estudo da estabilidade do movimento rotacional … · pelos momentos generalizados ( , , ) e pelas...
TRANSCRIPT
ESTUDO DA ESTABILIDADE DO MOVIMENTO ROTACIONAL DE SATÉLITES
ARTIFICIAIS COM VARIÁVEIS CANÔNICAS
W. R. Silva1, M. C. Zanardi
2, R. E. S. Cabette
3, J. K. Formiga
4.
1 Faculdade de Engenharia – UNESP – Campus de Guaratinguetá, Guaratinguetá, Brasil, [email protected] 2 Faculdade de Engenharia – UNESP – Campus de Guaratinguetá, Guaratinguetá, Brasil, cecí[email protected]
3 Centro de Controle de Satélites - INPE, São José dos Campos, Brasil, [email protected] 4 Centro de Controle de Satélites - INPE, São José dos Campos, Brasil, [email protected]
Resumo: Este trabalho tem como objetivo analisar a
estabilidade do movimento rotacional de satélites artificiais
em órbita circular com a influência do torque de gradiente
de gravidade, usando as variáveis canônicas de Andoyer. O
método utilizado requer a redução da Hamiltoniana em sua
forma normal ao redor de seus pontos de equilíbrios. Tais
pontos de equilíbrios são encontrados por meio das
equações de movimento rotacional e logo em seguida é feito
um estudo linear de sua estabilidade. Um processo
semianalítico de normalização foi utilizado para obter a
Hamiltoniana normal até a quarta ordem. Os coeficientes da
Hamiltoniana são indispensáveis no estudo da estabilidade
não linear do ponto de equilíbrio segundo as três condições
do teorema de estabilidade utilizado. Este estudo é aplicado
para satélites simétricos, utilizando características de três
satélites hipotéticos similares a de três satélites reais. Como
resultado foi obtido um número maior de pontos de
equilíbrio em comparação com resultados de trabalhos
anteriores. Em termos da determinação da forma normal e
da análise da estabilidade, houve otimização no algoritmo
para o processo de normalização e para os testes de
estabilidade. Os resultados deste trabalho podem contribuir
diretamente na manutenção da atitude de satélites artificiais,
podendo gerar uma economia de combustível através de um
menor número de manobras de atitude para manter a atitude
desejada.
Palavras Chaves: estabilidade, dinâmica de atitude,
satélites artificiais.
1. INTRODUÇÃO.
Análise de estabilidade do movimento rotacional de um
satélite levando em conta a influência dos torques externos é
muito importante na manutenção da atitude para assegurar o
sucesso de uma missão espacial.
Pontos de equilíbrios e/ou regiões de estabilidade são
estabelecidas quando parcelas associadas a torques externos
atuantes no satélite são incluídas nas equações de
movimento rotacional. Neste trabalho o torque externo
considerado é o torque de gradiente de gravidade.
As variáveis de Andoyer são utilizadas para descrever o
movimento rotacional do satélite, de modo a facilitar a
aplicação de métodos de estabilidade de sistemas
Hamiltonianos.
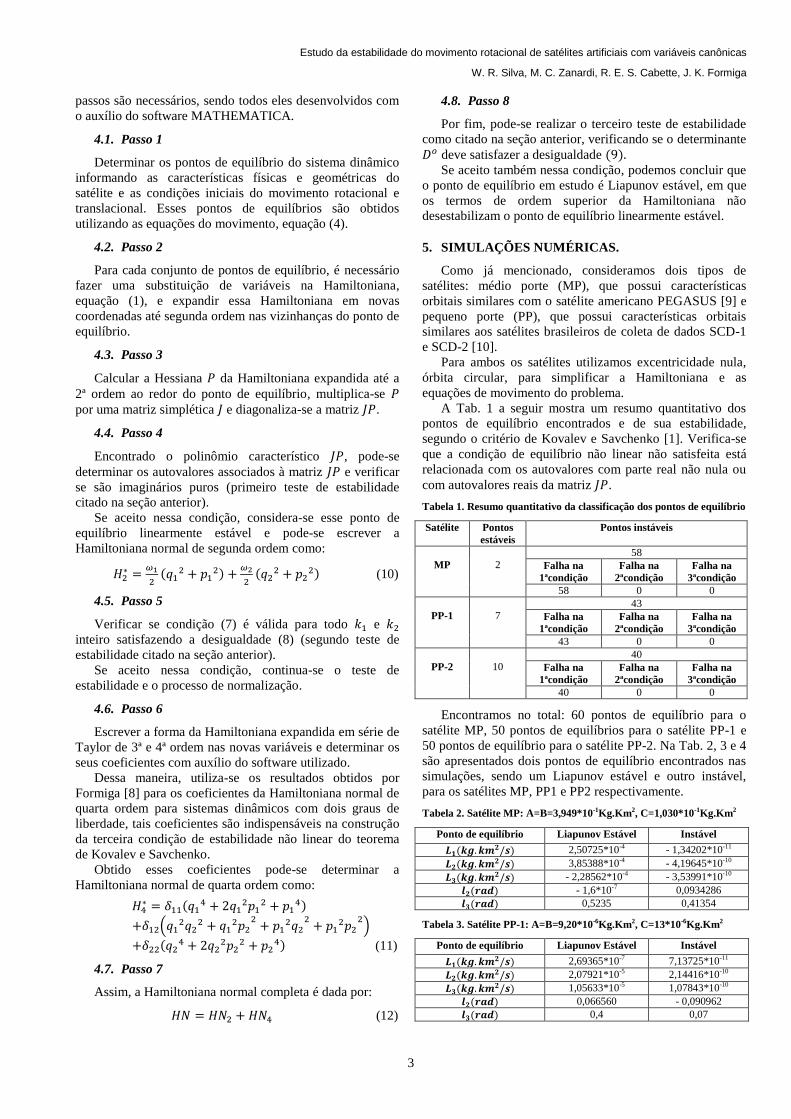
As variáveis canônicas de Andoyer [1] são representadas
pelos momentos generalizados ( , , ) e pelas
coordenadas generalizadas ( ) e estão
esquematizadas na Fig. 1. As variáveis , , são
ângulos relacionados com o sistema do satélite Oxyz (com
eixos paralelos ao sistema de eixos principais de inércia do
satélite) e o sistema equatorial OXYZ (com eixos paralelos
ao eixo do sistema equatorial da Terra). As variáveis
métricas de Andoyer , , são definidas como: é o
módulo do vetor momento angular de rotação ⃗⃗⃗⃗ , e
são, respectivamente, a projeção de ⃗⃗⃗⃗ no eixo z do sistema
de eixos principal de inércia ( , onde é o
ângulo entre o eixo do satélite z e ⃗⃗⃗⃗ ) e a projeção de ⃗⃗⃗⃗ no
eixo equatorial Z ( , onde é o ângulo entre o
eixo equatorial Z e ⃗⃗⃗⃗ ).
Figura 1. Variáveis de Andoyer [2]
A estabilidade não linear dos pontos de equilíbrio do
movimento rotacional é aqui analisada pelo teorema de
Kovalev e Savchenko [3], que requer a Hamiltoniana
normalizada em torno dos pontos de equilíbrio.

Estudo da estabilidade do movimento rotacional de satélites artificiais com variáveis canônicas
W. R. Silva, M. C. Zanardi, R. E. S. Cabette, J. K. Formiga
2
Assim com a Hamiltoniana do problema, os pontos de
equilíbrio das equações de movimento são encontrados, de
modo a transformar a Hamiltoniana em sua forma normal
até a quarta ordem. Deste modo pode-se verificar se os
pontos de equilíbrio que são linearmente estáveis
permanecem estáveis sobre influência dos termos de ordem
superior da Hamiltoniana.
Neste trabalho foram feitas simulações numéricas para
dois grupos de satélites artificiais hipotéticos simétricos e
em órbita circular, aqui classificado como de médio e
pequeno porte, de acordo com suas características físicas e
geométricas.
2. EQUAÇÕES DO MOVIMENTO.
As variáveis de Andoyer, definidas na seção anterior, são
usadas para caracterizar o movimento rotacional de um
satélite ao redor de seu centro de massa e as variáveis de
Delaunay descrevem o movimento translacional do centro
de massa do satélite ao redor da Terra [1].
As variáveis de Delaunay ( ) são definidas
como: √ √ , é a
anomalia média, é o argumento do perigeu, é a
longitude do nódo ascendente, é a massa do satélite, é o
parâmetro gravitacional de Terra, é a inclinação da órbita,
é o semieixo maior e é a excentricidade orbital.
Aqui é assumido que o satélite tem órbita circular e
conhecido, de modo que o enfoque principal do trabalho é
apenas o movimento rotacional do satélite.
Neste caso a Hamiltoniana do problema é expressa em
termos das variáveis de Andoyer e das variáveis de
Delaunay [4] da seguinte forma:
( ) ( ) ( ) (1)
em que é a Hamiltoniana não perturbada e é o termo
associado com a Hamiltoniana do torque de gradiente de
gravidade, respectivamente descritas por [5]:
((
)
(
)
)
(
) (
) (2)
[
( )
( )] (3)
em que e ; e são os momentos
principais de inércia do satélite; e são funções das
variáveis ( ), onde e são argumentos dos
cossenos presente na Hamiltoniana. Sua forma completa é
apresentada em Cabette [6] para órbitas excêntricas. Neste
trabalho será simplificado considerando o satélite em
órbita circular.
Logo, as equações de movimento associada à
Hamiltoniana, equação (1), são dadas por:
{
( ) (4)
Essas equações são utilizadas para encontrar os possíveis
pontos de equilíbrio do movimento rotacional.
Nesse estudo, é também considerado que o satélite
possui dois de seus momentos principais de inércia iguais,
. Com essa relação, a variável não estará presente
na Hamiltoniana, reduzindo o sistema dinâmico a 2 graus de
liberdade.
3. FORMA NORMAL DA HAMILTONIANA E
ANÁLISE ESTABILIDADE.
Seja a Hamiltoniana uma função analítica de
coordenadas ( ) e momentos generalizados ( ) para um
ponto fixo. O processo de determinação da forma normal
de é extenso envolvendo diversas transformações de
variáveis além de ser necessária a utilização do método de
Lie-Hori [7]. Este processo é descrito detalhadamente em de
Moraes et al. [2] e Formiga [8]. Sua forma normal
representada por é expressa por:
∑
∑
(5)
em que representa termos de ordem superior; é a
parte imaginária dos autovalores associados a matriz
definida pelo produto de uma matriz simplética de ordem 4
com a Hessiana da Hamiltoniana expandida em série de
Taylor até 2ª ordem em torno do ponto de equilíbrio [2,6];
dependem dos autovalores
e dos coeficientes da
Hamiltoniana expandida em série de Taylor de 3ª e 4ª ordem
em torno do ponto de equilíbrio que são apresentados
analiticamente em Formiga [8]; e
com (6)
A análise da estabilidade é aqui realizada através do
teorema de Kovalev e Savchenko [3] que garante que o
movimento é Liapunov estável se as seguintes condições são
satisfeitas:
i. Os autovalores do sistema linear reduzido são
imaginários puros e
;
ii. A condição
(7)
é válida para todo e inteiro satisfazendo a
desigualdade.
| | | | (8)
iii. O determinante deve satisfazer a desigualdade
(
) (9)
em que são os coeficientes da Hamiltoniana normal de
quarta ordem.
Assim, para analisarmos a estabilidade dos pontos de
equilíbrio é necessário determinar os coeficientes e
que são associados com a Hamiltoniana normal de segunda
e quarta ordem como apresentado na equação (5).
4. ALGORITMO COMPUTACIONAL PARA A
FORMA NORMAL E ANÁLISE DA ESTABILIDADE.
De acordo com Cabette [6] e Formiga [8], para a
determinação da forma normal da Hamiltoniana os seguintes
Estudo da estabilidade do movimento rotacional de satélites artificiais com variáveis canônicas
W. R. Silva, M. C. Zanardi, R. E. S. Cabette, J. K. Formiga
3
passos são necessários, sendo todos eles desenvolvidos com
o auxílio do software MATHEMATICA.
4.1. Passo 1
Determinar os pontos de equilíbrio do sistema dinâmico
informando as características físicas e geométricas do
satélite e as condições iniciais do movimento rotacional e
translacional. Esses pontos de equilíbrios são obtidos
utilizando as equações do movimento, equação (4).
4.2. Passo 2
Para cada conjunto de pontos de equilíbrio, é necessário
fazer uma substituição de variáveis na Hamiltoniana,
equação (1), e expandir essa Hamiltoniana em novas
coordenadas até segunda ordem nas vizinhanças do ponto de
equilíbrio.
4.3. Passo 3
Calcular a Hessiana da Hamiltoniana expandida até a
2ª ordem ao redor do ponto de equilíbrio, multiplica-se
por uma matriz simplética e diagonaliza-se a matriz .
4.4. Passo 4
Encontrado o polinômio característico , pode-se
determinar os autovalores associados à matriz e verificar
se são imaginários puros (primeiro teste de estabilidade
citado na seção anterior).
Se aceito nessa condição, considera-se esse ponto de
equilíbrio linearmente estável e pode-se escrever a
Hamiltoniana normal de segunda ordem como:
(
)
(
) (10)
4.5. Passo 5
Verificar se condição (7) é válida para todo e
inteiro satisfazendo a desigualdade (8) (segundo teste de
estabilidade citado na seção anterior).
Se aceito nessa condição, continua-se o teste de
estabilidade e o processo de normalização.
4.6. Passo 6
Escrever a forma da Hamiltoniana expandida em série de
Taylor de 3ª e 4ª ordem nas novas variáveis e determinar os
seus coeficientes com auxílio do software utilizado.
Dessa maneira, utiliza-se os resultados obtidos por
Formiga [8] para os coeficientes da Hamiltoniana normal de
quarta ordem para sistemas dinâmicos com dois graus de
liberdade, tais coeficientes são indispensáveis na construção
da terceira condição de estabilidade não linear do teorema
de Kovalev e Savchenko.
Obtido esses coeficientes pode-se determinar a
Hamiltoniana normal de quarta ordem como:
(
)
(
)
(
) (11)
4.7. Passo 7
Assim, a Hamiltoniana normal completa é dada por:
(12)
4.8. Passo 8
Por fim, pode-se realizar o terceiro teste de estabilidade
como citado na seção anterior, verificando se o determinante
deve satisfazer a desigualdade (9). Se aceito também nessa condição, podemos concluir que
o ponto de equilíbrio em estudo é Liapunov estável, em que
os termos de ordem superior da Hamiltoniana não
desestabilizam o ponto de equilíbrio linearmente estável.
5. SIMULAÇÕES NUMÉRICAS.
Como já mencionado, consideramos dois tipos de
satélites: médio porte (MP), que possui características
orbitais similares com o satélite americano PEGASUS [9] e
pequeno porte (PP), que possui características orbitais
similares aos satélites brasileiros de coleta de dados SCD-1
e SCD-2 [10].
Para ambos os satélites utilizamos excentricidade nula,
órbita circular, para simplificar a Hamiltoniana e as
equações de movimento do problema.
A Tab. 1 a seguir mostra um resumo quantitativo dos
pontos de equilíbrio encontrados e de sua estabilidade,
segundo o critério de Kovalev e Savchenko [1]. Verifica-se
que a condição de equilíbrio não linear não satisfeita está
relacionada com os autovalores com parte real não nula ou
com autovalores reais da matriz .
Tabela 1. Resumo quantitativo da classificação dos pontos de equilíbrio
Satélite Pontos
estáveis
Pontos instáveis
MP
2
58
Falha na
1ªcondição
Falha na
2ªcondição
Falha na
3ªcondição
58 0 0
PP-1
7
43
Falha na
1ªcondição
Falha na
2ªcondição
Falha na
3ªcondição
43 0 0
PP-2
10
40
Falha na
1ªcondição
Falha na
2ªcondição
Falha na
3ªcondição
40 0 0
Encontramos no total: 60 pontos de equilíbrio para o
satélite MP, 50 pontos de equilíbrios para o satélite PP-1 e
50 pontos de equilíbrio para o satélite PP-2. Na Tab. 2, 3 e 4
são apresentados dois pontos de equilíbrio encontrados nas
simulações, sendo um Liapunov estável e outro instável,
para os satélites MP, PP1 e PP2 respectivamente.
Tabela 2. Satélite MP: A=B=3,949*10-1Kg.Km2, C=1,030*10-1Kg.Km2
Ponto de equilíbrio Liapunov Estável Instável
( ) 2,50725*10-4 - 1,34202*10-11
( ) 3,85388*10-4 - 4,19645*10-10
( ) - 2,28562*10-4 - 3,53991*10-10
( ) - 1,6*10-7 0,0934286
( ) 0,5235 0,41354
Tabela 3. Satélite PP-1: A=B=9,20*10-6Kg.Km2, C=13*10-6Kg.Km2
Ponto de equilíbrio Liapunov Estável Instável
( ) 2,69365*10-7 7,13725*10-11
( ) 2,07921*10-5 2,14416*10-10
( ) 1,05633*10-5 1,07843*10-10
( ) 0,066560 - 0,090962
( ) 0,4 0,07
Estudo da estabilidade do movimento rotacional de satélites artificiais com variáveis canônicas
W. R. Silva, M. C. Zanardi, R. E. S. Cabette, J. K. Formiga
4
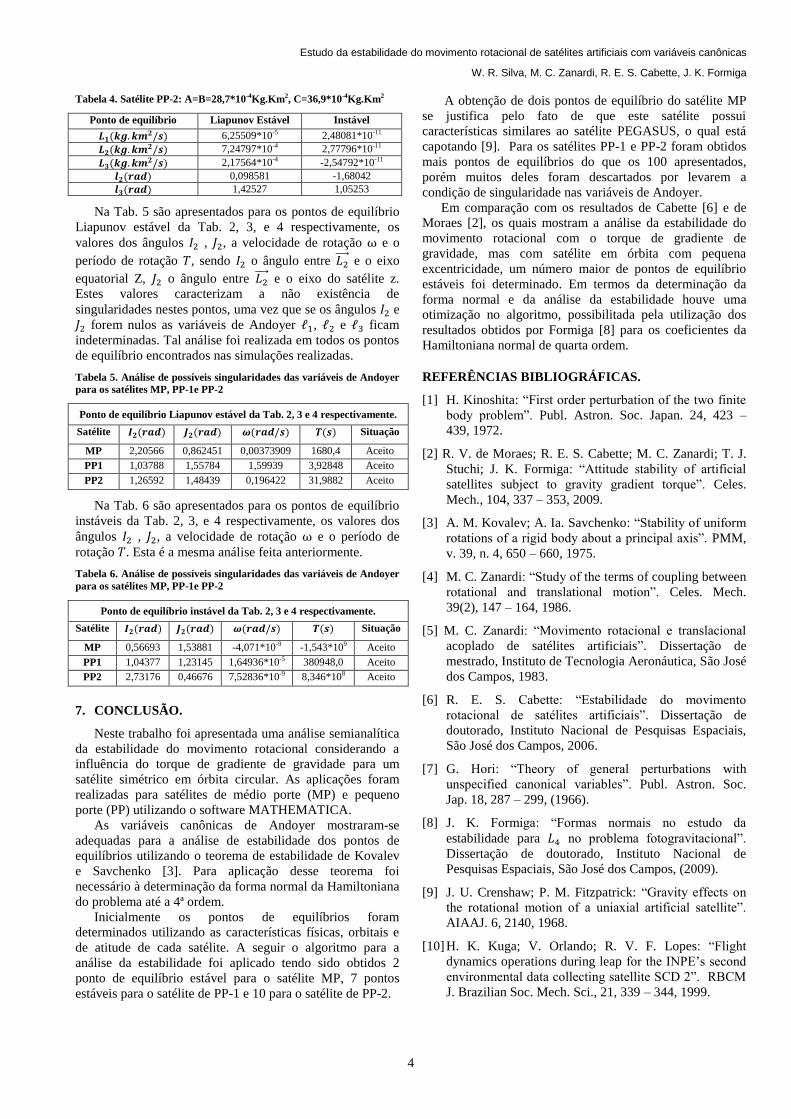
Tabela 4. Satélite PP-2: A=B=28,7*10-4Kg.Km2, C=36,9*10-4Kg.Km2
Ponto de equilíbrio Liapunov Estável Instável
( ) 6,25509*10-5 2,48081*10-11
( ) 7,24797*10-4 2,77796*10-11
( ) 2,17564*10-4 -2,54792*10-11
( ) 0,098581 -1,68042
( ) 1,42527 1,05253
Na Tab. 5 são apresentados para os pontos de equilíbrio
Liapunov estável da Tab. 2, 3, e 4 respectivamente, os
valores dos ângulos , , a velocidade de rotação e o
período de rotação , sendo o ângulo entre ⃗⃗⃗⃗ e o eixo
equatorial Z, o ângulo entre ⃗⃗⃗⃗ e o eixo do satélite z.
Estes valores caracterizam a não existência de
singularidades nestes pontos, uma vez que se os ângulos e
forem nulos as variáveis de Andoyer , e ficam
indeterminadas. Tal análise foi realizada em todos os pontos
de equilíbrio encontrados nas simulações realizadas.
Tabela 5. Análise de possíveis singularidades das variáveis de Andoyer
para os satélites MP, PP-1e PP-2
Ponto de equilíbrio Liapunov estável da Tab. 2, 3 e 4 respectivamente.
Satélite ( ) ( ) ( ) ( ) Situação
MP 2,20566 0,862451 0,00373909 1680,4 Aceito
PP1 1,03788 1,55784 1,59939 3,92848 Aceito
PP2 1,26592 1,48439 0,196422 31,9882 Aceito
Na Tab. 6 são apresentados para os pontos de equilíbrio
instáveis da Tab. 2, 3, e 4 respectivamente, os valores dos
ângulos , , a velocidade de rotação e o período de
rotação . Esta é a mesma análise feita anteriormente.
Tabela 6. Análise de possíveis singularidades das variáveis de Andoyer
para os satélites MP, PP-1e PP-2
Ponto de equilíbrio instável da Tab. 2, 3 e 4 respectivamente.
Satélite ( ) ( ) ( ) ( ) Situação
MP 0,56693 1,53881 -4,071*10-9 -1,543*109 Aceito
PP1 1,04377 1,23145 1,64936*10-5 380948,0 Aceito
PP2 2,73176 0,46676 7,52836*10-9 8,346*108 Aceito
7. CONCLUSÃO.
Neste trabalho foi apresentada uma análise semianalítica
da estabilidade do movimento rotacional considerando a
influência do torque de gradiente de gravidade para um
satélite simétrico em órbita circular. As aplicações foram
realizadas para satélites de médio porte (MP) e pequeno
porte (PP) utilizando o software MATHEMATICA.
As variáveis canônicas de Andoyer mostraram-se
adequadas para a análise de estabilidade dos pontos de
equilíbrios utilizando o teorema de estabilidade de Kovalev
e Savchenko [3]. Para aplicação desse teorema foi
necessário à determinação da forma normal da Hamiltoniana
do problema até a 4ª ordem.
Inicialmente os pontos de equilíbrios foram
determinados utilizando as características físicas, orbitais e
de atitude de cada satélite. A seguir o algoritmo para a
análise da estabilidade foi aplicado tendo sido obtidos 2
ponto de equilíbrio estável para o satélite MP, 7 pontos
estáveis para o satélite de PP-1 e 10 para o satélite de PP-2.
A obtenção de dois pontos de equilíbrio do satélite MP
se justifica pelo fato de que este satélite possui
características similares ao satélite PEGASUS, o qual está
capotando [9]. Para os satélites PP-1 e PP-2 foram obtidos
mais pontos de equilíbrios do que os 100 apresentados,
porém muitos deles foram descartados por levarem a
condição de singularidade nas variáveis de Andoyer.
Em comparação com os resultados de Cabette [6] e de
Moraes [2], os quais mostram a análise da estabilidade do
movimento rotacional com o torque de gradiente de
gravidade, mas com satélite em órbita com pequena
excentricidade, um número maior de pontos de equilíbrio
estáveis foi determinado. Em termos da determinação da
forma normal e da análise da estabilidade houve uma
otimização no algoritmo, possibilitada pela utilização dos
resultados obtidos por Formiga [8] para os coeficientes da
Hamiltoniana normal de quarta ordem.
REFERÊNCIAS BIBLIOGRÁFICAS.
[1] H. Kinoshita: “First order perturbation of the two finite
body problem”. Publ. Astron. Soc. Japan. 24, 423 –
439, 1972.
[2] R. V. de Moraes; R. E. S. Cabette; M. C. Zanardi; T. J.
Stuchi; J. K. Formiga: “Attitude stability of artificial
satellites subject to gravity gradient torque”. Celes.
Mech., 104, 337 – 353, 2009.
[3] A. M. Kovalev; A. Ia. Savchenko: “Stability of uniform
rotations of a rigid body about a principal axis”. PMM,
v. 39, n. 4, 650 – 660, 1975.
[4] M. C. Zanardi: “Study of the terms of coupling between
rotational and translational motion”. Celes. Mech.
39(2), 147 – 164, 1986.
[5] M. C. Zanardi: “Movimento rotacional e translacional
acoplado de satélites artificiais”. Dissertação de
mestrado, Instituto de Tecnologia Aeronáutica, São José
dos Campos, 1983.
[6] R. E. S. Cabette: “Estabilidade do movimento
rotacional de satélites artificiais”. Dissertação de
doutorado, Instituto Nacional de Pesquisas Espaciais,
São José dos Campos, 2006.
[7] G. Hori: “Theory of general perturbations with
unspecified canonical variables”. Publ. Astron. Soc.
Jap. 18, 287 – 299, (1966).
[8] J. K. Formiga: “Formas normais no estudo da
estabilidade para no problema fotogravitacional”.
Dissertação de doutorado, Instituto Nacional de
Pesquisas Espaciais, São José dos Campos, (2009).
[9] J. U. Crenshaw; P. M. Fitzpatrick: “Gravity effects on
the rotational motion of a uniaxial artificial satellite”.
AIAAJ. 6, 2140, 1968.
[10] H. K. Kuga; V. Orlando; R. V. F. Lopes: “Flight
dynamics operations during leap for the INPE’s second
environmental data collecting satellite SCD 2”. RBCM
J. Brazilian Soc. Mech. Sci., 21, 339 – 344, 1999.