estratégias evolutivas aplicadas à resolução de otimização ... · cada elemento gerado pelo...
TRANSCRIPT
Estratégias Evolutivas Aplicadas à Resolução de Otimização Multimodal
M. L. [email protected]
O. R. [email protected]
Grupo de Sistemas de Energia ElétricaDepartamento de Engenharia de Eletricidade
Universidade Federal do MaranhãoSão Luís - MA - 65085-580
Resumo:
Neste artigo apresenta-se um estudo comparativo de desem-penho de estratégias evolutivas para resolução de problemasmultimodais complexos, similares aos observados em problemasde sistemas de energia elétrica. Dois tipos de mutação sãoconsiderados; a tradicional mutação gaussiana e a mutaçãobasead a na distribuição de Cauchy. São reportados resultadosnuméricos estatísticos com tr ês fun ções amplamente divulgadasna lit eratura.
Abstract:
This article presents a compa rative study of evolut ion st rate-gies for solving complex multimodal fun ctions, similar to prob-lem types found in power system applica tions. Two mutationtype s have been considere d: the traditional gaussian mutationand cauchy mutation . Numerical results with three widely usedfunctions are reported.
1 Introdução
Durante as três últimas déc adas, tem ocorrido um cres-cente interesse em algoritmos baseados em evolução para re-solver diferentes tipos de problemas em uma ampla variedadede domínios [1][2][3] . .Tais algoritmos são chamados do termogenérico de "Evolução Simulada", onde a maioria das imple-mentações encontra-se dividida em três grandes ramos:
- Algoritmos Gen éticos (AG 's) ;
- Es tratégias Evolutivas (EE's) ;
- Programação' Evolucionária (PE) .
Em cada um desses métodos, uma população de indivíduos éinicializada e evolui para sucessivas regiões melhores no espaçode buscai através de um processo estocástico de seleção, mutaçãoe , se apropriado, recombinação (cruzamento) . Os métodosdiferem com relação à representação específica, operações demutação e processos de seleção.Enquanto os 'algoritmos genéticos enfatizam os oper-
adores cromossômicos baseados na observação dos mecanismosgenéticos, isto é, cruzamento e mutação, as Estratégias deEvolução e Programação Evolucionãria enfatizam a adaptaçãoe diversidade do comportamento de pais para descendentes emsucessivas gerações.
507
Como tal, estes últimos têm sido descritos como Algorit-mos Evolucionários. O paradigma de Estratégias de Evoluçãoé muito similar ao de Programação Evolucionária. Ambosmétodos operam com uma população de soluções, sujeitandoessas soluções a alterações através de mutações randômicas ecompetição entre soluções existentes com relação a uma funçãoobjetivo externa. A diferença mais notável entre EE e PE dizrespeito à. utili zação da recombinação nesta segunda.Em EE , a abordagem clássica utiliza uma mutação Gaus-
siana (MG). Porém, nas EE e na Evolução Simulada em geral,as aplicações práticas encontram um grande obstáculo que é otempo de proc essamento. Logo, inicia tivas dirigidas a diminuiro tempo gasto para resolver problemas práticos são desejáveis eobjetivo de muita pesquisa. Uma tentativa de introduzir gan-hos de velocidade foi proposta 'em [7] através da utili zação demutações bas eadas na distribuição de Cauchy. Devido às car-acterísticas desta distribuição , esp era-se mutações bem maioresque a tradicional mutação gau ssiana, permitindo, em tese, en-contrar melhores soluções mais rapidamente.Neste trabalho é realizado um estudo comparativo entre EE's
com a forma tradicional de mutação e EE's com uma nova formaproposta, utilizando para tal operador a distribuição de Cauchy(MO). Para validar o desempenho desta mutação foram real-izados testes comparativos com algumas funções multimodaisamplamente difundidas na literatura. O estudo foi reali zado s0-
bre o modelo (p,>') [4], que tem recebido relativamente poucaatenção para aplicações práticas, porém que aparentam inter-essantes características quando utilizada com problemas com-plexos .O artigo está organizado como segue: Primeiro, são revisadas
as est ratégias evolutivas clássicas, bem como um algoritmogenérico EE. Depois, é apresentada a distribuição de Cauchy.Em seguida, é apresentado o algoritmo EE modificado com ainclusão da nova mutação. Finalmente, são apresentados os re-sultados de testes comparativos e uma discussão do desempenhoobtido. ' ,
2 Estratégias Evolutivas (EE's)As EE's foram desenvolvidas inicialmente na Alemanha,' nadécada de 60, focalizando a resolução de problemas contínuos deotimização param étricajê], sendo estendidas recentemente paratratamento de problemas discretos. Nas EE's, um indivíduo érepresentado por um par de vetores reais da forma 11 = (x,0') ,onde x representa o ponto de busca no espaço e O' o vetor dedesvio padrão associado. Nas versões atualmente utilizadas, a

descendência é obtida submetendo-se os indivíduos da geraçãoa dois operadores: cruzamento e mutação. Observa-se que oparâmetro (1 - que determina a mutação de x - também está su-jeito ao processo de evolução. Esta é uma característica funda-mental das EE's, que permite o auto-ajuste de seus parâmetros.Assumindo algumas hipóteses, é possível provar que as EE's con-vergem ao ótimo global com probabilidade 1, considerando umtempo de busca suficientemente longo .Uma primeira versão de EE's focaliza um processo de busca
no esquema 1 genitor - 1 descendente. Isto foi denominado(1+1) - EE, onde um único filho é criado a partir de um únicogenitor e ambos são confrontados numa competição por sobre-vivência, onde a seleção elimina a solução mais pobre. Um as-pecto negativo observado' é a convergência lenta, além da buscaponto a ponto ser susceptível a estagnar em mínimos locais.Outras versões foram desenvolvidas com o objetivo de re-
solver tais problemas. Estas estratégias são denomidadas multi-indivíduos, onde o tamanho da população é maior que L
As EE's multi-membros atualmente foram aperfeiçoadas emdois principais tipos: (p.+>") - EE e (p., >..) -EE. Na primeira, p.indivíduos produzem>" descendentes, gerando-se uma populaçãotemporária de (p. + À) indivíduos, de onde são escolhidos p. in-divíduos para a próxima geração. Na (p., >..) - EE, p. indivíduosproduzem >.. descendentes, com p. < >.., sendo que a nova pop-ulação de p. indivíduos é formada por apenas indivíduos sele-cionados do conjunto de >.. descendentes. Assim, o período devida de cada indivíduo é limitado a apenas uma geração. Estetipo de estratégia tem bom desempenho em problemas onde oponto ótimo é função do tempo, ou onde a fun ção é afetadapor ruído [5]. Neste trabalho foi implementada est a última es-tratégia, motivada pelo fato de existirem poucos estudos envol-vendo sua implementação .
3 Algoritmo Genérico para EE'sCom base na síntese teórica que foi exposta na seção anterior,é mostrado abaixo um algoritmo genérico para EE multi-indivíduo. O algoritmo consiste bas icamente no seguinte;
par de vetores (Xi,(1i), Vi E 1, ... , p..2. Avalia-se o valor da fitness de cada indivíduo (x;, (1;),Vi E 1, ..., p. da população. Neste caso a fitness é dadapela própria função objetivo f(xi).
3. "Escolhe-se aleatoriamente, mas de forma ponderada à fit-ness de cada indivíduo, dois elementos da população eefetua-se o cruzamento, que nesse estudo foi do tipo dis-creto, no qual dados os vetores
O vetor gerado pelo cruzamento será dado por
v = (x, (1) = ..., x; ), ...., (1; ))
onde q = 1 ou 2, ou seja, cada componente provém de VI
ou V2.
4. Cada elemento gerado pelo cruzamento do passo anteriorrecebe uma mutação, gerando um indivíduo v' = (x', (11),até que a quantidade>" de descendentes seja satisfeita. Estamutação é dada por;
(1;j =u{exp(r'N(O,l)+rNj(O,l)) (2)
onde i = 1, ... ,>" e j = 1, ...,n. N(O,l) representa umnúmero gaussiano com média zero e variãncia 1, que deveser o mesmo para todas as posições do vetor. Nj(O, l )também representa um número gaussiano, entretanto estevalor deve ser diferente para valor de j. Os fatores r e r 'são sugeridos por Back como r = ( -1 e r' = (.J2ii) -1 ,
respectivamente, onde n representa a ordem do problema[4] [5] [6].
No algoritmo descrito acima, os parâmetros (1 também partici-pam do processo evolutivo da mesma forma que as variáveis orig-inais do problema. Este processo é referido como auto-adaptaçãode parãmetros [6].
5. Avalia-se a fitness de cada descendente (x:' (1D , 'Vi E 1, ... , >...6. Os p. melhores indivíduos da população de descendentessão selecionados para formarem a nova população,P(t+1).Volta-se para o passo 3, até que o critério de parada sejasatisfeito.
t:=O;inicializa P(t);avalia P(t);enquanto (critério de parada não satisfeito)P '(t):= recombinação [P(t))P"(t) :=mutação [P'(t)]avalia P" (t)se (p., >") -EE então
P(t+l):=seleção [P"(t));senão P(t+l):=seleção [P"(t) U P(t));
t:=t+lfim enquanto 4 Distribuição de Cauchy
Neste algoritmo, P(t) refere-se à população de p, indivíduos nageração t. Urna população de descendente P"(t) de tamanho>" égerada através de operadores de variação, no caso recombinaçãoe mu tação (porém outros operadores, tais corno inversão sãopossíveis). Os descendentes são então avaliados e selecionadoscalculando-se os valores das suas respectivas fitness e levando oprocesso para melhores soluções.Cada ponto nas EE's é um vetor a: E Rn , e o valor da fit-
ness do indivíduo é o próprio valor da função aplicada nesteponto. Uma análise mais refinada permite explicar o algoritmoda maneira abaixo:
1. Gera-se a população inicial de p. individuos P(t) =X1(t), ..., x ,,(t ). Cada indivíduo vié representado por um
S08
A função densidade de probabilidade de Cauchy unidimen-sional centrada na origem é definida por:
(3)
onde t > O é um parâmetro escalar [10]. A correspondentefunção distribuição é dada por
1 1 xFt(x) = - + -arctan- (4)2 11"" tDessa forma pode-se verificar que a variação da distribuição
de Cauchy é infinita. Isso permite, em tese, uma busca globalde maior eficiência, podendo ser mais rápida e garantir melhoresresultados.

7 Resultados de testes
• Para cada indivíduo da população, associou-se uma proba-bilidade de cruzamento dada por:
A seguir, o desempenho comparativo das (/L, À)-EE usandomutação Gaussiana e de Cauchy, respectivamente, é ilustradoutilizando algumas funções referenciadas na literatura. Aprimeira função utilizada é chamada de Função Generalizadade Rosenbrock e é dada pela expressão:
(7)
. (6)
i=l
0-1
h =I:[100(Xi+1 - + (X i - 1)2]
. f(x;)P; =1 - 2:]'=1 f(xj)
Isso faz com que a probabilidade de um indivíduo cruzar-seseja diretamente proporcional à sua fitness, em relação aoconjunto;
• Gerou-se um número aleatório N(O,I);• Se P; > N(O,I), o elemento poderá se reproduzir. Casocontrário, será escolhido outro elemento. Assim, o processode escolha torna-se probabilístico, porém indivíduos commelhores fitness tem maior chance de reproduzirem-se;
Nesse ponto, uma população intermediária de Àdescendentesoriundos apenas do simples cruzamento estava formada.MutaçãoAqui, cada indivíduo da população intermediária que foi ger-
ada pela aplicação do recombinação, sofreu uma mutação de-scrita pelas equações (1) e (2) para MG e (2) e (5) para MC .Os valores r e ri foram ajustados conforme à seção 3.
SeleçãoSelecionou-se os m melhores . indivíduos da população tem-
porária de tamanho 1, visto qu e a EE usada foi (tL, .À). Estapopulação foi novamente submetida aos mesmos processos (àexcessão da inicialização, é claro) até que o critério de paradafosse satisfeito.Critério de ParadaDevido a este trabalho ter como objetivo a análise do desem-
penho dos algoritmos em termos de evolução, o critério adotadofoi simplesmente o número de gerações fixado. Convém ressaltarque ao se utilizar a (/L, À)-EE, a melhor solução deve sempre serguardada, pois o processo é generacional, ou seja, não preservaindivíduos da geração anterior.
Ela é uma função unimodal, portanto, bem comportada eque não coloca à prova as metodologias evolutivas. Mais ainda,métodos de otimização convencionais são, com certeza, muitomais eficientes do que as EEs nesse caso. Porém, é importanteilustrar, ainda para esta função, o desempenho das EEs . Asoutras duas funções são multimodais e com vários mínimos lo-cais. Estas funções foram selecionadas devido a sua semelhançacom os tipos de problemas encontrados em sistemas de energiaelétrica [11]. As funções utilizadas são:
(5)
Fogel e Back mostraram que MG com auto-adaptação temdesempenho melhor que sem auto-adaptação [4]. Portanto, noestudos e simulações realizadas neste trabalho e reportadas aqui,foi utilizada esta última opção.Abaixo, mostra-se a forma geral de como foram feitos os
estudos, visto que a mudança entre as propostas de soluçãoconcentram-se apenas no que diz respeito à mutação. impor-tante observar que tal análise permite também mostrar o efeitoda recombinação na diferença entre EE-MG e EE-MC.A forma detalhada de como foi implementado o algoritmo é
descrita como segue:Inicialização da PopulaçãoGerou-se a população inicial de m = 20 indivíduos. A ini-
cialização foi feita de forma aleatória, satisfazendo às restriçõesimpostas pelos problemas.AvaliaçãoA cada indivíduo da população, associou-se um valor de fit-
ness, representada pela própria aplicação da função no pontoque representa esse indivíduo. Portanto, cada indivíduo foi rep-resentado, a nível de concorrência, por sua respectiva fitness.RecombinaçãoPara realizar a recombinação, fez-se uso do seguinte procedi-
mento:
"Ix E S: f(xmin) f(x)
Um problema de otimização pode ser formalizado como um par(S,I), onde S ç RO é um subconjunto de RO e f : S --+ Ré o valor de tal função aplicada nestes n pontos. O problemaconsiste em encontrar um ponto Xmio tal que
6 Implementação
onde Ój é um número randômico de Cauchy com parâmetroescalar t = 1, e é gerado para cada valor de j.
As características da distribuição de Cauchy descritas no itemanterior se tornam interessantes para aplicações de engenharia,onde implementações práticas devem fornecer soluções em tem-pos permissíveis. A distribuição de Cauchy, por ser uma funçãomais expandida que a normal, permite que sejam produzidasmaiores mutações, gerando, dessa forma, indivíduos mais difer-entes. Isto pode significar uma melhor busca numa área maiordo espaço de soluções, e portanto há chance de encontrarmosmelhores soluções. Alguns autores têm sugerido a inclusão demutação de Cauchy no lugar de Gaussiana [7].A estratégia evolutiva com mutação de Cauchy (MC) segue
o mesmo algoritmo da seção anterior, com a diferença que aequação (1» é substituída por:
5 EE's com mutação de Cauchy(Me)
Parâmetros UtilizadosO tamanho da população utilizada foi /L =20, enquanto que a
população de descendentes foi .À=100. Os testes foram realiza-dos executando 10 simulações para um total de 1000 gerações,
• Foram escolhidos, de forma aleatória e proporcional às suasfitness , dois indivíduos da população;
• Utilizou-se a forma mais simples de recombinação, na qualo elemento gerado leva metade do material genético de cadagenitor;
• O processo foi repetido até que o número de descendentes,no caso .À= 100, foi atingido;
Para a escolha dos indivíduos a serem recombinados, utilizou-se o seguinte procedimento:
h =I: -Xisin (M)i=1
o
/3 = - 10cos(21rXi) + 10]i=1
(8)
(9)
509
Melhor Média1e+08 .,.----,---,...--,-----,----;:
10
100000
Melhor Média
-6000
-4000
-2000
-10000
-12000
Fitness-8000
200 400 600 800 1000Geração
1'----'----1.--...1------'-----'O
100
1000
Fitness.OOOO
1e+06
'fl - MC'1e+07 Ma" :>.
L-----......
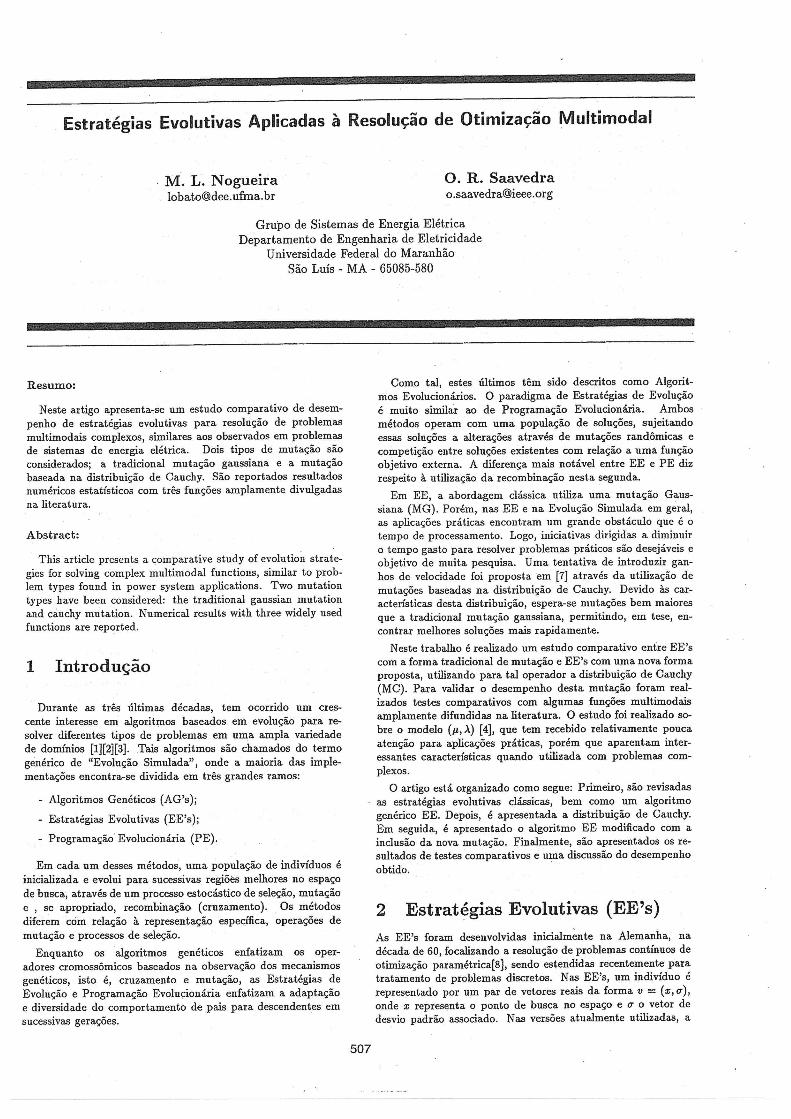
Figura 1: Comparação entre distribuições Cauchy e Gaus-siana - Função 1
-14000 I.-_.l-_-L-_--l-_---L_--'200 400 600 800 1000
Geração
para cada problema. A dimensão n do problema foi assumida30. As restrições paraz nos problemas foram:
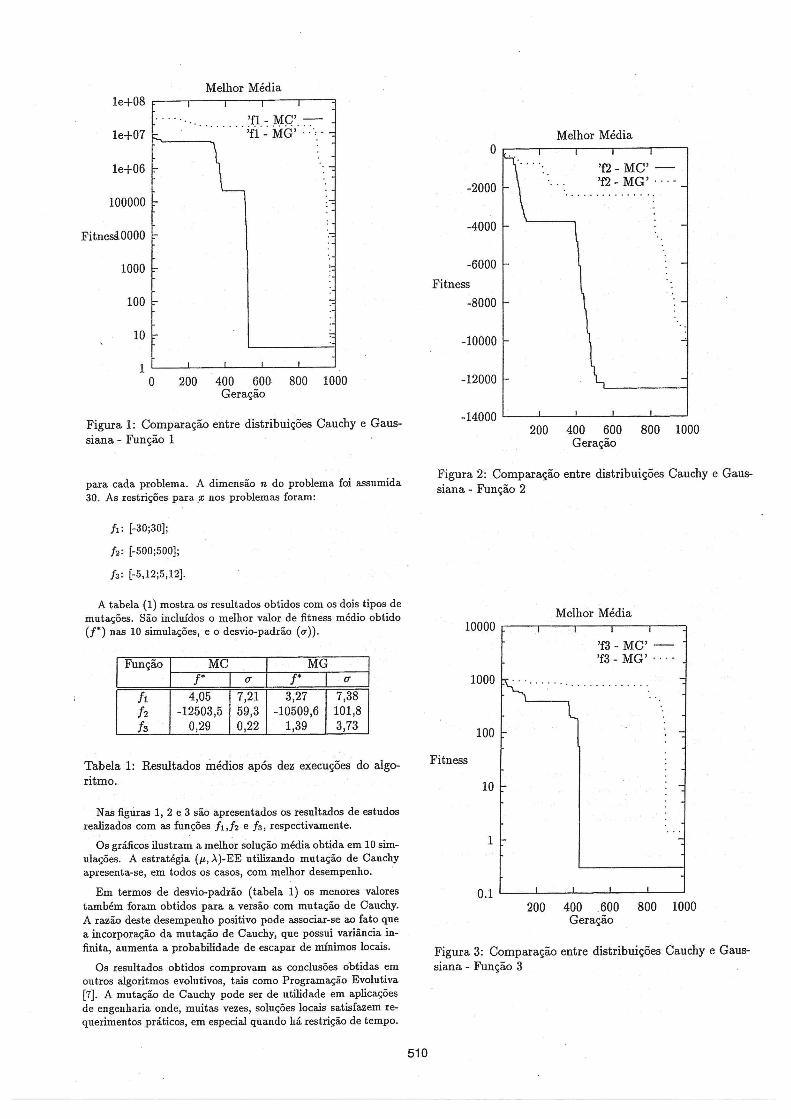
Figura 2: Comparação entre distribuições Cauchy e Gaus-siana - Função 2
[i : [-30;30];
h: [-500;500];la: [-5,12;5,12].
1
-
-
Melhor MédiaI I I
'f3 - MC''f3 - MG' . . ..
K··· ··········· ··· ·· ··..
100
1000
10000 r--,.---..,--.,---,.---,
MGr I o-
f* MC[ijI-----,=--_,---
fI 4,05 7,21 3,27 7,38h -12503,5 59,3 -10509,6 101,8la 0,29 0,22 1,39 3,73
IFunção I
A tabela (1) mostra os resultados obtidos com os dois tipos demutações. São incluídos o melhor valor de fitness médio obtido(t') nas 10 simulações, e o desvio-padrão (0-».
Tabela 1: Resultados médios após dez execuções do algo-ritmo.
Fitness
10 -Nas figuras 1, 2 e 3 são apresentados os resultados de estudos
realizados com as funções /l ,h e h , respectivamente.Os gráficos ilustram a melhor solução média obtida em 10 sim-
ulações. A estratégia (J.L ,A)-EE utilizando mutação de Cauchyapresenta-se, em todos os casos, com melhor desempenho. .
Em termos de desvio-padrão (tabela 1) os menores valorestambém foram obtidos para a versão com mutação de Cauchy.A razão deste desempenho positivo pode associar-se ao fato quea incorporação da mutação de Cauchy, que possui variâneia in-finita, aumenta a probabilidade de escapar de mínimos locais.
Os resultados obtidos comprovam as conclusões obtidas emoutros algoritmos evolutivos, tais corno Programação Evolutiva[7]. A mutação de Cauchy pode ser de utilidade em aplicaçõesde engenharia onde, muitas vezes, soluções locais satisfazem re-querimentos práticos, em especial quando há restrição de tempo.
1
200 400 .600 800 1000Geração
Figura 3: Comparação entre distribuições Cauchy e Gaus-siana - Função 3
510

8 ConclusõesNeste trabalho apr esentou-se a implementação e estudo com-parativo das estratégias evolutivas À)-EE utilizando mutaçãogaussiana e de Cauchy. Apesar deste tipo de estratégia ser dis-ruptiva, isto é, as soluções candidatas são utilizadas em umageração e não são traspassadas à. próxima, elas apresentam in-teressantes propriedades de busca em problemas de alta com-plexidade.A substituição da tradicional mutação gaussiana por mutação
de Cauchy apresenta-se benéfica, superando em todos os testeso desempenho do algoritmo da. primeira. Uma razão para esteganho é que a mutação de Cauchy aumenta a probabilidadedo problema não estagnar em mínimo local. Em palavras maissimples , a probabilidade de mutações maiores permite que umamaior área do espaço de busc a sej a varrida, aumentando comisso as chances de encontrar melhores soluções .Este trabalho é parte de um projeto maior, titulado Evolução _
Simulada Aplicada a Sistemas de Potência. Por essa razão,utilizaram-se funções de validação com formas cosenoidais e nãolinearidades parecidas às encontradas nas formulações de prob-lemas de sistemas de potência.
Bibliografia .[1] Fogel, D·.B., "A Comparison of Evolutionary Programmingand Genetic Algorithms on Seleeted Constrained Optimiza-tion Problems", Simulation, pp 397-404, Junho 1995.
[2] Fogel, D.B., "Evolutionary Optirnization" , ConferenceRecord of the XXVI ASILOMAR Confercnce on Signal , Sys-tem and Computers , IEEE Computo Soe. Press, pp 409-414,Pacific Grove, CA , USA, 26-28 oet. 1992.
[3] Fogel, D.B ., "Na Introduction to Simulated EvolutionaryOptirnization" , IEEE Transaetions on Neural Networks, vol5 No 1, pp 3-14, Janeiro 1994.
[4] Bãck, T., Schwefel, H.P., "An Overview of Evolutionary Al-gorithms for Parameter Optimization" , Evolutionary Com-putation, pp . 1-27, 1993.
[5] Bãck, T ., Hammel, U., Schwefel, H. P. "Evolutionary Com-putation: An Overview", in Proc. '3rd IEEE Conf . on Evolu-tionary Computation, Piscataway, NJ: IEEE Press, pp . 20-29, 1996. .
[6] Bãck T., Rudolph, G. and Schwefel, H.P. "Evolutionary Pro-gramrning and Evolution Strategies: Sirnilarities and Differ-ences" , Proc. of European Conf. on Alife, Granada, Spain,1995.
[7] Xin Yao e Yong Li, "Fast Evolutionary Programming" ,inProc. 5th Annu . Conf. Evolutionary Programming, L. J . Fo-gel, P. J . Angeline, e T Back Ed., Cambridge, MA: MITPress, 1996, pp. 451-460.
[8] Schwefel, H.P. e M"anner, R., Eds., "Parállel Problem Solv-ing from Nature", Proc. 1st Workshop PPSNI, Berlin , Ger-many, Springer, 1991, voI. 496 of Lecture Notes in ComputerScience.
[9] De jong, K.A e Sarma, J ., "Generat ion Gaps Revisited" ,in Foundations of Genetic Algorithms 2, San Mateo, CA,Morgan Kauffman, 1993, pp. 19-28. .
[10] Feller, W., "An Introduetion to Probability Theory and itsAplications" , VoI. 2, John Wiley & Sons, Inc ., 2a edição ,1971.
[11] Gomes, J . R. , Saavedra O. R., "Optimal ReaetivePower Flow Using na Extended Evolu tion Strategy", Aceitona IMACS/IEEE CSCC99 International Mult iconference ,Athenas, Junho, 1999.
511
[12] Yao, ' Xin e Li, Yong, "Fast Evolution Strategies", inProc 6th Annu . Conf. Evolutionary Programming, R. G.Reynolds, J . R. McDonneli,. P. J . Angeline Ed, Berlim, Ger-many, Springer, 1997, pp 151-161.
AGRADECIMENTOS
Os autores desejam expressar seus agradecimentos ao Con-selho Nacional de Desenvolvimento Tecnológico, CNPq, à. Su-perintendência de Desenvolvimento da Amazônia, SUDAM eà. Fundação de Amparo à. Pesquisa do Estado do Maranhão,FAPEMA, que apoiaram o desenvolvimento deste tra.balho.
BIOGRAFIASMarcelo Luis Lobato Nogueira é aluno do Curso de Ciência daComputação e bolsista de iniciação científica FAPEMA, Uni-versidade Federal do Maranhão - UFMA, São Luís, MA , Brasil .
Osvaldo R. Saauedra Mende» (DSc.1993j MSc. 1988; EE, 1981),é professor junto ao Departamento de Engenharia de Eletrici-dade da Universidade Federal do Maranhão - UFMA, São Luís,MA, Brasil.