eletricista forÇa e controleacademico.riogrande.ifrs.edu.br/~jose.eli/apostilas/...figura 7.1 –...
TRANSCRIPT
ELETRICISTA FORÇA E CONTROLE
PRINCÍPIOS BÁSICOS DE AUTOMAÇÃO INDUSTRIAL
1
PRINCÍPIOS BÁSICOS DE AUTOMAÇÃO INDUSTRIAL

2
© PETROBRAS – Petróleo Brasileiro S.A. Todos os direitos reservados e protegidos pela Lei 9.610, de 19.2.1998.
É proibida a reprodução total ou parcial, por quaisquer meios, bem como a produção de apostilas, sem
autorização prévia, por escrito, da Petróleo Brasileiro S.A. – PETROBRAS.
Direitos exclusivos da PETROBRAS – Petróleo Brasileiro S.A.
CORRÊA, Carlos Jesus Anghinoni e AFONSO, Vladimir
Princípios básicos de automação industrial / CEFET-RS. Pelotas, 2008.
66P.:69il.
PETROBRAS – Petróleo Brasileiro S.A.
Av. Almirante Barroso, 81 – 17º andar – Centro CEP: 20030-003 – Rio de Janeiro – RJ – Brasil

3
ÍNDICE
UNIDADE I ............................................................................................................................................... 8
UNIDADE II .............................................................................................................................................. 9
2.1 Sensores de Corrente Contínua com Três ou Quatro Fios ........................................................... 9
2.2 Sensores de Corrente Contínua com Dois Fios .......................................................................... 10
2.3 Sensores de Corrente Alternada de Três ou Quatro Fios ........................................................... 11
2.4 Características dos Sensores de Proximidade............................................................................ 11
2.5 Sensores Indutivos ...................................................................................................................... 13
2.5.1 Tipos de Sensores................................................................................................................ 15
2.5.2 Sensores Blindados e Não-Blindados .................................................................................. 15
2.6 Sensores Capacitivos .................................................................................................................. 16
2.6.1 Sensores Blindados e Não-Blindados .................................................................................. 19
2.6.2 Ajuste de Sensibilidade ........................................................................................................ 20
2.7 Sensores Óticos ou Fotoelétricos ................................................................................................ 21
2.7.1 Sensor Ótico Por Barreira .................................................................................................... 21
2.7.2 Sensor Ótico Por Difusão ..................................................................................................... 23
2.7.3 Sensor Ótico Refletivo.......................................................................................................... 25
UNIDADE III ........................................................................................................................................... 28
3.1 Controles eletromecânicos de nível............................................................................................. 28
3.1.1 Chave de nível do tipo pá rotativa ........................................................................................ 28
3.1.2 Chave de nível com membrana............................................................................................ 29
3.1.3 Chaves de nível do tipo bóia ................................................................................................ 29
UNIDADE IV ........................................................................................................................................... 30
UNIDADE V ............................................................................................................................................ 31
5.1 Termopar...................................................................................................................................... 31
5.1.1 Teoria Termoelétrica............................................................................................................. 31
5.1.2 Definição de Termopar ......................................................................................................... 32
5.1.3 Leis do Circuito Termoelétrico.............................................................................................. 33
5.1.4 Compensação da Temperatura Ambiente ( Tr )................................................................... 34
5.1.5 Conversão de Tensão para Temperatura ............................................................................ 36
5.1.6 Tipos e Características dos Termopares ............................................................................. 36
5.1.7 Termopar de Isolação Mineral.............................................................................................. 38
5.1.8 Tipos de Junções de Medição.............................................................................................. 38
5.1.9 Fios e Cabos de Extensão e Compensação ........................................................................ 39
4
5.1.10 Acessórios dos Termopares, Características e Aplicações ............................................... 42
5.2 Termômetro de Resistência......................................................................................................... 44
5.2.1 Esquema de Montagem de Termoresistências.................................................................... 46
5.3 Termoresistência x Termopar ...................................................................................................... 49
UNIDADE VI ........................................................................................................................................... 50
6.1 Conceitos básicos de controle de processos .............................................................................. 50
6.2 Sistemas de controle em malha aberta ....................................................................................... 51
6.3 Sistemas de controle em malha fechada..................................................................................... 52
6.4 Controladores............................................................................................................................... 53
6.4.1 Controlador liga-desliga........................................................................................................ 53
6.4.2 Controlador PID .................................................................................................................... 54
UNIDADE VI ........................................................................................................................................... 58
7.1 Nomenclatura de Equipamentos Industriais ................................................................................ 58
7.2 Nomenclatura de Instrumentos e Malhas de Controle ................................................................ 59
7.3 Regras Básicas Para Identificação dos Instrumentos ................................................................. 63
7.4 Representação das Linhas de Instrumentação ........................................................................... 64
BIBLIOGRAFIA....................................................................................................................................... 65
5
LISTA DE FIGURAS
Figura 1.1 – Chave fim de curso com acionamento por rolete. ............................................................... 8
Figura 2.1 – Montagem de um sensor PNP............................................................................................. 9
Figura 2.2 – Montagem de um sensor NPN........................................................................................... 10
Figura 2.3 – Montagem de um sensor CC com dois fios....................................................................... 10
Figura 2.4 – Montagem de um sensor CA. ............................................................................................ 11
Figura 2.5 – Histerese de um sensor. ................................................................................................... 12
Figura 2.6 – Simbologia de um sensor indutivo. .................................................................................... 13
Figura 2.7 – Acionamento de um sensor indutivo.................................................................................. 13
Figura 2.8 – Diagrama em blocos de um sensor indutivo...................................................................... 14
Figura 2.9 – Construção e montagem de um sensor indutivo blindado. ............................................... 15
Figura 2.10 – Construção e montagem de um sensor indutivo não blindado. ...................................... 15
Figura 2.11 – Simbologia de um sensor capacitivo. .............................................................................. 16
Figura 2.12 – Construção básica de um capacitor................................................................................. 16
Figura 2.13 – Diagrama em blocos de um sensor capacitivo. ............................................................... 17
Figura 2.14 – Gráfico dos fatores de correção para sensores capacitivos............................................ 18
Figura 2.15 – Construção de um sensor capacitivo blindado. ............................................................... 19
Figura 2.16 – Construção de um sensor capacitivo não blindado. ........................................................ 19
Figura 2.17 – Ajuste de sensibilidade e detecção de líquido dentro de garrafas. ................................. 20
Figura 2.18 – Simbologia de sensores óticos por barreira. ................................................................... 21
Figura 2.19 – Acionamento de um sensor ótico por barreira................................................................. 22
Figura 2.20 – Feixe de luz do sensor contornando o objeto.................................................................. 22
Figura 2.21 – Simbologia de sensores óticos por difusão. .................................................................... 23
Figura 2.22 – Acionamento de um sensor ótico por difusão.................................................................. 23
Figura 2.23 – Simbologia de sensores óticos refletivos......................................................................... 25
Figura 2.24 – Acionamento de um sensor ótico refletivo....................................................................... 25
Figura 2.25 – Construção de um espelho prismático............................................................................. 26
Figura 2.26 – Montagem angular de sensor refletivo............................................................................. 26
Figura 3.1 – Chave de nível tipo pá rotativa. ......................................................................................... 28
Figura 3.2 – Chave de nível com membrana. ........................................................................................ 29
Figura 3.3 – Chave de nível do tipo bóia ............................................................................................... 29
Figura 4.1 – Acionamento de um sensor magnético.............................................................................. 30
Figura 5.1 – Circulação de corrente no termopar. ................................................................................. 31
Figura 5.2 – Geração da força eletromotriz no termopar....................................................................... 31
6
Figura 5.3 – Conexão do instrumento medidor ao termopar. ................................................................ 32
Figura 5.4 – Representação da lei do circuito homogêneo. .................................................................. 33
Figura 5.5 – Representação da lei dos metais intermediários............................................................... 33
Figura 5.6 – Representação da lei das temperaturas intermediárias. ................................................... 34
Figura 5.7 – Banho de água e gelo da junção de referência do termopar. ........................................... 35
Figura 5.8 – Exemplo de medição com um termopar. ........................................................................... 35
Figura 5.9 – Relação FEM x temperatura dos termopares.................................................................... 37
Figura 5.10 – Termopar de isolação mineral. ........................................................................................ 38
Figura 5.11 – Tipos de junção dos termopares...................................................................................... 39
Figura 5.12 – Curvas características do termopar e do cabo de compensação. .................................. 41
Figura 5.13 – Isoladores......................................................................................................................... 42
Figura 5.14 – Bloco de ligação............................................................................................................... 43
Figura 5.15 – Cabeçote.......................................................................................................................... 43
Figura 5.16 – Tubo de proteção. ............................................................................................................ 44
Figura 5.17 – Bulbo de resistência......................................................................................................... 45
Figura 5.19 – Resposta de uma termoresistência Pt-100...................................................................... 45
Figura 5.19 – Ponte de wheatstone. ...................................................................................................... 46
Figura 5.20 – Ligação a dois fios. .......................................................................................................... 47
Figura 5.21 – Ligação a três fios. ........................................................................................................... 48
Figura 6.1 – Exemplo de Sistema Básico. ............................................................................................. 50
Figura 6.2 – Sistema de controle de temperatura em malha aberta...................................................... 51
Figura 6.3 – Sistema de controle em malha aberta ............................................................................... 51
Figura 6.4 – Sistema de controle de temperatura em malha fechada................................................... 52
Figura 6.5 – Sistema de controle em malha fechada............................................................................. 52
Figura 6.6 – Resposta de um sistema sob controle on-off .................................................................... 53
Figura 6.7 – Ação Proporcional: Kp=1 (contínuo), Kp=2 (tracejado) e Kp=4 (pontilhado) .................... 54
Figura 6.8 – Ação PI: Kp=1; Ti=2 (pontilhado), Ti=4 (tracejado) e Ti=10 (contínuo)............................. 55
Figura 6.9 – Ação PID - Kp=4; Ti=1.5; Td=0.1 (tracejado), Td=0.4 (pontilhado) e Td=2 (contínuo) ..... 56
Figura 6.10 – Representação gráfica de Pcr. ........................................................................................ 57
Figura 7.1 – Exemplo de identificação de equipamento industrial......................................................... 58
Figura 7.2 – Símbolos gerais de instrumentos....................................................................................... 61
Figura 7.3 – Símbolos de instrumentos de vazão.................................................................................. 62
Figura 7.4 – Simbologia utilizada na representação de válvulas de controle de vazão. ....................... 62
Figura 7.5 – Controlador de temperatura com chave de nível alto........................................................ 63
Figura 7.6 – Representação das linhas de instrumentação................................................................... 64
Figura 7.7 – Exemplo de representação do tipo de suprimento. ........................................................... 64
7
LISTA DE TABELAS
Tabela 2.1 – Fatores de correção para sensores indutivos................................................................... 14
Tabela 2.2 – Rigidez dielétrica dos materiais ........................................................................................ 18
Tabela 2.3 – Fatores de correção para sensores óticos por difusão..................................................... 24
Tabela 2.4 – Fatores de correção de sensores óticos refletivos. .......................................................... 27
Tabela 5.1 – Materiais que compõe os termopares............................................................................... 37
Tabela 6.1 – Relações para determinação dos parâmetros Kp, Ti e Td. .............................................. 57
Tabela 7.1 – Siglas de identificação de equipamentos industriais. ....................................................... 59
Tabela 7.2 – Exemplo de identificação de instrumento ......................................................................... 59
Tabela 7.3 – Siglas utilizadas na identificação de instrumentos............................................................ 60
Tabela 7.4 – Representação do tipo de suprimento. ............................................................................. 64

8
I – SENSORES MECÂNICOS OU CHAVES FIM DE CURSO
Os sensores mecânicos ou chaves fim de curso consistem de chaves elétricas cujo acionamento
se dá de forma mecânica através de alavanca, rolete ou outro mecanismo. O posicionamento,
normalmente, é feito nas extremidades do curso de um atuador. Assim, sempre que o atuador atingir
a posição desejada é gerado um sinal elétrico o qual pode ser utilizado para, por exemplo, parar o
atuador, ativar um sinal de alarme, entre outros. As chaves fim de curso não são recomendadas para
aplicações que possuam um alto número de acionamentos. Na Figura 1.1 se pode observar uma
chave fim de curso com acionamento por rolete.
Figura 1.1 – Chave fim de curso com acionamento por rolete.

9
II - SENSORES DE PROXIMIDADE
Os sensores de proximidade são dispositivos utilizados na detecção de peças, componentes,
elementos de máquinas, entre outros. Os sensores de proximidade podem ser de corrente contínua
ou corrente alternada.
2.1 Sensores de Corrente Contínua com Três ou Quatro Fios
Os sensores CC de quatro fios possuem dois fios de alimentação, um fio ligado a um contato NA
e um fio ligado a um contato NF. Os sensores CC de três fios possuem somente o contato NA.
Os sensores CC de três ou quatro fios são divididos em dois tipos: PNP e NPN.
Sensores PNP – são os sensores que possuem saída positiva, ou seja, a carga é ligada entre a
saída do sensor e o negativo da alimentação.
Na Figura .1 se pode observar a montagem de um sensor PNP.
Figura 2.1 – Montagem de um sensor PNP.
Sensores NPN – são os sensores que possuem saída negativa, ou seja, a carga é ligada entre a
saída do sensor e o positivo da alimentação.

10
Na Figura 2.2 se pode observar a montagem de um sensor NPN.
Figura 2.2 – Montagem de um sensor NPN.
2.2 Sensores de Corrente Contínua com Dois Fios
Os sensores CC de dois fios devem ser ligados em série com a carga. Neste tipo de sensor é
importante observar que a alimentação do circuito é feita através da própria carga, portanto não é
recomendado para acionar cargas eletrônicas com corrente de manutenção muito baixa.
Na Figura 2.3 se pode observar a montagem de um sensor CC com dois fios.
Figura 2.3 – Montagem de um sensor CC com dois fios.
11
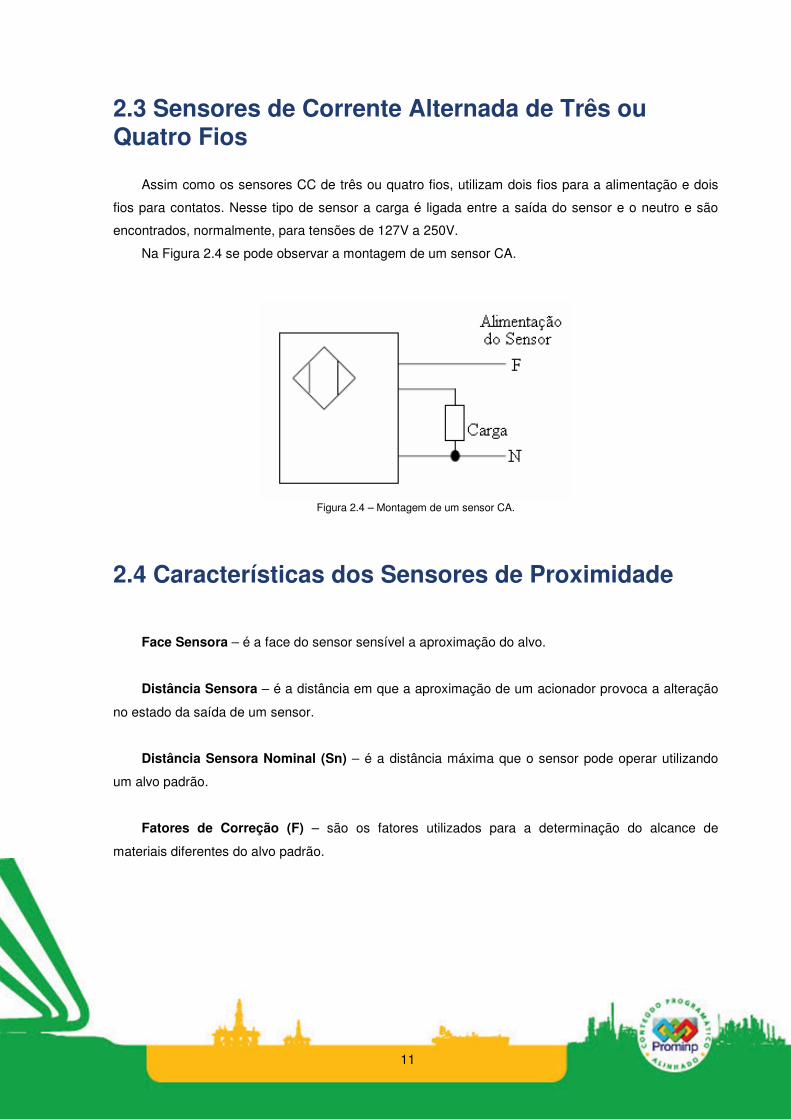
2.3 Sensores de Corrente Alternada de Três ou Quatro Fios
Assim como os sensores CC de três ou quatro fios, utilizam dois fios para a alimentação e dois
fios para contatos. Nesse tipo de sensor a carga é ligada entre a saída do sensor e o neutro e são
encontrados, normalmente, para tensões de 127V a 250V.
Na Figura 2.4 se pode observar a montagem de um sensor CA.
Figura 2.4 – Montagem de um sensor CA.
2.4 Características dos Sensores de Proximidade
Face Sensora – é a face do sensor sensível a aproximação do alvo.
Distância Sensora – é a distância em que a aproximação de um acionador provoca a alteração
no estado da saída de um sensor.
Distância Sensora Nominal (Sn) – é a distância máxima que o sensor pode operar utilizando
um alvo padrão.
Fatores de Correção (F) – são os fatores utilizados para a determinação do alcance de
materiais diferentes do alvo padrão.
12
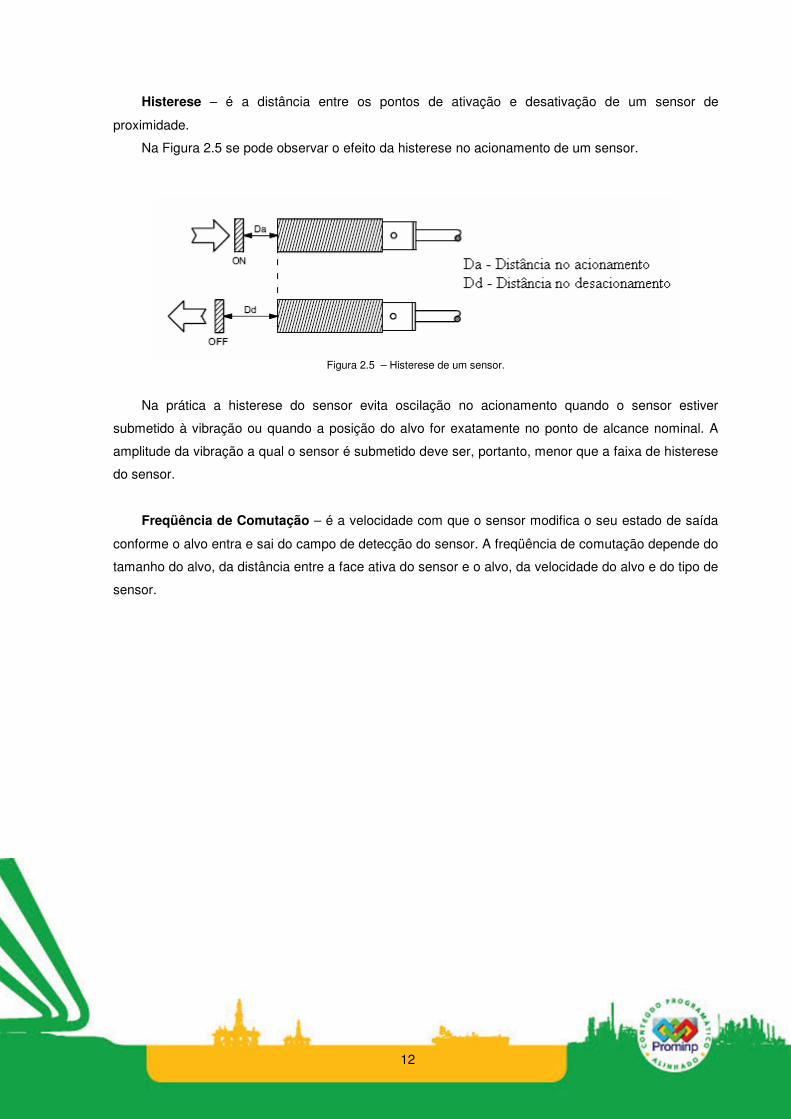
Histerese – é a distância entre os pontos de ativação e desativação de um sensor de
proximidade.
Na Figura 2.5 se pode observar o efeito da histerese no acionamento de um sensor.
Figura 2.5 – Histerese de um sensor.
Na prática a histerese do sensor evita oscilação no acionamento quando o sensor estiver
submetido à vibração ou quando a posição do alvo for exatamente no ponto de alcance nominal. A
amplitude da vibração a qual o sensor é submetido deve ser, portanto, menor que a faixa de histerese
do sensor.
Freqüência de Comutação – é a velocidade com que o sensor modifica o seu estado de saída
conforme o alvo entra e sai do campo de detecção do sensor. A freqüência de comutação depende do
tamanho do alvo, da distância entre a face ativa do sensor e o alvo, da velocidade do alvo e do tipo de
sensor.
13
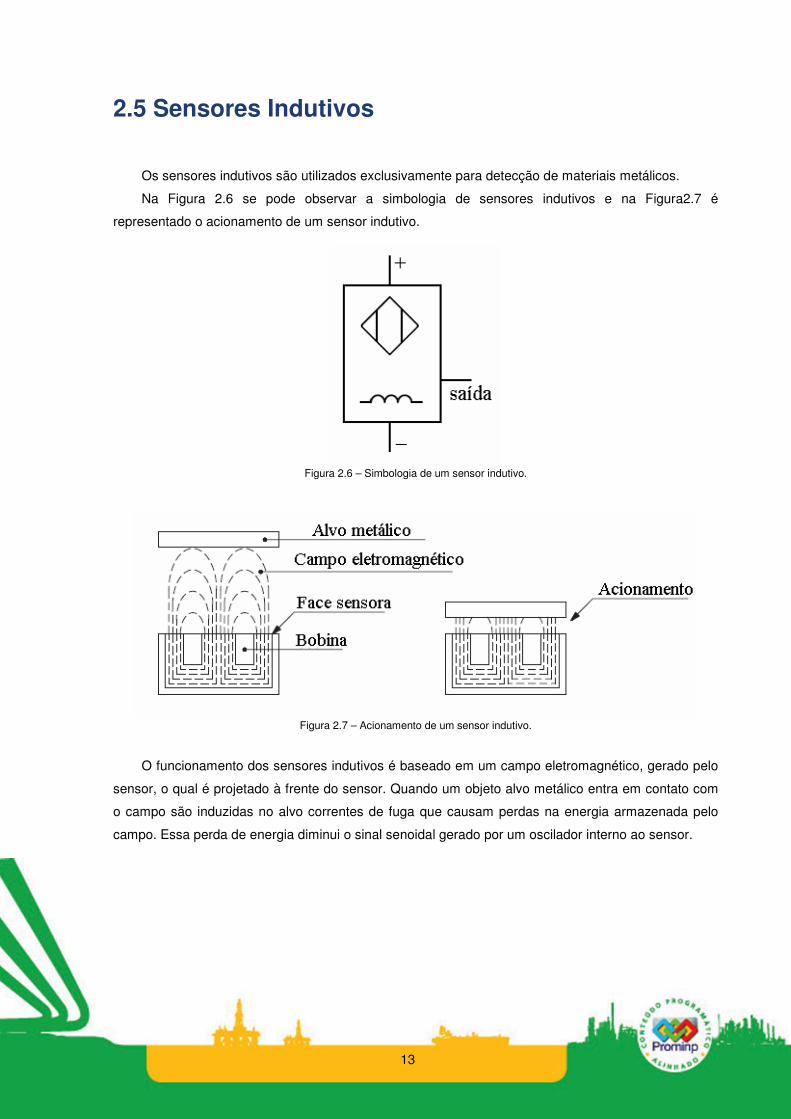
2.5 Sensores Indutivos
Os sensores indutivos são utilizados exclusivamente para detecção de materiais metálicos.
Na Figura 2.6 se pode observar a simbologia de sensores indutivos e na Figura2.7 é
representado o acionamento de um sensor indutivo.
Figura 2.6 – Simbologia de um sensor indutivo.
Figura 2.7 – Acionamento de um sensor indutivo.
O funcionamento dos sensores indutivos é baseado em um campo eletromagnético, gerado pelo
sensor, o qual é projetado à frente do sensor. Quando um objeto alvo metálico entra em contato com
o campo são induzidas no alvo correntes de fuga que causam perdas na energia armazenada pelo
campo. Essa perda de energia diminui o sinal senoidal gerado por um oscilador interno ao sensor.

14
Assim, a mudança no sinal senoidal gera um sinal de comando para o circuito de saída. O
diagrama em blocos de um sensor indutivo pode ser observado na Figura2.8.
Figura 2.8 – Diagrama em blocos de um sensor indutivo.
Distância Sensora Operacional (Sa) – é a distância na qual o sensor pode operar com
segurança, considerando variações de industrialização, temperatura, tensão, entre outros fatores.
Considerando um alvo padrão metálico de aço carbono pode considerar-se a seguinte expressão:
Sa ≤ 0,81 x Sn
Onde: Sa é a distância sensora operacional
Sn é a distância sensora nominal
A distância de acionamento depende do tamanho do alvo e de sua superfície.
Quando o material metálico a ser detectado for diferente do alvo padrão de aço carbono deve-se
utilizar um fator de correção conforme a expressão:
Sa ≤ 0,81 x Sn x F
Onde: F é um fator de correção
Os fabricantes fornecem tabelas que listam os materiais e os seus respectivos fatores de
correção. Um exemplo pode ser observado na Tabela 2.1.
Tabela 2.1 – Fatores de correção para sensores indutivos
Material Fator
Ferro ou Aço 1,0 Cromo Níquel 0,9
Aço Inox 0,85 Latão 0,5
Alumínio 0,4 Cobre 0,3
Exemplo: O aço inox tem um fator de correção de 0,85. Com isso, o alcance de um alvo de aço
inox é menor em relação a um alvo padrão de aço carbono.
15
2.5.1 Tipos de Sensores
Ferroseletivos – não detectam materiais como latão, alumínio ou cobre.
Não-Ferroseletivos – não detectam materiais como aço ou aço inox do tipo ferroso.
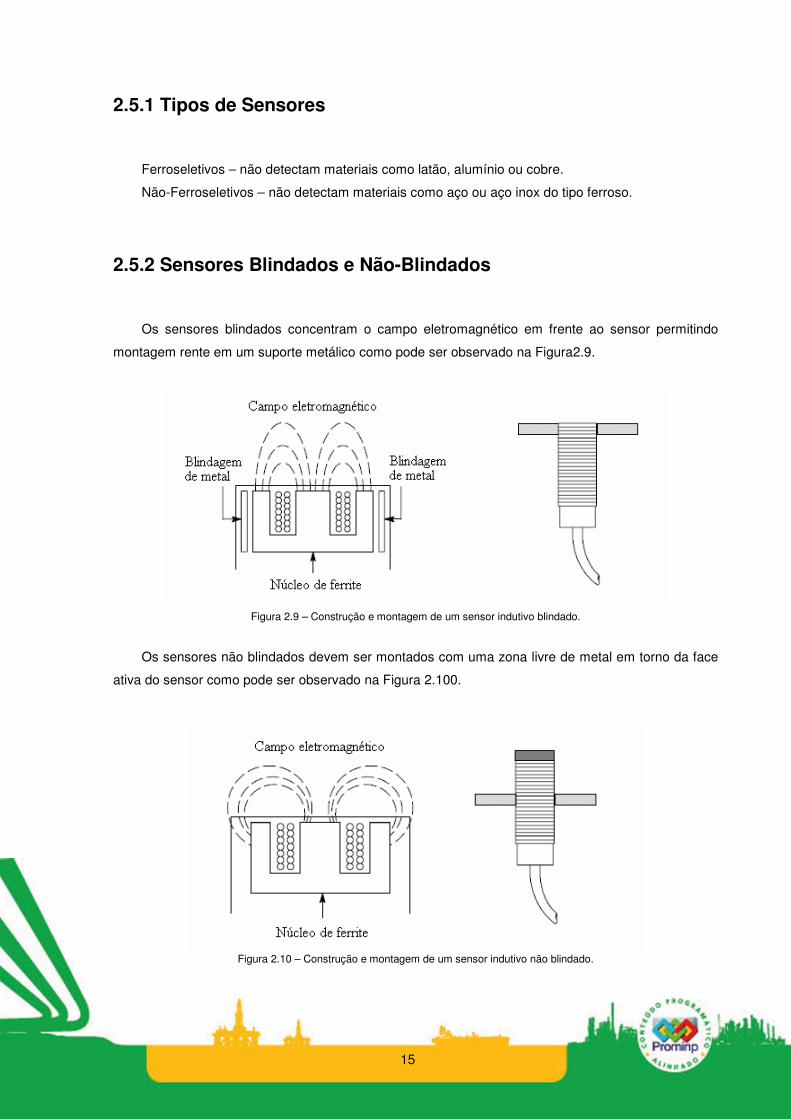
2.5.2 Sensores Blindados e Não-Blindados
Os sensores blindados concentram o campo eletromagnético em frente ao sensor permitindo
montagem rente em um suporte metálico como pode ser observado na Figura2.9.
Figura 2.9 – Construção e montagem de um sensor indutivo blindado.
Os sensores não blindados devem ser montados com uma zona livre de metal em torno da face
ativa do sensor como pode ser observado na Figura 2.100.
Figura 2.10 – Construção e montagem de um sensor indutivo não blindado.
16
Exemplo do cálculo da distância sensora nominal de um sensor indutivo
1° Passo) Obter a distância sensora operacional medindo a distância que o alvo encontra-se do
sensor.
2º Passo) Verificar o valor do fator de correção diretamente na tabela do fabricante.
3° Passo) Encontrar Sn através da equação.
Sn = Sa ÷ (0,81 x F)
Deve ser especificado um valor de Sn comercial imediatamente superior ao calculado.
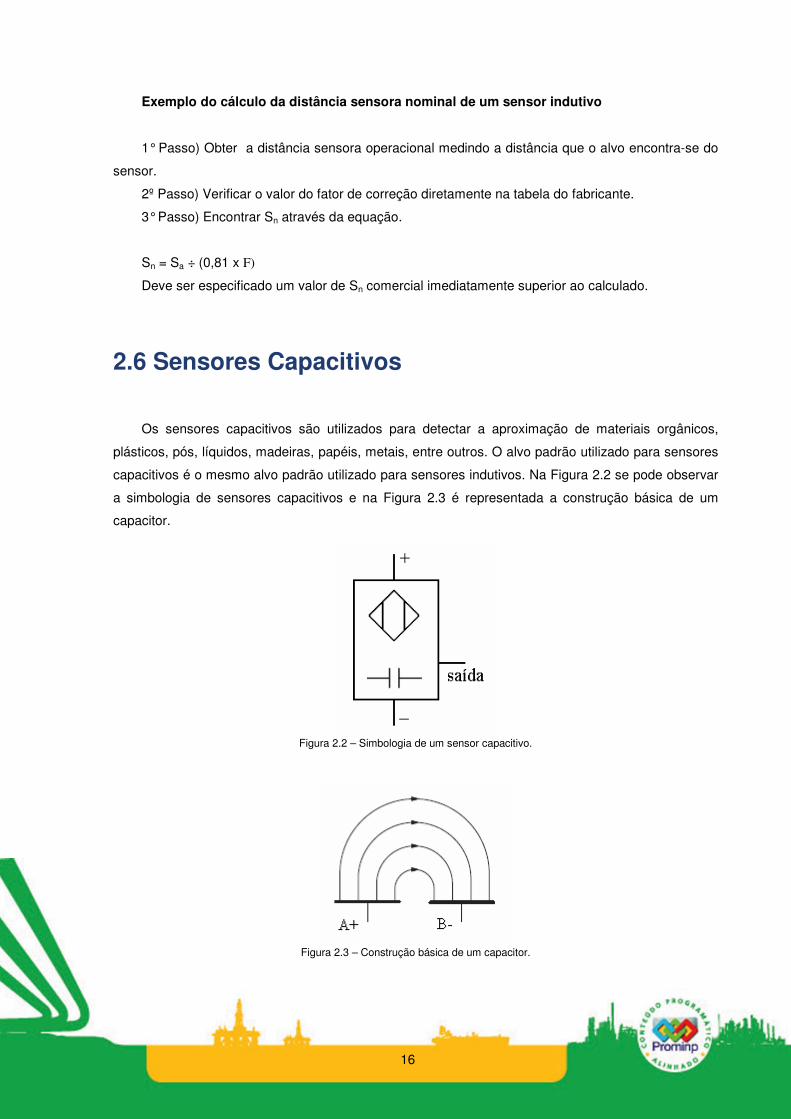
2.6 Sensores Capacitivos
Os sensores capacitivos são utilizados para detectar a aproximação de materiais orgânicos,
plásticos, pós, líquidos, madeiras, papéis, metais, entre outros. O alvo padrão utilizado para sensores
capacitivos é o mesmo alvo padrão utilizado para sensores indutivos. Na Figura 2.2 se pode observar
a simbologia de sensores capacitivos e na Figura 2.3 é representada a construção básica de um
capacitor.
Figura 2.2 – Simbologia de um sensor capacitivo.
Figura 2.3 – Construção básica de um capacitor.
17
O sensor é constituído de um capacitor formado por duas placas metálicas com cargas opostas e
separadas pelo ar o qual é o dielétrico. As placas projetam o campo eletrostático gerado pelo
capacitor à frente do sensor. A capacitância depende do tamanho do alvo, da constante dielétrica do
alvo e da distância entre o alvo e a face do sensor.
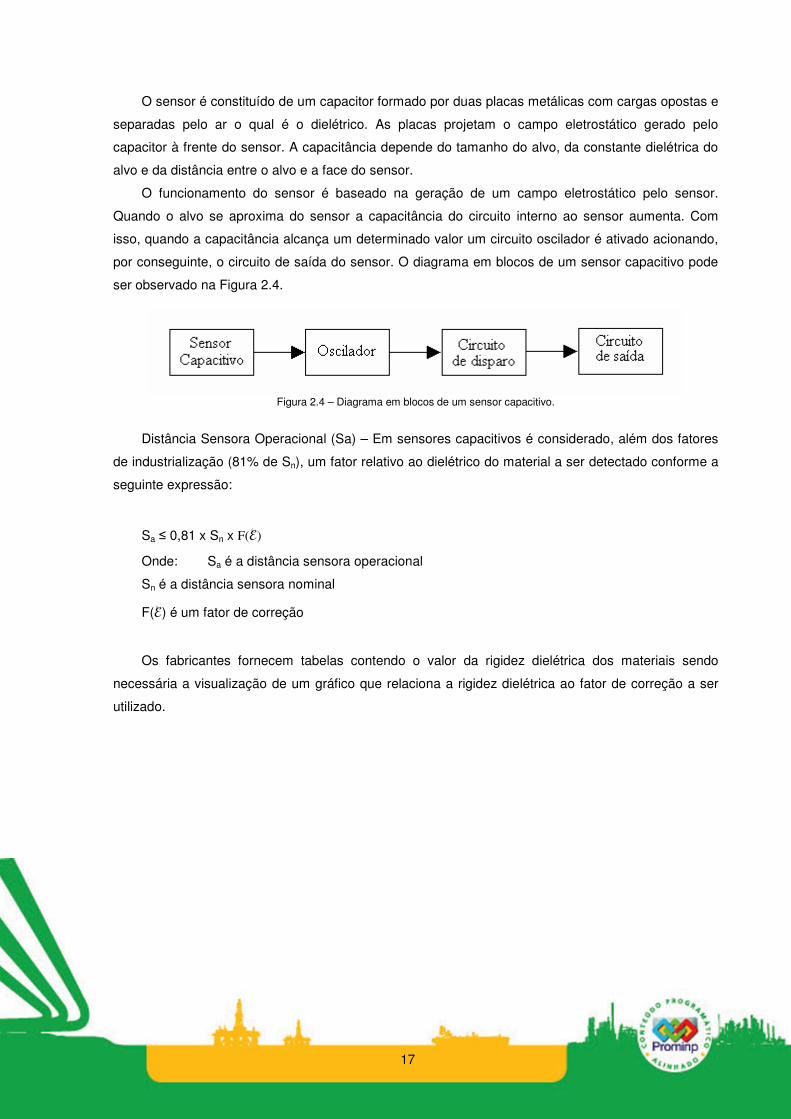
O funcionamento do sensor é baseado na geração de um campo eletrostático pelo sensor.
Quando o alvo se aproxima do sensor a capacitância do circuito interno ao sensor aumenta. Com
isso, quando a capacitância alcança um determinado valor um circuito oscilador é ativado acionando,
por conseguinte, o circuito de saída do sensor. O diagrama em blocos de um sensor capacitivo pode
ser observado na Figura 2.4.
Figura 2.4 – Diagrama em blocos de um sensor capacitivo.
Distância Sensora Operacional (Sa) – Em sensores capacitivos é considerado, além dos fatores
de industrialização (81% de Sn), um fator relativo ao dielétrico do material a ser detectado conforme a
seguinte expressão:
Sa ≤ 0,81 x Sn x F(�)
Onde: Sa é a distância sensora operacional
Sn é a distância sensora nominal
F(�) é um fator de correção
Os fabricantes fornecem tabelas contendo o valor da rigidez dielétrica dos materiais sendo
necessária a visualização de um gráfico que relaciona a rigidez dielétrica ao fator de correção a ser
utilizado.

18
A Tabela 2.2 indica valores de rigidez de alguns materiais e a Figura 2.5 mostra o gráfico que
relaciona a rigidez dielétrica ao fator de correção.
Tabela 2.2 – Rigidez dielétrica dos materiais
Material � Ar, vácuo 1
Óleo, papel, petróleo, poliuretano, parafina, silicone, teflon 2 a 3 Araldite, baquelite, quartzo, madeiras 3 a 4
Vidro, papel grosso, borracha, porcelana 4 a 5 Mármore, pedras, madeiras pesadas 6 a 8
Água, alcoólicos, soda cáustica 9 a 80
Figura 2.5 – Gráfico dos fatores de correção para sensores capacitivos.
19
2.6.1 Sensores Blindados e Não-Blindados
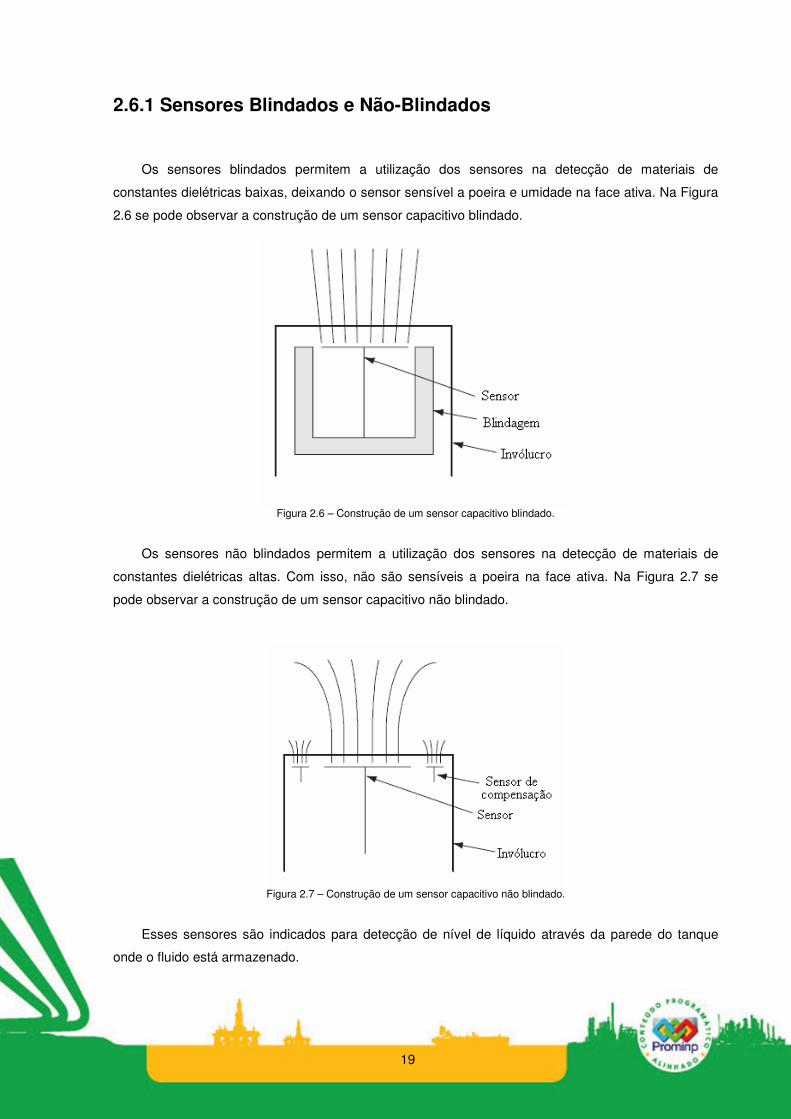
Os sensores blindados permitem a utilização dos sensores na detecção de materiais de
constantes dielétricas baixas, deixando o sensor sensível a poeira e umidade na face ativa. Na Figura
2.6 se pode observar a construção de um sensor capacitivo blindado.
Figura 2.6 – Construção de um sensor capacitivo blindado.
Os sensores não blindados permitem a utilização dos sensores na detecção de materiais de
constantes dielétricas altas. Com isso, não são sensíveis a poeira na face ativa. Na Figura 2.7 se
pode observar a construção de um sensor capacitivo não blindado.
Figura 2.7 – Construção de um sensor capacitivo não blindado.
Esses sensores são indicados para detecção de nível de líquido através da parede do tanque
onde o fluido está armazenado.
20
2.6.2 Ajuste de Sensibilidade
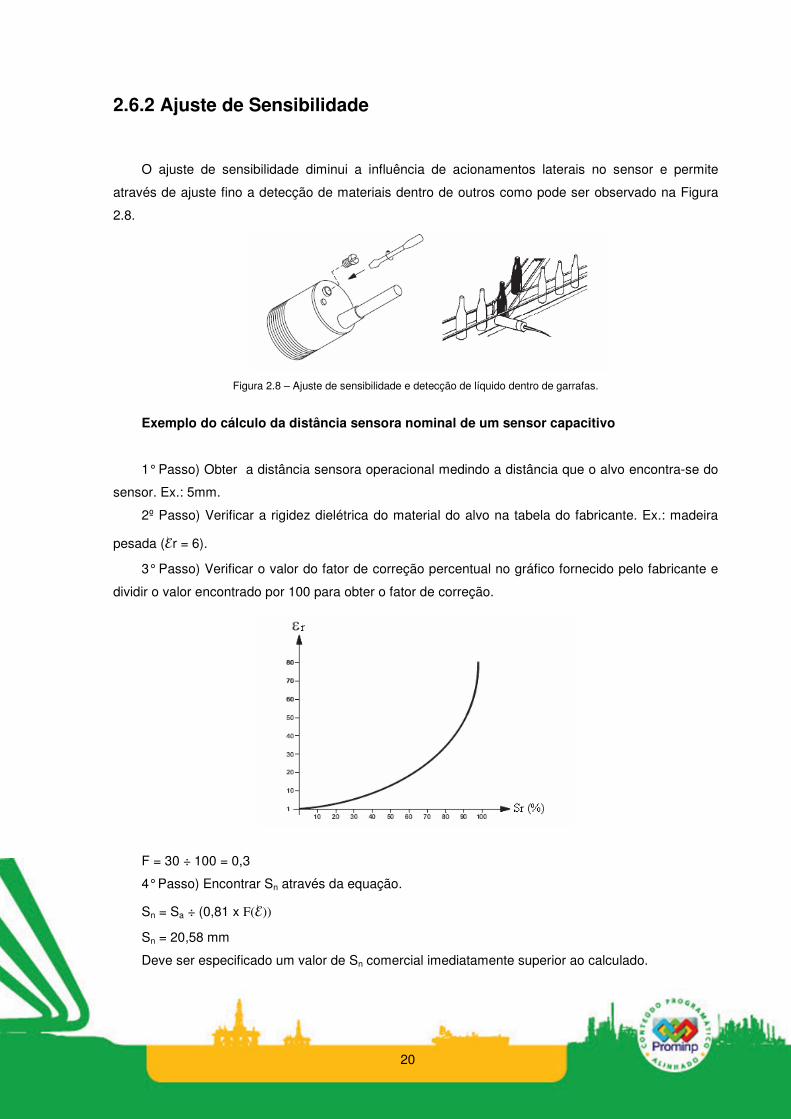
O ajuste de sensibilidade diminui a influência de acionamentos laterais no sensor e permite
através de ajuste fino a detecção de materiais dentro de outros como pode ser observado na Figura
2.8.
Figura 2.8 – Ajuste de sensibilidade e detecção de líquido dentro de garrafas.
Exemplo do cálculo da distância sensora nominal de um sensor capacitivo
1° Passo) Obter a distância sensora operacional medindo a distância que o alvo encontra-se do
sensor. Ex.: 5mm.
2º Passo) Verificar a rigidez dielétrica do material do alvo na tabela do fabricante. Ex.: madeira
pesada (�r = 6).
3° Passo) Verificar o valor do fator de correção percentual no gráfico fornecido pelo fabricante e
dividir o valor encontrado por 100 para obter o fator de correção.
F = 30 ÷ 100 = 0,3
4° Passo) Encontrar Sn através da equação.
Sn = Sa ÷ (0,81 x F(�))
Sn = 20,58 mm
Deve ser especificado um valor de Sn comercial imediatamente superior ao calculado.

21
2.7 Sensores Óticos ou Fotoelétricos
Sensores óticos são sensores capazes de detectar a presença de um acionador através da
emissão e recepção de luz.
O funcionamento dos sensores baseia-se na transmissão e recepção de luz infravermelha a qual
é invisível ao olho humano. O transmissor envia o feixe de luz através de um fotodiodo, com alta
potência e curta duração, para evitar que o receptor confunda a luz emitida com a luz ambiente. O
receptor é composto por um foto-transistor e um filtro sintonizado na mesma freqüência de pulsação
do transmissor, o que permite o funcionamento correto.
Os sensores óticos podem ser de três tipos: Sistema por barreira, sistema por difusão e sistema
refletivo.
2.7.1 Sensor Ótico Por Barreira
Na Figura 2.9 se pode observar a simbologia utilizada para representar sensores óticos por
barreira.
Figura 2.9 – Simbologia de sensores óticos por barreira.

22
No sensor ótico por barreira o acionamento ocorre quando o alvo interrompe o feixe de luz
disposto entre duas unidades independentes colocadas frente a frente. Uma das unidades contém o
transmissor enquanto a outra unidade contém o receptor. Na Figura 2.19 pode ser observado o
acionamento de um sensor ótico por barreira.
Figura 2.19 – Acionamento de um sensor ótico por barreira.
Neste tipo de sistema devem-se respeitar as recomendações de dimensões mínimas do objeto,
pois existe a possibilidade do feixe de luz contornar o objeto. Na Figura 2.10 pode ser observado um
feixe de luz emitido por um sensor contornando um objeto pequeno.
Figura 2.10 – Feixe de luz do sensor contornando o objeto.

23
2.7.2 Sensor Ótico Por Difusão
Na Figura 2.11 se pode observar a simbologia utilizada para representar sensores óticos por
difusão.
Figura 2.11 – Simbologia de sensores óticos por difusão.
No sensor ótico por difusão o acionamento ocorre quando o alvo a ser detectado entra na região
de sensibilidade e reflete ao receptor a luz emitida pelo transmissor sendo que o transmissor e o
receptor são montados na mesma unidade. Na Figura 2.12 pode ser observado o acionamento de um
sensor ótico por difusão.
Figura 2.12 – Acionamento de um sensor ótico por difusão.
O alvo padrão dos sensores óticos por difusão consiste de uma folha de papel fotográfico branco
com índice de refletividade de 90% com dimensões que variam de acordo com o modelo do sensor.
24
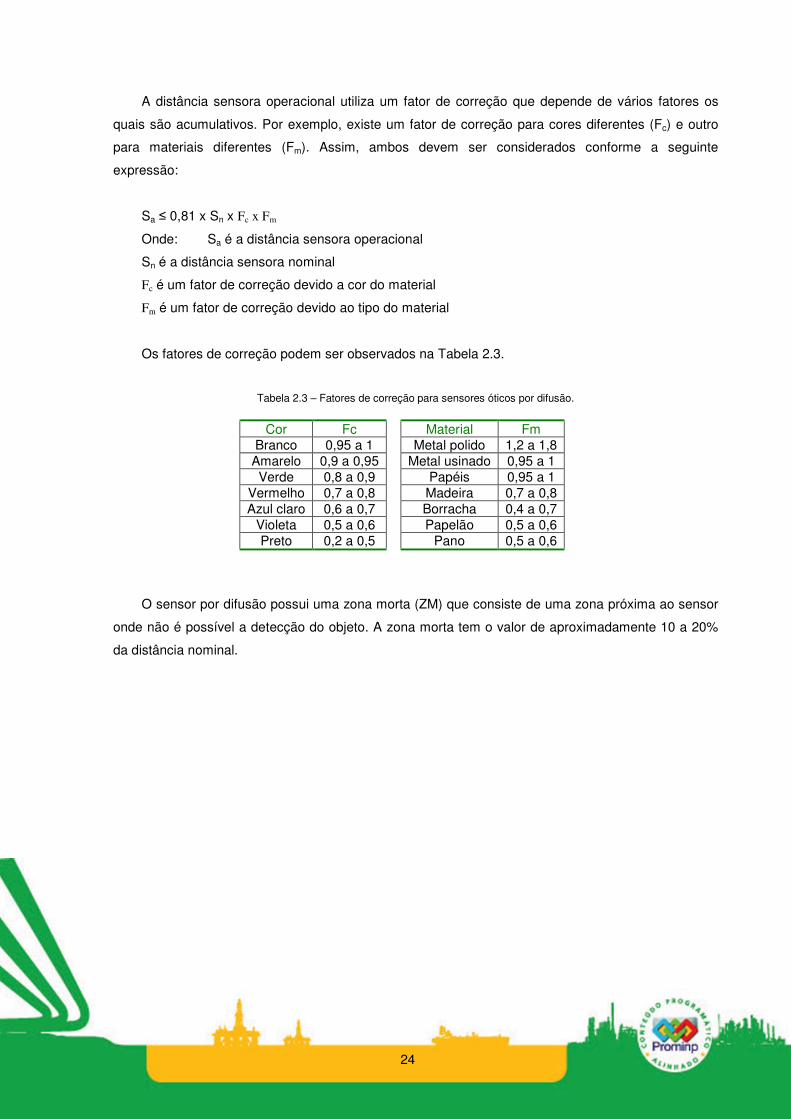
A distância sensora operacional utiliza um fator de correção que depende de vários fatores os
quais são acumulativos. Por exemplo, existe um fator de correção para cores diferentes (Fc) e outro
para materiais diferentes (Fm). Assim, ambos devem ser considerados conforme a seguinte
expressão:
Sa ≤ 0,81 x Sn x Fc x Fm
Onde: Sa é a distância sensora operacional
Sn é a distância sensora nominal
Fc é um fator de correção devido a cor do material
Fm é um fator de correção devido ao tipo do material
Os fatores de correção podem ser observados na Tabela 2.3.
Tabela 2.3 – Fatores de correção para sensores óticos por difusão.
Cor Fc Branco 0,95 a 1 Amarelo 0,9 a 0,95 Verde 0,8 a 0,9
Vermelho 0,7 a 0,8 Azul claro 0,6 a 0,7
Violeta 0,5 a 0,6 Preto 0,2 a 0,5
Material Fm Metal polido 1,2 a 1,8
Metal usinado 0,95 a 1 Papéis 0,95 a 1 Madeira 0,7 a 0,8 Borracha 0,4 a 0,7 Papelão 0,5 a 0,6
Pano 0,5 a 0,6
O sensor por difusão possui uma zona morta (ZM) que consiste de uma zona próxima ao sensor
onde não é possível a detecção do objeto. A zona morta tem o valor de aproximadamente 10 a 20%
da distância nominal.
25
2.7.3 Sensor Ótico Refletivo
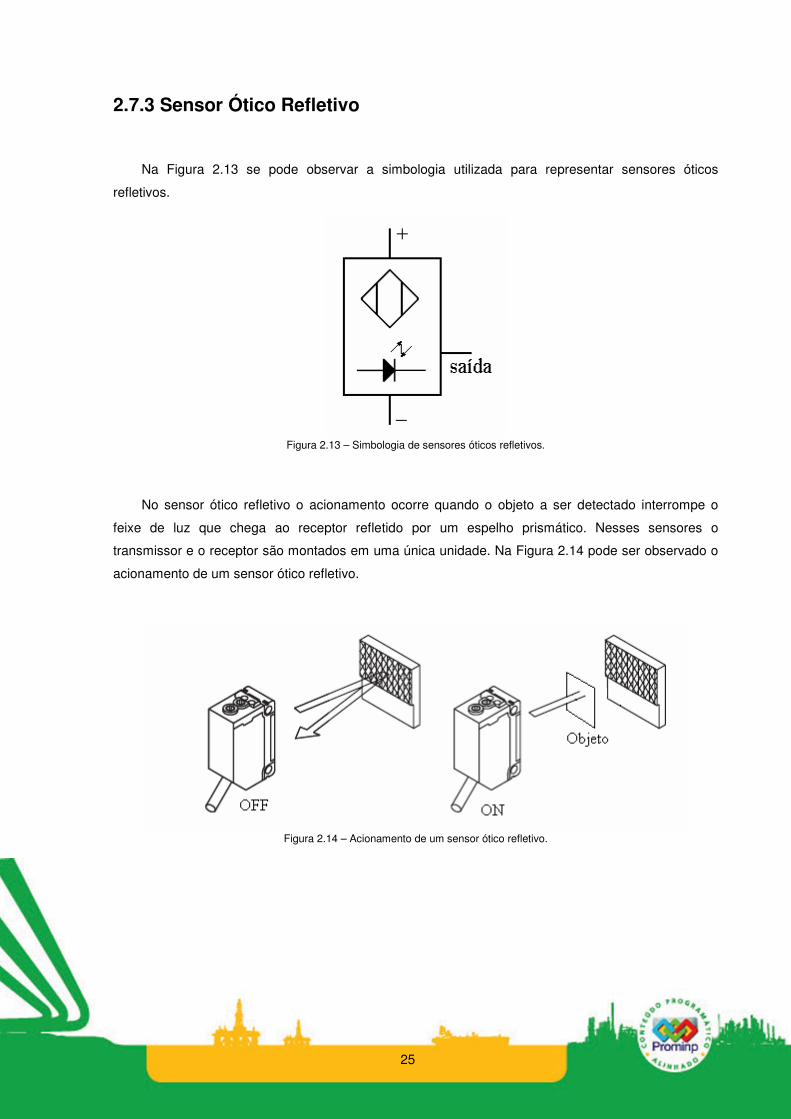
Na Figura 2.13 se pode observar a simbologia utilizada para representar sensores óticos
refletivos.
Figura 2.13 – Simbologia de sensores óticos refletivos.
No sensor ótico refletivo o acionamento ocorre quando o objeto a ser detectado interrompe o
feixe de luz que chega ao receptor refletido por um espelho prismático. Nesses sensores o
transmissor e o receptor são montados em uma única unidade. Na Figura 2.14 pode ser observado o
acionamento de um sensor ótico refletivo.
Figura 2.14 – Acionamento de um sensor ótico refletivo.
26
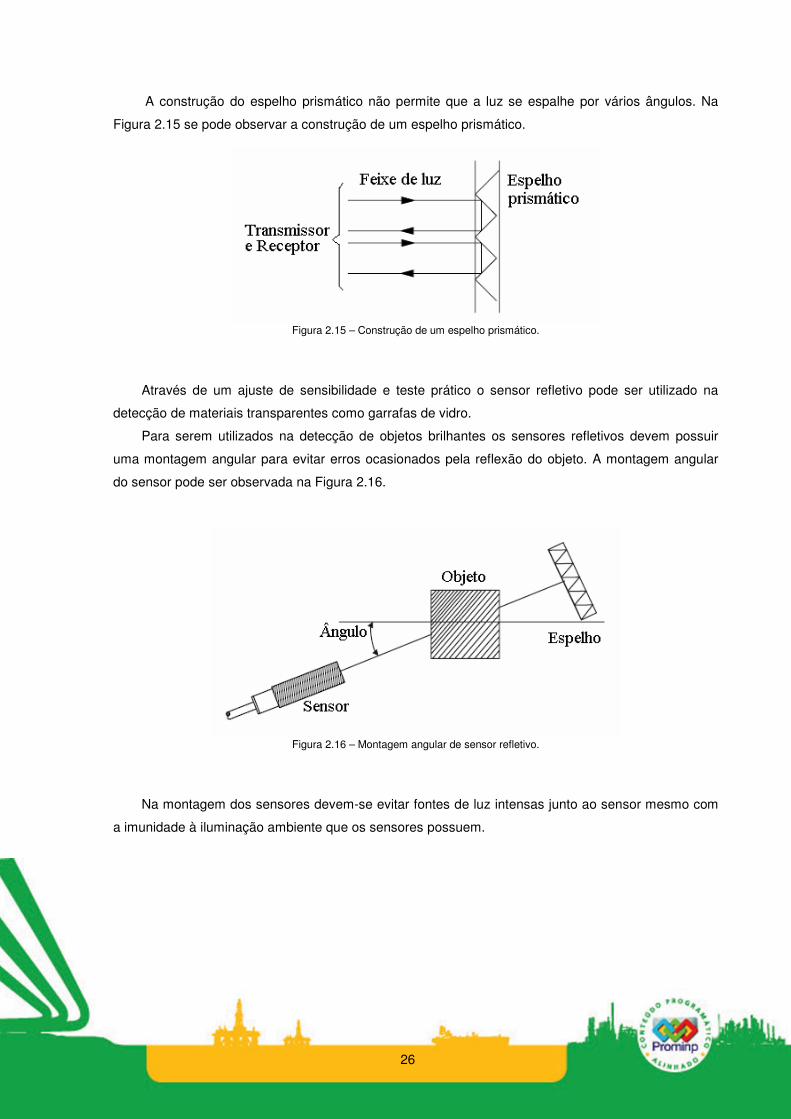
A construção do espelho prismático não permite que a luz se espalhe por vários ângulos. Na
Figura 2.15 se pode observar a construção de um espelho prismático.
Figura 2.15 – Construção de um espelho prismático.
Através de um ajuste de sensibilidade e teste prático o sensor refletivo pode ser utilizado na
detecção de materiais transparentes como garrafas de vidro.
Para serem utilizados na detecção de objetos brilhantes os sensores refletivos devem possuir
uma montagem angular para evitar erros ocasionados pela reflexão do objeto. A montagem angular
do sensor pode ser observada na Figura 2.16.
Figura 2.16 – Montagem angular de sensor refletivo.
Na montagem dos sensores devem-se evitar fontes de luz intensas junto ao sensor mesmo com
a imunidade à iluminação ambiente que os sensores possuem.
27
2.7.3.1 Outros fatores de correção
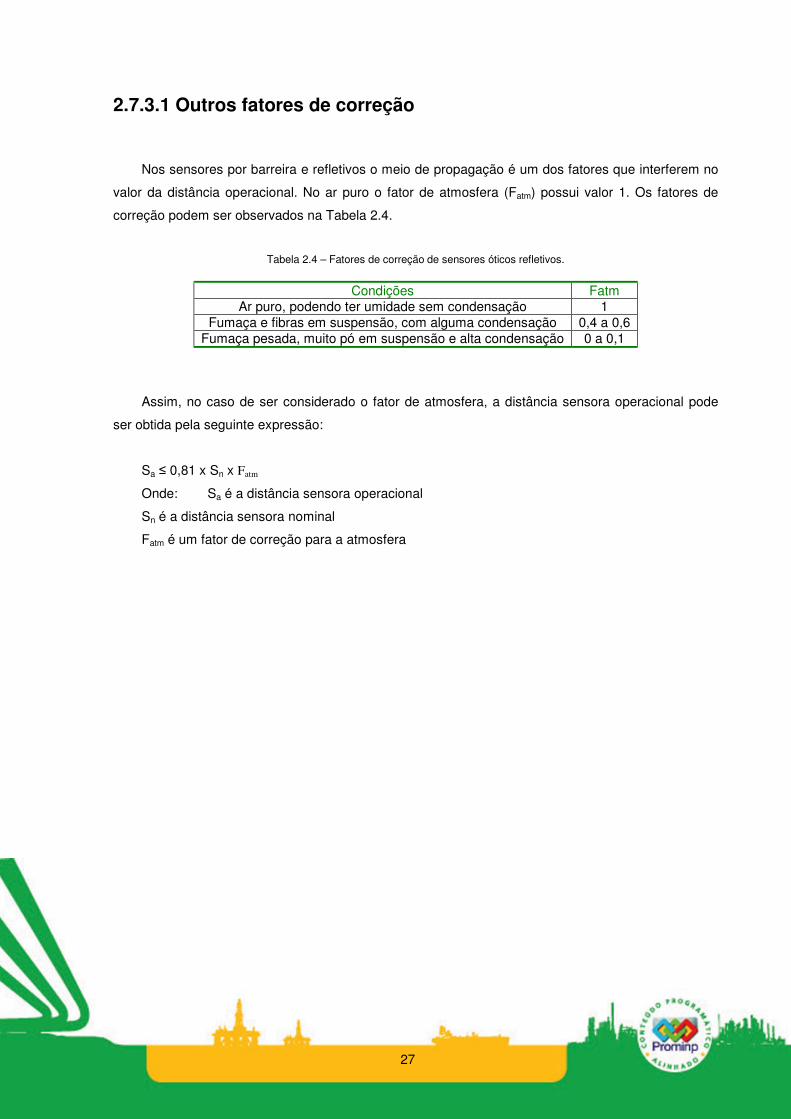
Nos sensores por barreira e refletivos o meio de propagação é um dos fatores que interferem no
valor da distância operacional. No ar puro o fator de atmosfera (Fatm) possui valor 1. Os fatores de
correção podem ser observados na Tabela 2.4.
Tabela 2.4 – Fatores de correção de sensores óticos refletivos.
Condições Fatm Ar puro, podendo ter umidade sem condensação 1
Fumaça e fibras em suspensão, com alguma condensação 0,4 a 0,6 Fumaça pesada, muito pó em suspensão e alta condensação 0 a 0,1
Assim, no caso de ser considerado o fator de atmosfera, a distância sensora operacional pode
ser obtida pela seguinte expressão:
Sa ≤ 0,81 x Sn x Fatm
Onde: Sa é a distância sensora operacional
Sn é a distância sensora nominal
Fatm é um fator de correção para a atmosfera
28
III - SENSORES DE NÍVEL
3.1 Controles eletromecânicos de nível
O sensor é eletromecânico é utilizado em processos de armazenagem ou transporte de materiais
sólidos ou granulados, principalmente em indústrias de plásticos, minérios, alimentícias, químicas,
entre outras.
3.1.1 Chave de nível do tipo pá rotativa
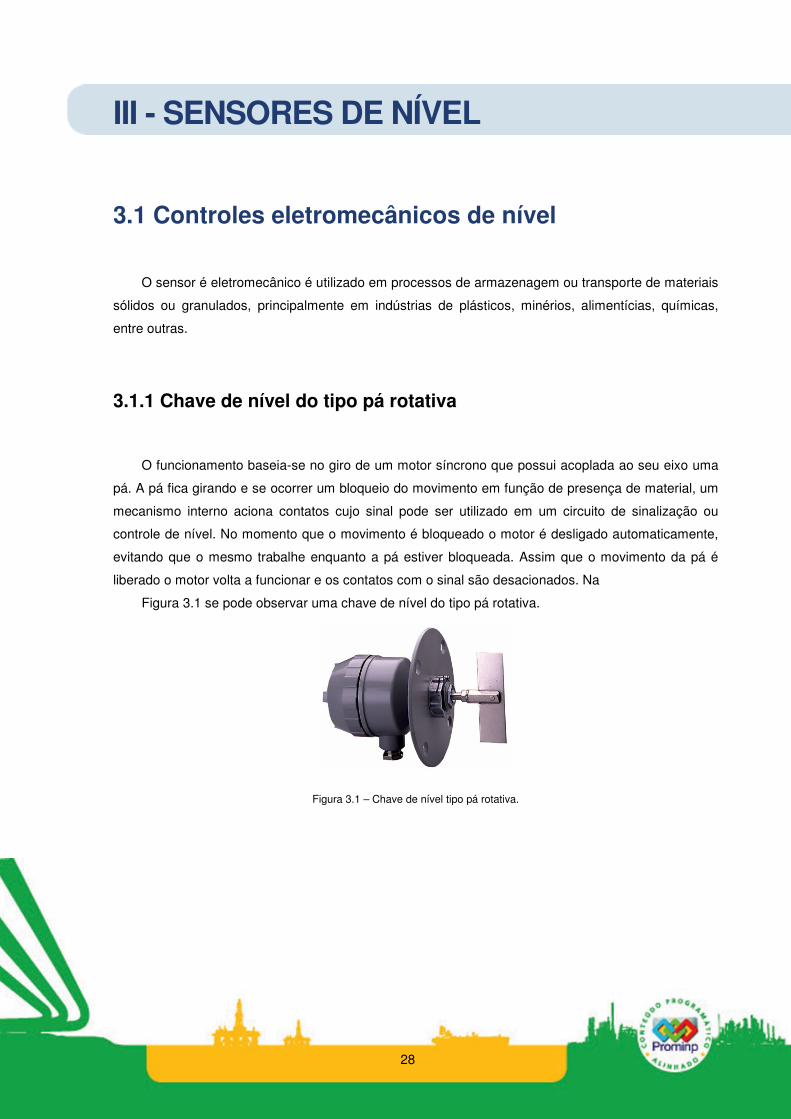
O funcionamento baseia-se no giro de um motor síncrono que possui acoplada ao seu eixo uma
pá. A pá fica girando e se ocorrer um bloqueio do movimento em função de presença de material, um
mecanismo interno aciona contatos cujo sinal pode ser utilizado em um circuito de sinalização ou
controle de nível. No momento que o movimento é bloqueado o motor é desligado automaticamente,
evitando que o mesmo trabalhe enquanto a pá estiver bloqueada. Assim que o movimento da pá é
liberado o motor volta a funcionar e os contatos com o sinal são desacionados. Na
Figura 3.1 se pode observar uma chave de nível do tipo pá rotativa.
Figura 3.1 – Chave de nível tipo pá rotativa.

29
3.1.2 Chave de nível com membrana
O funcionamento ocorre através de uma membrana flexível que ao ser pressionada pelo material
armazenado aciona contatos cujo sinal pode ser utilizado em dispositivos de sinalização ou controle.
Na Figura 3.17 se pode observar uma chave de nível com membrana.
Figura 3.17 – Chave de nível com membrana.
3.1.3 Chaves de nível do tipo bóia
O funcionamento das chaves tipo bóia baseia-se na posição de uma bóia. A bóia está
fisicamente ligada a uma chave e conforme o nível ela aciona ou não a chave. Ao ser acionada, a
chave ativa contatos cujo sinal pode ser utilizado para sinalização ou controle. As chaves do tipo bóia
são empregadas principalmente nas indústrias têxtil, química e alimentícia. Na Figura 3.18 se pode
observar uma chave de nível do tipo bóia.
Figura 3.18 – Chave de nível do tipo bóia
30
IV - SENSORES MAGNÉTICOS OU REED SWITCHS
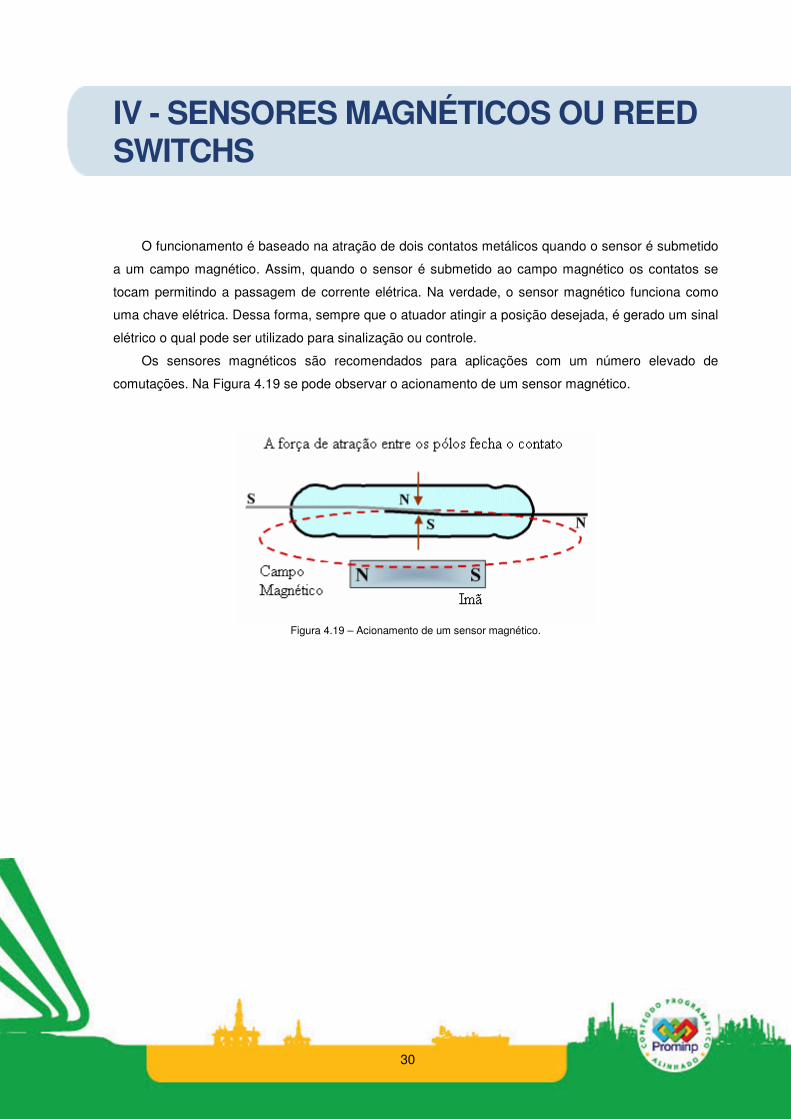
O funcionamento é baseado na atração de dois contatos metálicos quando o sensor é submetido
a um campo magnético. Assim, quando o sensor é submetido ao campo magnético os contatos se
tocam permitindo a passagem de corrente elétrica. Na verdade, o sensor magnético funciona como
uma chave elétrica. Dessa forma, sempre que o atuador atingir a posição desejada, é gerado um sinal
elétrico o qual pode ser utilizado para sinalização ou controle.
Os sensores magnéticos são recomendados para aplicações com um número elevado de
comutações. Na Figura 4.19 se pode observar o acionamento de um sensor magnético.
Figura 4.19 – Acionamento de um sensor magnético.
31
V - SENSORES DE TEMPERATURA
5.1 Termopar
O termopar é o sensor de temperatura mais utilizado industrialmente. Ele cobre uma faixa
bastante extensa de temperatura que vai de valores negativos a alguns milhares de graus Celsius
dependendo do tipo de termopar.
5.1.1 Teoria Termoelétrica
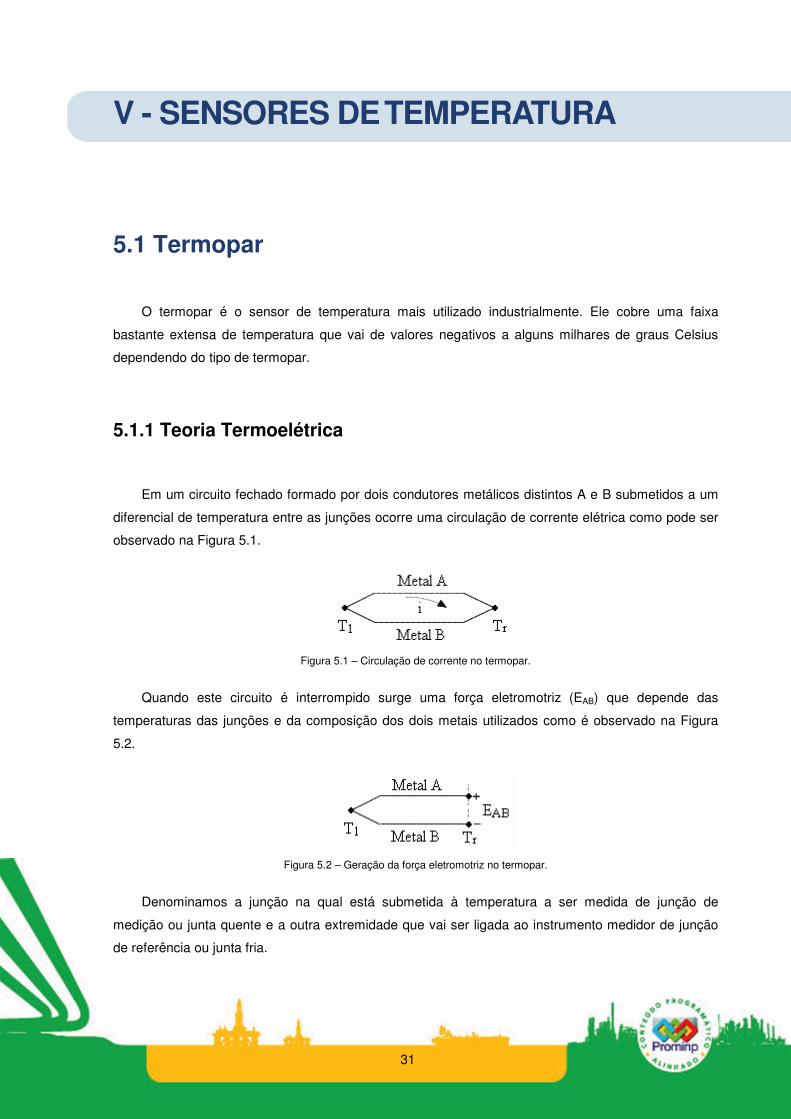
Em um circuito fechado formado por dois condutores metálicos distintos A e B submetidos a um
diferencial de temperatura entre as junções ocorre uma circulação de corrente elétrica como pode ser
observado na Figura 5.1.
Figura 5.1 – Circulação de corrente no termopar.
Quando este circuito é interrompido surge uma força eletromotriz (EAB) que depende das
temperaturas das junções e da composição dos dois metais utilizados como é observado na Figura
5.2.
Figura 5.2 – Geração da força eletromotriz no termopar.
Denominamos a junção na qual está submetida à temperatura a ser medida de junção de
medição ou junta quente e a outra extremidade que vai ser ligada ao instrumento medidor de junção
de referência ou junta fria.
32
Quando a temperatura da junção de referência (Tr) é mantida constante, verifica-se que a FEM
térmica (EAB) é uma função da temperatura da junção de medição (T1). Isto permite utilizar este
circuito como um medidor de temperatura, pois se conhecendo a Tr e a FEM gerada, determina-se a
temperatura da junção de medição.
EAB = f (∆T)
EAB = ET1 - ETr
5.1.2 Definição de Termopar
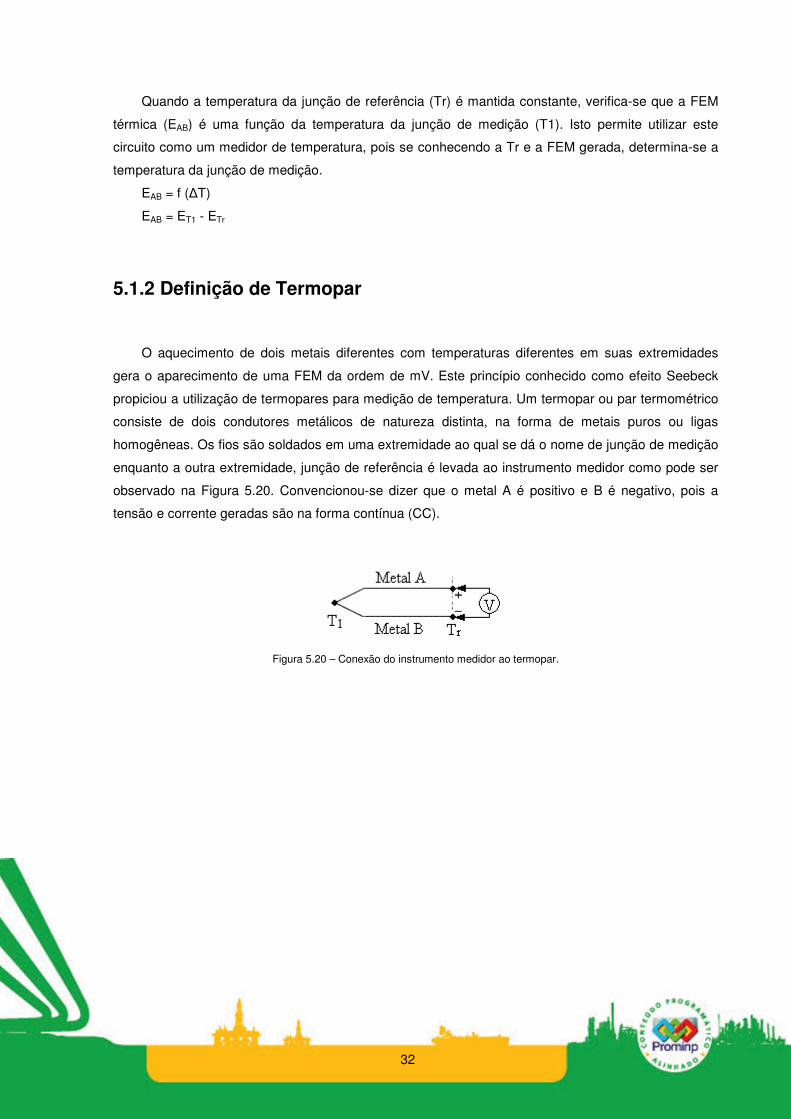
O aquecimento de dois metais diferentes com temperaturas diferentes em suas extremidades
gera o aparecimento de uma FEM da ordem de mV. Este princípio conhecido como efeito Seebeck
propiciou a utilização de termopares para medição de temperatura. Um termopar ou par termométrico
consiste de dois condutores metálicos de natureza distinta, na forma de metais puros ou ligas
homogêneas. Os fios são soldados em uma extremidade ao qual se dá o nome de junção de medição
enquanto a outra extremidade, junção de referência é levada ao instrumento medidor como pode ser
observado na Figura 5.20. Convencionou-se dizer que o metal A é positivo e B é negativo, pois a
tensão e corrente geradas são na forma contínua (CC).
Figura 5.20 – Conexão do instrumento medidor ao termopar.

33
5.1.3 Leis do Circuito Termoelétrico
5.1.3.1 Lei do Circuito Homogêneo
A FEM gerada por um termopar depende única e exclusivamente da composição química dos
dois metais e das temperaturas entre as duas junções, ou seja, a tensão gerada independe do
gradiente de temperatura ao longo dos fios. A lei do circuito homogêneo é representada na Figura 5..
Figura 5.4 – Representação da lei do circuito homogêneo.
A aplicação desta lei permite medições de temperatura em pontos bem definidos com os
termopares, pois o importante é a diferença de temperatura entre as suas junções.
5.1.3.2 Lei dos Metais Intermediários
A FEM gerada por um par termoelétrico não será alterada se for inserido em qualquer ponto do
circuito, um metal genérico diferente dos que compõem o sensor, desde que as novas junções
formadas estejam na mesma temperatura. A lei dos metais intermediários é representada na Figura
5..
Figura 5.5 – Representação da lei dos metais intermediários.
Uma aplicação prática desta lei é o uso dos contatos de latão ou cobre no bloco de ligação, para
a interligação do termopar ao seu cabo.

34
5.1.3.3 Lei das Temperaturas Intermediárias
A FEM gerada em um circuito termoelétrico com suas junções às temperaturas T1 e T3
respectivamente, é a soma algébrica de FEM gerada com as junções às temperaturas T1 e T2 e a
FEM do mesmo circuito com as junções às temperaturas de T2 e T3. A lei das temperaturas
intermediárias é representada na Figura 5..
Figura 5.6 – Representação da lei das temperaturas intermediárias.
Uma conseqüência desta lei é o uso dos cabos compensados, que tendo as mesmas
características termoelétricas do termopar, podem ser introduzidos no circuito sem causar erros no
sinal gerado.
5.1.4 Compensação da Temperatura Ambiente ( Tr )
Para utilizar-se o termopar como medidor de temperatura, é necessário conhecer a FEM gerada
e a temperatura da junção de referência Tr. Conhecendo esses valores pode-se determinar a
temperatura da junção de medição T1.
EAB = ET1 - ETr
Portanto pode encontrar-se a temperatura T1 desde que se conheça a temperatura Tr. Uma
maneira de se determinar a temperatura Tr é forçá-la para um valor conhecido, como por exemplo,
0ºC.
35
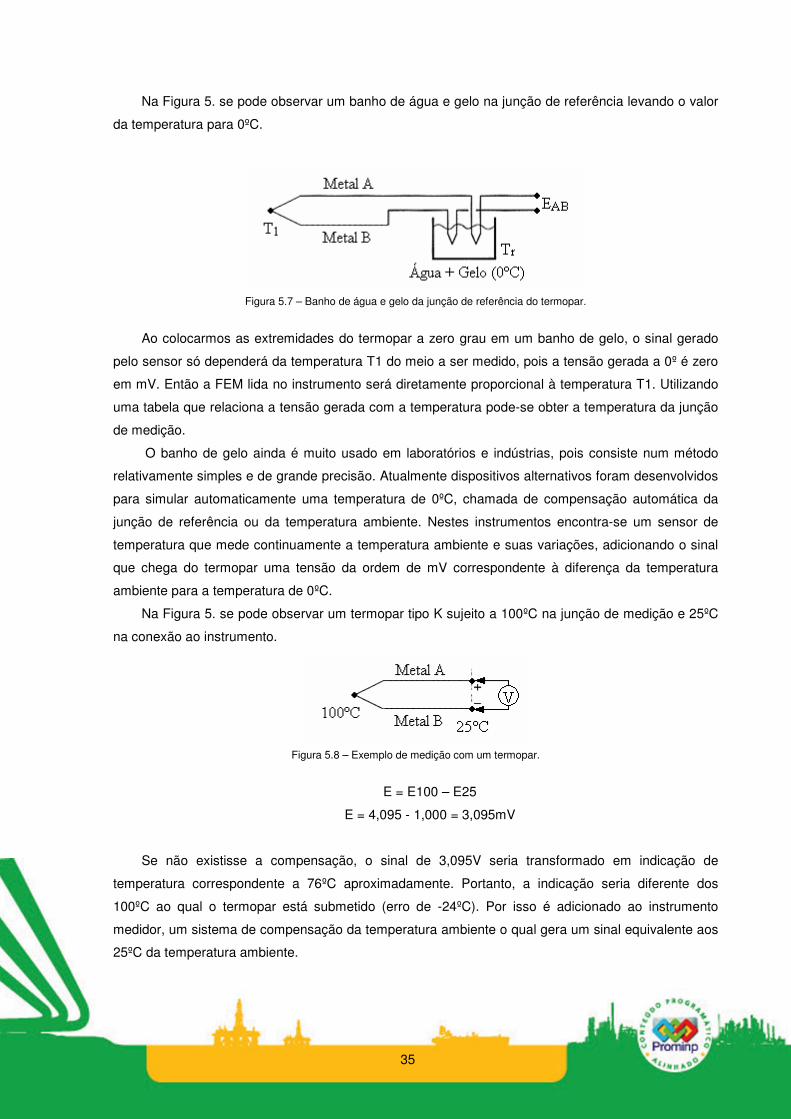
Na Figura 5. se pode observar um banho de água e gelo na junção de referência levando o valor
da temperatura para 0ºC.
Figura 5.7 – Banho de água e gelo da junção de referência do termopar.
Ao colocarmos as extremidades do termopar a zero grau em um banho de gelo, o sinal gerado
pelo sensor só dependerá da temperatura T1 do meio a ser medido, pois a tensão gerada a 0º é zero
em mV. Então a FEM lida no instrumento será diretamente proporcional à temperatura T1. Utilizando
uma tabela que relaciona a tensão gerada com a temperatura pode-se obter a temperatura da junção
de medição.
O banho de gelo ainda é muito usado em laboratórios e indústrias, pois consiste num método
relativamente simples e de grande precisão. Atualmente dispositivos alternativos foram desenvolvidos
para simular automaticamente uma temperatura de 0ºC, chamada de compensação automática da
junção de referência ou da temperatura ambiente. Nestes instrumentos encontra-se um sensor de
temperatura que mede continuamente a temperatura ambiente e suas variações, adicionando o sinal
que chega do termopar uma tensão da ordem de mV correspondente à diferença da temperatura
ambiente para a temperatura de 0ºC.
Na Figura 5. se pode observar um termopar tipo K sujeito a 100ºC na junção de medição e 25ºC
na conexão ao instrumento.
Figura 5.8 – Exemplo de medição com um termopar.
E = E100 – E25
E = 4,095 - 1,000 = 3,095mV
Se não existisse a compensação, o sinal de 3,095V seria transformado em indicação de
temperatura correspondente a 76ºC aproximadamente. Portanto, a indicação seria diferente dos
100ºC ao qual o termopar está submetido (erro de -24ºC). Por isso é adicionado ao instrumento
medidor, um sistema de compensação da temperatura ambiente o qual gera um sinal equivalente aos
25ºC da temperatura ambiente.

36
E1 = E25 – E0
E1 = 1,000 - 0 = 1,000mV
O sinal total que será convertido em temperatura pelo instrumento será a somatória do sinal do
termopar e da compensação, resultando na indicação correta da temperatura na qual o termopar está
submetido (independendo da variação da temperatura ambiente).
Etotal = E + E1
Etotal = 3,095 + 1,000 = 4,095mV
E100 = 4,095mV
A indicação no instrumento será de 100ºC, que é a temperatura medida.
5.1.5 Conversão de Tensão para Temperatura
Como a relação FEM x temperatura de um termopar não é linear, o instrumento indicador deve
de algum modo linearizar o sinal gerado pelo sensor. No caso de alguns instrumentos analógicos
como registradores, a escala gráfica do instrumento não é linear acompanhando a curva do termopar.
Em instrumentos digitais usa-se ou a tabela de correlação FEM x temperatura, armazenada em
memória ou uma equação matemática que descreve a curva do sensor. Esta equação é um
polinômio, que a depender da precisão requerida pode alcançar uma ordem de até 9º grau.
5.1.6 Tipos e Características dos Termopares
Foram desenvolvidas diversas combinações de pares de ligas metálicas com o intuito de se obter
uma alta potência termoelétrica (mV/ºC), homogenidade dos fios, resistência à corrosão, relação
razoavelmente linear entre temperatura e tensão entre outros. Os termopares podem ser divididos em
dois grupos:
-Termopares de Base Metálica ou Básicos
-Termopares Nobres ou a Base de Platina
Os termopares de base metálica ou básicos (Tipos T, J, K e E) são os termopares de maior uso
industrial, em que os fios são de custo relativamente baixo e sua aplicação admite um limite de erro
maior.
37
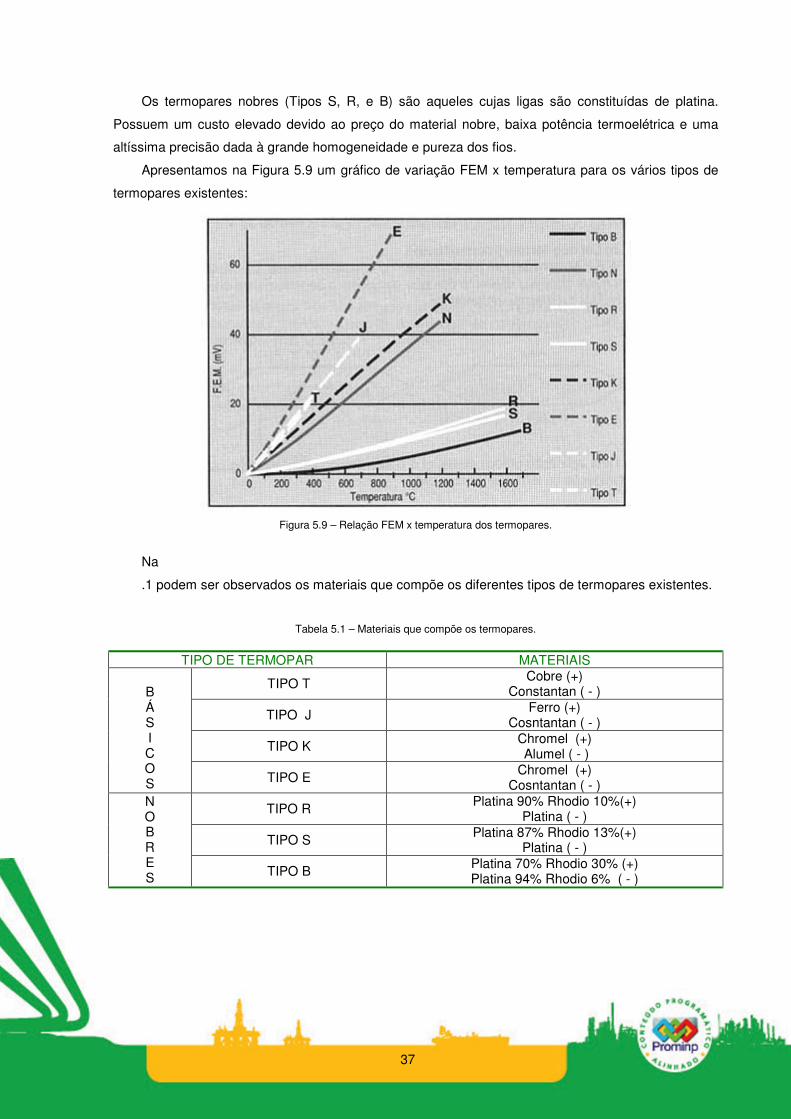
Os termopares nobres (Tipos S, R, e B) são aqueles cujas ligas são constituídas de platina.
Possuem um custo elevado devido ao preço do material nobre, baixa potência termoelétrica e uma
altíssima precisão dada à grande homogeneidade e pureza dos fios.
Apresentamos na Figura 5.9 um gráfico de variação FEM x temperatura para os vários tipos de
termopares existentes:
Figura 5.9 – Relação FEM x temperatura dos termopares.
Na
.1 podem ser observados os materiais que compõe os diferentes tipos de termopares existentes.
Tabela 5.1 – Materiais que compõe os termopares.
TIPO DE TERMOPAR MATERIAIS
TIPO T Cobre (+) Constantan ( - )
TIPO J Ferro (+) Cosntantan ( - )
TIPO K Chromel (+) Alumel ( - )
B Á S I C O S TIPO E Chromel (+)
Cosntantan ( - )
TIPO R Platina 90% Rhodio 10%(+) Platina ( - )
TIPO S Platina 87% Rhodio 13%(+) Platina ( - )
N O B R E S TIPO B Platina 70% Rhodio 30% (+)
Platina 94% Rhodio 6% ( - )

38
5.1.7 Termopar de Isolação Mineral
O desenvolvimento dos termopares isolação mineral partiu da necessidade de satisfazer as
severas exigências do setor nuclear. Desde então, os benefícios deste trabalho puderam ser
transmitidos à indústria em geral, que os utiliza numa grande variedade de aplicações devido à série
de vantagens que oferecem, tais como grande estabilidade, resistência mecânica entre outros.
O termopar isolação mineral consiste de três partes básicas: um ou mais pares de fios isolados
entre si por um material cerâmico compactado (pó de óxido de magnésio) a uma bainha metálica
externa como pode ser observado na Figura 5.10.
Figura 5.10 – Termopar de isolação mineral.
Este tipo de montagem é de extrema utilidade, pois os fios ficam completamente isolados dos
ambientes agressivos, que podem causar a completa deterioração dos termoelementos, além da
grande resistência mecânica, o que faz com que o termopar isolação mineral possa ser usado em um
número quase infinito de aplicações.
O óxido de magnésio é um excelente isolante elétrico e um bom condutor térmico, de maneira
que quando compactado, ocupa todos os espaços internos, isolando eletricamente os fios entre si e a
bainha além de dar alta resistência mecânica ao conjunto e proporcionar boa troca térmica.
5.1.8 Tipos de Junções de Medição
Podemos classificar os termopares, de acordo com a posição da junção de medição em relação
à bainha metálica, em três tipos:
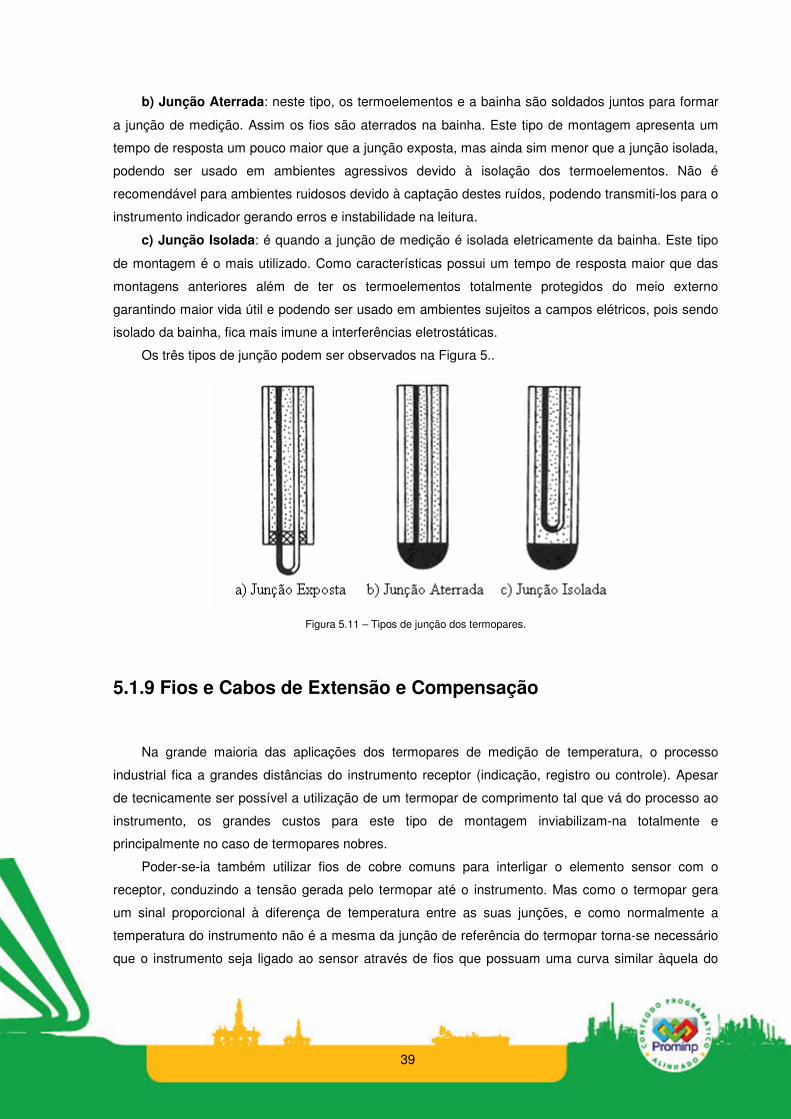
a) Junção Exposta: neste tipo de montagem, parte da bainha e da isolação são removidos,
expondo os termoelementos ao ambiente. Tem como características um tempo de resposta
extremamente pequeno e grande sensibilidade a pequenas variações na temperatura, mas representa
como desvantagem o rápido envelhecimento dos termoelementos devido ao contato com o ambiente
agressivo.
39
b) Junção Aterrada: neste tipo, os termoelementos e a bainha são soldados juntos para formar
a junção de medição. Assim os fios são aterrados na bainha. Este tipo de montagem apresenta um
tempo de resposta um pouco maior que a junção exposta, mas ainda sim menor que a junção isolada,
podendo ser usado em ambientes agressivos devido à isolação dos termoelementos. Não é
recomendável para ambientes ruidosos devido à captação destes ruídos, podendo transmiti-los para o
instrumento indicador gerando erros e instabilidade na leitura.
c) Junção Isolada: é quando a junção de medição é isolada eletricamente da bainha. Este tipo
de montagem é o mais utilizado. Como características possui um tempo de resposta maior que das
montagens anteriores além de ter os termoelementos totalmente protegidos do meio externo
garantindo maior vida útil e podendo ser usado em ambientes sujeitos a campos elétricos, pois sendo
isolado da bainha, fica mais imune a interferências eletrostáticas.
Os três tipos de junção podem ser observados na Figura 5..
Figura 5.11 – Tipos de junção dos termopares.
5.1.9 Fios e Cabos de Extensão e Compensação
Na grande maioria das aplicações dos termopares de medição de temperatura, o processo
industrial fica a grandes distâncias do instrumento receptor (indicação, registro ou controle). Apesar
de tecnicamente ser possível a utilização de um termopar de comprimento tal que vá do processo ao
instrumento, os grandes custos para este tipo de montagem inviabilizam-na totalmente e
principalmente no caso de termopares nobres.
Poder-se-ia também utilizar fios de cobre comuns para interligar o elemento sensor com o
receptor, conduzindo a tensão gerada pelo termopar até o instrumento. Mas como o termopar gera
um sinal proporcional à diferença de temperatura entre as suas junções, e como normalmente a
temperatura do instrumento não é a mesma da junção de referência do termopar torna-se necessário
que o instrumento seja ligado ao sensor através de fios que possuam uma curva similar àquela do

40
termopar, a fim de compensar a diferença de temperatura existente entre a junção de referência e o
instrumento e para que no instrumento possa ser efetuada corretamente a compensação da
temperatura ambiente.
Portanto, fios e cabos de extensão e compensação (ou fios e cabos compensados), nada mais
são que outros termopares, cuja função além de conduzir o sinal gerado pelo sensor, é a de
compensar os gradientes de temperatura existentes entre a junção de referência (cabeçote) do sensor
e os bornes do instrumento, gerando um sinal proporcional de tensão a este gradiente.
O uso de cabos de cobres comuns interligando o termopar ao instrumento, sujeitos a
temperaturas diferentes entre suas extremidades provocam erros na indicação final de temperatura,
pois o cabo de cobre não compensa o diferencial de temperatura. Este erro pode ser maior ou menor,
dependendo do gradiente de temperatura existente.
5.1.9.1 Definições Técnicas dos Fios de Extensão e Cabos de Compensação
a) Fios são aqueles condutores constituídos por um eixo sólido, e cabos condutores formados
por um feixe de condutores de menor diâmetro, formando um condutor flexível.
b) Fios e cabos de extensão são condutores fabricados com as mesmas ligas dos termopares a
que se destinam e, portanto, apresentam a mesma curva FEM x temperatura.
Os fios e cabos de extensão são usados com os termopares de base metálica ou básicos tipo T,
J, E e K. Apesar de possuírem as mesmas ligas dos termopares, apresentam um custo menor devido
à limitação de temperatura que podem ser submetidos, pois sua composição química não é tão
homogênea quanto à do termopar.
c) Fios e cabos de compensação são os condutores fabricados com ligas diferentes dos
termopares a que se destinam, mas também apresentando a mesma curva FEM x temperatura dos
termopares.
Os fios e cabos de compensação são usados principalmente com os termopares nobres (feitos à
base de platina) tipos S e R, porém pode-se utilizá-lo em alguns termopares básicos e com os novos
tipos que ainda não estão normalizados.
O uso de materiais diferentes do termopar deve-se única e exclusivamente aos problemas
inerentes de custos, pois é totalmente inviável economicamente conduzir o sinal gerado pelo termopar
ao instrumento, usando fios e cabos de extensão de platina (mesmo tendo um grau de pureza menor).
Por isso faz-se uso de ligas diferentes da platina, porém apresentando a mesma curva de FEM x
temperatura. A única restrição no seu uso é a temperatura máxima de trabalho que é bem menor que
os termopares.
41
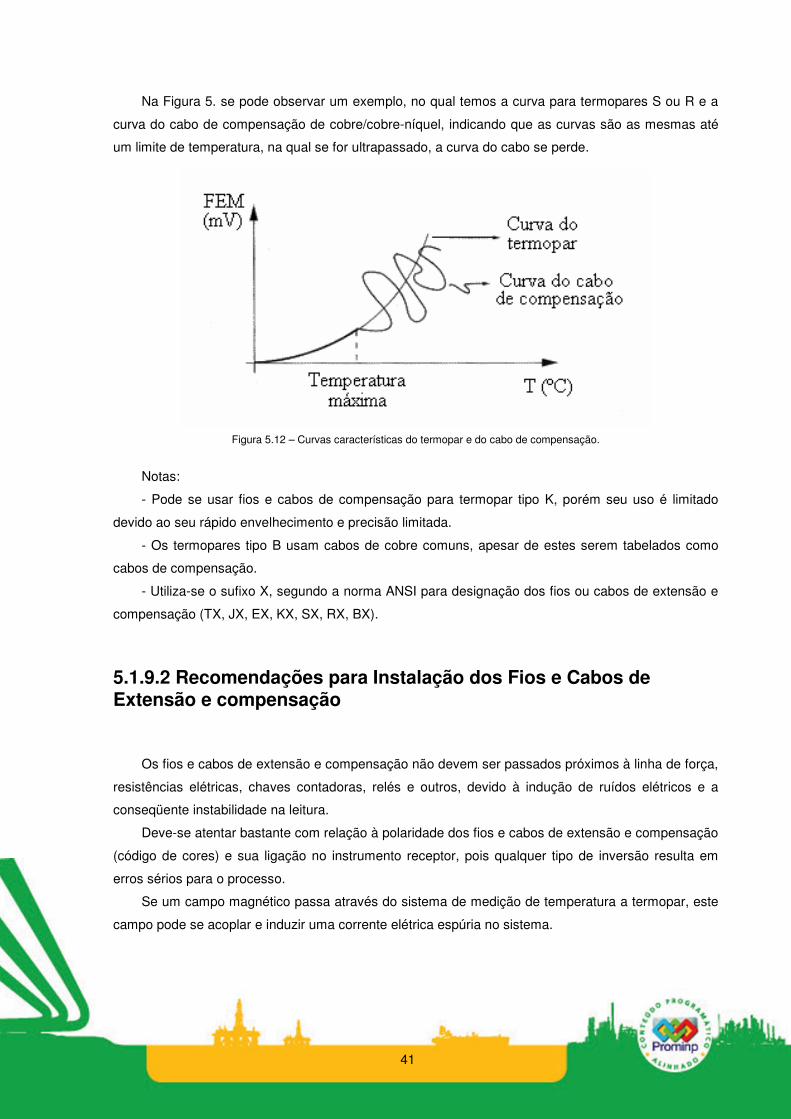
Na Figura 5. se pode observar um exemplo, no qual temos a curva para termopares S ou R e a
curva do cabo de compensação de cobre/cobre-níquel, indicando que as curvas são as mesmas até
um limite de temperatura, na qual se for ultrapassado, a curva do cabo se perde.
Figura 5.12 – Curvas características do termopar e do cabo de compensação.
Notas:
- Pode se usar fios e cabos de compensação para termopar tipo K, porém seu uso é limitado
devido ao seu rápido envelhecimento e precisão limitada.
- Os termopares tipo B usam cabos de cobre comuns, apesar de estes serem tabelados como
cabos de compensação.
- Utiliza-se o sufixo X, segundo a norma ANSI para designação dos fios ou cabos de extensão e
compensação (TX, JX, EX, KX, SX, RX, BX).
5.1.9.2 Recomendações para Instalação dos Fios e Cabos de Extensão e compensação
Os fios e cabos de extensão e compensação não devem ser passados próximos à linha de força,
resistências elétricas, chaves contadoras, relés e outros, devido à indução de ruídos elétricos e a
conseqüente instabilidade na leitura.
Deve-se atentar bastante com relação à polaridade dos fios e cabos de extensão e compensação
(código de cores) e sua ligação no instrumento receptor, pois qualquer tipo de inversão resulta em
erros sérios para o processo.
Se um campo magnético passa através do sistema de medição de temperatura a termopar, este
campo pode se acoplar e induzir uma corrente elétrica espúria no sistema.
42
O método para a minimização dos ruídos magnéticos é a torção dos fios ou cabos de extensão e
compensação. A torção dos cabos faz com que a corrente induzida se cancele, atenuando este tipo
de interferência. Quanto maior for o número de torções, mais eficiente será contra os ruídos.
Para uma melhor proteção, os fios ou cabos de extensão e compensação devem sempre ser
torcidos e blindados (ruídos eletrostáticos).
5.1.10 Acessórios dos Termopares, Características e Aplicações
Tão importante quanto à especificação correta do termopar para as condições de um
determinado processo, é também a escolha dos acessórios que compõem a montagem do mesmo.
5.1.10.1 Isoladores
Sua função é a de isolar eletricamente os termoelementos e resistir a altas temperaturas. Os
isoladores geralmente são feitos de cerâmica ou de alumina.
Na Figura 5. pode ser observado vários tipos de formatos e isoladores.
Figura 5.13 – Isoladores.
43
5.1.10.2 Blocos de Ligação
A função do bloco de ligação é a de interligar o termopar ao fio ou cabo de extensão ou
compensação, e prendê-los no cabeçote. A base é feita de cerâmica isolante e os contatos são feitos
de latão niquelado ou cobre.
Existem diversos tamanhos e formatos, que são estabelecidos pelo tipo do termopar e cabeçotes
utilizados. Um exemplo de bloco de ligação pode ser observado na Figura 5..
Figura 5.14 – Bloco de ligação.
5.1.10.3 Cabeçotes
A função do cabeçote é a de proteger os contatos do bloco de ligação, facilitar a conexão do tubo
de proteção, além de manter uma temperatura estável nos contatos do bloco de ligação, para que os
contatos feitos de materiais diferentes do termopar não interfiram no sinal gerado por ele (vide Lei dos
metais intermediários).
Os cabeçotes são feitos normalmente de alumínio ou ferro fundido, existindo também em vários
tipos e formatos, dependendo do ambiente a ser aplicado. Na Figura 5. pode ser observado um
exemplo de cabeçote.
Figura 5.15 – Cabeçote.
44
5.1.10.4 Tubos de Proteção
Os tubos de proteção têm como função principal proteger os termopares de ambientes de
trabalho (processos), pois na maioria das aplicações o ambiente do processo agride os termopares e
caso fossem usados sem proteção, teriam uma vida útil muito reduzida.
Na Figura 5., tem-se o esquema de um tubo de proteção.
Figura 5.16 – Tubo de proteção.
5.2 Termômetro de Resistência
As termoresistências ou termômetros de resistência são sensores de temperatura utilizados na
indústria e em laboratórios e centros de pesquisa. O seu funcionamento está baseado na variação da
resistência elétrica que ocorre devido à variação da temperatura que o material metálico é submetido,
causando um acréscimo de resistência com a elevação de temperatura. A variação da resistência
com a temperatura pode ser obtida de uma maneira simplificada através da seguinte expressão:
R = R0 (1 + αT)
Onde: R é a resistência da termoresistência
Ro é a resistência da termoresistência a 0o C
α é o coeficiente de variação da resistência com a temperatura
T é a temperatura
O sensor é constituído de um fio metálico bastante fino enrolado sobre um isolante e
encapsulado em outro isolante (suporte de cerâmica, vidro ou mica) constituindo o bulbo de
resistência. O bulbo é colocado no ambiente aonde vai se medir a temperatura através de um poço de
proteção. O bulbo é parte integrante de um circuito eletrônico, que através da circulação de corrente
detecta as variações de temperatura decorrentes da mudança de sua resistência.
45
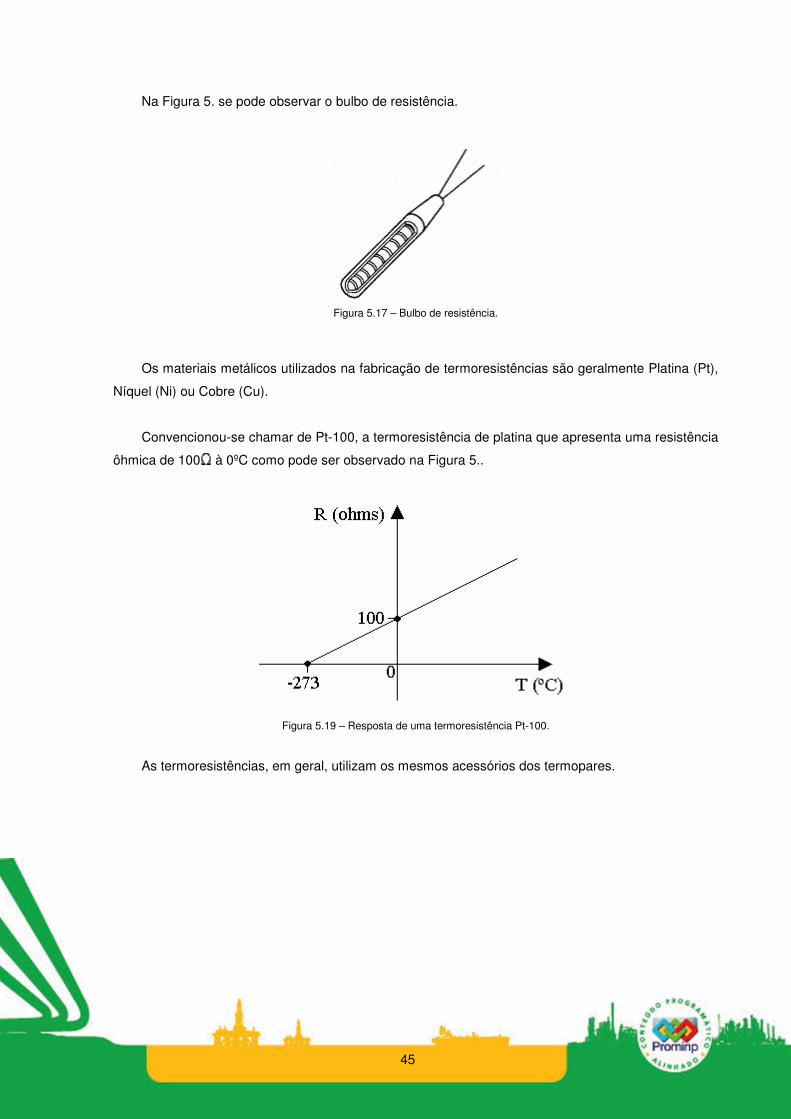
Na Figura 5. se pode observar o bulbo de resistência.
Figura 5.17 – Bulbo de resistência.
Os materiais metálicos utilizados na fabricação de termoresistências são geralmente Platina (Pt),
Níquel (Ni) ou Cobre (Cu).
Convencionou-se chamar de Pt-100, a termoresistência de platina que apresenta uma resistência
ôhmica de 100 à 0ºC como pode ser observado na Figura 5..
Figura 5.19 – Resposta de uma termoresistência Pt-100.
As termoresistências, em geral, utilizam os mesmos acessórios dos termopares.
46
5.2.1 Esquema de Montagem de Termoresistências
A variação de resistência sofrida pelo bulbo de resistência não é medida através de um
ohmímetro, e sim com um circuito auxiliar que converte a variação de resistência em variação de
corrente elétrica ou tensão.
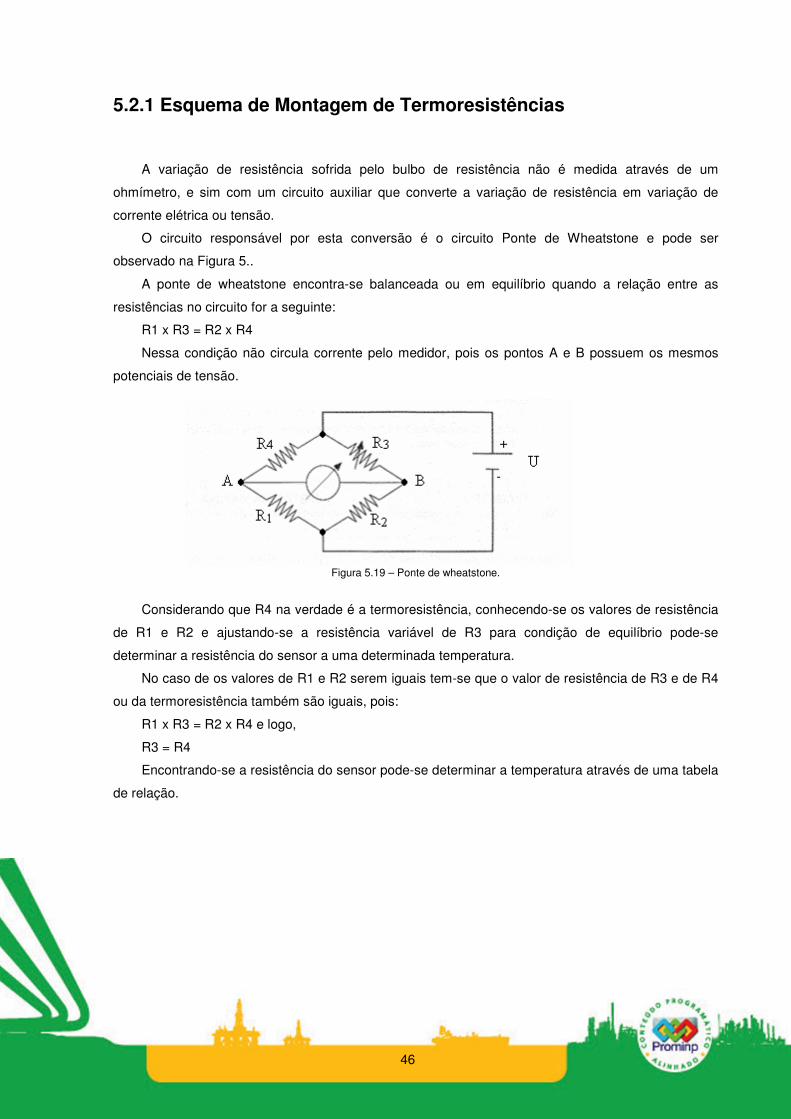
O circuito responsável por esta conversão é o circuito Ponte de Wheatstone e pode ser
observado na Figura 5..
A ponte de wheatstone encontra-se balanceada ou em equilíbrio quando a relação entre as
resistências no circuito for a seguinte:
R1 x R3 = R2 x R4
Nessa condição não circula corrente pelo medidor, pois os pontos A e B possuem os mesmos
potenciais de tensão.
Figura 5.19 – Ponte de wheatstone.
Considerando que R4 na verdade é a termoresistência, conhecendo-se os valores de resistência
de R1 e R2 e ajustando-se a resistência variável de R3 para condição de equilíbrio pode-se
determinar a resistência do sensor a uma determinada temperatura.
No caso de os valores de R1 e R2 serem iguais tem-se que o valor de resistência de R3 e de R4
ou da termoresistência também são iguais, pois:
R1 x R3 = R2 x R4 e logo,
R3 = R4
Encontrando-se a resistência do sensor pode-se determinar a temperatura através de uma tabela
de relação.
47
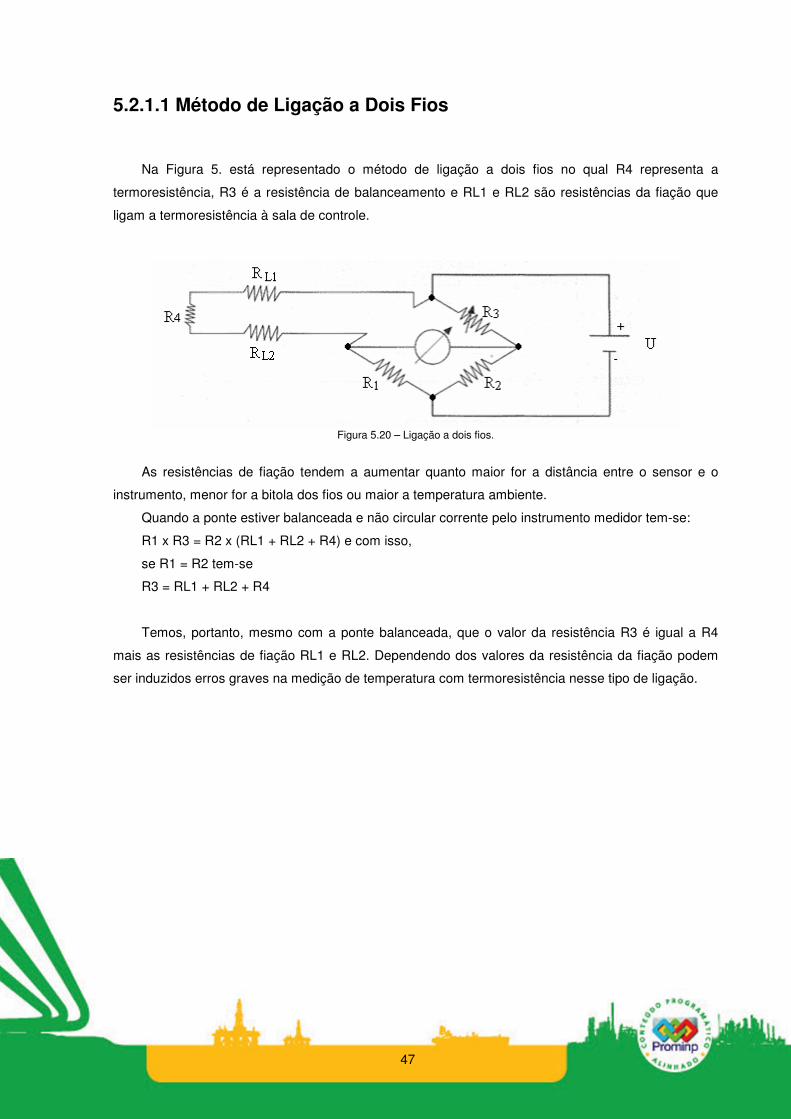
5.2.1.1 Método de Ligação a Dois Fios
Na Figura 5. está representado o método de ligação a dois fios no qual R4 representa a
termoresistência, R3 é a resistência de balanceamento e RL1 e RL2 são resistências da fiação que
ligam a termoresistência à sala de controle.
Figura 5.20 – Ligação a dois fios.
As resistências de fiação tendem a aumentar quanto maior for a distância entre o sensor e o
instrumento, menor for a bitola dos fios ou maior a temperatura ambiente.
Quando a ponte estiver balanceada e não circular corrente pelo instrumento medidor tem-se:
R1 x R3 = R2 x (RL1 + RL2 + R4) e com isso,
se R1 = R2 tem-se
R3 = RL1 + RL2 + R4
Temos, portanto, mesmo com a ponte balanceada, que o valor da resistência R3 é igual a R4
mais as resistências de fiação RL1 e RL2. Dependendo dos valores da resistência da fiação podem
ser induzidos erros graves na medição de temperatura com termoresistência nesse tipo de ligação.
48
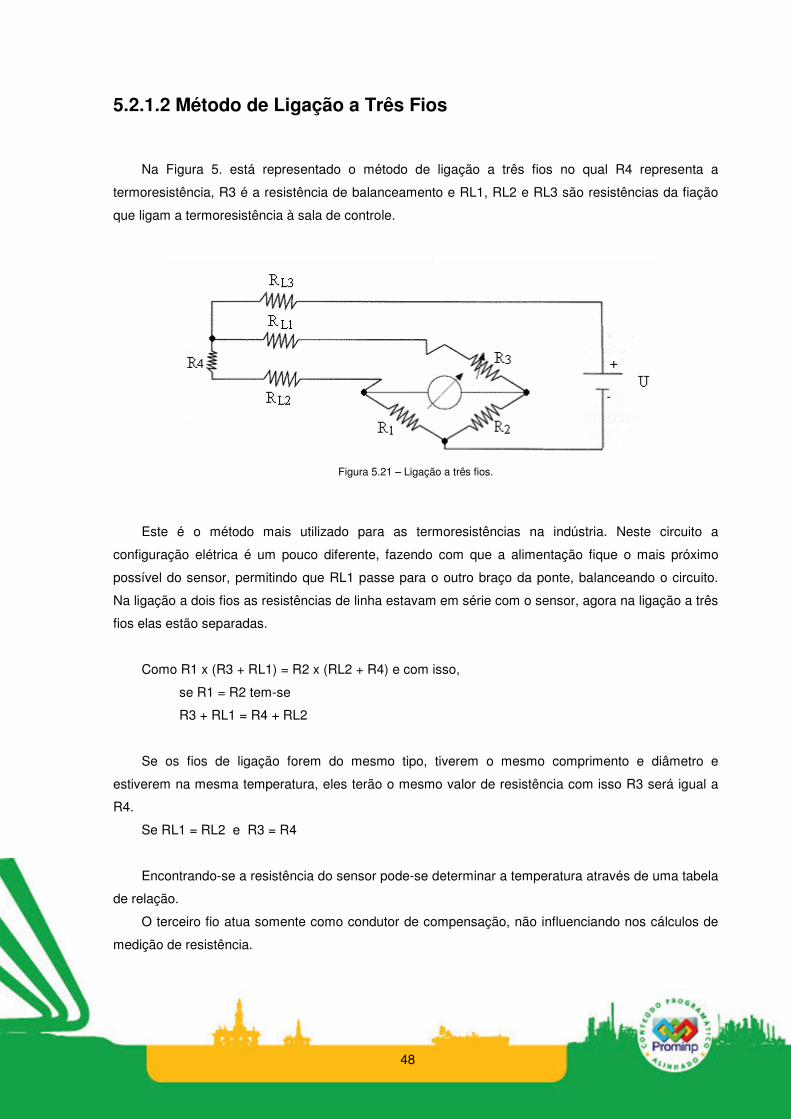
5.2.1.2 Método de Ligação a Três Fios
Na Figura 5. está representado o método de ligação a três fios no qual R4 representa a
termoresistência, R3 é a resistência de balanceamento e RL1, RL2 e RL3 são resistências da fiação
que ligam a termoresistência à sala de controle.
Figura 5.21 – Ligação a três fios.
Este é o método mais utilizado para as termoresistências na indústria. Neste circuito a
configuração elétrica é um pouco diferente, fazendo com que a alimentação fique o mais próximo
possível do sensor, permitindo que RL1 passe para o outro braço da ponte, balanceando o circuito.
Na ligação a dois fios as resistências de linha estavam em série com o sensor, agora na ligação a três
fios elas estão separadas.
Como R1 x (R3 + RL1) = R2 x (RL2 + R4) e com isso,
se R1 = R2 tem-se
R3 + RL1 = R4 + RL2
Se os fios de ligação forem do mesmo tipo, tiverem o mesmo comprimento e diâmetro e
estiverem na mesma temperatura, eles terão o mesmo valor de resistência com isso R3 será igual a
R4.
Se RL1 = RL2 e R3 = R4
Encontrando-se a resistência do sensor pode-se determinar a temperatura através de uma tabela
de relação.
O terceiro fio atua somente como condutor de compensação, não influenciando nos cálculos de
medição de resistência.
49
5.3 Termoresistência x Termopar
Vantagens:
a) Possuem maior precisão dentro da faixa de utilização.
b) Tem características de estabilidade e repetibilidade melhores.
c) Com ligação adequada, não existe limitação para distância de operação.
d) Dispensa o uso de fios e cabos de extensão e compensação para ligação, sendo necessário
somente fios de cobre comuns.
e) Se adequadamente protegido (poços e tubos de proteção), permite a utilização em qualquer
ambiente.
f) Curva de Resistência x Temperatura mais linear.
g) Menos influenciada por ruídos elétricos.
Desvantagens:
a) São mais caras.
b) Range de temperatura menor do que os termopares.
c) Deterioram-se com mais facilidade, caso se ultrapasse a temperatura máxima de utilização.
d) É necessário que todo o corpo do bulbo esteja com a temperatura estabilizada para a correta
indicação.
e) Possui um tempo de resposta mais alto que os termopares.
f) Mais frágil mecanicamente.
g) Auto-aquecimento, exigindo instrumentação sofisticada.
50
VI - CONTROLE DE PROCESSOS
6.1 Conceitos básicos de controle de processos
A função fundamental do controle automático de processos é manipular a relação entre a entrada
e a saída de um sistema de modo a manter determinadas variáveis do processo dentro dos limites
desejados.
Atualmente, tarefas que antes eram realizadas manualmente ou com o auxílio de um operador
vêm sendo automatizadas. Com isso, o ser humano vem sendo substituído por tecnologias capazes
de executar tais tarefas.
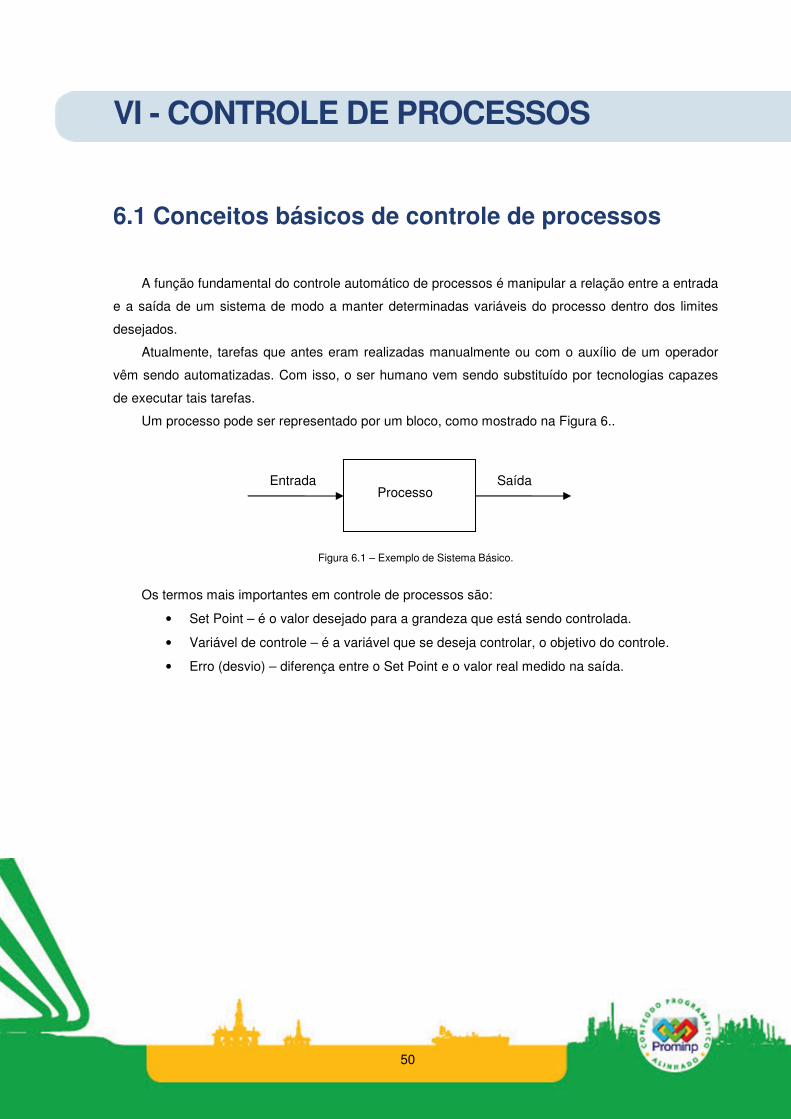
Um processo pode ser representado por um bloco, como mostrado na Figura 6..
Figura 6.1 – Exemplo de Sistema Básico.
Os termos mais importantes em controle de processos são:
• Set Point – é o valor desejado para a grandeza que está sendo controlada.
• Variável de controle – é a variável que se deseja controlar, o objetivo do controle.
• Erro (desvio) – diferença entre o Set Point e o valor real medido na saída.
Processo Entrada Saída
51
6.2 Sistemas de controle em malha aberta
Os sistemas em que a saída não tem nenhum efeito sobre a ação de controle são chamados
sistemas de controle em malha aberta. Portanto, em um sistema de controle em malha aberta, a saída
não é medida e nem realimentada para comparação com a entrada. Dessa forma, a saída não
interfere no processo de controle.
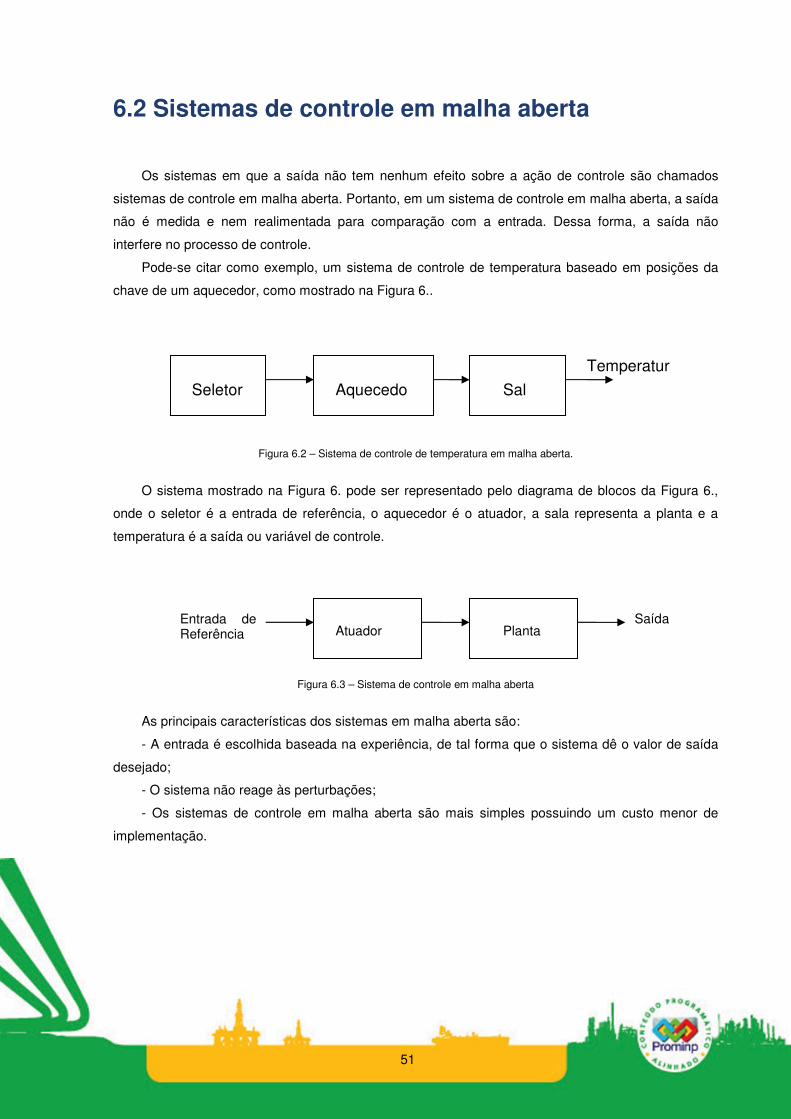
Pode-se citar como exemplo, um sistema de controle de temperatura baseado em posições da
chave de um aquecedor, como mostrado na Figura 6..
Figura 6.2 – Sistema de controle de temperatura em malha aberta.
O sistema mostrado na Figura 6. pode ser representado pelo diagrama de blocos da Figura 6.,
onde o seletor é a entrada de referência, o aquecedor é o atuador, a sala representa a planta e a
temperatura é a saída ou variável de controle.
Figura 6.3 – Sistema de controle em malha aberta
As principais características dos sistemas em malha aberta são:
- A entrada é escolhida baseada na experiência, de tal forma que o sistema dê o valor de saída
desejado;
- O sistema não reage às perturbações;
- Os sistemas de controle em malha aberta são mais simples possuindo um custo menor de
implementação.
Entrada de Referência Atuador Planta
Saída
Seletor Aquecedo Sal
Temperatur
52
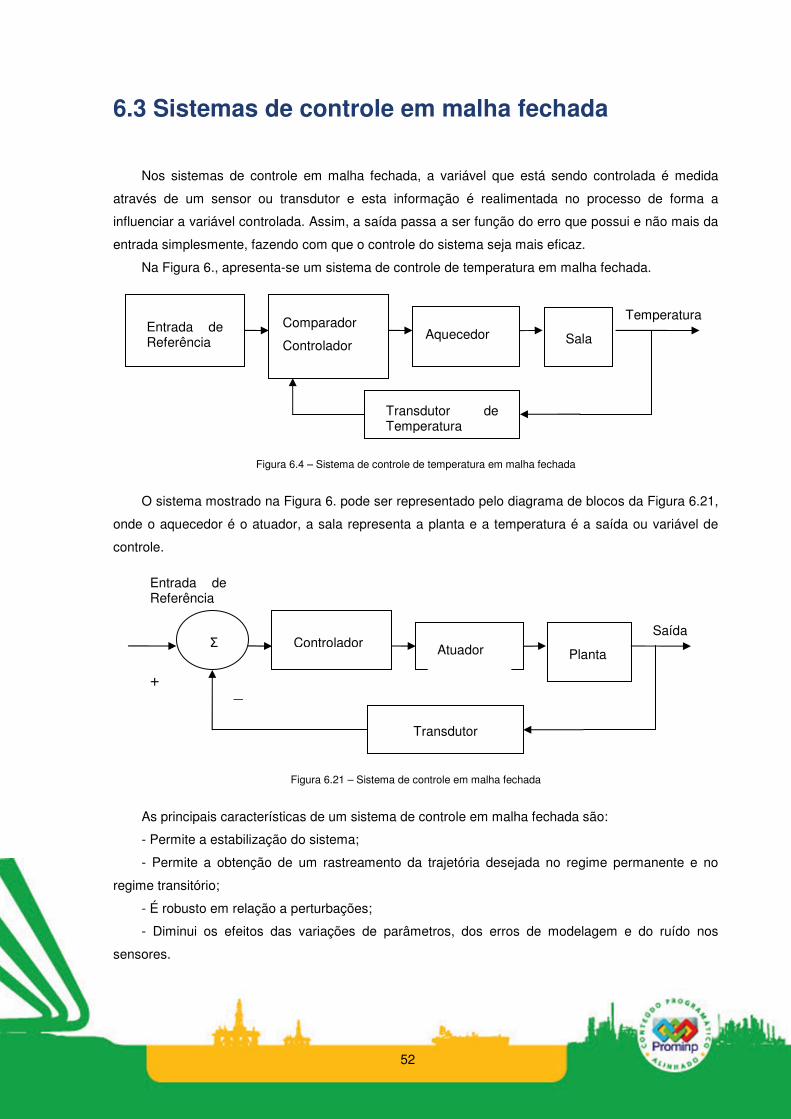
6.3 Sistemas de controle em malha fechada
Nos sistemas de controle em malha fechada, a variável que está sendo controlada é medida
através de um sensor ou transdutor e esta informação é realimentada no processo de forma a
influenciar a variável controlada. Assim, a saída passa a ser função do erro que possui e não mais da
entrada simplesmente, fazendo com que o controle do sistema seja mais eficaz.
Na Figura 6., apresenta-se um sistema de controle de temperatura em malha fechada.
Figura 6.4 – Sistema de controle de temperatura em malha fechada
O sistema mostrado na Figura 6. pode ser representado pelo diagrama de blocos da Figura 6.21,
onde o aquecedor é o atuador, a sala representa a planta e a temperatura é a saída ou variável de
controle.
Figura 6.21 – Sistema de controle em malha fechada
As principais características de um sistema de controle em malha fechada são:
- Permite a estabilização do sistema;
- Permite a obtenção de um rastreamento da trajetória desejada no regime permanente e no
regime transitório;
- É robusto em relação a perturbações;
- Diminui os efeitos das variações de parâmetros, dos erros de modelagem e do ruído nos
sensores.
Entrada de Referência
Atuador Planta
Saída Controlador
Transdutor
Σ
+ _
Entrada de Referência
Aquecedor Sala
Temperatura Comparador
Controlador
Transdutor de Temperatura
53
6.4 Controladores
O controlador é o elemento, na malha de controle, responsável pela correção do valor de saída
do processo, agindo em função do erro do sistema.
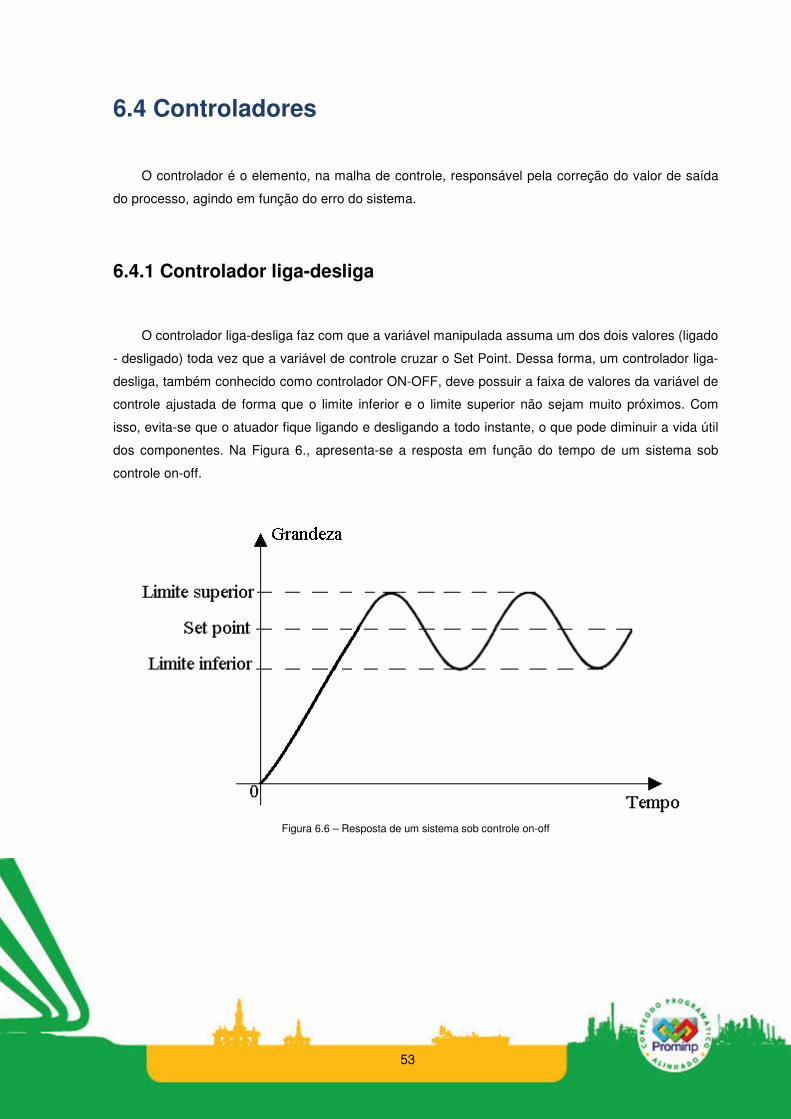
6.4.1 Controlador liga-desliga
O controlador liga-desliga faz com que a variável manipulada assuma um dos dois valores (ligado
- desligado) toda vez que a variável de controle cruzar o Set Point. Dessa forma, um controlador liga-
desliga, também conhecido como controlador ON-OFF, deve possuir a faixa de valores da variável de
controle ajustada de forma que o limite inferior e o limite superior não sejam muito próximos. Com
isso, evita-se que o atuador fique ligando e desligando a todo instante, o que pode diminuir a vida útil
dos componentes. Na Figura 6., apresenta-se a resposta em função do tempo de um sistema sob
controle on-off.
Figura 6.6 – Resposta de um sistema sob controle on-off
54
6.4.2 Controlador PID
O controlador PID (Proporcional-Integral-Derivativo) tem origem na combinação de três diferentes
ações de controle: a ação proporcional, a ação integral e a ação derivativa. O objetivo é aproveitar as
características particulares de cada uma dessas ações a fim de se obter uma melhora significativa do
comportamento transitório e em regime permanente do sistema controlado. Dessa forma têm-se três
parâmetros de sintonia no controlador: o ganho proporcional Kp (ação proporcional), o tempo integral
Ti (ação integral) e o tempo derivativo Td (ação derivativa). Apesar de termos a disponibilidade das
três ações, dependendo da aplicação só será necessária à utilização de uma das ações.
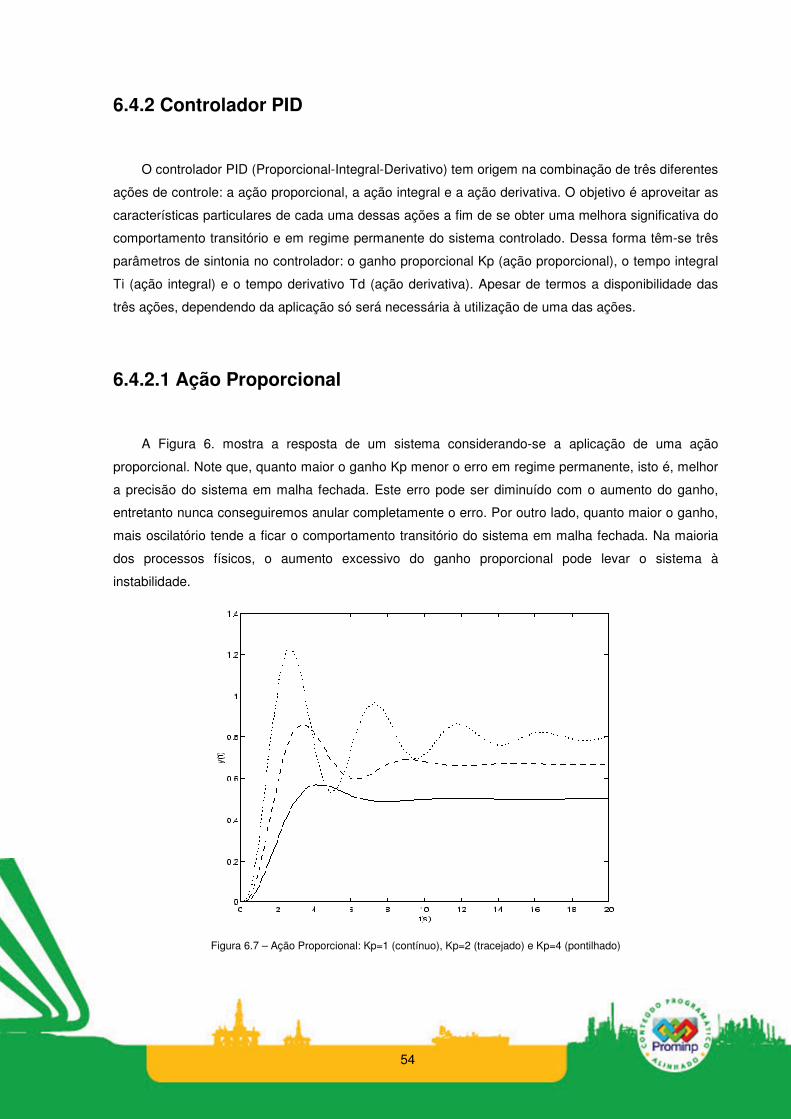
6.4.2.1 Ação Proporcional
A Figura 6. mostra a resposta de um sistema considerando-se a aplicação de uma ação
proporcional. Note que, quanto maior o ganho Kp menor o erro em regime permanente, isto é, melhor
a precisão do sistema em malha fechada. Este erro pode ser diminuído com o aumento do ganho,
entretanto nunca conseguiremos anular completamente o erro. Por outro lado, quanto maior o ganho,
mais oscilatório tende a ficar o comportamento transitório do sistema em malha fechada. Na maioria
dos processos físicos, o aumento excessivo do ganho proporcional pode levar o sistema à
instabilidade.
Figura 6.7 – Ação Proporcional: Kp=1 (contínuo), Kp=2 (tracejado) e Kp=4 (pontilhado)
55
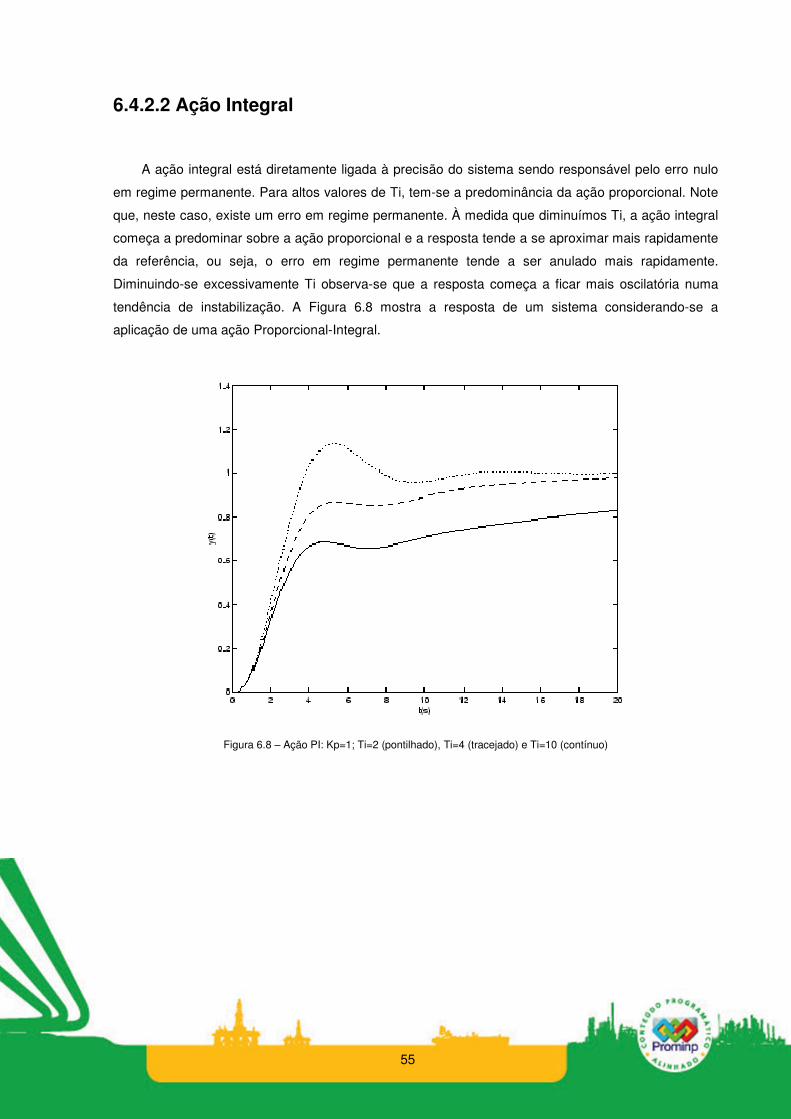
6.4.2.2 Ação Integral
A ação integral está diretamente ligada à precisão do sistema sendo responsável pelo erro nulo
em regime permanente. Para altos valores de Ti, tem-se a predominância da ação proporcional. Note
que, neste caso, existe um erro em regime permanente. À medida que diminuímos Ti, a ação integral
começa a predominar sobre a ação proporcional e a resposta tende a se aproximar mais rapidamente
da referência, ou seja, o erro em regime permanente tende a ser anulado mais rapidamente.
Diminuindo-se excessivamente Ti observa-se que a resposta começa a ficar mais oscilatória numa
tendência de instabilização. A Figura 6.8 mostra a resposta de um sistema considerando-se a
aplicação de uma ação Proporcional-Integral.
Figura 6.8 – Ação PI: Kp=1; Ti=2 (pontilhado), Ti=4 (tracejado) e Ti=10 (contínuo)
56
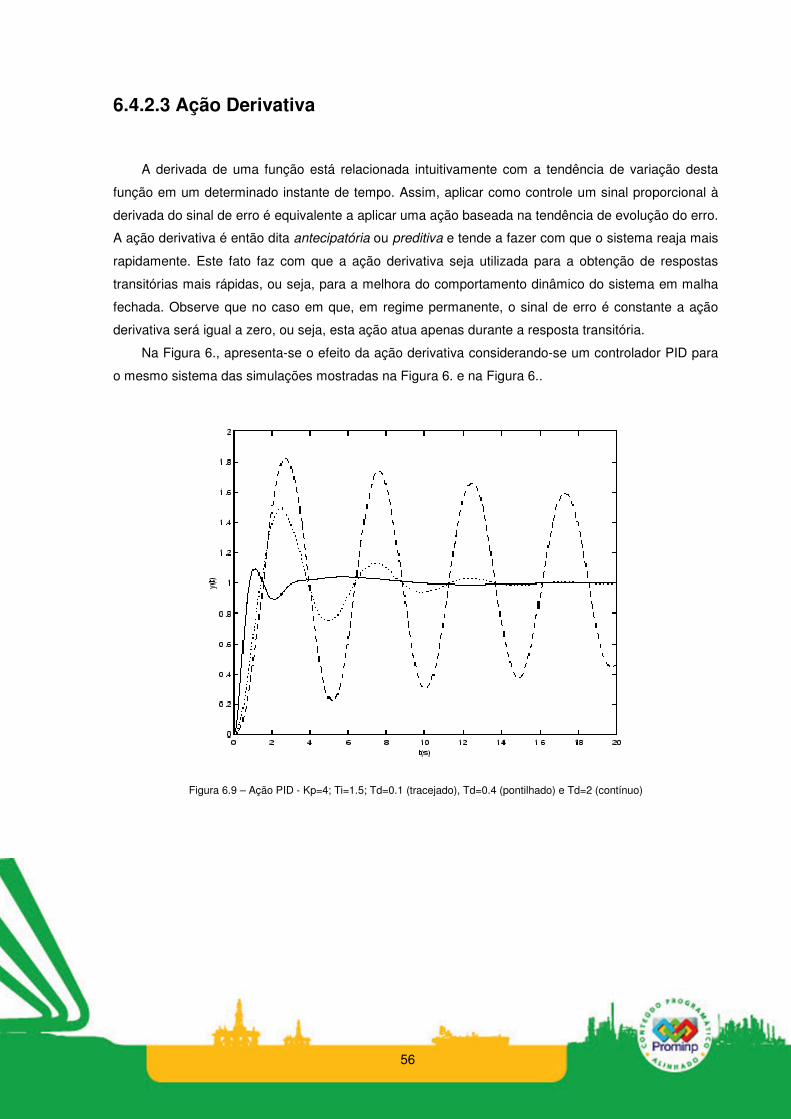
6.4.2.3 Ação Derivativa
A derivada de uma função está relacionada intuitivamente com a tendência de variação desta
função em um determinado instante de tempo. Assim, aplicar como controle um sinal proporcional à
derivada do sinal de erro é equivalente a aplicar uma ação baseada na tendência de evolução do erro.
A ação derivativa é então dita antecipatória ou preditiva e tende a fazer com que o sistema reaja mais
rapidamente. Este fato faz com que a ação derivativa seja utilizada para a obtenção de respostas
transitórias mais rápidas, ou seja, para a melhora do comportamento dinâmico do sistema em malha
fechada. Observe que no caso em que, em regime permanente, o sinal de erro é constante a ação
derivativa será igual a zero, ou seja, esta ação atua apenas durante a resposta transitória.
Na Figura 6., apresenta-se o efeito da ação derivativa considerando-se um controlador PID para
o mesmo sistema das simulações mostradas na Figura 6. e na Figura 6..
Figura 6.9 – Ação PID - Kp=4; Ti=1.5; Td=0.1 (tracejado), Td=0.4 (pontilhado) e Td=2 (contínuo)

57
6.4.2.4 Método de Sintonia de Ziegler-Nichols
O método de sintonia de Ziegler-Nichols consiste de um método prático para determinação dos
parâmetros Kp, Ti e Td em controladores PID.
1° PASSO – elimina-se o ganho integral e o ganho derivativo (Ti=∞; Td=0)
2° PASSO – eleva-se o valor de Kp até um ponto crítico (Kcr), onde o sistema apresenta
oscilações em regime permanente.
3º PASSO – anota-se os valores de Kcr e Pcr (Período do sinal que apresenta oscilação em
regime permanente) e utiliza-se uma tabela.
Na Figura 6. se pode observar graficamente Pcr e na Tabela 6 podem ser observadas as
relações utilizadas para determinar os parâmetros Kp, Ti e Td.
Figura 6.10 – Representação gráfica de Pcr.
Tabela 6.1 – Relações para determinação dos parâmetros Kp, Ti e Td.
CONTROLADOR Kp Ti Td P 0,5. Kcr ∞ 0 PI 0,45. Kcr (1/1,2).Pcr 0
PID 0,6. Kcr 0,5.Pcr 0,125.Pcr
58
VII -SIMBOLOGIA DE INSTRUMENTAÇÃO E CONTROLE
A simbologia para representação de instrumentos na área de controle e instrumentação é
padronizada pelos órgãos normativos, a ISA (Instrument Society of America) e a ABNT (Associação
Brasileira de Normas Técnicas).
Em geral a simbologia de instrumentação é utilizada em conjunto com a representação de
equipamentos de processo originando um documento chamado de P&I (Process and Instrumentation /
Piping and Instrumentation).
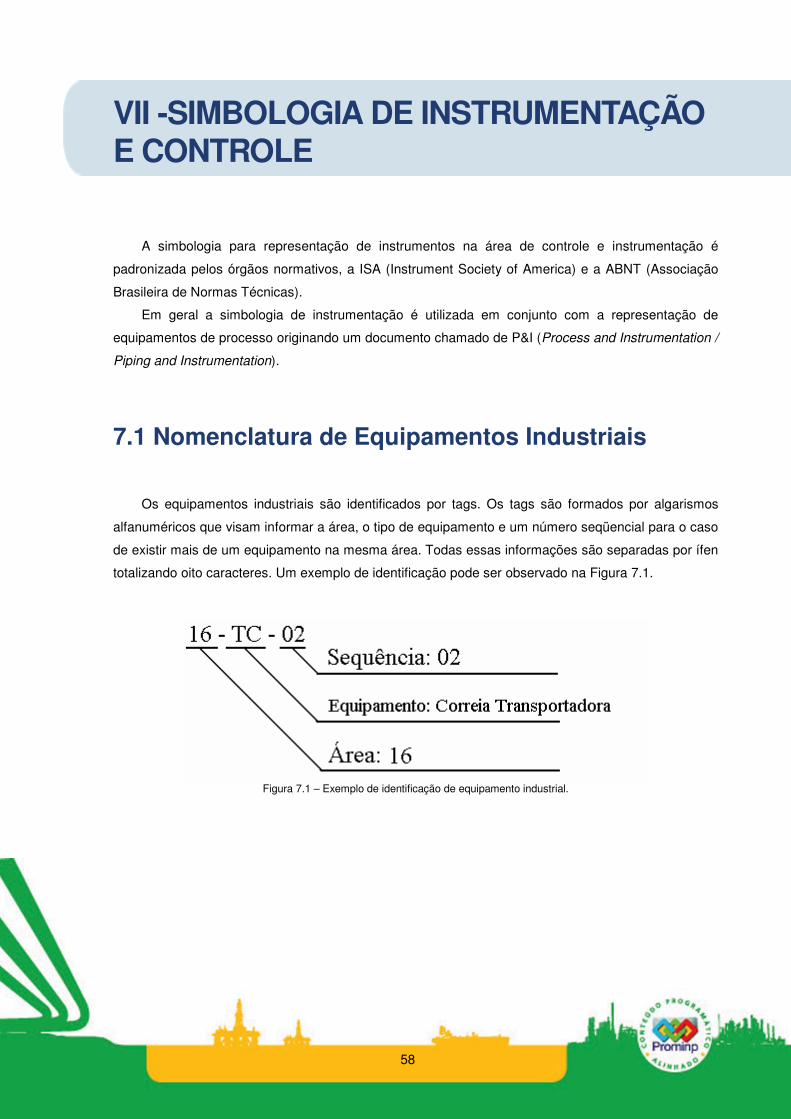
7.1 Nomenclatura de Equipamentos Industriais
Os equipamentos industriais são identificados por tags. Os tags são formados por algarismos
alfanuméricos que visam informar a área, o tipo de equipamento e um número seqüencial para o caso
de existir mais de um equipamento na mesma área. Todas essas informações são separadas por ífen
totalizando oito caracteres. Um exemplo de identificação pode ser observado na Figura 7.1.
Figura 7.1 – Exemplo de identificação de equipamento industrial.
59
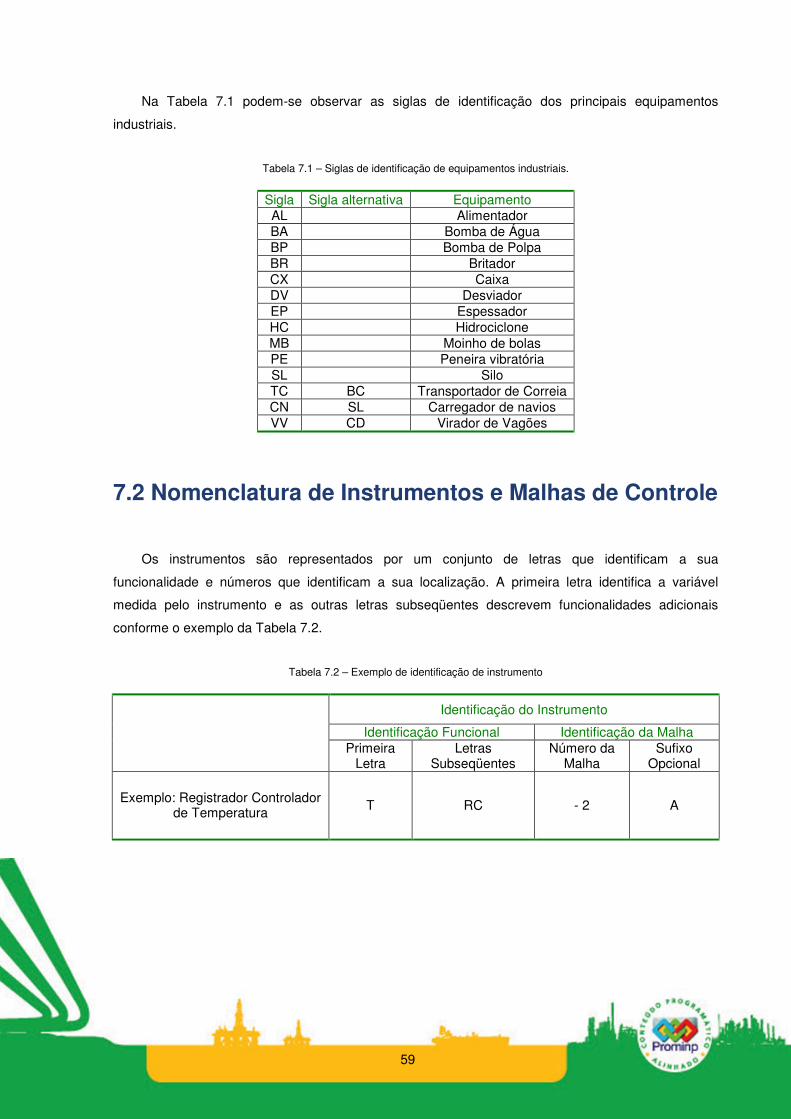
Na Tabela 7.1 podem-se observar as siglas de identificação dos principais equipamentos
industriais.
Tabela 7.1 – Siglas de identificação de equipamentos industriais.
Sigla Sigla alternativa Equipamento AL Alimentador BA Bomba de Água BP Bomba de Polpa BR Britador CX Caixa DV Desviador EP Espessador HC Hidrociclone MB Moinho de bolas PE Peneira vibratória SL Silo TC BC Transportador de Correia CN SL Carregador de navios VV CD Virador de Vagões
7.2 Nomenclatura de Instrumentos e Malhas de Controle
Os instrumentos são representados por um conjunto de letras que identificam a sua
funcionalidade e números que identificam a sua localização. A primeira letra identifica a variável
medida pelo instrumento e as outras letras subseqüentes descrevem funcionalidades adicionais
conforme o exemplo da Tabela 7.2.
Tabela 7.2 – Exemplo de identificação de instrumento
Identificação do Instrumento
Identificação Funcional Identificação da Malha Primeira
Letra Letras
Subseqüentes Número da
Malha Sufixo
Opcional
Exemplo: Registrador Controlador de Temperatura T RC - 2 A
60
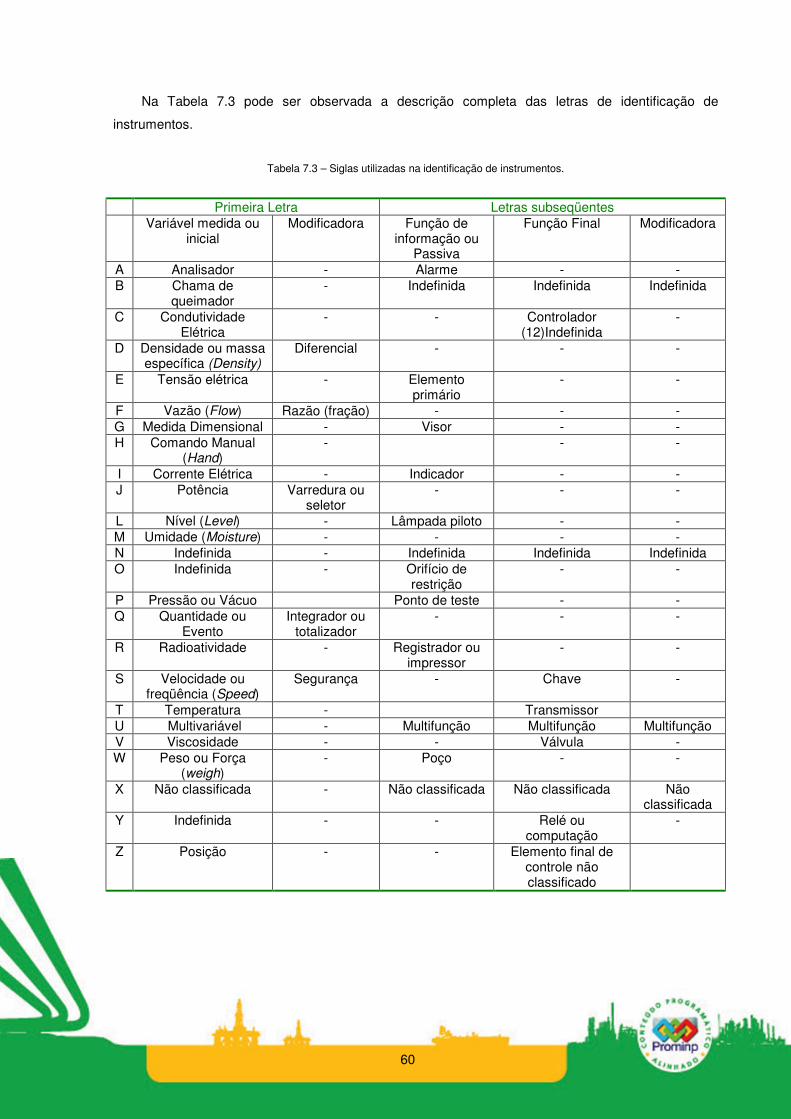
Na Tabela 7.3 pode ser observada a descrição completa das letras de identificação de
instrumentos.
Tabela 7.3 – Siglas utilizadas na identificação de instrumentos.
Primeira Letra Letras subseqüentes Variável medida ou
inicial Modificadora Função de
informação ou Passiva
Função Final Modificadora
A Analisador - Alarme - - B Chama de
queimador - Indefinida Indefinida Indefinida
C Condutividade Elétrica
- - Controlador (12)Indefinida
-
D Densidade ou massa específica (Density)
Diferencial - - -
E Tensão elétrica - Elemento primário
- -
F Vazão (Flow) Razão (fração) - - - G Medida Dimensional - Visor - - H Comando Manual
(Hand) - - -
I Corrente Elétrica - Indicador - - J Potência Varredura ou
seletor - - -
L Nível (Level) - Lâmpada piloto - - M Umidade (Moisture) - - - - N Indefinida - Indefinida Indefinida Indefinida O Indefinida - Orifício de
restrição - -
P Pressão ou Vácuo Ponto de teste - - Q Quantidade ou
Evento Integrador ou
totalizador - - -
R Radioatividade - Registrador ou impressor
- -
S Velocidade ou freqüência (Speed)
Segurança - Chave -
T Temperatura - Transmissor U Multivariável - Multifunção Multifunção Multifunção V Viscosidade - - Válvula - W Peso ou Força
(weigh) - Poço - -
X Não classificada - Não classificada Não classificada Não classificada
Y Indefinida - - Relé ou computação
-
Z Posição - - Elemento final de controle não classificado

61
Na Figura 7. podem ser observados os símbolos gerais dos instrumentos.
Figura 7.2 – Símbolos gerais de instrumentos.
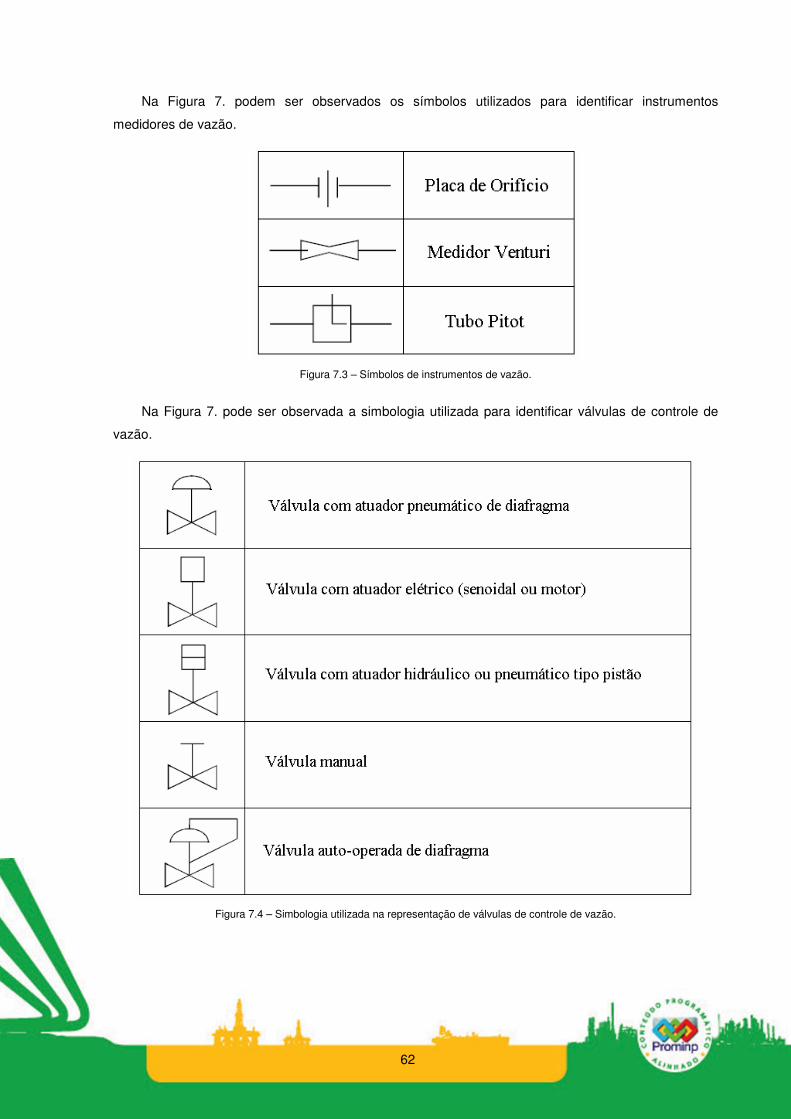
62
Na Figura 7. podem ser observados os símbolos utilizados para identificar instrumentos
medidores de vazão.
Figura 7.3 – Símbolos de instrumentos de vazão.
Na Figura 7. pode ser observada a simbologia utilizada para identificar válvulas de controle de
vazão.
Figura 7.4 – Simbologia utilizada na representação de válvulas de controle de vazão.
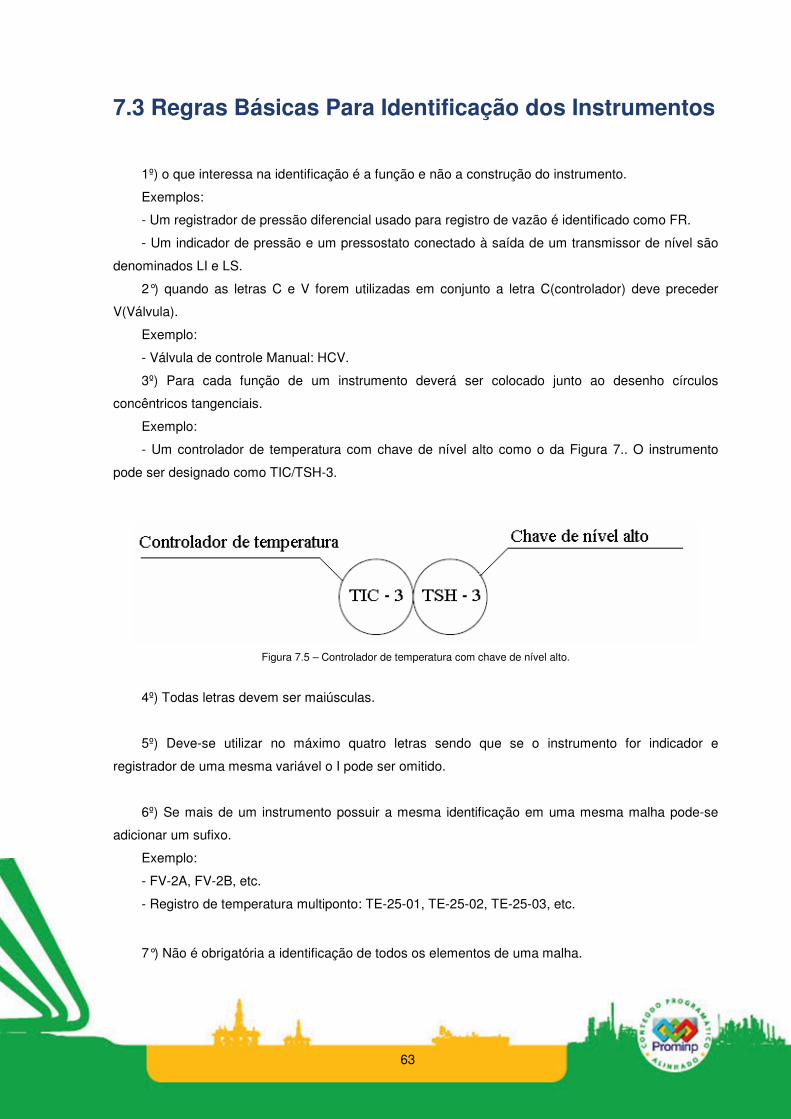
63
7.3 Regras Básicas Para Identificação dos Instrumentos
1º) o que interessa na identificação é a função e não a construção do instrumento.
Exemplos:
- Um registrador de pressão diferencial usado para registro de vazão é identificado como FR.
- Um indicador de pressão e um pressostato conectado à saída de um transmissor de nível são
denominados LI e LS.
2°) quando as letras C e V forem utilizadas em conjunto a letra C(controlador) deve preceder
V(Válvula).
Exemplo:
- Válvula de controle Manual: HCV.
3º) Para cada função de um instrumento deverá ser colocado junto ao desenho círculos
concêntricos tangenciais.
Exemplo:
- Um controlador de temperatura com chave de nível alto como o da Figura 7.. O instrumento
pode ser designado como TIC/TSH-3.
Figura 7.5 – Controlador de temperatura com chave de nível alto.
4º) Todas letras devem ser maiúsculas.
5º) Deve-se utilizar no máximo quatro letras sendo que se o instrumento for indicador e
registrador de uma mesma variável o I pode ser omitido.
6º) Se mais de um instrumento possuir a mesma identificação em uma mesma malha pode-se
adicionar um sufixo.
Exemplo:
- FV-2A, FV-2B, etc.
- Registro de temperatura multiponto: TE-25-01, TE-25-02, TE-25-03, etc.
7°) Não é obrigatória a identificação de todos os elementos de uma malha.
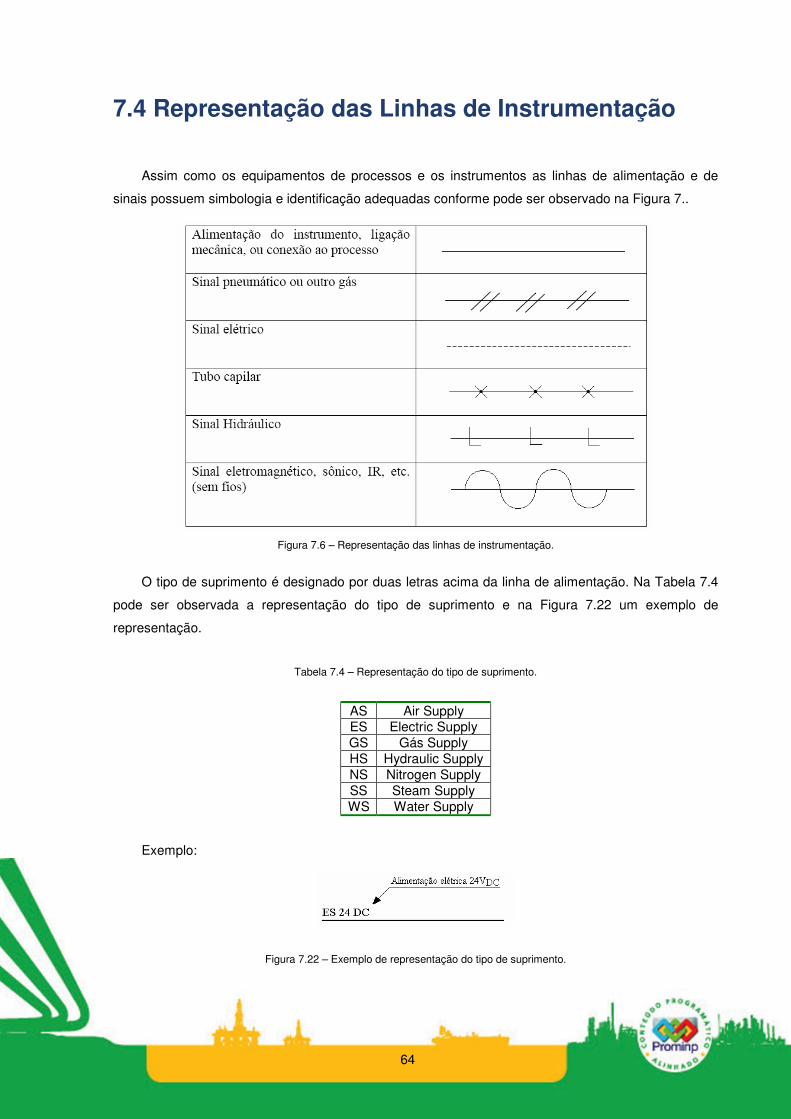
64
7.4 Representação das Linhas de Instrumentação
Assim como os equipamentos de processos e os instrumentos as linhas de alimentação e de
sinais possuem simbologia e identificação adequadas conforme pode ser observado na Figura 7..
Figura 7.6 – Representação das linhas de instrumentação.
O tipo de suprimento é designado por duas letras acima da linha de alimentação. Na Tabela 7.4
pode ser observada a representação do tipo de suprimento e na Figura 7.22 um exemplo de
representação.
Tabela 7.4 – Representação do tipo de suprimento.
AS Air Supply ES Electric Supply GS Gás Supply HS Hydraulic Supply NS Nitrogen Supply SS Steam Supply WS Water Supply
Exemplo:
Figura 7.22 – Exemplo de representação do tipo de suprimento.

65
BIBLIOGRAFIA
SENSE – SENSORES E INSTRUMENTOS. Catálogo Geral 2002. São Paulo, 2002. ALLEN – BRADLEY. Catálogo Allen Bradley – Sensores. São Paulo, 2001. IOPE. Introdução Conceitual. Disponível em: <http://www.iope.com.br/3i_introducao.htm>. Acesso em: 27 fev. 2008. IOPE. Termopares. Disponível em: <http://www.iope.com.br/3ia1_termopares.htm>. Acesso em: 27 fev. 2008. IOPE. Termopar de Isolação Mineral. Disponível em: <http://www.iope.com.br/3ib1_termopar_isolac_mineral.htm>. Acesso em: 27 fev. 2008. IOPE. Fios e Cabos de Extensão e Compensação. Disponível em: <http://www.iope.com.br/3ic1_fios_e_cabos_de_extensao.htm>. Acesso em: 27 fev. 2008. IOPE. Acessórios dos Termopares, Características e Aplicações. Disponível em: <http://www.iope.com.br/3id1_acess_dos_term_caract_aplic.htm>. Acesso em: 27 fev. 2008. IOPE. Tipos de Montagens. Disponível em: <http://www.iope.com.br/3ie1_tipos%20de%20montagens.htm>. Acesso em: 27 fev. 2008. IOPE. Considerações Gerais Sobre os Termopares e os Cabos Compensados. Disponível em: <http://www.iope.com.br/3if1_consid_gerais.htm>. Acesso em: 27 fev. 2008. IOPE. Termoresistências. Disponível em: <http://www.iope.com.br/3ig1_termoresistencias.htm>. Acesso em: 27 fev. 2008. CUNHA, Mauro André. Apostila de Sistemas de Controle – Módulo IV. Pelotas, 2005. 20p. VIANA, Ulisses Barcelos. Instrumentação Básica, Pressão e Nível. Vitória, 1999. 123p.