estudo comparativo entre sÍnteses de ...5 agradecimentos a deus, mestre dos mestres, por me...
TRANSCRIPT

INSTITUTO MILITAR DE ENGENHARIA
MAURÍCIO FERREIRA HADDAD
ESTUDO COMPARATIVO ENTRE SÍNTESES DE CONTROLE
ROBUSTO PARAMÉTRICO
Dissertação de Mestrado apresentada ao Curso de Mestrado em Engenharia Elétrica do Instituto Militar de Engenharia, como requisito parcial para a obtenção do título de Mestre em Ciências em Engenharia Elétrica.
Orientador: Cap QEM Roberto Ades – Dr.PUC- Rio
Rio de Janeiro
2001

2
c2001
INSTITUTO MILITAR DE ENGENHARIA
Praça General Tibúrcio, 80 – Praia Vermelha
Rio de Janeiro - RJ CEP: 22290-270
Este exemplar é de propriedade do Instituto Militar de Engenharia, que poderá incluí-lo em
base de dados, armazenar em computador, microfilmar ou adotar qualquer forma de
arquivamento.
É permitida a menção, reprodução parcial ou integral e a transmissão entre bibliotecas
deste trabalho, sem modificação de seu texto, em qualquer meio que esteja ou venha a ser
fixado, para pesquisa acadêmica, comentários e citações, desde que sem finalidade comercial e
que seja feita a referência bibliográfica completa.
Os conceitos expressos neste trabalho são de responsabilidade do autor e do orientador.
H 126 Haddad, Maurício Ferreira
Estudo comparativo entre sínteses de controle robusto paramétrico. – Rio de Janeiro: Instituto Militar de Engenharia, 2001.
105 f. : il., graf., tab. Dissertação (mestrado) - Instituto Militar de Engenharia, 2001. 1. Controle robusto paramétrico. 2. PRCBI. 3. Estudo
comparativo.

3
INSTITUTO MILITAR DE ENGENHARIA
MAURÍCIO FERREIRA HADDAD
ESTUDO COMPARATIVO ENTRE SÍNTESES DE CONTROLE
ROBUSTO PARAMÉTRICO
Dissertação de Mestrado apresentada ao Curso de Mestrado em Engenharia Elétrica do Instituto Militar de Engenharia, como requisito parcial para a obtenção do título de Mestre em Ciências em Engenharia Elétrica. Orientador: Cap QEM Roberto Ades – Dr.PUC – Rio.
Aprovada em 24 de maio de 2001 pela seguinte Banca Examinadora:
_______________________________________________________________
Cap QEM Roberto Ades – Dr.PUC-Rio do IME - Presidente
_______________________________________________________________
Prof. Mario César Mello Massa de Campos – Dr. ECP da Petrobras
_______________________________________________________________
Prof. Geraldo Magela Pinheiro Gomes – Dr. ENSAE do IME
________________________________________________________________
Cap QEM José Vicente Medlig de Sousa – M.C. do IME
Rio de Janeiro
2001

4
Dedico esta dissertação de mestrado à memória de meu pai Chafic
Salim Haddad.

5
AGRADECIMENTOS
A Deus, Mestre dos mestres, por me privilegiar de um espírito de sabedoria e ciência.
Ao IME, em especial ao DE/3 pela oportunidade de realização do curso de pós-
graduação.
Ao meu orientador e professor Roberto Ades, pela orientação, interesse, dedicação e pa-
ciência no decorrer da dissertação.
Às minhas irmãs Natália e Andréa e à minha mãe Judith A. F. Haddad pelo grande
incentivo.
A todos os meus professores deste curso, especialmente ao professor Decílio de Medeiros
Sales.
Aos meus colegas de turma Padilha, Rebello e em especial a Edilmar e toda a sua família.
A minha noiva Emiliane, pelos finais de semanas perdidos, durante esta dissertação.
A CAPES pelo incentivo à pesquisa através da bolsa de estudos fornecida durante todo
este curso.
A todos os funcionários do DE/3, pela ajuda nesses dois anos de convivência.
A secretaria do DE/3, em especial a Lourdes, por todos os documentos despachados sem-
pre em tempo.
A todos aqueles esquecidos de serem aqui citados, e que de alguma forma colaboraram
com este trabalho.

6
SUMÁRIO
LISTA DE ILUSTRAÇÕES..................................................................................................... 08
LISTA DE TABELAS.............................................................................................................. 10
LISTA DE ABREVIATURAS E SÍMBOLOS.........................................................................11
1 INTRODUÇÃO GERAL..........................................................................................15
1.1 Motivação e posicionamento da dissertação............................................................... 15
1.2 Objetivos e Escopo......................................................................................................17
2 SUPORTE TEÓRICO UTILIZADO...................................................................... 19
2.1 Métodos de otimização............................................................................................... 19
2.1.1 Método de Powell........................................................................................................21
2.1.2 Método BFGS............................................................................................................. 23
2.1.3 Método de busca unidimensional via aproximação quadrática...................................24
2.2 Síntese PRCBI.............................................................................................................29
3 SÍNTESE DE KONSTANTOPOULOS E ANTSAKLIS.......................................35
3.1 Introdução................................................................................................................... 35
3.2 Considerações iniciais................................................................................................. 36
3.3 Projeto de controladores de realimentação de saída....................................................38
3.3.1 Perturbação não estruturada sem especificações de desempenho............................... 39
3.3.2 Perturbação não estruturada com especificações de desempenho.............................. 45
3.3.3 Perturbação estruturada sem especificações de desempenho......................................47
3.3.4 Perturbação estruturada com especificações de desempenho..................................... 49
4 APLICAÇÕES NUMÉRICAS DAS SÍNTESES PRCBI E DE K&A..................52
4.1 Sistema de controle longitudinal de uma aeronave..................................................... 52
4.2 Sistema massa-mola com 8 estados............................................................................ 70
7
5 CONCLUSÕES E SUGESTÕES.............................................................................80
5.1 Conclusões.................................................................................................................. 80
5.2 Sugestões para futuros trabalhos................................................................................. 82
6 REFERÊNCIAS BIBLIOGRÁFICAS.................................................................... 83
7 ANEXO ......................................................................................................................84
7.1 ANEXO 1....................................................................................................................84

8
LISTA DE ILUSTRAÇÕES FIG. 2.1 Diagrama geral do sistema de otimização........................................................20
FIG. 2.2 Evolução do processo de minimização pelo método de Powell.......................21
FIG. 2.3 Fluxograma do método de Powell....................................................................22
FIG. 2.4 Possível forma de F(Xq + α. Sq) x α................................................................25
FIG. 2.5 Fluxograma do método de busca unidimensional por aproximação
quadrática utilizado......................................................................................... 28
FIG. 2.6 Estrutura LQG................................................................................................. 29
FIG. 2.7 Síntese PRCBI em malha fechada...................................................................32
FIG. 3.1 Síntese de K&A com realimentação de saída..................................................36
FIG. 3.2 Fluxograma do algoritmo de K&A..................................................................44
FIG. 4.1 Região de estabilidade e hiperesfera com o controlador kc1 ...........................61
FIG. 4.2 Diagrama de sensibilidade com o controlador kc1...........................................61
FIG. 4.3 Região de estabilidade e hiperesfera com o controlador kc2 ...........................62
FIG. 4.4 Diagrama de sensibilidade com o controlador kc2...........................................62
FIG. 4.5 Região de estabilidade e hiperesfera com o controlador kc3 ...........................63
FIG. 4.6 Diagrama de sensibilidade com o controlador kc3...........................................63
FIG. 4.7 Região de estabilidade e hiperesfera com o controlador kc4 ...........................64
FIG. 4.8 Diagrama de sensibilidade com o controlador kc4...........................................64
FIG. 4.9 Região de estabilidade e hiperesfera com o controlador kc5............................65
FIG. 4.10 Diagrama de sensibilidade ampliado com o controlador kc1 ...........................65
FIG. 4.11 Diagrama de sensibilidade ampliado com o controlador kc2 ...........................66
FIG. 4.12 Resposta ao impulso em MA para o sistema da EQ 4.2..................................66

9
FIG. 4.13 Resposta ao impulso em M.F para o sistema da EQ 4.2 com o
controlador kc1........................................... ......................................................67
FIG. 4.14 Resposta ao impulso em M.F para o sistema da EQ 4.2 com o
controlador kc2............................. ....................................................................67
FIG. 4.15 Resposta ao impulso em M.F para o sistema da EQ 4.2 com o
controlador kc3............................. ....................................................................68
FIG. 4.16 Resposta ao impulso em M.F para o sistema da EQ 4.2 com o
controlador kc4............................. ....................................................................68
FIG. 4.17 Resposta ao impulso em M.F para o sistema da EQ 4.2 com o
controlador kc5............................. ....................................................................69
FIG. 4.18 Diagrama físico do sistema mass-mola 8 estados ...........................................70
FIG. 4.19 Região de estabilidade e hiperesfera percentual com o controlador KLQG ......75
FIG. 4.20 Diagrama de sensibilidade com o controlador KLQG .......................................75
FIG. 4.21 Região de estabilidade e hiperesfera percentual com o controlador KPRCBI....76
FIG. 4.22 Diagrama de sensibilidade com o controlador KPRCBI ....................................76
FIG. 4.23 Região de estabilidade e hiperesfera percentual com o controlador KH100 .....77
FIG. 4.24 Diagrama de sensibilidade com o controlador KH100 ......................................77
FIG. 4.25 Região de estabilidade e hiperesfera percentual com o controlador KK&A1 ....78
FIG. 4.26 Diagrama de sensibilidade com o controlador KK&A1 .....................................78
FIG. 4.27 Região de estabilidade e hiperesfera percentual com o controlador KK&A2 ....79
FIG. 4.28 Diagrama de sensibilidade com o controlador KK&A2 .....................................79

10
LISTA DE TABELAS
TAB. 4.1 Significado físico dos estados, entradas e saídas do modelo
para o modelo de (JIANG, 1994)..............................................................................52
TAB. 4.2 Controladores obtidos no modelo de (JIANG, 1994)...............................................56
TAB. 4.3 Matrizes Z diagonal otimizadas................................................................................58
TAB. 4.4 Características obtidas nos controladores calculados...............................................59
TAB. 4.5 Significado físico dos estados do sistema massa-mola 8 estados.............................71
TAB. 4.6 Controladores de destaque relativos ao sistema massa-mola com
8 estados....................................................................................................................73
TAB. 4.7 Características obtidas pelos controladores mencionados na TAB. 4.6...................73
11
LISTA DE ABREVIATURAS E SÍMBOLOS
ABREVIATURAS
PRCBI : “Parameter Robust Control by Bayesian Identification”
K&A : “Konstantopoulos & Antsaklis”
LQG-LTR : “Linear Quadratic Gaussian - Loop Transfer Recovery”
PRLQG : “Parameter Robust Linear - Quadratic Gaussian”
LQG : “Linear Quadratic Gaussian”
LQR : ”Linear Quadratic Regulator”
MF : Malha fechada
MA : Malha aberta
SÍMBOLOS
Ctrl : Controlador
X : Vetor X
nℜ : Conjunto dos vetores reais de ordem n
AT : Matriz transposta da matriz A
θ : Vetor paramétrico
Cb ∈ : b pertence a C
qxpℜ : Conjunto das matrizes reais de ordem p x q
In : Matriz identidade de ordem n
1
0G −
θ : Matriz da qualidade de identificação bayesiana
Tr(A) : Traço da matriz A
⋅E : Esperança matemática
A>0 : A é uma matriz positiva definida
A<0 : A é uma matriz negativa definida
A>B : A-B é uma matriz positiva definida
A-1
: Matriz inversa da matriz A
)A(maxσ : Maior valor singular da matriz A

12
)A(mimσ : Menor valor singular da matriz A
: = : Por definição
)X(F2∇ : Matriz Hessiana de F(X)
)X(F∇ : Gradiente de F(X)
θ
kYp : Probabilidade condicional de θ dado que Y
k ocorreu
A : Determinante da matriz A
)(minA
⋅ : Encontrar o valor mínimo da expressão variando A
X : Norma quadrática do vetor X
( )⋅F : F é uma função objetivo do argumento
( )⋅F : Módulo do valor da função objetivo do argumento
♦ : Fim de Lema e Teorema

13
RESUMO
Esta dissertação apresenta um estudo na área de controle robusto, que é um assunto de
interesse atual, dada a sua aplicação na capacidade de manter a estabilidade e assegurar uma
maior insensibilidade do desempenho do sistema que esteja submetido a um determinado tipo
de perturbação.
Este trabalho apresenta um estudo comparativo entre a síntese de controle robusto para-
métrico PRCBI (“Parameter Robust Control By Bayesian Identification”) (GOMES,1991),
baseada na qualidade de identificação Bayesiana dos parâmetros incertos a serem robusteci-
dos e a síntese desenvolvida em (KONSTANTOPOULOS & ANTSAKLIS, 1996), aqui deno-
minada por síntese de K&A, onde o algoritmo de minimização proposto utiliza uma versão do
método de direções conjugadas baseado na regra BFGS (BAZARAA et alii, 1993).
Na parte aplicativa deste trabalho, calcula-se os controladores gerados pelas sínteses
mencionadas em cima do sistema de controle longitudinal de uma aeronave (JIANG, 1994), e
de um sistema massa-mola de 08 estados, verificando através de gráficos e tabelas as vanta-
gens obtidas pela utilização dos controladores calculados por meio de cada uma das sínteses
aqui citadas.

14
ABSTRACT
This dissertation features a study in the field of robust control, which is a subject of
current interest, given its application in the capacity of keeping stability and assure a greater
insensibility of the system performance which is submitted to a determined type of
perturbation.
This project features a comparative study between the synthesis of Parametric Robust
Control PRCBI ( "Parameter Robust Control by Bayesian Identification") (GOMES, 1991),
based on the bayesian identification quality of uncertain parameters to be robusted and the
developed synthesis into (KONSTANTOPOULOS & ANTSAKLIS, 1996), here denominated
by K&A synthesis, where the algorithm of minimization proposed uses a version of the
conjugated directions method based on the BFGS rule (BAZARAA et alii, 1993).
In the applicable part of this project, it is calculated the controllers generated by the
synthesis mentioned over the longitudinal control system of an aeroplane ( JIANG, 1994) and
a mass-spring of 08 states, verifying through graphs and tables the advantages obtained by the
utilization of controllers calculated by each synthesis here cited.

15
1 INTRODUÇÃO GERAL
1.1 MOTIVAÇÃO E POSICIONAMENTO DA DISSERTAÇÃO
Nesta dissertação propõe-se um estudo comparativo entre as sínteses de controle robusto
paramétrico, PRCBI (“Parameter Robust Control By Bayesian Identification”) (GOMES,
1991) e a desenvolvida em (KONSTANTOPOULOS & ANTSAKLIS, 1996), sendo esta
última referida neste trabalho por síntese de K&A.
O Controle Robusto é uma linha de pesquisa que visa adaptar os métodos de controle
ótimo, de maneira a tornar os sistemas imunes a uma classe específica de perturbações, isto é,
um regulador robusto deve ser capaz de manter a estabilidade e assegurar uma maior
insensibilidade do desempenho de um sistema, que esteja submetido a um determinado tipo
de perturbação.
Tendo em vista a sua importância, foram desenvolvidas recentemente várias técnicas de
Controle Robusto. Uma das primeiras e mais importantes, baseada na modelagem das classes
de incertezas estruturais previamente conhecidas, surgiu em (DOYLE & STEIN, 1981), onde
é utilizada uma representação externa das incertezas sob a forma de uma matriz de erro. Esta
técnica recebeu a denominação de LQG-LTR (“Linear Quadratic Gaussian - Loop Transfer
Recovery”).
Posteriormente em (TAHK & SPEYER, 1987), foi proposta uma técnica de Controle
Robusto voltada para as variações paramétricas, conhecida como PRLQG (“Parameter Robust
Linear - Quadratic Gaussian”), sendo baseada na representação interna das incertezas e cuja
metodologia de síntese consiste em analisar as propriedades assintóticas do método LQG
(“Linear Quadratic Gaussian”). O estudo mostra que o método desenvolvido é mais
abrangente, tornando a técnica LQG-LTR um caso particular da PRLQG no que se refere às
características de desempenho e robustez paramétrica em estabilidade. Ainda assim, a técnica
PRLQG possui algumas limitações em relação a sua aplicação.
Em (GOMES, 1991) foi proposta a síntese PRCBI, que lida com o caso de perturbações
paramétricas. Esta síntese se aplica bem a estrutura LQG e visa o robustecimento do sistema
em malha fechada ou em malha aberta face às variações paramétricas da planta. A síntese
PRCBI explora o fato de que uma má qualidade de identificação paramétrica em malha aberta
é obtida sempre que o sistema apresenta boa margem de estabilidade. Quanto mais sensível
for um sistema à variação de um parâmetro, melhor a sua identificação.

16
Várias aplicações recentes da síntese PRCBI foram realizadas. Em (PELLANDA, 1993)
aplicou-se a síntese PRCBI para o robustecimento de um sistema elétrico de potência. Em
(ADES, 1994) foi proposto um algoritmo para conciliar as características de robustez paramé-
trica em estabilidade fornecidas pela síntese PRCBI e o desempenho em malha fechada do
sistema. Para exemplificar os resultados foram utilizados modelos de sistemas massa-mola de
4 e 8 estados, bem como o de um helicóptero em vôo longitudinal. Em (MEDLIG, 1996) de-
senvolveu-se uma extensão da síntese PRCBI, considerando variações na matriz de saída do
sistema, realizando uma aplicação na pilotagem automática de mísseis.
Posteriormente, foram realizadas outras aplicações da síntese PRCBI em (GÓES, 1997) e
(ARNAUT, 2000), referentes ao controle de uma central eletronuclear, em (CERDEIRA,
1998) referente ao guiamento de um míssil solo-ar e em (MENDES, 1998) relacionada ao
controle de um levitador magnético.
Na síntese de K&A (KONSTANTOPOULOS & ANTSAKLIS, 1996) discute-se um
algoritmo rápido para o projeto de controladores robusto de realimentação de saída em
sistemas lineares incertos e discretos no tempo. Este algoritmo baseia-se no método de
otimização BFGS (BAZARAA et alii, 1993). O critério a ser minimizado inclui o custo LQR
(“Linear Quadratic Regulator”) e desenvolvimentos recentes dos autores, relacionados à
maximização dos limites de incertezas estruturadas e não estruturadas a que a planta estiver
submetida. Apresenta-se uma abordagem unificada para os casos de incertezas estruturadas e
não estruturadas nas matrizes de modelos sob a forma de espaço de estado e comenta-se que
os limites de perturbações não estruturadas obtidos são superiores em relação aos calculados
em (KOLLA & FARISON, 1991).
De acordo com (KONSTANTOPOULOS & ANTSAKLIS, 1996) o caso de perturbação
não estruturada na matriz da dinâmica são comparados com os de (KOLLA et alii, 1989) e
(KOLLA & FARISON, 1991) pois foram os únicos encontrados na literatura da área. Cabe
observar que em (KONSTANTOPOULOS & ANTSAKLIS, 1996), as perturbações não
estruturadas são equivocadamente consideradas com dimensões finitas. Além disso, não foi
apresentado um meio de ponderar as características de robustez em estabilidade e de
desempenho do sistema em malha fechada.
A motivação principal deste trabalho será a realização de um estudo comparativo entre as
sínteses de controle robusto paramétrico PRCBI e de K&A, utilizando alguns exemplos eluci-
dativos, a fim de vislumbrar as potencialidades de cada uma das sínteses mencionadas. Na
parte final do trabalho procurar-se-á apresentar algumas sugestões que permitam colaborar

17
com o aperfeiçoamento da síntese proposta em (KONSTANTOPOULOS & ANTSAKLIS,
1996).
1.1 OBJETIVOS E ESCOPO
Os objetivos desta dissertação são:
a) Realizar um estudo da síntese de K&A, desenvolvida para o robustecimento em estabili-
dade do sistema face a variação de parâmetros incertos a partir da realimentação de saída
de sistemas lineares e discretos no tempo. A síntese mencionada emprega o método de oti-
mização BFGS para a minimização de uma função objetivo que leva em conta os limites
de incertezas desenvolvidos em (KONSTANTOPOULOS & ANTSAKLIS, 1996) e um
critério de desempenho quadrático.
b) Estudar e utilizar a síntese PRCBI, baseada no comportamento assintótico dos estimadores
bayesianos e na estrutura LQG. Esta síntese permite o robustecimento do sistema em rela-
ção a uma classe previamente determinada de variações paramétricas.
c) Aplicar as sínteses mencionadas em um exemplo de um controle longitudinal de uma aero-
nave e no sistema massa-mola de 8 estados, verificando através de gráficos e tabelas os re-
sultados obtidos a partir da aplicação de cada uma das sínteses estudadas.
d) Discutir as vantagens e desvantagens de cada uma das sínteses aplicadas.
No capítulo 2 desta dissertação é apresentado os métodos de otimização numérica de
Powell (FOX, 1971) e o BFGS (BERTSEKAS, 1995), bem como o método de busca
unidimensional via aproximação quadrática, que consiste em parte do suporte teórico
necessário ao desenvolvimento deste trabalho. Além disso, explana-se a síntese PRCBI de
maneira simplificada, visto que tal assunto já foi alvo de vários trabalhos anteriores na
Instituição.
O capítulo 3 apresenta uma resenha de (KONSTANTOPOULOS & ANTSAKLIS, 1996)
para os casos desenvolvidos considerando perturbações estruturadas e não estruturadas.
18
Discute-se ainda os projetos de controladores robustos levando-se em conta ou não as
especificações de desempenho, bem como os algoritmos desenvolvidos.
No capítulo 4 realiza-se a aplicação numérica das sínteses estudadas, utilizando um e-
xemplo de um sistema de controle longitudinal de uma aeronave (JIANG, 1994) e outro relati-
vo a um sistema massa-mola com 8 estados (ADES, 1994). Para isto, foram confeccionados
gráficos com a evolução temporal dos sistemas em malha fechada, da região de estabilidade e
do diagrama de sensibilidade para os vários controladores calculados. Os gráficos de evolução
temporal são obtidos pela aplicação de um impulso unitário na entrada do sistema em malha
aberta e, após um certo tempo, pelo fechamento da malha com um dos controladores projeta-
dos, permitindo a observação do comportamento do sistema no tempo. Os gráficos da região
de estabilidade mostram o comportamento do sistema em malha fechada com um dos contro-
ladores calculados, no que diz respeito a estabilidade, face à variações paramétricas. Nestes
gráficos encontram-se traçadas as respectivas hiperesferas de estabilidade, degeneradas em
circunferências de estabilidade. Cada controlador calculado gera uma circunferência de esta-
bilidade, que é aquela que possui o maior raio de perturbação possível inscrita na região de es-
tabilidade dentro do domínio paramétrico, centrada no ponto em que os parâmetros incertos
assumem seus valores nominais.
Nos diagramas de sensibilidade mostram-se os deslocamentos dos pólos de malha fecha-
da do sistema, para cada controlador calculado, face à perturbações paramétricas conveniente-
mente escolhidas. Quando possível, os resultados obtidos serão comparados com aqueles em
(ADES, 1994).
No capítulo 5 são tecidos alguns comentários e as conclusões alcançadas durante o desen-
volvimento desta dissertação. Também são apresentadas algumas sugestões para futuros tra-
balhos.

19
2 SUPORTE TEÓRICO UTILIZADO
2.1 MÉTODOS DE OTIMIZAÇÃO
O problema de otimização a ser resolvido nesta dissertação enquadra-se na seguinte
classe:
Minimizar F(X)
sujeito a 0)X(g i ≤ para i = m,,1L
0)X(h j = para j = p,,1L
onde )(F ⋅ é uma função normalmente chamada de função objetivo ou função custo, gi )( ⋅ e
hi )( ⋅ são funções que representam as restrições de desigualdade e igualdade do problema, res-
pectivamente, e X nℜ∈ é o vetor de variáveis de projeto que deve satisfazer as restrições e
minimizar a função F )( ⋅ .
Para a minimização das funções objetivos desta dissertação serão usados os métodos de
otimização de Powell (FOX, 1971), também chamado de método das direções conjugadas, o
método da classe quase-Newton BFGS (BAZARAA et alii, 1993), bem como o método de
busca unidimensional via aproximação quadrática, que atua conjuntamente com os outros dois
citados acima.
Os problemas aqui tratados são de natureza não convexa, não sendo possível garantir que
a solução no processo de minimização seja de fato o mínimo global pesquisado. Deste modo,
as soluções serão denominadas mínimos locais ou relativos por garantirem o valor mínimo da
função somente em suas respectivas vizinhanças, mas não necessariamente para todo espaço
pesquisado. Neste caso a solução escolhida para o projeto ótimo será a melhor dentre os mí-
nimos relativos calculados a partir de vários pontos iniciais testados.
A FIG. 2.1 ilustra o sistema de otimização utilizado neste trabalho, em que o programa
principal define as constantes e os parâmetros a serem empregados, fornecendo para as rotinas
de otimização um ponto de partida X0. De posse deste projeto X0, o método de otimização de-
termina uma direção de busca S0, que será utilizada pela rotina de busca unidimensional.
Dado o projeto X0 e a direção S0, o problema de busca unidimensional consiste em en-
contrar α = *α de modo que:

20
F(X0 + *α S0) ℜ∈α∀α+≤ ),SX(F 00 EQ 2.1
seja mínimo na direção S0, a partir de X0, para qualquer α, onde *α é calculado pelo método
de busca unidimensional por aproximação quadrática, que será visto adiante.
Tanto o método de otimização, quanto a rotina de busca unidimensional utilizam o simu-
lador, que é a rotina responsável pela informação de custo de cada projeto. Encontrado o
passo ótimo *α , a rotina de busca unidimensional devolve o controle para o método de
otimização, que determinará o novo projeto X1 = X0 + *α S0 e em seguida, calculará a nova
direção de busca S1. O problema se repete ao enviar X1 e S1 para a rotina de busca
unidimensional. Quanto ao critério de parada do sistema, vários podem ser empregados, sendo
que um dos mais usuais é aquele que compara o valor da função em dois projetos
consecutivos, ou seja:
ε≤− − |)X(F)X(F| 1qq EQ 2.2
Enquanto esta condição não for satisfeita, o processo será repetido. Atendida a condição, o
método de otimização retornará para o programa principal o último projeto calculado, que se-
rá considerado a solução do problema tratado.
FIG. 2.1: Diagrama geral do sistema de otimização.
PROGRAMAPRINCIPAL
ROTINAS DE OTIMIZAÇÃO
MÉTODO DEOTIMIZAÇÃO
ROTINA DE BUSCAUNIDIMENSINAL
SIMULADOR
qX
0X ótimoX
)X(FJ q=
J J
)F( min ⋅ )SXF( min qq α+ℜ∈α
*α
qq S,X
qX

21
2.1.1 MÉTODO DE POWELL
Este método é também conhecido como o método das direções conjugadas. Neste método
parte-se de uma base vetorial para o espaço de otimização a ser pesquisado. Normalmente a
base adotada é a canônica. Após a escolha da base, minimiza-se unidimensionalmente cada
uma destas direções, de acordo com EQ 2.1, sempre partindo do projeto obtido na busca
anterior. Ao completar esse primeiro ciclo, determina-se uma direção conjugada, formada
pelo ponto final deste processo e pelo ponto inicial X0. Esta direção conjugada irá substituir
uma das direções do conjunto anterior, em geral a mais antiga. O processo será repetido
minimizando-se unidimensionalmente cada uma das direções desse novo conjunto,
completando-se assim o segundo ciclo, onde será calculada uma nova direção conjugada,
formada pelos pontos inicial e final do referido ciclo. Novamente, a direção conjugada irá
substituir uma das existentes no conjunto inicial e este processo será repetido até que seja a-
tendido o critério de parada proposto.
A FIG. 2.2 ilustra o processo de minimização através do método de Powell para um caso
bidimensional, onde as direções 1 e 2 são as da base inicial e a direção a é a conjugada,
calculada no final do primeiro ciclo. Esta direção conjugada irá substituir a direção 1 da base
inicial. As direções 3 e 4 (que é a mesma direção 2) da nova base serão seqüencialmente
minimizadas, gerando ao final do segundo ciclo uma nova direção conjugada b, sendo que
esta substituirá a direção 2 da base inicial. O processo continuará até que o critério de
convergência adotado seja atingido.
FIG. 2.2 : Evolução do processo de minimização pelo método de Powell.
1
2
3
4
5
6
a
b

22
Demonstra-se (FOX, 1971) que no caso de uma função objetivo )(F ⋅ quadrática, isto é:
F(X) = XTCX + XTB + a EQ 2.3
onde C é uma matriz quadrada positiva definida, B um vetor com dimensão compatível e a
um escalar, o método de Powell alcançará o mínimo global de )(F ⋅ após a execução do algo-
ritmo apresentado na FIG. 2.3. Nesta figura, a matriz A contém em suas colunas as direções
iniciais de busca, J é o contador das direções minimizadas dentro de cada ciclo, L é o contador
do número de ciclos executados, S é a direção a ser pesquisada na busca unidimensional, X0 é
o projeto inicial e *α é o passo ótimo calculado na busca unidimensional.
FIG. 2.3: Fluxograma do método de Powell.
O teste de convergência ilustrado na FIG. 2.3 poderá ser realizado conforme EQ 2.2, on-
de ε é uma constante previamente definida.
INÍCIO
1L
0q
1J
IA nxn
←
←
←
←
J < n
S
NL > n
CONVERGIU?
1L←S
N
N
S
FIM
)J,(:AS←
0q
0q
XX
1J
1LL
XX)L,:(A
←
←
+←
−←
qótimo XX ←
1JJ
1qq
+←
+←
SXX *q1q α+←+
Calculaque minimiza
*α=α
)SX(F q α+

23
2.1.2 MÉTODO BFGS
O método BFGS (BERTSEKAS, 1995) é um método de otimização de ordem 1 da classe
de métodos quasi-Newton. Os parâmetros iniciais do algoritmo são X0 e D0, onde X0 é o
projeto inicial, arbitrado pelo usuário, e D0 é uma matriz simétrica e positiva definida com
dimensão compatível. Calcula-se inicialmente a direção )X(FDd 000 ∇−= e resolve-se o
problema de busca unidimensional )dX(Fmin 00 α+α
. A solução deste problema, obtida com
α = α0 determinará o novo projeto de acordo com X1 = X0 + α0 0d . Após estes cálculos,
executa-se para q=0, 1, ... o seguinte procedimento iterativo:
q1qq XXp −= + EQ 2.4 )X(F)X(Fq q1qq ∇−∇= + EQ 2.5
tqq qDq=τ EQ 2.6
q
qtq
qD
qp
pv
τ−= EQ 2.7
e a matriz Dq+1 poderá ser obtida de acordo com:
tqqq
qqtq
qtqqq
qtq
tqq
q1q vvqDq
DqqD
qp
ppDD τ+−+=+ EQ 2.8
determinando-se a nova direção de busca por:
)X(FDd qqq ∇−= EQ 2.9
Repete-se então este procedimento, resolvendo o problema de busca unidimensional:
)dX(Fmin qq α+
α EQ 2.10
o que levará à determinação do novo projeto por meio da seguinte equação:

24
qqq1q dXX α+=+ EQ 2.11
A vantagem deste método é a obtenção de uma convergência rápida, não necessitando do
cálculo da segunda derivada associado aos métodos de Newton, sendo que as direções pesqui-
sadas neste método são calculadas pelas equações EQ 2.9 e EQ 2.11.
Uma das principais idéias neste método é que duas iterações sucessivas Xq e Xq+1 acom-
panhadas de seus respectivos gradientes )X(F q∇ e )X(F 1q+∇ , rendam a informação de curva-
tura por meio de uma relação aproximada, ou seja:
q1q
2q p).X(Fq +∇≈ EQ 2.12
Em particular, dado n incrementos linearmente independentes de iterações p0, p1,..., pn-1
junto com seus correspondentes incrementos de gradientes q0, q1,..., qn-1, obtém-se uma apro-
ximação da matriz Hessiana por:
[ ][ ] 11n01n0n
2 ppqq)X(F −
−−≈∇ KK EQ 2.13
e uma aproximação de sua inversa através da seguinte expressão:
[ ][ ] 11n01n0
1n
2 qqpp)X(F −
−−− ≈∇ KK EQ 2.14
2.1.3 MÉTODO DE BUSCA UNIDIMENSIONAL VIA APROXIMAÇÃO QUADRÁTICA
Nesta dissertação utilizou-se o método de busca unidimensional via aproximação quadrá-
tica. Este método foi empregado conjuntamente com os algoritmos apresentados nas seções
2.1.1 (método de Powell) e 2.1.2 (método BFGS). O problema da busca unidimensional
consiste na determinação do valor α= *α escalar, de maneira que )SX(F qq α+ seja o mínimo
na direção Sq considerada, isto é:
ℜ∈αmin F(Xq + α. Sq) EQ 2.15
Neste trabalho as funções tratadas são de natureza não convexas, acarretando vários míni-
mos relativos. Desta forma, tentar determinar precisamente o valor de um destes mínimos da
25
função na direção pesquisada seria improdutivo, implicando num tempo excessivo de proces-
samento computacional.
Seja Sq a direção determinada pelo método de otimização e Xq o projeto atual. O novo
projeto será calculado do seguinte modo:
Xq+1 = Xq + α. Sq EQ 2.16
O lugar geométrico de Xq+1, sabendo que α é uma variável escalar, será uma reta no
espaço nℜ . O novo projeto Xq+1 será determinado utilizando a EQ 2.16 e escolhendo um
valor para ℜ∈α de maneira que:
F(Xq+1) : = F(Xq + α. Sq) < F(Xq) EQ 2.17
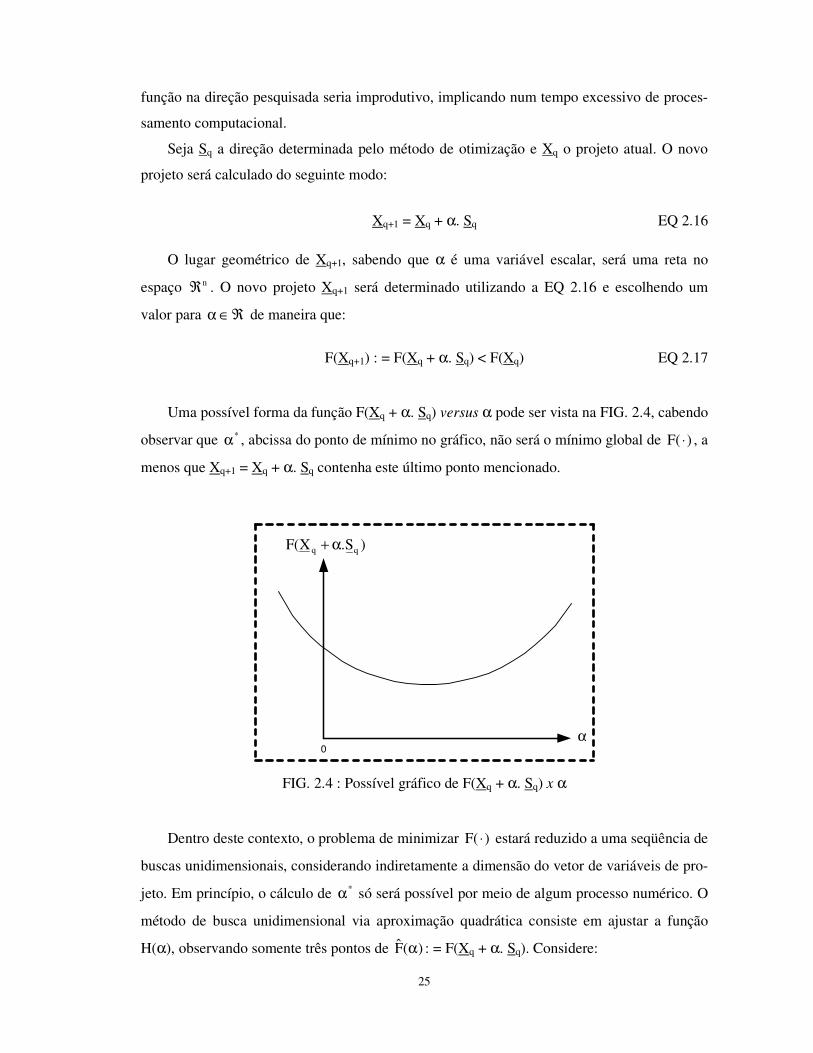
Uma possível forma da função F(Xq + α. Sq) versus α pode ser vista na FIG. 2.4, cabendo
observar que *α , abcissa do ponto de mínimo no gráfico, não será o mínimo global de )(F ⋅ , a
menos que Xq+1 = Xq + α. Sq contenha este último ponto mencionado.
FIG. 2.4 : Possível gráfico de F(Xq + α. Sq) x α
Dentro deste contexto, o problema de minimizar )(F ⋅ estará reduzido a uma seqüência de
buscas unidimensionais, considerando indiretamente a dimensão do vetor de variáveis de pro-
jeto. Em princípio, o cálculo de *α só será possível por meio de algum processo numérico. O
método de busca unidimensional via aproximação quadrática consiste em ajustar a função
H(α), observando somente três pontos de )(F α : = F(Xq + α. Sq). Considere:
)S.X(F qq α+
α0

26
H(α) : = a + bα + cα2 EQ 2.18
A função quadrática H(α) possuirá um mínimo se c > 0. Neste caso, o mínimo da função
estará localizado em:
α+=α
c2bd
dH = 0 EQ 2.19
ou seja,
α = c2
b* −=α EQ 2.20
onde a, b e c ℜ∈ podem ser calculados atribuindo-se valores a )(F α em três pontos distintos
α1, α2 e α3 e resolvendo as seguintes equações: 2
111 cbaf α+α+=
2222 cbaf α+α+= EQ 2.21
2333 cbaf α+α+=
Para simplificar os cálculos, escolhe-se α1 = 0, α2 = t e α3 = 2t. Assim:
)0(Hf)0(F 1 ==
)t(Hf)t(F 2 == EQ 2.22
)t2(Hf)t2(F 3 ==
Da EQ 2.21 vem que: f1 = a f2 = a + bt + ct2 EQ 2.23 f3 = a + 2bt + 4ct2 Resolvendo as equações, chega-se a:

27
2213
312
1
t2
f2ffc
t2
ff3f4b
fa
−+=
−−=
=
EQ 2.24
e da EQ 2.19:
t.f2f2f4
ff3f4
132
312*
−−
−−=α EQ 2.25
Para que haja o mínimo em H(α) deve-se atender a seguinte condição: 2f2 < f3 + f1 EQ 2.26
Adicionalmente, se f1 > f2 e f3 > f2, então o mínimo de H(α) estará entre os pontos extre-
mos, isto é, 0< *α <2.t. Uma vez que não há garantia que a aproximação seja adequada, torna-
se necessário verificar se 1* f)(F ≤α no algoritmo utilizado para a busca unidimensional via
aproximação quadrática, ilustrada na FIG. 2.5. Nesta figura, M é o número máximo de
tentativas, S é a direção de busca, α é o passo inicial, X é o ponto inicial e *α é o passo que
leva ao suposto mínimo na direção S.
O valor do parâmetro t será dobrado durante a execução do algoritmo até que a condição
apresentada na EQ 2.26 seja satisfeita.
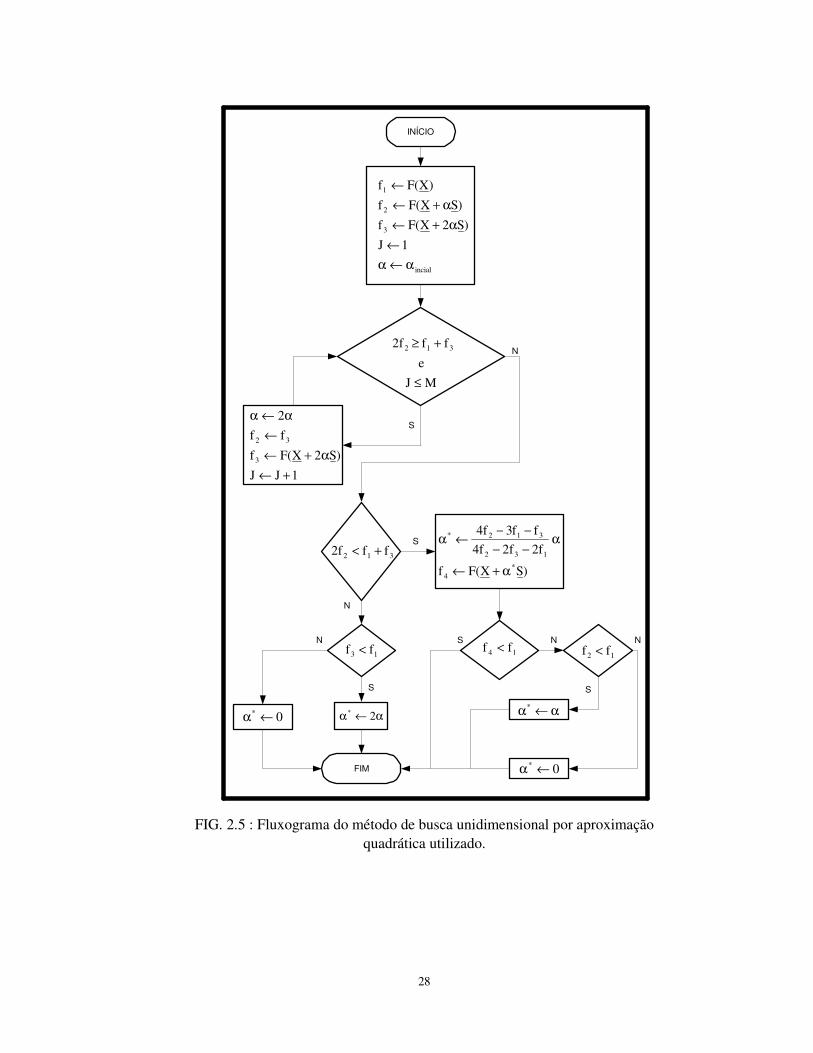
28
FIG. 2.5 : Fluxograma do método de busca unidimensional por aproximação quadrática utilizado.
INÍCIO
incial
3
2
1
1J
)S2X(Ff
)SX(Ff
)X(Ff
α←α
←
α+←
α+←
←
MJ
e
fff2 312
≤
+≥
S
S
N
FIM
S
)SX(Ff
f2f2f4
ff3f4
*4
132
312*
α+←
α−−
−−←α
1JJ
)S2X(Ff
ff
2
3
32
+←
α+←
←
α←α
312 fff2 +<
14 ff <
α←α*
N
0* ←α α←α 2*
12 ff <
N
13 ff <
S
N
S
N
0* ←α

29
2.2 SÍNTESE PRCBI
Uma das estruturas de controle mais importante na teoria de controle moderno é a estru-
tura LQG ilustrada na FIG. 2.6. Seu ponto forte está relacionado com a realimentação de esta-
dos estimados, possibilitando uma grande flexibilidade na alocação de pólos para sistemas
controláveis. O ponto fraco do controle LQG é que, utilizando um Filtro de Kalman para
estimar o estado completo, com este sintonizado no ponto nominal do modelo da planta,
acarreta ao sistema em malha fechada características de pouca robustez paramétrica.
A síntese PRCBI será então utilizada para tornar robusta em estabilidade, em relação às
variações paramétricas da planta, a estrutura LQG.
FIG. 2.6: Estrutura LQG.
A síntese PRCBI foi proposta em (GOMES, 1991) e baseia-se nos estudos sobre o
comportamento assintótico dos estimadores bayesianos (GAUVRIT, 1982). Esta técnica
utiliza uma formulação matemática baseada na qualidade de identificação dos parâmetros
incertos em regime permanente do sistema em malha fechada. Em outras palavras ela explora
o fato, já devidamente comprovado, de que uma má qualidade de identificação de um certo
conjunto de parâmetros da planta está geralmente associada a uma grande robustez em
estabilidade em relação à variação desse conjunto de parâmetros. Em resumo, a síntese
+ SISTEMA
Ruído daplanta
+
Ruído do sensor demedidas de saída
FILTRO DEKALMANcK
REGULADOR
kr ky
x

30
PRCBI busca um controlador, através da otimização de um critério, que conduz à pior
qualidade de identificação possível, obtendo-se, assim, um sistema em malha fechada com
sensibilidade paramétrica bastante reduzida.
A seguir encontra-se um resumo sobre a síntese PRCBI. Cabe observar que uma análise
mais profunda sobre este assunto já foi realizada em trabalhos anteriores (GOMES, 1991),
(PELLANDA, 1993), (ADES, 1994) e não será portanto objeto deste trabalho.
Além disso, em todo este item, o cálculo de um vetor ou matriz variação ∆V qualquer é
sempre considerado como ∆V= Vperturbado – V0, onde V0 representa o caso nominal.
A identificação bayesiana consiste em determinar
θ
kYp , isto é, a densidade de pro-
babilidade condicional do vetor de parâmetros sensíveis θ , sendo conhecidos o conjunto de
medidas de saída da planta até o instante k, ou seja, k10
k y ,,y ,yY K= , onde q
iy ℜ∈ e,
também, a partir do conhecimento a priori da densidade de probabilidade )(p0 θ .
Com a aplicação da formulação de Bayes pode-se escrever esta função densidade de pro-
babilidade condicional da seguinte forma recursiva:
θ
θ
=
θ
−
−−
1kk
1kk
1k
k
Yyp
Y,yp
Yp
Yp EQ 2.27
onde
θ −1k
k
Y,yp representa uma densidade de probabilidade normal de média kY e de co-
variância ( )( )[ ]Tkkkkk yyyyEM −−= . Os outros componentes da expressão EQ 2.27 são
constantes e fazem parte do cálculo recursivo.
Com o uso da expressão analítica da função densidade de probabilidade gaussiana, a função
na EQ 2.27 converge assintoticamente para:
[ ]
∆−
−Λ
=
θ∆+θ − MMTr
2
kexp
M
2
mkexp
Yp 1
02
k
0
k0 EQ 2.28

31
Observa-se na expressão EQ 2.28 a relação de uma variação do conjunto de parâmetros
∆θ com a respectiva variação da matriz de covariância ∆M.
• m é o número de parâmetros de θ;
• ⋅ representa o determinante da matriz indicada;
• M é a covariância do erro de predição do vetor de saída em regime assintótico e
M=M0+∆M onde M0 é o valor nominal e ∆M a variação devida a ∆θ.
Como a relação entre ∆θ e ∆M é do tipo quadrática pode-se escrever:
[ ] θ∆θ∆=∆ −θ
− 1T10 0
GMMTr EQ 2.29
A matriz 1
0G −
θ é a base do critério para a síntese PRCBI, pois ela contém informações so-
bre a variância dos valores estimados dos parâmetros da planta.
A minimização do traço da matriz 1
0G −
θ conduz à pior qualidade de identificação do vetor
0θ .
Para o cálculo da matriz 1
0G −
θ são consideradas as seguintes definições:
Tri21 )( εεεε=θ∆ KK EQ 2.30
( ) r1i,0000 Ti
iKKK =ε=θ∆ EQ 2.31
então, [ ]
2i
101
ii
i
0
MMTr)i,i(Gg
ε
∆==
θ∆
−
−θ EQ 2.32
A representação em malha fechada da síntese PRCBI é ilustrada na FIG. 2.7, onde o vetor
0θ representa o vetor de parâmetros incertos em seu respectivo valor nominal, sendo:
• o modelo nominal da planta definido por ( ) ( )0000 , θΓ=ΓθΦ=Φ e ( )00 CC θ= ;
• D nxpℜ∈ é a matriz de entrada de ruídos na planta;
• p
kℜ∈ξ é o vetor de ruído que atua na planta;
• p
kℜ∈η é o vetor de ruído que age nas medidas de saída;

32
• Q é a matriz de covariância do ruído no interior da planta, isto é,
Q=E ( )( ) T
kkDD ξξ = [ ] T
rTT
kkDQDDED =ξξ , onde Qr é a covariância do ruído incidente.
Observa-se que se D for um vetor coluna, Qr será apenas uma grandeza escalar que representa
a variação do ruído incidente na planta.
• R é a matriz de covariância do ruído nos sensores de medida na saída, ou seja,
R=E T
kkηη .
Na FIG. 2.7 o processo de otimização utiliza um algoritmo de programação não linear pa-
ra minimizar o critério PRCBI e o cálculo da medida de robustez em estabilidade será repeti-
do até que o processo encontre o traço mínimo de 1
0G −
θ . Depois da otimização, as matrizes
Drob e KCrob serão introduzidas no regulador, que passará a ser robusto em relação às variações
do vetor de parâmetros sensíveis da planta.
FIG. 2.7 : Síntese PRCBI em malha fechada
D
kξ
Sistema
kη
)(C)()( θθΓθΦ
F.K.
Cálculo do
[ ]1
0GTr −
θ
cK )(C)( 00 θθΦ
Programação não linear
( )[ ]1
K,D 0c
GTrmin −θ
ESTRUTURALQG

33
Para o cálculo das matrizes M0, ∆M e, consequentemente, o )G(Tr 1
0
−θ , utiliza-se a formu-
lação a seguir: RCPCM T
0'000 += EQ 2.33
onde:
• R é a matriz de covariância do ruído;
• '0P pode ser calculado a partir da solução da equação algébrica de Ricatti discreta a seguir:
0QPC)RCPC(CPPP T
0'00
1T0
'00
T0
'00
T0
'00
'0 =−Φ+Φ+ΦΦ− − EQ 2.34
O ganho de realimentação de estados (Kc) e a matriz de entrada de ruído na planta (D)
são as duas grandezas usadas como variáveis de projeto na otimização. A matriz 1
0G −
θ será en-
tão obtida, calculando-se o conjunto de equações (tipo Sylvester) mostrado a seguir: T
c00T000c00
Tc00c00 )K(KMK)K()K(L)K(L Γ−ΦΓ−Φ+Γ−ΦΓ−Φ= EQ 2.35
T
0000c00
Tc00
T0
T00c00
)KK~
(MK)K(-
~L)K()CKI(N)K(N
∆Φ+Φ∆Γ−Φ
Φ∆Γ−Φ−Φ−Γ−Φ= EQ 2.36
onde cK~
∆Γ−∆Φ=Φ∆ , e
TT
000
TT00000
T0
T00
T0
T00000
~N)CKI(-
~L
~)K
~K(M)K
~K(
)CKI(N~
)CKI('P)CKI('P
Φ∆−Φ
Φ∆Φ∆−Φ∆+∆ΦΦ∆+∆Φ+
Φ−Φ∆−Φ−∆−Φ=∆
EQ 2.37
e T
00 C'PCM ∆=∆ EQ 2.38
juntamente com a EQ 2.29.
Como uma matriz não define uma medida de robustez em estabilidade, verificou-se em
(GOMES, 1991) que o traço da matriz 1
0G −
θ poderia representar o índice desejado, isto é: )G(TrJ 1
rob 0
−θ= EQ 2.39

34
A medida de robustez com base na qualidade de identificação bayesiana dos parâmetros
incertos necessita do conhecimento das matrizes D, Q e R e das demais características esto-
cásticas destes ruídos. Assim sendo, podem ocorrer três situações:
a) No caso do sistema ser tratado como estocástico, estas matrizes são impostas pelo modelo,
sendo consideradas como dados do problema. O ganho de Kalman é determinado em fun-
ção destas matrizes e dos valores nominais do sistema, restando agir sobre o ganho de
realimentação de estado Kc, a fim de minimizar a medida de robustez em estabilidade: ( )[ ]1
K1 0
c
GTrminJ −θ= EQ 2.40
b) No caso do sistema ser tratado como determinístico, ou seja, naquele em que os ruídos não
afetam fortemente a precisão do modelo, pode-se usar também a matriz D, e a relação Q/R
como grandezas variáveis no processo de minimização da medida de robustez em malha
fechada. Deste modo, os ruídos são considerados fictícios e o Filtro de Kalman passa a a-
tender as características de robustez em estabilidade desejadas.
( )[ ]1
K,D2 0
c
GTrminJ −θ= EQ 2.41
c) Em uma terceira abordagem, o controlador Kc pode ser calculado a priori para atender as
condições de desempenho desejadas e desta forma a minimização dependerá unicamente
do Filtro de Kalman para o robustecimento do sistema.
( )[ ]1
D3 0
GTrminJ −θ= EQ 2.42

35
3 SÍNTESE DE KONSTANTOPOULOS & ANTSAKLIS
3.1 INTRODUÇÃO
O problema de determinação de uma lei de controle com realimentação de saída para sis-
temas lineares incertos é um assunto de interesse atual, tendo em vista que os modelos nomi-
nais considerados nos projetos não representam fielmente as respectivas realidades físicas das
plantas. Alguns critérios têm sido utilizados para caracterizar as incertezas destes sistemas, de
forma que a estabilidade assintótica, quadrática ou exponencial seja garantida caso estes crité-
rios sejam satisfeitos.
A síntese de K&A, tema deste capítulo, apresenta uma abordagem para o projeto de um
controlador de realimentação de saída, conforme ilustrado na FIG. 3.1, unificando os casos de
perturbações estruturadas e não estruturadas. Cabe aqui observar que no trabalho de
(KONSTANTOPOULOS & ANTSAKLIS, 1996), considera-se as perturbações não
estruturadas com dimensão finita, contrariando a literatura da área de controle. A síntese de
K&A é baseada em teoremas desenvolvidos em (KONSTANTOPOULOS & ANTSAKLIS,
1994a, 1995b), permitindo uma melhora nos limites de perturbações propostos e o aumento da
região de estabilidade apresentada no trabalho de (KOLLA & FARISON, 1991).
A função objetivo adotada na determinação do controlador é baseada em um índice de ro-
bustez em estabilidade a ser minimizado, associado à maximização do limite de perturbação
estruturada ou não estruturada, conforme definido em (KONSTANTOPOULOS &
ANTSAKLIS, 1996). Além do caso anterior em que se maximiza a robustez em estabilidade,
apresenta-se também uma função objetivo contendo um termo referente ao desempenho.
Neste novo caso, a síntese de K&A não impõe uma ponderação direta entre os dois termos
considerados, isto é, desempenho e robustez em estabilidade, tornando o compromisso es-
tabelecido uma conseqüência das matrizes escolhidas para o LQR. O algoritmo de minimiza-
ção utilizado na solução do problema proposto é baseado naquele de Broyden-Fletcher-
Goldfarb-Shanno (BFGS) (BAZARAA et alii, 1993), discutido no capítulo anterior. O caso de
realimentação de estado pode ser facilmente derivado escolhendo a matriz de saída como a i-
dentidade, C = In.

36
FIG. 3.1: Síntese de K&A com realimentação de saída
3.2 CONSIDERAÇÕES INICIAIS Considere o sistema linear discreto no tempo (l.d.t.): x(k+1) = Ax(k) EQ 3.1 onde x ∈ ℜn é o vetor de estados e A é uma matriz assintoticamente estável. Dada uma ma-
triz arbitrária Q simétrica positiva definida, existe uma matriz P simétrica positiva definida,
que é a única solução da eq. de Lyapunov (KONSTANTOPOULOS & ANTSAKLIS, 1996):
ATPA – P + Q = 0 EQ 3.2
Supondo que o sistema EQ 3.1 seja perturbado em seu comportamento dinâmico, tem-se
que:
x(k+1) = (A + ∆A)x(k) EQ 3.3
O novo sistema perturbado definido na EQ 3.3 se manterá estável caso (∆A)T (αZ+AP)
(∆A)+α
1Ω1<Q, onde a notação M1>0 e M2>M3 utilizada, significa que as matrizes M1 e
32 MM − são positivas definidas. Isto decorre da substituição da matriz da dinâmica nominal
A pela matriz perturbada A+∆A na EQ 3.2, conforme será discutido no teorema 3.1 a seguir.
Sistemax (k+1) = Ax(k) + Bu(k)y (k) = Cx(k) + Du(k)
y
K
+ur +
-

37
Teorema 3.1: Considere o sistema l.d.t. na EQ 3.1, onde A é uma matriz assintoticamente
estável que satisfaz a EQ 3.2. Suponha que a matriz A seja substituída por A+∆A, então o
novo sistema na EQ 3.3 permanecerá assintoticamente estável se:
(∆A)T (αZ + A P)(∆A) + α
1Ω1 < Q EQ 3.4
ou, equivalentemente, σmax (∆A) <
2/1
max
1maxmin
)PZ(
]1
[)Q(
+ασ
Ω
ασ−σ
EQ 3.5
onde Z é uma matriz positiva definida arbitrariamente escolhida com as dimensões apropria-
das e α um número positivo qualquer que satisfaça:
α > σ
σmax
min Q
( )
( )
Ω1 EQ 3.6
sendo Ω1 : = ATPZ-1PA EQ 3.7 Demonstração: Ver em (KONSTANTOPOULOS & ANTSAKLIS, 1996), ANEXO 1 ♦ Para o caso de perturbação estruturada, com a matriz ∆A descrita da seguinte maneira:
∆A = θ i ii
m
A=
∑1
EQ 3.8
onde θi , i = 1,..., m representam os parâmetros incertos reais; Ai, i = 1,..., m são matrizes pre-
viamente conhecidas que determinam a perturbação a ser realizada sobre a matriz da dinâmica
A do sistema, o teorema 3.2 mostra que o aumento da região de estabilidade pode ser dado
pela relação de desigualdade entre os parâmetros incertos iθ e as matrizes Q, [(1/α)Ω1], Α~
e
(αZ+P) conforme será visto na EQ 3.9.
Teorema 3.2: Seja o sistema l.d.t. na EQ 3.3 com a matriz da dinâmica A sendo assintotica-
mente estável. Suponha que este sistema seja submetido a perturbações estruturadas da forma
da EQ 3.8, então o mesmo permanecerá assintoticamente estável se os parâmetros incertos iθ
atenderem a seguinte desigualdade:

38
θσ σ α
σ σ αi
min max
max maxi
m Q
A Z P2 1
21
1<
−
+=
∑( ) [( / ) ]
(~
) ( )
Ω EQ 3.9
onde, por definição, Ã : = [ A A AT TmT
1 2 ... ]T.
Demonstração: Ver em (KONSTANTOPOULOS & ANTSAKLIS, 1995b), ANEXO 1 ♦ Conforme será visto adiante, os teoremas 3.1 e 3.2 serão as bases da síntese de K&A. No
próximo item deste trabalho será tratado o problema de projeto de controladores de realimen-
tação de saída com perturbações estruturadas e não estruturadas considerando-se ou não as
especificações de desempenho.
3.3 PROJETO DE CONTROLADORES DE REALIMENTAÇÃO DE SAÍDA Considere o sistema l.d.t.:
=
+=+
(k)xC (k)y
(k)uB (k)xA 1)(kx EQ 3.10
onde x ∈ ℜn é o vetor de estado, u ∈ ℜr é o vetor de entrada e y ∈ ℜq é o vetor de saída. Vale
lembrar que na síntese de K&A considera-se as perturbações não estruturadas com dimensões
finitas, como uma generalização das perturbações estruturadas mencionadas na EQ 3.8. Assim
sendo, considere que o sistema na EQ 3.10 esteja submetido a perturbações não estruturadas
em todas as matrizes do sistema, de acordo com:
A = A0 + ∆A , B = B0 + ∆B , C = C0 + ∆C EQ 3.11
e suponha uma lei de realimentação estática de saída da forma:
u(k) = Ky(k) = KCx(k) EQ 3.12
O sistema em malha fechada perturbado será descrito por:
x(k+1) = [ Α0 + ∆A + (∆B)KC0 + B0K(∆C) + (∆B)K(∆C)]x(k) EQ 3.14

39
onde a matriz da dinâmica em malha fechada nominal será:
Α0 = A0 + B0KC0 EQ 3.15
Do teorema 3.1, em analogia a EQ 3.2 e a EQ 3.7, segue para o sistema nominal em
malha fechada (MF) que:
Α Α0 0TP - P + Q = 0 EQ 3.16
Ω Α1 0= T PZ-1P Α0 EQ 3.17
Pelo teorema 3.1, a estabilidade do sistema em malha fechada na EQ 3.14 pode ser
mantida caso as matrizes perturbações ∆A, ∆B e ∆C satisfaçam a seguinte condição
suficiente:
( ) ( ) ( ) ( ) ( ) ( ) ( )+∆σΚσΒσ+σΚσ∆Βσ+∆Ασ CC maxmax0max0maxmaxmaxmax
+ ( ) ( ) ( )Cmaxmaxmax ∆σΚσ∆Βσ <
2/1
max
1maxmin
)PZ(
]1
[)Q(
+ασ
Ω
ασ−σ
EQ 3.18
onde Q é uma matriz arbitrária simétrica positiva definida, P e Ω1 estão definidos na EQ 3.16
e na EQ 3.17, respectivamente. Note que a desigualdade acima define uma região em ℜ3 para
maxσ (∆Α), maxσ (∆B) e maxσ (∆C). O objetivo a seguir será encontrar um ganho K estático de
realimentação de saída, estabilizante, que maximize a região definida na EQ 3.18,
satisfazendo a EQ 3.16.
3.3.1 PERTURBAÇÃO NÃO ESTRUTURADA SEM ESPECIFICAÇÕES DE DESEMPENHO
Para descobrir um ganho K estático de realimentação de saída, estabilizante, com a
finalidade de maximizar a região definida por maxσ (∆Α), maxσ (∆B) e maxσ (∆C) na EQ 3.18,
será necessário minimizar maxσ (K) no lado esquerdo da desigualdade mencionada, bem como

40
minimizar
Ω
ασ 1max
1 no numerador e maxσ (αZ + P) no denominador do lado direito da
EQ 3.18.
Tendo em vista a seguinte propriedade:
≤σ )A(2max Tr(ATA) EQ 3.19
onde Tr(A) é o traço da matriz A, substitui-se as minimizações dos máximos valores
singulares mencionados no parágrafo anterior por:
i) minimizar J1 = Tr(KTK) ao invés de minimizar maxσ (K).
ii) minimizar J2 = Tr[(αZ+P)T(αZ+P)]=Tr(α2Z2+2αPZ+P2) no lugar de maxσ (αZ+P).
iii) minimizar J3 = ( )10 0
α
Tr TΑ Α , pois σ
αmax
11
Ω = maxσ
α
−0
1T0 APPZA
≤
)A(1
02maxσ
α)P(2
maxσ )Z( 1max
−σ . Como )P(maxσ e )Z( 1max
−σ já estão sendo mini-
mizados em (ii), basta apenas considerar )A(1
02maxσ
α, o que acarretará pela EQ
3.19 no custo J3.
Entretanto, como o custo a ser minimizado J’ABC = J1 + J2 + J3 deve ser realizado atendendo a
restrição imposta pela EQ 3.16, referente a estabilidade do sistema em malha fechada, chega-
se ao seguinte Lagrangeano:
( )
+−ΑΑ+ΑΑ
α++α+α+ΚΚ= QPPL
1PPZ2ZTrJ 0
T010
T0
222TrABC EQ 3.20
onde L1 ∈ ℜnxn é a matriz multiplicadora de Lagrange.

41
A fim de minimizar rABCJ na EQ 3.20, uma condição necessária é que
=∂
∂
1
rABC
L
J=
α∂
∂ rABCJ
0KP
J rABC
rABC =
∂
∂=
∂
∂ sendo para isto utilizadas as propriedades de
(ATHANS,1967):
T2 X2)X(TrX
=∂
∂
T1
T111 BA)YBA(Tr
Y=
∂
∂
222T
2 AB)BYA(TrY
=∂
∂
T3
T333
T33 YBAYBA)YYBA(Tr
Y+=
∂
∂
Empregando-se estas propriedades, tem-se que:
∂
∂
J
LP P QABC
r
Lr T
11 0 0= = − +∆ Α Α EQ 3.21
( ) ( ) ( )0T02
2rrABC Tr
1PZTr2ZTr2
JΑΑ
α−+α=∆=
∂α
∂α EQ 3.22
∂
∂α
J
PP Z L LABC
r
pr T T T= = + + −∆ Α Α2 2 0 1 0 1 EQ 3.23
∂
∂ α α
J
KK KC C CABC
r
Kr T T T T= = + +∆ Β Β Β Α2
2 20 0 0 0 0 0 0 +
+ ( ) ( )Β Β Β Β0 0 0 1 1 0 0 0 1 1 0T T T T T TP KC L L C P L L C+ + + EQ 3.24
O método de direções conjugadas, baseado em regra BFGS comentado no subitem 2.1.2
deste trabalho, bem como o algoritmo desenvolvido em (KONSTANTOPOULOS &
ANTSAKLIS, 1996), que tem seu fluxograma representado na FIG. 3.2, foram empregados
para a minimização de rABCJ na EQ 3.20.

42
A seguir será apresentado o algoritmo desenvolvido na síntese de K&A para o caso de
projeto sem especificações de desempenho:
Algoritmo
Passo inicial:
Seja ε > 0 escalar.
Escolha um ganho estabilizante inicial
( )
( )K
T
r
T1
11
1
=
τ
τ
EQ 3.25
onde ( )τs
T1 , s=1,..., r são as linhas 1 x q de K1 , que estabiliza ( )Α Β0 0 0, ,C , isto é,
torna Α0 estável. Escolha uma matriz inicial simétrica p.d. D1 ∈ ℜrq x rq . Seja
φ χ
τ
τ
1 1
11
1
= =
r
EQ 3.26
o vetor coluna das linhas transpostas de K1 e m =j = 1. Passo principal:
passo 01- Substitua a matriz de ganho Kj nas EQ 3.21 a EQ 3.23. Faça ∆ Lr
1=0, ∆α
r = 0,
∆ Pr = 0 e resolva respectivamente para P, α , L1 nesta específica ordem.
passo 02- Substitua estes parâmetros na EQ 3.24 e calcule
( )
( )∆ K j
r
j T
rj T
=
σ
σ
1
EQ 3.27
onde ( )σs
T1 , s=1,..., r são as linhas 1 x q de ∆ Kr
j.

43
passo 03- Seja
( )∇ =
J ABCr
j
j
rj
φ
σ
σ
1
EQ 3.28
Se ( )∇ <J ABCr
jφ ε , pare. O ganho ótimo é Kj.
Caso contrário, inicie o passo 04.
passo 04- Se j > 1, atualize a matriz d.p. Dj como segue:
D Dp p
p q
q D q
p q
D q p p q D
p qj jj j
T
jT
j
jT
j j
jT
j
j j jT
j jT
j
jT
j
= + +
−
+−
− −
− −
− − −
− −
− − − − − −
− −
11 1
1 1
1 1 1
1 1
1 1 1 1 1 1
1 1
1 EQ 3.29
onde: p dj j j j j− − − −= = −1 1 1 1λ φ φ EQ 3.30
( ) ( )q J Jj ABCr
j ABCr
j− −= ∇ − ∇1 1φ φ EQ 3.31
passo 05- Defina
( )d D Jj j ABCr
j= − ∇ φ EQ 3.32
e seja λ j uma solução ótima do problema de minimização de ( )J dABCr
j jφ λ+
sujeito a λ ≥ 0 e considere:
φ φ λ
τ
τ
j j j j
j
rj
d+
+
+
= + =
1
11
1
EQ 3.33
de modo que ( )
( )K j
j T
rj T
+
+
+
=
1
11
1
τ
τ
EQ 3.34
passo 06- Se j < rq, faça j = j+1 e repita o passo principal.
Se j = rq, faça φ χ φ1 1= = +m rq , j =1 e m = m+1.
Repita o passo principal.

44
A busca unidimensional, no passo 05, está restrita a matrizes de ganho
estabilizantes (sistema malha fechada nominal). Considerada esta restrição,
minimiza-se rABCJ .
Um critério de parada seria o passo 03, mas outros critérios podem ser propostos.
A FIG. 3.2 ilustra o fluxograma do algoritmo recém discutido, apresentando-o de uma
maneira mais simples.
FIG. 3.2: Fluxograma do algoritmo de K&A.
INÍCIO
S
N
21.3EQnacalculadoP
J
20.3EQnacalculadoJ
19.3EQnacalculadoL
J
CKBAA
rABCr
P
rABCr
1
rABCr
L
0j000
1
⇒∂
∂=∆
⇒α∂
∂=∆
⇒∂
∂=∆
+←
α
28.3EQna)(J
Calcular
jrABC φ∇
AtualizarDj na EQ 3.27
a EQ 3.32
0
0
0
rP
r
rL1
=∆
=∆
=∆
α
ε<φ∇ )(J jrABC
FIM
KK ótimoj ←
T11
in1
K
KK
←φ
←
1
rK
L e P,
de valoresos dosubstituin
3.24 EQ. na Calcular
α
∆

45
3.3.2 PERTURBAÇÃO NÃO ESTRUTURADA COM ESPECIFICAÇÕES DE DESEMPENHO
Considere o custo LQR:
( ) ( ) ( ) ( )∑∞
=
+=0k
1T
1T'
LQR kuRkukxQkxJ EQ 3.35
onde Q1 e R1 são matrizes arbitradas de ponderação dos estados e das entradas, positivas defi-
nidas e com dimensões apropriadas. Para o sistema nominal (A0, B0, C0) com realimentação
de saída, tem-se utilizando as EQ 3.10, 3.12, 3.15 e 3.35:
( )( ) ( ) ( )∑∞
=
ΑΑ=0k
T
0
kT0
T'LQR 0xQ0xJ = )0(x)A(Q)A()0(x T
00k
kT0
T
∑
∞
=
EQ 3.36
onde Q Q C R CT T= +1 0 1 0Κ Κ EQ 3.37 Já em (OGATA, 1987) mostra-se que a matriz P da forma:
∑∞
=
=0k
kkT QA)A(P EQ 3.38
é a solução da seguinte equação de Lyapunov discreta: 0QPPAT =+−Α EQ 3.39 o que permite concluir que '
LQRJ , em analogia a EQ 3.38, pode ser calculado por:
( ) ( )0xP0xJ 2T'
LQR = EQ 3.40
onde P2 é a solução da seguinte equação de Lyapunov discreta: 0QPP 202
T0 =+−ΑΑ EQ 3.41
Para eliminar a dependência de '
LQRJ com x(0), assume-se que x(0) é um vetor aleatório
com E[x(0)] = x0, ( ) ( ) 0X]0x0x[E 0T
>= e define-se LQRJ = E [Tr( 'LQRJ )]. Utilizando a pro-
priedade que Tr(AB) = Tr(BA), onde A e B são matrizes com dimensões compatíveis, tem-se
que:

46
( )[ ] ( ) ( ) ( ) ( ) ==== ]0x0xP[TrE]0xP0x[TrEJTrE:J T22
T'LQRLQR
( ) ( ) ( )02T
2 XPTr]0x0xP[ETr == EQ 3.42
A fim de considerar não somente o critério de robustez em estabilidade proposto na EQ
3.20, mas também uma parcela relativa ao desempenho, propõe-se o critério p,rABCJ a ser mini-
mizado. Este critério engloba a EQ 3.42 e inclui a restrição na EQ 3.41 por meio de uma
matriz multiplicadora de Lagrange L2, de forma a transformar o novo problema em um sem
restrição. Deste modo:
p,rABCJ ( ) +
++−ΑΑ+ΑΑ
α++α+α+= 020
T010
T0
222T XPQPPL1
PPZ2ZKKTr
( ) )QPPL 202T02 +−ΑΑ+ EQ 3.44
Analogamente ao procedimento realizado em 3.3.1, calcula-se as derivadas parciais da
função objetivo p,rABCJ em relação as novas variáveis do problema a ser resolvido:
QPPL
J0
T0
p,rL
1
p,rABC
1+−ΑΑ=∆=
∂
∂ EQ 3.45
∂
∂
J
LP P QABC
r p
Lr p T
,,
22 0 2 0 2= = − +∆ Α Α EQ 3.46
( ) ( ) ( )∂
∂αα
αα
JTr Z Tr PZ TrABC
r pr p T
,,= = + −∆ Α Α2 2
122 0 0 EQ 3.47
T1
T0
T10
p,rp
p,rABC LLZ2P2P
J−ΑΑ+α+=∆=
∂
∂ EQ 3.48
T2
T0
T20
T0
p,rp
2
p,rABC LLXP
J2
−ΑΑ+=∆=∂
∂ EQ 3.49
T0
T2202
T0
T0
T22002
T0
T0
T110
T0
T0
T1100
T0
T0
T2201
T00
T0
T000
T0
p,rK
p,rABC
C)LL(APBC)LL(KCBPB
C)LL(PABC)LL(KCPBB
C)LL(KCRCAB2
CKCBB2
K2K
J
++++
+++++
+++α
+α
+=∆=∂
∂
EQ 3.50
Deste modo, o algoritmo de K&A apresentado no subitem 3.3.1 será modificado para o
caso de projeto com especificações de desempenho, substituindo-se os passos 1 e 2 do
algoritmo mencionado pelos que se seguem:

47
passo 1- Substituindo a matriz de ganho Kj nas derivadas parciais das EQ 3.45 a EQ 3.49,
fazendo 0p,rL1
=∆ , 0p,rL2
=∆ , 0p,r =∆α , 0p,rp =∆ , 0p,r
p2=∆ e resolvendo P, P2, α, L1
e L2 nesta específica ordem.
passo 2- Substituindo estes parâmetros na EQ 3.50 e calculando
( )
( )
σ
σ
=∆Tj
r
TT1
p,rK j
EQ 3.51
onde ( )σsj T
, s=1,..., r são linhas 1 x q de ∆ K j
r p,
3.3.3 PERTURBAÇÃO ESTRUTURADA SEM ESPECIFICAÇÕES DE DESEMPENHO
Neste caso, parte-se de um sistema linear discreto no tempo, formulado sob a forma de
espaço de estado de acordo com:
=
+=+
)k(xC)k(y
)k(uB)k(xA)1k(x
0
EQ 3.52
onde supõe-se que as matrizes nominais da dinâmica A0 e da entrada B0 estejam sujeitas a
perturbações da forma:
A = ∑=
Α+ΑAm
1iii0 k , B = ∑
=
Βλ+ΒBm
1jjj0 EQ 3.53
com Ai (i = 1,2,...) e Bj (j = 1,2,...) sendo matrizes previamente estabelecidas com dimensões
compatíveis.
Aplicando uma lei de realimentação de saída estática:
u(k) = Ky(k) = KC0x(k) EQ 3.54

48
o sistema l.d.t. com perturbações estruturadas nas matrizes A e B conforme EQ 3.53 permane-
cerá assintoticamente estável se os parâmetros incertos ki e jλ satisfizerem:
2A&K
mm
1i max2max
1maxmin2i R:
P)(σ)ˆ(σ
])/1[()Q(ˆBA
=+ΖαΠ
Ωασ−σ<θ∑
+
=
EQ 3.55
onde A&KR é o raio de estabilidade garantido pela síntese de K&A,
Π : ( ) ( )[ ]TT0m
T01
Tm
T1 KC...KC|...
BAΒΒΑΑ= EQ 3.56
e [ ] [ ]Tmm1T
m1m1 BABA
ˆˆ:|kk +θθ=λλ KKK EQ 3.57
Neste subitem, o objetivo será maximizar a região definida pela EQ 3.55. Para isto, além
dos objetivos (ii) e (iii) vistos no subitem 3.3.1, será necessário minimizar maxσ ( Π ), bastando
para isto adicionar a parcela J4=Tr( Π T Π ) na função objetivo J’AB a ser considerada.
Desta maneira a função objetivo a ser minimizada passa a ser J’AB = J2 + J3 + J4.
Entretanto, como o custo a ser minimizado J’AB = J2 + J3 + J4 deve ser realizado atendendo a
restrição imposta pela EQ 3.16, referente a estabilidade do sistema em malha fechada, chega-
se ao seguinte Lagrangeano:
( )
+−ΑΑ+ΠΠ+ΑΑ
α++α+α= QPPLˆˆ1
PPZ2ZTrJ 0T01
T0
T0
222rAB EQ 3.58
Para a minimização da função objetivo r
ABJ na EQ 3.58 basta usar o algoritmo visto
anteriormente, substituindo o termo 2K nas EQ 3.24 e 3.50 por:
( ) T00
*m
T*m
4 CKC2K
JBB
ΒΒ=∂
∂ EQ 3.59
onde ( )TTm
T1
*m BB
...ΒΒ=Β EQ 3.60

49
3.3.4 PERTURBAÇÃO ESTRUTURADA COM ESPECIFICAÇÕES DE DESEMPENHO
Considere o custo LQR na EQ 3.35 e suponha que o sistema esteja sujeito a perturbações
somente na matriz A, então o sistema em malha fechada perturbado descrito por
x(k+1)=( )A0 ∆+Α x(k) permanecerá estável, se:
maxσ (∆A) <
2/1
max
1maxmin
)PZ(
]1
[)Q(
+ασ
Ω
ασ−σ
EQ 3.61
são mantidas para P, Q e Ω1.
Com a finalidade de maximizar a região da EQ 3.61 será necessário, no lado direito da
desigualdade, minimizar maxσ (αZ + P) no denominador, bem como σα
max
11
Ω no
numerador.
Em analogia ao item 3.3.1, as minimizações de maxσ (αZ + P) e σα
max
11
Ω podem ser
substituídas pelas mininizações do Tr(α2Z2 + 2αPZ + P2) e ( )10 0
α
Tr TΑ Α , respectivamente.
Portanto, para a minimização do custo da função objetivo definida por rAJ = J2 + J3 e
LQRrA
p,rA JJJ += , onde J2=Tr(α2Z2+ 2αPZ + P2) e J3= ( )1
0 0α
Tr TΑ Α , pode-se usar os algorit-
mos vistos nos subitens 3.3.1 e 3.3.2, sendo que a única diferença será a omissão do termo
K2K
J1 =∂
∂ nas EQ 3.24 e 3.50.
Demonstração: Ver em (KONSTANTOPOULOS & ANTSAKLIS, 1995a ), ANEXO 1.
Para o caso em que considera-se a robustez em estabilidade e o desempenho com
perturbações nas matrizes A e B, tem-se a função objetivo J ABr p, = p,r
AJ + J4, valendo as
mesmas considerações feitas no item anterior .
Como em (KONSTANTOPOULOS & ANTSAKLIS, 1996) não é imposta uma
ponderação direta entre as funções que quantizam a robustez em estabilidade e o desempenho,

50
o compromisso estabelecido é uma conseqüência das matrizes escolhidas para o LQR e da
faixa de valores assumida por estas funções.

52
4 APLICAÇÕES NUMÉRICAS DAS SÍNTESES PRCBI E DE K&A
4.1 SISTEMA DE CONTROLE LONGITUDINAL DE UMA AERONAVE
Este exemplo foi também utilizado em (KONSTANTOPOULOS & ANTSAKLIS, 1996).
A título de comparação será aplicada também a síntese PRCBI neste exemplo, a fim de
verificar os resultados alcançados pelos controladores calculados. O modelo dinâmico
contínuo e linearizado, fornecido abaixo, refere-se ao controle longitudinal de uma aeronave
(JIANG, 1994).
τ
η
−
−+
θ
ψ
β
α
−−−
−−
−−
=
θ
ψ
β
α
)t(
)t(
00
011.1
00541.0
10
)t(
)t(
)t(
)t(
0100
0947.0685.00715.0
0109.1685.0303.0
171.000651.00582.0
)t(
)t(
)t(
)t(
&
&
&
&
EQ 4.1
y(t) =
θ
ψ
β
α
)t(
)t(
)t(
)t(
1000
0100
0010
0001
O significado físico dos estados, entradas e saídas estão apresentados na TAB. 4.1.
TAB. 4.1: Significado físico dos estados, entradas e saídas do modelo para o modelo de
(JIANG,1994).
Variável Significado Físico
α(t) velocidade longitudinal
β(t) Velocidade vertical
ψ(t) velocidade angular de ataque
θ(t) ângulo de ataque
η(t) ângulo do profundor
τ(t) posição da manete de potência

53
Discretizando o modelo contínuo fornecido na EQ 4.1 com um período de discretização
de T=0,5s, chega-se ao seguinte modelo discreto:
τ
η+
θ
ψ
β
α
=
+θ
+ψ
+β
+α
)k(
)k(B
)k(
)k(
)k(
)k(
A
)1k(
)1k(
)1k(
)1k(
dd
EQ 4.2
y(k+1) = Cd
θ
ψ
β
α
)k(
)k(
)k(
)k(
onde as matrizes Ad, Bd e Cd são respectivamente as matrizes da dinâmica, de entrada e de saí-
da do modelo discretizado, cujos valores numéricos são:
−−
−−
−
−−
=
0001.13873.00621.00041.0
0007.05644.02126.00086.0
0059.03584.06469.01302.0
0842.00112.00283.09692.0
Ad
EQ 4.3
−−
−−
−−=
0009.01170.0
0041.04266.0
0344.01385.0
4924.00017.0
Bd e Cd = I4.
Considere que o sistema fornecido na EQ 4.2 esteja submetido em sua matriz da dinâmica
a perturbações estruturadas de acordo com:
pdA = dd AA ∆+ EQ 4.4
onde a perturbação aditiva ∆Ad, retirada de (KONSTANTOPOULOS & ANTSAKLIS, 1996)
foi considerada da forma:
−+
=∆
005.000
05.0000
001.00
05.0000
k
05.0001.0
0000
01.0005.0
0015.01.0
kA 21d EQ 4.5

54
sendo k1, k2 ℜ∈ . Logicamente, a matriz da dinâmica nominal é obtida fazendo-se k1=k2=0.
Para a execução do algoritmo apresentado no subitem 3.3.1 e para encontrar os resultados
fornecidos em (KONSTANTOPOULOS & ANTSAKLIS, 1996), algumas variáveis foram
inicialmente arbitradas, a saber:
• a matriz Q da equação de Lyapunov na EQ 3.2, foi adotada como:
Q = 10-2 I4 EQ 4.6
• a matriz D1 de ponderação das direções de busca, utilizada no algoritmo proposto no
subitem 3.3.1, foi considerada como:
D1= I8 EQ 4.7
• a matriz Z simétrica, positiva definida, que aparece na EQ 3.4, fornecida no trabalho de
(KONSTANTOPOULOS & ANTSAKLIS, 1996, p.85) está errada, pois não atende as
características mencionadas. Desta forma, arbitrou-se inicialmente a matriz Z=I4.
• um ganho inicial K1 estabilizante, conforme a EQ 4.8, que posicione os pólos de malha
fechada discretos nas seguintes posições do plano z: 0.20, 0.07, -0.50 ± 0.25j.
K1=
−−
−−
0742.00224.02706.06068.1
2700.100531.31722.00264.0 EQ 4.8
O problema proposto consistirá na determinação de um controlador de realimentação de
estados que maximize o raio R da circunferência gerada pelas variáveis k1 e k2 dentro da
região de estabilidade, onde:
R = 22
21 kk + EQ 4.9
O raio desta circunferência delimitará uma região, na qual será possível variar k1 e k2, ga-
rantindo que o sistema discreto definido na EQ 4.2 permanecerá estável.

55
Com o controlador calculado pelo algoritmo discutido no subitem 3.3.1 e fornecido em
(KONSTANTOPOULOS & ANTSAKLIS, 1996), obteve-se o seguinte resultado:
( )222
21 5269.0kk <+ EQ 4.10
Vale observar que o resultado apresentado na EQ 4.10 não pôde ser reproduzido, pois
conforme mencionado anteriormente, a matriz Z fornecida não era positiva definida.
O objetivo aqui será a determinação de vários controladores para o modelo discreto defi-
nido na EQ 4.2, considerando a otimização de critérios que levem em conta a robustez em es-
tabilidade e o desempenho do sistema em malha fechada. O cálculo desses controladores foi
realizado por intermédio de algoritmos desenvolvidos neste trabalho, bem como pela imple-
mentação das sínteses PRCBI e de K&A, discutidas nos capítulos 2 e 3, respectivamente.
O custo de robustez em estabilidade e o de desempenho quadrático que compõem o cri-
tério a ser otimizado, são dados pelas EQ 4.11 e EQ 4.12, respectivamente:
Jrob = Tr (G 1
0
−θ ) EQ 4.11
Jdesemp = ( )∑=
+230
151kk2
Tkk1
Tk uQuxQx EQ 4.12
Como a matriz Z é um parâmetro inicial arbitrado para a síntese de K&A e como o con-
trolador calculado é função desta matriz, partiu-se para o seguinte problema: determinar a ma-
triz Z diagonal que maximize a região definida na EQ 4.10 garantida pelos resultados de
(KONSTANTOPOULOS & ANTSAKLIS, 1996). Para isto, empregou-se o método de
otimização numérica de Powell (FOX, 1971), obtendo-se a seguinte matriz Z otimizada:
=
8112.0000
05122.000
008334.00
0004804.0
Z EQ 4.13
Na TAB. 4.2 estão listados quatro controladores de realimentação positiva de estados, de
acordo com a FIG. 3.1. O primeiro controlador, 1cK , foi extraído do trabalho de
(KONSTANTOPOULOS & ANTSAKLIS, 1996), tendo sido calculado pela síntese de K&A.
O segundo controlador, 2cK , foi calculado pelas rotinas implementadas neste trabalho,

56
otimizando-se uma matriz Z diagonal e empregando a síntese de K&A, conforme será
explicado no próximo parágrafo. O terceiro controlador, Kc3, é o de melhor desempenho
(LQR), considerando o critério quadrático com Q1=I4 e R1=I2, de acordo com EQ 4.12. Por
fim, o quarto controlador, Kc4, é o controlador com características de robustez em estabilidade
calculado pela síntese PRCBI, determinado de acordo com a seção 2.2 deste trabalho e com
sinal invertido para realimentação positiva de estados.
Para o cálculo do controlador Kc2 desenvolveu-se um algoritmo que otimizava uma ma-
triz Z diagonal de maneira a maximizar o raio de estabilidade na EQ 3.9, desenvolvido em
(KONSTANTOPOULOS & ANTSAKLIS, 1996). Neste caso, para cada matriz Z diagonal
encontrava-se um controlador específico de realimentação de estados. O problema proposto
foi então determinar a matriz Z diagonal, e consequentemente o controlador correspondente,
que maximizasse o raio de estabilidade definido em função dos parâmetros sensíveis k1 e k2.
TAB. 4.2: Controladores obtidos no modelo de (JIANG, 1994).
CONTROLADORES
K&A
−
−−=
0641.00590.00895.09253.1
9723.04512.11988.00672.0K 1c
K&A c/ Z otimizada
−−
−=
2506.00490.00676.09491.1
8252.16617.10016.01472.0K 2c
LQR
−
−−=
0129.00289.00471.07579.0
7740.07081.01962.00266.0K 3c
PRCBI
−−−=
9658.22797.02027.45350.2
3008.21761.20213.22510.0K 4c
Além dos controladores apresentados na TAB. 4.2, foi também calculado o controlador
Kc5, que é o LQG. Para os cálculos dos controladores PRCBI, LQR e LQG, aonde tenham
sido necessário, foram adotados os seguintes parâmetros:

57
• matrizes de ponderação dos estados e da entrada, respectivamente, Q1=I4 e R1=I2
• matriz de covariância do ruído na planta Q2=10-3 I2
• matriz de covariância do ruído no sensor de medidas na saída R2 = 10-4 I4.
• matriz de entrada de ruído na planta D foi considerada D:= Bd, isto é, o ruído na planta entra
pelos atuadores.
De posse dos controladores mencionados, verificou-se as características alcançadas por
cada um deles em cima dos seguintes tópicos:
• Raio da hiperesfera de estabilidade - é o raio da maior hiperesefera (circunferência) de per-
turbação que poderá ser inscrita na região de estabilidade do espaço paramétrico, centrada no
ponto em que os parâmetros sensíveis assumem seus valores nominais. Neste caso, o contro-
lador obtido pela síntese PRCBI obteve o maior raio, conforme mostra a TAB. 4.4.
• Custo de robustez em estabilidade na EQ 4.11. O controlador que obteve o menor custo, isto
é, aquele com maior robustez em estabilidade segundo o critério proposto na EQ 4.11 foi o
controlador da síntese PRCBI, pois minimiza esse critério.
• Custo de desempenho quadrático na EQ 4.12. Este custo leva em conta a energia total dos
estados e da entrada, ponderados pelas matrizes Q1=I4 e Q2=I2, após fechar a malha em k=151
durante a evolução do sistema em malha fechada por 80 períodos. O menor custo foi en-
contrado pelo controlador LQR, que é aquele que minimiza o critério na EQ 4.12.
• Raio de estabilidade garantido por K&A na EQ 3.9 - é o raio calculado pelo algoritmo pro-
posto em (KONSTANTOPOULOS & ANTSAKLIS, 1996), representando a região na qual os
parâmetros sensíveis k1 e k2 podem ser variados e a estabilidade do sistema na EQ 4.2
continua garantida. Neste caso, o maior raio de estabilidade foi conseguido pelo controlador
Kc2, cujo método de cálculo foi comentado acima.
• Área da região de estabilidade - é a quantização em unidade de área do tamanho do domínio
paramétrico de estabilidade gerado por cada um dos controladores calculados, atuando no
sistema em malha fechada. É nesta região que se inscreve a hiperesfera.
A TAB. 4.4 ilustra as características de cada controlador. Na primeira e na segunda
linha desta tabela apresenta-se as características do controlador Kc1. A diferença é que na pri-
meira linha exibe-se o resultado de (KONSTANTOPOULOS & ANTSAKLIS, 1996) em que
a matriz Z fornecida não é positiva definida, inviabilizando a reprodução do resultado. Na

58
segunda linha, foi mantido o controlador sugerido por (KONSTANTOPOULOS &
ANTSAKLIS, 1996), mas a matriz Z foi otimizada de maneira a ampliar o raio de
estabilidade garantido por K&A. Pode-se observar na TAB. 4.4, que o raio de estabilidade
garantido por K&A na segunda linha aumentou aproximadamente 3,5% em relação ao da
primeira linha.
O controlador Kc4 forneceu o menor raio de estabilidade garantido por K&A e o pior de-
sempenho em relação aos demais controladores, mas note que este mesmo controlador gerou
a maior área da região de estabilidade e conseqüentemente a maior hiperesfera, conforme
mostrado na TAB. 4.4.
Para a determinação do raio RK&A de estabilidade garantido por K&A, que é uma figura
de mérito da síntese de K&A, foi necessário otimizar uma matriz diagonal Z para cada um dos
controladores, inclusive para os controladores PRCBI e LQR. Estas matrizes estão ilustradas
na TAB. 4.3 a seguir:
TAB. 4.3: Matrizes Z diagonal otimizadas.
CONTROLADOR Matriz Z diagonal otimizada
*Kc1 Z = diag[0.1244 0.1943 0.1396 0.1927]
Kc2 Z = diag[0.0821 0.0804 0.0763 0.0781]
Kc3 Z = diag[0.1683 0.2219 0.2057 0.2222]
Kc4 Z = diag[2.6545 2.4760 2.2718 2.5140]
( * ) Controlador obtido em (KONSTANTOPOULOS & ANTSAKLIS, 1996).
Nas FIG. 4.1, 4.3, 4.5, 4.7 e 4.9 estão ilustradas as regiões de estabilidade e as respectivas
hiperesferas, neste caso degeneradas em circunferências, para o sistema fornecido na EQ 4.2
em malha fechada, com realimentação de estados via controladores da TAB. 4.4. Nestas figu-
ras que ilustram as regiões de estabilidade, os pontos de cor azul indicam que o sistema é está-
vel para os respectivos valores de k1 e k2, a cruz de cor preta mostra a posição do ponto nomi-
nal dos parâmetros sensíveis e a circunferência em vermelho ilustra graficamente a circunfe-
rência de estabilidade, cujo valor do raio está mostrado na TAB. 4.4.

59
TAB. 4.4: Características obtidas nos controladores calculados.
Controlador
Raio da hiperesfera
Custo Jrob estabilidade
Custo Jdesemp
desempenho quadrático
Raio estab. garantido por K&A
Área região estab. gerada
por cada ctrl.em u.a.
1cK 2.8881 0.0107 58.0291 0.5269 6823
1c* K 2.8881 0.0107 58.0291 0.5457 6823
2cK 2.9233 0.0079 74.9195 0.6422 7144
3cK 2.2179 0.0221 55.8273 0.5224 5474
4cK 3.3882 0.0054 323.5365 0.2742 7441
5cK 2.2307 0.0221 55.8273 -- 5588
( * ) Controlador obtido em (KONSTANTOPOULOS & ANTSAKLIS, 1996), usado conjuntamente com a matriz Z diagonal otimizada ilustrada na TAB. 4.3 para o seu respectivo controlador.
As FIG. 4.2, 4.4, 4.6 e 4.8 exibem os diagramas de sensibilidade dos controladores apre-
sentados na TAB. 4.2. Nestes diagramas ilustram-se as posições dos pólos de MF para o sis-
tema perturbado em direções aleatórias com raios de perturbação constantes, isto é,
=+ 22
21 kk 1, 9 e 25. As curvas de cores vermelha, azul e verde representam os pólos de MF
para perturbações com raios de uma, três e cinco unidades, respectivamente. As várias cruzes
assinaladas mostram as posições dos pólos de MF na situação nominal, ou seja, com os parâ-
metros sensíveis iguais a zero. A partir destes diagramas, torna-se possível verificar a sensibi-
lidade dos pólos de MF ao submeter o sistema a perturbações com raio constante em várias
direções do espaço paramétrico para os controladores exibidos na TAB. 4.2. Normalmente,
uma maior sensibilidade estará associada a uma maior degradação do desempenho nominal.
A FIG. 4.12 representa a resposta ao impulso em malha aberta durante 150 amostras ( 75
segundos ), onde a linha vermelha representa a velocidade longitudinal (α(t)), a linha verde a
velocidade vertical (β(t)), a linha azul escura a velocidade angular de ataque (ψ(t)) e a linha
azul clara o ângulo de ataque (θ(t)).
Nas FIG. 4.13, 4.14, 4.15, 4.16 e 4.17 encontram-se as evoluções dos estados em malha
fechada para o sistema sob atuação de cada um dos controladores apresentados na TAB. 4.2.
A simulação é desenvolvida após a evolução de 150 períodos, conforme apresenta a FIG.
4.12. Após isto, fecha-se a malha e apresenta-se a evolução dos estados por mais 80 períodos.

60
O desempenho obtido por cada um dos controladores é avaliado pela expressão EQ 4.12, em
cima das respectivas curvas de evolução temporal dos estados. Quanto maior for a área sob as
curvas, maior será o custo de desempenho. Note que a FIG. 4.16, relativa ao controlador do
PRCBI, apresenta as maiores áreas sob as curvas de evolução dos estados, enquanto que as da
FIG. 4.15, referente ao controlador LQR, apresentam as menores áreas. Isto já era esperado,
pois o controlador LQR, de acordo com a definição do critério de desempenho, é o que possui
custo mínimo.
As FIG. 4.2, 4.4 e 4.6 que ilustram os diagramas de sensibilidade dos controladores Kc1,
Kc2 e Kc3, respectivamente, mostram que quando o raio de perturbação é escolhido em 3 e 5
unidades, o sistema torna-se instável em algumas das direções de perturbação, pois ul-
trapassaram o valor do raio da hiperesfera de estabilidade apresentada na TAB 4.4. As FIG.
4.10 e 4.11 são ampliações das FIG. 4.2 e 4.4, permitindo uma melhor visualização de que
uma perturbação com raio de 3 unidades terá parte do diagrama fora do círculo unitário no
plano z. As FIG. 4.8 e 4.9 tem a mesma relação com o controlador Kc4, no que se refere ao
raio de perturbação e raio da hiperesfera de estabilidade. Para o controlador Kc5 não foi feito o
diagrama de sensibilidade, pois neste caso aparece o Filtro de Kalman, dobrando o número de
pólos de malha fechada.
A título de comparação entre as FIG. 4.2, 4.4 e 4.6 em relação à FIG. 4.8, o diagrama de
sensibilidade do controlador PRCBI (Kc4) foi calculado com realimentação direta de estado e
não com a estrutura LQG, incluindo o Filtro de Kalman, conforme foi visto na FIG. 2.6 do
item 2.2.

61
FIG. 4.1: Região de estabilidade e hiperesfera com o controlador Kc1.
FIG. 4.2: Diagrama de sensibilidade com o controlador Kc1.
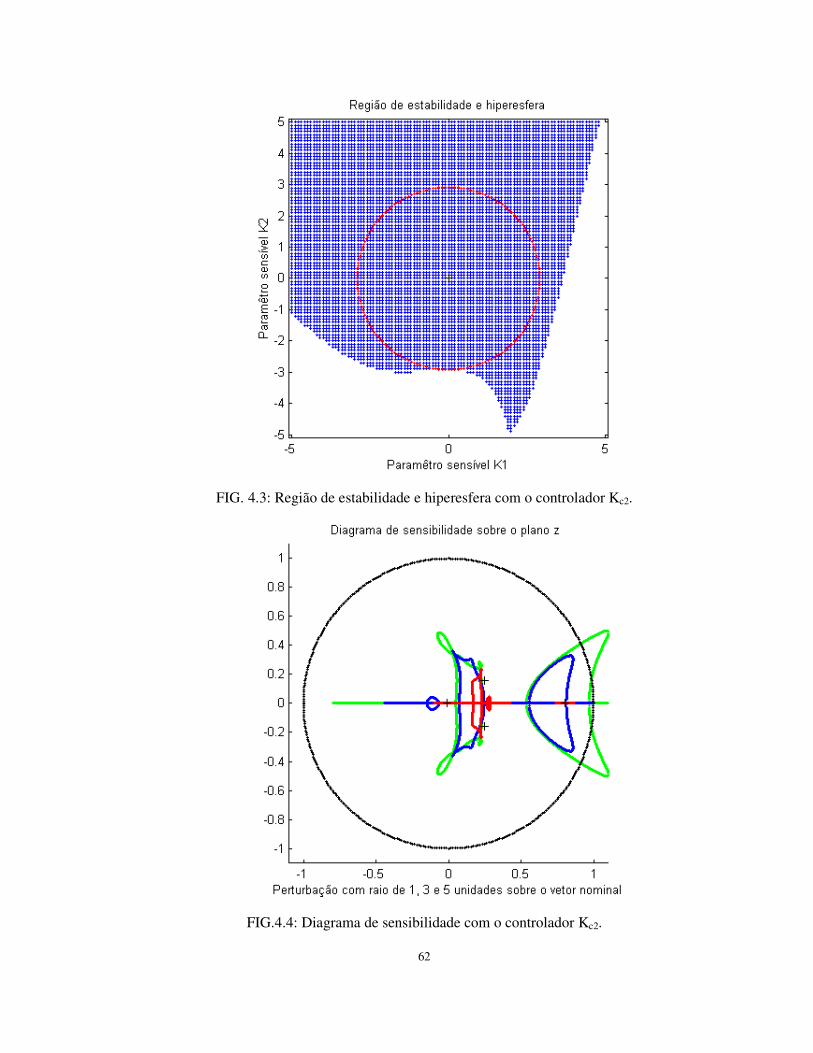
62
FIG. 4.3: Região de estabilidade e hiperesfera com o controlador Kc2.
FIG.4.4: Diagrama de sensibilidade com o controlador Kc2.

63
FIG. 4.5: Região de estabilidade e hiperesfera com o controlador Kc3.
FIG. 4.6: Diagrama de sensibilidade com o controlador Kc3.

64
FIG. 4.7: Região de estabilidade e hiperesfera com o controlador Kc4.
FIG. 4.8: Diagrama de sensibilidade com o controlador Kc4.

65
FIG. 4.9: Região de estabilidade e hiperesfera com o controlador Kc5.
FIG. 4.10: Diagrama de sensibilidade ampliado com o controlador Kc1.

66
FIG. 4.11: Diagrama de sensibilidade ampliado com o controlador Kc2.
FIG. 4.12: Resposta ao impulso em MA para o sistema da EQ 4.2.
Estados: α(t)-verm.; β(t)-verde; Ψ(t)-azul; θ(t)-azul claro.
0 10 20 30 40 50 60 70 80-2
-1
0
1
2
3
4
5
Resposta ao impulso do sis tema em M.A durante 75 segundos(150 amostras)
tempo (s)
es
tad
os
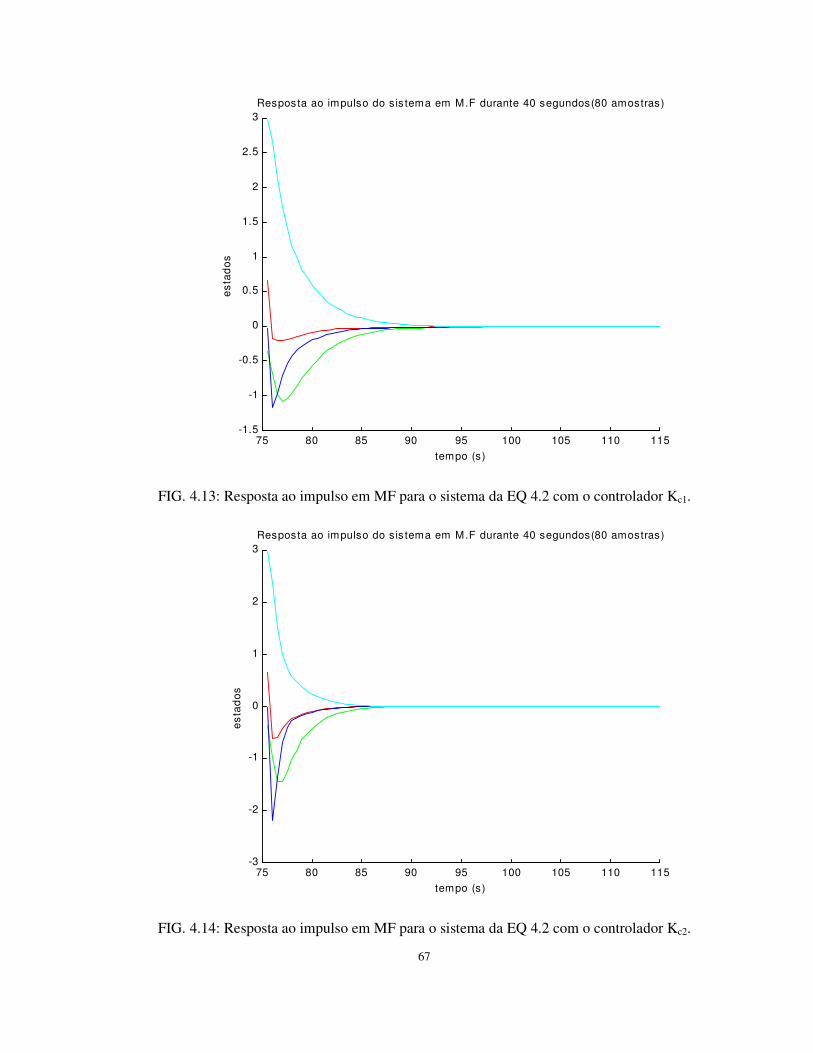
67
FIG. 4.13: Resposta ao impulso em MF para o sistema da EQ 4.2 com o controlador Kc1.
FIG. 4.14: Resposta ao impulso em MF para o sistema da EQ 4.2 com o controlador Kc2.
75 80 85 90 95 100 105 110 115-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Resposta ao impulso do sis tema em M.F durante 40 segundos(80 amostras)
tempo (s)
es
tad
os
75 80 85 90 95 100 105 110 115-3
-2
-1
0
1
2
3
Resposta ao impulso do sis tema em M.F durante 40 segundos(80 amostras)
tempo (s)
es
tad
os

68
FIG. 4.15: Resposta ao impulso em MF para o sistema da EQ 4.2 com o controlador Kc3.
FIG. 4.16: Resposta ao impulso em MF para o sistema da EQ 4.2 com o controlador Kc4.
75 80 85 90 95 100 105 110 115-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Resposta ao impulso do sis tema em M.F durante 40 segundos(80 amostras)
tempo (s)
es
tad
os
75 80 85 90 95 100 105 110 115-6
-5
-4
-3
-2
-1
0
1
2
3
Resposta ao impulso do sis tema em M.F durante 40 segundos(80 amostras)
tempo (s)
es
tad
os

69
FIG. 4.17: Resposta ao impulso em MF para o sistema da EQ 4.2 com o controlador Kc5.
75 80 85 90 95 100 105 110 115-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
Resposta ao impulso do sis tema em M.F durante 40 segundos(80 amostras)
tempo (s)
es
tad
os

70
4.2 SISTEMA MASSA-MOLA COM 8 ESTADOS
Este exemplo foi utilizado no trabalho de (ADES, 1994). O objetivo nesta aplicação será
o cálculo de um controlador pela síntese de K&A, levando em conta somente o
robustecimento em estabilidade do sistema face às variações das massas 1 e 4 do sistema
ilustrado na FIG. 4.18, a fim de comparar com os resultados já obtidos pela aplicação da
síntese PRCBI em (ADES, 1994). Os gráficos e os resultados relativos aos controladores
LQG, PRCBI e híbrido 100% foram extraídos em (ADES, 1994).
Massa 1
u
Massa 1Massa 2
Massa 3 Massa 4
y
FIG. 4.18: Diagrama físico do sistema massa-mola 8 estados.
Na EQ 4.14 mostra-se um modelo em espaço de estado do sistema da FIG. 4.18
=
+=
xCy
uBxAx& EQ 4.14
onde xT = ( x1 x2 ... x8 ) é o vetor de estados, cujo significado físico encontra-se na TAB.
4.5. Além disso tem-se que “y” é a saída ( posição da massa 4 ) e “u” a entrada da planta
(força aplicada na massa 1). As matrizes A, B e C são dadas por:

71
A =
−−
−−
−−
−−
4444
333333
222222
1111
m
b
m
k
m
b
m
k0000
10000000m
b
m
k
m
b2
m
k2
m
b
m
k00
00100000
00m
b
m
k
m
b2
m
k2
m
b
m
k00001000
0000m
b
m
k
m
b
m
k00000010
EQ 4.15
= 000000
m
10B
1
T EQ 4.16
[ ]01000000C = EQ 4.17
TAB. 4.5: Significado físico dos estados do sistema massa-mola 8 estados.
ESTADOS SIGNIFICADO FÍSICO x1 Posição da massa 1 (m) x2 Velocidade da massa 1 (m/s) x3 Posição da massa 2 (m) x4 Velocidade da massa 2 (m/s) x5 Posição da massa 3 (m) x6 Velocidade da massa 3 (m/s) x7 Posição da massa 4 (m) x8 Velocidade da massa 4 (m/s)
Para o cálculo dos controladores apresentados, foram adotados os seguintes parâmetros e constantes: • m1=1.0, m2=0.25, m3=0.1 e m4=0.1 são os valores nominais das massas em kg;
• k = 0.145 N/m é a constante elástica da mola;
• b = 0.04875 N.s/m é a constante do amortecedor;
• período de amostragem na discretização T = 0.1s;

72
• custo de desempenho de acordo com a EQ 4.18, onde as matrizes de ponderação dos
estados e da saída são, respectivamente, Q1 = I8 e Q2 = 1;
Jdesemp = ( )∑=
+200
51kk2
Tkk1
Tk uQuxQx EQ 4.18
• custo de robustez em estabilidade de acordo com a EQ. 4.11;
• matriz de covariância de entrada de ruídos na planta: Q = 0.01;
• matriz covariância de ruído no sensor de medidas de saída da planta: R = 0.0001;
• nas simulações utilizou-se a estrutura LQG com Filtro de Kalman, de acordo com a
FIG. 2.6;
• o ruído entra na planta pelos atuadores, isto é, D = Γ (ver FIG. 2.7);
• vetor de parâmetros sensíveis a serem robustecidos ( )T41 mm=θ ;
• as matrizes arbitradas Z e Q, referentes à síntese de K&A, foram adotadas com os
seguintes valores: Z = 20 I8 e Q = 10-6 I8 por tentativa e erro para a convergência da síntese
de K&A.
A TAB. 4.6 apresenta os controladores LQG (desempenho ótimo), PRCBI e híbrido
100%, extraídos de (ADES, 1994), bem como os controladores K&A1 e K&A2, calculados
pela síntese de K&A. Os elementos dos vetores que representam os controladores K&A1 e
K&A2 estão com seus sinais invertidos, indicando realimentação negativa, tal como os
demais. Cabe observar que no capítulo 3, referente a síntese de K&A, foi adotado a
realimentação positiva conforme mostra a EQ. 3.12.
A TAB. 4.7 apresenta as características de custo de robustez em estabilidade, custo de
desempenho, raio da hiperesfera percentual de estabilidade, conforme definido em (ADES,
1994, p.43), e o raio de estabilidade garantido por K&A para os controladores relacionados na
TAB. 4.6.

73
TAB. 4.6: Controladores de destaque relativos ao sistema massa-mola com 8 estados.
CONTROLADORES
KLQG = [ 1.846076533 2.205799446 0.020262473 1.664610417 -0.040385758 0.769685911 –0.048710792 0.816805303 ]
KPRCBI = [ 4.705820385 7.361800067 –4.270015626 –6.408789105 0.440542769 -2.104900311 –0.876346472 1.152333760 ]
KH100 = [ 5.453379809 9.564500067 –3.715771139 –5.586051605 0.643760899 –1.348749630 –0.358188095 1.897859931 ]
KK&A1 = [ 0.072584679 0.860754592 0.030135312 0.009260002 0.006205396 0.001576863 -0.005084672 0.004750105 ]
KK&A2 = [ 0.044178785 0.861069738 0.019970790 0.015558045 0.006811836 0.002136684 0.005044984 0.001671661 ]
TAB. 4.7: Características obtidas pelos controladores mencionados na TAB. 4.6.
CONTROLADOR
CUSTO DE ROBUSTEZ EM ESTABILIDADE
Jrob=Tr(Gθ0
1− )
CUSTO DE
DESEMPENHO Jdesemp
RAIO DA HIPERESFERA PERCENTUAL
DE ESTABILIDADE
RAIO RK&A DE ESTABILIDADE
GARANTIDO POR K&A
KPRCBI 2.60409 991.791 59.9609 - KH100 5.20790 70.376 41.7188 - KLQG 45.51052 32.030 14.0234 - KK&A1 4.67623 64.550 58.6792 0.05703347 KK&A2 4.41153 71.723 62.3303 0.05329108
Tendo em vista que na síntese de K&A as perturbações sobre as matrizes do modelo
nominal ocorrem conforme a EQ 3.53, as matrizes Ai e Bj (com i = 1, 2 e j = 1), referentes às
variações de perturbação, que aparecem nessa mesma equação foram geradas da seguinte
maneira:
A1 = Aperturbado1 - Anominal = A( 0.95, 0.25, 0.1, 0.1 ) - A( 1.0, 0.25, 0.1, 0.1 ) A2 = Aperturbado2 - Anominal = A( 1.0, 0.25, 0.1, 0.095 ) - A( 1.0, 0.25, 0.1, 0.1 )
B1 = Bperturbado1 - Bnominal = B( 0.95, 0.25, 0.1, 0.1 ) - B( 1.0, 0.25, 0.1, 0.1 )

74
onde A = A( m1, m2, m3, m4 ) é a matriz da dinâmica dada pela EQ 4.15 e B = B( m1, m2, m3,
m4 ) é a matriz de entrada do modelo na EQ 4.16. O raio de estabilidade garantido por K&A,
apresentado na TAB. 4.7, relaciona-se com as perturbações do seguinte modo:
2
A&K21
22
21 Rkk ≤λ++ EQ 4.19
conforme a EQ 3.53 apresentada no subitem 3.3.3.
O controlador K&A1 foi obtido durante a execução do algoritmo de K&A, escolhendo
durante as iterações o controlador que gerava o maior raio RK&A. Já o controlador K&A2 foi
aquele gerado pelo algoritmo em sua última iteração, ao atingir o critério de parada.
Nas FIG. 4.19, 4.21, 4.23, 4.25 e 4.27 estão ilustradas as regiões de estabilidade e as
respectivas hiperesferas percentuais para o sistema com os controladores da TAB. 4.6.
As FIG. 4.20, 4.22, 4.24, 4.26 e 4.28 exibem os diagramas de sensibilidade dos controla-
dores apresentados na TAB. 4.6. Nestes diagramas ilustram-se as posições dos pólos de malha
fechada do sistema perturbado com raios percentuais de 10% (vermelho) e 40% ( azul ).
Pela TAB. 4.7 pode-se observar primeiramente que os raios de estabilidade RK&A dos
controladores K&A1 e K&A2 são bastante reduzidos, tornando-se desprezíveis quando
comparados à região de estabilidade. Embora o controlador KK&A1 possua um raio RK&A
maior que o do KK&A2, o raio da hiperesfera do último foi superior quando comparado com o
do primeiro.

75
0.5 1 1.5 2 2.5 3
0.05
0.1
0.15
0.2
0.25
0.3
massa 1 - (Variação de -80% a +200% do valor nominal)
Região de Estabilidade e Hiperesfera Percentual
Ctrl LQG - Desempenho ótimomassa 4
FIG. 4.19: Região de estabilidade e hiperesfera percentual com o controlador KLQG.
0.7 0.8 0.9 1 1.1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Perturbações de 10% e 40% do vetor paramétrico nominal
Diagrama de Sensibilidade - Estrutura LQG
Ctrl LQG
FIG. 4.20: Diagrama de sensibilidade com o controlador KLQG.
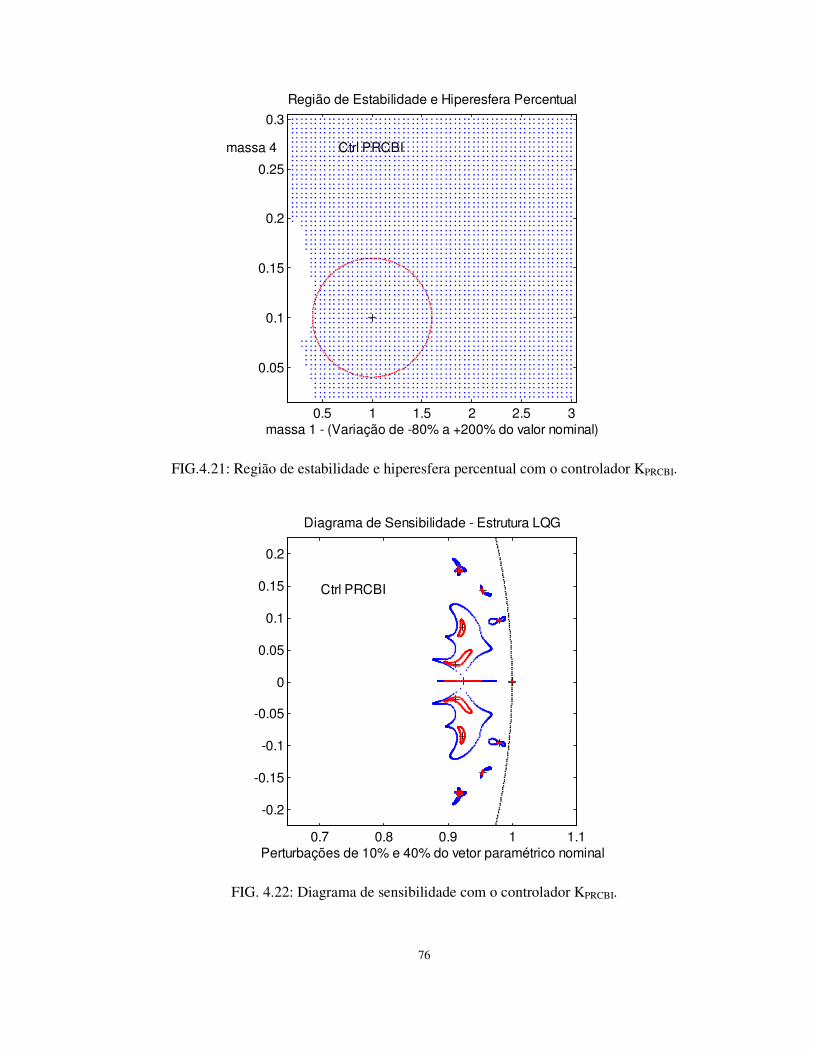
76
0.5 1 1.5 2 2.5 3
0.05
0.1
0.15
0.2
0.25
0.3
massa 1 - (Variação de -80% a +200% do valor nominal)
Região de Estabilidade e Hiperesfera Percentual
Ctrl PRCBImassa 4
FIG.4.21: Região de estabilidade e hiperesfera percentual com o controlador KPRCBI.
0.7 0.8 0.9 1 1.1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Perturbações de 10% e 40% do vetor paramétrico nominal
Diagrama de Sensibilidade - Estrutura LQG
Ctrl PRCBI
FIG. 4.22: Diagrama de sensibilidade com o controlador KPRCBI.

77
0.5 1 1.5 2 2.5 3
0.05
0.1
0.15
0.2
0.25
0.3
massa 1 - (Variação de -80% a +200% do valor nominal)
Região de Estabilidade e Hiperesfera Percentual
Ctrl Híbrido 100%massa 4
FIG. 4.23: Região de estabilidade e hiperesfera percentual com o controlador KH100.
0.7 0.8 0.9 1 1.1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Perturbações de 10% e 40% do vetor paramétrico nominal
Diagrama de Sensibilidade - Estrutura LQG
Ctrl Híbrido 100%
FIG. 4.24: Diagrama de sensibilidade com o controlador KH100.
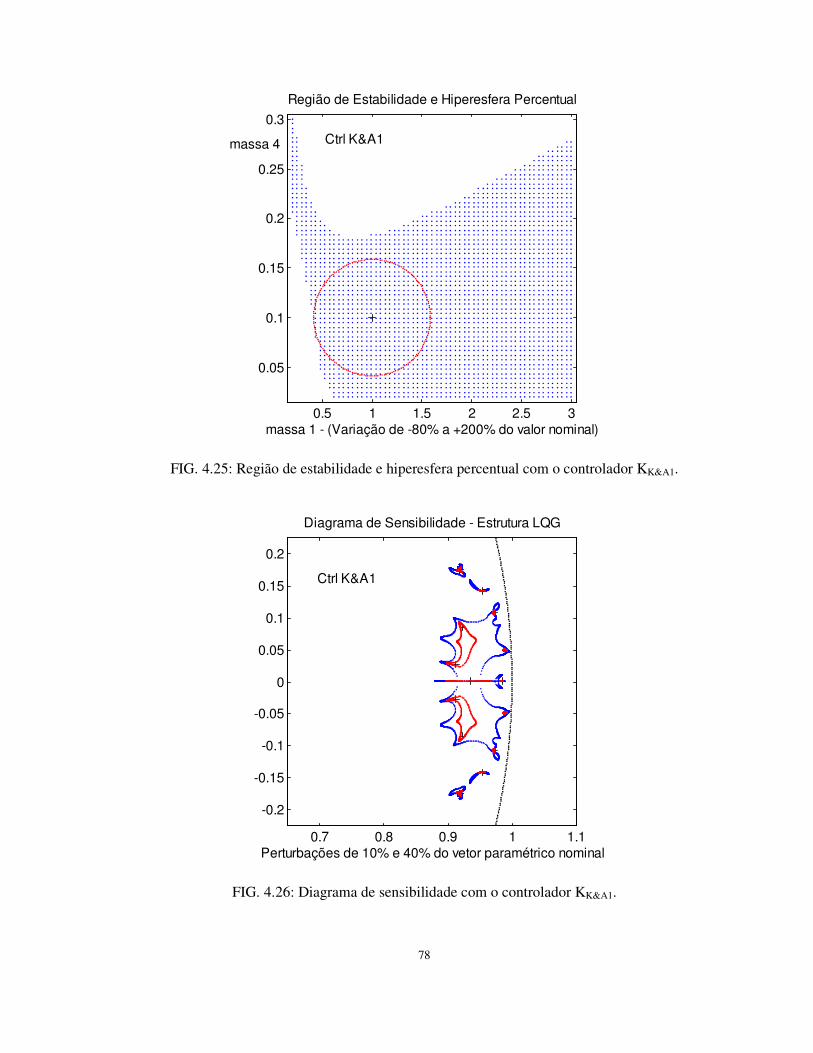
78
0.5 1 1.5 2 2.5 3
0.05
0.1
0.15
0.2
0.25
0.3
massa 1 - (Variação de -80% a +200% do valor nominal)
Região de Estabilidade e Hiperesfera Percentual
Ctrl K&A1massa 4
FIG. 4.25: Região de estabilidade e hiperesfera percentual com o controlador KK&A1.
0.7 0.8 0.9 1 1.1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Perturbações de 10% e 40% do vetor paramétrico nominal
Diagrama de Sensibilidade - Estrutura LQG
Ctrl K&A1
FIG. 4.26: Diagrama de sensibilidade com o controlador KK&A1.

79
0.5 1 1.5 2 2.5 3
0.05
0.1
0.15
0.2
0.25
0.3
massa 1 - (Variação de -80% a +200% do valor nominal)
Região de Estabilidade e Hiperesfera Percentual
Ctrl K&A2massa 4
FIG. 4.27: Região de estabilidade e hiperesfera percentual com o controlador KK&A2.
0.7 0.8 0.9 1 1.1
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
Perturbações de 10% e 40% do vetor paramétrico nominal
Diagrama de Sensibilidade - Estrutura LQG
Ctrl K&A2
FIG. 4.28: Diagrama de sensibilidade com o controlador KK&A2.

80
5 CONCLUSÕES E SUGESTÕES
5.1 CONCLUSÕES
Este trabalho apresentou um estudo comparativo entre a síntese de controle robusto pa-
ramétrico PRCBI (GOMES,1991), baseada na qualidade de identificação bayesiana dos parâ-
metros incertos a serem robustecidos e a síntese desenvolvida em (KONSTANTOPOULOS &
ANTSAKLIS, 1996), onde o algoritmo de minimização proposto utiliza uma versão do méto-
do de direções conjugadas baseado na regra BFGS.
Na parte aplicativa deste trabalho, calculou-se os controladores gerados pelas sínteses
mencionadas em cima do sistema de controle longitudinal de uma aeronave (JIANG, 1994) e
de um sistema massa-mola de 8 estados (ADES, 1994), verificando através de gráficos e tabe-
las as vantagens obtidas pela utilização dos controladores calculados por meio de cada uma
das sínteses aqui citadas.
Tendo em vista o trabalho realizado nesta dissertação, observou-se as seguintes
conclusões:
• Na síntese de K&A é feita uma abordagem para o projeto de um controlador de realimen-
tação de saída unificando os casos de perturbações estruturadas e não estruturadas.
• Considera-se na síntese de K&A perturbações não estruturadas com dimensão finita,
sendo estas apenas uma generalização das perturbações estruturadas, contrariando a lite-
ratura específica da área de controle.
• A função custo adotada na síntese de K&A é baseada na soma direta de um índice de ro-
bustez em estabilidade a ser minimizado, associado à maximização do limite de perturba-
ção estruturada ou não estruturada, com um termo referente ao desempenho quadrático,
tornando o compromisso estabelecido uma conseqüência das matrizes escolhidas para o
LQR e das faixas de valores dos índices empregados.

81
• A síntese de K&A nem sempre fornece raios de estabilidade positivos e ainda, o que é
pior, nem sempre converge em seu algoritmo.
• Os raios de estabilidade e a convergência do algoritmo de K&A são altamente dependen-
tes dos valores arbitrados para as matrizes Q na EQ 3.2 e Z na EQ 3.4.
• A não convergência do algoritmo de K&A ocorre em seu passo 05 durante a execução do
problema de minimização de ( )J dABCr
j jφ λ+ com a EQ 3.33, onde considera-se que P, α
e L1 são constantes, o que não é verdade a partir do momento em que altera-se a variável
jφ e consequentemente o controlador K.
• Quando o algoritmo de K&A converge, geralmente ocorre rapidamente e com poucas
iterações.
• No mesmo algoritmo desenvolvido por K&A, implementando-se um sistema de otimiza-
ção para o cálculo da matriz Z diagonal, obteve-se um controlador que garante um raio de
estabilidade maior que o encontrado em (KONSTANTOPOULOS & ANTSAKLIS,
1996).
• O raio de estabilidade garantido por K&A é calculado a partir de uma condição suficiente
para a variação dos parâmetros e, geralmente, fornece um raio bem inferior ao da hiperes-
fera de estabilidade conforme pode ser visto nos exemplos apresentados.
• Foi observado que com o controlador PRCBI, obtém-se em MF uma região de estabilida-
de superior a apresentada pelos demais controladores.
• O controlador PRCBI possui uma maior insensibilidade face às variações paramétricas
que os demais controladores.
• De acordo com o exemplo do sistema massa-mola de 8 estados, observou-se que embora
a região de estabilidade gerada pelo controlador de K&A seja menor que a do PRCBI, o
raio da hiperesfera do primeiro foi superior a do segundo.

82
• Embora o controlador de K&A seja mais sensível que o PRCBI no exemplo mostrado no
item 4.2, o desempenho do mesmo foi bem superior, com um raio de hiperesfera
equivalente.
• Por intermédio do método de otimização de Powell, foi possível calcular uma matriz Z
diagonal otimizada, obtendo-se um raio de estabilidade de K&A maior que aquele calcu-
lado em (KONSTANTOPOULOS & ANTSAKLIS, 1996), no item 4.1.
5.2 SUGESTÕES PARA FUTUROS TRABALHOS
Tendo em vista que na síntese de K&A o custo minimizado é composto pela soma direta
de uma parcela que diz respeito à maximização dos limites de incertezas e à minimização de
um critério de desempenho (LQR), o desenvolvimento de um novo algoritmo, baseado naque-
le apresentado em (ADES, 1994) e denominado “Técnica das liberações” seria uma sugestão
bastante interessante. Com isso seria possível resolver as dificuldades do algoritmo de K&A
no que diz respeito à ponderação entre os custos de desempenho e robustez em estabilidade.
Uma segunda sugestão seria a otimização de uma matriz Z completa, ao invés de somente
uma matriz Z diagonal, conforme foi experimentado neste trabalho. Também seria possível
tentar otimizar a matriz Q.
Por fim, seria importante realizar um estudo no sentido de determinar sob quais hipóteses
a síntese K&A teria sua convergência garantida.

83
6 REFERÊNCIAS BIBLIOGRÁFICAS
ADES, Roberto. Síntese de Controle Robusto Paramétrico – Otimização de um Critério
combinando Estabilidade e Desempenho. Tese de Mestrado, IME, Rio de Janeiro, 1994. ARNAUT, Bruno M. Modelagem e Controle Robusto PRCBI de uma Central
Eletronuclear PWR. Tese de Mestrado, IME, Rio de Janeiro, 2000. ATHANS, M. The matrix minimum principle. Information and Control, vol.11, p. 592-606,
1967. BAZARAA et alii, M. S., Sherali, H. D.; Shetty, C. M., Nonlinear Programming: Theory
and Applicattions. New York: Wiley, 1993. BERTSEKAS, D. P. Nonlinear Programming. Athena Scientific, 1995. CERDEIRA, J.Gonzales. Controle Robusto aplicado no modelo Acoplado de um míssil
solo-ar e análise de desempenho do sistema de guiamento. Tese de Mestrado, IME, Rio de Janeiro, 1998.
CHEN, Chi-Tsong. Linear Systems Theory and Design. CBS College Publishing, New
York, 1994. DOYLE, John C.; Stein, Gunter. Multivariable Feedback Design: Concepts for a
Classical/Modern Synthesis. IEEE Trans. Automatic Control, p.4-16, fevereiro de 1981. FRANKLIN et alii, Gene F.; Powell, J. David; Workman, Michael L. Digital Control of
Dynamics Systems. Addison-Wesley, second edition, Massachusetts, 1992. FOX, Richard L. Optimization Methods for Engineering Design. Addison-Wesley,
Califónia, 1971. GAUVRIT, Michel. Performances des Estimateurs Bayesiens en Boucle Ouverte et
Fermée. Tese de Doutorado, Université Paul Sabatier, Toulouse, 1982. GÓES, C.E. da Mota. Modelagem e Controle Robusto Paramétrico de reatores nucleares.
Tese de Mestrado, IME, Rio de Janeiro, 1997. GOMES, G.M.Pinheiro. Synthese d’une Commande Robuste Liee a la Qualite de
L’identification Bayesienne. Tese de Doutorado, Ecole Nationale Superieure de l’Aeronautique et de l’Espace, Toulouse, 1991.
JIANG, J. Design of reconfigurable control systems using eigenstructure assignments.
International Journal of Control, vol.59, p. 395-410,1994. KAILATH, Thomas. Linear Systems, Prentice Hall, Englewood Cliffs, New Jersey, 1980.
84
KOLLA, S. R.; Farison, J. B.; Reduced-order dynamic compensator desing for stability robustness of linear discrete-time systems. IEEE Transactions on Automatic Control, vol. 36, p. 1077-1081, 1991.
KOLLA, S. R.; Farison, J. B. Techniques in reduced-order dynamic compensator design
for stability robustness of linear discrete-time systems. Control and Dynamic Systems, vol. 63, p. 77-128, 1994.
K&A, Konstantopoulos & Antsaklis. Robust stability of linear continuous and discrete-
time systems under parametric uncertainty. Technical Report of the ISIS Group at the University of Notre Dame, No. ISIS-94-006, 1994a.
K&A, Konstantopoulos & Antsaklis. New bounds for robust stability of continuous and
discrete-time systems under parametric uncertainty. Kybernetika, vol. 31, p. 621-634,1995b.
K&A, Konstantopoulos & Antsaklis. Optimal design of robust controllers for uncertain
discrete – time systems. Int. Jour. of Control, vol. 65, no.1, p. 71-91, 1996. KUO, B. C. Automatic Control Systems, second edition, Prentice Hall, Englewood Cliffs,
New Jersey, 1967. MEDLIG, José Vicente. Técnica de Controle Robusto Paramétrico Aplicadas na
Pilotagem Automática de Mísseis. Tese de Mestrado, IME, Rio de Janeiro, 1996. MENDES, I.S.F. Aplicação em Tempo Real de Controle Robusto Paramétrico em um
Levitador Magnético. Tese de Mestrado, IME, Rio de Janeiro, 1998. OGATA, Katsuhiko. Discrete-Time Control Systems, Prentice Hall, Englewood Cliffs, New
Jersey, 1987. OGATA, Katsuhiko. Engenharia de Controle Moderno, Prentice Hall do Brasil, Rio de
Janeiro, 1982. PELLANDA, Paulo Cesar. Controle Robusto Aplicado na Estabilização de Sistemas
Elétricos de Potência. Tese de Mestrado, IME, Rio de Janeiro, 1993. TAHK, M. & SPEYER, J. L. A Parameter Robust LQG Design Synthesis with
Applications to Control of Flexible Structures, IEEE Trans. Automatic Control, 1987.

85
7 ANEXO
7.1 ANEXO 1
Cópia do artigo “Optimal design of robust controllers uncertain discrete- time systems”
de Joannis K. Konstantopoulos e Panos J. Antsaklis do International Journal of Control,
1996, vol. 65, no. 1, 71-91.

86
87

88

89

90

91

92

93

94

95
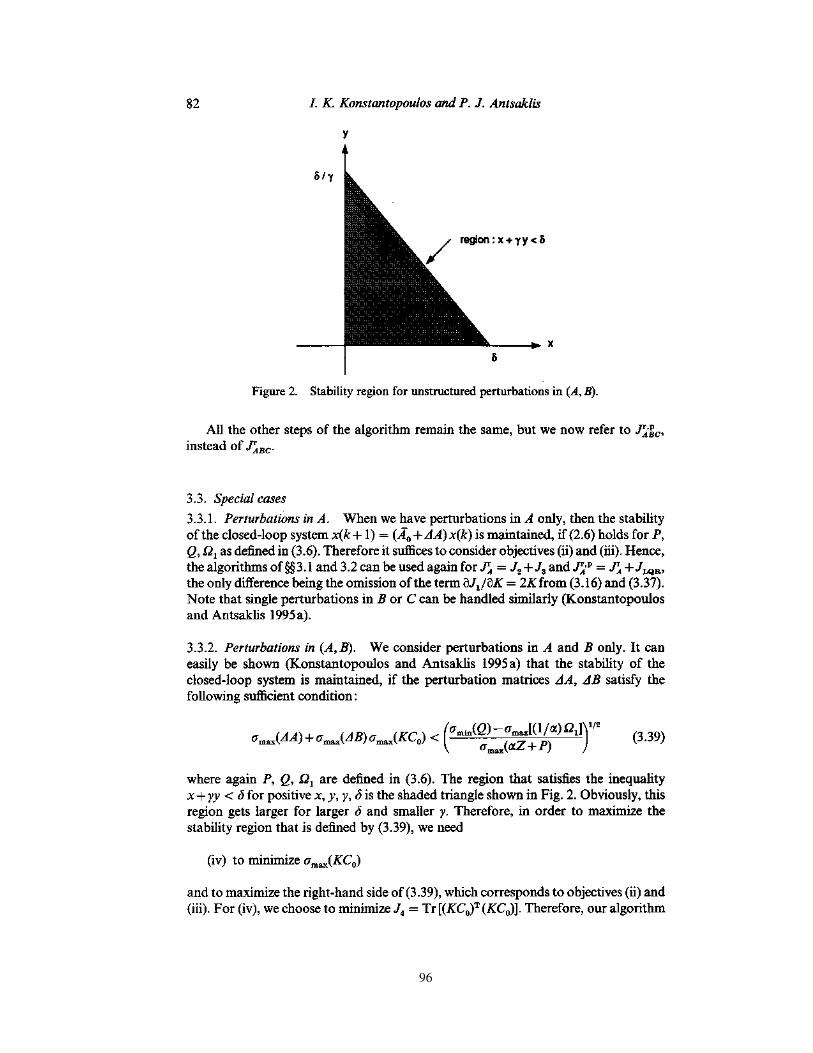
96

97

98

99

100

101

102

103

104
105