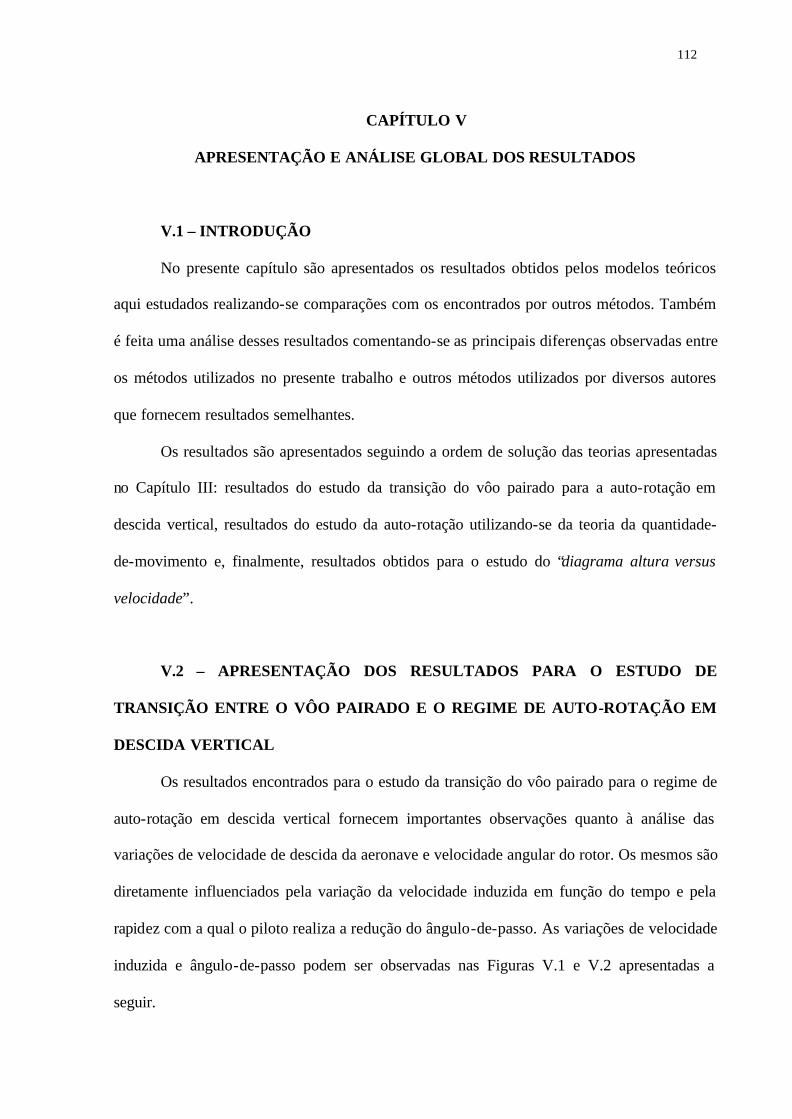
112
CAPÍTULO V
APRESENTAÇÃO E ANÁLISE GLOBAL DOS RESULTADOS
V.1 – INTRODUÇÃO
No presente capítulo são apresentados os resultados obtidos pelos modelos teóricos
aqui estudados realizando-se comparações com os encontrados por outros métodos. Também
é feita uma análise desses resultados comentando-se as principais diferenças observadas entre
os métodos utilizados no presente trabalho e outros métodos utilizados por diversos autores
que fornecem resultados semelhantes.
Os resultados são apresentados seguindo a ordem de solução das teorias apresentadas
no Capítulo III: resultados do estudo da transição do vôo pairado para a auto-rotação em
descida vertical, resultados do estudo da auto-rotação utilizando-se da teoria da quantidade-
de-movimento e, finalmente, resultados obtidos para o estudo do “diagrama altura versus
velocidade”.
V.2 – APRESENTAÇÃO DOS RESULTADOS PARA O ESTUDO DE
TRANSIÇÃO ENTRE O VÔO PAIRADO E O REGIME DE AUTO-ROTAÇÃO EM
DESCIDA VERTICAL
Os resultados encontrados para o estudo da transição do vôo pairado para o regime de
auto-rotação em descida vertical fornecem importantes observações quanto à análise das
variações de velocidade de descida da aeronave e velocidade angular do rotor. Os mesmos são
diretamente influenciados pela variação da velocidade induzida em função do tempo e pela
rapidez com a qual o piloto realiza a redução do ângulo-de-passo. As variações de velocidade
induzida e ângulo-de-passo podem ser observadas nas Figuras V.1 e V.2 apresentadas a
seguir.
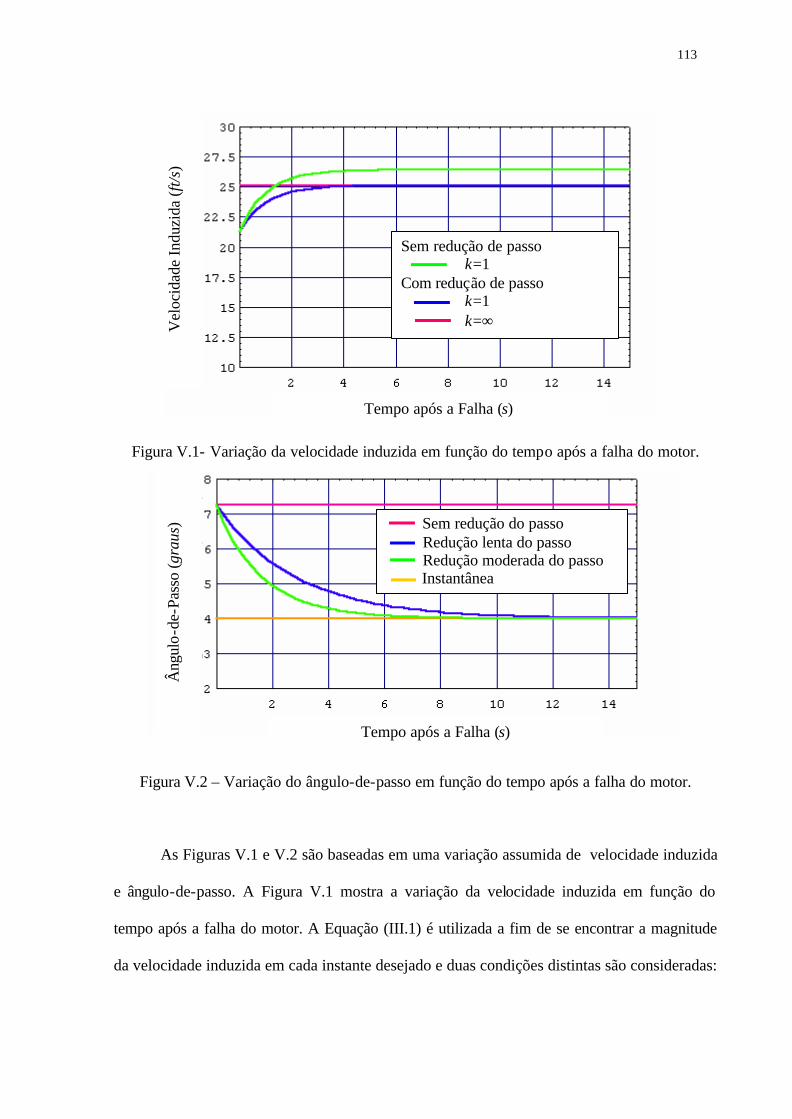
113
Figura V.1- Variação da velocidade induzida em função do tempo após a falha do motor.
Figura V.2 – Variação do ângulo-de-passo em função do tempo após a falha do motor.
As Figuras V.1 e V.2 são baseadas em uma variação assumida de velocidade induzida
e ângulo-de-passo. A Figura V.1 mostra a variação da velocidade induzida em função do
tempo após a falha do motor. A Equação (III.1) é utilizada a fim de se encontrar a magnitude
da velocidade induzida em cada instante desejado e duas condições distintas são consideradas:
Sem redução do passo Redução lenta do passo Redução moderada do passo Instantânea
Tempo após a Falha (s)
Âng
ulo-
de-P
asso
(gra
us)
Sem redução de passo k=1 Com redução de passo k=1 k=∞
Tempo após a Falha (s)
Vel
ocid
ade
Indu
zida
(ft/
s)
114
a) com redução do ângulo-de-passo e, b) sem redução do ângulo-de-passo (manter o ângulo-
de-passo na posição inicial do momento da falha do motor).
Pode-se observar que, quando o ângulo-de-passo é reduzido, obtêm-se menores
valores de velocidade induzida em relação à não-redução do mesmo. Na solução com
redução do ângulo-de-passo, dois valores para o coeficiente de declínio k são adotados. Em
uma primeira análise, adota-se o coeficiente k=1 e pode-se observar nesta situação, que a
velocidade induzida varia exponencialmente em função do tempo decorrido após a falha do
motor, partindo do valor inicial u0 e atingindo o valor final uf em (aproximados) 4s, indicando
que a transição para o regime auto-rotacional estável já está praticamente concluída. Quando
se adota o coeficiente k=∞ pode-se verificar na Equação (III.1) que a velocidade induzida
assume um valor constante igual a uf desde o instante em que ocorre a falha do motor. A
explicação teórica para esta situação pode ser creditada a uma hipotética redução instantânea
do ângulo-de-passo por parte do piloto da aeronave assim que se perceba a falha do motor.
Logicamente que em uma situação real de vôo esta alteração é praticamente impossível de ser
realizada. Portanto, a curva representada por k=∞ na Figura V.1 é apenas apresentada a título
ilustrativo no presente trabalho indicando que teoricamente um regime estável de auto-rotação
poderia ser obtido instantaneamente.
A Figura V.2 mostra a variação do ângulo-de-passo em função do tempo após a falha
do motor. No contexto do presente trabalho, a Figura V.2 ilustra com clareza o tempo de
reação do piloto após perceber a falha do motor. As curvas apresentadas podem ser obtidas
matematicamente através da solução direta da Equação (III.2), que fornece como resultado o
valor do ângulo-de-passo a cada instante desejado.
Deve-se observar que os pilotos reagem de diferentes maneiras quando percebem a
falha do motor. Existem aqueles que não efetuam a redução no ângulo-de-passo, ou seja,
apenas mantém o mesmo na posição do instante da falha, colocando em risco uma entrada
115
segura em auto-rotação. E existem aqueles que efetuam a redução no ângulo-de-passo, alguns
com mais agilidade que os outros.
As curvas exponenciais representadas na Figura V.2 são obtidas considerando-se
quatro situações diferentes. Em um primeiro caso, considera-se a não-redução do ângulo-de-
passo, e, nessa situação, verifica-se como resultado que θf=θ0, ou seja, não existe um
comando por parte do piloto com o intuito de se reduzir o ângulo-de-passo.
A curva denominada instantânea representa uma situação teórica, impossível de se
obter na prática, já comentada na análise da Figura V.I. Por mais rápida que seja a reação do
piloto ao perceber a falha do motor, é impossível que a redução do ângulo-de-passo seja
realizada de maneira instantânea.
Os tempos de reação podem ser observados com mais clareza nas curvas que
representam uma redução lenta do ângulo-de-passo e uma redução moderada do ângulo-de-
passo. Naturalmente, uma infinidade de curvas pode ser obtida, e cada uma delas indica a
rapidez com que o comando é aplicado. Matematicamente a Equação (III.2) é utilizada, e
pode-se observar que as variáveis de controle do tempo de reação são a1 e a2, onde esses
valores são adotados e estão contidos no intervalo ]0,1[, podendo fornecer infinitas respostas
diferentes. Para a análise realizada na Figura V.2, os valores de a1 e a2 adotados são os
seguintes: a) redução lenta do ângulo-de-passo: a1=0.3 e a2=0.4; b) redução moderada do
ângulo-de-passo: a1=0.5 e a2=0.6.
A maneira com a qual o piloto da aeronave realiza a redução do ângulo-de-passo,
influencia de modo direto tanto a razão-de-descida da aeronave como a velocidade de rotação
angular do rotor. Estas variações podem ser observadas na análise das Figuras V.3 e V.4 que
mostram os efeitos da variação do ângulo-de-passo tanto na razão-de-descida da aeronave
quanto na velocidade angular de rotação do rotor.
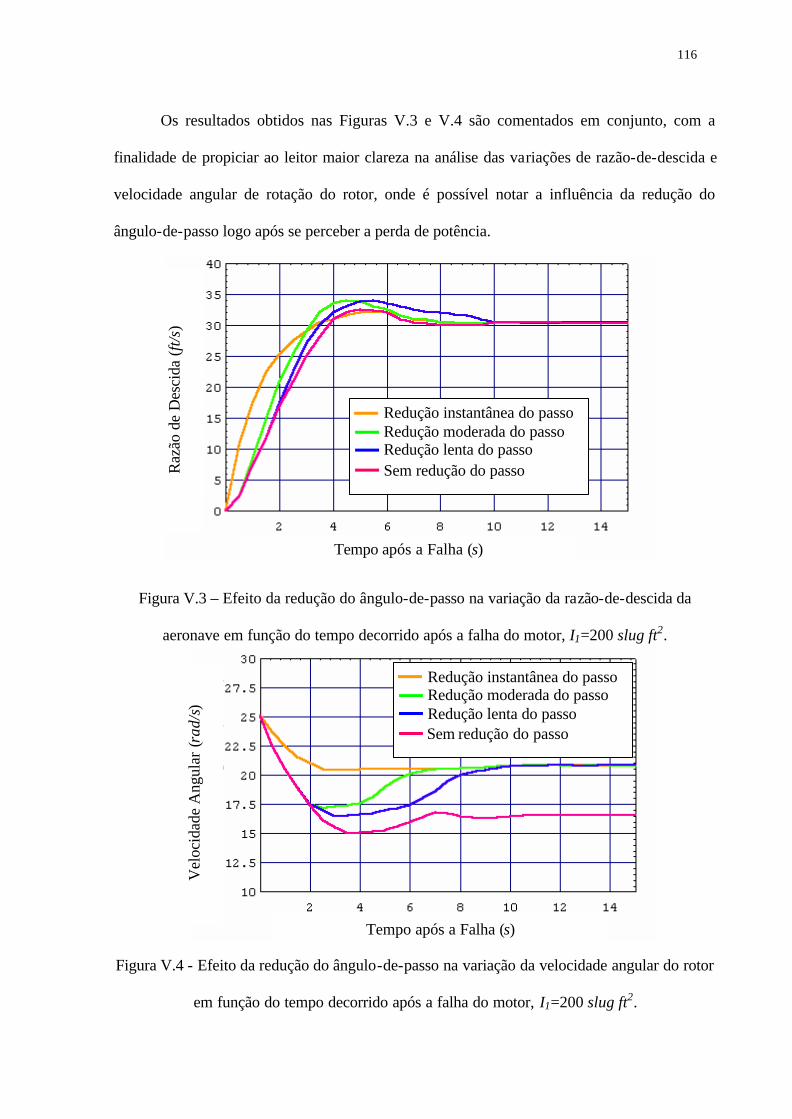
116
Os resultados obtidos nas Figuras V.3 e V.4 são comentados em conjunto, com a
finalidade de propiciar ao leitor maior clareza na análise das variações de razão-de-descida e
velocidade angular de rotação do rotor, onde é possível notar a influência da redução do
ângulo-de-passo logo após se perceber a perda de potência.
Figura V.3 – Efeito da redução do ângulo-de-passo na variação da razão-de-descida da
aeronave em função do tempo decorrido após a falha do motor, I1=200 slug ft2.
Figura V.4 - Efeito da redução do ângulo-de-passo na variação da velocidade angular do rotor
em função do tempo decorrido após a falha do motor, I1=200 slug ft2.
Redução instantânea do passo Redução moderada do passo Redução lenta do passo Sem redução do passo
Tempo após a Falha (s)
Vel
ocid
ade
Ang
ular
(ra
d/s)
Redução instantânea do passo Redução moderada do passo Redução lenta do passo Sem redução do passo
Tempo após a Falha (s)
Raz
ão d
e D
esci
da (
ft/s)
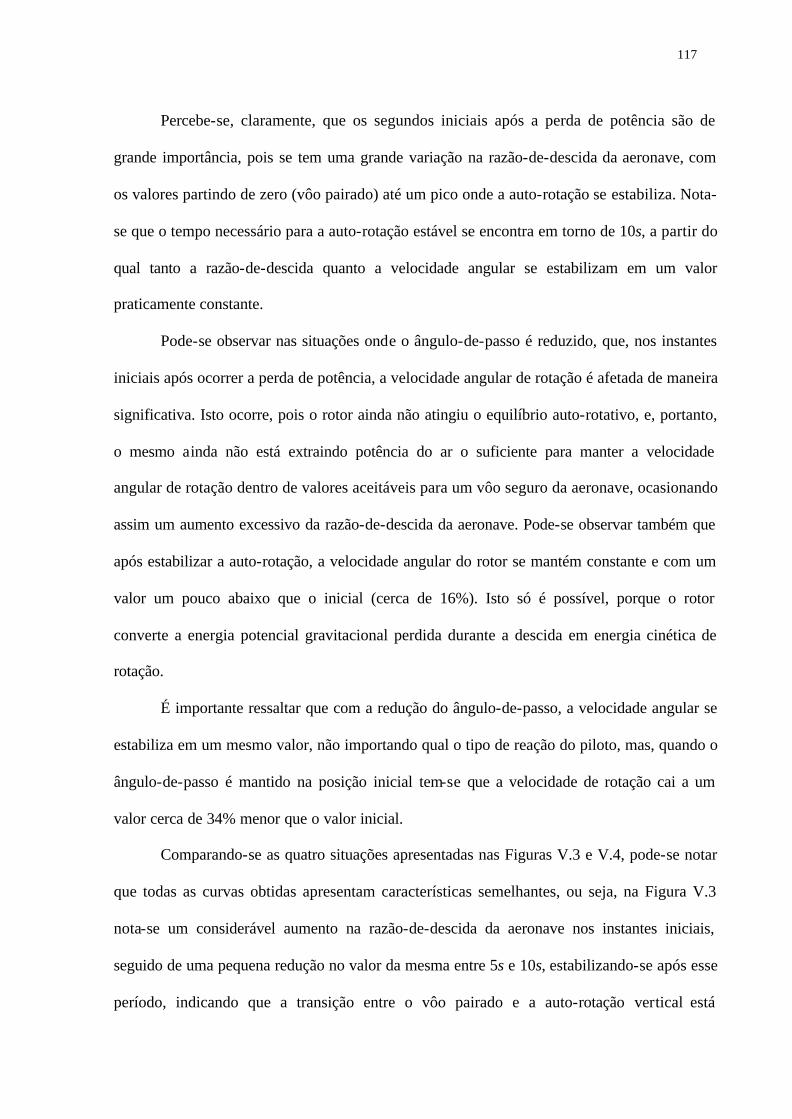
117
Percebe-se, claramente, que os segundos iniciais após a perda de potência são de
grande importância, pois se tem uma grande variação na razão-de-descida da aeronave, com
os valores partindo de zero (vôo pairado) até um pico onde a auto-rotação se estabiliza. Nota-
se que o tempo necessário para a auto-rotação estável se encontra em torno de 10s, a partir do
qual tanto a razão-de-descida quanto a velocidade angular se estabilizam em um valor
praticamente constante.
Pode-se observar nas situações onde o ângulo-de-passo é reduzido, que, nos instantes
iniciais após ocorrer a perda de potência, a velocidade angular de rotação é afetada de maneira
significativa. Isto ocorre, pois o rotor ainda não atingiu o equilíbrio auto-rotativo, e, portanto,
o mesmo ainda não está extraindo potência do ar o suficiente para manter a velocidade
angular de rotação dentro de valores aceitáveis para um vôo seguro da aeronave, ocasionando
assim um aumento excessivo da razão-de-descida da aeronave. Pode-se observar também que
após estabilizar a auto-rotação, a velocidade angular do rotor se mantém constante e com um
valor um pouco abaixo que o inicial (cerca de 16%). Isto só é possível, porque o rotor
converte a energia potencial gravitacional perdida durante a descida em energia cinética de
rotação.
É importante ressaltar que com a redução do ângulo-de-passo, a velocidade angular se
estabiliza em um mesmo valor, não importando qual o tipo de reação do piloto, mas, quando o
ângulo-de-passo é mantido na posição inicial tem-se que a velocidade de rotação cai a um
valor cerca de 34% menor que o valor inicial.
Comparando-se as quatro situações apresentadas nas Figuras V.3 e V.4, pode-se notar
que todas as curvas obtidas apresentam características semelhantes, ou seja, na Figura V.3
nota-se um considerável aumento na razão-de-descida da aeronave nos instantes iniciais,
seguido de uma pequena redução no valor da mesma entre 5s e 10s, estabilizando-se após esse
período, indicando que a transição entre o vôo pairado e a auto-rotação vertical está
118
concluída. No caso da Figura V.4, a velocidade angular de rotação sofre uma substancial
redução nos instantes iniciais, recuperando-se entre 4s e 10s estabilizando-se após esse
período.
Quando se considera uma hipotética redução instantânea do ângulo-de-passo, pode-se
observar que a velocidade de rotação angular se estabiliza após 2s, indicando que a transição
para o regime auto-rotacional ocorre de modo mais acelerado, o que pode ser percebido na
curva que representa a variação da razão-de-descida, onde se observa nos instantes iniciais um
maior ganho de velocidade em relação às outras situações.
No caso da redução lenta e moderada do ângulo-de-passo, pode-se observar que a
velocidade angular de rotação decresce consideravelmente nos instantes iniciais, recuperando-
se posteriormente a atingindo um valor igual ao da situação na qual o ângulo-de-passo é
reduzido de maneira instantânea. Porém, nota-se que a recuperação da velocidade angular
depende muito do tempo de reação do piloto, pois quanto mais acelerada é a aplicação do
comando, mais rápida é a recuperação mesma. O beneficio obtido com esta situação é notado
na curva que mostra redução moderada do ângulo-de-passo, representada na Figura V.3, onde
é possível observar que a máxima razão-de-descida ocorre aproximadamente 1s antes que na
situação com redução lenta do ângulo-de-passo. Como a recuperação da velocidade angular
de rotação é mais acelerada, é de se esperar que a razão-de-descida se estabilize antes.
Portanto, uma redução mais acelerada do ângulo-de-passo é aparentemente benéfica para o
regime de transição entre o vôo pairado e a auto-rotação em descida vertical. Porém deve-se
ressaltar que a rapidez em se atingir a velocidade angular de rotação estável, pode ser
prejudicial a uma entrada suave em auto-rotação, pois pode ocasionar vibrações na aeronave
devido a uma mudança brusca de atitude da mesma. Portanto, é aconselhável que a redução
do passo seja realizada logo após a perda de potência, porém a mesma deve ser feita de
maneira lenta e suave.
119
Na situação onde o ângulo-de-passo é mantido na posição inicial, pode-se notar que a
velocidade angular de rotação se estabiliza em um valor abaixo dos demais, porém a razão-de-
descida da aeronave se estabiliza em um valor igual. Neste caso pode-se esperar que com uma
menor velocidade angular de rotação do rotor, a razão-de-descida seja bem maior, pois a
sustentação gerada é menor, reduzindo assim a relação de eficácia L/D ocasionando maiores
razões-de-descida. Porém, na solução matemática apresentada no Capítulo III do presente
trabalho, é possível notar que embora a velocidade de rotação se encontre reduzida, o valor do
ângulo-de-passo permanece o mesmo, ou seja, na Equação (III.10) é possível notar que existe
uma compensação no termo (θ∆t/3)Ω∆t2 resultando em acelerações quase idênticas às
encontradas quando o ângulo-de-passo é reduzido, proporcionando desse modo razões-de-
descida semelhantes às encontradas naquela situação. Como a partir de 10s a velocidade
angular, o ângulo-de-passo e a velocidade induzida são praticamente constantes, a Equação
(III.10) fornece como resultado numérico acelerações próximas de zero, fazendo com que a
razão-de-descida da aeronave também permaneça constante e com um valor igual ao da
situação quando o ângulo-de-passo é reduzido. Porém, vale ressaltar que este é um resultado
incoerente, uma vez que a modelagem assumida para variação da velocidade induzida não é
capaz de captar adequadamente a física presente no regime de transição entre o vôo pairado e
a auto-rotação em descida vertical. Para se obter uma solução mais adequada do problema,
Johnson [20], apresenta um modelo analítico para a determinação da velocidade induzida.
As Figuras V.5 e V.6 mostram a variação da razão-de-descida e da velocidade angular
de rotação do rotor em função do tempo decorrido após a falha do motor quando o fator
exponencial k é considerado na análise da variação de velocidade induzida comentada na
Figura V.1. Novamente uma análise conjunta é realizada, e nesta situação, é possível observar
que praticamente não existe influência do valor de k quando a redução do ângulo-de-passo é
realizada.
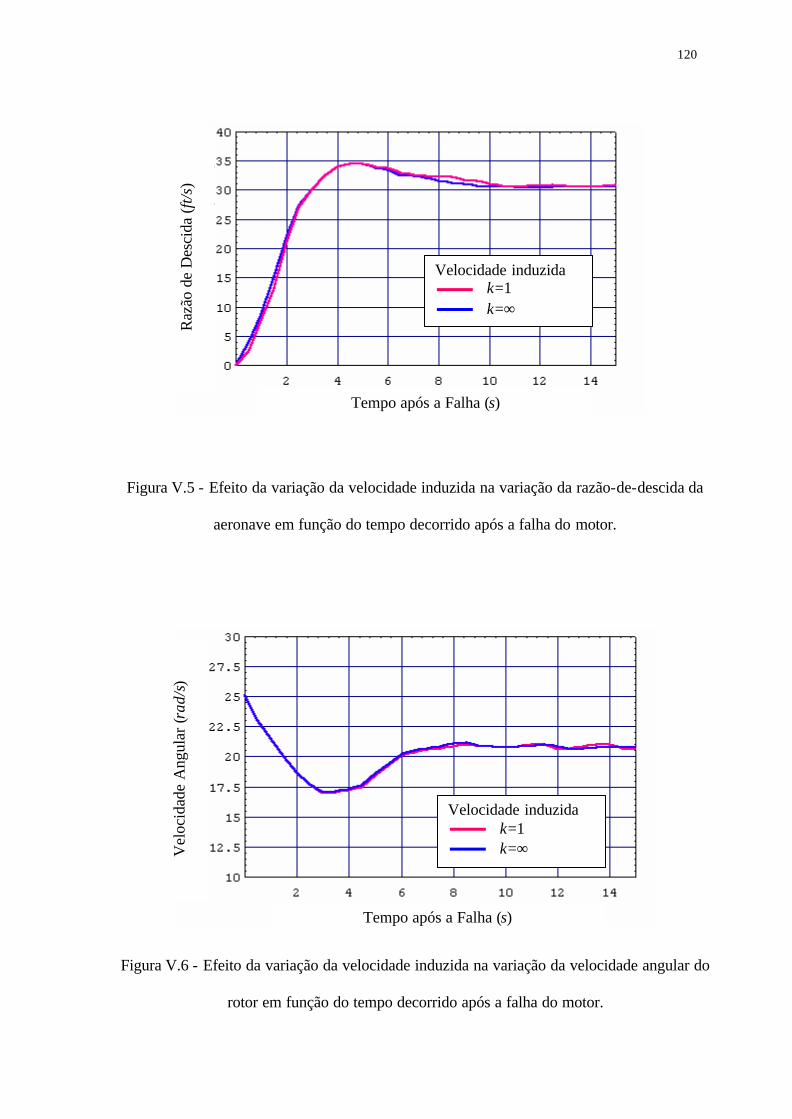
120
Figura V.5 - Efeito da variação da velocidade induzida na variação da razão-de-descida da
aeronave em função do tempo decorrido após a falha do motor.
Figura V.6 - Efeito da variação da velocidade induzida na variação da velocidade angular do
rotor em função do tempo decorrido após a falha do motor.
Velocidade induzida k=1 k=∞
Tempo após a Falha (s)
Vel
ocid
ade
Ang
ular
(rad
/s)
Velocidade induzida k=1 k=∞
Tempo após a Falha (s)
Raz
ão d
e D
esci
da (
ft/s)
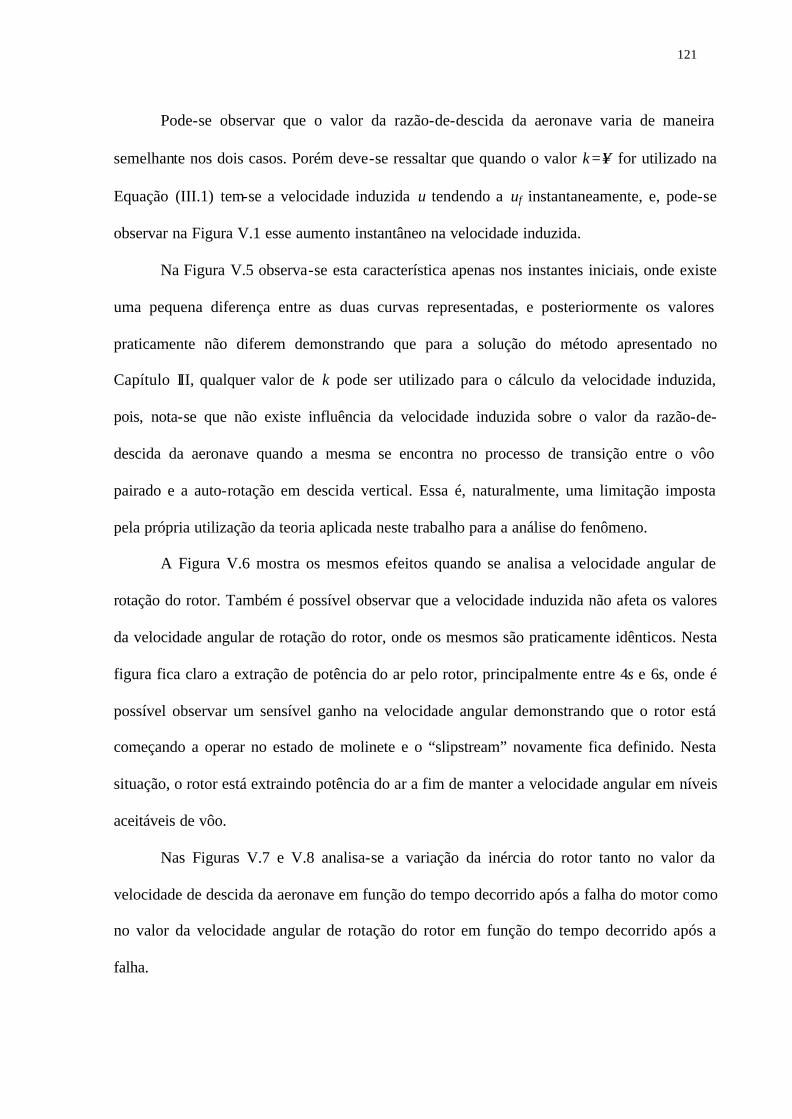
121
Pode-se observar que o valor da razão-de-descida da aeronave varia de maneira
semelhante nos dois casos. Porém deve-se ressaltar que quando o valor k=∞ for utilizado na
Equação (III.1) tem-se a velocidade induzida u tendendo a uf instantaneamente, e, pode-se
observar na Figura V.1 esse aumento instantâneo na velocidade induzida.
Na Figura V.5 observa-se esta característica apenas nos instantes iniciais, onde existe
uma pequena diferença entre as duas curvas representadas, e posteriormente os valores
praticamente não diferem demonstrando que para a solução do método apresentado no
Capítulo III, qualquer valor de k pode ser utilizado para o cálculo da velocidade induzida,
pois, nota-se que não existe influência da velocidade induzida sobre o valor da razão-de-
descida da aeronave quando a mesma se encontra no processo de transição entre o vôo
pairado e a auto-rotação em descida vertical. Essa é, naturalmente, uma limitação imposta
pela própria utilização da teoria aplicada neste trabalho para a análise do fenômeno.
A Figura V.6 mostra os mesmos efeitos quando se analisa a velocidade angular de
rotação do rotor. Também é possível observar que a velocidade induzida não afeta os valores
da velocidade angular de rotação do rotor, onde os mesmos são praticamente idênticos. Nesta
figura fica claro a extração de potência do ar pelo rotor, principalmente entre 4s e 6s, onde é
possível observar um sensível ganho na velocidade angular demonstrando que o rotor está
começando a operar no estado de molinete e o “slipstream” novamente fica definido. Nesta
situação, o rotor está extraindo potência do ar a fim de manter a velocidade angular em níveis
aceitáveis de vôo.
Nas Figuras V.7 e V.8 analisa-se a variação da inércia do rotor tanto no valor da
velocidade de descida da aeronave em função do tempo decorrido após a falha do motor como
no valor da velocidade angular de rotação do rotor em função do tempo decorrido após a
falha.
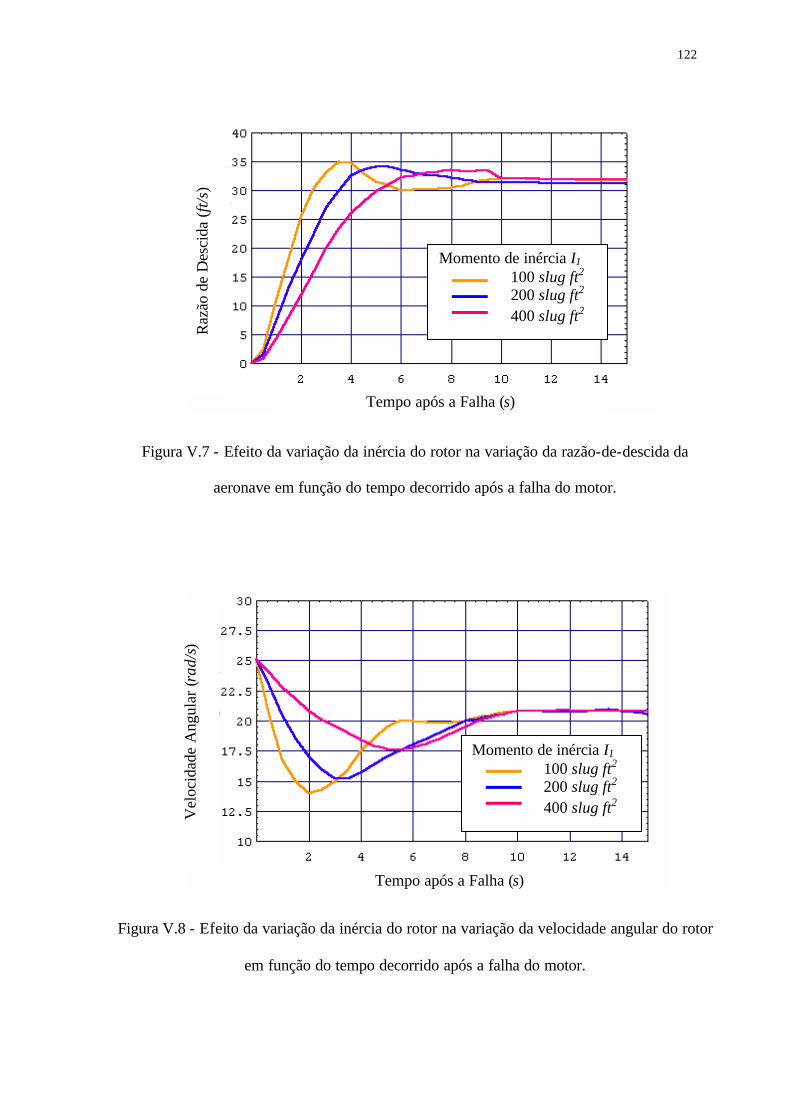
122
Figura V.7 - Efeito da variação da inércia do rotor na variação da razão-de-descida da
aeronave em função do tempo decorrido após a falha do motor.
Figura V.8 - Efeito da variação da inércia do rotor na variação da velocidade angular do rotor
em função do tempo decorrido após a falha do motor.
Momento de inércia I1 100 slug ft2 200 slug ft2 400 slug ft2
Tempo após a Falha (s)
Vel
ocid
ade
Ang
ular
(rad
/s)
Momento de inércia I1 100 slug ft2 200 slug ft2 400 slug ft2
Tempo após a Falha (s)
Raz
ão d
e D
esci
da (
ft/s)
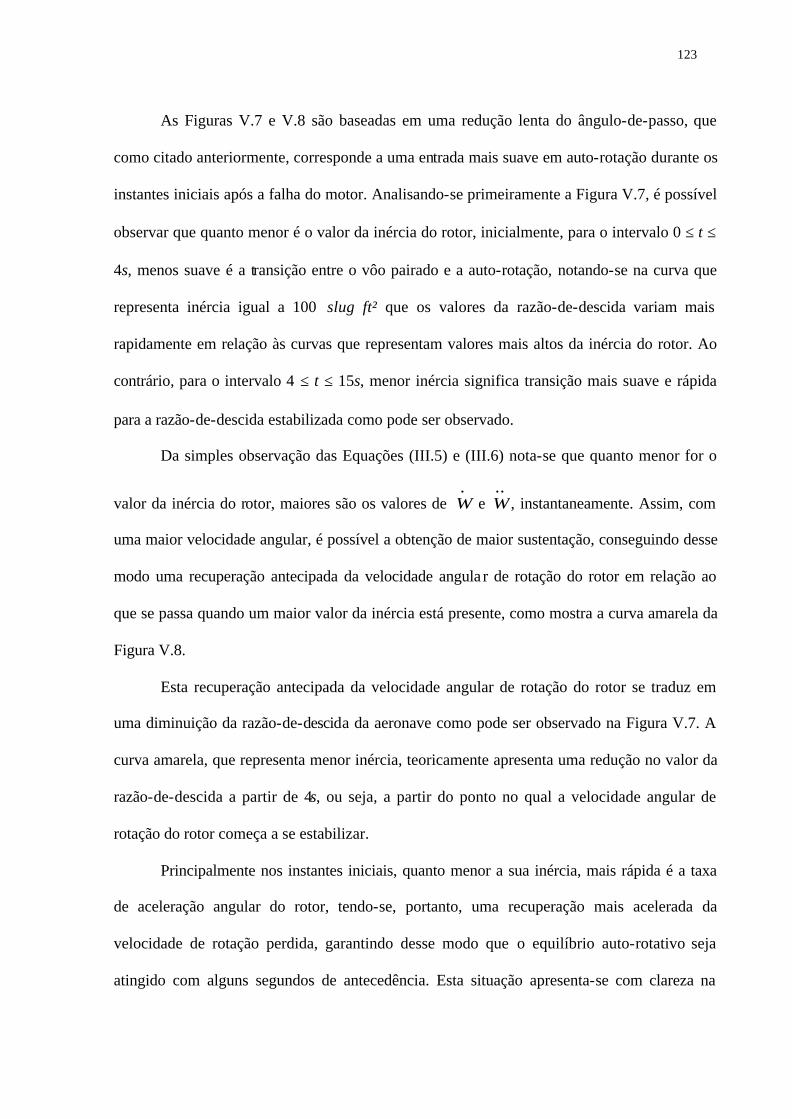
123
As Figuras V.7 e V.8 são baseadas em uma redução lenta do ângulo-de-passo, que
como citado anteriormente, corresponde a uma entrada mais suave em auto-rotação durante os
instantes iniciais após a falha do motor. Analisando-se primeiramente a Figura V.7, é possível
observar que quanto menor é o valor da inércia do rotor, inicialmente, para o intervalo 0 ≤ t ≤
4s, menos suave é a transição entre o vôo pairado e a auto-rotação, notando-se na curva que
representa inércia igual a 100 slug ft² que os valores da razão-de-descida variam mais
rapidamente em relação às curvas que representam valores mais altos da inércia do rotor. Ao
contrário, para o intervalo 4 ≤ t ≤ 15s, menor inércia significa transição mais suave e rápida
para a razão-de-descida estabilizada como pode ser observado.
Da simples observação das Equações (III.5) e (III.6) nota-se que quanto menor for o
valor da inércia do rotor, maiores são os valores de •
Ω e ••
Ω , instantaneamente. Assim, com
uma maior velocidade angular, é possível a obtenção de maior sustentação, conseguindo desse
modo uma recuperação antecipada da velocidade angula r de rotação do rotor em relação ao
que se passa quando um maior valor da inércia está presente, como mostra a curva amarela da
Figura V.8.
Esta recuperação antecipada da velocidade angular de rotação do rotor se traduz em
uma diminuição da razão-de-descida da aeronave como pode ser observado na Figura V.7. A
curva amarela, que representa menor inércia, teoricamente apresenta uma redução no valor da
razão-de-descida a partir de 4s, ou seja, a partir do ponto no qual a velocidade angular de
rotação do rotor começa a se estabilizar.
Principalmente nos instantes iniciais, quanto menor a sua inércia, mais rápida é a taxa
de aceleração angular do rotor, tendo-se, portanto, uma recuperação mais acelerada da
velocidade de rotação perdida, garantindo desse modo que o equilíbrio auto-rotativo seja
atingido com alguns segundos de antecedência. Esta situação apresenta-se com clareza na
124
curva que representa inércia igual a 100 slug ft². É importante notar que com uma maior
aceleração do rotor, mais rápida é a transição entre o vôo pairado e a auto-rotação vertical,
garantindo mais segurança ao vôo da aeronave, pois quanto antes se conseguir um regime de
auto-rotação estável semelhante às características do vôo com potência, melhor é a situação.
Naturalmente que deve haver uma solução-de-compromisso entre a rapidez em se atingir a
velocidade angular de rotação estável em auto-rotação e as condições de vibração devido às
maiores acelerações angulares envolvidas logo após a perda de potência, - no intervalo (0 ≤ t
≤ 4s) por exemplo - para se garantir que é melhor a utilização de um valor menor de inércia
do rotor principal do helicóptero.
V.3 – APRESENTAÇÃO DOS RESULTADOS PARA O ESTUDO DO REGIME
DE AUTO-ROTAÇÃO ESTÁVEL EM VÔO À FRENTE UTILIZANDO-SE A
TEORIA DA QUANTIDADE-DE-MOVIMENTO
Nesta seção são apresentados os principais resultados obtidos a partir do estudo do
regime de auto-rotação estável em vôo à frente utilizando-se a teoria da quantidade-de-
movimento. Com exceção da curva que representa os resultados obtidos na Re ferência [3]
para ensaios realizados em túnel de vento, todos os resultados da teoria da quantidade-de-
movimento (qdm aplicável e qdm não aplicável), bem como os resultados obtidos para o
regime de auto-rotação ideal foram numericamente calculados neste trabalho.
As equações propostas para o estudo da teoria da quantidade-de-movimento
apresentadas no Capítulo III do presente trabalho são tratadas de maneira normalizada
adimensional visando a encontrar uma solução genérica para qualquer tipo de helicóptero
estudado.
O primeiro resultado obtido mostra a variação da velocidade induzida em função da
velocidade de planeio da aeronave, como pode ser observado na Figura V.9.
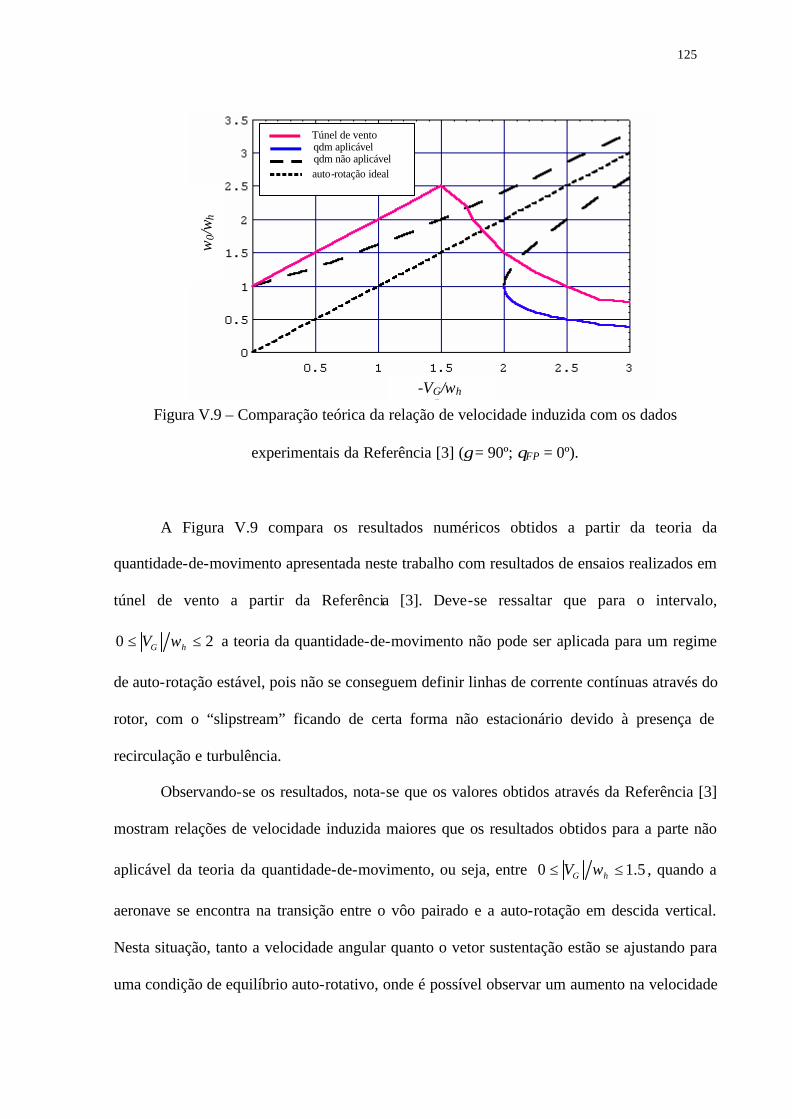
125
Figura V.9 – Comparação teórica da relação de velocidade induzida com os dados
experimentais da Referência [3] (γ = 90º; θFP = 0º).
A Figura V.9 compara os resultados numéricos obtidos a partir da teoria da
quantidade-de-movimento apresentada neste trabalho com resultados de ensaios realizados em
túnel de vento a partir da Referência [3]. Deve-se ressaltar que para o intervalo,
20 ≤≤ hG wV a teoria da quantidade-de-movimento não pode ser aplicada para um regime
de auto-rotação estável, pois não se conseguem definir linhas de corrente contínuas através do
rotor, com o “slipstream” ficando de certa forma não estacionário devido à presença de
recirculação e turbulência.
Observando-se os resultados, nota-se que os valores obtidos através da Referência [3]
mostram relações de velocidade induzida maiores que os resultados obtidos para a parte não
aplicável da teoria da quantidade-de-movimento, ou seja, entre 5.10 ≤≤ hG wV , quando a
aeronave se encontra na transição entre o vôo pairado e a auto-rotação em descida vertical.
Nesta situação, tanto a velocidade angular quanto o vetor sustentação estão se ajustando para
uma condição de equilíbrio auto-rotativo, onde é possível observar um aumento na velocidade
Túnel de vento qdm aplicável qdm não aplicável auto-rotação ideal
-VG/wh
w0/
wh
126
induzida devido à recirculação presente sobre o rotor, bem como uma redução momentânea
da sustentação que acompanha a perda de potência.
Conforme a velocidade de planeio aumenta, a velocidade induzida decresce
rapidamente, indicando que o equilíbrio auto-rotativo está sendo atingido e que a energia
potencial perdida está sendo convertida em energia cinética no rotor. Nesta situação, o
“slipstream” se encontra definido, e a recirculação sobre o rotor desaparece, fazendo com que
a velocidade induzida se estabilize em um valor próximo à velocidade induzida para o vôo
pairado.
A equação que rege a teoria da quantidade-de-movimento é a Equação (III.18) e pode-
se perceber na análise da Figura V.9 que a mesma somente pode ser aplicada quando
2>hG wV (auto-rotação estável), fornecendo assim algum significado físico próximo do
encontrado em túnel de vento. Na Figura V.9, embora a Equação (III.18) tenha sido aplicada
para valores entre 30 ≤≤ hG wV , somente no intervalo entre 32 ≤≤ hG wV é que uma
análise prática pode ser realizada, pois neste caso tem-se o rotor operando no estado de
molinete e a aeronave encontra-se no regime de auto-rotação estável. Comparando-se os
resultados obtidos pela Referência [3] (curva vermelha da Figura V.9) com os resultados
obtidos pela teoria da quantidade-de-movimento na região aplicável da mesma, pode-se
observar que os resultados teóricos obtidos apresentam uma situação mais favorável que os
resultados obtidos durante o ensaio em túnel de vento, ou seja, para uma mesma velocidade
induzida, obtêm-se através da teoria menores valores de velocidade de planeio. Este fato pode
ser creditado às hipóteses adotadas na formulação da teoria da quantidade-de-movimento
apresentadas no Capítulo III do presente trabalho, no qual o rotor é modelado como um disco
de espessura infinitesimal composto por um número infinito de pás, acelerando o ar de
maneira uniforme e sem perdas nas pontas, o que permite ao rotor ser capaz de gerar, para um
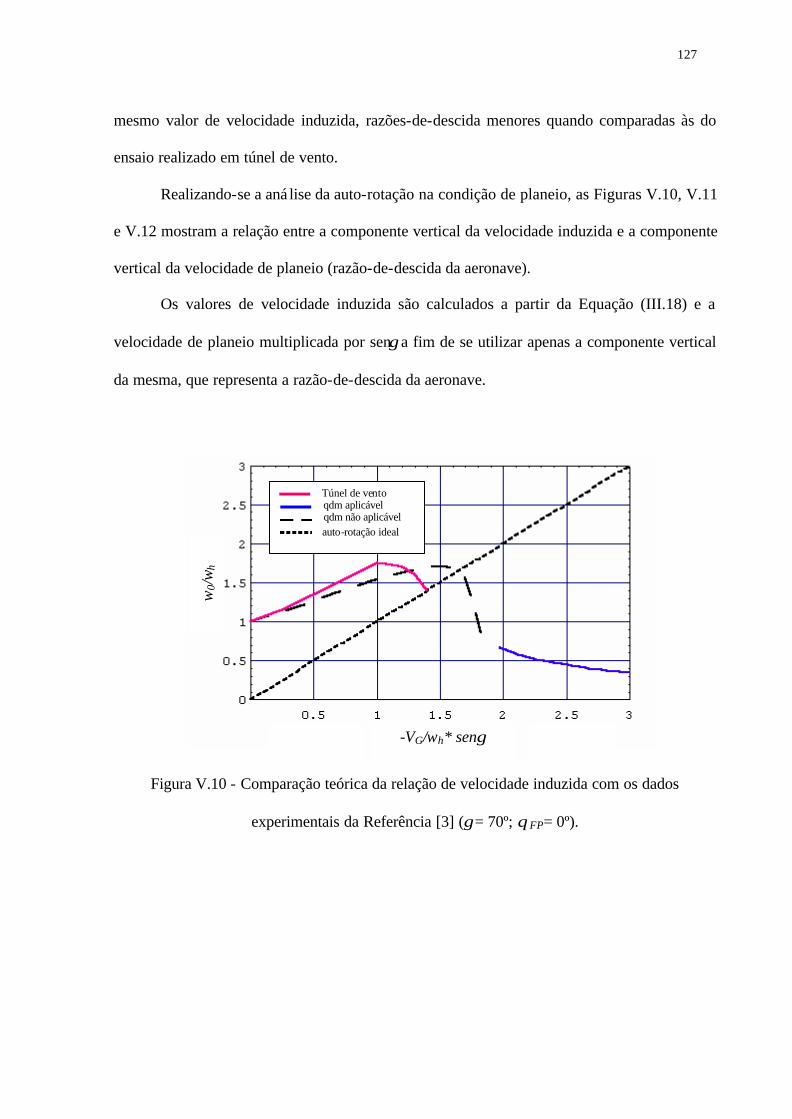
127
mesmo valor de velocidade induzida, razões-de-descida menores quando comparadas às do
ensaio realizado em túnel de vento.
Realizando-se a aná lise da auto-rotação na condição de planeio, as Figuras V.10, V.11
e V.12 mostram a relação entre a componente vertical da velocidade induzida e a componente
vertical da velocidade de planeio (razão-de-descida da aeronave).
Os valores de velocidade induzida são calculados a partir da Equação (III.18) e a
velocidade de planeio multiplicada por senγ a fim de se utilizar apenas a componente vertical
da mesma, que representa a razão-de-descida da aeronave.
Figura V.10 - Comparação teórica da relação de velocidade induzida com os dados
experimentais da Referência [3] (γ = 70º; θ FP= 0º).
Túnel de vento qdm aplicável qdm não aplicável auto-rotação ideal
-VG/wh* senγ
w0/
wh
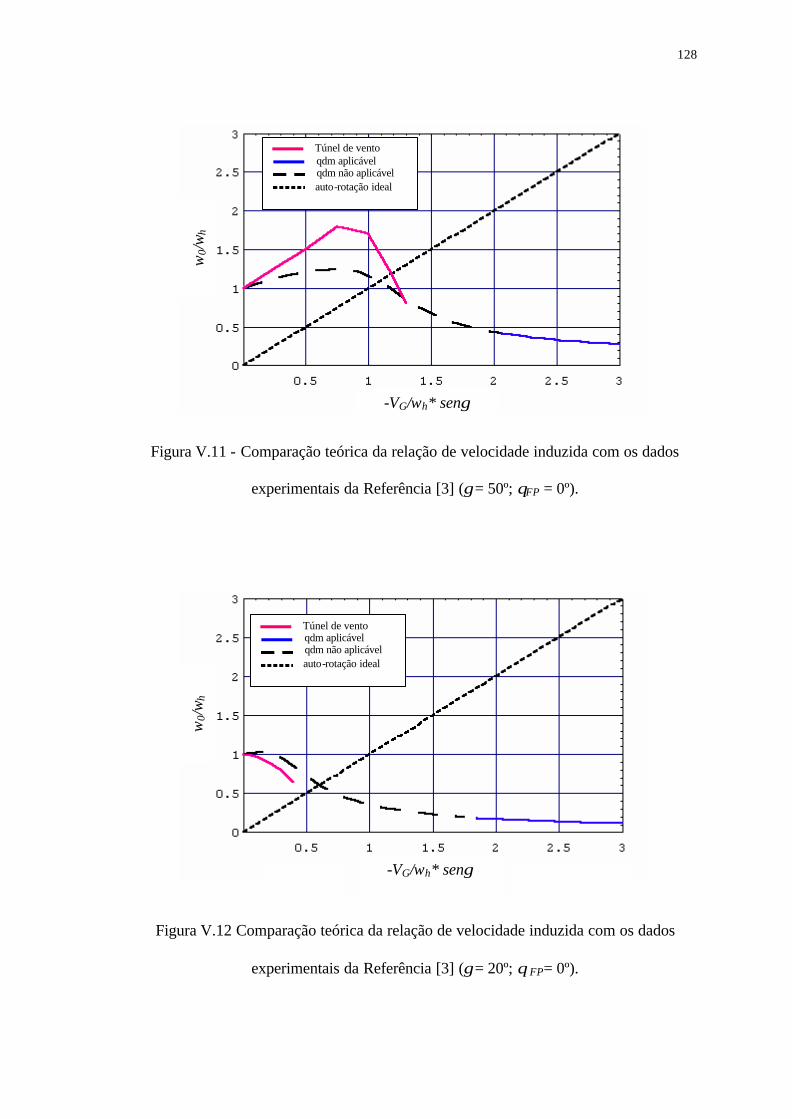
128
Figura V.11 - Comparação teórica da relação de velocidade induzida com os dados
experimentais da Referência [3] (γ = 50º; θFP = 0º).
Figura V.12 Comparação teórica da relação de velocidade induzida com os dados
experimentais da Referência [3] (γ = 20º; θ FP= 0º).
Túnel de vento qdm aplicável qdm não aplicável auto-rotação ideal
-VG/wh* senγ
w0/
wh
Túnel de vento qdm aplicável qdm não aplicável auto-rotação ideal
-VG/wh* senγ
w0/
wh
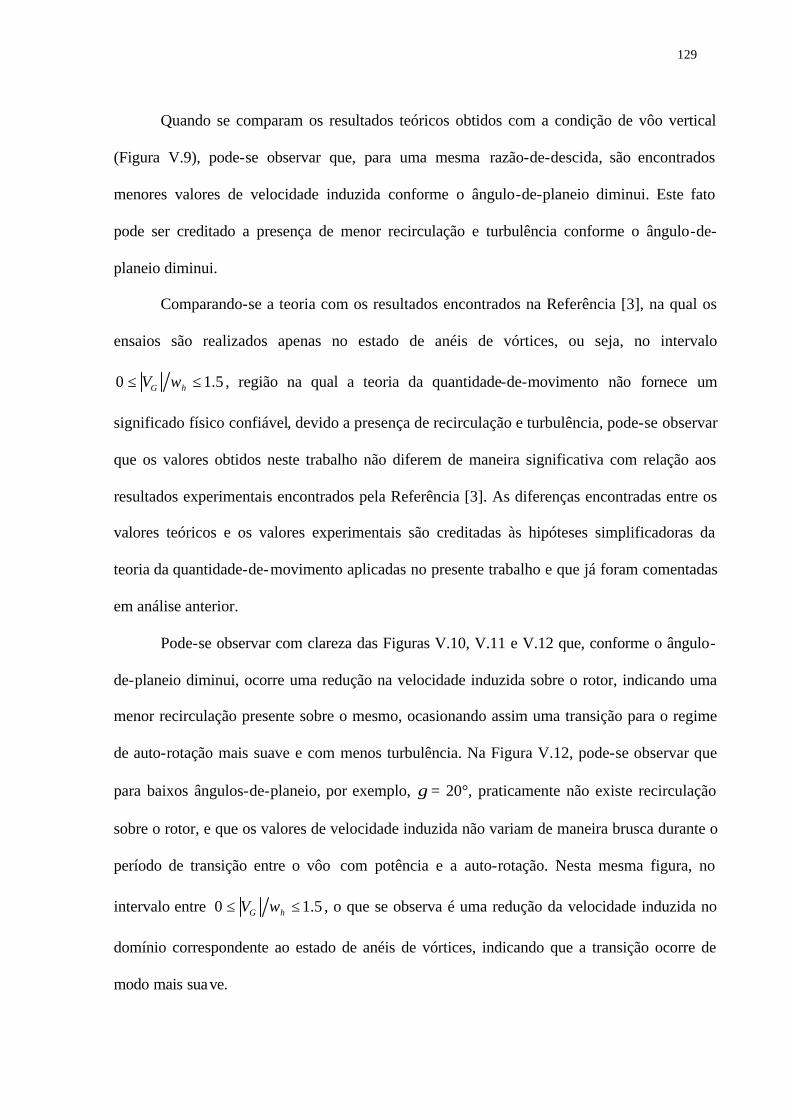
129
Quando se comparam os resultados teóricos obtidos com a condição de vôo vertical
(Figura V.9), pode-se observar que, para uma mesma razão-de-descida, são encontrados
menores valores de velocidade induzida conforme o ângulo-de-planeio diminui. Este fato
pode ser creditado a presença de menor recirculação e turbulência conforme o ângulo-de-
planeio diminui.
Comparando-se a teoria com os resultados encontrados na Referência [3], na qual os
ensaios são realizados apenas no estado de anéis de vórtices, ou seja, no intervalo
5.10 ≤≤ hG wV , região na qual a teoria da quantidade-de-movimento não fornece um
significado físico confiável, devido a presença de recirculação e turbulência, pode-se observar
que os valores obtidos neste trabalho não diferem de maneira significativa com relação aos
resultados experimentais encontrados pela Referência [3]. As diferenças encontradas entre os
valores teóricos e os valores experimentais são creditadas às hipóteses simplificadoras da
teoria da quantidade-de-movimento aplicadas no presente trabalho e que já foram comentadas
em análise anterior.
Pode-se observar com clareza das Figuras V.10, V.11 e V.12 que, conforme o ângulo-
de-planeio diminui, ocorre uma redução na velocidade induzida sobre o rotor, indicando uma
menor recirculação presente sobre o mesmo, ocasionando assim uma transição para o regime
de auto-rotação mais suave e com menos turbulência. Na Figura V.12, pode-se observar que
para baixos ângulos-de-planeio, por exemplo, γ = 20°, praticamente não existe recirculação
sobre o rotor, e que os valores de velocidade induzida não variam de maneira brusca durante o
período de transição entre o vôo com potência e a auto-rotação. Nesta mesma figura, no
intervalo entre 5.10 ≤≤ hG wV , o que se observa é uma redução da velocidade induzida no
domínio correspondente ao estado de anéis de vórtices, indicando que a transição ocorre de
modo mais suave.
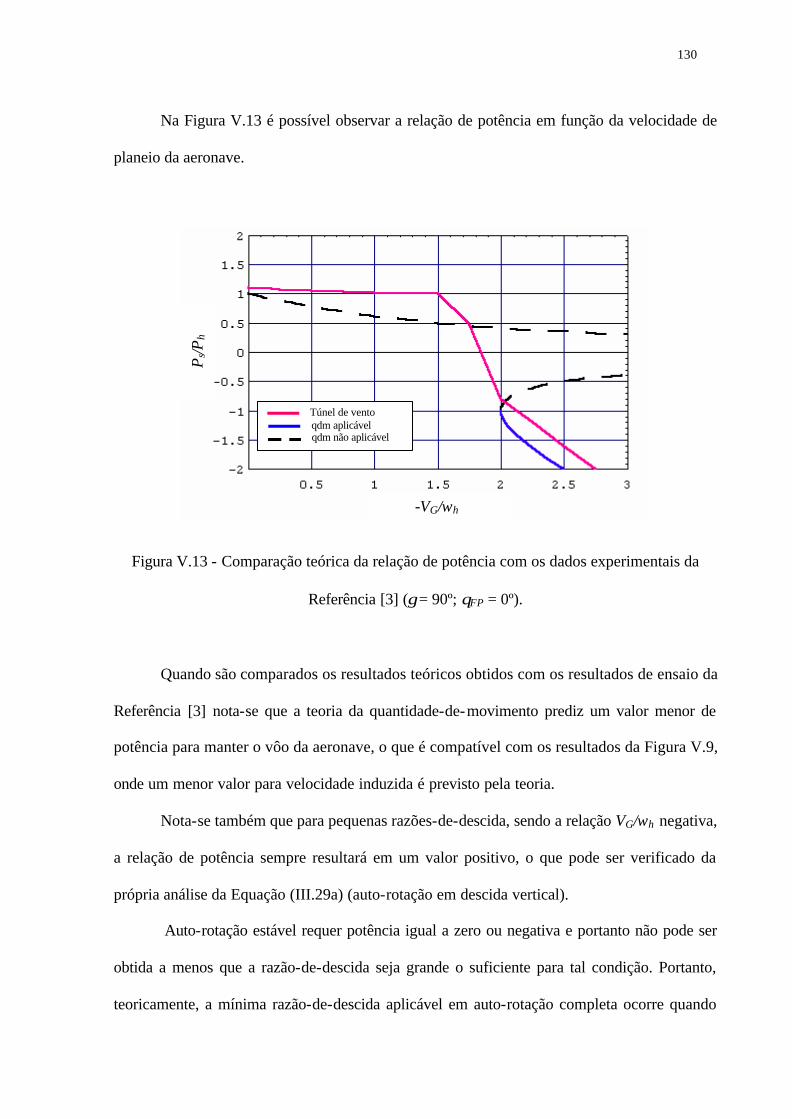
130
Na Figura V.13 é possível observar a relação de potência em função da velocidade de
planeio da aeronave.
Figura V.13 - Comparação teórica da relação de potência com os dados experimentais da
Referência [3] (γ = 90º; θFP = 0º).
Quando são comparados os resultados teóricos obtidos com os resultados de ensaio da
Referência [3] nota-se que a teoria da quantidade-de-movimento prediz um valor menor de
potência para manter o vôo da aeronave, o que é compatível com os resultados da Figura V.9,
onde um menor valor para velocidade induzida é previsto pela teoria.
Nota-se também que para pequenas razões-de-descida, sendo a relação VG/wh negativa,
a relação de potência sempre resultará em um valor positivo, o que pode ser verificado da
própria análise da Equação (III.29a) (auto-rotação em descida vertical).
Auto-rotação estável requer potência igual a zero ou negativa e portanto não pode ser
obtida a menos que a razão-de-descida seja grande o suficiente para tal condição. Portanto,
teoricamente, a mínima razão-de-descida aplicável em auto-rotação completa ocorre quando
Túnel de vento qdm aplicável qdm não aplicável
-VG/wh
Ps/P
h
131
VG/wh=-2. Nesta razão-de-descida, a Equação (III.29b) indica a relação de potência igual a –1,
ou seja, o rotor está extraindo potência do ar a fim de tentar manter uma razão-de-descida
aceitável. Assim, quanto mais potência o rotor extrair do ar, melhor é a eficiência do mesmo.
Com razões-de-descida mais elevadas, VG/wh>-2, um “slipstream” definido pode ser
encontrado e fisicamente a teoria da quantidade-de-movimento pode ser aplicada. Nesta
situação, a auto-rotação já está estabilizada, e o rotor opera no estado de molinete, extraindo
potência do ar para vencer o arrasto e produzir sustentação necessária para uma aceitável
razão-de-descida.
Novamente pode-se observar que os valores obtidos numericamente através da teoria
da quantidade-de-movimento fornecem resultados abaixo que os encontrados a partir da
Referência [3] durante a realização do ensaio em túnel de vento. Essa diferença ocorre devido
aos fatores citados na análise da Figura V.9, onde a teoria da quantidade-de-movimento
aplicada neste trabalho possui algumas simplificações que na prática são impossíveis de
serem obtidas. Pode-se perceber claramente na análise das Figuras V.9 e V.13 que a teoria da
quantidade-de-movimento apresenta uma fotografia ideal da performance do rotor, pois a
mesma omite todas as perdas viscosas e todas as perdas causadas pela não-uniformidade da
transferência de quantidade-de-movimento. Portanto, os resultados obtidos através da teoria
aqui aplicada são aparentemente melhores que os resultados obtidos no ensaio em túnel de
vento, pois como pode ser observado a partir da Figura V.13, para manter uma mesma razão-
de-descida o rotor extrai um valor menor de potência do ar em relação ao ensaio realizado em
túnel de vento.
As Figuras V.14, V.15 e V.16 correlacionam valores teóricos de potência em função
da razão-de-descida da aeronave, encontrados a partir da teoria da quantidade-de-movimento
e os obtidos nos ensaios realizados na Referência [3].
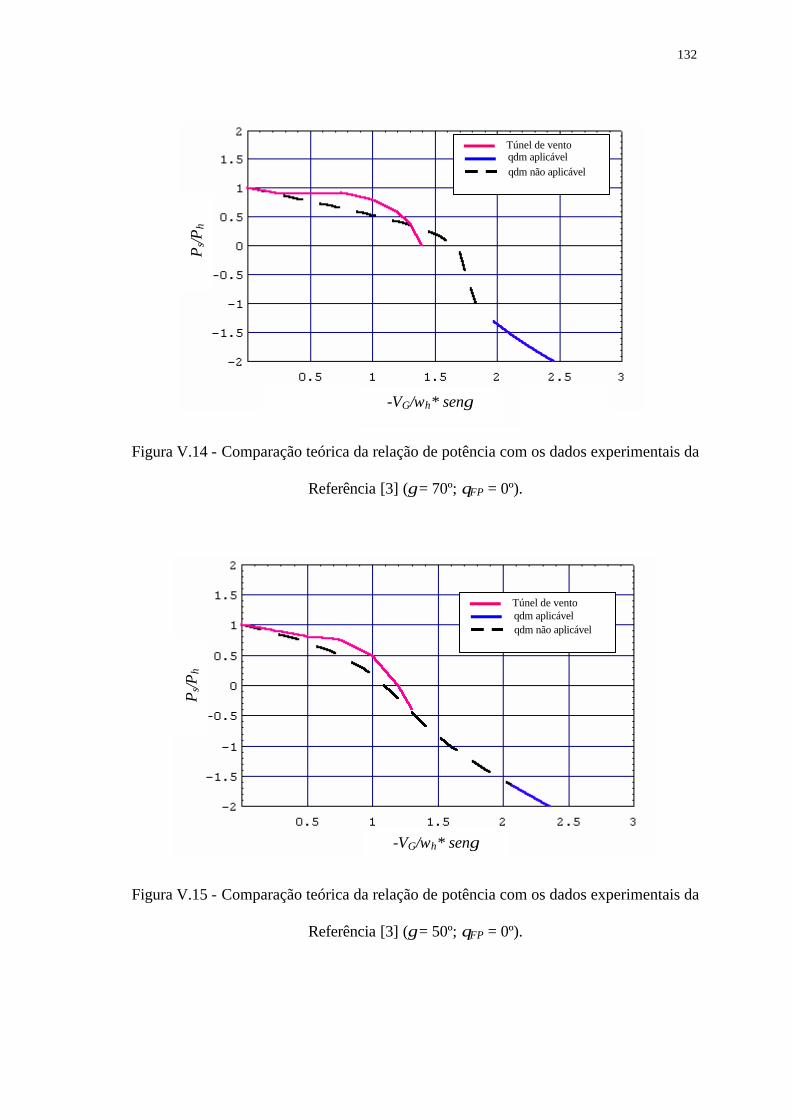
132
Figura V.14 - Comparação teórica da relação de potência com os dados experimentais da
Referência [3] (γ = 70º; θFP = 0º).
Figura V.15 - Comparação teórica da relação de potência com os dados experimentais da
Referência [3] (γ = 50º; θFP = 0º).
Túnel de vento qdm aplicável qdm não aplicável
-VG/wh* senγ
Ps/P
h
Túnel de vento qdm aplicável qdm não aplicável
-VG/wh* senγ
Ps/P
h
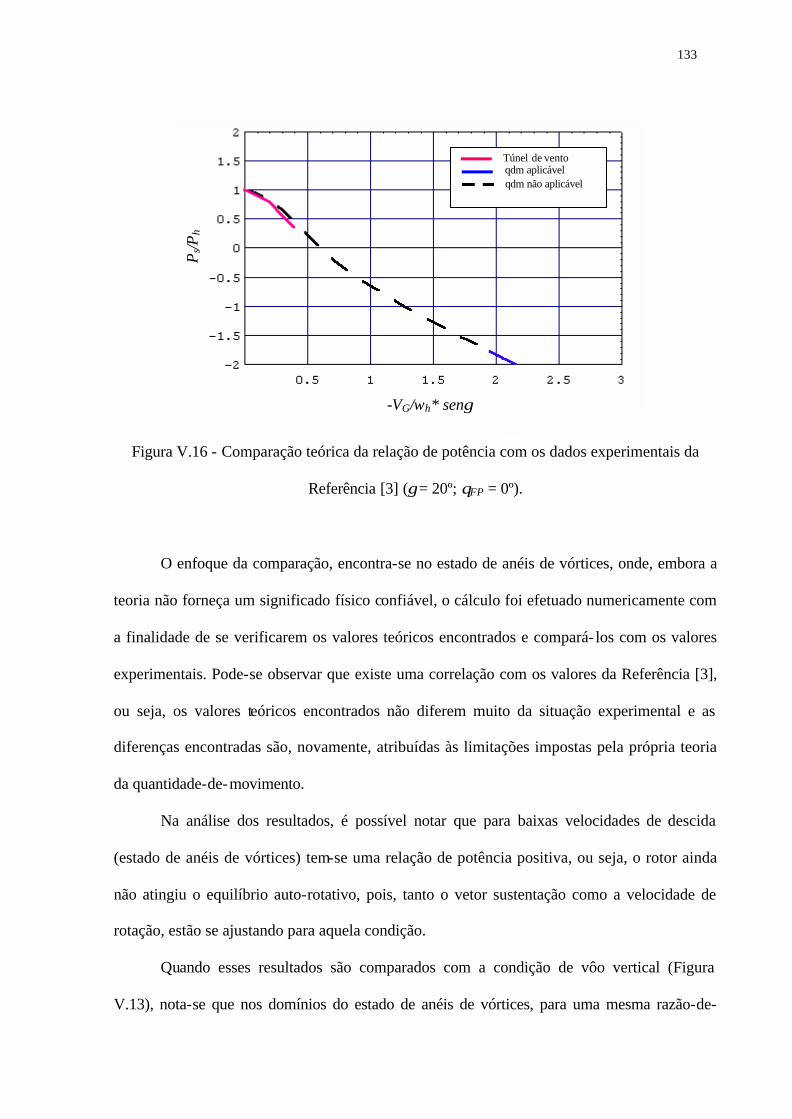
133
Figura V.16 - Comparação teórica da relação de potência com os dados experimentais da
Referência [3] (γ = 20º; θFP = 0º).
O enfoque da comparação, encontra-se no estado de anéis de vórtices, onde, embora a
teoria não forneça um significado físico confiável, o cálculo foi efetuado numericamente com
a finalidade de se verificarem os valores teóricos encontrados e compará- los com os valores
experimentais. Pode-se observar que existe uma correlação com os valores da Referência [3],
ou seja, os valores teóricos encontrados não diferem muito da situação experimental e as
diferenças encontradas são, novamente, atribuídas às limitações impostas pela própria teoria
da quantidade-de-movimento.
Na análise dos resultados, é possível notar que para baixas velocidades de descida
(estado de anéis de vórtices) tem-se uma relação de potência positiva, ou seja, o rotor ainda
não atingiu o equilíbrio auto-rotativo, pois, tanto o vetor sustentação como a velocidade de
rotação, estão se ajustando para aquela condição.
Quando esses resultados são comparados com a condição de vôo vertical (Figura
V.13), nota-se que nos domínios do estado de anéis de vórtices, para uma mesma razão-de-
Túnel de vento qdm aplicável qdm não aplicável
-VG/wh* senγ
Ps/P
h
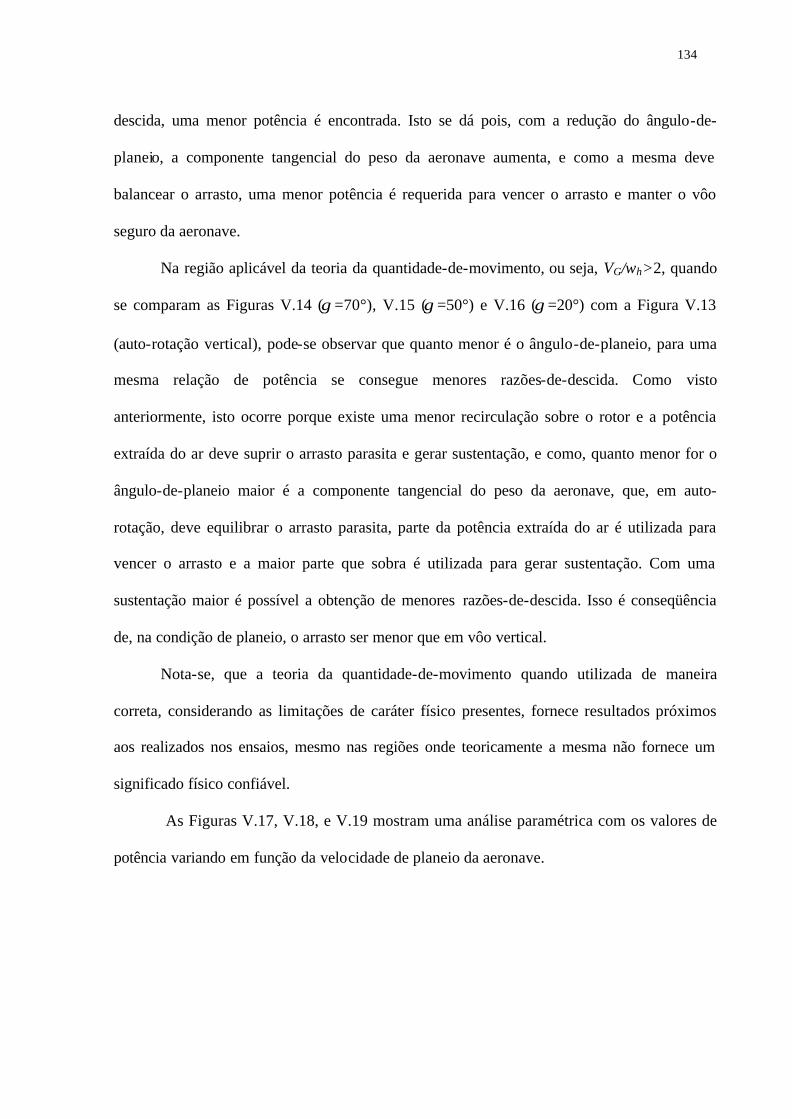
134
descida, uma menor potência é encontrada. Isto se dá pois, com a redução do ângulo-de-
planeio, a componente tangencial do peso da aeronave aumenta, e como a mesma deve
balancear o arrasto, uma menor potência é requerida para vencer o arrasto e manter o vôo
seguro da aeronave.
Na região aplicável da teoria da quantidade-de-movimento, ou seja, VG/wh>2, quando
se comparam as Figuras V.14 (γ =70°), V.15 (γ =50°) e V.16 (γ =20°) com a Figura V.13
(auto-rotação vertical), pode-se observar que quanto menor é o ângulo-de-planeio, para uma
mesma relação de potência se consegue menores razões-de-descida. Como visto
anteriormente, isto ocorre porque existe uma menor recirculação sobre o rotor e a potência
extraída do ar deve suprir o arrasto parasita e gerar sustentação, e como, quanto menor for o
ângulo-de-planeio maior é a componente tangencial do peso da aeronave, que, em auto-
rotação, deve equilibrar o arrasto parasita, parte da potência extraída do ar é utilizada para
vencer o arrasto e a maior parte que sobra é utilizada para gerar sustentação. Com uma
sustentação maior é possível a obtenção de menores razões-de-descida. Isso é conseqüência
de, na condição de planeio, o arrasto ser menor que em vôo vertical.
Nota-se, que a teoria da quantidade-de-movimento quando utilizada de maneira
correta, considerando as limitações de caráter físico presentes, fornece resultados próximos
aos realizados nos ensaios, mesmo nas regiões onde teoricamente a mesma não fornece um
significado físico confiável.
As Figuras V.17, V.18, e V.19 mostram uma análise paramétrica com os valores de
potência variando em função da velocidade de planeio da aeronave.
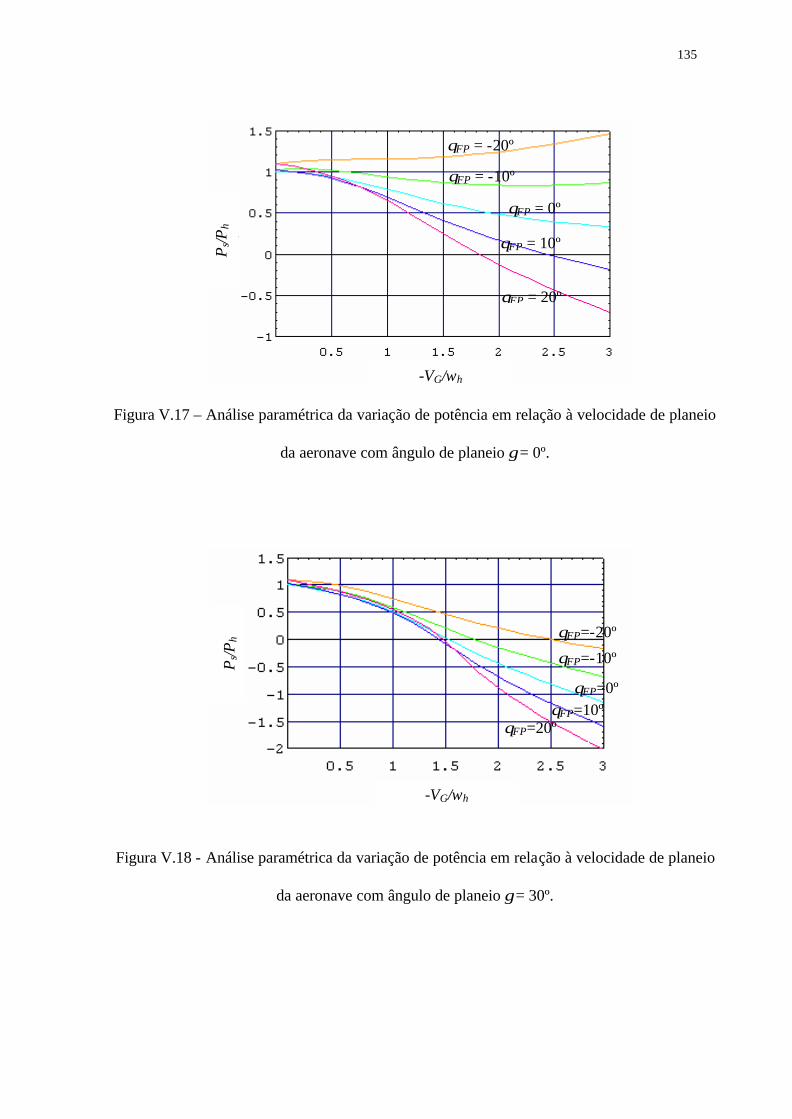
135
Figura V.17 – Análise paramétrica da variação de potência em relação à velocidade de planeio
da aeronave com ângulo de planeio γ = 0º.
Figura V.18 - Análise paramétrica da variação de potência em relação à velocidade de planeio
da aeronave com ângulo de planeio γ = 30º.
θFP = -20º
θFP = -10º
θFP = 0º
θFP = 10º
θFP = 20º
-VG/wh
Ps/P
h
θFP=-20º
θFP=-10º
θFP=0º θFP=10º
θFP=20º
-VG/wh
Ps/P
h
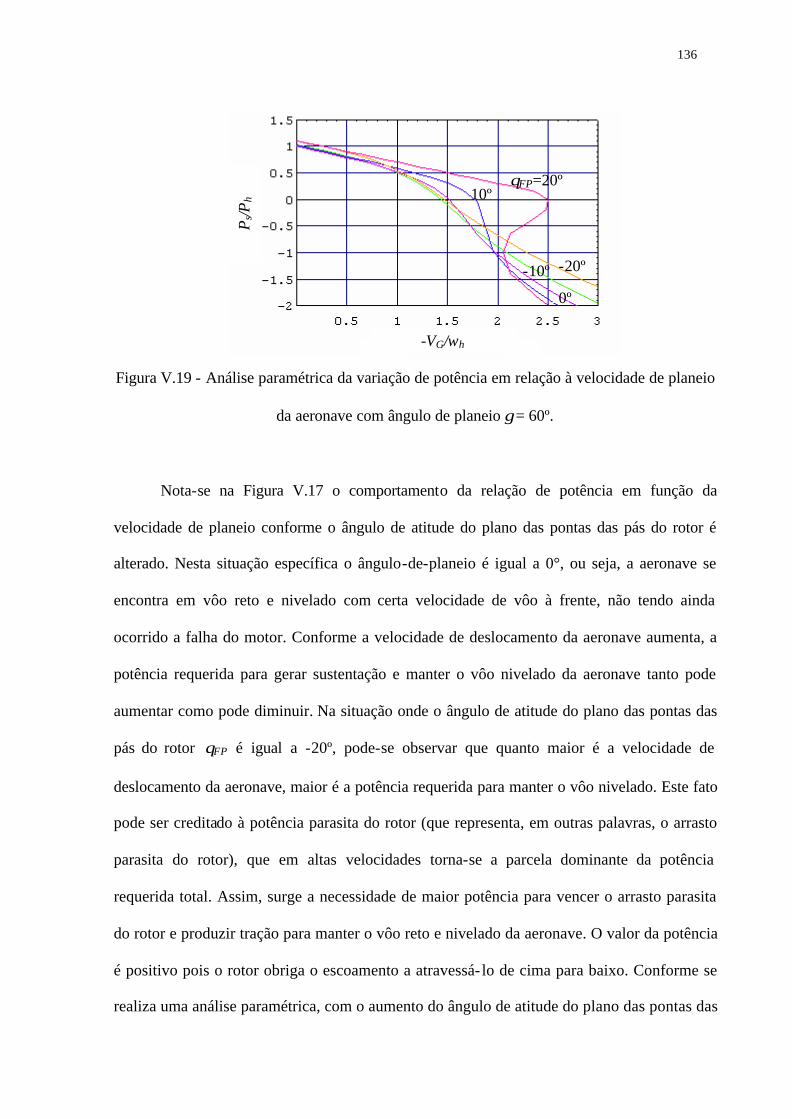
136
θFP=20º 10º
0º
-10º -20º
-VG/wh
Ps/P
h
Figura V.19 - Análise paramétrica da variação de potência em relação à velocidade de planeio
da aeronave com ângulo de planeio γ = 60º.
Nota-se na Figura V.17 o comportamento da relação de potência em função da
velocidade de planeio conforme o ângulo de atitude do plano das pontas das pás do rotor é
alterado. Nesta situação específica o ângulo-de-planeio é igual a 0°, ou seja, a aeronave se
encontra em vôo reto e nivelado com certa velocidade de vôo à frente, não tendo ainda
ocorrido a falha do motor. Conforme a velocidade de deslocamento da aeronave aumenta, a
potência requerida para gerar sustentação e manter o vôo nivelado da aeronave tanto pode
aumentar como pode diminuir. Na situação onde o ângulo de atitude do plano das pontas das
pás do rotor θFP é igual a -20º, pode-se observar que quanto maior é a velocidade de
deslocamento da aeronave, maior é a potência requerida para manter o vôo nivelado. Este fato
pode ser creditado à potência parasita do rotor (que representa, em outras palavras, o arrasto
parasita do rotor), que em altas velocidades torna-se a parcela dominante da potência
requerida total. Assim, surge a necessidade de maior potência para vencer o arrasto parasita
do rotor e produzir tração para manter o vôo reto e nivelado da aeronave. O valor da potência
é positivo pois o rotor obriga o escoamento a atravessá- lo de cima para baixo. Conforme se
realiza uma análise paramétrica, com o aumento do ângulo de atitude do plano das pontas das
137
pás de –20º para 20º, nota-se que quanto maior é a velocidade de deslocamento, menor é a
potência requerida para manter o vôo nivelado da aeronave. Isto ocorre, pois, nesta condição,
tem-se um aumento do ângulo-de-ataque do disco do rotor, fazendo desse modo com o vento
relativo ataque o rotor da parte de baixo do disco para a parte superior do mesmo, resultando
assim em um menor valor de potência parasita do rotor, onde potência é extraída do
escoamento. Isto implica em uma menor potência requerida no eixo do rotor para se manter o
vôo reto e nivelado. Em suma, da Figura V.17, teoricamente, a aplicação da teoria apresentada
neste trabalho fornece como resultados para maiores valores de velocidades e de ângulos de
atitude do plano das pontas das pás, valores de potência negativos, indicando que ao invés de
o rotor fornecer potência ao escoamento, o mesmo está extraindo potência do mesmo. Assim,
dependendo do ângulo de atitude do plano das pontas das pás e da velocidade de vôo à frente,
é possível se manter o vôo reto e nivelado da aeronave com uma potência requerida no eixo
bem menor que a potência requerida, por exemplo, durante o vôo pairado, pois como se pode
perceber da análise da Figura V.17, parte da potência requerida advém diretamente do
escoamento, minimizando desse modo a potência fornecida pelo motor ao rotor.
Analisando-se a Figura V.18, verifica-se um comportamento paramétrico semelhante
ao apresentado na Figura V.17. A diferença se encontra no fato de que, como o rotor está
descendo sob um ângulo-de-planeio de 30°, a potência parasita do rotor diminui com o
aumento da velocidade de planeio, mesmo para o ângulo de atitude do plano das pontas das
pás de -20°. Na prática, essa diminuição da potência é reflexo da maior extração de potência
do escoamento, aproveitando-se que a aeronave se encontra numa rampa de descida. Daí os
valores de potência, para um determinado valor da velocidade de planeio, serem mais
negativos que os correspondentes na curva para o vôo reto e nivelado.
Comparando-se os resultados obtidos na Figura V.17 (vôo nivelado) com os resultados
obtidos na Figura V.18 (auto-rotação), pode-se observar que com a falha do motor, a aeronave
138
é obrigada a iniciar o vôo de planeio adquirindo um ângulo de planeio diferente de zero, pois
não existe mais tração no rotor principal para manter o vôo nivelado resultando, então, em
perda de altura em relação ao solo. A comparação dos resultados deixa claro que com ângulo-
de-planeio igual a 30º, a potência requerida é menor que para o vôo nivelado. Isto ocorre, pois
a potência requerida deve ser suficiente apenas para manter uma razão-de-descida aceitável da
aeronave e não para manter o vôo nivelado da mesma. Novamente pode-se observar que com
um maior ângulo trajetória de vôo do rotor, em altas velocidades de planeio, o rotor passa a
extrair potência do escoamento, ou seja, trabalhando como um moinho (estado de molinete).
Para uma dada velocidade de planeio, fica claro que com o aumento do ângulo-de-
planeio, a velocidade de descida vertical da aeronave (razão-de-descida) também é maior,
porém a componente horizontal da velocidade de planeio é cada vez menor. Uma análise
idêntica à da Figura V.18 pode ser feita para a Figura V.19, neste caso, com o ângulo-de-
planeio aumentado para 60°. Para valores do ângulo de atitude do plano das pontas das pás
entre 0 e –20°, através da análise da Figura III.1, é possível observar que o aumento do
ângulo-de-planeio acarreta no aumento do ângulo-de-ataque do disco do rotor. Comparando-
se as situações para estes valores do ângulo de atitude do plano das pontas das pás
apresentadas na Figura V.19 com as mesmas situações apresentadas na Figura V.18, pode-se
observar que, com o aumento do ângulo-de-planeio de 30º para 60º, na região onde é
aplicável a teoria da quantidade-de-movimento, ou seja, VG/wh>2, para se manter uma dada
velocidade de planeio, o escoamento pelo rotor passa a extrair mais potência do ar quando
comparado ao menor ângulo-de-planeio. Isto ocorre devido ao maior arrasto parasita do rotor
provocado pelo aumento do ângulo-de-planeio. A situação representada na Figura V.18 é
mais favorável que a situação representada na Figura V.19 no qual o ângulo-de-planeio é
maior, pois se observa que quanto menor o ângulo-de-planeio, maior é a componente
horizontal da velocidade de planeio e menor é a razão-de-descida da aeronave, permitindo
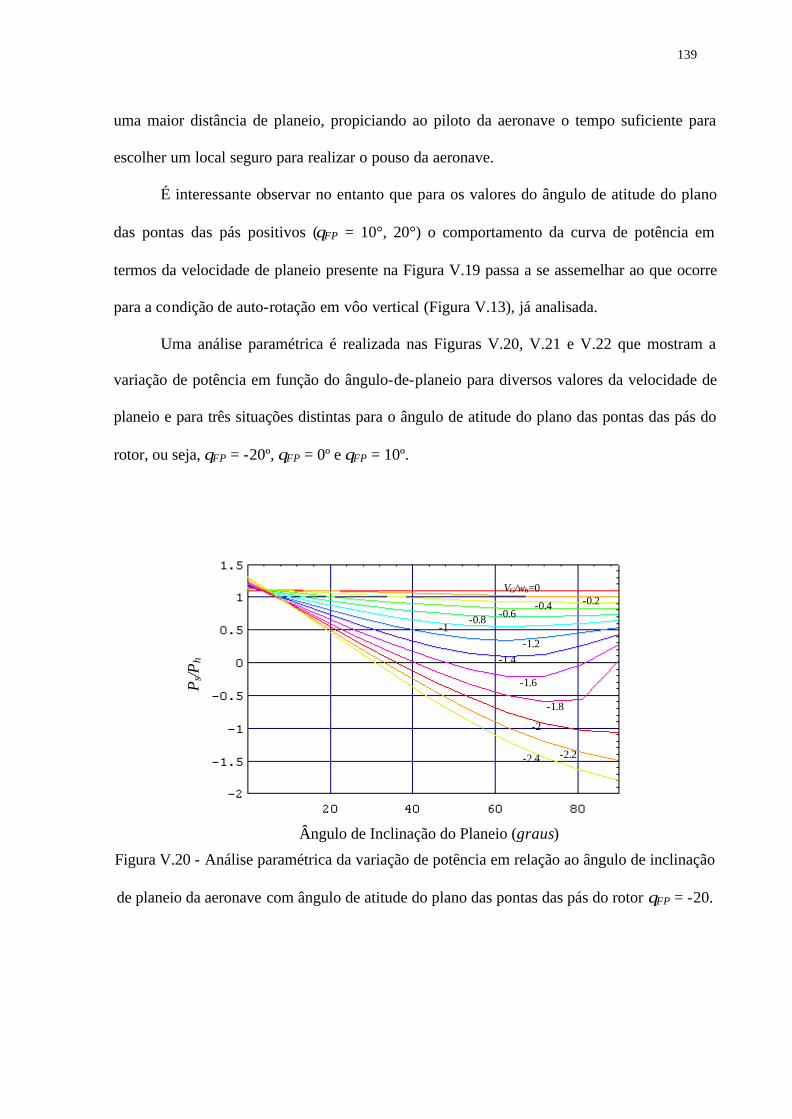
139
uma maior distância de planeio, propiciando ao piloto da aeronave o tempo suficiente para
escolher um local seguro para realizar o pouso da aeronave.
É interessante observar no entanto que para os valores do ângulo de atitude do plano
das pontas das pás positivos (θFP = 10°, 20°) o comportamento da curva de potência em
termos da velocidade de planeio presente na Figura V.19 passa a se assemelhar ao que ocorre
para a condição de auto-rotação em vôo vertical (Figura V.13), já analisada.
Uma análise paramétrica é realizada nas Figuras V.20, V.21 e V.22 que mostram a
variação de potência em função do ângulo-de-planeio para diversos valores da velocidade de
planeio e para três situações distintas para o ângulo de atitude do plano das pontas das pás do
rotor, ou seja, θFP = -20º, θFP = 0º e θFP = 10º.
Figura V.20 - Análise paramétrica da variação de potência em relação ao ângulo de inclinação
de planeio da aeronave com ângulo de atitude do plano das pontas das pás do rotor θFP = -20.
VG/wh=0
-2.4 -2.2
-2
-1.8
-1.6
-1.4
-1
-1.2
-0.8 -0.6 -0.4 -0.2
Ps/P
h
Ângulo de Inclinação do Planeio (graus)
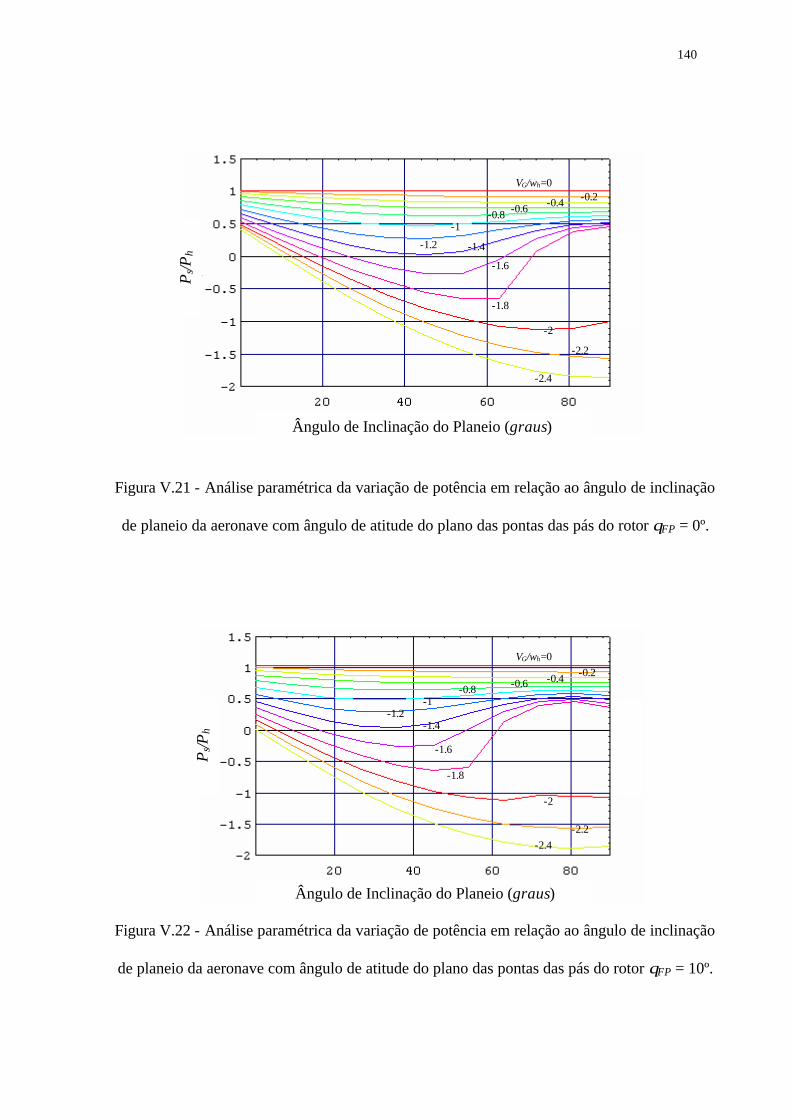
140
Figura V.21 - Análise paramétrica da variação de potência em relação ao ângulo de inclinação
de planeio da aeronave com ângulo de atitude do plano das pontas das pás do rotor θFP = 0º.
Figura V.22 - Análise paramétrica da variação de potência em relação ao ângulo de inclinação
de planeio da aeronave com ângulo de atitude do plano das pontas das pás do rotor θFP = 10º.
VG/wh=0
-2.4
-2.2
-2
-1.8
-1.6
-1.4
-1 -1.2
-0.8 -0.6 -0.4 -0.2
Ps/P
h
Ângulo de Inclinação do Planeio (graus)
VG/wh=0
-2.4
-2.2
-2
-1.8
-1.6
-1.4
-1
-1.2
-0.8 -0.6 -0.4 -0.2 P
s/Ph
Ângulo de Inclinação do Planeio (graus)
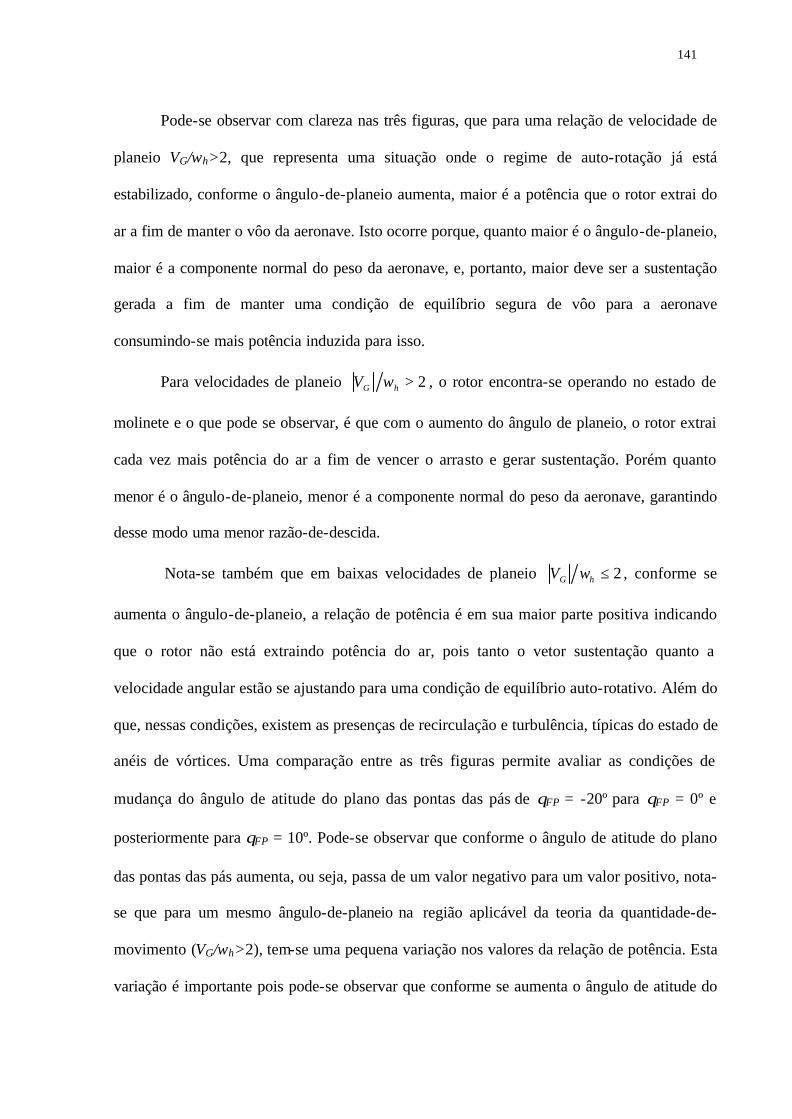
141
Pode-se observar com clareza nas três figuras, que para uma relação de velocidade de
planeio VG/wh>2, que representa uma situação onde o regime de auto-rotação já está
estabilizado, conforme o ângulo-de-planeio aumenta, maior é a potência que o rotor extrai do
ar a fim de manter o vôo da aeronave. Isto ocorre porque, quanto maior é o ângulo-de-planeio,
maior é a componente normal do peso da aeronave, e, portanto, maior deve ser a sustentação
gerada a fim de manter uma condição de equilíbrio segura de vôo para a aeronave
consumindo-se mais potência induzida para isso.
Para velocidades de planeio 2>hG wV , o rotor encontra-se operando no estado de
molinete e o que pode se observar, é que com o aumento do ângulo de planeio, o rotor extrai
cada vez mais potência do ar a fim de vencer o arrasto e gerar sustentação. Porém quanto
menor é o ângulo-de-planeio, menor é a componente normal do peso da aeronave, garantindo
desse modo uma menor razão-de-descida.
Nota-se também que em baixas velocidades de planeio 2≤hG wV , conforme se
aumenta o ângulo-de-planeio, a relação de potência é em sua maior parte positiva indicando
que o rotor não está extraindo potência do ar, pois tanto o vetor sustentação quanto a
velocidade angular estão se ajustando para uma condição de equilíbrio auto-rotativo. Além do
que, nessas condições, existem as presenças de recirculação e turbulência, típicas do estado de
anéis de vórtices. Uma comparação entre as três figuras permite avaliar as condições de
mudança do ângulo de atitude do plano das pontas das pás de θFP = -20º para θFP = 0º e
posteriormente para θFP = 10º. Pode-se observar que conforme o ângulo de atitude do plano
das pontas das pás aumenta, ou seja, passa de um valor negativo para um valor positivo, nota-
se que para um mesmo ângulo-de-planeio na região aplicável da teoria da quantidade-de-
movimento (VG/wh>2), tem-se uma pequena variação nos valores da relação de potência. Esta
variação é importante pois pode-se observar que conforme se aumenta o ângulo de atitude do
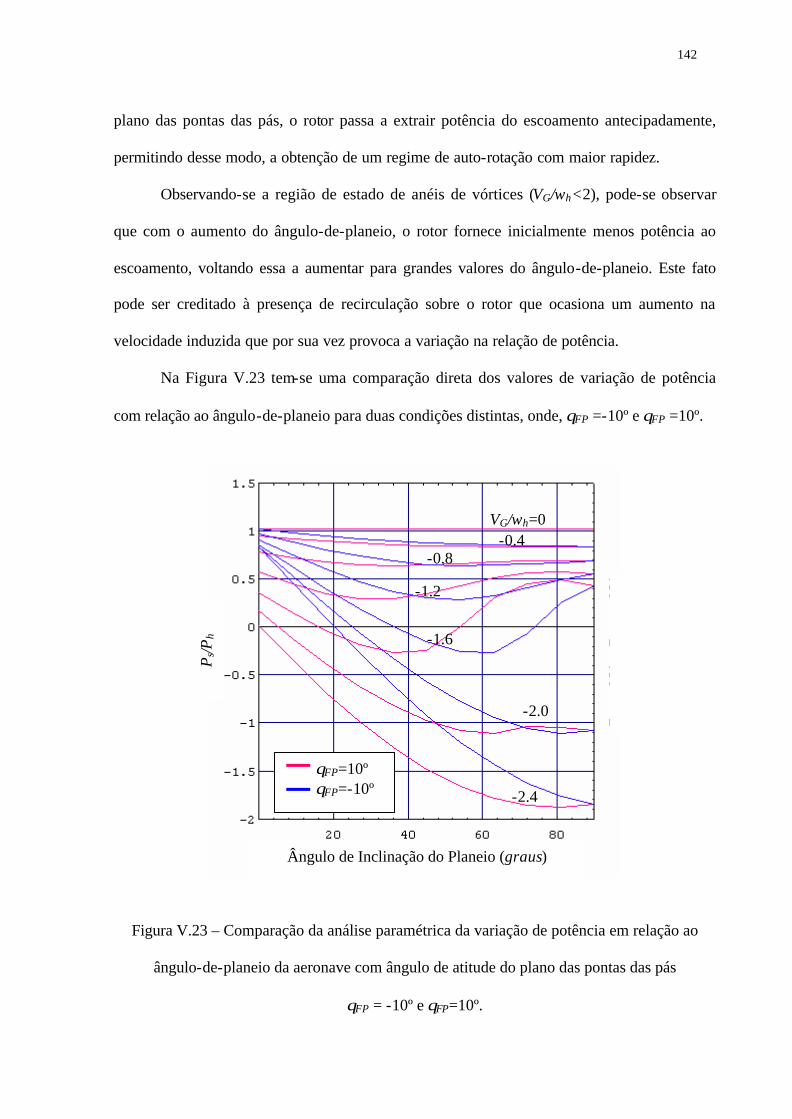
142
plano das pontas das pás, o rotor passa a extrair potência do escoamento antecipadamente,
permitindo desse modo, a obtenção de um regime de auto-rotação com maior rapidez.
Observando-se a região de estado de anéis de vórtices (VG/wh<2), pode-se observar
que com o aumento do ângulo-de-planeio, o rotor fornece inicialmente menos potência ao
escoamento, voltando essa a aumentar para grandes valores do ângulo-de-planeio. Este fato
pode ser creditado à presença de recirculação sobre o rotor que ocasiona um aumento na
velocidade induzida que por sua vez provoca a variação na relação de potência.
Na Figura V.23 tem-se uma comparação direta dos valores de variação de potência
com relação ao ângulo-de-planeio para duas condições distintas, onde, θFP =-10º e θFP =10º.
Figura V.23 – Comparação da análise paramétrica da variação de potência em relação ao
ângulo-de-planeio da aeronave com ângulo de atitude do plano das pontas das pás
θFP = -10º e θFP=10º.
VG/wh=0 -0.4
-0.8
-1.2
-1.6
-2.0
-2.4
θFP=10º θFP=-10º
Ps/P
h
Ângulo de Inclinação do Planeio (graus)
143
Nota-se, principalmente, que para ângulos-de-planeio compreendidos entre 0º e 60º, os
valores da potência são consideravelmente menores para θFP =10º que para θFP =-10º.
Novamente pode-se citar como causa o aumento do ângulo-de-ataque do rotor. É possível
observar também que quando γ =90º (descida vertical), os valores da relação de potência são
os mesmos tanto para θFP =10º, como para θFP =-10º. Isto ocorre, pois ao se observar as
Equações (III.29a) e (III.29b) nota-se que em descida auto-rotativa vertical os valores da
relação de potência não são influenciados nem pelo ângulo-de-planeio, nem pelo ângulo de
atitude do plano das pontas das pás do rotor.
V.4 – APRESENTAÇÃO DOS RESULTADOS PARA O ESTUDO DO
“DIAGRAMA ALTURA VERSUS VELOCIDADE”
Os resultados obtidos através da implementação numérica descrita no Capítulo IV são
apresentados e comparados com os de ensaio-em-vôo da Referência [29]. Para efeito de
estudos do comportamento do “diagrama altura versus velocidade”, algumas situações são
testadas, como por exemplo: variação de altitude, variação de peso, área equivalente de placa
plana e variação da inércia do rotor.
As Figuras V.24 e V.25 mostram os diagramas dimensionais e adimensionais,
respectivamente, para três helicópteros com características operacionais diferentes.
A finalidade principal da análise das Figuras V.24 e V.25 é mostrar que, independente
do tipo e configuração da aeronave (aeronave convencional), o “diagrama altura versus
velocidade” adimensional apresenta características semelhantes.
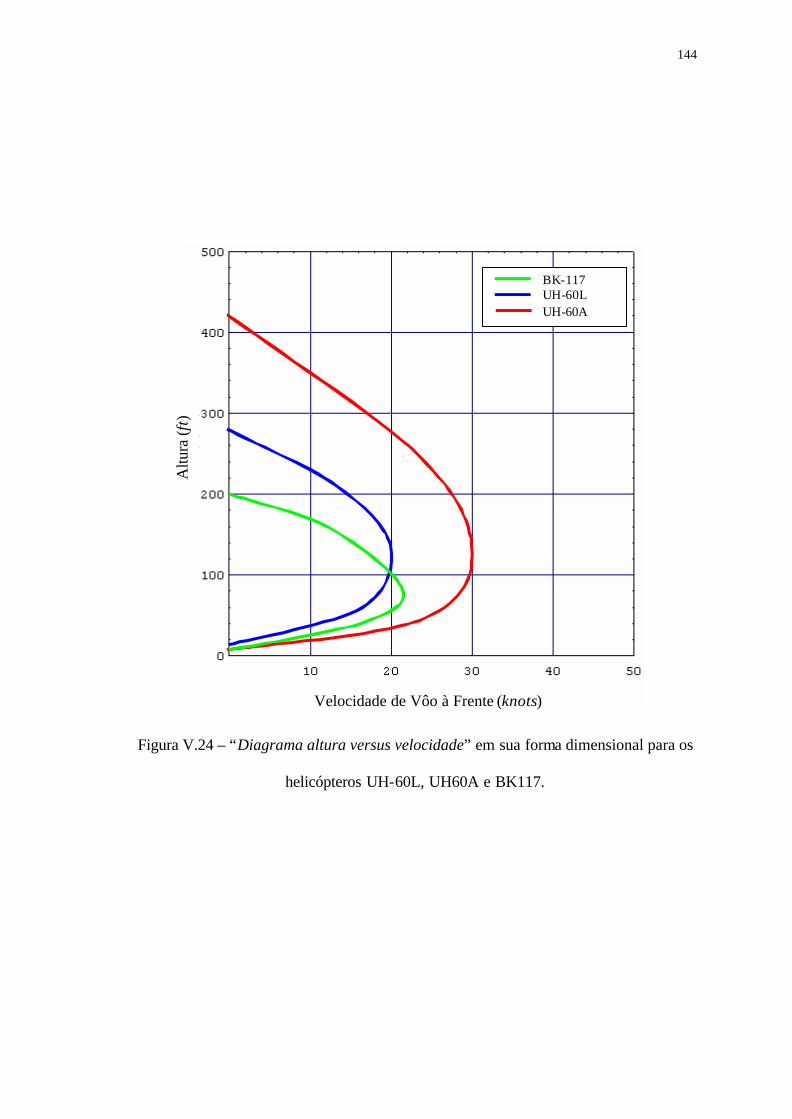
144
Figura V.24 – “Diagrama altura versus velocidade” em sua forma dimensional para os
helicópteros UH-60L, UH60A e BK117.
BK-117 UH-60L UH-60A
Velocidade de Vôo à Frente (knots)
Altu
ra (f
t)
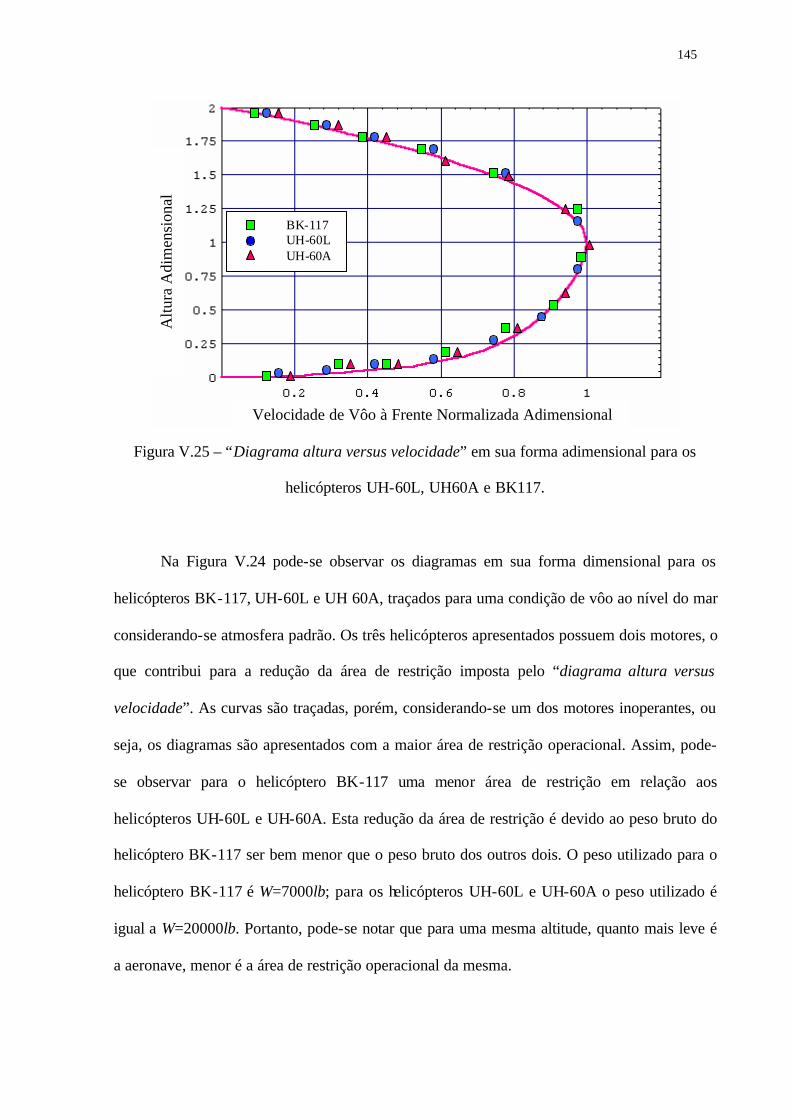
145
Figura V.25 – “Diagrama altura versus velocidade” em sua forma adimensional para os
helicópteros UH-60L, UH60A e BK117.
Na Figura V.24 pode-se observar os diagramas em sua forma dimensional para os
helicópteros BK-117, UH-60L e UH 60A, traçados para uma condição de vôo ao nível do mar
considerando-se atmosfera padrão. Os três helicópteros apresentados possuem dois motores, o
que contribui para a redução da área de restrição imposta pelo “diagrama altura versus
velocidade”. As curvas são traçadas, porém, considerando-se um dos motores inoperantes, ou
seja, os diagramas são apresentados com a maior área de restrição operacional. Assim, pode-
se observar para o helicóptero BK-117 uma menor área de restrição em relação aos
helicópteros UH-60L e UH-60A. Esta redução da área de restrição é devido ao peso bruto do
helicóptero BK-117 ser bem menor que o peso bruto dos outros dois. O peso utilizado para o
helicóptero BK-117 é W=7000lb; para os helicópteros UH-60L e UH-60A o peso utilizado é
igual a W=20000lb. Portanto, pode-se notar que para uma mesma altitude, quanto mais leve é
a aeronave, menor é a área de restrição operacional da mesma.
BK-117 UH-60L UH-60A
Velocidade de Vôo à Frente Normalizada Adimensional
Altu
ra A
dim
ensi
onal
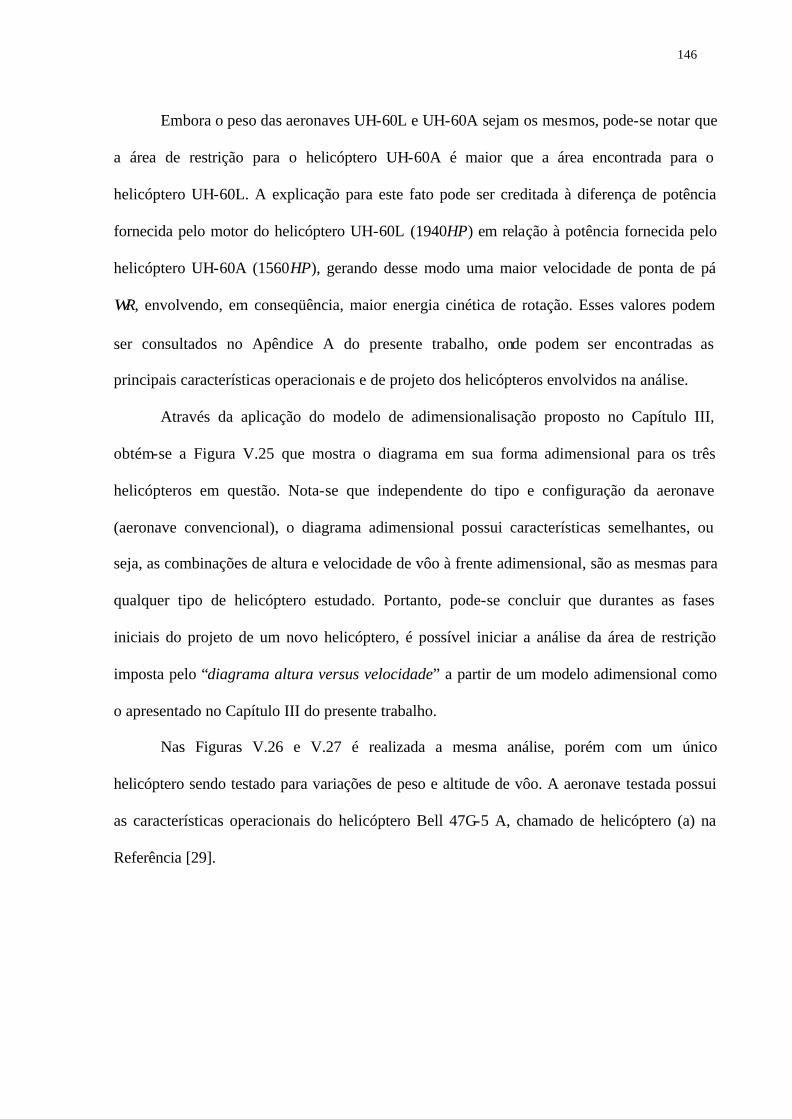
146
Embora o peso das aeronaves UH-60L e UH-60A sejam os mesmos, pode-se notar que
a área de restrição para o helicóptero UH-60A é maior que a área encontrada para o
helicóptero UH-60L. A explicação para este fato pode ser creditada à diferença de potência
fornecida pelo motor do helicóptero UH-60L (1940HP) em relação à potência fornecida pelo
helicóptero UH-60A (1560HP), gerando desse modo uma maior velocidade de ponta de pá
ΩR, envolvendo, em conseqüência, maior energia cinética de rotação. Esses valores podem
ser consultados no Apêndice A do presente trabalho, onde podem ser encontradas as
principais características operacionais e de projeto dos helicópteros envolvidos na análise.
Através da aplicação do modelo de adimensionalisação proposto no Capítulo III,
obtém-se a Figura V.25 que mostra o diagrama em sua forma adimensional para os três
helicópteros em questão. Nota-se que independente do tipo e configuração da aeronave
(aeronave convencional), o diagrama adimensional possui características semelhantes, ou
seja, as combinações de altura e velocidade de vôo à frente adimensional, são as mesmas para
qualquer tipo de helicóptero estudado. Portanto, pode-se concluir que durantes as fases
iniciais do projeto de um novo helicóptero, é possível iniciar a análise da área de restrição
imposta pelo “diagrama altura versus velocidade” a partir de um modelo adimensional como
o apresentado no Capítulo III do presente trabalho.
Nas Figuras V.26 e V.27 é realizada a mesma análise, porém com um único
helicóptero sendo testado para variações de peso e altitude de vôo. A aeronave testada possui
as características operacionais do helicóptero Bell 47G-5 A, chamado de helicóptero (a) na
Referência [29].
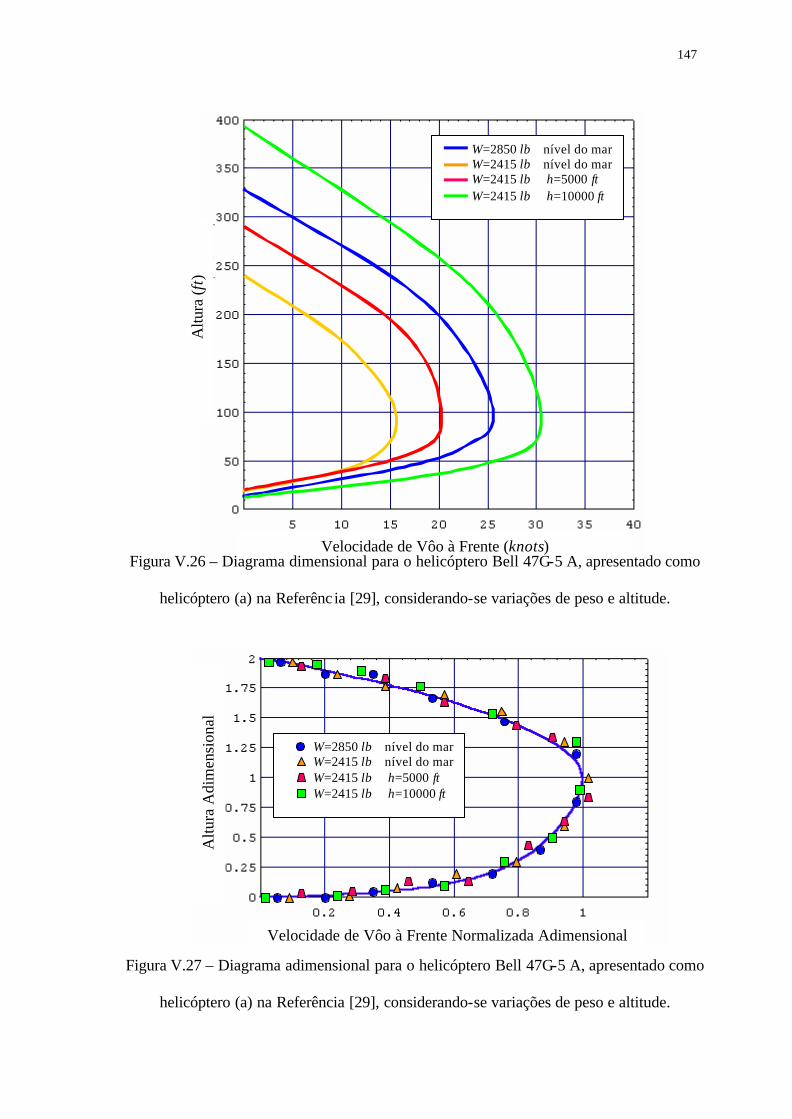
147
W=2850 lb nível do mar W=2415 lb nível do mar W=2415 lb h=5000 ft W=2415 lb h=10000 ft
Altu
ra (f
t)
Velocidade de Vôo à Frente (knots)
Figura V.26 – Diagrama dimensional para o helicóptero Bell 47G-5 A, apresentado como
helicóptero (a) na Referênc ia [29], considerando-se variações de peso e altitude.
Figura V.27 – Diagrama adimensional para o helicóptero Bell 47G-5 A, apresentado como
helicóptero (a) na Referência [29], considerando-se variações de peso e altitude.
W=2850 lb nível do mar W=2415 lb nível do mar W=2415 lb h=5000 ft W=2415 lb h=10000 ft
Velocidade de Vôo à Frente Normalizada Adimensional
Altu
ra A
dim
ensi
onal
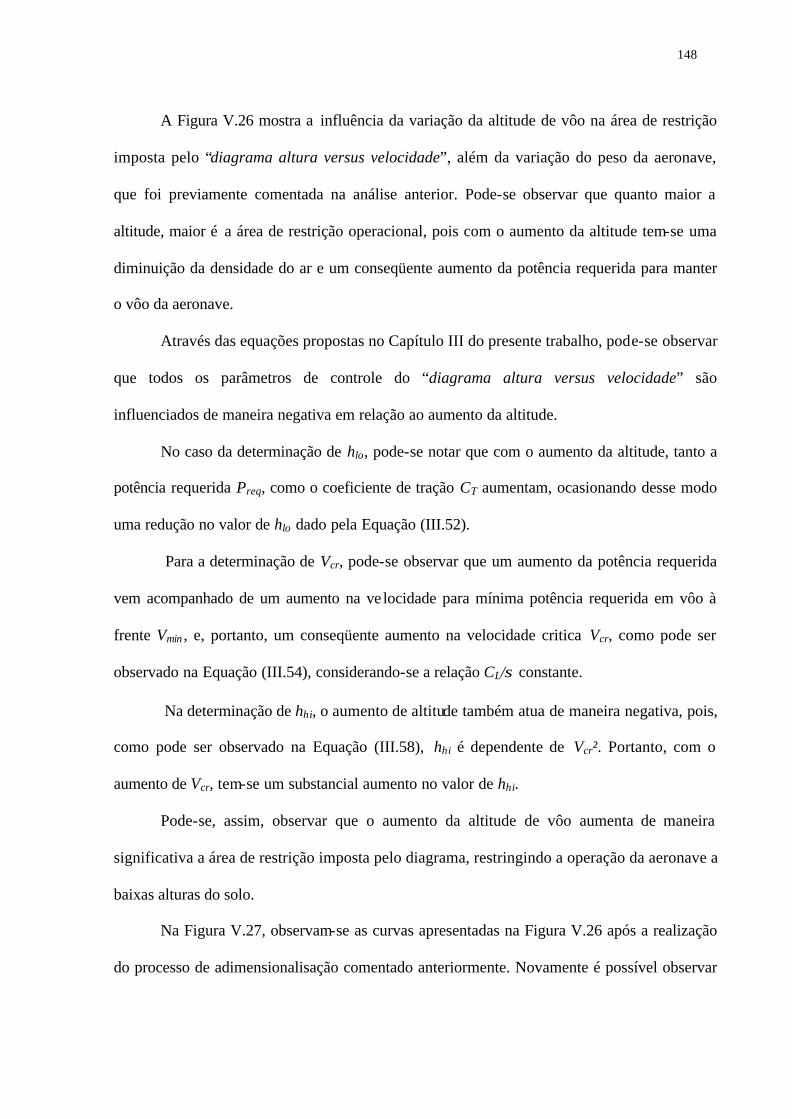
148
A Figura V.26 mostra a influência da variação da altitude de vôo na área de restrição
imposta pelo “diagrama altura versus velocidade”, além da variação do peso da aeronave,
que foi previamente comentada na análise anterior. Pode-se observar que quanto maior a
altitude, maior é a área de restrição operacional, pois com o aumento da altitude tem-se uma
diminuição da densidade do ar e um conseqüente aumento da potência requerida para manter
o vôo da aeronave.
Através das equações propostas no Capítulo III do presente trabalho, pode-se observar
que todos os parâmetros de controle do “diagrama altura versus velocidade” são
influenciados de maneira negativa em relação ao aumento da altitude.
No caso da determinação de hlo, pode-se notar que com o aumento da altitude, tanto a
potência requerida Preq, como o coeficiente de tração CT aumentam, ocasionando desse modo
uma redução no valor de hlo dado pela Equação (III.52).
Para a determinação de Vcr, pode-se observar que um aumento da potência requerida
vem acompanhado de um aumento na ve locidade para mínima potência requerida em vôo à
frente Vmin , e, portanto, um conseqüente aumento na velocidade critica Vcr, como pode ser
observado na Equação (III.54), considerando-se a relação CL/σ constante.
Na determinação de hhi, o aumento de altitude também atua de maneira negativa, pois,
como pode ser observado na Equação (III.58), hhi é dependente de Vcr². Portanto, com o
aumento de Vcr, tem-se um substancial aumento no valor de hhi.
Pode-se, assim, observar que o aumento da altitude de vôo aumenta de maneira
significativa a área de restrição imposta pelo diagrama, restringindo a operação da aeronave a
baixas alturas do solo.
Na Figura V.27, observam-se as curvas apresentadas na Figura V.26 após a realização
do processo de adimensionalisação comentado anteriormente. Novamente é possível observar
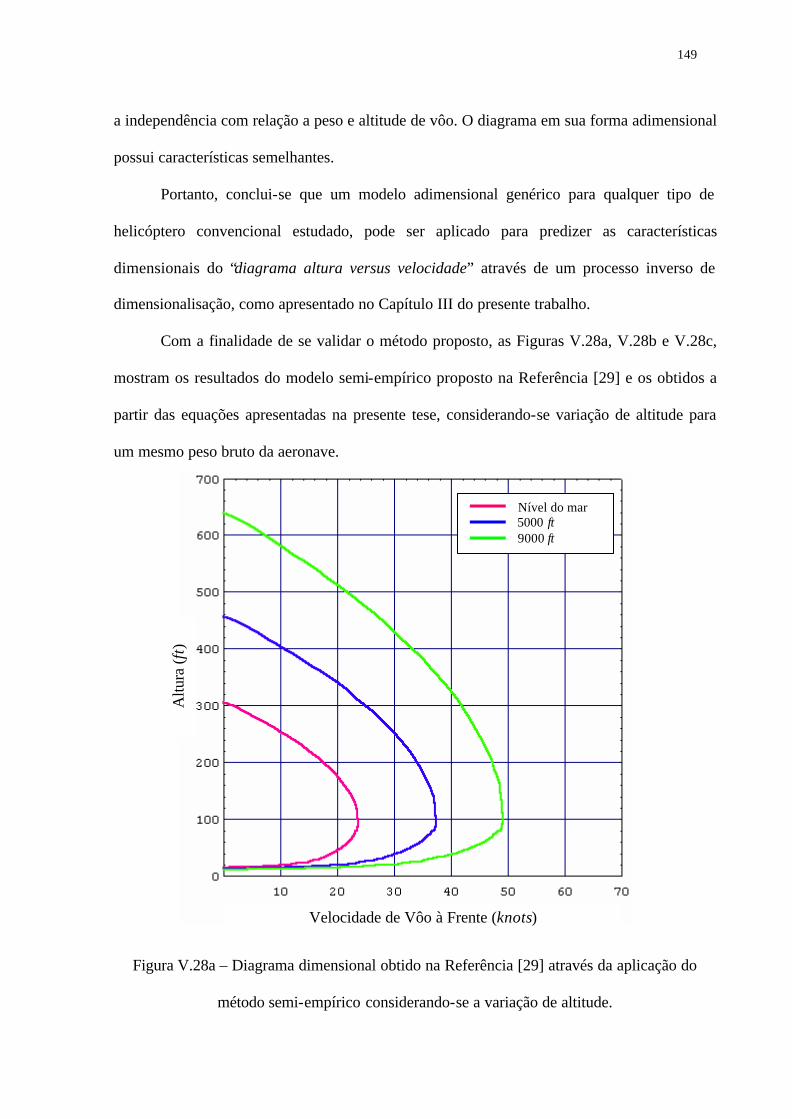
149
a independência com relação a peso e altitude de vôo. O diagrama em sua forma adimensional
possui características semelhantes.
Portanto, conclui-se que um modelo adimensional genérico para qualquer tipo de
helicóptero convencional estudado, pode ser aplicado para predizer as características
dimensionais do “diagrama altura versus velocidade” através de um processo inverso de
dimensionalisação, como apresentado no Capítulo III do presente trabalho.
Com a finalidade de se validar o método proposto, as Figuras V.28a, V.28b e V.28c,
mostram os resultados do modelo semi-empírico proposto na Referência [29] e os obtidos a
partir das equações apresentadas na presente tese, considerando-se variação de altitude para
um mesmo peso bruto da aeronave.
Figura V.28a – Diagrama dimensional obtido na Referência [29] através da aplicação do
método semi-empírico considerando-se a variação de altitude.
Nível do mar 5000 ft 9000 ft
Altu
ra (f
t)
Velocidade de Vôo à Frente (knots)
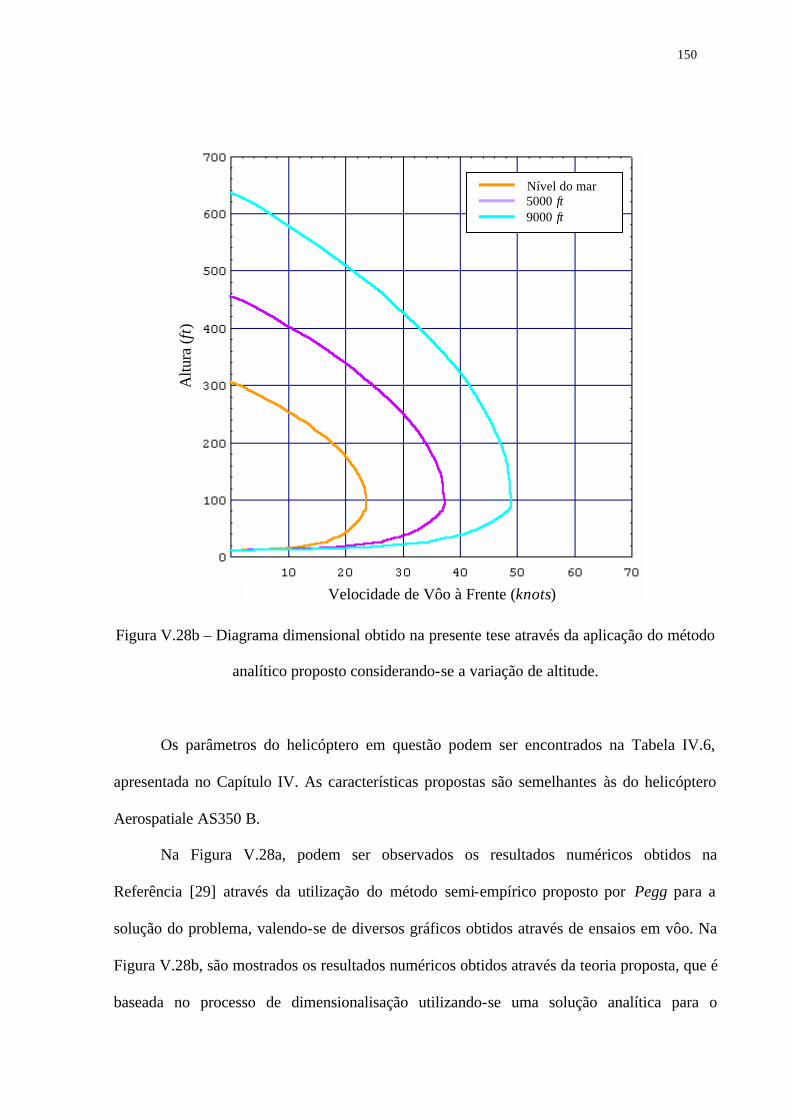
150
Figura V.28b – Diagrama dimensional obtido na presente tese através da aplicação do método
analítico proposto considerando-se a variação de altitude.
Os parâmetros do helicóptero em questão podem ser encontrados na Tabela IV.6,
apresentada no Capítulo IV. As características propostas são semelhantes às do helicóptero
Aerospatiale AS350 B.
Na Figura V.28a, podem ser observados os resultados numéricos obtidos na
Referência [29] através da utilização do método semi-empírico proposto por Pegg para a
solução do problema, valendo-se de diversos gráficos obtidos através de ensaios em vôo. Na
Figura V.28b, são mostrados os resultados numéricos obtidos através da teoria proposta, que é
baseada no processo de dimensionalisação utilizando-se uma solução analítica para o
Nível do mar 5000 ft 9000 ft
Altu
ra (f
t)
Velocidade de Vôo à Frente (knots)
151
problema. Com o intuito de se comparar os resultados obtidos na Referência [29] com os
resultados obtidos no presente trabalho, a Figura V.28c mostra a sobreposição das Figuras
V.28a e V.28b, na qual é possível observar que os resultados são praticamente idênticos,
indicando que a teoria apresentada é válida e pode ser aplicada para qualquer configuração de
helicóptero convencional.
Figura V.28c – Comparação da teoria apresentada no presente trabalho com os resultados
obtidos através do método semi-empírico aplicado na Referência [29].
Comparando-se os resultados obtidos na Figura V.28c, é possível notar que o método
analítico proposto no Capítulo III pode ser aplicado, fornecendo resultados semelhantes aos
encontrados através da aplicação do método semi-empírico e mostrados na Referência [29].
Pegg [29] Nível do mar 5000 ft 9000 ft Tese Nível do mar 5000 ft 9000 ft
Altu
ra (f
t)
Velocidade de Vôo à Frente (knots)
152
Como citado em análise anterior, é possível notar que um aumento da altitude de vôo,
atua de maneira negativa no aspecto do “diagrama altura versus velocidade”. Na análise
realizada, o peso bruto da aeronave é mantido constante (W=3700lb), assim como as demais
características de caráter físico do projeto do rotor.
Na análise da Figura V.28c, pode-se notar que um aumento na altitude de vôo, do
nível do mar para 5000ft, acarreta em uma deformação no aspecto do diagrama. Nota-se que
os pontos de controle do diagrama não variam do mesmo modo, ou seja, cada um deles é
influenciado de modo diferente com relação à variação de altitude. Por exemplo, a velocidade
crítica Vcr passa de Vcr=23knots para Vcr=38knots, ao se variar a altitude de vôo do nível do
mar para 5000 ft, o que representa um aumento percentual de 65% em relação ao valor inicial.
A altura hhi passa de hhi=300ft para hhi=470ft, representando um aumento percentual de 56%
em relação ao valor inicial. Para a altura hlo, pode-se perceber que praticamente não existe
influência na variação de altitude, pois as diferenças encontradas são muito pequenas quando
comparados aos demais fatores de controle do diagrama. Quando a altitude passa de 5000ft
para 9000ft, pode-se observar que novamente os principais fatores que se alteram são Vcr e hhi.
Em termos percentuais, pode-se verificar que Vcr passa de Vcr=38knots para Vcr=48knots,
respectivamente, ou seja, um aumento equivalente a 26%. No caso da altura hhi, se tem uma
variação de hhi=470ft para hhi=630ft, um aumento equivalente a 34%. Portanto, pode-se
perceber que o “diagrama altura versus velocidade” não se deforma do mesmo modo em
relação aos parâmetros de controle do mesmo.
Na Figura V.29, tem-se a representação do diagrama dimensional para um helicóptero
semelhante ao Aerospatiale AS 350B considerando-se variação de peso da aeronave para uma
altitude equivalente ao nível do mar, atmosfera padrão e relação CL/σ constante. É possível
observar que para uma determinada altitude, a redução no peso da aeronave acarreta em uma
redução na área de restrição imposta pelo diagrama e o aumento em um aumento daquela.
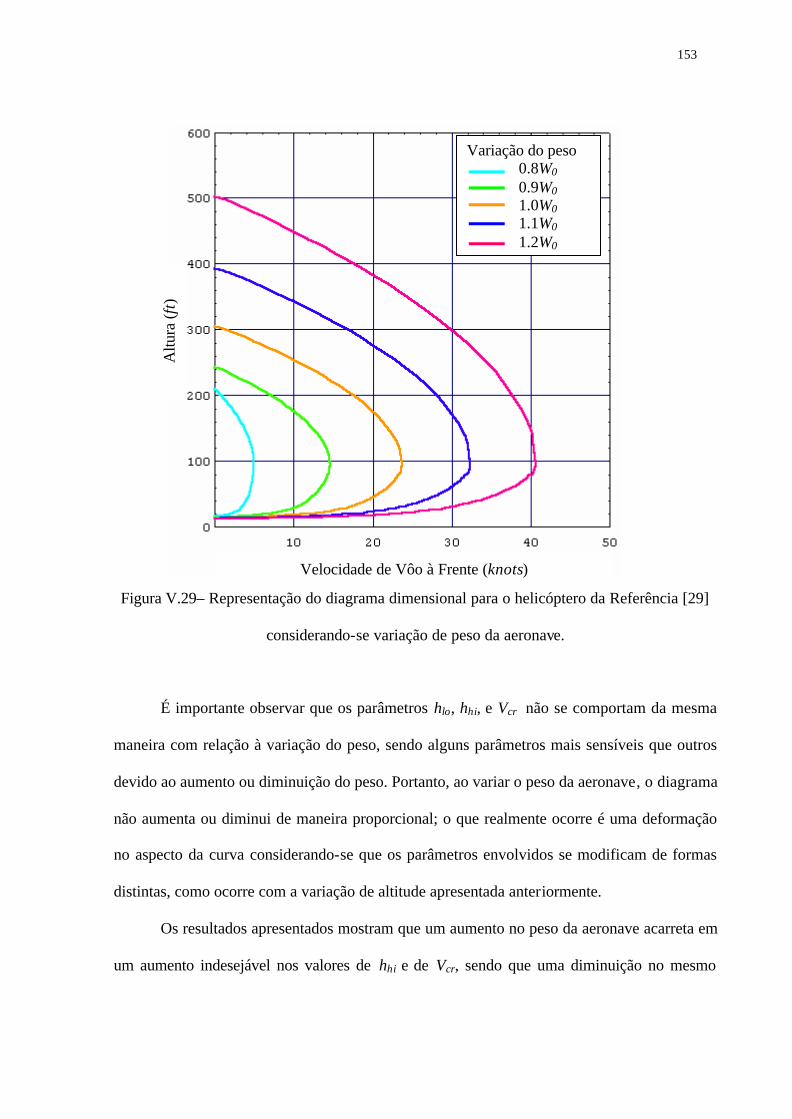
153
Figura V.29– Representação do diagrama dimensional para o helicóptero da Referência [29]
considerando-se variação de peso da aeronave.
É importante observar que os parâmetros hlo, hhi, e Vcr não se comportam da mesma
maneira com relação à variação do peso, sendo alguns parâmetros mais sensíveis que outros
devido ao aumento ou diminuição do peso. Portanto, ao variar o peso da aeronave, o diagrama
não aumenta ou diminui de maneira proporcional; o que realmente ocorre é uma deformação
no aspecto da curva considerando-se que os parâmetros envolvidos se modificam de formas
distintas, como ocorre com a variação de altitude apresentada anteriormente.
Os resultados apresentados mostram que um aumento no peso da aeronave acarreta em
um aumento indesejável nos valores de hhi e de Vcr, sendo que uma diminuição no mesmo
Variação do peso 0.8W0 0.9W0 1.0W0 1.1W0 1.2W0
Altu
ra (f
t)
Velocidade de Vôo à Frente (knots)
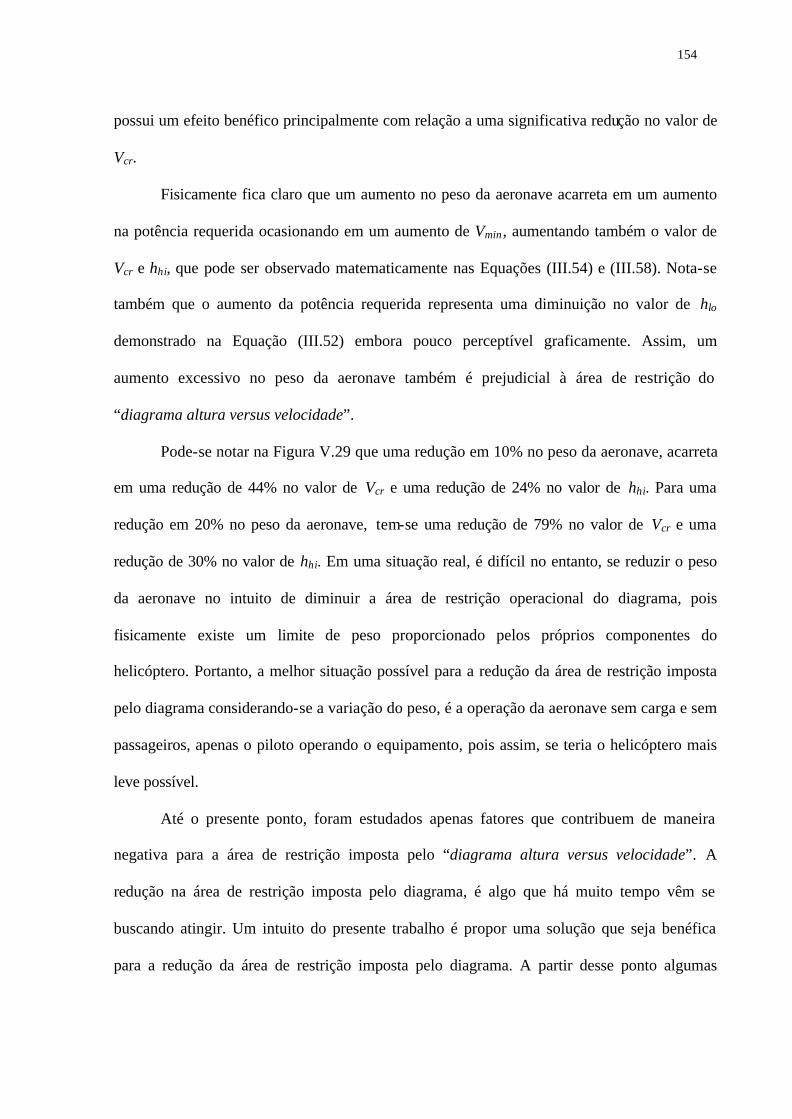
154
possui um efeito benéfico principalmente com relação a uma significativa redução no valor de
Vcr.
Fisicamente fica claro que um aumento no peso da aeronave acarreta em um aumento
na potência requerida ocasionando em um aumento de Vmin, aumentando também o valor de
Vcr e hhi, que pode ser observado matematicamente nas Equações (III.54) e (III.58). Nota-se
também que o aumento da potência requerida representa uma diminuição no valor de hlo
demonstrado na Equação (III.52) embora pouco perceptível graficamente. Assim, um
aumento excessivo no peso da aeronave também é prejudicial à área de restrição do
“diagrama altura versus velocidade”.
Pode-se notar na Figura V.29 que uma redução em 10% no peso da aeronave, acarreta
em uma redução de 44% no valor de Vcr e uma redução de 24% no valor de hhi. Para uma
redução em 20% no peso da aeronave, tem-se uma redução de 79% no valor de Vcr e uma
redução de 30% no valor de hhi. Em uma situação real, é difícil no entanto, se reduzir o peso
da aeronave no intuito de diminuir a área de restrição operacional do diagrama, pois
fisicamente existe um limite de peso proporcionado pelos próprios componentes do
helicóptero. Portanto, a melhor situação possível para a redução da área de restrição imposta
pelo diagrama considerando-se a variação do peso, é a operação da aeronave sem carga e sem
passageiros, apenas o piloto operando o equipamento, pois assim, se teria o helicóptero mais
leve possível.
Até o presente ponto, foram estudados apenas fatores que contribuem de maneira
negativa para a área de restrição imposta pelo “diagrama altura versus velocidade”. A
redução na área de restrição imposta pelo diagrama, é algo que há muito tempo vêm se
buscando atingir. Um intuito do presente trabalho é propor uma solução que seja benéfica
para a redução da área de restrição imposta pelo diagrama. A partir desse ponto algumas
155
mudanças nos parâmetros operacionais do helicóptero em questão são testadas com a
finalidade de se tentar reduzir a área de restrição original.
Nas Figuras V.30 e V.31 são realizadas variações em alguns parâmetros de projeto do
rotor com o intuito de tentar reduzir a área de restrição imposta pelo “diagrama altura versus
velocidade”. São testados: aumento da inércia do rotor e variação da área equivalente de placa
plana do helicóptero.
Na Figura V.30, é testado o aumento da inércia do rotor, com a finalidade de se
observar os efeitos causados no aspecto do “diagrama altura versus velocidade”.
Figura V.30 – Representação do diagrama dimensional para o helicóptero da Referência [29]
considerando-se variação da inércia do rotor principal.
Variação da inércia 0.8IR 0.9IR 1.0IR 1.1IR 1.2IR
Altu
ra (f
t)
Velocidade de Vôo à Frente (knots)
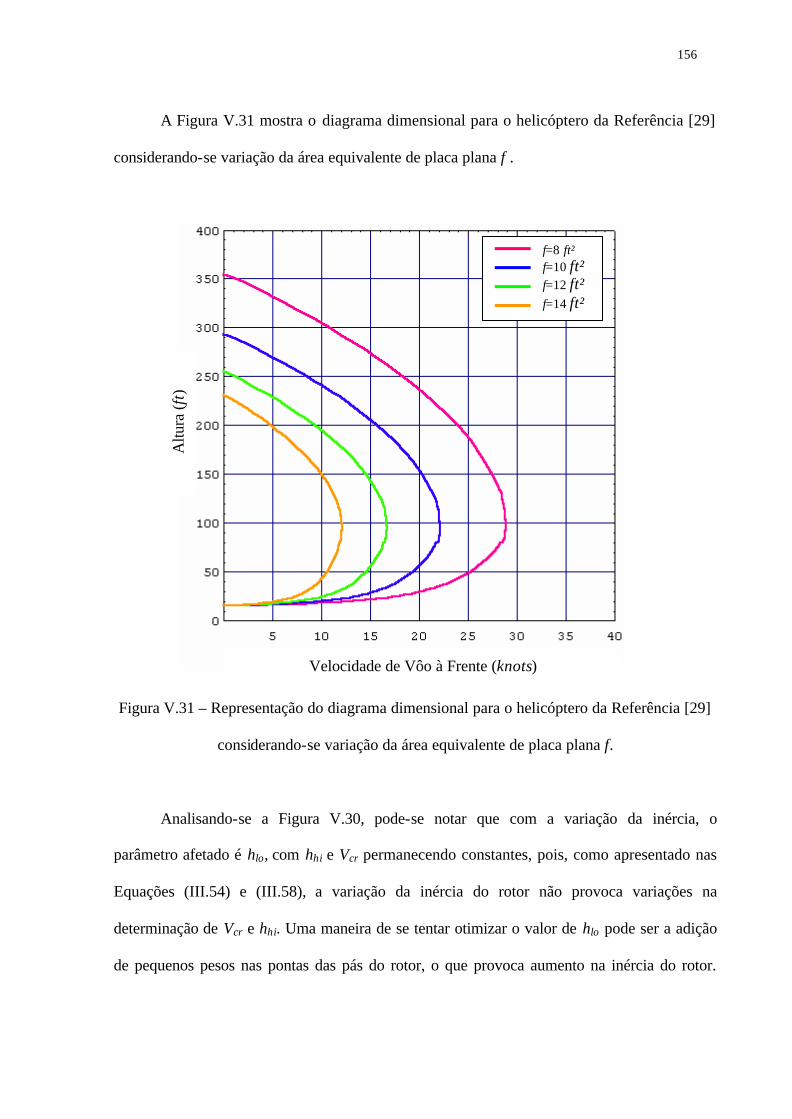
156
A Figura V.31 mostra o diagrama dimensional para o helicóptero da Referência [29]
considerando-se variação da área equivalente de placa plana f .
Figura V.31 – Representação do diagrama dimensional para o helicóptero da Referência [29]
considerando-se variação da área equivalente de placa plana f.
Analisando-se a Figura V.30, pode-se notar que com a variação da inércia, o
parâmetro afetado é hlo, com hhi e Vcr permanecendo constantes, pois, como apresentado nas
Equações (III.54) e (III.58), a variação da inércia do rotor não provoca variações na
determinação de Vcr e hhi. Uma maneira de se tentar otimizar o valor de hlo pode ser a adição
de pequenos pesos nas pontas das pás do rotor, o que provoca aumento na inércia do rotor.
f=8 ft² f=10 ft² f=12 ft²
f=14 ft²
Altu
ra (f
t)
Velocidade de Vôo à Frente (knots)
157
Com um pequeno aumento na massa, consegue-se um maior valor de IR, contribuindo assim
para o aumento de hlo.
Nota-se, também que com o aumento da inércia, o valor do parâmetro hlo também
aumenta. Como visto anteriormente é desejável que se tenha o maior valor possível para o
parâmetro hlo, sempre respeitando os limites de resistência estrutural do trem de pouso. Isto
mostra que o aumento da inércia é uma das opções possíveis a fim de se otimizar hlo.
Observa-se na Figura V.30 que o aumento da inércia do rotor fornece um resultado
satisfatório com relação ao vôo pairado (aumento de cerca de 3m levando-se em conta o
domínio de inércia analisado), não oferecendo vantagens, no entanto, para os demais valores
de velocidade em vôo à frente.
Uma outra maneira para se tentar reduzir a área de restrição, é a variação da área
equivalente de placa plana, que pode variar desde 5ft² até 60ft² [33], dependendo do tipo e
configuração do helicóptero.
A partir da Equação (III.57), é possível se reduzir o valor da velocidade que minimiza
a potência requerida, porém nota-se que essa redução deve ser compensada por algum
parâmetro presente na própria equação. Considerando-se todos os parâmetros com um valor
constante, pode-se variar a área equivalente de placa plana e verificar qual a influência
provocada no valor de Vmin .
Através da análise da Figura V.31, pode-se observar que com o aumento no valor de f,
tem-se uma redução no valor de Vmin, e uma conseqüente redução no valor hhi, com hlo
permanecendo inalterado. Pode-se observar que a partir da configuração original onde f=8ft²,
é possível reduzir a área de restrição imposta pelo diagrama através do aumento da área
equivalente de placa plana, com o valor numérico variando de f=8ft² até f=14ft², representando
assim, um aumento na parcela referente ao arrasto parasita.
158
Quando se altera o valor de f de 8ft² para 14ft², pode-se observar que tanto o parâmetro
Vcr como hhi sofrem variações que reduzem a área de restrição imposta pelo diagrama.
Portanto, pode-se notar que uma escolha adequada do fator f, ao mesmo tempo é capaz de
reduzir Vcr e hhi, sendo desse modo uma possível solução para a redução da área de restrição
imposta pelo “diagrama altura versus velocidade” utilizando-se o modelo proposto no
presente trabalho. Porém, é importante comentar que o aumento de f produz aumento da
potência requerida parasita, comprometendo diretamente o desempenho e as qualidades do
vôo da aeronave na condição de vôo à frente.
Pode-se perceber a partir da análise realizada na Figura V.31, que a área de restrição
imposta pelo “diagrama altura versus velocidade” fica reduzida em relação à situação
original, porém, há que se lembrar que existe uma solução-de-compromisso entre a redução
da área de restrição imposta pelo diagrama e características operacionais da aeronave em
outras condições de vôo diferentes do regime de auto-rotação, comprometendo desse modo a
aplicação de modificações nos parâmetros testados no presente trabalho.
Matematicamente, a área de restrição imposta pelo diagrama pode ser reduzida a um
segmento de reta sobre o eixo vertical do mesmo se o valor de crV for fixado em zero. Assim,
a Equação (III.64) fornece a possibilidade matemática de que as restrições impostas sejam
aplicadas apenas ao vôo pairado.
No capítulo seguinte são apresentadas as conclusões obtidas durante a realização do
presente trabalho, bem como sugestões para trabalhos futuros.
159
CAPÍTULO VI
CONCLUSÕES E SUGESTÕES PARA TRABALHOS FUTUROS
VI.1 – INTRODUÇÃO
A intenção de desenvolver como tese de mestrado esse tema deve-se à preocupação
em encontrar soluções aos problemas mais freqüentes no que diz respeito à segurança
operacional da aeronave, e, principalmente, de seus ocupantes, pois, como pôde ser observado
durante a pesquisa realizada, o regime de auto-rotação é uma característica particular de
helicópteros e autogiros que permite o pouso da aeronave mesmo após completa perda de
potência.
A partir dos resultados obtidos podem ser apresentadas algumas conclusões sobre o
procedimento que se deve ter quando em uma situação de emergência, visando a obter o
regime de auto-rotação. Também são deixadas algumas sugestões com a finalidade de se
continuar o estudo realizado no presente trabalho.
IV.2 – SOBRE A TRANSIÇÃO DO VÔO PAIRADO PARA A AUTO-
ROTAÇÃO EM DESCIDA VERTICAL
Métodos analíticos são utilizados para a análise da transição entre o vôo pairado e a
auto-rotação em descida vertical e algumas conclusões podem ser apontadas:
1 – Em uma situação de emergência, é desejável que a redução do ângulo-de-passo
seja realizada de maneira lenta e suave logo após se perceber a perda de potência.
2 – Como os valores inicial e final da velocidade induzida foram assumidos, a
variação da velocidade induzida praticamente não interfere nas variações da razão-de-descida
e velocidade angular do rotor quando se considera a teoria apresentada na presente tese.
160
3 – Quanto menor a inércia do rotor, mais rápida é a transição entre o vôo pairado e a
auto-rotação em descida vertical.
4 - O tempo médio para que ocorra a transição a partir do vôo pairado é em torno de
dez segundos, para as situações investigadas no presente estudo.
VI.3 – SOBRE O ESTUDO DA AUTO-ROTAÇÃO ESTÁVEL UTILIZANDO-
SE A TEORIA DA QUANTIDADE-DE-MOVIMENTO
A teoria da quantidade-de-movimeto apresentada neste trabalho modela o
comportamento específico de rotores de helicópteros monomotores em vôo descendente.
Como principais conclusões sobre esse estudo, pode-se citar:
1 – A descida vertical deve ser evitada sempre que possível, pois como estudado, na
condição de planeio se consegue uma menor razão-de-descida.
2 – Se não for possível evitar a descida vertical, o piloto da aeronave deve estar atento
às restrições de operação do “diagrama altura versus velocidade” e à mínima razão-de-
descida possível.
3 – Embora a operação no estado de anéis de vórtices não forneça uma situação física
definida para aplicação da teoria da quantidade-de-movimento, pôde-se constatar no presente
trabalho que os resultados numéricos encontrados não diferem significativamente dos
resultados encontrados nos ensaios realizados em túnel de vento.
4 – Os pilotos devem estar preparados para rápidas atitudes de comando durante a
descida.
5 – O vôo descendente deve ser limitado a pequenos ângulos-de-planeio e a
velocidade ao longo da rampa de planeio deve ser mantida elevada, preferencialmente maior
que duas vezes o valor da velocidade induzida.
161
6 - A auto-rotação em vôo à frente foi analisada e comparada com resultados
encontrados em ensaio de túnel de vento demonstrando boas aproximações com as razões-de-
descida obtidas a partir da teoria.
VI.4 – SOBRE O ESTUDO DO TRAÇADO DO “DIAGRAMA ALTURA
VERSUS VELOCIDADE”
Com relação ao estudo do “diagrama altura versus velocidade”, as seguintes
conclusões podem ser citadas:
1 - O diagrama adimensional apresentado independe do tipo e configuração da
aeronave e, portanto, possui um grande poder de generalização, podendo ser aplicado para
qualquer tipo de helicóptero de estrutura convencional.
2 - O diagrama adimensional apresentado foi obtido experimentalmente pela FAA,
utilizando-se pilotos de prova experientes, no qual os pontos encontrados representam o vôo
da aeronave na condição limite de segurança dos helicópteros testados. Daí conclui-se que os
diagramas dimensionais obtidos através do método apresentado por Pegg [29] são diagramas-
limites, que minimizam a área de restrição e que não são aplicados a pilotos menos
experientes. Portanto, esses diagramas devem ser utilizados somente com o intuito de projeto,
a fim de se comparar às diversas possibilidades de configuração da aeronave, mas não devem
ser utilizados para constar nos manuais de vôo das aeronaves, pois, nestes manuais os
diagramas encontrados devem ser aplicados mesmo aos pilotos menos experientes.
3 - A fim de minimizar a área de restrição imposta pelo “diagrama altura versus
velocidade” conclui-se que a melhor maneira de se otimizar o problema é através da
diminuição do valor de Vcr, pois, dessa forma, consegue-se, ao mesmo tempo, uma
aproximação da curva em direção ao eixo vertical e uma redução no valor de hhi, entretanto,
162
limitações de caráter físico ou tecnológico podem estar presentes dependendo da combinação
de parâmetros escolhidos para minimizar Vcr.
VI.5 – SUGESTÕES PARA TRABALHOS FUTUROS
Não há dúvida que o estudo das características auto-rotacionais no desempenho de
helicópteros é de grande importância no contexto de uma operação segura da aeronave. O
trabalho aqui apresentado buscou tratar os principais problemas relacionados ao estudo da
auto-rotação, mas como pôde ser observado, o tema estudado possui uma série de parâmetros
envolvidos, e, somente com a sua continuidade poderão ser encontradas soluções mais
completas do que as aqui apresentadas.
Seguem algumas sugestões para continuidade do presente trabalho.
1 – Análise envolvendo aplicação do movimento de “flap” das pás e seus efeitos nos
valores da razão-de-descida da aeronave e da velocidade angular do rotor.
2 – Realização do estudo da transição entre o vôo com potência e a auto-rotação na
condição de planeio, pois no presente trabalho apenas realizou-se o estudo da transição na
condição de descida vertical.
3 – Utilização da teoria combinada (quantidade-de-movimento/elemento-de-pá), que
permite reduzir as restrições de caráter físico presentes na teoria da quantidade-de-
movimento, possibilitando a obtenção de resultados mais próximos da realidade.
4 – Aplicação de variações de solidez, corda da pá e número de pás com o intuito de se
reduzir a área de restrição imposta pelo “diagrama altura versus velocidade”.
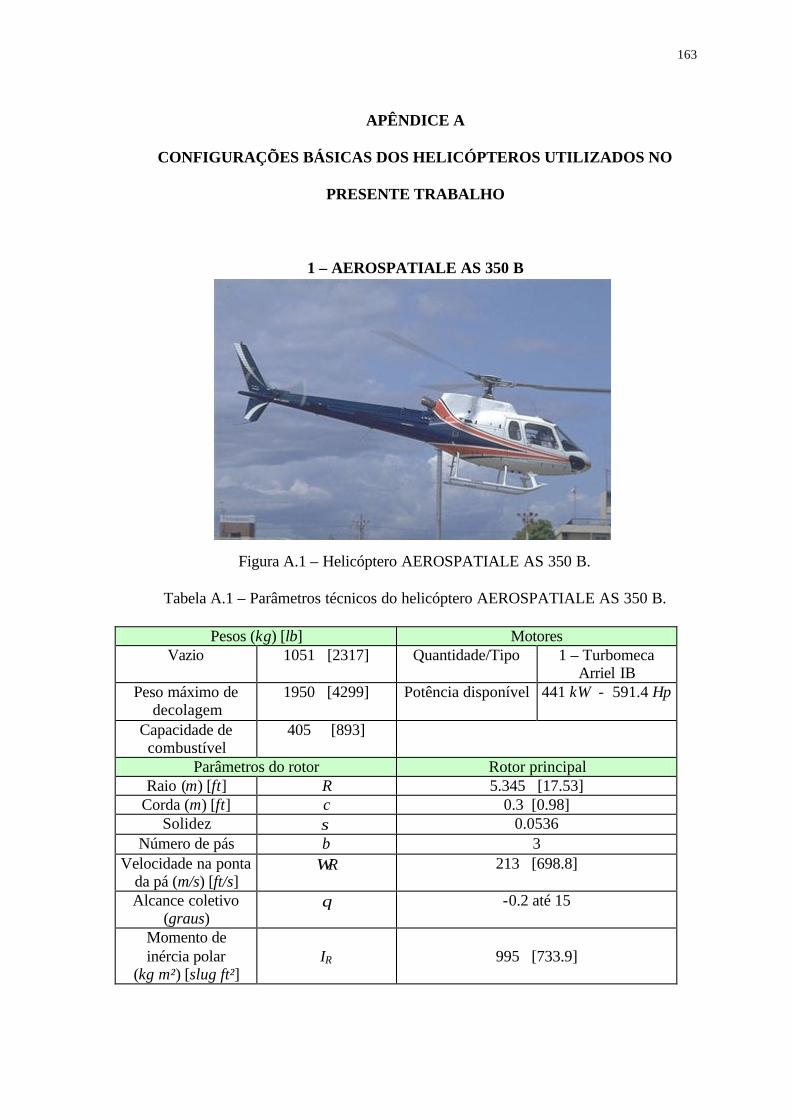
163
APÊNDICE A
CONFIGURAÇÕES BÁSICAS DOS HELICÓPTEROS UTILIZADOS NO
PRESENTE TRABALHO
1 – AEROSPATIALE AS 350 B
Figura A.1 – Helicóptero AEROSPATIALE AS 350 B.
Tabela A.1 – Parâmetros técnicos do helicóptero AEROSPATIALE AS 350 B.
Pesos (kg) [lb] Motores Vazio 1051 [2317] Quantidade/Tipo 1 – Turbomeca
Arriel IB Peso máximo de
decolagem 1950 [4299] Potência disponível 441 kW - 591.4 Hp
Capacidade de combustível
405 [893]
Parâmetros do rotor Rotor principal Raio (m) [ft] R 5.345 [17.53]
Corda (m) [ft] c 0.3 [0.98] Solidez σ 0.0536
Número de pás b 3 Velocidade na ponta
da pá (m/s) [ft/s] ΩR 213 [698.8]
Alcance coletivo (graus)
θ -0.2 até 15
Momento de inércia polar
(kg m²) [slug ft²]
IR
995 [733.9]
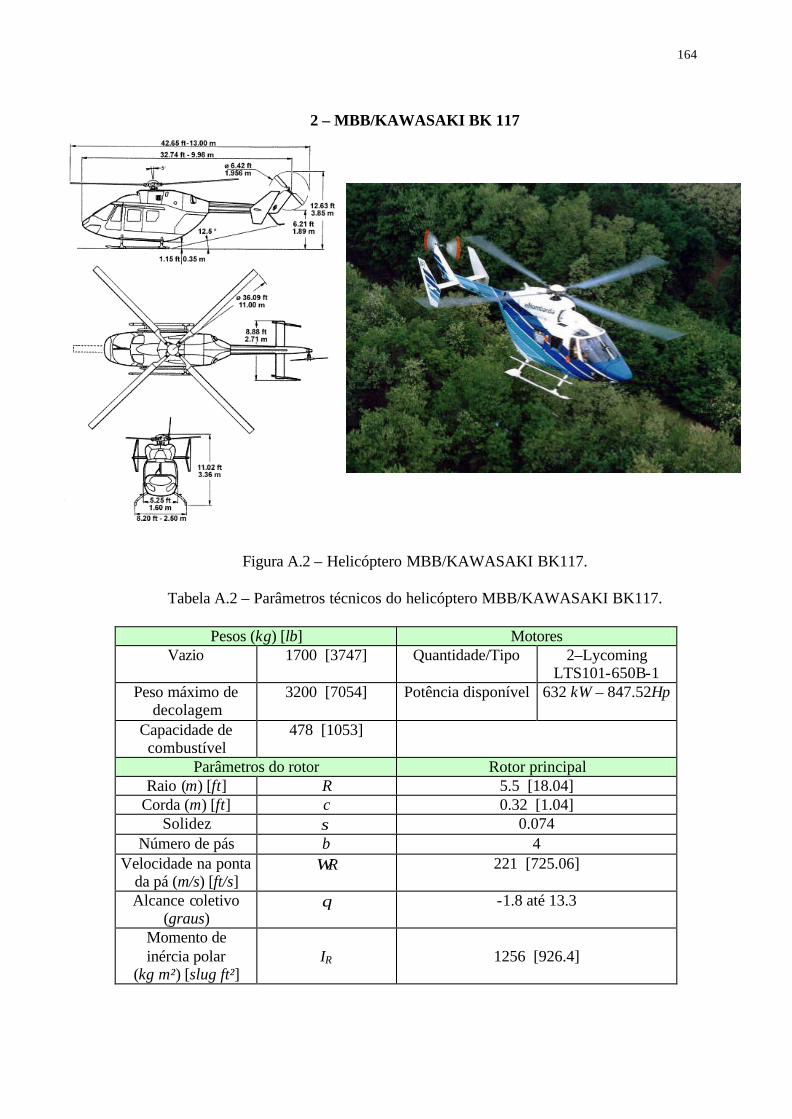
164
2 – MBB/KAWASAKI BK 117
Figura A.2 – Helicóptero MBB/KAWASAKI BK117.
Tabela A.2 – Parâmetros técnicos do helicóptero MBB/KAWASAKI BK117.
Pesos (kg) [lb] Motores Vazio 1700 [3747] Quantidade/Tipo 2–Lycoming
LTS101-650B-1 Peso máximo de
decolagem 3200 [7054] Potência disponível 632 kW – 847.52Hp
Capacidade de combustível
478 [1053]
Parâmetros do rotor Rotor principal Raio (m) [ft] R 5.5 [18.04]
Corda (m) [ft] c 0.32 [1.04] Solidez σ 0.074
Número de pás b 4 Velocidade na ponta
da pá (m/s) [ft/s] ΩR 221 [725.06]
Alcance coletivo (graus)
θ -1.8 até 13.3
Momento de inércia polar
(kg m²) [slug ft²]
IR
1256 [926.4]
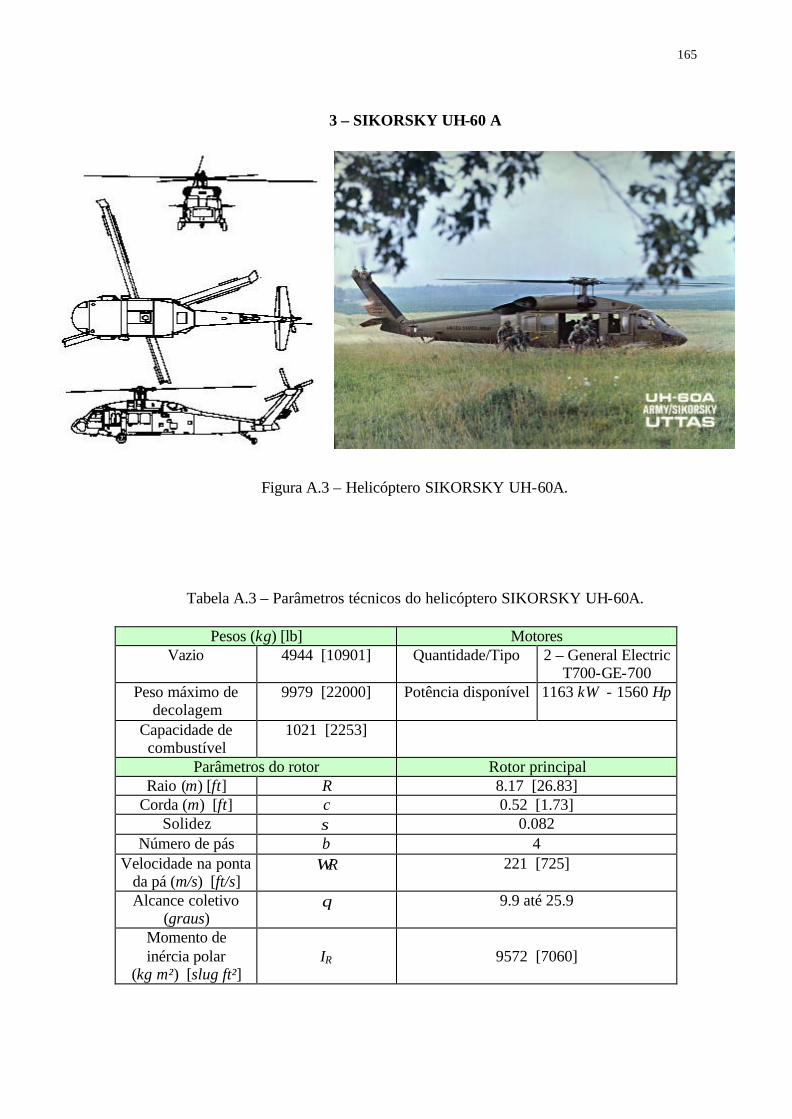
165
3 – SIKORSKY UH-60 A
Figura A.3 – Helicóptero SIKORSKY UH-60A.
Tabela A.3 – Parâmetros técnicos do helicóptero SIKORSKY UH-60A.
Pesos (kg) [lb] Motores Vazio 4944 [10901] Quantidade/Tipo 2 – General Electric
T700-GE-700 Peso máximo de
decolagem 9979 [22000] Potência disponível 1163 kW - 1560 Hp
Capacidade de combustível
1021 [2253]
Parâmetros do rotor Rotor principal Raio (m) [ft] R 8.17 [26.83]
Corda (m) [ft] c 0.52 [1.73] Solidez σ 0.082
Número de pás b 4 Velocidade na ponta
da pá (m/s) [ft/s] ΩR 221 [725]
Alcance coletivo (graus)
θ 9.9 até 25.9
Momento de inércia polar
(kg m²) [slug ft²]
IR
9572 [7060]
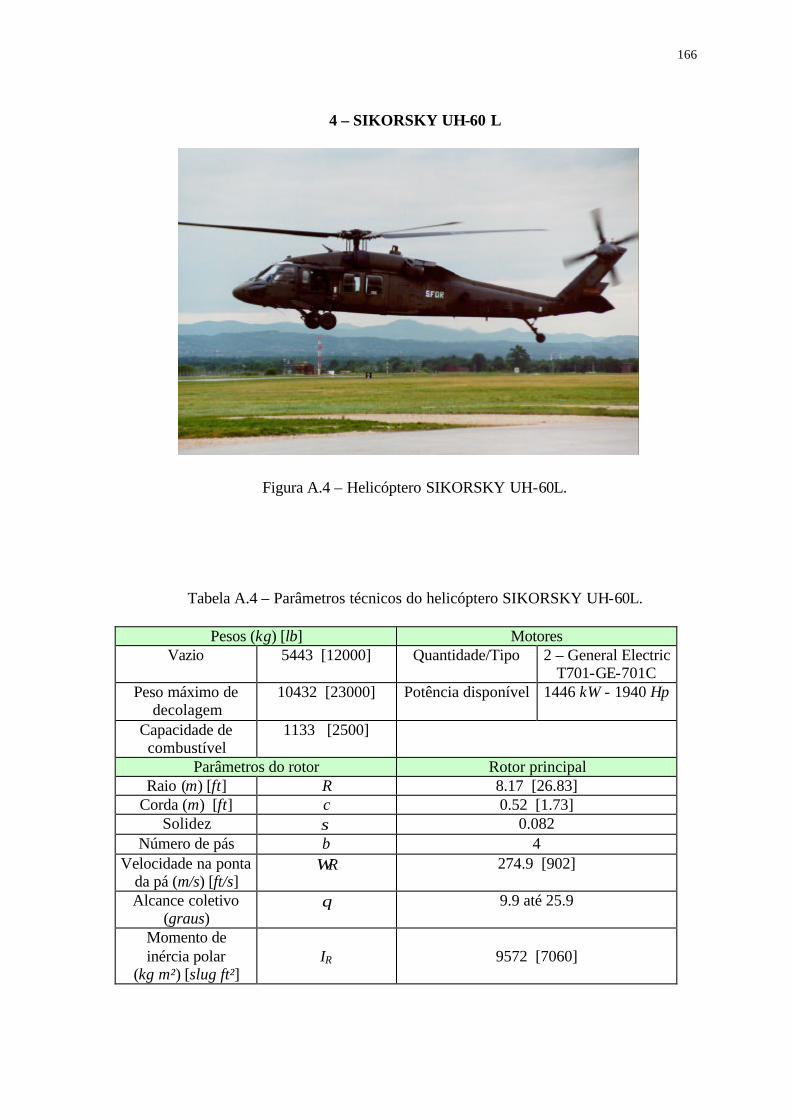
166
4 – SIKORSKY UH-60 L
Figura A.4 – Helicóptero SIKORSKY UH-60L.
Tabela A.4 – Parâmetros técnicos do helicóptero SIKORSKY UH-60L.
Pesos (kg) [lb] Motores Vazio 5443 [12000] Quantidade/Tipo 2 – General Electric
T701-GE-701C Peso máximo de
decolagem 10432 [23000] Potência disponível 1446 kW - 1940 Hp
Capacidade de combustível
1133 [2500]
Parâmetros do rotor Rotor principal Raio (m) [ft] R 8.17 [26.83]
Corda (m) [ft] c 0.52 [1.73] Solidez σ 0.082
Número de pás b 4 Velocidade na ponta
da pá (m/s) [ft/s] ΩR 274.9 [902]
Alcance coletivo (graus)
θ 9.9 até 25.9
Momento de inércia polar
(kg m²) [slug ft²]
IR
9572 [7060]
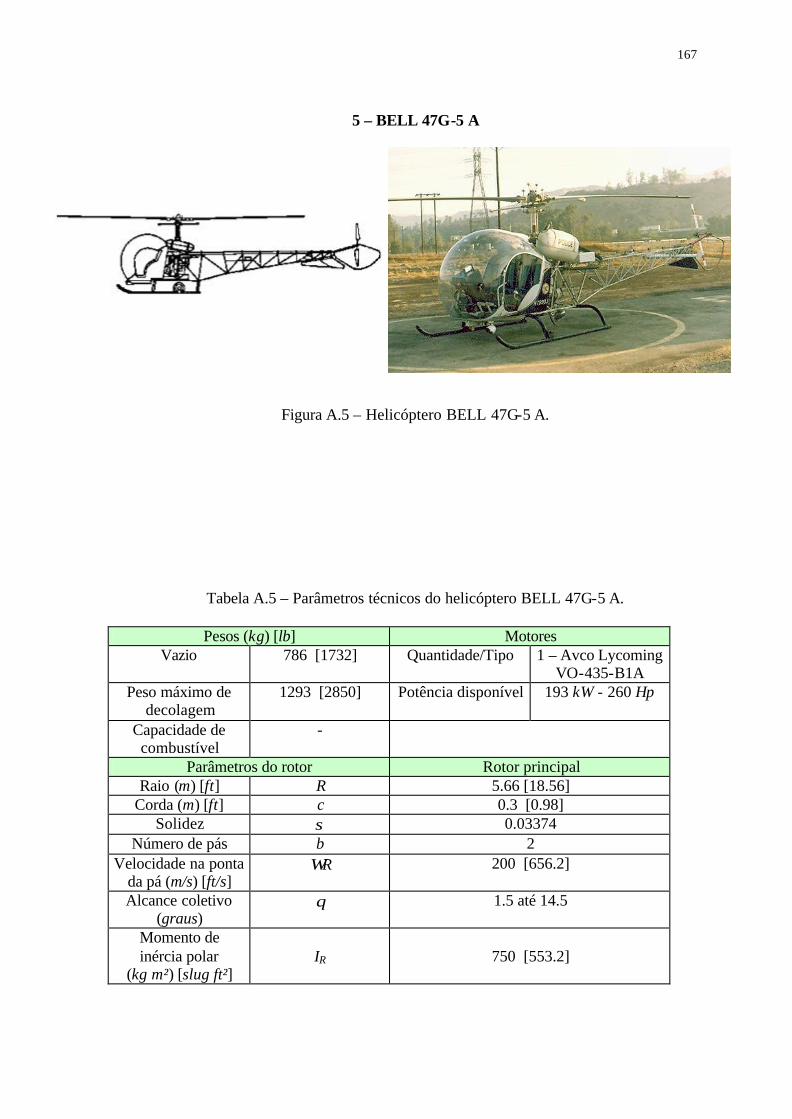
167
5 – BELL 47G-5 A
Figura A.5 – Helicóptero BELL 47G-5 A.
Tabela A.5 – Parâmetros técnicos do helicóptero BELL 47G-5 A.
Pesos (kg) [lb] Motores Vazio 786 [1732] Quantidade/Tipo 1 – Avco Lycoming
VO-435-B1A Peso máximo de
decolagem 1293 [2850] Potência disponível 193 kW - 260 Hp
Capacidade de combustível
-
Parâmetros do rotor Rotor principal Raio (m) [ft] R 5.66 [18.56]
Corda (m) [ft] c 0.3 [0.98] Solidez σ 0.03374
Número de pás b 2 Velocidade na ponta
da pá (m/s) [ft/s] ΩR 200 [656.2]
Alcance coletivo (graus)
θ 1.5 até 14.5
Momento de inércia polar
(kg m²) [slug ft²]
IR
750 [553.2]

168
APÊNDICE B
DEDUÇÃO DAS PRINCIPAIS EQUAÇÕES UTILIZADAS NO PRESENTE
TRABALHO
B.1 – DEDUÇÃO DAS EQUAÇÕES (III.4) E (III.5)
As Equações (III.4) 5 (III.5) podem ser deduzidas a partir do equilíbrio das forças
atuantes no helicóptero e a partir da determinação da tração e do torque no elemento de pá
como representado a seguir.
Para a condição de vôo auto-rotativo, pode-se aplicar a segunda lei de Newton para as
forças atuantes na aeronave, resultando em:
•
−=− VmWT . (B.1)
Sabe-se que:
gWm /= . (B.2)
Portanto:
WgT
gV −=•
. (B.3)
A contribuição da tração no elemento-de-pá para um rotor com b pás e raio r pode ser
representada por:
drRr
vVrRRabcdT D
−
+=Ω
θΩρ 22
21
. (B.4)
Integrando-se ao longo da envergadura da pá para o intervalo entre 0 ≤ r ≤ 1, obtém-
se:
−
+=RvV
RabcT D
ΩθΩρ
2321 32 . (B.5)

169
Substituindo-se a Equação (B.5) na Equação (B.3), chega-se a Equação (B.6) que na
presente tese é representada pela Equação (III.4):
+
−−=
•2
3
322ΩθΩρ
RuV
gW
bacRgV D . (B.6)
De maneira similar o elemento de torque é dado por:
drCrRbcRr
uVRr
uVrRabcrdDragdQ D
DD
+
−
−
+−== 0342342
21
21
ΩρΩΩ
θΩρ . (B.7)
Integrando-se ao longo da envergadura da pá tem-se:
+
−
−
+−= 04242
81
21
321
DDD CRbc
RuV
RuV
RabcQ ΩρΩΩ
θΩρ . (B.8)
Resolvendo-se a Equação (B.8) para Ω e derivando-se no tempo, chega-se a Equação
(B.9), que representa a Equação (III.5).
( ) ( ) ( )
++′−−
−−−−
−=
•2
2210212
22
1
4
432
22ΩθδθδδΩδθδδρΩ uV
Ra
uVR
aI
cRDD .(B.9)
B.2 – DEDUÇÃO DA EQUAÇÃO (III.10)
A partir das Equações (III.8) e (III.9), chega-se na Equação (III.10) através da seguinte
dedução:
Substituindo-se a Equação (III.8) na Equação (III.9), obtém-se:
+
−
++−=
•••2
00
3
3222t
ttt
tt uVV
tV
RgW
abcRgV ∆
∆∆∆
∆∆ Ω
θ∆Ωρ . (B.10)
Chamando-se os termos constantes de A, B, C e D obtém-se:
gW
abcRA
2
3ρ= , (B.11)
170
RB t
2∆Ω
= , (B.12)
2t
C∆
= , e (B.13)
2
3 ttD ∆
∆ Ωθ
= . (B.14)
Substituindo-se as Equações (B.11), (B.12), (B.13) e (B.14) na Equação (B.10),
obtém-se:
+
−
++−=
•••
DuVVCVBAgV ttt ∆∆∆ 00 . (B.15)
Resolvendo-se a Equação (B.15):
ADABuVABCVABCABVgV ttt −+−−−=•••
∆∆∆ 00 . (B.16)
Portanto,
ADABuVABCABVgABCV tt −+−−=+••
∆∆ 00)1( , (B.17)
)1(00
ABCADABuVABCABVg
V tt +
−+−−=
••
∆∆ . (B.18)
Assim, chega-se a Equação (B.19), que representa a Equação (III.10):
t
tt
tt
t
gWabcR
t
uVt
VRgW
bacRg
V
∆
∆∆
∆∆
∆
Ωρ∆
Ωθ∆Ωρ
81
32222
2
00
3
+
+
−+−
=
•
•
. (B.19)
171
REFERÊNCIAS BIBLIOGRÁFICAS
1. BAILEY, F. J. A simplified theoretical method of determining the characteristics of
lifting rotor in forward flight. Langley Field: Langley Memorial Aeronautical
Laboratory, 1941. (NACA Report, n. 716).
2. BAZOV, D. I. Helicopter aerodynamics. 1972. (NASA TT F-676).
3. CASTLES JUNIOR, W.; GRAY, R. B. Empirical relation between velocity, thrust and
rate of descent of a helicopter rotor as determined by wind-tunnel tests on four model
rotors . WASHINGTON, D.C.,1951. (NACA TN 2474).
4. CERBE, T.; REICHERT, G. Optimization of helicopter takeoff and landing. Journal of
Aircraft, v. 26, n.10, oct., 1989.
5. CHEN, R. T. N.; ZHAO, Y. Optimal trajectories for the helicopter in one-engine-
inoperative terminal-area operations . Moffett Field, Ca: Ames Research Center, 1996.
(NASA TM-110400).
6. CHEN, R. T. N.; SHARMA, V.; ZHAO, Y. Optimal sideways operation of a category-a
helicopter from an elevated helipad. In: ANNUAL FORUM AMERICAN HELICOPTER
SOCIETY, 52., 1996, WASHINGTON, D.C.: AHS, 1996. p.1000-3000p.
7. CHEN, R. T. N. ; ZHAO, Y.; CARLSON, E. B. Optimal trajectories for tiltrotor
aircraft in total power failure . Moffett Field, Ca: NASA Ames Research Center, 1996.
8. ANDRADE, D. Tecnologia de helicópteros: parte III- aplicação, mercado e atualidades.
Revista ITA Engenharia, Ano IV, n.6. No prelo.
9. DINGELDEIN, R. C.; SHAEFER, R. F. Full-scale investigation of the aerodynamic
characteristics of a single-rotor helicopter in forward flight. Langley Field,
Va.:Langley Aeronautical Laboratory, 1947. (NACA TN-1289).
172
10. FALEIROS, A. C. Aritmética, Álgebra e Cálculo com o Mathematica. São Paulo:
Edgard Blücher, 1998. 278p.
11. GESSOW, A. Flight investigation on effects of rotor blade twist on helicopter
performance in the high-speed and vertical-autorotative-descent conditions . Langley
Field, Va.:Langley Aeronautical Laboratory, 1948. (NACA TN-1666).
12. GESSOW, A. An analysis of the autorotative performance of a helicopter powered by
rotor tip jet units. Langley Air Force Base, Va.:Langley Aeronautical Laboratory, 1950.
(NACA TN-2154).
13. GESSOW, A.; MYERS, G. C. Aerodynamics of the Helicopter. New York, NY.: Mac
Millan, 1952. p.117-137.
14. GUSTAFSON, F. B.; GESSOW, A. Analysis of flight-performance measurements on a
twisted plywood - covered helicopter rotor in various flight conditions. Langley Air
Force Base, Va.:Langley Aeronautical Laboratory,1948. (NACA TN-1595).
15. HELICOPTER design handbook, AMCP 702-201: preliminary design - helicopter
engineering, part I.: Headquarters, U.S. Army Material, 1974. p. 3-151; 3-161. 1690p.
16. HARIS; SLOAN; ULRICH. Typical helicopter performance calculation. New York,
NY.: The Ronald Press, 1960. p. 50-59, 380p.
17. HEYSON, H. H. A note on the mean value of induced velocity for a helicopter rotor.
Langley Field, Va.: Langley Research Center, 1960. (NASA TN D-240).
18. HEYSON, H. H. Nomographic solution of the momentum equation for vtol – stol
aircraft. Langley Field, Va.: Langley Research Center, 1961. (NASA TN D-814).
19. HEYSON, H. H. A momentum analysis of helicopters and autogyros in inclined
descent, with comments on operational restrictions . HAMPTON, Va.: Langley
Research Center, 1975. (NASA TN D-7917).
173
20. JOHNSON, W. Helicopter theory. Princeton, NJ.: Princeton University Press. 1980. p.
101-105, 325-330. 1090p.
21. KEYS, C. N.; STEPNIEWSKI, W. Z. Rotary-Wing Aerodynamics. New York, NY.:
Dover Publications, 1979. p.100-101, 139-140. 560p.
22. LEE, A. Y. Optimal landing of a helicopter in autorotation. 1986. 291f. Dissertation
Thesis ( Ph.D. in Aeronautics) - Stanford University, Stanford.
23. LEE, A. Y.; BRYSON, A. E.; HINDSON, W. S. Optimal landing of a helicopter in
autorotation. Journal Guidance and Control, v.11, n.1, p. 7-12, jan./feb., 1988.
24. McCORMICK, B. W. Aerodynamics of V/STOL flight. New York, NY.: John Wiley &
Sons, 1998. p. 121-124, 328p.
25. NEWMAN, S. The foundations of helicopter flight. New York, NY.: Halsted Press /
John Wiley & Sons, 1994. p.117-130, 302p.
26. NIKOLSKY, A. A.; SECKEL, E. An analysis of the transition of a helicopter from
hovering to steady autorotative vertical descent. WASHINGTON D.C.: Princeton
University, 1949. (NACA TN 1907).
27. NIKOLSKY, A. A. Helicopter analysis. New York, NY.: The Ronald Press 1951. p. 40-
45, 373p.
28. OKUNO, Y.; KAWACHI, K.; AKIRA, A. Analytical prediction of height-velocity
diagram of a helicopter using optimal control theory. Journal Guidance and Control, v.
14, n. 2, mar./apr, 1991.
29. PEGG, R. J. An investigation of the helicopter height-velocity diagram showing effects
of density altitude and gross weight, HAMPTON, Va.: Langley Research Center, 1968.
(NASA TN D-4536).
174
30. PEGG, R. J. A flight investigation of a lightweight helicopter to study the feasibility
of fixed-collective-pitch autorotations . HAMPTON, Va.: Langley Research Center, 1969.
(NASA TN D-5270).
31. PLEASANTS, W. A.; WHITE, G. T. Status of improved autorotative landing
capability research. HAMPTON, Va.: Langley Research Center, 1988. (AD-A090431).
32. PROUTY, R. W. Helicopter aerodynamics. Rotor & Wing International, 1984, p. 68-69,
78-79, 173p.
33. PROUTY, R. W. Helicopter performance, stability and control. Boston, MA.: PWS
Engineering, 1986. p. 109-115, 346-352, 731p.
34. SHI-CUN, W. Analytical approach to the induced flow of a helicopter rotor in vertical
descent. Journal of the American Helicopter Society, Jan., 1990. p.92 – 98.
35. SLAYMAKER, S. E.; LYNN, R. R.; GRAY, R. B. Experimental investigation of
transition of a model helicopter rotor from hovering to vertical autorotation.
Washington D.C.: Princeton University, 1952. (NACA TN-2648).
36. SLAYMAKER, S. E.; GRAY, R. B. Power-off flare -up tests of a model helicopter
rotor in vertical autorotation. Washington D.C.: Princeton University, 1953. (NACA
TN-2870).
37. STEPNIEWSKI, W. Z. Introduction to helicopter aerodynamics. New York, NY.: The
Ronald Press, 1950. p.150-157, 252p.
38. WHEATLEY, J. B. Lift and drag characteristics an gliding performance of an
autogyro as determined in flight. WASHINGTON D.C.:Langley Memorial Aeronautical
Laboratory, 1932. (NACA Report , 434).
39. YOUNG, A. R. Helicopter Engineering. New York, NY.: The Ronald Press, 1949. p. 60-
69, 347p.
175
FOLHA DE REGISTRO DO DOCUMENTO
1. CLASSIFICAÇÃO/TIPO
TM
2. DATA
26 Setembro 2001
3. DOCUMENTO N° CTA/ITA-IEM/TM-009/2001
4. N° DE PÁGINAS 174
5. TÍTULO E SUBTÍTULO:
ESTUDO DO DESEMPENHO DE HELICÓPTEROS MONOMOTORES OPERANDO NO REGIME DE AUTO-ROTAÇÃO
6. AUTOR(ES):
LUIZ EDUARDO MIRANDA JOSÉ RODRIGUES
7. INSTITUIÇÃO(ÕES)/ÓRGÃO(S) INTERNO(S)/DIVISÃO(ÕES): Instituto Tecnológico de Aeronáutica. Divisão de Engenharia Mecânica-Aeronáutica – ITA/IEM
8. PALAVRAS-CHAVE SUGERIDAS PELO AUTOR:
AUTO-ROTAÇÃO, HELICÓPTEROS, DESEMPENHO, TEORIA DA QUANTIDADE DE MOVIMENTO, TEORIA DO ELEMENTO-DE-PÁ
9.PALAVRAS-CHAVE RESULTANTES DE INDEXAÇÃO:
Helicópteros; Desempenho de aeronaves; Auto-rotação; Asas rotativas; Aerodinâmica de rotores; Equações de movimento; Engenharia aeronáutica; Engenharia mecânica
10. APRESENTAÇÃO: X Nacional Internacional
ITA, São José dos Campos, 2001.
11. RESUMO:
Nesta pesquisa são estudados os efeitos provocados pela perda de potência líquida através do rotor de helicópteros monomotores ocasionando o regime de operação
conhecido como auto-rotação. São deduzidas as equações correspondentes desde o momento em que ocorre a perda de potência até quando o regime de auto-rotação já está
estabilizado. Para o estudo realizado, faz-se uso das teorias da quantidade-de-movimento e do elemento-de-pá. Também é apresentado um modelo semi-empírico para o traçado do “diagrama altura versus velocidade”. Nele estão demonstradas as regiões nas quais o vôo da aeronave fica restrito no caso da auto-rotação. Análises
qualitativa e quantitativa do estudo realizado são levadas a cabo por meio de comparações dos resultados obtidos neste trabalho com os obtidos por diversos autores
e disponíveis na literatura.
12. GRAU DE SIGILO:
(X ) OSTENSIVO ( ) RESERVADO ( ) CONFIDENCIAL ( ) SECRETO