equações de movimento, forças e momentos.torres/wp-content/uploads/2018/02/aula3.pdf ·...
TRANSCRIPT
Introdução ao Controle Automático deAeronaves
Equações de Movimento, Forças eMomentos.
Leonardo Torres
Escola de Engenharia – Universidade Federal de Minas Gerais/EEUFMG
Dep. Eng. Eletronica – EEUFMG – p. 1
Equações de Movimento
O comportamento temporal do veículo, considerando-ocomo um corpo rígido, pode ser descrito por 2 conjuntosde equações:
Equacoes Cinematicas: relações entre posições evelocidades de translação; e relações entreposicionamento espacial (atitude) e velocidadesangulares.
Equacoes Dinamicas: relações entre acelerações eforças resultantes sobre o veículo; e relações entreacelerações angulares e torques resultantes sobre aaeronave. ⇒ Leis de Newton.
Dep. Eng. Eletronica – EEUFMG – p. 2
Revisão: Transformações de
Coordenadas
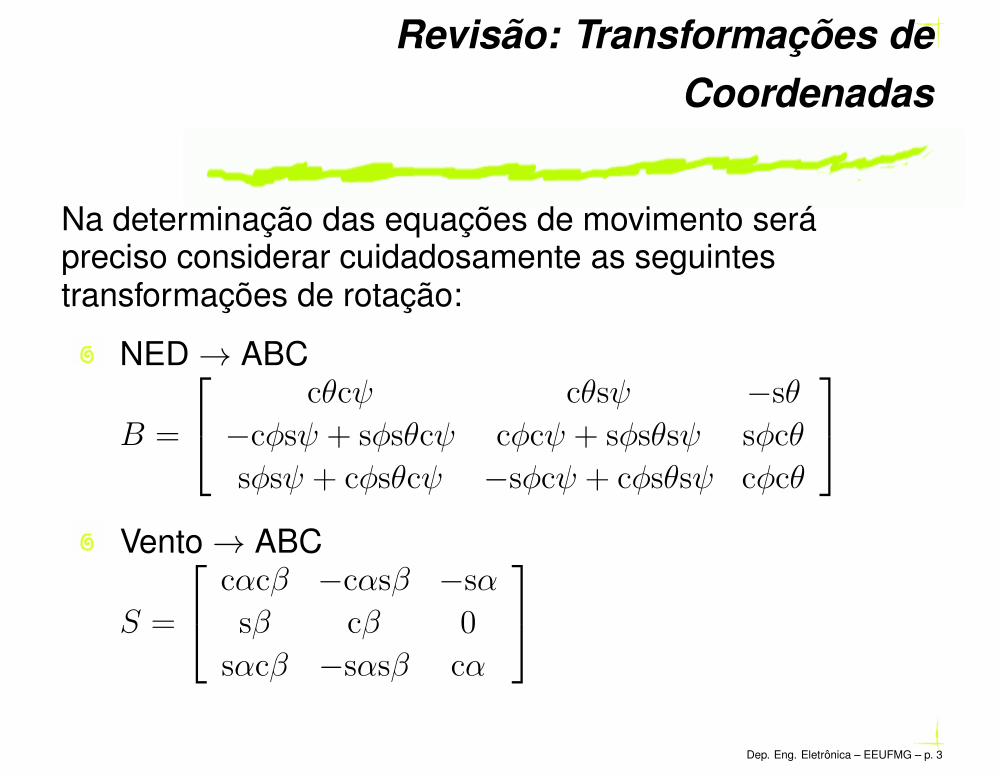
Na determinação das equações de movimento serápreciso considerar cuidadosamente as seguintestransformações de rotação:
NED → ABC
B =
cθcψ cθsψ −sθ
−cφsψ + sφsθcψ cφcψ + sφsθsψ sφcθ
sφsψ + cφsθcψ −sφcψ + cφsθsψ cφcθ
Vento → ABC
S =
cαcβ −cαsβ −sα
sβ cβ 0
sαcβ −sαsβ cα
Dep. Eng. Eletronica – EEUFMG – p. 3
Revisão: Matrizes de Inércia
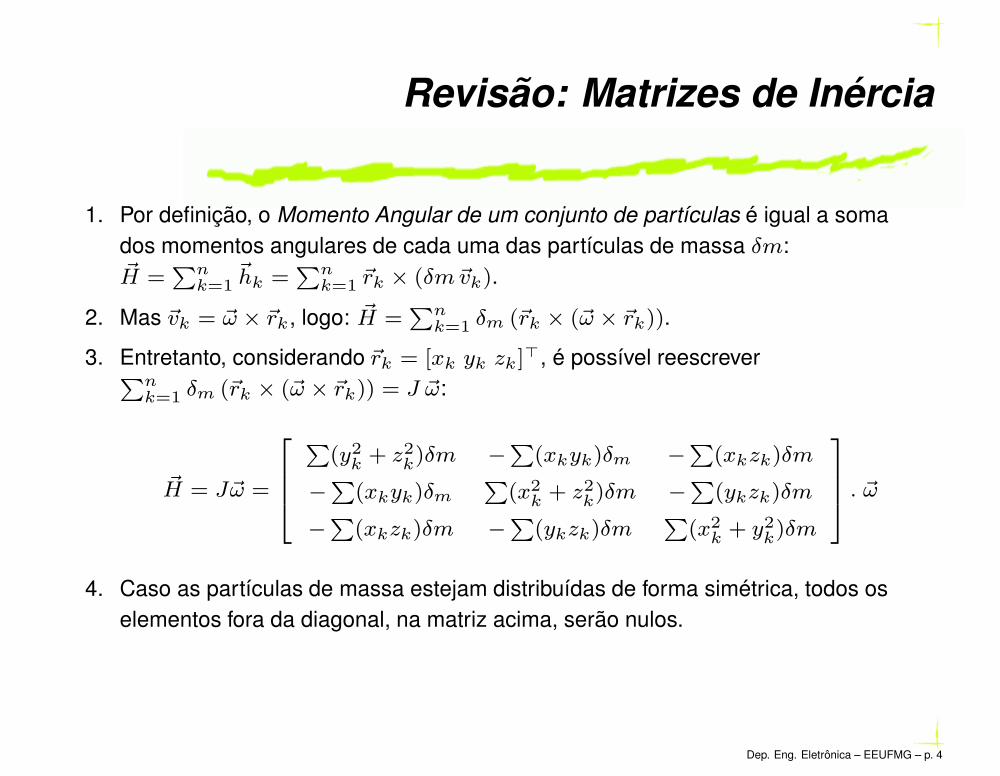
1. Por definição, o Momento Angular de um conjunto de partículas é igual a somados momentos angulares de cada uma das partículas de massa δm:~H =
∑nk=1
~hk =∑n
k=1~rk × (δm~vk).
2. Mas ~vk = ~ω × ~rk, logo: ~H =∑n
k=1δm (~rk × (~ω × ~rk)).
3. Entretanto, considerando ~rk = [xk yk zk]⊤, é possível reescrever
∑nk=1
δm (~rk × (~ω × ~rk)) = J ~ω:
~H = J~ω =
∑
(y2k+ z2
k)δm −
∑
(xkyk)δm −
∑
(xkzk)δm
−
∑
(xkyk)δm∑
(x2
k+ z2
k)δm −
∑
(ykzk)δm
−
∑
(xkzk)δm −
∑
(ykzk)δm∑
(x2
k+ y2
k)δm
. ~ω
4. Caso as partículas de massa estejam distribuídas de forma simétrica, todos oselementos fora da diagonal, na matriz acima, serão nulos.
Dep. Eng. Eletronica – EEUFMG – p. 4
Revisão: Matrizes de Inércia
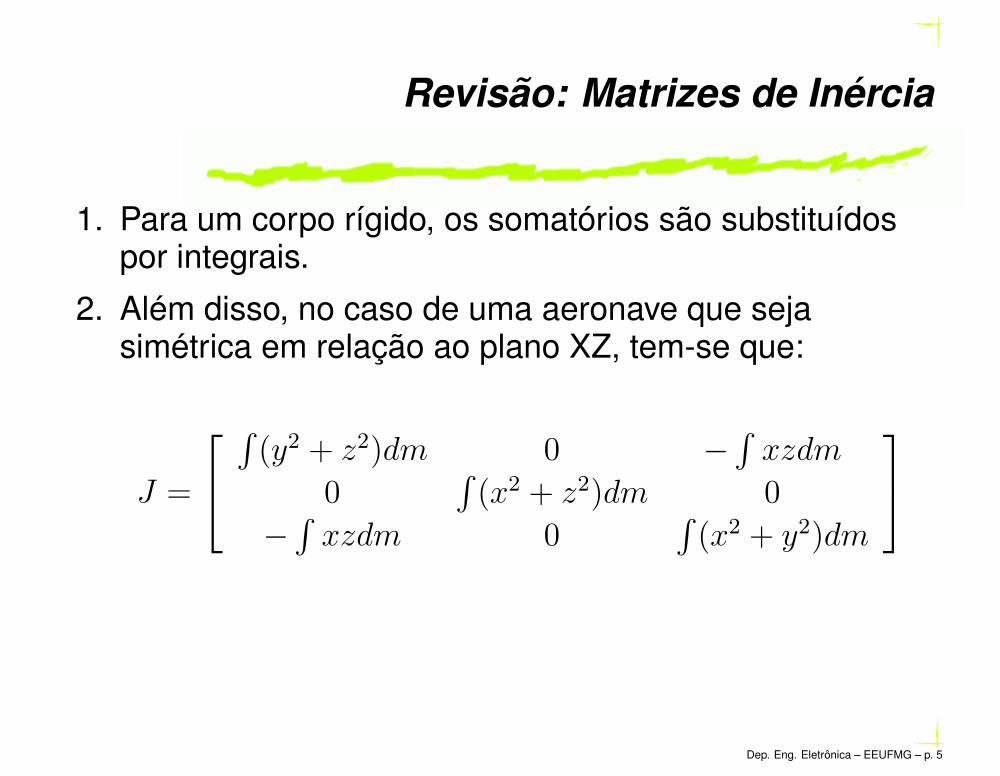
1. Para um corpo rígido, os somatórios são substituídospor integrais.
2. Além disso, no caso de uma aeronave que sejasimétrica em relação ao plano XZ, tem-se que:
J =
∫(y2 + z2)dm 0 −
∫xzdm
0∫(x2 + z2)dm 0
−∫xzdm 0
∫(x2 + y2)dm
Dep. Eng. Eletronica – EEUFMG – p. 5
Revisão: Matrizes de Inércia
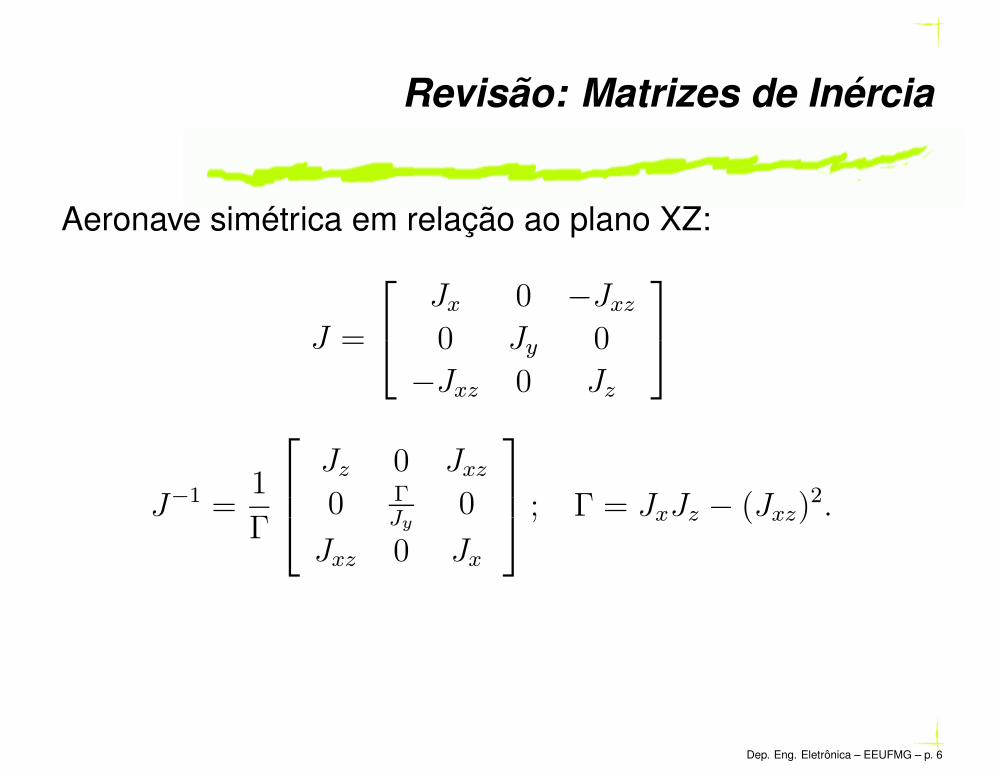
Aeronave simétrica em relação ao plano XZ:
J =
Jx 0 −Jxz0 Jy 0
−Jxz 0 Jz
J−1 =1
Γ
Jz 0 Jxz0 Γ
Jy0
Jxz 0 Jx
; Γ = JxJz − (Jxz)
2.
Dep. Eng. Eletronica – EEUFMG – p. 6
Equações de Movimento – Equações
Cinemáticas
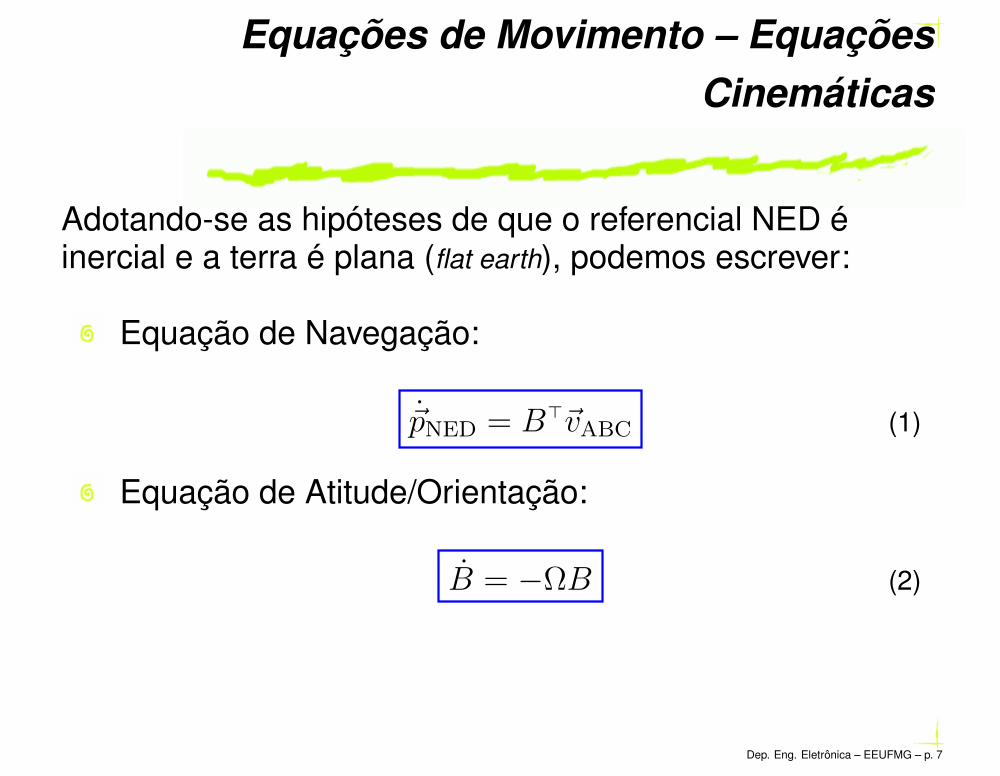
Adotando-se as hipóteses de que o referencial NED éinercial e a terra é plana (flat earth), podemos escrever:
Equação de Navegação:
~pNED = B⊤~vABC (1)
Equação de Atitude/Orientação:
B = −ΩB (2)
Dep. Eng. Eletronica – EEUFMG – p. 7
Equações de Movimento – Equações
Dinâmicas
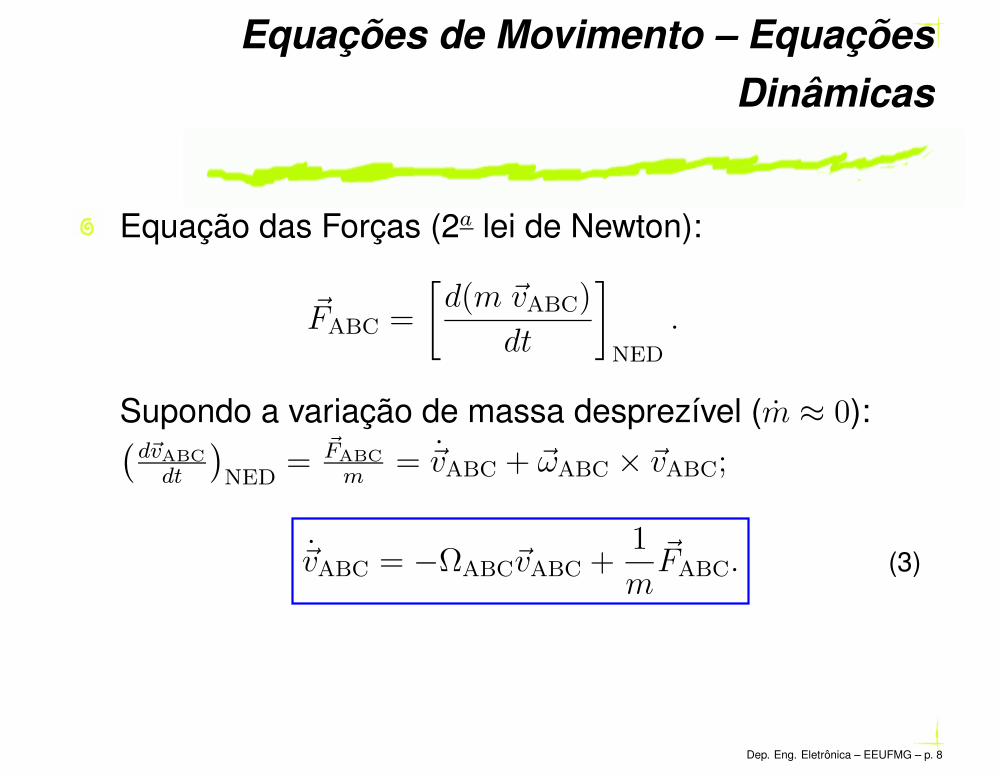
Equação das Forças (2a lei de Newton):
~FABC =
[d(m ~vABC)
dt
]
NED
.
Supondo a variação de massa desprezível (m ≈ 0):(d~vABC
dt
)
NED=
~FABC
m= ~vABC + ~ωABC × ~vABC;
~vABC = −ΩABC~vABC +1
m~FABC. (3)
Dep. Eng. Eletronica – EEUFMG – p. 8
Equações de Movimento – Equações
Dinâmicas
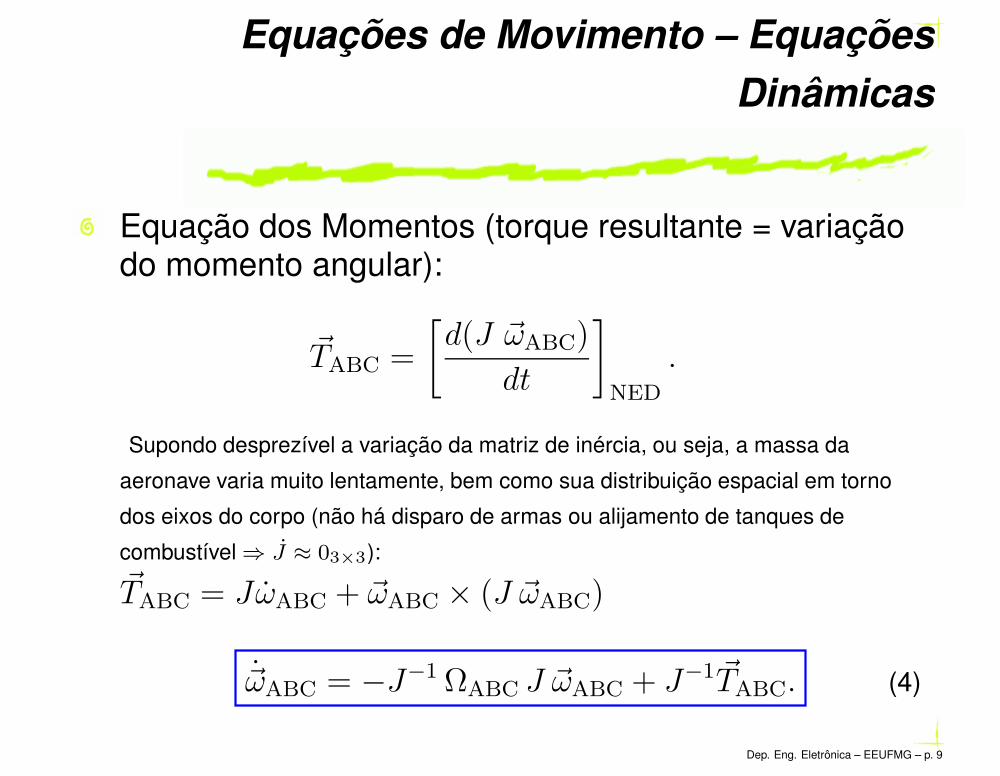
Equação dos Momentos (torque resultante = variaçãodo momento angular):
~TABC =
[d(J ~ωABC)
dt
]
NED
.
Supondo desprezível a variação da matriz de inércia, ou seja, a massa da
aeronave varia muito lentamente, bem como sua distribuição espacial em torno
dos eixos do corpo (não há disparo de armas ou alijamento de tanques de
combustível ⇒ J ≈ 03×3):
~TABC = JωABC + ~ωABC × (J ~ωABC)
~ωABC = −J−1ΩABC J ~ωABC + J−1 ~TABC. (4)
Dep. Eng. Eletronica – EEUFMG – p. 9
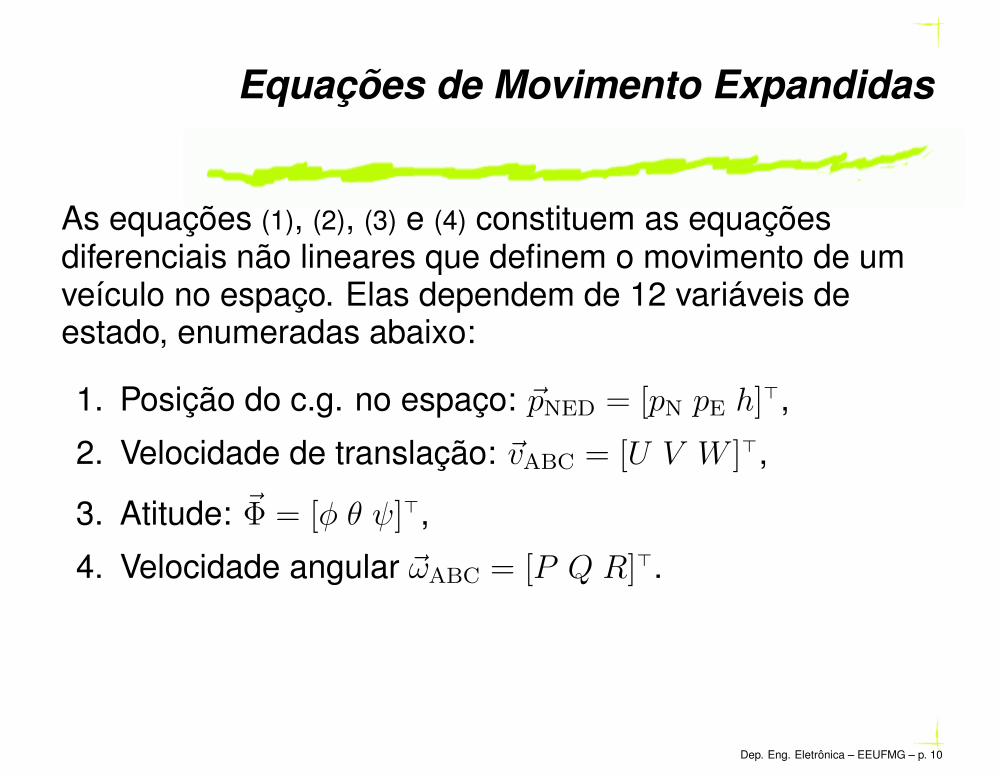
Equações de Movimento Expandidas
As equações (1), (2), (3) e (4) constituem as equaçõesdiferenciais não lineares que definem o movimento de umveículo no espaço. Elas dependem de 12 variáveis deestado, enumeradas abaixo:
1. Posição do c.g. no espaço: ~pNED = [pN pE h]⊤,
2. Velocidade de translação: ~vABC = [U V W ]⊤,
3. Atitude: ~Φ = [φ θ ψ]⊤,
4. Velocidade angular ~ωABC = [P Q R]⊤.
Dep. Eng. Eletronica – EEUFMG – p. 10
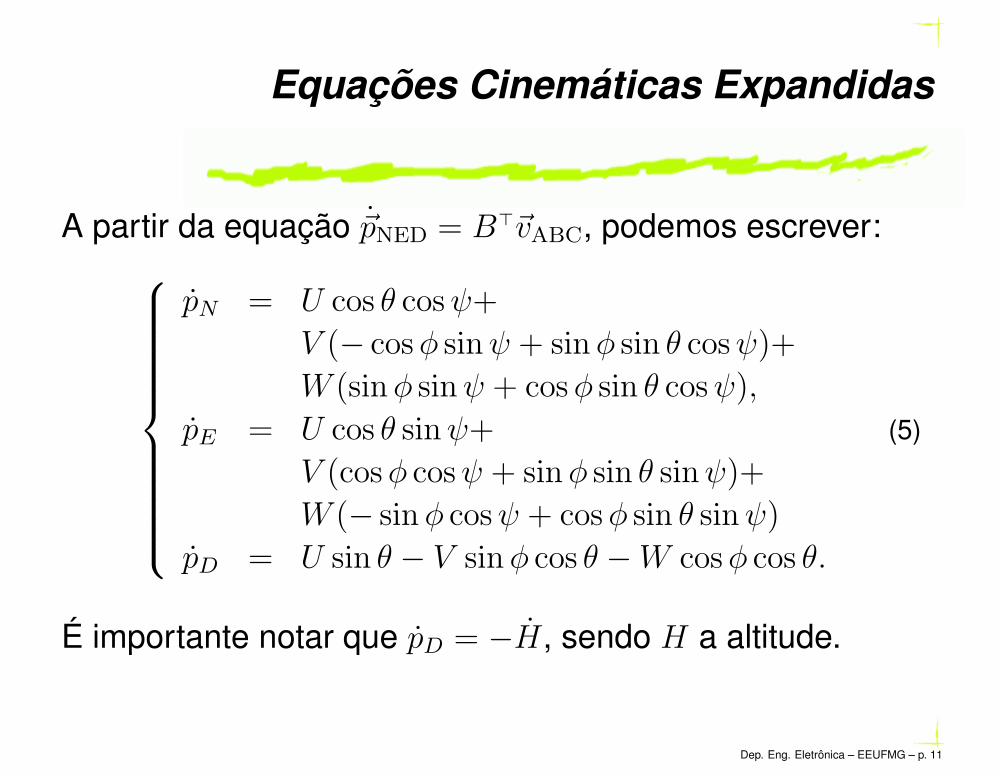
Equações Cinemáticas Expandidas
A partir da equação ~pNED = B⊤~vABC, podemos escrever:
pN = U cos θ cosψ+
V (− cosφ sinψ + sinφ sin θ cosψ)+
W (sinφ sinψ + cosφ sin θ cosψ),
pE = U cos θ sinψ+
V (cosφ cosψ + sinφ sin θ sinψ)+
W (− sinφ cosψ + cosφ sin θ sinψ)
pD = U sin θ − V sinφ cos θ −W cosφ cos θ.
(5)
É importante notar que pD = −H, sendo H a altitude.
Dep. Eng. Eletronica – EEUFMG – p. 11
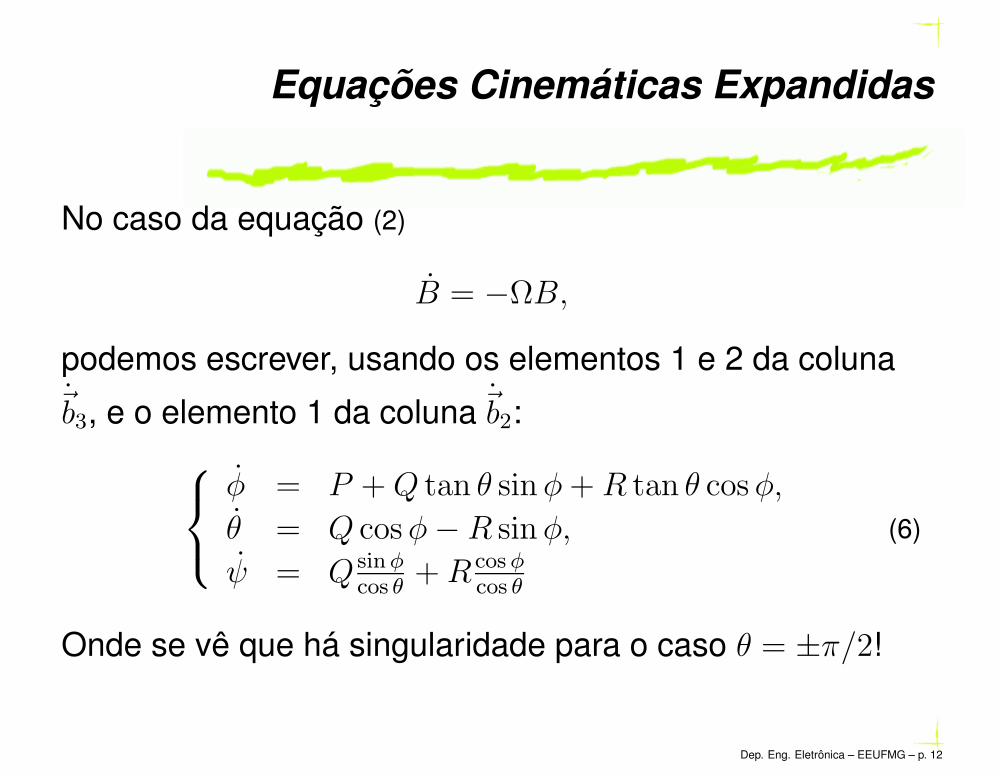
Equações Cinemáticas Expandidas
No caso da equação (2)
B = −ΩB,
podemos escrever, usando os elementos 1 e 2 da coluna~b3, e o elemento 1 da coluna ~b2:
φ = P +Q tan θ sinφ+ R tan θ cosφ,
θ = Q cosφ− R sinφ,
ψ = Q sinφ
cos θ+R cosφ
cos θ
(6)
Onde se vê que há singularidade para o caso θ = ±π/2!
Dep. Eng. Eletronica – EEUFMG – p. 12
Equações Dinâmicas Expandidas
Escrevendo~FABC = [Fx Fy Fz]
⊤,
a equação (3) pode ser expandida como:
U = RV −QW + Fx
m,
V = −RU + PW + Fy
m,
W = QU − PV + Fz
m.
(7)
Dep. Eng. Eletronica – EEUFMG – p. 13
Equações Dinâmicas Expandidas
Escrevendo~TABC = [L M N ]⊤,
a equação (4) pode ser expandida como:
P = (−c1R+ c2P )Q+ c3L+ c4N,
Q = c5PR − c6(P2 − R2)+ c7M,
R = (c8P − c2R)Q+ c4L+ c9N,
(8)
sendo que ck, k = 1, . . . , 9 são coeficientes que dependemdos elementos da matriz de inércia da aeronave.
Dep. Eng. Eletronica – EEUFMG – p. 14
Equações de Movimento
As 12 equações diferenciais mostradas anteriormentepodem ser escritas de forma compacta como:
~x = f(~x, ~u),
sendo que ~x ∈ R12 é o vetor de estados
~x = [pN pE h φ θ ψ U V W P Q R]⊤,
e ~u é o vetor de entradas de controle. Por exemplo:
~u = [δe δa δr δth]⊤.
sendo δe a deflexão do profundor; δa a deflexão dosailerons; δr a deflexão do leme e δth o comando de tração.
Dep. Eng. Eletronica – EEUFMG – p. 15
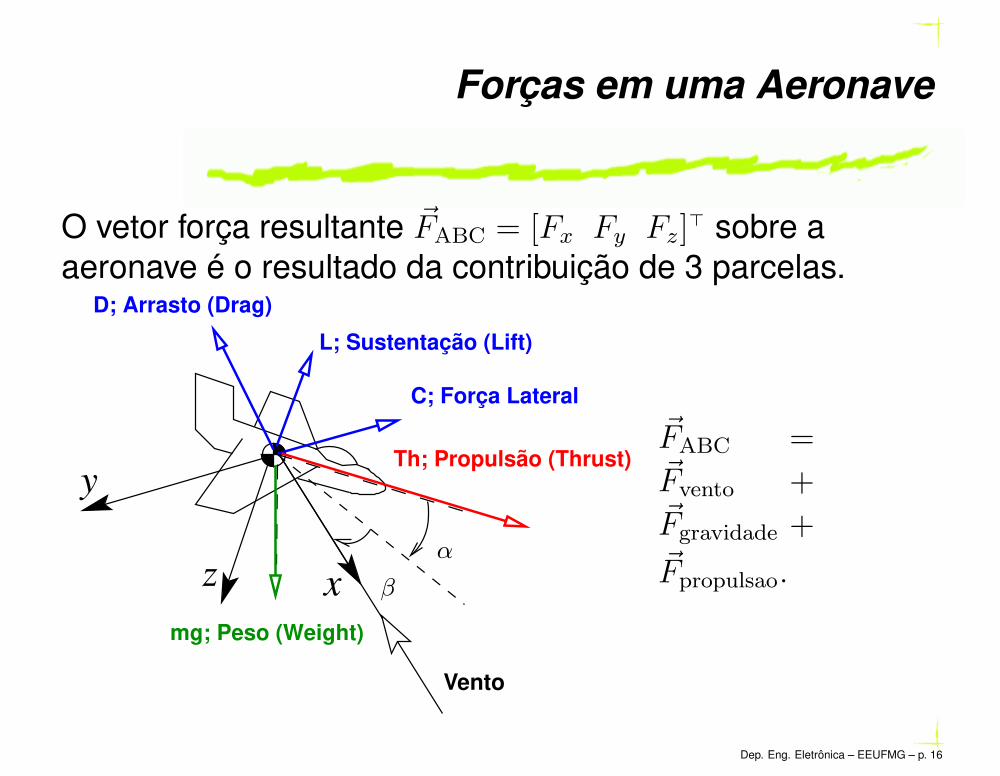
Forças em uma Aeronave
O vetor força resultante ~FABC = [Fx Fy Fz]⊤ sobre a
aeronave é o resultado da contribuição de 3 parcelas.
z
y
x
L; Sustentação (Lift)
D; Arrasto (Drag)
mg; Peso (Weight)
C; Força Lateral
Th; Propulsão (Thrust)
α
β
Vento
~FABC =~Fvento +~Fgravidade +~Fpropulsao.
Dep. Eng. Eletronica – EEUFMG – p. 16
Forças do Vento
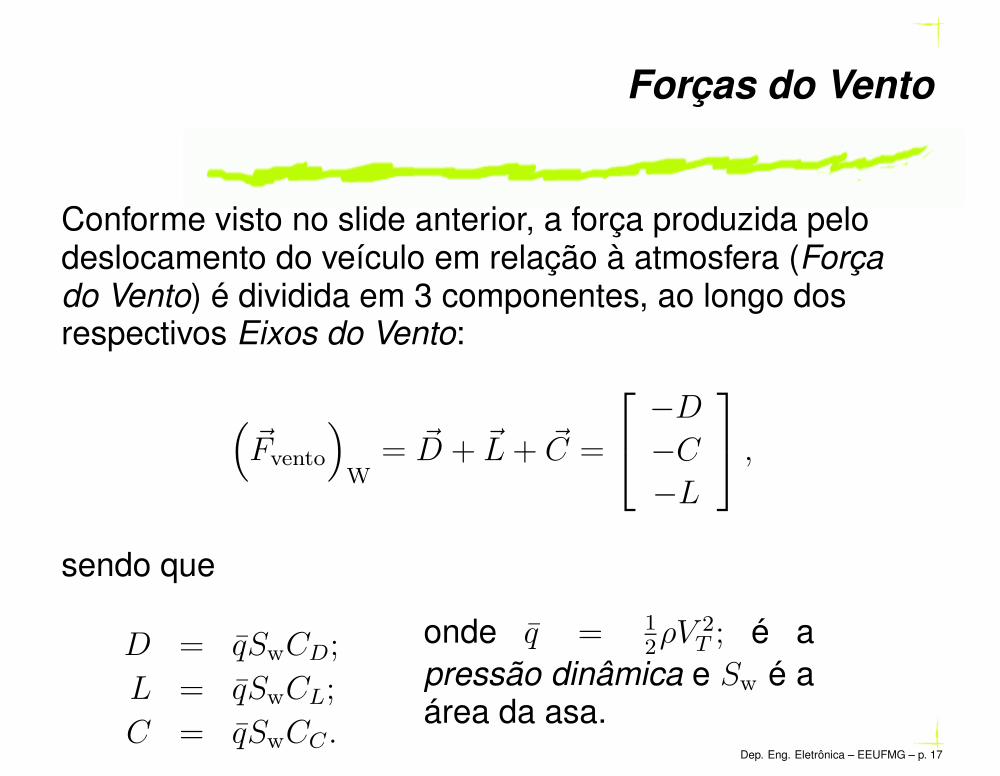
Conforme visto no slide anterior, a força produzida pelodeslocamento do veículo em relação à atmosfera (Forçado Vento) é dividida em 3 componentes, ao longo dosrespectivos Eixos do Vento:
(
~Fvento
)
W= ~D + ~L+ ~C =
−D
−C
−L
,
sendo que
D = qSwCD;
L = qSwCL;
C = qSwCC .
onde q = 12ρV 2
T ; é apressão dinâmica e Sw é aárea da asa.
Dep. Eng. Eletronica – EEUFMG – p. 17
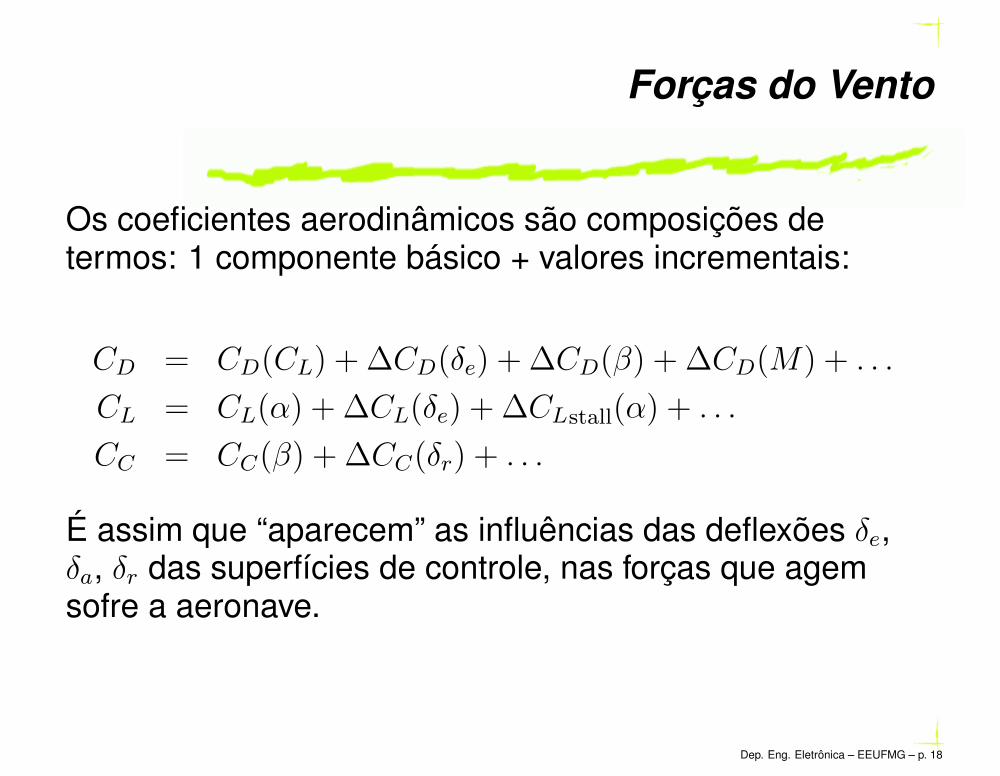
Forças do Vento
Os coeficientes aerodinâmicos são composições determos: 1 componente básico + valores incrementais:
CD = CD(CL) + ∆CD(δe) + ∆CD(β) + ∆CD(M) + . . .
CL = CL(α) + ∆CL(δe) + ∆CLstall(α) + . . .
CC = CC(β) + ∆CC(δr) + . . .
É assim que “aparecem” as influências das deflexões δe,δa, δr das superfícies de controle, nas forças que agemsofre a aeronave.
Dep. Eng. Eletronica – EEUFMG – p. 18
Forças do Vento
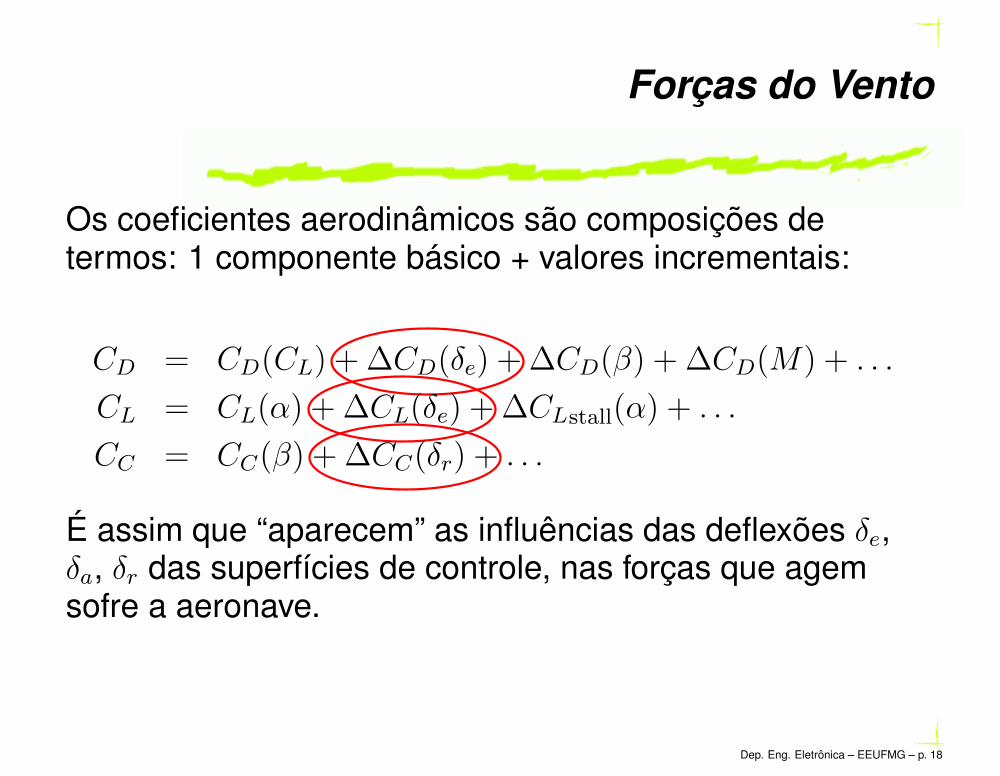
Os coeficientes aerodinâmicos são composições determos: 1 componente básico + valores incrementais:
CD = CD(CL) + ∆CD(δe) + ∆CD(β) + ∆CD(M) + . . .
CL = CL(α) + ∆CL(δe) + ∆CLstall(α) + . . .
CC = CC(β) + ∆CC(δr) + . . .
É assim que “aparecem” as influências das deflexões δe,δa, δr das superfícies de controle, nas forças que agemsofre a aeronave.
Dep. Eng. Eletronica – EEUFMG – p. 18
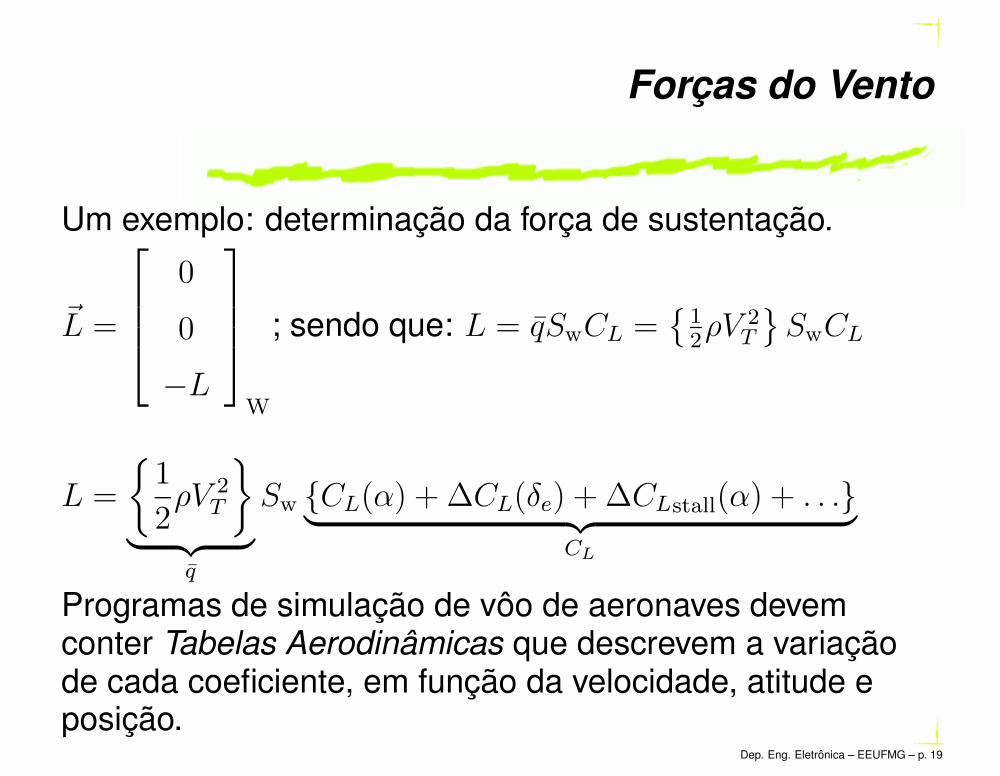
Forças do Vento
Um exemplo: determinação da força de sustentação.
~L =
0
0
−L
W
; sendo que: L = qSwCL =
12ρV 2
T
SwCL
L =
1
2ρV 2
T
︸ ︷︷ ︸
q
Sw CL(α) + ∆CL(δe) + ∆CLstall(α) + . . .︸ ︷︷ ︸
CL
Programas de simulação de vôo de aeronaves devemconter Tabelas Aerodinâmicas que descrevem a variaçãode cada coeficiente, em função da velocidade, atitude eposição.
Dep. Eng. Eletronica – EEUFMG – p. 19
Especificação de Forças no FlightGear
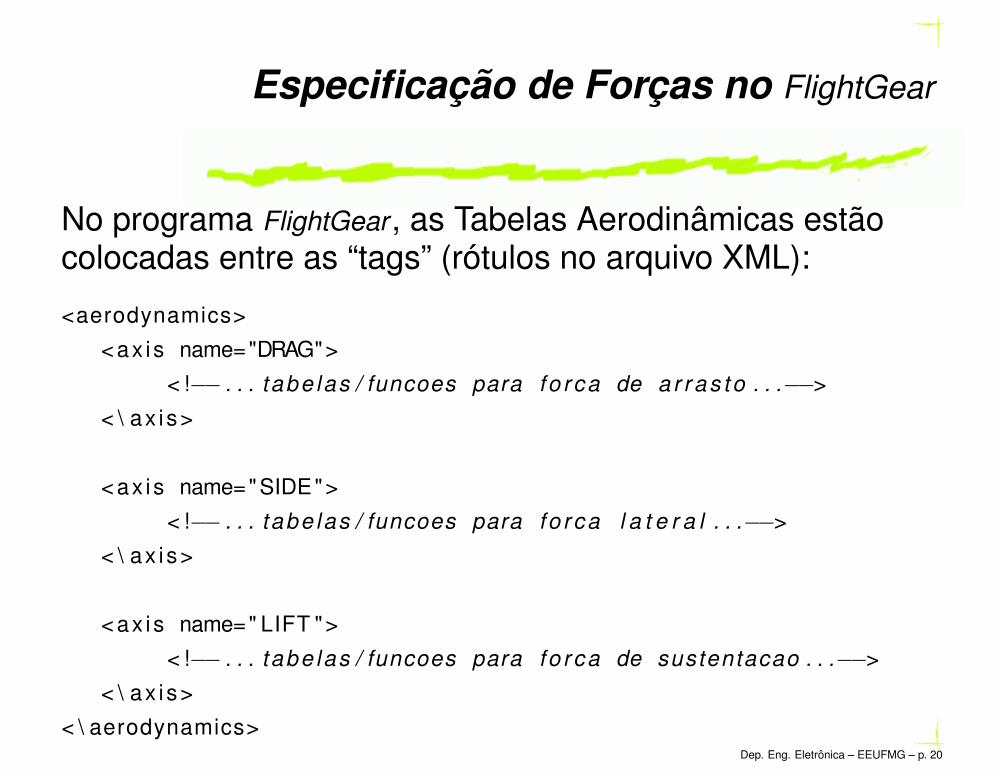
No programa FlightGear , as Tabelas Aerodinâmicas estãocolocadas entre as “tags” (rótulos no arquivo XML):
<aerodynamics>
<ax is name="DRAG">
< !−− . . . tabe las / funcoes para fo rca de a r ra s to . . .−−>
< \ ax is>
<ax is name="SIDE">
< !−− . . . tabe las / funcoes para fo rca l a t e r a l . . .−−>
< \ ax is>
<ax is name=" LIFT ">
< !−− . . . tabe las / funcoes para fo rca de sustentacao . . .−−>
< \ ax is>
< \ aerodynamics>Dep. Eng. Eletronica – EEUFMG – p. 20
Especificação de Forças no FlightGear
Exemplo (força de sustentação para a aeronave F-16).Análise do arquivo XML correspondente à aeronave:
f16.xml
Dep. Eng. Eletronica – EEUFMG – p. 21
Especificação de Forças no FlightGear
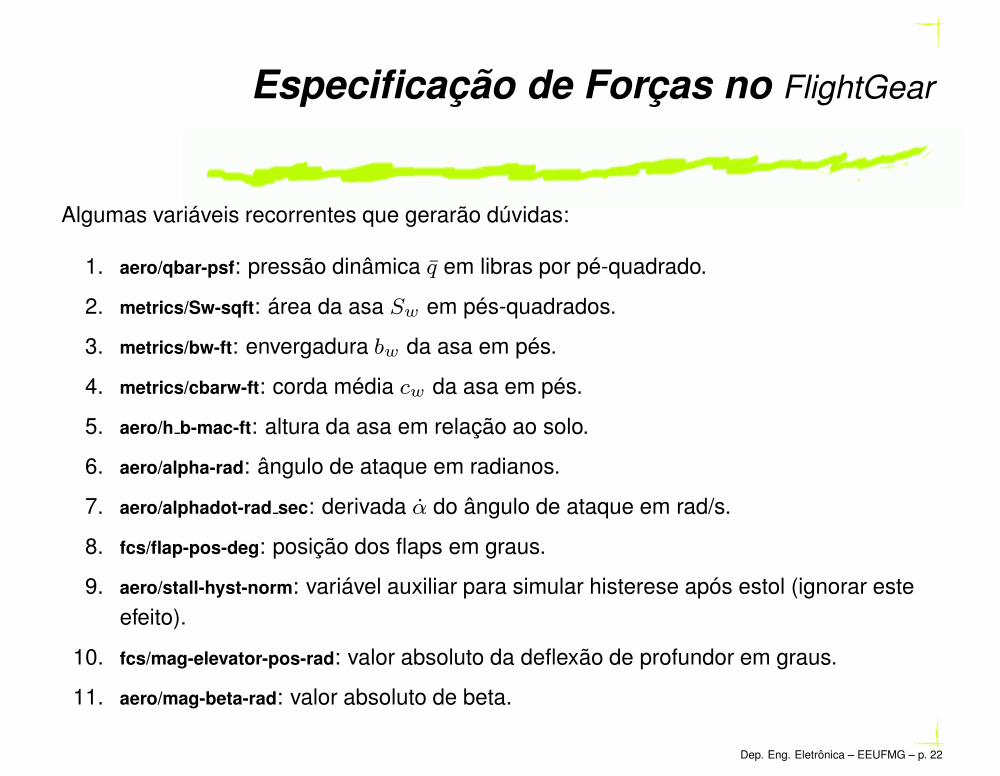
Algumas variáveis recorrentes que gerarão dúvidas:
1. aero/qbar-psf: pressão dinâmica q em libras por pé-quadrado.
2. metrics/Sw-sqft: área da asa Sw em pés-quadrados.
3. metrics/bw-ft: envergadura bw da asa em pés.
4. metrics/cbarw-ft: corda média cw da asa em pés.
5. aero/h b-mac-ft: altura da asa em relação ao solo.
6. aero/alpha-rad: ângulo de ataque em radianos.
7. aero/alphadot-rad sec: derivada α do ângulo de ataque em rad/s.
8. fcs/flap-pos-deg: posição dos flaps em graus.
9. aero/stall-hyst-norm: variável auxiliar para simular histerese após estol (ignorar esteefeito).
10. fcs/mag-elevator-pos-rad: valor absoluto da deflexão de profundor em graus.
11. aero/mag-beta-rad: valor absoluto de beta.
Dep. Eng. Eletronica – EEUFMG – p. 22
Especificação de Forças no FlightGear
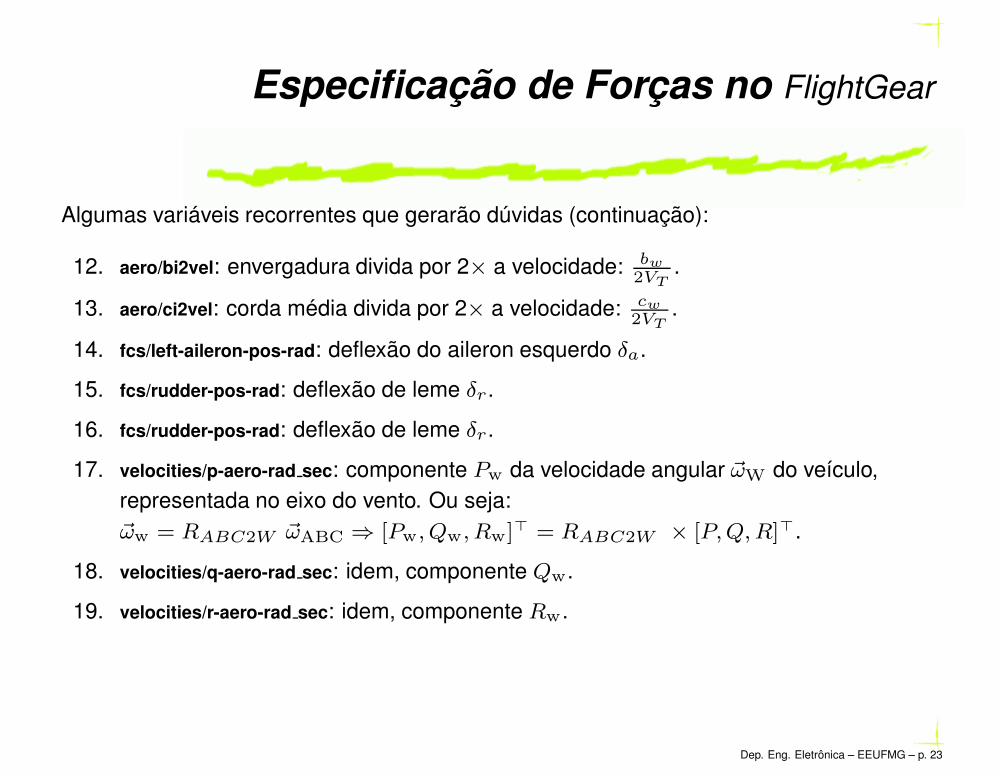
Algumas variáveis recorrentes que gerarão dúvidas (continuação):
12. aero/bi2vel: envergadura divida por 2× a velocidade: bw2VT
.
13. aero/ci2vel: corda média divida por 2× a velocidade: cw2VT
.
14. fcs/left-aileron-pos-rad: deflexão do aileron esquerdo δa.
15. fcs/rudder-pos-rad: deflexão de leme δr.
16. fcs/rudder-pos-rad: deflexão de leme δr.
17. velocities/p-aero-rad sec: componente Pw da velocidade angular ~ωW do veículo,representada no eixo do vento. Ou seja:~ωw = RABC2W ~ωABC ⇒ [Pw, Qw, Rw]⊤ = RABC2W × [P,Q,R]⊤.
18. velocities/q-aero-rad sec: idem, componente Qw.
19. velocities/r-aero-rad sec: idem, componente Rw.
Dep. Eng. Eletronica – EEUFMG – p. 23
Especificação de Forças no FlightGear
Outras variáveis podem ser compreendidas lendo o“Manual da biblioteca JSBSim”, a qual contém as rotinasusadas para integrar as equações diferenciais quedescrevem a aeronave (veja a Seção 2.6):
Manual do JSBSim
Dep. Eng. Eletronica – EEUFMG – p. 24